Embed Size (px)
Citation preview

Elektronski fakultet Niᘐ
Seminarski rad iz predmeta: Autoelektronika
Tema: Sistem digitalne kontrole motora
Mentor: Prof. dr Branislav Petroviၰ Studenti: Marko Milovanoviၰ 12013 MIM Milan ័ivkoviၰ 12834 MIM
jul 2008
Sistem digitalne kontrole motora
1
Sadr០aj: Sistem digitalne kontrole motora ................................................................................. 2 Naაin upravljanja za kontrolu goriva............................................................................ 4 Zagrevanje motora ...................................................................................................... 8 Proces otvorenog upravljanja....................................................................................... 9 Proces zatvorenog upravljanja ................................................................................... 11 Zasiၰenje ubrzavanjem .............................................................................................. 12 Osiromaᘐenje usporavanjem ...................................................................................... 13 Kontrola broja obrtaja motora u praznom hodu ......................................................... 13 EGR kontrola (Exhaust gas recirculation) .................................................................. 15 Elektronska kontrola paljenja .................................................................................... 16 Zatvorena-petlja regulacije trenutka paljenja ............................................................... 18 Korekciona ᘐema ranijeg paljenja ............................................................................... 21 Integrisan sistem kontrole motora.............................................................................. 22 Secondary Air Management ....................................................................................... 23 Ⴠiᘐၰenje kanistera isparenja emisije ............................................................................ 24 Kontrola zakljuაavanja hidrauliაnog kvaაila obrtnog momenta ................................... 24 Sistem za automatsko podeᘐavanje............................................................................. 24 Dijagnostika sistema.................................................................................................. 24 Pregled kontrolnih modova ....................................................................................... 25 Poboljᘐanja u elektronskoj kontroli motora ................................................................ 27 Integrisani sistemi kontrole motora............................................................................ 27 Poboljᘐanja senzora kiseonika.................................................................................... 28 Tajming ubrizgavanja goriva ...................................................................................... 28 Kontrola emisije ᘐtetnih gasova u automobilima ......................................................... 29 Literatura:................................................................................................................. 30
Sistem digitalne kontrole motora
2
Sistem digitalne kontrole motora
U ovom radu su objaᘐnjeni neki od osnovnih problema koje obuhvata
elektronska kontrola motora. Ova oblast istra០uje neke praktiაne sisteme digitalne kontrole. Tu su i naravno znaაajne varijacije u konfiguraciji i predstavi o kontroli koja se razlikuje meᄐu projzvoᄐaაima. Kako god, ova oblast opisuje reprezentativne kontrolne sisteme koji nisu nu០no bazirani na sistemima nokog odreᄐenog projzvoᄐaაa, na taj naაin აitaoc mo០e da razume komfiguraciju i operacione principe opᘐtih reprezentnih sistema. Kao takav, sistem koji se opisuje je skup karakteristika koriᘐၰenih od strane nekoliko projzvoᄐaაa.
U ovom poglavlju, kontrola motora je opisana u odnosu na kontinualno predstavljanje. U stvari, veၰina modernih kontrolnih sistema motora, koja se opisuju u ovom poglavlju su digitalni. Tipiაni kontrolni sistem motora imaju ugraᄐen mikroprocesor i on je u suᘐtini kompjuter specijalne namene.
Elektronska kontrola motora se razvila od relativno prostog sistema kontrole goriva do upotrebe diskretnih analognih komponenti za visoko preciznu kontrolu ubrizgavanja i paljenja preko 32-bitnog mikroprocesora – zasnivanom na integrisano digitalnoj elektronskoj konrtoli pogonskog sklopa. Motivacija za razvijanje sofisticiranijih sistema digitalne kontrole se uveၰala stro០ijim propisima emisije izduvnih gasova i potroᘐnje goriva. Dokazano je da je isplativije implementacija kontrolera pogonskog sklopa kao viᘐemodni kompjuter – sistem napravljen da zadovolji ove zahteve.
Viᘐemodni kontroler funkcioniᘐe na jedan od mnogo moguၰih naაina rada, i, meᄐu ostalim zadatcima, menja razliაite kalibracione parametre radnih uslova da bi optimizovao performanse. Da bi implementirali viᘐemodno upravljanje u analognoj elektronici bilo bi potrebno promeniti hardverske parametre (na primer, pomoၰu sistema prebacivanja) za usklaᄐivanje razliაitih operativnih uslova. Ipak u kontrolerima na bazi kompjutera kontrolna pravila i sistemski parametri se menjaju putem programa (npr softver) upravljanja. Hardver ostaje nepromenjen ali softver se rekonfiguriᘐe u skladu sa uslovima rada koji odreᄐuje merenje senzora i ulaznog prekidaაa kontrolera.
Ovo poglavlje objaᘐnjava kako je programirani mikrokontroler odgovoran za generisanje elektriაnog signala koji upravlja ubrizgavanjem goriva i okidanje impulsa paljenja. Takoᄐe ၰe biti reაi o sporednim funkcijama (kao ᘐto su upravljanje izduvima koji prolaze kroz katalizator EGR propisi i kontrola emisije isparavanja) o kojima ranije nije bilo reაi.
Prisetimo se da je osnovna svrha elektronskog sistema kontrole motora podesiti smeᘐu (vazguh-gorivo), vreme paljenja, i EGR. Maltene svi veၰi projzvoᄐaაi automobila koji prodaju u americi (uvozni i domaၰi) koriste trostruki katalizator za skup ograniაenja izduvnih gasova. Za takve automobile, odnos vazduh/gorivo se dr០i koliko je god moguၰe pribli០noj stehiometrijskoj vrednosti od 14,7 maksimalno vremenski izvodljivo. Tajming paljenja i EGR se kontroliᘐe odvojeno da bi se optimizovale performanse i potroᘐnja goriva.
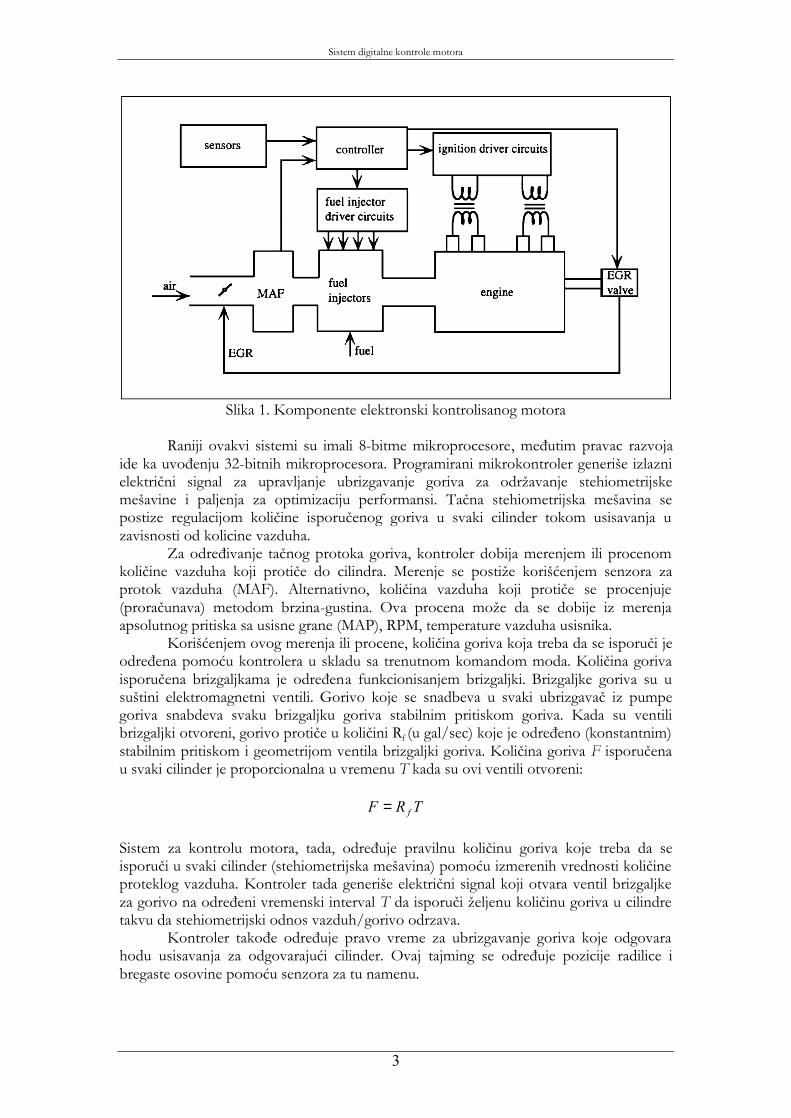
Slika 1 pokazuje glavne komponente elektronskog sistema kontrole motora. Na ovoj slici, kontrolni sistem motora je mikrokonrtoler, tipiაno implementiran sa specijalno namenjenim mikroprocesorom i radi pod kontrolom programa. Tipiაno, kontroler objedinjuje hardverski mno០ioc i ROM. Hardverski mno០ioc u velikoj meri ubrzava brzinu operacija koje su potrebne u viᘐe etapa relativnosti kontrole motora do programa softverskog mno០ioca, koje su uglavnom neაim optereၰene i spore. Prateၰi ROM sadr០i program za svaki mod kao dobro podeᘐeni kalibracioni parametri i tabele.
Sistem digitalne kontrole motora
3
Slika 1. Komponente elektronski kontrolisanog motora
Raniji ovakvi sistemi su imali 8-bitme mikroprocesore, meᄐutim pravac razvoja ide ka uvoᄐenju 32-bitnih mikroprocesora. Programirani mikrokontroler generiᘐe izlazni elektriაni signal za upravljanje ubrizgavanje goriva za odr០avanje stehiometrijske meᘐavine i paljenja za optimizaciju performansi. Taაna stehiometrijska meᘐavina se postize regulacijom koliაine isporuაenog goriva u svaki cilinder tokom usisavanja u zavisnosti od kolicine vazduha. Za odreᄐivanje taაnog protoka goriva, kontroler dobija merenjem ili procenom koliაine vazduha koji protiაe do cilindra. Merenje se posti០e koriᘐၰenjem senzora za protok vazduha (MAF). Alternativno, koliაina vazduha koji protiაe se procenjuje (proraაunava) metodom brzina-gustina. Ova procena mo០e da se dobije iz merenja apsolutnog pritiska sa usisne grane (MAP), RPM, temperature vazduha usisnika. Koriᘐၰenjem ovog merenja ili procene, koliაina goriva koja treba da se isporuაi je odreᄐena pomoၰu kontrolera u skladu sa trenutnom komandom moda. Koliაina goriva isporuაena brizgaljkama je odreᄐena funkcionisanjem brizgaljki. Brizgaljke goriva su u suᘐtini elektromagnetni ventili. Gorivo koje se snadbeva u svaki ubrizgavaა iz pumpe goriva snabdeva svaku brizgaljku goriva stabilnim pritiskom goriva. Kada su ventili brizgaljki otvoreni, gorivo protiაe u koliაini Rf (u gal/sec) koje je odreᄐeno (konstantnim) stabilnim pritiskom i geometrijom ventila brizgaljki goriva. Koliაina goriva F isporuაena u svaki cilinder je proporcionalna u vremenu T kada su ovi ventili otvoreni:
TRF f=
Sistem za kontrolu motora, tada, odreᄐuje pravilnu koliაinu goriva koje treba da se isporuაi u svaki cilinder (stehiometrijska meᘐavina) pomoၰu izmerenih vrednosti koliაine proteklog vazduha. Kontroler tada generiᘐe elektriაni signal koji otvara ventil brizgaljke za gorivo na odreᄐeni vremenski interval T da isporuაi ០eljenu koliაinu goriva u cilindre takvu da stehiometrijski odnos vazduh/gorivo odrzava. Kontroler takoᄐe odreᄐuje pravo vreme za ubrizgavanje goriva koje odgovara hodu usisavanja za odgovarajuၰi cilinder. Ovaj tajming se odreᄐuje pozicije radilice i bregaste osovine pomoၰu senzora za tu namenu.
Sistem digitalne kontrole motora
4
Naაin upravljanja za kontrolu goriva
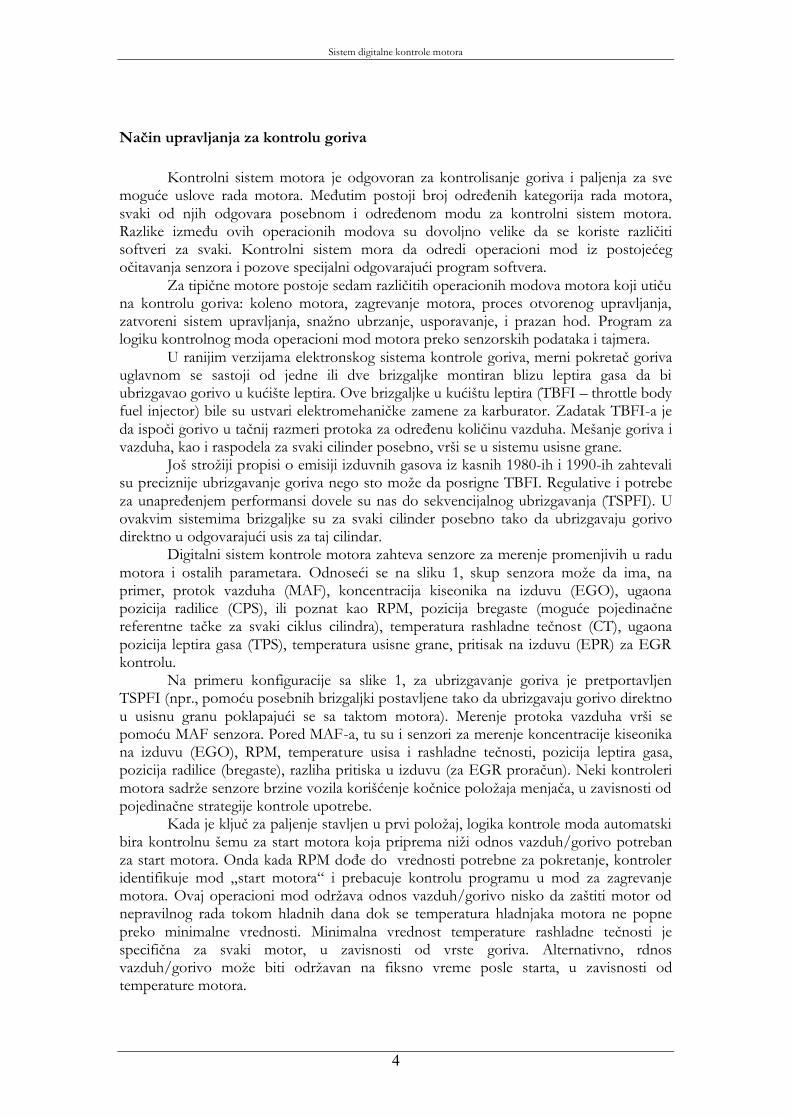
Kontrolni sistem motora je odgovoran za kontrolisanje goriva i paljenja za sve moguၰe uslove rada motora. Meᄐutim postoji broj odreᄐenih kategorija rada motora, svaki od njih odgovara posebnom i odreᄐenom modu za kontrolni sistem motora. Razlike izmeᄐu ovih operacionih modova su dovoljno velike da se koriste razliაiti softveri za svaki. Kontrolni sistem mora da odredi operacioni mod iz postojeၰeg oაitavanja senzora i pozove specijalni odgovarajuၰi program softvera. Za tipiაne motore postoje sedam razliაitih operacionih modova motora koji utiაu na kontrolu goriva: koleno motora, zagrevanje motora, proces otvorenog upravljanja, zatvoreni sistem upravljanja, sna០no ubrzanje, usporavanje, i prazan hod. Program za logiku kontrolnog moda operacioni mod motora preko senzorskih podataka i tajmera. U ranijim verzijama elektronskog sistema kontrole goriva, merni pokretaა goriva uglavnom se sastoji od jedne ili dve brizgaljke montiran blizu leptira gasa da bi ubrizgavao gorivo u kuၰiᘐte leptira. Ove brizgaljke u kuၰiᘐtu leptira (TBFI – throttle body fuel injector) bile su ustvari elektromehaniაke zamene za karburator. Zadatak TBFI-a je da ispoაi gorivo u taაnij razmeri protoka za odreᄐenu koliაinu vazduha. Meᘐanje goriva i vazduha, kao i raspodela za svaki cilinder posebno, vrᘐi se u sistemu usisne grane. Joᘐ stro០iji propisi o emisiji izduvnih gasova iz kasnih 1980-ih i 1990-ih zahtevali su preciznije ubrizgavanje goriva nego sto mo០e da posrigne TBFI. Regulative i potrebe za unapreᄐenjem performansi dovele su nas do sekvencijalnog ubrizgavanja (TSPFI). U ovakvim sistemima brizgaljke su za svaki cilinder posebno tako da ubrizgavaju gorivo direktno u odgovarajuၰi usis za taj cilindar. Digitalni sistem kontrole motora zahteva senzore za merenje promenjivih u radu motora i ostalih parametara. Odnoseၰi se na sliku 1, skup senzora mo០e da ima, na primer, protok vazduha (MAF), koncentracija kiseonika na izduvu (EGO), ugaona pozicija radilice (CPS), ili poznat kao RPM, pozicija bregaste (moguၰe pojedinaაne referentne taაke za svaki ciklus cilindra), temperatura rashladne teაnost (CT), ugaona pozicija leptira gasa (TPS), temperatura usisne grane, pritisak na izduvu (EPR) za EGR kontrolu. Na primeru konfiguracije sa slike 1, za ubrizgavanje goriva je pretportavljen TSPFI (npr., pomoၰu posebnih brizgaljki postavljene tako da ubrizgavaju gorivo direktno u usisnu granu poklapajuၰi se sa taktom motora). Merenje protoka vazduha vrᘐi se pomoၰu MAF senzora. Pored MAF-a, tu su i senzori za merenje koncentracije kiseonika na izduvu (EGO), RPM, temperature usisa i rashladne teაnosti, pozicija leptira gasa, pozicija radilice (bregaste), razliha pritiska u izduvu (za EGR proraაun). Neki kontroleri motora sadr០e senzore brzine vozila koriᘐၰenje koაnice polo០aja menjaაa, u zavisnosti od pojedinaაne strategije kontrole upotrebe. Kada je kljuა za paljenje stavljen u prvi polo០aj, logika kontrole moda automatski bira kontrolnu ᘐemu za start motora koja priprema ni០i odnos vazduh/gorivo potreban za start motora. Onda kada RPM doᄐe do vrednosti potrebne za pokretanje, kontroler identifikuje mod „start motora“ i prebacuje kontrolu programu u mod za zagrevanje motora. Ovaj operacioni mod odr០ava odnos vazduh/gorivo nisko da zaᘐtiti motor od nepravilnog rada tokom hladnih dana dok se temperatura hladnjaka motora ne popne preko minimalne vrednosti. Minimalna vrednost temperature rashladne teაnosti je specifiაna za svaki motor, u zavisnosti od vrste goriva. Alternativno, rdnos vazduh/gorivo mo០e biti odr០avan na fiksno vreme posle starta, u zavisnosti od temperature motora.
