Embed Size (px)
Citation preview
República Bolivariana De Venezuela
Ministerio Del Poder Popular Para La Educación Superior
Instituto Universitario Politécnico Santiago Mariño
Ext. Maturín Edo. Monagas
Escuela: Ingeniería Civil
Cátedra: Estructura II
Profesor: Bachillere:
Ing. Lorenzo Mantilla Wender Monserratte
C.I.V-17721776
Maturín, Mayo de 2013
1

ContenidoIntroducción......................................................................................................................3
Estructuras Estáticamente Indeterminadas.............................................................................4
Equilibrio..................................................................................................................................9
Compatibilidad.......................................................................................................................13
Determinación de esfuerzos.........................................................................15
Determinación de resistencia y rigidez..................................................16
Modelos materiales............................................................................................17
Métodos Generales de Análisis de estructuras Estáticamente Indeterminadas....................18
Determinación de esfuerzos.........................................................................18
Determinación de resistencia y rigidez..................................................19
Modelos materiales............................................................................................19
Conclusión..............................................................................................................................21
2
IntroducciónLas estructuras estáticamente indeterminadas pueden ser analizadas ya sea en forma “exacta” o bien de modo “aproximado”. En la siguiente investigación se explican varios métodos “exactos” que se basan en deformaciones elásticas. Se presentan métodos aproximados que exigen el empleo de hipótesis simplificadas. Tales procedimientos tienen muchas aplicaciones prácticas, que se mostraran a continuación.
La diferencia entre una estructura estáticamente determinada de una indeterminada las podemos definir qué: las estructuras ESTÁTICAMENTE determinadas son aquellas que puedes resolver mediante las básicas ecuaciones del equilibrio estático, esto sucede cuando es menor la cantidad de condiciones de respuesta de la estructura es menor a estas ecuaciones, de forma que resulta sencillo encontrar su comportamiento.
Pero las estructuras estáticamente indeterminadas no cumplen esta condición, o sea que su respuestas no se puede obtener así, por ejemplo en vigas continuas cuando existen más reacciones y no podemos resolverlas con las 3 ecuaciones básicas del equilibrio estático (que son, suma de momentos=0, suma de fuerzas en X y en Y = 0...Por cierto, en algunos sistemas estáticamente determinados puede existir alguna articulación intermedia que pueda dar la impresión de que es indeterminada pero aquí aparece otra ecuación, la de suma de momentos en la articulación = 0) Bien, entonces para resolver las estructuras indeterminadas se emplean métodos mas avanzados de análisis como los métodos energéticos, métodos virtuales y aproximados.
3
Estructuras Estáticamente IndeterminadasInicialmente se debe identificar cuando es una estructura
indeterminada.
Las estructuras rígidas se componen de miembros rectos
conectados por medio de conexiones rígidas (que resisten los
momentos), o bien, por conexiones articuladas, para formar
configuraciones estables. Por lo general, los miembros de las
estructuras se conectan por uniones rígidas, aun cuando a veces se
usan las conexiones articuladas.
Una unión rígida impide las traslaciones y rotaciones relativas de lo
miembros conectados a ellas, de modo que la unión es capaz de
transmitir dos componentes rectangulares de fuerza y un par entre
los miembros conectados.
En general, bajo la acción de cargas externos, los miembros de una
estructura pueden quedar sujetos a momento flexionante, fuerza,
cortante y tensión o compresión axiales.
Se considera que una estructura es estáticamente determinada, si
los momentos flexionantes, las fuerzas cortantes y las fuerzas
axiales, en todos sus miembros, asi como las reacciones externas,
se pueden determinar mediante las aplicaciones de las ecuaciones
d equilibrio y de condición.
∑Fx=0 ; ∑Fy=0 ; ∑M=0.
4

Se considera una estructura internamente estable o rígida,
si mantiene su forma y sigue siendo un cuerpo rígido
cuando se separa de los apoyos. De manera inversa, una
estructura de denomina inestable (o no rígida), sino pede
conservar su forma y puede sufrir grandes desplazamientos
bajo pequeñas perturbaciones cuando no esta apoyada
desde el exterior.
