ZONGULDAK BLENT ECEVT NVERSTES MHENDSLK FAKLTES
ELEKTRK ELEKTRONK MHENDSL BLM
DC MOTORLARIN KONTROL VE UYGULAMALARI
DPLOMA ALIMASI
GRDoru akm motorlar, dk maliyetli, hz kontrlnn kolay olmas, geni
g ve tork aralnda kolay bulunabilirlii ve dk bakm gerektirmesi
nedeniyle yaygn olarak kullanlmaktadr. Bu almada doru akm
motorlarnn farkl yntemlerle nasl hz kontrolnn gerekletirildii
aratrlmtr. DC motorlarn yaps ve srlmesi be birimden olumaktadr.
Bunlar; rotor, stator, geri besleme niteleri (pozisyon alglayc
sensrler ile akm ve hz geri besleme bilgileri), evirici birimi, src
birimi ve denetleyicidir (yazlmsal ve donanmsal yaplar). Otomotiv
gibi sanayi alanlarnda, motorlarn hz deiiminin de hassas bir ekilde
ayarlanabilmesi istenmektedir. Bu noktada frasz DC motorlar avantaj
salamaktadr. Fral (Brush) DC motorlar, yksek bir verime ve kalk
momentine, dorusal bir moment-hz karakteristiine sahiptir. Fakat
fral DC motorlarn bnyesindeki fra ve kollektr dzeneklerinden dolay
srtnme ve yksek akmdan dolay ark olumasyla bakm aralklarnn sk olmas
gerekliliine neden olmakta ve verimi drmektedir. Klasik (fral)
motorlarn bu dezavantajlarn ortadan kaldrmak iin BLDC motorlar
gelitirilmitir. Klasik motorlarda, kollektr ve kollektre dokunan
fralar vastasyla rotordaki sarglara elektrik iletilmektedir. BLDC
motorlarda ise, bu sistemin grevini elektronik denetleyiciler
yerine getirmektedir. Denetleyici rotorun hzn takip edebilmesi iin
rotorun pozisyonunu bilmesi gerekir. Aksi takdirde motorun almasnda
aksamalar olur. Rotorun pozisyonunun tespitinde ounlukla Alan
(Hall) etkili sensrler kullanlmaktadr. BLDC motorlarn
elektromanyetik kirliliinin dk olmas, yapsnn basit olmas, teki
motorlara nispetle daha fazla gvenilirlie sahip olmas, yksek g
younluuna sahip olmas gibi etmenler nedeniyle kullanm gnmzde
artmtr. BLDC motorlar, dk g ve servo kontroll sistemlerde olduka
fazla kullanlmaktadr. DC motorlar, uzay sistemlerinde, otomotiv
alannda, askeri sahada, robotik sistemlerde, tp elektroniinde,
bilgisayar sistemlerinde, ev aletlerinde velhsl gnmzdeki pek ok
endstriyel alanlarda sklkla kullanlmaktadr. Fasz DC motorlarn sahip
olduu avantajlar belirtirsek; verimleri ok yksektir, yaplar
salamdr, gvenilirlii yksektir, yaplarnda fra olmamas sebebiyle ark
olumaz ve karbon tozlar bulunmaz, yksek hzlar elde edilebilir,
kolay soutulabilir, hz kontrol mmkndr, yksek akm-moment ve
moment-atalet ilikisine sahiptir, kk boyutlarna ramen yksek moment
retebilirler. Sahip olduklar bu avantajlarna ramen, birtakm
dezavantajlara da sahiptir. Bunlar da belirtirsek; pozisyon sensr
kullanm gereklilii ve karmak bir kontrol devresine sahip olmas
eklinde sylenebilir. Gnmzde, kontrol tekniklerinin ve teknolojinin
dzeyinin ilerlemesi ile DC motorlarnn kullanm hem artm, hem de
sregelen zamanda dezavantajlar da elimine edilmeye allmtr. DC
motorlarn, g elektronii devrelerini kullanarak kontrol
yaplabilmektedir. Bunun yannda, gnmzde eitli algoritmalar
kullanlarak oluturulan kontrol yntemlerinin kullanlmasnn gereklilii
daha da artmtr. Teknolojik gelimelerle retilen mikroilemcilerin
ilevleri gelitirilmekte ve yeni ilevlere sahip mikroilemcilerle
birlikte DC motorlara uygun olarak yeni saysal kontrolrler
gelitirilebilir.
DC Motorlarn Kontrol ve UygulamalarDC Makina TanmDC makinalar,
DC elektrik enerjisini mekanik enerjiye dntren motor ve mekanik
enerjiyi DC elektrik enerjisine dntren jeneratrlerden oluur. DC
makinalar dahili AC gerilimi, ularnda DC akma dntren bir
mekanizmaya sahip olduklarndan dolay bir DC ka sahiptir. Bu
nedenle, ou DC makinalar dahili AC gerilim ve akma sahip AC
makinalara benzerler. Bu mekanizma komtatr olarak adlandrlrlar ve
DC makinalar aktarml makinalar olarak DC bilinirler.
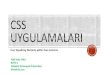
ekil 1 : DC Motor ve Jeneratrn Basit Yaps
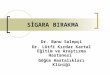
DC Motorun Yaps Balca DC motor birka temel yapdan oluur. ereve
aft Mil yata Stator sarglar Armatr Komtatr Fralar
ekil 2 : DC Motorun Yaps
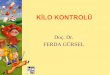
Aadaki resimde DC motorun elektriksel ierii gsterilmektedir.
Dikkat edilmesi gereken bir husus statordaki sarglara stator
sarglar, rotordaki sarglara DC armatr sarglar denmesidir. Uyarma
motorun kutuplar tarafnda olacaktr. Bilindii zere kk DC motorlarda
uyarma sarglar yoktur onun yerine mknatslar kullanlr, ancak byk DC
motorlarnda uyarma, elektromanyetik yol ile olur. Armatr sarglar
uyarma sarglar ile bire bir balantldr.
ekil 3 : DC Motorun Armatr ve Rotoru
Armatr sarglar Rotor sarglar, armatr, stator kutuplarnn arasna
konumlandrlm ve mil yata ile de desteklenmektedir. Armatr balca
aft, demir ekirdei, armatr sarglar ve komtatrden oluur.
ekil 4 : DC Motorun Rotoru ve Bilezikleri
Fralar Fralarn asl grevi motor iin gerekli gerilimi
nakletmektir. Fralarn yaps biraz kompleks olduu iin motorda en
fazla problem karan ksmdr. Fralardan kaynaklanan balca problemler
kvlcm yani atelenme ve gerilim d kayplardr.
ekil 5 : DC Motorun Fralar DC Motorlarn zellikleriDC motorlar
gelimesiyle birlikte AC motorlarn nne gemektedir. Gnmzde AC motor
uygulamalarnn ounluuyla birlikte DC motor zellikle eki gc
gerektiren uygulamalarda kendine zg zelliklerinden dolay konumunu
korumaktadr. DC motorlar geni tork aralklarnn ve hz kontrolnn
gerektii uygulamalarda kullanlmaktadrlar. DC motorlarn zellikleri
aadaki gibi sralanabilir;
DC motorlar yksek kalk torkuna ve hz reglasyon kapasitesine
sahiptir. Kalc mknatsl tip DC motorlar yksek iletme torklu
nesnelerin konumlandrlmasnda kullanlr. Seri DC motorlar yksek kalk
torkuna sahip olduklarndan ar yklerle kalk yapabilirler Seri
motorlar yksz altrldklarnda motora zarar verebilecek yksek hzlara
ulaabilirler nt motorlarda iyi hz ayar yaplr. DC motor dnme yn
armatr veya uyarma ularn deitirerek deitirilebilir. DC motor hz
armatr gerilimi veya uyarma akm deitirilerek ayarlanabilir. nt
motorlarda tork armatr gerilimiyle orantldr. Seri motorlarda tork
armatr akmnn karesiyle orantldr.DC Motorlar zelliklerine gre farkl
ekillerde snflandrlmaktadrlar. DC motorlarn sarglarna gre
snflandrlmas aada anlatld gibidir.DC motorlar sarg balantlarna gre
temelde 2ye ayrlr.Dardan Uyarmal DC MotorlarveKendinden Uyarmal DC
Motorlar. Kendinden Uyarmal DC motorlar daSeri Motor, nt Motor
veBileik Motorolmak zere e ayrlr.DC Motor eitleria)Frasz DC
motorlarSeri motornt motorKompunt motorb)Fral DC motorlarSabit
mknatsl motorElektromknatsl motorFrasz DC Motorlar Brushless (
frasz) motorlarda fra ve kollektr bulunmaz bu yzden bu motorlara
frasz motor denir. Frasz (Brushless) BLDC motor, teknolojinin
gelimesi ile robotik alanda da kullanlmaya balanmtr. Yeni bir tip
motor olmalarna karn her ortamda karlamak mmkndr.(Frasz)Brushless
DCnin ksaltmas BLDC olarak da yazlr. Normal DC motorlarn,
zellikleri ve kullanm kolayl asndan geni bir kullanm alanlar
vardr.
ekil 6 : Frasz DC Motor
Buna ramen fra ve komtatre baml olmas nedeniyle baz ortamlarda
kullanlma alanlarn daraltmtr. Fralar andklar iin zaman iinde bakm
gerektirir. Bu durumda bakma gereksinimi olan bir motorun disket
veya CD src gibi sabit dnme says istenen ortamlarda kullanldnda,
ilerleyen zaman ierisinde dnme saysnda bir deiiklik olur. Fra ve
komtatrn yerini yar iletken anahtar ald zaman frasz (brushless) DC
motorlar meydana gelir. Bu motorlarn rotor ksmnda gl doal mknats
kullanlmaktadr. Statorda ise bobinli sarglar mevcuttur. Brushless
DC motor gelien teknoloji ile birlikte birok alanda olduu gibi
robot projelerinde kullanm alan bulmutur. Standart motorlara gre
yeni saylabilecek bir motor teknolojisi olmalarna karn gnmzde frasz
motorlarla her ortamda karlalmaktadr. Frasz motor zellikle radyo
kontroll projeler iin kullanlrlar. Birim enerji younluklar daha iyi
olduundan RC arabalarda,helikopterlerde, fotokopi makinalar,
yazclar, teyp srcleri,optik tarayc ve tp cihazlargibiyksek g
gerektiren yerlerde kullanlrlar. Frasz motorlarn, fral motorlardan
fark; yksek hza sahip olmalar, torklar fazla, elektriksel grlt
meydana getirmez, sessiz alr, uzun mrldr ve bakmlar kolaydr. Bu
zellikleri sayesinde kullanma alanlar genitir. Bunun yannda
brushlessdc motorlar tamamen kontrol gerektiren, fazla snan ve
brushless dc motor fiyatlar pahal bir sistem olduu iin bu da
kullanmdaki eksileridir.Brushless motorlarn genel fral motorlara
gre birok avantaj ve dezavantaj vardr.
Frasz motorlarn avantajlar Yksek verim Dorusal moment-hz ilikisi
Yksek moment-hacim oran (Az bakr gerektirir.) Fralarn ve kolektrn
olmay (daha az bakm, tehlikeli ortamlarda kullanlabilme) Sessiz
alma Elektriksel grlt meydana getirmemesi Daha ok tork Uzun mr
Frasz motorlarn dezavantajlar Harici g elektronii gerektirir.
Uygun alma iin rotor konum bilgisi gerektirir. Hall-etkili
sensrlere gerek vardr. Alglaycsz yntemlerin kullanm ilave
algoritmalar gerektirir. Pahal sistem
Frasz DC Motor YapsFrasz dc motorlarn yaps, dnen blmleri rotor
(endvi) sabit mknatstan, duran blmleri (stator) ise kk bobinli
sarglardan meydana gelmitir.
Stator (Endktr) Frasz DC motorun yaps, AC senkron motoruna
benzer. Statoru (endktr) duran blmdr. Sarg ve nveden meydana
gelir.Endvi tarafndan elde edilen manyetik alan ile endktr
tarafndan elde edilen manyetik alan ayn frekansta dner. CD srcler,
harddisk gibi elektronik cihazlarda kullanlan frasz doru akm
motorlar, fazldr. Yani endktr sargdan meydana gelir. Mikro
ilemcinin soutma fanlarndaki motorlar ise iki fazldr. Endktr
sarglar ok fazl AC motorlardaki gibi sarlmaktadr. Frasz DC motorun,
AC motorlardan fark, sarglar srerken endvi yerleri bilinmelidir. Bu
ilemde Hall sensr veya optik sensr ad verilen alan etkili
sensrlerle gerekletirilir. Frasz dc motorda endvi endktrn iine ve
dna yerletirilir. Frasz DC motorda endktr, birbirine sktrlan ince
elik plakalarn meydana getirdii yarklara sarlan sarglardan meydana
gelir. Bir veya birka bobin birbirini dik kesecek biiminde balanr
ve endktrn etrafna datlr. Endktre sarglar iki biimde sarlr. Yldz
(Y) ve gen (delta) sarlr. gen sarm, ayr sargy bir gen meydana
gelecek ekilde balanr. Her birleim noktalarna gerilim verilir. Yldz
balants, her sargy tek bir merkeze balar. Gerilim, sarglarn akta
kalan ularna verilir.
