Embed Size (px)
Citation preview

China Ocean Eng.,Vol. 27, No. 5, pp. 629 – 644 © 2013 Chinese Ocean Engineering Society and Springer-Verlang Berlin Heidelberg DOI 10.1007/s13344-013-0053-5, ISSN 0890-5487
Dynamic Motion and Tension of Marine Cables Being Laid During Velocity
Change of Mother Vessels*
XU Xue-song (徐雪松)1, WANG Sheng-wei (王盛炜) and LIAN Lian (连 琏)
School of Naval Architecture, Ocean and Civil Engineering, Shanghai JiaoTong University,
Shanghai 200240, China
(Received 4 June 2012; received revised form 11 October 2012; accepted 25 January 2013)
ABSTRACT
Flexible segment model (FSM) is adopted for the dynamics calculation of marine cable being laid. In FSM, the cable
is divided into a number of flexible segments, and nonlinear governing equations are listed according to the moment
equilibriums of the segments. Linearization iteration scheme is employed to obtain the numerical solution for the
governing equations. For the cable being laid, the payout rate is calculated from the velocities of all segments. The
numerical results are shown of the dynamic motion and tension of marine cables being laid during velocity change of the
mother vessels.
Key words: dynamics calculation; discretization method; marine cable; cable laying; cable payout rate
1. Introduction
In the current information age, more and more marine telecommunication cables have been laid to
connect two offshore areas or islands. Laying cable is a common task in ocean engineering. In the
cable laying operation, the velocity of mother vessel may change according to the task requirement.
The most typical examples of velocity change of the mother vessel are: (1) the mother vessel starts
from the initial static status; (2) the mother vessel decelerates from a forwarding velocity to zero
velocity. During the Velocity Change of the mother vessel, the cable configuration and tension may
vary all the time. It will take a long time for the cable to transform in different statuses. In the
meanwhile, the payout rate should be set to the value by which the lower end of cable freely drops to
the seafloor without tension. In the past decades, there have been a lot of researches for the dynamics calculation of marine
cables (Patel, 1995; Howell et al., 1992; Park et al., 2003; Grosenbaugh, 2007). Howell et al. (1992)
formulated the three-dimensional nonlinear equations of motion for a submerged cable. The derivation
of the equations can be viewed as a general formulation in that all forces and moments are equated for
an incremental cable segment. The numerical techniques had been provided to analyze the nonlinear
dynamics of low-tension cables and chains. Park et al. (2003) also made a numerical and experimental
study on the dynamics of a towed low tension cable. An implicit finite difference algorithm is
* The research was jointly supported by the National Natural Science Foundation of China (Grant Nos. 51009092 and 51279107),
Doctoral Foundation of Education Ministry of China (Grant No. 20090073120013) and Scientific Research Foundation of State Education Ministry for the Returned Overseas Chinese Scholars.
1 Corresponding author. E-mail: [email protected]

