Embed Size (px)
Citation preview
저 시-비 리- 경 지 2.0 한민
는 아래 조건 르는 경 에 한하여 게
l 저 물 복제, 포, 전송, 전시, 공연 송할 수 습니다.
다 과 같 조건 라야 합니다:
l 하는, 저 물 나 포 경 , 저 물에 적 된 허락조건 명확하게 나타내어야 합니다.
l 저 터 허가를 면 러한 조건들 적 되지 않습니다.
저 에 른 리는 내 에 하여 향 지 않습니다.
것 허락규약(Legal Code) 해하 쉽게 약한 것 니다.
Disclaimer
저 시. 하는 원저 를 시하여야 합니다.
비 리. 하는 저 물 리 목적 할 수 없습니다.
경 지. 하는 저 물 개 , 형 또는 가공할 수 없습니다.
i
공학박사학위논문
비선형 계획법 및 모터 토크 분배를 사용한
직렬형 하이브리드 버스의 에너지 관리 전략
Energy Management Strategy of Series Hybrid Electric Bus Using
Nonlinear Programming and Motor Torque Distribution
2014 년 8 월
서울대학교 대학원
기계항공공학부
김 민 재
ii
비선형 계획법 및 모터 토크 분배를 사용한
직렬형 하이브리드 버스의 에너지 관리 전략
Energy Management Strategy of Series Hybrid Electric Bus Using
Nonlinear Programming and Motor Torque Distribution
지도교수 민 경 덕
이 논문을 공학박사 학위논문으로 제출함
2014 년 7 월
서울대학교 대학원
기계항공공학부
김 민 재
김민재의 공학박사 학위논문을 인준함
2014 년 7 월
위 원 장 : ______차__석__원______
부위원장 : ______민__경__덕______
위 원 : ______송__한__호______
위 원 : ______이__동__준______
위 원 : ______박__영__일______
iii
Abstract
Energy Management Strategy of Series Hybrid
Electric Bus Using Nonlinear Programming and
Motor Torque Distribution
Minjae Kim
Department of Mechanical and Aerospace Engineering
The Graduate School
Seoul National University
One of the most widespread issues with the hybrid electric vehicle is the
energy management strategy from the engine to the motor for fuel economy
improvement. There are lots of approaches to achieve it, but many of them are
hard to apply and/or the mathematical background is so complicated.
Furthermore, the sophisticated and complicated strategy usually required an
ideal model and environment that the practical application was not available.
Therefore, simple rule based strategies are often in use for the real-time
applications. Such a tendency was evident in SHEV (Series Hybrid Electric
Vehicle) because the structure of SHEV is so simple that those rule based
strategies such as thermostat and power follower strategies are considered to be
enough for covering the energy flow management from the engine to the battery
[1-3].
iv
This research proposes an advanced strategy which overcomes those
weaknesses. The strategy proposed in this research fully optimizes the SHEV
energy applicable to SHEV that the efficiency of the total system increase by
finding the most efficient operating points in each component in the vehicle. The
proposed strategy, which uses a semi MPC framework, has its foundation on
NLP (Nonlinear Programming) for finding minimum fuel consumption and the
speed prediction with intra-city bus was evaluated with the real bus data for the
future path plan. Furthermore, the manipulation of command signal (signal
synchronization, signal bundling, signal removing & filling up, and zero speed
synchronization) and the traction torque distribution in TMU (Traction Motor
Unit) were also considered, where the torque distribution made it possible avoid
large currents from the battery to the motor during the periods of high loading
required in the traction. The performance of the proposed strategy was compared
to that of other strategies such as DP (Dynamic Programming), thermostatic
strategy, and power follower strategy where DP gives the reference global
optimal operating points and thermostat & power follower strategies are the
well-known real-time energy distribution strategy. So, the contribution of the
proposed techniques could be evaluated.
As a result, the proposed strategy in this paper shows much better fuel
economy with the practical, fast, and exact methodology uniquely adapted to
series type hybrid electric intra-city bus. All simulation was achieved based on
AMEsim and Simulink co-simulation for the non-analytic forward bus model
and NLP solver of ‘NPSOL’ was used for the simulation.
Keywords: Diesel driven generators, Energy management, Optimal control,
Power generation control, Real time systems, Series Hybrid Electric Vehicle.

v
Student Number: 2010-30182
vi
Chapter 1. Introduction ........................................................1
1.1 Motivation ....................................................................................... 1
1.2 Literature Review ........................................................................... 7
1.3 Objectives ...................................................................................... 12
1.4 Contributions ................................................................................ 13
Chapter 2. Hybrid Electric Vehicle Modeling .................... 15
2.1 Hybrid Electric Vehicle Structure ................................................ 15
2.1.1 Series Type Structure .......................................................................... 17
2.1.2 Parallel Type Structure ........................................................................ 17
2.1.3 Series-Parallel Type Structure ............................................................. 18
2.2 Powertrain Modeling .................................................................... 23
Chapter 3. Existing Strategies ............................................ 31
3.1 Thermostat Strategy ..................................................................... 31
3.2 Power Follower Strategy............................................................... 34
3.3 Merits and Demerits of Existing Strategies ................................. 37
Chapter 4. Proposed Strategy ............................................. 39
4.1 Overall Concept ............................................................................ 39
4.2 Semi Model Predictive Control .................................................... 42
vii
4.2.1 Variables and Objective ...................................................................... 42
4.2.2 Dynamic Programming ....................................................................... 45
4.2.3 Semi Model Predictive Control ........................................................... 47
4.3 Nonlinear Programming ............................................................... 52
4.3.1 Unconstrained Optimization ............................................................... 52
4.3.2 Equality Constraints............................................................................ 53
4.3.3 Inequality Constrains .......................................................................... 54
4.3.4 SQP (Sequential Quadratic Programming) .......................................... 54
4.3.5 Problem Reconstruction ...................................................................... 54
4.3.6 NLP Starting Point Selections ............................................................. 56
4.4 Future Path Plan ........................................................................... 59
4.4.1 Bus Route ........................................................................................... 59
4.4.2 Speed Prediction Algorithm ................................................................ 62
4.4.3 Wrong Speed Prediction Handling ...................................................... 63
4.5 Signal Manipulation ..................................................................... 66
4.5.1 Signal Synchronization ....................................................................... 66
4.5.2 Signal Bundling .................................................................................. 68
4.5.3 Signal Removing and Filling Up ......................................................... 70
4.5.4 Zero Speed Synchronization ............................................................... 73
4.6 Motor Torque Distribution in MCU ............................................. 74
4.6.1 Existing Strategy ................................................................................ 74
4.6.2 Strategy Concept ................................................................................ 74
4.6.3 Procedure ........................................................................................... 76
Chapter 5. Simulation Results ............................................ 82
viii
5.1 Engine Generating Power ............................................................. 82
5.2 Battery SoC (State of Charge) ...................................................... 88
5.3 Signal Manipulations .................................................................... 90
5.4 Optimal Torque Distribution ........................................................ 93
5.5 Mode Comparisons ..................................................................... 101
5.6 Fuel Economy Comparison ........................................................ 104
Chapter 6. Conclusions ..................................................... 106
Bibliography ...................................................................... 108
초 록 .......................................................................... 117
ix
List of Tables
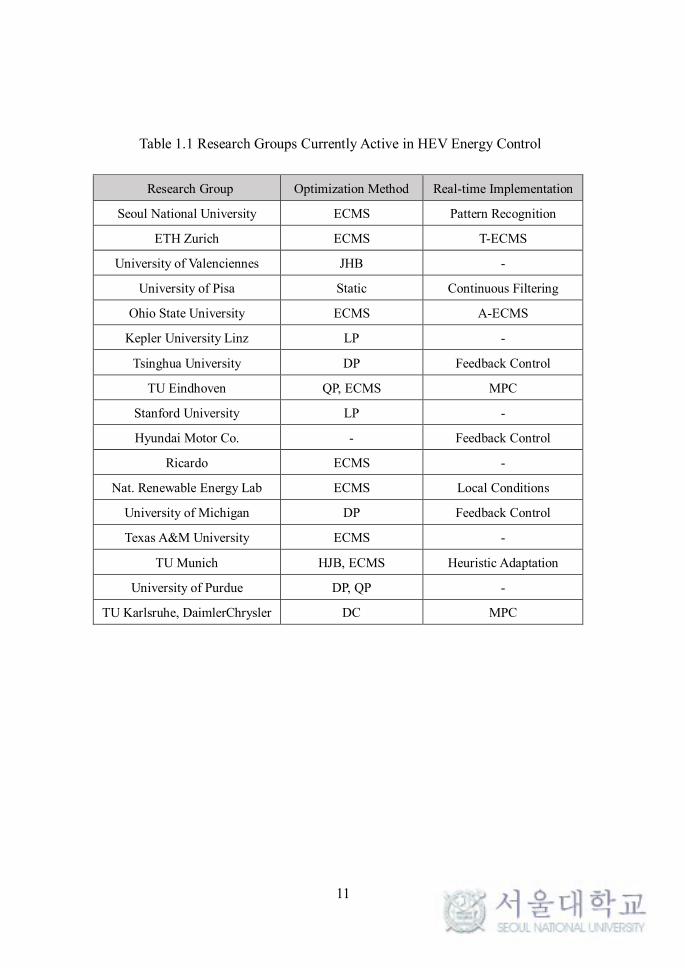
Table 1.1 Research Groups Currently Active in HEV Energy Control .............. 11
Table 2.1 Bus Specification ............................................................................. 27
x
List of Figures
Figure 1.1 Global Mean Land-ocean Temperature Change................................. 1
Figure 1.2 1997 Fuel Economy Statistics for Various US Models ...................... 5
Figure 1.3 ExxonMobil's Report about the Share of HEV - Main Increase of
HEVs Due to Government Policies ................................................... 6
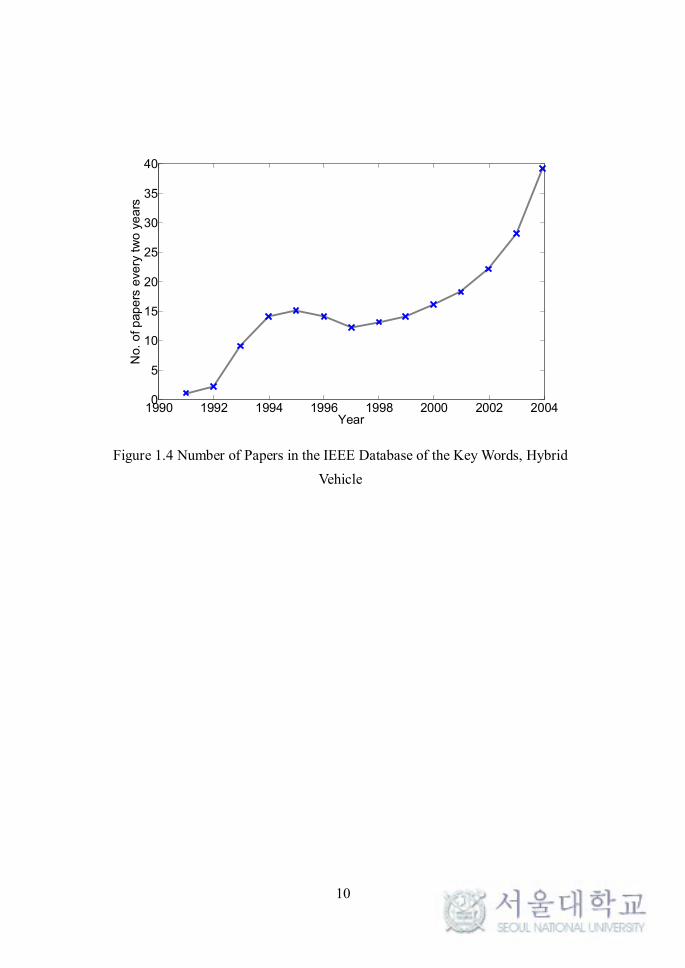
Figure 1.4 Number of Papers in the IEEE Database of the Key Words, Hybrid
Vehicle .......................................................................................... 10
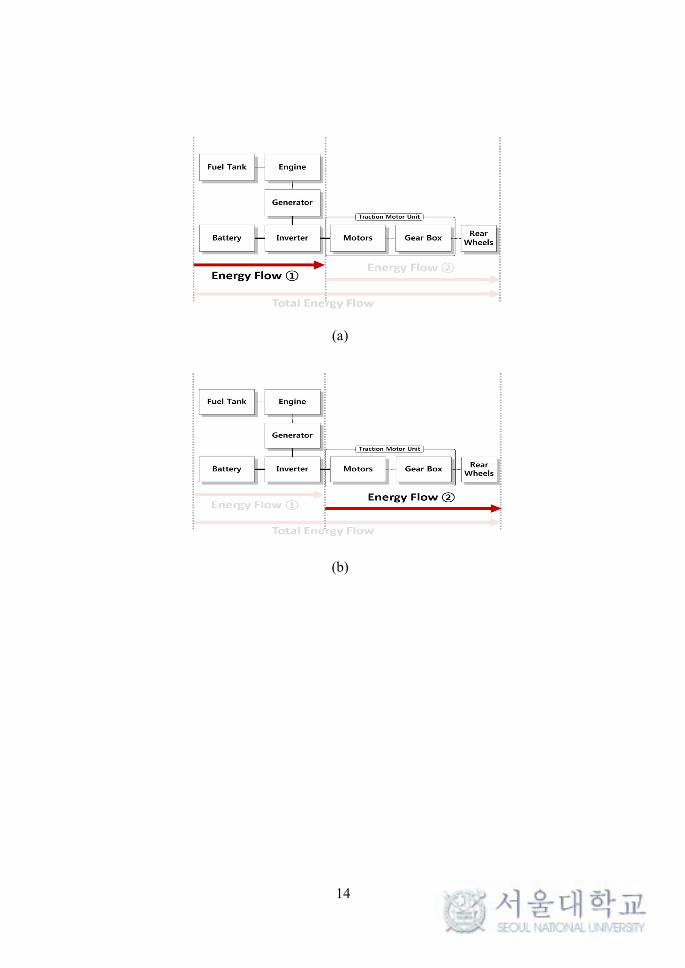
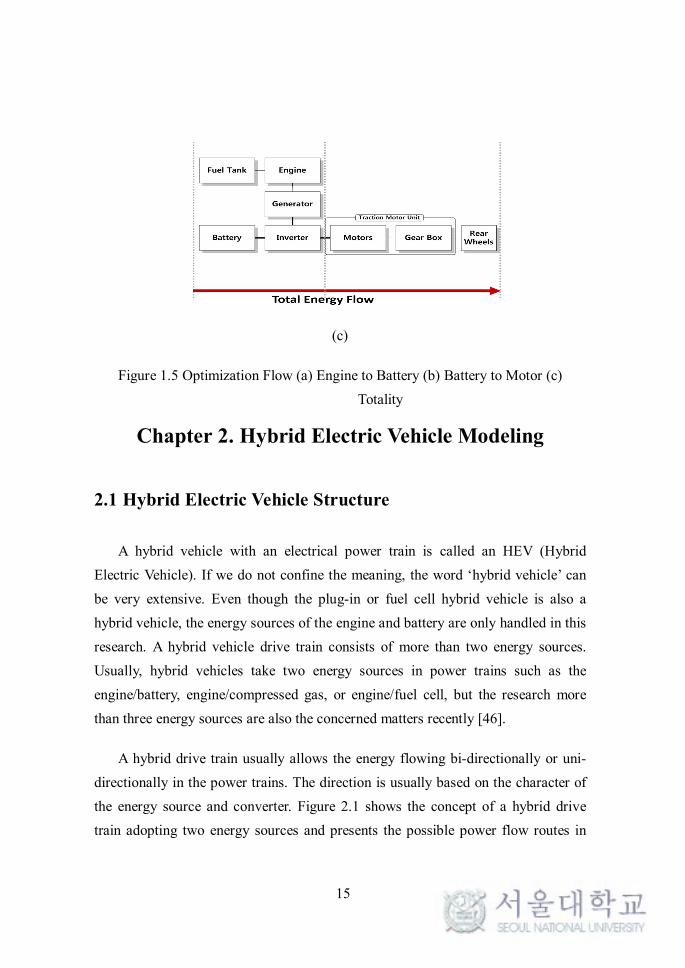
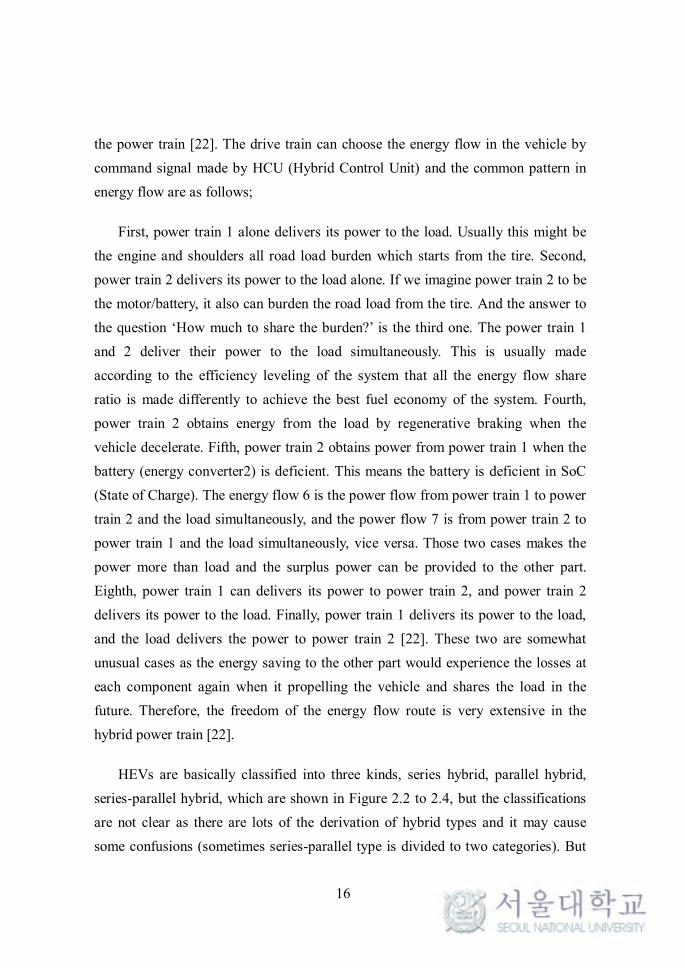
Figure 1.5 Optimization Flow (a) Engine to Battery (b) Battery to Motor (c)
Totality ......................................................................................... 15
Figure 2.1 HEV Powertrain Connection of Two Energy Sources...................... 19
Figure 2.2 Series Type Hybrid Electric Vehicle................................................ 20
Figure 2.3 Parallel Type Hybrid Electric Vehicle ............................................. 21
Figure 2.4 Series Parallel Type Hybrid Electric Vehicle ................................... 22
Figure 2.5 Simulation Model ........................................................................... 28
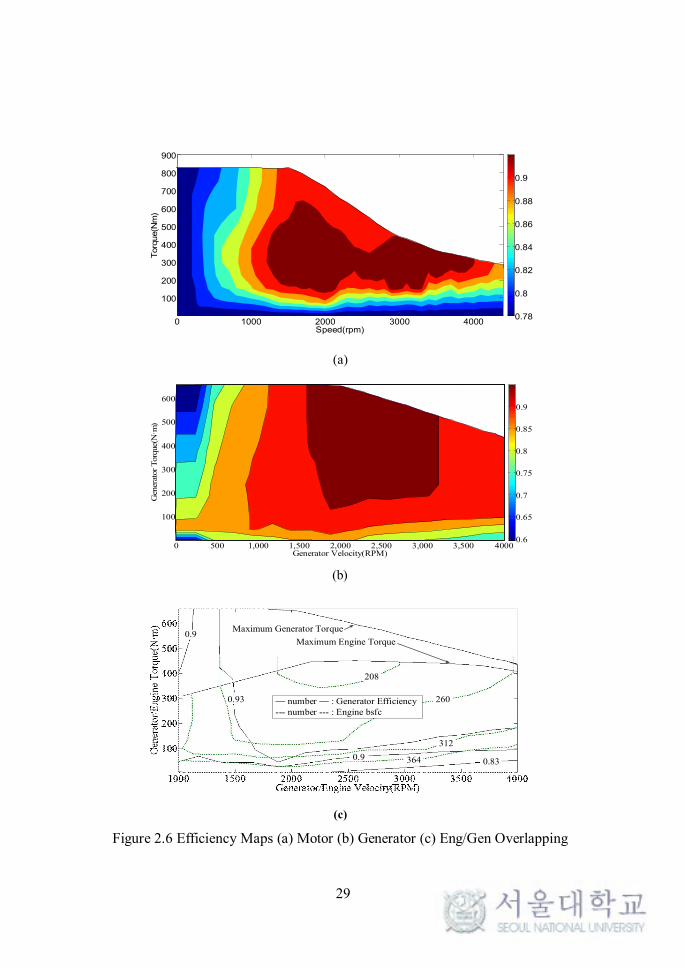
Figure 2.6 Efficiency Maps (a) Motor (b) Generator (c) Eng/Gen Overlapping 29
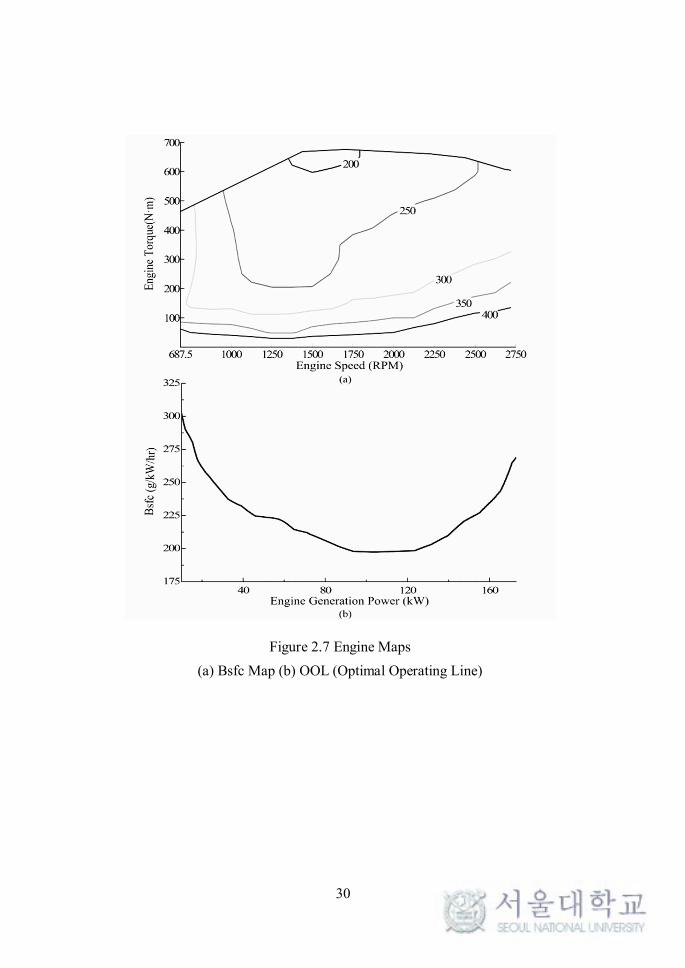
Figure 2.7 Engine Maps .................................................................................. 30
Figure 3.1 Typical Thermostat Strategy SOC Trajectory .................................. 33
xi
Figure 3.2 Power Follower Strategy Character ................................................ 36
Figure 3.3 Battery Thevenin’s equivalent circuit .............................................. 38
Figure 4.1 Algorithm Relationship .................................................................. 40
Figure 4.2 Backward Model to Forward Model Transplant .............................. 41
Figure 4.3 Power Flow Relations .................................................................... 44
Figure 4.4 R Matrix in DP ............................................................................... 47
Figure 4.5 MPC Framework Concept .............................................................. 50
Figure 4.6 Receding Horizon in MPC ............................................................. 51
Figure 4.7 Initial Point Selections by Battery Efficiency (a) Battery Efficiency
with the Required Power (b) Required Power at the Battery ........... 58
Figure 4.8 Intra-city Bus Route for Speed Prediction ....................................... 59
Figure 4.9 Bus Speed vs. Time ........................................................................ 61
Figure 4.10 Bus Speed vs. Distance................................................................. 61
Figure 4.11 Speed Prediction Algorithm .......................................................... 64
Figure 4.12 Speed Prediction Result ................................................................ 64
Figure 4.13 Wrong Speed Prediction Handling ................................................ 65
Figure 4.14 Speed Gap between Real Case and Prediction ............................... 67
Figure 4.15 Signal Pulling for the Synchronization .......................................... 67
xii
Figure 4.16 Signal Bundling ........................................................................... 69
Figure 4.17 Signal Removing (a) Useless Signal (b) Removed Useless Signal
....................................................................................................................... 71
Figure 4.18 Signal Filling Up (a) Command Signal Before Filling Up (b)
Command Signal After Filling Up............................................... 72
Figure 4.19 Conventional Traction Force Distribution ..................................... 77
Figure 4.20 Traction Force Summation ........................................................... 78
Figure 4.21 Motor Torque Distribution Process ............................................... 79
Figure 4.22 Torque Discretization ................................................................... 80
Figure 4.23 Torque Distribution Procedure ...................................................... 81
Figure 5.1 DP Control Input ............................................................................ 84
Figure 5.2 MPC Control Input ......................................................................... 84
Figure 5.3 DP and MPC Overlapping .............................................................. 85
Figure 5.4 Zoomed Comparisons of DP and MPC ........................................... 86
Figure 5.5 Wrong Prediction by Interference ................................................... 86
Figure 5.6 Thermostat Strategy and Power Follower Strategy Command Signal
....................................................................................................................... 89
Figure 5.7 Battery SOC Comparisons.............................................................. 89
Figure 5.8 DP Result of Control Input and Vehicle Speed ................................ 91
xiii
Figure 5.9 MPC Result of Control Input and Vehicle Speed ............................. 91
Figure 5.10 MPC Result of Control Input and Vehicle Speed after Signal
Manipulation ............................................................................. 92
Figure 5.11 SoC Comparison Including MPC after Signal Manipulation.......... 92
Figure 5.12 Best Distribution Map .................................................................. 94
Figure 5.13 Existing Total Traction Motor Efficiency Map .............................. 95
Figure 5.14 Proposed Total Traction Motor Efficiency Map............................. 96
Figure 5.15 Torque Distribution before/after Motor Power Difference ............. 98
Figure 5.16 Required Power before the Batter before/after Torque Distribution 99
Figure 5.17 Zooming the Required Power before the Batter before/after Torque
Distribution ............................................................................... 100
Figure 5.18 Traction Motor Torque................................................................ 102
Figure 5.19 Zoomed Traction Motor Torque .................................................. 102
Figure 5.20 Engine Mechanical Power of TH & PF ....................................... 103
Figure 5.21 Engine Mechanical Power of PF & MPC .................................... 103
Figure 5.22 Fuel Economy Comparison ........................................................ 105
xiv
Acronym
IPCC Intergovernmental Panel on Climate Change
US United States of America
ICE Internal Combustion Engine
HEV Hybrid Electric Vehicle
IEEE Institute of Electrical and Electronics Engineers
LP Linear Programming
DP Dynamic Programming
GA Genetic Algorithm
SDP Stochastic Dynamic Programming
NDP Neuro Dynamic Programming
PMP Pontryagin Minimum Principal
ECMS Equivalent Consumption Minimization
SHEV Series Hybrid Electric Vehicle
QP Quadratic Programming
MPC Model Predictive Control
xv
OOP Optimal Operating Point
OOL Optimal Operating Line
BSFC Brake Specific Fuel Consumption
BLDC Brushless DC
NiMH Nickel Metal Hydride
RPM Revolution Per Minute
Eng Engine
Gen Generator
SoC State of Charge
KKT Karush Kuhn Tucker
SQP Sequential Quadratic Programming
GPS Global Positioning System
NLP Nonlinear Programming
MCU Motor Control Unit
T-N Torque Rpm
TH Thermostat Strategy
PF Power Follower Strategy
xvi
DP1 Dynamic Programming
DP2 DP1 with Signal Manipulation and Optimal Torque Distribution
MPC1 Basic MPC
MPC2 MPC with Signal Manipulating
MPC3 MPC with Signal Manipulation and Optimal Torque Distribution
1
Chapter 1. Introduction
1.1 Motivation
Global warming means the average temperature increase at Earth's surface [4].
It is one of the most vigorously debated topics around the world as the future
climate change and related impacts would vary beyond human’s expectations. The
increase of the earth surface temperature makes the gas in the land and sea vaporize
into the air and accelerates the global warming gradually. And the heavy vapor
inclusion in the air causes the unwanted disaster [5].
Global warming effects include heat waves, ecosystem disturbing, forest fire,
heavy rainfall, flood, ocean acidification, heavy rain, species extinctions, and the
expansion of the droughts, so humans would be threatened by the food famine from
decreasing crop harvest by them [6, 7]. In fact, the biggest problem of global
warming is the sea level rise as the land for people living shrinks. It is mainly
caused by the glaciers to be melted which usually happens in Arctic [8, 9].
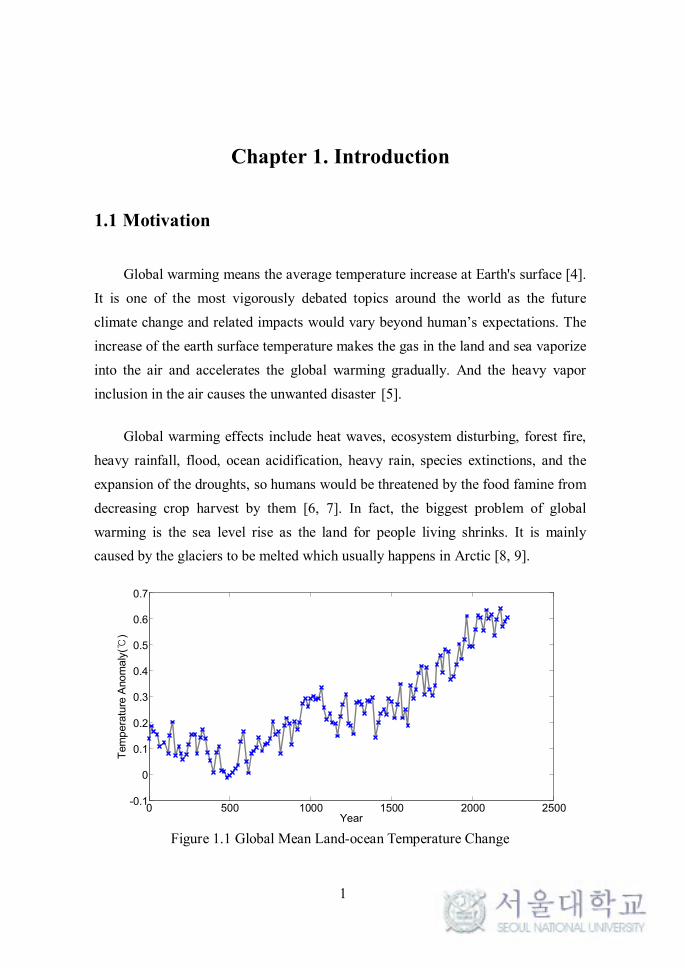
Figure 1.1 Global Mean Land-ocean Temperature Change
0 500 1000 1500 2000 2500-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Year
Tem
pe
ratu
re A
no
ma
ly(
)℃
2
Figure 1.1 presents the global mean land-ocean temperature change. The
increase is mainly caused by the temperature increase in the oceans and the increase
tendency becomes heavier as it gets recent [10]. Therefore, finding the reason for
the global warming and setting up the solution is very urgent and important
assignment for the present generations.
Recently, IPPC (Intergovernmental Panel on Climate Change) announced that
the scientists were certain that the cause of the global warming is greenhouse gases
such as vapor, carbon dioxide, methane produced by human activities and was
recognized by the national science academies in 2010. Assuring these findings in
2013, IPCC stated that one of the largest inducer of the global warming is carbon
dioxide emissions from fossil fuel combustion [11]. The report in 2013 states:
“Human influence has been detected in warming of the atmosphere and the ocean,
in changes in the global water cycle, in reductions in snow and ice, in global mean sea
level rise, and in changes in some climate extremes. This evidence for human influence
has grown since AR4. It is extremely likely (95-100%) that human influence has been
the dominant cause of the observed warming since the mid-20th century.”
in IPCC report [12]. Therefore, the endeavors to overcome the disasters caused by
global warming are essentially required and the effort for an automobile industry
took the form of vehicle fuel economy improvement.
A fuel economy refers to the fuel efficiency relationship between the distance
traveled and the amount of fuel consumed by the vehicle. Fuel consumption can be
expressed in terms of volume of fuel to travel a distance, or the distance travelled
per unit volume of fuel consumed. Since the fuel consumption of vehicles is a
significant factor in the air pollution, and since importation of vehicle fuel can be a
large part of a nation's foreign trade, many countries impose some constraints for
the fuel economy. As a result, the fuel economy in the automobile industry has
3
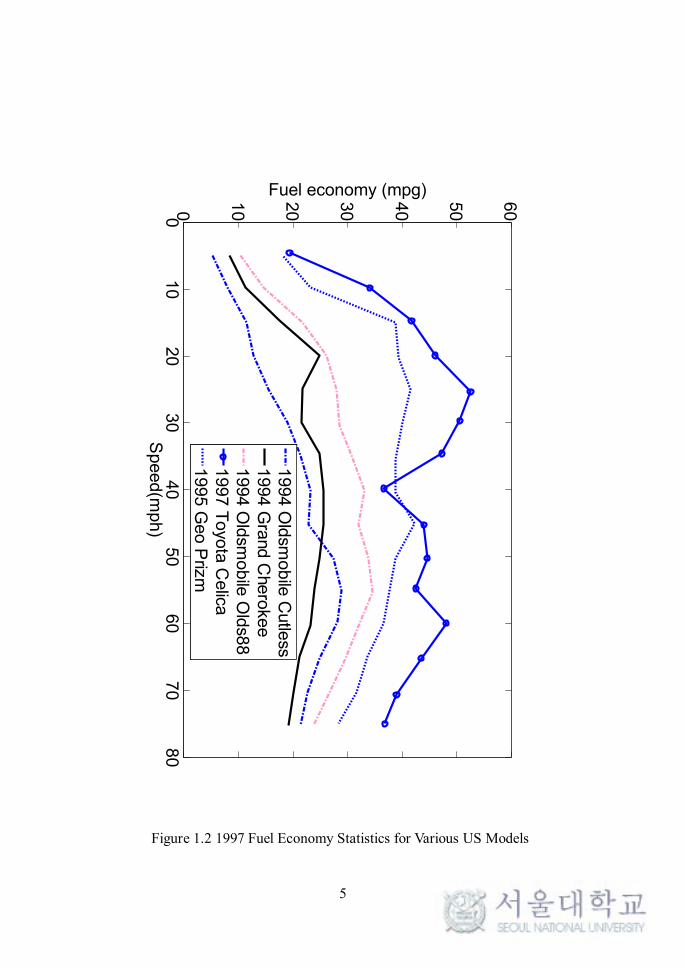
been improved year by year as in Figure 1.2, which shows the fuel economy
increase especially to a light duty vehicle in US from 1988 to 1997 [7].
The energy in fuel is required to overcome various losses such as wind
resistance, tire drag, road slope, and others in propelling the vehicle, and in
providing power to vehicle systems such as ignition, alternator generating, or air
conditioning. Thus, various measures can be taken to reduce losses at each of the
conversions between chemical energy of the fuel and kinetic energy in the vehicle.
One approach for the solution is to maintain a conventional vehicle configuration.
By making vehicles smaller, lighter, and more streamlined, the energy for
propelling the vehicle can be reduced, and thereby the fuel consumption would
decrease. The driver behavior also can affect the fuel economy; maneuvers such as
sudden acceleration and heavy braking waste energies much. Or the fuel reduction
can be obtained by improving the drive train component efficiencies; engine has
become the center of this research [13]. The working principle of internal
combustion engines has been the same for over a century, but, in the last two
decades, large improvements have been made in the efficiency with various
approaches, such as spark ignition and EGR reuse [14-16]. However, to meet the
more and more demand, radical solutions to lower fuel consumption is needed and
the totally different vehicle propulsion concepts are uttered called as the next
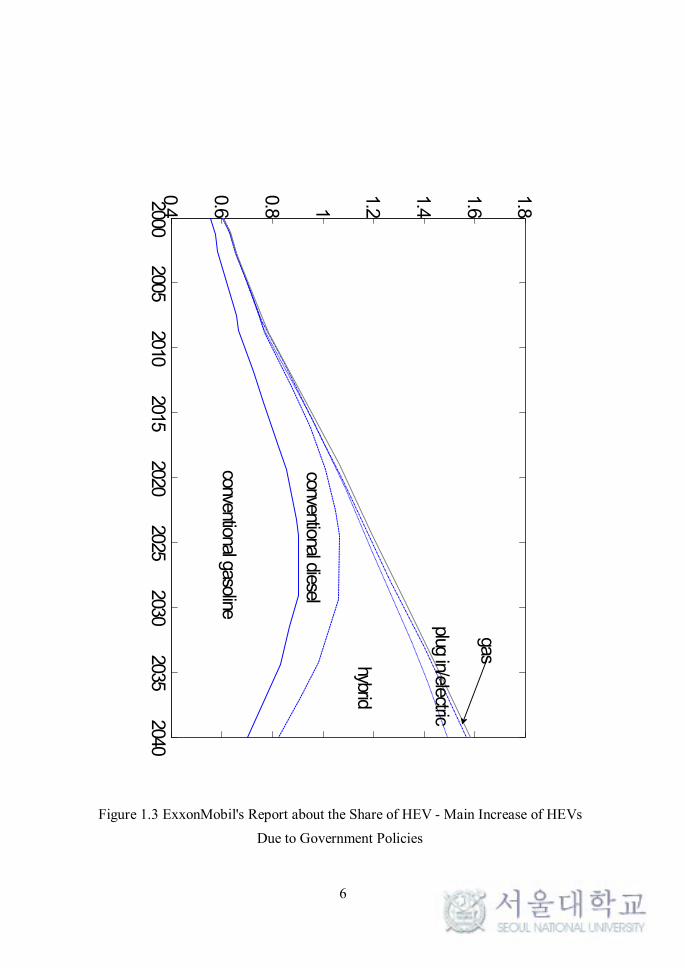
generation vehicles [17]. The government policies on fuel economy around the
world also have the same way of doing enlargement for the next generation
vehicles. Figure 1.3 shows ‘ExxonMobil’s 2012 Outlook for Energy’ [18].
Recent advances in combustion technologies and the use of alternative fuels
have resulted in reductions in emissions and helped to achieve higher fuel economy.
However, from the viewpoint of increased car usage, more powerful advances seem
to be essential. Although the electric vehicle has been suggested as a
counterproposal, the disadvantages of the limited range, increased vehicle weight
because of the battery and high battery cost limit their use in commercial
4
applications. Therefore, the hybrid electric vehicle which shows a short-term
approach improving fuel efficiency and reducing pollutant emissions of
automobiles has emerged as an alternative solution [19, 20].
There are many methodologies to achieve fuel economy increases or emission
reductions in hybrid vehicles. Among those methodologies, control strategy
research is one of the most important issues, as a hybrid vehicle strongly depends
on the supervisory control strategy, which influences each component of the
vehicle. Though the engine, generator, battery, motor and other components are
very powerful and effective, the resultant output performance without an
appropriate control strategy may be no more, or even less, than that of the internal
combustion engine [21].
5
Figure 1.2 1997 Fuel Economy Statistics for Various US Models
010
20
30
40
50
60
70
80
0
10
20
30
40
50
60
Speed(m
ph)
Fuel economy (mpg)
1994 O
ldsm
obile
Cutle
ss1994 G
rand C
hero
kee
1994 O
ldsm
obile
Old
s88
1997 T
oyo
ta C
elica
1995 G
eo P
rizm
6
Figure 1.3 ExxonMobil's Report about the Share of HEV - Main Increase of HEVs
Due to Government Policies
20002005
20102015
20202025
20302035
20400.4
0.6
0.8 1
1.2
1.4
1.6
1.8
hybrid
gas
plug in/electric
conventional diesel
conventional gasoline