Frasz DC motorlar, birinci sargya pozitif (+), ikinci sargya
negatif (-) (GND) enerji verilir ve altrlr. nc sarg bota yani
enerjisizdir. Bu prensibe gre gen ve yldz balantlarn
zellikleri;
Y balantsnda her zaman iki sarg seri olarak kullanld iin
manyetik alan iddetlidir. Bu demektir ki daha ok tork, daha dk hz.
Buna ragmen gerilim yksek akm dk olur. gen (delta) balantsnda tek
bir sarg kullanld iin dk gerilimde yksek akm salanr. Bu da yannda
yksek hz, dk tork getirir. ki fazl motorlarda endktr, mikroilemci
fan gibi drt kutupludur. Baz trlerde manyetik aknn l noktalarnn
azaltlmas iin glge (yardmc) kutuplar kullanlr.
Rotor (Endvi)Sabit mknatsl endvinin kutup says iki-sekiz arasnda
deiir. Endvide istenen manyetik ak younluuna bal uygun malzeme
seimi yaplr. Genellikle ferritten yaplan mknatslar, alaml mknats
malzemelerden ucuzdur. Buna karn daha az manyetik younluk salar.
Gnmzde Neodmiyum-Ferrit-Boron (NdFeB), Neodmiyum(Nd) ve
Samarium-Cobalt (SmCo) alamndan mkantslar retilmektedir.Frasz dc
motor rotor tipleri; endvi milinin zerine yerletirilmi kalc mknats,
endvinin gvdesi ierisine yerletirilmi kalc mknats, endvi oyuklarna
yerletirilmi kalc mknatslardan meydana gelen tipleri vardr.
Sabit mknatslar endvi nvesine; biimde yerletirilir; Dairesel
nvenin etrafna Dairesel nvenin iine dikdrtgen ktkler eklinde
gmlerek Dairesel nvenin iine dikdrtgen ktkler eklinde sokularak
Frasz dc motor stator tipleri; frasz DC motorlarda sarglara
enerji iletimi kolektr ve fralar yerine elektronik anahtarlarla
gerekletirilir.Frasz motorun hzn ve dn ynn ayarlamak iin drt adet
src transistr gerekir.Hz aral genitir. Baz uygulamalarda 50.000
devir/dakika y geer.alma hz; motorun ebatlarna ve ykne bal
deiir.Besleme gerilimi dktr. Genellikle 24V gerilimle alr.
Doru akmla altklar iin frekans kayplar olmaz. ebekenin frekans
deiiminden etkilenmez. Ebatlar 2.5 cm ile 14 cm civarndadr. Frasz
doru akm motorlar kapal ve ak yaplabilir. Verim %80ler
seviyesindedir.
Frasz DC Motor alma Prensibi Frasz dc motorlar, fral dc
motorlarla ayndr. alrken gsterdii farkllk, endvi stnde bobin
olmamas, sabit mknatslarn endvi stnde olmas, endktr bobinlerinin
gvde stne sabit olmasdr. Frasz dc motorlarda endktr ve endvinin
yeri deimitir. Frasz dc motorlarn faydas; kolektr (komutatr)
sisteminin kalkmas, srtnme ve fra- kolektr bunlarn oluturduu
direnten tr meydana gelen elektrik mekanik kayplar ortadan kaldrr.
Bu tasarm mekanik olarak denetlenmediinden ve bobinlerin saysnn
arttrlmasna msaade ettii iin frasz doru akm motorlarndan yksek tork
alnr.
Motorun almas iin ek donanm olarak elektronik bir devre ile sarg
stne gelen akm kontrol etmektir. Bu dezavantajdr. Fra kolektr
(komutatr) sistemiyle salanan karmak ateleme sistemi d devrelerce
yaplmaldr. Bu motoru kullanacak kiilere ek masraf aar. Ancak ayn
gte olan bir motora kyasla kk, hafif olmas, devir kontrolnn
yaplabilmesi masraf azaltabilir.
Frasz dc motorlarla,step motorlar arasndaki fark; frasz
motorlarda, endvinin yerinin bilinmesi iin endvi (rotor) konum
sensrnn kullanlmasdr.Konum sensrleri ile endvinin yerini algladktan
sonra hangi sargyahangi ynde bir enerji uygulanacana karar
verilir.Frasz DC Motor eitleriFrasz motorlar i yaplarna gre ikiye
ayrlr.
Inrunner Brushlesss MotorMotorun dnen ksm yani rotoru motorun i
ksmndadr. Gvde (stator) sabittir. Bu motorlarn genel olarak hzlar
dier tr olan outrunnera gre daha yksektir. Buna karlk motorlarn
volt bana rettikleri tork daha azdr. Rotorun ite olmas birok
kullanm kolayl salar. Grn olarak standart fral motorlara
benzerler.
Outrunner Brushless MotorOutrunner motorlarda, nrunner motorlarn
aksine bir mekanik dzenleme vardr.Motorun rotoru d ksmdadr. Yani
motorun gvdesi dner sabit ksmsa ierdedir. Soutulmalar bobin ksmnn
merkezde olmas nedeniyle daha zordur. Outrunner motorlarn hzlarnn
daha dk toklarnn daha yksek olmalar sebebi ile uan projelerde
(helikopter,quadrotor,uak) daha sk olarak kullanlrlar.
Bu projelerde kullanlan outrunner motorlar ESC (Electronic Speed
Controller)denilen elemanlar tarafndan kontrolleri yaplr. k olan
outrunner motorlar, tane girii olan ESC lere balanr. stenilen hz
seviyeleri ESC tarafndan tespit edilerek motor o devirde
dndrlr.
Frasz motorlar sensrl ve sensrsz olarak ta iki gruba
ayrlr.Sensrl frasz motorlar bobinin gvde iinde nerde olduunu tam
olarak hassas bir ekilde alglar. Uygun bir ESC ile birlikte
motordan hi bir kayp g meydana gelmez.
Sensrsz frasz motorlar yaygn olarak bulunan motorlardr. ESCler
bobine gnderilen dalgann deitirileceine, akm yollanmam bobinde
meydana gelen elektrik sinyali ile (indksyon akmyla meydana gelen
sinyal) karar verirler. Sensrsz motorlar sensrl motorlar kadar
yksek hzlara ve ivmelere ulamazlar.
Brushlessmotorlarn robotikte kullanm alanlar;Bu motorlar fral
motorlarn kullanld btn ortamlarda kullanlr. Bunun yannda motor
komtatrlerinden meydana gelebilecek arklarn (kvlcmlarn) tehlike
meydana getirdii sistemlerde, daha yksek enerji younluu gerektiren
ilerde, yksek hz isteyen sistemlerde kullanlrlar.Motor alma
VoltajlarBrushlessmotorlarn elektronik devreleri de olduundan
altklar voltaj aralklar standart fral motorlara gre dardr.
Motorda verimlilik;frasz motorlarda herhangi bir mekanik kontak
olmadndan iin ve srtnme de minimumdur. Bu durumda motorlar daha
verimlidir. Verim % 70 ile % 90 a kadar kabilir.
Motorun sualtnda altrlmas;frasz motorlarda herhangi bir mekanik
kontak olmamas sebebi ile balant noktalarnda gerekli izolasyon
yaplrsa motorlar sualtnda da altrlabilir. Tuzlu su motor bobin
tellerine korozif etki yapar ve telleri paslandrr.
Motorlarda uzun mr;Brushlessbir motorda komtatr fralar
olmadndanilk eskimesi beklenen sistemler motor aftna destek olan
bilyalardr. Bilyalar uzun mrl olduundan frasz motorlar da uzun
mrldr.
Brushless motorlarnmaliyeti;gnmzde frasz motor imalat, standart
fral motorlara gre daha ucuza olmasna karn brushless dc motor
fiyatlar daha pahaldr.
Elektronik Hz Kontrolr Sistemi (ESCler)Frasz motorlar kontrol
etmek amac ile kullanlan elektronik devre sistemleridir. Bu
devreler motorlarn bobinlerine sras ile PWM dalgas yollarlar.
Bir ESC devresi sistemden meydana gelir. Servo sinyallerini zc
ve ileyici Motor akm ykseltme devresi (Fet, Mosfet Transistorlu
devreler) Geribildirim devresi motorlarda meydana gelen EMI y len
devre. Sensrl motorlar iin uygun olan ESC lerde EMI yi len devre
yerine sensr bilgilerini zmleyen decoder vardr.
ESC Nasl alr?RC ESCler Radyo kumandalarn da kullanlmak iin imal
edilen zel motor konrol devresidir. Radyo kumandalar, servolar
altrmak iin gerekli sinyalleri (PCM veya PPM) retirler. Bu
sinyaller %7 ile %14 arasndaki PWM sinyallaleridir. Bu saykl
saniyede 60-70 hertzlik frekansta meydana gelir. ESC ler de bu
sinyalleri brushlessmotorlara uygun duruma getirir.
ESC nin zellikleriGenel olarak firmalar imal ettikleri ESC
lerden laboratuvar artlarnda elde edebildikleri yksek deerleri
etiketlerine yazarlar. rnein maksimum 30 ampere dayankl ESC ler bu
akm ekimine milisaniyeler mertebesinde dayanr.alma voltaj motora
uygun olmaldr. ESC ler genel olarak sadece tek ynde alacak ekilde
imal edilirler. Bu durumda helikopter motorunu hep bir yne eviren
bir sistem iin problem olmaz ama robotik kulanm iin uygun deildir.
leri ve geri dndrlmesi iin ESC nin geri dndrebilir (reversible) ESC
zellikte olmas gerekir.ESC seimi yaparken,motor ve ESC markas ayn
olmaldr.
Fral DC MotorDC motorlarnrotorlarndaki manyetik alan elektrik
akmnn etkisiyle meydana gelir. Hareketli olan rotor ksmna akm,
sabit bir iletken tel stnden verilmez. nk motor dnerken iletken tel
motor miline sarlr. Kollektr ve fra denilen bir mekanizmayla
motorun hareketli olan ksmna akm aktarlr. Kollektr ve fra kullanlan
bu tip motorlara fral DC motor(Brush dc motor) ad verilir. Gnmzde
motor src entegreleri ile fral DC motor imalat yaplmaktadr. Bu
motorlardan; yksek dinamik ivmelenme, dk atalet momenti, bakm
istemeyen, salam tasarm, redktr, fren, tako, encoder montaj ve
yksek verim alma imkn vardr.
Fral DC motorlar gvdelerindeki manyetik alann kaynana gre iki
gruba ayrlr. Sabit mknats motoru Elektro-mknatsl motorBtn
motorlarda, motorlar meydana getiren paralar hemen hemen ayndr.Fral
DC motor paralar;
Gvde (Stator)AC motor veya DC motorlarda N-S kutuplarnn meydana
getirilmesi iin yaplan sarglarn yerletirildii blme indktr ad
verilir. Kk motorlarn endktrleri doal mknatstan yaplr. Yksek gl
motorlarn endktrleri bobinlerle meydana getirilir. ndktrler gvdeye
yani endktrn ierisine oturtulur. Endktrn iinde doal mknats
olabilecei gibi elektromknats da olabilir.
Fralar ve DonanmlarAC ve DC ile alan kollektrl motorlarn
kollektre yaparak elektrik akmnn letilmesini salayan paralarna fra
(kmr) ad verilir. Kmrler (fra), motorun gerilim ve akm deerine gre
deiik zelliklerde sert, orta sert, yumuak karbon, karbon bakr alaml
vb. imal edilirler. Motor kmrlerinin kollektre dzgn bir ekilde
basmasn salamak iin bask yaylar kullanlmaktadr. Kullanldka zaman
ierisinde fra arzalar meydana gelir. Fralar anr ve biter. Fralarn
bittii yle anlalr; kollektrde ar ark (kvlcm) meydana gelir ve
motorun sesi deiir. Bu kvlcm bazen ozon gaz meydana getirir.
