Embed Size (px)
Citation preview

DEFINICIÓN DE INDICADORES DE CALIDAD EN EL PROCESO DE GENERACIÓN
DE IMÁGENES ORTORRECTIFICADAS OBTENIDAS A PARTIR DE SENSORES
REMOTOS DE MEDIA RESOLUCIÓN
JULIETH NATALIA ACOSTA AGUDELO
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE INGENIERÍA
INGENIERÍA CATASTRAL & GEODESIA
AGOSTO de 2017
DEFINICIÓN DE INDICADORES DE CALIDAD EN EL PROCESO DE GENERACIÓN
DE IMÁGENES ORTORRECTIFICADAS OBTENIDAS A PARTIR DE SENSORES
REMOTOS DE MEDIA RESOLUCIÓN
JULIETH NATALIA ACOSTA AGUDELO
TRABAJO DE GRADO EN LA MODALIDAD DE MONOGRAFÍA PARA OPTAR POR
EL TÍTULO DE INGENIERA CATASTRAL Y GEODESTA
DIRECTOR:
PhD. ERIKA SOFÍA UPEGUI CARDONA
Profesor asistente del proyecto curricular de Ingeniería Catastral y Geodesia.
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE INGENIERÍA
INGENIERÍA CATASTRAL & GEODESIA.
AGOSTO de 2017.
ii
Nota de aceptación:
Firma del director
Firma del jurado
iii
Agradecimientos
Agradezco en primer lugar a mis padres Eduardo Acosta y Blanca Agudelo por haberme
apoyado durante toda la carrera, por apoyarme y por dedicar su tiempo a aconsejarme y
acompañarme en todos los momentos, siempre estuvieron tanto en los malos, como en los buenos,
fueron mi apoyo incondicional.
En los últimos 5 años debo agradecerles a muchas personas que aportaron a mi aprendizaje
en la carrera de formación como Ingeniera Catastral y Geodesta, estoy muy agradecida con la
universidad Distrital Francisco José de caldas por brindarme la oportunidad de pertenecer a su
alumnado, a todos los profesores de los cuales tuve la posibilidad de aprender, me llevo un grato
recuerdo, a mi directora de tesis Erika Upegui por su guía y recomendaciones, a mis compañeros
de carrera y a Dios por guiarme en el camino.
Finalmente, al Instituto Geográfico Agustín Codazzi por permitirme realizar esta
investigación en sus instalaciones y permitirme utilizar los datos existentes dentro del mismo.
iv
Resumen
Este proyecto de investigación define indicadores de calidad para la evaluación de las
imágenes ortorrectificadas, partiendo de la descripción del proceso metodológico para la
corrección geométrica adecuada de las imágenes digitales de media resolución, hasta la
descripción de las características que deben tener los insumos utilizados en el proceso.
Adicionalmente se realiza un breve estudio sobre diferentes Modelos Digitales de Superficie
disponibles y se evalúan varios métodos de fusión de imágenes donde se determina que el método
de componentes principales ofrece mayor resolución espacial, degradando en menor proporción
la resolución espectral con respecto a los demás métodos estudiados.
Palabras clave
Ortorrectificación, Calidad, Sensores remotos, Resolución espacial y Resolución espectral
2
Tabla de contenido Introducción .................................................................................................................................. 10
1 Planteamiento del problema .................................................................................................. 12
2 Justificación ........................................................................................................................... 13
3 Objetivos ................................................................................................................................ 14
3.1 Objetivo general .......................................................................................................................... 14
3.2 Objetivos específicos .................................................................................................................. 14
4 Marco de referencia ............................................................................................................... 15
4.1 Marco teórico .............................................................................................................................. 15
4.1.1 Sensores remotos ............................................................................................................... 15
4.1.2 Procesamiento de imágenes digitales ................................................................................ 20
4.1.3 Procesos estadísticos .......................................................................................................... 24
4.1.4 Términos geodésicos ........................................................................................................... 30
4.2 Marco normativo ........................................................................................................................ 33
4.3 Antecedentes .............................................................................................................................. 34
Proceso de ortorrectificación para generación de cartografía ............................................................... 34
Importancia del DEM y medidas de calidad para una ortoimágen ........................................................ 37
4.4 Marco espacial e insumos. .......................................................................................................... 38
4.4.1 Descripción de las imágenes ............................................................................................... 40
4.4.2 Softwares utilizados ............................................................................................................ 41
4.4.3 DEM utilizados .................................................................................................................... 41
5 Metodología ........................................................................................................................... 42
5.1 Diagrama de flujo metodológico ................................................................................................ 42
5.2 Fase I ........................................................................................................................................... 43
5.3 Fase II .......................................................................................................................................... 44
5.4 Fase III ......................................................................................................................................... 44
5.5 Fase IV ......................................................................................................................................... 44
6 Resultados y análisis de los resultados .................................................................................. 46
6.1 Modelos estadísticos resultados ................................................................................................. 46
6.1.1 Datos del proceso de ortorrectificación para las estadísticas. ........................................... 46
6.1.2 Resultados y análisis de los modelos de regresión ............................................................. 51
6.1.3 Modelos resultado .............................................................................................................. 52
6.1.4 Verificación significancia individual y global. ...................................................................... 55
3
6.2 Validación del modelo ................................................................................................................. 56
6.3 Metodología de ortorrectificación e insumos ............................................................................ 57
6.3.1 Requerimientos de las imágenes crudas ............................................................................ 58
6.3.2 Modelo digital del terreno .................................................................................................. 59
6.3.3 Requerimientos de los puntos de control/apoyo (GCP) y chequeo (CPS) .......................... 65
6.3.4 Mejoramiento de resolución espacial ................................................................................. 67
6.4 Definición de indicadores de calidad .......................................................................................... 71
6.4.1 Elemento totalidad ............................................................................................................. 71
6.4.2 Consistencia lógica .............................................................................................................. 71
6.4.3 Consistencia topológica ...................................................................................................... 72
6.4.4 Exactitud de posición externa o relativa. ............................................................................ 72
6.4.5 Exactitud temática .............................................................................................................. 73
7 Aplicación del modelo ........................................................................................................... 74
8 Conclusiones y recomendaciones .......................................................................................... 76
9 Bibliografía ............................................................................................................................ 79
10 ANEXOS ........................................................................................................................... 85
4
Lista de figuras
Figura 1. Representación de las superficies. ...................................................................................... 31
Figura 2. Mapa de la zona de estudio, Topografía ondulada, Huila. ................................................. 39
Figura 3. Mapa de la zona de estudio, Topografía plana, Casanare. ................................................. 40
Figura 4. Diagrama de flujo de las actividades más importantes a realizar en el proyecto .............. 42
Figura 5. Gráfico de recubrimiento de las imágenes RapidEye seleccionadas para el departamento
de Huila. 47
Figura 6. Gráfico de recubrimiento de las imágenes Landsat seleccionadas para el departamento de
Huila. 48
Figura 7. Gráfico de recubrimiento de las imágenes Landsat seleccionadas para el departamento de
Casanare. 49
Figura 8. Gráfico de recubrimiento de las imágenes RapidEye seleccionadas para el departamento
de Casanare. ........................................................................................................................................ 50
Figura 9. Verificación de exactitud de posición de una de las imágenes obtenidas con la
metodología del IGAC. ........................................................................................................................ 58
Figura 11. Localización estudio DEM zona con topografía ondulada plana Zona 1. .......................... 60
Figura 12. Localización estudio DEM zona Ondulada Zona 2. ........................................................... 61
Figura 13. Cubrimiento de los mejores insumos para la zona 1 de estudio de DEM. ....................... 62
Figura 14. Cubrimiento de los mejores insumos para la zona 2 de estudio de DEM. ....................... 63
Figura 15. Imagen inicial antes de realizar la prueba de fusión. ........................................................ 67
Figura 16. Resultados obtenidos luego de aplicar los diferentes métodos de fusión. ..................... 68
Figura 16. Método propuesto de ortorrectificación .......................................................................... 70
Figura 17. DEM utilizados para el proceso de ortorrectificación. ...................................................... 74
Figura 18 Formato F320 de reporte de información del proceso de ortorrectificación. ................... 87
Figura 19 Descripción del formato F320 de reporte del proceso de ortorrectificación. ................... 88
Figura 20 Modelo de regresión lineal para topografía plana con todas las variables. ...................... 92
Figura 21 Modelo de regresión logarítmico para topografía plana con todas las variables. ............. 92
Figura 22 Modelo de regresión lineal para topografía plana con variables significativas al 95%. .... 92
Figura 23 Modelo de regresión logarítmico para topografía plana con variables significativas al
95%. 93
Figura 24 Calculo de la variable Z1 modelo topografía lineal. ........................................................... 93
Figura 25 Calculo de la variable Z2 modelo topografía lineal. ........................................................... 93
Figura 26 Modelo de regresión lineal para topografía ondulada con todas las variables. ................ 94
5
Figura 27 Modelo de regresión lineal para topografía ondulada con variables significativas al 95%.
94
Figura 28 Modelo de regresión logarítmica para topografía ondulada con todas las variables. ...... 94
Figura 29 Modelo de regresión logarítmico para topografía ondulada con variables significativas al
95%. 95
Figura 30 Calculo de la variable Z1 modelo topografía ondulada...................................................... 95
Figura 31 Calculo de la variable Z2 modelo topografía ondulada...................................................... 95
Figura 32 Cubrimiento de la Zona 1 ALOS PALSAR 12, 5 metros. ...................................................... 97
Figura 33 Ondulación de la zona 1 EGM 2008. ................................................................................. 98
Figura 34 Disponibilidad DTM restitución 10 metros de la zona 1. .................................................. 98
Figura 35 Disponibilidad Geosar Banda P 5 metros Zona 1. .............................................................. 99
Figura 36 Disponibilidad SRTM 30 metros. ...................................................................................... 100
Figura 37 Puntos de la Red Fundamental para la zona 1. ................................................................ 101
Figura 38 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de La red
Fundamental para la zona 1. ............................................................................................................. 101
Figura 39 Puntos de la Red Pasiva para la zona 1. ........................................................................... 103
Figura 40 Grafica de error en altura de Geosar, ALOS y SRTM con respecto a los puntos de La Red
pasiva para la zona 1 ......................................................................................................................... 103
Figura 41 Grafica de error en altura de DTM restitución, ALOS y SRTM con respecto a los puntos de
La Red pasiva para la zona 1. ............................................................................................................ 104
Figura 42 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de La Red pasiva
para la zona 1. ................................................................................................................................... 105
Figura 43. Puntos de las Pilastras para la zona 1 ............................................................................. 106
Figura 44 Grafica de error en altura de Geosar, ALOS y SRTM con respecto a los puntos de las
Pilastras para la zona 1. .................................................................................................................... 107
Figura 45 Grafica de error en altura de DTM restitución, ALOS y SRTM con respecto a los puntos de
las Pilastras para la zona 1. ............................................................................................................... 108
Figura 46 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de las Pilastras para
la zona 1. 109
Figura 47 Cubrimiento de todos los insumos para la zona 2. .......................................................... 110
Figura 48 Ondulación de la zona EGM 2008 para la zona 2. ............................................................ 111
Figura 49 Puntos de la Red Fundamental para la zona 2. ................................................................ 112
Figura 50 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de la Red
Fundamental para la zona 2. ............................................................................................................. 113
Figura 51 Puntos de la Red Pasiva para la zona 2. ........................................................................... 114
6
Figura 52 Grafica de error en altura de Lidar, ALOS y SRTM con respecto a los puntos de la Red
Pasiva para la zona 2. ........................................................................................................................ 115
Figura 53 Grafica de error en altura de DTM restitución, ALOS y SRTM con respecto a los puntos de
la Red Pasiva para la zona 2. ............................................................................................................. 116
Figura 54 Grafica de error en altura de ALOS y Geosar con respecto a los puntos de la Red Pasiva
para la zona 2. ................................................................................................................................... 116
Figura 55 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de la Red Pasiva
para la zona 2. ................................................................................................................................... 117
Figura 56 Puntos de Pilastras para la zona 2. ................................................................................... 118
Figura 57 Grafica de error en altura de DTM restitución, ALOS y SRTM con respecto a los puntos de
las Pilastras para la zona 2. ............................................................................................................... 118
Figura 58 Grafica de error en altura de ALOS y Geosar con respecto a los puntos de las Pilastras
para la zona 2. ................................................................................................................................... 119
Figura 59 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de las Pilastras para
la zona 2. …………………………………………………………………………………………………………………………………...120
Figura 60. Bandas resultantes del proceso de generación de la fusión IHS. ................................... 123
Figura 61. Resultado de la prueba de los puntos de control para la zona 1, PC = Puntos de control.
130
Figura 62. Resultado de la prueba de los puntos de control para la zona 2, PC = Puntos de control.
131
Figura 63 Superposición de la imagen ortorrectificada respecto a la cruda. .................................. 131
Figura 64 Distribución de los puntos de control a la hora de ortorrectificar la imagen con 20 puntos.
132
Figura 65. Distribución de los 20 puntos de chequeo en la imagen. ............................................... 132
Figura 66 Tabla de resultados de la verificación de la calidad de la imagen ortorrectificada ......... 137
7
Lista de tablas
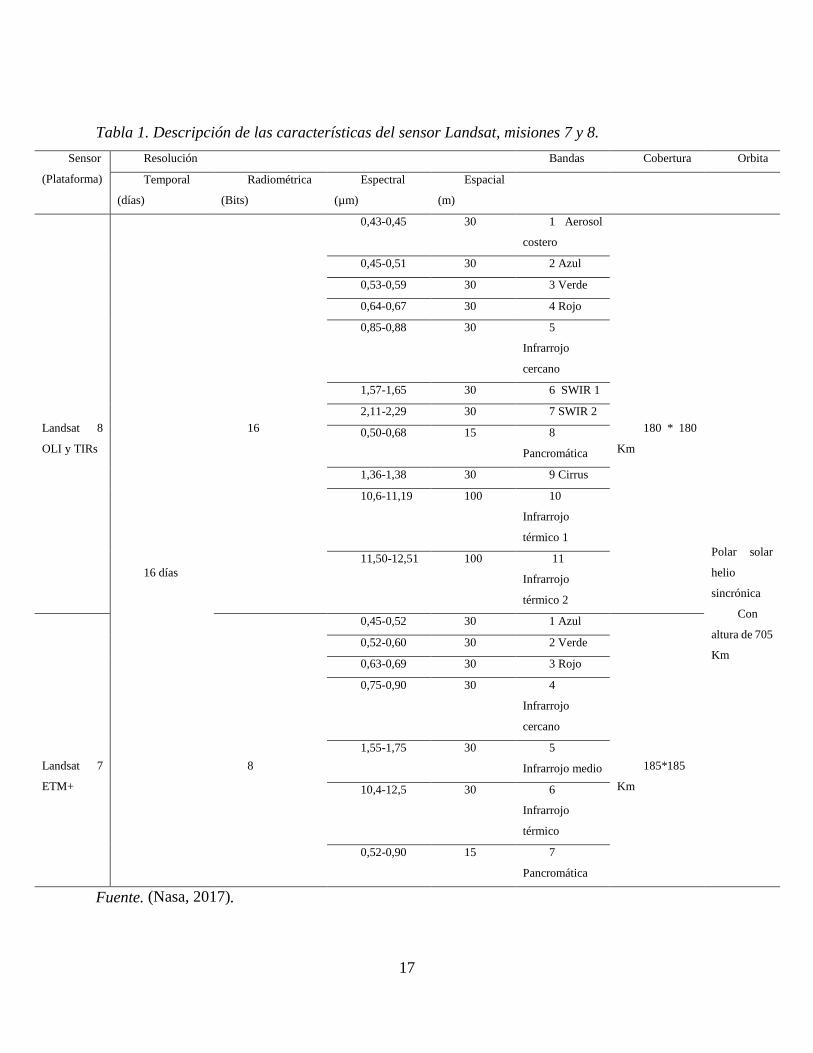
Tabla 1. Descripción de las características del sensor Landsat, misiones 7 y 8. ................................. 17
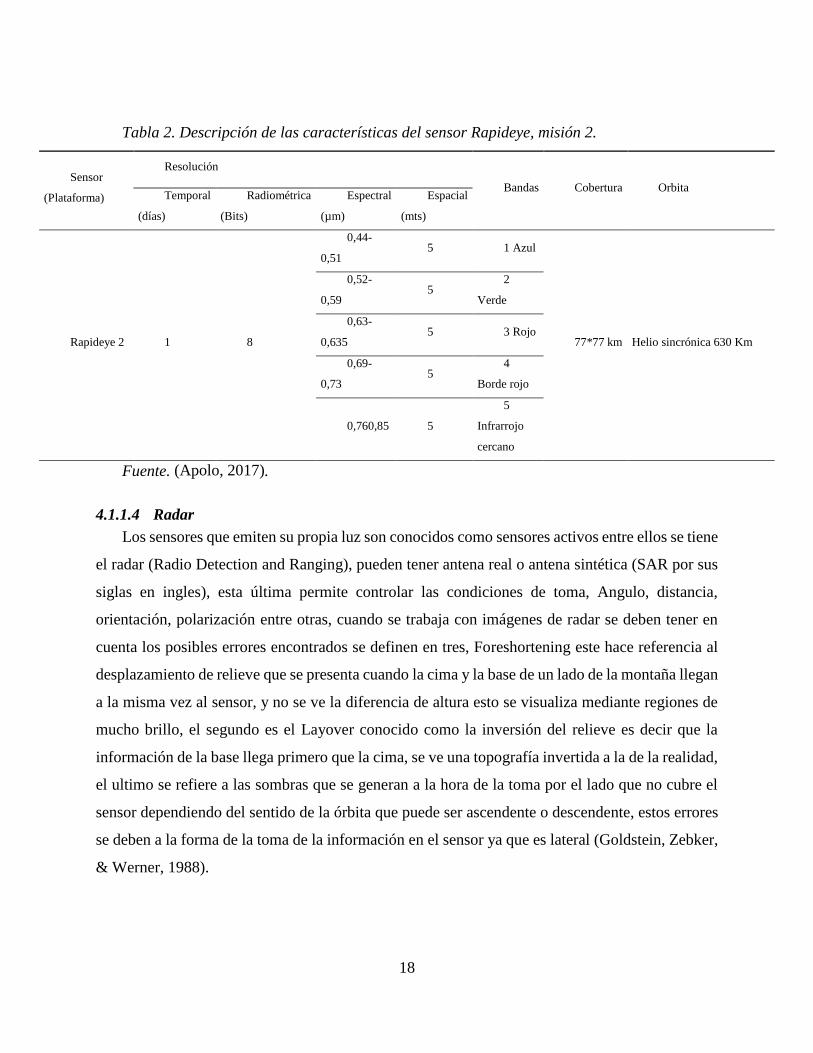
Tabla 2. Descripción de las características del sensor Rapideye, misión 2. ........................................ 18
Tabla 3. Listado de variables. .............................................................................................................. 52
Tabla 4. Estadísticas para evaluación del mejor modelo de regresión para la topografía ondulada. 52
Tabla 5. Estadísticas para evaluación del mejor modelo de regresión para la topografía Plana. ...... 53
Tabla 6. Resultados de regresión para los modelos lineal y logarítmico topografía ondulada. ......... 53
Tabla 7. Resultados de regresión para los modelos lineal y logarítmico topografía plana. ............... 53
Tabla 8. Resumen estadístico de los coeficientes de la regresión topografía plana. ......................... 54
Tabla 9. Resumen estadístico de los coeficientes de la regresión topografía ondulada. ................... 54
Tabla 10. Fisher de los modelos Vs Fisher de las tablas...................................................................... 56
Tabla 11. Verificación de los modelos de regresión con información de ortoimágenes. ................... 56
Tabla 12 Resultamos DEM zona 1. ...................................................................................................... 62
Tabla 13. Resultados DEM zona 2. ...................................................................................................... 63
Tabla 14. Requisitos de MDT por escala. ............................................................................................ 64
Tabla 15. Resultado pruebas de puntos de control ............................................................................ 66
Tabla 16. Resultado pruebas de puntos de Chequeo ......................................................................... 66
Tabla 17. Resultado de las estadísticas realizadas con ERGAS. .......................................................... 69
Tabla 18. Resultado de las estadísticas realizadas con BIAS. .............................................................. 69
Tabla 19. Nivel de tolerancia por escalas. ........................................................................................... 72
Tabla 20. Errores en metros cuadros del proceso de ortorrectificación. ........................................... 74
Tabla 21. Errores permitidos para cada uno de los procesos, los datos están dados en metros. ...... 75
Tabla 22 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto a los
puntos de La red Fundamental para la zona 1. ................................................................................. 102
Tabla 23 Desviaciones estándar y media del error en altura de Geosar, ALOS y SRTM con respecto a
los puntos de La Red pasiva para la zona 1. ...................................................................................... 104
Tabla 24 Desviaciones estándar y media del error en altura de DTM restitución, ALOS y SRTM con
respecto a los puntos de La Red pasiva para la zona 1. .................................................................... 105
Tabla 25 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto a los
puntos de La Red pasiva para la zona 1. ........................................................................................... 106
Tabla 26 Desviaciones estándar y media del error en altura de Geosar, ALOS y SRTM con respecto a
los puntos de las Pilastras para la zona 1. ......................................................................................... 107
Tabla 27 Desviaciones estándar y media del error en altura de DTM restitución, ALOS y SRTM con
respecto a los puntos de las Pilastras para la zona 1. ....................................................................... 108
8
Tabla 28 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto a los
puntos de las Pilastras para la zona 1. .............................................................................................. 109
Tabla 29 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto a los
puntos de la red Fundamental para la zona 2. ................................................................................. 113
Tabla 30 Desviaciones estándar y media del error en altura de Lidar, ALOS y SRTM con respecto a
los puntos la Red Pasiva para la zona 2.3 ......................................................................................... 115
Tabla 31 Desviaciones estándar y media del error en altura de DTM, ALOS y SRTM con respecto a
los puntos la Red Pasiva para la zona 2. ........................................................................................... 116
Tabla 32 Desviaciones estándar y media del error en altura de ALOS y Geosar con respecto a los
puntos la Red Pasiva para la zona 2. ................................................................................................. 117
Tabla 33 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto a los
puntos la Red Pasiva para la zona 2. ................................................................................................. 117
Tabla 34 Desviaciones estándar y media del error en altura de DTM, ALOS y SRTM con respecto a
los puntos de las Pilastras para la zona 2. ......................................................................................... 119
Tabla 35 Desviaciones estándar y media del error en altura de ALOS y DTM con respecto a los
puntos de las Pilastras para la zona 2. .............................................................................................. 119
Tabla 36 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto a los
puntos de las Pilastras para la zona 2. .............................................................................................. 120
Tabla 37 Matriz de correlación de las bandas de la imagen Landsat 8 correspondientes a una zona
del departamento de Casanare. ....................................................................................................... 122
Tabla 38 Desviación estándar de las bandas de la imagen Landsat trabajada. ................................ 122
Tabla 39 Tabla de los cálculos de la mejor combinación. ................................................................. 122
Tabla 40 Descripción medida de calidad Omisión ............................................................................ 125
Tabla 41 Descripción medida de calidad Resolución Espacial .......................................................... 125
Tabla 42 Descripción medida de calidad Resolución Radiométrica ................................................. 126
Tabla 43 Descripción medida de calidad Consistencia de empalme ................................................ 126
Tabla 44 Descripción medida de calidad Consistencia geometría interna ...................................... 126
Tabla 45 Descripción medida de calidad Error medio cuadrático en posición ................................. 127
Tabla 46 Tabla de descripción medidas de calidad ........................................................................... 127
9
Lista de Anexos
ANEXO 1 Formato f320 de reporte de proceso de ortorrectificación ................................................ 86
ANEXO 2 Calculo de modelos de regresión para las dos topografías plana y ondulada. ................... 89
ANEXO 3 Evaluación de dem disponibles para dos zonas del país. .................................................... 96
ANEXO 4. Calculo del mejor método de fusión ................................................................................ 121
ANEXO 5. Tablas resumen de los indicadores de calidad definidos para el proceso de
ortorrectificación .............................................................................................................................. 124
ANEXO 6. Número de puntos de control y chequeo óptimos en el proceso de ortorrectificación .. 128
ANEXO 7 Resultado de la verificación de la imagen ortorrectificada, con los indicadores de calidad
propuestos en esta investigación. .................................................................................................... 135
10
Introducción
La presente investigación define indicadores de calidad a partir de la verificación del proceso
de ortorrectificación de imágenes de satélite, donde se evalúa el proceso en todas sus fases desde
la selección de insumos, el método de ortorrectificación con el mejoramiento espacial mediante la
fusión y la evaluación de la ortoimágen resultante, aunque el objetivo principal de la investigación
era la definición de indicadores de calidad que permitieran medir la ortoimágen se obtuvieron
conclusiones importantes para la caracterización de los insumos, tanto para los puntos de control
como para los Modelos Digitales de Terreno, donde se determinó que el proceso de
ortorrectificación realizado en el Instituto Geográfico Agustín Codazzi necesitaba de ajustes para
poder garantizar la precisión necesaria, a partir de la investigación se realizó y se definió la
especificación técnica del instituto para las ortoimágenes producidas, al cambiar el método se
definieron nuevos manuales de operación del proceso y se definió el manual de la verificación de
la calidad de las ortoimágenes producidas, este manual se realizó por primera vez gracias a la
investigación desarrollada lo que permitió definir indicadores y poder entregar las imágenes
generadas a partir de la ortorrectificación con la evaluación de calidad.
La motivación principal se debió a que en los últimos años se han puesto en órbita varios
satélites de observación de la tierra para distintas aplicaciones, aunque la cantidad de datos
disponibles cada vez es mayor no siempre se preparan de manera correcta, por ello se considera
que es necesario determinar métodos que garanticen la buena precisión posicional de los datos, en
especial para terrenos difíciles con altas montañas, correspondientes a gran parte del territorio
colombiano (Marsetič, Oštir, & Fras, 2015), las ortoimágenes son utilizadas entre otros, en
procesos de interpretación de elementos geográficos y captura de vectores para su representación
y generación de cartografía básica, proceso para el cual se requiere que todos y cada uno de los
píxeles de la imagen original sean colocados en el sitio correcto del espacio de proyección, si se
quiere garantizar un producto de buena calidad, la calidad de la corrección sólo puede estimarse a
partir de un conjunto de puntos de control independiente de los puntos de apoyo (Cuartero &
Felicisimo, 2003).
El establecimiento de un buen método de ortorrectificación, define inicialmente la realización
de correcciones radiométricas a las imágenes crudas, donde se intenta corregir la saturación
puntual que han sufrido los detectores del sensor debido a los elementos que producen alta
reflectancia, esto se debe aplicar tanto en banda pancromática como en las bandas que conforman
11
la imagen multiespectral (Ruiz & Ruiz, 2010), el método que se analizó para la generación de las
ortoimágenes será el conocido en adelante como “pixel by pixel”, puesto que se considera la
solución más rigurosa para hacer las correcciones geométricas de una imagen (Ruiz & Ruiz, 2010).
(Riyahi, Kleinn, & Fuchs, 2009) definen las técnicas de fusión de imágenes, como una
solución alternativa que se pueden utilizar para integrar el detalle geométrico de una imagen de
alta resolución PANCROMÁTICA y el color de imágenes de baja resolución
MULTIESPECTRALES, para producir una nueva y mejor imagen de alta resolución.
Se realizaron pruebas que permitirán definir los puntos de control óptimos para el proceso de
ortorrectificación, además para las características del DEM se trabajó con diversos insumos entre
ellos GeoSAR, Alos Palsar, SRTM los cuales se pudieron evaluar mediante los puntos geodésicos
de la Red Continua y Pasiva disponible en el país, a partir de esto se produce un concepto que se
recomienda utilizar a la hora de ortorrectificar.
El trabajo realizado derivo en la definición de una especificación técnica por parte del Instituto
Geográfico Agustín Codazzi de obligatorio cumplimiento interno para la producción de
ortoimágenes al igual que dos manuales, el primero que describe el procedimiento de
ortorrectificación y el segundo del control de calidad de las ortoimágenes como se mencionó
anteriormente, estos documentos se encuentra en aprobación para la publicación interna, se aclara
que son documentos producidos en el Instituto Geográfico Agustín Codazzi, con referencia a esta
investigación los cuales se muestran en los anexos.
12
1 Planteamiento del problema
En la actualidad la ortoimágen digital es un producto cartográfico de gran importancia por la
capacidad de sustitución de las labores de levantamiento de datos en campo en función de la
modelación del espacio, utilizándola como insumo para la generación o actualización de
cartografía base y como fuente de datos para trabajo en múltiples ramas temáticas, con el
aprovechamiento de la radiometría de las imágenes para la interpretación de datos específicos
(Palá, Arbiol, & Pérez, 2001).
Debido a la importancia de las imágenes, es necesario garantizar el proceso de
ortorrectificación, este como resultado debe ofrecer imágenes con exactitud de presión adecuadas
para la escala de trabajo, permitiendo que la información que se produce a partir de ellas garantice
calidad geométrica y radiométrica, con ese proyecto se pretende definir indicadores de calidad
que midan las imágenes y me permitan decidir si sirven o no para la escala de trabajo.
La calidad de las imágenes crudas depende del sensor remoto con el cual se toma la
información, por este motivo se debe seleccionar un modelo de ortorrectificación adecuado según
la resolución de la imagen y coeficientes racionales polinómicos, los cuales guardan los datos de
orbita de la toma de cada una de las imágenes, el cual debe proporcionar exactitud en la
corrección, se busca con esto poder garantizar buena ejecución del procedimiento y consecuentes
resultados adecuados que cumplan con los requerimientos definidos para el producto (Cuartero
& Felicisimo, 2003).
Antes de realizar este estudio, la entidad oficial para definir la metodología de generación de
ortoimágenes y sus precisiones es el Instituto Geográfico Agustín Codazzi (IGAC), quien a la
fecha no había generado un documento oficial y utilizará como referencia este estudio.
13
2 Justificación
Actualmente el IGAC, entidad encargada de la elaboración de la cartografía base del país,
utiliza como principal insumo para la actualización de la cartografía escala 1:25.000 imágenes
ortorrectificadas de los sensores RapidEye 2 y Spot 5, y para escalas 1:100.000 imágenes Landsat
y RapidEye, el proceso de ortorrectificación de las imágenes se realiza dentro del instituto con
insumos existentes, sin embargo, estas imágenes no tienen un control de calidad que indique si
son aptas para la escala cartográfica elegida.
El IGAC, no tiene definidas las características de los insumos utilizados en el proceso de
corrección geométrica de las imágenes, el método utilizado es de pixel by pixel, método que
utiliza como principal insumo un DEM dependiendo de la disponibilidad de datos, puntos de
control de alta precisión y coeficientes racionales polinómicos (RCP), (Ruiz & Ruiz, 2010).
En cuanto al DEM, se cuenta en este momento con cinco (5) insumos diferentes, el más
preciso por la forma de adquisición de los datos es el Modelo Digital de Terreno (DTM por sus
siglas en ingles Digital Terrain Model) de restitución a escala 1:10.000, sin embargo, su
cubrimiento es bajo en relación al área del país, se cuenta con otros datos como el Modelo Digital
de superficie (DSM por sus siglas en ingles Digital Surface Model) de Alos Palsar (12, 5 metros
de resolución espacial), GeoSAR banda P con longitud de onda de 86 cm el cual corresponde a
un DTM gracias a que la longitud de onda atraviesa el follaje (5 metros de resolución espacial),
SRTM el cual corresponde a un DSM (30 metros de resolución espacial) y en algunas áreas
mínimas con DTM generado a partir de datos de LiDAR, por eso es necesario definir cuál de
estos modelos digitales se acomoda mejor a la topografía de la zona a procesar.
Dada la importancia de tener información actualizada y de alta precisión del país, es necesario
definir indicadores de calidad de las imágenes ortorrectificadas, para permitir que los productos
derivados como la cartografía base, puedan cumplir con la exactitud de posición necesaria.
Las imágenes y los metadatos utilizados en la investigación fueron procesados desde las
instalaciones del IGAC, gracias al convenio celebrado entre la Universidad Distrital Francisco
José de Caldas y dicho instituto, Las imágenes se pueden encontrar en la página web del BNI (
http://bni.igac.gov.co:81/home/srv/es/main.busqueda).
14
3 Objetivos
El objetivo general y los objetivos específicos del proyecto de investigación son los
siguientes:
3.1 Objetivo general
Estandarizar indicadores que permitan determinar la calidad geométrica y radiométrica de las
imágenes resultado del proceso de ortorrectificación, las cuales se utilizarán como insumo para la
generación de productos cartográficos a escala 1:25.000 y 1:100.000.
3.2 Objetivos específicos
1. Evaluar el método de correcciones geométricas actual para poder caracterizar las variables
que intervienen en el proceso de ortorrectificación.
2. Evaluar los insumos utilizados en el proceso de ortorrectificación para determinar cuáles
deben ser sus características.
3. Definir indicadores que permitan medir la calidad de las imágenes ortorrectificadas.
4. Revisar y validar la metodología propuesta para la evaluación de los productos
ortoimágenes.
15
4 Marco de referencia
4.1 Marco teórico
4.1.1 Sensores remotos
Existen dos grupos grandes de sensores: los pasivos cuando se limitan a recibir energía exterior
a ellos y los activos cuando son capaces de emitir su propia energía, como lo es el LiDAR y el
Radar.
Los sensores de importancia para esta investigación son los sensores pasivos, para los que
según su procedimiento para capturar la energía se catalogarían en tres tipos: Fotográficos, óptico-
electrónicos y de antena. Los sensores a trabajar son los óptico-electrónicos los cuales tienen dos
formas de adquirir la información, sensores de Barrido y de Empuje (Chuvieco, 2010).
Los sensores de barrido utilizan un espejo móvil, el cual oscila en forma perpendicular en la
dirección de la trayectoria del sensor, la radiancia recibida se dirige a una serie de detectores que
convierten esta información a una señal eléctrica que se transmite en un valor numérico.
Las imágenes pueden ser pancromáticas o multiespectrales, se captan mediante un sensor
digital que mide la reflectancia de energía en una amplia parte del espectro electromagnético que
suelen abarcar la parte visible y el infrarrojo cercano del espectro. Las imágenes pancromáticas
normalmente se representan mediante la escala de grises, las imágenes multiespectrales miden la
reflectancia en muchas bandas. Estos distintos valores de reflectancia se combinan para crear
imágenes de color. Los satélites de hoy en día miden la reflectancia simultáneamente en un número
determinado de bandas dependiendo de las características del sensor (Chuvieco, 2010).
4.1.1.1 Landsat
La constelación de satélites Landsat fue la primera misión de estados unidos para el monitoreo
de los recursos terrestres, la forman 8 satélites, su mantenimiento y operación está a cargo de la
Administración Nacional de la Aeronáutica y del Espacio (NASA) en tanto que la producción y
comercialización de las imágenes depende del Servicio Geológico de los Estados unidos (USGS).
Las misiones que se utilizaron para el desarrollo de la investigación son los correspondientes
a la 7 y 8, Landsat 7 cuenta con un sensor Thematic Mapper(TM) y Landsat 8 cuenta con el sensor
Enhanced Thematic Mapper Plus (ETM+) (Nasa, 2017).
En la Tabla 1 se puede observar las características de las misiones que se utilizan para el
desarrollo de este proyecto de investigación.
16
4.1.1.2 RapidEye
Pertenece a una compañía alemana proveedora de información espacial, en 2008 empieza la
circulación, llevando la constelación de RapidEye que incluía cinco satélites, este sensor ofrece
soluciones geoespaciales según la información que es tomada por el sensor, sirve para monitoreo
de agricultura, Forestación, seguridad y emergencia, medio ambiente, soluciones espaciales y
energía e infraestructura ver Tabla 2.
4.1.1.3 Modelos digitales de elevación
Se denomina Modelo Digital de Terreno a la representación los datos que contienen la
elevación del terreno. Su finalidad es obtener una representación del relieve basados en dos tipos
de modelos: vectorial y raster. El modelo vectorial se basa en entidades u objetos geométricos,
como el modelo basado en red de triángulos irregulares adosados (TIN), el modelo raster se basa
en localizaciones espaciales, en donde a cada una se les asigna un valor para la unidad elemental,
el cual se refiere al pixel.
Adicionalmente a los métodos de ortorrectificación como un factor relevante en el proceso de
georreferenciación, hay que tener en cuenta otras condiciones, como por ejemplo la geomorfología
del terreno (Powney & Patricio, 2012).
En (Van Niel, McVicar, Li, Gallant, & Yang, 2008) mientras menor sea la resolución espacial
de un modelo, menor será la fidelidad con que representa la topografía y mayor será la diferencia
absoluta con datos medidos en el terreno con el GPS. Por lo tanto, es probable que el error en los
MDT, calculado según los estándares de la Federal Geographic Data Committee - FGDC, esté
asociado a la rugosidad del terreno. Además, existen otras razones para justificar la asociación
entre geoformas y error vertical, como el error posicional.
El DTM de la zona permite definir que hay cambios de pendiente en la topografía lo que
definitivamente afecta la ortocorrección de la imagen (VÍCTOR Guevara, Reyes, Salcedo, Ruiz,
& Torres, 2004).
Si durante la rectificación se utiliza un DEM, el proceso recibe el nombre de ortorrectificación,
ya que se trata de un tipo especial de rectificación que corrige específicamente el desplazamiento
del terreno (Loaiza Salas, 2007).
La ortorrectificación hace que las imágenes sean planimétricamente correctas, es decir, que se
representen de manera exacta los detalles del paisaje, como si la superficie de la tierra fuera plana
y no ondulada y curva (Loaiza Salas, 2007).
17
Tabla 1. Descripción de las características del sensor Landsat, misiones 7 y 8.
Sensor
(Plataforma)
Resolución Bandas Cobertura Orbita
Temporal
(días)
Radiométrica
(Bits)
Espectral
(µm)
Espacial
(m)
Landsat 8
OLI y TIRs
16 días
16
0,43-0,45 30 1 Aerosol
costero
180 * 180
Km
Polar solar
helio
sincrónica
Con
altura de 705
Km
0,45-0,51 30 2 Azul
0,53-0,59 30 3 Verde
0,64-0,67 30 4 Rojo
0,85-0,88 30 5
Infrarrojo
cercano
1,57-1,65 30 6 SWIR 1
2,11-2,29 30 7 SWIR 2
0,50-0,68 15 8
Pancromática
1,36-1,38 30 9 Cirrus
10,6-11,19 100 10
Infrarrojo
térmico 1
11,50-12,51 100 11
Infrarrojo
térmico 2
Landsat 7
ETM+
8
0,45-0,52 30 1 Azul
185*185
Km
0,52-0,60 30 2 Verde
0,63-0,69 30 3 Rojo
0,75-0,90 30 4
Infrarrojo
cercano
1,55-1,75 30 5
Infrarrojo medio
10,4-12,5 30 6
Infrarrojo
térmico
0,52-0,90 15 7
Pancromática
Fuente. (Nasa, 2017).
18
Tabla 2. Descripción de las características del sensor Rapideye, misión 2.
Sensor
(Plataforma)
Resolución
Bandas Cobertura Orbita Temporal
(días)
Radiométrica
(Bits)
Espectral
(µm)
Espacial
(mts)
Rapideye 2 1 8
0,44-
0,51 5 1 Azul
77*77 km Helio sincrónica 630 Km
0,52-
0,59 5
2
Verde
0,63-
0,635 5 3 Rojo
0,69-
0,73 5
4
Borde rojo
0,760,85 5
5
Infrarrojo
cercano
Fuente. (Apolo, 2017).
4.1.1.4 Radar
Los sensores que emiten su propia luz son conocidos como sensores activos entre ellos se tiene
el radar (Radio Detection and Ranging), pueden tener antena real o antena sintética (SAR por sus
siglas en ingles), esta última permite controlar las condiciones de toma, Angulo, distancia,
orientación, polarización entre otras, cuando se trabaja con imágenes de radar se deben tener en
cuenta los posibles errores encontrados se definen en tres, Foreshortening este hace referencia al
desplazamiento de relieve que se presenta cuando la cima y la base de un lado de la montaña llegan
a la misma vez al sensor, y no se ve la diferencia de altura esto se visualiza mediante regiones de
mucho brillo, el segundo es el Layover conocido como la inversión del relieve es decir que la
información de la base llega primero que la cima, se ve una topografía invertida a la de la realidad,
el ultimo se refiere a las sombras que se generan a la hora de la toma por el lado que no cubre el
sensor dependiendo del sentido de la órbita que puede ser ascendente o descendente, estos errores
se deben a la forma de la toma de la información en el sensor ya que es lateral (Goldstein, Zebker,
& Werner, 1988).
19
4.1.1.5 Alos Palsar
Actualmente existen datos gratuitos para descarga como del sensor ALOS PALSAR,
recordando que ALOS es la constelación que también tiene los satélites PRISMA y AVNIR -2, y
actualmente lanzó un nuevo satélite PALSAR -2, sin embargo, entre los datos que se entregan de
PALSAR-1 el cual cuenta con alta resolución debido a que tiene la Banda L y polarización HH
tomadas entre 2007 y 2011, se está entregando un producto RT1 que tienen correcciones
pertinentes del terreno, es decir que traen correcciones geométricas. Esto muy interesante, debido
a que la resolución espacial de estos datos está en 12,5 metros, un modelo que serviría para hacer
ortorrectificación de imágenes para escala 1:25.000, según normas internacionales (Rauste,
Lonnqvist, Molinier, Henry, & Heme, 2007),este sensor tiene una Banda llamada L con una
longitud de onda de 1270 MHz.
4.1.1.6 GeoSAR
Existen datos de modelos de superficie, GeoSAR permite tener información de 5 metros de
resolución, consta de dos bandas la P y la X, la banda X con una longitud de onda de 3 cm la cual
permite tomar datos de cubiertas de vegetación y la banda X con una longitud de onda de 86 cm
que permite pasar la vegetación y tomar datos casi a terreno, además cada una genera su DSM. Es
ideal el DSM de la Banda P para tener datos e información de la morfología de terreno, funcionaría
para realizar ortorrectificaciones de imágenes para cartografía 1:10 000 en adelante, además que
sirve para trazar drenajes importantísimos para la cartografía 1: 25 000 (Rubiano & Gerardo,
2014).
4.1.1.7 SRTM
Otros datos importantes son los que proporciona SRTM 30, información capturada por
sensores de radar de apertura sintética, programa que orbito la tierra 16 veces al día durante una
misión que duro 11 días y que cuenta con una resolución espacial de 30 metros y funcionaria para
ortorrectificar imágenes para cartografía 1:100 000 (Jarvis, Rubiano, Nelson, Farrow, & Mulligan,
2004)
4.1.1.8 LiDAR
LiDAR, por sus siglas en ingles Light Detection and Ranging, es un método de detección
remota que utiliza luz en forma de un láser pulsado para medir rangos (distancias variables) a la
Tierra (Hermosilla Gómez, 2011). Estos impulsos de luz, combinados con otros datos registrados
20
por el sistema aerotransportado, generan información tridimensional precisa sobre la forma de la
Tierra y sus características superficiales, un instrumento LiDAR consta principalmente de un láser,
un escáner y un receptor GPS especializado . Los aviones y helicópteros son las plataformas más
utilizadas para la adquisición de datos LiDAR en áreas amplias, existen dos (2) tipos de LiDAR
son topográficos y batimétricos, el LiDAR topográfico utiliza típicamente un láser de infrarrojo
cercano para mapear la tierra, mientras que el LiDAR batimétrico usa luz verde penetrante de agua
para medir asimismo el fondo marino y las elevaciones del cauce, los sistemas LiDAR permiten a
los científicos ya los profesionales de la cartografía examinar tanto los entornos naturales como
los artificiales con precisión, precisión y flexibilidad (Hermosilla Gómez, 2011).
4.1.2 Procesamiento de imágenes digitales
4.1.2.1 Métodos de correcciones geométricas
Para cualquier tipo de procesamiento de imágenes, son esenciales los pasos y la información
de pre procesamiento geométrica de los sensores de barrido. Para la ortorrectificación, se requiere
por lo menos la extracción de RCP (Marsetič et al., 2015).
Para realizar las correcciones es necesario ajustar las coordenadas de la imagen es decir filas
y columnas en coordenadas reales de un Datum, las formulas a aplicar en este proyecto mediante
el software ERDAS IMAGINE se expresan con las siguientes ecuaciones 1 y 2 (Angel, M., 1995).
𝑋 = 𝑓1(𝑓, 𝑐) (1)
𝑌 = 𝑓2(𝑓, 𝑐) (2)
La forma y parámetros de estas funciones depende fundamentalmente del tipo de enfoque que
se escoja para realizar la georreferenciación. Existen fundamentalmente dos métodos. El primero,
la corrección orbital, modeliza las fuentes de error y su influencia. Para ello es necesario conocer
con precisión tanto las características de la órbita del satélite como las del sensor. El segundo es
un enfoque empírico que modeliza la distribución de errores en la imagen utilizando puntos de
control(Palá et al., 2001).
El primero es más automático conociendo la información necesaria y las ecuaciones de
transformación, aunque falla cuando aparecen errores aleatorios; es el que se suele suministrar
cuando los datos se piden georreferenciados.
El segundo es más simple en cuanto a su formulación y corrige mejor los errores aleatorios,
su inconveniente es que es más trabajoso. El método de los puntos de control no deja de ser un

21
procedimiento de regresión. En general, en los métodos de regresión se dispone del valor de dos
variables, X e Y, medidas en una serie de casos y, a partir de ellos, se obtiene una ecuación que
permite estimar Y a partir de nuevos valores de X. A la variable X se le denomina independiente
y a Y variable dependiente. En el caso de la georreferenciación las variables independientes son c
y f, es decir la columna y fila en que se ubica un pixel en la imagen original; mientras que X e Y,
las coordenadas correspondientes a un sistema, son las dependientes.
Para el caso de investigación se utilizaron las ecuaciones polinómicas ya que están son las
utilizadas por el software y permiten modificar de forma más fácil las coordenadas de la imagen.
El orden del polinomio determina la flexibilidad del ajuste y de la transformación,
normalmente se emplean transformaciones de tipo lineal (polinomio de grado 1), cuadrático
(polinomio de grado 2) o cúbico (polinomio de grado 3) (Castillejo-González et al., 2009).
Los casos más habituales son la transformación lineal:
𝑋 = 𝐴𝑐 + 𝐵𝑓 + 𝐶 (3)
𝑌 = 𝐷𝑐 + 𝐸𝑓 + 𝐹 (4)
y la transformación cuadrática
𝑋 = 𝐴𝑐 + 𝐵𝑓 + 𝐶𝑐2 + 𝐷𝑓 2 + 𝐸𝑐𝑓 + 𝐹 (5)
𝑌 = 𝐺𝑐 + 𝐻𝑓 + 𝐼𝑐2 + 𝐽𝑐2 + 𝐾𝑐𝑓 + 𝐿 (6)
Empleando el procedimiento de los mínimos cuadrados, se pueden calcular los valores de los
coeficientes A, B, … N, a partir de las coordenadas de un conjunto de puntos de control. Como
regla general, el número de puntos de control debería ser mayor que el número de parámetros que
se van a calcular, 6 en la transformación lineal, 12 en la cuadrática y 24 en la cúbica, la
transformación cúbica es más compleja, las ecuaciones son similares a las lineales y cuadráticas,
pero incluyendo términos elevados al cubo, para este proyecto todas las correcciones se realizaron
en grado 2, teniendo en cuenta la calidad y cantidad de puntos de control (Suliman & Zhang, 2014).
Empleando el procedimiento de los mínimos cuadrados, se pueden calcular los valores de los
coeficientes A, B, Se trata de puntos en los que se conoce tanto la fila y la columna como las
coordenadas reales. Como regla general, el número de puntos de control debería ser mayor que el
número de parámetros que se van a calcular, 6 en la transformación lineal, 12 en la cuadrática y
24 en la cúbica (Palá et al., 2001).
22
4.1.2.2 Corrección en saturación de las imágenes y filtros.
Estas técnicas se usan en el espacio de imágenes (Image space) como filtrado espacial o de
convolución. Es posible también trabajar en el dominio de la frecuencia, por ejemplo, usando las
transformadas de Fourier. Al hacer un filtrado de la imagen, reforzando o suavizando los contrastes
espaciales existentes entre los valores de los píxeles, la idea es transformar esos valores para que
se asemejen o se diferencien más a los píxeles vecinos. Un punto a tener en cuenta al hacer un
filtrado es que no conviene hacerlo si después se va a clasificar la imagen ya que los valores de los
píxeles cambian, a menos que se tenga la seguridad que el filtrado a realizar, favorecerá la futura
clasificación. (Mehl & Peinado, 2013).
4.1.2.3 Fusión de imágenes
Existen dos enfoques de fusión de imágenes, es decir, la sustitución de componentes (CS por
sus siglas en ingles) y el análisis multirresolución (MRA por sus siglas en inglés) (Vivone et al.,
2015). El enfoque CS transforma la imagen multiespectral original en un nuevo dominio y
sustituye uno de los componentes con la banda de resolución espacial mayor como la banda
pancromática (PAN) en PAN-sharpening. Los ejemplos comunes de CS incluyen el análisis de
componentes principales (PCA), saturación intensidad-matiz (IHS), transformación de Brovey
(BT).
En (Gonzalo & Lillo, 2007)) “Se afirma que la mayoría de las representaciones de imágenes
multirresolución y multi-direccional, se basan en la aplicación de un doble banco de filtros. Uno
para el paso de un nivel de resolución espacial superior al inferior y otro direccional que capta la
característica direccional en cada uno de los niveles”.
Un cambio de coordenadas de RGB a IHS, del sistema de colores al sistema de intensidad,
saturación y tono, donde la intensidad se refiere al brillo, el tono es el color específico y la
saturación es la cantidad de color, el nuevo RGB después de haber sido procesado, produce
imágenes con buena diferenciación de colores para la interpretación visual. Se usa para combinar
imágenes de diferentes sensores, lo que se hace es cambiar la intensidad por una banda de la otra
imagen de diferente sensor (Mehl & Peinado, 2013).
EL método de componentes principales se usa para reducir la cantidad de información de los
datos originales (Mehl & Peinado, 2013).
En Wald, (2002) se menciona la disponibilidad de un gran número de metodologías y
algoritmos para la fusión de imágenes ópticas, siendo las más utilizadas las basadas en diferentes
23
transformadas. Algunas son muy sencillas desde un punto de vista conceptual, como las
metodologías basadas en la transformada de Brovey (TB), el Análisis de Componentes Principales
o la transformada IHS (intensidad, brillo y saturación) y las más complejas como la transformadas
de Wavelength.
