Embed Size (px)
Citation preview

149
E アンチロック・フレーキ・システム
第 1章高度整備技術
1 概要
濡れた路面や,氷結した道路(アイスバーン)などの摩擦係数の小さな路面を車で走行中,運転者が急ブレ
ーキを掛けると,車輪がロックを起こし,適切な制動ができなくなることがある。このとき,後輪がロック
すると方向安定性が低下し,更に前輪がロックすると操舵性が低下して車両が不安定な状態になる。アンチ
ロック・ブレーキ・システム(以下, ABSという 。)は,このような現象を防ぐために,車輪のスリップ率が
大きくなると,その車輪のブレーキの作動油圧を自動的に減圧・増圧・保持させることで,車輪のロックに
より生じるスリップ(スキッド)を防止し,制動時の方向安定性と操舵性の確保を図るシステムである。
ABSは,図 1-1のようにABS. ECU,四つの車輪速センサ,モジュレータ・ユニットなどで構成され
ている。
フェイルセーフ・リレー 車輪速センサ
モジュレータ・ユニット 車輪速センサ
図 1一1 構成部品配置図

150 皿 ABS:第1章:概要
図 1-2は, ABSの回路システム図の一例で, ABSの制御に必要な車輪速センサ信号,ブレーキング信
号,パーキング・ブレーキ信号を ABS. ECUで検出すると共に,エンジン ECUよりバッテリ電圧信号,
EPSの舵角信号などのデータ情報を活用して,直進及び旋回時に発生する四車輪のそれぞれの回転速度を検
出している。車輪の回転速度が異常値にある場合には, ABS . ECUは,駆動制御信号を出力して該当する
車輪速度をモジ、ユレータ・ユニットに設けられたブレーキ油圧制御モジュレータ・バルブ、を駆動させて規定
回転速度に戻す制御を行い, トラクションの確保を行っている。
図1一2 ABSのシステム概念図
NC:ノーマル・クローズ (非励磁時バルブ閉)
NO:ノーマル・オープン(非励磁時バルブ開)

皿 ABS:第1章 :概要 151
図 1ー3は,電子制御装置の入出力信号を表したシステム・ブロック図の一例である。ABSには,ステ
アリング操舵信号など他のEPSなどに活用する各種センサ,アクチュエータが取り付けられているが,こ
こでは, ABSの基本となるセンサとアクチュエータについて説明する。
更に近年では,車両全体の各装置の制御が多様化され,多くの情報処理を行う必要から,従来,個別のシ
ステムとして作動していた複数のECUをネットワークで結び,各ECUのセンサ信号の共有化や通信速度の
高速化などを目的にCAN通信導入による車両の統合制御が進んでいる。
入力(センサ)
バッテリ電源(公称12V)
バッテリ電圧信号
パーキング・ブレーキ信号
ブレーキング信号
ステアリング蛇角信号
Gセンサ信号
フロント (R)車輪速センサ信号
フロント(L)車輪速センサ信号
リヤ (R)車輪速センサ信号
リヤ(L)車輪速センサ信号
出力(アクチュ工ータ)
|(ーーーーー一一日-了一一一一一寸
i〔|」一円[
ポンプ・モータ駆動リレー出力信号
フェイルセーフ・リレー出力信号
出
力
回
路モジュレータ・バルブ
日ン卜川 | フロント (L)IN フロント (R)OUTフロント (L)OUT
マイコン
l
TITI
HUHU
川
間
0
0
)
)
)
)
nnlLn円
lL
((((
ヤヤヤヤ
ljlノ
lノ
lノ
[
メータ・テ2イスフ。レイ出力信号(ABS警告灯〕
図1-3 ABSシステム・ブロック図

152 皿 ABS:第1章:構造・機能・点検:センサ
2 構造・機能・点検
1 )電源回路
電源回路については, I一級自動車整備士エンジン電子制御装置の教科書の電源回路の構成」の項で述べ
たとおり,エンジンと ABSは,共通の電源回路を用いることとしているため,ここでの説明は省略する。
2 )センサ
センサの概念は,エンジン電子制御装置の教科書において記述しているため,ここでは,センサの概念の
記述を省略し, ABSのセンサの信号形態別(論理信号,リニア信号)及び用途別にシステム・ブロック図に
表記したセンサについて説明する。なお,センサを説明する上で重要となる, Iセンサ信号の異常検知に関
する定義J及び「センサの回路点検に関する定義」については, ATの項で説明したものと同じであるため,
ここでは掲載を省略する。
( 1 )論理信号センサ
ABSの論理信号センサとしては,ストップ・ランプ・スイ
ッチ及びパーキング・ブレーキ・ランプ・スイッチがある。
ストップ・ランプ・スイッチ及びパーキング・ブレーキ・ラ
ンプ・スイッチに使用されるものは,図 1-4のようなコンタ
クト・ポイントのスイッチ構造をもっプシュ・スイッチ,リー
ド・スイッチなどが該当し, I電圧あり J,I電圧なし」の論理
形態の電気信号が作られる。ここでは,プシュ・スイッチの論
理信号センサ回路の構造・機能について説明する。
( 1 ) -1 回路の構造・機能
(イ)ストップ・ランプ・スイッチ及び、パーキング・ブレーキ・ランプ・スイッチ(プシュ・スイッチなど)
ストップ・ランプ・スイッチ及びパーキング・プレーキ・ランプ・スイッチでは,プシュ・スイッチが利
用され,ランプの点灯時と消灯時に発生する信号電圧の変化を利用して,ブレーキ操作時とパーキング・ブ
レーキ操作時の状態の検出をECUが行っている。
これらの論理信号センサは,位置の移動変化情報を連結しているコンタクト・ポイントで遮断又は接続さ
せ,位置移動が規定値を超えた場合と,規定値を下回る場合の二つの事象を検出することができる。
ストップ・ランプ・スイッチ(常間接点式)及びパーキング・ブレーキ・ランプ・スイッチ(常閉接点式)の
信号電圧を作る回路構成は,図 1ー5及び図 1-6に示すもので, ECU内5V安定化電源回路ニコ抵抗(R)
コボデー・アースに電流を流す回路構成になっており,センサの ON. OFFによって信号電圧である 5V又
フ。シュ・スイッチ
ノリー ド片
¥ リード片
図1-4論理信号センサ
12V電源 12V電源
12V電源
ーーー」
電セ
寄与¥一フン。フ
電源線
図1一5 ストップ・ランプ・スイッチの回路構成
図1-6 パーキング・ブレーキ・ランプ・スイッチの回路構成

皿 ABS:第1章:構造・機能・点検:センサ 153
はOVを作り,入力回路を介してマイコンに入力され,マイコンの関値(ここでは上限値と下限値を設定して
いる。)と信号電圧の比較が行われる。
( a )信号形態
図 1-5のストップ・ランプ・スイッチのセンサが非作動時(閉)のときは, 12V電源コセンサコランプコ
ボデー・アースに電流が流れ,信号線には, 12Vの電源電圧が掛かっている。ダイオードにより入力回路に
は,図 1ー7のように5V安定化電源回路(A)コ抵抗(R)からの5Vの信号電圧が入力される。
センサが作動時(開)のときは, 5V安定化電源回路コ抵抗(R)コランプコボデー・アースに電流が流れ,
入力回路には,図 1-7のようにOVの信号電圧が入力される。
図 1-6のパーキング・ブレーキ・ランプ・スイッチのセンサが非作動時(閉)のときは, 12V電源コラン
プコセンサコボデー・アースの回路が構成される。これにより, 5V安定化電源回路コ抵抗(R)コダイオー
ドコ信号線コボデー・アースに電流が流れる回路が構成され,入力回路には,図 1ー8のようにOVの信号
電圧が入力される。
センサが作動時(開)のときは,信号線に 12Vの電源電圧が掛かっているが,ダイオードにより入力回路に
は,図 1-8のように 5V安定化電源回路コ抵抗Rからの5Vの信号電圧が入力される。
5V 5V
信号電圧 信号電圧
OV---1 OV 非作動(閉) 作動(開) 非作動(閉) 作動(開)
図1-7スト ップ・ランプ・スイッチ信号電圧特性
図1-8 /¥ーキング・ブレーキ・ランプ・スイッチ信号電圧特性
マイコンによる信号電圧の検出,マイコンの関値と信号
電圧の比較により行われるが,図 1-9のように上限値を
アップ・エッジしたときに信号電圧を検出する。また,下
限値をダウン・エッジしたときに信号電圧を検出する。
( b )異常検知
( i )異常検知の範囲
マイコンが異常検知する仕組みは,マイコンの関値と検
出信号電圧を比較して行うが,論理信号センサの単純セン
サの場合には,断線・短絡時に入力回路に入力される信号電
圧値と正常時のセンサが作る信号電圧に同じものが混在す
ることになり,図 1ー 10のように 5Vの信号電圧と OVの信
号電圧をマイコンの上限値及び下限値の関値と比較して異
常と判断することができない。
また,上述した論理信号センサを使用している装置で,
制御上,断線 ・短絡などの異常検知を必要とする場合には,
ソフトウェアを使用して,当該センサの状態を別のセンサ
で監視・認識する機能をもたせることにより,センサ信号
電圧の変化値が車両の運転上あり得ない場合などに,異常
検知を可能とするものがある。
上限値
下限値
5V
OV
()7,')プ エyジ)+
rダウン工 yジ)
図 1-9闇値
IGスイッチON-ー』
図1一10 異常検知範囲

154 皿 ABS:第1章:構造・機能・点検:センサ
( ii )異常検知の回路(異常時の入力信号変化)
① 図 1- 11のしーーの部分の回路において,センサ,信号線,駆動線,ランプ,ランプ・アース線の
いずれかに断線がある場合には, 12V電源二今センサコランプコボデー・アースの回路構成及びECU内
5V安定化電源回路コ抵抗(R)コ信号線コランプコボデー・アースに流れる回路構成ではなくなるため,
①センサ,又は駆動線(信号線より上流側)の断線では,入力回路には下限値の関値をダウン・エッジす
るOVの信号電圧が入力される。
①信号線,駆動線(信号線より下流側)の断線,ランプの断線,信号アース線のいずれかに断線がある場
合は,入力回路には上限値の関値をアップ・エッジする 5Vの信号電圧が入力される。
入力回路には,それぞれ,下限値の関値をダウン・エッジする OV,上限値の閥値をアップ・エッジ
する 5Vの信号電圧が入力されるが,これは,センサが非作動時(閉)及びセンサが作動時(開)のときの
信号電圧と同じ5V,又はOVになることからマイコンは異常検知を行わない。
② 図 1- 12の口d日 の部分の回路において,センサ,信号線,駆動線,ランプのいずれかに短絡があ
る場合には, 12V電源二今センサコランプコボデー・アースの回路構成及びECU内5V安定化電源回路二今
抵抗(R)コ信号線二今ランプコボデー・アースに流れる回路構成ではなくなるため,入力回路には下限値
の関値をダウン・エッジする OVの信号電圧が入力されるが,これはセンサが作動時(開)のときの信号
電圧と同じOVの信号電圧となることからマイコンは異常検知を行わない。
12V電源 12V電源
12V電源 12V電源
図 1-11 スト ップ・ランプ・スイッチ 図1一12 ストップ・ランプ・スイッチの異常検知の回路 (1 ) の異常検知の回路 (2 )

田 ABS:第1章:構造・機能・点検:センサ 155
③ 図 1-13の巳ごコの部分の回路において,ランプ,信号線,駆動線,センサ,信号アース線のいず
れかに断線がある場合には, 12V電源コランプコセンサコボデー・アースの回路構成,及びECU内5V
安定化電源回路コ抵抗(R)コ信号線コセンサコボデー・アースに流れる回路構成ではなくなるため,
① ランプ,又は駆動線(信号線より上流側)の断線では,入力回路には下限値の関値をダウン・エッジす
るOVの信号電圧が入力される。
@信号線,駆動線(信号線より下流側),センサ内部の断線,信号アース線のいずれかに断線がある場合
には,入力回路には上限値の関値をアップ・エッジする 5Vの信号電圧が入力される。
入力回路には,それぞれ,下限値の関値をダウン・エッジする OVの信号電圧,上限値の関値をアッ
プ・エッジする 5Vの信号電圧が入力されるが,これは,センサが非作動時(閉)及びセンサが作動時(開)
のときの信号電圧と同じOV,又は5Vになることからマイコンは異常検知を行わない。
④ 図 1-14の o. の部分の回路において,ランプ,信号線(駆動線を含む。),センサのいずれかに短
絡がある場合には, 12V電源コランプコセンサコボデー・アースの回路構成,又はECU内5V安定化電
源回路二今抵抗(R)コ信号線コセンサコボデー・アースに流れる回路構成ではなくなるため,入力回路に
は下限値の閥値をダウン・エッジする OVの信号電圧が入力されるが,これはセンサが非作動時(閉)のと
きの信号電圧と同じOVとなることからマイコンは異常検知を行わない。
12V電源
図1一13 パーキング・ブレーキ・ランプ・スイ ッチの異常検知回路 (3 )
12V電源
図1ー14 パーキング・ブレーキ・ランプ・スイッチの異常検知回路 (4 )
156 m ABS:第I章 :構造・機能・点検:センサ
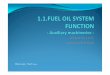
( c )回路点検
ストップ・ランプ・スイッチ及びパーキング・ブレーキ・ランプ・スイッチに使用されている常閉接点ス
イッチの回路点検は,センサの作動状態及び非作動状態における信号電圧の回路の点検などについて説明す
るO 回路上の点検は,図に指示した⑪, 0などの点検個所を一箇所ごと,測定する。
( i )信号電圧など、の回路点検(信号線,駆動線など)
① ストップ・ランプ・スイッチの回路
② 図 1ー 15のセンサが非作動状態(スイッチ閉)の
とき,⑪, 0,⑪に 12Vの電圧が発生している
こと。⑪に 12Vの電圧が発生し,@に電圧が発生
しない場合は,センサの異常(断線)が推測でき,
@に 12Vの電圧が発生し,@に電圧が発生しない
場合は,駆動線(信号線より上流側)及び信号線の異
常(断線)が推測できる。また,⑪, 0,⑪共に
電圧が発生しないときは,センサ電源線の異常(断
線,短絡),センサの異常(短絡),駆動線,ランプ,
信号線のいずれかに異常(短絡)が推測できる。
⑪ センサが作動状態(スイッチ開)のとき,⑪はOV
の信号電圧であること 。5Vの信号電圧が発生すれ
ば,信号線,駆動線,ランプ,ランプ・アース線,
ボデー・アースのいずれかに異常(断線)が推測でき
る。
② パーキング・ブレーキ・ランフ・スイッチの回路
④ 図 1- 16のセンサが非作動状態(スイッチ閉)の
とき,⑪に 12Vの電圧が発生し, 0,@は電圧
が発生しないこと 。⑪に 12Vの電圧の発生がなけ
れば,ランプ電源、線の異常(断線,短絡,接触抵抗
などの増大)が推測できる。⑪ に 12Vの電圧が発生
し,かっ, 0,⑪にも 12Vの電圧が等しく発生す
れば,センサ,センサ・アース線,ボデー・アース
のいずれかに異常(断線)が推測できる。また,@
に5Vの電圧が発生していれば,信号線の異常(断線)
が推測できる。
⑪ センサが作動状態(スイッチ開)のとき,⑪,⑪,
@に 12Vの電圧が発生すること。⑪に 12Vの電圧
が発生し, @,⑪に 12Vの電圧が発生しなければ,
ランプの異常(断線),駆動線の異常(信号線より上
流側では,断線,短絡,下流側では短絡)及び信号
線の異常(短絡)が推測でき,⑪,@に 12Vの電圧
が発生し,@に 12Vの電圧が発生しなければ,信
号線の異常(断線)が推測できる。また,⑪,⑪に
12Vの電圧が発生し,@に 12Vの電圧が発生しな
ければ,駆動線(信号線より下流側)の異常(断線)が
推測できる。
12V電源
図 1-15 信号電圧など‘の回路点検 (1 )
12V電源
V1
司自ー」
図 1一16 信号電圧などの回路点検(2 )