Sistem digitalne kontrole motora
5
Kada se temperatura rashladne teაnosti popne na odreᄐeni nivo, logika kontrole modova upuၰuje sistemu da radi u re០imu otvorenog sistema upravljanja sve dok EGO senzor ne dostigne dovoljnu temperaturu za adekvatno isაitavanje. To stanje se detektuje praၰenjem naponskih isაitavanja iznad izvesnog minimuma bogate smeᘐe vazduh/gorivo zadate vrednosti napona na izlazu EGO senzora. Kada senzor detektuje barem jednom bogatu smeᘐu nakon ᘐto je motor uᘐo u re០im otvorenog sistema upravljanja tokom odreᄐenog intervala, logika selekcije kontrolnog moda bora mod zatvorenog sistema upravljanja za sistem (drugi kriterijumi takoᄐe mogu biti izabrani). Motor ostaje u rezimu zatvorenog sistema upravljanja sve dok se EGO senzor ne ohladi i ne oაita bogatu smeᘐu na izvestno vreme ili se javi sna០no ubrzanje ili usporavanje. Ako se senzor ohladi, logika naაina upravljanja ponovo bira re០im otvorenog sistema upravljanja. Za vreme sna០nih ubrzanja ili jakog optereၰenja motora, logika selekcije kontrolnog moda bira program koji snadbeva bogatom smeᘐom vazduh/gorivo sve dok traje optereၰenje. Ovaj program obezbeᄐuje maksimalni obrtni moment ali relativno slabu komtrolu zagaᄐenja i loᘐu regulaciju potroᘐnje goriva u poreᄐenju stehiometrijskog odnosa vazduh/gorivo. Nakon potrebe za zasiၰenjem, kontrola se vraၰa ili u re០im otvorenog ili zatvorenog sistema upravljanja, u zavisnosti od trenutnih uslova koju bija logika kontorole moda. Tokom usporavanja, odnos vazduh/gorivo se poveၰava da bi redukovao emisiju HC i CO usled nesagorelog viᘐka goriva. Tokom praznog hoda, logika kontrole moda prebacuje sistemsku kontrolu u mod broja obrtaja u praznom hodu. U tom modu brzina motora se kontroliᘐe radi redukcile nemirnog rada i zaustavljanje koje mo០e da se desi usled punjenja u praznom hodu koje se menja zbog rada klima ureᄐaja, alternatora, ili pozicije menjaაa sa parking/neutralnog u polu០aj brzine, inaაe stehiometrijska meᘐavina koja se koristi kad je motor zagrejan. U modernim kontrolnim sistemima motora, kontroler je digitalni kompjuter specijalne namene ugraᄐen oko mikroprocesora. Blok ᘐema tipiაnog modernog digitalnog kontrolnog sistema motora je opisan na slici 2. Kontroler takoᄐe sadr០i ROM u kome se nalazi glavni program (nekoliko hiljada linija koda) kao i RAM za privremeno skladiᘐၰenje podataka tokom procesiranja. Signal senzora je povezan na kontroler preko ulazno/izlaznog (I/O) podsistema. Sliაno, I/O podsistem snadbeva izlaznim signalima brizgaljke goriva (na slici 2 kao blok merenja goriva) tako ᘐto okida impulse na sistem paljenja (biၰe kasnije objaᘐnjen). Uz ovaj poluprovodviაki kontrolni sistem ide i hardver za semplovanje i analogno-digitalnu konverziju takve da sva merenja senzora su u odgovarajuაem obliku za oაitavanje koje vrᘐi mikroprocesor.
Kontrolni sistem bira operacioni mod na osnovu trenutnih operacionih uslova koje odreᄐuju merenja senzora. Za vreme bilo kog operacionog moda ០eljeni odnos vazduh/gorivo (A/F)d je selektovan. Kontroler zatim odreᄐuje koliაinu goriva koja treba ta se ubrizga u svaki cilindar tokom svakog ciklusa motora. Koliაina goriva zavisi od pojedinaაih uslova rada dokle god kontroler radi u tom modu kao ᘐto ၰe biti objaᘐnjeno nadalje.
Sistem digitalne kontrole motora
6
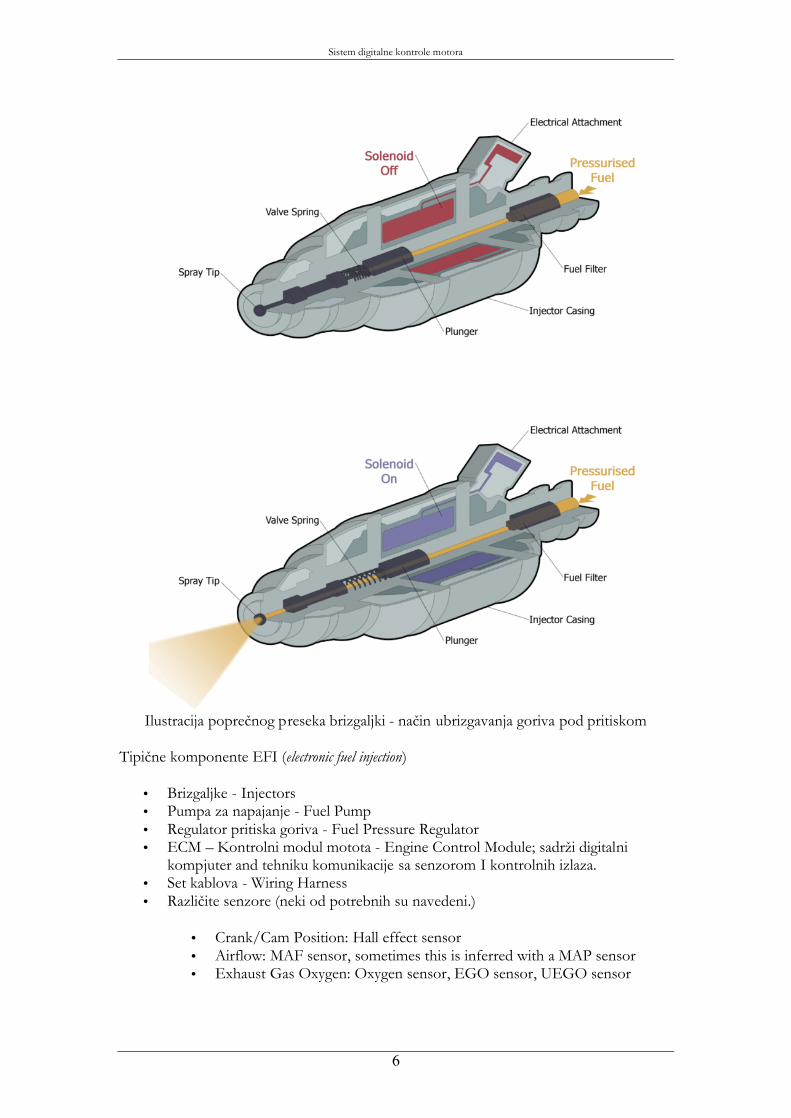
Ilustracija popreაnog preseka brizgaljki - naაin ubrizgavanja goriva pod pritiskom
Tipiაne komponente EFI (electronic fuel injection)
• Brizgaljke - Injectors • Pumpa za napajanje - Fuel Pump • Regulator pritiska goriva - Fuel Pressure Regulator • ECM – Kontrolni modul motota - Engine Control Module; sadr០i digitalni
kompjuter and tehniku komunikacije sa senzorom I kontrolnih izlaza. • Set kablova - Wiring Harness • Razliაite senzore (neki od potrebnih su navedeni.)
• Crank/Cam Position: Hall effect sensor • Airflow: MAF sensor, sometimes this is inferred with a MAP sensor • Exhaust Gas Oxygen: Oxygen sensor, EGO sensor, UEGO sensor
Sistem digitalne kontrole motora
7
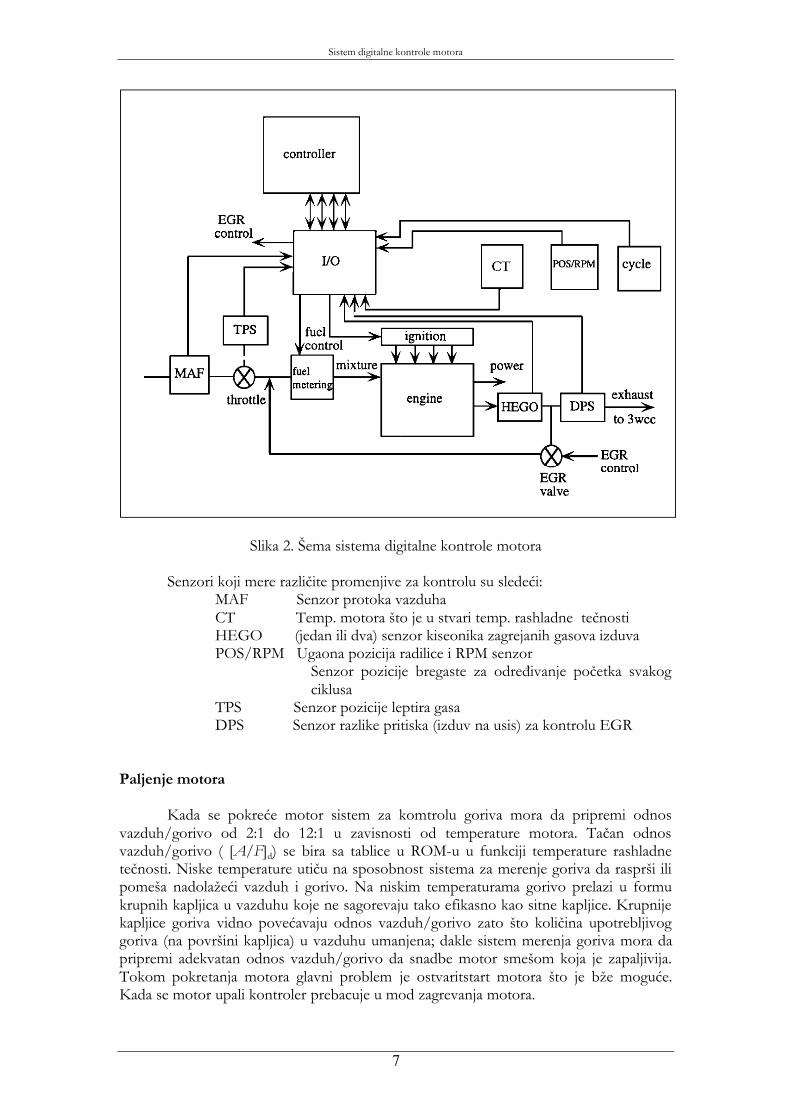
Slika 2. ᘀema sistema digitalne kontrole motora
Senzori koji mere razliაite promenjive za kontrolu su sledeၰi: MAF Senzor protoka vazduha
CT Temp. motora ᘐto je u stvari temp. rashladne teაnosti HEGO (jedan ili dva) senzor kiseonika zagrejanih gasova izduva POS/RPM Ugaona pozicija radilice i RPM senzor
Senzor pozicije bregaste za odreᄐivanje poაetka svakog ciklusa
TPS Senzor pozicije leptira gasa DPS Senzor razlike pritiska (izduv na usis) za kontrolu EGR Paljenje motora Kada se pokreၰe motor sistem za komtrolu goriva mora da pripremi odnos vazduh/gorivo od 2:1 do 12:1 u zavisnosti od temperature motora. Taაan odnos vazduh/gorivo ( [A/F]d) se bira sa tablice u ROM-u u funkciji temperature rashladne teაnosti. Niske temperature utiაu na sposobnost sistema za merenje goriva da rasprᘐi ili pomeᘐa nadola០eၰi vazduh i gorivo. Na niskim temperaturama gorivo prelazi u formu krupnih kapljica u vazduhu koje ne sagorevaju tako efikasno kao sitne kapljice. Krupnije kapljice goriva vidno poveၰavaju odnos vazduh/gorivo zato ᘐto koliაina upotrebljivog goriva (na povrᘐini kapljica) u vazduhu umanjena; dakle sistem merenja goriva mora da pripremi adekvatan odnos vazduh/gorivo da snadbe motor smeᘐom koja je zapaljivija. Tokom pokretanja motora glavni problem je ostvaritstart motora ᘐto je b០e moguၰe. Kada se motor upali kontroler prebacuje u mod zagrevanja motora.
Sistem digitalne kontrole motora
8
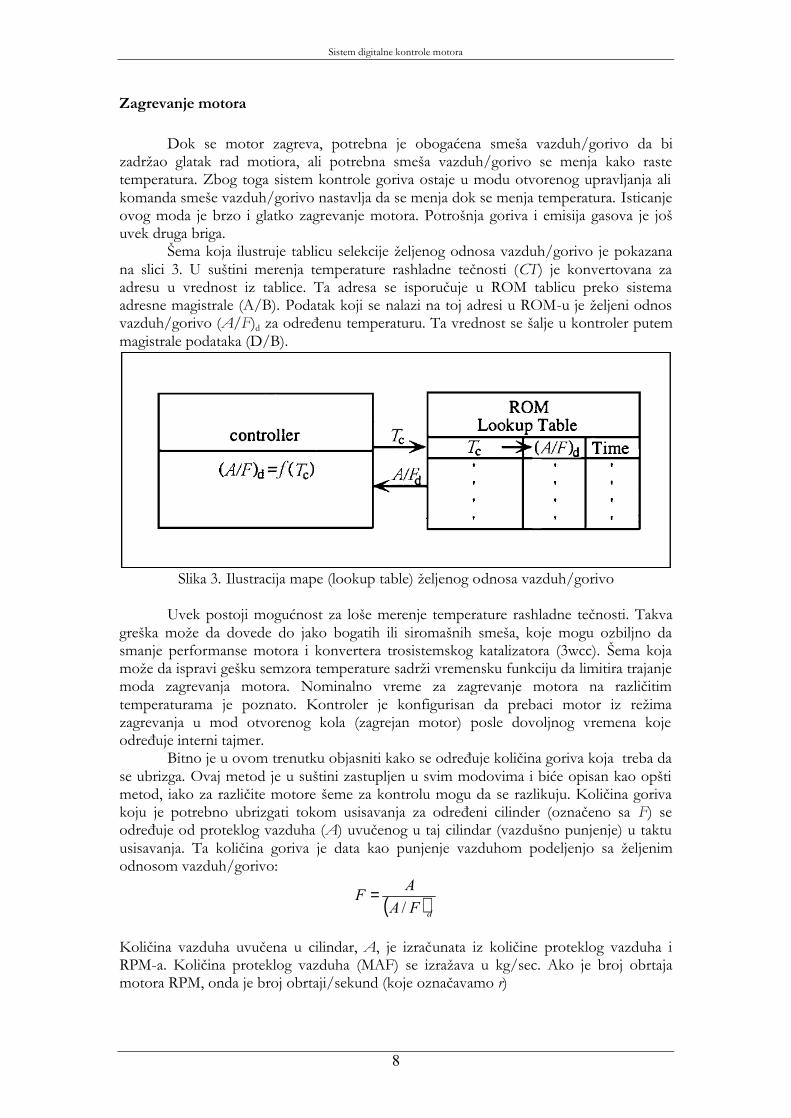
Zagrevanje motora Dok se motor zagreva, potrebna je obogaၰena smeᘐa vazduh/gorivo da bi zadr០ao glatak rad motiora, ali potrebna smeᘐa vazduh/gorivo se menja kako raste temperatura. Zbog toga sistem kontrole goriva ostaje u modu otvorenog upravljanja ali komanda smeᘐe vazduh/gorivo nastavlja da se menja dok se menja temperatura. Isticanje ovog moda je brzo i glatko zagrevanje motora. Potroᘐnja goriva i emisija gasova je joᘐ uvek druga briga. ᘀema koja ilustruje tablicu selekcije ០eljenog odnosa vazduh/gorivo je pokazana na slici 3. U suᘐtini merenja temperature rashladne teაnosti (CT) je konvertovana za adresu u vrednost iz tablice. Ta adresa se isporuაuje u ROM tablicu preko sistema adresne magistrale (A/B). Podatak koji se nalazi na toj adresi u ROM-u je ០eljeni odnos vazduh/gorivo (A/F)d za odreᄐenu temperaturu. Ta vrednost se ᘐalje u kontroler putem magistrale podataka (D/B).
