Embed Size (px)
Citation preview
Quaderni dell’Unione Matematica Italiana
37
J. Kijowski
ELASTICITÀ FINITAE RELATIVISTICA:introduzione aimetodi geometricidella teoria dei campi
a cura di
D. Bambusi e G. Magli
Pitagora Editrice • Bologna 1991

ISBN 88-371-0565-7
Stampa: Tecnoprint, Via del Legatore 3, Bologna
c© Copyright 1991 Unione Matematica Italiana
Pitagora Editrice s.r.l., Via del Legatore 3, Bologna
INDICE
Prefazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 5
Parte I. MECCANICA DEI MATERIALI ELASTICI
Capitolo 1. Introduzione ai fondamenti geometrici della meccanica deicontinui.1.1 La meccanica dei continui come teoria di campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 71.2 Spazio fisico e spazio materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 81.3 Campi covarianti e “pull–back” . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 10
Capitolo 2. Descrizione lagrangiana della statica.2.1 Struttura metrica dello spazio ambiente e dello spazio materiale . . . . . . . . . . . . pag. 132.2 Tensore delle deformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 172.3 Approssimazione lineare del tensore delle deformazioni . . . . . . . . . . . . . . . . . . . . . pag. 202.4 Energia interna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 222.5 Equazioni dell’equilibrio statico di un materiale elastico . . . . . . . . . . . . . . . . . . . . pag. 242.6 Relazione sforzi–deformazione (stress–strain relations) . . . . . . . . . . . . . . . . . . . . . . pag. 282.7 Equazioni dell’equilibrio elastico in aprossimazione lineare . . . . . . . . . . . . . . . . . . pag. 332.8 Tensore della elasticita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 372.9 Descrizione alternativa delle deformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 38
Capitolo 3. Descrizione lagrangiana della dinamica.3.1 Cinematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 413.2 Equazioni del moto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 413.3 Onde elastiche e relazioni di dispersione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 443.4 Problemi al contorno in elasticita lineare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 483.5 Forma hamiltoniana delle equazioni dinamiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 513.6 Formulazione hamiltoniana della elasticita lineare . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 563.7 Tensore energia–momento e teorema di Nother . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 583.8 Teorema di Rosenfeld–Belinfante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 62
Capitolo 4. Descrizione euleriana.4.1 Cinematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 634.2 Principio variazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 674.3 Momenti coniugati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 694.4 Teorema di Nother . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 714.5 Equazioni di Eulero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 724.6 Equazioni di Eulero per i fluidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 75
1
Capitolo 5. Elasticita relativistica.5.1 Spazio–tempo relativistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 775.2 Cinematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 795.3 Tensore delle deformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 835.6 Energia interna e densita lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 855.5 Tensore di Piola–Kirchhoff. Stress–strain relations . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 875.6 Tensore energia–momento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 895.7 Equazioni del moto e teorema di Nother . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 935.8 Conservazione dell‘energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 965.9 Idrodinamica dei fluidi perfetti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 975.10 Descrizione alternativa delle deformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 985.11 Il limite non relativistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1005.12 Interazione di un solido elastico con il proprio campo gravitazionale . . . . . . pag. 1035.13 Descrizione lagrangiana della elasticita relativistica . . . . . . . . . . . . . . . . . . . . . . pag. 107
Capitolo 6. Elementi di termo–elasticita relativistica.6.1 Termodinamica relativistica dei processi adiabatici . . . . . . . . . . . . . . . . . . . . . . . . pag. 1156.2 Un modello della conduzione del calore in termo–elasticita relativistica . . . . pag. 1196.3 Onde termo–elastiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 124
Capitolo 7. Teoria delle piastre e delle membrane.7.1 Struttura geometrica dello spazio materiale bidimensionale . . . . . . . . . . . . . . . . pag. 1297.2 Calcolo della deformazione trasversale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1327.3 Calcolo della configurazione degli strati del materiale. . . . . . . . . . . . . . . . . . . . . . pag. 1367.4 Deformazione esterna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1377.5 Energia elastica di una piastra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1397.6 Principio variazionale del secondo ordine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1417.7 Relazioni sforzo–deformazione per la teoria del secondo ordine . . . . . . . . . . . . . pag. 1437.8 Dinamica delle piastre elastiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1467.9 Approssimazione lineare dei tensori di deformazione . . . . . . . . . . . . . . . . . . . . . . . pag. 1477.10 Determinazione della energia interna di una piastra a partire dalle proprieta elastichedel materiale tridimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1517.11 Piccole oscillazioni delle piastre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 155
Parte II. STRUMENTI GEOMETRICI DELLA TEORIA DEI CAMPI
Capitolo 8. Strutture fondamentali della geometria.8.1 Varieta differenziabile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1578.2 Spazio tangente. Vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1588.3 Notazione fisica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1608.4 I vettori come operatori defferenziali del primo ordine . . . . . . . . . . . . . . . . . . . . . pag. 1618.5 Applicazione Tangente (“Push–forward”) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1638.6 Spazio cotangente. Covettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 164
2
8.7 Prodotto tensoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1658.8 Multicovettori. Prodotto esterno ed interno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1678.9 Pull-back dei multicovettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1728.10 Densita scalari e densita vettoriali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1738.11 Fibrato tangente, campi vettoriali, parentesi di Lie . . . . . . . . . . . . . . . . . . . . . . . pag. 1758.12 Fibrato cotangente. Forme differenziali. Derivata esterna . . . . . . . . . . . . . . . . . pag. 1778.13 Integrazione di una k-forma e teorema di Stokes . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1798.14 Sistemi dinamici e derivata di Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 182
Capitolo 9. Geometria riemanniana e connessioni simmetriche.9.1 Metrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1919.2 Integrazione ed altre strutture indotte dalla metrica . . . . . . . . . . . . . . . . . . . . . . . pag. 1939.3 Geometria riemanniana tridimensionale. Analisi vettoriale . . . . . . . . . . . . . . . . . pag. 1979.4 Elementi di calcolo operatoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 1999.5 Strutture affini globali e locali: connessioni simmetriche . . . . . . . . . . . . . . . . . . . pag. 2059.6 Connessione di Levi-Civita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 2119.7 Linee geodetiche e coordinate di Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 2129.8 Curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 2149.9 Curvatura esterna o seconda forma fondamentale . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 2219.10 Derivata di Lie della metrica e della connessione. Equazione di Killing . . . . pag. 227
Capitolo 10. Elementi di geometria simplettica.10.1 Elementi di teoria simplettica del controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 23110.2 Formulazione simplettica della dinamica delle particelle . . . . . . . . . . . . . . . . . . pag. 23610.3 Formalismo simplettico per la teoria dei campi . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 240
Note bibliografiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 249Indice analitico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag. 251
3

4
PREFAZIONE
Come mi succede sempre con tutte le cose importanti della mia vita, anche questolibro e il risultato di una lunga serie di coincidenze. La prima coincidenza e dovuta a SantaLucia. Nel 1978, durante la scuola estiva sui sistemi dinamici organizzata a Bressanonedall’Unione Matematica Italiana, incontrai il Prof. Luigi Galgani dell’Universita di Milano,e una sera, attorno a una tavola con salami e vino, ci capito di suonare e cantare insiemealcune canzoni napoletane, e cosı diventammo amici. Poi ci rendemmo conto di avere glistessi interessi nella teoria classica dei campi, pur lavorando con metodi diversi. Infatti,entrambi eravamo insoddisfatti delle incoerenze che si presentano nelle trattazioni delleteorie classiche dei campi in interazione con delle particelle, e ci trovavamo d’accordosul fatto che i metodi usati ad esempio per descrivere il bremsstrahlung sono basati susemplificazioni inaccettabili. Il solo modo per comprendere questi problemi sarebbe dianalizzare un modello consistente di interazione tra materia e campo elettromagnetico, incui l’irraggiamento venisse spiegato mediante la soluzione di un problema ai dati inizialiper il sistema completo, piuttosto che con le consuete approssimazioni ed estrapolazioni adhoc. Naturalmente, un tale modello dovrebbe essere relativisticamente invariante. Ora, unmodello idrodinamico per la materia e inaccettabile per la sua instabilita, e il piu semplicemodello di materia stabile che ci venne in mente e l’elastomeccanica. Non avendo trovatoalcun modello relativistico soddisfacente di elastomeccanica, decidemmo di far qualcosa intale direzione.
D’altra parte io mi trovavo da tempo coinvolto nello studio dell’energia gravitazionale,e dei problemi connessi a un tentativo di costruire una versione quantistica della RelativitaGenerale. Mi resi presto conto che non vi e speranza di compiere progressi in tali campisenza un’analisi profonda degli integrali di superficie che si presentano nella formulazionecanonica della teoria dei campi, e che sono di solito trascurati. La ben semplice provadella positivita dell’energia gravitazionale che avevo ottenuto come sottoprodotto di questeconsiderazioni, e la necessita di trovare un modo pedagogicamente semplice di spiegarla,mi avevano ricondotto alla meccanica dei continui, in cui si comprende perfettamente ilsignificato degli integrali di superficie. Risultava dunque che la meccanica dei continui,specialmente l’elastomeccanica, e un buon banco di prova per la teoria dei campi.
Nel 1987 venni invitato a tenere delle lezioni su questi argomenti all’Universita diMilano, come professore a contratto. Dopo qualche esitazione, incoraggiato dal prof. Gal-gani, decisi di tenere le lezioni nel mio povero italiano. Tra gli studenti che seguivano lelezioni vi erano due giovani brillanti: Dario Bambusi e Giulio Magli. Essi prepararono gliappunti, e al mio ritorno a Milano per la successiva visita trovai gia pronte circa 100 paginebattute in TeX, che costituiscono l’inizio di questo lavoro. Il testo presente e il risultatodi una lunga e laboriosa cooperazione fra noi tre. Esso contiene almeno tre nuovi risultatiscientifici:
1) Una formulazione completa dell’elastodinamica relativistica, libera da ogni ipotesi adhoc sull’esistenza di uno stato di rilassamento globale del materiale;
2) Un nuovo modello iperbolico di propagazione del calore in solidi isolanti;
3) La deduzione della teoria completa, non lineare, delle piastre non omogenee, a partire
5
della teoria tridimensionale.Questi tre argomenti sono stati messi a punto da Giulio Magli, e questo lavoro ha costituitola sua tesi di laurea.
Nel libro si intende trasmettere due messaggi:1) Per diventare matura, una teoria fisica richiede un linguaggio matematico appropriato;2) Una grande parte dell’anima della matematica consiste nelle sue applicazioni alla
fisica.Considerandomi sia un matematico sia un fisico teorico, mi capita di soffrire molto
dell’attuale separazione tra matematica e fisica. Gran parte dei fisici si annoiano nel leggeredei testi matematici, e accusano i matematici di porgere troppa attenzione al formalismoinvece che a “problemi reali”. Gran parte dei matematici si arrabbiano invece nel leggeretesti fisici, ed accusano i fisici di abusare del linguaggio e di essere terribilmente imprecisi.Cio e particolarmente vero in geometria differenziale. Si trova ad esempio una gran moledi lavori dedicati alla quantizzazione della gravita, scritti in un modo che sembra mostrareuna ben piccola comprensione della struttura geometrica della teoria; ma allo stesso tempovi sono molti lavori che tentano di spiegare tale struttura a un livello alquanto povero,puramente formale, si potrebbe dire “burocratico”.
Nel nostro libro abbiamo tentato di mostrare che la moderna geometria differenzialeapplicata non consiste tanto nelle esigenze burocratiche imposte sulla notazione, quantopiuttosto nei potenti metodi che essa mette a disposizione sia per aumentare l’efficienzadei calcoli, sia per migliorare l’efficienza dell’immaginazione inventiva. Per questo motivonell’esposizione abbiamo sempre cercato di mantenerci a meta strada tra lo sviluppo for-male della teoria a partire degli assiomi e la presentazione euristica delle idee che ne sonoalla base. Dal punto di vista didattico, l’esposizione data nel libro di diverse strutturegeometriche (ad esempio la connessione e la derivata covariante, la curvatura, la derivatadi Lie, la geometria simplettica) e piuttosto non convenzionale. Ho la speranza che questaproposta didattica possa essere utile come complemento alle esposizioni consuete che sitrovano in molti testi di geometria differenziale.
I miei soggiorni a Milano, che hanno permesso la stesura del presente libro, sono statisupportati sia dal Dipartimento di Matematica della Universita di Milano, che mi ha offertouna posizione di professore a contratto, sia dal Gruppo Nazionale di Fisica Matematica delConsiglio Nazionale delle Ricerche, nell’ambito del programma per i professori visitatori.Vorrei dunque ringraziare cordialmente queste due istituzioni.
Il prof. Galgani e sempre stato il primo lettore di ogni paragrafo di questo libro, eil suo contributo nel migliorare la presentazione e lo stile e stato fondamentale. Essendopoi la persona che mi ha invitato a tenere questa serie di lezioni, egli e in effetti il padrespirituale della triplice avventura, scientifica, didattica e linguistica, che e divenuta per mela preparazione di questo libro. Grazie tante, Luigi!
Milano, S. Giuseppe, 1990
Jerzy Kijowski
6
PARTE I: MECCANICA DEI MATERIALI ELASTICI.
Capitolo 1. INTRODUZIONE AI FONDAMENTI GEOMETRICI DELLAMECCANICA DEI CONTINUI.
1.1 La meccanica dei continui come teoria di campo.
In questo libro si prendono in considerazione sette modelli fisici di materiali elastici:due modelli lagrangiani (dinamica non relativistica e dinamica relativistica), i corrispon-denti due modelli euleriani, due modelli termo–elastici relativistici e la teoria delle piastreelastiche. Tutti questi modelli presentano la stessa struttura di teoria di campo: princi-pio variazionale (quello delle piastre e del secondo ordine!), momenti coniugati, teoremadi Nother, leggi di conservazione. In ognuno di tali modelli la gestione appropriata degliintegrali al contorno permette di descrivere diversi modi di controllo dei dati al contornostessi.
Un fisico teorico che si interessi di fisica fondamentale (teoria quantistica dei campi, rel-ativita generale o addirittura gravita quantistica) incontra costantemente nella sua ricercastrutture simili a quelle sopra citate e osserva che senza una comprensione approfondita siarriva spesso a costruzioni del tutto superficiali; ne e un esempio il recente tentativo di al-cuni relativisti di localizzare l’energia gravitazionale (“quasi–local mass”) senza analizzareil contenuto dinamico di tale energia. Un tale fisico si rende dunque conto immediatamenteche la meccanica dei continui e un ottimo “laboratorio” per lo studio approfondito dellateoria dei campi. Questo e stato proprio il mio caso. Ho imparato tale punto di vista dauno dei miei maestri, W lodzimierz Tulczyjew. Ispirato da questa filosofia ho studiato lameccanica dei continui come un esercizio per comprendere l’energia gravitazionale.
Tutte le strutture matematiche necessarie per lo sviluppo della meccanica dei continuisono introdotte e descritte con abbastanza dettaglio nella seconda parte del libro, che quindicostituisce in qualche modo una introduzione ai fondamenti della geometria differenziale.Evidentemente questa seconda parte del libro puo essere completamente trascurata, salvoforse che per fissare alcune notazioni, da chi gia sia in possesso delle nozioni fondamentalidi geometria qui richiamate. Un primo scopo di tale parte a carattere matematico equello di fornire gli elementi essenziali per l’esposizione della teoria dell’elasticita finita,non relativistica e relativistica, nella sua formulazione moderna, che fa uso sostanziale delleforme differenziali. E’ stato fatto un certo sforzo per mediare tra la formulazione moderna equella tradizionale, in cui i differenziali venivano trattati come “grandezze infinitesime”; ciopotrebbe essere utile da una parte ai fisici per potersi servire di uno strumento matematicoormai divenuto consueto, e dall’altra ai matematici per poter leggere le trattazioni classiche,dove l’uso costante della “notazione fisica” (vedi paragrafo 8.3) e spesso un serio ostacoloalla comprensione del contenuto per un matematico rigoroso. In effetti si tratta di unabreve esposizione delle strutture matematiche che si possono gia trovare in ogni buon testo
7
di analisi matematica, come per esempio quelli di L.Schwartz e di K.Maurin.Comunque, l’esposizione di alcune parti e non del tutto convenzionale. Cosı, la connes-
sione viene qui presentata come il campo dei “riferimenti inerziali”: la derivata covariantee definita come la derivata parziale consueta, ma calcolata rispetto a un “riferimento in-erziale”, che viene opportunamente definito in ambito puramente geometrico. Questa ideae evidentemente vicina alla intuizione fisica; d’altra parte risulta che essa e anche ader-ente alla primitiva intuizione originale di Riemann. Personalmente, sono convinto che talepresentazione della connessione sia didatticamente piu efficace di quella consueta. Cosı an-che la presentazione degli aspetti simplettici della dinamica non e del tutto convenzionale,e segue le idee di W lodzimierz Tulczyjew, gia illustrate ad esempio nel libro Symplecticframework for field theories che scrissi con lui qualche anno fa.
Per quanto riguarda l’aspetto fisico, il presente volume contiene alcuni contributinuovi. Si tratta di tutto il capitolo sulla elasticita relativistica e di una considerevole partedel capitolo sulla termoelasticita. Per quanto riguarda quest’ultimo, la descrizione deiprocessi adiabatici era stata gia pubblicata, ma solo per i fluidi, mentre qui e estesa anche aicorpi elastici; invece, il modello della conduzione del calore qui presentato e completamentenuovo. Tale modello risulta essere di tipo iperbolico, e puo essere impiegato per decriverela propagazione di onde termiche in materiali isolanti.
1.2 Spazio fisico e spazio materiale.
L’ambiente dei fenomeni fisici verra chiamato spazio fisico e denotato con X . E’questo l’insieme dei punti dove potenzialmente puo aver luogo un qualunque evento fisico.La meccanica dei continui richiede di considerare anche un altro spazio, lo spazio materialeZ, che e l’insieme dei punti del materiale che si vuole descrivere. Se un materiale assumeuna certa configurazione, ogni suo punto puo essere parametrizzato tramite la posizioneche esso occupa nello spazio fisico. Cosı, nell’approccio tradizionale, i punti del materialesono parametrizzati con le coordinate spaziali che essi hanno in una certa configurazionedi riferimento. Ma questo tentativo di eliminare lo spazio materiale come entita autonomae fuorviante. Pertanto nel presente libro lo spazio materiale viene considerato come aventeuna struttura geometrica autonoma e viene parametrizzato in modo indipendente dallaconfigurazione del materiale nello spazio fisico. In tal modo i “parametri materiali” sono“congelati” nel materiale stesso e giocano il ruolo di “etichette” per le particelle che locostituiscono. Cosı si evita l’introduzione di qualsiasi “configurazione di riferimento” e siottiene una formulazione molto piu trasparente della teoria.
La meccanica dei continui puo quindi essere intesa come la teoria delle applicazionitra due varieta: lo spazio materiale Z e lo spazio fisico X . Sono possibili due diversi tipidi descrizione. Nella prima, detta descrizione lagrangiana, la configurazione del materialee descritta da una applicazione
F : Z → X .
Dal punto di vista fisico, cio corrisponde a studiare in quale punto dello spazio fisico sitrova un dato punto del materiale. Nella seconda descrizione, detta descrizione euleriana,la configurazione e descritta da una applicazione:
G : X → Z .
8

Dal punto di vista fisico, questa seconda descrizione consiste nello studiare quale punto delmateriale occupa un dato punto dello spazio fisico. E’ ovvio che la descrizione lagrangianaF e la descrizione euleriana G dello stessa configurazione fisica sono una l’inversa dell’altra.
Figura 1
L’approccio lagrangiano e quello piu intuitivo, poiche in tale descrizione la mecca-nica dei continui e una naturale generalizzazione della meccanica (statica o dinamica) diun sistema di un numero finito di particelle: infatti, nell’approccio lagrangiano ad ognipunto del materiale si assegna la corrispondente posizione, esattamente come nel casodella meccanica dei punti materiali. La differenza tra la meccanica di un sistema di par-ticelle e la meccanica di un sistema continuo consiste allora semplicemente nel fatto chein quest’ultimo le “particelle” sono distribuite con continuita. Pertanto, mentre nel casofinito la varieta delle configurazioni e finito–dimensionale, nel caso di un sistema continuoessa e uno spazio funzionale (lo spazio dei diffeomorfismi da Z in X) infinito–dimensionale.
L’approccio euleriano per contro costituisce una migliore introduzione alla teoria deicampi. Infatti i parametri materiali diventano, nella descrizione euleriana, campi definitisullo spazio–tempo, come il campo elettromagnetico nella teoria di Maxwell o il campospinoriale nella teoria di Dirac dell’elettrone. Vale la pena di ricordare che l’intero sviluppodell’elettromagnetismo e stato guidato dall’analogia tra la propagazione delle perturbazionielastiche e la propagazione delle onde elettromagnetiche, e che fino all’avvento della teoriadella relativita queste ultime erano interpretate come oscillazioni dell’etere.
L’importanza dell’approccio euleriano consiste anche nel fatto che, come vedremo, essosoltanto permette di costruire una teoria relativistica dei continui in forma manifestamentecovariante. D’altra parte, dal punto di vista teorico, una teoria relativistica dell’elasticitae importante perche costituisce l’unico modello relativistico di materia stabile. Invece, ilmodello della materia come fluido perfetto, utilizzato abitualmente in astrofisica e cosmolo-gia, ad esempio per dedurre le equazioni di moto per le stelle doppie, non e stabile, percheil fluido tende sempre a disperdersi. Ci si dovrebbe dunque rendere conto del fatto che ilmodello a fluido perfetto e incompatibile con la stabilita delle componenti considerate.
Data la maggiore intuitivita della descrizione lagrangiana, essa verra qui sviluppataprima di quella euleriana.
9

1.3 Campi covarianti e “pull–back”.
Nel presente paragrafo vogliamo presentare in maniera alquanto succinta alcuni “ferridel mestiere”, indispensabili perche un lettore gia eventualmente a conoscenza dei fonda-menti della meccanica dei continui possa comprendere la parte fisica del testo senza dovereprocedere a uno studio piu approfondito della geometria differenziale, come esposta nellaseconda parte del libro.
Gli oggetti geometrici di cui avremo bisogno sono i campi covarianti su varieta dif-ferenziabili. In generale, per campo covariante (di tipo algebrico non specificato) su unavarieta M si intende una funzione che ad ogni vettore tangente attaccato (o applicato)in un punto m ∈ M associa un numero. Ci sono diversi tipi di campi covarianti, che sidistinguono tra loro per le diverse proprieta algebriche che possiedono, cioe per il mododiverso con cui dipendono dai vettori applicati nello stesso punto.
Il tipo piu semplice possibile di campo covariante e il campo scalare, il cui valore nondipende dal vettore stesso ma solo dal punto in cui esso e attaccato.
Un altro esempio e il campo covettoriale, che gode della proprieta di linearita (sepa-ratamente in ogni punto della varieta, perche in generale non ha senso sommare vettoriattaccati in punti distinti). Se f e un campo scalare (una funzione f : M → R) il suodifferenziale df , che ad ogni vettore v associa la derivata direzionale df(v) di f lungo v, eun campo covettoriale. Se (xk) e un sistema di coordinate in M , i differenziali dxk dellecoordinate costituiscono una base per i campi covettoriali; dunque ogni campo covettorialeα puo essere sviluppato come combinazione lineare:
α =∑
k
αkdxk ≡ αkdx
k ,
dove e stata introdotta la convenzione di Einstein secondo la quale la somma sugli indiciripetuti (uno in alto ed uno in basso) e sottointesa. Utilizzeremo questa convenzione intutto il testo.
Un ulteriore esempio e dato dalla metrica g, che ad ogni vettore v associa un numerog(v) in modo tale che per ogni vettore w fissato l’espressione g(v + w) − g(v − w) sialineare rispetto a v (vedi paragrafo 9.1): il valore g(v) si chiama quadrato della lunghezzadel vettore v. Anche la metrica puo essere costruita in modo algebrico a partire dai campicovettoriali dxk. Infatti per ogni metrica g esistono dei coefficenti gkl tali che:
g(v) = gkldxk(v)dxl(v)
(somma su k ed l !). Assumeremo sempre che la matrice gkl sia simmetrica, perche ognieventuale parte antisimmetrica si annulla quando viene saturata con la matrice simmetricadxk(v)dxl(v), ed e quindi irrilevante.
Se N e un’altra varieta differenziabile, e se F : M → N e una applicazione differen-ziabile, F trasporta in modo naturale i vettori tangenti ad M in un punto m nei vettoritangenti ad N nel punto F (m). Questa applicazione si puo visualizzare se si immagina Fcome una deformazione di un materiale continuo: i vettori “congelati” nella configurazione
10

iniziale M sono trasformati dalla deformazione nei vettori tangenti alla configurazione fi-nale N . Una tale applicazione prende il nome di applicazione tangente o push–forward deivettori e si denota con F∗.
L’applicazione F trasporta in modo naturale anche i campi covarianti, ma nella di-rezione opposta, cioe da N su M . Questo trasporto viene chiamato pull–back e denotatocon F ∗. Il pull–back e definito come l’applicazione duale del push–forward:
(F ∗α)(v) := α(F∗v) ,
cioe per calcolare il valore di F ∗α su un vettore bisogna trasportare il vettore tramite F∗ epoi calcolare il valore di α sul vettore trasportato. In termini delle coordinate l’operazionedi pull–back e semplicemente la sostituzione delle variabili dipendenti con quelle indipen-denti. Infatti se f : N → R e un campo scalare, allora:
F ∗f ≡ fF := f F
e una funzione definita per sostituzione:
fF (m) = f(F (m)) .
Cosı pure, se (xk) e un sistema di coordinate in M e (yl) e un sistema di coordinate in N ,e se per esempio
α = αldyl (1.1)
e un campo covettoriale su N , allora si ha
F ∗α = αldylF ,
dove, come sopra, ylF = yl F e il pull–back della funzione scalare yl di N su M . DunqueF ∗α si ottiene dalla stessa formula (1.1), solo che ora le yl non sono indipendenti, madevono essere considerate come funzioni di xk tramite F . Allora lo sviluppo di F ∗αrispetto alle coordinate in M segue immediatamente:
F ∗α = αl∂yl
∂xkdxk .
Questa proprieta viene spesso detta nei testi di analisi “invarianza in forma del differen-ziale”. La stessa tecnica di sostituzione vale anche per la metrica: se g = glmdy
ldym, allorasi ha
F ∗g = glmdylFdy
mF = glm
∂yl
∂xi∂ym
∂xkdxidxk .
Si osservi che l’operazione di push–forward e ben definita per i singoli vettori ma non lo ein generale per i campi vettoriali. Infatti se F (m) = n = F (m), allora, in generale si haF∗vm 6= F∗vm, dove vm e vm sono i valori di un assegnato campo vettoriale v; dunque ilpush–forward di un campo vettoriale non e ben definito. Inversamente, il pull–back e bendefinito per i campi, ma non lo e in generale per i singoli covettori. Infatti, se αn e uncovettore attaccato in n ∈ N , il suo pull–back non ha senso se non specifichiamo in chepunto lo vogliamo trasportare: m o m. Ovviamente, se F e biunivoca allora entrambe leapplicazioni son ben definite sia per i campi che per i singoli oggetti.
11

12

Capitolo 2. DESCRIZIONE LAGRANGIANA DELLA STATICA.
2.1 Struttura metrica dello spazio ambiente e dello spazio materiale.
Denoteremo sempre i punti dello spazio materiale Z con ξ e i punti dello spazio fisicoX con x. Una configurazione del materiale e una applicazione
F : Z → X .
Una volta scelto un sistema di coordinate ξa (a = 1, 2, 3) in Z ed un sistema di coordinatexk (k = 1, 2, 3) in X , adotteremo costantemente la “notazione fisica” (vedi paragrafo 8.3),cioe, scrivendo xk, intenderemo il valore della k-esima coordinata di F (ξ):
xk = xk(ξ) := F k(ξ) ;
infine, per semplicita indicheremo la derivata parziale di F k rispetto a ξa con xka:
xka = ∂axk =
∂xk
∂ξa:=
∂F k
∂ξa.
L’insieme delle grandezze xka prende il nome di gradiente di deformazione. Nel seguito,gli indici i, j, k, l, ... (indici “fisici”) si riferiranno sempre allo spazio X mentre gli indicia, b, c, ..., f (indici “materiali”) si riferiranno sempre allo spazio Z.
Lo spazio fisico e dotato di una metrica, g. La metrica g puo essere l’ordinaria metricaeuclidea di R3 che corrisponde al modello newtoniano della fisica. In tale caso e utilelavorare con un sistema di coordinate cartesiane, tali cioe che le componenti di g sianoglm = δlm. Non e pero necessario per lo sviluppo della teoria della elasticita assumere che lametrica fisica sia euclidea e in questo libro, se non diversamente specificato, considereremosempre il caso generale in cui la metrica fisica puo essere curva.
Utilizzando l’immersione F dello spazio materiale nello spazio fisico X , che e dotatodella metrica g, per ogni configurazione F si possono misurare le distanze dei punti di Zrispetto alla metrica ambiente. Cio significa che per ogni configurazione F e definita in Zuna metrica h tramite il pull–back F ∗ associato ad F (vedi paragrafo 9.1):
h := F ∗g .
In termini delle coordinate l’espressione esplicita della metrica h e data da
hab(ξ) = gkl(x(ξ))xkaxlb . (2.1)
Questa metrica esprime la lunghezza dei vettori materiali pensati immersi nello spazio fisiconella particolare configurazione considerata. Si pensi a due particelle ξ, ξ del corpo e allecorrispondenti posizioni x = F (ξ), x = F (ξ) relative alla configurazione F : la definizioneh = F ∗g significa che come distanza dei punti ξ e ξ del corpo prendiamo proprio ladistanza fisica tra le corrispondenti posizioni x e x. Se cambia la configurazione F cambia
13

ovviamente la distanza dei punti x e x cioe cambia la metrica h. Essa contiene dunque uncerto numero di informazioni su F . E’ facile pero vedere che non identifica F univocamente.Infatti, supponiamo che lo spazio fisico sia euclideo. Sia R una trasformazione isometricadi X , cioe la composizione di una traslazione con una rotazione. La configurazione:
F = R F
e ovviamente differente da F ma la metrica h definita da F coincide con quella definita daF poiche R non cambia le distanze in X .
Ogni materiale possiede anche un’altra metrica, che chiameremo metrica materialee che denoteremo con γ. La metrica materiale non dipende dalla configurazione F .L’esistenza di questa metrica e un fatto assiomatico della teoria dell’elasticita; essa esostanzialmente equivalente all’ipotesi che esista una “configurazione di rilassamento lo-cale”(o distensione locale) del materiale, come ora cercheremo di illustrare.
Diciamo che, per una configurazione F , il corpo si trova in uno stato di “rilassamentolocale attorno a ξ” se, estraendo un piccolo blocchetto di materiale attorno a ξ e lasciandololibero nello spazio ambiente, tale blocchetto non si deforma. In tal caso si definisce il valoredella metrica γ nel punto ξ proprio come
γξ := F ∗gx ,
dove x = F (ξ). Questa operazione puo ripetersi indipendentemente per ogni punto ξ,definendo in tal modo la metrica γ. Il significato di questa definizione di γ e che, permisurare la lunghezza secondo γ di un vettore “attaccato” a un generico punto ξ, bisognaprendere un piccolo blocchetto di materiale attorno a ξ, estrarlo, ed aspettare che si rilasci.A questo punto il vettore, essendo “congelato” nel materiale, si e esso stesso rilasciato.Come sua lunghezza rispetto a γ prendiamo dunque la lunghezza che esso assume dopo ilrilassamento.
In generale, possono esistere infinite configurazioni F che sono di rilassamento localein ξ; e pero facile intuire che γξ non dipende dalla scelta di F . Infatti se si passa da unaconfigurazione F1 ad una configurazione F2 dello stesso piccolo pezzo del materiale intornoa ξ la trasformazione F1F−1
2 trasporta un pezzetto disteso in un pezzetto disteso e dunquenon puo cambiare le distanze all’interno di questo pezzetto perche un tale cambiamentointrodurrebbe tensioni nel materiale. Allora, localmente nell’intorno di ξ, la trasformazioneF1 F−1
2 puo soltanto essere una composizione di rotazioni e traslazioni locali.Vediamo dunque che se F e una configurazione di rilassamento locale in ξ, allora le
due metriche h e γ coincidono in ξ e quindi l’equazione hξ = γξ e la condizione necessariae sufficiente per il rilassamento locale in ξ.
In particolare, puo avvenire che esista una configurazione F di rilassamento globale,cioe una configurazione che e di rilassamento locale per ogni punto ξ nel senso precedente;in tal caso si ha evidentemente la definizione globale di γ
γ := F ∗g .
Una configurazione di rilassamento globale ha la proprieta che, se si taglia il corpo inqualunque modo, esso non si deforma. Prendiamo ad esempio un bastone e sorreggiamolo
14
lasciandolo disteso: se esso viene tagliato in mezzo, la configurazione non varia. Se invecelo sforziamo tenendolo piegato ad arco, allora, dopo il taglio, esso tende a rilassarsi e lasua configurazione cambia: dunque la configurazione che era mantenuta con sforzo non edi rilassamento globale. Esistono corpi che non ammettono configurazioni di rilassamentoglobale. Ad esempio prendiamo due cubi di materiale elastico, di cui uno un po’ piugrande dell’altro, comprimiamo il piu grande uniformemente fino a renderlo uguale alsecondo, incolliamoli insieme lungo una faccia, e poi lasciamo che il sistema si distenda;allora nessuno dei due cubi perviene alla propria configurazione naturale. Qui chiaramentenon esiste una configurazione di rilassamento globale; e evidente che invece esiste unaconfigurazione di rilassamento locale per ogni punto che non si trovi sulla superficie diincollamento (in questo caso la metrica materiale γ e discontinua lungo tale superficie).Un procedimento simile si puo ripetere aggiungendo un altro cubo deformato e poi unaltro e cosı via. In tal modo si puo costruire un materiale costituito da moltissimi piccolicubi difettosi (non perfettamente uguali) ed incollati tra loro con sforzo. Un materialesiffatto contiene tensioni “congelate” al suo interno e non possiede una configurazionedi rilassamento globale. Se vogliamo rilassarlo in un punto possiamo farlo, ma a pattodi aumentare le tensioni nei punti adiacenti. Cio significa che se il materiale e tagliatoin cubetti, questi si dilatano e il materiale esplode. Lo scopo della metallurgia e proprioquello di preparare dei materiali che ammettano una configurazione di rilassamento globale(internamente rilassati). Se tale scopo non viene raggiunto, viene prodotto un materialecon “tensioni interne”, che per molti scopi non e affidabile.
Dal punto di vista della struttura geometrica dello spazio materiale associato a questimateriali “difettosi”, possiamo dire che la metrica γ corrispondente non e isomorfa allametrica dello spazio ambiente. Per esempio, la metrica materiale puo essere curva anchese lo spazio fisico e euclideo (piatto).
Ricordiamo che una metrica e piatta se e solo se esiste un sistema di coordinate(detto cartesiano) in cui le sue componenti coincidono con le componenti della matrice diKronecker δij (vedi paragrafo 9.8). Dimostriamo ora che, se g e piatta, e possibile unaconfigurazione di rilassamento globale se e solo se anche la metrica materiale e piatta,ovvero che per una metrica γ curva non esistono configurazioni del materiale elastico incui non siano presenti tensioni interne.
A tal fine, supponiamo che esista una configurazione F di rilassamento globale di Z.Se xk e un sistema di coordinate su X tale che gij = δij , possiamo indurre su Z un sistemadi coordinate ξk mediante la relazione
ξk := F ∗xk .
In tale sistema di riferimento si ha chiaramente
hab = gklδkaδlb = gab = δab .
D’altra parte, essendo F di rilassamento globale, si ha γ = F ∗g = h e quindi anche lametrica materiale e piatta. Viceversa, supponiamo che γ sia piatta, cioe esista un sistemadi coordinate ξk tale che γlk = δlk; definendo allora la configurazione
F k(ξ) = xk(ξ) = ξk ,
15

e immediato vedere che in tale configurazione si ha h = F ∗g = γ, cioe F e una configu-razione di rilassamento globale.
Si osservi che in tale dimostrazione gioca un ruolo fondamentale il fatto che le co-ordinate xk siano euclidee, cioe che X sia piatto. Se lo spazio fisico e curvo, come puoavvenire nella relativita generale, il corpo elastico ammette una configurazione di rilassa-mento globale solo se esiste un isomorfismo isometrico tra Z ed X . Si capisce cosı come ilproblema della elasticita sia rilevante per la comprensione della relativita generale, in cuila nozione di metrica curva e fondamentale.
Per ogni configurazione F , disponiamo nello spazio materiale Z delle due metriche γ edh, e quindi delle due corrispondenti forme di volume (vedi paragrafo 9.2). Il volume di unaporzione V ⊂ Z del materiale, misurata rispetto ad h = F ∗g, e la corrispondente porzionedi spazio fisico da esso occupata. Essa puo essere per esempio misurata in centimetricubi, se il sistema di unita di misura scelto e il c.g.s.. Il volume della stessa porzione dimateriale, misurato rispetto a γ, e invece pari alla porzione di spazio da esso occupata nellaconfigurazione di rilassamento. Il rapporto tra di loro e dunque uguale al rapporto tra ilvolume attuale e il volume nello stato di rilassamento. Se adesso introduciamo il volumespecifico ϑ, cioe la grandezza che misura il volume occupato da una mole di materiale, e ilvolume specifico del materiale localmente rilassato ϑ0, allora si ha
√det h√det γ
=ϑ
ϑ0.
Possiamo anche introdurre l’inverso del volume specifico, cioe la densita di materia
ρ :=1
ϑ.
Essa descrive il numero di moli di materiale per unita di volume (in molti testi si utilizza unadiversa unita per misurare la quantita di materiale, per esempio il numero di molecole). Ladensita ρ0 = 1
ϑ0, che in molti modelli e considerata costante, e una quantita caratteristica
del materiale, da considerarsi fissata nel modello studiato. Abbiamo pertanto trovato perla densita ρ l’espressione
ρ = ρ0
√det γ
det h. (2.2)
In termini di ϑ abbiamo dunque
ϑ = ϑ0
√det h
det γ. (2.3)
Osserviamo anche che la formula (2.1) implica che det h = (det g)(det xka)2 cioe :
ρ0
√det γ = ρ
√det g det xka . (2.4)
16

2.2 Tensore delle deformazioni
Data una configurazione F disponiamo dunque nello spazio materiale delle due met-riche γ ed h: e quindi spontaneo misurare la deformazione del materiale corrispondente adF confrontando queste due metriche. Nell’approccio classico la deformazione viene mis-urata dalla differenza h − γ. E’ ancora piu significativo prendere la “differenza relativa”γ−1(h − γ) = γ−1h − 1. Un grande vantaggio di questa scelta e il fatto che il tensoreH := γ−1h risulta essere un operatore simmetrico dello spazio TZ in se (vedi paragrafo9.4), sicche e possibile misurare la deformazione tramite una sua qualunque funzione f(H).La scelta fatta sopra, f(H) = H − 1, e solo una delle possibilita. Alla fine di questo capi-tolo discuteremo la descrizione della elasticita che si ottiene con tale scelta. Noi pero inquesto testo preferiamo utilizzare f(H) = 1
2 logH che, come vedremo, conduce ad unaformulazione fisicamente piu significativa.
Ricordiamo, che ad ogni tensore simmetrico 2-covariante in uno spazio riemannianocorrisponde un campo di operatori simmetrici ottenuto alzando un indice mediante lametrica inversa (vedi paragrafo 9.4). Cosı, usando la metrica materiale, possiamo associareal tensore h l’operatore H, con componenti
hab = γachcb . (2.5)
Fissato un punto ξ ∈ Z, siano (e1, e2, e3) gli autovettori (normalizzati) di H. Questi au-tovettori vengono chiamati assi principali di deformazione. Siano (h1, h2, h3) i corrispon-denti autovalori; nella base degli assi principali abbiamo dunque
(hab ) =
h1 0 00 h2 00 0 h3
,
e il numero ha misura l’allungamento del materiale lungo l’asse ea corrispondente allaconfigurazione F che definisce h.
Ovviamente un tensore simmetrico 3 × 3 ha 6 componenti indipendenti. A queste6 componenti corrispondono 3 informazioni sulla direzione degli assi principali di defor-mazione del materiale e altre 3 date dagli autovalori, che misurano l’intensita della defor-mazione lungo ciascun asse. Se a questi 6 parametri aggiungiamo ancora l’informazionesull’orientazione degli assi principali nello spazio fisico, otteniamo 9 parametri. Conoscerequesti 9 parametri e equivalente a conoscere le 9 derivate xka(ξ). Cosı l’informazione datadal gradiente di deformazione xka e stata divisa in 3 gruppi: 3 allungamenti (gli autoval-ori), 3 informazioni sulla posizione degli assi principali di deformazione rispetto allo spaziomateriale, e 3 informazioni sulla posizione di questi assi nello spazio fisico. Se lasciamo daparte quest’ultimo gruppo, gli altri due sono contenuti nel tensore H.
Vogliamo ora costruire un oggetto geometrico che misuri la deformazione rispetto allaconfigurazione di rilassamento. Osserviamo che lo stato di rilassamento (cioe la configu-razione in cui localmente γ ed h coincidono) corrisponde ad H = I (cioe hab = δab ). Unbuon candidato per tale oggetto e dunque la grandezza
S =1
2logH , (2.6)
17

che si annulla quando il corpo localmente non e deformato (per la definizione delle funzionidi operatori vedi ancora il paragrafo 9.4). Nella definizione di S come logaritmo e essenzialeil fatto che gli autovalori di H siano positivi; ed infatti si ha
hi = γ(Hei, ei) = h(ei, ei) = F ∗g(ei, ei) = g(F∗ei, F∗ei) > 0 .
Il tensore S e detto tensore delle deformazioni; esso contiene le stesse informazioni chesono contenute in H. Nella base degli assi principali di deformazione abbiamo:
(sab ) =
s1 0 00 s2 00 0 s3
,
dove sa = 12 logha.
La scelta (2.6) non e obbligata. Altri autori parametrizzano le deformazioni con diversioggetti geometrici; alla fine di questo capitolo discuteremo brevemente tali descrizioni.Noi utilizzeremo sempre la scelta (2.6) perche, come vedremo, conduce alla struttura piuelegante possibile della teoria.
L’informazione completa sugli autovalori di S puo essere ricavata dai 3 invarianti diS (vedi ancora paragrafo 9.4). Poniamo
α = TrS
β =1
2TrS2 − 1
6(TrS)2
θ =1
3TrS3 − 1
3(TrS)(TrS2) +
2
27(TrS)3 ,
(2.7)
o, anche:α = TrS
β =1
2TrS2 − 1
6(α)2
θ =1
3TrS3 − 2
3αβ − 1
27(α)3 .
(2.8)
Introducendo la “parte a traccia nulla” S di S:
S = S − 1
3(TrS)I
ovvero:
sab = sab −1
3αδab
gli invarianti (2.7) si possono riscrivere:
α = saa
β =1
2sab s
ba
θ =1
3sac s
cdsda ,
18

e questo spiega la scelta degli “strani” coefficenti numerici in (2.7).Osserviamo inoltre che, nella base degli assi principali, si ha
α = TrS = s1 + s2 + s3 =1
2log(h1h2h3) =
1
2log det H = log
√det h√det γ
,
dova l’ultima uguaglianza segue dalla definizione (2.5). Poiche sia il primo che l’ultimomembro di questa relazione sono invarianti rispetto a trasformazioni di coordinate, larelazione stessa e valida in ogni base. Infatti, la traccia del logaritmo di un operatore euguale al logaritmo del determinante dell’operatore stesso (vedi formula (9.11)).
La formula (2.2) implica
ρ = ρ0e−α , (2.9)
o, in termini di volume specifico,
ϑ = ϑ0eα , (2.10)
e quindi il parametro α misura la variazione relativa di volume del materiale dovuta alladeformazione locale S.
Per comprendere il significato di β, osserviamo che esso, essendo la somma dei quadratidegli autovalori di S, e non negativo. Quindi quando si annulla β si annullano tutte lecomponenti di S, cioe S e proporzionale all’identita. In questa situazione tutti gli autovaloridi S sono uguali, e quindi il materiale e deformato uniformemente in tutte le direzioni.Cio significa che localmente il materiale non ha cambiato forma, anche se ha cambiatodimensioni. Se β non e nullo, e stata cambiata anche la forma; possiamo dire dunque cheβ misura la deviazione della deformazione dalla simmetria sferica.
Per discutere il significato fisico del parametro θ osserviamo che, se S gode di simmetriacilindrica, due suoi autovalori coincidono. Rispetto agli assi principali, si ha dunque:
(sab ) =
s1 0 00 s1 00 0 s3
,
(sab ) =
s 0 00 s 00 0 −2s
,
dove s = 13s1 − 1
3s3. Allora:
sac scb =
s2 0 00 s2 00 0 4s2
da cui β = 3s2. Inoltre:
sac scdsdb =
s3 0 00 s3 00 0 −8s3
,
19

da cui, nel caso della simmetria cilindrica, abbiamo θcil. = −2s3 = 2(β3
) 32
sgn θ. Nel
caso generale, la differenza tra θ e il valore corrispondente alla simmetria cilindrica, cioela grandezza
θ := θ − θcil. = θ − 2
(β
3
) 32
sgn θ , (2.11)
misura la deviazione del tensore S da questo tipo di simmetria.
2.3 Approssimazione lineare del tensore delle deformazioni.
Assumiamo che xk = ξk sia una configurazione di rilassamento globale del materialeelastico nello spazio fisico euclideo e studiamo configurazioni vicine a questa, cioe descritteda
xk(ξ) = ξk + φk(ξ),
ove φk descrive “piccoli spostamenti” dalla posizione di rilassamento globale. Assumiamoanche che (xk) siano coordinate cartesiane, tali cioe che gkl = δkl. Allora anche la metricamateriale e piatta e si ha γkl = δkl. Infatti, essendo nella configurazione di rilassamentoxk = ξk, la metrica materiale coincide con quella fisica. Questa e la formulazione classicadella teoria dell’elasticita, in cui si identificano i due spazi euclidei Z ed X , e la configu-razione del materiale e descritta da un campo vettoriale Φ := (φk), chiamato campo deglispostamenti o displacement vector. Il gradiente di deformazione e dato da:
xka = δka + φka .
Calcoliamo il tensore delle deformazioni in termini del campo degli spostamenti φk. Ab-biamo:
hab = gklxkaxlb = δkl(δ
ka + φka)(δlb + φlb) =
= δab + φab + φba + δklφkaφ
lb = δab + 2φ(ab) + δklφ
kaφ
lb ,
(2.12)
dove, come di consueto, si e denotato φa = γabφb, φab = ∂bφa, mentre i due indici tra
parentesi tonde indicano la parte simmetrica:
φ(mn) :=1
2(φmn + φnm) .
Utilizzando lo sviluppologH ≃ H − I ,
valido per (H − I) piccolo, abbiamo, al primo ordine in Φ:
S =1
2(H − I) , (2.13)
cioe:smn = φ(mn) .
20

Nella approssimazione lineare il tensore delle deformazioni e dunque uguale alla partesimmetrica del gradiente di deformazione. Per comprendere il significato fisico di questorisultato, osserviamo che il gradiente di deformazione puo essere decomposto nella sommadella sua parte simmetrica e della sua parte antisimmetrica:
ωmn = φ[mn] :=1
2(φmn − φnm) ,
cioe:φmn = ωmn + smn .
Consideriamo ora una piccola porzione del materiale nell’intorno di un fissato punto ξ; ilvettore spostamento nei punti adiacenti ξ si puo esprimere al primo ordine come:
φk(ξ) = φk(ξ) + (ξa − ξa)φka(ξ) +O(φ2) =
= φk(ξ) + (ξa − ξa)ωka + (ξa − ξa)ska +O(φ2) .
Il primo termine non dipende da ξ ed esprime il fatto che il pezzetto di materiale e statosottoposto a traslazione; il secondo esprime una rotazione attorno al vettore:
Ωk = ǫkmnωmn ,
dove ǫkmn e il simbolo di Levi Civita (vedi paragrafo 8.8). La traslazione e la rotazionenon introducono deformazioni nel materiale e dunque solo la parte simmetrica smn provocadeformazioni. Osserviamo che ω descrive tre componenti del gradiente di deformazione eds le sei rimanenti.
Dal punto di vista geometrico il doppio della parte simmetrica di φka e la derivata diLie della metrica g rispetto al campo degli spostamenti (vedi paragrafo 9.10):
£Φgmn = φmn + φnm = 2φ(mn) ,
cioe e l’incremento (al primo ordine) della metrica dovuto allo spostamento Φ del materiale.Il calcolo classico (2.12) non funziona quando le componenti della metrica non sono
costanti. Questo puo avvenire se la metrica fisica non e piatta o se utilizziamo coordinatecurvilinee. In tal caso e necessario sviluppare anche le componenti della metrica stessarispetto al campo degli spostamenti:
gkl(x(ξa)) = gkl(ξ) + φm∂mgkl +O(φ2) .
Le derivate della metrica sono date dai coefficenti della connessione (vedi formula (9.23)):
∂mgkl = gnkΓnlm + gnlΓnkm .
Sostituendo questa espressione nello sviluppo (2.12) otteniamo, al primo ordine:
hab = (δka + φka)(δlb + φlb)(gkl + φmgnkΓnlm + φmgnlΓnkm) =
= gab + ∇aφb + ∇bφa +O(φ2) ,
21

dove ∇ indica la derivata covariante associata alla metrica gab. Utilizzando di nuovo losviluppo (2.13) otteniamo la formula
sab = ∇(aφb) =1
2£φgab , (2.14)
che adesso vale in ogni sistema di coordinate.
2.4 Energia interna.
Studiamo ora l’espressione della densita di energia di un materiale elastico. Comevedremo, questa grandezza determina completamente il comportamento del materiale inquestione. La densita di energia e rappresentata da una 3-forma (o densita scalare) U datada
U = U dξ1 ∧ dξ2 ∧ dξ3 = u ρ0
√det γ dξ1 ∧ dξ2 ∧ dξ3 . (2.15)
La funzione scalare u descrive la densita di energia per mole di materiale. In molti casi epossibile decomporre questa funzione in due parti:
u = uE + uI ,
ove uE e l’energia delle forze esterne (per esempio quelle gravitazionali), dipendente dallasola posizione del materiale nello spazio fisico, cioe uE = uE(x(ξ)); uI e invece l’energiainterna elastica, che non dipende dalla posizione x(ξ) del materiale ma solo dalle suedeformazioni, cioe dalle derivate xka. Ci limiteremo qui a discutere modelli in cui vale taleproprieta.
Assumiamo che le interazioni elastiche che determinano l’energia interna siano iso-trope; cio significa che, se estraiamo un pezzetto di materiale e lo ruotiamo nello spaziofisico, la sua energia interna non cambia. In termini matematici, cio corrisponde al fattoche l’energia non dipende da tutte le 9 derivate xka, ma solo dal tensore delle deforma-zioni. Cosı, l’isotropia dello spazio fisico X riduce il numero di parametri da cui dipendel’energia interna alle 6 componenti della matrice sab . Inoltre, supponiamo che il materialesia isotropo. Cio significa che le proprieta di un pezzetto di materiale V non dipendonodalla direzione in cui lo abbiamo tagliato per estrarlo, ma solo dalle sue proprieta metricherispetto a γ. Dunque, in ogni punto ξ l’espressione locale dell’energia interna deve essereinvariante anche rispetto alle rotazioni degli assi principali della deformazione nello spaziomateriale Z. Tale proprieta riduce infine il numero di parametri indipendenti di cui efunzione l’energia ai tre invarianti algebrici di S.
Assumiamo dunque che l’energia elastica dipenda dalle derivate xka attraverso i 3parametri della deformazione: α, β, θ. Poiche nella costruzione dei tre invarianti compareesplicitamente la matrice γab, l’energia interna puo dipendere anche dalle ξa attraverso lecomponenti di γ se essa non e costante. Inoltre, negli invarianti di S e presente anchela metrica fisica g attraverso gli elementi di matrice di H. Se essa non e euclidea o se
22

utilizziamo un sistema xk non cartesiano, l’energia dipende anche dalle funzioni xk(ξ)tramite le componenti di g. Pertanto si ha in generale
uI(α, β, θ) = uI(ξa, xk, xka)
Se assumiamo inoltre che lo stato di rilassamento locale corrisponda ad un valore minimodi uI , si avra :
uI = u0 + u1(α, β, θ) . (2.16)
dove u0 e una costante (energia di rilassamento) che, nella teoria non relativistica, puosempre essere trascurata (nella meccanica non relativistica, l’energia e definita a meno diuna costante arbitraria). Abbiamo cosı u1(0, 0, 0) = 0 e u1(α, β, θ) > 0 per (α, β, θ) 6= 0cioe (0, 0, 0) e punto di minimo per u1.
Calcoliamo ora lo sviluppo di Taylor della energia interna attorno al punto S = 0,arrestato ai termini del secondo ordine in S. Osserviamo che α e del primo ordine in S,β e del secondo ordine e θ del terzo. Questo implica che θ non appare in questo sviluppotroncato. Inoltre la condizione di minimo implica che la derivata prima di uI rispetto adα si annulla. Allora:
uI =1
2Aα2 +Bβ +O(S3) .
dove
A =∂2uI∂2α
(0, 0, 0)
B =∂uI∂β
(0, 0, 0) .
(2.17)
Le due costanti A e B sono evidentemente positive a causa della condizione di minimoin (0, 0, 0). Dal punto di vista fisico, la positivita di A e B esprime la stabilita dellostato di rilassamento. Se tale stato non fosse un minimo per l’energia, dopo una piccolaperturbazione il materiale tenderebbe ad allontanarsi dalla configurazione di rilassamentoper minimizzare l’energia. Vediamo quindi che, qualunque sia la dipendenza di uI da(α, β, θ), nel caso di piccole deformazioni si ha sempre:
uI =1
2Aα2 +Bβ . (2.18)
Chiameremo la teoria della elasticita che si ottiene con questa struttura della energiainterna modello quasi lineare. Si tratta evidentemente del modello piu semplice che puoessere considerato. Malgrado cio, la teoria rimane comunque altamente non lineare neicampi xa, a causa della dipendenza, appunto non lineare, dei parametri α e β dal gradientedi deformazione.
Si osservi che, se uI non dipende da β e da θ, l’energia interna non cambia quando sicompiono deformazioni in cui non varia il volume del materiale: tale materiale non opponeresistenza a deformazioni che non comportino compressioni o dilatazioni di volume. Comee noto, i materiali che godono di questa proprieta sono i fluidi, e la teoria della elasticitaper questi materiali si riduce alla idrodinamica.
23

Invece di considerare la dipendenza di uI dal parametro θ si sarebbe potuto eviden-temente considerare la dipendenza da θ. Questa descrizione e completamente equivalentema alcune formule diventano meno eleganti. Per tale motivo utilizzeremo la prima.
2.5 Equazioni dell’equilibrio statico di un materiale elastico
Per determinare le equazioni che danno la posizione d’equilibrio di un materiale elas-tico introduciamo il seguente assioma: un materiale elastico di cui siano fissati i bordi hacome configurazione di equilibrio quella corrispondente alla minor energia possibile nellaclasse di configurazioni che hanno le stesse posizioni al contorno.
Cercare la configurazione d’equilibrio di un materiale elastico equivale quindi a cercarela configurazione per la quale il funzionale:
E =
∫
V
U =
∫
V
U(ξa, xk(ξ), xka(ξ)) dξ1 ∧ dξ2 ∧ dξ3
prende il valore minimo nella classe delle funzioni xk = xk(ξ) che assumono valori fissatisul contorno ∂V . Un tale problema matematico si chiama problema variazionale del primoordine, perche la funzione integranda contiene solo derivate del primo ordine, ed implicaun sistema di equazioni differenziali a derivate parziali del secondo ordine per le funzioniincognite xk; tale sistema si chiama sistema diequazioni di Eulero-Lagrange associato alproblema variazionale.
Cerchiamo ora di determinare la configurazione che minimizza E .Sia F una configurazione che soddisfa al suddetto principio variazionale; consideriamo
una variazione generica di F , cioe una famiglia Fτ di configurazioni
Fτ : Z → X
con τ ∈ (−a, a), (a > 0), tale che F0 = F , e che inoltre lascia invariata la posizione delcontorno per ogni τ :
Fτ |∂V = F |∂V .
In termini delle coordinate xk scriveremo: F kτ (ξ) = xk(ξ, τ). Il principio di minimo dell’energia implica che la derivata della funzione
E(τ) :=
∫
V
U(ξa, xk(ξ, τ), xka(ξ, τ)) dξ1 ∧ dξ2 ∧ dξ3
si annulla per τ = 0, cioe per la configurazione cercata.Per semplificare la notazione, seguendo la tradizione indicheremo con δ l’operatore
ddτ
∣∣τ=0
. Poniamo quindi
δxk(ξ) :=dF kτdτ
∣∣∣∣τ=0
(ξ) =∂xk(ξ, τ)
∂τ
∣∣∣∣τ=0
.
24

Poiche Fτ non cambia i dati sul contorno, le funzioni δxk si annullano sul contorno stesso:δxk|∂V = 0.
Calcoliamo ora la derivata della energia totale rispetto al parametro τ :
δE :=dE(τ)
dτ
∣∣∣∣τ=0
=
∫
V
(∂U
∂xkδxk +
∂U
∂xkaδxka
)d3ξ .
Ora, poiche ∂∂ξa commuta con ∂
∂τ, si ha
δxka =∂
∂τ
(∂xk(ξ, τ)
∂ξa
)∣∣∣∣τ=0
= ∂aδxk ;
possiamo dunque utilizzare l’ovvia identita
∂U
∂xkaδxka = ∂a
(∂U
∂xkaδxk)−(∂a
∂U
∂xka
)δxk ,
che implica
δE =
∫
V
(∂U
∂xk− ∂a
∂U
∂xka
)δxkd3ξ +
∫
V
∂a
(∂U
∂xkaδxk)d3ξ ;
quindi, utilizzando il teorema di Stokes, si ottiene
δE =
∫
V
(∂U
∂xk− ∂a
∂U
∂xka
)δxkd3ξ +
∫
∂V
∂U
∂xkaδxk
(∂
∂ξadξ1 ∧ dξ2 ∧ dξ3
). (2.19)
Il secondo termine di (2.19) e identicamente nullo poiche δxk = 0 sul contorno ∂V ; inoltre,dovendosi δE annullare per ogni scelta delle funzioni δxk, si ha
∂a∂U
∂xka− ∂U
∂xk= 0 , (2.20)
che sono le equazioni dell’equilibrio statico o equazioni di Eulero-Lagrange del sistema.Vogliamo ora comprendere il significato fisico di queste relazioni. Ci limitiamo per ora
a considerare il caso in cui la metrica fisica e piatta e le coordinate (xk) sono cartesiane (lametrica materiale invece puo essere curva). Allora l’energia dipende dalle xk solo attraversol’energia delle forze esterne e dunque si puo riscrivere il secondo termine di (2.20) come:
− ∂U
∂xk= −ρ0
√det γ
∂uE∂xk
= ρ0
√det γ fk ,
dove fk = −∂uE
∂xk e la forza esterna.Per interpretare il primo termine di (2.20), calcoliamo la variazione dell’energia cor-
rispondente ad una variazione dei dati al contorno. Nella formula (2.19) prendiamo dunqueδxk|∂V 6= 0, ma supponiamo che per ogni τ la configurazione Fτ sia quella di equilibrio
25

rispetto ai dati F |∂V al contorno. La variazione dell’energia interna e uguale al lavorocompiuto dalle forze esterne che abbiamo applicato per effettuare la deformazione Fτ . Ilprimo integrale in (2.19) si annulla perche Fτ soddisfa le (2.20), essendo una configurazionedi equilibrio. Il lavoro totale e dunque uguale all’integrale sul contorno:
δE = −∫
∂V
πkδxk ,
dove abbiamo definito la densita vettoriale (vedi paragrafo 8.10).
πk := − ∂U
∂xka
(∂
∂ξadξ1 ∧ dξ2 ∧ dξ3
).
Il motivo della scelta del segno negativo in tale definizione sara chiarito piu oltre. Ladensita vettoriale
π(δx) := πkδxk ,
rappresenta l’opposto della densita di lavoro effettuato per spostare di δxk un elementoinfinitesimo del contorno ∂V . Possiamo quindi interpretare l’oggetto geometrico π comel’opposto della densita delle forze esterne che hanno compiuto questo lavoro. Dal puntodi vista geometrico interpretiamo π come un covettore su X a valori nello spazio delledensita vettoriali su Z, cioe come un operatore che ad ogni vettore δx ∈ TF (ξ)X associauna densita vettoriale (un 2-covettore) su Z attaccata in ξ (vedi paragrafo 8.7). Si puoscrivere
π = πk ⊗ (dxk)
ovvero:
π = p ak
(∂
∂ξadξ1 ∧ dξ2 ∧ dξ3
)⊗ (dxk) (2.21)
(vedi formula (8.20)), dove abbiamo definito:
p ak := − ∂U
∂xka. (2.22)
L’opposto della densita di lavoro e dunque uguale al valore di π sul vettore spostamento.La stessa analisi puo essere applicata ad ogni piccola parte “∆V ” del materiale; se,
durante la deformazione, l’energia interna di ∆V e stata cambiata, cio e dovuto al lavorodelle forze con le quali la parte esterna del materiale ha agito su ∆V stesso.
Gli sforzi esistono pero non solo sul contorno ma anche all’interno del materiale.Infatti, in ogni punto si puo tagliare il materiale. Pensando ai due lati del taglio comea due corpi che interagiscono tramite la superficie di taglio si puo mettere in evidenza lapresenza di tali sforzi. Per misurare dunque la componente p a
k dello sforzo nel puntoξ bisogna tagliare il materiale lungo una superficie passante per ξ ortogonale all’a-esimoasse, e misurare la k-esima componente della forza necessaria per mantenere il materialenella configurazione precedente al taglio. Come abbiamo visto, la forza con cui l’esternoagisce sull’interno e data da −p a
k ; nella configurazione di equilibrio queste forze (esterne
26

rispetto a ∆V ) sono equilibrate dalle tensioni interne del materiale. E’ proprio per questomotivo che il tensore p a
k , che descrive le tensioni interne (sforzi) del materiale (forze conle quali l’interno di ∆V agisce sull’esterno), e stato definito come l’opposto della densitadelle forze che hanno compiuto il lavoro. L’oggetto geometrico π si chiama densita deglisforzi.
Utilizzando la densita degli sforzi possiamo scrivere le equazioni della statica come:
−∂ap ak − ∂U
∂xk= 0 . (2.23)
Come abbiamo visto, in ogni punto ξ il primo termine e il risultante delle forze elastiche cheagiscono sul pezzetto del materiale intorno a ξ; quanto al secondo termine, esso rappresentale forze esterne (non elastiche, per esempio gravitazionali). In altri termini, l’equazionedell’equilibrio (2.23) ci dice che il risultante totale delle forze in gioco si annulla in ognipunto del materiale.
L’interpretazione delle equazioni dell’equilibrio nel caso in cui lo spazio fisico non eeuclideo e un po piu delicata. Infatti, per poter continuare ad interpretare la grandezza−∂ap a
k come il risultante delle forze esterne che agiscono sul contorno del pezzetto dimateriale in esame dobbiamo poter sommare forze attaccate in punti distinti del contorno.Questa operazione e definita soltanto dopo che sia stata introdotta la connessione nellospazio X (vedi paragrafi 9.5 e 9.6). Allora la divergenza di p a
k diventa ben definitacome risultante delle forze solo se si aggiunge un altro termine che contiene i simboli diChristoffel della metrica g. Questo termine e infatti generato da ∂uI
∂xk perche adesso uIdipende esplicitamente da x tramite le componenti gkl. Allora l’equazione (2.23) diventa:
−∂ap ak − ∂UI
∂xk− ∂UE∂xk
= 0 ,
dove i primi due termini rappresentano il risultante delle forze elastiche e l’ultimo le forzeesterne. Vediamo dunque che anche in questo caso l’equazione (2.23) descrive la condizionedi equilibrio delle forze.
Osserviamo che, rispetto alle tre incognite xk, queste equazioni costituiscono un sis-tema di tre equazioni differenziali a derivate parziali del secondo ordine. Si puo dimostrareche si tratta di un sistema di tipo ellittico per il quale ci aspettiamo l’esistenza e l’unicitadella soluzione per ogni scelta dei dati al contorno.
E’ utile definire la derivata variazionale del funzionale E come la densita scalare:
δEδxk
:=
(∂U
∂xk− ∂a
∂U
∂xka
)dξ1 ∧ dξ2 ∧ dξ3 .
Con questa definizione possiamo riscrivere la formula (2.19) come
δE =
∫
V
δEδxk
δxk −∫
∂V
π ⊥k δxk .
In questa formula abbiamo denotato con π ⊥k la proiezione di πk su ∂V (la parte trasversale
di πk), che costituisce una densita scalare su ∂V . (Per una discussione approfondita
27

rimandiamo il lettore ai paragrafi 8.13 e 9.2). Vediamo dunque che, nello spazio dellefunzioni xk(ξ) che soddisfano le condizioni al contorno l’ultimo integrale si annulla e ladensita δE
δxk rappresenta la derivata del funzionale E .Il metodo di minimizzazione di E non serve se si vuole trovare lo stato di equilibrio
quando si fissino i valori degli sforzi e non quelli delle posizioni sul contorno. Infatti inquesto caso l’integrale sul contorno non si annulla. Per analizzare il problema con sforzi alcontorno fissati occorre riscrivere l’ultimo integrale come:
−∫
∂V
π ⊥k δxk = − δ
∫
∂V
π ⊥k xk +
∫
∂V
xkδπ ⊥k .
Definendo il funzionale:
E := E +
∫
∂V
π ⊥k xk =
∫
V
(U + ∂a(p a
k xk)),
si ha:
δE =
∫
V
δEδxk
δxk +
∫
∂V
xkδπ ⊥k .
Cio significa che la configurazione d’equilibrio si ottiene in questo caso minimizzando E .
2.6 Relazione sforzi-deformazione (stress-strain relations).
La formula (2.22) ci permette di calcolare p ak in termini del tensore delle deformazioni.
Infatti, ponendo U = ρ0
√det γ u abbiamo
p ak = −ρ0
√det γ
∂u
∂xka.
E’ utile rappresentare l’oggetto misto p ak per mezzo del suo pull–back p a
k xkb sullo spaziomateriale. Dividendo tale densita tensoriale per ρ0
√det γ otteniamo il tensore
tab =1
ρ0
√det γ
p ak xkb
che prende il nome di tensore di Cauchy o tensore degli sforzi. I due oggetti tab , p ak ,
rispettivamente tensore degli sforzi e densita degli sforzi, sono due diverse rappresentazionigeometriche del medesimo oggetto fisico, forze delle tensioni interne. Nei testi classici, siusa di consueto il tensore degli sforzi. La differenza tra queste due rappresentazioni eche π non e un tensore, bensı un covettore sullo spazio fisico X a valori nello spazio delledensita vettoriali sullo spazio materiale Z. Il passaggio da π a t consiste nel portare l’indicebasso (di covettore) dallo spazio fisico allo spazio materiale (oltre al passaggio banale dalladensita tensoriale al tensore). Dal punto di vista geometrico, la “saturazione” p k
a xkbsignifica l’operazione di pull–back di un covettore tra due varieta. La quantita π e, come
28

oggetto geometrico, piu complicato del tensore t. La sua grande utilita consiste nel fattoche la sua derivata esterna (divergenza) e definita geometricamente in maniera semplice,sicche le equazioni dell’equilibrio (2.23) sono indipendenti dal sistema di coordinate.
Alla fine di questo paragrafo proveremo (in due modi diversi) la seguente relazione tragli sforzi e le deformazioni:
tab := −(
1
α
∂u
∂αsccδ
ab +
∂u
∂βsab +
∂u
∂θ˜sac scb
)(2.24)
ovvero
p al = −ρ0
√det γ
(1
α
∂u
∂αsccδ
ab +
∂u
∂βsab +
∂u
∂θ˜sac scb
)ξbl . (2.25)
Il tensore t e simmetrico (e combinazione lineare di tensori simmetrici), composto di unaparte proporzionale all’identita e di una a traccia nulla. Questa parte a traccia nulla prendeil nome di tensore deviatore ed e data da:
zab = −(∂u
∂βsab +
∂u
∂θ˜sac scb
).
Le formule (2.24) e (2.25) prendono entrambe il nome di relazione sforzi deformazioneo stress–strain relation. Esse esprimono una relazione tra la grandezza che descrive ledeformazioni (cioe sab ) e le forze (descritte da tab o da π a
k ) necessarie per mantenere taledeformazione.
Osserviamo che la formula (2.24) implica che gli assi principali degli sforzi coinci-dono con gli assi principali della deformazione. Tutta l’informazione sulla resistenza delmateriale e contenuta nelle tre funzioni 1
α∂u∂α
, ∂u∂β
, ∂u∂θ
, che prendono il nome di coefficenti
di risposta del materiale; le quantita 1α∂u∂α
, ∂u∂β
, vengono dette rispettivamente compress-ibilita e modulo di taglio. Osserviamo che, per deformazioni piccole, questi coincidonocon i coefficenti A e B che abbiamo introdotto nelle formule (2.17) discutendo il modelloquasi–lineare. Come vedremo nel prossimo paragrafo, tali coefficenti vengono determinatiproprio tramite misure di compressibilita e di resistenza a sforzi di taglio.
Osserviamo ora che le formule (2.9) ed (2.10) implicano:
−ρ0∂u
∂α= −ρ0
∂u
∂ϑ
∂ϑ
∂α= −ρ0
∂u
∂ϑϑ = −ρ0
∂u
∂ϑϑ0e
α = −∂u∂ϑ
eα ,
e quindi se definiamo la pressione P come l’opposto della derivata dell’energia internarispetto al volume specifico:
P := −∂u∂ϑ
(2.26)
possiamo riscrivere la formula (2.24) come:
tab = ϑPδab + zab , (2.27)
29

che e la decomposizione del tensore degli sforzi in una parte proporzionale alla identita edin una parte a traccia nulla. Si osservi che la definizione della pressione puo essere riscrittain termini della densita di materia ρ nel modo seguente:
P = −ρ0e−α ∂u
∂α= −ρ∂u
∂α. (2.28)
Passiamo ora alla dimostrazione della relazione sforzo–deformazione. Osserviamo chel’energia interna dipende dal gradiente di deformazione solo attraverso le componenti diH. Allora:
p ak = −ρ0
√det γ
∂u
∂hcd
∂hcd∂xka
,
dove:∂hcd∂xka
=∂(glmx
lcxmd)
∂xka= gkmx
mdδac + gklx
lcδad . (2.29)
Ne segue:
p ak = −2ρ0
√det γ
∂u
∂hadgkmx
md = −2ρ0
√det γ Nadgkmx
md , (2.30)
dove abbiamo sfruttato la simmetria di H e abbiamo denotato con N il tensore di compo-nenti:
N cd :=∂u
∂hcd. (2.31)
Poiche l’energia interna dipende da H solo attraverso i parametri α, β, θ, abbiamo:
N cd =∂u
∂α
∂α
∂hcd+∂u
∂β
∂β
∂hcd+∂u
∂θ
∂θ
∂hcd.
Dobbiamo dunque calcolare le derivate dei parametri della deformazione rispetto agli el-ementi di matrice hcd. A questo scopo osserviamo che la formula hab = γachcb implica(ovviamente) che per ogni funzione f di H possiamo scrivere:
∂f
∂hab= γac
∂f
∂hcb.
E’ quindi equivalente calcolare le derivate dei parametri rispetto ad hcb cioe rispetto allecomponenti di H e non alla metrica. Questo ha il vantaggio che possiamo utilizzare laformula che esprime la derivata della traccia di qualunque funzione di un operatore rispettoalle componenti dell’operatore stesso:
∂
∂hcbTr f(H) = (f ′(H))
b
c ,
dove f ′ e la derivata di f . Questa formula e dimostrata nel paragrafo 9.4. Qui daremo unadimostrazione che vale quando gli autovalori di H sono contenuti nel disco di convergenzadi
f(z) =
∞∑
n=0
cnzn .
30

