Embed Size (px)
Citation preview

INSTITUTO UNIVERSITARIO
POLITÉCNICO “SANTIAGO MARIÑO”
EXTENSIÓN PORLAMAR
ESFU ER ZO, D EFOR M A C I Ó N ,
FLEX I ÓN , FAT I GA Y
TORSI ÓN
Profesor:
Julián Caneiro
Bachiller:
Enmanuel reyes
C.I: 24110856
INTRODUCCION
El objetivo principal del estudio de la mecánica de materiales es
suministrar al futuro ingeniero los conocimientos para analizar y diseñar
las diversas máquinas y estructuras portadoras de carga.
Tanto el análisis como el diseño de una estructura dada involucran la
determinación de esfuerzo y deformación. La flexión es un concepto
importante, ya que se utiliza en el diseño de muchos componentes
estructurales y de máquinas.
Con respecto a la fatiga encontraremos los efectos que generan en un
material. En cuanto a la torsión se encuentran elementos sometidos a
muchas situaciones de ingeniería. A continuación observaremos la
importancia de estos temas, los cuales un ingeniero siempre debe tomar en
cuenta.

CAPITULO IESFUERZO Y DEFORMACION
ESFUERZO
La fuerza por unidad de área, o la intensidad de las fuerzas distribuidas a
través de una sección dada, se llama esfuerzo sobre esa sección y se
representa con la letra griega σ (sigma).
El esfuerzo en un elemento con área transversal A, sometido a una carga
axial P se obtiene por lo tanto al dividir la magnitud P de la carga entre el
área
A: σ= P/A
En general, los esfuerzos que actúan sobre una superficie plana pueden
ser uniformes en toda el área o bien variar en intensidad de un punto a
otro.
TIPOS DE ESFUERZO
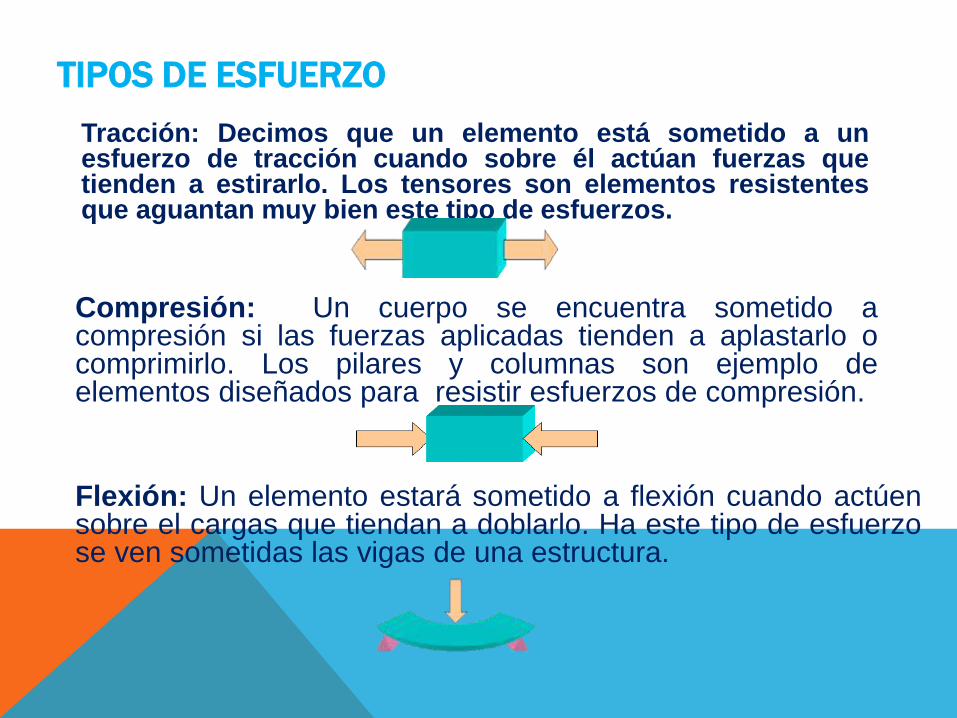
Tracción: Decimos que un elemento está sometido a unesfuerzo de tracción cuando sobre él actúan fuerzas quetienden a estirarlo. Los tensores son elementos resistentesque aguantan muy bien este tipo de esfuerzos.
Compresión: Un cuerpo se encuentra sometido acompresión si las fuerzas aplicadas tienden a aplastarlo ocomprimirlo. Los pilares y columnas son ejemplo deelementos diseñados para resistir esfuerzos de compresión.
Flexión: Un elemento estará sometido a flexión cuando actúensobre el cargas que tiendan a doblarlo. Ha este tipo de esfuerzose ven sometidas las vigas de una estructura.
