Embed Size (px)
Citation preview

UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
DEPARTAMENTO DE ELETRÔNICA
ENGENHARIA ELETRÔNICA
FABRICIO PEROSA
PAULO HENRIQUE SGANZERLA DEFINSKI
ESTUDO DE TÉCNICAS DE CONTROLE APLICADAS AO LIMPADOR DE PARA-BRISAS VEICULAR
TRABALHO DE CONCLUSÃO DE CURSO
PONTA GROSSA
2016

FABRICIO PEROSA
PAULO HENRIQUE SGANZERLA DEFINSKI
ESTUDO DE TÉCNICAS DE CONTROLE APLICADAS AO LIMPADOR DE PARA-BRISAS VEICULAR
Trabalho de Conclusão de Curso apresentado como requisito parcial à obtenção do título de Bacharel em Engenharia Eletrônica, do Departamento de Eletrônica (DAELE), da Universidade Tecnológica Federal do Paraná.
Orientadora: Prof. Fernanda Cristina Corrêa, Dra.
PONTA GROSSA
2016

TERMO DE APROVAÇÃO
ESTUDOS DE TÉCNICA DE CONTROLE APLICADAS AO LIMPADOR DE PARA-
BRISAS VEICULAR
por
FABRICIO PEROSA PAULO HENRIQUE SGANZERLA DEFISNKI
Este Trabalho de Conclusão de Curso (TCC) foi apresentado em 22 de junho de 2016
como requisito parcial para a obtenção do título de Bacharel em Engenharia
Eletrônica. Os candidatos foram arguidos pela Banca Examinadora composta pelos
professores abaixo assinados. Após deliberação, a Banca Examinadora considerou
o trabalho aprovado.
_______________________________ Fernanda Cristina Corrêa
Profa. Orientadora
_______________________________ Alexandre Junior Fenato
Responsável pelos Trabalhos de Conclusão de Curso
_______________________________ Alexandre Junior Fenato
Membro titular
_______________________________ Prof. Ms. Edson Luiz Salgado Silva
Membro titular
_______________________________ Prof. Ms. Jeferson José Gomes
Coordenador do Curso UTFPR - Campus Ponta Grossa
- O TERMO DE APROVAÇÃO ASSINADO ENCONTRA-SE ARQUIVADO NA SECRETARIA ACADÊMICA -
Ministério da Educação
Universidade Tecnológica Federal do Paraná Campus Ponta Grossa
Diretoria de Graduação e Educação Profissional

Dedicamos este trabalho as nossas famílias, nossos amigos e a todos que
nos deram apoio em horas difíceis.

AGRADECIMENTOS
Este trabalho está só começando, mas até agora já tivemos a colaboração de
muitas pessoas.
Agradecemos aos nossos professores, especialmente a nossa orientadora
Fernanda Cristina Corrêa, por todos ensinamentos prestados durante a graduação e
pela colaboração na aquisição deste trabalho.
Agradecemos as nossas famílias pela colaboração e pela confiança em todos
esses anos de graduação, pois sem a educação por eles prestada não estaríamos
fazendo um curso de Engenharia.

RESUMO
PEROSA, Fabricio; DEFINSKI, Paulo Henrique Sganzerla. Estudo de Técnicas de Controle Aplicadas ao Limpador de Para-Brisas Veicular. 2016. 65 f. Trabalho de Conclusão de Curso (Graduação) – Curso de Engenharia Eletrônica. Universidade Tecnológica Federal do Paraná, Ponta Grossa, 2016.
Um item que é encontrado desde os primeiros automóveis criados no início dos anos de 1900 é o limpador de para-brisas. O limpador de para-brisas veicular foi desenvolvido por Mary Anderson em 1903 e desde então é item obrigatório, pois trata-se de um item de segurança e de extrema importância. Neste sentido, o presente estudo tem como objetivo estudar as técnicas de controle fuzzy e técnica clássica PID (proporcional, integral e derivativo) a fim de verificar qual delas oferece maior eficiência para o limpador de para-brisas automático. Foram estudados os controladores necessários para simulação. Todo o arquétipo foi modelado matematicamente e efetuada a simulação no ambiente MATLAB/Simulink, no qual os controladores foram implementados e ajustados. Ao final foram analisadas as diferenças que ocorreram entre o controlador PID e fuzzy no controle do limpador automático de para-brisas, no qual o controlador PID obteve melhores resultados.
Palavras-chaves: Controle PID. Controle Fuzzy. Limpador de Para-brisas.

ABSTRACT
PEROSA, Fabricio; DEFINSKI, Paulo Henrique Sganzerla. Study of Control Technique Applied on Automotive Windscreen Wiper. 2016. 65 f. Trabalho de Conclusão de Curso (Graduação) – Curso de Engenharia Eletrônica. Universidade Tecnológica Federal do Paraná, Ponta Grossa, 2016.
An item that is found from the first car created in the early 1900s is the windscreen wiper. Mary Anderson developed the cleaner car windscreen in 1903 and since then it is mandatory item, because it is a safety item and very important. In this sense, the present study aims to study the fuzzy control techniques and classical technique PID (proportional, integral and derivative) in order to determine which one offers greater efficiency for the automatic windshield wiper. The drivers required for simulation were studied. The entire construct was mathematically modeled and performed the simulation in MATLAB / Simulink environment in which the drivers were implemented and adjusted. At the end, we analyzed the differences that occurred between PID and fuzzy controller in the control of the automatic cleaner windshields, in which the PID controller obtained better results.
Key-words: PID Control. Fuzzy Control. Windscreen Wiper.

LISTA DE ILUSTRAÇÕES
Figura 1 – Patente do Primeiro Sistema Limpador de Para-brisa ............................. 16
Figura 2 – Limpador de Para-brisas manual ............................................................. 17
Figura 3 – Sistema de limpador de para-brisa com acionamento automático através de bomba de vácuo. .................................................................................................. 17
Figura 4 – Sistema de limpador de para-brisas com acionamento por motor elétrico. .................................................................................................................................. 18
Figura 5 – Resolução Americana FMVSS 104 .......................................................... 20
Figura 6 – Zona de limpeza “A” ................................................................................. 21
Figura 7 – Zona de limpeza "B" ................................................................................. 21
Figura 8 – Mecanismo Acionador e suas Partes ....................................................... 22
Figura 9 – Ângulo de ataque da Palheta ................................................................... 23
Figura 10 – Motor de Acionamento ........................................................................... 24
Figura 11 – Braço do Limpador ................................................................................. 25
Figura 12 – Palheta do Limpador de Para-brisas. ..................................................... 26
Figura 13 – Secção transversal da lâmina de borracha. ........................................... 27
Figura 14 – Diagrama esquemático de um servomotor ............................................. 30
Figura 15 – Aumento do comportamento oscilatório com aumento de Kp ................ 33
Figura 16 – Aumento do comportamento oscilatório com aumento de Ki ................. 34
Figura 17 – Tendência de amplificar sinal em alta frequência .................................. 35
Figura 18 – Definição formal conjunto fuzzy.............................................................. 45
Figura 19 – Representação esquemática de um controlador fuzzy ........................... 46
Figura 20 – Deslocamento negativo dos polos com aumento do ganho integral Ki .. 52
Figura 21 – Layout do controle fuzzy ........................................................................ 52
Figura 22 – Controlador fuzzy com as variáveis de entrada e saída ......................... 53
Figura 23 – Regras do Fuzzy .................................................................................... 55
Figura 24 – Universo de discurso para a variável “Erro” ........................................... 56
Figura 25 – Universo de discurso para a variável “Variação do Erro” ....................... 56
Figura 26 – Universo de discurso para a variável “Saída” ......................................... 57
Figura 27 – Processo de Defuzzificação ................................................................... 57
Figura 28 – Mapeamento de Polos e Zeros do Controle PID .................................... 58

LISTA DE TABELAS
Tabela 1 – Percentual Mínimo de Limpeza de acordo com a FMVSS 104 ............... 20
Tabela 2 – Erro Estacionário em Função do Ganho K .............................................. 43
Tabela 3 – Combinação das Regras Fuzzy............................................................... 54
Tabela 4 – Comparação do Controle PID com o Controle Fuzzy .............................. 59

SUMÁRIO
1 INTRODUÇÃO .....................................................................................................10
1.1 TEMA ................................................................................................................11
1.1.1 Delimitação do Tema ..................................................................................11
1.2 PROBLEMA ......................................................................................................11
1.3 HIPÓTESE ........................................................................................................12
1.4 OBJETIVOS ......................................................................................................12
1.4.1 Objetivo Geral .............................................................................................12
1.4.2 Objetivos Específicos .................................................................................12
1.5 JUSTIFICATIVA ................................................................................................13
1.6 ESCOPO DO TRABALHO ................................................................................13
2 REVISÃO DA LITERATURA ...............................................................................15
2.1 A INVENÇÃO E EVOLUÇÃO DO LIMPADOR DE PARA-BRISA .................15
2.2 LEGISLAÇÃO PARA O SISTEMA LIMPADOR DE PARA-BRISAS .............19
2.3 PARTES CONSTITUINTES DO SISTEMA LIMPADOR DE PARA-BRISAS 22
2.3.1 Mecanismo Acionador ................................................................................22
2.3.2 Motor de Acionamento ................................................................................23
2.3.3 Braço do Limpador .....................................................................................25
2.3.4 Palheta .......................................................................................................26
2.3.5 Lâmina de Borracha ...................................................................................27
2.4 TECNOLOGIA DE SENSORES DE CHUVA ................................................27
2.4.1 Sensor de Imagem CMOS ..........................................................................28
2.4.2 Sensor Sonoro ............................................................................................28
2.4.3 Sensor Capacitivo.......................................................................................29
2.4.4 Sensor de Chuva Óptico .............................................................................29
2.4.5 Sensor de Chuva Omnidirecional ...............................................................29
2.5 MODELAGEM DO MOTOR DE ACIONAMENTO ........................................30
2.6 CONTROLE DO SERVOMOTOR .................................................................31
2.7 CONTROLE PROPORCIONAL INTEGRAL E DERIVATIVO .......................32
2.7.1 Erro ao Degrau ...........................................................................................39
2.7.2 Erro a Rampa .............................................................................................40
2.7.3 Erro a Parábola...........................................................................................41
2.7.4 Ação do Ganho Integral no Erro Estacionário ............................................43
2.8 CONTROLE FUZZY .....................................................................................44
2.8.1 Lógica Fuzzy versus Modelagem Matemática ............................................44
2.8.2 Fundamentos da Lógica Fuzzy ...................................................................46
2.8.2.1 Fuzzificação ................................................................................................48
2.8.2.2 Inferência ....................................................................................................48
2.8.2.3 Defuzzificação ............................................................................................48
2.8.2.4 Variáveis linguísticas ..................................................................................49