Para una estructura, si el número de incógnitas es igual al
número de ecuaciones, es decir:
6m + r = 3 (m + j) + ec ( 1)
Siendo:
. m = Nº de miembros.
. r = Nº de reacciones.
. j = Nº de juntas.
. ec= ecuaciones de condición.
O bien:
6m + r = 3m + 3j + ec
Despejando se tiene:
3m + r= 3j + ec
5
Entonces se pueden determinar todas las incógnitas al
resolver las ecuaciones de equilibrio y las de condición y la
estructura es estáticamente determinada.
Para una estructura, si el número de incógnitas es menor
que el número de ecuaciones disponibles; esto es:
3m + r < 3j + ec
Se dice que esa estructura es estáticamente inestable.
Si una estructura tiene más incógnitas que ecuaciones de
las que dispone; es decir,
3m + r > 3j +ec
No se pueden determinar todas las incógnitas mediante la
resolución de las ecuaciones disponibles, (ecuaciones de
equilibrio) y se dice que la estructura es estáticamente
indeterminada.
Las estructuras estáticamente indeterminadas tienen más
miembros o reacciones externas, o más de ambos, que las
mínimas requeridas por la estabilidad.
Se dice que los miembros y reacciones en exceso son redundantes
y el número de miembros y reacciones en exceso se menciona
6
como grado de indeterminación estática, i, el cual se puede
expresar como:
.- i = (3m + r) – (3j + ec)
Las condiciones para la inestabilidad, la determinación y la
indeterminación de las estructuras se pueden resumir como lo
siguiente:
a. 3m + r < 3j + ec → 3m + r – 3j – ec < 0 → estáticamente
inestable
b. 3m + r = 3j + ec → 3m + r – 3j – ec = 0 → estáticamente
determinado
c. 3m + r > 3j + ec → 3m + r – 3j – ec > 0 → estáticamente
indeterminado
Es decir;
.- i < 0, inestable.
.- i= 0 , determinado.
.- i> 0 , indeterminado
En la aplicación de las ecuaciones (a, b, c); los extremos de la
estructura sujetos a los apoyos, asi como cualquier extremo libre;
se tratan como (nodos) juntas. Las condiciones para la
determinación e indeterminación estáticos, como lo expresaron las
ecuaciones (a,b,c), son necesarios, pero no suficientes.
7

Para que estos criterios en relación con la determinación e
indeterminación estáticos sean validos, la disposición de los
miembros, las reacciones en los apoyos, y las articulaciones y
rodillos internos (si los hay), debe ser tal que la estructura seguirá
siendo geométricamente estable bajo un sistema general de cargas
coplanares.
Recordemos que las ecuaciones de condiciones que se generan en
una articulación interna proporcionan una ecuación de condición y
que un rodillo interno da lugar a dos de esas ecuaciones.
Cuando varios de los miembros de una estructura se conectan en
un nodo anticuado, el número de ecuaciones de condición en este
último es igual al número de miembros que se encuentran en el
menos uno.
Como ya se ha dicho anteriormente las estructuras indeterminadas
tienen mas reacciones en los apoyos o miembros, o ambas cosas,
que los requeridos por la estabilidad estática, las ecuaciones de
equilibrio por si solas no son suficientes para la determinación de
las reacciones y las fuerzas internas de esas estructuras y deben
complementarse por medio de relaciones basadas en
la configuración geométrica de la deformación de las estructuras.