Slika 3. Ilustracija mape (lookup table) ០eljenog odnosa vazduh/gorivo
Uvek postoji moguၰnost za loᘐe merenje temperature rashladne teაnosti. Takva
greᘐka mo០e da dovede do jako bogatih ili siromaᘐnih smeᘐa, koje mogu ozbiljno da smanje performanse motora i konvertera trosistemskog katalizatora (3wcc). ᘀema koja mo០e da ispravi geᘐku semzora temperature sadr០i vremensku funkciju da limitira trajanje moda zagrevanja motora. Nominalno vreme za zagrevanje motora na razliაitim temperaturama je poznato. Kontroler je konfigurisan da prebaci motor iz re០ima zagrevanja u mod otvorenog kola (zagrejan motor) posle dovoljnog vremena koje odreᄐuje interni tajmer.
Bitno je u ovom trenutku objasniti kako se odreᄐuje koliაina goriva koja treba da se ubrizga. Ovaj metod je u suᘐtini zastupljen u svim modovima i biၰe opisan kao opᘐti metod, iako za razliაite motore ᘐeme za kontrolu mogu da se razlikuju. Koliაina goriva koju je potrebno ubrizgati tokom usisavanja za odreᄐeni cilinder (oznaაeno sa F) se odreᄐuje od proteklog vazduha (A) uvuაenog u taj cilindar (vazduᘐno punjenje) u taktu usisavanja. Ta koliაina goriva je data kao punjenje vazduhom podeljenjo sa ០eljenim odnosom vazduh/gorivo:
( )dFAAF/
=
Koliაina vazduha uvuაena u cilindar, A, je izraაunata iz koliაine proteklog vazduha i RPM-a. Koliაina proteklog vazduha (MAF) se izra០ava u kg/sec. Ako je broj obrtaja motora RPM, onda je broj obrtaji/sekund (koje oznaაavamo r)
Sistem digitalne kontrole motora
9
60RPMr =
Znaაi, protok goriva je raspodeljen pribli០no jednako u polovinu cilindara tokom jednog obrtaja. Ako je broj cilindra N onda je vazduᘐno punjenje (masa) u svaki cilindar tokom jednog obrtaja
( )2/NrMAFA =
U tom sluაaju masa goriva isporuაena u svaki cilindar je
( )( )dFANrMAFF
/2/=
Proraაun se izvrᘐava neprekidno putem kontrolera tako da koliაina goriva mo០e da varira brzo da se prilagodi naglim promenama uslovima rada motora. Trajanje impulsa brizgaljki T odgovara koliაini goriva koja se proraაunava koriᘐၰenjem koliაine isporuაenog goriva koje nam je poznato Rf:
fRFT =
ᘀirina pulsa je poznata kao osnovna ᘐirina pulsa. Stvarna ᘐirina pulsa koja se koristi je modifikovana prema operacionom modu koji se koristi u tom trenutku, kao ᘐto ၰe biti objaᘐnjeno.
Sistem i kompleksnost sistema u direktnoj je vezi sa potrebama primene sistema. Kontrolni sistemi se ᘐire klasifikuju kao CLOSED-LOOP (zatvoreno upravljanje-
petlja) ili OPEN-LOOP (otvoreno upravljanje-petlja) sistemi.
Proces otvorenog upravljanja Za zagrevanje motora kontroler koristi mod otvorenog kola ako je iz nekih razloga mod zatvorenog kola nedostupan. Na primer motor mo០e da se dovoljno zagreje ali da EGO senzor ne dobije upotrebljiv signal. U svakom sluაaju veoma je va០no ᘐto je pre moguၰe imati stehiometrijsku meᘐavinu radi umanjenja ᘐtetnih gasova. Osnovna ᘐirina pulsa Tb se proraაunava na ០eljenu vrednost osim ᘐto je ០eljeni odnos vazduh/gorivo (A/F)d 14.7 (stehiometrija):
( )( ) fb RsNr
MAFT7.14/
= osnovna ᘐirina pulsa
Korekcije osnovne ᘐirine pulsa se javljaju kad god neᘐto utiაe na taაnost u isporuci goriva. Na primer nizak napon akumulatora mo០e da utiაe na pritisak u cevაicama koje isporuაuju gorivo brizgaljkama. Korekcija osnovne ᘐirine impulsa se tada vrᘐi koriᘐၰenjem stvarnog napona akumulatora.
Sistem digitalne kontrole motora
10
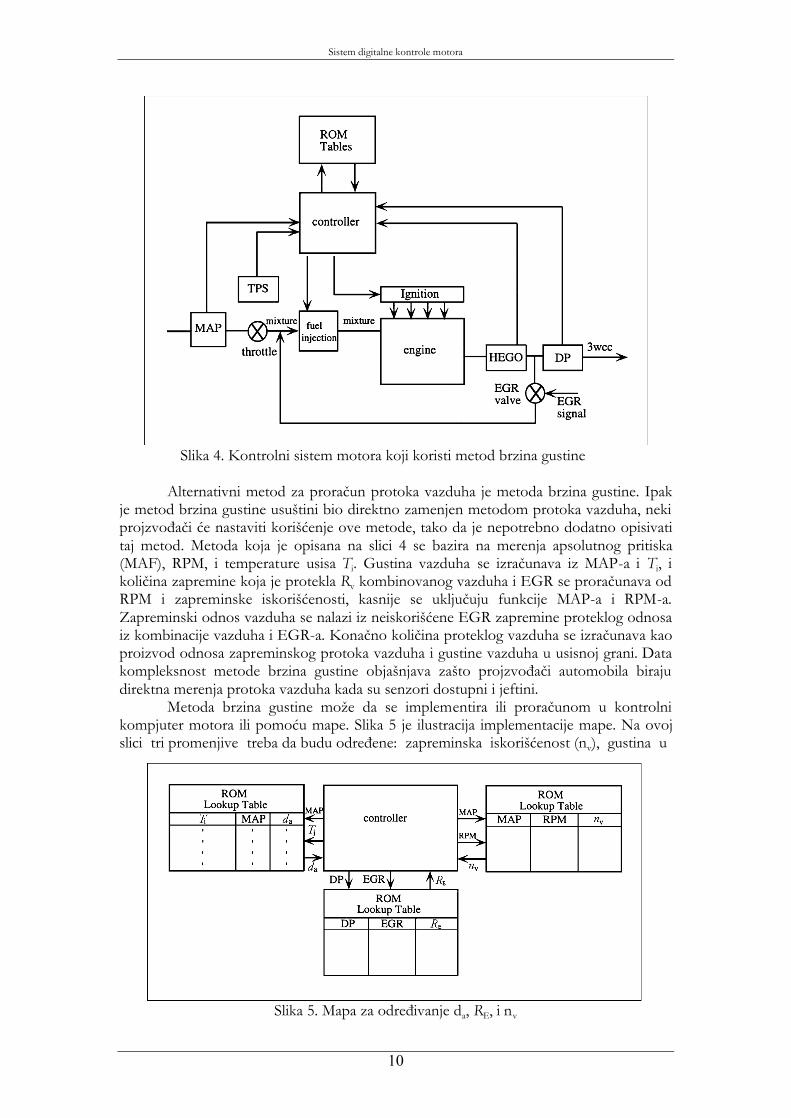
Slika 4. Kontrolni sistem motora koji koristi metod brzina gustine
Alternativni metod za proraაun protoka vazduha je metoda brzina gustine. Ipak
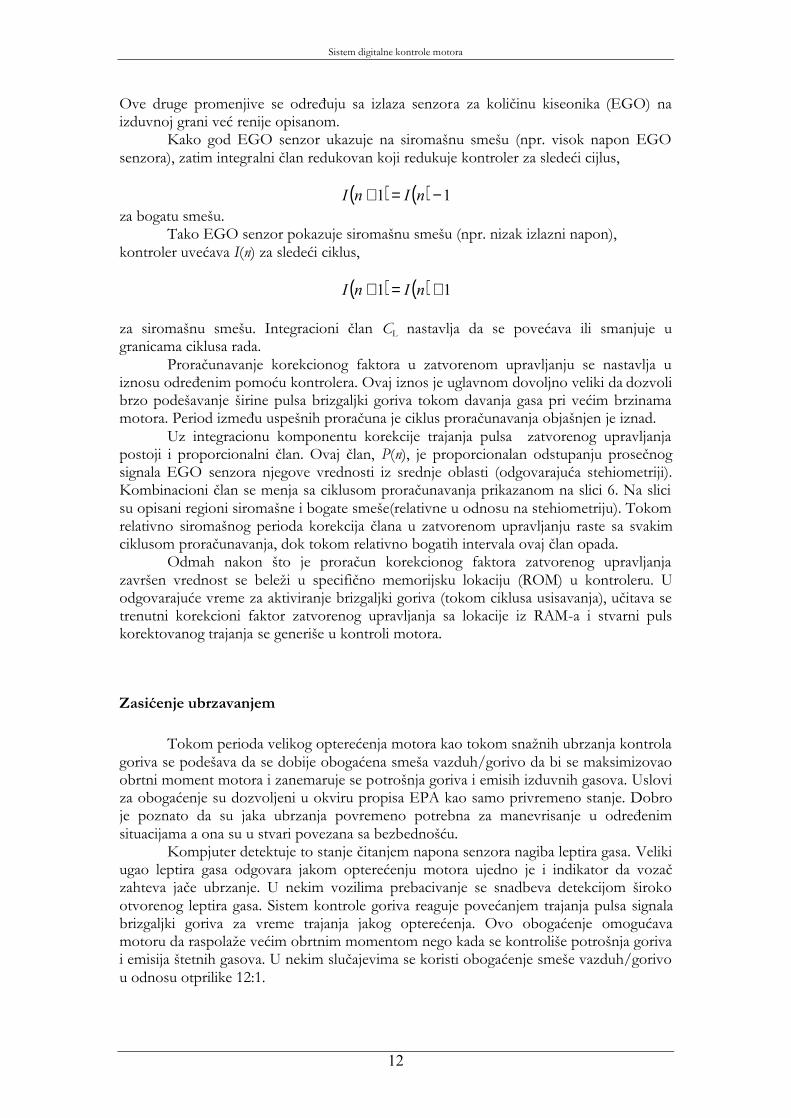
je metod brzina gustine usuᘐtini bio direktno zamenjen metodom protoka vazduha, neki projzvoᄐaაi ၰe nastaviti koriᘐၰenje ove metode, tako da je nepotrebno dodatno opisivati taj metod. Metoda koja je opisana na slici 4 se bazira na merenja apsolutnog pritiska (MAF), RPM, i temperature usisa Ti. Gustina vazduha se izraაunava iz MAP-a i Ti, i koliაina zapremine koja je protekla Rv kombinovanog vazduha i EGR se proraაunava od RPM i zapreminske iskoriᘐၰenosti, kasnije se ukljuაuju funkcije MAP-a i RPM-a. Zapreminski odnos vazduha se nalazi iz neiskoriᘐၰene EGR zapremine proteklog odnosa iz kombinacije vazduha i EGR-a. Konaაno koliაina proteklog vazduha se izraაunava kao proizvod odnosa zapreminskog protoka vazduha i gustine vazduha u usisnoj grani. Data kompleksnost metode brzina gustine objaᘐnjava zaᘐto projzvoᄐaაi automobila biraju direktna merenja protoka vazduha kada su senzori dostupni i jeftini. Metoda brzina gustine mo០e da se implementira ili proraაunom u kontrolni kompjuter motora ili pomoၰu mape. Slika 5 je ilustracija implementacije mape. Na ovoj slici tri promenjive treba da budu odreᄐene: zapreminska iskoriᘐၰenost (nv), gustina u
Slika 5. Mapa za odreᄐivanje da, RE, i nv

Sistem digitalne kontrole motora
11
usisnoj grani (da), i EGR zapreminski odnos protoka (RE). Zapreminska iskoriᘐၰenost se აita iz ROM-a sa adresom odreᄐenom iz RPM-a i meranja MAP-a. Gustina vazduha u usisnoj grani se აita iz drugog sektora ROM-a sa adresom odreᄐenom MAP-om i Ti merenja. Potekli zapreminski odnis EGR-a se აita takoᄐe iz drugog sektora u ROM-u sa adresom odreᄐenom iz rezlike pritiska (DP) i pozicije ventila EGR-a. Ove promenjive se kombinuju u projzvod koliაine proteklog vazduha:
−
= Eva RnDRPMdMAF
260
gde je D zapremina motora.