2.8.2.5 Função de pertinência ................................................................................49
2.8.2.6 Regras Fuzzy .............................................................................................50
3 DESENVOLVIMENTO DO CONTROLE DO LIMPADOR DE PARA-BRISAS ...51
3.1 CONTROLADOR PID........................................................................................51
3.2 CONTROLADOR FUZZY ..................................................................................52
3.2.1 Regras do Controle Fuzzy ..............................................................................54
3.2.2 Universo de Discurso das Regras para as Entradas e Saída do Sistema ......55
4 RESULTADOS OBTIDOS ..................................................................................58
5 CONSIDERAÇÕES FINAIS ................................................................................60
REFERÊNCIAS .......................................................................................................61

10
1 INTRODUÇÃO
Os veículos em geral, sejam de carga ou de passeio, são peças importantes
no desenvolvimento da humanidade. Proporcionam maior conforto e rapidez no
transporte de cargas ou pessoas substituindo o uso da força animal.
Desde o lançamento do primeiro automóvel, modificações e melhorias no
projeto inicial foram feitas com o objetivo de proporcionar mais conforto, aumentar a
segurança, melhorar a autonomia e o design do veículo. A indústria automobilística
pode ser considerada como grande desenvolvedora de novas tecnologias e a
incorporação disso nos automóveis é notável ao longo dos anos.
Uma das tecnologias de grande importância é o limpador de para-brisas
veicular, desenvolvido por Mary Anderson em 1903 (MACIEL, 2010 apud UNITED
STATES PATENT AND TRADE MARK OFFICE). Este item é encontrado nos veículos
até nos dias atuais, pelo fato de ser um item de segurança. O limpador de para-brisas
tem sofrido melhorias a fim de aumentar a eficiência na limpeza e a segurança dos
passageiros do veículo. Inicialmente ele funcionava de forma manual, ou seja, o
motorista realizava a limpeza do vidro quando julgava necessário. Atualmente, em
veículos de mais modernos e sofisticados o limpador de para-brisas tem acionamento
automático de acordo com a intensidade da chuva ou presença de sujeira.
As inovações no sistema de limpador de para-brisas passam pela forma de
acionamento do motor, melhorias na forma construtiva da palheta, uso de novos
materiais para confecção das palhetas, entre outros (GOES, 2003).
Quanto ao motor de acionamento, Goes (2003) cita que motores com sentido
de rotação eletronicamente reversível permite o funcionamento a uma velocidade
continuamente regulável, e com o auxílio de um sensor de chuva, a velocidade é
adaptada automaticamente à precipitação corrente. Cita ainda que as unidades de
acionamento eletronicamente controladas permitem ainda que durante a operação de
limpeza, o sentido de rotação do motor seja invertido, desta forma elimina-se a
necessidade de uma área reservada para movimentação da articulação do
mecanismo que transmite o movimento aos braços limpadores. Outra vantagem é
permitir a regulagem continua da velocidade do limpador através de um comando ou
botão interno no veículo.

11
1.1 TEMA
O objetivo do trabalho é avaliar as técnicas de controle proporcional integral
derivativa (PID) e fuzzy para um limpador de para-brisas veicular automático, a fim de
verificar qual técnica apresenta melhor comportamento no domínio do tempo.
1.1.1 Delimitação do Tema
Dentro das diversas técnicas de controle, neste trabalho será realizada a
comparação de duas técnicas (controle PID e fuzzy) com o intuito de verificar qual
técnica de controle apresenta melhor resposta para o acionamento automático do
limpador de para-brisas veicular.
1.2 PROBLEMA
Segundo dados da Polícia Rodoviária Federal brasileira (2014), no ano de 2014
foram registrados 168.593 acidentes em rodovias federais nacionais, que deixaram
100.396 pessoas feridas e levaram a 8.227 óbitos. A Polícia Rodoviária Federal (2014)
cita que grande parte dos acidentes está relacionado ao comportamento humano,
dados apontam que 32% dos acidentes que levaram a morte foram causados por falta
de atenção dos condutores.
Esse índice de acidentes precisa ser reduzido, e é nisso que as autoridades e
a comunidade científica devem focar. Muitos acidentes poderiam ser evitados através
de uma maior conscientização das pessoas no trânsito, redobrar a atenção na direção,
melhorar a condição das vias, contar com o uso de novas tecnologias que venham
facilitar a condução do veículo pelo motorista, entre outras atitudes.
É neste contexto de novas tecnologias implantadas nos veículos que visam aprimorar
a segurança do condutor e dos passageiros que este trabalho será desenvolvido. O
ato do motorista acionar o limpador de para-brisas e definir a velocidade que melhor

12
se adapte à condição climática vigente, desvia a atenção do condutor por alguns
segundos, e estes podem ser essenciais para se de evitar um acidente. Estudos e
cálculos realizados mostram que desviar a atenção do motorista por alguns segundos
faz com que o veículo percorra determinada distância de acordo com a velocidade
atual sem a devida vigilância e percepção necessária para a condução do automóvel.
Além disso, a percepção da intensidade de chuva pelo motorista pode ser lenta e
assim a visibilidade da rodovia fique prejudicada (Woodworth: 1869-1962).
1.3 HIPÓTESE
Através de referências textuais, foi observado que é possível fazer
comparações das técnicas de controle do limpador de para-brisas utilizando-se o
software MATLAB da MathWorks a fim de simular a condição real.
1.4 OBJETIVOS
1.4.1 Objetivo Geral
Pesquisar e analisar as técnicas de controle PID e fuzzy, a fim de verificar qual
delas apresenta melhor resultado no acionamento automático do limpador de para-
brisas veicular.
1.4.2 Objetivos Específicos
a) Pesquisa bibliográfica sobre funcionamento dos limpadores de para-brisa;
b) Desenvolvimento de um modelo matemático do motor elétrico do limpador de
para-brisas;

13
c) Elaboração e projeto dos controladores PID e fuzzy para o modelo matemático
da planta;
d) Simulação dos controladores com o uso do MATLAB/Simulink;
e) Comparação dos resultados obtidos por meio das simulações, verificando-se
as vantagens e desvantagens no uso destas técnicas de controle para esta
aplicação.
1.5 JUSTIFICATIVA
O limpador de para-brisas veicular é um item de segurança e obrigatório em
todos os veículos. Desde sua criação até os dias atuais, melhorias significativas
aconteceram, seja no desenvolvimento de novos materiais aumentando sua
eficiência, formas de acionamento (manual ou automático) e diferentes configurações
com o mesmo objetivo.
O acionamento automático do limpador de para-brisas através de sensores
que fazem a leitura da intensidade da chuva é um componente que busca aumentar
a segurança durante a condução do veículo. A falta de atenção ao dirigir é algo
extremamente grave, pois um carro a 100 km/h em 1 segundo percorre
aproximadamente 28 metros. Suficiente para ocasionar um acidente. Portanto, se o
acionamento do limpador de para-brisas for automático evitará que o condutor do
veículo se distraia a fim de acionar e ajustar a frequência da limpeza do vidro de forma
mais eficiente. Outro fator positivo para o acionamento automático do limpador de
para-brisas e de um controle mais eficiente de seu motor de acionamento é o ganho
na limpeza do para-brisa proporcionando um aumento na visibilidade do motorista.
1.6 ESCOPO DO TRABALHO
Este trabalho está organizado da seguinte forma:
No capítulo 2 é apresentada uma revisão da literatura que contempla a história
da criação do limpador de para-brisas, bem como a legislação que rege seu projeto e

14
uso, as partes constituintes do sistema, a tecnologia dos sensores utilizados, a
modelagem e controle do motor e uma abordagem sobre o controle PID e fuzzy.
No capítulo 3 é abordado o desenvolvimento do trabalho em termos do
controle PID e fuzzy.
No capítulo 4 apresenta-se e discute-se os resultados dos controles PID e
fuzzy para o sistema limpador de para-brisas.
E finalmente, no capítulo 5 apresenta-se uma breve conclusão sobre os 2 tipos
de controle estudados.

15
2 REVISÃO DA LITERATURA
A indústria automobilística é o berço de grandes desenvolvimentos
tecnológicos ao longo da história. Muitos equipamentos, processos, técnicas e
modelos de gestão fabril utilizados amplamente na indústria em geral, foram
desenvolvidos pela indústria automobilística no decorrer dos anos.
Segundo Maciel (2010), a indústria automobilística sofre grande influência de
forma positiva devido as variações de consumo, resultado da crise econômica que
atingiu o mercado nos últimos anos. Novos investimentos e pesquisas tornam-se
estratégicos e fundamentais para a sobrevivência de montadoras e fornecedores,
principalmente em mercados emergentes.
Os veículos automotores fazem uso de diversos dispositivos eletrônicos,
sejam eles para segurança, comodidade ou melhoria de processo. Um desses
dispositivos é o limpador de para-brisas, muitas vezes esquecidos pelos motoristas,
mas é um item essencial nos veículos e considerado como um item de segurança.
O limpador de para-brisas só é lembrado pelos motoristas quando começa a
chover ou algo suja o para-brisas. É nessa hora que precisamos dele e seu mal
funcionamento pode ocasionar um acidente grave.
2.1 A INVENÇÃO E EVOLUÇÃO DO LIMPADOR DE PARA-BRISA
De acordo com Maciel (2010 apud UNITED STATES PATENT AND TRADE
MARK OFFICE), a invenção do limpador de para-brisas foi concedida a Mary
Anderson no dia 10 de novembro de 1903 sob a patente n° 743.801. Na Figura 1 a
seguir observa-se o dispositivo de limpeza de janelas.