Motor Yan KapaklarKapaklar ve stator motoru darnn olumsuz
etkilerinden korumak iin demir, demir alam veya alminyumdan yaplr.
Endvinin endktr iinde merkezi olarak yataklanmas grevini ise
kapaklar yapar.
Fral DC Motor Kullanm AlanlarKalknma momenti yksek ve sabit
devir sayl yerlerde kullanlr. Vantilatr, aspiratr ve tulumbalar, kt
fabrikalar, dokuma tezghlar, gemi pervaneleri, matbaa makineleri ve
asansrlerkullanm alanlar ierisindedir. Fral dc motor fiyatlar
kullanm alanlar, kapasite ve markalarna gre DC motor sat yapan
reticiler vardr.Redktrl MotorlarElektrik motorlarnn yksek dn
hzlarn, makineler iin gerekli olan dn hzlarna drmek iin tasarlanan
kapal dili sistemlerine redktr denir. Redktrler, gvde iine
yerletirilen miller, dili arklar, yataklar vs gibi elemanlardan
oluan sistemlerdir. Redktrler hareket ve g iletmek, dnme ynleri
elde etmek, az bir gle byk moment elde etmek, dndrlen iki eleman
arasnda bamsz hareket salamaktr .Redktr hesab, kullanldklar
alanlara gre, kk ve byk boyutta yaplr.Redktr tasarm, her yandan
balanabilen, deiebilir gvde sistemi ile montaj kolayl ve esneklii
salanmtr. Flan ve k mil balantlar ok alternatifli montajlar iin
uygundur.
Redktr eitleriRedktr eitleri unlardr; Delik milli redktr Yatk
tip redktr E Tipi redktr K Tipi redktr M Tipi redktr N Tipi redktr
D Tipi redktr Y Tipi redktr
Redktr seimi, k devri ve g en nemli paremetrelerdir. Bu iki
paremetre belirtildikten sonra motorlu motorsuz, flanl ayakl, delik
milli, yatay, dikey ayrntlar belirleyerek uygun redktr satn
alnabilir.
Redktr balant ekilleri, bunu tahrik eden mekanizma arasnda deiik
balant mevcuttur. Motor, fren, redktr, ara balant adaptr, kaplin
balants nemli bir deer ifade etmektedir. Redktr balant ekillerini u
balklar altnda snflandrabiliriz:
1) k miline gre Parelel milli Dz hatl 90 yn deiimi
ekil 7 : Paralel milli redktr2) Mil balantlarna gre Dz mil
balantl Delik mil balantl Delik milli ve skma bilezikli Spline mil
balantl
ekil 8 : Delik milli ve skma bilezikli redktr3) Dili eidine gre
Sonsuzdili (Sonsuz dili redktr) Planet dili (Planet redktr) Helisel
dili (Helise dili redktr) Hipoid dili (Hipoidredktr) Konik dili
(Konikredktr)
ekil 9 : Helisel dili redktr4) Balant ekillerine gre Flan
balantl Ayak balantl Flan ve ayak balantl Flan balantl uzatlm
kovanl Moment kol balantl
ekil 10 : Flan balantl redktr
Elektrik motorlar eitleri, redktrl ac motor ve redktrl dc motor
kullanldklar alanlara gre isimlendirilirler. Redktrl motorlar
dililerin anmasn nlemek iin devaml yal olmas gerekir. Dililerin bir
ksmnn srekli ya ierisinde olmas iin, redktrn ya haznesi vardr.
Sonsuz vidal redktr motorlar, tahrik ksmnda sonsuz bir vida
kullanlmaktadr. Genellikle dili arklar, mil zerine tespit edilir.
Bir karter iine monte edilen sonsuz vida, dili arktan meydana
gelir. evrim oranlar 1 : 25 ile 1 : 50 arasndadr. Tahrik gruplaryla
kullanlan bu mekanizmalar, boyutlarnn kk olmas ve sessiz almalaryla
son derece uygundur. Gleri byk olan motorlarda evrim oranlarn dntre
bilme zellii vardr. Motor devir saylarnn hzlar, deiik kasnak aplar
kullanlarak, istenilen devre ayarlanabilir. Robotik servo redktr bu
alanda kullanlmaktadr.
Redktrler, sonsuz vida ve karsndaki arkdan meydana gelir. Bu
malzemeler tornadan geirilerek freze, talama, ve sertletirmeden
geirilmi, ark malzemesi ise kokil ve kumdan seilerek savurma dkm
malzemesi kullanlr. Sertletirilmi elikten yaplan sonsuz mil, karlkl
iki tane bilye ile yataklanr. Normal dililer genellikle sonsuz
vidadan meydana gelmektedir. Mekanizmann evrim oran genellikle,
sonsuz vidann az saysna bal olarak deimektedir.
Dili sistemlerin anmamas iin makina gruplarnn srekli yal olmas
gereklidir. Redktrn ya haznesindeki dililerin bir blm ya iindedir.
Redktr iindeki minimum ve maksimumya seviyesi, ya ubuu ile kontrol
edilir. Bu yan periyodik kontrol yaplmaldr. Makina ya, genelde
mineral ya ve sentetik ya diye ikiye ayrlr.
Ya deiim sreleri mineral iin 400 saat, sentetik iin ise 800
saattir. Redktrde ya yok ise minimum ve maksimum seviyenin ortasna
gelecek ekilde ya konulur. Redktrde ki ya boaltmak iin altta
bulunan ya tpas alr ve boaltlr. Doldurmak iin tpa tekrar sklr ve ya
doldurulur. Ya doldururken fren balatalarnn yalanmamasna dikkat
edilmelidir.Redktrl motor imalatlar tarafndanretilen eitlimakina ya
markas mevcuttur. Motora hangi marka ya uygun ise o ya kullanlr.
Tabiimakina ya markasna ve kalitesine gre makine ya fiyatlar da
deimektedir.
Dardan Uyarmal DC MotorlarDardan uyarmal DC motorlarda endvi
sargsna uygulanan gerilim ile rotor sargsna uygulanan gerilim
kaynaklar ayrdr. Alan sargs ayr olarak balanan bir dc kaynak ile
uyarlr ve manyetik alan oluturulur.
ekil 11 : dardan uyarmal dc motorun elektrik edeer devresi
Yukardaki edeer devrede grlecei gibi endvi ve rotor (armatr)
farkl dc g kaynaklarndan beslenmektedir.Toplam Gerilim (VT) Armatr
Gerilimi (Va) ve Endvi Gerilimi (Vf) toplamna eittir. ( VT = Va +
Vf )
Toplam Giri Gc (PT) = VfxIf + VaxIa
Sabit Mknatsl Motorlar Sabit mknatsl motorlar DC uyarma sarglar
yerine mknats paralar kullanlr. Bu motorlarn en byk avantaj kalkta
yksek momentte alabilirliidir. En byk dezavantaj ise ancak belirli
bir yke kadar DC tolere edilebiliyor olmalardr. Dolaysyla yksek
moment istemeyen ufak apl ilerde tercih sebebi olurlar.
ekil 12 : Basit DC Motor Kendinden Uyarmal DC MotorlarKendinden
uyarmal dc motorlarda endvi ve armatr sarglar ayn dc gerilimden
beslenmektedir. Kendinden uyarmal dc motorlar endvi sargsnn balant
ekline gre e ayrlmaktadrlar.
Seri Uyarmal Motorlar Seri uyarmal motorlarda uyarma sarglar
rotor sarglarna seri olarak balanr. Ancak bir farkla uyarma sarglar
biraz daha kaln bir tel ile sarlmaldr. nk armatrn tm akmn stlerinde
tarlar. Seri uyarmal motorlarn en karakteristik zellii kalk
momentinin yksek oluudur. Ancak yke kar ok hassastrlar. Bu yzden
hassaslk gerektiren ilerde fazla tercih edilmezler. Ayrca bu
motorlar yksz olarak altrlamaz; aksi takdirde motor kaar ve etrafna
zarar vermeye balar. Bu yzden sabit olarak bir ksm ykler motora
balanmaldr. Sonu olarak seri uyarmal motorlar eitli hz kademeleri
gerektiren ilerde kullanlamazlar.
ekil 13 : a)Seri Uyarmal DC Motor b) Seri Motor Endktr Sargs
Edeer devreden de grld zere alan (endvi) sargs ve armatr sargs
birbirine paralel baldr ve endvi sargsndan geen akmla armatr
sargsndan geen akm birbirine eittir.
Toplam giri gc (PT) = Vf x If
nt (Paralel) Uyarmal Motor nt uyarmal motorlarda uyarma sarglar
rotor sarglarna paralel olarak sarlrlar. Bu motorlarda ok iyi hz
kontrol yaplr. nt uyarmal motorlarda istenilirse uyarma sarglar
dardan da harici olarak beslenebilir. Ancak ok dikkat edilmesi
gereken bir husus, uyarmann asla sfrlanmamasdr. Aksi takdirde motor
kaar ve etrafna byk hasar verir. Bunlara ilaveten bu motorlar
motorun dn yn ok kolay deitirilebilir. Bu regeneratif frenlemede
kullanlabilir. edeer devrede de grlecei gibi endvi ve armatr
sarglar birbirine paralel balanmtr. Armatr ve endvi gerilimleri
birbirine eittir. Besleme kaynandan ekilen toplam akm endvi ve
armatr akmlarnn toplamlarna eittir.
( IT = If + Ia )
Toplam Giri Gc ( PT ) = VT x IT
ekil 14 : nt Uyarmal DC Motor Devre emas
ekil 15: nt Motor Endktr Sargs
Kompound Uyarmal Motor Kompound uyarmal motor, seri ve nt
uyarlamal motorlarn bir nevi birleimidir. Seri uyarmalar ok iyi
kalk momenti salarken, nt uyarmalar da ok iyi hz kontrol yapma
imknn verir. Bunlara ramen seri sarglar yznden yine de hz
kontrolnde baz sakncalar dourabilir. Bu yzden 4 blgeli kontroll
sistemlerde kullanlmas fazla tercih edilmez.
ekil 16 : Kompound Uyarmal Motor
DC Motorlarn Karlatrlmas Grafikte net olarak tm DC motorlarn hz
ve tork ilikileri karlatrlmal olarak verilmitir. Kesiim noktasn yle
dnebiliriz; Grafiin sol taraf iin motorun zerinden bir ksm yk alnm
ve motor hzlanmaya balamtr. Kesiim notasnn dier taraf iin ise motor
ar olarak yklenmeye maruz braklm ve dolaysyla hz dmtr.
ekil 17 : DC Motorlarn Karlatrlmas
DC Motorun Edeer DevresiEdeer devre elemanlarna ksaca deinirsek;
herhangi bir doru akmdan gelen besleme gerilimine [Va], uyarma
sarglarna uygulanan gerilime [Vf], armatr sarglarndaki dirence
[Ra], Va gerilimi uygulannca akan akma [Ia], uyarma sarglarnda
oluan akya [] diye tanmlarsak, devreyi oluturabiliriz.
ekil 18 : DC Motorun Edeer Devresi
Besleme Gerilimi [Va] DC motorun ularna uygulanan gerilimi
formlize edersek;
Va= Uygulanan doru gerilimi Kt= Motor tasarm sabiti = Uyarma aks
n = Rotor hz Ia = Armatr akm Ra= Armatr sarg direnci
Motor Hz Motor hz ile uygulanan gerilim arasnda lineer bir iliki
vardr (sabit bir aks altnda). rnein uygulanan gerilim nominal
gerilimin %50si ise motorun dn hz da nominal deerinin %50si
civarndadr.
ekil 19 : DA Motorun Gerilim-Hz likisi Motor Torku Tork,
motordan hareket paralarna (tekerlek, dili, palet vb) iletilen itme
kuvveti ya da dnme momentidir. Yandaki ekilde gsterildii gibi bir
motorun aftna bal bir tekerlein bulunduu bir dzenekte tork,
kuvvetin motor aftna olan uzunluk ile arpmna eittir. Torkun birimi
Newton metredir (N.m). = F x d Ayn zamanda DC motorlarn torku
uygulanan gerilim ve uyarmalarda oluan ak ile de doru orantldr. =
Ia Bir motorun gc o motorun torkunun asal hz ile arpmna eittir. P =
x w
Motor gc ( P ), motora uygulanan voltaj ile motorun ektii akmn
arpmna eittir. P = V x I
Asal hz ise motorun frekansnn ( motorun bir saniyede tamamlad
tur saysnn) says ile arpmnn iki katdr. w = 2 x x f Projeye balarken
motor seimi srasnda kullancnn motor hakknda bilmesi gereken en
nemli zelliklerden biri torktur. Eer motorun tork bilgisi mevcut
deilse torkun llmesi ya da hesaplanmas gerekir. Bu formda kullanlan
g birimi watt, devir says ise motorun bir dakikada tamamlad devir
saysdr (rpm).Anma hz uygulanan anma gerilimi ve anma aksna tekabl
eder. Motorlarda sabit bir tork blgesi vardr. Bu tork blgesi,
nceden belirlenmi gerilime gre anma hznda alan motorun torkudur.
