Embed Size (px)
Citation preview
Valeri Vodovozov
Raik Jansikene
ELEKTROONIKA JA JÕUPOOLJUHTTEHNIKA
4
Valeri Vodovozov kaitses oma PhD kraadi elektrotehnika alal St Peterburi Elektrotehnika Insituudis, kus ta töötab 1976. aastast dotsendi ja vanemteadusrina. Tema õpetatavate kursuste hulka kuuluvad elektriajamid, arvutitehnka, elektroonika ja elektromehaaniliste ning humaansete infosüsteemide programmeerimine. Tema teaduslikud huvid ja peamised uurimissuunad haaravad objekt-orienteeritud tehnikate rakendusi tööstuses ja hariduses.
Peale Elektrotehnika Instituudi õpetab ta ka St. Peterburi Täiendõppe Instituudis ja loeb mitmeid kursusi tööstuse ja äriettevõtete õppekeskustes ülalpool loetletud õppeainetes Aastatel !997, 2002 ja 2005 töötas ta külalisprofessorina Tallinna Tehnikaülikoolis, olles vahepeal 2000 .aastal töötanud USA-s Ford Motor Company teaduslaboratooriumis. Erialaühingutest on ta Venemaa Elektriajamite Ühingu liige, Eesti M.H. Jacobi Seltsi liige ja kuulub ka Põhjamaade Elektriajamite Würgu liikmete hulka. Ta on valitud Cambridge Biograafiakeskuse poolt aastatel 1999 ja 2000 Rahvusvaheliseks Meheks ning sisse kantud biograafiatesse Marquis’I "Who’s Who in the World" ja “Who’s Who in Science and Engineering" (1998-2005), samuti ka raamatusse "Kuulsad venelased " (Moskva, 1999-2000). Valery Vodovozov on monograafiate “Теория и системы электропривода” (С.- Петербург: ЛЭТИ, 2004), “Техника программирования на VBA, Pascal и C++” (С.-Петербург: ЛЭТИ, 2001), “Basics of Informational Technologies” (Deaborn, MI: SRL, 2000), “Практическое введение в информационные системы” (С.-Петербург: Поликом, 1995), “Микропроцессорные системы программного управления” (С.-Петербург: Энергоатомиздат, 1994), “Роботы в судокорпусных производствах” (С.-Петербург, Судостроение, 1986) autor. On avaldatud üle 200 leiutise, brošüüri,ja artikli.
Raik Jansikene on sündinud 27.mal 1962. Lõpetas Tallinna Tehnikaülikooli 1985. aastal elektriajamite ja tööstuse automatiseerimise erialal. Raik Jansikesel on M.Sc teaduslik kraad elektrotehnika alal Tallinna Tehnikaülikoolist 1992. aastast ja Ph.D. teaduslik kraad 2003. aastast. On elektriajamite ja jõuelektroonika Instituudi elektriajamite ja elektrivarustuse õppetooli dotsent aastast 2003.Tema õpetatavate ainete hulka kuuluvad elektriajamid, jõuelektroonika ning elektroonika ja jõupooljuhid. On avaldanud üle 25 teadusliku artikli magetohüdrodünaamiliste (MHD) ajamite, elektriajamite sagedusreguleerimise ja tööstuse automatiseerimise alalt. Erialaühingutest kuulub Eesti M.H. Jacobi Seltsi liikmete hulka
Copyright © 2006, Valery Vodovozov and Raik Jansikene
3
SISUKORD
TÄHISED.................................................................................................................................... 5 LÜHENDID................................................................................................................................. 5 EESSÕNA.................................................................................................................................. 7 SISSEJUHATUS ........................................................................................................................ 8 PEATÜKK 1. POOLJUHTSEADISED....................................................................................... 14 1.1. Pooljuhid ........................................................................................................................... 14 1.1.1. Voolud juhtides ja isolaatorites ....................................................................................... 14 1.1.2. Voolud pooljuhtides ........................................................................................................ 15 1.1.3. pn-siire ........................................................................................................................... 17 1.2. Dioodid .............................................................................................................................. 20 1.2.1. Alaldusdioodid ................................................................................................................ 20 1.2.2. Jõudiood......................................................................................................................... 22 1.2.3. Eriotstarbelised dioodid .................................................................................................. 24 1.3. Transistorid........................................................................................................................ 28 1.3.1 Transistoride üldomadused ............................................................................................. 28 1.3.2. Bipolaartransistor (BJT) .................................................................................................. 29 1.3.3 Bipolaar-jõutransistorid. ................................................................................................... 34 1.3.4. pn-väljatransistor (JFET) ................................................................................................ 37 1.3.5. Metall-oksüüd pooljuht-väljatransistorid (MOSFET) ........................................................ 39 1.3.6. Isoleeritud paisuga bipolaartransistorid (IGBT) ............................................................... 43 1.4. Türistorid ........................................................................................................................... 45 1.4.1. Alaldustüristorid (SCR) ................................................................................................... 45 1.4.2. Eriotstarbelised türistorid ............................................................................................... 48 PEATÜKK 2. ANALOOGELEKTROONIKA............................................................................... 50 2.1. Skeemide koostamine ....................................................................................................... 50 2.1.1. Komponendid ................................................................................................................. 50 2.1.2. Ahelate omadused.......................................................................................................... 54 2.2. Võimendid ......................................................................................................................... 56 2.2.1. Vahelduvvooluvõimendid................................................................................................ 56 2.2.2. AV võimendid ................................................................................................................. 63 2.2.3. IC Opvõimendid.............................................................................................................. 67 2.3. Toiteallikad ja tugipinged ................................................................................................... 71 2.3.1. Toiteallikad ..................................................................................................................... 71 2.3.2. Filtrid .............................................................................................................................. 74 2.3.3 Matemaatilised muundurid............................................................................................... 79 PEATÜKK 3. IMPULSS- JA DIGITAALELEKTROONIKA ......................................................... 84 3.1. Lülitusahelad ..................................................................................................................... 84 3.1.1. Lülitid.............................................................................................................................. 84 3.1.2. Signaaligeneraatorid....................................................................................................... 89 3.1.3 Kvantimine ja kodeerimine............................................................................................... 94 3.1.4. Digitaallülitused .............................................................................................................. 96 3.2. Andmemuundurid ............................................................................................................ 102 3.2.1. Digitaal-analoogmuundurid........................................................................................... 102 3.2.2. Analoog-digitaalmuundurid ........................................................................................... 107 3.2.3. Koodandurid ................................................................................................................. 112 PEATÜKK 4. HARJUTUSI PROGRAMMIGA “ELECTRONICS WORKBENCH”..................... 116
4
4.1. Eesmärk .......................................................................................................................... 116 4.2. Lineaarahelad.................................................................................................................. 116 4.3. Filtrid ............................................................................................................................... 118 4.4. Dioodahelad .................................................................................................................... 120 4.5. Võimendid ....................................................................................................................... 122 4.6. Opvõimendid ................................................................................................................... 124 4.7. Matemaatilised muundurid............................................................................................... 125 4.8. Ostsillaatorid.................................................................................................................... 127 PEATÜKK 5. KÜSIMUSED .................................................................................................... 129 5.1. Küsimused sissejuhatuse kohta....................................................................................... 129 5.2. Küsimused pooljuhtidest.................................................................................................. 129 5.2.1. Küsimused dioodidest ja türistoridest............................................................................ 130 5.2.2. Küsimused transistoridest............................................................................................. 131 5.3. Küsimused analoogelektroonikast .................................................................................. 132 5.4. Küsimused impulss- ja digitaalelektroonikast................................................................... 133 AINEREGISTER..................................................................................................................... 134 KIRJANDUS........................................................................................................................... 136
5
TÄHISED
С kondensaator D diood, türistor L induktiivsus,
paispool R takisti T transistor w keerdude arv C mahtuvus cos ϕ võimsustegur f sagedus G juhivus
I vool K võimendustegur L induktiivsus P võimsus q töötsükkel Q pingekordistus Q selektiivsus r pulsatsioonitegur R aktiivtakistus t aeg T periood
U pinge W energia Z näivtakistus α dc tüürnurk β vooluvõimendus δ viga, kaod η kasutegur ϕ faasinurk ω nurksagedus
LÜHENDID
A amper ac vahelduvvool ADC analoog-digitaalmuundur AM amplitudmodulatsioon BiFET bipolaarne väljatransistor FET BiMOS bipolaarne MOS
väljatransistor BJT bipolaartransistor CB ühisbaas täiendav bipolaartehnoloogia CC ühiskollektor CD kooder CE ühisemitter CMOS komplementaarne MOS DAC digitaal-analoogmuundur dc alalisvool D3C dekooder DMOS toppeltdifusioontransistor F Farad FET väljatransistor FM sagedusmodulatsioon FS täisskaala G Giga = 109 (prefiks) GaAsFET gallium-arseniid
väljatransistor GTO suletav türistor H Henry Hz Hertz IC integraalskeem IGBT isoleeritud paisuga
bipolaartransistor JFET siirde väljatransistor k kilo = 103 (prefiks) LDR foto takisti LED valgusdiood LSI suur integraalskeem LSB madalaim bit M Mega = 106 (prefiks)
m milli = 10-3 (prefiks) MOS metall-oksiid-pooljuht MCT MOS-tüüritav türistor MPP tipust tipuni maksimum MSB kõrgeim bit MSI keskmine integraalskeem MUX kordistaja (multipleksor) n nano = 10-9 (prefiks) n negatiivne p pico = 10-12 (prefiks) p positiivne PWM pulsilaiusmodulatsioon PZT piesoelektriline andur RDC koodkettaga digitaalmuundur
(kiiruse ja asendi mõõtmiseks) rms ruutkeskmine RMS pinge efektiivväärtus S siemens s sekund SADC alam-ADC SAR sammlähendusmeetod SCR lihttüristor SDAC alam-DAC S/H diskrediteerimine SSI väike integraalskeem T triger TTL transistor-transistor loogika V volt VDC alalispinged VCO pingega juhitav generaator VFC pinge-sagedus muundur W vatt WA volt/amper XFCB eriti kiire CB tehnoloogia µ micro = 10-6 (eesliide) Ω oom
7
EESSÕNA
Selle raamatu ülesandeks on juhatada lugeja elektroonika algteadmiste juurde. Siit võivad üliõpilased saada esimesi teadmisi signaalidest, võimendamisest ja filtreerimisest, passiivsetest ja aktiivsetest komponentidest. Peatähelepanu on pööratud igapäevaselt kasutatavatele tarbeelektroonika seadmetele. Seepärast leiavad käsitlemist pooljuhtkomponendid, nagu dioodid, transistorid ja türistorid. Vaadeldud on ka enamlevinud lülitusi: diferentsiaal- ja operatsioonvõimendid, pulserid, loogikalülitused jne. Õppeaine tutvustab elektroonikakomponentidel baseeruvate lihtsate elektromuundurite võimalusi ja funktsioone. Raamatut soovitame nendele, kes õpivad elektroonikat ja pooljuhtseadiseid, Käsitletavad teemad on elektroonika põhimõisted, pooljuhtkomponentide tüübid, dioodid, transistorid ja türistorid; võimendid, filtrid, matemaatilised muundurid; tagasisideahelad, loogikalülitused; signaalide genereerimine ja muundamine. Selle kursuse järel võivad üliõpilased siirduda elektroonika põhjalikumate küsimuste juurde. Tuleb selgeks saada üldised koormuse toite küsimused, samuti ka erinevate mõjurite poolt põhjustatud võrgu moonutused ning nende vähendamine erineva koormusega jõuelektroonika seadmetes. Sellised probleemid, nagu digitaalseadmete projekteerimise meetodid, Booli algebra, digitaalarvutus ja koodid, kombineeritud ja jadaskeemid, võrgu seadmed ja arvutid siin käsitlemist ei leia. Modelleerivad skeemid ja nende analüüsi meetodid peaksid olema ka tulevaste inseneride huviobjektideks. Ja veel – jõuelektroonika käsitleb üldistatud energiamuundurite teooriat, jõuelektroonika muundurite juhtimist ja kaitset, elektromagnetilise ühildatavuse probleeme, jõuelektroonika komponentide valikut muunduritele, juhtimisalgoritme, programme ja elektroonikamuundurite mikroprotsessor-juhtimisseadmeid, seadmete jahutamist ning elektronmuundurite projekteerimist. Autorid tänavad kolleege ja sõpru, kes jagasid käsikirja ettevalmistamise ajal kasulikke teaduslikke leide ja abistavaid soovitusi. Eriline tänu olgu väljendatud Juhan Laugisele ja Tõnu Lehtlale Tallinna Tehnikaülikoolist, Vladimir Latõškole St. Peterburi Elektrotehnika Ülikoolist ja Aleksandr Vodovozovile Vologda Tehnikaülikoolist, kelle materjale on raamatus kasutatud. Soovitame nende õpikuid igaühele üksikasjaliseks tutvumiseks. Käesolev raamat on tõlgitud inglise keelest ning seetõttu vabandavad autorid võimalike ebatäpsuste pärast terminoloogias ja tõlkes. Autorid
8
SISSEJUHATUS
Elektroonikasüsteemid. Mistahes tehniline süsteem kujutab endast komponentide kogumit, mis on omavahel ühendatud mingi masina või tööprotsessi moodustamiseks. Elektroonikasüsteem sisaldab üldkasutatavaid elektriseadmeid, nagu takistid, kondensaatorid, transformaatorid, induktiivsused (paispoolid), paneelid, jne, ja mõningaid pooljuhtseadiseid (dioodid, türistorid ja transistorid). Nad on kokku ühendatud koormuse juhtimiseks. Ajaloofaktid. Inglise füüsik W Hilbert esitas mõiste “elekter” juba aastal 1700. 1744. asutas H. Rihman Venemaa Teaduste Akadeemias esimese elektrotehnikalabori, kus M. Lomonossov uuris elektri osa “asjade olemuses”. Elektroonika suurem areng toimus 1819 paiku, kui H. Oersted, Taani füüsik, avastas elektri- ja magnetväljade vahelise seose. 1832. loob leiutaja ja diplomaat P. L. Shilling elektromagnetilise telegraafi. Siiski, esimese pöörleva elektromagnetilise muunduri loojaks (1834) osutus M. H. Jacobi, Eesti arhitekt ja Venemaa elektrik. Tema lõi ka esimese telegraafi jadavastuvõtja ja tähti trükkiva masina 1850.aastal. Siemens pani esimese telegraafi-merekaabli St. Peterburi ja Kroonlinna vahele 1853. Samal ajal ehitas Ameerika maalikunstnik S. Morse originaalse kodeerimissüsteemiga telegraafi ja W. Kelvin, Šoti füüsik ja matemaatik, võttis kasutusele digitaal-analoog muunduri, kasutades releesid ja takisteid. 1856.aastal leiutas Itaalia füüsik D. Kaselly pantelegraafi joonise ülekandmiseks, millest sai faksi prototüüp. A.G. Bell tegi katseid telegraafiga, kui avastas võimaluse hääle ülekandmiseks. Telefoni leiutamine tema poolt 1875. aastal oli kogu side ajaloo olulisim sündmus. Aastatel 1895-1897 demonstreerisid A.S. Popov ja G Marconi oma esimesi raadio saate ja vastuvõtu seadmeid. Aastal 1882 avastas Prantsuse füüsik J. Jasmin pooljuhtivuse ja tegi ettepaneku kasutada seda efekti mehaaniliste lülitite asemel vahelduvvoolu alaldamiseks. 1992 leiutas Saksa uurija L. Srons esimese vaakuum-elavhõbedaventiili. P. C. Hewitt arendas välja USA-s esimese kaarleekventiili 1901 ja hiljem patenteeris elavhõbedaalaldi. Aastal 1906 leiutas J.A. Fleming esimese vaakuumdioodi, Ameerika elektrik G.W. Pickard leiutas räniventiili ja 1907. patenteeris L. Forest vaakuumtoru ja vaakuumtrioodi. Sellest leiutusest sai alguse elektronvõimendite areng. Hiljem töötati samade põhimõtete alusel välja mitut tüüpi elektronseadmeid. Võtmetehnoloogiaks oli tagasisidevõimendi leiutamine H.S. Black’I poolt 1927. aastal. 1921. aastal formuleeris F.W. Meyuer Saksamaalt jõuelektroonika põhiprintsiibid ja arengusuunad. 20. sajandi esimesel poolel põhines elektronseadis peamiselt vaakuumtorudel, nagu gaaslahenduslambid, türatronid, elavhõbeda-kaarleekalaldid ja ignitronid. 1930-datel asendati need efektiivsemate elavhõbedaseadistega. Enamik ventiilidest oli kujundatud koaksiaalsete silindritena katoodi ümber. Keerulisemad ventiilid sisaldasid võretatud elektroode katoodi ja anoodi vahel. Selliselt olid kujundatud triood-, tetrood- ja pentoodlambid. Vaakuumtorul on mitmeid puudusi: tal on sisemine kütteniit, selle eluaeg lõpeb enne kui kütteniit läbi põleb, see võtab palju ruumi ja eraldab soojust, mis tõstab seadme sisetemperatuuri.
9
Vaakuumtorude tehnoloogia kasutamse tõttu olid esimesed elektronseadmed väga kallid, suuremõõtmelised ja eraldasid palju soojust. 1920-ndate keskel uuris H. Nyquist telegraafi ja leidis maksimaalse signaalide edastamise kiiruse. Tema avastuseks oli, et impulsside kiirust ei saa suurendada üle kahekordse kanali ribalaiuse. Seda ideed kasutati esmakordselt televisiooniülekannetes, mida teostasid J Baird Šotimaal 1920.aastal ja V. Zvorõkin Venemaal 1931. aastal. 1948. aastal pani C.E. Shannon alused Nyquist’ teoorial põhinevale signaalide edastamise teooriale. Digitaalarvuti oli digitaalelektroonika arengus olulisim liikumapanev jõud. Esimest arvutiprojekti alustati 1942. aastal, avalikustati aastal 1946. ENIAC-ilt viis tee esimese kommertskasutuse arvutile UNIAC (Eckert ja Mauchy, 1951). Hiljem töötati välja suurarvuti IBM-360 ja PDP-seeria miniarvutid, tööstuslikud ja militaarsüsteemid. Pooljuhtseadiste ajastu algas 1947. aastal, kui Ameerika teadlased J. Bardeen, W.H. Brattain ja W. B. Shockley Bell Lab’ist leiutasid germaaniumtransistori. Hiljem autasustati neid selle leiutuse eest Nobeli preemiaga. Transistori eelised võimaldasid ületada vaakuumtorude puudusi. !952. aastast General Electric esimese germaaniumdioodi. !954. aastal tootis G. Teal Texas Instrument’is esimese ränitransistori, mis võitis turul laialdase tunnustuse oma suurenenud temperatuuritaluvuse ja töökindlusega. !950-date keskelt kuni 1960-date alguseni hakkas elektroonikaskeemide konstruktsioon liikuma vaakuumtorudelt transistoridele, avades sellega uusi uurimisetööde ja rakendusprojektide võimalusi. Integraalskeemi leiutamisele J. Kilby poolt Texas Instruments’ist 1958. aastal järgnes 1959. aastal plaanartehnoloogia Fairchild Semiconductors’ilt, mis muutus tahkiselektroonika nurgakiviks. Enne 1960. aastat käsitati pooljuhttehnikat nõrkvoolu ja madalpinge elektroonika osana. Tahkiselektroonikas olid voolud alla ühe ampri ja pinged ainult kümmekond volti. Aastal 1970 algas üks erutavamaid kümnendeid nõrkvooluelektroonika arengu ajaloos. Rida uusi firmasid ilmus turule, nende hulgas Analog Devices, Computer Labs ja National Semiconductors. 1980-dad on integraal-ja hübriidskeemide ning moodul-andmemuundurite kiire kasvu aastad. 1990-datel on suuremateks rakendusteks tootmisprotsesside juhtimine, mõõtmised , meditsiin, audio, video ja arvutid. Üha suuremaks tõukejõuks odavate väikesevõimsuseliste ning töökindlate muundurite kasutamisel modemites, mobiiltelefonides, raadiolevis ja teistes teisaldatavates rakendustes muutus kommunikatsioon. Suundumus üha suurema hulga integreeritud funktsioonidele ja soojuskadude vähendamisele on jätkunud kuni 2000 aastani. Jõupooljuhtseadiste aeg algas 1956. aastal, mil J. Molli juhitud Ameerika teaduskollektiiv leiutas ränitüristorid. Selle leiutuse alusel töötati välja mitmed pooljuhtide põlvkonnad. Aastaid 1956 -1975 võib lugeda esimese põlvkonna jõupooljuhtseadiste ajastuks. Teise generatsiooni ajal aastatel 1975 kuni 1990 töötati välja metalloksiid väljatransistorid, bipolaar- npn ja pnp. transistorid, pindtransistorid ja paisuga suletavad türistorid. Hiljem tulid tootmisesse mikroprotsessorid, eriotstarbelised integraallülitused ja jõuintegraalskeemid.
10
1990-datel võitis isoleeritud paisuga bipolaartransistor kindla koha kolmanda põlvkonna võimsuslülitina. Uus suundumus tekkis elektroonikas arukate jõuseadmete ja arukate jõumoodulite kasutuselevõtuga. Praegu on elektroonika kiiresti arenev elektrotehnika ala, mis katab laiaulatusliku tehnoloogiate spektri. Põhisuurused. Põhilised elektroonikasüsteemis toimuvaid protsesse kirjeldavad seadused on Ohm’I seadus ja Kirchhoff’I seadus. Põhilised suurused, mis elektroonikaskeemides toimuvaid protsesse kirjeldavad, on aktiivtakistus R, mahtuvus C ja induktiivsus L. Tuletatud suurused on reaktiivtakistus X, näivtakistus Z, admittantse ehk täisjuhtivus G. Induktiivne reaktiivtakistus (reluktants) on
XL = ωL, ning mahtuvuslik reaktiivtakistus on
XC = 1 / (ωC),
milles ω = 2πf on nurksagedus ja f on toitepinge sagedus . Näivtakistus sõltub ahela tüübist. RLC jadaskeemis on reaktiivtakistus järgmine:
X = XL – XC, Z = √(X 2 + R2).
RLC rööpühenduse korral
G = 1 / XL – 1 / XC, Z = √(G 2 + 1 / R2).
Resonants Mistahes induktiivsuse ja mahtuvuse ühendust nimetatakse võnkeringiks ehk resonantsahelaks. Sellistes skeemides võib tekkida resonants. Resonantssagedusel on reluktants ja mahtuvuslik reaktiivtakistus võrdsed
XL = XC,
Sellest tulenevalt on karakteristlik näivtakistus
Zr = R .
Resonantssagedused on järgmised:
ωr = 1 / √ (LC), fr = 1 / (2π√ (LC)).
Jadaühenduses tekib madal näivtakistus, kuna rööplülituse korral on tegemist suure näivtakistusega, sest jadalülitus käitub väikese aktiivtakistusena ja rööplülitus suure aktiivtakistusena. Allpool resonantssagedust käitub jadalülitus takistus-mahtuvusliku ahelana ja
11
rööplülitus takistuslik-induktiivse ahelana. Ülalpool resonantssagedust käitub jadalülitus takistuslik-induktiivse ahelana ja rööplülitus käitub takistuslik-mahtuvusliku ahelana. Signaalid . Mistahes ahel laseb läbi signaale. Signaali põhisuurusteks on vool I, pinge U ja võimsused - P (tegelik võimsus ehk aktiivvõimsus) ja PS (näivvõimsus). Võimsus on hetkeline energiahulk mis siseneb mingisse elektroonikaelementi või väljub sellest. Aktiivvõimsuse P suhet näivvõimsusesse PS defineeritakse kui võimsustegurit. Seda nimetatakse sageli ka
cos ϕ, kusjuures
ϕ = arctg (X / R).
Nihet pinge ja voolu vahel nimetatakse faasinihke nurgaks, mida tähistatakse kreeka tähega ϕ. Seega on aktiivvõimsus määratud seosega
P = UI cos ϕ = PS cos ϕ.
Elektroonikaskeem peab olema kooskõlas koormuse suurusega. Alalisvoolu (dc) korral kirjeldavad põhilised seadused ülalmainitud suuruste muutumise taset. Elektrotehnika terminites on alalisvool unipolaarne vool, mis võib sisaldada arvestataval hulgal vahelduvvoolu komponente. Need (vahelduvvoolu komponendid) summeeruvad fluktuatsioonideks alalisvoolu väljundsuurusel, mida nimetatakse pulsatsiooniks. Pinge keskväärtust iseloomustatakse alalisvoolu voltides mõõdetud pingena Udc , VDC. Voolu keskväärtus Id, on mõõdetud alalisvoolu amprites. Vahelduvvoolu korral tuleb eelkõige arvestada signaalide märke, samuti ka nende kuju ja korduvust. Korduva signaali lainel on tsükkel T. Selle periood on ajahulk esimese pooltsükli alguse ja järgmise positiivse pooltsükli alguse vahel. Sagedus on tsüklite arv perioodis ja korduvate signaalide korral määratakse seosega
f = 1 / T.
Euroopa elektrifirmad annavad tavaliselt siinuselist pinget 220 V sagedusega f = 50 Hz perioodiga T = 20 ms. Tavaliselt muutub vahelduvvoolu pinge hetkväärtus tööaja jooksul. Kui aga signaal on siinuselise pideva laine kujuline, siis koosneb tippudevaheline väärtus kahest amplituudsuurusest. Vahelduvvoolu päripinget, mis võrdub sama võimsusega alalispingele, nimetatakse ruutkeskmiseks väärtuseks , RMS, ehk efektiivväärtuseks:
Urms = √(1 / (2π)⋅∫(U2⋅dωt)) = Umax / √2 = 0,707 Umax,
milles U on sinusoidaalse laine hetkväärtus, Umax on selle amplituudväärtus. Seda taset mõõdetakse vahelduvvoolu voltides, RMS.
12
Vahelduvvoolu suurust, mis võrdub selle positiivse osa signaaliga piiratud pindalaga perioodi T jooksul, nimetatakse keskväärtuseks, mis on avaldatav seosega
Ud = 1 / π⋅∫(U⋅dωt) = 2Umax / π = 0,637 Umax.
Passiivsed ja aktiivsed seadmed. Seadmeid, millised võimaldavad ainult vähendada signaali amplituudi või teisendada seda madalamale väärtusele, nimetatakse passiivseteks seadmeteks ehk atenuaatoriteks. Näideteks on takisti, kondensaator ja paispool. Kui signaali suurus töö käigus kasvab, siis öeldakse, et tegemist on võimendamisega . Sellist tüüpi komponendid on tuntud aktiivsete seadmetena. Selliste seadmete näiteks on transistorid ja nende baasil ehitatud skeemid. Aktiivse seadme poolt rakendatud võimenduse suurust nimetatakse võimendusteguriks. Elektrooniliselt on võimendustegur väljundsignaali ja sisendsignaali suhe. Pingevõimendusteguri ehk võimenduse valem on
KU = Uout / Uin.
Valem KI = Iout / I in
Väljendab voolu võimendust ja KP = Pout / Pin = KUKI
on võimsuse võimendus. Indeks “in” tähistab siin sisendsignaali ja indeks “out” seadme väljundsignaali. Resonantsahel võib tekitada pingevõimenduse ilma võimsuse võimendamiseta. Sellist võimendust nimetatakse pingekordistuseks Q
Q = Uout / Uin = ωrL / R,
Q = 1 / (ωrCR),
Q = √ (L / C) / R.
Tõhusus. Elektroonikasüsteemi võimsuse kvaliteedi hindamiseks kasutatakse tõhusust, mis määratud seosega
η = PL / PS⋅100% .
See tähendab, et tõhusus on koormuse võimsuse PL ja toitevõimsuse PS. suhe. Siinjuures
PS = USIS, PL = UI,
kus US on toitepinge, IS on kogu toitevool ehk koguvool, U on koormuse pinge ja I on
koormusvoolu amplituud. Süsteemi tõhusus on mingi suurus 0 ja 100 protsendi vahel. See on vahend selleks et määrata, kui hästi kasutab süsteem toiteallika võimsust kasuliku koormuse tootmiseks. Võimsuskadu võib arvutada kui
Ploss = PS – PL = PL (100 / η – 1).
13
Eriomadused ja standardid. Kaasaegses elektroonikas eristatakse kahte haru. Need on nõrkvooluelektroonika, mis kuulub signaalitöötluse või raadioelektroonika valdkonda, ja jõuelektroonika, mis kuulub elektrivarustuse ja energiamuundurite valdkonda. Jõuelektroonikat kui eraldi tehnikaharu ei ole selles raamatus üksikasjaliselt käsitletud. Kaasaegne elektroonika kätkeb endas nii nõrkvoolu elektroonikakiipide, trükkskeemide ja loogikamaatriksite kui ka jõuelektroonika seadmete ja nende moodulite tootmise, Elektroonikaseadmete ja skeemide tähtsamad omadused on järgmised:
• läbilöögi- ja katkestuspinged ja voolud,
• hetkelised ja pidevad pinged, voolud ja võimsused,
• sisse-ja väljalülitamise kiirused, • võimsuskaod ja võimsuse hajumine,
• sagedustundlikkus,
• tõhusus. Järgmised kaks valdkonda moodustavad analoog- ja digitaal- (impulses või lülitus-) elektroonika. Märkusena: ei ole olemas puhtalt analoog- või digitaalseadmeid ja kõik süsteemid sisaldavad mõlemaid komponente. Siiski on need kaks seadme töötamise moodust traditsiooniliselt käsitatud eraldi nende erinevate omaduste ja karakteristikute tõttu. Käesolevas raamatus kasutatakse alljärgnevaid standardeid elektroonikaelementide, ahelate ja seadmete esitamiseks ja nende kvaliteedi mõõtmiseks:
• ISO 3.1-11. Suurused ja ühikud. Matemaatilised tähised ja sümbolid kasutamiseks teadustes ja tehnikas;
• ISO 129. Tehnilised joonised. − Dimensioneerimine − Põhiprintsiibid, definitsioonid, teostusmeetodid ja erimärgistused;
• EN 60617 / IEC 617. Skeemide graafilised sümbolid.
14
PEATÜKK 1. POOLJUHTSEADISED
1.1. Pooljuhid
1.1.1. Voolud juhtides ja isolaatorites
Aru saamaks sellest, kuidas elektroonikaseade töötab, tuleb esmalt tundma õppida aine aatomistruktuuri. Aine ehitus. Aine koosneb aatomitest, mis sisaldavad elektrone, ja tuumast tihedalt koondatud prootonite ja neutronitega. Elektronil on negatiivne laeng. Prootonil on positiivne laeng, mis võrdub elektroni negatiivse laenguga. Neutronil, nagu nimigi ütleb, ei ole laengut, see on elektriliselt neutraalne. Igal elemendil on kindel hulk prootoneid ja sama arv elektrone, et hoida aatom elektriliselt neutraalne. Igat elementi iseloomustab selle elektronide arv, või nagu seda nimetatakse, aatomiarv. Elektronid on jaotatud tuuma ümbritsevas ruumis ümbristes, millised võib võrrelda planeetide orbiitidega päikese ümber. Elektrone võib mõnikord lihtsalt aatomist eraldada, jättes selle loomulikult positiivselt laetuna, kuid palju raskem on lahti murda tuuma. Vool. Elektrivool voolab aines laengukandjateks nimetatavate osakeste vahel toimuva vastastikuse mõju tulemusel Elektrijuhtimise mehhanismi uurimine erinevates materjalides näitab, et eIektrolüütides ja gaasides toimub elektri juhtimine ioonide liikumise teel. Metalsetes juhtides toimub juhtimine elektronide liikumise kaudu, isolaatorites ei ole mingit juhtivust, ainult väike laengute nihkumine aatomite eneste sees. Vabade laengukandjate hulk erinevates materjalides võib muutuda väga laiades piirides. Metallides on vabade elektronide tihedus suurusjärgus 1023 1/cm3. Isolaatorites on vabade elektronide tihedus väiksem kui 103 1/cm3. Selle tõttu on erinevate materjalide elektrijuhtivus väga erinev, rohkem kui 106 S/cm metallides ja väiksem kui 10-15 S/cm isolaatorites. Energianivood. Negatiivselt laetud elektronid võivad omada energiat diskreetsetes hulkades, seepärast on need paigutatud kindlatele energiatasanditele ilma mingi vaheta nende tasandite vahel. Normaalolukorras püüavad elektronid täita kõige madalamat energiatasandit, jättes täitmata ainult kõrgeima tasandi. Selle välise tasandi elektronid on tuumaga nõrgalt seotud ja nad võivad saada vabastatud või seotud naaberaatomitega . Tahketes ainetes on aatomid paigutatud väga tihedalt üksteise kõrvale. Naaberaatomid võivad häirida üksteise energianivoosid ja kombineeruda energiatsoonide moodustamiseks. Tahkise juhtivusomaduste mõistmiseks on oluline ainult väline orbiit ehk niinimetatud valentsitsoon, milles elektronid võivad liikuda ja osaleda elektrivoolus. Valentsi ja teiste tsoonide vahel on keelatud vahemik, mille elektronid võivad läbida, kuid kuhu nad ei tohi jääda. Juhtivus. Keemiliste elementide elektrijuhtivuse võtmeks on elektronide arv nende valentsiorbiidil. Isolaatoritel on kuni kaheksa valentsielektroni. Mõnedel juhtide aatomitel on välisorbiidil ainult üks valtsielektron. Kuna üksainus valentsielektron võib väga kergesti olla välja võetud oma aatomist, siis nimetatakse seda vabaks elektroniks ehk juhtimistsooni elektroniks , kuna ta rändab suurel orbiidil mis on ekvivalentne kõrgele energianivoole. Väikseimgi pinge põhjustab vabade elektronide voolamise ühest aatomist teise.
15
Metallide ja isolaatorite vabade laengukandjate tihedus on ligikaudu konstantne ja seda ei saa muuta teatud etteantud piirides. Metalli elektriline takistus muutub veidi koos temperatuuriga. Takistuse muutust temperatuuri mõjul põhjendatakse järgmiselt: metallis on väga vähe vabu elektrone, mis võiksid liikuda potentsiaalide vahe rakendamisel. Juhi temperatuuri vähendamisel aatomite kristallvõre soojuslik vibratsioon väheneb. Selle tulemusena on aatomite häiriv mõju elektronide liikumisele väiksem ja järjelikult takistus väheneb. Sellist takistuse liiki nimetatakse oomiliseks takistuseks ehk positiivseks takistuseks. Ainult absoluutse nulli lähedal toimub järsk muutus. Kokkuvõtteks. Elektrivool on laetud laengukandjate vool ja nende vastastikune mõju. Juhtides toimub juhtimine negatiivelt laetud elektronide liikumisega. Elektrijuhtivus sõltub elektronide arvust keemilise elemendi valentsiorbiidil. Pinge põhjustab elektronide voolamise ühelt aatomilt teisele. Elektronide tihedus metallis on ligikaudu konstantne. Soojusliku vibratsiooni tõttu metalli takistus temperatuuri langedes veidi langeb. Sellist liiki takistust nimetatakse metallide positiivseks oomiliseks takistuseks.
1.1.2. Voolud pooljuhtides
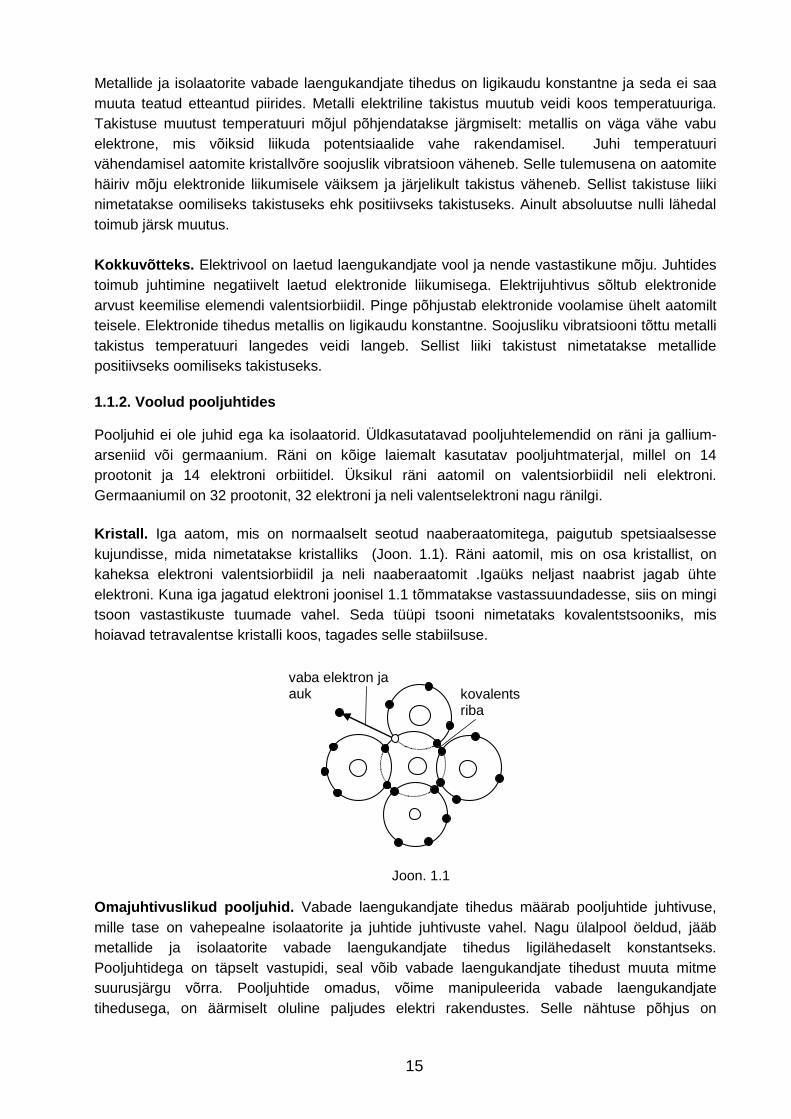
Pooljuhid ei ole juhid ega ka isolaatorid. Üldkasutatavad pooljuhtelemendid on räni ja gallium-arseniid või germaanium. Räni on kõige laiemalt kasutatav pooljuhtmaterjal, millel on 14 prootonit ja 14 elektroni orbiitidel. Üksikul räni aatomil on valentsiorbiidil neli elektroni. Germaaniumil on 32 prootonit, 32 elektroni ja neli valentselektroni nagu ränilgi. Kristall. Iga aatom, mis on normaalselt seotud naaberaatomitega, paigutub spetsiaalsesse kujundisse, mida nimetatakse kristalliks (Joon. 1.1). Räni aatomil, mis on osa kristallist, on kaheksa elektroni valentsiorbiidil ja neli naaberaatomit .Igaüks neljast naabrist jagab ühte elektroni. Kuna iga jagatud elektroni joonisel 1.1 tõmmatakse vastassuundadesse, siis on mingi tsoon vastastikuste tuumade vahel. Seda tüüpi tsooni nimetataks kovalentstsooniks, mis hoiavad tetravalentse kristalli koos, tagades selle stabiilsuse.
vaba elektron ja auk kovalents
riba
Joon. 1.1
Omajuhtivuslikud pooljuhid. Vabade laengukandjate tihedus määrab pooljuhtide juhtivuse, mille tase on vahepealne isolaatorite ja juhtide juhtivuste vahel. Nagu ülalpool öeldud, jääb metallide ja isolaatorite vabade laengukandjate tihedus ligilähedaselt konstantseks. Pooljuhtidega on täpselt vastupidi, seal võib vabade laengukandjate tihedust muuta mitme suurusjärgu võrra. Pooljuhtide omadus, võime manipuleerida vabade laengukandjate tihedusega, on äärmiselt oluline paljudes elektri rakendustes. Selle nähtuse põhjus on
16
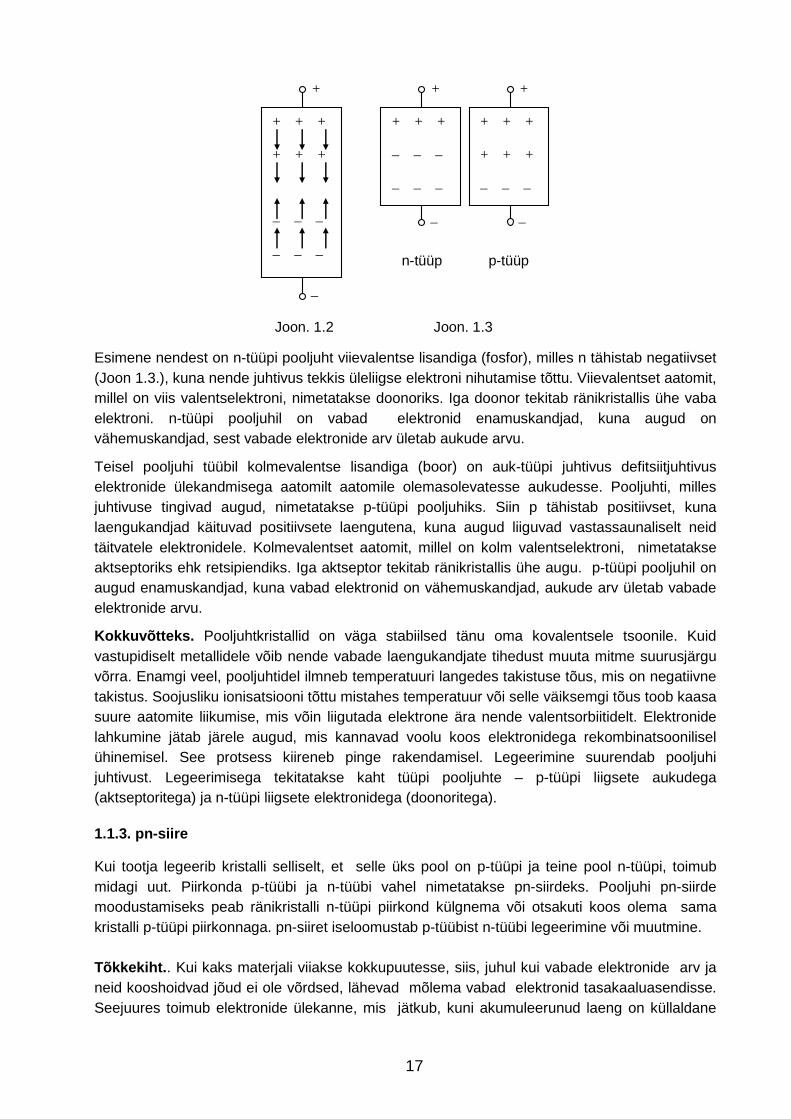
alljärgnev. Pooljuhtide juhtivus toimub samuti nagu metallideski elektronidega, kuid vastupidiselt metallidele, ilmneb sellistel materjalidel temperatuuri vähenemisel hoopis takistuse suurenemine. Pooljuhtmaterjalide takistust nimetatakse omatakistuseks. Kuna temperatuuri tõusmisel takistus väheneb, siis nimetatakse seda seadme negatiivseks temperatuurikoefitsiendiks. Selline aine kuulub pooljuhtide hulka, kuna temperatuuri absoluutse nulli juures muutub see isolaatoriks ja väga kõrgete temperatuuride juures on ta elektrijuht. Toatemperatuuril on puhtal ränikristallil ainult mõned soojuslikult tekitatud vabad elektronid. Mistahes temperatuuri tõus toob kaasa aatomite soojusliku liikumise. Seda protsessi nimetatakse termiliseks ionisatsiooniks. Mida kõrgem on ümbritsev temperatuur, seda tugevam on aatomite ja kristallvõre mehaaniline vibratsioon. See võib valentsiorbiidilt ära tuua ühe elektroni. Näiteks, kui temperatuur muutub mõnikümmend Celsiuse kraadi, muutub puhta germaaniumi elektritakistus mitusada korda. Materjale, milliste juhtivus kasvab temperatuuri tõusuga väga suures ulatuses, nimetatakse omajuhtivuslikeks pooljuhtideks. Nimetus “omajuhtivuslik” tähendab seda, et see omadus on iseloomulik puhtale materjalile, milles ei ole midagi muud kui räni või germaaniumi aatomid. Neid ei iseloomusta mitte üksnes takistuse tegur, vaid ka selliste tegurite suur mõju juhtivusele, nagu soojus ja valgus. Rekombinatsioon. Elektroni lahkumine jätab valentsiorbiidile vakantsi. Sellist vakantsijälge vakantsitsoonis nimetatakse auguks. Auk käitub mitmes suhtes nagu positiivne laeng, kuna see meelitab ligi ja püüab kinni mistahes läheduses oleva elektroni, nagu näidatud joonisel 1.1. Juhuslik vaba elektron jõuab augu lähedale, allub selle külgetõmbele ja kukub sinna sisse. Sellist vaba elektroni ja augu ühinemist nimetatakse rekombinatsiooniks. Sellisel viisil rändab valentselektron materjalis. Seni kuni mõlemad, nii elektron kui ka auk osalevad juhtimises, annavad augud igal juhul poole sellest, mis annavad elektronid. Keskmist aega vaba elektroni tekke ja selle rekombinatsiooni vahel nimetatakse eluajaks. Pinge mõju. Rakendatud pinge sunnib elektrone ja auke liikuma kristallis positiivsete ja negatiivsete kontaktide vahel. Kui väline pinge rakendatakse pooljuhile, siis liiguvad vabad elektronid positiivse kontakti suunas ja augud voolavad vooluallika negatiivse kontakti poole. Joonisel 1.2. liiguvad elektronid ja augud vastupidistes suundades. Edaspidi kujutame ette voolu pooljuhis kahe voolu kombineeritud koosmõjuna: elektronide vool suuremate orbiitide kaudu ühes suunas ja aukude vool suuremate ja väiksemate orbiitide kaudu teises suunas. Seega kannavad vabad elektronid ja augud laengut ühest kohast teise. Mõlemad on laengukandjad vastupidiselt metallide elektronidele. Legeerimine. Üks võimalus juhtivuse tõstmiseks on legeerimine. See tähendab lisandainete aatomite lisamist puhtalt tetravalentsesse kristalli (omajuhtivuslikku kristalli). Legeeritud ainet nimetatakse lisandpooljuhiks. Lisandaine aatomid muudavad elektronide ja aukude soojusliku tasakaalu tihedust. Räni puhul on sobivad lisandid elementide perioodilisuse tabeli 5. ja 3. tulbad, st sellised nagu fosfor ja boor. Legeerimisega võib toota kahte tüüpi pooljuhte.
17
–
+
+ + + + + + – – – – – –
Joon. 1.2
–
+
+ + + + + + – – –
–
+
+ + + – – – – – –
Joon. 1.3
p-tüüp n-tüüp
Esimene nendest on n-tüüpi pooljuht viievalentse lisandiga (fosfor), milles n tähistab negatiivset (Joon 1.3.), kuna nende juhtivus tekkis üleliigse elektroni nihutamise tõttu. Viievalentset aatomit, millel on viis valentselektroni, nimetatakse doonoriks. Iga doonor tekitab ränikristallis ühe vaba elektroni. n-tüüpi pooljuhil on vabad elektronid enamuskandjad, kuna augud on vähemuskandjad, sest vabade elektronide arv ületab aukude arvu.
Teisel pooljuhi tüübil kolmevalentse lisandiga (boor) on auk-tüüpi juhtivus defitsiitjuhtivus elektronide ülekandmisega aatomilt aatomile olemasolevatesse aukudesse. Pooljuhti, milles juhtivuse tingivad augud, nimetatakse p-tüüpi pooljuhiks. Siin p tähistab positiivset, kuna laengukandjad käituvad positiivsete laengutena, kuna augud liiguvad vastassaunaliselt neid täitvatele elektronidele. Kolmevalentset aatomit, millel on kolm valentselektroni, nimetatakse aktseptoriks ehk retsipiendiks. Iga aktseptor tekitab ränikristallis ühe augu. p-tüüpi pooljuhil on augud enamuskandjad, kuna vabad elektronid on vähemuskandjad, aukude arv ületab vabade elektronide arvu.
Kokkuvõtteks. Pooljuhtkristallid on väga stabiilsed tänu oma kovalentsele tsoonile. Kuid vastupidiselt metallidele võib nende vabade laengukandjate tihedust muuta mitme suurusjärgu võrra. Enamgi veel, pooljuhtidel ilmneb temperatuuri langedes takistuse tõus, mis on negatiivne takistus. Soojusliku ionisatsiooni tõttu mistahes temperatuur või selle väiksemgi tõus toob kaasa suure aatomite liikumise, mis võin liigutada elektrone ära nende valentsorbiitidelt. Elektronide lahkumine jätab järele augud, mis kannavad voolu koos elektronidega rekombinatsoonilisel ühinemisel. See protsess kiireneb pinge rakendamisel. Legeerimine suurendab pooljuhi juhtivust. Legeerimisega tekitatakse kaht tüüpi pooljuhte – p-tüüpi liigsete aukudega (aktseptoritega) ja n-tüüpi liigsete elektronidega (doonoritega).
1.1.3. pn-siire
Kui tootja legeerib kristalli selliselt, et selle üks pool on p-tüüpi ja teine pool n-tüüpi, toimub midagi uut. Piirkonda p-tüübi ja n-tüübi vahel nimetatakse pn-siirdeks. Pooljuhi pn-siirde moodustamiseks peab ränikristalli n-tüüpi piirkond külgnema või otsakuti koos olema sama kristalli p-tüüpi piirkonnaga. pn-siiret iseloomustab p-tüübist n-tüübi legeerimine või muutmine. Tõkkekiht. . Kui kaks materjali viiakse kokkupuutesse, siis, juhul kui vabade elektronide arv ja neid kooshoidvad jõud ei ole võrdsed, lähevad mõlema vabad elektronid tasakaaluasendisse. Seejuures toimub elektronide ülekanne, mis jätkub, kuni akumuleerunud laeng on küllaldane
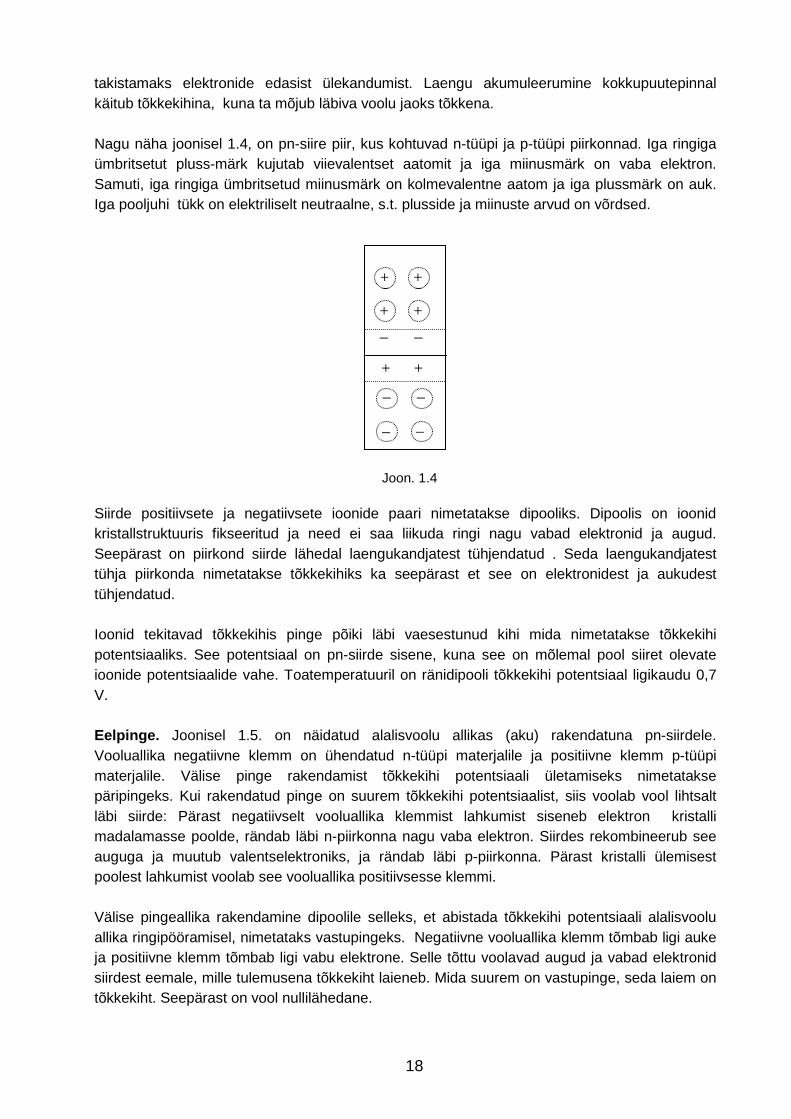
18
takistamaks elektronide edasist ülekandumist. Laengu akumuleerumine kokkupuutepinnal käitub tõkkekihina, kuna ta mõjub läbiva voolu jaoks tõkkena. Nagu näha joonisel 1.4, on pn-siire piir, kus kohtuvad n-tüüpi ja p-tüüpi piirkonnad. Iga ringiga ümbritsetut pluss-märk kujutab viievalentset aatomit ja iga miinusmärk on vaba elektron. Samuti, iga ringiga ümbritsetud miinusmärk on kolmevalentne aatom ja iga plussmärk on auk. Iga pooljuhi tükk on elektriliselt neutraalne, s.t. plusside ja miinuste arvud on võrdsed.
+
–
Joon. 1.4
–
+
– –
– –
+ +
+ +
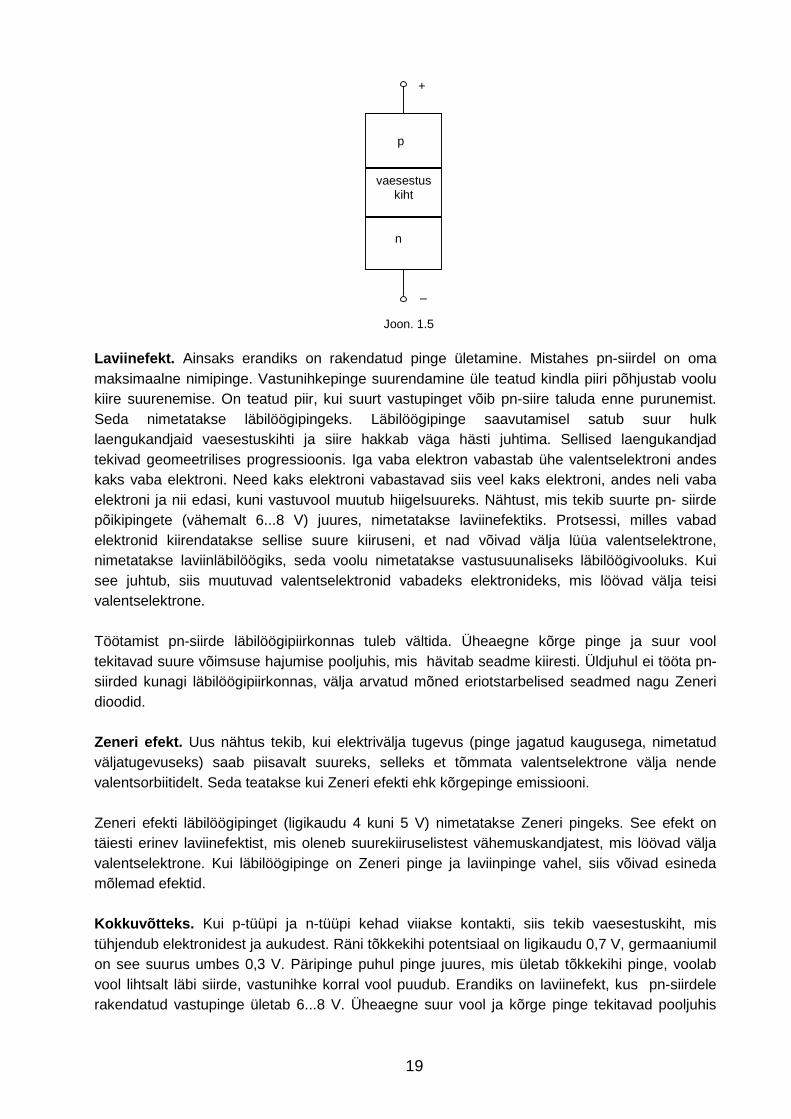
Siirde positiivsete ja negatiivsete ioonide paari nimetatakse dipooliks. Dipoolis on ioonid kristallstruktuuris fikseeritud ja need ei saa liikuda ringi nagu vabad elektronid ja augud. Seepärast on piirkond siirde lähedal laengukandjatest tühjendatud . Seda laengukandjatest tühja piirkonda nimetatakse tõkkekihiks ka seepärast et see on elektronidest ja aukudest tühjendatud. Ioonid tekitavad tõkkekihis pinge põiki läbi vaesestunud kihi mida nimetatakse tõkkekihi potentsiaaliks. See potentsiaal on pn-siirde sisene, kuna see on mõlemal pool siiret olevate ioonide potentsiaalide vahe. Toatemperatuuril on ränidipooli tõkkekihi potentsiaal ligikaudu 0,7 V. Eelpinge. Joonisel 1.5. on näidatud alalisvoolu allikas (aku) rakendatuna pn-siirdele. Vooluallika negatiivne klemm on ühendatud n-tüüpi materjalile ja positiivne klemm p-tüüpi materjalile. Välise pinge rakendamist tõkkekihi potentsiaali ületamiseks nimetatakse päripingeks. Kui rakendatud pinge on suurem tõkkekihi potentsiaalist, siis voolab vool lihtsalt läbi siirde: Pärast negatiivselt vooluallika klemmist lahkumist siseneb elektron kristalli madalamasse poolde, rändab läbi n-piirkonna nagu vaba elektron. Siirdes rekombineerub see auguga ja muutub valentselektroniks, ja rändab läbi p-piirkonna. Pärast kristalli ülemisest poolest lahkumist voolab see vooluallika positiivsesse klemmi. Välise pingeallika rakendamine dipoolile selleks, et abistada tõkkekihi potentsiaali alalisvoolu allika ringipööramisel, nimetataks vastupingeks. Negatiivne vooluallika klemm tõmbab ligi auke ja positiivne klemm tõmbab ligi vabu elektrone. Selle tõttu voolavad augud ja vabad elektronid siirdest eemale, mille tulemusena tõkkekiht laieneb. Mida suurem on vastupinge, seda laiem on tõkkekiht. Seepärast on vool nullilähedane.
19
+
–
p
n
vaesestuskiht
Joon. 1.5
Laviinefekt. Ainsaks erandiks on rakendatud pinge ületamine. Mistahes pn-siirdel on oma maksimaalne nimipinge. Vastunihkepinge suurendamine üle teatud kindla piiri põhjustab voolu kiire suurenemise. On teatud piir, kui suurt vastupinget võib pn-siire taluda enne purunemist. Seda nimetatakse läbilöögipingeks. Läbilöögipinge saavutamisel satub suur hulk laengukandjaid vaesestuskihti ja siire hakkab väga hästi juhtima. Sellised laengukandjad tekivad geomeetrilises progressioonis. Iga vaba elektron vabastab ühe valentselektroni andes kaks vaba elektroni. Need kaks elektroni vabastavad siis veel kaks elektroni, andes neli vaba elektroni ja nii edasi, kuni vastuvool muutub hiigelsuureks. Nähtust, mis tekib suurte pn- siirde põikipingete (vähemalt 6...8 V) juures, nimetatakse laviinefektiks. Protsessi, milles vabad elektronid kiirendatakse sellise suure kiiruseni, et nad võivad välja lüüa valentselektrone, nimetatakse laviinläbilöögiks, seda voolu nimetatakse vastusuunaliseks läbilöögivooluks. Kui see juhtub, siis muutuvad valentselektronid vabadeks elektronideks, mis löövad välja teisi valentselektrone. Töötamist pn-siirde läbilöögipiirkonnas tuleb vältida. Üheaegne kõrge pinge ja suur vool tekitavad suure võimsuse hajumise pooljuhis, mis hävitab seadme kiiresti. Üldjuhul ei tööta pn-siirded kunagi läbilöögipiirkonnas, välja arvatud mõned eriotstarbelised seadmed nagu Zeneri dioodid. Zeneri efekt. Uus nähtus tekib, kui elektrivälja tugevus (pinge jagatud kaugusega, nimetatud väljatugevuseks) saab piisavalt suureks, selleks et tõmmata valentselektrone välja nende valentsorbiitidelt. Seda teatakse kui Zeneri efekti ehk kõrgepinge emissiooni. Zeneri efekti läbilöögipinget (ligikaudu 4 kuni 5 V) nimetatakse Zeneri pingeks. See efekt on täiesti erinev laviinefektist, mis oleneb suurekiiruselistest vähemuskandjatest, mis löövad välja valentselektrone. Kui läbilöögipinge on Zeneri pinge ja laviinpinge vahel, siis võivad esineda mõlemad efektid. Kokkuvõtteks. Kui p-tüüpi ja n-tüüpi kehad viiakse kontakti, siis tekib vaesestuskiht, mis tühjendub elektronidest ja aukudest. Räni tõkkekihi potentsiaal on ligikaudu 0,7 V, germaaniumil on see suurus umbes 0,3 V. Päripinge puhul pinge juures, mis ületab tõkkekihi pinge, voolab vool lihtsalt läbi siirde, vastunihke korral vool puudub. Erandiks on laviinefekt, kus pn-siirdele rakendatud vastupinge ületab 6...8 V. Üheaegne suur vool ja kõrge pinge tekitavad pooljuhis
20
A
C
Joon. 1.6
suure võimsuse hajumise, mis hävitab seadise kiiresti. Sarnane nähtus tekib siis, kui elektrivälja tugevus muutub väge suureks. Zeneri pinge 4 kuni 5 V võib samuti seadise hävitada.
1.2. Dioodid
1.2.1. Alaldusdioodid
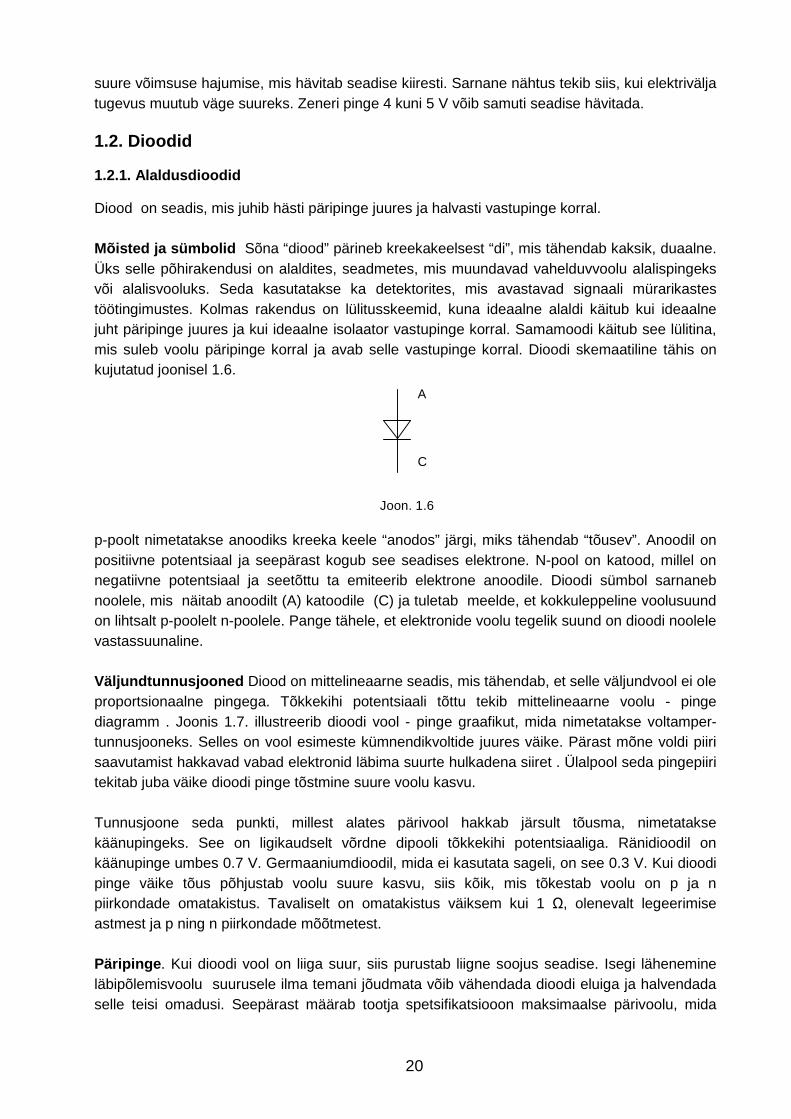
Diood on seadis, mis juhib hästi päripinge juures ja halvasti vastupinge korral. Mõisted ja sümbolid Sõna “diood” pärineb kreekakeelsest “di”, mis tähendab kaksik, duaalne. Üks selle põhirakendusi on alaldites, seadmetes, mis muundavad vahelduvvoolu alalispingeks või alalisvooluks. Seda kasutatakse ka detektorites, mis avastavad signaali mürarikastes töötingimustes. Kolmas rakendus on lülitusskeemid, kuna ideaalne alaldi käitub kui ideaalne juht päripinge juures ja kui ideaalne isolaator vastupinge korral. Samamoodi käitub see lülitina, mis suleb voolu päripinge korral ja avab selle vastupinge korral. Dioodi skemaatiline tähis on kujutatud joonisel 1.6.
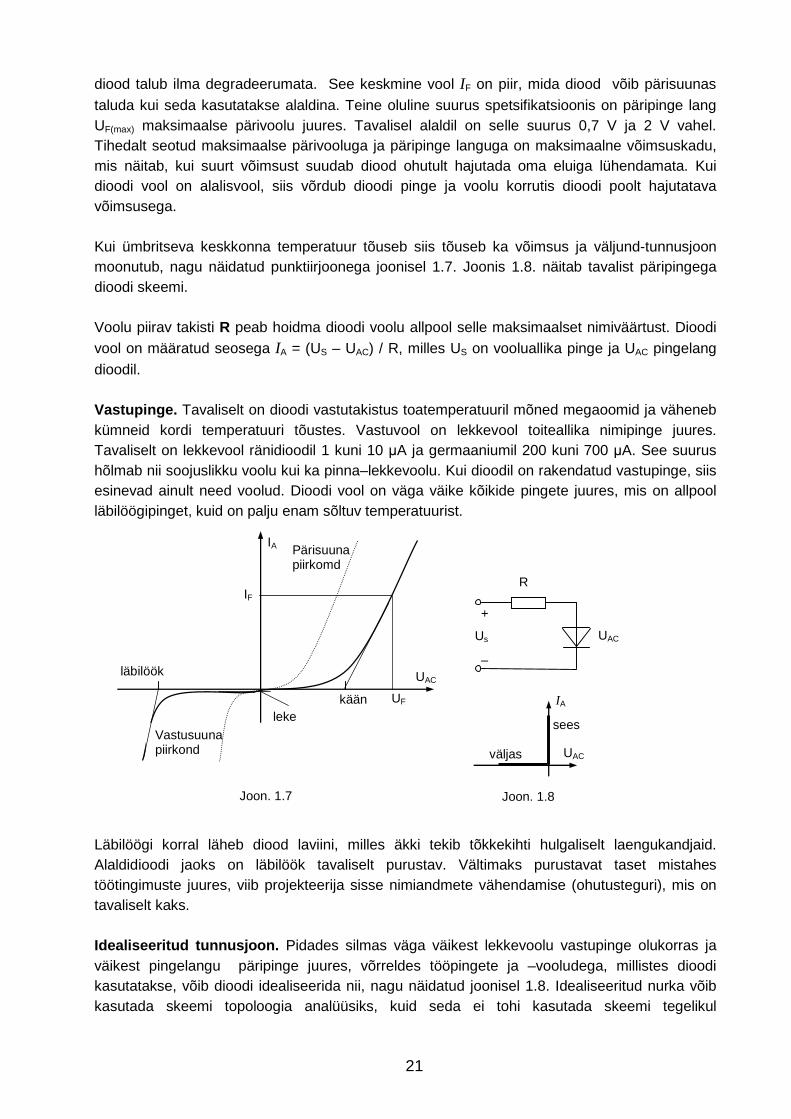
p-poolt nimetatakse anoodiks kreeka keele “anodos” järgi, miks tähendab “tõusev”. Anoodil on positiivne potentsiaal ja seepärast kogub see seadises elektrone. N-pool on katood, millel on negatiivne potentsiaal ja seetõttu ta emiteerib elektrone anoodile. Dioodi sümbol sarnaneb noolele, mis näitab anoodilt (A) katoodile (C) ja tuletab meelde, et kokkuleppeline voolusuund on lihtsalt p-poolelt n-poolele. Pange tähele, et elektronide voolu tegelik suund on dioodi noolele vastassuunaline. Väljundtunnusjooned Diood on mittelineaarne seadis, mis tähendab, et selle väljundvool ei ole proportsionaalne pingega. Tõkkekihi potentsiaali tõttu tekib mittelineaarne voolu - pinge diagramm . Joonis 1.7. illustreerib dioodi vool - pinge graafikut, mida nimetatakse voltamper-tunnusjooneks. Selles on vool esimeste kümnendikvoltide juures väike. Pärast mõne voldi piiri saavutamist hakkavad vabad elektronid läbima suurte hulkadena siiret . Ülalpool seda pingepiiri tekitab juba väike dioodi pinge tõstmine suure voolu kasvu. Tunnusjoone seda punkti, millest alates pärivool hakkab järsult tõusma, nimetatakse käänupingeks. See on ligikaudselt võrdne dipooli tõkkekihi potentsiaaliga. Ränidioodil on käänupinge umbes 0.7 V. Germaaniumdioodil, mida ei kasutata sageli, on see 0.3 V. Kui dioodi pinge väike tõus põhjustab voolu suure kasvu, siis kõik, mis tõkestab voolu on p ja n piirkondade omatakistus. Tavaliselt on omatakistus väiksem kui 1 Ω, olenevalt legeerimise astmest ja p ning n piirkondade mõõtmetest. Päripinge . Kui dioodi vool on liiga suur, siis purustab liigne soojus seadise. Isegi lähenemine läbipõlemisvoolu suurusele ilma temani jõudmata võib vähendada dioodi eluiga ja halvendada selle teisi omadusi. Seepärast määrab tootja spetsifikatsiooon maksimaalse pärivoolu, mida
21
diood talub ilma degradeerumata. See keskmine vool IF on piir, mida diood võib pärisuunas
taluda kui seda kasutatakse alaldina. Teine oluline suurus spetsifikatsioonis on päripinge lang UF(max) maksimaalse pärivoolu juures. Tavalisel alaldil on selle suurus 0,7 V ja 2 V vahel. Tihedalt seotud maksimaalse pärivooluga ja päripinge languga on maksimaalne võimsuskadu, mis näitab, kui suurt võimsust suudab diood ohutult hajutada oma eluiga lühendamata. Kui dioodi vool on alalisvool, siis võrdub dioodi pinge ja voolu korrutis dioodi poolt hajutatava võimsusega. Kui ümbritseva keskkonna temperatuur tõuseb siis tõuseb ka võimsus ja väljund-tunnusjoon moonutub, nagu näidatud punktiirjoonega joonisel 1.7. Joonis 1.8. näitab tavalist päripingega dioodi skeemi. Voolu piirav takisti R peab hoidma dioodi voolu allpool selle maksimaalset nimiväärtust. Dioodi vool on määratud seosega IA = (US – UAC) / R, milles US on vooluallika pinge ja UAC pingelang
dioodil. Vastupinge. Tavaliselt on dioodi vastutakistus toatemperatuuril mõned megaoomid ja väheneb kümneid kordi temperatuuri tõustes. Vastuvool on lekkevool toiteallika nimipinge juures. Tavaliselt on lekkevool ränidioodil 1 kuni 10 µA ja germaaniumil 200 kuni 700 µA. See suurus hõlmab nii soojuslikku voolu kui ka pinna–lekkevoolu. Kui dioodil on rakendatud vastupinge, siis esinevad ainult need voolud. Dioodi vool on väga väike kõikide pingete juures, mis on allpool läbilöögipinget, kuid on palju enam sõltuv temperatuurist.
UF
IF
käänu
läbilöök UAC
IA
Joon. 1.7
Pärisuuna piirkomd
Vastusuuna piirkond
leke
+
–
väljas
sees
UAC
R
Joon. 1.8
Us
UAC
IA
Läbilöögi korral läheb diood laviini, milles äkki tekib tõkkekihti hulgaliselt laengukandjaid. Alaldidioodi jaoks on läbilöök tavaliselt purustav. Vältimaks purustavat taset mistahes töötingimuste juures, viib projekteerija sisse nimiandmete vähendamise (ohutusteguri), mis on tavaliselt kaks. Idealiseeritud tunnusjoon. Pidades silmas väga väikest lekkevoolu vastupinge olukorras ja väikest pingelangu päripinge juures, võrreldes tööpingete ja –vooludega, millistes dioodi kasutatakse, võib dioodi idealiseerida nii, nagu näidatud joonisel 1.8. Idealiseeritud nurka võib kasutada skeemi topoloogia analüüsiks, kuid seda ei tohi kasutada skeemi tegelikul
22
projekteerimisel. Sisselülimisel võib dioodi vaadelda ideaalse lülitina, kuna ta lülitub sisse kiiresti võrreldes skeemis toimuvate siirdeprotsessidega. Paljudes skeemides ei mõjuta lekkevool oluliselt skeemi ja sellepärast võib dioodi vaadelda ideaalse lülitina. Kokkuvõtteks. Diood juhib hästi, kui on sel on päripinge, ja halvasti, kui sel on vastupinge. See on lihtsaim mittejuhitav pooljuhtseadis, mis käitub nagu lüliti ahelate sulgemisel (siselülitamine) voolu voolamiseks ühes suunas ja avamisel (väljalülimine) teises suunas. Erinevalt ideaallülitist on diood mittelineaarne seadis selles mõttes, et selle väljundvool ei ole pingega proportsionaalne. Selle tüüpiline omatakistus on alla 1 Ω ja päripinge lang 0,7 ja 2 V vahel. Kui ümbritsev temperatuur tõuseb, siis dioodi tunnusjoon veidi moonutub. Vastutakistuse tõttu on dioodil väike lekkevool, tavaliselt 1 kuni 700 µA kõikide vastupingete juures, mis jäävad allapoole läbilöögipinget. Läbilöögi korral läheb diood laviini, mis võib selle purustada. Sellist hävitavat olukorda tuleb vältida.
1.2.2. Jõudiood
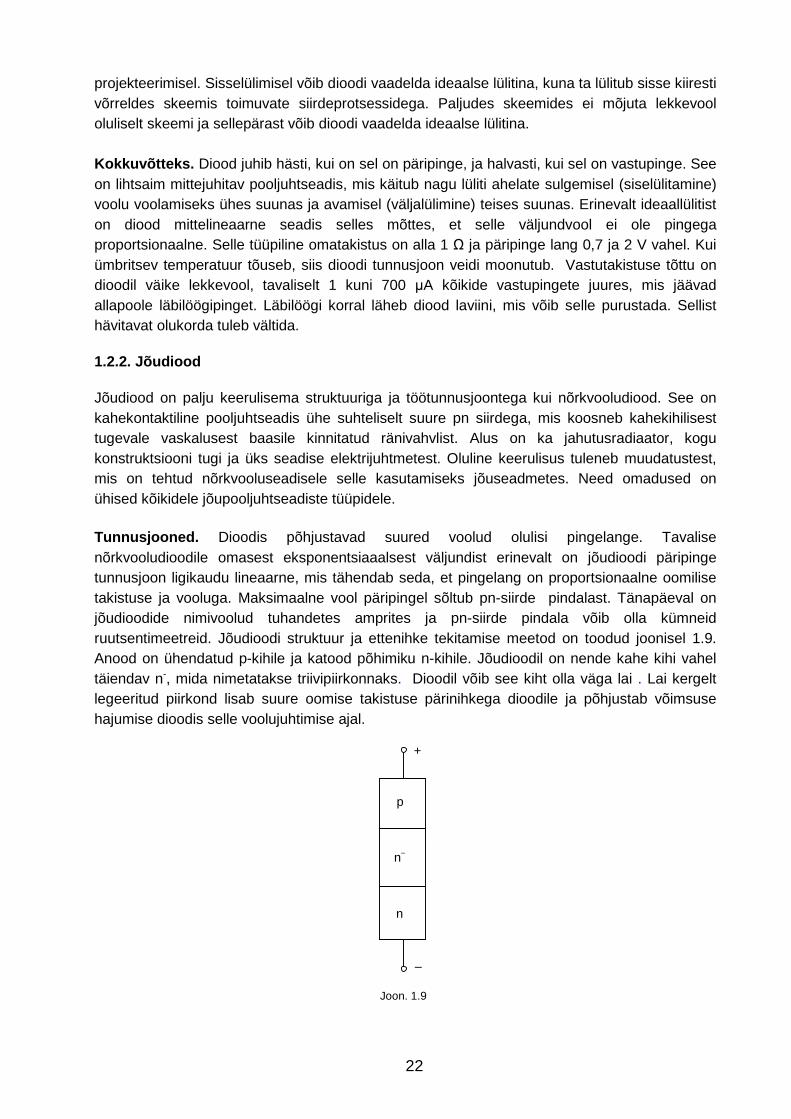
Jõudiood on palju keerulisema struktuuriga ja töötunnusjoontega kui nõrkvooludiood. See on kahekontaktiline pooljuhtseadis ühe suhteliselt suure pn siirdega, mis koosneb kahekihilisest tugevale vaskalusest baasile kinnitatud ränivahvlist. Alus on ka jahutusradiaator, kogu konstruktsiooni tugi ja üks seadise elektrijuhtmetest. Oluline keerulisus tuleneb muudatustest, mis on tehtud nõrkvooluseadisele selle kasutamiseks jõuseadmetes. Need omadused on ühised kõikidele jõupooljuhtseadiste tüüpidele. Tunnusjooned. Dioodis põhjustavad suured voolud olulisi pingelange. Tavalise nõrkvooludioodile omasest eksponentsiaaalsest väljundist erinevalt on jõudioodi päripinge tunnusjoon ligikaudu lineaarne, mis tähendab seda, et pingelang on proportsionaalne oomilise takistuse ja vooluga. Maksimaalne vool päripingel sõltub pn-siirde pindalast. Tänapäeval on jõudioodide nimivoolud tuhandetes amprites ja pn-siirde pindala võib olla kümneid ruutsentimeetreid. Jõudioodi struktuur ja ettenihke tekitamise meetod on toodud joonisel 1.9. Anood on ühendatud p-kihile ja katood põhimiku n-kihile. Jõudioodil on nende kahe kihi vahel täiendav n-, mida nimetatakse triivipiirkonnaks. Dioodil võib see kiht olla väga lai . Lai kergelt legeeritud piirkond lisab suure oomise takistuse pärinihkega dioodile ja põhjustab võimsuse hajumise dioodis selle voolujuhtimise ajal.