16
Figura 1 – Patente do Primeiro Sistema Limpador de Para-brisa
Fonte: Estados Unidos da América Patente Nº US743801 A (1903)
Conforme pode ser observado na Figura 1, o dispositivo criado é composto
por uma alavanca metálica acionada manualmente, internamente ao veículo. Esta
alavanca aciona um braço oscilante que, por sua vez, articulava uma lâmina de
borracha sobre o vidro. Alguns equipamentos semelhantes haviam sido criados
anteriormente, mas este foi o primeiro a realizar a tarefa com eficiência (MACIEL, 2010
apud MASSACHUSETTS INSITUTE OF TECHNOLOGY Website).
A invenção de Mary Anderson realizava a limpeza do para-brisa e auxiliava a
condução do veículo em dias chuvosos, porém era acionado de forma manual o que
ocasionava cansaço ao motorista e exigia com que o condutor dirigisse apenas com
uma das mãos, tornando-se bastante perigoso. Na Figura 2, observa-se o sistema
limpador de para-brisa com acionamento manual.

17
Figura 2 – Limpador de Para-brisas manual
Fonte: Maciel (2010)
Foi então que em 1919, o inventor William M. Folberth solicitou a patente de
um limpador de para-brisas automático. Esta solicitação foi atendida em 1922,
tornando-se o primeiro dispositivo automático a realizar esta função. Este sistema
fazia uso do acionamento através de uma bomba de vácuo, este sistema tornou-se
padrão nos automóveis até aproximadamente 1960. Na Figura 3 é apresentado o
sistema criado por William M. Folberth (ESTADOS UNIDOS DA AMÉRICA PATENTE
Nº US1797977 A, 1924).
Figura 3 – Sistema de limpador de para-brisa com acionamento automático através de bomba de vácuo.
Fonte: Maciel (2010)
A invenção de William Folberth solucionou os problemas de seu antecessor,
porém tinha como deficiência o fato que sua velocidade de funcionamento era alterada

18
de acordo com a rotação do motor. Para solucionar esta falha, os fabricantes deste
produto passaram a desenvolver o acionamento do limpador de para-brisas com
motores elétricos. Esta forma de acionamento é basicamente utilizada até os dias
atuais. Na Figura 4 é apresentado um sistema de limpador de para-brisas com
acionamento por motor elétrico.
Figura 4 – Sistema de limpador de para-brisas com acionamento por motor elétrico.
Fonte: Maciel (2010)
Um item de extrema importância nos limpadores de para-brisa são as
palhetas. Essas palhetas ficam em contato direto com o vidro e visam a remoção de
água e sujeira do para-brisa. Juntamente com a forma de acionamento do limpador
de para-brisas, este item passou por constante desenvolvimento com o objetivo de
obter melhor distribuição de pressão da lâmina de borracha sobre o para-brisa através
da força aplicada pelo braço no centro da mesma. Basicamente, a evolução deste
material aconteceu na forma geométrica, material utilizado e forma de fixação no
braço do limpador de para-brisas.
Todos os itens e sistemas presentes nos veículos passam por rigorosos testes
de qualidade e segurança, devendo cumprir determinações legais de durabilidade e
segurança. Isso é válido também para o limpador de para-brisa. Este sistema deve
cumprir as determinações legais de manter a visibilidade através do para-brisa. As
normas legais definem a área mínima de abrangência do sistema de para-brisas
(MACIEL, 2010).

19
Como requisitos legais, o sistema limpador de para-brisa deve cumprir
efetivamente os seguintes itens (BOSCH, 2005):
Remoção de água e neve;
Remoção de sujeira mineral, orgânica e biológica;
Operação tanto em alta temperatura (+70°C) como em baixa
temperatura (-30°C);
Resistência a corrosão e a intempéries;
Prover durabilidade de 1,5 milhões de ciclos de limpeza para veículos
de passeio e 3 milhões para veículos utilitários;
Teste de bloqueio.
2.2 LEGISLAÇÃO PARA O SISTEMA LIMPADOR DE PARA-BRISAS
No Brasil está em vigor a resolução do CONTRAN 224/06. Esta resolução é
fundamentada com base regulamentação americana e sua última revisão em 2006,
passou a ser aperfeiçoada na diretiva europeia (CONSELHO NACIONAL DE
TRÂNSITO. Resolução n. 224, de 9 de fevereiro de 2006).
Alternativamente se admitirá a homologação de veículos que cumpram com
os sistemas de limpador e lavador do para-brisa que atendam a Diretiva Europeia
78/318/EEC, emendada pela Diretiva 94/68/EEC, ou a norma americana FMVSS 104,
de 24 de setembro de 1998 (CONSELHO NACIONAL DE TRÂNSITO. Resolução n.
224, de 9 de fevereiro de 2006).
A principal preocupação destas legislações é com a área mínima de limpeza
que o sistema deve atender. No caso da FMVSS 104, valores mínimos de área de
limpeza através de planos projetados do campo de visão do motorista devem ser
atendidos. Estes planos determinam três áreas de limpeza distintas: A, B e C. Estes
planos podem ser vistos na Figura 5.

20
Figura 5 – Resolução Americana FMVSS 104
Fonte: SAE J903, 1999
Para estes 3 planos apresentados, esta resolução determina um percentual
mínimo de limpeza que o sistema limpador de para-brisas deve realizar, conforme a
Tabela 1.
Tabela 1 – Percentual Mínimo de Limpeza de acordo com a FMVSS 104
Área Percentual de Limpeza da Área
A 80
B 94
C 99
Fonte: SAE J903, 1999
Já a diretiva europeia 78/318/EEC especifica apenas duas áreas de limpeza,
A e B, usando também planos projetados do campo de visão do motorista, com
critérios diferentes da regulamentação americana. A área mínima de limpeza na zona
A é de 98% e na zona B é de 80%. Estes planos são apresentados nas Figuras 6 e 7,
respectivamente.

21
Figura 6 – Zona de limpeza “A”
Fonte: European Comission, 1978
Figura 7 – Zona de limpeza "B"
Fonte: European Comission, 1978
Em geral, os sistemas limpadores de para-brisa têm maior dificuldade de
atendimento das áreas de limpeza determinadas pela regulamentação americana do
que à diretiva europeia, principalmente para veículos que apresentam menor largura.
Isso ocorre devido ao percentual requisitado da área intermediária (área B) da lei
americana (MACIEL, 2010).
Além das áreas mínimas de limpeza, também é regulamentado requisitos de
velocidades de limpeza do sistema, desempenho à alta velocidade, durabilidade,
resistência a baixas e altas temperaturas, resistência mecânica e química.

22
2.3 PARTES CONSTITUINTES DO SISTEMA LIMPADOR DE PARA-BRISAS
O sistema de limpador de para-brisas essencialmente é constituído por um
mecanismo acionador, um motor de acionamento, o braço do limpador, palheta e
lâmina de borracha. Cada um destes itens é composto por itens menores que serão
abordados em seguida.
2.3.1 Mecanismo Acionador
O mecanismo acionador é o sistema responsável por transmitir o movimento
de rotação do motor em um movimento de vai e volta do conjunto braço e palheta.
Este movimento é obtido através de um sistema de manivelas, onde a manivela do
motor gira 360º e aciona transmissões conectadas às manivelas acionadoras dos
eixos de acoplamento dos braços (MACIEL, 2010).
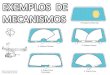
Na Figura 8 é mostrado o sistema do mecanismo acionador e suas partes
constituintes: mancal, manivela do motor, transmissões, eixo de acoplamento do
braço, manivela, coxim e motor elétrico.
Figura 8 – Mecanismo Acionador e suas Partes
Fonte: Maciel, 2010

23
No desenvolvimento e projeto de um mecanismo acionador, existem dois
pontos principais de otimização do sistema que devem ser considerados: o primeiro
ponto é o movimento estável das palhetas, mantendo os valores extremos de
aceleração angular próximos do ponto de reversão da palheta; componente mais
importante do limpador é a borracha que é fixado através do engate no braço do
limpador de para-brisa para que a palheta esteja ligeiramente inclinada num ângulo
de aproximadamente 45°, afim de auxiliar o trabalho da inversão do lábio de limpeza
da lâmina de borracha, conforme pode ser observado na Figura 9 (BOSCH, 2000).
Figura 9 – Ângulo de ataque da Palheta
Fonte: SAE J903, 1999
2.3.2 Motor de Acionamento
O motor de acionamento é responsável pelo movimento do limpador de para-
brisas. De acordo com Bosch (2005), para o desempenho desta tarefa usualmente
são empregados motores de corrente contínua com imã permanente. Eles são
equipados com uma caixa redutora de sistema de engrenagem do tipo eixo sem-fim,
como na Figura 10.

24
Figura 10 – Motor de Acionamento
Fonte: Bosch, 2005
O mesmo autor cita que a determinação da potência dos motores de
acionamento difere dos propulsores elétricos usuais. As regulamentações legais e as
especificações de uso geralmente estabelecem uma rotação de 45 rpm para a
frequência mais baixa e 65 rpm para a frequência mais alta da palheta. Do atrito
máximo entre a lâmina de borracha e o para-brisa, resulta o torque que o motor deve
fornecer para cada palheta na rotação mínima de 5 rpm.
Este torque é o chamado torque de arranque que é calculado com base nos
seguintes itens (BOSCH, 2005):
Força nominal de contato da palheta;
Coeficiente de máximo de atrito da lâmina de borracha com o para-
brisa no regime a seco;
Fator de atrito das articulações;
Fator de tolerância da força de contato da palheta;
Comprimento das palhetas;
Velocidade angular máxima da palheta;
Velocidade angular média da manivela do motor;
Grau de eficiência das transmissões;
Resistência do induzido aquecido pela operação normal;

25
Resistência do induzido frio.
Para a concepção do motor, outro item a ser considerado é a resistência ao
curto-circuito. Ela é definida como o tempo em que o motor bloqueado, com tensão
total, deve resistir sem superaquecimento (BOSCH, 2005).
O torque operacional com o vidro molhado é equivalente a 0-20% do torque
de arranque (BOSCH, 2005).
2.3.3 Braço do Limpador
É responsável por fazer a ligação entre a palheta e o sistema acionador. Ele
é responsável por pressionar a palheta sobre o para-brisa, fornecendo a quantidade
de força necessária e o ângulo de ataque (BOSCH, 2000).
A fixação do braço é realizada por cone serrilhado, aplicado na união do eixo
do motor com a articulação do braço do limpador. O eixo em forma de cone serrilhado
e articulação do braço limpador com furo cônico serrilhado visa proporcionar uma
fixação eficiente e segura, evitando queda de torque e espanamento dos filetes de
rosca serrilhado. A outra extremidade possui um arame chato de aço curvado em
forma de gancho, que trava a palheta no braço. (INSTITUTO ALEMÃO PARA
NORMALIZAÇÃO 1997ii.)
O braço do limpador é constituído pela cabeça, dobradiça, mola, haste e
gancho, como observa-se na Figura 11.
Figura 11 – Braço do Limpador
Fonte: Grenouillat; Leblanc, 2002