7
1.2 Literature Review
Basically, HEV reduces the fuel consumption by the following principles. First,
HEV recovers the vehicle’s kinetic energy by the regeneration of motors. The
regeneration of motor usually happens when the vehicle tries to stop and it works as
an electric generator. While braking the motor regenerative brakes, the motor
regenerative kinetic energy is convert into the electric energy, and is usually saved
in the battery. Thus, the traction motor with an inverter becomes an energy
converter while the mechanical brakes in ICE vehicles convert the kinetic energy
into the thermal energy, which cannot be used again [22]. Second, an HEV can shut
down the engine when it is needed. That is usually called ‘Idle Stop and Go’. As the
engine efficiency usually is bad when the load (torque) of the engine is little that
during idling and low load operations, using the motor only and turning off the
engine becomes much efficient that HEV can avoid the low efficiency operating
points of the engine. Third, the load leveling is possible with HEV. Since the
electric motor can provide a part of the torque, the best distribution of the load at
each time in the engine and motor unit is available and the motor can reduce the
burden of the engine. As a result, HEV can be designed with a smaller displacement
that ‘Downsizing of the engine’ can be achievable and the operating efficiency
improvements of the engine are realized [20, 23].
The fuel economy of HEV deeply depends on the vehicle; vehicle structure,
driving cycle, hybridization degree, component performance, component sizing,
and parameter tuning that the output performance of HEV ranges much according
to the options. The number of papers published by IEEE from 1990 to 2004
containing the keywords “hybrid vehicle” shows the rapidly increased interests for
finding out a more efficient car of HEV as in Figure 1.4 [20]. However, the
efficiency improvement can be realized only with an elaborate control strategy that
optimizes the energy flow from the engine to the wheel via the motor and battery
within the vehicle [20, 24].
8
Among the HEV control strategies, two general trends are rule-based
strategies and optimization-based strategies. The rule based strategies are based on
heuristics, intuition, human expertise and even mathematical models without a
priori knowledge of a predefined driver cycle [25, 26]. Thermostat strategy, power
follower strategy and fuzzy rule-based strategy are the examples and their purpose
is load-leveling [27-30]. The limitation of heuristic control concepts is that the
various parameters depend strongly on the particular HEV system as well as on the
driving conditions. On the other hand, optimization-based strategies try to find a
global optimum using LP (Linear Programming), DP (Dynamic Programming), GA
(Genetic Algorithm), or etc. However, these strategies show the limit of non-
availability in the real-time environment [25, 26, 31, 32]. For example, DP is good
for the bench marks for the desirable references, however the strategy calculation
complexness and time deeply depend on the variable dimensions. If another energy
sources are included such as an ultra-capacitor, the calculation is almost impossible
as the calculation burden increases enormously. So, using SDP (Stochastic
Dynamic Programming), NDP (Neuro-Dynamic Programming), PMP (Pontryagin
Minimum Principal), or ECMS (Equivalent Consumption Minimization) was
suggested as a real-time solution [33-39]. However, even though the strategies
using the equivalent coefficient methodologies show the powerful performance,
handling the inequality constraint in the methodology and solving the problem
which cannot be analyzed analytically are so picky; or the equivalent coefficient
becomes so sensitive to the problem itself. Table 1 classifies publications in terms
of those optimal control techniques used around the world [20].
That is, these strategies still have some difficulties in their use, as it is not easy
to apply their mathematical backgrounds due to the complexity and size associated
with the controller required for the vehicle and still heavy calculation, which may
cause disability in the calculation or the harsh calculation time. Or, uncertainty
about future driving conditions is transferred to uncertainty on the optimal value of
the constant adjoint state approximation. So, in a real-time application, in spite of

9
fairly good, more complex, and sophisticated other strategies, the rule based
strategies, such as thermostat strategy or power follower strategy, have been still
realistic and powerful in series type hybrid electric vehicle [25, 40-43]. Or,
combinations of them are also considered for the better performance [1-3].
Nowadays, MPC (Model Predictive Control) which is applicable to real-time
model is introduced in the hybrid energy distribution. Usually, it requires an object
function of linear or nonlinear model and solver, where QP (Quadratic
Programming) or DP (Dynamic Programming) can be used. The hybrid model in
MPC can be applied for not only the linearized simple one but also the complex
nonlinear model. And, as of the real-time capability, both of the backward and the
forward hybrid vehicle models can be used. However, there are some demerits that
the initial points (using QP) dominates the result quality and the calculation burden
(using DP) is so heavy. Furthermore, as it requires the boundary conditions, the
speed information was surely required. Thus, in most cases, the speed was given
ideally and receding horizons for the every joint expectation was used, but it was
not true online energy distribution strategy [44, 45].
Therefore, if it is possible to overcome these weakness with more clear
standards of the energy distribution, better energy management strategy applicable
to the HEV system can be achievable: the real-time availability, calculation
exactness, and speedy calculation.
10
Figure 1.4 Number of Papers in the IEEE Database of the Key Words, Hybrid
Vehicle
1990 1992 1994 1996 1998 2000 2002 20040
5
10
15
20
25
30
35
40
Year
No.
of p
ap
ers
eve
ry t
wo
ye
ars
11
Table 1.1 Research Groups Currently Active in HEV Energy Control
Research Group Optimization Method Real-time Implementation
Seoul National University ECMS Pattern Recognition
ETH Zurich ECMS T-ECMS
University of Valenciennes JHB -
University of Pisa Static Continuous Filtering
Ohio State University ECMS A-ECMS
Kepler University Linz LP -
Tsinghua University DP Feedback Control
TU Eindhoven QP, ECMS MPC
Stanford University LP -
Hyundai Motor Co. - Feedback Control
Ricardo ECMS -
Nat. Renewable Energy Lab ECMS Local Conditions
University of Michigan DP Feedback Control
Texas A&M University ECMS -
TU Munich HJB, ECMS Heuristic Adaptation
University of Purdue DP, QP -
TU Karlsruhe, DaimlerChrysler DC MPC
12
1.3 Objectives
In this study, the optimal energy distribution strategy of series hybrid electric
bus was suggested. The strategy is unique, and especially suited for the series type
hybrid electric bus. The detailed objectives of this study are:
1. Developing the torque distribution strategy at the traction motor unit
2. Developing the energy distribution strategy from the engine to the battery
that the entire optimization of SHEV would be realized.
A number of strategies for power management of HEV were proposed in the
literature before to achieve optimality while keeping the realistic and practical
concept and this research shows a novel strategy for that. First, the control
technique which has semi-MPC structure is described from mathematical
viewpoints, which shows that the instantaneous optimal control with speedy
convergence that the battery and engine usages can be close to an optimal solution
of DP. In the strategy, NLP is used for the objective function optimization. And the
speed prediction of future path plan was used for the load and boundary condition
decision with a real bus data. Furthermore, additional techniques such as signal
removing, flattening, fill up, and synchronizing with zero vehicle speed was also
used for the performance improvement. Second, the traction motor unit torque
distribution which is uniquely needed for the dual traction motors were considered
for the fuel economy improvement. The performance of the hybrid vehicle using
the proposed control algorithm is evaluated by comparison the proposed strategy to
global optimal control algorithm based on DP and other baseline rule based
strategies such as thermostat strategy and power follower strategy.
13
1.4 Contributions
The contribution of this research is, first, the full optimization of SHEV was
achieved from the engine to the motor as in Figure 1.5(c). In the previous SHEV
optimal energy distribution researches, the energy flow optimization was achieved
just in ‘Energy Flow ①’ such that even though there is another chance which can
be added to improve the performance of SHEV, the optimization was just a half.
Because the performance achieved in other competitive hybrid types were with the
total powertrain components that the performance comparison with the half
optimization SHEV was unfair. So, this research shows the best availability of
series type hybrid electric vehicle, especially for dual traction motor mount. The
second contribution of this research is the proposed strategy is uniquely applicable
powerful strategy for the series type hybrid electric intra-buses. This character
comes from the independent operation between engine/generator unit and motor
unit. Thus, the signal manipulation and torque distribution also become possible.
The third contribution is this research gives the far precise answer of ‘How much to
generate?’ and “When to generate?” at once which were recognized as the
weaknesses of the existing rule based strategies. And final contribution is this
strategy uses NLP for the realistic forward model first and find a global sub-
optimum.
To conclude, this strategy suggest a fuel usage reduction methodology for the
intra-city bus. It is very worthy as its character is unique, clear, efficient, and
practical that solves the nonlinear SHEV energy management problem.
14
(a)
(b)
15
(c)
Figure 1.5 Optimization Flow (a) Engine to Battery (b) Battery to Motor (c)
Totality
Chapter 2. Hybrid Electric Vehicle Modeling
2.1 Hybrid Electric Vehicle Structure
A hybrid vehicle with an electrical power train is called an HEV (Hybrid
Electric Vehicle). If we do not confine the meaning, the word ‘hybrid vehicle’ can
be very extensive. Even though the plug-in or fuel cell hybrid vehicle is also a
hybrid vehicle, the energy sources of the engine and battery are only handled in this
research. A hybrid vehicle drive train consists of more than two energy sources.
Usually, hybrid vehicles take two energy sources in power trains such as the
engine/battery, engine/compressed gas, or engine/fuel cell, but the research more
than three energy sources are also the concerned matters recently [46].
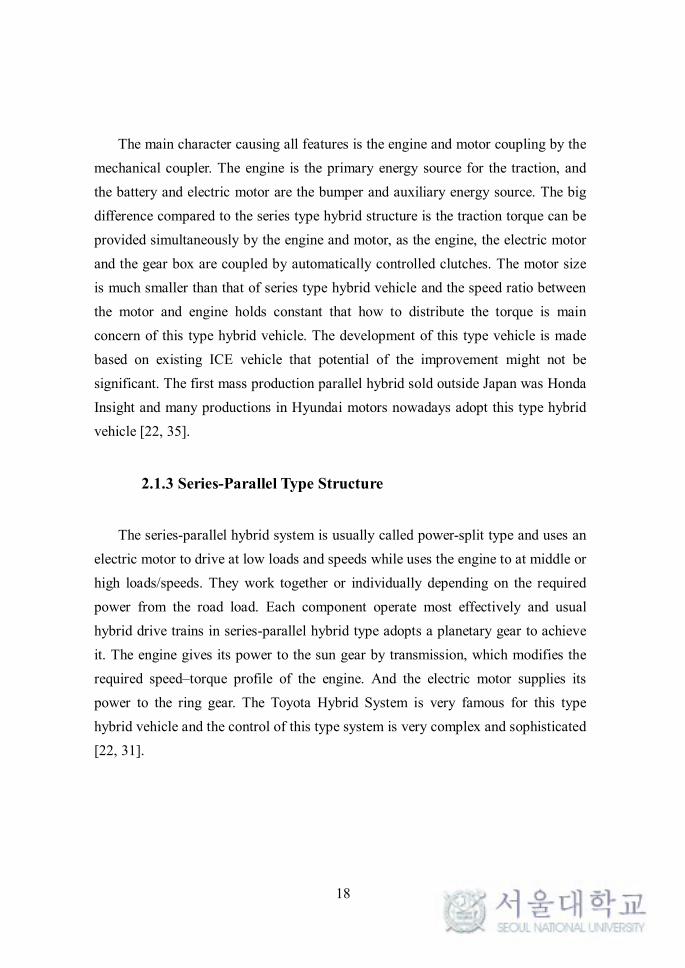
A hybrid drive train usually allows the energy flowing bi-directionally or uni-
directionally in the power trains. The direction is usually based on the character of
the energy source and converter. Figure 2.1 shows the concept of a hybrid drive
train adopting two energy sources and presents the possible power flow routes in
16
the power train [22]. The drive train can choose the energy flow in the vehicle by
command signal made by HCU (Hybrid Control Unit) and the common pattern in
energy flow are as follows;
First, power train 1 alone delivers its power to the load. Usually this might be
the engine and shoulders all road load burden which starts from the tire. Second,
power train 2 delivers its power to the load alone. If we imagine power train 2 to be
the motor/battery, it also can burden the road load from the tire. And the answer to
the question ‘How much to share the burden?’ is the third one. The power train 1
and 2 deliver their power to the load simultaneously. This is usually made
according to the efficiency leveling of the system that all the energy flow share
ratio is made differently to achieve the best fuel economy of the system. Fourth,
power train 2 obtains energy from the load by regenerative braking when the
vehicle decelerate. Fifth, power train 2 obtains power from power train 1 when the
battery (energy converter2) is deficient. This means the battery is deficient in SoC
(State of Charge). The energy flow 6 is the power flow from power train 1 to power
train 2 and the load simultaneously, and the power flow 7 is from power train 2 to
power train 1 and the load simultaneously, vice versa. Those two cases makes the
power more than load and the surplus power can be provided to the other part.
Eighth, power train 1 can delivers its power to power train 2, and power train 2
delivers its power to the load. Finally, power train 1 delivers its power to the load,
and the load delivers the power to power train 2 [22]. These two are somewhat
unusual cases as the energy saving to the other part would experience the losses at
each component again when it propelling the vehicle and shares the load in the
future. Therefore, the freedom of the energy flow route is very extensive in the
hybrid power train [22].
HEVs are basically classified into three kinds, series hybrid, parallel hybrid,
series-parallel hybrid, which are shown in Figure 2.2 to 2.4, but the classifications
are not clear as there are lots of the derivation of hybrid types and it may cause
some confusions (sometimes series-parallel type is divided to two categories). But
17
the clear one is there are two kinds of energy flows in the drive train, mechanical
and electrical power flows [22].
Among those hybrid types, SHEV (Series Hybrid Electric Vehicle) was chosen
as a research target in this research as the outstanding performance of SHEV intra-
city bus was proven in other researches but has still has some possibility of
performance improvements [47, 48]. However, the structures of other types are also
introduced in this Chapter for a better understanding. Each configuration would be
introduced with simple schematics, and the characteristic of each configuration will
be discussed briefly [49].
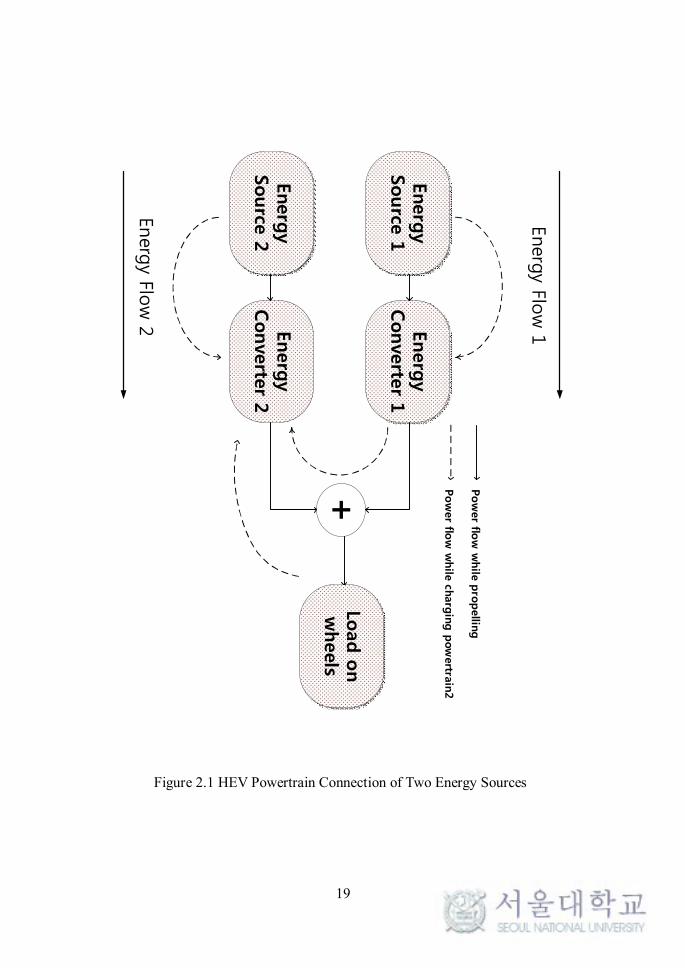
2.1.1 Series Type Structure
This type hybrid vehicle has two different electrical power trains. The first one
is the generator coupled with the engine and used for the power generation to the
battery, of single power direction. And the other is traction motor used for the
vehicle traction. The simultaneous vehicle traction is not considered in this
structure and the regeneration of the energy is very large as the capacity of the
traction motor is the biggest among the hybrid types. So, it is similar to the electric
vehicle. The engine, and the generator constitute the primary energy sources that
the battery functions as an energy bumper. The configuration of the series hybrid
system is unique as the engine operation is independently connected to the
operation of the traction motor, so electric motor produces all propulsion force
without any interferences of the engine/generator unit. Thus, optimal operation
engine is very easy compared to the other type hybrid vehicle. But, each component
capacity becomes very large and, as the energy conversion might happens in the
power train often, managing the energy flow is very important [22, 34, 43].
2.1.2 Parallel Type Structure
18
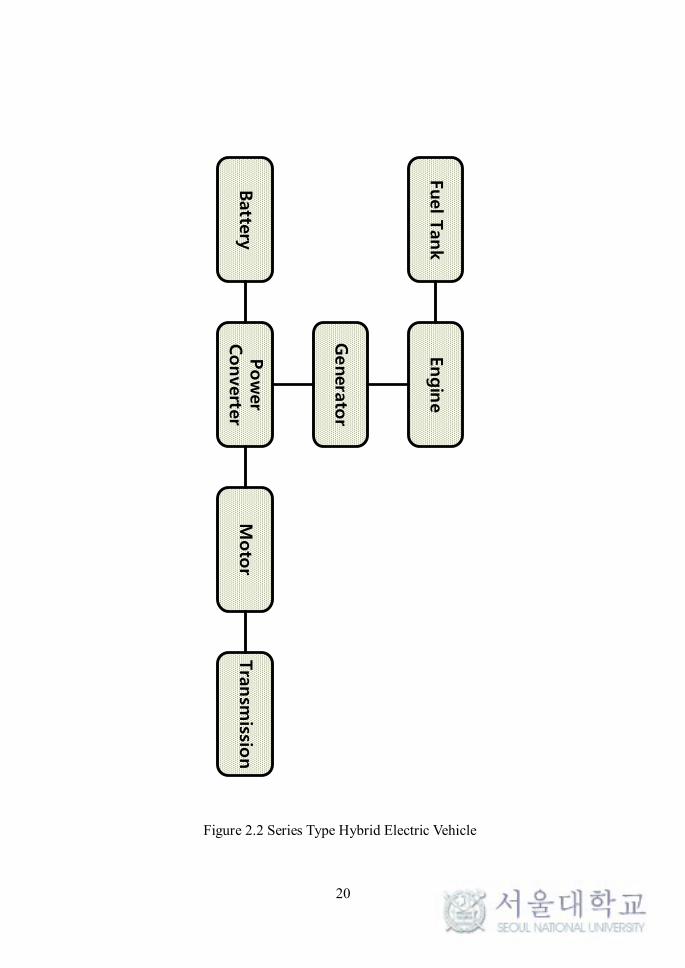
The main character causing all features is the engine and motor coupling by the
mechanical coupler. The engine is the primary energy source for the traction, and
the battery and electric motor are the bumper and auxiliary energy source. The big
difference compared to the series type hybrid structure is the traction torque can be
provided simultaneously by the engine and motor, as the engine, the electric motor
and the gear box are coupled by automatically controlled clutches. The motor size
is much smaller than that of series type hybrid vehicle and the speed ratio between
the motor and engine holds constant that how to distribute the torque is main
concern of this type hybrid vehicle. The development of this type vehicle is made
based on existing ICE vehicle that potential of the improvement might not be
significant. The first mass production parallel hybrid sold outside Japan was Honda
Insight and many productions in Hyundai motors nowadays adopt this type hybrid
vehicle [22, 35].
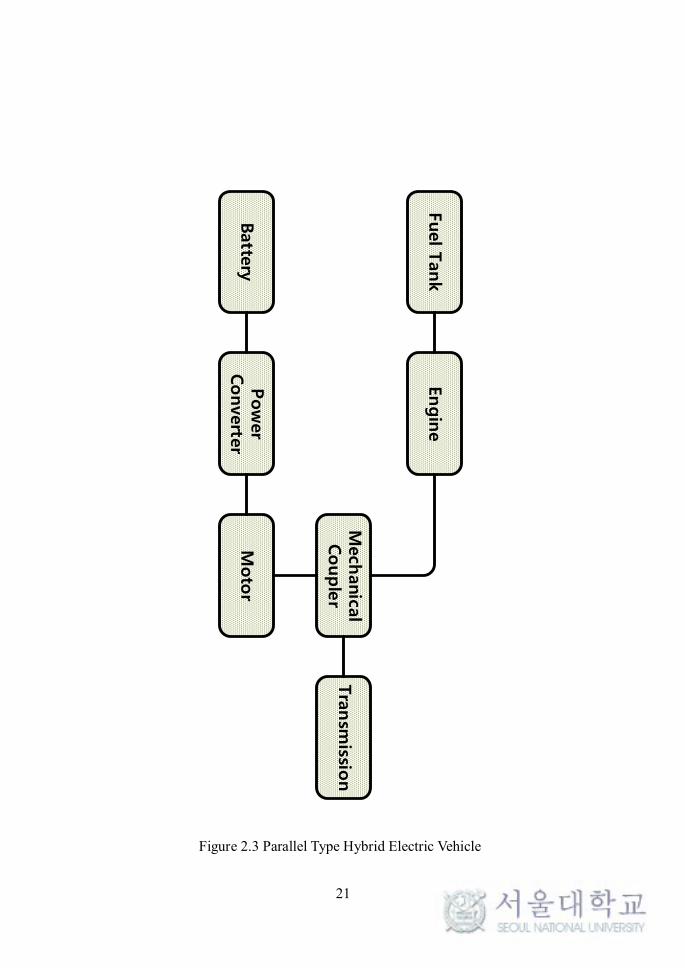
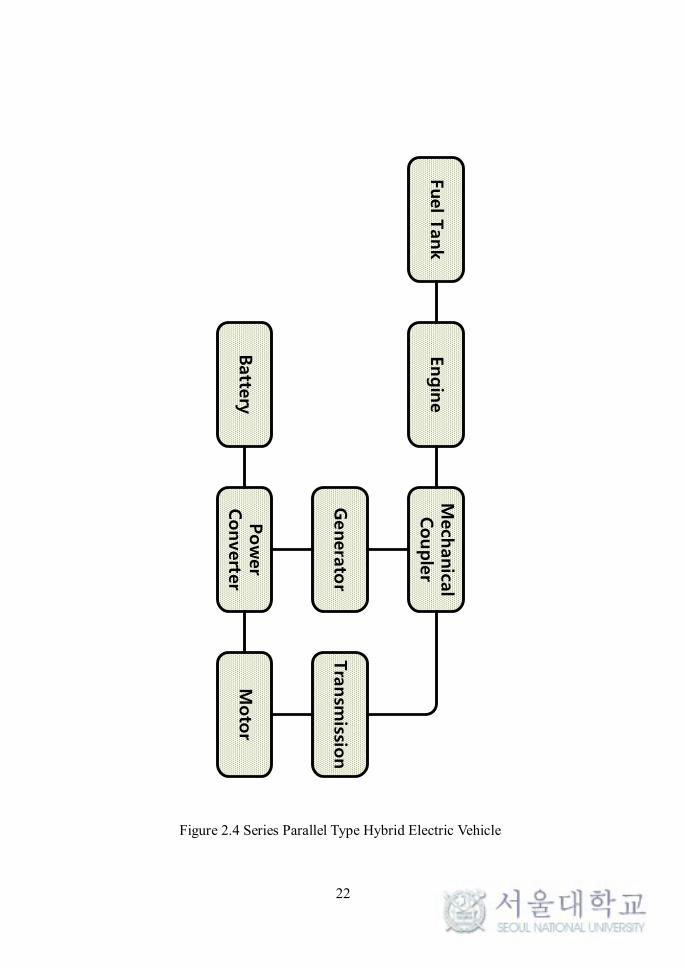
2.1.3 Series-Parallel Type Structure
The series-parallel hybrid system is usually called power-split type and uses an
electric motor to drive at low loads and speeds while uses the engine to at middle or
high loads/speeds. They work together or individually depending on the required
power from the road load. Each component operate most effectively and usual
hybrid drive trains in series-parallel hybrid type adopts a planetary gear to achieve
it. The engine gives its power to the sun gear by transmission, which modifies the
required speed–torque profile of the engine. And the electric motor supplies its
power to the ring gear. The Toyota Hybrid System is very famous for this type
hybrid vehicle and the control of this type system is very complex and sophisticated
[22, 31].
19
Energ
y
Source
1Energ
y
Converte
r 1
Energ
y
Source
2Energ
y
Converte
r 2
+ Pow
er flo
w w
hile
pro
pellin
g
Pow
er flo
w w
hile
charg
ing p
ow
ertra
in2
Load o
n
wheels
Energ
y F
low
1
Energ
y F
low
2
Figure 2.1 HEV Powertrain Connection of Two Energy Sources
20
Fuel T
ank
Engin
e
Genera
tor
Pow
er
Converte
rBatte
ryM
oto
rTra
nsm
ission
Figure 2.2 Series Type Hybrid Electric Vehicle
21
Fuel T
ank
Engin
e
Tra
nsm
ission
Pow
er
Converte
rBatte
ryM
oto
r
Mechanic
al
Couple
r
Figure 2.3 Parallel Type Hybrid Electric Vehicle
22
Fuel T
ank
Engin
e
Tra
nsm
ission
Pow
er
Converte
rBatte
ryM
oto
r
Mech
anica
l Couple
r
Genera
tor
Figure 2.4 Series Parallel Type Hybrid Electric Vehicle
23
2.2 Powertrain Modeling
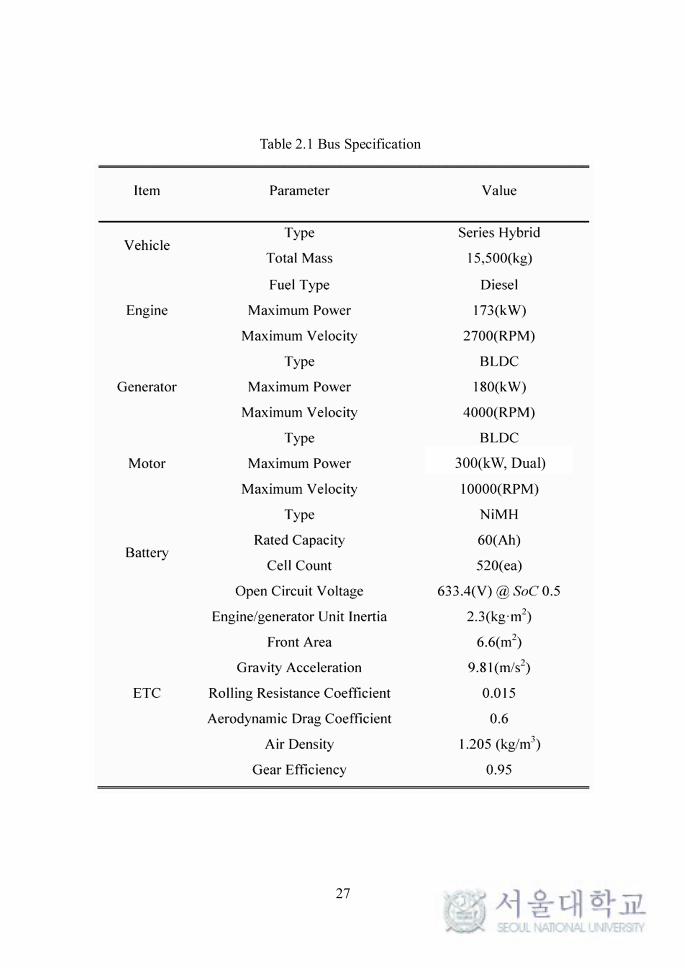
Table 2.1 shows the specifications for a series type hybrid bus. The bus is an
intra-city bus for the Seoul city transit system and uses dual motors as a traction
motor. The powers of the engine, generator and motor are 173 kW, 180 kW and 300
kW (Dual), respectively. The slop of the road, the wind velocity and the moment of
inertia for the traction motor was ignored, as the rotational inertia of the motor is
negligible in comparison to the inertia of the vehicle [50].
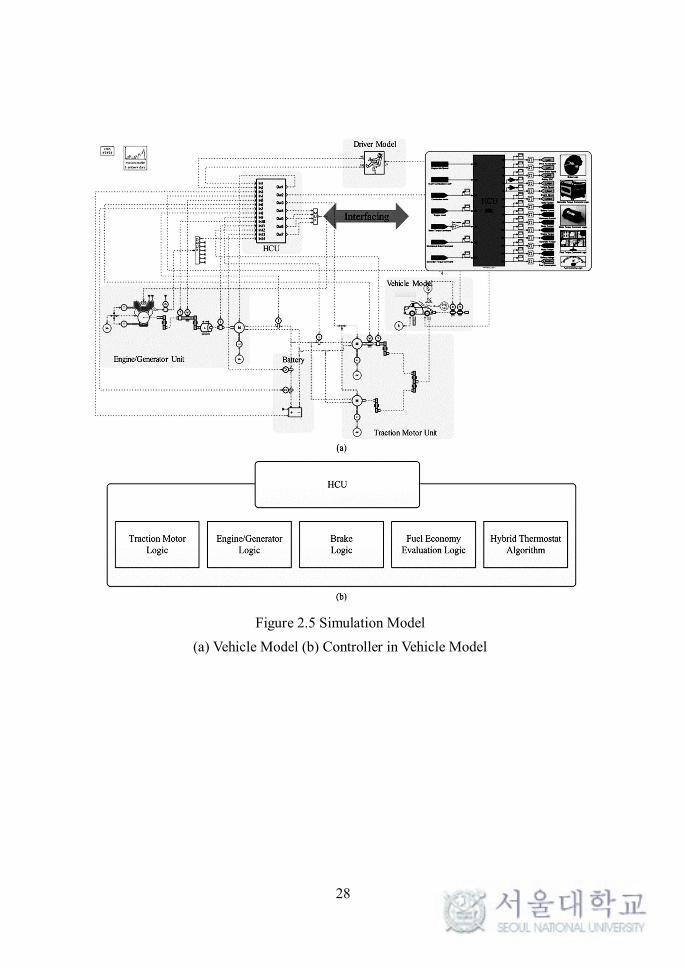
In this research, the hybrid electric bus was developed with a forward
simulation model. The bus model was developed in AMESim which considers the
inertia of the system with control logic in Simulink. Figure 2.5 shows the
simulation model for this research. It consists of the engine/generator unit, the
battery, the vehicle model, the driver model, HCU (Hybrid Control Unit), the gears
between the components, and dual traction motors where inverter effect is included
in the motor efficiency map. Basically, the battery model receives electrical energy
from the engine/generator unit and transfers it to the dual traction motors. And dual
traction motor torque is enlarged with reduction gears, so the summation gear
gathers both torques at once and transfers it to the wheels. In the end, the traction
motor torque is transferred to the vehicle model where the road load is calculated
and the acceleration overcoming it is made with the control of the driver model.
HCU interfaces with Simulink and includes the traction motor logic, the
engine/generator torque logic, the brake logic, the fuel economy evaluation, and the
hybrid control algorithm.
The basic equations in the modeling are defined below [47, 48, 51-58]. The
output engine power eP is expressed by:
( , )
e e e e
e e e f
P Load w
w P
t
h t
= ´ ´
= ´ (2.1)