Estas relaciones adicionales, que se denominan condiciones de
compatibilidad, garantizan que se mantenga la continuidad de los
desplazamientos de uno u otro lado de la estructura y que las
diversas partes de esta se ajustan entre si. Por ejemplo: En un Nodo
8

o junta rígida, las deflexiones y las rotaciones de todos los
miembros que se unen en este nodo deben ser las mismas. Por lo
tanto el análisis de una estructura indeterminado comprende,
además de las dimensiones y la disposición de los miembros de la
estructura, sus propiedades y de los materiales (como las áreas de
las secciones transversales, los momentos de inercia, los módulos
de elasticidad, etc); las cuales a su vez, dependen de las fuerzas
internas de la estructura. Por lo tanto, el diseño de una estructura
estáticamente indeterminada, se lleva a cabo de manera iterativa,
con la cual inicialmente se suponen el tamaño (relativos) de los
miembros estructurales y se usan para revisar el tamaño de los
miembros; si el tamaño revisado de estos no están cercanos a los
que se supusieron en un principio, entonces se vuelve a analizar la
estructura usando el tamaño mas reciente de esos miembros, se
continua la iteración hasta que el tamaño de los miembros basado
en los resultados de un análisis son cercanos a los supuestos para
este análisis.
EquilibrioEl método de equilibrio se basa en tomar como incógnitas los
movimientos de forma que cumplan las condiciones de
compatibilidad e imponer ecuaciones de equilibrio para resolverlos
Método de las Fuerzas o Flexibilidades
se estudiará el método de resolución de vigas, marcos y estructuras reticulares planas hiperestáticas conocido como método de las fuerzas o de las flexibilidades Dado que las estructuras que se analizarán son hiperestáticas, las ecuaciones de equilibrio (ΣF=0 y ΣM=0) no serán suficientes. Así pues, para la resolver este tipo de
9
estructuras se necesitara calcular esfuerzos y deformaciones virtuales los cuales serán luego compatibilizados con las condiciones de borde de esfuerzo y desplazamiento definidas en los apoyos.
Este tipo de análisis se limitará al rango elástico de deformaciones.
2 Formulación del Método
Para este método se considera, en primer lugar, una estructura que llamaremos primaria. Esta se obtiene a partir de la estructura original eliminando las reacciones redundantes para obtener una estructura estáticamente determinada, y conservando el sistema de cargas original. Esta
estructura primaria deberá ser estable y las reacciones redundantes serán aquellas que exceden el número posible de determinar mediante las ecs de equilibrio.
Luego, aplicado el principio de superposición, se irá incluyendo el efecto de cada una de las redundantes, modeladas como fuerzas de magnitud desconocida. De esta forma se obtendrá un set de ecuaciones para cada una de las redundantes. Superponiendo cada uno de estos efectos y aplicando las condiciones de borde impuestas por los apoyos será posible resolver la estructura.
El método considera entonces una estructura isostática, denominada primarias, en la que se calculan desplazamientos (lineales y/o angulares) en los apoyos que se eliminaron de la estructura hiperestática inicial, y en las direcciones en las que se eliminaron dichas restricciones. Estos desplazamientos se calculan también en estructuras de misma geometría que la estructura primaria, siendo las cargas las reacciones redundantes correspondientes.
La corrección de los desplazamientos de la estructura primaria con los generados por las reacciones redundantes, aplicadas de manera que se cumplan las condiciones geométricas de la estructura
10
original, permite establecer un sistema de ecuaciones cuyo número es igual al número de reacciones redundantes.
La solución del sistema de ecuaciones permite determinar los valores de las reacciones redundantes. Una vez determinadas estas reacciones en los apoyos, los esfuerzos se pueden calcular en todos los miembros de la estructura por medio de las ecuaciones de equilibrio de la estática, pudiendo aplicarse, también, el principio de superposición.