Para este proyecto de investigación de utilizaran las CS, las cuales son Componentes
Principales, Transformada de Brovey, Multiplicativo y IHS.
Para que dos imágenes puedan fusionarse es necesario que sean perfectamente superponibles,
por lo que tanto la imagen multiespectral como la pancromática se corrigen geométricamente. El
proceso de corrección de la imagen multiespectral se utiliza además para remuestrearla con el fin
de igualar el tamaño de píxel de esta imagen al de la imagen pancromática. (Castillejo-González
et al., 2009).
Método IHS En general, el color de un determinado píxel se define en función de sus
componentes, es decir, en función de su contenido de Rojo, Verde y Azul. De forma alternativa,
puede representarse el color de un píxel en función no de sus componentes, sino de sus
propiedades, es decir, en función de su Intensidad (I), Tono (H) y Saturación (S). La amplia
utilización de estas transformaciones para fusionar imágenes reside en el hecho de que las
transformaciones IHS logran desacoplar la información espectral de una composición RGB en las
componentes H y S, y aíslan en la componente I gran parte de la información espacial (Castillejo-
González et al., 2009). Se han desarrollado diversos algoritmos que permiten convertir los valores
tricromáticos RGB a valores de IHS. Además del tiempo de procesamiento, estos algoritmos se
diferencian en la metodología empleada para calcular el valor de la componente I.
Independientemente del algoritmo seleccionado, la transformación IHS se aplica siempre a
composiciones RGB lo que implica que la fusión sólo se podrá realizar para tres bandas de la
imagen multiespectral. Como resultado de esta transformación se obtienen las nuevas imágenes de
I, H y S, la componente I se sustituye por la imagen pancromática cuyo histograma previamente
se ha igualado al de la imagen I, con el fin de minimizar la distorsión espectral en la imagen
fusionada. La transformación IHS inversa permite obtener la imagen RGB fusionada, a la que se
ha incorporado el detalle espacial de la imagen pancromática. (Castillejo-González et al., 2009)
Método Componentes Principales (ACP), la mayoría de los sensores multiespectrales recogen
información en bandas adyacentes del espectro electromagnético lo que habitualmente implica
detectar información redundante, ya que muchas de las cubiertas existentes sobre la superficie
24
terrestre tienden a presentar comportamientos similares en regiones próximas del espectro. En este
contexto, el ACP permite sintetizar las bandas originales creando nuevas bandas, los componentes
principales (CP), que recogen y reorganizan la información original. En general, la primera
componente principal (CP1) recoge información común a todas las bandas utilizadas como datos
de entrada en el ACP, es decir, la información espacial, mientras que la información espectral
propia de cada una de las bandas se recoge en el resto de componentes principales, esto hace que
el ACP se presente como una técnica muy apropiada para la fusión de imágenes multiespectrales
y pancromáticas, todas las bandas de la imagen multiespectral original constituyen los datos de
entrada para el ACP, como resultado de este análisis se obtienen nuevas bandas, no correlacionadas
entre sí, los componentes principales. La primera componente es reemplazada por la imagen
pancromática, cuyo histograma previamente se ha igualado al de la primera componente
principal.(Castillejo-González et al., 2009)
Transformada de Brovey, Para realizar esta fusión es necesario explicar que es lo que está
haciendo conceptualmente la fórmula para calcular esta fusión se puede ver en la ecuación 1.
𝑁𝐷𝐵1 =𝑁𝐷𝐵1
𝑁𝐷𝐵1 + 𝑁𝐷𝐵2 + 𝑁𝐷𝐵3∗ 𝑃𝑎𝑛
𝑁𝐷𝐵2 =𝑁𝐷𝐵1
𝑁𝐷𝐵1+𝑁𝐷𝐵2+𝑁𝐷𝐵3∗ 𝑃𝑎𝑛 (7)
𝑁𝐷𝐵3 =𝑁𝐷𝐵1
𝑁𝐷𝐵1 + 𝑁𝐷𝐵2 + 𝑁𝐷𝐵3∗ 𝑃𝑎𝑛
4.1.3 Procesos estadísticos
4.1.3.1 Definición del tamaño de muestras
El tamaño de las muestras para estudios estadísticos se calcula para cada una de las zonas
seleccionadas, debido a la cantidad de imágenes ortorrectificadas disponibles en el Banco nacional
de imágenes. Estas imágenes ortorrectificadas fueron producidas en el Instituto Geográfico
Agustín Codazzi. Para el cálculo de las muestras se utiliza la distribución normal, ver ecuación 8.
𝑛 =𝑁∗𝑍2∗𝑝∗(1−𝑝)
(𝑁−1)∗𝑒2+𝑍2∗𝑝∗(1−𝑝) (8)
En la ecuación 8, 𝑛 es el tamaño de la muestra, 𝑁 el tamaño del universo, 𝑍 es la desviación
del valor medio que aceptamos para lograr el nivel de confianza deseado, 𝑒 es el margen de error
25
máximo permitido, 𝑝 es la proporción que deseamos encontrar (WALPOLE, Myers, & Myers,
1999).
Para generar las muestras se toma como nivel de confianza 95%, por tanto él 𝑍 corresponde
1,96, el margen de error 𝑒 se toma con el 10% y la proporción que deseamos encontrar 𝑝 con un
5%, el tamaño de datos esperados para que se cumpla con un tamaño de muestra que explique la
población (Ferreira & Lachos, 2016).
4.1.3.2 Métodos para estimar la exactitud de posición
Se utilizaron estadísticos como el error medio, la desviación estándar y el RMSE (del inglés
root mean square error), para su uso es necesario disponer de una fuente de referencia para poder
estimarlos. La fuente debe ser confiable y tener 3 veces más precisión que la imagen a evaluar y
debe tener información complementaria para poder interpretar la fiabilidad de los datos. (Lencinas
& Díaz, 2011).
El número de puntos de control de referencia utilizados para definir la exactitud planimétrica
de imágenes de alta resolución espacial es altamente variable, aunque puede generalizarse de 20 a
40 (Aguilar, Aguera, & Carvajal, 2008).
Existen a nivel mundial estudios e investigaciones que determinan una cantidad aproximada
de puntos de apoyo-GCP o Sistema Global de Posicionamiento- GPS para la corrección geométrica
de imágenes satelitales, en las cuales se sugiere que se debe utilizar un polinomio de segundo orden
con un total de 18 a 24 puntos de apoyo (Powney & Patricio, 2012),
4.1.3.3 Modelos de regresión
Los modelos de regresión son utilizados en diferentes problemas para evaluar la relación entre
dos o más variables, el análisis de la regresión es una técnica estadística para el modelado y la
investigación, en el caso de la regresión lineal múltiple considera solo un regresor o variable
dependiente y se compone de una o más variables que junto con su coeficiente puede predecir la
variable independiente, los modelo de regresión pueden ser lineales o no lineales dependiendo de
la función que los representen, pueden ser logarítmicos, regresión de cuadrados mínimos
ordinarios entre otros (Gujarati & Porter, 2011). Para este proyecto se hizo una prueba para
determinar qué modelo se ajustaba mejor a los datos (Gujarati & Porter, 2011), existen dos
coeficientes de determinación, esta medida mide la bondad del ajuste en los modelos, el cual nos
permite determinar qué porcentaje del modelo esta explicado es conocido como R2 y mide la
26
proporción de variabilidad total de la variable dependiente, respecto a las variables dependientes,
sin embargo este tienen limitaciones ya que a medida que se introducen más variables explicativas
al modelo este valor aumenta, independiente de si son o no relevantes para el modelo, por eso
existe la alternativa del R2 ajustado R̃ este si considera los grados de libertad del modelo, es decir
a medida que se introducen nuevas variables, este aumenta o disminuye dependiendo si la variable
aporta o no al modelo.
4.1.3.4 Pruebas modelo de regresión
Prueba propuesta por MacKinnon, White y Davidson conocida por sus siglas como prueba
MWD, esta prueba consiste en el planteamiento de dos hipótesis, la primera es h0 : Modelo Lineal
y h1 :Modelo logarítmico, donde es usual la hipótesis nula y la alterna, la decisión de la prueba se
hace mediante coeficientes calculados que acompañan al modelo, z1 para el modelo lineal y z2
para el modelo logarítmico, la regla de decisión define que si alguno de los coeficientes z1 o z2 es
significativo en el modelo, el mejor modelo es el que contrario, es decir si z1 es significativo el
mejor modelo es el logarítmico, si existen contradicciones el mejor modelo se seleccionara
teniendo en cuenta el R ajustado, la segunda prueba utilizada fue la de significancia global e
individual para los modelos, La prueba Stepwise hacia atrás, muestra que con una significancia
del 0.05, todas las variables incluidas en el modelo si explican a la variable dependiente, al verificar
que el p valor de cada una de ellas es menor a 5% de significancia para un modelo al 95 % de
confianza (Damodar & Porter, 2011).
La prueba de Fisher se utiliza para evaluar la significancia Global de un modelo mediante el
cálculo de las varianzas del modelo de regresión seleccionado (Damodar & Porter, 2011).
4.1.3.5 Índices de calidad
Corresponde a una herramienta que me permite medir la calidad integral de un insumo o producto,
el cual me define unos parámetros mínimos de cumplimiento (Gujarati & Porter, 2011), a
continuación se explican algunos de los índices estadísticos más destacados.
4.1.3.5.1 ERGAS
En el año 2000, (Wald, 2002)propuso un índice de error que ofrece una visión global de la
calidad del resultado de un proceso de fusión. Se conoce originalmente como “erreur relative
globale adimensionnelle de synth`ese” (ERGAS) (relative adimensional global error in synthesis).
27
Esta métrica sirve para estimar globalmente la calidad espectral de las imágenes fusionadas y está
dada por la ecuación 9.
𝐸𝑅𝐺𝐴𝑆 = 100𝑑ℎ
𝑑𝑙√
1
𝐿∑ 1𝐿
𝑙=1 (𝑅𝑀𝑆𝐸
𝜇(𝑙))
2
(9)
Donde, dh: Resolución de la PAN (m), dl: Resolución de la MS (m) L: Número de bandas
espectrales involucradas en la fusión, µ (l): Media de cada banda espectral de la imagen de
referencia, RMSE (l): Error medio cuadrático de cada banda fusionada.
Cuanto menor sea el valor del ERGAS, mayor la calidad espectral de la imagen fusionada, su
valor ideal es cero. Wald expresa que un error ERGAS mayor a 3 corresponde a productos
fusionados de baja calidad, mientras que un ERGAS menor a 3 indica un producto de calidad
satisfactoria.
4.1.3.5.2 BIAS
Este índice es igual a 1 menos el cociente de la media de la imagen resultante luego de la
fusión que se utilizó, sobre el promedio de la imagen original. Por ende el Valor ideal de esta
prueba debería ser 0, ya que la mejor imagen resultante debería tenerla misma media que la inicial
ver ecuación 10 (Vaiopoulos & Nikolakopoulos, 2015).
𝐵 = 1 −�̅�
�̅� (10)
4.1.3.6 Métodos de evaluación de exactitud de posición de productos cartográficos
4.1.3.6.1 Test NMAS
El NMAS (National Map Accuracy Standard) es el test empleado por el USGS desde 1947,
por lo que ha sido empleado por numerosas instituciones y organismos oficiales dedicados a la
cartografía, para la utilización de este método se debe realizar la comparación con una fuente de
mayor exactitud, analiza la componente horizontal y la vertical, las cuales se evalúan de forma
conjunta, el procedimiento se describe a continuación:
Seleccionar una muestra sobre el mapa de, al menos, 20 puntos de fácil determinación
Determinar las coordenadas de los puntos sobre el mapa.
Obtener las coordenadas de los mismos puntos sobre una fuente de mayor exactitud.
Determinar si se ha alcanzado el estándar de exactitud horizontal predefinido. En el caso
del USGS, el estándar indica que, como máximo, el 10 % de los puntos de la muestra
28
pueden tener un error horizontal mayor de 1/30 de pulgada (0.846 mm) en cartografía a
escala mayor de 1/20.000, o de 1/50 de pulgada (0.508 mm) en cartografía a escala menor
de 1/20.000. El error viene definido como la diferencia entre la posición de los puntos en
el mapa y en la fuente de mayor exactitud - determinar si se ha alcanzado el estándar de
exactitud vertical predefinido. En el caso del USGS, el estándar indica que, como máximo,
el 10 % de los puntos de la muestra pueden tener un error vertical mayor de la mitad del
intervalo de las curvas de nivel. El error en la dimensión vertical puede corregirse
modificando la posición de los puntos en una cantidad igual al error horizontal aceptable.
Discusión: la ventaja del test NMAS es su simplicidad: los resultados se expresan de la forma
cumple / no cumple, de fácil interpretación por parte del usuario. No obstante, las desventajas del
empleo del NMAS son numerosas. La principal es la falta de indicación de una medida de
inexactitud presente en el mapa: existiendo sólo indicación de si cumple o no cumple, las
diferencias en el nivel de exactitud pueden ser notables y no están resueltas. Por consiguiente,
resulta difícil estimar cuánto puede costar obtener un mapa de mayor exactitud. Una limitación
posterior del test reside en el método de muestreo utilizado. Al considerar el requisito de fácil
determinación de los puntos, ya sobre el mapa como sobre la fuente de referencia, se introduce en
las mediciones un grado de dependencia de las mismas respecto al observador externo. Además,
el hecho de poder corregir el error vertical de un punto actuando sobre su componente horizontal
hace alcanzable el estándar de exactitud sólo en superficies de fuerte pendiente. En definitiva, el
test no suministra medida de inexactitud de los puntos tomados: el mapa pasa el test cuando no
llegan al 10 % los puntos que se exceden de un cierto límite, sin posibilidad de conocer la
superación de ése límite por los puntos (Atkinson & García, 2011).
4.1.3.6.2 Test EMAS/ASPRS Standard
El test EMAS (Enineering Map Accuracy Standard) nos proporciona la exactitud de los mapas
topográficos a gran escala, este estándar ha sido desarrollado por la ASPRS (American Cociety of
Photogrammetry and Remote Sensing) junto con la American Cociety of Civil Engineers y el
American Congress on Surveying and Mapping, emplea ajustes de mayor precisión, analiza tanto
la componente vertical como la horizontal, permite realizar un estudio se parado por cada
componente, se utilizan puntos para la verificación, el estándar nos permite definir los umbrales
aceptables de error y el nivel de confianza, está basado sobre los límites aceptables para los errores
aleatorios y sistemáticos, se obtienen estadísticos para analizar si existen desplazamientos
29
constantes (errores sistemáticos), y la variabilidad de la muestra (errores casuales), se emplean de
forma independiente las componentes, donde se recomienda utilizar una muestra de 20 puntos,
para los errores sistemáticos se trabaja con el estadístico t estudent y para los errores casuales la
chi cuadrado, l test EMAS/ASPRS presenta dos importantes diferencias con respecto al test
NMAS. En EMAS las diferencias entre las localizaciones de los puntos sobre el mapa y sobre la
fuente de referencia están expresadas en términos de distancias sobre el terreno, mientras que en
NMAS la unidad de medida es la distancia sobre el mapa. Además, el límite de error aceptable
puede ser definido por el usuario, esto tiene como consecuencia importante que los estándares de
exactitud pueden definirse en base a las exigencias de aplicación que tiene el usuario de la
cartografía. La desviación es similar al error cuadrático medio (RMSE), que es una medida
utilizada con frecuencia en las valoraciones sobre la exactitud cartográfica. La desviación y el
RMSE son iguales sólo cuando el error medio es igual a cero. Algunas versiones del EMAS
utilizan más que el límite de error aceptable el valor de RMSE. En este caso, no es necesario
desarrollar los dos pasos anteriores (tx, ty, tz), y el valor de la desviación es reemplazado por el
valor de RMSE (Atkinson & García, 2011).
4.1.3.6.3 Test NSSDA
las agencias federales de los Estados Unidos que realicen labores de producción de datos
cartográficos analógicos y/o digitales han de cumplir con los estándares del FGDC de acuerdo con
el NSSDA (National Standard for Spatial Data Accuracy), emplea fuentes de mayor exactitud
analiza la componente horizontal en forma conjunta y la vertical de forma separada, con la
obtención del RMSE para XY por un lado, y para Z por otro, calcula el error real de la muestra
analizada en función de un determinado nivel de confianza impuesto por el usuario (generalmente
el 95 %). Este test nos muestra un índice de calidad de la cartografía en unidades reales sobre el
terreno, este es el test empleado actualmente por las agencias federales de los Estados Unidos para
analizar bases de datos gráficas, la mayor ventaja que ofrece es que no dice si el mapa es aceptado
o denegado, tal y como hacían los test anteriores, sino que nos ofrece un índice de calidad de la
cartografía en unidades reales sobre el terreno. En este caso, le corresponde al usuario de la
cartografía el establecer los límites de aceptación en función de sus necesidades (Atkinson &
García, 2011).
30
4.1.4 Términos geodésicos
4.1.4.1 Sistema global de posicionamiento (GPS)
El Sistema de Posicionamiento Global, más conocido por sus siglas en inglés, GPS (siglas
de Global Positioning System), es un sistema que permite determinar en toda la Tierra la posición
de un lugar con una precisión de hasta centímetros, en donde se utilice DPS diferencial, El sistema
fue desarrollado, instalado y empleado por el Departamento de Defensa de los Estados Unidos
(Bradley J, 2011). Para determinar las posiciones en el globo, el sistema GPS se sirve de 24
satélites y utiliza la trilateración.
El DGPS (Differential GPS), o GPS diferencial, es un sistema que proporciona a los receptores
de GPS correcciones de los datos recibidos de los satélites GPS, con el fin de proporcionar una
mayor precisión en la posición calculada, un receptor GPS fijo en tierra (referencia) que conoce
exactamente su posición basándose en otras técnicas, recibe la posición dada por el sistema GPS,
y puede calcular los errores producidos por el sistema GPS, comparándola con la suya, conocida
de antemano. Este receptor transmite la corrección de errores a los receptores próximos a él, y así
estos pueden, a su vez, corregir también los errores producidos por el sistema dentro del área de
cobertura de transmisión de señales del equipo GPS de referencia (Bradley J, 2011).
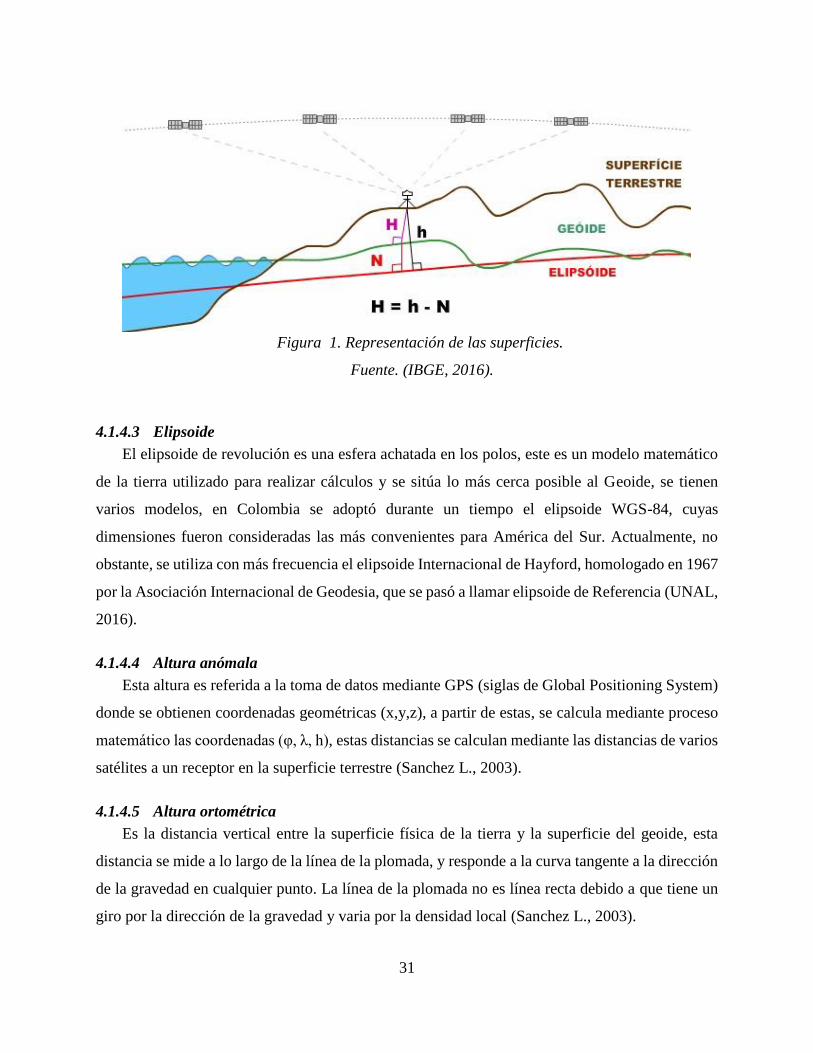
4.1.4.2 Geoide
El geoide es de forma irregular, y su principal utilidad es establecer la superficie de referencia
de la altura ortométrica, la cual es utilizada en los procesos de cartografía y apoyo terrestre para la
fotografía aérea e insumo para los Modelos Digitales de Elevación, con la combinación de la
información de un modelo de alturas geoidales con alturas geodésicas obtenidas mediante técnicas
de posicionamiento satelitales, es posible obtener alturas ortométricas (UNAL, 2016).
La manera de transformar el valor de altura geodésica (h) que proporciona un receptor GPS
en un valor de altura ortométrica (H), es mediante la resta del valor de altura geoidal (N) dada por
un modelo digital de elevación geoidal ver ecuación 2 (INEGI, 2016).
𝐻 = ℎ − 𝑁 (11)
31
Figura 1. Representación de las superficies.
Fuente. (IBGE, 2016).
4.1.4.3 Elipsoide
El elipsoide de revolución es una esfera achatada en los polos, este es un modelo matemático
de la tierra utilizado para realizar cálculos y se sitúa lo más cerca posible al Geoide, se tienen
varios modelos, en Colombia se adoptó durante un tiempo el elipsoide WGS-84, cuyas
dimensiones fueron consideradas las más convenientes para América del Sur. Actualmente, no
obstante, se utiliza con más frecuencia el elipsoide Internacional de Hayford, homologado en 1967
por la Asociación Internacional de Geodesia, que se pasó a llamar elipsoide de Referencia (UNAL,
2016).
4.1.4.4 Altura anómala
Esta altura es referida a la toma de datos mediante GPS (siglas de Global Positioning System)
donde se obtienen coordenadas geométricas (x,y,z), a partir de estas, se calcula mediante proceso
matemático las coordenadas (φ, λ, h), estas distancias se calculan mediante las distancias de varios
satélites a un receptor en la superficie terrestre (Sanchez L., 2003).
4.1.4.5 Altura ortométrica
Es la distancia vertical entre la superficie física de la tierra y la superficie del geoide, esta
distancia se mide a lo largo de la línea de la plomada, y responde a la curva tangente a la dirección
de la gravedad en cualquier punto. La línea de la plomada no es línea recta debido a que tiene un
giro por la dirección de la gravedad y varia por la densidad local (Sanchez L., 2003).
32
4.1.4.6 Ondulación Geoidal
La ondulación geoidal o del geoide es la relación entre los modelos de geoide y las altitudes
orotométricas, se calculan mediante mediciones de altitudes elipsoidales con GPS, el cálculo se
puede ver en la ecuación 1 (Sanchez L., 2003).
4.1.4.7 EGM 2008
El modelo EGM2008 es una solución combinada de datos derivados del satélite GRACE) y
de una base datos global de anomalía de gravedad con una resolución espacial de 2.5´ x 2.5´, este
modelo, al combinar los datos terrestres, marinos y aéreos con los datos de satélite, alcanza un alto
orden del desarrollo en armónicos esféricos (N=2159). Este modelo posee la mayor resolución
espacial para un modelo global de gravedad hasta el momento (λ/2=9 km), sin embargo, en un
trabajo reciente, (Pavlis, Holmes, Kenyon, & Factor, 2012), (2012) expuso que sobre las áreas en
donde sólo hay disponibles datos de gravedad con baja resolución, su contenido espectral fue
complementado con la información gravitacional implicada en modelos Topográficos/Isostáticos
(grados entre 720 a 2160), es decir, las altas frecuencias de la señal gravimétrica correspondiente
al modelo EGM2008 se encuentran altamente contaminadas por la señal topográfica (Pavlis et al.,
2012), en especial en aéreas en donde no se cuenta con una buena base de datos de gravedad
(Álvarez et al., 2016).
33
4.2 Marco normativo
La Norma Técnica Colombiana (NTC5662, 2006) se basa en lo establecido por la norma ISO
19131:2006, Geographic Information. Data Product Specification. Esta norma proporciona ayuda
en la creación de especificaciones técnicas para productos geográficos, de conformidad con otras
normas existentes para la información geográfica, con el fin de producir una lista completa de los
elementos utilizados para especificar los lineamientos principales que se tendrán en cuenta en la
creación de un producto geográfico, una especificación técnica de un producto geográfico es un
documento con la descripción detallada de un producto o conjunto de datos geográficos que
permite crearlos, proveerlos y usarlos estableciendo los requisitos y expectativas por parte del
cliente o usuario, en la especificación técnica de un producto geográfico se establecen
características generales del producto y se determinan elementos importantes como el modelo de
datos, el modelo de representación, la evaluación de la calidad y el perfil de metadato, para que
cumpla su propósito debe estar terminada antes de comenzar la fase productiva y se debe
implementar durante la creación del producto (NTC5662, 2006).
La norma técnica colombiana (NTC5043, 2008) Información geográfica, Conceptos básicos
de la calidad de los datos geográficos, Esta norma proporciona los conceptos básicos para describir
la calidad de los datos geográficos disponibles en formato digital y análogo; presenta un modelo
conceptual que facilita el manejo de la información sobre la calidad de dichos datos geográficos.
ISO 19131: 2007 especifica requisitos para la especificación de productos de datos
geográficos, basados en los conceptos de otras Normas Internacionales ISO 19100. También
proporciona ayuda en la creación de especificaciones de productos de datos, para que sean
fácilmente comprendidos y adecuados para su propósito.
También se utilizaron las normas de la División de Aplicaciones Fotogramétricas (PAD) y las
Divisiones de Adquisición de Datos Primarios (PDAD) celebraron una serie de conferencias
telefónicas con la intención de formar un comité para actualizar y revisar los Estándares de
Precisión de Mapa ASPRS existentes para Mapas a Gran Escala, en la conferencia de noviembre
de 2011 ASPRS Pécora en Washington DC.
34
4.3 Antecedentes
Proceso de ortorrectificación para generación de cartografía
Algunos autores como A. B McBratney, Mendonça Santos, & Minasny, 2003 sugieren que
debe haber al menos 2*2 pixeles para representar el menor objeto redondeado de interés y al menos
2 pixeles para representar el ancho de objetos a largados.
Otros autores hablan acerca de la localización de máxima precisión la cual es expresada en la
ecuación 12, y entonces tendríamos que para la escala 1:25000 sería de 2, 5 máxima y una
resolución mínima de 6,5 m (Vink, 1975).
Cruz, (2015) afirma que “La efectividad de la ortorrectificación está en función de la exactitud
planimétrica, con respecto a su verdadera localización en el terreno”, además para realizar las
correcciones geométricas se utiliza el Modelo Digital de Elevación DEM (Rocchini & Di Rita,
2005). En cuanto a la efectividad de la corrección, esta depende de la resolución de la imagen, la
cantidad y exactitud posicional de los puntos de control localizados en la imagen y del modelo de
ortorrectificación (Jensen, 2000).
En Graça et al., (2014) se refiere a las características de un buen proceso de ortorrectificación,
este debe tener una imagen cruda que no tenga ningún proceso ni geométrico, ni radiométrico, si
no se tienen puntos de control, al menos se debe contar con insumos como fotografías u otras
imágenes con características tales como buena exactitud de posición y buena resolución espacial
(Yue, Zhang, & Tan, 2015).
En Marchionni & Schalamuk, (2010) se afirmó que la información de radar tiene problemas
para reflejar la información de los cuerpos de agua, alguna se absorbe y la que se refleja no lo hace
de la mejor manera debido a los movimientos o partículas contenidas en la superficie del cuerpo
de agua.
Estudios realizados por Palá et al., (2001) se afirma que la ortorrectificación es el proceso de
eliminación de los errores geométricos inherentes en las imágenes, las imágenes ortorectificadas
son usadas como información base para la visualización y edición de capas vectoriales con el uso
de herramientas GIS (por sus siglas en inglés Geographic Information Symtem), mientras en
(Suliman & Zhang, 2014) se habló de características de los datos ópticos, estos tienen que ser
rectificados con los datos de orientación interior y exterior, para las imágenes de satélite se
entregan los coeficientes polinómicos reales (RCP) proporcionados por el satélite los cuales traen
toda la información de la toma de la imagen.
35
La topografía de una zona y la precisión del registro geométrico de las imágenes de satélite
afectan significativamente la calidad de los datos de satélite como se menciona en (Fontana,
Trishchenko, Khlopenkov, Luo, & Wunderle, 2009), debido a que a la hora de la toma de la
información los pixeles se desplazan dependiendo de la elevación del terreno y la geometría, el
efecto se debe corregir con la ortorrectificación , además en (Bettemir, 2009) se dice que la
ortorrectificación elimina la variación de escalas contenida en la imagen causada por el sensor, el
resultado en una imagen planimétrica correcta, la base de este proceso radica en la técnica de
aerotriangulación en bloque, o si se prefiere se puede trabajar por imagen, siempre y cuando se
trabaje con los insumos correctos dependiendo la escala como se concluyó en la investigación de
(Leprince, Barbot, Ayoub, & Avouac, 2007), el ajuste de estos histogramas se debe realizar
mediante software especializados según estudios realizados por (Suliman & Zhang, 2014) para
garantizar que se está utilizando la riqueza espectral de la imagen para obtener una identificación
correcta de los elementos en el espacio geográfico de la imágenes y así garantizar un buen proceso
de ortorrectificación.
En la investigación de (Iikura, 2012) se define que el método de ortorrectificación se emplea
cuando la resolución espacial de la imagen es menor que 10 m, y las variaciones de altura no
superan los 250 m, sin embargo se pueden utilizar para imágenes de menos resolución espacial y
en terrenos de morfología montañosa, pero el ángulo de observación del sensor a la hora de la toma
de la imagen debe ser menos al 15 %,se destacan tres aspectos importantes en los métodos básicos
de corrección: método, interpretación de los estadísticos de ajuste y estimación del error de la
corrección mediante puntos de control como se menciona en (Cuartero & Felicisimo, 2003), un
buen resultado de ortorrectificación se pueden obtener teniendo las coordenadas geográficas y una
transformación 3D donde se incluya la componente de altura, extraída de datos de un DEM
(Yousefzadeh & Mojaradi, 2012).
Las deformaciones que tiene una imagen son causadas por diferentes factores: Movimientos
de la plataforma, rotación y curvatura de la tierra, las correcciones consisten en realizar pequeños
cambios en la posición de los pixeles de la imagen original (Ruiz J., 2007), en (Fontana et al.,
2009) La ortorrectificación debe ser una parte integral del procesamiento, si se descuida el efecto
de desplazamiento del terreno puede conducir a sesgos importantes y ruido adicional a diversas
escalas.
36
En el proceso de ortorrectificación a cada pixel de la imagen se le asigna coordenadas
cartográficas, donde se introduce información del relieve mediante un DEM, esto da como
resultado una ortoimágen, tras este proceso la imagen será apta para realizar cartografía según el
tamaño del pixel. Para zonas donde no hay gran variación de la topografía, no es necesario utilizar
un DEM mencionado en (Ruiz J., 2007), la propagación del error a la hora de ortorrectificar una
imagen se debe al ajuste del modelo y el error que trae el DSM (Junfeng & Jingfeng, 2006).
Existen dos métodos de rectificación de imágenes; el primer método es la rectificación
geométrica, este se basa en los puntos de apoyo los cuales se utilizan para calcular funciones de
ajuste entre los dos espacios de referencia, en este caso las funciones son bidimensionales, debido
a que solo se utilizan las coordenadas X e Y, y su objetivo es conseguir una función de
correspondencia entre ambos espacios, habitualmente estas ecuaciones son de segundo o tercer
grado ajustadas por mínimos cuadrados, es un método muy básico su problema es que ignora el
relieve. Los insumos que se necesitan son la imagen y los puntos de apoyo para su rectificación
(Marsetič et al., 2015).
El segundo método corresponde al método indirecto. En este método se proyecta el pixel de
la imagen a través del modelo digital de elevación (DEM), esto método suelen tener mayor calidad
y velocidad de procesamiento y no dejan pixeles con vacíos de información (Marsetič et al., 2015),
sin embargo uno de los problemas más frecuentes es no disponer de un DEM adecuado. Este
método se basa en la reconstrucción geométrica de la toma a partir de las coordenadas de los puntos
de apoyo (Cuartero & Felicisimo, 2003) .
En (Palá et al., 2001) se usa la información del modelo del sensor a la hora de la toma de la
imagen, RCP y un modelo digital del terreno DTM, los errores asociados a la orientación del
sensor, al relieve, a la curvatura de la tierra y a otras fuentes se pueden eliminar. Se busca que los
datos geográficos y las dimensiones extraídas de una imagen ortorrectificada, representen las
correspondientes mediciones como si estas fueran tomadas en la superficie de la tierra y en (Cano
& Gasteiz, 2006) básicamente los métodos permiten transformar una imagen cónica a ortogonal,
eliminando el desplazamiento producido por la inclinación del eje de la toma y en caso de
rectificarse conjuntamente con un modelo digital del terreno, se elimina también el efecto
orográfico.
37
Importancia del DEM y medidas de calidad para una ortoimágen
Con relación a la distribución espacial de los errores en ortoimágenes de alta resolución
espacial de áreas montañosas, se presume que los errores no están distribuidos uniformemente
porque el error de los DEM se propaga a las ortoimágenes y estos errores están asociados con la
pendiente, orientación y rugosidad del terreno, factores que se distribuyen heterogéneamente en
áreas montañosas. Por lo tanto, la distribución no uniforme debería tenerse en cuenta en el diseño
de muestreo (Powney & Patricio, 2012).
En Elaksher, (2009) se trabajó para poder lograr una precisión de mapeo de menor de 2 metros
utilizando los modelos de transformación con componente, estos resultados sugieren que utilizar
una imagen junto con el DEM de buena resolución espacial, puede lograr la exactitud planimétrica
requerida según el tamaño del pixel de la imagen, el proceso de evaluación de la calidad de las
imágenes se basa en la exactitud de posición utilizando los valores RMSE, donde se debe definir
una distribución espacial de los puntos de control (ASPRS, 2015).
Un enfoque semiautomático de integración de datos sobre la base de conjuntos de datos
digitales generados por el procesamiento combinado de imágenes de satélite y el análisis de DEM,
produce los mejores resultados (Siart, Bubenzer, & Eitel, 2009).
Se recomienda realizar un estudio exhaustivo de la precisión de producto final cuando se
introduce el DEM, en especial cuando se trate de zonas con condiciones de relieve y con ángulos
cercanos al nadir (Victor Guevara, 2013).
38
4.4 Marco espacial e insumos.
Este proyecto se desarrolla para dos zonas del país. La primera es el departamento de Huila
que se caracteriza por tener relieve montañoso, cuenta con el paso de dos Cordilleras, la Cordillera
Occidental y la Cordillera Oriental. Este territorio es ideal para realizar las pruebas de las
correcciones geométricas de las imágenes como estudio de caso, este departamento está localizado
al suroccidente del país éntrelos 3°55’12” y 1°30’04” de latitud norte, esto entre el nacimiento del
Río Riachón, municipio de Colombia y el pico de La Fragua, y los 74°25’24” y 76°35’16” de
longitud Oeste entre el Alto de las Osera, municipio de Colombia y el páramo de Las Papas,
municipio de san Agustín (Lamilla, 2016).
Según mapas de datos estadísticos de la cartografía elaborada por el Instituto Geográfico
Agustín Codazzi, la superficie del Departamento es de 19.900 Km2. Al Norte limita con los
departamentos de Cundinamarca y el Tolima, al Sur con los departamentos de Cauca y Caquetá,
al Oriente con los departamentos de Meta y Caquetá, y hacia el Occidente con los departamentos
de Cauca y Tolima. (Lamilla, 2016).
Entre los accidentes más importantes se encuentra el volcán de Sotará, los páramos de
Cutanga, La Soledad, Las Papas y los picos de la Fragua, la cordillera central del Huila abarca el
flanco oriental de esta cordillera; entre los accidentes más destacados se encuentra el volcán
nevado del Huila, la máxima elevación del sistema andino colombiano, la cuchilla de san isidro,
La ensillada y Gigante; en la cordillera occidental huilense se destacan dos relieves importantes,
en el sur el Valle del río y en el norte, parte del páramo de Sumapaz (Lamilla, 2016),El valle del
río Magdalena está enmarcado por la cordillera Central y Oriental que se bifurcan en el Macizo
Colombiano, donde tienen origen el río Magdalena, el clima es muy diverso, la temperatura varía
de acuerdo con la altitud y el relieve de cada lugar, alterada por los vientos y las lluvias, los
periodos de lluvia son en los meses de abril, mayo y de octubre a diciembre, el resto del año se
considera época seca, aun cuando se presentan lluvias esporádicas. Sus tierras se distribuyen en
los pisos térmicos cálido, templado, fríos y el piso bioclimático paramo, el mapa de la primera
zona de estudio se puede ver en la Figura 2.
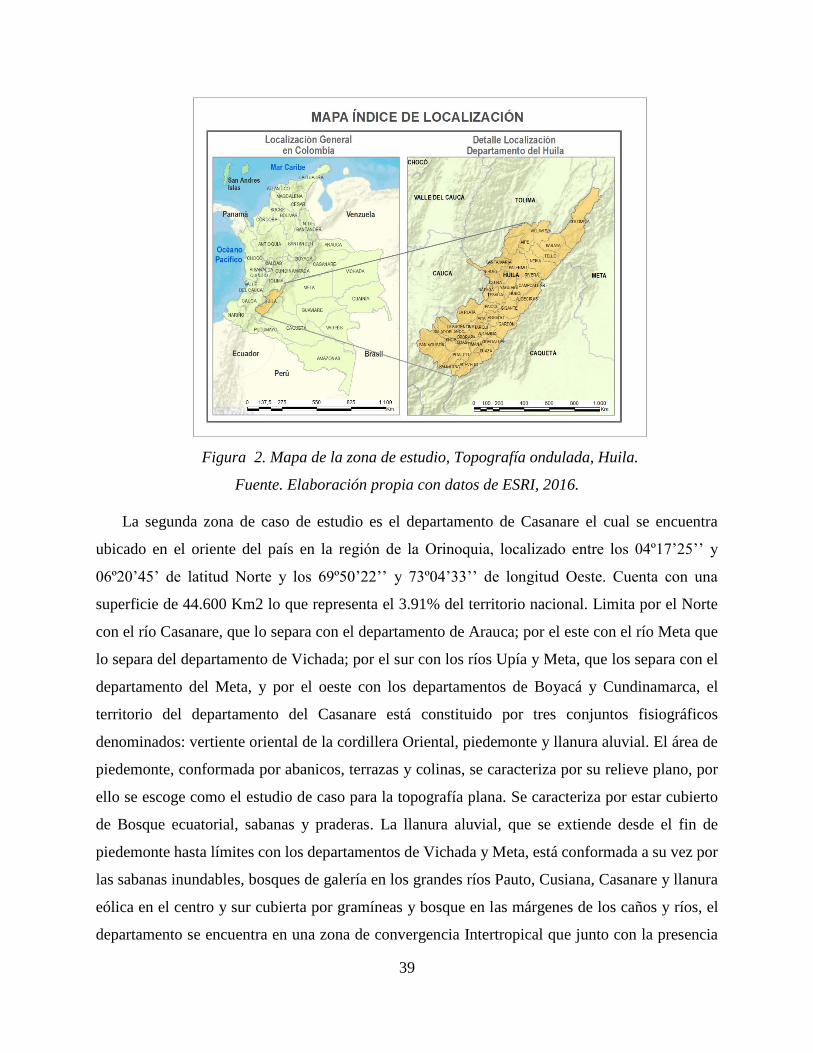
39
Figura 2. Mapa de la zona de estudio, Topografía ondulada, Huila.
Fuente. Elaboración propia con datos de ESRI, 2016.
La segunda zona de caso de estudio es el departamento de Casanare el cual se encuentra
ubicado en el oriente del país en la región de la Orinoquia, localizado entre los 04º17’25’’ y
06º20’45’ de latitud Norte y los 69º50’22’’ y 73º04’33’’ de longitud Oeste. Cuenta con una
superficie de 44.600 Km2 lo que representa el 3.91% del territorio nacional. Limita por el Norte
con el río Casanare, que lo separa con el departamento de Arauca; por el este con el río Meta que
lo separa del departamento de Vichada; por el sur con los ríos Upía y Meta, que los separa con el
departamento del Meta, y por el oeste con los departamentos de Boyacá y Cundinamarca, el
territorio del departamento del Casanare está constituido por tres conjuntos fisiográficos
denominados: vertiente oriental de la cordillera Oriental, piedemonte y llanura aluvial. El área de
piedemonte, conformada por abanicos, terrazas y colinas, se caracteriza por su relieve plano, por
ello se escoge como el estudio de caso para la topografía plana. Se caracteriza por estar cubierto
de Bosque ecuatorial, sabanas y praderas. La llanura aluvial, que se extiende desde el fin de
piedemonte hasta límites con los departamentos de Vichada y Meta, está conformada a su vez por
las sabanas inundables, bosques de galería en los grandes ríos Pauto, Cusiana, Casanare y llanura
eólica en el centro y sur cubierta por gramíneas y bosque en las márgenes de los caños y ríos, el
departamento se encuentra en una zona de convergencia Intertropical que junto con la presencia
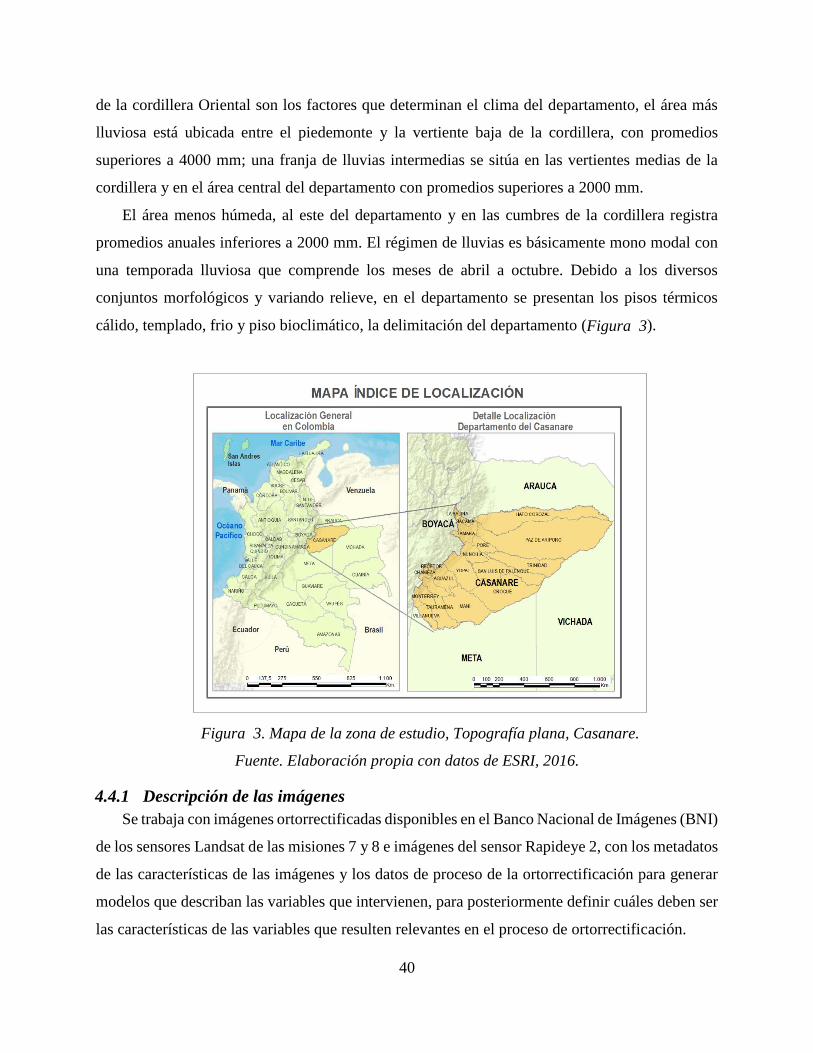
40
de la cordillera Oriental son los factores que determinan el clima del departamento, el área más
lluviosa está ubicada entre el piedemonte y la vertiente baja de la cordillera, con promedios
superiores a 4000 mm; una franja de lluvias intermedias se sitúa en las vertientes medias de la
cordillera y en el área central del departamento con promedios superiores a 2000 mm.
El área menos húmeda, al este del departamento y en las cumbres de la cordillera registra
promedios anuales inferiores a 2000 mm. El régimen de lluvias es básicamente mono modal con
una temporada lluviosa que comprende los meses de abril a octubre. Debido a los diversos
conjuntos morfológicos y variando relieve, en el departamento se presentan los pisos térmicos
cálido, templado, frio y piso bioclimático, la delimitación del departamento (Figura 3).
Figura 3. Mapa de la zona de estudio, Topografía plana, Casanare.
Fuente. Elaboración propia con datos de ESRI, 2016.
4.4.1 Descripción de las imágenes
Se trabaja con imágenes ortorrectificadas disponibles en el Banco Nacional de Imágenes (BNI)
de los sensores Landsat de las misiones 7 y 8 e imágenes del sensor Rapideye 2, con los metadatos
de las características de las imágenes y los datos de proceso de la ortorrectificación para generar
modelos que describan las variables que intervienen, para posteriormente definir cuáles deben ser
las características de las variables que resulten relevantes en el proceso de ortorrectificación.
41
4.4.2 Softwares utilizados
Se utilizó diferentes softwares para desarrollar las actividades, inicialmente se utilizó “Stata”
que es un programa estadístico de propósito investigativo, el cual nos permite manejar gráficos y
datos. Fue utilizado para definir los modelos de regresión que permitieron determinar los insumos
que mayor información aportan al proceso de ortorrectificación (STATA, 2016).
Luego se utilizaron los softwares ERDAS IMAGINE Y ARCGIS, en los cuales se hicieron
pruebas del proceso de ortorrectificación, y procesos de fusión con las imágenes Landsat, estos
softwares permiten tener un buen manejo de imágenes, ARCGIS se especializa en Sistemas de
información es decir que se puede manejar muy bien el componente espacial y ERDAS es muy
bueno para manejo de información raster.
Finalmente, con ayuda del software MATLAB se realizaron estadísticos para determinar la
mejor fusión aplicable a las imágenes tratadas.
4.4.3 DEM utilizados
Se utilizó diferentes DEM disponibles para evaluar cuál de ellos representa mejor la superficie
Alos Palsar de resolución espacial de 12, 5 metros¸ GeoSAR DEM Banda P, con resolución
espacial de 5 metros, SRTM 30 metros de resolución espacial, el DTM de restitución de 10 metros
de resolución espacial y DEM de datos LiDAR con resolución de 10 metros.