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
630
employed for solving the three-dimensional cable equations. Fluid and geometric nonlinearities are
solved by NewtonRaphson iteration.
Patel et al. (1995) presented a numerical model for the transient behavior of marine cables during
laying operation. The solution methodology consists of dividing the cable into a number of straight
elements with equilibrium relationships and geometric compatibility equations satisfied for each
element. Vaz et al. (2000) presented a 3D steady-state formulation for elastic segmented marine cables
during installation in sheared currents. The time independent set of first-order nonlinear ordinary
differential equations are solved by a Runge-Kutta integrator.
In the laying operation, the cable tension may vary in a large range if the cable is set at the
negative slack (Yoshizawa et al., 1983). The payout rate should be set at a desirable value to avoid
negative slack cable. Jung et al. (2001) calculated the slack from a comparison of the cable payout rate
and the ship ground speed in accordance with laying conditions, and the speed controller of the cable
engine based on an H∞ servo control is designed for adjusting the cable engine in order to lay a desired
amount of slack.
In this paper, a flexible segment model (FSM) based the method of Xu et al. (2012) is employed
to calculate the dynamic motion and tension of marine laying cables during Velocity Change of mother
vessels. In the FSM-based method, a cable is discretized into a series of flexible segments. For each
flexible segment, its deflection feature and external forces are analyzed independently. For the whole
cable, the nonlinear governing equations are listed according to the moment equilibrium at nodes. To
solve the nonlinear equations, a linearization iteration scheme is provided. The linearization iteration
scheme can avoid the widely used NewtonRapson iteration scheme in which the calculation stability
is influenced by the initial points.
The remaining sections will be organized as follows: Section 2 details the FSM of cable being laid,
and analyzes the deformation, displacement, velocity and acceleration of segment based on the FSM;
Section 3 lists the governing equations of cable motion; Section 4 presents the linearization iteration
scheme for the nonlinear governing equations; Section 5 comes up the equation to calculate the payout
rate for slack cable laying; Section 6 and Section 7 show the numerical results of dynamic motion and
tension in Velocity Change of mother vessel; Section 8 sums up the paper.
2. Flexible Segment Model of Cable Being Laid
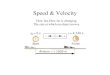
As shown in Fig. 1a, the marine cable is laid out from the mother vessel, and its lower end drops
to seafloor accordingly. FSM of the cable being laid is shown in Figs. 1b and 1c. In Fig. 1b, the cable is
discretized into n flexible segments, marked as S1, S2, …, Sn. At the ends of these flexible segments,
there are n+1 nodes N1, … , Nn, Nn+1. N1 is the upper end, connected with the mother vessel. Nn+1 is the
cable lower end, linked with the seafloor, i.e. touch-down point (TDP). Between Ni and Ni+1, there is a
midpoint Ci on Si.
The cable being laid deforms under external loads. The deformation includes lateral deflection
and axial elongation respectively caused by bending moment and axial tension. As the axial elongation
is much smaller than the lateral deflection, axial elongation is neglected as Patel and Vaz did in 1995

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
631
(Patel and Vaz, 1995).
Fig. 1. Flexible segment model of the cable being laid: (a) marine cable being laid; (b) segments and nodes of the model;
(c) deformation of Si.
To illustrate the deformation, the segment Si is magnified, as shown in Fig. 1c, although the real
deformation of each segment is very small. There are three hypotheses for each segment:
(1) The bending moment and internal tension are uniform in each segment;
(2) The external forces lump at the midpoint of each segment;
(3) The deformation of each segment is very small, although the deformation of the whole cable
may be large.
The 2-D global and local coordinate systems are shown in Figs. 1b and 1c. The global coordinate
system XY is set as X axis parallel to the horizontal plane, Y axis pointing to the sea floor, and its origin
is set at the initial position of the cable upper end. If the upper end moves, it will leave the origin.
At each node Ni, there is a local moving coordinate system niti. It is set as axis ti axial, axis ni
perpendicular to ti, the origin always at Ni. In the same way, at the midpoint Ci, there is a local
coordinate system nc,itc,i.
2.1 Deformation Caused by Bending Moment
To illuminate the deflection feature of segments, the following parameters are denominated, as
shown in Fig. 1c:
Segment deflecting angle i is the angle from the tangent at Ni to the tangent at Ni+1.
Segment deflection in is the deflection from the tangent at Ni to the point Ni+1.
Segment angle i is the angle from Y axis to the line NiNi+1;
Assuming that Mi is the bending moment of Segment Si, the segment deflection angle i
between the tangents at Ni and Ni+1, as shown in Fig. 1c, can be calculated by
ii i
Ml
EI , (1)