TIPOS DE ESFUERZO
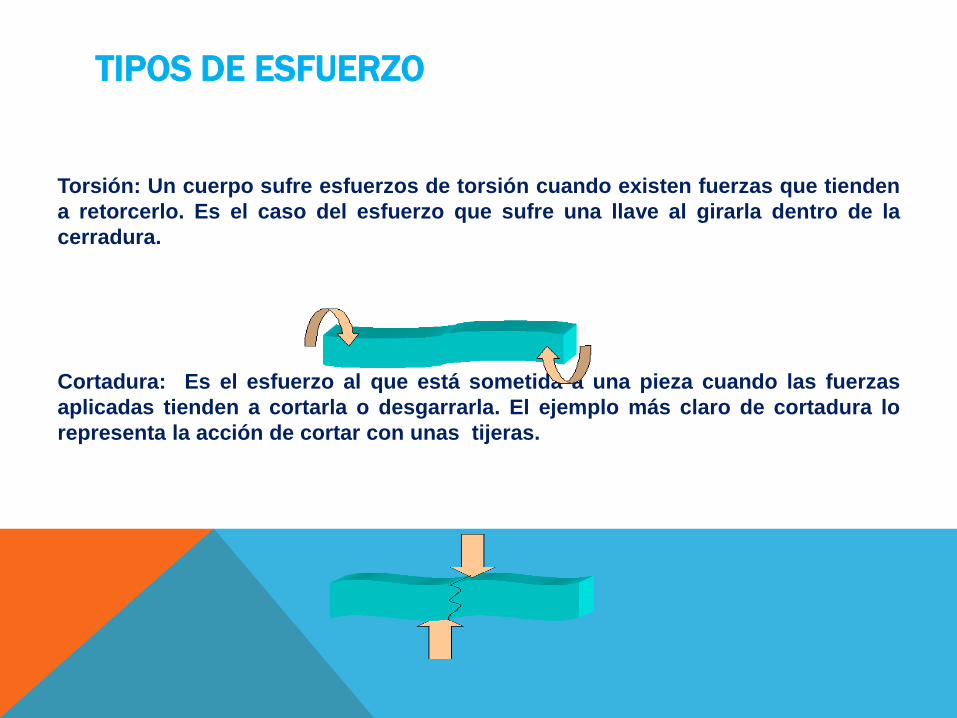
Torsión: Un cuerpo sufre esfuerzos de torsión cuando existen fuerzas que tienden
a retorcerlo. Es el caso del esfuerzo que sufre una llave al girarla dentro de la
cerradura.
Cortadura: Es el esfuerzo al que está sometida a una pieza cuando las fuerzas
aplicadas tienden a cortarla o desgarrarla. El ejemplo más claro de cortadura lo
representa la acción de cortar con unas tijeras.
ESFUERZOS PERMISIBLES
Los factores de seguridad se definen e implementan de diversas maneras.
Para muchas estructuras, es importante que el material permanezca dentro
del rango elástico a fin de evitar deformaciones permanentes cuando se
remuevan las cargas.
En estas condiciones el factor de seguridad se establece con respecto a la
fluencia de la estructura. La fluencia inicia cuando el esfuerzo de fluencia
se alcanza en cualquier punto dentro de la estructura.
Por tanto al aplicar un factor de seguridad con respecto al esfuerzo de
fluencia (o resistencia a la fluencia), obtenemos un esfuerzo permisible (o
esfuerzo de trabajo que no se debe rebasar en la estructura. Por tanto,
Esfuerzo permisible = Resistencia a la fluencia / Factor de seguridad
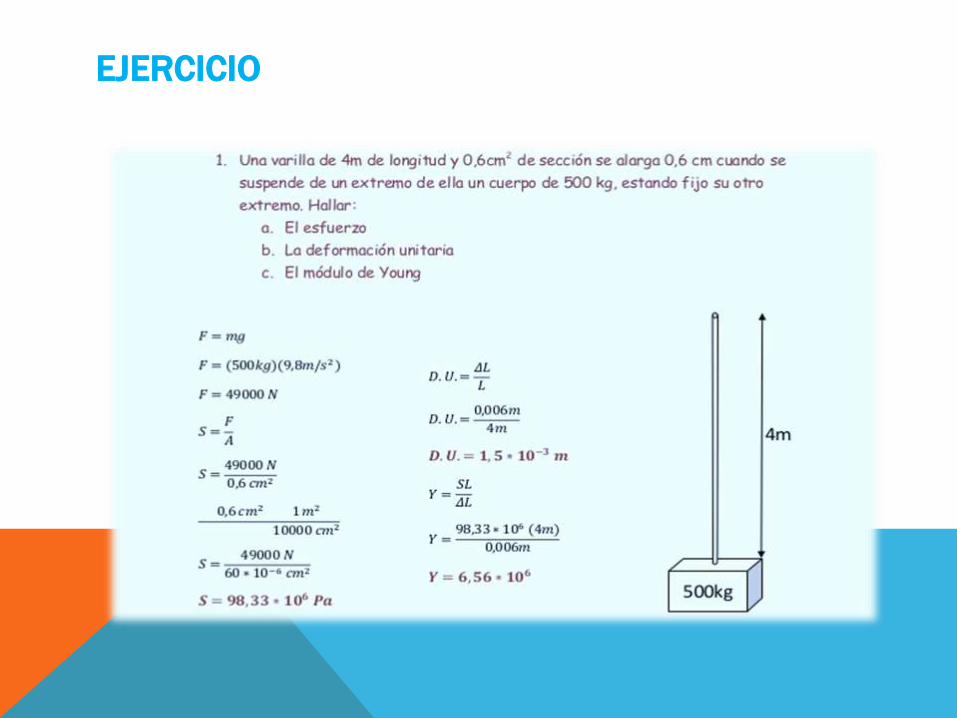
EJERCICIO
DEFORMACIÓN
Se conoce como el cambio en el tamaño o forma de un cuerpo debido a la