26
2.3.4 Palheta
A palheta tem como função principal sustentar a lâmina de borracha sobre o
para-brisa, direcionando o seu movimento, e transformando a força de contato do
braço em pressão distribuída da lâmina de borracha sobre o para-brisa. (MACIEL,
2010)
A paleta deve manter a pressão da borracha constante e uniforme sobre o
vidro e diminuir o efeito de levantamento sofrido devido aos efeitos aerodinâmicos do
vento que atingem o vidro em altas velocidades (BILLOT,2001)
A palheta é constituída pelo ponto de fixação, articuladores, adaptador,
garras, lâmina de borracha e suporte para borracha. Isso pode ser observado na
Figura 12.
Figura 12 – Palheta do Limpador de Para-brisas.
Fonte: Grenouillat; Leblanc, 2002

27
2.3.5 Lâmina de Borracha
O perfil da lâmina de borracha, é formado pelo lábio de limpeza, que possui
as duas arestas de contato com o para-brisa (uma de cada lado), que por sua vez é
conectado com a parte superior da lâmina, através de um pescoço de articulação. A
parte superior, é destinada a fixar a lâmina de borracha com o suporte da borracha da
estrutura da palheta, como pode ser visto na Figura 13 a seguir (MACIEL, 2010).
Figura 13 – Secção transversal da lâmina de borracha.
Fonte: NWB Website
Quando pressionada sobre o para-brisa pelo suporte da borracha, a lâmina
de borracha para prover uma boa qualidade de limpeza, deve inclinar o lábio sobre o
para-brisa de forma a obter um ângulo aproximado de 45º, proporcionando um contato
superficial de 0,01 mm a 0,015 mm (BOSCH, 2005). Caso o ângulo formado pelo lábio
e o para-brisa, esteja acima do desejado, aumentará o contato superficial, causando
uma má qualidade de limpeza. A sensação deste efeito é de um para-brisa embaçado.
Já o contrário, ou seja, o ângulo esteja abaixo do desejado, o lábio de limpeza poderá
vibrar, causando uma má qualidade de limpeza e ruído. Esta má qualidade de limpeza
é chamada de trepidação (MACIEL, 2010).
2.4 TECNOLOGIA DE SENSORES DE CHUVA
O sensor, por definição, é um dispositivo que recebe estímulos físicos e
transmite um impulso correspondente. Neste caso, o sensor é empregado para

28
detectar a intensidade da chuva no momento e enviar um sinal correspondente a esta
intensidade ao controlador a fim de estabelecer a velocidade dos limpadores de para-
brisa. O sensor empregado neste tipo de aplicação pode fazer uso de diferentes
tecnologias para fazer a detecção do estímulo físico. A seguir são abordadas algumas
das tecnologias mais utilizadas (ALAZZAWI e CHAKRAVARTY, 2015)
2.4.1 Sensor de Imagem CMOS
O sensor de imagem CMOS é um dispositivo semicondutor fabricado através
de processos de microeletrônica. Um sensor CMOS é constituído de uma matriz de
micros diodos fotossensíveis, isto é, um nano diodo em cada célula que é chamado
eletronicamente de píxel (SOSA CARDOZA, 2012). Quando uma gota de chuva cai
sobre um píxel deste sensor, um sinal de tensão é gerado que por sua vez gera um
sinal luminoso. Este sinal luminoso é convertido para o código gray e armazenado em
uma memória. Em seguida, os valores armazenados na memória são comparados e
analisados com os valores padrões da escala e desta forma é possível determinar a
intensidade da chuva.
Este tipo de sensor tem como problema para esta aplicação a característica
de que uma vez que os pixels estejam molhados, a sensibilidade do sensor é
diminuída podendo não detectar o próximo pingo de chuva. Outro ponto a se observar
é que o sensor cobre apenas uma região do para-brisas, desta forma ele não
apresenta a real condição do ambiente. Além do mais, o sensor não diferencia o objeto
detectado, logo pode ser uma gota de chuva, poeira ou folhas, o que diminui muito
sua efetividade (ALAZZAWI e CHAKRAVARTY, 2015).
2.4.2 Sensor Sonoro
A intensidade de chuva pode ser detectada através do uso de um microfone
instalado no carro a fim de captar o som criado pelo choque das gotas de chuva com
o material metálico do teto do veículo. Porém, o inconveniente deste tipo de sensor é

29
a necessidade do uso de filtro seletor de frequências para eliminar o ruído ambiente
(ALAZZAWI e CHAKRAVARTY, 2015) e (JARAJREH et al., 2004).
2.4.3 Sensor Capacitivo
Este tipo de sensor tem uma patente registrada, pois a ideia é colocar um filme
do sensor capacitivo junto com a camada de laminado do para-brisa, desta forma o
sensor detectará a intensidade de chuva baseado na flutuação do sinal capacitivo e a
resistência devido a conexão dos eletrodos. As maiores dificuldades desta tecnologia
são: que nem todos os veículos possuem vidros laminados; os eletrodos necessitam
de conexão elétrica, o que dificulta e se torna oneroso; e quando os eletrodos estão
molhados, diminui a sensibilidade dos mesmos (ALAZZAWI e CHAKRAVARTY,
2015), (YISHAY, 2002), (MUKUL et al., 2013) e (KYOO, 2011).
2.4.4 Sensor de Chuva Óptico
O sensor de chuva óptico faz uso da teoria da reflexão luminosa. A partir de
uma fonte é emitida luz infravermelha no para-brisas, esta luz é absorvida por
fotodetector. Baseado na mudança angular da deflexão da luz, o sistema reconhece
a presença de gotas de chuva. Entretanto, este tipo de sensor sobre com a influência
de partículas indesejadas, como poeira, folhas e sujeira. Outro fator ser considerado
a sua aplicação é a sensibilidade a luz externa, o que atrapalha o sistema. Outro ponto
é a pequena área de atuação, devido ao uso de luz infravermelha (NICE, 2016).
2.4.5 Sensor de Chuva Omnidirecional
Este sensor funciona de forma muito semelhante ao sensor de chuva óptico,
a diferença é que a emissão dos feixes de luz infravermelha é feita em todas as

30
direções. Esse sistema apresenta a vantagem de uma maior área de atuação, mas
também é ineficiente a objetos indesejados, como poeira, sujeira e folhas (KYOO,
2011).
2.5 MODELAGEM DO MOTOR DE ACIONAMENTO
Conforme mencionando anteriormente, o motor de acionamento do sistema
de limpador de para-brisas usualmente é feito por motores de corrente contínua com
imã permanente. Dentro desta classificação encontra-se o servomotor.
Segundo a definição de Rezende e Maitelli (1999), servomotor é um pequeno
motor de corrente contínua acoplado através de um sistema de engrenagens a uma
carga, sobre a qual é realizado o controle de posição. Para a aplicação deste trabalho,
esta característica do servomotor é de extrema importância devido à particularidade
do movimento do limpador de para-brisas que não realiza o ciclo de giro de 360°. Na
Figura 14 tem-se o diagrama esquemático do servomotor.
Figura 14 – Diagrama esquemático de um servomotor
Fonte: Rezende; Maitelli, 1999
Na Figura 14, as variáveis wm e wi representam as velocidades angulares do
motor e da carga, respectivamente. A relação entre essas rotações é dada pelo índice
kg, que é a relação entre o raio das engrenagens da carga e motor.
Os índices Jm e J1 são os momentos de inércia do eixo do motor e da carga,
respectivamente. Tm é o torque magnético que surge pela indução no rotor, To é o
torque que surge efetivamente sobre a carga, após as relações de engrenagens.

31
Como variáveis elétricas, temos: Vin que é a tensão aplicada na entrada do rotor, Im é
a corrente que circula no rotor, Ra a resistência do rotor e Vb a força contra
eletromotriz, dada pela equação (1):
𝑉𝑏 = 𝐾𝑏 × 𝑤𝑚
(1)
Extraindo a função de transferência do sistema, tem-se a equação (2):
𝜃(𝑠)
𝑉𝑖𝑛(𝑠)=
1
𝑠 (𝑠𝑅𝑚𝐽𝑒𝑞
𝐾𝑚𝐾𝑔+ 𝐾𝑚𝐾𝑔)
(2)
Onde Jeq é o momento de inércia equivalente, dado pela equação (3):
𝐽𝑒𝑞 = 𝐾𝑔2𝐽𝑚 + 𝐽1 (3)
Considerando J1=0, os autores Rezende e Maitelli (1999) afirmam que a
função de transferência da planta é igual à apresentada nas equações (4) e (5):
𝜃(𝑠)
𝑉𝑖𝑛(𝑠)=
1
5𝑠(0,0026𝑠 + 0,1081) (4)
𝜃(𝑠)
𝑉𝑖𝑛(𝑠)=
1
(0,013𝑠2 + 0,5405𝑠) (5)
2.6 CONTROLE DO SERVOMOTOR
Para a aplicação em um limpador de para-brisas automático, o servomotor
possui as características ideais de um motor: dinâmica, controle de rotação, torque
constante e precisão de posicionamento (OTTOBONI, 2002).
O servomotor é um atuador rotativo com alta precisão de controle para
posicionamento angular. É composto por um motor acoplado a um sensor de posição
para feedback. Também faz uso de um servodrive, este drive utiliza o sinal de

32
feedback do sensor para controlar a posição angular do motor de forma precisa. Isto
é chamado de controle de malha fechada (KOLLMORGEN, 2016).
No controle em malha fechada, utilizam-se sensores para medir e enviar ao
controlador sinais referentes a variável controlada por meio da realimentação ou
feedback. O sinal recebido é comparado com a referência do sistema, esta
comparação resulta em um sinal de erro. Por sua vez, este sinal de erro é analisado
pelo controlador a fim de corrigir a variável controlada. No caso do servomotor, a
variável controlada pode ser: corrente, posição, velocidade e torque (FITZGERALD,
1978).
2.7 CONTROLE PROPORCIONAL INTEGRAL E DERIVATIVO
Um controlador automático compara o valor real da grandeza de saída do
processo com a grandeza de referência (valor desejado), desta forma determina o erro
e produz um sinal de controle que reduzirá o desvio a zero ou a um valor pequeno
próximo de zero. A ação descrita realizada pelo controlador automático produz um
sinal de controle, chamado de ação de controle (OGATA, 2003).
O controlador Proporcional Integral e Derivativo (PID) faz parte de um grupo
de sistemas de controle de processos amplamente difundido no âmbito industrial.
Cada uma das letras que compõem a sigla PID representam uma ação de controle
desenvolvida por este controlador com características definidas e distintas entre si,
proporcionando um sinal de controle preciso.
A ação de controle Proporcional (Kp) essencialmente aplica uma ação de
amplificador com ganho ajustável. A relação entre o sinal de saída do controlador u(t)
e o sinal de erro atuante e(t) pode ser representado pela equação (6) (OGATA, 2003).
𝑢(𝑡) = 𝐾𝑝𝑒(𝑡) (6)
Onde Kp representa o ganho proporcional.