皿 ABS:第1章:構造・機能・点検:センサ 157
( i i )検出情報(検出物理量)と信号電圧の整合確認
検出情報(検出物理量)と信号電圧の点検は,センサを非作動状態(スイッチ閉)から作動状態(スイッチ開)
に操作したとき, ECU信号端子の電圧が,検出情報と一致することを確認する。
① 図 1ー 17のセンサが非作動状態(スイッチ閉)のとき,⑪の信号電圧が,図 1ー 18に示す信号電圧
特性の 12Vにあり,センサを作動状態(スイッチ開)にしたとき,⑪がOVに反転すれば, ECUには短
絡はなく,センサ電源線,センサ,ランプ,駆動線及び信号線には断線・短絡はない。かっ,ランプ・
アース線及びボデー・アースには断線はない。
② 図 1- 19のセンサが非作動状態(スイッチ閉)のとき,⑪の信号電圧が,図 1-20に示す信号電圧
特性のOVにあり,センサを作動状態(スイッチ開)に したとき,⑪が12Vに反転すれば, ECUには短
絡はなく ,ランプ電源線,ランプ,駆動線,センサ及び信号線には断線・短絡はない。かつ,ランプ・
アース線及びボデー・アースには断線はない。
12V電源
図1-17 スト ップ・ランプ・スイ ッチの信号電圧の点検
12V電源
一一」
図1一19 パーキング・ブレーキ・ランプ・スイ ッチの信号電圧の点検
12V
信号電圧
OV-非作動(閉) 作動(開)l
図1-18 スト ップ・ランプ・スイ ッチの信号電圧特性
12V
信号電圧
OV 非作動(閉) 作動(開)
図1一20 パーキング・ブレーキ・ランプ・スイ ッチの信号電圧特性

ABS:第1章 :構造・機能・点検:センサ
( iii) 12 V電源の点検
① 図 1-21のようにセンサを外し,⑪に 12V電源が発生すれば,センサ電源線の断線及び短絡はない。
図の@に 12V電源が発生すれば, 12V電源の回路には断線はない。
⑪に 12V電源が発生し, @に12V電源が発生しなければ,駆動線,
デー・アースの異常(断線)が推測できる。
② 図 1-22ようにセンサを外し,⑪に 12V電源が発生すれば,
線及び短絡はなく,信号線及びECU本体には短絡はない。
図の@に 12V電源が発生すれば,信号線及びECU内信号回路にボデー接地がない限り, 12V電源の回
路には断線及び短絡はない。
⑪に 12V電源が発生し,@に 12V電源が発生しなければ,センサ・アース線及びボデー・アースの
異常(断線)が推測できる。
信号線及び信号アース線の異常の切り分けは,(i)信号電圧の回路点検と同じ方法により行う 。
ランプ・アース線及びボ
ランプ,駆動線には断ランプ電源線,
ランフ,
E
158
12V電源12V電源
12V電源 5V安定化電源回路
川i0!抵グエ|抗)一 !(R)
パーキング・ブレーキ・ランプ・スイッチの基準電圧の点検
図 1ー 22ストップ・ランプ・スイッチの基準電圧の点検
図 1ー 21

)
わ
ツ
き
増
と
な
常
検
け
行
エ
と
の
圧
し
異
常
一
が
・
た
抗
電
致
の
異
お
液
プ
、
し
柑
号
一
刊
は
ベ
此
ツ
シ
,制
官
が
(
ン
-
の
ア
ッ
接
引
と
図
コ
rr川
小
山
町
間
賠
一
札
制
F
I
は
圧
ン
は
信
の
ウ
各
比
伝
号
ば
州
制
時
引
戸
詰
似
削
闘
が
ゆ
ハ
た
利
信
市
サ
品
じ
た
明
桝
ど
牡
鵬
間
古
代
M
try沼山崎汁い丸山一一草加山岳紅巳。崎町一一一位一位一
言
郎
の
完
す
ミ
示
歪
で
路
セ
作
劇
す
定
ン
の
回
信
力
ン
慧
'
速
ム
位
刻
じ
る
知
知
異
イ
図
は
う
能
'
度
の
電
制
同一一一一一一
ur吋一一一一…………マ一一町一目即時時一一一一一一抗措
幻
仰
る
o
速
用
図
・
い
て
2
イ
信
の
一
∞
路
回
電
よ
作
し
れ
a信
臼
腿
て
J
圧
b
i
マ
す
イ
た
常
セ
ど
一
合
不
き
れ
い
減
が
サ
て
い
(
(
サ
1
E
回
力
に
に
が
介
さ
(
静
ゆ
お
り
ふ
電
(
(
示
マ
し
異
な
1
場
知
で
159
おEF後氏民グー
ABS:第1章:構造・機能・点検:センサ
G
A
↑||+
センサ・チップ(半導体)
E
加速度センサの原理
Q:?
図 1ー 23
v
/ /
/
ν /
/
/ / ,
G (減速)
加速度センサの信号特性
(V) 5
4
3
2
+G+N (加速)
図 1一25
12V電源
マイコン
図
( 2 )闇値
図 1-26異常検知
(]7,')プ工 yジ)+
異常検知可能範囲
( 1 )異常検知範囲
異常検知不可範囲
rダウン工 yジ)
上限値
下限値
加速度センサの回路構成
5V
上限値
下限値
OV
図 1-24

ABS:第1章:構造・機能・点検:センサ
( ii )異常検知の回路
① 図 1-27の仁:...._]の部分の回路において,信号アース線及びECU内部に断線がある場合には, ECU
内5V安定化電源回路コセンサコ信号アース線に電流を流す回路構成ではなくなるため,マイコンは,
上限値の関値をアップ・エッジする 5Vの信号電圧を検出して異常検知を行う 。
② 図のE口口の部分において,電源線から信号線に電源短絡がある場合には, ECU内5V安定化電源回路
コセンサコ信号アースに電流を流す回路構成ではなくなるため,入力回路には,電源線の5Vの電圧が
入力される。マイコンは,上限値の関値をアップ・エッジする 5Vの信号電圧を検出して異常検知を行う 。
③ 図 1-28の一一」の部分の回路において, ECU内部(電源線側),電源線,センサ内部,信号線, ECU
内部(信号線側)のいずれかに断線がある場合には, ECU内5V安定化電源回路コセンサコ信号アース線
及びセンサコ信号線コ入力回路に電流を流す回路構成ではなくなるため,入力回路には,信号電圧OV
が入力され,マイコンは,下限値の関値をダウン・エッジする OVの信号電圧を検出して異常検知を行う 。
④ 図の・日日」の部分の回路において,センサ内部,電源線,信号線, ECU内部(電源線及び信号線側)の
いずれかに短絡がある場合には,入力回路には,信号電圧OVが入力され,マイコンは,下限値の関値
をダウン・エッジする OVの信号電圧を検出して異常検知を行う 。
12V電源
皿160
12V電源
マイコン
加速度センサ
L 'セ
回首
異常検知の回路 (2 )
v
/ /
プ/
/
/ V J
+G+N G
4
(V)
5
3
2
図1一28
マイコン
12V電源
異常検知の回路 (1 )
加速度センサ
L .セ
「スーiン円什サ一寸回
( c )回路点検
ここでは,図 1ー 29の
ような加速度センサ(以下,
Gセンサという)で,セン
サの最大信号電圧は,図
1 -30のように5V,最小
信号電圧がOVで,静止時及
び定速走行時には lV付近
(N信号電圧)の特性をもっ
回路について説明を行う 。
回路上の点検は,図に指示
した⑪,@などの点検個
所を一箇所ごと,測定する。
図 1ー 27
図1-30 加速度センサの信号特性
加速度センサの回路構成図 1-29

161
( i )信号電圧の回路点検
静止時はN信号電圧の確認を行うが、 加減速度信号の点検では,必要に応じて車両に加減速Gを発生させ
て,G検出電圧の変化の確認を行う 。あるいは,規定の点検要領によって確認をする。
注意:点検終了時にはセンサ回路のオープンなど,接続を外す作業を実施するため点検結果の正常異常にか
かわらず異常検知の リセットを行うこと。
① 車両静止時には,図 1-31に示す⑪及び@は,図 1ー30に示すN位置の lVの信号電圧が発生し
ていること。電圧値が⑪及び@共に同じ値でlVから外れている場合は,センサ及びECU本体の異常,
電源線の異常(断線,短絡など),信号線の異常(短絡)が推測できる。
② 図 1ー31に示す⑪及び⑪の電圧値に差が発生していれば,信号線及び信号アース線の異常(断線,
接触抵抗などの増大)が推測できる。
③ 図 1- 32の⑪及び@の電圧値が同じ値であること 。電圧値に差が発生していれば信号線の異常
(断線,接触抵抗などの増大)が推測できる。
④ 図の⑪及び⑪には,電圧が発生しないこと。@に電圧が発生して⑪に発生していなければ,信号
アース線の異常(断線,接触抵抗などの増大)が推測でき,⑪に電圧が発生していれば, ECU本体の異
常, ECUアース線及びボデー・アースの異常(断線,接触抵抗などの増大)が推測できる。
源電々台回
一
一色刷「
V
源電々合回
一
一切」
如「
V
ABS:第1章:構造・機能・点検:センサ皿
マイコン
加速度
センサ
L :セ
回毎;回マ
イコン
加速度
センサ
L :セ
自主:回
|路
信号電圧の点検 (2 ) 図 1-32 信号電圧の点検 (1 ) 図 1-31
ABS:第1章:構造・機能・点検:センサ
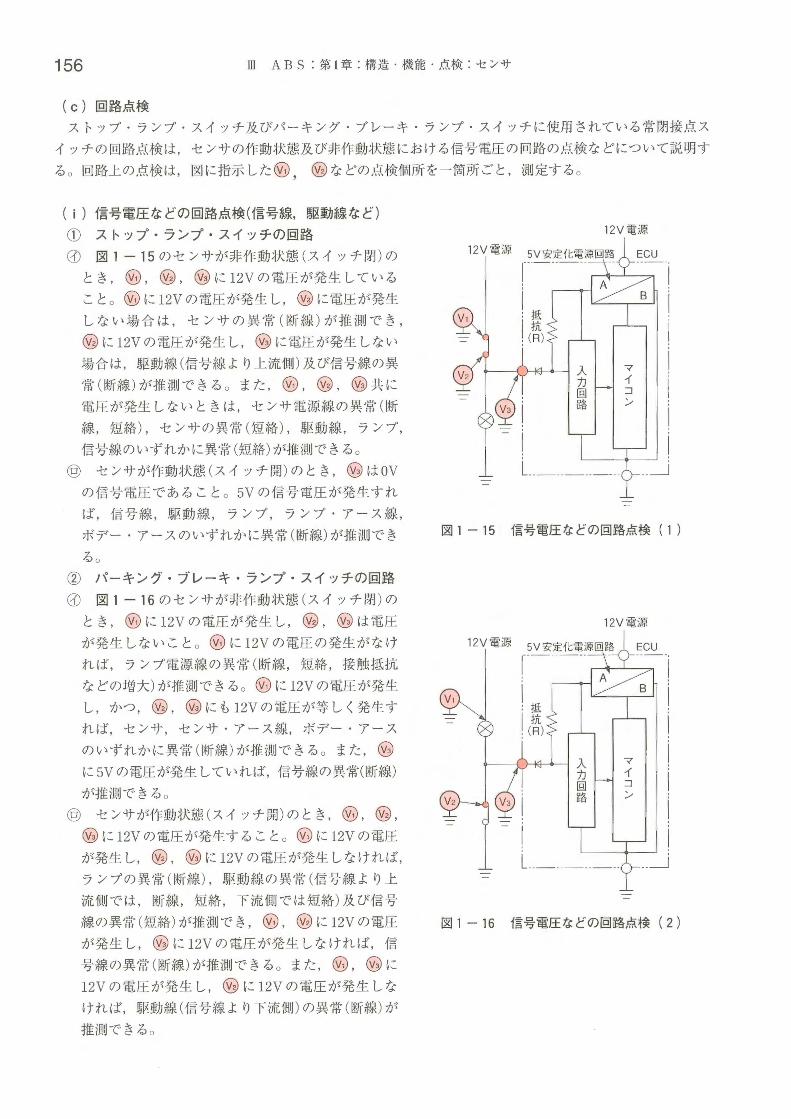
( i i )検出情報(検出物理量)と信号電圧の整合確認
検出情報(検出物理量)と信号電圧の点検は,信号電圧が,車両走行中に制動操作を行って減速したとき,
検出情報と Gセンサの信号特性とが一致することを確認する。
図 1-33に示す⑪の信号電圧が,車両制動時に減速度の大きさによって,図 1-34で示すlV付近(N
信号電圧位置)から 5V(-G信号電圧側)に変化すること 。Gセンサの信号特性に一致すれば, ECU本体,
電源線,センサ及び信号線は正常で,信号アース線には断線はない。
なお,簡易的な点検方法としては,減速時において, N信号電圧位置から -G信号電圧側に変化すること
により判断する。
(注意)Gセンサの信号電圧の正確な測定は,加速度計を用いて加速度を測定しながら行う 。
皿162
v
/ /
プμ V ν /
(V)
5
4
3
2
源電々合回
一
一切」
一一「V
マイコン
加速度
センサ
L 'セ
「ニーiン円 ....1サ一つ回
G 十G+N
図1-34加速度センサの信号特性
図 1-35
マイコン
基準電圧の点検
源電々合回一
一切↓
レい一
朗
「
V
検出情報と信号電圧の整合確認
什ii)基準電圧の回路点検
① 図 1-35のようにセンサを外し,⑪に基準電圧
が発生すれば,基準電圧の回路には断線及び短絡は
ない。
基準電圧が発生しなければ, ECU本体の異常,
ECU電源線の異常(断線,短絡など),電源線の異常
(断線,短絡),信号アース線, ECUアース線,ボデ
ー・アースのいずれかに異常(断線)が推測できる。
② 図 1-35の@に基準電圧が発生すれば, ECU側
の基準電圧の回路には断線及び短絡はない。
基準電圧が発生しなければ, ECU本体の異常, ECU
電源線の異常(断線,短絡など)及び電源線の異常(短
絡), ECUアース線及びボデー・アースの異常(断線)
が推測できる。
③ 図 1-35の⑪と@の電圧値が異なる場合は,電
j原線及び信号アース線の異常(断線)が推測できる。
電源線,信号線及び信号アース線の異常の切り分
けは, (i)信号電圧の回路点検と同じ方法により行う 。
図 1-33

皿 ABS:第1章:構造・機能・点検:センサ 163
( 3 )周波数信号センサ
ABSの周波数信号センサでは,車輪速センサがあり,図 1-36 ( 1 ) --( 4 )のよ うにパルス ・ジェネレー
タ式(発電機)及び光学式,ホール素子式,磁気抵抗素子式に半導体が用いられ,走行時, 制動時における車
輪開の回転速度変化や車輪のロックの検出に使用されている。ここでは,パルス・ジェネレータ式(発電機
式)及び磁気抵抗素子式を用いた車輪速センサについて説明する。
ジ‘工ネレータ・センサ
ホ卜・ダイオード回転板
車自
( 1 ) パjレス・ジ、工ネレータ式
ピックアップ
込。〈ヨコ
( 2 )光学式(半導体式)
口一タ
ピックアップ
r~ 電源線
i ii 磁気抵抗素子
辻村 信号線
id I i 磁気抵抗素子
ji」 十一o信号アース
( 4 )磁気抵抗素子式(半導体式)
図 1-36 周波数信号センサの原理
( 3 )一1 回路の構造・機能
(イ)パルス・ジェネレータ式
パルス・ジェネレータ式は,図 1-37一(1 )のよう
に4輪に取り付けられており,検出 した信号電圧は,
ECUに送られ,各車輪の速度や車体速度の計算に利用
される。
構造は,図(2 )のよう に発電機形態のセ ンサが多く,
車輪の回転部に取り付けられたロータ部とピックアッ
プ・コイルで構成され,それらの問には,エア・ギャ
ップが設けられている。車輪の回転により,ギヤ・パ
ルサの突起部が,ピックアップ・コイルの先端を通過
することにより,磁束密度が変化して交流電圧が発生
する。
ギヤ ・
パルサ
コ
(1 ) 車輪速センサ
¥
ピックアップ ・コイル
巴 i圧
ギヤ ・パルサ
( 2 ) ギヤ・パルサとピック・アップコイル
図 1-37 車輪速センサ