aplicación de una o mas fuerzas sobre el mismo o la ocurrencia de dilatación
térmica.
La deformación puede ser visible o prácticamente inadvertida si no se emplea
el equipo apropiado para hacer mediciones precisas.
Podemos observa que la deformación esta dada por la siguiente ecuación.
ε =δ/L
ENERGÍA DE DEFORMACIÓN
La energía de deformación es un concepto fundamental en la mecánica aplicada,y sus principios se usan ampliamente para determinar la respuesta de maquinasy estructuras sometidas a cargas estáticas y dinámicas.
Para ilustrar las ideas básicas, consideramos una barra prismática con longitudL sometida a una fuerza de tensión P. Suponemos que la carga se aplicalentamente, de manera que aumenta gradualmente de cero a su valor máximo P.
Una carga de este tipo se denomina carga estática debido a que no hay efectosdinámicos o inerciales debidos a algún movimiento.
La barra se alarga gradualmente conforme se aplica la carga y al final alcanza sualargamiento máximo δ al mismo tiempo que la carga alcanza su valor total P.Después de esto, la carga y el alargamiento permanecen sin cambio.
TIPOS DE DEFORMACION
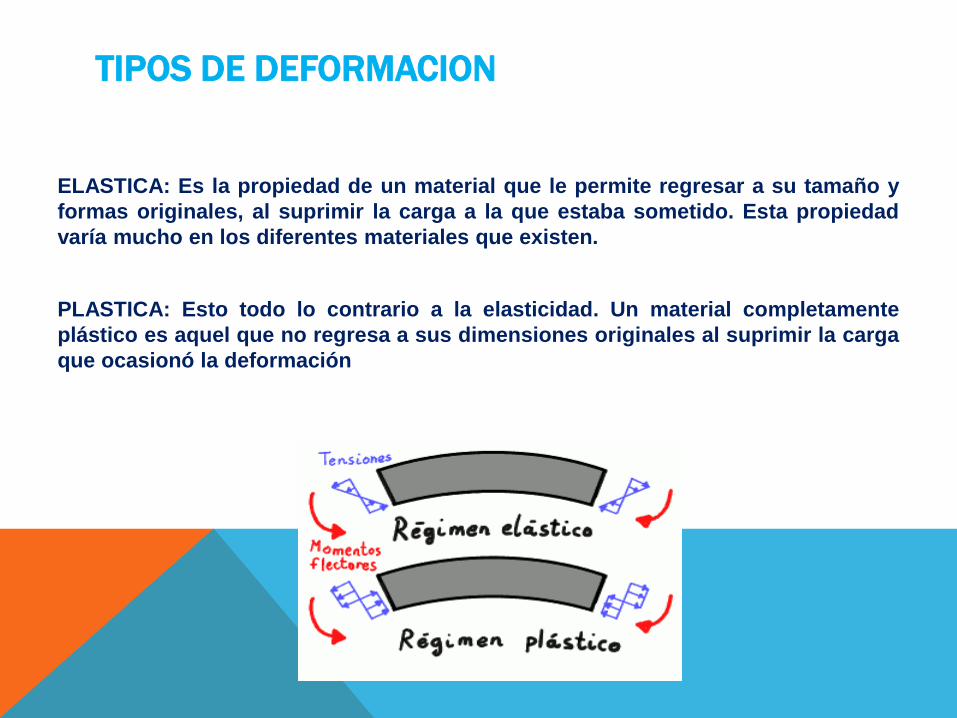
ELASTICA: Es la propiedad de un material que le permite regresar a su tamaño y
formas originales, al suprimir la carga a la que estaba sometido. Esta propiedad
varía mucho en los diferentes materiales que existen.