24
where the engine load eLoad refers to how much torque at a certain velocity is
required compared to the maximum torque that could be used. The maximum
engine torque et is obtained from the table data given by the experiment. The
variable ew is the rotating velocity of the engine, and eh is the combustion
efficiency. The variable fP is the fuel power available at the point ( , )e ewt . The
generator power gP is expressed as:
( , )g e g e e bus gP P w V Ih t= ´ = ´ (2.2)
where gh ,
busV and gI are the generator efficiency, the bus voltage and the
generator current, respectively. The total fuel consumption totalfc of the engine is:
0
ft
total e efc bsfc dtt w= ´ ´ò (2.3)
where ft is final time for the simulation and bsfc means brake specific fuel
consumption [59]. Therefore, the engine torque and speed are decided from load
and control signals, and fuel consumption is calculated from bsfc map. Then, (2.3)
integrate the fuel consumption during the simulation and the fuel economy is
evaluated from the distance to the total fuel consumption ratio where the diesel
density, 0.84 km/l (standard diesel), is used [55]. The motor and the generator use
the efficiency map as in Fig. 2.6, and the motor output torque mT was calculated
from:
1
1m l
r
T Tt s
=+
(2.4)
using a first order lag rt where
lT is the limited torque from the motor limitation
[60]. The mechanical power developed by the motor mP is:
m m mP T w= ´ (2.5)

25
where mw is the motor rotational velocity. The same analysis method was applied
to the generator modeling. The battery model for this simulation was developed
according to the internal resistance model equations:
bbus oc b i
b
PV E I R
I= = - ´ (2.6)
2b oc b b iP E I I R= ´ - ´ (2.7)
2 4
2
oc oc i bb
i
E E R PI
R
- -= (2.8)
0
t
bI dt
SoCQ
-
D =ò (2.9)
where bP,
bI , ocE ,
iR , SoCD , and Q are the battery power, the battery current,
the open circuit voltage, the battery internal resistance, the variation of state of
charge and the total battery capacity where ocE comes from the 520 open cell
voltages.
The gear matching between the engine and the generator was considered for
the combined system efficiency. Without a well-constructed gear matching, the
system efficiency becomes worse [33, 39, 51, 61-67]. So, the gear ratio between the
engine and the generator made the engine OOP (Optimal Operating Point) matches
the best efficient region of the generator in this research. However, other operating
points of the engine are also in the very efficient region as the generator has a large
high efficiency region (over 0.9). Thus the effect of engine bsfc map becomes more
dominant than that of the generator efficiency map. Figure 2.6(c) shows engine bsfc
map overlapping generator efficiency map with the gear ratio 1.5, where the

26
numbers between the lines show engine bsfc and the numbers between the dot-lines
show the generator efficiency. The circle points are sample power follower
operating points and the cross points are sample hybrid thermostat operating points
which would be explained in the next Chapter. As mentioned above, almost all
points are in the high efficiency region of the generator, so the efficiency of the
system is directly influenced by the engine efficiency, bsfc map.
27
Table 2.1 Bus Specification
300(kW, Dual)
28
Figure 2.5 Simulation Model
(a) Vehicle Model (b) Controller in Vehicle Model
29
(a)
(b)
Maximum Generator Torque
Maximum Engine Torque
260
208
312
364
0.93
0.9
0.9 0.83
― number ― : Generator Efficiency --- number --- : Engine bsfc
(c)
Figure 2.6 Efficiency Maps (a) Motor (b) Generator (c) Eng/Gen Overlapping
Speed(rpm)
Torq
ue(N
m)
0 1000 2000 3000 4000
100
200
300
400
500
600
700
800
900
0.78
0.8
0.82
0.84
0.86
0.88
0.9
0 500 1,000 1,500 2,000 2,500 3,000 3,500 4000
100
200
300
400
500
600
Generator Velocity(RPM)
Gen
erat
or
Torq
ue(N
·m)
0.6
0.65
0.7
0.75
0.8
0.85
0.9
30
Figure 2.7 Engine Maps
(a) Bsfc Map (b) OOL (Optimal Operating Line)
31
Chapter 3. Existing Strategies
This Chapter shows the conventional strategies which were often used to
evaluate series type hybrid electric vehicle system fuel economy. As of the simple
structure, even though lots of other strategies were suggested at the case of parallel
hybrid or parallel-series hybrid, in the case of series type hybrid vehicle, theses rule
based strategies are often used as a baseline strategies. Furthermore, the recent
studies still upbuild these strategies for a better performance.
3.1 Thermostat Strategy
Thermostat strategy is a rule based on/off strategy that considers the SoC (state
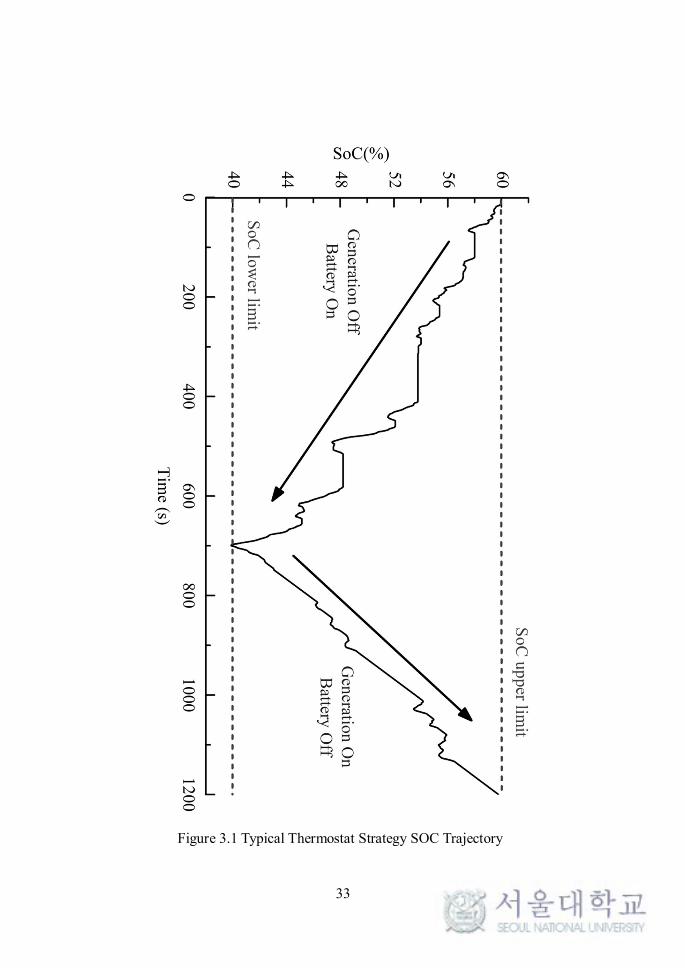
of charge) limitation of the battery. Fig. 3.1 shows the typical trend observed when
using this strategy. The strategy turns on the engine/generator unit when the battery
SoC approaches the lower limit, and turns off the engine when the battery SoC
approaches the upper limit, where the upper and lower boundaries are selected
based on the internal resistance of the battery. Because this strategy uses an
engine/generator unit at the OOP, the operating efficiency of the engine is very high
[34, 47, 68].
Equation (3.1) shows the turn on/off criteria for the thermostat strategy. The
engine/generator unit power command is computed in (3.2) and (3.3) [25, 26, 64,
69, 70]:

32
( )0
( ) ( ) 0
( )1
( ) ( ) 1
U
L EG
EG
L
U EG
SoC t SoCif
SoC t SoC and S tS
SoC t SoCif
SoC t SoC and S t
-
- -
-
- -
é ì ³ïê í
> =ïê î= ê
ì £ïêíê < =ïîë
(3.1)
0 ( )
( ) ( ) ( ) ( )
( ) ( )
L
B R E L U
R U
if SoC t SoC
P t P t P t if SoC SoC t SoC
P t if SoC t SoC
<éê
= - £ £êê ³ë
(3.2)
0 ( ) 0( )
( ) 1
EG
E
bb EG
if S tP t
P if S t
=é= ê =ë
(3.3)
In the above equations, BP , EP , RP and bbP are the engine generating
power, the battery power burden for the motor traction, the required power and the
generation power at the OOP, respectively. The variables t- , EGS , SoCU and
SoCL are the time just before the on/off cycling, the engine on/off selection ( ES of 1
means engine-on and 0 means engine-off ) in the simulation, the SoC upper limit
and the SoC lower limit, respectively.
Thermostat strategy usually maximizes the efficiency of the engine operation.
However, when the engine is off, the only power source is the battery, so the burden
on the battery becomes very heavy due to the high resistive losses. But as of simple
concept with high efficiency this strategy is widely used in SHEV.
33
Figure 3.1 Typical Thermostat Strategy SOC Trajectory

34
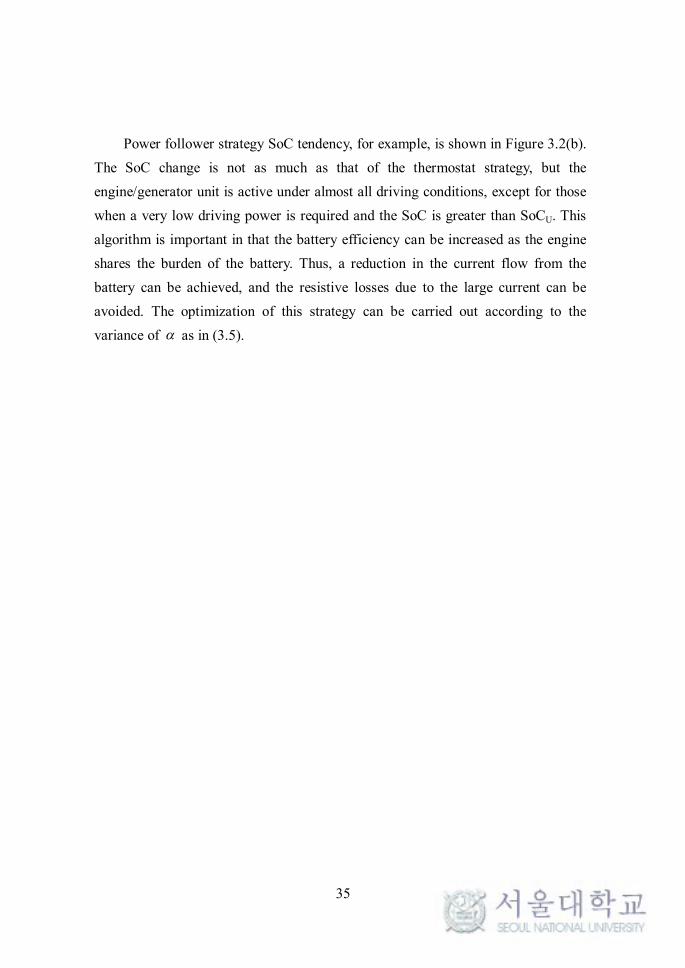
3.2 Power Follower Strategy
Power follower strategy appoints the engine/generator unit as the main power
source, and the controller adjusts the output power to follow the power requirement
of the vehicle. The control logic of power follower strategy is based on the map in
Figure 3.2(a) with the corresponding power output determined by (3.4) to (3.6).
EP a , ,E MinP , ,E MaxP and ,B MaxP are the base of the engine power, which considers the
battery SoC (a is the design variable for the control optimization); the minimum
available engine power; the maximum available engine power; and the maximum
available battery supply power, respectively. In Figure 3.2(a), there are four
operation modes for the engine/generator set by EP . If the current SoC is greater
than the target SoC, the power generated is smaller than the required power and the
battery is discharged. When the current SoC is lower than the target SoC, more
power is generated than required and the battery can recharge. The gray area in Fig.
3.2(a) prevents frequent on/off cycling of the engine and the engine operates around
the OOL (Optimal Operating Line) [34-36]:
, ,
, ,
, ,
0 ( ) 0
( ) 1 ( )( )
( ) ( ) 1 ( )
( ) 1 ( )
EG
E Min EG E E Min
E
E EG E Min E E Max
E Max EG E E Max
if S t
P if S t and P t PP t
P t if S t and P P t P
P if S t and P t P
a
a a
a
=éê = <ê=ê = £ <ê
= ³êë
(3.4)
( ) [ ( )]2
U LE R
SoC SoCP t P SoC ta a
+= + ´ - (3.5)
( ) ( ) ( ) 1( )
( ) ( ) 0
R E EG
B
R EG
P t P t if S tP t
P t if S t
- =é= ê =ë
(3.6)
35
Power follower strategy SoC tendency, for example, is shown in Figure 3.2(b).
The SoC change is not as much as that of the thermostat strategy, but the
engine/generator unit is active under almost all driving conditions, except for those
when a very low driving power is required and the SoC is greater than SoCU. This
algorithm is important in that the battery efficiency can be increased as the engine
shares the burden of the battery. Thus, a reduction in the current flow from the
battery can be achieved, and the resistive losses due to the large current can be
avoided. The optimization of this strategy can be carried out according to the
variance of a as in (3.5).
36
Figure 3.2 Power Follower Strategy Character
(a) Engine Criterion Map (b) Typical Power Follower Strategy SoC Trajectory