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
632
where li is the length of Si, E is Young’s modulus, and I is inertia moment of the cross-section area.
The segment deflection δni from the tangent at Ni to the point Ni+1, as shown in Fig. 1c, can be
calculated by
2
2 2i i
i i i
Mn l l
EI
. (2)
The deflecting angle from the tangent at Ni to the tangent at Ci can be calculated by
, 2 2i i i
c i
M l
EI
. (3)
The deflection from the tangent at Ni to the point Ci can be calculated by 2
, 2 2 4 2i i i i
c i
M l ln
EI
. (4)
The segment angle i from Y axis to the line NiNi+1 can be expressed by
1
01 2
ii
i jj
, (5)
where 0 is the angle between Y axis and the tangent at N1.
2.2 Displacement Calculation
The rotational transform from niti to ni+1ti+1 can be denoted by:
1 1
cos sinˆ ˆ ˆˆ ˆ ˆ
sin cosi i
i i i i i i i
i i
n t n t P n t , (6)
where iP is the variable matrix about i , ˆin and it are unit vectors of axes ni, ti, 1
ˆin and
1it are unit vectors of axes ni+1, ti+1.
The coordinate transformation between Ni and Ni+1 can be denoted as:
1
1
ˆ2
i i ii i
i i
x xl
y y
P t . (7)
From Eq. (3), the rotational transform between nc,itc,i and niti can be calculated by
, ,ˆ ˆˆ ˆ
2i
c i c i i i
n t P n t . (8)
From Eq. (4), the coordinate transformation between Ci and Ni can be calculated by
,
,
ˆ2 4
c i i i ii
c i i
x x ly y
P t . (9)
The first and second derivatives of ( )iP can be written as:
cos sin sin cos
sin cos cos sini i i i i i
i
i i i i i i
P
; (10)

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
633
2 2
2 2
1 2
sin cos
cos sin
sin coscos sin
cos sin sin cos
,
i i i i
i
i i i i
i ii i i i
i
i ii i i i
i i i
P
P P
(11)
where 1 iP and 2 iP are variable matrixes about i . In the remaining part, P matrixes are all
variable matrixes also.
2.3 Velocity Calculation
From Eq. (7), the relationship between velocities of Ni and Ni+1 can be expressed by
1
1
ˆ ˆ ˆ2 2 2
i i i i ii i i i i i
i i
x xl l l
y y
P t P t P t , (12)
where il is the time derivative of il . 1l
is the payout rate of cable, while for 2i , 0il .
i
t is the time derivative of it , and can be obtained from 1it :
1 1 1 1 1 1ˆ ˆ ˆ ˆ( ) ( ) ( )i i i i i i i
t P t P t P t . (13)
But for N1,
0 01 0
0 0
0 cosˆ ( )1 sin
t P . (14)
In the same way, from Eq. (9), the relationship between velocities of Ci and Ni+1 can be expressed
by
,
,
ˆ ˆ ˆ2 4 2 4 2 4
c i i i i i i i ii i i
c i i
x x l l ly y
P t P t P t
. (15)
2.4 Acceleration Calculation
Based on Eq. (15), the second derivative of 1t can be calculated by
2 200 0 0 0 0 0 0 0
1 02 200 0 0 0 0 0 0 0
coscos sin cos sinˆsinsin cos sin cos
t
. (16)
Set
T
0 1 n Θ , (17)
Eq. (16) can be simplified by
1 1,1 2,1ˆ t K K Θ , (18)
where 1,1K and 2,1K are variable matrixes about Θ . In the remaining part, the following K matrixes
are all variable matrixes also.