Proces zatvorenog upravljanja Mo០da naj znaაajnije podeᘐavanje trajanja pulsa brizgaljki goriva se javlja kada je kontrola u modu zatvorenog upravljanja. U modu otvorenog upravljanja preciznost ubrizgavanja goriva zavisi od preciznosti merenja bitnih promenjivih. Ipak osnovni sistem je osetljivost na promene ili operacionih stanja (npr. temperatura) ili sa vremenom (starenje ili habanje komponenti). U bilo kom zatvorenom sistemu upravljanja merenje izlaznih promenjivih se uporeᄐuje sa ០eljenom vrednoᘐၰu tih promenjivih. U sluაaju kontrole goriva promenjiva vrednost koja se reguliᘐe koncentracija izduvnih gasova HC, CO i NOx. Meᄐutim direktno merenje ovih gasova nije izvodljivo kod fabriაkih automobila, dovoljno je u svrhu potroᘐnje goriva merenje koncentracije kiseonika u izduvnim gasovima. Mod zatvorenog upravljanja moze se iskljuაivo aktivirati kada se EGO (ili HEGO) senzor dovoljno zagreje. Proseაno vreme EGO senzora izlaznog napona pribavlja povratni signal za kontrolu goriva u modu zatvorenog upravljanja. Trenutna vrednost napona EGO senzora fluktuira naglo sa visokih na niske vrednosti ali je proseაna vrednost dobar indikator za meᘐavinu. Kao ᘐto je objaᘐnjeno ranije ubrizgavanje goriva koje vrsi sistem kontrole motora se kontroliᘐe pomoၰu trajanja pulsa (T) za svaku brizgaljku. Kontroler motora neprekidno prilagoᄐava trajanje pulsa za razliაite uslove rada i radnih parametara. Reprezentativni algoritam za trajanje pulsa brizgaljki goriva za datu brizgaljku tokom n-tog kruga proraაuna, T(n), je dato kao:
( ) ( ) ( )[ ]nCnTnT Lb +×= 1 gde su
Tb(n) je osnovna ᘐirina pulsa odreᄐena iz merenja odnosa proteklog vazduha i ០eljenog odnosa vazduh/gorivo CL(n) je korekcioni faktor zatvorenog upravljanja
Za rad otvorenog upravljanja, CL jednako je O; za rad u zatvorenom upravljanju, CL je dato kao
( ) ( ) ( )nPnInCL βα += gde su I(n) je integlalni deo korekcije zatvorenog upravljanja P(n) je proporcionalni deo korekcije zatvorenog upravljanja 㬐 i 㬠 su konstante
Sistem digitalne kontrole motora
12
Ove druge promenjive se odreᄐuju sa izlaza senzora za koliაinu kiseonika (EGO) na izduvnoj grani veၰ renije opisanom. Kako god EGO senzor ukazuje na siromaᘐnu smeᘐu (npr. visok napon EGO senzora), zatim integralni აlan redukovan koji redukuje kontroler za sledeၰi cijlus,
( ) ( ) 11 −=+ nInI za bogatu smeᘐu. Tako EGO senzor pokazuje siromaᘐnu smeᘐu (npr. nizak izlazni napon), kontroler uveၰava I(n) za sledeၰi ciklus,
( ) ( ) 11 +=+ nInI
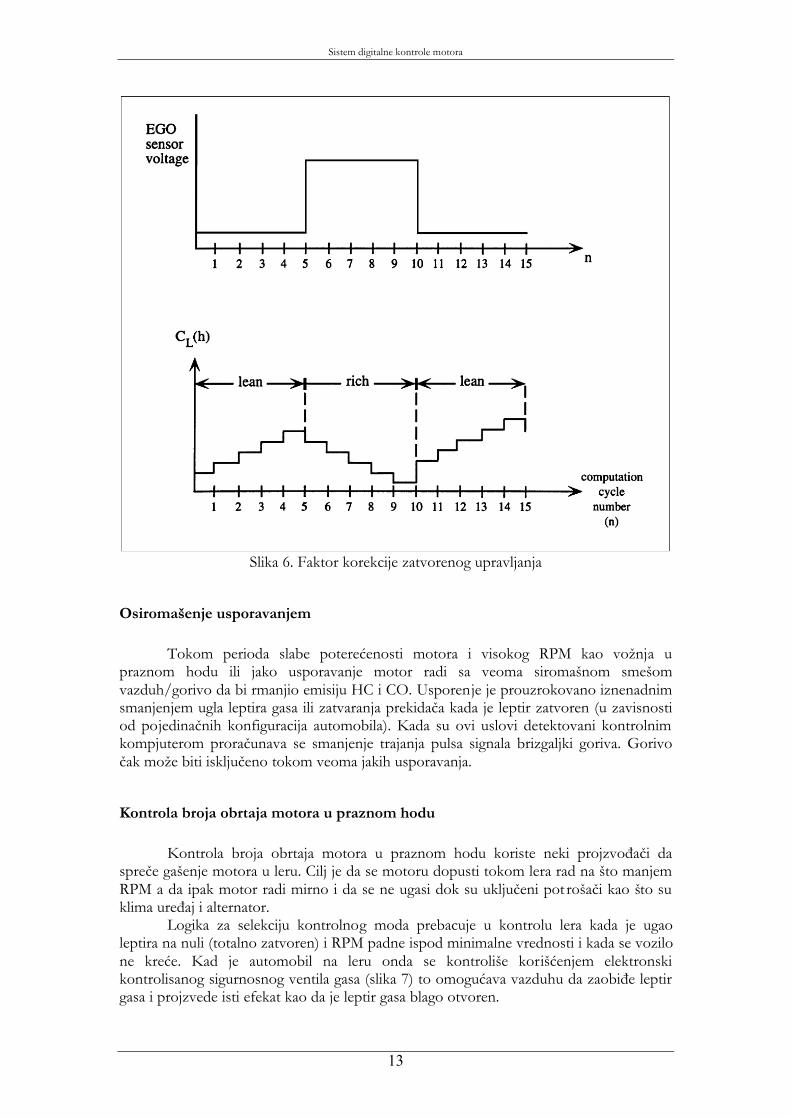
za siromaᘐnu smeᘐu. Integracioni აlan CL nastavlja da se poveၰava ili smanjuje u granicama ciklusa rada. Proraაunavanje korekcionog faktora u zatvorenom upravljanju se nastavlja u iznosu odreᄐenim pomoၰu kontrolera. Ovaj iznos je uglavnom dovoljno veliki da dozvoli brzo podeᘐavanje ᘐirine pulsa brizgaljki goriva tokom davanja gasa pri veၰim brzinama motora. Period izmeᄐu uspeᘐnih proraაuna je ciklus proraაunavanja objaᘐnjen je iznad. Uz integracionu komponentu korekcije trajanja pulsa zatvorenog upravljanja postoji i proporcionalni აlan. Ovaj აlan, P(n), je proporcionalan odstupanju proseაnog signala EGO senzora njegove vrednosti iz srednje oblasti (odgovarajuၰa stehiometriji). Kombinacioni აlan se menja sa ciklusom proraაunavanja prikazanom na slici 6. Na slici su opisani regioni siromaᘐne i bogate smeᘐe(relativne u odnosu na stehiometriju). Tokom relativno siromaᘐnog perioda korekcija აlana u zatvorenom upravljanju raste sa svakim ciklusom proraაunavanja, dok tokom relativno bogatih intervala ovaj აlan opada. Odmah nakon ᘐto je proraაun korekcionog faktora zatvorenog upravljanja zavrᘐen vrednost se bele០i u specifiაno memorijsku lokaciju (ROM) u kontroleru. U odgovarajuၰe vreme za aktiviranje brizgaljki goriva (tokom ciklusa usisavanja), uაitava se trenutni korekcioni faktor zatvorenog upravljanja sa lokacije iz RAM-a i stvarni puls korektovanog trajanja se generiᘐe u kontroli motora.
Zasiၰenje ubrzavanjem Tokom perioda velikog optereၰenja motora kao tokom sna០nih ubrzanja kontrola goriva se podeᘐava da se dobije obogaၰena smeᘐa vazduh/gorivo da bi se maksimizovao obrtni moment motora i zanemaruje se potroᘐnja goriva i emisih izduvnih gasova. Uslovi za obogaၰenje su dozvoljeni u okviru propisa EPA kao samo privremeno stanje. Dobro je poznato da su jaka ubrzanja povremeno potrebna za manevrisanje u odreᄐenim situacijama a ona su u stvari povezana sa bezbednoᘐၰu. Kompjuter detektuje to stanje აitanjem napona senzora nagiba leptira gasa. Veliki ugao leptira gasa odgovara jakom optereၰenju motora ujedno je i indikator da vozaა zahteva jaაe ubrzanje. U nekim vozilima prebacivanje se snadbeva detekcijom ᘐiroko otvorenog leptira gasa. Sistem kontrole goriva reaguje poveၰanjem trajanja pulsa signala brizgaljki goriva za vreme trajanja jakog optereၰenja. Ovo obogaၰenje omoguၰava motoru da raspola០e veၰim obrtnim momentom nego kada se kontroliᘐe potroᘐnja goriva i emisija ᘐtetnih gasova. U nekim sluაajevima se koristi obogaၰenje smeᘐe vazduh/gorivo u odnosu otprilike 12:1.
Sistem digitalne kontrole motora
13
Slika 6. Faktor korekcije zatvorenog upravljanja
Osiromaᘐenje usporavanjem Tokom perioda slabe potereၰenosti motora i visokog RPM kao vo០nja u praznom hodu ili jako usporavanje motor radi sa veoma siromaᘐnom smeᘐom vazduh/gorivo da bi rmanjio emisiju HC i CO. Usporenje je prouzrokovano iznenadnim smanjenjem ugla leptira gasa ili zatvaranja prekidaაa kada je leptir zatvoren (u zavisnosti od pojedinaაnih konfiguracija automobila). Kada su ovi uslovi detektovani kontrolnim kompjuterom proraაunava se smanjenje trajanja pulsa signala brizgaljki goriva. Gorivo აak mo០e biti iskljuაeno tokom veoma jakih usporavanja.
Kontrola broja obrtaja motora u praznom hodu Kontrola broja obrtaja motora u praznom hodu koriste neki projzvoᄐaაi da spreაe gaᘐenje motora u leru. Cilj je da se motoru dopusti tokom lera rad na ᘐto manjem RPM a da ipak motor radi mirno i da se ne ugasi dok su ukljuაeni pot roᘐaაi kao ᘐto su klima ureᄐaj i alternator. Logika za selekciju kontrolnog moda prebacuje u kontrolu lera kada je ugao leptira na nuli (totalno zatvoren) i RPM padne ispod minimalne vrednosti i kada se vozilo ne kreၰe. Kad je automobil na leru onda se kontroliᘐe koriᘐၰenjem elektronski kontrolisanog sigurnosnog ventila gasa (slika 7) to omoguၰava vazduhu da zaobiᄐe leptir gasa i projzvede isti efekat kao da je leptir gasa blago otvoren.
Sistem digitalne kontrole motora
14
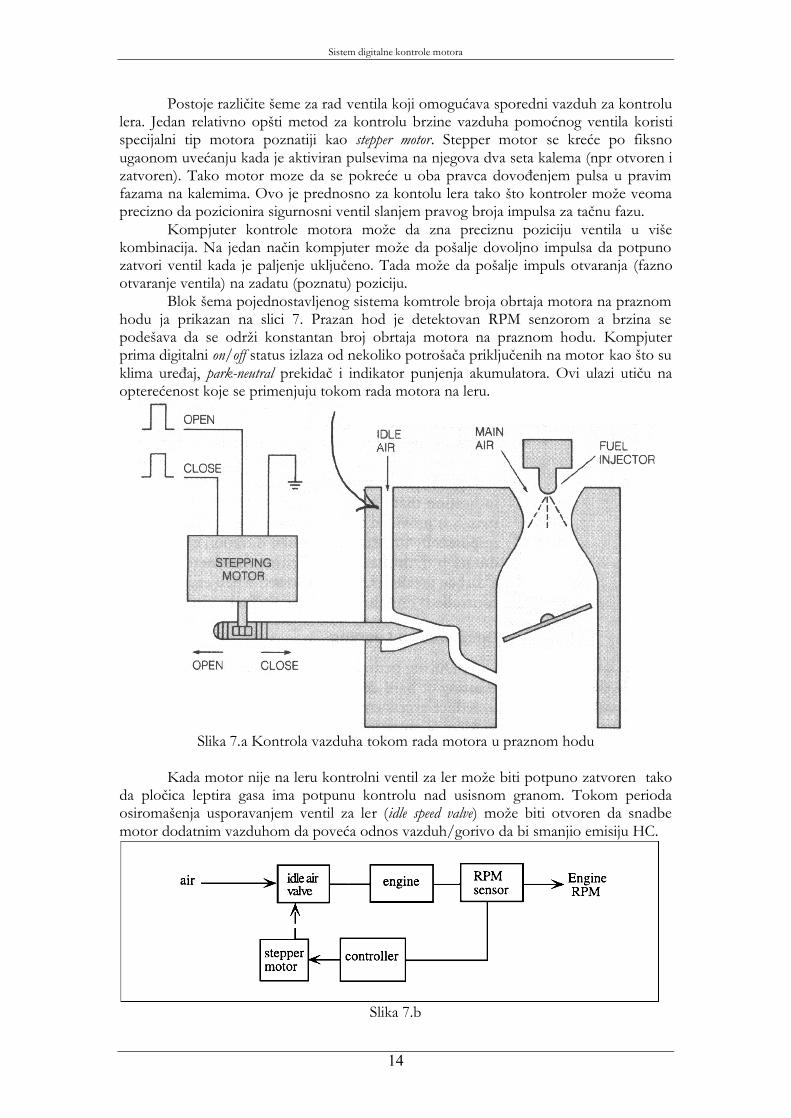
Postoje razliაite ᘐeme za rad ventila koji omoguၰava sporedni vazduh za kontrolu lera. Jedan relativno opᘐti metod za kontrolu brzine vazduha pomoၰnog ventila koristi specijalni tip motora poznatiji kao stepper motor. Stepper motor se kreၰe po fiksno ugaonom uveၰanju kada je aktiviran pulsevima na njegova dva seta kalema (npr otvoren i zatvoren). Tako motor moze da se pokreၰe u oba pravca dovoᄐenjem pulsa u pravim fazama na kalemima. Ovo je prednosno za kontolu lera tako ᘐto kontroler mo០e veoma precizno da pozicionira sigurnosni ventil slanjem pravog broja impulsa za taაnu fazu. Kompjuter kontrole motora mo០e da zna preciznu poziciju ventila u viᘐe kombinacija. Na jedan naაin kompjuter mo០e da poᘐalje dovoljno impulsa da potpuno zatvori ventil kada je paljenje ukljuაeno. Tada mo០e da poᘐalje impuls otvaranja (fazno otvaranje ventila) na zadatu (poznatu) poziciju. Blok ᘐema pojednostavljenog sistema komtrole broja obrtaja motora na praznom hodu ja prikazan na slici 7. Prazan hod je detektovan RPM senzorom a brzina se podeᘐava da se odr០i konstantan broj obrtaja motora na praznom hodu. Kompjuter prima digitalni on/off status izlaza od nekoliko potroᘐaაa prikljuაenih na motor kao ᘐto su klima ureᄐaj, park-neutral prekidaა i indikator punjenja akumulatora. Ovi ulazi utiაu na optereၰenost koje se primenjuju tokom rada motora na leru.
Slika 7.a Kontrola vazduha tokom rada motora u praznom hodu
Kada motor nije na leru kontrolni ventil za ler mo០e biti potpuno zatvoren tako da ploაica leptira gasa ima potpunu kontrolu nad usisnom granom. Tokom perioda osiromaᘐenja usporavanjem ventil za ler (idle speed valve) mo០e biti otvoren da snadbe motor dodatnim vazduhom da poveၰa odnos vazduh/gorivo da bi smanjio emisiju HC.
Slika 7.b
Sistem digitalne kontrole motora
15
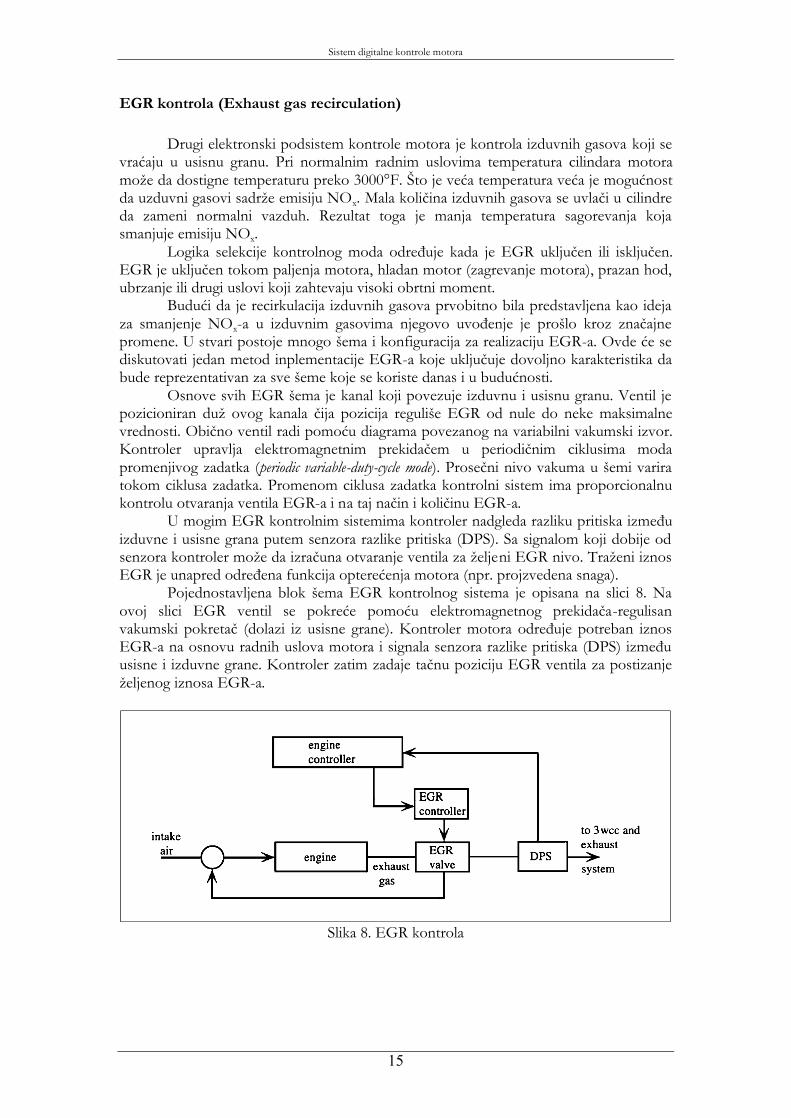
EGR kontrola (Exhaust gas recirculation) Drugi elektronski podsistem kontrole motora je kontrola izduvnih gasova koji se vraၰaju u usisnu granu. Pri normalnim radnim uslovima temperatura cilindara motora mo០e da dostigne temperaturu preko 3000°F. ᘀto je veၰa temperatura veၰa je moguၰnost da uzduvni gasovi sadr០e emisiju NOx. Mala koliაina izduvnih gasova se uvlaაi u cilindre da zameni normalni vazduh. Rezultat toga je manja temperatura sagorevanja koja smanjuje emisiju NOx. Logika selekcije kontrolnog moda odreᄐuje kada je EGR ukljuაen ili iskljuაen. EGR je ukljuაen tokom paljenja motora, hladan motor (zagrevanje motora), prazan hod, ubrzanje ili drugi uslovi koji zahtevaju visoki obrtni moment. Buduၰi da je recirkulacija izduvnih gasova prvobitno bila predstavljena kao ideja za smanjenje NOx-a u izduvnim gasovima njegovo uvoᄐenje je proᘐlo kroz znaაajne promene. U stvari postoje mnogo ᘐema i konfiguracija za realizaciju EGR-a. Ovde ၰe se diskutovati jedan metod inplementacije EGR-a koje ukljuაuje dovoljno karakteristika da bude reprezentativan za sve ᘐeme koje se koriste danas i u buduၰnosti. Osnove svih EGR ᘐema je kanal koji povezuje izduvnu i usisnu granu. Ventil je pozicioniran du០ ovog kanala აija pozicija reguliᘐe EGR od nule do neke maksimalne vrednosti. Obiაno ventil radi pomoၰu diagrama povezanog na variabilni vakumski izvor. Kontroler upravlja elektromagnetnim prekidaაem u periodiაnim ciklusima moda promenjivog zadatka (periodic variable-duty-cycle mode). Proseაni nivo vakuma u ᘐemi varira tokom ciklusa zadatka. Promenom ciklusa zadatka kontrolni sistem ima proporcionalnu kontrolu otvaranja ventila EGR-a i na taj naაin i koliაinu EGR-a. U mogim EGR kontrolnim sistemima kontroler nadgleda razliku pritiska izmeᄐu izduvne i usisne grana putem senzora razlike pritiska (DPS). Sa signalom koji dobije od senzora kontroler mo០e da izraაuna otvaranje ventila za ០eljeni EGR nivo. Tra០eni iznos EGR je unapred odreᄐena funkcija optereၰenja motora (npr. projzvedena snaga). Pojednostavljena blok ᘐema EGR kontrolnog sistema je opisana na slici 8. Na ovoj slici EGR ventil se pokreၰe pomoၰu elektromagnetnog prekidaაa-regulisan vakumski pokretaა (dolazi iz usisne grane). Kontroler motora odreᄐuje potreban iznos EGR-a na osnovu radnih uslova motora i signala senzora razlike pritiska (DPS) izmeᄐu usisne i izduvne grane. Kontroler zatim zadaje taაnu poziciju EGR ventila za postizanje ០eljenog iznosa EGR-a.
