Embed Size (px)
Citation preview

加速度センサのみを用いた 移動手段判定システム
Life-Cloud B4 boro
2015.2.4 Wed
1

概要
•
2
歩行
走行
自転車
電車
自動車
バス
その他

背景
• ウェアラブルデバイスやスマートフォンの普及
• 日常行動記録の1つとして,移動手段の判定が研究されている
• コンテキストに合わせた アプリケーション提供が 可能になる
3

日常行動記録のシステム例:「Moves」
•
•
•
4 http://www.moves-app.com/

人の行動判定
•
–階段の上り下り,スキップ,ジャンプなど
•
–電車,自転車,自動車など
5

関連研究
•– Activity Recognition using Cell Phone Accelerometers
• Jennifer R. Kwapisz, Gary M. Weiss, Samuel A. Moore, SIGKDD, 2010 • 歩行,ジョギング,階段上り,階段下り,座る,立っている状態
– 加速度センサを用いた人間の走行・転倒の検出 • 品川佳満,谷川智宏,太田茂 • 端末の位置,走行,転倒などを推定
•– 釈迦:携帯電話を用いたユーザ移動状態推定方式
• 小林亜令, 岩本健嗣, 西山智, 情報処理学会, 2009年 • 歩行,走行,自転車,停止,自動車,バス,電車
– 加速度センサ等を用いた移動状態判定方式の検討 • 山崎亜希子,五味田啓,全国大会講演論文集,2008年 • 徒歩,停止,バス,電車,車,自転車
6

人の移動手段の判定
•
–階段の上り下り,スキップ,ジャンプなど
•
–電車,自転車,自動車など
7

問題意識
•
•
•
8

機能要件
•
•
9

移動手段判定システム
•
•
•
10

移動手段判定システム
• ユーザのスマートフォン上で動作
• 一定時間ごとに現在の移動手段を判定し,出力する
• 7種類の移動手段を判定
–歩行,走行,電車,バス,自動車,自転車,その他(移動していない状態含む)
11

設計
12

移動手段判定モジュール
13

特徴量の抽出手法
•
–平均,二乗平均平方根,分散,相関係数,共分散
•
– FFTパワースペクトル
14

特徴量
パ
ワ
ース
ペ
ク
ト
ル
周波数 15
加
速
度
時間
時系列分割 周波数分割

機械学習
•
– BayesNet
– J48
– KStar
– Multilayer Perceptron
– Random Forest
– SMO
16

移動手段補正モジュール
17
•

スマートフォンの所持位置
18
•
•
•

実装環境
•
– Android 4.2
•
– Galaxy Nexus
•
– Java
•
– 125Hz
19

予備実験
•
–特徴量の選定と機械学習アルゴリズム選定を行うため
•
1. 加速度データの収集
2. 特徴量の抽出
3. 機械学習による分類
20

予備実験手順
•– 被験者5人 – 7種類の移動手段
(歩行,走行,電車,バス,自動車,自転車,その他)
– 3種類の所持位置 (ズボンのポケットの中,カバンの中,手の上)
– それぞれ300秒間記録
•– 時系列分割手法 – 周波数分割手法
21

予備実験手順
•– 機械学習ソフトウェア
• Weka
– アルゴリズム • BayesNet • J48 • KStar • Multilayer Perceptron • RandomForest • SMO
•– 交差検証
22

予備実験結果
95.13% 98.04% 98.25% 93.85% 99.04%
70.75% 62.87%
82.87% 82.73% 77.96%
85.25% 85.84%
0.00%
20.00%
40.00%
60.00%
80.00%
100.00%
BayesN
et
J48
KStar
Mu
ltilayer Percep
tron
Ran
do
m Fo
rest
SMO
時系列分割
周波数分割
23

