-
8/10/2019 iu Khin Cng Sut Pht Trong Wsn
1/5
Distributed Algorithms for Transmission PowerControl in Wireless
Sensor Networks
Martin Kubisch, Holger Karl, Adam WoliszTelecommunication
Networks Group
Technische Universit at BerlinSekr. FT 5-2, Einsteinufer 25
10587 Berlin, Germanykubisch|karl|[email protected]
Lizhi Charlie Zhong, Jan RabaeyBerkeley Wireless Research
CenterUniversity of California Berkeley
2108 Allston Way, Suite 200Berkeley, CA 94704-1302
czhong|[email protected]
Abstract Two algorithms for dynamically adjusting trans-mission
power level on a per-node basis have been evaluatedusing a
simulative approach. Network lifetime, convergencespeed as well as
resulting network connectivity have beenobtained for these two
algorithms using a particular indoorsensor environment. The network
lifetime metrics of these twolocal algorithms are also benchmarked
against power controlalgorithms using global information. We show
that these twoalgorithms outperform xed power level assignment and
aregenerally within a lifetime of two of a globally
computedsolution.
Keywords: Relaying, energy efciency, sensor networks
I. INTRODUCTION
Sensor networks [1] networks of tiny nodes equippedwith limited
sensing, computing, and radio communicationcapabilities are a
technological vision that is currentlyreceiving a lot of attention
from several research commu-nities. In a typical scenario, such
sensor networks woulduse wireless communication to transmit their
observationvalues to a given monitor station which would serve as
a
user interface.A joint characteristic of most application
scenarios is that
sensors only have a limited energy supply which might noteven be
rechargeable, hence they have to work as energy-efciently as
possible. One option is to reduce transmissionpower using
intermediate nodes as relays instead of directcommunication with a
remote node. While such relayinghas its own disadvantages (energy
is now also consumedfor intermediate reception and transmission),
relaying canbe benecial for improving energy efciency [2].
Yet arbitrarily reducing transmission power is not possi-ble; at
least, some direct neighbors of a sensor node mustbe reachable to
provide the possibilities to perform relayingand to form a
connected network via relaying. Therefore itis important to nd
algorithms which determine appropriatetransmission power levels for
every node. In addition,because of the size and dynamics of sensor
networks,these algorithms should be distributed ones, relying only
onlocally available information and therewith being scalableas the
network growths.
We present two distributed (local) algorithms that deter-mine an
individual transmission power level for each nodeof a xed,
non-mobile wireless sensor network. The same
power is used when sending to any neighbor, irrespectiveof
whether some neighbors are closer than others. Onereason to do so
is the time and hence energy expenditurethat is require to set the
amplier to different powerlevels. Algorithmically, the use of
different power levelsdepending on the intended receivers is easily
possible.
The distributed computation happens in an initializationphase,
and the resulting power levels are then used for thedata
communication within the network. As this distributedcalculation
does not warranty a full connected network, itmay be reasonable to
leave few (communication expensive)nodes out in order to spend this
energy for a network lifetime extension.
As the local algorithms would not be deployed asstand-alone,
instead they would be integrated with othermechanism using the same
information, e.g., locating of sensors, neither a particular MAC
protocol nor a dedicatedprotocol for route discovery is used. But
to evaluate thealgorithms in terms of network lifetime, data
transfer must
be realized, hence any MAC protocol intended to work withmust
provide correct data delivery. The routing tables arecomputed using
the per-node power level achieved and theshortest-path routing
based on Dijkstras algorithm [3]. Oneparticularly interesting
aspect is the fact that power assign-ment algorithms can result in
asymmetric communicationrelationships. Hence, the routing protocol
applied in realsystems must be able to handle such a situation.