33
Figura 15 – Aumento do comportamento oscilatório com aumento de Kp Fonte: Bazanella, 1999
Na Figura 15 fica evidente que com o aumento de Kp a tendência é a redução
do erro porem com o aumento demasiado de Kp o sistema tende a ficar cada vez mais
oscilatório.
A ação de controle Integral (Ki) atua no valor da saída do controlador u(t), de
forma que este varia segundo uma taxa proporcional ao sinal de erro atuante e(t),
conforme mostra a equação (7) (OGATA, 2003).
𝑢(𝑡) = 𝐾𝑖 ∫ 𝑒(𝑡)𝑑𝑡𝑡
0
(7)
Onde Ki é uma constante ajustável. Desta forma, se o valor de e(t) for
dobrado, então o valor de u(t) varia duas vezes mais rápido. Para erro atuante nulo, o
valor de u(t) permanece estacionário. A ação de controle integral também é
denominada controle de restabelecimento (reset) (OGATA, 2003).
Na Figura 16 observa-se que com o aumento do ganho integral Ki o sistema
torna-se cada vez mais oscilatório, numa tendência de instabilização, isso justifica-se
pelo fato que neste caso o zero do controlador começa a se afastar excessivamente
do polo na origem e o controlador tende a se comporta como um integrador puro.
Como a função soma dados instantâneos, o resultado do processo tende a exceder o
ponto desejado essa ultrapassagem do ponto desejado é denominada overshoot.

34
Figura 16 – Aumento do comportamento oscilatório com aumento de Ki Fonte: Wescott, 2016
A ação de controle Derivativa (Kd) corresponde à aplicação de um sinal de
controle proporcional a derivada do sinal de erro, atuando no fornecimento de uma
correção antecipada ao erro e diminuindo assim o tempo de resposta para eliminar o
problema do overshoot (GUERRA, 2009).

35
Figura 17 – Tendência de amplificar sinal em alta frequência Fonte: Bazanella, 1999
Na Figura 17 observa-se a tendência de amplificar sinais em alta frequência
para evitar essa amplificação indesejada a implementação da ação derivativa da se
com a introdução de um polo em alta frequência que este tem finalidade justamente
de limitar este ganho (Bazanella,1999).
Em suma, o controlador PID reúne em uma forma de controle o que há de
melhor nas três ações de controle. A ação proporcional elimina os ruídos do sistema,
a ação integral é responsável por eliminar o erro de off-set e a ação derivativa trabalha
fornecendo uma ação antecipada ao sistema (SOUZA; LOPES, 2012).
O controlador PID é definido matematicamente pela equação (8).
𝑢(𝑡) = 𝐾𝑝𝑒(𝑡) +𝐾𝑝
𝑇𝑖∫ 𝑒(𝑡)𝑑𝑡 + 𝐾𝑝𝑇𝑑
𝑑𝑒(𝑡)
𝑑𝑡
𝑡
0
(8)
Onde Kp representa o ganho proporcional, Td o tempo derivativo e Ti o tempo
integral (OGATA, 2003).
O controlador PID baseado no Método Analítico Lugar das Raízes (LGR)
determina o comportamento do sistema pela posição dos polos de malha fechada. O

36
objetivo é projetar um controlador de modo que o sistema de malha fechada apresente
os polos desejados, os quais asseguram o desempenho desejado do sistema.
Neste método considera-se um sistema de malha fechada, onde a malha
aberta é formada por um controlador (K(s)) em série com a planta (P(s)) segundo a
equação (9).
𝐿(𝑠) = 𝐾(𝑠)𝑃(𝑠) (9)
Desta forma, um polo 𝑠𝐷 de malha fechada corresponde a uma raiz do
denominador, ou seja:
𝑇(𝑠) = 𝑌(𝑠)
𝑅(𝑠)=
𝐿(𝑠)
1 + 𝐿(𝑠) (10)
18011)(0)(1 DD sLsL (11)
O ganho de malha (L(s)), incluindo o controlador e a planta, é dado por:
))(()()()(s
KsKKsPsKsPsL i
dp
(12)
Para um polo 𝑠𝐷 qualquer no plano s, 𝑠𝐷 = 𝜎𝐷 + 𝑗𝜔𝐷, pode-se escrever para
a planta a equação (13).
Pj
PD emsP
)( (13)
Para esse ponto 𝑠𝐷 = 𝜎𝐷 + 𝑗𝜔𝐷, pode-se escrever para o controlador a
equação abaixo.
Kj
K
DD
ipDDdD em
j
KKjKsK
)()(
(14)
Considerando que 𝑠𝐷 = 𝜎𝐷 + 𝑗𝜔𝐷 representa o polo desejado, a equação a
seguir é válida.

37
))()((1)(DD
iDDdpDDD
j
KjKKjPsL
(15)
E portanto,
)(
1 KPKP j
KP
j
K
j
P emmemem
(16)
A partir disso, chega-se assim a duas fórmulas básicas para a amplitude e a
fase do controlador.
KP
KPmm 1
(17)
Ou ainda, isolando os termos.
PK
K
Pm
m
1
(18)
Uma vez determinada a amplitude e a fase necessárias ao controlador para
𝑠𝐷 corresponder ao polo desejado, pode escrever o seguinte.
)sin(cos)()(
)(
2
KKK
j
K
DD
iDDpDDd
D jmemj
KjKjKsK K
(19)
)sin(cos)()()( 2
KKKDDiDDpDDd jmjKjKjK
(20)
)sincos(sincos
)2()( 22
KKDKKDKKDKKD
DpDDdiDpDDd
mmjmm
KKjKKK
(21)
Quando igualados os termos reais e imaginários das equações acima, obtém-
se as duas equações abaixo.
KKDKKDiDpDDd mmKKK sincos)( 22 (22)

38
KKDKKDDpDDd mmKK sincos2 (23)
Essas equações podem ser simplificadas de forma a obter as equações a
seguir, respectivamente.
ipd KbKaK (24)
pd dKcK (25)
Onde as variáveis representam o seguinte.
KKDKKD
D
DD
mm
b
a
sincos
22
KKDKKD
D
DD
mm
d
c
sincos
2
(26)
Isolando Kp da equação (25) e substituindo na equação (24) obtém-se:
)**(
)***(
dabc
cKcaK i
p
(27)
Substituído Kp da equação (27) em (25) obtém-se Kd:
)**(
)***(
dabc
bdKdK i
d
(28)
Para determinação de Ki usou-se um método empírico, em que foi sendo
arbitrado valores de Ki de modo a se encontrar uma faixa de valores de Ki que
providencie uma melhor resposta do sistema.

39
2.7.1 Erro ao Degrau
Segundo (OGATA, 2003) o erro estacionário à uma excitação devido a um
degrau unitário dá-se por:
𝑒𝑠𝑠 = lim𝑠→0
𝑠
1 + 𝐺(𝑠)
1
𝑠
(29)
Onde o coeficiente de erro estático de posição, 𝐾𝑃, é definido como:
𝐾𝑃 = lim𝑠→0
𝐺(𝑠)
(30)
Sendo assim, o erro estacionário em termos do coeficiente do erro estático de
posição, 𝐾𝑃, é expresso como:
𝑒𝑠𝑠 =1
1 + 𝐾𝑃
(31)
Para sistemas do tipo 0,
𝐾𝑃 =𝐾(𝑇𝑎𝑠+1)(𝑇𝑏𝑠+1)…
𝑠0(𝑇1𝑠+1)(𝑇2𝑠 +1)…=K
(32)
Para sistemas maiores ou iguais a do tipo 1,
𝐾𝑃 =𝐾(𝑇𝑎𝑠+1)(𝑇𝑏𝑠+1)…
𝑠𝑛(𝑇1𝑠+1)(𝑇2𝑠 +1)…=∞, Para n ≥ 1
(33)
Em uma excitação em degrau unitário, o erro estacionário pode ser resumido
em:
𝑒𝑠𝑠 =1
1+𝐾, para sistemas de tipo 0
(34)

40
𝑒𝑠𝑠 = 0, para sistemas de tipo 1 ou superior
(35)
2.7.2 Erro a Rampa
Segundo (OGATA, 2003) o erro estacionário à uma excitação devido a uma
rampa unitária dá-se por:
𝑒𝑠𝑠 = lim𝑠→0
𝑠
1 + 𝐺(𝑠)
1
𝑠²
Onde o coeficiente de erro estático de posição, 𝐾𝑣, é definido como:
(36)
𝐾𝑣 = lim𝑠→0
𝑠𝐺(𝑠) (37)
Sendo assim, o erro estacionário em ternos do coeficiente do erro
estático de velocidade, 𝐾𝑣, é expresso como:
𝑒𝑠𝑠 =1
𝐾𝑉
(38)
Para sistemas de ordem 0,
𝐾𝑣 =𝑠𝐾(𝑇𝑎𝑠+1)(𝑇𝑏𝑠+1)…
(𝑇1𝑠+1)(𝑇2𝑠 +1)…=0, para n=0
(39)
Para sistemas de ordem 1,
𝐾𝑣 =𝑠𝐾(𝑇𝑎𝑠+1)(𝑇𝑏𝑠+1)…
𝑠(𝑇1𝑠+1)(𝑇2𝑠 +1)…=K, para n=1
(40)