予備実験結果
•
24
歩行 走行 自転車 電車 バス 自動車 その他
歩行 99.73% 0.18% 0.09% 0.00% 0.00% 0.00% 0.00%
走行 0.09% 99.91% 0.00% 0.00% 0.00% 0.00% 0.00%
自転車 0.17% 0.00% 98.50% 0.67% 0.17% 0.00% 0.50%
電車 0.00% 0.13% 0.25% 98.13% 1.25% 0.25% 0.00%
バス 0.20% 0.00% 0.80% 2.00% 96.80% 0.00% 0.20%
自動車 0.00% 0.00% 0.33% 0.33% 0.67% 98.67% 0.00%
その他 0.00% 0.00% 0.00% 0.13% 0.00% 0.00% 99.88%
分類結果
入力データ

予備実験結果
•
25
歩行 走行 自転車 電車 バス 自動車 その他
歩行 47.91% 13.82% 22.55% 0.00% 0.00% 15.73% 0.00%
走行 25.36% 74.09% 0.55% 0.00% 0.00% 0.00% 0.00%
自転車 8.01% 8.51% 66.28% 0.50% 0.00% 16.53% 0.17%
電車 0.50% 0.13% 0.63% 66.38% 2.13% 3.63% 26.63%
バス 0.20% 0.00% 6.60% 11.80% 33.00% 15.20% 33.20%
自動車 0.00% 0.00% 9.17% 13.67% 0.50% 62.00% 14.67%
その他 0.00% 0.00% 0.13% 14.75% 0.13% 3.63% 81.38%
分類結果
入力データ

考察
•
•
–加速度の変化量が大きいため
–変化量が小さい電車やバス,自動車,その他では分類精度が低い
26

考察
•– 時系列分割では14個のパラメータ – 周波数分割では768個のパラメータ – パラメータが多いほど計算量が多くなる
•– KStarやJ48では計算量が多く分類に時間がかかった – Random Forestは分類精度が高く高速
27

評価実験
•– 評価用データを用いて分類精度の評価を行い,実環境における本システムの有用性について考察する
•A) 教師データがあるユーザの場合 B) 教師データがないユーザを追加した場合 C) 教師データを作成した端末と異なる端末に変更した場合
•1. 加速度データの収集 2. 特徴量の抽出 3. 機械学習による分類
28

評価実験内容
被験者 計測時間 端末
A)教師データがあるユーザ
5人 150秒間 (教師データ) +150秒間 (評価用データ)
Galaxy Nexus
B)教師データが無いユーザを追加
5人 (教師データ) +1人 (評価用データ)
300秒間 Galaxy Nexus
C)異なる端末に変更
5人 300秒間 Galaxy Nexus (教師データ) +HTC Sensation (評価用データ)
29

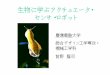
評価実験結果
95.13%
9.78%
45.83%
98.44%
10.28%
47.28%
0.00%
20.00%
40.00%
60.00%
80.00%
100.00%
教師データがあるユーザ 教師データがないユーザを追加 異なる端末に変更
移動手段補正
モジュールあり
移動手段補正
モジュールなし
33

考察
•
–実環境で十分な移動手段の判定
•
–補正を行う目的を果たせた
34

考察
•
–2回以上連続で判定を誤った場合などは,補正できない
–2つ後ろの判定結果を用いれば補正できるがリアルタイム性が損なわれる
35

考察
•
– 9.78%と大きく低下
– 人による違いが大きい
• スマートフォンの持ち方
• 歩き方や走り方の違い
•
– 45.83%
– 端末に搭載されている加速度センサが異なるため
36

今後の展望
•
–新幹線や飛行機,船など
–教師データの作成
–特徴量の抽出手法
•
–教師データを作成する人数を増やす
37

まとめ
•
–特徴量:時系列分割手法
–機械学習:Random Forest
– 98.44%の分類精度
38

39

処理時間の結果
•
40
処理時間
BayesNet 11秒
J48 14秒
Kstar 8分03秒
Multilayer Perceptron 27分32秒
Random Forest 21秒
SMO 35秒

省電力性の評価 – 実験結果
41