As the local algorithms can result in networks not beingfully
connected, it is hard to compare local and globalalgorithms in
terms of network lifetime 1 (time until therst sensor node dies;
all nodes start with the same xedamount of energy). The solution is
to consider the nodes notbeing connected as dead nodes, hence, a
global algorithmruns until one node more than the number of not
connectednodes (from the local case) died. For the local
algorithmsthe lifetime is over when the rst node of the
largestconnected part of the network runs out of energy. But ascan
be seen in Section III-B, the average number of nodesnot being
connected is far below one percent, which in the
1 Alternatively, time to network partition could be used, but as
the localalgorithms can end up with some nodes not being connected
it is notcomparable
appeared in Wireless Communications and Networking Conference
(WCNC), New Orleans, LA, March 2003 IEEE
-
8/10/2019 iu Khin Cng Sut Pht Trong Wsn
2/5
scenarios used means below one node. Hence, we neglectedthis
effect and consider always the dead of the rst nodeas our gure of
merit and optimization criterion.
The remainder of this paper is organized as follows.Section II
describes both local algorithms considered aswell as the global
algorithms which serve as comparisoncases. Section III outlines the
simulation setup we usedto study these algorithms and presents
simulation results.Section IV gives an overview of related work.
Finally,Section V presents conclusions and directions for
futurework.
I I . P ROBLEM SOLUTIONS
In the following, ve different approaches are introduced.The rst
two are the local algorithms which can be appliedto sensor networks
in a distributed manner, whereas theother three (global) algorithms
are comparison cases whichmake use of global knowledge and hence
always achieveoptimal solutions, according to their respective
restrictions.The global algorithms are used to show the
effectivenessof the local algorithms.
A. Threshold in number of neighbors
The local mean algorithm (LMA) works in the follow-ing way: All
nodes start with the same initial transmissionpower ( TransPwr ).
Every node periodically broadcasts alife message ( LifeMsg )
including its unique identity. Allthe other nodes, which receive
such a LifeMsg , replywith a life acknowledge message ( LifeAckMsg
) includingthe address of the LifeMsg sender. Before a node
issuesthe next LifeMsg it counts the number of LifeAckMsg sreceived
( NodeResp ). If NodeResp is less than a mini-mum threshold (
NodeMinThresh ), the node increases itstransmission power by a
certain amount ( A inc ) for every
missing neighbor; the transmission power is not increasedby more
than B max in a single step. 2 If NodeResp is largerthan a maximum
threshold ( NodeMaxThresh ), it decreasesits transmission power by
a certain amount ( Adec ) for everysupernumerary neighbor; the
transmission power is notdecreased by less then B min in a single
step. 3 If NodeRespis between NodeMinThresh and NodeMaxThresh
thenode does not change its transmission power anymore; ithas
converged. While this algorithm has a periodic nature, itis
important to note that no close synchronization of nodesor global
time base is required; the notion of periodicity isa purely local
one.
B. Threshold in mean number of neighborsThe local mean of
neighbors algorithm (LMN) works
similar to LMA except that it adds some information tothe
LifeAckMsg and it denes NodeResp in a differentway. In addition to
the address from the received LifeMsg ,the LifeAckMsg also contains
its own, most recently
2 Formally: TransPwr min {B max TransPwr , A inc (NodeMinThresh
NodeResp) TransPwr }.
3 Formally: TransPwr max {B min TransPwr , A dec (1 (NodeResp
NodeMaxThresh) TransPwr }.
computed, number of neighbors. The node receiving theLifeAckMsg
s calculates a mean value from its neighborsnumber of neighbors the
new NodeResp , which in turnis used to adjust the transmission
power. E.g., when nodeA sends a LifeMsg , the nodes B , C and D
receive thismessage and respond with a LifeAckMsg containing
theirmost recent NodeResp (B =6; C =4; D =3). As node Areceives all
these LifeAckMsg it creates the mean out of the number of responses
(three neighbors B,C,D ) andtheir mean number of neighbors (6;4;3),
which is thenew NodeResp for A (here 4). If this new NodeRespis
below NodeMinThresh or above NodeMaxThresh thetransmission power
adaption is done as described in SectionII-A.