+
–
Joon. 1.9
n–
n
p
23
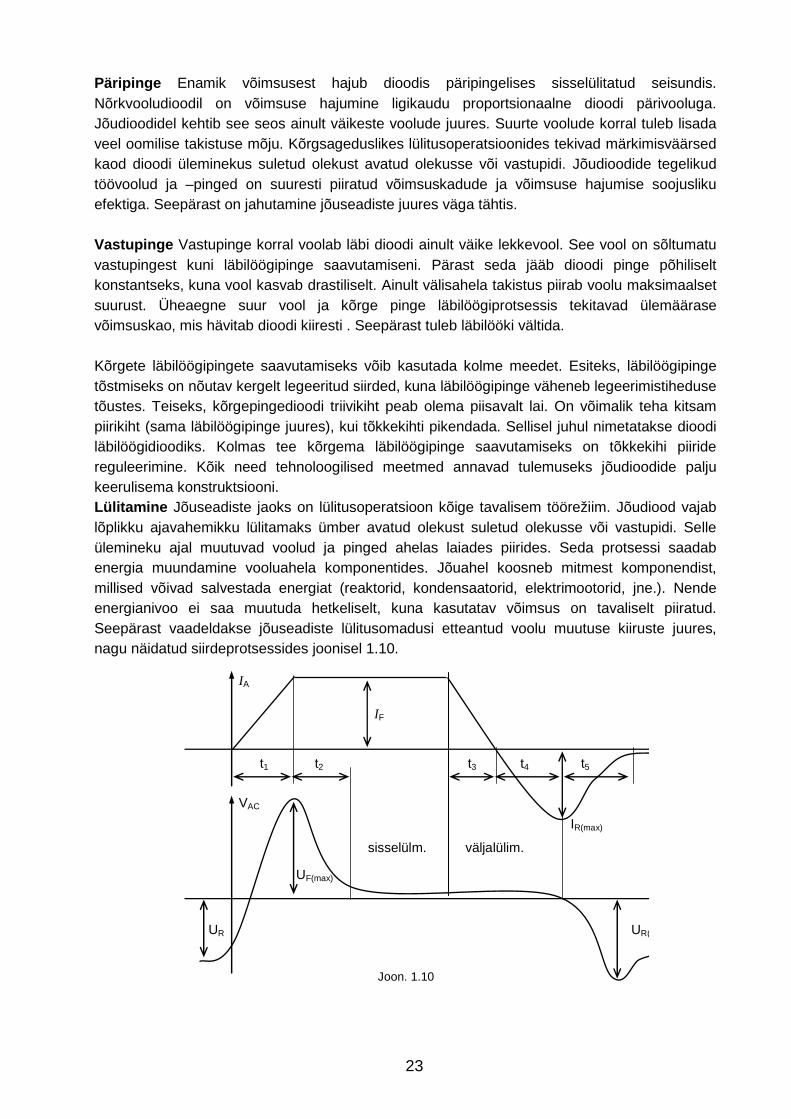
Päripinge Enamik võimsusest hajub dioodis päripingelises sisselülitatud seisundis. Nõrkvooludioodil on võimsuse hajumine ligikaudu proportsionaalne dioodi pärivooluga. Jõudioodidel kehtib see seos ainult väikeste voolude juures. Suurte voolude korral tuleb lisada veel oomilise takistuse mõju. Kõrgsageduslikes lülitusoperatsioonides tekivad märkimisväärsed kaod dioodi üleminekus suletud olekust avatud olekusse või vastupidi. Jõudioodide tegelikud töövoolud ja –pinged on suuresti piiratud võimsuskadude ja võimsuse hajumise soojusliku efektiga. Seepärast on jahutamine jõuseadiste juures väga tähtis. Vastupinge Vastupinge korral voolab läbi dioodi ainult väike lekkevool. See vool on sõltumatu vastupingest kuni läbilöögipinge saavutamiseni. Pärast seda jääb dioodi pinge põhiliselt konstantseks, kuna vool kasvab drastiliselt. Ainult välisahela takistus piirab voolu maksimaalset suurust. Üheaegne suur vool ja kõrge pinge läbilöögiprotsessis tekitavad ülemäärase võimsuskao, mis hävitab dioodi kiiresti . Seepärast tuleb läbilööki vältida. Kõrgete läbilöögipingete saavutamiseks võib kasutada kolme meedet. Esiteks, läbilöögipinge tõstmiseks on nõutav kergelt legeeritud siirded, kuna läbilöögipinge väheneb legeerimistiheduse tõustes. Teiseks, kõrgepingedioodi triivikiht peab olema piisavalt lai. On võimalik teha kitsam piirikiht (sama läbilöögipinge juures), kui tõkkekihti pikendada. Sellisel juhul nimetatakse dioodi läbilöögidioodiks. Kolmas tee kõrgema läbilöögipinge saavutamiseks on tõkkekihi piiride reguleerimine. Kõik need tehnoloogilised meetmed annavad tulemuseks jõudioodide palju keerulisema konstruktsiooni. Lülitamine Jõuseadiste jaoks on lülitusoperatsioon kõige tavalisem töörežiim. Jõudiood vajab lõplikku ajavahemikku lülitamaks ümber avatud olekust suletud olekusse või vastupidi. Selle ülemineku ajal muutuvad voolud ja pinged ahelas laiades piirides. Seda protsessi saadab energia muundamine vooluahela komponentides. Jõuahel koosneb mitmest komponendist, millised võivad salvestada energiat (reaktorid, kondensaatorid, elektrimootorid, jne.). Nende energianivoo ei saa muutuda hetkeliselt, kuna kasutatav võimsus on tavaliselt piiratud. Seepärast vaadeldakse jõuseadiste lülitusomadusi etteantud voolu muutuse kiiruste juures, nagu näidatud siirdeprotsessides joonisel 1.10.
t5 t3 t4 t2 t1
UR
IF
UF(max)
VAC
IR(max)
IA
Joon. 1.10
1.10
UR(max)
sisselülm. väljalülim.
24
Kõige olulisemateks näitajateks võimsuse lülitamisel on päripinge impulss UF(max) , kui diood lülitub sisse ja vastuvoolu tipp IR(max) , kui diood lülitub välja.
Protsessi käigus, kui laeng viiakse tõkkekihist välja, tekitavad oomiline ja induktiivne takistus kümnetesse voltidesse ulatuva päripinge impulsi. Jõudioodi sisselülitusprotsessi kestus.on kahe ajaintervalli summa: voolu kasvamise aeg t1 kuni dioodi voolu kujunenud väärtuseni IF , ja aeg t2
päripinge kujunenud pinge stabiliseerumiseni. Kõrgepingedioodidel (mõned kilovoldid) on esimene ajaintervall mõned sajad nanosekundid ja teine umbes üks mikrosekund, kuna tavalistel dioodidel on need suurused kümneid kordi väiksemad. Üldiselt ei ole võimalik saada üheaegselt nii lühemaid siirdeprotsesse kui ka väiksemaid võimsuskadusid. Väljalülimispinge ja -voolu siirdeprotsess on kolme ajaintervalli summa: pärivoolu vähenemise aeg t3 , vastuvoolu kasvu aeg t4 ja vastupinge kujunemise aeg t5 . Vastuvoolu maksimaalne suurus IR(max) jääb paigale teise ajaintervalli lõpuks ja siis langeb voolu suurus kiiresti. Pärast
dioodi väljalülitumist langeb vool peaaegu nullini ja voolama jääb ainult väike lekkevool. Dioodi vastuvoolu vähenemine tõstab vastupinget UR, mis saavutab oma maksimumväärtuse UR(max) juures. Aegade t4 ja t5 summat nimetatakse vastusuunaliseks taastusajaks. Kokkuvõte. Jõudiood on kohandatud võimsuste lülitamiseks. Lisaks omatakistusele on sellel ka kõrge oomiline takistus. Et taluda suuri kadusid, mis tekivad dioodi üleminekul väljalülitatud olekust suletus olekusse või vastupidi, on väga oluline jahutus..Kõrgete läbilöögipingete saavutamiseks võetakse tavaliselt kasutusele mõningaid meetmeid, nagu kergelt legeeritud siirded, piisavalt laiad triivkihid ja tõkkekihi piiride juhtimine. Nende meetmete tulemuseks on jõudioodi keerulisem konstruktsioon, kuid lüheneb nende taastusaeg ja pikeneb eluiga.
1.2.3. Eriotstarbelised dioodid
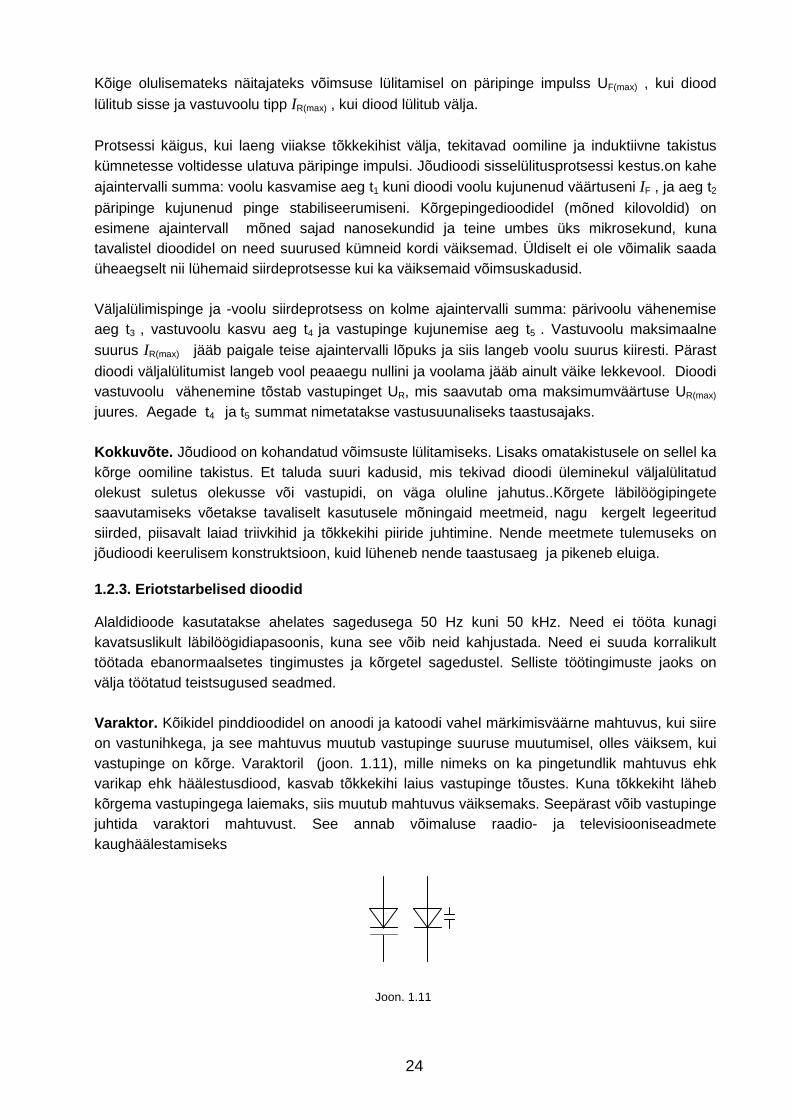
Alaldidioode kasutatakse ahelates sagedusega 50 Hz kuni 50 kHz. Need ei tööta kunagi kavatsuslikult läbilöögidiapasoonis, kuna see võib neid kahjustada. Need ei suuda korralikult töötada ebanormaalsetes tingimustes ja kõrgetel sagedustel. Selliste töötingimuste jaoks on välja töötatud teistsugused seadmed. Varaktor. Kõikidel pinddioodidel on anoodi ja katoodi vahel märkimisväärne mahtuvus, kui siire on vastunihkega, ja see mahtuvus muutub vastupinge suuruse muutumisel, olles väiksem, kui vastupinge on kõrge. Varaktoril (joon. 1.11), mille nimeks on ka pingetundlik mahtuvus ehk varikap ehk häälestusdiood, kasvab tõkkekihi laius vastupinge tõustes. Kuna tõkkekiht läheb kõrgema vastupingega laiemaks, siis muutub mahtuvus väiksemaks. Seepärast võib vastupinge juhtida varaktori mahtuvust. See annab võimaluse raadio- ja televisiooniseadmete kaughäälestamiseks
Joon. 1.11
25
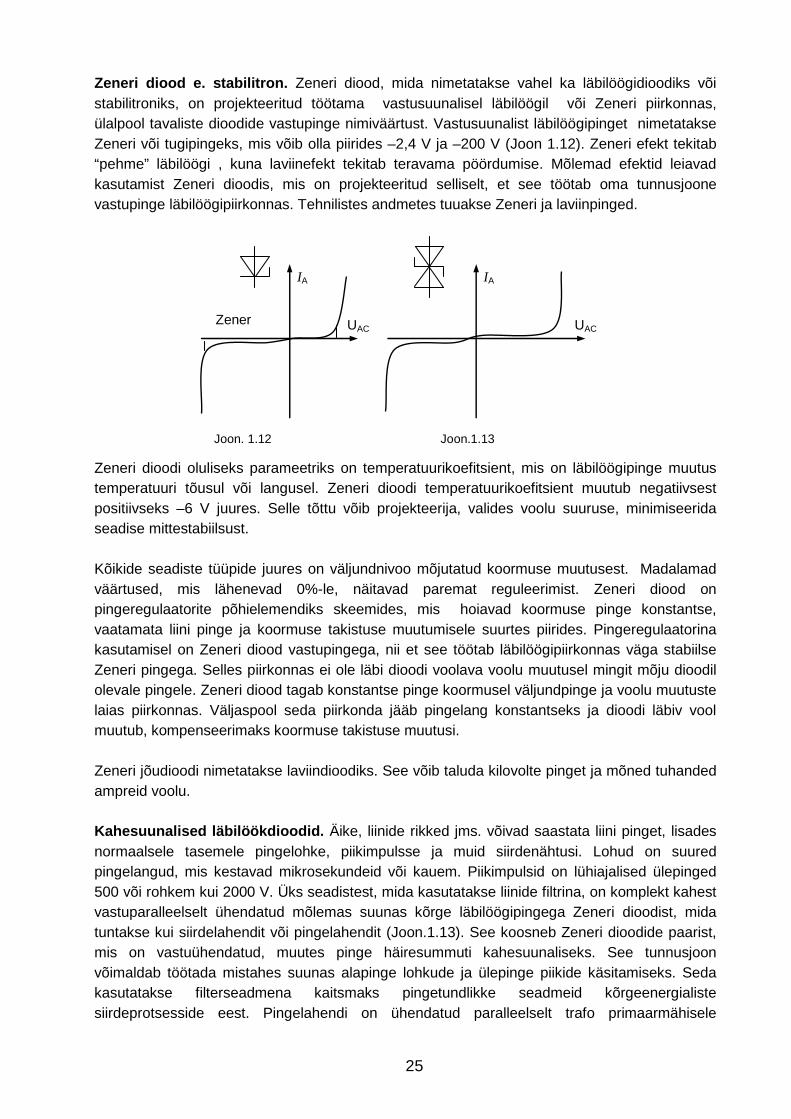
Zeneri diood e. stabilitron. Zeneri diood, mida nimetatakse vahel ka läbilöögidioodiks või stabilitroniks, on projekteeritud töötama vastusuunalisel läbilöögil või Zeneri piirkonnas, ülalpool tavaliste dioodide vastupinge nimiväärtust. Vastusuunalist läbilöögipinget nimetatakse Zeneri või tugipingeks, mis võib olla piirides –2,4 V ja –200 V (Joon 1.12). Zeneri efekt tekitab “pehme” läbilöögi , kuna laviinefekt tekitab teravama pöördumise. Mõlemad efektid leiavad kasutamist Zeneri dioodis, mis on projekteeritud selliselt, et see töötab oma tunnusjoone vastupinge läbilöögipiirkonnas. Tehnilistes andmetes tuuakse Zeneri ja laviinpinged.
UAC Zener
IA
Joon. 1.12
UAC
IA
Joon.1.13
Zeneri dioodi oluliseks parameetriks on temperatuurikoefitsient, mis on läbilöögipinge muutus temperatuuri tõusul või langusel. Zeneri dioodi temperatuurikoefitsient muutub negatiivsest positiivseks –6 V juures. Selle tõttu võib projekteerija, valides voolu suuruse, minimiseerida seadise mittestabiilsust. Kõikide seadiste tüüpide juures on väljundnivoo mõjutatud koormuse muutusest. Madalamad väärtused, mis lähenevad 0%-le, näitavad paremat reguleerimist. Zeneri diood on pingeregulaatorite põhielemendiks skeemides, mis hoiavad koormuse pinge konstantse, vaatamata liini pinge ja koormuse takistuse muutumisele suurtes piirides. Pingeregulaatorina kasutamisel on Zeneri diood vastupingega, nii et see töötab läbilöögipiirkonnas väga stabiilse Zeneri pingega. Selles piirkonnas ei ole läbi dioodi voolava voolu muutusel mingit mõju dioodil olevale pingele. Zeneri diood tagab konstantse pinge koormusel väljundpinge ja voolu muutuste laias piirkonnas. Väljaspool seda piirkonda jääb pingelang konstantseks ja dioodi läbiv vool muutub, kompenseerimaks koormuse takistuse muutusi. Zeneri jõudioodi nimetatakse laviindioodiks. See võib taluda kilovolte pinget ja mõned tuhanded ampreid voolu. Kahesuunalised läbilöökdioodid. Äike, liinide rikked jms. võivad saastata liini pinget, lisades normaalsele tasemele pingelohke, piikimpulsse ja muid siirdenähtusi. Lohud on suured pingelangud, mis kestavad mikrosekundeid või kauem. Piikimpulsid on lühiajalised ülepinged 500 või rohkem kui 2000 V. Üks seadistest, mida kasutatakse liinide filtrina, on komplekt kahest vastuparalleelselt ühendatud mõlemas suunas kõrge läbilöögipingega Zeneri dioodist, mida tuntakse kui siirdelahendit või pingelahendit (Joon.1.13). See koosneb Zeneri dioodide paarist, mis on vastuühendatud, muutes pinge häiresummuti kahesuunaliseks. See tunnusjoon võimaldab töötada mistahes suunas alapinge lohkude ja ülepinge piikide käsitamiseks. Seda kasutatakse filterseadmena kaitsmaks pingetundlikke seadmeid kõrgeenergialiste siirdeprotsesside eest. Pingelahendi on ühendatud paralleelselt trafo primaarmähisele
26
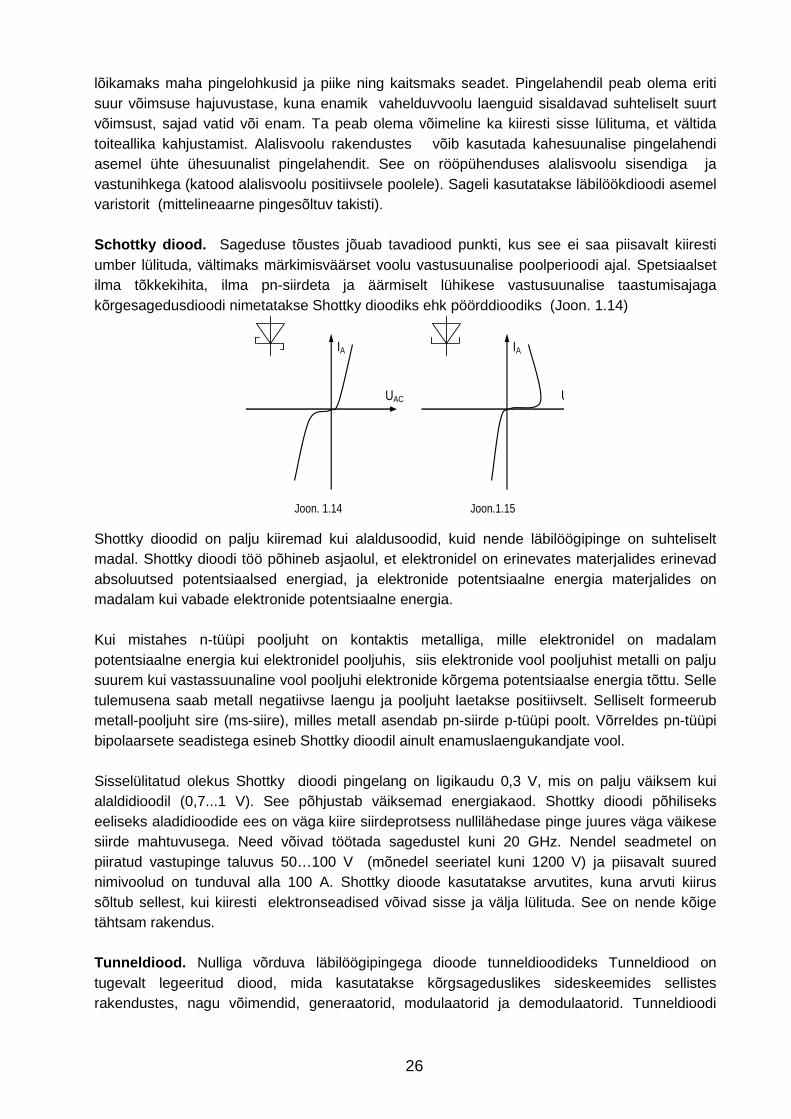
lõikamaks maha pingelohkusid ja piike ning kaitsmaks seadet. Pingelahendil peab olema eriti suur võimsuse hajuvustase, kuna enamik vahelduvvoolu laenguid sisaldavad suhteliselt suurt võimsust, sajad vatid või enam. Ta peab olema võimeline ka kiiresti sisse lülituma, et vältida toiteallika kahjustamist. Alalisvoolu rakendustes võib kasutada kahesuunalise pingelahendi asemel ühte ühesuunalist pingelahendit. See on rööpühenduses alalisvoolu sisendiga ja vastunihkega (katood alalisvoolu positiivsele poolele). Sageli kasutatakse läbilöökdioodi asemel varistorit (mittelineaarne pingesõltuv takisti). Schottky diood. Sageduse tõustes jõuab tavadiood punkti, kus see ei saa piisavalt kiiresti umber lülituda, vältimaks märkimisväärset voolu vastusuunalise poolperioodi ajal. Spetsiaalset ilma tõkkekihita, ilma pn-siirdeta ja äärmiselt lühikese vastusuunalise taastumisajaga kõrgesagedusdioodi nimetatakse Shottky dioodiks ehk pöörddioodiks (Joon. 1.14)
Joon. 1.14
UAC
IA
Joon.1.15
U
IA
Shottky dioodid on palju kiiremad kui alaldusoodid, kuid nende läbilöögipinge on suhteliselt madal. Shottky dioodi töö põhineb asjaolul, et elektronidel on erinevates materjalides erinevad absoluutsed potentsiaalsed energiad, ja elektronide potentsiaalne energia materjalides on madalam kui vabade elektronide potentsiaalne energia. Kui mistahes n-tüüpi pooljuht on kontaktis metalliga, mille elektronidel on madalam potentsiaalne energia kui elektronidel pooljuhis, siis elektronide vool pooljuhist metalli on palju suurem kui vastassuunaline vool pooljuhi elektronide kõrgema potentsiaalse energia tõttu. Selle tulemusena saab metall negatiivse laengu ja pooljuht laetakse positiivselt. Selliselt formeerub metall-pooljuht sire (ms-siire), milles metall asendab pn-siirde p-tüüpi poolt. Võrreldes pn-tüüpi bipolaarsete seadistega esineb Shottky dioodil ainult enamuslaengukandjate vool. Sisselülitatud olekus Shottky dioodi pingelang on ligikaudu 0,3 V, mis on palju väiksem kui alaldidioodil (0,7...1 V). See põhjustab väiksemad energiakaod. Shottky dioodi põhiliseks eeliseks aladidioodide ees on väga kiire siirdeprotsess nullilähedase pinge juures väga väikese siirde mahtuvusega. Need võivad töötada sagedustel kuni 20 GHz. Nendel seadmetel on piiratud vastupinge taluvus 50…100 V (mõnedel seeriatel kuni 1200 V) ja piisavalt suured nimivoolud on tunduval alla 100 A. Shottky dioode kasutatakse arvutites, kuna arvuti kiirus sõltub sellest, kui kiiresti elektronseadised võivad sisse ja välja lülituda. See on nende kõige tähtsam rakendus. Tunneldiood. Nulliga võrduva läbilöögipingega dioode tunneldioodideks Tunneldiood on tugevalt legeeritud diood, mida kasutatakse kõrgsageduslikes sideskeemides sellistes rakendustes, nagu võimendid, generaatorid, modulaatorid ja demodulaatorid. Tunneldioodi
27
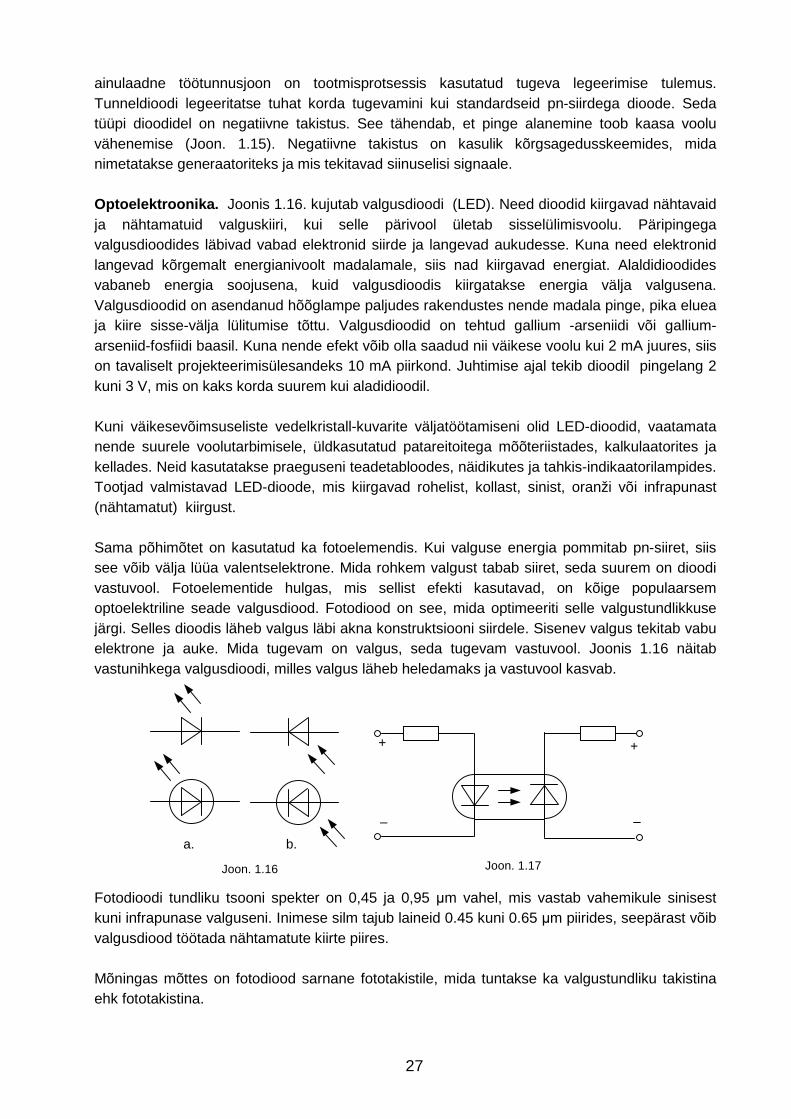
ainulaadne töötunnusjoon on tootmisprotsessis kasutatud tugeva legeerimise tulemus. Tunneldioodi legeeritatse tuhat korda tugevamini kui standardseid pn-siirdega dioode. Seda tüüpi dioodidel on negatiivne takistus. See tähendab, et pinge alanemine toob kaasa voolu vähenemise (Joon. 1.15). Negatiivne takistus on kasulik kõrgsagedusskeemides, mida nimetatakse generaatoriteks ja mis tekitavad siinuselisi signaale. Optoelektroonika. Joonis 1.16. kujutab valgusdioodi (LED). Need dioodid kiirgavad nähtavaid ja nähtamatuid valguskiiri, kui selle pärivool ületab sisselülimisvoolu. Päripingega valgusdioodides läbivad vabad elektronid siirde ja langevad aukudesse. Kuna need elektronid langevad kõrgemalt energianivoolt madalamale, siis nad kiirgavad energiat. Alaldidioodides vabaneb energia soojusena, kuid valgusdioodis kiirgatakse energia välja valgusena. Valgusdioodid on asendanud hõõglampe paljudes rakendustes nende madala pinge, pika eluea ja kiire sisse-välja lülitumise tõttu. Valgusdioodid on tehtud gallium -arseniidi või gallium-arseniid-fosfiidi baasil. Kuna nende efekt võib olla saadud nii väikese voolu kui 2 mA juures, siis on tavaliselt projekteerimisülesandeks 10 mA piirkond. Juhtimise ajal tekib dioodil pingelang 2 kuni 3 V, mis on kaks korda suurem kui aladidioodil. Kuni väikesevõimsuseliste vedelkristall-kuvarite väljatöötamiseni olid LED-dioodid, vaatamata nende suurele voolutarbimisele, üldkasutatud patareitoitega mõõteriistades, kalkulaatorites ja kellades. Neid kasutatakse praeguseni teadetabloodes, näidikutes ja tahkis-indikaatorilampides. Tootjad valmistavad LED-dioode, mis kiirgavad rohelist, kollast, sinist, oranži või infrapunast (nähtamatut) kiirgust. Sama põhimõtet on kasutatud ka fotoelemendis. Kui valguse energia pommitab pn-siiret, siis see võib välja lüüa valentselektrone. Mida rohkem valgust tabab siiret, seda suurem on dioodi vastuvool. Fotoelementide hulgas, mis sellist efekti kasutavad, on kõige populaarsem optoelektriline seade valgusdiood. Fotodiood on see, mida optimeeriti selle valgustundlikkuse järgi. Selles dioodis läheb valgus läbi akna konstruktsiooni siirdele. Sisenev valgus tekitab vabu elektrone ja auke. Mida tugevam on valgus, seda tugevam vastuvool. Joonis 1.16 näitab vastunihkega valgusdioodi, milles valgus läheb heledamaks ja vastuvool kasvab.
a. b.
Joon. 1.16
–
+
–
+
Joon. 1.17
Fotodioodi tundliku tsooni spekter on 0,45 ja 0,95 µm vahel, mis vastab vahemikule sinisest kuni infrapunase valguseni. Inimese silm tajub laineid 0.45 kuni 0.65 µm piirides, seepärast võib valgusdiood töötada nähtamatute kiirte piires. Mõningas mõttes on fotodiood sarnane fototakistile, mida tuntakse ka valgustundliku takistina ehk fototakistina.
28
Veel üks optoelektroonika seadis on optronsidesti, nimetatud ka optoisolaatoriks, milles on kokku kombineeritud ühte seadisesse valgusdiood (LED) ja fotodiood. Joonis 1.17. illustreerib optronsidestit millel on LED sisendpoolel ja fotodiood väljundpoolel. Vasakpoolne toiteallikas ja jadatakisti määravad voolu suuruse läbi valgusdioodi. Valgus LED-ilt tabab fotodioodi, mis tekitab vastuvoolu väljundahelas. Vastuvool tekitab pinge väljundtakistil. Seega väljundpinge võrdub toitepinge miinus pinge takistil. Kui sisendpinge muutub, siis muutub valguse hulk ja väljundpinge muutub koos sisendpingega. Sellisel viisil võib seadis sidestada sisendsignaali väljundahelaga. Optronsidesti põhieelis on sisend- ja väljundahelate elektriline isoleerimine. Optronsidesti kasutamisel on valguskiir ainukeseks kontaktiks sisendi ja väljundi vahel. Selle tõttu on nende ahelate vahel võimalik tuhandetesse megaoomidesse ulatuv isolatsioonitakistus. Jõu-optoelektronmoodulid võivad töötada pingetel 2 kV ja vooludel kuni 0...5 kA. Veel dioode. Peale vaadeldud spetsiaalsete dioodide on veel mõningaid. Püsivooludiood töötab risti vastupidiselt Zeneri dioodile. Selle asemel, et hoida pinget konstantsena, hoiab see diood pinge muutumisel voolu konstantsena. Sammtaastuvdioodil on ebatavaline legeerimisprofiil, kuna laengukandjate tihedus selles siirde ligidal väheneb. Sellist nähtust nimetatakse „reverssiivpäästmiseks” (reverse snap-off). Positiivse poolperioodi ajal diood juhib nagu tavaline alaldusdiood. Kuid negatiivse poolperioodi ajal eksisteerib vastuvool vaid hetke salvestatud laengu tõttu, seejärel langeb vool äkki nulli. See nähtus on kasutatav sageduskordistajate juures. Zeneri dioodidel on tavaliselt läbilöögipinged suuremad kui –2 V. Legeerimise astme suurendamisel saavutatakse Zeneri efekt ligikaudu nulli ligidal (ligikaudu 0.1 V). Sellist dioodi nimetatakse vastudioodiks, kuna see juhib paremini vastassuunas kui pärisuunas. Vastudioode kasutatakse mõnikord nõrkade signaalide võimendamiseks. Kokkuvõtteks. Eriotstarbelised dioodid töötavad edukalt läbilöögipiirkonnas, kõrgesageduslikes rakendustes ja teistes eritingimustes. Enimlevinud on Zeneri ja Shottky dioodid, milliseid kasutatakse nõrkade signaalide ja keskmiste võimsuste juures, samuti ka optoelektriliste seadistena signaalide ahelates ja juhtimisskeemides.
1.3. Transistorid
1.3.1 Transistoride üldomadused
Sõna “transistor” võeti kasutusele kirjeldamaks “takisti ümberlülitamise” protsessi. Esimesena loodi punkt-transistor. Selles oli kaks teineteisele väga ligistikku asetsevat punktdioodi, nii et dioodide voolud mõjutasid suurel määral üksteist. Dioodide õige eelpingestuse korral oli võimalik saavutada elektriliste signaalide võimsuse võimendamine, paigutades punktid mõne mikroni kaugusele teineteisest. Üks selle seadise juhtmetest projekteeriti emitterina, sellele vastav diood eelpingestati pärisuunas, teine juhe oli kollektor ja selle diood oli eelpingestatud vastusuunas, kolmandat nimetati baasiks. Võimsuse võimendamine saavutati tänu asjaolule, et väikesed baasi voolu muutused tekitasid suuri muutusi emitter-kollektori voolus.
29
Punkttransistoril oli mõningaid puudusi:
• suur temperatuuri tundlikkus nii välistemperatuuri kui ka enda genereeritud emperatuuri suhtes;
• tootmisprobleemid, st kuidas saada samu elektrilisi parameetreid masstoodangu väikeste tolerantside piires;
• väike võimendustegur, eriti kõrgete sageduste juures. Nende puuduste kõrvaldamiseks tehti intensiivselt uurimistöid. Selle tulemusena töötati välja pooljuhtmaterjalid, mis ei olnud nii tundlikud temperatuuri suhtes, olid odavamad, töötasid kõrgematel sagedustel, neil oli väiksem võimsuskadu ja madalam transistori sisemüra. Seadis, mis on palju stabiilsem nii mehaaniliselt kui ka elektriliselt, konstrueeriti mitte punktkontakti, vaid siirde baasil. Transistoride üldklassid, mida tänapäeval elektroonikas kasutatakse, on järgmised:
• bipolaartransistorid (BJT);
• väljatransistorid (JFET);
• metall-oksüüd väljatransistorid (MOSFET) kuni paari kilovatini, 200 A, ja kümnendikud gigahertsid;
• isoleeritud paisuga bipolaartransistorid (IGBT) tuhandete kilovattideni, ligi 4 kA, ja 100 kHz. Türistoridel on ehitatud veelgi võimsamaid seadmeid, kuna IGBT-d võivad neid asendada.
1.3.2. Bipolaartransistor (BJT)
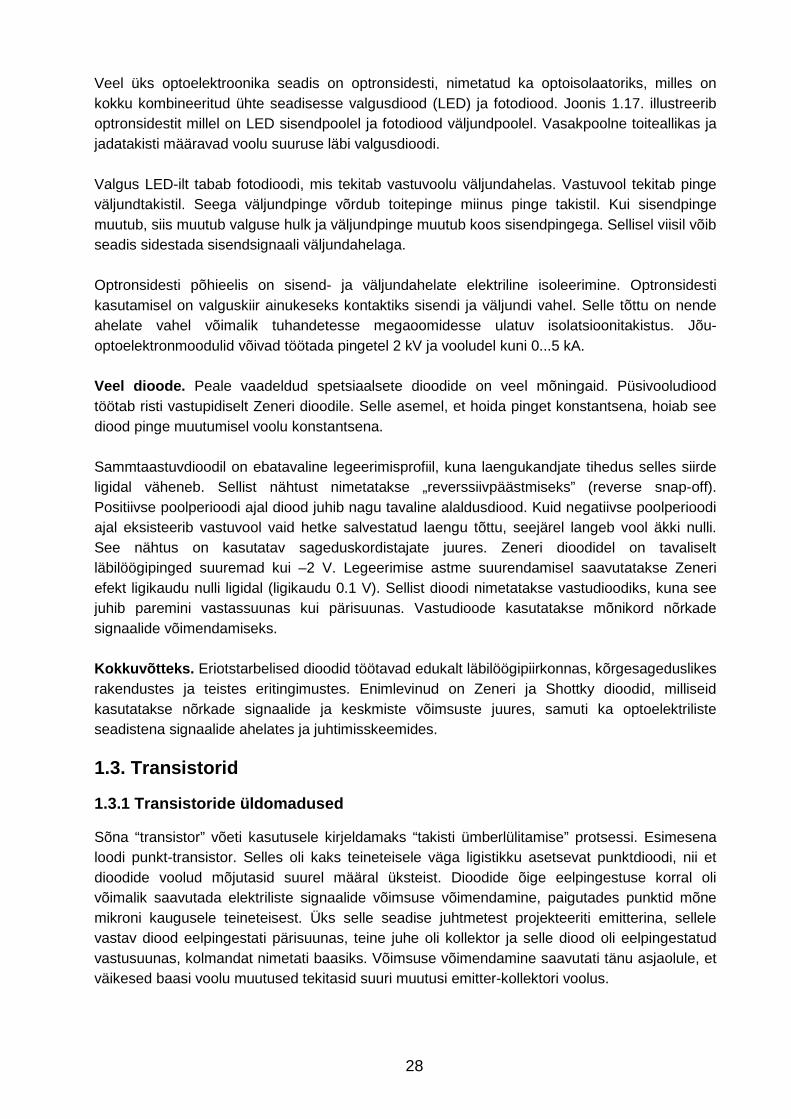
Pindtransistoril on kolm legeeritud piirkonda, nagu näidatud joonisel 1.18. Selle põhja piirkond on emitter, keskmine piirkond baas ja ülemine on kollektor. See konkreetne seade on npn- transistor. Transistoreid toodetakse ka pnp-transistoridena, millel on kõik voolud ja pinged vastupidised nende npn-kolleegide omadele . Neid võib kasutada negatiivsetes toiteallikates ja ka positiivsetes ümberpööratud konfiguratsioonides.
Joon. 1.18
Kollektor (n)
Baas (p)
Emitter (n)
– – – + + + – – – + + +
– – – + + + – – – + + +
– – – + + + – – – + + +
30
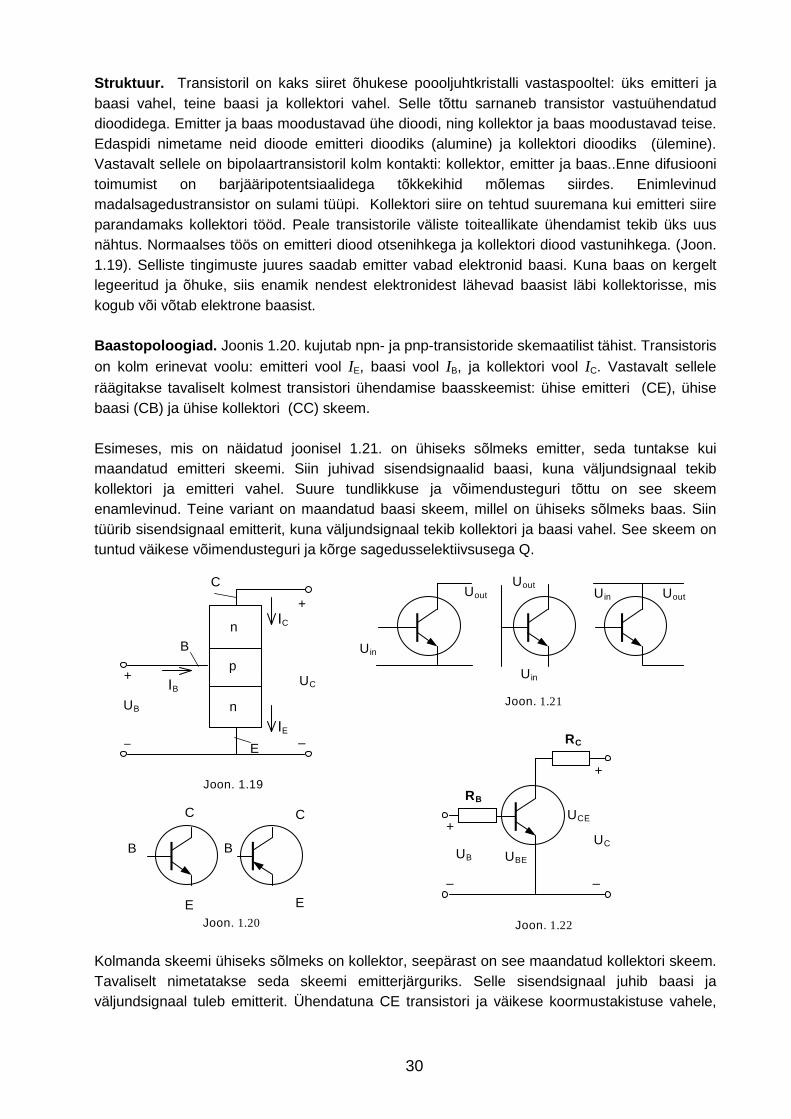
Struktuur. Transistoril on kaks siiret õhukese poooljuhtkristalli vastaspooltel: üks emitteri ja baasi vahel, teine baasi ja kollektori vahel. Selle tõttu sarnaneb transistor vastuühendatud dioodidega. Emitter ja baas moodustavad ühe dioodi, ning kollektor ja baas moodustavad teise. Edaspidi nimetame neid dioode emitteri dioodiks (alumine) ja kollektori dioodiks (ülemine). Vastavalt sellele on bipolaartransistoril kolm kontakti: kollektor, emitter ja baas..Enne difusiooni toimumist on barjääripotentsiaalidega tõkkekihid mõlemas siirdes. Enimlevinud madalsagedustransistor on sulami tüüpi. Kollektori siire on tehtud suuremana kui emitteri siire parandamaks kollektori tööd. Peale transistorile väliste toiteallikate ühendamist tekib üks uus nähtus. Normaalses töös on emitteri diood otsenihkega ja kollektori diood vastunihkega. (Joon. 1.19). Selliste tingimuste juures saadab emitter vabad elektronid baasi. Kuna baas on kergelt legeeritud ja õhuke, siis enamik nendest elektronidest lähevad baasist läbi kollektorisse, mis kogub või võtab elektrone baasist. Baastopoloogiad. Joonis 1.20. kujutab npn- ja pnp-transistoride skemaatilist tähist. Transistoris on kolm erinevat voolu: emitteri vool IE, baasi vool IB, ja kollektori vool IC. Vastavalt sellele
räägitakse tavaliselt kolmest transistori ühendamise baasskeemist: ühise emitteri (CE), ühise baasi (CB) ja ühise kollektori (CC) skeem. Esimeses, mis on näidatud joonisel 1.21. on ühiseks sõlmeks emitter, seda tuntakse kui maandatud emitteri skeemi. Siin juhivad sisendsignaalid baasi, kuna väljundsignaal tekib kollektori ja emitteri vahel. Suure tundlikkuse ja võimendusteguri tõttu on see skeem enamlevinud. Teine variant on maandatud baasi skeem, millel on ühiseks sõlmeks baas. Siin tüürib sisendsignaal emitterit, kuna väljundsignaal tekib kollektori ja baasi vahel. See skeem on tuntud väikese võimendusteguri ja kõrge sagedusselektiivsusega Q.
Uout U in Uout
U in
Uout
U in
Joon. 1.21
B
E
C
B
E
C
Joon. 1.20
+
+
– –
UB
UCE
RB
UBE
Joon. 1.22
RC
UC
IB
IC
+
– –
+
E
C
UB
B
UC
Joon. 1.19
n
p
n
IE
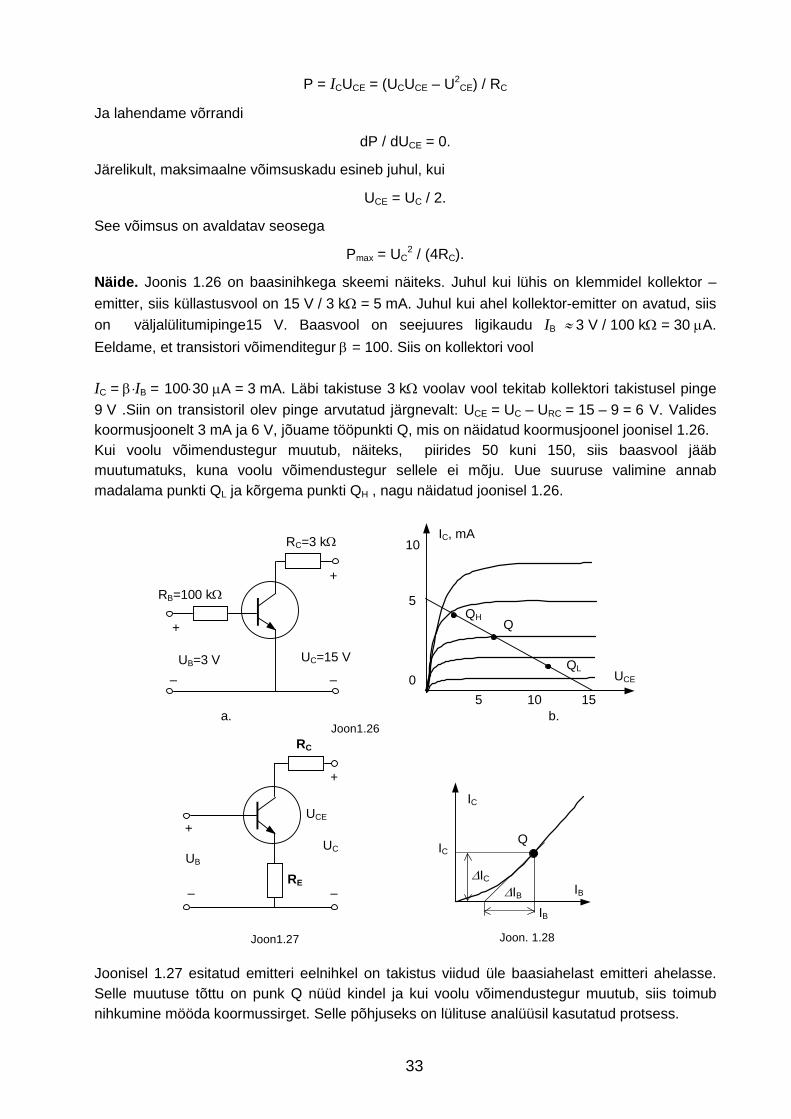
Kolmanda skeemi ühiseks sõlmeks on kollektor, seepärast on see maandatud kollektori skeem. Tavaliselt nimetatakse seda skeemi emitterjärguriks. Selle sisendsignaal juhib baasi ja väljundsignaal tuleb emitterit. Ühendatuna CE transistori ja väikese koormustakistuse vahele,
31
võib emitterjärgur juhtida väikest koormust stabiilse pingevõimenduse juures ülekoormamiseta ja väikeste moonutustega. Beeta ja alfa võimendused. Joonisel 1.22. on iga pingeallika maa pool ühendatud emitterile. Selle tõttu on see CE skeemi näiteks baasskeemiga vasakul ja kollektorskeemiga paremal pool. Toiteallika vool siseneb kollektorisse, voolab läbi baasi ja väljub emitteri kaudu. Kollektori vool võrdub ligikaudu emitteri vooluga. Baasi vool on palju väiksem, tavaliselt 5 protsenti emitteri voolust. Kollektori voolu IC suhe baasi voolu IB nimetatakse vooluvõimendusteguriks ehk transistori
staatiliseks võimenditeguriks, on väljendatud seosega
β = IC / IB.
Seda parameetrit nimetatakse ka pärivoolu ülekandeteguriks, mis on CE lülituses transistori põhiomadus. Nõrkvoolu transistoridel on see tavaliselt 100 kuni 300 vahel. Transistori vooluvõimendustegur on ettearvamatu suurus ning võib muutuda temperatuuri ja koormuse muutudes isegi piirides 3:1 ja olla erinevatel transistoridel erinev. Transistori alalisvoolu alfa näitab, kui lähedal on kollektori voolu ja emitteri voolu väärtused, see on määratud seosega
α = IC / IE.
Alfa võimendustegur on CB lülituses transistori põhiomadus. Sellest järelduvalt, alfa valem beeta terminites on
α = β / (β + 1) ja vastupidi,
β = α / (1 – α).
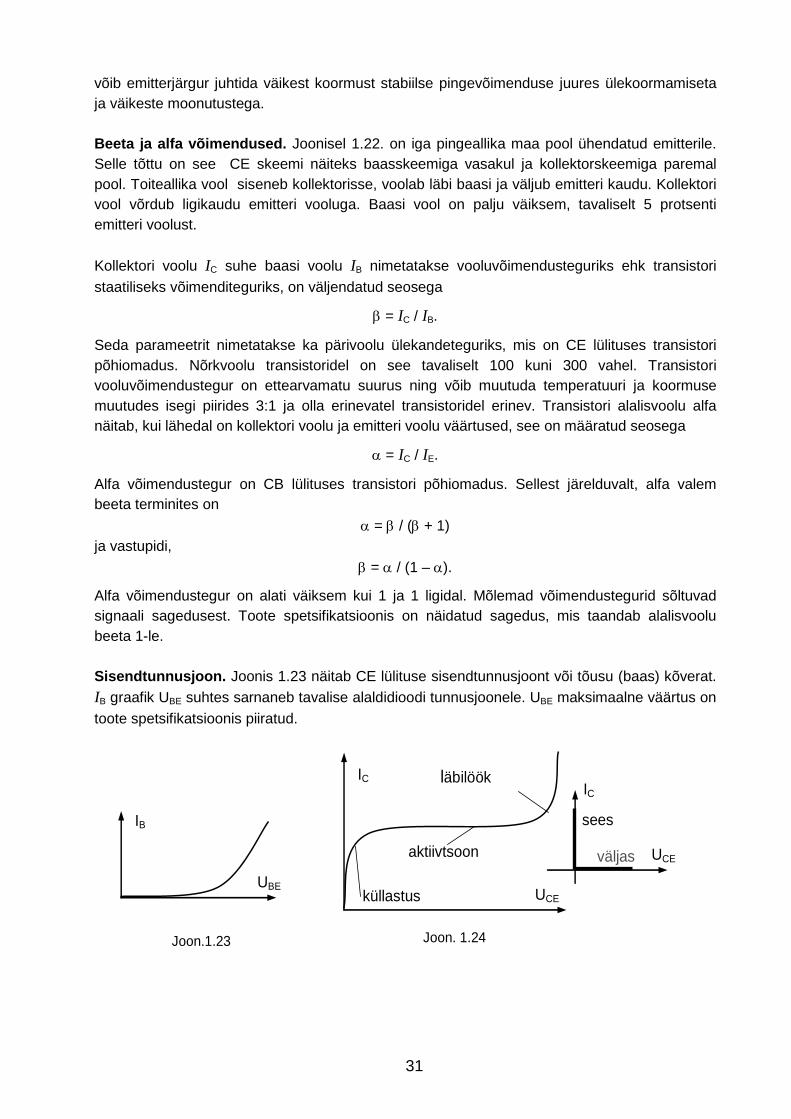
Alfa võimendustegur on alati väiksem kui 1 ja 1 ligidal. Mõlemad võimendustegurid sõltuvad signaali sagedusest. Toote spetsifikatsioonis on näidatud sagedus, mis taandab alalisvoolu beeta 1-le. Sisendtunnusjoon. Joonis 1.23 näitab CE lülituse sisendtunnusjoont või tõusu (baas) kõverat. IB graafik UBE suhtes sarnaneb tavalise alaldidioodi tunnusjoonele. UBE maksimaalne väärtus on
toote spetsifikatsioonis piiratud.
UBE
IB
Joon.1.23
läbilöök
küllastus UCE
IC
Joon. 1.24
aktiivtsoon väljas
sees
UCE
IC
32
Väljundtunnusjooned Joonis 1.24 näitab väljundtunnusjoont, mida tuntakse kollektori
kõverana, mis on kollektori vool IC funktsioonina kollektor-emitter pingest UCE. Kollektori kõveral
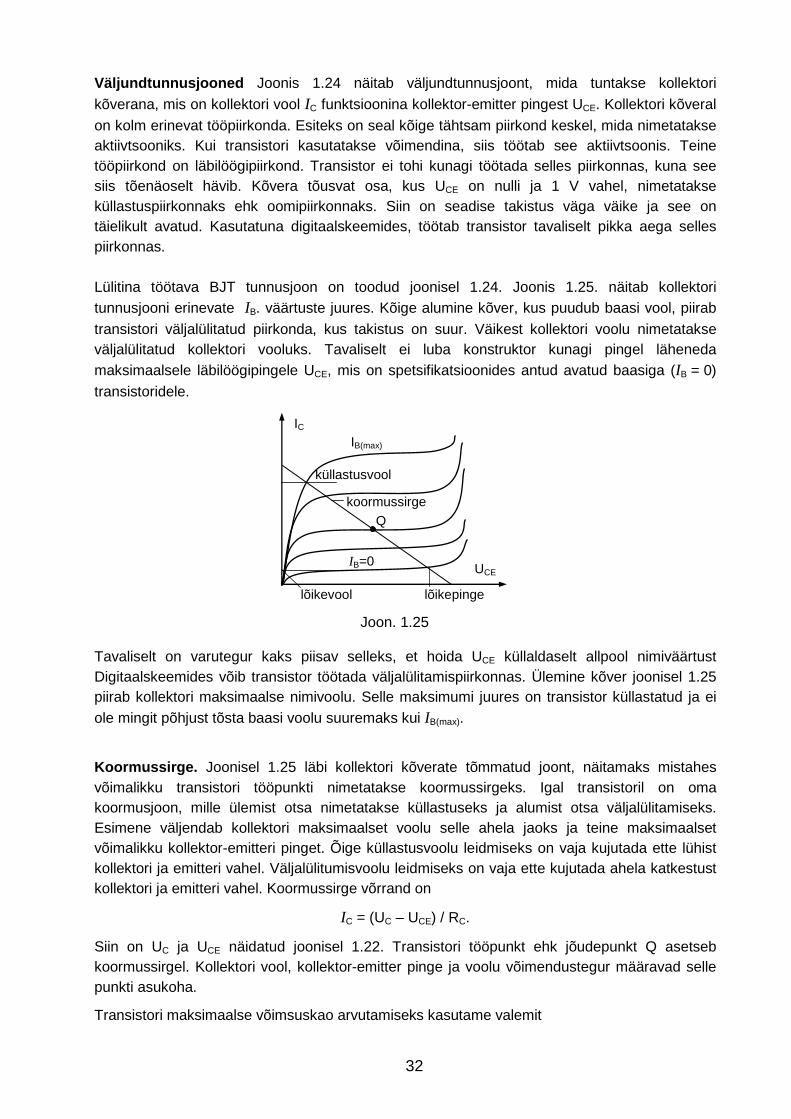
on kolm erinevat tööpiirkonda. Esiteks on seal kõige tähtsam piirkond keskel, mida nimetatakse aktiivtsooniks. Kui transistori kasutatakse võimendina, siis töötab see aktiivtsoonis. Teine tööpiirkond on läbilöögipiirkond. Transistor ei tohi kunagi töötada selles piirkonnas, kuna see siis tõenäoselt hävib. Kõvera tõusvat osa, kus UCE on nulli ja 1 V vahel, nimetatakse küllastuspiirkonnaks ehk oomipiirkonnaks. Siin on seadise takistus väga väike ja see on täielikult avatud. Kasutatuna digitaalskeemides, töötab transistor tavaliselt pikka aega selles piirkonnas. Lülitina töötava BJT tunnusjoon on toodud joonisel 1.24. Joonis 1.25. näitab kollektori tunnusjooni erinevate IB. väärtuste juures. Kõige alumine kõver, kus puudub baasi vool, piirab
transistori väljalülitatud piirkonda, kus takistus on suur. Väikest kollektori voolu nimetatakse väljalülitatud kollektori vooluks. Tavaliselt ei luba konstruktor kunagi pingel läheneda maksimaalsele läbilöögipingele UCE, mis on spetsifikatsioonides antud avatud baasiga (IB = 0)
transistoridele.
lõikepinge
koormussirge
Joon. 1.25
lõikevool
Q
küllastusvool
IB(max)
IB=0 UCE
IC
Tavaliselt on varutegur kaks piisav selleks, et hoida UCE küllaldaselt allpool nimiväärtust Digitaalskeemides võib transistor töötada väljalülitamispiirkonnas. Ülemine kõver joonisel 1.25 piirab kollektori maksimaalse nimivoolu. Selle maksimumi juures on transistor küllastatud ja ei ole mingit põhjust tõsta baasi voolu suuremaks kui IB(max).
Koormussirge. Joonisel 1.25 läbi kollektori kõverate tõmmatud joont, näitamaks mistahes võimalikku transistori tööpunkti nimetatakse koormussirgeks. Igal transistoril on oma koormusjoon, mille ülemist otsa nimetatakse küllastuseks ja alumist otsa väljalülitamiseks. Esimene väljendab kollektori maksimaalset voolu selle ahela jaoks ja teine maksimaalset võimalikku kollektor-emitteri pinget. Õige küllastusvoolu leidmiseks on vaja kujutada ette lühist kollektori ja emitteri vahel. Väljalülitumisvoolu leidmiseks on vaja ette kujutada ahela katkestust kollektori ja emitteri vahel. Koormussirge võrrand on
IC = (UC – UCE) / RC.
Siin on UC ja UCE näidatud joonisel 1.22. Transistori tööpunkt ehk jõudepunkt Q asetseb koormussirgel. Kollektori vool, kollektor-emitter pinge ja voolu võimendustegur määravad selle punkti asukoha.
Transistori maksimaalse võimsuskao arvutamiseks kasutame valemit
33
P = ICUCE = (UCUCE – U2CE) / RC
Ja lahendame võrrandi
dP / dUCE = 0.
Järelikult, maksimaalne võimsuskadu esineb juhul, kui
UCE = UC / 2.
See võimsus on avaldatav seosega
Pmax = UC2 / (4RC).
Näide. Joonis 1.26 on baasinihkega skeemi näiteks. Juhul kui lühis on klemmidel kollektor –
emitter, siis küllastusvool on 15 V / 3 kΩ = 5 mA. Juhul kui ahel kollektor-emitter on avatud, siis
on väljalülitumipinge15 V. Baasvool on seejuures ligikaudu IB ≈ 3 V / 100 kΩ = 30 µA.
Eeldame, et transistori võimenditegur β = 100. Siis on kollektori vool IC = β⋅IB = 100⋅30 µA = 3 mA. Läbi takistuse 3 kΩ voolav vool tekitab kollektori takistusel pinge
9 V .Siin on transistoril olev pinge arvutatud järgnevalt: UCE = UC – URC = 15 – 9 = 6 V. Valides koormusjoonelt 3 mA ja 6 V, jõuame tööpunkti Q, mis on näidatud koormusjoonel joonisel 1.26. Kui voolu võimendustegur muutub, näiteks, piirides 50 kuni 150, siis baasvool jääb muutumatuks, kuna voolu võimendustegur sellele ei mõju. Uue suuruse valimine annab madalama punkti QL ja kõrgema punkti QH , nagu näidatud joonisel 1.26.
IC
IB
∆IB ∆IC
Q
IB
IC
Joon. 1.28
QH
QL 0
10
5
Q
10 15 5
UCE
IC, mA
Joon1.26 a. b.
+
+
– –
RC=3 kΩ
UB=3 V
RB=100 kΩ
UC=15 V
+
+
– –
UCE
UB
Joon1.27
RC
UC
RE
Joonisel 1.27 esitatud emitteri eelnihkel on takistus viidud üle baasiahelast emitteri ahelasse. Selle muutuse tõttu on punk Q nüüd kindel ja kui voolu võimendustegur muutub, siis toimub nihkumine mööda koormussirget. Selle põhjuseks on lülituse analüüsil kasutatud protsess.
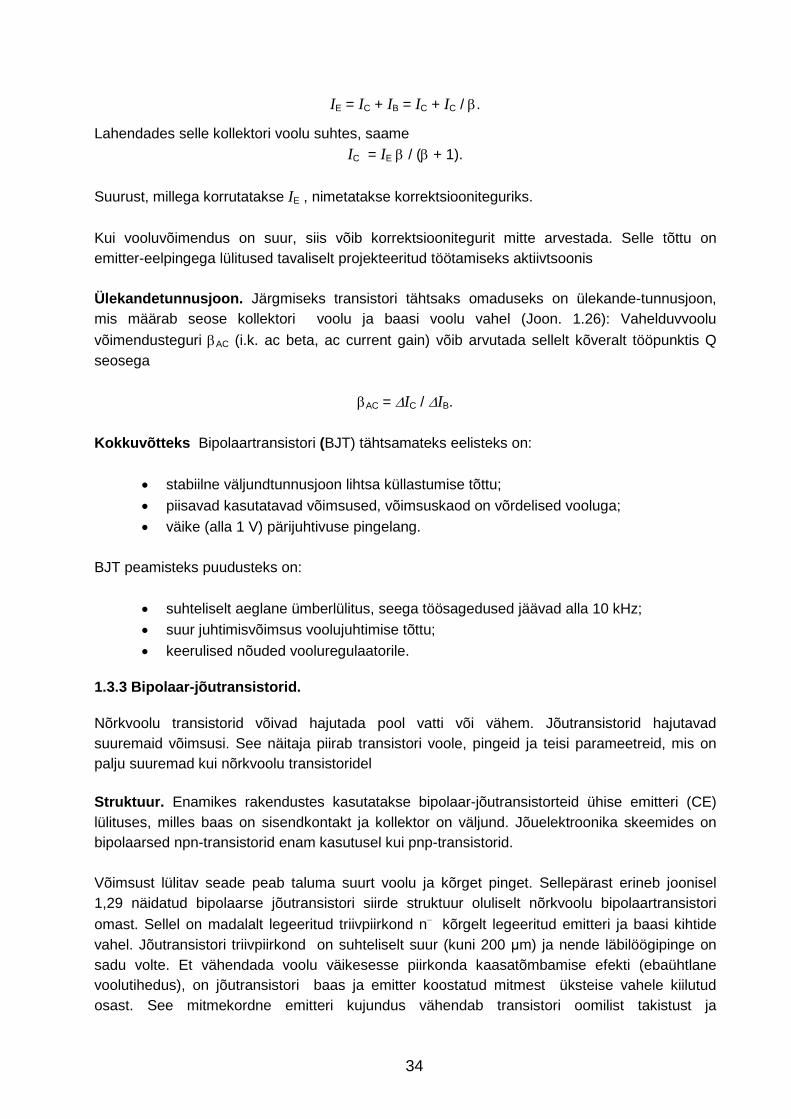
34
IE = IC + IB = IC + IC / β.
Lahendades selle kollektori voolu suhtes, saame IC = IE β / (β + 1).
Suurust, millega korrutatakse IE , nimetatakse korrektsiooniteguriks.
Kui vooluvõimendus on suur, siis võib korrektsioonitegurit mitte arvestada. Selle tõttu on emitter-eelpingega lülitused tavaliselt projekteeritud töötamiseks aktiivtsoonis Ülekandetunnusjoon. Järgmiseks transistori tähtsaks omaduseks on ülekande-tunnusjoon, mis määrab seose kollektori voolu ja baasi voolu vahel (Joon. 1.26): Vahelduvvoolu
võimendusteguri βAC (i.k. ac beta, ac current gain) võib arvutada sellelt kõveralt tööpunktis Q seosega
βAC = ∆IC / ∆IB.
Kokkuvõtteks Bipolaartransistori (BJT) tähtsamateks eelisteks on:
• stabiilne väljundtunnusjoon lihtsa küllastumise tõttu;
• piisavad kasutatavad võimsused, võimsuskaod on võrdelised vooluga; • väike (alla 1 V) pärijuhtivuse pingelang.
BJT peamisteks puudusteks on:
• suhteliselt aeglane ümberlülitus, seega töösagedused jäävad alla 10 kHz; • suur juhtimisvõimsus voolujuhtimise tõttu;
• keerulised nõuded vooluregulaatorile.
1.3.3 Bipolaar-jõutransistorid.
Nõrkvoolu transistorid võivad hajutada pool vatti või vähem. Jõutransistorid hajutavad suuremaid võimsusi. See näitaja piirab transistori voole, pingeid ja teisi parameetreid, mis on palju suuremad kui nõrkvoolu transistoridel Struktuur. Enamikes rakendustes kasutatakse bipolaar-jõutransistorteid ühise emitteri (CE) lülituses, milles baas on sisendkontakt ja kollektor on väljund. Jõuelektroonika skeemides on bipolaarsed npn-transistorid enam kasutusel kui pnp-transistorid. Võimsust lülitav seade peab taluma suurt voolu ja kõrget pinget. Sellepärast erineb joonisel 1,29 näidatud bipolaarse jõutransistori siirde struktuur oluliselt nõrkvoolu bipolaartransistori
omast. Sellel on madalalt legeeritud triivpiirkond n− kõrgelt legeeritud emitteri ja baasi kihtide vahel. Jõutransistori triivpiirkond on suhteliselt suur (kuni 200 µm) ja nende läbilöögipinge on sadu volte. Et vähendada voolu väikesesse piirkonda kaasatõmbamise efekti (ebaühtlane voolutihedus), on jõutransistori baas ja emitter koostatud mitmest üksteise vahele kiilutud osast. See mitmekordne emitteri kujundus vähendab transistori oomilist takistust ja
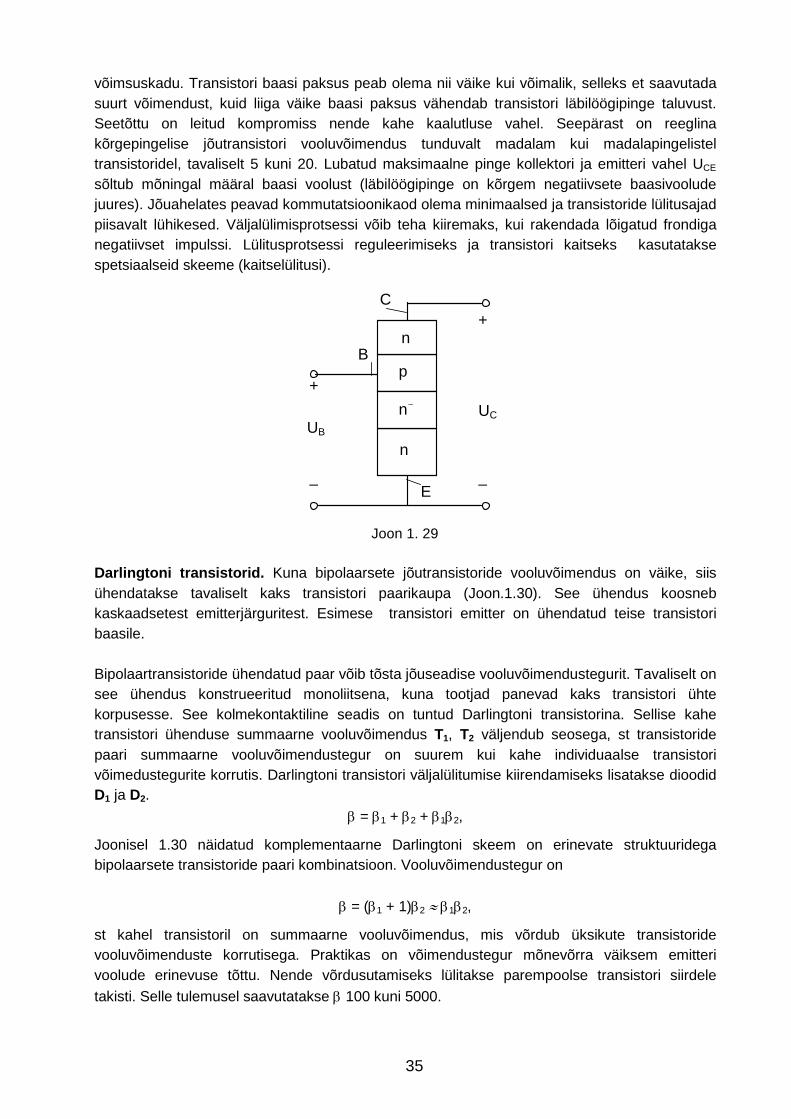
35
võimsuskadu. Transistori baasi paksus peab olema nii väike kui võimalik, selleks et saavutada suurt võimendust, kuid liiga väike baasi paksus vähendab transistori läbilöögipinge taluvust. Seetõttu on leitud kompromiss nende kahe kaalutluse vahel. Seepärast on reeglina kõrgepingelise jõutransistori vooluvõimendus tunduvalt madalam kui madalapingelistel transistoridel, tavaliselt 5 kuni 20. Lubatud maksimaalne pinge kollektori ja emitteri vahel UCE sõltub mõningal määral baasi voolust (läbilöögipinge on kõrgem negatiivsete baasivoolude juures). Jõuahelates peavad kommutatsioonikaod olema minimaalsed ja transistoride lülitusajad piisavalt lühikesed. Väljalülimisprotsessi võib teha kiiremaks, kui rakendada lõigatud frondiga negatiivset impulssi. Lülitusprotsessi reguleerimiseks ja transistori kaitseks kasutatakse spetsiaalseid skeeme (kaitselülitusi).
UC
C
E
+
– –
+
B
UB
VB
Joon 1. 29
n
p
n
n−
Darlingtoni transistorid. Kuna bipolaarsete jõutransistoride vooluvõimendus on väike, siis ühendatakse tavaliselt kaks transistori paarikaupa (Joon.1.30). See ühendus koosneb kaskaadsetest emitterjärguritest. Esimese transistori emitter on ühendatud teise transistori baasile. Bipolaartransistoride ühendatud paar võib tõsta jõuseadise vooluvõimendustegurit. Tavaliselt on see ühendus konstrueeritud monoliitsena, kuna tootjad panevad kaks transistori ühte korpusesse. See kolmekontaktiline seadis on tuntud Darlingtoni transistorina. Sellise kahe transistori ühenduse summaarne vooluvõimendus T1, T2 väljendub seosega, st transistoride paari summaarne vooluvõimendustegur on suurem kui kahe individuaalse transistori võimedustegurite korrutis. Darlingtoni transistori väljalülitumise kiirendamiseks lisatakse dioodid D1 ja D2.
β = β1 + β2 + β1β2,
Joonisel 1.30 näidatud komplementaarne Darlingtoni skeem on erinevate struktuuridega bipolaarsete transistoride paari kombinatsioon. Vooluvõimendustegur on
β = (β1 + 1)β2 ≈ β1β2,
st kahel transistoril on summaarne vooluvõimendus, mis võrdub üksikute transistoride vooluvõimenduste korrutisega. Praktikas on võimendustegur mõnevõrra väiksem emitteri voolude erinevuse tõttu. Nende võrdusutamiseks lülitakse parempoolse transistori siirdele
takisti. Selle tulemusel saavutatakse β 100 kuni 5000.
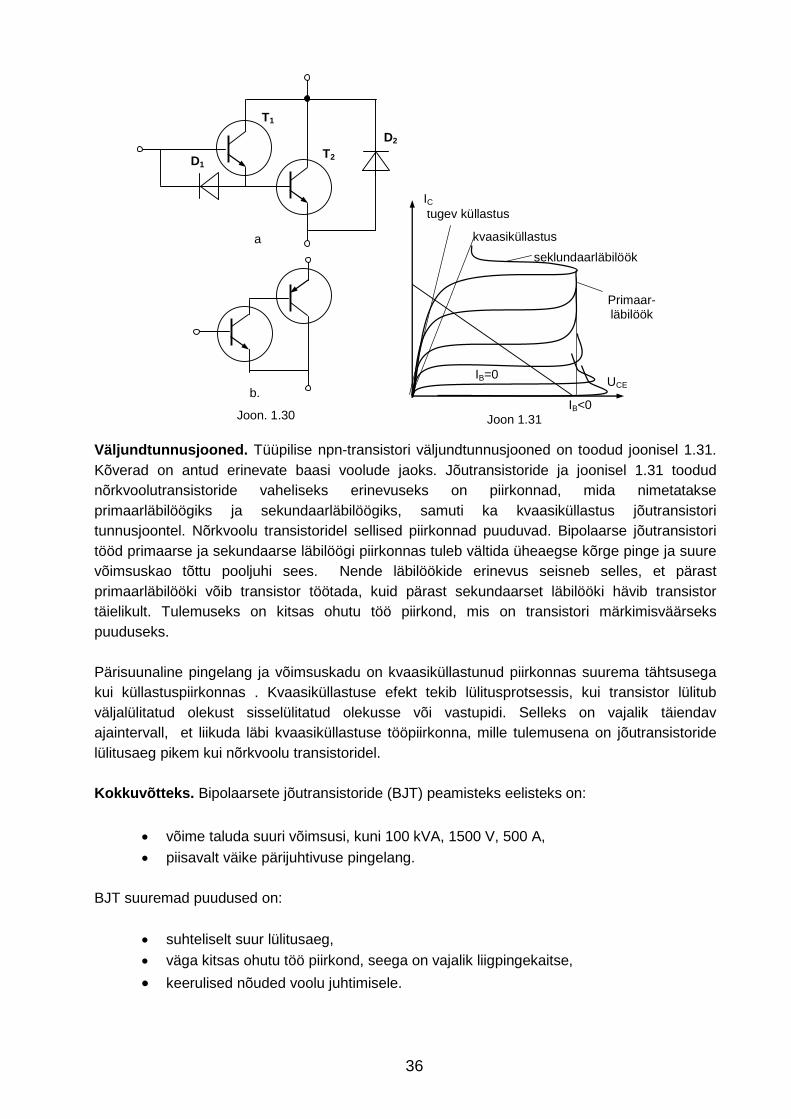
36
IB<0
seklundaarläbilöök
tugev küllastus
kvaasiküllastus
Joon 1.31
IB=0 UCE
IC
Primaar-läbilöök
a.
T2
T1
D2
D1
b.
Joon. 1.30
Väljundtunnusjooned. Tüüpilise npn-transistori väljundtunnusjooned on toodud joonisel 1.31. Kõverad on antud erinevate baasi voolude jaoks. Jõutransistoride ja joonisel 1.31 toodud nõrkvoolutransistoride vaheliseks erinevuseks on piirkonnad, mida nimetatakse primaarläbilöögiks ja sekundaarläbilöögiks, samuti ka kvaasiküllastus jõutransistori tunnusjoontel. Nõrkvoolu transistoridel sellised piirkonnad puuduvad. Bipolaarse jõutransistori tööd primaarse ja sekundaarse läbilöögi piirkonnas tuleb vältida üheaegse kõrge pinge ja suure võimsuskao tõttu pooljuhi sees. Nende läbilöökide erinevus seisneb selles, et pärast primaarläbilööki võib transistor töötada, kuid pärast sekundaarset läbilööki hävib transistor täielikult. Tulemuseks on kitsas ohutu töö piirkond, mis on transistori märkimisväärseks puuduseks. Pärisuunaline pingelang ja võimsuskadu on kvaasiküllastunud piirkonnas suurema tähtsusega kui küllastuspiirkonnas . Kvaasiküllastuse efekt tekib lülitusprotsessis, kui transistor lülitub väljalülitatud olekust sisselülitatud olekusse või vastupidi. Selleks on vajalik täiendav ajaintervall, et liikuda läbi kvaasiküllastuse tööpiirkonna, mille tulemusena on jõutransistoride lülitusaeg pikem kui nõrkvoolu transistoridel. Kokkuvõtteks. Bipolaarsete jõutransistoride (BJT) peamisteks eelisteks on:
• võime taluda suuri võimsusi, kuni 100 kVA, 1500 V, 500 A,
• piisavalt väike pärijuhtivuse pingelang. BJT suuremad puudused on:
• suhteliselt suur lülitusaeg, • väga kitsas ohutu töö piirkond, seega on vajalik liigpingekaitse,
• keerulised nõuded voolu juhtimisele.
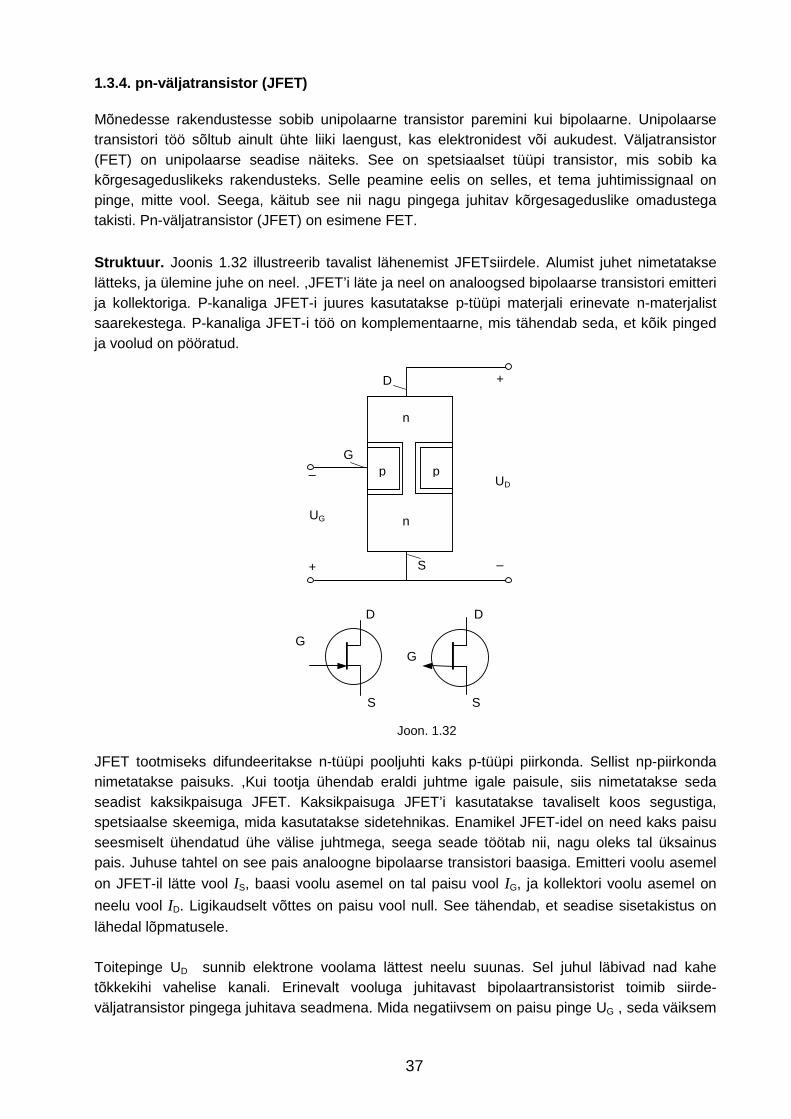
37
1.3.4. pn-väljatransistor (JFET)
Mõnedesse rakendustesse sobib unipolaarne transistor paremini kui bipolaarne. Unipolaarse transistori töö sõltub ainult ühte liiki laengust, kas elektronidest või aukudest. Väljatransistor (FET) on unipolaarse seadise näiteks. See on spetsiaalset tüüpi transistor, mis sobib ka kõrgesageduslikeks rakendusteks. Selle peamine eelis on selles, et tema juhtimissignaal on pinge, mitte vool. Seega, käitub see nii nagu pingega juhitav kõrgesageduslike omadustega takisti. Pn-väljatransistor (JFET) on esimene FET. Struktuur. Joonis 1.32 illustreerib tavalist lähenemist JFETsiirdele. Alumist juhet nimetatakse lätteks, ja ülemine juhe on neel. ,JFET’i läte ja neel on analoogsed bipolaarse transistori emitteri ja kollektoriga. P-kanaliga JFET-i juures kasutatakse p-tüüpi materjali erinevate n-materjalist saarekestega. P-kanaliga JFET-i töö on komplementaarne, mis tähendab seda, et kõik pinged ja voolud on pööratud.