In questo caso:
∂
∂hcbTr f(H) =
∂
∂hcbTr
∞∑
n=0
cnHn =
∂
∂hcb
∞∑
n=0
cnTrHn =
∞∑
n=0
cn∂
∂hcb
(ha1a2ha2a3...han
a1
)=
=∞∑
n=0
n cn(hba2
ha2a3...han−1
c
)=
( ∞∑
n=0
n cnHn−1
)b
c
= (f ′(H))b
c .
Nel nostro caso, come f(H) prendiamo successivamente 12 logH = S, 1
4 log2H = S2 e18 log3H = S3. Cosı otteniamo:
∂
∂hcbTrS =
1
2(h−1)bc
∂
∂hcbTrS2 = sbd(h
−1)dc
∂
∂hcbTrS3 =
3
2sbds
de(h
−1)ec ,
dove (h−1)c
d denota la matrice inversa di hba. Da queste relazioni, utilizzando le definizioni(2.7), segue:
∂α
∂hcd=
1
2(h−1)cd ,
∂β
∂hcd=
1
2scb(h
−1)bd − 1
6α(h−1)cd =
1
2scb(h
−1)bd,
∂θ
∂hcd=
1
2sces
eb(h
−1)bd − 2
3α∂β
∂hcd− 2
3β∂α
∂hcd− 1
9α2 ∂α
∂hcd=
=1
2(sces
eb −
1
3δcb s
ef sfe )(h−1)bd ,
(2.32)
dove (h−1)cd
= γce(h−1)de. Introduciamo anche, con un piccolo abuso di notazione, la“parte a traccia nulla del quadrato della parte a traccia nulla”:
˜sac scb = sac scb −
1
3δab s
dc scd .
Allora:∂θ
∂hcd=
1
2˜sceseb(h−1)bd .
Finalmente abbiamo:
N cd =1
2
[∂u
∂α(h−1)cd +
∂u
∂βscf (h−1)fd +
∂u
∂θ˜scesef (h−1)fd
],
31

e dunque:
p ak = −ρ0
√det γ
[∂u
∂α(h−1)ad +
∂u
∂βsaf (h−1)fd +
∂u
∂θ˜sae sef (h−1)fd
]gkmx
md =
= −ρ0
√det γ
[∂u
∂αδae +
∂u
∂βsae +
∂u
∂θ˜saf s
fe
](h−1)edgkmx
md .
(2.33)
E’ utile introdurre ora la matrice inversa (ξbl) di (xkb), cioe la matrice che soddisfa l’identitaxkbξ
bl = δkl . Cosı possiamo scrivere:
p al = −ρ0
√det γ
(∂u
∂αδae +
∂u
∂βsae +
∂u
∂θ˜sac sce
)(h−1)edgkmx
mdxkbξbl ;
ora:(h−1)edgkmx
mdxkb = (h−1)edhdb = δeb
e dunque le formule (2.24) ed (2.25) sono provate.A conclusione di questo paragrafo, vogliamo dare una deduzione della struttura del
tensore di Cauchy e delle relazioni sforzi-deformazioni seguendo un procedimento che dif-ferisce dal precedente perche fa intervenire la proprieta di commutativita delle funzioni dioperatori con l’operatore stesso. Prendiamo direttamente la definizione di p a
k e, usandola matrice (ξak), scriviamo:
p ak = p a
l xlbξbk = −ρ0
√det γ
(∂u
∂xlaxlb
)ξbk .
Il tensore di Cauchy si puo quindi esprimere come:
tab = − ∂u
∂xlaxlb ,
ovvero
tab = −(∂u
∂α
∂α
∂hcd+∂u
∂β
∂β
∂hcd+∂u
∂θ
∂θ
∂hcd
)∂hcd∂xla
xlb .
Utilizzando le relazioni (2.32) abbiamo:
tab = −1
2
∂u
∂α(h−1)cd +
∂u
∂βsce(h
−1)ed +∂u
∂θ˜scesef (h−1)fd
∂hdc∂xla
xlb .
Ora dalla (2.29) si ha immediatamente:
∂hdc∂xla
xlb = hbdδac + hcbδ
ad , (2.34)
e quindi:
tab = −∂u
∂αδab +
1
2
∂u
∂β
[sab + sce(h
−1)eahcb]
+1
2
∂u
∂θ
[˜sac scb + ˜scesed(h−1)adhcb
].
32

Come ultimo passo mostriamo che valgono le due identita :
sce(h−1)eahcb = sab
˜scesed(h−1)adhcb = ˜sac scb .
Infatti si ha
sce(h−1)eahcb = sec(h
−1)aehcb = (h−1)ae s
echcb = (H−1SH)ab .
L’ultimo prodotto e la matrice che corrisponde al prodotto di operatori H−1SH. Questitre operatori sono funzioni dell’operatore H. Osserviamo che un operatore commuta conuna sua qualunque funzione. (Infatti, ogni funzione f(H) ha gli stessi autovettori di H;per calcolare il prodotto f(H)H possiamo utilizzare la base degli autovettori comuni e intale base i due operatori corrispondono a matrici diagonali e dunque commutano.) Nesegue SH = HS, da cui si ha: H−1SH = S. Dunque la prima identita e dimostrata. Inmaniera analoga si dimostra la seconda. Ritroviamo cosı la formula (2.24) e dunque la(2.25).
2.7 Equazioni dell’equilibrio elastico in approssimazione lineare.
Come abbiamo visto, la dipendenza piu semplice che l’energia interna puo avere daiparametri descriventi la deformazione e data dal modello quasi–lineare, che e anche illimite di ogni altro modello nel caso di deformazioni piccole. Il modello quasi–lineare puoessere a sua volta reso lineare rispetto ai campi xk(ξ) utilizzando l’approssimazione linearedel tensore delle deformazioni. Come nel paragrafo 2.3 assumiamo che xk = ξk sia unaconfigurazione di rilassamento globale del materiale elastico nello spazio fisico euclideo estudiamo configurazioni descritte dal vettore spostamento Φ:
xk(ξ) = ξk + φk(ξ).
Come abbiamo visto, il tensore delle deformazioni e uguale alla parte simmetrica del gra-diente di deformazione:
smn = φ(mn) .
Dunque si haα = φmm
β =1
2
[φ(mn)φ
(mn) − 1
3(φmm)2
]=
1
2φ(mn)φ
(mn) ,
dove
φ(mn) = φ(mn) −1
3δmnφ
kk
e la parte a traccia nulla del tensore delle deformazioni. Nella teoria quasi–lineare lafunzione uI non dipende dal parametro θ (che comunque risulterebbe del terzo ordine in
33

Φ), e dunque si ha
uI =1
2Aα2 +Bβ =
1
2
[A(φnn)2 +Bφ(mn)φ
(mn)]
=
=1
2
(A− 1
3B
)(φnn)2 +
1
2Bφ(mn)φ
(mn)(2.35)
a meno di termini di ordine superiore. Spesso nei trattati classici sulla teoria della elasticitale costanti A− 1
3B e 12B vengono dette coefficenti di Lame del materiale in esame.
Dalla formula (2.35) otteniamo immediatamente le componenti del tensore degli sforzinella approssimazione lineare (ricordiamo che det γ = 1):
tmn =1
ρ0p mk xkn =
1
ρ0p mk (δkn + φkn) ≃ 1
ρ0p mn ,
cioe
tmn =1
ρ0pmn = − ∂u
∂φmn= −
[Aφkk δ
mn +Bφ(mn)]. (2.36)
Il primo termine e la parte degli sforzi proporzionale all’identita e il secondo il tensoredeviatore. Per calcolare la pressione osserviamo che
ϑ
ϑ0=ϑ0 + ∆ϑ
ϑ0= 1 +
∆ϑ
ϑ0≃ exp(TrS) = 1 + TrS +O(φ2) = 1 + φkk +O(φ2) , (2.37)
e dunque nella approssimazione lineare si ha:
ϑ = ϑ0 (1 + φkk) .
Allora:
P = −∂u∂ϑ
= −ρ0∂u
∂φkk= −ρ0 Aφ
kk .
Osserviamo che la formula (2.37) implica:
P = −ρ0 A∆ϑ
ϑ0.
Il coefficiente A, che abbiamo chiamato compressibilita, misura dunque la proporzionalitatra la pressione e la variazione relativa di volume specifico nella approssimazione lineare.
Per comprendere il significato del coefficiente B consideriamo la deformazione, dettadi taglio (vedi fig. 2), che non cambia il volume ed e data da
xk = ξk + s δk1 ξ3 ,
34

Figura 2
(cioe φ1 = sξ3, φ2 = φ3 = 0).Le uniche componenti del tensore di deformazione diverse da zero sono
s13 = s31 =1
2φ13 =
1
2s ,
e la formula (2.36) implica che le uniche componenti non nulle del tensore degli sforzi sonoin questo caso:
t13 = t31 = −1
2Bs .
Il coefficiente B di proporzionalita tra la forza t13 e l’intensita della deformazione s sichiama modulo di taglio o shear modulus o anche rigidity modulus. Si osservi che per unfluido e B = 0, poiche il fluido non reagisce a deformazioni che non cambiano il volume. Inquesto caso il tensore degli sforzi si riduce all’operatore identita (matrice δkl ) moltiplicatoper la pressione. Cio significa che gli sforzi agiscono ugualmente in tutte le direzioni.Questa proprieta prende il nome di principio di isotropia della pressione per un fluido olegge di Pascal.
Un altro metodo per dare l’interpretazione fisica dei due coefficienti A e B consiste nelconsiderare il caso di un materiale elastico avente simmetria cilindrica, cui venga applicatauna forza nella direzione dell’asse di simmetria, per esempio l’asse x1, e che sia lasciatolibero nelle altre direzioni. Di conseguenza, il materiale si allunga in direzione della forza esi contrae nelle direzioni ortogonali alla forza stessa. La configurazione di equilibrio staticosara dunque data da:
x1 = (1 + s1)ξ1
x2 = (1 − s)ξ2
x3 = (1 − s)ξ3 ,
dove il parametro s1 descrive l’allungamento nella direzione x1 e il parametro s la con-seguente contrazione. Si ha quindi s11 = s1, s22 = s33 = −s, mentre le altre componentidella deformazione sono nulle. Ne segue che
t11 = −(A+2
3B)s1 + (2A− 2
3B)s (2.38)
t22 = t33 = −(A− 1
3B)s1 + (2A− 1
3B)s , (2.39)
35

e gli altri sforzi sono nulli. Dobbiamo imporre che il materiale sia libero nelle direzioni ξ2
e ξ3, cioe che si annullino i corrispondenti sforzi al contorno, ovvero
tk2∣∣∣∂V
= tk3∣∣∣∂V
= 0 .
Dalla formula (2.39) si ha che queste componenti sono costanti, cioe non dipendono daξ. Allora l’equazione sopra implica che si ha: tk2 ≡ tk3 ≡ 0, e l’equazione (2.39) implicainfine la relazione di proporzionalita tra l’allungamento s1 in una direzione e la contraziones nelle altre direzioni, precisamente:
s = σs1 . (2.40)
Il coefficiente
σ =3A−B
6A+B=
1
2
(1 − 3B
6A+B
)(2.41)
si chiama modulo di Poisson. Dalle equazioni (2.40) e (2.38) risulta anche la relazione diproporzionalita (detta legge di Hooke) tra la forza e l’allungamento in direzione della forza
t11 = −Y s1 .
Il coefficiente
Y = 9AB
6A+B(2.42)
viene detto modulo di Young. Nei testi classici si usa spesso scrivere i coefficenti A e B intermini di σ ed Y . Si verifica facilmente che si ha in questo caso
A =Y
3(1 − 2σ)
B =Y
1 + σ,
(2.43)
e dunque il primo coefficente di Lame vale
A− 1
3B =
Y σ
(1 − 2σ)(1 + σ).
La formula (2.41) e la positivita di A e B (che, come abbiamo visto, equivale allastabilita della configurazione di rilassamento) implicano che σ < 1
2 . Per i materiali pocorigidi (B piccolo) il valore del modulo di Poisson σ si avvicina ad 1
2.
Introducendo l’espressione (2.36) nelle equazioni di Eulero-Lagrange (2.23) otteniamole equazioni della elastostatica lineare per un materiale soggetto ad una forza esterna f :
−∂uE∂xk
+ (A+1
6B)φl lk +
1
2Bφ l
k l = 0 ,
36

o, utilizzando il linguaggio dell’analisi vettoriale (vedi paragrafo 9.3):
f + (A+1
6B) grad div Φ +
1
2B Φ = 0 , (2.44)
che sono equazioni differenziali lineari a derivate parziali di tipo ellittico per il campo delvettore spostamento. Dato il campo delle forze esterne e dato il valore φ|∂V sul contorno,esiste un’unica soluzione della (2.44), che corrisponde alla configurazione di equilibrio delmateriale per l’assegnata condizione al contorno. Questo problema prende il nome diproblema di Dirichlet statico. Se invece di controllare le posizioni si controllano gli sforzial contorno, il problema corrispondente prende il nome di problema di Neumann.
2.8 Tensore della elasticita.
Consideriamo la derivata di p ak rispetto al gradiente di deformazione:
Aa bk l :=∂p a
k
∂xlb(2.45) .
Tale oggetto geometrico prende il nome di primo tensore della elasticita. Osserviamo che,poiche p a
k e a sua volta definito come l’opposto della derivata prima della energia internarispetto al gradiente di deformazione, si ha:
Aa bk l = − ∂2U
∂xlb∂xka
,
e dunque Aa bk l gode della proprieta di essere simmetrico rispetto allo scambio simultaneodegli indici “materiali” e degli indici “fisici” tra loro:
Aa bk l = Ab al k . (2.46)
Molti autori preferiscono discutere la teoria della elasticita assegnando a priori le relazionisforzi–deformazioni senza dedurle da una densita di energia interna. In questo caso laproprieta di simmetria (2.46) non e automaticamente soddisfatta, anzi essa diventa unacondizione necessaria e sufficente per l’esistenza della energia interna; la teoria della elas-ticita per materiali che non godono della (2.46) prende il nome di iper–elasticita.
Vogliamo ora sviluppare l’espressione (2.45), utilizzando la definizione di p ak come
derivata della energia interna. In termini del tensore Nab definito in (2.31) si ha:
Aa bk l = −ρ0
√det γ
∂
∂xlb
(Nadgkmx
md
)= −ρ0
√det γ
[∂Nad
∂xlbgkmx
md +Nabgkl
].
Utilizzando la formula (2.34), che fornisce la derivata di h rispetto al gradiente di defor-mazione, si ha poi:
∂Nad
∂xlb=
∂
∂xlb
∂u
∂had=
∂2u
∂hef∂had
∂hef∂xlb
= 2∂2u
∂hbf∂hadglnx
nf ,
37

e quindi, se definiamo il secondo tensore della elasticita come:
Bbfad := 2∂2u
∂hbf∂had,
abbiamo:Aa bk l = −ρ0
√det γ
(Bbfadgkmglnx
mdxnf +Nabgkl
).
Si noti che il tensore Bbfad gode delle proprieta di simmetria:
Bbfad = Bfbad = Bfbda = Bdafb .
Il tensore Aa bk l presenta interesse nella discussione delle equazioni della elasticitalineare. Infatti, nell’approssimazione lineare tale tensore risulta costante ed esprime unarelazione di proporzionalita tra p a
k ed il gradiente di deformazione. Per rendersene conto,e sufficente utilizzare la relazione (2.36). Si ha:
Aa bk l = −ρ0∂
∂φlb
[Aφmm δak +B(
1
2φak +
1
2φ ak − 1
3φmm δak)
]=
= −ρ0
[(A− 1
3B)δakδ
bl +
1
2B(δbkδ
al + δabδkl)
],
(2.47)
e dunque:p ak = Aa bk lφ
lb .
Si noti inoltre che, in base a questa formula, l’energia interna si puo riscrivere come
U = −1
2
√det γAa bk lφ
kaφ
lb . (2.48)
In questo contesto, il tensore Aa bk l viene anche detto tensore delle costanti elastiche.
2.9 Descrizione alternativa delle deformazioni.
In questo paragrafo vogliamo discutere un’altra parametrizzazione delle deformazioniche e usata da molti autori, e mostrare che essa e completamente equivalente a quella danoi introdotta. Cominciamo con l’osservare che, se f e una arbitraria funzione analiticatale che f(H − I) e ben definito e si ha f(0) = 0, f ′(0) = 1, possiamo parametrizzare ledeformazioni definendo:
Sf :=1
2f(H − I) ;
la nostra definizione S = 12
logH si ottiene con f(z) = log(1+z). Per deformazioni piccole,cioe per H vicino all’identita, tutti gli operatori Sf coincidono in virtu dello sviluppo diTaylor:
Sf =1
2(H − I) +O
((H − I)2
),
38

e, in particolare, si puo scegliere semplicemente f(z) = z e definire
S∗ :=1
2(H − I) .
Vogliamo dunque riscrivere le formule principali della teoria della elasticita utilizzandoquesta parametrizzazione. Cominciamo con l’osservare che gli invarianti di S∗ sono funzionilineari degli invarianti di H; possiamo quindi scegliere come parametri che descrivono ladeformazione i cosiddetti invarianti fondamentali di H, definiti da
I1 =1
2(TrH − I)
I2 =1
4
[TrH2 − (TrH)2
]
I3 =1
2(det H − 1) .
E’ evidente che i “nostri” invarianti α, β, θ possono essere espressi in funzione di I1, I2, I3,e dunque anche l’energia interna puo essere espressa come una funzione uI = uI(I1, I2, I3)definita positiva e tale che uI(0, 0, 0) = 0. Questa descrizione e quindi completamenteequivalente a quella da noi esposta.
Calcoliamo ora le grandezze p ak . Avremo una formula identica alla (2.30):
p ak = −2ρ0
√det γ Madgkmx
md ,
dove ora M e espresso come:
Mad =∂u
∂I1
∂I1∂had
+∂u
∂I2
∂I2∂had
+∂u
∂I3
∂I3∂had
=
=1
2
[∂u
∂I1γad +
∂u
∂I2
(had − hccγ
ad)
+∂u
∂I3(det H)(h−1)ad
];
si ha dunque
p ak = −ρ0
√det γ
[∂u
∂I1γad +
∂u
∂I2
(had − hccγ
ad)
+∂u
∂I3(det H)(h−1)ad
]gkmx
md . (2.49)
Il tensore degli sforzi e dato da:
tab =1
ρ0
√det γ
p ak xkb = −
[∂u
∂I1γad +
∂u
∂I2
(had − hccγ
ad)
+∂u
∂I3(det H)(h−1)ad
]hdb =
= −[∂u
∂I1hab +
∂u
∂I2
(hadhdb − hcch
ab
)+∂u
∂I3(det H)δab
].
Da queste formule si vede che questa parametrizzazione, pur essendo equivalente allanostra, non e altrettanto chiara perche non permette una interpretazione fisica diretta
39

singolarmente dei termini che compaiono in t. Inoltre la nostra definizione S = 12 logH
permette in maniera immediata il passaggio dalla descrizione lagrangiana alla descrizioneeuleriana delle deformazioni, come sara chiarito nel capitolo 4. Infatti, la descrizionedelle deformazioni consiste sempre nel considerare i rapporti tra le “lunghezze fisiche”(cioe le lunghezze attuali) e le “lunghezze materiali” (cioe le lunghezze di riferimento). Ilpassaggio dalla descrizione lagrangiana alla descrizione euleriana consiste nello scambiarecio che si intende per “attuale” con cio che si intende per “riferimento”, cioe semplicementenell’invertire tali rapporti. Il logaritmo, che cambia solo il segno quando si inverte il suoargomento, e particolarmente simmetrico rispetto a tale operazione. E’ questo il motivoprincipale per la nostra scelta.
40

Capitolo 3. DESCRIZIONE LAGRANGIANA DELLA DINAMICA.
3.1 Cinematica.
Vogliamo ora, sempre nell’ambito della descrizione lagrangiana, studiare la dinamicadei materiali elastici. Introduciamo dunque la coordinata temporale ξ0 = t. Scriveremo(ξα), α = 0, 1, 2, 3, per indicare il complesso delle coordinate (ξ0, ξk), k = 1, 2, 3 sulprodotto cartesiano Z := R × Z, che chiamiamo spazio-tempo materiale.
Una configurazione spazio-temporale, o “storia del materiale” e descritta da una fun-zione:
F : Z → X ,
che ad ogni t = ξ0 fissato assegna una configurazione spaziale. In termini delle coordinate,la configurazione e descritta da tre campi, cioe da tre funzioni incognite di quattro variabiliindipendenti: xk = xk(ξα) = Fk(ξα).
La matrice jacobiana di F ha la struttura (xkα) = (xk0, xka), dove, come di consueto,
xkα = ∂αxk. L’insieme delle grandezze xkα prende anche nel caso dinamico il nome di
gradiente di deformazione. La velocita v = (vk) del materiale nel punto ξ e la derivatatemporale della posizione e sara spesso indicata con un puntino:
vk =∂xk
∂t= xk = xk0 .
3.2 Equazioni del moto.
I campi xk soddisfano ad un sistema di equazioni differenziali alle derivate parzialidel secondo ordine. Per ricavare queste equazioni procediamo in modo analogo a quelloseguito nella meccanica delle particelle puntiformi dove le equazioni del moto si ricavanodal principio variazionale di Hamilton:
δ
∫ t2
t1
L dt = 0 .
La funzioneL = T − U ,
dove T e l’energia cinetica ed U e l’energia potenziale, dipende dalla posizione e dallavelocita e prende il nome di lagrangiana. Il funzionale:
A :=
∫ t2
t1
L dt ,
che ad ogni traiettoria associa un numero, si chiama azione. Le traiettorie fisiche cor-rispondono ai punti stazionari dell’azione:
δA = 0 .
41

Per un sistema di N -particelle puntiformi la lagrangiana totale e la somma delle lagrangianedi ogni singola particella (si pensi all’energia potenziale di interazione tra due particellecome suddivisa ugualmente tra di loro). Un materiale elastico e un insieme continuo edinfinito di punti; per tale motivo e naturale sostituire la somma di N -lagrangiane conun integrale 3-dimensionale di una densita scalare che contiene i contributi di tutte leparticelle del materiale; per calcolare l’azione si deve ulteriormente integrare sul tempo(per una trattazione piu dettagliata si veda ad esempio il libro del Goldstein [3] capitolo11).
L’azione risulta dunque definita da un integrale sullo spazio-tempo materiale Z delladensita scalare (4-forma):
L := L dξ0 ∧ dξ1 ∧ dξ2 ∧ dξ3
doveL = T − U.
In questa formula, U e la densita di energia potenziale che gia conosciamo, mentre ladensita di energia cinetica T e data da
T =1
2m ρ0
√det γ ‖v‖2 ,
dove ‖v‖2 = gij(x(ξ))vivj , e la costante m e pari alla massa di una mole del materiale. Siha dunque
L = ρ0
√det γ λ . (3.1)
dove
λ =1
2m‖v‖2 − u
e la lagrangiana per una mole del materiale.Nella meccanica ordinaria la variazione dell’azione viene effettuata mantenendo fis-
sati i valori delle funzioni incognite xk agli estremi dell’intervallo [t1, t2]. Qui l’integraleunidimensionale e rimpiazzato da un integrale esteso ad un volume 4-dimensionale Ω, ela variazione deve essere effettuata mantenendo fissati i valori delle xk sul contorno ∂Ω.Tipicamente, ma non necessariamente, si puo scrivere Ω nella forma Ω = [t1, t2]× V , doveV e un volume 3-dimensionale; in tal caso e
∂Ω = (+t2 × V ) ∪ (−t1 × V ) ∪ ([t1, t2]) × ∂V .
Assegnare i dati sul contorno di Ω significa dunque dare non solo i dati iniziali (in t1) efinali (in t2) su tutto V , come nella meccanica delle particelle, ma anche dare i dati sulcontorno ∂V durante tutto l’intervallo temporale [t1, t2]. La struttura di Ω come prodottocartesiano Ω = [t1, t2] × V non e comunque necessaria e possiamo pensare ad Ω come adun generico volume 4-dimensionale nello “spazio-tempo materiale” Z. Ad ogni siffattovolume si assegna dunque l’azione
A =
∫
Ω
L dξ0 ∧ dξ1 ∧ dξ2 ∧ dξ3 .
42

Il principio variazionale δA = 0 implica le equazioni di Eulero-Lagrange, che si deter-minano con un calcolo analogo a quello del paragrafo 2.5: si ha anzitutto
δA =
∫
Ω
(∂L
∂xk− ∂α
∂L
∂xkα
)δxkd4ξ +
∫
∂Ω
∂L
∂xkα
(∂
∂ξαdξ0 ∧ dξ1 ∧ dξ2 ∧ dξ3
)δxk, (3.2)
dove, come nel paragrafo 2.5, δxk e la variazione della configurazione, in questo casospazio-temporale. Imponendo che la variazione non alteri i dati sul contorno, cioe
δxk∣∣∂Ω
= 0 ,
l’integrale sul contorno si annulla. Affinche il primo integrale sia nullo per ogni variazionearbitraria δxk si deve necessariamente avere:
∂L
∂xk− ∂α
∂L
∂xkα= 0 ; (3.3)
sono queste le equazioni di Eulero-Lagrange della dinamica di un sistema continuo. Seintroduciamo, come nel capitolo precedente, la derivata variazionale:
δAδxk
:=∂L
∂xk− ∂α
∂L
∂xkα
possiamo scrivere:δAδxk
= 0 .
Analogamente a quanto fatto nel caso statico, introduciamo l’oggetto geometrico
π αk :=
∂L
∂xkα, (3.4)
che chiameremo momento coniugato ai campi xk. Si ha
π ak =
∂L
∂xka= − ∂U
∂xka= p a
k
π 0k =
∂L
∂xk0=
∂T
∂xk0= m ρ0
√det γ vi gik =: pk ;
(3.5)
la componente spaziale π ak coincide quindi con la densita degli sforzi che gia conosciamo,
mentre la componente temporale pk = π 0k rappresenta la densita di quantita di moto.
Si vede da qui il motivo per il quale il momento coniugato e stato definito come − ∂U∂xk
a
nel capitolo precedente: nella statica, la lagrangiana coincide con l’opposto dell’energiapotenziale.
Dal punto di vista geometrico l’oggetto π αk e un covettore su X a valori nello spazio
delle densita vettoriali su Z (vedi formula (8.20)):
π = π αk
(∂
∂ξαdξ0 ∧ dξ1 ∧ dξ2 ∧ dξ3
)⊗ (dxk) .
43

Ad ogni variazione δx della configurazione esso associa la variazione δA dell’azione dovutaal corrispondente cambiamento dei dati sul contorno ∂Ω.
In termini del momento π le equazioni del moto si scrivono:
∂απα
k − ∂L
∂xk= 0 , (3.6)
o anche
pk = −∂aπ ak − ∂U
∂xk; (3.7)
come gia sappiamo (formula (2.23)), il secondo membro rappresenta il risultante delleforze (elastiche e esterne) applicate ad ogni pezzetto del materiale. Nel caso statico questaespressione deve annullarsi. Nel caso dinamico, invece, quando non e nulla, essa provocaun cambiamento della quantita di moto. Le equazioni di Eulero-Lagrange che abbiamotrovato sono quindi l’analogo delle equazioni di Newton nel caso di un sistema continuo.
3.3 Onde elastiche e relazioni di dispersione
Cerchiamo ora la forma che assumono le equazioni della dinamica nella approssi-mazione lineare. Come nei paragrafi 2.3 e 2.7 assumiamo
xk = ξk + φk(ξα) ,
ove xk = ξk e una configurazione di distensione, le metriche sono piatte γab = gab = δab,ed ora il vettore spostamento Φ dipende anche dal tempo. La densita di lagrangiana alsecondo ordine in Φ si scrive
L = ρ0
[1
2mδklφ
kφl − 1
2
(A− 1
3B
)(φkk)2 − 1
2Bφ(kl)φ
(kl) − uE
](3.8)
dove uE = uE(xk) e il potenziale delle forze esterne (per esempio gravitazionali). Lecomponenti spaziali del momento canonico π α
k sono date dalle formule (2.36), mentre lecomponenti temporali risultano
π 0k = pk = mρ0 φk .
Le equazioni del moto (3.7) ottenute dalla lagrangiana (3.8) sono allora le seguenti:
mΦ = (A+1
6B)grad div Φ +
1
2B Φ + f . (3.9)
Nel caso statico il membro a sinistra si annulla, e l’annullamento del secondo membroe la condizione di equilibrio tra tutte le forze che agiscono sul materiale (vedi paragrafo2.7). Per semplificare l’analisi delle soluzioni, in questo paragrafo assumiamo che non cisiano forze esterne e che il materiale sia infinitamente esteso, cioe che Z ≃ R3. Come e
44

noto, un’equazione differenziale a derivate parziali lineare a coefficienti costanti si prestaad essere studiata con il metodo delle trasformate di Fourier che riconduce il problemaalla soluzione di un sistema algebrico lineare (o di una equazione differenziale ordinaria nelcaso in cui non si effettui la trasformata anche rispetto al tempo).
Ad ogni istante di tempo la configurazione Φ del materiale puo essere rappresentatacon un integrale di Fourier tridimensionale:
Φ(t, ~ξ) =
∫ei(~k|~ξ)Ψ(t, ~k)d3k , (3.10)
dove
Ψ(t, ~k) =1
(2π)3
∫e−i(
~k|~ξ)Φ(t, ~ξ)d3ξ , (3.11)
e (·|·) denota il prodotto scalare euclideo. Passando al complesso coniugato di (3.10),abbiamo:
Φ∗(t, ~ξ) =
∫e−i(
~k|~ξ)Ψ∗(t, ~k)d3k =
∫ei(~k|~ξ)Ψ∗(t,−~k)d3k .
Poiche Φ e reale (Φ∗ = Φ), deve valere l’identita
Ψ∗(t,−~k) = Ψ(t, ~k) (3.12)
per ogni valore del vettore ~k. La formula (3.10) significa che ogni spostamento Φ puo essere
considerato come la sovrapposizione di onde piane ei(~k|~ξ), ognuna corrispondente al vettore
~k, detto vettore d’onda, e presa con il peso Ψ(t, ~k). La relazione (3.12) ci assicura che leparti immaginarie delle onde piane si cancellano vicendevolmente, in modo da rendere Φreale.
Introducendo l’espressione (3.10) nelle equazioni del moto (3.9) e denotando con k la
lunghezza del vettore ~k (k = ‖~k‖) otteniamo la relazione
∫ei(~k|~ξ)
[mΨ + (A+
1
6B)~k(~k|Ψ) +
1
2Bk2Ψ
]d3k = 0 ,
che deve valere per ogni ξ. Dalla formula di inversione (3.11) risulta dunque la seguenteequazione differenziale ordinaria per la funzione trasformata:
mΨ + (A+1
6B)~k(~k|Ψ) +
1
2Bk2Ψ = 0 . (3.13)
Denotiamo con ~n = ~n(~k) =~kk
il versore nella direzione del vettore d’onda e scomponiamoΨ nelle sue parti longitudinale e trasversale rispetto alla direzione ~n:
Ψ = Ψ‖ + Ψ⊥ ,
doveΨ‖ = (Ψ|~n)~n
45

e Ψ⊥ = Ψ − Ψ‖, cioe:(Ψ⊥|~n) = 0 .
L’equazione (3.13) si decompone allora in due parti:
mΨ‖ = −(A+
2
3B
)k2Ψ‖
mΨ⊥ = −1
2Bk2Ψ⊥ .
(3.14)
In ognuna di queste equazioni si riconosce immediatamente la struttura della equazionedell’oscillatore armonico. Vediamo dunque che le equazioni differenziali a derivate parziali(3.9) sono equivalenti ad un sistema di infiniti oscillatori armonici disaccoppiati, tre per
ogni vettore d’onda ~k (uno per la parte longitudinale e due per la parte trasversale,queste due corrispondendo alle due possibili polarizzazioni delle onde trasversali). Queste
equazioni ammettono un’unica soluzione per ogni scelta dei dati iniziali Ψ(t0, ~k), Ψ(t0, ~k).Abbiamo cosı provato che le equazioni (3.9) ammettono un’unica soluzione per ogni scelta
dei dati di Cauchy Φ(t0, ~ξ), Φ(t0, ~ξ). La soluzione delle (3.14) e data da
Ψ‖(t, ~k) =[b1(~k)eiω‖t + b2(~k)e−iω‖t
]~n
Ψ⊥(t, ~k) = ~a1(~k)eiω⊥t + ~a2(~k)e−iω⊥t(3.15)
con (~k|~a1) = (~k|~a2) = 0. La formula (3.14) implica che la frequenza per le onde longitudi-nali e data da
ω‖ = k
√(A+ 2
3B)
m, (3.16)
e quella per le onde trasversali e data da
ω⊥ = k
√B
2m. (3.17)
In generale, una relazione tra frequenza e vettore d’onda prende il nome di relazione didispersione.
Introduciamo ora le velocita delle onde elastiche
c‖ :=ω‖k
=
√3A+ 2B
3m
c⊥ :=ω⊥k
=
√B
2m.
(3.18)
Dalle equazioni (3.15) e (3.10) si vede allora che ogni soluzione delle equazioni della di-namica (3.9) si puo rappresentare come una sovrapposizione di onde piane:
Ψeik[(~n|~ξ)±ct] ,
46

dove c = c‖ per Ψ parallelo a ~k e c = c⊥ per Ψ ortogonale a ~k. Vediamo dunque chec‖ e c⊥ sono rispettivamente le velocita di propagazione delle onde piane longitudinali etrasversali. Tali velocita sono diverse e la (3.18) implica che si ha sempre
2√3c⊥ < c‖ ,
cioe le onde longitudinali si muovono sempre con velocita superiore a quella delle ondetrasversali.
Ricordando le (2.43), le velocita dei due tipi di onde si possono riscrivere in terminidel modulo di Poisson σ e del modulo di Young Y nella forma
c‖ =
√Y (1 − σ)
m(1 − 2σ)(1 + σ)
c⊥ =
√Y
2m(1 + σ).
Osserviamo che la formula (3.10) implica:
rot Φ = i
∫ei(~k|~ξ)(~k × Ψ)d3k
div Φ = i
∫ei(~k|~ξ)(~k|Ψ)d3k
(dove × e il prodotto vettoriale). Da queste formule si vede che le soluzioni puramentelongitudinali (cioe ottenute come sovrapposizione di sole onde longitudinali) hanno rotorenullo e invece le soluzioni puramente trasversali hanno divergenza nulla. Dall’analisi diFourier risulta dunque che ogni campo vettoriale su R3 puo essere decomposto in unaparte longitudinale Φ‖ ed una parte trasversale Φ⊥, che soddisfano rispettivamente a
rot Φ‖ = 0 ,
div Φ⊥ = 0 .
Si noti che non abbiamo specificato la classe di funzioni a cui la configurazione deveappartenere affinche la discussione che abbiamo effettuato sia corretta dal punto di vistadell’analisi funzionale, cioe il dominio dell’operatore differenziale:
A := (A+1
6B)grad div +
B
2 (3.19)
nello spazio di Hilbert L2(R3) ⊗ R3. Si tratta di un problema importante ma piuttostocomplicato che ci porterebbe al di la degli scopi di questa esposizione.
47

3.4 Problemi al contorno in elasticita lineare
Nel capitolo precedente abbiamo mostrato che per un corpo infinitamente esteso leequazioni della elasticita lineare si risolvono in termini di onde piane, e i dati iniziali de-terminano univocamente la dinamica, cioe e risolto univocamente il problema di Cauchy.Nel caso di materiale finito, la situazione non e cosı semplice, poiche sorgono fenomeni diriflessione delle onde da parte del contorno del materiale. D’altra parte e chiaro che ladinamica non e determinata finche non si conoscono le condizioni al contorno che devonoessere soddisfatte dal corpo. In particolare possiamo fissare la posizione del contorno (con-dizioni di Dirichlet) oppure i valori degli sforzi con i quali agiamo sul bordo del materiale(problema di Neumann generalizzato). Si possono considerare anche problemi misti, dovela posizione di una parte del contorno e fissata e gli sforzi sono fissati sulla parte rimanente.
Nella teoria lineare ognuno di questi problemi porta ad un problema di oscillatoriarmonici disaccopiati per i modi principali di oscillazione, ma questi modi principali e lerispettive frequenze sono completamente diversi per i diversi problemi al contorno. Questofenomeno e ben noto ai costruttori di strumenti musicali: le oscillazioni di una laminaquando si tengono le due estremita fissate (controllo delle posizioni agli estremi) sonodiverse da quelle della stessa lamina quando si tenga una sola estremita fissata e si lasciandare l’altra (controllo delle posizioni di un estremo e degli sforzi sull’altro).
Per discutere brevemente il problema di determinare le soluzioni di un problema diDirichlet o di Neumann generalizzato per un corpo di volume qualunque V , cominciamocon l’introdurre l’operatore differenziale del secondo ordine
A = (A+1
6B)grad div +
B
2 ,
che agisce sullo spazio delle funzioni vettoriali Φ definite e sufficientemente derivabili su V .Si osservi che l’operatore cosı definito non coincide con quello introdotto nel precedenteparagrafo, che era definito sullo spazio delle funzioni definite su tutto R3. Le equazionidel moto si scrivono allora nella forma
mΦN = AΦN . (3.20)
Abbiamo utilizzato il suffisso N per sottolineare che ΦN soddisfa le condizioni in generalenon omogenee (cioe non uguali a zero) sul contorno. Il problema associato a dati alcontorno identicamente nulli si chiama problema dinamico omogeneo. Vogliamo provareche un problema dinamico non omogeneo si riduce ad un problema non omogeneo staticocorrispondente e al problema dinamico omogeneo. Infatti, decomponiamo la soluzione ΦNdi un problema non omogeneo nella forma:
ΦN (t) = ΦS(t) + Φ(t) ,
dove ΦS(t) e la soluzione del problema statico (cioe AΦS(t) = 0), corrispondente ai datinon omogenei sul contorno all’istante t, e invece Φ(t) soddisfa le condizioni omogenee.Sostituendo nell’equazione (3.20) segue
mΦ(t) = AΦ(t) −mΦS(t) . (3.21)
48

Se sappiamo risolvere il problema statico non omogeneo, cioe se sappiamo associare adogni scelta dei dati sul contorno la corrispondente configurazione di equilibrio, conosciamoΦS(t). Allora anche ΦS(t) e noto (in particolare, se i dati al contorno sono indipendenti daltempo, risulta che ΦS stessa non dipende dal tempo e l’equazione (3.21) diventa omogenea).Nel caso generale, l’ultimo termine a destra e noto e gioca il ruolo della forza esterna.
Per analizzare le soluzioni di (3.21) definiamo ora tre operatori del primo ordine ta
tramite la relazione(taΦ)k := tak(Φ) ,
dove tak(Φ) e lo sforzo corrispondente al vettore spostamento Φ, dato dall’espressione(2.36). Evidentemente
AΦ = −∂a(taΦ) .
Nello spazio ambiente dell’operatore A (ovvero in L2(R3) ⊗ R3) e definito il prodottoscalare ⟨
Φ|Ψ⟩
=
∫
V
(Φ|Ψ)d3ξ ,
dove ( | ) e l’ordinario prodotto scalare di R3 (ricordiamo che le soluzioni che cerchiamosono reali). Come vedremo piu avanti, vale la seguente identita
⟨Ψ|AΦ
⟩=⟨AΨ|Φ
⟩−∫
∂V
(Ψ|t⊥Φ)dσ +
∫
∂V
(t⊥Ψ|Φ)dσ . (3.22)
Se ci si restringe a considerare o lo spazio D che comprende le sole funzioni che si annullanosu ∂V , cioe
Ψ∣∣∂V
= Φ∣∣∂V
= 0 ,
oppure lo spazio N che comprende solo le funzioni per le quali lo sforzo si annulla su ∂V ,cioe
t⊥Ψ∣∣∂V
= t⊥Φ∣∣∂V
= 0 ,
i due integrali al contorno si annullano e l’operatore A risulta simmetrico:⟨
Ψ|AΦ⟩
=⟨AΨ|Φ
⟩.
Lo stesso argomento e valido anche per lo spazio funzionale relativo al problema misto,in cui cioe su una parte di ∂V si controlla lo sforzo e sul resto si controlla la posizione.Se V e sufficientemente regolare, si puo provare che A e essenzialmente autoaggiunto eidentificarlo con la sua estensione autoaggiunta. Esiste dunque un sistema completo diautofunzioni di A sia in D che in N .
Per dimostrare la formula (3.22) osserviamo che, come si verifica facilmente, si ha
(taΦ)k = ∂bAakblφl = −Aakbl∂bφl ,
dove Aakbl e il primo tensore della elasticita, che (vedi formula (2.47)) e costante nellaapprossimazione lineare. Ricordando che, posto
Aakbl = δkmAa bm l ,
49

si ha
Aa bk l = −ρ0
[(A− 1
3B
)δakδ
bl +
1
2B(δbkδ
al + δabδkl
)],
si vede che A e un operatore differenziale associato ad A nel modo seguente:
(AΦ)k = ∂a∂bAakblφl ,
ovvero
(Ψ|AΦ) = ψkAa bk l∂a∂bφl .
Integrando per parti, si ha
⟨Ψ|AΦ
⟩=
∫
V
ψkAa bk l∂a∂bφld3ξ =
= −∫
V
(∂aψk)Aa bk l∂bφ
ld3ξ +
∫
∂V
ψkA⊥ bk l∂bφ
ldσ =
= −∫
V
(∂aψk)Aa bk l∂bφ
ld3ξ −∫
∂V
(Ψ|t⊥Φ)dσ .
(3.23)
La simmetria di Aa bk l rispetto allo scambio simultaneo di (a, k) con (b, l) implica:
⟨Ψ|AΦ
⟩= −
∫
V
(∂aψk)Ab al k∂bφ
ld3ξ −∫
∂V
(Ψ|t⊥Φ)dσ =
=
∫
V
(∂b∂aψk)Ab al kφ
ld3ξ −∫
∂V
(∂aψk)A⊥a
lkφldσ −
∫
∂V
(Ψ|t⊥Φ)dσ =
=⟨AΨ|Φ
⟩= +
∫
∂V
(t⊥Ψ|Φ)dσ −∫
∂V
(Ψ|t⊥Φ)dσ .
La formula (3.23) implica che l’operatore A e definito negativo. Infatti si ha
(∂aφk)Aa bk l(∂bφ
l) =
(A− 1
3B
)(φkk)2 +
1
2B[(∂aφ
k)∂kφa + (∂aφ
k)∂aφk]
=
=
(A− 1
3B
)(φkk)2 +Bφ(ak)φ
(ak) = A(TrS)2 +BTr S2 ≥ 0 ,
dove, si ricordi, S e la parte a traccia nulla del tensore di deformazione sak = φ(ak). Il fatto
che A sia definito negativo implica a sua volta che i suoi autovalori sono tutti negativi.Siano ora un, n = 1, 2, ... le autofunzioni di A e (−λn) i rispettivi autovalori (quindi
λn ≥ 0). Poiche un e un sistema completo, possiamo sviluppare Φ come:
Φ =∑
n
an(t)un ,
50

e quindi l’equazione (3.21) diviene
m∑
n
an(t)un = −∑
n
an(t)λnun −m∑
n
fn(t)un ,
dove fn(t) sono i coefficienti dello sviluppo di ΦS. Ne segue
an(t) = −λnman(t) − fn(t) .
Cosı si ritrova Φ come sovrapposizione di oscillatori armonici forzati indipendenti, confrequenze
ωn =
√λnm
.
(se i dati al contorno non dipendono dal tempo le forze fn(t) si annullano). In defini-tiva se conosciamo la risoluzione spettrale dell’operatore A siamo in grado di risolverecompletamente il sistema dinamico omogeneo e dunque anche quello non omogeneo. Sot-tolineiamo pero che, in generale, il problema di trovare la forma esplicita delle autofunzionidell’operatore A per assegnate condizioni al contorno e decisamente complesso.
3.5 Forma hamiltoniana delle equazioni dinamiche.
Nel paragrafo 3.2 abbiamo visto come, assegnata la lagrangiana L, si ottenganole equazioni di Eulero-Lagrange. Abbiamo poi introdotto i momenti π α
k e riscritto leequazioni del moto nella forma
π αk =
∂L
∂xkα
ϕk := ∂απα
k =∂L
∂xk,
(3.24)
dove adesso identifichiamo ϕk con la divergenza degli sforzi. Consideriamo ora questacoppia di equazioni come un sistema del primo ordine avente per incognite le variabiliπ e x, a priori indipendenti. Osserviamo che, se si inseriscono le equazioni (3.24) nellavariazione della lagrangiana:
δL =∂L
∂xkδxk +
∂L
∂xkαδxkα , (3.25)
si ottiene una relazione equivalente alle (3.24):
δL = ϕkδxk + π α
k δxkα . (3.26)
In tale formula, la variazione della lagrangiana e espressa mediante la variazione dellevariabili xk e xkα, che quindi giocano il ruolo di variabili indipendenti. Le quantita
51
xk, π αk , xkα, ϕk sono legate dalle equazioni del moto (3.24), di modo che, dei 4 gruppi
di variabili considerate, solo due sono indipendenti. La formula (3.26) puo essere consid-erata come una relazione tra i parametri di controllo xk e xkα (posizione, deformazione,orientazione spaziale di un piccolo pezzo di materiale e anche la sua velocita) e i parametridi risposta del materiale ϕk, π
αk (forze, sforzi e anche quantita di moto). Nella teoria
del controllo una tale relazione si chiama relazione controllo–risposta e la funzione L, chedefinisce completamente questa relazione, si chiama funzione generatrice (vedi capitolo10).
La formula (3.26) e analoga alla relazione
dL(x, p) = pkdxk + pkdx
k , (3.27)
della meccanica dei punti, che e a sua volta equivalente alle equazioni di Lagrange:
∂L
∂xk= pk
∂L
∂xk= pk .
Anche queste relazioni possono essere interpretate come relazioni controllo–risposta (vediancora il paragrafo 10.2). Nello spazio 4 × 3=12 dimensionale parametrizzato dalle gran-dezze (xk, xk, pk, pk) abbiamo scelto come parametri di controllo la posizione e le velocita;i momenti e le forze (fk = pk) sono i parametri di risposta; la funzione lagrangiana e lafunzione generatrice di questa relazione.
Il controllo mediante le posizioni e le velocita non e l’unico possibile. In particolare, sesi scelgono come parametri di controllo le posizioni ed i momenti pk, si ottiene la descrizionehamiltoniana della dinamica. A tale scopo riscriviamo la formula (3.27) come:
dL = pkdxk + d(pkx
k) − xkdpk .
Introducendo la funzione hamiltoniana
H := pkxk − L ,
ed esprimendo le xk in funzione dei momenti pk (e, se e necessario, anche delle coordinatexk), abbiamo dunque
−dH(x, p) = pkdxk − xkdpk , (3.28)
che e ovviamente equivalente alle equazioni di Hamilton:
− ∂H
∂xk= pk
∂H
∂pk= xk .
(3.29)
Anche queste relazioni possono essere interpretate come relazioni controllo–risposta (vediparagrafo 10.2). Nello spazio 4 × 3=12 dimensionale parametrizzato da (xk, xk, pk, pk)
52

come parametri di controllo abbiamo scelto la posizione e i momenti; le velocita le forze(fk = pk) sono i parametri di risposta.
La descrizione hamiltoniana e possibile anche nella teoria dei campi. Per passare alladescrizione hamiltoniana nel caso della elasticita cominciamo con l’osservare che da (3.26)si ha:
δL = ϕkδxk + π 0
k δxk0 + π ak δxka =
= ϕkδxk + δ(π 0
k xk0) − xk0δπ0
k + π ak δxka .
Tenendo conto della relazione:
ϕk = ∂απα
k = pk + ∂aπa
k ,
abbiamo:δ(L− pkx
k) = (pk + ∂aπa
k )δxk − xkδpk + π ak δ(∂ax
k ) =
= pkδxk − xkδpk + ∂a(π a
k δxk) .(3.30)
Definiamo ora la densita di hamiltoniana:
H = pkxk − L = ρ0
√det γ
(1
2m‖v‖2 + u
)= ρ0
√det γ e , (3.31)
dove con e abbiamo indicato la somma dell’energia cinetica e dell’energia potenziale:
e =1
2m‖v‖2 + u .
La densita H misura la quantita di energia per unita di volume dello spazio materiale,mentre lo scalare e misura la quantita di energia per mole; nella formula (3.31) e sottintesoche H deve essere calcolata in funzione delle posizioni xk, delle derivate spaziali xka e dellequantita di moto pk. Cio significa che, poiche u non dipende da pk, bisogna semplicementesostituire alle derivate temporali la loro espressione in termini delle quantita di moto:
‖v‖ =1
m ρ0
√det γ
‖p‖ ;
di conseguenza, l’equazione (3.30) implica che la variazione della densita di hamiltonianae data da:
−δH(xk, xka, pk) = pkδxk − xkδpk + ∂a(π a
k δxk) =
= (pk + ∂aπa
k )δxk + π ak δxka − xkδpk ,
(3.32)
ovviamente equivalente alle tre seguenti equazioni:
pk + ∂aπa
k = − ∂H
∂xk,
π ak = − ∂H
∂xka,
xk =∂H
∂pk.
53

Le prime due equazioni si scrivono spesso come un’unica equazione in termini della derivatavariazionale δH
δxk , precisamente:
−pk =δH
δxk:=
∂H
∂xk− ∂
∂xk∂H
∂xka.
Anche la terza equazione puo essere riscritta tramite la derivata variazionale perche l’hamil-toniana non dipende dalle derivate di pk e si ha allora:
xk =δH
δpk=∂H
∂pk.
Consideriamo ora l’integrale di H esteso su un volume 3-dimensionale V :
EV :=
∫
V
Hd3ξ .
Si tratta di un funzionale definito sullo spazio delle 6 funzioni (xk(ξ), pk(ξ)) che dipendonoda tre variabili e sono definite su V . Da questo punto di vista la dipendenza dal tempoe di tipo parametrico. Calcoliamo la variazione (per un fissato valore del tempo) δEV diquesto funzionale. La formula (3.32) implica:
−δEV = −∫
V
δHd3ξ =
∫
V
(pkδxk − xkδpk)d3ξ +
∫
∂V
π ⊥k δxk , (3.33)
ove π ⊥k e la parte di π trasversale a ∂V . Limitiamoci ora allo spazio D dei dati iniziali
che soddisfano condizioni al contorno del tipo di Dirichlet; in questo caso i valori xk sulcontorno sono fissati, e quindi
δxk∣∣∣∂V
= 0 ,
e dunque
−δEV =
∫
V
(pkδxk − xkδpk)d3ξ , (3.34)
che e l’analoga della formula (3.28). Nel caso della teoria dell’elasticita lo spazio 6–dimensionale dei parametri di controllo si ripete in ogni punto ξ ∈ V indipendentemente.Abbiamo dunque un sistema ad infiniti gradi di liberta, ma la struttura delle relazionicontrollo–risposta rimane la stessa.
D’altra parte, la variazione dell’energia puo essere calcolata come nel paragrafo 2.5:
δEV =
∫
V
(∂H
∂xkδxk +
∂H
∂xkaδxka +
∂H
∂pkδpk
)d3ξ =
=
∫
V
(δH
δxkδxk +
δH
δpkδpk
)d3ξ −
∫
∂V
π ⊥k δxk .
(3.35)
54

Grazie alle condizioni al contorno, l’ultimo integrale si annulla. Vediamo quindi che lederivate funzionali dell’energia possono essere rappresentate dalle derivate variazionali dellasua densita:
δEVδxk(ξ)
=δH
δxk(ξ)
δEVδpk(ξ)
=δH
δpk(ξ) .
Le formule (3.34) e (3.35) implicano che le derivate temporali delle variabili canonichesono date dalle derivate variazionali di EV nel modo seguente:
pk(ξ) = − δEVδxk(ξ)
xk(ξ) =δEVδpk(ξ)
.
(3.36)
La formula (3.36) rappresenta le equazioni di Hamilton dell’elasticita. Si osservi che nelcaso statico le derivate temporali si annullano, l’energia si riduce alla sola energia poten-ziale che non dipende dai momenti cinetici, e dunque la seconda equazione e soddisfattaidenticamente mentre la prima si riduce all’equazione statica δU
δxk = 0.Se invece di controllare le posizioni al contorno controlliamo gli sforzi, le equazioni
dinamiche si possono scrivere ancora nella forma di Hamilton con una densita hamiltonianadifferente. Per determinarla, torniamo alla formula (3.33) e prendiamo in considerazioneil termine di bordo. Si ha:
∫
∂V
π ⊥k δxk =
∫
∂V
δ(π ⊥k xk) −
∫
∂V
xkδπ ⊥k =
= δ
∫
V
∂a(π ak xk)d3ξ −
∫
∂V
xkδπ ⊥k ,
da cui, risostituendo in (3.33):
−δ∫
V
(H + ∂a(π ak xk))d3ξ =
∫
V
(pkδxk − xkδpk)d3ξ −
∫
∂V
xkδπ ⊥k .
Se invece, a differenza di quanto fatto finora, consideriamo lo spazio N dei dati inizialisoddisfacenti alla condizione di Neumann generalizzata su ∂V , i valori di π ⊥
k sono fissatisul bordo del materiale e quindi si ha
δπ ⊥k
∣∣∣∂V
= 0,
cioe
−δEV =
∫
V
(pkδxk − xkδpk)d3ξ , (3.37)
dove
EV :=
∫
V
Hd3ξ ,
55

e la nuova densita di hamiltoniana e definita da:
H := H + ∂a(π ak xk) . (3.38)
Nello spazio N la dinamica e dunque descritta dalla funzione generatrice EV , e le equazionidi Hamilton si scrivono:
pk = −δEVδxk
xk =δEVδpk
.
(3.39)
Anche in questo caso, nella situazione statica la seconda equazione e identicamente soddis-fatta. Allora, invece di minimizzare EV dobbiamo minimizzare la “nuova” energia EV . Ciomette bene in luce l’importanza della scelta delle condizioni al contorno che definiscono lospazio funzionale in cui si svolge la dinamica. Dal punto di vista fisico l’esistenza di diversehamiltoniane e dovuta al fatto che l’evoluzione del sistema e influenzata dall’esterno delmateriale. Assegnare i dati al contorno vuol dire fissare le modalita di interazione del ma-teriale col mondo esterno. Cio e analogo a quanto avviene in termodinamica: l’evoluzionedi un sistema isolato adiabaticamente dall’esterno e determinata dalla sua energia in-terna. Se lo stesso sistema viene invece immerso in un bagno termico, la sua evoluzionee completamente diversa ed e determinata dall’energia libera (vedi paragrafo 10.1). Ledue hamiltoniane H ed H sono dunque analoghe all’energia e all’energia libera. Deciderequale e la “vera” energia corrisponde a decidere quale tipo di dati al contorno descrivel’isolamento adiabatico del sistema dal mondo esterno. E’ interessante osservare che indiverse teorie di campo un criterio valido che permette di effettuare tale scelta e il criteriodi positivita dell’energia. Come abbiamo visto nella formula (3.31), la densita H e semprepositiva. Invece si possono scegliere valori al contorno per π ⊥
k in modo che H risultinegativa. Dunque, in base a questo criterio, e il controllo delle posizioni al contorno checorrisponde all’isolamento adiabatico del sistema. Allora EV e la vera energia, mentre EVpuo essere chiamata energia libera.
3.6 Formulazione hamiltoniana della elasticita lineare.
La teoria della elasticita lineare descritta nei paragrafi 3.3 e 3.4 si puo facilmenteesprimere nella forma hamiltoniana, seguendo le linee generali che sono state esposte nelparagrafo precedente. Tenendo presente che i momenti cinetici sono dati da:
pk = mρ0 gklφl ,
abbiamo immediatamente la densita di hamiltoniana nella forma:
H =1
2mρ0gklpkpl + ρ0(uI + uE) .
56

La variazione della densita hamiltoniana e data da:
−δH = pkδφk − φkδpk + ∂a(π a
k δφk) ,
dove π ak e dato dalla espressione (2.36). Quindi, se scegliamo le condizioni al contorno
del tipo di Dirichlet (δφk = 0 su ∂V ), abbiamo le equazioni di Hamilton:
φk =∂H
∂pk
pk = − ∂H
∂φk− ∂a
∂H
∂φka= −∂uE
∂φk− ∂a
∂uI∂φka
.
(3.40)
La prima di queste equazioni e semplicemente un modo di riscrivere la definizione dei mo-menti cinetici; la seconda, se risostituiamo p in funzione di φ, da le equazioni gia discussenel paragrafo 3.3. Naturalmente, da questo punto di vista la descrizione hamiltoniananon da alcuna informazione ulteriore. Esattamente come nella meccanica dei punti, oltreche avere una fondamentale importanza teorica, la descrizione hamiltoniana e importanteperche il sistema (3.40) e un sistema di equazioni differenziali del primo ordine in formanormale e quindi, tra l’altro, si presta piu facilmente alla analisi numerica tramite calco-latori. Si noti che questa hamiltoniana, oltre a corrispondere alle condizioni al contornodel tipo di Dirichlet, corrisponde anche alla situazione in cui il materiale e indefinitamenteesteso. In questo caso l’annullarsi dei campi sul contorno corrisponde alla condizione cheφk(ξ) si annulli all’infinito. Questa condizione, a parte i noti “casi patologici” che qui nonci interessano, corrisponde sostanzialmente ad ammettere l’esistenza della trasformata diFourier dei campi e quindi a poter effettuare l’analisi che abbiamo discusso nel paragrafo3.3.
Come abbiamo visto nel precedente paragrafo, nel caso di condizioni del tipo di Neu-mann la descrizione hamiltoniana si ottiene utilizzando la densita :
H = H + ∂m(π mk xk) ;
anche in questo caso si puo facilmente determinare l’espressione esplicita della hamiltoniananella approssimazione lineare. Infatti in questo caso si deve calcolare l’espressione
H = H + ∂m(π mk φk) .
Per effettuare questo calcolo e conveniente riscrivere la densita lagrangiana (3.8) in terminidel tensore della elasticita. Abbiamo, utilizzando la formula (2.48)
L =1
2
(ρ0mδklφ
kφl + Aa bk lφkaφ
lb
),
e dunque
H =1
2mρ0gklpkpl +
1
2Aa bk lφ
kaφ
lb + Aa bk lφ
kφlba .
57

3.7 Tensore energia-momento e teorema di Nother.
Ad ogni configurazione spazio-temporale F : Z → X associamo un oggetto geometricochiamato, per motivi che saranno chiari in seguito, densita tensoriale di energia–momentoo tensore di Piola–Kirchhoff. Si tratta di una densita tensoriale T che ad ogni vettorew ∈ Z associa la densita vettoriale T w (vedi paragrafo 8.10), definita da:
T w = π(F∗w) − w L . (3.41)
Ricordiamo che il momento π associa ad ogni “variazione di posizione”, cioe ad ogni vettoretangente allo spazio fisico, una 3-forma e che, in termini delle coordinate, si ha (F∗w)k =xkβw
β . Quindi:
T w = (T w)α(∂
∂ξαdξ0 ∧ dξ1 ∧ dξ2 ∧ dξ3
)=
=(π αk xkβ − δαβL
)wβ(∂
∂ξαdξ0 ∧ dξ1 ∧ dξ2 ∧ dξ3
) ,
cioe(T w)α = T α
βwβ ,
doveT αβ = π α
k xkβ − δαβL . (3.42)
Dunque, a differenza di π, la densita tensoriale T non e un oggetto misto ma “vive”interamente nello spazio–tempo materiale. Dalla (3.42) segue:
∂αT αβ = (∂απ
αk )xkβ + π α
k xkβα − ∂βL ,
dove xkαβ := ∂β∂αxk. Per ora ∂αT α
β non ha significato geometrico, poiche dipende dallecoordinate. Infatti, in generale, le derivate parziali di un tensore non costituiscono a lorovolta un tensore. Per ovviare a questo “incoveniente” si introduce il concetto di derivatacovariante di un tensore, che utilizzeremo tra breve.
La densita lagrangiana L dipende da ξα tramite i valori xk(ξ), xkβ(ξ), le componentidella metrica γab(ξ), ed eventualmente anche in maniera diretta (se il materiale non eomogeneo, ne dipendono le sue proprieta elastiche). Allora si ha
∂βL =∂L
∂xkxkβ +
∂L
∂xkαxkαβ +
∂L
∂γab
∂γab∂ξβ
+ Lβ ,
dove con Lβ abbiamo indicato la derivata parziale esplicita di L rispetto a ξβ, cioe laderivata calcolata tenendo fissati i valori delle variabili xk, xkβ e γab. Quindi si ha
∂αT αβ =
(∂απ
αk − ∂L
∂xk
)xkβ +
(π αk − ∂L
∂xkα
)xkαβ −
∂L
∂γab
∂γab∂ξβ
− Lβ , (3.43)
58

dove abbiamo utilizzato la simmetria della derivata seconda xkαβ = xkβα. Il secondotermine e identicamente nullo in virtu della definizione dei momenti coniugati.
Per semplificare questa espressione e utile introdurre nello spazio–tempo materiale Zuna struttura pseudo–riemanniana con metrica definita da:
(γαβ) =
−1 0 0 000 (γab)0
.
Una struttura analoga verra utilizzata nella descrizione relativistica (vedi formula (5.11)).A tale metrica e associata la derivata covariante ∇α (vedi paragrafo 9.6) che, a causadella particolare struttura di γαβ, ha nulli tutti i simboli di Christoffel in cui compareun indice temporale. Questo significa che, rispetto alla metrica γαβ, abbiamo ∇0 = ∂0 eche l’operatore ∇a coincide con l’operatore di derivazione covariante associato alla metricatridimensionale. In altri termini, l’introduzione della metrica 4–dimensionale e, in questocontesto, soltanto un artificio tecnico per indicare l’insieme degli operatori differenziali(∂0,∇a) come (∇α), (α = 0, 1, 2, 3).
Ora, per ogni punto ξ ∈ Z dove calcoliamo l’espressione (3.43), utilizziamo un sistemadi coordinate inerziale per la metrica γ, cioe tale che le derivate delle componenti dellametrica si annullino:
∂γab∂ξβ
= 0 ,
(vedi paragrafo 9.6). Rispetto a questi sistemi le derivate parziali divengono derivatecovarianti e finalmente abbiamo:
∇αT αβ + Lβ =
(∂απ
αk − ∂L
∂xk
)xkβ . (3.44)
(Nel paragrafo successivo daremo una dimostrazione alternativa di questa formula che nonfa uso dei sistemi di coordinate speciali).
Se la configurazione spazio temporale soddisfa alle equazioni di Eulero–Lagrange, ilmembro di destra della (3.44) si annulla e abbiamo
∇αT αβ + Lβ = 0 . (3.45)
In particolare, se il materiale e omogeneo:
∇αT αβ = 0 ;
cioe le equazioni del moto implicano che la divergenza di T αβ si annulla.
L’identita (3.44) che, tramite le equazioni del moto (3.6), implica le (3.45), e conosciutacome teorema di Nother. Mostriamo che nel nostro caso e vera anche l’affermazione inversa,cioe se valgono le (3.45) allora sono soddisfatte le equazioni del moto. Infatti, moltiplicandole tre equazioni “spaziali” di (3.45) per la matrice inversa ξbl otteniamo:
(∇αT αb + Lb) ξ
bl =
(∂απ
αl − ∂L
∂xl
).
59

Quindi se sono soddisfatte le equazioni spaziali della (3.45) sono soddisfatte anche leequazioni del moto. Mostriamo ora che l’equazione temporale e conseguenza di quellespaziali. Moltiplicando questa equazione per vl = xl0 otteniamo, in virtu dell’equazione“temporale” (cioe quella corrispondente a β = 0) di (3.44):
(∇αT αb + Lb) ξ
blvl − (∇αT α
0 + L0) = 0 . (3.46)
Questa identita e soddisfatta sempre, anche per configurazioni che non soddisfano leequazioni del moto. Quindi tra le equazioni (3.45) solo tre sono indipendenti.
La formula (3.42) implica che
T 0b = π 0
k xkb = pkxkb =: pb
e la densita di quantita di moto vista nello spazio materiale. Inoltre si ha
T ab = π a
k xkb − δabL = ρ0
√det γ tacξ
ckx
kb − δabL =
= ρ0
√det γ tab − δabL = ρ0
√det γ (tab − δabλ) .
(3.47)
La parte spazio–spazio T ab del tensore energia–momento e dunque simmetrica. Le equazioni
del moto si possono quindi scrivere nella forma equivalente:
p = ρ0
√det γ ∇a(tab − δabλ) .
Dalla formula (3.42) segue anche:
T 00 = π 0
k xk0 − L = pkxk − L = H
e la densita di energia. Inoltre, essendo:
T a0 = π a
k xk0 = π ak vk ,
l’equazione “temporale” di (3.45) esprime la legge di conservazione dell’energia:
H + L0 = −∇a(π ak vk) = −∂a(π a
k vk) ; (3.48)
si noti che l’espressione in parentesi e una densita vettoriale, e dunque la sua divergenzacovariante coincide con quella ordinaria. Questa densita vettoriale e la densita di lavoro(per unita di tempo) compiuto dagli sforzi quando si cambia la configurazione. Pertanto,se vk
∣∣∂V
= 0, cioe se la posizione del contorno non si muove nel tempo, e se la lagrangiananon dipende esplicitamente dal tempo (cioe L0 = 0), ne segue:
dEVdt
=
∫
V
Hd3ξ = −∫
∂V
π ⊥k vk = 0 .
Questa condizione ovviamente non e soddisfatta quando sul contorno controlliamo glisforzi e non le posizioni. Infatti, in tal caso, come abbiamo visto, l’evoluzione temporale e
60

governata dall’hamiltoniana H che differisce da H per il termine ∂a(π ak xk). Un semplice
calcolo mostra che anche in questo caso il valore dell’hamiltoniana rimane costante neltempo se i dati sul contorno non variano. Infatti, nel caso L0 = 0, l’equazione (3.48)implica:
dH
dt= H +
d
dt∂a(π a
k xk) = ∂a(π ak xk) ,
cioe :dEVdt
= −∫
∂V
π ⊥k xk ,
da cui, se gli sforzi π ⊥k sono costanti sul contorno, si ha dEV
dt= 0.
Il teorema di Nother, che qui abbiamo dimostrato nel caso particolare della elasticita,e di fondamentale importanza in tutta la teoria dei campi. Nella sua forma piu generale,esso afferma che ad ogni simmetria della densita lagrangiana corrisponde una quantitaconservata. Per simmetria si intende invarianza rispetto ad un gruppo di trasformazioni,e per grandezza conservata si intende una densita vettoriale la cui divergenza si annulla sesono soddisfatte le equazioni del moto. Nel nostro caso la densita lagrangiana non dipendeesplicitamente dal tempo (cioe si ha L0 = 0), e dunque la teoria e invariante rispetto algruppo delle traslazioni temporali. Se il materiale e omogeneo (cioe con La = 0) una similelegge di conservazione esiste per ogni campo vettoriale w puramente “spaziale” (cioe conw0 = 0), indipendente dal tempo, che sia un campo di simmetria per la metrica γ, cioesoddisfi l’equazione di Killing (9.53) (vedi paragrafo 9.10):
∇(awb) = 0 .
Infatti, associamo a w una densita vettoriale su Z:
eα := (T w)α = wβT αβ = wβT αβ .
La divergenza di e e data da:
∂αeα = ∇αe
α = T αβ∇αwβ + wβ∇αT αβ .
Se sono soddisfatte le equazioni del moto, l’ultimo termine e nullo in virtu del teoremadi Nother. Inoltre nel nostro caso l’espressione ∇αwβ e nulla se uno o entrambi gli indiciassumono il valore zero. Allora si ha
∂αeα = T ab∇awb = T ab∇(awb) = 0 ,
poiche la parte spazio–spazio di T e simmetrica. Quindi la densita eα(w) si conserva se esolo se w e un campo di Killing per la metrica.
In generale, una metrica non ammette simmetrie. Nel caso di metrica γ piatta leuniche simmetrie sono le traslazioni e le rotazioni; le quantita fisiche conservate in virtudel teorema di Nother sono allora rispettivamente il momento cinetico ed il momentoangolare.
61

3.8 Teorema di Rosenfeld–Belinfante.
Osserviamo che, essendo L una densita, la grandezza 1√det γ
L e uno scalare. Se
dunque cambiamo le coordinate nell’intorno di un certo punto ζ ponendo ad esempio
ξa
= ξa + ǫfa(ξ) ,
dove le funzioni fa si annullano in ζ, il valore di tale grandezza non cambia. Pero
xka =∂x
∂ξb
∂ξb
∂ξa= xka + ǫxkbf
ba ,
γab = γcd(δca + ǫf ca)(δdb + ǫfdb) = γab + ǫγcaf
cb + ǫγcbf
ca +O(ǫ2) .
Inoltre si ha
1√det γ
=1√
det γ
1√det (δab + 2ǫfab +O(ǫ2)
=1√
det γ(1 − ǫfaa +O(ǫ2)) .
Allora
1√det γ
L(xk, xk, xka, ξa, γab) =
=1√
det γ
[L(xk, xk, xka, ξ
a, γab) + ǫf ba
(−Lδab +
∂L
∂xkaxkb + 2
∂L
∂γacγcb
)+O(ǫ2)
].
L’invarianza dello scalare a sinistra rispetto al cambiamento delle coordinate implica chela parte a destra non dipende da ǫ. Allora, ricordando la definizione (3.42) del tensoreenergia–momento, si ha l’identita:
T ab =
∂L
∂xkaxkb − Lδab = −2
∂L
∂γacγcb ,
ovvero∂L
∂γab= −1
2T ab . (3.49)
Questa identita prende il nome di Teorema di Rosenfeld–Belinfante. Utilizzando questaidentita la relazione (3.43) puo essere riscritta in qualunque sistema di coordinate. Pertale scopo si osservi che, denotando con Γαβγ il simbolo di Christoffel associato alla metricaγ ed utilizzando la simmetria di T , si ha:
∂αT αβ +
∂L
∂γab
∂γab∂ξβ
=
= ∂αT αβ −
1
2T ab ∂γab
∂ξβ= ∂αT α
β − 1
2T αδ
(∂γαδ∂ξβ
+∂γαβ∂ξδ
− ∂γβδ∂ξα
)=
= ∂αT αβ − T δ
αΓαβδ = ∇αT αβ .
62

Capitolo 4. DESCRIZIONE EULERIANA.
4.1 Cinematica.
Cominciamo col ricordare che per descrizione euleriana si intende il punto di vista incui ad ogni punto x dello spazio fisico si assegna il punto ξ del materiale (la particella) chesi trova in x. Ad ogni istante di tempo una configurazione euleriana e descritta da unaapplicazione differenziabile G definita su X a valori in Z:
G : X → Z
(xk) 7→ ξa(xk) .
Questa applicazione puo essere considerata come l’inversa dell’applicazione F che abbiamoutilizzato nella descrizione lagrangiana: G = F−1. La matrice jacobiana di G, i cui elementidenotiamo con
ξal =∂ξa
∂xl,
e invertibile e prende il nome di gradiente di deformazione euleriano. Indicheremo lamatrice inversa di (ξal) con (xlb), intendendo con xlb la funzione non lineare
xlb = xlb(ξak) (4.1)
di ξak ottenuta mediante le usuali regole di inversione. Gli elementi xlb coincidono con lecomponenti del gradiente di deformazione lagrangiano che corrispondono a G−1.
Per descrivere la dinamica del materiale elastico aggiungiamo allo spazio fisico il tempox0 = t, costruendo cosı lo spazio-tempo fisico, che denoteremo con X . Per simmetriadelle formule e utile introdurre anche un “tempo materiale” ξ0 che coincide con il tempofisico: ξ0 = x0 = t. In tal modo possiamo descrivere la “storia del materiale” come unaapplicazione
G : X → Z(xµ) 7→ ξα = ξα(xµ) ,
(dove α, µ = 0, 1, 2, 3), tale che ξ0 ≡ x0. La matrice quadrata definita da
(ξαµ) =
1 ξ1 ξ2 ξ3
00 (ξal)0
,
dove ξa = ξa0, e a sua volta invertibile. Denotiamo con D il suo determinante:
D := det ξαµ = det ξak =1
det xka6= 0 .
63

Gli elementi della matrice inversa saranno indicati con xµα, intendendo anche qui per xµαla funzione non lineare delle ξαµ ottenuta mediante le ordinarie regole di inversione. Si
osservi che gli elementi xkb cosı definiti coincidono con quelli dati da (4.1). Inoltre si ha:
xk0 = vk ,
x00 = 1 ,
x0a = 0 ,
dove vk e la velocita . Per ottenere una struttura simmetrica in alcune formule, e con-veniente introdurre il vettore velocita quadri–dimensionale vµ, ponendo v0 := 1. Cosı leequazioni sopra implicano:
vµ = xµ0 . (4.2)
Per ottenere la descrizione euleriana dell’elasticita, possiamo trasformare tutte le quan-tita , calcolate nei capitoli precedenti in termini delle variabili indipendenti ξα, in nuovegrandezze in cui le variabili indipendenti siano le xµ. Questo e possibile perche, comeabbiamo visto, ogni configurazione euleriana puo essere vista come l’inversa di una cor-rispondente configurazione lagrangiana. Naturalmente, e possibile seguire la strada inversa,cioe costruire prima la descrizione euleriana senza riferirsi alle intuizioni lagrangiane e poipassare, se si vuole, alla descrizione lagrangiana. Nella teoria non relativistica abbiamointrodotto prima la descrizione lagrangiana perche e quella che piu si avvicina alla mecca-nica dei punti. Sottolineiamo pero che questo tipo di approccio e efficace solo nell’ambitopuramente non relativistico in cui ci siamo posti. Come vedremo, una teoria relativisticadell’elasticita si presenta in una forma manifestamente covariante solo nella descrizione eu-leriana; una descrizione lagrangiana e ancora possibile, ma non in forma manifestamentecovariante.
Vogliamo ora esprimere le grandezze cinematiche (velocita , densita di materia, tensoredelle deformazioni) in funzione dei 3 campi incogniti ξa e delle loro derivate.
Dalla relazione ξαµxµβ = δαβ possiamo subito dedurre l’espressione della velocita in
termini delle variabili euleriane. Infatti, si ha
0 = δa0 = ξaµxµ0 = ξa + ξalv
l ,
da cui
ξa = −ξalvl .
Moltiplicando a sinistra per l’inversa xka troviamo
vk = −xkaξa . (4.3)
Vediamo dunque che le componenti della velocita dipendono linearmente dalle derivatetemporali ξa dei campi e, tramite la matrice inversa xka, dipendono non linearmente dallederivate spaziali ξak.
64