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
634
From Eq. (14), the second derivative of 1it can be obtained by
1
1 2
3 4
1, 1 2, 1
ˆ ˆ ˆ ˆ2
ˆ ˆ ˆ ˆ2
ˆ ˆ ˆ, , ,
i i i i i i i
i i i i i i i i i
i i i i i i
i i
i
t P t P t P t
P t P t P t P t
P t P t Θ P t
K K Θ
(19)
Based on Eq. (13), the acceleration of Ni+1 can be expressed by
1
1
ˆ ˆ ˆ2 2 2
ˆ ˆ ˆ ˆ ˆ2 2 22 2 2 2 2
i i i i ii i i i i i
i i
i i i i i ii i i i i i i i i i
i
x xl l l
y y
xl l l l l
y
P t P t P t
P t P t P t P t P t
1 4 1, 2,
3, 1 4, 1
ˆ2
ˆ ˆ ˆ ˆ2 2 22 2 2 2
ˆˆ , ,
2 2 2 2
2
ii i
i i i i ii i i i i i i i
i
i i i ii i i i i i
j
i i
l
xl l l l
y
l l i l
P t
P t P t P t P t
tP t P Θ P K K Θ
K K Θ P
1
ˆ .i
j jj
l
t
(20)
The acceleration of Ci can be expressed by
,
,
1 ˆ ˆ ˆ2 4 4 4
ˆ ˆ ˆ ˆ ˆ4 4 4 2 4 2 4
c i i i i ii i i i i i
c i i
i i i i i i i ii i i i i i i i
i
x xl l l
y y
x l ll l l
y
P t P t P t
P t P t P t P t P t
1 4 1, 2,
5, 6,
ˆ2 4
ˆ ˆ ˆ ˆ4 4 4 2 4
ˆˆ , ,
2 4 2 4 4 2 4 2 4
i ii
i i i i i ii i i i i i i
i
i i i i i i i i ii i i
i i
l
x ll l l
y
l l l li
P t
P t P t P t P t
tP t P Θ P K P K Θ
K K
1
1
ˆˆ .
2 4 2
ij i i
j j ij
l l
tΘ P t P
(21)
3. Governing Equation
The governing equations are derived from the principle of moment equilibrium at the segment
midpoints. The external forces working on Segment Si include:
(1) Hydrodynamic force 1,iF ;

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
635
(2) Net gravity 2,iF ;
(3) Inertia force 3,iF .
External forces on each segment here are assumed lumped at its midpoint. In the non- inertial
coordinate system, these external forces must reach moment equilibrium at all midpoints C1, C2, …, Cn.
Equations of moment equilibrium at all midpoints will be listed as governing equations. The external
forces acting on segments can be calculated as follows.
3.1 Hydrodynamic Force
To simplify the calculation of hydrodynamic force, the segments of cable are all viewed as
oblique cylinders. Herein the semi-empirical Morrison approach is adopted for modeling
hydrodynamic force (Pao et al., 2000). The hydrodynamic force can be decomposed into tangent,
normal components. Thus, the hydrodynamic force of Si at Ci can be calculated by
1, 1, 1,i n i t i F F F , (22)
where 1,n iF and 1,t iF are the normal and tangent components of the hydrodynamic force, calculated
by
1, d w , , , , M w ,
M w ,
1( )
2 ( 1) ;
n i i i wn i n i wn i n i i i wn i
i i n i
c d l c Al
c Al
F v v v v v
v
(23)
1, f w , , , ,
1( )
2t i i i wt i t i wt i t ic d l F v v v v , (24)
in which, cd, cM are drag and inertia coefficients, di is the diameter of Si, Ai is the outer area of
cross-section of Si, ρw is the water density, and cf is the frictional coefficient.
,n iv is the normal component of velocity vector ,c iv of Ci, calculated by
2
,, , ,, , ,, , , , , 7,2
,, , ,, , ,
1( )
1cx ic i c i c icx i cx i cy i
n i cx i c i cy i c i i
cy ic i c i c icx i cy i cy i
tx x xt t tt x t y
ty y yt t t
v K
, (25)
where ,cx it and ,cy it are components of cit , denoted by
T
, ,ci cx i cy it t t . (26)
Similarly, ,n iv is the normal component of acceleration vector ,c iv at Ci, calculated by
,, ,
, , , , , 7,
,, ,
( ) cx ic i c i
n i cx i c i cy i c i i
cy ic i c i
tx xt x t y
ty y
v K , (27)
where ,wn iv is the normal component of current velocity vector ,w iv at Ci, ,wn iv is the normal
component of current acceleration vector ,w iv at Ci, and ,t iv is the tangent component of current
velocity vector ,c iv at Ci, expressed by
2, , ,, , ,
, , , , , 8, 8, ,2, , ,, , ,
( ) cx i c i c icx i cx i cy i
t i cx i c i cy i c i i i c i
cy i c i c icx i cy i cy i
t x xt t tt x t y
t y yt t t
v K K v . (28)