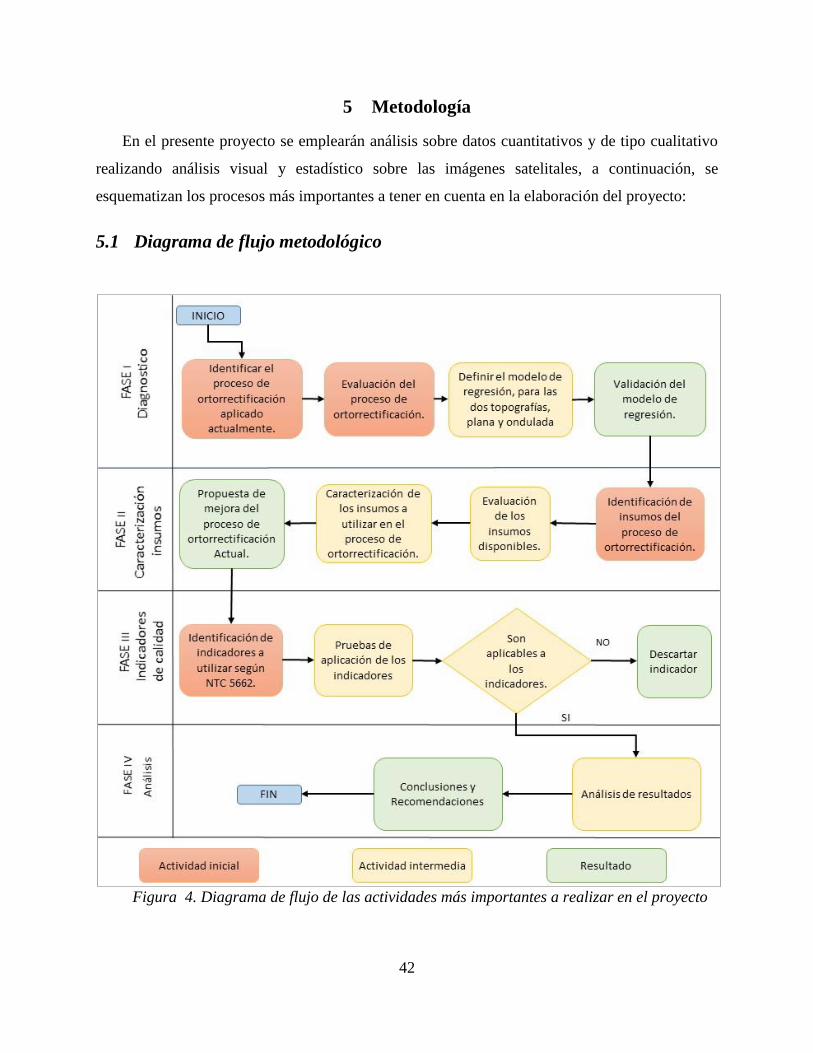
42
5 Metodología
En el presente proyecto se emplearán análisis sobre datos cuantitativos y de tipo cualitativo
realizando análisis visual y estadístico sobre las imágenes satelitales, a continuación, se
esquematizan los procesos más importantes a tener en cuenta en la elaboración del proyecto:
5.1 Diagrama de flujo metodológico
Figura 4. Diagrama de flujo de las actividades más importantes a realizar en el proyecto
43
5.2 Fase I
En la fase I se realiza un diagnóstico de cómo se encontraba el proceso de ortorrectificación
de imágenes de satélite de media resolución en el IGAC, entidad encargada de la producción de la
cartografía básica de todo el país, se identificó un proyecto en ejecución de actualización de
cartografía básica a escala 1:25000 que utiliza como insumo principal las imágenes RapidEye de
5 metros de resolución espacial, que son ortorrectificadas en un proceso interno del IGAC. Se
utiliza el método de ortorrectificación donde se toma como insumo un modelo de elevación SRTM
30 metros y como puntos de control sacados de cartografía análoga (digitalizada con escaneo de
alta resolución), existente de los años comprendidos entre el 70 y el 90 escala 1:25.000. En las
zonas donde se tenía cubrimiento de GeoSAR se utilizaba la banda P con 5 metros de resolución
espacial y cartografía restituida a partir de fotografías aéreas de escala 1:10.000, sin embargo,
existen otros insumos de mejor presión disponibles que por falta de pruebas no se están utilizando
como lo son los puntos de fotocontrol, fotografías aéreas y existen otras posibilidades para los
DSM como es el de GeoSAR y el de Alos Palsar, tomando en cuenta que el error permitido máximo
para la escala 1:25000 es de ½ de escala según las especificaciones técnicas el pixel ideal para
realizar cartografía 1:25000 es de 2,5 metros según especificaciones técnicas establecidas por el
IGAC,
𝑝 ≥ 𝑆𝑁 ∗ 0.0001 𝑚á𝑥𝑖𝑚𝑎 𝑦 𝑝 ≥ 𝑆𝑁 ∗ 0.0001 𝑚í𝑛𝑖𝑚𝑎 (12)
Teniendo en cuenta lo anterior se realiza un estudio mediante regresiones para poder definir
las variables más aportantes y significativas, poder evaluar así el error del ajuste obtenido esta fase
va sujeta al objetivo número uno (1) del proyecto de investigación donde se quiere definir los
insumos más relevantes a la hora de realizar el proceso de ortorrectificación, sin embargo se
hicieron pruebas para verificar la exactitud de posición de las imágenes tomando como puntos de
chequeo, los puntos de fotocontrol y cartografía 1:25000 generada a partir de vectores 1:10000,
mediante la extensión Positional Accuracy Assesment de Arcgis se evaluaron las imágenes, por
eso fue necesario evaluar y dar un seguimiento a todo el proceso para determinar que variables
son las más significativas en el proceso, lo primero que se realizo fue un estudio de las variables
que intervienen en el proceso para lo cual se estimó un modelo de regresión que predijera la
intervención de cada variable en el modelo y luego se hizo una validación de los modelos, los
44
resultados de pueden ver en el numeral 6 del documento, se utilizaron dos tipos de regresión la
lineal y la logarítmica, de las cuales se eligió solo una mediante la prueba MWD.
5.3 Fase II
Luego de encontrar los insumos que intervienen en el proceso de ortorrectificación según el
modelo de regresión, se verifican cuáles deben ser sus características dependiendo de la escala de
trabajo para la cual se van a utilizar las imágenes ortorrecticadas, donde se puedan comprobar que
están características si mejoran los resultados y se pueden obtener mejores resultados en la
exactitud de posición, en este apartado se realizara además un estudio para verificar que DSM
entre GeoSAR, Alos Palsar Y SRTM 30 está más acorde a la realidad, para que sea utilizado como
DSM cuando no se tenga el DTM de restitución, se realizaron estudios y pruebas para determinar
la cantidad optima de puntos de control y puntos de chequeo, y se realizó un estudio de fusión para
verificar el mejor método convencional a utilizar.
Cuando se determinó la característica de los insumos, y luego de indagar en las investigaciones
mencionadas en el estado del arte se propone un flujo de procedimiento que garantice realizar
imágenes ortorrectificadas con aceptable resolución espacial y espectral ya que su uso principal
será la digitalización de elementos cartográficos para escalas 1:25000 y 1:100000.
5.4 Fase III
Cuando se tuvo verificado el modelo y los insumos, se verifico que indicadores de calidad son
aplicables a las imágenes ortorrectificadas, para resolver este objetivo se remitió a la Norma
Técnica Colombiana (NTC) 5662 y la NTC 5043, a partir de esta consulta se generaron las
descripciones y la forma como se debe evaluar una imagen con los indicadores seleccionados como
pertinentes.
5.5 Fase IV
Una vez definidos los indicadores se realizan evaluaciones de las imágenes ortorrectificadas
tanto con el modelo actual como el propuesto en esta investigación para verificar y validar todo el
proceso, además de eso se hizo una prueba con las imágenes Landsat para verificar que fusión se
acomoda mejor a las características de estas imágenes que son utilizadas para la digitalización de
cartografía base, este proceso no se realiza para las imágenes RapidEye ya que esta no cuenta con
una banda pancromática que nos permita mejorar la resolución espacial y tampoco existe un
insumos disponible para utilizarlo como banda pancromática, finalmente se hizo un análisis final

45
para dar conclusiones y recomendaciones acordes a los objetivos de este proyecto de investigación,
se entregara la especificación técnica con el manual que indique la calidad de las imágenes.
46
6 Resultados y análisis de los resultados
Inicialmente se analizó el proceso anterior de ortorrectificación y mediante los formatos de
reporte se procedió a realizar las estadísticas de los datos para determinar un modelo de regresión
que identifique que variables intervienen en el error medio cuadrático y así definir cuáles son sus
características según la resolución espacial de las imágenes a ortorrectificar, y se encontró que
estaban desplazadas aproximadamente entre 25 y 50 metros.
6.1 Modelos estadísticos resultados
6.1.1 Datos del proceso de ortorrectificación para las estadísticas.
Para el departamento de Huila la muestra arroja un valor 20,74 se aproxima al valor siguiente
es decir que para cada uno de los sensores se toma una muestra de 21 imágenes ortorrectificadas
y para el departamento de Casanare arroja un valor de 9,79 aproximado tendíamos una muestra de
10 imágenes por cada sensor, en las Figura 5, Figura 6, Figura 7 y Figura 8 se puede observar
el listado de imágenes utilizado para cada uno de los departamento.
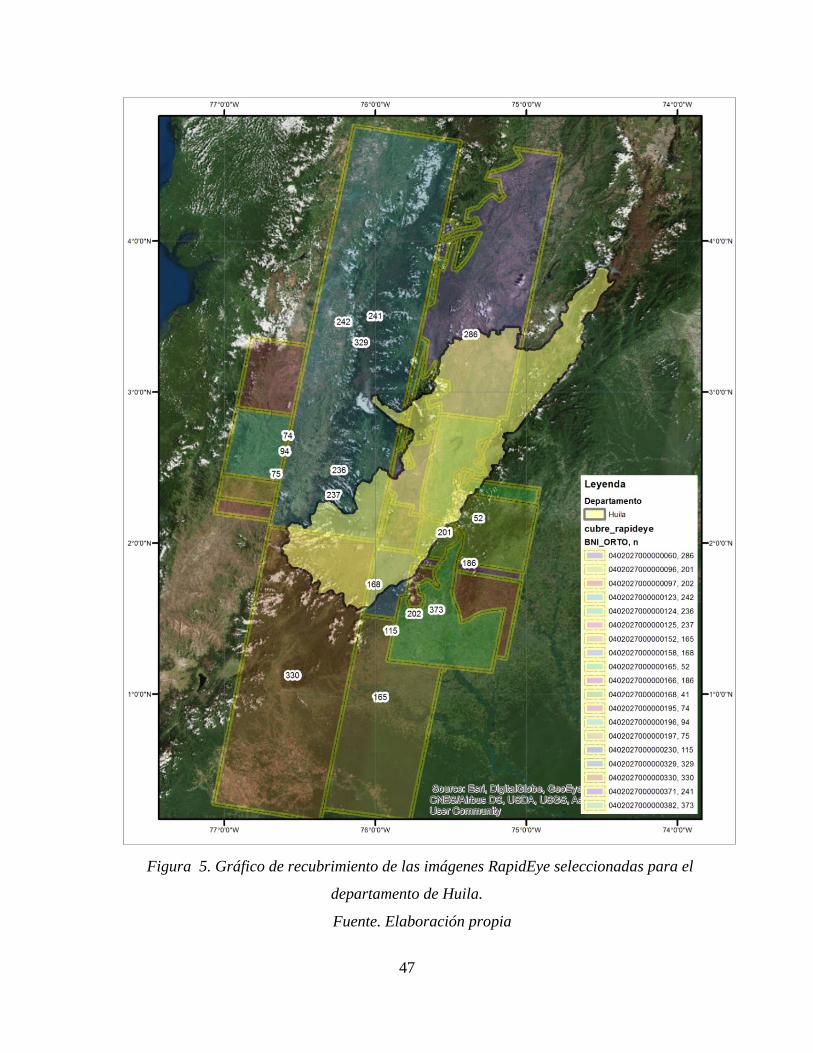
47
Figura 5. Gráfico de recubrimiento de las imágenes RapidEye seleccionadas para el
departamento de Huila.
Fuente. Elaboración propia
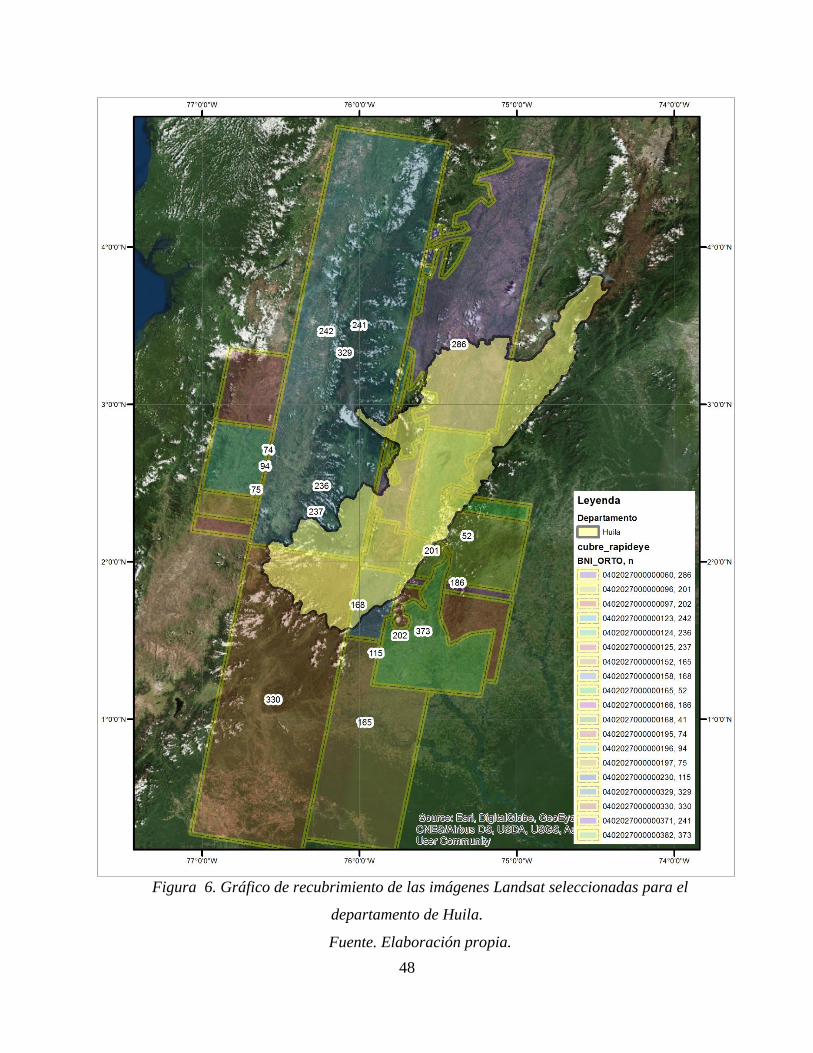
48
Figura 6. Gráfico de recubrimiento de las imágenes Landsat seleccionadas para el
departamento de Huila.
Fuente. Elaboración propia.
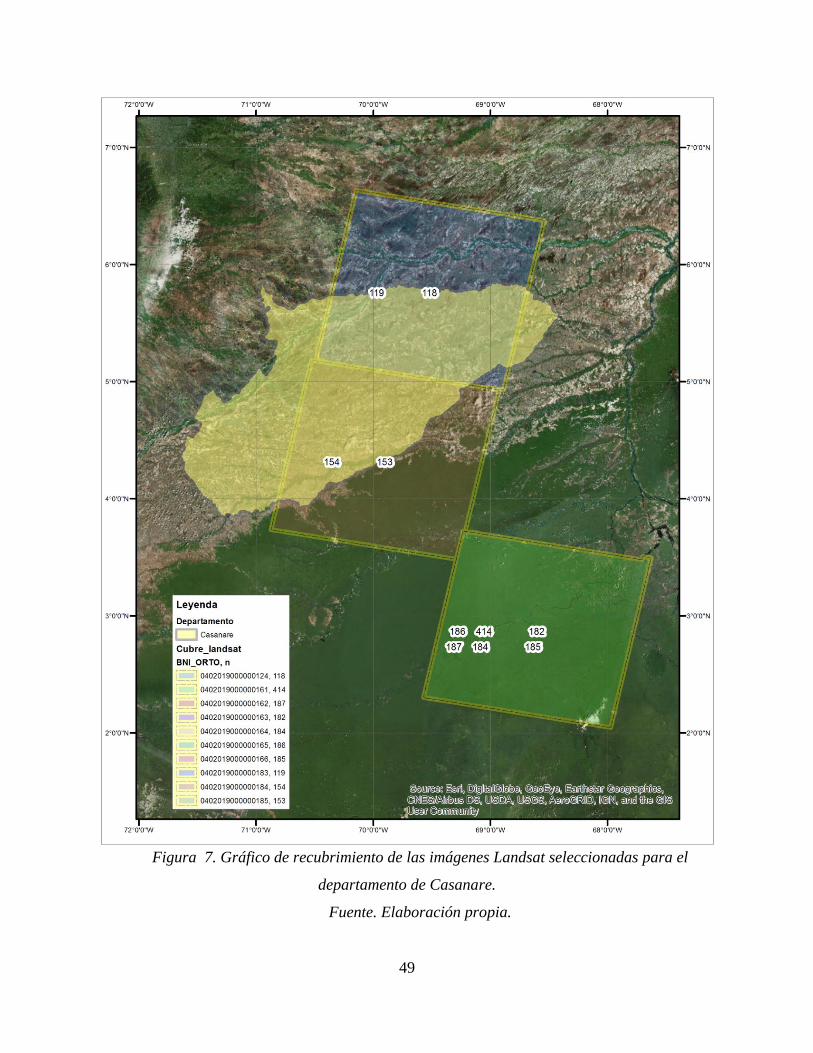
49
Figura 7. Gráfico de recubrimiento de las imágenes Landsat seleccionadas para el
departamento de Casanare.
Fuente. Elaboración propia.
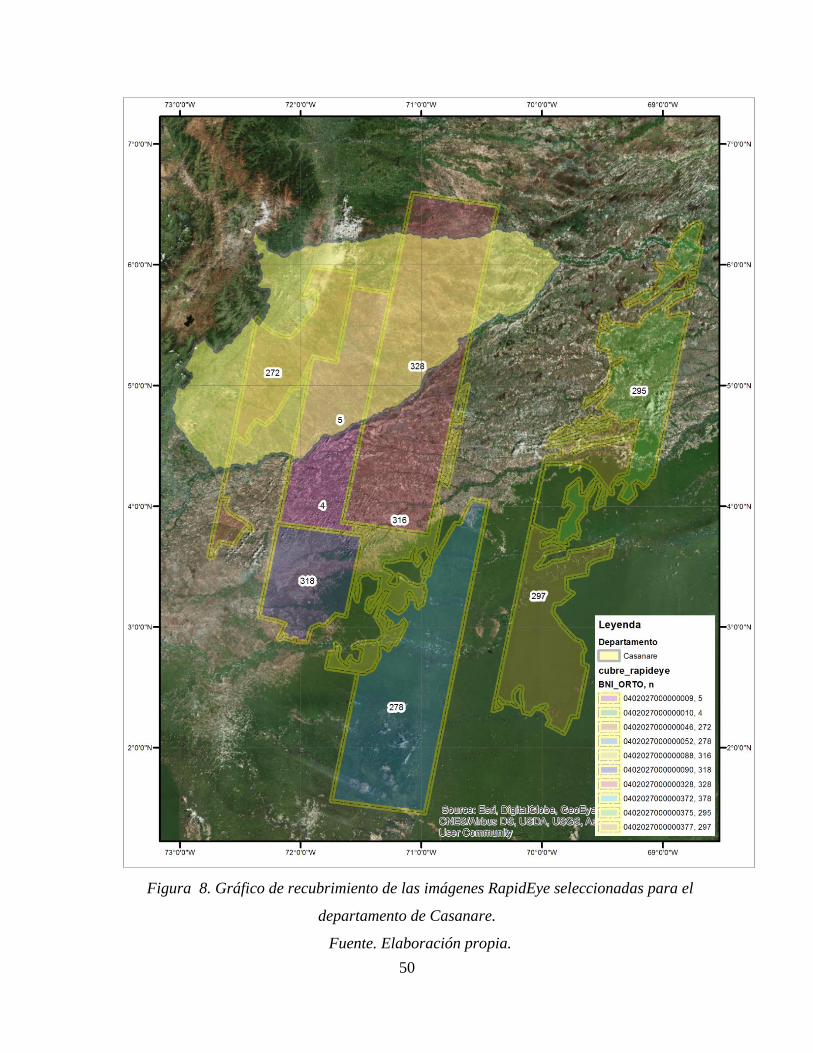
50
Figura 8. Gráfico de recubrimiento de las imágenes RapidEye seleccionadas para el
departamento de Casanare.
Fuente. Elaboración propia.

51
Los datos fueron extraídos del formato de reporte F320 del proceso de ortorrectificación del
IGAC (ANEXO 1), del cual se extrae la información de imágenes correspondientes a las zonas
de estudio según la topografía que para el caso de estudio se realiza para topografía plana y
topografía ondulada, de los departamentos de Casanare y Huila respectivamente, se toma la
información de imágenes ortorrectificadas correspondientes al sensor Rapideye 2 e imágenes
correspondientes al sensor Landsat, estos sensores son los que están disponibles con el formato de
ortorrectificación, los variables extraídas de estos formatos fueron las consideradas relevantes
para el procedimiento de ortorrectificación de imágenes.
Los datos que se tomaron de los formatos de reporte del proceso de ortorrectificación se
explican en la Tabla 3.
Algunas de estas variables eran colineales, es decir sus valores eran exactamente iguales para
todos los datos, por ello, se omitieron y algunas de las variables eran dicótomas, es decir tipo texto
por ente se generó la trasformación correspondiente (ANEXO 2) para ver todo el proceso
estadístico y trasformación de las variables tipo texto.
6.1.2 Resultados y análisis de los modelos de regresión
Luego de seleccionar y extraer los datos de las imágenes se procede a realizar la selección del
modelo de regresión se utilizaron dos modelos, la prueba MWD se realiza bajo las siguientes
hipótesis:
𝐻𝑜 = 𝑀𝑜𝑑𝑒𝑙𝑜 𝑙𝑖𝑛𝑒𝑎𝑙
𝑅𝑀𝑆𝐸 = 𝐵1 + 𝐵2𝑆 + 𝐵3𝐶𝑖 + 𝐵4𝐸 + 𝐵5𝑂𝑐 + 𝐵6𝑇𝑚 + 𝐵7𝑁𝑏 + 𝐵8𝑁𝑑 + 𝐵9𝑇𝐷𝐸𝑀 + 𝐵10𝑝𝐶
+ 𝐵11𝑀𝑟 + 𝐵12𝐴𝑛𝑚 + 𝐵13𝐴𝑙𝑚 + 𝐵14𝑁𝑏𝑠
𝐻1 = 𝑀𝑜𝑑𝑒𝑙𝑜 𝑙𝑜𝑔𝑎𝑟𝑖𝑡𝑚𝑖𝑐𝑜
𝑅𝑀𝑆𝐸 = 𝐵1 + 𝐵2𝑆 + 𝐵3𝐶𝑖 + 𝐵4𝐸 + 𝐵5𝑂𝑐 + 𝐵6𝑙𝑛𝑇𝑚 + 𝐵7𝑙𝑛𝑁𝑏 + 𝐵8𝑙𝑛𝑁𝑑 + 𝐵9𝑙𝑛𝑇𝐷𝐸𝑀
+ 𝐵10𝑙𝑛𝑃𝑐 + 𝐵11𝑀𝑟 + 𝐵12𝑙𝑛𝐴𝑛𝑚 + 𝐵13𝑙𝑛𝐴𝑙𝑚 + 𝐵14𝑙𝑛𝑁𝑏𝑠
Este trabajo se realizó para las dos topografías plana y ondulada para ver todo el proceso
(ANEXO 2).
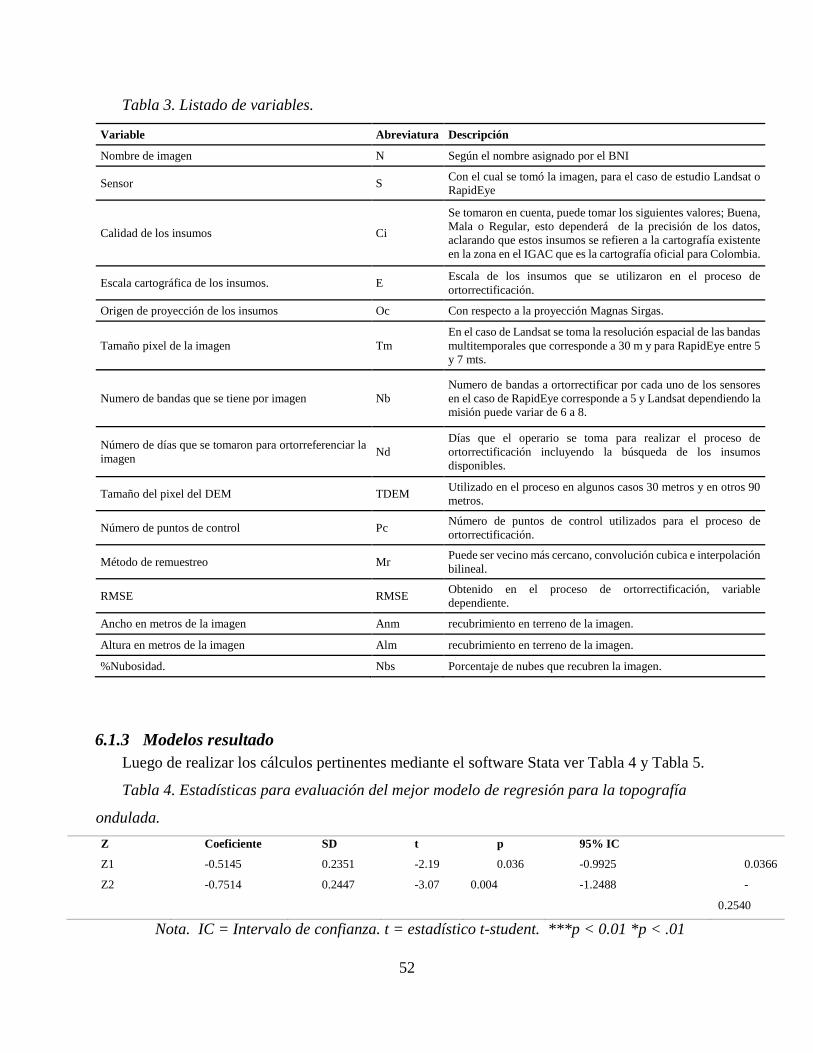
52
Tabla 3. Listado de variables.
Variable Abreviatura Descripción
Nombre de imagen N Según el nombre asignado por el BNI
Sensor S Con el cual se tomó la imagen, para el caso de estudio Landsat o
RapidEye
Calidad de los insumos Ci
Se tomaron en cuenta, puede tomar los siguientes valores; Buena,
Mala o Regular, esto dependerá de la precisión de los datos,
aclarando que estos insumos se refieren a la cartografía existente
en la zona en el IGAC que es la cartografía oficial para Colombia.
Escala cartográfica de los insumos. E Escala de los insumos que se utilizaron en el proceso de
ortorrectificación.
Origen de proyección de los insumos Oc Con respecto a la proyección Magnas Sirgas.
Tamaño pixel de la imagen Tm
En el caso de Landsat se toma la resolución espacial de las bandas
multitemporales que corresponde a 30 m y para RapidEye entre 5
y 7 mts.
Numero de bandas que se tiene por imagen Nb
Numero de bandas a ortorrectificar por cada uno de los sensores
en el caso de RapidEye corresponde a 5 y Landsat dependiendo la
misión puede variar de 6 a 8.
Número de días que se tomaron para ortorreferenciar la
imagen Nd
Días que el operario se toma para realizar el proceso de
ortorrectificación incluyendo la búsqueda de los insumos
disponibles.
Tamaño del pixel del DEM TDEM Utilizado en el proceso en algunos casos 30 metros y en otros 90
metros.
Número de puntos de control Pc Número de puntos de control utilizados para el proceso de
ortorrectificación.
Método de remuestreo Mr Puede ser vecino más cercano, convolución cubica e interpolación
bilineal.
RMSE RMSE Obtenido en el proceso de ortorrectificación, variable
dependiente.
Ancho en metros de la imagen Anm recubrimiento en terreno de la imagen.
Altura en metros de la imagen Alm recubrimiento en terreno de la imagen.
%Nubosidad. Nbs Porcentaje de nubes que recubren la imagen.
6.1.3 Modelos resultado
Luego de realizar los cálculos pertinentes mediante el software Stata ver Tabla 4 y Tabla 5.
Tabla 4. Estadísticas para evaluación del mejor modelo de regresión para la topografía
ondulada.
Z Coeficiente SD t p 95% IC
Z1 -0.5145 0.2351 -2.19 0.036 -0.9925 0.0366
Z2 -0.7514 0.2447 -3.07 0.004 -1.2488 -
0.2540
Nota. IC = Intervalo de confianza. t = estadístico t-student. ***p < 0.01 *p < .01

53
Tabla 5. Estadísticas para evaluación del mejor modelo de regresión para la topografía
Plana.
Z Coeficiente SD t p 95% IC
Z1 -0.1733 0.9744 -0.18 0.0861 -2.2129 1.8663
Z2 -1.4434 2.3929 -0.60 0.5554 -0.3598 0.0801
Nota. IC = Intervalo de confianza. t = estadístico t-student. ***p < 0.01 *p < .01
Los resultados son contradictorios según el P valor de los atributos calculados por ello
apoyándonos en las reglas de decisión de la prueba MWD cualquiera de los modelos puede ser
seleccionado, sin embargo, se toma la decisión de tomar el modelo que mayor explique la variable
independiente que para este caso es el RMSE, para las dos topografías se selecciona el modelo
lineal ya que explican mejor el modelo ver Tabla 6 y Tabla 7.
Tabla 6. Resultados de regresión para los modelos lineal y logarítmico topografía ondulada.
Modelo de regresión R R ajustado RMSE modelo
Lineal 77.10% 73.17% 0.1325
Logarítmico 61.77% 55.22% 0.2150
Tabla 7. Resultados de regresión para los modelos lineal y logarítmico topografía plana.
Modelo de regresión R R ajustado RMSE modelo
Lineal 63.64% 60% 0.1341
Logarítmico 45.76% 40.34% 0.2934
Para las dos topografías se seleccionó el modelo lineal, para la topografía plana se tiene un
modelo que explica el 73.17 % y para el modelo de topografía plana se tiene un modelo que explica
el 60%, aunque los modelos y en especial en la topografía plana no se están explicando en su
totalidad, esto permite hacer un reconocimiento de las variables más influyentes para el método de
ortorrectificación los modelos finales obtenidos para las dos zonas de estudio se expresan en las
ecuaciones 13 y 14.
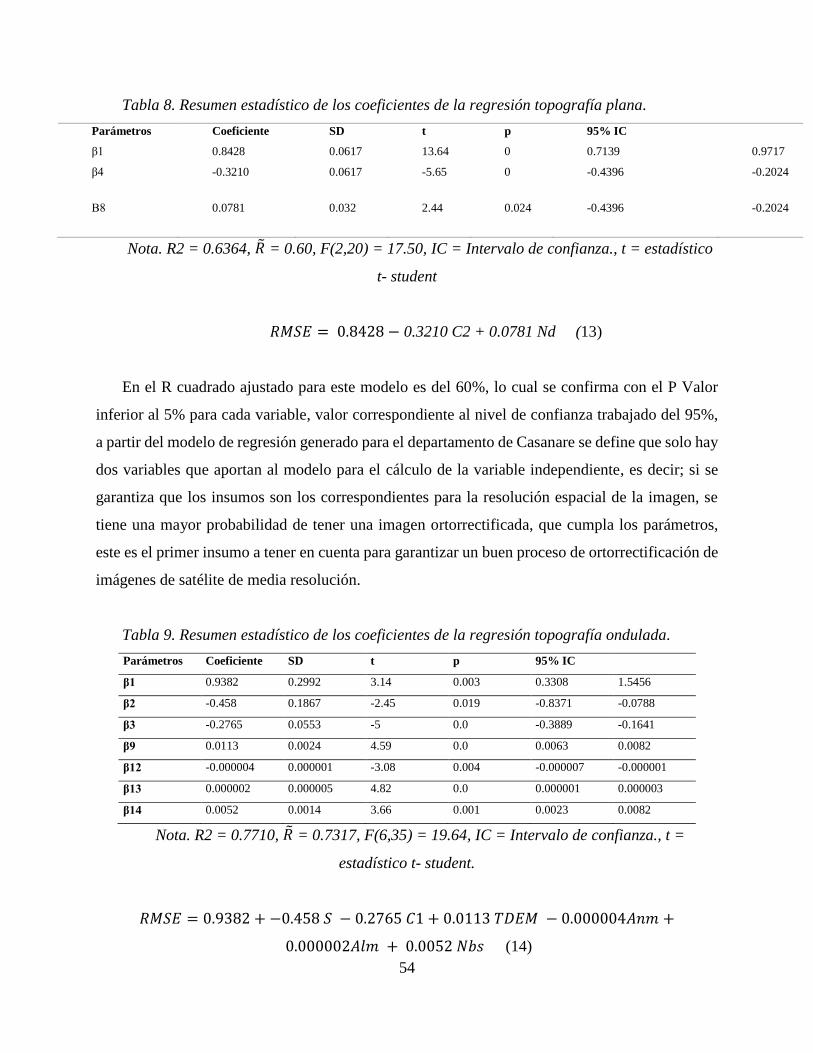
54
Tabla 8. Resumen estadístico de los coeficientes de la regresión topografía plana.
Parámetros Coeficiente SD t p 95% IC
β1 0.8428 0.0617 13.64 0 0.7139 0.9717
β4 -0.3210 0.0617 -5.65 0 -0.4396 -0.2024
Β8 0.0781 0.032 2.44 0.024 -0.4396 -0.2024
Nota. R2 = 0.6364, �̃� = 0.60, F(2,20) = 17.50, IC = Intervalo de confianza., t = estadístico
t- student
𝑅𝑀𝑆𝐸 = 0.8428 − 0.3210 C2 + 0.0781 Nd (13)
En el R cuadrado ajustado para este modelo es del 60%, lo cual se confirma con el P Valor
inferior al 5% para cada variable, valor correspondiente al nivel de confianza trabajado del 95%,
a partir del modelo de regresión generado para el departamento de Casanare se define que solo hay
dos variables que aportan al modelo para el cálculo de la variable independiente, es decir; si se
garantiza que los insumos son los correspondientes para la resolución espacial de la imagen, se
tiene una mayor probabilidad de tener una imagen ortorrectificada, que cumpla los parámetros,
este es el primer insumo a tener en cuenta para garantizar un buen proceso de ortorrectificación de
imágenes de satélite de media resolución.
Tabla 9. Resumen estadístico de los coeficientes de la regresión topografía ondulada.
Parámetros Coeficiente SD t p 95% IC
β1 0.9382 0.2992 3.14 0.003 0.3308 1.5456
β2 -0.458 0.1867 -2.45 0.019 -0.8371 -0.0788
β3 -0.2765 0.0553 -5 0.0 -0.3889 -0.1641
β9 0.0113 0.0024 4.59 0.0 0.0063 0.0082
β12 -0.000004 0.000001 -3.08 0.004 -0.000007 -0.000001
β13 0.000002 0.000005 4.82 0.0 0.000001 0.000003
β14 0.0052 0.0014 3.66 0.001 0.0023 0.0082
Nota. R2 = 0.7710, �̃� = 0.7317, F(6,35) = 19.64, IC = Intervalo de confianza., t =
estadístico t- student.
𝑅𝑀𝑆𝐸 = 0.9382 + −0.458 𝑆 − 0.2765 𝐶1 + 0.0113 𝑇𝐷𝐸𝑀 − 0.000004𝐴𝑛𝑚 +
0.000002𝐴𝑙𝑚 + 0.0052 𝑁𝑏𝑠 (14)
55
En el R cuadrado ajustado para este modelo es del 73%, lo cual se confirma con el P Valor
inferior al 5% para cada variable, valor correspondiente al nivel de confianza trabajado del 95%.
A partir del modelo de regresión generado para el departamento de Huila se definen las
variables influyentes en el error medio cuadrático: el tamaño de pixel DEM utilizado el en proceso
de ortorrectificación, el porcentaje de nubosidad de las imágenes crudas que se ortorectifican, el
recubrimiento que tiene la imagen tanto en ancho como en altura en metros de terreno, la calidad
de los insumos y finalmente el sensor de donde provienen las imágenes, este proceso ayuda a
determinar las variables más influyentes a la hora de realizar el proceso geométrico a las imágenes,
sin embargo una de las variables que se debe tener en cuenta que aunque según las estadísticas no
es significativa es la cantidad y distribución de los puntos de control por su importancia en la
rectificación de la imagen.
Luego de definir los modelos se procede a realizar la evaluación de los dos modelos lineales
(Gujarati, 2006)(WALPOLE et al., 1999). Por tanto, se verifican los supuestos del modelo de
regresión lineal.
6.1.4 Verificación significancia individual y global.
Verificando los resultados del modelo y los coeficientes del modelo existe significancia
individual para los dos modelos debido a que el P valor está por debajo del 5 % correspondiente
para una regresión con el 95% de confianza, sin embargo se calcula el valor de las tablas para la
prueba t-student ( Se calcula al 95 % de confianza y con los grados de libertad del modelo) , para
el modelo de la topografía plana se tiene un intervalo (-2.0859, 2.0859) si se verifica con el valor
de t de cada variable (ver Tabla 8), se observa que ninguna de las variables está dentro de este
intervalo, por ende se concluye que son estadísticamente significativas, para el modelo de
topografía ondulada el intervalo de la t-student es (-2.0301, 2.0301) verificando los t valores (ver
Tabla 9) de las variables se determina que ninguno está dentro del intervalo por tanto se concluye
que son estadísticamente significativas para el modelo (Damodar & Porter, 2011).
Para la significancia global se utiliza la prueba Fisher calculado del modelo y el de las tablas
en la Tabla 10 se observan los resultados obtenidos, el Fcalculado para los dos modelo es mayor que
el F teórico o F de las tablas, por ello se dice que los dos modelos tienen significancia global
(Damodar & Porter, 2011).
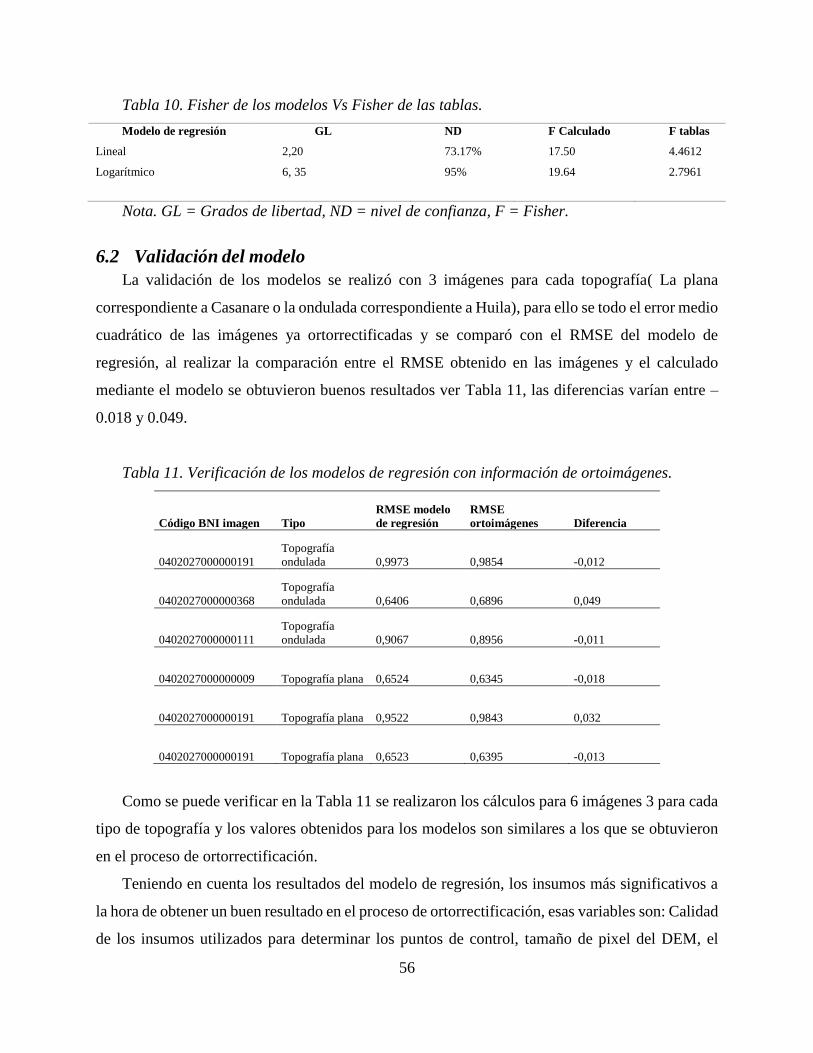
56
Tabla 10. Fisher de los modelos Vs Fisher de las tablas.
Modelo de regresión GL ND F Calculado F tablas
Lineal 2,20 73.17% 17.50 4.4612
Logarítmico 6, 35 95% 19.64 2.7961
Nota. GL = Grados de libertad, ND = nivel de confianza, F = Fisher.
6.2 Validación del modelo
La validación de los modelos se realizó con 3 imágenes para cada topografía( La plana
correspondiente a Casanare o la ondulada correspondiente a Huila), para ello se todo el error medio
cuadrático de las imágenes ya ortorrectificadas y se comparó con el RMSE del modelo de
regresión, al realizar la comparación entre el RMSE obtenido en las imágenes y el calculado
mediante el modelo se obtuvieron buenos resultados ver Tabla 11, las diferencias varían entre –
0.018 y 0.049.
Tabla 11. Verificación de los modelos de regresión con información de ortoimágenes.
Código BNI imagen Tipo
RMSE modelo
de regresión
RMSE
ortoimágenes Diferencia
0402027000000191
Topografía
ondulada 0,9973 0,9854 -0,012
0402027000000368
Topografía
ondulada 0,6406 0,6896 0,049
0402027000000111
Topografía
ondulada 0,9067 0,8956 -0,011
0402027000000009 Topografía plana 0,6524 0,6345 -0,018
0402027000000191 Topografía plana 0,9522 0,9843 0,032
0402027000000191 Topografía plana 0,6523 0,6395 -0,013
Como se puede verificar en la Tabla 11 se realizaron los cálculos para 6 imágenes 3 para cada
tipo de topografía y los valores obtenidos para los modelos son similares a los que se obtuvieron
en el proceso de ortorrectificación.
Teniendo en cuenta los resultados del modelo de regresión, los insumos más significativos a
la hora de obtener un buen resultado en el proceso de ortorrectificación, esas variables son: Calidad
de los insumos utilizados para determinar los puntos de control, tamaño de pixel del DEM, el
57
porcentaje de nubosidad de la imagen, tamaño de la imagen y el sensor con el cual se tomó la
imagen , esto se tendrá en cuenta para realizar el estudio de las condiciones que debe tener cada
uno de estos aspectos para cumplir con el propósito de la ortorrectificación según la escala de
trabajo.
6.3 Metodología de ortorrectificación e insumos
Las imágenes ortorrectificadas en el IGAC tenían problemas en la exactitud de posición al
evaluarlas con vectores existentes presentaban un desplazamiento de 25 a 50 metros (Figura 9),
se evaluó una muestra de 10 imágenes, 5 en cada zona de estudio, donde se obtuvieron errores que
varían desde los 20 metros hasta los 200 metros en planimetría, Las ortoimágenes son utilizadas
para digitalizar cartografía 1: 25000, estás imágenes corresponden a la plataforma RapidEye con
5 metros de resolución, sin embargo la resolución espacial de toma es de 6,5 metros, hecho que
hace muy difícil reconocer elementos en las ortoimágenes para realizar la cartografía con exactitud
para la escala, por ello es necesario definir un proceso correcto, donde se determinen las
características específicas de cada uno de los insumos teniendo en cuenta la escala para la cual se
vaya a trabajar.
Los puntos de control deben tener la exactitud de posición adecuada según el tamaño del pixel
de la imagen, ya que según la característica de resolución espacial estas imágenes serán utilizadas
para generar productos cartográficos los resultados concuerdan con lo encontrado en el trabajo de
Yue, Zhang, & Tan, (2015), el DEM que ayudara a darle el componente orto a la imágenes debe
ser consistente con la escala de trabajo y su exactitud de posición tanto planimétrica como
altimétrica deben estar acorde con la resolución espacial de la imagen, una vez terminado el
proceso de ortorrectificación se debe realizar la evaluación de la imagen (Qayyum, Malik, Nuafal,
Iqbal, & Abdullah, 2015) y esta debe cumplir con los estándares de calidad definidos en esta
investigación ver numeral 6.4.
El error de las imágenes evaluadas permite verificar que el proceso llevado al momento no era
el más óptimo y necesitaba ser ajustado, y aunque el objetivo de la investigación es el
establecimiento de los indicadores de calidad esto nos ha permitido identificar que se necesitan
hacer ajustes en los procesos de búsqueda de insumos y el método de ortorrrectificación, por eso
se realiza un estudio para cada uno de los insumos relevantes según los modelos de regresión como
se verá a continuación.
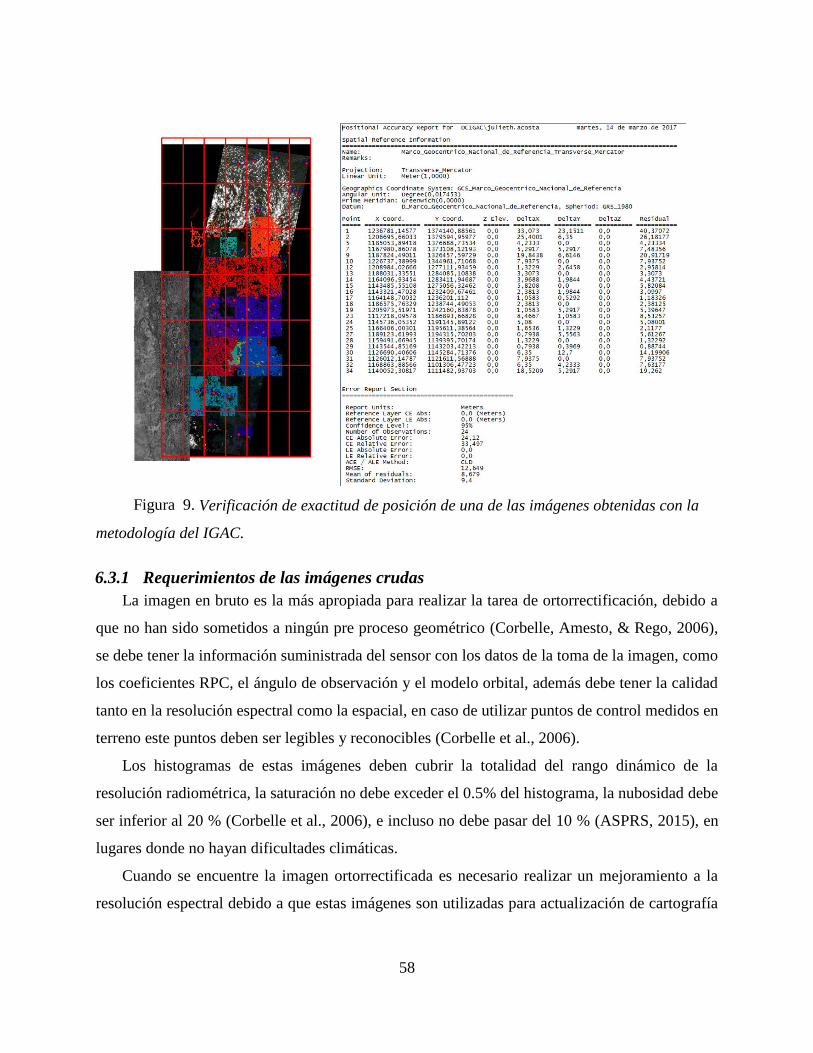
58
Figura 9. Verificación de exactitud de posición de una de las imágenes obtenidas con la
metodología del IGAC.
6.3.1 Requerimientos de las imágenes crudas
La imagen en bruto es la más apropiada para realizar la tarea de ortorrectificación, debido a
que no han sido sometidos a ningún pre proceso geométrico (Corbelle, Amesto, & Rego, 2006),
se debe tener la información suministrada del sensor con los datos de la toma de la imagen, como
los coeficientes RPC, el ángulo de observación y el modelo orbital, además debe tener la calidad
tanto en la resolución espectral como la espacial, en caso de utilizar puntos de control medidos en
terreno este puntos deben ser legibles y reconocibles (Corbelle et al., 2006).
Los histogramas de estas imágenes deben cubrir la totalidad del rango dinámico de la
resolución radiométrica, la saturación no debe exceder el 0.5% del histograma, la nubosidad debe
ser inferior al 20 % (Corbelle et al., 2006), e incluso no debe pasar del 10 % (ASPRS, 2015), en
lugares donde no hayan dificultades climáticas.
Cuando se encuentre la imagen ortorrectificada es necesario realizar un mejoramiento a la
resolución espectral debido a que estas imágenes son utilizadas para actualización de cartografía
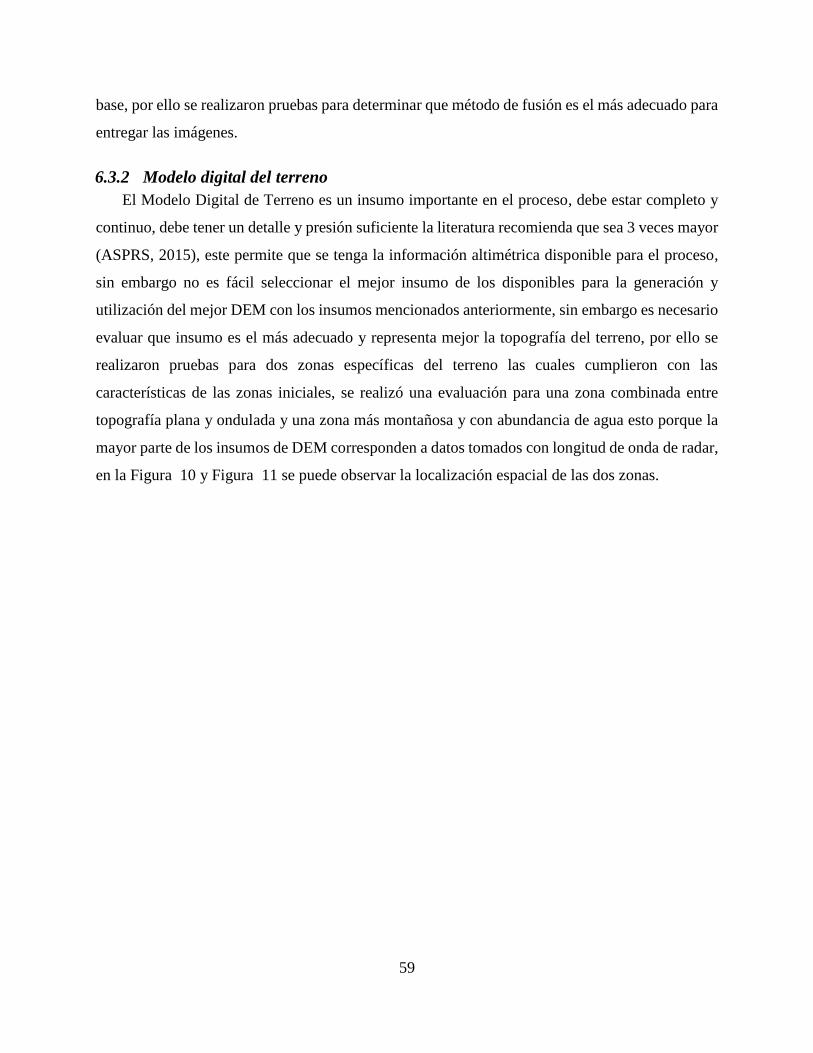
59
base, por ello se realizaron pruebas para determinar que método de fusión es el más adecuado para
entregar las imágenes.
6.3.2 Modelo digital del terreno
El Modelo Digital de Terreno es un insumo importante en el proceso, debe estar completo y
continuo, debe tener un detalle y presión suficiente la literatura recomienda que sea 3 veces mayor
(ASPRS, 2015), este permite que se tenga la información altimétrica disponible para el proceso,
sin embargo no es fácil seleccionar el mejor insumo de los disponibles para la generación y
utilización del mejor DEM con los insumos mencionados anteriormente, sin embargo es necesario
evaluar que insumo es el más adecuado y representa mejor la topografía del terreno, por ello se
realizaron pruebas para dos zonas específicas del terreno las cuales cumplieron con las
características de las zonas iniciales, se realizó una evaluación para una zona combinada entre
topografía plana y ondulada y una zona más montañosa y con abundancia de agua esto porque la
mayor parte de los insumos de DEM corresponden a datos tomados con longitud de onda de radar,
en la Figura 10 y Figura 11 se puede observar la localización espacial de las dos zonas.