Per determinare l’espressione della densita di materia ρ osserviamo che la relazione(2.4) implica:
ρ0
√det γ = ρ
√det g det xka =
ρ√
det g
D ,
da cui:
ρ = ρ0
√det γ√det g
D . (4.4)
Per esprimere il tensore delle deformazioni tramite le variabili euleriane, ricordiamoche, nel caso lagrangiano, abbiamo utilizzato la matrice h = F ∗g, l’operatore H = γ−1F ∗ged il tensore S = 1
2 logH. Nel caso euleriano, e la metrica dello spazio materiale chedeve essere trasportata mediante la configurazione G, mentre la metrica dello spazio fisicoviene utilizzata per alzare ed abbassare gli indici. Consideriamo dunque il pull-back h diγ mediante G :
h := G∗γ ,
cioe:hkl = γabξ
akξbl . (4.5)
Il corrispondente operatore sara:H = g−1G∗γ ,
ovvero, in termini delle coordinate:
hnl = gnkhkl . (4.6)
L’operatore H e l’inverso dell’operatore lagrangiano H, trasportato nello spazio fisico.Infatti si ha
G∗H−1 = G∗(γ−1F ∗g)−1 = G∗((F ∗g−1)γ) = (G∗F ∗g−1)(G∗γ) = (g−1G∗γ) = H .
Ne segue che il tensore delle deformazioni euleriano definito come:
S := −1
2log H , (4.7)
che misura di quanto H si discosta dall’identita, coincide, tramite il pull-back, con il tensoredelle deformazioni S che abbiamo introdotto nella descrizione lagrangiana, cioe si ha:
S = G∗S . (4.8)
Si ha infatti:
G∗S =1
2G∗ logH = −1
2G∗ logH−1 = −1
2log(G∗H−1) = −1
2log H .
Quindi le componenti di S corrispondono alle componenti del tensore delle deformazionilagrangiano, calcolate rispetto alle coordinate dello spazio fisico; per tale motivo le in-dicheremo con la stessa lettera:
skl = xkasabξbl . (4.9)
65

I due operatori S ed S descrivono dunque lo stesso oggetto fisico, il primo rispetto allecoordinate materiali, il secondo rispetto alle coordinate spaziali. Per S si possono ripetere iragionamenti fatti nel capitolo sulla statica lagrangiana; in particolare, tutta l’informazionesui suoi autovalori e contenuta nei tre invarianti (α, β, θ) definiti da
α = skk
β =1
2skl s
lk
θ =1
3skl s
lnsnk ,
dove il simbolo “tilde” indica come al solito la parte a traccia nulla. Come si vede subitodalla formula (4.9), questi tre invarianti coincidono con quelli definiti nel 2.2.
Prima di concludere questo paragrafo, costruiremo una densita vettoriale Jµ cheprende il nome di corrente di materia. Consideriamo a tal fine la 3-forma di volumedi Z:
ω = ρ0
√det γ dξ1 ∧ dξ2 ∧ dξ3 .
Il suo pull-back secondo la configurazione spazio–temporale G sara dato da
J := G∗ω = ρ0
√det γ ξ1νξ
2µξ
3σdx
ν ∧ dxµ ∧ dxσ ; (4.10)
essendo una 3-forma in uno spazio 4-dimensionale (cioe una densita vettoriale), J puoessere rappresentata nel modo seguente (vedi paragrafo 8.10):
J = Jµ(∂µ dx0 ∧ dx1 ∧ dx2 ∧ dx3) ,
e la formula (4.10) implica la seguente espressione delle componenti di J in termini delgradiente delle deformazioni:
Jµ = ρ0
√det γ ǫµνρσξ1νξ
2ρξ
3σ . (4.11)
La derivata esterna della corrente di materia si annulla identicamente; infatti
dJ = d(G∗ω) = G∗(dω) ≡ 0 ,
perche dω ≡ 0, trattandosi di una 4-forma nello spazio tridimensionale Z. In termini dellecomponenti di J si ha quindi
∂µJµ = ∂0J
0 + ∂kJk = 0 , (4.12)
che e la ben nota equazione di continuita ed esprime la conservazione della materia.Dimostriamo ora che la corrente di materia Jµ ha la struttura seguente, probabilmente
piu familiare al lettore:
J0 = ρ√
det g ,
Jk = ρ√
det g vk ,(4.13)
66

cioe :Jµ = ρ
√det g vµ .
Per provare la (4.13) osserviamo che la formula (4.11) implica:
Jµ = ρ0
√det γ ǫµνρσξ1νξ
2ρξ
3σ = ρ0
√det γ ǫτνρσδµτ ξ
1νξ
2ρξ
3σ =
= ρ0
√det γ
(ǫτνρσξκτξ
1νξ
2ρξ
3σ
)xµκ ;
ora, se κ 6= 0, la somma tra parentesi si annulla essendo il determinante di una matriceche ha necessariamente due colonne uguali. Quindi si ha
Jµ = ρ0
√det γ
(ǫτνρσξ0τξ
1νξ
2ρξ
3σ
)xµ0 = ρ0
√det γ Dxµ0 = ρ
√det g xµ0 ,
e dunque in virtu di (4.2) la formula (4.13) e provata.Se, invece della densita Jµ, utilizziamo il corrispondente vettore definito da:
jµ =1√
det gJµ = ρvµ
(cioe j0 = ρ, jk = ρvk), l’ equazione di continuita (4.12) assume la forma ben nota:
∂ρ
∂t+ div(ρ~v) = 0 . (4.14)
4.2 Principio variazionale.
Per formulare la descrizione euleriana vogliamo utilizzare le conoscenze gia acquisitenella formulazione della descrizione lagrangiana. Osserviamo che, dal punto di vista ge-ometrico, una configurazione del materiale e una sottovarieta Σ del prodotto cartesianoX × Z dello spazio–tempo fisico e dello spazio–tempo materiale. La sottovarieta Σ e ilgrafico della configurazione F : Z 7→ X che abbiamo utilizzato nella descrizione lagrangianao della sua inversa G : X 7→ Z. Ora, se i punti di Σ sono parametrizzati mediante le vari-abili ξα si ottiene la descrizione lagrangiana, mentre se essi sono parametrizzati con xµ
si ottiene la descrizione euleriana. Il passaggio da una descrizione all’altra e quindi sem-plicemente un cambiamento di coordinate su Σ. Di conseguenza possiamo re–interpretareil principio variazionale che governa la dinamica di un sistema elastico: invece di consid-erarlo come una condizione su F o G possiamo considerarlo come una condizione su Σ.Osserviamo che le variazioni a contorno fissato di F corrispondono a variazioni a contornofissato di G ed anche di Σ. Allora l’equazione
δA = 0
con contorno fissato non dipende dal modo in cui si parametrizza Σ e si descrive la suavariazione. Per ottenere le equazioni del moto nella descrizione euleriana e quindi suffi-ciente esprimere l’azione in funzione delle ξa e ripetere il procedimento gia seguito nel casolagrangiano.
67

Dal teorema sul cambiamento di variabili negli integrali multipli si ha, utilizzando la(4.4) e la (3.1):
A =
∫
Ω
Ld4ξ =
∫
Ω
det
(∂ξ
∂x
)Ld4x =
∫
Ω
DLd4x =
=
∫
Ω
ρ√
det g
ρ0
√det γ
ρ0
√det γ λd4x =
∫
Ω
ρ√
det g λd4x =
∫
Ω
Λd4x,
(4.15)
dove Ω = G(Ω) e l’immagine in X di Ω secondo G, e dove:
Λ := DL = ρ√
det g λ = ρ√
det g
(1
2‖v‖2 − u
).
La relazione (4.15) implica che la densita lagrangiana nella descrizione euleriana e ugualea Λ. Si faccia attenzione al fatto che essa deve essere espressa come funzione delle variabili(ξa, ξaµ, xµ), cioe :
Λ(ξa, ξaµ, xµ) = ρ(ξak)
√det g λ(ξa, ξaµ, x
µ),
λ(ξa, ξaµ, xµ) =
1
2m‖v‖2 − u(ξa, ξal, x
µ) ,
u(ξa, ξal, xµ) = uI(ξ
a, ξal) + uE(xµ) .
Notiamo che uI ed uE sono le stesse funzioni utilizzate nella descrizione lagrangiana, inparticolare:
uI = uI(α, β, θ) .
Se la variazione della configurazione non modifica il contorno nella descrizione la-grangiana (cioe δxk
∣∣∂Ω
= 0), lo stesso vale nella descrizione euleriana (δξa∣∣∂Ω
= 0). Conun calcolo analogo a quello del paragrafo 3.2 si verifica che la variazione dell’azione cor-rispondente alla variazione δξa della configurazione del materiale e data dalla formula:
δA =
∫
Ω
(∂Λ
∂ξa− ∂µ
∂Λ
∂ξaµ
)δξad4x+
∫
∂Ω
∂Λ
∂ξaµ
(∂µ dx0 ∧ dx1 ∧ dx2 ∧ dx3
)δξa , (4.16)
equivalente a (3.2). Ne segue che il principio variazionale
δA = 0
con la condizioneδξa∣∣∂Ω
= 0 , (4.17)
porta alle seguenti equazioni di Eulero-Lagrange:
∂µ∂Λ
∂ξaµ− ∂Λ
∂ξa= 0 , (4.18)
68

dove ora ∂µ = ∂∂xµ . Dal procedimento seguito e evidente che queste equazioni sono equiv-
alenti alle corrispondenti equazioni di Eulero-Lagrange (3.3), nel senso che, se G soddisfale (4.18), F soddisfa le (3.3) e viceversa.
4.3 Momenti coniugati.
La formula (4.16) implica che, se la configurazione soddisfa le equazioni del moto,la variazione dell’azione dovuta al cambiamento dei dati al contorno δξa
∣∣∂Ω
6= 0 e datadall’integrale
δA =
∫
∂Ω
P µa
(∂µ dx0 ∧ dx1 ∧ dx2 ∧ dx3
)δξa ,
dove le grandezze
P µa :=
∂Λ
∂ξaµ
sono i momenti canonici coniugati alle variabili ξ. L’oggetto
P = P µa
(∂
∂xµdx0 ∧ dx1 ∧ dx2 ∧ dx3
)⊗ (dξa)
e un covettore in Z a valori nelle densita vettoriali in X , ed e detto tensore di Piola-Kirchhoff.
Per comprenderne la struttura, cominciamo con l’osservare che si ha
P µa =
√det g
(∂ρ
∂ξaµλ+ ρ
∂λ
∂xkβ
∂xkβ∂ξaµ
).
Derivando rispetto a ξaµ la relazione xλαξαν = δλν , troviamo
xλαδαa δ
µν +
∂xλα∂ξaµ
ξαν = 0 ,
ovvero, moltiplicando a destra per xνβ ,
∂xλβ∂ξaµ
= −xλaxµβ .
Inoltre si ha∂ρ
∂ξa= ρ0
√det γ√det g
∂D∂ξa
= 0
∂ρ
∂ξak= ρ0
√det γ√det g
∂D∂ξak
= ρ0
√det γ√det g
Dxka = ρxka ,
69
perche la derivata del determinante di una matrice rispetto ad un elemento della matricestessa e dato dall’elemento corrispondente della matrice inversa moltiplicato per il deter-minante stesso. Ricordando che il tempo e indipendente in entrambe le descrizioni, si hax0a = 0, e quindi
∂ρ
∂ξaµ= ρxµa .
Dall’equazione (3.4) segue:
P µa =
√det g
(ρλxµa − ρ
∂λ
∂xkβxkax
µβ
)= D(Lxµa − π β
k xkaxµβ) , (4.19)
relazione che lega il tensore energia–momento T lagrangiano ai momenti P µa . Infatti,
ricordando cheT αβ = π α
k xkβ − δαβL ,
troviamo
P µa = D(Lxµa − π β
k xkaxµβ) = D(Lδβa − π β
k xka)xµβ = −DT βa x
µβ . (4.20)
Il tensore energia–momento lagrangiano viene dunque trasformato, tramite il pull–backdell’indice in alto, nella densita tensoriale P µ
a (la presenza del determinante D nella leggedi trasformazione e dovuta al fatto che sia P che T sono densita tensoriali). Vediamo cosıche P e −T costituiscono due rappresentazioni matematiche dello stesso oggetto fisico: Te una densita tensoriale omogenea (cioe con i due indici nello stesso spazio-tempo, quellomateriale), mentre P e un oggetto misto allo stesso modo del tensore π lagrangiano. Vedi-amo quindi che il tensore di Piola–Kirchhoff descrive i momenti canonici nella descrizioneeuleriana e, tramite il pull–back, il tensore energia–momento della descrizione lagrangiana.
L’espressione (4.19) ha una semplice interpretazione fisica. Il termine Dπ βk xkax
µβ e
semplicemente il pull–back di π, cioe una sua traduzione in termini delle coordinate (xµ)dello spazio-tempo fisico. Il segno meno che compare nella formula (4.19) e dovuto al fattoche, mentre π e definito mediante le derivate della lagrangiana rispetto alla matrice (xkα), Pe definito tramite le derivate di Λ rispetto alla matrice inversa (ξaµ) (incrementare il valore
di ξa in un punto di X corrisponde a diminuire il valore di xk in un corrispondente puntodi Z). Per capire il significato del termine proporzionale a L in (4.19), osserviamo che,quando consideriamo due configurazioni vicine, il contributo di tale termine alla variazionedell’azione e dato da (vedi formula (9.5))
∫
∂Ω
ρLxµa
(∂
∂xµdx0 ∧ dx1 ∧ dx2 ∧ dx3
)δξa .
A causa della integrazione, solo la componente x⊥a entra in gioco. Pero la grandezzax⊥aξ
a rappresenta la parte perpendicolare al bordo di Ω del pull–back della variazioneδξa, e quindi ρx⊥aδξ
a rappresenta il flusso di materia attraverso la superficie ∂Ω dovutaalla variazione δξa della configurazione. Il termine in esame e quindi dovuto al fatto che,
70

fissato un volume Ω nello spazio fisico, la quantita di materia in esso contenuta variaquando si varia la configurazione. In definitiva i due termini di (4.19) corrispondono allavariazione dell’azione dovuta al cambiamento della configurazione elastica della materia(secondo termine) e, rispettivamente, alla variazione dell’azione dovuta al cambiamentodella quantita di materia contenuta nel volume considerato dello spazio–tempo.
4.4 Teorema di Nother.
Definiamo, analogamente a quanto fatto nel paragrafo 3.7, il tensore energia–momen-to euleriano come l’operatore che ad ogni vettore w ∈ TX associa una densita vettorialeTw nel modo seguente:
Tw := P (G∗w) − w Λ .
Le componenti di T si calcolano con lo stesso metodo seguito nel paragrafo 3.7:
Tµν := P µa ξaν − δµνΛ . (4.21)
Utilizzando la stessa tecnica del paragrafo 3.7 si dimostra il Teorema di Nother:
∇µTµν + Λν =
(∂µ
∂Λ
∂ξaµ− ∂Λ
∂ξa
)ξaν , (4.22)
dove ∇µ = (∂0,∇k) e dove Λν indica la derivata esplicita di Λ rispetto a xν calcolatamantenendo fissati i campi ξa, le loro derivate ξaµ e la metrica, cioe
Λν = −ρ√
det g∂uE∂xν
.
E possibile considerare l’operatore ∇µ come la derivata covariante associata alla seguentemetrica fisica spazio–temporale:
(gµν) :=
−1 0 0 000 (gkl)0
. (4.23)
Nell’ambito della meccanica non relativistica l’introduzione di una metrica nello spazio–tempo e semplicemente un artificio tecnico; tale metrica non e infatti invariante rispetto alletrasformazioni del gruppo di Galileo. La situazione e ben diversa in meccanica relativistica,dove lo spazio–tempo e in modo naturale una varieta pseudo–riemanniana tetradimension-ale. La derivata covariante ∇µ sopra introdotta puo dunque essere vista come la derivatacovariante associata alla metrica gµν .
Se sono soddisfatte le equazioni del moto, il teorema di Nother implica che
∇µTµν + Λν = 0 . (4.24)
71

Anche se non sono soddisfatte le equazioni del moto, moltiplicando la parte “spaziale”di(4.22) per xkb si ha:
(∇µTµk + Λk)xkb = ∂µ
∂Λ
∂ξbµ− ∂Λ
∂ξb; (4.25)
sostituendo l’espressione cosı trovata nella parte “temporale” di (4.22) si ottiene l’identita:
∇µTµ0 + Λ0 = (∇µT
µk + Λk) xkbξ
b = − (∇µTµk + Λk) vk .
Introducendo il vettore quattro–dimensionale vµ definito da vµ = (v0, vk) con v0 = 1,possiamo riscrivere questa relazione nella forma:
vν (∇µTµν + Λν) = 0 .
Questa identita e sempre soddisfatta in virtu della struttura del tensore energia–momento,anche se non sono soddisfatte le equazioni del moto. Allora, in virtu di (4.25), le sole treequazioni spaziali
∇µTµk + Λk = 0 (4.26)
sono equivalenti alle equazioni del moto (4.18).
4.5 Equazioni di Eulero.
Le formule (4.20) e (4.21) implicano che le componenti Tµν del tensore energia–mo-mento sono date da
Tµν = D(Lxµaξaν − π β
k xkaξaνx
µβ − δµνL) =
= D(−Lxµ0ξ0ν − π βk δkνx
µβ + π β
k xkξ0νxµβ) =
= D[δ0ν(π β
k vkxµβ − Lxµ0) − π βk δkνx
µβ
].
Dalla formula (3.31) segue che T 00 e la densita di energia, che denotiamo con H; infatti si
haH := T 0
0 = D(π βk vkx0
β − L) = D(π 0k vk − L) = DH =
= Dρ0
√det γ
(1
2‖v‖2 + u
)= ρ√
det g e ,
dove, come ci ricordiamo,
e =1
2‖v‖2 + u
e l’energia per una mole di materiale. Inoltre, se con
pl = mvl = mglkvk ,
72

denotiamo il vettore momento cinetico nella descrizione euleriana, la formula (3.5) implica:
T 0l = −Dπ β
k δkl x0β = −Dπ 0
l =
= −Dpl = −Dmρ0
√det γ glkv
k = −mρ√
det g vl = −ρ√
det g pl .
Per calcolare T j0 e T jl osserviamo che dalla formula (2.25) segue
Dπ al xja = Dρ0
√det γ tabξ
blxja = ρ
√det g tjl ,
dove contjl = xjat
abξbl
abbiamo denotato la rappresentazione del tensore di Cauchy rispetto alle coordinate dellospazio fisico. Allora otteniamo
T j0 = D(π βk vkxjβ − vjL) =
= D(π 0k vk − L)vj + D(π m
k vkxjm) = DHvj + Dπ mk xjmv
k =
= ρ√
det g (evj + tjkvk) ,
T jl = −Dπ βk δkl x
jβ = −D(π 0
l vj + π ml xjm) =
= −ρ√
det g (plvj + tjl ) = −ρ
√det g (mvlv
j + tjl ) .
Da quest’ultima relazione segue che la parte spazio–spazio del tensore energia–momento esimmetrica:
T jl = −ρ√
det g (mvjvl + tjl) = T lj .
In definitiva il tensore T ha la seguente struttura matriciale:
(Tµν ) = ρ√
det g
e evj + tjl vl
−pk −(pkvj + tjk)
. (4.27)
L’interpretazione fisica delle componenti di T e la seguente: T 00 e la densita di energia,
T j0 e la corrente di energia, T 0k e l’opposto della densita di momento cinetico e T jl e
la somma della corrente di momento e del tensore degli sforzi. Come vedremo, il ten-sore energia–momento della descrizione euleriana relativistica semplifica questa strutturae risulta interamente simmetrico, non solo nella parte spazio–spazio.
Esprimiamo ora le equazioni (4.24) in termini delle componenti di T . L’equazionetemporale diventa:
H + ∂j(Hvj) = −∂j(ρ√
det g tjkvk) + ρ
√det g
∂uE∂t
, (4.28)
e quelle spaziali:
∂
∂t(ρ√
det g pl) + ∇j(ρ√
det g plvj) = −∇j(ρ
√det g tjl ) − ρ
√det g
∂uE∂xl
. (4.29)
73

Nella prima equazione le derivate covarianti sono state rimpiazzate dalle derivate parzialiperche abbiamo a che fare con densita vettoriali. Nella seconda equazione, il determinantedi g puo essere estratto dalle derivate covarianti, e dunque possiamo riscriverla in terminidi tensori invece che di densita tensoriali:
∂
∂t(ρpl) + ∇j(ρplv
j) = −∇j(ρtjl ) − ρ
∂uE∂xl
, (4.30)
o anche:
pl
(∂ρ
∂t+ ∇j(ρv
j)
)+ ρ
(∂pl∂t
+ vj∇jpl
)= −∇j(ρt
jl ) − ρ
∂uE∂xl
.
Utilizzando l’equazione di continuita (4.14) e dividendo per ρ otteniamo:
∂pl∂t
+ vj∇jpl = −1
ρ∇j(ρt
jl ) −
∂uE∂xl
.
Queste tre equazioni si chiamano equazioni di Eulero. L’operatore a sinistra che agisce su
pl si chiama derivata sostanziale o derivata lagrangiana e sara denotato con/ddt
:
/d
dt:=
∂
∂t+ vj∇j = vµ∇µ .
Questo operatore tiene conto della dipendenza dal tempo sia esplicita sia implicita at-traverso il cambiamento di posizione della particella di materiale presente nel punto inconsiderazione. Possiamo dunque scrivere
/d
dtpl = −1
ρ∇j(ρt
jl ) + fl , (4.31)
dove la forza esterna e data dal gradiente del potenziale esterno:
fl = −∂uE∂xl
.
Le equazioni di Eulero devono essere considerate come tre equazioni differenziali aderivate parziali nelle funzioni incognite ξa, e quindi le grandezze che vi compaiono devonoessere espresse tramite tali funzioni e le loro derivate. Sappiamo gia, dal paragrafo 4.1, comesi esprimono vk, ρ e quindi anche pl; per quanto riguarda t, vale la stessa relazione sforzi–deformazioni (2.24) della descrizione lagrangiana poiche sforzi e deformazioni euleriani sonosemplicemente il pull–back delle corrispondenti quantita lagrangiane. Ne segue:
tkl = −(∂u
∂αδkl +
∂u
∂βskl +
∂u
∂θ˜sknsnl
). (4.32)
Le equazioni di Eulero (4.31) esprimono la seconda legge di Newton: la derivatatemporale della quantita di moto contenuta in un pezzo di materiale e uguale al risultante
74

delle forze agenti su di esso. Tale risultante e, nel nostro caso, data dalla somma di duetermini: il primo rappresenta le forze elastiche, il secondo quelle esterne.
Come sappiamo, le equazioni di Eulero implicano l’equazione “temporale” (4.28),che puo anch’essa essere riscritta in termini di derivata sostanziale. Infatti, utilizzandonuovamente l’equazione di continuita , si ha:
H + ∂j(Hvj) = ∂0(eJ0) + ∂j(eJj) = e∂µJ
µ + Jµ∂µe = ρ√
det gvµ∂µe = ρ√
det g/d
dte ;
dunque dividendo per ρ√
det g e passando alla derivata covariante si ottiene la formaequivalente di (4.28):
/d
dte = −1
ρ∇j(ρt
jkvk) +
∂uE∂t
. (4.33)
Questa equazione esprime la legge di conservazione dell’energia nel caso in cui le forzeesterne non dipendono dal tempo (cioe ∂uE
∂t= 0). Infatti, in tal caso, integrando la (4.28)
su un volume tridimensionale V dello spazio fisico X , otteniamo:
d
dt
∫
V
H +
∫
∂V
Hv⊥ = −∫
∂V
ρ√
det g t⊥k vk .
Il secondo integrale a sinistra e il flusso di energia portato dalla corrente di materia at-traverso il contorno di V . L’integrale a destra e il lavoro delle forze elastiche sul contorno.Entrambi gli integrali si annullano se il contorno e fissato (vk
∣∣∂V
= 0), e in tal caso l’energiatotale e conservata, cioe si ha:
d
dt
∫
V
H = 0 .
Come nella descrizione lagrangiana (vedi paragrafo 3.7), anche nella descrizione eu-leriana il teorema di Nother (4.24) implica le leggi di conservazione associate ai campi disimmetria della lagrangiana e della metrica. La conservazione dell’energia e un esempiodi queste leggi di conservazione, nel caso in cui il campo di simmetria corrispondente e ilgeneratore delle traslazioni temporali ∂
∂t. In modo analogo, prendendo i generatori delle
traslazioni spaziali e delle rotazioni si possono ottenere le leggi di conservazione del mo-mento cinetico e del momento angolare quando la lagrangiana e invariante rispetto a questetrasformazioni. La procedura generale e identica a quella discussa nel paragrafo 3.7. Siainfatti wµ e un campo vettoriale puramente spaziale (w0 = 0) indipendente dal tempo etale che la derivata di Lie £wgkl = 2∇(kwl) si annulli. Se inoltre si ha wkΛk = 0, risulta:
∂µ(Tµν wν) = ∇µ(Tµν w
ν) = wν∇µTµν + Tµν ∇µw
ν = T lk∇lwk = T lk∇lwk = T lk∇(lwk) = 0 ,
il che significa che la densita vettoriale eµ = Tµl wl e conservata.
4.6 Equazioni di Eulero per i fluidi.
Le equazioni di Eulero (4.31) sono particolarmente note nel caso particolare dei fluidi.Come sappiamo, la descrizione dei fluidi si ottiene dalla teoria generale della elasticita
75

sopprimendo la dipendenza dell’energia interna dalle deformazioni che non cambiano ilvolume, cioe ponendo e = e(α). in questo caso l’equazione costitutiva (4.32) implica laseguente forma del tensore degli sforzi:
tkl = −∂u∂α
δkl .
Ora, ricordando che la pressione e definita da
P = −ρ∂u∂α
(vedi formula (2.28)), si ha:
tkl =1
ρPδkl .
Sostituendo in (4.31) si ha infine:
/d
dtpl = −1
ρ∂lP + fl . (4.34)
76
Capitolo 5. ELASTICITA’ RELATIVISTICA
5.1 Spazio–tempo relativistico.
In questo capitolo affrontiamo e risolviamo il problema di dare una estensione rel-ativistica alla teoria della elasticita cosı come e stata sviluppata nei capitoli precedenti.Avvertiamo il lettore che per la comprensione di quanto segue e necessario avere famil-iarita con la relativita speciale e con i fondamenti della relativita generale. Dal punto divista matematico non e invece richiesta alcuna conoscenza ulteriore rispetto a quelle chesi possono acquisire con la lettura della seconda parte del libro.
Ricordiamo che lo spazio-tempo fisico X della relativita generale e una varieta 4-dimensionale munita di una metrica pseudo-riemanniana gµν (µ, ν = 0, 1, 2, 3). Si chiamasegnatura di una metrica l’“accostamento” dei segni dei suoi autovalori. Poiche una met-rica pseudo-riemanniana e non degenere, il segno di ogni autovalore e costante, e quindila segnatura e una caratteristica invariante della metrica stessa. La segnatura di gµν edetta segnatura di Lorentz ed e, a seconda delle convenzioni, data da (−,+,+,+) o da(+,−,−,−). Noi useremo costantemente la prima convenzione. Inoltre useremo sempre ilsistema di unita di misura in cui la velocita della luce e c = 1. I tensori sullo spazio–temposaranno indicati con lettere maiuscole non in grassetto, rimanendo tale carattere riservatoper le grandezze euleriane non relativistiche introdotte nel capitolo precedente.
Nella teoria non relativistica, il tempo era un parametro assoluto e completamentedistinto dallo spazio; la struttura geometrica dello spazio–tempo era cosı ottenuta tramiteil prodotto cartesiano fra lo spazio fisico X e l’asse del tempo: X = X×R. Nella relativitanon esiste un tempo assoluto; come “tempo” siamo liberi di scegliere qualunque parametrox0 : X 7→ R tale che le superfici di livello:
Xt = m ∈ X : x0(m) = t
siano di tipo spazio, cioe la metrica g ristretta ad Xt sia positiva. Se inoltre e statascelta una identificazione tra i punti delle diverse superfici Xt per ogni t, diciamo chee stato individuato un riferimento nello spazio–tempo. In altre parole, un riferimento el’identificazione di X con un prodotto cartesiano:
X ∼= X × R , (5.1)
dove X e una varieta tridimensionale di tipo spazio. Le superfici di livello risultano dateda Xt = X × t, e possono essere identificate con la varieta X , che quindi gioca un ruoloanalogo a quello dello spazio fisico tridimensionale. Si noti pero che, nel caso relativistico,la decomposizione (5.1) non e unica. Una volta introdotto il riferimento, se si scegliex0 come parametro canonico sulla retta reale ed una qualunque parametrizzazione (xk),(k = 1, 2, 3) in X , l’insieme (xµ), µ = 0, 1, 2, 3, costituisce un sistema di coordinate nellospazio-tempo; viceversa, un sistema di coordinate tale che le superfici x0 = costante
77

siano di carattere spaziale, definisce un riferimento in X . Formuleremo la teoria dellaelasticita relativistica in una forma indipendente dal sistema di riferimento, cioe in unaforma manifestamente invariante.
Oltre allo spazio–tempo fisico, considereremo lo spazio materiale Z. Esattamentecome nella teoria non relativistica, Z e una varieta tridimensionale munita di una metricaγ definita positiva. Per comprendere il significato fisico di γ rimandiamo al paragrafo 2.1.E’ importante sottolineare che Z e una varieta astratta e non e assolutamente necessarioper lo sviluppo della elasticita, sia relativistica che non relativistica, pensare Z come unavarieta immersa nello spazio–tempo.
Scegliere un sistema di coordinate ξa in Z corrisponde a scegliere delle “etichette”per ogni particella del materiale. Negli approcci tradizionali Z veniva parametrizzatatramite una “configurazione di riferimento” e la dinamica corrispondeva a confrontare laconfigurazione del sistema ad un certo istante t con quella che esso aveva all’istante diriferimento t0; inoltre si assumeva che la configurazione di riposo corrispondesse ad unaconfigurazione di equilibrio globale del corpo.
Questo punto di vista e fuorviante e, a nostro parere, e il motivo per cui la teoriarelativistica della elasticita non e stata finora mai formulata in maniera soddisfacente.Come vedremo, e molto piu semplice considerare Z anche nel caso relativistico come unavarieta astratta e formulare la dinamica semplicemente chiedendosi quale particella si trovain un certo istante in un certo punto dello spazio–tempo, senza assumere l’esistenza di unaconfigurazione di equilibrio globale. Ci si rende conto facilmente che la teoria che si ottienein questo modo e invariante rispetto alle riparametrizzazioni dello spazio materiale Z.
Una volta scelti un riferimento in X come descritto sopra e la parametrizzazione diZ, siamo in una situazione analoga a quella non relativistica; pertanto se scegliamo comeparametri indipendenti il tempo x0 e le coordinate ξa e come campi incogniti le componentixk della posizione nello “spazio fisico” X , possiamo dare la formulazione lagrangiana dellaelasticita relativistica. Questa formulazione e pero poco elegante perche, dipendendo dallascelta del riferimento, non e manifestamente invariante. E’ molto piu naturale tenere unitiil tempo e lo spazio in una sola entita fisica e considerare come campi incogniti le ξa. Intal modo si ottiene la formulazione euleriana
G : X → Z ,
descritta da tre campiξa = ξa(xµ)
che si comportano come scalari rispetto a trasformazioni di coordinate nello spazio–tempo.Tale formulazione costituisce una teoria relativistica di campo manifestamente covariantecome lo sono, ad esempio, l’elettromagnetismo e la teoria di Dirac del campo spinoriale.
78

5.2 Cinematica.
La matrice (ξaµ), doveξaµ := ∂µξ
a ,
prende il nome di gradiente di deformazione relativistico.Assumeremo che le applicazioni:
ξa : Xt 7→ Z ,
ξa = ξa(xk, t) .
siano localmente invertibili in ogni punto dello spazio-tempo, cioe che il determinantedella matrice 3 × 3 jacobiana (ξak) sia diverso da zero ovunque. Per ogni scelta dellaconfigurazione e del sistema di coordinate in X esiste dunque la matrice inversa 3× 3, cheindichiamo con (xkb), tale che:
ξakxkb = δab ;
si noti che le grandezze xkb non hanno significato geometrico, perche dipendono dallaparametrizzazione scelta per X .Dalla invertibilita della matrice (ξak) segue che la matrice jacobiana 3×4 della applicazioneG:
(ξaµ) =
ξ1 ξ2 ξ3
(ξal)
e di rango massimo. In altri termini, l’applicazione tangente:
TxX 7→ Tξ(x)Z
ha un nucleo monodimensionale. Se wµ ∂∂xµ e un vettore che appartiene a questo nucleo,
si ha:wµξaµ = 0 . (5.2)
Questo significa che la varieta ξa = costante e sempre una curva; ognuna di queste curvee la traiettoria di una particella del materiale. Il vettore wµ ∂
∂xµ e tangente alla traiettoriase e verificata l’equazione (5.2).
Osserviamo che le traiettorie sono di carattere temporale, cioe
gµνwµwν < 0 .
Infatti, supponiamo che una traiettoria sia di carattere spaziale. Allora esiste un riferi-mento nel quale il vettore ∂
∂x1 e tangente alla traiettoria stessa e dunque, essendo in taleriferimento ξa1 = 0, la matrice (ξak) ha una riga composta di tutti zeri e di conseguenzanon e invertibile.
79

Nel sottospazio monodimensionale tangente alla traiettoria esistono sempre due vettorinormalizzati, cioe tali che la loro lunghezza e uguale a −1. L’orientazione temporale dellospazio–tempo permette di scegliere quello dei due che punta nella direzione positiva deltempo. Chiameremo questo vettore campo di velocita del materiale e lo denoteremo conuµ. In definitiva, la velocita e definita dalle condizioni:
uµξaµ = 0
gµνuµuν = uµuµ = −1 (5.3)
u0 > 0 .
Se si inverte l’orientazione temporale, si deve cambiare uµ in −uµ. Si verifica facilmente chela teoria risulta invariante rispetto a questa trasformazione, cioe rispetto alla inversionetemporale.
Per calcolare le componenti uµ in termini del gradiente di deformazione possiamoutilizzare formule analoghe a quelle introdotte per la velocita non relativistica (si veda laformula (4.3)). Una volta scelto un sistema di coordinate, prendiamo il vettore vµ ∂
∂xµ dove
v0 = 1, vk = −ξaxka. Osserviamo che:
vµξaµ = ξa + vkξak = ξa − ξbxkbξak = 0 .
Quindi la direzione di questo vettore non dipende dalla scelta delle coordinate perche esempre tangente alla traiettoria delle particelle; in altri termini, vµ ∂
∂xµ e proporzionale alcampo di velocita :
uµ = u0vµ = (u0, u0vk) .
In questa formula, il coefficente u0 dipende dalla scelta delle coordinate in modo tale chela velocita ne risulta indipendente. Le condizioni (5.3) implicano che si ha:
u0 =1√
|gµνvµvν |=
1√|g00 + 2g0kvk + gklvkvl|
. (5.4)
Introduciamo ora la corrente di materia relativistica J , definita tramite il pull-backdella 3-forma di volume in Z:
ω = ρ0
√det γ dξ1 ∧ dξ2 ∧ dξ3 .
Si ha:J := G∗ω = ρ0
√det γ ξ1νξ
2µξ
3σ dx
ν ∧ dxµ ∧ dxσ .In termini delle componenti Jµ definite da
J = Jµ(∂µ dx0 ∧ dx1 ∧ dx2 ∧ dx3) ,
possiamo scrivere:Jµ = ρ0
√det γ ǫµνρσξ1νξ
2ρξ
3σ . (5.5)
80

Come nel caso non relativistico, la derivata esterna dω di ω si annulla perche e una 4-formain uno spazio a tre dimensioni; dunque vale l’equazione di continuita
dJ = d(G∗ω) = G∗(dω) = 0 ,
o, in termini delle coordinate,∂µJ
µ = 0 .
Osserviamo ora che:
Jµξaµ = ρ0
√det γ ǫµνρσξ1νξ
2ρξ
3σξaµ = 0 , (5.6)
perche ǫµνρσξ1νξ2ρξ
3σξaµ e il determinante di una matrice che ha necessariamente due
colonne uguali. Se ora introduciamo il determinante della metrica:
g := det gµν ,
che e evidentemente negativo (g < 0), possiamo fattorizzare la densita vettoriale Jµ come:
Jµ =√−g jµ ,
dove jµ e un vettore. La formula (5.6) implica che j e proporzionale ad u e quindi esisteuno scalare ρ tale che:
jµ = ρuµ (5.7)
cioe:Jµ = ρ
√−g uµ . (5.8)
Evidentemente si ha:ρ = −jνuν
o, equivalentemente:
ρ =
√1
gJµJµ . (5.9)
Si noti che la relazione (5.8) implica la seguente espressione per l’equazione di continuita :
∇µ(ρuµ) = 0 . (5.10)
Consideriamo ora una qualunque configurazione G del materiale. Un riferimento X ∼=X ×R si dice riferimento di riposo in un punto m di X rispetto alla configurazione G se:
1) Il vettore ∂∂x0 coincide con la velocita nel punto m, cioe si ha uµ = (1, 0, 0, 0) ;
2) Nel punto m lo “spazio” X e ortogonale ad uµ.La condizione 1) significa che g00 = gµνu
µuν = −1 e la 2) che gk0 = g0k = 0. In unriferimento di riposo nel punto m abbiamo quindi gµ0 = −δ0µ, cioe:
(gµν) =
−1 0 0 000 (gkl)0
, (5.11)
81

come nel caso non relativistico (si veda la formula (4.23)), e l’elemento di volume quadridi-mensionale
√−g nello spazio-tempo e pari a√
det gkl, cioe al corrispondente elemento divolume tridimensionale. Inoltre in tale riferimento si ha uµ = (−1, 0, 0, 0).
E’ ovvio che un riferimento di riposo esiste per ogni configurazione, separatamentein ogni punto dello spazio-tempo. Vogliamo pero sottolineare che un riferimento che e diriposo in un punto m rispetto ad una certa configurazione, non e in generale un riferimentodi riposo rispetto alla stessa configurazione neanche in un piccolo intorno di m. Si noti chenel riferimento di riposo si ha:
jµ = (ρ, 0, 0, 0) ,
cioe:Jµ = (ρ
√det gkl, 0, 0, 0) ,
come nella formula (4.13) nel caso vk = 0. Lo scalare ρ e quindi la densita di materiacalcolata nel riferimento di riposo.
In ogni punto m dello spazio-tempo, la configurazione del materiale permette di de-comporre lo spazio tangente ad X in m nella parte parallela e nella parte ortogonale allavelocita. L’operatore di proiezione sul sottospazio ortogonale e:
Eµν := δµν + uµuν . (5.12)
Questo operatore gode delle ovvie proprieta :
EµνEνρ = Eµρ ;
Eµν uν = 0 ;
Eµν uµ = 0 ;
e prende il nome di proiettore spaziale. E’ evidente che E agisce come l’identita su ognivettore appartenente al sottospazio ortogonale ad uµ e, in particolare, nel riferimento diriposo si ha:
E = diag(0, 1, 1, 1) .
L’operatore di proiezione sul sottospazio dei vettori paralleli alla velocita prende il nomedi proiettore temporale ed e dato da:
Uµν = −uµuν ;
per questo operatore valgono le proprieta :
Uµρ Uρν = Uµν
Uµν uν = uµ
Uµν uµ = uν .
Tramite E ed U possiamo determinare la decomposizione canonica di ogni oggetto geo-metrico rispetto al campo di velocita. Se wµ e un campo vettoriale, si ha:
wµ = wµ⊥ + wµ‖ ,
82

dove:
wµ⊥ := Eµνwν
e la parte ortogonale rispetto ad uµ, mentre
wµ‖ := Uµν wν
e la parte parallela. Allo stesso modo, se Aµν e un campo tensoriale 2–controvariante siha:
Aµν = Aµν⊥ + EµλUνρA
λρ + EνρUµλA
λρ +Aµν‖ (5.13)
dove
Aµν⊥ := EµρEνλA
ρλ
e ortogonale alla velocita in entrambi gli indici, e
Aµν‖ = Uµρ UνλA
ρλ
e “parallelo” in entrambi gli indici.
5.3 Tensore delle deformazioni
Vogliamo ora introdurre un oggetto geometrico che rappresenta l’analogo relativisticodel tensore delle deformazioni introdotto nella formula (4.7). Cominciamo col considerareil pull-back della metrica materiale:
h := G∗γ ,
cioe:
hµν = γabξaµξbν , (5.14)
che e una formula analoga alla (4.5). Osserviamo che si tratta di un tensore simmetrico;inoltre, in virtu della relazione
hµνuν = γabξ
aµξbνu
ν = 0 ,
h appartiene al sottospazio dei tensori ortogonali alla velocita in entrambi gli indici (sinoti che questa e una caratteristica comune ad ogni oggetto tensoriale i cui indici spazio-temporali provengono dall’operazione di pull-back dallo spazio materiale). Ad h cor-risponde l’operatore:
H = g−1G∗γ ,
di componenti:
hµν = gµρhρν . (5.15)
83

Nel riferimento di riposo l’operatore H ha la struttura seguente:
(hµν ) =
0 0 0 000 (gmkhkl)0
;
cioe hµν vive nel sottospazio ortogonale ad uµ e coincide, nel riferimento di riposo, conl’oggetto che abbiamo utilizzato nella teoria non relativistica (formula (4.6)). Definiamoora l’operatore simmetrico:
K := H + U ,
le cui componenti sono:
kµν = gµρ(hρν − uρuν) = hµν − uµuν ,
e osserviamo che la velocita e un suo autovettore con autovalore 1:
kµνuν = uµ ,
kµνuµ = uν .
Nel riferimento di riposo si ha dunque:
(kµν ) =
1 0 0 000 (gmkhkl)0
. (5.16)
Come sappiamo, la configurazione statica del materiale e una configurazione di rilassamentolocale nel punto m se il trasporto della metrica materiale coincide con la metrica dellospazio:
gkmhml = δkl ,
cioe, in base alla (5.16), se K coincide con l’operatore identita. Per misurare la defor-mazione del materiale e allora naturale definire il tensore relativistico delle deformazionicome:
S := −1
2logK . (5.17)
Si osservi che K e un operatore positivo e dunque la definizione e ben posta. Inoltre, nelriferimento di riposo, si ha:
(sµν ) =
0 0 0 000 (skl )0
,
dove s e il tensore delle deformazioni della descrizione euleriana non relativistica.
84

E’ utile osservare che, essendo uµ un autovettore di K, esso e anche autovettore diogni funzione di K stesso. In particolare uµ e autovettore dell’operatore inverso K−1 e dellogaritmo, con autovalori rispettivamente 1 e 0:
(K−1)µνuν = uµ ,
(K−1)µνuµ = uν ,(5.18)
sµνuν = 0 ,
sµνuµ = 0 .(5.19)
Come nella teoria non relativistica, il tensore S contiene tutte le informazioni sulla defor-mazione, e quindi anche sulla distribuzione della materia. Per trovare la relazione tra S ela densita a riposo ρ osserviamo che, in un riferimento qualunque, le relazioni (5.5) e (5.8)implicano:
ρ√−g u0 = J0 = ρ0
√det γ D , (5.20)
doveD := ǫ0νρσξ1νξ
2ρξ
3σ = ǫ0hklξ1hξ
2kξ
3l = ǫhklξ1hξ
2kξ
3l = det (ξak) (5.21)
e il determinante tridimensionale analogo a quello non relativistico. In un riferimento diriposo si ha u0 = 1 e
√−g =√
det gkl, e allora le formule (5.16), (5.14) e (5.15) implicano:
det K = (det gmk)(det hkl) = (det gmk)−1(det γ)(det (ξak))2 =det γ
−g D2 =
(ρ
ρ0
)2
.
Essendo sia il determinante di K che ( ρρ0
)2 grandezze scalari, l’uguaglianza:
det K =
(ρ
ρ0
)2
vale in ogni riferimento. Ora la formula (5.17) implica:
TrS = −1
2Tr logK = − log
√det K ,
da cui infine:ρ = ρ0
√det K = ρ0 exp(−TrS) . (5.22)
5.4 Energia interna e densita lagrangiana.
Formuleremo la teoria relativistica della elasticita avvalendoci del principio di cor-rispondenza: ogni relazione dinamica della teoria relativistica, quando venga scritta in unriferimento di riposo, deve coincidere con la corrispondente espressione della teoria statica.
85

Poiche la dinamica deve essere dedotta dalla densita lagrangiana, e quindi dall’energia in-terna uI , l’energia interna stessa dovra coincidere con l’espressione non relativistica quandola si calcoli nel riferimento di riposo.
Cominciamo con l’osservare che S e un oggetto che “vive” nel sottospazio ortogonalealla velocita. In questo sottospazio possiamo ripetere il ragionamento gia fatto nel casonon relativistico, rimpiazzando pero l’operatore identita con l’operatore E. Decomponiamoquindi il tensore delle deformazioni in una parte a traccia nulla ed una parte proporzionalead E:
sµν = sµν +1
3sρρE
µν , (5.23)
dove sµµ = 0, e facciamo lo stesso per il quadrato della parte a traccia nulla:
sµρ sρν = ˜sµρ sρν +
1
3Eµν s
σρ sρσ , (5.24)
dove ˜sµρ sρµ = 0. Introduciamo ora gli invarianti cosı definiti:
α = TrS = sµµ
β =1
2Tr S2 =
1
2sµν s
νµ
θ =1
3Tr S3 =
1
3sµρ s
ρν sνµ =
1
3˜sµρ sρν sνµ .
(5.25)
Nel riferimento di riposo, questi invarianti coincidono con le corrispondenti espressioninon relativistiche. In particolare la formula (5.22) implica che si ha:
ρ = ρ0 e−α (5.26)
come nella statica.In base al principio di corrispondenza, l’energia interna relativistica e data da:
uI = uI(α, β, θ, ξa, xµ)
dove uI e, ancora una volta, la stessa funzione definita nel secondo capitolo. Notiamoche, in un riferimento che non sia di riposo, gli invarianti della deformazione contengono,a differenza di quanto avveniva nel caso non relativistico, tutte e quattro le derivate ξaµ enon solo le derivate “spaziali” ξak.
Se le proprieta elastiche del materiale non dipendono dal punto dello spazio Z ilmateriale si dice omogeneo. Per un materiale omogeneo l’energia interna dipende daicampi ξa solamente attraverso la metrica materiale γ. In assenza di campi fisici esternioltre al campo gravitazionale rappresentato dalla metrica gµν , la densita di energia internadipende dalle coordinate dello spazio-tempo, oltre che attraverso i campi ξa e le loroderivate, soltanto attraverso le componenti gµν della metrica stessa.
Osserviamo che, come nel caso non relativistico, la dipendenza piu semplice chel’energia interna puo avere dai parametri della deformazione e data dallo sviluppo di Taylorarrestato al secondo ordine (vedi formula (2.18)):
uI =A
2α2 +Bβ . (5.27)
86

Chiameremo il modello cosı ottenuto modello relativistico quasi lineare. L’interpretazionefisica dei coefficenti A e B e identica a quella discussa nel caso non relativistico.
La dinamica relativistica dei materiali elastici sara dedotta dalla densita lagrangiana:
Λ = −ρ√−g e (5.28) ,
dove e e la densita di energia totale per unita di mole calcolata in un riferimento di riposo.L’energia cinetica e nulla in tale riferimento e cio spiega il segno negativo nella (5.28):l’energia e solo di tipo potenziale. Il principio di relativita ci impone di prendere comedensita di energia totale la somma della energia di deformazione uI e della energia di quietemc2. Nelle nostre unita la velocita della luce c e uguale ad 1, e inoltre m e la massa diquiete di una mole del materiale. Si ha quindi:
e = m+ uI
Λ = −ρ√−g (m+ uI) . (5.29)
Infine, e anche utile definire la densita di energia per unita di volume:
ǫ := ρe = ρ (m+ uI) ,
e allora:Λ = −√−g ǫ .
5.5 Tensore di Piola–Kirchhoff. Stress-strain relations.
Definiamo i momenti canonicamente coniugati ai campi ξa:
P µa :=
∂Λ
∂ξaµ. (5.30)
Questo oggetto viene anche detto tensore relativistico di Piola–Kirchhoff. Si tratta di unadensita tensoriale mista che, nel caso non relativistico, e stata gia introdotta nel capitoloprecedente. Osserviamo che la densita lagrangiana dipende dalle derivate dei campi soloattraverso le componenti di K. Ne segue:
P µa :=
∂Λ
∂kρν
∂kρν∂ξaµ
= −√−g ∂ǫ
∂kρν
∂kρν∂ξaµ
.
Ora, si ha∂kρν∂ξaµ
= γabξbρδµν + γabξ
bνδµρ − ∂uρ
∂ξaµuν −
∂uν∂ξaµ
uρ ,
da cui segue:
P µa = −2
√−g(
∂ǫ
∂kρµγabξ
bρ −
∂ǫ
∂kρν
∂uν∂ξaµ
uρ
).
87

Denotiamo ora:
Nµν :=∂ǫ
∂kµν, (5.31)
cosı che:
P µa = −2
√−g[Nµνγabξ
bν −Nρνuρ
∂uν∂ξaµ
]. (5.32)
Ora si ha:
Nµν = e∂ρ
∂kµν+ ρ
(∂e
∂α
∂α
∂kµν+∂e
∂β
∂β
∂kµν+∂e
∂θ
∂θ
∂kµν
),
e le derivate dei parametri si calcolano come nel paragrafo 2.6 (formula (2.32)) ottenendo:
∂α
∂kµν= −1
2(K−1)µν
∂β
∂kµν= −1
2sνρ(K−1)ρµ
∂θ
∂kµν= −1
2˜sνρ sρλ(K−1)λµ .
(5.33)
Inoltre in virtu della formula (5.26) si ha:
∂ρ
∂kµν= ρ0
∂e−α
∂kµν=
1
2ρ(K−1)µν ,
da cui:
Nµν =ρ
2
[(e− ∂e
∂α
)(K−1)µν − ∂e
∂βsµρ (K−1)ρν − ∂e
∂θ˜sµρ sρλ(K−1)λν
]. (5.34)
Ne segue, sfruttando l’ortogonalita di sµν e di ˜sµρ sρν con la velocita uµ e il fatto che uµ eautovettore dell’operatore (K−1) con autovalore 1 (formula (5.18)):
Nνρuρ∂uν∂ξaµ
=ρ
2
(e− ∂e
∂α
)uν
∂uν∂ξaµ
=ρ
2
(e− ∂e
∂α
)1
2
∂(uνuν)
∂ξaµ= 0 ,
e quindi, utilizzando questo risultato in (5.32), si ottiene:
P µa = −2
√−gNµνγabξbν . (5.35)
Inserendo in questa ultima relazione l’espressione esplicita (5.34) di N troviamo le stress-strain relations relativistiche:
P µa = ρ
√−g[(
−e+∂e
∂α
)δµρ +
∂e
∂βsµρ +
∂e
∂θ˜sµλsλρ
](K−1)ρνγabξ
bν . (5.36)
88

5.6 Tensore energia–momento.
Definiamo la densita tensoriale di energia–momento relativistica come:
tµν := P µa ξaν − δµνΛ . (5.37)
L’invarianza della lagrangiana rispetto al cambiamento delle coordinate spazio–temporaliimplica, tramite un ragionamento analogo a quello del paragrafo 3.8, l’identita di Rosen-feld–Belinfante
tµν = −2∂Λ
∂gµν.
Per calcolare tµν in termini delle deformazioni, utilizziamo la formula (5.36) ottenendo:
tµν = ρ√−g
[(−e+
∂e
∂α
)δµρ +
∂e
∂βsµρ +
∂e
∂θ˜sµλsλρ
](K−1)ρσγabξ
bσξaν − δµνΛ .
Ma:(K−1)ρσγabξ
bσξaν = (K−1)ρσ(kσν + uσuν) = δρν + uρuν = Eρν , (5.38)
da cui, essendo sµρEρν = sµν e ˜sµλsλρEρν = ˜sµλsλν , si ha:
tµν = ρ√−g
[(−e+
∂e
∂α
)Eµν +
∂e
∂βsµν +
∂e
∂θ˜sµρ sρν + δµν e
]=
= ρ√−g
[−euµuν +
∂e
∂αEµν +
∂e
∂βsµν +
∂e
∂θ˜sµρ sρν
].
(5.39)
Il tensore energia–momento puo essere decomposto in una parte “parallela” ed una parteortogonale al campo di velocita. Quest’ultima prende il nome di tensore relativistico deglisforzi o tensore di Cauchy ed e data da:
τµν := −ρ√−g[∂e
∂αEµν +
∂e
∂βsµν +
∂e
∂θ˜sµρ sρν
]. (5.40)
Come nella teoria non relativistica, la sua parte a traccia nulla prende il nome di tensoredeviatore:
Zµν := −ρ[∂e
∂βsµν +
∂e
∂θ˜sµρ sρν
]. (5.41)
Il tensore degli sforzi e legato al tensore delle deformazioni tramite i tre coefficenti ∂e∂α
,∂e∂β
e ∂e∂θ
. Essi descrivono la reazione del materiale alla deformazione corrispondente adα, β, θ e prendono, come nella teoria non relativistica, il nome di coefficenti di risposta delmateriale. Introducendo la pressione:
P := −ρ ∂e∂α
, (5.42)
89

possiamo riscrivere il tensore energia–momento nella forma:
tµν = −√−g (ǫuµuν + PEµν + Zµν ) = Λuµuν − τµν , (5.43)
o anche:tµν = −√−g [(ǫ+ P )uµuν + Pδµν + Zµν ] . (5.44)
Le relazioni (5.42) e (5.41) si dicono relazioni costitutive.Osserviamo che:
P = −ρ ∂e∂α
= −ρ∂e∂ρ
∂ρ
∂α= ρ2 ∂e
∂ρ= − ∂e
∂( 1ρ)
= − ∂e
∂ϑ,
dove ϑ = 1ρ
e il volume specifico. Quindi la pressione e l’opposto della derivata dell’energiainterna rispetto al volume specifico, come nella fisica elementare.
Mostreremo ora che e possibile ricavare l’espressione (5.39) con un procedimento dif-ferente, utilizzato gia nel caso non relativistico. Le formule che otterremo ci saranno utiliin seguito. Osserviamo che si ha:
tµν + δµνΛ =∂Λ
∂ξaµξaν =
= −√−g[e∂ρ
∂ξaµξaν +
(∂e
∂α
∂α
∂ξaµξaν +
∂e
∂β
∂β
∂ξaµξaν +
∂e
∂θ
∂θ
∂ξaµξaν
)],
(5.45)
e quindi possiamo calcolare il tensore energia–momento se conosciamo le grandezze ∂f∂ξa
µξaν ,
dove f = (ρ, β, θ) (si ricordi che α = − log ρρ0
). Queste grandezze possono tutte esserecalcolate partendo dalla relazione:
∂Jρ
∂ξaµξaν = Jρδµν − Jµδρν (5.46)
che dimostriamo alla fine del paragrafo. Abbiamo:
∂ρ
∂ξaµξaν =
∂ρ
∂Jλ∂Jλ
∂ξaµξaν =
1
gρJλ∂Jλ
∂ξaµξaν =
= −ρuλ(uλδµν − uµδλν ) = ρEµν
(5.47)
∂uλ
∂ξaµξaν =
1√−g
(Jλ
∂
∂ξaµ
1
ρ+
1
ρ
∂Jλ
∂ξaµ
)ξaν =
=1√−g
(−J
λ
ρ2
∂ρ
∂ξaµ+
1
ρ
∂Jλ
∂ξaµ
)ξaν = −uµEλν
(5.48)
∂kλρ∂ξaµ
ξaν =∂hλρ∂ξaµ
ξaν − uρ∂uλ∂ξaµ
ξaν − uλ∂uρ∂ξaµ
ξaν =
= hνλδµρ + hνρδ
µλ + uλuνE
µρ + uρuνE
µλ =
= kλνδµρ + kρνδ
µλ + uλuνE
µρ + uρuνE
µλ + uµ (gνλuρ + gνρuλ) .
(5.49)
90

La formula (5.47) implica anche:
∂α
∂ξaµξaν = −1
ρ
∂ρ
∂ξaµξaν = −Eµν .
Usando le equazioni (5.49) e (5.33) si ha:
∂β
∂ξaµξaν =
∂β
∂kρλ
∂kλρ∂ξaµ
ξaν = −1
2
[sµν + sλρ(K−1)µλK
ρν
]
∂θ
∂ξaµξaν =
∂θ
∂kρλ
∂kλρ∂ξaµ
ξaν = −1
2
[˜sµρ sρν + ˜sρλsωρ (K−1)µωK
λν
].
Con un ragionamento del tutto analogo a quello del paragrafo 2.6 si prova che, per lacommutativita delle funzioni di operatori con l’operatore stesso, nelle due ultime formulei due termini in parentesi sono uguali fra loro e quindi:
∂β
∂ξaµξaν = −sµν (5.50)
∂θ
∂ξaµξaν = − ˜sµλsλν . (5.51)
Introducendo le (5.50), (5.51) e (5.47) nell’espressione (5.45) si ritrova la (5.39).Finalmente, vogliamo provare l’identita (5.46). Cominciamo con l’osservare che dalla
espressione (5.5) delle componenti di Jµ risulta:
∂Jµ
∂ξaωξaλ =
∂(ρ0
√det γ ǫµνρσξ1νξ
2ρξ
3σ
)
∂ξaωξaλ =
= ρ0
√det γ
(ǫµωρσξ1λξ
2ρξ
3σ + ǫµνωσξ1νξ
2λξ
3σ + ǫµνρωξ1νξ
2ρξ
3λ
).
(5.52)
Per motivi puramente tecnici, vogliamo “completare” la matrice (ξaµ) in modo che diventiuna matrice quadrata invertibile. A tale scopo scegliamo una qualunque funzione ξ0 =ξ0(xµ) tale che la matrice (ξαµ), (α = 0, 1, 2, 3), sia invertibile. E’ facile verificare chequesto avviene se e solo se ξ0 soddisfa la condizione:
ξ0µuµ 6= 0 ,
dove uµ e la velocita del materiale e, come al solito, l’indice in basso di ξ0 indica la derivatarispetto ad xµ. Denotiamo con (xµβ) la matrice inversa. In tal modo possiamo introdurrela rappresentazione dell’unita :
ξαµxµβ = δαβ
che ci sara utile nella dimostrazione.Poiche tutto cio che segue e indipendente dalla particolare scelta di ξ0, utilizzeremo
la piu semplice scelta possibile che e ξ0 = x0. Con questa scelta abbiamo ξ00 = 1, ξ0k = 0(cioe ξ0µ = δ0µ) e anche:
δkl = xkαξαl = xk0ξ
0l + xkaξ
al = xkaξ
al .
91

Questa relazione prova che, in questo caso, la matrice (xka) e l’inversa tridimensionale dellamatrice (ξal) che abbiamo introdotto nel paragrafo 5.2. Inoltre si ha:
0 = δk0 = xkαξα0 = xk0ξ
0l + xkaξ
a = xk0 + xkaξa ,
che implica:
xk0 = −xkaξa = vk =uk
u0.
Allo stesso modo,0 = δ0k = x0
αξαk = x0
0ξ0k + x0
aξak = x0
aξak
implica x0a = 0. Utilizzando questo fatto abbiamo anche:
1 = δ00 = x0αξ
α0 = x0
0ξ00 + x0
aξa0 = x0
0 ,
e a questo punto, scrivendo x00 = u0
u0 , abbiamo finalmente:
xµ0 =uµ
u0= vµ . (5.53)
Utilizziamo ora la matrice (xµα) per semplificare il secondo membro della (5.52): si hainfatti
ǫµωρσξ1λξ2ρξ
3σ + ǫµνωσξ1νξ
2λξ
3σ + ǫµνρωξ1νξ
2ρξ
3λ =
=[(ǫγτρσξβγ ξ
ατ ξ
2ρξ
3σ
)ξ1λ +
(ǫγντσξβγξ
ατ ξ
1νξ
3σ
)ξ2λ +
(ǫγνρτ ξβγξ
ατ ξ
2ρξ
1ν
)ξ3λ]xµβ x
ωα =
= D[(δβ0 δ
α1 − δβ1 δ
α0
)ξ1λ +
(δβ0 δ
α2 − δβ2 δ
α0
)ξ2λ +
(δβ0 δ
α3 − δβ3 δ
α0
)ξ3λ
]xµβ x
ωα ,
dove abbiamo utilizzato l’uguaglianza del determinante quadridimensionale con quellotridimensionale (vedi formula (5.21)):
det (ξαµ) = ǫγνρτ ξ0γξ1νξ
2ρξ
3τ = ǫ0νρτ ξ1νξ
2ρξ
3τ = ǫhklξ1hξ
2kξ
3l = det (ξak) = D .
Ricordando che ρ0
√det γ D = ρ
√−g u0 (formula (5.20)), si ha:
∂Jµ
∂ξaωξaλ = ρ
√−g u0 [xµ0 xωaξaλ − xω0 x
µaξaλ]
= ρ√−g u0
[xµ0(δωλ − xω0ξ
0λ
)− xω0
(δµλ − xµ0ξ
0λ
)]
= ρ√−g u0xµ0δ
ωλ − ρ
√−g u0xω0δµλ .
Ne segue, utilizzando (5.53):
∂Jµ
∂ξaωξaλ = ρ
√−g (uµδωλ − uωδµλ) = Jµδωλ − Jωδµλ ,
che e cio che volevamo dimostrare.
92

5.7 Equazioni del moto e teorema di Nother.
Le equazioni del moto del sistema si ricavano dal principio variazionale:
δ
∫
Ω
Λ d4x = 0
e si scrivono immediatamente nella forma delle equazioni di Eulero-Lagrange:
∂µ∂Λ
∂ξaµ− ∂Λ
∂ξa= 0 . (5.54)
Infatti, l’azione
A =
∫
Ω
Λ d4x
e gia espressa in forma invariante e quindi non e richiesto alcun cambiamento rispetto allacorrispondente deduzione non relativistica. Le equazioni (5.54) costituiscono un sistemadi tre equazioni differenziali a derivate parziali del secondo ordine nelle incognite ξa(xµ).Si osservi che, una volta espresso P µ
a in funzione dei campi e delle loro derivate tramitele stress-strain relations (5.36), si puo scrivere la (5.54) nella forma:
∂µPµa =
∂Λ
∂ξa. (5.55)
Vogliamo ora provare il teorema di Nother: le equazioni del moto (5.54) sono equiv-alenti alla “legge di conservazione”:
∇µtµν = 0 (5.56)
e viceversa. Cominciamo provando che le (5.54) implicano le (5.56). Calcoliamo preventi-vamente la derivata parziale del tensore tµν definito in (5.37):
∂µtµν = ξaν∂µ
∂Λ
∂ξaµ+
∂Λ
∂ξaµ∂µξ
aν − ∂νΛ .
Per calcolare ∂νΛ osserviamo che la densita lagrangiana dipende dalle coordinate tramitei campi, le derivate dei campi e la metrica. Dunque:
∂νΛ =∂Λ
∂ξaξaν +
∂Λ
∂ξaµ∂νξ
aµ +
∂Λ
∂gρσ
∂gρσ∂xν
.
Ne segue:
∂µtµν = ξaν∂µ
∂Λ
∂ξaµ+
∂Λ
∂ξaµ∂µξ
aν −
∂Λ
∂ξaξaν −
∂Λ
∂ξaµ∂νξ
aµ −
∂Λ
∂gρσ
∂gρσ∂xν
.
93

Utilizzando la simmetria delle derivate seconde si ha:
∂µtµν = ξaν
(∂µ
∂Λ
∂ξaµ− ∂Λ
∂ξa
)− ∂Λ
∂gρσ
∂gρσ∂xν
.
Questa espressione dipende dal sistema di coordinate, ma in ogni punto dello spazio-tempo possiamo calcolarne entrambi i membri rispetto al sistema localmente inerziale,cioe rispetto al sistema in cui le derivate della metrica si annullano (vedi paragrafo 9.6).In tale sistema di coordinate le derivate parziali diventano derivate covarianti e si ha
∇µtµν =
(∂µ
∂Λ
∂ξaµ− ∂Λ
∂ξa
)ξaν . (5.57)
Ora, anche se l’equazione (5.57) e stata calcolata in un riferimento particolare, essa rimanevalida in ogni sistema perche entrambi i membri sono di carattere tensoriale. Ne segue chele equazioni del moto implicano le (5.56).
Osserviamo ora che l’uguaglianza (5.57) vale per ogni configurazione ξa(xµ), anche sequesta non e una soluzione delle equazioni del moto. Ne segue che, per ogni configurazionee indipendentemente dal fatto che questa sia o meno soluzione delle equazioni dinamiche,vale l’identita :
uν∇µtµν = 0 , (5.58)
come si verifica immediatamente formando il prodotto scalare delle (5.57) con il campo divelocita e ricordando che uνξaν = 0. Conseguentemente, solo tre delle quattro equazioni(5.57) sono indipendenti; scegliamo quelle “spaziali” e proviamo che esse implicano sia leequazioni del moto che l’equazione “temporale” ∇µt
µ0 = 0. Si ha:
∇µtµl =
(∂µ
∂Λ
∂ξaµ− ∂Λ
∂ξa
)ξal , (5.59)
quindi, usando la matrice inversa tridimensionale xlb, otteniamo:
(∇µtµl )xlb = ∂µ
∂Λ
∂ξbµ− ∂Λ
∂ξb. (5.60)
Questa formula prova che ∇µtµl = 0 implica le equazioni del moto. Infine, la (5.58) si puo
scrivere:
∇µtµ0 = − ul
u0∇µt
µl ,
e dunque ∇µtµl = 0 implica anche ∇µt
µ0 = 0.
Osserviamo che t e simmetrico; inoltre, utilizzando l’espressione esplicita (5.43), si haimmediatamente la sua decomposizione rispetto alla velocita:
tµν = tµν⊥ + t uµuν ,
94

dove:tµν⊥ = −√−g (P Eµν + Zµν )
t =√−g ǫ = −Λ .
Utilizzando la relazione (5.44) possiamo scrivere le equazioni del moto nella forma:
∇µ [(ǫ+ P ) uµuν + Pδµν + Zµν ] = 0 ,
cioe:uν∇µ [(ǫ+ P )uµ] + (ǫ+ P )uµ∇µuν = −∇νP −∇µZ
µν . (5.61)
Come sappiamo, l’equazione uν∇µtµν = 0 e identicamente soddisfatta, e quindi possiamo
rimpiazzare la (5.61) con la sua parte ortogonale al campo di velocita, che si ottienemoltiplicando per il proiettore E. Utilizzando il fatto che uν∇µuν = 1
2∇µ(uνuν) = 0,abbiamo che il secondo termine del membro di sinistra e ortogonale alla velocita, cioe Eagisce su di esso come l’identita. Il primo termine e invece proporzionale, e dunque E loannichila. Allora:
(ǫ+ P )uµ∇µuν = −Eµν(∇µP + ∇ρZ
ρµ
). (5.62)
In base al teorema di Nother queste equazioni costituiscono una forma equivalente alleequazioni del moto (5.55).
E’ interessante il fatto che l’identita (5.58) puo essere verificata direttamente, facendouso della equazione di continuita, delle relazioni costitutive e delle identita (5.50) e (5.51).Poiche si ha:
uν∇µtµν = ∇µ (ǫuµ) + P∇µu
µ + Zµν∇µuν =
= ρ∂e
∂α(uµ∇µα−∇µu
µ) + ρ∂e
∂β(uµ∇µβ − sµν∇µu
ν) + ρ∂e
∂θ
(uµ∇µθ − ˜sµρ sρν∇µu
ν),
e sufficiente provare che sono identicamente nulli i tre termini in parentesi. Ora la formula(5.26) implica che α = − log ρ
ρ0e dunque:
uµ∇µα−∇µuµ = −1
ρuµ∇µρ−∇µu
µ = −1
ρ(uµ∇µρ+ ρ∇µu
µ) = −1
ρ∇µ (ρuµ) = 0 ;
inoltre
uµ∇µβ − sµν∇µuν =
∂β
∂ξaν(uµ∇µξ
aν − sµν∇µu
ν) = 0 .
In questa relazione abbiamo usato la proprieta uµξaµ = 0 e anche il fatto che, essendo leξa campi scalari, la derivata covariante coincide con la derivata ordinaria:
∇µξa = ∂µξ
a := ξaµ .
In modo del tutto analogo si ha infine:
uµ∇µθ − ˜sµρ sρν∇µuν = −
(∂θ
∂ξaµξaν + ˜sµρ sρν
)∇µu
ν = 0 .
95

5.8 Conservazione dell’energia.
A differenza di quanto avviene nel caso non relativistico, la relazione ∇µtµ0 = 0 non
implica generalmente una legge di conservazione dell’energia meccanica. Per capire comesi esprimono le leggi di conservazione nell’ambito della relativita generale, associamo adogni campo vettoriale w = wµ ∂
∂xµ definito sullo spazio–tempo X la densita vettoriale:
eµ = eµ(w) := wνtµν = wνtµν .
La divergenza di e(w) e data da:
∂µeµ = ∇µe
µ = tµν∇µwν + wν∇µtµν .
Se sono soddisfatte le equazioni del moto, la divergenza di t si annulla in virtu del teorema diNother. Inoltre, poiche t e simmetrico, possiamo sostituire a ∇µwν la sua parte simmetrica:
∂µeµ = tµν∇(µwν) ,
e quindi la densita e(w) si conserva se e solo se w corrisponde ad una simmetria dellametrica dello spazio–tempo, cioe se ∇(µwν) = 0. Un campo vettoriale che gode di questaproprieta prende il nome di vettore di Killing (vedi paragrafo 9.10). Ne segue che ad ognivettore di Killing corrisponde una densita la cui divergenza e nulla; nel linguaggio dellateoria dei campi, una densita vettoriale cosı ottenuta prende il nome di corrente conservata.Se V ∈ X e un volume tridimensionale, ad ogni corrente conservata possiamo associareuna carica corrispondente:
QV :=
∫
V
e0d3x .
Allora, in virtu del teorema di Stokes, si ha:
dQVdt
=
∫
V
∂0e0 d3x = −
∫
V
∂kek d3x = −
∫
∂V
e⊥ .
Cio significa che la carica Q e conservata nel tempo se il flusso di ek attraverso il contornodi V si annulla. Nel caso non relativistico, abbiamo sempre assunto che la metrica nondipendesse dal tempo, cioe che il vettore ∂
∂x0 fosse un vettore di Killing. In questo caso siha wµ = δµ0 e dunque
eµ(∂
∂x0
)= tµ0 .
La carica conservata corrispondente a ∂∂x0 era l’energia meccanica definita come integrale
della densita t00. Se lo spazio–tempo e piatto esistono anche altre cariche conservate cor-rispondenti ai generatori del gruppo di Poincare: i momenti cinetici associati alle traslazionispaziali, i momenti angolari associati alle rotazioni spaziali e i momenti statici associatialle rotazioni di Lorentz, che vengono anche chiamate trasformazioni di boost.
96