Ancak gerek tork motorun ykne baldr.
ekil 20 : Sabit Moment
Sabit Tork ve Beygir GcBaz uygulamalarda motor anma hzndan daha
hzl almas gerekir. Motorun bunu yapabilmesi iin uygulanan gerilimin
artrlmas gerekir. Ancak motora anma geriliminden yksek gerilim
uygulanrsa motor snr ve zarar grebilir. Bunun yerine motora
uygulanan uyarma aks deitirilir. Tabi ki unutulmamas gereken nokta
motor hzlandka torkunun da deceidir. Yukarda anlatlanlar grafik
eklinde incelersek;
ekil 21 : Sabit Tork ve Beygir Gc
Beygir gcnn sabit kalmasnn sebebi hzn artmasdr. Formlize
edilirse:
Alan Sarglarnda Saturasyon Hz ve tork formllerinden de kolaylkla
grlecei gibi uyarma aksnn younluu direkt olarak motorun hz ve torku
zerinde etkilidir. rnek vermek gerekirse, uyarma aks bir mertebe
arttrlrsa; motor hz der bunun yannda tork artar.
M= Ia x
Uyarma akm ile ak arasnda lineer bir iliki yoktur. Uyarma akm
arttrldnda ak da artacaktr; ancak yle bir noktaya gelinir ki,
uyarma akm her ne kadar arttrlrsa arttrlsn ak artmaz ite bu noktaya
saturasyon (doyma) noktas denir.
ekil 22 : Alan Sarglarnda Saturasyon
DC Motor Kayp eitleriDC makinelerinde meydana gelen kayplar
grupta incelenir.Bakr KayplarBakr kayplar akmdan dolay meydana
geldii iin, akm geen her ksmda bakr kayplar mevcuttur. DC
motorlarda bakr kayb; endvi sargsnda, nt sargda, seri sargda,
yardmc kutup sargsnda ve kompanzasyon sargsnda meydana gelir.Demir
KayplarKutuplarn manyetik alanndan dolay makinenin hareket eden
ksmlarnda, endvi manyetik alanndan dolay kutup ularnda kayplar
meydana gelir. Bu kayplara demir kayplar denir. Histerisiz ve
fukolt kayplar olarak adlandrlan demir kayplar, ykle ok az deime
gsteren sabit kayplardr.Rzgar ve Srtnme KayplarDC makinelerinde
meydana gelen eitli srtnme ve vantilasyondan dolay bir enerji kayb
olur. Bu kayp; fra, yatak, endvinin dnerken hava ile srtnmesi ve
makineyi soutmak iin kullanlan vantilatrn meydana getirdii kayplarn
tmdr. Srtnme ve rzgr kayplar sabit olmakla birlikte devir saysyla
bir miktar deiir.
DC Motor Src Esaslar DC motor kontrol genelde tristr kprleri ile
u gerilimi deitirilerek yaplr.
ekil 23 : DC Motorun Src Devresi
nemli bir nokta, uygulanan gerilim DA motorun plaka deerlerinde
tanmlanm olan deerinden byk olamaz. Armatr sarglar genelde 500 V
DAya gre yaplmtr. Dolaysyla u gerilimi ile ayarlamalar 0 ile 500
volt arasnda olmaldr.
DC motor yol vericilerBir DC motor, almasndaki balca
fonksiyonunu yerine getirebilmesi iin baz zel kontrol ve koruma
donanmlarna sahip olmaldr. Bu donanmlarn amalar aadaki gibidir;
1. Donanmdaki ksa devreler nedeniyle oluacak tahribe kar motoru
korumak2. Uzun sreli ar yklerden oluacak tahriplere kar motoru
korumak3. Ar yol verme akmlarna kar motoru korumak4. Motorun alma
hzn kontrol etmek zere uygun tarz salamak
DC motor yol verme devreleri Yol verme direnleri bir kez
seilirse onlarn doru anda devre d edilmesini salayacak ksa devre
kontaklarn anahtarlama yaparak kontrol edilebilir. Bu anahtarlamay
yapmak iin birok farkl emalar kullanlmaktadr. Bunlardan en yaygn
olan ikisi bu blmde aklanacaktr. Bunu yapmadan nce motor yol verme
devresinde kullanlan elemanlarn bazlar ileride tantlacaktr. ekil 19
motor kontrol devrelerinde yaygn olarak kullanlan cihazlarn bazlar
gsterilmektedir. Gsterilen cihazlar sigortalar, basmal anahtarlar,
rleler, zaman geciktirme rleleri ve ar yk korumalardr. ekil 19de
sigortann sembol gsterilmektedir. Motor kontrol devresindeki
sigorta ksa devre tehlikesine kar motoru korumaya yarar.
Ab
ekil 24 : a) Sigorta b) Sigorta Yuvas ve Yaps
Motora giden g kaynann hatlarna yerletirilir. Motorda ksa devre
olursa, motorun kendisinde herhangi bir tahribat olmadan nce
devreye aarak ona giden hattaki sigortaya yanacaktr. ab
ekil 25 : a) Yay Tipi Basmal Anahtar b) Yay Tipi Basmal Anahtarn
Yapsekil 25te yay tipi basmal anahtarlar gsterilmektedir. Normalde
ak ve normalde kapal trden iki temel tipi vardr. Normalde ak
kontaklar butona dokunulmadnda zaman aktr ve butona basld zaman
kapanr. Buna karn normalde kapal kontaklar dmeye baslmad zaman
kapaldr ve basld zaman aktr.
ab
ekil 26 : a) Rle b) Rlenin Yaps
Bir rle ekil 26de gsterilmektedir. Bir ana bobin ve kontaklardan
ibarettir. Ana bobin daire ile sembolize edilir ve kontaklar
paralel izgiler ile gsterilir. Kontaklar iki tiptir normalde ak ve
normalde kapal olanlar. Normalde ak kontak rlenin enerjisi kesildii
zaman ak kontaktr ve normalde kapal kontak rle enerjisizken kapal
olan kontaktr. Elektrik enerjisi rleye uyguland zaman (rle enerjili
iken) kontaklar durum deitirir; normalde ak kontaklar kapanr ve
normalde kapal olanlar alr.
ab
ekil 27 : a) zaman gecikmeli rle b) zaman gecikmeli rlenin i
yaps
Zaman geciktirme rlesi ekil 27de gsterilmektedir. Davran sradan
rleye benzer tek fark enerjilendirildiinde kontaklar durum
deitirmeden nce ayarlanabilir bir sre gecikmesi vardr.ab
ekil 28 : a) Ar Akm Rlesi b) Manyetik Ar Yk Rlesi YapsAr yk
rlesi ekil 28de gsterilmektedir. Bir stc bobin ve normalde kapal
kontaklardan ibarettir. Motora akan akm stc bobinden geer.
Motordaki yk ok byk olduunda motora akan akm normalde kapal olan ar
yk kontaklarnn almasna neden olacak olan stc bobinleri stacaktr. Bu
kontaklar motor koruma devrelerinin baz tiplerini sra ile aktive
eder.
DC MOTORLARIN HIZ KONTROL Bir ok uygulamada DC motor devir
saysnn geni snrlar ierisinde ayarlanmas gerekir. Motor devir saysnn
ayarlanabilmesi iin DC motor srcleri kullanlr. DC motor hz kontrol
analog ve saysal olmak zere iki tipte yaplabilmektedir. Gemite
endstriyel uygulamalar iin hz ayar yar iletken kontroll ayarl
gerilim kaynakl analog DC motor srcleri ile yaplrken, g
elektroniindeki gelimeler sonucunda analog kontrol yerini saysal hz
kontrol sistemlerine brakmtr.Kontrol Tanm DC motorlarn kontrolnde
kullanlan kontrol sistemlerinde, kn istenilen deerlerde elde
edilebilmesi iin, sistemin giriine uygulanmas gereken deerlerin
tespit edilmesi gerekir. Sistemde hedeflenen (referans) k deeri ile
mevcut sistem k deeri arasndaki fark, hata deeri olarak adlandrlr.
Sisteme uygulanacak giri sinyali, ite bu hatay en az deere
indirebilecek bir deer olarak retilebilmelidir. Bu da ayn zamanda,
sistem knn deeri ile referans knn deerinin birbiriyle karlatrlmas
demektir. Bu amala, gerekli sistem knn bilinebilmesi iin alglama
elemanlarnn kullanm gerekirDenetleyici (Kontrolr) Referans girii
ile pozisyon alglaycsndan ald bilgiyi kullanp rettii kontrol
sinyalleriyle motorun istenilen alma artlarn gerekletiren bir
birimdir. PWM sinyallerinin durumu, denetleyicinin rettii kontrol
sinyalleriyle belirlenmi olan kontrol algoritmasna gre kontrol
edilir. Denetleyici ile temel olarak hz, akm ve/veya pozisyon
dngsnn kontrol yaplr. Denetleyici, hem donanm ve hem de yazlm
yaplarndan oluurDC Motor Hz Kontrol YntemleriDoru akm motorlar,
deiken kolay hz deitirme zelliklerine sahip olduundan hzn kontrol
edilmesi istenen yerlerde kullanlrlar. Yksek yol alma momenti
saladndan, hz kontrol geni aralklarda yaplr. Hz kontrol alternatif
akm motorlarna gre daha kolay ve daha ucuzdur.
Kontroll dorultucular, sabit AC gerilimden deiken DC gerilimi
elde ederken, kyclar ise sabit DC gerilimi deiken DC gerilime
evirir. DC motorun hz aadaki yntemlerle ayarlanabilir.1. Endvi
devresi direncini (Ra) deitirerek 1. Uyarma akmn (Ia) deitirerek1.
Ward-Leonard sistemi ile 1. Yariletkenler kullanlarak 1. DGM (Darbe
Genilik Modlasyonu) ile
Endvi Devresi Direncinin Deitirilmesi le Hz Kontrol Endvi
devresi direncinin deitirilmesi iin endvi devresine seri direnler
balanr ve bylece motorun hz ayarlanabilir. Bu metot en ok DC
motorlara kademeli olarak yol vermek iin kullanlr. Bu uygulamada
kullanlan seri direnler srekli olarak kullanmda kalrlarsa direnler
zerinde nemli lde g kayb meydana gelecektir. Bu nedenle endvi
direncinin deitirilmesi, srekli hz deiimi gerektiren yerlerde
tercih edilmez.
Uyarma Akmnn Deitirilmesi le Hz Kontrol Uyarma akmnn
deitirilmesi ile hz kontrol seri ve paralel uyartml DC motorlarda
tercih edilen bir yntemdir. Bu yntemde endvi u gerilimi
deimemektedir. Motorun paralel ularna balanan ayarl bir diren
yardmyla uyarma akm deitirilir. Uyarma akmnn deiimi manyetik aknn
deimesine neden olacak ve hzn deiimi gerekleecektir. Bu yntemde
paralel uyarma devresinden geen uyarma akm, endvi devresi akmna gre
ok kk olduu iin manyetik alan ayar direnci zerinde oluan enerji
kayb az olacaktr.