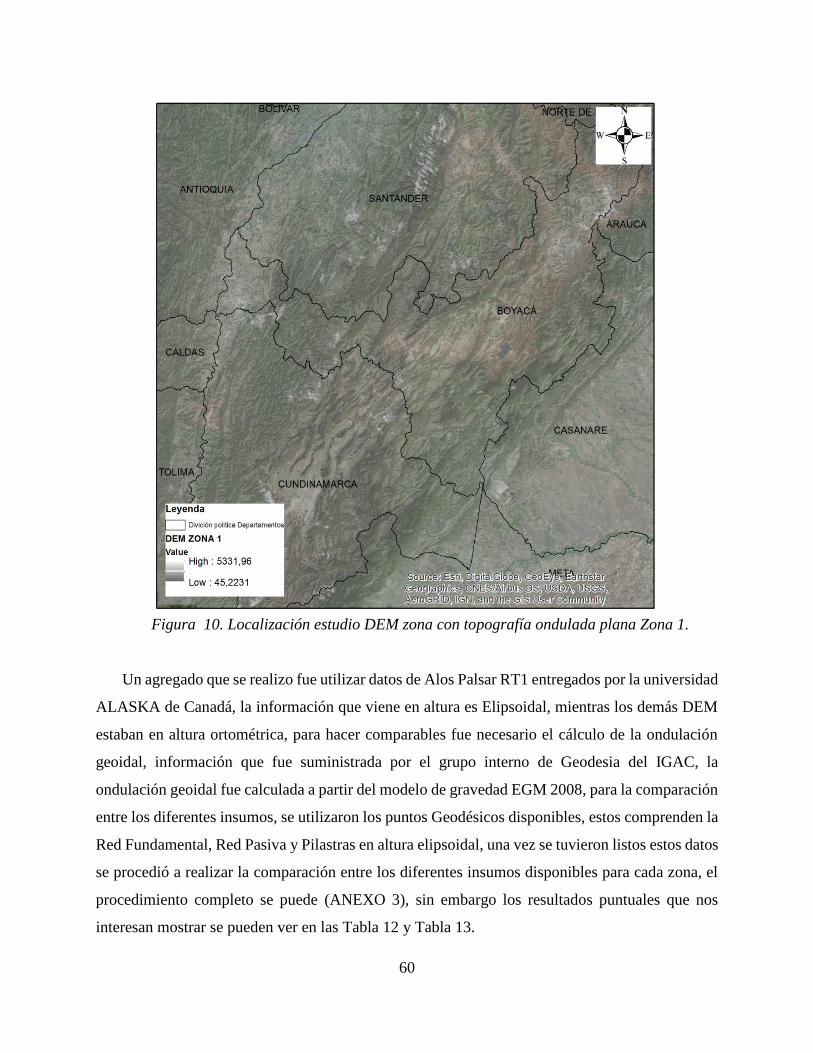
60
Figura 10. Localización estudio DEM zona con topografía ondulada plana Zona 1.
Un agregado que se realizo fue utilizar datos de Alos Palsar RT1 entregados por la universidad
ALASKA de Canadá, la información que viene en altura es Elipsoidal, mientras los demás DEM
estaban en altura ortométrica, para hacer comparables fue necesario el cálculo de la ondulación
geoidal, información que fue suministrada por el grupo interno de Geodesia del IGAC, la
ondulación geoidal fue calculada a partir del modelo de gravedad EGM 2008, para la comparación
entre los diferentes insumos, se utilizaron los puntos Geodésicos disponibles, estos comprenden la
Red Fundamental, Red Pasiva y Pilastras en altura elipsoidal, una vez se tuvieron listos estos datos
se procedió a realizar la comparación entre los diferentes insumos disponibles para cada zona, el
procedimiento completo se puede (ANEXO 3), sin embargo los resultados puntuales que nos
interesan mostrar se pueden ver en las Tabla 12 y Tabla 13.
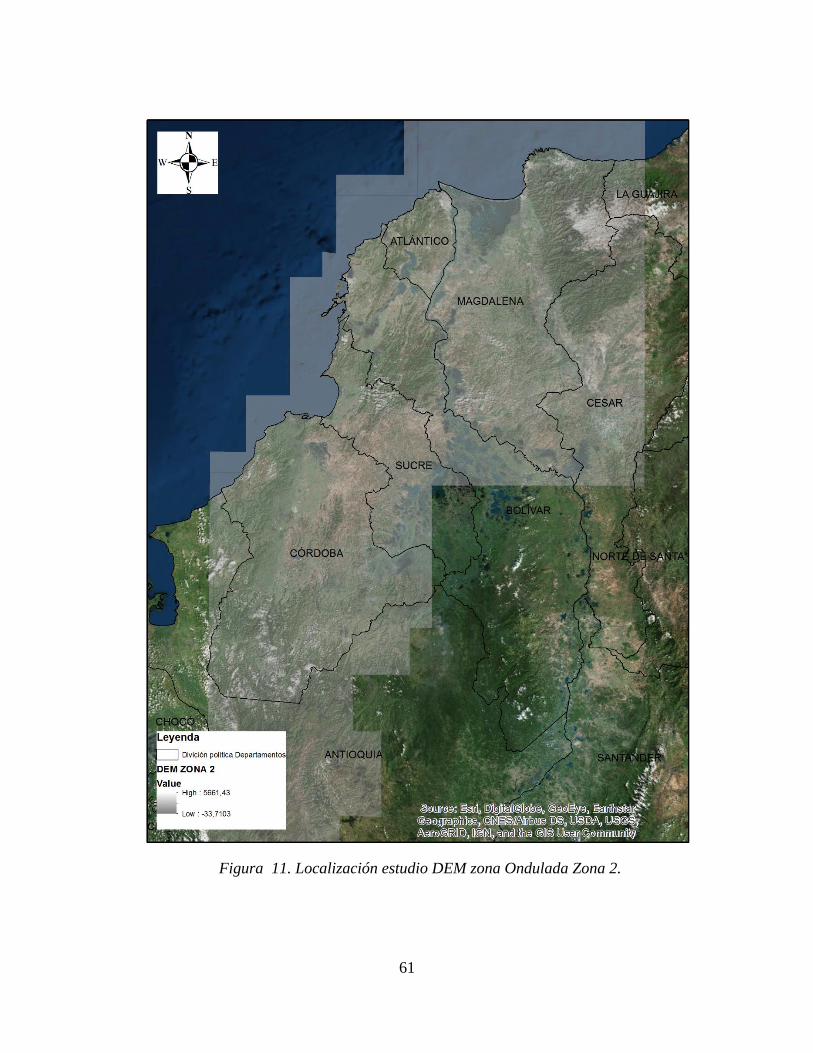
61
Figura 11. Localización estudio DEM zona Ondulada Zona 2.
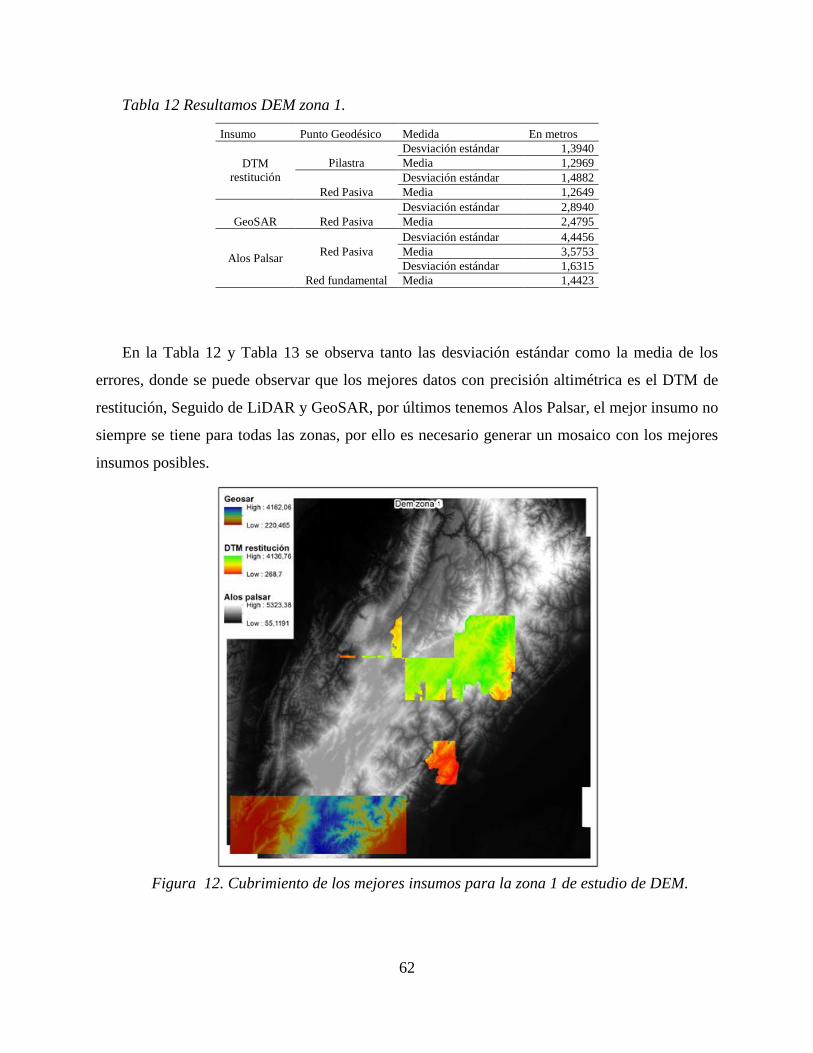
62
Tabla 12 Resultamos DEM zona 1.
Insumo Punto Geodésico Medida En metros
DTM
restitución
Pilastra
Desviación estándar 1,3940
Media 1,2969
Red Pasiva
Desviación estándar 1,4882
Media 1,2649
GeoSAR Red Pasiva
Desviación estándar 2,8940
Media 2,4795
Alos Palsar Red Pasiva
Desviación estándar 4,4456
Media 3,5753
Red fundamental
Desviación estándar 1,6315
Media 1,4423
En la Tabla 12 y Tabla 13 se observa tanto las desviación estándar como la media de los
errores, donde se puede observar que los mejores datos con precisión altimétrica es el DTM de
restitución, Seguido de LiDAR y GeoSAR, por últimos tenemos Alos Palsar, el mejor insumo no
siempre se tiene para todas las zonas, por ello es necesario generar un mosaico con los mejores
insumos posibles.
Figura 12. Cubrimiento de los mejores insumos para la zona 1 de estudio de DEM.
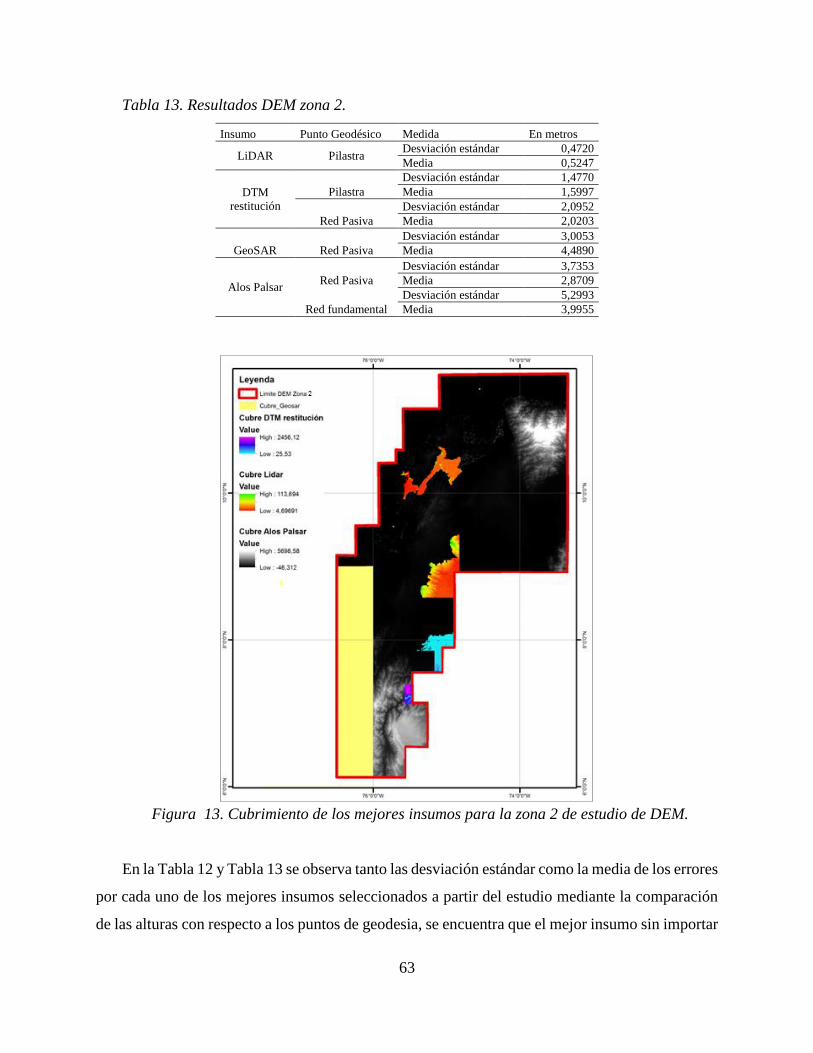
63
Tabla 13. Resultados DEM zona 2.
Insumo Punto Geodésico Medida En metros
LiDAR Pilastra Desviación estándar 0,4720
Media 0,5247
DTM
restitución
Pilastra
Desviación estándar 1,4770
Media 1,5997
Red Pasiva
Desviación estándar 2,0952
Media 2,0203
GeoSAR Red Pasiva
Desviación estándar 3,0053
Media 4,4890
Alos Palsar Red Pasiva
Desviación estándar 3,7353
Media 2,8709
Red fundamental
Desviación estándar 5,2993
Media 3,9955
Figura 13. Cubrimiento de los mejores insumos para la zona 2 de estudio de DEM.
En la Tabla 12 y Tabla 13 se observa tanto las desviación estándar como la media de los errores
por cada uno de los mejores insumos seleccionados a partir del estudio mediante la comparación
de las alturas con respecto a los puntos de geodesia, se encuentra que el mejor insumo sin importar
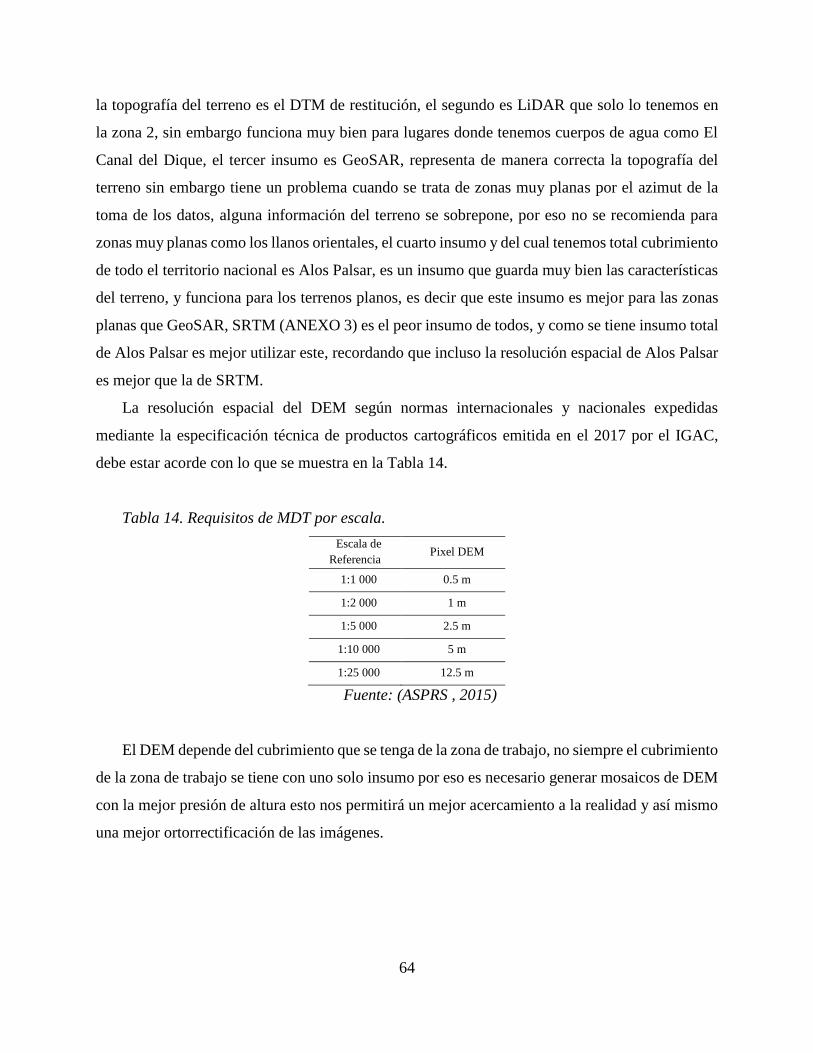
64
la topografía del terreno es el DTM de restitución, el segundo es LiDAR que solo lo tenemos en
la zona 2, sin embargo funciona muy bien para lugares donde tenemos cuerpos de agua como El
Canal del Dique, el tercer insumo es GeoSAR, representa de manera correcta la topografía del
terreno sin embargo tiene un problema cuando se trata de zonas muy planas por el azimut de la
toma de los datos, alguna información del terreno se sobrepone, por eso no se recomienda para
zonas muy planas como los llanos orientales, el cuarto insumo y del cual tenemos total cubrimiento
de todo el territorio nacional es Alos Palsar, es un insumo que guarda muy bien las características
del terreno, y funciona para los terrenos planos, es decir que este insumo es mejor para las zonas
planas que GeoSAR, SRTM (ANEXO 3) es el peor insumo de todos, y como se tiene insumo total
de Alos Palsar es mejor utilizar este, recordando que incluso la resolución espacial de Alos Palsar
es mejor que la de SRTM.
La resolución espacial del DEM según normas internacionales y nacionales expedidas
mediante la especificación técnica de productos cartográficos emitida en el 2017 por el IGAC,
debe estar acorde con lo que se muestra en la Tabla 14.
Tabla 14. Requisitos de MDT por escala.
Escala de
Referencia Pixel DEM
1:1 000 0.5 m
1:2 000 1 m
1:5 000 2.5 m
1:10 000 5 m
1:25 000 12.5 m
Fuente: (ASPRS , 2015)
El DEM depende del cubrimiento que se tenga de la zona de trabajo, no siempre el cubrimiento
de la zona de trabajo se tiene con uno solo insumo por eso es necesario generar mosaicos de DEM
con la mejor presión de altura esto nos permitirá un mejor acercamiento a la realidad y así mismo
una mejor ortorrectificación de las imágenes.
65
6.3.3 Requerimientos de los puntos de control/apoyo (GCP) y chequeo (CPS)
Los GCPs, deben medirse en trabajo en campo utilizando redes de estaciones GPS de
referencia, cuando se trabaja con imágenes de satélite se dificulta tener estos puntos de trabajo en
terreno, lo importante en este caso sería tener otras fuentes de precisión como Ortófotos,
cartografía de precisión y otros insumos disponibles en la zona que garanticen un buen ajuste
(Ministerio de Ambiente, Perú, 2014).
Es importante que los puntos de control se encuentren distribuidos de forma uniforme para
que estadísticamente la imagen se corrija geométricamente, la cantidad y distribución optima y
adecuada de los puntos, usualmente se utilizan de 20 a 25 puntos, estos puntos deben ser
inconfundibles y definidos en la imagen como cruces de vías, edificaciones entre otras, los puntos
deben estar a nivel de suelo (GUEVARA & SALCEDO, s. f.).
Los puntos de control deben medirse mediante trabajo de campo usando la técnica de cálculo
diferencial por Sistema global de posicionamiento o redes de estaciones GPS de referencia, en
caso de no poder trabajar con puntos tomados en campo, la literatura apunta a extraerlos de mapas
topográficos, estos puntos de control, deben estar distribuidos de manera adecuada para garantizar
un buen modelo de ortorrectificación, estos puntos deben estar entre 20 y 25 puntos (ASPRS,
2015), no se deben elegir puntos que no estén a nivel de piso (Ramírez Espinoza, 2011).
Cuando se utilicen mapas topográficos u ortofotos con insumo para la corrección geométrica
de una imagen, se puede aceptar hasta un valor de 0.02 mm sobre la escala de mapa, la cual es la
mínima unidad legible y para controles verticales la precisión debería ser menor a 2 m RSME
(Lencinas & Díaz, 2011) .
Los datos de referencia como los puntos de control tomados en terreno, cartografía base u
ortofotos y en general datos de referencia utilizados deben tener una resolución espacial tres veces
mayor para garantizar un mejor modelado(Angel, M., 1995).
Para definir la cantidad y distribución se utilizaron imágenes del sensor RapidEye de las
mismas zonas del estudio de los DEM, la prueba quería definir el número adecuado tanto de los
puntos de control como los puntos de chequeo se realizaron pruebas con diferente número de
puntos control, donde se obtuvieron los mejores resultados con 20 y 30 puntos de control
independiente del tamaño de las imágenes, se encontró que un mejor ajuste se define por la
distribución de los puntos de control y la precisión que estos tengan, los resultados de las pruebas
están descritos en la Tabla 15 ( ANEXO 6).
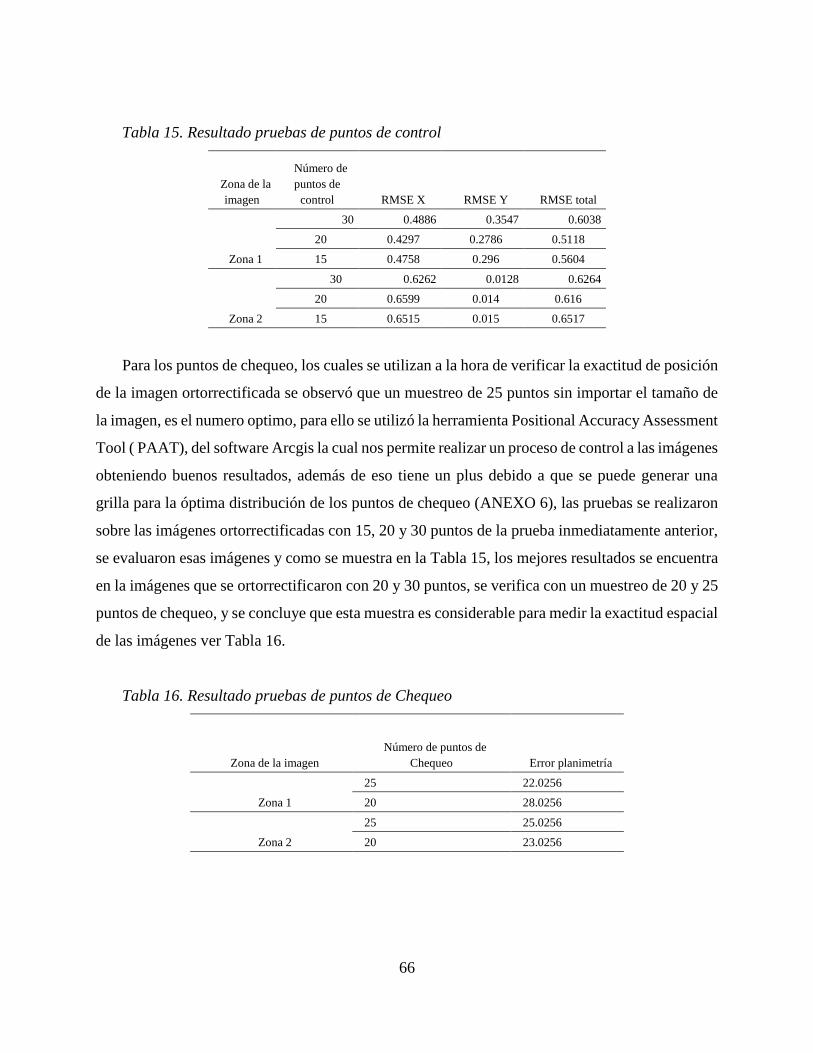
66
Tabla 15. Resultado pruebas de puntos de control
Zona de la
imagen
Número de
puntos de
control RMSE X RMSE Y RMSE total
Zona 1
30 0.4886 0.3547 0.6038
20 0.4297 0.2786 0.5118
15 0.4758 0.296 0.5604
Zona 2
30 0.6262 0.0128 0.6264
20 0.6599 0.014 0.616
15 0.6515 0.015 0.6517
Para los puntos de chequeo, los cuales se utilizan a la hora de verificar la exactitud de posición
de la imagen ortorrectificada se observó que un muestreo de 25 puntos sin importar el tamaño de
la imagen, es el numero optimo, para ello se utilizó la herramienta Positional Accuracy Assessment
Tool ( PAAT), del software Arcgis la cual nos permite realizar un proceso de control a las imágenes
obteniendo buenos resultados, además de eso tiene un plus debido a que se puede generar una
grilla para la óptima distribución de los puntos de chequeo (ANEXO 6), las pruebas se realizaron
sobre las imágenes ortorrectificadas con 15, 20 y 30 puntos de la prueba inmediatamente anterior,
se evaluaron esas imágenes y como se muestra en la Tabla 15, los mejores resultados se encuentra
en la imágenes que se ortorrectificaron con 20 y 30 puntos, se verifica con un muestreo de 20 y 25
puntos de chequeo, y se concluye que esta muestra es considerable para medir la exactitud espacial
de las imágenes ver Tabla 16.
Tabla 16. Resultado pruebas de puntos de Chequeo
Zona de la imagen
Número de puntos de
Chequeo Error planimetría
Zona 1
25 22.0256
20 28.0256
Zona 2
25 25.0256
20 23.0256
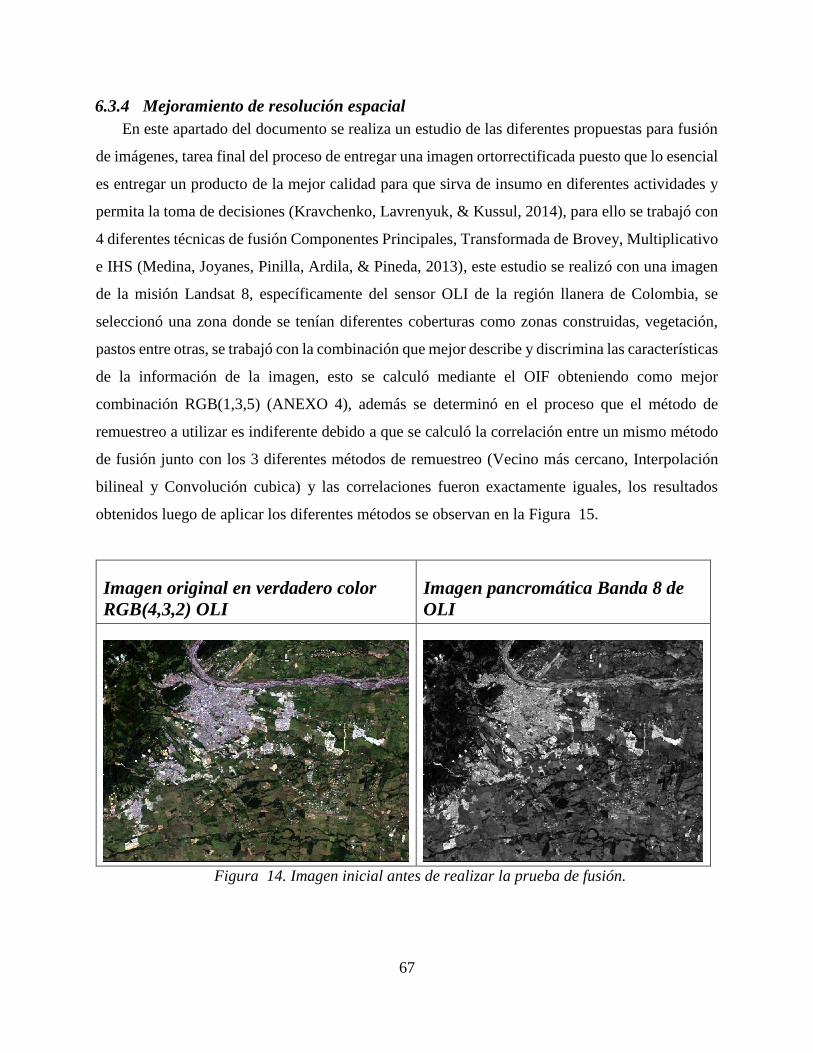
67
6.3.4 Mejoramiento de resolución espacial
En este apartado del documento se realiza un estudio de las diferentes propuestas para fusión
de imágenes, tarea final del proceso de entregar una imagen ortorrectificada puesto que lo esencial
es entregar un producto de la mejor calidad para que sirva de insumo en diferentes actividades y
permita la toma de decisiones (Kravchenko, Lavrenyuk, & Kussul, 2014), para ello se trabajó con
4 diferentes técnicas de fusión Componentes Principales, Transformada de Brovey, Multiplicativo
e IHS (Medina, Joyanes, Pinilla, Ardila, & Pineda, 2013), este estudio se realizó con una imagen
de la misión Landsat 8, específicamente del sensor OLI de la región llanera de Colombia, se
seleccionó una zona donde se tenían diferentes coberturas como zonas construidas, vegetación,
pastos entre otras, se trabajó con la combinación que mejor describe y discrimina las características
de la información de la imagen, esto se calculó mediante el OIF obteniendo como mejor
combinación RGB(1,3,5) (ANEXO 4), además se determinó en el proceso que el método de
remuestreo a utilizar es indiferente debido a que se calculó la correlación entre un mismo método
de fusión junto con los 3 diferentes métodos de remuestreo (Vecino más cercano, Interpolación
bilineal y Convolución cubica) y las correlaciones fueron exactamente iguales, los resultados
obtenidos luego de aplicar los diferentes métodos se observan en la Figura 15.
Imagen original en verdadero color
RGB(4,3,2) OLI
Imagen pancromática Banda 8 de
OLI
Figura 14. Imagen inicial antes de realizar la prueba de fusión.
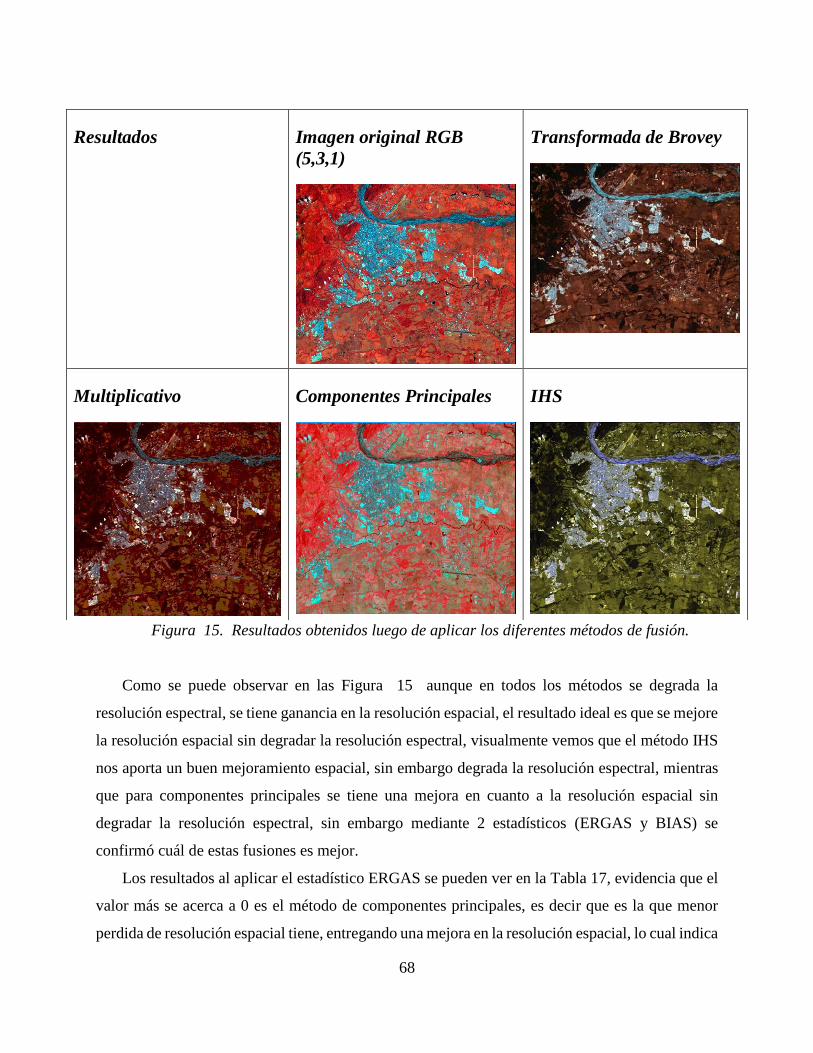
68
Figura 15. Resultados obtenidos luego de aplicar los diferentes métodos de fusión.
Como se puede observar en las Figura 15 aunque en todos los métodos se degrada la
resolución espectral, se tiene ganancia en la resolución espacial, el resultado ideal es que se mejore
la resolución espacial sin degradar la resolución espectral, visualmente vemos que el método IHS
nos aporta un buen mejoramiento espacial, sin embargo degrada la resolución espectral, mientras
que para componentes principales se tiene una mejora en cuanto a la resolución espacial sin
degradar la resolución espectral, sin embargo mediante 2 estadísticos (ERGAS y BIAS) se
confirmó cuál de estas fusiones es mejor.
Los resultados al aplicar el estadístico ERGAS se pueden ver en la Tabla 17, evidencia que el
valor más se acerca a 0 es el método de componentes principales, es decir que es la que menor
perdida de resolución espacial tiene, entregando una mejora en la resolución espacial, lo cual indica
Resultados Imagen original RGB
(5,3,1)
Transformada de Brovey
Multiplicativo
Componentes Principales
IHS
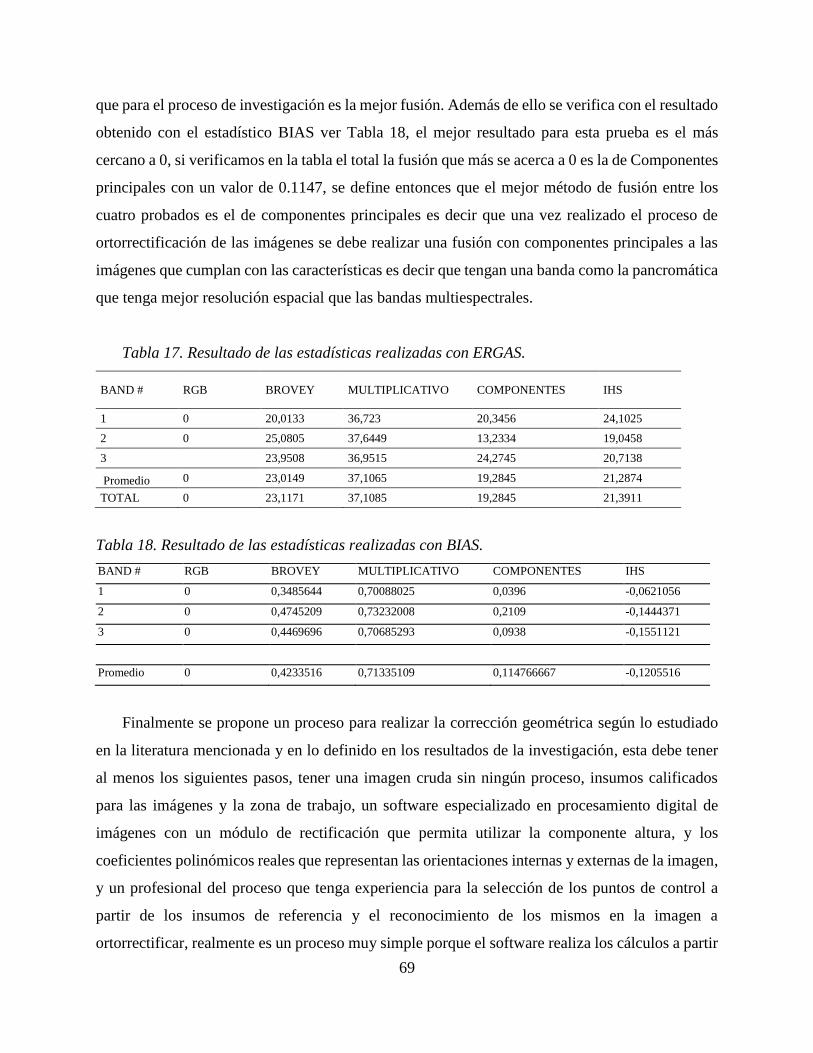
69
que para el proceso de investigación es la mejor fusión. Además de ello se verifica con el resultado
obtenido con el estadístico BIAS ver Tabla 18, el mejor resultado para esta prueba es el más
cercano a 0, si verificamos en la tabla el total la fusión que más se acerca a 0 es la de Componentes
principales con un valor de 0.1147, se define entonces que el mejor método de fusión entre los
cuatro probados es el de componentes principales es decir que una vez realizado el proceso de
ortorrectificación de las imágenes se debe realizar una fusión con componentes principales a las
imágenes que cumplan con las características es decir que tengan una banda como la pancromática
que tenga mejor resolución espacial que las bandas multiespectrales.
Tabla 17. Resultado de las estadísticas realizadas con ERGAS.
BAND # RGB BROVEY MULTIPLICATIVO COMPONENTES IHS
1 0 20,0133 36,723 20,3456 24,1025
2 0 25,0805 37,6449 13,2334 19,0458
3 23,9508 36,9515 24,2745 20,7138
Promedio 0 23,0149 37,1065 19,2845 21,2874
TOTAL 0 23,1171 37,1085 19,2845 21,3911
Tabla 18. Resultado de las estadísticas realizadas con BIAS.
BAND # RGB BROVEY MULTIPLICATIVO COMPONENTES IHS
1 0 0,3485644 0,70088025 0,0396 -0,0621056
2 0 0,4745209 0,73232008 0,2109 -0,1444371
3 0 0,4469696 0,70685293 0,0938 -0,1551121
Promedio 0 0,4233516 0,71335109 0,114766667 -0,1205516
Finalmente se propone un proceso para realizar la corrección geométrica según lo estudiado
en la literatura mencionada y en lo definido en los resultados de la investigación, esta debe tener
al menos los siguientes pasos, tener una imagen cruda sin ningún proceso, insumos calificados
para las imágenes y la zona de trabajo, un software especializado en procesamiento digital de
imágenes con un módulo de rectificación que permita utilizar la componente altura, y los
coeficientes polinómicos reales que representan las orientaciones internas y externas de la imagen,
y un profesional del proceso que tenga experiencia para la selección de los puntos de control a
partir de los insumos de referencia y el reconocimiento de los mismos en la imagen a
ortorrectificar, realmente es un proceso muy simple porque el software realiza los cálculos a partir
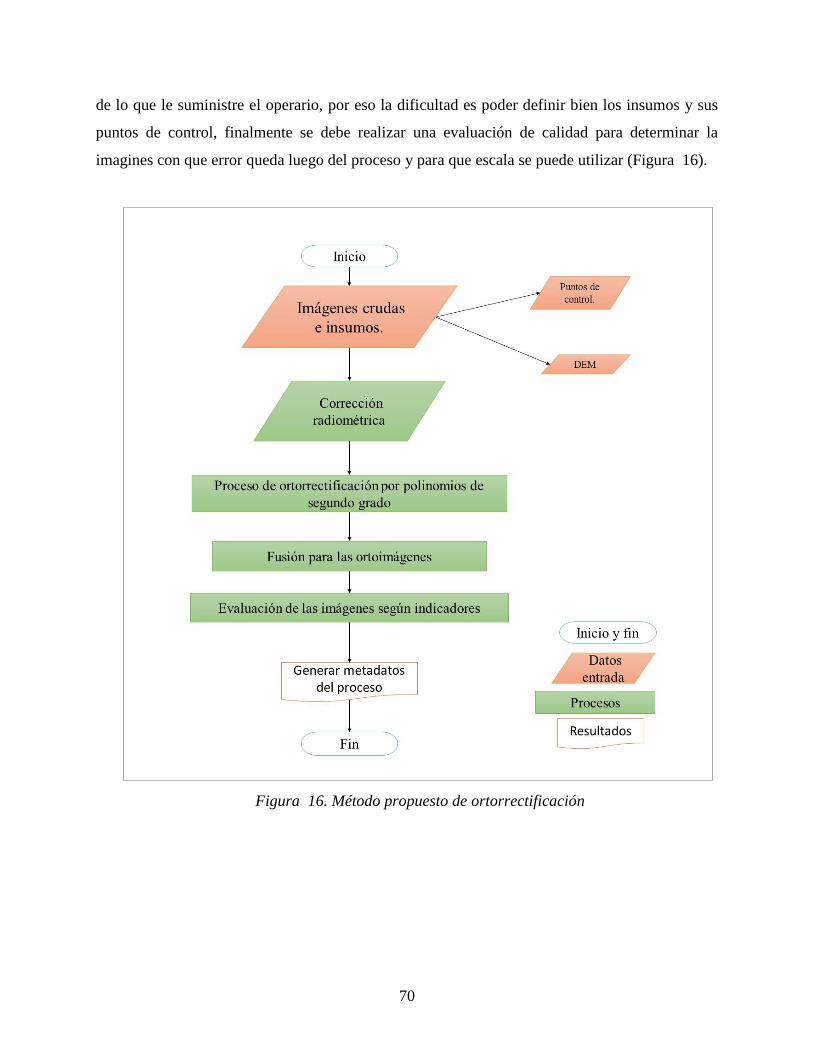
70
de lo que le suministre el operario, por eso la dificultad es poder definir bien los insumos y sus
puntos de control, finalmente se debe realizar una evaluación de calidad para determinar la
imagines con que error queda luego del proceso y para que escala se puede utilizar (Figura 16).
Figura 16. Método propuesto de ortorrectificación
71
6.4 Definición de indicadores de calidad
Una vez definido las características de los insumos y el proceso adecuado a seguir para la
ortorrectificación de las imágenes, se seleccionaron elementos de calidad los cuales están definidos
detalladamente en la ficha del perfil de especificación técnica para cada escala conforme a la
Norma Técnica Colombiana NTC 5043. En las fichas de especificación se desarrollan
completamente las medidas de calidad aplicables para cada escala, conforme a la norma NTC
5660, estas medidas fueron tomadas en cuenta para definir los índices de calidad de las
ortoimágenes, solo se seleccionaron las aplicables a las imágenes (ANEXO 5).
6.4.1 Elemento totalidad
Describe el nivel de veracidad con el cual las imágenes representan el universo abstracto, y
representa el área útil de la imagen, la cual garantiza ser una fuente de exactitud para realizar
actividades como digitalización de cartografía, para las imágenes debe medirse la totalidad de
cubrimiento, totalidad de cubrimiento (omisión). Porcentaje del área de la imagen que no se
encuentra dentro del área útil como nubes dispersas, sombras o desplazamientos, el porcentaje de
omisión no debe ser mayor al 10 %, para zonas con condiciones climáticas donde hay mucho
cubrimiento de nubes durante casi todo el año se puede permitir hasta un 20 % (Victor Guevara,
2013).
6.4.2 Consistencia lógica
Describe el grado de certidumbre con el cual un determinado conjunto de datos cumple con
las especificaciones del producto en lo que respecta a la estructura interna de los datos, reglas
topológicas, atributos y relaciones (NTC5662, 2006).
6.4.2.1 Consistencia Conceptual
Adherencia a las reglas definidas en el esquema conceptual, establecidas para garantizar la
invariabilidad del conjunto de datos durante el proceso de desarrollo. La consistencia conceptual
hace referencia al grado en que el conjunto de datos refleja los parámetros establecidos en el
modelo de conceptos, generado durante la fase de planeación del conjunto de datos (NTC5662,
2006).
6.4.2.1.1 Conformidad de la Resolución Espectral
Verifica la cantidad y correspondencia de bandas espectrales que componen la ortoimágen,
estas deben ser iguales a las de la imagen cruda (NTC5662, 2006).
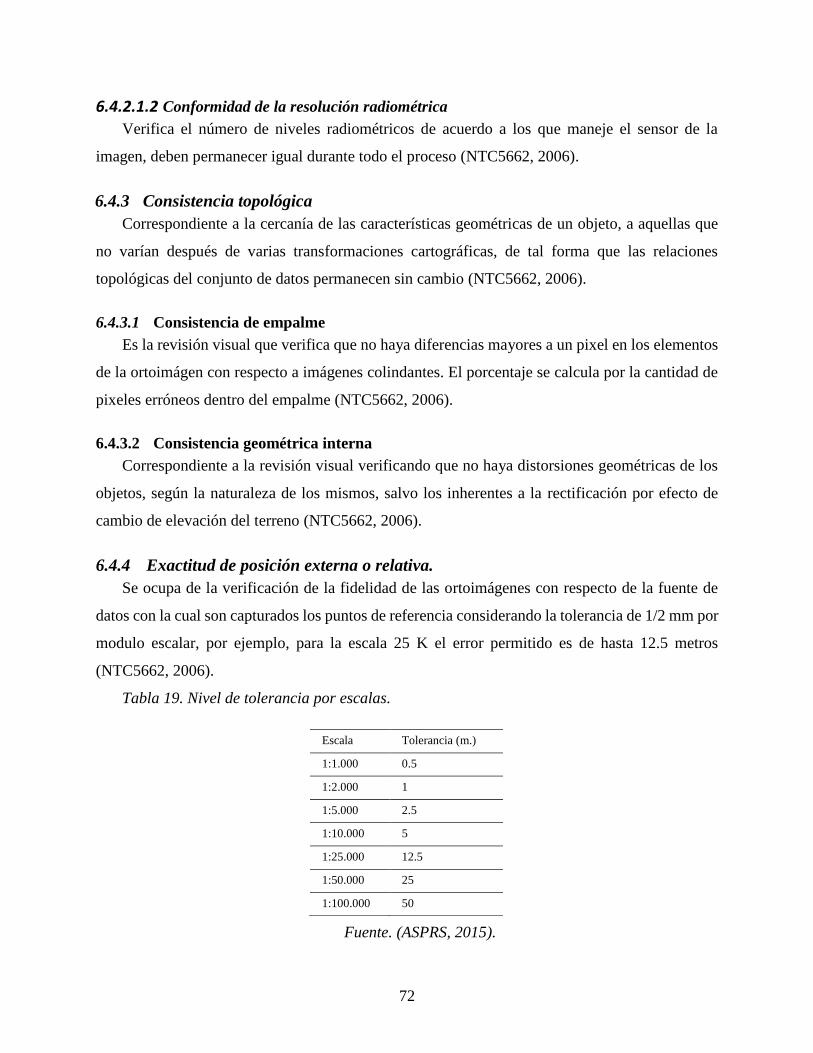
72
6.4.2.1.2 Conformidad de la resolución radiométrica
Verifica el número de niveles radiométricos de acuerdo a los que maneje el sensor de la
imagen, deben permanecer igual durante todo el proceso (NTC5662, 2006).
6.4.3 Consistencia topológica
Correspondiente a la cercanía de las características geométricas de un objeto, a aquellas que
no varían después de varias transformaciones cartográficas, de tal forma que las relaciones
topológicas del conjunto de datos permanecen sin cambio (NTC5662, 2006).
6.4.3.1 Consistencia de empalme
Es la revisión visual que verifica que no haya diferencias mayores a un pixel en los elementos
de la ortoimágen con respecto a imágenes colindantes. El porcentaje se calcula por la cantidad de
pixeles erróneos dentro del empalme (NTC5662, 2006).
6.4.3.2 Consistencia geométrica interna
Correspondiente a la revisión visual verificando que no haya distorsiones geométricas de los
objetos, según la naturaleza de los mismos, salvo los inherentes a la rectificación por efecto de
cambio de elevación del terreno (NTC5662, 2006).
6.4.4 Exactitud de posición externa o relativa.
Se ocupa de la verificación de la fidelidad de las ortoimágenes con respecto de la fuente de
datos con la cual son capturados los puntos de referencia considerando la tolerancia de 1/2 mm por
modulo escalar, por ejemplo, para la escala 25 K el error permitido es de hasta 12.5 metros
(NTC5662, 2006).
Tabla 19. Nivel de tolerancia por escalas.
Fuente. (ASPRS, 2015).
Escala Tolerancia (m.)
1:1.000 0.5
1:2.000 1
1:5.000 2.5
1:10.000 5
1:25.000 12.5
1:50.000 25
1:100.000 50
73
6.4.5 Exactitud temática
6.4.5.1 Exactitud de atributos cualitativos
Es la diferencia de los valores dados a los atributos cualitativos respecto a los valores
verdaderos o considerados como verdaderos (NTC5662, 2006).
6.4.5.2 Balance radiométrico
Correspondiente a la revisión visual y mediante el histograma, intensidad, brillo y contraste
de la ortoimágen(NTC5662, 2006).
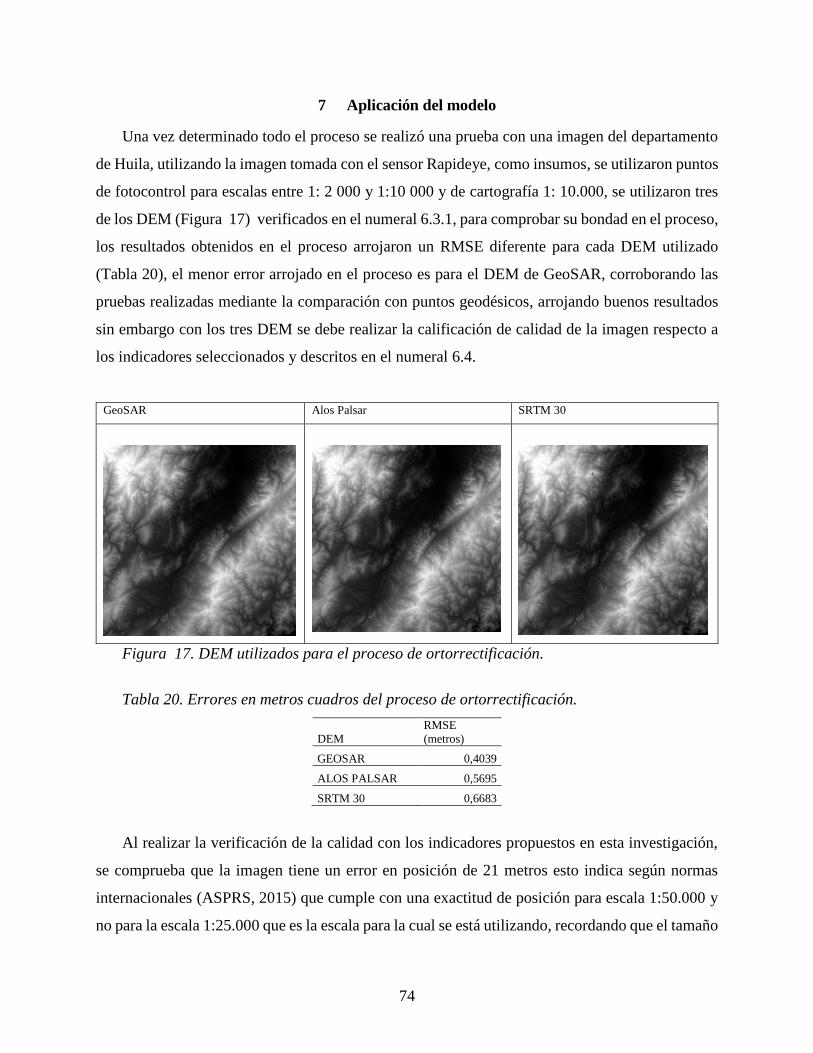
74
7 Aplicación del modelo
Una vez determinado todo el proceso se realizó una prueba con una imagen del departamento
de Huila, utilizando la imagen tomada con el sensor Rapideye, como insumos, se utilizaron puntos
de fotocontrol para escalas entre 1: 2 000 y 1:10 000 y de cartografía 1: 10.000, se utilizaron tres
de los DEM (Figura 17) verificados en el numeral 6.3.1, para comprobar su bondad en el proceso,
los resultados obtenidos en el proceso arrojaron un RMSE diferente para cada DEM utilizado
(Tabla 20), el menor error arrojado en el proceso es para el DEM de GeoSAR, corroborando las
pruebas realizadas mediante la comparación con puntos geodésicos, arrojando buenos resultados
sin embargo con los tres DEM se debe realizar la calificación de calidad de la imagen respecto a
los indicadores seleccionados y descritos en el numeral 6.4.