+
– +
–
G
G G
S S
D D
Joon. 1.32
UG
D
S
UD p p
n
n
JFET tootmiseks difundeeritakse n-tüüpi pooljuhti kaks p-tüüpi piirkonda. Sellist np-piirkonda nimetatakse paisuks. ,Kui tootja ühendab eraldi juhtme igale paisule, siis nimetatakse seda seadist kaksikpaisuga JFET. Kaksikpaisuga JFET’i kasutatakse tavaliselt koos segustiga, spetsiaalse skeemiga, mida kasutatakse sidetehnikas. Enamikel JFET-idel on need kaks paisu seesmiselt ühendatud ühe välise juhtmega, seega seade töötab nii, nagu oleks tal üksainus pais. Juhuse tahtel on see pais analoogne bipolaarse transistori baasiga. Emitteri voolu asemel on JFET-il lätte vool IS, baasi voolu asemel on tal paisu vool IG, ja kollektori voolu asemel on
neelu vool ID. Ligikaudselt võttes on paisu vool null. See tähendab, et seadise sisetakistus on
lähedal lõpmatusele. Toitepinge UD sunnib elektrone voolama lättest neelu suunas. Sel juhul läbivad nad kahe tõkkekihi vahelise kanali. Erinevalt vooluga juhitavast bipolaartransistorist toimib siirde-väljatransistor pingega juhitava seadmena. Mida negatiivsem on paisu pinge UG , seda väiksem
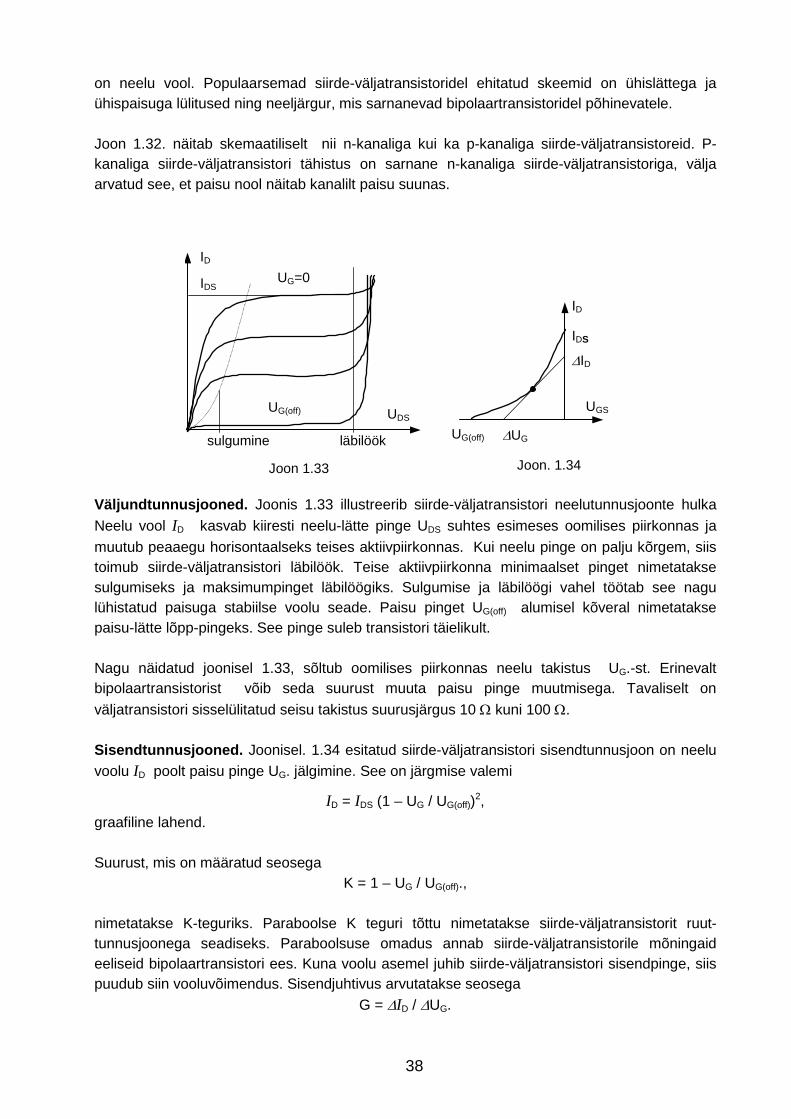
38
on neelu vool. Populaarsemad siirde-väljatransistoridel ehitatud skeemid on ühislättega ja ühispaisuga lülitused ning neeljärgur, mis sarnanevad bipolaartransistoridel põhinevatele. Joon 1.32. näitab skemaatiliselt nii n-kanaliga kui ka p-kanaliga siirde-väljatransistoreid. P-kanaliga siirde-väljatransistori tähistus on sarnane n-kanaliga siirde-väljatransistoriga, välja arvatud see, et paisu nool näitab kanalilt paisu suunas.
∆UG
∆ID
ID
IDS
UGS
Joon. 1.34
UG(off)
IDS
läbilöök
Joon 1.33
sulgumine
UDS
ID
UG=0
UG(off)
Väljundtunnusjooned. Joonis 1.33 illustreerib siirde-väljatransistori neelutunnusjoonte hulka
Neelu vool ID kasvab kiiresti neelu-lätte pinge UDS suhtes esimeses oomilises piirkonnas ja
muutub peaaegu horisontaalseks teises aktiivpiirkonnas. Kui neelu pinge on palju kõrgem, siis toimub siirde-väljatransistori läbilöök. Teise aktiivpiirkonna minimaalset pinget nimetatakse sulgumiseks ja maksimumpinget läbilöögiks. Sulgumise ja läbilöögi vahel töötab see nagu lühistatud paisuga stabiilse voolu seade. Paisu pinget UG(off) alumisel kõveral nimetatakse paisu-lätte lõpp-pingeks. See pinge suleb transistori täielikult. Nagu näidatud joonisel 1.33, sõltub oomilises piirkonnas neelu takistus UG.-st. Erinevalt bipolaartransistorist võib seda suurust muuta paisu pinge muutmisega. Tavaliselt on
väljatransistori sisselülitatud seisu takistus suurusjärgus 10 Ω kuni 100 Ω. Sisendtunnusjooned. Joonisel. 1.34 esitatud siirde-väljatransistori sisendtunnusjoon on neelu voolu ID poolt paisu pinge UG. jälgimine. See on järgmise valemi
ID = IDS (1 – UG / UG(off))2,
graafiline lahend. Suurust, mis on määratud seosega
K = 1 – UG / UG(off).,
nimetatakse K-teguriks. Paraboolse K teguri tõttu nimetatakse siirde-väljatransistorit ruut-tunnusjoonega seadiseks. Paraboolsuse omadus annab siirde-väljatransistorile mõningaid eeliseid bipolaartransistori ees. Kuna voolu asemel juhib siirde-väljatransistori sisendpinge, siis puudub siin vooluvõimendus. Sisendjuhtivus arvutatakse seosega
G = ∆ID / ∆UG.
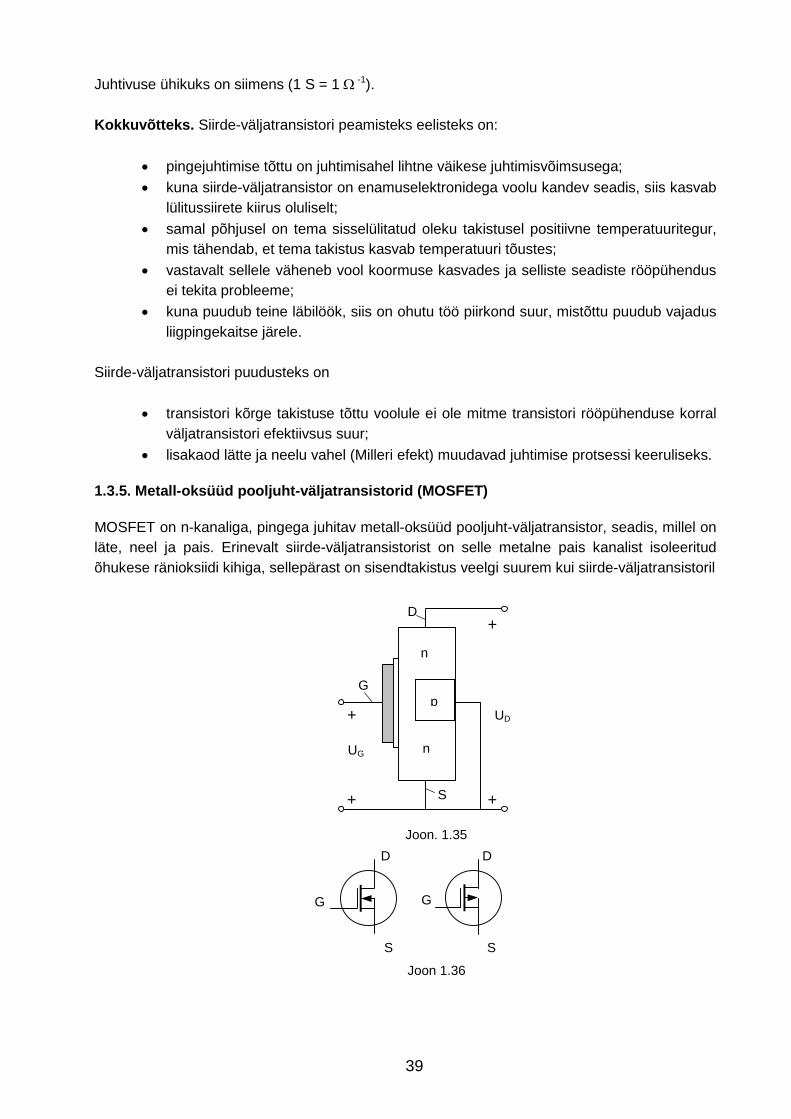
39
Juhtivuse ühikuks on siimens (1 S = 1 Ω -1). Kokkuvõtteks. Siirde-väljatransistori peamisteks eelisteks on:
• pingejuhtimise tõttu on juhtimisahel lihtne väikese juhtimisvõimsusega; • kuna siirde-väljatransistor on enamuselektronidega voolu kandev seadis, siis kasvab
lülitussiirete kiirus oluliselt;
• samal põhjusel on tema sisselülitatud oleku takistusel positiivne temperatuuritegur, mis tähendab, et tema takistus kasvab temperatuuri tõustes;
• vastavalt sellele väheneb vool koormuse kasvades ja selliste seadiste rööpühendus ei tekita probleeme;
• kuna puudub teine läbilöök, siis on ohutu töö piirkond suur, mistõttu puudub vajadus liigpingekaitse järele.
Siirde-väljatransistori puudusteks on
• transistori kõrge takistuse tõttu voolule ei ole mitme transistori rööpühenduse korral väljatransistori efektiivsus suur;
• lisakaod lätte ja neelu vahel (Milleri efekt) muudavad juhtimise protsessi keeruliseks.
1.3.5. Metall-oksüüd pooljuht-väljatransistorid (MO SFET)
MOSFET on n-kanaliga, pingega juhitav metall-oksüüd pooljuht-väljatransistor, seadis, millel on läte, neel ja pais. Erinevalt siirde-väljatransistorist on selle metalne pais kanalist isoleeritud õhukese ränioksiidi kihiga, sellepärast on sisendtakistus veelgi suurem kui siirde-väljatransistoril
G G
S S
D D
Joon 1.36
Joon. 1.35
+ +
+
+
G
D
S
UG
UD
n
n
p
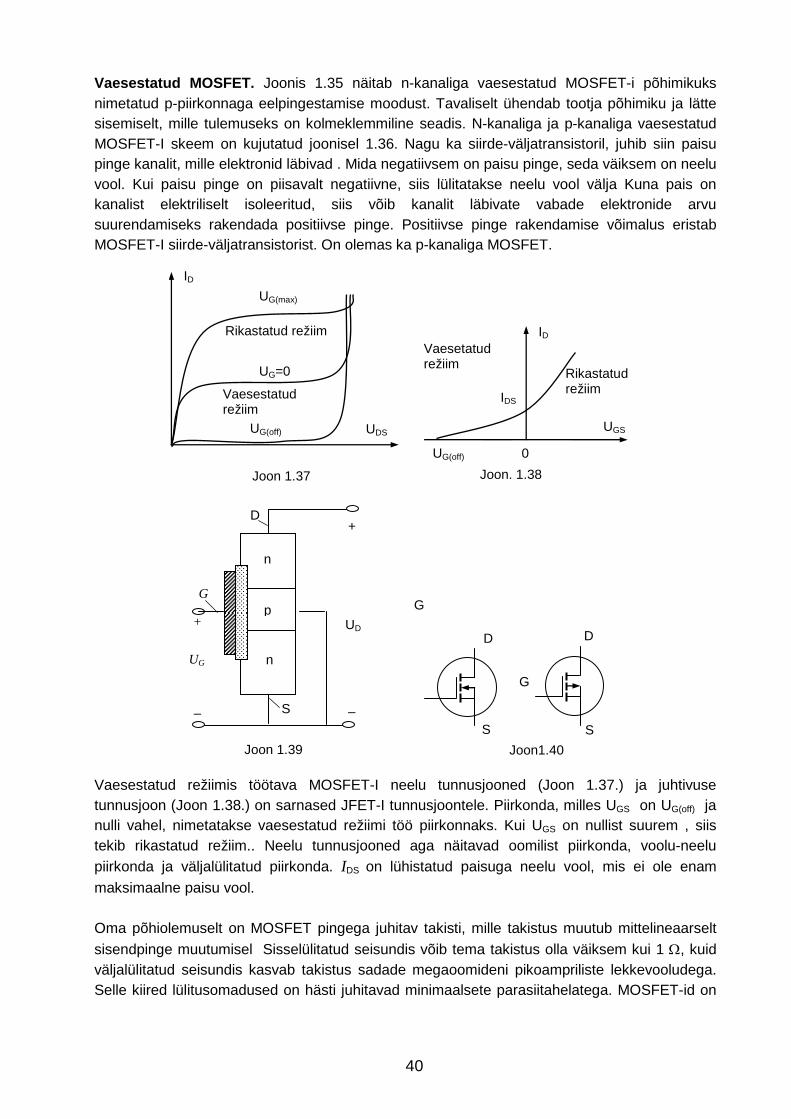
40
Vaesestatud MOSFET. Joonis 1.35 näitab n-kanaliga vaesestatud MOSFET-i põhimikuks nimetatud p-piirkonnaga eelpingestamise moodust. Tavaliselt ühendab tootja põhimiku ja lätte sisemiselt, mille tulemuseks on kolmeklemmiline seadis. N-kanaliga ja p-kanaliga vaesestatud MOSFET-I skeem on kujutatud joonisel 1.36. Nagu ka siirde-väljatransistoril, juhib siin paisu pinge kanalit, mille elektronid läbivad . Mida negatiivsem on paisu pinge, seda väiksem on neelu vool. Kui paisu pinge on piisavalt negatiivne, siis lülitatakse neelu vool välja Kuna pais on kanalist elektriliselt isoleeritud, siis võib kanalit läbivate vabade elektronide arvu suurendamiseks rakendada positiivse pinge. Positiivse pinge rakendamise võimalus eristab MOSFET-I siirde-väljatransistorist. On olemas ka p-kanaliga MOSFET.
Joon 1.37
Rikastatud režiim
Vaesestatud režiim
UG(off)
UG=0
UDS
ID
UG(max)
G
D D
S S
G
Joon1.40
Vaesetatud režiim
Rikastatud režiim
IDS
UGS
ID
Joon. 1.38
UG(off) 0
– –
+
+
G
UG
D
UD
S
Joon 1.39
n
n
p
Vaesestatud režiimis töötava MOSFET-I neelu tunnusjooned (Joon 1.37.) ja juhtivuse tunnusjoon (Joon 1.38.) on sarnased JFET-I tunnusjoontele. Piirkonda, milles UGS on UG(off) ja nulli vahel, nimetatakse vaesestatud režiimi töö piirkonnaks. Kui UGS on nullist suurem , siis tekib rikastatud režiim.. Neelu tunnusjooned aga näitavad oomilist piirkonda, voolu-neelu piirkonda ja väljalülitatud piirkonda. IDS on lühistatud paisuga neelu vool, mis ei ole enam
maksimaalne paisu vool. Oma põhiolemuselt on MOSFET pingega juhitav takisti, mille takistus muutub mittelineaarselt
sisendpinge muutumisel Sisselülitatud seisundis võib tema takistus olla väiksem kui 1 Ω, kuid väljalülitatud seisundis kasvab takistus sadade megaoomideni pikoampriliste lekkevooludega. Selle kiired lülitusomadused on hästi juhitavad minimaalsete parasiitahelatega. MOSFET-id on
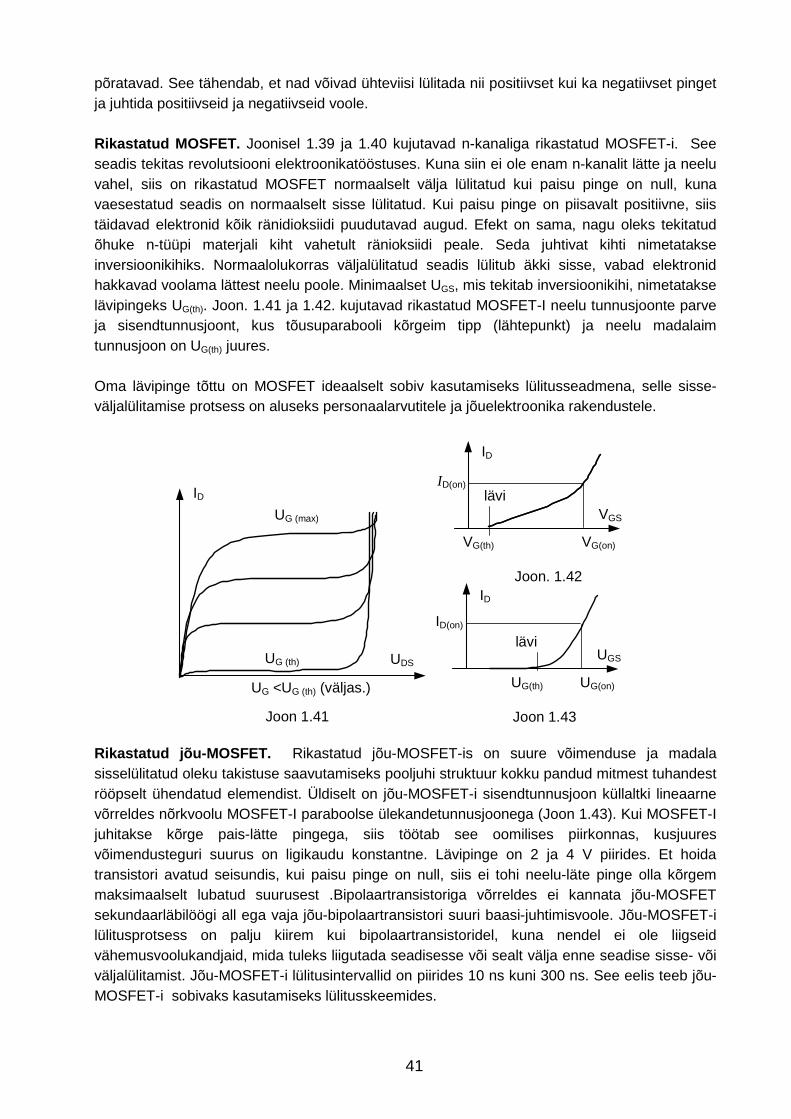
41
põratavad. See tähendab, et nad võivad ühteviisi lülitada nii positiivset kui ka negatiivset pinget ja juhtida positiivseid ja negatiivseid voole. Rikastatud MOSFET. Joonisel 1.39 ja 1.40 kujutavad n-kanaliga rikastatud MOSFET-i. See seadis tekitas revolutsiooni elektroonikatööstuses. Kuna siin ei ole enam n-kanalit lätte ja neelu vahel, siis on rikastatud MOSFET normaalselt välja lülitatud kui paisu pinge on null, kuna vaesestatud seadis on normaalselt sisse lülitatud. Kui paisu pinge on piisavalt positiivne, siis täidavad elektronid kõik ränidioksiidi puudutavad augud. Efekt on sama, nagu oleks tekitatud õhuke n-tüüpi materjali kiht vahetult ränioksiidi peale. Seda juhtivat kihti nimetatakse inversioonikihiks. Normaalolukorras väljalülitatud seadis lülitub äkki sisse, vabad elektronid hakkavad voolama lättest neelu poole. Minimaalset UGS, mis tekitab inversioonikihi, nimetatakse lävipingeks UG(th). Joon. 1.41 ja 1.42. kujutavad rikastatud MOSFET-I neelu tunnusjoonte parve ja sisendtunnusjoont, kus tõusuparabooli kõrgeim tipp (lähtepunkt) ja neelu madalaim tunnusjoon on UG(th) juures. Oma lävipinge tõttu on MOSFET ideaalselt sobiv kasutamiseks lülitusseadmena, selle sisse-väljalülitamise protsess on aluseks personaalarvutitele ja jõuelektroonika rakendustele.
UG <UG (th) (väljas.)
UG (th)
Joon 1.41
UDS
ID
UG (max)
ID
ID(on) lävi
VG(on) VG(th)
VGS
Joon. 1.42
lävi
UG(on) UG(th)
ID(on)
UGS
ID
Joon 1.43
Rikastatud jõu-MOSFET. Rikastatud jõu-MOSFET-is on suure võimenduse ja madala sisselülitatud oleku takistuse saavutamiseks pooljuhi struktuur kokku pandud mitmest tuhandest rööpselt ühendatud elemendist. Üldiselt on jõu-MOSFET-i sisendtunnusjoon küllaltki lineaarne võrreldes nõrkvoolu MOSFET-I paraboolse ülekandetunnusjoonega (Joon 1.43). Kui MOSFET-I juhitakse kõrge pais-lätte pingega, siis töötab see oomilises piirkonnas, kusjuures võimendusteguri suurus on ligikaudu konstantne. Lävipinge on 2 ja 4 V piirides. Et hoida transistori avatud seisundis, kui paisu pinge on null, siis ei tohi neelu-läte pinge olla kõrgem maksimaalselt lubatud suurusest .Bipolaartransistoriga võrreldes ei kannata jõu-MOSFET sekundaarläbilöögi all ega vaja jõu-bipolaartransistori suuri baasi-juhtimisvoole. Jõu-MOSFET-i lülitusprotsess on palju kiirem kui bipolaartransistoridel, kuna nendel ei ole liigseid vähemusvoolukandjaid, mida tuleks liigutada seadisesse või sealt välja enne seadise sisse- või väljalülitamist. Jõu-MOSFET-i lülitusintervallid on piirides 10 ns kuni 300 ns. See eelis teeb jõu-MOSFET-i sobivaks kasutamiseks lülitusskeemides.
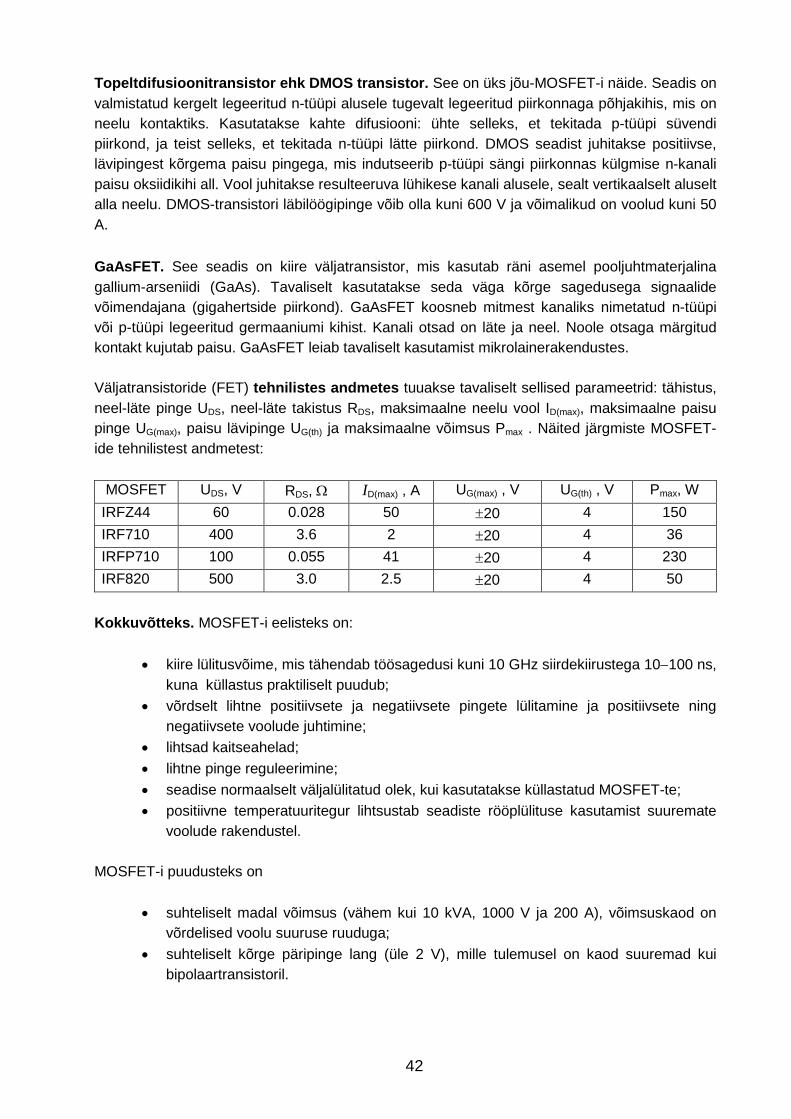
42
Topeltdifusioonitransistor ehk DMOS transistor. See on üks jõu-MOSFET-i näide. Seadis on valmistatud kergelt legeeritud n-tüüpi alusele tugevalt legeeritud piirkonnaga põhjakihis, mis on neelu kontaktiks. Kasutatakse kahte difusiooni: ühte selleks, et tekitada p-tüüpi süvendi piirkond, ja teist selleks, et tekitada n-tüüpi lätte piirkond. DMOS seadist juhitakse positiivse, lävipingest kõrgema paisu pingega, mis indutseerib p-tüüpi sängi piirkonnas külgmise n-kanali paisu oksiidikihi all. Vool juhitakse resulteeruva lühikese kanali alusele, sealt vertikaalselt aluselt alla neelu. DMOS-transistori läbilöögipinge võib olla kuni 600 V ja võimalikud on voolud kuni 50 A.
GaAsFET. See seadis on kiire väljatransistor, mis kasutab räni asemel pooljuhtmaterjalina gallium-arseniidi (GaAs). Tavaliselt kasutatakse seda väga kõrge sagedusega signaalide võimendajana (gigahertside piirkond). GaAsFET koosneb mitmest kanaliks nimetatud n-tüüpi või p-tüüpi legeeritud germaaniumi kihist. Kanali otsad on läte ja neel. Noole otsaga märgitud kontakt kujutab paisu. GaAsFET leiab tavaliselt kasutamist mikrolainerakendustes. Väljatransistoride (FET) tehnilistes andmetes tuuakse tavaliselt sellised parameetrid: tähistus, neel-läte pinge UDS, neel-läte takistus RDS, maksimaalne neelu vool ID(max), maksimaalne paisu pinge UG(max), paisu lävipinge UG(th) ja maksimaalne võimsus Pmax . Näited järgmiste MOSFET-ide tehnilistest andmetest:
MOSFET UDS, V RDS, Ω ID(max) , A UG(max) , V UG(th) , V Pmax, W
IRFZ44 60 0.028 50 ±20 4 150
IRF710 400 3.6 2 ±20 4 36
IRFP710 100 0.055 41 ±20 4 230
IRF820 500 3.0 2.5 ±20 4 50
Kokkuvõtteks. MOSFET-i eelisteks on:
• kiire lülitusvõime, mis tähendab töösagedusi kuni 10 GHz siirdekiirustega 10−100 ns, kuna küllastus praktiliselt puudub;
• võrdselt lihtne positiivsete ja negatiivsete pingete lülitamine ja positiivsete ning negatiivsete voolude juhtimine;
• lihtsad kaitseahelad;
• lihtne pinge reguleerimine;
• seadise normaalselt väljalülitatud olek, kui kasutatakse küllastatud MOSFET-te; • positiivne temperatuuritegur lihtsustab seadiste rööplülituse kasutamist suuremate
voolude rakendustel.
MOSFET-i puudusteks on
• suhteliselt madal võimsus (vähem kui 10 kVA, 1000 V ja 200 A), võimsuskaod on võrdelised voolu suuruse ruuduga;
• suhteliselt kõrge päripinge lang (üle 2 V), mille tulemusel on kaod suuremad kui bipolaartransistoril.
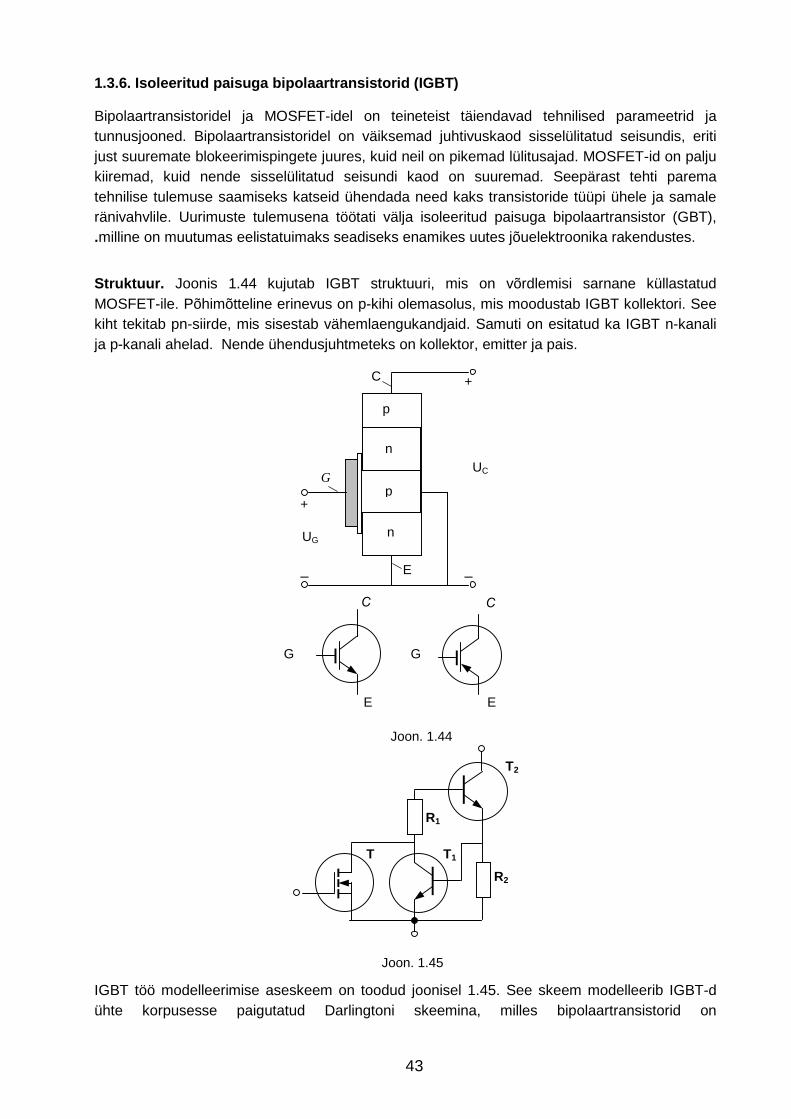
43
1.3.6. Isoleeritud paisuga bipolaartransistorid (IG BT)
Bipolaartransistoridel ja MOSFET-idel on teineteist täiendavad tehnilised parameetrid ja tunnusjooned. Bipolaartransistoridel on väiksemad juhtivuskaod sisselülitatud seisundis, eriti just suuremate blokeerimispingete juures, kuid neil on pikemad lülitusajad. MOSFET-id on palju kiiremad, kuid nende sisselülitatud seisundi kaod on suuremad. Seepärast tehti parema tehnilise tulemuse saamiseks katseid ühendada need kaks transistoride tüüpi ühele ja samale ränivahvlile. Uurimuste tulemusena töötati välja isoleeritud paisuga bipolaartransistor (GBT), .milline on muutumas eelistatuimaks seadiseks enamikes uutes jõuelektroonika rakendustes.
Struktuur. Joonis 1.44 kujutab IGBT struktuuri, mis on võrdlemisi sarnane küllastatud MOSFET-ile. Põhimõtteline erinevus on p-kihi olemasolus, mis moodustab IGBT kollektori. See kiht tekitab pn-siirde, mis sisestab vähemlaengukandjaid. Samuti on esitatud ka IGBT n-kanali ja p-kanali ahelad. Nende ühendusjuhtmeteks on kollektor, emitter ja pais.
– –
+
+
G
UG
C
UC
E
G G
С С
E E
Joon. 1.44
n
p
p
n
T T1
T2
Joon. 1.45
R1
R2
IGBT töö modelleerimise aseskeem on toodud joonisel 1.45. See skeem modelleerib IGBT-d ühte korpusesse paigutatud Darlingtoni skeemina, milles bipolaartransistorid on
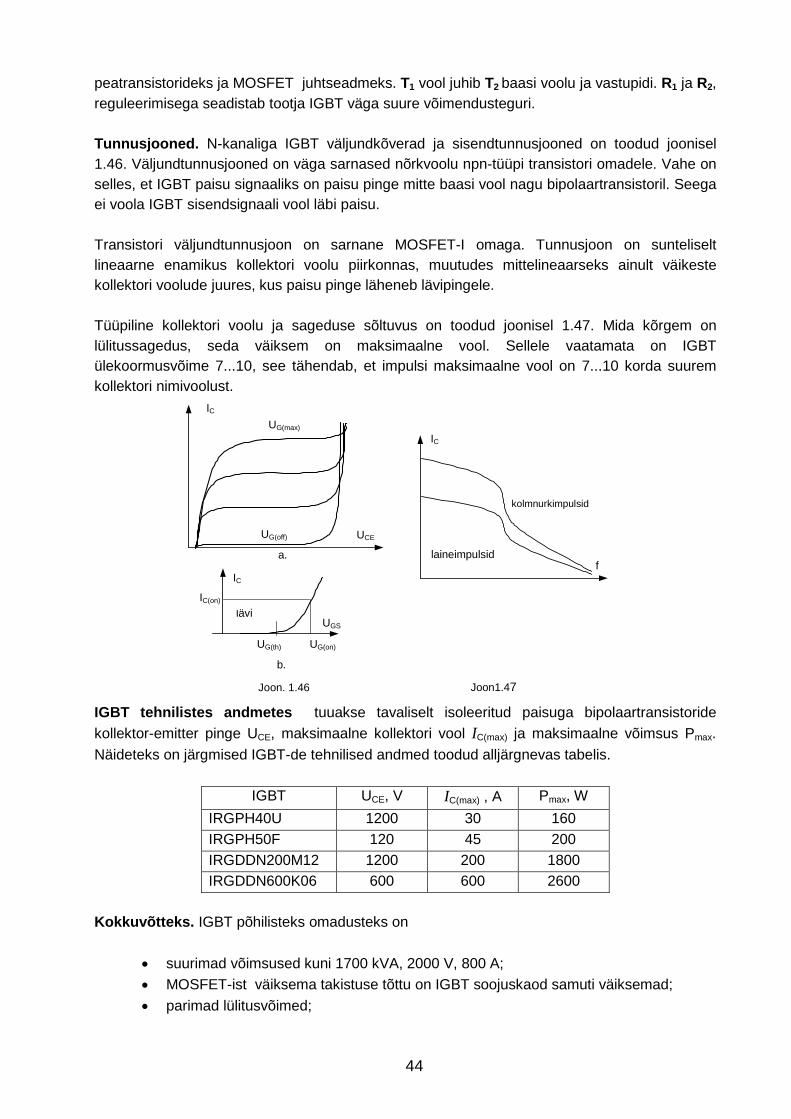
44
peatransistorideks ja MOSFET juhtseadmeks. T1 vool juhib T2 baasi voolu ja vastupidi. R1 ja R2, reguleerimisega seadistab tootja IGBT väga suure võimendusteguri. Tunnusjooned. N-kanaliga IGBT väljundkõverad ja sisendtunnusjooned on toodud joonisel 1.46. Väljundtunnusjooned on väga sarnased nõrkvoolu npn-tüüpi transistori omadele. Vahe on selles, et IGBT paisu signaaliks on paisu pinge mitte baasi vool nagu bipolaartransistoril. Seega ei voola IGBT sisendsignaali vool läbi paisu. Transistori väljundtunnusjoon on sarnane MOSFET-I omaga. Tunnusjoon on sunteliselt lineaarne enamikus kollektori voolu piirkonnas, muutudes mittelineaarseks ainult väikeste kollektori voolude juures, kus paisu pinge läheneb lävipingele. Tüüpiline kollektori voolu ja sageduse sõltuvus on toodud joonisel 1.47. Mida kõrgem on lülitussagedus, seda väiksem on maksimaalne vool. Sellele vaatamata on IGBT ülekoormusvõime 7...10, see tähendab, et impulsi maksimaalne vool on 7...10 korda suurem kollektori nimivoolust.
kolmnurkimpulsid
laineimpulsid
Joon1.47
f
IC
a.
Joon. 1.46
UG(off) UCE
IC
UG(max)
lävi
UG(on) UG(th)
IC(on)
UGS
IC
b.
IGBT tehnilistes andmetes tuuakse tavaliselt isoleeritud paisuga bipolaartransistoride kollektor-emitter pinge UCE, maksimaalne kollektori vool IC(max) ja maksimaalne võimsus Pmax.
Näideteks on järgmised IGBT-de tehnilised andmed toodud alljärgnevas tabelis.
IGBT UCE, V IC(max) , A Pmax, W
IRGPH40U 1200 30 160 IRGPH50F 120 45 200 IRGDDN200M12 1200 200 1800 IRGDDN600K06 600 600 2600
Kokkuvõtteks. IGBT põhilisteks omadusteks on
• suurimad võimsused kuni 1700 kVA, 2000 V, 800 A; • MOSFET-ist väiksema takistuse tõttu on IGBT soojuskaod samuti väiksemad;
• parimad lülitusvõimed;
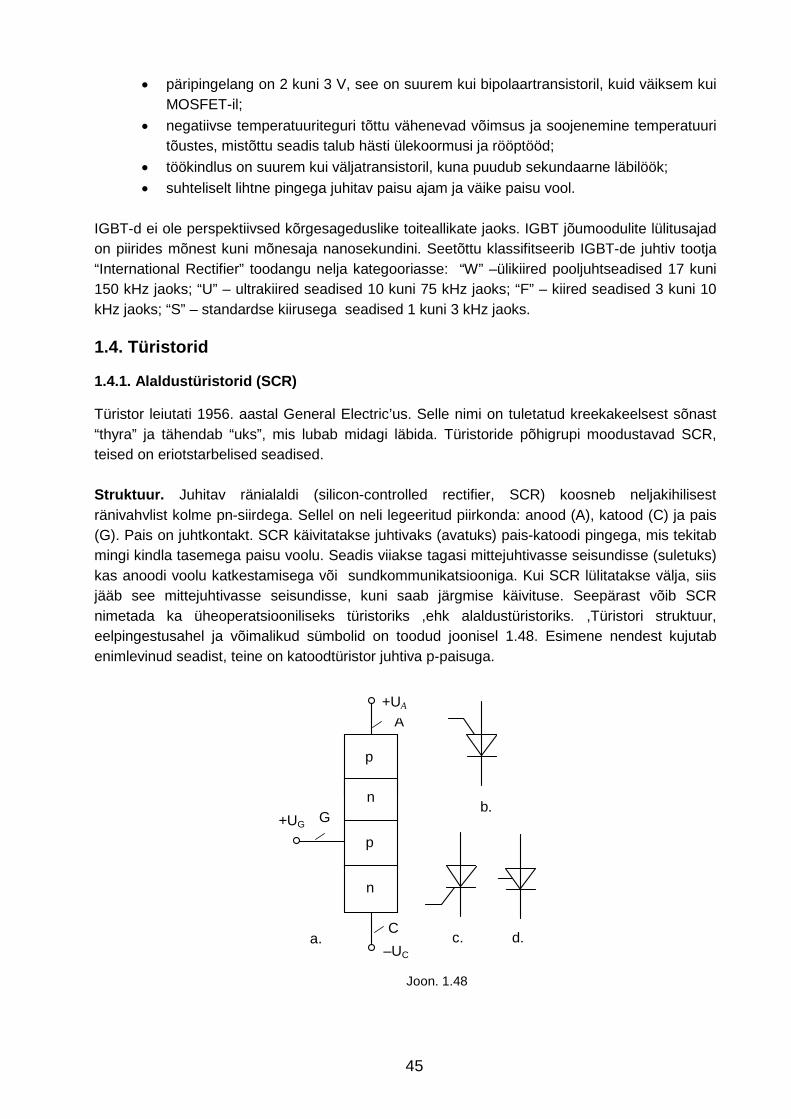
45
• päripingelang on 2 kuni 3 V, see on suurem kui bipolaartransistoril, kuid väiksem kui MOSFET-il;
• negatiivse temperatuuriteguri tõttu vähenevad võimsus ja soojenemine temperatuuri tõustes, mistõttu seadis talub hästi ülekoormusi ja rööptööd;
• töökindlus on suurem kui väljatransistoril, kuna puudub sekundaarne läbilöök; • suhteliselt lihtne pingega juhitav paisu ajam ja väike paisu vool.
IGBT-d ei ole perspektiivsed kõrgesageduslike toiteallikate jaoks. IGBT jõumoodulite lülitusajad on piirides mõnest kuni mõnesaja nanosekundini. Seetõttu klassifitseerib IGBT-de juhtiv tootja “International Rectifier” toodangu nelja kategooriasse: “W” –ülikiired pooljuhtseadised 17 kuni 150 kHz jaoks; “U” – ultrakiired seadised 10 kuni 75 kHz jaoks; “F” – kiired seadised 3 kuni 10 kHz jaoks; “S” – standardse kiirusega seadised 1 kuni 3 kHz jaoks.
1.4. Türistorid
1.4.1. Alaldustüristorid (SCR)
Türistor leiutati 1956. aastal General Electric’us. Selle nimi on tuletatud kreekakeelsest sõnast “thyra” ja tähendab “uks”, mis lubab midagi läbida. Türistoride põhigrupi moodustavad SCR, teised on eriotstarbelised seadised. Struktuur. Juhitav ränialaldi (silicon-controlled rectifier, SCR) koosneb neljakihilisest ränivahvlist kolme pn-siirdega. Sellel on neli legeeritud piirkonda: anood (A), katood (C) ja pais (G). Pais on juhtkontakt. SCR käivitatakse juhtivaks (avatuks) pais-katoodi pingega, mis tekitab mingi kindla tasemega paisu voolu. Seadis viiakse tagasi mittejuhtivasse seisundisse (suletuks) kas anoodi voolu katkestamisega või sundkommunikatsiooniga. Kui SCR lülitatakse välja, siis jääb see mittejuhtivasse seisundisse, kuni saab järgmise käivituse. Seepärast võib SCR nimetada ka üheoperatsiooniliseks türistoriks ,ehk alaldustüristoriks. ,Türistori struktuur, eelpingestusahel ja võimalikud sümbolid on toodud joonisel 1.48. Esimene nendest kujutab enimlevinud seadist, teine on katoodtüristor juhtiva p-paisuga.
Joon. 1.48
b.
c. d.
A
+UG
–UC
G
+UA
C
p
n
p
n
a.
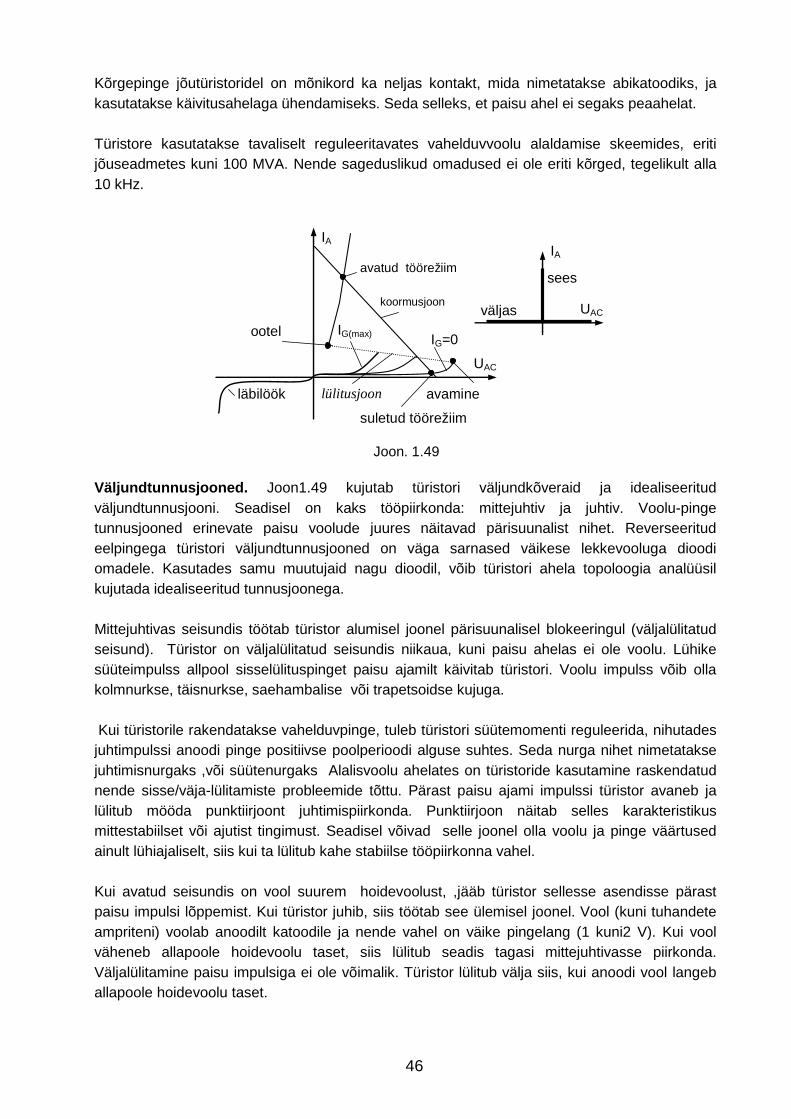
46
Kõrgepinge jõutüristoridel on mõnikord ka neljas kontakt, mida nimetatakse abikatoodiks, ja kasutatakse käivitusahelaga ühendamiseks. Seda selleks, et paisu ahel ei segaks peaahelat. Türistore kasutatakse tavaliselt reguleeritavates vahelduvvoolu alaldamise skeemides, eriti jõuseadmetes kuni 100 MVA. Nende sageduslikud omadused ei ole eriti kõrged, tegelikult alla 10 kHz.
lülitusjoon läbilöök
IG(max) ootel
koormusjoon
avamine
avatud töörežiim
UAC
IA
Joon. 1.49
suletud töörežiim
IG=0
väljas
sees
UAC
IA
Väljundtunnusjooned. Joon1.49 kujutab türistori väljundkõveraid ja idealiseeritud väljundtunnusjooni. Seadisel on kaks tööpiirkonda: mittejuhtiv ja juhtiv. Voolu-pinge tunnusjooned erinevate paisu voolude juures näitavad pärisuunalist nihet. Reverseeritud eelpingega türistori väljundtunnusjooned on väga sarnased väikese lekkevooluga dioodi omadele. Kasutades samu muutujaid nagu dioodil, võib türistori ahela topoloogia analüüsil kujutada idealiseeritud tunnusjoonega. Mittejuhtivas seisundis töötab türistor alumisel joonel pärisuunalisel blokeeringul (väljalülitatud seisund). Türistor on väljalülitatud seisundis niikaua, kuni paisu ahelas ei ole voolu. Lühike süüteimpulss allpool sisselülituspinget paisu ajamilt käivitab türistori. Voolu impulss võib olla kolmnurkse, täisnurkse, saehambalise või trapetsoidse kujuga. Kui türistorile rakendatakse vahelduvpinge, tuleb türistori süütemomenti reguleerida, nihutades juhtimpulssi anoodi pinge positiivse poolperioodi alguse suhtes. Seda nurga nihet nimetatakse juhtimisnurgaks ,või süütenurgaks Alalisvoolu ahelates on türistoride kasutamine raskendatud nende sisse/väja-lülitamiste probleemide tõttu. Pärast paisu ajami impulssi türistor avaneb ja lülitub mööda punktiirjoont juhtimispiirkonda. Punktiirjoon näitab selles karakteristikus mittestabiilset või ajutist tingimust. Seadisel võivad selle joonel olla voolu ja pinge väärtused ainult lühiajaliselt, siis kui ta lülitub kahe stabiilse tööpiirkonna vahel. Kui avatud seisundis on vool suurem hoidevoolust, ,jääb türistor sellesse asendisse pärast paisu impulsi lõppemist. Kui türistor juhib, siis töötab see ülemisel joonel. Vool (kuni tuhandete ampriteni) voolab anoodilt katoodile ja nende vahel on väike pingelang (1 kuni2 V). Kui vool väheneb allapoole hoidevoolu taset, siis lülitub seadis tagasi mittejuhtivasse piirkonda. Väljalülitamine paisu impulsiga ei ole võimalik. Türistor lülitub välja siis, kui anoodi vool langeb allapoole hoidevoolu taset.
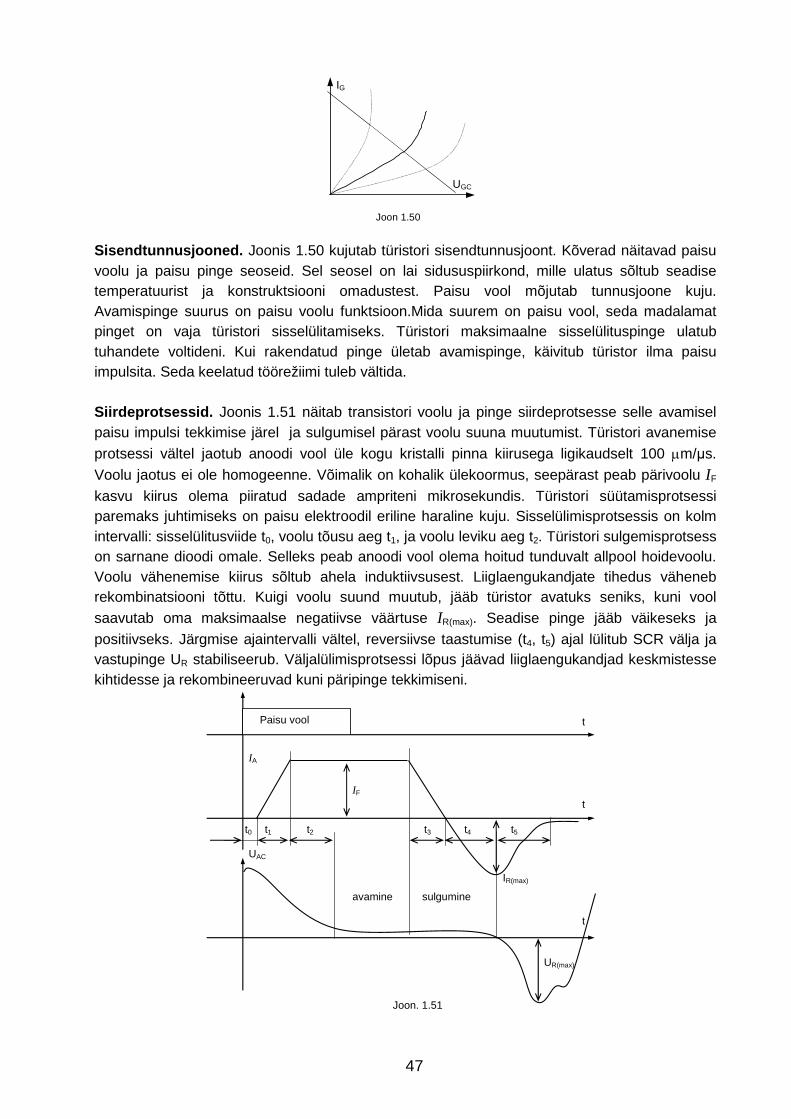
47
UGC
IG IG
Joon 1.50
Sisendtunnusjooned. Joonis 1.50 kujutab türistori sisendtunnusjoont. Kõverad näitavad paisu voolu ja paisu pinge seoseid. Sel seosel on lai sidususpiirkond, mille ulatus sõltub seadise temperatuurist ja konstruktsiooni omadustest. Paisu vool mõjutab tunnusjoone kuju. Avamispinge suurus on paisu voolu funktsioon.Mida suurem on paisu vool, seda madalamat pinget on vaja türistori sisselülitamiseks. Türistori maksimaalne sisselülituspinge ulatub tuhandete voltideni. Kui rakendatud pinge ületab avamispinge, käivitub türistor ilma paisu impulsita. Seda keelatud töörežiimi tuleb vältida. Siirdeprotsessid. Joonis 1.51 näitab transistori voolu ja pinge siirdeprotsesse selle avamisel paisu impulsi tekkimise järel ja sulgumisel pärast voolu suuna muutumist. Türistori avanemise
protsessi vältel jaotub anoodi vool üle kogu kristalli pinna kiirusega ligikaudselt 100 µm/µs.
Voolu jaotus ei ole homogeenne. Võimalik on kohalik ülekoormus, seepärast peab pärivoolu IF
kasvu kiirus olema piiratud sadade ampriteni mikrosekundis. Türistori süütamisprotsessi paremaks juhtimiseks on paisu elektroodil eriline haraline kuju. Sisselülimisprotsessis on kolm intervalli: sisselülitusviide t0, voolu tõusu aeg t1, ja voolu leviku aeg t2. Türistori sulgemisprotsess on sarnane dioodi omale. Selleks peab anoodi vool olema hoitud tunduvalt allpool hoidevoolu. Voolu vähenemise kiirus sõltub ahela induktiivsusest. Liiglaengukandjate tihedus väheneb rekombinatsiooni tõttu. Kuigi voolu suund muutub, jääb türistor avatuks seniks, kuni vool saavutab oma maksimaalse negatiivse väärtuse IR(max). Seadise pinge jääb väikeseks ja
positiivseks. Järgmise ajaintervalli vältel, reversiivse taastumise (t4, t5) ajal lülitub SCR välja ja vastupinge UR stabiliseerub. Väljalülimisprotsessi lõpus jäävad liiglaengukandjad keskmistesse kihtidesse ja rekombineeruvad kuni päripinge tekkimiseni.
t0
t
UR(max)
t
t5 t3 t4 t2 t1
IF
UAC
IR(max)
IA
Joon. 1.51
t
avamine sulgumine
Paisu vool
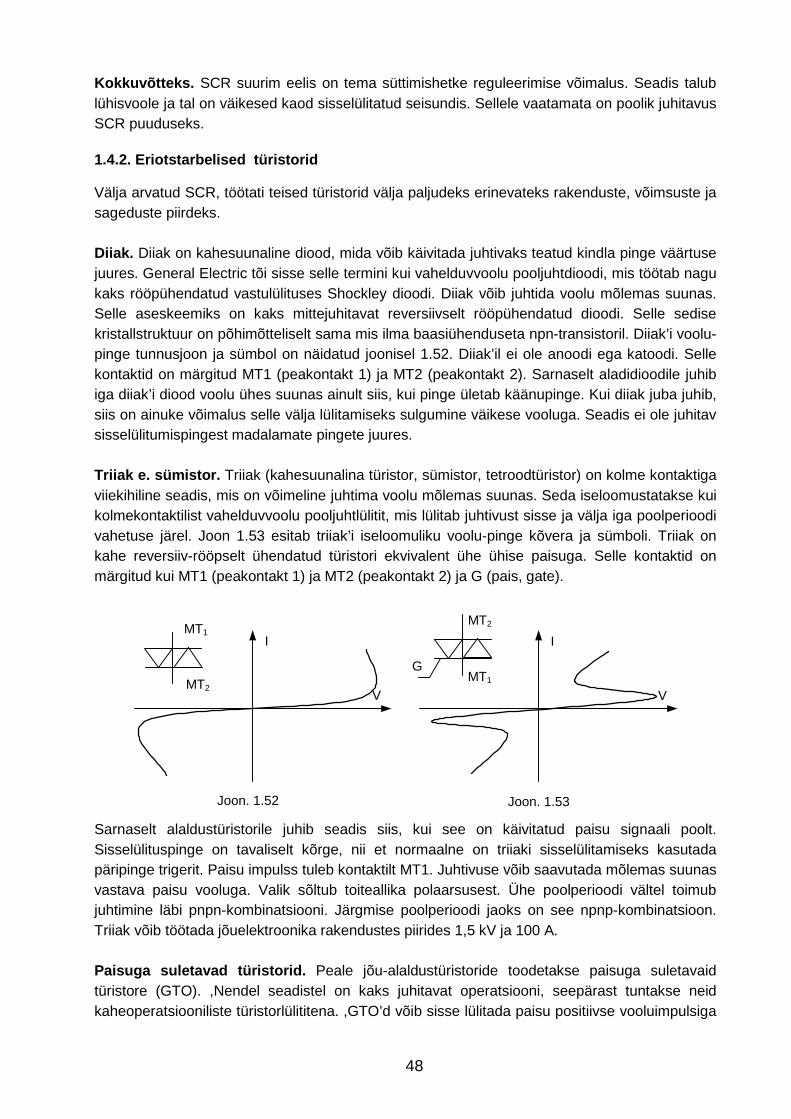
48
Kokkuvõtteks. SCR suurim eelis on tema süttimishetke reguleerimise võimalus. Seadis talub lühisvoole ja tal on väikesed kaod sisselülitatud seisundis. Sellele vaatamata on poolik juhitavus SCR puuduseks.
1.4.2. Eriotstarbelised türistorid
Välja arvatud SCR, töötati teised türistorid välja paljudeks erinevateks rakenduste, võimsuste ja sageduste piirdeks. Diiak. Diiak on kahesuunaline diood, mida võib käivitada juhtivaks teatud kindla pinge väärtuse juures. General Electric tõi sisse selle termini kui vahelduvvoolu pooljuhtdioodi, mis töötab nagu kaks rööpühendatud vastulülituses Shockley dioodi. Diiak võib juhtida voolu mõlemas suunas. Selle aseskeemiks on kaks mittejuhitavat reversiivselt rööpühendatud dioodi. Selle sedise kristallstruktuur on põhimõtteliselt sama mis ilma baasiühenduseta npn-transistoril. Diiak’i voolu-pinge tunnusjoon ja sümbol on näidatud joonisel 1.52. Diiak’il ei ole anoodi ega katoodi. Selle kontaktid on märgitud MT1 (peakontakt 1) ja MT2 (peakontakt 2). Sarnaselt aladidioodile juhib iga diiak’i diood voolu ühes suunas ainult siis, kui pinge ületab käänupinge. Kui diiak juba juhib, siis on ainuke võimalus selle välja lülitamiseks sulgumine väikese vooluga. Seadis ei ole juhitav sisselülitumispingest madalamate pingete juures. Triiak e. sümistor. Triiak (kahesuunalina türistor, sümistor, tetroodtüristor) on kolme kontaktiga viiekihiline seadis, mis on võimeline juhtima voolu mõlemas suunas. Seda iseloomustatakse kui kolmekontaktilist vahelduvvoolu pooljuhtlülitit, mis lülitab juhtivust sisse ja välja iga poolperioodi vahetuse järel. Joon 1.53 esitab triiak’i iseloomuliku voolu-pinge kõvera ja sümboli. Triiak on kahe reversiiv-rööpselt ühendatud türistori ekvivalent ühe ühise paisuga. Selle kontaktid on märgitud kui MT1 (peakontakt 1) ja MT2 (peakontakt 2) ja G (pais, gate).
MT2
MT1 G
V
I
Joon. 1.53
MT2
MT1
V
I
Joon. 1.52
Sarnaselt alaldustüristorile juhib seadis siis, kui see on käivitatud paisu signaali poolt. Sisselülituspinge on tavaliselt kõrge, nii et normaalne on triiaki sisselülitamiseks kasutada päripinge trigerit. Paisu impulss tuleb kontaktilt MT1. Juhtivuse võib saavutada mõlemas suunas vastava paisu vooluga. Valik sõltub toiteallika polaarsusest. Ühe poolperioodi vältel toimub juhtimine läbi pnpn-kombinatsiooni. Järgmise poolperioodi jaoks on see npnp-kombinatsioon. Triiak võib töötada jõuelektroonika rakendustes piirides 1,5 kV ja 100 A. Paisuga suletavad türistorid. Peale jõu-alaldustüristoride toodetakse paisuga suletavaid türistore (GTO). ,Nendel seadistel on kaks juhitavat operatsiooni, seepärast tuntakse neid kaheoperatsiooniliste türistorlülititena. ,GTO’d võib sisse lülitada paisu positiivse vooluimpulsiga
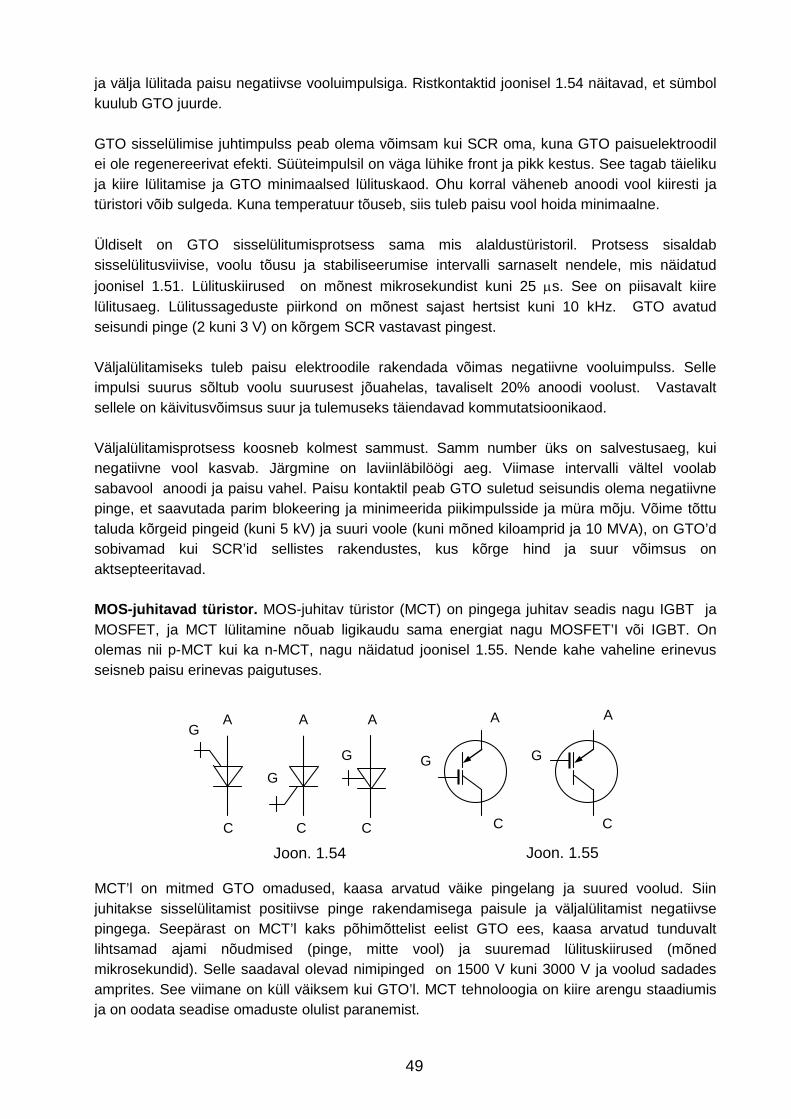
49
ja välja lülitada paisu negatiivse vooluimpulsiga. Ristkontaktid joonisel 1.54 näitavad, et sümbol kuulub GTO juurde. GTO sisselülimise juhtimpulss peab olema võimsam kui SCR oma, kuna GTO paisuelektroodil ei ole regenereerivat efekti. Süüteimpulsil on väga lühike front ja pikk kestus. See tagab täieliku ja kiire lülitamise ja GTO minimaalsed lülituskaod. Ohu korral väheneb anoodi vool kiiresti ja türistori võib sulgeda. Kuna temperatuur tõuseb, siis tuleb paisu vool hoida minimaalne. Üldiselt on GTO sisselülitumisprotsess sama mis alaldustüristoril. Protsess sisaldab sisselülitusviivise, voolu tõusu ja stabiliseerumise intervalli sarnaselt nendele, mis näidatud
joonisel 1.51. Lülituskiirused on mõnest mikrosekundist kuni 25 µs. See on piisavalt kiire lülitusaeg. Lülitussageduste piirkond on mõnest sajast hertsist kuni 10 kHz. GTO avatud seisundi pinge (2 kuni 3 V) on kõrgem SCR vastavast pingest. Väljalülitamiseks tuleb paisu elektroodile rakendada võimas negatiivne vooluimpulss. Selle impulsi suurus sõltub voolu suurusest jõuahelas, tavaliselt 20% anoodi voolust. Vastavalt sellele on käivitusvõimsus suur ja tulemuseks täiendavad kommutatsioonikaod. Väljalülitamisprotsess koosneb kolmest sammust. Samm number üks on salvestusaeg, kui negatiivne vool kasvab. Järgmine on laviinläbilöögi aeg. Viimase intervalli vältel voolab sabavool anoodi ja paisu vahel. Paisu kontaktil peab GTO suletud seisundis olema negatiivne pinge, et saavutada parim blokeering ja minimeerida piikimpulsside ja müra mõju. Võime tõttu taluda kõrgeid pingeid (kuni 5 kV) ja suuri voole (kuni mõned kiloamprid ja 10 MVA), on GTO’d sobivamad kui SCR’id sellistes rakendustes, kus kõrge hind ja suur võimsus on aktsepteeritavad. MOS-juhitavad türistor. MOS-juhitav türistor (MCT) on pingega juhitav seadis nagu IGBT ja MOSFET, ja MCT lülitamine nõuab ligikaudu sama energiat nagu MOSFET’I või IGBT. On olemas nii p-MCT kui ka n-MCT, nagu näidatud joonisel 1.55. Nende kahe vaheline erinevus seisneb paisu erinevas paigutuses.
G G
A A
C C
Joon. 1.55
G
G
G
C C C
Joon. 1.54
A A A
MCT’l on mitmed GTO omadused, kaasa arvatud väike pingelang ja suured voolud. Siin juhitakse sisselülitamist positiivse pinge rakendamisega paisule ja väljalülitamist negatiivse pingega. Seepärast on MCT’l kaks põhimõttelist eelist GTO ees, kaasa arvatud tunduvalt lihtsamad ajami nõudmised (pinge, mitte vool) ja suuremad lülituskiirused (mõned mikrosekundid). Selle saadaval olevad nimipinged on 1500 V kuni 3000 V ja voolud sadades amprites. See viimane on küll väiksem kui GTO’l. MCT tehnoloogia on kiire arengu staadiumis ja on oodata seadise omaduste olulist paranemist.
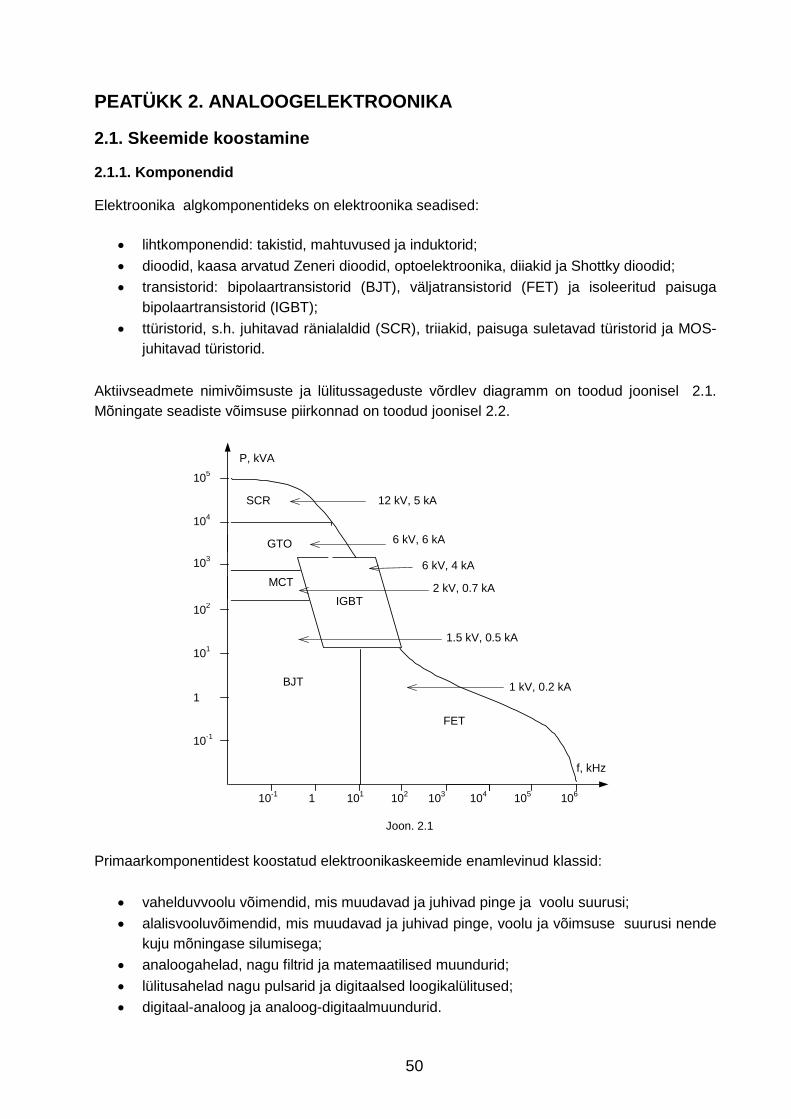
50
PEATÜKK 2. ANALOOGELEKTROONIKA
2.1. Skeemide koostamine
2.1.1. Komponendid
Elektroonika algkomponentideks on elektroonika seadised:
• lihtkomponendid: takistid, mahtuvused ja induktorid;
• dioodid, kaasa arvatud Zeneri dioodid, optoelektroonika, diiakid ja Shottky dioodid; • transistorid: bipolaartransistorid (BJT), väljatransistorid (FET) ja isoleeritud paisuga
bipolaartransistorid (IGBT);
• ttüristorid, s.h. juhitavad ränialaldid (SCR), triiakid, paisuga suletavad türistorid ja MOS-juhitavad türistorid.
Aktiivseadmete nimivõimsuste ja lülitussageduste võrdlev diagramm on toodud joonisel 2.1. Mõningate seadiste võimsuse piirkonnad on toodud joonisel 2.2.
1.5 kV, 0.5 kA
6 kV, 6 kA
6 kV, 4 kA
2 kV, 0.7 kA
1 kV, 0.2 kA
12 kV, 5 kA
f, kHz
MCT
GTO
10-1 1 101 102 103 104 105 106
104
103
102
101
1
10-1
105
P, kVA
BJT
IGBT
SCR
FET
Joon. 2.1
Primaarkomponentidest koostatud elektroonikaskeemide enamlevinud klassid:
• vahelduvvoolu võimendid, mis muudavad ja juhivad pinge ja voolu suurusi;
• alalisvooluvõimendid, mis muudavad ja juhivad pinge, voolu ja võimsuse suurusi nende kuju mõningase silumisega;
• analoogahelad, nagu filtrid ja matemaatilised muundurid;
• lülitusahelad nagu pulsarid ja digitaalsed loogikalülitused; • digitaal-analoog ja analoog-digitaalmuundurid.
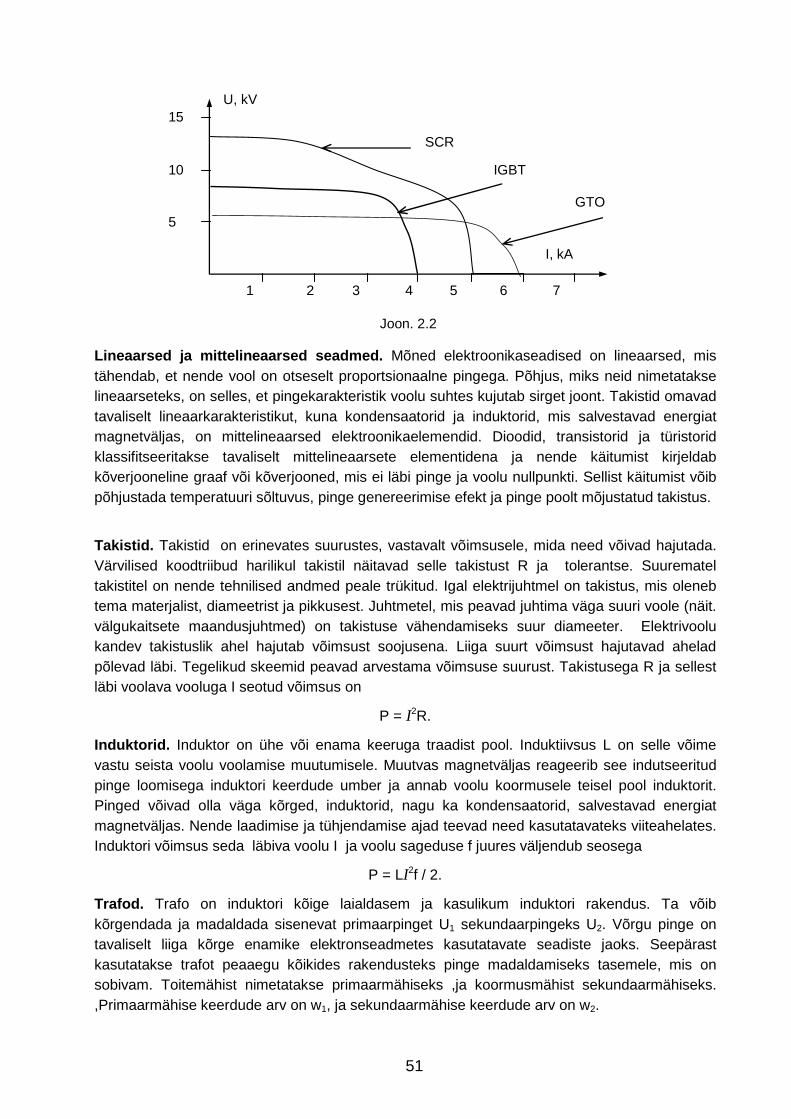
51
Lineaarsed ja mittelineaarsed seadmed. Mõned elektroonikaseadised on lineaarsed, mis tähendab, et nende vool on otseselt proportsionaalne pingega. Põhjus, miks neid nimetatakse lineaarseteks, on selles, et pingekarakteristik voolu suhtes kujutab sirget joont. Takistid omavad tavaliselt lineaarkarakteristikut, kuna kondensaatorid ja induktorid, mis salvestavad energiat magnetväljas, on mittelineaarsed elektroonikaelemendid. Dioodid, transistorid ja türistorid klassifitseeritakse tavaliselt mittelineaarsete elementidena ja nende käitumist kirjeldab kõverjooneline graaf või kõverjooned, mis ei läbi pinge ja voolu nullpunkti. Sellist käitumist võib põhjustada temperatuuri sõltuvus, pinge genereerimise efekt ja pinge poolt mõjustatud takistus.
Takistid. Takistid on erinevates suurustes, vastavalt võimsusele, mida need võivad hajutada. Värvilised koodtriibud harilikul takistil näitavad selle takistust R ja tolerantse. Suurematel takistitel on nende tehnilised andmed peale trükitud. Igal elektrijuhtmel on takistus, mis oleneb tema materjalist, diameetrist ja pikkusest. Juhtmetel, mis peavad juhtima väga suuri voole (näit. välgukaitsete maandusjuhtmed) on takistuse vähendamiseks suur diameeter. Elektrivoolu kandev takistuslik ahel hajutab võimsust soojusena. Liiga suurt võimsust hajutavad ahelad põlevad läbi. Tegelikud skeemid peavad arvestama võimsuse suurust. Takistusega R ja sellest läbi voolava vooluga I seotud võimsus on
P = I2R.
Induktorid. Induktor on ühe või enama keeruga traadist pool. Induktiivsus L on selle võime vastu seista voolu voolamise muutumisele. Muutvas magnetväljas reageerib see indutseeritud pinge loomisega induktori keerdude umber ja annab voolu koormusele teisel pool induktorit. Pinged võivad olla väga kõrged, induktorid, nagu ka kondensaatorid, salvestavad energiat magnetväljas. Nende laadimise ja tühjendamise ajad teevad need kasutatavateks viiteahelates. Induktori võimsus seda läbiva voolu I ja voolu sageduse f juures väljendub seosega
P = LI2f / 2.
Trafod. Trafo on induktori kõige laialdasem ja kasulikum induktori rakendus. Ta võib kõrgendada ja madaldada sisenevat primaarpinget U1 sekundaarpingeks U2. Võrgu pinge on tavaliselt liiga kõrge enamike elektronseadmetes kasutatavate seadiste jaoks. Seepärast kasutatakse trafot peaaegu kõikides rakendusteks pinge madaldamiseks tasemele, mis on sobivam. Toitemähist nimetatakse primaarmähiseks ,ja koormusmähist sekundaarmähiseks. ,Primaarmähise keerdude arv on w1, ja sekundaarmähise keerdude arv on w2.