11

12

13

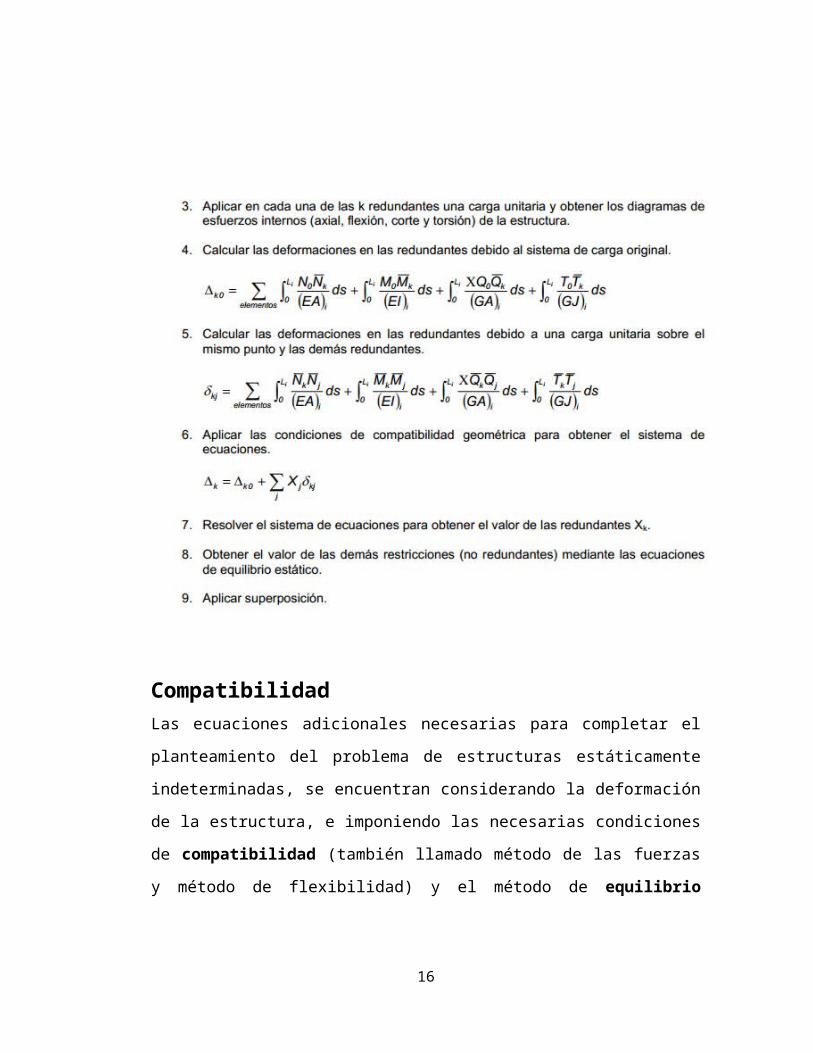
Compatibilidad Las ecuaciones adicionales necesarias para completar el
planteamiento del problema de estructuras estáticamente
indeterminadas, se encuentran considerando la deformación de la
estructura, e imponiendo las necesarias condiciones de
compatibilidad (también llamado método de las fuerzas y método
de flexibilidad) y el método de equilibrio (También llamado
método de los movimientos y método de la rigidez)
El método de la Compatibilidad se basa en tomar a las fuerzas
estáticamente indeterminadas como incógnitas del problema e
imponer ecuaciones adicionales de compatibilidad de movimientos.
Este método fue desarrollado originalmente por James Clerk
Maxwell en 1864 y perfeccionado posteriormente por Otto Mohr y
Múller-Breslau. Mohr, diez años después, de forma independiente,
amplió la teoría casi a su estado actual de desarrollo. En este
método se suprimen las redundantes (cantidad de reacciones que
hacen hiperestático el problema, evidentemente que el número de
redundantes es igual al GH) lográndose una estructura estable y
estáticamente determinada, que en algunos textos se le llama
sistema base
Se calculas los desplazamientos en la dirección de las redundantes
eliminadas. Como al final los puntos donde están las redundantes
no se pueden mover, estas deben tener un valor tal que haga a
esos puntos volver a su estado inicial. Se establece una ecuación
14

para la condición de deflexión nula en cada redundante y estas se
despejan de las ecuaciones resultantes. A este sistema de
ecuaciones se les llama “ecuaciones canónicas” A este método
se le llama también:
Método de la Flexibilidad, Deflexiones Compatibles,
Deformaciones Consistentes o Maxwell- Mohr.