GeoSAR Alos Palsar SRTM 30
Figura 17. DEM utilizados para el proceso de ortorrectificación.
Tabla 20. Errores en metros cuadros del proceso de ortorrectificación.
DEM
RMSE
(metros)
GEOSAR 0,4039
ALOS PALSAR 0,5695
SRTM 30 0,6683
Al realizar la verificación de la calidad con los indicadores propuestos en esta investigación,
se comprueba que la imagen tiene un error en posición de 21 metros esto indica según normas
internacionales (ASPRS, 2015) que cumple con una exactitud de posición para escala 1:50.000 y
no para la escala 1:25.000 que es la escala para la cual se está utilizando, recordando que el tamaño
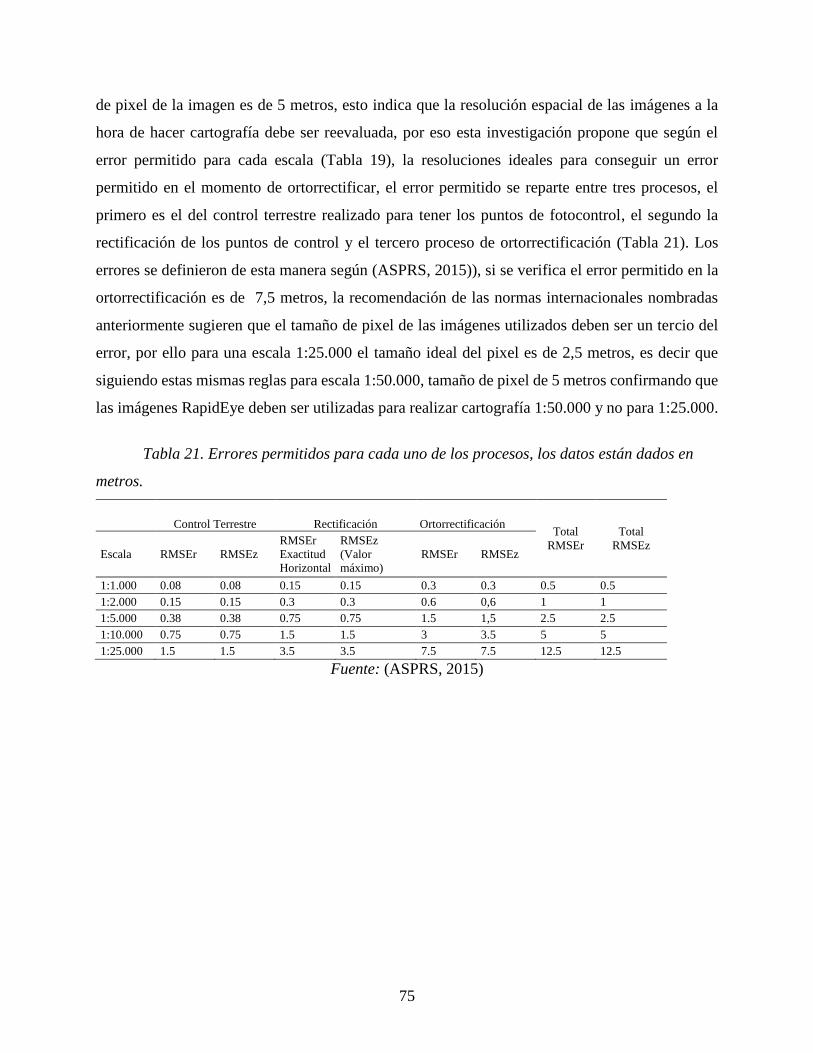
75
de pixel de la imagen es de 5 metros, esto indica que la resolución espacial de las imágenes a la
hora de hacer cartografía debe ser reevaluada, por eso esta investigación propone que según el
error permitido para cada escala (Tabla 19), la resoluciones ideales para conseguir un error
permitido en el momento de ortorrectificar, el error permitido se reparte entre tres procesos, el
primero es el del control terrestre realizado para tener los puntos de fotocontrol, el segundo la
rectificación de los puntos de control y el tercero proceso de ortorrectificación (Tabla 21). Los
errores se definieron de esta manera según (ASPRS, 2015)), si se verifica el error permitido en la
ortorrectificación es de 7,5 metros, la recomendación de las normas internacionales nombradas
anteriormente sugieren que el tamaño de pixel de las imágenes utilizados deben ser un tercio del
error, por ello para una escala 1:25.000 el tamaño ideal del pixel es de 2,5 metros, es decir que
siguiendo estas mismas reglas para escala 1:50.000, tamaño de pixel de 5 metros confirmando que
las imágenes RapidEye deben ser utilizadas para realizar cartografía 1:50.000 y no para 1:25.000.
Tabla 21. Errores permitidos para cada uno de los procesos, los datos están dados en
metros.
Control Terrestre Rectificación Ortorrectificación Total
RMSEr
Total
RMSEz Escala RMSEr RMSEz
RMSEr
Exactitud
Horizontal
RMSEz
(Valor
máximo)
RMSEr RMSEz
1:1.000 0.08 0.08 0.15 0.15 0.3 0.3 0.5 0.5
1:2.000 0.15 0.15 0.3 0.3 0.6 0,6 1 1
1:5.000 0.38 0.38 0.75 0.75 1.5 1,5 2.5 2.5
1:10.000 0.75 0.75 1.5 1.5 3 3.5 5 5
1:25.000 1.5 1.5 3.5 3.5 7.5 7.5 12.5 12.5
Fuente: (ASPRS, 2015)
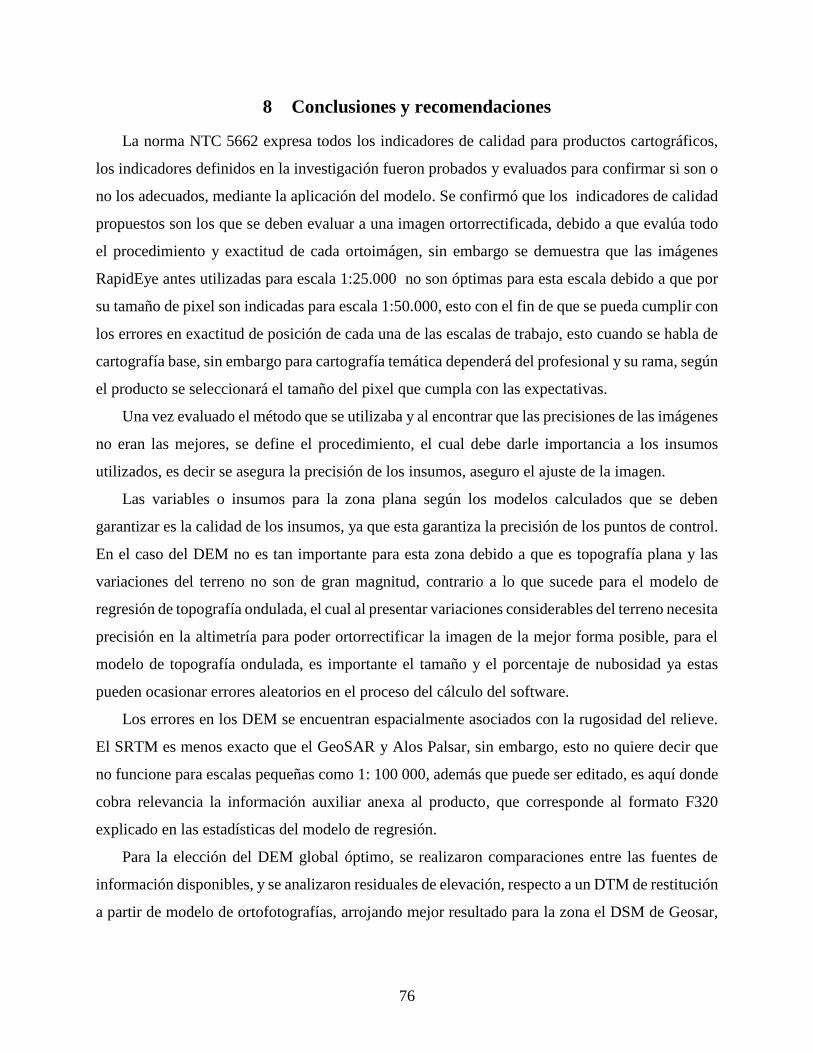
76
8 Conclusiones y recomendaciones
La norma NTC 5662 expresa todos los indicadores de calidad para productos cartográficos,
los indicadores definidos en la investigación fueron probados y evaluados para confirmar si son o
no los adecuados, mediante la aplicación del modelo. Se confirmó que los indicadores de calidad
propuestos son los que se deben evaluar a una imagen ortorrectificada, debido a que evalúa todo
el procedimiento y exactitud de cada ortoimágen, sin embargo se demuestra que las imágenes
RapidEye antes utilizadas para escala 1:25.000 no son óptimas para esta escala debido a que por
su tamaño de pixel son indicadas para escala 1:50.000, esto con el fin de que se pueda cumplir con
los errores en exactitud de posición de cada una de las escalas de trabajo, esto cuando se habla de
cartografía base, sin embargo para cartografía temática dependerá del profesional y su rama, según
el producto se seleccionará el tamaño del pixel que cumpla con las expectativas.
Una vez evaluado el método que se utilizaba y al encontrar que las precisiones de las imágenes
no eran las mejores, se define el procedimiento, el cual debe darle importancia a los insumos
utilizados, es decir se asegura la precisión de los insumos, aseguro el ajuste de la imagen.
Las variables o insumos para la zona plana según los modelos calculados que se deben
garantizar es la calidad de los insumos, ya que esta garantiza la precisión de los puntos de control.
En el caso del DEM no es tan importante para esta zona debido a que es topografía plana y las
variaciones del terreno no son de gran magnitud, contrario a lo que sucede para el modelo de
regresión de topografía ondulada, el cual al presentar variaciones considerables del terreno necesita
precisión en la altimetría para poder ortorrectificar la imagen de la mejor forma posible, para el
modelo de topografía ondulada, es importante el tamaño y el porcentaje de nubosidad ya estas
pueden ocasionar errores aleatorios en el proceso del cálculo del software.
Los errores en los DEM se encuentran espacialmente asociados con la rugosidad del relieve.
El SRTM es menos exacto que el GeoSAR y Alos Palsar, sin embargo, esto no quiere decir que
no funcione para escalas pequeñas como 1: 100 000, además que puede ser editado, es aquí donde
cobra relevancia la información auxiliar anexa al producto, que corresponde al formato F320
explicado en las estadísticas del modelo de regresión.
Para la elección del DEM global óptimo, se realizaron comparaciones entre las fuentes de
información disponibles, y se analizaron residuales de elevación, respecto a un DTM de restitución
a partir de modelo de ortofotografías, arrojando mejor resultado para la zona el DSM de Geosar,
77
seguido de Alos Palsar y finalmente el SRTM. Es importante aclarar que esto puede variar a lo
largo del territorio colombiano, por las diferencias de altura.
Para el DEM Alos Palsar se realizó una revisión exhaustiva y se realizó el paso de altura
elipsoidal a altura ortométrica, lo cual nos garantiza poder comparar los DEM disponibles, Alos
Palsar es un buen insumo debido a su cubrimiento total en el país y tiene una resolución de 12, 5
metros, esto puede ayudar a solventar la falta de DEM del territorio colombiano con una buena
precisión, y además de que se puede conseguir gratuito ventaja sobre Geosar que aunque tiene
mejor resolución espacial es costoso, Alos Palsar tiene otra ventaja y es que sus datos tienen
correcciones de terreno a nivel geométrico, sin embargo como ya se mencionó sus alturas vienen
en altura elipsoidal.
El error en los DEM se propagará a la ortoimágen con mayor intensidad en las mayores y
menores elevaciones del área, generando un vector de error con dirección aproximadamente
coincidente con la línea de vista del sensor, por eso es necesario evaluarla presión con puntos
geodésicos.
Al definir el proceso óptimo para la ortorrectificación es necesario que se tenga en cuenta un
mejoramiento de la resolución espacial cuando la imagen lo permita, esto con el fin de mejorar la
interpretación de las procesionales que hagan la digitalización de los objetos espaciales a la hora
de realizar la cartografía base, según los análisis realizados la fusión que mejores resultados nos
proporciona es la de Componentes Principales.
Para los puntos de control son suficiente 20 puntos que se encuentren bien distribuidos sobre
la imagen, un mayor tamaño de la imagen no significa mayores puntos, mientras se tengan puntos
de precisión para la ortorrectificación, para los puntos de chequeo de la exactitud de posición basta
con 25 puntos diferentes a los utilizados en el proceso de ortorrectificación, utilizando como datos
referencia, datos con precisiones conocidas y mejores de las esperadas en la ortorrectificación.
Al realizar el proceso de ortorrectificación con la nueva metodología se observa mejoras en la
exactitud de posición se disminuye el promedio de los errores de 33 metros a 12, 5 metros, esto
permite verificar que las características del modelo propuesto mejora de forma exponencial la
ortorrectificación de la imagen.
Se recomienda que para trabajos futuros se utilicen métodos de fusión más completos para
realizar un mayor mejoramiento con menor perdida de resolución espectral como se vio en las
pruebas realizadas en la fusión el mejor método convencional es componentes, sin embargo a la

78
hora de evaluar con el índice de calidad ERGAS este da un valor aproximado a 20 sin embargo la
literatura aconseja que este valor debe ser menor a 3 por eso la recomendación se dirige a un
método de fusión que cumpla con este valor y se puedan ver mejoraras sin perder información de
la resolución espectral.
Otra recomendación se dirige a la realización de pruebas para escalas más grandes donde se
pueda demostrar que para cualquier escala de trabajo lo que se propone en esta investigación
cumple sin ningún problema, y finalmente proponer métodos rigurosos que permitan mejorar el
proceso de ortorrectificación.
79
9 Bibliografía
Aguilar, M., Aguera, F., & Carvajal, F. (2008). Geometric accuracy assessment of the
orthorectification process from very high resolution satellite imagery for Common Agricultural
Policy purposes. Internacional Journal of Remote Sensing, 29(24), 7181-7197.
Álvarez, O., Linceklinger, F., Sánchez, M., Weidmann, C., Ariza, J., & Giménez, M. (2016).
Modelos globales de gravedad GOCE y EGM2008: su utilidad y complementariedad en la
exploración geofísica. Revista de la Asociación Geológica Argentina, 73(1), 134-148.
Angel, M. (1995). Corrección del efecto topográfico en las imágenes Landsat mediante el uso
de un modelo digital de elevaciones, 7.
Apolo, M. (2017, enero). RapidEye Satellite Imagery - Apollo Mapping | The Image Hunters.
ASPRS Positional Accuracy Standards for Digital Geospatial Data. (2015). Photogrammetric
Engineering & Remote Sensing, 81(3), 1-26. https://doi.org/10.14358/PERS.81.3.A1-A26
Atkinson, A., & García, J. (2011). Los diferentes test para el control de calidad posicional en
cartografía. Universidad de Extremadura, España.
Bettemir, O. H. (2009). Differential sensitivity analysis for the orthorectification of small
satellite images. En 2009 4th International Conference on Recent Advances in Space Technologies
(pp. 386-391). https://doi.org/10.1109/RAST.2009.5158230
Bradley J. (2011). Differential Global Positioning System. Murdoch, University Australia.
Cano, N., & Gasteiz, V. (2006). Fotogrametría digital aplicada a la obtención de ortofotos y
modelos digitales de las entidades patrimoniales. (Proyecto de investigación). Universidad del País
Vasco- Euskal Herriko Unibertsitatea, País Vasco.
Castillejo-González, I. L., López-Granados, F., García-Ferrer, A., Peña-Barragán, J. M.,
Jurado-Expósito, M., de la Orden, M. S., & González-Audicana, M. (2009). Object- and pixel-
based analysis for mapping crops and their agro-environmental associated measures using
QuickBird imagery. Computers and Electronics in Agriculture, 68(2), 207-215.
https://doi.org/10.1016/j.compag.2009.06.004
Chuvieco, E. (2010). Teledetección Ambiental (3ra ed.). España: Ariel. S.A.
Corbelle, E., Amesto, J., & Rego, T. (2006). La escala cartográfica de la imagen de satélite,
caso particular de las imágenes IKonos y QuickBird., 10.
80
Cruz, I. (2015). Evaluación de modelos digitales de elevación en el proceso de
Ortorrectificación de imágenes satelitales de muy alta resolución. Universidad Nacional Autónoma
de México., México.
Cuartero, A., & Felicisimo, A. (2003). Rectificación y ortorrecticación de imágenes de satélite:
análisis comparativo y discusión, 3(1), 45-58.
Damodar, G., & Porter, D. C. (2011). Econometría Básica. McGraw Hill Brasil.
Elaksher, A. F. (2009). Using LIDAR-based DEM to orthorectify Ikonos panchromatic
images. Optics and Lasers in Engineering, 47(6), 629-635.
https://doi.org/10.1016/j.optlaseng.2009.01.005
Ferreira, C. S., & Lachos, V. H. (2016). Nonlinear regression models under skew scale
mixtures of normal distributions. Statistical Methodology, 33, 131-146.
https://doi.org/10.1016/j.stamet.2016.08.004
Fontana, F. M. A., Trishchenko, A. P., Khlopenkov, K. V., Luo, Y., & Wunderle, S. (2009).
Impact of orthorectification and spatial sampling on maximum NDVI composite data in mountain
regions. Remote Sensing of Environment, 113(12), 2701-2712.
https://doi.org/10.1016/j.rse.2009.08.008
Goldstein, R. M., Zebker, H. A., & Werner, C. L. (1988). Satellite radar interferometry: Two-
dimensional phase unwrapping. Radio Science, 23(4), 713-720.
https://doi.org/10.1029/RS023i004p00713
Gonzalo, C., & Lillo, M. (2007). QuickBird Image Fusion by a Multirresolution-
Multidirectional Joint Image Representation (PDF Download Available). IEEE Geoscience and
Remote Sensing Letters, 5(1), 7.
Graça, L. M. D. A., Araújo, E. H. G., Silva, E. A. D., Pugliesi, E. A., Shikawa, M. I., &
Camargo, P. D. O. (2014). The geometric and cartographic characteristics of the ZY-3 images and
their usage in the production of cartographic data and GIS applications in Brazil. En 2014 Third
International Workshop on Earth Observation and Remote Sensing Applications (EORSA) (pp.
247-250). https://doi.org/10.1109/EORSA.2014.6927888
Guevara, V. (2013). Precisión de la orto-rectificación de una imagen del radar de apertura
sintética (sar) accuracy of synthetic aperture radar (sar) image orthorectification (PDF Download
Available). Caracas, Venezuela.
81
Guevara, V., Reyes, A., Salcedo, R., Ruiz, A., & Torres, W. (2004). Evaluación de la precisión
en la ortorectificación de imágenes del satélite IKONOS en el área urbana de Caracas. Revista
SELPER, 20(1).
Gujarati, D. N. (2006). Principios de econometría. McGraw-Hill / Interamericana de España.
Gujarati, D. N., & Porter, D. C. (2011). Econometría Básica - 5 Ed. McGraw Hill Brasil.
Hermosilla Gómez, T. (2011, julio 28). Detección automática de edificios y clasificación de
usos del suelo en entornos urbanos con imágenes de alta resolución y datos LiDAR (PhD. Tesis).
IBGE. (2016). IBGE Instituto Brasileiro de Geografía e Estadística.
Iikura, Y. (2012). Practical orthorectification of system corrected satellite images and its
validation. En 2012 IEEE International Geoscience and Remote Sensing Symposium (pp. 3455-
3458). https://doi.org/10.1109/IGARSS.2012.6350677
INEGI. (2016). Instituto Nacional de Estadística y Geografía.
Jarvis, A., Rubiano, J. E., Nelson, A., Farrow, A., & Mulligan, M. (2004). Practical use of
SRTM data in the tropics: comparisons with digital elevation models generated cartographic data
(Working Paper).
Jensen, J. (2000). Remote Sensing of the Environment: An Earth Resource Perspective.
Junfeng, X., & Jingfeng, H. (2006). Orthorectification of IKONOS and impact of different
resolution DEM. Geo-Spatial Information Science, 9(2), 108-111.
https://doi.org/10.1007/BF02826935
Kravchenko, O., Lavrenyuk, M., & Kussul, N. (2014). Orthorectification of Sich-2 satellite
images using elastic models. En 2014 IEEE Geoscience and Remote Sensing Symposium (pp.
2281-2284). https://doi.org/10.1109/IGARSS.2014.6946925
Lamilla, L. F. (2016). Caracterización de la actividad agrícola en el centro del departamento
del Huila en el marco del proyecto incentivo a la asistencia técnica IAT - 2014.
Lencinas, J. D., & Díaz, G. M. (2011). Corrección geométrica de datos satelitales QuickBird,
incidencia de los modelos digitales de elevación SRTM-C/X y ASTER GDEM. GeoFocus. Revista
Internacional de Ciencia y Tecnología de la Información Geográfica, 0(11), 431-454.
Leprince, S., Barbot, S., Ayoub, F., & Avouac, J. P. (2007). Automatic and Precise
Orthorectification, Coregistration, and Subpixel Correlation of Satellite Images, Application to
Ground Deformation Measurements. IEEE Transactions on Geoscience and Remote Sensing,
45(6), 1529-1558. https://doi.org/10.1109/TGRS.2006.888937
82
Loaiza Salas, P. (2007). Prueba de dos metodologías para la ortorectificación de fotografías
CARTA 2005.
Marchionni, D., & Schalamuk, I. (2010). Aplicación de la teledetección espacial óptica y de
radar para el análisis geológico y la detección de áreas mineralizadas en el sector central del
Macizo del Deseado, Provincia de Santa Cruz. Revista de la Asociación Geológica Argentina,
66(4), 592-607.
Marsetič, A., Oštir, K., & Fras, M. K. (2015). Automatic Orthorectification of High-
Resolution Optical Satellite Images Using Vector Roads. IEEE Transactions on Geoscience and
Remote Sensing, 53(11), 6035-6047. https://doi.org/10.1109/TGRS.2015.2431434
Medina, J., Joyanes, L., Pinilla, C., Ardila, O., & Pineda, F. (2013). Evaluación de la fusión
de imágenes satelitales usando la Transformada rápida de wavelet haar y counturlet. Presentado
en Eleventh LACCEI Latin American and Caribbean Confer ence for Engineering and Technology
(LACCEI’2013), Cancún, Mexico.
Mehl, H., & Peinado, O. (2013). Fundamentos del procesamiento digital de imágenes.
Comisión Nacional de Actividades Espaciales (CONAE), Argentina.
Ministerio de Ambiente, Perú. (2014). Protocolo ortorectificación imágenes (p. 45). Perú:
Ministerio de Ambiente.
Nasa. (2017, enero). Landsat 7 «Landsat Science.
NTC5043. Conceptos básicos de calidad, Pub. L. No. NTC 5043 (2008).
NTC5662. Especificaciones técnicas de productos geográficos (2006).
Palá, V., Arbiol, R., & Pérez, F. (2001). Generación de Ortoimágen en áreas urbanas.
Teledetección, Medio Ambiente y Cambio Global., 1(1), 201-204.
Pavlis, N. K., Holmes, S. A., Kenyon, S. C., & Factor, J. K. (2012). The development and
evaluation of the Earth Gravitational Model 2008 (EGM2008). Journal of Geophysical Research:
Solid Earth, 117(B4), B04406. https://doi.org/10.1029/2011JB008916
Powney, K., & Patricio, E. (2012). Cálculo del número de puntos GPS para la corrección
geométrica y generación de una ortoimágen de alta resolución en áreas de baja y mediana
pendiente.
Qayyum, A., Malik, A. S., Nuafal, M., Iqbal, M., & Abdullah, M. F. (2015). Design of digital
elevation model based on orthorectified satellite stereo images. En 2015 9th International
83
Conference on Signal Processing and Communication Systems (ICSPCS) (pp. 1-6).
https://doi.org/10.1109/ICSPCS.2015.7391777
Ramírez Espinoza, R. E. (2011). Servicio de consultoría para el procesamiento digital de
imágenes del año 2000 de la Amazonía Peruana.
Rauste, Y., Lonnqvist, A., Molinier, M., Henry, J. B., & Heme, T. (2007). Ortho-rectification
and terrain correction of polarimetric SAR data applied in the ALOS/Palsar context. En 2007 IEEE
International Geoscience and Remote Sensing Symposium (pp. 1618-1621).
https://doi.org/10.1109/IGARSS.2007.4423123
Riyahi, R., Kleinn, C., & Fuchs, H. (2009). Comparison of different image fusion techniques
for individual tree crown identification using QuickBird images. International Society for
Photogrammetry and Remote Sensing, High-Resolution Earth Imaging for Geospatial
Information, 38, 1–4.
Rocchini, D., & Di Rita, A. (2005). Relief effects on aerial photos geometric correction.
Applied Geography, 25(2), 159-168. https://doi.org/10.1016/j.apgeog.2005.03.002
Rubiano, J., & Gerardo, Y. (2014). Métodos para la fotointerpretación de redes de drenajes en
el sistema Geosar de percepción remota con radar.
Ruiz J. (2007). Teledetección y SIG en la asistencia de la actuación forestal post-incendio
(Doctoral). Universidad de Castilla, Cuenca.
Ruiz, R., & Ruiz, A. (2010). Generación de una Ortoimágen digital a partir de un sensor
espacial de alta resolución (Quickbird). Universidad Politécnica de Valencia.
Sanchez L. (2003). Determinación de la superficie vertical de referencia para Colombia.
Dresden: Technische Universität Dresden.
Siart, C., Bubenzer, O., & Eitel, B. (2009). Combining digital elevation data (SRTM/ASTER),
high resolution satellite imagery (Quickbird) and GIS for geomorphological mapping: A multi-
component case study on Mediterranean karst in Central Crete. Geomorphology, 112(1), 106-121.
https://doi.org/10.1016/j.geomorph.2009.05.010
STATA. (2016). Data Analysis and Statistical Software | Stata.
Suliman, A., & Zhang, Y. (2014). Integration of off-nadir VHR imagery with elevation data
for advanced information extraction. En 2014 IEEE Geoscience and Remote Sensing Symposium
(pp. 4742-4745). https://doi.org/10.1109/IGARSS.2014.6947553
UNAL. (2016). Universidad Nacional de Colombia.
84
Vaiopoulos, A., & Nikolakopoulos, K. G. (2015). Quality evaluation of different fusion
techniques applied on Worldview-2 data (p. 96440W-96440W-13). Presentado en SPIE Remote
Sensing, International Society for Optics and Photonics. https://doi.org/10.1117/12.2194453
Van Niel, T. G., McVicar, T. R., Li, L., Gallant, J. C., & Yang, Q. (2008). The impact of
misregistration on SRTM and DEM image differences. Remote Sensing of Environment, 112(5),
2430-2442. https://doi.org/10.1016/j.rse.2007.11.003
Vink, A. P. A. (1975). Land Use in Advancing Agriculture (Vol. 1). Berlin, Heidelberg:
Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-642-66049-8
Vivone, G., Alparone, L., Chanussot, J., Mura, M. D., Garzelli, A., Licciardi, G. A., … Wald,
L. (2015). A Critical Comparison Among Pansharpening Algorithms. IEEE Transactions on
Geoscience and Remote Sensing, 53(5), 2565-2586. https://doi.org/10.1109/TGRS.2014.2361734
Wald, L. (2002). Data Fusion: Definitions and Architectures: Fusion of Images of Different
Spatial Resolutions. Presses des MINES.
WALPOLE, R., Myers, R., & Myers, S. (1999). Probabilidad y estadística para ingenieros -
Ronald E. Walpole, Raymond H. Myers, Sharon L. Myers - Google Libros (Sexta edición).
Mexico.
Yousefzadeh, M., & Mojaradi, B. (2012). Combined rigorous-generic direct orthorectification
procedure for IRS-p6 sensors. ISPRS Journal of Photogrammetry and Remote Sensing, 74, 122-
132. https://doi.org/10.1016/j.isprsjprs.2012.09.005
Yue, P., Zhang, M., & Tan, Z. (2015). A geoprocessing workflow system for environmental
monitoring and integrated modelling. Environmental Modelling & Software, 69, 128-140.
https://doi.org/10.1016/j.envsoft.2015.03.017

85
10 ANEXOS

86
ANEXO 1 FORMATO F320 DE REPORTE DE PROCESO DE
ORTORRECTIFICACIÓN
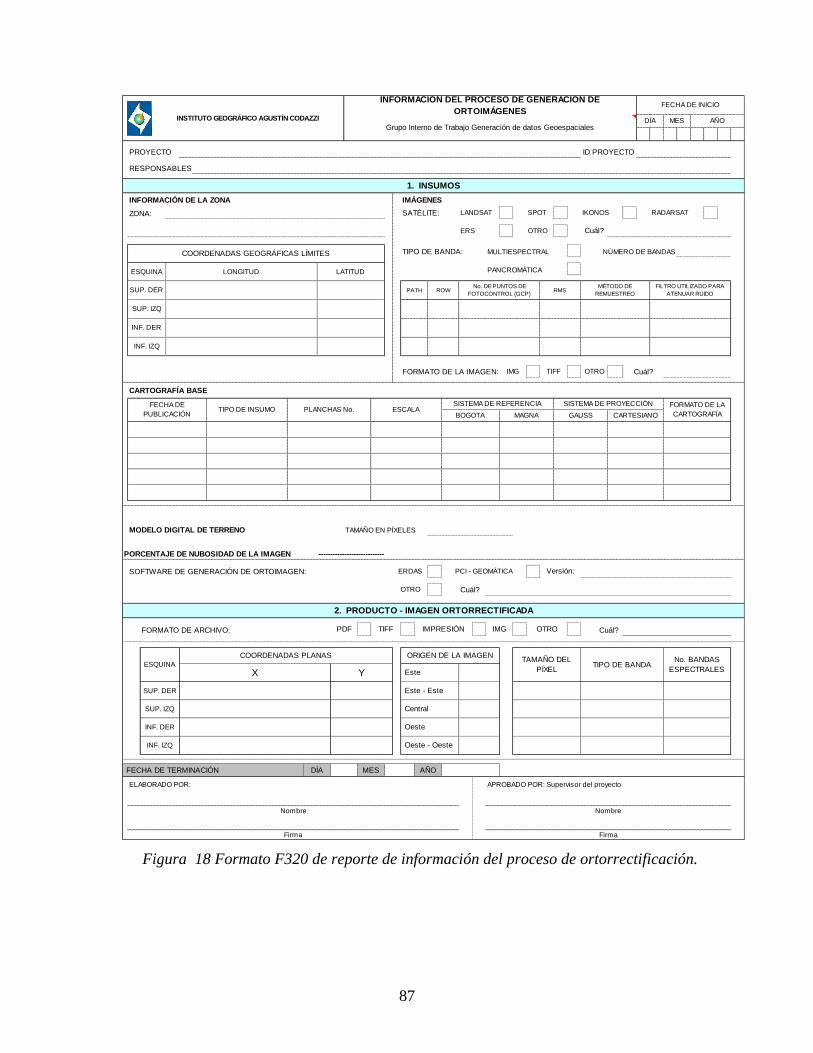
87
Figura 18 Formato F320 de reporte de información del proceso de ortorrectificación.
RESPONSABLES
INFORMACIÓN DE LA ZONA IMÁGENES
SATÉLITE: LANDSAT SPOT IKONOS RADARSAT
ERS OTRO
TIPO DE BANDA: MULTIESPECTRAL
PANCROMÁTICA
FORMATO DE LA IMAGEN: Cuál?
CARTOGRAFÍA BASE
MODELO DIGITAL DE TERRENO NTAMAÑO EN PÍXELES
PORCENTAJE DE NUBOSIDAD DE LA IMAGEN ----------------------------
SOFTWARE DE GENERACIÓN DE ORTOIMAGEN:
Cuál?
FORMATO DE ARCHIVO:
ELABORADO POR: APROBADO POR: Supervisor del proyecto
NombreNombre
2. PRODUCTO - IMAGEN ORTORRECTIFICADA
1. INSUMOS
PROYECTO
OTRO
No. DE PUNTOS DE
FOTOCONTROL (GCP)
Firma Firma
Cuál?
TIPO DE INSUMO
ZONA:
INF. IZQ
COORDENADAS GEOGRÁFICAS LÍMITES
ESQUINA LONGITUD LATITUD
FECHA DE INICIO
INSTITUTO GEOGRÁFICO AGUSTÍN CODAZZI
INFORMACIÓN DEL PROCESO DE GENERACIÓN DE
ORTOIMÁGENES
Grupo Interno de Trabajo Generación de datos GeoespacialesAÑOMESDÍA
ID PROYECTO
FORMATO DE LA
CARTOGRAFÍA
SUP. DER Este - Este
Este
FECHA DE
PUBLICACIÓN MAGNABOGOTAESCALAPLANCHAS No.
SISTEMA DE REFERENCIA
IMG TIFF OTRO
NÚMERO DE BANDAS
TIPO DE BANDANo. BANDAS
ESPECTRALES
Cuál?
Central
ERDAS PCI - GEOMÁTICA Versión:
ORIGEN DE LA IMAGENTAMAÑO DEL
PÍXEL
Oeste
Oeste - Oeste
PATH ROW RMSMÉTODO DE
REMUESTREO
FILTRO UTILIZADO PARA
ATENUAR RUIDO
DÍA MES AÑO
GAUSS
INF. DER
SUP. DER
SUP. IZQ
CARTESIANO
SISTEMA DE PROYECCIÓN
FECHA DE TERMINACIÓN
INF. IZQ
SUP. IZQ
INF. DER
ESQUINA
X
COORDENADAS PLANAS
TIFF OTROPDF IMG
Y
IMPRESIÓN
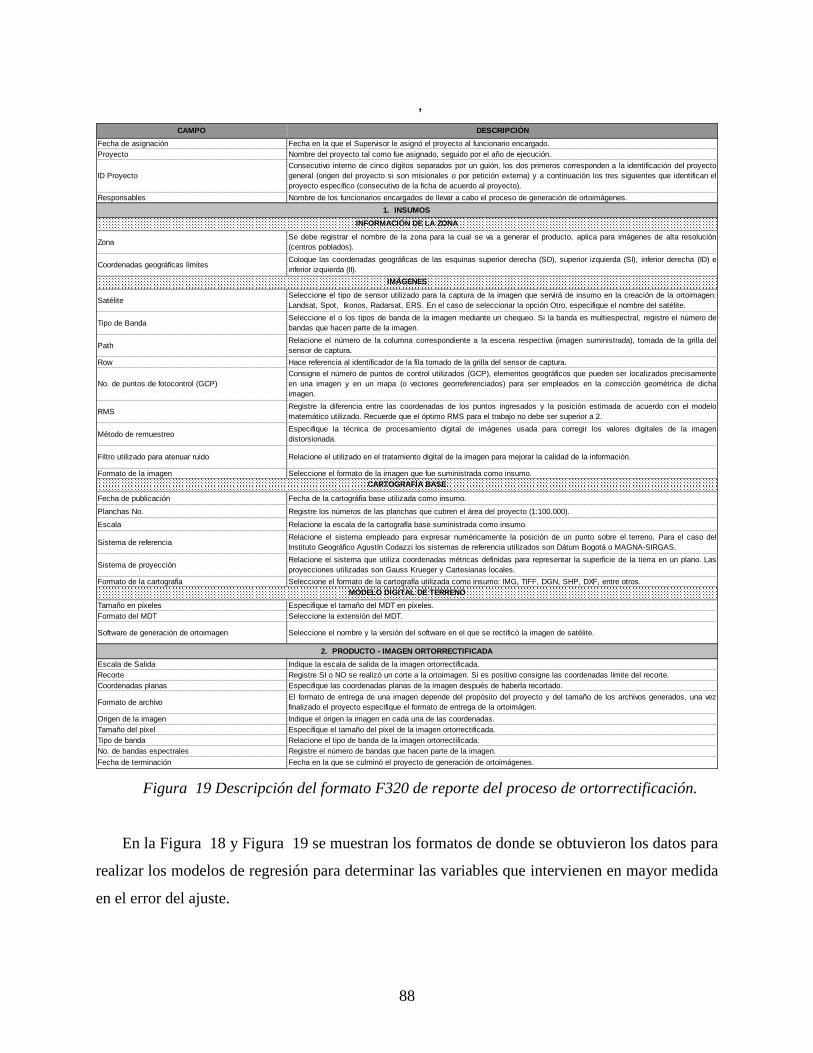
88
,
Figura 19 Descripción del formato F320 de reporte del proceso de ortorrectificación.
En la Figura 18 y Figura 19 se muestran los formatos de donde se obtuvieron los datos para
realizar los modelos de regresión para determinar las variables que intervienen en mayor medida
en el error del ajuste.
Fecha de terminación Fecha en la que se culminó el proyecto de generación de ortoimágenes.
Registre los números de las planchas que cubren el área del proyecto (1:100.000).
Seleccione el formato de la cartografía utilizada como insumo: IMG, TIFF, DGN, SHP, DXF, entre otros.
Registre el número de bandas que hacen parte de la imagen.
Software de generación de ortoimagen
Relacione el tipo de banda de la imagen ortorrectificada.
Sistema de proyección
Relacione el sistema empleado para expresar numéricamente la posición de un punto sobre el terreno. Para el caso del
Instituto Geográfico Agustín Codazzi los sistemas de referencia utilizados son Dátum Bogotá o MAGNA-SIRGAS.Sistema de referencia
Escala
Coordenadas planas
Formato de archivo
Origen de la imagen
Tamaño del píxel
Planchas No.
Coordenadas geográficas límites
Seleccione el tipo de sensor utilizado para la captura de la imagen que servirá de insumo en la creación de la ortoimagen:
Landsat, Spot, Ikonos, Radarsat, ERS. En el caso de seleccionar la opción Otro, especifique el nombre del satélite.
Seleccione el o los tipos de banda de la imagen mediante un chequeo. Si la banda es multiespectral, registre el número de
bandas que hacen parte de la imagen.
Row
Relacione el sistema que utiliza coordenadas métricas definidas para representar la superficie de la tierra en un plano. Las
proyecciones utilizadas son Gauss Krueger y Cartesianas locales.
Relacione la escala de la cartografía base suministrada como insumo.
RMS
Especifique la técnica de procesamiento digital de imágenes usada para corregir los valores digitales de la imagen
distorsionada.
Relacione el utilizado en el tratamiento digital de la imagen para mejorar la calidad de la información.
Responsables Nombre de los funcionarios encargados de llevar a cabo el proceso de generación de ortoimágenes.
Fecha en la que el Supervisor le asignó el proyecto al funcionario encargado.Fecha de asignación
Seleccione el formato de la imagen que fue suministrada como insumo.
Método de remuestreo
Filtro utilizado para atenuar ruido
Formato de la imagen
Se debe registrar el nombre de la zona para la cual se va a generar el producto, aplica para imágenes de alta resolución
(centros poblados).
Proyecto Nombre del proyecto tal como fue asignado, seguido por el año de ejecución.
Zona
Consecutivo interno de cinco dígitos separados por un guión, los dos primeros corresponden a la identificación del proyecto
general (origen del proyecto si son misionales o por petición externa) y a continuación los tres siguientes que identifican el
proyecto específico (consecutivo de la ficha de acuerdo al proyecto).
ID Proyecto
Coloque las coordenadas geográficas de las esquinas superior derecha (SD), superior izquierda (SI), inferior derecha (ID) e
inferior izquierda (II).
Formato de la cartografía
Consigne el número de puntos de control utilizados (GCP), elementos geográficos que pueden ser localizados precisamente
en una imagen y en un mapa (o vectores georreferenciados) para ser empleados en la corrección geométrica de dicha
imagen.
Registre la diferencia entre las coordenadas de los puntos ingresados y la posición estimada de acuerdo con el modelo
matemático utilizado. Recuerde que el óptimo RMS para el trabajo no debe ser superior a 2.
No. de puntos de fotocontrol (GCP)
Relacione el número de la columna correspondiente a la escena respectiva (imagen suministrada), tomada de la grilla del
sensor de captura.
Hace referencia al identificador de la fila tomado de la grilla del sensor de captura.
Satélite
Tipo de Banda
Path
Tamaño en píxeles
Formato del MDT
Escala de Salida
Recorte
Especifique el tamaño del MDT en píxeles.
Seleccione la extensión del MDT.
Seleccione el nombre y la versión del software en el que se rectificó la imagen de satélite.
Fecha de publicación
Indique la escala de salida de la imagen ortorrectificada.
Registre SI o NO se realizó un corte a la ortoimagen. Si es positivo consigne las coordenadas límite del recorte.
2. PRODUCTO - IMAGEN ORTORRECTIFICADA
Indique el origen la imagen en cada una de las coordenadas.
Especifique el tamaño del píxel de la imagen ortorrectificada.
Especifique las coordenadas planas de la imagen después de haberla recortado.
El formato de entrega de una imagen depende del propósito del proyecto y del tamaño de los archivos generados, una vez
finalizado el proyecto especifique el formato de entrega de la ortoimágen.
No. de bandas espectrales
DESCRIPCIÓNCAMPO
1. INSUMOS
INFORMACIÓN DE LA ZONA
IMÁGENES
CARTOGRAFÍA BASE
MODELO DIGITAL DE TERRENO
Tipo de banda
Fecha de la cartográfia base utilizada como insumo.

89
ANEXO 2 CALCULO DE MODELOS DE REGRESIÓN PARA LAS DOS
TOPOGRAFÍAS PLANA Y ONDULADA.
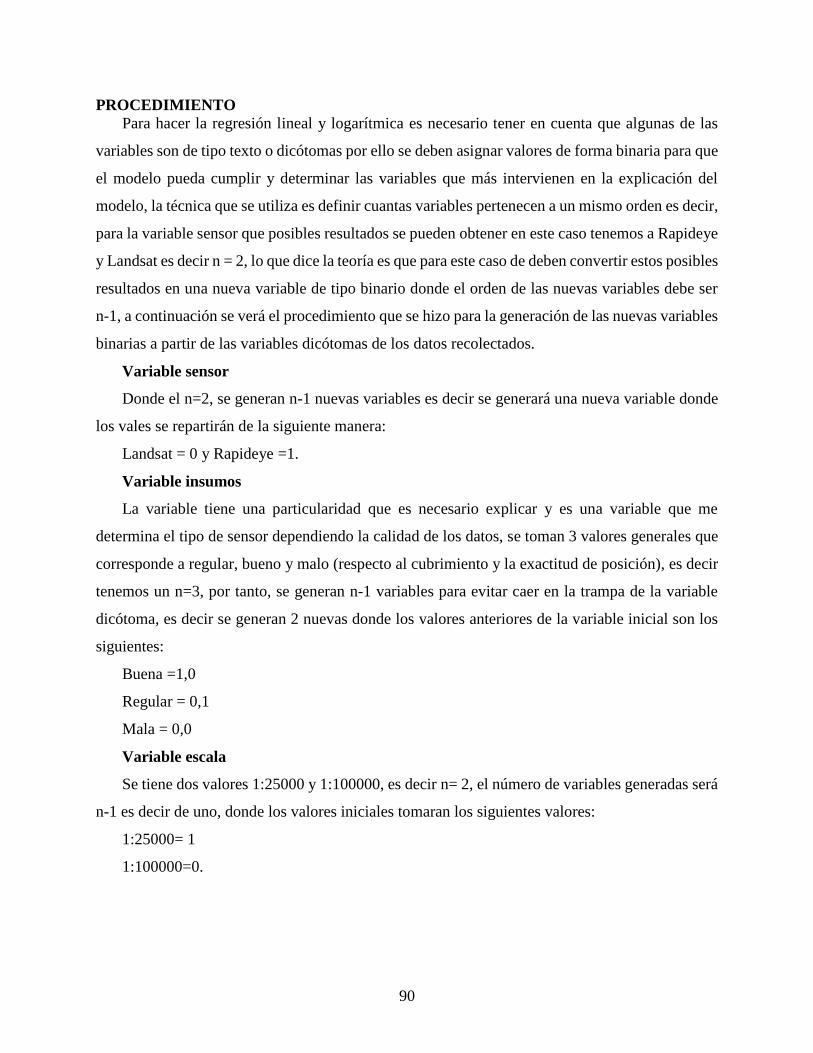
90
PROCEDIMIENTO
Para hacer la regresión lineal y logarítmica es necesario tener en cuenta que algunas de las
variables son de tipo texto o dicótomas por ello se deben asignar valores de forma binaria para que
el modelo pueda cumplir y determinar las variables que más intervienen en la explicación del
modelo, la técnica que se utiliza es definir cuantas variables pertenecen a un mismo orden es decir,
para la variable sensor que posibles resultados se pueden obtener en este caso tenemos a Rapideye
y Landsat es decir n = 2, lo que dice la teoría es que para este caso de deben convertir estos posibles
resultados en una nueva variable de tipo binario donde el orden de las nuevas variables debe ser
n-1, a continuación se verá el procedimiento que se hizo para la generación de las nuevas variables
binarias a partir de las variables dicótomas de los datos recolectados.
Variable sensor
Donde el n=2, se generan n-1 nuevas variables es decir se generará una nueva variable donde
los vales se repartirán de la siguiente manera:
Landsat = 0 y Rapideye =1.
Variable insumos
La variable tiene una particularidad que es necesario explicar y es una variable que me
determina el tipo de sensor dependiendo la calidad de los datos, se toman 3 valores generales que
corresponde a regular, bueno y malo (respecto al cubrimiento y la exactitud de posición), es decir
tenemos un n=3, por tanto, se generan n-1 variables para evitar caer en la trampa de la variable
dicótoma, es decir se generan 2 nuevas donde los valores anteriores de la variable inicial son los
siguientes:
Buena =1,0
Regular = 0,1
Mala = 0,0
Variable escala
Se tiene dos valores 1:25000 y 1:100000, es decir n= 2, el número de variables generadas será
n-1 es decir de uno, donde los valores iniciales tomaran los siguientes valores:
1:25000= 1
1:100000=0.
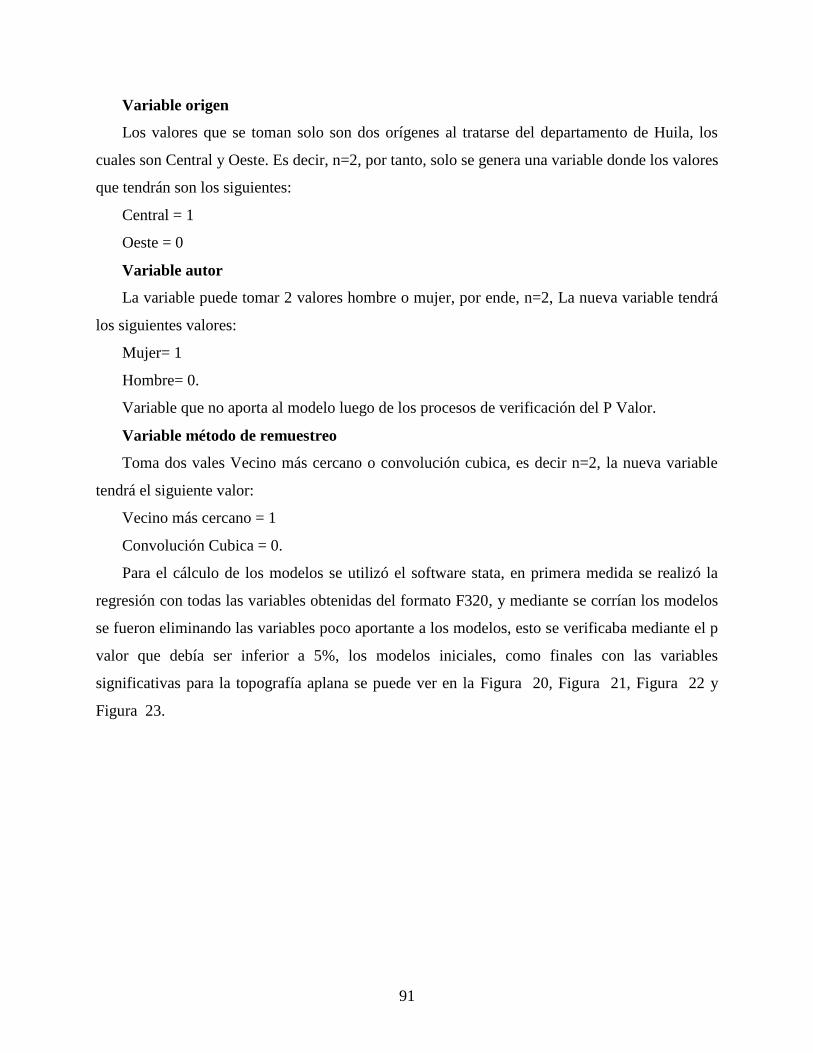
91
Variable origen
Los valores que se toman solo son dos orígenes al tratarse del departamento de Huila, los
cuales son Central y Oeste. Es decir, n=2, por tanto, solo se genera una variable donde los valores
que tendrán son los siguientes:
Central = 1
Oeste = 0
Variable autor
La variable puede tomar 2 valores hombre o mujer, por ende, n=2, La nueva variable tendrá
los siguientes valores:
Mujer= 1
Hombre= 0.