GTO
IGBT
SCR
I, kA
1 2 3 4 5 6 7
15
10
5
U, kV
Joon. 2.2
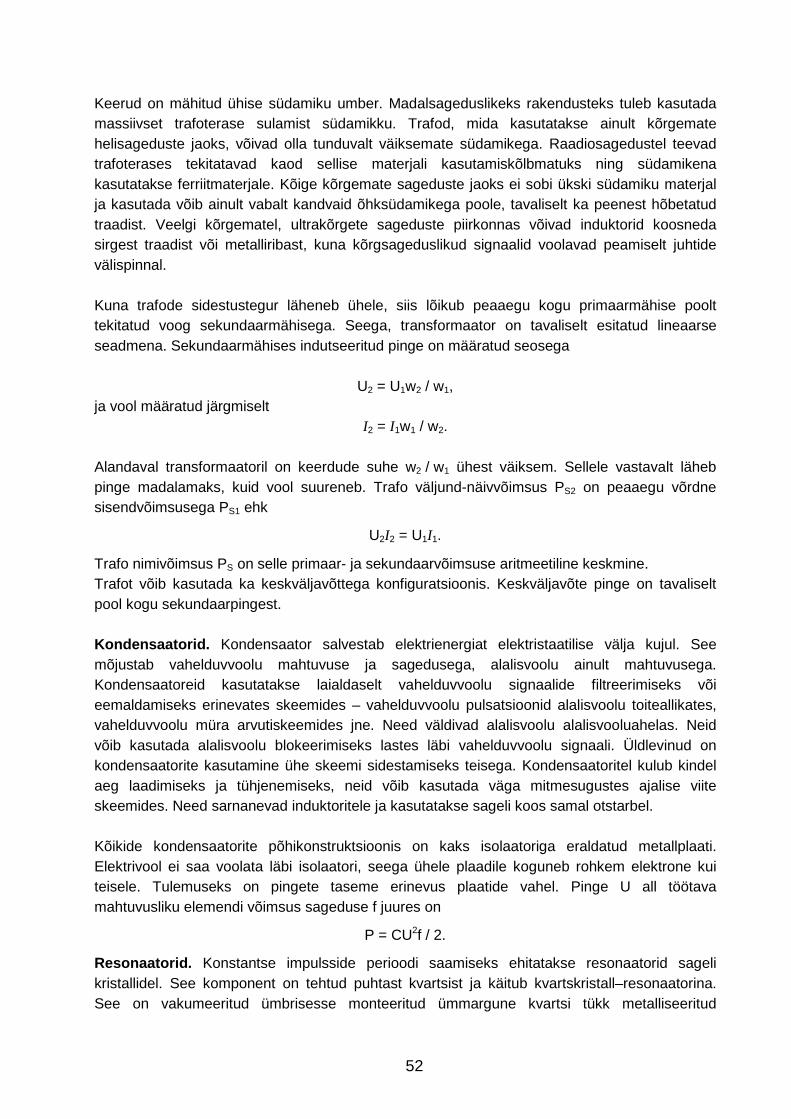
52
Keerud on mähitud ühise südamiku umber. Madalsageduslikeks rakendusteks tuleb kasutada massiivset trafoterase sulamist südamikku. Trafod, mida kasutatakse ainult kõrgemate helisageduste jaoks, võivad olla tunduvalt väiksemate südamikega. Raadiosagedustel teevad trafoterases tekitatavad kaod sellise materjali kasutamiskõlbmatuks ning südamikena kasutatakse ferriitmaterjale. Kõige kõrgemate sageduste jaoks ei sobi ükski südamiku materjal ja kasutada võib ainult vabalt kandvaid õhksüdamikega poole, tavaliselt ka peenest hõbetatud traadist. Veelgi kõrgematel, ultrakõrgete sageduste piirkonnas võivad induktorid koosneda sirgest traadist või metalliribast, kuna kõrgsageduslikud signaalid voolavad peamiselt juhtide välispinnal. Kuna trafode sidestustegur läheneb ühele, siis lõikub peaaegu kogu primaarmähise poolt tekitatud voog sekundaarmähisega. Seega, transformaator on tavaliselt esitatud lineaarse seadmena. Sekundaarmähises indutseeritud pinge on määratud seosega
U2 = U1w2 / w1, ja vool määratud järgmiselt
I2 = I1w1 / w2.
Alandaval transformaatoril on keerdude suhe w2 / w1 ühest väiksem. Sellele vastavalt läheb pinge madalamaks, kuid vool suureneb. Trafo väljund-näivvõimsus PS2 on peaaegu võrdne sisendvõimsusega PS1 ehk
U2I2 = U1I1.
Trafo nimivõimsus PS on selle primaar- ja sekundaarvõimsuse aritmeetiline keskmine. Trafot võib kasutada ka keskväljavõttega konfiguratsioonis. Keskväljavõte pinge on tavaliselt pool kogu sekundaarpingest. Kondensaatorid. Kondensaator salvestab elektrienergiat elektristaatilise välja kujul. See mõjustab vahelduvvoolu mahtuvuse ja sagedusega, alalisvoolu ainult mahtuvusega. Kondensaatoreid kasutatakse laialdaselt vahelduvvoolu signaalide filtreerimiseks või eemaldamiseks erinevates skeemides – vahelduvvoolu pulsatsioonid alalisvoolu toiteallikates, vahelduvvoolu müra arvutiskeemides jne. Need väldivad alalisvoolu alalisvooluahelas. Neid võib kasutada alalisvoolu blokeerimiseks lastes läbi vahelduvvoolu signaali. Üldlevinud on kondensaatorite kasutamine ühe skeemi sidestamiseks teisega. Kondensaatoritel kulub kindel aeg laadimiseks ja tühjenemiseks, neid võib kasutada väga mitmesugustes ajalise viite skeemides. Need sarnanevad induktoritele ja kasutatakse sageli koos samal otstarbel. Kõikide kondensaatorite põhikonstruktsioonis on kaks isolaatoriga eraldatud metallplaati. Elektrivool ei saa voolata läbi isolaatori, seega ühele plaadile koguneb rohkem elektrone kui teisele. Tulemuseks on pingete taseme erinevus plaatide vahel. Pinge U all töötava mahtuvusliku elemendi võimsus sageduse f juures on
P = CU2f / 2.
Resonaatorid. Konstantse impulsside perioodi saamiseks ehitatakse resonaatorid sageli kristallidel. See komponent on tehtud puhtast kvartsist ja käitub kvartskristall–resonaatorina. See on vakumeeritud ümbrisesse monteeritud ümmargune kvartsi tükk metalliseeritud
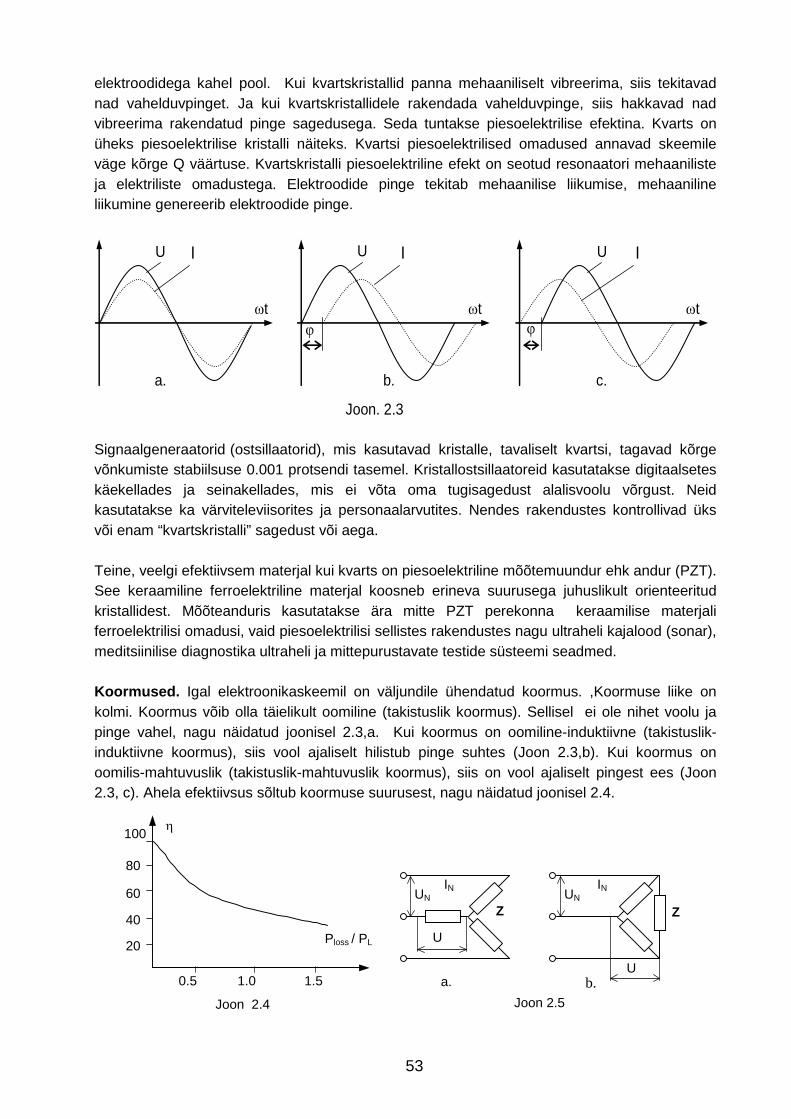
53
elektroodidega kahel pool. Kui kvartskristallid panna mehaaniliselt vibreerima, siis tekitavad nad vahelduvpinget. Ja kui kvartskristallidele rakendada vahelduvpinge, siis hakkavad nad vibreerima rakendatud pinge sagedusega. Seda tuntakse piesoelektrilise efektina. Kvarts on üheks piesoelektrilise kristalli näiteks. Kvartsi piesoelektrilised omadused annavad skeemile väge kõrge Q väärtuse. Kvartskristalli piesoelektriline efekt on seotud resonaatori mehaaniliste ja elektriliste omadustega. Elektroodide pinge tekitab mehaanilise liikumise, mehaaniline liikumine genereerib elektroodide pinge.
a. b. c.
ϕ ϕ ωt
U
Joon. 2.3
ωt
I U
ωt
U I I
Signaalgeneraatorid (ostsillaatorid), mis kasutavad kristalle, tavaliselt kvartsi, tagavad kõrge võnkumiste stabiilsuse 0.001 protsendi tasemel. Kristallostsillaatoreid kasutatakse digitaalsetes käekellades ja seinakellades, mis ei võta oma tugisagedust alalisvoolu võrgust. Neid kasutatakse ka värviteleviisorites ja personaalarvutites. Nendes rakendustes kontrollivad üks või enam “kvartskristalli” sagedust või aega. Teine, veelgi efektiivsem materjal kui kvarts on piesoelektriline mõõtemuundur ehk andur (PZT). See keraamiline ferroelektriline materjal koosneb erineva suurusega juhuslikult orienteeritud kristallidest. Mõõteanduris kasutatakse ära mitte PZT perekonna keraamilise materjali ferroelektrilisi omadusi, vaid piesoelektrilisi sellistes rakendustes nagu ultraheli kajalood (sonar), meditsiinilise diagnostika ultraheli ja mittepurustavate testide süsteemi seadmed. Koormused. Igal elektroonikaskeemil on väljundile ühendatud koormus. ,Koormuse liike on kolmi. Koormus võib olla täielikult oomiline (takistuslik koormus). Sellisel ei ole nihet voolu ja pinge vahel, nagu näidatud joonisel 2.3,a. Kui koormus on oomiline-induktiivne (takistuslik-induktiivne koormus), siis vool ajaliselt hilistub pinge suhtes (Joon 2.3,b). Kui koormus on oomilis-mahtuvuslik (takistuslik-mahtuvuslik koormus), siis on vool ajaliselt pingest ees (Joon 2.3, c). Ahela efektiivsus sõltub koormuse suurusest, nagu näidatud joonisel 2.4.
Ploss / PL
0.5 1.0 1.5
20
60
100
80
40
Joon 2.4
η
a. b.
IN UN
U
Z
Joon 2.5
IN UN
U
Z
54
Kolmefaasilises süsteemis on voolud 120 elektrilise kraadi võrra nihutatud teineteise suhtes. Pinget faasijuhtme ja neutraali juhtme vahel nimetatakse faasi pingeks U .Pinget kahe faasijuhtme vahel nimetatakse võrgupingeks UN. Sellele vastavalt võib kolmefaasilistes süsteemides olla tähtühenduses koormus (Joon 2.5, a) või kolmnurkühenduses koormus (Joon. 2.5, b) Tähtühenduses on elektroonikaskeemi väljund ühendatud ühte koormuse otstest, kuna teised koormuse otsad on lühistatud tähte. Siin
U = UN / √3. Voolude kohta kehtib järgmine seos:
I1 = I2 = I3 = IN.
KoImnurkühenduses on kolm haru ühendatud jadamisi ja iga ühenduskoht on ühendatud süsteemi väljundisse. Pinged erinevatel koormusharudel on
U = UN. Voolude kohta kehtib
I1 = I2 = I3 = IN / √3.
Kokkuvõtteks. Lineaarsed ja mittelineaarsed analoog-, lülitus- ja segaskeemid esindavad laialdast elektroonika analoog- ja lülitusseadmete hulka. Takistid, induktorid ja transformaatorid, kondensaatorid ja resonaatorid osalevad signaali genereerimisel ja muundamisel. Nende töö oleneb koormusest, neil on suur mõju koormuse käitumisele. Takistuslik koormus on kõige lihtsamalt kirjeldatav ja juhitav. Praktiliselt on takistuslik-induktiivne koormus kõige enam levinud energia tarbija ja signaali tootja. Mõnikord on elektroonikaskeemidel takistuslik-mahtuvuslik koormus. Väikesevõimsuselised ühefaasised ja suurevõimsuselised kolmefaasised koormused vastavad erinevatele tööstuslike ja kodutarbija rakenduste nõuetele.
2.1.2. Ahelate omadused
Analoog-elektroonikaskeemide peamisteks omadusteks on võimsuspiirkond ja efektiivsus, sageduskarakteristik ja avatud ning suletud ahelate astmekaja. Sageduskarakteristik. Joonis 2.6 näitab elektroonikasüsteemi tüüpilist sageduskarakteristikut. See on kõver, mis näitab võimendusteguri või väljundpinge muutust sõltuvalt sagedusest sinusoidaalse signaali korral. Madalate ja kõrgete sageduste juures võimendustegur ja väljundpinge vähenevad süsteemi sisend- ja väljundmahtuvuste tõttu. Sageduste vahepealses piirkonnas toodab elektroonikasüsteem maksimaalset väljundsignaali. Sagedusi allpool ja ülalpool keskmiste sageduste piirkonda välditakse enamikes rakendustes amplituudmoonutuste ja sagedusmoonutuste tõttu. Süsteemi kriitilised sagedused ,on sagedused, mille juures väljundpinge on 0,7 maksimumist (-3 detsibelli). Kriitiliste sageduste alternatiivseteks nimetusteks on lõikesagedused, , poolvõimsuse punktid, murdesagedused, 3-dB sagedused jne. Sageduste piirkonda lõikesageduste vahel, kus väljundi suurused on maksimaalsed, nimetatakse nimiribaks või ribalaiuseks. See on
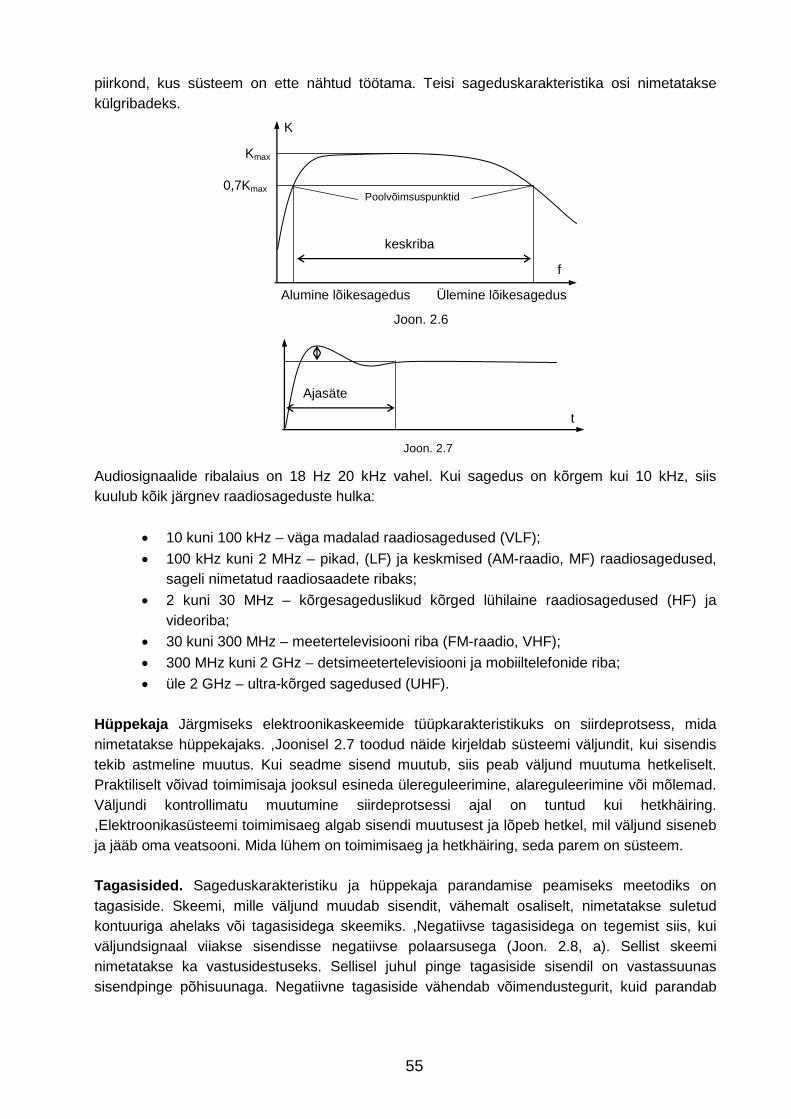
55
piirkond, kus süsteem on ette nähtud töötama. Teisi sageduskarakteristika osi nimetatakse külgribadeks.
t
Ajasäte
Joon. 2.7
Ülemine lõikesagedus
Poolvõimsuspunktid
Alumine lõikesagedus
0,7Kmax
Kmax
K
f
keskriba
Joon. 2.6
Audiosignaalide ribalaius on 18 Hz 20 kHz vahel. Kui sagedus on kõrgem kui 10 kHz, siis kuulub kõik järgnev raadiosageduste hulka:
• 10 kuni 100 kHz – väga madalad raadiosagedused (VLF);
• 100 kHz kuni 2 MHz – pikad, (LF) ja keskmised (AM-raadio, MF) raadiosagedused, sageli nimetatud raadiosaadete ribaks;
• 2 kuni 30 MHz – kõrgesageduslikud kõrged lühilaine raadiosagedused (HF) ja videoriba;
• 30 kuni 300 MHz – meetertelevisiooni riba (FM-raadio, VHF);
• 300 MHz kuni 2 GHz – detsimeetertelevisiooni ja mobiiltelefonide riba; • üle 2 GHz – ultra-kõrged sagedused (UHF).
Hüppekaja Järgmiseks elektroonikaskeemide tüüpkarakteristikuks on siirdeprotsess, mida nimetatakse hüppekajaks. ,Joonisel 2.7 toodud näide kirjeldab süsteemi väljundit, kui sisendis tekib astmeline muutus. Kui seadme sisend muutub, siis peab väljund muutuma hetkeliselt. Praktiliselt võivad toimimisaja jooksul esineda ülereguleerimine, alareguleerimine või mõlemad. Väljundi kontrollimatu muutumine siirdeprotsessi ajal on tuntud kui hetkhäiring. ,Elektroonikasüsteemi toimimisaeg algab sisendi muutusest ja lõpeb hetkel, mil väljund siseneb ja jääb oma veatsooni. Mida lühem on toimimisaeg ja hetkhäiring, seda parem on süsteem. Tagasisided. Sageduskarakteristiku ja hüppekaja parandamise peamiseks meetodiks on tagasiside. Skeemi, mille väljund muudab sisendit, vähemalt osaliselt, nimetatakse suletud kontuuriga ahelaks või tagasisidega skeemiks. ,Negatiivse tagasisidega on tegemist siis, kui väljundsignaal viiakse sisendisse negatiivse polaarsusega (Joon. 2.8, a). Sellist skeemi nimetatakse ka vastusidestuseks. Sellisel juhul pinge tagasiside sisendil on vastassuunas sisendpinge põhisuunaga. Negatiivne tagasiside vähendab võimendustegurit, kuid parandab
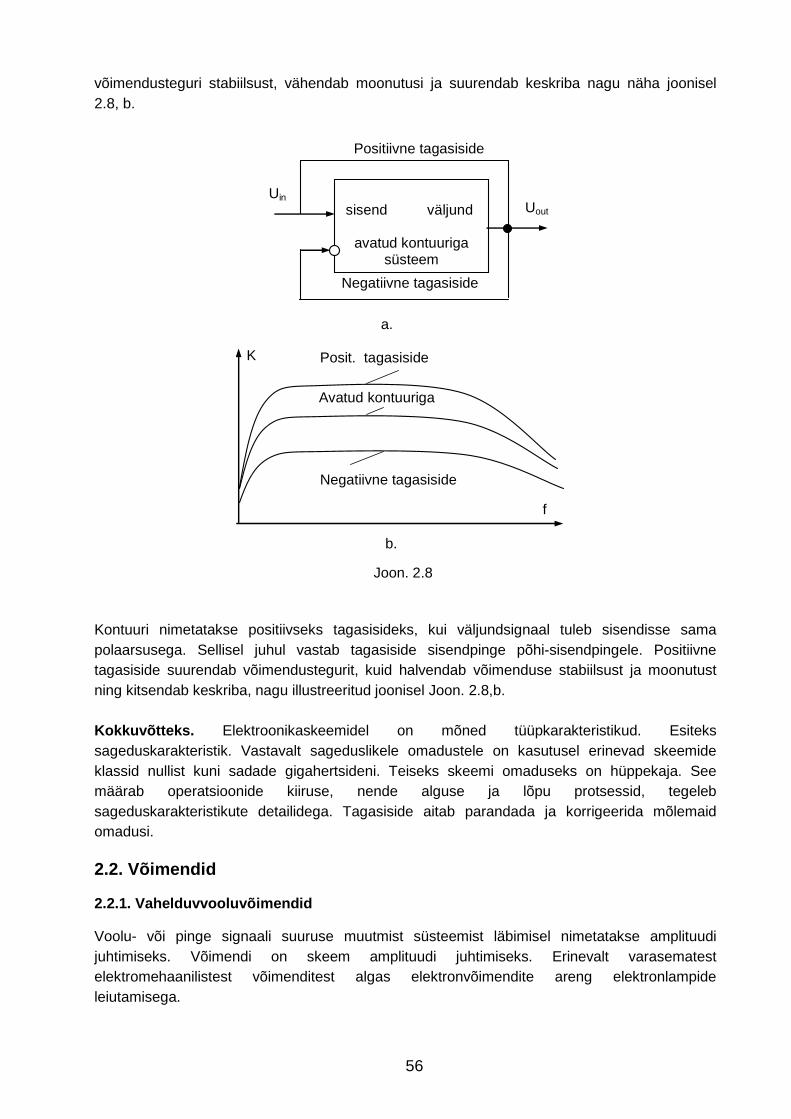
56
võimendusteguri stabiilsust, vähendab moonutusi ja suurendab keskriba nagu näha joonisel 2.8, b.
Avatud kontuuriga
K
f
Joon. 2.8
Posit. tagasiside
Negatiivne tagasiside
Uout Uin
Positiivne tagasiside
Negatiivne tagasiside
sisend väljund
avatud kontuuriga süsteem
a.
b.
Kontuuri nimetatakse positiivseks tagasisideks, kui väljundsignaal tuleb sisendisse sama polaarsusega. Sellisel juhul vastab tagasiside sisendpinge põhi-sisendpingele. Positiivne tagasiside suurendab võimendustegurit, kuid halvendab võimenduse stabiilsust ja moonutust ning kitsendab keskriba, nagu illustreeritud joonisel Joon. 2.8,b. Kokkuvõtteks. Elektroonikaskeemidel on mõned tüüpkarakteristikud. Esiteks sageduskarakteristik. Vastavalt sageduslikele omadustele on kasutusel erinevad skeemide klassid nullist kuni sadade gigahertsideni. Teiseks skeemi omaduseks on hüppekaja. See määrab operatsioonide kiiruse, nende alguse ja lõpu protsessid, tegeleb sageduskarakteristikute detailidega. Tagasiside aitab parandada ja korrigeerida mõlemaid omadusi.
2.2. Võimendid
2.2.1. Vahelduvvooluvõimendid
Voolu- või pinge signaali suuruse muutmist süsteemist läbimisel nimetatakse amplituudi juhtimiseks. Võimendi on skeem amplituudi juhtimiseks. Erinevalt varasematest elektromehaanilistest võimenditest algas elektronvõimendite areng elektronlampide leiutamisega.
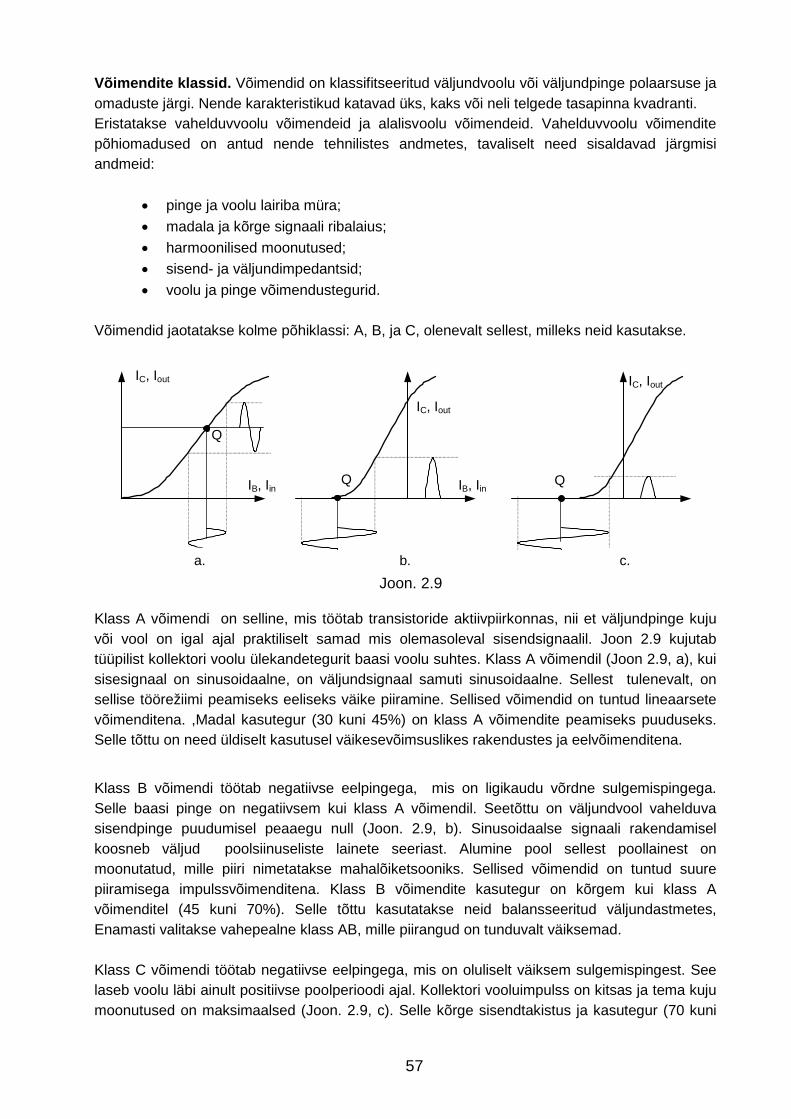
57
Võimendite klassid. Võimendid on klassifitseeritud väljundvoolu või väljundpinge polaarsuse ja omaduste järgi. Nende karakteristikud katavad üks, kaks või neli telgede tasapinna kvadranti. Eristatakse vahelduvvoolu võimendeid ja alalisvoolu võimendeid. Vahelduvvoolu võimendite põhiomadused on antud nende tehnilistes andmetes, tavaliselt need sisaldavad järgmisi andmeid:
• pinge ja voolu lairiba müra;
• madala ja kõrge signaali ribalaius;
• harmoonilised moonutused; • sisend- ja väljundimpedantsid;
• voolu ja pinge võimendustegurid. Võimendid jaotatakse kolme põhiklassi: A, B, ja C, olenevalt sellest, milleks neid kasutakse.
Q
IB, Iin
IC, Iout
Q IB, Iin
IC, Iout
Joon. 2.9
Q
IC, Iout
a. b. c.
Klass A võimendi on selline, mis töötab transistoride aktiivpiirkonnas, nii et väljundpinge kuju või vool on igal ajal praktiliselt samad mis olemasoleval sisendsignaalil. Joon 2.9 kujutab tüüpilist kollektori voolu ülekandetegurit baasi voolu suhtes. Klass A võimendil (Joon 2.9, a), kui sisesignaal on sinusoidaalne, on väljundsignaal samuti sinusoidaalne. Sellest tulenevalt, on sellise töörežiimi peamiseks eeliseks väike piiramine. Sellised võimendid on tuntud lineaarsete võimenditena. ,Madal kasutegur (30 kuni 45%) on klass A võimendite peamiseks puuduseks. Selle tõttu on need üldiselt kasutusel väikesevõimsuslikes rakendustes ja eelvõimenditena.
Klass B võimendi töötab negatiivse eelpingega, mis on ligikaudu võrdne sulgemispingega. Selle baasi pinge on negatiivsem kui klass A võimendil. Seetõttu on väljundvool vahelduva sisendpinge puudumisel peaaegu null (Joon. 2.9, b). Sinusoidaalse signaali rakendamisel koosneb väljud poolsiinuseliste lainete seeriast. Alumine pool sellest poollainest on moonutatud, mille piiri nimetatakse mahalõiketsooniks. Sellised võimendid on tuntud suure piiramisega impulssvõimenditena. Klass B võimendite kasutegur on kõrgem kui klass A võimenditel (45 kuni 70%). Selle tõttu kasutatakse neid balansseeritud väljundastmetes, Enamasti valitakse vahepealne klass AB, mille piirangud on tunduvalt väiksemad. Klass C võimendi töötab negatiivse eelpingega, mis on oluliselt väiksem sulgemispingest. See laseb voolu läbi ainult positiivse poolperioodi ajal. Kollektori vooluimpulss on kitsas ja tema kuju moonutused on maksimaalsed (Joon. 2.9, c). Selle kõrge sisendtakistus ja kasutegur (70 kuni
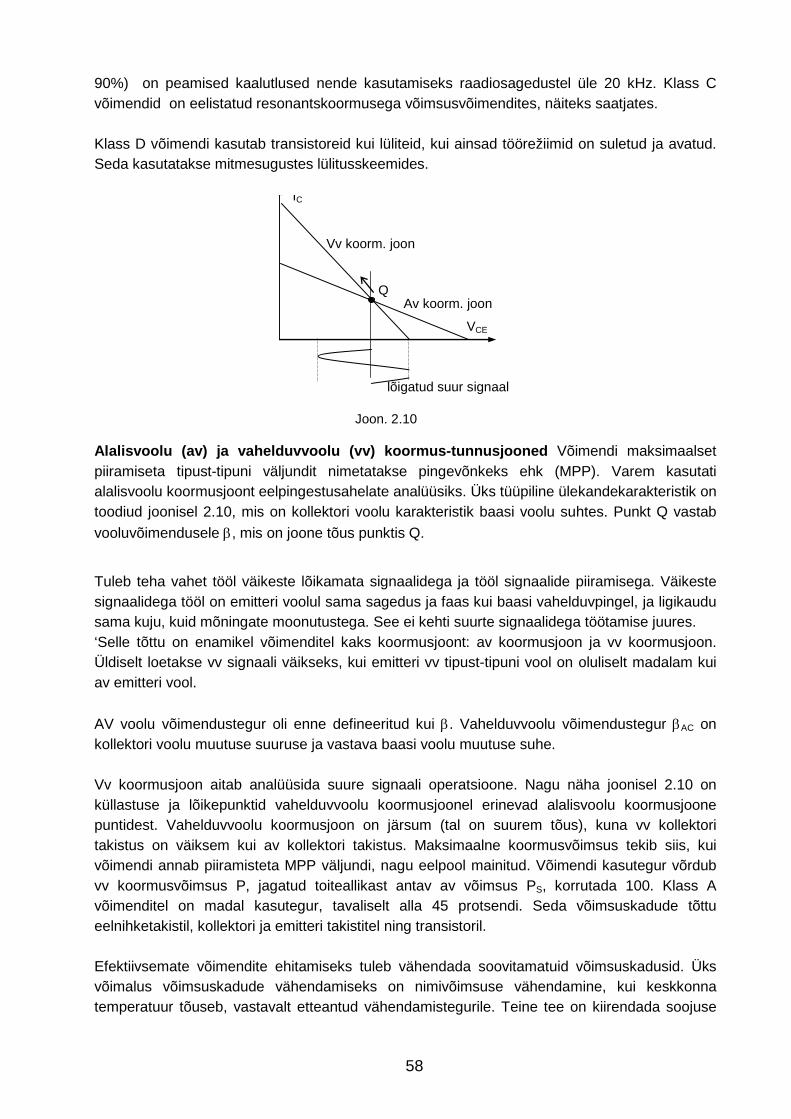
58
90%) on peamised kaalutlused nende kasutamiseks raadiosagedustel üle 20 kHz. Klass C võimendid on eelistatud resonantskoormusega võimsusvõimendites, näiteks saatjates. Klass D võimendi kasutab transistoreid kui lüliteid, kui ainsad töörežiimid on suletud ja avatud. Seda kasutatakse mitmesugustes lülitusskeemides.
Joon. 2.10
lõigatud suur signaal
Q Av koorm. joon
Vv koorm. joon
VCE
IC
Alalisvoolu (av) ja vahelduvvoolu (vv) koormus-tunn usjooned Võimendi maksimaalset piiramiseta tipust-tipuni väljundit nimetatakse pingevõnkeks ehk (MPP). Varem kasutati alalisvoolu koormusjoont eelpingestusahelate analüüsiks. Üks tüüpiline ülekandekarakteristik on toodiud joonisel 2.10, mis on kollektori voolu karakteristik baasi voolu suhtes. Punkt Q vastab
vooluvõimendusele β, mis on joone tõus punktis Q.
Tuleb teha vahet tööl väikeste lõikamata signaalidega ja tööl signaalide piiramisega. Väikeste signaalidega tööl on emitteri voolul sama sagedus ja faas kui baasi vahelduvpingel, ja ligikaudu sama kuju, kuid mõningate moonutustega. See ei kehti suurte signaalidega töötamise juures. ‘Selle tõttu on enamikel võimenditel kaks koormusjoont: av koormusjoon ja vv koormusjoon. Üldiselt loetakse vv signaali väikseks, kui emitteri vv tipust-tipuni vool on oluliselt madalam kui av emitteri vool.
AV voolu võimendustegur oli enne defineeritud kui β. Vahelduvvoolu võimendustegur βAC on kollektori voolu muutuse suuruse ja vastava baasi voolu muutuse suhe. Vv koormusjoon aitab analüüsida suure signaali operatsioone. Nagu näha joonisel 2.10 on küllastuse ja lõikepunktid vahelduvvoolu koormusjoonel erinevad alalisvoolu koormusjoone puntidest. Vahelduvvoolu koormusjoon on järsum (tal on suurem tõus), kuna vv kollektori takistus on väiksem kui av kollektori takistus. Maksimaalne koormusvõimsus tekib siis, kui võimendi annab piiramisteta MPP väljundi, nagu eelpool mainitud. Võimendi kasutegur võrdub vv koormusvõimsus P, jagatud toiteallikast antav av võimsus PS, korrutada 100. Klass A võimenditel on madal kasutegur, tavaliselt alla 45 protsendi. Seda võimsuskadude tõttu eelnihketakistil, kollektori ja emitteri takistitel ning transistoril. Efektiivsemate võimendite ehitamiseks tuleb vähendada soovitamatuid võimsuskadusid. Üks võimalus võimsuskadude vähendamiseks on nimivõimsuse vähendamine, kui keskkonna temperatuur tõuseb, vastavalt etteantud vähendamistegurile. Teine tee on kiirendada soojuse
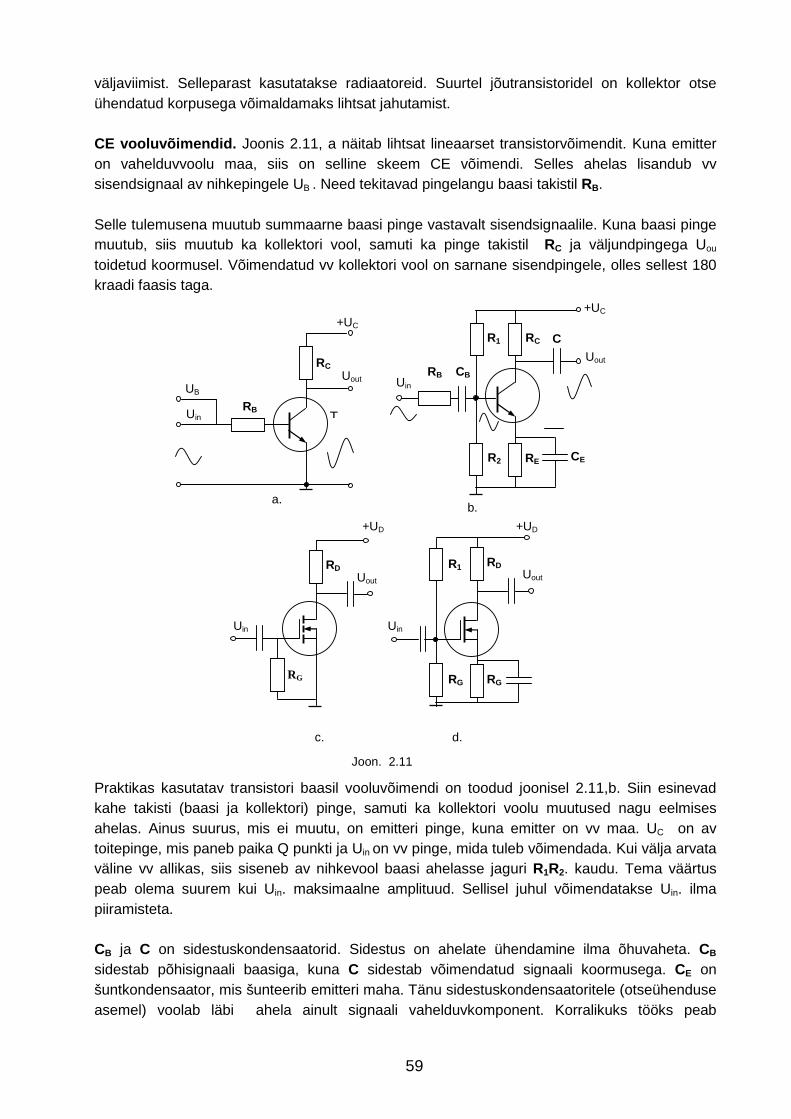
59
väljaviimist. Selleparast kasutatakse radiaatoreid. Suurtel jõutransistoridel on kollektor otse ühendatud korpusega võimaldamaks lihtsat jahutamist. CE vooluvõimendid. Joonis 2.11, a näitab lihtsat lineaarset transistorvõimendit. Kuna emitter on vahelduvvoolu maa, siis on selline skeem CE võimendi. Selles ahelas lisandub vv sisendsignaal av nihkepingele UB . Need tekitavad pingelangu baasi takistil RB. Selle tulemusena muutub summaarne baasi pinge vastavalt sisendsignaalile. Kuna baasi pinge muutub, siis muutub ka kollektori vool, samuti ka pinge takistil RC ja väljundpingega Uou toidetud koormusel. Võimendatud vv kollektori vool on sarnane sisendpingele, olles sellest 180 kraadi faasis taga.
R1
RB CB
+UC
RC C Uout
b.
RE CE R2
Uin
+UC
Uout
Uin T
a.
RC
UB
RB
Joon. 2.11
R1
RG RG
+UD
Uout RD
Uin
RG
Uin
+UD
Uout RD
c. d.
Praktikas kasutatav transistori baasil vooluvõimendi on toodud joonisel 2.11,b. Siin esinevad kahe takisti (baasi ja kollektori) pinge, samuti ka kollektori voolu muutused nagu eelmises ahelas. Ainus suurus, mis ei muutu, on emitteri pinge, kuna emitter on vv maa. UC on av toitepinge, mis paneb paika Q punkti ja Uin on vv pinge, mida tuleb võimendada. Kui välja arvata väline vv allikas, siis siseneb av nihkevool baasi ahelasse jaguri R1R2. kaudu. Tema väärtus peab olema suurem kui Uin. maksimaalne amplituud. Sellisel juhul võimendatakse Uin. ilma piiramisteta. CB ja C on sidestuskondensaatorid. Sidestus on ahelate ühendamine ilma õhuvaheta. CB sidestab põhisignaali baasiga, kuna C sidestab võimendatud signaali koormusega. CE on šuntkondensaator, mis šunteerib emitteri maha. Tänu sidestuskondensaatoritele (otseühenduse asemel) voolab läbi ahela ainult signaali vahelduvkomponent. Korralikuks tööks peab
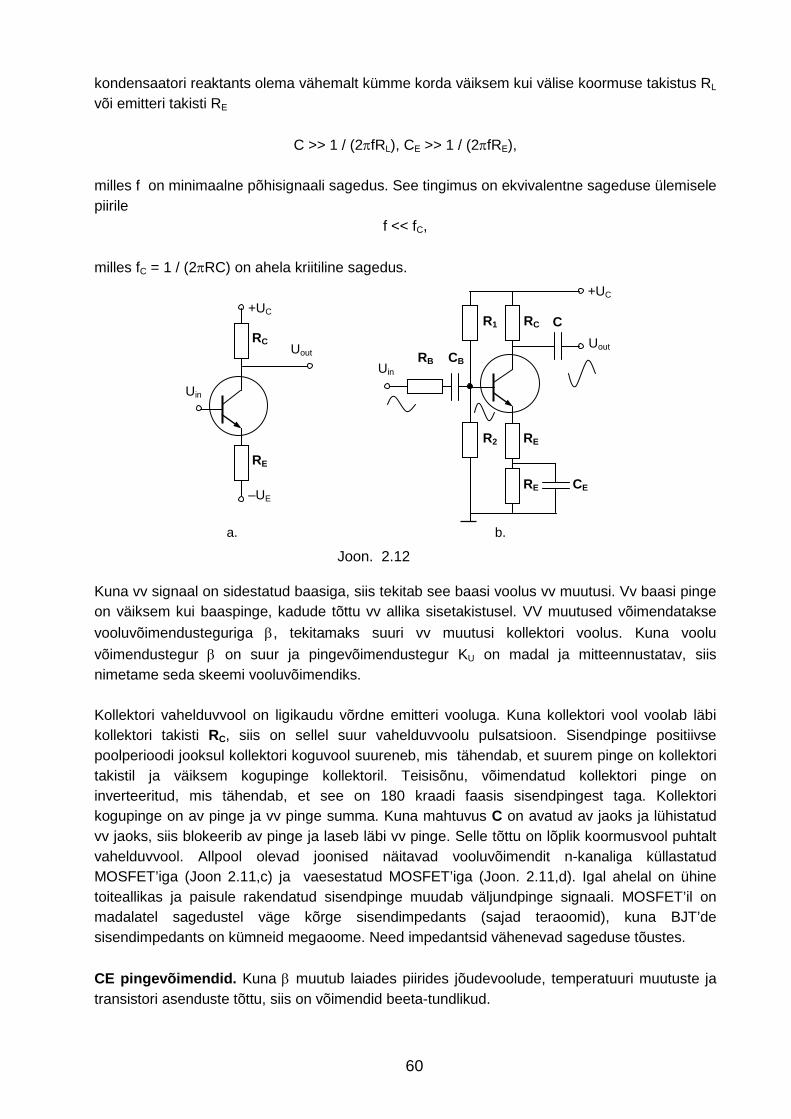
60
kondensaatori reaktants olema vähemalt kümme korda väiksem kui välise koormuse takistus RL või emitteri takisti RE
C >> 1 / (2πfRL), CE >> 1 / (2πfRE), milles f on minimaalne põhisignaali sagedus. See tingimus on ekvivalentne sageduse ülemisele piirile
f << fC,
milles fC = 1 / (2πRC) on ahela kriitiline sagedus.
–UE
Uout
RC C
Joon. 2.12
+UC
RE CE
RE R2
R1
RB CB Uin
b. a.
Uout
+UC
RE
Uin
RC
Kuna vv signaal on sidestatud baasiga, siis tekitab see baasi voolus vv muutusi. Vv baasi pinge on väiksem kui baaspinge, kadude tõttu vv allika sisetakistusel. VV muutused võimendatakse
vooluvõimendusteguriga β, tekitamaks suuri vv muutusi kollektori voolus. Kuna voolu
võimendustegur β on suur ja pingevõimendustegur KU on madal ja mitteennustatav, siis nimetame seda skeemi vooluvõimendiks. Kollektori vahelduvvool on ligikaudu võrdne emitteri vooluga. Kuna kollektori vool voolab läbi kollektori takisti RC, siis on sellel suur vahelduvvoolu pulsatsioon. Sisendpinge positiivse poolperioodi jooksul kollektori koguvool suureneb, mis tähendab, et suurem pinge on kollektori takistil ja väiksem kogupinge kollektoril. Teisisõnu, võimendatud kollektori pinge on inverteeritud, mis tähendab, et see on 180 kraadi faasis sisendpingest taga. Kollektori kogupinge on av pinge ja vv pinge summa. Kuna mahtuvus C on avatud av jaoks ja lühistatud vv jaoks, siis blokeerib av pinge ja laseb läbi vv pinge. Selle tõttu on lõplik koormusvool puhtalt vahelduvvool. Allpool olevad joonised näitavad vooluvõimendit n-kanaliga küllastatud MOSFET’iga (Joon 2.11,c) ja vaesestatud MOSFET’iga (Joon. 2.11,d). Igal ahelal on ühine toiteallikas ja paisule rakendatud sisendpinge muudab väljundpinge signaali. MOSFET’il on madalatel sagedustel väge kõrge sisendimpedants (sajad teraoomid), kuna BJT’de sisendimpedants on kümneid megaoome. Need impedantsid vähenevad sageduse tõustes.
CE pingevõimendid. Kuna β muutub laiades piirides jõudevoolude, temperatuuri muutuste ja transistori asenduste tõttu, siis on võimendid beeta-tundlikud.
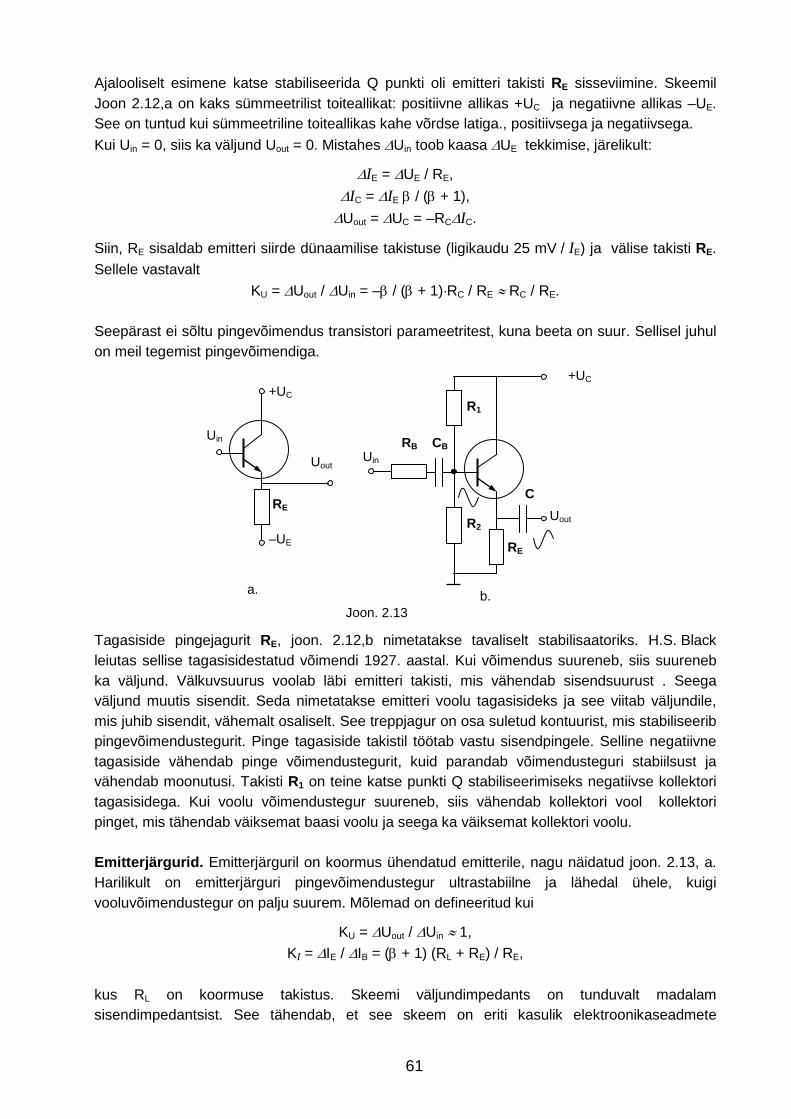
61
Ajalooliselt esimene katse stabiliseerida Q punkti oli emitteri takisti RE sisseviimine. Skeemil Joon 2.12,a on kaks sümmeetrilist toiteallikat: positiivne allikas +UC ja negatiivne allikas –UE. See on tuntud kui sümmeetriline toiteallikas kahe võrdse latiga., positiivsega ja negatiivsega.
Kui Uin = 0, siis ka väljund Uout = 0. Mistahes ∆Uin toob kaasa ∆UE tekkimise, järelikult:
∆IE = ∆UE / RE,
∆IC = ∆IE β / (β + 1),
∆Uout = ∆UC = –RC∆IC.
Siin, RE sisaldab emitteri siirde dünaamilise takistuse (ligikaudu 25 mV / IE) ja välise takisti RE.
Sellele vastavalt
KU = ∆Uout / ∆Uin = –β / (β + 1)⋅RC / RE ≈ RC / RE. Seepärast ei sõltu pingevõimendus transistori parameetritest, kuna beeta on suur. Sellisel juhul on meil tegemist pingevõimendiga.
b.
C
+UC
Uout
RE
R2
R1
RB CB Uin
Joon. 2.13
a.
–UE
Uout
+UC
RE
Uin
Tagasiside pingejagurit RE, joon. 2.12,b nimetatakse tavaliselt stabilisaatoriks. H.S. Black leiutas sellise tagasisidestatud võimendi 1927. aastal. Kui võimendus suureneb, siis suureneb ka väljund. Välkuvsuurus voolab läbi emitteri takisti, mis vähendab sisendsuurust . Seega väljund muutis sisendit. Seda nimetatakse emitteri voolu tagasisideks ja see viitab väljundile, mis juhib sisendit, vähemalt osaliselt. See treppjagur on osa suletud kontuurist, mis stabiliseerib pingevõimendustegurit. Pinge tagasiside takistil töötab vastu sisendpingele. Selline negatiivne tagasiside vähendab pinge võimendustegurit, kuid parandab võimendusteguri stabiilsust ja vähendab moonutusi. Takisti R1 on teine katse punkti Q stabiliseerimiseks negatiivse kollektori tagasisidega. Kui voolu võimendustegur suureneb, siis vähendab kollektori vool kollektori pinget, mis tähendab väiksemat baasi voolu ja seega ka väiksemat kollektori voolu. Emitterjärgurid. Emitterjärguril on koormus ühendatud emitterile, nagu näidatud joon. 2.13, a. Harilikult on emitterjärguri pingevõimendustegur ultrastabiilne ja lähedal ühele, kuigi vooluvõimendustegur on palju suurem. Mõlemad on defineeritud kui
KU = ∆Uout / ∆Uin ≈ 1,
KI = ∆IE / ∆IB = (β + 1) (RL + RE) / RE,
kus RL on koormuse takistus. Skeemi väljundimpedants on tunduvalt madalam sisendimpedantsist. See tähendab, et see skeem on eriti kasulik elektroonikaseadmete
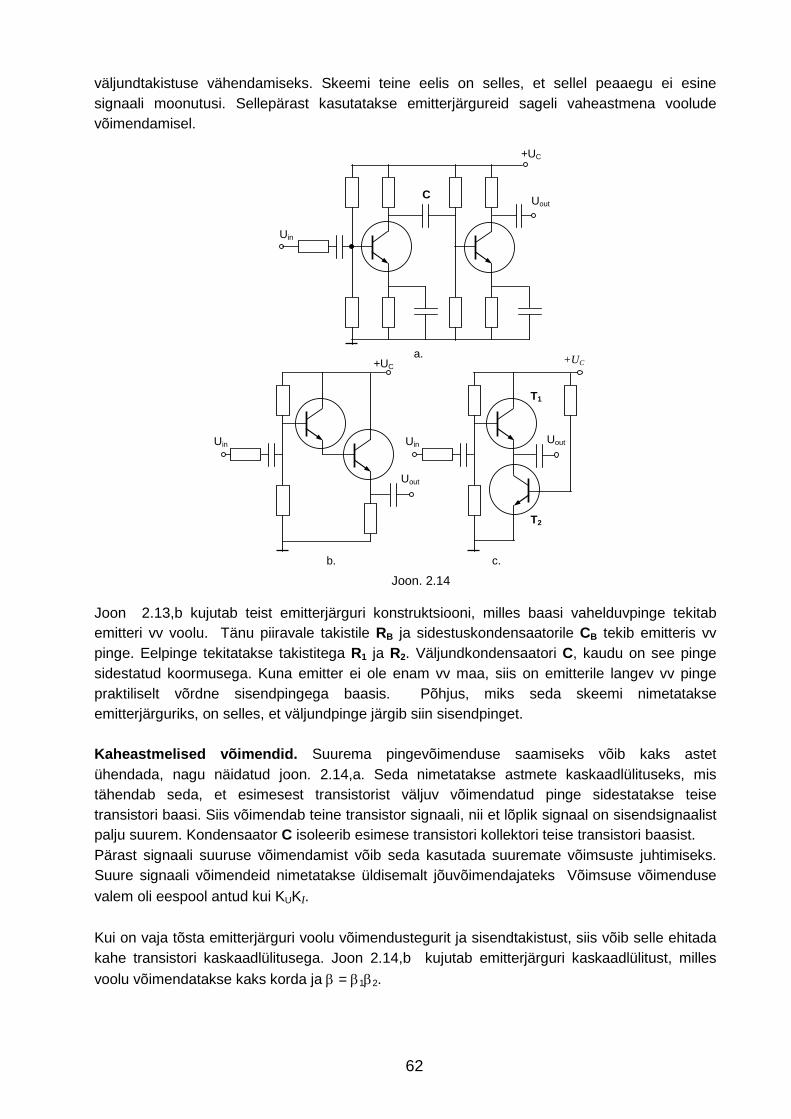
62
väljundtakistuse vähendamiseks. Skeemi teine eelis on selles, et sellel peaaegu ei esine signaali moonutusi. Sellepärast kasutatakse emitterjärgureid sageli vaheastmena voolude võimendamisel.
T1
T2
+UC
Uout
Joon. 2.14
+UC
Uout
Uin Uin
b. c.
Uout
+UC
a.
Uin
C
Joon 2.13,b kujutab teist emitterjärguri konstruktsiooni, milles baasi vahelduvpinge tekitab emitteri vv voolu. Tänu piiravale takistile RB ja sidestuskondensaatorile CB tekib emitteris vv pinge. Eelpinge tekitatakse takistitega R1 ja R2. Väljundkondensaatori C, kaudu on see pinge sidestatud koormusega. Kuna emitter ei ole enam vv maa, siis on emitterile langev vv pinge praktiliselt võrdne sisendpingega baasis. Põhjus, miks seda skeemi nimetatakse emitterjärguriks, on selles, et väljundpinge järgib siin sisendpinget. Kaheastmelised võimendid. Suurema pingevõimenduse saamiseks võib kaks astet ühendada, nagu näidatud joon. 2.14,a. Seda nimetatakse astmete kaskaadlülituseks, mis tähendab seda, et esimesest transistorist väljuv võimendatud pinge sidestatakse teise transistori baasi. Siis võimendab teine transistor signaali, nii et lõplik signaal on sisendsignaalist palju suurem. Kondensaator C isoleerib esimese transistori kollektori teise transistori baasist. Pärast signaali suuruse võimendamist võib seda kasutada suuremate võimsuste juhtimiseks. Suure signaali võimendeid nimetatakse üldisemalt jõuvõimendajateks Võimsuse võimenduse valem oli eespool antud kui KUKI.
Kui on vaja tõsta emitterjärguri voolu võimendustegurit ja sisendtakistust, siis võib selle ehitada kahe transistori kaskaadlülitusega. Joon 2.14,b kujutab emitterjärguri kaskaadlülitust, milles
voolu võimendatakse kaks korda ja β = β1β2.
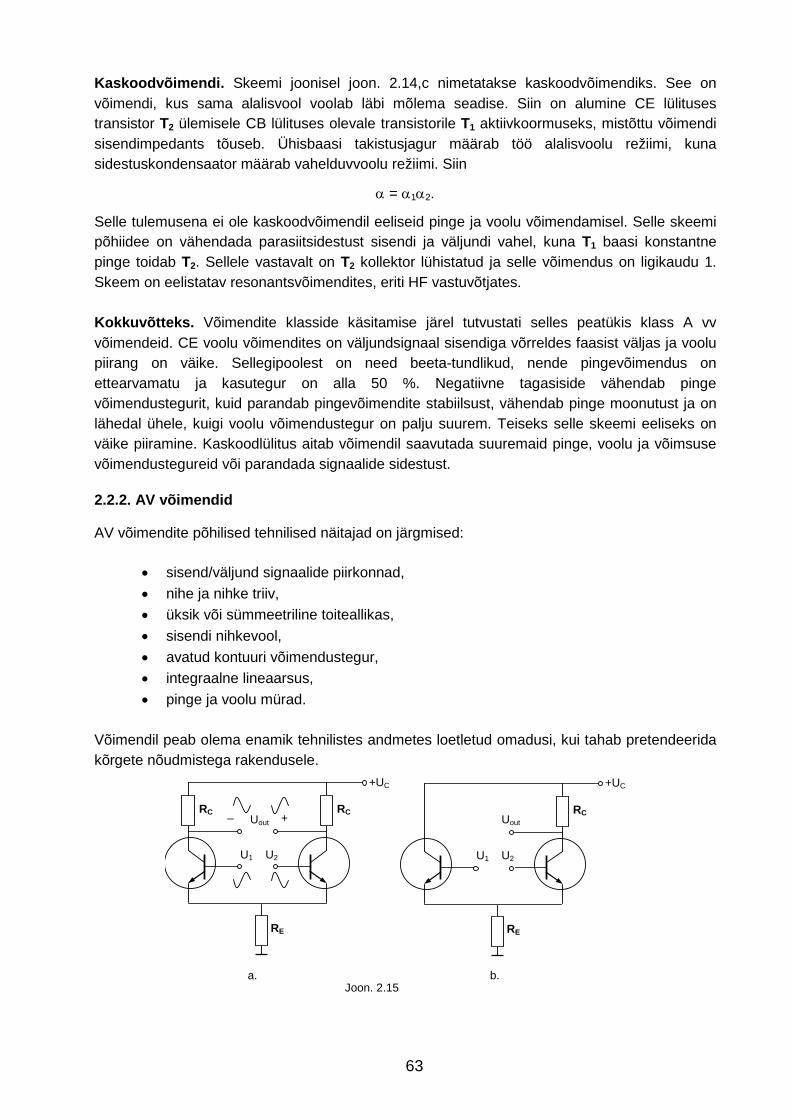
63
Kaskoodvõimendi. Skeemi joonisel joon. 2.14,c nimetatakse kaskoodvõimendiks. See on võimendi, kus sama alalisvool voolab läbi mõlema seadise. Siin on alumine CE lülituses transistor T2 ülemisele CB lülituses olevale transistorile T1 aktiivkoormuseks, mistõttu võimendi sisendimpedants tõuseb. Ühisbaasi takistusjagur määrab töö alalisvoolu režiimi, kuna sidestuskondensaator määrab vahelduvvoolu režiimi. Siin
α = α1α2.
Selle tulemusena ei ole kaskoodvõimendil eeliseid pinge ja voolu võimendamisel. Selle skeemi põhiidee on vähendada parasiitsidestust sisendi ja väljundi vahel, kuna T1 baasi konstantne pinge toidab T2. Sellele vastavalt on T2 kollektor lühistatud ja selle võimendus on ligikaudu 1. Skeem on eelistatav resonantsvõimendites, eriti HF vastuvõtjates. Kokkuvõtteks. Võimendite klasside käsitamise järel tutvustati selles peatükis klass A vv võimendeid. CE voolu võimendites on väljundsignaal sisendiga võrreldes faasist väljas ja voolu piirang on väike. Sellegipoolest on need beeta-tundlikud, nende pingevõimendus on ettearvamatu ja kasutegur on alla 50 %. Negatiivne tagasiside vähendab pinge võimendustegurit, kuid parandab pingevõimendite stabiilsust, vähendab pinge moonutust ja on lähedal ühele, kuigi voolu võimendustegur on palju suurem. Teiseks selle skeemi eeliseks on väike piiramine. Kaskoodlülitus aitab võimendil saavutada suuremaid pinge, voolu ja võimsuse võimendustegureid või parandada signaalide sidestust.
2.2.2. AV võimendid
AV võimendite põhilised tehnilised näitajad on järgmised:
• sisend/väljund signaalide piirkonnad,
• nihe ja nihke triiv, • üksik või sümmeetriline toiteallikas,
• sisendi nihkevool,
• avatud kontuuri võimendustegur, • integraalne lineaarsus,
• pinge ja voolu mürad.
Võimendil peab olema enamik tehnilistes andmetes loetletud omadusi, kui tahab pretendeerida kõrgete nõudmistega rakendusele.
+UC
b.
Uout
U2 U1
RE
RC
+UC
Uout
U2 U1
+ –
a.
RE
RC RC
Joon. 2.15
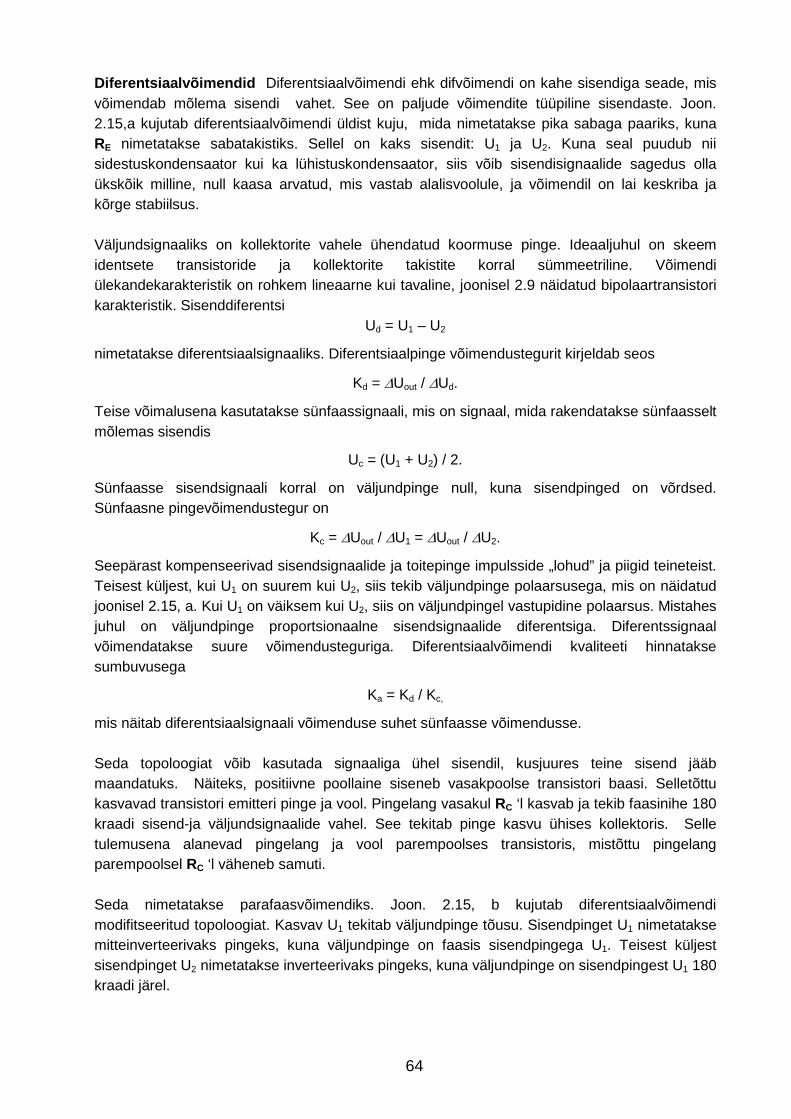
64
Diferentsiaalvõimendid Diferentsiaalvõimendi ehk difvõimendi on kahe sisendiga seade, mis võimendab mõlema sisendi vahet. See on paljude võimendite tüüpiline sisendaste. Joon. 2.15,a kujutab diferentsiaalvõimendi üldist kuju, mida nimetatakse pika sabaga paariks, kuna RE nimetatakse sabatakistiks. Sellel on kaks sisendit: U1 ja U2. Kuna seal puudub nii sidestuskondensaator kui ka lühistuskondensaator, siis võib sisendisignaalide sagedus olla ükskõik milline, null kaasa arvatud, mis vastab alalisvoolule, ja võimendil on lai keskriba ja kõrge stabiilsus. Väljundsignaaliks on kollektorite vahele ühendatud koormuse pinge. Ideaaljuhul on skeem identsete transistoride ja kollektorite takistite korral sümmeetriline. Võimendi ülekandekarakteristik on rohkem lineaarne kui tavaline, joonisel 2.9 näidatud bipolaartransistori karakteristik. Sisenddiferentsi
Ud = U1 – U2
nimetatakse diferentsiaalsignaaliks. Diferentsiaalpinge võimendustegurit kirjeldab seos
Kd = ∆Uout / ∆Ud.
Teise võimalusena kasutatakse sünfaassignaali, mis on signaal, mida rakendatakse sünfaasselt mõlemas sisendis
Uc = (U1 + U2) / 2.
Sünfaasse sisendsignaali korral on väljundpinge null, kuna sisendpinged on võrdsed. Sünfaasne pingevõimendustegur on
Kc = ∆Uout / ∆U1 = ∆Uout / ∆U2.
Seepärast kompenseerivad sisendsignaalide ja toitepinge impulsside „lohud” ja piigid teineteist. Teisest küljest, kui U1 on suurem kui U2, siis tekib väljundpinge polaarsusega, mis on näidatud joonisel 2.15, a. Kui U1 on väiksem kui U2, siis on väljundpingel vastupidine polaarsus. Mistahes juhul on väljundpinge proportsionaalne sisendsignaalide diferentsiga. Diferentssignaal võimendatakse suure võimendusteguriga. Diferentsiaalvõimendi kvaliteeti hinnatakse sumbuvusega
Ka = Kd / Kc,
mis näitab diferentsiaalsignaali võimenduse suhet sünfaasse võimendusse. Seda topoloogiat võib kasutada signaaliga ühel sisendil, kusjuures teine sisend jääb maandatuks. Näiteks, positiivne poollaine siseneb vasakpoolse transistori baasi. Selletõttu kasvavad transistori emitteri pinge ja vool. Pingelang vasakul RC ‘l kasvab ja tekib faasinihe 180 kraadi sisend-ja väljundsignaalide vahel. See tekitab pinge kasvu ühises kollektoris. Selle tulemusena alanevad pingelang ja vool parempoolses transistoris, mistõttu pingelang parempoolsel RC ‘l väheneb samuti. Seda nimetatakse parafaasvõimendiks. Joon. 2.15, b kujutab diferentsiaalvõimendi modifitseeritud topoloogiat. Kasvav U1 tekitab väljundpinge tõusu. Sisendpinget U1 nimetatakse mitteinverteerivaks pingeks, kuna väljundpinge on faasis sisendpingega U1. Teisest küljest sisendpinget U2 nimetatakse inverteerivaks pingeks, kuna väljundpinge on sisendpingest U1 180 kraadi järel.
65
Kaheastmeline av võimendi. Joon. 2.12 näidatud mahtuvus kahe astme vahel vähendab signaali ja nihutab neid faasis. See on võimendi sageduse piiramise peamine põhjus. Võimendite projekteerimisel on vaja laiemat ruumi. Veelgi enam, on palju rakendusi ilma vahelduvvoolu signaalita.
Joon. 2.16
R3
R2
R1
Uout
–UE
Uin
+UC
Otsesidestatud kaheastmeline võimendi on toodud joon. 2.16. Nagu on eelnevast nähtub, kui puudub sisendpinge Uin, siis peaks eelistatuim väljundpinge võrduma poolele toitepingest
Uout = UC / 2.
Tulemusena saavutatakse signaali maksimaalne võimsus ja amplituud. Mis puutub alalisvooluvõimenditesse, siis see probleem on lahendatud võrdsete lattidega sümmeetrilise toite kasutamisega. Pingejagurist R1, R2, R3, tingituna on vasaku transistori emitteri potentsiaal seatud veidi negatiivsemaks maa suhtes. Seega on vasakpoolne transistor avatud. Parempoolne transistor nihutab väljundpinge nullini ja samal ajal võimendab signaali. Seepärast, tingituna jaotatud toitest (võrdsed pinged - positiivne ja negatiivne) on jõudeoleku väljund ideaaljuhul 0 V, kui sisendpinge on null. Integraallülitused. J. Kilby firmast Texas Instruments leiutas esimese integraalskeemi (IC) 1958. aastal. Kilby’ga samaaegselt töötasid R. Noyce, kes samuti töötas välja IC, ja J. Hoerni, kes arendas planaar IC protsessi (mõlemad firmast Fairchild Semiconductor, 1959). 1965. aastal asutatud Analog Devices oli esimene firma, kas hakkas tootma integraallülitusi. Põhiline protsess, bipolaarprotsess, oli selleks ajaks esmaselt välja töötatud heade IC transistoride saamiseks. Siis hakkasid ilmuma komplementaarsed metall-oksüüd (CMOS) seadised. CMOS võimaldas palju suuremat pakkimistihedust ja madalamat võimsust kui bipolaarseadised, ja peagi muutus IC protsess parimaks valikuks. 1970-date alguses töötati välja uus tehnoloogiline protsess lineaarskeemide jaoks, mis nõudis stabiilseid täppistakisteid ja kalibreerimise võimalust. See oli kelmetakisti tehnoloogia. Kokkuvõtteks, bipolaarprotsess, ühendatuna kelmetakistite ja „vahvli kujundamise” lasertehnoloogiaga, viis IC kiirele arengule 1970-1990-datel aastatel. 1980. aastal võeti kasutusele komplementaarne bipolaarprotsess. CMOS ja bipolaarprotsess ühendati, saavutamaks nii madalavõimsuselist kõrgtihedat loogikat kui ka suure täpsusega madala müraga analooglülitust ühel kiibil. Monoliitsel IC’l on võimsuse hajuvus tavaliselt alla ühe vatti tänu FET transistoridele. Suuremavõimsuslikeks rakendusteks võib kasutada kelmet, koorikuid
66
ja hübriid-IC-d. Tavaliselt on CMOS’il või komplementaarses bipolaarprotsessis toodetud IC’l fikseeritud sisendpiirid, mis on vähemalt mõnisada millivolti kummaltki latilt. Hõreda integratsiooniga (SSI) IC’ tähendab vähemat kui 10 integreeritud komponenti. Keskmisel integratsioonil on 10 kuni 100 komponenti, lausintegratsioonis on enam kui 100 integreeritud komponenti. Operatsioonvõimendid (OV). Operatsioonvõimendid või opvõimendid e. OV on kõrgekvaliteedilised otseühendatud alalisvoolu võimendid, milles on hulk transistoreid. Opvõimendi põhiomadused on suur võimendustegur, suur sisendtakistus, väike väljundtakistus ja alalisvooluni ulatuv ribalaius. See lõpetab ühel kiibil olevate lülituste, nagu võimendid, pingeregulaatorid ja arvutiskeemid rea. Esimese opvõimendi npn-transistoridel töötas välja R. Widlar ja Fairchild Semiconductor tootis
IC’d µA702 ja µA709 alates 1964. aastast. Mõni aeg hiljem töötati välja komplementaarne bipolaartehnoloogia (CB) ja ilmusid opvõimendid pnp-transistoridel. Järgmiseks sammuks oli BIFET tehnoloogia bipolaarsetel FET seadistel, mis olid suurema sisendimpedantsi ning madalama sisendvoolu ja müraga. Algas väikseimate sisendvoolude, suurima sisendimpedantsiga ja minimaalsete kadudega CMOS’ide tootmine. Mitmed lineaarseadmed on praegu rajatud BiMOS (Bipolar Metaloxyde Semiconductor) tehnoloogiale ja kiiremad opvõimendid kasutavad firma Analog Devices XFCB (eXtra Fast Complementary Bipolar) tehnoloogiat. Opvõimendil võib olla üks sisend ja üks väljund, diferentsiaalsisend ja üks väljund, või diferentsiaalsisend ja diferentsiaalväljund. Joon. 2.17,a näitab tüüpilist opvõimendi topoloogiat. Sisendsignaalide ulatus määrab opvõimendi väljundpinge kaksikamplituudi nõuded. On palju ühe toiteallikaga võimendeid sisendiga, mis ulatub 0 V-st kuni positiivse toitepingeni. Kuid sisendpiirkond võib olla seatud selliselt, et sisendsignaal kummalgi lati poolel ulatub mõnesaja millivoldini. Sageli on vaja opvõimendeid sisendpingega, mis ulatub mõlema toitelatini, latist-latini töö. Latist-latini opvõimendid on väga populaarsed madala toitepingega (3 V ja vähem) kantavates seadmetes , kus tavalised opvõimendid ei võimalda suurt väljundi kaksikamplituudi. Paljudes ühe toitega rakendustes on nõutav, et sünfaasne sisendpinge piirkond ulatuks üheni toitelatist (tavaliselt negatiivne latt või maa). Sisendaste on diferentsiaalvõimendi, millele järgneb üks või enam võimendusastmeid ja väljund. Need astmed peavad tagama vajaliku võimendusteguri ja nihkepinge, mis sobiks alalisvoolusidestuses rakendusele. Joon 2.17,b kujutab opvõimendi lihtsustatud skeemi. Sisendaste on diferentsiaalvõimendi, mis kasutab pnp transistoreid T1 ja T2. T6 moodustab aktiivse koormuse, mis asendab sabatakisti. R2 ja D2 juhivad T6, eelpinget, mis tekitab diferentsiaalvõimendi sabavoolu. Tavalise takisti asemel kasutatakse T3 aktiivkoormust. Selle tõttu on diferentsiaalvõimendi pingevõimendustegur kõrge. Difvõimendis võimendatud signaal tüürib T4, baasi, mis on emitterjärgur. See aste väldib diferentsiaalvõimendi mahalaadimise. T4 –st väljuv signaal läheb transistorisse T5. Dioodid D4 ja D5 on lõppastme eelpingestamise osad, T7 on transistori T5. aktiivkoormus. Seepärast on T5 ja T7 kui CE aste väge suure pinge võimendusteguriga. CE astme võimendatud signaal läheb lõppastmesse, mis on klass B emitterjärgur T8 ja T9. Tänu sümmeetrilisele toitele on väljund 0 V, kui sisendpinge on null. Mistahes hälbimist 0 voldist
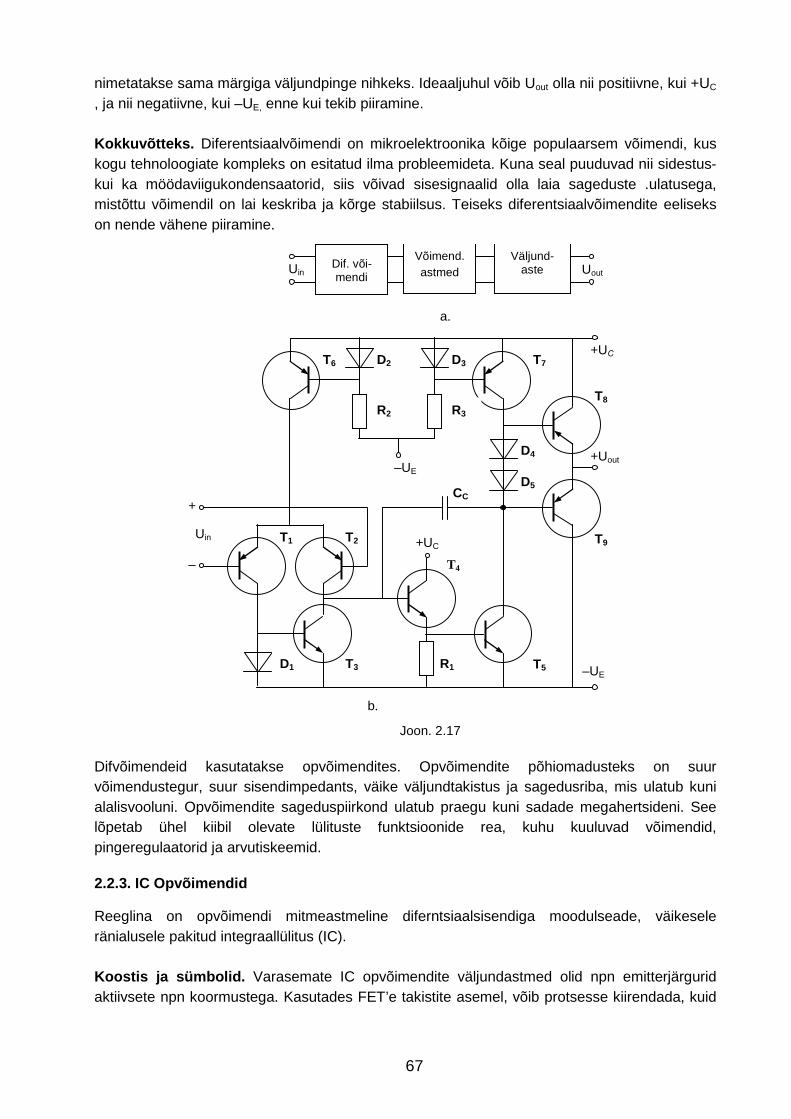
67
nimetatakse sama märgiga väljundpinge nihkeks. Ideaaljuhul võib Uout olla nii positiivne, kui +UC , ja nii negatiivne, kui –UE, enne kui tekib piiramine. Kokkuvõtteks. Diferentsiaalvõimendi on mikroelektroonika kõige populaarsem võimendi, kus kogu tehnoloogiate kompleks on esitatud ilma probleemideta. Kuna seal puuduvad nii sidestus- kui ka möödaviigukondensaatorid, siis võivad sisesignaalid olla laia sageduste .ulatusega, mistõttu võimendil on lai keskriba ja kõrge stabiilsus. Teiseks diferentsiaalvõimendite eeliseks on nende vähene piiramine.
Uout Uin Dif. või-mendi
Võimend.astmed
Väljund-aste
a.
+UC
D3 +UС
T7 T6
D4
D5
–UE
CC
T4
T3
T2 T1
–
Uin
b.
D1
+
R1 T5
T9
+Uout
T8
D2
R2 R3
–UE
Joon. 2.17
Difvõimendeid kasutatakse opvõimendites. Opvõimendite põhiomadusteks on suur võimendustegur, suur sisendimpedants, väike väljundtakistus ja sagedusriba, mis ulatub kuni alalisvooluni. Opvõimendite sageduspiirkond ulatub praegu kuni sadade megahertsideni. See lõpetab ühel kiibil olevate lülituste funktsioonide rea, kuhu kuuluvad võimendid, pingeregulaatorid ja arvutiskeemid.