C. Fixed transmission power
The most simplest algorithm is to assign an arbitrarilychosen
transmission power level to all sensor nodes, muchlike it would be
done at production time for sensors that donot have power control
at all. In the following we assumethat the target conguration
(i.e., the density of nodes)is known and hence the minimum
transmission powerproviding a fully connected network is known as
well. Thisvalue is used as xed transmission power.
Additionallylarger transmission values are used to show the effect
of using to much a power.
D. Global solution with equal transmission power
The Equal Transmission Power (ETP) algorithm alsoassigns a
uniform power to all nodes, but chooses theminimal value that
ensures a fully connected network forthis particular scenario. To
nd the minimum transmissionpower, the following algorithm is
used:
1) Among the node pairs that are not yet connected,
choose the one with the smallest distance.2) Set transmission
power of all nodes to a value suf-cient to connect these two
nodes.
3) Check connectivity of the resulting network and whenthe
network is connected, the minimum power levelis found; otherwise
start from 1.
This power value represents the smallest value for a
fullyconnected sensor network with xed transmission rangeand it
also results in symmetric communication links. Thisalgorithm uses
global information and it is not evident howto implement a
corresponding local algorithm that achievesthe same results.
E. Global solution with diverse transmission power The global
solution with Diverse Transmission Power
(DTP) algorithm creates a connected network but does notset all
transmission ranges to the same value. Instead it triesto nd a
minimum power level for every node individually.The algorithm works
in the following way:
1) Among the node pairs that are not yet connected,choose the
one with the smallest distance.
2) Set transmission power of these two nodes to a valuesufcient
to connect them.
-
8/10/2019 iu Khin Cng Sut Pht Trong Wsn
3/5
3) Check connectivity of the resulting network and whenthe
network is not connected start from 1.
This algorithm minimizes the overall transmission
powerconsumption for the entire network, but it may resultin
asymmetric communication links, e.g., one node canreceive data from
a far neighbor which uses a highertransmission power, but can not
answer directly due to itssmaller transmission power.
Even though it is possible to construct networks wherethis
algorithm does not nd minimum power levels for allnodes, DTP vastly
outperforms any other global algorithmthat we have considered.
Therefore, we use DTP as acomparison case. Similarly to the ETP
algorithm, thisalgorithm also uses global knowledge, and equivalent
localimplementations are not obvious.
III . S IMULATION RESULTS
A. Investigation scenario
In order to evaluate and compare these algorithms, wesimulated
the energy consumption and resulting network lifetime for a
particular indoor sensor network scenario.
The simulator used for this task was written using theOMNeT++
[4] simulation tool.During the data communication phase, energy is
con-
sumed for both transmitting and receiving data packets aswell as
for idle phases. The power consumption during theidle phase is 0.1
W, for receiving 0.5 mW, for sending1 mW; 4 a sensor nodes initial
energy supply is 100 J. Atan assumed bit rate of 10 kbit/s, these
values correspond to1 J and 0.5 J to send and receive a bit,
respectively. Thetransmission power levels are set by the above
algorithmssuch that transmission errors only happen with
negligibleprobability (more precisely, a node is only considered
toreceive from a neighbor if the SNR at its antenna is at least
-90 dBm), hence transmission errors are not considered.The
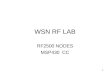
physical layout consists of four rooms connectedby a hallway as
shown in Figure 1. All rooms are 3.5 mhigh, the grey bars indicate
doors (1 m wide; assumed toreach up to the ceiling), the black dots
show the positionof two monitor nodes (acting as the user interface
andbeing the master station which poll the sensors over
thenetwork), which are positioned 1.2 m above the ground.Walls are
assumed to be innitesimally thin, constituting noobstacle for radio
communication. The path loss coefcientof the channel is set to 2.
Based on this layout, 32 differentplacements of sensor nodes were
generated by placing 318nodes randomly on the walls, ceilings, and
oors (using a
uniform node distribution).For each of these placements, every
algorithm computes
the transmission power level assignments for each sensornode.