41
Para sistemas de ordem 2 ou superior,
𝐾𝑣 =𝑠𝐾(𝑇𝑎𝑠+1)(𝑇𝑏𝑠+1)…
𝑠𝑛(𝑇1𝑠+1)(𝑇2𝑠 +1)…=∞, para n ≥ 2
(41)
Em uma excitação em rampa, o erro estacionário pode ser resumido em:
𝑒𝑠𝑠 =1
𝐾𝑣= ∞, para sistemas de ordem zero
(42)
𝑒𝑠𝑠 =1
𝐾𝑣=
1
𝐾, para sistemas de primeira ordem
(43)
𝑒𝑠𝑠 =1
𝐾𝑣= 0, para sistemas de segundo ordem ou mais (44)
2.7.3 Erro a Parábola
O erro estacionário à uma excitação devido a uma parábola unitária dá-se por
(OGATA, 2003):
𝑒𝑠𝑠 = lim𝑠→0
𝑠
1 + 𝐺(𝑠)
1
𝑠³
Onde o coeficiente de erro estático de posição, 𝐾𝑎 , é definido como:
(45)
𝐾𝑎 = lim𝑠→0
𝑠²𝐺(𝑠) (46)
Sendo assim, o erro estacionário em ternos do coeficiente do erro
estático de aceleração, 𝐾𝑎, é expresso como:

42
𝑒𝑠𝑠 =1
𝐾𝑎
(47)
Para sistemas de ordem 0,
𝐾𝑣 =𝑠²𝐾(𝑇𝑎𝑠+1)(𝑇𝑏𝑠+1)…
(𝑇1𝑠+1)(𝑇2𝑠 +1)…=0, para n=0
(48)
Para sistemas de ordem 1,
𝐾𝑣 =𝑠²𝐾(𝑇𝑎𝑠+1)(𝑇𝑏𝑠+1)…
𝑠𝑛(𝑇1𝑠+1)(𝑇2𝑠 +1)…=0, para n=1
(49)
Para sistemas de ordem 2 ou superior,
𝐾𝑣 =𝑠²𝐾(𝑇𝑎𝑠+1)(𝑇𝑏𝑠+1)…
𝑠𝑛(𝑇1𝑠+1)(𝑇2𝑠 +1)…=K, para n ≥ 2
(50)
Para sistemas de ordem 3 ou superior,
𝐾𝑣 =𝑠²𝐾(𝑇𝑎𝑠+1)(𝑇𝑏𝑠+1)…
𝑠𝑛(𝑇1𝑠+1)(𝑇2𝑠 +1)…=∞, para n ≥ 3
(51)
Em uma excitação em parábola, o erro estacionário pode ser resumido em:
𝑒𝑠𝑠 =1
𝐾𝑎= ∞, para sistemas de ordem zero e ordem 1
(52)
𝑒𝑠𝑠 =1
𝐾𝑎=
1
𝐾, para sistemas de segunda ordem
(53)
𝑒𝑠𝑠 =1
𝐾𝑎= 0, para sistemas de terceira ordem ou mais
(54)

43
Na Tabela 2 abaixo tem-se uma síntese do apresentado acima com relação
ao erro estacionário em função do ganho K.
Tabela 2 – Erro Estacionário em Função do Ganho K
Entrada em
Degrau
Entrada em
Rampa
Entrada em
Aceleração
𝑟(𝑡) = 1 𝑟(𝑡) = 𝑡 𝑟(𝑡) = 1
2𝑡2
Sistema tipo 0 1
1 + 𝐾 ∞ ∞
Sistema tipo 1 0 1
𝐾 ∞
Sistema tipo 2 0 0 1
𝐾
Fonte: OGATA,2000, p. 231.
2.7.4 Ação do Ganho Integral no Erro Estacionário
Para eliminar o erro de off-set, desenvolveu-se uma unidade denominada
ação integral. A ação integral atua no processo ao longo do tempo enquanto existir
diferença entre o valor desejado e o valor adquirido. Assim, o sinal de correção é
integrado no tempo e por isto enquanto a ação proporcional atua de forma quase que
imediata quando ocorre um distúrbio em degrau, a ação integral vai atuar de forma
lenta até extinguir o erro. A grosso modo, o ganho integral atua melhorando a resposta
em regime permanente, tendendo a eliminar o erro de estado estacionário, entretanto
prejudica-se o regime transitório, pois acrescenta-se um polo ao sistema por
integrador adicionado tendendo a desestabilizar e com isso aumentar o tempo de
acomodação (OGATA,2003).

44
2.8 CONTROLE FUZZY
Os sistemas de controle foram desenvolvidos para fornecem uma resposta a
uma determinada entrada de acordo com sua função de transferência. A denominação
de sistemas inteligentes é dada aos sistemas que fornecem respostas que solucionam
problemas, em situações até mesmo novas ou inesperadas, fazendo com que o
comportamento destes sistemas seja único, podendo até ser considerado criativo
(SIMÕES; SHAW, 2007).
Até os dias atuais, a capacidade criativa dos seres humanos está muito além
da possibilidade de solução de problemas das máquinas computacionais, isso devido
ao fato de que as pessoas raciocinam de forma incerta, imprecisa, difusa ou nebulosa,
enquanto que as máquinas e computadores são movidos por raciocínio preciso e
binário. A eliminação de tal restrição faria com que as máquinas fossem inteligentes,
isto é, pudessem raciocinar da mesma maneira imprecisa, como os seres humanos.
Tal forma de raciocínio é chamada em inglês por fuzzy e é utilizada como sinônimo
de incerto, impreciso, difuso ou nebuloso (OLIVEIRA, 2008).
A lógica fuzzy (também referida como lógica nebulosa e em alguns casos por
teoria de possibilidades) se diferencia das demais por representar de forma inovadora
o manuseio de informações imprecisas. O autor Oliveira (2008) comenta que a lógica
fuzzy provê um método de traduzir expressões verbais, vagas, imprecisas e
qualitativas, comuns na comunicação humana em valores numéricos. Tal
característica possibilita converter a experiência humana em uma forma
compreensível pelos computadores. Pensando de forma prática, a lógica fuzzy
possibilita incluir a forma de pensar do operador humano ou do especialista no
processo em um controlador computadorizado para realizar o controle do processo
(OLIVEIRA, 2008).
2.8.1 Lógica Fuzzy versus Modelagem Matemática
As técnicas tradicionais de controle focam-se em obter um modelo idealizado
do processo a ser controlado, geralmente fazendo uso de equações diferenciais na

45
forma de transformadas de Laplace ou Z. Para obter modelos matemáticos mais
simples, adotam-se restrições ou particularidades ao sistema, como por exemplo, que
o processo é linear, ou seja, que variações nas entradas produzem variações
proporcionais nas saídas. Fazer o uso de tais restrições permite fazer o uso de
técnicas extremamente poderosas e conhecidas na área de engenharia e tecnologia,
com soluções analíticas ideais (OLIVEIRA, 2008).
Um conjunto fuzzy A definido no universo de discurso Z é caracterizado por
uma função de pertinência µA, a qual mapeia os elementos de X para o intervalo [0,1].
µA:X → [0,1] (55)
Desta forma, a função de pertinência associa a cada elemento x pertencente
a X, um número real µA(X) no intervalo [0,1], que representa o grau de pertinência do
elemento x ao conjunto A, insto é, o quanto é possível para o elemento x pertencer ao
conjunto A (PRATI, 2016).
Um conjunto fuzzy A em X é expresso como um conjunto e pares ordenados,
tal qual Figura 18 ilustra.
Figura 18 – Definição formal conjunto fuzzy Fonte: Prati (2016)

46
2.8.2 Fundamentos da Lógica Fuzzy
A lógica fuzzy tem sido bastante utilizada no controle de processos
sofisticados, pois tem como vantagem tornar requerimentos complexos serem
implementados em controladores simples, de manutenção facilitada e custo baixo.
Torna-se ainda mais vantajoso o uso desta lógica quando o modelo matemático do
sistema é complexo e sujeito a incertezas (STUCK, 2006).
Sistemas fuzzy são conhecidos por aproximarem a decisão computacional da
decisão humana, permitindo a operação de dispositivos através de decisões tais como
“próximo de”, “em torno de”, “muito alto” ou “muito baixo”. Esses sistemas, por serem
baseados em regras linguísticas, são recomendados para a solução de problemas
que possam ser descritos qualitativamente. Outra vantagem de sua utilização está na
independência da modelagem matemática e na capacidade de aproximação de
modelos complexos não lineares sem a necessidade do uso de software sofisticados
e de alto custo (CORRÊA, 2013).
De acordo com Pedrycz e Gomide (1998), o controlador fuzzy pode ser
representado e subdividido, conforme mostrado na Figura 19.
Figura 19 – Representação esquemática de um controlador fuzzy Fonte: Corrêa (2013)

47
Conforme a Figura 19, a descrição do diagrama esquemático é dada a seguir:
Interface de Fuzzificação: obtém os valores das variáveis de entrada,
faz um escalonamento para condicionar os universos de discurso,
transformando números em conjuntos fuzzy.
Base de Conhecimento: consiste de uma base de regras,
caracterizando a estratégia de estimação e suas metas.
Base de Dados: armazenam as definições necessárias sobre
discretização, definição de funções de pertinência e etc.
Procedimento de Inferência: processa os dados fuzzy de entrada,
juntamente com as regras, de modo a inferir as ações de saída fuzzy.
Interface de Defuzzificação: transforma as ações de saída fuzzy
inferidas em ações/respostas não fuzzy. Em seguida, efetua um
escalonamento de modo a compatibilizar os valores normalizados
vindos do passo anterior com os valores reais dos universos de
discurso das variáveis.
Processo: define-se como a planta que será empregado o controle
fuzzy.
Corrêa (2013) afirma que o controlador fuzzy permite a manipulação de
informações inexatas como também a modelagem de processos descritos
qualitativamente. Estas informações compõem uma família de conjuntos fuzzy que
representam as entradas e saídas do controle através de variáveis linguísticas. Em
geral, as principais características das variáveis linguísticas são:
Nome da variável linguística;
Os nomes dos termos linguísticos associados à variável: conjunto de
termos;
O domínio no qual cada variável linguística é definida: universo de
discurso;
Conjuntos fuzzy que representam cada valor pertencente aos
conjuntos de termos da variável linguística: função de pertinência.