2.2.3. IC Opvõimendid
Reeglina on opvõimendi mitmeastmeline diferntsiaalsisendiga moodulseade, väikesele ränialusele pakitud integraallülitus (IC). Koostis ja sümbolid. Varasemate IC opvõimendite väljundastmed olid npn emitterjärgurid aktiivsete npn koormustega. Kasutades FET’e takistite asemel, võib protsesse kiirendada, kuid
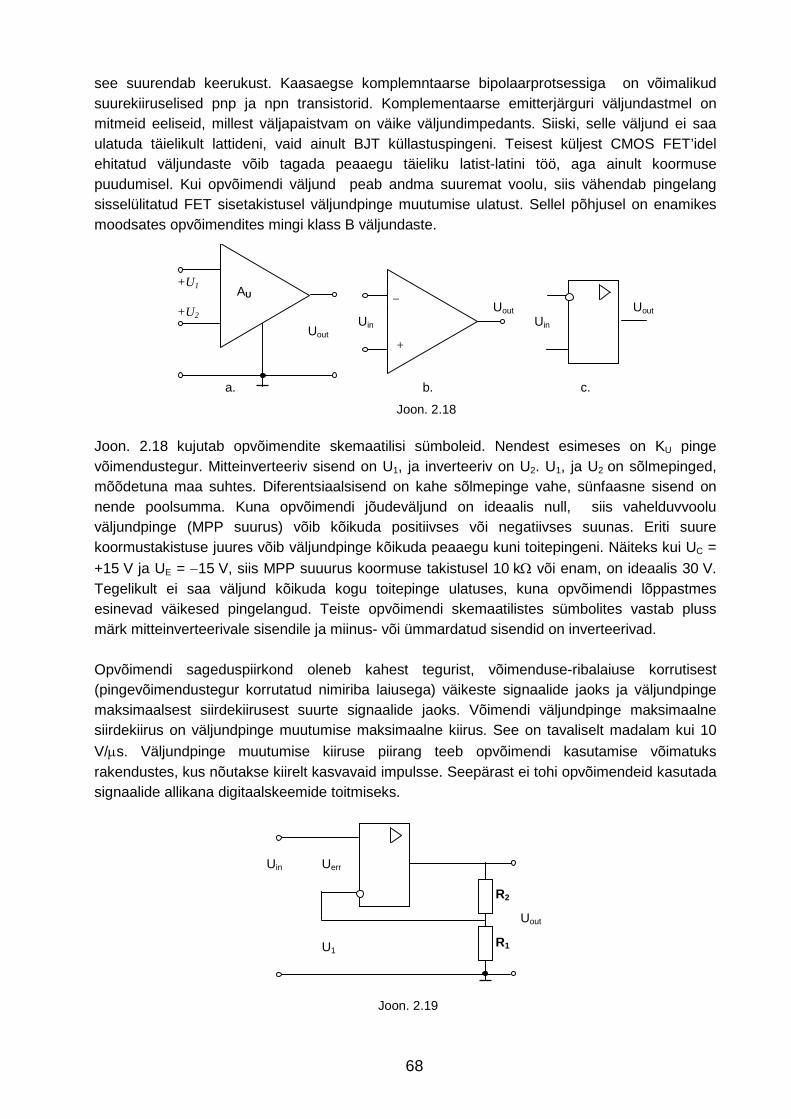
68
see suurendab keerukust. Kaasaegse komplemntaarse bipolaarprotsessiga on võimalikud suurekiiruselised pnp ja npn transistorid. Komplementaarse emitterjärguri väljundastmel on mitmeid eeliseid, millest väljapaistvam on väike väljundimpedants. Siiski, selle väljund ei saa ulatuda täielikult lattideni, vaid ainult BJT küllastuspingeni. Teisest küljest CMOS FET’idel ehitatud väljundaste võib tagada peaaegu täieliku latist-latini töö, aga ainult koormuse puudumisel. Kui opvõimendi väljund peab andma suuremat voolu, siis vähendab pingelang sisselülitatud FET sisetakistusel väljundpinge muutumise ulatust. Sellel põhjusel on enamikes moodsates opvõimendites mingi klass B väljundaste.
a.
+U2
Uout
+U1
Joon. 2.18
AU Uout
–
+
Uin Uout
Uin
b. c.
Joon. 2.18 kujutab opvõimendite skemaatilisi sümboleid. Nendest esimeses on KU pinge võimendustegur. Mitteinverteeriv sisend on U1, ja inverteeriv on U2. U1, ja U2 on sõlmepinged, mõõdetuna maa suhtes. Diferentsiaalsisend on kahe sõlmepinge vahe, sünfaasne sisend on nende poolsumma. Kuna opvõimendi jõudeväljund on ideaalis null, siis vahelduvvoolu väljundpinge (MPP suurus) võib kõikuda positiivses või negatiivses suunas. Eriti suure koormustakistuse juures võib väljundpinge kõikuda peaaegu kuni toitepingeni. Näiteks kui UC =
+15 V ja UE = −15 V, siis MPP suuurus koormuse takistusel 10 kΩ või enam, on ideaalis 30 V. Tegelikult ei saa väljund kõikuda kogu toitepinge ulatuses, kuna opvõimendi lõppastmes esinevad väikesed pingelangud. Teiste opvõimendi skemaatilistes sümbolites vastab pluss märk mitteinverteerivale sisendile ja miinus- või ümmardatud sisendid on inverteerivad. Opvõimendi sageduspiirkond oleneb kahest tegurist, võimenduse-ribalaiuse korrutisest (pingevõimendustegur korrutatud nimiriba laiusega) väikeste signaalide jaoks ja väljundpinge maksimaalsest siirdekiirusest suurte signaalide jaoks. Võimendi väljundpinge maksimaalne siirdekiirus on väljundpinge muutumise maksimaalne kiirus. See on tavaliselt madalam kui 10
V/µs. Väljundpinge muutumise kiiruse piirang teeb opvõimendi kasutamise võimatuks rakendustes, kus nõutakse kiirelt kasvavaid impulsse. Seepärast ei tohi opvõimendeid kasutada signaalide allikana digitaalskeemide toitmiseks.
R1
Uout
Uin
R2
U1
Uerr
Joon. 2.19
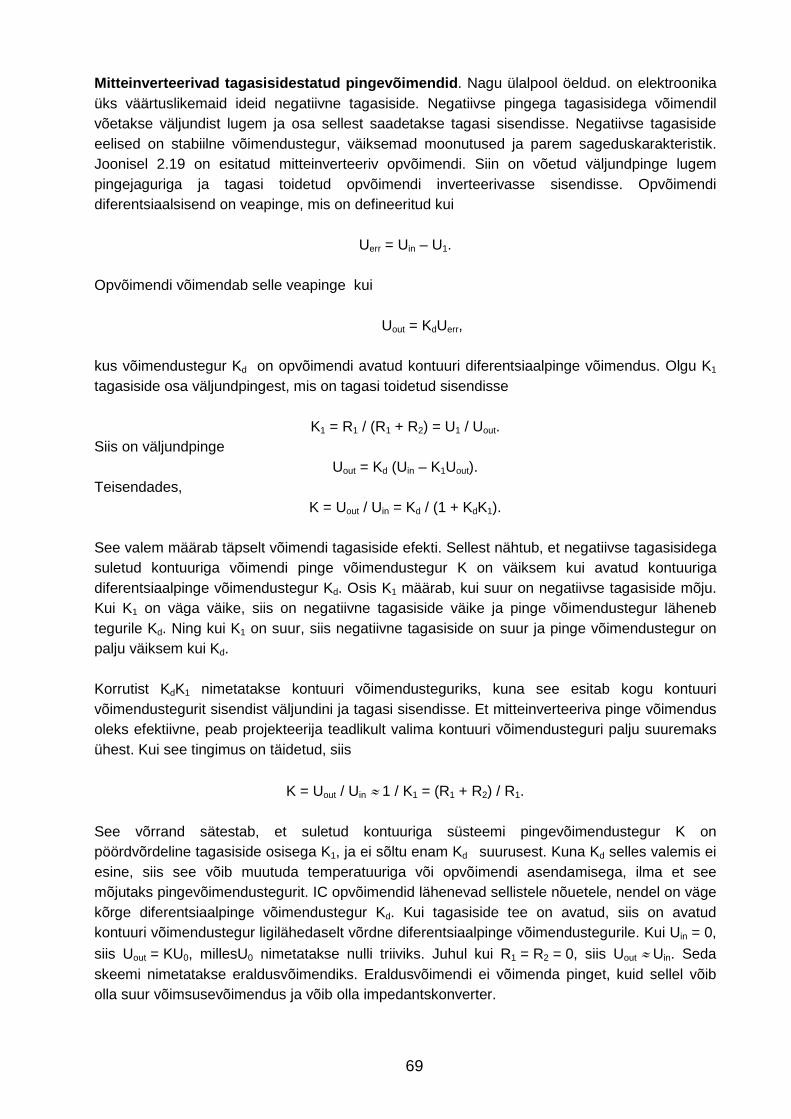
69
Mitteinverteerivad tagasisidestatud pingevõimendid . Nagu ülalpool öeldud. on elektroonika üks väärtuslikemaid ideid negatiivne tagasiside. Negatiivse pingega tagasisidega võimendil võetakse väljundist lugem ja osa sellest saadetakse tagasi sisendisse. Negatiivse tagasiside eelised on stabiilne võimendustegur, väiksemad moonutused ja parem sageduskarakteristik. Joonisel 2.19 on esitatud mitteinverteeriv opvõimendi. Siin on võetud väljundpinge lugem pingejaguriga ja tagasi toidetud opvõimendi inverteerivasse sisendisse. Opvõimendi diferentsiaalsisend on veapinge, mis on defineeritud kui
Uerr = Uin – U1.
Opvõimendi võimendab selle veapinge kui
Uout = KdUerr,
kus võimendustegur Kd on opvõimendi avatud kontuuri diferentsiaalpinge võimendus. Olgu K1 tagasiside osa väljundpingest, mis on tagasi toidetud sisendisse
K1 = R1 / (R1 + R2) = U1 / Uout.
Siis on väljundpinge Uout = Kd (Uin – K1Uout).
Teisendades, K = Uout / Uin = Kd / (1 + KdK1).
See valem määrab täpselt võimendi tagasiside efekti. Sellest nähtub, et negatiivse tagasisidega suletud kontuuriga võimendi pinge võimendustegur K on väiksem kui avatud kontuuriga diferentsiaalpinge võimendustegur Kd. Osis K1 määrab, kui suur on negatiivse tagasiside mõju. Kui K1 on väga väike, siis on negatiivne tagasiside väike ja pinge võimendustegur läheneb tegurile Kd. Ning kui K1 on suur, siis negatiivne tagasiside on suur ja pinge võimendustegur on palju väiksem kui Kd. Korrutist KdK1 nimetatakse kontuuri võimendusteguriks, kuna see esitab kogu kontuuri võimendustegurit sisendist väljundini ja tagasi sisendisse. Et mitteinverteeriva pinge võimendus oleks efektiivne, peab projekteerija teadlikult valima kontuuri võimendusteguri palju suuremaks ühest. Kui see tingimus on täidetud, siis
K = Uout / Uin ≈ 1 / K1 = (R1 + R2) / R1.
See võrrand sätestab, et suletud kontuuriga süsteemi pingevõimendustegur K on pöördvõrdeline tagasiside osisega K1, ja ei sõltu enam Kd suurusest. Kuna Kd selles valemis ei esine, siis see võib muutuda temperatuuriga või opvõimendi asendamisega, ilma et see mõjutaks pingevõimendustegurit. IC opvõimendid lähenevad sellistele nõuetele, nendel on väge kõrge diferentsiaalpinge võimendustegur Kd. Kui tagasiside tee on avatud, siis on avatud kontuuri võimendustegur ligilähedaselt võrdne diferentsiaalpinge võimendustegurile. Kui Uin = 0,
siis Uout = KU0, millesU0 nimetatakse nulli triiviks. Juhul kui R1 = R2 = 0, siis Uout ≈ Uin. Seda skeemi nimetatakse eraldusvõimendiks. Eraldusvõimendi ei võimenda pinget, kuid sellel võib olla suur võimsusevõimendus ja võib olla impedantskonverter.
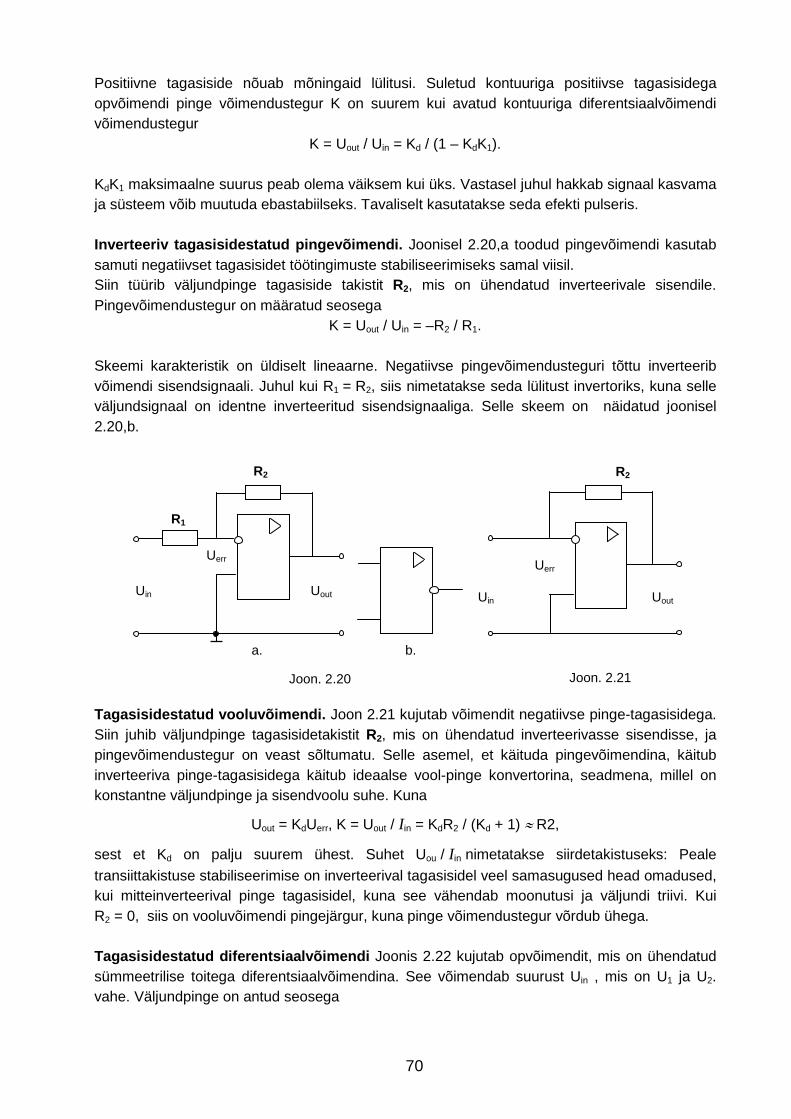
70
Positiivne tagasiside nõuab mõningaid lülitusi. Suletud kontuuriga positiivse tagasisidega opvõimendi pinge võimendustegur K on suurem kui avatud kontuuriga diferentsiaalvõimendi võimendustegur
K = Uout / Uin = Kd / (1 – KdK1). KdK1 maksimaalne suurus peab olema väiksem kui üks. Vastasel juhul hakkab signaal kasvama ja süsteem võib muutuda ebastabiilseks. Tavaliselt kasutatakse seda efekti pulseris. Inverteeriv tagasisidestatud pingevõimendi. Joonisel 2.20,a toodud pingevõimendi kasutab samuti negatiivset tagasisidet töötingimuste stabiliseerimiseks samal viisil. Siin tüürib väljundpinge tagasiside takistit R2, mis on ühendatud inverteerivale sisendile. Pingevõimendustegur on määratud seosega
K = Uout / Uin = –R2 / R1.
Skeemi karakteristik on üldiselt lineaarne. Negatiivse pingevõimendusteguri tõttu inverteerib võimendi sisendsignaali. Juhul kui R1 = R2, siis nimetatakse seda lülitust invertoriks, kuna selle väljundsignaal on identne inverteeritud sisendsignaaliga. Selle skeem on näidatud joonisel 2.20,b.
R2
Uout
Joon. 2.21
Uin
Uerr
Joon. 2.20
R2
Uout Uin
Uerr
R1
b. a.
Tagasisidestatud vooluvõimendi. Joon 2.21 kujutab võimendit negatiivse pinge-tagasisidega. Siin juhib väljundpinge tagasisidetakistit R2, mis on ühendatud inverteerivasse sisendisse, ja pingevõimendustegur on veast sõltumatu. Selle asemel, et käituda pingevõimendina, käitub inverteeriva pinge-tagasisidega käitub ideaalse vool-pinge konvertorina, seadmena, millel on konstantne väljundpinge ja sisendvoolu suhe. Kuna
Uout = KdUerr, K = Uout / I in = KdR2 / (Kd + 1) ≈ R2,
sest et Kd on palju suurem ühest. Suhet Uou / I in nimetatakse siirdetakistuseks: Peale
transiittakistuse stabiliseerimise on inverteerival tagasisidel veel samasugused head omadused, kui mitteinverteerival pinge tagasisidel, kuna see vähendab moonutusi ja väljundi triivi. Kui R2 = 0, siis on vooluvõimendi pingejärgur, kuna pinge võimendustegur võrdub ühega. Tagasisidestatud diferentsiaalvõimendi Joonis 2.22 kujutab opvõimendit, mis on ühendatud sümmeetrilise toitega diferentsiaalvõimendina. See võimendab suurust Uin , mis on U1 ja U2. vahe. Väljundpinge on antud seosega
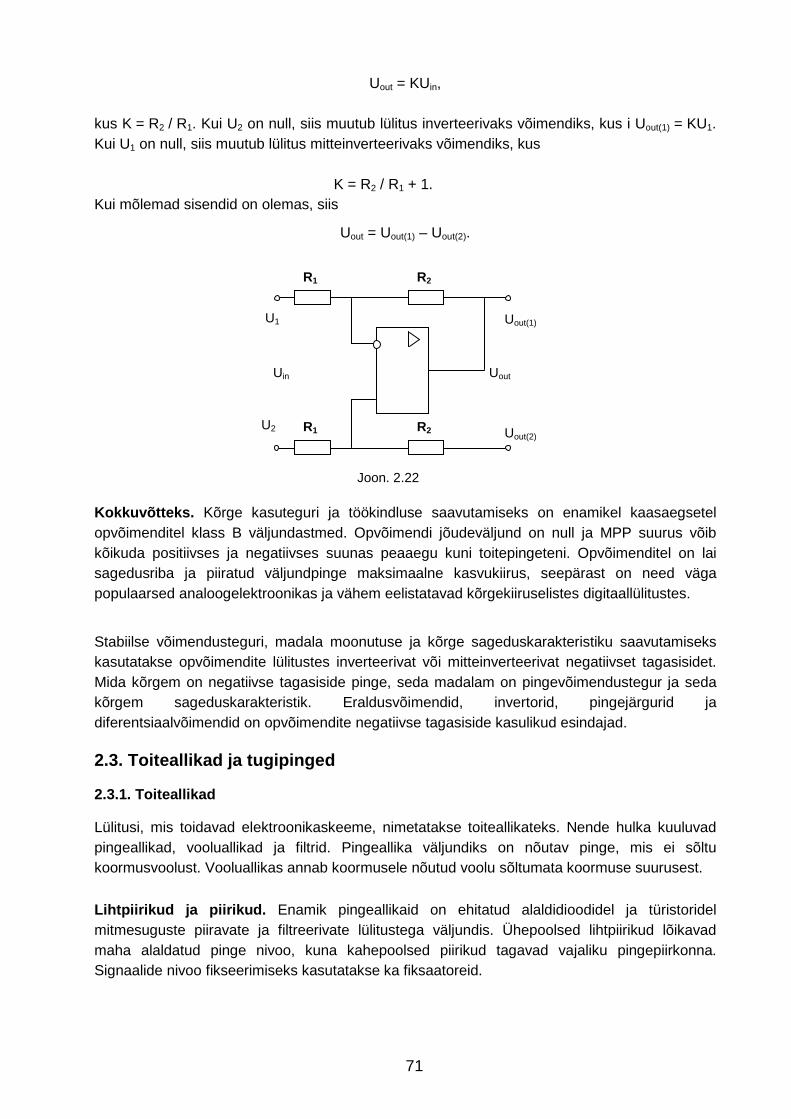
71
Uout = KUin,
kus K = R2 / R1. Kui U2 on null, siis muutub lülitus inverteerivaks võimendiks, kus i Uout(1) = KU1. Kui U1 on null, siis muutub lülitus mitteinverteerivaks võimendiks, kus
K = R2 / R1 + 1.
Kui mõlemad sisendid on olemas, siis
Uout = Uout(1) – Uout(2).
U2
R2 R1
R2 R1
Uout(1)
Uout(2)
Uout Uin
U1
Joon. 2.22
Kokkuvõtteks. Kõrge kasuteguri ja töökindluse saavutamiseks on enamikel kaasaegsetel opvõimenditel klass B väljundastmed. Opvõimendi jõudeväljund on null ja MPP suurus võib kõikuda positiivses ja negatiivses suunas peaaegu kuni toitepingeteni. Opvõimenditel on lai sagedusriba ja piiratud väljundpinge maksimaalne kasvukiirus, seepärast on need väga populaarsed analoogelektroonikas ja vähem eelistatavad kõrgekiiruselistes digitaallülitustes.
Stabiilse võimendusteguri, madala moonutuse ja kõrge sageduskarakteristiku saavutamiseks kasutatakse opvõimendite lülitustes inverteerivat või mitteinverteerivat negatiivset tagasisidet. Mida kõrgem on negatiivse tagasiside pinge, seda madalam on pingevõimendustegur ja seda kõrgem sageduskarakteristik. Eraldusvõimendid, invertorid, pingejärgurid ja diferentsiaalvõimendid on opvõimendite negatiivse tagasiside kasulikud esindajad.
2.3. Toiteallikad ja tugipinged
2.3.1. Toiteallikad
Lülitusi, mis toidavad elektroonikaskeeme, nimetatakse toiteallikateks. Nende hulka kuuluvad pingeallikad, vooluallikad ja filtrid. Pingeallika väljundiks on nõutav pinge, mis ei sõltu koormusvoolust. Vooluallikas annab koormusele nõutud voolu sõltumata koormuse suurusest.
Lihtpiirikud ja piirikud. Enamik pingeallikaid on ehitatud alaldidioodidel ja türistoridel mitmesuguste piiravate ja filtreerivate lülitustega väljundis. Ühepoolsed lihtpiirikud lõikavad maha alaldatud pinge nivoo, kuna kahepoolsed piirikud tagavad vajaliku pingepiirkonna. Signaalide nivoo fikseerimiseks kasutatakse ka fiksaatoreid.
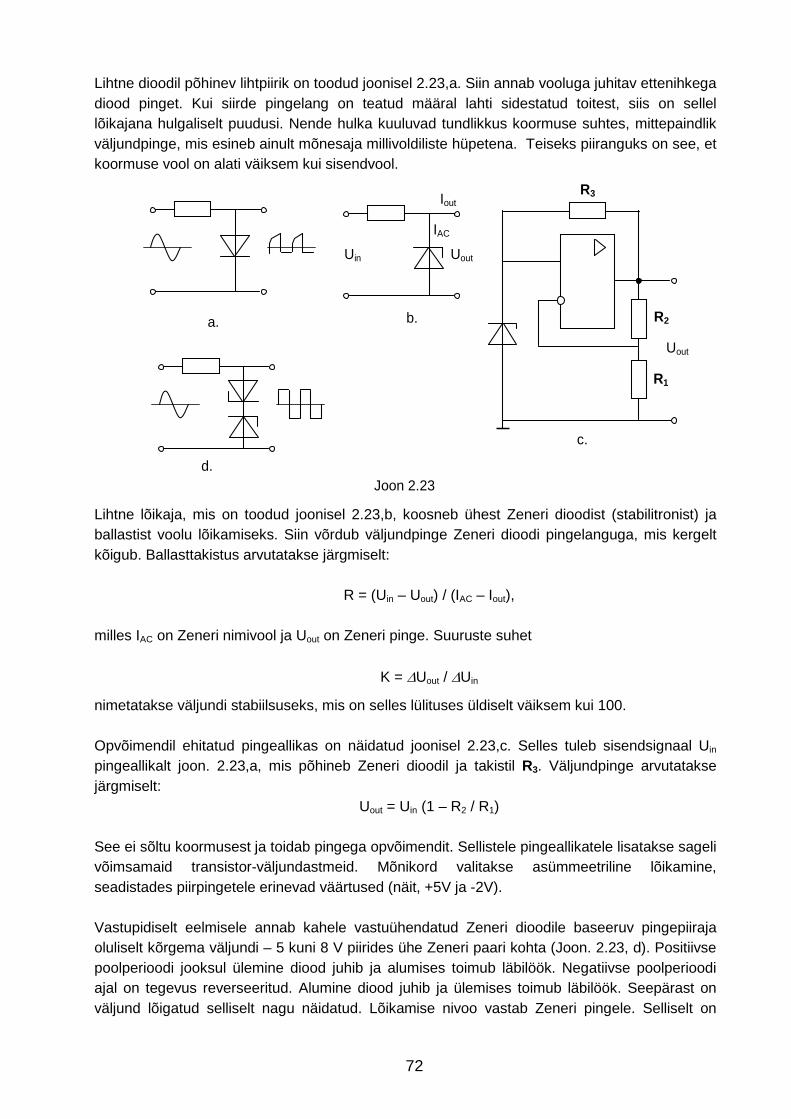
72
Lihtne dioodil põhinev lihtpiirik on toodud joonisel 2.23,a. Siin annab vooluga juhitav ettenihkega diood pinget. Kui siirde pingelang on teatud määral lahti sidestatud toitest, siis on sellel lõikajana hulgaliselt puudusi. Nende hulka kuuluvad tundlikkus koormuse suhtes, mittepaindlik väljundpinge, mis esineb ainult mõnesaja millivoldiliste hüpetena. Teiseks piiranguks on see, et koormuse vool on alati väiksem kui sisendvool.
R1
c.
Uout
R3
R2
Uout
IAC
Iout
b.
Uin
Joon 2.23 d.
a.
Lihtne lõikaja, mis on toodud joonisel 2.23,b, koosneb ühest Zeneri dioodist (stabilitronist) ja ballastist voolu lõikamiseks. Siin võrdub väljundpinge Zeneri dioodi pingelanguga, mis kergelt kõigub. Ballasttakistus arvutatakse järgmiselt:
R = (Uin – Uout) / (IAC – Iout),
milles IAC on Zeneri nimivool ja Uout on Zeneri pinge. Suuruste suhet
K = ∆Uout / ∆Uin
nimetatakse väljundi stabiilsuseks, mis on selles lülituses üldiselt väiksem kui 100.
Opvõimendil ehitatud pingeallikas on näidatud joonisel 2.23,c. Selles tuleb sisendsignaal Uin pingeallikalt joon. 2.23,a, mis põhineb Zeneri dioodil ja takistil R3. Väljundpinge arvutatakse järgmiselt:
Uout = Uin (1 – R2 / R1)
See ei sõltu koormusest ja toidab pingega opvõimendit. Sellistele pingeallikatele lisatakse sageli võimsamaid transistor-väljundastmeid. Mõnikord valitakse asümmeetriline lõikamine, seadistades piirpingetele erinevad väärtused (näit, +5V ja -2V). Vastupidiselt eelmisele annab kahele vastuühendatud Zeneri dioodile baseeruv pingepiiraja oluliselt kõrgema väljundi – 5 kuni 8 V piirides ühe Zeneri paari kohta (Joon. 2.23, d). Positiivse poolperioodi jooksul ülemine diood juhib ja alumises toimub läbilöök. Negatiivse poolperioodi ajal on tegevus reverseeritud. Alumine diood juhib ja ülemises toimub läbilöök. Seepärast on väljund lõigatud selliselt nagu näidatud. Lõikamise nivoo vastab Zeneri pingele. Selliselt on
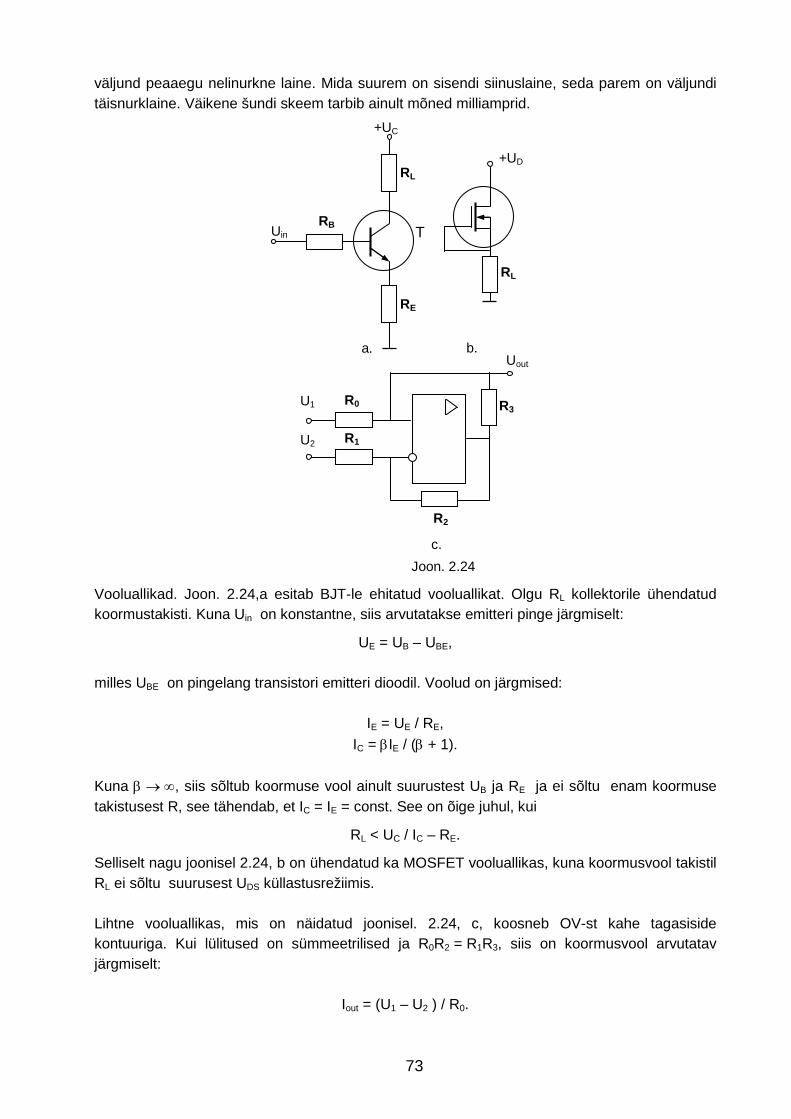
73
väljund peaaegu nelinurkne laine. Mida suurem on sisendi siinuslaine, seda parem on väljundi täisnurklaine. Väikene šundi skeem tarbib ainult mõned milliamprid.
U2 R1
R0
c.
Uout
U1 R3
R2
+UC
T
a.
RL
Uin RB
RE
RL
+UD
b.
Joon. 2.24
Vooluallikad. Joon. 2.24,a esitab BJT-le ehitatud vooluallikat. Olgu RL kollektorile ühendatud koormustakisti. Kuna Uin on konstantne, siis arvutatakse emitteri pinge järgmiselt:
UE = UB – UBE, milles UBE on pingelang transistori emitteri dioodil. Voolud on järgmised:
IE = UE / RE,
IC = βIE / (β + 1).
Kuna β → ∞, siis sõltub koormuse vool ainult suurustest UB ja RE ja ei sõltu enam koormuse takistusest R, see tähendab, et IC = IE = const. See on õige juhul, kui
RL < UC / IC – RE.
Selliselt nagu joonisel 2.24, b on ühendatud ka MOSFET vooluallikas, kuna koormusvool takistil RL ei sõltu suurusest UDS küllastusrežiimis. Lihtne vooluallikas, mis on näidatud joonisel. 2.24, c, koosneb OV-st kahe tagasiside kontuuriga. Kui lülitused on sümmeetrilised ja R0R2 = R1R3, siis on koormusvool arvutatav järgmiselt:
Iout = (U1 – U2 ) / R0.
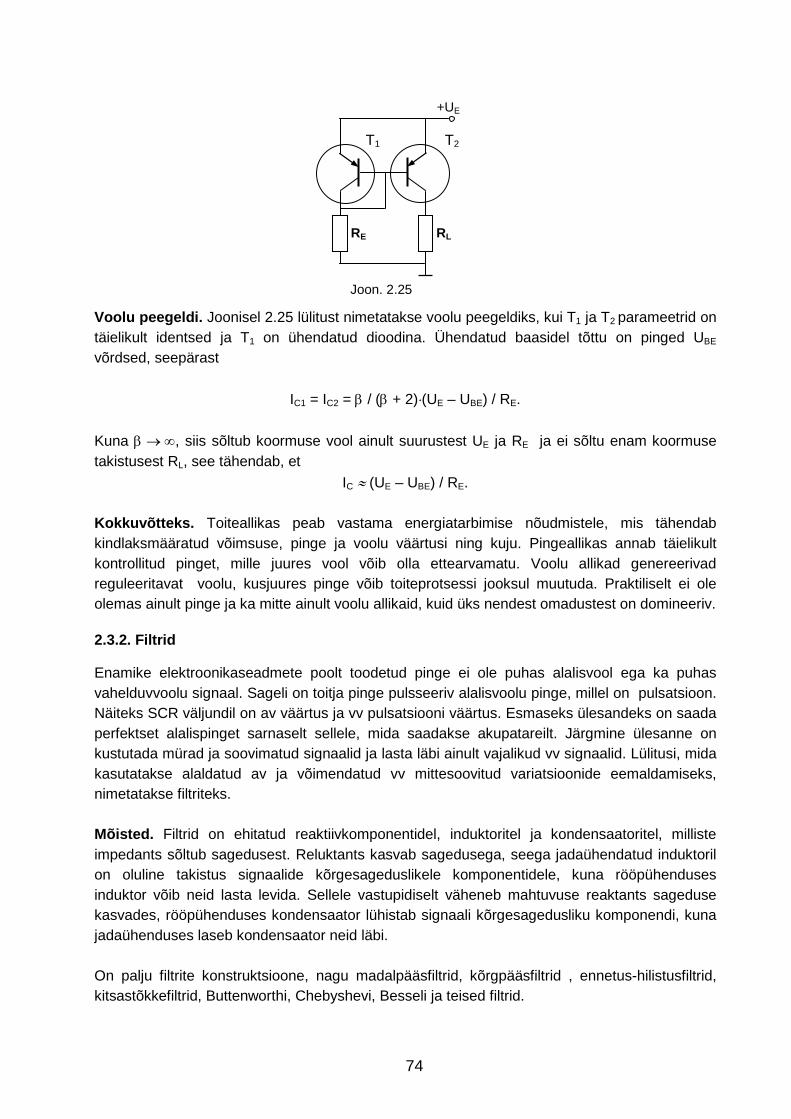
74
T1
+UE
T2
Joon. 2.25
RL RE
Voolu peegeldi. Joonisel 2.25 lülitust nimetatakse voolu peegeldiks, kui T1 ja T2 parameetrid on täielikult identsed ja T1 on ühendatud dioodina. Ühendatud baasidel tõttu on pinged UBE võrdsed, seepärast
IC1 = IC2 = β / (β + 2)⋅(UE – UBE) / RE.
Kuna β → ∞, siis sõltub koormuse vool ainult suurustest UE ja RE ja ei sõltu enam koormuse takistusest RL, see tähendab, et
IC ≈ (UE – UBE) / RE. Kokkuvõtteks. Toiteallikas peab vastama energiatarbimise nõudmistele, mis tähendab kindlaksmääratud võimsuse, pinge ja voolu väärtusi ning kuju. Pingeallikas annab täielikult kontrollitud pinget, mille juures vool võib olla ettearvamatu. Voolu allikad genereerivad reguleeritavat voolu, kusjuures pinge võib toiteprotsessi jooksul muutuda. Praktiliselt ei ole olemas ainult pinge ja ka mitte ainult voolu allikaid, kuid üks nendest omadustest on domineeriv.
2.3.2. Filtrid
Enamike elektroonikaseadmete poolt toodetud pinge ei ole puhas alalisvool ega ka puhas vahelduvvoolu signaal. Sageli on toitja pinge pulsseeriv alalisvoolu pinge, millel on pulsatsioon. Näiteks SCR väljundil on av väärtus ja vv pulsatsiooni väärtus. Esmaseks ülesandeks on saada perfektset alalispinget sarnaselt sellele, mida saadakse akupatareilt. Järgmine ülesanne on kustutada mürad ja soovimatud signaalid ja lasta läbi ainult vajalikud vv signaalid. Lülitusi, mida kasutatakse alaldatud av ja võimendatud vv mittesoovitud variatsioonide eemaldamiseks, nimetatakse filtriteks. Mõisted. Filtrid on ehitatud reaktiivkomponentidel, induktoritel ja kondensaatoritel, milliste impedants sõltub sagedusest. Reluktants kasvab sagedusega, seega jadaühendatud induktoril on oluline takistus signaalide kõrgesageduslikele komponentidele, kuna rööpühenduses induktor võib neid lasta levida. Sellele vastupidiselt väheneb mahtuvuse reaktants sageduse kasvades, rööpühenduses kondensaator lühistab signaali kõrgesagedusliku komponendi, kuna jadaühenduses laseb kondensaator neid läbi. On palju filtrite konstruktsioone, nagu madalpääsfiltrid, kõrgpääsfiltrid , ennetus-hilistusfiltrid, kitsastõkkefiltrid, Buttenworthi, Chebyshevi, Besseli ja teised filtrid.
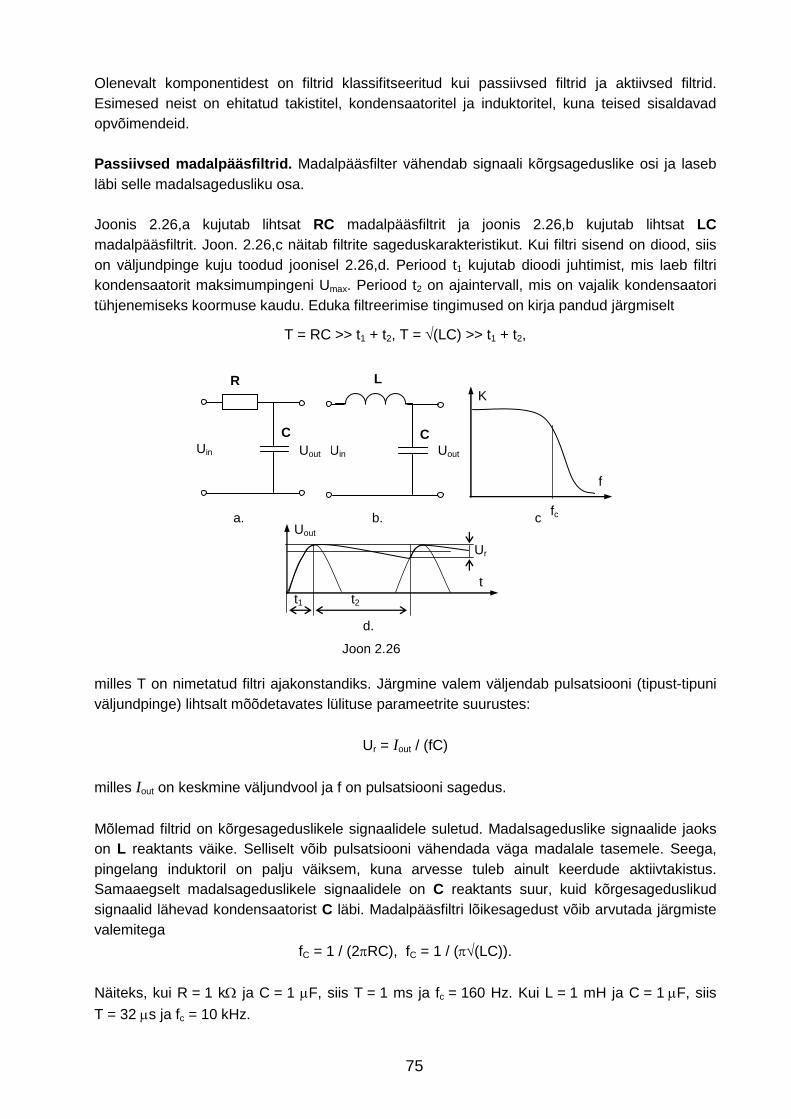
75
Olenevalt komponentidest on filtrid klassifitseeritud kui passiivsed filtrid ja aktiivsed filtrid. Esimesed neist on ehitatud takistitel, kondensaatoritel ja induktoritel, kuna teised sisaldavad opvõimendeid. Passiivsed madalpääsfiltrid. Madalpääsfilter vähendab signaali kõrgsageduslike osi ja laseb läbi selle madalsagedusliku osa. Joonis 2.26,a kujutab lihtsat RC madalpääsfiltrit ja joonis 2.26,b kujutab lihtsat LC madalpääsfiltrit. Joon. 2.26,c näitab filtrite sageduskarakteristikut. Kui filtri sisend on diood, siis on väljundpinge kuju toodud joonisel 2.26,d. Periood t1 kujutab dioodi juhtimist, mis laeb filtri kondensaatorit maksimumpingeni Umax. Periood t2 on ajaintervall, mis on vajalik kondensaatori tühjenemiseks koormuse kaudu. Eduka filtreerimise tingimused on kirja pandud järgmiselt
T = RC >> t1 + t2, T = √(LC) >> t1 + t2,
d.
Uin
c.
t2 t1
Ur
Uout
t
C
Joon 2.26
Uout
fc
K
f
Uin
a.
R
C Uout
b.
L
milles T on nimetatud filtri ajakonstandiks. Järgmine valem väljendab pulsatsiooni (tipust-tipuni väljundpinge) lihtsalt mõõdetavates lülituse parameetrite suurustes:
Ur = Iout / (fC)
milles Iout on keskmine väljundvool ja f on pulsatsiooni sagedus.
Mõlemad filtrid on kõrgesageduslikele signaalidele suletud. Madalsageduslike signaalide jaoks on L reaktants väike. Selliselt võib pulsatsiooni vähendada väga madalale tasemele. Seega, pingelang induktoril on palju väiksem, kuna arvesse tuleb ainult keerdude aktiivtakistus. Samaaegselt madalsageduslikele signaalidele on C reaktants suur, kuid kõrgesageduslikud signaalid lähevad kondensaatorist C läbi. Madalpääsfiltri lõikesagedust võib arvutada järgmiste valemitega
fC = 1 / (2πRC), fC = 1 / (π√(LC)).
Näiteks, kui R = 1 kΩ ja C = 1 µF, siis T = 1 ms ja fc = 160 Hz. Kui L = 1 mH ja C = 1 µF, siis
T = 32 µs ja fc = 10 kHz.
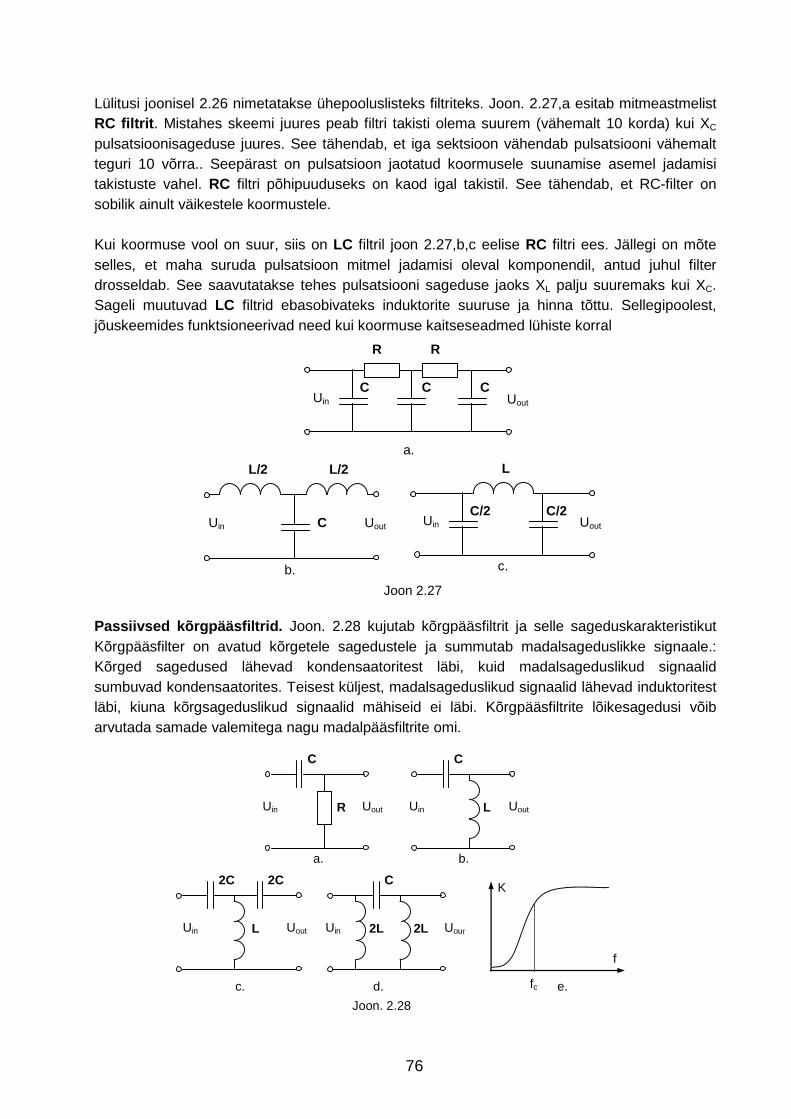
76
Lülitusi joonisel 2.26 nimetatakse ühepooluslisteks filtriteks. Joon. 2.27,a esitab mitmeastmelist RC filtrit . Mistahes skeemi juures peab filtri takisti olema suurem (vähemalt 10 korda) kui XC pulsatsioonisageduse juures. See tähendab, et iga sektsioon vähendab pulsatsiooni vähemalt teguri 10 võrra.. Seepärast on pulsatsioon jaotatud koormusele suunamise asemel jadamisi takistuste vahel. RC filtri põhipuuduseks on kaod igal takistil. See tähendab, et RC-filter on sobilik ainult väikestele koormustele. Kui koormuse vool on suur, siis on LC filtril joon 2.27,b,c eelise RC filtri ees. Jällegi on mõte selles, et maha suruda pulsatsioon mitmel jadamisi oleval komponendil, antud juhul filter drosseldab. See saavutatakse tehes pulsatsiooni sageduse jaoks XL palju suuremaks kui XC. Sageli muutuvad LC filtrid ebasobivateks induktorite suuruse ja hinna tõttu. Sellegipoolest, jõuskeemides funktsioneerivad need kui koormuse kaitseseadmed lühiste korral
c. b.
Uin
R
C C
a.
R
C Uout
L/2 L/2
C Uin Uout
L
Uin C/2 C/2
Uout
Joon 2.27
Passiivsed kõrgpääsfiltrid. Joon. 2.28 kujutab kõrgpääsfiltrit ja selle sageduskarakteristikut Kõrgpääsfilter on avatud kõrgetele sagedustele ja summutab madalsageduslikke signaale.: Kõrged sagedused lähevad kondensaatoritest läbi, kuid madalsageduslikud signaalid sumbuvad kondensaatorites. Teisest küljest, madalsageduslikud signaalid lähevad induktoritest läbi, kiuna kõrgsageduslikud signaalid mähiseid ei läbi. Kõrgpääsfiltrite lõikesagedusi võib arvutada samade valemitega nagu madalpääsfiltrite omi.
a. b.
c. d. e.
Uout
L
C
Uin Uout
Joon. 2.28
L
2C 2C
Uout Uin 2L
C
2L Uin
fc
K
f
R
C
Uin Uout
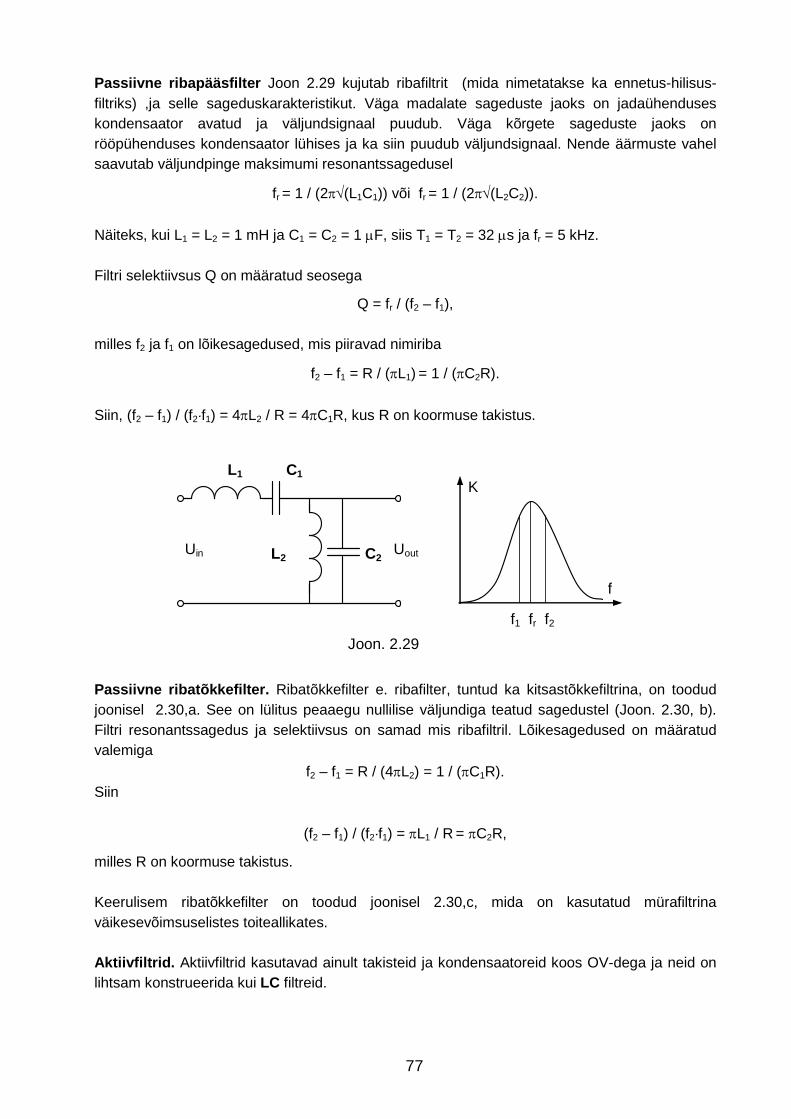
77
Passiivne ribapääsfilter Joon 2.29 kujutab ribafiltrit (mida nimetatakse ka ennetus-hilisus-filtriks) ,ja selle sageduskarakteristikut. Väga madalate sageduste jaoks on jadaühenduses kondensaator avatud ja väljundsignaal puudub. Väga kõrgete sageduste jaoks on rööpühenduses kondensaator lühises ja ka siin puudub väljundsignaal. Nende äärmuste vahel saavutab väljundpinge maksimumi resonantssagedusel
fr = 1 / (2π√(L1C1)) või fr = 1 / (2π√(L2C2)).
Näiteks, kui L1 = L2 = 1 mH ja C1 = C2 = 1 µF, siis T1 = T2 = 32 µs ja fr = 5 kHz. Filtri selektiivsus Q on määratud seosega
Q = fr / (f2 – f1),
milles f2 ja f1 on lõikesagedused, mis piiravad nimiriba
f2 – f1 = R / (πL1) = 1 / (πC2R).
Siin, (f2 – f1) / (f2⋅f1) = 4πL2 / R = 4πC1R, kus R on koormuse takistus.
K
f
C1 L1
C2 L2
Joon. 2.29
Uin Uout
f1 fr f2
Passiivne ribatõkkefilter. Ribatõkkefilter e. ribafilter, tuntud ka kitsastõkkefiltrina, on toodud joonisel 2.30,a. See on lülitus peaaegu nullilise väljundiga teatud sagedustel (Joon. 2.30, b). Filtri resonantssagedus ja selektiivsus on samad mis ribafiltril. Lõikesagedused on määratud valemiga
f2 – f1 = R / (4πL2) = 1 / (πC1R). Siin
(f2 – f1) / (f2⋅f1) = πL1 / R = πC2R,
milles R on koormuse takistus. Keerulisem ribatõkkefilter on toodud joonisel 2.30,c, mida on kasutatud mürafiltrina väikesevõimsuselistes toiteallikates. Aktiivfiltrid. Aktiivfiltrid kasutavad ainult takisteid ja kondensaatoreid koos OV-dega ja neid on lihtsam konstrueerida kui LC filtreid.
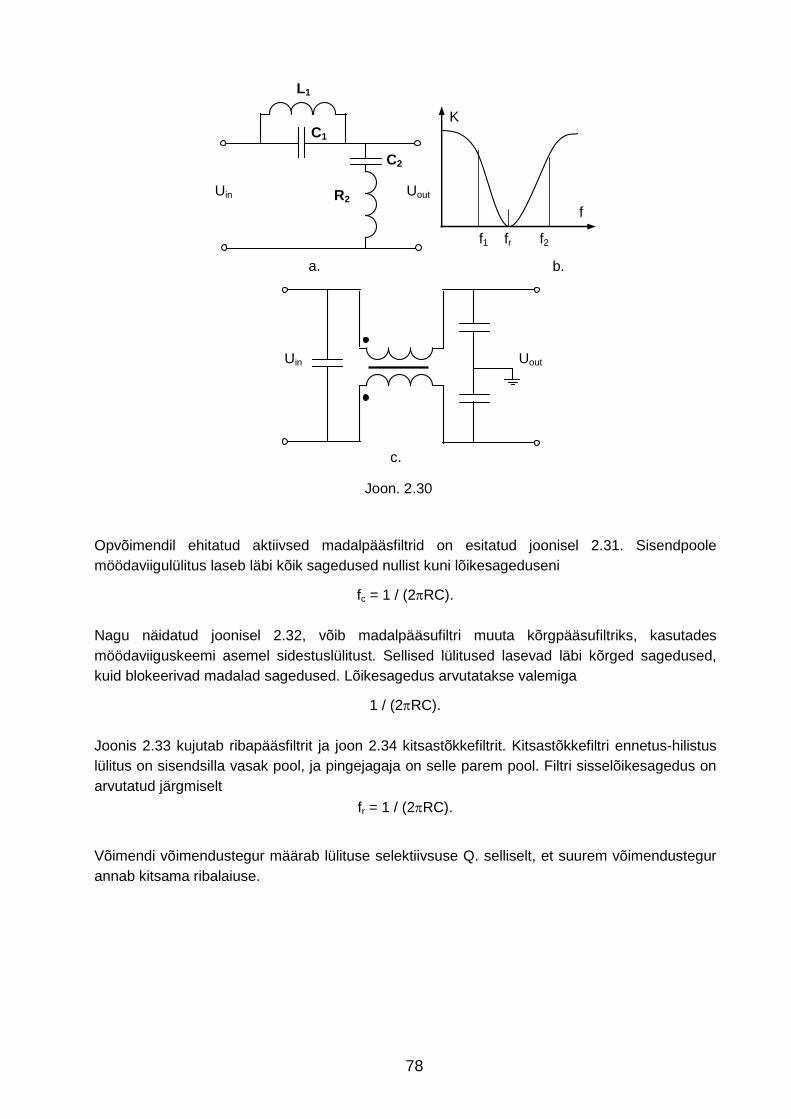
78
a. b.
f1 fr f2
Joon. 2.30
K
f
C1
L1
C2
R2 Uin Uout
Uout Uin
c.
Opvõimendil ehitatud aktiivsed madalpääsfiltrid on esitatud joonisel 2.31. Sisendpoole möödaviigulülitus laseb läbi kõik sagedused nullist kuni lõikesageduseni
fc = 1 / (2πRC).
Nagu näidatud joonisel 2.32, võib madalpääsufiltri muuta kõrgpääsufiltriks, kasutades möödaviiguskeemi asemel sidestuslülitust. Sellised lülitused lasevad läbi kõrged sagedused, kuid blokeerivad madalad sagedused. Lõikesagedus arvutatakse valemiga
1 / (2πRC).
Joonis 2.33 kujutab ribapääsfiltrit ja joon 2.34 kitsastõkkefiltrit. Kitsastõkkefiltri ennetus-hilistus lülitus on sisendsilla vasak pool, ja pingejagaja on selle parem pool. Filtri sisselõikesagedus on arvutatud järgmiselt
fr = 1 / (2πRC).
Võimendi võimendustegur määrab lülituse selektiivsuse Q. selliselt, et suurem võimendustegur annab kitsama ribalaiuse.
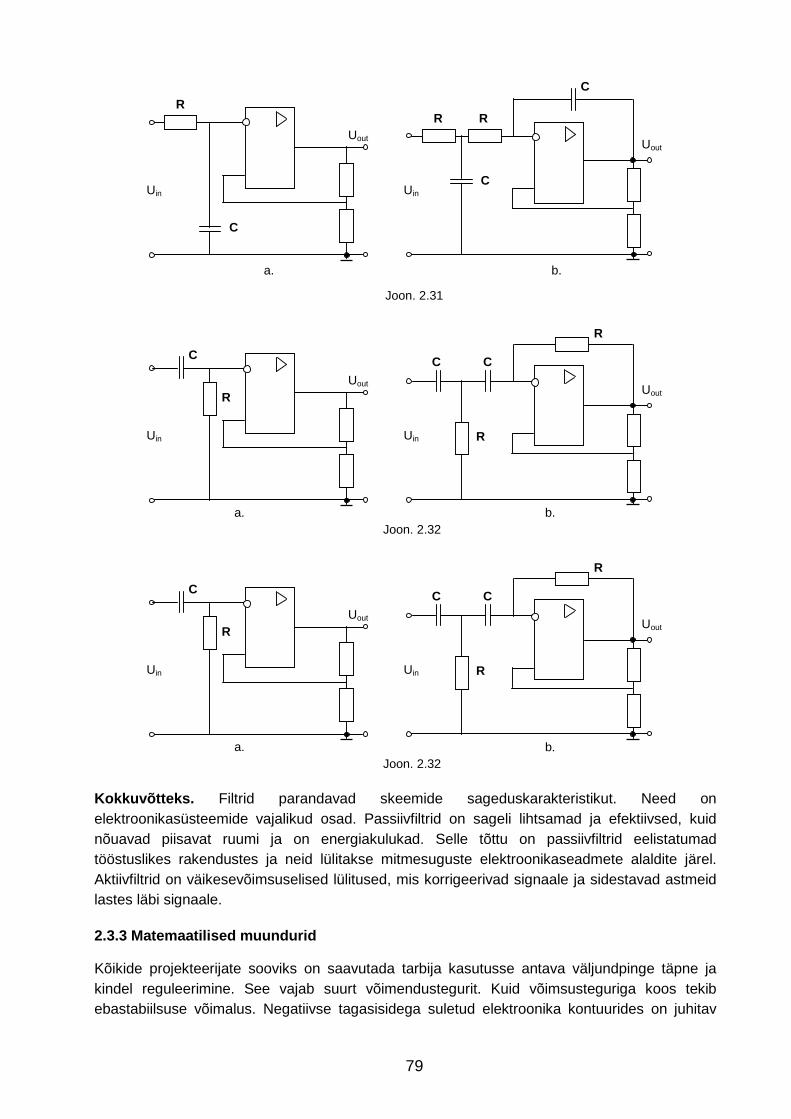
79
R
C
Uout
R
Joon. 2.31
Uin
C
Uout
R
Uin C
a. b.
C C C
R
Uout R
Joon. 2.32
Uin
Uout
R
Uin
a. b.
C C C
R
Uout R
Joon. 2.32
Uin
Uout
R
Uin
a. b.
Kokkuvõtteks. Filtrid parandavad skeemide sageduskarakteristikut. Need on elektroonikasüsteemide vajalikud osad. Passiivfiltrid on sageli lihtsamad ja efektiivsed, kuid nõuavad piisavat ruumi ja on energiakulukad. Selle tõttu on passiivfiltrid eelistatumad tööstuslikes rakendustes ja neid lülitakse mitmesuguste elektroonikaseadmete alaldite järel. Aktiivfiltrid on väikesevõimsuselised lülitused, mis korrigeerivad signaale ja sidestavad astmeid lastes läbi signaale.
2.3.3 Matemaatilised muundurid
Kõikide projekteerijate sooviks on saavutada tarbija kasutusse antava väljundpinge täpne ja kindel reguleerimine. See vajab suurt võimendustegurit. Kuid võimsusteguriga koos tekib ebastabiilsuse võimalus. Negatiivse tagasisidega suletud elektroonika kontuurides on juhitav
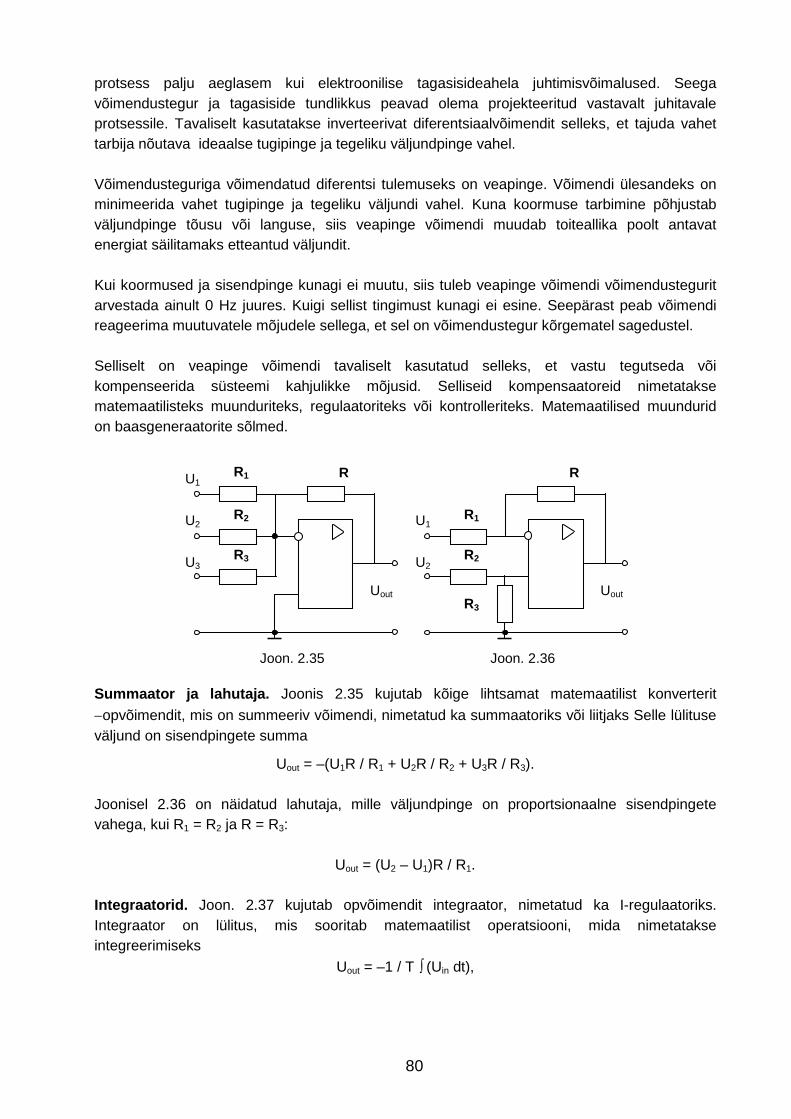
80
protsess palju aeglasem kui elektroonilise tagasisideahela juhtimisvõimalused. Seega võimendustegur ja tagasiside tundlikkus peavad olema projekteeritud vastavalt juhitavale protsessile. Tavaliselt kasutatakse inverteerivat diferentsiaalvõimendit selleks, et tajuda vahet tarbija nõutava ideaalse tugipinge ja tegeliku väljundpinge vahel. Võimendusteguriga võimendatud diferentsi tulemuseks on veapinge. Võimendi ülesandeks on minimeerida vahet tugipinge ja tegeliku väljundi vahel. Kuna koormuse tarbimine põhjustab väljundpinge tõusu või languse, siis veapinge võimendi muudab toiteallika poolt antavat energiat säilitamaks etteantud väljundit. Kui koormused ja sisendpinge kunagi ei muutu, siis tuleb veapinge võimendi võimendustegurit arvestada ainult 0 Hz juures. Kuigi sellist tingimust kunagi ei esine. Seepärast peab võimendi reageerima muutuvatele mõjudele sellega, et sel on võimendustegur kõrgematel sagedustel. Selliselt on veapinge võimendi tavaliselt kasutatud selleks, et vastu tegutseda või kompenseerida süsteemi kahjulikke mõjusid. Selliseid kompensaatoreid nimetatakse matemaatilisteks muunduriteks, regulaatoriteks või kontrolleriteks. Matemaatilised muundurid on baasgeneraatorite sõlmed.
U2
U3
U1
R2
Joon. 2.35
R
R3
R1
Uout
U1
U2
R1
Joon. 2.36
R
R2
Uout R3
Summaator ja lahutaja. Joonis 2.35 kujutab kõige lihtsamat matemaatilist konverterit
−opvõimendit, mis on summeeriv võimendi, nimetatud ka summaatoriks või liitjaks Selle lülituse väljund on sisendpingete summa
Uout = –(U1R / R1 + U2R / R2 + U3R / R3).
Joonisel 2.36 on näidatud lahutaja, mille väljundpinge on proportsionaalne sisendpingete vahega, kui R1 = R2 ja R = R3:
Uout = (U2 – U1)R / R1.
Integraatorid. Joon. 2.37 kujutab opvõimendit integraator, nimetatud ka I-regulaatoriks. Integraator on lülitus, mis sooritab matemaatilist operatsiooni, mida nimetatakse integreerimiseks
Uout = –1 / T ∫ (Uin dt),
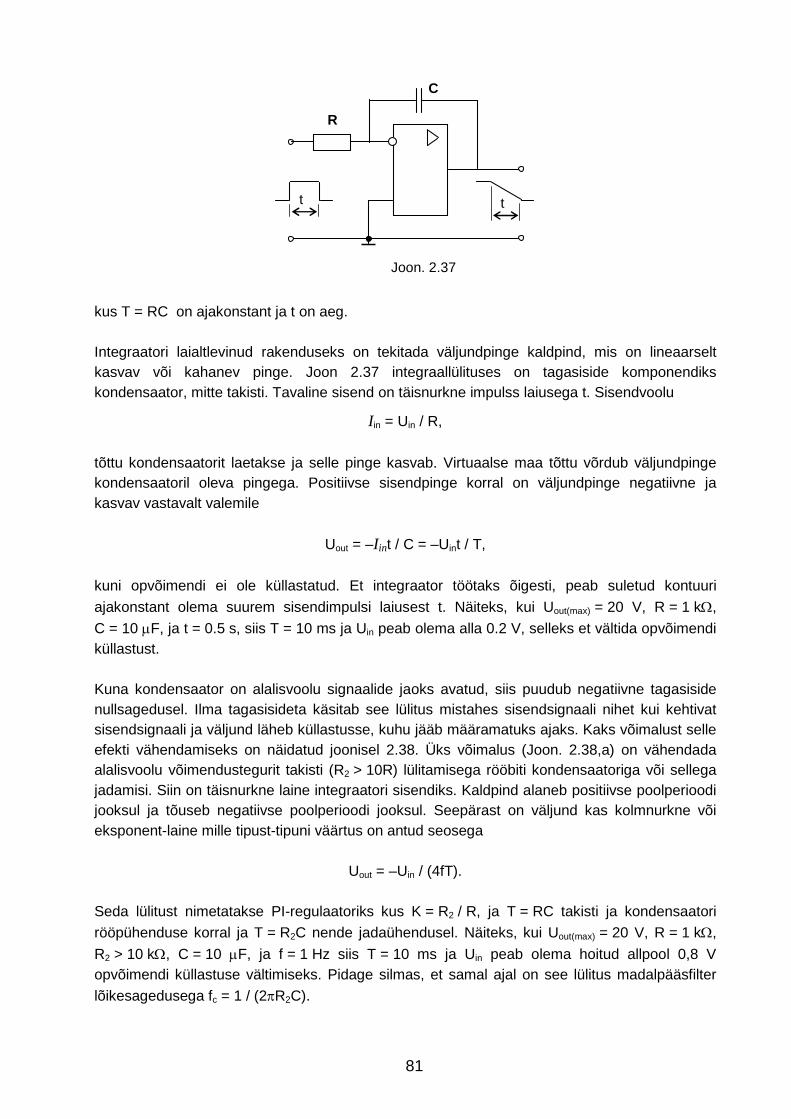
81
Joon. 2.37
t
C
R
t
kus T = RC on ajakonstant ja t on aeg. Integraatori laialtlevinud rakenduseks on tekitada väljundpinge kaldpind, mis on lineaarselt kasvav või kahanev pinge. Joon 2.37 integraallülituses on tagasiside komponendiks kondensaator, mitte takisti. Tavaline sisend on täisnurkne impulss laiusega t. Sisendvoolu
I in = Uin / R,
tõttu kondensaatorit laetakse ja selle pinge kasvab. Virtuaalse maa tõttu võrdub väljundpinge kondensaatoril oleva pingega. Positiivse sisendpinge korral on väljundpinge negatiivne ja kasvav vastavalt valemile
Uout = –I int / C = –Uint / T,
kuni opvõimendi ei ole küllastatud. Et integraator töötaks õigesti, peab suletud kontuuri
ajakonstant olema suurem sisendimpulsi laiusest t. Näiteks, kui Uout(max) = 20 V, R = 1 kΩ,
C = 10 µF, ja t = 0.5 s, siis T = 10 ms ja Uin peab olema alla 0.2 V, selleks et vältida opvõimendi küllastust. Kuna kondensaator on alalisvoolu signaalide jaoks avatud, siis puudub negatiivne tagasiside nullsagedusel. Ilma tagasisideta käsitab see lülitus mistahes sisendsignaali nihet kui kehtivat sisendsignaali ja väljund läheb küllastusse, kuhu jääb määramatuks ajaks. Kaks võimalust selle efekti vähendamiseks on näidatud joonisel 2.38. Üks võimalus (Joon. 2.38,a) on vähendada alalisvoolu võimendustegurit takisti (R2 > 10R) lülitamisega rööbiti kondensaatoriga või sellega jadamisi. Siin on täisnurkne laine integraatori sisendiks. Kaldpind alaneb positiivse poolperioodi jooksul ja tõuseb negatiivse poolperioodi jooksul. Seepärast on väljund kas kolmnurkne või eksponent-laine mille tipust-tipuni väärtus on antud seosega
Uout = –Uin / (4fT).
Seda lülitust nimetatakse PI-regulaatoriks kus K = R2 / R, ja T = RC takisti ja kondensaatori
rööpühenduse korral ja T = R2C nende jadaühendusel. Näiteks, kui Uout(max) = 20 V, R = 1 kΩ,
R2 > 10 kΩ, C = 10 µF, ja f = 1 Hz siis T = 10 ms ja Uin peab olema hoitud allpool 0,8 V opvõimendi küllastuse vältimiseks. Pidage silmas, et samal ajal on see lülitus madalpääsfilter
lõikesagedusega fc = 1 / (2πR2C).
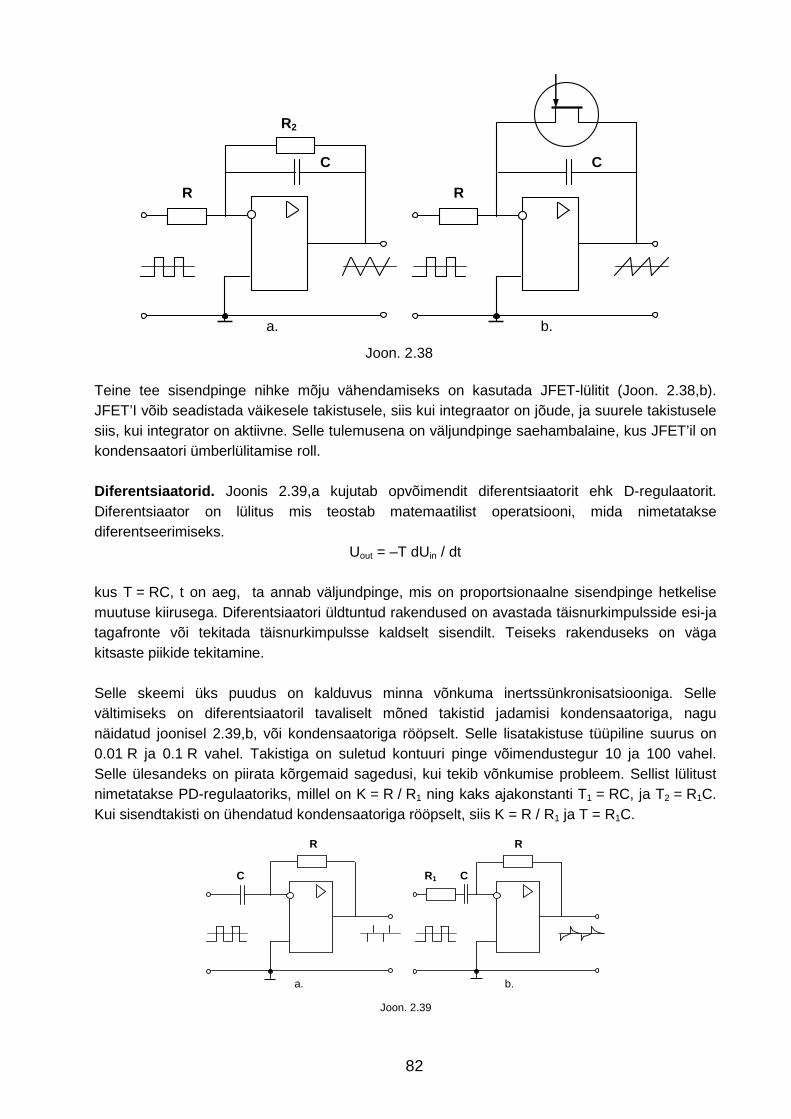
82
Joon. 2.38
b. a.
R2
C
R
C
R
Teine tee sisendpinge nihke mõju vähendamiseks on kasutada JFET-lülitit (Joon. 2.38,b). JFET’I võib seadistada väikesele takistusele, siis kui integraator on jõude, ja suurele takistusele siis, kui integrator on aktiivne. Selle tulemusena on väljundpinge saehambalaine, kus JFET’il on kondensaatori ümberlülitamise roll. Diferentsiaatorid. Joonis 2.39,a kujutab opvõimendit diferentsiaatorit ehk D-regulaatorit. Diferentsiaator on lülitus mis teostab matemaatilist operatsiooni, mida nimetatakse diferentseerimiseks.
Uout = –T dUin / dt
kus T = RC, t on aeg, ta annab väljundpinge, mis on proportsionaalne sisendpinge hetkelise muutuse kiirusega. Diferentsiaatori üldtuntud rakendused on avastada täisnurkimpulsside esi-ja tagafronte või tekitada täisnurkimpulsse kaldselt sisendilt. Teiseks rakenduseks on väga kitsaste piikide tekitamine. Selle skeemi üks puudus on kalduvus minna võnkuma inertssünkronisatsiooniga. Selle vältimiseks on diferentsiaatoril tavaliselt mõned takistid jadamisi kondensaatoriga, nagu näidatud joonisel 2.39,b, või kondensaatoriga rööpselt. Selle lisatakistuse tüüpiline suurus on 0.01 R ja 0.1 R vahel. Takistiga on suletud kontuuri pinge võimendustegur 10 ja 100 vahel. Selle ülesandeks on piirata kõrgemaid sagedusi, kui tekib võnkumise probleem. Sellist lülitust nimetatakse PD-regulaatoriks, millel on K = R / R1 ning kaks ajakonstanti T1 = RC, ja T2 = R1C. Kui sisendtakisti on ühendatud kondensaatoriga rööpselt, siis K = R / R1 ja T = R1C.
C R1
R
b.
C
R
a.
Joon. 2.39
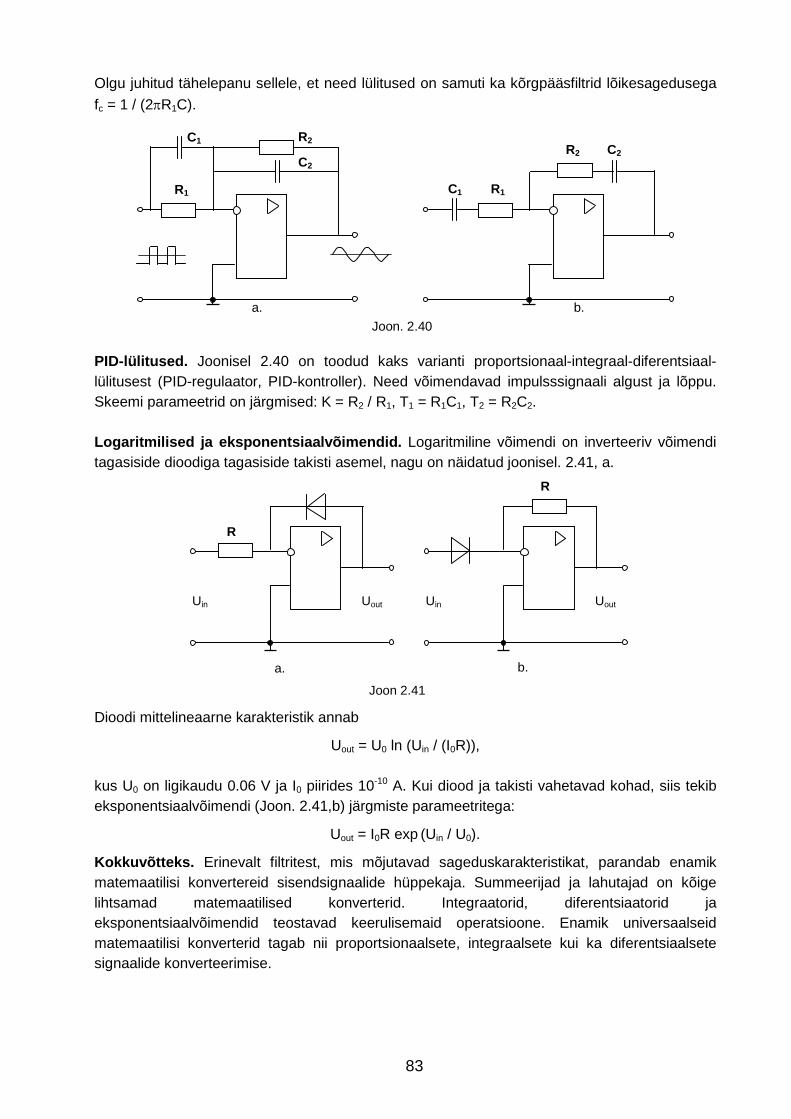
83
Olgu juhitud tähelepanu sellele, et need lülitused on samuti ka kõrgpääsfiltrid lõikesagedusega
fc = 1 / (2πR1C).
C2
a. b.
C1 R2
R1
Joon. 2.40
C1
R2 C2
R1
PID-lülitused. Joonisel 2.40 on toodud kaks varianti proportsionaal-integraal-diferentsiaal-lülitusest (PID-regulaator, PID-kontroller). Need võimendavad impulsssignaali algust ja lõppu. Skeemi parameetrid on järgmised: K = R2 / R1, T1 = R1C1, T2 = R2C2. Logaritmilised ja eksponentsiaalvõimendid. Logaritmiline võimendi on inverteeriv võimendi tagasiside dioodiga tagasiside takisti asemel, nagu on näidatud joonisel. 2.41, a.
a.