Ward-Leonard sistemi ile Hz kontrolSerbest uyarmal doru akm
kayna ile ayarlanan endvi gerilimi ve bu gerilimle beslenen
motor-jeneratr grubu Ward-Leonard sistemi olarak adlandrlr. DC
motor hznn geni snrlar arasnda ayarlanmasn ve her iki yne doru
dnmesini salamak iin Ward-Leonard sistemi kullanlr. Ayarlanabilir
endvi gerilimi ya bir transformatr dorultma grubu yardm ile
alternatif gerilim kaynandan ya da serbest uyarmal bir doru akm
kaynandan salanr. Genellikle kullanlan bileenleri, bir DC jeneratr
ve bir sabit gerilimli uyarcy tahrik eden AC endksiyon veya
senkronize motoru; nt sarml DC tahrik motorunu ve bir alan reostasn
iermektedir. Bu donanm sayesinde, jeneratr nt alannn reglasyonu
yoluyla 10:1 hz orannn salanabilmesi mmkndr ve bu sistemler 360 W
ve zerindeki gler iin kullanlmaktadr.
ekil 29 : Ward-Leonard DC Motor Hz Kontrol Devresi
Daha kk g sistemlerinde 15: 1'e kadar varan hz oranlar
salanabilmektedir; fakat genel kullanm amalar iin gvenli snrn 10:1
olarak kabul edilmesi gereklidir. Bu yolla salanan hz kontrol son
derece kararldr. Tam yk ve sfr yk koullar arasndaki herhangi bir
zel ayar noktasndan sapma ekipmann boyutlarna ve tasarmna bal
olarak %7-10 arasnda deimektedir. Bu tip srcler, deiik endstriyel
uygulamalar iin kullanlmaktadr ve k gleri 15 kW-112 kW arasnda
deien elektrikli planyalarda ve asansrlerdeki ve ayrca hz oranlar
6:1-10: 1 arasnda olan 360 W, 0.75 kW ve 1.50 kW k gc olan bileyi
makinelerinde kullanm zellikle baarldr. ekil 25de Ward-Leonard
kontrol devresi gsterilmektedir. Sistemin almas asenkron motorla
uyartlan serbest uyartml bir doru akm jeneratrnn leonard motoruna
doru akm retmesiyle gerekleir. Birok sistemde Leonard jeneratr
uyartm akmn yar iletken dorultucu zerinden salar. Ward-Leonard hz
kontrol sisteminin en nemli zellikleri sabit fark ve g
salamasdr.
ekil 30 : Ward-Leonard Sistemiyle Elde Edilen Sabit G ve Tork
Erisi
Yar iletkenler ile Hz kontrol Gl silikon diyotlar ve tristrlerin
gelitirilmesi, alternatif akmn dorultularak DC motor kontrol
devreleri iin yeni bir kontrol metodu ortaya karmtr. Bu metot motor
jeneratr sistemlerinden daha gvenilir ve verimli bir metottur. Yar
iletkenler motorlarn uyartm ve endvi devresi elektriki zaman
gecikmesini azaltr ve tepki hzlarnn artmasn salar.Yariletkenlerle
kontrol devreleri grupta toplanr. Bir fazl kontrol fazl kontrol Kyc
(Chopper) srcler
Bir fazl srclerle kontrol DC motorun endvi devresindeki giri
gerilimi, tristr ya da diyot kullanlarak tek fazl bir alternatif
geriliminden elde edilmektedir. Motor ularndaki gerilim, tristrn
tetikleme as (a) deitirilerek ayarlanr. Uygulanan gerilimin yars
kullanlarak motor beslendiinden verim olduka dktr.
ekil 31 : Bir Fazl DC Konvertrl Step Motor Src
ekil 31de gsterilen bir fazl yarm dalga src kullanlarak bir DC
motor kontrol edildiinde, endvi geriliminin deeri, tetikleme as 0
ile arasnda deitirilmek suretiyle;
Va=(1+cos) olarak hesaplanr. Burada Vm, AC kaynak geriliminin
maksimum deeridir. Kontrol ilemini tam dalga olarakta gerekletirmek
mmkndr.
fazl srclerle kontrol Yksek gl motorlarda fazl srcler kullanlr.
Bu tr srclerde endvi devresi gerilimindeki dalgalanmalarn frekans
tek fazl srclere gre daha yksektir bu nedenle bu src modelinde
szgeleme kullanlr. fazl tam dalga yarm kontroll src ekil 32'de
grlmektedir.
ekil 32 : fazl Yarm Dalga Konverterli Src DevresiDC motorun
endvi gerilimi ise
Va=3cosa
olarak bulunur. Bu tr srclerde tetikleme as 90 nin stnde
olduunda kosinsn eitlie etkisi ele alndnda motorun jeneratr olarak
alaca grlmektedir. Bu src trnde de yarm dalgann yan sra tam dalga
konvertr de kullanlabilmektedir.
Kyc (Chopper) srcler Endvi gerilimini deitirmek iin bir DC kyc,
sabit gerilimli DC kaynak ile DC motorun arasna balanr. Kyclar
motor endvi devresi ile g kayna arasndaki balantda devre kesici
yardmyla saniyede yzlerce kez alp kapanma esasna gre alrlar. Kyc
tipi srclerde verim olduka yksek olup, hzn kontrol srekli olarak
deitirilebilir ve motor gerekli durumlarda bir jeneratr olarak
frenlenebilir. Bu birimde, motor kontrolnn salanmasnda kullanlacak
gerilim elde edilir. AC/DC evirici (ebeke balantl sistemlerde),
frenleme kycs, filtre ve yar iletken anahtarlarn (transistr, mosfet
v.b) bir araya gelmesinden oluan bir evirici sistemidir.
ekil 33 : Kyc Devresi ile Hz Kontrol Devresi
ekil 33'de grlen kyc devre ile hz kontrol devresi, endstriyel
tahrik sistemlerinde, elektrik ile alan trenlerde tercih edilen
sistemdir.
ekil 34 : Kyc Devresi Gerilim-Zaman(V-t) erisi Kyc devresindeki
tristr, kesici grevi yapar ve endvi devresi gerilimini saniyede
yzlerce kez ap kapatr. ekil 34da kyc devrenin gerilim zaman ilikisi
grlmektedir. Endvi devresinin iletim sresi ti, kesim sresi tk
istenildii gibi azaltlp oaltlarak motora uygulanan gerilimin Vm
etkin deeri ve dolaysyla motor dn yn ve hz istenildii gibi
ayarlanabilir. Bu durumda yk ularnda oluan gerilim,
Vy=V. olarak hesaplanr. DC kyclar ile motor kontrol yaplrken
DCyi kyacak tristrlerin tetikleme alar deitirilir. Tristr belirli
sre ierisinde iletimde, belirli sre ierisinde de kesimde olacaktr.
Tristrn iletimde ve kesimde kalma sresi deitirildiinde gerilimin
deerinde de deime olacaktr. Burada frekansn PWM ile ayarlandktan
sonra geri besleme yaplarak PI kontrolr sayesinde hz ayar yaplr.
Sabit hz deerlerinde maksimum momentte geici durum koullarna uygun
ayarlama yaplr. ekil 35 (a)' da doru akm ayarlaycs ile motor
kontrol gsterilmitir. ekil 35 (b)' de ise motor ularndaki gerilim
ve devredeki akmlarn deiimi grlmektedir. Gerilimi sabit ve U
deerinde olan bir doru akm kaynandan motorun ektii g tristrler
yardm ile ayarlanr. T2 tristrn sndrlmesi srasnda kondansatr st
plakas (+) ve alt plakas (-) olmak zere arj olmutur. ki tristrde de
kapama durumunda kald srece kondansatr arj durumunu korur, t0 annda
T1 tristr tetiklendiinde ise, alter iindeki bobin ve ona seri bal
olan diyot zerinden boalr ve ters ynde arj olur. Kondansatr ve
bobin bir rezonans devresi oluturur. Devredeki D2 diyotu
kondansatrn tekrar boalmasn engeller. Bylece kondansatr, T1
tristrnn sndrlmesi iin gerekli olan ynde arj olur.
ekil 35 : a) DA kyc ile motorun beslenmesi b) Gerilim ve akmlarn
deiimi
t0 annda T2 tristr, t1 annda T1 tristr periyodik olarak
tetiklenerek motor zerine gerilimin aralklarla uygulanmas salanr.
ekil 35(b) de Yk tarafnda darbe biiminde bir U2 geriliminin meydana
geldii gsterilmitir. T1 tristrndeki gerilim dm ihmal edilebileceine
gre t0 ile t1 zaman aralnda U2=U olur. t1 annda T2 tristrnn
tetiklenmesi ve T1 tristrnn snmesi ile bir an iin U = U + U deerini
alr. Kaynak ve kondansatr seri balandndan toplam gerilim ykn ularna
uygulanm olur. T zaman aralnda U2 = U. T2 aralnda ise U2=0 kabul
edilebilir.Bir doru akm ayarlaycsnda, gerilim ve akmn ortalama
deerleri elde edilerek motorun kararl alma deerleri hesaplanr.
Gerilimin daha byk olduu taraftaki akm () darbe eklinde dikdrtgen
biimli bloklardan olumutur. Dier tarafta ise U gerilimi darbe
eklinde, buna karlk I2 akm sreklidir. Giriteki akmnn ekil 35 (b)'
deki gibi darbeli olabilmesi iin, U gerilimli doru akm kaynann i
endktans ok kk olmaldr. ekil 35'da ebeke geriliminin dorultulduktan
sonra transitrler yardm ile kylmas gsterilmitir. Drt adet
transistor kpr devresi ile PWM devresi kegen ifti ile hattn kontrol
salanmaktadr. Transistrlerin kollektr ile emiter arasna balanan
diyotlar transistrlerin salkl almasn salayacaktr. Bu transistrler
iin ok nemli bir konudur. Diyotlar ters balandndan yk akmlarnn
zerlerinden gemelerine izin vermeyeceklerdir. Ancak transistrlerin
anahtarlamas sonucu yk zerinden akmn akmas DC gerilimin kylmas
sonucunu ortaya karacaktr. Diyotlarn transistor kollektr emiter
arasna balanmas gereklidir, nk kapasite ve bobin zerinde depo
edilecek gerilimler bu diyotlar yardm ile boalacaklardr. ekil 35da
gsterilen devrede endktif kaaklar ve kapasitif durumlarn olumasndan
dolay baz transistor kayplar olumaktadr.
ekil 36 : Drt Blgede alan DC-DC konverter
DC motor srcs ile anma hzn altndaki hzlarda almak iin armatr
gerilimi kontrol edilirken, anma hzn zerindeki hzlarda ise manyetik
alan zayflatmas yaplr. Ska kalk, devir yn deiimi, frenleme ve
hzlanma gerektiren uygulamalarda drt-blgeli DC motor src sistemine
gereksinim vardr. Byle bir src devresi ile yaplan hz ayar ve
frenleme almalar dier devrelerinkine gre daha verimli ve daha
ekonomik olur. Sekil 33de gsterilen ve bir DC motoru besleyen
drt-blgeli H-kpr DC-DC evirici g devresi drt adet IGBT yariletken
anahtar eleman kullanlarak oluturulmutur. Yariletken anahtarlar
uygun bir ekilde kontrol edilerek k gerilimi ve akm ortalama
deerlerinin yan sra polariteleri de ayarlanabilir. Bylece, kycnn
bir DC motoru beslemesi durumunda drt-blgeli alma elde edilebilir.
DC kyc g devresinde ilave olarak anahtarlara ters paralel bal
diyotlar kullanlmamtr. Denetleyici, yar iletken anahtarlar,
belirlemi olduu anlarda iletim veya kesime sokar. Yar iletkenlerden
oluan ara birime, anahtar src blou denir. Bu katman, stator
sarglarndan geen akmn ynnn deiimini, rotor pozisyon bilgisini
kullanarak salar ve bylelikle rotor dn gerekleir. Denetleyici,
pozisyon sensrlerinden edindii bilgiye bal olarak eviricideki alt
adet yar iletken anahtara ama ve kapama iareti gnderir. ekil 37de
mosfetlerin kullanld anahtar src blou grlmektedir. Rotor konumu gz
nnde tutularak yar iletken anahtarlar bir sra dahilinde tetiklenir.
lemci srcnn tetiklenmesini salayarak konum sensrlerinden ald
bilgiye dayanarak bir faza pozitif, bir dier faza negatif ve nc
faza ise gerilim uygulamaz. Bu gerilim uygulamas, sistematik bir
ekilde srayla her faza ayr ayr tatbik edilir. Bu ekilde ilemci, bu
src yapsyla motorda bir dnme momenti meydana getirir. Src, motorun
performansn belirleyen en nemli elemandr. lemci ve anahtarlar da
src performansnn mertebesini belirler. Anahtarlar, bir srcnn en
nemli elemanlardr. Anahtar iin eleman seiminde, anahtarlamann hz ve
kayplar gz nnde tutulur. Mosfet, en yaygn kullanlan elemandr. Fakat
, dier yar iletken malzemeler de kullanlabilir (rnein, transistr,
tristr, IGBT vb. gibi)
Sekil 37 : Drt-blgeli DC kyc g devresi.Drt-blgeli alsma iin
kullanlan anahtarlama durumlar, Va evirici ks gerilimi ya da motor
u gerilimi, ec zt emk ve ia armatr akm olmak zere, u ekilde
zetlenebilir:
Sekil 38 : Tam kpr bir DC kycnn drt-blgeli alsmas.