PLASTICA: Esto todo lo contrario a la elasticidad. Un material completamente
plástico es aquel que no regresa a sus dimensiones originales al suprimir la carga
que ocasionó la deformación
COMPORTAMIENTO ELÁSTICO CONTRA
COMPORTAMIENTO PLÁSTICO DE UN MATERIALSi las deformaciones causadas en una probeta por la aplicación de unacarga dada desaparecen cuando se retira la carga, se dice que el materialse comporta elásticamente. El máximo valor de esfuerzo para que elmaterial se comporte elásticamente se denomina el limite elástico delmaterial.
En otras palabras , el material se comporta elástica y linealmente mientrasel esfuerzo se mantenga por debajo del punto de cedencia.
Cuando ε no regresa a cero después de que la carga ha sido retiradaindica que ha ocurrido una deformación permanente o deformaciónplástica en el material. Para la mayor parte de los materiales, ladeformación plástica depende no tan solo del valor máximo alcanzado porel esfuerzo, sino también del tiempo que pase antes de que se retire lacarga
EJERCICIO
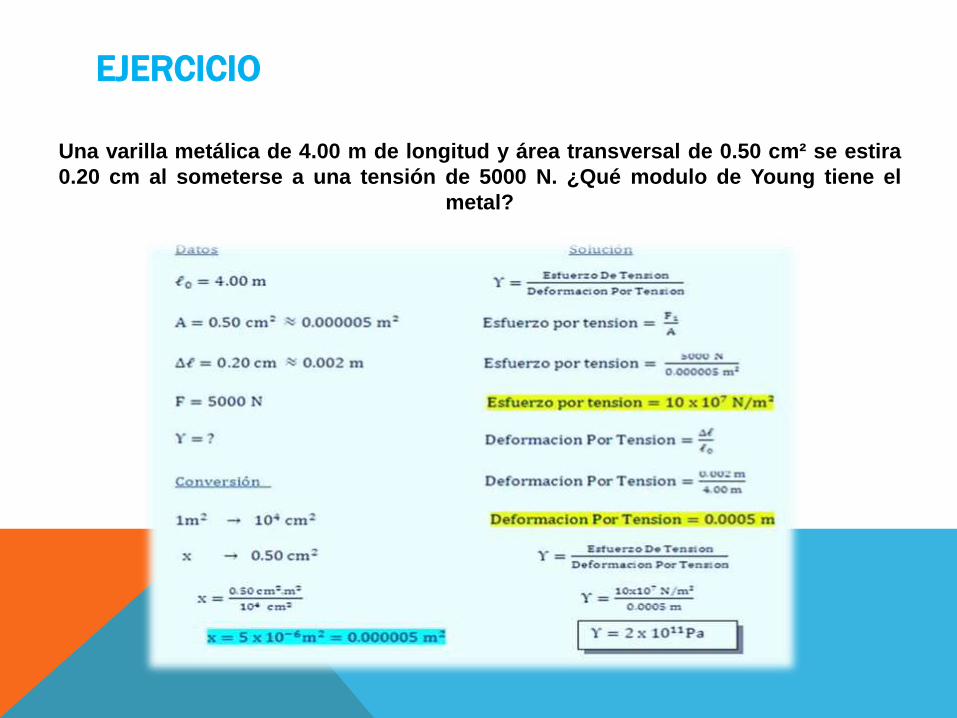
Una varilla metálica de 4.00 m de longitud y área transversal de 0.50 cm² se estira
0.20 cm al someterse a una tensión de 5000 N. ¿Qué modulo de Young tiene el
metal?

CAPITULO II
FLEXION Y FATIGA
FLEXIÓN
En ingeniería se denomina flexión al tipo de deformación que presenta un
elemento estructural alargado en una dirección perpendicular a su eje
longitudinal.
El término "alargado" se aplica cuando una dimensión es dominante frente
a las otras. Un caso típico son las vigas, las que están diseñadas para
trabajar, principalmente, por flexión.
Igualmente, el concepto de flexión se extiende a elementos estructurales
superficiales como placas o láminas.
FLEXIÓN PURA Y
FLEXIÓN NO UNIFORMEAl analizar vigas, con frecuencia es necesario distinguir entre flexión pura
y flexión no uniforme. Flexión pura se refiere a la flexión de una viga ante
un momento flexionante constante.