According to this assignments, edges between thenodes able to
overhear each other are calculated and withDijkstras algorithm [3]
the routing table entries for everynode are calculated. For the ETP
and DTP algorithms as
4 the assumption is that a sending node can wake up nodes in its
vicinityby using a low-bandwidth signaling channel that is easy to
demodulateeven for a low-power receiver, e.g. the Frisbee model in
[5]
Room Room Room Room
Hallway
5 m
2 m
4m 4m 4m 6m
18m
Fig. 1. Physical room layout. Grey bars represent doors, black
circlesrepresent monitor nodes.
well as for the xed transmission power, this results ina single
conguration of power level assignments. Thenal transmission power
level for the local algorithmsdepends on the initial transmission
power to be used byeach node and the number of cycles an algorithm
runs.
The initial power value is varied linearly in 56 steps froma
transmission range of 25 mm to 1.4 m. For each of theseinitial
power levels, the initialization phase is computedusing 100 cycles
with either LMA or LMN. Even thoughboth algorithm settle down
earlier, this number was usedto avoid instable routes.
The local algorithms use a transmission power increasevalue ( A
inc ) of 10% with an upper bound ( B max ) of twotimes the old
transmission power and a decay value ( Adec )of 2% with a lower
bound ( B min ) of half the old value(more aggressive values let
the implementation oscillate).
Note that the energy consumption during this initializa-tion
phase is not taken into account. Information needed for
the algorithms are also available in other,
sensor-network-related protocols [6], thus it can get this
information with-out additional overhead and the consumption is
negligible.
After the initialization, the data communication phaseis
simulated. The trafc in the network consists of re-quest/replies
initiated by the monitor. These requests aredirected at a randomly
chosen sensor node (the monitoris assumed to have sufcient
information about the sen-sors). The nodes receive the request and
answer with an(arbitrary) reply value. These requests are sent
every half a second, alternating between the two monitor nodes.
These simulation runs result in a total of 32 network lifetime
samples for the global algorithms and 32 56 sam-ples for the local
algorithms; network lifetimes, condencelevels for the average
lifetime and comparisons are shownin Section III-C. But rst, the
question of convergencespeed of the local algorithms as well as
whether thesealgorithms reach a fully connected network is
interesting.
B. Convergence and connectivity
The local algorithms LMA and LMN use a number of iterations
before settling down to particular transmissionpower levels. An
individual node has converged when
-
8/10/2019 iu Khin Cng Sut Pht Trong Wsn
4/5
its number of neighbors is between NodeMinThresh
andNodeMaxThresh . As determined by K LEINROCK andSILVESTER in [7]
the mean number of neighbors assuringa good connectivity should be
5.89 and preliminary experi-ments with the global algorithm, as
described in Section II-E, showed that the number of neighbors of
most nodes isbetween four and seven; these values were therefore
usedas thresholds for the local algorithms.
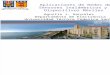
A desirable property of such an algorithm would bethat all nodes
converge very quickly. Evidently, the ini-tial transmission power
(equivalent to the initial range of transmission) plays an
important role for these algorithms.Figure 2 shows that most nodes
converge within a smallnumber of cycles and some few nodes take up
to 50 cycles.For certain initial power levels, it also happens that
a very
1
1 3
2 5
3 7
4 9
6 1
7 3
8 5
9 7
2.5
62.5
122.50
50
100
150
200
250
N u m
b e r o
f
c o n v e r g e
d n o
d e s
Cycle number
Initialrange(cm)
Fig. 2. Histogram of time to convergence (in cycles) depending
on intitialtransmission range (in cm)
small number of nodes do not converge at all. As anexample,
consider a case where a single node is located faraway from a
cluster of nodes that quickly form a connectedgroup before they
receive the far nodes LifeMsg .
While a larger value of NodeMaxThresh increases thelikelihood of
a connected network, it also results in largertransmission power
levels.
Figure 3 shows the percentage of nodes that were notreachable
from the monitor stations for the local algorithmsfrom Sections
II-A and II-B. The largest value is 1.65% forLMA and 0.04% for LMN,
and on the average, 0.003%are not connected considering LMN and
0.37% when onlytaking into account LMA. 5 These results suggest
that LMN
creates a much stronger connected network than LMA.