Uout Uin
R
b.
R
Uout Uin
Joon 2.41
Dioodi mittelineaarne karakteristik annab
Uout = U0 ln (Uin / (I0R)),
kus U0 on ligikaudu 0.06 V ja I0 piirides 10-10 A. Kui diood ja takisti vahetavad kohad, siis tekib eksponentsiaalvõimendi (Joon. 2.41,b) järgmiste parameetritega:
Uout = I0R exp (Uin / U0).
Kokkuvõtteks. Erinevalt filtritest, mis mõjutavad sageduskarakteristikat, parandab enamik matemaatilisi konvertereid sisendsignaalide hüppekaja. Summeerijad ja lahutajad on kõige lihtsamad matemaatilised konverterid. Integraatorid, diferentsiaatorid ja eksponentsiaalvõimendid teostavad keerulisemaid operatsioone. Enamik universaalseid matemaatilisi konverterid tagab nii proportsionaalsete, integraalsete kui ka diferentsiaalsete signaalide konverteerimise.
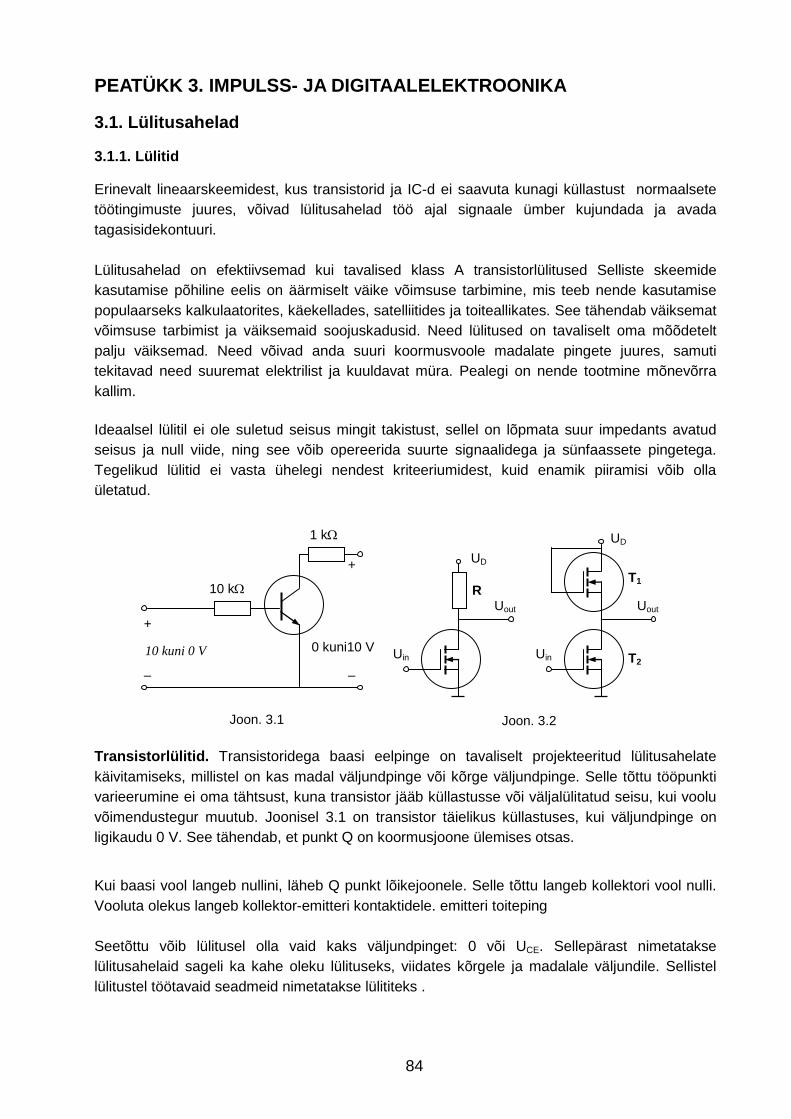
84
PEATÜKK 3. IMPULSS- JA DIGITAALELEKTROONIKA
3.1. Lülitusahelad
3.1.1. Lülitid
Erinevalt lineaarskeemidest, kus transistorid ja IC-d ei saavuta kunagi küllastust normaalsete töötingimuste juures, võivad lülitusahelad töö ajal signaale ümber kujundada ja avada tagasisidekontuuri. Lülitusahelad on efektiivsemad kui tavalised klass A transistorlülitused Selliste skeemide kasutamise põhiline eelis on äärmiselt väike võimsuse tarbimine, mis teeb nende kasutamise populaarseks kalkulaatorites, käekellades, satelliitides ja toiteallikates. See tähendab väiksemat võimsuse tarbimist ja väiksemaid soojuskadusid. Need lülitused on tavaliselt oma mõõdetelt palju väiksemad. Need võivad anda suuri koormusvoole madalate pingete juures, samuti tekitavad need suuremat elektrilist ja kuuldavat müra. Pealegi on nende tootmine mõnevõrra kallim. Ideaalsel lülitil ei ole suletud seisus mingit takistust, sellel on lõpmata suur impedants avatud seisus ja null viide, ning see võib opereerida suurte signaalidega ja sünfaassete pingetega. Tegelikud lülitid ei vasta ühelegi nendest kriteeriumidest, kuid enamik piiramisi võib olla ületatud.
T2
UD
UD
Uin
Joon. 3.2
Uout R
Uin
Uout
T1
+
– –
+
Joon. 3.1
1 kΩ
10 kuni 0 V
10 kΩ
0 kuni10 V
Transistorlülitid. Transistoridega baasi eelpinge on tavaliselt projekteeritud lülitusahelate käivitamiseks, millistel on kas madal väljundpinge või kõrge väljundpinge. Selle tõttu tööpunkti varieerumine ei oma tähtsust, kuna transistor jääb küllastusse või väljalülitatud seisu, kui voolu võimendustegur muutub. Joonisel 3.1 on transistor täielikus küllastuses, kui väljundpinge on ligikaudu 0 V. See tähendab, et punkt Q on koormusjoone ülemises otsas.
Kui baasi vool langeb nullini, läheb Q punkt lõikejoonele. Selle tõttu langeb kollektori vool nulli. Vooluta olekus langeb kollektor-emitteri kontaktidele. emitteri toiteping Seetõttu võib lülitusel olla vaid kaks väljundpinget: 0 või UCE. Sellepärast nimetatakse lülitusahelaid sageli ka kahe oleku lülituseks, viidates kõrgele ja madalale väljundile. Sellistel lülitustel töötavaid seadmeid nimetatakse lülititeks .
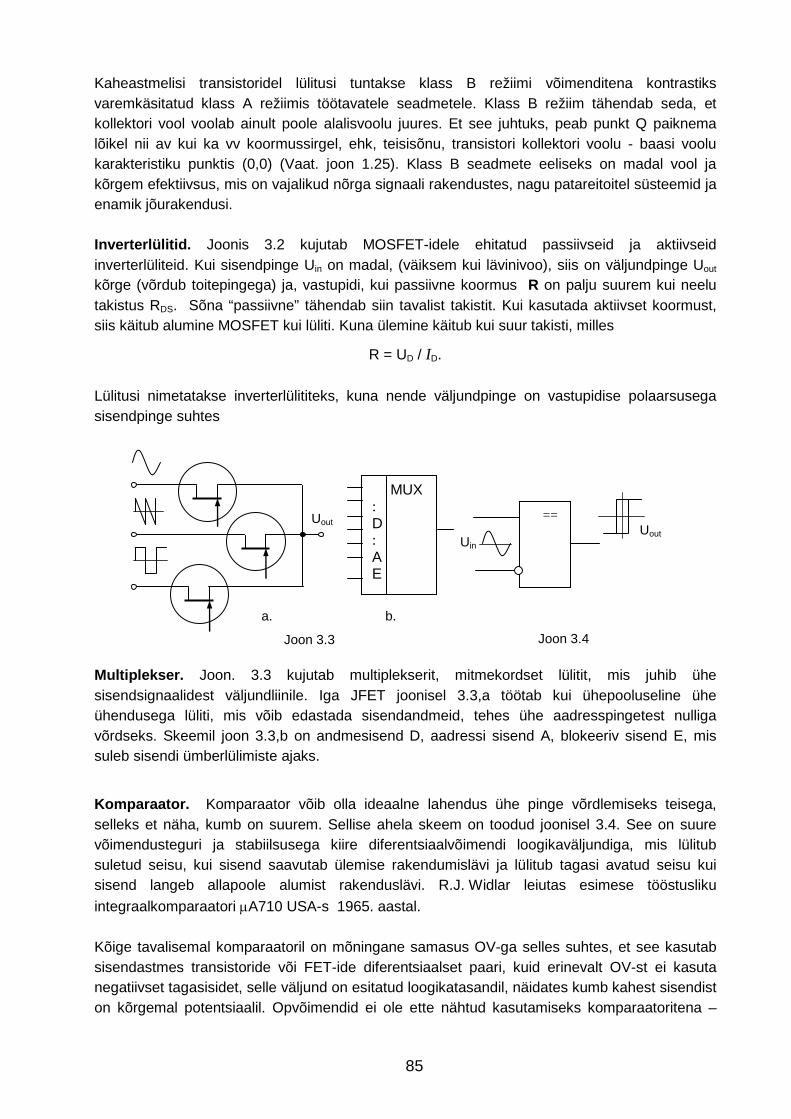
85
Kaheastmelisi transistoridel lülitusi tuntakse klass B režiimi võimenditena kontrastiks varemkäsitatud klass A režiimis töötavatele seadmetele. Klass B režiim tähendab seda, et kollektori vool voolab ainult poole alalisvoolu juures. Et see juhtuks, peab punkt Q paiknema lõikel nii av kui ka vv koormussirgel, ehk, teisisõnu, transistori kollektori voolu - baasi voolu karakteristiku punktis (0,0) (Vaat. joon 1.25). Klass B seadmete eeliseks on madal vool ja kõrgem efektiivsus, mis on vajalikud nõrga signaali rakendustes, nagu patareitoitel süsteemid ja enamik jõurakendusi. Inverterlülitid. Joonis 3.2 kujutab MOSFET-idele ehitatud passiivseid ja aktiivseid inverterlüliteid. Kui sisendpinge Uin on madal, (väiksem kui lävinivoo), siis on väljundpinge Uout kõrge (võrdub toitepingega) ja, vastupidi, kui passiivne koormus R on palju suurem kui neelu takistus RDS. Sõna “passiivne” tähendab siin tavalist takistit. Kui kasutada aktiivset koormust, siis käitub alumine MOSFET kui lüliti. Kuna ülemine käitub kui suur takisti, milles
R = UD / ID.
Lülitusi nimetatakse inverterlülititeks, kuna nende väljundpinge on vastupidise polaarsusega sisendpinge suhtes
Uin Uout
Joon 3.4
==
Joon 3.3
Uout
MUX : D : A E
a. b.
Multiplekser. Joon. 3.3 kujutab multiplekserit, mitmekordset lülitit, mis juhib ühe sisendsignaalidest väljundliinile. Iga JFET joonisel 3.3,a töötab kui ühepooluseline ühe ühendusega lüliti, mis võib edastada sisendandmeid, tehes ühe aadresspingetest nulliga võrdseks. Skeemil joon 3.3,b on andmesisend D, aadressi sisend A, blokeeriv sisend E, mis suleb sisendi ümberlülimiste ajaks.
Komparaator. Komparaator võib olla ideaalne lahendus ühe pinge võrdlemiseks teisega, selleks et näha, kumb on suurem. Sellise ahela skeem on toodud joonisel 3.4. See on suure võimendusteguri ja stabiilsusega kiire diferentsiaalvõimendi loogikaväljundiga, mis lülitub suletud seisu, kui sisend saavutab ülemise rakendumislävi ja lülitub tagasi avatud seisu kui sisend langeb allapoole alumist rakenduslävi. R.J. Widlar leiutas esimese tööstusliku
integraalkomparaatori µA710 USA-s 1965. aastal. Kõige tavalisemal komparaatoril on mõningane samasus OV-ga selles suhtes, et see kasutab sisendastmes transistoride või FET-ide diferentsiaalset paari, kuid erinevalt OV-st ei kasuta negatiivset tagasisidet, selle väljund on esitatud loogikatasandil, näidates kumb kahest sisendist on kõrgemal potentsiaalil. Opvõimendid ei ole ette nähtud kasutamiseks komparaatoritena –
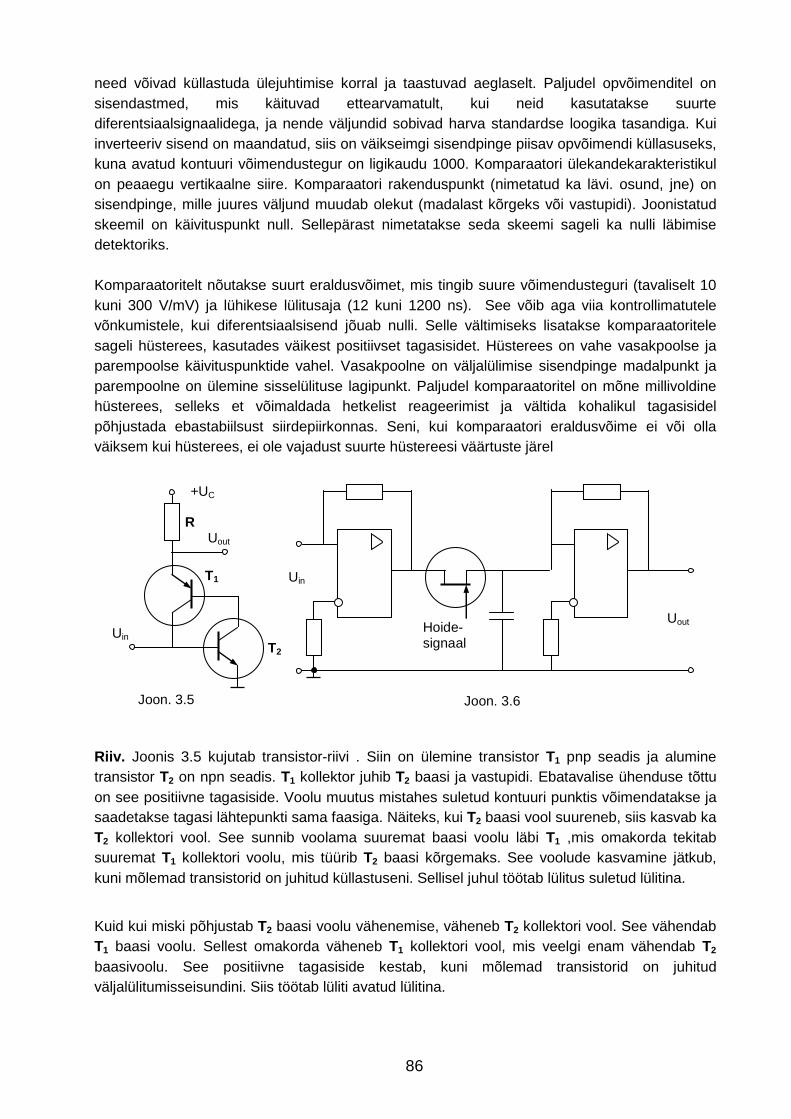
86
need võivad küllastuda ülejuhtimise korral ja taastuvad aeglaselt. Paljudel opvõimenditel on sisendastmed, mis käituvad ettearvamatult, kui neid kasutatakse suurte diferentsiaalsignaalidega, ja nende väljundid sobivad harva standardse loogika tasandiga. Kui inverteeriv sisend on maandatud, siis on väikseimgi sisendpinge piisav opvõimendi küllasuseks, kuna avatud kontuuri võimendustegur on ligikaudu 1000. Komparaatori ülekandekarakteristikul on peaaegu vertikaalne siire. Komparaatori rakenduspunkt (nimetatud ka lävi. osund, jne) on sisendpinge, mille juures väljund muudab olekut (madalast kõrgeks või vastupidi). Joonistatud skeemil on käivituspunkt null. Sellepärast nimetatakse seda skeemi sageli ka nulli läbimise detektoriks. Komparaatoritelt nõutakse suurt eraldusvõimet, mis tingib suure võimendusteguri (tavaliselt 10 kuni 300 V/mV) ja lühikese lülitusaja (12 kuni 1200 ns). See võib aga viia kontrollimatutele võnkumistele, kui diferentsiaalsisend jõuab nulli. Selle vältimiseks lisatakse komparaatoritele sageli hüsterees, kasutades väikest positiivset tagasisidet. Hüsterees on vahe vasakpoolse ja parempoolse käivituspunktide vahel. Vasakpoolne on väljalülimise sisendpinge madalpunkt ja parempoolne on ülemine sisselülituse lagipunkt. Paljudel komparaatoritel on mõne millivoldine hüsterees, selleks et võimaldada hetkelist reageerimist ja vältida kohalikul tagasisidel põhjustada ebastabiilsust siirdepiirkonnas. Seni, kui komparaatori eraldusvõime ei või olla väiksem kui hüsterees, ei ole vajadust suurte hüstereesi väärtuste järel
+UC
Uout
Joon. 3.5
Uin T2
T1
R
Hoide-signaal
Uin
Uout
Joon. 3.6 3.6.3
Riiv. Joonis 3.5 kujutab transistor-riivi . Siin on ülemine transistor T1 pnp seadis ja alumine transistor T2 on npn seadis. T1 kollektor juhib T2 baasi ja vastupidi. Ebatavalise ühenduse tõttu on see positiivne tagasiside. Voolu muutus mistahes suletud kontuuri punktis võimendatakse ja saadetakse tagasi lähtepunkti sama faasiga. Näiteks, kui T2 baasi vool suureneb, siis kasvab ka T2 kollektori vool. See sunnib voolama suuremat baasi voolu läbi T1 ,mis omakorda tekitab suuremat T1 kollektori voolu, mis tüürib T2 baasi kõrgemaks. See voolude kasvamine jätkub, kuni mõlemad transistorid on juhitud küllastuseni. Sellisel juhul töötab lülitus suletud lülitina.
Kuid kui miski põhjustab T2 baasi voolu vähenemise, väheneb T2 kollektori vool. See vähendab T1 baasi voolu. Sellest omakorda väheneb T1 kollektori vool, mis veelgi enam vähendab T2 baasivoolu. See positiivne tagasiside kestab, kuni mõlemad transistorid on juhitud väljalülitumisseisundini. Siis töötab lüliti avatud lülitina.
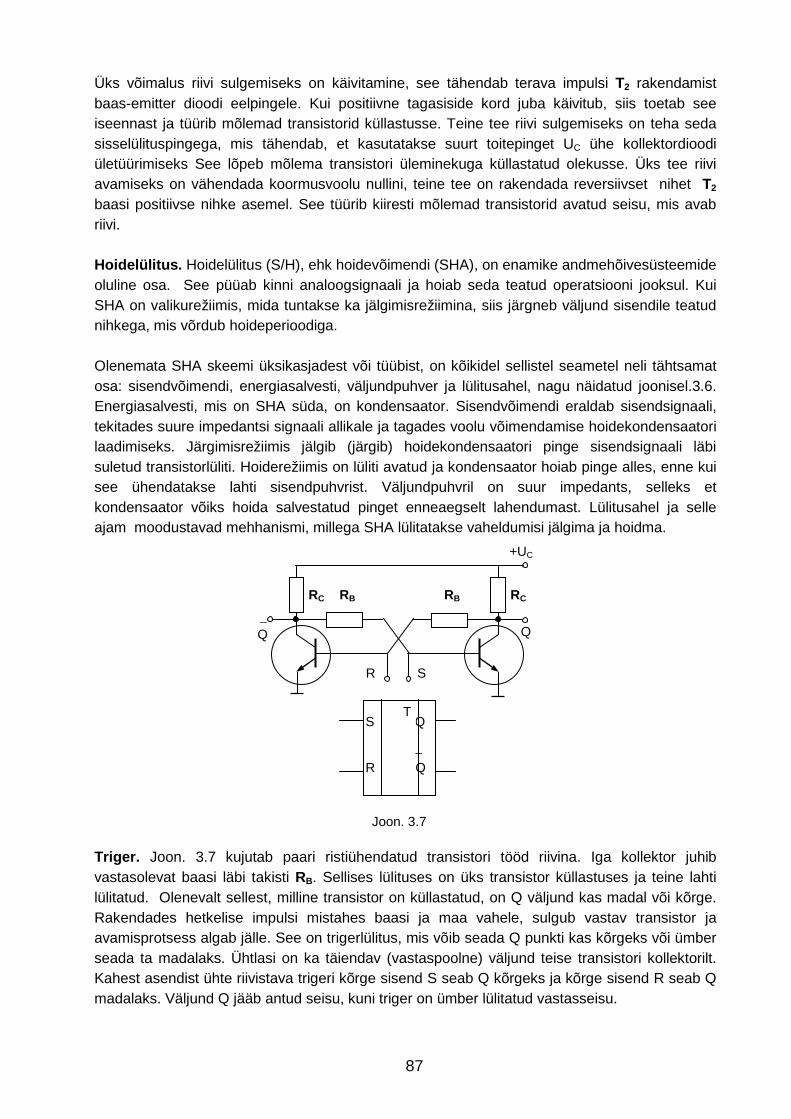
87
Üks võimalus riivi sulgemiseks on käivitamine, see tähendab terava impulsi T2 rakendamist baas-emitter dioodi eelpingele. Kui positiivne tagasiside kord juba käivitub, siis toetab see iseennast ja tüürib mõlemad transistorid küllastusse. Teine tee riivi sulgemiseks on teha seda sisselülituspingega, mis tähendab, et kasutatakse suurt toitepinget UC ühe kollektordioodi ületüürimiseks See lõpeb mõlema transistori üleminekuga küllastatud olekusse. Üks tee riivi avamiseks on vähendada koormusvoolu nullini, teine tee on rakendada reversiivset nihet T2 baasi positiivse nihke asemel. See tüürib kiiresti mõlemad transistorid avatud seisu, mis avab riivi. Hoidelülitus. Hoidelülitus (S/H), ehk hoidevõimendi (SHA), on enamike andmehõivesüsteemide oluline osa. See püüab kinni analoogsignaali ja hoiab seda teatud operatsiooni jooksul. Kui SHA on valikurežiimis, mida tuntakse ka jälgimisrežiimina, siis järgneb väljund sisendile teatud nihkega, mis võrdub hoideperioodiga. Olenemata SHA skeemi üksikasjadest või tüübist, on kõikidel sellistel seametel neli tähtsamat osa: sisendvõimendi, energiasalvesti, väljundpuhver ja lülitusahel, nagu näidatud joonisel.3.6. Energiasalvesti, mis on SHA süda, on kondensaator. Sisendvõimendi eraldab sisendsignaali, tekitades suure impedantsi signaali allikale ja tagades voolu võimendamise hoidekondensaatori laadimiseks. Järgimisrežiimis jälgib (järgib) hoidekondensaatori pinge sisendsignaali läbi suletud transistorlüliti. Hoiderežiimis on lüliti avatud ja kondensaator hoiab pinge alles, enne kui see ühendatakse lahti sisendpuhvrist. Väljundpuhvril on suur impedants, selleks et kondensaator võiks hoida salvestatud pinget enneaegselt lahendumast. Lülitusahel ja selle ajam moodustavad mehhanismi, millega SHA lülitatakse vaheldumisi jälgima ja hoidma.
R S
+UC
– Q
RB RB
Q
Joon. 3.7
RC RC
S Q – R Q
T
Triger. Joon. 3.7 kujutab paari ristiühendatud transistori tööd riivina. Iga kollektor juhib vastasolevat baasi läbi takisti RB. Sellises lülituses on üks transistor küllastuses ja teine lahti lülitatud. Olenevalt sellest, milline transistor on küllastatud, on Q väljund kas madal või kõrge. Rakendades hetkelise impulsi mistahes baasi ja maa vahele, sulgub vastav transistor ja avamisprotsess algab jälle. See on trigerlülitus, mis võib seada Q punkti kas kõrgeks või ümber seada ta madalaks. Ühtlasi on ka täiendav (vastaspoolne) väljund teise transistori kollektorilt. Kahest asendist ühte riivistava trigeri kõrge sisend S seab Q kõrgeks ja kõrge sisend R seab Q madalaks. Väljund Q jääb antud seisu, kuni triger on ümber lülitatud vastasseisu.
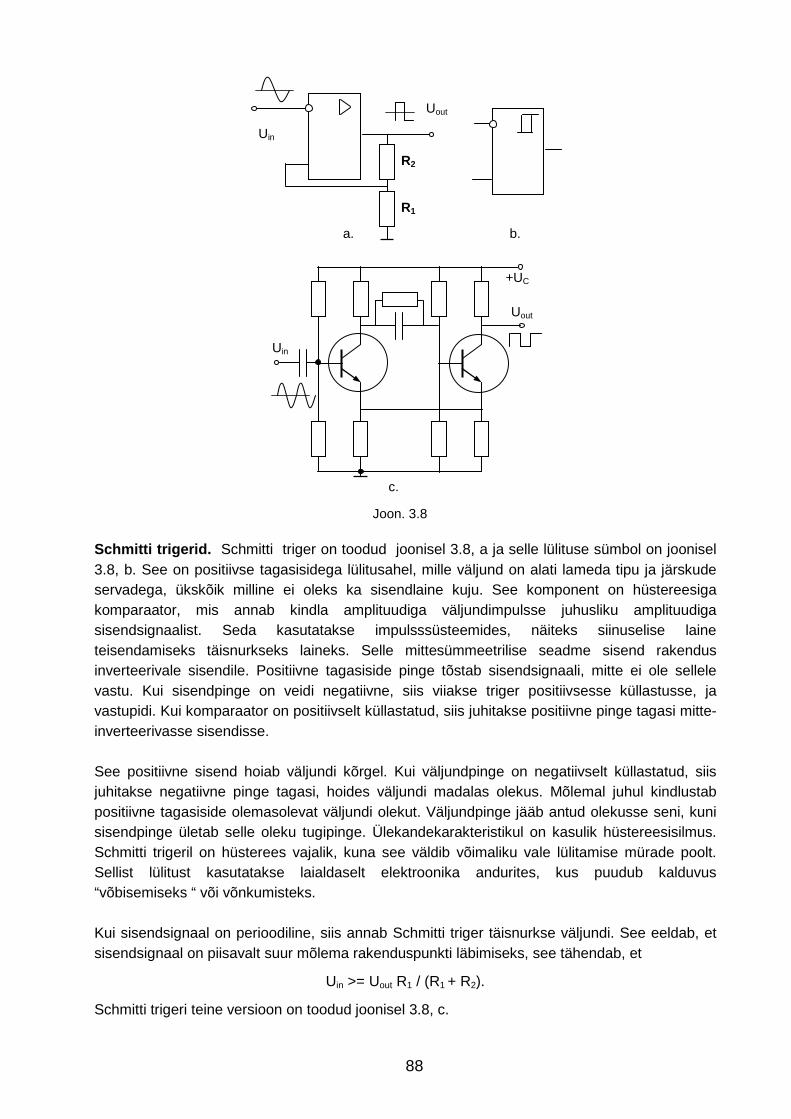
88
R1
a. b.
Uout
+UC
c.
Uin
R2
Uin
Joon. 3.8
Uout
Schmitti trigerid. Schmitti triger on toodud joonisel 3.8, a ja selle lülituse sümbol on joonisel 3.8, b. See on positiivse tagasisidega lülitusahel, mille väljund on alati lameda tipu ja järskude servadega, ükskõik milline ei oleks ka sisendlaine kuju. See komponent on hüstereesiga komparaator, mis annab kindla amplituudiga väljundimpulsse juhusliku amplituudiga sisendsignaalist. Seda kasutatakse impulsssüsteemides, näiteks siinuselise laine teisendamiseks täisnurkseks laineks. Selle mittesümmeetrilise seadme sisend rakendus inverteerivale sisendile. Positiivne tagasiside pinge tõstab sisendsignaali, mitte ei ole sellele vastu. Kui sisendpinge on veidi negatiivne, siis viiakse triger positiivsesse küllastusse, ja vastupidi. Kui komparaator on positiivselt küllastatud, siis juhitakse positiivne pinge tagasi mitte-inverteerivasse sisendisse. See positiivne sisend hoiab väljundi kõrgel. Kui väljundpinge on negatiivselt küllastatud, siis juhitakse negatiivne pinge tagasi, hoides väljundi madalas olekus. Mõlemal juhul kindlustab positiivne tagasiside olemasolevat väljundi olekut. Väljundpinge jääb antud olekusse seni, kuni sisendpinge ületab selle oleku tugipinge. Ülekandekarakteristikul on kasulik hüstereesisilmus. Schmitti trigeril on hüsterees vajalik, kuna see väldib võimaliku vale lülitamise mürade poolt. Sellist lülitust kasutatakse laialdaselt elektroonika andurites, kus puudub kalduvus “võbisemiseks “ või võnkumisteks. Kui sisendsignaal on perioodiline, siis annab Schmitti triger täisnurkse väljundi. See eeldab, et sisendsignaal on piisavalt suur mõlema rakenduspunkti läbimiseks, see tähendab, et
Uin >= Uout R1 / (R1 + R2).
Schmitti trigeri teine versioon on toodud joonisel 3.8, c.
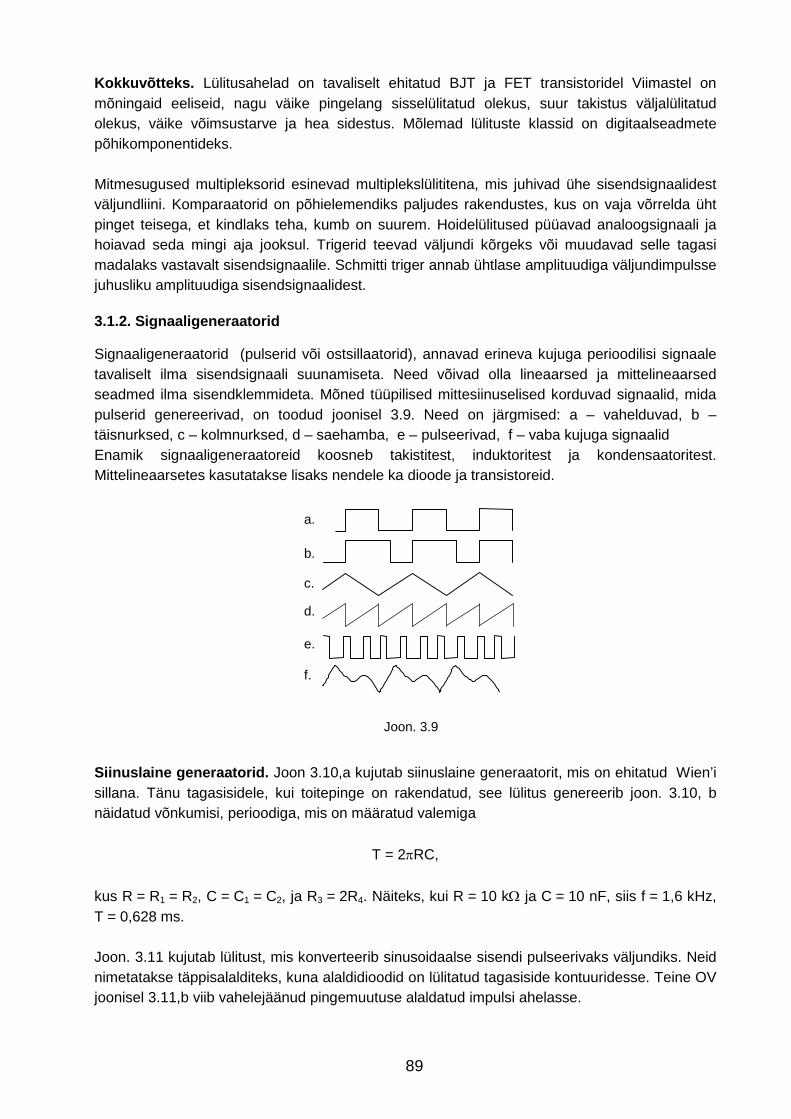
89
Kokkuvõtteks. Lülitusahelad on tavaliselt ehitatud BJT ja FET transistoridel Viimastel on mõningaid eeliseid, nagu väike pingelang sisselülitatud olekus, suur takistus väljalülitatud olekus, väike võimsustarve ja hea sidestus. Mõlemad lülituste klassid on digitaalseadmete põhikomponentideks. Mitmesugused multipleksorid esinevad multiplekslülititena, mis juhivad ühe sisendsignaalidest väljundliini. Komparaatorid on põhielemendiks paljudes rakendustes, kus on vaja võrrelda üht pinget teisega, et kindlaks teha, kumb on suurem. Hoidelülitused püüavad analoogsignaali ja hoiavad seda mingi aja jooksul. Trigerid teevad väljundi kõrgeks või muudavad selle tagasi madalaks vastavalt sisendsignaalile. Schmitti triger annab ühtlase amplituudiga väljundimpulsse juhusliku amplituudiga sisendsignaalidest.
3.1.2. Signaaligeneraatorid
Signaaligeneraatorid (pulserid või ostsillaatorid), annavad erineva kujuga perioodilisi signaale tavaliselt ilma sisendsignaali suunamiseta. Need võivad olla lineaarsed ja mittelineaarsed seadmed ilma sisendklemmideta. Mõned tüüpilised mittesiinuselised korduvad signaalid, mida pulserid genereerivad, on toodud joonisel 3.9. Need on järgmised: a – vahelduvad, b – täisnurksed, c – kolmnurksed, d – saehamba, e – pulseerivad, f – vaba kujuga signaalid Enamik signaaligeneraatoreid koosneb takistitest, induktoritest ja kondensaatoritest. Mittelineaarsetes kasutatakse lisaks nendele ka dioode ja transistoreid.
a.
b.
c.
d.
e.
f.
Joon. 3.9
a.
Siinuslaine generaatorid. Joon 3.10,a kujutab siinuslaine generaatorit, mis on ehitatud Wien’i sillana. Tänu tagasisidele, kui toitepinge on rakendatud, see lülitus genereerib joon. 3.10, b näidatud võnkumisi, perioodiga, mis on määratud valemiga
T = 2πRC,
kus R = R1 = R2, C = C1 = C2, ja R3 = 2R4. Näiteks, kui R = 10 kΩ ja C = 10 nF, siis f = 1,6 kHz, T = 0,628 ms. Joon. 3.11 kujutab lülitust, mis konverteerib sinusoidaalse sisendi pulseerivaks väljundiks. Neid nimetatakse täppisalalditeks, kuna alaldidioodid on lülitatud tagasiside kontuuridesse. Teine OV joonisel 3.11,b viib vahelejäänud pingemuutuse alaldatud impulsi ahelasse.
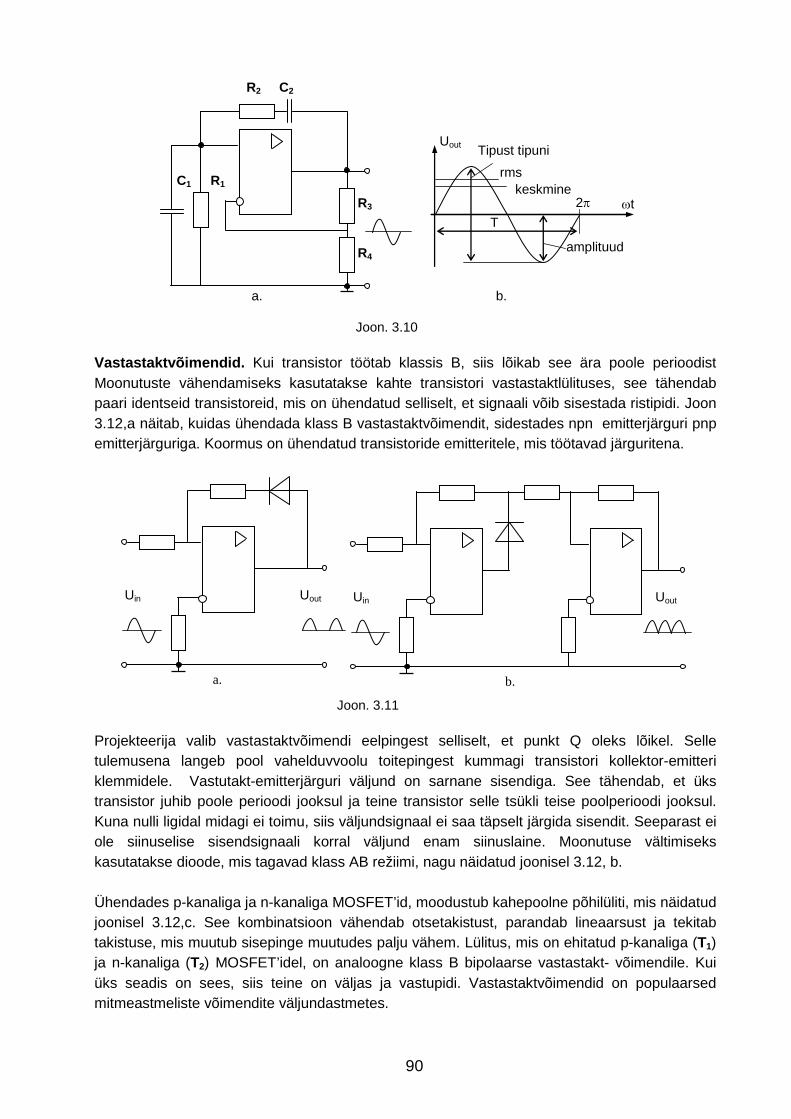
90
2π
Uout
a. b.
C1
R2 C2
R1
R4
R3
Joon. 3.10
keskmine
amplituud
T
rms
Tipust tipuni
ωt
Vastastaktvõimendid. Kui transistor töötab klassis B, siis lõikab see ära poole perioodist Moonutuste vähendamiseks kasutatakse kahte transistori vastastaktlülituses, see tähendab paari identseid transistoreid, mis on ühendatud selliselt, et signaali võib sisestada ristipidi. Joon 3.12,a näitab, kuidas ühendada klass B vastastaktvõimendit, sidestades npn emitterjärguri pnp emitterjärguriga. Koormus on ühendatud transistoride emitteritele, mis töötavad järguritena.
Uin Uout
a.
Uin Uout
b.
Joon. 3.11
Projekteerija valib vastastaktvõimendi eelpingest selliselt, et punkt Q oleks lõikel. Selle tulemusena langeb pool vahelduvvoolu toitepingest kummagi transistori kollektor-emitteri klemmidele. Vastutakt-emitterjärguri väljund on sarnane sisendiga. See tähendab, et üks transistor juhib poole perioodi jooksul ja teine transistor selle tsükli teise poolperioodi jooksul. Kuna nulli ligidal midagi ei toimu, siis väljundsignaal ei saa täpselt järgida sisendit. Seeparast ei ole siinuselise sisendsignaali korral väljund enam siinuslaine. Moonutuse vältimiseks kasutatakse dioode, mis tagavad klass AB režiimi, nagu näidatud joonisel 3.12, b. Ühendades p-kanaliga ja n-kanaliga MOSFET’id, moodustub kahepoolne põhilüliti, mis näidatud joonisel 3.12,c. See kombinatsioon vähendab otsetakistust, parandab lineaarsust ja tekitab takistuse, mis muutub sisepinge muutudes palju vähem. Lülitus, mis on ehitatud p-kanaliga (T1) ja n-kanaliga (T2) MOSFET’idel, on analoogne klass B bipolaarse vastastakt- võimendile. Kui üks seadis on sees, siis teine on väljas ja vastupidi. Vastastaktvõimendid on populaarsed mitmeastmeliste võimendite väljundastmetes.
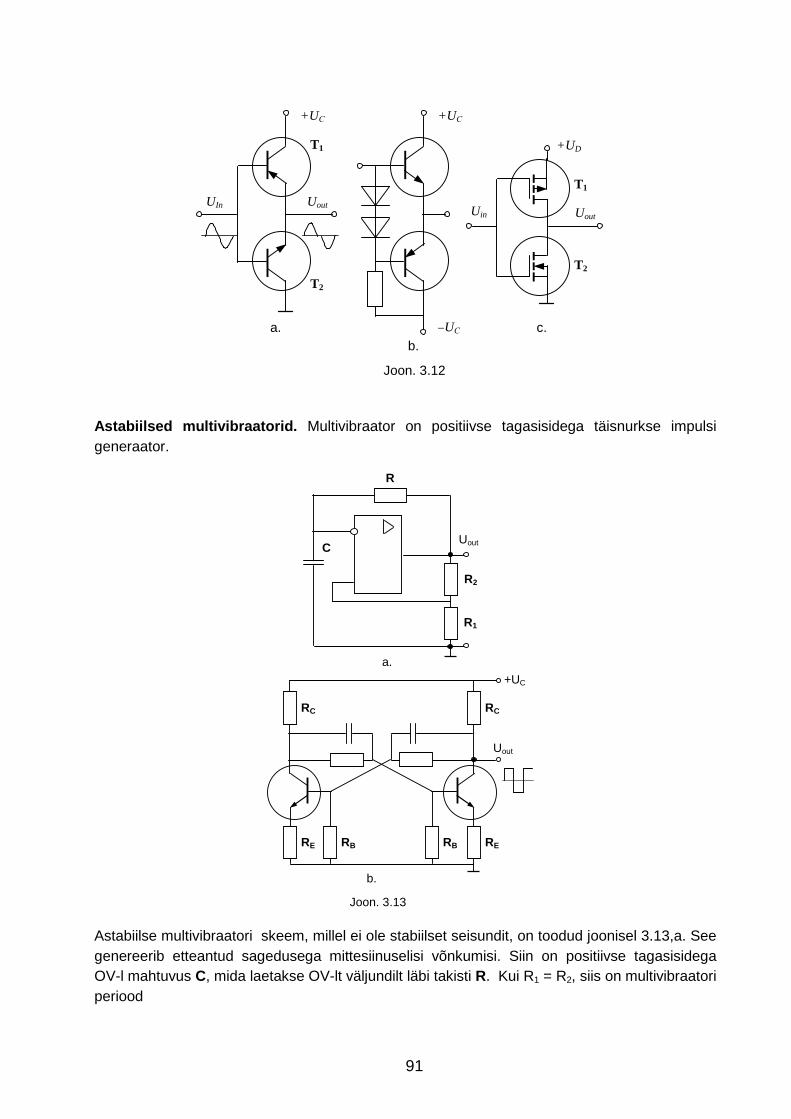
91
T2
+UD
Joon. 3.12
Uin Uout
T1 UIn Uout
T1
T2
+UС
a. c.
+UС
b. –UС
Astabiilsed multivibraatorid. Multivibraator on positiivse tagasisidega täisnurkse impulsi generaator.
R2
R1
Joon. 3.13
a.
+UC
RE RE RB RB
Uout
RC RC
b.
C Uout
R
Astabiilse multivibraatori skeem, millel ei ole stabiilset seisundit, on toodud joonisel 3.13,a. See genereerib etteantud sagedusega mittesiinuselisi võnkumisi. Siin on positiivse tagasisidega OV-l mahtuvus C, mida laetakse OV-lt väljundilt läbi takisti R. Kui R1 = R2, siis on multivibraatori periood
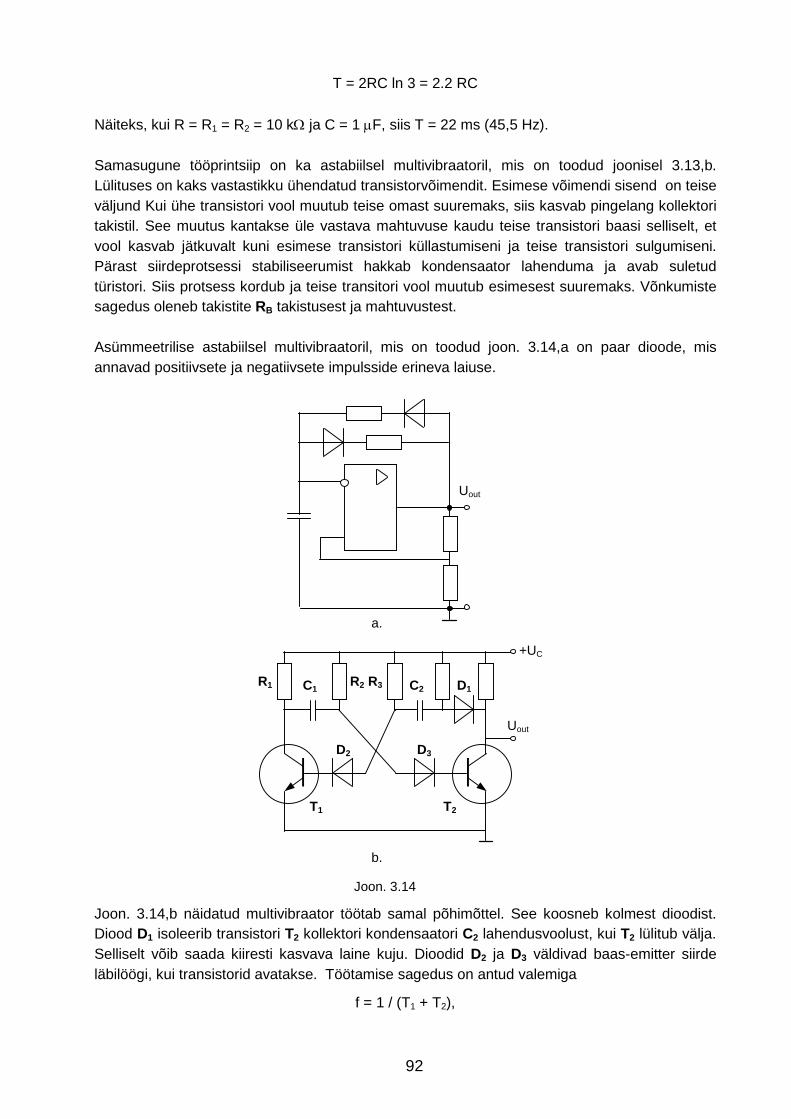
92
T = 2RC ln 3 = 2.2 RC
Näiteks, kui R = R1 = R2 = 10 kΩ ja C = 1 µF, siis T = 22 ms (45,5 Hz). Samasugune tööprintsiip on ka astabiilsel multivibraatoril, mis on toodud joonisel 3.13,b. Lülituses on kaks vastastikku ühendatud transistorvõimendit. Esimese võimendi sisend on teise väljund Kui ühe transistori vool muutub teise omast suuremaks, siis kasvab pingelang kollektori takistil. See muutus kantakse üle vastava mahtuvuse kaudu teise transistori baasi selliselt, et vool kasvab jätkuvalt kuni esimese transistori küllastumiseni ja teise transistori sulgumiseni. Pärast siirdeprotsessi stabiliseerumist hakkab kondensaator lahenduma ja avab suletud türistori. Siis protsess kordub ja teise transitori vool muutub esimesest suuremaks. Võnkumiste sagedus oleneb takistite RB takistusest ja mahtuvustest. Asümmeetrilise astabiilsel multivibraatoril, mis on toodud joon. 3.14,a on paar dioode, mis annavad positiivsete ja negatiivsete impulsside erineva laiuse.
a.
R1
T1 T2
D2 D3
D1
+UC
Uout
C1 C2 R2 R3
Joon. 3.14
b.
Uout
Joon. 3.14,b näidatud multivibraator töötab samal põhimõttel. See koosneb kolmest dioodist. Diood D1 isoleerib transistori T2 kollektori kondensaatori C2 lahendusvoolust, kui T2 lülitub välja. Selliselt võib saada kiiresti kasvava laine kuju. Dioodid D2 ja D3 väldivad baas-emitter siirde läbilöögi, kui transistorid avatakse. Töötamise sagedus on antud valemiga
f = 1 / (T1 + T2),
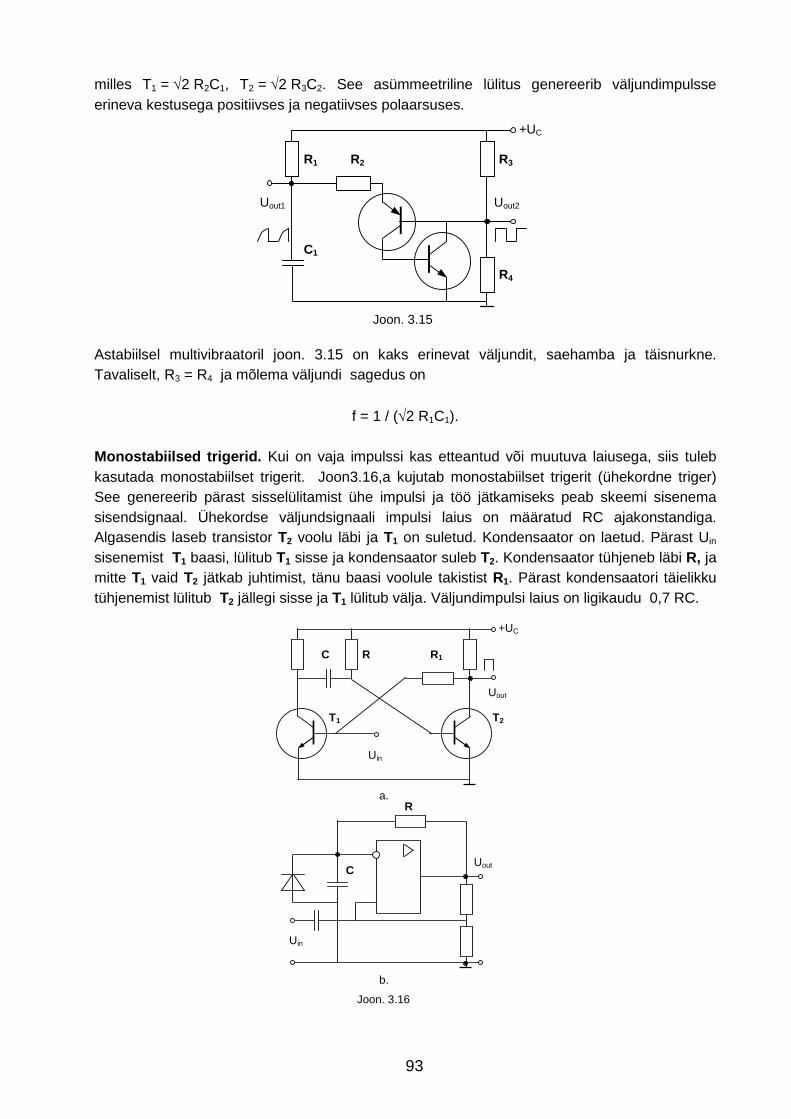
93
milles T1 = √2 R2C1, T2 = √2 R3C2. See asümmeetriline lülitus genereerib väljundimpulsse erineva kestusega positiivses ja negatiivses polaarsuses.
+UC
C1
Uout1
R4
Uout2
Joon. 3.15
R3 R1 R2
Astabiilsel multivibraatoril joon. 3.15 on kaks erinevat väljundit, saehamba ja täisnurkne. Tavaliselt, R3 = R4 ja mõlema väljundi sagedus on
f = 1 / (√2 R1C1).
Monostabiilsed trigerid. Kui on vaja impulssi kas etteantud või muutuva laiusega, siis tuleb kasutada monostabiilset trigerit. Joon3.16,a kujutab monostabiilset trigerit (ühekordne triger) See genereerib pärast sisselülitamist ühe impulsi ja töö jätkamiseks peab skeemi sisenema sisendsignaal. Ühekordse väljundsignaali impulsi laius on määratud RC ajakonstandiga. Algasendis laseb transistor T2 voolu läbi ja T1 on suletud. Kondensaator on laetud. Pärast Uin sisenemist T1 baasi, lülitub T1 sisse ja kondensaator suleb T2. Kondensaator tühjeneb läbi R, ja mitte T1 vaid T2 jätkab juhtimist, tänu baasi voolule takistist R1. Pärast kondensaatori täielikku tühjenemist lülitub T2 jällegi sisse ja T1 lülitub välja. Väljundimpulsi laius on ligikaudu 0,7 RC.
R1
T2 T1
b.
Uin
+UC
Uout
a.
R C
Joon. 3.16
C Uout
R
Uin
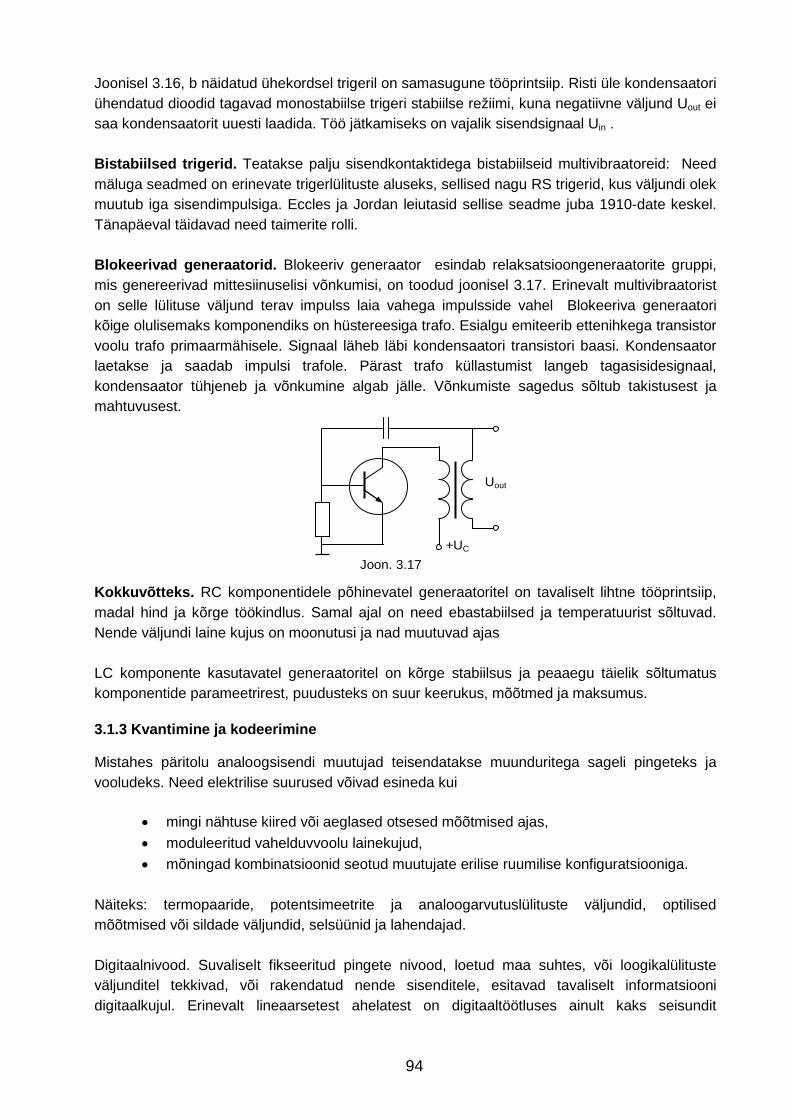
94
Joonisel 3.16, b näidatud ühekordsel trigeril on samasugune tööprintsiip. Risti üle kondensaatori ühendatud dioodid tagavad monostabiilse trigeri stabiilse režiimi, kuna negatiivne väljund Uout ei saa kondensaatorit uuesti laadida. Töö jätkamiseks on vajalik sisendsignaal Uin . Bistabiilsed trigerid. Teatakse palju sisendkontaktidega bistabiilseid multivibraatoreid: Need mäluga seadmed on erinevate trigerlülituste aluseks, sellised nagu RS trigerid, kus väljundi olek muutub iga sisendimpulsiga. Eccles ja Jordan leiutasid sellise seadme juba 1910-date keskel. Tänapäeval täidavad need taimerite rolli. Blokeerivad generaatorid. Blokeeriv generaator esindab relaksatsioongeneraatorite gruppi, mis genereerivad mittesiinuselisi võnkumisi, on toodud joonisel 3.17. Erinevalt multivibraatorist on selle lülituse väljund terav impulss laia vahega impulsside vahel Blokeeriva generaatori kõige olulisemaks komponendiks on hüstereesiga trafo. Esialgu emiteerib ettenihkega transistor voolu trafo primaarmähisele. Signaal läheb läbi kondensaatori transistori baasi. Kondensaator laetakse ja saadab impulsi trafole. Pärast trafo küllastumist langeb tagasisidesignaal, kondensaator tühjeneb ja võnkumine algab jälle. Võnkumiste sagedus sõltub takistusest ja mahtuvusest.
+UC
Joon. 3.17
Uout
Kokkuvõtteks. RC komponentidele põhinevatel generaatoritel on tavaliselt lihtne tööprintsiip, madal hind ja kõrge töökindlus. Samal ajal on need ebastabiilsed ja temperatuurist sõltuvad. Nende väljundi laine kujus on moonutusi ja nad muutuvad ajas LC komponente kasutavatel generaatoritel on kõrge stabiilsus ja peaaegu täielik sõltumatus komponentide parameetrirest, puudusteks on suur keerukus, mõõtmed ja maksumus.
3.1.3 Kvantimine ja kodeerimine
Mistahes päritolu analoogsisendi muutujad teisendatakse muunduritega sageli pingeteks ja vooludeks. Need elektrilise suurused võivad esineda kui
• mingi nähtuse kiired või aeglased otsesed mõõtmised ajas,
• moduleeritud vahelduvvoolu lainekujud, • mõningad kombinatsioonid seotud muutujate erilise ruumilise konfiguratsiooniga.
Näiteks: termopaaride, potentsimeetrite ja analoogarvutuslülituste väljundid, optilised mõõtmised või sildade väljundid, selsüünid ja lahendajad. Digitaalnivood. Suvaliselt fikseeritud pingete nivood, loetud maa suhtes, või loogikalülituste väljunditel tekkivad, või rakendatud nende sisenditele, esitavad tavaliselt informatsiooni digitaalkujul. Erinevalt lineaarsetest ahelatest on digitaaltöötluses ainult kaks seisundit
95
lülitusseadmete väljundis: sisselülitatud seisund ja väljalülitatud seisund. Sisselülitatud olekut loetakse loogiliseks “1” ehk ÕIGE seisund. Väljalülitatud seisund võrdub loogilisele “0”-le ehk väärtusele VÄÄR. Enamik loogikasüsteeme kasutab positiivset loogikat, milles “0” on esitatud nullpingega või madala pingenivooga alla 0.5 V, kuna “1” on esitatud kõrgema pingega. Lülitumine ühest olekust teise on väga kiire protsess. Juhtivuse vahepealseid väärtusi sellistes tingimustes ei käsitata. Digitaalseid numbreid esitavaid nivoode gruppe nimetatakse sõnadeks. Nivood võivad esineda üheaegselt rööpselt siinil või loogikalülituste sisenditel või väljunditel seeriatena või (mingi ajaühiku jooksul) ühel joonel või rööpsete baitide jadana. Siin on binaarse informatsiooni rada - tavaliselt 4, 8, 16, 32 või 64-bitti lai. Kolm levinumat tüüpi informatsiooni, mis tavaliselt siinidel esinevad, on andmed, aadressid ja juhtimissignaalid. Kolmeolekulised väljundlülitid (passiivne, kõrge ja madal) võimaldavad mitmeid allikaid ühendata siinile, kusjuures ainult üks on igal ajal aktiivne. Kvantimine. Igale analoognivoole seatakse vastavuses üks digitaalnivoode rööpne või jadas rühmitis ehk kood, mis on kvanditud (s.t. esitab ainumat osa analoogpiirkonnast) Tüüpiline digitaalkood võiks olla vektor
d7 d6 d5 d4 d3 d2 d1 d0 = 1 0 1 1 1 0 0 1 See on koostatud kaheksast bitist. Bitti “1”, äärmist vasakul nimetatakse kõrgeimaks bitiks (MSB), ja äärmine paremal on nimetatud madalaimaks bitiks (LSB) .Koodi tähendus numbrina, märgina või analoogmuutujana on seni määramata, kuni ei ole defineeritud kood ja selle teisendussuhted. Binaarset digitaalsõna, tavaliselt 8 bitti lai, nimetatakse baitiks. Sageli on bait sellise pikema sõna osa, mis peab mahtuma 8-bitilisele siinile kahes astmes. Baiti, mis sisaldab MSB’d nimetatakse kõrgeks baidiks, seda, mis sisaldab LSB nimetatakse madalaks baidiks. Kodeerimine. Andmesüsteemides on kõige lihtsam olukord see, kui sisend või väljund on unipolaarne alalispinge. Sellist tüüpi signaalide kõige populaarsem kood on esmane kahendkood, mis 4-bitilise muunduri jaoks on antud alljärgnevas tabelis:
Baas 10 Skaala +10 V täisskaala (FS) Kahendkood Gray kood 15 15/16 FS (+FS…1LSB) 9.375 1111 1000 14 14/16 FS 8.750 1110 1001 13 13/16 FS 8.125 1101 1011 12 12/16 FS 7.500 1100 1010 11 11/16 FS 6.875 1011 1110 10 10/16 FS 6.250 1010 1111 9 9/16 FS 5.625 1001 1101 8 8/16 FS 5.000 1000 1100 7 7/16 FS 4.375 0111 0100 6 6/16 FS 3.750 0110 0101
96
Baas 10 Skaala +10 V täisskaala (FS) Kahendkood Gray kood 5 5/16 FS 3.125 0101 0111 4 4/16 FS 2.500 0100 0110 3 3/16 FS 1.875 0011 0010 2 2/16 FS 1.250 0010 0011 1 1/16 FS (1LSB) 0.625 0001 0001 0 0/16 FS 0.000 0000 0000
Teine kood, mis väärib märkimist selles punktis, on Grey kood (e. reflektiivne kahendkood), mis leiutati E. Gray poolt 1878. aastal ja taasleiutati F. Gray poolt 1949. aastal. Gray koodis, kui numbri suurus muutub, toob üleminek ühest koodist järgmisele kaasa ainult ühe biti korraga. See on põhimõtteliselt erinev binaarkoodist, kus üleminekul 0111 ja 1000 muutuvad kõik bitid. See teeb Grey koodi eelistatuks analoog-digitaal teisenduses. Mõned seadmed kasutavad seda sisemiselt ja seejärel muundavad selle välise kasutuse jaoks Gray koodi binaarkoodiks. Paljudes süsteemides on vaja esitada nii positiivseid kui ka negatiivseid analoogsuurusi binaarkoodides. Seda võimaldavad sellised koodid, nagu nihutatud binaarkood, kahenitäiend, ühenitäiend või märginitäiend. Kahend-kümnendkoodis (BCD) on iga kümnendnumber esitatud vastava 4-bitilise otsese kahendsõnana. See on väga sobiv kood numbriliste displeide, nagu numbrilised voltmeetrid ühendamiseks. Kokkuvõtteks. Analoogmuutujad võivad olla teisendatud digitaalseteks sõnadeks ja vastupidi. Konverteerimise käigus toimub kvantimine ja analoogpiirkonna üksikud osad teisendatakse digitaalkoodideks. Koodi kõrgem bait sisaldab MSB ja madal bait sisaldab LSB. Digitaalsüsteemides on kõige populaarsem otsene kahendkood, mille puuduseks on transistoride müra, mis võib põhjustada teisenduse viga . Gray koodil pole sellist puudust, kuna selle üleminek ühelt koodilt teisele haarab ainult ühte bitti korraga. Mõningates süsteemides kasutatakse erinevaid bipolaarseid koode.
3.1.4. Digitaallülitused
Loogikalülitused on ehitatud digitaallülituste baasil. Need on mistahes digitaalse süsteemi elementaarkomponendid. Digitaallülituste kasutamisega võib konstrueerida erinevaid loogikalülitusi. Need ühendatakse kokku mitmesuguste lülitusseadmete koostamiseks. Kahendloogika. Loogikasüsteeme on mitmeid, , enimkasutatud nivoo valikud on need, mis on TTL–is (transistor-transitor-loogika), milles “1” vastab minimaalsele väljundnivoole +2,4 V ja “0” vastab maksimaalsele väljundnivoole +0,4 V. Standardne TTL lülitus tarbib keskmiselt võimsust 10 mW. TTL väljund võib tavaliselt juhtida 10 TTL sisendit. TTL seadmed ehitatakse BJT transistoridel, milliseid toidetakse 5V alalispingega. Seda suurust tuleb hoida piisavalt täpselt. Teine väga populaarne loogikasüsteem on CMOS, kuid selle nivood on tehtud ühilduvaks vanema TTL loogika standardiga. CMOS elementide baasiks on MOSFET, mis töötab väga laias pingete piirides alates 7 kuni 15 V; selle keskmine suurus on 10 V. Kahe loogika tasandi kasutamine viib loomulikult kahendastmiku e. pooleksloenduri kasutamisele, kus on kasutusel ainult numbrid “1” ja “0” , kus “1” asukoht määrab, millist arvu 2
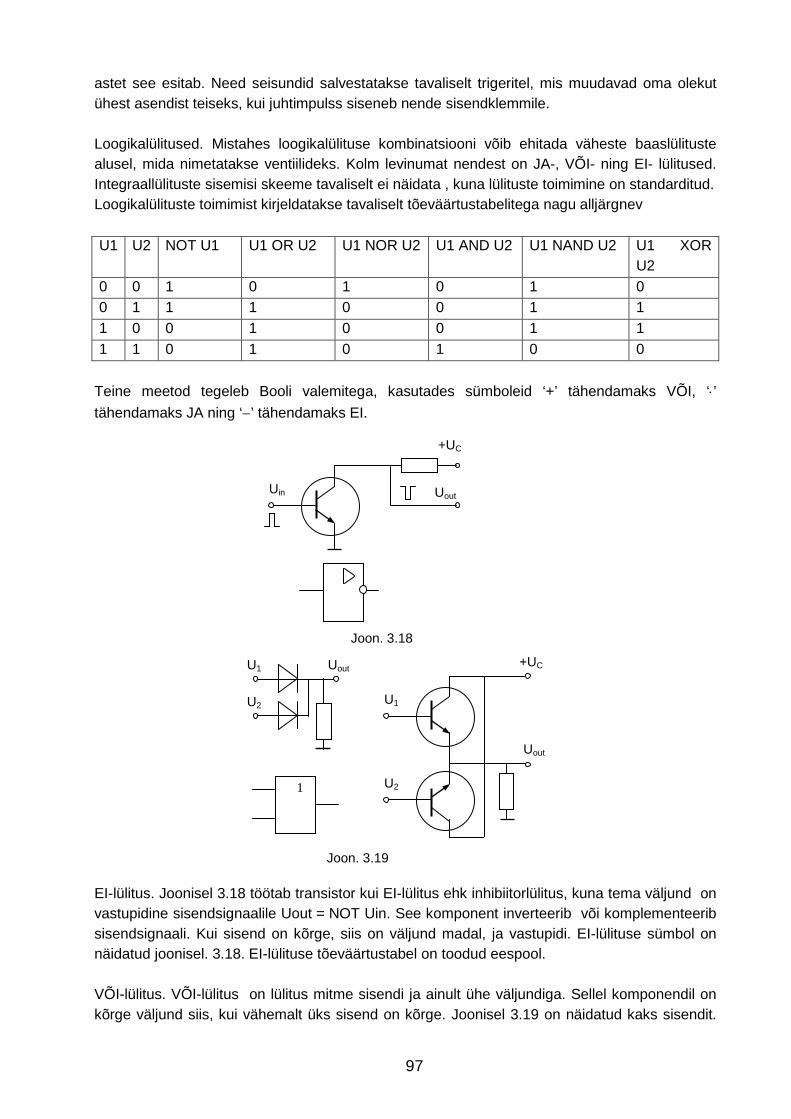
97
astet see esitab. Need seisundid salvestatakse tavaliselt trigeritel, mis muudavad oma olekut ühest asendist teiseks, kui juhtimpulss siseneb nende sisendklemmile. Loogikalülitused. Mistahes loogikalülituse kombinatsiooni võib ehitada väheste baaslülituste alusel, mida nimetatakse ventiilideks. Kolm levinumat nendest on JA-, VÕI- ning EI- lülitused. Integraallülituste sisemisi skeeme tavaliselt ei näidata , kuna lülituste toimimine on standarditud. Loogikalülituste toimimist kirjeldatakse tavaliselt tõeväärtustabelitega nagu alljärgnev U1 U2 NOT U1 U1 OR U2 U1 NOR U2 U1 AND U2 U1 NAND U2 U1 XOR
U2 0 0 1 0 1 0 1 0 0 1 1 1 0 0 1 1 1 0 0 1 0 0 1 1 1 1 0 1 0 1 0 0
Teine meetod tegeleb Booli valemitega, kasutades sümboleid ‘+’ tähendamaks VÕI, ‘⋅’
tähendamaks JA ning ‘−’ tähendamaks EI.
Uout
U2
Uout U1
U1
+UC
Joon. 3.19
U2 1
Uin Uout
+UC
Joon. 3.18
EI-lülitus. Joonisel 3.18 töötab transistor kui EI-lülitus ehk inhibiitorlülitus, kuna tema väljund on vastupidine sisendsignaalile Uout = NOT Uin. See komponent inverteerib või komplementeerib sisendsignaali. Kui sisend on kõrge, siis on väljund madal, ja vastupidi. EI-lülituse sümbol on näidatud joonisel. 3.18. EI-lülituse tõeväärtustabel on toodud eespool. VÕI-lülitus. VÕI-lülitus on lülitus mitme sisendi ja ainult ühe väljundiga. Sellel komponendil on kõrge väljund siis, kui vähemalt üks sisend on kõrge. Joonisel 3.19 on näidatud kaks sisendit.
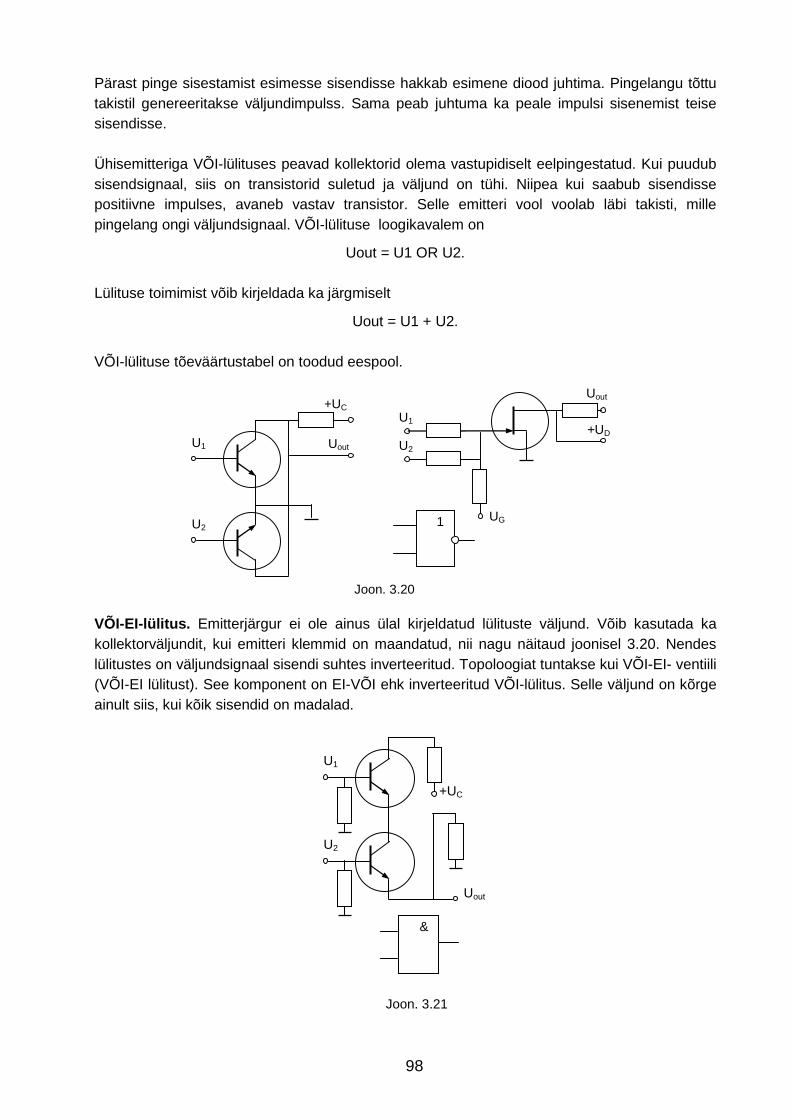
98
Pärast pinge sisestamist esimesse sisendisse hakkab esimene diood juhtima. Pingelangu tõttu takistil genereeritakse väljundimpulss. Sama peab juhtuma ka peale impulsi sisenemist teise sisendisse. Ühisemitteriga VÕI-lülituses peavad kollektorid olema vastupidiselt eelpingestatud. Kui puudub sisendsignaal, siis on transistorid suletud ja väljund on tühi. Niipea kui saabub sisendisse positiivne impulses, avaneb vastav transistor. Selle emitteri vool voolab läbi takisti, mille pingelang ongi väljundsignaal. VÕI-lülituse loogikavalem on
Uout = U1 OR U2. Lülituse toimimist võib kirjeldada ka järgmiselt
Uout = U1 + U2. VÕI-lülituse tõeväärtustabel on toodud eespool.
UG
Joon. 3.20
U2
Uout
U1 +UD
1
Uout U1
+UC
U2
VÕI-EI-lülitus. Emitterjärgur ei ole ainus ülal kirjeldatud lülituste väljund. Võib kasutada ka kollektorväljundit, kui emitteri klemmid on maandatud, nii nagu näitaud joonisel 3.20. Nendes lülitustes on väljundsignaal sisendi suhtes inverteeritud. Topoloogiat tuntakse kui VÕI-EI- ventiili (VÕI-EI lülitust). See komponent on EI-VÕI ehk inverteeritud VÕI-lülitus. Selle väljund on kõrge ainult siis, kui kõik sisendid on madalad.
+UC
U1
Uout
U2
Joon. 3.21
&
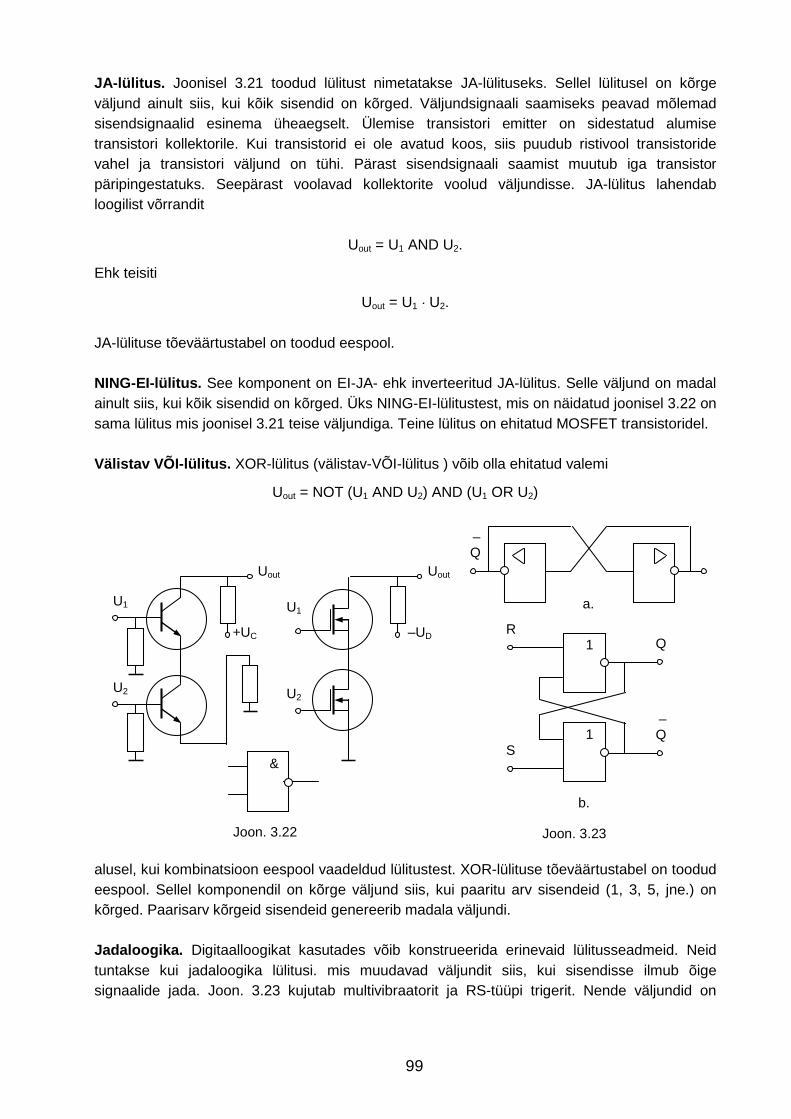
99
JA-lülitus. Joonisel 3.21 toodud lülitust nimetatakse JA-lülituseks. Sellel lülitusel on kõrge väljund ainult siis, kui kõik sisendid on kõrged. Väljundsignaali saamiseks peavad mõlemad sisendsignaalid esinema üheaegselt. Ülemise transistori emitter on sidestatud alumise transistori kollektorile. Kui transistorid ei ole avatud koos, siis puudub ristivool transistoride vahel ja transistori väljund on tühi. Pärast sisendsignaali saamist muutub iga transistor päripingestatuks. Seepärast voolavad kollektorite voolud väljundisse. JA-lülitus lahendab loogilist võrrandit
Uout = U1 AND U2.
Ehk teisiti
Uout = U1 ⋅ U2. JA-lülituse tõeväärtustabel on toodud eespool. NING-EI-lülitus. See komponent on EI-JA- ehk inverteeritud JA-lülitus. Selle väljund on madal ainult siis, kui kõik sisendid on kõrged. Üks NING-EI-lülitustest, mis on näidatud joonisel 3.22 on sama lülitus mis joonisel 3.21 teise väljundiga. Teine lülitus on ehitatud MOSFET transistoridel. Välistav VÕI-lülitus. XOR-lülitus (välistav-VÕI-lülitus ) võib olla ehitatud valemi
Uout = NOT (U1 AND U2) AND (U1 OR U2)
U1
U2
+UC
U1
Uout
U2
Joon. 3.22
–UD
Uout
&
Q
a.
S
R Q
– Q
– Q
1
1
b.