Variable que no aporta al modelo luego de los procesos de verificación del P Valor.
Variable método de remuestreo
Toma dos vales Vecino más cercano o convolución cubica, es decir n=2, la nueva variable
tendrá el siguiente valor:
Vecino más cercano = 1
Convolución Cubica = 0.
Para el cálculo de los modelos se utilizó el software stata, en primera medida se realizó la
regresión con todas las variables obtenidas del formato F320, y mediante se corrían los modelos
se fueron eliminando las variables poco aportante a los modelos, esto se verificaba mediante el p
valor que debía ser inferior a 5%, los modelos iniciales, como finales con las variables
significativas para la topografía aplana se puede ver en la Figura 20, Figura 21, Figura 22 y
Figura 23.
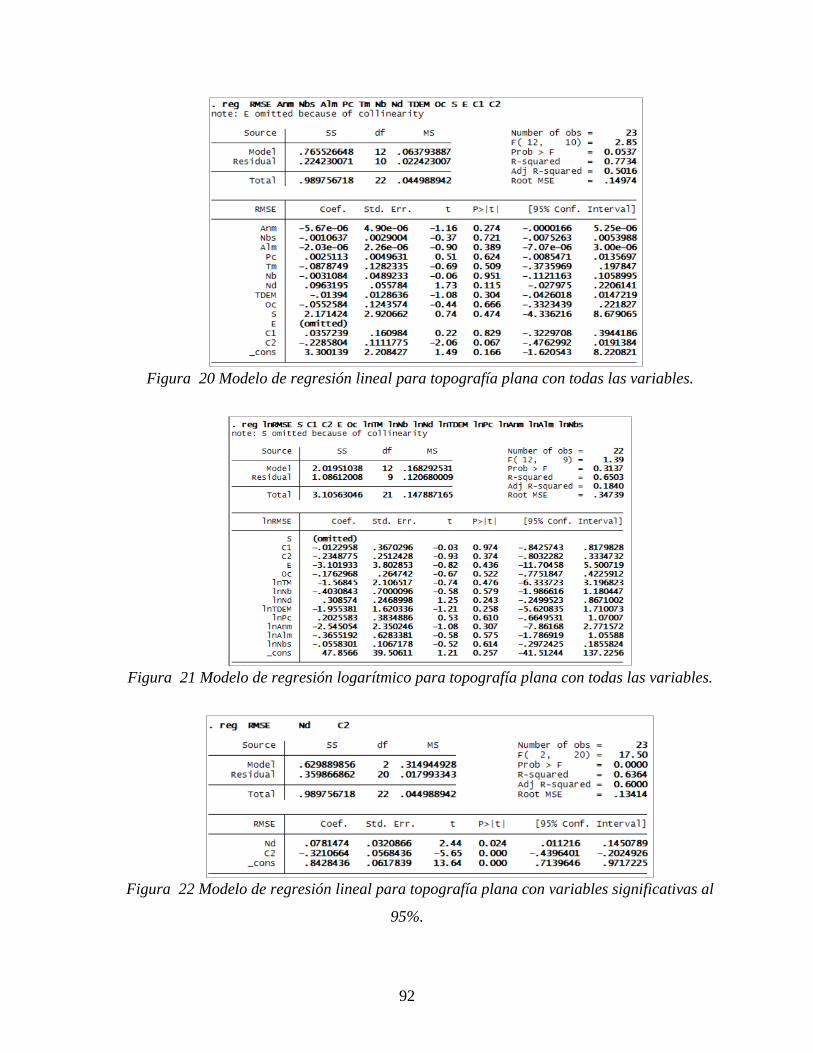
92
Figura 20 Modelo de regresión lineal para topografía plana con todas las variables.
Figura 21 Modelo de regresión logarítmico para topografía plana con todas las variables.
Figura 22 Modelo de regresión lineal para topografía plana con variables significativas al
95%.
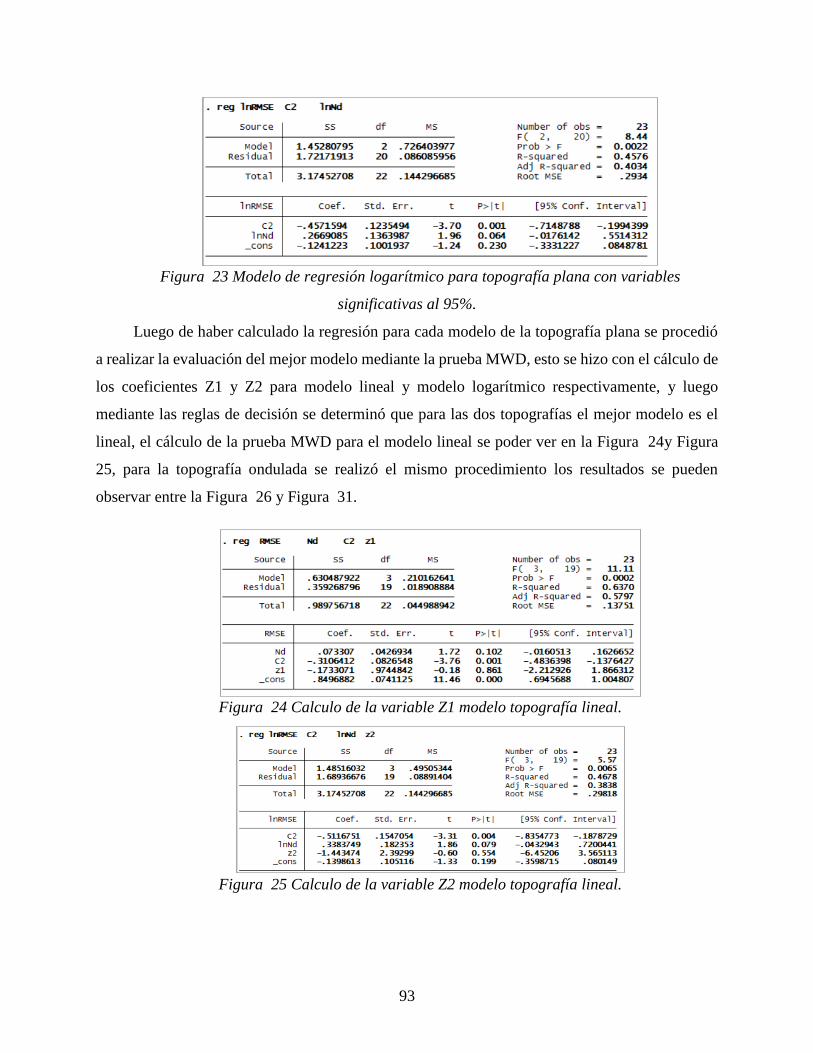
93
Figura 23 Modelo de regresión logarítmico para topografía plana con variables
significativas al 95%.
Luego de haber calculado la regresión para cada modelo de la topografía plana se procedió
a realizar la evaluación del mejor modelo mediante la prueba MWD, esto se hizo con el cálculo de
los coeficientes Z1 y Z2 para modelo lineal y modelo logarítmico respectivamente, y luego
mediante las reglas de decisión se determinó que para las dos topografías el mejor modelo es el
lineal, el cálculo de la prueba MWD para el modelo lineal se poder ver en la Figura 24y Figura
25, para la topografía ondulada se realizó el mismo procedimiento los resultados se pueden
observar entre la Figura 26 y Figura 31.
Figura 24 Calculo de la variable Z1 modelo topografía lineal.
Figura 25 Calculo de la variable Z2 modelo topografía lineal.
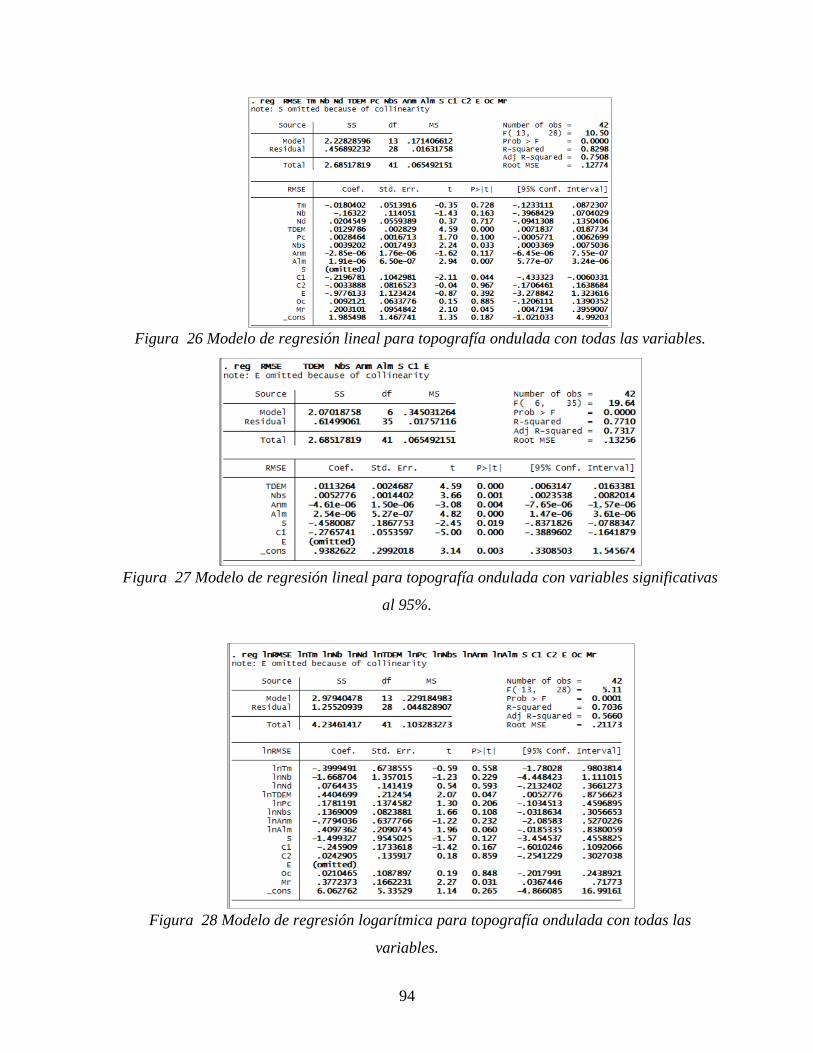
94
Figura 26 Modelo de regresión lineal para topografía ondulada con todas las variables.
Figura 27 Modelo de regresión lineal para topografía ondulada con variables significativas
al 95%.
Figura 28 Modelo de regresión logarítmica para topografía ondulada con todas las
variables.
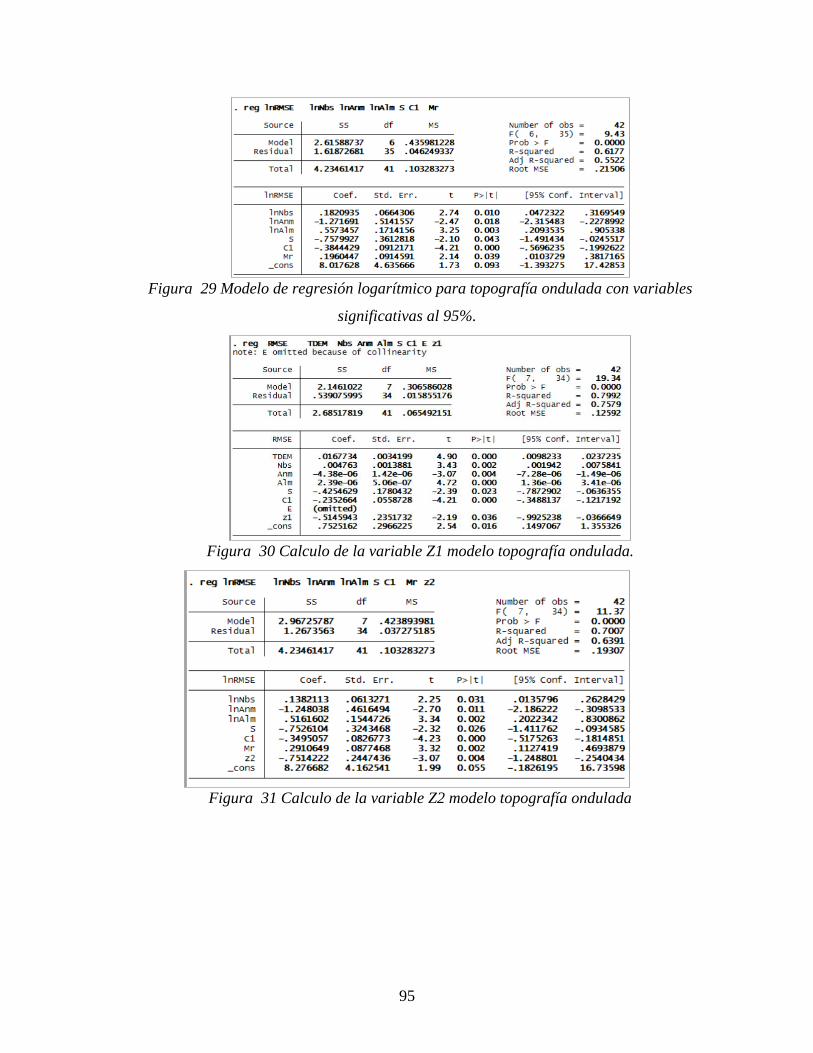
95
Figura 29 Modelo de regresión logarítmico para topografía ondulada con variables
significativas al 95%.
Figura 30 Calculo de la variable Z1 modelo topografía ondulada.
Figura 31 Calculo de la variable Z2 modelo topografía ondulada

96
ANEXO 3 EVALUACIÓN DE DEM DISPONIBLES PARA DOS ZONAS DEL PAÍS.
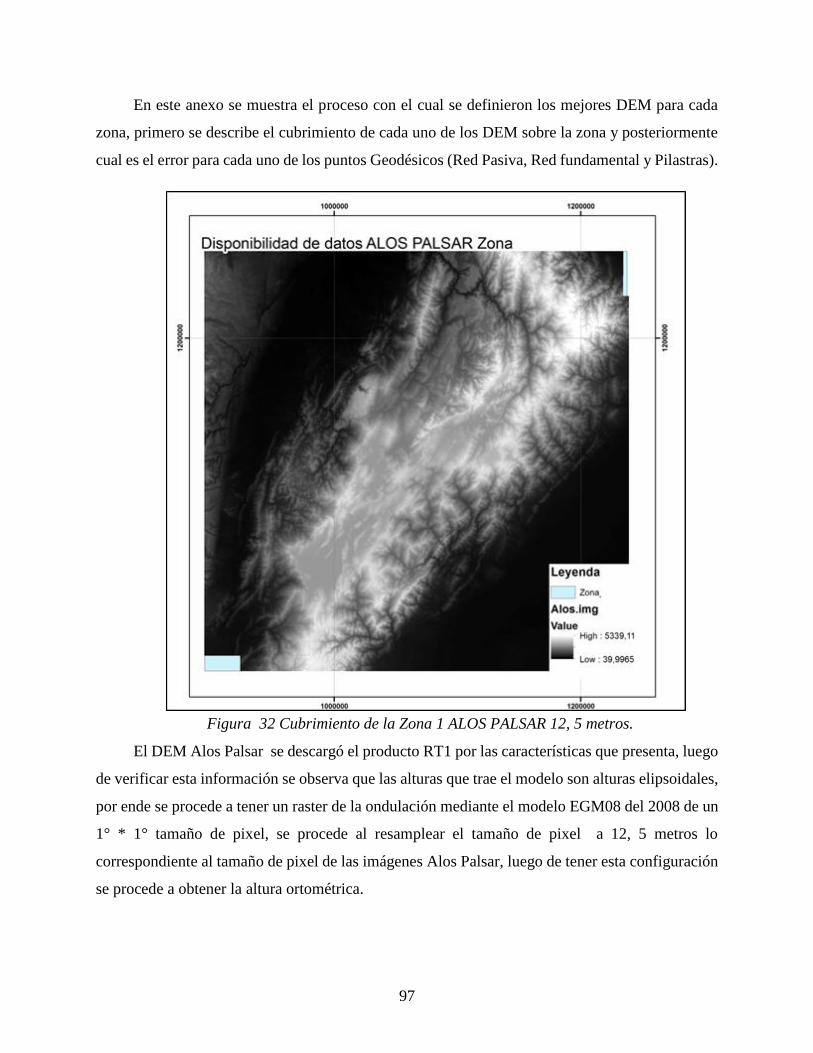
97
En este anexo se muestra el proceso con el cual se definieron los mejores DEM para cada
zona, primero se describe el cubrimiento de cada uno de los DEM sobre la zona y posteriormente
cual es el error para cada uno de los puntos Geodésicos (Red Pasiva, Red fundamental y Pilastras).
Figura 32 Cubrimiento de la Zona 1 ALOS PALSAR 12, 5 metros.
El DEM Alos Palsar se descargó el producto RT1 por las características que presenta, luego
de verificar esta información se observa que las alturas que trae el modelo son alturas elipsoidales,
por ende se procede a tener un raster de la ondulación mediante el modelo EGM08 del 2008 de un
1° * 1° tamaño de pixel, se procede al resamplear el tamaño de pixel a 12, 5 metros lo
correspondiente al tamaño de pixel de las imágenes Alos Palsar, luego de tener esta configuración
se procede a obtener la altura ortométrica.
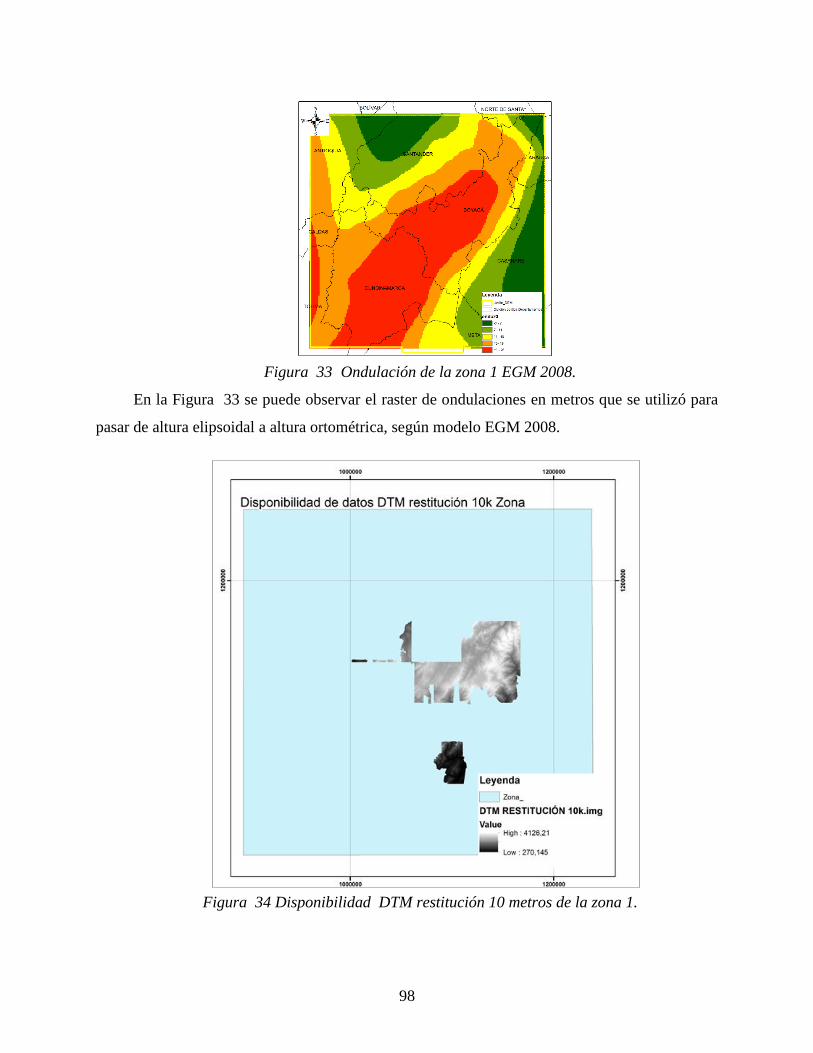
98
Figura 33 Ondulación de la zona 1 EGM 2008.
En la Figura 33 se puede observar el raster de ondulaciones en metros que se utilizó para
pasar de altura elipsoidal a altura ortométrica, según modelo EGM 2008.
Figura 34 Disponibilidad DTM restitución 10 metros de la zona 1.
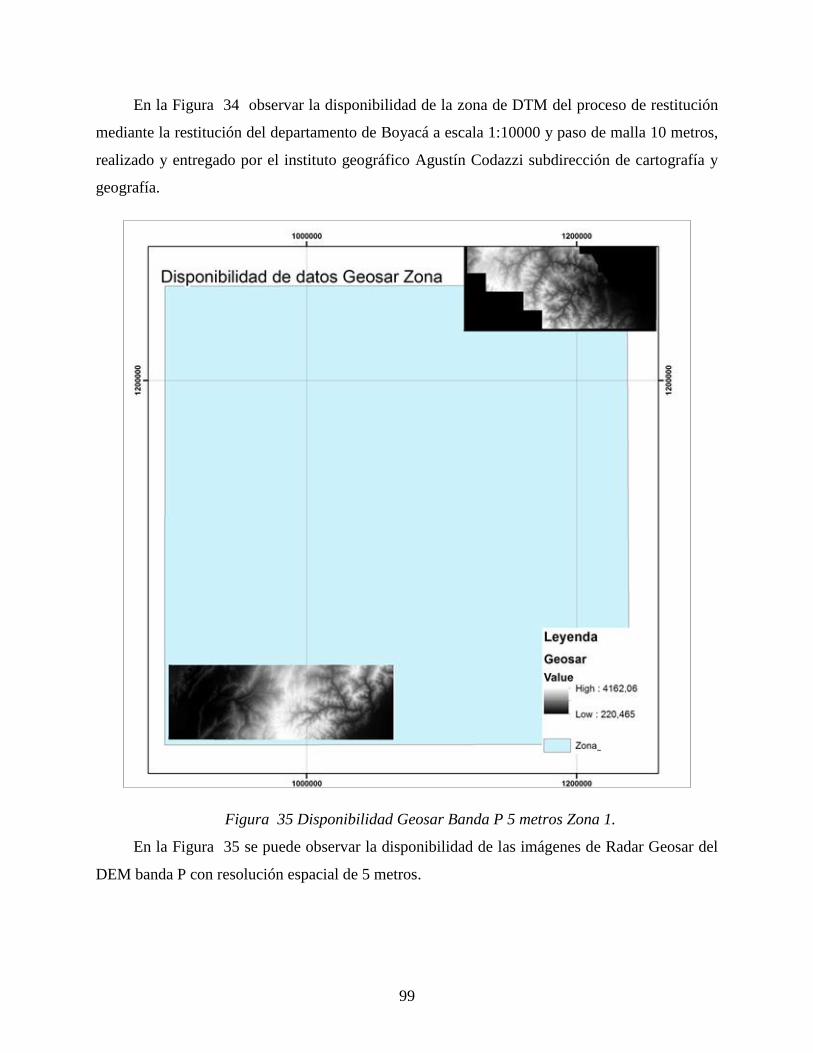
99
En la Figura 34 observar la disponibilidad de la zona de DTM del proceso de restitución
mediante la restitución del departamento de Boyacá a escala 1:10000 y paso de malla 10 metros,
realizado y entregado por el instituto geográfico Agustín Codazzi subdirección de cartografía y
geografía.
Figura 35 Disponibilidad Geosar Banda P 5 metros Zona 1.
En la Figura 35 se puede observar la disponibilidad de las imágenes de Radar Geosar del
DEM banda P con resolución espacial de 5 metros.
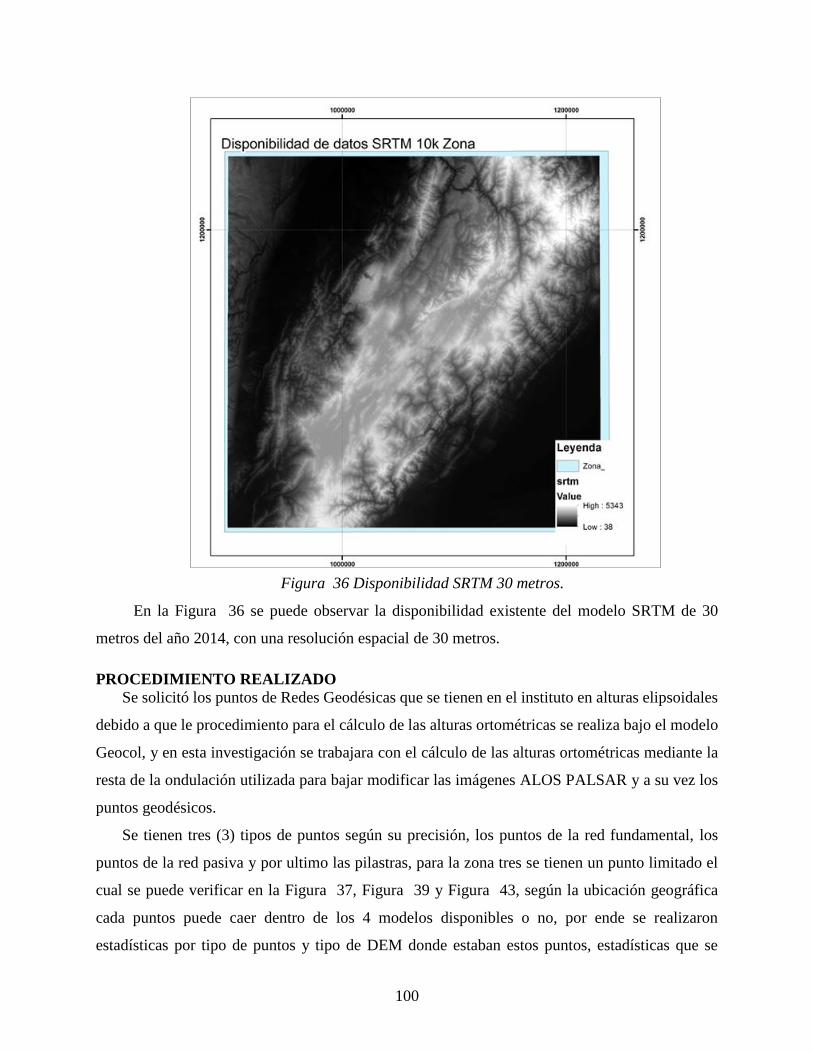
100
Figura 36 Disponibilidad SRTM 30 metros.
En la Figura 36 se puede observar la disponibilidad existente del modelo SRTM de 30
metros del año 2014, con una resolución espacial de 30 metros.
PROCEDIMIENTO REALIZADO
Se solicitó los puntos de Redes Geodésicas que se tienen en el instituto en alturas elipsoidales
debido a que le procedimiento para el cálculo de las alturas ortométricas se realiza bajo el modelo
Geocol, y en esta investigación se trabajara con el cálculo de las alturas ortométricas mediante la
resta de la ondulación utilizada para bajar modificar las imágenes ALOS PALSAR y a su vez los
puntos geodésicos.
Se tienen tres (3) tipos de puntos según su precisión, los puntos de la red fundamental, los
puntos de la red pasiva y por ultimo las pilastras, para la zona tres se tienen un punto limitado el
cual se puede verificar en la Figura 37, Figura 39 y Figura 43, según la ubicación geográfica
cada puntos puede caer dentro de los 4 modelos disponibles o no, por ende se realizaron
estadísticas por tipo de puntos y tipo de DEM donde estaban estos puntos, estadísticas que se
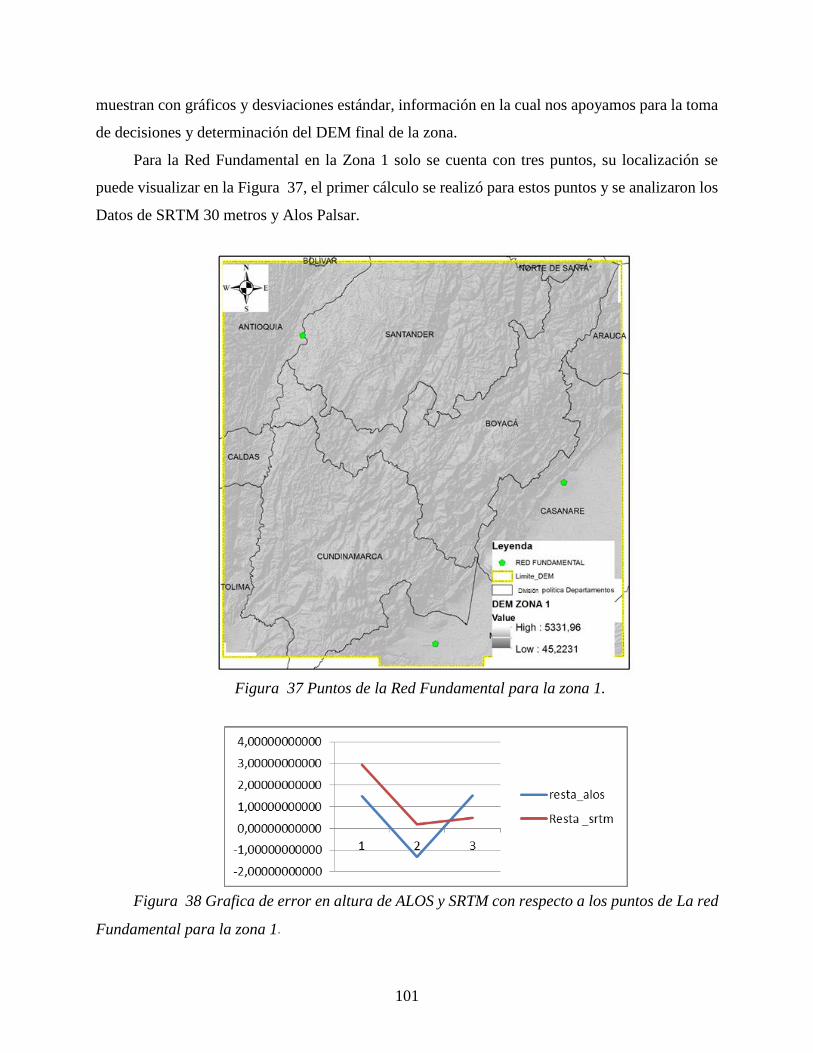
101
muestran con gráficos y desviaciones estándar, información en la cual nos apoyamos para la toma
de decisiones y determinación del DEM final de la zona.
Para la Red Fundamental en la Zona 1 solo se cuenta con tres puntos, su localización se
puede visualizar en la Figura 37, el primer cálculo se realizó para estos puntos y se analizaron los
Datos de SRTM 30 metros y Alos Palsar.
Figura 37 Puntos de la Red Fundamental para la zona 1.
Figura 38 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de La red
Fundamental para la zona 1.
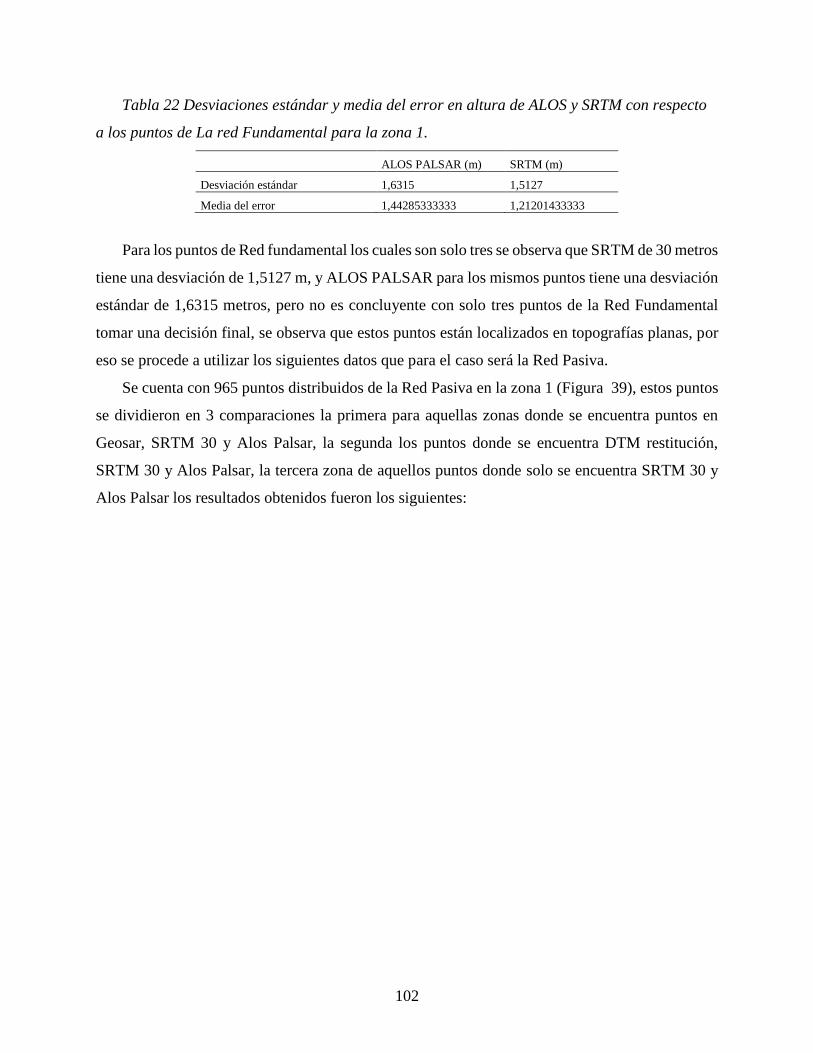
102
Tabla 22 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto
a los puntos de La red Fundamental para la zona 1.
ALOS PALSAR (m) SRTM (m)
Desviación estándar 1,6315 1,5127
Media del error 1,44285333333 1,21201433333
Para los puntos de Red fundamental los cuales son solo tres se observa que SRTM de 30 metros
tiene una desviación de 1,5127 m, y ALOS PALSAR para los mismos puntos tiene una desviación
estándar de 1,6315 metros, pero no es concluyente con solo tres puntos de la Red Fundamental
tomar una decisión final, se observa que estos puntos están localizados en topografías planas, por
eso se procede a utilizar los siguientes datos que para el caso será la Red Pasiva.
Se cuenta con 965 puntos distribuidos de la Red Pasiva en la zona 1 (Figura 39), estos puntos
se dividieron en 3 comparaciones la primera para aquellas zonas donde se encuentra puntos en
Geosar, SRTM 30 y Alos Palsar, la segunda los puntos donde se encuentra DTM restitución,
SRTM 30 y Alos Palsar, la tercera zona de aquellos puntos donde solo se encuentra SRTM 30 y
Alos Palsar los resultados obtenidos fueron los siguientes:
103
Figura 39 Puntos de la Red Pasiva para la zona 1.
Para los puntos donde se tiene Geosar, Alos Y SRTM estadísticas puntos Geosar, Alos y
SRTM 30 se calculó la desviación estándar y la media de los errores.
Figura 40 Grafica de error en altura de Geosar, ALOS y SRTM con respecto a los puntos
de La Red pasiva para la zona 1
-15,00000000000
-10,00000000000
-5,00000000000
0,00000000000
5,00000000000
10,00000000000
15,00000000000
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86
Diferencia_SRTM
Diferencia_Geosar
Diferencia_Alos
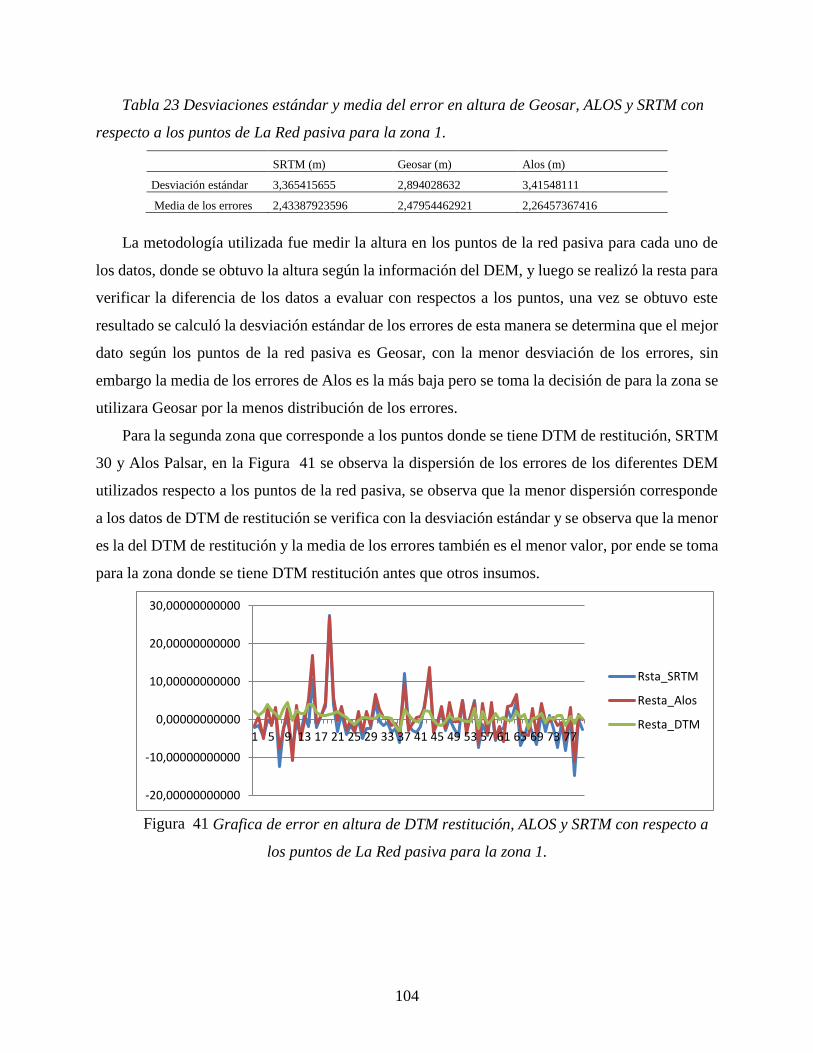
104
Tabla 23 Desviaciones estándar y media del error en altura de Geosar, ALOS y SRTM con
respecto a los puntos de La Red pasiva para la zona 1.
SRTM (m) Geosar (m) Alos (m)
Desviación estándar 3,365415655 2,894028632 3,41548111
Media de los errores 2,43387923596 2,47954462921 2,26457367416
La metodología utilizada fue medir la altura en los puntos de la red pasiva para cada uno de
los datos, donde se obtuvo la altura según la información del DEM, y luego se realizó la resta para
verificar la diferencia de los datos a evaluar con respectos a los puntos, una vez se obtuvo este
resultado se calculó la desviación estándar de los errores de esta manera se determina que el mejor
dato según los puntos de la red pasiva es Geosar, con la menor desviación de los errores, sin
embargo la media de los errores de Alos es la más baja pero se toma la decisión de para la zona se
utilizara Geosar por la menos distribución de los errores.
Para la segunda zona que corresponde a los puntos donde se tiene DTM de restitución, SRTM
30 y Alos Palsar, en la Figura 41 se observa la dispersión de los errores de los diferentes DEM
utilizados respecto a los puntos de la red pasiva, se observa que la menor dispersión corresponde
a los datos de DTM de restitución se verifica con la desviación estándar y se observa que la menor
es la del DTM de restitución y la media de los errores también es el menor valor, por ende se toma
para la zona donde se tiene DTM restitución antes que otros insumos.
Figura 41 Grafica de error en altura de DTM restitución, ALOS y SRTM con respecto a
los puntos de La Red pasiva para la zona 1.
-20,00000000000
-10,00000000000
0,00000000000
10,00000000000
20,00000000000
30,00000000000
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77
Rsta_SRTM
Resta_Alos
Resta_DTM
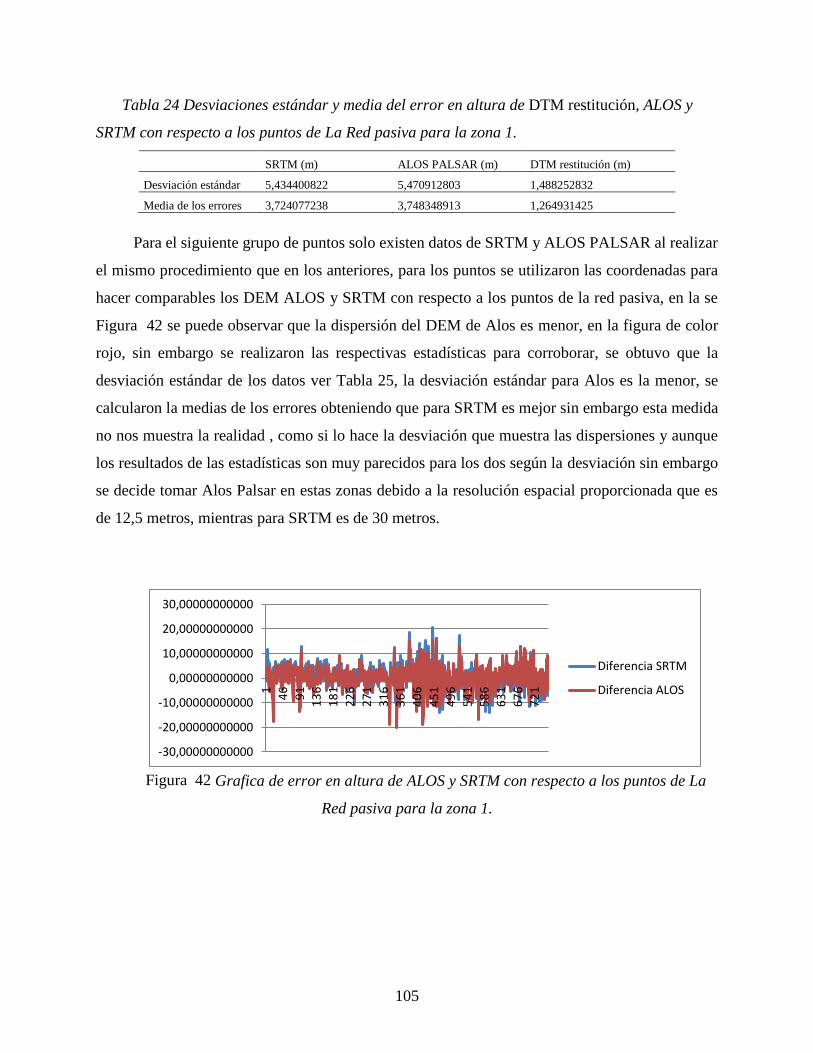
105
Tabla 24 Desviaciones estándar y media del error en altura de DTM restitución, ALOS y
SRTM con respecto a los puntos de La Red pasiva para la zona 1.
SRTM (m) ALOS PALSAR (m) DTM restitución (m)
Desviación estándar 5,434400822 5,470912803 1,488252832
Media de los errores 3,724077238 3,748348913 1,264931425
Para el siguiente grupo de puntos solo existen datos de SRTM y ALOS PALSAR al realizar
el mismo procedimiento que en los anteriores, para los puntos se utilizaron las coordenadas para
hacer comparables los DEM ALOS y SRTM con respecto a los puntos de la red pasiva, en la se
Figura 42 se puede observar que la dispersión del DEM de Alos es menor, en la figura de color
rojo, sin embargo se realizaron las respectivas estadísticas para corroborar, se obtuvo que la
desviación estándar de los datos ver Tabla 25, la desviación estándar para Alos es la menor, se
calcularon la medias de los errores obteniendo que para SRTM es mejor sin embargo esta medida
no nos muestra la realidad , como si lo hace la desviación que muestra las dispersiones y aunque
los resultados de las estadísticas son muy parecidos para los dos según la desviación sin embargo
se decide tomar Alos Palsar en estas zonas debido a la resolución espacial proporcionada que es
de 12,5 metros, mientras para SRTM es de 30 metros.
Figura 42 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de La
Red pasiva para la zona 1.
-30,00000000000
-20,00000000000
-10,00000000000
0,00000000000
10,00000000000
20,00000000000
30,00000000000
1
46
91
13
6
18
1
22
6
27
1
31
6
36
1
40
6
45
1
49
6
54
1
58
6
63
1
67
6
72
1
Diferencia SRTM
Diferencia ALOS
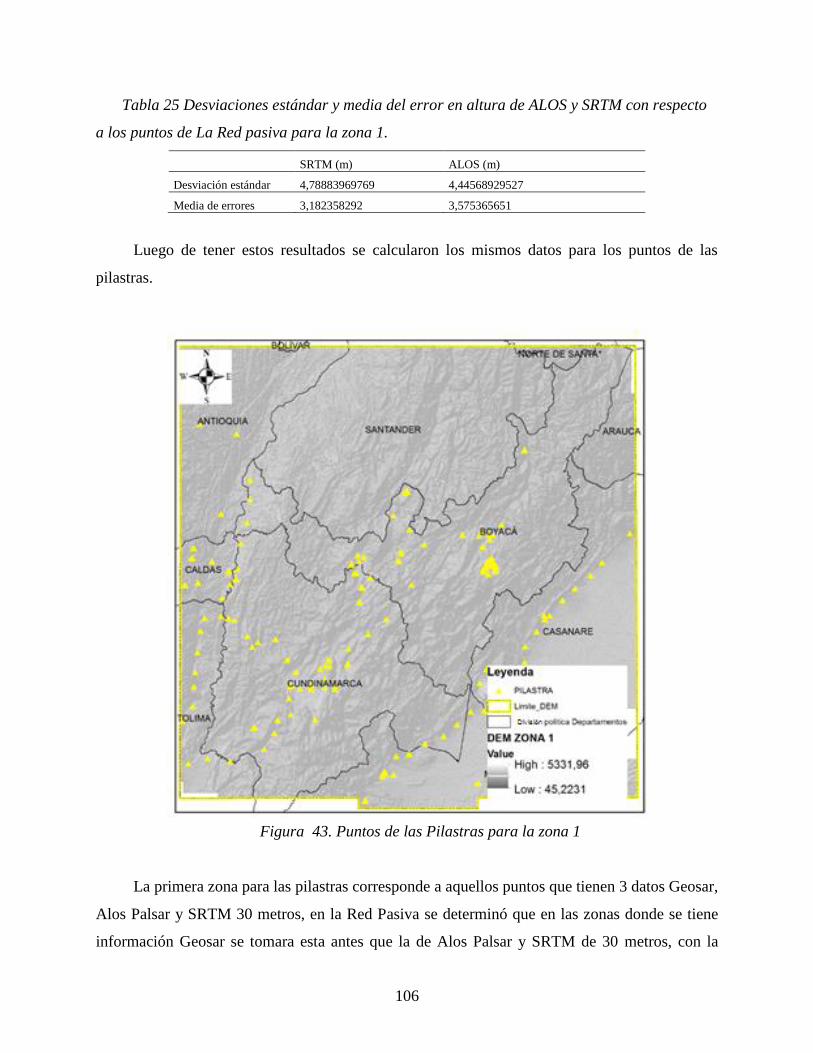
106
Tabla 25 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto
a los puntos de La Red pasiva para la zona 1.
SRTM (m) ALOS (m)
Desviación estándar 4,78883969769 4,44568929527
Media de errores 3,182358292 3,575365651
Luego de tener estos resultados se calcularon los mismos datos para los puntos de las
pilastras.
Figura 43. Puntos de las Pilastras para la zona 1
La primera zona para las pilastras corresponde a aquellos puntos que tienen 3 datos Geosar,
Alos Palsar y SRTM 30 metros, en la Red Pasiva se determinó que en las zonas donde se tiene
información Geosar se tomara esta antes que la de Alos Palsar y SRTM de 30 metros, con la
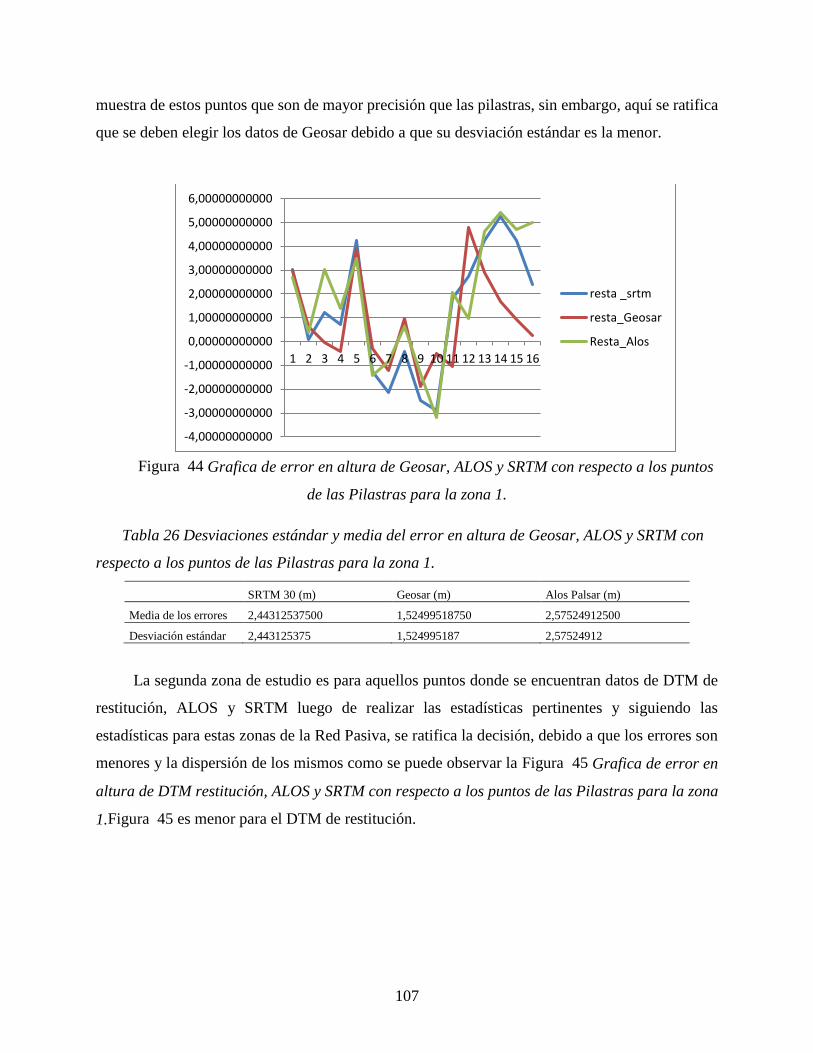
107
muestra de estos puntos que son de mayor precisión que las pilastras, sin embargo, aquí se ratifica
que se deben elegir los datos de Geosar debido a que su desviación estándar es la menor.