Slika 8. EGR kontrola
Sistem digitalne kontrole motora
16
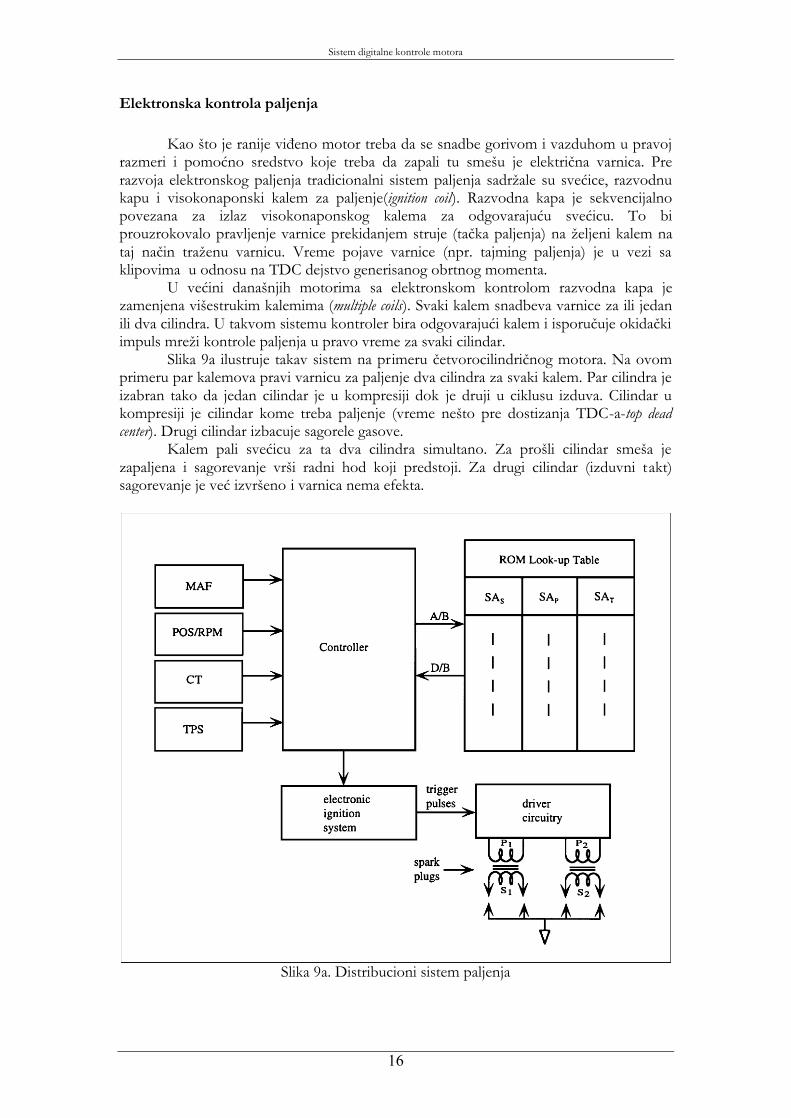
Elektronska kontrola paljenja Kao ᘐto je ranije viᄐeno motor treba da se snadbe gorivom i vazduhom u pravoj razmeri i pomoၰno sredstvo koje treba da zapali tu smeᘐu je elektriაna varnica. Pre razvoja elektronskog paljenja tradicionalni sistem paljenja sadr០ale su sveၰice, razvodnu kapu i visokonaponski kalem za paljenje(ignition coil). Razvodna kapa je sekvencijalno povezana za izlaz visokonaponskog kalema za odgovarajuၰu sveၰicu. To bi prouzrokovalo pravljenje varnice prekidanjem struje (taაka paljenja) na ០eljeni kalem na taj naაin tra០enu varnicu. Vreme pojave varnice (npr. tajming paljenja) je u vezi sa klipovima u odnosu na TDC dejstvo generisanog obrtnog momenta. U veၰini danaᘐnjih motorima sa elektronskom kontrolom razvodna kapa je zamenjena viᘐestrukim kalemima (multiple coils). Svaki kalem snadbeva varnice za ili jedan ili dva cilindra. U takvom sistemu kontroler bira odgovarajuၰi kalem i isporuაuje okidaაki impuls mre០i kontrole paljenja u pravo vreme za svaki cilindar. Slika 9a ilustruje takav sistem na primeru აetvorocilindriაnog motora. Na ovom primeru par kalemova pravi varnicu za paljenje dva cilindra za svaki kalem. Par cilindra je izabran tako da jedan cilindar je u kompresiji dok je druji u ciklusu izduva. Cilindar u kompresiji je cilindar kome treba paljenje (vreme neᘐto pre dostizanja TDC-a-top dead center). Drugi cilindar izbacuje sagorele gasove. Kalem pali sveၰicu za ta dva cilindra simultano. Za proᘐli cilindar smeᘐa je zapaljena i sagorevanje vrᘐi radni hod koji predstoji. Za drugi cilindar (izduvni takt) sagorevanje je veၰ izvrᘐeno i varnica nema efekta.
Slika 9a. Distribucioni sistem paljenja
Sistem digitalne kontrole motora
17
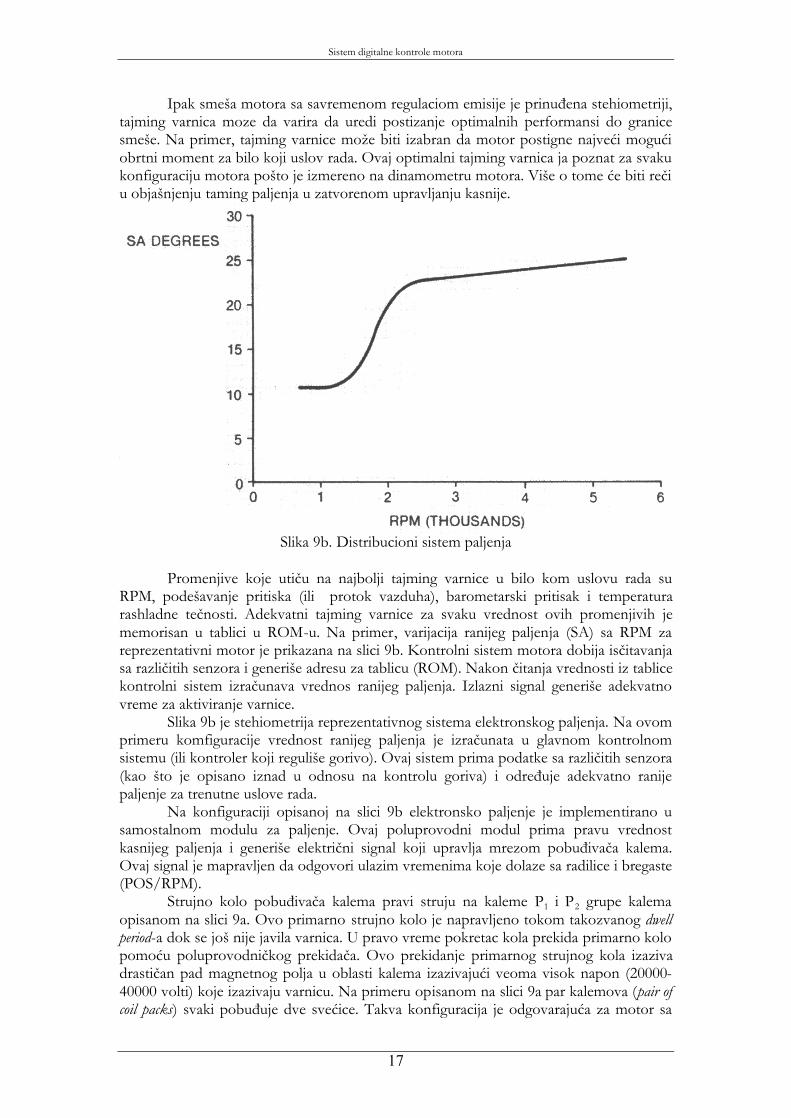
Ipak smeᘐa motora sa savremenom regulaciom emisije je prinuᄐena stehiometriji, tajming varnica moze da varira da uredi postizanje optimalnih performansi do granice smeᘐe. Na primer, tajming varnice mo០e biti izabran da motor postigne najveၰi moguၰi obrtni moment za bilo koji uslov rada. Ovaj optimalni tajming varnica ja poznat za svaku konfiguraciju motora poᘐto je izmereno na dinamometru motora. Viᘐe o tome ၰe biti reაi u objaᘐnjenju taming paljenja u zatvorenom upravljanju kasnije.
Slika 9b. Distribucioni sistem paljenja
Promenjive koje utiაu na najbolji tajming varnice u bilo kom uslovu rada su RPM, podeᘐavanje pritiska (ili protok vazduha), barometarski pritisak i temperatura rashladne teაnosti. Adekvatni tajming varnice za svaku vrednost ovih promenjivih je memorisan u tablici u ROM-u. Na primer, varijacija ranijeg paljenja (SA) sa RPM za reprezentativni motor je prikazana na slici 9b. Kontrolni sistem motora dobija isაitavanja sa razliაitih senzora i generiᘐe adresu za tablicu (ROM). Nakon აitanja vrednosti iz tablice kontrolni sistem izraაunava vrednos ranijeg paljenja. Izlazni signal generiᘐe adekvatno vreme za aktiviranje varnice. Slika 9b je stehiometrija reprezentativnog sistema elektronskog paljenja. Na ovom primeru komfiguracije vrednost ranijeg paljenja je izraაunata u glavnom kontrolnom sistemu (ili kontroler koji reguliᘐe gorivo). Ovaj sistem prima podatke sa razliაitih senzora (kao ᘐto je opisano iznad u odnosu na kontrolu goriva) i odreᄐuje adekvatno ranije paljenje za trenutne uslove rada. Na konfiguraciji opisanoj na slici 9b elektronsko paljenje je implementirano u samostalnom modulu za paljenje. Ovaj poluprovodni modul prima pravu vrednost kasnijeg paljenja i generiᘐe elektriაni signal koji upravlja mrezom pobuᄐivaაa kalema. Ovaj signal je mapravljen da odgovori ulazim vremenima koje dolaze sa radilice i bregaste (POS/RPM). Strujno kolo pobuᄐivaაa kalema pravi struju na kaleme P1 i P2 grupe kalema opisanom na slici 9a. Ovo primarno strujno kolo je napravljeno tokom takozvanog dwell period-a dok se joᘐ nije javila varnica. U pravo vreme pokretac kola prekida primarno kolo pomoၰu poluprovodniაkog prekidaაa. Ovo prekidanje primarnog strujnog kola izaziva drastiაan pad magnetnog polja u oblasti kalema izazivajuၰi veoma visok napon (20000-40000 volti) koje izazivaju varnicu. Na primeru opisanom na slici 9a par kalemova (pair of coil packs) svaki pobuᄐuje dve sveၰice. Takva konfiguracija je odgovarajuၰa za motor sa
Sistem digitalne kontrole motora
18
აetiri cilindra. U normalnim uslovima trbalo bi da bude jedan par kalemova za svaki par cilindara. Gore opisani sistem paljenja je poznat kao distribucioni sistem paljenja (distributorless ignition system DIS). Postoji odreᄐeni broj starijih automobila na putevima koji koriste distributor. Kako god elektronski sistem paljenja je pokazan na slici 9a, up to the coil packs. U motorima sa ugraᄐenim distributorom postoji sano jedan kalem coil a drugi je povezan za rotacioni prekidaა (ili distributor). U tipiაnom sistemu elektronskog paljenja potpuno kaᘐnjenje paljenja, SA ( u stepenima pre TDC) izra០ene su nekoliko komponenti koje se dodaju zajedno:
TPS SASASASA ++=
Prva komponenta SAS je osnovno ubrzanje varnice koje je tabelarna vrednost RPM-a i MAP-a. Kontrolni sistem აita RPM i MAP i proraაunava adresu u ROM za vrednost SAS koja odgovara datoj vrednosti. Tipiაno pomeranje sa RPM u leru do oko 1200 RPM je relativno sporo. Onda sa otprilike 1200 do 2300 RPM uveၰanje RPM je relativno brzo. Preko 2300 RPM poveၰanje RPM je ponovo relativno sporo. Svaki motor ima svoje karakteristiაno uprzanje paljenja koje je uglavnom kompromis suprotnih faktora. Druga komponenta SPP je prilog ranijeg paljenja u odnosu na pritisak u usisnoj grani. Ova vrednost se odreᄐuje iz tablice u ROM-u. Generalno gledano SA se smanjuje poveၰanjem pritiska. Zadnja komponenta SAT je priolog ranijeg paljenja u odnosu na temperaturu. Temperatura utiაe na ranije paljenje relativno kompleksno izimajuၰi uvid hladnog starta, zagrevanje motora i potpuno zagrejanog motora ali je to izvan namera ovog rada.
Zatvorena-petlja regulacije trenutka paljenja
Sistem za paljenje prethodno opisan je sistem otvorene petlje. Glavni nedostatak kontrole otvorene petlje je da ona ne mo០e automatski nadoknaditi mehaniაke promene u sistemu. Zatvorena petlja regulacije taაke paljenja je po០eljna sa stanoviᘐta poboljᘐanja performansi motora i odr០avanja tih performansi uprkos promenama sistema. Za najbolje performanse varnica se podeᘐava sve dok se ne pojavi udarac.
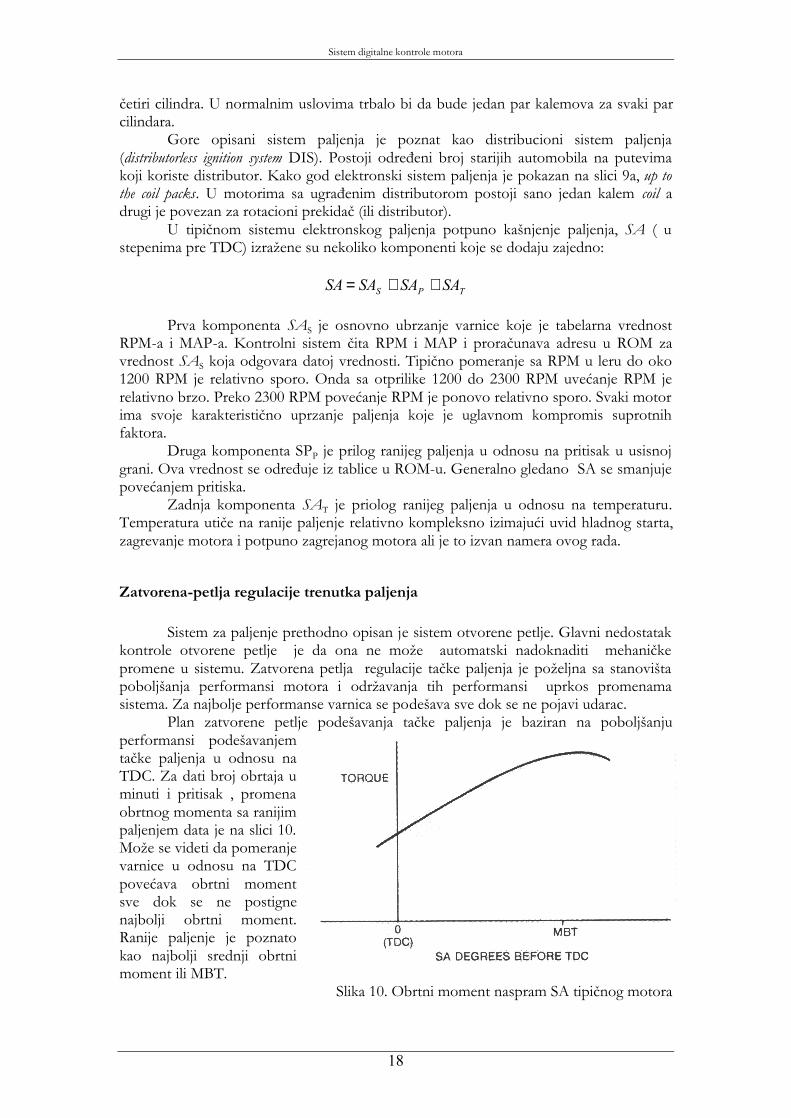
Plan zatvorene petlje podeᘐavanja taაke paljenja je baziran na poboljᘐanju performansi podeᘐavanjem taაke paljenja u odnosu na TDC. Za dati broj obrtaja u minuti i pritisak , promena obrtnog momenta sa ranijim paljenjem data je na slici 10. Mo០e se videti da pomeranje varnice u odnosu na TDC poveၰava obrtni moment sve dok se ne postigne najbolji obrtni moment. Ranije paljenje je poznato kao najbolji srednji obrtni moment ili MBT.