Nel caso di una metrica generica pero, il vettore ∂∂x0 non e un vettore di Killing (la
derivata covariante di δµ0 non e necessariamente nulla) e dunque l’energia meccanica non econservata. Cio e dovuto al fatto che il campo gravitazionale, cambiando nel tempo, compieun lavoro. Per ristabilire la legge di conservazione dell’energia, bisognerebbe considerarel’energia totale del sistema costituito dal corpo e dal campo gravitazionale. Tale sistemae governato dalle equazioni della elasticita e dalle equazioni di Einstein.
Ma, nell’ambito della relativita generale, l’energia del campo gravitazionale non puoessere descritta tramite un tensore energia–momento. Pertanto, l’insistere sulla necessitadell’esistenza di un tensore energia–momento come fatto primordiale, ha condotto alcunifisici a rinunciare del tutto al principio di covarianza generale, e ad introdurre invece lanozione di riferimento globale privilegiato. Ritengo tale punto di vista decisamente errato.Anzi, proprio la presa di coscienza di questa situazione paradossale e stata l’elementoche mi ha indotto a ristudiare dall’inizio i fundamenti della teoria dei campi, e quindiin particolare a ripensare la teoria dell’elasticita nel modo qui esposto. Ritengo di avertrovato l’approcio corretto al problema dell’energia gravitazionale. L’esposizione di questirisultati ci porterebbe pero al di la degli scopi di questo libro.
5.9 Idrodinamica relativistica dei fluidi perfetti.
Un fluido perfetto e un materiale privo di rigidita di forma: le deformazioni che noncambiano il volume specifico non “costano” nulla. In termini di energia interna possiamodire che, per un fluido perfetto, l’energia interna dipende solo dal parametro α, cioe dalvolume specifico ϑ. Infatti:
α = − log
(ρ
ρ0
)= logϑ− logϑ0 .
Possiamo quindi scrivere la densita lagrangiana per un fluido perfetto relativistico nellaforma:
Λ = −ρ√−g [m+ uI(α)] ,
cioe, in termini della energia interna specifica per unita di volume e per unita di mole:
Λ = −√−g ǫ(ρ)
Λ = −√−g ρe(ρ) .
L’espressione corrispondente per la densita tensoriale di energia–momento si ottiene dallaformula (5.43) semplicemente annullando il tensore deviatore Z (perche nella formula (5.41)si ha ∂e
∂β= ∂e
∂θ= 0):
tµν = −√−g (ǫuµuν + P Eµν ) . (5.63)
Questa formula esprime la legge di Pascal: la parte spaziale del tensore energia–momentoe proporzionale all’unita, e il coefficente di proporzionalita e la pressione. Si noti che:
P = − de
dϑ= −d(ǫϑ)
dϑ= −ϑ dǫ
dϑ− ǫ = ρ
dǫ
dρ− ǫ , (5.64)
97

o anche:
P = ρ2 de
dρ.
Integrando la (5.64) si ottiene:
e = m−∫ ϑ
+∞P (ϑ′) dϑ′ = m+
∫ +∞
ϑ
P (ϑ′)dϑ′ .
L’energia interna specifica di una mole del fluido e dunque uguale all’energia che competeallo stato completamente rarefatto (ρ = 0, cioe ϑ infinitamente grande) piu il lavoronecessario a comprimere la mole stessa alla densita attuale ρ. Le relazioni P = P (v) oP = P (ρ) prendono, come nel caso generale, il nome di relazioni costitutive e determinanounivocamente la lagrangiana e conseguentemente la dinamica. Le equazioni del moto siottengono dalle (5.62) semplicemente annullando Z:
(ǫ+ P )uµ∇µuν = −Eµν∇µP . (5.65)
5.10 Descrizione alternativa delle deformazioni
Come abbiamo visto nel paragrafo 2.9, e possibile dare una descrizione alternativadelle deformazioni, nel caso non relativistico, mediante l’uso di parametrizzazioni differenti.Non e difficile rendersi conto che questo e possibile anche nel caso relativistico. Data unaqualunque funzione analitica f tale che f(K − I) e ben definito e f(0) = 0, f ′(0) = 1,possiamo descrivere la deformazione mediante l’operatore:
Sf := −1
2f(K − I) .
Per deformazioni piccole, cioe per (K−I) prossimo a zero, tutti questi operatori coincidonoperche vale lo sviluppo di Taylor:
Sf = −1
2
[f(0) + f ′(0)(K − I) +O((K − I)2)
]≃ −1
2(K − I) . (5.66)
Noi abbiamo scelto f(z) = log(1 + z) per motivi di eleganza della formulazione. Nei rarilavori esistenti sulla elasticita relativistica si trova di solito una scelta differente: f(z) = z.Per completezza, mostreremo in questo paragrafo che la formulazione basata su tale sceltae completamente equivalente alla nostra, ma piu intricata.
Prendiamo dunque:
S∗ := −1
2(K − I) =
1
2(E −H) ,
e cerchiamo la forma che assumono le stress–strain relations e il tensore energia momentoutilizzando tale parametrizzazione. La deformazione puo essere parametrizzata tramite
98

gli invarianti di K. Poiche K ha sempre l’autovalore uno, esistono solo tre invariantiindipendenti, e possiamo per esempio scegliere i cosiddetti invarianti fondamentali cosıdefiniti:
I1 =1
2(TrK − 4)
I2 =1
4[TrK2 − (TrK)2]
I3 =1
2(det K − 1) .
(5.67)
I “nostri” invarianti α, β, θ possono evidentemente essere espressi in funzione di questi edunque anche la densita lagrangiana si puo esprimere come:
Λ = −√−gǫ(I1, I2, I3) ,
dove ǫ(0, 0, 0) = m. Abbiamo dunque:
P µa = −√−g ∂ǫ
∂ξaµ= −2
√−g(Mµργabξ
bρ −Mνρuρ
∂uν∂ξaµ
),
dove:
Mµρ :=∂ǫ
∂kµρ=
∂ǫ
∂I1
∂I1∂kµρ
+∂ǫ
∂I2
∂I2∂kµρ
+∂ǫ
∂I3
∂I3∂kµρ
=
=1
2
[∂ǫ
∂I1gµρ +
∂ǫ
∂I2
(kµρ − kλλg
µρ)
+∂ǫ
∂I3(det K) (K−1)µρ
]=
=1
2
[∂ǫ
∂I1kµτ +
∂ǫ
∂I2
(kµσk
στ − kλλk
µτ
)+
∂ǫ
∂I3(det K) δµτ
](K−1)τρ .
Ora:
Mµρuρ∂uν∂ξaµ
=1
2
[∂ǫ
∂I1kµτ +
∂ǫ
∂I2
(kµσk
στ − kλλk
µτ
)+
∂ǫ
∂I3(det K) δµτ
]uν
∂uν∂ξaµ
= 0 ,
e dunque:
P µa = −√−g
[∂ǫ
∂I1kµτ +
∂ǫ
∂I2
(kµσk
στ − kλλk
µτ
)+
∂ǫ
∂I3(det K) δµτ
](K−1)τργabξ
bρ .
Calcoliamo ora il tensore energia–momento. Utilizzando la relazione (5.38), si ha:
P µa ξaν = −√−g
[(∂ǫ
∂I1− kλλ
∂ǫ
∂I2
)kµτ +
∂ǫ
∂I2kµσk
στ +
∂ǫ
∂I3(det K) δµτ
]Eτν .
MakµτE
τν = kµν + uµuν = hµν
kµσkστE
τν = hµσh
σµ ,
99

e dunque:
P µa ξaν = −√−g
[(∂ǫ
∂I1− kλλ
∂ǫ
∂I2
)hµν +
∂ǫ
∂I2hµσh
σν +
∂ǫ
∂I3(det K) Eµν
],
da cui infine:
tµν =√−g
[−ǫuµuν −
(−ǫ+
∂ǫ
∂I3det K
)Eµν −
(∂ǫ
∂I1− kλλ
∂ǫ
∂I2
)hµν − ∂ǫ
∂I2hµσh
σν
]. (5.68)
Questo tensore puo essere facilmente riscritto come somma di tre termini:
tµν = −√−g [ǫuµuν + P ∗Eµν + Z∗µν ] ,
dove Z∗ e un tensore a traccia nulla ortogonale al campo di velocita. Infatti, utilizzandole relazioni (di immediata verificabilita)
hµν = hµν +1
3hρρE
µν ,
hµρhρν = ˜hµρ h
ρν +
1
3hρρh
µν +
1
3
[hλρ h
ρλ +
1
3(hρρ)
2
],
si ottiene facilmente:
P ∗ =∂ǫ
∂I3det K − ǫ+
1
3hρρ
(∂ǫ
∂I2− ∂ǫ
∂I1
)+
1
3
∂ǫ
∂I2
[4
3(hρρ)
2 + hλρ hρλ
],
Z∗µν = hµν
[∂ǫ
∂I2
(1 +
4
3hρρ
)− ∂ǫ
∂I1
]+
∂ǫ
∂I2˜hµρ h
ρν .
5.11 Il limite non relativistico.
Sappiamo gia che, nel riferimento di riposo, la teoria relativistica coincide con la staticanon relativistica. In questo paragrafo studieremo le ”piccole oscillazioni” intorno ad unaposizione di equilibrio stabile, e mostreremo che anche in questo caso la teoria relativisticacoincide con la corrispondente teoria non relativistica. Consideriamo solo il caso in cui lospazio–tempo e lo spazio materiale siano piatti, e prendiamo sia in X che in Z un sistemadi coordinate cartesiane. Abbiamo dunque:
gµν = ηµν = diag(−1, 1, 1, 1) ,
γab = δab = diag(1, 1, 1) .
Ne segue che per la configurazione ξa = xa il tensore delle deformazioni si annulla, perchele metriche spaziali coincidono. Consideriamo ora le piccole deformazioni di questo statodi riposo globale, corrispondenti al “campo degli spostamenti” φa = φa(xµ):
ξa = xa + φa(xµ) . (5.69)
100

Mostreremo che lo sviluppo al secondo ordine in φa della densita lagrangiana relativisticacoincide (a meno di un termine che non contribuisce alle equazioni del moto) con la densitalagrangiana non relativistica della elasticita lineare (equazione (3.8)):
Λnon rel. = ρ0
[1
2mδklφ
kφl − 1
2A(φkk)2 − 1
2Bφ(kl)φ(kl)
], (5.70)
dove φ(kl) = φ(kl) − 13φ
mmδkl. Come vedremo, questo calcolo non e del tutto banale e, oltre
ad essere un utile esercizio di teoria dei campi, e importante per mostrare la coerenza dellateoria relativistica qui sviluppata con la teoria non relativistica lineare.
Cominciamo col calcolare lo sviluppo della corrente di materia. Dalla relazione
Jµ = ρ0
√det γ ǫµνρσξ1νξ
2ρξ
3σ == ρ0ǫ
µνρσ(δ1ν + φ1
ν
) (δ2ρ + φ2
ρ
) (δ3σ + φ3
σ
),
(dove si e posto det γ = 1) si trova facilmente la seguente espressione:
Jµ = Jµ(0) + Jµ(1) + Jµ(2) + Jµ(3) ,
dove l’indice in basso tra parentesi indica l’ordine algebrico rispetto a φ:
Jµ(0) = ρ0 δµ0 ,
Jµ(1) = ρ0
(φkkδ
µ0 − φlδµl
),
Jµ(2) =1
2ρ0
((φkk)2 − φklφ
lk
)δµ0 + ρ0
(φklφ
l − φl lφk)δµk ,
Jµ(3) = ρ0 ǫµνρσφ1
νφ2ρφ
3σ .
(5.71)
Ne segue:
JµJµ = ρ20
(−1 − 2φkk − 2(φkk)2 + φklφ
lk + ηklφ
kφl +O(φ3)),
ρ =
√JµJµg
=√−JµJµ +O(φ3) =
= ρ0
√1 + 2φkk + 2(φkk)2 − φklφ
lk − ηklφkφl +O(φ3) ,
da cui, sviluppando la radice:
ρ = ρ0
[1 + φkk +
1
2(φkk)2 − 1
2φklφ
lk −
1
2δklφ
kφl +O(φ3)]
=
= −1
2ρ0δklφ
kφl + J0(0) + J0
(1) + J0(2) +O
(φ3).
(5.72)
Per calcolare lo sviluppo della densita lagrangiana prendiamo lo sviluppo della energiainterna rispetto ai tre parametri che descrivono la deformazione. Come gia sappiamo dalparagrafo 2.4, si ha:
uI(α, β, θ) =1
2
∂2uI(0, 0, 0)
∂α2α2 +
∂uI(0, 0, 0)
∂ββ +O(φ3) =
A
2α2 +Bβ +O(φ3) ,
101

dove A e B sono il modulo di compressibilita e il modulo di taglio, e i due parametri siintendono sviluppati al secondo ordine in φ.
Per calcolare lo sviluppo dei parametri, osserviamo che:
S = −1
2(K − I) +O(φ3) ,
ovvero:
sµν = −1
2(hµν − uµuν − δµν ) ,
e dunque, a meno di termini d’ordine superiore:
α = sµµ = −1
2(kµµ − 4) = −1
2(hµµ − 3)
β =1
2
(sµνsµν −
1
3α2
)=
1
8
[hµνhµν − 2hµµ + 3 − 1
3
(hµµ − 3
)2]
=1
8
[hµνhµν −
(hµµ)2
3
].
Per calcolare lo sviluppo di H introduciamo il tempo materiale ξ0 ≡ x0 e la conven-zione φ0 ≡ 0. Allora:
hµν = δab(δaµ + φaµ)(δbν + φbν) = ηµν + δ0µδ
0ν + 2φ(µν) + ηρσφ
ρµφ
σν ,
da cui, con qualche calcolo:
α = −φµµ − 1
2ηρσφ
ρµφ
σνg
µν +O(φ3) = −φkk +O(φ2)
β =1
2φ(kl)φ
(kl) +O(φ3) ,
(5.73)
e quindi:
uI =A
2(φkk)2 +
B
2φ(kl)φ
(kl) +O(φ3) .
Siamo finalmente in grado di scrivere lo sviluppo di Λ. Utilizzando lo sviluppo (5.72) di ρabbiamo:
Λ = −ρ(m+ uI) = −[ρ0 + ρ0φ
kk +
1
2ρ0(φkk)2 − 1
2ρ0φ
klφlk −
1
2ρ0δklφkφl +O(φ3)
]×
×[m+
A
2(φkk)2 +
B
2φ(kl)φ
(kl) +O(φ3)
]=
= ρ0
[1
2mδklφkφl −
1
2A(φkk)2 − 1
2Bφ(kl)φ(kl) +O(φ3)
]−m(J0
(0) + J0(1) + J0
(2)) =
= Λnon rel. −mJ0 +O(φ3),
ovvero:Λ +mJ0 = Λnon rel. +O
(φ3). (5.74)
102

Osserviamo che i due principi variazionali:
δ
∫
Ω
Λ d4x = 0 ,
δ
∫
Ω
(Λ +mJ0
)d4x = 0 ,
sono equivalenti. Infatti:
∫
Ω
J0 d4x =
∫dx0
∫
Ωt
J0 d3x ,
dove Ωt e l’intersezione di Ω con la ipersuperficie x0 = t. Ora l’integrale tridimensionaledi J0 su Ωt e pari alla quantita di materiale contenuto in Ωt e quindi non dipende daivalori dei campi all’interno del volume di integrazione ma solo dai valori sul contorno ∂Ωt.Questo significa che δ
∫ΩJ0 d4x ≡ 0.
Osserviamo anche che il termine del terzo ordine in φ nella formula (5.74) da terminidel secondo ordine nelle equazioni del moto. Ne segue che la lagrangiana non relativisticaΛnon rel. implica, a meno di termini del secondo ordine, le stesse equazioni del moto cheimplica la lagrangiana relativistica Λ. Affinche la teoria sia consistente con il principio direlativita, la velocita di propagazione delle onde elastiche data dalla formula (3.18) deveessere minore della velocita della luce, cioe
√3A+ 2B
3m< c .
5.12 Interazione di un solido elastico con il proprio campo gravitazionale.
Fino ad ora, abbiamo sviluppato la teoria della elasticita relativistica considerandofissata la metrica dello spazio–tempo, anche se in modo arbitrario. Se si vuole pero descri-vere l’interazione di un solido elastico con il campo gravitazionale, e necessario trattarela metrica come un oggetto dinamico governato dalle equazioni di Einstein che descrivonol’interazione della materia con il campo gravitazionale stesso.
Come e noto, le equazioni di Einstein si scrivono, in unita in cui la costante di gravi-tazione universale e la velocita della luce sono uguali ad uno, nel modo seguente:
Gµν = 8πTµν . (5.75)
In questa formula, Tµν e il tensore energia–momento della materia dato da Tµν = − 1√−g tµν
dove tµν e il tensore canonico definito dalla equazione (5.43) (il segno negativo appare permotivi storici), e Gµν e il tensore di Einstein definito da:
Gµν = Rµν − 1
2Rδµν ,
103

dove Rµν e il tensore di Ricci e R = Rµµ. Le equazioni di Einstein contengono le equazionidel moto come equazioni di compatibilita. Infatti, in virtu delle identita di Bianchi, ladivergenza di Gµν e nulla e quindi si deve avere anche ∇µT
µν = 0. Le equazioni (5.75)
possono essere dedotte da un principio variazionale δA = 0 se si assume la seguente densitascalare come lagrangiana che descrive il sistema:
Λtot = Λgrav + Λmat ,
dove Λmat e la densita di lagrangiana della materia e Λgrav e la densita di lagrangiana diHilbert–Einstein definita da:
Λgrav = − 1
8π
√−g R .
Nel nostro caso, vogliamo descrivere l’interazione di un solido elastico con il campogravitazionale da esso stesso generato. Dunque Λmat sara la densita lagrangiana dellaelasticita relativistica che gia conosciamo. Si puo mostrare facilmente che la derivatavariazionale di Λmat rispetto alla metrica produce il tensore dell’energia–momento. Intal modo, una volta assegnata Λmat, il problema ha tredici incognite: le dieci compo-nenti del campo gravitazionale ed i tre campi incogniti ξa che descrivono la materia.Come e noto, esistono poche soluzioni esatte conosciute delle equazioni di Einstein; ledue piu famose si hanno quando si descrive la materia con un fluido perfetto e si studial’evoluzione dell’universo (soluzione cosmologica di Robertson–Walker) oppure quando sistudia il campo gravitazionale generato da una distribuzione sferica di massa (soluzione diSchwartzschild). Nel nostro caso, scriveremo le equazioni di Einstein per un corpo elasticoa simmetria sferica, cioe descrivendo la materia con un tensore energia–momento in cui, adifferenza che nel caso dei fluidi, il tensore deviatore non e nullo.
Cominciamo col richiamare brevemente come si ottiene la soluzione di Schwartzschildnel caso in cui la materia sia un fluido perfetto. Questa soluzione e ben nota, e per maggioridettagli rimandiamo, per esempio, al libro di Wald [24].
Scriviamo le equazioni di Einstein nel riferimento di riposo. Se introduciamo unsistema di coordinate sferiche per lo spazio (x1 = r, x2 = θ, x3 = ϕ), possiamo scrivere lametrica nella forma:
gµν = diag(−a(r), b(r), r2, r2 sin2 θ) , (5.76)
dove a(r) e b(r) sono funzioni incognite. Si hanno le seguenti tre componenti indipendentidel tensore di Einstein:
G00 =
b′
ra2+
1
r2
(1 − 1
b
)
G11 =
a′
rab− 1
r2
(1 − 1
b
)
G22 = G3
3 =1
2
1√ab
d
dr
(a′√ab
)+
1
2
a′
rab− 1
2
b′
rb2
(5.77)
dove l’apice indica derivazione rispetto ad r. Le equazioni di Einstein si scrivono:
G00 = T 0
0
G11 = T 1
1
G22 = T 2
2 ,
(5.78)
104

dove:T 0
0 = −8πǫ
T 11 = T 2
2 = T 33 = 8πP .
Una volta assegnata l’equazione di stato, per esempio nella forma ǫ = ǫ(P ), si ha unsistema di tre equazioni nelle tre incognite (a(r), b(r), P (r)).
Per risolvere questo sistema e conveniente passare dalle incognite (a(r), b(r)) alleincognite(m(r), φ(r)) definite da:
φ(r) = log a(r)
m(r) :=r
2
(1 − 1
b(r)
).
Si verifica allora facilmente che le equazioni (5.78) equivalgono al sistema:
m′(r) = 4πǫ(P (r))r2
φ′(r) = −m+ 4πPr3
r(r − 2m)
P ′(r) = −(ǫ+ P )m+ 4πPr3
r(r − 2m).
(5.79)
L’ultima equazione di questo sistema prende il nome di equazione di Tolman–Volkoffdell’equilibrio idrostatico. Per la discussione delle soluzioni di questo sistema rimandi-amo al testo del Wald [24].
Passiamo ora a discutere il problema del campo gravitazionale generato da un solidoelastico rinunciando all’ipotesi che si tratti di un fluido perfetto. Assumiamo che la metricamateriale sia euclidea, e introduciamo un sistema di coordinate sferiche ξ1 = y, ξ2 =θz, ξ
3 = ϕz in Z. Allora:γab = diag(1, y2, y2 sin2 θz) .
Per lo spazio–tempo fisico assumiamo lo stesso sistema di coordinate usato nel caso delfluido perfetto, e quindi la metrica (5.76). Se supponiamo che le deformazioni possanoavvenire solo radialmente, cioe che esse “rispettino” la simmetria sferica, nel sistema diriposo si avra: y = y(r), θz = θ , ϕz = ϕ. Abbiamo dunque un solo campo materialeincognito, il “raggio materiale” y = y(r), e il sistema delle equazioni di Einstein saracostituito di tre equazioni per le tre incognite (a(r), b(r), y(r)).
Osserviamo che, a causa della simmetria sferica del problema, il tensore deviatore ediagonale nel riferimento di riposo e deve valere z0
0 = 0, z22 = z3
3 ; inoltre, poiche il tensoredeviatore e a traccia nulla, si avra z1
1 = −2z22 . Posto z2
2 := −Ω(r) si avra dunque:
(zµν ) = diag(0, 2Ω,−Ω,−Ω) .
Le equazioni di Einstein si scrivono quindi:
G00 = T 0
0 = 8πǫ
G11 = T 1
1 = 8π(P + 2Ω)
G22 = G3
3 = T 22 = T 3
3 = 8π(P − Ω) ,
(5.80)
105

dove le componenti di G sono evidentemente ancora date da (5.77). Queste equazionicontengono per il momento implicitamente il campo materiale y(r). Per rendere esplicitaquesta dipendenza e naturalmente necessario assegnare l’energia interna in funzione deiparametri che descrivono la deformazione. Prima di fare questo si puo pero sviluppareil sistema (5.80) in una forma che generalizza il sistema (5.79) nel caso in cui il tensoredeviatore non e nullo.
Poiche le grandezze b(r) ed m(r) sono legate solo dalla prima equazione, che e la stessanei due casi, si avra ancora:
m′(r) = 4πǫ(P (r))r2 . (5.81)
Si trova poi facilmente che la grandezza φ(r) = log a(r) soddisfa all’equazione:
φ′(r) = −m+ 4πPr3 + 8πr3Ω
r(r − 2m), (5.82)
e che la terza equazione si puo scrivere:
P ′(r) + 2Ω′ = −(ǫ+ P + 2Ω)m+ 4πPr3 + 8πr3Ω
r(r − 2m)− 6
Ω
r. (5.83)
Si noti che, ponendo Ω = 0, si ritrova la (5.79).Vogliamo ora scrivere esplicitamente le equazioni di Einstein in termini del campo y
e delle sue derivate. Osserviamo che:
hµν = gµρhρν = gµργabξaµξbν = gµρ[γ11(y′)2δ1νδ
1ρ + γ22δ
2νδ
2ρ + γ22δ
3νδ
3ρ] =
= gµρ[(y′)2δ1νδ1ρ + y2δ2νδ
2ρ + y2 sin2 θδ3νδ
3ρ]
cioe :
(hµν ) = diag
(0,
(y′(r))2
b(r),y2(r)
r2,y2(r)
r2
).
Ne segue:
(kµν ) = diag
(1,
(y′(r))2
b(r),y2(r)
r2,y2(r)
r2
),
ρ = ρ0
√det K = ρ0
y′(r)y2(r)
r2√b(r)
.
Il tensore delle deformazioni risulta:
(sµν ) = −1
2logK = diag
(0,− log
y′(r)√b(r)
,− logy(r)
r,− log
y(r)
r
).
Poiche (Eµν ) = diag(0, 1, 1, 1), si ha inoltre:
(sµν ) = −1
3log
ry′(r)
y(r)√b(r)
1
3diag (0, 2,−1,−1)
106

A questo punto abbiamo tutte le relazioni necessarie per esprimere esplicitamente l’energiainterna in funzione delle deformazioni e quindi in funzione del campo incognito y, una voltache sia nota la funzione e = e(α, β, θ). Infatti gli invarianti della deformazione si scrivono,in funzione di y, come:
α = sµµ = − logy′(r)y2(r)
r2√b(r)
,
β =1
2sµν s
νµ =
1
3log2 ry′(r)
y(r)√b(r)
,
θ =1
3sµν s
νρ sρµ = − 2
27log3 ry′(r)
y(r)√b(r)
= − 2
27β
32 .
Come nel caso non relativistico, a causa della simmetria cilindrica della deformazione, ilparametro θ non da ulteriori informazioni rispetto al parametro β (vedi paragrafo 2.2). Sinoti inoltre che gli invarianti non dipendono solo dalla derivata di y ma anche da y stesso.Cio e dovuto al fatto che, come avevamo gia osservato nella discussione generale sullaenergia interna, se la metrica materiale non e costante gli invarianti dipendono dai campitramite la metrica stessa (basta riscrivere y(r) =
√γ22 per rendersi conto della validita di
questa affermazione).A questo punto non e piu possibile sviluppare ulteriormente la discussione senza in-
trodurre esplicitamente la funzione e. Scegliamo il modello piu semplice, cioe il modelloquasi lineare:
e = m+A
2α2 +Bβ .
Allora la pressione e data da:
P = −Aρα = Aρ0y′(r)y2(r)
r2√b(r)
logy′(r)y2(r)
r2√b(r)
,
e, essendo zµν = −ρBsµν , si ha:
Ω(y(r)) = z22 = −1
3Bρ0
y′(r)y2(r)
r2√b(r)
logry′(r)
y(r)√b(r)
.
Utilizzando queste relazioni si puo riscrivere immediatamente il sistema delle equazioni(5.81), (5.82) e (5.83) in termini delle incognite (m(r), ϕ(r), y(r)). Naturalmente, si trattadi un sistema non lineare la cui integrazione richiede metodi numerici, il cui studio ciporterebbe al di fuori dei limiti che ci siamo posti per questo libro (per un ulteriore ap-profondimento di questo argomento rimandiamo il lettore all’articolo [22]).
5.13 Descrizione lagrangiana della elasticita relativistica.
Come abbiamo visto nel primo paragrafo di questo capitolo, non e possibile dare ladescrizione lagrangiana della elasticita relativistica in una forma manifestamente covari-ante. Scegliamo dunque un riferimento X ≃ X × R e introduciamo il tempo materiale
107

ξ0 identificandolo con il tempo fisico x0. Aggiungendo il tempo materiale allo spazio Zotteniamo lo spazio–tempo materiale Z := Z × R. Una configurazione spazio–temporale
F : Z 7→ X e descritta da tre funzioni xk = xk(ξα). Il gradiente di deformazione xkα = ∂xk
∂ξα
contiene le informazioni sulla deformazione e sulla velocita del materiale:
vk = xk0 = xk =uk
u0,
che coincide con la parte spaziale del vettore vµ = (1, vk) introdotto nella formula (5.53).Ricordiamo che vµ non e un oggetto invariante perche la sua lunghezza (ma non la suadirezione) dipende dalla scelta del sistema di riferimento. Per misurare la deformazionedel materiale, bisogna confrontare la metrica materiale γ con il pull–back della metricaekl che misura le distanze spaziali nel riferimento di riposo. Questa metrica deve esserecostruita in modo tale che le lunghezze dei vettori tridimensionali rispetto ad essa sianouguali alle lunghezze delle loro proiezioni sul sottospazio ortogonale alla velocita misuratecon la metrica gµν . Questo significa che, se w = wk ∂
∂xk (w0 = 0), la lunghezza eklwkwl di
w rispetto a tale metrica e pari a
eklwkwl := gµν(Eµρw
ρEνλwλ) = EρνE
νλw
ρwλ = Eρλwρwλ = Eklw
kwl ,
dove abbiamo utilizzato l’idempotenza dell’operatore E. Dunque si ha semplicementeekl = Ekl. Definiamo ora il pull–back della metrica e e il corrispondente operatore:
H := γ−1F ∗e ,
le cui componenti sono dunque date da:
hab = Eklxkaxlcγac .
E’ ovvio che H e l’inverso del pull–back della parte spaziale dell’operatore H che abbiamoutilizzato nella descrizione euleriana relativistica (per verificare cio, basta fare il calcolo inun riferimento di riposo). Allora, il tensore delle deformazioni definito come
S :=1
2log H , (5.84)
coincide con il pull–back del corrispondente tensore euleriano relativistico. Ne segue che iparametri della deformazione rimangono invariati:
α = saa
β =1
2sab s
ba
θ =1
3sab s
bcsca .
(5.85)
Per calcolare questi parametri in termini del gradiente delle deformazioni, dobbiamo cal-colare le componenti hab. Utilizzando la formula (5.4) si ha:
Ekl = gkl + ukul = gkl −gkµv
µglνvν
gρλvρvλ,
108

e dunque
hab =
(gkl −
gkµvµglνv
ν
gρλvρvλ
)xkax
lcγac . (5.86)
Questa formula, insieme con le (5.84) e (5.85), permette di esprimere i parametri di de-formazione in termini del gradiente di deformazione. Una volta eseguito questo calcolo,l’energia interna risulta una funzione delle variabili lagrangiane e delle loro derivate. Leequazioni del moto seguono dal principio variazionale δA = 0, dove utilizzando la formula(5.20) si ha:
A =
∫
Ω
Λd4x = −∫
Ω
ρ√−g e d4x = −
∫
F−1(Ω)
1
u0ρ0
√det γ e d4ξ .
Cio significa che la densita di lagrangiana nella descrizione lagrangiana relativistica e datada:
L = −ρ0
√det γ
e
u0= −ρ0
√det γ
m+ uIu0
.
Dopo aver espresso la lagrangiana in termini dei campi xk e delle loro derivate, la variazionedell’azione fornisce le equazioni di Eulero–Lagrange e dunque la dinamica.
Osserviamo che in un riferimento di riposo si ha u0 = 1 e dunque la lagrangiana Le l’opposto della densita di energia potenziale, come nella statica. Mostriamo che in unriferimento generico essa contiene anche l’energia cinetica attraverso il famoso “fattorerelativistico di contrazione”
√1 − v2. A tale scopo definiamo la funzione lapse:
N :=1√−g00
e il vettore shift:
Nk := gklg0l ,
dove con gkl abbiamo denotato la matrice inversa tridimensionale della metrica spazialegkl. Osserviamo che il vettore:
n :=1
N
(∂
∂x0−Nk ∂
∂xk
)
(cioe nµ = 1N
(1, Nk)) e ortogonale allo spazio X ed e normalizzato a −1. Infatti si ha
(n∣∣ ∂∂xl
)=
1
Ngµνn
µδνl =1
Nglµn
µ =1
N(gl0 − glkN
k) = 0 ,
ed anche
(n|n) =1
N2gµνn
µnν = −g00(g00 − 2g0kNk +NkN lgkl) = −g00(g00 −NkNk) = −1 .
109

Decomponiamo ora la velocita vµ in una parte ortogonale ad X (cioe parallela ad n) e inuna parte “puramente spaziale”:
vµ∂
∂xµ= Nn+ (vk −Nk)
∂
∂xk= N
(n+
vk −Nk
N
∂
∂xk
).
Se ora definiamo la “velocita trasversale”:
v := vk∂
∂xk,
dove
vk =vk −Nk
N,
abbiamo:
1 − v2 = 1 − gklvkvl =
1
N2
(− 1
g00− gklv
kvl + 2gklvkN l − gklN
kN l
)=
= − 1
N2gµνv
µvν =1
(Nu0)2,
e quindi1
u0=
√1 − v2
√−g00
.
La lagrangiana diventa pertanto
L = −ρ0
√det γ
√1 − v2(m+ uI)
1√−g00
.
Introduciamo ora i momenti canonicamente coniugati ai campi lagrangiani:
π αk :=
∂L
∂xkα.
Per calcolare le componenti di π αk seguiamo il metodo gia utilizzato in precedenza sia
nel caso non relativistico che nel caso euleriano relativistico. Osserviamo che la densitalagrangiana dipende dalle derivate spaziali dei campi xka solo attraverso l’energia internauI ; a sua volta, l’energia interna dipende dalle xka solo attraverso le componenti hcd dellamatrice di deformazione. Dunque, definendo come al solito la grandezza ausiliaria
N cd :=∂uI∂hcd
,
si ha:
π ak = −ρ0
√det γ√−g00
√1 − v2
∂uI∂xka
=
= −ρ0
√det γ√−g00
√1 − v2
∂uI∂hcd
∂hcd∂xka
= −ρ0
√det γ√−g00
√1 − v2N cd ∂hcd
∂xka.
110

Utilizzando l’espressione (5.86) abbiamo:
∂hcd∂xka
= gmnvmvngρλvρvλ
(δmk δacx
nd + δnk δ
adx
mc) .
Introduciamo ora l’inversa della matrice (xka). Come al solito, denotiamo le componentidi questa matrice con ξak. Possiamo allora scrivere:
∂uI∂hcd
∂hcd∂xka
= N cd ∂hcd∂xla
xlbξbk =
= N cdgmnvmvngρλvρvλ
×
× (δml δacx
nd + δnl δ
adx
mc)x
lbξbk = N cd(hdbδ
ac + hcbδ
ad)ξbl = 2Nadhdbξ
bl .
Osserviamo ora che la grandezza2Nadhdb := tab
coincide in forma con quella calcolata nel paragrafo 2.6 e dunque il tensore di Cauchy delladescrizione lagrangiana relativistica e dato da:
tab =∂uI∂α
δab +∂uI∂β
sab +∂uI∂θ
˜sac scb .
Otteniamo dunque le seguenti relazioni sforzo–deformazione:
π ak = −ρ0
√det γ√−g00
√1 − v2 tabξ
bk .
Calcoliamo ora le componenti cinetiche π 0k . Si ha:
π 0k =
∂L
∂vk= −ρ0
√det γ√−g00
(e∂
∂vk
√1 − v2 +
√1 − v2
∂uI∂vk
)=
= −ρ0
√det γ√−g00
(− gmnv
n
√1 − v2
∂
∂vkvm +
√1 − v2N cd∂hcd
∂vk
).
Ora si ha:∂vm
∂vk=
1
Nδmk ,
e inoltre:
∂hcd∂vk
= − ∂
∂vk
(vmvngρλvρvλ
xmcxnd
)=
1
N2xmcx
nd
∂
∂vk
(vmvn1 − v2
)=
=xmcx
nd
N2(1 − v2)
(gmkvngnkvm − 2
vmvngρλvρvλ
vk + 2vmvngρλvρvλ
Nk
).
111

Otteniamo dunque:
π 0k = −ρ0
√det γ√−g00
[− evk
N√
1 − v2+
N cd
N2√
1 − v2(Emkx
mcxndvm +Enkx
ndxmcvm) +
+ −2N cd xmcvmx
ndvn
N2√
1 − v2Nk
].
Se infine introduciamo il pull–back della velocita definito da:
v∗a := xmavm ;
otteniamo:
π 0k = −ρ0
√det γ√−g00
1
N2√
1 − v2
[−evk +N cd (Emkx
mcv
∗d + Enkx
ndv
∗d) +
+(e− 2N cdv∗cv
∗d
)Nk].
Una volte note le componenti dei momenti canonici in funzione del gradiente di defor-mazione, le equazioni del moto si possono esprimere nella forma:
∂L
∂xk− ∂απ
αk = 0
e risultano equazioni differenziali a derivate parziali del secondo ordine per le tre funzioniincognite xk(ξα). Se la lagrangiana non dipende esplicitamente dalle ξa, cioe dipende dallecoordinate materiali solo attraverso i campi, vale il teorema di Nother
∇αταβ = 0 ,
per la densita tensoriale di energia momento lagrangiana cosı definita:
ταβ := π αk x
kβ − δαβL .
Esplicitiamo le componenti di τ . La densita di hamiltoniana e data da:
τ00 = π 0
k vk − L =
= ρ0
√det γ√−g00
1
N2√
1 − v2[evkv
k + vkN cd(Emkxmcv
∗d + Emkx
mdv
∗c )+
+ (e−N cdv∗cv∗d)Nkv
k] + ρ0
√det γ√−g00
√1 − v2e =
= ρ0
√det γ√−g00
[e√
1 − v2+
1
N2√
1 − v2vkN cd(Emkx
mcv
∗d +Emkx
mdv
∗c )+
+1
N2√
1 − v2(e−N cdv∗cv
∗d)Nkv
k − 2Nkvmgkm + gkmNkNm
].
112

Per le altre componenti otteniamo:
τ0b = π 0
k xkb = ρ0
√det γ√−g00
1
N2√
1 − v2
[ev∗b − 2tdbv
∗d − (e−N cdv∗cv
∗d)Nkx
kb
],
τa0 = π ak v
k = −ρ0
√det γ√−g00
√1 − v2tacξ
ckvk ,
τab = π ak x
kb − δabL = −ρ0
√det γ√−g00
√1 − v2(tab − eδab ) .
Per esempio, l’equazione di conservazione della energia si esprime dunque come:
∂0τ00 + ∂aτ
a0 = 0 .
113

114

Capitolo 6. ELEMENTI DI TERMO–ELASTICITA’ RELATIVISTICA
6.1 Termodinamica relativistica dei processi adiabatici.
Vogliamo ora introdurre nella descrizione relativistica della elasticita anche i gradi diliberta termici. Considereremo per il momento solamente processi adiabatici, nei qualicioe e conservato il flusso di entropia. La conservazione dell’entropia significa che se siprende un pezzo di materiale la quantita di entropia in esso contenuta non cambia durantel’evoluzione temporale del sistema, cioe l’entropia e “congelata” nel materiale. Per primacosa abbiamo bisogno di una definizione relativisticamente invariante della temperaturaassoluta. Come giustificheremo al termine del paragrafo, questa definizione puo esseredata tramite l’introduzione di un ulteriore campo scalare ξ0 = ξ0(xµ): il tempo materiale.Nell’ambito della teoria relativistica abbiamo gia introdotto il tempo materiale nel para-grafo 5.6, solo che nella descrizione della termodinamica esso non e piu un artificio tecnicodato da una funzione arbitraria soggetta solo alla condizione ξ0µu
µ 6= 0, ma e un oggettodinamico della teoria.
Estendiamo dunque lo spazio materiale al prodotto cartesiano Z = Z × R. Unaconfigurazione del materiale e una applicazione:
G : X → Z
descritta da quattro campi scalari:
ξα = ξα(xµ) .
Assumiamo ora che lo scalare ξ0µuµ, oltre ad essere non nullo, sia sempre positivo, cioe
che ξ0 sia una funzione monotona crescente su ogni traiettoria. Effettuiamo ora il seguenteAnsatz per la temperatura assoluta del materiale:
T := λuµξ0µ , (6.1)
dove λ e una costante fenomenologica positiva che e specifica del materiale in esame. Poichemisuriamo ξ0 in unita di tempo (si ricordi che la velocita relativistica e adimensionale),questa costante ha le dimensioni di una temperatura. Vedremo al termine del paragrafocome si puo specificare λ nel caso di un gas monoatomico. Osserviamo che il gradiente diξ0 si decompone rispetto alla velocita nel modo seguente:
ξ0µ = Eνµξ0ν −
T
λuµ . (6.2)
Assumiamo ora che la densita lagrangiana di un sistema termo–elastico dipenda dallatemperatura e dai parametri della deformazione:
Λ = −√−gρf(α.β, θ, T ) .
115

Proveremo che la teoria desiderata si ottiene scegliendo come f l’energia libera per unita dimole. Per vedere cio basta provare che le equazioni dinamiche implicano la conservazionedell’entropia e che il tensore energia–momento, descrivente le proprieta meccaniche delmateriale, coincide in forma con quello elastomeccanico, esaminato nel capitolo precedente.
L’introduzione dei fenomeni termici ci costringe a cambiare un po’ la filosofia delladescrizione delle deformazioni meccaniche del materiale. Nella teoria sviluppata finora,che puo essere definita isoterma, la metrica materiale era stata definita come “metrica delmateriale nello stato rilassato”. Se ammettiamo che la temperatura possa cambiare, lostato di rilassamento dipende dalla temperatura. Cosı, per definire la metrica materialedobbiamo completare la definizione precedente specificando per esempio la temperaturadi riferimento T0 alla quale si prende lo stato di rilassamento. Se la metrica materiale edefinita in tal modo, non e piu vero che il minimo della energia elastica corrisponda aivalori nulli di α, β, θ se la temperatura e diversa da T0. La funzione f puo pero essereconsiderata come la grandezza fenomenologica che contiene tutte le informazioni sulleproprieta termo–elastiche del materiale considerato.
Per descrivere queste proprieta cominciamo col calcolare le stress–strain relations. Imomenti canonicamente coniugati sono:
P µα :=
∂Λ
∂ξαµ,
dove:
P µa =
∂Λ
∂ξaµ= −√−g ∂(ρf)
∂ξaµ
P µ0 =
∂Λ
∂ξ0µ= −√−g ρ ∂f
∂T
∂T
∂ξ0µ.
Osserviamo che il calcolo di ∂(ρf)∂ξa
µe identico in forma, per quanto riguarda la dipendenza
di ρf dai parametri della deformazione, a quello gia eseguito per ǫ = ρe nel capitoloprecedente. Dunque:
P µa = ρ
√−g[(
−f +∂f
∂α
)δµρ +
∂f
∂βsµρ +
∂f
∂θ˜sµλsλρ
](K−1)ρσγabξ
bσ − ρ
√−g ∂f∂T
∂T
∂ξaµ.
Ora dalla formula (6.1) si ha:∂T
∂ξaµ= λξ0ρ
∂uρ
∂ξaµ,
e dunque:
P µa = ρ
√−g[(
−f +∂f
∂α
)δµρ +
∂f
∂βsµρ +
∂f
∂θ˜sµλsλρ
](K−1)ρσγabξ
bσ − ∂f
∂Tλξ0ρ
∂uρ
∂ξaµ
.
Per quanto riguarda P µ0 , si ha:
P µ0 = −√−gρ ∂f
∂Tλuµ = −λσJµ , (6.3)
116

dove:
σ := − ∂f
∂T(6.4)
rappresenta l’entropia per unita di mole. Poiche la lagrangiana non dipende da ξ0 ma solodalle sue derivate, la equazione di Eulero–Lagrange temporale:
∂µ∂Λ
∂ξ0µ− ∂Λ
∂ξ0= 0 (6.5)
e l’equazione di continuita implicano la legge di conservazione dell’entropia nei processiadiabatici:
0 = ∂µPµ
0 = ∂µ(λσJµ) = λJµ∂µσ ,
cioe :uµ∂µσ = 0 . (6.6)
Calcoliamo ora il tensore energia–momento. Utilizzando la relazione:
∂uρ
∂ξaµξaν = −Eρνuµ , (6.7)
che e stata dimostrata nel capitolo precedente, otteniamo:
tµν = P µα ξαν − δµνΛ = P µ
a ξaν + P µ0 ξ0ν − δµνΛ ;
dunque:
tµν = ρ√−g
[−(f − T
∂f
∂T
)uµuν +
∂f
∂αEµν +
∂f
∂βsµν +
∂f
∂θ˜sµρ sρν
]. (6.8)
Introduciamo ora l’energia interna:
e = e(α, β, θ, σ) := f − T∂f
∂T= f + σT ,
dove T deve essere calcolata in funzione dei parametri della deformazione e dell’entropiatramite l’equazione (6.4). Questa formula esprime la trasformazione di Legendre di frispetto a T (vedi paragrafo 10.1). Infatti, se calcoliamo il differenziale di f otteniamo:
df =∂f
∂αdα +
∂f
∂βdβ +
∂f
∂θdθ +
∂f
∂TdT ;
essendo:∂f
∂TdT = −d(σT ) + Tdσ
abbiamo:
de = d(f + σT ) =∂f
∂αdα+
∂f
∂βdβ +
∂f
∂θdθ + Tdσ .
117

Da questa relazione segue che le derivate di f rispetto ai parametri della deformazioneα, β, θ coincidono con le corrispondenti derivate di e, e che inoltre:
T =∂e
∂σ.
Ne segue dunque che l’espressione (6.8) coincide con il tensore energia–momento puramentemeccanico, che e stato calcolato nel capitolo precedente (formula (5.39)).
Con un ragionamento del tutto analogo a quello seguito nel capitolo precedente siprova che anche in questo caso vale il teorema di Nother:
∇µtµν =
(∂µ
∂Λ
∂ξαµ− ∂Λ
∂ξα
)ξαµ , (6.9)
e dunque le equazioni del moto
∂µ∂Λ
∂ξαµ− ∂Λ
∂ξα= 0 (6.10)
sono equivalenti alle equazioni di conservazione:
∇µtµν = 0 . (6.11)
Moltiplicando scalarmente la (6.9) per la velocita si ottiene:
uν∇µtµν =
(∂µ
∂Λ
∂ξ0µ− ∂Λ
∂ξ0
)ξ0νu
ν =T
λ∂µP
µ0 , (6.12)
e dunque uν∇µtµν = 0 non e piu identicamente soddisfatta, ma e equivalente ad una delle
equazioni dinamiche, precisamente quella di conservazione dell’entropia.Finalmente, vogliamo dare l’interpretazione microscopica dell’ “Ansatz” che abbiamo
assunto per la temperatura. Consideriamo un fluido costituito da molecole di massa m.Ad una data temperatura T , le molecole del fluido si muovono di moto caotico lungo lelinee teoriche di flusso, cioe le linee tangenti alla velocita uµ. Rispetto al riferimento diriposo, l’energia cinetica media di ogni molecola e data (a basse temperature) da:
1
2mv2 =
3
2kbT ,
dove kb e la costante di Boltzmann. A causa di questo moto, il tempo proprio τ delleparticelle e ritardato rispetto al tempo fisico x0 e, se v ≪ c, si ha:
τ =
∫ √1 − v2
c2dx0 ≃
(1 − v2
2c2
)x0 =
(1 − 3kbT
2mc2
)x0 .
Se ora poniamo:
λ :=2mc2
3kb,
118

che ha le dimensioni di una temperatura, abbiamo, a meno di termini d’ordine superiore:
x0 − τ =3kbT
2mc2x0 =
1
λx0T ,
ovvero:
T = λ∂
∂x0(x0 − τ) .
Osserviamo ora che nel riferimento di riposo la relazione T = λuµξ0µ assume la forma
T = λ ∂∂x0 ξ
0, e dunque coincide con la relazione data sopra se identifichiamo ξ0 con (x0−τ).Interpretiamo allora il tempo materiale ξ0 come ritardo del tempo proprio delle particellecostituenti il fluido rispetto al tempo fisico misurato nel riferimento di riposo. Questadiscussione ci permette di costruire (almeno teoreticamente) un “termometro al radio”sfruttando tale fenomeno nel modo seguente. Per misurare la temperatura iniettiamo unagoccia di una sostanza radioattiva nel materiale; a causa del moto caotico delle particellela vita media della sostanza radioattiva si allunga proporzionalmente alla temperatura, edunque misurando la vita media si misura anche la temperatura del fluido.
6.2 Un modello della conduzione del calore in termo–elasticita relativistica.
Introduciamo la metrica spazio–temporale materiale γαβ ponendo:
(γαβ) =
−λ2 0 0 000 (γab)0
, (6.13)
dove γab e la metrica dello spazio Z e λ e il parametro fenomenologico che e stato introdottonel paragrafo precedente. La configurazione termo–elasto dinamica ci permette di definireil pull–back di γαβ, cioe:
h∗µν = γαβξαµξβν = γ00ξ
0µξ
0ν + γabξ
aµξbν =
= −λ2(Eρµξ0ρ +
T
λuµ)(Eρνξ
0ρ +
T
λuν) + hµν =
= −T 2uµuν + hµν − 2λTu(µEρν)ξ
0ρ .
(6.14)
Definiamo l’operatore H∗ = g−1h∗. Nel riferimento di riposo le componenti di H∗ sonodate da:
(h∗µν ) =
T 2 λTξ0k
λTglmξ0m (hlk)
. (6.15)
Questo operatore descrive la “deformazione spazio–temporale”. Se esso coincide con ilproiettore E introdotto nel capitolo precedente diremo che il materiale si trova nello stato
119

di rilassamento assoluto. Questo significa che la temperatura si annulla (“rilassamento ter-mico”) e le condizioni meccaniche coincidono con quelle di rilassamento meccanico. Nellasituazione generale la deformazione spazio–temporale consiste in una parte spaziale hkl , chemisura le deformazioni meccaniche, una parte temporale h0
0, che misura la temperaturadel materiale, ma anche una parte “mista” λTξ0k che, per analogia con la trasformazionedi taglio meccanico, puo essere chiamata “taglio spazio–temporale”. La descrizione adi-abatica del precedente paragrafo corrispondeva ad assumere che la densita lagrangiananon dipendesse dal taglio spazio–temporale. Questa indipendenza implica la proprieta diinvarianza di gauge rispetto alle trasformazioni:
ξ0 7→ ξ0 + ζ(ξa) ,
cioe la lagrangiana non cambia se si somma al tempo materiale una funzione arbitrariadella configurazione meccanica ξa. Per vedere questo e sufficiente osservare che si ha:
uµ∂µζ =∂ζ
∂ξauµξaµ = 0 ,
e dunque la temperatura rimane invariata.Vogliamo ora comprendere che cosa avviene se introduciamo in Z una “rigidita di
taglio spazio–temporale”. Vedremo che si puo ottenere in questo modo un modello dellaconduzione del calore.
La descrizione standard dei fenomeni di conduzione del calore e quella di Fourier che,come e noto, si basa su una equazione differenziale a derivate parziali di tipo parabol-ico. La velocita di propagazione del calore in tale descrizione e infinita e dunque la de-scrizione stessa e del tutto incompatibile con la teoria della relativita. Negli ultimi annisono stati fatti molti tentativi di sostituire il modello di Fourier con un modello governatoda equazioni di tipo iperbolico, che dunque porti a velocita di propagazione finite. A nostroparere nessuno di essi e pienamente soddisfacente, e a tutt’oggi non esiste una descrizionedei fenomeni di propagazione del calore che sia pienamente in accordo con la relativita.
Dal punto di vista fisico, la conduzione del calore, e dunque lo scambio di energia nonmeccanica tra le diverse regioni del materiale, puo avvenire in due modi distinti. Un primomodo e lo scambio di energia tra particelle adiacenti, tramite collisioni. Un secondo modo einvece lo scambio vero e proprio di particelle del materiale al suo interno, cioe la diffusionedella materia, con la conseguente diffusione di energia. Il primo meccanismo gioca ilruolo fondamentale nei materiali solidi isolanti, nei quali gli elettroni di conduzione sonopraticamente assenti e dunque non si scambia materia tra le varie regioni del materiale. Ilsecondo meccanismo prevale nei gas ed anche nei solidi conduttori dove il gas degli elettronidi conduzione e libero di spostarsi. In presenza di diffusione di materia le diverse regioni delmateriale perdono la loro identita e la nozione di “spazio materiale” che abbiamo utilizzatoin questo libro non e ben definita. Per tale motivo non siamo in grado di descrivere inquesto contesto i fenomeni di diffusione. Pero, come vedremo, il modello basato sullaipotesi di rigidita dello spazio–tempo materiale ai tagli spazio–temporali si presta bene perdescrivere la conduzione del calore nei materiali isolanti, nei quali i fenomeni di diffusionesono trascurabili. E’ noto che la propagazione del calore in tali materiali e di tipo iperbolico,cioe esistono onde termiche che si propagano con velocita finita.
120

Assumiamo dunque che la lagrangiana Λ dipenda anche dalla parte spazio–temporaledi h∗, cioe dalla proiezione Eρµξ
0ρ del tempo materiale sul sottospazio ortogonale alla
velocita. Questa dipendenza deve essere “mediata” da una grandezza scalare. La grandezzapiu semplice che possiamo costruire con Eρµξ
0ρ e il quadrato:
2χ := Eρµξ0ρE
µνξ0ν = ξ0ρEρνξ0ν = gρσξ0ρξ
0σ +
T 2
λ2= gρσξ0ρξ
0σ + (uµξ0µ)2 . (6.16)
Poniamo dunque:
Λ = Λad. + Λcond. = −ρ√−g [f(α, β, θ, T ) + f1(χ)] ,
dove, ancora una volta, f = e− Tσ e l’energia libera. Per Λad. intendiamo la parte dellalagrangiana che descrive i processi adiabatici, mentre Λcond. e il termine aggiuntivo respon-sabile dei processi di conduzione del calore. Calcoliamo le relazioni sforzi–deformazioni. Imomenti canonicamente coniugati sono:
Π µα =
∂Λ
∂ξαµ= P µ
α − ρ√−g ∂f1
∂χ
∂χ
∂ξαµ,
dove P µα coincide in forma con la grandezza calcolata nel paragrafo precedente. Abbiamo
dunque:
Π µa = P µ
a −√−gρ∂f1∂χ
∂χ
∂ξaµ= P µ
a −√−gρ∂f1∂χ
T
λξ0ρ
∂uρ
∂ξaµ
Π µ0 = P µ
0 − ρ√−g ∂f1
∂χ
∂χ
∂ξ0µ=
= P µ0 − ρ
√−g ∂f1∂χ
(gµρξ0ρ +
T
λuµ)
= P µ0 − ρ
√−g ∂f1∂χ
Eµρξ0ρ .
(6.17)
Ne segue che il tensore energia–momento e dato da:
tµν = Π µα ξ
αν − δµνΛ =
= P µa ξaν − ρ
√−g ∂f1∂χ
T
λξ0ρ
∂uρ
∂ξaµξaν + P µ
0 ξ0ν − ρ√−g ∂f1
∂χ
(gµρξ0ρ +
T
λuµ)ξ0ν − δµνΛ .
Utilizzando la relazione (6.7) otteniamo:
tµν = P µa ξaν + P µ
0 ξ0ν − δµνΛ − ρ√−g ∂f1
∂χ
(−TλEρνξ
0ρuµ + gµρξ0ρξ
0ν +
T
λuµξ0ν
)=
= P µa ξaν + P µ
0 ξ0ν − δµνΛ − ρ√−g ∂f1
∂χ
(gµρξ0ρξ
0ν −
T 2
λ2uµuν
).
Indichiamo ora con (tad.)µν la parte “adiabatica” del tensore energia–momento, cioe la parte
che coincide in forma con l’espressione calcolata nel precedente paragrafo:
(tad.)µν = P µ
a ξaν + P µ0 ξ0ν − δµνΛad. = −√−g (ǫuµuν + PEµν + Zµν )
121

(dove ǫ = ρe), e con (tcond.)µν la parte rimanente che, come vedremo, descrive la conduzione
del calore:
(tcond.)µν = −√−gρ
[uµuνf1 +
∂f1∂χ
(gµρξ0ρξ
0ν −
T 2
λ2uµuν
)]. (6.18)
Allora:tµν = (tad.)
µν + (tcond.)
µν .
Il tensore t e ovviamente simmetrico ma, al contrario di quanto avviene nel caso dei processiadiabatici, la sua “semi–proiezione” sul campo di velocita, cioe la densita vettoriale
Qλ := tµνuνEλµ ,
che e ortogonale ad u, non e nulla. Esplicitamente si ha:
Qλ = (tcond.)µνu
νEλµ = −ρ√−g Tλ
∂f1∂χ
Eµλξ0µ . (6.19)
In termini di questa densita vettoriale il tensore (tcond.)µν si puo cosı riscrivere:
(tcond.)µν =
λ
TQµξ0ν −Qνu
µ − ρ√−guµuνf1 .
Nel riferimento di riposo si ha Q0 = 0 e T = λξ00 e dunque:
(tcond.)µν =
−ρ√−gf1 Qk
Ql 1ρ√−g
λ2
T 2QkQl
,
cioe tcond. contiene il flusso Qk di energia non meccanica, che identifichiamo con il flussodi calore. Osserviamo che tcond. contiene anche una parte spazio–spazio, che descrive letensioni non meccaniche. Questo e dovuto al fatto che nella relativita l’energia “pesa”, cioeil flusso di energia ha una inerzia propria. Inoltre, il tensore tcond. contiene un contributoalla energia t00 di riposo pari (nel riferimento di riposo) a:
(tcond.)00 = ρ
√−gf1 .
Questo contributo e dovuto alle tensioni provocate dal flusso di calore e, affinche la teoriasia stabile, deve essere positiva. Infatti, come vedremo nell’ambito della approssimazionelineare della teoria, l’energia totale risulta positiva solo se vale tale condizione.
Osserviamo ora che la derivata ∂f1∂χ
descrive la proporzionalita tra il gradiente del
tempo materiale ξ0 ed il flusso del calore. Nella teoria abituale del calore (quella diFourier) il flusso di calore e invece proporzionale al gradiente della temperatura, cioe alladerivata temporale del gradiente di ξ0. In tale teoria il calore scorre sempre dai punti atemperatura maggiore ai punti a temperatura minore. Nella nostra teoria invece la formula
122

(6.19) implica che (se ∂f1∂χ
e positivo) il calore scorre dai punti a tempo materiale maggioreai punti a tempo materiale minore. Pero il gradiente della temperatura e quello del tempomateriale possono avere direzione opposta. Quindi nella nostra teoria il calore puo, in uncerto istante, scorrere dai punti a temperatura minore a quelli a temperatura maggiore.Questa situazione “paradossale” non si mantiene a lungo perche nei punti a temperaturaalta il tempo materiale cresce piu velocemente, e quindi, dopo qualche tempo, il gradiente diξ0 si inverte e finalmente il calore comincia a scorrere nella direzione “giusta”. Possiamodunque dire che, se ∂f1
∂χe positivo, il calore tende a scorrere dai punti a temperatura
maggiore ai punti a temperatura minore anche se, temporaneamente, puo fare l’opposto.La differenza tra la nostra teoria e quella di Fourier puo essere paragonata a quella tra lameccanica newtoniana e quella aristotelica. In quest’ultima si credeva, conformemente amolte esperienze quotidiane, che un corpo si muovesse sempre nella direzione della forza adesso applicata. La meccanica newtoniana ha superato questa concezione affermando che ilcorpo ha solo la tendenza a muoversi lungo tale direzione perche non la sua velocita, masolo la derivata temporale della velocita, cioe l’accelerazione, e proporzionale alla forza.Come abbiamo gia detto, dal punto di vista matematico la teoria di Fourier e di tipoparabolico. In tale teoria i segnali termici si propagano con velocita infinita. Questaproprieta e totalmente incompatibile con la teoria della relativita. Come vedremo nelprossimo paragrafo, la nostra teoria e di tipo iperbolico e dunque le onde si propagano convelocita finita.
La teoria che abbiamo esposto e invariante rispetto all’inversione temporale e dunquedescrive processi reversibili. I fenomeni di diffusione cui si accennava prima sono inveceprocessi irreversibili che hanno tipicamente tempi di rilassamento piu lunghi dei tempicaratteristici dei fenomeni di tipo ondulatorio che stiamo descrivendo. Possiamo dunqueaffermare che la nostra teoria descrive adeguatamente i processi veloci.
Si osservi che la funzione f1 deve essere positiva e crescente. Il modello piu semplicesi ottiene ponendo:
f1(χ) = Cχ , (6.20)
dove C e una costante.Ancora una volta si dimostra facilmente la validita del teorema di Nother (6.9), che a
sua volta implica le equazioni di conservazione (6.11) cioe:
∇µ(tad.)µν = −∇µ(tcond.)
µν .
Proviamo che il flusso di calore Qµ soddisfa la seconda legge della termodinamica. In virtudi (6.3), (6.17) e di (6.19), il momento coniugato a ξ0 e pari a:
Π µ0 = λ
(σJµ +
Qµ
T
).
Poiche Λ non dipende da ξ0 si ha semplicemente:
∂µΠ µ0 = 0 ,
cioe :
∂µ(σJµ) = −∂µQµ
T, (6.21)
123

o anche, utilizzando l’equazione di continuita :
ρ√−guµ∂µσ = −∂µ
Qµ
T.
Integrando la (6.21) nel riferimento di riposo su un piccolo pezzetto di materiale ∆V sivede che l’entropia non e piu costante, e che la sua derivata temporale e pari all’oppostodel flusso di calore attraverso il contorno di ∆V (cioe alla quantita di calore acquisita dalpezzetto di materiale considerato) diviso per la temperatura, cioe che vale la seconda leggedella termodinamica ∆Q = T∆S.
Se si considera un corpo finito, i dati iniziali non sono piu sufficienti a determinare ladinamica, ma bisogna dare le condizioni al contorno. Come sappiamo, nella elastomecca-nica si possono considerare problemi al contorno del tipo di Dirichlet, in cui si controllanole posizioni al contorno, e problemi di Neumann, in cui si controllano gli sforzi. Nel casodella termoelasticita, una volta assegnate le condizioni al contorno del problema meccanico(cioe per le ξa) di Dirichlet o di Neumann, possiamo controllare il valore di ξ0 sul contornooppure il valore degli “sforzi” ad esso corrispondenti, cioe di Q. Il problema di Dirichletper tutte e quattro le ξα si riferisce evidentemente alla situazione in cui la temperaturaT e fissata al contorno (bagno termico). Infatti se conosciamo il valore di ξ0 sul contornoe se ξa sono costanti sul contorno, allora uµ = δµ0 e T = λξ00, cioe conosciamo anche latemperatura. Invece il problema di Neumann si riferisce alla situazione in cui si controllail flusso di calore sul contorno. In particolare, assegnare il valore zero a Q sul contornosignifica isolare adiabaticamente il pezzo di materiale considerato.
6.3 Onde termo–elastiche.
In questo paragrafo ci proponiamo di calcolare il limite non relativistico lineare dellateoria sopra esposta. Le tecniche che seguiremo sono analoghe a quelle gia utilizzatenel paragrafo 5.11. Per prima cosa supponiamo lo spazio fisico piatto e scegliamo unaconfigurazione di equilibrio del materiale in esame. Questa configurazione puo non essereuna configurazione di rilassamento. Per semplicita ci limitiamo a considerare uno statonel quale il materiale e teso uniformemente in ogni direzione e dunque β e θ si annullano.Linearizziamo dunque la teoria intorno allo stato corrispondente ai valori T = T0, α = α0,β = 0, θ = 0, χ = 0. La scelta χ = 0 significa che nello stato di riferimento presceltonon c’e flusso di calore. Sia dunque ξk = xk la configurazione di equilibrio per il materialenello spazio fisico piatto, e poniamo:
ξk = xk + φk(xµ) ,
dove φk e il campo degli spostamenti. A meno di termini d’ordine superiore, questo camposoddisfa la relazione
α− α0 = φkk .
Il tempo materiale prende i valori:
ξ0(xµ) =T0
λxo + ψ(xµ) ,
124

dove la funzione ψ descrive piccole deviazioni dello stato termico del materiale dallo statodi riferimento in cui si ha T = T0.
Procediamo ora come nel paragrafo 5.11. Per trovare lo sviluppo di T = λuµξ0µabbiamo bisogno dello sviluppo del campo di velocita . Dalle relazioni (5.71) e (5.72)otteniamo:
uµ =1
ρJµ =
[1 + s+
1
2s2 − 1
2φklφ
lk −
1
2φ2 +O(φ3)
]−1
×
×[δµ0 + sδµ0 − φlδµl +
1
2(s2 − φklφ
lk)δµ0 + (φklφ
l − sφk)δµk +Oµ(φ3)
]=
=
(1 − s+
1
2s2 +
1
2φklφ
lk +
1
2φ2 +O(φ3)
)×
×[δµ0 + sδµ0 − φlδµl +
1
2(s2 − φklφ
lk)δµ0 + (φklφ
l − sφk)δµk +Oµ(φ3)
]=
= δµ0 − φlδµl +1
2φ2δµ0 + δµkφ
klφl +Oµ(φ3) .
Dunque si ha:
T = λuµξ0µ =
[δµ0 − φlδµl +
1
2φ2δµ0 + δµkφ
klφl +Oµ(φ3)
] (T0δ
0µ + ψµ
)+O(3) =
= T0 + λψ − λφlψl +1
2T0φ
2 +O(3) ,
(6.22)
dove abbiamo indicato genericamente con O(3) i termini di ordine superiore al secondo inφ, ψ e nei loro prodotti. Troviamo ora lo sviluppo del parametro χ. Si ha:
2χ = gρσξ0ρξ0σ +
T 2
λ2=
= −T20
λ2− 2
T0
λψ − ψ2 + gklψkψl +
1
λ2(T0 + λψ)2+
+2
λ2(T0 + λψ)
(−λφlψl +
1
2T0φ
2
)+O(3) =
= gklψkψl +2
λ2
(−λT0φ
lψl +1
2T 2
0 φ2
)+O(3) .
(6.23)
Abbiamo ora tutti gli elementi necessari per il calcolo della densita lagrangiana a meno ditermini del terzo ordine nei campi. Lo sviluppo di Taylor al secondo ordine dell’energialibera f + f1 e pari a:
f + f1 = f0 +∂f
∂α(α− α0) +
∂f
∂T(T − T0) +
1
2
∂2f
∂α2α2 +
∂f
∂ββ +
1
2
∂2f
∂T 2(T − T0)2+
+∂2f
∂α∂T(T − T0)(α− α0) +
∂f1∂χ
χ ;
125

in questa formula tutte le derivate si intendono calcolate nel punto α = α0, β = 0, θ = 0,χ = 0, T = T0. Come al solito, la dipendenza da θ e almeno del terzo ordine nei campi ede stata trascurata. Definiamo ora le seguenti costanti:
A : =∂2f(α0, 0, 0, T0)
∂α2,
B : =∂f(α0, 0, 0, T0)
∂β,
F : =∂f(α0, 0, 0, T0)
∂α,
C1 : =∂f(α0, 0, 0, T0)
∂T,
C2 : =∂2f(α0, 0, 0, T0)
∂T 2,
E : =∂2f(α0, 0, 0, T0)
∂α∂T,
C : =∂f1(0)
∂χ,
cosı che:
f + f1 = f0 + F (α− α0) + C1(T − T0) +1
2A(α− α0)2 + Bβ +
1
2C2(T − T0)2+
+ E(T − T0)(α− α0) + Cχ .(6.24)
Osserviamo che, essendo P = −ρ ∂e∂α
e ρ = ρ0e−α, si ha:
F =∂e
∂α= −1
ρP (α0, 0, 0, T0) = − 1
ρ0eα0P (α0, 0, 0, T0) ;
dunque:
E = − 1
ρ0eα0
∂P (α0, 0, 0, T0)
∂T
descrive il cambiamento della pressione a volume costante. Inoltre dalla definizione dientropia si ha:
C1 = −σ(α0, 0, 0, T0) < 0 ,
e anche:
C2 = −∂σ(α0, 0, 0, T0)
∂T< 0 .
Infatti la seconda legge della termodinamica nella forma ∆Q = T∆σ implica, a volumecostante:
δQ = T∂σ
∂T∆T ,
126

e dunque il calore specifico a volume costante e pari a:
cv =∂∆Q
∂∆T= T
∂S
∂T,
cioe infine:
C2 = −(∂σ
∂T
)
v
= − cvT0
< 0 .
Introducendo le (5.73),(6.22) e (6.23) nella (6.24) si ha:
Λ = −ρ0
[1 + s+
1
2s2 − 1
2φklφ
lk −
1
2φ2 +O(3)
]×
×[f0 + Fφkk +
1
2F (φ2 − φklφ
lk) + C1
(λψ − λφlψl +
1
2T0φ
2
)+
+1
2A∗(φkk)2 +
1
2Bφ(kl)φ(lk) +
1
2C2(λψ +O(2))2 + λEφkkψ+
+ C
(1
2gklψkψl −
T0
λφlψl +
1
2
T 20
λ2φ2
)+O(3)
].
Sviluppando ulteriormente i calcoli si ottiene facilmente:
Λ = ρ0
[1
2m∗φ2 − 1
2A∗(φkk)2 − 1
2B∗φ(kl)φ(lk)
]+
− ρ0
[1
2λ2C2ψ
2 +1
2Cgklψkψl
]+
+ ρ0
[(C1 +E)φkkψ −
(C1 +
T0
λ2C
)φlψl
]− ρ0Fφ
kk − ρ0λC1ψ − f0J
0 +O(3) .
L’ultimo addendo −f0J0 puo essere eliminato con lo stesso ragionamento gia seguito nel5.11. Inoltre anche i termini lineari −ρ0Fφ
kk e −ρ0λC1ψ possono a loro volta essere
eliminati perche non contribuiscono alle equazioni del moto, essendo il primo la divergenzadi un campo vettoriale ed il secondo la derivata temporale di un campo scalare.
I termini rimanenti sono stati raccolti in tre gruppi. Il primo ha la struttura delladensita lagrangiana (5.70) con massa
m∗ = f0 − T0
(C1 +
T0
λ2C
)+ F ,
modulo di compressibilita A∗ = A − 13F e modulo di taglio B∗ = B − F . Il terzo e
un termine di interazione che, come vedremo, genera termini di accoppiamento tra ledeformazioni meccaniche e quelle termiche. Consideriamo ora il secondo termine:
L := −ρ0
[1
2λ2C2ψ
2 +1
2Cgklψkψl
].
127

La grandezza L ha la struttura usuale di una densita lagrangiana di tipo meccanico se lacostante C e positiva. Infatti, la densita di hamiltoniana corrispondente risulta:
HL :=∂L∂ψ
ψ − L = −1
2λ2ρ0C2ψ
2 +1
2ρ0Cg
klψkψl ,
l’hamiltoniana e quindi una forma quadratica definita positiva solo se risulta C > 0,dunque, se C non fosse positivo, non sarebbe definita positiva la densita di energia.
Determiniamo ora le equazioni del moto generate da Λ. Le equazioni per il campodegli spostamenti spaziali Φ = (φk) sono le ordinarie equazioni della elasticita lineare (3.9)alle quali si aggiunge un termine di interazione:
m∗Φ =
(A∗ +
1
6B∗)grad div Φ +
1
2B∗∆Φ +
(E − T0
λ2C
)grad ψ ;
le equazioni per il campo ψ sono invece:
∆ψ − 1
v2ψ =
(E
C− T0
λ2
)div Φ ,
dove abbiamo introdotto la costante
v =
√C
λ√−C2
=1
λ
√CT0
cv.
Vediamo dunque che la costante v e la velocita delle onde termiche. Affinche v sia piu pic-cola della velocita della luce, la costante C del nostro modello deve essere sufficientementepiccola.
128