37
3.3 Merits and Demerits of Existing Strategies
Thermostat strategy generally uses a single optimal operating point as a
command signal. Therefore, when the controller turns on the engine, the engine
operating point soon arrives at the OOP. Running at this operating point allows for
high system efficiency. However, some disadvantages occur when the discharge
starts and the battery is only in use for the traction motor. If the required power is
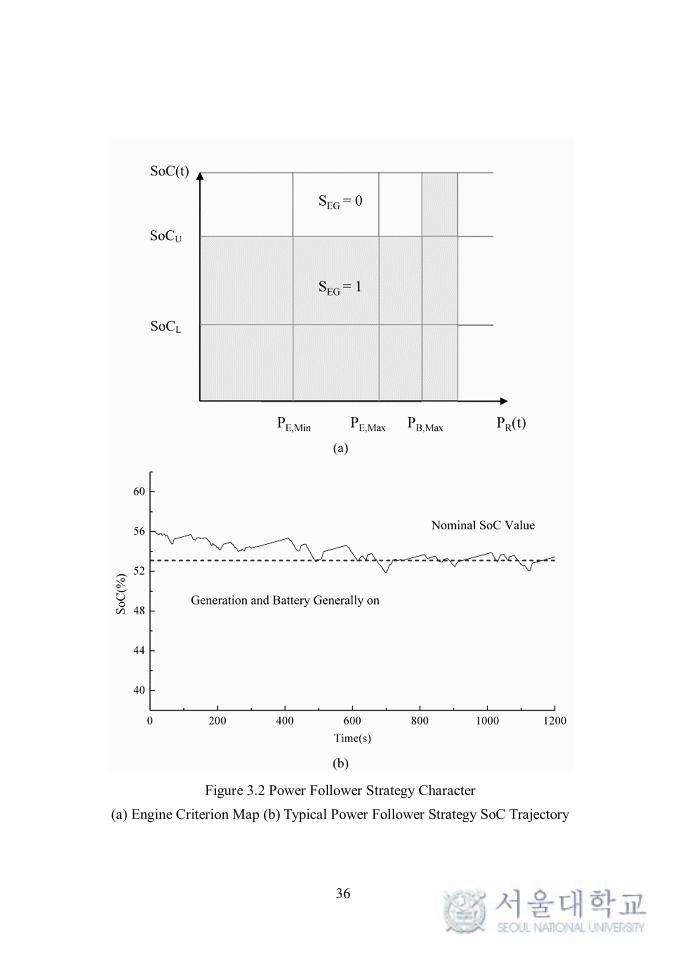
low, the current from the battery in Figure 3.3 is small, and the battery internal
resistance loss is negligible. However, when high power is required, a large current
will flow from the battery to the traction motors, and the internal resistive losses in
the battery increase enormously. As the variation effect of Ib is more dominant than
that of internal resistance Ri or the open circuit voltage Eoc , a large value for Ib
when using the thermostat strategy makes the system efficiency very poor [12].
Furthermore, the hard use of the battery makes the battery life becomes less and
less.
On the other hand, the disadvantage of power follower strategy is that this
strategy usually uses less efficient operating point than the OOP as an engine
command operating signal. Even though the power follower strategy works using
OOL in Figure 2.7(b), OOL itself shows deep bsfc variation according to the power
generated by the engine. Thus, the engine operating point efficiencies usually much
less than OOP might be used. That is because the generation power of the power
follower strategy is constrained by SoC condition in (3.5) that the command signal
might goes to less efficient operating point inadvertently. Furthermore the operating
point commands require transient time to make the engine operating points arriving
at the designated commands but as the command changes so rapidly, the engine
operating points swing in the bsfc map before arriving at the target operating points
with less efficiency.These are the limitations of the rule based strategies, as the rule
are usually made by heuristic perceptions.
38
+
-
Eoc
Ri
Vbus
Ib
Figure 3.3 Battery Thevenin’s equivalent circuit
39
Chapter 4. Proposed Strategy
4.1 Overall Concept
This chapter presents the energy management strategy that is derived from the
optimal control theory. First, a formal problem definition is given, by expressing
the total fuel consumption minimization along the driving cycle as a function of the
control variables. Then, semi MPC (Model Predictive Control) is used to explicitly
use the dynamic model to predict the system evolution in the future where the
optimal control sequence, NLP (Nonlinear Programming), has been applied to
minimize the object function, under the assumption that the next section of the
driving cycle is predictable in advance. Then, the speed prediction algorithm by the
least square method was carried out, as NLP requires the boundary condition and
road load for the next Chapter in advance. As a result, the method could calculate
the engine operating set-points of the next section in the model from the engine to
the battery very efficiently. Figure 4.1 shows the relation concept of this algorithm.
DP gives a very good reference as it is well known for the global optimal
solution. However, even though the calculation performance is guaranteed, the
computation time for the real-time implementation is so important, whereas the
computation time of DP is too long. Therefore, DP can be only the performance
comparison reference. In this research, to achieve further calculation efficiency
improvements, the additional real-time strategy techniques such as signal
synchronizing, signal bundling, signal removing, signal filling up, and zero speed
synchronizing are also suggested, which are uniquely adoptable for SHEV.
Finally, MTU (Motor Traction Unit) torque distribution was proposed which is
unique to dual traction motors and not considered in other researches. As the
efficiency increase by those methods are achieved without changing the structure or
alternating the component of SHEV, the value of this research increases.
40
Basically the calculation in the above paragraph is done in SHEV backward
model. This research focuses on the real-time forward model that the calculation
result by backward model is made is soon re-used in the forward model as in Figure
4.2. To carry out such a calculation, the exact and fast calculations in the backward
model should be guaranteed.
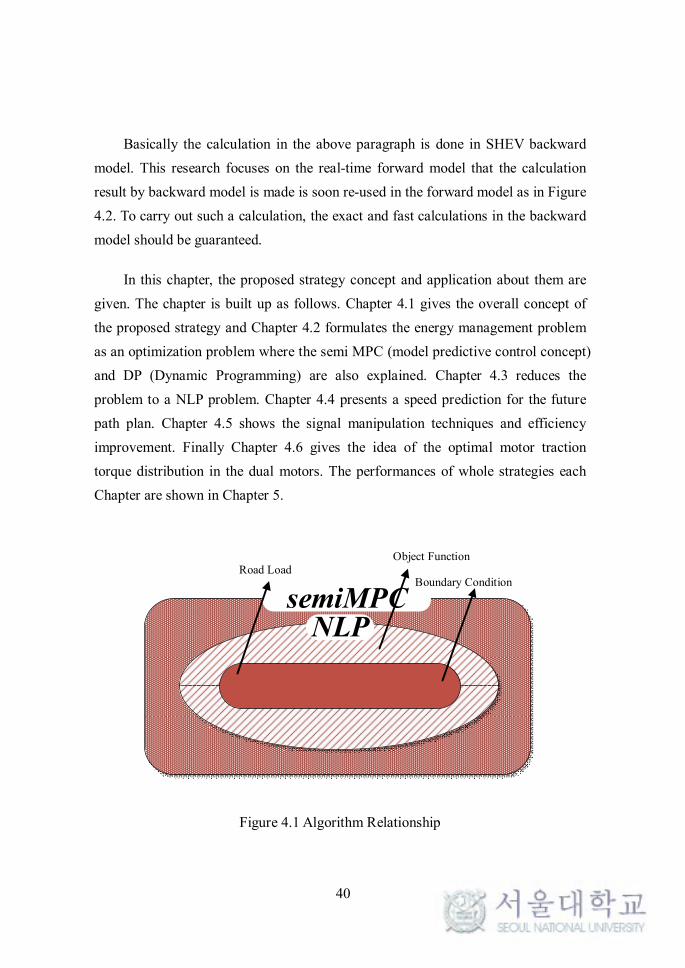
In this chapter, the proposed strategy concept and application about them are
given. The chapter is built up as follows. Chapter 4.1 gives the overall concept of
the proposed strategy and Chapter 4.2 formulates the energy management problem
as an optimization problem where the semi MPC (model predictive control concept)
and DP (Dynamic Programming) are also explained. Chapter 4.3 reduces the
problem to a NLP problem. Chapter 4.4 presents a speed prediction for the future
path plan. Chapter 4.5 shows the signal manipulation techniques and efficiency
improvement. Finally Chapter 4.6 gives the idea of the optimal motor traction
torque distribution in the dual motors. The performances of whole strategies each
Chapter are shown in Chapter 5.
Speed Prediction
NLPsemiMPC
Object Function
Boundary ConditionRoad Load
Figure 4.1 Algorithm Relationship
41
Figure 4.2 Backward Model to Forward Model Transplant
42
4.2 Semi Model Predictive Control
The basic idea of controlling the engine power is initiated by finding the most
efficient operating points which would result in achieving the best fuel economy in
the vehicle. It can be possible by considering the correlation of each component. In
this Chapter, the energy flow from engine/generator unit to the battery is usually
handled when the road load from the traction motor is given.
4.2.1 Variables and Objective
The problem is for the backward model and this control problem can be
formulated as a discrete state space problem. Using discrete time, the system
dynamics can be described as follows [13, 71]:
( 1) ( ( ), ( ), )x k f x k u k k+ = (4.1)
and the object function is:
0
( ( ), ( ), )n
k
J x k u k k t=
Då (4.2)
where the constraints are:
( ( ), ( ), ) 0x k u k kx = (4.3)
( ( ), ( ), ) 0x k u k kz £ (4.4)
Usually, x(k) are the state variables, such as vehicle speed, engine speed, and
energy storage levels and u(k) are the control variables like the engine generating
power and x is equality constraints with z of inequality constraints. In this
application, the relevant state is the energy level in the battery Es which also can be
altered by SoC. By using a discrete time version the system becomes:
43
( 1) ( ) ( ( ) ( ))s s s lE k E k P k P k t+ - = - D (4.5)
( )s eE P k tD = Då (4.6)
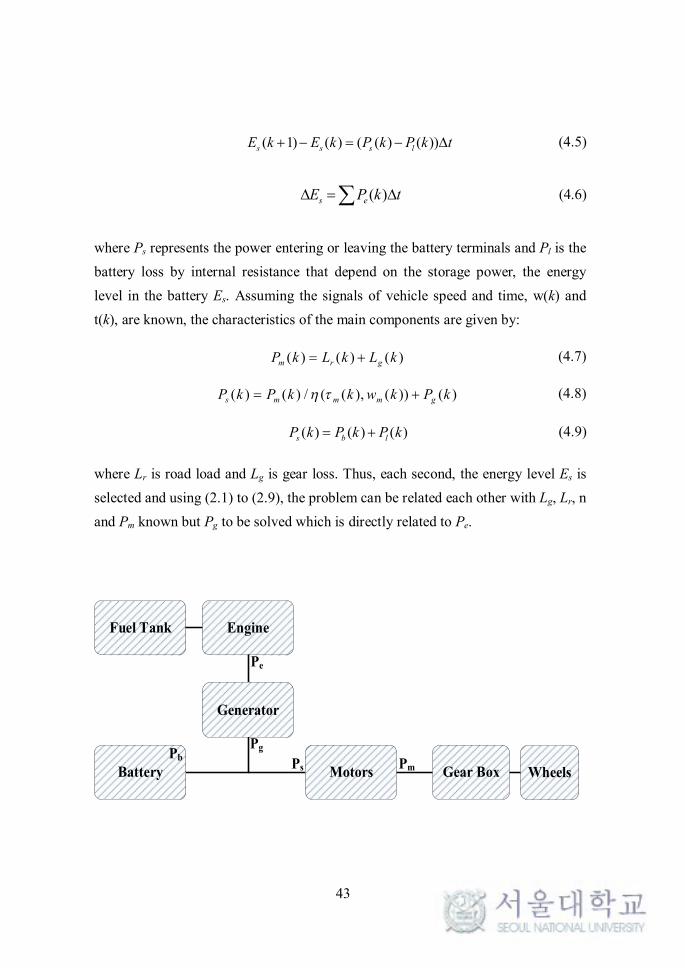
where Ps represents the power entering or leaving the battery terminals and Pl is the
battery loss by internal resistance that depend on the storage power, the energy
level in the battery Es. Assuming the signals of vehicle speed and time, w(k) and
t(k), are known, the characteristics of the main components are given by:
( ) ( ) ( )m r gP k L k L k= + (4.7)
( ) ( ) / ( ( ), ( )) ( )s m m m gP k P k k w k P kh t= + (4.8)
( ) ( ) ( )s b lP k P k P k= + (4.9)
where Lr is road load and Lg is gear loss. Thus, each second, the energy level Es is
selected and using (2.1) to (2.9), the problem can be related each other with Lg, Lr, n
and Pm known but Pg to be solved which is directly related to Pe.
Battery
Fuel Tank Engine
Motors Gear Box Wheels
Pg
Pm
Pe
PsPb
Generator

44
Figure 4.3 Power Flow Relations
The fuel consumption rate can be expressed as a function of the engine
instantaneous generating power where w(k), t(k) is in OOL (Optimal Operating
Line):
m¢ = J(Pe(k)) (4.10)
by bsfc map each duration tD . And the current time t is tD ·k by discretization
parameter k. Thus, the cost function now becomes the fuel usage over the driving
cycle in the time interval using (4.2) and (4.10) as follows:
0
n
k
m t=
¢Då (4.11)
And all the optimization is achieved by single variable problem Pe in (4.10).
Therefore, by choosing appropriate Pe as a control variable, the characteristics of all
components included model would head for the optimal direction. This calculation
is from backward model and calculations worked out on the time interval of tD = 1
s, with Euler method [37].
The operating range of the components is limited, so more bounds have to be
set. This can be done by the following max, min constraints:
Pm,min ≤ Pm ≤ Pm,max (4.12)
Pe,min ≤ Pe ≤ Pe,max (4.13)
Pg,min ≤ Pg ≤ Pg,max (4.14)
Pb,min ≤ Pb ≤ Pb,max (4.15)
Es,min ≤ Es ≤ Es,max (4.16)

45
where motor power, engine power, generator power, battery power limitation and
the bounds on the battery energy level Es which is between 0 to 1 in SoC are
displayed and subscript min (max) means minimum (maximum). Finally, as the
endpoint constraint also is required. The energy level at the end of the cycle tf
would be the same as at the beginning as below:
( ) (0)s f sE t E= (4.17)
The optimization problem can be carried out using the variables and object
function relations above. However, nonlinear solvers are now necessary as the
optimization or minimization methodologies are not suggested above. The problem
minimization or optimization technique can be easily incorporated into an
optimization technique, such as DP. However, as the computation time is limited to
an online application, another nonlinear optimization solver QP (Quadratic Problem)
might be better. In fact, only a limited prediction of the future driving cycle would
be available and NLP with semi MPC structure was used as in the next Chapter
[72].
4.2.2 Dynamic Programming
Dynamic Programming is well known for global optimization technique and
basically solves an optimization problem with assumption of knowing all speed
information in advance [13, 73]. The time division and possible energy levels in DP
become as follows:
/fn t t= D (4.18)
,max ,min( ) /s s sl E E E= - D (4.19)

46
where n is the length of the driving cycle. Equations (4.10) define the instantaneous
fuel consumption of a dynamic system with the control input Pe, however in DP all
the calculation were worked out base on the battery power Pb, which has direct
relation with Es or SoC. The relation between sED and
bPD is:
s bE P tD = D ´D (4.20)
and Pcur matrix which contains the current information of each energy level in (4.19)
at that time is calculated and the possible the engine generating points considering
road load energy consumption and engine generating are found. The feasible input
at each instant k can be defined by Pb:
Pb,min ≤ u(k)D Pb≤ Pb,max (4.21)
Therefore, it is possible to define a matrix R that possess the fuel consumption
information at all feasible combinations (u, k) for the given driving cycle. R
becomes (l+1) × n matrix and the minimum consumption at that time and that
battery energy level is saved as in Figure 4.4. That is, the fuel consumption is
evaluated and saved at every R(u,k), where u0 is the starting energy level constraint
of the battery [13, 74]:
R(0,u0)=0 (4.22)
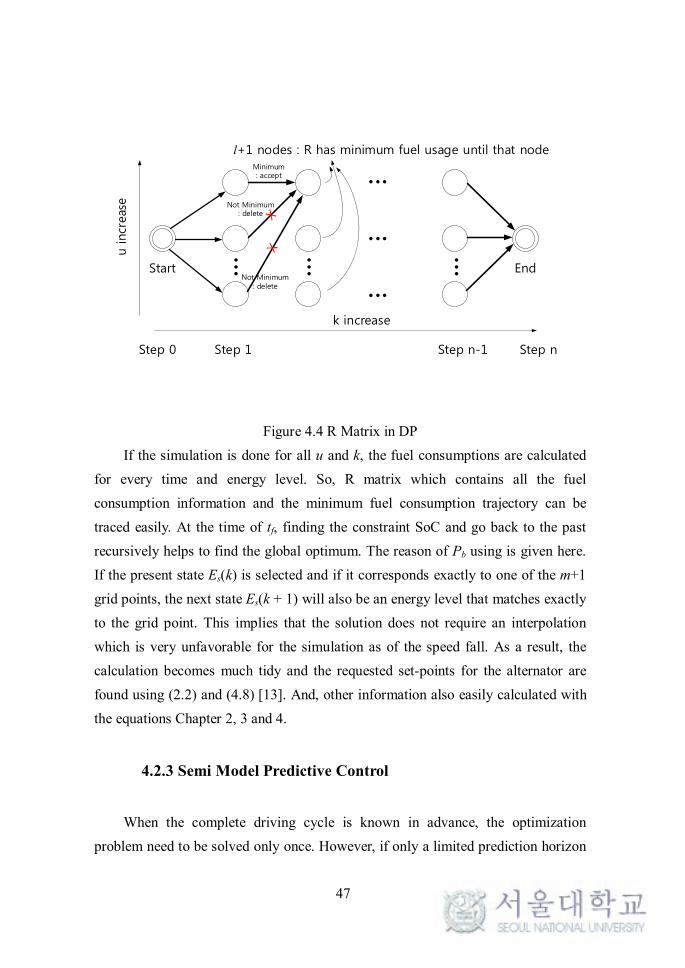
47
Step 0 Step 1
k increase
Step n-1 Step n
...
...
...Start End
l+1 nodes : R has minimum fuel usage until that node
u incr
eas
e
Minimum: accept
Not Minimum: delete
Not Minimum: delete
... ......
Figure 4.4 R Matrix in DP
If the simulation is done for all u and k, the fuel consumptions are calculated
for every time and energy level. So, R matrix which contains all the fuel
consumption information and the minimum fuel consumption trajectory can be
traced easily. At the time of tf, finding the constraint SoC and go back to the past
recursively helps to find the global optimum. The reason of Pb using is given here.
If the present state Es(k) is selected and if it corresponds exactly to one of the m+1
grid points, the next state Es(k + 1) will also be an energy level that matches exactly
to the grid point. This implies that the solution does not require an interpolation
which is very unfavorable for the simulation as of the speed fall. As a result, the
calculation becomes much tidy and the requested set-points for the alternator are
found using (2.2) and (4.8) [13]. And, other information also easily calculated with
the equations Chapter 2, 3 and 4.
4.2.3 Semi Model Predictive Control
When the complete driving cycle is known in advance, the optimization
problem need to be solved only once. However, if only a limited prediction horizon

48
is available, the problem can solved by Model Predictive Control (MPC). This
methodology minimizes the object function at each time step over a limited
prediction horizon and extracts some control sequence. At the next time step, a new
optimization is then again carried out using an updated data [72, 75-77].
Basically, MPC is described by the formula as bellows:
2 2( )i i i i iJ w r x y u= - + Då å (4.23)
where xi is ith controlled variable and ri is ith reference variable. And wi and yi are
weighting factors which do the role of adjusting x importance and u variances. The
optimization cost function J in (4.23) is usually given by QP (quadratic problem) as
QP has a clear minimum point. So each sampling instant k, if we assume the time is
t, x(t+k/t) is computed for a certain horizon N, as functions of the control action
u(t+k/t).
MPC usually takes the first element of the optimal predicted input sequence:
u(k) = u*(t+k|t) (4.24)
The process of computing u(k) by minimizing the predicted cost and implementing
the first element of u* is then repeated at each sampling instant k with same:
k= [0 … N] (4.25)
Nt0 = Nt1 … = Np (4.26)
where Np is the final receding horizon for MPC. Therefore, the strategy becomes an
online optimization strategy and the prediction horizon remains same length as
Figure 4.5. By continually shifting the horizon, this horizon can be continued
infinitely.
49
In this research, as there are no references, ri in (4.23) cannot be used, and the
first input u(k) might be zero with basic MPC concept. So another approach of the
speed prediction is applied instead of receding horizon, which requires some speed
profile in advance. And there is no guarantee that a solver will converge to a global
minimum of (4.2). So, more sophisticated approach of NLP solver was adopted in
this research. Unlike QP solvers, the computational loads of solvers for nonlinear
programming problems are strongly problem-dependent and initial point selection
is very important.
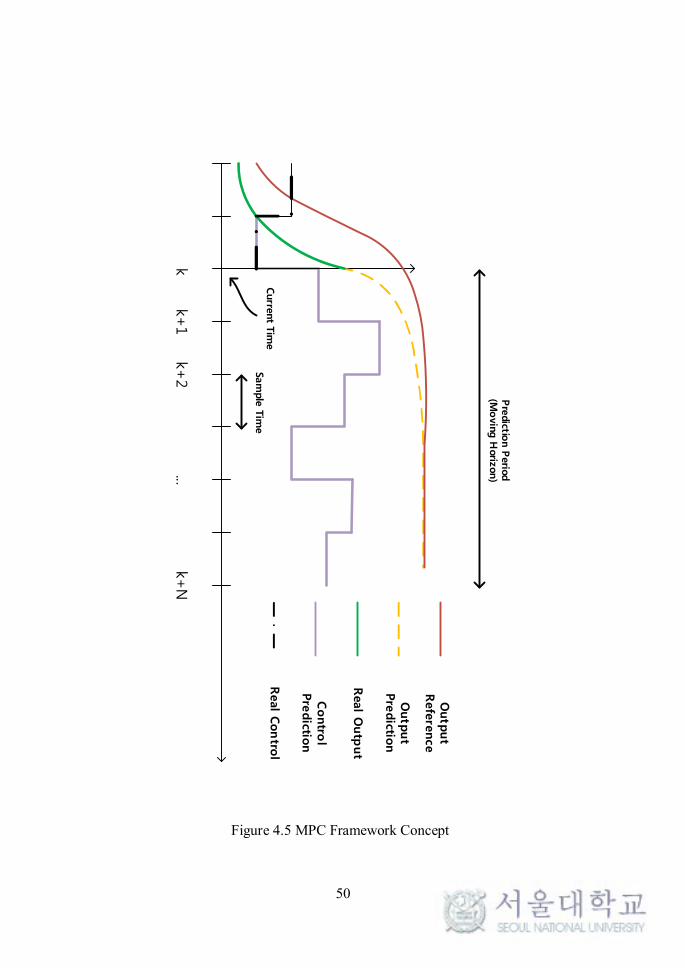
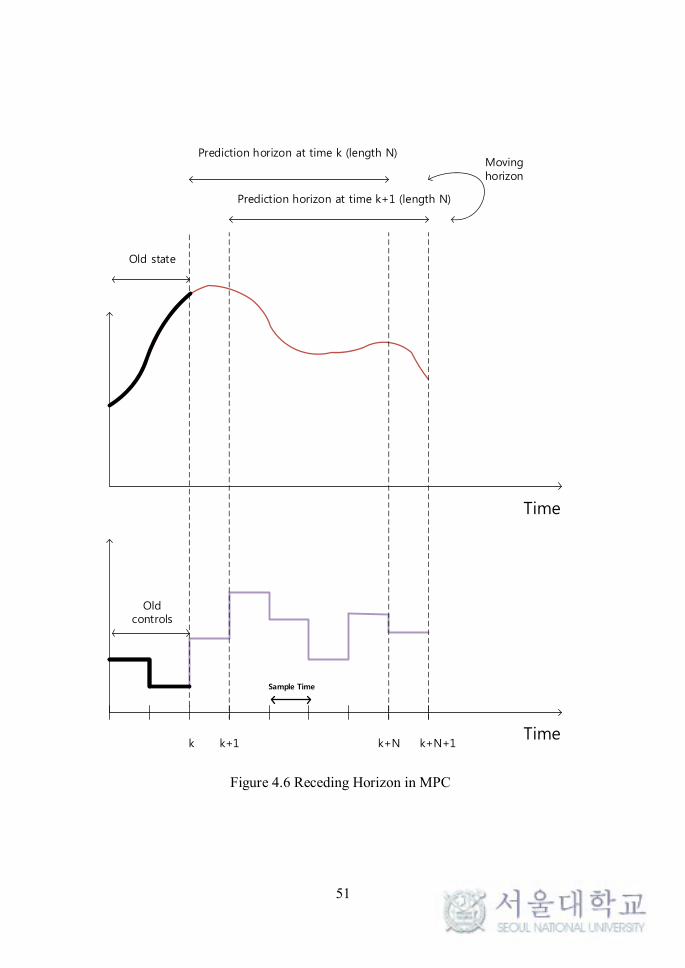
Figure 4.5 shows the basic concept of MPC theory [78, 79]. The past values
are made by the old control inputs of the prediction horizon and the frame moves as
sample time goes by. Figure 4.6 shows the moving (receding) horizon [78, 79]. If
reference trajectory exists, the input is adapted to follow the reference trajectory
with object function minimization. The control inputs made by prediction horizon
is updated each time, and the old values are removed for the control.
50
kk+1
k+
2k+N
...
Outp
ut
Refe
rence
Outp
ut
Pre
dictio
n
Real O
utp
ut
Contro
l Pre
dictio
n
Sam
ple
Tim
e
Real C
ontro
l
Pre
dictio
n P
erio
d
(Movin
g H
oriz
on)
Curre
nt T
ime
Figure 4.5 MPC Framework Concept
51
k k+1 k+N+1
Sample Time
Time
Time
k+N
Prediction horizon at time k (length N)
Prediction horizon at time k+1 (length N)
Old controls
Old state
Moving horizon
Figure 4.6 Receding Horizon in MPC
52
4.3 Nonlinear Programming
Optimal control theory gives fairly good results for hybrid vehicles [21, 25, 35,
68, 80]. And NLP (nonlinear programming) is well known for its advantages in
providing effective and practical solutions for the trajectory problems, and very
flexible to problem reformulations such as addition of new constraints. In this study,
the proposed method makes the system fully discretized in n subintervals [ti, ti+1]
with t1 < t2 < . . . < tf, and the problem requires discretized control vector and state
vector for the sizing problem. After that, the optimization problem is solved using a
nonlinear programming solver, which give the answer for ‘How much to generate?’
[81].
4.3.1 Unconstrained Optimization
In the unconstrained optimization problem, the variables:
xT = (x1, … , xn) (4.27)
becomes the input and output. The objective function
F(x) is what should be minimized. To solve the problem, F(x) is approximated by a
Taylor series as follows:
F(x ) = F(x) + gT(x)(x –x) + 0.5(x –x)TH(x)(x –x) (4.28)
The first 3 terms are used to provide a quadratic approximation with g(x), H(x),
x, and x of n-dimension gradient vector, n × n Hessian matrix, current point, and
new point for the minimization. Then, the gradient for minimizing F(x ) is given by
following equations:
0 = g(x) + H(x)p (4.29)
53
P = x – x (4.30)
P = -H-1(x)g(x) (4.31)
4.3.2 Equality Constraints
If m-constraints of c(x) = 0 subject to m < n are used in the problem, Lagrange
multipliers are required and the problem becomes:
L(x, λ) = F(x) – λTc(x) (4.32)
And at the optimal values of (x*, λ*), the constraints satisfy following conditions
[81]:
▽x L(x*, λ*) = 0 (4.33)
▽λ L(x*, λ*) = 0 (4.44)
And the gradient of L with respect to x or λ become as follows:
▽x L = g – GTλ (G = ∂c/∂x, Jacobian) (4.45)
▽λ L = -c(x) (4.46)
In fact, the real x and λ update to accomplish (4.45), (4.46) is achieved by 3-term
Taylor series expansion of (4.47), (4.48) about (x, λ) and are obtained by:
0 = g – GTλ + HL(x – x) – GT(λ – λ) (4.47)
0 = -c – G(x –x) (4.48)
where HL is the Hessian of the Lagrangian and λ is the vector of Lagrange
multipliers at the new point. Now the system can be simplified as bellows and
called KKT (Karush-Kuhn-Tucker) condition:
54
TL
-p gH G=
λ cG 0
é ù é ù é ùê ú ê ú ê ú
ë û ë ûë û (4.49)
As (4.49) gives the direction to the minimization, the appropriate variable direction
for the convergence can be calculated.
4.3.3 Inequality Constrains
If the inequality constraints of λi(x) ≥ 0 is used, the system distinguishes
whether ith λi(x) is active or not. If λi(x) is active that λi(x*) = 0 then, the
problem considers the inequality constraint just as it considers the equality
condition. But if λi(x*) > 0, it is called inactive and removed from the calculation
[81].
4.3.4 SQP (Sequential Quadratic Programming)
Equation (4.27) to (4.49) shows the process how to solve the complex problem
by quadratic approximation and recursive updates [82]. In NLP theory, F(x) solving
problem becomes quadratic programming problem and the minimum is found with
the selective choices of inequality conditions not to violate any inactive inequalities.
With such recursive updates, the problem converges and stops optimization. Then,
it starts the same process at the minimum point again. In other words, perform (4.27)
to (4.49) and finds the minimum again and again until the value is assumed to the
sub-global minimum by NLP theory where lots of globalization strategies can be
used. In the problem, the workstation CPU of 3.3 gHz and nonlinear programming
solver ‘NPSOL’ was used each 1 s time interval to achieve that [81].
4.3.5 Problem Reconstruction
55
With the NLP theory, the problem object is to minimize the total fuel
consumption during the cycle and can be summarized as follows:
k = 1 , … , 776 (total 776 seconds)
P = [p1, p2, p3,…, p776] (kW, control variables) (4.50)
SOC = [SoC1, SoC2, SoC3,…, SoC776] (%, state variables) (4.51)
where [P, SOC] becomes NLP inputs. And the constraints are:
SOC(t0) = SoCinit (4.52)
SOC(tf) = SoCfin (4.53)
SoC − SoC = ( , ,
(4.54)
tD =1 (4.55)
Minimum Motor Power ≤ Motor Power ≤ Maximum Motor Power (4.56)
Minimum Generator Power ≤ Generator Power ≤ 0 (4.57)
0 (kW) ≤ Engine Power ≤ Maximum Engine Power (4.58)
Minimum Battery Current ≤ Battery Current Limit ≤ Maximum Battery Current (4.59)
Minimum Motor Torque ≤ Motor Torque ≤ Maximum Motor Torque (4.60)
Minimum Generator Torque ≤ Generator Torque ≤ Maximum Generator Torque (4.61)
Minimum Engine Torque ≤ Engine Torque ≤ Maximum Engine Torque (4.62)
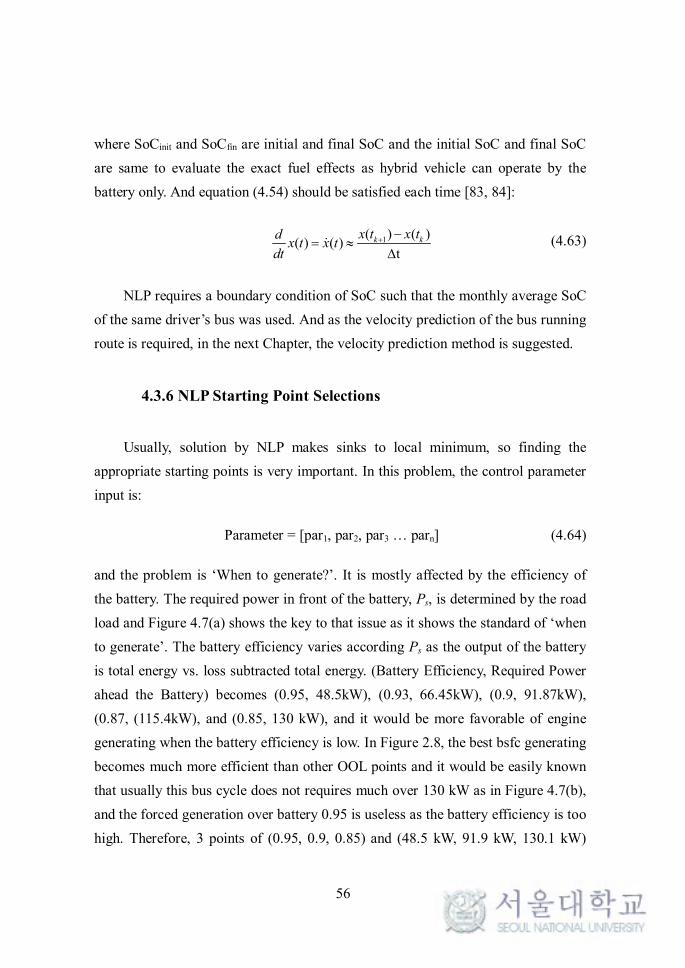
56
where SoCinit and SoCfin are initial and final SoC and the initial SoC and final SoC
are same to evaluate the exact fuel effects as hybrid vehicle can operate by the
battery only. And equation (4.54) should be satisfied each time [83, 84]:
1( ) ( )( ) ( )
tk kx t x td
x t x tdt
+ -= »
D& (4.63)
NLP requires a boundary condition of SoC such that the monthly average SoC
of the same driver’s bus was used. And as the velocity prediction of the bus running
route is required, in the next Chapter, the velocity prediction method is suggested.
4.3.6 NLP Starting Point Selections
Usually, solution by NLP makes sinks to local minimum, so finding the
appropriate starting points is very important. In this problem, the control parameter
input is:
Parameter = [par1, par2, par3 … parn] (4.64)
and the problem is ‘When to generate?’. It is mostly affected by the efficiency of
the battery. The required power in front of the battery, Ps, is determined by the road
load and Figure 4.7(a) shows the key to that issue as it shows the standard of ‘when
to generate’. The battery efficiency varies according Ps as the output of the battery
is total energy vs. loss subtracted total energy. (Battery Efficiency, Required Power
ahead the Battery) becomes (0.95, 48.5kW), (0.93, 66.45kW), (0.9, 91.87kW),
(0.87, (115.4kW), and (0.85, 130 kW), and it would be more favorable of engine
generating when the battery efficiency is low. In Figure 2.8, the best bsfc generating
becomes much more efficient than other OOL points and it would be easily known
that usually this bus cycle does not requires much over 130 kW as in Figure 4.7(b),
and the forced generation over battery 0.95 is useless as the battery efficiency is too
high. Therefore, 3 points of (0.95, 0.9, 0.85) and (48.5 kW, 91.9 kW, 130.1 kW)
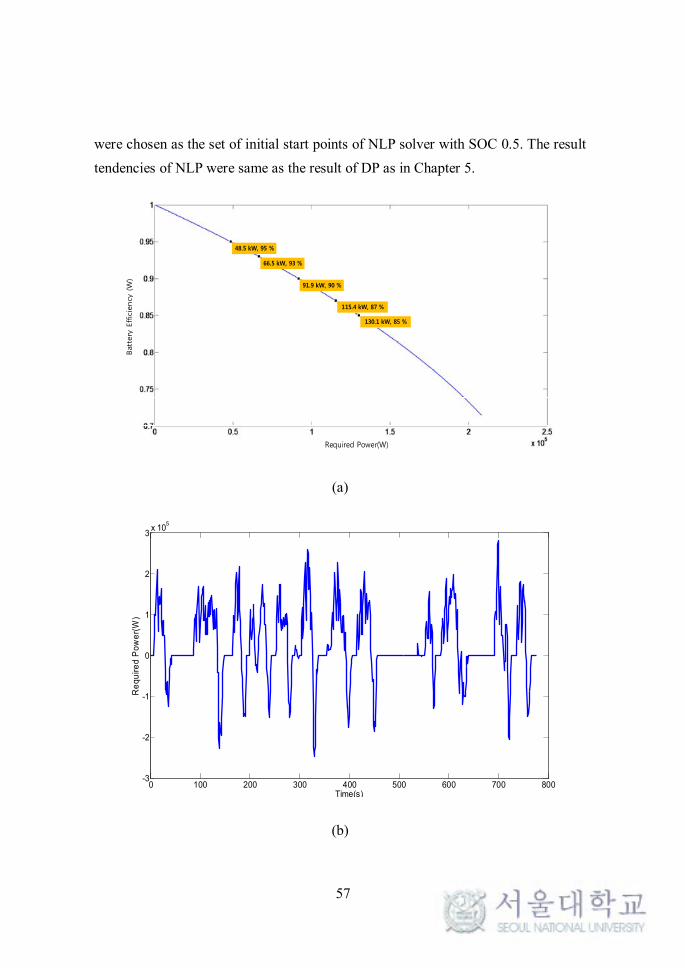
57
were chosen as the set of initial start points of NLP solver with SOC 0.5. The result
tendencies of NLP were same as the result of DP as in Chapter 5.
66.5 kW, 93 %
48.5 kW, 95 %
91.9 kW, 90 %
115.4 kW, 87 %
130.1 kW, 85 %
Required Power(W)
Batt
ery
Effic
iency
(W
)
(a)
(b)
0 100 200 300 400 500 600 700 800-3
-2
-1
0
1
2
3x 10
5
Time(s)
Re
qu
ire
d P
ow
er(
W)