Figura 44 Grafica de error en altura de Geosar, ALOS y SRTM con respecto a los puntos
de las Pilastras para la zona 1.
Tabla 26 Desviaciones estándar y media del error en altura de Geosar, ALOS y SRTM con
respecto a los puntos de las Pilastras para la zona 1.
SRTM 30 (m) Geosar (m) Alos Palsar (m)
Media de los errores 2,44312537500 1,52499518750 2,57524912500
Desviación estándar 2,443125375 1,524995187 2,57524912
La segunda zona de estudio es para aquellos puntos donde se encuentran datos de DTM de
restitución, ALOS y SRTM luego de realizar las estadísticas pertinentes y siguiendo las
estadísticas para estas zonas de la Red Pasiva, se ratifica la decisión, debido a que los errores son
menores y la dispersión de los mismos como se puede observar la Figura 45 Grafica de error en
altura de DTM restitución, ALOS y SRTM con respecto a los puntos de las Pilastras para la zona
1.Figura 45 es menor para el DTM de restitución.
-4,00000000000
-3,00000000000
-2,00000000000
-1,00000000000
0,00000000000
1,00000000000
2,00000000000
3,00000000000
4,00000000000
5,00000000000
6,00000000000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
resta _srtm
resta_Geosar
Resta_Alos
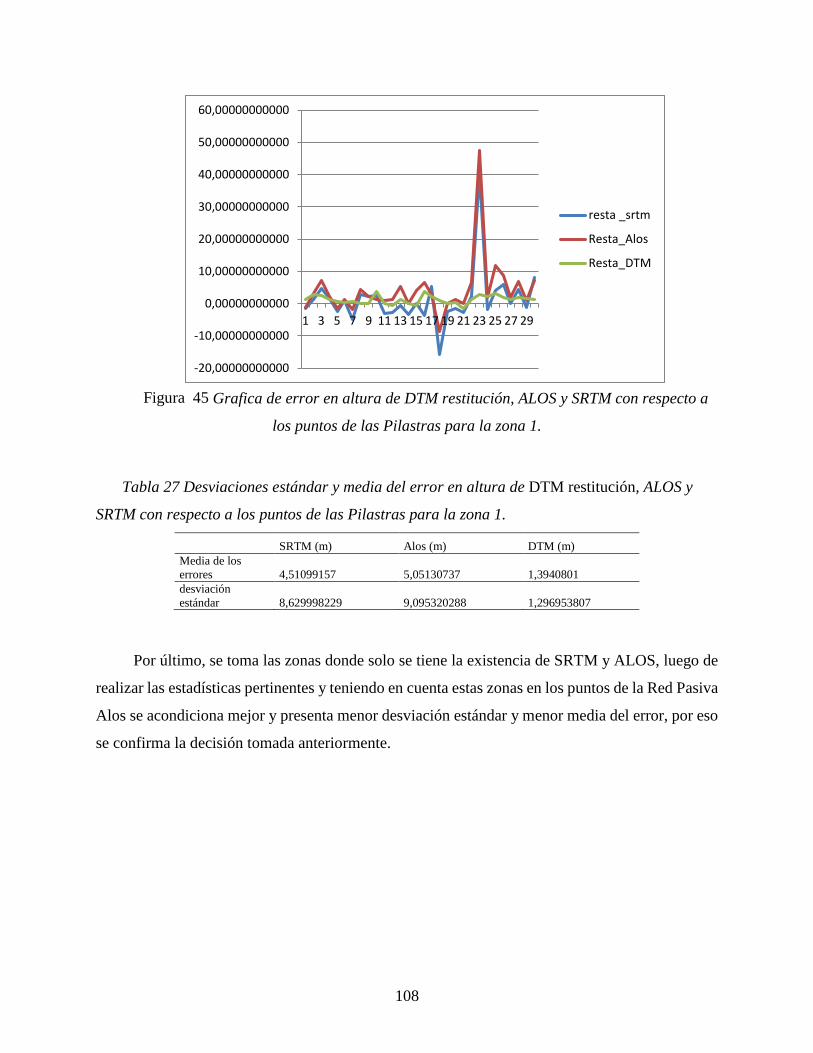
108
Figura 45 Grafica de error en altura de DTM restitución, ALOS y SRTM con respecto a
los puntos de las Pilastras para la zona 1.
Tabla 27 Desviaciones estándar y media del error en altura de DTM restitución, ALOS y
SRTM con respecto a los puntos de las Pilastras para la zona 1.
SRTM (m) Alos (m) DTM (m)
Media de los
errores 4,51099157 5,05130737 1,3940801
desviación
estándar 8,629998229 9,095320288 1,296953807
Por último, se toma las zonas donde solo se tiene la existencia de SRTM y ALOS, luego de
realizar las estadísticas pertinentes y teniendo en cuenta estas zonas en los puntos de la Red Pasiva
Alos se acondiciona mejor y presenta menor desviación estándar y menor media del error, por eso
se confirma la decisión tomada anteriormente.
-20,00000000000
-10,00000000000
0,00000000000
10,00000000000
20,00000000000
30,00000000000
40,00000000000
50,00000000000
60,00000000000
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29
resta _srtm
Resta_Alos
Resta_DTM
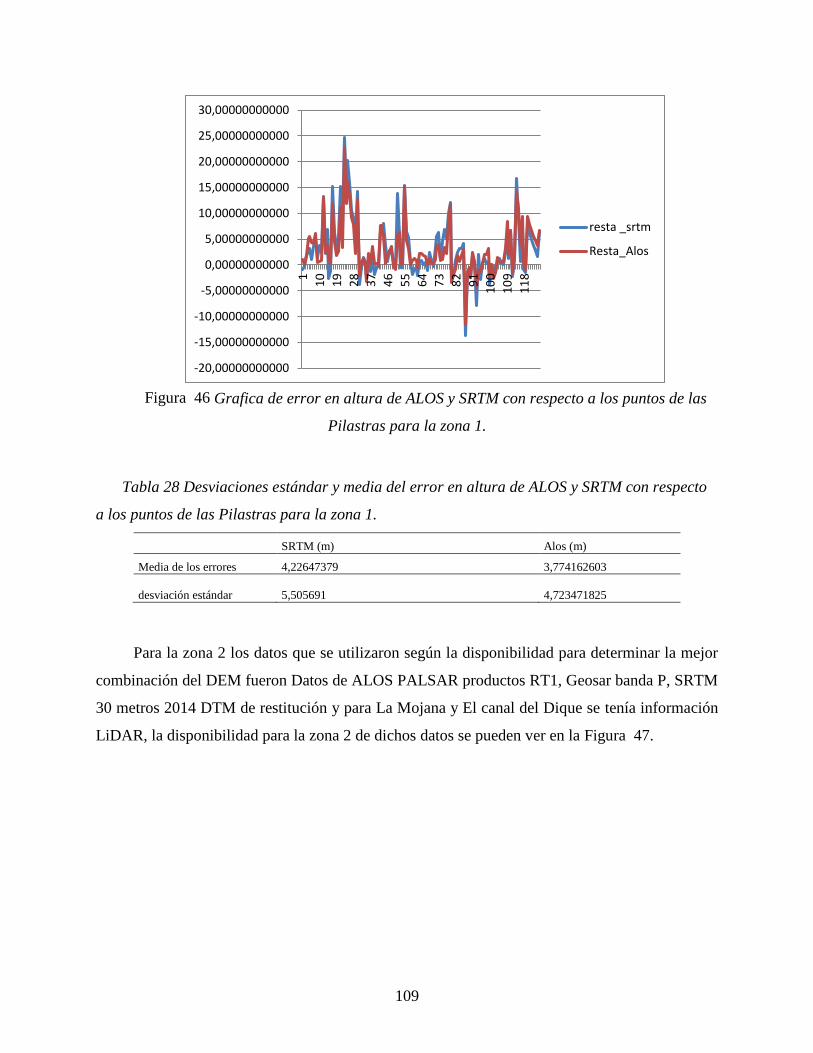
109
Figura 46 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de las
Pilastras para la zona 1.
Tabla 28 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto
a los puntos de las Pilastras para la zona 1.
SRTM (m) Alos (m)
Media de los errores 4,22647379 3,774162603
desviación estándar 5,505691 4,723471825
Para la zona 2 los datos que se utilizaron según la disponibilidad para determinar la mejor
combinación del DEM fueron Datos de ALOS PALSAR productos RT1, Geosar banda P, SRTM
30 metros 2014 DTM de restitución y para La Mojana y El canal del Dique se tenía información
LiDAR, la disponibilidad para la zona 2 de dichos datos se pueden ver en la Figura 47.
-20,00000000000
-15,00000000000
-10,00000000000
-5,00000000000
0,00000000000
5,00000000000
10,00000000000
15,00000000000
20,00000000000
25,00000000000
30,00000000000
1
10
19
28
37
46
55
64
73
82
91
10
0
10
9
11
8
resta _srtm
Resta_Alos
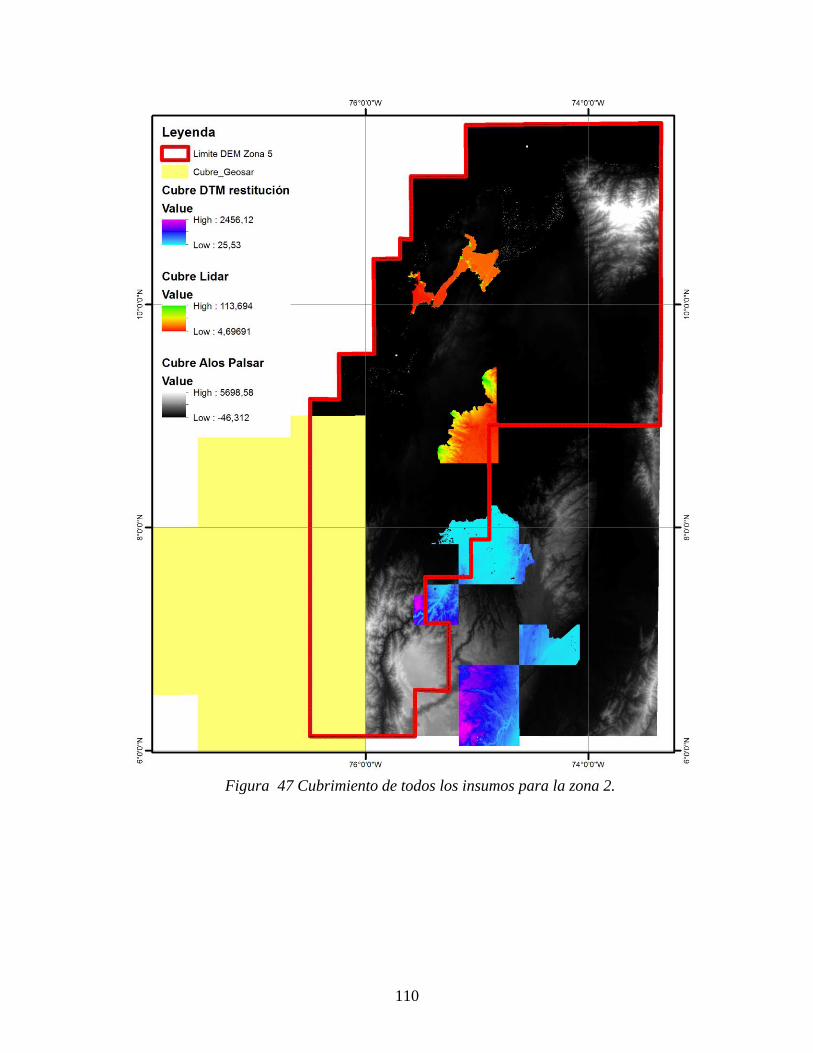
110
Figura 47 Cubrimiento de todos los insumos para la zona 2.
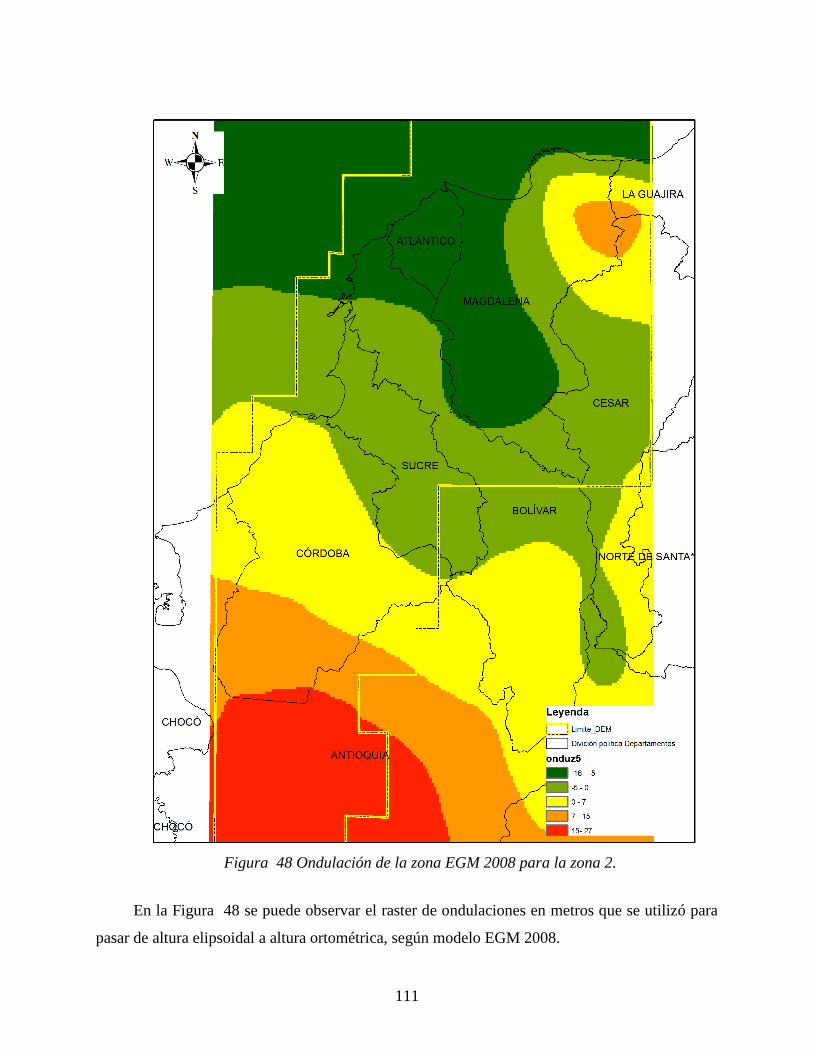
111
Figura 48 Ondulación de la zona EGM 2008 para la zona 2.
En la Figura 48 se puede observar el raster de ondulaciones en metros que se utilizó para
pasar de altura elipsoidal a altura ortométrica, según modelo EGM 2008.
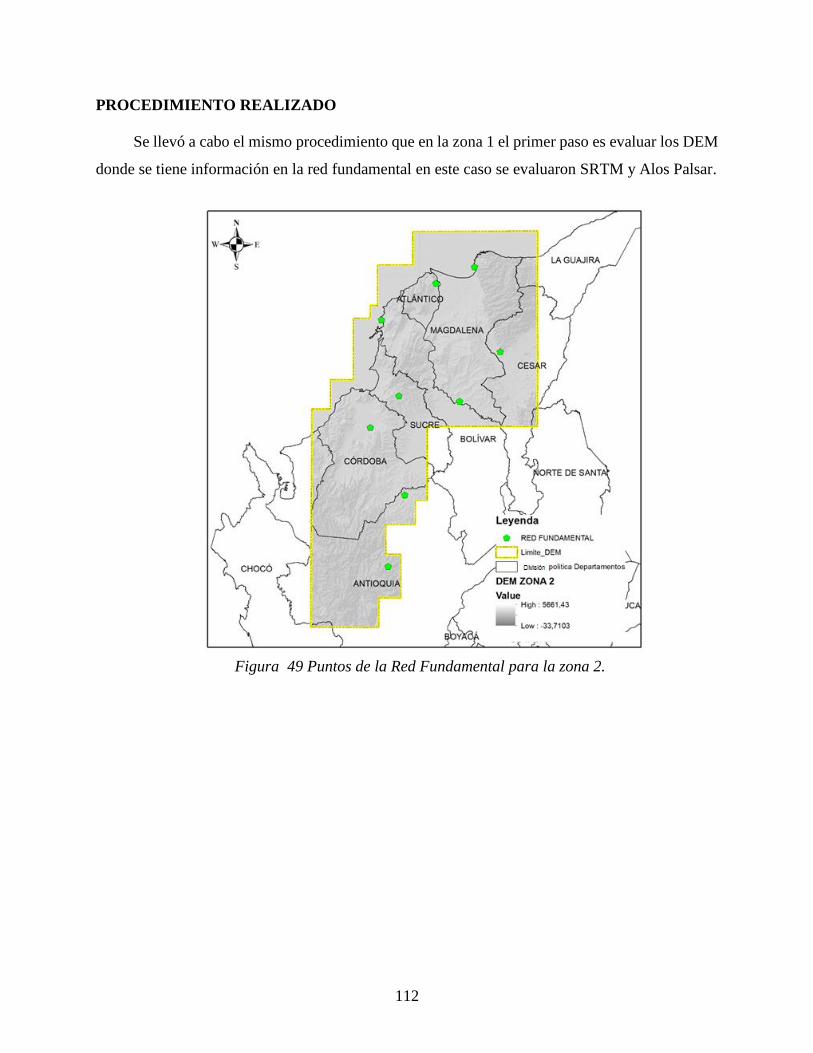
112
PROCEDIMIENTO REALIZADO
Se llevó a cabo el mismo procedimiento que en la zona 1 el primer paso es evaluar los DEM
donde se tiene información en la red fundamental en este caso se evaluaron SRTM y Alos Palsar.
Figura 49 Puntos de la Red Fundamental para la zona 2.
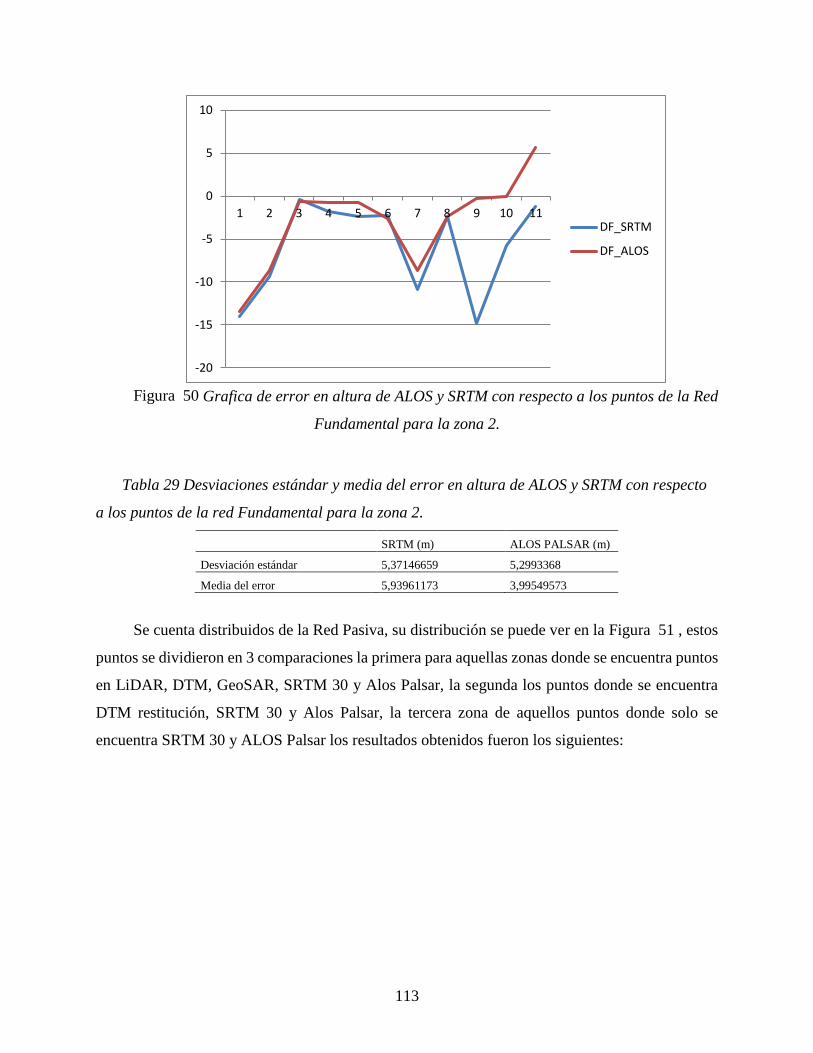
113
Figura 50 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de la Red
Fundamental para la zona 2.
Tabla 29 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto
a los puntos de la red Fundamental para la zona 2.
SRTM (m) ALOS PALSAR (m)
Desviación estándar 5,37146659 5,2993368
Media del error 5,93961173 3,99549573
Se cuenta distribuidos de la Red Pasiva, su distribución se puede ver en la Figura 51 , estos
puntos se dividieron en 3 comparaciones la primera para aquellas zonas donde se encuentra puntos
en LiDAR, DTM, GeoSAR, SRTM 30 y Alos Palsar, la segunda los puntos donde se encuentra
DTM restitución, SRTM 30 y Alos Palsar, la tercera zona de aquellos puntos donde solo se
encuentra SRTM 30 y ALOS Palsar los resultados obtenidos fueron los siguientes:
-20
-15
-10
-5
0
5
10
1 2 3 4 5 6 7 8 9 10 11DF_SRTM
DF_ALOS
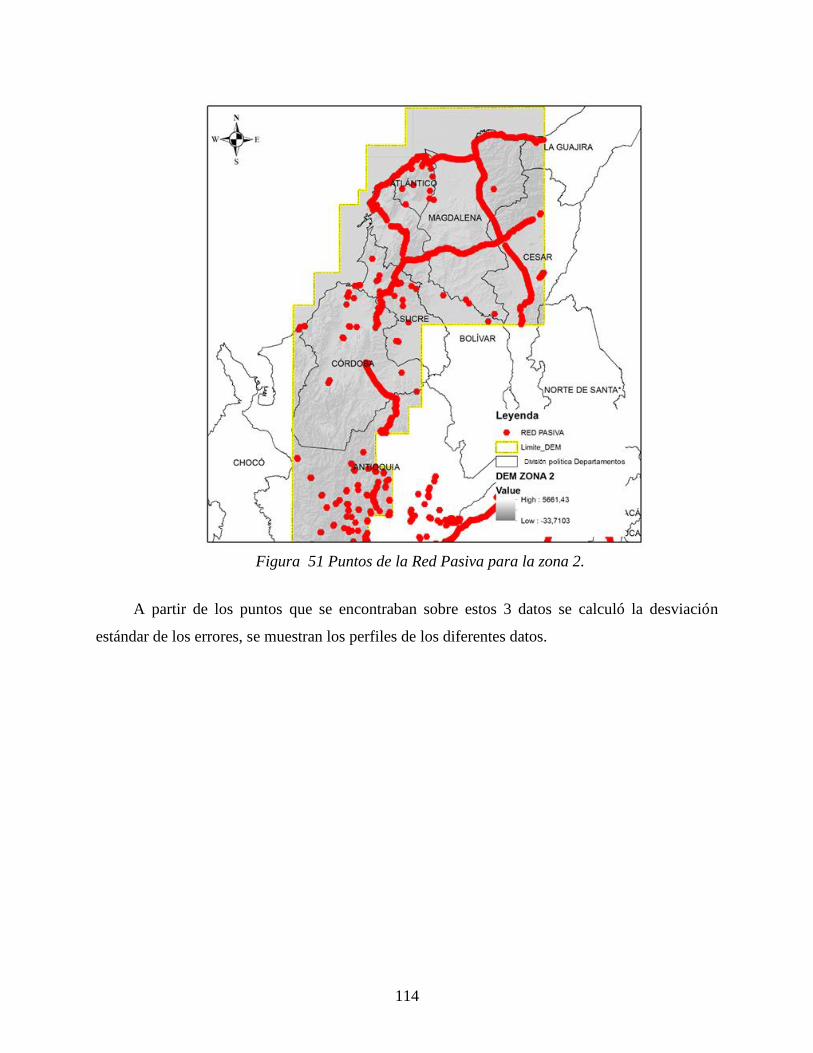
114
Figura 51 Puntos de la Red Pasiva para la zona 2.
A partir de los puntos que se encontraban sobre estos 3 datos se calculó la desviación
estándar de los errores, se muestran los perfiles de los diferentes datos.
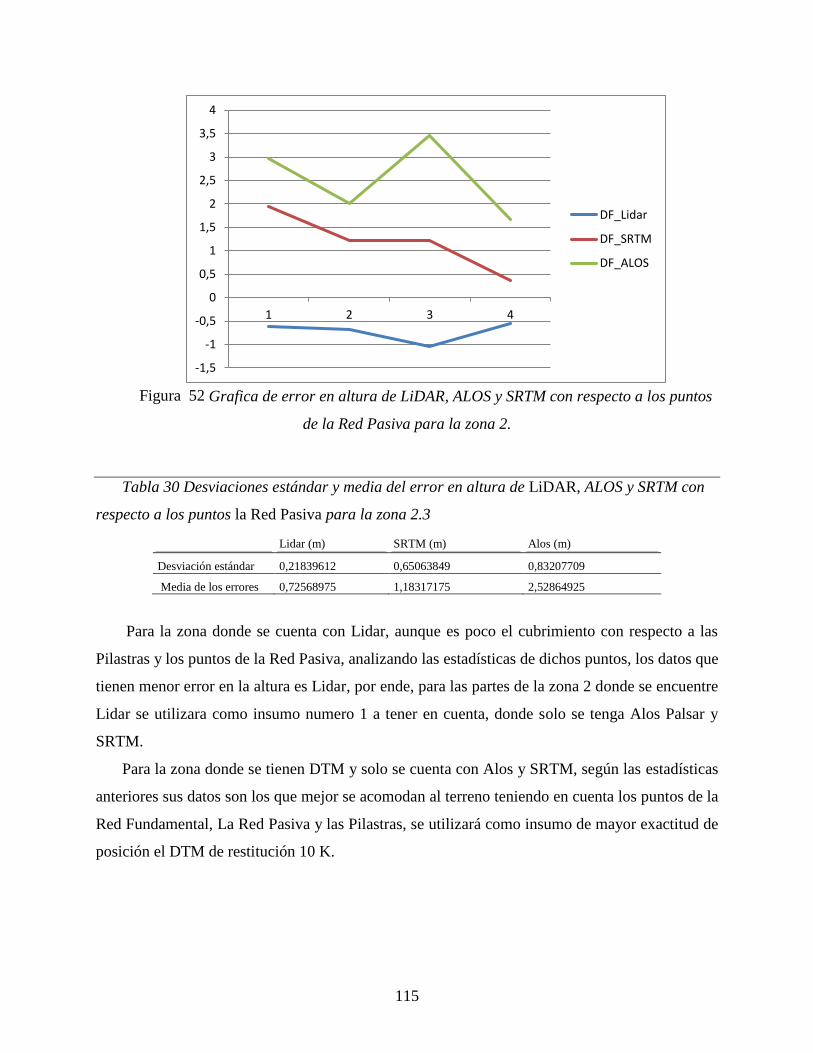
115
Figura 52 Grafica de error en altura de LiDAR, ALOS y SRTM con respecto a los puntos
de la Red Pasiva para la zona 2.
Tabla 30 Desviaciones estándar y media del error en altura de LiDAR, ALOS y SRTM con
respecto a los puntos la Red Pasiva para la zona 2.3
Lidar (m) SRTM (m) Alos (m)
Desviación estándar 0,21839612 0,65063849 0,83207709
Media de los errores 0,72568975 1,18317175 2,52864925
Para la zona donde se cuenta con Lidar, aunque es poco el cubrimiento con respecto a las
Pilastras y los puntos de la Red Pasiva, analizando las estadísticas de dichos puntos, los datos que
tienen menor error en la altura es Lidar, por ende, para las partes de la zona 2 donde se encuentre
Lidar se utilizara como insumo numero 1 a tener en cuenta, donde solo se tenga Alos Palsar y
SRTM.
Para la zona donde se tienen DTM y solo se cuenta con Alos y SRTM, según las estadísticas
anteriores sus datos son los que mejor se acomodan al terreno teniendo en cuenta los puntos de la
Red Fundamental, La Red Pasiva y las Pilastras, se utilizará como insumo de mayor exactitud de
posición el DTM de restitución 10 K.
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
3
3,5
4
1 2 3 4
DF_Lidar
DF_SRTM
DF_ALOS
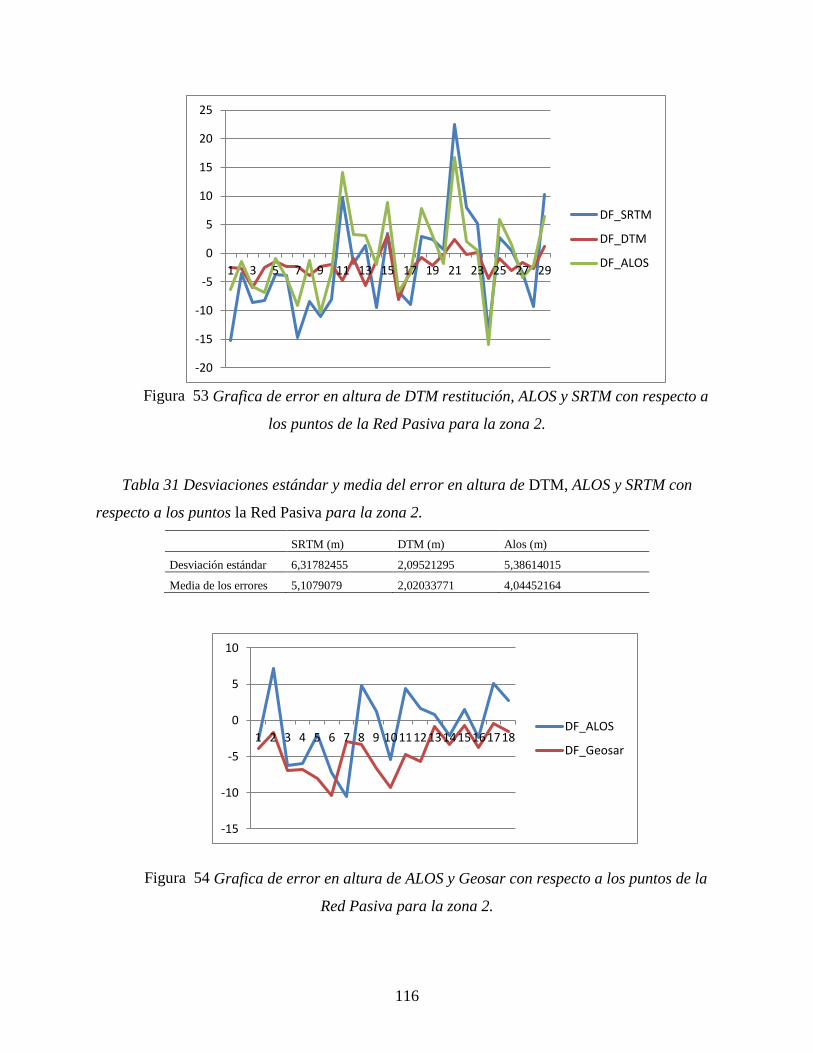
116
Figura 53 Grafica de error en altura de DTM restitución, ALOS y SRTM con respecto a
los puntos de la Red Pasiva para la zona 2.
Tabla 31 Desviaciones estándar y media del error en altura de DTM, ALOS y SRTM con
respecto a los puntos la Red Pasiva para la zona 2.
SRTM (m) DTM (m) Alos (m)
Desviación estándar 6,31782455 2,09521295 5,38614015
Media de los errores 5,1079079 2,02033771 4,04452164
Figura 54 Grafica de error en altura de ALOS y Geosar con respecto a los puntos de la
Red Pasiva para la zona 2.
-20
-15
-10
-5
0
5
10
15
20
25
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29
DF_SRTM
DF_DTM
DF_ALOS
-15
-10
-5
0
5
10
1 2 3 4 5 6 7 8 9 101112131415161718DF_ALOS
DF_Geosar
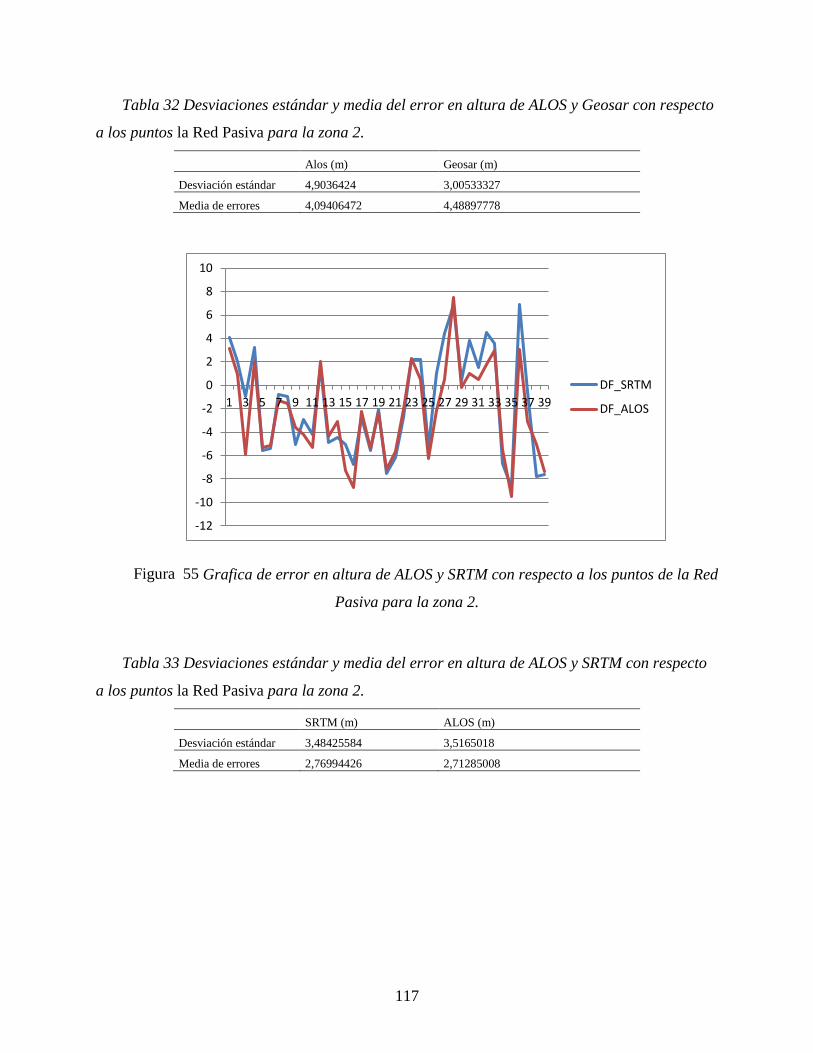
117
Tabla 32 Desviaciones estándar y media del error en altura de ALOS y Geosar con respecto
a los puntos la Red Pasiva para la zona 2.
Alos (m) Geosar (m)
Desviación estándar 4,9036424 3,00533327
Media de errores 4,09406472 4,48897778
Figura 55 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de la Red
Pasiva para la zona 2.
Tabla 33 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto
a los puntos la Red Pasiva para la zona 2.
SRTM (m) ALOS (m)
Desviación estándar 3,48425584 3,5165018
Media de errores 2,76994426 2,71285008
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39
DF_SRTM
DF_ALOS
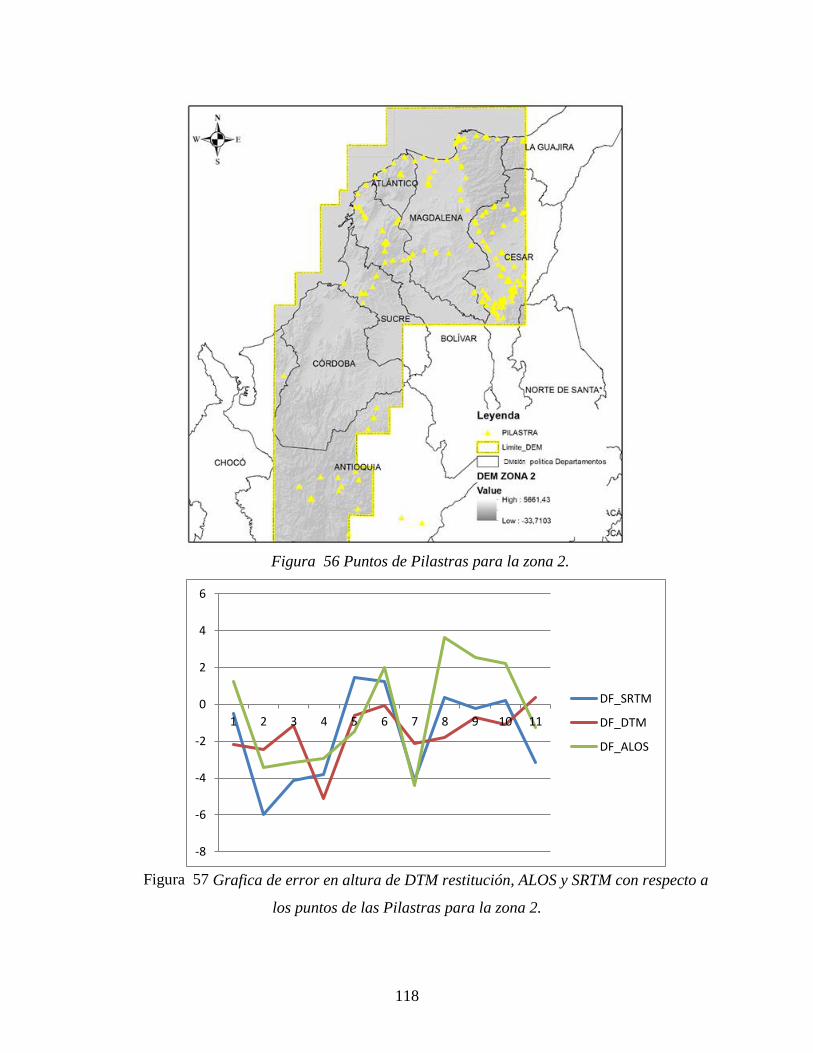
118
Figura 56 Puntos de Pilastras para la zona 2.
Figura 57 Grafica de error en altura de DTM restitución, ALOS y SRTM con respecto a
los puntos de las Pilastras para la zona 2.
-8
-6
-4
-2
0
2
4
6
1 2 3 4 5 6 7 8 9 10 11
DF_SRTM
DF_DTM
DF_ALOS
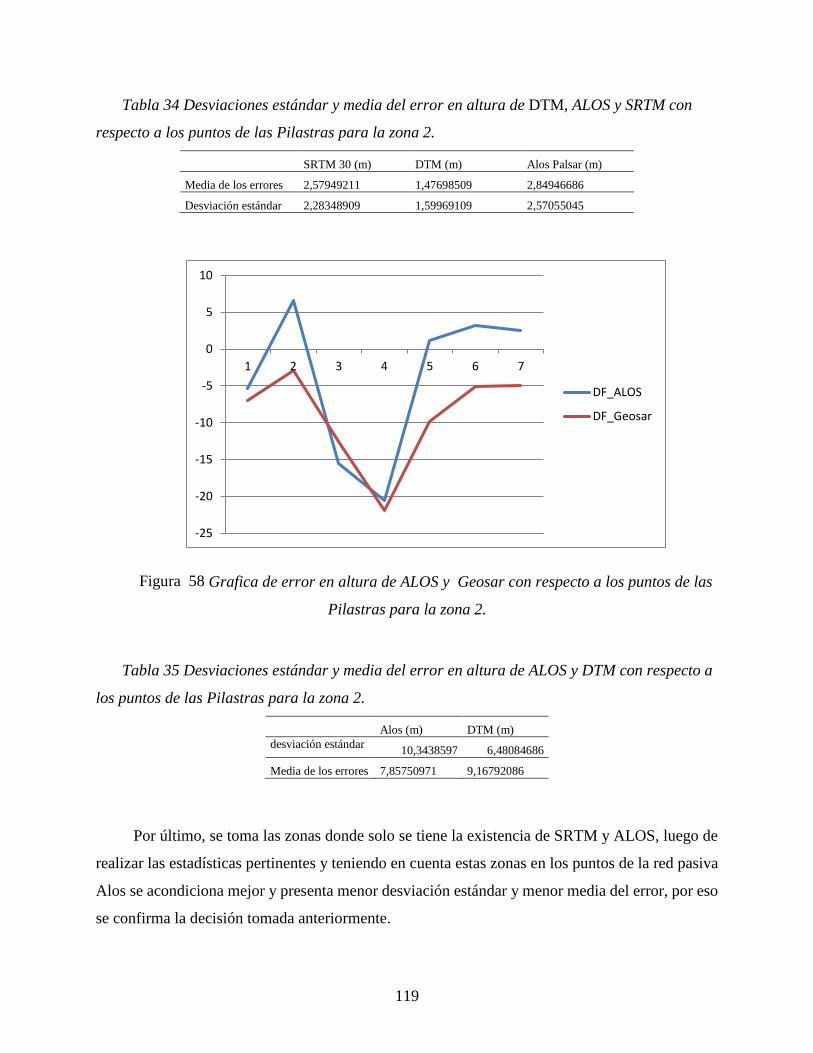
119
Tabla 34 Desviaciones estándar y media del error en altura de DTM, ALOS y SRTM con
respecto a los puntos de las Pilastras para la zona 2.
SRTM 30 (m) DTM (m) Alos Palsar (m)
Media de los errores 2,57949211 1,47698509 2,84946686
Desviación estándar 2,28348909 1,59969109 2,57055045
Figura 58 Grafica de error en altura de ALOS y Geosar con respecto a los puntos de las
Pilastras para la zona 2.
Tabla 35 Desviaciones estándar y media del error en altura de ALOS y DTM con respecto a
los puntos de las Pilastras para la zona 2.
Alos (m) DTM (m)
desviación estándar 10,3438597 6,48084686
Media de los errores 7,85750971 9,16792086
Por último, se toma las zonas donde solo se tiene la existencia de SRTM y ALOS, luego de
realizar las estadísticas pertinentes y teniendo en cuenta estas zonas en los puntos de la red pasiva
Alos se acondiciona mejor y presenta menor desviación estándar y menor media del error, por eso
se confirma la decisión tomada anteriormente.
-25
-20
-15
-10
-5
0
5
10
1 2 3 4 5 6 7
DF_ALOS
DF_Geosar
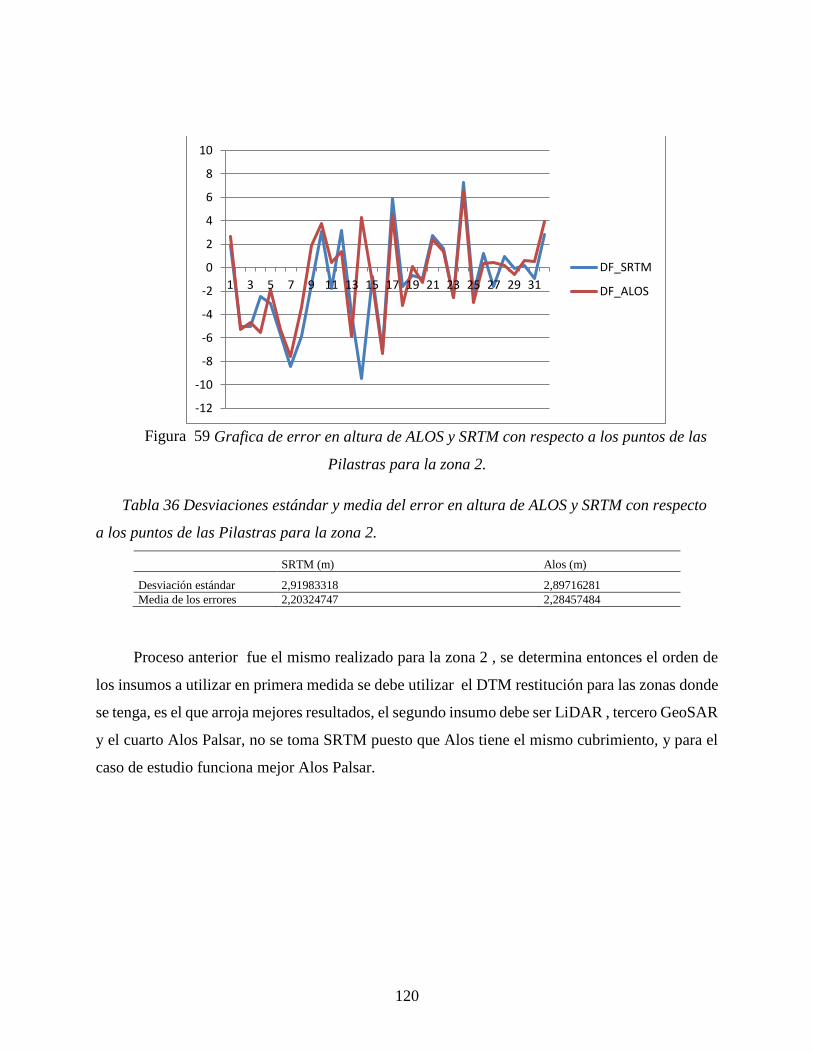
120
Figura 59 Grafica de error en altura de ALOS y SRTM con respecto a los puntos de las
Pilastras para la zona 2.
Tabla 36 Desviaciones estándar y media del error en altura de ALOS y SRTM con respecto
a los puntos de las Pilastras para la zona 2.
SRTM (m) Alos (m)
Desviación estándar 2,91983318 2,89716281
Media de los errores 2,20324747 2,28457484
Proceso anterior fue el mismo realizado para la zona 2 , se determina entonces el orden de
los insumos a utilizar en primera medida se debe utilizar el DTM restitución para las zonas donde
se tenga, es el que arroja mejores resultados, el segundo insumo debe ser LiDAR , tercero GeoSAR
y el cuarto Alos Palsar, no se toma SRTM puesto que Alos tiene el mismo cubrimiento, y para el
caso de estudio funciona mejor Alos Palsar.
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31
DF_SRTM
DF_ALOS

121
ANEXO 4. CALCULO DEL MEJOR MÉTODO DE FUSIÓN
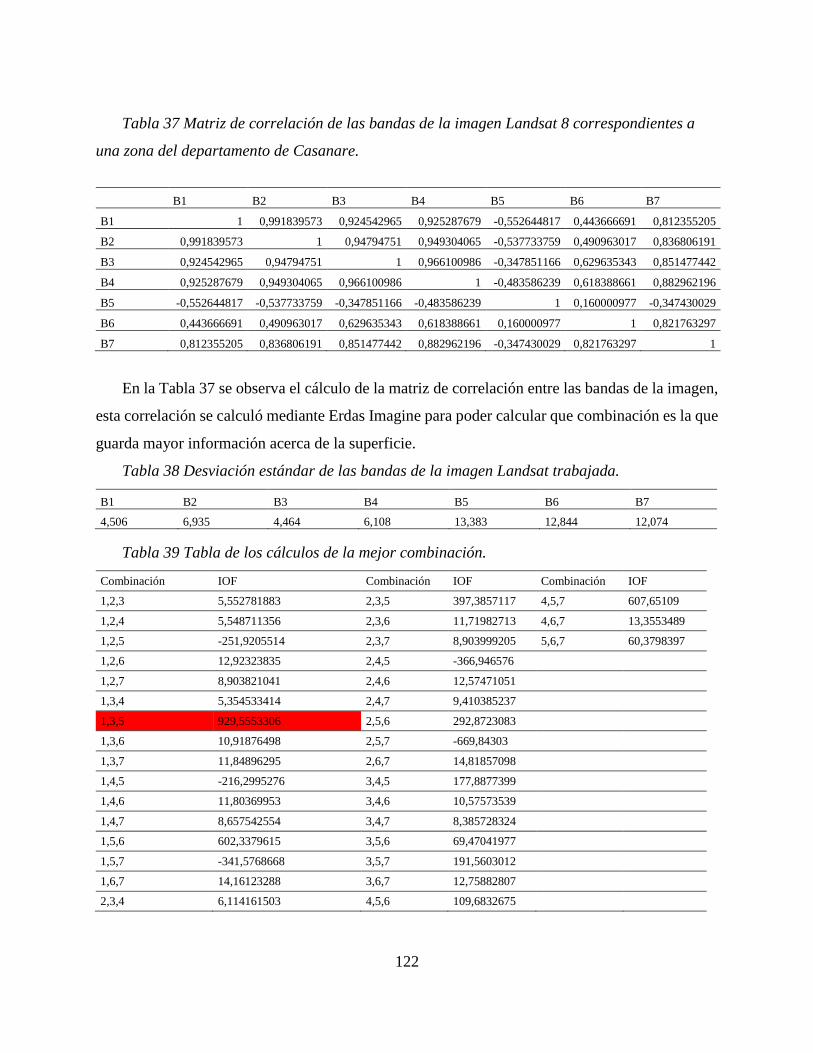
122
Tabla 37 Matriz de correlación de las bandas de la imagen Landsat 8 correspondientes a
una zona del departamento de Casanare.
B1 B2 B3 B4 B5 B6 B7
B1 1 0,991839573 0,924542965 0,925287679 -0,552644817 0,443666691 0,812355205
B2 0,991839573 1 0,94794751 0,949304065 -0,537733759 0,490963017 0,836806191
B3 0,924542965 0,94794751 1 0,966100986 -0,347851166 0,629635343 0,851477442
B4 0,925287679 0,949304065 0,966100986 1 -0,483586239 0,618388661 0,882962196
B5 -0,552644817 -0,537733759 -0,347851166 -0,483586239 1 0,160000977 -0,347430029
B6 0,443666691 0,490963017 0,629635343 0,618388661 0,160000977 1 0,821763297
B7 0,812355205 0,836806191 0,851477442 0,882962196 -0,347430029 0,821763297 1
En la Tabla 37 se observa el cálculo de la matriz de correlación entre las bandas de la imagen,
esta correlación se calculó mediante Erdas Imagine para poder calcular que combinación es la que
guarda mayor información acerca de la superficie.
Tabla 38 Desviación estándar de las bandas de la imagen Landsat trabajada.
B1 B2 B3 B4 B5 B6 B7
4,506 6,935 4,464 6,108 13,383 12,844 12,074
Tabla 39 Tabla de los cálculos de la mejor combinación.