48
De acordo com Vidal et al. (2012), a lógica fuzzy é composta por três etapas:
fuzzificação, inferência e defuzzificação. A seguir será abordado cada uma delas.
2.8.2.1 Fuzzificação
A primeira etapa de implementação de um controle fuzzy é a fuzzificação, esta
converte os dados iniciais de entrada em suas respectivas variáveis linguísticas.
(VIDAL et al., 2012).
Fuzzificação pode ser definida como o pré-processamento de categorias ou
classes do sinal de entrada, diminuindo o número de valores a serem processados
(SIMÕES; SHAW, 2007).
2.8.2.2 Inferência
Nesta etapa de inferência é onde ocorre a tomada de decisão. Von Altrock
(1996) afirma que esta fase pode ser dividida em dois elementos: Agregação e
Composição. A agregação é o conjunto de regras “se” que regerão o processo de
inferência e a composição o conjunto de regras “se-então”.
2.8.2.3 Defuzzificação
Na defuzzificação o valor da variável linguística de saída inferida na etapa de
inferência será traduzido para um número com o objetivo de obter um valor numérico
que melhor represente os valores fuzzy (SIMÕES; SHAW, 2007).

49
2.8.2.4 Variáveis linguísticas
As variáveis linguísticas assumem palavras representadas em conjuntos fuzzy
que representam seus valores. Um conjunto de variáveis linguísticas forma um
conjunto de termos. Como forma de ilustrar as variáveis linguísticas, usaremos o
exemplo da temperatura de determinado processo que pode ser uma variável
linguística assumindo valores: baixa, média e alta (VIDAL et al., 2012).
As variáveis linguísticas têm por objetivo sistematizar a caracterização
aproximada de fenômenos mal definidos, propiciando o processamento de sistemas
complexos para análise através de termos matemáticos (SIMÕES; SHAW, 2007).
2.8.2.5 Função de pertinência
Uma função de pertinência é uma curva que define o grau de pertinência (valor
entre 0 e 1) de cada entrada (OLIVEIRA, 2008). As funções de pertinência podem ter
diferentes formas, dependendo do conceito que se deseja representar e do contexto
que em que serão utilizadas (TANSCHEIT, 2016). Prati (2016) afirma que a função de
pertinência reflete o conhecimento que se tem em relação a intensidade com que o
objeto pertence ao conjunto fuzzy.
As funções de pertinência podem ser definidas a partir da experiência e da perspectiva
do usuário, mas usualmente utilizam-se as funções de pertinência padrão: triangular,
trapezoidal e Gaussiana (TANSCHEIT, 2016). De acordo com Simões (1999), os tipos
mais usuais na literatura de funções de pertinência associados aos conjuntos fuzzy
são triângulos e trapezóides, devido a serem gerados com facilidade. Existem também
as funções de pertinência do tipo Gaussiana e sigmóide, que são mais utilizadas em
casos onde um desempenho suave do controle é de importância crítica (CORRÊA,
2013).

50
2.8.2.6 Regras Fuzzy
Suetake et al. (2010) comenta que as regras fuzzy podem ser implementadas
com base no conhecimento especialista do processo, as quais são tratadas de forma
linguística na estrutura “se-então”. Em decorrência a este fato dispensa-se de
conhecimentos detalhados, precisos e até mesmo do modelo matemático
representativo da planta de controle.
As regras fuzzy baseadas na estrutura “se-então” são a forma mais comum
e mais utilizadas no projeto deste tipo de controle. A regra funciona da seguinte
maneira:
Se <antecedente> Então <consequente>
De forma que o antecedente possui condições que, quando satisfeitas
(mesmo que parcialmente), determinam o processamento do consequente através de
um mecanismo de inferência difusa. O disparo de uma regra ocorre quando o
processamento do antecedente para as entradas atuais gerou graus de pertinência
não nulos (TEDESCO e VASCONCELOS, 2016).
Já o consequente é composto por ações ou diagnósticos que são gerados
com o disparo da regra. Os consequentes das regras disparadas são processados em
conjunto para gerar uma resposta determinística para cada variável de saída do
sistema (TEDESCO e VASCONCELOS, 2016).

51
3 DESENVOLVIMENTO DO CONTROLE DO LIMPADOR DE PARA-BRISAS
Neste capítulo serão abordados os passos para o desenvolvimento dos
controladores PID e fuzzy aplicados no sistema limpador de para-brisas.
3.1 CONTROLADOR PID
O controle PID foi realizado através do software de simulação MATLAB
desenvolvido pela Mathworks. Para isso utilizou-se o método LGR (Lugar Geométrico
das Raízes). A planta a ser controlada foi definida através da função de transferência
do servomotor, já apresentada no capítulo 2 deste trabalho. O valor de 𝐾𝑖 foi alternado
de 0 a 800 para encontrar as melhores respostas do controlador aplicado na planta.
Como 𝐾𝑝 e 𝐾𝑑 são diretamente dependentes de 𝐾𝑖, a variação 𝐾𝑖 foi utilizada para
encontrar a região onde o PID tem melhor desempenho. Para isso, foi utilizado um
laço for para alternar os valores de 𝐾𝑖, consequentemente 𝐾𝑝 e 𝐾𝑑. Pois quanto maior
o valor de 𝐾𝑖 mais negativo se torna o polo e consequentemente o sistema obtém
uma melhor resposta. A seguir na Figura 20, demonstra-se o deslocamento dos polos
para a esquerda para o aumento dos valores de 𝐾𝑖.
A partir dos valores de 𝐾𝑖, das equações 27 e 28 apresentadas na seção 2.8
e dos critérios de projeto é possível determinar os valores de 𝐾𝑝 e 𝐾𝑑. Para cada valor
de 𝐾𝑖 gerado, os valores de 𝐾𝑝 e 𝐾𝑑 são modificados. O objetivo é fazer a análise
destes valores a fim de determinar a melhor resposta do sistema no domínio do tempo.

52
Figura 20 – Deslocamento negativo dos polos com aumento do ganho integral Ki
3.2 CONTROLADOR FUZZY
O controle fuzzy foi simulado também por meio do Simulink/MATLAB. O
diagrama de blocos do sistema de controle fuzzy pode ser visto na Figura 21. Para
implementar o controlador fuzzy foi utilizado o bloco “Fuzzy Logic Controller with
Ruleviewer” presente na biblioteca do Simulink no item “Fuzzy Logic Toolbox”.
Figura 21 – Layout do controle fuzzy

53
No bloco “Fuzzy Logic Toolbox” foram definidas duas entradas: o “Erro” e a
“Variação do Erro”. O “Erro” é a diferença entre a referência (neste caso, um degrau
unitário) e a saída do sistema. Já a “Variação do Erro” é gerada a partir da derivada
do “Erro”. Essa “Variação do Erro” tem como função indicar a tendência de
comportamento da variável “Erro”, ou seja, se a “Variação do Erro” tem valores
negativos indica que a saída do sistema é menor que o sinal de referência. Já o
contrário, “Variação do Erro” com valores positivos, indica que a saída do sistema é
maior que o sinal de referência. E a saída do controle foi definida como “Saída” e é a
atuação do controle na planta. Além disso, foi criada a variável “Controlador”, onde
foram definidas as regras. A implementação do controlador fuzzy usando o toolbox
pode ser vista na Figura 22.
Figura 22 – Controlador fuzzy com as variáveis de entrada e saída

54
3.2.1 Regras do Controle Fuzzy
As regras utilizadas neste trabalho foram baseadas nos estudos conduzidos
por C. C. Lee em 1990 e são apresentadas na Tabela 3.
Tanto as entradas como a saída fuzzy foram organizadas em cinco termos
linguísticos que abrangem o universo de discurso: NG (Negativo Grande), NP
(Negativo Pequeno), Z (Zero), PP (Positivo Pequeno) e PG (Positivo Grande). A
combinação dos termos linguísticos para as duas entradas, “Erro” e “Variação do
Erro”, geram uma “Saída” com estes parâmetros. Por exemplo, se o “Erro” for NG e a
“Variação do Erro” for NG, então a “Saída” é NG. Os termos linguísticos definidos
foram criados a fim de melhor representar o universo de discurso em pequenas
seções.
Tabela 3 – Combinação das Regras Fuzzy
VARIAÇÃO DO ERRO
ERRO NG (--) NP (-) Z (0) PP (+) PG (++)
NG (--) -- -- -- - 0
NP (-) -- -- - 0 +
Z (0) -- - 0 + ++
PP (+) - 0 + ++ ++
PG (++) 0 ++ ++ ++ ++
A combinação das regras apresentadas acima resulta em um conjunto de 25
regras que abrangem todo o universo de discurso. A definição das regras na variável
criada denominada “Controlador” é apresentada na Figura 23. Essa definição foi
criada com base na verificação da ativação das regras durante a simulação e
baseadas também no trabalho publicado por KANTAWONG e JANEPUMISART
(2014).

55
Figura 23 – Regras do Fuzzy
3.2.2 Universo de Discurso das Regras para as Entradas e Saída do Sistema
Para as duas entradas e a saída foram definidos intervalos numéricos em uma
escala para cada um dos cinco parâmetros criados (NG, NP, Z, PP e PG), isso é
denominado de universo de discurso. O ajuste do universo de discurso dos termos
linguísticas reflete na melhor definição do controle para a planta. Estes intervalos
foram ajustados de forma que o valor do erro em regime permanente seja nulo, da
mesma forma que acontece quando utilizado o controle PID.
Durante o projeto e ajuste dos termos linguísticas das entradas e saídas do
controle fuzzy, alguns comportamentos foram verificados durante a simulação. O
primeiro é que o sistema é extremamente sensível, logo, pequena alteração no valor
Regra 1. Se o erro é NG e a variação do erro é NG, então a saída é NG
Regra 2. Se o erro é NP e a variação do erro é NG, então a saída é NG
Regra 3. Se o erro é Z e a variação do erro é NG, então a saída é NG
Regra 4. Se o erro é PP e a variação do erro é NG, então a saída é NP
Regra 5. Se o erro é PG e a variação do erro é NP, então a saída é Z
Regra 6. Se o erro é NP e a variação do erro é NP, então a saída é NG
Regra 7. Se o erro é Z e a variação do erro é NP, então a saída é NP
Regra 8. Se o erro é NG e a variação do erro é NP, então a saída é NG
Regra 9. Se o erro é PP e a variação do erro é Z, então a saída é Z
Regra 10. Se o erro é PG e a variação do erro é Z, então a saída é PP
Regra 11. Se o erro é NG e a variação do erro é Z, então a saída é NG
Regra 12. Se o erro é NP e a variação do erro é Z, então a saída é NP
Regra 13. Se o erro é Z e a variação do erro é PP, então a saída é Z
Regra 14. Se o erro é PP e a variação do erro é PP, então a saída é PP
Regra 15. Se o erro é PG e a variação do erro é PP, então a saída é PG
Regra 16. Se o erro é NG e a variação do erro é PP, então a saída é NP
Regra 17. Se o erro é NP e a variação do erro é PP, então a saída é Z
Regra 18. Se o erro é Z e a variação do erro é PP, então a saída é PP
Regra 19. Se o erro é PP e a variação do erro é PP, então a saída é PG
Regra 20. Se o erro é PG e a variação do erro é PG, então a saída é PG
Regra 21. Se o erro é NG e a variação do erro é PG, então a saída é Z
Regra 22. Se o erro é NP e a variação do erro é PG, então a saída é PP
Regra 23. Se o erro é Z e a variação do erro é PG, então a saída é PG
Regra 24. Se o erro é PP e a variação do erro é PG, então a saída é PG
Regra 25. Se o erro é PG e a variação do erro é PG, então a saída é PG