58
Figure 4.7 Initial Point Selections by Battery Efficiency (a) Battery Efficiency with
the Required Power (b) Required Power at the Battery
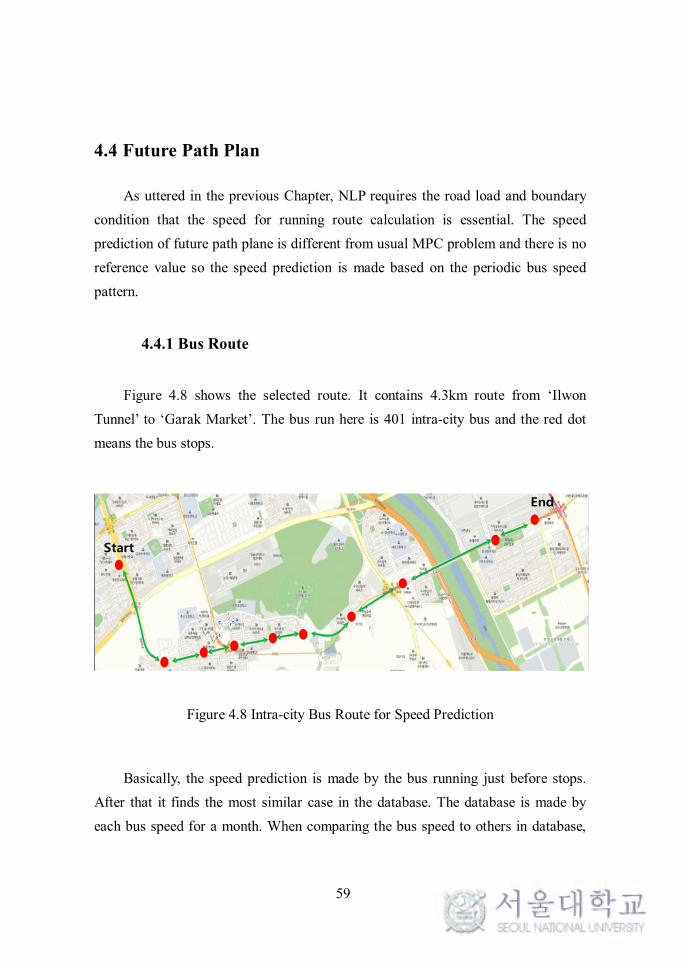
59
4.4 Future Path Plan
As uttered in the previous Chapter, NLP requires the road load and boundary
condition that the speed for running route calculation is essential. The speed
prediction of future path plane is different from usual MPC problem and there is no
reference value so the speed prediction is made based on the periodic bus speed
pattern.
4.4.1 Bus Route
Figure 4.8 shows the selected route. It contains 4.3km route from ‘Ilwon
Tunnel’ to ‘Garak Market’. The bus run here is 401 intra-city bus and the red dot
means the bus stops.
Start
End
Figure 4.8 Intra-city Bus Route for Speed Prediction
Basically, the speed prediction is made by the bus running just before stops.
After that it finds the most similar case in the database. The database is made by
each bus speed for a month. When comparing the bus speed to others in database,

60
the speed comparison comparing ‘Speed vs. Time’ is not possible as of the
deviation of time at the same spot. Figure 4.9 shows the speed according to time.
Thus another approach is required and ‘Speed vs. Distance’ is a solution in Figure
4.10, because every bus are suggested to stop at a bus stop.
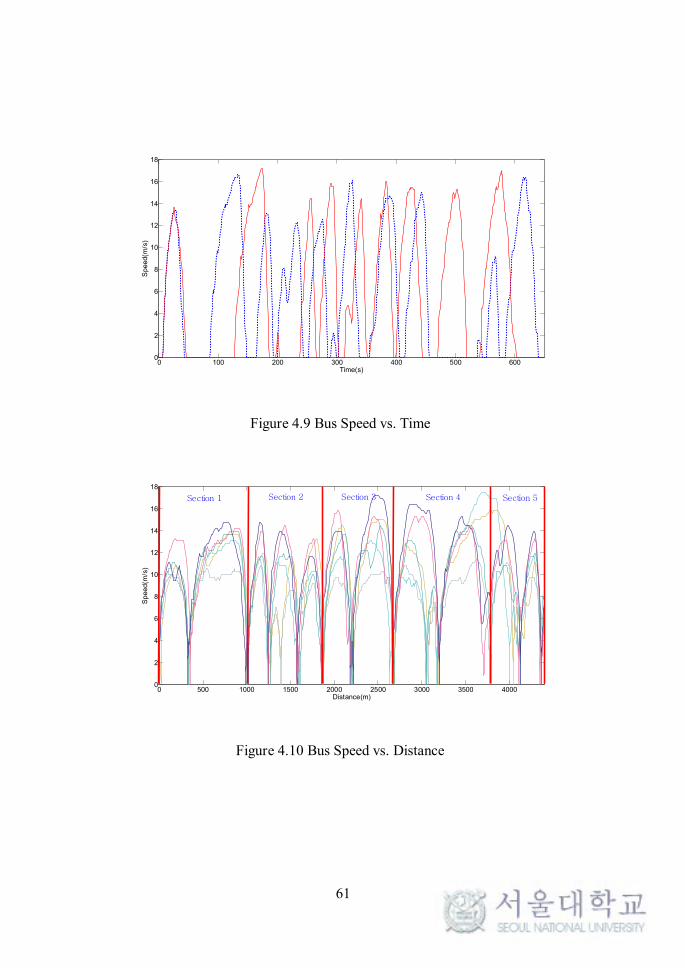
61
Figure 4.9 Bus Speed vs. Time
Figure 4.10 Bus Speed vs. Distance
0 100 200 300 400 500 6000
2
4
6
8
10
12
14
16
18
Time(s)
Speed(m
/s)
0 500 1000 1500 2000 2500 3000 3500 40000
2
4
6
8
10
12
14
16
18
Distance(m)
Speed(m
/s)
Section 1 Section 2 Section 3 Section 4 Section 5

62
4.4.2 Speed Prediction Algorithm
The basic algorithm of speed prediction is in Figure 4.11. To expect the speed
of section 2, run section 1 and find the most similar speed cases based on ‘Speed vs.
Distance’ comparison. As the similar speed means similar traffic conditions. If the
run speed is same at the same distance, the traffic or traffic signals would be similar.
The similar cases are found by:
2[ ( ) ( )]m
refv i v i-å (4.65)
where v(i) and vref(i) is the velocity in each distance. To achieve that the database
for the vehicle speed should be made by speed vs distance.
Now, the similar 5 cases are found. Then, as the bus has run section 1 so the
duration time for the section 1 can be known. And the next section duration time
will be given by Seoul Transport Operation & Information Service. So the time can
be assumed to be used (next time duration is usually given nowadays by a smart
phone). Thus the finding timing becomes:
T1 = Time to next section start by information service (4.66)
T2 = Time to next section start by data base (4.67)
T1 » T2 (4.68)
The reason of finding (4.68) is that if the speed and time similar, the traffic
condition seems to be similar. As a result, the next session is made by this way as
MPC does this with receding horizon. And the expected speed can be synched by
speed zero to positive case. The result is in Figure 4.12. The most important thing
about the speed expectation is that the traffic jam should not be so harsh. And the
database should be made one driver as the driving style is totally different

63
according to the driver. The timing of where to pass can be logged by GPS signal,
so each stop the GPS logger distinguishes where the bus is.
4.4.3 Wrong Speed Prediction Handling
Figure 4.13 shows the wrong speed prediction in section 2, where the thick
blue lines shows the real speed of the bus. Such a drastic speed change can happen
when the traffic jam is so heavy or some car accidents happen. Therefore, at that
time, energy distribution is suggested to be carried out not efficiently but stably.
Thus, thermostat strategy in Chapter 3.1 would be used. In Figure 4.13, thermostat
strategy is used in section 3 as the speed prediction after section 2 cannot be carried
out properly, and from section 4 the proposed strategy works well again as the
speed is normal in section 3.
64
Section n-1 Section n Section n+1
Speed Comparison
Speed Comparison
Speed Comparison
Time Comparison
Time Comparison
Time Comparison
Time Comparison
Figure 4.11 Speed Prediction Algorithm
Figure 4.12 Speed Prediction Result
0 100 200 300 400 500 600 700 8000
2
4
6
8
10
12
14
16
18
Time(s)
Sp
ee
d(m
/s)
Real Speed
Prediction Speed
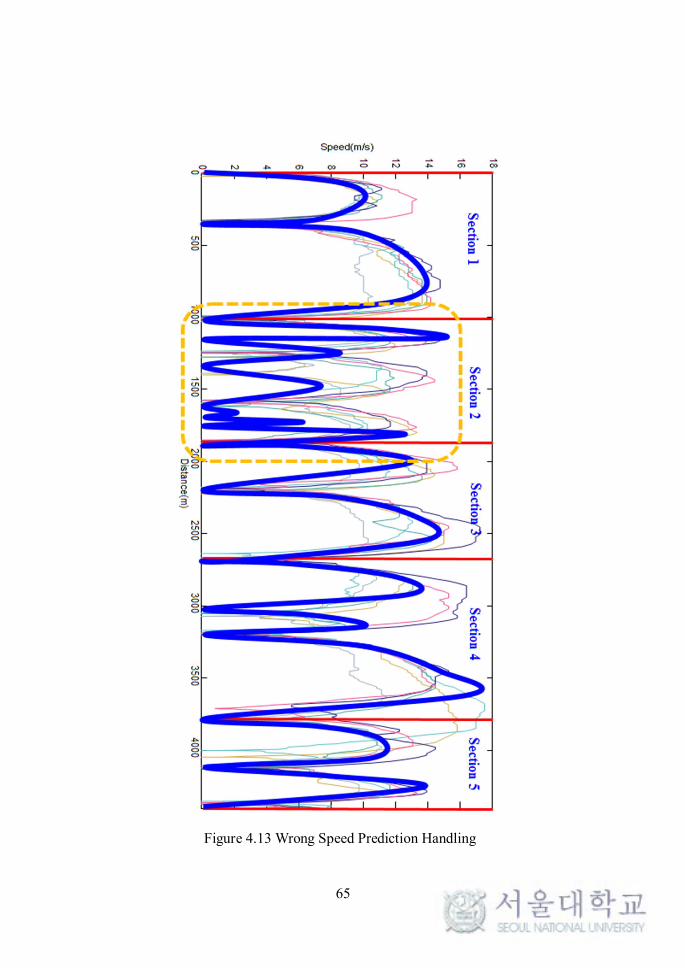
65
Figure 4.13 Wrong Speed Prediction Handling
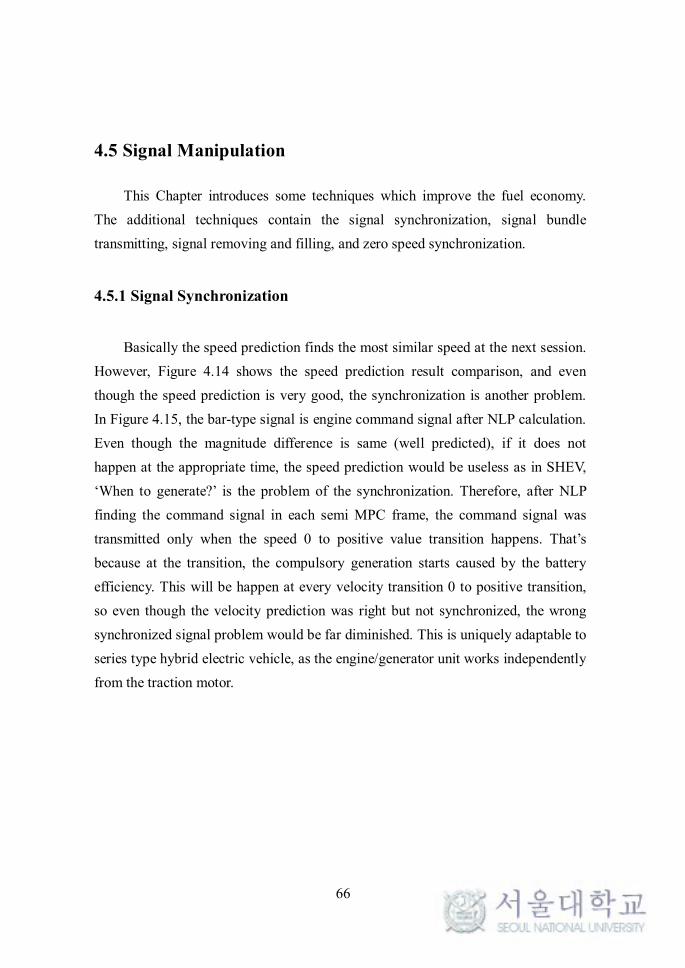
66
4.5 Signal Manipulation
This Chapter introduces some techniques which improve the fuel economy.
The additional techniques contain the signal synchronization, signal bundle
transmitting, signal removing and filling, and zero speed synchronization.
4.5.1 Signal Synchronization
Basically the speed prediction finds the most similar speed at the next session.
However, Figure 4.14 shows the speed prediction result comparison, and even
though the speed prediction is very good, the synchronization is another problem.
In Figure 4.15, the bar-type signal is engine command signal after NLP calculation.
Even though the magnitude difference is same (well predicted), if it does not
happen at the appropriate time, the speed prediction would be useless as in SHEV,
‘When to generate?’ is the problem of the synchronization. Therefore, after NLP
finding the command signal in each semi MPC frame, the command signal was
transmitted only when the speed 0 to positive value transition happens. That’s
because at the transition, the compulsory generation starts caused by the battery
efficiency. This will be happen at every velocity transition 0 to positive transition,
so even though the velocity prediction was right but not synchronized, the wrong
synchronized signal problem would be far diminished. This is uniquely adaptable to
series type hybrid electric vehicle, as the engine/generator unit works independently
from the traction motor.
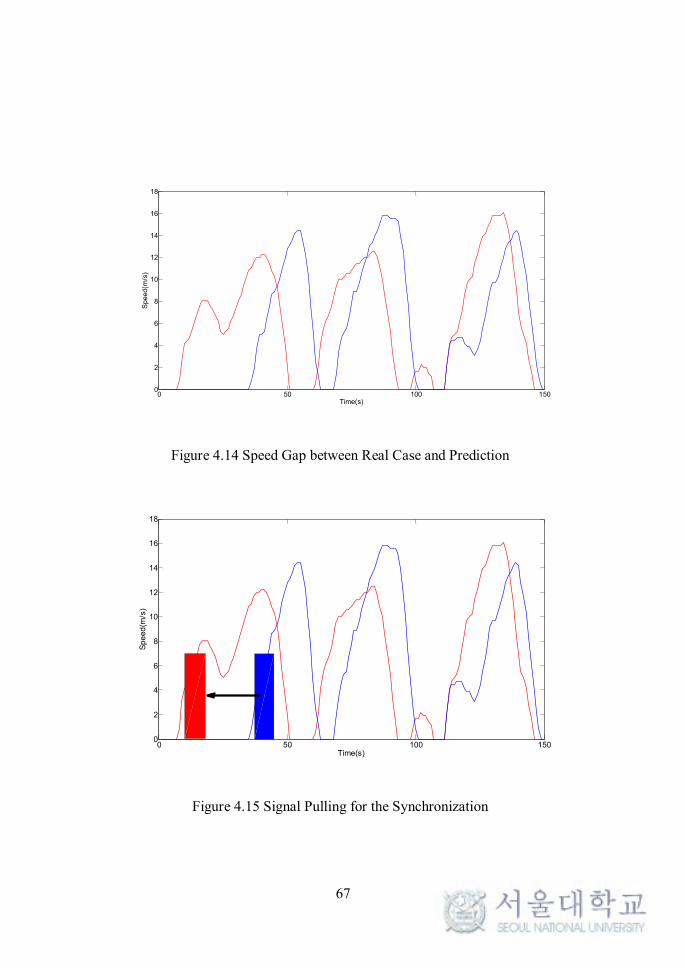
67
Figure 4.14 Speed Gap between Real Case and Prediction
Figure 4.15 Signal Pulling for the Synchronization
0 50 100 1500
2
4
6
8
10
12
14
16
18
Time(s)
Speed(m
/s)
0 50 100 1500
2
4
6
8
10
12
14
16
18
Time(s)
Sp
ee
d(m
/s)
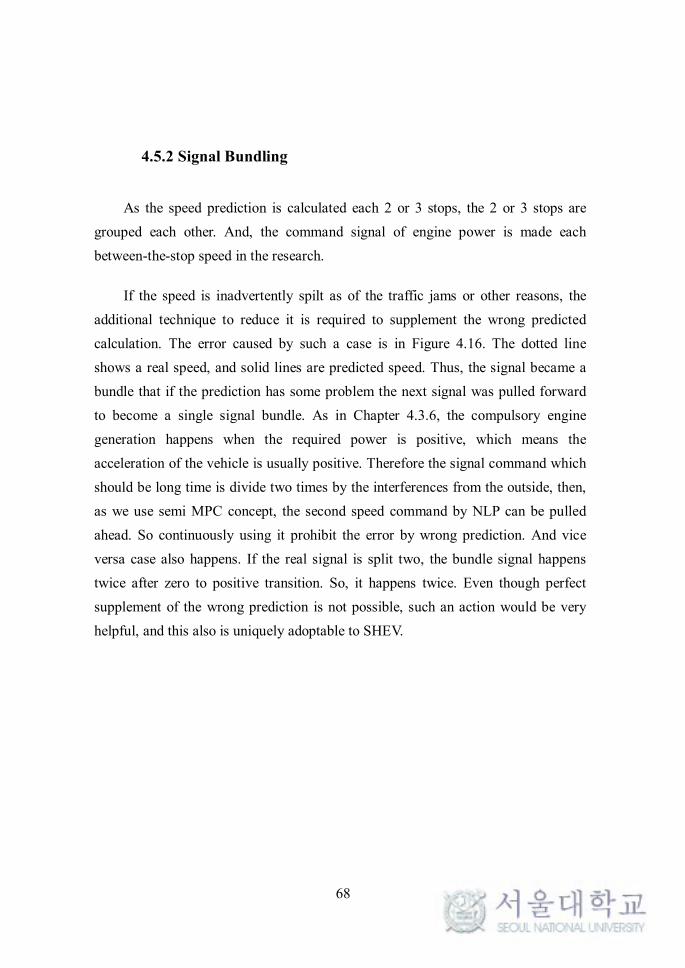
68
4.5.2 Signal Bundling
As the speed prediction is calculated each 2 or 3 stops, the 2 or 3 stops are
grouped each other. And, the command signal of engine power is made each
between-the-stop speed in the research.
If the speed is inadvertently spilt as of the traffic jams or other reasons, the
additional technique to reduce it is required to supplement the wrong predicted
calculation. The error caused by such a case is in Figure 4.16. The dotted line
shows a real speed, and solid lines are predicted speed. Thus, the signal became a
bundle that if the prediction has some problem the next signal was pulled forward
to become a single signal bundle. As in Chapter 4.3.6, the compulsory engine
generation happens when the required power is positive, which means the
acceleration of the vehicle is usually positive. Therefore the signal command which
should be long time is divide two times by the interferences from the outside, then,
as we use semi MPC concept, the second speed command by NLP can be pulled
ahead. So continuously using it prohibit the error by wrong prediction. And vice
versa case also happens. If the real signal is split two, the bundle signal happens
twice after zero to positive transition. So, it happens twice. Even though perfect
supplement of the wrong prediction is not possible, such an action would be very
helpful, and this also is uniquely adoptable to SHEV.
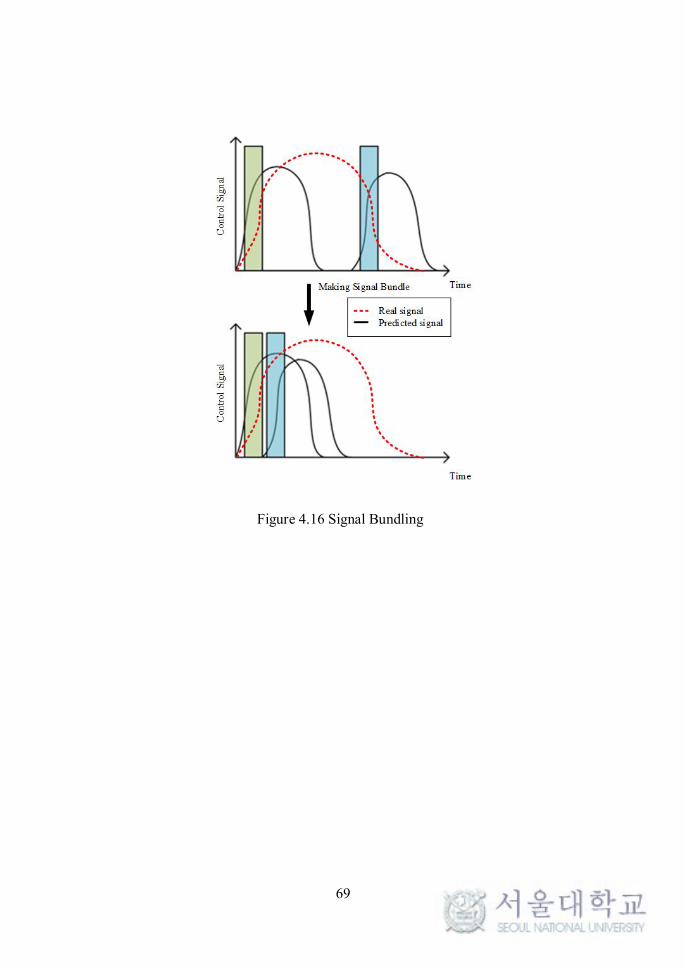
69
Figure 4.16 Signal Bundling

70
4.5.3 Signal Removing and Filling Up
If the signal cavity is less than 4 seconds, the cavities would be filled up. For
example, (00****00), (00***00), (00**00), and (00*00) were removed where ‘*’
means nonzero value. The fuel consumption minimization was made in backward
simulation and the real system cannot follow the ideal input command of the
backward model as of the inertia. Thus, intermittent generation or useless cavities
are removed as the cycling engine on/off frequently is not beneficial for the fuel
consumption improvement. Furthermore, a long time filling up also is not
beneficial as the surplus power is sent to the battery, so it experiences battery losses
when the current flow from the battery to the traction motors in the future. Figure
4.17(a) shows the meaningless signal and Figure 4.17(b) is the removed signals.
The real engine output power stops before it arrives at the target engine power, and
inefficient.
Figure 4.18 illustrates the application concept of the filling up. The short
cavity was filled up that the system efficiency can be improved as the swing of the
engine command signal shakes the engine operating points much. As a result, the
more fuel efficiency can be achieved using the filling up with the appropriate
selections of filling up duration, 1 or 2 second. And the average engine power
commands of the positive command group were selected as the constant command
signals. Usually, the command and real following duration is about 4 seconds as the
time for the signal to the exact movement in the system takes usually 3~ 4 seconds
in this system.
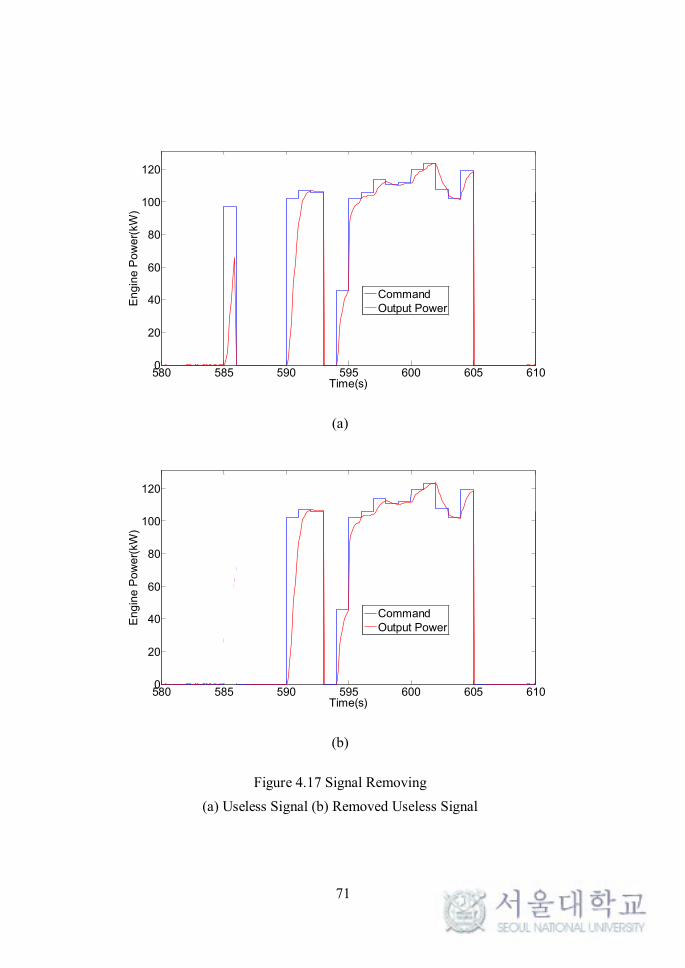
71
(a)
(b)
Figure 4.17 Signal Removing
(a) Useless Signal (b) Removed Useless Signal
580 585 590 595 600 605 6100
20
40
60
80
100
120
Time(s)
En
gin
e P
ow
er(
kW
)
CommandOutput Power
580 585 590 595 600 605 6100
20
40
60
80
100
120
Time(s)
En
gin
e P
ow
er(
kW
)
CommandOutput Power
72
(a)
(b)
Figure 4.18 Signal Filling Up
(a) Command Signal Before Filling Up (b) Command Signal After Filling Up
580 585 590 595 600 605 6100
50
100
150
Time(s)
Eng
ine
Po
wer(
kW
)
Command before filling upOutput Power before filling up
580 585 590 595 600 605 6100
50
100
150
Time(s)
Eng
ine
Po
wer(
kW
)
Command before filling upOutput Power before filling upCommand after filling upOutput Power after filling up
73
4.5.4 Zero Speed Synchronization
As the explanation in Chapter 4.3.6, to use battery only is less efficient if the
required power is large, as of the battery efficiency, Vbus/Eoc. This also is applied to
the zero speed. When the required power is zero, it is better to generate the
engine/generator during the load happening as in Figure 4.7. Therefore, if the
required power is zero, engine power also engaged to be zero, which is shown in
the Chapter 5.1.3.