Slika 10. Obrtni moment naspram SA tipiაnog motora
Sistem digitalne kontrole motora
19
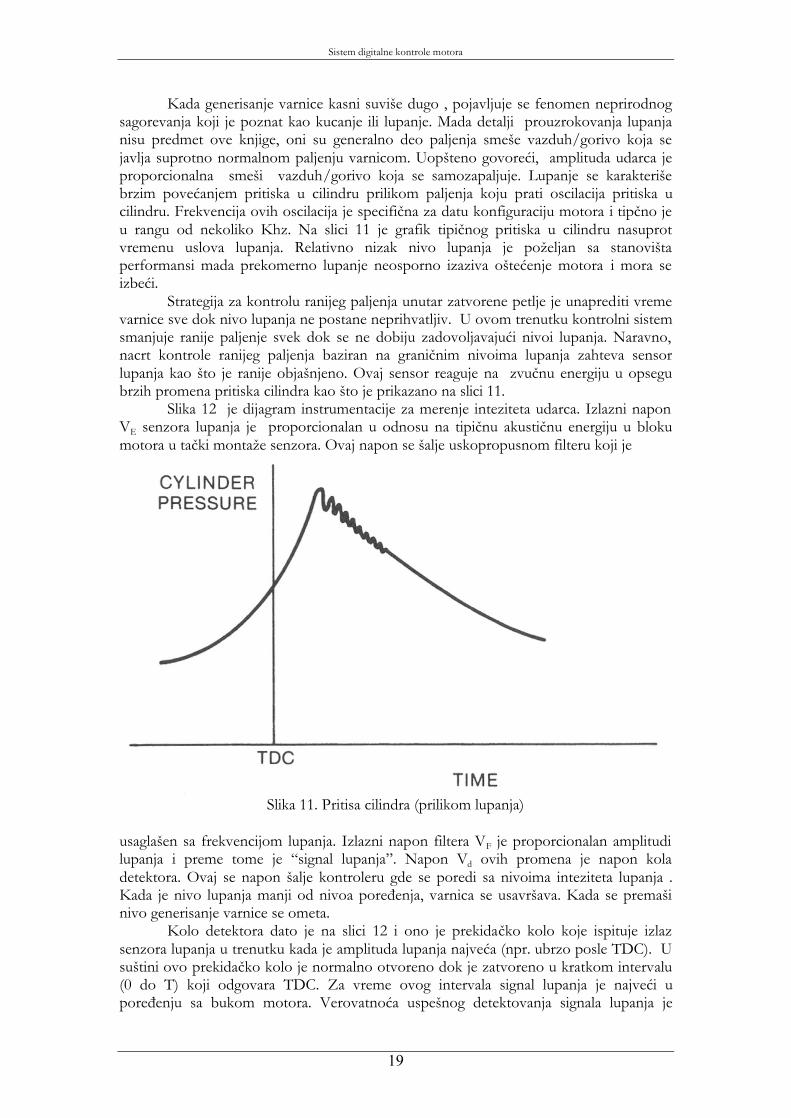
Kada generisanje varnice kasni suviᘐe dugo , pojavljuje se fenomen neprirodnog sagorevanja koji je poznat kao kucanje ili lupanje. Mada detalji prouzrokovanja lupanja nisu predmet ove knjige, oni su generalno deo paljenja smeᘐe vazduh/gorivo koja se javlja suprotno normalnom paljenju varnicom. Uopᘐteno govoreၰi, amplituda udarca je proporcionalna smeᘐi vazduh/gorivo koja se samozapaljuje. Lupanje se karakteriᘐe brzim poveၰanjem pritiska u cilindru prilikom paljenja koju prati oscilacija pritiska u cilindru. Frekvencija ovih oscilacija je specifiაna za datu konfiguraciju motora i tipაno je u rangu od nekoliko Khz. Na slici 11 je grafik tipiაnog pritiska u cilindru nasuprot vremenu uslova lupanja. Relativno nizak nivo lupanja je po០eljan sa stanoviᘐta performansi mada prekomerno lupanje neosporno izaziva oᘐteၰenje motora i mora se izbeၰi.
Strategija za kontrolu ranijeg paljenja unutar zatvorene petlje je unaprediti vreme varnice sve dok nivo lupanja ne postane neprihvatljiv. U ovom trenutku kontrolni sistem smanjuje ranije paljenje svek dok se ne dobiju zadovoljavajuၰi nivoi lupanja. Naravno, nacrt kontrole ranijeg paljenja baziran na graniაnim nivoima lupanja zahteva sensor lupanja kao ᘐto je ranije objaᘐnjeno. Ovaj sensor reaguje na zvuაnu energiju u opsegu brzih promena pritiska cilindra kao ᘐto je prikazano na slici 11.
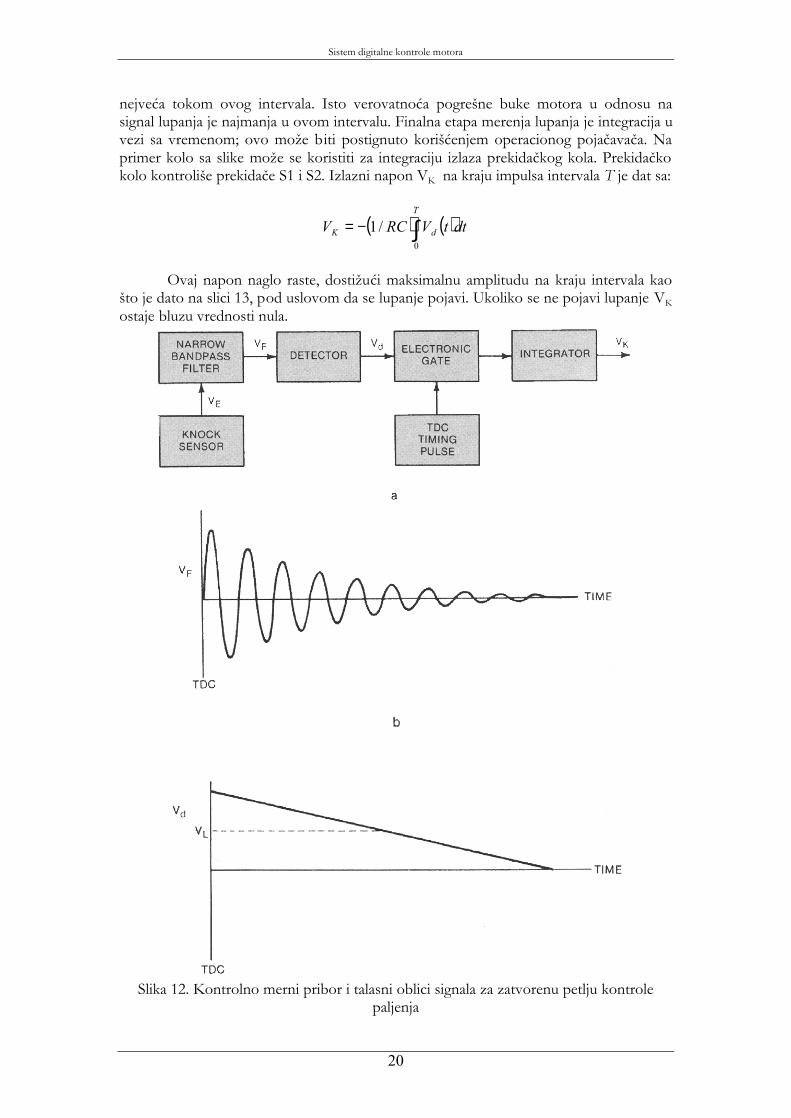
Slika 12 je dijagram instrumentacije za merenje inteziteta udarca. Izlazni napon VE senzora lupanja je proporcionalan u odnosu na tipiაnu akustiაnu energiju u bloku motora u taაki monta០e senzora. Ovaj napon se ᘐalje uskopropusnom filteru koji je
Slika 11. Pritisa cilindra (prilikom lupanja)
usaglaᘐen sa frekvencijom lupanja. Izlazni napon filtera VF je proporcionalan amplitudi lupanja i preme tome je “signal lupanja”. Napon Vd ovih promena je napon kola detektora. Ovaj se napon ᘐalje kontroleru gde se poredi sa nivoima inteziteta lupanja . Kada je nivo lupanja manji od nivoa poreᄐenja, varnica se usavrᘐava. Kada se premaᘐi nivo generisanje varnice se ometa.
Kolo detektora dato je na slici 12 i ono je prekidaაko kolo koje ispituje izlaz senzora lupanja u trenutku kada je amplituda lupanja najveၰa (npr. ubrzo posle TDC). U suᘐtini ovo prekidaაko kolo je normalno otvoreno dok je zatvoreno u kratkom intervalu (0 do T) koji odgovara TDC. Za vreme ovog intervala signal lupanja je najveၰi u poreᄐenju sa bukom motora. Verovatnoၰa uspeᘐnog detektovanja signala lupanja je
Sistem digitalne kontrole motora
20
nejveၰa tokom ovog intervala. Isto verovatnoၰa pogreᘐne buke motora u odnosu na signal lupanja je najmanja u ovom intervalu. Finalna etapa merenja lupanja je integracija u vezi sa vremenom; ovo mo០e biti postignuto koriᘐၰenjem operacionog pojaაavaაa. Na primer kolo sa slike mo០e se koristiti za integraciju izlaza prekidaაkog kola. Prekidaაko kolo kontroliᘐe prekidaაe S1 i S2. Izlazni napon VK na kraju impulsa intervala T je dat sa:
( ) ( )∫−=T
dK dttVRCV0
/1
Ovaj napon naglo raste, dosti០uၰi maksimalnu amplitudu na kraju intervala kao
ᘐto je dato na slici 13, pod uslovom da se lupanje pojavi. Ukoliko se ne pojavi lupanje VK ostaje bluzu vrednosti nula.
Slika 12. Kontrolno merni pribor i talasni oblici signala za zatvorenu petlju kontrole
paljenja
Sistem digitalne kontrole motora
21
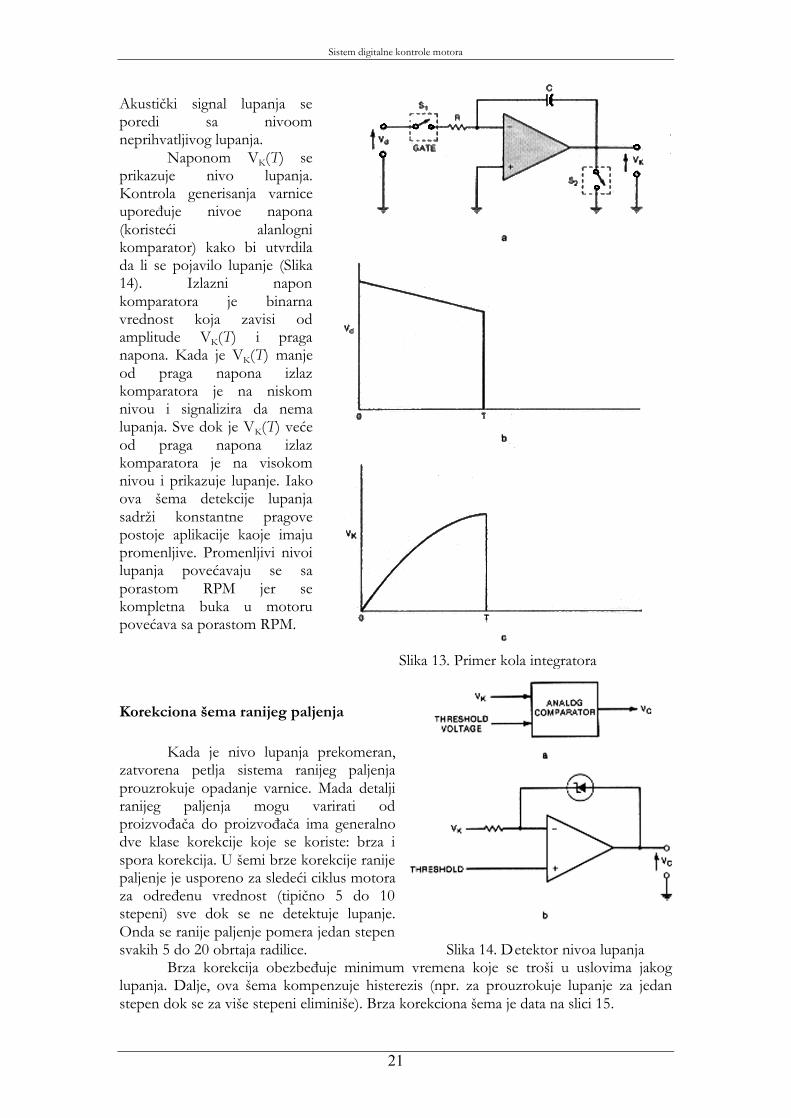
Akustiაki signal lupanja se poredi sa nivoom neprihvatljivog lupanja.
Naponom VK(T) se prikazuje nivo lupanja. Kontrola generisanja varnice uporeᄐuje nivoe napona (koristeၰi alanlogni komparator) kako bi utvrdila da li se pojavilo lupanje (Slika 14). Izlazni napon komparatora je binarna vrednost koja zavisi od amplitude VK(T) i praga napona. Kada je VK(T) manje od praga napona izlaz komparatora je na niskom nivou i signalizira da nema lupanja. Sve dok je VK(T) veၰe od praga napona izlaz komparatora je na visokom nivou i prikazuje lupanje. Iako ova ᘐema detekcije lupanja sadr០i konstantne pragove postoje aplikacije kaoje imaju promenljive. Promenljivi nivoi lupanja poveၰavaju se sa porastom RPM jer se kompletna buka u motoru poveၰava sa porastom RPM. Slika 13. Primer kola integratora
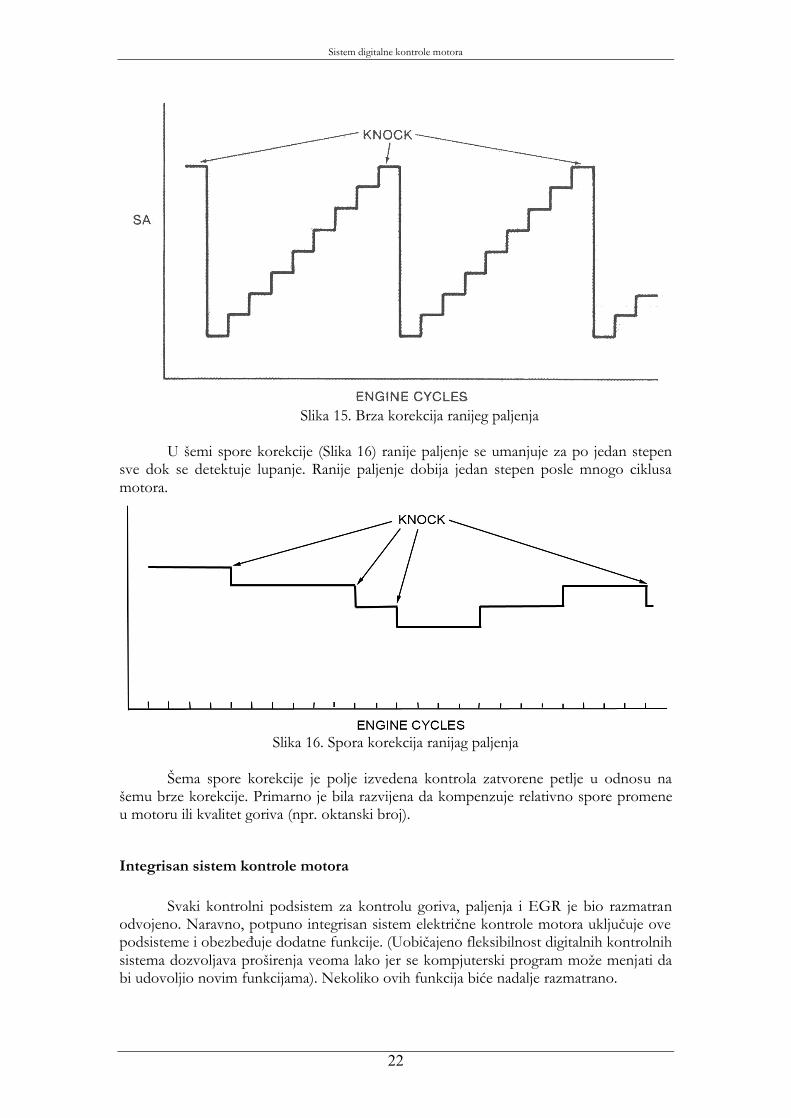
Korekciona ᘐema ranijeg paljenja
Kada je nivo lupanja prekomeran, zatvorena petlja sistema ranijeg paljenja prouzrokuje opadanje varnice. Mada detalji ranijeg paljenja mogu varirati od proizvoᄐaაa do proizvoᄐaაa ima generalno dve klase korekcije koje se koriste: brza i spora korekcija. U ᘐemi brze korekcije ranije paljenje je usporeno za sledeၰi ciklus motora za odreᄐenu vrednost (tipiაno 5 do 10 stepeni) sve dok se ne detektuje lupanje. Onda se ranije paljenje pomera jedan stepen svakih 5 do 20 obrtaja radilice. Slika 14. Detektor nivoa lupanja
Brza korekcija obezbeᄐuje minimum vremena koje se troᘐi u uslovima jakog lupanja. Dalje, ova ᘐema kompenzuje histerezis (npr. za prouzrokuje lupanje za jedan stepen dok se za viᘐe stepeni eliminiᘐe). Brza korekciona ᘐema je data na slici 15.