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
636
,wt iv is the tangent component of current velocity vector ,w iv at Ci.
The hydrodynamic force of Si at Ci can be summed as:
1, d w , , , , M w , M ,
f w , , , ,
4, 5,
1( ) ( 1)
21
( )2
,
i i i wn i n i wn i n i i i wn i i i w n i
i i wt i t i wt i t i
i i
c d l c Al c Al
c d l
F v v v v v v
v v v v
F F
(29)
where
4, d w , , , , M w ,
f w , , , ,
1( )
21
( ) ;2
i i i wn i n i wn i n i i i wn i
i i wt i t i wt i t i
c d l c Al
c d l
F v v v v v
v v v v
(30)
5, M w , M w 7, ,( 1) ( 1)i i i n i i i i c ic Al c Al K F v v . (31)
3.2 Net Gravity
As the cross-section area of each segment is much smaller than the whole surface area of segment,
the segment is viewed approximately enclosed by water. Therefore, Archimede’s principle can be applied.
The net gravity at Ci is calculated by
2, wi i i rA l F g , (32)
where iA is the cross-section area of Si, g is the gravity vector, and rw is the cable density in
water.
3.3 Inertia Force
According to D'Alembert’s principle, the inertia force at Ci is calculated by
3, r ,i i i c iA l F r , (33)
where r is the cable density in air.
3.4 Sum-up of External Force
Sum up the above F1,i, F2,i and F3,i, the external forces working on Si at Ci can be summed up:
,
1, 2, 3, 4, 2, 5, 3,
,
4, 2, M w 7, , r ,
4, 2, M w 7, r ,
9, 10,
( 1)
( 1)
.
x i
i i i i i i i i
y i
i i i i i c i i i c i
i i i i i i i c i
i i
F
F
c Al Al
c Al Al
F F F F F F F F
F F K r r
F F K I r
K K Θ
(34)
3.5 Tension of Segment
For each segment Si, the axial tension is viewed uniform, and can be obtained by
T T T T
, , 9, 10, , 9, , 10,ˆ ˆ ˆ ˆ
n n n n
i c i j c i j j c i j c i jj i j i j i j i
T t F t K K Θ t K t K Θ . (35)

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
637
3.6 Moment Equilibrium
The moment at Ci caused by the external forces can be calculated by
, , , , , ,1
,
, , , ,1 ,
, , , , 9, 10,1
11, 12,
( ) ( )
( ) ( )
( ) ( ) ( )
n
i x j c j c i y j c j c ij i
nx j
c j c i c j c ij i y j
n
c j c i c j c i j jj i
i i
M F y y F x x
Fy y x x
F
y y x x
K K Θ
K K Θ
(36)
By combining Eqs. (1) and (36), the following equation can be obtained:
11, 12,i i i i
i
EIM
l K K . (37)
3.7 Boundary Conditions
For the deep-sea cable, the upper end can be viewed as freely connected. The moment equilibrium
at N1 can be expressed by
0 , , , , ,1
,
, , , ,1 ,
( ) ( )
( ) ( )
0.
n
x j c j i y j c j c ij
nx j
c j c i c j c ij i y j
M F y y F x x
Fy y x x
F
(38)
Eqs. (37) and (38) are governing equations of the marine cable motion while being laid.
4. Numerical Solution
In the dynamics calculation, Θ as an unknown variable matrix needs to be calculated from Eqs.
(37) and (38) as governing equations. Since Eqs. (37) and (38) are highly nonlinear about Θ , it is
difficult to get the analytical solution to the equations directly, so we resort to the numerical solution.
Here we employ a linearization iteration scheme to get the numerical solution.
There is a special and important feature about the governing equations: if the current Θ and Θ
are known, they become linear equations about the current Θ . By solving the linear equations, the
current Θ can be obtained directly. This is the key point in the linearization iteration scheme.
From the current Θ , the next Θ and Θ can be calculated by the following iteration: ( 1) ( ) ( )i i i t Θ Θ Θ ; (39)
( 1) ( ) ( ) ( 1)1( )
2i i i i t Θ Θ Θ Θ , (40)
where i in the superscript bracket means the iteration times (e.g. ( )iΘ is the value of Θ in the i-th
iteration), and t is the time interval of iteration. By the iteration, the time history of Θ can be