164 m ABS:第1章:構造・機能・点検:センサ
信号電圧を作るセンサの回路構
成は,図 1-38に示すもので, ロ
ータの回転に応じて,発生する起
電力(交流電圧)がセンサの信号電
圧であり,その起電力の信号電圧
が入力回路を介してマイコンに入
力される。
( a )信号形態
12V電源
信号アース線 l一一一一一
図1ー38 パルス・ジェネレータ式センサの回路構成
信号電圧は, ロータの回転が遅い場合には,図 1-39一(1 )のような電圧と周波数を有し,回転が速くな
ると図(2 )のように電圧,周波数は共に高くなる。したがって,最小信号電圧値をあらかじめ設定している
ため, ECUは,入力回路に より波形整形する電圧波形値が闘値をアップ・エッジしたとき,入力回路のカウ
ンタ回路で5V安定化電源を基準と して,図 1-40のよ うな方形波(スケア・ウェーブ)に整形され,規定時
間に発生するパルス数がカ ウントされて回転数と速度を検出する。
回転角度の検出は, ロータの 1回転当たり歯数によって設定され, 1周360度を歯数で除した値が1パル
ス時の角度であり,歯数が多いロータほど角度分解能が高くなる。
タイミングの検出は,発生 した正弦波(サイン・ウェーブ)と入力回路で整形された方形波(スケア・ウェ
ーブ)は相関関係にあるため,波形の立ち上がり又は波形の立ち下がりがタイミングの検出に利用される。
中性点(OV)
5V
一一一一」ー占一一一ー
2ms 5V O.5ms
( 1 )遅く 回転させたとき (2 )速く回転させたとき
図1ー39正弦波(サイン・ウェーブ)
OV 国一.lU__UD lii「日
5V 2ms
図1-40方形波 (スケア・ウェーブ)
m ABS:第1章:構造・機能・点検:センサ 165
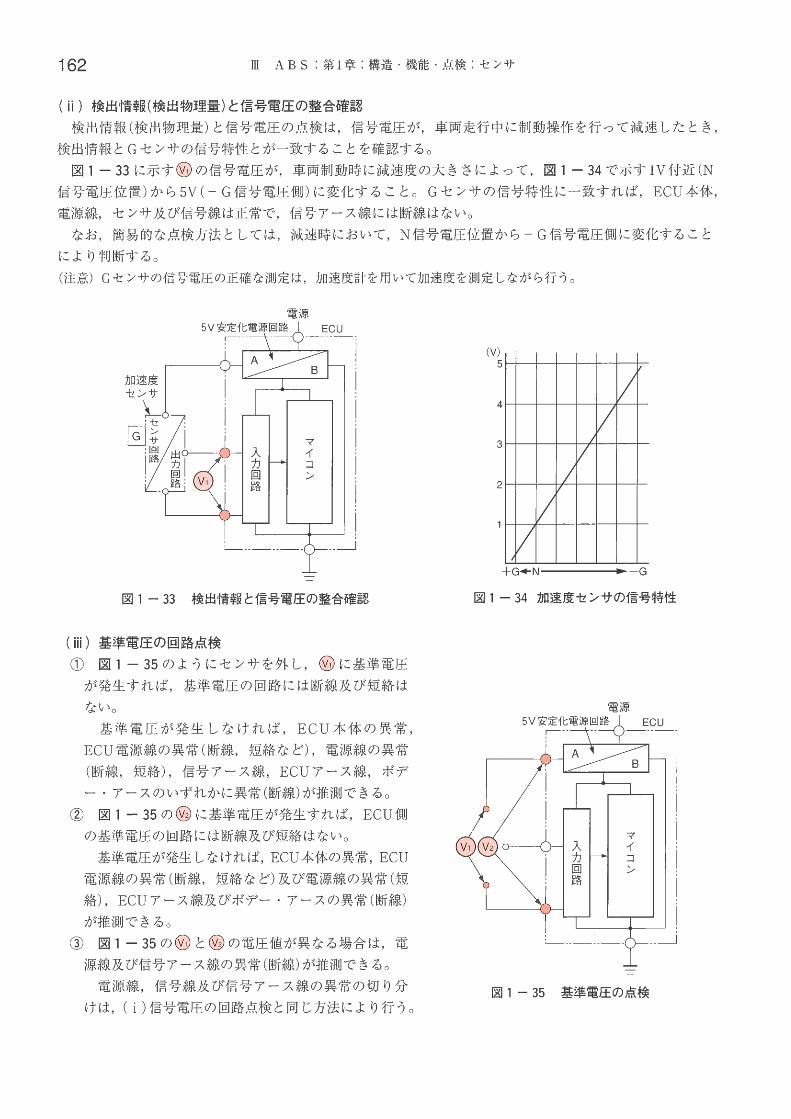
( b )異常検知
( i )異常検知範囲
パルス・ジェネレータ式センサは,電源電圧をもたず,自
己起電力による信号電圧になるため,回路構成上,上限値に
関わる異常検知はできない。
マイコンが異常検知する仕組みは,図 1-41一(1 )に示す
ようにマイコンの関値と検出信号の比較が行われ,マイコンは,
図(2 )に示す関値をダウン・エッジしたときに異常検知を行う 。
センサの機能低下(特性異常)や各配線に異常(接触抵抗の増大
など)が発生し,プログラムのマップ・データと検出信号電圧と
が一致しない場合でも,この信号電圧がプログラムのマップ・
データで設定した異常検知不可範囲の電圧値に入っていれば,
マイコンは異常検知せず,通常制御が行われる。
電圧
闇値
ov
)
-,,l
、
闇値 rタウン工 Yジ)
( 2 ) 闇値
図 1-41 異常検知
また,自己起電力をもっパルス・ジェネレータ式センサは,インピーダンス(注参照)が大きいものと,運
転状況に応じてインピーダンスが大きくなるものがあり,信号以外の電圧(ノイズ)が混入 して異常信号を発
生する場合がある。これらのノイズ混入の対策では,ソフトウェアを使用し,マイコンが図 1-42に示す
ように高速域でセンサ信号情報を検出する場合に,他の関連センサ情報との相関を比較して,ノイズ混入の
異常検知を行うものがある。なお,高いインピーダンスを有するセンサ回路では,ノイズ除去の目的で信号
線にシールド線を用いており,図 1-43に示す信号線の破線で示す部分がこれに該当する。
電圧
闇値
ov
異常検知可能範囲
図1-42異常検知範囲
12 V電源
図1-43パルス・ジェネレータ式センサの回路構成
(注)インピーダンスとは,交流回路における直流の場合の回路抵抗に当たるもので,電圧の最大値と電流の最大値との比で求め
られ.インピーダンスが高いほど.直流抵抗の影響は少なくなる円

166 III ABS:第1章:構造・機能・点検:センサ
( ii )異常検知の回路
① 図 1- 44 の~の部分の回路において,
ECU内部,センサ内部,信号線,信号アー
ス線のいずれかに断線がある場合と, []'111
の部分において,信号線と信号アース線に
短絡がある場合には,入力回路には,信号
電圧ovが入力され,マイコンは,闘値をダ
ウン・エッジする信号電圧を検出して異常
検知を行う 。
( c )回路点検
図1-44異常検知の回路
12 V電源
パルス・ジ、ェネレータ式センサの信号電圧の回路点検,センサの検出情報(検出物理量)と信号電圧の整合
確認について説明する。
回路上の点検は,図に指示した⑪,@などの点検箇所を 1箇所ごと,測定する。
( i )信号電圧の回路点検(信号線,信号アース線など)
① ロータを,遅く回転させたときと速く回転させたとき(いずれも一定速度で回転),それぞれの状態で,
図 1ー45の⑪に規定の信号電圧が発生すること。
信号電圧が発生しなければ, ECUの異常,センサの異常,信号線及び信号アース線の異常(断線,短
絡)が推測できる。
② ロータを,遅く回転させたときと速く回転させたとき,それぞれの状態で,図の⑪と@に規定の信
号電圧が発生し,かつ,等しければ,信号線及び信号アース線は正常である。@と@の電圧値が異な
る場合は,信号線及び信号アース線の異常(断線,接触抵抗などの増大)が推測できる。
③ ロータを,遅く回転させたときと速く回転させたとき,それぞれの状態で図 1-46の③と@に規
定の信号電圧が発生し,かつ,等しければ,信号線は正常である。@と@の電圧値が異なる場合は,
信号線の異常(断線,接触抵抗などの増大)が推測できる。
12 V電源 12 V電源
図1-45信号電圧の点検 (1 ) 図1-46信号電圧の点検 (2 )

皿 ABS:第1章:構造・機能・点検:センサ
④ ロータを,遅く回転させたときと速く回転
させたとき,それぞれの状態で図の⑧と@
には電圧が発生しないこと。@に電圧が発生
し,@には発生しない場合は,信号アース線
の異常(断線)が推測できる。また,@と@
に電圧が発生し,かつ,電圧値が等しい場合
は, ECU本体の異常が推測できる。
167
12 V電源
⑤ 図 1-47の@に導通があれば,シールド
線及びシールド線のアース回路は正常である。
導通がなければ,信号線にノイズが重畳する
原因となり,シールド線及びシールド線のア
ース回路の異常(断線)が推測できる。 ー__j
( ii )検出情報(検出物理量)と信号電圧の整合確圭刃
ロータを一定速度で回転させたとき,センサ
からの信号電圧が信号電圧特性に一致すること
を確認する。
① ロータを遅く回転させたときと,速く回
転させたとき(いずれも 一定速度で回転),
図 1-48の⑪の信号電圧の測定をオシロス
コープで行う 。それぞれの状態で信号電圧
が,図 1-49の信号電圧特性と 一致すれば,
センサ,信号線,信号アース線は正常であ
る。信号電圧特性と異なる場合は, (i)信
号電圧の回路点検の不具合箇所の切り分け
によりセンサの異常,信号線,信号アース
線の異常(断線又は接触抵抗の増大など)を
推測する。
中性点(OV)
5V 2ms
( 1 )遅く回転させたとき
図1-47 シールド線の導通点検
12 V電源
図1-48検出情報と信号電圧の整合確認
5V O.5ms
(2 )速く回転させたとき
図1-49信号電圧特性

168 m ABS:第1章:構造・機能・点検:センサ
(口)磁気抵抗素子式(半導体式)
磁気抵抗素子式は,磁力線の変化を検出し,電流
の変化に置き換えている。基本構造は,図 1ー50に
示すような歯形のロータと磁気抵抗素子を二対直列
接続したピックアップで構成され,ロータが回転す
るとロータの歯形によりコアからの磁力線が変化し,
この変化に応じて,磁気抵抗素子の抵抗は変化する。
センサ信号電圧は,磁気抵抗素子を流れる微電
流の変化を,増幅回路で基準電圧を基に増幅と波
形整形を行い,方形波(スケア・ウェーブ)が整形
される。
信号電圧を作るセンサの回路構成は,図 1ー 51
に示すもので,センサ側の12V電源、二今5V安定化電
源回路コボデー・アースに電流を流す回路構成及
び5V安定化電源回路コセンサ・アンプ/出力回路
(MREピックアップを含む。)コECUのアースに電
流を流す回路構成と ECUの5V安定化電源回路コ抵
抗(R)コセンサ・アンプ/出力回路のTrコECUの
アースに電流を流す回路構成により信号電圧への
増幅と変換を行って,センサ信号が作られ,入力
回路を介してマイコンに入力される。
( a )信号形態
ECU内5V安定化電源をもと
に波形整形を行うため,回転に
関係なく,電圧は常に一定でロ
ータの回転が遅い場合には,図
1 -52一(1 )の周波数を有 し,
回転が速くなると図(2 )のよう OV
に周波数が高くなる。
ECUの入力回路では,信号電
圧値が関値を通過したとき,パ
ルス数がカウン トされ,回転数
と速度が検出される。回転角度
の検:出は,ロータの 1回転当た
りの歯数によって設定され, 1
周360度を歯数で除した値が1パ
ルス時の角度であり,歯数が多
いロータほど角度分解能が高くなる O また,タイミングの検出は,
センサ回路が検出 した波形数と方形波(スケア・ウェーブ)に相関
関係にあるため,波形の立ち上がり又は立ち下がりがタイミング
の検出に利用される。
マイコンによる信号電圧の検出は,マイコンの関値と信号電
圧の比較により行われるが,図 1- 53のように上限値の関値
をアップ・エッジ したとき,又は下限値の関値をダウン・エッ
ジしたときに信号電圧を検出する。
口ータ
図1一50磁気抵抗素子式センサ(MRE)
12 V電源 12 V電源
汁一i一
一
九
一
-制一コ一
磁「:
l
i
li
a--
-
一
図 1-51 磁気抵抗素子式センサの回路構成
一一
OV ー .ー・・・ーー--l ‘ ・・ ・
“・・ー・ーー"一一ー一一一一ー一一一一---一ー
一一----+ー一一一←ー一一...-ー一一・ー一一_.←一一一トー一一+一一一-・一一一ー+一一一司
5V O.5ms
一一一←-_._---←一一←ーー←一一
5V O.5ms
(1 )遅く回転させたとき (2 )速く回転させたとき
図1一52信号電圧特性
(V)
5V
上限値(アップ・エッジ)
下限値
OV
図 1-53 閤値

皿 ABS:第1章:構造・機能・点検:センサ 169
( b )異常検知
( i )異常検知範囲
マイコンが異常検知する仕組みは,図 1-54ー(1 )に示すようにマイコンの閥値と検出信号電圧の比較
が行われ,マイコンは,図(2 )に示す上限値の関値をアップ・エッジしたとき,又は,下限値の関値をダウ
ン・エッジしたときに異常検知(信号電圧が一定になる。)を行う 。
センサの機能低下(特性異常)や各配線に接触抵抗の増大などが発生し,プログラムのマップデータと検
出信号電圧とが一致しない場合でも,この信号電圧が図 1ー54ー(1 )の異常検知不可範囲の電圧値に入っ
ていれば,マイコンは異常検知せず,通常制御が行われる。
5V 異常検知可能範囲
異常検知不可範囲上限値
下限値
下限値」
OVl+IGスイッチON~ 作動中-4(1 ) 異常検知範囲
図1一54 異常検知
( ii )異常検知の回路 (異常時の入力信号変化)
① 図 1ー 55のこ コの部分の回路において,
センサ電源線,センサ内部,信号線,信号
山口ジJl(ルエッジ)
(2 ) 闇値
12 V電源
宇 品 磁気抵抗素子式センサアース線及びセンサ・アース線L断線かあ ー一一一一一一一一一一一
る場合は,センサ側の 12V電源コ5V安定化
電源回路コボデー・アースに電流を流す回
路構成及び5V安定化電源回路コセンサ・ア
ンプ/出力回路コECUのアースに電流を流
す回路構成と ECUの5V安定化電源回路コ
抵抗(R)コセンサ・アンプ/出力回路の Tr
コ
二今ECUのアースに電流を流す回路構成では 一一一一一一一一ー
なくなるため,入力回路には, 5V安定化電
源、回路から抵抗(R)を経由した電圧が入力さ
れ,マイコンは,関値をアップ・エッジす
る5Vの信号電圧を検出して異常検知を行う 。
図1-55異常検知の回路
12 V電源
② 図 1-55のE・..の部分の回路において,ECU内部,センサ内部,信号線のいずれかに短絡がある
場合は,信号を作る回路構成がなくなるため,マイコンは,関値をダウン・エッジする OVの信号電圧
を検出して異常検知を行う 。
( c )回路点検
磁気抵抗素子式センサの信号電圧の回路点検,センサの検出情報(検出物理量)と信号電圧の整合確認につ
いて説明する。
回路上の点検は,図に指示した⑪,@などの点検箇所を 1箇所ごと,測定する。こ こでは,センサ・ア
ース線とは,センサ0 ボデー・アース間の配線を,信号アース線とは,センサ信号アース端子。ECU信号
アース端子聞の配線をいう 。