Capitolo 7. TEORIA DELLE PIASTRE E DELLE MEMBRANE.
7.1 Struttura geometrica dello spazio materiale bidimensionale.
In questo capitolo discuteremo la teoria dei materiali elastici tridimensionali che hannouna dimensione lineare “piccola”, in un senso che preciseremo, rispetto alle altre due, e chequindi sono essenzialmente bidimensionali. Di questi materiali non e possibile dare unadescrizione euleriana, perche esistono punti dello spazio fisico X a cui non corrisponde alcunpunto del materiale (si puo osservare per inciso che una situazione analoga si presenta anchea proposito della descrizione euleriana per un corpo tridimensionale non indefinitamenteesteso e con bordo non fissato). La descrizione lagrangiana di tali materiali verra sviluppatabasandosi su uno spazio materiale bidimensionale Σ, considerato come una superficie nellospazio materiale tridimensionale Z utilizzato nei capitoli precedenti. Evidentemente, Lasuperficie materiale bidimensionale Σ eredita dallo spazio Z la sua struttura geometrica.Il primo oggetto che individua questa struttura e la metrica materiale bidimensionale γ,che e semplicemente la restrizione di γ a Σ. Se (ξA), (A = 1, 2), sono delle coordinate sullasuperficie Σ e se η = ξ3 e una terza coordinata su Z, tale che η sia costante su Σ, allora lecomponenti di γ coincidono con le corrispondenti componenti di γ:
γAB = γAB .
Nella descrizione lagrangiana, una configurazione statica di una piastra e descritta da unaapplicazione:
F : Σ → X
ξA 7→ xk(ξA) .(7.1)
Ad ogni configurazione si puo come al solito associare il pull–back della metrica fisica suΣ:
h = F∗g ,
ovvero:hAB = gklx
kAx
lB , (7.2)
e il corrispondente tensore delle deformazioni:
S =1
2log H , (7.3)
dove:H = γ−1h .
In maniera del tutto analoga a quanto visto nella teoria dei materiali tridimensionali, ladeformazione S e caratterizzata dalla posizione degli assi principali (una informazione)e dai due autovalori. Se il materiale e omogeneo, l’energia interna non dipende dalla
129

posizione degli assi principali ma soltanto dagli autovalori stessi. Questi ultimi possonoessere univocamente determinati dai due invarianti:
I := TrS = sAA ,
J :=1
2TrS
2=
1
2sABs
BA ,
dove S indica la parte a traccia bidimensionale nulla del tensore S, cioe:
sAB := sAB − 1
2δABs
CC ,
che implica
J =1
2
(sABs
BA − 1
2(sCC)2
).
Il tensore S descrive soltanto le deformazioni interne alla superficie Σ, cioe gli “al-lungamenti” o “accorciamenti” lungo la superficie stessa. Esistono materiali che “sentono”solo questo tipo di deformazioni, come ad esempio le membrane di gomma molto sottili.Per visualizzare questa situazione consideriamo un foglio di carta. Se lo arrotoliamo for-mando un tubo, le distanze interne dei punti del foglio non cambiano; allora il tensore S diuna tale deformazione e nullo, e cio corrisponde al fatto che la geometria interna del foglionon e cambiata. Se invece di arrotolare un foglio, cerchiamo di arrotolare una lamina dimetallo, vediamo che la situazione e diversa. Immaginiamo la lamina come composta dapiu strati sovrapposti. Anche se le distanze dei punti appartenenti allo strato medio noncambiano, gli strati esterni devono dilatarsi e gli strati interni devono comprimersi percheil materiale si arrotoli. Dal punto di vista dello strato medio la deformazione interna siannulla. Vediamo dunque che la deformazione interna S non descrive le deformazioni deltipo “arrotolamento”, cioe tali da non alterare la geometria interna di Σ. Per descriveretali deformazioni “esterne” e necessario avere una informazione sulla geometria degli strativicini a Σ. Ovviamente, tutte le informazioni necessarie sono contenute nella metricamateriale tridimensionale γ, e dunque siamo liberi di descrivere un materiale elastico diquesto tipo utilizzando la teoria generale sviluppata nei capitoli precedenti. Il fatto che laterza dimensione del materiale e “piccola” rispetto alle altre permette, come vedremo, disviluppare la teoria dell’elasticita al primo ordine rispetto alla dimensione trasversale. Lateoria che si ottiene in tal modo e puramente bidimensionale e prende il nome di teoriadelle piastre. Per questo scopo non abbiamo bisogno di tutta l’informazione contenutain γ, ma solo del suo sviluppo rispetto alla dimensione trasversale. Come vedremo, talesviluppo e descritto dalla seconda forma fondamentale della metrica o tensore di curvaturaesterna (vedi paragrafo 9.9).
Immaginiamo dunque che gli strati vicini a Σ siano stati parametrizzati con unacoordinata η che varia sull’intervallo fissato (−1
2 ,12):
Z ≃ Σ ×(−1
2,
1
2
). (7.4)
130
Le due facce esterne del materiale corrispondono rispettivamente a
Σ 12
:= Σ ×
1
2
ed a
Σ− 12
:= Σ ×−1
2
,
mentre lo strato medio corrisponde a Σ = Σ0 := Σ × 0. La scelta di un intervallounitario per la parametrizzazione della dimensione trasversale evidentemente non ha alcunsignificato fisico particolare. Il fatto che tale dimensione e “piccola” sara espresso mediantela proprieta che una opportuna componente della metrica tridimensionale e piccola.
Supponiamo inoltre che il prodotto cartesiano (7.4) sia costruito in modo tale che ilvettore ∂
∂ηsia ortogonale agli strati Ση. Una tale conveniente parametrizzazione e sempre
possibile.Ogni sistema di coordinate (ξA) su Σ induce, attraverso (7.4), un sistema di coordinate
(ξa), a = 1, 2, 3, dove ξ3 = η su Z. Un sistema di questo tipo si chiama sistema dicooordinate adattato alla superficie Σ. In tale sistema di coordinate la metrica materialetridimensionale ha la struttura a blocchi seguente:
(γab) =
(γAB 0
0 γ33
),
dove, come abbiamo visto, γAB descrive la metrica interna di Σ. Lo spessore del materialee descritto dalla funzione lapse:
N :=1√γ33
,
che, nel sistema di coordinate adattato, e uguale a:
N =√γ33 .
Per vedere che N descrive lo spessore del materiale, basta osservare che la distanza tra ledue facce e pari a: ∫ 1
2
− 12
‖ ∂∂η
‖dη =
∫ 12
− 12
√γ33 dη ≃ N .
Pertanto, la circostanza di considerare un materiale con dimensione trasversale piccola siesprime nel fatto che la quantita N stessa e piccola. Otterremo la teoria delle piastre edelle membrane come uno sviluppo della teoria tridimensionale rispetto ad N .
In un sistema di coordinate adattato la curvatura esterna di Σ e data dalla derivatadella metrica bidimensionale rispetto al parametro η (vedi paragrafo 9.9):
κAB := −NΓ3
AB =1
2N
∂γAB(ξ, 0)
∂η, (7.5)
131

dove con Γa
bc abbiamo denotato le componenti della connessione di Levi–Civita associataalla metrica materiale γab. Dunque lo sviluppo di γAB al primo ordine in η e dato da:
γAB(η) = γAB + 2NηκAB +O(N2η2) . (7.6)
In questa formula abbiamo introdotto la notazione secondo la quale, se una grandezzadipende da η, questa dipendenza viene indicata esplicitamente. Se non scriviamo taledipendenza, intendiamo che la grandezza viene calcolata in η = 0, cioe su Σ.
Poiche conosciamo la metrica tridimensionale di Z, conosciamo anche la funzioneγ33 e la metrica bidimensionale γAB negli strati vicini a Σ. La dipendenza di questi dalparametro η non e fissata se non specifichiamo piu precisamente la parametrizzazione di Znella classe dei sistemi adattati a Σ. Un modo particolarmente comodo di parametrizzare Zconsiste nella scelta delle coordinate normali rispetto alla superficie Σ (vedi paragrafo 9.9).In questa parametrizzazione le linee della coordinata η (cioe le linee ξA = cost.) sono legeodetiche ortogonali a Σ e il parametro η e proporzionale al parametro geodetico su ognilinea, con coefficente di proporzionalita pari ad N = N(ξA). In tale parametrizzazione laderivata seconda di γAB e data dalla formula (9.51):
∂2γAB∂η2
= 2N2(κACκCB −R3
A3B) = 2N2RAB ,
dove abbiamo postoRAB := κACκ
CB −R3
A3B ,
e dove R e il tensore di Riemann tridimensionale. Da questa formula si ottiene lo sviluppodi γAB al secondo ordine in η:
γAB(η) = γAB + 2NηκAB + (Nη)2RAB +O(N3η3) . (7.7)
Assumeremo d’ora in poi che le coordinate che utilizziamo siano normali.La struttura geometrica dello spazio materiale Σ di una piastra e completamente
determinata da quattro oggetti: la metrica interna γAB, la curvatura esterna κAB , lospessore N che e una funzione positiva su Σ, e infine il tensore RAB . Quest’ultimo edeterminato completamente dai tre oggetti precedenti e dalle componenti R3
A3B dellacurvatura di Z.
7.2 Calcolo della deformazione trasversale.
La teoria delle piastre e basata sulla supposizione che le due facce del materiale sianolibere, cioe che gli sforzi si annullino su di esse. Per comprendere le conseguenze di questaipotesi fondamentale, consideriamo la configurazione (7.1) come la restrizione alla superficieΣ di una configurazione tridimensionale:
F : Z → X
ξa 7→ xk(ξa) .
132

Il contorno di Z si decompone come:
∂Z =
∂Σ ×
(−1
2,
1
2
)∪ Σ− 1
2∪ Σ 1
2.
L’ipotesi che le due facce siano libere equivale alla condizione:
t⊥|Σ− 1
2
= t⊥|Σ 12
= 0 ,
dove t⊥ e la componente trasversale del tensore degli sforzi tridimensionale corrispondentealla configurazione F . In un sistema di coordinate adattato a Σ cio significa che
t3a(−1
2) = t3a(
1
2) = 0 .
Dal punto di vista dello sviluppo in η questo implica che t3a si annulla su Σ fino al primoordine in η. Proveremo che le relazioni t3A = 0 implicano che il vettore ∂
∂ηe un asse prin-
cipale di deformazione. Infatti, osserviamo che, mediante le relazioni sforzo–deformazione(2.24), le relazioni t3A = 0 implicano:
0 =∂u
∂βs3A +
∂u
∂θ˜s3c scA .
Sviluppando entrambe le espressioni si trova facilmente il seguente sistema di equazioni:
[∂u
∂β+
1
3(s33 − 2scc)
∂u
∂θs11
]s31 + (
∂u
∂θs21)s32 = 0
(∂u
∂θs12)s31 +
[∂u
∂β+
1
3(s33 − 2scc)
∂u
∂θs22
]s32 = 0 .
Consideriamo questo sistema come il prodotto di una matrice 2 × 2 per il vettore di com-ponenti s3A. Osserviamo che il determinante di questa matrice e diverso da zero nel punto(α, β, θ) = (0, 0, 0). Infatti in tale punto la matrice diventa proporzionale all’identita concoefficente di proporzionalita ∂u
∂β6= 0. Dunque, per continuita, possiamo concludere che
il determinante non si annulla anche al di fuori di questo punto e che l’unica soluzione diquesto sistema e la soluzione nulla: s31 = s32 = 0. Ne segue che S ha struttura a blocchi:
sab =
(sAB 00 s33
), (7.8)
e dunque ∂∂η
e un asse principale di deformazione della piastra. Inoltre questa struttura
di S implica che anche il pull–back H = exp(2S) della metrica fisica ha una strutturaanaloga:
hab =
(hAB 00 h3
3
). (7.9)
133

Abbassando gli indici abbiamo che anche la rappresentazione hab della metrica fisicarispetto alle coordinate materiali ha la struttura a blocchi:
hab =
(hAB 0
0 h33
).
Ne segue che il vettore ∂∂η
e ortogonale alla piastra anche rispetto alla metrica fisica.
Vediamo ora le conseguenze della relazione t33 = 0. Essa implica che s33 puo essereespresso in funzione degli invarianti del tensore delle deformazioni interne sAB = sAB . Allorasegue dalla formula (7.8) che il tensore tridimensionale delle deformazioni e univocamentedeterminato dal tensore bidimensionale delle deformazioni interne. Infatti, la relazionet33 = 0 si scrive (vedi ancora formula (2.24)):
0 =∂u
∂α+ s33
∂u
∂β+ ˜s3c sc3
∂u
∂θ. (7.10)
Pero sia i parametri della deformazione tridimensionale (α, β, θ) che le componenti s33,˜s3c sc3
possono ovviamente essere espressi immediatamente in funzione di s33 e dei parametri I eJ della deformazione interna. In particolare si ha:
α = s33 + I
β =1
2[(s33)2 + sABs
BA − 1
3(s33 + I)2 =
= J +1
3(s33)2 +
1
12I2 − 1
3Is33 .
(7.11)
Per calcolare l’espressione di θ si osservi che (vedi formula (2.8) ) si ha:
θ =1
3TrS3 − 2
3αβ − 1
27α3 .
Ora la formula (7.8) implica che:
(saa)3 = (s33)3 + sABs
BCs
CA .
Come si verifica facilmente passando alla base in cui il tensore di deformazione e diagonale,si ha:
sABsBCs
CA =
3
2sAA sCBs
BC − 1
2(sAA)3 ,
e dunque da questa relazione e dalla (7.11) risulta:
θ = (s33)3 +3
2I(2J +
1
2I2)− 1
3(s33 + I)
[2
3(s33)2 + 2J +
1
6I2 − 2
3Is33
]− 1
27(s33 + I)3 . (7.12)
Lasciamo al lettore il compito di verificare anche le relazioni:
˜s3c sc3 =2
9(s33)2 − 2
9Is33 +
1
18I2 − 2
3J ,
s33 =2
3s33 −
1
3I .
(7.13)
134

Sostituendo le (7.11), (7.12) e (7.13) nella equazione (7.10), otteniamo una relazioneche definisce implicitamente s33 in funzione dei due invarianti I e J . Per comodita discrittura indicheremo questa funzione con la lettera y:
s33 = y(I, J) . (7.14)
Sapendo dunque che s3a = 0 e conoscendo il valore di s33, possiamo finalmente calcolare gliinvarianti tridimensionali α, β, θ tramite gli invarianti bidimensionali I e J . In particolare,nel caso del modello quasi–lineare (vedi paragrafo 2.4):
u =1
2Aα2 +Bβ ,
si ha:
0 = Aα+Bs33 =
(A+
2
3B
)s33 +
(A− 1
3B
)I ,
e dunque y non dipende da J ed e proporzionale ad I:
y = −λI , (7.15)
dove
λ =3A−B
3A+ 2B
e una costante adimensionale. In termini del modulo di Poisson σ (vedi formula (2.41)) sipuo riscrivere
λ =σ
1 − σ.
Sostituendo la (7.15) nelle (7.11) si ottiene:
α = I(1 − λ)
β = J +1
12I2(4λ2 + 4λ+ 1) .
Si ottiene cosı immediatamente la seguente espressione per l’energia interna:
u(I, J) =1
2
[A(1 − λ)2 +
B
6(4λ2 + 4λ+ 1)
]I2 +BJ =
1
2AI2 +BJ ; (7.16)
dove abbiamo definito:
A := A(1 − λ)2 +B
6(4λ2 + 4λ+ 1) =
9AB
2(3A+ 2B)=
Y
2(1 − σ), (7.17)
dove Y e il modulo di Young (vedi formula (2.42)) e σ e il modulo di Poisson. La formula(7.16) mostra dunque che anche il corrispondente modello bidimensionale e del tipo quasilineare ed ha lo stesso modulo di taglio, mentre il modulo di compressibilita e A.
135

7.3 Calcolo della configurazione degli strati del materiale.
Calcoliamo, a meno di termini del secondo ordine, la posizione degli strati vicini allostrato centrale Σ. Al primo ordine in η possiamo scrivere:
xk(ξA, η) = xk(ξA) + xk3(ξA, 0)η .
Se conosciamo la configurazione di Σ, cioe le funzioni xk(ξA), conosciamo evidentementeanche le loro derivate xkA, ma a priori non conosciamo la derivata trasversale xk3. Mostr-eremo pero che le due conseguenze dell’annullamento degli sforzi trasversali ottenute nelprecedente paragrafo, cioe il fatto che un asse principale della deformazione e ortogonalealla piastra e il fatto che la deformazione trasversale e univocamente determinata da quelleinterne, permettono di esprimere xk3 in termini della configurazione della superficie Σ. Os-serviamo pero che le tre relazioni t3a = 0 valgono, come abbiamo visto, solo al primo ordinein η. Dunque anche le conseguenze che ne trarremo avranno lo stesso limite di validita.
Per calcolare xk3 sfruttiamo il fatto che il vettore ∂∂η
= xi3∂∂xi e ortogonale alla piastra
rispetto alla metrica fisica. Poiche i vettori di componenti xp1 e xq2 sono indipendenti etangenti alla piastra, il vettore xn3
∂∂xn deve essere proporzionale al loro prodotto vettoriale.
Poniamo dunque:V i = gimǫmpqx
p1xq2 .
Si verifica immediatamente che V k e ortogonale a Σ, cioe che vale la relazione:
gklxlBV
k = 0 .
Infatti:gklx
lBV
k = gklxlBg
kmǫmpqxp1xq2 = ǫlpqx
lBx
p1xq2 ,
e si ha ǫlpqxlBx
p1xq2 = 0 perche per ogni B questa espressione e il determinante di una
matrice che ha due colonne uguali.Introduciamo ora il versore normale:
nl :=V l
‖V ‖ ; (7.18)
cioe:
nl =ǫlpqx
p1xq2√
gmkǫmpqxp1xq2ǫkrsx
r1xs2
. (7.19)
Per calcolare xk3 osserviamo che la lunghezza del vettore ∂∂η
rispetto alla metrica fisica edata da:
‖ ∂∂η
‖ =√gklx
k3xl3 =
√h33 =
√h3
3
γ33= Nes
33 = Ney(I,J) . (7.20)
Queste due informazioni determinano univocamente il vettore stesso:
∂
∂η= Ney(I,J)nk
∂
∂xk,
136

cioe:
xk3 = Ney(I,J)nk = Ney(I,J)gklǫlpqx
p1xq2√
gmkǫmpqxp1xq2ǫkrsx
r1xs2
. (7.21)
Poiche I e J dipendono solamente dalle xkA, questa formula esprime finalmente xk3 infunzione delle derivate dei campi lungo Σ e dei campi stessi (si ricordi che le componentigkl della metrica fisica su Σ dipendono dalle xk). Vediamo dunque che la configurazionedi Σ determina univocamente le configurazioni degli strati vicini del materiale.
7.4 Deformazione esterna.
Conoscendo ora la configurazione degli strati vicini a Σ, si puo calcolare anche losviluppo del tensore delle deformazioni al primo ordine in η.
Per semplificare questo calcolo e conveniente utilizzare anche nello spazio fisico un sis-tema di coordinate “adattato alla piastra” o, piu esattamente, adattato all’immagine F (Σ)della piastra nello spazio fisico. Ovviamente, un tale sistema dipende dalla configurazionedella piastra. Pero, i risultati che otterremo sono di carattere geometrico e non dipendonodalla scelta particolare delle coordinate in cui vengono calcolati.
Una volta scelta la configurazione F , introduciamo dunque un sistema di coordinateadattato ad F (Σ) ponendo x3 = η F−1, e scegliendo le coordinate xK , (K = 1, 2), inmodo tale che risulti xK3 = 0. In questo sistema di coordinate il gradiente di deformazioneha la struttura a blocchi seguente:
(xka) =
(xKA 00 1
);
allora anche la corrispondente matrice inversa ξak ha una struttura a blocchi simile
(ξak) =
(ξAK 00 1
).
Poiche gkl = ξakξblhab, una struttura a blocchi di h e di ξak implica la struttura a blocchi
per la metrica fisica:
(gkl) =
(gKL 0
0 g33
),
dove:hAB(η) = gKL(η)xKAx
LB
e:h33(η) = gkl(η)xk3x
l3 = g33(η) .
Il calcolo della deformazione trasversale che abbiamo effettuato nel paragrafo precedenteimplica che
g33(η) = h33(η) = γ33h33(η) = N2e2s
33(η) , (7.22)
137

cioe permette di calcolare il “lapse” fisico√g33 tramite il corrispondente “lapse” materiale
N e tramite la deformazione:
√g33 = Ney(I(η),J(η)) .
Denotiamo ora con kKL la curvatura esterna fisica della piastra, cioe la seconda formafondamentale della superficie F (Σ) in X . Allora, la metrica fisica degli strati vicini a Σ edata, al primo ordine, da una formula analoga a quella per la metrica materiale:
gKL(η) = gKL + 2η√g33 kKL = gKL + 2Nηey(I,J)kKL .
Ne segue:
hAB(η) = (gKL + 2Nηey(I,J)kKL)xKAxLB = hAB + 2Nηey(I,J)kAB , (7.23)
dove con kAB abbiamo denotato il pull–back bidimensionale del tensore kKL
kAB := kKLxKAx
LB .
Il tensore kAB ha significato intrinseco nella superficie Σ, indipendentemente dal sistema dicoordinate adattato xk utilizzato. Infatti, esso descrive la curvatura esterna della piastrarispetto alla metrica fisica h, mentre κAB descrive la curvatura esterna della stessa piastrarispetto alla metrica materiale γ. La formula (7.23) permette di calcolare le deformazionidegli strati vicini quando si conosca la configurazione di Σ. Per tale scopo dobbiamo primacalcolare lo sviluppo della metrica inversa γAB(η). La formula (7.6) implica
γAC(η) = γAC − 2NηκAC , (7.24)
dove per alzare gli indici di κAB abbiamo naturalmente utilizzato la metrica materiale diΣ. Infatti:
(γAC − 2NηκAC)(γCB + 2NηκCB) = δAB +O(N2η2) .
Le formule (7.23) e (7.24) implicano:
hAB(η) = (γAC − 2NηκAC)(hCB + 2Nηey(I,J)kCB) =
= hAB + 2Nη(ey(I,J)kAB − κACh
CB
)+O(N2η2) =
= hAB + 2Nη[eySAB + κAC(eyδCB − hCB)
]+O(N2η2) ,
dove abbiamo introdotto la differenza tra le due curvature esterne di Σ, quella rispetto allametrica fisica e quella rispetto alla metrica materiale:
SAB := kAB − κAB . (7.25)
Questo tensore sara chiamato tensore delle deformazioni esterne. Per semplificare la no-tazione utilizziamo anche il tensore
zAB := δAB − e−yhAB (7.26) ;
138

allora:hAB(η) = hAB + 2Nηey(SAB + κAEz
EB ) +O(N2η2) . (7.27)
Utilizziamo ora la formula (9.14), che permette di calcolare lo sviluppo di
sAB(η) =1
2(logh)AB(η)
a partire dallo sviluppo (7.27). Ponendo ora
r := r(hAB) =2
hCC
√−det hAB ,
abbiamo finalmente:
sAB(η) =1
2
(log[hCD + 2Nηey(SCD + κCEz
ED) +O(N2η2)
])AB
=
= sAB +Nηey
1
(1 − r2)hCC
(κDE z
ED + SDD − 2
hCD(SDC + κDE zEC )
hEE
)+
+
[4F ′(r)
r(hCC)2
(1
hCChCD(SDC + κDE z
EC ) − r2
2(SCC + κCEz
EC )
)+
2F (r)(SCC + κCEzEC )
(hDD)2
]hAB+
+2F (r)
hCC(SAB + ˜κAEzEB )
+O(N2η2) .
(7.28)Osserviamo che, se si annulla la deformazione interna di Σ, si ha hAB = δAB e dunque hAB = 0.Inoltre e anche zAB = 0, r = 0, F = 1, e dunque la formula sopra si riduce semplicementea:
sAB(η) = NηSAB ,
cioe la derivata trasversale delle deformazioni interne e determinata solamente dal tensoredelle deformazioni esterne. Questa formula esprime il significato del tensore delle defor-mazioni esterne: esso misura la deformazione interna negli strati vicini a Σ in assenza dideformazione interna di Σ stessa.
7.5 Energia elastica di una piastra.
Consideriamo ora l’espressione dell’energia interna di una piastra. La relazione u =u(α, β, θ) implica che possiamo considerare u come funzione di I(η) e J(η); infatti α, β, θsi possono esprimere in funzione di questi e di s33, che a sua volta e funzione solo di I e J acausa della (7.10). D’ora in poi considereremo dunque l’energia interna u = u(I(η), J(η))contenuta in ogni strato corrispondente al valore η, come la funzione fondamentale de-scrivente le proprieta elastiche del materiale, sottintendendo che nella funzione u(α, β, θ)che descrive il materiale tridimensionale la deformazione trasversale sia stata espressatramite la (7.14).
139

Per ottenere l’energia interna di tutta la piastra e necessario sommare i contributi ditutti gli strati del materiale vicini a Σ. Utilizzando la relazione (7.4) abbiamo:
E =
∫
Z
ρ0
√det γ u(I, J)d3ξ =
=
∫
Σ
ρ0Nd2ξ
∫ 12
− 12
√det γAB(η) u(I(η), J(η))dη .
(7.29)
Calcolando u(I(η), J(η) per mezzo della equazione (7.28) ed eseguendo l’integrale internosi ottiene l’energia totale come un integrale bidimensionale su Σ:
E =
∫
Σ
U d2ξ ,
dove
U(S,S) := ρ0N
∫ 12
− 12
√det γAB(η) u(I(η), J(η))dη . (7.30)
In questo calcolo abbiamo tenuto conto del fatto che nel sistema adattato la funzione Nnon dipende da η (vedi formula (9.47)). Se la dipendenza dell’energia U dalle deformazioniinterne S ed esterne S. viene misurata sperimentalmente, essa puo essere considerata comeil punto di partenza della descrizione matematica di una piastra, senza nessun bisogno diconoscere la teoria tridimensionale del materiale. Pero, come vedremo nel paragrafo 7.10, lateoria tridimensionale ci permette di calcolare tale funzione con una buona approssimazionese conosciamo le proprieta elastiche del materiale stesso.
Per poter derivare la statica e la dinamica della piastra dobbiamo esprimere i duetensori di deformazione S e S tramite la configurazione xk(ξA) e le sue derivate, qualunquesia il sistema di coordinate adottato nello spazio fisico. Il tensore delle deformazioni internedipende, come sappiamo dalle formule (7.2) ed (7.3), solo dalle derivate prime xkA dellaconfigurazione. Mostreremo ora che il tensore delle deformazioni esterne dipende anchedalle derivate seconde xkAB :
xkAB =: ∂AxkB =
∂2xk
∂ξA∂ξB.
Per questo scopo occorre considerare la grandezza cosı definita:
alAB := xlAB + ΓlkmxkAx
mB , (7.31)
dove Γlkm e la connessione della metrica fisica. In particolare, se lo spazio fisico e pi-atto ed utilizziamo un sistema di coordinate cartesiane, le componenti della connessione siannullano e la grandezza alAB coincide semplicemente con le derivate seconde della config-urazione. Calcoliamo preventivamente le componenti ΓaAB della connessione della metricafisica hab rispetto alle coordinate materiali. Dalla formula (9.17) segue:
ΓaAB = ΓklmxlAx
mBξ
ak +
∂2xk
∂ξA∂ξBξak = (Γklmx
lAx
mB + xkAB)ξak = akABξ
ak .
140

Contraendo con la matrice xla otteniamo:
alAB = ΓaBCxla . (7.32)
La parte ortogonale a Σ e dunque uguale a:
nlalAB = ΓaBCnlx
la = ΓCABnlx
lC + Γ3
ABnlxl3 .
Ricordando che nlxlC e nullo e che
nlxl3 = ‖ ∂
∂η‖ =
√h33 ,
abbiamo:
nlalAB =
√h33Γ3
AB =1√h33
Γ3AB = −kAB . (7.33)
Abbiamo dunque ottenuto la seguente espressione del tensore delle deformazioni esterne:
SAB = kAB − κAB = −nlalAB − κAB =
= − ǫlpqxp1xq2√
gmkǫmpqxp1xq2ǫkrsx
r1xs2
(xlAB + Γlkmx
kAx
lB
)− κAB .
(7.34)
Osserviamo che S dipende linearmente dalle derivate seconde, mentre la dipendenza dallederivate prime e altamente non lineare.
Calcoliamo anche la parte tangenziale di alAB che ci servira nel seguito. La formula(7.32) implica:
alABglmxmC = ΓaABx
laglmx
mC = ΓaABhaC = ΓDABhDC , (7.35)
perche h3C si annulla.
7.6 Principio variazionale del secondo ordine.
Le equazioni dell’equilibrio statico di una piastra si ottengono dal principio di minimodella energia totale, cioe dal principio variazionale:
δE = 0 .
Le equazioni della dinamica si ottengono dal corrispondente principio di Hamilton
δA = 0 ,
dove A e l’azione definita come l’integrale rispetto al tempo della differenza tra energiacinetica totale ed energia potenziale totale. In entrambi i casi l’integrando dipende dalla
141

configurazione xk = xk(ξA) attraverso i due tensori di deformazione S e S. Come sappiamodalle formule (7.2), (7.3) ed (7.34), il primo dipende solamente dalle derivate prime dellaconfigurazione stessa, mentre il secondo dipende anche dalle derivate seconde. Dunque sianel caso statico che nel caso dinamico il principio variazionale e del secondo ordine.
Per ottenere le equazioni dell’equilibrio statico di una piastra dobbiamo dunque min-imizzare l’energia interna:
E =
∫
Σ
U(xk, xkA, xkAB)d2ξ .
Ne segue:
0 = δE =
∫
Σ
(∂U
∂xkδxk +
∂U
∂xkAδxkA +
∂U
∂xkABδxkAB
)d2ξ .
Integrando due volte per parti si ottiene:
δE =
∫
Σ
(∂U
∂xk− ∂A
∂U
∂xkA+ ∂A∂B
∂U
∂xkAB
)δxkd2ξ+
+
∫
∂Σ
[(∂U
∂xkA− ∂B
∂U
∂xkAB
)δxk +
∂U
∂xkABδxkB
]∂
∂ξA(dξ1 ∧ dξ2) .
Introduciamo ora gli oggetti geometrici cosı definiti:
p ABk := − ∂U
∂xkAB
p Ak := − ∂U
∂xkA− ∂Bp
ABk .
(7.36)
Allora la variazione della energia totale puo essere riscritta nella forma:
δE =
∫
Σ
(∂U
∂xk− ∂A
∂U
∂xkA+ ∂A∂B
∂U
∂xkAB
)d2ξ+
+
∫
∂Σ
(p ⊥k δxk + p ⊥B
k δxkB).
(7.37)
Abbiamo dunque che per annullare l’integrale al contorno non e piu sufficiente fissareil valore della posizione sul contorno, ma bisogna fissare anche il valore della derivata.Dal punto di vista geometrico questo significa che controlliamo la posizione del contornodella piastra e la direzione normale al contorno stesso. Se allora fissiamo i valori xk|∂Σ exkA|∂Σ otteniamo che la condizione di minimo della energia totale corrisponde alle seguentiequazioni di Eulero–Lagrange del secondo ordine:
∂U
∂xk− ∂A
∂U
∂xkA+ ∂A∂B
∂U
∂xkAB= 0 .
142

In termini delle grandezze p Ak e p AB
k possiamo riscrivere:
∂U
∂xk− ∂A(p A
k + ∂BpABk ) + ∂A∂Bp
ABk = 0
cioe:∂U
∂xk− ∂Ap
Ak = 0 . (7.38)
L’interpretazione fisica di p ABk risulta dalla equazione (7.37). Riscriviamo infatti l’ultimo
termine come ∫
∂Σ
(p ⊥k δxk + p
⊥‖k δxk‖ + p ⊥⊥
k δxk⊥
),
dove il simbolo ‖ indica la parte tangente alla linea ∂Σ. Mantenendo fissati i valori xk|∂Σ,cioe anche xk‖|∂Σ, la grandezza p ⊥⊥
k fornisce la variazione della energia totale quando viene
cambiata la direzione della piastra sul contorno, cioe xk⊥. Interpretiamo quindi p ABk come
la densita del momento flettente. L’interpretazione dell’oggetto p Ak e piu delicata e sara
discussa nel prossimo paragrafo.
7.7 Relazioni sforzo–deformazione per la teoria del secondo ordine.
Per calcolare i momenti p Ak e p AB
k in termini dei due tensori di deformazione, intro-duciamo i tensori:
NAB : =∂U
∂hAB
MAB : =∂U
∂SAB.
Allora si ha:
δU =∂U
∂hABδhAB +
∂U
∂SABδSAB − fkδx
k =
= NABδ(gklxkAx
lB) −MABδ[nl(x
lAB + Γlmnx
mAx
nB)] − fkδx
k .
(7.39)
Ne segue:p ABk = nkM
AB ,
cioe il momento flettente p ABk e proporzionale al vettore normale alla superficie. Os-
serviamo che la dipendenza di gkl e di Γlmn dai punti della superficie fornisce dei terminiaggiuntivi ad fk nella variazione di U rispetto ad xk. Questi termini non sono di caratteretensoriale perche contengono le derivate parziali della metrica e della connessione. Altritermini di questo tipo compaiono nelle derivate di p A
k . Insieme, tutti questi termini sicompongono in modo tale che il primo membro della equazione (7.38) sia una densitacovettoriale. L’equazione stessa esprime l’equilibrio delle forze e dei momenti delle forze.Lasciamo al lettore il compito di verificare questo nel caso in cui la geometria dello spazio
143

fisico e curva, e ci limitiamo a discutere il caso dello spazio fisico piatto. Naturalmente,per semplificare i calcoli, utilizzeremo un sistema di coordinate cartesiane, nel quale quindila metrica g e costante e le componenti della connessione si annullano.
In questo caso, la formula (7.39) implica:
δU = 2NABgklxlBδx
kA −MABnlδx
lAB+
−MBCxlBC∂nl∂xkA
δxkA − fkδxk .
(7.40)
Per calcolare il penultimo termine di questa relazione osserviamo che, essendo nlnl = 1, si
ha:
0 =∂(nln
l)
∂xkA= 2
∂nl∂xkA
nl .
Per ogni valore fissato di k e di A il vettore di componenti gml ∂nl
∂xkA
= ∂nm
∂xkA
e dunque
tangente alla superficie Σ. Cio significa che esso puo essere scritto come combinazionelineare dei vettori di componenti xmC , e quindi esistono delle grandezze αACk tali che:
∂nl∂xkA
= αACk xnCgnl . (7.41)
Per determinare tali grandezze si osservi che, essendo xlBnl = 0, si ha:
0 =∂
∂xkA(xlBnl) =
∂nl∂xkA
xlB + δABnk ,
cioe:∂nl
∂xkAxlB = −δABnk .
Sostituendo la (7.41) in quest’ultima relazione otteniamo:
αACk xnCgnlxlB = αACk hCB = −δABnk ,
da cui segue:αACk = −(h−1)ACxnBgnl ,
cioe :∂nl∂xkA
= −nk(h−1)ACxnCgnl .
Sostituendo nella (7.40) otteniamo:
δU = 2NABgklxlBδx
kA −MABnlδx
lAB + nkM
BCxlBC(h−1)ADxmDgmlδxkA − fkδx
k ,
cioe:∂U
∂xk= −fk ,
∂U
∂xkA= 2NABgklx
lB + nkM
BCxlBC(h−1)ADxmDgml .
144

Allora:
p Ak = − ∂U
∂xkA− ∂Bp
ABk =
= −2NABgklxlB − nk
(MBCxlBC(h−1)ADxmDgml + ∂BM
AB)−MAB∂Bnk .
(7.42)Utilizzando l’equazione (7.35) si puo riscrivere il termine in parentesi:
∂BMAB +MBCalBC(h−1)ADxmDgml = ∂BM
AB +MBC(h−1)ADΓEBChED =
= ∂BMAB +MBC ΓABC = ∇(h)
B MAB ,
dove con il simbolo ∇(h) denotiamo la derivata covariante rispetto alla metrica fisica hABsulla piastra. Per l’ultima uguaglianza abbiamo utilizzato il fatto che MAB non e untensore ma una densita tensoriale. Per calcolare l’ultimo termine di (7.42) osserviamo chevale
∂Bnk = ∇Bnk = gkm∇Bnm .
Dalla formula (9.41) otteniamo pero:
∇B
(nl
∂
∂xl
)= (∇Bn
l)∂
∂xl= k C
B
∂
∂ξC= k C
B xlC∂
∂xl,
cioe∂Bnk = gklx
lCk
CB .
Allora si ha finalmente:
p Ak = −(2NAC +MABkCB)gklx
lC − nk∇(h)
B MAB .
Decomponiamo ora l’equazione di equilibrio (7.38) in una parte ortogonale alla piastra eduna parte tangente ponendo:
f = nkfk ,
fA = xkAfk ,
tA = nkp Ak = −∇(h)
B MAB ,
tAB = xkBpAk = −(2NAC +MADkCD)hCB .
Allora:f = nk∂Ap
Ak = ∂A(nkp A
k ) − p Ak ∂An
k = ∂AtA − kAC t
CA , (7.43)
fB = xkB∂ApAk = ∂At
AB − p A
k ∂AxkB = ∇(h)
A tAB − tAkAB . (7.44)
Vediamo dunque che tAB e la densita degli sforzi che agiscono lungo la superficie dellapiastra. Questo oggetto prende il nome di tensore degli sforzi interni. La densita vettorialetA descrive le forze di flessione che sono sempre ortogonali alla piastra stessa. La forza
145

esterna fA lungo Σ deve essere dunque equilibrata dalla componente tangenziale deglisforzi interni. Secondo l’equazione (7.44), quest’ultima e pari alla divergenza covariantedel tensore degli sforzi interni piu un termine aggiuntivo che e pari al prodotto dellacurvatura di Σ per la densita delle forze di flessione. La forza esterna trasversale deve essereequilibrata con la corrispondente componente trasversale degli sforzi interni. Secondol’equazione (7.43), questa componente e uguale alla divergenza della densita delle forzedi flessione piu un termine aggiuntivo che e pari al prodotto della curvatura di Σ per ladensita degli sforzi interni.
7.8 Dinamica delle piastre elastiche.
Per descrivere la dinamica delle piastre elastiche introduciamo la configurazione spa-zio–temporale
xk : Σ × R 7→ X
xk → xk(ξA, t) .
L’insieme delle coordinate (ξA, t) su Σ × R sara indicato con (ξΠ), dove Π = 0, 1, 2.Indicheremo inoltre l’insieme delle derivate della configurazione, cioe il gradiente di defor-mazione, con xkΠ, dove
xkΠ :=∂xk
∂ξΠ.
Le equazioni del moto si deducono dalla densita lagrangiana
L = T − U = ρ0
√det γ
(1
2mgklx
kxl − u(xkA, xkAB)
),
tramite il principio di Hamilton δA = 0, dove l’azione A e definita da
A =
∫
ω
Ld2ξdt
ed ω = Σ × (t1, t2). Abbiamo:
0 = δA =
∫
ω
∂L
∂xkδxk +
∂L
∂xkΠδxkΠ +
∂L
∂xkΠΛ
δxkΠΛ =
=
∫
ω
(∂L
∂xk− ∂Π
∂L
∂xkΠδ + ∂Π∂Λ
∂L
∂xkΠΛ
)δxk+
+
∫
∂ω
[(∂L
∂xkΠ− ∂Λ
∂L
∂xkΠΛ
)δxk +
∂L
∂xkΠΛ
δxkΛ
]∂
∂ξΠ(dξ0 ∧ dξ1 ∧ dξ2
).
Introduciamo ora gli oggetti
p ΠΛk :=
∂L
∂xkΠΛ
p Πk :=
∂L
∂xkΠ− ∂Λp
ΠΛk .
(7.45)
146

Osserviamo che le componenti spaziali p ABk , p A
k coincidono con le componenti degli oggettidefiniti in (7.36), mentre p ΠΛ
k si annulla se uno od entrambi gli indici assumono il val-ore 0. Infatti, la lagrangiana non dipende dalle derivate spaziali della velocita e dalleaccellerazioni. Dunque
p 0k =
∂L
∂xk− ∂Λp
ΠΛk =
∂T
∂xk= mρ0
√det γgklx
l := pk ;
cioe le componenti p 0k coincidono con i momenti cinetici.
Tramite i momenti coniugati possiamo riscrivere la variazione dell’azione nella forma
0 = δA =
∫
ω
∂L
∂xkδxk +
∂L
∂xkΠδxkΠ +
∂L
∂xkΠΛ
δxkΠΛ =
=
∫
ω
p ⊥k δxk + p ⊥Λ
k δxkΛ .
Dunque se l’integrale al contorno si annulla, analogamente al caso statico, otteniamo leequazioni di Eulero–Lagrange della dinamica di una piastra elastica nella forma
∂L
∂xk− ∂Π
∂L
∂xkΠ+ ∂Π∂Λ
∂L
∂xkΠΛ
= 0 ,
o, anche:
− ∂U
∂xk+ ∂A
∂U
∂xkA− ∂A∂B
∂U
∂xkAB= pk . (7.46)
Nel caso statico, l’annullamento del primo membro di questa equazione esprimeva la con-dizione di equilibrio delle forze applicate in ogni punto del materiale. Nel caso dinamico, ilrisultante delle forze applicate non e nullo e produce la variazione nel tempo del momentocinetico. Dunque la (7.46) esprime la seconda legge di Newton per una piastra elastica.
Come nel caso statico, decomponiamo l’equazione (7.46) in una parte ortogonolale allapiastra ed in una tangente alla piastra. Utilizzando le equazioni (7.43) e (7.44) otteniamoimmediatamente:
p⊥ = f − ∂AtA + kAC t
CA ,
pB = fB −∇(h)A tAB + tAkAB .
7.9 Approssimazione lineare dei tensori di deformazione.
Calcoliamo i due tensori delle deformazioni di una piastra che si trovi in una con-figurazione vicina alla configurazione di rilassamento. Assumiamo dunque l’esistenza diuna configurazione di rilassamento globale del materiale e prendiamo sia nello spazio fisicoche in quello materiale un sistema di coordinate normali rispetto a Σ (vedi paragrafo9.9). La configurazione di rilassamento corrisponde dunque alla situazione in cui i duesistemi coincidono, cioe x3 = η = 0, x1 = ξ1, x2 = ξ2. Sinteticamente possiamo scrivere
147

xk(ξA) = δkCξC . Come sappiamo, nella configurazione di rilassamento la metrica materiale
e la metrica fisica coincidono.
Consideriamo adesso piccoli spostamenti della configurazione del materiale, descrittida:
xk(ξA) = δkC(ξC + ψC) + φδk3 , (7.47)
dove il vettore bidimensionale ψC tangente alla piastra descrive piccoli spostamenti longi-tudinali, ed il campo scalare φ descrive piccoli spostamenti trasversali.
Cominciamo calcolando le espressioni dei due tensori delle deformazioni al primo or-dine in ψC e φ. Dalla formula (7.34) si vede che dobbiamo calcolare lo sviluppo di nl e dialAB. Ora
ǫlpqxp1xq2 = ǫlpq
(δp1 + δpCψ
C1 + φ1δ
p3
) (δq2 + δqDψ
D2 + φ2δ
q3
)=
= ǫl12 + ǫl1DψD2 + ǫlC2ψ
C1 + ǫl13φ2 + ǫl32φ1 +O(2) =
= δ3l (1 + ψCC) − δCl φC +O(2) ,
dove, come al solito, abbiamo indicato genericamente con O(2) i termini di ordine supe-riore al primo rispetto agli spostamenti. Dunque, tenendo presente che nel sistema dellecoordinate normali e g3A = 0, si ha
gmlǫlpqxp1xq2ǫmrsx
r1xs2 =
=[g3m(1 + ψCC) − gCmφC
] [δ3m(1 + ψDD) − δDmφD
]+O(3) =
= g33(1 + ψCC)2 + gCDφCφD +O(3) = N−2(1 + ψCC)2 + gCDφCφD +O(3) ,
e quindi:
nl =ǫlpqx
p1xq2√
gmkǫmpqxp1xq2ǫkrsx
r1xs2
= N(δ3l − δCl φC
)+O(2) .
Dall’equazione (7.34) otteniamo cosı
− SAB − κAB =
= nlalAB = N
(δ3l − δCl φC
) (xlAB + Γlmnx
mAx
nB
)= N
(δ3l − δCl φC
)×
×[δl3φAB + δlCψ
CAB + ΓlKL(δKA + ψKA)(δLA + ψLA) + Γl3KφAδ
KB + ΓlK3φBδ
KA
]+
+O(2) =
= N(φAB + Γ3
AB + Γ3AKψ
KB + Γ3
KBψKA + Γ3
3BφA + Γ33AφB − ΓCABφC
)+O(2) .
Osserviamo adesso che le componenti ΓCAB della connessione tridimensionale sono ugualialle corrispondenti componenti bidimensionali perche nel sistema delle coordinate normalile componenti γ3A della metrica si annullano. Allora si ha:
φAB − ΓCABφC = ∂AφB − ΓCABφC = ∇A∇Bφ ,
148

dove ∇A e la derivata covariante bidimensionale su Σ, calcolata rispetto alla metrica internaγAB della piastra. Inoltre la formula (9.50) implica che, per le coordinate normali, vale
Γ33A =
1
2N2∇AN
2 =1
N∇AN .
Cosı otteniamo
− (SAB + κAB) =
= N∇A∇Bφ+ φANB + φBNA +NΓ3AKψ
KB +NΓ3
KBψKA +NΓ3
AB +O(2) .(7.48)
Naturalmente, i valori di NΓ3AB devono essere calcolati nel punto xk(ξA). Sviluppando
questi valori al primo ordine rispetto alla deformazione otteniamo il valore nel punto nondeformato (ξC, 0), piu le derivate calcolate in questo punto moltiplicate per gli incrementi:
NΓ3AB(ξC + ψC , φ) = NΓ3
AB + ψC∂C(NΓ3AB) + φNΓ3
AB3 + φ(∂3N)Γ3AB .
Ricordiamo ora che N non dipende da η (vedi formula (9.47)) e che si ha κAB = −NΓ3AB .
Dunque valeNΓ3
AB(ξC + ψC , φ) = −κAB − ψC∂CκAB + φNΓ3AB3 .
Sostituendo questa espressione in (7.48) e utilizzando la formula (9.49) otteniamo
−(SAB + κAB) = N∇A∇Bφ+ φANB + φBNA − κAB − κACψCB − κCBψ
CA+
− ψC∂CκAB +1
2Nφ
(∇A∇BN
2 − ∂2gAB∂η2
).
Osserviamo ora che, come si verifica facilmente, nella somma dei termini che contengonoκAC le derivate parziali possono essere sostituite dalle derivate covarianti:
κAC∂BψC + κCB∂Aψ
C + ψC∂CκAB =
= κAC∇BψC + κCB∇Aψ
C + ψC∇CκAB = 2κC(A∇B)ψC + ψC∇CκAB ;
dunque
−SAB = N∇B∇Aφ+ φANB + φBNA + φ1
2N∇A∇BN
2+
− 2κC(A∇B)ψC − ψC∇CκAB − φ
1
2N
∂2gAB∂η2
.
Come ultimo passo introduciamo la nuova grandezza
ϕ := Nφ ,
ed osserviamo che vale
N∇A∇Bφ+ φANB + φBNA =
= ∇A(NφB) + φANB = ∇A (ϕB − φNB) + φANB =
= ∇A∇Bϕ− 1
Nϕ∇A∇BN .
149

Dunque abbiamo:
N∇A∇B(φ) + φANB + φBNA + φ1
2N∇A∇BN
2 =
= ∇A∇Bϕ− ϕ1
N∇A∇BN + ϕ
1
2N2∇A∇BN
2 =
= ∇A∇Bϕ+ ϕ1
N2(∇AN)(∇BN) .
Prendendo infine in considerazione la formula (9.51) otteniamo:
SAB = −∇A∇Bϕ− ϕ
(1
N2(∇AN)(∇BN) +R3
A3B − κACκCB
)+
+ 2κC(A∇B)ψC + ψC∇CκAB .
(7.49)
Utilizzando la nuova variabile ϕ, la configurazione (7.47) del materiale si puo riscriverenella forma:
xk(ξA) = δkC(ξC + ψC) + ϕ1
Nδk3 . (7.50)
La funzione ϕ misura dunque lo spostamento trasversale nella direzione del vettore normale
nk = gklnl = Ngklδ3l = Ng3k = Ng33δk3 =1
Nδk3 .
La funzione ϕ verra chiamata spostamento trasversale. Il campo vettoriale ψ verra chiam-ato spostamento longitudinale. Osserviamo che per una piastra piatta il tensore κAB siannulla e la deformazione esterna (7.49) dipende soltanto dallo spostamento trasversale.Nel caso generale pero essa dipende anche dagli spostamenti longitudinali. Osserviamoancora che, nella maggior parte delle applicazioni, lo spazio ambiente e piatto e dunque ilsuo tensore di Riemann si annulla: R3
A3B = 0.Calcoliamo ora il tensore delle deformazioni interne. Dalla formula (7.3) si ha
sAB ≃ 1
2(gklx
kAx
lB − γAB) . (7.51)
Se le componenti di gkl non sono costanti (perche la metrica non e piatta o perche utilizzi-amo un sistema curvilineo), in questa formula e necessario sviluppare anche le componentidi gkl rispetto al campo degli spostamenti. Dunque si ha:
gkl(x(ξ))xkAxlB =
= gkl(ξc + ψc, φ)
(δkA + ψCAδ
kC + φAδ
k3
) (δlB + ψDBδ
lD + φBδ
l3
)=
= gkl(ξc, 0)
(δkA + ψCAδ
kC + φAδ
k3
) (δlB + ψDBδ
lD + φBδ
l3
)+
+
(∂gkl∂ξC
ψC +∂gkl∂η
φ
)δkAδ
lB +O(2) =
= gAB + gDAψDB + gDBψ
DA +
∂gAB∂ξC
ψC −NκABφ .
150

Osserviamo ora che la formula (9.23) implica:
∂CgAB = gDBΓDCA + gDAΓDCB ,
e dunque:
gklxkAx
lB = gAB + gDA(ψDB + ΓDCBψ
C) + gDB(ψDA + ΓDCAψC) −NκABφ =
= gAB + 2∇(AψB) −NκABφ+O(2) .
Sostituendo nella (7.51) e ricordando che gAB = γAB, si ha finalmente:
sAB = ∇(AψB) −1
2ϕκAB (7.52)
a meno di termini d’ordine superiore. Come il tensore delle deformazioni esterne dipende ingenerale non solo dagli spostamenti trasversali ma anche da quelli longitudinali, cosı ancheavviene per il tensore delle deformazioni interne. Solo se la piastra e piatta quest’ultimodipende solamente dalle deformazioni longitudinali. In questo caso la formula (7.52) di-venta
sAB = ∇(AψB) ,
ed e quindi del tutto analoga alla formula (2.14) della teoria tridimensionale, dove il tensoredelle deformazioni era pari alla parte simmetrica del gradiente di deformazione.
7.10 Determinazione della energia interna di una piastra a partire dalleproprieta elastiche del materiale tridimensionale
In questo paragrafo vogliamo determinare la densita di energia interna di una piastra
U(S,S) = ρ0N
∫ 12
− 12
√det γAB(η) u
(sCC(η),
1
2
(sAB(η)sBA(η) − 1
2(sCC(η))2
))dη , (7.53)
basandoci sulle proprieta del materiale tridimensionale. Assumiamo prima di tutto chele deformazioni siano “piccole” dal punto di vista tridimensionale. Questo significa chel’espressione della energia interna u e data dal modello quasi lineare
u(η) =1
2A(sCC(η))2 +
1
2B
(sAB(η)sBA(η) − 1
2(sCC(η))2
), (7.54)
dove il coefficiente A e definito dalla formula (7.17). Per calcolare l’integrale in (7.53) dob-biamo sviluppare la funzione integranda rispetto ad η. Ogni termine di questo sviluppocontiene N alla stessa potenza di η. Inoltre osserviamo che tutti i termini di potenza dis-pari spariscono quando vengono integrati sull’intervallo simmetrico
(−1
2, 1
2
). Dall’integrale
otterremo quindi termini di ordine zero, due, quattro ecc. in N . Poiche lo spessore della
151

piastra e piccolo, potremo trascurare ogni termine di ordine superiore al secondo in N .Inoltre, se supponiamo che gli spostamenti della piastra siano piccoli (e dunque siano pic-coli i due tensori delle deformazioni che sono lineari nei gradienti degli spostamenti e neglispostamenti stessi), riteniamo nella (7.54) solo i termini del secondo ordine nei tensori dideformazione. Questo significa che in tale equazione possiamo inserire lo sviluppo (7.28)troncato ai termini lineari sia in η che nelle deformazioni. Per questo scopo utilizziamo iseguenti sviluppi al primo ordine in S:
ey(I,J) ≃ 1 + y(I, J) = 1 − λI = 1 − λ(sCC)2 , (7.55)
(vedi formula (7.15)), e
hAB ≃ δAB + 2sAB .
Allora, per l’oggetto zAB introdotto nella formula (7.26), otteniamo l’approssimazione se-guente:
zAB = δAB − e−y(δAB + 2sAB) ≃ yδAB − 2sAB ≃ −λsCCδAB − 2sAB . (7.56)
Sostituendo questi sviluppi nella formula (7.28) e mantenendo soltanto i termini linearinelle deformazioni otteniamo:
sAB(η) = sAB +Nη
[1
2(SCC + κCEz
EC )δAB + SAB + ˜κAEzEB
]+O(2) =
= sAB +Nη(SAB − λκABsDD − 2κACs
CB) +O(2) ,
(7.57)
dove con O(2) abbiamo genericamente indicato tutti i termini che sono di ordine superioreal primo negli spostamenti e nello spessore N .
Per comodita introduciamo la notazione
QAB := SAB − λκABsDD − 2κACs
CB . (7.58)
Allora abbiamo:
sCC(η) = sCC +NηQCC = s+ ηQ
dove abbiamo indicato con s ed Q le tracce rispettivamente di sAB e QAB. Inoltre:
sAB(η)sBA(η) = sABsAB + 2NηsABQAB + (Nη)2QABQAB ;
dunque:
(sCC(η)
)2= s2 + 2NηsQ+ (Nη)2Q2 ,
sAB(η)sBA(η) − 1
2
(sCC(η)
)2= sABsAB − 1
2s2 + 2Nη
(sABQAB − 1
2sQ
)+
+ (Nη)2(QABQAB − 1
2Q2
).
152

Introducendo queste relazioni nella (7.54) otteniamo
u(η) =1
2As2 +
1
2B
(sABsAB − 1
2s2)
+Nη
[AsQ+B
(sABQAB − 1
2sQ
)]+
+ +(Nη)2[
1
2AQ2 +
1
2B
(QABQAB − 1
2Q2
)].
(7.59)
Calcoliamo ora lo sviluppo di√
det γAB. Dalla formula (7.7) si ha:
√det γAB(η) =
√det [γAB + 2NηκAB + (Nη)2RAB ]
=√
det γAB
√det (δAB + 2NηκAB + (Nη)2RA
B) =
=√
det γAB
√1 + 2NηTrκ+ (Nη)2TrR + (Nη)2det (2κAB +NηRA
B) .
Allora, utilizzando lo sviluppo della radice si ottiene, al secondo ordine in Nη:
√det γAB(η) =
=√
det γAB
(1 +NηTrκ+
1
2(Nη)2TrR + 2(Nη)2det (κAB) − (Nη)2(Trκ)2)
)=
=√
det γAB
(1 +Nηκ+
1
2(Nη)2M
),
(7.60)dove abbiamo indicato con κ la traccia di κAB ed abbiamo introdotto la notazione:
M := 4det (κAB) + TrR− 2(Trκ)2 .
Questa funzione dipende soltanto dalla geometria “materiale”della piastra e deve dunqueessere considerata come una funzione nota delle ξA. Introducendo le (7.59) ed (7.60) nella(7.53) ed integrando, il termine lineare in η non da contributo all’energia totale perche il
153

suo integrale rispetto ad η su un intervallo simmetrico si annulla. Dunque otteniamo
U(S,S) =
= ρ0N√
det γAB
∫ 12
− 12
(1 +Nηκ+
1
2(Nη)2M
)×
×
1
2As2 +
1
2B
(sABsAB − 1
2s2)
+Nη
[AsQ+B
(sABQAB − 1
2sQ
)]+
+ (Nη)2[
1
2AQ2 +
1
2B
(QABQAB − 1
2Q2
)]dη =
= ρ0N√
det γAB
∫ 12
− 12
1
2As2 +
1
2B
(sABsAB − 1
2s2)
+
+Nη
[1
2κAs2 +
1
2κB
(sABsAB − 1
2s2)
+AsQ+B
(sABQAB − 1
2sQ
)]+
+ (Nη)2[
1
4MAs2 +
1
4MB
(sABsAB − 1
2s2)
+ κAsQ+
+ κB
(sABQAB − 1
2sQ
)+
1
2AQ2 +
1
2B
(QABQAB − 1
2Q2
)]dη =
= ρ0N√
det γAB
(1 +
1
24N2M
)[1
2As2 +
1
2B
(sABsAB − 1
2s2)]
+
+1
12N2
[κAsQ+
1
2AQ2 + κB
(sABQAB − 1
2sQ
)+
1
2B
(QABQAB − 1
2Q2
)].
Introducendo infine esplicitamente l’espressione (7.58) otteniamo:
U(S,S) = ρ0N√
det γAB
(1 +
1
24N2M
)[1
2As2 +
1
2B
(sABsAB − 1
2s2)]
+
+1
12N2A
[κsS(1 − λ) − s2κ2λ
(1 − 1
2λ
)− κs(2 − λ)κABsAB+
+ 2κABsAB(κCDsCD − S) +1
2S2
]+
+1
12N2B
[κsABSAB + κ
(S + s(1 − 2λ) − κABsAB
)κCDsCD − 1
2κsS(1 − λ)+
− 2κABsBCs
CA +
1
2λκ2s2
(1 − 1
2λ
)+
1
2λ2κABκABs
2 − λsSABκAB+
−κABSBC sCA + 2λsκABκBCs
CA + 2κABκ
BCs
CDs
DA +
1
2SABSAB − 1
4S2
],
dove S denota la traccia del tensore SAB . Esprimendo s ed S in questa relazione tramitei campi degli spostamenti si ottiene una funzione quadratica, che dipende dalle derivate
154

prime dello spostamento longitudinale e dalle derivate prime e seconde dello spostamentotrasversale.
7.11 Piccole oscillazioni delle piastre.
La dinamica delle piastre nella approssimazione lineare risulta dalla lagrangiana
L =1
2ρ0N
√det γmgklx
kxl − U .
Le oscillazioni trasversali interagiscono con quelle longitudinali se la piastra non e piatta.Se invece la piastra e piatta, la lagrangiana si decompone in due parti:
L = Lϕ + Lψ
dove:
Lϕ =1
2ρ0N
√det γAB
mϕ2 − N2
12
[AS2 +B
(SABSAB − 1
2S2
)],
e
Lψ =1
2ρ0N
√det γAB
[mgABψ
AψB −As2 −B
(sABsAB − 1
2s2)]
.
Inoltre abbiamo
SAB = −∇A∇Bϕ− ϕ1
N2(∇AN)(∇BN)
sAB = ∇(AψB) .
Le oscillazioni longitudinali generate da Lψ sono dunque dello stesso tipo delle ordinarieonde elastiche tridimensionali; esse sono quindi governate dalla versione bidimensionaledell’equazione (3.9). Le oscillazioni trasversali risultano invece dalla lagrangiana del sec-ondo ordine:
Lϕ =1
2ρ0N
√det γAB
[mϕ2 −
(a− 1
2b
)(∇A∇Aϕ)2 − b(∇A∇Bϕ)(∇A∇Bϕ)
],
dove
a =N2
12A =
N2
24
9AB
3A+ 2B=N2
24
Y
1 − σ
b =N2
12B =
N2
12
Y
1 + σ.
si dicono rispettivamente modulo di compressibilita esterno e modulo di taglio esterno.L’equazione del moto:
∂L
∂ϕ− ∂0
∂L
∂ϕ− ∂A
∂L
∂ϕA+ ∂A∂B
∂L
∂ϕAB= 0
155

diventamϕ = D∆∆ϕ ,
dove abbiamo introdotto il coefficente
D := a+1
2b =
N2
12
(A+
1
2B
)=N2
24
12A+B
3A+BB =
N2
24
Y
1 − σ2
che viene detto rigidita della piastra. L’equazione statica corrispondente
∆∆ϕ = 0
si chiama equazione bilaplaciana. Questa equazione e di tipo ellittico; pero per l’unicitadella soluzione non basta assegnare il valore di ϕ al contorno, ma occorre assegnare ancheil valore della sua derivata trasversale.
156

PARTE II: STRUMENTI GEOMETRICI DELLA TEORIA DEI CAMPI.
Capitolo 8. STRUTTURE FONDAMENTALI DELLA GEOMETRIA
8.1 Varieta differenziabile.
“L’arena” in cui si svolge tutta la geometria differenziale e una varieta differenziabile.Come esempio di varieta differenziabile di dimensione due possiamo pensare alla superficie“idealizzata” della terra, che costituisce l’oggetto di interesse dei geografi. L’idealizzazioneconsiste nel lisciare la superficie, cioe nel “dimenticare” l’erba, le case, i sassi ecc. earrotondare le montagne. La struttura di tale varieta e data dalla collezione di tutte lecarte geografiche disegnate con i metodi piu disparati (proiezione di Mercatore, proiezionepolare, ecc.). Queste carte sono compatibili una con l’altra nel senso che l’applicazioneche ai punti di una carta assegna i punti di un’altra corrispondenti allo stesso luogo dellaterra e differenziabile. Una tale applicazione si chiama spesso funzione di transizione. E’importante anche che la collezione delle carte sia completa, nel senso che ogni punto dellavarieta sia rappresentato su almeno una carta. Questa situazione puo essere formalizzatanel modo seguente.
Sia M uno spazio topologico di Hausdorff, Uαα∈I una collezione di suoi sottoinsiemiaperti che costituisce una copertura di M , cioe
M =⋃
Uα .
Sia inoltre ϕαα∈I una collezione di funzioni continue ed iniettive definite su Uα a valoriin Rn:
ϕα : Uα → Rn .
Se, per ogni Uα, Uβ tali che Uα ∩ Uβ 6= ∅, l’applicazione
ϕα ϕ−1β : ϕβ(Uα ∩ Uβ) → ϕα(Uα ∩ Uβ),
(detta funzione di transizione) e differenziabile di classe C∞, allora M si dice varietadifferenziabile di dimensione n, le funzioni ϕα si dicono carte e l’insieme Uα, ϕαα∈I ditutte le carte di M si dice atlante di M .
Osserviamo che, ∀x ∈ Uα, si ha ϕα(x) = (x1(x), x2(x), ..., xn(x)), cioe ϕα rappresentala scelta di un “sistema di coordinate” in Uα. Se ϕβ e un’altra carta, con coordinate(y1, ..., yn), l’applicazione ϕα ϕ−1
β e la funzione che ai valori delle coordinate (yk) assegna
i corrispondenti valori delle coordinate (xi). Molto spesso, conformemente a quanto si trovanella maggior parte dei testi di fisica, useremo il “linguaggio delle coordinate”, scrivendo
xi = xi(yk)
157
invece di (x1, . . . , xn) = (ϕα ϕ−1β )(y1, ..., yn). La richiesta di differenziabilita di tali
funzioni equivale a richiedere che le trasformazioni di coordinate ammissibili siano dif-ferenziabili, in modo da garantire l’indipendenza dal sistema di coordinate di proprietaquali la derivabilita delle funzioni su M .
Definiamo ora il concetto di applicazione differenziabile su M . Date due varieta dif-ferenziabili M ed N , l’applicazione F : M → N e detta differenziabile se, ∀x ∈ M, sceltauna qualunque carta ϕα in un intorno di x (cioe tale che il suo dominio Uα contiene x) eduna carta ψβ in un intorno di F (x), la funzione ψβ F ϕ−1
α : Rn → Rm e differenziabile.La differenziabilita di F equivale dunque alla differenziabilita delle funzioni che associanoalle coordinate di x le coordinate di F (x).
Considereremo qui soltanto funzioni differenziabili. In realta, in fisica esistono anchefenomeni non descrivibili mediante funzioni C∞ (quali le onde d’urto), ma in questo libronon li prenderemo in considerazione.
8.2 Spazio tangente. Vettori.
Se consideriamo una superficie curva S nello spazio euclideo E3, ad esempio una sfera,e chiaro cosa si intende per piano tangente ad S in x ∈ S: esso e l’insieme dei vettori diE3 tangenti ad S in x, nell’usuale senso della geometria elementare. Un simile concetto fapero riferimento allo spazio in cui S e immersa. La geometria differenziale lo generalizzain modo da dare una definizione di spazio tangente ad una varieta M in un suo punto, chedipende solo dalle proprieta di M e non da quelle di un eventuale spazio piu vasto di cuiM sia sottoinsieme.
Sia data una varieta differenziabile M e sia x ∈ M un suo punto. Una funzione(differenziabile) γ : (a, b) → M, dove (a, b) ⊂ R e un intervallo dell’asse reale, si chiamacurva parametrizzata con origine x, se γ(0) = x. Scelta una carta ϕ in x e possibileassociare a γ una curva γϕ := ϕ γ in Rn che e detta espressione locale di γ; se (xi) sonole coordinate della carta ϕ, l’espressione locale di γ e (γi(t)). Consideriamo il vettore diRn tangente (nel senso consueto) a γϕ:
γϕ(0) :=d
dtϕ(γ(t))
∣∣∣∣t=0
=
(d
dtx1(γ(t)), ...,
d
dtxn(γ(t))
)∣∣∣∣t=0
= (γ1ϕ(0), ..., γnϕ(0)) ,
ovvero γϕ(0) = (x1(0), ..., xn(0)).
Gli n numeri reali γiϕ(0) sono le componenti del vettore. Ci proponiamo ora di deter-minare la legge di trasformazione di questo vettore, cioe la regola con cui cambiano le suecomponenti quando il sistema di coordinate in M viene cambiato. Se ψ e ϕ sono due cartein x, si ha
γψ(0) =d
dt(ψ γ)(t)
∣∣∣∣t=0
=d
dt[(ψ ϕ−1) (ϕ γ)(t)]
∣∣∣∣t=0
=
=d
dt[(ψ ϕ−1) γϕ(t)]
∣∣∣∣t=0
= D(ψ ϕ−1)(ϕ(x))γϕ(0) ,
158

dove abbiamo utilizzato la notazione D(ψ ϕ−1) per indicare la derivata dell’applicazioneψ ϕ−1 : Rn → Rn.
Se (yk) e (xi) sono le coordinate delle carte ψ, ϕ rispettivamente, allora l’applicazioneψ ϕ−1 si scrive yk = yk(xi), e il valore della sua derivata nel punto ϕ(x) e rappresentato
dalla matrice (∂yk
∂xi ) (matrice jacobiana). Si ottiene
γkψ(0) =n∑
i=1
∂yk
∂xiγiϕ(0) ≡ ∂yk
∂xiγiϕ(0) , (8.1)
o semplicemente
yk =∂yk
∂xixi .
Abbiamo qui introdotto la convenzione di Einstein secondo la quale, quando in una formulacompare un indice ripetuto, una volta in alto ed una in basso, esso si intende sommato sututti i valori che assume (ad esempio aib
i = a1b1 + ...+anb
n). Tale convenzione, che risultamolto comoda per svolgere i calcoli, e utilizzata dalla quasi totalita dei testi e anche noi lautilizzeremo costantemente. In modo analogo a (8.1) si ricava la corrispondente formulainversa:
γiϕ(0) =∂xi
∂ykγkψ(0).
Nell’insieme delle curve con origine in x introduciamo la seguente relazione di equi-valenza: diciamo che due curve γ1, γ2 sono equivalenti (γ1 ≃ γ2) se, scelta una carta in x,vale
γ1ϕ(0) = γ2ϕ(0).
E facile vedere che tale relazione non dipende dalla scelta della carta in x; infatti, la leggedi trasformazione appena trovata garantisce che
γ2ϕ(0) = γ1ϕ(0) ⇐⇒ γ2ψ(0) = γ1ψ(0).
Due curve sono dunque equivalenti quando le loro espressioni locali hanno lo stesso vettoretangente in Rn.
Definizione: Lo spazio ottenuto quozientando l’insieme delle curve con origine in xrispetto alla relazione d’equivalenza definita sopra, cioe lo spazio delle classi di curve equiv-alenti, si dice spazio tangente ad M in x e si indica con TxM .
Un elemento di tale spazio e una classe d’equivalenza di curve. Nel caso in cui M siauna superficie bidimensionale nello spazio euclideo tridimensionale E3 e chiaro che ad unaclasse d’equivalenza appartengono tutte e sole le curve aventi in x un determinato vettoretangente (nel senso della geometria elementare) e quindi che, in tal caso, lo spazio tangenteda noi definito e identificabile con lo spazio tangente classicamente inteso.
Abitualmente, immaginiamo un vettore come una freccia, cioe come un tratto dilinea retta o meglio di retta parametrizzata: se t e il parametro lungo tale linea, il puntot = 0 corrisponde all’origine della freccia e il punto t = 1 corrisponde alla sua punta;questa freccia corrisponde allo spostamento nell’intervallo di tempo (0, 1), e rappresenta la
159

velocita di un punto che si muove sulla retta. Nel caso generale di una varieta curva, nonesistono su M linee rette e si deve modificare questo punto di vista: ad un vettore X si facorrispondere una “freccia curva”, cioe un tratto di curva parametrizzata scelta nella classed’equivalenza di X . In questo modo viene a cadere la biunivocita della corrispondenza travettori e frecce; ma, se prendiamo tratti di curva sempre piu corti, le frecce di una stessaclasse d’equivalenza diventano sempre meno distinguibili e la corrispondenza dei vettoricon le freccette diventa sempre piu precisa. Allora il vettore velocita puo essere pensatocome il piccolo “vettore spostamento” corrispondente al piccolo intervallo di tempo (0, ǫ),moltiplicato per 1/ǫ, il che corrisponde ad un’unica freccia finita.
E possibile dotare lo spazio tangente della struttura di spazio lineare: siano X(1), X(2)
∈ TxM e siano γ1 ∈ X(1) = [γ1] e γ2 ∈ X(2) = [γ2], dove [ . ] denota la classe d’equivalenza;scelta una carta ϕ in x, definiamo
α[γ1] + β[γ2] := [ϕ−1(αγ1ϕ + βγ2ϕ)] ,
dove α e β sono numeri reali. Invitiamo il lettore a mostrare che il secondo membro diquesta equazione non dipende ne dalla carta scelta ne dai rappresentativi γ1 e γ2 di X(1)
e X(2).Scelta una carta ϕ in x, vi e una corrispondenza biunivoca tra il vettore X = [γ] ∈
TxM e la n-upla delle sue componenti (X i), dove
X i = γiϕ(0).
L’equazione (8.1) da la legge di trasformazione delle componenti quando si cambia carta.Con un piccolo abuso di notazione scriveremo (come si trova in tutti i testi di fisica)X = (X i) sottintendendo la scelta di una carta. Evidentemente la struttura lineare diTxM corrisponde alla struttura lineare dello spazio vettoriale Rn delle componenti:
(αX + βY )i = αX i + βY i,
cioe la i-esima componente della combinazione lineare dei vettori e uguale alla combinazionelineare delle i-esime componenti dei vettori.
8.3 Notazione fisica.
Per semplificare la notazione, scelta una carta in x, invece di scrivere f(ϕ−1(x1, ..., xn))scriveremo, come in tutti i libri di fisica, f(x1, ..., xn). In “notazione fisica”, scriveremodunque
∂f
∂xi:=
∂
∂xi(f) :=
∂
∂xi(f(ϕ−1(x1, ..., xn)))
∣∣∣∣(x1,...,xn)=ϕ(x)
.
Vediamo che ∂∂xi rappresenta esattamente il consueto operatore di derivata parziale.
Tale notazione, sebbene sia matematicamente leggermente imprecisa, e fisicamentemolto significativa. Un matematico, infatti, per funzione intende la legge (cioe una oper-azione algebrica o analitica) che trasforma una certa grandezza x in un’altra come sinx,
160

cosx, log x. Un fisico invece e piu interessato ai valori che una certa funzione assume, inquanto cio che gli preme e descrivere la distribuzione di una certa grandezza fisica (adesempio la temperatura o la pressione nei vari punti della superficie terrestre). Cosı, peril matematico, se cambia la parametrizzazione (cioe la scelta delle coordinate) dello spaziosu cui f e definita, cambia la funzione stessa e quindi egli usera un simbolo diverso perindicare la nuova legge secondo cui si assegna un valore ad ogni valore dei parametri. Peril fisico, invece, la parametrizzazione e assolutamente ininfluente in quanto un fenomeno eindipendente dal modo con cui lo si descrive (la temperatura o la pressione in un puntodella terra non cambiano se cambiamo la parametrizzazione della terra stessa). Questadifferenza di modo di pensare e spesso causa di forti incomprensioni tra fisici e matematici;cercheremo qui di mantenerci ad un livello intermedio tra i due modi di vedere al fine direndere il testo leggibile sia agli uni che agli altri.
8.4 I vettori come operatori differenziali del primo ordine.
E possibile dare per lo spazio tangente una definizione alternativa che, sebbene siameno intuitiva, presenta una notevole utilita: essa e sostanzialmente basata sulla cor-rispondenza tra vettore e derivata direzionale di ogni funzione lungo quel vettore.
Consideriamo l’algebra delle funzioni differenziabili da M in R, indicata con C∞(M)(la moltiplicazione e la somma sono definite puntualmente). Si dice derivazione (o ancheoperatore differenziale del primo ordine) v su M in x un funzionale, v : C∞(M) → R,dotato delle seguenti proprieta:
i) e un operatore lineare, cioe, se α, β ∈ R, allora
v(αf + βg) = αv(f) + βv(g) ;
ii) verifica la regola di Leibnitz (per la derivata di un prodotto):
v(fg) = v(f)g(x) + f(x)v(g).
E ovvio che le derivazioni in x costituiscono uno spazio vettoriale poiche la combinazionelineare di derivazioni e ancora una derivazione.
Scelta una carta (un sistema di coordinate) in x, osserviamo che la derivazione ∂∂xi
(spesso indicata semplicemente con ∂i), cioe la derivata lungo la i-esima linea coordinata,verifica le condizioni i) e ii), ed e quindi una derivazione su M in x.
Vogliamo ora mostrare che
∂∂xi
i=1,...,n
costituisce una base dello spazio delle deriva-
zioni in x. Si osservi che, utilizzando successivamente le proprieta ii) e i), segue che unaqualunque derivazione applicata ad una funzione costante f(x) ≡ α produce lo zero, poichesi ha
v(α) = v(1α) = 1v(α) + αv(1) = v(α) + v(α).
Inoltre, se g(x) = f(x) = 0, la condizione ii) implica che ogni derivazione v in x si annullasul prodotto fg: v(fg) = 0. Data f ∈ C∞(M), consideriamo un intorno di un punto x e
161

per comodita scegliamo una carta tale che ϕ(x) = 0; dall’analisi classica sappiamo allorache in un intorno di x e possibile sviluppare f come
f(x) = f(x) + aixi + bi(x)xi,
ove
ai =∂f
∂xi(0) ,
mentre le bi(x) sono funzioni che si annullano in x; se ora applichiamo v ad f otteniamo,in virtu delle due osservazioni precedenti, che esso si annulla sul primo e sul terzo terminee quindi:
v(f) = aiv(xi) .
Denotando il valore della derivazione v sulla funzione xi con vi:
vi := v(xi) ,
si ha allora
v(f) = viai =
(vi
∂
∂xi
)(f) ,
o semplicemente
v = vi∂
∂xi.
Abbiamo dunque dimostrato che ogni derivazione e esprimibile come combinazione linearedelle derivazioni ∂
∂xi associate alla carta prescelta.Se (yk) costituisce un nuovo sistema di coordinate, ad esso si associa la nuova base
∂∂yk dello spazio tangente. Naturalmente e possibile sviluppare gli elementi di questasulla vecchia base ed i coefficienti di tale sviluppo si ottengono utilizzando il teorema diderivazione per le applicazioni composte:
∂
∂yk=∂xi
∂yk∂
∂xi.
Mostriamo infine che ad ogni classe d’equivalenza di curve corrisponde una derivazionee viceversa, sicche possiamo identificare derivazioni e vettori tangenti. Infatti, da un lato,dato un vettore X = [γ] in x, ad esso si associa l’operatore vX che ad ogni funzione fassocia la sua derivata direzionale lungo il vettore X :
vX(f) :=d
dtf(γ(t))
∣∣∣∣t=0
.
Scelta una carta ϕ, utilizzando la relazione f γ = (f ϕ−1) (ϕ γ), si ha allora
vX =∂f
∂xiγi(0) =
(γi(0)
∂
∂xi
)(f).
162