Joon. 3.23
alusel, kui kombinatsioon eespool vaadeldud lülitustest. XOR-lülituse tõeväärtustabel on toodud eespool. Sellel komponendil on kõrge väljund siis, kui paaritu arv sisendeid (1, 3, 5, jne.) on kõrged. Paarisarv kõrgeid sisendeid genereerib madala väljundi. Jadaloogika. Digitaalloogikat kasutades võib konstrueerida erinevaid lülitusseadmeid. Neid tuntakse kui jadaloogika lülitusi. mis muudavad väljundit siis, kui sisendisse ilmub õige signaalide jada. Joon. 3.23 kujutab multivibraatorit ja RS-tüüpi trigerit. Nende väljundid on
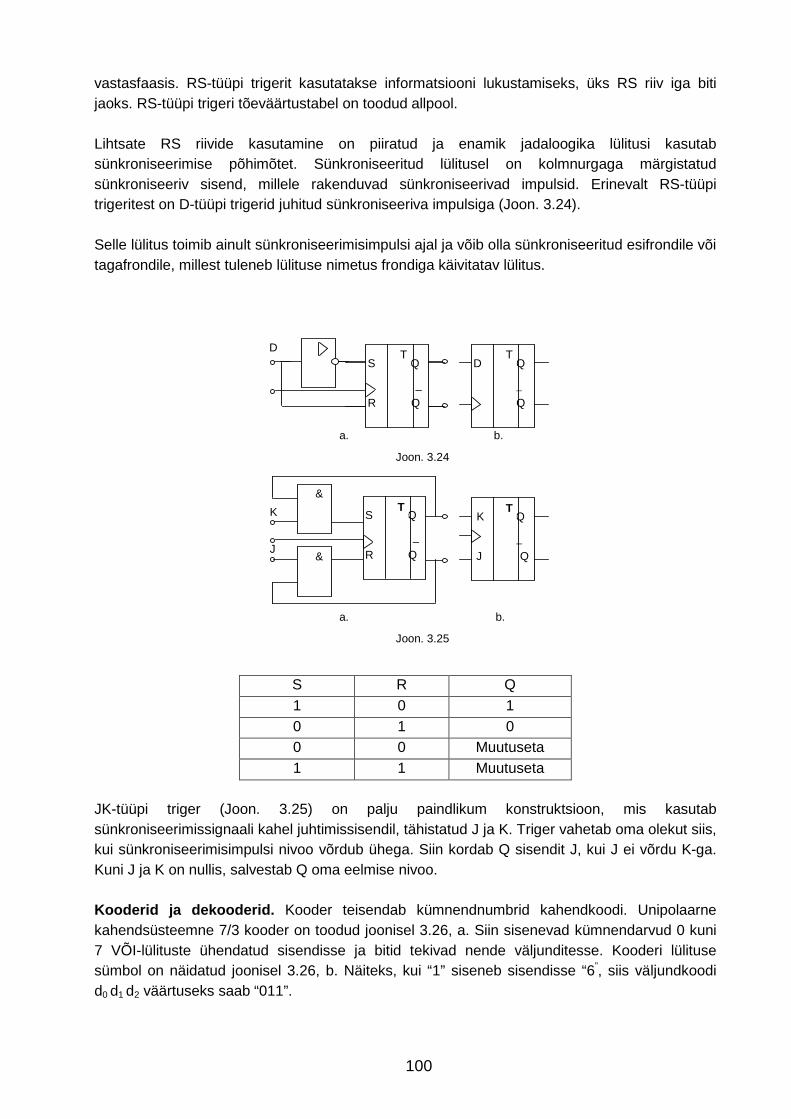
100
vastasfaasis. RS-tüüpi trigerit kasutatakse informatsiooni lukustamiseks, üks RS riiv iga biti jaoks. RS-tüüpi trigeri tõeväärtustabel on toodud allpool. Lihtsate RS riivide kasutamine on piiratud ja enamik jadaloogika lülitusi kasutab sünkroniseerimise põhimõtet. Sünkroniseeritud lülitusel on kolmnurgaga märgistatud sünkroniseeriv sisend, millele rakenduvad sünkroniseerivad impulsid. Erinevalt RS-tüüpi trigeritest on D-tüüpi trigerid juhitud sünkroniseeriva impulsiga (Joon. 3.24). Selle lülitus toimib ainult sünkroniseerimisimpulsi ajal ja võib olla sünkroniseeritud esifrondile või tagafrondile, millest tuleneb lülituse nimetus frondiga käivitatav lülitus.
a. b.
J
K
D
S Q – R Q
T
S Q – R Q
T &
&
a.
D Q – Q
T
K Q – J Q
T
b.
Joon. 3.24
Joon. 3.25
S R Q 1 0 1 0 1 0 0 0 Muutuseta 1 1 Muutuseta
JK-tüüpi triger (Joon. 3.25) on palju paindlikum konstruktsioon, mis kasutab sünkroniseerimissignaali kahel juhtimissisendil, tähistatud J ja K. Triger vahetab oma olekut siis, kui sünkroniseerimisimpulsi nivoo võrdub ühega. Siin kordab Q sisendit J, kui J ei võrdu K-ga. Kuni J ja K on nullis, salvestab Q oma eelmise nivoo. Kooderid ja dekooderid. Kooder teisendab kümnendnumbrid kahendkoodi. Unipolaarne kahendsüsteemne 7/3 kooder on toodud joonisel 3.26, a. Siin sisenevad kümnendarvud 0 kuni 7 VÕI-lülituste ühendatud sisendisse ja bitid tekivad nende väljunditesse. Kooderi lülituse sümbol on näidatud joonisel 3.26, b. Näiteks, kui “1” siseneb sisendisse “6”, siis väljundkoodi d0 d1 d2 väärtuseks saab “011”.
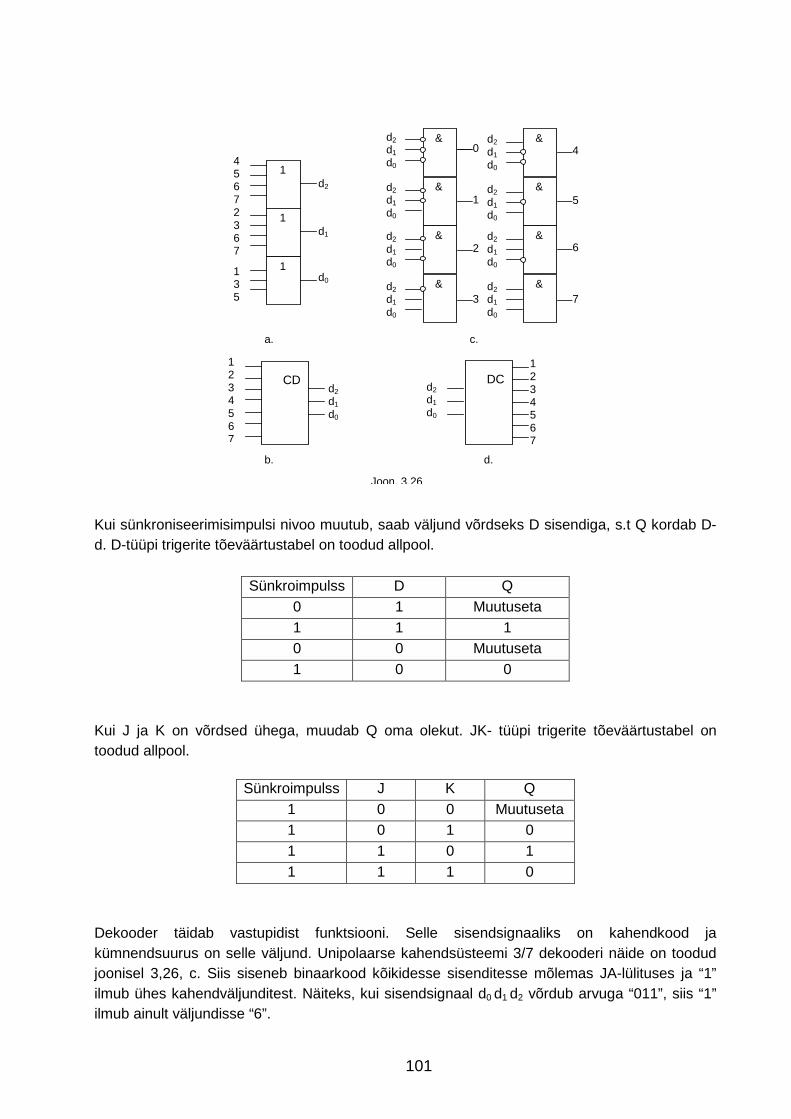
101
d.
Joon. 3.26
1
1
1
4567 2367
135
d0
d1
d2
&
&
&
&
&
&
&
&
d2 d1 d0
d2 d1 d0
d2 d1 d0
d2 d1 d0
d2 d1 d0
d2 d1 d0
d2 d1 d0
d2 d1 d0
0
1
2
3 7
6
5
4
CD
1234567
d2 d1
d0
DC d2 d1
d0
1234567
c. a.
b.
Kui sünkroniseerimisimpulsi nivoo muutub, saab väljund võrdseks D sisendiga, s.t Q kordab D-d. D-tüüpi trigerite tõeväärtustabel on toodud allpool.
Sünkroimpulss D Q 0 1 Muutuseta 1 1 1 0 0 Muutuseta 1 0 0
Kui J ja K on võrdsed ühega, muudab Q oma olekut. JK- tüüpi trigerite tõeväärtustabel on toodud allpool.
Sünkroimpulss J K Q 1 0 0 Muutuseta 1 0 1 0 1 1 0 1 1 1 1 0
Dekooder täidab vastupidist funktsiooni. Selle sisendsignaaliks on kahendkood ja kümnendsuurus on selle väljund. Unipolaarse kahendsüsteemi 3/7 dekooderi näide on toodud joonisel 3,26, c. Siis siseneb binaarkood kõikidesse sisenditesse mõlemas JA-lülituses ja “1” ilmub ühes kahendväljunditest. Näiteks, kui sisendsignaal d0 d1 d2 võrdub arvuga “011”, siis “1” ilmub ainult väljundisse “6”.
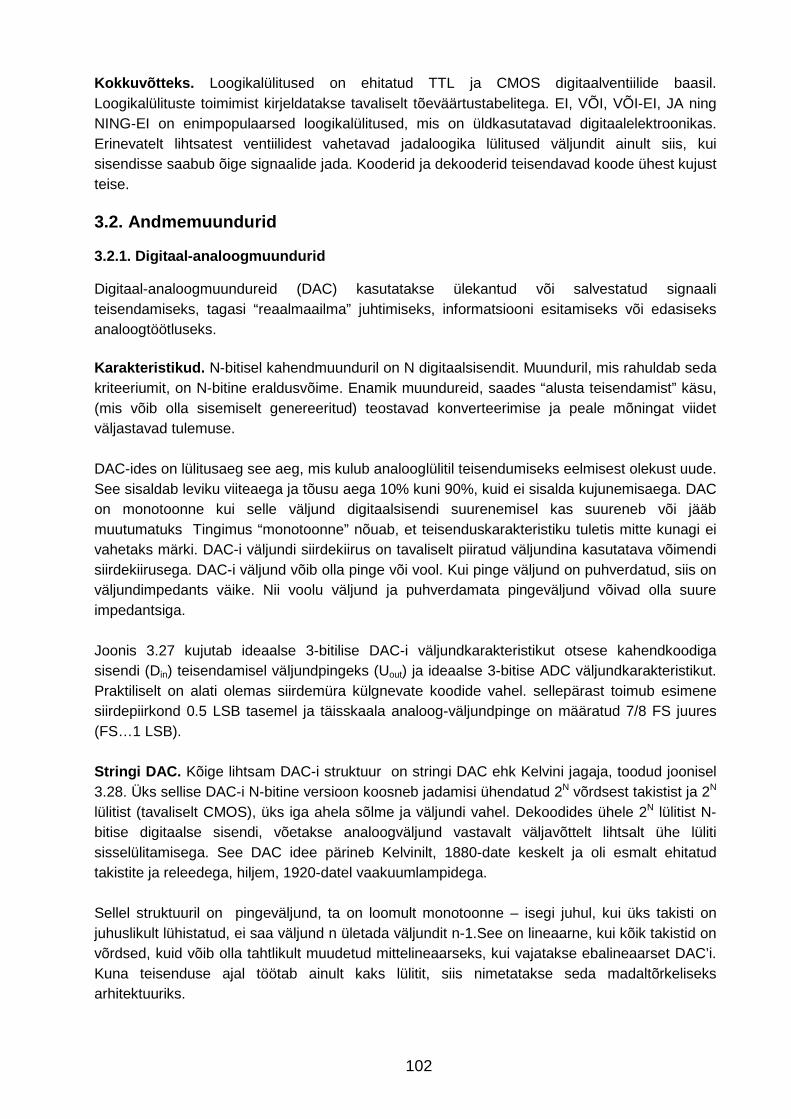
102
Kokkuvõtteks. Loogikalülitused on ehitatud TTL ja CMOS digitaalventiilide baasil. Loogikalülituste toimimist kirjeldatakse tavaliselt tõeväärtustabelitega. EI, VÕI, VÕI-EI, JA ning NING-EI on enimpopulaarsed loogikalülitused, mis on üldkasutatavad digitaalelektroonikas. Erinevatelt lihtsatest ventiilidest vahetavad jadaloogika lülitused väljundit ainult siis, kui sisendisse saabub õige signaalide jada. Kooderid ja dekooderid teisendavad koode ühest kujust teise.
3.2. Andmemuundurid
3.2.1. Digitaal-analoogmuundurid
Digitaal-analoogmuundureid (DAC) kasutatakse ülekantud või salvestatud signaali teisendamiseks, tagasi “reaalmaailma” juhtimiseks, informatsiooni esitamiseks või edasiseks analoogtöötluseks. Karakteristikud. N-bitisel kahendmuunduril on N digitaalsisendit. Muunduril, mis rahuldab seda kriteeriumit, on N-bitine eraldusvõime. Enamik muundureid, saades “alusta teisendamist” käsu, (mis võib olla sisemiselt genereeritud) teostavad konverteerimise ja peale mõningat viidet väljastavad tulemuse. DAC-ides on lülitusaeg see aeg, mis kulub analooglülitil teisendumiseks eelmisest olekust uude. See sisaldab leviku viiteaega ja tõusu aega 10% kuni 90%, kuid ei sisalda kujunemisaega. DAC on monotoonne kui selle väljund digitaalsisendi suurenemisel kas suureneb või jääb muutumatuks Tingimus “monotoonne” nõuab, et teisenduskarakteristiku tuletis mitte kunagi ei vahetaks märki. DAC-i väljundi siirdekiirus on tavaliselt piiratud väljundina kasutatava võimendi siirdekiirusega. DAC-i väljund võib olla pinge või vool. Kui pinge väljund on puhverdatud, siis on väljundimpedants väike. Nii voolu väljund ja puhverdamata pingeväljund võivad olla suure impedantsiga. Joonis 3.27 kujutab ideaalse 3-bitilise DAC-i väljundkarakteristikut otsese kahendkoodiga sisendi (Din) teisendamisel väljundpingeks (Uout) ja ideaalse 3-bitise ADC väljundkarakteristikut. Praktiliselt on alati olemas siirdemüra külgnevate koodide vahel. sellepärast toimub esimene siirdepiirkond 0.5 LSB tasemel ja täisskaala analoog-väljundpinge on määratud 7/8 FS juures (FS…1 LSB). Stringi DAC. Kõige lihtsam DAC-i struktuur on stringi DAC ehk Kelvini jagaja, toodud joonisel 3.28. Üks sellise DAC-i N-bitine versioon koosneb jadamisi ühendatud 2N võrdsest takistist ja 2N lülitist (tavaliselt CMOS), üks iga ahela sõlme ja väljundi vahel. Dekoodides ühele 2N lülitist N-bitise digitaalse sisendi, võetakse analoogväljund vastavalt väljavõttelt lihtsalt ühe lüliti sisselülitamisega. See DAC idee pärineb Kelvinilt, 1880-date keskelt ja oli esmalt ehitatud takistite ja releedega, hiljem, 1920-datel vaakuumlampidega. Sellel struktuuril on pingeväljund, ta on loomult monotoonne – isegi juhul, kui üks takisti on juhuslikult lühistatud, ei saa väljund n ületada väljundit n-1.See on lineaarne, kui kõik takistid on võrdsed, kuid võib olla tahtlikult muudetud mittelineaarseks, kui vajatakse ebalineaarset DAC’i. Kuna teisenduse ajal töötab ainult kaks lülitit, siis nimetatakse seda madaltõrkeliseks arhitektuuriks.
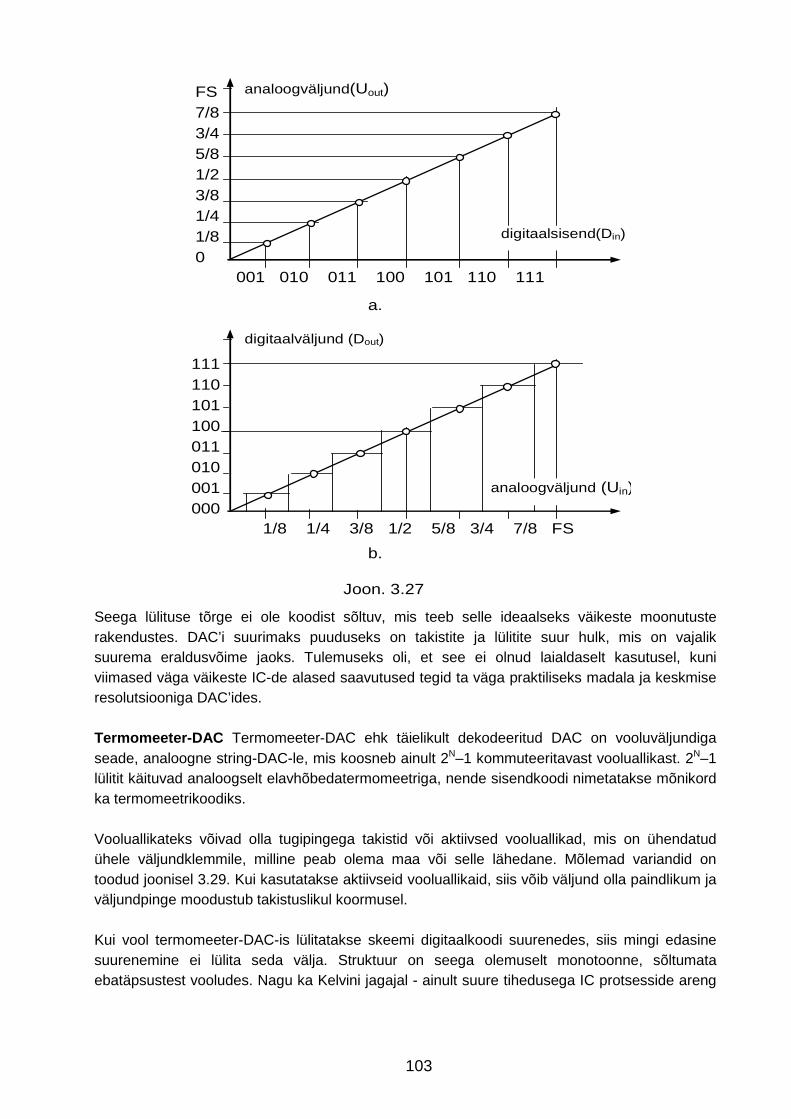
103
a.
b.
001 010 011 100 101 110 111
analoogväljund(Uout) FS 7/8 3/4 5/8 1/2 3/8 1/4 1/8 0
1/8 1/4 3/8 1/2 5/8 3/4 7/8 FS
digitaalväljund (Dout) 111 110 101 100 011 010 001 000
Joon. 3.27
analoogväljund (Uin)
digitaalsisend(Din)
Seega lülituse tõrge ei ole koodist sõltuv, mis teeb selle ideaalseks väikeste moonutuste rakendustes. DAC’i suurimaks puuduseks on takistite ja lülitite suur hulk, mis on vajalik suurema eraldusvõime jaoks. Tulemuseks oli, et see ei olnud laialdaselt kasutusel, kuni viimased väga väikeste IC-de alased saavutused tegid ta väga praktiliseks madala ja keskmise resolutsiooniga DAC’ides. Termomeeter-DAC Termomeeter-DAC ehk täielikult dekodeeritud DAC on vooluväljundiga seade, analoogne string-DAC-le, mis koosneb ainult 2N–1 kommuteeritavast vooluallikast. 2N–1 lülitit käituvad analoogselt elavhõbedatermomeetriga, nende sisendkoodi nimetatakse mõnikord ka termomeetrikoodiks. Vooluallikateks võivad olla tugipingega takistid või aktiivsed vooluallikad, mis on ühendatud ühele väljundklemmile, milline peab olema maa või selle lähedane. Mõlemad variandid on toodud joonisel 3.29. Kui kasutatakse aktiivseid vooluallikaid, siis võib väljund olla paindlikum ja väljundpinge moodustub takistuslikul koormusel. Kui vool termomeeter-DAC-is lülitatakse skeemi digitaalkoodi suurenedes, siis mingi edasine suurenemine ei lülita seda välja. Struktuur on seega olemuselt monotoonne, sõltumata ebatäpsustest vooludes. Nagu ka Kelvini jagajal - ainult suure tihedusega IC protsesside areng
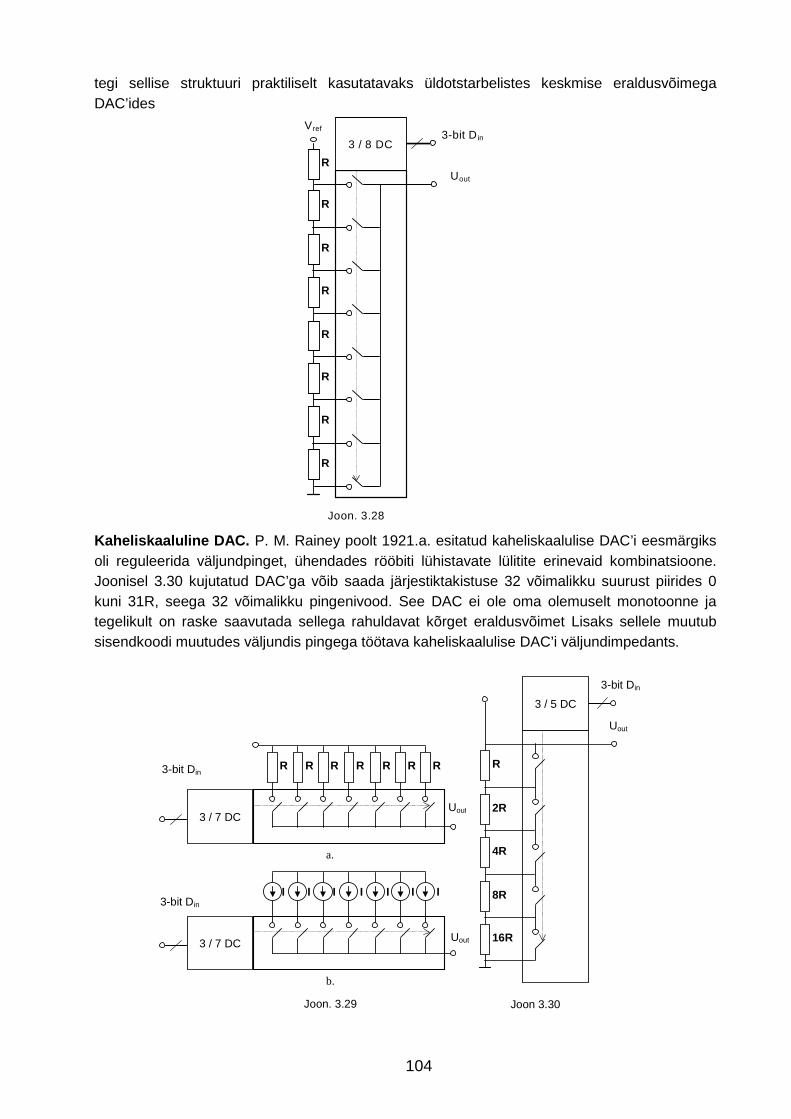
104
tegi sellise struktuuri praktiliselt kasutatavaks üldotstarbelistes keskmise eraldusvõimega DAC’ides
R
R
R
R
R
R
R
R
Vref 3 / 8 DC
3-bit D in
Joon. 3.28
Uout
Kaheliskaaluline DAC. P. M. Rainey poolt 1921.a. esitatud kaheliskaalulise DAC’i eesmärgiks oli reguleerida väljundpinget, ühendades rööbiti lühistavate lülitite erinevaid kombinatsioone. Joonisel 3.30 kujutatud DAC’ga võib saada järjestiktakistuse 32 võimalikku suurust piirides 0 kuni 31R, seega 32 võimalikku pingenivood. See DAC ei ole oma olemuselt monotoonne ja tegelikult on raske saavutada sellega rahuldavat kõrget eraldusvõimet Lisaks sellele muutub sisendkoodi muutudes väljundis pingega töötava kaheliskaalulise DAC’i väljundimpedants.
Uout
Joon 3.30
R
2R
4R
8R
16R
3 / 5 DC
3-bit Din
b.
a.
Uout
Joon. 3.29
3-bit Din
3 / 7 DC
R R R R R R R
Uout
3-bit Din
3 / 7 DC
I I I I I I I
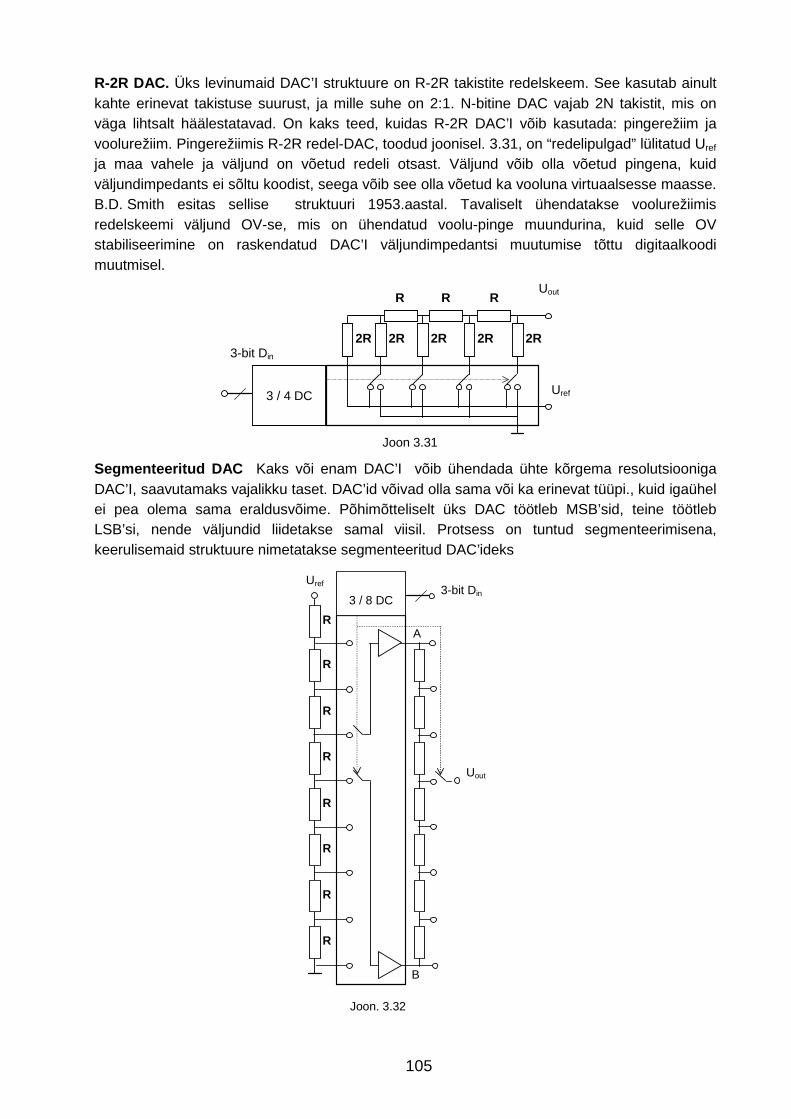
105
R-2R DAC. Üks levinumaid DAC’I struktuure on R-2R takistite redelskeem. See kasutab ainult kahte erinevat takistuse suurust, ja mille suhe on 2:1. N-bitine DAC vajab 2N takistit, mis on väga lihtsalt häälestatavad. On kaks teed, kuidas R-2R DAC’I võib kasutada: pingerežiim ja voolurežiim. Pingerežiimis R-2R redel-DAC, toodud joonisel. 3.31, on “redelipulgad” lülitatud Uref ja maa vahele ja väljund on võetud redeli otsast. Väljund võib olla võetud pingena, kuid väljundimpedants ei sõltu koodist, seega võib see olla võetud ka vooluna virtuaalsesse maasse. B.D. Smith esitas sellise struktuuri 1953.aastal. Tavaliselt ühendatakse voolurežiimis redelskeemi väljund OV-se, mis on ühendatud voolu-pinge muundurina, kuid selle OV stabiliseerimine on raskendatud DAC’I väljundimpedantsi muutumise tõttu digitaalkoodi muutmisel.
R R R
Uout
Joon 3.31
3-bit Din
Uref 3 / 4 DC
2R 2R 2R 2R 2R
Segmenteeritud DAC Kaks või enam DAC’I võib ühendada ühte kõrgema resolutsiooniga DAC’I, saavutamaks vajalikku taset. DAC’id võivad olla sama või ka erinevat tüüpi., kuid igaühel ei pea olema sama eraldusvõime. Põhimõtteliselt üks DAC töötleb MSB’sid, teine töötleb LSB’si, nende väljundid liidetakse samal viisil. Protsess on tuntud segmenteerimisena, keerulisemaid struktuure nimetatakse segmenteeritud DAC’ideks
B
A R
R
R
R
R
R
R
R
Uref 3 / 8 DC
3-bit Din
Joon. 3.32
Uout
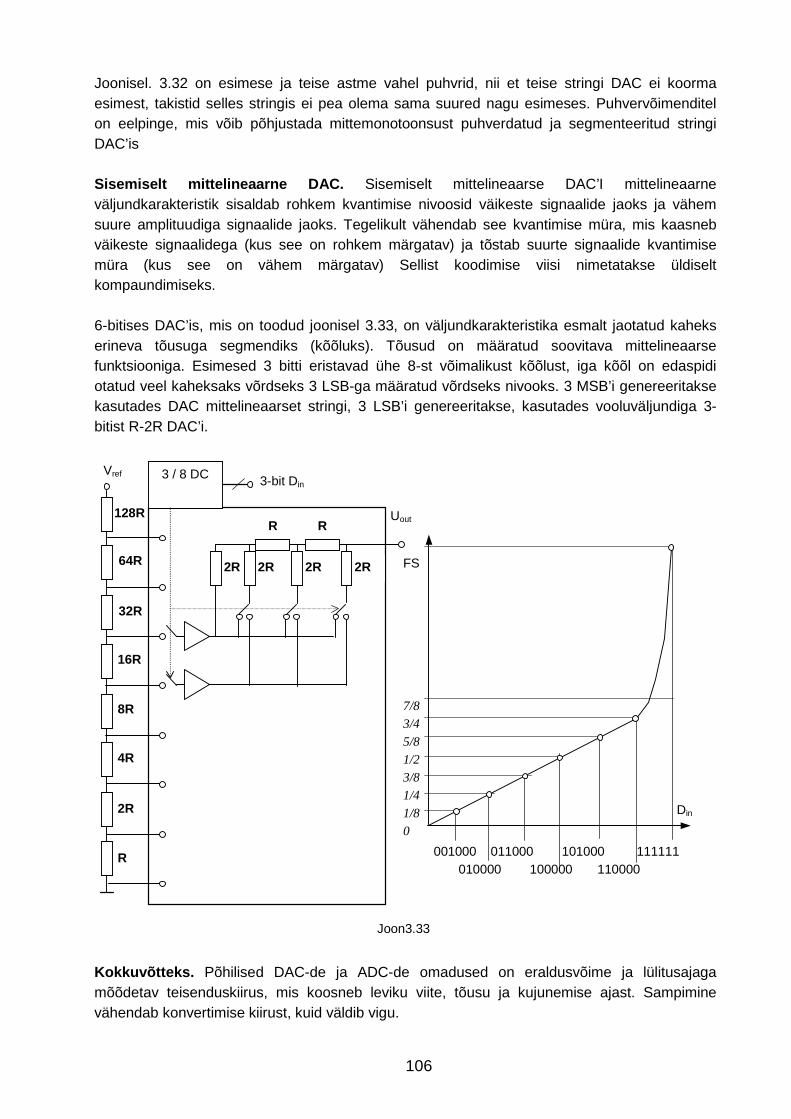
106
Joonisel. 3.32 on esimese ja teise astme vahel puhvrid, nii et teise stringi DAC ei koorma esimest, takistid selles stringis ei pea olema sama suured nagu esimeses. Puhvervõimenditel on eelpinge, mis võib põhjustada mittemonotoonsust puhverdatud ja segmenteeritud stringi DAC’is Sisemiselt mittelineaarne DAC. Sisemiselt mittelineaarse DAC’I mittelineaarne väljundkarakteristik sisaldab rohkem kvantimise nivoosid väikeste signaalide jaoks ja vähem suure amplituudiga signaalide jaoks. Tegelikult vähendab see kvantimise müra, mis kaasneb väikeste signaalidega (kus see on rohkem märgatav) ja tõstab suurte signaalide kvantimise müra (kus see on vähem märgatav) Sellist koodimise viisi nimetatakse üldiselt kompaundimiseks. 6-bitises DAC’is, mis on toodud joonisel 3.33, on väljundkarakteristika esmalt jaotatud kaheks erineva tõusuga segmendiks (kõõluks). Tõusud on määratud soovitava mittelineaarse funktsiooniga. Esimesed 3 bitti eristavad ühe 8-st võimalikust kõõlust, iga kõõl on edaspidi otatud veel kaheksaks võrdseks 3 LSB-ga määratud võrdseks nivooks. 3 MSB’i genereeritakse kasutades DAC mittelineaarset stringi, 3 LSB’i genereeritakse, kasutades vooluväljundiga 3-bitist R-2R DAC’i.
64R
32R
16R
Uout
3-bit Din
128R
Vref 3 / 8 DC
Joon3.33
R R
2R 2R 2R 2R
8R
4R
2R
R 001000 011000 101000 111111 010000 100000 110000
Din
FS
7/8
3/4
5/8
1/2
3/8
1/4
1/8
0
Kokkuvõtteks. Põhilised DAC-de ja ADC-de omadused on eraldusvõime ja lülitusajaga mõõdetav teisenduskiirus, mis koosneb leviku viite, tõusu ja kujunemise ajast. Sampimine vähendab konvertimise kiirust, kuid väldib vigu.
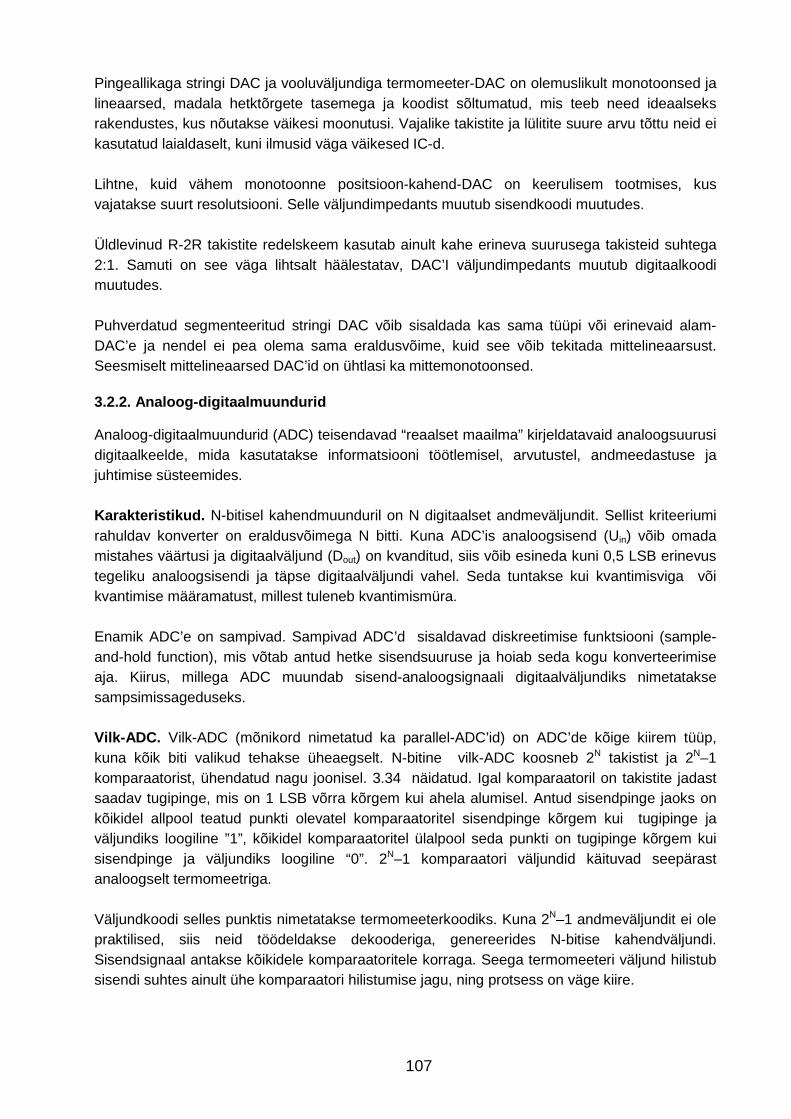
107
Pingeallikaga stringi DAC ja vooluväljundiga termomeeter-DAC on olemuslikult monotoonsed ja lineaarsed, madala hetktõrgete tasemega ja koodist sõltumatud, mis teeb need ideaalseks rakendustes, kus nõutakse väikesi moonutusi. Vajalike takistite ja lülitite suure arvu tõttu neid ei kasutatud laialdaselt, kuni ilmusid väga väikesed IC-d. Lihtne, kuid vähem monotoonne positsioon-kahend-DAC on keerulisem tootmises, kus vajatakse suurt resolutsiooni. Selle väljundimpedants muutub sisendkoodi muutudes. Üldlevinud R-2R takistite redelskeem kasutab ainult kahe erineva suurusega takisteid suhtega 2:1. Samuti on see väga lihtsalt häälestatav, DAC’I väljundimpedants muutub digitaalkoodi muutudes. Puhverdatud segmenteeritud stringi DAC võib sisaldada kas sama tüüpi või erinevaid alam-DAC’e ja nendel ei pea olema sama eraldusvõime, kuid see võib tekitada mittelineaarsust. Seesmiselt mittelineaarsed DAC’id on ühtlasi ka mittemonotoonsed.
3.2.2. Analoog-digitaalmuundurid
Analoog-digitaalmuundurid (ADC) teisendavad “reaalset maailma” kirjeldatavaid analoogsuurusi digitaalkeelde, mida kasutatakse informatsiooni töötlemisel, arvutustel, andmeedastuse ja juhtimise süsteemides. Karakteristikud. N-bitisel kahendmuunduril on N digitaalset andmeväljundit. Sellist kriteeriumi rahuldav konverter on eraldusvõimega N bitti. Kuna ADC’is analoogsisend (Uin) võib omada mistahes väärtusi ja digitaalväljund (Dout) on kvanditud, siis võib esineda kuni 0,5 LSB erinevus tegeliku analoogsisendi ja täpse digitaalväljundi vahel. Seda tuntakse kui kvantimisviga või kvantimise määramatust, millest tuleneb kvantimismüra. Enamik ADC’e on sampivad. Sampivad ADC’d sisaldavad diskreetimise funktsiooni (sample-and-hold function), mis võtab antud hetke sisendsuuruse ja hoiab seda kogu konverteerimise aja. Kiirus, millega ADC muundab sisend-analoogsignaali digitaalväljundiks nimetatakse sampsimissageduseks. Vilk-ADC. Vilk-ADC (mõnikord nimetatud ka parallel-ADC’id) on ADC’de kõige kiirem tüüp, kuna kõik biti valikud tehakse üheaegselt. N-bitine vilk-ADC koosneb 2N takistist ja 2N–1 komparaatorist, ühendatud nagu joonisel. 3.34 näidatud. Igal komparaatoril on takistite jadast saadav tugipinge, mis on 1 LSB võrra kõrgem kui ahela alumisel. Antud sisendpinge jaoks on kõikidel allpool teatud punkti olevatel komparaatoritel sisendpinge kõrgem kui tugipinge ja väljundiks loogiline ”1”, kõikidel komparaatoritel ülalpool seda punkti on tugipinge kõrgem kui sisendpinge ja väljundiks loogiline “0”. 2N–1 komparaatori väljundid käituvad seepärast analoogselt termomeetriga. Väljundkoodi selles punktis nimetatakse termomeeterkoodiks. Kuna 2N–1 andmeväljundit ei ole praktilised, siis neid töödeldakse dekooderiga, genereerides N-bitise kahendväljundi. Sisendsignaal antakse kõikidele komparaatoritele korraga. Seega termomeeteri väljund hilistub sisendi suhtes ainult ühe komparaatori hilistumise jagu, ning protsess on väge kiire.
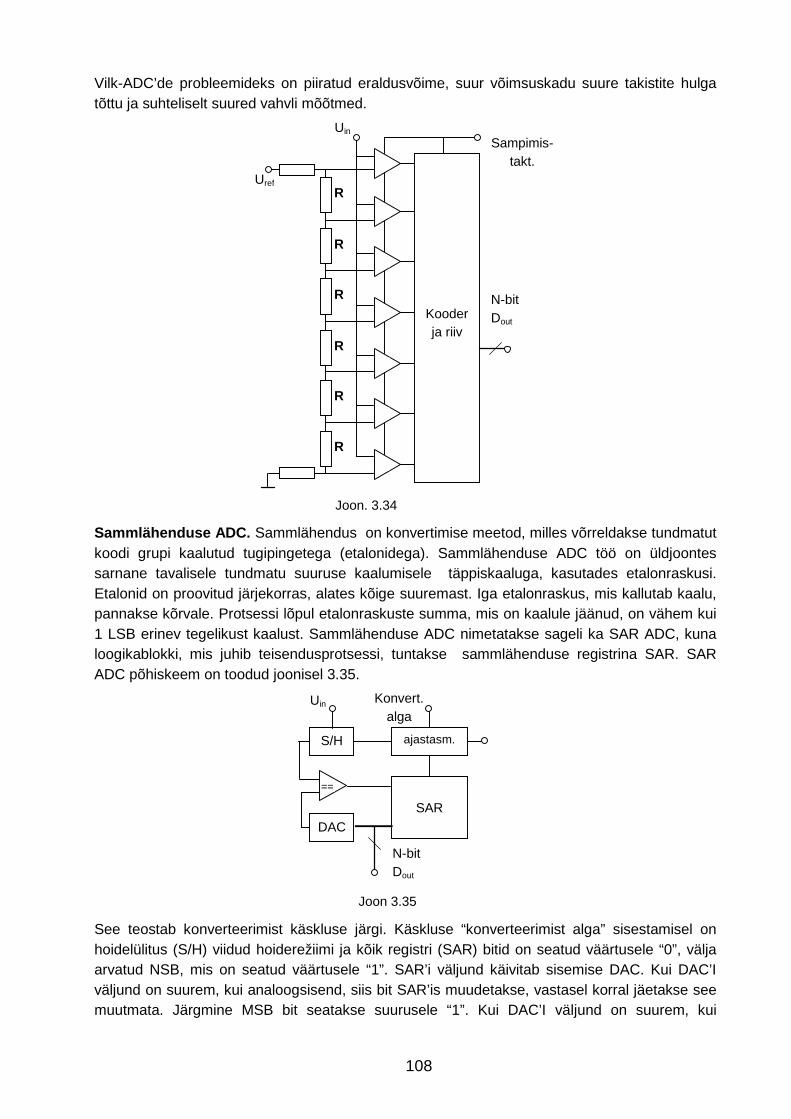
108
Vilk-ADC’de probleemideks on piiratud eraldusvõime, suur võimsuskadu suure takistite hulga tõttu ja suhteliselt suured vahvli mõõtmed.
Uin
N-bit Dout
Sampimis- takt.
R
R
R
R
R
R
Uref
Joon. 3.34
Kooder ja riiv
==
==
==
==
==
==
==
Sammlähenduse ADC. Sammlähendus on konvertimise meetod, milles võrreldakse tundmatut koodi grupi kaalutud tugipingetega (etalonidega). Sammlähenduse ADC töö on üldjoontes sarnane tavalisele tundmatu suuruse kaalumisele täppiskaaluga, kasutades etalonraskusi. Etalonid on proovitud järjekorras, alates kõige suuremast. Iga etalonraskus, mis kallutab kaalu, pannakse kõrvale. Protsessi lõpul etalonraskuste summa, mis on kaalule jäänud, on vähem kui 1 LSB erinev tegelikust kaalust. Sammlähenduse ADC nimetatakse sageli ka SAR ADC, kuna loogikablokki, mis juhib teisendusprotsessi, tuntakse sammlähenduse registrina SAR. SAR ADC põhiskeem on toodud joonisel 3.35.
OC
Uin
N-bit Dout
Konvert. alga
SAR
Joon 3.35
DAC
ajastasm.ne
S/H
==
See teostab konverteerimist käskluse järgi. Käskluse “konverteerimist alga” sisestamisel on hoidelülitus (S/H) viidud hoiderežiimi ja kõik registri (SAR) bitid on seatud väärtusele “0”, välja arvatud NSB, mis on seatud väärtusele “1”. SAR’i väljund käivitab sisemise DAC. Kui DAC’I väljund on suurem, kui analoogsisend, siis bit SAR’is muudetakse, vastasel korral jäetakse see muutmata. Järgmine MSB bit seatakse suurusele “1”. Kui DAC’I väljund on suurem, kui
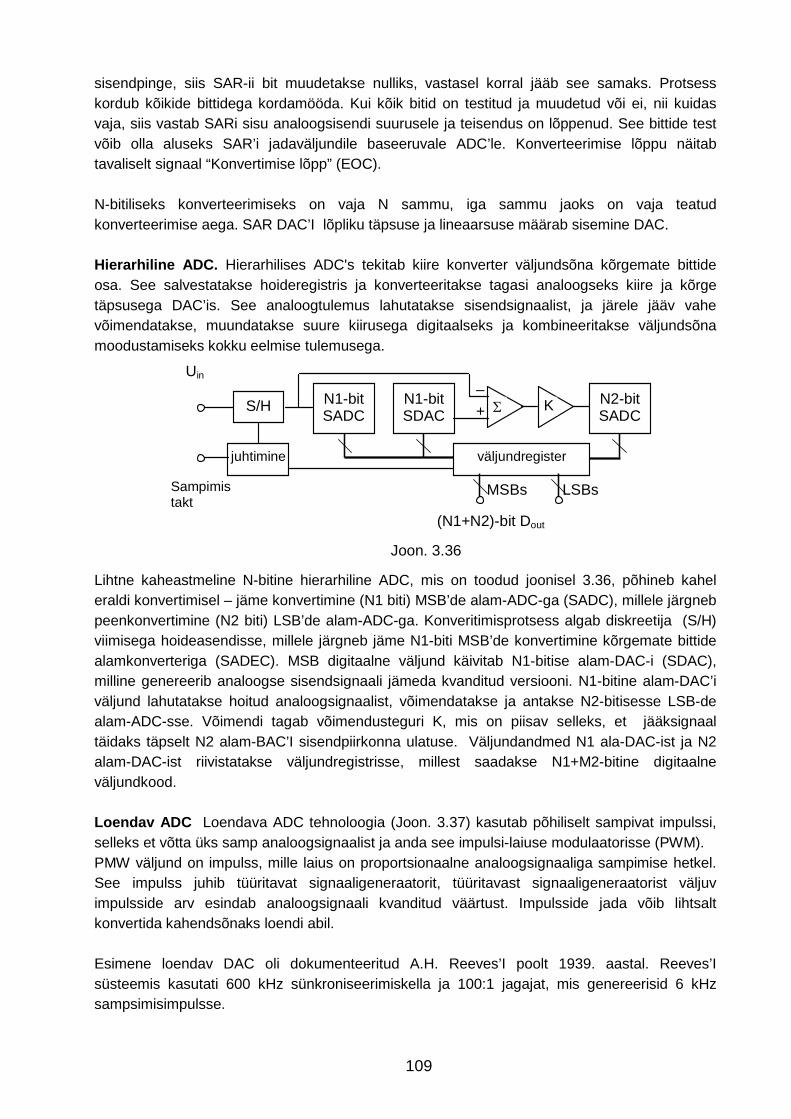
109
sisendpinge, siis SAR-ii bit muudetakse nulliks, vastasel korral jääb see samaks. Protsess kordub kõikide bittidega kordamööda. Kui kõik bitid on testitud ja muudetud või ei, nii kuidas vaja, siis vastab SARi sisu analoogsisendi suurusele ja teisendus on lõppenud. See bittide test võib olla aluseks SAR’i jadaväljundile baseeruvale ADC’le. Konverteerimise lõppu näitab tavaliselt signaal “Konvertimise lõpp” (EOC). N-bitiliseks konverteerimiseks on vaja N sammu, iga sammu jaoks on vaja teatud konverteerimise aega. SAR DAC’I lõpliku täpsuse ja lineaarsuse määrab sisemine DAC. Hierarhiline ADC. Hierarhilises ADC's tekitab kiire konverter väljundsõna kõrgemate bittide osa. See salvestatakse hoideregistris ja konverteeritakse tagasi analoogseks kiire ja kõrge täpsusega DAC’is. See analoogtulemus lahutatakse sisendsignaalist, ja järele jääv vahe võimendatakse, muundatakse suure kiirusega digitaalseks ja kombineeritakse väljundsõna moodustamiseks kokku eelmise tulemusega.
LSBs MSBs
(N1+N2)-bit Dout
+ –
Uin
Sampimis takt
Joon. 3.36
juhtimine
S/H N1-bit SADC
N1-bit SDAC
Σ K N2-bit SADC
väljundregister
Lihtne kaheastmeline N-bitine hierarhiline ADC, mis on toodud joonisel 3.36, põhineb kahel eraldi konvertimisel – jäme konvertimine (N1 biti) MSB’de alam-ADC-ga (SADC), millele järgneb peenkonvertimine (N2 biti) LSB’de alam-ADC-ga. Konveritimisprotsess algab diskreetija (S/H) viimisega hoideasendisse, millele järgneb jäme N1-biti MSB’de konvertimine kõrgemate bittide alamkonverteriga (SADEC). MSB digitaalne väljund käivitab N1-bitise alam-DAC-i (SDAC), milline genereerib analoogse sisendsignaali jämeda kvanditud versiooni. N1-bitine alam-DAC’i väljund lahutatakse hoitud analoogsignaalist, võimendatakse ja antakse N2-bitisesse LSB-de alam-ADC-sse. Võimendi tagab võimendusteguri K, mis on piisav selleks, et jääksignaal täidaks täpselt N2 alam-BAC’I sisendpiirkonna ulatuse. Väljundandmed N1 ala-DAC-ist ja N2 alam-DAC-ist riivistatakse väljundregistrisse, millest saadakse N1+M2-bitine digitaalne väljundkood. Loendav ADC Loendava ADC tehnoloogia (Joon. 3.37) kasutab põhiliselt sampivat impulssi, selleks et võtta üks samp analoogsignaalist ja anda see impulsi-laiuse modulaatorisse (PWM). PMW väljund on impulss, mille laius on proportsionaalne analoogsignaaliga sampimise hetkel. See impulss juhib tüüritavat signaaligeneraatorit, tüüritavast signaaligeneraatorist väljuv impulsside arv esindab analoogsignaali kvanditud väärtust. Impulsside jada võib lihtsalt konvertida kahendsõnaks loendi abil. Esimene loendav DAC oli dokumenteeritud A.H. Reeves’I poolt 1939. aastal. Reeves’I süsteemis kasutati 600 kHz sünkroniseerimiskella ja 100:1 jagajat, mis genereerisid 6 kHz sampsimisimpulsse.
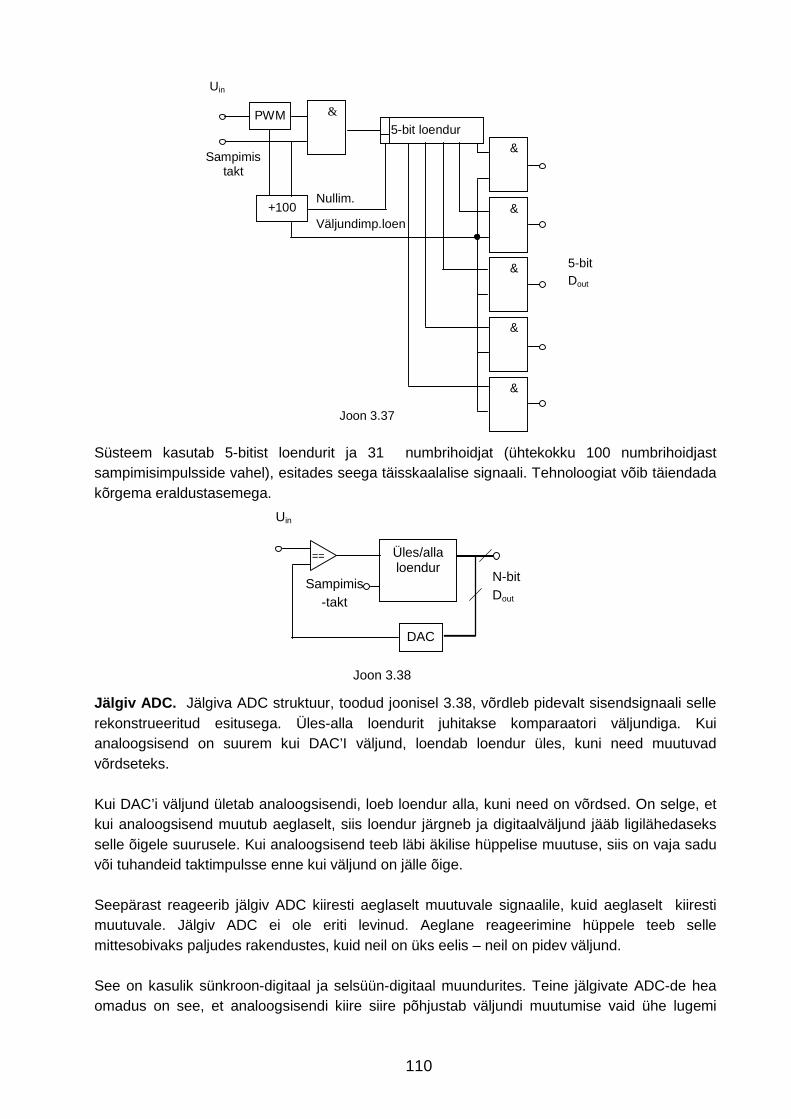
110
Väljundimp.loen loend
Nullim.
5-bit Dout
Uin
Sampimis takt
Joon 3.37
+100
PWM 5-bit loendur
&
&
&
&
&
&
Süsteem kasutab 5-bitist loendurit ja 31 numbrihoidjat (ühtekokku 100 numbrihoidjast sampimisimpulsside vahel), esitades seega täisskaalalise signaali. Tehnoloogiat võib täiendada kõrgema eraldustasemega.
Uin
N-bit Dout
Sampimis-takt
Üles/alla loendur
Joon 3.38
DAC
==
Jälgiv ADC. Jälgiva ADC struktuur, toodud joonisel 3.38, võrdleb pidevalt sisendsignaali selle rekonstrueeritud esitusega. Üles-alla loendurit juhitakse komparaatori väljundiga. Kui analoogsisend on suurem kui DAC’I väljund, loendab loendur üles, kuni need muutuvad võrdseteks. Kui DAC’i väljund ületab analoogsisendi, loeb loendur alla, kuni need on võrdsed. On selge, et kui analoogsisend muutub aeglaselt, siis loendur järgneb ja digitaalväljund jääb ligilähedaseks selle õigele suurusele. Kui analoogsisend teeb läbi äkilise hüppelise muutuse, siis on vaja sadu või tuhandeid taktimpulsse enne kui väljund on jälle õige. Seepärast reageerib jälgiv ADC kiiresti aeglaselt muutuvale signaalile, kuid aeglaselt kiiresti muutuvale. Jälgiv ADC ei ole eriti levinud. Aeglane reageerimine hüppele teeb selle mittesobivaks paljudes rakendustes, kuid neil on üks eelis – neil on pidev väljund. See on kasulik sünkroon-digitaal ja selsüün-digitaal muundurites. Teine jälgivate ADC-de hea omadus on see, et analoogsisendi kiire siire põhjustab väljundi muutumise vaid ühe lugemi
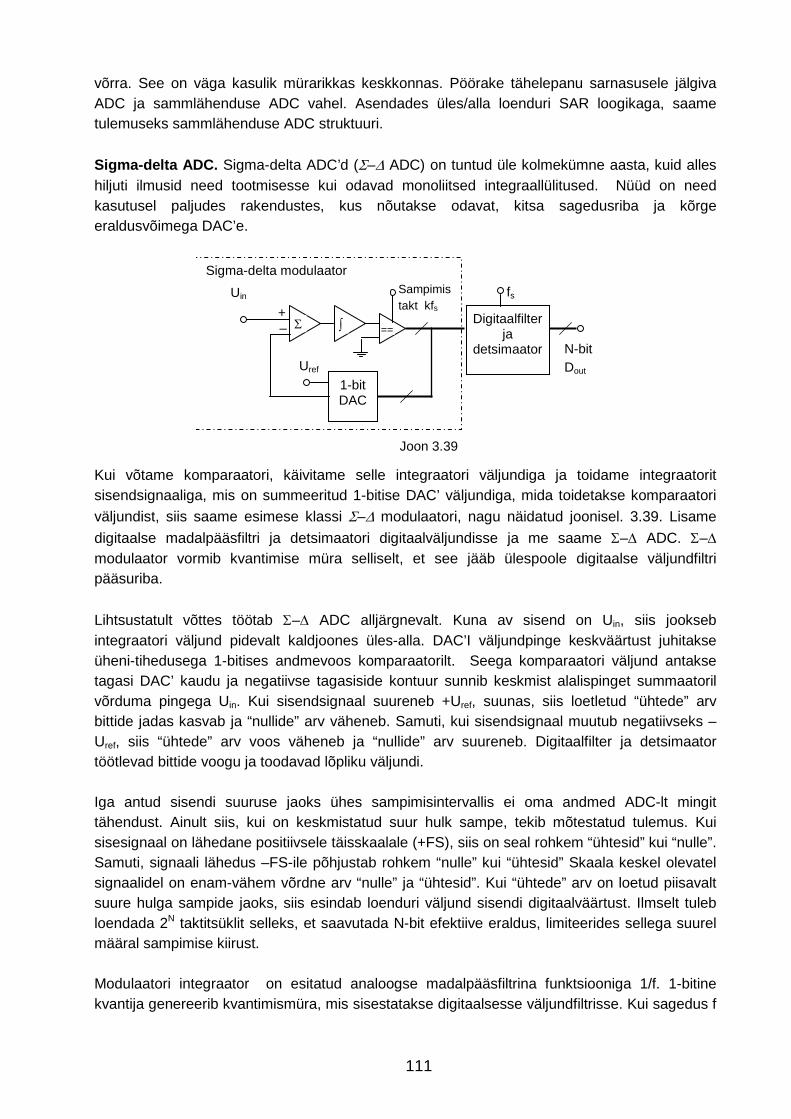
111
võrra. See on väga kasulik mürarikkas keskkonnas. Pöörake tähelepanu sarnasusele jälgiva ADC ja sammlähenduse ADC vahel. Asendades üles/alla loenduri SAR loogikaga, saame tulemuseks sammlähenduse ADC struktuuri.
Sigma-delta ADC. Sigma-delta ADC’d (Σ–∆ ADC) on tuntud üle kolmekümne aasta, kuid alles hiljuti ilmusid need tootmisesse kui odavad monoliitsed integraallülitused. Nüüd on need kasutusel paljudes rakendustes, kus nõutakse odavat, kitsa sagedusriba ja kõrge eraldusvõimega DAC’e.
Sigma-delta modulaator
Uin
– +
N-bit Dout
Joon 3.39
Σ ∫
Uref
Sampimistakt kfs
Digitaalfilter ja
detsimaator
fs
1-bit DAC
==
Kui võtame komparaatori, käivitame selle integraatori väljundiga ja toidame integraatorit sisendsignaaliga, mis on summeeritud 1-bitise DAC’ väljundiga, mida toidetakse komparaatori
väljundist, siis saame esimese klassi Σ–∆ modulaatori, nagu näidatud joonisel. 3.39. Lisame
digitaalse madalpääsfiltri ja detsimaatori digitaalväljundisse ja me saame Σ–∆ ADC. Σ–∆ modulaator vormib kvantimise müra selliselt, et see jääb ülespoole digitaalse väljundfiltri pääsuriba.
Lihtsustatult võttes töötab Σ–∆ ADC alljärgnevalt. Kuna av sisend on Uin, siis jookseb integraatori väljund pidevalt kaldjoones üles-alla. DAC’I väljundpinge keskväärtust juhitakse üheni-tihedusega 1-bitises andmevoos komparaatorilt. Seega komparaatori väljund antakse tagasi DAC’ kaudu ja negatiivse tagasiside kontuur sunnib keskmist alalispinget summaatoril võrduma pingega Uin. Kui sisendsignaal suureneb +Uref, suunas, siis loetletud “ühtede” arv bittide jadas kasvab ja “nullide” arv väheneb. Samuti, kui sisendsignaal muutub negatiivseks –Uref, siis “ühtede” arv voos väheneb ja “nullide” arv suureneb. Digitaalfilter ja detsimaator töötlevad bittide voogu ja toodavad lõpliku väljundi. Iga antud sisendi suuruse jaoks ühes sampimisintervallis ei oma andmed ADC-lt mingit tähendust. Ainult siis, kui on keskmistatud suur hulk sampe, tekib mõtestatud tulemus. Kui sisesignaal on lähedane positiivsele täisskaalale (+FS), siis on seal rohkem “ühtesid” kui “nulle”. Samuti, signaali lähedus –FS-ile põhjustab rohkem “nulle” kui “ühtesid” Skaala keskel olevatel signaalidel on enam-vähem võrdne arv “nulle” ja “ühtesid”. Kui “ühtede” arv on loetud piisavalt suure hulga sampide jaoks, siis esindab loenduri väljund sisendi digitaalväärtust. Ilmselt tuleb loendada 2N taktitsüklit selleks, et saavutada N-bit efektiive eraldus, limiteerides sellega suurel määral sampimise kiirust. Modulaatori integraator on esitatud analoogse madalpääsfiltrina funktsiooniga 1/f. 1-bitine kvantija genereerib kvantimismüra, mis sisestatakse digitaalsesse väljundfiltrisse. Kui sagedus f
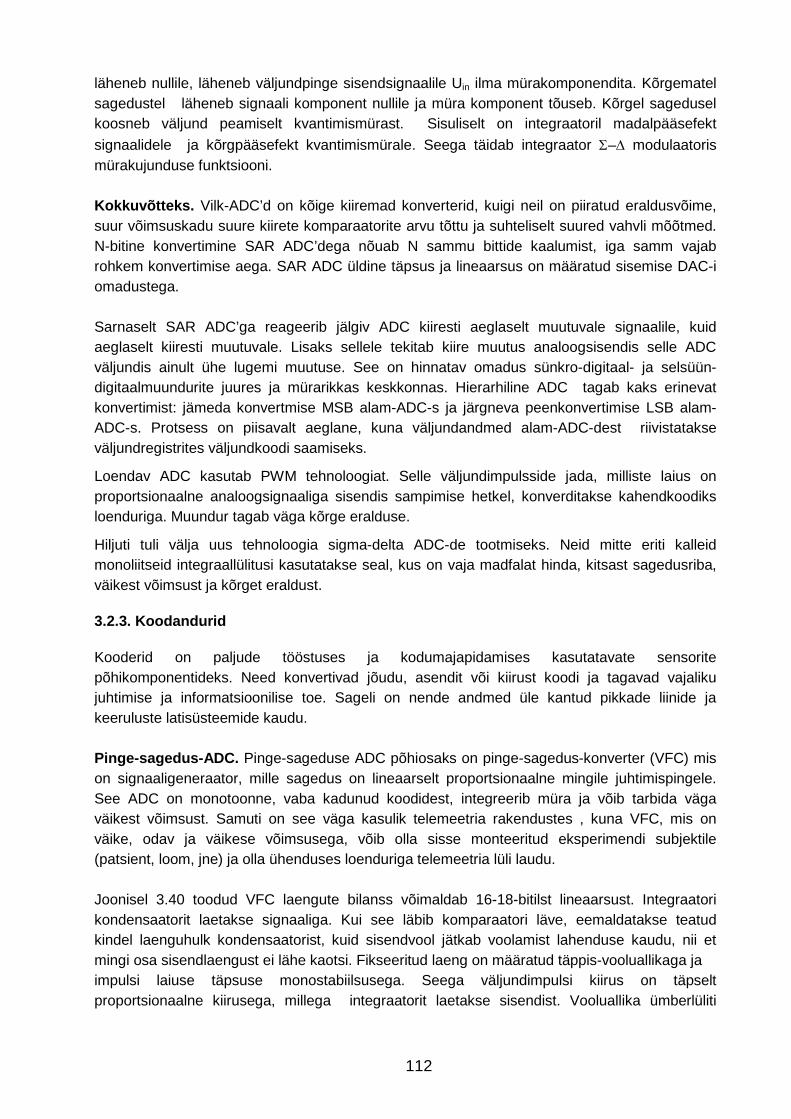
112
läheneb nullile, läheneb väljundpinge sisendsignaalile Uin ilma mürakomponendita. Kõrgematel sagedustel läheneb signaali komponent nullile ja müra komponent tõuseb. Kõrgel sagedusel koosneb väljund peamiselt kvantimismürast. Sisuliselt on integraatoril madalpääsefekt
signaalidele ja kõrgpääsefekt kvantimismürale. Seega täidab integraator Σ–∆ modulaatoris mürakujunduse funktsiooni. Kokkuvõtteks. Vilk-ADC’d on kõige kiiremad konverterid, kuigi neil on piiratud eraldusvõime, suur võimsuskadu suure kiirete komparaatorite arvu tõttu ja suhteliselt suured vahvli mõõtmed. N-bitine konvertimine SAR ADC’dega nõuab N sammu bittide kaalumist, iga samm vajab rohkem konvertimise aega. SAR ADC üldine täpsus ja lineaarsus on määratud sisemise DAC-i omadustega. Sarnaselt SAR ADC’ga reageerib jälgiv ADC kiiresti aeglaselt muutuvale signaalile, kuid aeglaselt kiiresti muutuvale. Lisaks sellele tekitab kiire muutus analoogsisendis selle ADC väljundis ainult ühe lugemi muutuse. See on hinnatav omadus sünkro-digitaal- ja selsüün-digitaalmuundurite juures ja mürarikkas keskkonnas. Hierarhiline ADC tagab kaks erinevat konvertimist: jämeda konvertmise MSB alam-ADC-s ja järgneva peenkonvertimise LSB alam-ADC-s. Protsess on piisavalt aeglane, kuna väljundandmed alam-ADC-dest riivistatakse väljundregistrites väljundkoodi saamiseks.
Loendav ADC kasutab PWM tehnoloogiat. Selle väljundimpulsside jada, milliste laius on proportsionaalne analoogsignaaliga sisendis sampimise hetkel, konverditakse kahendkoodiks loenduriga. Muundur tagab väga kõrge eralduse.
Hiljuti tuli välja uus tehnoloogia sigma-delta ADC-de tootmiseks. Neid mitte eriti kalleid monoliitseid integraallülitusi kasutatakse seal, kus on vaja madfalat hinda, kitsast sagedusriba, väikest võimsust ja kõrget eraldust.
3.2.3. Koodandurid
Kooderid on paljude tööstuses ja kodumajapidamises kasutatavate sensorite põhikomponentideks. Need konvertivad jõudu, asendit või kiirust koodi ja tagavad vajaliku juhtimise ja informatsioonilise toe. Sageli on nende andmed üle kantud pikkade liinide ja keeruluste latisüsteemide kaudu. Pinge-sagedus-ADC. Pinge-sageduse ADC põhiosaks on pinge-sagedus-konverter (VFC) mis on signaaligeneraator, mille sagedus on lineaarselt proportsionaalne mingile juhtimispingele. See ADC on monotoonne, vaba kadunud koodidest, integreerib müra ja võib tarbida väga väikest võimsust. Samuti on see väga kasulik telemeetria rakendustes , kuna VFC, mis on väike, odav ja väikese võimsusega, võib olla sisse monteeritud eksperimendi subjektile (patsient, loom, jne) ja olla ühenduses loenduriga telemeetria lüli laudu. Joonisel 3.40 toodud VFC laengute bilanss võimaldab 16-18-bitilst lineaarsust. Integraatori kondensaatorit laetakse signaaliga. Kui see läbib komparaatori läve, eemaldatakse teatud kindel laenguhulk kondensaatorist, kuid sisendvool jätkab voolamist lahenduse kaudu, nii et mingi osa sisendlaengust ei lähe kaotsi. Fikseeritud laeng on määratud täppis-vooluallikaga ja impulsi laiuse täpsuse monostabiilsusega. Seega väljundimpulsi kiirus on täpselt proportsionaalne kiirusega, millega integraatorit laetakse sisendist. Vooluallika ümberlüliti
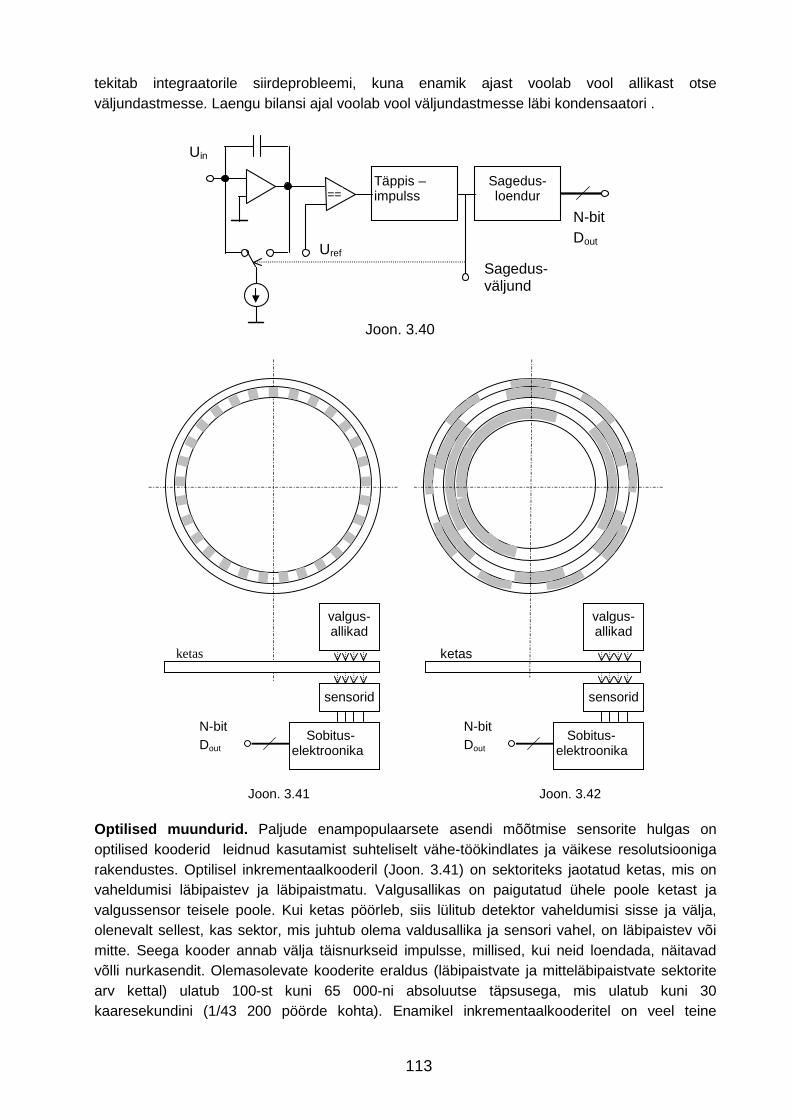
113
tekitab integraatorile siirdeprobleemi, kuna enamik ajast voolab vool allikast otse väljundastmesse. Laengu bilansi ajal voolab vool väljundastmesse läbi kondensaatori .
Uin
N-bit Dout
Täppis –impulss
Joon. 3.40
Uref
Sagedus-loendur
Sagedus-väljund
==
Joon. 3.41
ketas
N-bit Dout
valgus-allikad
sensorid
Sobitus- elektroonika
ketas
N-bit Dout
valgus-allikad
sensorid
Sobitus-elektroonika
Joon. 3.42
Optilised muundurid. Paljude enampopulaarsete asendi mõõtmise sensorite hulgas on optilised kooderid leidnud kasutamist suhteliselt vähe-töökindlates ja väikese resolutsiooniga rakendustes. Optilisel inkrementaalkooderil (Joon. 3.41) on sektoriteks jaotatud ketas, mis on vaheldumisi läbipaistev ja läbipaistmatu. Valgusallikas on paigutatud ühele poole ketast ja valgussensor teisele poole. Kui ketas pöörleb, siis lülitub detektor vaheldumisi sisse ja välja, olenevalt sellest, kas sektor, mis juhtub olema valdusallika ja sensori vahel, on läbipaistev või mitte. Seega kooder annab välja täisnurkseid impulsse, millised, kui neid loendada, näitavad võlli nurkasendit. Olemasolevate kooderite eraldus (läbipaistvate ja mitteläbipaistvate sektorite arv kettal) ulatub 100-st kuni 65 000-ni absoluutse täpsusega, mis ulatub kuni 30 kaaresekundini (1/43 200 pöörde kohta). Enamikel inkrementaalkooderitel on veel teine
114
valgusallikas ja andur teatud nurga all peamisest valgusallikast ja andurist, selleks et määrata pöörlemise suunda. Paljudel kooderitel on veel kolmas valgusallikas ja andur täispöörde märkimiseks. Ilma pöörde märkijata on raske määrata absoluutset nurka. Potentsiaalselt tõsine puudus on see, et inkrementaalkooder vajab välist loendurit absoluutse nurga määramiseks ühe pöörde sees. Kui toide on hetkel välja lülitatud või kui kooder jätab impulsse vahele kas müra või mustunud ketta tõttu, siis on tulemuseks saadav nurgainformatsioon vigane. Absoluutne optiline kooder (Joon. 3.42) väldib neid puudusi, kuid on kallim. Absoluutse optilise kooderi ketas on jagatud N sektoriks (N = 4, näiteks), ja iga sektor on veel jagatud radiaalselt oma pikkuse ulatuses läbipaistvateks ja mitteläbipaistvateks sektsioonideks, moodustades ainulise N-bitise digitaalsõna maksimaalselt 2N–1 lugemiga. Digitaalse sõna, mis moodustatakse radiaalselt iga sektori poolt, väärtus kasvab sammhaaval ühest sektorist teise, tavaliselt Grey koodi kasutades. Kahendkoodi võib kastada, kuid see võib tekitada suuri vigu, kui andurid tõlgendavad valesti ühte bitti. N valgusandurit esindavad N-bitist digitaalsõna, mis vastab ketta absoluutse nurga positsioonile. Tööstuslikud optilised kooderid saavutavad kuni 16-bitise resolutsiooni absoluutse täpsusega, mis läheneb eraldusvõimele 20 kaaresekundit. Nii absoluutsed kui ka inkrementaalkooderid võivad karmides tööstuslikes tingimustes saada kahjustatud. Selsüün-digitaalmuundurid ja sünkrod. Tööpinkide ja robotite tootjad pöörduvad üha sagedamini selsüünide ja sünkrode poole täpse informatsiooni saamiseks nurkade ja pöörlemise kohta. Need seadmed paistavad silma järjest kasvavas tööstuslikes rakendustes, kus nõutakse väikesi mõõtmeid, pikaajalist töökindlust, absoluutse asendi mõõtmist, kõrget täpsust ja müravaba tööd. Nii sünkrodel kui ka selsüünidel on ühemähiseline rootor mis pöörleb edasi-tagasi paigalseisva staatori sees. Lihtsa sünkro staatoril on kolm mähist mis on paigutatud 120 kraadi lahku ja ühendatud tähtühendusse. Selsüünid erinevad sünkrodest selle poolest, et nende staatoril on ainult kaks mähist, mis on paigutatud 90 kraadi all. Tänapäeval leiavad sünkrod üha ulatuslikumat kasutamist, välja arvatud mõningad sõjaliste ja lennunduslike rakenduste modifikatsioonid. Moodsad selsüünid on seevastu saadaval harjadeta kujul, kus kasutatakse trafot rootori ja staatori signaalide sidestamiseks. Selle trafo primaarmähis paikneb staatoril ja sekundaarmähis rootoril. Teised selsüünid kasutavad traditsioonilisi harju või kontaktrõngaid signaalide sidestamiseks rootori mähisega. Enamik selsüüne on ette nähtud töötamiseks pingetel 2 – 40 V rms ja sagedustel 400 Hz kuni 10 kHz. Nurga täpsused on piirides alates 5 kuni 0.5 kaareminutit. Töös meenutavad sünkrod ja selsüünid pöörlevaid trafosid. Vahelduvvoolu etalonpinge, sagedusega kuni mõned kilohertsid, ergutab rootori mähist. Igas staatori mähises indutseeritud
pinge on proportsionaalne nurga θ siinusega, mis on rootori pooli telje ja staatori pooli telje
vahel. Kuna selsüüni rootori vahelduvpinge etalon on U sin ωt, siis staatori klemmide pinged on
vastavalt U sin ωt⋅sin θ ja U sin ωt⋅cos θ.
Tüüpiline selsüün-digitaal-muundur (RDS) on näidatud joonisel 3.43. Selsüüni kaks väljundit antakse siinuse ja kosiinuse korrutajatesse, kus on siinuse ja kosiinuse tabelid ja mis töötavad kui korrutavad digitaal-analoogmuundurid.
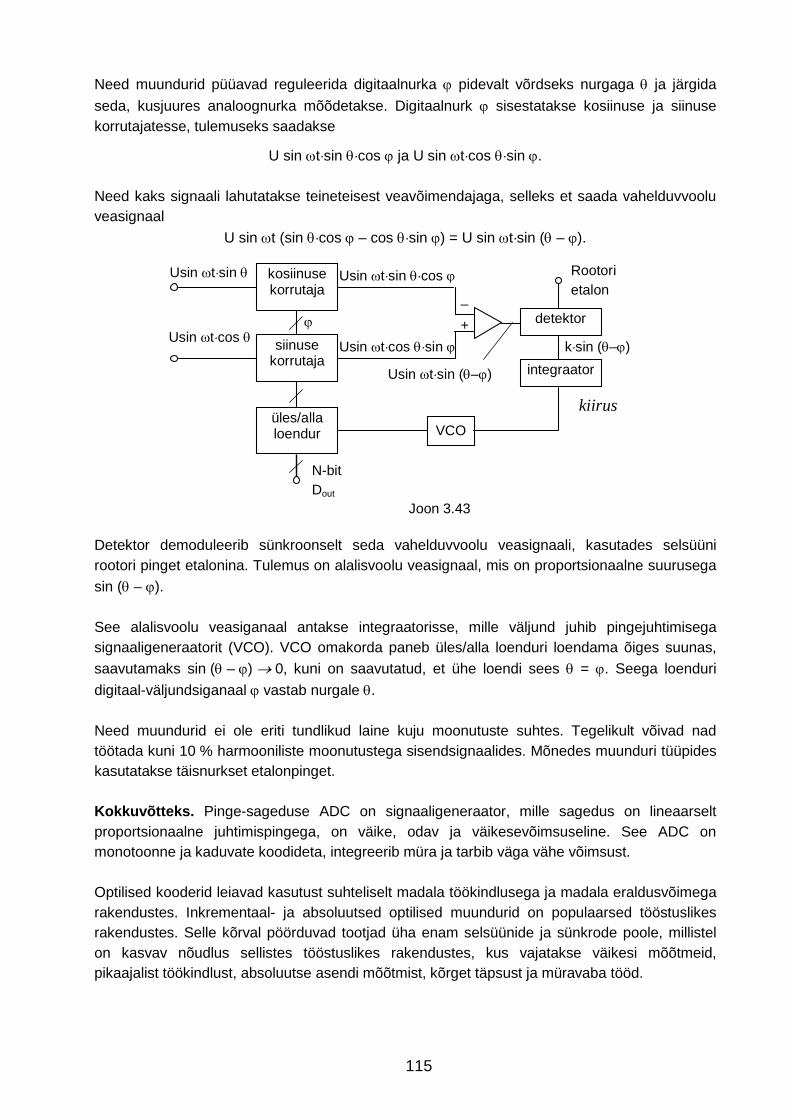
115
Need muundurid püüavad reguleerida digitaalnurka ϕ pidevalt võrdseks nurgaga θ ja järgida
seda, kusjuures analoognurka mõõdetakse. Digitaalnurk ϕ sisestatakse kosiinuse ja siinuse korrutajatesse, tulemuseks saadakse
U sin ωt⋅sin θ⋅cos ϕ ja U sin ωt⋅cos θ⋅sin ϕ.