I. Blge: ileri ynde motor alma ( Va > ec ve ia >0 ).Akm S1
ve D4 arasnda anahtarlanr.S1 ve S2 iletimde, S3 ve S4 kesimde,
motoralma S2 ve D4 iletimde, S1 ve S3 kesimde, boluk alma
III. Blge: Ters ynde motor alma ( |Va| >|ec| veya < 0 )Akm
S4 ve D1 arasnda anahtarlanr.S3 ve S4 iletimde, S1 ve S2 kesimde,
motoralma S3 ve D1 iletimde, S2 ve S4 kesimde, boluk alma
II. Blge:ileri ynde jeneratr alma ( Va < ec veya < 0 )Akm
S4 ve D1 arasnda anahtarlanr.S4 ve D2 iletimde, S1 ve S3 kesimde,
bolukalma D1 ve D2 iletimde, S3 ve S4 kesimde, jeneratr almaIV.
Blge: Ters ynde jeneratr alma ( |Va| 0 )Akm S1 ve D4 arasnda
anahtarlanr.S1 ve D3 iletimde, S2 ve S4 kesimde, bolukalma D3 ve D4
iletimde, S1 ve S2 kesimde, jeneratr alma
Bylece, darbe genilik modlasyon (PWM) teknii ile denetlenen kyc
devre sayesinde srekli mknatsl DC motorun drt-blgeli hz ayar
yaplabilir.
Darbe Genilik Modlasyonu (DGM) ile Hz kontrol DC motorlarnda hz
ayar 1891 ylnda Ward Leonard tarafndan gerilim kontrol vastasyla
ilk olarak gerekletirilmitir. Bu yntem endvi devresine eklenen
direnler vastasyla gerekletirildii iin sistemin verimini direnlerde
meydana gelen kayplar nedeniyle olumsuz olarak etkilemekteydi. G
elektroniinde anahtarlama eleman olarak tristrn kullanlmaya
balamasyla DC motorlarnn hz ayarnda ayarl gerilim kaynaklar n plana
kmtr. Daha sonraki yllarda anahtarlama eleman olarak MOSFET, IGBT
ve GTO gibi yar iletken elemanlar kullanlmtr. lk nceleri bu
elemanlarn anahtarlamalar analog devreler vastasyla yaplmaktayd ve
frekanslar dk, grltden etkilenme oran yksekti. Ancak daha sonralar
saysal kontrol elemanlarnn kullanlmas ile deiken evre koullarndan
etkilenme oran en aza indirilmitir. Daha yksek anahtarlama frekans
deerlerine klmtr. Bu saysal kontroln salanmas iin gerekli olan
anahtarlama algoritmalar darbe genilik modlasyonu (DGM) kontrol
teknii ile salanmtr. Geleneksel analog kontrol devrelerinin bir ok
dezavantaj vardr. Karmak uygulama emas nedeniyle analog devrelerin
uygulanmas zordur. Analog devreler esneklikten yoksun ve grltye kar
duyarldr. Ayrca analog devrede kullanlan elektronik malzemelerin
her biri farkl tolerans deerlerine sahiptirler. Bu dezavantajlar
gvenilir, esnek ve grltden etkilenmeyen denetleyicili sistemlerin
kullanlmas ile giderilmektedir.
Ak dngl sistemle motor hz kontrolnde devir says ayar endvi veya
uyartm sargs zerine den gerilimi deitirmekle ayarlanabilir. Ak dngl
sistemde motor gerilimindeki ve motor devir saysndaki deiiklikler
dikkate alnmamaktadr. Bu yntemde, yk durumuna gre devir artar veya
azalr. Bu nedenle sabit hz uygulamalarnda ak dngl sistem
kullanlamaz. Kapal dng sistemle motor hz kontrolnde, k bykl sistem
deikenlerinden bamsz hale getirilir. ekilde kurulan dng sayesinde k
bykl olan motor devri says(hz) sabit tutulmak istenmektedir.
ekil 39 : DC motorun PI ile hz kontrol.
Yukarda verilen kapal dng sistemde motor devir says referans
deeri ile ayarlanr. Sistemde kullanlan takometre sayesinde motor
devrindeki deime alglanr. Motor yk durumuna gre endvi sargs veya
uyartm sargs gerilimi deitirilerek devir saysnn referans deerinde
kalmas salanr Motor gerilimi yar iletkenler yardm ile ayarlandndan,
sistem verimli ve gvenilirdir. ekilde PI kontrolr emas
verilmektedir. Sistemde oluacak hata sinyali kontrolrde
deerlendirilerek ka aktarlmaktadr. Hata sinyali e(t) sistem kazanc
ile arplmakta ve hata sinyalinin entegrali alnmaktadr. Sistemde
integratr kullanlarak ktaki am nlenir. Hata sinyalinin deerine gre
PI k artrr veya azaltr.Otomatik Denetim KavramBir sistemin
denetlenmesi ileminde insan faktrn en aza indirgeyecek ekilde
tasarlanm, sistemin ilevini yerine getirirken meydana gelebilecek
bozucu etkileri alglayabilen denetim trdr. ster mekanik, ister
elektrik isterse elektronik sistemler olsun, sistemin belirli bir
kararl aralkta almas istenilen her durumda otomatik denetim
ynteminden faydalanlr.Otomatik denetim sistemlerinin tasarmnda
aadaki zellikleri salayp salamad aratrlr.
Karal alma: Sistemin k deerinin snrl aralklarda tutulmas denetim
sisteminin kararl almas anlamna gelir.
Geici durum almas halinde hzl cevap: Bir otomatik denetim
sisteminin yarlara hzl cevap vermesi gerekir. Yani sistemin knn
istenen deere gelmesi anna kadar geen sre, geici durumdur. Bu
durumun ksa olmas denetim sisteminin iyi altnn iaretidir.
Kalc durum davran: Bir denetim sisteminde kalc durum almasnda
hatalarn sfr ya da ihmal edilebilir deerlerde tutulmas istenir.
Denetim Sistemi TrleriDenetim sistemleri; Ak evrim Kapal
evrimolmak zere iki temel kontrol yaklamn ierir. Kapal evrim
denetim sistemleri ayr bir modl konusu olduu iin burada
bahsedilmeyecektir.
Ak evrim Denetim Sisteminin Tanm
Ak evrim denetim sistemiSistemi kontrol eden dzenein sistemin
kndan etkilenmedii, sadece verilen referans deerine gre denetim
ileminin yapld sistemlerdir. Hassasiyet gerektirmeyen sistemlerde
kullanlan bir denetim sistemi mekanizmasdr. Sisteme etkiyen bozucu
faktrlerin alglanmas insan faktryle olabilmektedir. Verilen
referans iareti kontrol eleman tarafndan alnr ve oransal bir
kontrol iareti retir. Bu iaret, kontrol edilen sisteme verildiinde
sistem giri deikenini sre iine alr ve istenilen k iaretini verir.
Ak evrim denetim, genellikle kumanda edilen sistemin yapsnn ve
sisteme etkiyen dier girilerin nceden ok iyi bilindii uygulamalarda
kullanlr. Ak evrim denetim sistemi gnlk yaantmzda yaygn olarak
kullanlmaktadr. Bir anahtarla bir lambann kumandas en temel ak
evrim denetim rneidir.
1.2. Ak evrim Denetim Sisteminin ElemanlarBir ak evrim denetim
sistemi oluturulduunda sistem elemanlar aada aklanmtr.
Giri/k KavramlarBir sisteme, o sistemin dndan uygulanan, dier
deikenlerden bamsz biimde deiebilen ve sistemin davrann etkileyen
deikenlere sistemin girileri ad verilir. k ise denetim sisteminden
salanan gerek cevaptr. rnein bir stma sisteminin kortamn llen
scakldr. DenetleyiciSistemin istenilen k verecek dorultuda almasn
salamak iin verilen referansdeere bal olarak kontrol iareti retir.
Genellikle elektronik bir elemandr. Bir ak evrimsistemde alan
denetleyici retilen kn deerini ve durumunu kontrol etmez.
Dolaysylakapal evrime gre yaps daha basittir.
Denetlenen sistem (Plant)Denetleyicinin mdahale ettii,
ynlendirdii ve istenen sonularn alnmasn salad dzenektir. Endstri de
kullanlan her trl mekanizma ve tehizat denetlenen sistem olarak
adlandrlabilir. Motorlar, stma - soutma elemanlar, Aydnlatma
tehizatlar, retim bantlar denetlenen sistemlere verilebilecek
yzlerce rnekten bazlardr.
Ayar Noktas Ve Ayar Dengesi KavramlarDenetim sistemlerinde
sistemin giri deikenlerini bir srece sokarak kretebilmesi iin
referans deerine ihtiyac vardr. Bu referans deeri ayar noktas
olarakbelirlenir. Denetimin salanabilmesi, ktan istenen ve ideal
deerlerin alnabilmesi ancakayar noktas ve dengesinin salanmasna
baldr.
Ak evrim Denetimin Uygulama AlanlarAk evrim denetim yntemi aada
sralanan karakteristik zelliklerine uyan tm alanlarda baaryla
uygulanmaktadr. Ak evrim denetim sistemleri ilemlerin nceden ok iyi
bilindii sistemlerde yaygn olarak kullanlmaktadr. ok fazla
hassasiyet beklenmeyen sistemler iin idealdir. Ak evrim sistemlerin
maliyetleri daha dktr. Bu nedenle ucuz zmler istenen yerlerde
tercih edilir. Ak evrim denetim yntemi sisteme etkiyen bozucular
zayflatmaz. Ak evrim denetim yntemi kararsz bir sistemi kararl hale
getiremez. Yani ak evrim denetim ynteminin uygulanaca sistemin
zaten kararl ve dzgn alan bir sistem olmas zorunludur. Ak evrim
denetim yntemi, sistemin parametrelerindeki deiimlere kar bir
hassasiyet gstermez. Sistem almasna devam eder. Yani tasarm
aamasnda normal bir sistem iin hesaplamalar yaplm olan bir ak evrim
denetim sistemi, gerek sisteme uyarlandnda, gerek sistemdeki var
olan baz parametrelerin deerlerindeki hassas kaymalar dikkate
almadan, yine hesapland gibi doru bir ekilde alabilir.
Geri Besleme niteleri Stator sarglar rotor pozisyonuna gre
enerjilendirilmelidir. Alglayclar kullanlarak rotor pozisyonu
belirlenir. Buna ek olarak, src fonksiyonlar iin gereken akm ve
gerilim deerleri llmeli ve lm deerlerine gre kullanlmaldr. BLDC
motorlarda hz ve konumun kontrol edilebilmesi iin, rotorun konumunu
alglayacak alglayclara ihtiya vardr. Bu alglama ilemi iin
geleneksel olarak Alan (Hall) etkili ya da optik sensrler kullanlr.
Bunlar statora ya da motorun miline yerletirilir. Bu sensrl srm
tekniklerinin haricinde, BLDC motorun sensr kullanlmadan srld
teknikler de gnmzde artan bir ekilde kullanlmaktadr. Lkin sensrsz
srme teknikleri, ek olarak muhtelif algoritmalarn kullanlmas
zaruretini ortaya karr. Bir de sensrsz kullanlan motorlar, sensrl
kullanlan motorlara nispetle daha az hz ve ivme deerlerine
eriebilirler.
Sradan bir kaynaktan ulaan uyar ya da iaretleri alp, ald bu
iaretlere uygun olarak sinyal retebilen elemanlara sensr denir.
Bunlar, motor kontrol (denetimi) iin kontrol edilen (denetlenen)
mekanik veya elektriksel byklkten geri besleme alarak denetleyiciye
gnderen optik veya elektromanyetik elemanlardr. Denetleme
devrelerinde sensrlerden gelen geri belsem bilgileri ilenecek bykle
dntrlr. Rotor konumu alglayan alglayclar ok eitlidir. Bunlarn
ierisinde en ok kulanlan alan etkili sensrler(Hall Effect
Sensors)dir. Bu sensrlerin haricinde, optik sensrler (encoder) ve
sfr gei dedektrleri (zero crossing dedectors) de kullanlr. Motor
kontrolnde, rotor pozisyonun alglanmas iin, hangi alglama elemann
seileceine karar vermek amacyla baz kriterlerin deerlendirilmesi
gerekir. Bu kriterler; evre koullar, rotorda asal olarak yer
deitirmenin byklk derecesi, alglayc iin ayrlan mesafe, kontrolden
beklenen hassaslk ve doruluk derecesi, alglayc elemann ekmesi
beklenilen en fazla g ve alglayc elemann seri biimde retilebilme
durumu olarak saylabilir.