170 皿 ABS:第1章:構造・機能・点検:センサ
( i )信号電圧の回路点検(信号線,信号アース線など)
① ロータを,遅く回転させたときと速
く回転させたとき(いずれも一定速度で
回転),それぞれの状態で,図 1-56
の⑪に規定の信号電圧が発生すること。
信号電圧が発生しなければ, ECU本
体の異常, ECU電源、線,センサの異常,
信号線の異常(断線,短絡),信号アー
ス線, ECUアース線及びボデー・アー
スの異常(断線など)が推測できる。
② ロータを,遅く回転させたときと速
く回転させたとき,それぞれの状態で,
図の⑪と@に規定の信号電圧が発生し,
かつ,等しければ,信号線及び信号ア
ース線は正常である。⑪と@の電圧値
が異なる場合は,信号線及び信号アー
ス線の異常(断線,接触抵抗などの増
大)が推測できる。
③ ロータを,遅く回転させたときと速
く回転させたとき,それぞれの状態で,
図 1- 57の⑪と⑪に規定の信号電圧
が発生し,かつ, 等 しければ,信号線
は正常である。
@と⑪の電圧値が異なる場合は,信
号線の異常(断線,接触抵抗などの増大)
が推測できる。
④ ロータを,遅く回転させたときと速
く回転させたとき,それぞれの状態で,
図の@と@には電圧が発生しないこ
と。@に電圧が発生し, ⑪に電圧が発
生しない場合は,信号アース線の異常
(断線)が推測できる。また,@と@に
電圧が発生し,かつ,等しい場合は,
ECU本体の異常が推測できる。
( ii )検出情報(検出物理量)と信号電圧の
整合確認
ロータを, 一定速度で回転させたとき,
信号電圧が信号波形に一致することを確認
する。
① ロータを,遅く回転させたときと,速
12 V電源
磁気抵抗素子
|コ
図1-56 信号電圧の点検 (1 )
12 V電源
磁気抵抗素子
|コ
図1一57信号電圧の点検 (2 )
12 V電源
磁気抵抗素子
コ
12 V電源
12 V電源
12 V電源
く回転させたとき(いずれも一定速度で回
転),図 1-58の⑪の信号電圧の測定を
オシロスコープで行う 。それぞれの状態
で信号電圧が,図 1ー 59の信号電圧特 図1-58検出情報と信号電圧の整合確認
性と一致すれば,センサ,信号線,信号
皿 ABS:第1章:構造・機能・点検:センサ 171
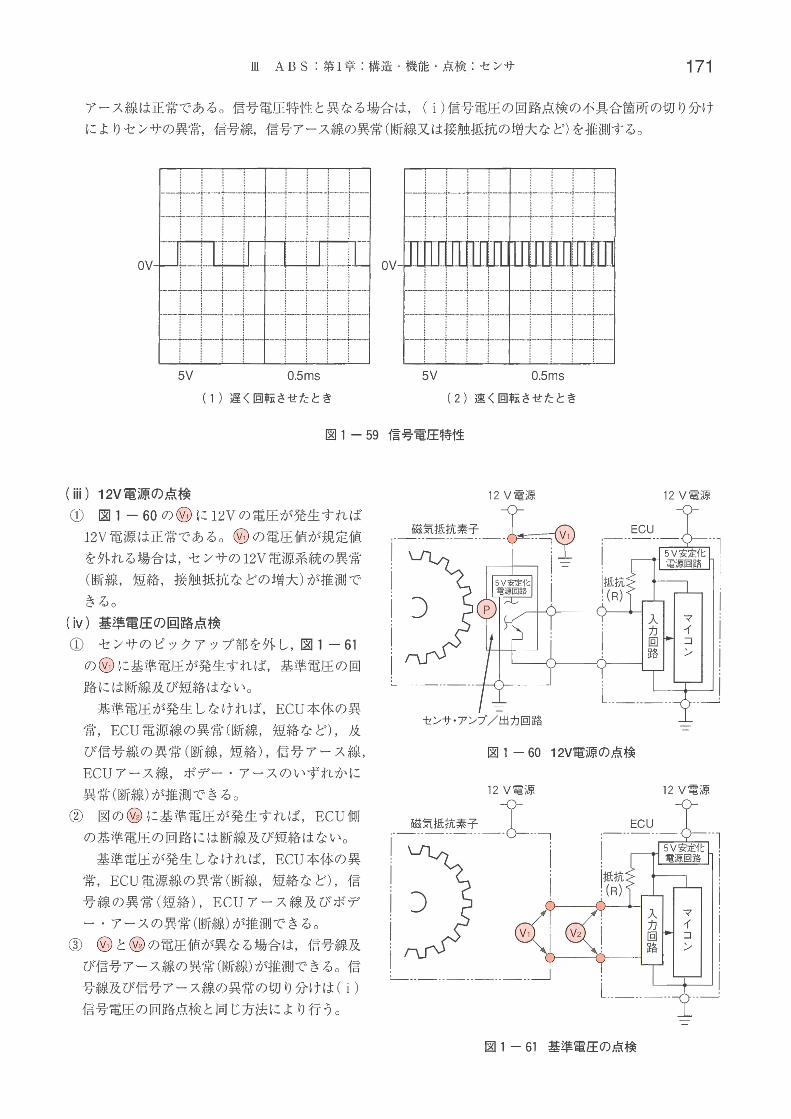
アース線は正常で、ある。信号電圧特性と異なる場合は, (i)信号電圧の回路点検の不具合箇所の切り分け
によりセンサの異常,信号線,信号アース線の異常(断線又は接触抵抗の増大など)を推測する。
OV
5V O.5ms
( 1 )遅く回転させたとき
ー一w__~一一・._oI_____-4.一一一一一
一一一一一一一一一一・一一一一一一
OV一戸ー
+・・↑・・・・・
5V O.5ms
( 2 )速く回転させたとき
図1一59信号電圧特性
( iii) 12V電源の点検
① 図 1-60の⑪に 12Vの電圧が発生すれば
12V電源は正常である。⑪の電圧値が規定値
を外れる場合は,センサの 12V電源系統の異常
(断線,短絡,接触抵抗などの増大)が推測で
きる。
( iv)基準電圧の回路点検
① センサのピックアップ部を外し,図 1ー 61
の⑪に基準電圧が発生すれば,基準電圧の回
路には断線及び短絡はない。
基準電圧が発生しなければ, ECU本体の異
常, ECU電源線の異常(断線,短絡など),及
び信号線の異常(断線,短絡),信号アース線,
ECUアース線,ボデー・アースのいずれかに
異常(断線)が推測できる。
② 図の@に基準電圧が発生すれば, ECU側
の基準電圧の回路には断線及び短絡はない。
基準電圧が発生しなければ, ECU本体の異
常, ECU電源線の異常(断線,短絡など),信
号線の異常(短絡), ECUアース線及びボデ
ー・アースの異常(断線)が推測できる。
③ ⑪と@の電圧値が異なる場合は,信号線及
ぴ信号アース線の異常(断線)が推測できる。信
号線及び信号アース線の異常の切り分けは(i )
信号電圧の回路点検と同じ方法により行う 。
12 V電源 12 V電源
磁気抵抗素子
|コ
図1-60 12V電源の点検
|ど些子-t112 V電源
図1-61 基準電圧の点検

172 皿 ABS:第1章:構造・機能・点検:アクチュエータ
3 )アクチュ工ータ
アクチュエータの概念は,エンジン電子制御装置の教科書において記述しているため,ここでは,アクチ
ユエータの概念の記述を省略し, ABSのアクチュエータの信号形態別(論理信号,リニア信号)及び用途別
にシステム・ブロック図に表記したアクチュエータについて説明する。なお,アクチュエータを説明する上
で重要となる, rアクチュエータ信号の異常検知に関する定義」及び「アクチュエータの回路点検に関する
定義」については, ATの項で説明したものと同じため,ここでの掲載は省略する。
( 1 )スイッチング駆動アクチュ工ータ
ABSのモジュレータ・ユニットは,図 1-62に示すように各車輪へのブレーキ圧を制御するモジュレー
タ・バルブ,減圧制御時にブレーキ・フルードを一時蓄えるリザーバ,リザーバに蓄えられたブレーキ液を
マスタ・シリンダへ戻すポンプとポンプ・モータなどから構成されている。
ABSでは,パワー・リレーを介してモジュレータ・ユニットを駆動する。モータによりポンプを駆動し
て油圧を昇圧させ,モジュレータ・ユニット内のモジ、ユレータ・バルブにより油圧の制御を行う 。アクチュ
エータの作動としては,停止と駆動を比較的長い周期で行う場合と瞬間的に駆動と停止を行うアクチュエー
タがあり,駆動停止時には電圧なし,駆動時には,電源電圧の範囲で設定された一定電圧で駆動される。
ポンプ
モジ‘ュレータ・/¥}レブ
リザーパ
モジュレータ・ユニット断面図 ポンプ・ユニット断面図
図1ー62 モジュレータ・ユニット
(イ)ポンプ・モータ
ポンプ・モータは,小型で駆動トルクの大きい固
定磁界モータが利用され,図 1-63のような固定
磁界モータ構造で,ヨークにパーマネント・マグネ
ット(永久磁石)が内蔵され,ブラシからコンミュテ
ータを介して,ロータ・コイルに電流を流して駆動
する。
口ータ・コイjレ
図1-63 ポンプ・モータ

173
図 1-64
皿
( a )回路構成
田路の構成は,図 1ー64に示すようにECUのマ
イコンの信号電圧により 12V電源コ駆動回路のFSR
のTrコFSRのコイル(フェイルセーフ・リレー・コ
イル)コボデー・アースに電流を流す回路構成,及
びマイコンの信号電圧により 12V電源コFSR(フェ
イルセーフ・リレー)コPMRのコイル(ポンプ・モ
ータ・リレー・コイル)コ駆動回路のPMRのTrコ
ECUのアースに電流を流す回路構成,更に 12V電源
コPMRコモータコに電流を流す回路が構成されて
ポンプ・モータが駆動する 。 また, MCK (ポン
プ・モータ駆動チェック)の回路の構成は,駆動停
止時には,駆動回路コダイオードコMCK駆動診断
線コモータコボディー・アースに電流を流す回路構
成,駆動時には,モータ駆動線二今MCK駆動信号線
コダイオードで電流の流れが止まり,駆動回路コ診断信号線に電流を流す回路が構成される。なお, FSR,
PMR, MCK端子からマイコンにフィードパックされる信号線は,便宜上, 一つの信号線とし表しているが,
実際は並列接続となっている。
( b )信号形態
( i ) FSR(フェイルセーフ・リレー)駆動回路(プラス駆動回路)
PMR(ポンプ・モータ・リレー)の駆動準備は,図 1-64に示す駆動回路がFSRコイルを駆動することに
より FSRコンタクト・ポイントがONされ, PMRのコイルに電源電圧が入力(駆動回路のTrがOFFで
PMRは駆動はしない。)してPMRの駆動準備が整う 。図 1-65に示すものがFSRコイル駆動信号電圧特性,
図 1-66に示すものがFSRコイル駆動電圧特性で,イグニション・スイッチON状態のシステム正常時に
は,常にPMR(ポンプ・モータ・リレー)駆動準備完了状態にある。
FSR
タ線
一動
モ駆
モータ・アース線
12 V電源
FSR 電源線
駆動回路構成
ABS:第 1章 :構造・機能・点検:アクチュエータ
マイコン
(V)
10
8
6
4
2
。
10
8
。4
6
2
FSRコイル駆動電圧特性図 1-66 FSRコイル駆動信号電圧特性図 1-65

174 皿 ABS:第1章:構造・機能・点検:アクチュエータ
( ii) PMR(ポンプ・モータ・リレー)駆動回路(マイナス駆動回路)
走行状態の過程において,マイコンが必要と判断した場合には,回路構成の図 1-64で示すようにFSR
コンタクト・ポイントを経由した電源電圧をPMRコイルを介して引き込み, PMRコンタクト・ポイントを
ONして,ポンプ・モータを駆動して制御油圧の圧送を行う 。図 1-67に示すものがPMRコイル駆動信号
電圧特性,図 1ー68に示すも のがモータの駆動電圧特性である。
12V電源
OV
図1-67 PMRコイル駆動信号電圧特性
12 V電源
②
異常検知可能範囲
闇値
むV
12V電源
OV
12 V
闇値
OV
図1一68 PMRコイル駆動電圧特性
5V安定化
電源回路 12 V電源
Ecu
マイコン
図1ー69 駆動回路構成
(V)
1(ア yプ工 yジ)
(タウンエ yジ);
駆動停止時
( 1 ) 駆動時( 2 )
(川)MCK(モータ・チェック信号)回路
図 1-64に示すMCK(モータ・チェック信号)のフィードパックは,駆動停止時の正常時には,駆動回路
から MCK駆動診断線に5Vを出力し,モータ・アース線を介してボデー・アースに落ちて,マイコンには
OVが入力される。よって,マイコンは,回路不具合に より MCKの診断信号5Vが入力された場合には,駆
動回路がFSRコイルの駆動を停止して,フェイルセーフに入る。
( c )異常検知
( i )異常検知の範囲
ポンプ・モータ駆動回路は,図 1-69で示すように2系統の駆
動回路をもち (FSR駆動回路及びPMR駆動回路),更にモータ駆動
電圧のMCKの異常検知を行い安全性を確保している。
① FSR駆動回路(プラス駆動回路)
図 1-69に示すFSR駆動回路でのマイコンが異常検知する仕
組みは,マイコンの関値と駆動回路の信号電圧の比較が行われ,
マイコンは,図 1-70に示すマイコンの閥値と信号電圧に論理
の不一致があるときに異常検知を行う 。
図1ー71の(1 )に示すFSR駆動停止時(イニシャル・チェック)
に関値をアップ・エッジする信号電圧を検出したときに異常検知
を行う 。また,駆動時(ABS作動時)に図の(2 )に示す関値をダウ
ン・エッジする信号電圧を検出したときに異常検知を行う 。
図1-71 闇値

皿 ABS:第1章:構造・機能・点検:アクチュエータ 175
図 1-70に示すPMR駆動回路でのマイコンが異常検知する仕組みは,マイコンの関値と駆動回路の信号
電圧の比較が行われ,マイコンは,図 1-72に示すマイコンの閥値と信号電圧に論理の不一致があるとき
に異常検知を行う 。
図 1ー73の(1 )に示すPMR駆動停止時に関値をダウン・エッジする信号電圧を検出したときに異常検知
を行う 。また,図の (2 )に示すPMR駆動時に関値をアップ・エッジする信号電圧を検出したときに異常検
知を行う 。
12 V電源
闇値
OV
異常検知不可範囲 異常検知可能範囲
異常検知可能範囲
図 1-72 異常検知範囲
③ MCK(ポンプ・モータ駆動チェック)
(V)
12 V
闇値
OV
(ア yプ工 yジ)t ; (ダウンエ yジ)
駆動停止時( 1 )
図 1一73 闇値
駆動時( 2 )
図 1ー69のMCK回路でのマイコンが異常検知する仕組みは,モータの電源側端子の監視を行い,図 1-
74に示すモータ駆動停止時にマイコンの関値と MCKの診断回路の信号電圧の比較が行われ,マイコンは,
図1-75に示すマイコンの関値をアップ ・エッジする信号電圧を検出したときに異常検知を行う 。
(V)
5V
異常検知可能範囲
闇値闇値 l
OV OV
駆動停止時
図 1-74 異常検知範囲図 1-75 闇 値

12 V電源
12 V電源
ABS:第1章:構造・機能・点検:アクチュエータ
5V安定化電源回路
「ーー
FSRの異常検知回路 (1 )
FSRの異常検知回路 (2 ) 図 1-77
図 1-76
マイコン
マイコン
5V安定化電源回路
「司ー
皿
( ii )異常検知の回路
① FSR駆動回路(プラス駆動回路)
@ 図 1-76の駆動停止時に..__]の部分の回路
において,駆動回路のTrなどに固着がある場合
には, FSR駆動信号線から分岐した診断回路
(12Vが掛かる。)により,マイコンは,関値をア
ップ・エッジする診断信号電圧を検出して異常検
知を行う 。
⑪ 図 1-76の駆動時に 一二コの部分の回路にお
いて,アクチュエータのコイル,駆動信号線,駆
動アース線のいずれかに断線がある場合には,
FSR駆動信号電圧線から分岐した診断固路(l2V
が掛かる 。)により,マイコンには,関値をアッ
プ・エッジする診断信号電圧が入力されるが,マ
イコンは,正常の駆動時には,関値をアップ・エッ
ジする診断信号電圧を正常と判断するため,正常・
異常の判別ができず,異常検知は行わない。
の 図1-77の駆動停止時に白川 の部分の回路
において,アクチュエータのコイ ルの短絡,又は
駆動信号線に短絡がある場合には, FSR駆動信号
電圧線から分1I皮した診断固路(OVが掛かる。)によ
り,マイコンには,関値をダウン・エッジする診
断信号電圧が入力されるが,マイコンは,正常の
駆動停止時には,関値をダウン・エッジする診断
信号電圧を正常と判断するため,正常・異常の判
別ができず,異常検知は行わない。
@ 図 1- 77の駆動時に・...の部分の回路にお
いて,アクチュエータのコイルの短絡,又は駆動
信号線に短絡がある場合には, FSR駆動信号電圧
線から分岐した診断回路 (OVが掛かる。)により,
マイコンは,関値をダウン・エッジする診断信号
電圧を検出して異常検知を行う 。
② PMR駆動回路(マイナス駆動回路)
@ 図 1ー 78のFSR駆動回路が駆動し,コンタク
ト・ポイン トがONすると, PMR駆動回路が構成
される。PMR駆動回路の駆動停止時にし一----'の
部分の回路において,アクチュエータのコイル,
電源線,駆動信号線のいずれかに断線がある場合
には, PMR駆動信号線から分岐した診断固路(OV
が掛かる。)により,マイコンには,関値をダウ
ン・エッジする診断信号電圧を検出して異常検知
を行う 。
176
PMRの異常検知回路 (1 ) 図1-78