Por tanto, la flexión pura ocurre sólo en regiones de una viga donde la
fuerza cortante es cero ya que V = dM/dx En contraste, flexión no uniforme
se refiere a la flexión en presencia de fuerzas cortantes, lo cual significa
que el momento flexionante cambia conforme nos movemos a lo largo del
eje de la viga.
Como ejemplo de flexión pura consideramos una viga simple AB cargada
por dos pares M1 que tienen la misma magnitud pero que actúan en
sentidos opuestos como se muestra en la figura a. Estas cargas producen
un momento flexionante constante M = M1 en toda la longitud de la viga,
como lo muestra el diagrama de momento flexionante en la parte (b) de la
figura.
(Ver figura)
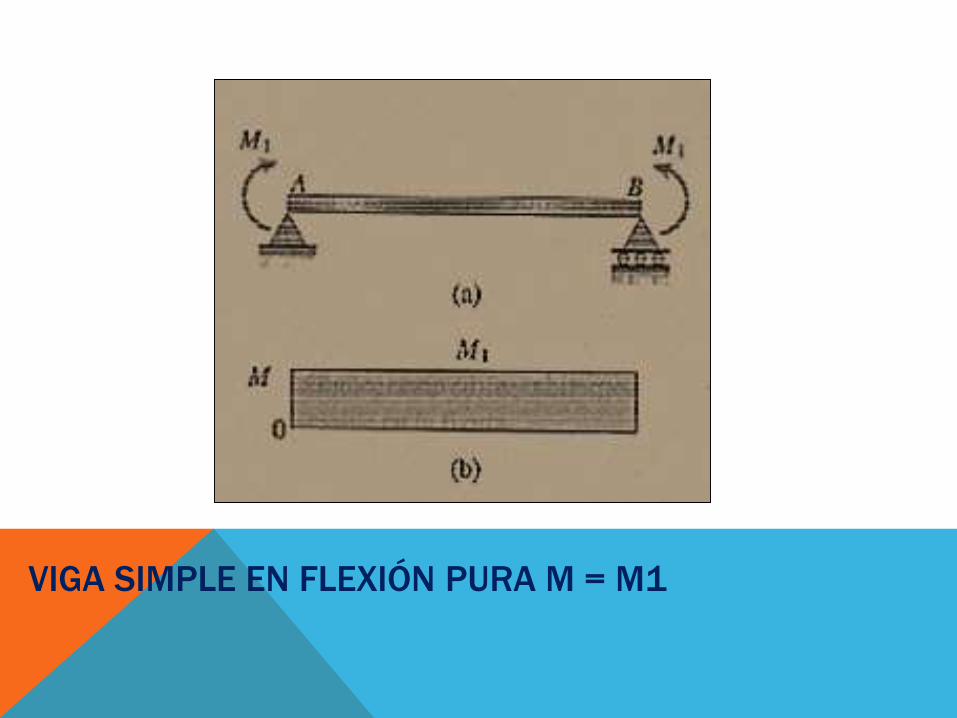
VIGA SIMPLE EN FLEXIÓN PURA M = M1
DEFORMACIONES EN UN ELEMENTO
SIMÉTRICO SOMETIDO A FLEXIÓN
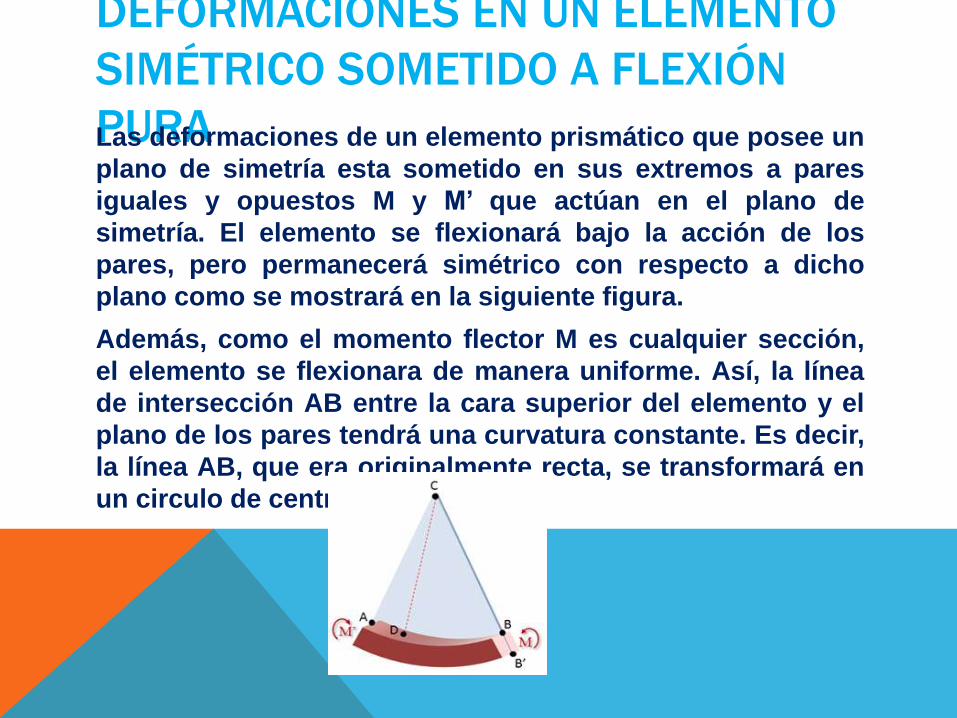
PURALas deformaciones de un elemento prismático que posee un
plano de simetría esta sometido en sus extremos a pares
iguales y opuestos M y M’ que actúan en el plano de
simetría. El elemento se flexionará bajo la acción de los
pares, pero permanecerá simétrico con respecto a dicho
plano como se mostrará en la siguiente figura.