Questa formula esprime il fatto che vX e uguale alla combinazione lineare delle derivazioni∂∂xi secondo le componenti X i = γi(0) di X , e quindi non dipende dalla curva γ scelta perdefinire X .
Viceversa, costruiamo la classe d’equivalenza di curve associata ad una derivazione v.Scelta una carta, disponiamo della decomposizione v = vi ∂
∂xi ; e quindi spontaneo associarea v la curva γ definita da
γ(t) := ϕ−1(xi + tvi) ,
che ha per componenti nella carta proprio vi. E facile verificare che la classe [γ] di γnon dipende dalla scelta del sistema di coordinate; si vede inoltre che vale v[γ] = v. Si
osservi che la curva associata alla derivazione ∂∂xi e la i-esima linea coordinata (quella che
si ottiene “bloccando” tutte le coordinate tranne la i−esima).D’ora in poi, per vettori di TxM intenderemo sempre sia una classe d’equivalenza
di curve sia la derivazione associata; inoltre, scelta una carta, ad un vettore assoceremosempre le corrispondenti componenti rispetto alla base canonica
∂∂xi
i=1,...,n
di TxM .
8.5 Applicazione Tangente (“Push forward”).
Data una applicazione differenziabile F da una varieta M a una varieta N , ad essa siassocia la corrispondente applicazione tangente (detta anche derivata di F ) denotata conF∗ e definita da
F∗ : TxM → TF (x)N
[γ] 7→ [F γ].
Per visualizzare l’applicazione tangente possiamo pensare ad una varieta come a una su-perficie di gomma, ed ai vettori in un suo punto come a frecce disegnate sulla gomma.In tale contesto un’applicazione di M in se e visualizzabile come una deformazione dellasuperficie di gomma; l’applicazione tangente ci dice allora in che modo e stata deformatala freccetta che avevamo disegnato per rappresentare un vettore.
Scelta una carta ϕ ≡ (xi) in x, il vettore X = [γ] ∈ TxM e rappresentato dallecomponenti X i = γiϕ(0). Sia poi ψ ≡ (yk) una carta in F (x); allora l’applicazione F puoessere rappresentata dalla sua espressione locale
yk = F k(xi),
dove F k := yk F . In “notazione fisica” scriveremo anche
yk = yk(xi).
Calcoliamo ora le componenti del vettore Y = F∗X = [F γ]; si ha
Y k =d
dtF k(γ1(t), ..., γn(t))
∣∣∣∣t=0
=∂F k
∂xi
∣∣∣∣ϕ(x)
γi(0) =∂F k
∂xi
∣∣∣∣ϕ(x)
X i,
163

e dunque l’applicazione tangente F∗ e lineare e si rappresenta con la matrice delle derivateparziali di F (matrice jacobiana di F ). Nella “notazione fisica”, la stessa formula siscriverebbe:
Y k =∂yk
∂xiX i.
Si osservi che, se F e interpretata come funzione di transizione tra due sistemi di coordinate,questa relazione e esattamente quella che da la legge di trasformazione delle componentidi X .
Se consideriamo il vettoreX come una derivazione, allora ∀f ∈ C∞(N) vale la formula:
(F∗X)(f) = X(f F ).
Spesso questa equazione e utilizzata quale definizione di F∗. Nel nostro caso, pero, avendogia definito tale applicazione in altro modo, dobbiamo dimostrare la validita di quest’ultimaformula; in effetti si ha
(F∗X)(f) =d
dtf((F γ)(t)
)∣∣∣∣t=0
=d
dt(f F )(γ(t))
∣∣∣∣t=0
= X(f F ).
8.6 Spazio cotangente. Covettori.
Lo spazio duale a TxM (cioe lo spazio dei funzionali lineari su TxM) si chiama spaziocotangente ad M in x e si indica con T ∗
xM . Se α ∈ T ∗xM e X ∈ TxM , indichiamo con
〈X ;α〉 ∈ R
il valore di α su X . Un elemento di T ∗xM si dice covettore su M attaccato in x.
Se i vettori descrivono grandezze fisiche quali spostamento, velocita, accelerazioneecc., i covettori sono invece necessari per descrivere grandezze fisiche quali la forza ed imomenti. Infatti, la forza e un funzionale lineare che ad ogni vettore spostamento associa ilvalore del lavoro corrispondente (cioe “quanto si paga per compiere tale spostamento”); larappresentazione della forza con un vettore e meno naturale perche mediata dalla strutturaeuclidea dello spazio (mostreremo piu avanti, nel capitolo sulla struttura metrica, comequesto isomorfismo sia realizzato in pratica).
Ogni funzione differenziabile f definisce in ogni punto x un covettore dfx detto dif-ferenziale di f in x, mediante la formula
〈X ; dfx〉 := X(f)
dove X ∈ TxM . Scelta una carta (xi), se X = X i ∂∂xi dalla definizione si ha
〈X ; dfx〉 = X i ∂f
∂xi, (8.2)
164

ovvero il valore del differenziale su un vettore e la derivata direzionale di f lungo il vettoreX . Ad esempio se prendiamo come f la coordinata xi (la funzione xi che associa ad ognipunto di M la sua i-esima coordinata), allora si ha
⟨∂
∂xj; dxi
⟩=∂xi
∂xj= δij ,
ove δij e la delta di Kronecker (δij = 1 se i = j, δij = 0 se i 6= j); questa relazione mostra
come la collezione (dxi) dei differenziali delle coordinate costituisce la base di T ∗xM duale
alla base ( ∂∂xj ) di TxM . Gli elementi della base duale possono essere utilizzati per calcolare
le componenti di un vettore X ; infatti si ha
⟨X ; dxi
⟩=
⟨Xj ∂
∂xj; dxi
⟩= Xjδij = X i.
Troviamo ora le componenti di df rispetto alla base (dxi): si ha
〈X ; df〉 = X i ∂f
∂xi=⟨X ; dxi
⟩ ∂f∂xi
=
⟨X ;
∂f
∂xidxi⟩,
e questa relazione significa che
df =∂f
∂xidxi,
poiche mostra che tali covettori assumono lo stesso valore su ogni vettore X . Come esempiodi applicazione di questa formula consideriamo un nuovo sistema di coordinate (yk) eprendiamo come funzione f quella che esprime una delle vecchie coordinate (xi) in funzione
delle nuove: si ha allora dxi = ∂xi
∂yk dyk. Da cio segue che, se α = αidx
i e un covettore,
allora lo sviluppo di α rispetto alla base (dyk) sara dato dalla formula
α = αi∂xi
∂ykdyk,
che fornisce la legge di trasformazione delle componenti di un covettore.Il valore di un covettore α = αjdx
j su un vettore X = X i ∂∂xi e dato da
〈X ;α〉 =
⟨X i ∂
∂xi;αjdx
j
⟩= X iαjδ
ji = X iαi.
8.7 Prodotto tensoriale.
Siano V e W due spazi vettoriali di dimensione finita e sia V ∗ il duale di V . Sianoinoltre u ∈ V ∗ e w ∈ W . Definiamo il prodotto tensoriale w ⊗ u come l’operatore linearesu V a valori in W che ad ogni vettore v ∈ V associa il vettore w 〈v; u〉 ∈ W . Lo spaziogenerato da tali prodotti si chiama prodotto tensoriale di W con V ∗ e si denota con W⊗V ∗.
165

Il prodotto tensoriale e utilizzato molto frequentemente nell’ambito della meccanicaquantistica. In tale contesto il vettore w si denota con |w > e viene detto ket ed il covettoreu si denota con < u| e viene detto bra. Tale denominazione e stata introdotta da Dirac eproviene dallo spezzamento della parola inglese bracket, che significa parentesi. Il prodottotensoriale di un bra con un ket si denota con |w >< u|. Tale prodotto agisce sui vettori|v > di V producendo il valore |w >< u|v >. Si osservi che, nella espressione < u|v >, ilcovettore si trova a sinistra ed il vettore a destra; questa notazione e utilizzata dai fisici.Noi utilizziamo piuttosto la notazione matematica 〈v; u〉 dove il covettore compare a destra.
Dimostreremo ora che l’insieme di tutti questi prodotti tensoriali genera lo spazioL(V,W ) degli operatori lineari definiti su V a valori in W , cioe che vale
W ⊗ V ∗ = L(V,W ) .
Sia infatti A ∈ L(V,W ). Prendiamo una base ei in V ed una base fj in W . Denotiamo
con aji le componenti del vettore Aei rispetto alla base fj, cioe
Aei = ajifj .
Prendiamo adesso la base ek di V ∗ duale alla base ei. Mostreremo che vale
A = ajifj ⊗ ei . (8.3)
Per verificare l’uguaglianza di questi due operatori e sufficiente mostrare che essi danno lostesso risultato quando agiscono su vettori della base. Allora:
(ajifj ⊗ ei)ek = aji (fj ⊗ ei)ek = ajifj⟨ek; ei
⟩= ajifjδ
ik = ajkfj = Aek .
Cosı abbiamo provato che i prodotti tensoriali dei vettori delle due basi, quella di W e diV ∗, costituiscono una base del prodotto tensoriale W ⊗ V ∗ = L(V,W ). Molto spesso unelemento di questo spazio si chiama anche covettore su V a valori in W e la (8.3) forniscela possibilita di rappresentare un tale oggetto come combinazione di prodotti tensoriali dicovettori su V con vettori in W .
Nel caso finito dimensionale lo spazio duale di uno spazio duale coincide con lo spaziodi partenza: (V ∗)∗ = V ∗∗ = V . Questa identita corrisponde al fatto che l’espressione〈v; u〉 puo essere considerata come una funzione lineare di v con u fissato, oppure comeuna funzione lineare di u con v fissato. Se allora invece di V prendiamo V ∗, abbiamo
W ⊗ V = W ⊗ V ∗∗ = L(V ∗,W ) .
Conseguentemente, il prodotto w⊗v e un operatore lineare che ad ogni u associa il vettorew 〈v; u〉.
Un caso particolare si ha nel prodotto tensoriale di uno spazio con il suo duale:
V ⊗ V ∗ = L(V, V ) .
166

Lasciamo al lettore il compito di verificare che, se ei e una base in V ed ek e la suabase duale, si ha ∑
i
ei ⊗ ei = 1V ,
dove 1V e l’operatore identita su V .Un caso particolarmente importante si ha quando come spazio V ∗ si prende lo spazio
cotangente T ∗xM ad una varieta M nel punto x. La collezione degli spazi W ⊗ T ∗
xMcorrispondenti a tutti i punti x ∈ M si denota semplicemente con W ⊗ T ∗M . I suoielementi si chiamano covettori su M a valori nello spazio W . Un tale “covettore a valoriin W” e un operatore lineare che ai vettori tangenti ad M associa elementi di W . Sceltauna carta (xi), gli elementi di base ei nella formula (8.3) possono essere rimpiazzati daicovettori dxi. Cosı ogni elemento π ∈W ⊗ T ∗M puo essere sviluppato come
π = p ji fj ⊗ dxi . (8.4)
8.8 Multicovettori. Prodotto esterno ed interno.
Tramite i covettori in x si possono costruire degli oggetti geometrici chiamati multi-covettori in x. Per multicovettore di grado k (o k-covettore) in x si intende una applicazionemultilineare che a k vettori di TxM associa un numero reale e che sia totalmente antisim-metrica. Sia ω un k-covettore e
〈X(1), ..., X(k);ω〉il suo valore sui k vettori X(1), ..., X(k); dicendo che ω e totalmente antisimmetrica siintende che, per ogni permutazione σ di 1, ..., k, vale
(−1)σ〈X(σ(1)), ..., X(σ(k));ω〉 = 〈X(1), ..., X(k);ω〉,
ove (−1)σ e la parita di σ. Talvolta il valore di ω sui k vettori X(1), ..., X(k) e indicatoanche con
ω(X(1), ..., X(k)).
Per uniformita si definiscono anche gli 0-covettori semplicemente come i numeri reali.Lo spazio vettoriale dei k-covettori in x si indica con
∧k(T ∗xM) (essendo
∧0(T ∗xM) := R).
Dati un k-covettore θ e un l-covettore ω in x, si definisce il loro prodotto esterno (o
wedge product) θ ∧ ω ∈ ∧l+k(T ∗xM), come dato da
〈X(1), ..., X(k+l); θ ∧ ω〉 :=1
k! l!
∑
σ
(−1)σ〈X(σ(1)), ..., X(σ(k)); θ〉〈X(σ(k+1)), ..., X(σ(k+l));ω〉
ove la somma e estesa a tutte le permutazioni dei primi (k+ l) numeri. Si tratta in praticadi un’antisimmetrizzazione di quella che sarebbe una definizione spontanea del prodotto diθ e ω (〈X(1), ..., X(k+l); θ·ω〉 = 〈X(1), ..., X(k); θ〉〈X(k+1), ..., X(k+l);ω〉) in modo da ottenere
167

un’espressione antisimmetrica, cioe un elemento di∧k+l
(T ∗xM). In particolare, il fattore
k!l! e stato introdotto al fine di ottenere che il prodotto esterno sia associativo.Lasciamo al lettore il compito di verificare che il prodotto esterno e associativo: (θ ∧
ω)∧χ = θ∧(ω∧χ), e che vale la proprieta di simmetria generalizzata: θ∧ω = (−1)klω∧θ.Il piu significativo esempio di k-covettore costruito mediante il prodotto esterno e dato
da dxi1 ∧ ... ∧ dxik . Utilizzando la proprieta 〈X ; dxi〉 = X i e la definizione del prodottoesterno si puo calcolare il suo valore su X(1), ..., X(k) mediante il principio di induzione.Lasciamo al lettore il compito di verificare che si ha
〈X(1), ..., X(k); dxi1 ∧ ... ∧ dxik〉 =
∑
σ
(−1)σX i1(σ(1))...X
ik(σ(k)), (8.5)
dove X i(l) sono le componenti dei vettori X(l) = X i
(l)∂∂xi ; tale valore e dunque il determi-
nante della matrice(Xij(l)
)con j ≤ k, l ≤ k. Si osservi che, se ia = ib per qualche valore di
a e b, allora si ottiene zero.Da questa relazione si vede subito che, se gli indici i1...ik fissati sono tutti diversi,
allora ⟨∂
∂xi1, ...,
∂
∂xik; dxi1 ∧ ... ∧ dxik
⟩= 1
(qui, eccezionalmente, non si somma sugli indici ripetuti!). Il fatto importante e che ognik−multicovettore e combinazione lineare di multicovettori del tipo dxi1 ∧ ... ∧ dxik , coni1 6= i2 6= ... 6= ik. Infatti, se ω ∈ ∧k(T ∗
xM) e X(1), ..., X(k) ∈ TxM , si ha
⟨X(1), ..., X(k);ω
⟩=∑
σ
(−1)σ1
k!
⟨X(σ(1)), ..., X(σ(k));ω
⟩=
=∑
σ
(−1)σ1
k!X i1
(σ(1))...Xik(σ(k))
⟨∂
∂xi1, ...,
∂
∂xik;ω
⟩,
che ponendo
ωi1...ik :=1
k!
⟨∂
∂xi1, ...,
∂
∂xik;ω
⟩, (8.6)
e utilizzando (8.5), diviene
⟨X(1), ..., X(k);ω
⟩=⟨X(1), ..., X(k); dx
i1 ∧ ... ∧ dxik⟩ωi1...ik
=⟨X(1), ..., X(k);ωi1...ikdx
i1 ∧ ... ∧ dxik⟩,
da cui
ω = ωi1...ikdxi1 ∧ ... ∧ dxik . (8.7)
La formula (8.6) implica che ωi1...ik e completamente antisimmetrico, cioe
(−1)σωiσ(1)...iσ(k)= ωi1...ik . (8.8)
168

Per la proprieta di antisimmetria del prodotto esterno, una base di∧k
(T ∗xM) e quella
costituita dai multicovettori
dxi1 ∧ ... ∧ dxik , (i1 < i2 < ... < ik) ,
e quindi possiamo scrivere ogni k-covettore come
ω =∑
i1<...<ik
ai1...ikdxi1 ∧ ... ∧ dxik . (8.9)
Per i1 < ... < ik si ha allorak! ωi1...ik = ai1...ik ,
poiche nel caso della somma libera (8.7) i termini che si ottengono mediante la permu-tazione degli indici hanno lo stesso valore. Tale valore si ripete dunque k! volte. Allora laformula (8.6) implica:
ai1...ik :=
⟨∂
∂xi1, ...,
∂
∂xik;ω
⟩.
Sottolineiamo il fatto che nella (8.9) non si e utilizzata la convenzione di Einstein; nelseguito, quando si omettono il simbolo di sommatoria e la specificazione del campo divariabilita degli indici, la somma si intende estesa a tutti i valori degli indici stessi. Laformula (8.9) implica che la dimensione dello spazio dei k-covettori e uguale al numerodelle combinazioni di n oggetti a k a k (o di classe k), dove n = dimM , cioe:
dim( k∧
(T ∗xM)
)=
n!
k!(n− k)!=
(nk
).
Quindi per k > n i k-covettori sono tutti nulli. Si vede dunque che il massimo gradopossibile per un k-covettore su M e la dimensione dello spazio M stesso.
Calcoliamo il valore di un multicovettore ω = ωi1...ikdxi1 ∧ ... ∧ dxik sui k-vettori
X(1), ..., X(k) con componenti X i(l) definite da X(l) = X i
(l)∂∂xi . Innanzitutto si ha
⟨X(1), ..., X(k);ω
⟩= ωj1...jk
⟨X(1), ..., X(k); dx
j1 ∧ ... ∧ dxjk⟩
=
= ωj1...jk∑
σ
(−1)σXj1(σ(1))...X
jk(σ(k)) .
Ponendo σ(i) = l e denotando con ρ la permutazione inversa di σ, abbiamo i = ρ(l).Ordinando il prodotto delle componenti dei vettori X(l) secondo valori di l crescenti,l’espressione precedente diviene
∑
ρ
(−1)ρωj1...jkXjρ(1)
(1) ...Xjρ(k)
(k) =
=∑
σ
(−1)σωjσ(1)...jσ(k)Xj1
(1)...Xjk(k) ,
169

e dall’antisimmetria di ω (formula (8.8)) si ha finalmente:
⟨X(1), ..., X(k);ω
⟩= k! ωj1...jkX
j1(1), ..., X
jk(k) . (8.10)
In relazione con la particolare n−forma dx1 ∧ ... ∧ dxn si puo introdurre il simbolocompletamente antisimmetrico di Levi Civita ǫi1...in definito da
dx1 ∧ ... ∧ dxn =1
n!ǫi1...indx
i1 ∧ ... ∧ dxin .
Evidentemente tale simbolo vale +1 o −1 per permutazioni rispettivamente pari o disparirispetto alla permutazione fondamentale, e zero altrimenti.
Prodotto Interno.
Dati un k-covettore ω ed un vettore X , si definisce il loro prodotto interno mediantela relazione:
: TxM ×k∧
(T ∗xM) →
k−1∧(T ∗xM)
(X,ω) 7→ X ω := 〈X, ...;ω〉,
ovvero ⟨X(2), ..., X(k);X ω
⟩=⟨X,X(2), ..., X(k);ω
⟩.
Scelto un sistema di coordinate, dalla formula (8.10) si trova allora facilmente
(X ω)i2...ikdxi2 ∧ ... ∧ dxik = k X i1ωi1...ikdx
i2 ∧ ... ∧ dxik . (8.11)
Se ia 6= ib per ogni a e b, vale la semplice formula
∂
∂xi1(dxi1 ∧ dxi2 ∧ ... ∧ dxik ) = dxi2 ∧ ... ∧ dxik .
Per calcolare il prodotto interno dello stesso k-covettore con ∂
∂xijquando j non e uguale
a 1, possiamo usare la stessa formula dopo aver riordinato il prodotto esterno in modo daportare dxij al primo posto, osservando che
dxi1 ∧ ... ∧ dxik = (−1)j−1dxij ∧ dxi1 ∧ ... ∧ dxij−1 ∧ dxij+1 ∧ ... ∧ dxik ,
da cui segue
∂
∂xl(dxi1 ∧ ... ∧ dxik) =
k∑
j=1
δijl (−1)j−1dxi1 ∧ ... ∧ dxij−1 ∧ dxij+1 ∧ ... ∧ dxik . (8.12)
Come esempio, consideriamo il caso dimM = 3 e la forma ω = dx1 ∧ dx2 ∧ dx3, per cui sitrova
X ω = X i
(∂
∂xidx1 ∧ dx2 ∧ dx3
)= 3X i 1
3!ǫijkdx
j ∧ dxk =
= X1dx2 ∧ dx3 +X2dx3 ∧ dx1 +X3dx1 ∧ dx2 .
170
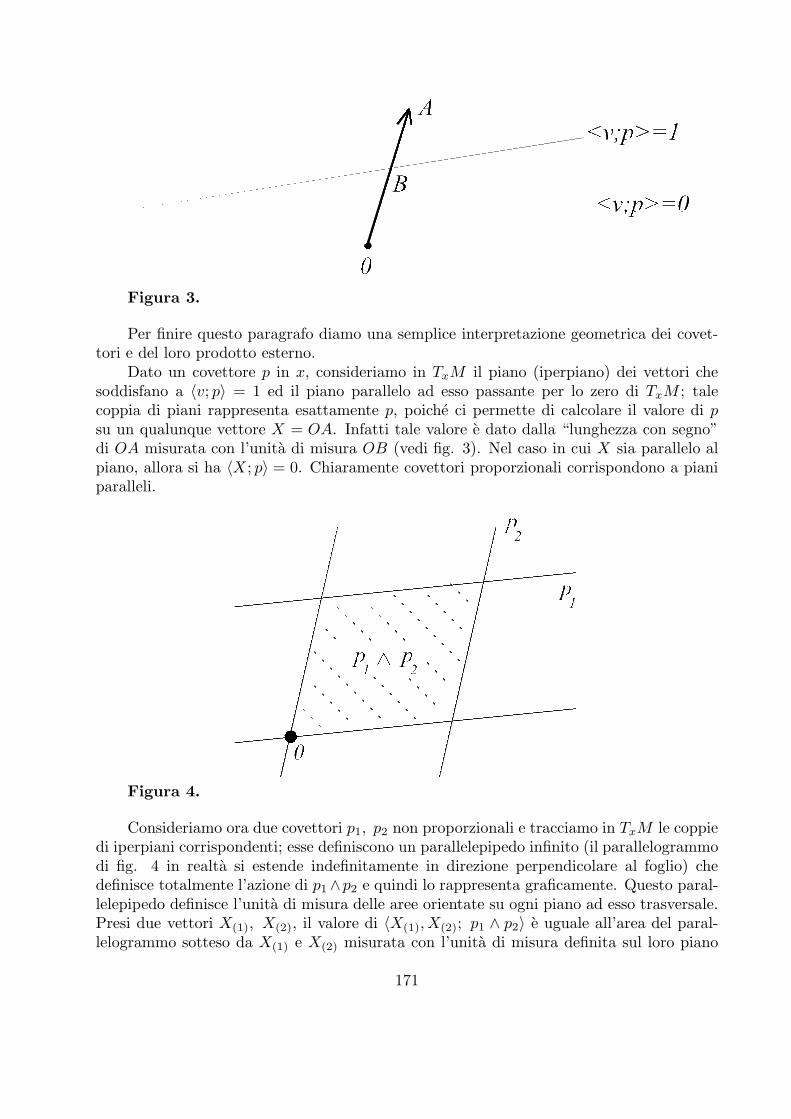
Figura 3.
Per finire questo paragrafo diamo una semplice interpretazione geometrica dei covet-tori e del loro prodotto esterno.
Dato un covettore p in x, consideriamo in TxM il piano (iperpiano) dei vettori chesoddisfano a 〈v; p〉 = 1 ed il piano parallelo ad esso passante per lo zero di TxM ; talecoppia di piani rappresenta esattamente p, poiche ci permette di calcolare il valore di psu un qualunque vettore X = OA. Infatti tale valore e dato dalla “lunghezza con segno”di OA misurata con l’unita di misura OB (vedi fig. 3). Nel caso in cui X sia parallelo alpiano, allora si ha 〈X ; p〉 = 0. Chiaramente covettori proporzionali corrispondono a pianiparalleli.
Figura 4.
Consideriamo ora due covettori p1, p2 non proporzionali e tracciamo in TxM le coppiedi iperpiani corrispondenti; esse definiscono un parallelepipedo infinito (il parallelogrammodi fig. 4 in realta si estende indefinitamente in direzione perpendicolare al foglio) chedefinisce totalmente l’azione di p1∧p2 e quindi lo rappresenta graficamente. Questo paral-lelepipedo definisce l’unita di misura delle aree orientate su ogni piano ad esso trasversale.Presi due vettori X(1), X(2), il valore di 〈X(1), X(2); p1 ∧ p2〉 e uguale all’area del paral-lelogrammo sotteso da X(1) e X(2) misurata con l’unita di misura definita sul loro piano
171

da p1 ∧ p2. Se il piano definito dai due vettori non e trasversale al parallelepipedo, allorae⟨X(1), X(2); p1 ∧ p2
⟩= 0.
8.9 “Pull Back” dei Multicovettori.
Data una applicazione F : M → N tra due varieta differenziabili, si definisce ilpull-back F ∗ :
∧k(T ∗F (x)N) → ∧k
(T ∗xM) dai multicovettori su N ai multicovettori su M
ponendo ⟨X(1), ..., X(k);F
∗ω⟩
:=⟨F∗X(1), ..., F∗X(k);ω
⟩,
ove X(1), ..., X(k) ∈ TxM, ω ∈ ∧k(T ∗F (x)N) e F∗ e l’applicazione tangente ad F . Osservia-
mo in particolare che, nel caso k = 0, in cui ω e uno scalare, la definizione comporta cheil valore di F ∗ω nel punto x e uguale al valore di ω nel punto F (x), ovvero
F ∗ω = ω F ,
ovvero F ∗ω(x) = ω(F (x)).E semplice vedere che F ∗ e lineare, e che vale
F ∗(ω ∧ θ) = F ∗ω ∧ F ∗θ , (8.13)
cioe F ∗ “rispetta” il prodotto esterno ed e quindi un omomorfismo di algebre. Per darel’espressione locale di F ∗ in termini delle coordinate, (xi) su M e (yk) su N , cominciamoa considerare il caso di un 1-covettore (semplicemente un covettore) α = αkdy
k. Sel’espressione locale di F e yk = F k(xi) (cioe F k = ykF ), allora per ogni vettore X ∈ TxMvale:
〈X ;F ∗α〉 = 〈F∗X ;α〉 =⟨F∗X ;αkdy
k⟩
=
= αk⟨F∗X ; dyk
⟩= αk(F∗X)(yk) = αkX(yk F ) =
= αkX(F k) = αk⟨X ; dF k
⟩=⟨X ;αkdF
k⟩,
da cui si ottiene
F ∗α = αkdFk = αk
∂F k
∂xidxi.
In “notazione fisica” si scrive:
F ∗(αkdyk) = αk
∂yk
∂xidxi. (8.14)
Dalle equazioni (8.13) e (8.14) discende una formula per l’azione di F ∗ sui multico-vettori:
F ∗(ωj1...jkdyj1 ∧ ... ∧ dyjk) = ωj1...jk
(∂yj1
∂xi1dxi1
)∧ ... ∧
(∂yjk
∂xikdxik
), (8.15)
o piu precisamente
(F ∗ω)i1...ik(x) =∂F j1
∂xi1(x)...
∂F jk
∂xik(x) ωj1...jk(F (x)) .
172

La formula (8.15) ci dice che, per ottenere l’immagine di un covettore sotto l’azione di F ∗
si devono semplicemente reinterpretare, nella sua espressione in coordinate, le quantita yk
come funzioni di xi. L’operatore F ∗ agisce come “operatore di sostituzione”: il suo valoresu dyj (dove yj e una coordinata su N) e uguale a dyj stesso, dove ora pero yj = F j e daconsiderarsi come una funzione su M .
Un esempio di applicazione di questa formula e dato dalla legge di trasformazionedelle componenti di un multicovettore. Infatti, se F : M →M e la funzione di transizionetra due carte, la (8.14) e la legge di trasformazione delle componenti di α. Se (yk) e ilnuovo sistema di coordinate, le vecchie coordinate si possono pensare come funzioni dellenuove; allora, dato un k-covettore ω = ωi1...ikdx
i1 ∧ ... ∧ dxik , si avra:
ω = ωi1...ik∂xi1
∂yj1...∂xik
∂yjkdyj1 ∧ ... ∧ dyjk (8.16)
che da la legge cercata.
8.10 Densita scalari e densita vettoriali.
Consideriamo lo spazio∧n
(T ∗xM) degli n-covettori, dove n e la dimensione di M ; in tal
caso, la sua dimensione e
(nn
)= 1, e cio significa che, dati comunque due n-covettori, essi
sono tra loro proporzionali. Rispetto ad un sistema di coordinate (xk), ogni n-covettore αsi scrive dunque
α = ρdx1 ∧ ... ∧ dxn ;
una n-forma e pertanto caratterizzata da una sola funzione ρ = ρ(x). Sarebbe perosbagliato considerare ρ come uno scalare. Infatti, se rispetto ad un altro sistema di coor-dinate (yj) si ha
α = ρdy1 ∧ ... ∧ dyn ,generalmente si trova ρ 6= ρ. Infatti anzitutto si ha evidentemente
ρdx1 ∧ ... ∧ dxn = ρ∂x1
∂yj1...∂xn
∂yjndyj1 ∧ ... ∧ dyjn ;
d’altra parte si osserva che, se (j1, ..., jn) non e una permutazione di (1, ..., n), il prodottoesterno della formula precedente si annulla. Basta quindi estendere la sommatoria prece-dente alle permutazioni jl = σ(l), e si ottiene
α = ρ∑
σ
∂x1
∂yσ(1)...
∂xn
∂yσ(n)dyσ(1) ∧ ... ∧ dyσ(n) =
= ρ∑
σ
(−1)σ∂x1
∂yσ(1)...
∂xn
∂yσ(n)dy1 ∧ ... ∧ dyn =
= ρ det
(∂xi
∂yj
)dy1 ∧ ... ∧ dyn .
173

Abbiamo dunque ottenuto che
ρ = ρ det
(∂xi
∂yj
). (8.17)
Tradizionalmente un oggetto che si trasforma secondo la legge (8.17) e detto densita scalare(piu precisamente densita scalare di tipo dispari, perche si riserva il nome di densita scalaridi tipo pari agli oggetti nella cui legge di trasformazione figura il modulo del determinantejacobiano). Fisicamente si capisce bene la differenza tra densita scalari e scalari veri epropri, se si pensa alla differenza tra quantita come la densita di carica elettrica da unaparte, e la temperatura dall’altra; infatti se si riparametrizza lo spazio cambiando l’unitadi misura delle lunghezze, ad esempio dai centimetri ai pollici, la temperatura non cambia,mentre la densita di carica per centimetro cubico e diversa dalla densita di carica perpollice cubico.
Abbiamo quindi identificato le forme di grado massimo su M con le densita scalari.Consideriamo ora il caso delle (n − 1)-forme; come abbiamo visto nel paragrafo 8.8,
una base dello spazio∧n−1
T ∗xM degli (n− 1)-covettori e costituita dagli elementi
∂
∂xi(dx1 ∧ ... ∧ dxn) = (−1)i−1dx1 ∧ ... ∧ dxi−1 ∧ dxi+1 ∧ ... ∧ dxn ,
e dunque, in un sistema di coordinate, ogni (n− 1)-forma β puo essere scritta come
β = X i ∂
∂xi(dx1 ∧ ... ∧ dxn) . (8.18)
Ancora, sarebbe errato considerare X i come le componenti di un vettore; infatti, se
β = X j ∂
∂yj(dy1 ∧ ... ∧ dyn) ,
si trova facilmente la legge di trasformazione
X j = X i∂yj
∂xidet
(∂xk
∂yl
), (8.19)
che di nuovo differisce dalla legge di trasformazione dei vettori per la presenza del de-terminante jacobiano. Tradizionalmente questi oggetti si chiamano densita vettoriali (piurigorosamente, densita vettoriali di tipo dispari). Osserviamo che, come si vede subitodalla formula (8.11), le componenti di β sono date da
βi2...in = X i11
(n− 1)!ǫi1i2...in .
Un esempio di densita vettoriale e la densita di corrente di un fluido nello spaziofisico tridimensionale. Ad ogni superficie bidimensionale la densita di corrente associaun numero che rappresenta la quantita di materia che attraversa la superficie nell’unita
174

di tempo. Questo numero non dipende dalla parametrizzazione dello spazio; ne dipendeinvece la densita di corrente, in maniera analoga a quanto avviene per le densita scalari.Un altro esempio e dato dall’induzione magnetica B che ad ogni superficie bidimensionaleassocia il flusso magnetico attraverso la superficie stessa. La grandezza B e dunque unadue–forma, cioe una densita vettoriale nello spazio tridimensionale.
Per descrivere la densita degli sforzi in un materiale elastico abbiamo anche bisogno dioggetti geometrici che si ottengono dalle densita vettoriali tramite un prodotto tensoriale.Siano dunque M e Z due varieta differenziabili. Per ogni coppia (x, z) ∈ M × Z, condimM = n, consideriamo il prodotto tensoriale
(n−1∧
T ∗xM
)⊗ T ∗
z Z .
La collezione di tutti questi spazi corrispondenti a tutti i punti (x, z) si indica con
(n−1∧
T ∗M
)⊗ T ∗Z .
Un elemento di questo spazio e un operatore lineare che ad ogni vettore tangente a Zassocia una densita vettoriale su M . Tali oggetti si chiamano covettori su Z a valori nellospazio delle densita vettoriali su M . Se (xi) e (za) sono due carte rispettivamente su M eZ, la formula (8.4) implica che ognuno di questi oggetti puo essere rappresentato come:
π = p ia
(∂
∂xidx1 ∧ ... ∧ dxn
)⊗ dza . (8.20)
8.11 Fibrato tangente, campi vettoriali, parentesi di Lie.
Consideriamo l’unione disgiunta degli spazi tangenti
⋃
x∈MTxM = TM .
Tale unione e detta fibrato tangente ad M ; un suo elemento e un vettore in un punto diM (o, come a volte si dice, applicato in un punto). Si osservi che, sebbene unione di spazilineari, TM non e uno spazio lineare, perche due suoi elementi non si possono in generalesommare: e possibile farlo solo se si tratta di vettori applicati nello stesso punto di M . Sidice anche che M e la base del fibrato e che TxM e la fibra in x.
Il fibrato tangente e anche una varieta differenziabile. Infatti, scelta una carta ϕ :U → Rn , U ⊂M , disponiamo canonicamente di un sistema di coordinate in
TU :=⋃
x∈UTxM ⊂ TM
175

nel modo seguente: se X ∈ TxM ⊂ TU , le sue coordinate saranno date da (x1, ..., xn,X1, ..., Xn), dove (xi) sono le coordinate del punto x in cui X e applicato, e X i sono lecomponenti di X rispetto a (xk), cioe:
X = X i ∂
∂xi.
Siano ϕ e ψ due carte di M , definite su aperti che si intersecano; allora, se la funzionedi transizione tra queste carte e k volte differenziabile, si vede facilmente che la funzionedi transizione tra le corrispondenti carte di TM e (k − 1) volte differenziabile. Percio, sele carte della nostra varieta M hanno funzioni di transizione C∞, allora anche le carte diTM sono di classe C∞.
Consideriamo l’applicazione Π che ad ogni punto di TM associa il punto di M in cuie applicato:
Π(X) = x se X ∈ TxM ⊂ TM ;
tale applicazione e detta proiezione canonica di TM su M. Si osservi che Π−1(x) = TxM .Una funzione σ : M → TM , tale che Π σ = 1M (identita di M) e detta sezione di
TM . Una sezione associa dunque ad ogni punto x ∈ M un vettore in x e per questo eanche detta campo vettoriale su M . In coordinate, una sezione di TU si puo scrivere come
σ : U → TU
(x1, ..., xn) 7→ (x1, ..., xn, X1(x), ..., Xn(x));
in “notazione fisica” scriveremo piu semplicemente X i = X i(x).Siano X e Y due campi vettoriali. Definiamo un nuovo operatore differenziale [X, Y ]
tramite la formula[X, Y ](f) := X(Y (f)) − Y (X(f)) . (8.21)
Apparentemente questo e un operatore del secondo ordine, ma si tratta in realta di unoperatore del primo ordine perche la parte che contiene le derivate seconde si annulla.Infatti si calcola
[X, Y ](fg) = X(Y (fg)) − Y (X(fg)) = X(fY (g) + gY (f)) − Y (fX(g) + gX(f)) =
= X(f)Y (g) + fX(Y (g)) +X(g)Y (f)+
+ gX(Y (f)) − Y (f)X(g)− fY (X(g))− Y (g)X(f)− gY (X(f)) =
= f [X, Y ](g) + g[X, Y ](f) ,
e questo mostra che l’operatore differenziale [X, Y ] e una derivazione. Ne segue che [X, Y ]e un campo vettoriale che chiameremo parentesi di Lie o commutatore di X e Y .
Le componenti [X, Y ]m del campo [X, Y ] si calcolano facilmente dalle componenti Xk,Y m di X e Y :
[X, Y ](f) = Xk ∂
∂xk
(Y l
∂
∂xlf
)− Y l
∂
∂xl
(Xk ∂
∂xkf
)=
= Xk ∂Yl
∂xk∂f
∂xl+XkY l
∂2f
∂xk∂xl− Y lXk ∂2f
∂xl∂xk− Y l
∂Xk
∂xl∂f
∂xk=
= (Xk∂kYl − Y k∂kX
l)∂
∂xlf ,
176

da cui[X, Y ]l = Xk∂kY
l − Y k∂kXl . (8.22)
E facile verificare che l’espressione a destra si trasforma come un vettore.
8.12 Fibrato Cotangente, Forme Differenziali, Derivata Esterna.
L’unione disgiunta ⋃
x∈MT ∗xM = T ∗M
e detta fibrato cotangente di M .Anche in questo caso definiamo la proiezione canonica π di T ∗M su M , che ad ogni
covettore associa il punto di M in cui si trova. Analogamente a quanto fatto per il fibratotangente, per ogni sistema di coordinate (xi) su U ⊂ M costruiamo un sistema di coor-dinate (xi, pj) su T ∗U : i valori delle coordinate associate all’elemento p ∈ T ∗M sono lecoordinate (xi) del punto x = π(p) e i coefficienti (pi) dello sviluppo di p rispetto alla base(dxi).
Una sezione di T ∗M (o campo covettoriale) su M e una applicazione α : M → T ∗Mtale che π α = 1M . Un esempio di sezione di T ∗M e dato dal differenziale df di unafunzione f ∈ C∞(M), che ad ogni punto x ∈ M associa il suo differenziale dfx in x.Cosı anche le quantita dxi sono campi covettoriali, poiche sono assegnati in ogni puntodell’aperto U in cui sono definite le coordinate xi.
L’unione disgiunta⋃
x∈M
k∧(T ∗xM) =
k∧(T ∗M).
si chiama fibrato dei k-covettori.In quanto segue le sezioni dei tre fibrati definiti sopra sono fondamentali; adotteremo
quindi, per lo spazio delle sezioni di TM, T ∗M,∧k
(T ∗M), rispettivamente anche i simbolispeciali
Sec(TM), Sec(T ∗M), Sec(
k∧(T ∗M)).
Si osservi che T ∗M =∧1
(T ∗M) e che Sec(∧0
(T ∗M)) = C∞(M). Cio significa che le1-forme sono proprio i campi covettoriali e che le 0-forme sono le funzioni a valori reali (ocampi scalari).
Definiremo ora l’operatore di derivazione esterna (o differenziale), che e una genera-lizzazione del differenziale di una 0-forma (una funzione).Definizione: si dice derivata esterna, un operatore lineare che ad ogni k-forma associa una(k + 1)-forma
d : Sec(k∧
(T ∗M)) → Sec(k+1∧
(T ∗M))
e che gode delle seguenti proprieta:
177

1) se f e una funzione, cioe f ∈ Sec(∧0
(T ∗M)) = C∞(M), allora df e il differenzialedefinito precedentemente.2) se ω e una k-forma e ϕ una l-forma, allora:
d(ω ∧ ϕ) = dω ∧ ϕ+ (−1)kω ∧ dϕ
(regola di Leibnitz generalizzata).3) d2 := dd = 0.
Lasciamo per ora da parte il problema dell’esistenza di tale operatore e studiamo qualisarebbero le sue proprieta. Scelta una carta, sia ω = ωi1...ikdx
i1 ∧ ... ∧ dxik una k-forma;allora, da 2) segue che:
dω = d(ωi1...ikdxi1 ∧ ... ∧ dxik) =
= dωi1...ik ∧ dxi1 ∧ ... ∧ dxik + ωi1...ikd(dxi1 ∧ ... ∧ dxik);
ma il secondo addendo e nullo per 2) e 3), e quindi 1) implica che
dω = dωi1...ik ∧ dxi1 ∧ ... ∧ dxik =
=∂ωi1...ik∂xi0
dxi0 ∧ dxi1 ∧ ... ∧ dxik .(8.23)
Ammesso che l’operatore d esista, abbiamo visto che le tre proprieta richieste lo determi-nano completamente in termini delle coordinate; ora, per dimostrarne l’esistenza dobbiamofar vedere che la formula precedente e indipendente dal sistema di coordinate prescelto.Denotando con (yj) nuove variabili e con ωj1...jk le componenti di ω rispetto a (dyj),abbiamo
ω = ωj1...jkdyj1 ∧ ... ∧ dyjk .
Denotiamo con dω la (k + 1)-forma che si ottiene da ω utilizzando la formula (8.23) nelsistema di coordinate (yj). Dobbiamo dimostrare che dω = dω. Utilizzando anche laformula (8.16) abbiamo:
dω =
(∂ωj1...jk∂yj0
)dyj0 ∧ ... ∧ dyjk =
∂
∂yj0
(ωi1...ik
∂xi1
∂yj1...∂xik
∂yjk
)dyj0 ∧ ... ∧ dyjk .
Infatti, quando si applica la derivata ∂∂yj0
a uno dei fattori ∂xil
∂yjlsi ottiene la derivata
seconda di xil che e simmetrica rispetto ai due indici j0 e jl, e questo termine si annullaquando lo si contrae con l’espressione totalmente antisimmetrica dyj0 ∧ ... ∧ dyjk . Pero
∂
∂yj0=∂xi0
∂yj0∂
∂xi0.
Percio si ha
dω =∂ωi1...ik∂xi0
∂xi0
∂yj0...∂xik
∂yjkdyj0 ∧ ... ∧ dyjk = dω ,
178

dove per l’ultimo passaggio si e utilizzata ancora la formula (8.16). Abbiamo dunquemostrato che il valore di dω ottenuto tramite la formula (8.23) non dipende dal sistema dicoordinate, il che prova l’esistenza dell’operatore d. L’unicita e gia stata dimostrata sopra.
E facile vedere che l’operatore d commuta con il pull-back: sia F un’applicazionedifferenziabile da una varieta M in una varieta N , e ω una k-forma su N ; allora si ha:
d(F ∗ω) = F ∗dω .
Consideriamo ora il prodotto interno di un vettore X con la n-forma ω = ρ dx1 ∧... ∧ dxn = 1
n!εi1...inρ dxi1 ∧ ... ∧ dxin (dove ε1,2,...,n e il simbolo di Levi Civita e ρ e una
qualunque densita scalare) e valutiamo l’azione di d su di esso; si trova
d(X ω) = n1
n!
∂
∂xi1(ρXk)εk,i2...indx
i1 ∧ ... ∧ dxin =∂
∂xk(ρXk)dx1 ∧ ... ∧ dxn . (8.24)
Prendiamo ad esempio una densita vettoriale β (vedi formula (8.18)). La sua derivataesterna e una densita scalare. Da (8.24) si ottiene infatti
dβ =∂X i
∂xidx1 ∧ ... ∧ dxn . (8.25)
Dunque se (X i) e una densita vettoriale, allora ∂X i
∂xi e una densita scalare.
8.13 Integrazione di una k-forma e Teorema di Stokes.
1. Orientazione di una varieta.Consideriamo l’insieme delle carte di una varieta M . Il segno del determinante della
derivata della funzione di transizione tra due carte puo essere sia positivo che negativo.Esistono varieta per le quali si puo utilizzare tale proprieta per dividere le carte in due classiG1 e G2, in modo tale che, se ϕ, ψ ∈ G1 o ϕ, ψ ∈ G2, allora det (D(ϕ ψ−1)(ψ(x))) > 0per ogni x appartenente all’intersezione dei domini delle due carte; se invece ϕ ∈ G1 eψ ∈ G2, allora det (D(ϕ ψ−1)(ψ(x))) < 0.
Si osservi pero che esistono varieta che presentano coppie di carte di cui non e possibilestabilire se stanno nella stessa classe o no. Basta pensare al nastro di Moebius coperto condue carte; esse avranno due regioni di intersezione e il determinante della derivata dellafunzione di transizione avra segno diverso nelle due regioni.Definizione: se una varieta e copribile interamente mediante carte appartenenti ad un unicaclasse, allora tale varieta si dice orientabile. In tal caso la scelta di una classe d’equivalenzadi carte si dice scelta dell’orientazione.
Scegliere un’orientazione corrisponde in pratica a scegliere l’ordine con cui si sus-seguono i vettori di ogni base dello spazio tangente; ad esempio, sulla sfera bidimensionale sisceglie un’orientazione se si ordinano le coordinate di un punto come (ϕ, θ), ϕ longitudine,θ latitudine, mentre si sceglie l’altra se si ordinano come (θ, ϕ).
179

2. Integrazione di una k-forma su di una superficie k-dimensionale orientata.Siano ω ∈ Sec(
∧k(T ∗M)), e D una parte compatta di una superficie k-dimensionale
orientata contenuta in M ; scelto un sistema di coordinate (ti) in D, compatibile conl’orientazione, si definisce allora:
∫
D
ω :=
∫
D
⟨∂
∂t1, ...,
∂
∂tk;ω
⟩dkt
ove D ⊂ Rk e l’insieme dei valori assunti dalle coordinate (ti) in corrispondenza ai puntidi D, e l’integrale a destra e l’usuale integrale di Lebesgue.
Mostriamo che tale definizione e coerente, cioe non dipende dal sistema di coordinateprescelto. Siano (τ j) nuove coordinate su D, e D ⊂ Rk il dominio dei valori di (τ j)corrispondente; allora
∫
D
⟨∂
∂τ1, ...,
∂
∂τk;ω
⟩dkτ =
∫
D
∂ti1
∂τ1...∂tik
∂τk
⟨∂
∂ti1, ...,
∂
∂tik;ω
⟩dkτ .
D’altra parte per l’antisimmetria di ω questa espressione e uguale a:
∫
D
(∑
σ
(−1)σ∂tσ(1)
∂τ1...∂tσ(k)
∂τk
)⟨∂
∂t1, ...,
∂
∂tk;ω
⟩dkτ =
=
∫
D
det (∂t
∂τ)
⟨∂
∂t1, ...,
∂
∂tk;ω
⟩dkτ.
Ma det ( ∂t∂τ
) =∣∣det ( ∂t
∂τ)∣∣ poiche le due carte appartengono alla stessa orientazione e
dunque, utilizzando il teorema del cambiamento di variabili negli integrali multipli, cioe
∣∣∣∣det (∂t
∂τ)
∣∣∣∣ dkτ = dkt,
si vede che l’espressione ottenuta coincide con quella di partenza.Dalla discussione sopra segue che il valore dell’integrale cambia di segno quando cam-
bia l’orientazione di D. Per integrare una forma abbiamo utilizzato una carta globalesu D supponendo che esistesse. Se non esiste, si puo definire ugualmente l’integrale diuna k-forma esteso a tutto D. Il modo piu semplice per farlo consiste nel dividere D intante parti disgiunte, i cui bordi siano coincidenti, e tali che su ognuna di esse esista unacarta, quindi integrare su ognuna di esse e sommare. Poiche il risultato di ogni integralenon dipende dalla carta scelta, tutta l’operazione produce un risultato invariante. A voltepero e necessario definire l’integrale in modo piu liscio. Per far cio bisogna prendere unacopertura di D e la partizione dell’unita ad essa subordinata; si integra quindi su ogniparte di tale copertura la forma in considerazione moltiplicata per la funzione della par-tizione dell’unita corrispondente al dominio in cui ci troviamo. La somma dei risultati nondipende dalla partizione scelta. Noi comunque non avremo occasione nel seguito di far usodi questo secondo procedimento che richiede la partizione dell’unita.
180

Per omogeneita definiamo l’integrale di una 0-forma f (funzione) su una superficie0-dimensionale orientata, cioe una collezione di punti ad ognuno dei quali e stato associatoun segno positivo o negativo, come la somma dei valori della funzione su tali punti, ognunocontato col segno dato dall’orientazione del punto corrispondente.Esempio 1
Integrale di una 1-forma F = Fidxi (per esempio un campo di forze) su una curva γ.
Se γ = (γi(t)), 0 ≤ t ≤ 1, e una qualunque parametrizzazione di tale curva, abbiamo:
∫
γ
F =
∫ 1
0
Fi(γ(t))γi(t)dt ,
che rappresenta il lavoro della forza lungo il cammino considerato.Esempio 2
Sia α = ρdx1 ∧ ... ∧ dxn una densita scalare, e V un volume orientato (sottovarietan-dimensionale) di M ; allora si verifica che
∫
V
α =
∫
V
ρdnx .
A differenza di quanto avviene per le densita, per poter integrare uno scalare su un volumesi deve scegliere prima una qualche misura; l’unica integrazione intrinseca per uno scalaree quella 0-dimensionale, cioe il calcolo dei valori su dei punti. Dunque, dal punto di vistadell’integrazione la densita scalare e autosufficiente: una densita scalare e essa stessa unamisura (non necessariamente positiva), e il coefficiente ρ e la sua densita rispetto allamisura di riferimento dnx. Cambiando le coordinate, si cambia la misura di riferimento, equindi la densita ρ cambia corrispondentemente.Esempio 3
Sia β = βi ∂∂xi dx1 ∧ ... ∧ dxn una densita vettoriale e D una ipersuperficie (n −
1)-dimensionale. Poiche l’integrale di β su D e indipendente dalla parametrizzazione,possiamo utilizzare un sistema di coordinate adattato a D, in modo tale che D corrispondaalla superficie x1=costante. Allora si verifica immediatamente che
∫
D
β =
∫
D
β1dx2 ∧ ... ∧ dxn ,
perche gli altri termini contengono dx1, che si annulla sui vettori tangenti a D. Su ogniipersuperficie D, la densita vettoriale β definisce dunque una densita scalare che indichere-mo con β⊥ (la parte di β trasversale a D). Rispetto ad un sistema di coordinate adattatoa D, questa densita scalare e data dalla prima componente di β:
β⊥ = β1dx2 ∧ ... ∧ dxn ,
e si ha dunque ∫
D
β =
∫
D
β⊥ .
181

3. Teorema di Stokes.Ci limitiamo qui ad enunciare senza dimostrazione il teorema di Stokes. Sia ω ∈
Sec(∧k
(T ∗M)) e D una (k+ 1)-superficie orientata contenuta in M ; allora si ha (teoremadi Stokes) ∫
D
dω =
∫
∂D
ω ,
ove ∂D e il bordo orientato di D. L’orientazione di ∂D e indotta dall’orientazione di Dsecondo la regola seguente: negli intorni dei punti di ∂D si sceglie una parametrizzazionedi D compatibile con l’orientazione e tale che ∂D corrisponda ad una superficie con t1 =costante. Tale parametrizzazione esiste sempre. Se t1 e crescente in direzione uscente daD si sceglie su ∂D l’orientazione data dalle coordinate (t2, ..., tk+1), in caso contrario sisceglie l’altra.
Un primo esempio del teorema di Stokes e l’ordinario teorema fondamentale del calcolointegrale per una funzione f ∈ C∞(Rn):
∫ b
a
df = f(b) − f(a) ;
in questo caso D e una curva in Rn che unisce i punti a e b, cioe γ(0) = a, γ(1) = b, e ∂De la varieta 0-dimensionale composta dal punto finale orientato positivamente e dal puntoiniziale orientato negativamente: ∂D = b ∪ −a.
Un secondo esempio e il teorema di Gauss. Se β e una densita vettoriale, V un volumeorientato, si ha ∫
V
∂βi
∂xidnx =
∫
V
dβ =
∫
∂V
β =
∫
∂V
β⊥ .
Per dimostrare il teorema di Stokes sono fondamentali tutte le proprieta usate perdefinire d, anzi il teorema di Stokes puo anche essere assunto come definizione della derivataesterna; a tale proposito val la pena di osservare che la proprieta dd = 0 discenderebbedirettamente dalla proprieta geometrica del bordo di essere una varieta il cui bordo el’insieme vuoto: ∂∂D = ∅.
8.14 Sistemi dinamici e derivata di Lie.
Nelle applicazioni si incontrano spesso gruppi Gtt∈R di diffeomorfismi della varietaM che dipendendono da un parametro reale, cioe famiglie di applicazioni Gt : M → M ,che godono delle proprieta:
1) G0 e uguale all’identita (G0 = IM )2) vale la proprieta di gruppo
Gt Gs = Gt+s .
Ne segue anche che G−t = (Gt)−1. Una siffatta famiglia di diffeomorfismi e dettagruppo ad un parametro di diffeomorfismi o flusso globale su M .
Esempi.
182

1) Gruppo delle traslazioni.Sia M uno spazio vettoriale, e v un suo vettore; allora
Gt(x) := x+ tv
e un gruppo di diffeomorfismi.2) Gruppo delle rotazioni.
Sia M = R2; allora
Gt(xy
):=
(cost −sintsint cost
)(xy
)=
(x cos t− y sin tx sin t+ y cos t
)
e detto gruppo delle rotazioni 2-dimensionale.3) Gruppo di Lorentz 2-dimensionale.
Sia ancora M = R2; allora
Gt(xy
):=
(cht shtsht cht
)(xy
)=
(xcht+ yshtxsht+ cht
)
e detto gruppo di Lorentz 2-dimensionale.Fissiamo ora un punto x0 ∈M , e consideriamo la curva
γx0(t) := Gt(x0) .
Se x1 e un qualunque punto di γx0, allora esiste t1 tale che
x1 = γx0(t1) = Gt1(x0) .
Se dunque consideriamo la curva γx1si vede che essa contiene gli stessi punti di γx0
; infattie
γx1(t) = Gt(x1) = Gt(Gt1(x0)) = Gt+t1(x0) = γx0
(t+ t1) .
Si vede pertanto che i punti delle due curve coincidono, ma le parametrizzazioni differisconoper una costante additiva. Allora i vettori tangenti alle due curve coincidono in ogni puntox ∈M . Tali curve si dicono linee di flusso di Gt.
Il flusso definisce dunque univocamente un campo vettoriale X su M ; in ogni puntox ∈ M , il valore X(x) e dato dal vettore tangente alla linea di flusso passante per x.Abbiamo cosı, in un sistema di coordinate (xk):
Xk(x) =d
dt(Gt(x))k
∣∣∣t=0
. (8.26)
Esempi.1) Il campo vettoriale definito dal gruppo delle traslazioni x + tvt∈R di uno spaziovettoriale e costante: Xk(x) = vk.
183

2) Il campo vettoriale definito dal gruppo delle rotazioni di R2 e uguale a
X =d
dt
(cost −sintsint cost
)(xy
)∣∣∣∣t=0
=
(0 −11 0
)(xy
)=
(−yx
)=
∂
∂ϕ,
dove ϕ = arctg yx
e la coordinata angolare del sistema polare, cioe X e tangente allecirconferenze x2 + y2 = cost..3) Il campo vettoriale definito dal gruppo di Lorentz 2–dimensionale e uguale a:
X =d
dt
(cht shtsht cht
)(xy
)∣∣∣∣t=0
=
(0 11 0
)(xy
)=
(yx
)=
∂
∂β,
dove β = arth yx
e la “coordinata angolare”del sistema iperbolico nel piano, cioe X etangente alle iperboli x2 −y2 = cost.. Questo campo e il generatore delle trasformazionidi “boost”.
Ci poniamo ora il problema di associare ad un campo vettoriale X un corrispondenteflusso. Tale problema consiste nel risolvere l’equazione ordinaria (8.26) nelle incognite(Gt(x))k con condizioni iniziali (G0(x))k = xk. Se Xk e un campo differenziabile, lasoluzione dell’equazione (8.26) esiste sempre, ma solo localmente. Cio significa che perogni punto x esistono un intorno U e una costante ǫ > 0 tale che per ogni y ∈ U , il valoredi Gt(y) e ben definito solo per |t| < ǫ. Una tale famiglia di diffeomorfismi locali si diceflusso locale definito dal campo X .
Per ricordare che Gt e definito dal campo X scriveremo GtX . Chiameremo GtX lasoluzione del sistema dinamico (8.26).
Esempio.Sia M = R parametrizzato dalla sola coordinata x. Il campo vettoriale X = f(x) ∂
∂x
definisce un sistema dinamicodx(t)
dt= f(x(t)) ,
che si risolve per integrazione
t =
∫ x(t)
x(0)
dx
f(x).
Supponiamo allora, che la funzione f sia scelta in modo tale che l’integrale a destra sialimitato, cioe che esiste un numero N > 0 tale che per ogni x(0), x(t) valga
∣∣∣∣∣
∫ x(t)
x(0)
dx
f(x)
∣∣∣∣∣ < N .
In questo caso il parametro t non puo assumere tutti i valori, quindi il flusso associato adX non e definito globalmente. Se ad esempio f(x) = 1 + x2, si avra
t =
∫ x(t)
x(0)
dx
1 + x2= arctg(x(t)) − arctg(x(0))
184

e quindix(t) = tg(t+ arctg(x(0))) .
Vediamo dunque che t deve soddisfare
−π2− arctg(x(0)) < t <
π
2− arctg(x(0)) .
Se allora U = (a, b) e un intervallo, il flusso GtX e ben definito su U solo per valori di t taliche la condizione
−π2− arctg(x(a)) < t <
π
2− arctg(x(b))
sia soddisfatta. Questo significa che il flusso non e globale. Possiamo immaginare che,“viaggiando lungo il campo X” arriviamo all’infinito in un tempo finito.
Se il valore del campo X e diverso da zero in un certo punto x0 ∈M , allora e possibiletrovare un sistema di coordinate (xk) tale che X = ∂
∂x1 . Per mostrare questo scegliamo unaqualunque ipersuperficie Σ passante per x0 trasversale a X in x0; per continuita essa saratrasversale ad X anche in un intorno di x0. Scegliamo una qualunque parametrizzazioneκ di Σ in un intorno di x0
Rn−1 ∋ (x2, ..., xn) 7→ κ(x2, ..., xn) ∈ Σ ,
tale che κ(0) = x0. Definiamo l’applicazione
Rn ∋ (x1, x2, ..., xn) 7→ x(x1, x2, ..., xn) := Gx1
X (κ(x2, ..., xn)) ∈M ,
che e ben definita in un certo intorno dello zero. La derivata di questa applicazione einvertibile nello zero e dunque esiste un intorno di x0 nel quale questa applicazione e undiffeomorfismo. Dunque, localmente, questa applicazione definisce un sistema di coordinate(xk). In tale sistema di coordinate il flusso GtX si riduce alla traslazione costante della primacoordinata; infatti:
GtX(x(x1, ..., xn)) = GtX(Gx1
X (κ(x2, ..., xn))) = Gx1+tX (κ(x2, ..., xn)) = x(x1 + t, x2, ..., xn) ,
e ne segue che X = ∂∂x1 .
Se X si annulla in x0 questo procedimento non e applicabile e il comportamento delcampo nell’intorno di x0 e un problema difficile che e studiato dalla teoria dei sistemidinamici.
Derivata di Lie di un campo covettoriale.
Sia dato un campo vettoriale X e una qualunque forma differenziale α. Vogliamoconfrontare i valori di α nel punto x ∈ M e nel punto GtX(x). Tali valori appartengonoa spazi vettoriali diversi, ma utilizzando il pull-back (GtX)∗ associato a GtX e possibiletrasportare elementi di uno di questi spazi nell’altro. In ogni punto si puo dunque calcolareil rapporto incrementale
(GtX)∗α− α
t,
185

che, essendo la differenza di due forme differenziali, e ovviamente anch’essa una formadifferenziale. Il suo limite per t tendente a zero si chiama derivata di Lie di α lungo X esi indica con
£Xα = limt→0
(GtX)∗α− α
t. (8.27)
Consideriamo ora l’esempio di una 1-forma differenziale. Per calcolare l’espressione incoordinate della sua derivata di Lie, in un punto x in cui il campo vettoriale non e nullo,utilizziamo un sistema di coordinate (zl) in cui X = ∂
∂z1. In termini delle coordinate il
diffeomorfismo GtX e dato da:
(y1, ..., yn) = GtX(z1, ..., zn) = (z1 + t, z2, ..., zn) ,
e quindi∂yk
∂zl= δkl .
Se nel punto y abbiamo α = αk(y)dyk, allora il suo pull–back (Gtx)α ha gli stessi coefficenti:
(GtX)α = αk(z1 + t, z2, ..., zn)∂yk
∂zldzl = αk(z1 + t, z2, ..., zn)dzk .
Allora
(£Xα)l = limt→0
1
t(αl(z
1 + t, z2, ..., zn) − αl(z1, ..., zn)) =
∂αl∂z1
.
Abbiamo dunque mostrato che, nel sistema di coordinate in cui X = ∂∂z1
, la derivata diLie si riduce ad una semplice derivata parziale.
Passiamo ora ad un altro sistema di coordinate (xk) generico. Il campo vettoriale Xnon e piu costante, e si ha
X =∂
∂z1=∂xk
∂z1
∂
∂xk= Xk ∂
∂xk, (8.28)
dove
Xk =∂xk
∂z1.
Inoltre α = αldzl = αl
∂zl
∂xk dxk = αkdx
k, dove
αk = αl∂zl
∂xk.
Utilizzando la legge di trasformazione delle componenti del campo covettoriale £Xα e laformula (8.28) abbiamo
£Xα = (£Xα)ldzl =
∂αl∂z1
dzl =∂αl∂z1
∂zl
∂xkdxk =
(∂
∂z1
(αm
∂xm
∂zl
))∂zl
∂xkdxk =
=
(∂αm∂z1
∂xm
∂zl∂zl
∂xk+ αm
∂2xm
∂z1∂zl∂zl
∂xk
)dxk =
(∂αk∂z1
+ αm∂zl
∂xk∂
∂zlXm
)dxk =
=
(X i∂αk
∂xi+ αi
∂X i
∂xk
)dxk
186

cioe
(£Xα)k = X i∂iαk + αi∂kXi . (8.29)
Il lettore puo verificare esplicitamente che l’espressione a destra nella (8.29) si trasformacome le componenti di un covettore; ne segue che l’espressione (8.29) e valida in ognisistema di coordinate.
Questa formula vale universalmente, anche nei punti x in cui X si annulla. Infatti, seX si annulla anche in un intorno di x, il flusso e uguale all’identita in x e quindi la derivatadi Lie si annulla in x, come l’espressione di destra della (8.29). Se invece in ogni intornodi x esistono punti dove il campo non si annulla, la formula rimane vera anche in x percontinuita.
Mostriamo ora che vale la formula
£Xα = d(X α) +X dα . (8.30)
Infatti si ha
d(X α) = ∂k(Xmαm)dxk = ((∂kXm)αm +Xm(∂kαm)) dxk
e, utilizzando la formula (8.12) e (8.23),
X dα =
(X l ∂
∂xl
)(∂mαk)dxm ∧ dxk = (X l∂mαk)
∂
∂xl(dxm ∧ dxk) =
= (X l∂mαk)(δml dxk − δkl dx
m) = (Xm(∂mαk) −Xm(∂kαm)) dxk ,
da cui, insieme con (8.29) segue subito (8.30).Ovviamente la definizione (8.27) e valida anche per forme differenziali di qualunque
grado; in particolare per gli 0-covettori. Si osservi che, poiche il pull-back di uno scalare fe banale, la derivata di Lie lungo X e data semplicemente da
£Xf = X(f) ,
e coincide con l’espressione (8.30) pur di definire il prodotto interno di uno 0-covettore conun vettore come identicamente nullo:
X f := 0 .
Cio appare naturale alla luce dell’equazione (8.12), in cui si vede che gli unici termini checontribuiscono al prodotto interno sono quelli in cui ∂
∂xk trova un corrispondente dxk con
cui “accoppiarsi”; nel caso di uno scalare non ci sono dxk e quindi non c’e nessun terminediverso da zero.
Lasciamo al lettore il compito di verificare che la formula (8.30) e valida anche performe di grado superiore. In molti testi la formula (8.30) viene utilizzata come definizioneassiomatica della derivata di Lie.
187

Derivata di Lie di un campo vettoriale.
Dati due campi vettoriali X ed Y , vogliamo ancora confrontare il valore di Y in duepunti vicini usando il flusso locale associato al campo X . In questo caso, non disponiamodel pull-back, ma solo del push-forward (GtX)∗. Per spostare il vettore Y (y) dal puntoy = GtX(x) al punto x utilizziamo quindi (G−t
X )∗ cioe l’inverso di (GtX)∗. Cosı possiamocostruire il rapporto incrementale
(G−tX )∗Y − Y
t.
Definiamo la derivata di Lie di Y rispetto ad X come il limite per t tendente a zero di talerapporto:
£XY := limt→0
(G−tX )∗Y − Y
t.
Per calcolare l’espressione in coordinate di £XY , cominciamo col metterci in un puntox in cui X non sia nullo e scegliamo un sistema di coordinate (zl) in cui X = ∂
∂z1. Si ha
allora che
(£XY )l =∂Y l
∂z1,
dove
Y = Y l∂
∂zl.
Passando ora ad un sistema di coordinate (xk) generico, si avra:
Y = Y l∂
∂zl= Y l
∂zk
∂xl∂
∂xk= Y k
∂
∂xk.
Quindi
£XY =∂Y l
∂z1
∂
∂zl=
∂
∂z1
(∂zl
∂xkY k)∂xi
∂zl∂
∂xi=
= Y k∂
∂z1
(∂zl
∂xk
)∂xi
∂zl∂
∂xi+∂xj
∂z1
∂Y k
∂xj∂zl
∂xk∂xi
∂zl∂
∂xi.
Per valutare l’espressione data sopra, osserviamo che
0 =∂
∂z1δik =
∂
∂z1
(∂zl
∂xk∂xi
∂zl
)=
=∂
∂z1
(∂zl
∂xk
)∂xi
∂zl+
∂2xi
∂zl∂z1
∂zl
∂xk=
∂
∂z1
(∂zl
∂xk
)∂xi
∂zl+∂X i
∂zl∂zl
∂xk=
=∂
∂z1
(∂zl
∂xk
)∂xi
∂zl+∂X i
∂xk.
Allora si ha∂
∂z1
(∂zl
∂xk
)∂xi
∂zl= −∂X
i
∂xk,
188

da cui segue
£XY =
(−Y k ∂X
i
∂xk+Xk ∂Y
i
∂xk
)∂
∂xi,
e quindi
(£XY )i = Xk ∂Yi
∂xk− Y k
∂X i
∂xk. (8.31)
Poiche il sistema di coordinate (xk) e generico, questa espressione e valida in qualunquesistema di coordinate. Si osservi che anche in questo caso la formula (8.31) e valida percontinuita anche nei punti in cui X = 0.
Confrontando l’espressione (8.31) con l’equazione (8.22) si vede che la derivata di Liedi un campo vettoriale Y rispetto ad un campo X coincide con il commutatore dei duecampi:
£XY = [X, Y ] .
189
190

Capitolo 9. GEOMETRIA RIEMANNIANA E CONNESSIONI SIMMETRI-CHE.
9.1 Metrica.
Si dice metrica riemanniana su M una applicazione differenziabile g che ad ogni puntox ∈M associa un prodotto scalare gx su TxM ; cioe, gx ha le seguenti proprieta:
1) gx e bilineare2) gx(X, Y ) = gx(Y,X)3) gx(X,Z) = 0 ∀Z ∈ TxM ⇒ X = 04) gx(X,X) > 0 se X 6= 0.
Una varieta munita di una metrica si dice riemanniana. Ad esempio una superficie bidimen-sionale nello spazio euclideo tridimensionale e una varieta riemanniana quando si considerain ogni suo spazio tangente il prodotto scalare ereditato dalla struttura euclidea dello spazioambiente.
Se si rinuncia alla proprieta 4), la metrica g si dice pseudo-riemanniana. Una talemetrica si usa ad esempio per descrivere lo spazio-tempo nella teoria della relativita. Tuttele costruzioni geometriche che faremo utilizzando la metrica riemanniana valgono anche,se non diversamente specificato, per una metrica pseudo–riemanniana.
Introdotto un sistema di coordinate in x, disponiamo della base canonica di TM , e siha allora:
gx(X, Y ) = X iY jgx(∂
∂xi,∂
∂xj) = X iY jgij(x),
ove la matrice gij ha per elementi i prodotti scalari dei vettori base:
gij = g
(∂
∂xi,∂
∂xj
)= gji.
Fissato un sistema di coordinate, g e rappresentata da una matrice simmetrica; inoltredalla condizione 3) si ha che tale matrice e non singolare, cioe det (gij) 6= 0; infine, per lacondizione 4) essa risulta definita positiva.
Se denotiamo con gkl le componenti di g rispetto ad un nuovo sistema di coordinate(yk), la legge di trasformazione e
gkl = g
(∂
∂yk,∂
∂yl
)= g
(∂xi
∂yk∂
∂xi,∂xj
∂yl∂
∂xj
)=∂xi
∂ykgij∂xj
∂yl. (9.1)
Come nel caso delle forme esterne, questa formula e un caso particolare dell’operazionedi pull-back della metrica, definita da
(F ∗g)(X, Y ) := g(F∗X,F∗Y ) ,
dove F : N → M, X e Y sono vettori tangenti ad N : in altri termini, per calcolareil prodotto scalare tra due vettori su N li si trasporta su M tramite l’applicazione F∗ e
191

si calcola il loro prodotto scalare con la metrica di M . Se (yk) e (xi) sono coordinaterispettivamente su N ed M , si ha dunque
(F ∗g)kl = (F ∗g)
(∂
∂yk,∂
∂yl
)= g
(F∗
∂
∂yk, F∗
∂
∂yl
)=
= g
(∂xi
∂yk∂
∂xi,∂xj
∂yl∂
∂xj
)=∂xi
∂ykgij
∂xj
∂yl.
In uno spazio euclideo e sempre possibile scegliere coordinate ortonormali, cioe taliche la matrice di g diventi la matrice identita: gij = δij ; in generale, invece, si possonotrovare coordinate tali che la metrica si riduca all’identita in un punto, ma non in un purpiccolo aperto. Data l’espressione esplicita di una metrica, non e immediato riconoscerese si tratta di una metrica euclidea oppure no. Per fare questo e necessario introdurreil tensore di curvatura il cui annullarsi indica che la metrica in esame e euclidea. In talcaso, se gij ha una dipendenza dalle coordinate complicata, cio e dovuto solo al fatto chele coordinate utilizzate non sono cartesiane. Una metrica euclidea e anche detta piatta, eduna metrica non euclidea si dice curva. Il tensore di curvatura verra studiato nel paragrafo9.8.
Ogni metrica induce una funzione
‖.‖ : TM → R
che associa ad ogni vettore X la sua lunghezza
‖X‖ =√g(X,X) . (9.2)
Poiche, come si controlla facilmente, vale la formula di polarizzazione
4g(X, Y ) = ‖X + Y ‖2 − ‖X − Y ‖2 ,
tutta l’informazione sulla metrica e data quando si conoscono le lunghezze di tutti i vettori.Nel caso della metrica pseudo–riemanniana il prodotto scalare di un vettore con se
stesso non e una norma, ed esistono vettori con “quadrato della lunghezza” positiva, neg-ativa e nulla. Nell’ambito della relativita tali vettori corrispondono rispettivamente aivettori di “tipo spazio”, di “tipo tempo” e di “tipo luce”. In tale caso la formula (9.2)deve essere rimpiazzata da:
‖X‖ =√
|g(X,X)| .Un altro modo di assegnare una metrica consiste nello scegliere in ogni punto una base
ortonormale di vettori; ovviamente esistono infinite scelte equivalenti alla stessa metrica.Segnaliamo che non sempre e possibile assegnare in modo differenziabile un riferimentoortonormale in ogni punto di M (ad esempio cio non e possibile nel caso in cui M sia unasfera). Malgrado questo, si puo sempre utilizzare il procedimento di cui sopra sfruttandoproprio il fatto che ad una stessa metrica corrispondono molti riferimenti ortonormali.
192