C. Network lifetime
The most interesting performance metric for such asensor network
is the network lifetime: the longer everysingle node is capable to
communicate, the better thetransmission power levels were chosen.
In order to give
5 Note that these numbers are averaged over different initial
transmissionpower levels, hence percentages do not correspond to an
integer numberof nodes.
00,20,40,60,8
11,21,41,61,8
1 4 7 1 0
1 3
1 6
1 9
2 2
2 5
2 8
3 1
Configuration number
L M A
00,0050,010,0150,020,0250,030,0350,040,0450,05
L M N
LMA LMN
Fig. 3. Percentage of nodes not connected for different network
congurations
a rough idea of possible network lifetimes achievablein our
conguration, Figure 4 shows the results for thesimple xed
assignments of transmission powers (powervalues corresponding to
transmission ranges of 3, 5, and
7 m were used; therewith the used networks were fullyconnected)
as well as the case for the global ETP algorithm.As expected, ETP
outperforms the xed value algorithmsand achieves an average network
lifetime of about 48800seconds, while the xed network algorithms
achievementsare considerably below that. It is also interesting to
seethat the lifetime of the network depends heavily on theactual
network conguration; differences are up to 50%.More interesting is
the comparison between the global and
0
10
20
30
4050
60
70
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31
Configuration number
N e
t w o r k
l i f e t i m e
( x
1 0 0 0 s )
Fixed @ 3m Fixed @ 5m Fixed @ 7m ETP
Fig. 4. Network lifetimes for different congurations for xed
transmis-sion power and equal transmission power assignments
the local algorithms in Figure 5. It comes as no surprisethat
DTP vastly outperforms all other algorithms with itsglobal
knowledge. As a general impression, the lifetimeachieved by DTP is
up to 209% longer than that obtainedby LMN and even higher for LMA.
On average, DTPachieves network lifetimes that are about twice as
long asLMA, LMN, and ETP. Figure 5 also suggests that the
localalgorithms and the ETP algorithm perform quite similarly.
Figure 6 shows the condence intervals for the meannetwork
lifetime at a 95% condence level. Applying asimple graphical
interpretation, we can infer that ETP
-
8/10/2019 iu Khin Cng Sut Pht Trong Wsn
5/5
0
20
40
60
80
100
120
140
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31
Configuration number
N e
t w o r k
l i f e t i m e
( x
1 0 0 0 s
)
DTP ETP LMN LMA
Fig. 5. Network lifetimes (in thousands of seconds) for
differentcongurations for global and local algorithms
36
38
40
42
44
46
48
50
52
ETP LMN LMA
N e
t w o r k
l i f e t i m e
( x
1 0 0 0 s
)
Fig. 6. Condence intervals of network lifetimes for local
algorithmsand ETP; 95% condence level
outperforms both local algorithms. This stems from the factthat
ETP uses global information, but it is important to note
that LMN does not only create a much stronger connectednetwork,
it also performs in mean by 14% better than LMA.Moreover, the local
algorithms are almost competitive withthe global ones.
IV. R ELATED WORK
In recent publications the problem of power control wasaddressed
while assuming information on the angle of reception [8] or the
nodes knowledge of its location [9][10].In these publications more
complicated algorithms than inthis paper are used, but as they use
additional informationa comparison can only be made using the same
metric.
As there are similar approaches to solve the problemof power
control as in this work [11][12], they differin that E LBATT et al.
needs a separate and contention-free feedback channel and uses a
cellular TDMA system.KRISHNAMACHARI et al. uses an algorithm with
an expo-nential grow in control messages in the number of
nodes.
In [13] R AMANATHAN and ROSALES -HAIN providedthe idea for the
rst algorithm used in this paper, but theyused the algorithm to
examine network throughput anddelay in a two dimensional space with
a smaller set of nodes.
V. C ONCLUSIONS
We can state that using heuristics, which consider thenumber of
neighbors a node has, result in a sufcientlyconnected network,
provide improvements in network life-time over simple xed
assignments and are in the rangeof symmetric algorithms using
perfect knowledge. Whilethe presented local algorithms are not able
to outperformsophisticated ones, they perform usually within a
factor of two considering the lifetime.