Relación Fuerza-Desplazamiento
Para definir la relación fuerza-desplazamiento es necesario utilizar
las leyes constitutivas para un material dado (propiedades físicas
del material) y los conceptos de equilibrio y compatibilidad de
deformaciones. Hay dos formas básicas para expresar estas
relaciones. La primera relación fuerza-desplazamiento es de la
forma:
P = K.D
donde: P es la fuerza, K la rigidez de la estructura y D los
desplazamientos. La rigidez tiene unidades de fuerza entre longitud
y puede definirse como fuerza necesaria para mantener al elemento
con una unidad de desplazamiento. Esta relación es la base para el
método de las rigideces, método muy utilizado en la solución de las
estructuras, la segunda relación se puede expresar:
D = F.P
Donde: F es el coeficiente de flexibilidad de la estructura y tiene por
unidades, las inversas de la rigidez, esto es, unidades de longitud
entre fuerza y puede definirse como el desplazamiento necesario de
inducir, para obtener una fuerza de reacción unitaria. Esta relación
es la base para el método d las flexibilidades también utilizado con
15
menos frecuencia en la solución de las estructuras. Las literales D y
P tienen un significado similar al anteriormente definido
Métodos Generales de Análisis de estructuras estáticamente
Indeterminadas.
Determinación de esfuerzos
El tipo de método empleado difiere según la complejidad y precisión
requerida por los cálculos:
Métodos clásicos, para estructuras muy sencillas entre los que
se encuentran la teoría de vigas de Euler-Bernouilli es el método
más simple, es aplicable sólo a barras esbeltas sometidas a
flexión y esfuerzos axiales. Naturalmente no todas las
estructuras se dejan analizar por este método. Cuando existen
elementos estructurales bidimensionales en general deben
emplearse métodos basados en resolver ecuaciones
diferenciales.
Métodos programables:
Así para determinar esfuerzos sobre marcos o pórticos se
usa frecuentemente el método matricial de la rigidez basado
en el modelo de barras largas, que modeliza los elementos
resistentes como elementos unidimensionales sometidos
predominantemente a flexión
16
Cuando se trata de analizar elementos más pequeños o con
forma irregular donde pueden producirse concentraciones de
tensiones se usan métodos numéricos más complejos como
el Método de los elementos finitos.
Determinación de resistencia y rigidez
A partir de los esfuerzos se pueden calcular directamente los
desplazamientos y las tensiones. En el caso del método de los
elementos finitos se suele determinar directamente el
desplazamiento sin necesidad de calcular los esfuerzos internos.
Una estructura correctamente diseñada además de ser funcional y
económica debe cumplir obligatoriamente dos criterios razonables
de seguridad:
1. El criterio de resistencia, consistente en comprobar en que en
ninguno de sus puntos el material sobrepasa unas tensiones
admisibles máximas.
2. El criterio de rigidez, consistente en comprobar que bajo las
fuerzas y solicitaciones actuantes los desplazamientos y
deformaciones de la estructura no sobrepasan un cierto
límite. Dicho límite está relacionado con criterios de
funcionalidad, pero también de estabilidad o de aplicabilidad
de la teoría de la elasticidad lineal.1
Modelos materiales
Dentro del análisis estructural es importante modelizar el
comporamiento de los materiales empleados mediante una
ecuación constitutiva adecuada. Los tipos modelos de materiales
más frecuentes son:
17
Modelo elástico lineal e isótropo, el más usado, ya que
el teorema de Rivlin-Ericksen permite establecer que para
deformaciones suficientemente pequeñas todo sólido elástico es
asintóticamente lineal e isótropo.
Modelo elástico lineal otrotrópico, constitueye una modificación
de modelo isótropo para materiales cuya resistencia y
comportamiento depende de la dirección, laminados, elementos
de mandera, etc., requieren modelos ortótropos para ser
adecuadamente modelizados.
Modelos de plasticidad y viscoplasticidad. Los metales a partir de
ciertos valores de tensión experimentan deformaciones plásticas
irreversibles, así como otras no linealidades. El cálculo plástico a
costa de complicar las leyes materiales una predicción más
exacta de las cargas de colapso o fallo de las estructuras, así
como un ahorro en material al poder tener en cuenta el rango de
trabajo de los materiales en el que estos están experimentando
transformaciones irreversibles pero sin alcanzar las cargas de
fallo o colapso.