A. Alan Etkili Sensr (Hall Effect Sensor) Kullanm: Alan etkisi
sensrler, manyetik alann alglanmasnda kullanlr. Dr. Edwin Hall
tarafndan ilk defa olarak 1879 ylnda alan etkisinin varl kefedildi.
Dr. Hall, altndan yaplm ve iinden geen ince bir altn plakann bir
yzeyine, dik bir manyetik alan olacak ekilde bir mknats
yerletirdiinde, plakann dier tarafnda potansiyel bir fark olutuunu
kefetti. Oluan bu potansiyel fark (Hall Gerilimi), bir iletkenden
geebilecek akm ve o iletkende oluabilecek manyetik ak ile orantl
olmaktadr. Bu olay da, alan (Hall) etkisinin varln gstermektedir.
zerinden akmn getii bir ince plakann kndaki ular, mevcut manyetik
alana dik bir biimde balanm durumdadr. Manyetik bir alann mevcut
olmad durumlarda bir gerilim (Hall Gerilimi, Vh) olumaz. Geen akm
ve mevcut manyetik alann iddet ve yn, oluacak gerilimin iddet ve
ynn tayin eder. Akm, kontroln bykl olarak anlr ve kta oluacak
gerilimle doru orantldr.
Motorlarn kontrolnde, hava araln lmek amacyla bu sensrler ilk
kez 1960 senelerinde kullanlmaya balanmtr. BLDC motor rotorunun
dndrlebilmesi iin statorun sarglarna bir sra dahilinde g
uygulanmaldr. Stator ierisine gmlen alan sensrleri sayesinde
rotorun pozisyonu alglanr.
Statora yerletirilen alan sensrlerinin yerleri kutup saysna gre
farkllk gsterir. ekil 2.6da iki ve drt kutuplu motorlarda alan
sensrlerinin nerelere yerletirildii rneklenmitir (H1, H2 ve H3
olarak adlandrlan harfler, Alan (Hall) etkili sensrleri ifade
etmektedir).
ekil 2.6 : ki ve drt kutuplu motorlarda alan etkili sensrlerin
durumu
Alan etkili sensrlere, rotorun mknatsndan manyetik ak salanr.
Ender olarak, motorun miline bal olan yardmc bir mknats tarafndan
manyetik ak salanr. 30 mV gibi kk bir deere sahip olan Hall
Gerilimi bir ykselte yardmyla ykseltilir.Statorun ierisine alan
etkili sensrlerin yerletirilmesi riskli ve karmak bir ilemdir. nk
statora yerletirilen mknatslardan dolay yanl bir sinyal retilirse,
rotorun pozisyonu da yanl olarak tespit edilebilir. ekil 2.8de
motor ierisine yerletirilen alan etkili sensrler grlmektedir.
ekil 2.8 : Motor iindeki alan etkili sensrlerin konumu
Alan etkili sensrlerin seri retime olan uygunsuzluu, motor
ierisine gmlmesi zarureti, scakla olan hassasiyeti ve snrl bir
znrle sahip olmas olumsuz taraflardr. Bununla beraber yapsnn
basitlii ve ucuzluu dolaysyla gnmzde yaygn bir kullanma
sahiptir.ekil 2.9da Alan etkili sensrlerin motorlara yerleim
ekilleri gsterilmitir.
ekil 2.9 : Alan etkili sensrlerin yerleim ekilleri
ekil 2.9da da grld gibi, alan etkili sensrler, 60 ya da 120
aralklarla motorlarn statorlarna yerletirilir.
B.Optik Sensr (Encoder) Kullanm: Optik sensrler kullanlarak
rotorun konumu, hassas olacak ekilde asal olarak belirlenir. Optik
sensrlerin alma prensibi; biri sabit, dieri de hareketli olan iki
diskin bir k kaynandan gnderilen geirip geirmedii ve dorusal veya
asal olarak yer deitirmenin alglanmas esasna dayanr. Gnderilen n
bir demet halinde, %50 geirgenlii olan bir durgun diskten geip dier
diske yani hareketli olana eriir. Hareketli diskten gemi olan k
demeti, a duyarl bir yzeye sahip optik sensrn yzeyine odaklanr ve
bu sayede elektriksel bir iarete dnm olur. Hareketli diskte mevcut
olan aralklarn darlk derecesinin art, hareketin alglanma
hassasiyetini de arttrr.
ki eit encoder tipi vardr. Biri artrmsal ya da artml
(incremental) alglayc, dieri ise mutlak alglaycdr. Artml
alglayclarn saysal k bir bitliktir. Bu alglaycnn klar, kullanlacak
bir elektronik devre ile saylacak, bu da motorun hz ve konumu
hakknda bilgi verecektir. ekil 2.10da Artml bir encoder
gsterilmitir.
ekil 2.10 : Artml (artrmsal) encoder
Belirgin bir noktaya gre motorun hz ve konumunu belirleyen
alglayclara mutlak alglayclar denir [9]. Mutlak alglaycda, mil
konumu ile alkal bir tek dijital sinyal retilmektedir. Mildeki her
bir konum bir dijital desene sahiptir. kilik bir say dzeninde olan
bu dijital desen ierisindeki bitler, znrl oluturur. Dijital desen,
disk zerinde mevcut olan her bir dairesel iz veyahut sradr. Bu
desen, 28=256 deiik konum disk zerinde belirtebilir. rnein, 10 ize
sahip bir dijital desen 210=1024 konum belirtir. ekil 2.11de mutlak
encoder gsterilmitir.
ekil 2.11 : Mutlak encoder
Optik sensrlerde, asal hz bykl, dijital deerdeki k bilgisinden
iki deiik biimde elde edilir.
Birincisi, k darbelerinin saylmas yntemi kullanlarak : Dijital
denetleyicide rnekleme periyodunun esas alnmasyla, rnekleme sreci
ierisindeki, dijital denetleyicide alglayc darbesi saylp
belirlenir. rnekleme periyodu , asal hz , rnekleme periyodu
ierisinde belirlenen darbe says , diskteki zgara says olarak tespit
edildiinde milin sahip olduu asal hz;
eklindedir. Bu metot, dk hz durumunda bilhassa tespit edilen bir
hz deerinin altnda kati netice vermemesi, dikkat edilmesi gereken
bir husustur.
kincisi, darbe zamanlandrma yntemini kullanarak: Bir kodlaycnn
sresi (bitiik vaziyetteki iki zgara arasndaki sre), yksek frekansa
sahip saat sinyallerinin kullanlmasyla llerek belirlenir. Dk
hzlarda doru bir biimde lme yapabilmek iin bu yntem uygundur.
Burada, frekans , zgara says , bir kodlaycnn sresi ierisinde
saylacak saat sinyalleri olarak tespit edildiinde milin asal hz
deeri;
eklindedir. Bu denklem ierisindeki, diskin bir devri mddetince
geen ortalama sre olarak ifade edilir. Ksa mesafeler iin encoderdan
alnlan bilgiler, paralel bir biimde denetleme birimine, her bir bit
deerine karlk bir kablo olacak ekilde gnderilir. Dk znrlk ve ksa
mesafe durumlar iin paralel olarak yaplan veri aktarm en uygun
yntemdir. Ancak, znrl yksek olan ve bir adetten daha fazla encodern
kullanld robot sistemlerinde maliyet artna sebep olmaktadr.
Artml alglayclar, mutlak alglayclara oranla daha fazla
kullanlmaktadr. nk basittir, ucuzdur ve kullanl bir yapya
sahiptir.
Hassas uygulamalarda encoder kullanm tercih edilir. Bunun dnda,
pahal olmas ve kompleks bir yapya sahip olmasndan dolay mantkl bir
seim deildir.C. Sfr Gei Dedektr Kullanm:Statorun sarglarnda
endklenen zt-emkne gre, sfr gei dedektr kullanlarak rotor
pozisyonunun belirlenmesi mmkndr. Bu sensr, motor srcsne bal olup
rotor konumunun tespit edilebilmesi iin, stator faz sarglarna
uygulanan gerilim ile besleme geriliminin yar deeri karlatrlr.
Kendisinin hareketli paralarnn bulunmamas ve motor hareketli
paralar ile balantl olmamas avantaj salar. Sfr gei dedektrnn yaps
ve balants ekil 2.12de grlmektedir.
ekil 2.12 : Sfr gei detektrnn yaps ve balants120 genilie sahip
akmlar statorun faz sarglarna uyguland zaman, fazl BLDC motorda,
bir fazdan pozitif, dier fazdan ise negatif akm akmasna neden
olacaktr. naktif durumda olan da nc faz olacaktr. naktif durumda
olan faz, sfrdan gei metodunda zt-emkni lmek iin kullanlr. ki
komtasyon noktasnn tam ortas, zt- emknin sfrdan getii nokta olup bu
nokta sfr gei noktas (zero crossing point) olarak adlandrlr. Sfr
gei noktas, bir sonraki sarg iftinin enerjilendirilmesi iin
referans tekil eder. Sfr geii olduunda, bir nceki sfr geiine yar
periyotluk bir sre eklenmesiyle, bir sonraki komtasyon an iin
kestirimde bulunulabilir. BLDC motorun yksek hzl uygulamalarnda,
bir fazn pasif kalma sresi ok ksa olacandan sfr gei noktasnn tayini
de bir hayli gleecektir. Bu yzden, bu tip uygulamalar iin bu yntem
uygun deildir.
Sfr gei ynteminin haricinde, alglaycsz almada, Kalman Filtre
Teorisi olarak anlan daha gl bir yntem de kullanlmaktadr. Kalman
Matematiksel modelinde, motorun hz, konum ve zt-emk deerleri
kullanlr. Bu model ile, ilerleyen zaman admlarnda motor durumunun
deiimi iin kestirimde bulunulur. Pasif kalan fazn zt-emk llr ve
kestirimde bulunulan fazn zt-emk ile mukayese edilir. kisinin
arasnda ortaya kan fark, motor alma performansn iyiletirmede
kullanlr. Kalman Teknii ile, sfr gei tahmininin yan sra, motor hz
ve konum tahmini her bir zaman adm iin yaplr. Bylece, komtasyonun
doruluk derecesi arttrlarak daha yksek bir verim elde edilmesi mmkn
olur.
ekil 40 : Deiken grev duty sayklna sahip DGM sinyalleri
ekil 32de gsterilen DGM sinyali iin grev saykl
d= olur.
Va geriliminin etkisi grev sayklna gre deitirildiine gre Eitlik
dzenlenecek olursa frekans sabit grev saykl farkl DGM sinyali DC
motora uygulandnda motor hz,
m= olacaktr. Grev sayklnn sfr olmas durumunda motorun hz da sfr
olur. Grev sayklnn bir olmas durumunda ise maksimum gerilim sabit
olarak uygulanm olur ve bu durumda ise motor maksimum hza ular.
Uygulanacak DGM sinyalinin frekans; kullanlan DC motorun
zelliklerine ve duyma eik frekans gz nne alnarak seilmelidir. Gemi
yllarda bu deerler iin en uygun aralk 400 - 1000 Hz aral olarak
ifade edilirken DC motor src devrelerin gelimesiyle bu snrn st aral
100 KHz snrna ulamtr.
ekil 41 : DGM retimi ve motor hz kontrol devresiDarbe genilik
modlasyonu ile alan, genellikle analog ya da dijital srclerdir.
Geri besleme olarak tako jeneratr, hall sensr veya artrml enkoder
kullanlr. Dinamik performans dk kullanm kolay ve ucuz
srclerdir.
ekil 42 : DC Servo motor src alma prensip emas
ekil 43 : eitli tip DC srcler
ekil 44 : 6 eksenli robot kolun kontrol bilgisayar
ekil 45 : Robot kolu kontrol eden bilgisayar ve motor srclerle
olan balantlar
ekil 46 : Robot kolun klemens balantlar ve sigortalar
ekil 47 : Robot kolun motor srcleri ve balant kablolar
Sekil 48 : 6 eksenli robot kol
Frasz DC Motor Kontrol Yntemleri Frasz DC motorlarda kullanlan
kontrol yntemleri ile motorun akm, torku (dnme momenti), rotor
konumu ve hz gibi parametreleri kontrol edilir. Gnmze dein birok
kontrol yntemi kullanlagelmitir. Doru akm motorlarnn hassas olarak
hz kontrollerinin yaplabilmesi iin, bugne dein yapay sinir alar,
bulank mantk, dalgack teknii, genetik algoritma olarak ad geen pek
ok yntem saylabilir. Ayrca, ad saylan bu yntemlerle birlikte ya da
tek bana PID kontrol de kullanlagelmitir. Klasik Kontrol Yntemleri
Klasik denetleyiciler kullanlarak yaplan BLDC motorlarnn parametrik
kontrolleri, klasik kontrol yntemleri olarak tanmlanmaktadr. Klasik
denetleyiciler PI (oransal- integral kontrol), PD (oransal-trev
kontrol) ve PID (oransal-integral ve trev kontrol) tipindeki
denetleyicilerdir. Klasik denetleyiciler, dier denetleyicilere
nazaran daha basit ve daha ucuz bir yapya sahiptir. Sanayideki
birok alanda yeteri derecede verimin elde edilmesini salamaktadr.