74
4.6 Motor Torque Distribution in MCU
In the past, when the MCU (Motor Control Unit) sent a total traction torque
command to the motors, the command was divided into two equal loads that were
sent to each traction motor. However, such a torque (power) distribution did not
consider the operating efficiency, unlike the proposed strategy, which includes
considerations for the efficiency using an optimal torque distribution map. The
MCU selects the best distribution at each operating point, and the torque is
distributed according to that map information.
4.6.1 Existing Strategy
The strategy for the basic power distribution in the traction motors was to split
the command torque from the MCU, as shown in Figure 4.19. For example, when
the torque command is 100 Nm, then a command of 50 Nm goes to traction motor 1
and to traction motor 2. This concept is very straightforward and universal in many
series hybrid vehicles [69, 85]. However, even though the power flow that starts
from the battery or the generator is optimal, it cannot be transferred to the wheels
via both traction motors in the most efficient manner.
4.6.2 Strategy Concept
The proposed strategy identifies the optimal distribution at each operating
point. When the torque signal is sent from the MCU, the distribution is carried out
with the pre-calculated optimal torque distribution map. To find the optimal point
of the power distribution, the total T-N curve (the sum of the two maximum motor
torques) for the torque distribution, as shown in Figure 4.20, is essential. In this
research, because the two motors are the same, the RPM limit is the same, and the
maximum torque is doubled. The approach for achieving the best efficiency is
75
shown in Figure 4.20. If the total target torque command is received, the best value
among α : β ratios is loaded from the optimal torque distribution map, where α and
β mean the share of the torque, and then the appropriate torque commands are sent
to each motor. The details of the torque distribution are shown in Figure 4.21. If the
output torque is equal to 4, then α : β after torque discretization might be (0 : 4),
(0.1 : 3.9), (0.2 : 3.8), (0.3 : 3.7) ··· (4 : 0) as in Figure 4.22. Even though the ratio
changes, the output summation torque is sustained.
For achieving the best distribution, the optimal torque distribution map at each
operating point of the total T-N curve is essential. Thus, for the loading of the best
efficiency at each operating point, the efficiency at each operating point of the total
T-N curve, totalh , was calculated with the variations of α and β in equations (4.69)-
(4.71). The power ratio becomes the torque ratio, as the distribution is executed on
the basis of the same summation gear ratios for both motors, so both motor
velocities are the same. totalP ,
currentw , 1h ,
2h and totalt mean the mechanical
total output motor power of dual motors, the current motor velocity, the operating
efficiency of motor 1, the operating efficiency of motor 2 and the mechanical total
motor output torque, respectively.
1 2
1 2
1 2
1 2
2 1
(1/ ) (1/ )
(1/ ) (1/ )
1
(1/ ) (1/ )
total
total
total total
total
total total
Mechanical Total Output Motor Power
ElectricalTotal Input Motor Power
p
p p
h
a h b h
t
t a h t b h
a h b h
hh
ah bh
=
=´ ´ + ´ ´
=´ ´ + ´ ´
=´ + ´
=+
(4.69)
76
total total currentp wt= ´ (4.70)
1a b+ = (4.71)
The efficiency in equation (4.69) is compared with each variation of the
operating point (α and β), and as in equation (4.72), the maximum value is saved to
the optimal torque distribution map,_total besth , at each operating point with the
information of α and β.
_ max( )total best totalh h= (4.72)
Thus, at each operating point, the best ratio can be found, and the results can
be saved in the total T-N curve operating region.
4.6.3 Procedure
The procedure for making the optimal torque distribution map is outlined in
Figure 4.23. Because the ratio α : β was optimized after discretization, it is
advantageous as the subdivision is delicate. The optimal torque distribution map
becomes symmetric about the x-axis (generating mode).
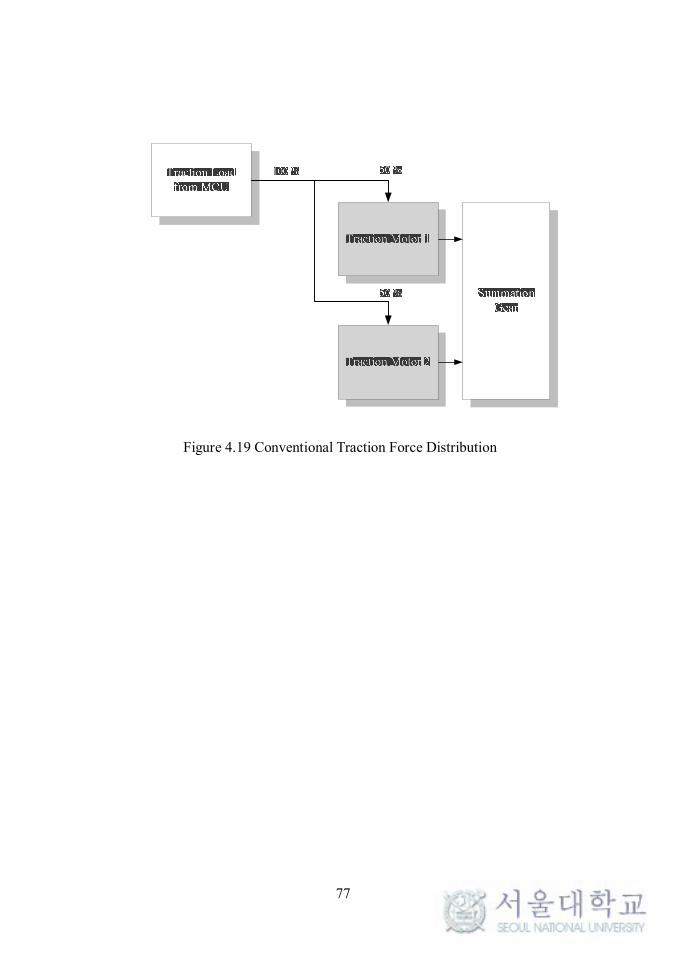
77
Figure 4.19 Conventional Traction Force Distribution
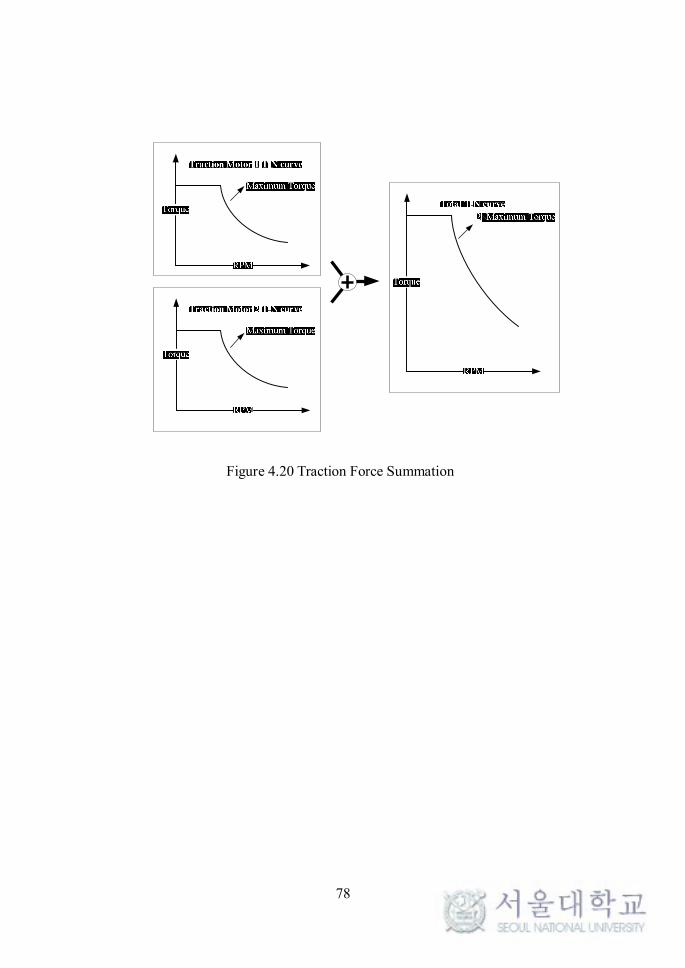
78
Figure 4.20 Traction Force Summation
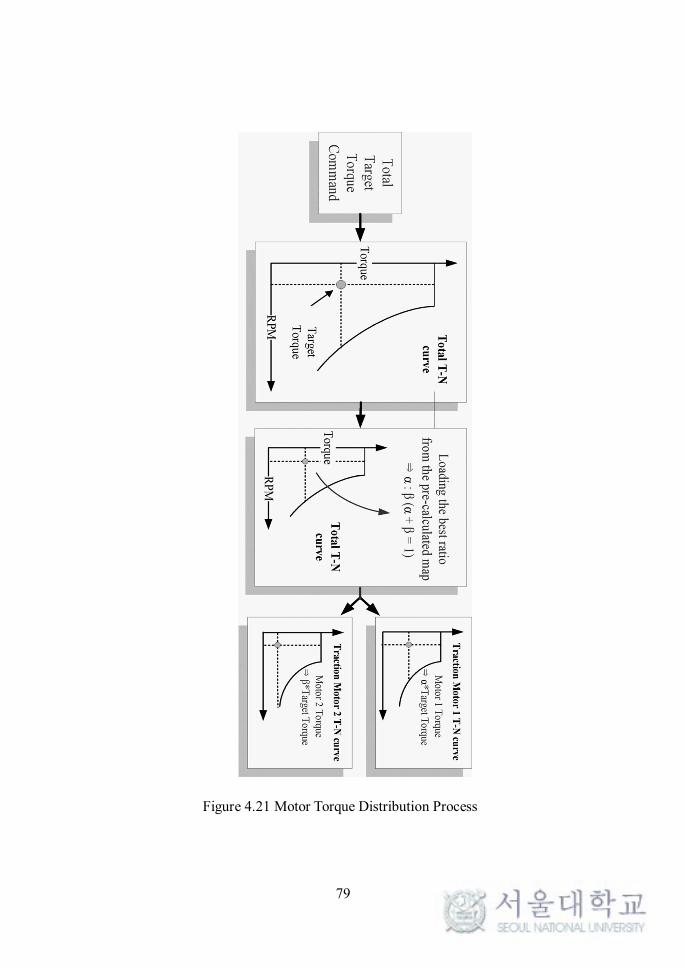
79
Figure 4.21 Motor Torque Distribution Process
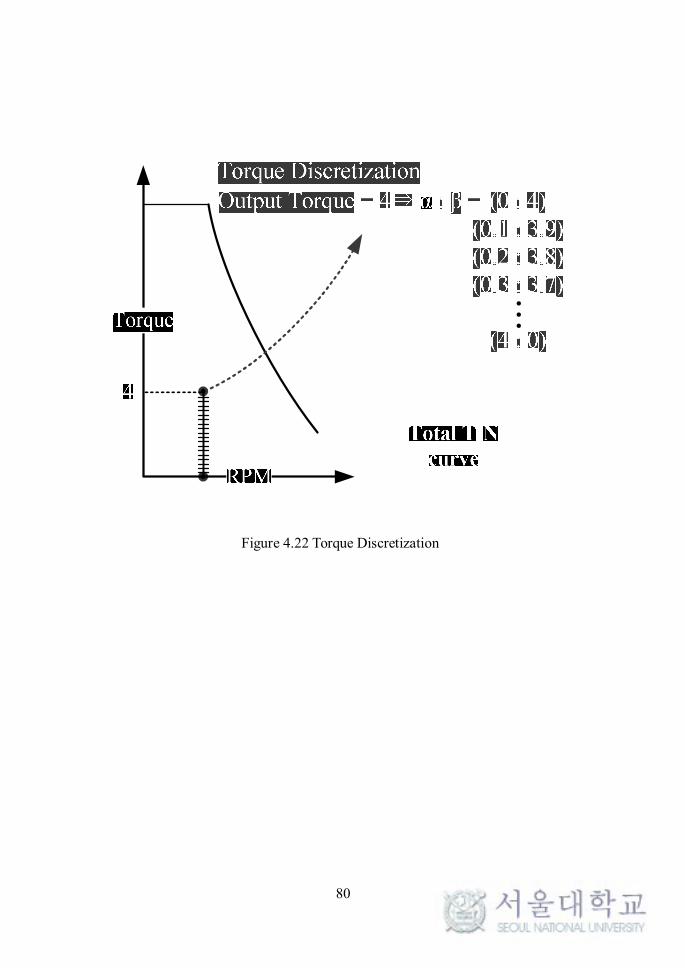
80
…
Figure 4.22 Torque Discretization
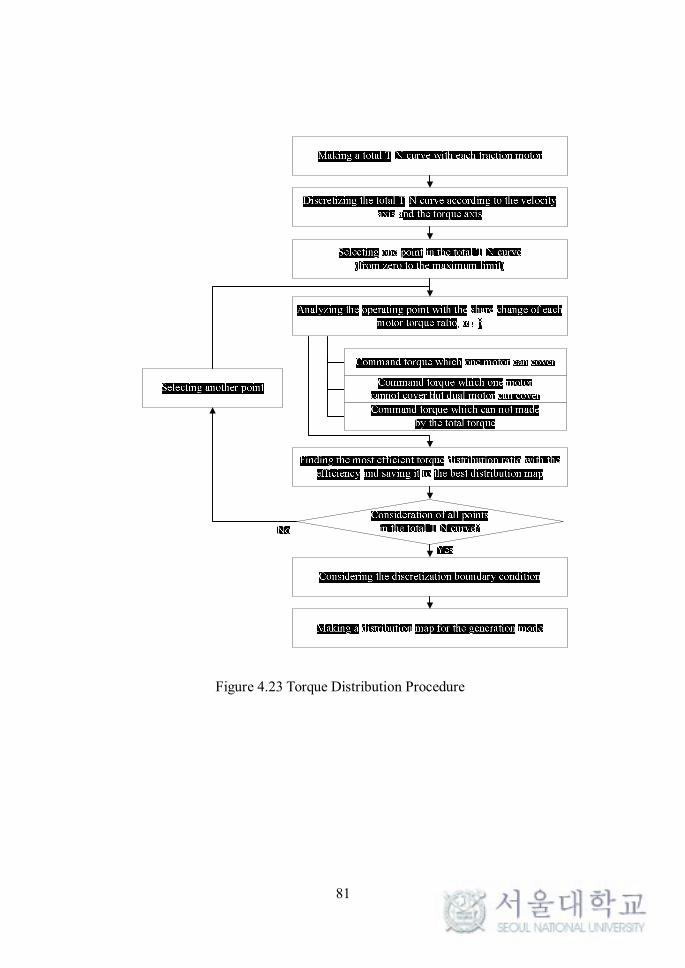
81
Figure 4.23 Torque Distribution Procedure
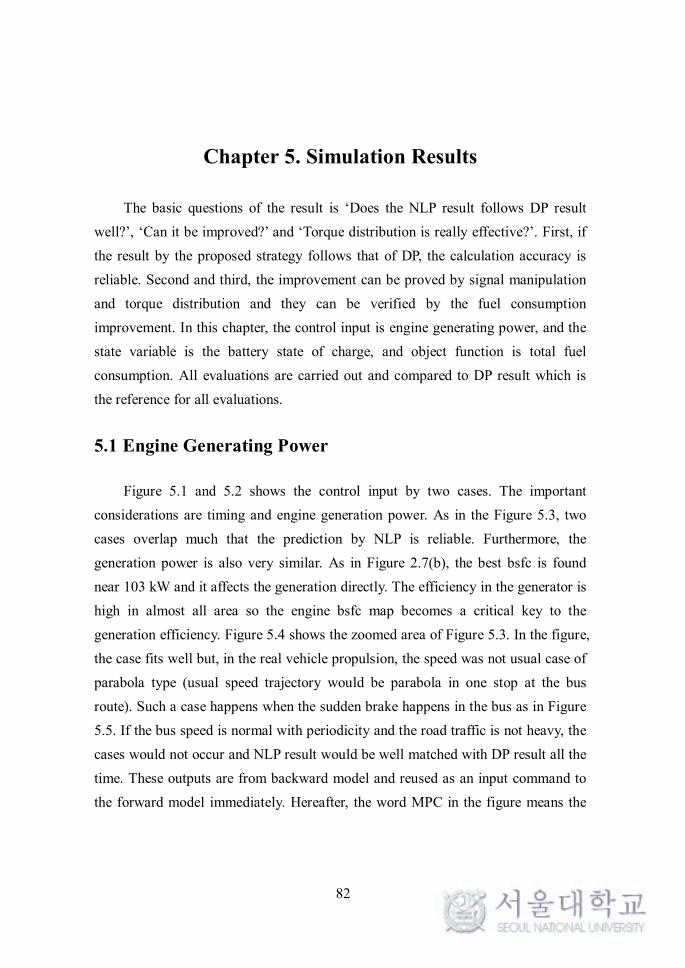
82
Chapter 5. Simulation Results
The basic questions of the result is ‘Does the NLP result follows DP result
well?’, ‘Can it be improved?’ and ‘Torque distribution is really effective?’. First, if
the result by the proposed strategy follows that of DP, the calculation accuracy is
reliable. Second and third, the improvement can be proved by signal manipulation
and torque distribution and they can be verified by the fuel consumption
improvement. In this chapter, the control input is engine generating power, and the
state variable is the battery state of charge, and object function is total fuel
consumption. All evaluations are carried out and compared to DP result which is
the reference for all evaluations.
5.1 Engine Generating Power
Figure 5.1 and 5.2 shows the control input by two cases. The important
considerations are timing and engine generation power. As in the Figure 5.3, two
cases overlap much that the prediction by NLP is reliable. Furthermore, the
generation power is also very similar. As in Figure 2.7(b), the best bsfc is found
near 103 kW and it affects the generation directly. The efficiency in the generator is
high in almost all area so the engine bsfc map becomes a critical key to the
generation efficiency. Figure 5.4 shows the zoomed area of Figure 5.3. In the figure,
the case fits well but, in the real vehicle propulsion, the speed was not usual case of
parabola type (usual speed trajectory would be parabola in one stop at the bus
route). Such a case happens when the sudden brake happens in the bus as in Figure
5.5. If the bus speed is normal with periodicity and the road traffic is not heavy, the
cases would not occur and NLP result would be well matched with DP result all the
time. These outputs are from backward model and reused as an input command to
the forward model immediately. Hereafter, the word MPC in the figure means the
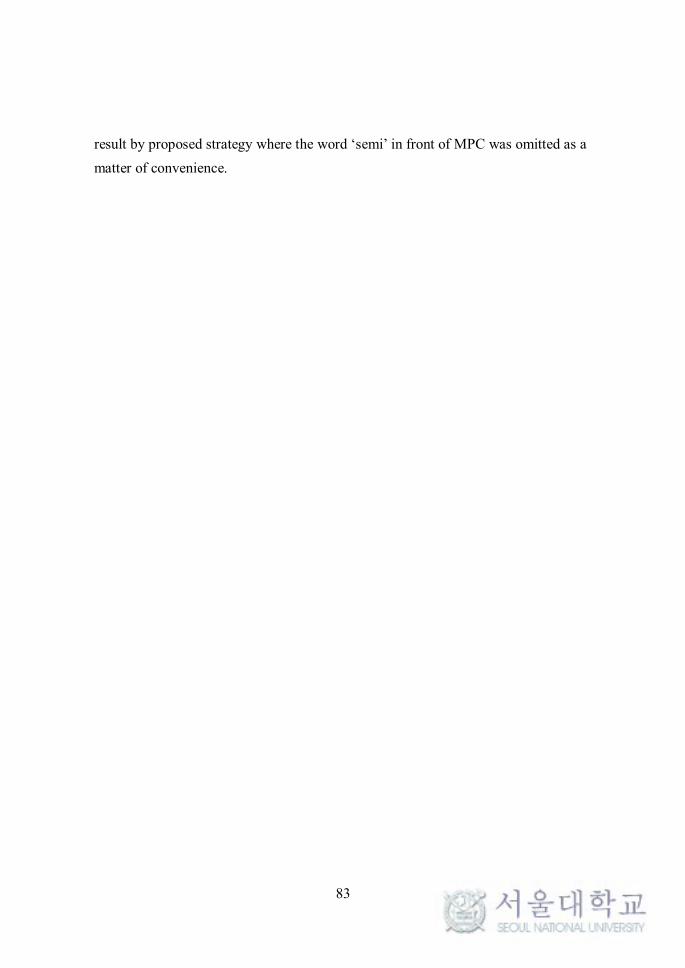
83
result by proposed strategy where the word ‘semi’ in front of MPC was omitted as a
matter of convenience.
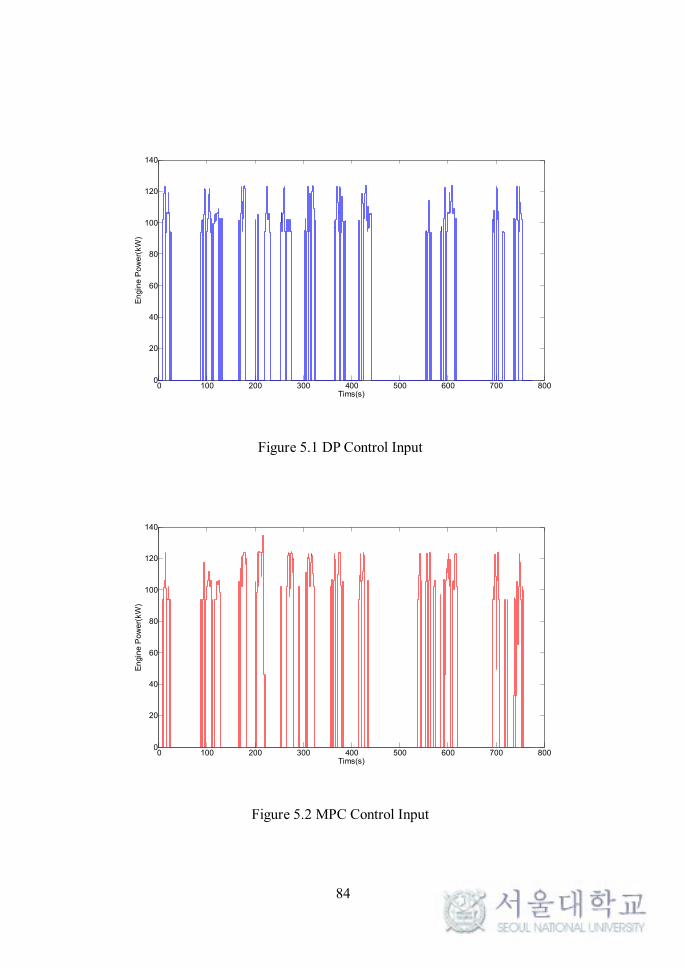
84
Figure 5.1 DP Control Input
Figure 5.2 MPC Control Input
0 100 200 300 400 500 600 700 8000
20
40
60
80
100
120
140
Tims(s)
En
gin
e P
ow
er(
kW
)
0 100 200 300 400 500 600 700 8000
20
40
60
80
100
120
140
Tims(s)
En
gin
e P
ow
er(
kW
)
85
Figure 5.3 DP and MPC Overlapping
010
02
00
30
040
05
00
60
07
00
80
00
20
40
60
80
10
0
12
0
14
0
Tim
s(s
)
Engine Power(kW)
DP
Inp
ut
MP
C In
pu
t
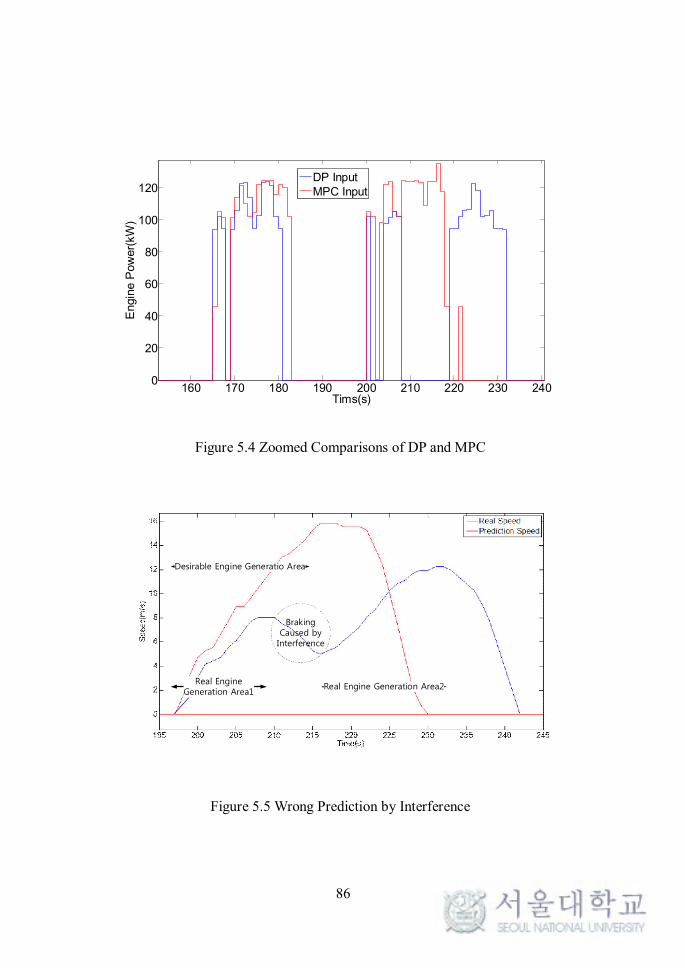
86
Figure 5.4 Zoomed Comparisons of DP and MPC
Desirable Engine Generatio Area
Real Engine Generation Area1
Real Engine Generation Area2
Braking Caused by Interference
Figure 5.5 Wrong Prediction by Interference
160 170 180 190 200 210 220 230 2400
20
40
60
80
100
120
Tims(s)
Engin
e P
ow
er(
kW
)
DP InputMPC Input