Modelos de daño.
Métodos Generales de Análisis de estructuras Estáticamente Indeterminadas.
Determinación de esfuerzos
18
El tipo de método empleado difiere según la complejidad y precisión
requerida por los cálculos:
Métodos clásicos, para estructuras muy sencillas entre los que
se encuentran la teoría de vigas de Euler-Bernouilli es el método
más simple, es aplicable sólo a barras esbeltas sometidas a
flexión y esfuerzos axiales. Naturalmente no todas las
estructuras se dejan analizar por este método. Cuando existen
elementos estructurales bidimensionales en general deben
emplearse métodos basados en resolver ecuaciones
diferenciales.
Métodos programables:
Así para determinar esfuerzos sobre marcos o pórticos se
usa frecuentemente el método matricial de la rigidez basado
en el modelo de barras largas, que modeliza los elementos
resistentes como elementos unidimensionales sometidos
predominantemente a flexión
Cuando se trata de analizar elementos más pequeños o con
forma irregular donde pueden producirse concentraciones de
tensiones se usan métodos numéricos más complejos como
el Método de los elementos finitos.
Determinación de resistencia y rigidez
19

A partir de los esfuerzos se pueden calcular directamente los
desplazamientos y las tensiones. En el caso del método de los
elementos finitos se suele determinar directamente el
desplazamiento sin necesidad de calcular los esfuerzos internos.
Una estructura correctamente diseñada además de ser funcional y
económica debe cumplir obligatoriamente dos criterios razonables
de seguridad:
1. El criterio de resistencia, consistente en comprobar en que en
ninguno de sus puntos el material sobrepasa unas tensiones
admisibles máximas.
2. El criterio de rigidez, consistente en comprobar que bajo las
fuerzas y solicitaciones actuantes los desplazamientos y
deformaciones de la estructura no sobrepasan un cierto
límite. Dicho límite está relacionado con criterios de
funcionalidad, pero también de estabilidad o de aplicabilidad
de la teoría de la elasticidad lineal.
Modelos materiales
Dentro del análisis estructural es importante modelizar el
comportamiento de los materiales empleados mediante una
ecuación constitutiva adecuada. Los tipos modelos de materiales
más frecuentes son:
Modelo elástico lineal e isótropo, el más usado, ya que
el teorema de Rivlin-Ericksen permite establecer que para
deformaciones suficientemente pequeñas todo sólido elástico es
asintóticamente lineal e isótropo.
20
Modelo elástico lineal otrotrópico, constituye una modificación
de modelo isótropo para materiales cuya resistencia y
comportamiento depende de la dirección, laminados, elementos
de mandera, etc., requieren modelos ortótropos para ser
adecuadamente modelizados.
Modelos de plasticidad y viscoplasticidad. Los metales a partir de
ciertos valores de tensión experimentan deformaciones plásticas
irreversibles, así como otras no linealidades. El cálculo plástico a
costa de complicar las leyes materiales una predicción más
exacta de las cargas de colapso o fallo de las estructuras, así
como un ahorro en material al poder tener en cuenta el rango de
trabajo de los materiales en el que estos están experimentando
transformaciones irreversibles pero sin alcanzar las cargas de
fallo o colapso.
Modelos de daño.
21
ConclusiónEn estática, una estructura es hiperestática o estáticamente
indeterminada cuando está en equilibrio pero las ecuaciones de la
estática resultan insuficientes para determinar todas las fuerzas
internas o las reacciones. [Una estructura en equilibrio estable que
no es hiperestática es isoestática]. Existen diversas formas de
hiperestaticidad:
Una estructura es internamente hiperestática si las
ecuaciones de la estática no son suficientes para determinar
los esfuerzos internos de la misma.
Una estructura es externamente hiperestática si las
ecuaciones de la estática no son suficientes para determinar
fuerzas de reacción de la estructura al suelo o a otra
estructura.
Una estructura es completamente hiperestática si es
internamente y externamente hiperestática.
22





