9.2 Integrazione ed altre strutture indotte dalla metrica.
Mostriamo ora alcune delle operazioni rese possibili dalla presenza di una metricariemanniana su una varieta (nel caso di una metrica pseudo–riemanniana valgono le stesserelazioni a patto di sostituire il determinante di g o il “quadrato della lunghezza” di unvettore con il loro modulo).1) Lunghezza di un arco di curva. Data una curva γ : (a, b) →M , si definisce la lunghezzadi un suo arco [c, d] ⊂ (a, b) mediante la formula
l(γ) =
∫ d
c
√g
(∂
∂t,∂
∂t
)dt =
∫ d
c
‖∂∂t
‖dt ,
ove t e il parametro della curva γ e quindi ∂∂t
e tangente alla curva in γ(t). In un sistemadi coordinate si ha γ(t) = (xi(t)), e tale vettore tangente e uguale a
∂
∂t=dxi
dt
∂
∂xi,
e quindi si ha
l(γ) =
∫ d
c
√gij
dxi
dt
dxj
dtdt. (9.3)
Si vede subito che, se si cambia parametrizzazione, il valore di l(γ) non cambia. Osserviamoche la definizione data costituisce una naturale generalizzazione del concetto elementare dilunghezza; infatti in R3 si scriverebbe (simbolicamente)
dl =√
(dx)2 + (dy)2 + (dz)2 =√
(d~x | d~x) =
√(d~x
dt| d~xdt
)dt = ‖d~x
dt‖dt ,
ove ~x = γ(t) e il prodotto scalare di R3 e stato indicato con ( | ).
2) Volume k-dimensionale in uno spazio n-dimensionale.Ricordiamo che, in uno spazio euclideo, il volume del parallelepipedo V sotteso dai
vettori ei, i = 1, ..., k:V = αiei, 0 ≤ αi ≤ 1,
e dato da: Vol(V ) = |V | =√
det (ei | ej). Per convincersi di cio basta pensare al caso in cui(ei | ej) e una matrice diagonale, cioe in cui ei e una base ortogonale; in tal caso det (ei | ej)e semplicemente il prodotto dei fattori (ei | ei), cioe dei quadrati delle lunghezze dei latidi V . Se ei non e una base ortogonale, non cambia nulla, in quanto esiste sempre unatrasformazione lineare avente determinante unitario che porta ei in una base ortogonale.
Cio premesso, e spontanea la definizione di volume di un sottospazio k-dimensionaleD di una varieta n−dimensionale con metrica g: dato un sistema di coordinate t1, ..., tk
su D, si definisce
Vol(D) :=
∫
D
√det g
(∂
∂ti,∂
∂tj
)dkt.
193

Osserviamo che, al contrario di quanto avveniva per l’integrale di una k-forma, per definirequesto integrale non abbiamo bisogno dell’orientazione. Quindi, se anche scegliamo unacarta dell’altra orientazione, l’integrale non cambia. Per mostrare che tale definizionenon dipende dal sistema di coordinate prescelto osserviamo che dalla formula (9.1) segueche il determinante della matrice g viene moltiplicato per il quadrato del determinante
jacobiano,(det ∂τ
∂t
)2, quando si passa dalle coordinate t alle coordinate τ . Si puo quindi
utilizzare il teorema del cambiamento di variabili e passare all’integrale di volume nellenuove coordinate.
3) Forma di volume.Se M e una varieta orientata si puo definire una n-forma, detta forma di volume, in
base alla proprieta che il suo integrale esteso ad una sottovarieta n-dimensionale N di Msia uguale al volume di N . Scelta una carta (xi) compatibile con l’orientazione, tale formae data da
ω =√
det (gij) dx1 ∧ ... ∧ dxn =
√gdx1 ∧ ... ∧ dxn,
dove abbiamo posto g = det (gij). Per mostrare che tale definizione non dipende dalsistema di coordinate scelto, osserviamo che, passando al sistema (yj), la formula (9.1)implica che il determinante della metrica si moltiplica per il quadrato del determinantejacobiano. La radice del determinante della metrica si moltiplica dunque ovviamente peril modulo dello jacobiano. Poiche i due sistemi appartengono alla stessa orientazione lojacobiano e positivo. Quindi
√g e una densita scalare (vedi paragrafo 8.10) e ω e la
corrispondente n–forma. Si osservi che per definire il volume non e necessario che Msia orientata, mentre cio e necessario per definire la forma di volume. Nella notazionetradizionale, la forma di volume ω si denota con dV ; attualmente si preferisce evitare talenotazione per riservare il simbolo “d” alla derivata esterna.
Nel caso della metrica pseudo–riemanniana il determinante di g puo essere negativo;in tal caso, ogni volta che compare sotto il segno di radice, tale determinante deve essererimpiazzato con il suo modulo.
4) Isomorfismo tra vettori e covettori.La metrica induce il seguente isomorfismo I tra vettori e covettori di M :
I : TM → T ∗M
X 7→ IX := g(X, .),
dove il covettore g(X, .) e definito da:
〈Y ; g(X, ·)〉 = g(X, Y ).
In pratica, essendo la metrica una “macchinetta” che a due vettori associa un numero, seinseriamo un vettore resta una casella libera, otteniamo cioe una macchinetta che ad unvettore associa un numero, ovvero un covettore.
Scelta una carta, si ha
〈Y ; IX〉 = g(X, Y ) = X iY jgij =
⟨Y j
∂
∂xj;X igikdx
k
⟩,
194

e quindiIX = gijX
idxj .
Le componenti del covettore IX = (IX)jdxj si ottengono dunque dalle componenti X i
“abbassando l’indice” con la matrice gij:
(IX)j = gijXi .
E ovvio che l’applicazione inversa I−1 : T ∗M → TM e data dalla matrice inversa di gil.Tale matrice viene denotata con gik (gkigil = δkl ). Se dunque p = pidx
i ∈ T ∗M , si ha
I−1p = gijpi∂
∂xj
ovvero(I−1p)j = gijpi .
Per calcolare il vettore associato ad un covettore bisogna dunque “alzare il suo indice”con la matrice inversa g−1 di g. L’isomorfismo I e spesso utilizzato per rappresentare icovettori (come la forza) mediante vettori. Sottolineiamo che, in relativita generale, dovela metrica stessa e un oggetto dinamico, la rappresentazione della forza come un vettorenon ha a priori senso.
Si osservi che, se gik = δik, allora, indicate con Xi le coordinate di IX e con X i
le coordinate di X si ha X i = Xi. Cosı nello spazio euclideo, lavorando con coordinateortonormali, si puo ignorare la differenza tra vettori e covettori. Invece in un genericospazio curvo cio non e possibile e si e costretti a distinguere tra vettori e covettori.
5) Integrale di un campo vettoriale lungo una curva.Dato un campo vettoriale X , studiamo il significato dell’integrale lungo una curva γ
della corrispondente 1-forma IX . Si ha
∫
γ
IX =
∫
γ
⟨∂
∂t; IX
⟩dt ;
ma ⟨∂
∂t; IX
⟩= g(X,
∂
∂t) = (X |∂
∂t),
sicche ∫
γ
IX =
∫
γ
(X | 1∥∥∂∂t
∥∥∂
∂t)‖ ∂∂t
‖dt .
Ora, 1
‖∂∂t‖
∂∂t
e il vettore normalizzato tangente a γ, usualmente indicato con ~l, mentre
‖ ∂∂t
‖dt rappresenta l’elemento di lunghezza di γ, usualmente indicato con dl; si ottienecosı ∫
γ
IX =
∫
γ
(X |~l)dl.
195

L’isomorfismo tra vettori e covettori da la possibilita di rappresentare un campo di forzetramite un campo vettoriale. Se dunque X e un campo di forze rappresentato vettorial-mente, l’integrale della corrispondente 1-forma fornisce esattamente il lavoro di X lungoγ. Cio offre l’opportunita di osservare che l’oggetto piu naturale da integrare e la 1-forma(campo covettoriale).
6) Isomorfismo tra vettori e densita vettoriali ((n− 1)-forme).Sia ω la forma di volume associata a g. Si definisce l’isomorfismo:
J : TM →n−1∧
(T ∗M)
X 7→ JX := X ω;
Se X = X i ∂∂xi , si ha quindi
JX =√gX i ∂
∂xi(dx1 ∧ ... ∧ dxn) =
=√g
1
(n− 1)!X i1εi1...indx
i2 ∧ ... ∧ dxin ,(9.4)
ove εi1...in e il simbolo totalmente antisimmetrico definito nel paragrafo 8.8. Si vede che√gX i e una densita vettoriale.
Se D e una ipersuperficie orientata (cioe una sottovarieta (n − 1)-dimensionale dellavarieta n-dimensionale M), la parte (JX)⊥ di JX normale a D e data dalla componentenormale di X , cioe X⊥ := g(X,~n), dove ~n e il vettore ortogonale a D di lunghezza unitaria,la cui direzione e compatibile con l’orientazione di D. Piu precisamente:
(JX)⊥ = X⊥σ , (9.5)
dove σ e la forma di volume (n−1)-dimensionale su D definita proprio dalla stessa metricag. Per dimostrare questa formula basta scegliere le coordinate intorno a D in modo taleche D corrisponda a x1=costante, che sia ‖ ∂
∂x1 ‖ = 1, e che ∂∂x1 sia ortogonale a D; cio e
sempre possibile. Con questa scelta si ha ~n = ∂∂x1 e inoltre g11 = 1, g1i = 0 per i 6= 1.
Come abbiamo visto nel paragrafo 8.13, si ha
(JX)⊥ =√gX1dx2 ∧ ... ∧ dxn ;
ma X1 = X⊥ = g(X,~n), e il determinante di g e uguale al determinante (n − 1)-dimensionale in cui sia stata eliminata la prima variabile, cioe al determinante che definiscela (n − 1)-forma di volume su D. Nei testi tradizionali la (n − 1)-forma di volume σ edenotata tipicamente con dS; come gia ricordato, nella notazione moderna si riserva ilsimbolo d per la derivata esterna.
7) Isomorfismo tra scalari e densita scalari.Se ω e la forma di volume, allora ad ogni funzione scalare f ∈ C∞(M) si associa la n-
forma (densita scalare) fω ∈ Sec(∧n
(T ∗M)), la cui espressione in un sistema di coordinatesara f
√g.
196

8) Divergenza di un campo vettoriale.Calcoliamo ora d(JX); questa sara una n-forma, quindi esprimibile come il prodotto
di una funzione per la n-forma di volume ω (in notazione tradizionale dV ); tale funzionee detta divergenza di X :
d(JX) =: div(X)ω = div(X)dV = div(X)√gdx1 ∧ ... ∧ dxn .
Si osservi che la formula (9.4) implica che:
div(X) =1√g
∂(√gXk)
∂xk. (9.6)
Tale formula vale in ogni sistema di coordinate curvilinee.
9) Gradiente di una funzione.Data una funzione f si definisce il campo vettoriale chiamato gradiente di f :
grad(f) := I−1df.
10) Laplaciano di una funzione.Data una funzione f , si definisce il campo vettoriale detto Laplaciano di f e indicato
con f :f := div grad f.
Utilizzando la formula (9.6), si vede subito che, in un qualunque sistema di coordinate vale
f =1√g
∂(√g gij∂jf)
∂xi=
1√g
∂
∂xi
(√g gij
∂f
∂xj
).
9.3 Geometria riemanniana tridimensionale. Analisi vettoriale.
Diamo ora alcuni esempi di applicazioni di questi isomorfismi nel caso in cui la dimen-sione dimM di M e tre. Utilizziamo la forma di volume ω =
√gdx1 ∧ dx2 ∧ dx3.
A) Dato un vettore X = Xk ∂∂xk , la corrispondente 2-forma sara data da
JX = X ω =√g(X1dx2 ∧ dx3 +X2dx3 ∧ dx1 +X3dx1 ∧ dx2). (9.7)
Studiamo il significato dell’integrale della 2-forma JX su una 2-superficie D. Si ha
∫
D
JX =
∫
D
√g (X1dx2 ∧ dx3 +X2dx3 ∧ dx1 +X3dx1 ∧ dx2) ;
come abbiamo gia visto ∫
D
(JX)⊥ =
∫
D
(X |~n)dS,
197

ove ~n e il versore normale a D in un suo punto e σ = dS la misura bidimensionale definitain 2). L’integrale della 2-forma JX sulla superficie D e dunque uguale a quello che vienedi consueto chiamato il flusso del campo X attraverso D. Le 2-forme sono necessarieper descrivere grandezze fisiche quali il campo magnetico B; la legge di Laplace fornisceinfatti il valore del flusso magnetico attraverso una qualunque superficie, cioe il valoredell’integrale di B esteso ad una superficie bidimensionale, ed e una 2-forma l’oggettonaturale da integrare sulle superfici bidimensionali. Se vogliamo rappresentare questa 2-forma con un campo vettoriale non ci basta la metrica, ma ci serve anche l’orientazioneper poter definire la forma di volume. Se cambiamo l’orientazione (invece della regoladella mano destra, prendiamo la regola della mano sinistra), lo stesso oggetto fisico Bsara rappresentato da un campo vettoriale opposto. I fisici dicono dunque che il campomagnetico e un “vettore assiale” o uno “pseudovettore”, ma si vede che la rappresentazionecon la 2-forma e piu naturale e non dipende da nessuna scelta arbitraria.B) Se X e Y sono due vettori, si definisce il loro prodotto vettoriale mediante la formula:
X × Y := J−1(IX ∧ IY ) .
Osserviamo che questa operazione e possibile soltanto in uno spazio a tre dimensioni,perche solo in tal caso si ha n − 1 = 2. Se X = X i ∂
∂xi , Y = Y j ∂∂xj , e Z = Zk ∂
∂xk e taleche Z = X × Y , allora
JZ =1
2
√g Zk ǫkijdx
i ∧ dxj = IX ∧ JY = XiYjdxi ∧ dxj ,
dove Xi e Yj sono le coordinate dei covettori IX e IY . Ne segue
1
2
√g Zk ǫkij =
1
2(XiYj − YiXj) .
Alzando gli indici otteniamo:
1
2
√g Zl ǫkijg
klgimgjn =1
2(XmY n − Y mXn) .
Se (lmn) e una permutazione di (123), il valore di ǫkijgklgimgjn sara uguale al determinante
della metrica inversa gij moltiplicato per la parita della permutazione stessa, altrimentisara zero. Allora
1
2
1√gZl ǫ
lmn = (XmY n − Y mXn)
dove ǫlmn e il simbolo totalmente antisimmetrico detto simbolo controvariante di Levi-Civita. E facile verificare che
ǫlmn ǫkmn = 2δlk .
Ne segue finalmenteZk =
√g ǫkmnX
mY n
o ancheZk =
√g gkl ǫlmnX
mY n .
198

Questa formula vale in ogni sistema di coordinate curvilinee.C) Rotore di un campo vettoriale. Dato un campo vettoriale X , consideriamo la corrispon-dente 1-forma IX ; se ne calcoliamo il differenziale otteniamo una 2-forma, cui d’altra partecorrisponde un campo vettoriale J−1d(IX): questo viene detto rotore di X ,
rot(X) := J−1d(IX).
Si dimostra facilmente che le classiche identita relative agli operatori differenzialidiv rot = 0, rot grad = 0 non sono che casi particolari della relazione dd = 0; infattisi ha
div rot(X)ω = div J−1d(IX)ω = d(JJ−1d(IX)) = dd(IX) = 0 ;
rot grad(f) = rot I−1df = J−1d(II−1df) = J−1ddf = 0.
Si vede inoltre immediatamente che i classici teoremi dell’analisi vettoriale, cioe i teo-remi del gradiente, del rotore e della divergenza, non sono che casi particolari del teoremadi Stokes. Infatti si ha:
1) Relazione tra lavoro e differenza di potenziale:
∫
γ
(grad(f)|~l)dl =
∫
γ
df = f(b) − f(a).
2) Flusso del rotore attraverso una superficie (teorema di Green):
∫
D2
(rot(X)|~n)dS =
∫
D2
d(IX) =
∫
∂D2
IX =
∫
∂D2
(X |~l)dl.
3) Integrale di volume della divergenza di un campo vettoriale (teorema di Gauss):
∫
D3
div(X) dV =
∫
D3
d(JX) =
∫
∂D3
JX =
∫
∂D3
( ~X|~n) dS.
9.4 Elementi di calcolo operatoriale.
Si dice campo tensoriale (2-covariante) su M una applicazione a che ad ogni punto x ∈M associa una funzione bilineare su TxM (cioe a valori scalari). Una metrica riemanniana equindi un esempio di campo tensoriale 2-covariante che inoltre e simmetrico, non degeneree definito positivo.
Se M e una varieta riemanniana con metrica g, ogni campo 2-covariante a definisceun operatore lineare A : TM → TM mediante la relazione
g(AX, Y ) = a(X, Y ) . (9.8)
199

In un sistema di coordinate (xk) il tensore a e rappresentato, come avveniva per il tensoremetrico g, dalla matrice (aij):
aij = a
(∂
∂xi,∂
∂xj
).
Vogliamo ora trovare la matrice che nello stesso sistema di coordinate rappresenta l’opera-tore lineare A. Sia X = X i ∂
∂xi un vettore qualunque e Z = Zk ∂∂xk il valore di A su X ,
cioe Z = AX . Per ogni vettore Y = Y j ∂∂xj si ha per definizione
ZkgkjYj = g(Z, Y ) = g(AX, Y ) = a(X, Y ) = X iaijY
j ,
il che comportaZkgkj = X iaij ;
moltiplicando a destra per la metrica inversa gjl (e sommando su j) abbiamo finalmente
Zl = X iaijgjl .
Cio significa che la matricea li := aijg
jl
ottenuta dalla matrice (aij) alzando il secondo indice tramite la metrica inversa forniscelo sviluppo dell’operatore A in termini di coordinate: infatti la relazione data comporta
A
(X i ∂
∂xi
)= X ia l
i
∂
∂xl,
ovvero
A∂
∂xi= a l
i
∂
∂xl.
Prendendo il valore del covettore dxj su ambo i membri abbiamo:
a ji =
⟨A∂
∂xi; dxj
⟩. (9.9)
Da cui segue la legge di trasformazione delle componenti di a:
a lk =
⟨A∂
∂yk; dyl
⟩=
⟨A∂xi
∂yk∂
∂xi;∂yl
∂xjdxj⟩
=∂xi
∂yka ji
∂yl
∂xi. (9.10)
In particolare l’operatore identita 1 (definito come 1X := X) corrisponde alla matrice δjidi Kronecker. Si vede immediatamente che la composizione degli operatori corrispondeall’ordinario prodotto di matrici:
(AB) li = a lj b
ji .
200

Un campo A di operatori su ogni TxM si chiama campo tensoriale 1-covariante 1-controva-riante. La struttura riemanniana g fornisce dunque un isomorfismo tra i tensori 2-covariantie quelli 1-covarianti 1-controvarianti, che in termini di coordinate consiste nella operazionedi alzare e abbassare gli indici.
Prendiamo ora una base qualunque (e1, ..., en) di TxM (per esempio(∂∂x1 , ...,
∂∂xn
)) e
la sua base duale (e1, ..., en) di T ∗xM . E facile verificare che il valore dell’espressione
n∑
i=1
⟨Aei; e
i⟩
non dipende dalla scelta della base, ma solo dall’operatore A. Questo valore si chiamatraccia di A e si indica con Tr A. La formula (9.9) implica:
TrA = a ii .
Un campo tensoriale 2-covariante e detto simmetrico se la corrispondente forma bilin-eare e simmetrica: a(X, Y ) = a(Y,X). In tal caso la matrice aij risulta simmetrica e ilcorrispondente operatore A risulta autoaggiunto, tale cioe che
g(AX, Y ) = g(X,AY ) .
In tal caso l’ordine degli indici e irrilevante; scriveremo dunque
a ji = aji := aji .
E noto che le matrici simmetriche sono diagonalizzabili. In ogni punto x ∈M esiste dunqueuna base ortonormale (e1, ..., en) in x costituita dagli autovettori di A in x. La matrice ajirispetto a questa base e diagonale e i suoi elementi sono gli autovalori di A. La traccia edunque la somma degli autovalori. Piu in generale la traccia di qualunque potenza di A,cioe di AN := A...A (N volte), e la somma degli autovalori, ognuno elevato alla N -esimapotenza. Ne segue che per un operatore lineare autoaggiunto nello spazio n-dimensionale glin numeri dati dalle tracce degli operatori A,A2, ..., An contengono l’informazione completasugli n autovalori di A. In particolare, il determinante di A e il prodotto degli autovalo-ri. Vediamo dunque che il deteminante di un tensore 1-covariante 1-controvariante e unoscalare, cioe non dipende dal sistema di coordinate; invece, il determinante di un tensore2–covariante, essendo una densita scalare, dipende dal sistema di coordinate.
Dato un operatore autoaggiunto A, e ben definito un qualunque polinomio P di A:
P (A) :=m∑
k=0
ckAk .
In modo analogo, data una funzione analitica
f(z) =∞∑
k=0
ckzk ,
201

si puo definire l’operatore f(A) tramite la formula
f(A) :=∞∑
k=0
ckAk ;
questo operatore e ben definito quando gli autovalori di A appartengono al disco di con-vergenza di f ; si puo infatti sempre pensare di passare alla base degli autovettori di A, edin tal caso la serie di cui sopra e banalmente convergente. L’operatore f(A) ha gli stessiautovettori di A con autovalori uguali a f(λi), dove λi sono i corrispondenti autovalori diA. Per esempio il logaritmo di un operatore puo essere costruito con la formula
log A :=
∞∑
k=1
(−1)k−1
k(A− 1)k ,
che converge se gli autovalori di A appartengono all’intervallo (0, 2). Prendendo il prolun-gamento analitico si puo definire il logaritmo di A per ogni operatore positivo, tale cioeche la forma a sia definita positiva. Essendo gli autovalori di logA pari a logλi, abbiamo:
Tr logA =∑
i
logλi = log∏
i
λi = log det A . (9.11)
Se F : M → N e una applicazione invertibile ed A e un tensore 1-covariante 1-controvariante su M , allora si puo definire il push forward o trasporto F∗A di A come:
(F∗A)Y := F∗A(F−1)∗Y ,
per ogni vettore Y tangente ad N . Se (xi) sono coordinate su M e (yk) sono coordinatesu N , e facile verificare che la matrice di F∗A e data dalla formula:
(F∗A)kl =∂yk
∂xiaij∂xj
∂yl.
E anche facile verificare che l’operazione di push forward commuta con l’operazione di“costruire” qualunque funzione operatoriale:
F∗ f(A) = f(F∗A) .
Nelle applicazioni (in particolare nella meccanica dei continui) e utile la seguenteformula:
d
dt
[Tr (f(A+ tB))
]∣∣∣t=0
= Tr (f ′(A)B) , (9.12)
dove A, B sono operatori simmetrici e f ′ e la derivata della funzione f . Per dimostrarequesta formula passiamo alla base degli autovettori di A, nella quale la matrice aji e diag-onale:
(aji ) = diag(λ1, ..., λn).
202

Per calcolare gli autovettori di (A+tB) dobbiamo risolvere l’equazione det (A+tB−λ1) =0. Si vede che il determinante e uguale al prodotto dei termini sulla diagonale piu terminid’ordine superiore al primo in t. Abbiamo dunque
(λ1 + tb11 − λ)...(λn + tbnn − λ) +O(t2) = 0 .
Le soluzioni di questa equazione sono date da
λi(t) = λi + tbii +O(t2)
(non si somma su i); ne segue che
Tr (f(A+ tB)) =n∑
i=1
f(λi + tbii +O(t2)) =
=n∑
i=1
f(λi) + tn∑
i=1
f ′(λi)bii +O(t2) = Tr f(A) + t Tr (f ′(A)B) +O(t2) ,
da cui si ottiene la formula (9.12).Il calcolo esplicito delle funzioni di operatori in una base generica in cui l’operatore
non e diagonale e particolarmente complesso. Dal punto di vista teorico, questo calcolo ereso possibile dal teorema di Cayley–Hamilton. Tale teorema afferma che ogni operatoresoddisfa alla sua equazione caratteristica, e puo essere verificato immediatamente passandoalla base in cui l’operatore e diagonale. Questo semplice risultato implica che un operatoreche agisce su uno spazio n–dimensionale ha solo n− 1 potenze indipendenti. Infatti, unavolta scritta l’equazione caratteristica per l’operatore, l’equazione stessa esprime un legametra la potenza n–esima e quelle inferiori. Applicando poi l’operatore all’espressione dellasua potenza ennesima si ottiene la potenza n+ 1–esima in funzione delle precedenti e cosıvia. In tal modo, in via di principio, una serie di potenze di un operatore su uno spazion–dimensionale e in realta una somma di n termini. Dal punto di vista pratico pero ilcalcolo esplicito di tale serie e molto complicato.
Nel caso particolare di uno spazio bidimensionale il calcolo delle funzioni di un oper-atore e il piu semplice. Per esempio si puo provare che:
logA = log
(1
2TrA
√1 − r2(A)
)1 + F (r(A))
2
TrAA , (9.13)
dove abbiamo denotato:
A := A− 1
21TrA ,
cioe A e la parte a traccia nulla di A, e anche
r(A) : =
√−det
(2
TrAA
)
F (r) : =1
2rlog
1 + r
1 − r.
203

Osserviamo che il determinante di una matrice simmetrica a traccia nulla e sempre neg-ativo e dunque r(A) e ben definito. Infatti, una matrice di questo tipo si puo semprerappresentare nella forma:
2
TrAA =
(x yy −x
),
e dunque
det
(2
TrAA
)= −(x2 + y2) ,
cioe r(A) =√x2 + y2. Inoltre r(A) = 0 implica A = 0, cioe l’operatore A e proporzionale
all’identita. Si puo inoltre verificare semplicemente che per un operatore positivo si ha
−1 < r(A) < 1 ,
e dunque F (r(A)) e ben definito per un tale operatore.Osserviamo anche che la funzione F si estende per continuita al punto r = 0 e risulta
F (0) = 1. Inoltre, essendo F una funzione pari, si ha: F ′(0) = 0.La formula (9.13) si verifica facilmente nel riferimento in cui l’operatore e diagonale.
Questo esercizio viene lasciato al lettore. La formula (9.13) ci permette di sviluppare illogaritmo dell’operatore A+ tB al primo ordine in t. Se definiamo A(t) = A+ tB allora:
TrA(t) = TrA+ tTrB ,
A(t) = A+ tB ,
2
TrA(t)A(t) =
1
TrA+ tTrB
(A+ tB
),
r2(A(t)) = −det
(2
TrA(t)A(t)
)= − 1
(TrA+ tTrB)2det (A+ tB) =
= − 1
(TrA+ tTrB)2
(det A+ t2det B − tTr (AB)
)=
=
(1 +
TrB
TrAt
)−2(r(A) + t
4Tr (AB)
(TrA)2+O(t2)
).
Inserendo tutti questi sviluppi nella formula (9.13) otteniamo finalmente:
log(A+ tB) = logA+ t
1
(1 − r2(A))TrA
(TrB − 2
Tr (AB)
TrA
)1+
+
[F ′(r(A))
r(A)
(2
TrA
)2(
Tr (AB)
TrA− 1
2r2(A)TrB
)+
+ 2F (r(A))TrB
(TrA)2
]A+
2F (r(A))
TrAB
+O(t2) .
(9.14)
204

Sottolineiamo che F ′(r)r
si estende per continuita anche in r = 0. Osserviamo che per
A = 1 vale A = 0, r(A) = 0, TrA = 2 e allora
log(1 + tB) = tB +O(t2) ,
conformemente alla definizione del logaritmo di un operatore.
9.5 Strutture affini globali e locali: connessioni simmetriche.
Supponiamo di conoscere il moto x(t) di una particella puntiforme su una varieta M .In ogni punto la velocita vi(t) = xi(t) e, come abbiamo visto, un vettore. Supponiamoora di voler calcolare l’accelerazione. Se calcoliamo la derivata della velocita v(t) = xnon otteniamo un vettore, perche cambiando il sistema di coordinate la n-upla di numeri(x1, ..., xn) non si trasforma come devono trasformarsi le componenti di un vettore. Infatti,se lo stesso oggetto e descritto in un altro sistema di coordinate, si ha
yk =d
dt(yk) =
d
dt
(∂yk
∂xixi)
=∂yk
∂xixi +
∂2yk
∂xi∂xjxixj , (9.15)
e la legge di trasformazione vettoriale non prevede la presenza, a destra, del secondotermine; quest’ultimo termine in particolare e nullo se la trasformazione delle coordinatee lineare.
Cio e dovuto al fatto che, per calcolare la derivata di un campo vettoriale, dobbiamoconfrontare due vettori x(m1) e x(m2), applicati in punti distinti, che a priori non sono con-frontabili in maniera intrinseca. Nella geometria elementare siamo abituati a trasportarevettori da un punto all’ altro mediante la nozione di parallelismo, e in tal modo si ha unaidentificazione tra spazi tangenti attaccati a punti diversi; cio permette di trasportare unpunto m lungo un vettore X ovvero “sommare” un punto ad un vettore ed ottenere unnuovo punto m+X . Questa azione di trasporto puo essere caratterizzata da un insieme diassiomi. In particolare si puo richiedere che sia soddisfatto l’assioma del parallelogrammo,cioe che sommando ad un punto un vettore X , poi un altro vettore Y , si ottenga lo stessopunto che si ottiene sommando prima il vettore Y poi il vettore X . Tale insieme di assiomipuo essere sostituito da un’unica assunzione, precisamente che esista un sistema globale dicoordinate tale che la somma di un vettore di componenti X i con un punto di coordinatemi sia definita come il punto avente per coordinate la somma delle corrispondenti coor-dinate, (m + X)i = mi + X i. Naturalmente, e evidente che, se esiste un tale sistema dicoordinate, allora esiste tutta una classe di sistemi di coordinate aventi la medesima pro-prieta: infatti si mostra facilmente che tale classe e quella dei sistemi di coordinate ottenutidal primo per trasformazioni lineari (anche non omogenee). Questi sistemi di coordinate sichiamano sistemi di coordinate affini. Le componenti xk calcolate rispetto ad un sistemaaffine definiscono un ben determinato vettore xk ∂
∂xk che si chiama accelerazione. La for-mula (9.15) prova che tale definizione non dipende dalla scelta del particolare riferimentoaffine nella sua classe d’equivalenza poiche, se (yk) e legato ad (xi) da una trasformazionelineare, l’ultimo termine a destra della (9.15) si annulla. A volte, invece di considerarecoordinate affini e utile calcolare l’accelerazione in un sistema qualunque di coordinate,
205

ad esempio cilindriche o sferiche; in tal caso la “derivata della velocita” ha componentiin cui figura anche il contributo dovuto alle derivate seconde delle coordinate curvilineerispetto a quelle affini. Una circostanza analoga si presenta in relazione ai cambiamenti dicoordinate coinvolgenti il tempo. Se come varieta M consideriamo lo spazio–tempo fisico,le trasformazioni curvilinee generali non conservano neanche la proprieta di inerzialita diun riferimento. Cosı, utilizzando un sistema non inerziale si devono aggiungere le accelera-zioni apparenti (come quella centrifuga e quella di Coriolis), descritte dal secondo terminedi (9.15), anche se il corpo si muove di pura inerzia. Per eliminare tale problema, nellafisica newtoniana e nella relativita speciale veniva postulata l’esistenza di un riferimentoinerziale globale (stelle fisse). Einstein ha osservato che questo postulato non e necessarioper lo sviluppo della meccanica, e che basta supporre che in ogni punto esista un sistemadi riferimento privilegiato, che viene detto sistema localmente inerziale. In un intorno diun punto m ∈M , un tale sistema e definito assegnando una classe d’equivalenza di sistemidi coordinate per i quali il calcolo delle accelerazioni da lo stesso risultato (cioe, se (xi)e (yk) appartengono alla stessa classe, si annulla l’ultimo termine a destra della (9.15)).Ritornando, motivati in tal modo, alla formulazione per una varieta generica M , diamo laseguenteDefinizione: Due sistemi di coordinate (xi) e (yk) danno la medesima struttura affine locale(o si dicono sistemi inerzialmente equivalenti nel punto m) se la matrice delle derivate
seconde ∂2yk
∂xi∂xj si annulla nel punto m.Una classe di equivalenza rispetto a questa relazione si dice struttura affine locale o sistemadi riferimento inerziale nel punto m.Definizione: Una connessione simmetrica su M e una scelta di una struttura affine localein ogni punto m ∈M .
Mentre nella geometria elementare la nozione di parallelismo permette di confrontare(sommare o sottrarre) “esattamente” vettori applicati in punti diversi, e quindi di con-frontare piu in generale tensori applicati in punti diversi (poiche i covettori sono individuatidalla loro azione sui vettori ed i tensori sono a loro volta determinati dalla loro azione suvettori e covettori), una connessione permette solo di confrontare al primo ordine tensoriapplicati in punti vicini. Prendiamo infatti un sistema di coordinate (xk) appartenentealla classe definita dalla connessione in un punto m, e sia t un assegnato campo tensorialecon componenti tk1...kr
l1...lsin quel sistema di coordinate. Allora, mediante uno sviluppo di
Taylor al primo ordine, e denotando con ∇i la derivata rispetto alla coordinata xi, si ha
tk1...kr
l1...ls(mj + ǫXj) − tk1...kr
l1...ls(mj) = ǫXj∇jt
k1...kr
l1...ls+O(ǫ2) ;
questa formula, troncata al primo ordine, ci permette di considerare ǫX i∇itk1...kr
l1...lscome la
differenza tra i valori del campo t nei due punti vicini. Vogliamo mostrare che le componenti∇it
k1...kr
l1...lsdefiniscono un nuovo campo tensoriale ∇t che ha un indice di covarianza in piu
rispetto al campo t. Infatti se (yk) e un sistema equivalente a (xi), le componenti del
tensore t rispetto a (yk) si ottengono moltiplicando le componenti di t per la matrice(∂yk
∂xi
)
tante volte quanti sono gli indici di controvarianza di t e per la matrice(∂xi
∂yk
)tante volte
quanti sono gli indici di covarianza di t. Quando prendiamo la derivata delle componenti
206

rispetto ad yk, tutte queste matrici jacobiane possono passare al di fuori dell’operatore diderivazione poiche la matrice delle derivate seconde si annulla. Otteniamo cosı la correttalegge di trasformazione per le componenti di ∇t.
Il tensore ∇t e dunque definito come l’operatore che ad ogni vettore associa un tensore,dello stesso tipo di t, il cui valore e uguale alla derivata del campo t nella direzione delvettore calcolata rispetto a un sistema di coordinate localmente affine. Scriveremo
(∇t)(X) = X i∇it ,
dove X = X i ∂∂xi e
∇it := (∇t)(∂
∂xi
).
Consideriamo ad esempio un campo vettoriale v = vj ∂∂xj ; la sua derivata covariante sara
un tensore 1-covariante 1-controvariante di componenti ∇ivj . Se (yr) e un altro sistema
di coordinate e vr = ∂yr
∂xi vi sono le componenti di v rispetto ad esso, si ha in generale:
∂vr
∂ys=∂xj
∂ys∂
∂xj
(∂yr
∂xivi)
=∂xj
∂ys∂yr
∂xi∂vi
∂xj+∂xj
∂ys∂2yr
∂xj∂xivi , (9.16)
e quindi, se (xi) e (yk) appartengono alla stessa classe, l’ultimo termine si annulla e otteni-amo che la legge di trasformazione per le componenti ∇iv
j coincide con la (9.10), cioe e ditipo tensoriale. Una volta definito questo tensore, conoscendo le componenti in un sistemalocalmente inerziale possiamo calcolare le componenti in ogni altro sistema di coordinate.
Vogliamo ora trovare la formula che permette di calcolare le derivate covarianti in unqualunque sistema di coordinate. Sia dunque (xi) un sistema non necessariamente local-mente affine. Per calcolare le componenti ∇jv
i del tensore ∇v nel sistema (xi) dobbiamoprima passare ad un sistema localmente affine (yr), calcolare le derivate parziali rispettoa tale sistema di riferimento e poi tornare indietro utilizzando di nuovo la formula (9.16).Si ha cosı
∇nvm =
∂xm
∂yr∂ys
∂xn∇sv
r ;
ma, poiche
vr =∂yr
∂xivi ,
e, inoltre, essendo (yr) un sistema localmente affine,
∇svr =
∂vr
∂ys,
si ha, utilizzando la formula (9.16):
∇nvm =
∂xm
∂yr∂ys
∂xn
[∂xj
∂ys∂yr
∂xi∂vi
∂xj+∂xj
∂ys∂2yr
∂xj∂xivi]
= ∂nvm + Γmniv
i ,
207

dove
∂nvm :=
∂vm
∂xn,
e abbiamo denotato con Γmni le grandezze
Γmni =∂xm
∂yr∂2yr
∂xn∂xi.
Queste ultime grandezze non dipendono dalla particolare scelta del sistema di coordinatenella classe localmente affine assegnata. Infatti, se invece di (yr) prendiamo un altrosistema di coordinate (zk) equivalente a (yr), e facile vedere che
∂xm
∂yr∂2yr
∂xn∂xi=∂xm
∂zr∂2zr
∂xn∂xi.
Questo significa che i coefficienti Γ caratterizzano completamente la connessione rispetto alsistema di coordinate (xi). Osserviamo che le Γmni sono simmetriche rispetto ai due indici(n, i); esse prendono il nome di componenti della connessione nel sistema di coordinate(xi).
Se (xi) e un qualunque sistema di coordinate e Γkij sono le componenti della stessa
connessione rispetto a (xi), abbiamo
Γkij =∂xk
∂yr∂2yr
∂xi∂xj=∂xl
∂yr∂xk
∂xl∂
∂xi
(∂yr
∂xm∂xm
∂xj
)=
=∂xl
∂yr∂xk
∂xl
(∂2yr
∂xm∂xn∂xn
∂xi∂xm
∂xj+
∂yr
∂xm∂2xm
∂xi∂xj
),
e quindi
Γkij = Γlmn∂xk
∂xl∂xn
∂xi∂xm
∂xj+∂xk
∂xl∂2xl
∂xi∂xj, (9.17)
che e la legge di trasformazione per i coefficienti della connessione. Si puo notare che,se non esistesse il secondo termine, Γ si trasformerebbe come un tensore 2-covariante 1-controvariante; e dunque il secondo termine la causa del fatto che la legge di trasformazionenon e di tipo tensoriale.
Evidentemente, per un sistema localmente affine, i coefficienti della connessione siannullano. La connessione puo pertanto essere definita mediante la scelta delle grandezzeΓlmn per un arbitrario sistema di coordinate. La legge di trasformazione (9.17) forniscepoi le corrispondenti grandezze in ogni altro sistema di coordinate. Se prendiamo il campovettoriale v = ∂
∂xj (le cui componenti sono vm = δmj ), abbiamo in particolare
∇nvm = ∂nδ
mj + Γmniδ
ij = Γmnj . (9.18)
Utilizzando la formula (9.9) possiamo esprimere le componenti della connessione tramitele derivate covarianti dei vettori di base:
Γmnj =
⟨(∇v)
(∂
∂xn
); dxm
⟩=
⟨∇n
∂
∂xj; dxm
⟩. (9.19)
208

E ovvio che se una certa combinazione di derivate parziali di un campo tensoriale t costi-tuisce gia un altro campo tensoriale s, allora calcolando s rispetto ad un riferimento local-mente affine si vede che le derivate parziali nella definizione di s possono essere sostituitecon quelle covarianti. Cosı la derivata di un campo scalare, che e un campo covettoriale,puo essere anche scritta con le derivate covarianti:
∂kφ = ∇kφ .
Nella definizione di derivata esterna, ad esempio, le derivate covarianti possono sostituirele derivate ordinarie. Per esempio, se p = pkdx
k e una 1-forma, allora le componenti dellasua derivata esterna sono uguali a
1
2(∂ipk − ∂kpi) =
1
2(∇ipk −∇kpi) .
Analogamente, se β = βk(∂∂xk dx1 ∧ · · · ∧ dxn
)e una densita vettoriale, la sua derivata
esterna (divergenza) sara una densita scalare data da
∂kβk = ∇kβ
k .
Calcoliamo ora la derivata covariante del campo covettoriale dxj . Poiche la formula⟨∂∂xi ; dxj
⟩= δji vale anche in un riferimento localmente affine, la sua derivata covariante
si annulla. Abbiamo cosı:
0 = ∇l
⟨∂
∂xj; dxi
⟩=
⟨∇l
∂
∂xj; dxi
⟩+
⟨∂
∂xj;∇ldx
i
⟩= Γilj +
⟨∂
∂xj;∇ldx
i
⟩,
ovvero ⟨∂
∂xj;∇ldx
i
⟩= − Γilj .
E ovvio che l’operatore di derivazione covariante verifica la regola di Leibnitz quandoagisce sul prodotto di un campo tensoriale per una funzione: ∇l(φt) = (∇lφ)t + φ∇lt =(∂lφ)t+ φ∇lt. Dunque, per un campo covettoriale p = pkdx
k abbiamo
∇lpi =
⟨∂
∂xi; (∇p) ∂
∂xl
⟩=
⟨∂
∂xi;∇l(pkdx
k)
⟩=
=
⟨∂
∂xi; (∂lpk)dxk + pk∇ldx
k
⟩= ∂lpi − pkΓkli .
Per calcolare la derivata covariante di una densita scalare α = ρdx1 ∧ ... ∧ dxn rispettoad un sistema di coordinate (xi), dobbiamo prima passare ad un sistema localmente affine(yr), ottenendo
α = ρdet
(∂x
∂y
)dy1 ∧ ... ∧ dyn ;
209

in questo riferimento possiamo sostituire le derivate covarianti con quelle parziali, e si ha
(∇α)
(∂
∂yr
)=
∂
∂yr
(ρdet
(∂x
∂y
))dy1 ∧ ... ∧ dyn =
=
[det
(∂x
∂y
)∂ρ
∂yr+ ρ
∂
∂yrdet
(∂x
∂y
)]dy1 ∧ ... ∧ dyn =
=
[∂ρ
∂yr+ ρ
(det
(∂x
∂y
))−1∂
∂yrdet
(∂x
∂y
)]dx1 ∧ ... ∧ dxn =
=
[∂ρ
∂yr− ρdet
(∂x
∂y
)∂
∂yr
(det
(∂x
∂y
))−1]dx1 ∧ ... ∧ dxn =
=∂xi
∂yr
[∂ρ
∂xi− ρdet
(∂x
∂y
)∂
∂xidet
(∂y
∂x
)]dx1 ∧ ... ∧ dxn .
Per calcolare la derivata del determinante osserviamo che questo sara la somma dei prodottidelle derivate del determinante rispetto ad ogni elemento di matrice per la derivata dell’e-lemento della matrice stessa. La derivata del determinante rispetto ad un elemento dimatrice e uguale al cofattore di tale elemento, cioe al corrispondente elemento della matriceinversa moltiplicato per il determinante stesso. Allora
∂
∂xidet
(∂y
∂x
)=
∂2ys
∂xi∂xj∂
∂(∂ym
∂xj
)det
(∂y
∂x
)= det
(∂y
∂x
)∂xj
∂ys∂2ys
∂xi∂xj= det
(∂y
∂x
)Γjij .
Sostituendo tale risultato nella formula precedente troviamo
(∇α)(∂
∂yr) =
∂xi
∂yr
[∂ρ
∂xi− ρΓjij
]dx1 ∧ ... ∧ dxn ,
e moltiplicando per la matrice inversa ( ∂yr
∂xm ) abbiamo finalmente
(∇α)(∂
∂xm) =
[∂ρ
∂xm− ρΓjmj
]dx1 ∧ ... ∧ dxn ,
ovvero∇mρ = ∂mρ− ρΓjmj . (9.20)
Come ultimo esempio calcoliamo la derivata covariante di una densita vettoriale. Questapuo essere sempre considerata come il prodotto di un campo vettoriale e di una densitascalare: βk = ρvk. Allora si ha
∇iβk = ∇i(ρv
k) = ρ∇ivk + (∇iρ)vk =
= ρ(∂ivk + Γkijv
j) + (∂iρ− ρΓjij)vk =
= ∂iβk + Γkijβ
i − Γjijβk .
210

Si osservi che questa formula implica immediatamente l’identita ∂kβk = ∇kβ
k, che giaconosciamo.
In modo analogo si puo calcolare la derivata covariante di qualunque campo tensoria-le, considerandolo come somma di prodotti dei tre tipi fondamentali di oggetti: vettori,covettori e densita.
Una connessione permette di definire il concetto di trasporto parallelo di qualunqueoggetto tensoriale lungo una curva assegnata γ nella varieta M . Se t e un tensore attaccatoad un punto m e la curva γ parte da m (cioe γ(0) = m), il trasporto parallelo di t lungo γsara una famiglia t(τ) di tensori dello stesso tipo di t, ognuno attaccato al corrispondentepunto γ(τ), e tale che la sua derivata covariante lungo la curva γ sia nulla:
dγk
dτ∇kt = 0 . (9.21)
Ad esempio la famiglia di vettori che costituisce il trasporto parallelo di un vettore e datadall’equazione
d
dτvl(τ) +
dγk(τ)
dτΓlkm(γ(τ))vm(τ) = 0 . (9.22)
Essendo assegnati i coefficienti della connessione e la curva γ, si tratta di un’equazionelineare alle derivate ordinarie per le incognite vl(τ) e con dato iniziale assegnato per τ = 0,che quindi ammette un’unica soluzione. Si constata immediatamente che lo stesso vale perun generico tensore t.
In generale, il risultato dell’operazione di trasporto parallelo di un tensore da un puntoad un altro dipende non solo dal punto iniziale e da quello finale, ma anche dalla curvascelta per effettuare il trasporto. Pertanto, se si trasporta un vettore lungo una curvachiusa, e possibile che il vettore ottenuto al termine di tale operazione differisca da quellodi partenza (si pensi ad esempio ad una linea chiusa su una sfera costituita da un trattodi equatore e da due archi di cerchi massimi passanti per un polo). Questo fatto saraconsiderato nel paragrafo 9.8 in cui si introdurra il concetto di curvatura.
9.6 Connessione di Levi-Civita.
Un esempio particolarmente importante di connessione e quello di connessione metricao connessione di Levi-Civita.
Se M e una varieta riemanniana, la metrica g induce una connessione in manieranaturale: in ogni punto di M si prende come sistema localmente affine quel sistema dicoordinate nel quale si annullano tutte le derivate prime delle componenti di g. Se esisteun riferimento affine globale, cioe in cui le componenti di g sono costanti ovunque, lametrica g si dice piatta. Infatti, in tal caso si puo sempre trovare una trasformazionelineare di coordinate che renda gkl uguale alla delta di Kronecker (coordinate cartesianeper g).
Per una metrica generica i sistemi localmente affini esistono solo separatamente in ognipunto e non globalmente. Per calcolare i coefficienti Γ della connessione di Levi-Civita in
211

un qualunque riferimento (xi), supponiamo che (yk) sia un riferimento localmente affine.Dalla formula (9.1) segue:
∂
∂xkgij =
∂
∂xk
(∂yr
∂xigrs
∂ys
∂xj
)=
=∂2yr
∂xk∂xigrs
∂ys
∂xj+∂yr
∂xi∂grs∂xk
∂ys
∂xj+∂yr
∂xigrs
∂2ys
∂xk∂xj.
Pero le derivate di grs si annullano:
∂grs∂xk
=∂yt
∂xs∂grs∂yt
= 0 ,
e dunque si ha
∂kgij = Γnki∂yr
∂xngrs
∂ys
∂xj+∂yr
∂xigrs
∂ys
∂xnΓnkj = gnjΓ
nki + gniΓ
nkj . (9.23)
Utilizzando tre volte questa formula e tenendo conto della simmetria di Γ e di g, si ottiene:
(∂igkj + ∂jgki − ∂kgij) = 2gknΓnij ,
da cui
Γnij =1
2gnk(∂igkj + ∂jgki − ∂kgij) . (9.24)
L’espressione a destra si chiama simbolo di Christoffel associato alla metrica g. Dalladefinizione segue che la derivata covariante della metrica rispetto alla sua connessione eidenticamente nulla. In effetti, l’equazione
∇g = 0
puo essere assunta come la definizione stessa della connessione di Levi-Civita.
9.7 Linee geodetiche e coordinate di Gauss.
Nello spazio affine una linea retta parametrizzata da un parametro affine e data da:
xk(t) = xk(0) + tvk .
Una tale curva e univocamente definita dalla scelta del punto di partenza xk(0) e del vettorevk. Tale vettore tangente rimane costante lungo la curva stessa; pertanto, se calcoliamol’accelerazione, cioe la derivata del vettore velocita xk rispetto al parametro affine, questasi annulla. In generale, in una varieta munita di una connessione simmetrica, una curvache gode di questa proprieta si chiama geodetica. Se dunque xk(t) e una parametrizzazione
212

di tale curva, l’annullarsi della accelerazione significa che il vettore tangente vk(t) = xk(t)deve soddisfare l’equazione (9.22), cioe:
0 =d
dtvk +
dxl
dtΓklmv
m = xk + xlΓklmxm . (9.25)
Vediamo dunque che la linea geodetica soddisfa ad una equazione differenziale ordinariadel secondo ordine. Fissati i dati iniziali, cioe il punto di partenza e la velocita in-iziale, esiste una ed una sola geodetica corrispondente. Osserviamo che, se cambiamola parametrizzazione uniformemente, la geodetica rimane geodetica ma la velocita cambiain ogni punto con la stessa proporzione. Infatti, se yk(t) := xk(at) dove a e una costante,allora yk(t) = avk(at), yk(t) = a2xk(at), e dunque anche la curva yk gode della proprietageodetica (9.25).
Usando le linee geodetiche si puo costruire in un intorno di un punto m un sistemadi coordinate, detto sistema di Gauss, che assomiglia al sistema affine dello spazio piatto.Consideriamo lo spazio tangente Tm0
M ad M in m0. Ad ogni vettore v ∈ Tm0M associamo
il punto m(v) ∈M che si trova sulla geodetica definita dal punto m0 e dal vettore v e checorrisponde al valore t = 1 del parametro affine. Dalla osservazione fatta sopra segue che, sev = aw, i punti m(v) e m(w) appartengono alla stessa geodetica. Infatti m(v) corrispondeal valore t = a del parametro affine della geodetica definita da w (e ovvio che m(0) = m0).L’applicazione v 7→ m(v) non e necessariamente biunivoca, perche le diverse geodetichepossono incrociarsi. Esiste pero un intorno dello zero nel quale l’applicazione e biunivoca.Se ek e una base nello spazio tangente TmM , e v = vkek e una parametrizzazionecorrispondente dei vettori tangenti, allora la identificazione sopra fatta permette di definirele coordinate xk di un punto m(vkek) ponendo xk = vk. Per ogni vettore vk la lineaxk(t) := tvk e dunque una geodetica. Per questa linea abbiamo xk(t) ≡ vk, xk(t) ≡ 0, eallora l’equazione (9.25) implica:
vlΓklm(tv)vm = 0 . (9.26)
In particolare si ha vlΓklm(0)vm = 0 per ogni vettore vk. Poiche Γ e simmetrica negli indicibassi, vale la formula di polarizzazione, che implica Γklm(0) = 0, cioe il sistema gaussianoe anche localmente inerziale in m0. Ovviamente non ogni sistema localmente inerziale egaussiano.
Una interessante proprieta del sistema gaussiano si ottiene derivando la formula (9.26)rispetto a t nell’origine:
Γklmn(0) vlvmvn = 0 , (9.27)
dove:
Γklmn :=∂Γklm∂xn
.
Nella formula (9.27) compare solo la parte completamente simmetrica delle derivate dellaconnessione, cioe:
Γk(lmn) =1
3
(Γklmn + Γkmnl + Γknlm
).
213

Poiche tale relazione deve essere soddisfatta per ogni vettore v, si ha:
Γk(lmn)(0) = 0 . (9.28)
Nel caso particolare della connessione di Levi–Civita le geodetiche sono anche le curvedi lunghezza stazionaria. Infatti, la lunghezza di una curva e data dalla formula (9.3). Sedefiniamo la lagrangiana
L(xk, xk) :=√gij(x)xixj ,
le linee di lunghezza stazionaria soddisfano le equazioni di Eulero–Lagrange:
∂L
∂xk− d
dt
∂L
∂xk= 0 ,
cioe:
1
2L(∂kgij)x
ixj− d
dt
1
Lgkjx
j =1
2L(∂kgij)x
ixj− 1
L2
dL
dtgkj x
j− 1
L(∂ngkj)x
nxj− 1
Lgkjx
j = 0 .
Ovviamente, il principio variazionale corrispondente alla lagrangiana L e invariante rispettoalle riparametrizzazioni delle curve. Infatti l’integrale (9.3) non dipende da quale parame-tro scegliamo sulla curva. Possiamo quindi scegliere una parametrizzazione tale che lalunghezza del vettore tangente rimane costante lungo la curva. In tale parametrizzazionesi ha dL
dt= 0 e l’equazione data sopra, dopo aver moltiplicato per L ed alzato l’indice k,
diventa:
−xl − glk(∂igkj)xixj +
1
2glk(∂kgij)x
ixj = 0 .
Poiche la grandezza (∂igkj)xixj e simmetrica rispetto allo scambio di i con j, possiamo
anche riscrivere:
xl +1
2glk(∂igkj + ∂jgki − ∂kgij)x
ixj = xl + Γlij xixj = 0 .
Abbiamo dunque mostrato che la linea di lunghezza stazionaria, parametrizzata in modotale che il vettore tangente abbia lunghezza costante, ha la proprieta geodetica (9.25).
9.8 Curvatura.
Per una data connessione Γ, in ogni punto m esiste un sistema di coordinate (xk)localmente affine in cui si annullano le componenti Γlnk in m. Se inoltre le componenti diΓ si annullano anche in tutto un intorno, cio significa che il sistema di coordinate (xk) elocalmente affine anche nei punti dell’intorno. Dal punto di vista della derivata covariante(o del trasporto parallelo dei tensori) cio significa che questo intorno si comporta comeuna porzione dello spazio affine Rn, perche il trasporto parallelo non dipende dalla curva econsiste semplicemente nel non cambiare le componenti del vettore che si vuole trasportare;cosı possiamo semplicemente identificare tensori applicati in punti diversi dell’intorno.
214

Per una connessione generica cio non e possibile: scegliendo coordinate adattate adun punto e possibile annullare le componenti della connessione in quel punto, ma non lesue derivate. In effetti, pur restando nella stessa classe d’equivalenza di coordinate affinilocali, si puo cercare di scegliere un sistema di coordinate nel quale si annullano le derivateprime dei coefficienti della connessione nel punto m. Constateremo tra poco che cio nonsempre e possibile e che l’ostruzione e misurata da un tensore, che viene detto tensore dicurvatura o tensore di Riemann. Quindi il non annullarsi del tensore di Riemann implicache le componenti di Γ non possono annullarsi in nessun intorno di m, e in tal caso diremoche la connessione non e piatta.
Sia dunque (xk) un sistema di coordinate localmente affini in m. Consideriamo unqualunque sistema di coordinate (ya) tale che nel punto m valga
∂xk
∂ya= δka ,
∂2xk
∂ya∂yb= 0 ; (9.29)
la seconda relazione esprime il fatto che i due sistemi di coordinate sono nella stessa classe,mentre la prima relazione e richiesta solo per semplificare i calcoli, e puo essere sempresoddisfatta con una opportuna trasformazione lineare: il significato di questa condizione eche ogni tensore in m ha le medesime componenti rispetto ai due sistemi di coordinate.
Siano Γlmn le componenti di una connessione rispetto al sistema (xk). Denotiamo,come nel precedente paragrafo, con
Γlmnk := ∂kΓlmn
la derivata delle componenti della connessione rispetto alla coordinata xk. Le analoghecomponenti rispetto al sistema (ya) saranno denotate con Γabc, Γabcd = ∂dΓ
abc. Utilizzando
la legge di trasformazione (9.17) delle componenti della connessione abbiamo
Γabcd =∂
∂yd
(∂ya
∂xlΓlmn
∂xm
∂yb∂xn
∂yc+∂ya
∂xl∂2xl
∂yb∂yc
)=
=∂ya
∂xlΓlmnk
∂xk
∂yd∂xm
∂yb∂xn
∂yc+∂ya
∂xl∂3xl
∂yd∂yb∂yc=
= Γabcd +∂3xa
∂yc∂yb∂yd,
(9.30)
dove si sono utilizzate le due relazioni (9.29). Ora, le derivate terze sono a nostra dispo-sizione (scegliendo corrispondentemente il sistema di coordinate), con l’unica restrizioneche siano completamente simmetriche negli indici b, c, d. Invece le componenti Γabcd sonosimmetriche solo rispetto agli indici b, c. Vediamo dunque che con una scelta opportunadelle coordinate (ya) possiamo annullare (nel punto m) soltanto la parte completamentesimmetrica
Γa(bcd) :=1
3
(Γabcd + Γacdb + Γadbc
)
delle derivate di Γabc; infatti, da (9.30) si ha
Γa(bcd) = Γa(bcd) +∂3xa
∂yb∂yc∂yd,
215

e basta dunque porre∂3xa
∂yb∂yc∂yd= −Γa(bcd)
nel puntom. Come abbiamo visto nel paragrafo precedente, questa condizione e soddisfattaper esempio se le coordinate sono gaussiane (vedi formula (9.28)).
Una volta annullata la parte completamente simmetrica delle derivate di Γabc possiamochiederci come caratterizzare la parte rimanente. Poniamo
Rabcd := Γabdc − Γabcd = ∂cΓabd − ∂dΓ
abc , (9.31)
e osserviamo che la differenza tra Γabcd e la sua parte completamente simmetrica puo essereespressa mediante Rabcd. Infatti, simmetrizzando Rabcd rispetto ai primi indici in basso siha
Ra(bc)d :=1
2(Rabcd +Racbd) =
1
2(Γabdc − Γabcd + Γacdb − Γacbd) =
=1
2(Γadbc + Γacdb + Γabcd) −
3
2Γabcd =
3
2Γa(bcd) −
3
2Γabcd ,
ovvero
Γabcd = Γa(bcd) −2
3Ra(bc)d .
Dunque, in un sistema di coordinate in cui Γa(bcd) si annulla in m, le derivate della connes-sione nel punto m sono date da
Γabcd = −2
3Ra(bc)d ,
e dunque R descrive l’ostruzione all’annullamento completo delle derivate di Γ. E facileverificare che le componenti Rabcd si trasformano come le componenti di un tensore sesi rimane nella classe delle coordinate localmente affini. Per calcolare Rabcd in un sis-tema arbitrario di coordinate (xk), dobbiamo prima passare a un sistema (ya) localmenteaffine, utilizzare la formula (9.31) e poi tornare indietro. Allora, utilizzando il fatto che lecomponenti Γabc si annullano nel punto m, si ha
Rlmnk =∂xl
∂ya∂yb
∂xm∂yc
∂xn∂yd
∂xk
(∂
∂ycΓabd −
∂
∂ydΓabc
)=
=∂xl
∂ya∂yb
∂xm∂yd
∂xk∂
∂xnΓabd −
∂xl
∂ya∂yb
∂xm∂yc
∂xn∂
∂xkΓabc =
=∂
∂xn
(∂xl
∂ya∂yb
∂xm∂yd
∂xkΓabd
)− ∂
∂xk
(∂xl
∂ya∂yb
∂xm∂yl
∂xnΓabc
)=
=∂
∂xn
(Γlmk −
∂xl
∂ya∂2ya
∂xm∂xk
)− ∂
∂xk
(Γlmn − ∂xl
∂ya∂2ya
∂xm∂xn
)=
= Γlmkn − Γlmnk −[∂
∂xn
(∂xl
∂ya
)]∂2ya
∂xm∂xn+
[∂
∂xk
(∂xl
∂ya
)]∂2ya
∂xm∂xn
− ∂xl
∂ya
(∂3ya
∂xm∂xk∂xn− ∂3ya
∂xm∂xn∂xk
).
216

L’ultimo termine si annulla per la simmetria delle derivate terze. Inoltre, in virtu dellarelazione
0 =∂
∂xnδls =
∂
∂xn
(∂xl
∂ya∂ya
∂xs
)=∂ya
∂xs∂
∂xn
(∂xl
∂ya
)+∂xl
∂ya∂2ya
∂xn∂xs,
si ha∂
∂xn
(∂xl
∂ya
)= −∂x
l
∂yb∂2yb
∂xn∂xs∂xs
∂ya,
e quindi
−[∂
∂xn
(∂xl
∂ya
)]∂2ya
∂xm∂xk+
[∂
∂xk
(∂xl
∂ya
)]∂2ya
∂xm∂xn=
=∂xl
∂yb∂2yb
∂xn∂xs∂xs
∂ya∂2ya
∂xm∂xk− ∂xl
∂yb∂2yb
∂xk∂xs∂xs
∂ya∂2ya
∂xm∂xn=
= ΓlsnΓsmk − ΓlskΓsmn .
In conclusione si ha la relazione
Rlmnk = Γlmkn − Γlmnk + ΓlsnΓsmk − ΓlskΓsmn =
= ∂nΓlmk − ∂kΓlmn + ΓlsnΓsmk − ΓlskΓsmn ,(9.32)
che vale in ogni sistema di coordinate. In particolare nei sistemi localmente affini questaformula si riduce alla (9.31). Osserviamo che R e completamente antisimmetrico rispettoagli ultimi due indici in basso:
Rlmnk = −Rlmkn ; (9.33)
inoltre la formula (9.32) implica anche che la parte completamente simmetrica di R siannulla
Rlmnk +Rlnkm +Rlkmn = 0 , (9.34)
come si verifica con semplici calcoli. Da questa relazione si ottiene in particolare chesimmetrizzando R rispetto ai primi due indici non si perde nessuna informazione poiche siha
Rl(mn)k −Rl(mk)n =3
2Rlmnk , (9.35)
e dunque il tensore Rlmnk si esprime mediante Rl(mn)k antisimmetrizzando rispetto agli
ultimi due indici. La dimostrazione delle (9.35) e data da
2Rl(mn)k − 2Rl(mk)n = Rlmnk +Rlmnk −Rlmkn −Rlkmn =
= 2Rlmnk +Rlnmk +Rlknm +Rlmkn −Rlmkn = 3Rlmnk .
Il tensore di curvatura soddisfa anche le cosiddette identita di Bianchi, che sono iden-tita differenziali, anziche algebriche come le (9.33), precisamente
∇sRlmnk + ∇nR
lmks + ∇kR
lmsn = 0 . (9.36)
217

Per dimostrare questa formula e opportuno pensare alla connessione come ad una collezionedi 1-forme differenziali
Γlm = Γlmndxn ,
parametrizzate dagli indici l,m. Se il sistema di coordinate e localmente affine nel puntom, il valore della 2-forma
Rlm = Rlmnkdx
n ∧ dxk
in m e uguale al valore della derivata esterna di Γlm, cioe
Rlm(m) = dΓlm(m) .
Questa formula “purtroppo” e vera soltanto nel punto m. In un suo intorno bisogna inveceutilizzare la formula (9.32), il che, come si verifica facilmente, implica
Rlm = dΓlm + Γls ∧ Γsm .
Calcoliamo ora la derivata esterna di quest’ultima relazione nel punto m; per la proprietadd = 0, abbiamo ddΓlm = 0; inoltre si ha d(Γls∧Γsm) = (dΓls)∧Γsm−Γls ∧ (dΓsm) = 0 poicheΓ si annulla nel punto m. Si ha quindi nel punto m
dRlm(m) = 0 ,
ovvero(∂sR
lmnk + ∂nR
lmks + ∂kR
lmsn) dxn ∧ dxk ∧ dxs = 0 .
D’altra parte, essendo le coordinate utilizzate localmente affini in m, cio significa che lederivate parziali nella formula sopra coincidono con le derivate covarianti delle identita diBianchi (9.36), che sono cosı dimostrate. Nella dimostrazione e stato anche messo in rilievoche queste identita sono sostanzialmente un caso particolare della proprieta fondamentaledd = 0 della derivata esterna.
Nel caso particolare della connessione metrica (o di Levi-Civita), il tensore di curvaturapresenta ulteriori simmetrie algebriche, precisamente
Rlmnk = −Rmlnk = Rnklm , (9.37)
dove il primo indice e stato abbassato con la metrica considerata, cioe Rlmnk = glsRsmnk.
Per dimostrare queste formule in un generico punto m, utilizziamo ancora un sistemalocalmente affine in m, in cui cioe le derivate prime delle componenti della metrica siannullano in m. La formula di Christoffel (9.24) e la formula (9.31) implicano allora che,nel punto m, vale
Rlmnk =1
2∂n[gls(∂kgsm + ∂mgsk − ∂sgmk)] − 1
2∂k[gls(∂ngsm + ∂mgsn − ∂sgmn)] =
=1
2gls(∂n∂kgsm + ∂n∂mgsk − ∂n∂sgmk − ∂k∂ngsm − ∂k∂mgsn + ∂k∂sgmn) ,
218

ovvero
Rlmnk =1
2(∂n∂mglk − ∂n∂lgmk − ∂k∂mgln + ∂k∂lgmn) ,
che implica immediatamente la (9.37).Il tensore Rml := Rkmkl definito per contrazione dal tensore di Riemann si chiama
tensore di Ricci. La sua contrazione R := Rmm prende il nome di curvatura scalare.Nel caso metrico, le identita algebriche (9.37) implicano che il tensore di Ricci e
simmetrico. Inoltre, insieme con le identita di Bianchi (9.36), esse implicano, come siverifica facilmente, la relazione
∇mGml = 0
dove Gml e il tensore di Einstein definito da:
Gml = Rml − 1
2Rδml .
Questa relazione e di fondamentale importanza nell’ambito della relativita generale.Vogliamo infine calcolare, tenendo conto delle identita algebriche sopra mostrate, il
numero di componenti algebricamente indipendenti del tensore di Riemann per una varieta
N -dimensionale. Un oggetto che soddisfa l’identita di antisimmetria (9.33) ha N ·N ·N(N−1)2
componenti indipendenti. Consideriamo ora le identita (9.34). Se due degli indici in bassosono uguali, l’identita e gia soddisfatta in virtu di (9.33); le identita indipendenti sonodunque quelle che corrispondono ai valori degli indici in basso tutti diversi. Il numero di
queste identita e pertanto N N(N−1)(N−2)6
. Cosı il numero di componenti indipendenti e ladifferenza tra i due numeri sopra trovati, ovvero
N2(N − 1)
(N
2− N − 2
6
)=
1
3N2(N − 1)(N + 1) =
4 per N = 224 per N = 380 per N = 4
.
Nel caso delle connessioni di Levi-Civita il numero delle componenti indipendenti emolto ridotto. Infatti, le identita (9.37) implicano che Rlmnk e antisimmetrico rispettoai primi due indici; inoltre esso e simmetrico per scambio della prima coppia di indici
con la seconda coppia. La prima o la seconda coppia possono assumere N(N−1)2 valori
indipendenti; tenendo conto della simmetria tra le coppie otteniamo che il numero deicoefficienti indipendenti e uguale al numero delle matrici simmetriche in uno spazio di
dimensione N(N−1)2 , cioe
1
2
N(N − 1)
2
(N(N − 1)
2+ 1
)=
1 N = 26 N = 321 N = 4
.
Infine bisogna ancora tener conto delle identita (9.34); e facile vedere che per dimensioneN = 2, N = 3, queste non comportano ulteriori condizioni. Invece, per N = 4 ciocomporta una ulteriore identita, sicche, per N = 4, il numero delle componenti del tensoredi Riemann e 20.
219

Vogliamo ora dare un’interpretazione geometrica del tensore di curvatura in termini deltrasporto parallelo definito nel paragrafo 9.5. Sia D una piccola superficie 2-dimensionale,contenente un punto m. Se prendiamo un vettore v attaccato in un punto del contorno∂D, e lo trasportiamo parallelamente lungo tutto il contorno, quando ritorniamo al puntodi partenza il vettore trasportato non coincidera, in generale, con il vettore di partenza.Calcoliamone la differenza, e a tal fine scegliamo una parametrizzazione di ∂D:
[0, 1] ∋ τ 7→ γ(τ) ∈ ∂D , γ(0) = γ(1) ,
e denotiamo con vl(τ) il valore del vettore trasportato parallelamente dal punto γ(0) alpunto γ(τ) lungo ∂V . Dalla definizione di trasporto parallelo (formula (9.22)) segue che:
dvl(τ)
dτ+ vm(τ)Γlmk(γ(τ))
dγk
dτ= 0 ,
e dunque si ha
vl(1) − vl(0) =
∫ 1
0
dvl(τ)
dτdτ = −
∫ 1
0
vm(τ)Γlmk(γ(τ))dγk
dτdτ . (9.38)
Se ora prendiamo coordinate (xk) localmente affini nel punto m, sicche Γ(m) = 0, e seinoltre D e sufficientemente piccolo, i valori di Γ su ∂D saranno piccoli, e potranno essereconsiderati al primo ordine. Se dunque siamo interessati allo sviluppo al prim’ordinedella differenza v(1)− v(0), sara sufficiente nell’integrale a destra della (9.38) prendere vm
all’ordine zero (cioe uguale a vm(0)) e Γ al primo ordine. Abbiamo dunque:
vl(1) − vl(0) ≃ −vm(0)
∫ 1
0
Γlmk(γ(τ))dγk
dτdτ = −vm(0)
∫
∂D
Γlm ,
dove si e utilizzata la forma Γlm gia introdotta sopra. Al primo ordine abbiamo dΓlm ≃ Rlm,e quindi dal teorema di Stokes segue:
vl(1) − vl(0) ≃ −vm(0)
∫
D
Rlm . (9.39)
Vediamo dunque che l’incremento di un vettore quando lo si trasporta parallelamente lungo∂D, al primo ordine, e proporzionale all’integrale della curvatura su D. Ora, negli spaziaffini per definizione si ha sempre v(1) − v(0) = 0. Vediamo dunque in base alla formula(9.39) che il tensore di Riemann misura la “non piattezza” di una varieta.
Per completare questa discussione sul tensore di Riemann mostreremo che esso descriveil commutatore di due derivate covarianti:
[∇k,∇l] = ∇k∇l −∇l∇k .
Infatti
∇k∇lXm = ∂k(∇lX
m) − (∇nXm)Γnlk + (∇lX
n)Γmnk =
= ∂k∂lXm + ∂k(XrΓmrl ) − (∂nX
m)Γnlk −XrΓmrnΓnlk + (∂lXn)Γmnk+
+XrΓnrlΓmnk = ∂k∂lX
m +Xr (∂kΓmrl − ΓmrnΓnlk + ΓnrlΓmnk) +
+ (∂kXn)Γmnl + (∂lX
n)Γmnk − (∂nXm)Γnlk .
220