Además, como el momento flector M es cualquier sección,
el elemento se flexionara de manera uniforme. Así, la línea
de intersección AB entre la cara superior del elemento y el
plano de los pares tendrá una curvatura constante. Es decir,
la línea AB, que era originalmente recta, se transformará en
un circulo de centro C.
FUNCIONES DE FUERZA CORTANTE Y MOMENTO
FLEXIONANTE
Especificar las coordenadas x separadas que tengan un origen en el
extremo izquierdo de la viga y se extiendan a regiones de la viga entre
fuerzas o momentos concentrados, o donde no haya discontinuidad de la
carga distribuida.
Seccionar la viga perpendicularmente a su eje en cada distancia x y dibujar
el diagrama de cuerpo libre de uno de los segmentos, asegurándose de
que V y M se muestran actuando en sus sentidos positivos, de acuerdo con
la convención de signos.
La fuerza cortante se obtiene sumando las fuerzas perpendiculares al eje
de la viga. El momento flexionante se obtiene sumando los momentos
respecto al extremo seccionado del segmento.
FATIGASe define como el deterioro de un material por acción de ciclos repetidos
de esfuerzo y deformación, lo que resulta en un agrietamiento progresivo
que finalmente produce la fractura.
La naturaleza de esta falla resulta del hecho de que existen regiones
microscópicas, normalmente en la superficie del miembro, donde el
esfuerzo local es mucho más grande que el esfuerzo promedio que actúa
en la sección transversal.
Cuando este esfuerzo mas grande se aplica en forma cíclica, conduce a la
formación de grietas diminutas. La presencia de estas grietas provoca un
aumento posterior del esfuerzo en sus puntas o fronteras, lo cual a su vez
ocasiona una extensión posterior de las grietas en el material cuando el
esfuerzo continúa ejerciendo su acción.
DIAGRAMA S-N
Con el objeto de especificar una resistencia segura para un material metálicobajo carga repetida, es necesario determinar un limite por debajo del cual nopueda ser detectada una evidencia de falla después de haber aplicado una cargadurante un numero determinado de ciclos.
Este esfuerzo limitante se llama limite de fatiga o, mas propiamente, limite deresistencia a la fatiga el cual es aquel esfuerzo para la cual la gráfica S-N sevuelve horizontal o asintótica. Usando una máquina de ensayos para estepropósito, una serie de muestras son sometidas a un esfuerzo específicoaplicado cíclicamente hasta su falla.
Los resultados se trazan en una gráfica que represente el esfuerzo S comoordenada y el número de ciclos N a la falla como abscisa. Esta gráfica se llamadiagrama S-N, o diagrama esfuerzos-ciclos.