177
⑪ 図 1-78の駆動時に田・置の部分の回路において,アクチュエータのコイル,電源、線,駆動信号線
のいずれかに断線がある場合には, PMR駆動信号線から分岐した診断回路(OVが掛かる。)により,マ
イコンには,関値をダウン・エッジする診断信号電圧が入力されるが,マイコンは,正常の駆動時には,
関値をダウン・エッジする診断信号電圧(OVが掛かる。)を正常と判断するため,正常・異常の判断がで
きず,異常検知は行わない。
の 図 1-79の駆動停止時に・E・Eの部分の回
路において,アクチュエータのコイル,電源
線,駆動信号線のいずれかに短絡がある場合
は,駆動信号線から分岐した診断回路(OVが
掛かる 。)により,マイコンは,関値をダウ
ン・エッジする診断信号電圧を検出して異常
検知を行う 。
@ 図 1-79の駆動時に...・の部分の回路に
おいて,アクチュエータのコイル,電源線,
駆動信号線のいずれかに短絡がある場合には,
PMR駆動信号線から分岐した診断回路(OVが
掛かる。)により,マイコンには,関値をダウ
ン・エッジする診断信号電圧が入力されるが,
マイコンは,正常の駆動時には,関値をダウ
ン・エッジする診断信号電圧 (OVが掛かる。)
を正常と判断するため,正常・異常の判断ができず,異常検知は行わない。
③ MCK(ポンプ・モータ駆動チェック)回路
③ 図 1ー80のPMR駆動回路の駆動停止時, ・・・の部分の回路において, MCK駆動診断線,モータ
駆動線,モータ, モータ・アース線のいずれかに断線がある場合には, MCK駆動診断線から分岐した
診断回路(5Vが掛かる)により,マイコンは,関値をアップ・エッジする信号電圧を検出して異常検知
を行う 。
⑪ 図 1-81のPMR駆動回路の駆動時, ・・置の部分の回路において,モータ駆動線に断線がある場合,
又は,図の・...の部分の回路において, MCK駆動診断線,モータ,又はモータ駆動線に短絡がある
場合には, MCK駆動診断線から分岐した診断回路(OVが掛かる。)により,マイコンには,閥値をダウ
ン・エッジする診断信号電圧が入力されるが,マイコンは,駆動時のポンプ・モータ駆動停止に関する
異常検知の回路構成がないため,異常検知は行わない。
12 V電源
ABS:第1章:構造・機能・点検:アクチュエータ
図 1-79 PMRの異常検知回路 (2 )
マイコン
皿
12 V電源12 V電源
MCKの異常検知回路 (2 ) 図 1-81 MCKの異常検知回路 (1 ) 図 1-80
ABS:第1章:構造・機能・点検:アクチュエータ
( d )回路点検
フェイルセーフ・ リレー(プラス駆動回路)やポンプ・モータ・ リレー(マイナス駆動回路)の点検は,それぞ
れのリレーの駆動停止時及び駆動時における駆動信号電圧,駆動電圧について説明する。図に示した⑪,@
などの点検箇所を一箇所ごと,測定する。
ここでは,フェイルセーフ・リレーをFSR,ポンプ・モータ・リレーを PMRと略語で使用する。FSR駆
動信号線とは, ECU<=>FSRコイル(以下, FSRアクチュエータという 。)聞の配線をいい, FSR電源、線とは,
電源。FSR(接点側)間の配線をいい, FSRアクチュエータ・アース線とは, FSRアクチュエータ0 ボデー・
アース聞の配線をいう 。PMRアクチュエータ電源線とは, FSR(接点側)<=>PMRコイル聞の配線をいい,
PMR駆動信号線とは, ECU<=>PMRアクチュエータ間の配線をいう 。PMR電源線とは,電源。PMR(接点
側)聞の配線をいい,モータ駆動線とは, PMR(接点側)<=>モータ聞の配線をいい,モータ・アース線とは,
モータ0ボデー ・アース聞の配線をいい, MCK信号線とは, ECUのMCK信号端子。モータ駆動線開の配線
をいう 。
( i )駆動信号電圧の回路点検
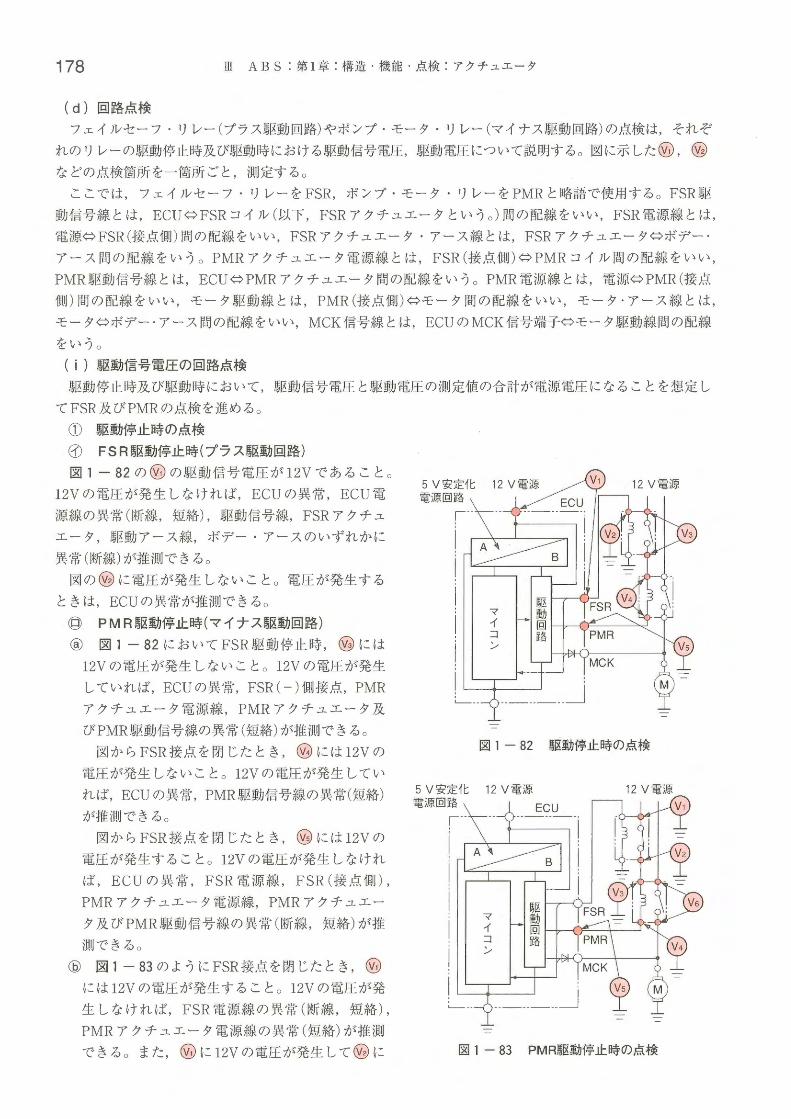
駆動停止時及び駆動時において,駆動信号電圧と駆動電圧の測定値の合計が電源、電圧になることを想定し
てFSR及びPMRの点検を進める。
① 駆動停止時の点検
③ FSR駆動停止時(プラス駆動回路)
図 1-82の⑪の駆動信号電圧が12Vであること 。
12Vの電圧が発生しなければ, ECUの異常, ECU電
源線の異常(断線,短絡),駆動信号線, FSRアクチュ
エータ,駆動アース線,ボデー・アースのいずれかに
異常(断線)が推測できる。
図の@に電圧が発生しないこと 。電圧が発生する
ときは, ECUの異常が推測できる。
⑪ PMR駆動停止時(マイナス駆動回路)
④ 図 1-82において FSR駆動停止時,@には
12Vの電圧が発生しないこと。12Vの電圧が発生
していれば,ECUの異常,FSR( -)側接点,PMR
アクチュエータ電源線, PMRアクチュエータ及
びPMR駆動信号線の異常(短絡)が推測できる。
図から FSR接点を閉じたとき ,⑪には 12Vの
電圧が発生しないこと。12Vの電圧が発生してい
れば, ECUの異常, PMR駆動信号線の異常(短絡)
が推測できる。
図から FSR接点を閉じたとき,@には 12Vの
電圧が発生すること。12Vの電圧が発生しなけれ
ば,ECUの異常, FSR電源線, FSR(接点側),
PMRアクチュエータ電源線,PMRアクチュエー
タ及びPMR駆動信号線の異常(断線,短絡)が推
測できる。
⑥ 図1-83のようにFSR接点を閉じたとき,⑪
には 12Vの電圧が発生すること。12Vの電圧が発
生しなければ,FSR電源、線の異常(断線,短絡),
PMRアクチュエータ電源線の異常(短絡)が推測
できる。また,⑪に 12Vの電圧が発生して@に 図 1-83
駆動停止時の点検
PMR駆動停止時の点検
図 1-82
マイコン
マイコン
皿178

m ABS:第1章:構造・機能・点検:アクチュエータ 179
発生しない場合は, FSR接点の異常(断線),同じく,@に発生して@に発生しない場合はPMRアクチ
ユエータ電源線FSR接点の異常(断線),⑪に発生して⑪に発生しない場合はPMRアクチュエータの
異常(断線),⑪に発生して⑪に発生しない場合はPMR駆動信号線の異常(断線), @に発生しない場
合はECUの異常がそれぞれ推測できる。
⑥ モータの駆動停止時に,図, -83の⑪に12Vの電圧が発生すること。12Vの電圧が発生しなければ,
PMR電源線の異常(断線,短絡), PMR(接点側)の異常(短絡),モータ駆動線,モータ,モータ・アー
ス線,ボデー・アースのいずれかに異常(断線)が推測できる。
② 駆動時の点検
Eo FSR駆動時(プラス駆動回路)
⑧ 図, -84の⑪の駆動信号電圧がOVであること。駆動信号電圧がOVよりも高く発生すれば, ECU
本体の異常が推測できる。また,図の@には,駆動電圧と同じ12Vの電圧が発生すること。この電圧
がOVであれば, ECU電源線の異常(断線,短絡), ECU本体の異常, FSR駆動信号線の異常(断線,
短絡), FSRアクチュエータの異常(短絡), ECUアース線及びボデー・アースの異常(断線など)が推測
できる。
⑥ 図, -84の@に 12Vの電圧が発生しているとき,⑪の電圧がOVで,⑪の電圧が12Vであるこ
と。⑪及び⑪の電圧がOVである場合は,ECUの異常, FSR電源線, FSR接点, PMRアクチュエー
タ電源線, PMRアクチュエータ及びPMR駆動信号線の異常(断線,短絡)が推測できる。
〈参考)FSRの駆動はエンジン始動で駆動する場合と,ブレーキ信号で駆動する場合がある。また,車
輪速信号とブレーキ信号の双方でFSR(フェイルセーフ・ リレー)駆動を実施する装置もある。
⑥ 図 1一85の⑪及び@に12V駆動電圧が発生していること 。⑪及び@の電圧に電圧差が発生して
いれば, FSR駆動信号線の異常(断線,接触抵抗などの増大)が推測できる。
12 V電源
図1-84 FSR駆動時の点検 (1 ) 図1ー85 FSR駆動時の点検 (2 )

ABS:第1章 :構造 ・機能・点検:アクチュエータ
PMR駆動時
図 1-86のようにFSR及びPMRの接点が閉じて
いるとき,⑪に 12Vの電圧が発生していること 。
12Vの電圧が発生しなければ, PMR電源線,PMR
(接点側),モータ駆動線の異常(断線,短絡,接触
抵抗などの増大),モータ及びMCK信号線の異常
(短絡)が推測できる。⑪に 12Vの電圧の発生はあ
り,モータが起動しない場合は,モータ,モータ・
アース線及ぴボデー・アースの異常(断線,接触抵
抗などの増大)が推測できる。
図の@の電圧はOVであること 。電圧の発生があ
ればPMR(接点側)の異常(断線,接触抵抗などの増
大)が推測できる。
⑥ 図 1-87のようにFSR及びPMRの接点が閉じて
いるとき,⑪に 12Vの電圧が発生していること 。
12Vの電圧が発生しなければ, PMR電源線の異常
(断線,短絡,接触抵抗などの増大), PMR(接点側),
モータ駆動線,モータ及びMCK信号線の異常(短絡)
が推測できる 。 また,⑪に 12Vの電圧が発生し
て@に発生 しない場合は, PMR接点の異常(断線),
同じく,@に発生して⑪に発生しない場合は,モ
ータ駆動線の異常(断線)が推測できる。
〈参考〉モータ駆動電流が装置の規定値より多い場合
は,モータ本体及びポンプ機構のオーバロードの原
因が考えられる。また,規定値より少ない場合は,
ポンプ機構の能力低下の原因が考えられる。
③ MCK(モータ・チェック信号)の点検
図 1-88の⑪の信号電圧が,モータ駆動停止時にはOVの電圧で,モータ駆動時には 12Vの電圧が発生
していること。モータ駆動時に 12Vの電圧が発生していなければ, MCK信号線の異常(断線)が推測できる。
図 1-89のようにECUのMCK信号端子の接続を外したとき,⑪の信号電圧が安定化電源電圧の5Vが
発生していること。5Vの電圧が発生していなければ, ECU本体の異常が推測できる。
12 V電源
12 V電源
PMR駆動時の点検 (2 )
PMR駆動時の点検(1 )
図 1-87
5V安定化
電源回路
「ーー
図 1-86
マイコン
マイコン
皿180
⑪
③
12 V電源12 V電源
マイコン
5V安定化電源回路
「ーー
モータ・チェック信号の点検 (2 ) 図1-89 モータ・チェック信号の点検 (1 ) 図 1-88

181
FSR
駆動電圧及び駆動信号電圧の点検
皿
( i i )駆動情報と駆動電圧の整合確認
駆動情報と駆動信号電圧及び駆動電圧の整合確認は,アクチュエータの駆動状態を駆動停止時コ駆動時に
したとき ,駆動信号電圧及び駆動電圧が駆動情報と一致することを確認する。
① FSRアクチュ工ータ
図 1-90のFSRアクチュエータを駆動停止時二今駆動時にしたとき,⑪の駆動信号電圧が,図 1-91の
駆動信号電圧特性に示す12Vから OVに反転すれば, ECU電源、線には,断線及び短絡がなく, ECU本体,
駆動信号線, FSRアクチュエータ, FSRコイル・アース線及びボデー・アースには断線はない。
図 1-90のFSRアクチユエータを駆動停止時コ駆動時にしたとき,@の駆動電圧が,図 1ー92の駆動
電圧特性に示すOVから 12Vに反転すれば, ECU本体, ECU電源線及びFSR駆動信号線には,断線及び短
絡がなく,また,アクチュエータには短絡がなく, ECUアース線, FSRコイル・アース線及びボデー・アー
スには断線はない。
② PMRアクチュエータ
図 1-90のPMRアクチュエータを駆動停止時二今駆
動時にしたとき,⑪の駆動信号電圧が,図 1-91の
駆動信号電圧特性に示す 12Vから OVに反転すれば,
ECU電源線, FSR電源、線, FSR(接点側), PMRアクチ
ユエータ電源、線, PMRアクチュエータ, PMR信号線に
は,断線及び短絡がなく, ECU本体, ECUアース線及
びボデー-アースには断線はない。
図 1-90のPMRアクチュエータを駆動停止時コ駆
動時にしたとき,@の駆動電圧が,図 1ー 92の駆動
電圧特性に示すOVから 12Vに反転すれば, ECU電源、線,
FSR電源、線, FSR(接点側), PMRアクチュエータ電源
線には,断線及び短絡がなく,また, PMRアクチュエ
ータには短絡はなく, ECU本体, PMR信号線,
アース線及びボデー・アースには断線はない。
ABS:第I章:構造・機能 ・点検:アクチュエータ
図 1-90
マイコン
ECU
(V)
10
8
6
4
2
。
10
8
6
4
2
。
FSR及びPMRの駆動電圧特性図 1-92 FSR及びPMRの駆動信号電圧特性図 1-91

インレット・/¥)レブ
、ヘソレイド・コイル
ABS:第1章:構造・機能・点検:アクチュエータ
(口)モジュレータ・バルブ
図 1-93に示すようにモジュレータ・バルブは,前後左
右輸のブレーキ本体の油圧制御を行うインレット・バルブと
アウ トレット・バルブから構成され,インレット・バルブは,
図のようにマスタ・シリンダの油圧を遮断し,アウトレッ
ト・バルブは,ホイール・シ リンダの油圧を抜く(減圧)役目
をする。モジュレータ・バルブの作動は,モジュレータ・バ
ルブに内蔵されたソレノイド・コイルの駆動により行う 。
( a )回路構成
前輪の駆動回路構成は,図 1-94に示すようにECUのマ
イコンの信号電圧により 12V電源コ駆動回路FSRのTrコ
FSRのコイル(フェイルセーフ・リレー・コイル)コボデー・
アースに電流を流す回路構成,走行状態の ABS作動時では,
マイコンが必要と判断した場合に,マイコンの信号電圧によ
り12V電源コFSR(フェイルセーフ・リレー)コ必要とするフ
ロント右IN(以下,FRINという 。),フ ロント右OUT(以下,
FROUTという 。),フロント左IN(以下, FLINという 。),
フロント左OUT(以下, FLOUTという 。)のいずれかのソレ
ノイド・コイルコ駆動回路の該当ソレノイド・コイルを作動
する TrコECUのアースに電流を流す回路が構成されてアク
チュエータが駆動する。
( b )信号波形
③ FSRの駆動回路
モジ、ユレータ・バルブ駆動用のソレノイド・コイルの駆動
準備は,図 1ー94に示す駆動回路がFSRコイルを駆動する
ことにより FSRコンタクト・ポイントがONされ,該当ソレ
ノイド・コイルに電源電圧が入力(駆動回路のTrがOFFで
PMRは駆動はしない。)して該当ソレノイド・コイルの駆動
準備が整う 。図 1-95一(1 )に示すものがFSRコイル駆動
信号電圧特性,図 1-95一(2 )に示すものがFSRコイル駆動電圧特性で,イグニション・スイッチON状
態のシステム正常時には,常にモジ、ユレータ・バルブ駆動用のソレノイド・コイル駆動準備完了状態にある。
モジュレータ・バルブ駆動回路である図 1-96及び図 1ー 97,並びに,ポンプ・モータの駆動回路であ
る図 1-64で示すFSRは,共用されており,フェイルセーフ時にモジュレータ・バルブ、駆動用のソレノイ
ド・コイルとポンプ駆動用のPMRの電源電圧をカットして異常駆動を止める回路構成になっている。
OUT
IN
12 V電源
モジュレータ・バルブ
前輪駆動回路構成
タ小八件
U
図 1-94
一unU〉
図 1-93
マイコン
皿182
(V)
10
8
6
4
2
。
10
8
6
4
2
。
(2) FSRの駆動電圧特性
FSRの駆動信号電圧特性及びFSRの駆動電圧特性
( 1 ) FSRの駆動信号電圧特性
図 1-95