Need kaks signaali lahutatakse teineteisest veavõimendajaga, selleks et saada vahelduvvoolu veasignaal
U sin ωt (sin θ⋅cos ϕ – cos θ⋅sin ϕ) = U sin ωt⋅sin (θ – ϕ).
–
+
k⋅sin (θ–ϕ)
Usin ωt⋅sin θ⋅cos ϕ Usin ωt⋅sin θ Rootori etalon
N-bit Dout
kosiinuse korrutaja
Joon 3.43
VCO
Usin ωt⋅cos θ⋅sin ϕ Usin ωt⋅cos θ siinuse
korrutaja
ϕ
üles/alla loendur
detektor
integraator
kiirus
Usin ωt⋅sin (θ–ϕ)
Detektor demoduleerib sünkroonselt seda vahelduvvoolu veasignaali, kasutades selsüüni rootori pinget etalonina. Tulemus on alalisvoolu veasignaal, mis on proportsionaalne suurusega
sin (θ – ϕ). See alalisvoolu veasiganaal antakse integraatorisse, mille väljund juhib pingejuhtimisega signaaligeneraatorit (VCO). VCO omakorda paneb üles/alla loenduri loendama õiges suunas,
saavutamaks sin (θ – ϕ) → 0, kuni on saavutatud, et ühe loendi sees θ = ϕ. Seega loenduri
digitaal-väljundsiganaal ϕ vastab nurgale θ. Need muundurid ei ole eriti tundlikud laine kuju moonutuste suhtes. Tegelikult võivad nad töötada kuni 10 % harmooniliste moonutustega sisendsignaalides. Mõnedes muunduri tüüpides kasutatakse täisnurkset etalonpinget. Kokkuvõtteks. Pinge-sageduse ADC on signaaligeneraator, mille sagedus on lineaarselt proportsionaalne juhtimispingega, on väike, odav ja väikesevõimsuseline. See ADC on monotoonne ja kaduvate koodideta, integreerib müra ja tarbib väga vähe võimsust. Optilised kooderid leiavad kasutust suhteliselt madala töökindlusega ja madala eraldusvõimega rakendustes. Inkrementaal- ja absoluutsed optilised muundurid on populaarsed tööstuslikes rakendustes. Selle kõrval pöörduvad tootjad üha enam selsüünide ja sünkrode poole, millistel on kasvav nõudlus sellistes tööstuslikes rakendustes, kus vajatakse väikesi mõõtmeid, pikaajalist töökindlust, absoluutse asendi mõõtmist, kõrget täpsust ja müravaba tööd.
116
PEATÜKK 4. HARJUTUSI PROGRAMMIGA “ELECTRONICS WORKBENCH”
4.1. Eesmärk
Elektroonika harjutustega, mis on mõeldud “Multisim from Electronics Workbench” tarkvara jaoks, võib võite praktiliselt kogeda järgmist:
• elektroonikalülituste uurimine ja arvutamine, • elektroonika komponentide valik, • pingete ja voolude mõõtmine ja lainekujude analüüs, • töö tulemuste kirjeldamine ja dokumenteerimine.
Tulemused. Iga harjutuse lõpus võrrelge arvutatud ja mõõdetud tulemusi. Aruandes peab olema
• eksperimendi skeem,
• tulemus- ja võrdlusandmete tabelid, • pingete ja voolude graafikud telgede skaaladega,
• sõltuvuste graafikud, vajaduse korral, • järeldused koos tulemuste selgitamisega.
Komponendid ja mõõteriistad. Modelleerimiseks on vajalikud
• toiteallikad: av pingeallikad, vv vooluallikad, vooluga juhitavad pingeallikad, maaühendus;
• põhikomponendid: takisti ja potentsiomeeter, kondensaator, drossel; • dioodid: diood ja Zeneri diood;
• transistorid: npn- bipolaartransistor (BJT);
• analoogintegraallülitused: 3-klemmiline opvõimendi, komparaator; • näitavad mõõteriistad: voltmeeter, ampermeeter;
• instrumendid: ostsillograaf, funktsioonigeneraator, Bode plotter
Baasandmed:
• sisendsagedus: 1-1000 Hz, • väljundi amplituud: 0,2-20 V.
4.2. Lineaarahelad
Harjutus 1.1. RL ahel
1. Alustuseks koostage skeem, kasutades ainult ühte takistit, drosselit ja maaühendust.
Ühendage takisti ja drossel jadamisi. Seadke takistus piiridesse 1-1000 Ω ja induktiivsus ligikaudu 10-1000 mH.
2. Ehitage toiteallikas, kasutades funktsioonigeneraatorit. Toitke drosselit funktsioonigeneraatori positiivsest klemmist ja maandage funktsioonigeneraatori ühisklemm ja takisti. Seadke funktsioonigeneraator siinuselise laine kujule Valige etalonamplituud ja sagedus.
117
3. Pinge ja voolu efektiivväärtuste mõõtmiseks lisage skeemi kaks vahelduvvoolu voltmeetrit ja ampermeter. Ühendage esimene voltmeeter takistile ja teine voltmeeter drosselile, ampermeter nendega jadamisi.
4. Lisage ostsillograaf ja ühendage selle kanal A drosseli sisendisse ahela pinge jälgimiseks. Ühendage kanal B drosseli väljundisse ahela voolu jälgimiseks. Siis lisage Bode plotter sageduskarakteristika jälgimiseks. Ühendage selle sisend drosseli sisendiga ja väljund drosseli väljundiga.
5. Lülitage ahela mudel sisse ja vaadake tulemust. Häälestage ostsillograaf ja Bode plotter kas enne modelleerimist või selle ajal.
6. Arvutage ahela vool, selle faas ja pingelangud komponentidel ja võrrelge arvutatud suurusi mõõdetutega.
Harjutus 1.2. RC ahel
1. Asendage eelmises skeemis drossel kondensaatoriga ja valige mahtuvus piirides 0.1-
10 µF.
2. Lülitage skeem sisse ja häälestage ostsillograaf ning Bode plotter tulemuste jälgimiseks.
3. Arvutage ahela vool, selle faas ja pingelangud komponentidel ja võrrelge arvutatud tulemusi mõõdetutega.
Harjutus 1.3. RLC ahel
1. Asetage drossel tagasi eelmisesse skeemi. Ühendage drossel, kondensaator ja takisti jadamisi. Ühendage funktsioonigeneraatori plussklemm drosselile ja maandage üldklemm ja takisti.
2. Valige eelmised amplituudi, sageduse, takistuse, induktiivsuse ja mahtuvuse väärtused.
3. Lülitage skeemi mudel sisse ja vaadake tulemusi. Häälestage ostsillograafi ja Bode plotteri seaded.
4. Arvutage ahela vool, selle faas ja pingelangud komponentidel ning võrrelge arvutatud tulemusi mõõtmistulemustega.
Harjutus 1.4. Järjestik-resonantsahel
1. Eelmises ahelas arvutage induktiivsuse ja mahtuvuse suurused, mis on vajalikud resonantsi tekkimiseks, ja seadistage leitud suurused.
2. Lülitage sisse skeem ja vaadake pinget ja voolu ilma faasinihketa, samuti ka Bode diagrammide suurust ja faasi.
3. Arvutage resonantssagedus, pingekordsus Q ja ahela karakteristlik impedants. Arvutage ja võrrelge arvutustulemusi mõõtmiste tulemustega..
Harjutus 1.5. Rööp-resonantsahel
1. Ühendage eelmises ahelas kondensaator ja drossel rööpselt. Seejärel lisage vahelduvvoolu ampermeetrid jadamisi mõlema komponendiga.
2. Lülitage skeem sisse ja vaadake voolu ja pinget ilma faasinihketa, samuti ka Bode diagrammi suurust ja faasi.
3. Võrrelge resonantsskeemi arvutatud tulemusi mõõtetulemustega.
118
4.3. Filtrid
Harjutus 2.1. RC filtrid
1. Koostage lihtne madalpääsfilter, kasutades takistit, kondensaatorit ja maaühendust. Joonistage skeem.
2. Toitke skeemi jadamisi ühendatud funktsioonigeneraatori ja vahelduvpinge allikaga. Seadistage funktsioonigeneraatoris siinuseline laine kuju ja valige baasamplituud ning sagedus. Vahelduvpinge allikas seadke amplituud kümme korda väiksemaks. baasamplituudist ja sagedus kõrgemaks kui 103 baassagedusest.
3. Lisage ostsillograaf ja ühendage selle kanal A toiteallikale sisendpinge jälgimiseks. Seejärel ühendage kanal B mahtuvusele väljundpinge jälgimiseks. Siis lisage Bode plotter sageduskarakteristiku jälgimiseks. Ühendage selle sisend toiteallikale ja selle väljund kondensaatorile.
4. Seadke takistus piiridesse 1-1000 Ω. Arvutage ja seake sisse mahtuvus, mis tagab lõikesageduse 103 põhisageduse kõrgusel.
5. Lülitage skeem sisse, häälestage ostsillograaf ja vaadake pingeid. Häälestage Bode plotter,
seadistage vertikaalskaala amplituud –20 ja 0 dB vahele ning faas –90° ja 90° vahele, seadistage horisontaalskaala vahemikku mõnest hertsist mõne megahertsini. Mõõtke sageduskarakteristikul eksperimentaalne lõikesagedus–3 dB juures ja võrrelge seda arvutatud suurusega.
6. Muutke madalpääsfilter kõrgpääsfiltriks, vahetades kondensaatori ja takisti kohad. Korrake katset ja võrrelge tulemusi.
Harjutus 2.2. LC filtrid
1. Kavandage lihtne madalpääsfilter, kasutades drosselit, kondensaatorit ja maaühendust. Koostage skeem.
2. Koostage toiteallikas, kasutades järjestikku ühendatud funktsioonigeneraatorit ja vahelduvvoolu pingeallikat. Seadistage funktsioonigeneraatoris siinuseline laine kuju ja valige baasamplituud ja sagedus. Seadke vahelduvpinge allikas amplituud kümme korda väiksemaks baasamplituudist ja sagedus kõrgemaks 103 baassagedusest.
3. Lisage ostsillograaf ja ühendage selle kanal A toiteallikale sisendpinge jälgimiseks. Ühendage kanal kondensaatorile väljundpinge jälgimiseks. Seejärel ühendage Bode plotter ostsillograafi klemmidele sageduskarakteristiku jälgimiseks.
4. Seadistage induktiivsus piiridesse 1-1000 mH. Arvutage ja seadistage mahtuvus, mis tagab lõikesageduse kõrgusel 103 baassagedusest.
5. Lülitage modelleerimisskeem sisse, häälestage ostsillograaf ja vaadake pingeid. Häälestage
Bode plotter, seadke vertikaalskaala amplituud –20 ja 20 dB vahele ning faas –180° ja 180° vahele, seadke horisontaalskaala piiridesse mõnest hertsist kuni mõne megahertsini. Mõõtke sageduskarakteristikul lõikesagedus –3 dB ümbruses ja võrrelge seda arvutatud suurusega.
6. Muutke madalpääsfilter kõrgpääsfiltriks, vahetades kondensaatori ja drosseli kohad. Korrake eksperimenti ja võrrelge tulemusi.
119
Harjutus 2.3. Ribapääsfilter
1. Koostage ribapääsfilter, kasutades kahte drosselit, kahte kondensaatorit ja maaühendust. Ühendage esimene drosseli ja kondensaatori paar jadamisi ja teine paar rööpselt, ühendage need kokku.
2. Koostage toiteallikas, kasutades jadamisi ühendatud funktsioonigeneraatorit ja kahte vahelduvvoolu pingeallikat. Seadistage funktsioonigeneraator siinuselise laine kujule ja valige baasamplituud ja sagedus. Seadistage esimese vahelduvvoolu pingeallika amplituud viis korda väiksemaks baasamplituudist. Teise vahelduvvoolu pingeallikas seadistage amplituud kümme korda madalamaks baasamplituudist.
3. Ühendage ostsillograafi kanal A toiteallikale sisendpinge jälgimiseks. Ühendage kanal B teisele paarile väljundpinge jälgimiseks. Seejärel ühendage Bode plotter ostsillograafi klemmidele sageduskarakteristiku jälgimiseks.
4. Seadistage induktiivsused võrdseteks piirides 1-1000 mH. Arvutage ja seadistage võrdseks mahtuvused, mis tagavad resonantssageduse kõrgusel 102 baassagedusest. Seadke esimene vahelduvvoolu pingeallikas resonantssagedusele. Teises pingeallikas seadistage sagedus kõrgemale kui 102 resonantssagedusest.
5. Lülitage sisse modelleerimisskeem, häälestage ostsillograaf ja vaadake pingeid. Häälestage
Bode plotter, seadke vertikaalskaala amplituud –20 ja 20 dB vahele ja faas –180° ja 180° vahele, seadistage horisontaalskaala mõne hertsi ja mõne megahertsi vahele. Mõõtke sageduskarakteristikul resonantssagedus ja võrrelge seda arvutatud suurusega. Mõõtke ülemist ja alumist lõikesagedust –3 dB ümbruses..
Harjutus 2.4. Ribatõkkefilter
1. Koostage ribatõkkefilter, kasutades kahte drosselit, kahte kondensaatorit ja maaühendust. Ühendage esimene drosseli ja mahtuvuse paar rööpselt ja teine paar jadamisi ning ühendage nad kokku.
2. Toitke filtrit jadamisi ühendatud funktsioonigeneraatori ja kahe vahelduvvoolu pingeallikaga. Funktsioonigeneraatoris seadke sisse siinuseline laine kuju ja määrake baasamplituud ja -sagedus. Esimeses vahelduvvoolu pingeallikas seadistage amplituud viis korda väiksemaks baasamplituudist. Teises vahelduvvoolu pingeallikas seadistage amplituud kümme korda väiksemaks kui baasamplituud.
3. Ühendage ostsillograafi kanal A toiteallikale sisendpinge jälgimiseks. Ühendage kanal B teisele paarile väljundpinge jälgimiseks. Seejärel ühendage Bode plotter ostsillograafi klemmidele sageduskarakteristiku jälgimiseks.
4. Seadistage võrdseteks induktiivsused piirides 1-1000 mH. Arvutage ja seadke võrdseks mahtuvused, mis tekitavad resonantssageduse kõrgusel 102 baassagedusest. Esimese vahelduvvoolu pingeallikas, seadistage resonantssagedus. Teises vahelduvolu pingeallikas seadistage sagedus, mis on kõrgem kui 102 resonantssagedus.
5. Lülitage katseskeem sisse, häälestage ostsillograaf ja vaadake pingeid. Häälestage Bode
plotter, seadistage vertikaalskaala amplituud –20 ja 20 dB vahele ja faas 180° ja 180° vahele seadistage horisontaalskaala mõne hertsi ja mõne megahertsi vahele. Mõõtke sageduskarakteristikul eksperimentaalne resonantssagedus ja võrrelge seda arvutatud suurusega. Mõõtke alumist ja ülemist lõikesagedust –3 dB ümbruses.
120
4.4. Dioodahelad
Harjutus 3.1. Väljundkarakteristikud
1. Koostage ja joonistage skeem kasutades funktsioonigeneraatorit, dioodi, takistit ja maaühendust. Ühendage diood ja takisti jadamisi. Seejärel ühendage funktsioonigeneraator plussklemm dioodi anoodile ja maandage ühisklemm ja takisti.
2. Seadistage funktsioonigeneraatoris siinuselise laine kuju. Valige baasamplituud ja
baassagedus. Seadistage takistus piirides 1-1000 Ω.
3. Pinge ja voolu mõõtmiseks lisage alalisvoolu voltmeeter ja ampermeeter. Ühendage voltmeeter dioodile ja ampermeeter jadamisi.
4. Vähendage amplituuti sammhaaval, sujuvalt lähteväärtusest nullini. Igas punktis lülitage katseahel sisse ja mõõtke voolu ja pinget. Seejärel joonistage pärinihkega dioodi väljundkarakteristik.
5. Ühendage diood ümber vastaspoolusele. Seadistage jällegi pinge suurus nullist kuni baasamplituudini. Igas punktis lülitage katseahel sisse ja mõõtke pinget ja voolu. Seejärel joonistage vastupingega dioodi väljundkarakteristik.
6. Veelkord ühendage diood ettenihkele ja seadistage baasamplituud. Lisage ostsillograaf ja ühendage selle kanal A anoodile, jälgimaks dioodi pinget. Ühendage kanal B, jälgimaks dioodi voolu. Lülitage ümber ostsillograafi teljed selliselt, et oleks võimalik vaadelda üht sisendkanalit teise suhtes. X-telje skaala on antud voltides jaotuse kohta kanalil B, ja vastupidi (1 mV = 1 mA, jne).
7. Lülitage sisse katse skeem, häälestage ostsillograaf ja vaadake tulemust. Seejärel lisage see väljundkõver eelmisele plotteri graafikule ja võrrelge neid.
8. Leidke käänupinge. Siis tõmmake puutuja paremalt käänupunktini ja arvutage dünaamiline
impedants, kui tõus ∆UAC / ∆IA.
Harjutus 3.2. Jada-lihtpiirikud
1. Joonistage ja koostage skeem, kasutades funktsioonigeneraatorit, alalisvoolu pingeallikat, dioodi, takistit ja maaühendust. Ühendage dioodi katood pingeallika “+” klemmile läbi takisti. Seejärel ühendage funktsioonigeneraatori positiivne klemm dioodi anoodile ning maandage üldklemm ja pingeallika “-“.
2. Seadistage takistus piirides 0.1-10 kΩ. Seadistage funktsioonigeneraator kolmnurkse laine kujule baasamplituudiga ja sama suure hälbega. Seadke pingeallikas poolele baasamplituudist. Arvutage lõikenivoo, mis on veidi väiksem dioodi pingelangu tõttu.
3. Pinge efektiivväärtuse mõõtmiseks lisage vahelduvvoolu voltmeeter ja ühendage see takisti klemmidele. Lisage ostsillograaf ja ühendage selle kanal A dioodi anoodile sisendpinge jälgimiseks. Ühendage kanal B dioodi katoodile väljundpinge jälgimiseks.
4. Lülitage sisse katseskeem, Häälestage ostsillograaf ja vaadake tulemust. Võrrelge seda arvutatud suurusega.
5. Ühendage diood ümber vastasklemmidele ja korrake katset. Hinnake lõikenivood ja selgitage tulemust.
121
Harjutus 3.3. Rööp-lihtpiirikud
1. Koostage skeem, kasutades funktsioonigeneraatorit, alalisvoolu pingeallikat, dioodi, takistit ja maaühendust. Ühendage takisti dioodi katoodile. Seejärel funktsioonigeneraatori positiivne klemm takistile, pingeallika “+” dioodi anoodile, maandage üldklemm ja pingeallika “-“.
2. Seadistage takistus piirides 0.1-10 kΩ. Funktsioonigeneraatoris seadke sisse kolmnurkse laine kuju baasamplituudiga ja sama suure hälbega. Arvutage lõikenivoo, mis on veidi väiksem dioodi pingelangu tõttu..
3. Pinge efektiivväärtuse mõõtmiseks lisage vahelduvvoolu voltmeeter ja ühendage see takisti klemmidele. Lisage ostsillograaf ja ühendage tema kanal A funktsioonigeneraatori positiivsele klemmile sisendpinge jälgimiseks. Ühendage kanal B dioodi katoodile väljundpinge jälgimiseks.
4. Lülitage katseskeem sisse, häälestage ostsillograaf ja vaadake tulemust. Võrrelge seda arvutatud suurusega.
5. Vahetage dioodi suund ja korrake katset. Hinnake lõikenivood ja selgitage tulemust.
Harjutus 3.4. Dioodpiirikud
1. Joonistage ja koostage jadaspiirik kasutades funktsioonigeneraatorit, kahte alalisvoolu pingeallikat, dioode ja takisteid ning maaühendust. Ühendage dioodid jadamisi, vastulülituses kokkuühendatud katoodidega. Ühendage iga vooluallika “+” selle takistile ning maandage nende “-“ ja funktsioonigeneraatori üldklemm. Seejärel ühendage funktsioongeneraatori positiivne klemm esimese dioodi anoodile, esimene takisti katoodidele ja teine takisti teise dioodi anoodile.
2. Seadistage võrdsed takistused piirides 1-1000 Ω. Funktsioonigeneraatoris seadistage kolmnurkne laine kuju baasamplituudiga ja sama suure hälbega. Seadistage esimese pingeallika pinge umbes veerandile amplituudist ja teise pingeallika pinge poolele amplituudist. Arvutage lõikenivoo, mis on olema veidi väiksem dioodi pingelangu tõttu..
3. Pinge efektiivväärtuse mõõtmiseks lisage vahelduvvoolu voltmeeter ja ühendage see teisele takistile. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatori positiivsele klemmile sisendpinge jälgimiseks. Ühendage kanal B teisele takistile väljundpinge jälgimiseks.
4. Lülitage katseskeem sisse, häälestage ostsillograaf ja vaadake tulemusi. Võrrelge seda arvutatud tulemustega.
5. Muutke jadaspiirik rööpseks piirikuks, vahetades esimese dioodi esimese takistiga ja asendades teise takisti teise dioodiga. Lülitage sisse katseskeem., Häälestage ostsillograaf ja vaadake tulemust. Võrrelge seda jadaspiirikuga.
Harjutus 3.5. Zeneri lülitus
1. Koostage lihtpiirik, kasutades funktsioonigeneraatorit, Zeneri dioodi, takistit ja maaühendust. Ühendage takisti Zeneri dioodi katoodile. Seejärel ühendage funktsioonigeneraatori positiivne klemm takistile ning maandage negatiivne klemm ja anood..
2. Seadistage takistus piirides 0.1-10 kΩ. Funktsioonigeneraatoris seadistage kolmnurkne laine kuju baassageduse ja -amplituudiga.
122
3. Pinge efektiivväärtuse mõõtmiseks lisage vahelduvvoolu voltmeeter ja ühendage see väljundisse. Lisage ostsillograaf ja ühendage tema kanal A funktsioonigeneraatori positiivsele klemmile sisendpinge jälgimiseks. Ühendage kanal B väljundpinge jälgimiseks.
4. Lülitage katseskeem sisse, häälestage ostsillograaf ja vaadake tulemust. Katsetage skeemi erinevate sisendpingete suurustega ja leidke stabiilse piiramise ulatus.
5. Muutke lihtpiirik piirikuks, lisades teise Zeneri dioodi jadamisi vastulülituses esimesele. Lülitage katseskeem sisse, häälestage ostsillograaf ja vaadake tulemust. Võrrelge seda lihtpiirikuga.
4.5. Võimendid
Harjutus 4.1. Väljundkarakteristikud
1. Kavandage ja koostage skeem väljundkarakteristikute määramiseks, kasutades BJT transistori, alalisvoolu pingeallikat, funktsioonigeneraatorit, potentsiomeetrit, takistit, dioodi ja maaühendust. Ühendage pingeallika “+” läbi potentsiomeetri baasile. Ühendage funktsioonigeneraatori positiivne klemm kollektorile läbi jadamisi ühendatud dioodi ja takisti. Seejärel maandage pingeallika “-“, kollektor ja funktsioonigeneraatori üldklemm.
2. Seadistage funktsioonigeneraatoris siinuselise laine kuju baassageduse ja –amplituudiga. Alalisvoolu pingeallikas seadistage pinge ligikaudu poolele amplituudist. Seadke
potentsiomeetri takistus ligikaudu 1 MΩ, kollektori takistus piirides 1-5 kΩ.
3. Baasi voolu mõõtmiseks lisage alalisvoolu ampermeeter baasi ahelasse. Kollektori voolu jälgimiseks lisage vooluga juhitav pingeallikas ja paigutage selle sisend kollektori allikasse.
4. Lisage ostsillograaf ja ühendage selle kanal A kollektorile kollektori pinge jälgimiseks. Baasi voolu jälgimiseks ühendage kanal B vooluga juhitava pingeallika positiivse pinge väljundisse Lülitage ümber ostsillograafi teljed, et jälgida üht sisendkanalit teise suhtes.
5. Lülitage sisse katseskeem, häälestage ostsillograaf ja vaadake tulemust, muutes potentsiomeetri takistust. Joonistage kollektori karakteristik erinevate baasi voolude juures nullist kuni maksimumini.
Harjutus 4.2. Sisendkarakteristikud
1. Joonistage ja koostage skeem sisendkarakteristiku määramiseks, kasutades samu komponente. Ühendage pingeallika “+” kollektorile läbi takisti. Ühendage funktsioonigeneraatori positiivne klemm baasile läbi jadamisi ühendatud dioodi ja potentsiomeetri. Seejärel maandage vooluallika “-“, kollektor ja funktsioonigeneraatori üldklemm.
2. Baasi voolu jälgimiseks viige pingejuhtimisega vooluallikas baasiahelasse.
3. Ühendage ostsillograafi kanal A baasile ja kanal B voolujuhtimisega pingeallika positiivsesse väljundisse.
4. Lülitage sisse katseskeem, häälestage ostsillograaf ja vaadake baasi karakteristikut.
Harjutus 4.3. CE võimendi
1. Kavandage CE võimendi, kasutades BJT transistorit, funktsioonigeneraatorit baasi toiteks, alalisvoolu pingeallikat kollektori toiteks, baasi ja kolletori takisteid ning maaühendust. Koostage võimendi.
123
2. Seadistage funktsioonigeneraatoris siinuselise laine kuju baassagedusega ja pärinihkega 2-3 V. Alalisvoolu pingeallikas seadistage pinge piirides 10-15 V. Seadistage baasi takistus
ligikaudu 100 kΩ ja kollektori takistus ligikaudu 1 kΩ.
3. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatorile sisendpinge jälgimiseks. Ühendage kanal B koormustakistusele väljundpinge jälgimiseks. Kasutage kahe kanali vahelduvvoolusidestust paremaks vahelduvvoolu signaalide jälgimiseks.
4. Lülitage sisse katseskeem. Leidke selline funktsioonigeneraatori amplituud, mis tagab MPP moonutusteta pööratud siinuselise laine.
5. Lisage ampermeter baasi ja kollektori ahelatesse ning arvutage BJT beeta ja alfa võimendustegurid.
Harjutus 4.4. CB võimendi
1. Kavandage ühisbaaslülituses (CB) võimendi, kasutades BJT transistori, funktsioonigeneraatorit emitteri toiteks, alalisvoolu pingeallikat kollektori toiteks, emitteri ja kollektori takisteid ja maaühendust. Koostage võimendi.
2. Seadistage funktsioonigeneraatoris siinuseline laine kuju baassagedusega ja nihkepingega -2 - -3 V. Seadistage alalisvoolu pingeallika pinge piirides 10-15 V. Seadistage emitteri
takistus ligikaudu 100 kΩ ja kollektori takistus ligikaudu 1 kΩ.
3. Lisage ostsillograaf ja ühendage tema kanal A funktsioonigeneraatorile sisendpinge jälgimiseks. Ühendage kanal B koormustakistusele väljundpinge jälgimiseks. Kasutage mõlema kanali vahelduvvoolu sidestust vahelduvvoolusignaalide paremaks jälgimiseks.
4. Lülitage sisse katseskeem. Leidke funktsionaalgeneraatori maksimaalne amplituud, mis tagab väljundis pööratud siinuslaine piiranguteta MPP.
5. Lisage ampermeter emitteri ja kollektori ahelatesse ja arvutage BJT beeta ja alfa võimendustegurid.
Harjutus 4.5. Emitterjärgur
1. Kavandage CC võimendi (emitterjärgur), kasutades BJT transistori, funktsioonigeneraatorit baasi toiteks, alalisvoolu pingeallikat kollektori toiteks, emitteri ja baasi takisteid ja maaühendust. Koostage võimendi.
2. Seadistage funktsioonigeneraatoris baassagedusega siinuseline laine kuju ettenihkega 2-3 V. Seadistage alalisvoolu pingeallikal pinge piiridesse 10-15 V. Seadistage baasi takistus
ligikaudu 100 kΩ ja emitteri takistus ligikaudu 1 kΩ.
3. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatorile sisendpinge jälgimiseks. Ühendage kanal B koormuse takistusele väljundpinge jälgimiseks. Kasutage mõlema kanali vahelduvvoolu sidestust vahelduvvoolu signaalide paremaks jälgimiseks.
4. Lülitage sisse katseskeem. Leidke funktsioonigeneraatori maksimaalne amplituud, mis tagab pööratud siinuselise laine piiranguteta MPP.
5. Lisage ampermeetrid emitteri ja kollektori ahelatesse ja arvutage BJT beeta ja alfa võimendustegurid.
124
4.6. Opvõimendid
Harjutus 5.1. Mitteinverteeriv pingevõimendi
1. Kavandage skeem, kasutades opvõimendit, sisend- ja tagasisidetakisteid ja maaühendust. Koostage mitteinverteeriv pingevõimendi ja juhtige seda funktsioonigeneraatorilt.
2. Seadistage funktsioonigeneraatoril baassagedusega siinuselise laine kuju ja sisendtakistil
takistus piirdes 1-10 kΩ.
3. Arvutage ja valige vajalik tagasisidetakistus ja funktsioonigeneraatori amplituud, mis tagab väljundis baaspinge piiranguteta MPP.
4. Lisage ostsillograaf ja ühendage selle A kanal funktsioonigeneraatorile sisendpinge jälgimiseks, ja kanal B koormusele väljundpinge jälgimiseks. Lisage Bode plotter sageduskarakteristiku jälgimiseks ja ühendage selle sisend ostsillograafile. Pingete mõõtmiseks lisage kaks vahelduvvoolu voltmeetrit ja ühendage need sisendisse ja väljundisse.
5. Lülitage katseskeem sisse ja vaadake pingeid, samuti ka Bode diagrammi suurust ja faasi. Võrrelge neid arvutatud suurustega.
6. Vähendage järgimööda tagasiside takistust kaks, viis ja kümme korda. Iga suuruse juures lülitage katseskeem sisse ja mõõtke pingeid, võimendust ja sagedusriba laiust. Seejärel joonistage välja ribalaiuse karakteristik pingevõimenduse suhtes.
Harjutus 5.2. Inverteeriv pingevõimendi
1. Kavandage ja koostage inverteeriv pingevõimendi, kasutades samu komponente.
2. Arvutage ja valige vajalik tagasisidetakistus ja funktsioonigeneraatori amplituud, mis tagaks baasi MPP piiramisteta väljundi.
3. Lülitage skeem sisse ja vaadake pingeid, samuti ka Bode diagrammide suurust ja faasi. Võrrelge neid arvutustulemustega.
4. Leidke ka siin ribalaiuse sõltuvus pingevõimendustegurist ja trükkige välja uus karakteristik ribalaiuse sõltuvuse kohta pingevõimendustegurist.
Harjutus 5.3. Detektorid ja komparaatorid
1. Kavandage ja koostage nullpunkt-detektor, kasutades komparaatorit ja maaühendust ning juhtides seda funktsioonigeneraatoriga. Ühendage funktsioonigeneraatori positiivne klemm komparaatori positiivsele sisendile. Ühendage komparaatori väljund takistile. Seejärel maandage funktsioonigeneraatori üldklemm ja komparaatori negatiivne sisend.
2. Seadistage funktsioonigeneraatoril siinuselise laine kuju baassagedusega ja amplituudiga piirides 1-10 mV.
3. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatorile sisendpinge jälgimiseks, ja kanal B komparaatori väljundile.
4. Lülitage skeem sisse ja vaadake pingete muutumist ajas. Lülitage ümber ostsillograafi teljed, et näidata üht sisendkanalit teise suhtes.
5. Koostage positiivse baaspingega detektor nullpunkt-detektori asemel. Selleks lisage alalisvoolu pingeallikas komparaatori negatiivse sisendi ja maaühenduse vahele. Hoidke
125
selle pinge kaks korda madalamal funktsioonigeneraatori amplituudist. Ja taas uurige pingete muutust ajas ja positiivse baasiga detektori sisend/väljund karakteristikuid.
6. Koostage negatiivse baaspingega detektor positiivse baaspingega detektori asemel. Selleks pöörake ümber alalisvoolu pinge. Vaadake pingete muutumist ajas ning negatiivse baasiga detektori sisend/väljund karakteristikuid.
Harjutus 5.4. Schmitti triger
1. Kavandage ja koostage Schmitti triger, kasutades komparaatorit, kahte takistit ja maaühendust ning toitke seda funktsioonigeneraatorilt. Ühendage funktsioonigeneraatori positiivne klemm komparaatori negatiivsele sisendile. Ühendage mõlemad takistid ja komparaatori positiivne sisend. Ühendage komparaatori väljund esimesele takistile. Seejärel maandage funktsioonigeneraatori üldklemm ja teine takisti.
2. Seadistage funktsioonigeneraatoril baassagedusega siinuselise laine kuju ja amplituud, mis on suurem kui komparaatori väljund.
3. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatorile, et jälgida sisendpinget ja kanal B komparaatori väljundile.
4. Lülitage katseskeem sisse ja vaadake pingete muutumist ajas. Lülitage ümber ostsillograafi teljed, et näidata üht sisendkanalit teise suhtes.
5. Vähendage teise takisti takistust järgemööda kaks, viis ja kümme korda. Iga suuruse juures lülitage katseskeem sisse ja mõõtke hüstereesi laiust. Siis trükkige välja karakteristik laiuse sõltuvuse kohta positiivsest pingevõimendustegurist.
4.7. Matemaatilised muundurid
Harjutus 6.1. Summaator
1. Kavandage ja koostage kahe sisendiga summaator, kasutades opvõimendit, kolme takistit ja maaühendust Esiteks pange kokku inverteeriv pingevõimendi ja lisage veel üks takisti opvõimendi negatiivsele sisendile. Seejärel koostage toiteallikad mõlemale sisendtakistile, toites esimest takistit funktsioonigeneraatorilt ja teist takistit alalisvoolu pingeallikalt.
2. Seadistage funktsioonigeneraatoris baassagedusega siinuseline laine kuju ja sisendtakistus
piirides 1-10 kΩ. Valige samad suurused teistele takistitele. Arvutage ja valige funktsioonigeneraatori amplituud, mis tagab baas-MPP piiramisteta väljundi. Seadistage alalisvoolu pingeallika pinge mõnele voldile.
3. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatorile sisendpinge jälgimiseks ja kanal B opvõimendi väljundisse. Pinge mõõtmiseks lisage voltmeeter ja ühendage see väljundisse.
4. Lülitage katseskeem sisse ja vaadake sisendsignaalide summat. Võrrelge väljundpingeid sisendpingetega.
Harjutus 6.2. Lahutaja
1. Kavandage ja koostage kahe sisendiga lahutaja, kasutades opvõimendit, funktsioonigeneraatorit, alalisvoolu pingeallikat, nelja takistit ja maaühendust. Esmalt koostage summaator ilma opvõimendi negatiivset sisendit maandamata. Seejärel teisaldage
126
takisti opvõimendi negatiivselt sisendilt positiivsele. Lisaks veel ühendage positiivne opvõimendi sisend maaga neljanda takisti kaudu.
2. Seadistage funktsioonigeneraatoris baassagedusega siinuselise laine kuju ja sisendtakistus
piirides 1-10 kΩ. Valige samad takistused teistel takistitel. Arvutage ja valige funktsioonigeneraatori amplituud, seadistage alalisvoolu pingeallika pinge allapoole seda amplituuti.
3. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatorile sisendpinge jälgimiseks ja kanal B opvõimendi väljundisse. Pinge mõõtmiseks lisage voltmeeter ja ühendage see väljundisse.
4. Lülitage sisse katseskeem ja vaadake funktsioonigeneraatori ja alalisvoolu pingeallika pingete vahet. Võrrelge väljundpinget sisendpingega.
Harjutus 6.3. Integraatorid
1. Kavandage ja koostage integraator, kasutades opvõimendit, funktsioonigeneraatorit, kondensaatorit, takistit ja maaühendust. Esmalt koostage inverteeriv pingevõimendi. Seejärel asendage tagasiside takisti kondensaatoriga.
2. Seadistage funktsioonigeneraatoris täisnurkse laine kuju baassagedusega, ja sisendtakisti
piirides 1-10 kΩ. Arvutage ja valige mahtuvus ja funktsioonigeneraatori amplituud, mis tagab väljundis piiramisteta kolmnurkse baasi.
3. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatorile sisendpinge jälgimiseks, ja kanal B opvõimendi väljundile . Pingete mõõtmiseks lisage voltmeeter ja ühendage see väljundisse.
4. Lülitage katseskeem sisse ja vaadake pingeid. Võrrelge väljundpinget arvutatud suurusega.
5. Lisage takisti kondensaatoriga rööpselt. Arvutage ja seadke sisse selle arvuline suurus, mis tagab piiramisteta baaspinge eksponentsiaalse väljundi. Lülitage katseskeem sisse ja võrrelge väljundpinget arvutatud suurusega. Seejärel eemaldage tagasiside takisti, et saada kolmnurkse väljundi.
6. Lülitage takisti kondensaatoriga jadamisi. Arvutage ja valige selle suurus, mis tagab väljundis piiramisteta eksponentsiaalse või kolmnurkse baaspinge. Lülitage katseskeem sisse ja võrrelge väljundpinget arvutatud suurusega.
Harjutus 6.4. Diferentseerijad
1. Kavandage ja koostage diferentsiaator, kasutades opvõimendit (OV), funktsioonigeneraatorit, kondensaatorit, takistit ja maaühendust. Kõigepealt koostage inverteeriv pingevõimendi. Seejärel asendage sisendtakisti kondensaatoriga.
2. Seadistage funktsioonigeneraatoris baassagedusega täisnurkse laine kuju ja tagasiside
takistus piirides 1-10 kΩ. Valige sama suured mahtuvus ja funktsioonigeneraatori amplituud nagu eelmises harjutuses.
3. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatorile sisendpinge jälgimiseks, ja kanal B opvõimendi väljundi jälgimiseks.
4. Lülitage katseskeem sisse ja vaadake pingeid.
127
5. Lisage takisti jadamisi kondensaatoriga. Valige selle suurus piirides 10-100 korda väiksem kui tagasiside takistus. Lülitage skeem sisse. Seejärel, tõstes sisendtakistust, jälgige trapetsoidaalset väljundsignaali.
Harjutus 6.5. PID-regulaator
1. Kavandage ja koostage PID-regulaator, kasutades opvõimendit, funktsioonigeneraatorit, kahte kondensaatorit , kahte takistit ja maaühendust. Kõigepealt koostage inverteeriv pingevõimendi. Seejärel lisage esimene kondensaator jadamisi sisendtakistiga ja teine kondensaator rööpselt tagasisidetakistiga.
2. Seadistage funktsioonigeneraatoris baassagedusega täisnurkse laine kuju. Seadke sisse samad takistused, mahtuvused ja funktsioonigeneraatori amplituud nagu eelmistes harjutustes.
3. Lisage ostsillograaf ja ühendage selle kanal A funktsioonigeneraatorile sisendpinge jälgimiseks, ja kanal B opvõimendi väljundisse. Pinge mõõtmiseks lisage voltmeeter ja ühendage see väljundisse.
4. Lülitage katseskeem sisse ja vaadake pingeid. Võrrelge väljundpinget eelmiste lülituse väljundpingetega.
4.8. Ostsillaatorid
Harjutus 7.1. Astabiilne multivibraator
1. Kavandage ja koostage astabiilne multivibraator, kasutades opvõimendit, alalisvoolu pingeallikat, kolme takistit, kondensaatorit ja maaühendust. Ühendage esimene takisti opvõimendi negatiivse sisendi ja selle väljundi vahele. Ühendage kondensaator opvõimendi negatiivse sisendi maa vahele. Ühendage teine ja kolmas takisti ning opvõimendi positiivne sisend. Ühendage opvõimendi väljund teise takistiga. Ühendage pingeallika “+” kolmandale takistile ja maandage pingeallika “-”.
2. Seadistage kõik takistused piiridesse 1-10 kΩ. Arvutage ja seadke sisse mahtuvuse ja alalispinge suurused, mis annavad baassagedusega väljundi.
3. Lisage ostsillograaf ja ühendage selle kanal A opvõimendi sisendpinge jälgimiseks ja kanal B OV väljundisse.
4. Lülitage sisse katseskeem ja vaadake sisend- ja väljundpingeid.
Harjutus 7.2. Sümmeetrilise toitega astabiilne mu ltivibraator
1. Kavandage ja ehitage sümmeetrilise toitega astabiilne multivibraator, kasutades 5-klemmilst opvõimendit, 2 VDD pingeallikat, 3 takistit, kondensaatorit ja maaühendust. Esmalt koostage astabiilne multivibraator ilma alalisvoolu pingeallikata. Selle asemel ühendage selle
toiteklemmid ±VDD pingeallikale.
2. Lisage ostsillograaf ja ühendage selle kanal A sisendpinge jälgimiseks ja kanal B opvõimendi väljundisse.
3. Lülitage katseskeem sisse ja vaadake sisend- ja väljundpingeid. Võrrelge neid eelmiste tulemustega.
128
4. Muutke see multivibraator asümmeetriliseks astabiilseks multivibraatoriks. Selleks lisage täiendav takistus negatiivsesse tagasisidesse. Seejärel lisage Zeneri diood jadamisi iga negatiivse tagasiside takistiga. Need dioodid tuleb ühendada vastulülituses, lubamaks tagasiside voolusid mõlemas suunas. Lülitage skeem sisse ja vaadake pingeid, muutes uue tagasisidetakisti suurust.
Harjutus 7.3 Wien'i silla signaaligeneraator
1. Kavandage ja koostage Wien'i silla signaaligeneraator, kasutades opvõimendit, alalisvoolu pingeallikat, 4 takistit, 2 kondensaatorit, dioodi ja maaühendust. Esmalt koostage mitteinverteeriv pingevõimendi, kasutades opvõimendit, esimest ja teist takistit ja maaühendust. Teiseks seadke sisse positiivne tagasiside, kasutades kolmanda takisti ja esimese kondensaatori jadaühendust. Seejärel lisage rööpühenduses neljas takisti ja teine kondensaator opvõimendi positiivse sisendi ja maa vahele. Lõpuks lisage jadas vastuühendatud diood ja alalisvoolu pingeallikas opvõimendi negatiivse sisendi ja väljundi vahele.
2. Seadke sisse võrdsed tagasiside takistus ja positiivse sisendi takistus piirides 1-10 kΩ. Seadke negatiivse sisendi takistus kaks korda väiksemaks. Arvutage ja valige võrdsed mahtuvuste ja alalispinge suurused, mis tagavad baassageduse ja väljundsignaali.
3. Lisage ostsillograaf ja ühendage selle kanal A opvõimendi sisendpinge jälgimiseks ja kanal B opvõimendi väljundisse.
4. Lülitage katseskeem sisse ja vaadake sisend- ja väljundpingeid.
Harjutus 7.4. Wien’i silla signaaligeneraator sümme etrilise toitega
1. Kavandage ja koostage Wien'i silla signaaligeneraator sümmeetrilise toitega, kasutades 5-klemmilist opvõimendit, 2 VDD pingeallikat, 5 takistit, 2 kondensaatorit, 2 Zeneri dioodi ja maaühendust. Esiteks ehitage Wien’i silla signaaligeneraator 5-klemmilisel OV'l ilma dioodi
ja alalispinge allikata. Selle asemel ühendage selle toiteklemmid ±VDD pingeallikale. Seejärel lisage uus takisti opvõimendi väljundi ja negatiivse tagasiside takisti vahele. Ühendage paar vastuühendatud Zeneri dioodi selle takisti klemmidele.
2. Seadistage uus tagasiside takisti kaks korda väiksemaks positiivse tagasiside takistusest.
3. Lisage ostsillograaf ja ühendage tema kanal A opvõimendi sisendpinge jälgimiseks ja kanal B opvõimendi väljundisse.
4. Lülitage skeem sisse ja vaadake sisend- ja väljundpingeid. Võrrelge neid eelmise signaaligeneraatori omadega.
129
PEATÜKK 5. KÜSIMUSED
5.1. Küsimused sissejuhatuse kohta
1. Kes avastas pooljuhtivuse? 2. Millisel sajandil algas pooljuhtide uurimine? 3. Millal müüdi esimesed pooljuhtseadised? 4. Milliseid seadiseid nimetatakse passiivseteks? 5. Millised on passiivsete seadiste karakteristikud? 6. Milliseid seadiseid nimetatakse aktiivseteks? 7. Millised on aktiivsete seadiste karakteristikud? 8. Millised seadised võivad salvestada energiat? 9. Nimeta seadiseid, mida võib kasutada kuumutajatena. 10. Kirjuta võimendusteguri valem. 11. Mis omadused eristavad voolu kui alalisvoolu ja kui vahelduvvoolu? 12. Kirjutage oomi seadus. 13. Millega võrdub sagedus, kui periood on 10? 14. Millega võrdub nurksagedus (ligikaudselt) kui periood on 10? 15. Millega võrdub tavalise toiteliini reaktants (ligikaudselt), kui mahtuvus on 0.1? 16. Millega võrdub tavalise toiteliini reluktants (ligikaudselt), kui induktiivsus on 0.1? 17. Milliseid andmeid kirjeldab tavaliselt elektroonikaseadiste kasutegur? 18. Millega võrdub kasutegur, kui Ploss = PL? 19. Millega võrdub kasutegur, kui Ploss = Ps ? 20. Millega võrdub kasutegur, kui Ps = PL? 21. Millega võrdub kasutegur, kui Ploss = 0.1?
5.2. Küsimused pooljuhtidest
1. Millistel tingimustel tekitab aine elektrilise efekti? 2. Mis on voolu allikad? 3. Millisele arvule vastab aatomi number? 4. Millega võrdub neutroni elektriline laeng? 5. Millest sõltub prootonite arv? 6. Millal on aatom elektrilisest tasakaalus? 7. Millised on elektroni omadused? 8. Millega on elektronil vastastikune mõju? 9. Mitu valentselektroni on räni aatomil? 10. Mitu valentselektroni on germaaniumi aatomil? 11. Mitu elektroni on räni aatomil? 12. Mitu elektroni on germaaniumi aatomil? 13. Mitu elektroni on räni aatomi valentsorbiidil kristallis? 14. Mitu elektroni on germaaniumi aatomi valentsorbiidil kristallis? 15. Milline on kõige enam kasutatud pooljuht? 16. Millest on tingitud metalli takistus? 17. Millest on tingitud pooljuhi takistus? 18. Mis põhjustab elektrivoolu metallis? 19. Mis põhjustab elektrivoolu pooljuhis?
130
20. Kuidas nimetatakse vaba elektroni ja augu ühinemist? 21. Kuidas nimetatakse aega augu tekkimisest kuni selle kadumiseni? 22. Mitu voolamise tüüpi esineb metallis? 23. Mitu laengukandja tüüpi on pooljuhis? 24. Mitu valentselektroni on kolmevalentsel aatomil? 25. Mitu valentselektroni on neljavalentsel aatomil? 26. Mitu valentselektroni on viievalentsel aatomil? 27. Millist tüüpi pooljuhis on augud vähemuslaengukandjad? 28. Millist tüüpi pooljuhis on augud enamuslaengukandjad? 29. Millist tüüpipooljuhis on vähemuslaengukandjad elektronid? 30. Millist tüüpi pooljuhis on enamuslaengukandjad elektronid? 31. Kas juhid muudavad oma omadusi väiliste tegurite mõjul? 32. Kas pooljuhid muudavad oma omadusi väliste tegurite mõjul? 33. Kas juhid muudavad oma takistust temperatuuri, valguse või magnetvälja mõjul? 34. Kas pooljuhid muudavad oma takistust temperatuuri, valguse või magnetvälja mõjul? 35. Milliseid pooljuhi tüüpe annab legeerimine? 36. Kuidas nimetatakse n-tüüpi pooljuhti? 37. Kuidas nimetatakse p-tüüpi pooljuhti? 38. Kuidas nimetatakse elektroni kui laengukandjat n-tüüpi pooljuhis? 39. Kuidas nimetatakse elektroni kui laengukandjat p-tüüpi pooljuhis? 40. Kuidas nimetatakse auku kui laengukandjat n-tüüpi pooljuhis? 41. Kuidas nimetatakse auku kui laengukandjat p-tüüpi pooljuhis? 42. Millega võrdub barjääripotentsiaal? 43. Millega võrdub laviinipinge? 44. Millega võrdub Zeneri pinge? 45. Mitu iooni on dipoolis? 46. Kuidas nimetatakse kristalli piirkonda p-tüüpi ja n-tüüpi osade vahel? 47. Millist nähtust nimetatakse laviiniefektiks? 48. Kuidas nimetatakse pinget, mille juures tekib laviiniefekt? 49. Millist nähtust nimetatakse Zeneri efektiks? 50. Kuidas nimetatakse pinget, mille juures tekib Zeneri efekt?
5.2.1. Küsimused dioodidest ja türistoridest
1. Mis liiki seadis on diood? 2. Kuidas on mittejuhtiv diood eelpingestatud? 3. Mis liiki takistus on dioodil? 4. Kas on see hea, kui dioodi pingelang on väike? 5. Kuidas on diood eelpingestatud, kui dioodi vool on suur? 6. Millist pinget nimetatakse dioodi põlvepingeks? 7. Milline on dioodi lekkevool võrreldes pärivooluga? 8. Milline näeb välja dioodi karakteristik ülalpool põlve? 9. Kui dioodi vool on 0.5 V ja vool on 50 mA, millega võrdub siis dioodi võimsus (W) ? 10. Kaks dioodi on jadamisi. Esimesel dioodil on pinge 0.4 V ja teisel on pinge 0.8V. Kui vool
läbi esimese dioodi on 0.5 A, millega võrdub siis vool (A) läbi teise dioodi? 11. Milline on kõige enam levinud dioodide kasutusala? 12. Mis liiki seade on varaktor?
131
13. Kas Zeneri dioodi läbilöögipinge kasvab, kui vool kasvab? 14. Mis liiki seade on Zeneri diood? 15. Mis on varistor? 16. Miks on Schottky dioodid palju kiiremad kui alaldusdioodid? 17. Milliseid optoelektroonilisi seadmeid teie teate? 18. Mis vahe on fotodioodide ja aladidioodide vahel? 19. Mida tähendab negatiivne takistus? 20. Kuis leiavad Schottky dioodid laialdast kasutamist? 21. Kes lahendas türistori konstruktsiooni probleemi? 22. Millisest tuleneb sõna “türistor”? 23. Kus ehitati esimene türistor? 24. Millal ilmusid türistorid? 25. Mitu välisjuhet on türistoril? 26. Nimetage türistori töötamise peamised põhimõtted. 27. Kas türistor muutub juhtivaks, kui ületatakse läbilöögi päripinge? 28. Millist laadi juhtivus on türistoril? 29. Millistes protsessides võib türistore kasutada? 30. Kuidas nimetatakse minimaalset sisendvoolu, mis võib türistori sisse lülitada? 31. Kuidas nimetatakse seda minimaalset sisendvoolu, mis võib türistori välja lülitada? 32. Millist nähtust võib põhjustada türistori päripinge tõus? 33. Kuidas saab peatada juhtivat türistori? 34. Millest koosneb diiak? 35. Mida eeldab triiaki tööpõhimõte? 36. Mida nimetatakse kaheoperatsiooniliseks türistoriks? 37. Miks pakuvad GTO-d suurt huvi? 38. Kus kasutatakse GTO-sid laialdaselt?
5.2.2. Küsimused transistoridest
1. Kes on esimese siirdetransistori leiutaja? 2. Mille eest autasustati leidureid Nobeli preemiaga? 3. Mitu legeeritud piirkonda on transistoril? 4. Mis on transistori oluline operatsioon? 5. Mis on enamuslaengukandjad npn-transistori baasis? 6. Kuidas tekitab npn-bipolaartransistor võimenduse? 7. Milline on tavaliselt emitteri dioodi eelpinge? 8. Millisel alusel on tehtud bipolaartransistor? 9. Millisel klemmilt algab npn-transistori elektronide vool? 10. Milline on elektronide peamine toime npn-transistori baasis? 11. Millega võrdub bipolaartransistori vooluvõimendustegur? 12. Kas kollektori toitepinge tõstmine suurendab baasi voolu? 13. Leidke pingevõimendus, kui sisendpinge on 0.2 V ja väljundpinge on 10 V.
14. Milline on vooluvõimendustegur, kui sisendvool on 5 µA ja väljundvool 10 mA? 15. Kui vooluvõimendustegur on 200 ja kollektori vool on 100 mA, milline on siis baasi vool
(µA)? 16. Kui transistoril on emitteri vool 10 mA ja kollektori vool on 9.95 mA, milline on siis baasi
vool (µA)?
132
17. Kui transistoril on kollektori vool 100 mA ja kollektor-emitteri pinge on 3.5 V, milline on siis võimsuse hajumine (W)?
18. CE võimendis tekitab baasi voolu muutus 0,1 kuni 0,5 mA muutuse kollektori voolus 15 kuni
60 mA. Millist suurust näitab β ? 19. Transistori baasi vooluks mõõdetakse 5 mA, kui emitteri vool on 30 mA. Mida näitab siis
kollektori vool? 20. Kui kollektori vool suureneb, mida teeb siis vooluvõimendustegur? 21. Millistes režiimides ei tohi transistor töötada? 22. Millist kahte bipolaartransitori ekstreemset töötingimust esindab koormussirge? 23. Kuidas nimetatakse piirkonda, milles transistor töötab siis, kui baasi vool on väge väike? 24. Kuidas nimetatakse piirkonda, milles transistor töötab, kui kollektor ja emitter on lühistatud? 25. Kuidas muutub kollektori vool aktiivpiirkonnas? 26. Milline koormussirge osa on mõeldud normaalseks transistori võimenduseks? 27. Kui baasi toitepinge suureneb, kuhu liigub siis Q punkt koormussirgel? 28. Millisesse koormussirge otsa liigub punkt Q pärast baasi takisti lahtiühendamist? 29. Milline peaks olema baasi takistuse suurus transistori küllastumiseks? 30. Millises koormussirge otsas jõuab Q lõikepunkti? 31. Milline on väljundpinge siis, kui transistorlülitis puudub baasi vool? 32. Kuidas nimetatakse lülitust fikseeritud emitteri vooluga?
5.3. Küsimused analoogelektroonikast
1. Milline seade on mittelineaarne? 2. Millised seadmed on lineaarsed? 3. Kui mahtuvus ja induktiivsus on 0,1, millega võrdub siis resonantssagedus (ligikaudu)? 4. Loetle salvestusahela komponendid. 5. Mida nimetatakse sageduskarakterisikuks? 6. Kui K = 10, millega võrdub siis võimendus nimiribas? 7. Milline on sagedusriba tööstuslikes seadistes? 8. Milline on sagedusriba audioseadmetes? 9. Milline on sagedusriba mobiiltelefonides? 10. Kuidas muutub võimendustegur negatiivse tagasiside korral? 11. Kuidas muutub võimendustegur positiivse tagasiside korral? 12. Kuidas muutub võimendustegur nimiribas negatiivse tagasiside korral? 13. Kuidas muutub võimendustegur nimiribas positiivse tagasiside korral? 14. Millise signaali parameetrit juhib võimendi? 15. Mida tuleb teha signaaliga, selleks et muuta selle amplituuti? 16. Milliseld võimendite liike on välja töötatud? 17. Mis on kaheastmelise võimendaja beeta, kui astmete beetad on 10 ja 20? 18. Kas lineaarsete võimendite omadused muutuvad selliste välitingimustega nagu temperatuur
ja koormuse takistus? 19. Milline on emitterjärguri lühend? 20. Millistest funktsionaalsetest plokkidest koosneb diferentsiaalvõimendi? 21. Millistest funktsionaalsetest plokkidest on koostatud av võimendi? 22. Millest on koostatud opvõimendi (OV)? 23. Millega võrdub tavaliselt opvõimendite võimendustegur? 24. Millised on opvõimendite populaarsed kasutusalad?
133
25. Kuidas võib võimendeid liigitada voolu järgi?
26. Kui kaks toitepinget on ±15 V, milline on siis tipust-tipuni suurus ideaaljuhul?
27. Opvõimendil on avatud kontuuri võimendustegur 100000 toitepingega ±12 V. Milline on minimaalne vajalik sisend (V), selleks et tekiks küllastus?
28. Milline on opvõimendi võimendustegur, milles kasutatakse sisendtakistust 100 Ω ja
tagasisidetakistist 100 kΩ? 29. Nimetage negatiivse tagasiside eeliseid.
5.4. Küsimused impulss- ja digitaalelektroonikast
1. Milline on põhiline erinevus lineaarse ja lülitava lülituse vahel? 2. Mis on lülitusahelate kasutamise suurim eelis? 3. Millist koormust nimetatakse “aktiivkoormuseks”? 4. Mitu sisendit ja väljundit on muliplekseril? 5. Millest tuleneb termin komparaator? 6. Miks ei saa tavalisi opvõimendeid kasutada komparaatoritena? 7. Mida nimetatakse komparaatori käivituspunktiks? 8. Millist liiki tagasisidet vajavad komparaatorid? 9. Millist tagasisidet vajab riiv? 10. Millised lülitused võtavad kinni analoogsignaali ja hoiavad seda teatud perioodi? 11. Millised lülitused võivad tööpunkti viia kõrgeks või teisendada selle madalaks? 12. Mitu väljundit on RS trigeril? 13. Miks on hüsterees vajalik Schmitti trigeril? 14. Milline tagasiside on Schmitti trigeril? 15. Kui siinuseline laine on Schmitti trigeri sisend, siis milline on väljundlaine? 16. Millised on Wien’i silla põhielemendid? 17. Kui Vpeak-to-peak (sin) = 100, millega võrdub siis Vrms? 18. Kui Vmax (sin) = 100, millega võrdub siis Vrms? 19. Kui Vpeak-to-peak (sin) = 100, millega võrdub siis Vd? 20. Kui Vrms = 10, millega võrdub siis Vmax (sin)? 21. Kui Vrms = 10, millega võrdub siis Vpeak-to-peak (sin)? 22. Kui Vd = 10, millega võrdub siis Vmax (sin)? 23. Kui Vd = 10, millega võrdub siis V peak-to-peak (sin)? 24. Miks on ühed multivibraatorid astabiilsed ja teised stabiilsed? 25. Milles on erinevus multivibraatori ja tõkestava signaaligeneraatori vahel?
134
AINEREGISTER
Σ–∆ ADC, 115 Σ–∆ modulaator, 115 aatom, 14 aatomiarv, 14 ac beta, 34 ajakonstant, 77 aktiivsed filtrid, 77 aktiivsed seadmed, 12 aktiivtakistus, 10 aktseptor, 17 alaldustüristor, 46 alalisvool, 11 amplitude value, 11 amplituudsuurus, 11 anood, 20 auk, 16 baas, 29 bipolaar-jõutranistor, 35 bipolaartransistor, 30 blokeeriv generaator, 97 byte, 98 cos ϕ, 11 dekooder, 104 diferentsiaalvõimendi, 66 digitaal-analoogmuundur, 105 digitaallülitus, 99 diiak, 49 diood, 20 dipool, 18 diskreetimise funktsioon, 111 doonor, 17 efektiivväärtus, 11 elektrolüüt, 14 elektron, 14 emitter, 29 emitterjärgur, 31 enamuskandjad, 17 energiamuundus, 12 fotoelement, 27 fototakisti, 28 GaAsFET, 43 germaanium, 15 hetkhäiring, 57 hierarhiline ADC, 113 hoidelülitus, 90 hoidevool, 47 hoidevõimendi, 90 hüppekaja, 57 induktiivsus, 10 induktor, 53 inhibiitorlülitus, 100 integraator, 83
I-regulaator, 83 isoleeritud paisuga bipolaartransistor (GBT),
44 JA-lülitus, 102 JK-tüüpi triger, 103 juhitav ränialaldi, 46 juht, 14 juhtimisnurk, 47 jälgiv ADC, 114 kaheoperatsiooniline türistor, 50 katood, 20 Kirchhoff’I seadus, 10 kitsastõkkefilter, 80 klass A võimendi, 59 klass B võimendi, 59 klass C võimendi, 59 klass D võimendi, 60 koguvool, 12 kollektor, 29 komparaator, 88 komplementaarne metall-oksüüd seadis
(CMOS), 67 kondensaator, 54 kontuuri võimendustegur, 71 koormus, 55 koormussirge, 33 kriitiline sagedus, 56 kristall, 15 kõrgpääsfilter, 78 käivitatav lülitus, 103 küllastuspiirkond, 32 laengukandja, 14 laviindiood, 26 laviinefekt, 19 legeerimine, 16 lineaarne võimendi, 59 lisand, 16 loendav ADC, 113 loogikalülitused, 99 lõikesagedus, 56 läbilöögipiirkond, 19 läbilöögipinge, 19 läte, 38 lüliti, 87 madal bait, 98 madalpääsfilter, 77 mahtuvus, 10 metall-oksüüd pooljuht-väljatransistor
MOSFET, 40 MOS-juhitav türistor, 50 multiplekser, 88 multivibraator, 94
135
neel, 38 n-tüüpi pooljuht, 17 näivtakistus, 10 näivvõimsus, 11 Ohm’I seadus, 10 ohutu töö piirkond, 37 ohutustegur, 21 omajuhtivuslikud pooljuhid, 16 operatsioonivõimendi (OV), 68 optiline inkrementaalkooder, 117 optoisolaator, 28 ostsillaator, 92 pais, 38 paisuga suletav türistor (GTO), 49 parafaasvõimendi, 67 paralleel ADC, 111 passiivne koormus, 88 passiivsed seadmed, 12 passivsed filtrid, 77 PID-kontroller, 85 PID-regulaator, 85 piikimpulsid, 26 piirik, 74 pika sabaga paar, 66 pingejagur, 63 pingejärgur, 73 pingekordistus Q, 12 pingevõimendi, 63 PI-regulaator, 84 pn-siire, 17 pooljuht, 15 primaarmähis, 53 p-tüüpi pooljuhiks, 17 pulsatsiooni sagedus, 78 pulser, 92 p-väljundtunnusjoon, 32 päripinge, 18 päripinge impulss, 24 päripinge lang, 21 pärivoolu ülekandetegur, 31 R-2R DAC, 108 reaktiivtakistus, 10 rekombinatsioon, 16 resonantsahel, 10 ribafilter, 79 riiv, 89 rms, 11 ruutkeskmine väärtus, 11 ruut-tunnusjoonega seadis, 39 räni, 15 sabatakisti, 66 sagedus, 10 sammlähendus, 112 Schmitti triger, 91 sekundaarmähis, 53 selektiivsus Q, 79
Shottky diood, 26 sigma-delta ADC, 115 signaaligeneraator, 92 siirdeprotsess, 23 sisendtunnusjoon, 32 staatiline võimendustegur, 31 stabilisaator, 63 stabilitron, 25 summeeriv võimendi, 82 sümmeetriline toiteallikas, 63 Zeneri diood, 25 Zeneri efekt, 19 tagasisidega.skeem, 57 takisti, 53 termometer DAC, 106 tetroodtüristor, 49 trafo, 53 transistor, 29 triiak, 49 tunneldiood, 27 turns ratio, 54 tuum, 14 tõkkekihi potentsiaal, 18 tõkkekiht, 18 täisjuhtivus, 10 vaba elektron, 14 vahelduvvool, 11 vahelduvvoolu võimendustegur, 34 valentselektron, 14 valentsitsoon, 14 valgusdiood, 27 varaktor, 25 varikap, 25 varistor, 26 vastupinge, 18 vastusuunaline taastumisaeg, 24 vastuvool, 21 Wien’i sild, 92 vilk ADC, 111 voltamper tunnusjoon, 20 vooluvõimendustegur, 31 VÕI-EI lülitus, 101 VÕI-EI- ventiil, 101 võimendamine, 12 võimendustegur, 12 võimsuskadu, 12 võrgupinge, 56 vähemuskandjad, 17 välistav-VÕI-lülitus, 102 väljatransistor, 38 üheoperatsiooniline türistor, 46 ühepooluseline filter, 78 ühisbaas, 30 ühisemitter, 30 ühiskollektor, 30 ülekande-tunnusjoon, 34
136
KIRJANDUS
1. Allen, B. W., Analogue Electronics for Higher Studies, Basingstoke; London: Macmillan, 1995. 247 p. ISBN: 0333606833
2. Almaini, A. E. A., Electronic logic systems, New York (NY) [etc.]: Prentice Hall, 1994. 562 p. ISBN: 013253519X
3. Amos , S. W., Newnes Dictionary of Electronics, Oxford [etc.]: Newnes, 1999. 389 p. ISBN: 0750656425
4. Anwar, A. , Basic Electronics, Lahore: Sajid Publ., 1998. 316 p. 5. Ashley, K. L., Analog Electronics with LabVIEW, Upper Saddle River (NJ): Prentice Hall
PTR, 2003. 400 p. ISBN: 0130470651 6. Attia, J. O., Electronics and Circuit Analysis Using MATLAB, Boca Raton (FL) [etc.]: CRC
Press, 1999. 378 p. ISBN: 0849311764 7. Attia, J. O., PSPICE and MATLAB for Electronics: An Integrated Approach, Boca Raton
(FL) [etc.]: CRC Press, 2002. 338 p. ISBN: 0849312639 8. Berube, R. H., Computer Simulated Experiments for Electric Circuits Using Electronics
Workbench, Upper Saddle River (NJ); Columbus (OH): Prentice Hall, 1997. 263 p. ISBN: 0133596214
9. Bishop , O., Essential Analog Electronics, Oxford [etc.]: Newnes, 1997. 287 p. ISBN: 0750628987
10. Borris, J. P., Semiconductor Devices Using Electronics Workbench, Upper Saddle River (NJ); Columbus (OH): Prentice-Hall, 2000. 207 p. ISBN: 0130260835
11. Cattermole, K. W., Principles of Pulse Code Modulation, NY, Elsevier, 1969. ISBN: 444197478
12. Craig, E. C., Laboratory Manual for Electronics via Waveform Analysis, New York [etc.]: Springer, 1994. 130 p. ISBN: 0387941363
13. Gosling, J. B., Simulation in the Design of Digital Electronic Systems, Cambridge [etc.]: Cambridge University Press, 1993. 273 p. ISBN: 0521426723
14. Grant, D. A., and D. Gower , Power MOSFETS – Theory and Application, New York: Wiley, 1989. 504 p. ISBN: 047182867X
15. Green, D. C., Applied Digital Electronics, Harlow : Longman, 1999. 483 p. ISBN: 0582356326
16. Green, D. C., Digital Electronics, Harlow: Longman, 1999. 398 p. ISBN: 0582317363 17. Hood, J. L., The Art of Linear Electronics, Oxford [etc.]: Butterworth-Heinemann, 1993. 344
p. ISBN: 0750608684 18. Horowitz, P., The Art of Electronics, Cambridge: Cambridge University Press, 1989. 1125
p. ISBN: 0521370957 19. Horsey, M. P., Electronics Projects Using Electronics Workbench, Oxford [etc.] : Newnes,
1998. 227 p. ISBN: 0750631376 20. Ibrahim, K. F., Electronic Systems & Techniques, London: Addison Wesley; Longman,
1994. 400 p. 21. IEEE Standard Dictionary of Electrical and Electronics Terms – Fifth Edition, IEEE, 1993.
1568 p. 22. James, M., Higher Electronics, Oxford [etc.]: Newnes, 1999. 310 p. ISBN: 075064169X 23. Joller, J., Jouelectroonika, Tallinn Technical University, 1996. 216 p. ISBN: 9985690095
137
24. Jonce, M. H., A Practical Introduction to Electronic Circuits, Cambridge University Press, 1995. 525 p.
25. Jung, W. G., Op amp Applications, Analog Devices, 2002. ISBN 0916550265 26. Kesler, W. (editor), Analog-Digital Conversion, Analog Devices, 2004. 800 p. ISBN:
0916550273. 27. Khanna, V. K. , The Industrial Gate Bipolar Transistor, IGBT. Piscataway (NY): IEEE Press;
Hoboken, NY: Wiley Interscience. 2003. 627 p. ISBN: 0471238457 28. Kimber, W., Practical Analog Electronics for Technicians, Oxford [etc.]: Butterworth-
Heinemann, 1997. 231 p. ISBN: 0750629525 29. Krenz , J. H., Electronic Concepts: An Introduction, Cambridge [etc.]: Cambridge University
Press, 2000. 454 p. ISBN: 0521662826 30. Lenk, J. D., Handbook of Practical Electronic Circuits, Englewood Cliffs (NJ): Prentice Hall,
1982. 344 p. 31. Lenk, J. D., Complete Guide to Electronic Power Supplies, Englewood Cliffs (NJ): Prentice
Hall, 1990. 272 p. ISBN: 0131728180 32. Lenk, J. D., Simplified Design of Switching Power Supplies, Boston: Butterworth-
Heinemann, 1995. 224 p. ISBN: 0750695072 33. Maddock, R. J., Electronics for Engineers, Harlow: Longman, 1994. 719 p. ISBN:
0582215838 34. Malik , N. R., Electronic Circuits : Analysis, Simulation, and Design, Englewood Cliffs (NJ) :
Prentice-Hall, 1995. 1182 p. ISBN: 0023749105 35. Malvino, A. P., Digital Computer Electronics, Lake Forest (Ill.) [etc.]: Glencoe, 1993, 522 p.
ISBN: 0071127135 36. Malvino, A. P., Electronic Principles, New York: McGraw-Hill Book Co, 1993. 960 p. ISBN:
0071134808 37. Mandl, M., Directory of Electronic Circuits, New Jersey: Prentice-Hall, Englewood Cliffs,
1978. 340 p. 38. Massobrio, G., Semiconductor Device Modeling with SPICE, New York: McGraw-Hill,
1993. 479 p. ISBN: 0070024693 39. Northrop , R. B., Analog Electronic Circuits: Analysis and Applications, Reading (MA):
Addison-Wesley, 1990. 521 p. ISBN: 0201116561 40. O’Duyer, A., Handbook of PI and PID Controller Tuning Rules, London: Imperial College
Press, 2003, 375 p. ISBN: 186094372X. 41. Ozenbaugh, R. L., EMI Filter Design, New York: Marcel Dekker, 2001.319 p 42. Patrick, D. R., and S. W. Fardo , Industrial Electronics: Devices and Systems. Lilburn, Ga:
Fairmont press; Basel: Dekker. 2000. 671 p. ISBN 0824705017 43. Power Sources Manufacturers Association, Inc. Handbook of Standardized Terminology
for the Power Sources Industry, Los Angeles (CA). 1995. 95 p. 44. Pressman, A. I. , Switching Power Supply Design, New York: McGraw-Hill, 1998, 682 p.
ISBN: 0070522367 45. Price, T. E., Analog Electronics: An Integrated PSpice Approach, London [etc.]: Prentice
hall, 1997. 706 p. ISBN: 0132428431 46. Raghuram, R., Computer Simulation of Electronic Circuits, New York [etc.]: New Delhi:
Wiley; Wiley Eastern, 1989. 246 p. ISBN: 0470213310 47. Rankis, I. and A. Zhiravetska, Electronics, Riga: RTU, 2005. 107 p. ISBN: 9984327892
138
48. Rincon-Mora, G. A., Voltage References: From Diodes to Precision High-Order Bandgap Circuits, Piscataway, NJ: IEEE Press; New York: Wiley-Interscience, 2002. 168 p. ISBN: 0471143367,
49. Rosen, A. and F. J. Zutavern (editors) , High-Power Optically Activated Solid-State Switches, Boston: Artech House, 1994. 377 p. ISBN: 0890065071
50. Sheingold, D., Analog-Digital Conversion Handbook, Analog Devices and Prentice-Hall, 1986. ISBN: 0130328480.
51. Sillakivi, P., Electronic Circuits: Examples for Project Based Subject "Technologies of Electronic Products", Tallinn : [Tallinna Tehnikaulikooli Kirjastus], 2003. 25 p. ISBN: 9985594002
52. Sinclair, I. R., Practical Electronics Handbook, Oxford (MA): Newnes, 2000. 560 p. ISBN: 0750645859
53. Streetman, B. G., Solid State Electronic Devices, Upper Saddle River (NJ): Prentice Hall International, 2000. 558 p. ISBN: 0130261017
54. Sum, K. K., Switch Mode Power Conversion, Basic Theory and Design, New York: M. Dekker, 1984. 324 p. ISBN: 0824772342
55. Tooley, M., Electronic Circuits Student Handbook, Oxford [etc.]: Butterworth Heinemann, 1995. 213 p. ISBN: 0750621184
56. Tsividis, Y., A First Lab in Circuits and Electronics, New York [etc.]: Wiley, 2002. 132 p. ISBN: 0471386952
57. Tuinenga, P. W., SPICE : A Guide to Circuit Simulation and Analysis Using PSPICE, Englewood Cliffs (NJ): Prentice Hall, 1995. 288 p. ISBN: 0134360494
58. Waggoner, R. M. (editor), Practical Guide to Quality Power for Sensitive Electronic Equipment, Overland Park, Kan.: EC&M Books, 1997. 144 p. ISBN: 0872886670
59. Warnes, L., Analogue and Digital Electronics, Houndmills; London: Macmillan, 1998. 572 p. ISBN: 0333658205
60. Whittington, H. W., B. W. Flynn, and D. E. MacPhers on , Switched-Mode Power Supplies - Design and Construction, Taunton, Somerset, England: Research Studies Press; New York: Wiley, 1997. 236 p. ISBN: 0863802036
61. Williams, J. , The Art and Science of Analog Circuit Design, EDN Series for Design Engineers, Butterworth Heinmann, Mass., 1995. 392 p.
62. Williams, T. EMC for Product Designers, Oxford; Boston: Newnes, 2001. 360 p. ISBN: 0750649305.
63. Wu, K. C. , Pulse-Width Modulated DC/DC Converters, New York: Chapman & Hall: International Thomson Pub., 1997. 234 p. ISBN:0412105411
64. Wu, K. C. , Transistor Circuits for Spacecraft Power System, Norwell (MA): Kluwer Academic Publishers, 2003. 217 p. ISBN:1402072619
65. Zebulum, R. S., M. A. C. Pacheco, and M. M. B. R. V elasco , Evolutionary Electronics, Boca Raton etc.: CRC Press. 2002. 209 p. ISBN 0-8493-0865-8
66. Быстров, Ю. А. и И. Г. Мироненко, Электронные цепи и устройства, Москва: Высш. шк., 1989. 286 c. ISBN 5060001245
67. Водовозов А. М., Основы электроники, Вологда: ВоГТУ, 2003. 136 с. ISBN: 5878512017
68. Головатенко-Абрамова, М. П. и А. М. Лапидес, Задачи по электронике, Москва: Энергоатомиздат, 1992. 110 с. ISBN 5283016056
69. Грабовски, Б., Краткий справочник по электронике, Москва: ДМК Пресс, 2001. 408 с. ISBN 5940740324
139
70. Гусев, В. Г. и Ю. М. Гусев, Электроника: [Учеб. пособие для приборостроит. специальностей вузов], М.: Высш. шк., 1991. 621 с. ISBN 5060006816:
71. Джонс, М. Х., Электроника - практический курс, Москва: Постмаркет, 1999. 527 с. ISBN 5901095014
72. Ибрагим, К. Ф., Основы электронной техники. Элементы, схемы, системы, 2-е изд., Москва: Мир, 2001. 397 с. ISBN 5030033947
73. Карлащук, В. И., Электронная лаборатория на IBM PC: Программа Electronics Workbench и ее применение, Москва: Солон-Р, 1999. 70 с. ISBN: 5934550063.
74. Кауфман, М., Практическое руководство по расчетам схем в электронике: В 2 т.: Справочник, Т. 1. Б.м. 1991. 365 с. ISBN 5283025063
75. Лачин, В. И. и Н. С. Савелов, Электроника: Учеб. пособие для втузов, Ростов н/Д: Феникс, 2000. 446 с. ISBN 522200998X
76. Лисовский, Ф. В. и И. К. Калугин, Англо-русский словарь по радиоэлектронике, Москва, Руссо, 1999. 752 с. ISBN: 5887211210
77. Миловзоров, О. В. и И. Г. Панков, Электроника: Учеб. для вузов, Москва: Высш. шк., 2004. 288 с. ISBN 5060044289
78. Мостицкий, И. Л., Новейший англо-русский толковый словарь по современной электронной технике: Ок. 8000 терминов, Москва: Лучшие книги, 2003. 527 с. ISBN 5936730220
79. Опадчий, Ю. Ф., О. П. Глудкин и А. И. Гуров, Аналоговая и цифровая электроника (полный курс): Учеб. для вузов, Москва: Горячая линия-Телеком, 2000. 768 с. ISBN 5935170027
80. Павлов В. Н., Схемотехника аналоговых электронных устройств: Учебник, Москва: Радио и связь, 1997. 320 с. ISBN 5256012606.
81. Панфилов, Д. И., В. С. Иванов и И. Н. Чепурин, Электротехника и электроника в экспериментах и упражнениях: Практикум на Electronics Workbench: В 2 т. Т. 1: Электротехника, Москва: Додэка, 1999. 304 с. Т. 2: Электроника, Москва: Додэка, 2000. 288 с. ISBN 5878350513
82. Партала, О. Н., Цифровая электроника, СПб.: Наука и техника, 2000. 208 с. ISBN 5793101020
83. Пейтон, А. Дж., Аналоговая электроника на операционных усилителях: Практ. руководство, Москва: Бином, 1994. 350 с. ISBN 5750300137:
84. Прянишников, В. А., Электроника: Учебник, Москва: Корона-принт, 2000. 415 с. ISBN 5793100180
85. Рекус, Г. Г. и А. И. Белоусов, Сборник задач по электротехнике и основам электроники: Учеб. пособ., Москва: Высш. шк., 1991. 416 с. ISBN 5060006778
86. Степаненко, И. П., Основы микроэлектроники: [Учеб. пособие для вузов], Москва: Лаб. базовых знаний, 2003. 488 с. ISBN 5932080450
87. Федоров, Н. Д и Д. Н. Федоров, Толковый словарь по электронике М.: Радио и связь, 2001. 237 с. ISBN 5356015109
88. Черепанов, А. Т., Англо-русский словарь сокращений по компьютерным технологиям, информатике, электронике и связи: Ок. 12 500 ед., Москва: Рус. яз., 2000. 496 с. ISBN 5200027527
89. Электроника: Спр. книга / Ю.А. Быстров, Я.М. Великсон, В.Д. Вогман и др.; Под ред. Ю.А.Быстрова, СПб.: Энергоатомиздат, 1996. 540 c. ISBN: 5283045889





