(ver figura)
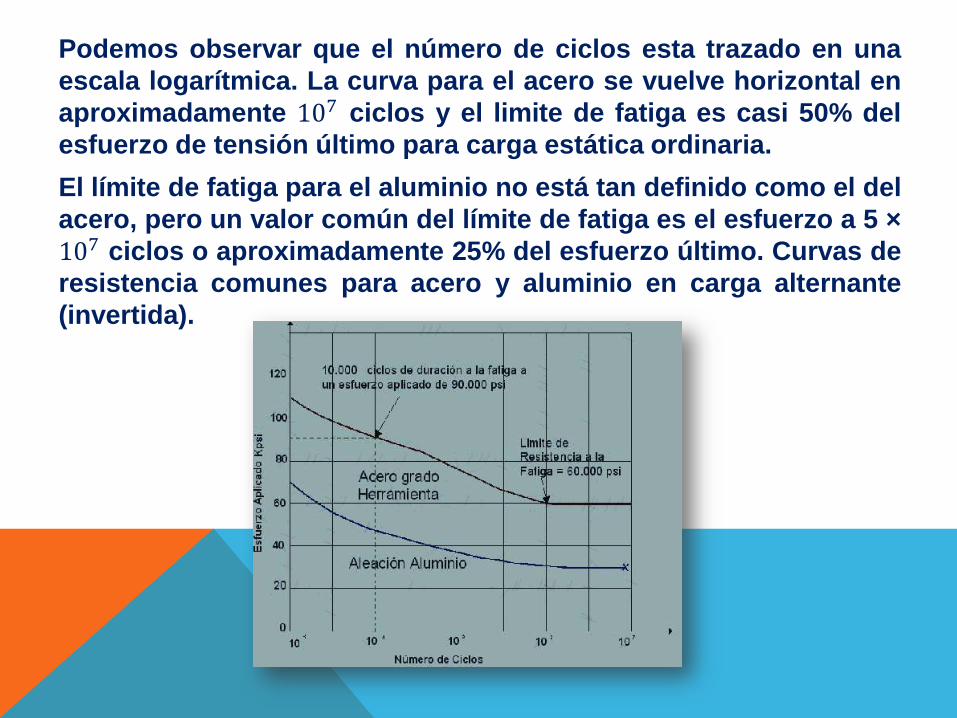
Podemos observar que el número de ciclos esta trazado en una
escala logarítmica. La curva para el acero se vuelve horizontal en
aproximadamente 107 ciclos y el limite de fatiga es casi 50% del
esfuerzo de tensión último para carga estática ordinaria.
El límite de fatiga para el aluminio no está tan definido como el del
acero, pero un valor común del límite de fatiga es el esfuerzo a 5 ×
107 ciclos o aproximadamente 25% del esfuerzo último. Curvas de
resistencia comunes para acero y aluminio en carga alternante
(invertida).
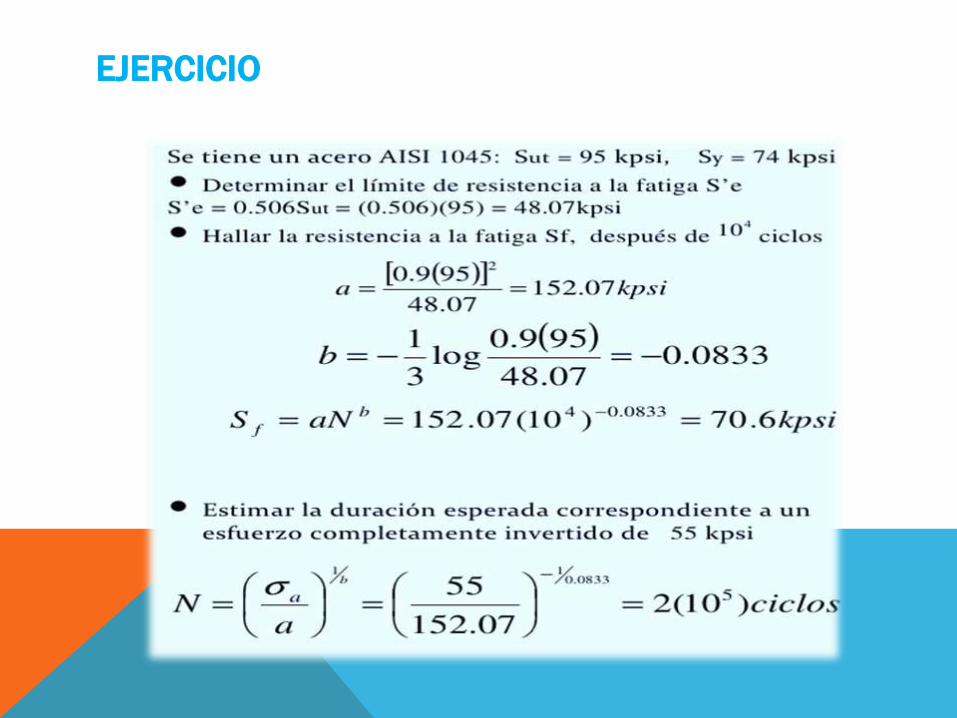
EJERCICIO
CAPITULO III
TORSION
TORSIÓN
Como sabemos en ingeniería, torsión es la solicitación que se presenta cuando seaplica un momento sobre el eje longitudinal de un elemento constructivo o prismamecánico, como pueden ser ejes o, en general, elementos donde una dimensiónpredomina sobre las otras dos, aunque es posible encontrarla en situaciones diversas.