87
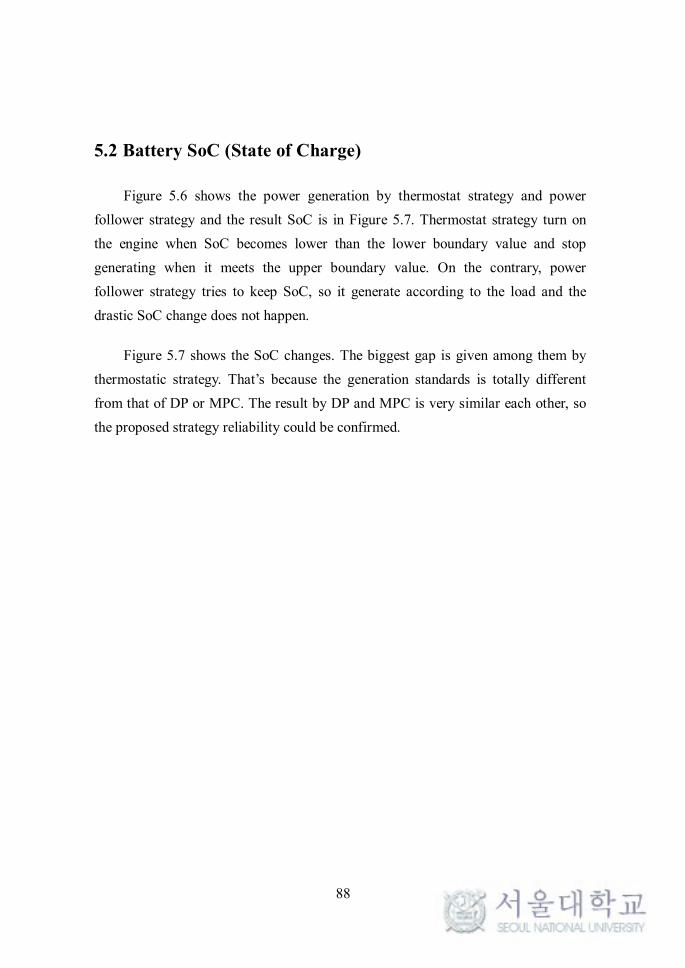
88
5.2 Battery SoC (State of Charge)
Figure 5.6 shows the power generation by thermostat strategy and power
follower strategy and the result SoC is in Figure 5.7. Thermostat strategy turn on
the engine when SoC becomes lower than the lower boundary value and stop
generating when it meets the upper boundary value. On the contrary, power
follower strategy tries to keep SoC, so it generate according to the load and the
drastic SoC change does not happen.
Figure 5.7 shows the SoC changes. The biggest gap is given among them by
thermostatic strategy. That’s because the generation standards is totally different
from that of DP or MPC. The result by DP and MPC is very similar each other, so
the proposed strategy reliability could be confirmed.
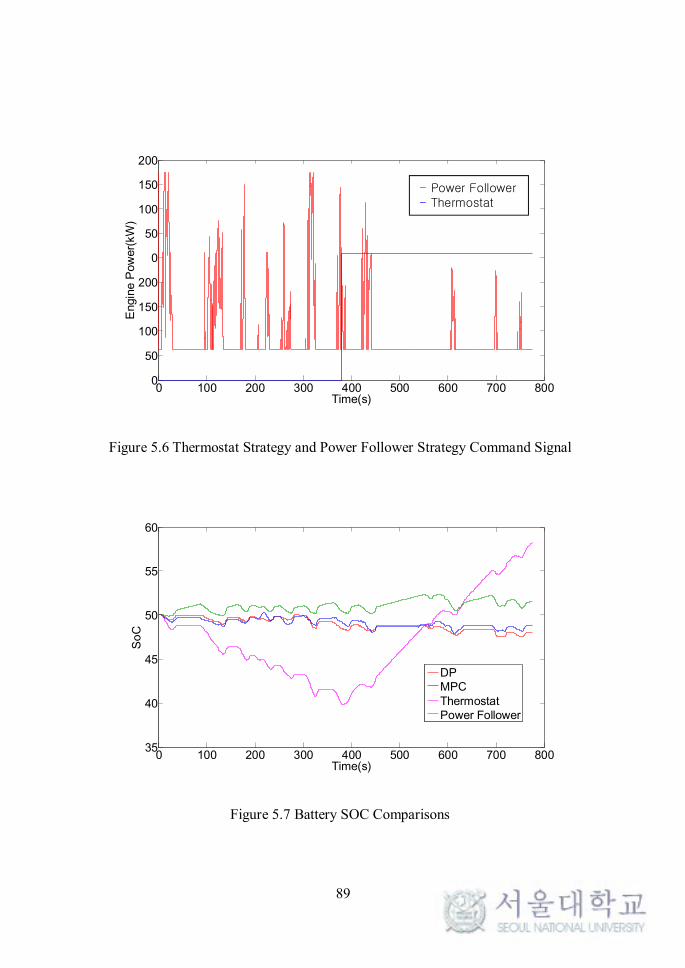
89
Figure 5.6 Thermostat Strategy and Power Follower Strategy Command Signal
Figure 5.7 Battery SOC Comparisons
0 100 200 300 400 500 600 700 8000
50
100
150
200
0
50
100
150
200
Time(s)
Engin
e P
ow
er(
kW
)
0 100 200 300 400 500 600 700 80035
40
45
50
55
60
Time(s)
So
C
DPMPCThermostatPower Follower
- Power Follower - Thermostat
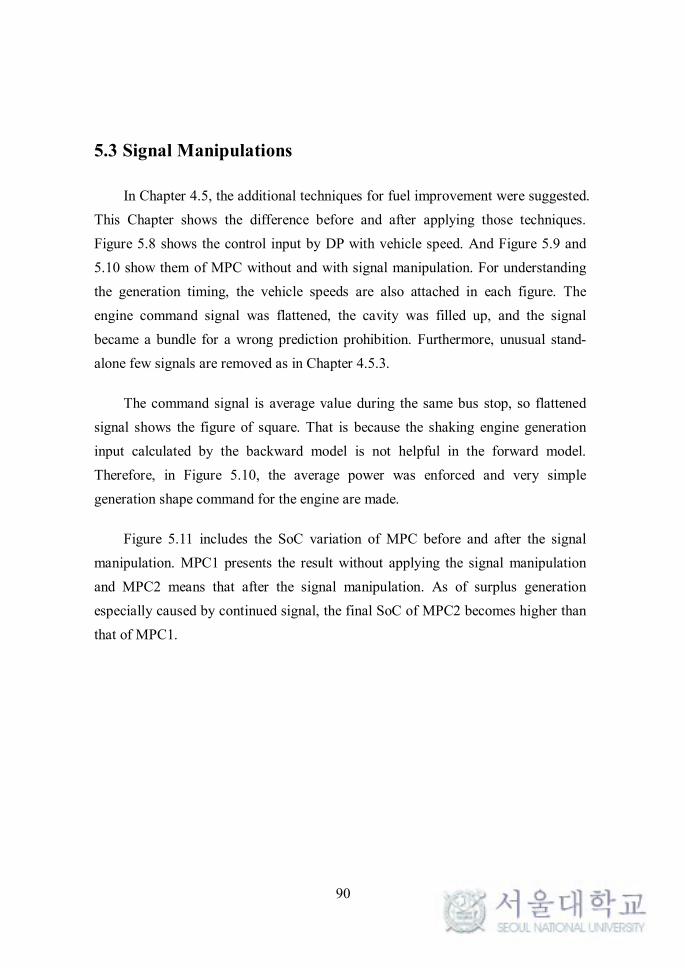
90
5.3 Signal Manipulations
In Chapter 4.5, the additional techniques for fuel improvement were suggested.
This Chapter shows the difference before and after applying those techniques.
Figure 5.8 shows the control input by DP with vehicle speed. And Figure 5.9 and
5.10 show them of MPC without and with signal manipulation. For understanding
the generation timing, the vehicle speeds are also attached in each figure. The
engine command signal was flattened, the cavity was filled up, and the signal
became a bundle for a wrong prediction prohibition. Furthermore, unusual stand-
alone few signals are removed as in Chapter 4.5.3.
The command signal is average value during the same bus stop, so flattened
signal shows the figure of square. That is because the shaking engine generation
input calculated by the backward model is not helpful in the forward model.
Therefore, in Figure 5.10, the average power was enforced and very simple
generation shape command for the engine are made.
Figure 5.11 includes the SoC variation of MPC before and after the signal
manipulation. MPC1 presents the result without applying the signal manipulation
and MPC2 means that after the signal manipulation. As of surplus generation
especially caused by continued signal, the final SoC of MPC2 becomes higher than
that of MPC1.
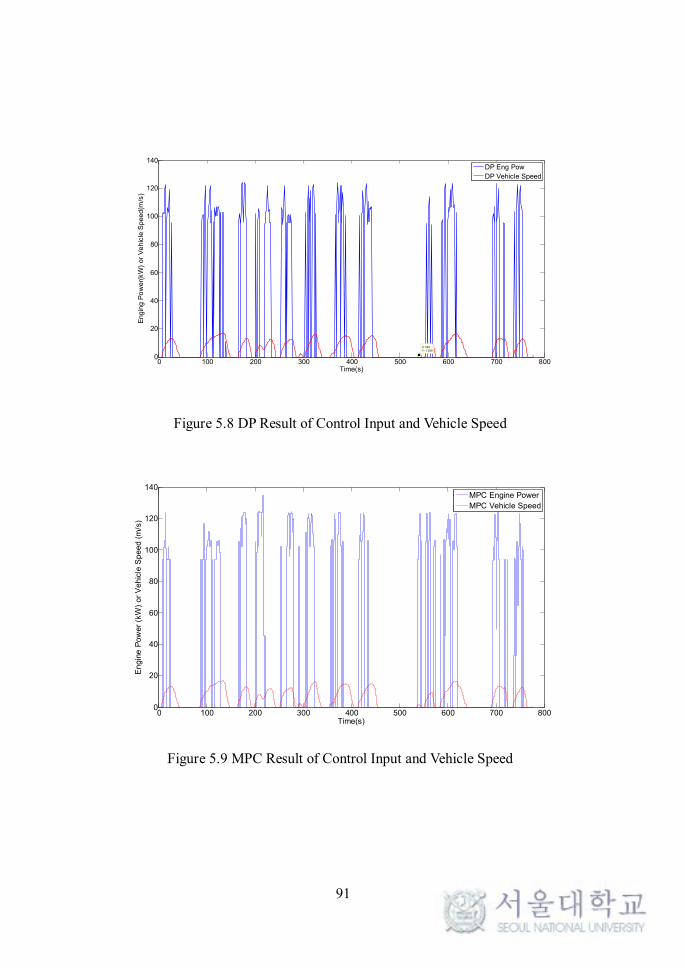
91
Figure 5.8 DP Result of Control Input and Vehicle Speed
Figure 5.9 MPC Result of Control Input and Vehicle Speed
0 100 200 300 400 500 600 700 8000
20
40
60
80
100
120
140
X: 540Y: 1.389
Time(s)
Engin
g P
ow
er(
kW
) or
Ve
hic
le S
peed(m
/s)
DP Eng Pow
DP Vehicle Speed
0 100 200 300 400 500 600 700 8000
20
40
60
80
100
120
140
Time(s)
En
gin
e P
ow
er
(kW
) o
r V
eh
icle
Sp
ee
d (
m/s
)
MPC Engine Power
MPC Vehicle Speed
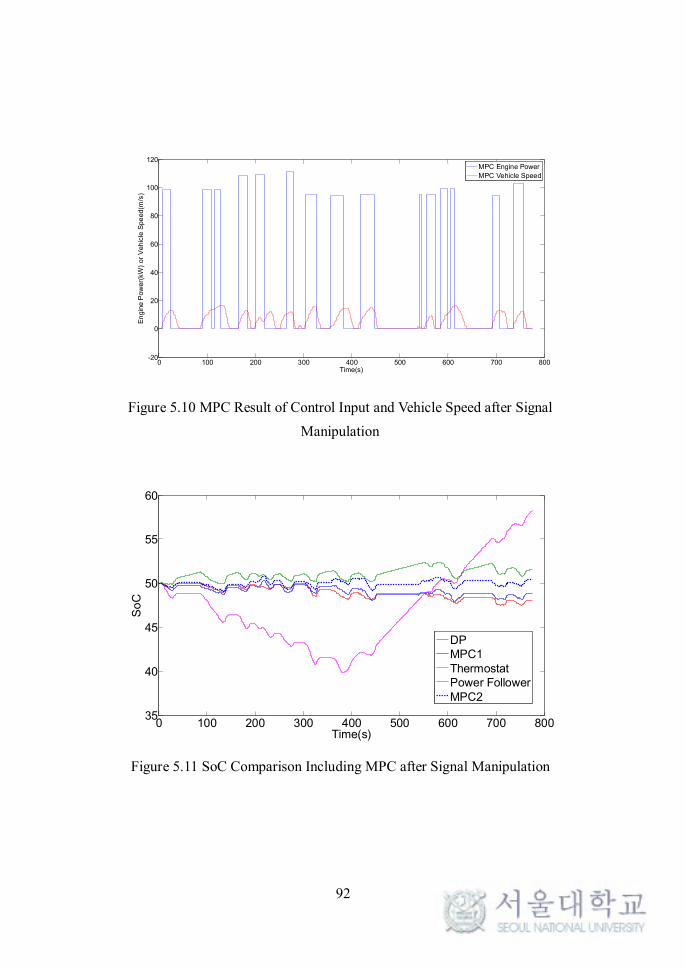
92
Figure 5.10 MPC Result of Control Input and Vehicle Speed after Signal
Manipulation
Figure 5.11 SoC Comparison Including MPC after Signal Manipulation
0 100 200 300 400 500 600 700 800-20
0
20
40
60
80
100
120
Time(s)
En
gin
e P
ow
er(
kW
) or
Vehic
le S
pe
ed(m
/s)
MPC Engine Power
MPC Vehicle Speed
0 100 200 300 400 500 600 700 80035
40
45
50
55
60
Time(s)
So
C
DPMPC1ThermostatPower FollowerMPC2
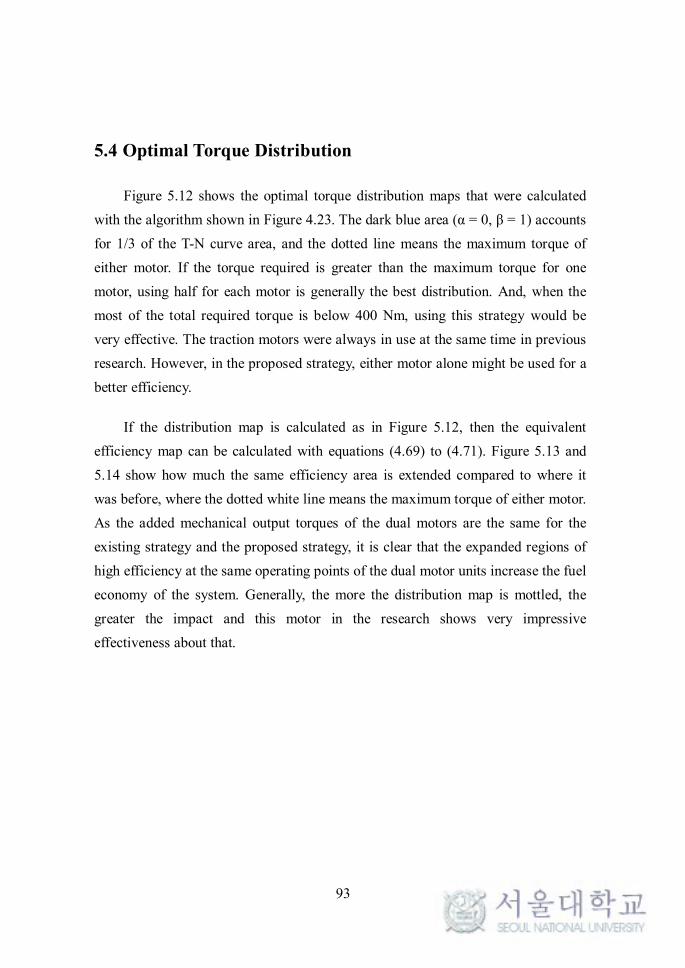
93
5.4 Optimal Torque Distribution
Figure 5.12 shows the optimal torque distribution maps that were calculated
with the algorithm shown in Figure 4.23. The dark blue area (α = 0, β = 1) accounts
for 1/3 of the T-N curve area, and the dotted line means the maximum torque of
either motor. If the torque required is greater than the maximum torque for one
motor, using half for each motor is generally the best distribution. And, when the
most of the total required torque is below 400 Nm, using this strategy would be
very effective. The traction motors were always in use at the same time in previous
research. However, in the proposed strategy, either motor alone might be used for a
better efficiency.
If the distribution map is calculated as in Figure 5.12, then the equivalent
efficiency map can be calculated with equations (4.69) to (4.71). Figure 5.13 and
5.14 show how much the same efficiency area is extended compared to where it
was before, where the dotted white line means the maximum torque of either motor.
As the added mechanical output torques of the dual motors are the same for the
existing strategy and the proposed strategy, it is clear that the expanded regions of
high efficiency at the same operating points of the dual motor units increase the fuel
economy of the system. Generally, the more the distribution map is mottled, the
greater the impact and this motor in the research shows very impressive
effectiveness about that.
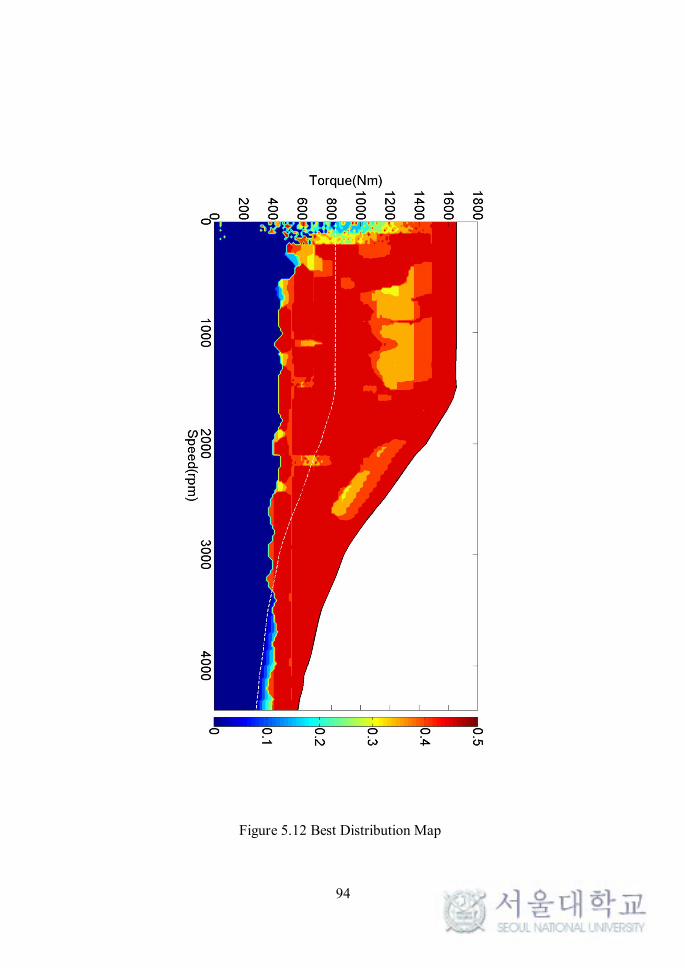
94
Figure 5.12 Best Distribution Map
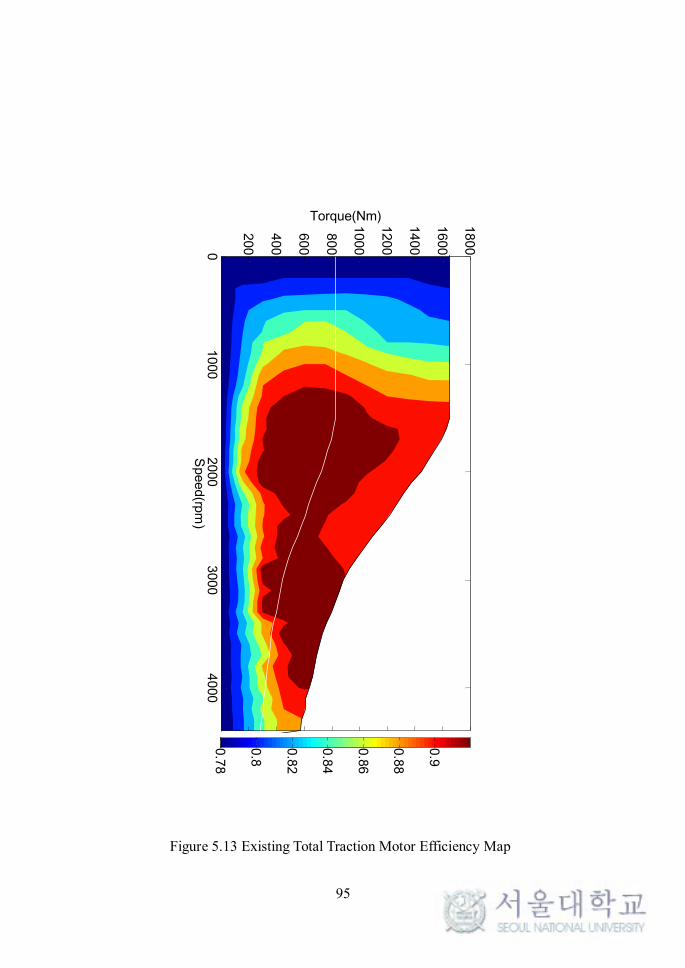
95
Figure 5.13 Existing Total Traction Motor Efficiency Map
Speed(rp
m)
Torque(Nm)
01000
2000
3000
4000
200
400
600
800
1000
1200
1400
1600
1800
0.7
8
0.8
0.8
2
0.8
4
0.8
6
0.8
8
0.9
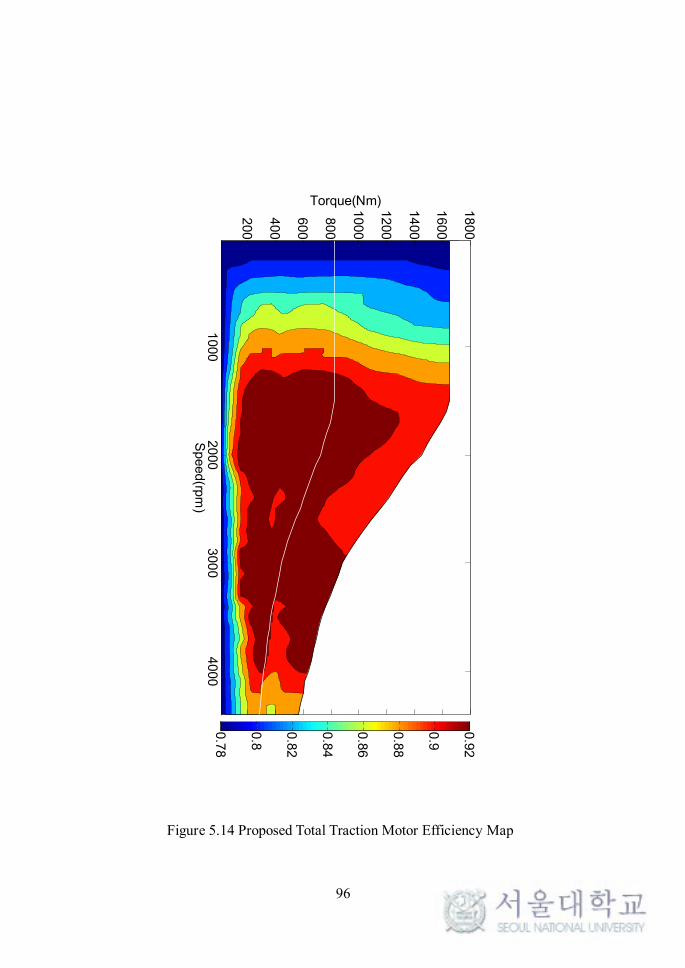
96
Figure 5.14 Proposed Total Traction Motor Efficiency Map
Speed(rp
m)
Torque(Nm)
1000
2000
300
04000
200
400
600
800
1000
1200
1400
1600
1800
0.7
8
0.8
0.8
2
0.8
4
0.8
6
0.8
8
0.9
0.9
2

97
Figure 5.15 shows a histogram comparison of the power difference according
to the total simulation time. The electrical motor power spent (or the re-generated
electrical motor power) considering the operating efficiency was calculated for
every time step for the cases of the half-and-half torque distribution and the
proposed distribution, and the more spent power (or the less re-generated power)
was calculated as in equations (5.1), (5.2) and (5.3):
1 1 2 22 / ( / / )half half opt opt opt optP P Ph h h´ - + : motoring (5.1)
1 1 2 22 ( )half half opt opt opt optP P Ph h h´ ´ - ´ + ´ : generating (5.2)
1 22 half opt optP P P´ = + , (5.3)
where halfP and halfh are the mechanical single-motor output power and the
single-motor efficiency with the half-and-half torque distribution, respectively, and
1optP , 1opth , 2optP and 2opth are the output power and the operating efficiency of
motor 1 and the output power and the operating efficiency of motor 2 with the
proposed distribution, respectively. Thus, the x-axis in Figure 5.15 is the more spent
electrical power at every time step (motoring), or the less re-generated electrical
power at every time step (re-generating), and the y-axis in Figure 5.15 gives the
number of occurrences throughout the simulation. For example, the condition
where 500 W (between 250 W and 750 W) more is spent (or less is re-generated)
occurs in approximately 12000 samples in the case shown in Figure 5.15
throughout the simulation run.
In Figure 5.15, the histogram bars exist mostly at the center or on the right side,
which proves that the proposed torque distribution is effective, as the half-and-half
torque distribution mostly spends the same or more power (or re-generates less
power). The number of occurrences below 100 was omitted, as the effects are minor.
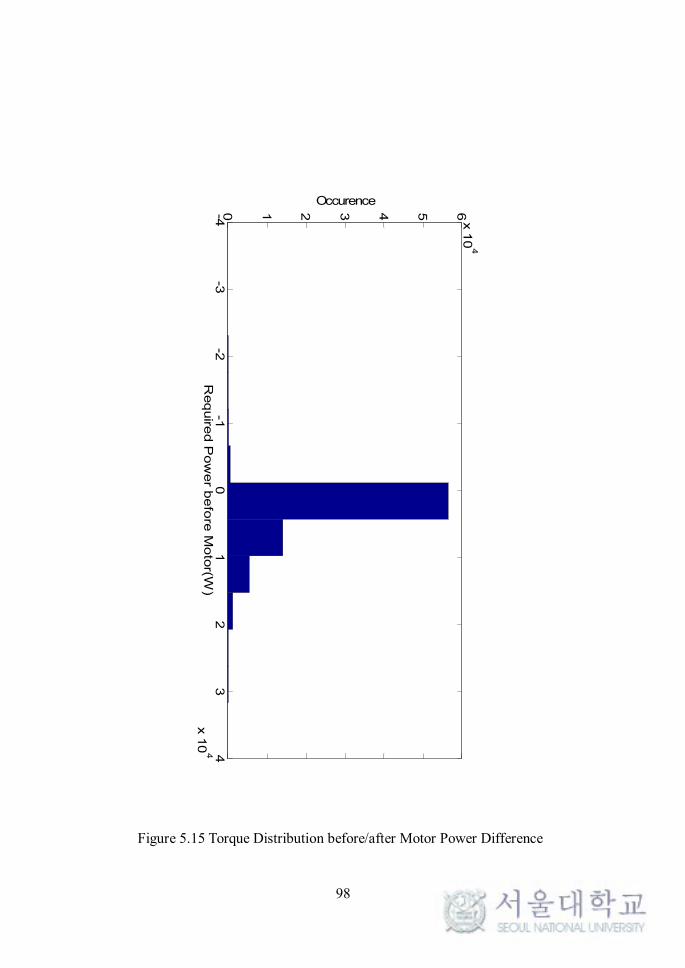
98
Figure 5.15 Torque Distribution before/after Motor Power Difference
-4-3
-2-1
01
23
4
x 1
04
0 1 2 3 4 5 6x 1
04
Require
d P
ow
er b
efo
re M
oto
r(W)
Occurence
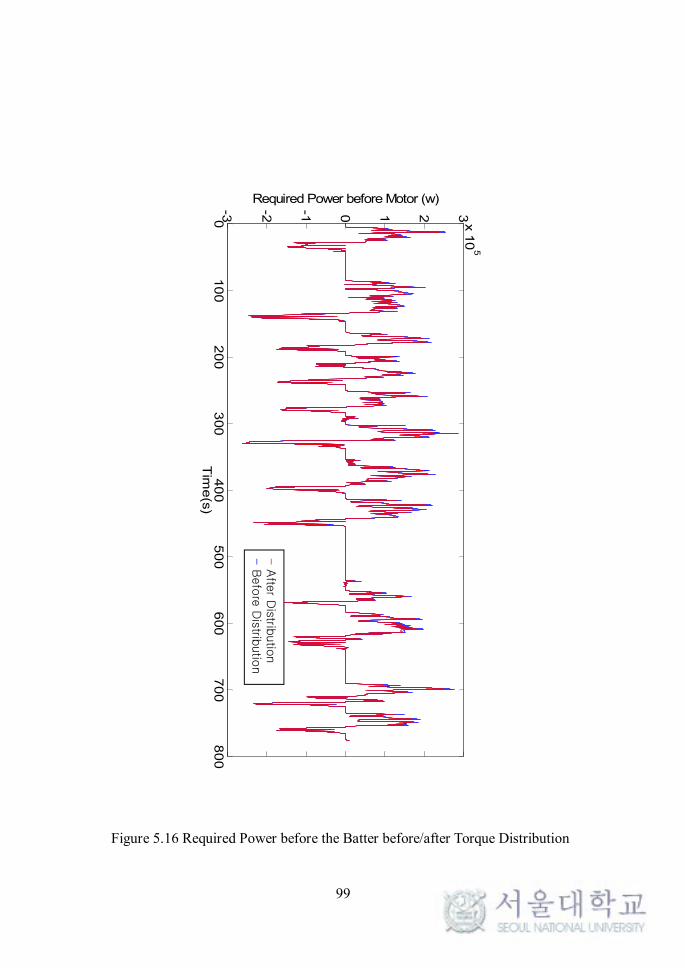
99
Figure 5.16 Required Power before the Batter before/after Torque Distribution
010
02
00
300
40
05
00
600
70
08
00
-3 -2 -1 0 1 2 3x 1
05
Tim
e(s
)
Required Power before Motor (w)
- A
fter D
istributio
n
- B
efo
re D
istrib
utio
n
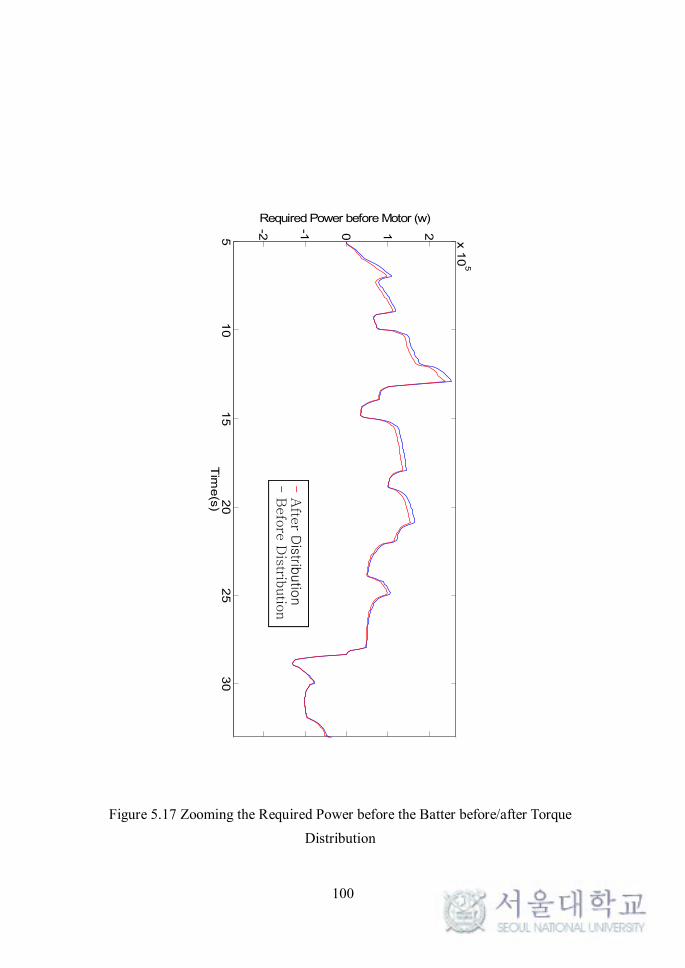
100
Figure 5.17 Zooming the Required Power before the Batter before/after Torque
Distribution
510
15
20
25
30
-2 -1 0 1 2
x 1
05
Tim
e(s
)
Required Power before Motor (w)
- A
fter D
istrib
utio
n
- B
efo
re D
istrib
utio
n
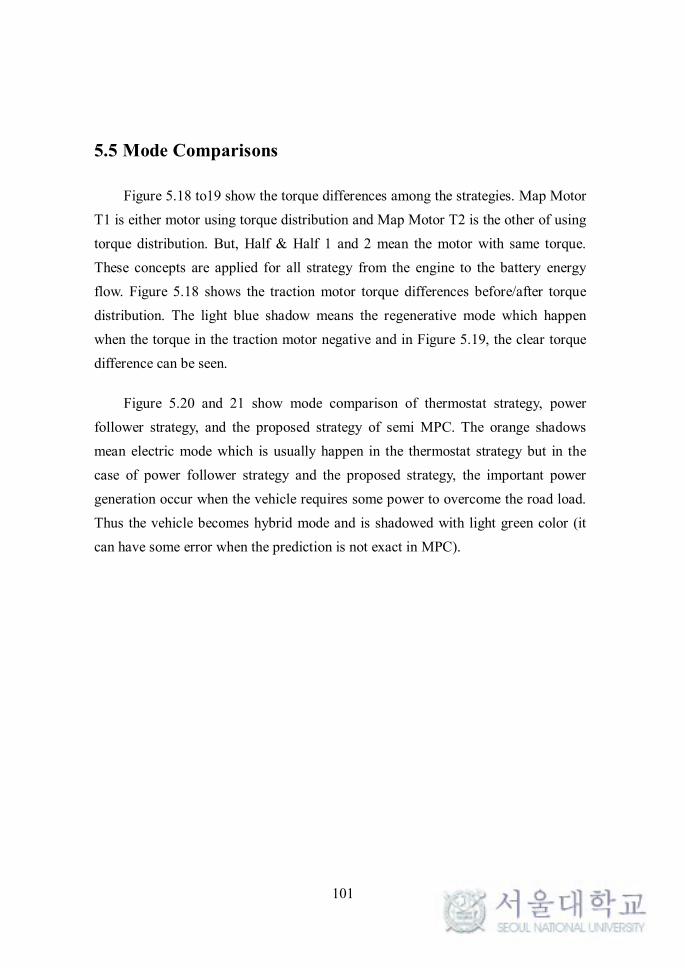
101
5.5 Mode Comparisons
Figure 5.18 to19 show the torque differences among the strategies. Map Motor
T1 is either motor using torque distribution and Map Motor T2 is the other of using
torque distribution. But, Half & Half 1 and 2 mean the motor with same torque.
These concepts are applied for all strategy from the engine to the battery energy
flow. Figure 5.18 shows the traction motor torque differences before/after torque
distribution. The light blue shadow means the regenerative mode which happen
when the torque in the traction motor negative and in Figure 5.19, the clear torque
difference can be seen.
Figure 5.20 and 21 show mode comparison of thermostat strategy, power
follower strategy, and the proposed strategy of semi MPC. The orange shadows
mean electric mode which is usually happen in the thermostat strategy but in the
case of power follower strategy and the proposed strategy, the important power
generation occur when the vehicle requires some power to overcome the road load.
Thus the vehicle becomes hybrid mode and is shadowed with light green color (it
can have some error when the prediction is not exact in MPC).
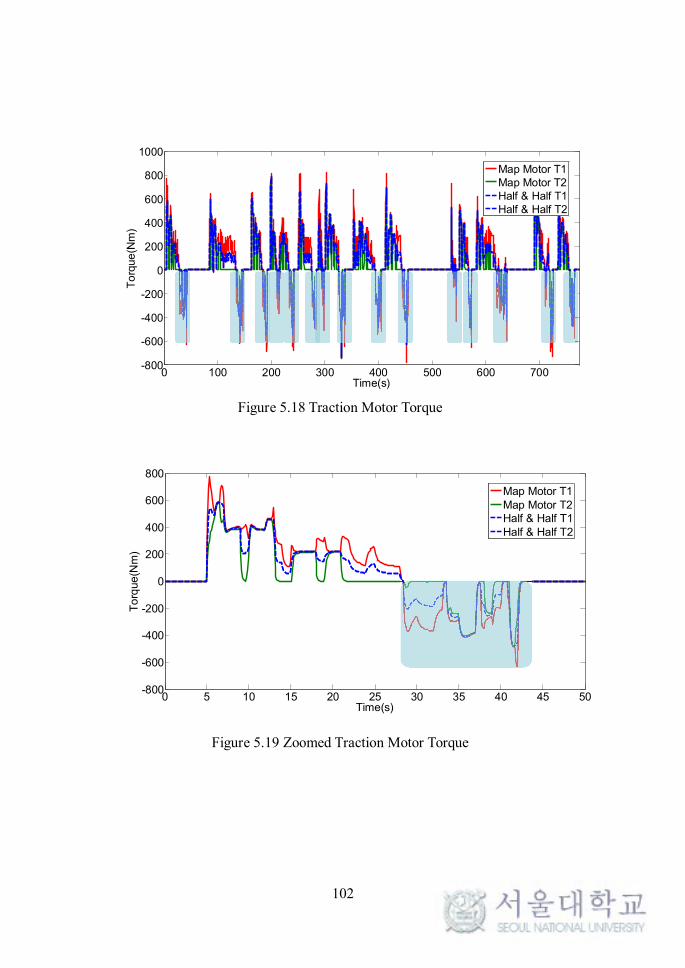
102
Figure 5.18 Traction Motor Torque
Figure 5.19 Zoomed Traction Motor Torque
0 100 200 300 400 500 600 700-800
-600
-400
-200
0
200
400
600
800
1000
Time(s)
To
rque
(Nm
)
Map Motor T1Map Motor T2Half & Half T1Half & Half T2
0 5 10 15 20 25 30 35 40 45 50-800
-600
-400
-200
0
200
400
600
800
Time(s)
To
rque
(Nm
)
Map Motor T1Map Motor T2Half & Half T1Half & Half T2
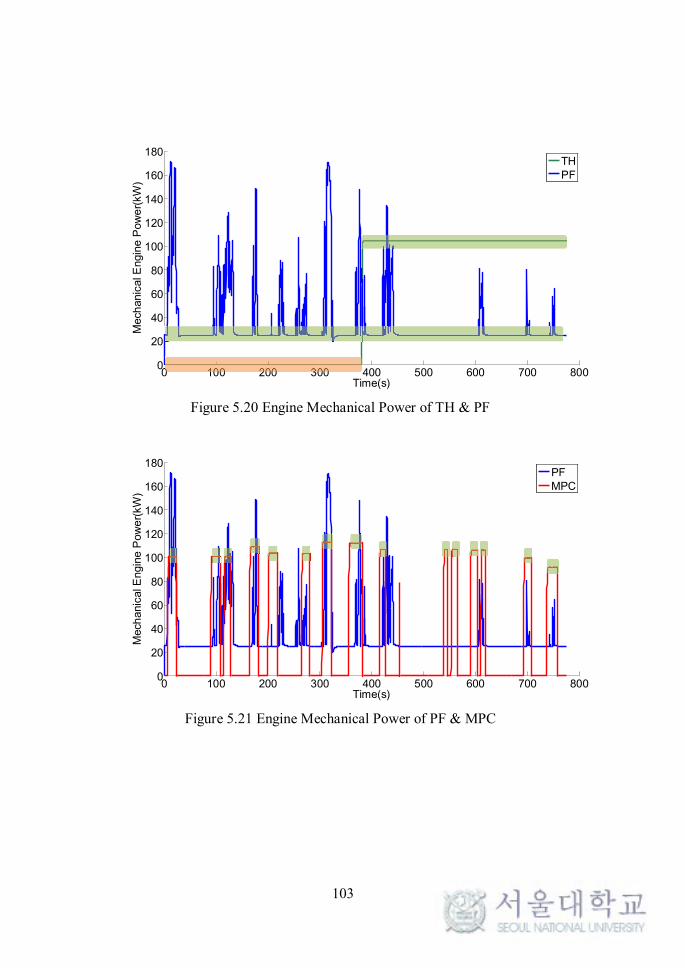
103
Figure 5.20 Engine Mechanical Power of TH & PF
Figure 5.21 Engine Mechanical Power of PF & MPC
0 100 200 300 400 500 600 700 8000
20
40
60
80
100
120
140
160
180
Time(s)
Mech
anic
al E
ngin
e P
ow
er(
kW
)
THPF
0 100 200 300 400 500 600 700 8000
20
40
60
80
100
120
140
160
180
Time(s)
Mech
anic
al E
ngin
e P
ow
er(
kW
)
PFMPC
104
5.6 Fuel Economy Comparison
Figure 5.22 shows the result of this research. All fuel economy improvement
was evaluated compared to DP1 result, where DP1 is the basic simulation result by
Dynamic Programming without signal manipulation. TH (thermostat strategy) or
PF (power follower strategy) results are less effective than DP1. And MPC1
(strategy which does not include signal manipulation technique and motor traction
torque distribution) also gives lower fuel economy than DP1. However, when the
signal manipulating techniques is applied, the fuel economy increase as much as
2.34 % better than DP1 and, when the torque distribution is added (MPC3), the
performance becomes 2.88 % better than that of DP1. However, the most efficiency
case is DP2 where the signal manipulation and torque distributions are used.
Basically, DP gives the ideal optimal calculation result in the backward
model. However, as the real-time simulation model requires a forward model, DP
result at the backward model cannot gives the best answer. Therefore, based on
semi MPC, signal manipulating and motor traction torque optimal distribution was
added and the results show very impressive fuel economy improvement.
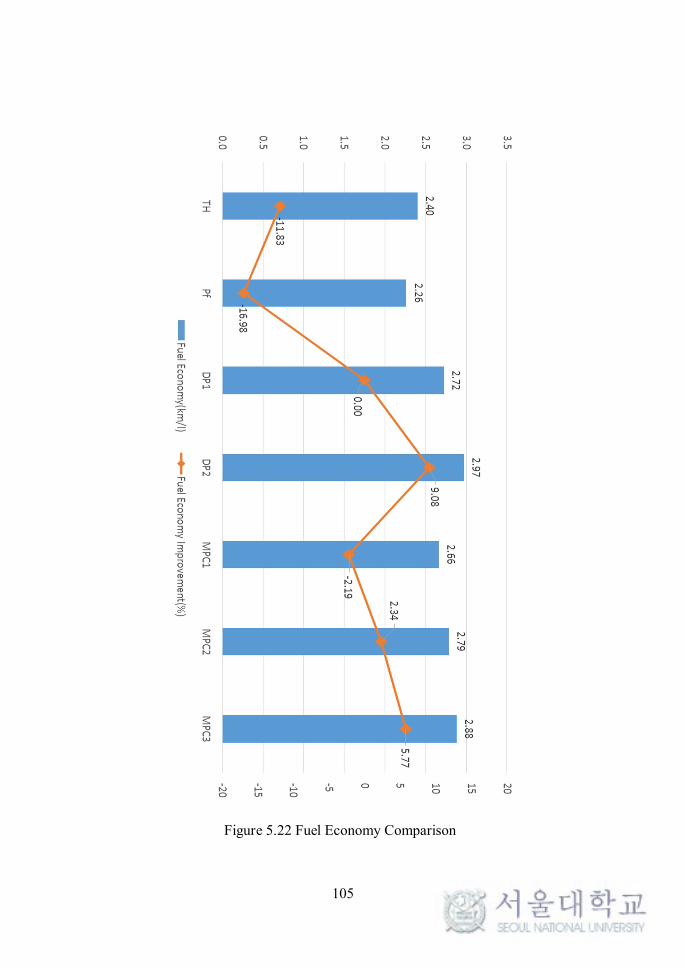
105
Figure 5.22 Fuel Economy Comparison
106
Chapter 6. Conclusions
In this study, a new strategy reducing the fuel consumption for series hybrid
electric intra-city bus is proposed. Intra-city bus is extremely well suited to hybrid
propulsion system because is capable of carrying the large payload required for the
battery and propulsion system. However, without an efficient energy management
strategy, the performance can be even worse than that of ICE vehicles. Thus, the
proposed strategy using NLP with speed prediction, signal manipulation and
traction motor torque distribution is developed, which is based on backward model
to the forward model transplanting.
The proposed strategy achieves the fuel economy of 2.88 km/l whereas DP
without motor torque distribution shows 2.72 km/l and DP with motor torque
distribution shows 2.97 km/l, where the DP calculation is reference given by the
pre-knowledge of all cycle information while the proposed strategy expects the
speed each section and does not know all speed information. Furthermore, the fuel
economy of the proposed strategy is much better than that of the conventional rule
based strategies, thermostat strategy of 2.40 km/l or power follower strategy of 2.26
km/l.
The advantages of the proposed strategy is that it solves the uncertain
standards of ‘When to generate or How much to generate?’ and shows the fast
calculation speed with exactness. It gives the full optimization solution from the
engine to the battery in SHEV which was not achieved before and all these are
demonstrated for the real bus test cycle with the online model. Thus, the fuel
economy is much improved with the real-time applicability and without a heavy
traffic jam or extraordinary accidents, this strategy would be very practical and
powerful.