Sistem digitalne kontrole motora
22
Slika 15. Brza korekcija ranijeg paljenja
U ᘐemi spore korekcije (Slika 16) ranije paljenje se umanjuje za po jedan stepen
sve dok se detektuje lupanje. Ranije paljenje dobija jedan stepen posle mnogo ciklusa motora.
Slika 16. Spora korekcija ranijag paljenja
ᘀema spore korekcije je polje izvedena kontrola zatvorene petlje u odnosu na
ᘐemu brze korekcije. Primarno je bila razvijena da kompenzuje relativno spore promene u motoru ili kvalitet goriva (npr. oktanski broj).
Integrisan sistem kontrole motora
Svaki kontrolni podsistem za kontrolu goriva, paljenja i EGR je bio razmatran odvojeno. Naravno, potpuno integrisan sistem elektriაne kontrole motora ukljuაuje ove podsisteme i obezbeᄐuje dodatne funkcije. (Uobiაajeno fleksibilnost digitalnih kontrolnih sistema dozvoljava proᘐirenja veoma lako jer se kompjuterski program mo០e menjati da bi udovoljio novim funkcijama). Nekoliko ovih funkcija biၰe nadalje razmatrano.
Sistem digitalne kontrole motora
23
Secondary Air Management
Secondary Air Management (SAM) koristi se da poboljᘐa performanse katalitiაkog konvertora obezbeᄐujuၰi naroაit (bogat kiseonikom) vazduh svakom konvertoru ili izduvnoj grani. Temperatura katalizatora mora biti iznad 200°C da bi uspeᘐno oksidirao HC i CO i smanjio se NOX. Dok se motor zagreva i kada je temperatura katalitiაkog konvertora niska, HC i CO oksidiraju u izduvnoj grani usmereni sekundarnim putem ka sistemu. Ovo podi០e temperaturu i ubrzava zagrevanje konvertora i EGO senzora omoguၰavajuၰi kontroli goriva da br០e uᄐe u zatvorenu petlju.
Konvertor mo០e biti oᘐteၰen primenom velike temperature. Ovo se mo០e desiti ukoliko se velika koliაina HC i CO oksidira za vreme masivnog punjenja ᘐto zahteva obogaၰenje smeᘐe ili za vreme usporenja. U ovim sluაajevima sekundarni vazduh je usmeren na preაistaა vazduha i nema efekta na izlaznu temperaturu izduvnih gasova.
Posle zagrevanja glavna primena sekundarnog vazduha je obezbeᄐivanje bogate kiseonikom atmosfere u drugoj od tri komore katalizatora. U dvokomornom konvertoru prva komora sadr០i rodijum, paladijum i platinu da bi smanjio NOX i oksidirao HC i CO. Druga komora sadr០i platinu i paladijum. Naroაit kiseonik iz sekundarnog vazduha poveၰava sposobnost konvertora da oksidira HC i CO u drugoj komori konvertora. Kompjuterski program za kontrolnu logiku selekcije mo០e biti modifikovan da ukljuაi ove uslove kontrole drugog vazduha.
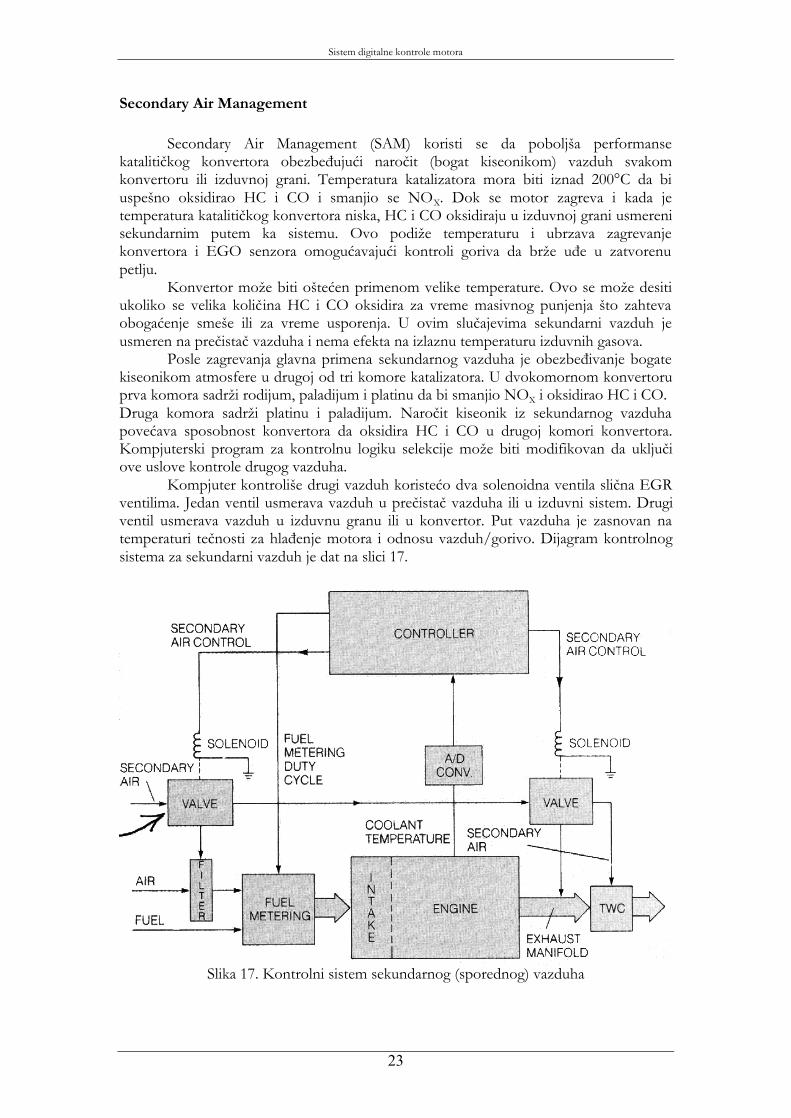
Kompjuter kontroliᘐe drugi vazduh koristeၰo dva solenoidna ventila sliაna EGR ventilima. Jedan ventil usmerava vazduh u preაistaა vazduha ili u izduvni sistem. Drugi ventil usmerava vazduh u izduvnu granu ili u konvertor. Put vazduha je zasnovan na temperaturi teაnosti za hlaᄐenje motora i odnosu vazduh/gorivo. Dijagram kontrolnog sistema za sekundarni vazduh je dat na slici 17.
Slika 17. Kontrolni sistem sekundarnog (sporednog) vazduha
Sistem digitalne kontrole motora
24
Ⴠiᘐၰenje kanistera isparenja emisije
Za vreme gaᘐenja motora gorivo u sistemu za gorivo, odnosno u kanisteru za isparavanje treba spreაiti da ne ispari u atmosferu. Smanjenje HC emisije posti០e se ugljenim filterom u kanisteru. Sakupljeno gorivo se ispuᘐta u usisni sistem preko solenoidnog ventila kojeg kontroliᘐe raაunar. Ovo se deᘐava tokom operacije zatvorene petlje da bi smanjili komplikacije proraაuna goriva u otvorenoj petlji.
Kontrola zakljuაavanja hidrauliაnog kvaაila obrtnog momenta
Pretvaraა torzijskog momenta zatvara kontrolu automatske transmisije koristeၰi hirauliაni sistem automobila. Zbog proklizavanja hirauliაno spajanje je manje efikasno od pritiska proizvedenog fiziაkom transmisijom. Dakle, ekonomiაnost je manja sa automatskom transmisijom nego sa standardnom. Ovaj problem je delimiაno reᘐen postavljanjem spojke sliაne standardnim ploაastim spojkama unutar konvertora torzije automatske transmisije. Ovo omoguၰuje automatskoj transmisiji da obezbedi ekonomuაnost goriva blisku ruაnoj transmisiji i takoᄐe poveၰanje pogodnosti. Sledi dobar primer dodavanja funkcije elektronskoj kontroli motora. Sinhronizacija blokade torzionog konvertora (TCC) je aktivirana kalemom za zakljuაavanje kontrolisana raაunarom kontrole motora. Kompjuter utvrᄐuje kada je period mirnog rada na osnovu pozicije leptira za gas i promene brzine vozila. On povlaაi u kvaაilo za zakljuაavanje i dr០i ih zajedno dok ne oseti stanje koje je povoljno za odvajanje.
Sistem za automatsko podeᘐavanje
Digitalni kontrolni sistem mo០e iz prethodnih izvrᘐavanja „nauაiti“. Mnogi kontrolni sistemi koriste ovu funkciju da omoguၰe raაunaru da koristi vrednosti iz tabele vrednosti koje su proraაunate za otvorenu petlju vazduh-gorivo odnosa. Kada kompjuter nije u zatvorenoj petlji on proverava vrednosti izraაunatih vrednosti odnosa vazduh-gorivo i poredi ih sa graniაnim vrednostima zatvorene petlje. Ukoliko su ove vrednosti pribli០ne niᘐta se ne preduzima, ali ako se razlikuju kontrola redukuje vrednosti tako da one budu bli០e vrednostima zatvorene petlje. Ovakve vrednosti se bele០e u RAM memoriji sve dok se ne ugasi motor. Po sledeၰem pokretanj motora koristi se tabela sa novim vrednostima. Ova funkcija je veoma va០na jer dozvoljava kontroleru promene i podeᘐavanje. Ovo se mo០e primeniti u podsistemima integrisane kontrole.
Dijagnostika sistema
Joᘐ jedna moguၰnost kontrole mikrosistema motora je dijagnostika kvara i obaveᘐtavanje. Greᘐke senzora i aktuatora se mogu lako otkriti kompjuterom. Na primer, kompjuter ၰe otkriti greᘐku MAF senzora ukoliko ovaj daje izlaz preko graniაnih vrednosti za specificirano vreme. Tipiაan primer je upravo opisani sistem. Ukoliko rezultati otvorene petlje dolaze sa greᘐkom, raაunar mo០e detektovati greᘐku funkcionisanja senzora otvorene petlje. Abnormalne vrednosti mogu biti odgovor aktuatora. Raაunar sada mo០e preၰi u neki drugi mod dok se problem ne otkloni. Operator je o ovome obaveᘐten na kontrolnoj tabli treperuၰim svetlom. Integrisani sistemi omoguၰavaju mikrokontroleru pristup velikom broju ulaza senzora koji se mogu proveravati. Poglavlje 10 detaljnije ovo opisuje.
Sistem digitalne kontrole motora
25
Pregled kontrolnih modova Posle svega ᘐto je diskutovano o tipiაnim sistemima elektronske kontrole motora da sumiramo ᘐta se deᘐava u operacionim sistemima za razliაite modove. Paljenje motora (Start) Sledeၰa lista je skup operacija u modu paljenja motora. Primarna kontrolna stvar je pouzdan start.
1. RPM motora pri brzini paljenja 2. rashladna teაnosti motora pri ni០im temperaturama 3. nizak odnos vazduh/gorivo 4. kasnije paljenje 5. EGR iskljuაen 6. Sekundarni vazduh u izduvnoj grani 7. Potroᘐnja goriva se ne kontroliᘐe pa០ljivo 8. Emisija ᘐtetnih gasova se ne kontroliᘐe
Zagrevanje motora Dok se motor zagreva temperatura motora se penje do radne temperature. Primarna kontrolna briga je brzo i glatko zagrevanje motora. Lista operacija motora tokom ovog moda:
1. RPM motora iznad broja pri paljenju po komandi vozaაa 2. Temperatura rashladne teაnost motora se penje do minimalne vrednosti 3. Nizak odnos vazduh/gorivo 4. Tajming varnica podeᘐava kontroler 5. EGR iskljuაen 6. Sekundarni vazduh u usisnoj grani 7. Potroᘐnja goriva se ne kontroliᘐe pa០ljivo 8. Emisija ᘐtetnih gasova se ne kontroliᘐe
Proces otvorenog upravljanja Sledeၰa lista sumira operacije motora tokom komtrole motora sistemom otvorenog upravljanja. To se deᘐava pre postizanja adekvatne temperature EGO senzora za rad zatvorenog upravljanja. Potroᘐnja goriva i emisija ᘐtetnih gasova se kontroliᘐe delimiაno.
1. RPM motora po komandi vozaაa 2. Temperatura motora iznad praga zagrevanja 3. Odnos vazduh/gorivo kontroliᘐe sistem otvorenog upravljanja na 14.7. 4. Temperatura EGO senzora manja od minimalne vrednosti 5. Tajming varnica podeᘐava kontroler 6. EGR pod kontrolom 7. Sekundarni vazduh u katalizator 8. Kontrola potroᘐnje goriva 9. Kontrola emisije
Sistem digitalne kontrole motora
26
Proces zatvorenog upravljanja Za precizniju kontrolu emisije gasova i potroᘐnju goriva pri ra០liაitim uslovima rada sistem elektronske kontrole motora je modu zatvorenog upravljanja. Potroᘐnja goriva i emisija se kontroliᘐe veoma tesno. Dole navedeno je kratak sadr០aj operacija motora tokom ovog perioda:
1. RPM motora po komandi vozaაa 2. Temperatura motora u normalnim granicama (iznad praga zagrevanja) 3. Proseაni odnos vazduh/gorivo pod kontrolom da 14.7,±0.05 4. Temperatura EGO senzora iznad minimalne granice detektovane indikacijom
izlaznom volta០om senzora bogate smeᘐe vazduha i goriva za kratko vreme 5. Sistem se vraၰa u otvoreno upravljanje ako se EGO senzor ohladi ispod
minimalne vrednosti za neko vreme. 6. EGR pod kontrolom 7. Sekundarni vazduh ide u katalizator 8. Usko kontrolisana potroᘐnja 9. Usko kontrolisana emisija
Jaka ubrzanja Kada motor mora da ubrza ili je pod jaაim optereၰenjem onda je pod specijalnim modom. Tada je primarna briga kontrolera motora da pru០i maksimalne performanse. Ovo je spisak operacija pod takvim uslovima:
1. Vozaა tra០i oᘐtro poveၰanje RPM ili snagu motora zahtevajuၰi maksimalni obrtni moment
2. Temperatura motora je u normalnim granicama 3. Odnos vazduh/gorivo je bogata smeᘐa 4. EGO nije u petlji 5. EGR iskljuაen 6. Sekundarni vazduh ide u usisnu granu 7. Relativno velika potroᘐnja goriva 8. Relativno slaba kontrola izduva
Usporavanje i prazan hod Usporavanje, zaustavljanje i ler su kombinovani u posebnom modu. Primarna briga kontrolera motora je smanjenje emisije uzduvnih gasova tokom usporavanja i dr០anje potroᘐnje goriva na minimum. Operacije motora su navedena na listi.