183
⑥ モジュレータ・バルブ駆動回路
図 1ー96で示す前輪駆動回路では,前輪左右輸のブレーキ本体の油圧制御を行い,図 1-97で示す後輪
駆動回路では,後輪左右輸のブレーキ本体の油圧制御を行っている。図 1-96で示す前輪駆動回路のモジ
ュレータ・バルブ駆動ソレノイド・コイルの駆動端子記号は, FRINが前輪右インレットを, FLINが前輪
左インレットを, FROUTが前輪右アウトレットを, FLOUTが前輪左アウトレットを示す。図 1-97で示
す後輪駆動回路のモジュレータ・バルブ駆動ソレノイド・コイルの駆動端子記号は, RRINが後輪右インレ
ットを, RLINが後輪左インレットを, RROUTが後輪右アウトレットを, RLOUTが後輪左アウトレット
を示す。
ABS:第1章:構造・機能・点検:アクチュエータ皿
12 V電源12 V電源
マイコン
5V安定化
電源回路
「ーー
後輪駆動回路構成図 1-97 前輪駆動回路構成図1-96
OV
ソレノイド・コイル駆動波形
ABS作動時には,各モジュレータ・バルブを個別
に駆動してブレーキ油圧の保持と減圧制御を行い,
車両の安定性を確保する。
図 1-98は,モジュレータ・バルブのソレノイ
ド・コイル駆動電圧波形で, ABS作動時は, O.lms
の聞に 2~3 回の ON . OFF駆動制御を行い,車輪
の回転速度信号をもとに車両の安定性の回復が確認
されると,マイコンは,モジュレータ・バルブのソ
レノイド・コイルの駆動を中止をする。
③
O.1ms
モジュレータ・バルブのソレノイド、.
コイルの駆動電圧波形
2V
図 1-98

ABS:第1章 :構造・機能・点検:アクチュエータ
モジュレータ ・バルブの制御は,図 1-99に示すモジュレータ・バルブのインレット・バルブ及びアウ
トレ ッ ト・バルブの開閉 (ON・OFF駆動制御)により ,表 1-1で示すようにブレーキ・ペダルの踏力増
加時にホイールのロックが発生する可能性があると保持作動に入り ,ロックが発生すると減圧作動を行うよ
うになっている。
皿184
IN:インレット ・バルブ(非励磁時 :バルブ開)
OUT:アウトレット ・バルブ(非励磁時:バルブ閉)
・油圧減圧方式は,キャリパを直接減圧する直接
減圧方式(還流式)。
-油圧制御は,減圧,保持,増圧の3モード0
・油圧回路は,各車輪を独立させX配管。
左後輪右前輪左前輪右後輪
モジュレータ・バルブの作動図 1-99
モジュレータ・バルブ作動
増圧作動インレット・バルブ開(通電OFF),アウ トレ ット・バルブ閉 (通電OFF)
マスタ・シリンダのブレーキ液は,キャリパに送られる。
保持 作動インレット・ バルブ閉 (通電ON),ア ウトレ ット・バルブ閉 (通電OFF)
キャリパのブレーキ液は,インレット・バルブとアウトレット・バルブに遮断される。
減圧作動インレット・バルブ閉 (通電ON),ア ウトレ ット・バルブ開 (通電ON)
キャリパのブレーキ液は,アウ トレ ット・バルブを通りリザーパへ抜ける。
モータ作動減圧作動開始時ON,ABS制御停止時OFF
リザーバのブレーキ液は,ポンプによりダンピング・チャンパを通りマスタ・シリンダへ戻される。
表 1-1
( c )異常検知
( i )異常検知の範囲
モジ、ユレータ ・バルブ駆動回路は,図 1ー 100のように FSR!駆動回路のほか,前・後輪8系統の駆動回路
インレット・バルブ及びアウトレット・バルブを作動させて,増圧・減圧 ・保持を行う 。をもち,
12 V電源
( 2 )後輪駆動回路構成
12 V電源
マイコン
駆動回路構成図 1一100
12 V電源
(1 )前輪駆動回路構成
12 V電源
マイコン

皿 ABS:第1章:構造・機能・点検:アクチュエータ 185
① FSR駆動回路(プラス駆動回路)
図 1ー 100に示す駆動回路のFSR駆動回路でのマイコンが異常検知する仕組みは, マイコンの閥値と駆
動回路の信号電圧の比較が行われ,マイコンは,図 1-101に示すマイコンの関値と信号電圧に論理の不一
致があるときに異常検知を行う 。
図 1一 102一(1 )に示すFSR駆動停止時(イニシャル・チェック)に関値をアップ・エッジする信号電圧を
検出したときに異常検知を行う 。また,駆動時(ABS作動時)に図(2 )に示す関値をダウン・エッジする信
号電圧を検出 したときに異常検知を行う 。
12 V電源(V)
闇値
OV
|異常検知不可範囲 !異常検知可能範囲
異常検知可能範囲
骨一駆動停止時 駆動時一-.j
12 V
闇値
U
ンH
ノ工プy
ア
A〒i・ーー
(タ ウン工 yジ);
OV
駆動停止時( 1 )
駆動時( 2 )
図 1-101 異常検知範囲図 1-102 闘値
② 前・後輪8系統のモジュレータ・バルブ(マイナス駆動回路)
図 1-100に示す駆動回路(前・後輪8系統)でのマイコンが異常検知する仕組みは,マイコンの関値と駆
動回路の信号電圧の比較が行われ,マイコンは,図 1-103に示すマイコンの関値と信号電圧に論理の不一
致があるときに異常検知を行う 。ここでは,前・後輪8系統の異常検知の仕組みは,基本的に同じであるた
め,図 1-100一(1 )の前輪駆動回路構成 iFLINJを例に説明する。
図 1一 104一(1 )に示すモジ、ユレータ・バルブ iFLINJの駆動停止時に関値をダウン・エッジする信号
電圧を検出したときに異常検知を行う 。また,図(2 )に示す iFLINJの駆動時に関値をアップ・エッジす
る信号電圧を検出したときに異常検知を行う 。
・モジ、ユ レータ ・バルブでの油圧制御結果が車輪速との関係で不可と判断された場合は,フェイルセーフ
に入る。
12 V電源 (V)
12 V
異常検知可能範囲
闇値
; (ルエッジ)
異常検知可能範囲 i i異常検知不可範囲ojOV
駆動停止時 駆動時
図 1-103 モジュレータ・バルブ駆動回路( 1 ) ( 2 )
異常検知範囲 図 1一104 闇値

ABS:第1章:構造・機能・点検:アクチュエータ
( i i )異常検知の回路
① FSR駆動回路(プラス駆動回路)
モジュレータ・バルブ及びポンプ・モータの駆動回路構成で示すFSR駆動端子は共用されており,ポン
プ・モータの駆動回路の(ii )異常検知の回路(①)FSR駆動回路(プラス駆動回路)において説明した内容と
同じため,ここではFSR駆動回路の異常検知の回路を省略する。
② 前・後輪8系統のモジュレータ・バルブ(マイナス駆動回路)
ここでは,前・後輪8系統の異常検知の仕組みは,基本的に同じであるため,前輪駆動回路構成 iFLINJ
を例に説明する。
④ 図 1ー 105のFSR駆動回路が駆動し, FSR(フェイルセーフ・リレー)がONすると,モジ、ユレータ・
バルブ iFLINJ駆動回路が構成される。駆動回路の駆動停止時に」ー の部分の回路において,アク
チュエータのコイル,電源線,駆動信号線のいずれかに断線がある場合には, iFLINJ駆動信号線から
分岐した診断回路(OVが掛かる。)により,マイコンは,関値をダウン・エッジする診断信号電圧を検出
して異常検知を行う 。
⑪ 図の iFLINJ駆動時に・・置の部分の回路において,アクチユエータのコイル,電源線,駆動信号
線のいずれかに断線がある場合には, iFLINJ駆動信号線から分岐した診断回路 (OVが掛かる。)によ
り,マイコンには,関値をダウン・エッジする診断信号電圧が入力されるが,マイコンは,正常の駆動
時には,関値をダウン・エッジする診断信号電圧を正常と判断するため,正常・異常の判断ができず異
常検知を行わない。
の 図 1 ー 106 の iFLINJ 駆動停止時に・~..の部分の回路において,アクチユエータのコイルの短絡,
又は電源線若しくは駆動信号線に短絡がある場合は,駆動信号線から分岐した診断回路(OVが掛かる。)
により,マイコンは,閥値をダウン・エッジする診断信号電圧を検出して異常検知を行う 。
@ 図の iFLINJの駆動時に・円曜.の部分の回路において,アクチュエータのコイルの短絡,又は電源線
若しくは駆動信号線に短絡がある場合には, iFLINJ駆動信号線から分岐した診断回路(OVが掛かる。)
により,マイコンには,関値をダウン・エッジする診断信号電圧が入力されるが,マイコンは,正常の
駆動時には,関値をダウン・エッジする診断信号電圧を正常と判断するため,正常・異常の判断ができ
ず,異常検知は行わない。
皿186
12 V電源
マイ'コン
5V安定化電源回路
「ーー
12 V電源
マイコン
5V安定化電源回路
「ー一
異常検知回路 (2 ) 図 1-106 異常検知回路 (1 ) 図 1-105

皿 ABS:第1章 :構造・機能・点検:アクチュエータ 187
( d )回路点検
モジュレータ・バルブ駆動回路(マイナス駆動回路)の点検は,ソレノイド・コイルへの駆動停止時及び:駆
動時における駆動信号電圧,駆動電圧などについて説明する。図に示した⑪,@などの点検箇所をー箇所
ごと,測定する。
ここでの回路点検は, 8本のソレノイド・コイルすべてが同じ測定確認方法であるため,前輪駆動回路構
成 iFLOUTJを例に説明する。
〈参考〉点検はソレノイド・コイルの駆動を再現する必要があり,再現方法は実走行,あるいは,外部診断
器を利用してソレノイド・コイルの駆動を行う方法がある。
ここでは,アクチュエータ電源線とは, FSR(接点側)~アクチュエータ聞の配線をいい, FSR電源線とは,
電源。FSR(接点側)聞の配線をいう 。
( i )駆動信号電圧の回路点検
駆動停止時及び駆動時において,駆動信号電圧と駆動電圧の測定値の合計が電源電圧になることを想定し
てソレノイド・コイルなどの点検を進める。
① 駆動停止時の点検
@ 図 1一107のようにFSRがONのとき,⑪の電圧はOVであり,@の電圧は 12Vであること。⑪に
12Vの電圧が発生していれば, ECU本体の異常,駆動信号線の異常(短絡)が推測でき,@に 12Vの電
圧が発生していなければ, ECU本体の異常, FSR電源線, FSR(接点側),アクチュエータ電源線,ア
クチユエータ及び駆動信号線の異常(断線,短絡)が推測できる。
⑪ 図 1ー108のようにFSRがONのとき,⑪~⑪には 12Vの電圧が発生していること。
⑪に 12Vの電圧が発生していなければ, FSR電源線, FSR駆動信号線, FSR(接点側)の異常(断線,
短絡),アクチュエータ電源線,アクチュエータの異常(短絡)が推測できる。また,⑪に 12Vの電圧が
発生して@に発生しないときは,アクチュエータ電源線の異常(断線)が推測でき,同じく,@に電圧
が発生して⑪に発生しないときは,アクチュエータの異常(断線),⑪に電圧が発生 して⑪に発生し
ないときは,駆動信号線の異常(断線),⑪に発生しているときは, ECU本体の異常, ECUアース線及
びボデー・アースの異常(断線)がそれぞれ推測できる。
12 V電源 12 V電源
図1一107 駆動停止時の点検(1 ) 図1一108 駆動停止時の点検(2 )
ABS:第1章:構造・機能・点検:アクチュエータ
12 V電源
駆動時の点検 (2 )
12 V電源
12 V電源
駆動時の点検 (1 ) 図1-109
図 1一110
マイコン
マイt
コン
マイコン
5V安定化
電源回路
5V安定化
電源回路
「ーー
5V安定化電源回路
「ーー
田
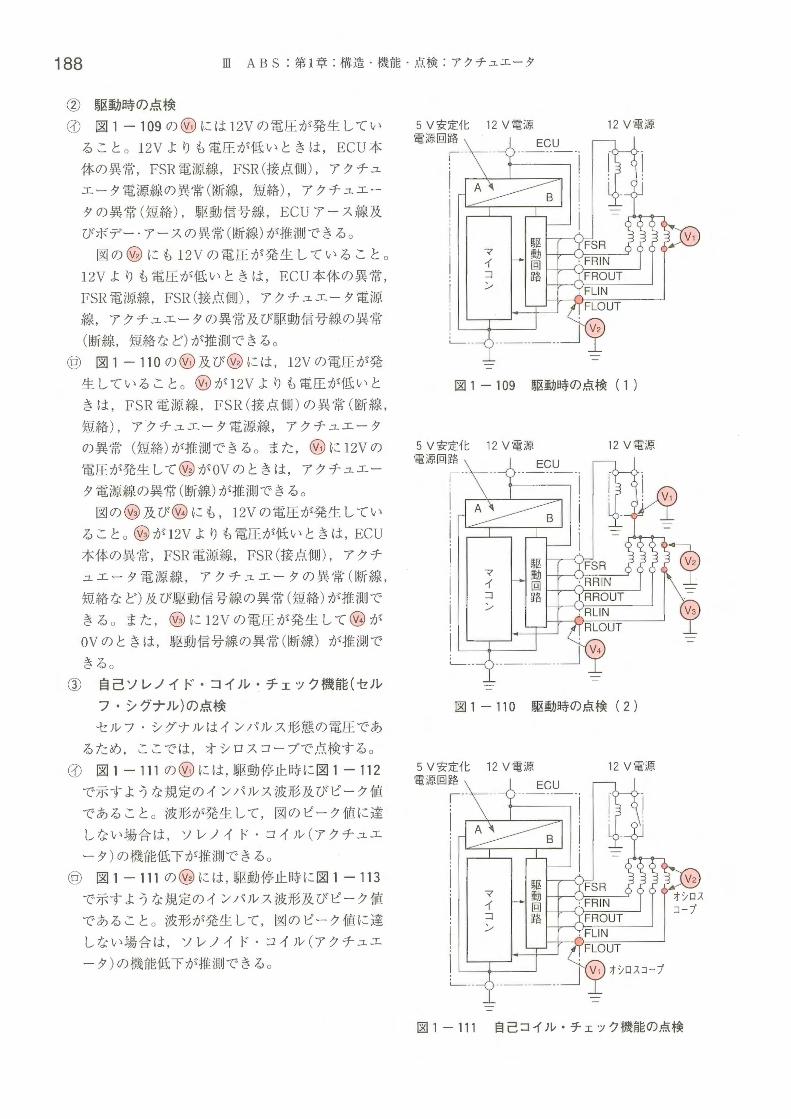
② 駆動時の点検
@ 図 1一109の⑪には 12Vの電圧が発生してい
ること 。12Vよりも電圧が低いときは, ECU本
体の異常, FSR電源、線, FSR(接点側),アクチュ
エータ電源線の異常(断線,短絡),アクチュエー
タの異常(短絡),駆動信号線, ECUアース線及
びボデー・アースの異常(断線)が推測できる。
図の@にも 12Vの電圧が発生していること 。
12Vよりも電圧が低いときは, ECU本体の異常,
FSR電源線, FSR(接点側),アクチュエータ電源
線,アクチュエータの異常及び駆動信号線の異常
(断線,短絡など)が推測できる。
⑪ 図 1ー 110の⑪及び@には, 12Vの電圧が発
生していること 。⑪が12Vよりも電圧が低いと
きは, FSR電源、線, FSR(接点側)の異常(断線,
短絡),アクチユエータ電源線,アクチュエータ
の異常(短絡)が推測できる。また,⑪に 12Vの
電圧が発生して@がOVのときは,アクチユエー
タ電源線の異常(断線)が推測できる。
図の⑪及び⑪にも, 12Vの電圧が発生してい
ること。@が12Vよりも電圧が低いときは, ECU
本体の異常, FSR電源線, FSR(接点側),アクチ
ユエータ電源線,アクチュエータの異常(断線,
短絡など)及び駆動信号線の異常(短絡)が推測で
きる 。また,@に 12Vの電圧が発生して⑪が
OVのときは,駆動信号線の異常(断線)が推測で
きる。
③ 自己ソレノイド・コイル・チェック機能(セル
フ・シグナル)の点検
セルフ・シグナルはインパルス形態の電圧であ
るため,ここでは,オシロスコープで点検:する。
③ 図 1-111の⑪には,駆動停止時に図 1一112
で示すような規定のインパルス波形及びピーク値
であること。波形が発生して,図のピーク値に達
しない場合は,ソレノイド・コイル(アクチュエ
ータ)の機能低下が推測できる。
⑪ 図 1-111の@には,駆動停止時に図 1-113
で示すような規定のインパルス波形及びピーク値
であること。波形が発生して,図のピーク値に達
しない場合は,ソレノイド・コイル(アクチュエ
ータ)の機能低下が推測できる。
188
自己コイル・チェック機能の点検図1-111