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
638
obtained from the initial Θ and Θ .
In the above numerical solution, 1l , 1l and 1l
are calculated beforehand. 1l is the cable payout
rate, can be determined by Eq. (51) in the next section.
With the current ( )
1
il , the length of S1 in the next iteration will be extended by
( 1) ( ) ( )
1 1 1
i i il l l t . (41)
The length of Sn in the next iteration will be subtracted by the length dropping to the sea floor, as Eq.
(43) in the next section.
1l in the next iteration can be obtained by
( 1) ( )( 1) 1 1
1
i ii l l
lt
. (42)
5. Payout Rate Calculation
If the cable is negative slack, the tension will increase rapidly, as presented by Yoshizawa et al.
(1983). The payout rate should be set appropriate to lay the cable to the seafloor slackly.
To ensure the lower end of the cable is laid down to the seafloor without tension and waste, the
payout rate should be set to a value by which the length of the lower end freely dropping to the sea is
equal to the length of lower end going through the seafloor.
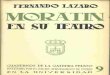
As shown in Fig. 2, the mother vessel goes leftward, and the marine cable is laid down to the
seafloor accordingly. The TDP in the i-th iteration is Nn+1(i), denoted by A. And then the TDP in the
(i+1)-th iteration is Nn+1(i+1), denoted by B. If there is no seafloor, A would freely drop to C.
Fig. 2. Payout rate analysis:
AV is the velocity vector of Nn+1(i), parallel to the displacement vector from A to C.
Assuming that BCl is the length between points B and C below the seafloor, i.e. the length of the
lower end freely drops to the seafloor, the length of Sn(i) is shortened by
( 1) ( )i i
n n BCl l l . (43)
Assume ABl is the distance between the TDPs of the i-th and (i+1)-th iterations, i.e. the forwarding

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
639
distance of the cable lower end.
To ensure the cable is freely dropped to the seafloor with no waste, the payout rate should be set
to a value by which the freely-dropping length is equal to the forwarding length: BC ABl l , and the
triangle ABC is isosceles.
Assuming that the seafloor is horrizonal, is the angle between AB and AC,
π2 π
2 n
; (44)
π
4 2n . (45)
If the seafloor is oblique, should be adjusted accordingly.
The velocity vector of Nn+1(i) is parallel to the displacement vector from A to C. The velocity
vector of Nn+1 is T
1 1n nx y , thus
1 1cos sinn ny x ; (46)
1
1
sin cos 0n
n
x
y
. (47)
Set
5 sin cos P , (48)
the equation can be denoted by
1
5
1
0n
n
x
y
P
. (49)
From Eq. (12), the velocity of Nn+1 can be calculated by
1
1
1 11 1
11
11 1 6
ˆ ˆ ˆ2 2 2
ˆ ˆ ˆ2 2 2
ˆ ,2
n n n n nn n n n n n
n n
ni i
i i i ii
x xl l l
y y
xl l l
y
l
P t P t P t
P t P t P t
P t P Θ
(50)
where 6P Θ is a variable matrix.
Input Eq. (49) into Eq. (48), the following can be obtained by
11 5 1 5 6
ˆ 02
l
P P t P P Θ , (51)
so the payout rate can be calculated by
5 6
1
15 12
l
P P Θ
P P t
. (52)