1. RPM rapidno opada dok vozaა ne zada komandu ili dok se dr០i na leru 2. Temperatura motora je u normalnim granicama 3. Siromaᘐna smeᘐa 4. Specijalni mod tokom usporavanja za smanjenje emisije 5. Specijalni mod tokom lera da dr០i RPM komstantno prilikom optereၰenja
klima ureᄐaja, ukljuაivanja automatske transmisije, itd. 6. EGR ukljuაen 7. Sekundarni vazduh ide u usisnu granu 8. Dobra potroᘐnja tokom usporavanja 9. Slaba potroᘐnja u leru ali se dr០i minimalno moguၰe
Sistem digitalne kontrole motora
27
Poboljᘐanja u elektronskoj kontroli motora Sistemi digitalne kontrole motora u ovom poglavlju su omoguၰena brzom evolucijom tehnologije. Neke od tih tehnologija su kratko objaᘐnjene u ovom poglavlju. Vredno je pomena neke od tehnoloᘐkih unapreᄐenja koje se pojavljuju u digitalnoj kontroli motora sa viᘐe detalja da se potpuno procene moguၰnosti savremenih digitalnih kontrola motora.
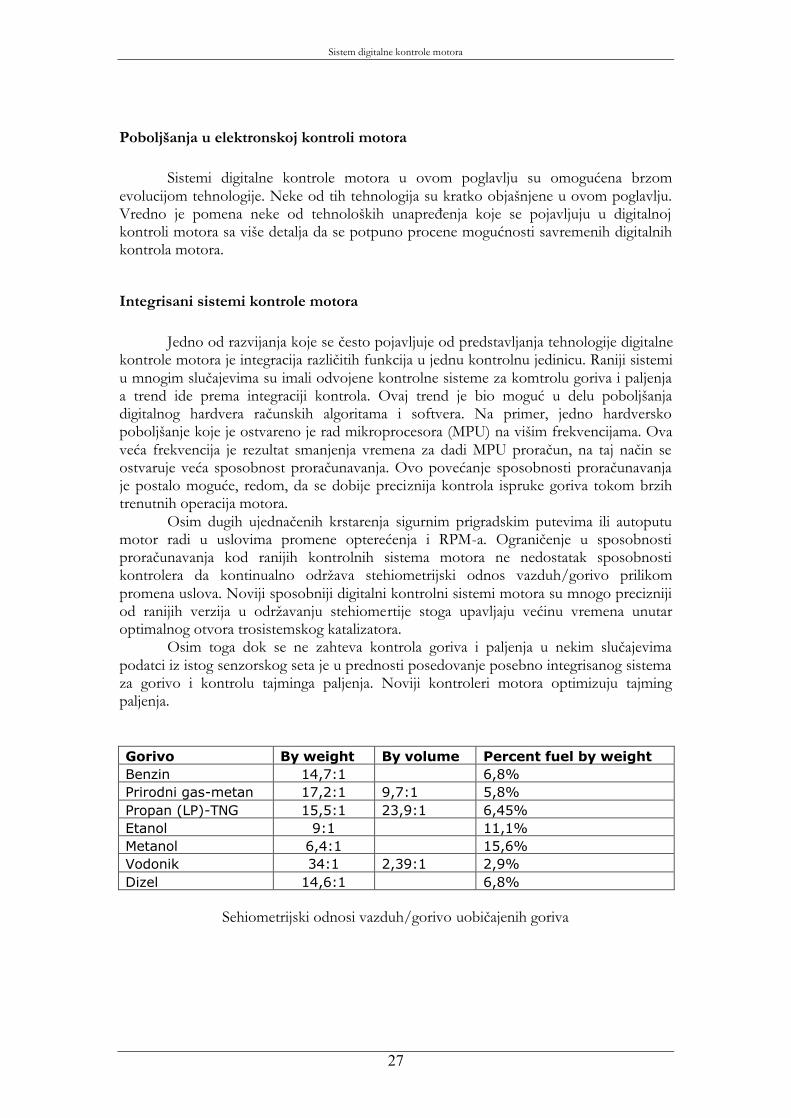
Integrisani sistemi kontrole motora Jedno od razvijanja koje se აesto pojavljuje od predstavljanja tehnologije digitalne kontrole motora je integracija razliაitih funkcija u jednu kontrolnu jedinicu. Raniji sistemi u mnogim sluაajevima su imali odvojene kontrolne sisteme za komtrolu goriva i paljenja a trend ide prema integraciji kontrola. Ovaj trend je bio moguၰ u delu poboljᘐanja digitalnog hardvera raაunskih algoritama i softvera. Na primer, jedno hardversko poboljᘐanje koje je ostvareno je rad mikroprocesora (MPU) na viᘐim frekvencijama. Ova veၰa frekvencija je rezultat smanjenja vremena za dadi MPU proraაun, na taj naაin se ostvaruje veၰa sposobnost proraაunavanja. Ovo poveၰanje sposobnosti proraაunavanja je postalo moguၰe, redom, da se dobije preciznija kontrola ispruke goriva tokom brzih trenutnih operacija motora. Osim dugih ujednaაenih krstarenja sigurnim prigradskim putevima ili autoputu motor radi u uslovima promene optereၰenja i RPM-a. Ograniაenje u sposobnosti proraაunavanja kod ranijih kontrolnih sistema motora ne nedostatak sposobnosti kontrolera da kontinualno odr០ava stehiometrijski odnos vazduh/gorivo prilikom promena uslova. Noviji sposobniji digitalni kontrolni sistemi motora su mnogo precizniji od ranijih verzija u odr០avanju stehiomertije stoga upavljaju veၰinu vremena unutar optimalnog otvora trosistemskog katalizatora. Osim toga dok se ne zahteva kontrola goriva i paljenja u nekim sluაajevima podatci iz istog senzorskog seta je u prednosti posedovanje posebno integrisanog sistema za gorivo i kontrolu tajminga paljenja. Noviji kontroleri motora optimizuju tajming paljenja. Gorivo By weight By volume Percent fuel by weight Benzin 14,7:1 6,8% Prirodni gas-metan 17,2:1 9,7:1 5,8% Propan (LP)-TNG 15,5:1 23,9:1 6,45% Etanol 9:1 11,1% Metanol 6,4:1 15,6% Vodonik 34:1 2,39:1 2,9% Dizel 14,6:1 6,8%
Sehiometrijski odnosi vazduh/gorivo uobiაajenih goriva
Sistem digitalne kontrole motora
28
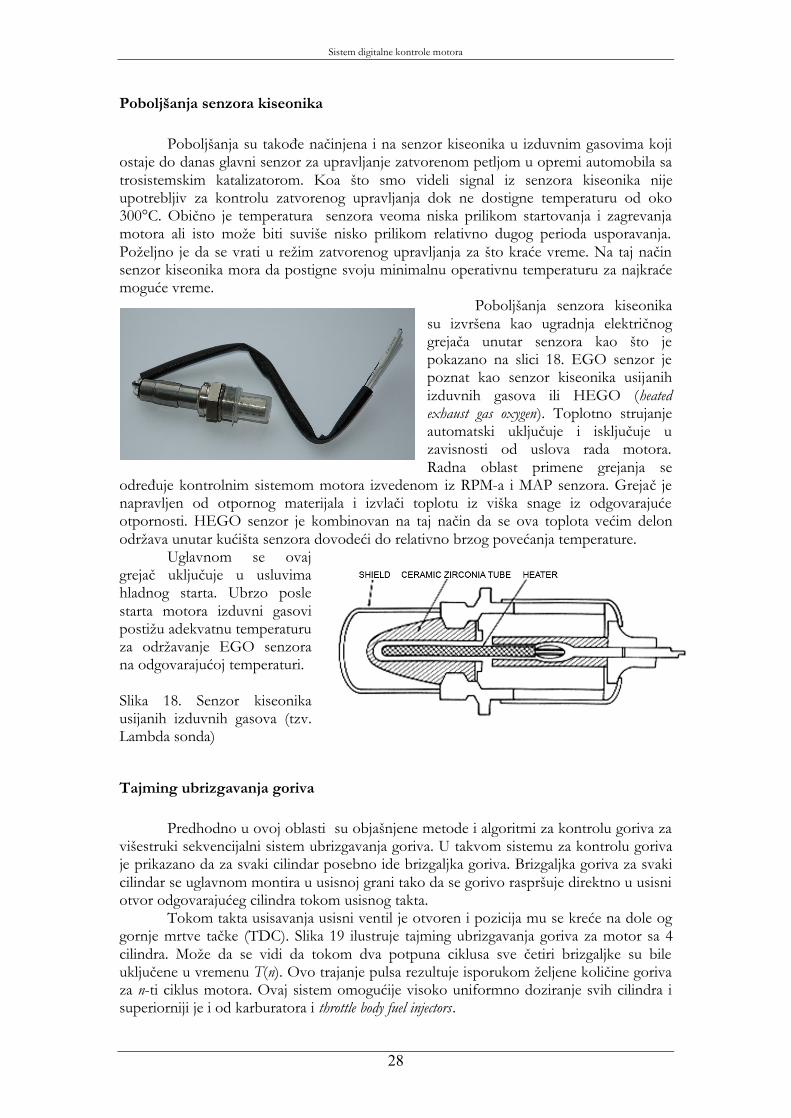
Poboljᘐanja senzora kiseonika Poboljᘐanja su takoᄐe naაinjena i na senzor kiseonika u izduvnim gasovima koji ostaje do danas glavni senzor za upravljanje zatvorenom petljom u opremi automobila sa trosistemskim katalizatorom. Koa ᘐto smo videli signal iz senzora kiseonika nije upotrebljiv za kontrolu zatvorenog upravljanja dok ne dostigne temperaturu od oko 300°C. Obiაno je temperatura senzora veoma niska prilikom startovanja i zagrevanja motora ali isto mo០e biti suviᘐe nisko prilikom relativno dugog perioda usporavanja. Po០eljno je da se vrati u re០im zatvorenog upravljanja za ᘐto kraၰe vreme. Na taj naაin senzor kiseonika mora da postigne svoju minimalnu operativnu temperaturu za najkraၰe moguၰe vreme.
Poboljᘐanja senzora kiseonika su izvrᘐena kao ugradnja elektriაnog grejaაa unutar senzora kao ᘐto je pokazano na slici 18. EGO senzor je poznat kao senzor kiseonika usijanih izduvnih gasova ili HEGO (heated exhaust gas oxygen). Toplotno strujanje automatski ukljuაuje i iskljuაuje u zavisnosti od uslova rada motora. Radna oblast primene grejanja se
odreᄐuje kontrolnim sistemom motora izvedenom iz RPM-a i MAP senzora. Grejaა je napravljen od otpornog materijala i izvlaაi toplotu iz viᘐka snage iz odgovarajuၰe otpornosti. HEGO senzor je kombinovan na taj naაin da se ova toplota veၰim delon odr០ava unutar kuၰiᘐta senzora dovodeၰi do relativno brzog poveၰanja temperature.
Uglavnom se ovaj grejaა ukljuაuje u usluvima hladnog starta. Ubrzo posle starta motora izduvni gasovi posti០u adekvatnu temperaturu za odr០avanje EGO senzora na odgovarajuၰoj temperaturi. Slika 18. Senzor kiseonika usijanih izduvnih gasova (tzv. Lambda sonda)
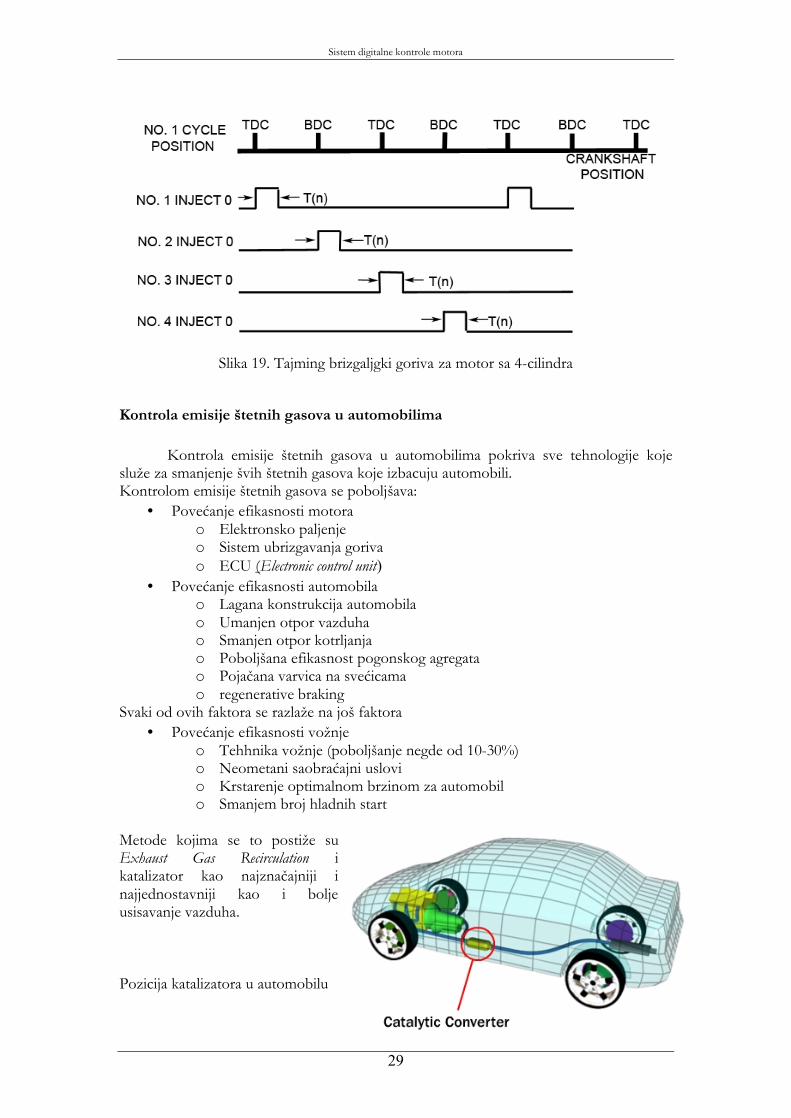
Tajming ubrizgavanja goriva Predhodno u ovoj oblasti su objaᘐnjene metode i algoritmi za kontrolu goriva za viᘐestruki sekvencijalni sistem ubrizgavanja goriva. U takvom sistemu za kontrolu goriva je prikazano da za svaki cilindar posebno ide brizgaljka goriva. Brizgaljka goriva za svaki cilindar se uglavnom montira u usisnoj grani tako da se gorivo rasprᘐuje direktno u usisni otvor odgovarajuၰeg cilindra tokom usisnog takta. Tokom takta usisavanja usisni ventil je otvoren i pozicija mu se kreၰe na dole og gornje mrtve taაke (TDC). Slika 19 ilustruje tajming ubrizgavanja goriva za motor sa 4 cilindra. Mo០e da se vidi da tokom dva potpuna ciklusa sve აetiri brizgaljke su bile ukljuაene u vremenu T(n). Ovo trajanje pulsa rezultuje isporukom ០eljene koliაine goriva za n-ti ciklus motora. Ovaj sistem omoguၰije visoko uniformno doziranje svih cilindra i superiorniji je i od karburatora i throttle body fuel injectors.
Sistem digitalne kontrole motora
29
Slika 19. Tajming brizgaljgki goriva za motor sa 4-cilindra
Kontrola emisije ᘐtetnih gasova u automobilima Kontrola emisije ᘐtetnih gasova u automobilima pokriva sve tehnologije koje slu០e za smanjenje ᘐvih ᘐtetnih gasova koje izbacuju automobili. Kontrolom emisije ᘐtetnih gasova se poboljᘐava:
• Poveၰanje efikasnosti motora o Elektronsko paljenje o Sistem ubrizgavanja goriva o ECU (Electronic control unit)
• Poveၰanje efikasnosti automobila o Lagana konstrukcija automobila o Umanjen otpor vazduha o Smanjen otpor kotrljanja o Poboljᘐana efikasnost pogonskog agregata o Pojaაana varvica na sveၰicama o regenerative braking
Svaki od ovih faktora se razla០e na joᘐ faktora • Poveၰanje efikasnosti vo០nje
o Tehhnika vo០nje (poboljᘐanje negde od 10-30%) o Neometani saobraၰajni uslovi o Krstarenje optimalnom brzinom za automobil o Smanjem broj hladnih start
Metode kojima se to posti០e su Exhaust Gas Recirculation i katalizator kao najznaაajniji i najjednostavniji kao i bolje usisavanje vazduha. Pozicija katalizatora u automobilu

Sistem digitalne kontrole motora
30
Literatura:
1. Understanding Automotive Electronics – Fifth Edition – William B. Ribbens, Ph.D. 1998 by Butterworth-Heinmann – Chapter 7 - Digital Engine Control System (str. 223-257)
Internet stranice
1. http://en.wikipedia.org/wiki/Fuel_Injection 2. http://www.tpub.com/content/neets/14187/index.htm 3. http://en.wikipedia.org/wiki/Stoichiometry 4. http://auto.howstuffworks.com/fuel-injection.htm 5. http://en.wikipedia.org/wiki/Automobile_emissions_control





