III ABS:第1章:構造 ・機能・点検:アクチュエータ 189
〈参考〉 ソレノイド・コイル(アクチュエータ)両端にプローブを接続する場合,プローブの接続極性を逆
にすると,図 1ー 113のような観測波形になる。また,コイルの機能低下は,回路の ON・OFF時に発
生するインパルスでコイルが振動することによって,レア・ショートや巻き線の緩みなどにより起こるこ
とが多い。
自己ソレノイド・コイル・チェック機能を持っていない場合の点検は,この項の冒頭で説明した方法に
より,ソレノイド・コイルの駆動を再現する必要がある。
一一一一」ー.~.一-~..-一一
ovlk
10V 10μs
図 1-112 ソレノイド・コイル・チェック
電圧(1 )
( ii )駆動情報と駆動電圧の整合確認
駆動情報と駆動信号電圧及び駆動電圧の整合確認は,
アクチュエータの駆動状態を駆動停止時二今駆動時にし
たとき,駆動信号電圧及び駆動電圧が駆動情報と一致
することを確認する。
① 図 1-114のアクチュエータを駆動停止時二今駆
動時にしたとき,⑪の駆動信号電圧と@の駆動電
圧が,図 1-115の駆動信号電圧特性と図 1-116
の駆動電圧に示す波形と一致していれば, ECU電
源線, FSR電源、線, FSR(接点側),アクチュエー
タ電源線,アクチュエータ及び駆動信号線には,
断線及び短絡がなく, ECU本体, ECUアース線及
びボデー-アースには断線はない。
OV
5V 0.1ms
図1一115 アクチュ工ータ駆動信号電圧
一一..~一一日一--_...・一一..一一一
一一--_------_一一一;一一...l'=ヨー一一--一一一一一一一一
OV
二仁一一一十一一一一一一ー一一ーー一一一
-ーー一+一一一←一→'一一十一司l
10V 10μs
図1一113 ソレノイド、・コイル・チェック
電圧(2 )
12 V電源
図1一114 駆動電圧及び駆動信号電圧の点検
OV
5V 0.1ms
図1-116 アクチュ工ータ駆動電圧

ABS:第 1章 :ABS . ECU 皿190
ABS制御のシステム・ブロック図
車輪速度が推定(又は疑似)車体速度より急激に下がると(①),図 1一,'8のようにインレット・バルブは
閉じ,ブレーキ圧を保持する。さらに,車輪速度が低下すると(②),アウトレット・バルブは一瞬開き,ブ
レーキ圧を減圧する。このとき,ポンプ・モータは作動を始める。車輪速度が回復してくると(③),インレ
ット・バルブを一瞬聞き,ブレーキ圧を増圧する。この作動を素早く繰り返し, AB S制御を行っている。
図 1-117
frナート」一
時間
円
ln I _ 時間
φ
「¥,y ,アウトレット・ 千
ハルフ ON(開)↓門 門
OFF(閉) II I : : : : I I
インレット・ T バルブ ON(閉)↓ ii it-i f
OFF(開) II UU
ON 十
OFF L
車体速度(又は実車体速度)
推定車体速度(又は疑似車体速度)速度
}車輪速度
時間
ー時間
圧力
ー時間
盲音合と市麿シエり..., 1" 一々生rI~制閉 1- 11 Q
モータ

皿 ABS:第 l章:ABS . ECU 191
( 2 )フェイルセーフ制御
フェイルセーフ制御は,故障などにより ABSに異常が発生すると, ECUがフェイルセーフ制御を実行
し, ABS制御をカットして通常ブレーキにするものである。
センサ,アクチュエータ, ECU内部などに異常が発生すると, ECUはフェイルセーフ・リレーを
OFFし, AB S制御を中止すると共に通常ブレーキにする。同時に,車載故障診断装置の診断機能により,
ABS警告灯を点灯させ,運転者にシステムの異常が発生していることと,制御を停止していることを知ら
せる。また,故障の系統を記憶し,整備性を向上させている。
(イ)制御内容
フェイルセーフ制御は,異常内容により次のように実行され,いずれも警告灯が点灯する。
① システムの異常を検知して,フェイルセーフ・リレー,モジ、ユレータ・バルブ及びポンプ・モータの
出力をすべてOFFにする。
② ABS動作中に異常検知した場合,故障箇所以外の作動をそのまま継続し,制御終了後に出力をすべ
てOFFにする。
③ メモリしているダイアグノーシス・コードにより,異常コードのときはABSの動作を禁止し,次に,
正常と判断された場合, AB S制御へ移行する。
これは,システムに異常がなくなった状態で,車速30km/h以上で,1秒以上走行した場合,解除さ
れてABS制御となる。
④ イグニション・スイッチ(IG2)の電圧異常(上昇,下降)で, AB Sの動作を禁止した場合は,電圧が
正常と判断された時点で, AB S制御へ移行する。
(口)車載故障診断装置による診断機能
車載故障診断装置による診断は,次の2種類がある。
① 初期診断:エンジン始動直後から ABS警告灯が消灯するまで。
② 常時診断:初期診断終了直後からイグニション・スイッチOFFまで。
車載故障診断装置による診断でシステムに異常を検知すると, AB S警告灯の点灯及びダイアグノーシ
ス・コードの記憶の制御を行う 。

192
第 2章 高度故障診断技術
1 故障診断を始める前に
1 )警告灯
警告灯は,システムの異常を検知したことを点灯で知らせ,また,車載故障診断装置の診断ランプ(警告
灯兼用)は,異常を検知した系統を点滅回数で知らせる。
( 1 )一過性の異常時
ABS警告灯は, ECUがシステムの異常を検出して点灯するが,正常に戻ると自動的に消灯する場合が
ある。ダイアグノーシス・コードの61,62(IG2の電圧診断)は,正常に戻ると消灯する。
ABS警告灯は,システムが正常に戻っても,イグニション・スイッチを OFFにするまで消灯しない場
合がある。上記のほかは,イグニション・スイッチを OFFするまで消灯しない。
ABS警告灯は,システムが正常に戻り,再度,イグニション・スイッチを ONにしても消灯せず,再走
行すると消灯することがある。ダイアグノーシス・コードの 12,14, 16, 18, 21, 22, 23, 24, 52, 53(車
輪速センサ信号異常,パルサ診断,モータ診断)は,イグニション・スイッチを OFF→ ONさせて再走行し
たとき,信号が正常であれば警告灯が消灯する。
( 2 )継続性の異常時
運転中,異常を検知すると警告灯を点灯し,エンジンを停止 して再度始動したとき, 警告灯は一旦消灯す
るが異常が継続しているため,警告灯が再度点灯する。
異常が継続している場合の点灯条件は,大別 して2系統あり ,エンジン始動で点灯させる系統と ,運転条
件を持って点灯させる系統があり,後者は定められた運転状態にして点灯確認を行う必要がある。
2 )故障診断を始める前の注意
ABS.ECUは, IG 2の電源、で起動するため,スタータ・モータ回転時は電源が切れるため,エンジ
ン始動後にも ABS警告灯が再点灯し, 2秒後に消灯する。
ABS警告灯は,システムが正常でも次のような状況下では異常と検出 し,点灯する ことがある。したが
って,これらのことも想定して問診を行い,システムが正常と判断できた場合は,ダイアグノーシス ・コー
ドを消去する。
i )駆動輪のみの回転
ii )駆動輪の片輪スタック
iii)車両スピン
iv)長時間のABS制御状態
v)外乱信号(ノイズ)
2 ダイアグノーシス・コードを持つ場合の故障診断
1 )ダイアグノーシス・コード
ダイアグノーシス・コードは,マイコンが起動できなかったり,マイコンが故障してABS警告灯が点灯
した場合は,記憶されない。
ダイアグノーシス・コードの記憶数に制限はないが,同じコー ドは上書きする。したがって,同 じコード
を複数回検出しでも一個の記憶となる。
ダイアグノーシス・コードは,数が小さい順に繰り返して表示する。故障の発生順ではないことに注意す
る。
ダイアグノーシス・コードは, EEP ROMに記憶する。したがって,コードの消去は,バッテリ端子を外
したことではできないので,指定の消去手順で行うこと。

皿 ABS:第 2章:ダイアグノーシス・コードを持つ場合の故障診断 193
2 )ダイアグノーシス・コードの確認
ダイアグノーシス・コードの確認方法には,車載故障診断装置の診断ランプの点滅により,コードに置き
換えて読み取ることができる。
( 1 )車載故障診断装置の診断ランプの表示方法
① イグニション・スイッチがOFFの状態で,サービス・チェック・シグナル・モードにする。
サービス・チェック・シグナル・モード条件は,車速lOkm/h以下で,イグニション・スイッチON
前に, SCS端子及びSTOP端子とも Lowレベルである。
② ブレーキ・ペダルを踏まないで,イグニション・スイッチを ONにする。
③ 図2一1に示すABS警告灯の点滅パターンを読み取り,ダイアグノーシス・コードの数値に置き換
える。
④ イグニション・スイッチを OFFにする。
ブレーキを踏んだ状態でイグニション・スイッチを ONにすると,消去モードに入る。
ダイアグノーシス・コードが記憶されていない場合は, 3.6秒の消灯後は点灯したままになる。
警告灯点灯-夕、イアクノーシス・コード:12 夕、イアグノーシス・コード:33
警告灯消灯一一|一一一一 I II
同ト一一一一一静|二 ..同昨一一一例 11
1 2秒 3.6秒け.3秒 11 3.6秒ー.1同一
イグニション・スイッチ ト--. 0.3秒
ON 1巡回
※は, バルブ切れチェック・モードを示す。
図2ー1 ダイアグノーシス・コードの表示
ゴ5kll36秒 L2巡回
3 )ダイアグノーシス・コードの消去
ダイアグノーシス・コードの消去方法には,警告灯の点滅に合わせてブレーキ・ペダルを操作する。
( 1 )ダイアグノーシス・コードの消去方法
① イグニション・スイッチがOFFの状態、で,サービス・チェック・シグナル・モードにする。
消去モード条件は,車速lOkm/h以下で,イグニション・スイッチON前に,SCS端子及びSTOP端
子とも Lowレベルである。
② 図2-2に示すようにブレーキ・ペダルを踏んだ、まま,イグニション・スイッチを ONにする。
③ ABS警告灯が消灯したら, 3秒以内にブレーキ・ペダルを放す。
④ ABS警告灯が点灯したら, 3秒以内に再度ブレーキ・ペダルを踏む。
⑤ ABS警告灯が消灯したら, 3秒以内に再度ブレーキ・ペダルを放す。
⑥ その後, AB S警告灯が2回点滅したらダイアグノーシス・コードは消去されている。2回点滅しな
いときは,最初から行う 。2回点滅の後に点灯したままになるときは,消去モードに入る前の初期診断
で異常を検出しているのでダイアグノーシス・コードを確認する。
⑦ イグニション・スイッチを OFFにする。
す
キ
〔一ル
左
レダ
ブペ
0.3秒___"I 1'- (
叩- 一 一-J___.,II十/
0.3秒
イク、ニション・スイッチON
図2-2 ダイアグノーシス・コードの消去方法

194 m ABS:第 2章 :ダイアグノーシス・コードを持つ場合の故障診断
表 2一 1 ダイアグノーシス ・コード一覧表
検出時期
タイアクノー ABS 診断名/症状
初期診断 時診断常故障部位 検 出 会オえミ 件
シス・コード 警告灯
消灯 ABS警告灯が点灯しないなし
点灯 ABS警告灯が消灯しない
11 フロント右 -車輪速センサ・ラインの,断線,ボデー短絡,電源短絡
13 車輪速センサ診断 フロント左 -同一車輪速センサ・ラインの端子短絡点灯
(断線,ボデー短絡,電源短絡)。
リヤ右15
17 リヤ左
12 フロン卜右 -リヤの最速車輪が10km/hのとき,他の車輪速センサ信号がなし ¥0
14 車輪速センサ診断 フロン卜左 -最速車輪が"30km/hのとき, 70秒以上信号がなし ¥0
点灯(信号異常)
。リヤ右 -センサ・ハーネスと他センサ・ハーネスの短絡 (20km/h以上)16
18 リヤ左 -ノイズ入力
21 フロント右 -パルサ歯欠け
22 フロント左点灯 パルサ診断 。
リヤ右23
24 リヤ左
31 FRIN -初期診断時及び最速車輪が10km/hのとき,各モジ、ユ
32 FROUT レータ・バjレブ、への自己ソレノイド・コイル・チェック出力と
33 FLlN モジ‘ュレータ・バルブ出力の不一致
34 FLOUT -モジュレータ・バルブ出力の連続ON点灯 モジ、ュレータ・バルブ診断 。。
35 RRIN -マイコン出力OFF時のモジュレータ・バルブ出力ON
36 RROUT
37 RLlN
38 RLOUT
41 フロン卜右 -走行中のホイール・ロック
42 フロン卜左点灯 ホイール・ロック診断 。
リヤ右43
44 リヤ左
点灯 モータ・ロック診断 。 -イグニション・スイッチON後の発進時,モータを51
ONさせたときのモータ・ロック状態
52 点灯 モータOFF故障診断 。 -モータ・ リレーON出力時のMCK端子電圧が2V以下
53 点灯 モータON故障診断 。。 -モータ・ リレーOFF出力時のMCK端子電圧が6V以上
-フェイ ルセーフ ・リレ ーON出力時の全モジュレー
タ・バルブ端子電圧がOV状態54 点灯 フェイルセーフ・リレー診断 。
-フェイルセーフ・ リレーOFF出力時の全モジュレー
タ・バルブ端子電圧が12V状態
61 .1G2端子電圧10V以下 (車速10km/h以上)点灯 1G2電圧診断 。
'1G2端子電圧16V以上(車速10km/h以上)62
71 点灯 異径タイヤ診断 。 -異径タイヤ装着
81 点灯 マイコン診断 。。 -連続作動
'ECU内部診断異常