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
640
6. Dynamic Motion and Tension During Acceleration of Mother Vessel
Velocity Change of the mother vessel often occurs in cable laying operation. During the Velocity
Change of the mother vessel, the cable configuration and tension may change. To simulate the
changing process of the dynamic motion and tension of marine cables being laid, the numerical
calculation was carried out. Section 6 presents the numerical results of dynamic motion and tension
during the acceleration of the mother vessel, while Section 7 presents the numerical results of dynamic
motion and tension during the deceleration of the mother vessel.
Assuming the velocity of the mother vessel is set as
1 o f o( ) /x V V V t T , (53)
where oV and fV are the initial and final vessel velocities, respectively; and T is the accelerating
time taken for the vessel to reach the final velocity.
Assuming that the cable is armored, its features are shown in Table 1.
Table 1 Cable features
Weight in air Weight in sea Cable diameter Young’s modulusDrag
coefficient Inertia
coefficient Frictional coefficient
26.49 N/m 17.76 N/m 0.0332 m 1.4393e+10 N/m2 1.649 2.0 0.017
Here we used the above FSM based method to do the numerical calculation. The numerical
calculation was implemented by Matlab programming. In the acceleration of the mother vessel,
o 0V m/s, f 2V m/s and 100T s. The initial cable state is vertically hanged in water.
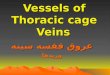
The numerical results are shown in Figs. 3–6. Fig. 3 shows the configurations of (a) 120-m-depth
and (b) 1200-m-depth cables. We can see that it will need about 300 s for the 120-m-depth cable to
reach the final steady configuration, while it will need about 2700 s for the 1200-m-depth cable to
reach the final steady configuration.
The cable tensions are shown in Fig. 4. The tensions vary in small ranges: 2.13–2.14 kN for the
120-m-depth cable; 21.2–21.4 kN for the 1200-m-depth cable.
The payout rates are shown in Fig. 5. For the 120-m-depth cable, it takes about 350 s to reach the
final payout rate (2 m/s). And for the 1200-m-depth cable, it takes about 3000 s to reach the final
payout rate (2 m/s).
As the accelerating time T will influence the tension varying range, the comparison of different
accelerating times is done. The results are shown in Fig. 6, and the time histories of cable tensions at
10T s, 50T s and 200T s are plotted with dash-dot, dashed and solid lines, respectively. The
influence of the accelerating time T on the cable tension can be concluded by
(1) As T goes smaller, i.e. acceleration is larger, the tension becomes larger;
(2) As the depth goes larger, the influence of T on the cable tension becomes smaller;
(3) Even though the acceleration is large, the varying range of cable tension is relatively small by
the calculated payout rate;
(4) The initial and final tensions are approximate.

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
641
Fig. 3. Cable configurations of (a) 120-m-depth and (b) 1200-m-depth cables during acceleration with 100T s.
Fig. 4. Cable tensions of (a) 120-m-depth and (b) 1200-m-depth cables during acceleration with 100T s.
Fig. 5. Cable payout rates of (a) 120-m-depth and (b) 1200-m-depth cables during acceleration with 100T s.

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
642
Fig. 6. Cable tensions of (a) 120-m-depth and (b) 1200-m-depth cables during acceleration with
10T s, 50T s and 200T s.
7. Dynamic Motion and Tension During Deceleration of the Mother Vessel
This section will present the numerical results of dynamic motion and tension of marine cable
being laid during the deceleration of the mother vessel. The parameters of Eq. (53) are set as
o 2V m/s, f 0V m/s and 100T s. The initial cables are in the 2m/s steady forwarding state.
The numerical results are shown in Figs. 7–9. Fig. 7 shows the configuration of (a) 120-m- and (b)
1200-m-depth cables during the deceleration. We can see that it will need about 350 s for the 120-m-
depth cable to reach the steady static configuration, while it will need about 3000 s for the 1200-m-
depth cable to reach the steady static configuration.
Fig. 7. Cable configurations of (a) 120-m- and (b) 1200-m-depth cables during deceleration with 100T s.
The cable tensions are shown in Fig. 8. The tensions vary in small ranges: about 2.11–2.13 kN for
the 120-m-depth cable; about 21.1–21.3 kN for the 1200-m-depth cable.