107
All calculations are based on AMEsim and Simulink co-simulation and more
simplification of this strategy and using art-of-state NLP solver would be very
helpful for applying this strategy for the real SHEV intra-city buses.
108
Bibliography
[1] N. N. P. Wältermann, J. Weimer, and A. Bachmann, "A Testbed for the
Analysis of Performance and Efficiency of a Series Hybrid Drive Train,"
presented at the FISITA, 1998.
[2] J.-W. Xu and L. Zheng, "Simulation and Analysis of Series Hybrid Electric
Vehicle (SHEV) Based on ADVISOR," in Measuring Technology and
Mechatronics Automation (ICMTMA), 2010 International Conference on,
2010, pp. 354-357.
[3] E. R. C. Villante, "On energy performance of an electrically-driven city-car,"
presented at the EVS 26, L.A., 2012.
[4] H. Riebeek. (2010). Global Warming: Feature Articles. Available:
http://earthobservatory.nasa.gov/Features/GlobalWarming/page2.php
[5] D. Yihui, W. Zunya, S. Yafang, and Z. Jin, "The unprecedented freezing
disaster in January 2008 in southern China and its possible association with
the global warming," 象气 学报, vol. 22, 2008.
[6] D. S. Battisti and R. L. Naylor, "Historical warnings of future food insecurity
with unprecedented seasonal heat," Science, vol. 323, pp. 240-4, Jan 9 2009.
[7] Wikipedia, "Global warming."
[8] Doopedia, "global warming," in doopedia, ed. Korea: Doosan Corporation.
[9] J. Lu, G. A. Vecchi, and T. Reichler, "Expansion of the Hadley cell under
global warming," Geophysical Research Letters, vol. 34, 2007.
[10] A. Carnesale and W. Chameides, "America’s Climate Choices," NRC/NAS
USA Committee on America’s Climate Choices http://download. nap.
edu/cart/deliver. cgi, 2011.
[11] S. Solomon, Climate change 2007-the physical science basis: Working group I
contribution to the fourth assessment report of the IPCC vol. 4: Cambridge
University Press, 2007.
109
[12] I. P. O. C. Change, "Climate change 2007: the physical science basis," Agenda,
vol. 6, 2007.
[13] M. Koot, "Energy management for vehicular electric power systems," Ph.D.,
echnische Universiteit Eindhoven, 2007.
[14] A. Shen. (2011). Exxon Is Incredibly Bullish On The Future Of Hybrid
Vehicles. Available: http://www.businessinsider.com/exxon-is-incredibly-
bullish-on-the-future-of-hybrid-vehicles-2011-12
[15] R. Maly, "Spark ignition: its physics and effect on the internal combustion
engine," in Fuel Economy, ed: Springer, 1984, pp. 91-148.
[16] G. Abd-Alla, "Using exhaust gas recirculation in internal combustion engines:
a review," Energy Conversion and Management, vol. 43, pp. 1027-1042, 2002.
[17] M. Koot, "Energy management for vehicular electric power systems," PH.D.,
Technical University of Einthoven, 2006.
[18] L. N. Link. (2011). Exxon Is Incredibly Bullish On The Future Of Hybrid
Vehicles. Available: http://latestnewslink.com/2011/12/exxon-is-incredibly-
bullish-on-the-future-of-hybrid-vehicles/
[19] G. Q. Ao, J. A. Qiang, H. Zhong, L. Yang, and B. Zhuo, "Exploring the fuel
economy potential of ISG hybrid electric vehicles through dynamic
programming," International Journal of Automotive Technology, vol. 8, pp.
781-790, Dec 2007.
[20] A. Sciarretta and L. Guzzella, "Control of hybrid electric vehicles," Ieee
Control Systems Magazine, vol. 27, pp. 60-70, Apr 2007.
[21] P. Pisu and G. Rizzoni, "A comparative study of supervisory control strategies
for hybrid electric vehicles," Ieee Transactions on Control Systems Technology,
vol. 15, pp. 506-518, May 2007.
[22] M. Ehsani, Y. Gao, and A. Emadi, Modern electric, hybrid electric, and fuel
cell vehicles: fundamentals, theory, and design: CRC press, 2009.
[23] B. Bates, "Getting a Ford HEV on the road," Spectrum, IEEE, vol. 32, pp. 22-
25, 1995.
110
[24] W. Xiong, Y. Zhang, and C. Yin, "Optimal energy management for a series–
parallel hybrid electric bus," Energy Conversion and Management, vol. 50, pp.
1730-1738, 2009.
[25] F. R. Salmasi, "Control strategies for hybrid electric vehicles: Evolution,
classification, comparison, and future trends," Ieee Transactions on Vehicular
Technology, vol. 56, pp. 2393-2404, Sep 2007.
[26] K. Çağatay Bayindir, M. A. Gözüküçük, and A. Teke, "A comprehensive
overview of hybrid electric vehicle: Powertrain configurations, powertrain
control techniques and electronic control units," Energy Conversion and
Management, vol. 52, pp. 1305-1313, 2011.
[27] N. Jalil, N. A. Kheir, and M. Salman, "A rule-based energy management
strategy for a series hybrid vehicle," in American Control Conference, 1997.
Proceedings of the 1997, 1997, pp. 689-693.
[28] S. Farrall and R. Jones, "Energy management in an automotive electric/heat
engine hybrid powertrain using fuzzy decision making," in Intelligent Control,
1993., Proceedings of the 1993 IEEE International Symposium on, 1993, pp.
463-468.
[29] B. M. Baumann, G. Washington, B. C. Glenn, and G. Rizzoni, "Mechatronic
design and control of hybrid electric vehicles," Ieee-Asme Transactions on
Mechatronics, vol. 5, pp. 58-72, Mar 2000.
[30] J. Wu, C. H. Zhang, and N. X. Cui, "Fuzzy Energy Management Strategy for a
Hybrid Electric Vehicle Based on Driving Cycle Recognition," International
Journal of Automotive Technology, vol. 13, pp. 1159-1167, Dec 1 2012.
[31] J. M. Liu and H. E. Peng, "Modeling and Control of a Power-Split Hybrid
Vehicle," Ieee Transactions on Control Systems Technology, vol. 16, pp. 1242-
1251, Nov 2008.
[32] S. Yang, M. Li, H. Cui, Y. Cao, G. Wang, and Q. Lei, "Offline Optimization of
Plug-In Hybrid Electric Vehicle Energy Management Strategy Based on the
Dynamic Programming," in Intelligent Computing and Information Science,
ed: Springer, 2011, pp. 668-674.
111
[33] R. Johri and Z. Filipi, "Self-Learning Neural controller for Hybrid Power
Management using Neuro-Dynamic Programming," 2011.
[34] J. P. Gao, G. M. G. Zhu, E. G. Strangas, and F. C. Sun, "Equivalent fuel
consumption optimal control of a series hybrid electric vehicle," Proceedings
of the Institution of Mechanical Engineers Part D-Journal of Automobile
Engineering, vol. 223, pp. 1003-1018, Aug 2009.
[35] N. Kim, S. Cha, and H. Peng, "Optimal Control of Hybrid Electric Vehicles
Based on Pontryagin's Minimum Principle," Ieee Transactions on Control
Systems Technology, vol. 19, pp. 1279-1287, Sep 2011.
[36] G. Paganelli, S. Delprat, T.-M. Guerra, J. Rimaux, and J.-J. Santin,
"Equivalent consumption minimization strategy for parallel hybrid
powertrains," in Vehicular Technology Conference, 2002. VTC Spring 2002.
IEEE 55th, 2002, pp. 2076-2081.
[37] L. V. Pérez and E. A. Pilotta, "Optimal power split in a hybrid electric vehicle
using direct transcription of an optimal control problem," Mathematics and
Computers in Simulation, vol. 79, pp. 1959-1970, 2009.
[38] R. Johri, A. Salvi, and Z. Filipi, "Optimal energy management for a hybrid
vehicle using neuro-dynamic programming to consider transient engine
operation," in ASME 2011 Dynamic Systems and Control Conference and
Bath/ASME Symposium on Fluid Power and Motion Control, 2011, pp. 279-
286.
[39] R. Johri and Z. Filipi, "Low-cost pathway to ultra efficient city car: Series
hydraulic hybrid system with optimized supervisory control," 2010.
[40] Z. Filipi and Y. J. Kim, "Hydraulic Hybrid Propulsion for Heavy Vehicles:
Combining the Simulation and Engine-In-the-Loop Techniques to Maximize
the Fuel Economy and Emission Benefits," Oil & Gas Science and
Technology-Revue D Ifp Energies Nouvelles, vol. 65, pp. 155-178, Jan-Feb
2010.
[41] Y. J. Kim and Z. Filipi, "Simulation study of a series hydraulic hybrid
propulsion system for a light truck," Training, vol. 2008, pp. 12-10, 2007.
112
[42] S. Nabi, M. Balike, J. Allen, and K. Rzemien, "An overview of hardware-in-
the-loop testing systems at Visteon," SAE paper, vol. 5, 2004.
[43] M. Kim, D. Jeong, H. Kang, and K. Min, "Series-Type Hybrid Electric Bus
Fuel Economy Increase with Optimal Component Sizing and Real-Time
Control Strategy," Trans. Korean Soc. Mech. Eng. B, vol. 37, pp. 307-312,
2013.
[44] G. Ripaccioli, A. Bemporad, F. Assadian, C. Dextreit, S. Di Cairano, and I. V.
Kolmanovsky, "Hybrid modeling, identification, and predictive control: An
application to hybrid electric vehicle energy management," in Hybrid Systems:
Computation and Control, ed: Springer, 2009, pp. 321-335.
[45] J. T. Kessels, M. Koot, B. de Jager, P. P. van den Bosch, N. Aneke, and D. B.
Kok, "Energy management for the electric powernet in vehicles with a
conventional drivetrain," Control Systems Technology, IEEE Transactions on,
vol. 15, pp. 494-505, 2007.
[46] S. M. Lukic, S. G. Wirasingha, F. Rodriguez, J. Cao, and A. Emadi, "Power
management of an ultracapacitor/battery hybrid energy storage system in an
HEV," in Vehicle Power and Propulsion Conference, 2006. VPPC'06. IEEE,
2006, pp. 1-6.
[47] D. J. M. Kim, and K. Min, "Series Type Hybrid Bus Research of SILS
System," presented at the KSAE, 2010.
[48] D. J. M. Kim, and K. MIn, "Distribution Control Research on Series Hybrid
Electric Vehicle Bus," presented at the KSAE, 2011.
[49] J. Jeong, D. Lee, C. Shin, D. Jeong, K. Min, S. Cha, and Y.-i. Park,
"Comparison of the Fuel Economy of Series and Parallel Hybrid Bus System
Using Dynamic Programming," Transactions of KSAE, vol. 21, pp. 92-98,
2013.
[50] L. R. A. Chapman, "Adaptive Semi-Global Energy Management for a Series
Hybrid Performance Vehicle," presented at the EVS 26, L.A., 2012.
113
[51] M. D. Petersheim and S. N. Brennan, "Scaling of hybrid-electric vehicle
powertrain components for Hardware-in-the-loop simulation," Mechatronics,
vol. 19, pp. 1078-1090, 2009.
[52] D. J. Xuan, J. W. Kim, and Y. B. Kim, "Optimal operation strategy
development for fuel cell hybrid vehicle," Journal of Mechanical Science and
Technology, vol. 25, pp. 183-192, Jan 2011.
[53] W. W. Pulkrabek, Engineering fundamentals of the internal combustion engine
vol. 2: Pearson Prentice Hall New Jersey, 2004.
[54] P. K. Devan and N. V. Mahalakshmi, "Performance, emission and combustion
characteristics of poon oil and its diesel blends in a DI diesel engine," Fuel,
vol. 88, pp. 861-867, May 2009.
[55] C.-C. Lin, Z. Filipi, Y. Wang, L. Louca, H. Peng, D. Assanis, and J. Stein,
Integrated, feed-forward hybrid electric vehicle simulation in SIMULINK and
its use for power management studies: SAE, 2001.
[56] W. Wang, X. Zeng, and Q. Wang, "Develop hybrid transit buses for chinese
cities," Training, vol. 2013, pp. 11-04, 2003.
[57] K. M. D. Jung, Y. Cho, and Y. Lim, "Study on the optimization of generation
system in a Series HEV Bus," presented at the KSME, 2010.
[58] J. H. Mathews and K. D. Fink, Numerical methods using MATLAB vol. 31:
Prentice hall Upper Saddle River, NJ, 1999.
[59] M. E. Al-Mualla, C. N. Canagarajah, and D. R. Bull, "Simplex minimization
for single- and multiple-reference motion estimation," Ieee Transactions on
Circuits and Systems for Video Technology, vol. 11, pp. 1209-1220, Dec 2001.
[60] W. G. Yim, K. O. An, J. H. Seo, M. J. Kim, and H. K. Jung, "Shape
Optimization for Interior Permanent Magnet Motor based on Hybrid
Algorithm," Journal of Electrical Engineering & Technology, vol. 7, pp. 64-68,
Jan 2012.
[61] J. Farnsworth, T. Bono, H. Mizuno, and Y. Tano, "Development of a Vehicle
Model for FCHV Control and Functional Specification Development within a
Software-in-the-Loop Simulation Environment," Safety, vol. 2013, pp. 04-08.
114
[62] K. O. An, C. H. Im, and H. K. Jung, "Magnetoencephalography source
localization using improved simplex method," Inverse Problems in Science
and Engineering, vol. 16, pp. 499-510, 2008.
[63] W.-G. Yim, K.-O. An, J.-H. Seo, D.-K. Woo, and H.-K. Jung, "A study of the
notch shape optimization for a BLAC motor by using the Response Surface
Method and Improved Simplex Method," in 2010 International Conference on
Electrical Machines and Systems, 2010, pp. 1268-1272.
[64] Z. Filipi and Y. Kim, "Hydraulic hybrid propulsion for heavy vehicles:
Combining the simulation and engine-in-the-loop techniques to maximize the
fuel economy and emission benefits," Oil & Gas Science and Technology–
Revue de l’Institut Français du Pétrole, vol. 65, pp. 155-178, 2009.
[65] Y. J. Kim and Z. Filipi, "Simulation study of a series hydraulic hybrid
propulsion system for a light truck," SAE paper, pp. 01-4151, 2007.
[66] Y. J. Kim and Z. Filipi, "Series hydraulic hybrid propulsion for a light truck–
optimizing the thermostatic power management," SAE Transactions, Journal
of Engines, vol. 116, pp. 24-0080, 2007.
[67] G. Fontaras, P. Pistikopoulos, and Z. Samaras, "Experimental evaluation of
hybrid vehicle fuel economy and pollutant emissions over real-world
simulation driving cycles," Atmospheric Environment, vol. 42, pp. 4023-4035,
Jun 2008.
[68] J. Gao, F. Sun, H. He, G. G. Zhu, and E. G. Strangas, "A comparative study of
supervisory control strategies for a series hybrid electric vehicle," in Power
and Energy Engineering Conference, 2009. APPEEC 2009. Asia-Pacific, 2009,
pp. 1-7.
[69] J. Gao, G. M. G. Zhu, E. Strangas, and F. Sun, "Equivalent fuel consumption
optimal control of a series hybrid electric vehicle," Proceedings of the
Institution of Mechanical Engineers, Part D: Journal of Automobile
Engineering, vol. 223, pp. 1003-1018, 2009.
115
[70] R. Johri, A. Salvi, and Z. Filipi, "Optimal Energy Management for a Hybrid
Vehicle Using Neuro-Dynamic Programming to Consider Transient Engine
Operation," 2011.
[71] D. E. Kirk, Optimal control theory: an introduction: Courier Dover
Publications, 2012.
[72] J. M. Maciejowski, Predictive control: with constraints: Pearson education,
2002.
[73] D. P. Bertsekas, D. P. Bertsekas, D. P. Bertsekas, and D. P. Bertsekas, Dynamic
programming and optimal control vol. 1: Athena Scientific Belmont, MA,
1995.
[74] N. Kim, "Energy management strategy for hybrid electric vehicles based on
pontryagin’s minimum principle," Seoul National University, 2009.
[75] M. Koot, J. T. Kessels, B. de Jager, W. Heemels, P. Van den Bosch, and M.
Steinbuch, "Energy management strategies for vehicular electric power
systems," Vehicular Technology, IEEE Transactions on, vol. 54, pp. 771-782,
2005.
[76] M. Back, M. Simons, F. Kirschaum, and V. Krebs, "Predictive control of
drivetrains," in World Congress, 2002, pp. 1506-1506.
[77] F. Yan, J. Wang, and K. Huang, "Hybrid electric vehicle model predictive
control torque-split strategy incorporating engine transient characteristics,"
Vehicular Technology, IEEE Transactions on, vol. 61, pp. 2458-2467, 2012.
[78] Wikipedia. Model Predictive Control. Available:
http://en.wikipedia.org/wiki/Model_predictive_control
[79] M. Cannon. Model Predictive Control. Available:
http://www.eng.ox.ac.uk/~conmrc/mpc/index.html
[80] G. Ao, J. Qiang, H. Zhong, L. Yang, and B. Zhuo, "Exploring the fuel
economy potential of ISG hybrid electric vehicles through dynamic
programming," Int. J. Automotive Technology, vol. 8, pp. 781-790, 2007.
[81] J. T. Betts, Practical methods for optimal control and estimation using
nonlinear programming vol. 19: Siam, 2010.
116
[82] D. Xuan, J. Kim, and Y. Kim, "Optimal operation strategy development for
fuel cell hybrid vehicle," Journal of Mechanical Science and Technology, vol.
25, pp. 183-192, 2011.
[83] E. D. Tate and S. P. Boyd, "Finding ultimate limits of performance for hybrid
electric vehicles," SAE transactions, vol. 109, pp. 2437-2448, 2000.
[84] L. Pérez and G. García, "State constrained optimal control applied to
supervisory control in HEVs," Oil & Gas Science and Technology–Revue de
l’Institut Français du Pétrole, vol. 65, pp. 191-201, 2010.
[85] M. Kim, D. Jeong, and K. Min, "Serie Type Hybrid Bus Research of SILS
System," 2010, pp. 2929-2934.
117
초 록
시리즈 이 리드차 연구에 가장 큰 이슈 나는 ‘엔진
이 닛 부 모 지 어떻게 에 지를 달 것인가?’
이다. 이를 달 해 많 이 들이 시 었지만, 존 연구들
그 용 이 모 거나, 용 자체가 어 거나, 는 용
배경이 요구 었다. 게다가 고 어 운 략일
이상 인 모델 반 여 모든 보를 아는 것 가 고 를
풀어 에, 그 실 이 떨어 다. 라 간단 략들이 실
어 리 이 에 사용 어 다. 본 연구에 는 이러 략들
약 극복 는 연 향상 에 지분배 략이 시 었다.
가능 속도에 해 계획법 높 과 른
계산속도는 실 인 안 고 다. 해당 략 계획법 및
속도 개 반 백워드 모델에 계획법 사용 여
소 연료량 발 지 값 추출 여 에 지 분배를 는
것 골자 다. 여 에 신 처리 및 견인모 닛에 토크분배도
부가함 써 이 리드 차량 연 를 이룰 있었다. 결국
구조 간단함 에 다소 도외시 직 이 리드 차량 특히
버스에 해 고 효 이루는 독특 방법 시 여, 병 이나
직별 이 리드 차량이 보 지 못 효 인 방법
연 를 이룩 있었다. 안 방법 직 이 리드
차량 배 질 감에도 여 것 다.
키워드: 구동 발 , 에 지 리, 어, 워 발 컨트 ,
실시간 시스 , 시리즈 이 리드 버스
번: 2010-30182





![Disclaimer - Seoul National University · 2019. 11. 14. · alternatives that can overcome demerits of astragalin. Kim, Kang et al. [11] have reported that astragalin glucosides have](https://img.pdfslide.tips/doc/110x75/60db0711ee5764472b026943/disclaimer-seoul-national-university-2019-11-14-alternatives-that-can-overcome.jpg)