195 皿
4 )故障診断
( 1 )ダイアグノーシス・コード表示: 11, 13, 15, 17
車輪速センサ信号の断線,短絡を検知している。
ABS警告灯が消灯せず,上記のダイアグノーシス・コードを表示していることを確認する。
解説はダイアグノーシス・コード13を例にしているが,他も同様である。
点検はイグニション・スイッチを ONにして行う 。
(イ)断線点検
図2ー3に示す電圧を測定して行う 。
① ⑪に電圧がない場合は, ECUの不良。
② ⑪に電圧があり,@に電圧がない場合は,⑪と@
聞の断線。
③ @に電圧があるとき,⑪の配線側端子を外して⑪
に電圧がない場合は,センサ内部の断線。
④ ⑪に電圧があるとき,⑪の配線側端子を外してその
端子に電圧がない場合は,@と⑪聞の断線。
⑤ ⑪に電圧がある場合は, ECUの不良。
(口)短絡点検
図2-4に示す電圧を測定して行う 。
① ⑪に電圧がなく,@の端子を外して,⑪に電圧が
有る場合は,車輪速センサ内の短絡。
② ⑪に電圧がなく,⑪の端子を外して,⑪に電圧が
ないとき,⑪の端子を外して,⑪のECU側端子に電
圧がある場合は,⑪と@聞の短絡。
③ ⑪の端子を外して,⑪のECU側端子に電圧がない
場合は, ECUの不良。
( 2 )ダイアグノーシス・コード表示:12, 14, 16, 18
車輪速センサ信号の異常,リヤ最速車輪が10km/h以上の
とき,他の車輪速センサ信号がない,最速車輪が30km/h以
上のとき, 70秒以上信号がない,センサ・ハーネスと他セ
ンサ・ハーネスの短絡,ノイズ入力による異常を検出している。
イグニション・スイッチを OFFから ONにし,車速30km/h以上で、走行して再現テストを実施する。ABS
警告灯が消灯しない又は点灯し,ダイアグノーシス・コード12,14, 16, 18を確認できた場合は,ダイア
グノーシス・コードに該当した車輪速センサに上記の検出条件下で,異常が発生している。
-点灯しない場合は,駆動輪のみの回転,車両スピン,ノイズ入力があったと考えられる。
( 3 )ダイアグノーシス・コード表示: 21 _, 24
車輪速センサ信号が一定車速以上のときに,パルサ歯欠け診断を実施している。
ダイアグノーシス・コードを消去した後,車速30km/h以上で走行して再現テストを実施する。ABS警
告灯が点灯し,ダイアグノーシス・コード 21~24 を確認できた場合は,ダイアグノーシス・コードに該当
した車輪速センサのパルサの歯欠け点検を実施する。
-点灯しない場合は,一時的な信号消失などの異常があったと考えられる。
( 4 )ダイアグノーシス・コード表示: 31 _, 38
ソレノイドを診断しており,初期診断及び最速車輪が10km/hのとき,各モジュレータ・バルブの自己ソ
レノイド・コイル・チェック出力とモジ、ユレータ・バルフゃ作動の不一致やモジ、ユレータ・バルブの異常作動
を検出している。(検出するとフェイルセーフ・リレーを OFFする。)
イグニション・スイッチを OFFから ONにして,警告灯が消灯しない場合は,
I 15v-l
JLJ 短絡の点検
ダイアグノーシス・コー
「一戸HGJ25日
断線の点検
ABS:第 2章:ダイアグノーシス・コードを持つ場合の故障診断
図2-3
「ーー一一一寸
I__一ーー」車輪速センサ
図2-4

ドにモジ、ユレータ・バルブと信号線の断線,短絡点検を実施する。
-点灯しない場合は,断線,短絡などの一時的な異常があったと考えられる。
( 5 )ダイアグノーシス・コード表示: 41 ,_ 44
ホイール・ロックを診断しており,走行中の車輪速センサ信号によりホイール・ロックを検出している。
走行して,ブレーキを掛けると ABS 警告灯が点灯し,ダイアグノーシス・コード41~44 を確認できた
場合は,ダイアグノーシス・コードに該当したホイールのブレーキの引きずりや車輪速センサの取り付け状
態などの点検を実施する。
-点灯しない場合は,旋回中のスピンや, 一時的な異常があったと考えられる。
( 6 )ダイアグノーシス・コード表示: 51
モータ・ロックを診断しており,イグニション・スイッチON後の発進時,
ータ・ロックを検出している。
ダイアグノーシス・コードを消去した後,車速10km/h以上で走行して再現テストを実施する。ABS警
告灯が点灯し,ダイアグノーシス・コード51を確認できた場合は,モータ(モジュレータ・ユニット)を交
換する。
-点灯しない場合は, 一時的な異常があったと考えられる。
( 7 )ダイアグノーシス・コード表示: 52
モータ OFFの故障診断をしており,発進時にモータを駆動し,
のときに警告灯を点灯させる。
発進時にABS警告灯が点灯し,
(イ)断線点検
図 2-5に示す電圧を測定して行う 。
① ダイアグノーシス・コードを消去
し,イグニション・スイッチを ONし
て, AB S警告灯が点灯していない
状態で⑪の電圧がない場合,電源側
の断線。
② ⑪に電圧があり,@に電圧がな
い場合は,ポンプ・モータ・リレー
の断線。
③ @に電圧があり,⑪に電圧がな
い場合は,@と@間の断線。
④ ⑪に電圧がある場合は,他系統の
故障又はECU側の不良。
⑤ ⑪に電圧がない場合は,電源側の
断線。
⑥ ポンプ・モータ・リレー ON時に,
@に電圧がない場合は,リレー内の
断線。
⑦ ポンプ・モータ・リレーON時に,@に電圧がある場合は,
ABS:第 2章:ダイアグノーシス・コードを持つ場合の故障診断
モータを駆動させたときのモ
E
196
モータ・チェック (MCK)電圧が2V以下
ダイアグノーシス・コード52を表示することを確認する。
|ポンプ・モータ
ー」
リレーから MCKラインの分岐聞の断線。
モータOFF故障診断時の断線の点検
4三「士一一
図 2-5
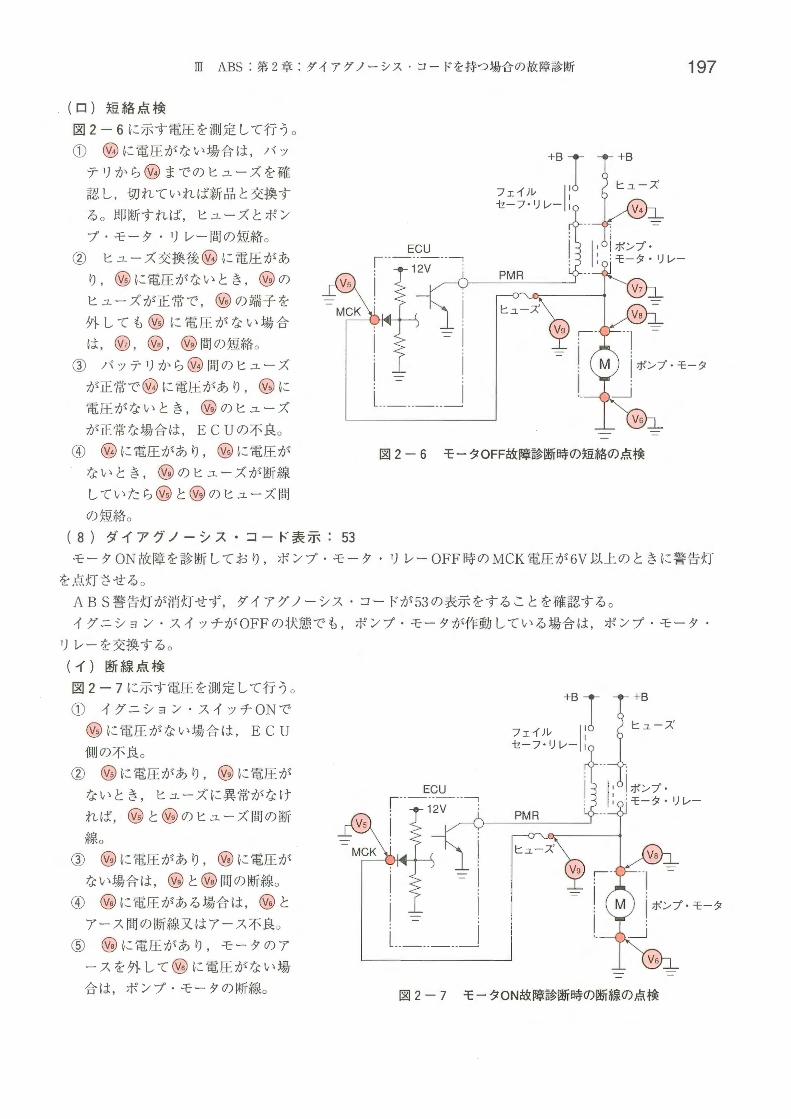
(口 )短絡点検
図2-6に示す電圧を測定して行う 。
① ⑪に電圧がない場合は,パツ
テリから⑪までのヒューズを確
認し,切れていれば新品と交換す
る。即断すれば,ヒューズとポン
プ・モータ・リレー間の短絡。
② ヒューズ交換後⑪に電圧があ
り,@に電圧がないとき,⑪の
ヒューズが正常で,@の端子を
外しでも@に電圧がない場合
は, @ ,⑪ ,⑪間の短絡。
③ バッテリから⑪聞のヒューズ
が正常で⑪に電圧があり,@に
電圧がないとき, ⑪のヒューズ
が正常な場合は, ECUの不良。
④ ⑪に電圧があり, @に電圧が
ないとき,⑪のヒューズが断線
していたら⑪と⑪のヒューズ、聞
の短絡。
( 8 )ダイアグノーシス・コード表示: 53
モータ ON故障を診断しており ポンプ・モータ・ リレー OFF時のMCK電圧が6V以上のときに警告灯
を点灯させる。
ABS警告灯が消灯せず,ダイアグノーシス・コードが53の表示をすることを確認する。
イグニション・スイッチがOFFの状態でも,ポンプ・モータが作動 している場合は,ポンプ・モータ・
リレーを交換する。
(イ )断線点検
図 2-7に示す電圧を測定して行う 。
① イグニション・スイッチ ONで
⑪に電圧がない場合は,
側の不良。
② @に電圧があり, @に電圧が
ないとき,ヒューズに異常がなけ
れば,⑪と@のヒューズ間の断
線。
③ ⑪に電圧があり, ⑪に電圧が
ない場合は,⑮と⑭聞の断線。
④ ⑪に電圧がある場合は, @と
アース間の断線又はアース不良。
⑤ ⑪ に電圧があり,モータのア
ースを外して⑪に電圧がない場
ポンプ・モータの断線。
197
|ポンプ・モータ
ー」
モータOFF故障診断時の短絡の点検
!|)
ABS:第 2章:ダイアグノーシス・コードを持つ場合の故障診断
図2-6
+8
ヒューズ
田
ECU
モータON故障診断時の断線の点検図2-7合は,

+8
ヒューズ
ABS:第 2章:ダイアグノーシス・コードを持つ場合の故障診断
|ポンプ・モータ
ー」
42一一一
(口)短絡点検
図2-8に示す電圧を測定して行う。
① @に電圧がなく, 0の端子を外
したとき,@に電圧がある場合は,
ECUの不良。
② @に電圧がなく,⑪の端子を外
しでも@に電圧がないとき,@の
端子を外して,@のポンプ・モー
タ・リレー側端子に電圧がある場合
は,⑪と@聞の短絡。
③ @に電圧がないとき,@の端子
を外して,@のポンプ・モータ・リ
レー側端子に電圧がない場合は,ポ
ンプ・モータ・リレーの短絡。
E
198
モータON故障診断時の短絡の点検
( 9 )ダイアグノーシス・コード表示: 54
フェイルセーフ・ リレーを診断しており,フェイルセーフ・リレーがON・OFF時の全モジュレータ・
バルブ端子電圧により ON故障, OFF故障を診断している。検出すると,フェイルセーフ・リレーを OFF
する。
ABS警告灯が消灯せず,ダイアグノーシス・コード54を確認できた場合は,フェイルセーフ・リレー
の駆動信号線,電源側,モジュレータ・バルブの電源側,フェイルセーフ・リレー単体を点検する。
-警告灯が点灯しない場合は,一時的な異常があったと考えられる。
( 10 )ダイアグノーシス・コード表示: 61, 62
IG2電源を診断しており,車速10km/h以上で、IG2電源電圧が, 10V以下又は16V以上で検出する。
ダイアグノーシス・コードを消去した後,車速10km/h以上で走行して再現テストを実施する。ABS警
告灯が点灯し,ダイアグノーシス・コード61又は62を確認できた場合は,充電系などを点検する。
-警告灯が点灯しない場合は,一時的な異常があったと考えられる。
( 11 )ダイアグノーシス・コード表示: 71
異径タイヤの診断を しており,走行したときの車輪速センサ信号の比較により,異径タイヤを装着してい
ないか検出する。
走行して再現テストを実施する。ABS警告灯が点灯し,
合は,タイヤを点検する。
( 12 )ダイアグノーシス・コード表示: 81
マイコンを診断しており,走行したときに連続作動やECU内の異常を検出する。
走行 して再現テストを実施する。ABS警告灯が点灯し,ダイアグノーシス・コード81を確認できた場
合は, ECUを交換する 0
・警告灯が点灯しない場合は,外的要因などによる一時的な異常があったと考えられる。
図2-8
ダイアグノーシス・コード71を確認できた場

199
また,パーキング・ブレー
E
3 ダイアグノーシス・コードを持たない場合の故障診断
1 ) ABS警告灯が点灯しない
イグニション・スイッチを ONにし, AB S警告灯が全く点灯しないこと,
キ・レバーを引き,ブレーキ警告灯が正常に点灯することを確認する。
( 1 )断線点検
イグニション・スイッチONから直後の2秒間,図
2ー9に示す電圧を測定し,⑪の電圧が3V以上の
場合は,断線点検を行う 。
① ⑪の電圧が3~6V以外は,メータ回路の故障。
② ⑪の電圧が3~6V であれば,バルブの点検を
行う 。このとき,バルブが断線していなければ,
メータ回路内の断線。
( 2 )短絡点検
イグニション・スイッチを ONから直後の 2秒間,
図に示す電圧を測定し,⑪の電圧がOVの場合は短
絡点検を行う 。
① ECUの端子を外し,イグニション・スイッ
チを ON にした場合,⑪に 3~6V の電圧があれば, ECUの不良。
② ECUの端子を外しても,⑪に電圧がないとき,⑪の端子を外し,⑪のコンビネーション・メー
タ側端子に 3~6V の電圧があれば,⑪と ECUの端子聞の短絡。
③ ⑪の端子を外 し , ⑪のコンビネーション・メータ側端子の電圧が3~6V以外の場合は ,ーション・メータ回路の不良。
2) ABS警告灯が、消灯しない
( 1 )断線点検
他のシステムやメータ内の他の警告灯が正常に作動していることを確認する。
イグニション・スイッチONから 2秒経過後, AB S警告灯が消灯 しないことを確認する。
点検はイグニション・スイッチを ONにして行う 。
① 図2-10に示す⑪に電圧があり,@に電圧がない場合は,⑪と@間のIG2ハーネスの断線。
② @に電圧があり ,@にも電圧がある場合は,⑪とアース聞の断線又はアース不良。
③ 図 2-11に示す⑪に電圧がない場合は,メータ回路の不良。
④ ⑪に電圧が3~6Vで,(yJに電圧がないとき,⑪と⑪聞の断線。
⑤ @に電圧が3~6V の場合は, ECUの不良。
警告灯コl
a
S
I
a
l
-
-
コンビネ
IG1 コンビネーション・メータ「ーーーーー
ABS警告灯回路の点検 (1 )
ABS:第 2章:ダイアグノーシス・コードを持たない場合の故障診断
図2-9
警告灯
1|〆
IG コンビネーション・メータ
「一一一一一
AI l 71T
ABS警告灯回路の点検 (3 ) 図 2-11 ABS警告灯回路の点検 (2 ) 図2-10

200 m ABS:第 2章:ダイアグノーシス・コードを持たない場合の故障診断
3 )車載故障診断装置に表示されない不具合
表 2-2 車載故障診断装置で表示されない故障の不具合状況と推定原因
不具合の状況 不具合の推定原因(注意事項等含む)
タイヤカfロックしてし 当該タイヤ側の OUT側モジ、ユレータ・バルブが閉側に固着
まう
ブレーキの効きが悪い 注:低μ路走行時は非装着車より長くなることあり(積雪時,アイスパー
ン時など)
エアの混入,油圧系統不良,車輪速センサの取り付け不良・ピックアツ
プ部の鉄片付着・ロータの歯欠け・配線系統不良・コネクタ接続不良,
制動力配分の不良, OUT側モジ、ユレータ・バルブ漏れ
作動時異音がする 注:変速時・突起や溝通過時・エンジン始動直後の発進時に,緩制動
(ペダルに足をのせる程度)のとき,及び,低μ路・高速旋回時・突起通
過時の通常制動時などには発生するときあり
センサ配線のシールド線アース不良,車輪速センサの取り付け不良・ピ
ックアップ部の鉄片付着・ロータの歯欠け・配線系統不良・コネクタ接
続不良
ブレーキが片効きする 左右片側のOUT側モジ、ユレータ・バルブ閉側に固着又は漏れ
通常ブレーキ時, ABS 車輪速センサの取り付け不良・ピックアップ部の鉄片付着・ロータの歯
が作動する,作動頻度 欠け・配線系統不良・コネクタ接続不良,フロント・アクスルのガタ大,
が多い 制動力配分の不良
ブレーキ・ペダルのス エアの混入,油圧系統不良, OUT側モジ、ユレータ・バルブ漏れ
トロークが大きい
ABS機能が作動しない 注:車輪速度が低いとき作動しない場合あり
車輪速センサの取り付け不良・ピックアップ部の鉄片付着・ロータの歯
欠け・配線系統不良・コネクタ接続不良