Combinación IOF Combinación IOF Combinación IOF
1,2,3 5,552781883 2,3,5 397,3857117 4,5,7 607,65109
1,2,4 5,548711356 2,3,6 11,71982713 4,6,7 13,3553489
1,2,5 -251,9205514 2,3,7 8,903999205 5,6,7 60,3798397
1,2,6 12,92323835 2,4,5 -366,946576
1,2,7 8,903821041 2,4,6 12,57471051
1,3,4 5,354533414 2,4,7 9,410385237
1,3,5 929,5553306 2,5,6 292,8723083
1,3,6 10,91876498 2,5,7 -669,84303
1,3,7 11,84896295 2,6,7 14,81857098
1,4,5 -216,2995276 3,4,5 177,8877399
1,4,6 11,80369953 3,4,6 10,57573539
1,4,7 8,657542554 3,4,7 8,385728324
1,5,6 602,3379615 3,5,6 69,47041977
1,5,7 -341,5768668 3,5,7 191,5603012
1,6,7 14,16123288 3,6,7 12,75882807
2,3,4 6,114161503 4,5,6 109,6832675
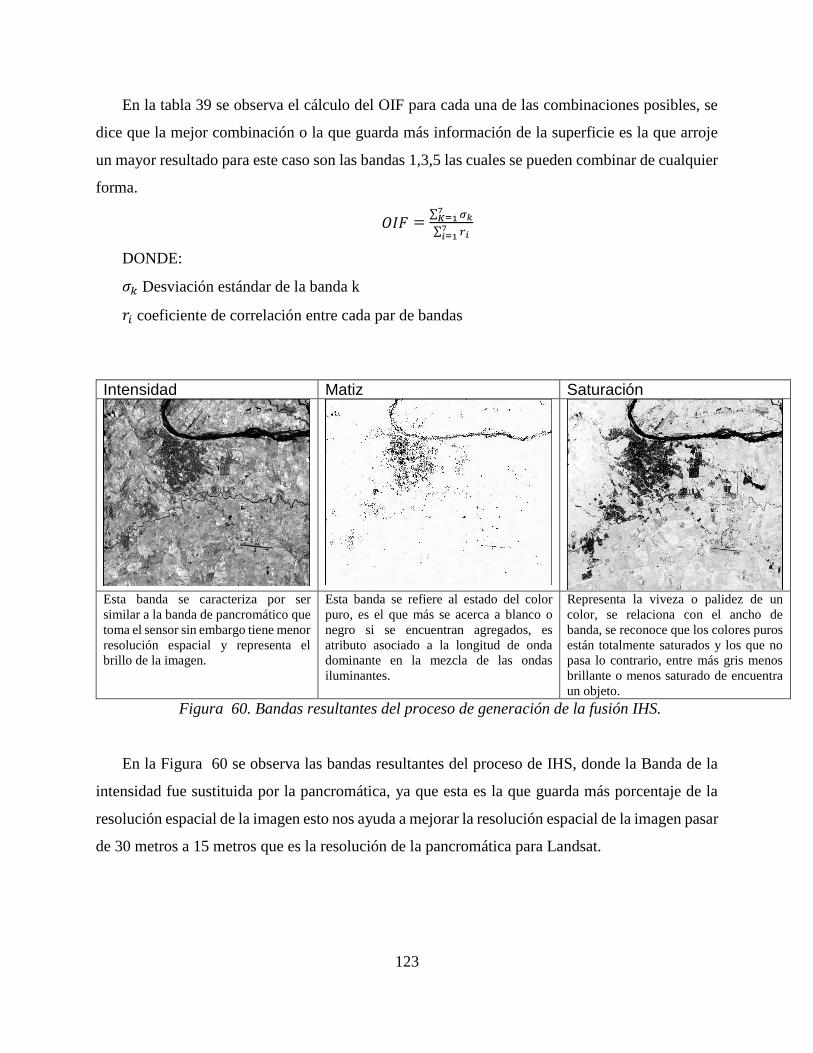
123
En la tabla 39 se observa el cálculo del OIF para cada una de las combinaciones posibles, se
dice que la mejor combinación o la que guarda más información de la superficie es la que arroje
un mayor resultado para este caso son las bandas 1,3,5 las cuales se pueden combinar de cualquier
forma.
𝑂𝐼𝐹 =∑ 𝜎𝑘
7𝐾=1
∑ 𝑟𝑖7𝑖=1
DONDE:
𝜎𝑘 Desviación estándar de la banda k
𝑟𝑖 coeficiente de correlación entre cada par de bandas
Intensidad Matiz Saturación
Esta banda se caracteriza por ser
similar a la banda de pancromático que
toma el sensor sin embargo tiene menor
resolución espacial y representa el
brillo de la imagen.
Esta banda se refiere al estado del color
puro, es el que más se acerca a blanco o
negro si se encuentran agregados, es
atributo asociado a la longitud de onda
dominante en la mezcla de las ondas
iluminantes.
Representa la viveza o palidez de un
color, se relaciona con el ancho de
banda, se reconoce que los colores puros
están totalmente saturados y los que no
pasa lo contrario, entre más gris menos
brillante o menos saturado de encuentra
un objeto.
Figura 60. Bandas resultantes del proceso de generación de la fusión IHS.
En la Figura 60 se observa las bandas resultantes del proceso de IHS, donde la Banda de la
intensidad fue sustituida por la pancromática, ya que esta es la que guarda más porcentaje de la
resolución espacial de la imagen esto nos ayuda a mejorar la resolución espacial de la imagen pasar
de 30 metros a 15 metros que es la resolución de la pancromática para Landsat.

124
ANEXO 5. TABLAS RESUMEN DE LOS INDICADORES DE CALIDAD DEFINIDOS
PARA EL PROCESO DE ORTORRECTIFICACIÓN
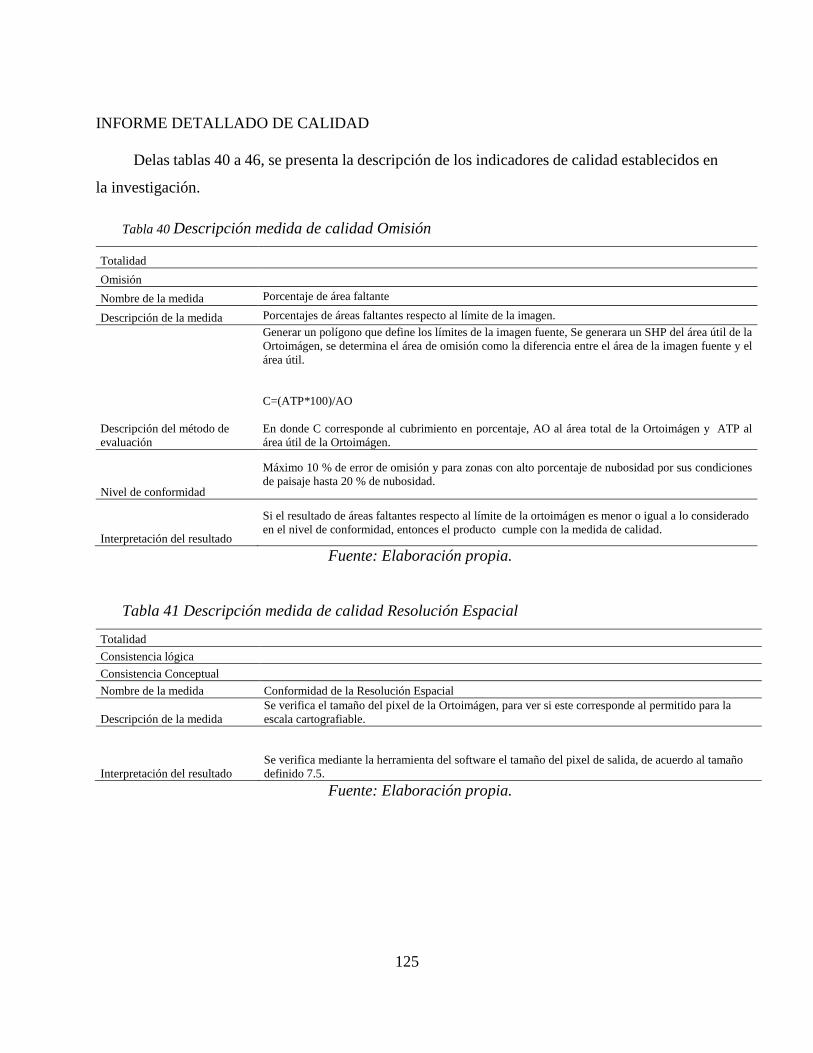
125
INFORME DETALLADO DE CALIDAD
Delas tablas 40 a 46, se presenta la descripción de los indicadores de calidad establecidos en
la investigación.
Tabla 40 Descripción medida de calidad Omisión
Totalidad
Omisión
Nombre de la medida Porcentaje de área faltante
Descripción de la medida Porcentajes de áreas faltantes respecto al límite de la imagen.
Descripción del método de
evaluación
Generar un polígono que define los límites de la imagen fuente, Se generara un SHP del área útil de la
Ortoimágen, se determina el área de omisión como la diferencia entre el área de la imagen fuente y el
área útil.
C=(ATP*100)/AO
En donde C corresponde al cubrimiento en porcentaje, AO al área total de la Ortoimágen y ATP al
área útil de la Ortoimágen.
Nivel de conformidad
Máximo 10 % de error de omisión y para zonas con alto porcentaje de nubosidad por sus condiciones
de paisaje hasta 20 % de nubosidad.
Interpretación del resultado
Si el resultado de áreas faltantes respecto al límite de la ortoimágen es menor o igual a lo considerado
en el nivel de conformidad, entonces el producto cumple con la medida de calidad.
Fuente: Elaboración propia.
Tabla 41 Descripción medida de calidad Resolución Espacial
Totalidad
Consistencia lógica
Consistencia Conceptual
Nombre de la medida Conformidad de la Resolución Espacial
Descripción de la medida
Se verifica el tamaño del pixel de la Ortoimágen, para ver si este corresponde al permitido para la
escala cartografiable.
Interpretación del resultado
Se verifica mediante la herramienta del software el tamaño del pixel de salida, de acuerdo al tamaño
definido 7.5.
Fuente: Elaboración propia.
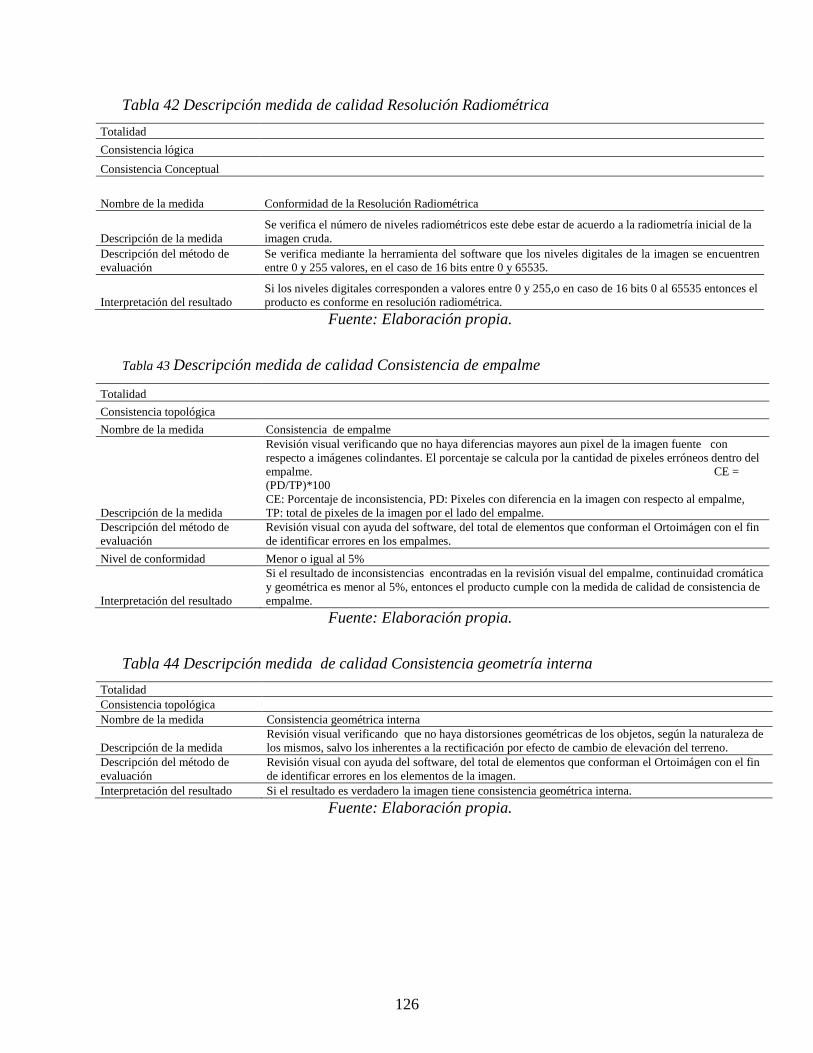
126
Tabla 42 Descripción medida de calidad Resolución Radiométrica
Totalidad
Consistencia lógica
Consistencia Conceptual
Nombre de la medida Conformidad de la Resolución Radiométrica
Descripción de la medida
Se verifica el número de niveles radiométricos este debe estar de acuerdo a la radiometría inicial de la
imagen cruda.
Descripción del método de
evaluación
Se verifica mediante la herramienta del software que los niveles digitales de la imagen se encuentren
entre 0 y 255 valores, en el caso de 16 bits entre 0 y 65535.
Interpretación del resultado
Si los niveles digitales corresponden a valores entre 0 y 255,o en caso de 16 bits 0 al 65535 entonces el
producto es conforme en resolución radiométrica.
Fuente: Elaboración propia.
Tabla 43 Descripción medida de calidad Consistencia de empalme
Totalidad
Consistencia topológica
Nombre de la medida Consistencia de empalme
Descripción de la medida
Revisión visual verificando que no haya diferencias mayores aun pixel de la imagen fuente con
respecto a imágenes colindantes. El porcentaje se calcula por la cantidad de pixeles erróneos dentro del
empalme. CE =
(PD/TP)*100
CE: Porcentaje de inconsistencia, PD: Pixeles con diferencia en la imagen con respecto al empalme,
TP: total de pixeles de la imagen por el lado del empalme.
Descripción del método de
evaluación
Revisión visual con ayuda del software, del total de elementos que conforman el Ortoimágen con el fin
de identificar errores en los empalmes.
Nivel de conformidad Menor o igual al 5%
Interpretación del resultado
Si el resultado de inconsistencias encontradas en la revisión visual del empalme, continuidad cromática
y geométrica es menor al 5%, entonces el producto cumple con la medida de calidad de consistencia de
empalme.
Fuente: Elaboración propia.
Tabla 44 Descripción medida de calidad Consistencia geometría interna
Totalidad
Consistencia topológica
Nombre de la medida Consistencia geométrica interna
Descripción de la medida
Revisión visual verificando que no haya distorsiones geométricas de los objetos, según la naturaleza de
los mismos, salvo los inherentes a la rectificación por efecto de cambio de elevación del terreno.
Descripción del método de
evaluación
Revisión visual con ayuda del software, del total de elementos que conforman el Ortoimágen con el fin
de identificar errores en los elementos de la imagen.
Interpretación del resultado Si el resultado es verdadero la imagen tiene consistencia geométrica interna.
Fuente: Elaboración propia.
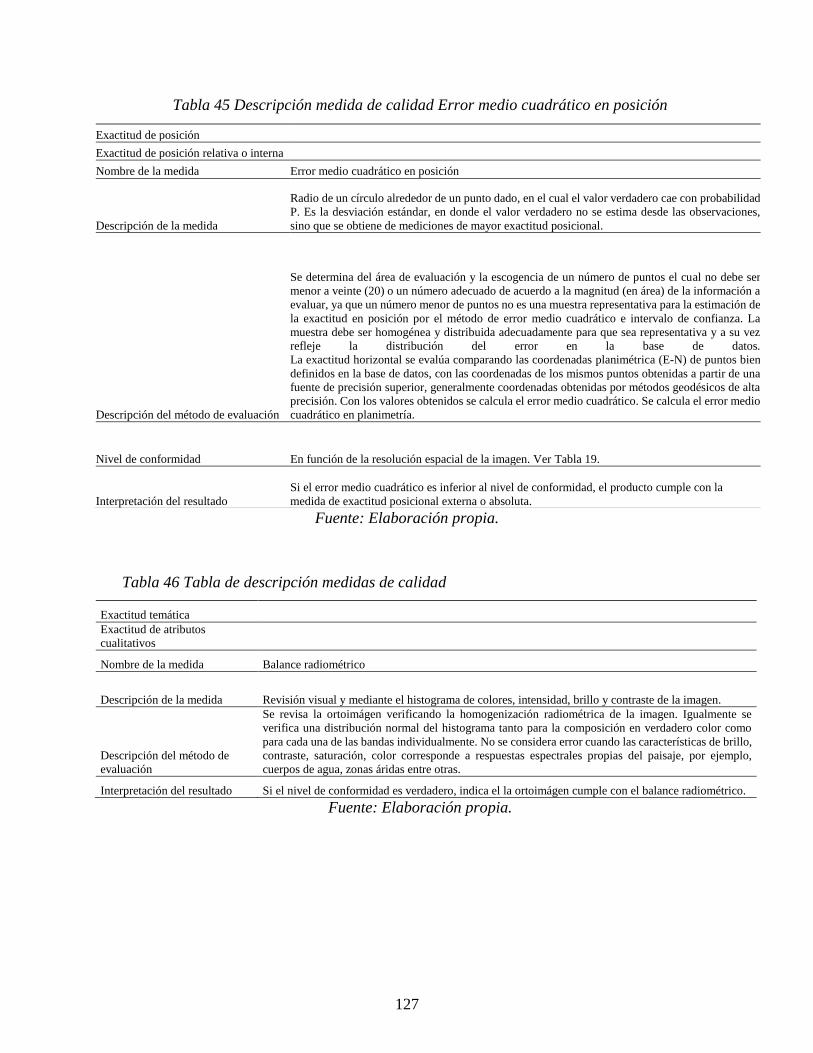
127
Tabla 45 Descripción medida de calidad Error medio cuadrático en posición
Fuente: Elaboración propia.
Tabla 46 Tabla de descripción medidas de calidad
Exactitud temática
Exactitud de atributos
cualitativos
Nombre de la medida Balance radiométrico
Descripción de la medida Revisión visual y mediante el histograma de colores, intensidad, brillo y contraste de la imagen.
Descripción del método de
evaluación
Se revisa la ortoimágen verificando la homogenización radiométrica de la imagen. Igualmente se
verifica una distribución normal del histograma tanto para la composición en verdadero color como
para cada una de las bandas individualmente. No se considera error cuando las características de brillo,
contraste, saturación, color corresponde a respuestas espectrales propias del paisaje, por ejemplo,
cuerpos de agua, zonas áridas entre otras.
Interpretación del resultado Si el nivel de conformidad es verdadero, indica el la ortoimágen cumple con el balance radiométrico.
Fuente: Elaboración propia.
Exactitud de posición
Exactitud de posición relativa o interna
Nombre de la medida Error medio cuadrático en posición
Descripción de la medida
Radio de un círculo alrededor de un punto dado, en el cual el valor verdadero cae con probabilidad
P. Es la desviación estándar, en donde el valor verdadero no se estima desde las observaciones,
sino que se obtiene de mediciones de mayor exactitud posicional.
Descripción del método de evaluación
Se determina del área de evaluación y la escogencia de un número de puntos el cual no debe ser
menor a veinte (20) o un número adecuado de acuerdo a la magnitud (en área) de la información a
evaluar, ya que un número menor de puntos no es una muestra representativa para la estimación de
la exactitud en posición por el método de error medio cuadrático e intervalo de confianza. La
muestra debe ser homogénea y distribuida adecuadamente para que sea representativa y a su vez
refleje la distribución del error en la base de datos.
La exactitud horizontal se evalúa comparando las coordenadas planimétrica (E-N) de puntos bien
definidos en la base de datos, con las coordenadas de los mismos puntos obtenidas a partir de una
fuente de precisión superior, generalmente coordenadas obtenidas por métodos geodésicos de alta
precisión. Con los valores obtenidos se calcula el error medio cuadrático. Se calcula el error medio
cuadrático en planimetría.
Nivel de conformidad En función de la resolución espacial de la imagen. Ver Tabla 19.
Interpretación del resultado
Si el error medio cuadrático es inferior al nivel de conformidad, el producto cumple con la
medida de exactitud posicional externa o absoluta.

128
ANEXO 6. NÚMERO DE PUNTOS DE CONTROL Y CHEQUEO ÓPTIMOS EN EL
PROCESO DE ORTORRECTIFICACIÓN
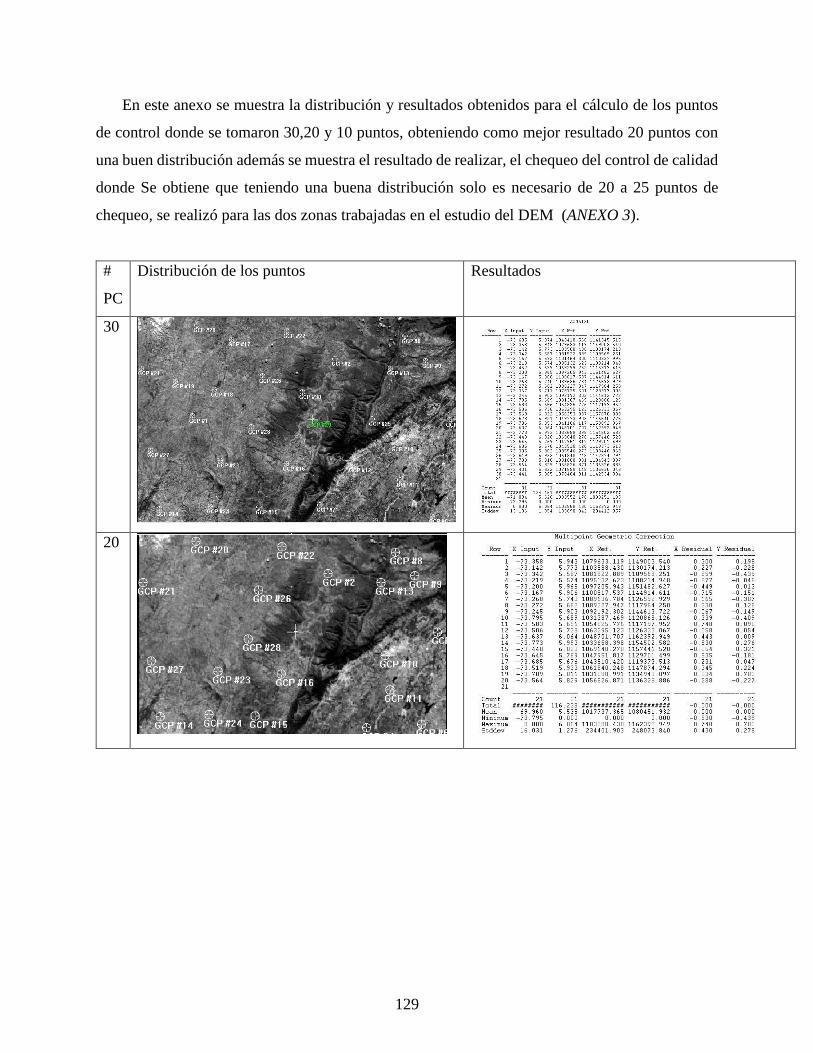
129
En este anexo se muestra la distribución y resultados obtenidos para el cálculo de los puntos
de control donde se tomaron 30,20 y 10 puntos, obteniendo como mejor resultado 20 puntos con
una buen distribución además se muestra el resultado de realizar, el chequeo del control de calidad
donde Se obtiene que teniendo una buena distribución solo es necesario de 20 a 25 puntos de
chequeo, se realizó para las dos zonas trabajadas en el estudio del DEM (ANEXO 3).
#
PC
Distribución de los puntos Resultados
30
20
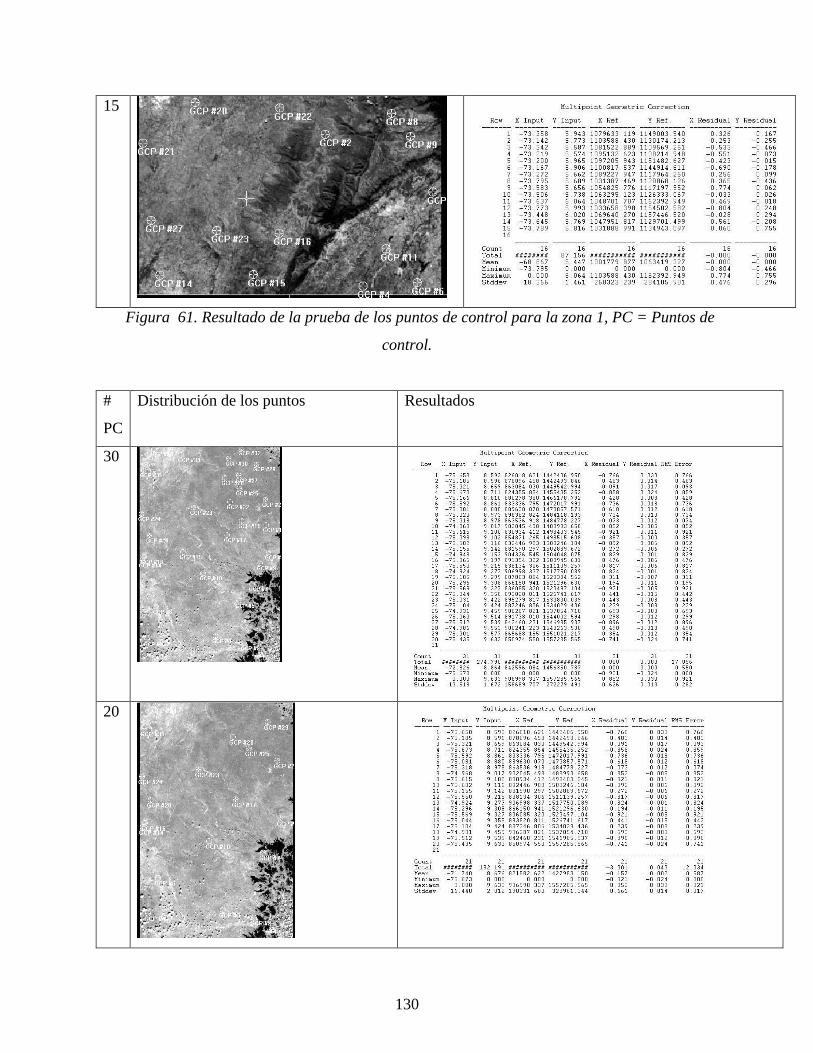
130
15
Figura 61. Resultado de la prueba de los puntos de control para la zona 1, PC = Puntos de
control.
#
PC
Distribución de los puntos Resultados
30
20
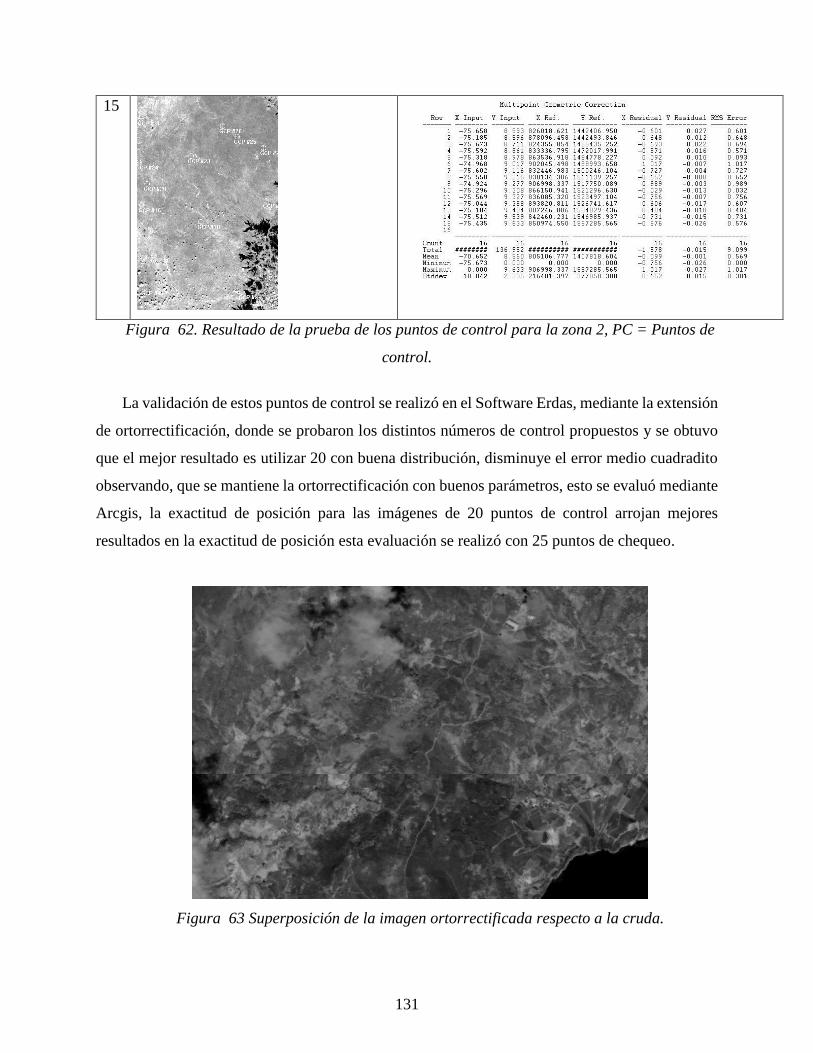
131
15
Figura 62. Resultado de la prueba de los puntos de control para la zona 2, PC = Puntos de
control.
La validación de estos puntos de control se realizó en el Software Erdas, mediante la extensión
de ortorrectificación, donde se probaron los distintos números de control propuestos y se obtuvo
que el mejor resultado es utilizar 20 con buena distribución, disminuye el error medio cuadradito
observando, que se mantiene la ortorrectificación con buenos parámetros, esto se evaluó mediante
Arcgis, la exactitud de posición para las imágenes de 20 puntos de control arrojan mejores
resultados en la exactitud de posición esta evaluación se realizó con 25 puntos de chequeo.
Figura 63 Superposición de la imagen ortorrectificada respecto a la cruda.
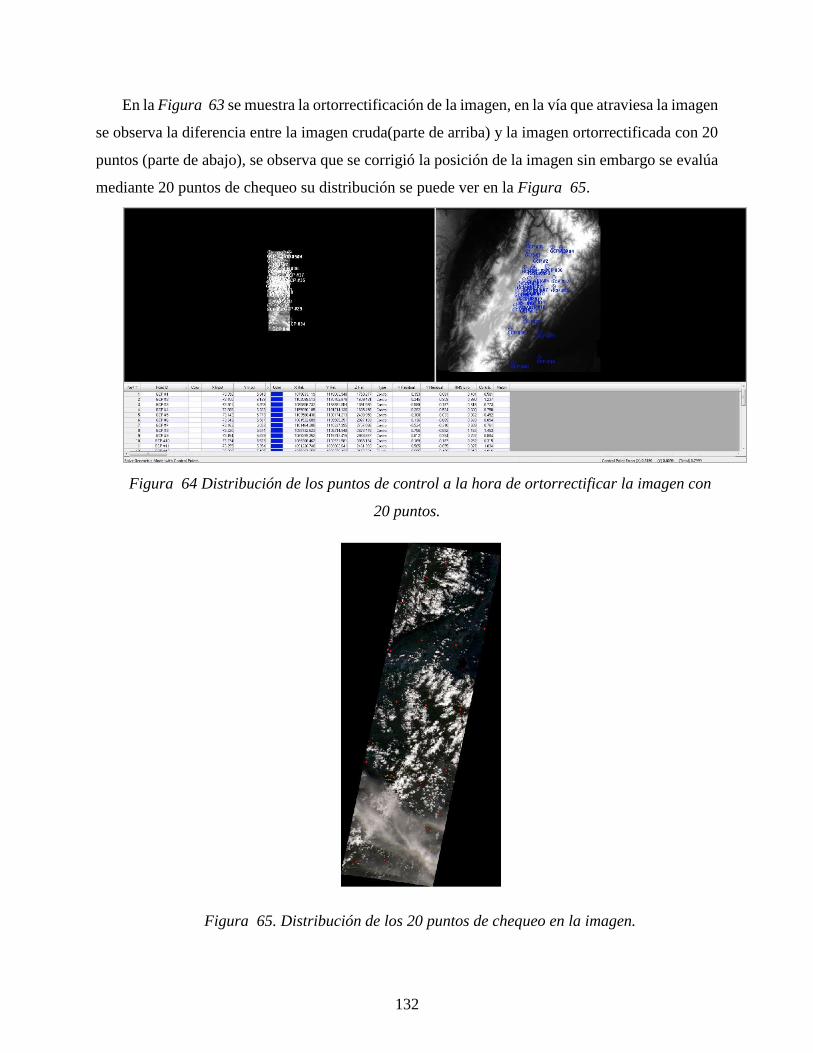
132
En la Figura 63 se muestra la ortorrectificación de la imagen, en la vía que atraviesa la imagen
se observa la diferencia entre la imagen cruda(parte de arriba) y la imagen ortorrectificada con 20
puntos (parte de abajo), se observa que se corrigió la posición de la imagen sin embargo se evalúa
mediante 20 puntos de chequeo su distribución se puede ver en la Figura 65.
Figura 64 Distribución de los puntos de control a la hora de ortorrectificar la imagen con
20 puntos.
Figura 65. Distribución de los 20 puntos de chequeo en la imagen.
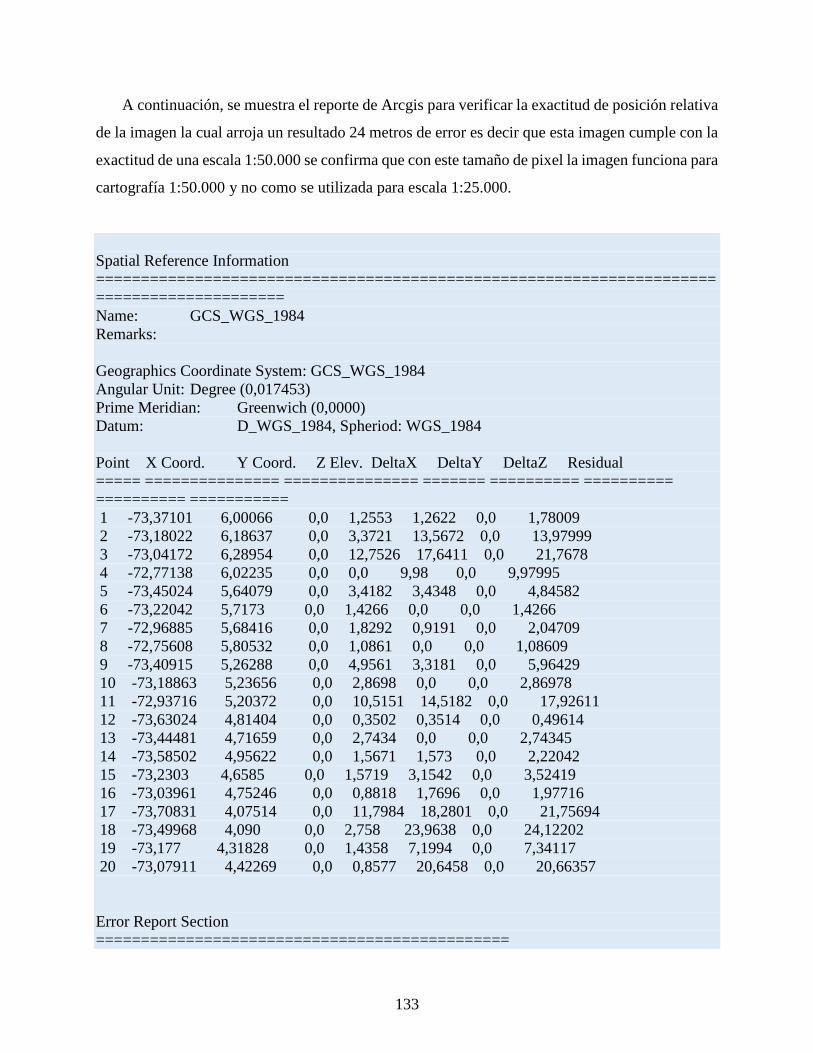
133
A continuación, se muestra el reporte de Arcgis para verificar la exactitud de posición relativa
de la imagen la cual arroja un resultado 24 metros de error es decir que esta imagen cumple con la
exactitud de una escala 1:50.000 se confirma que con este tamaño de pixel la imagen funciona para
cartografía 1:50.000 y no como se utilizada para escala 1:25.000.
Spatial Reference Information
=====================================================================
=====================
Name: GCS_WGS_1984
Remarks:
Geographics Coordinate System: GCS_WGS_1984
Angular Unit: Degree (0,017453)
Prime Meridian: Greenwich (0,0000)
Datum: D_WGS_1984, Spheriod: WGS_1984
Point X Coord. Y Coord. Z Elev. DeltaX DeltaY DeltaZ Residual
===== =============== =============== ======= ========== ==========
========== ===========
1 -73,37101 6,00066 0,0 1,2553 1,2622 0,0 1,78009
2 -73,18022 6,18637 0,0 3,3721 13,5672 0,0 13,97999
3 -73,04172 6,28954 0,0 12,7526 17,6411 0,0 21,7678
4 -72,77138 6,02235 0,0 0,0 9,98 0,0 9,97995
5 -73,45024 5,64079 0,0 3,4182 3,4348 0,0 4,84582
6 -73,22042 5,7173 0,0 1,4266 0,0 0,0 1,4266
7 -72,96885 5,68416 0,0 1,8292 0,9191 0,0 2,04709
8 -72,75608 5,80532 0,0 1,0861 0,0 0,0 1,08609
9 -73,40915 5,26288 0,0 4,9561 3,3181 0,0 5,96429
10 -73,18863 5,23656 0,0 2,8698 0,0 0,0 2,86978
11 -72,93716 5,20372 0,0 10,5151 14,5182 0,0 17,92611
12 -73,63024 4,81404 0,0 0,3502 0,3514 0,0 0,49614
13 -73,44481 4,71659 0,0 2,7434 0,0 0,0 2,74345
14 -73,58502 4,95622 0,0 1,5671 1,573 0,0 2,22042
15 -73,2303 4,6585 0,0 1,5719 3,1542 0,0 3,52419
16 -73,03961 4,75246 0,0 0,8818 1,7696 0,0 1,97716
17 -73,70831 4,07514 0,0 11,7984 18,2801 0,0 21,75694
18 -73,49968 4,090 0,0 2,758 23,9638 0,0 24,12202
19 -73,177 4,31828 0,0 1,4358 7,1994 0,0 7,34117
20 -73,07911 4,42269 0,0 0,8577 20,6458 0,0 20,66357
Error Report Section
==============================================
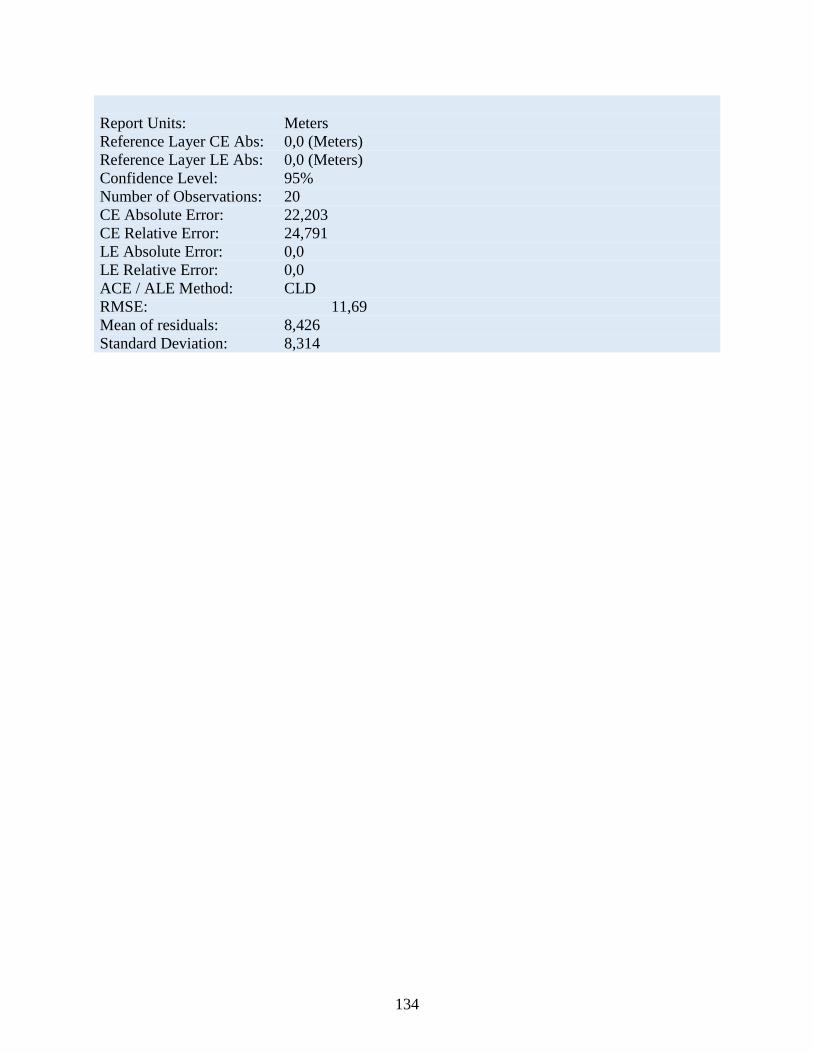
134
Report Units: Meters
Reference Layer CE Abs: 0,0 (Meters)
Reference Layer LE Abs: 0,0 (Meters)
Confidence Level: 95%
Number of Observations: 20
CE Absolute Error: 22,203
CE Relative Error: 24,791
LE Absolute Error: 0,0
LE Relative Error: 0,0
ACE / ALE Method: CLD
RMSE: 11,69
Mean of residuals: 8,426
Standard Deviation: 8,314

135
ANEXO 7 RESULTADO DE LA VERIFICACIÓN DE LA IMAGEN
ORTORRECTIFICADA, CON LOS INDICADORES DE CALIDAD PROPUESTOS EN ESTA
INVESTIGACIÓN.
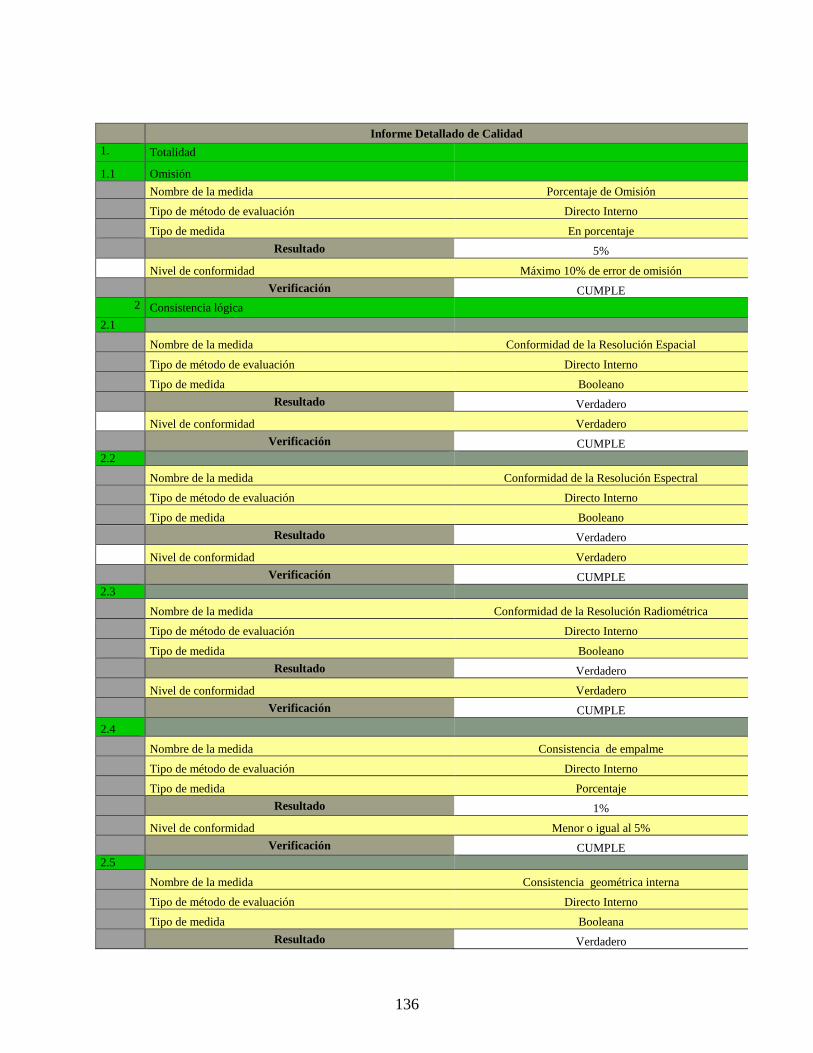
136
Informe Detallado de Calidad
1. Totalidad
1.1 Omisión
Nombre de la medida Porcentaje de Omisión
Tipo de método de evaluación Directo Interno
Tipo de medida En porcentaje
Resultado 5%
Nivel de conformidad Máximo 10% de error de omisión
Verificación CUMPLE
2 Consistencia lógica
2.1
Nombre de la medida Conformidad de la Resolución Espacial
Tipo de método de evaluación Directo Interno
Tipo de medida Booleano
Resultado Verdadero
Nivel de conformidad Verdadero
Verificación CUMPLE
2.2
Nombre de la medida Conformidad de la Resolución Espectral
Tipo de método de evaluación Directo Interno
Tipo de medida Booleano
Resultado Verdadero
Nivel de conformidad Verdadero
Verificación CUMPLE
2.3
Nombre de la medida Conformidad de la Resolución Radiométrica
Tipo de método de evaluación Directo Interno
Tipo de medida Booleano
Resultado Verdadero
Nivel de conformidad Verdadero
Verificación CUMPLE
2.4
Nombre de la medida Consistencia de empalme
Tipo de método de evaluación Directo Interno
Tipo de medida Porcentaje
Resultado 1%
Nivel de conformidad Menor o igual al 5%
Verificación CUMPLE
2.5
Nombre de la medida Consistencia geométrica interna
Tipo de método de evaluación Directo Interno
Tipo de medida Booleana
Resultado Verdadero
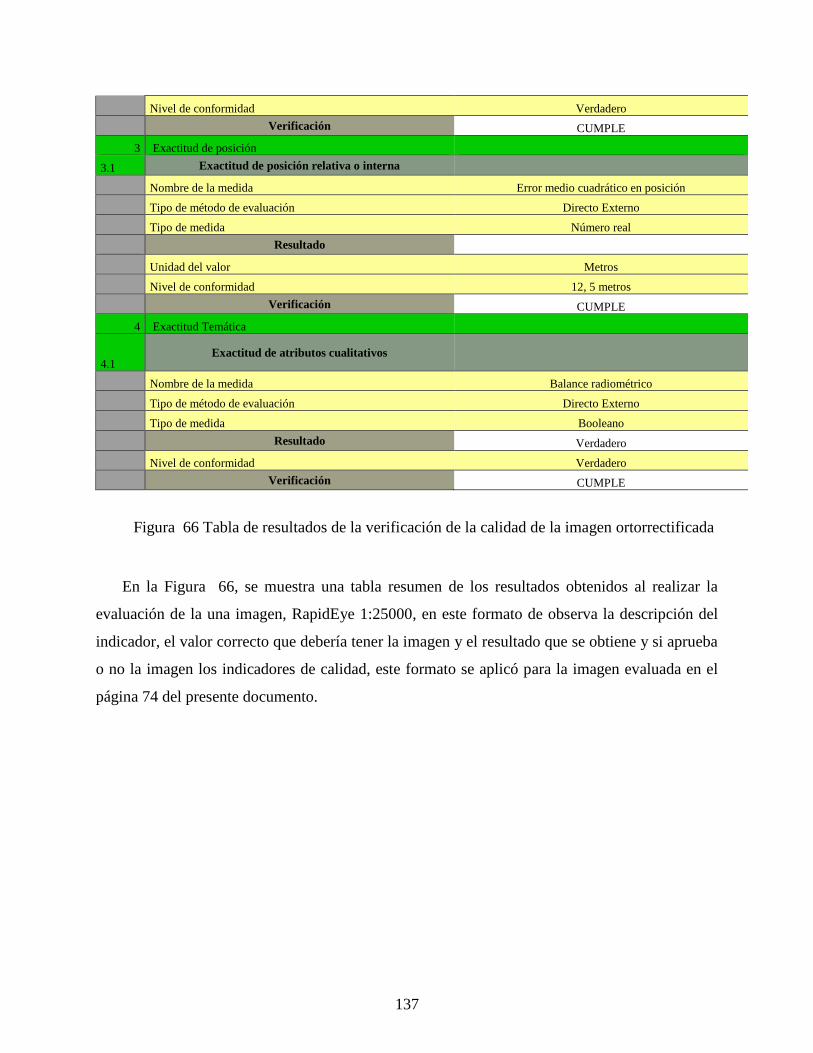
137
Nivel de conformidad Verdadero
Verificación CUMPLE
3 Exactitud de posición
3.1 Exactitud de posición relativa o interna
Nombre de la medida Error medio cuadrático en posición
Tipo de método de evaluación Directo Externo
Tipo de medida Número real
Resultado
Unidad del valor Metros
Nivel de conformidad 12, 5 metros
Verificación CUMPLE
4 Exactitud Temática
4.1 Exactitud de atributos cualitativos
Nombre de la medida Balance radiométrico
Tipo de método de evaluación Directo Externo
Tipo de medida Booleano
Resultado Verdadero
Nivel de conformidad Verdadero
Verificación CUMPLE
Figura 66 Tabla de resultados de la verificación de la calidad de la imagen ortorrectificada
En la Figura 66, se muestra una tabla resumen de los resultados obtenidos al realizar la
evaluación de la una imagen, RapidEye 1:25000, en este formato de observa la descripción del
indicador, el valor correcto que debería tener la imagen y el resultado que se obtiene y si aprueba
o no la imagen los indicadores de calidad, este formato se aplicó para la imagen evaluada en el
página 74 del presente documento.





