Cambiando l’indice k con l’indice l la parte simmetrica di questa espressione se ne va erimane soltanto:
∇k∇lXm −∇l∇kX
m = Xr (∂kΓmrl − ∂lΓmrk + ΓmnkΓnrl − ΓmnlΓ
nrk) = XrRmrkl .
Dunque[∇k,∇l]X
m = XrRmrkl . (9.40)
Questa formula puo essere utilizzata anche come definizione del tensore di curvatura. Sipossono facilmente determinare con calcoli analoghi i valori del commutatore [∇k,∇l]sui tensori di qualunque ordine, e tale operatore agisce sempre algebricamente, cioe nondipende dalle derivate delle componenti del tensore.
9.9 Curvatura esterna o seconda forma fondamentale.
Consideriamo una ipersuperficie Σ ⊂ M , dove M e una varieta riemanniana. Inogni punto esistono due vettori ortonormali rispetto a Σ (cioe ortogonali alla superficie enormalizzati). Questi due vettori sono evidentemente uno l’opposto dell’altro. Localmente,e sempre possibile scegliere uno di essi in modo continuo, ma globalmente questa sceltanon e possibile in generale. Per esempio, si consideri il nastro di Mobius. Se cerchiamo dimuoverci lungo la superficie in modo continuo, quando torniamo al punto di partenza ilvettore ha invertito la sua direzione. Una superficie tale che questa scelta sia possibile sidice esternamente orientabile. Una scelta globale di un campo di vettori ortonormali aduna superficie orientabile si dice orientazione esterna della superficie stessa.
Sia ora Σ una superficie orientata, e sia n(m) il campo dei vettori ad essa ortonormali.La derivata covariante di n lungo la superficie e un vettore ortogonale ad n e dunquetangente alla superficie. Se (t1, ..., tn−1) sono coordinate su Σ, si ha dunque:
∇ ∂
∂tIn = k J
I
∂
∂tJ, (9.41)
dove gli indici latini maiuscoli assumono i valori 1, 2, ..., n− 1. Il tensore (n − 1)–dimen-sionale di componenti k J
I cosı definito su Σ si chiama curvatura esterna della superficie oanche seconda forma fondamentale della superficie (in questo contesto, per prima formafondamentale si intende la metrica interna). Per calcolare la curvatura esterna scegliamo unsistema di coordinate (xk) in M tale che x1 = t1, ..., xn−1 = tn−1 su Σ, e che la coordinataxn := η sia costante su Σ. La scelta tra le due orientazioni esterne di Σ corrisponde allascelta tra la direzione in cui η cresce e quella in cui diminuisce. Indichiamo ora con gIJ
la matrice inversa (n− 1)–dimensionale della metrica di Σ (cioe di gIJ ). Si puo mostrarefacilmente la formula
gIJ = gIJ − gηIgηJ
gηη.
Definiamo ora le grandezze:
N =1√gηη
N I = gIJgJη ;
221

allora il vettore definito da:
n =1
N
(∂
∂η−N I ∂
∂xI
)(9.42)
e ortogonale alla superficie. Infatti si ha:
(n| ∂∂xI
)=
1
N
(∂
∂η−N I ∂
∂xJ| ∂∂xJ
)=
1
N(gηJ −N IgIJ ) = 0 .
Possiamo inoltre mostrare che n ha lunghezza unitaria. Infatti, si ha innanzi tutto:
(n|n) =1
N2
(∂
∂η−N I ∂
∂xI| ∂∂η
−NJ ∂
∂xJ
)=
= gηη(gηη −N IgηI) = gηη(gηη − gIJgηIgηJ
);
ora:0 = δηI = gηigiI = gηηgηI + gηJgJI ,
e dunque moltiplicando per l’inversa (n− 1)–dimensionale si ha:
gηJ = −gηηgJIgηI . (9.43)
Inoltre:1 = δηη = gηigiη = gηηgηη + gηIgIη = gηηgηη − gηηgJIgηJgηI .
Da queste relazioni segue infine:
1
gηη= gηη − gJIgηIgηJ , (9.44)
e dunque si ha effettivamente (n|n) = 1. Le grandezze N ed N I prendono rispettivamentei nomi di funzione lapse e di vettore shift.
Per calcolare la curvatura esterna di Σ utilizziamo la formula (9.41) e la formula (9.42).Mostreremo che si ha:
kIJ = −NΓηIJ . (9.45)
In questa formula abbiamo utilizzato la metrica interna della superficie per abbassarel’indice (n − 1)–dimensionale del tensore k J
I . Per prima cosa osserviamo che il secondomembro della formula (9.45) e effettivamente un tensore ben definito su Σ. Infatti, laformula (9.19) implica che:
ΓηIJ =
⟨∇ ∂
∂tI
∂
∂tJ;Ndη
⟩.
Ovviamente ∇ ∂
∂tI
∂∂tJ
e un oggetto definito intrinsecamente su Σ. D’altra parte, Ndη non
dipende dalla particolare scelta della coordinata η, purche tale coordinata sia costantesulla superficie. Infatti, il covettore dη si annulla su ogni vettore ∂
∂tIe dunque solo la sua
lunghezza puo cambiare quando cambia η. Il fattore N assicura l’invarianza anche dellalunghezza. Dunque entrambi i membri di (9.45) non dipendono dal modo in cui il sistema
222

(tI) delle coordinate su Σ e stato completato per ottenere un sistema n–dimensionale (xi),ed e quindi sufficiente provare la (9.45) in un solo sistema di coordinate. Il sistema piuopportuno e quello in cui le linee della coordinata η sono ortogonali a Σ, cioe il vettoreshift e nullo. In questo caso e n = 1
N∂∂η
e, nei punti appartenenti a Σ la metrica ha lastruttura a blocchi:
gkl =
(gIJ 00 gηη
).
La metrica inversa e uguale a:
(gIJ 00 1
gηη
),
cioe si ha gIJ = gIJ e gηη = (gηη)−1. Ne segue:
∇In =
(∂I
1√gηη
)∂
∂η+
1√gηη
∇I∂
∂η= −1
2(gηη)−
32 (∂Igηη)
∂
∂η+
1√gηη
ΓiIη∂
∂xi=
=1
√gηη
[−1
2gηη∂Igηη + ΓηIη
]∂
∂η+
1√gηη
ΓJIη∂
∂tJ.
Ora, poiche gIη = 0 su Σ, si ha:
ΓηIη =1
2gηi(∂ηgiI + ∂Igiη − ∂igIη) =
1
2gηη∂Igηη ,
e dunque la parte di ∇In proporzionale a ∂∂η
effettivamente si annulla e si ha:
∇In =1
√gηη
ΓJIη∂
∂tJ.
Confrontando la formula sopra con la (9.41) si ha:
kJI =1
√gηη
ΓJIη .
Osserviamo che questa formula vale soltanto nel sistema di coordinate che stiamo utiliz-zando (cioe il sistema in cui il vettore shift e nullo), perche, a differenza della formula(9.45), il secondo membro dipende dal modo in cui il sistema (tI) e stato completato perottenere il sistema (xk).
Abbassando l’indice nella formula sopra abbiamo:
kIJ =1
√gηη
gJKΓKIη =1
√gηη
1
2(∂ηgJI + ∂IgJη − ∂JgIη) =
=√gηη
1
2gηη∂ηgIJ = −N 1
2gηη(∂IgηJ + ∂JgηI − ∂ηgIJ ) = −NΓηIJ .
223

La formula (9.45) e dunque provata e non dipende piu dal completamento del sistema dicoordinate. Essa implica immediatamente che il tensore di curvatura esterna e simmetrico.Si osservi anche che, nel sistema in cui lo shift e nullo, la formula sopra implica:
kIJ =1
2N
∂gIJ∂η
,
cioe la curvatura esterna e proporzionale alla derivata della metrica su Σ nella direzioneortogonale alla superficie stessa.
Per dare un’altra interpretazione del tensore di curvatura esterna, consideriamo unacurva xI(t) in Σ (cioe xn(t) = η(t) = cost.), che sia geodetica rispetto alla metrica internadi Σ stessa. Allora
xK + ΓK
IJ xI xJ = 0 ,
dove Γ indica la connessione della metrica (n − 1)–dimensionale gIJ su Σ. Dal punto divista dello spazio ambiente M la curva non e necessariamente geodetica. Calcoliamonel’accelerazione. La parte tangenziale a Σ si annulla:
aK = xK + ΓKij xixj = xK + ΓKIJ x
I xJ = xK + ΓK
IJ xI xJ = 0 ;
infatti, gKη = 0 implica:
ΓKIJ =1
2gKi(∂JgiI + ∂IgiJ − ∂igIJ) =
1
2gKL(∂JgLI + ∂IgLJ − ∂LgIJ ) = Γ
K
IJ .
La parte ortogonale e data da:
aη = η + Γηij xixj = ΓηIJ x
I xJ .
Allora:
a = aη∂
∂η= NΓηIJ x
I xJ1
N
∂
∂η= kIJ x
I xJn .
Supponiamo ora che la curva sia stata parametrizzata in modo tale che la lunghezza dellavelocita sia unitaria. Denotiamo con λ il valore della forma simmetrica kIJ sul vettorevelocita:
λ := kIJ xI xJ .
Allora:a = λn . (9.46)
Vediamo dunque che l’accelerazione e proporzionale al vettore normale, cioe la curvaturadella curva e pari a λ. Questo significa che, localmente, la curva assomiglia ad una circon-ferenza di raggio 1
λ. Abbiamo dunque provato che le geodetiche su Σ, cioe le linee aventi
curvatura nulla in Σ, hanno, rispetto alla geometria dello spazio ambiente, curvatura nonnulla, data dai corrispondenti valori di kIJ sui rispettivi vettori tangenti.
Consideriamo ora il particolare sistema di coordinate ottenuto nel modo seguente.Scelta una funzione positiva N su Σ, in ogni punto individuiamo la geodetica che passa per
224

questo punto ed e definita dal vettore Nn, e completiamo il sistema di coordinate (tI) permezzo del parametro affine di tale geodetica, ponendo η pari a tale parametro. Come nelcaso delle coordinate di Gauss, un tale sistema puo non essere definito globalmente perchele geodetiche possono incrociarsi, ma e sempre definito almeno localmente. Un tale sistemadi coordinate verra detto sistema di coordinate normali generalizzate per la superficie Σ(spesso per coordinate normali si intende il caso particolare nel quale la funzione N eidenticamente uguale ad uno). Nel sistema delle coordinate normali si ha evidentemente:
∂
∂η=
1
Nn ,
e dunque:gηη(t
I , 0) = N2(tI)
gηI(tI , 0) = 0 .
Poiche le linee della coordinata η sono geodetiche, si ha inoltre:
0 ≡ ∇ ∂∂η
∂
∂η= Γiηη
∂
∂xi;
devono quindi annullarsi identicamente Γiηη e dunque anche gijΓjηη. Allora:
0 ≡ gijΓjηη =
1
2(2∂ηgiη − ∂igηη) .
Per i = n (cioe per la coordinata xn = η), questa relazione implica:
0 ≡ ∂ηgηη , (9.47)
e quindi gηη non dipende da η, cioe:
gηη(tI , η) = N2(tI) ;
mentre per i = J si ottiene:0 ≡ 2∂ηgJη − ∂Jgηη ,
cioe:
∂ηgJη(tI , η) =1
2∂Jgηη(tI , η) =
1
2∂JN
2(tI) ;
l’ultimo membro di questa relazione non dipende da η e quindi gJη dipende linearmenteda η stesso. Dovendo essere gηI(t
I , 0) = 0, integrando rispetto ad η otteniamo:
gJη(tI , η) =η
2∂JN
2(tI) .
Per comodita nei calcoli successivi porremo f = N2(tI). Allora:
gηη(tI , η) = f(tI)
gJη(tI , η) =
1
2η∂Jf(tI) .
225
Inoltre, utilizzando le formule (9.44) ed (9.43), abbiamo:
gηη(tI , η) =
[f − 1
4η2gJK(∂Jf)(∂Kf)
]−1
gJη(tI , η) = −gηηgJK 1
2η∂Kf .
Utilizzando queste formule si possono calcolare le derivate delle componenti della metricarispetto ad η. Infatti su Σ abbiamo:
∂ηgηη(tI , 0) = 0
∂ηgJη(tI , 0) = − 1
2fgJK∂Kf .
E’ interessante vedere come cambia la metrica bidimensionale nelle superfici η = cost.adiacenti a Σ. La prima derivata rispetto ad η e uguale, come gia sappiamo, alla curvaturaesterna. Per calcolare la seconda derivata troviamo le componenti RηIηJ del tensore diRiemann n–dimensionale su Σ. Utilizzando l’identita Γηηη ≡ 0 si ha:
RηIηJ = ∂ηΓηIJ − ∂JΓηIη + ΓηiηΓiIJ − ΓηiJΓiIη =
= ∂ηΓηIJ − ∂JΓηIη + ΓηKηΓKIJ − ΓηηJΓηIη − ΓηKJΓKIη .(9.48)
Ma:
ΓηIJ =1
2gηη (∂JgηI + ∂IgηJ − ∂ηgIJ ) +
1
2gηK (∂JgKI + ∂IgKJ − ∂KgIJ ) .
Poiche sappiamo i valori di tutte le componenti e delle loro derivate su Σ, possiamo calcolareil termine di RηIηJ che contiene la derivata della connessione rispetto ad η:
∂ηΓηIJ (0) =1
2f(∂J∂ηgIη + ∂I∂ηgJη − ∂η∂ηgIJ )+
− 1
2f(∂Lf)
1
2gLK (∂JgKI + ∂IgKJ − ∂KgIJ) =
=1
2f
(1
2∂J∂If +
1
2∂I∂Jf − ∂η∂ηgIJ
)− 1
2f(∂Lf)Γ
L
IJ =
=1
2f(∂I∂Jf − ∂η∂ηgIJ − Γ
K
IJ∂Kf) ,
(9.49)
dove Γ denota la connessione della metrica (n−1)–dimensionale su Σ. Gli altri termini della(9.48) su Σ non contegono la derivata rispetto ad η. Basta allora conoscere le corrispondenticomponenti della connessione su Σ:
ΓηIη(0) =1
2gηη (∂ηgηI + ∂Igηη − ∂ηgIη) +
+1
2gηK (∂ηgKI + ∂IgKη − ∂KgIη) =
1
2f∂If .
(9.50)
226

Ne segue:
∂JΓηIη(0) =1
2f∂I∂Jf − 1
2f2(∂If)(∂Jf) .
Inoltre:ΓKIJ (0) = Γ
K
IJ
ΓKIη(0) =1
2gKL (∂ηgLI + ∂IgLη − ∂LgIη) =
1
2gKL∂ηgLI .
Introducendo tutti questi risultati nella formula (9.48) molti termini si elidono e finalmentesi ha:
RηIηJ(tI , 0) = − 1
2f
∂2gIJ∂η2
+1
4fgKL(∂ηgKI)(∂ηgLJ) .
Pero:1
2N∂ηgIJ = kIJ
e allora:
RηIηJ(tI , 0) = − 1
2N2
∂2gIJ∂η2
+ kILkLJ . (9.51)
Questa formula esprime il cambiamento della metrica interna delle superfici η = cost.adiacenti a Σ in termini della curvatura esterna di Σ stessa e del tensore di Riemann dellospazio ambiente. In particolare, se quest’ultimo e piatto, il tensore di Riemann si annulla ela derivata seconda della metrica rispetto ad η e proporzionale al quadrato della curvaturaesterna:
∂2gIJ∂η2
= 2N2kILkLJ .
9.10 Derivata di Lie della metrica e della connessione. Equazione di Killing.
Come caso particolare di quanto fatto nel paragrafo 8.14 per un tensore generico, sipuo definire la derivata di Lie di una metrica:
£Xg := limt→0
(Gtx)∗g − g
t.
Il rapporto incrementale di cui si calcola il limite e un campo tensoriale simmetrico che none necessariamente positivo. Dunque la derivata di Lie di una metrica non e in generale a suavolta una metrica, ma e soltanto un tensore simmetrico. Per calcolare l’espressione di £Xgin un sistema di coordinate possiamo ancora utilizzare la tecnica di passare al riferimento(zl) in cui X = ∂
∂z1(se X si annulla le formule che troveremo sono ancora vere a causa
dell’argomento utilizzato nel paragrafo 8.14). Chiamiamo ˜(£Xg)ij le componenti di £Xg
rispetto al sistema (zl). Poiche X = ∂∂z1
, in questo sistema di coordinate la derivata di Liesi riduce alla derivata parziale:
˜(£Xg)ij =∂gij∂z1
.
227

Passiamo ora ad un generico sistema di coordinate (xk); allora X = ∂zk
∂x1∂∂xk = Xk ∂
∂xk , e
(£Xg)km =∂zi
∂xk∂zj
∂xm˜(£Xg)ij =
∂zi
∂xk∂zj
∂xm∂
∂z1
(∂xr
∂zi∂xs
∂zjgrs
)=
=∂zi
∂xk∂zj
∂xm
(∂Xr
∂zi∂xs
∂zjgrs +
∂xr
∂zi∂Xs
∂zjgrs +
∂xr
∂zi∂xs
∂zjXq ∂grs
∂xq
)=
=∂Xr
∂xkgrm +
∂Xs
∂xmgks +Xq ∂gkm
∂xq=
= ∂kXm −Xr∂kgrm + ∂mXk −Xr∂mgkr +Xr∂rgkm =
= ∂kXm + ∂mXk − 2XsΓskm = ∇kXm + ∇mXk ,
dove ∇ e la derivata covariante rispetto alla connessione di Levi Civita. Si ha quindi
(£Xg)km = ∇kXm + ∇mXk . (9.52)
Un campo vettoriale X tale che la derivata di Lie di g rispetto ad X sia nulla e dettocampo di Killing (o vettore di Killing) e soddisfa dunque l’equazione di Killing:
∇kXm + ∇mXk = 0 . (9.53)
Se X e un vettore di Killing, il suo flusso lascia la metrica invariante; cio significache, nel sistema di coordinate in cui X = ∂
∂z1, la metrica non dipende da z1. In questo
caso il flusso e detto simmetria della metrica g. In generale, una metrica non ha simmetriee quindi l’equazione di Killing corrispondente non ammette soluzione. Per visualizzarela situazione pensiamo ad una superficie bidimensionale. Una simmetria della metricacorrisponde ad un movimento della superficie su se stessa in cui non ci sia deformazione.Cio e possibile ad esempio se la geometria della superficie e piatta o sferica. E facile capirequanto siano rare le simmetrie! Nello spazio euclideo piatto, gli unici vettori di Killingsono le traslazioni e le rotazioni.
Si puo definire anche la derivata di Lie di una connessione simmetrica. Infatti, essendola connessione simmetrica un riferimento inerziale, e possibile definire il pull-back di unaconnessione, che sposta il riferimento da un punto a un’altro. La differenza tra due connes-sioni (quella spostata e quella originale) non e una connessione, ma un campo tensoriale,poiche la parte non omogenea della legge di trasformazione (9.17) si annulla se si prendela differenza di due connessioni. Per calcolare l’espressione in coordinate della derivata diLie di una connessione rispetto ad un campo vettoriale X , passiamo come al solito ad un
sistema di riferimento (zl) in cui X = ∂∂z1
. Denotiamo con ˜(£XΓ)a
bc le componenti delladerivata di Lie nel sistema (zl). Allora
˜(£XΓ)a
bc =∂Γabc∂z1
.
228

Trasformiamo questo tensore passando ad un generico sistema di coordinate (xk):
(£XΓ)kij =∂xk
∂za∂zb
∂xi∂zc
∂xj˜(£XΓ)
a
bc =
=∂xk
∂za∂zb
∂xi∂zc
∂xj∂
∂z1
(∂za
∂xm∂xl
∂zb∂xr
∂zcΓmlr +
∂za
∂xl∂2xl
∂zb∂zc
)=
=∂xk
∂za∂zb
∂xi∂zc
∂xj
∂
∂z1
(∂za
∂xm
)∂xl
∂zb∂xr
∂zcΓmlr+
∂za
∂xm∂X l
∂zb∂xr
∂zcΓmlr +
∂Xr
∂zc∂za
∂xm∂xl
∂zbΓmlr+
+∂za
∂xm∂xl
∂zb∂xr
∂zcXq ∂Γmlr
∂xq+
∂
∂z1
(∂za
∂xl
)∂2xl
∂zb∂zc+∂za
∂xl∂2X l
∂zb∂zc
=
= −∂Xk
∂xmΓmij +
∂X l
∂xiΓklj +
∂Xr
∂xjΓkir+
+Xq∂Γkij∂xq
− ∂Xk
∂xs∂2xs
∂zb∂zc∂zb
∂xi∂zc
∂xj+
∂2Xk
∂zb∂zc∂zb
∂xi∂zc
∂xj=
= ∂i∂jXk + (∂iX
l)Γkij + (∂jXl)Γkil − (∂mX
k)Γmij +X l∂lΓkij =
= ∂i(∇jXk) − (∂iX
l)Γklj + (∂iXl)Γklj + (∇jX
l −XmΓlmj)Γkil − (∇mX
k −X lΓklm)Γmij+
+X l(∂lΓkij − ∂iΓ
kij) = ∇i∇jX
k +X lRkjli ,
e finalmente si ha(£XΓ)kij = ∇i∇jX
k +X lRkjli .
Per mostrare che il tensore a destra e simmetrico negli indici ij, scomponiamolo nella partesimmetrica e nella parte antisimmetrica, ed utilizziamo la formula (9.40):
(£XΓ)kij = ∇(i∇j)Xk + ∇[i∇j]X
k +X lRkjli = ∇(i∇j)Xk +
1
2X lRklij +X lRkjli .
Utilizzando adesso l’identita (9.34) abbiamo:
1
2Rklij +Rkjli = −1
2Rkjli −
1
2Rkijl +Rkjli =
1
2
(Rkjil −Rkijl − 2Rkjil
)=
= −1
2(Rkijl +Rkjil) = −Rk(ij)l .
Allora abbiamo(£XΓ)kij = ∇(i∇j)X
k −X lRk(ij)l .
Se Γ e una connessione metrica si verifica immediatamente che
(£XΓ)kij =1
2gkm (∇j(£Xg)mi + ∇i(£Xg)mj −∇m(£Xg)ij) ,
da cui segue∇j(£Xg)mi = gmk(£XΓ)kij + gik(£XΓ)kmj .
Cio significa che i vettori di Killing che sono simmetrie per la metrica, sono anche simmetriedella sua connessione di Levi–Civita, e questi ultimi sono quelli per cui la derivata £Xg ecovariantamente costante.
229

230

Capitolo 10. ELEMENTI DI GEOMETRIA SIMPLETTICA.
10.1 Elementi di teoria simplettica del controllo.
Molte teorie fisiche possono essere formulate nel linguaggio della teoria del controllo,cioe come relazione tra un certo numero di grandezze controllate dallo sperimentatore e legrandezze di risposta che vengono da lui misurate. La formulazione generale di una taleteoria richiede l’introduzione di un fibrato di controllo P, che e un fibrato su una base C,detta spazio dei parametri di controllo.
Ad ogni punto c ∈ C, (cioe ad ogni scelta dei parametri di controllo) corrispondela fibra Pc che rappresenta tutte le misure che uno sperimentatore puo immaginare diottenere quando ha fissato c. Ogni sistema fisico concreto corrisponde ad una sottovarietaΛ di P che contiene solo le risposte che sono possibili per quel sistema. Molto spessoquesta sottovarieta e anche una sezione di P, cioe e una sottovarieta che contiene una solarisposta del sistema per ogni scelta del controllo; esistono pero anche sistemi di controlloper i quali questo non avviene, per esempio i sistemi con isteresi.
Per visualizzare alcune strutture che vogliamo discutere in questo paragrafo, utilizzi-amo un esempio dovuto a W.M.Tulczyjew. Consideriamo la termostatica di un corposemplice: il fibrato di controllo e un sottoinsieme di R4 corrispondente ai valori positividei 4 parametri: volume, pressione, temperatura, entropia, cioe :
P = (V, P, T, S) ∈ R4 : V, P, T, S > 0 .
Ogni corpo reale ha solo due gradi di liberta termodinamici che possiamo controllare: unavolta fissati due parametri di controllo, gli altri due parametri risultano univocamentedeterminati dai equazioni di stato (equazioni costitutive). Misurando la relazione tracontrollo e risposta, si trova una sottovarieta 2-dimensionale Λ ⊂ P, che caratterizzacompletamente le proprieta termodinamiche del corpo. La sottovarieta Λ puo dunqueessere descritta da due equazioni di stato; se per esempio prendiamo V e T come parametridi controllo, Λ e descritta da due funzioni φ e χ tali che
Λ = (V, P, T, S) : P = φ(V, T );S = χ(V, T ) (10.1) .
In realta, questa struttura e ancora troppo generale perche si trova che per ogni corpofisico reale vale l’identita di Maxwell:
(∂P
∂T
)
V
=
(∂S
∂V
)
T
,
ovvero∂φ
∂T=∂χ
∂V. (10.2)
231

Il modo naturale di risolvere questa equazione consiste nel considerare φ e χ come compo-nenti di un campo covettoriale sullo spazio dei parametri di controllo :
ϑ = φdV + χdT ,
perche l’identita (10.2) significa semplicemente che dϑ = 0, cioe che, localmente, ϑ e laderivata esterna di una opportuna funzione. Per motivi storici, denoteremo tale funzionecon −F . La funzione F prende il nome di energia libera di Helmholtz. Le funzioni φ e χnon sono dunque indipendenti ma si ha:
φ = −∂F∂V
χ = −∂F∂T
,
e le due equazioni di stato che costituiscono la definizione (10.1) di Λ si possono scriverenella forma:
dF (V, T ) = −PdV − SdT .
La coppia di parametri (−P,−S) si presta in maniera naturale ad essere interpretata comecovettore cotangente allo spazio dei parametri di controllo C descritto dai parametri (V, T ).In questo caso, dunque, il fibrato di controllo e un fibrato cotangente; inoltre, l’insiemedegli stati fisicamente ammissibili (10.1) a sua volta non e un insieme qualunque ma esempre il grafico della derivata di una opportuna funzione dei parametri di controllo:
Λ =
(V, P, T, S) : P = −∂F
∂V, S = −∂F
∂T
.
Tale funzione viene detta funzione generatrice della sottovarieta Λ.Una teoria del controllo per un sistema che soddisfa a queste due restrizioni (cioe Λ e
il grafico della derivata di una funzione dei parametri di controllo) si dice teoria simpletticadel controllo.
Un sistema fisico puo essere controllato in diversi modi, scambiando alcuni parametridi controllo con alcuni parametri di risposta. Cosı, nel nostro esempio termodinamico,invece di controllare V e T possiamo controllare, ad esempio, V ed S; dal punto di vistasperimentale, controllare T consiste nel porre il corpo in un bagno termico, mentre con-trollare S consiste nell’isolare adiabaticamente il corpo stesso. La sottovarieta Λ risulta inquesto caso descritta da due nuove funzioni α e β :
Λ = (V, P, T, S) : P = α(V, S);T = β(V, S) .
Anche in questo caso vale un’identita di Maxwell
(∂P
∂S
)
V
=
(−∂T∂V
)
S
.
Segnaliamo che le due identita di Maxwell non sono indipendenti, ma una implica l’altra.Basta infatti osservare che SdT = d(TS) − TdS, sicche la relazione dF = −PdV − SdT
232

comporta d(F − TS) = −PdV + TdS. Nel caso presente l’identita di Maxwell implica chele due funzioni α e β non sono indipendenti: esiste U(V, S) (energia interna) tale che
α = −∂U∂V
β =∂U
∂S
o, in altri termini,dU = −PdV + TdS .
La coppia di parametri (−P, T ) puo essere dunque interpretata, analogamente a quantofatto prima, come covettore cotangente allo spazio dei parametri di controllo C descrittodai parametri (V, S). La sottovarieta Λ appare ora come il grafico della derivata di Unel fibrato cotangente T ∗C, e la funzione U svolge il ruolo di funzione generatrice. Inmaniera analoga possiamo costruire gli altri due modi di controllo possibili. Infatti lostesso procedimento e applicabile quando si scelgano come parametri di controllo (P, S) (ilcorrispondente potenziale sara l’entalpia) o (P, T ) (corrispondente al potenziale di Gibbs).Non e pero possibile ritrovare la stessa struttura quando si prendano (V, P ) come parametridi controllo. Infatti Λ puo perfettamente essere parametrizzata con tali parametri, ma intal caso manca l’analogo delle identita di Maxwell.
Si capisce dunque come sia significativo ricercare un criterio che permetta di sceglieretra “parametrizzazioni buone” (cioe tali che Λ e il grafico della derivata di una funzione) e“parametrizzazioni cattive” per le quali questa proprieta non vale; inoltre vogliamo trovareun modo di formulare le identita di Maxwell indipendentemente dalla scelta del modo dicontrollo. Questo criterio e dato dall’esistenza di una struttura simplettica dello spaziodegli stati P. Consideriamo una generica varieta Q e poniamo la seguenteDefinizione: Si dice 1-forma canonica sul fibrato cotangente T ∗Q la forma Θ il cui valoreΘp in un punto p ∈ T ∗Q e dato da
〈v; Θp〉T∗Q= 〈π∗v; p〉Q (10.3)
per ogni vettore v tangente a T ∗Q nel punto p.Per π intenderemo sempre la proiezione canonica di T ∗Q su Q, che ad ogni punto p ∈ T ∗Qassocia il punto π(p) ∈ Q, in cui p e attaccato. La formula (10.3) significa allora che
Θp = π∗p . (10.4)
Se (qi) sono coordinate su Q e (pi, qi) sono coordinate su T ∗Q (cioe si ha p = pidq
i), alloraogni vettore tangente a T ∗Q e della forma
v = αi∂
∂qi+ βi
∂
∂pi.
L’operatore di proiezione π∗ consiste semplicemente nel dimenticare la parte verticale, cioee tale che
π∗v = αi∂
∂qi.
233

Se dunqueΘp = aidq
i + bidpi ,
abbiamo〈v; Θp〉T∗Q = aiα
i + βibi , (10.5)
mentre
〈π∗v; p〉Q =
⟨αi
∂
∂qi; pidq
i
⟩= piα
i . (10.6)
Affinche la (10.5) e la (10.6) coincidano per ogni scelta di (αi, βi) si deve avere
bi = 0 , ai = pi ,
cioeΘp = pidq
i , (10.7)
dove ora pi e considerato non come un fissato covettore, ma come una delle coordinate suT ∗Q.Definizione: Si dice forma simplettica canonica su un fibrato cotangente la derivata esternaΩ della 1-forma canonica Θ:
Ω := dΘ . (10.8)
La formula (10.7) implica che, nelle coordinate (p, q), Ω e data da
Ω = dpi ∧ dqi . (10.9)
Tornando al nostro esempio termodinamico, vediamo che la forma simplettica e datada
Ω = dV ∧ dP + dT ∧ dS .
Infatti le due parametrizzazioni di P che abbiamo discusso corrispondono alle due diverse1-forme canoniche
ΘF = −PdV − SdT
ΘU = −PdV + TdS ,
mentre la forma simplettica corrispondente e sempre la medesima:
dΘF = dΘU = Ω .
Una parametrizzazione di P ≃ T ∗C, sara chiamata modo di controllo solo quando la formasimplettica portata da T ∗C coincide con Ω.
Si puo mostrare che le identita di Maxwell, una volta soddisfatte in un modo dicontrollo, valgono anche in qualunque altro. Infatti, le identita di Maxwell sono equivalentialla proprieta che la forma simplettica si annulla quando e applicata a vettori tangenti a Λ(o, come si dice, quando e ristretta a Λ). Questa proprieta e intrinseca, indipendente dallaparametrizzazione cioe dalla scelta del modo di controllo. Per vedere questo nel caso di
234

modo di controllo generico, osserviamo che, se Λ e il grafico della derivata di una funzione(funzione generatrice), si ha:
Λ = (pi, qi) : pi =
∂f
∂qi ,
e la formula (10.7) implica che la restrizione Θ∣∣Λ
della 1-forma canonica Θ a Λ e una formachiusa, cioe
0 = d(Θ∣∣Λ
) = dΘ∣∣Λ
(10.10)
(la restrizione e il pull-back, tramite l’applicazione di immersione di Λ in P, della formaΘ da P su Λ, e dunque commuta con la derivata esterna). Allora la forma Ω si annullaquando e applicata a due vettori tangenti a Λ. Genericamente e vero anche l’inverso: seΛ e una sezione di T ∗Q (cioe le control response relations sono biunivoche, ovvero perogni controllo c’e una sola risposta) l’equazione Ω
∣∣Λ
= 0 implica che d(Θ∣∣Λ
) = 0 e allora
localmente vale pi = ∂f∂qi .
Naturalmente ogni sottovarieta Λ di Λ soddisfa anch’essa alla proprieta Ω∣∣Λ
= 0
se Ω∣∣Λ
= 0, ma avviene che le effettive equazioni costitutive che si presentano in fisica
corrispondono sempre a sottovarieta la cui dimensione e uguale dim C = 12dim T ∗Q.
Definizione: Una sottovarieta Λ ⊂ T ∗Q si dice lagrangiana se1) Ω
∣∣Λ
= 0
2) dim Λ = 12dim T ∗Q.
E proprio questa la formulazione che cercavamo: Λ e una sottovarieta lagrangiana see soltanto se verifica le identita di Maxwell in ogni modo di controllo e ha le giuste dimen-sioni. In teoria simplettica del controllo si considerano equazioni di stato che corrispondonosempre a sottovarieta lagrangiane. Questa proprieta, come abbiamo visto, implica le iden-tita di Maxwell in ogni modo di controllo; quindi tali identita sono proprieta generali delsistema fisico.
Tornando alla discussione generale per un fibrato cotangente P ≃ T ∗Q dotato della 2-forma simplettica canonica, osserviamo che tale forma permette di definire un isomorfismotra vettori e covettori, che spesso e denotato col simbolo “bemolle”:
TP ∋ X → X := X Ω ∈ T ∗P .
Se (qi, pi) sono coordinate su P e se X = αi ∂∂qi +βi
∂∂pi
, allora, per ogni Y = ai ∂∂qi + bi
∂∂pi
,abbiamo ⟨
Y ;X⟩
= 〈Y ;X Ω〉 =⟨X, Y ; dpi ∧ dqi
⟩= βia
i − αibi ,
il che significa
X = βidqi − αidpi . (10.11)
Si vede che questo isomorfismo e invertibile. L’isomorfismo inverso viene denotato con ilsimbolo “diesis”:
T ∗P ∋ ϑ→ ϑ♯ ∈ TP ,
235

dove (ϑ♯) = ϑ, (X)♯ = X . Questa proprieta di invertibilita e utilizzata per definire unospazio simplettico astratto, non necessariamente coincidente con il fibrato cotangente diuna varieta :Definizione: uno spazio simplettico e una varieta differenziale P munita di una 2-forma Ωtale che1) Ω e chiusa (dΩ = 0),2) Ω e non degenere (cioe l’operazione “bemolle” e invertibile).
Il fibrato cotangente e dunque un esempio di spazio simplettico. Il fatto che Ω sia nondegenere implica che la sua matrice Ωkl e invertibile (det Ω 6= 0).
Un semplice esercizio di algebra mostra che perche esista una matrice antisimmetricainvertibile lo spazio deve essere di dimensione pari; cio significa che dim P = 2n. In talcaso si puo provare un teorema (teorema di Darboux) che afferma che localmente esistonosempre delle coordinate (pi, q
i), con i = 1, ..., n tali che Ω = dpi ∧ dqi, cioe tali che lamatrice Ωkl delle sue componenti e della forma:
Ωkl =
(0 1−1 0
)
10.2 Formulazione simplettica della dinamica delle particelle.
Un esempio bello ed importante di spazio simplettico con due modi di controllonaturali, corrispondenti alle formulazioni lagrangiana ed hamiltoniana della meccanicarazionale, e stato proposto da W. M. Tulczyjew. Questa formulazione della dinamica ebasata sull’esistenza di isomorfismi canonici tra i seguenti spazi:
T ∗(T ∗Q) ≃ T (T ∗Q) ≃ T ∗(TQ) . (10.12)
per ogni varieta differenziale Q. Come vedremo, le equazioni del moto definiscono unasottovarieta lagrangiana nello spazio P = T (T ∗Q). Un punto di tale spazio descrive laposizione in Q, il momento e le loro corrispondenti derivate temporali. Allora, se prendiamoP come “spazio delle fasi”, i due suddetti isomorfismi ci permettono di scegliere in P duediversi modi di controllo:
T ∗C ≃ P ≃ T ∗C ,
dove C = T ∗Q, C = TQ. A tali due modi di controllo corrispondono due funzioni gen-eratrici che descrivono le equazioni del moto: la hamiltoniana −H definita su C e lalagrangiana L definita su C.
L’isomorfismo T ∗(T ∗Q) = T (T ∗Q) e dato dagli operatori “bemolle” e “diesis” nelfibrato cotangente T ∗Q che abbiamo discusso nel paragrafo precedente. Questi due op-eratori permettono di identificare i vettori e i covettori su T ∗Q, cioe danno l’isomorfismotra T ∗(T ∗Q) e T (T ∗Q). Come si e appena visto, se (qi, pi) sono coordinate su T ∗Q, e seX = qi ∂
∂qi + pi∂∂pi e un vettore tangente a T ∗Q, allora il corrispondente covettore X e
uguale aX = pidq
i − qidpi .
236

Vogliamo ora mostrare che esiste anche un isomorfismo naturale tra T (T ∗Q) e T ∗(TQ):
k : T (T ∗Q) → T ∗(TQ) .
Come vedremo, in coordinate tale isomorfismo si esprime come
k(X) = pidqi + pidq
i .
Sia dunque X un elemento di T (T ∗Q), cioe un vettore tangente a T ∗Q in un puntop ∈ T ∗Q. Questo vettore puo essere rappresentato come una curva
t→ Σ(t) ∈ T ∗Q ,
con Σ(0) = p. Definiamo la proiezione di Σ su Q:
γ(t) := π(Σ(t)) .
Sia q = γ(0) ∈ Q e v = γ(0) ∈ TqQ il suo vettore tangente. Per definire k(X) come uncovettore su TQ attaccato nel punto v, dobbiamo specificare il suo valore 〈Y ; k(X)〉 suogni vettore Y tangente a TQ nel punto v. Tale vettore Y puo essere rappresentato dauna curva nello spazio dei vettori tangenti a Q:
s→ Γ(s) ∈ TQ .
Ma ogni vettore tangente a Q e a sua volta rappresentato da una curva in Q, sicche Y puoessere rappresentato dall’applicazione a due parametri
(s, t) → σ(s, t) ∈ Q ,
tale cheσ(0, 0) = q
σ(0, t) = γ(t)
∂σ
∂t(s, 0) = Γ(0) .
L’applicazione σ ci permette di definire un’altra curva in TQ:
Γ(t) =∂σ
∂s(0, t) .
Ma osserviamo che Γ(t) e un vettore tangente a Q nel punto γ(t), cioe proprio nello stessopunto in cui era attaccato il covettore Σ(t). Allora possiamo porre:
〈Y ; k(X)〉 :=d
dt
⟨Γ(t); Σ(t)
⟩γ(t)
∣∣∣t=0
.
237

Dobbiamo infine mostrare che la definzione non dipende dalle scelte delle diverse curveche abbiamo effettuato. A tale scopo, basta mostrare che k e ben definito in termini dellecoordinate. Se (qi, pi) sono coordinate canoniche in T ∗Q, generate dal sistema (qi) dicoordinate in Q, ogni vettore tangente X puo essere sviluppato sulla base ( ∂
∂qi ,∂∂pi
). In
termini delle coordinate, se Σ(t) = (qi(t), pi(t)), il suo vettore tangente e
X = qi∂
∂qi+ pi
∂
∂pi.
Utilizziamo (qi, pi, qi, pi) come coordinate in T (T ∗Q). Allo stesso tempo, (qi, qi) sono
coordinate in TQ. Sia v = (qi, qi), e
Y = ai∂
∂qi+ bi
∂
∂qi(10.13)
un vettore tangente a TQ attaccato in v. In termini delle coordinate le applicazioni γ e σsi rappresentano come:
γ(t) = (qi(t))
σ(s, t) = (qi(s, t)) .
doveqi(0, 0) = qi
∂qi
∂t(0, 0) = qi
∂qi
∂s(0, 0) = ai
∂2qi
∂s∂t(0, 0) = bi ,
Abbiamo dunque
〈Y ; k(X)〉 =d
dt
⟨∂qi
∂s(0, t)
∂
∂qi; pj(t)dq
j
⟩ ∣∣∣t=0
=
=d
dt
(∂qi
∂s(0, t)pi(t)
)∣∣∣t=0
=∂2qi
∂t∂s(0, 0)pi +
∂qi
∂s(0, 0)pi = bipi + aipi ,
(10.14)Sicche, confrontando (10.13) con (10.14), si vede che
k(X) = pidqi + pidq
i . (10.15)
Questa formula prova che la nostra costruzione non dipende dalla scelta delle curve Σ e Γ,e pertanto abbiamo dimostrato l’esistenza dell’isomorfismo a destra della (10.12).
Lo spazio P = T (T ∗Q) puo essere dunque rappresentato come il fibrato cotangentea TQ o come il fibrato cotangente a T ∗Q. E facile verificare che le forme simplettiche
238

associate a queste due rappresentazioni coincidono. Infatti, la formula (10.15) implica chela 1-forma canonica ΘL su P associata con il modo di controllo P ≃ T ∗(TQ) e :
ΘL = pidqi + pidq
i . (10.16)
Prendiamo ora il modo di controllo P ≃ T ∗(T ∗Q). La formula (10.11) con X = qi ∂∂qi +
pi∂∂pi
, implica che X = pidqi − qidpi, e cio a sua volta significa che la corrispondente
1-forma canonica ΘH su P e uguale a
ΘH = pidqi − qidpi . (10.17)
Allora si ha:dΘL = dΘH = dpi ∧ dqi + dpi ∧ dqi =: Ω . (10.18)
Nello spazio 4n-dimensionale P associato ad un sistema meccanico con n gradi diliberta , i parametri (qi, pi, q
i, pi) corrispondono a posizioni, momenti, velocita e forzeapplicate. In ogni situazione dinamica concreta, di questi 4n parametri solo 2n sonoindipendenti: i rimanenti 2n si ottengono dalle equazioni del moto. Cosı le equazioni delmoto stesse possono essere interpretate come la definizione di una sottovarieta Λ ⊂ P; inmolti casi questa sottovarieta e lagrangiana.
Nel modo di controllo P = T ∗(TQ), Λ e descritta da una funzione generatrice che sichiama funzione lagrangiana L:
dL(qi, qi) = pidqi + pidq
i , (10.19)
ovvero∂L
∂qi= pi
∂L
∂qi= pi .
Nel modo di controllo P = T ∗(T ∗Q) le stesse equazioni del moto (cioe la stessa sottovarietaΛ) sono generate da una funzione −H, dove H prende il nome di hamiltoniana:
−dH(qi, pi) = pidqi − qidpi , (10.20)
ovvero:
−∂H∂qi
= pi
∂H
∂pi= qi .
La differenza tra le equazioni (10.19) e (10.20) da la formula di trasformazione di Legendre:
d(L+H) = d(piqi) ,
239

che permette di passare da una descrizione all’altra.Per finire osserviamo che la formula (10.19) puo essere scritta come
dL =d
dt(pidq
i) . (10.21)
Questa formula e importante per lo studio delle funzioni generatrici delle trasformazionicanoniche, che vengono descritte integrando la relazione (10.21) su un intervallo temporale(t1, t2).
10.3 Formalismo simplettico per la teoria dei campi.
Anche in teoria dei campi, dove si ha a che fare con equazioni alle derivate parziali,e possibile interpretare le equazioni di campo come relazioni simplettiche. Prendiamo ilmodello piu semplice dove i campi sono definiti sulla varieta spazio-tempo M e prendonovalori in uno spazio vettoriale fissato F . Nel caso in cui i campi siano sezioni di qualchefibrato di oggetti geometrici su M , l’analisi che segue necessita di qualche generalizzazione,ma, per gli scopi della meccanica dei continui, e sufficiente considerare il caso su indicato.
Consideriamo dunque la teoria delle applicazioni M → F . Se φa sono coordinate suF relative alla base (fa), e (xµ) coordinate su M , allora una di tali applicazioni e descrittadai campi φa = φa(xµ); le sue derivate parziali
φaµ := ∂µφa ,
sono le componenti di un covettore su M a valori in F :
∂φ ∈ F ⊗ T ∗M
dove∂φ = φaµfa ⊗ dxµ
(vedi formula (8.4)).Supponiamo che le leggi della fisica che governano i campi siano date da un principio
variazionale
δ
∫L = 0 , (10.22)
dove L e una funzione dei campi e delle loro derivate a valori nelle densita scalari su M :
L = L(φa, φaµ)dx0 ∧ dx1 ∧ dx2 ∧ dx3 .
Per sviluppare il formalismo simplettico, dobbiamo anche introdurre i momenti coniugatiai campi φa:
π µa :=
∂L
∂φaµ. (10.23)
240

E immediato rendersi conto che, per quanto riguarda le proprieta di trasformazione quandosi cambia base nello spazio F , un tale oggetto si comporta come un covettore. Per fissare leproprieta di trasformazione sotto un cambiamento di coordinate in M e invece necessarioricordare che L e una densita scalare e quindi π µ
a non e un vettore, ma una densitavettoriale. Cio significa che le componenti π µ
a definiscono un oggetto geometrico
π = π µa
(∂
∂xµdx0 ∧ dx1 ∧ dx2 ∧ dx3
)⊗ fa ∈
(3∧T ∗M
)⊗ F ∗ ,
dove (fa) e la base duale di (fa) nello spazio F ∗ duale a F . Gli oggetti di questo tipopossono essere chiamati covettori su F a valori nelle densita vettoriali su M . Tali oggettisono in un certo senso duali agli elementi dello spazio F ⊗T ∗M . Infatti, possiamo definireil valore di π su ∂φ:
< π|∂φ >∈4∧T ∗M . (10.24)
Questo valore si ottiene applicando prima la componente F ∗ di π alla componente F di∂φ e quindi moltiplicando esternamente la componente
∧3T ∗M per la componente T ∗M .
E ovvio che in termini delle coordinate il valore di (10.24) e uguale a
< π|∂φ >= (π µa φaµ)dx0 ∧ dx1 ∧ dx2 ∧ dx3 .
Le equazioni di Eulero–Lagrange generate da (10.22),
∂µ∂L
∂φaµ=
∂L
∂φa, (10.25)
insieme alla definizione dei momenti coniugati data dall’equazione (10.23), possono esserescritte nella forma di una relazione simplettica:
δL(φa, φaµ) = ∂µ (π µa δφa) = (∂µπ
µa )δφa + π µ
a δφaµ , (10.26)
ovviamente equivalente a (10.25), (10.23) e analoga alle relazioni (10.19) o (10.21) delladinamica delle particelle. Qui, come spazio C dei parametri di controllo si prende lo spaziodei valori dei campi e delle loro derivate in un punto fissato di M :
C = F × (F ⊗ T ∗xM)
(nel caso dei campi geometrici, questo spazio deve essere sostituito dallo spazio degli 1–getti su M). Come parametri di risposta appaiono le componenti del momento coniugatoπ e le componenti della sua divergenza. Queste ultime sono le componenti di un covettoresu F a valori nelle densita scalari su M :
div π = (∂µπµ
a )(dx0 ∧ dx1 ∧ dx2 ∧ dx3) ⊗ fa .
Osserviamo che, nella formula (10.26), abbiamo gia “diviso” ambo i membri dell’e-quazione per il fattore (dx0 ∧ dx1 ∧ dx2 ∧ dx3), che altrimenti comparirebbe a fattore di
241

ogni termine (per un’analisi piu accurata di questa costruzione si rimanda il lettore al libro[15]).
Come esempio consideriamo l’equazione delle onde, dove F = R1 e monodimensionale,con lagrangiana data da
L = −1
2
√−det g gµνφµφν .
Utilizzando coordinate lorentziane nello spazio di Minkowski, si ha che le uniche compo-nenti della metrica diverse da zero sono: g00 = −1, g11 = g22 = g33 = 1, e l’espressionedella lagrangiana e
L =1
2(φ)2 − 1
2
3∑
k=1
(φk)2 .
Dalla formula (10.26) segue:
π0 = φ , πk = −φk π0 + ∂kπk = 0 .
La relazione simplettica (10.26), cioe le equazioni di campo, possono essere descrittecon altri modi di controllo. Ad esempio, scambiando tutti i momenti π µ
a con le derivateφaµ si ottiene la formulazione di Poincare–Cartan, che qui non discuteremo. In fisica,un’altra trasformazione di Legendre, in cui si scambiano soltanto i momenti “temporali”
pa := π 0a
con le derivate temporali φa0, e piu importante. Per poter definire cosa si intende percomponenti temporali di un tensore, bisogna scegliere in M un riferimento. Supponiamoche il riferimento sia gia stato scelto e che le coordinate (xµ) siano adattate a questa scelta.Cio significa che la componente π 0
a e quella corrispondente alla superficie x0 =costante(dove x0 e la coordinata temporale), e la componente φa0 quella corrispondente al vettore∂∂x0 . Generalmente, un riferimento consiste nella scelta in TxM di un sottospazio 3–dimensionale e di un vettore ad esso trasversale. Fatte queste scelte, possiamo riscriverela formula (10.26) come
δL = ∂0(paδφa) + ∂k(π µ
a δφa) = paδφa0 + paδφ
a + ∂k(π ka δφa) =
= δ(paφa) + paδφ
a − φaδpa + ∂k(π ka δφa) .
Corrispondentemente si ha
−δH = paδφa − φaδpa + ∂k(π k
a δφa) =
= (pa + ∂kπk
a )δφa + π ka δφak − φaδpa ,
(10.27)
dove abbiamo definito la densita hamiltoniana H come
H := paφa − L .
242

Per completare la trasformazione di Legendre bisogna esprimere l’hamiltoniana H tramitei parametri di controllo, cioe i valori dei campi, le loro derivate (ma solo quelle spaziali!)e i momenti (solo temporali!) pa. La relazione (10.27) e ovviamente equivalente a
pa + ∂kπk
a = − ∂H
∂φa,
π ka = − ∂H
∂φak,
φa =∂H
∂pa.
Tali equazioni possono essere scritte in una forma piu compatta tramite le derivate vari-azionali
−pa =δH
δφa:=
∂H
∂φa− ∂
∂xk∂H
∂φak,
φa =δH
δpa:=
∂H
∂pa.
In particolare, nella seconda equazione e assente il secondo termine, poiche le derivate dipa non compaiono in H.
Scegliamo adesso un volume V tridimensionale nello spazio t = costante, e consid-eriamo il “cilindro” infinito V ×R1 ⊂M generato da V :
Λ = V ×R1 = (xµ) : (xk) ∈ V , x0 ∈ R1 .
Vogliamo descrivere l’evoluzione del campo in Λ. Se le equazioni del campo sono di tipoiperbolico, lo stato iniziale del campo determina la sua evoluzione, ammesso che sianostati specificati i dati sul contorno ∂Λ. In questo caso e possibile tradurre le equazionidel campo nel linguaggio dei sistemi hamiltoniani di dimensione infinita. Per far questointegriamo in ogni istante di tempo t la formula (10.27) su V , e otteniamo
−δEV =
∫
V
(paδφa − φaδpa)d3x+
∫
∂V
π ⊥a δφa , (10.28)
dove
EV :=
∫
V
Hd3x .
Supponiamo ora che i dati al contorno ∂Λ = ∂V ×R1 per i campi φa siano stati assegnati,e cerchiamo di trovare la soluzione delle equazioni del campo nella classe delle funzioni chesoddisfano le condizioni di Dirichlet, cioe assumono sul contorno i valori assegnati. In ogniistante di tempo occorrerebbe dunque prendere, come spazio delle fasi per descrivere lostato del campo, lo spazio delle funzioni (φa, pa) definite su V , soddisfacenti le condizioni alcontorno prescelte. Questo significherebbe pero che lo spazio delle fasi stesso cambierebbenel tempo nel caso in cui i dati al contorno cambiassero nel tempo. Se vogliamo tradurrequesto problema nel linguaggio della meccanica hamiltoniana, dobbiamo descrivere i campi
243
in modo che cio non succeda. A questo scopo si utilizza il seguente artificio tecnico. Adogni istante di tempo scegliamo lo stato del campo che minimizza l’energia EV nello spaziodelle funzioni che soddisfano i nostri dati al contorno. Supponiamo che esista un’unicasoluzione di questo problema, e chiamiamola (Φa, Pa). Ogni stato dei campi che soddisfile nostre condizioni al contorno e allora della forma (Φa + φa, Pa + pa), dove (φa, pa)soddisfano condizioni omogenee al bordo, cioe
φa∣∣∣∂V
= 0 .
Se sostituiamo (Φa + φa, Pa + pa) al posto delle variabili originali nella formula (10.28),otteniamo
−δEV =
∫
V
((Pa + pa)δφa − (Φa + φa)δpa)d3x ,
poiche δΦa = 0 e δPa = 0 in quanto (Φa, Pa) sono fissate. Inoltre si ha δφa∣∣∂V
= 0, invirtu delle condizioni al contorno. Allora, se definiamo “energia non omogenea contenutain V ” come
ENV := EV +
∫
V
(Paφa − Φapa)d3x , (10.29)
abbiamo
−δENV =
∫
V
(paδφa − φaδpa)d3x . (10.30)
Le funzioni Pa e Φa dipendono in generale dal tempo se i dati al contorno prescelti dipen-dono dal tempo; allora le loro derivate prime non si annullano e l’hamiltoniana non omoge-nea ENV contiene una parte lineare in pa e φa con coefficienti che dipendono esplicitamentedal tempo. La formula (10.30) e l’analogo infinito dimensionale della (10.20). Lo spaziodelle fasi (φa, pa) non dipende dal tempo ed e quello corrispondente ai dati omogenei albordo.
Il fatto che i dati al contorno dipendano dal tempo si riflette nella dipendenza esplicitadal tempo della hamiltoniana effettiva ENV .
L’equazione (10.30) significa che le derivate temporali dei campi sono date dallederivate funzionali della hamiltoniana effettiva:
pa(x) = − δENVδφa(x)
,
φa(x) =δENVδpa(x)
.
Nel caso particolare di dati al contorno indipendenti dal tempo, la parte lineare di(10.29) si annulla perche Φa e Pa sono costanti nel tempo e si ha allora
EV = ENV .
Il fatto che (Φa, Pa) minimizzino EV non e essenziale in questo contesto. Basta scegliereun qualunque metodo di prolungare i dati al contorno a tutto il dominio V , cioe assegnare
244

univocamente una funzione su V ad ogni scelta dei dati su ∂V . Dal punto di vista fisicopero, la scelta dello stato di energia minima e piu significativa e molto spesso semplifica laformulazione del problema.
A titolo di esempio consideriamo il caso dell’equazione delle onde. Scelto un volumeV di R3, la hamiltoniana e data da
EV =1
2
∫
V
(p2 +
3∑
k=1
φ2k
)d3x .
Assegnate condizioni al contorno del tipo
φ|∂V = f(t) ,
si ha che le funzioni (Φ, P ) che minimizzano l’energia in ogni istante fissato di tempo sonosoluzioni del problema
3∑
k=1
Φkk = 0 , Φ∣∣∂V
= f(t) ,
P = 0 ,
e sono quindi date da P ≡ 0, Φ ≡ f(t). Quest’ultima identita vale perche l’unicasoluzione dell’equazione di Laplace con dati di Dirichlet costanti e la corrispondente fun-zione costante. Sostituendo in (10.29) otteniamo l’espressione di ENV per questo caso:
ENV =1
2
∫
V
(p2(x) +
3∑
k=1
φ2k(x) − 2f(t)p(x)
)d3x .
Le equazioni del moto sono allora date da
p =
3∑
k=1
φkk , φ∣∣∂V
= 0
φ = p− f(t) ,
che si riducono ad un’unica equazione per φ:
φ−3∑
k=1
φkk = −f(t) .
In modo simile si puo anche trattare la dinamica del campo quando siano assegnatecondizioni di Neumann, cioe quando sia stato assegnato il valore π ⊥
a |∂V dei momentispaziali trasversali al contorno. A tale scopo eseguiamo dapprima la trasformazione diLegendre nel termine al contorno della formula (10.28):
π ⊥a δφa = δ(π ⊥
a φa) − φaδπ ⊥a .
245

Allora la formula (10.28) si riscrive come
−δEV =
∫
V
(paδφa − φaδpa)d3x−
∫
∂V
φaδπ ⊥a , (10.31)
dove abbiamo definito
EV := EV +
∫
∂V
φaπ ⊥a .
Ora dobbiamo limitarci allo spazio delle funzioni che soddisfano condizioni di Neumann sulcontorno. Anche in questo caso otterremo che l’evoluzione del campo e equivalente a quelladi un sistema hamiltoniano infinito dimensionale, in cui il ruolo di hamiltoniana e svoltoda EV . Fisicamente le due hamiltoniane EV ed EV corrispondono a due processi diversirelativi a due modi diversi di controllare i dati sul contorno. La distinzione tra di essi esimile alla differenza nell’evoluzione di un sistema termodinamico che si ha quando esso eisolato adiabaticamente o quando e immerso in un bagno termico. In termodinamica, ilprimo processo e governato dall’energia, mentre il secondo e governato dall’energia libera.Per analogia chiameremo EV energia e EV energia libera.
Di nuovo, per evitare che lo spazio delle fasi cambi nel tempo, traduciamo il fatto chei dati iniziali sul contorno dipendono dal tempo nella dipendenza temporale esplicita dellahamiltoniana. Assegnamo dunque ad ogni scelta dei dati al contorno π ⊥
a |∂V le funzioni(Φa, Pa) che minimizzano EV . Questo pero non e sempre possibile, perche in molte teorieappaiono dei vincoli sui dati di Neumann corrispondenti alle funzioni che minimizzano EVe questo comporta necessariamente la non unicita della soluzione del problema di minimo.Questo avviene per esempio per l’equazione delle onde, la quale implica il seguente vincolosui dati di Neumann: ∫
∂V
π⊥ = 0 ;
dunque non si ha unicita, perche l’energia non cambia aggiungendo una costante allafunzione φ. In un caso come questo e conveniente eseguire una trasformazione di Legendreun poco diversa. Decomponiamo dapprima φa e π ⊥
a in una parte costante e una parte amedia nulla:
φa = Ca + φa ,
π ⊥a = π ⊥
a + π ⊥a ,
dove Ca e la media di φa rispetto alla misura σ della superficie bidimensionale ∂V :
Ca :=
∫
∂V
φaσ ,
e φa e la sua parte a media nulla, cioe∫
∂V
φaσ = 0 .
Analogamente π ⊥a e la parte a media nulla di π ⊥
a , e π ⊥a e “costante”, ovvero e una
misura su ∂V proporzionale a σ:π ⊥a = Baσ .
246
Con questa decomposizione otteniamo
∫
∂V
π ⊥a δφa =
∫
∂V
π ⊥a δφa + |∂V |BaδCa ,
dove
|∂V | :=
∫
∂V
σ
e la misura della superficie di ∂V . Allora, effettuiamo la trasformazione di Legendre soloper le grandezze π ⊥
a , φa, lasciando il valor medio di φa tra i parametri di controllo. Cosıla formula (10.28) diventa
−δEV =
∫
V
(paδφa − φaδpa)d3x−
∫
∂V
φaδπ ⊥a + |∂V |BaδCa , (10.32)
con
EV := EV +
∫
∂V
φaπ ⊥a .
Ora, come dati al contorno dobbiamo assegnare π ⊥a e il valore medio Ca dei campi
sul contorno. Una volta assegnati i dati, scegliamo (Φa, Pa) che minimizzano EV nelsottospazio delle funzioni soddisfacenti le condizioni al contorno. Ogni stato dei campiche soddisfi le nostre condizioni al contorno e allora della forma (Φa + φa, Pa + pa), dove(φa, pa) soddisfano condizioni omogenee al bordo, cioe
π ⊥a
∣∣∣∂V
= 0 ,
∫
∂V
φaσ = 0 .
Se sostituiamo (Φa + φa, Pa + pa) al posto delle variabili originali nella formula (10.32),otteniamo
−δEV =
∫
V
((Pa + pa)δφa − (Φa + φa)δpa)d3x ,
poiche δΦa = 0 e δPa = 0 in quanto (Φa, Pa) sono fissate. Inoltre δπ ⊥a
∣∣∂V
= 0, δCa = 0in virtu delle condizioni al contorno. Allora si ha
−δENV =
∫
V
(paδφa − φaδpa)d3x , (10.33)
dove ENV sta per “energia libera non omogenea contenuta in V ”, definita come
ENV := EV +
∫
V
(Paφa − Φapa)d3x . (10.34)
Le funzioni Pa e Φa dipendono in generale dal tempo se i dati al contorno prescelti dipen-dono dal tempo; allora le loro derivate prime non si annullano e l’hamiltoniana non omo-genea ENV contiene una parte lineare in pa, φ
a con coefficienti che dipendono esplicitamentedal tempo.
247

L’equazione (10.33) significa che le derivate temporali dei campi sono date dallederivate funzionali della energia libera effettiva:
pa(x) = − δENVδφa(x)
,
φa(x) =δENVδpa(x)
.
Nel caso particolare dei dati al contorno che non dipendono dal tempo, la parte linearedi (10.34) si annulla, e si ha
EV = ENV .
Illustriamo anche questa costruzione nel caso dell’equazione delle onde. Siano date lecondizioni al contorno
π⊥∣∣∂V
= φ⊥∣∣∂V
= f(t)h ,
dove h : ∂V → R e una funzione a media nulla su ∂V . Le funzioni (Φ, P ) che minimizzanoEV e soddisfano le condizioni al bordo sono le soluzioni del seguente problema di Neumann:
3∑
k=1
Φkk = 0 , Φ⊥∣∣∂V
= f(t)h ,
P = 0 ,
(10.35)
che appartengono allo spazio delle funzioni la cui media su ∂V e uguale a quella assegnata.Consideriamo il problema ausiliario
3∑
k=1
Φ′kk = 0 , Φ′
⊥∣∣∂V
= h ;
dalla teoria delle equazioni ellittiche sappiamo che tale problema ammette una ed una solasoluzione Φ′ la cui media su ∂V e uguale a quella assegnata. D’altra parte e immediatoverificare che allora Φ′f(t) e soluzione di (10.35). Pertanto, dall’equazione (10.34) si hache l’energia libera effettiva per il nostro problema e data da
ENV =1
2
∫
V
(p(x)2 +
3∑
k=1
(φk(x) + Φ′k(x)f(t))2 − Φ′(x)f(t)p(x)
)d3x ,
e le equazioni per φ si riducono a
φ−3∑
k=1
φkk = −Φ′f(t) +
3∑
k=1
Φ′fkk = −Φ′f(t) , φ∣∣∂V
= 0 ,
dove abbiamo sfruttato il fatto che φ′f(t) e soluzione del problema (10.35), cioe realizza,istante per istante, il minimo dell’energia libera.
248
NOTE BIBLIOGRAFICHE
Una buona introduzione alla meccanica razionale si puo trovare per esempio in[1] L.D. Landau, E. Lifshits, Meccanica; Ed. Mir (1976),[2] C. Cercignani, Spazio, tempo, movimento; Ed. Zanichelli, Bologna (1976).
[3] H. Goldstein, Meccanica Classica; Ed. Zanichelli, Bologna (1971).I testi classici sulla elasticita sono moltissimi. Consigliamo al lettore soprattutto illibro di Sommerfeld:
[4] A. Sommerfeld, Mechanics of deformable bodies; Acad. Press N.Y. (1950),oppure il volume sulla teoria dell’elasticita del corso di fisica teorica di Landau eLifshitz:
[5] L.D. Landau, E. Lifshits, Teoria della elasticita Ed. Mir, Mosca (1976).
Entrambi i libri pero contengono solo la teoria lineare, nella quale la configurazionedel materiale e descritta da “piccoli spostamenti” rispetto ad una configurazione dirilassamento globale. Dal punto di vista della analisi funzionale legata ai problemi alcontorno, si puo citare il testo di Love:
[6] A. Love, Elasticity; Dover N.Y. (1972).
Un trattato moderno e completo, che contiene anche gli elementi della elasticita finita,e che pero fa uso di un formalismo matematico assai pesante, e quello di Marsden edHughes:
[7] J.Marsden, H. Hughes, Mathematical Foundations of Elasticity; Prentice Hall (1983).
Gli elementi della teoria delle equazioni differenziali a derivate parziali si possonotrovare ad esempio in:
[8] V. Smirnov, Course of higher mathematics 4; Pergamon Press, Oxford,[9] F. John, L. Beers, M. Schechter, Partial differential equations; Interscience Publ.
N.Y..Una versione della teoria relativistica della elasticita puo essere trovata nel lavoro(pubblicato postumo):
[10] C. Cattaneo, Teoria macroscopica dei continui relativistici; Quad. Un. Mat. It. 15;Pitagora (Bologna) (1980),la quale e pero basata sulla ipotesi di esistenza di una configurazione di equilibrioglobale del materiale. Altri contributi possono essere trovati nei lavori seguenti:
[11] W. C. Hernandez; Phys. Rev. D, 4 (1970), p.1013–1018.[12] B. Carter, H. Quintana; Proc. R. Soc. L. A331 (1972), p.57-83,[13] B. Carter; Comm. Math. Phys. 30 (1973), p. 261-286,[14] A. Bressan, Relativistic theories of materials; Tracts in Nat. Phil. 29, Springer-Verlag
N. Y. 1978,[15] G. A. Maugin, Jorn. Math. Phys. 19 (1978) p. 1212–1226,[16] A. C. Eringen, G. A. Maugin, Electrodynamics of continua, Springer–Verlag (1989).
La descrizione della meccanica dei continui come teoria di campo, con l’introduzionedello spazio materiale, puo essere trovata in:
249
[17] J. Kijowski, B. Pawlik, W.M. Tulczyjew; Bull. Acad. Polon. Sci. 27 (1979), p.163-170,
[18] J. Kijowski, W.M. Tulczyjew, A simplectic framework for field theories; Lec. Notes inPhys. 107, Springer Verlag, N.Y. (1979).Il tempo materiale come potenziale per la temperatura e stato introdotto nel lavoro
[19] J. Kijowski, W.M. Tulczyjew; University of Calgary, Preprint (1981)che e stato poi pubblicato come:
[20] J. Kijowski, W.M. Tulczyjew; Mem. Acad. Sci. Torino 6-7 (1982–83) p.3–17.Applicazioni alla relativita generale si trovano in
[21] J. Kijowski, A. Smolski, A. Gornicka; Phys. Rev. D 41 (1990) p. 1875–1884.[22] J. Kijowski, G. Magli, A generalization of the relativistic equilibrium equations for a
non rotating star, in attesa di pubblicazione in GRG Journal.Per studiare la relativita generale si possono per esempio utilizzare i testi seguenti:
[23] C. Misner, A. Wheeler, W. Thorne, Gravitation; Freeman, S. Francisco (1973),[24] R. Wald, General Relativity; Chicago U.P. (1984),[25] S. Weinberg, Gravitation and Cosmology; Wiley N.Y. (1972),[26] L. Landau, E. Lifschitz, Teoria dei campi; Ed. Mir, Mosca (1976).
I fondamenti della geometria differenziale (forme differenziali, teorema di Stokes) sipossono trovare nei moderni trattati di analisi matematica quali
[27] L. Schwartz, Analyse mathematique vol. 1 e 2; Parigi (1967),[28] K. Maurin, Analysis vol. 1 e 2; Polish Acad. Publ., Varsavia (1972),
oppure nei trattati di geometria quali[29] J. A. Schouten, Ricci Calculus; Springer Verlag, Berlino (1954),[30] K. Nomizu, Lie groups and differential geometry, Math. Soc. of Jap., Tokio (1956),[31] K. Nomizu, S. Kobayashi, Foundations of differential geometry; Interscience Publ.
N.Y. (1963).Gli elementi della geometria simplettica possono essere trovati in
[32] R. Abraham, J. Marsden, Foundations of Mechanics; Ben. Cumm. (Reading 1978).La formulazione simplettica della dinamica come teoria del controllo era stata propostada Tulczyjew in
[33] W. M. Tulczyjew; Hamiltonian systems, Lagrangian systems and the Legendre trans-formation; Symposia matematica 14 (1974) p. 247,
[34] R. Menzio, W. M. Tulczyjew, Infinitesimal symplectic relations and generalized Hamil-tonian dynamics; Ann. Inst. Henri Poincare, 28 (1978) p.349.L’applicazione di queste idee alla teoria dei campi puo essere trovata in [18].
250
Indice Analitico
applicazione differenziabile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.158applicazione tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.11, 163assi principali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.17atlante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.157azione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.41, 68, 93, 141autovalori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.201autovettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.201base canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.163campi covarianti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.10campo covettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.10, 177campo degli spostamenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.20campo di Killing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.61, 228campo di velocita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.80campo scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.10campo vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.10, 176carica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.96carta locale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.157coefficenti di Lame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.34coefficenti di risposta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.29, 89commutatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.176, 189componenti della connessione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.208compressibilita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.29, 34condizioni di Dirichelet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.243condizioni di Neumann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.245configurazione euleriana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.63configurazione lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.13configurazione spazio-temporale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.41connessione di Levi-Civita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.211connessione metrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.211connessione simmetrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.206control response relations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.235convenzione di Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.159coordinate cartesiane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.13coordinate normali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.132coordinate normali generalizzate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.225corrente conservata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.96corrente di energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.73corrente di materia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.66corrente di materia relativistica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.80
251
corrente di momento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.73covettore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.164criterio di positivita dell’energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.56curva parametrizzata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.158curvatura esterna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.130, 221curvatura scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.219delta di Kronecker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.165densita degli sforzi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.27densita di hamiltoniana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.53, 242densita di lagrangiana di Hilbert–Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.104densita di materia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.16, 82densita di momento flettente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.143densita lagrangiana per un fluido perfetto relativistico . . . . . . . . . . . . . . . . . . . . . . . . . . pag.97densita tensoriale di energia momento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.58, 112densita tensoriale di energia–momento relativistica . . . . . . . . . . . . . . . . . . . . . . . . . pag.89, 112densita scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.174densita vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.174descrizione euleriana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.8descrizione hamiltoniana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.52, 243descrizione lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.8derivata di Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.21, 185, 188derivata esterna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.177derivata lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.74derivata sostanziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.74derivata variazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.27, 54derivazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.161displacement vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.20energia libera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.115, 232equazione bilaplaciana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.156equazione dell’oscillatore armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.46equazione di continuita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.66, 81equazione di Killing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.61, 228equazioni dell’equilibrio statico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.25equazioni di Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.103equazioni di Eulero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.74equazioni di Eulero-Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.24, 43, 68, 93equazioni di Eulero–Lagrange del secondo ordine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.142equazioni di Hamilton dell’elasticita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.55fibra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.175fibrato cotangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.177fibrato dei k-covettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.177fibrato di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.231fibrato tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.175fluido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.23
252
flusso globale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.182flusso locale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.184forma di volume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.194forma simplettica canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.234formula di polarizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.192formulazione euleriana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.63formulazione euleriana relativistica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.78formulazione lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.13, 41formulazione lagrangiana relativistica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.78, 107forze di flessione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.145funzione di transizione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.157funzione generatrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.52, 232funzione hamiltoniana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.52, 239, 242funzione lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.239funzione lapse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.109, 131, 222geodetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.212gradiente di deformazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.13gradiente di deformazione euleriano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.63gradiente di deformazione relativistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.79gruppo ad un parametro di diffeomorfismi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.182identita di Bianchi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.217idrodinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.23invarianti fondamentali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.39, 99invarianza di gauge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.120inversione temporale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.80iper–elasticita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.37lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.41laplaciano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.197legge di conservazione dell’entropia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.117legge di Hooke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.36legge di Pascal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.35, 97linee di flusso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.183metrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.10, 191metrica fisica spazio–temporale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.71metrica materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.14metrica materiale bidimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.129metrica spazio–temporale materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.119modello quasi lineare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.23modello quasi lineare relativistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.87modulo di compressibilita esterno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.155modulo di Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.35modulo di taglio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.29, 35modulo di taglio esterno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.156modulo di Young . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.36
253
momenti canonici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.69momento coniugato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.43multicovettore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.167onde longitudinali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.47onde trasversali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.47operatore differenziale del primo ordine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.161orientazione esterna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.221orientazione di una varieta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.179parentesi di Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.176pressione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.29, 89prima forma fondamentale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.221primo tensore della elasticita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.37principio di corrispondenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.85problema di Dirichlet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.37problema dinamico omogeneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.48problema di Neumann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.37problema variazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.24prodotto esterno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.167prodotto interno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.170prodotto tensoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.165prodotto vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.198proiettore spaziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.82proiettore temporale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.82proiezione canonica nel fibrato tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.176pull–back . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.11, 172push–forward . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.11, 202quadrato della lunghezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.10relazione controllo–risposta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.52, 231, 235relazione di dispersione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.46relazione sforzi deformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.29relazioni costitutive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.90, 98riferimento di riposo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.81riferimento inerziale globale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.206riferimento nello spazio–tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.77rigidita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.156rigidity modulus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.35rotazioni di Lorentz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.96seconda forma fondamentale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.130, 221secondo tensore della elasticita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.38sezione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.176shear modulus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.35simbolo di Christoffel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.212simbolo di Levi Civita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.170, 198simmetria della metrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.228
254
sistema di Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.213sistema di riferimento inerziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.206sistema localmente inerziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.206sistemi di coordinate affini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.205sistemi inerzialmente equivalenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.206spazio cotangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.164sottovarieta lagrangiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.235spazio dei parametri di controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.231spazio fisico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.8spazio materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.8spazio simplettico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.236spazio tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.159spazio-tempo materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.41spostamento longitudinale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.150spostamento trasversale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.150stress–strain relations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.29stress-strain relations relativistiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.88struttura affine locale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.206struttura simplettica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.233temperatura assoluta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.115tempo materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.115tensore degli sforzi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.18, 28tensore degli sforzi interni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.145tensore degli sforzi relativistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.89tensore delle deformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.18tensore delle deformazioni esterne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.138tensore delle deformazioni euleriano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.65tensore delle deformazioni relativistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.84tensore deviatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.29tensore deviatore relativistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.89tensore di Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.28, 89tensore di curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.192, 215tensore di Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.219tensore di Piola–Kirchhoff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.58, 69tensore di Piola–Kirchhoff relativistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.87tensore di Ricci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.219tensore di Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.215tensore energia–momento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.71teorema di Nother . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.59, 71, 93teorema di ROsenfeld–Belinfante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.62, 89teoria del controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.231teoria delle piastre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.130teoria simplettica del controllo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.232traccia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.201
255
trasformazioni di boost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.96trasporto parallelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.211varieta differenziabile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.157varieta orientata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.194velocita delle onde elastiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.46velocita delle onde termiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.128vettore di Killing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.96, 228vettore d’onda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.45vettore shift . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.109, 222volume specifico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.16wedge product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pag.167
256


















![Libro - Fisica - Meccanica Quantistica Non Relativistica (Paccanoni - 2003) [ITA]](https://img.pdfslide.tips/doc/110x75/5571f85449795991698d2e65/libro-fisica-meccanica-quantistica-non-relativistica-paccanoni-2003-ita.jpg)