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
643
Fig. 8. Cable tensions of (a) 120-m- and (b) 1200-m-depth cables during deceleration with 100T s.
The payout rate is shown in Fig. 9. For the 120-m-depth cable, it takes about 350 s to reach the
final payout rate (0 m/s). And for 1200-m-depth cable, it takes about 2800 s to reach the final payout
rate (0 m/s).
Fig. 9. Cable payout rates of (a) 120-m- and (b) 1200-m-depth cables during deceleration with 100T s.
8. Conclusions
FSM-based method is employed to do dynamics calculation of marine riser being laid. In FSM,
the cable is divided into a number of flexible segments. The whole cable deformation is composed of a
series of small deformation of these flexible segments. Moment equilibrium equations on these
segments are listed as governing equations. A linearization iteration scheme is presented to obtain
numerical solution to the nonlinear governing equations. The iteration scheme can avoid the selection
of initial values which is important for NewtonRapson iteration. Therefore, the stability of the
dynamics calculation by the present linearization iteration scheme is improved.

XU Xue-song et al./China Ocean Eng., 27(5), 2013, 629 – 644
644
To lay the cable to the seafloor slackly, the equations to calculate the payout rate are presented.
With the calculated payout rate, the cable lower end can freely drop to the seafloor without tension and
waste.
The numerical results of the dynamic motion and tension of marine cables during Velocity
Change of mother vessels are presented. From the results, we can see that with the calculated payout
rate, the tension of the cable is not much influenced by the acceleration and deceleration of the mother
vessel.
References
Grosenbaugh, M. A., 2007. Transient behavior of towed cable systems during ship turning maneuvers, Ocean Eng.,
34(11): 1532–1542.
Howell, C. T., 1992. Investigation of the Dynamics of Low-Tension Cables, Ph. D Thesis, Massachusetts Institute
of Technology, USA.
Jung, K. Y., Yang, S. Y., Jeoung, C. H., and Lee, M. H., 2001. Laying control of a submarine cable, IEEE
International Symposium on Industrial Electronics, Pusan, Korea, 1496–1501.
Pao, H. P., Ling, S. C., and Kao, T. W., 2000. Measurement of axial hydrodynamic force on a yawed cylinder in a
uniform stream. Proceedings of the 10th Offshore and Polar Engineering Conference, Seattle, USA,
356–361.
Patel, M. H., and Vaz, M. A., 1995. The transient behaviour of marine cables being laid − the two-dimensional
problem, Appl. Ocean Res., 17(4): 245–258.
Patel, M. H., 1995. Review of flexible riser modeling and analysis techniques, Eng. Struct., 17(4): 293–304.
Park, H. I. and Jung, D. H., 2002. A finite element method for dynamic analysis of long slender marine structures
under combined parametric and forcing excitations, Ocean Eng., 29(11): 1313–1325.
Park, H. I., Jung, D. H. and Koterayama, W., 2003. A numerical and experimental study on dynamics of a towed
low tension cable, Appl. Ocean Res., 25(5): 289–299.
Vaz, M. A. and Patel, M. H., 2000. Three-dimensional behaviour of elastic marine cables in sheared currents, Appl.
Ocean Res., 22(1): 45–53.
Xu, X. S. and Wang, S. W., 2012. A flexible-segment-model-based dynamics calculation method for free hanging
marine risers in re-entry, China Ocean Eng., 26(1): 139–152.
Xu, X. S., Wang, S. W., Lian, L. and Ren, P., 2012. Dynamic calculation of towed cables under heave motion of
mother vessels, Proceedings of the 22nd International Offshore and Polar Engineering Conference, Rhodes,
Greece, 851–858.
Yoshizawa, N. Y. and Yabuta, T. T., 1983. Study on submarine cable tension during laying, IEEE Journal of
Oceanic Engineering, 8(4): 292–299.
Zhu, Y. R., 1991. Wave Mechanics for Ocean Engineering, Tianjin: Tianjin University Press. (in Chinese)