Bu zellikleri nedeniyle, gnmzde endstride yaygn bir kullanma
sahiptir. PI tipi denetleyicilerde, oransal ve integral katsaylarn;
PD tipi denetleyicilerde, oransal ve trev katsaylarn; PID tipi
denetleyicilerde oransal, integral ve trev katsaylarnn ayarlanmas
suretiyle istenilen alma performanslar elde edilebilir. Ancak bu
tip denetleyicilerin, denetlenecek sistemin modeline gereksinim
duymalar ve optimum kazan deerlerinin deneme-yanlma yntemiyle
belirlenmesi olumsuz ynlerini oluturur. Klasik denetleyicilerin,
ani olarak deien ve sinzoidal bir zellie sahip olan yklerdeki
performanslar dk olmaktadr. Endstride, BLDC motorlarn kontrolnde,
ok hassasiyet aranmyorsa, klasik denetleyici kullanmak doru bir
yaklamdr. nk bu denetleyicilerin maliyeti dk ve yaps basittir.
Endstride ok hassasiyetin arand uygulamalarda ise modern denetim
tekniklerini kullanmak daha dorudur. nk bu teknikler daha iyi
sonular vermektedir. Gnmzde tercih edilen modern denetim
teknikleri, bulank mantk, genetik algoritma, yapay sinir alar ve
sinirsel bulank denetleyicilerin kullanld teknikler olarak
rneklendirilebilir.Modern Kontrol Yntemleri A. Bulank Mantk: Klasik
denetleyicilerin yeterli hassasiyeti gsteremedii durumlar iin
tercih edilebilecek en akll yaklamlardan biri, bulank mantk denetim
yntemidir. Bulank mantk denetimi, matematiksel modelin oluturulamad
veya oluturulmas esnasnda zorluklar yaanld, insanlarn tecrbe ve
sezgilerine gereksinim duyulmas hllerinin yaand durumlarda ve
dorusal olmayan sistemler iin daha olumlu neticeler vermektedir.
Bulank denetleyiciler dilsel ifadeleri kullanrlar. Bulank
denetleyicilerde ilem ana basamaktan oluur: 1. Bulanklatrma: yelik
fonksiyonlarnn elde edilmesi ilemidir. Burada, dardan gelen kesin
bilgiler, yelik fonksiyonlar cinsinden ifade edilir, yani
bulanklatrlr. 2. Kural taban: Uygun kurallarn elde edildii ilemdir.
Bu kurallar, sistemin hakkndaki bilgi ve tecrbelere istinaden
oluturulur. 3. Durulatrma : Bulank sonu deerleri, durulama
yntemlerinden birini kullanarak tekrar kesin deerler cinsinden
ifade edilir ve sistemin ayarlanmas yaplr. ekil 3.1de bir bulank
denetleyicinin genel yaps grlmektedir.
ekil 49 : Bulank denetleyici genel yapsB. Genetik Algoritma:
Genetik algoritma (Genetic algorithm), fonksiyonlarn
optimizasyonunu, biyolojik srecin modellenmesi ilemi ile
gerekletiren evrim algoritmalardr. Poplasyonun her bir bireyi,
kromozomlar eklinde temsil edilir. Belirlenmi kurallar ierisinde,
poplasyonun uygunluunun minimizasyonu ve maksimizasyonu yaplr. Uzun
sren almalarn neticesinde, bu yntem ilk kez John Holland (1975)
tarafndan uygulanmaya balanmtr.
Genetik algoritmann stnlkleri:Ayrk ve srekli olan parametrelerin
optimizasyonunu salar. Trevsel bilgilere ihtiya gstermez. alma iin
ok sayda parametre kullanmak mmkndr. Paralel bilgisayarlarn
kullanlmasyla altrlabilmesi mmkndr. Kresel optimum deeri
bulabilmesi mmkndr. ok sayda parametrenin en uygun zmlerini elde
edebilmesi mmkndr. Sisteme ilikin bir ama fonksiyonu ve bu
fonksiyona bal olan snr artlar, genetik algoritmada belirlenmesi
gereken ilk ilemlerdir. Buna ilikin matematiksel ifadenin
oluturulmasndan sonra, bu ifade ve snr artlarnn algoritmaya
uyarlanmas ilemi gerekletirilir. Ama fonksiyonun belirlenmesinde
parametre saysnn arttrlmas daha da gereki bir optimizasyonun
yaplmasn salar. Genetik algoritmalar almas esnasnda ekil 45deki
ilem srasn takip ederler. Biyolojideki genleri, genetik algoritma
parametreleri temsil eder. Kromozom, parametrelerin toplu olarak
oluturduu kmedir. Her yeni nesil, rasgele olarak bilgi deiimiyle ve
diziler ierisinde hayatta kalanlarn birletirilmesiyle oluturulur.
Bir genetik algoritmada ana operatr vardr. Bunlar; seme, aprazlama
ve mutasyondur. lk nfus genelde rasgele oluturulur. Bir nesildeki
dizilerden, bir blm bir sonraki nesle aktarlp, bir blm de
aktarlamayp yok olur. Seim mekanizmalar, hangi dizilerin bir
sonraki nesle aktarlacanda rol oynar. aprazlama, en nemli genetik
operatr olup, yap bloklarnn tekrar birletirilmesinden ve
kartrlmasndan mesuldr. aprazlama, iki kromozomdan belirli noktalarn
yer deitirmesidir. Bylece, yeni zmler oluturmada kilit rol oynar.
yle ki; bir zmn bir blmn, dier bir zmle deitirir. Yeni tohumlar bu
ekilde meydana gelir. Mutasyon, genetik deiim salayan bir
operatrdr. Bir nesilden bir sonraki nesle kopyalama esnasnda,
rasgele bakalamlar genlere aktarlr. Mutasyon, ender olarak da olsa
iyi bireylerin yok olmasna sebep olur ki; genetik algoritma
ierisine elitizasyon yaps yerletirilmitir. Bu yap, en iyi
bireylerin bir sonraki nesle aktarlmasn salar.
ekil 50 : Genetik algoritmadaki ilem sras
Frasz DC Motorlarn Olumlu ve Olumsuz Ynleri BLDC motorlarn
olumlu ynleri unlardr: Makine uzunluu, BLDC motorlarn kollektr ve
fralara sahip olmamalar nedeniyle DC ve asenkron makinalara nazaran
daha ksadr. Bylece ayn deere sahip moment, daha da kk endvi yzeyi
ile elde edilmi olur. Ayn kazanla, daha yksek hzlara klarak, yksek
hzl uygulamalarda kullanlabilme imkan oluur ve de atalet
(eylemsizlik) momenti de azaltlm olur. BLDC motorlarn hz kontrol
olanaklar ok iyidir. Asenkron motorlara nazaran, kontrol edilebilen
hz aralklar daha genitir. Kk bir boyuta karn yksek bir moment
retebilirler. DC ve asenkron motorlara nispetle BLDC motorlarn,
akm/dndrme momenti, arlk/g olarak daha yksek oranlara sahiptir.
Fral DC motorlarn ihtiya gsterdii uyarma akmlarna, BLDC motorlar
ihtiya gstermezler. Saladklar alma ortam gvenilirdir. Kolay bir
ekilde soutulurlar. Sessiz bir alma ortam salarlar. ok yksek bir
verime sahiptirler. Ayn soutma ve boyut ile BLDC motorlarn,
asenkron ve DC motorlara nazaran sahip olduklar g faktr ve verim
daha iyidir. %20 ila %50 arasnda deien deerlerde, dier motorlara
nispetle daha fazla k gcne sahiptir. Fral DC motorlardaki fra
sistemine sahip olmadndan dolay, fralar nedeniyle oluan karbon
tozlarn iermezler. Yksek moment-hacim orann yani kk hacimle yksek
moment retimini salar ve bu sayede daha az bakr kullanm imkn
verirler. DC motorlardaki kollektr ve fra dzenekleri olmay
nedeniyle tehlikeli ortamlarda alabilme ve bakm gereksinimini
azaltma imkn salarlar. teki motorlara nazaran kontrolnn ok kolay
olmasnn nedeni, motor akm ile dorudan orantl olan bir k momentine
sahip olmasdr. Btn bu olumlu zelliklere ramen baz olumsuz
zelliklere de sahiptir: Harici bir g elektronii ve arzu edilen alma
iin rotor konum bilgisi gereklilii, Alan (Hall) etkili pozisyon
sensrlerine olan ihtiyac sz konusudur. Pozisyon sensr kullanlmad
durumlara alglaycsz alma durumu denir. BLDCnin alglaycsz olarak
almas iin birtakm ek algoritmalarn kullanlmas gereklidir. Bu yntem
de, dierine gre daha pahal bir yntemdir. Atmosferik ve termik
etkiler, daimi mknatslarn uzun sre kullanlmalar neticesinde
mknatsiyet zelliklerinin bozulmasna neden olur. Daimi mknatsl
motorlarn yksek hzlara ulaamamasnn nedeni, bu motorlar sabit bir
uyarma salarlar ve mknatslar arasndaki montaj mekanik gerilim
snrlandrmasna sebep olur. nverter hatalar, BLDC motorlarn
srclerinde oluabilir. Rotordaki mevcut daimi mknatslardan dolay,
inverterde bir ksa devre meydana gelirse, BLDC motorlarda mhim
derecede risk tekil eder. Bunun nedeni, dnmekte olan rotorun her
daim enerji vermesi ve srekli olarak ksa devre olan sarglarda bir
emkine sebep olmasdr. Byle bir durum, bu sarglarda ok byk deerde
bir akmn dolamna ve bu neticede de oluan byk bir momentle motorun
durdurulmasna neden olur. Gnmzde, kontrol tekniklerinin ve
teknolojinin dzeyinin ilerlemesi ile BLDC motorlarnn kullanm hem
artm, hem de sregelen dezavantajlar da elimine edilmeye doru yol
almtr.
SONUDoru akm motorlar, dk maliyetli, hz kontrlnn kolay olmas,
geni g ve tork aralnda kolay bulunabilirlii ve dk bakm gerektirmesi
nedeniyle yaygn olarak kullanlmaktadr. Bu almada, DC motorlarn
kontrol yntemleri incelenmitir. Yaplan bu aratrmalar sonucu basit
yapdan kompleks yaplara kadar farkl yntemlerin olduu anlalmtr.
Aratrma sonucu en sk kullanlan yntem olan PWM metodu olduu grlmtr.
PWM ile kontrol metodu kk boyut ve dk gteki DC motorlardan yksek
boyut ve yksek g tketen motorlarn kontrolne kadar geni bir aralna
sahiptir.Bu kontrol de yle gerekleir; denetleyicinin rettii kontrol
sinyali, seilen kontrol algoritmasna gre PWM sinyallerinin durumunu
kontrol eder. Bu ekilde denetleyici tarafndan motor parametreleri
kontrol edilir. Denetleyici, hem yazlm hem de donanm yaplarndan
oluur. DC motorlarn kontrolnde yaplarnn basit olmas nedeniyle,
birok uygulamalarda -fazla hassasiyet istenmezse- klasik
denetleyiciler (PI ve PD) tercih edilir. Klasik denetleyiciler,
kontrol edilmesi gereken sistemin modeline ihtiya duyarlar ve
optimum kazan deerlerinin deneme-yanlma yntemi yntemi kullanlarak
belirlenmesi gerekir. Klasik denetleyicilerin bu zellikleri
dezavantaj oluturur. Ayrca klasik denetleyiciler, ani olarak deien
yk durumlarnda ve ykn sinzoidal olarak deiimleri karsnda yeterli
derecede performans gerekletiremez. Klasik denetleyicilerin yeterli
derecede performans sergileyemedii veya daha ok hassasiyet istendii
uygulamalarda, modern denetim teknikleri (bulank mantk, genetik
algoritma, sinirsel bulank denetleyiciler v.b.) kullanlmas daha
doru bir yaklam olur.