Additionally, these algorithms are structured similarly toother
mechanisms that are conjectured to be deployed insensor networks,
e.g., locationing mechanisms. It wouldhence be possible to
integrate these algorithms and toamortize their joint resource
consumption.
A number of interesting questions remain for futurework, e.g.,
to use the number of neighbors in the announce-ment messages and to
weight this information againstthe transmission power with which it
was sent or how anon-reliable MAC inuences the algorithms. We
intend toinvestigate these areas in the near future.
R EFERENCES
[1] D. Estrin, R. Govindan, J. S. Heidemann, and S. Kumar,
Nextcentury challenges: Scalable coordination in sensor networks,
inProc. 5th Ann. Intl. Conf. on Mobile Computing and Networking
.Seattle, WA: ACM, Aug. 1999, pp. 263270.
[2] J. P. Monks, J.-P. Ebert, A. Wolisz, and W. mei W. Hwu, A
studyof the energy saving and capacity improvement potential of
powercontrol in multi-hop wireless networks, in Workshop on
Wireless Local Networks, Tampa, Florida, USA, also Conf. of Local
Computer Networks (LCN) , Nov. 2001.
[3] E. Dijkstra, A note on two problems in connection with
graphs, Numerical Mathematics , vol. 1, pp. 269271, 1959.
[4] A. Varga, OMNeT++: Discrete Event Simulation System ,
TechnicalUniversity of Budapest, Faculty of Electrical Engineering
and Infor-matics, Mar. 2001,
http://www.hit.bme.hu/phd/vargaa/omnetpp.htm.
[5] A. Cerpa, J. Elson, D. Estrin, L. Girod, M. Hamilton, and J.
Zhao,Habitat monitoring: Application driver for wireless
communications
technology, in Proc. ACM SIGCOMM Workshop on Data
Commu-nications , Latin America and the Caribbean, Apr. 2001.[6] J.
Li, J. Jannotti, D. De Couto, D. Karger, and R. Morris, A
scalable location service for geographic ad-hoc routing, in
Proc.of the 6th ACM International Conference on Mobile Computing
and Networking (MobiCom 20000) , Aug. 2000, pp. 120130.
[7] L. Kleinrock and J. A. Silvester, Optimum transmission radii
inpacket radio networks or why six is a magic number, in
NationalTelecommunications Conference . Birmingham, Alabama:
IEEE,Dec. 1978, pp. 4.3.14.3.5.
[8] R. Wattenhofer, L. Li, P. Bahl, and Y.-M. Wang,
Distributedtopology control for power efcient operation in multihop
wirelessad hoc networks, in vol. 3. Anchorage: IEEE, Apr. 2001.
[9] V. Rodoplu and T. H.-Y. Meng, Minimum energy mobile
wirelessnetworks, IEEE Journal on Selected Areas in Communications
,vol. 17, no. 8, pp. 13331344, Aug. 1999.
[10] C. Savarese, J. M. Rabaey, and J. Beutel, Locationing in
distributed
ad-hoc wireless sensor networks, in Proc. International
Conferenceon Acoustics, Speech, and Signal Processing , 2001.[11]
T. A. ElBatt, S. V. Krishnamurthy, D. Connors, and S. Dao,
Power
management for throughput enhancement in wireless ad-hoc
net-works, in ICC 2000 . New Orleans, LA: IEEE, June 2000.
[12] B. Krishnamachari, R. Bejar, and S. B. Wicker, Distributed
con-straint satisfaction and the bounds on resource allocation in
wirelessnetworks, in Sixth International Symposium on
CommunicationsTheory and Application . Ambleside, UK: ISCTA, July
2001.
[13] R. Ramanathan and R. Rosales-Hain, Topology control of
multihopwireless networks using transmit power adjustement, in
Proc. IEEE Infocom , Tel-Aviv, Israel, Mar. 2000.