La torsión se caracteriza geométricamente porque cualquier curva paralela al eje de lapieza deja de estar contenida en el plano formado inicialmente por la dos curvas. Enlugar de eso una curva paralela al eje se retuerce alrededor de él.
DEFORMACIÓN TORSIONANTES DE UNA BARRA
CIRCULAREn este punto consideramos una barra prismática con sección transversal circular torcida por pares detorsión T que actúan en sus extremos como se muestra en la figura, dado que cada sección transversal de labarra es idéntica y puesto que cada sección transversal se somete al mismo par de torsión interno, decimosque la barra esta en torsión pura.
A partir de consideraciones de simetría, se puede demostrar que las secciones transversales de la barra nocambian de forma conforme giran con respecto al eje longitudinal.
En otras palabras, todas las secciones transversales permanecen planas y circulares y todos los radiospermanecen rectos. Además, si el ángulo de rotación entre un extremo de la barra y el otro es pequeño, nocambiarán la longitud de la barra ni sus radios.
FORMULA DE LA TORSIÓN
Esta ecuación, conocida como la fórmula de la torsión, muestra que el esfuerzocortante máximo es proporcional al par de torsión aplicado T e inversamenteproporcional al momento de inercia polar IP.
τ máx. = Tr / Ip
Las unidades comunes empleadas en la formula de la torsión son las siguientes. En elsistema SI el par de torsión T suele expresarse en newton metro (N∙m), el radio r enmetros (m), el momento polar de inercia IP en metros a la cuarta potencia (m4) y elesfuerzo cortante t en pascales (Pa).
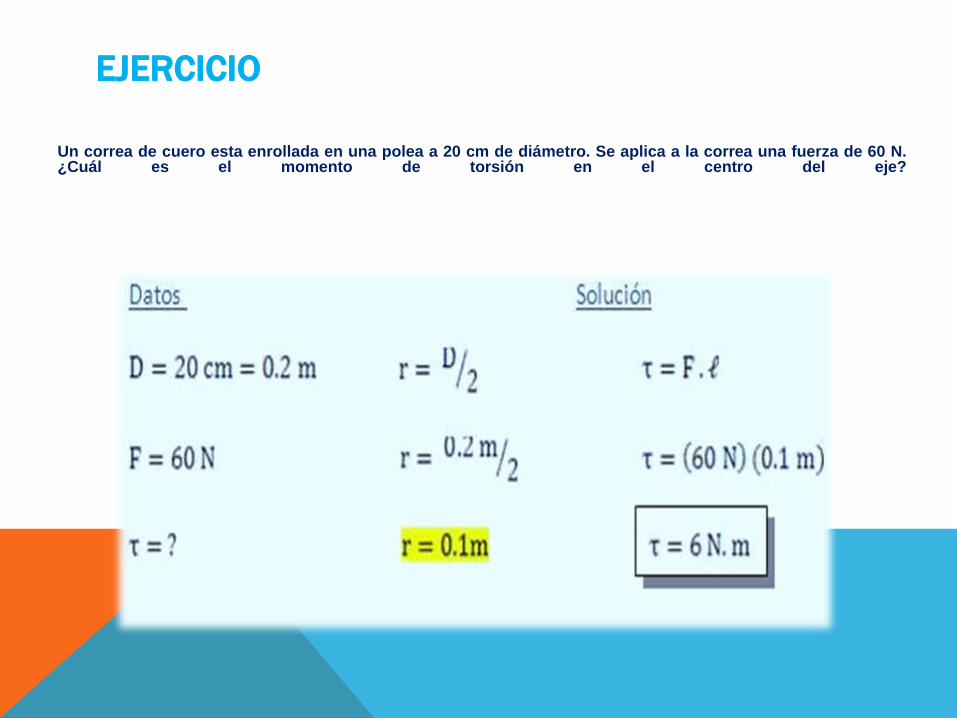
EJERCICIO
Un correa de cuero esta enrollada en una polea a 20 cm de diámetro. Se aplica a la correa una fuerza de 60 N.¿Cuál es el momento de torsión en el centro del eje?
CONCLUSIÓN
En la mecánica de materiales los esfuerzos que actúan sobre una superficie plana pueden ser uniformes en toda el área o bien variar en intensidad de un punto a otro, mientras que la deformación puede ser visible o prácticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas.
Otro punto importante que cabe destacar es que la flexión pura se refiere a la flexión de un elemento bajo la acción de un momento flexionante constante, ya que cuando un elemento se encuentra sometido a flexión pura, los esfuerzos cortantes sobre él son cero.
En cambio en la flexión no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga. Recordemos también que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformación. Por ultimo debemos tener presente que la torsión se caracteriza geométricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas.

