56
de um termo linguístico de uma entrada reflete no sistema como um todo alterando o
valor final do erro e no tempo de estabilização. O segundo comportamento é que
somente os valores exatos apresentados a seguir para os termos linguísticos das
entradas e saída produzem o valor de erro nulo, qualquer variação mínima que ocorra
resulta em um sinal de erro.
A definição do universo de discurso para a entrada denominada “Erro” é
apresentada na Figura 24.
Figura 24 – Universo de discurso para a variável “Erro”
A definição do universo de discurso para a entrada “Variação do Erro” é
apresentada na Figura 25.
Figura 25 – Universo de discurso para a variável “Variação do Erro”
Já o universo de discurso para a variável “Saída” é apresentado na Figura 26.

57
Figura 26 – Universo de discurso para a variável “Saída”
O processo de defuzzificação, utilizando-se do método da centróide, é
apresentado na Figura 27.
Figura 27 – Processo de Defuzzificação
Na Figura 27 observa-se a ativação das 25 regras definidas para o sistema.
Na última linha da coluna referente a variável linguística saída tem-se o somatório das
regras ativadas no processo de inferência que será traduzido em um valor numérico
que melhor represente os valores fuzzy.

58
4 RESULTADOS OBTIDOS
Nesta seção serão apresentados os resultados obtidos com o uso das duas
técnicas de controle. Com o objetivo de comparar a técnica de controle PID com o
fuzzy, têm-se interesse nos valores do tempo de subida, o tempo de estabilização do
sistema, o tempo de pico e o erro em estado estacionário, pois são parâmetros que
interferem diretamente na performance do sistema.
O controle PID está diretamente relacionado com a planta a ser controlada,
seu projeto depende exclusivamente do modelo matemático da mesma. Logo,
podemos dizer que seu projeto é exclusivo para esta planta de controle. Os
parâmetros de simulação observados neste trabalho para o controle PID são
apresentados na Tabela 4. Nela observa-se que o sistema responde de forma muito
positiva as ações de controle produzidas.
Na figura 28 observa-se o deslocamento do polo dominante cada vez mais ao
semi plano esquerdo, consequentemente afastando do eixo imaginaria esse
afastamento do eixo imaginário aumenta a resposta do sistema.
Figura 28 – Mapeamento de Polos e Zeros do Controle PID
No controle fuzzy, o resultado obtido para o sistema é tal que o valor do erro
em regime permanente ou estado estacionário é nulo da mesma forma que acontece

59
com o controle PID. Por se tratar de um controle ajustado de forma empírica, o único
intervalo de valores no universo de discurso das variáveis linguísticas das entradas e
saídas do sistema que produzem o efeito de anular o erro de estado estacionário é o
exposto na seção 3.2.2.
Na Tabela 4 é comparada a resposta do controle PID com a do controle fuzzy
durante o controle do servomotor do limpador de para-brisas.
Tabela 4 – Comparação do Controle PID com o Controle Fuzzy
RESPOSTA DO SISTEMA CONTROLE
PID CONTROLE
FUZZY
Tempo de Subida [s] 0.0013 0,5729
Tempo de Estabilização [s] 0.0033 0,713
Tempo de Pico [s] 0.0166 0,7413
Erro em Estado Estacionário
0 0

60
5 CONSIDERAÇÕES FINAIS
Os autores concluem a partir do exposto nas seções anteriores que o controle
PID tem uma resposta consideravelmente mais rápida para o sistema quando
comparada com a resposta do controle fuzzy. Levanta-se a hipótese que isso
aconteceu devido a particularidade da planta controlada ser do tipo 0, que por sua vez
tem erro em regime estacionário nulo para qualquer valor de iK em resposta a uma
entrada de degrau unitário no controle PID. Isso permite que se utilize qualquer valor
de iK para obter os critérios de projeto e a melhor resposta do sistema. Portanto, a
aplicação do controle PID no servomotor é a mais adequada visto que o tempo de
resposta do sistema foi mais veloz e é uma técnica de controle amplamente utilizada
no meio industrial e bastante discutida no meio acadêmico, por causa de sua simples
implementação e grande aplicabilidade.
O controle fuzzy aqui projetado foi ajustado de forma empírica, ou seja, os
ajustes foram feitos de acordo com a percepção do projetista sobre a mudança no
universo de discurso de tal variável linguística produz uma melhor resposta ao
sistema. Porém, com a padronização de algum método de projeto ou até mesmo o
desenvolvimento de um algoritmo que automatize o projeto do controle fuzzy permite
testar novas configurações das variáveis linguísticas e obter novos resultados que
podem ser melhores para o sistema.
O limpador de para-brisas automático ainda é pouco difundido nos automóveis
brasileiros, é visto somente em versões de maior valor agregado. Acredita-se que isso
mude com o passar do tempo e possa se tornar item obrigatório em todos modelos
comercializados no país, visto que é um item de segurança e pode contribuir com a
redução nos índices de acidentes automobilísticos. Recentemente isso aconteceu
com os freios ABS e air bags.
Como sugestão de trabalhos futuros, os autores sugerem fazer a
implementação física do sistema a fim de comprovar os resultados. Também sugere-
se fazer uso de outras técnicas de controle como o fuzzy-PID.

61
REFERÊNCIAS
ALAZZAWI, Lubna; CHAKRAVARTY, Avik. DESIGN AND IMPLEMENTATION OF A RECONFIGURABLE AUTOMATIC RAIN SENSITIVE WINDSHIELD WIPER. International Journal of Advances in Engineering & Technology, v. 8, n. 2, p. 73, 2015. BAZANELLA, Alexandre S.; SILVA JR, JMG da. Ajuste de controladores PID. Apostila do Curso de Extensão, Departamento de Engenharia Elétrica, Universidade Federal do Rio Grande do Sul. Porto Alegre, 1999. BOSCH, R. Manual de Tecnologia Automotiva. São Paulo: Edgard Blücher, 2005. BOSCH. Automotive Handbook. 5.ed. Robert Bosch GmbH, 2000. p. 770 – 775. CONSELHO NACIONAL DE TRÂNSITO. Resolução n. 224, de 9 de fevereiro de 2006. CORRÊA, Fernanda. Desenvolvimento e Análise de Estratégias de Gerenciamento de Potência em Veículo Elétrico Híbrido de Configuração Paralela. 2013. Tese de Doutorado. Universidade Estadual de Campinas, Campinas. (Estados Unidos da América Patente Nº US743801 A, 1903) (Estados Unidos da América Patente Nº US1797977 A, 1924) EUROPEAN COMISSION. ECC/78/318: Wiper and washer systems of motor vehicles. 1978. 32p. FAGERVALL, M.; NYMAN, M. Optimal windshield cleaning performance. Gothenburg, 2000. 64f. . FEDERAL MOTOR VEHICLE SAFETY. FMVSS 517.104: Windshield wiping and washing systems. 1971. 3p. FITZGERALD, A. E.; KINGSLEY JR., Charles; KUSKO, Alexander. Máquinas Elétricas. São Paulo: McGraw-Hill, 1975-1978. 623 p.

62
GOES, Maury Gonçalves de. PERCEPÇÃO DO CLIENTE QUANTO A ITENS DE SEGURANÇA VEÍCULAR - eficiência do sistema do limpador de pára-brisa. 2003. Monografia de MBA. Universidade de Taubaté, Taubaté. GRENOULLIAT, R. e C. LEBLANC. “Simulation of Mechanical Pressure in a Rubber-Glass Contact for Wiper Systems.” SAE Technical Paper Series (2002): 11. GRENOULLIAT, R. e C. LEBLANC. "Simulation of Chatter Vibrations for Wiper System." SAE Technical Paper Series (2002): 9. GUERRA, Wladimir de Andrade, 2009, Implementação de Controle Proporcional, Integral e Derivativo Digital em Controladores Lógico Programáveis, Universidade Federal de Pernambuco (UFPE), BRASIL. INSTITUTO ALEMÃO PARA NORMALIZAÇÃO Fixação por cone serrilhado, instalações para limpador de para-brisas para veículos rodoviários: DIN 72783. Rio de Janeiro: 1997. 6p. JARAJREH, M.; NORTCLIFFE, A.L.; GREEN, R. “Fuzzy logic and equivalent circuit approach to rain measurement”, Electronic letters, vol. 40, no. 24, pp. 1533 – 1534, 2004. KANTAWONG, Songkran; JANEPUMISART, Nontawat. Single wiper blade with new single link arm mechanism design using fuzzy-PID control system. In: Knowledge and Smart Technology (KST), 2014 6th International Conference on. IEEE, 2014. p. 63-68. KOLLMORGEN. Servo Motor. Disponível em: <http://www.kollmorgen.com/pt-br/products/motors/servo/servomotores/>. Acesso em: 15 abr. 2016. KYOO N.C., “Omni-directional rain sensor utilizing scattered light reflection by water particle on automotive windshield glass”, IEEE sensors, pp. 1728-1731, 2011. MACIEL, Patrícia Paula Braga. Estudo do Sistema Limpador de Para-Brisa Automotivo com Palhetas Tipo Flat. 2010. Dissertação de Mestrado, Escola Politécnica da Universidade de São Paulo, São Paulo. LEE, Chuen-Chien. Fuzzy logic in control systems: fuzzy logic controller. II.IEEE Transactions on systems, man, and cybernetics, v. 20, n. 2, p. 419-435, 1990.

63
MACIEL, P. P. B. Estudo do sistema limpador de para-brisa automotivo equipado com palhetas tipo flat. 2010. 110 f. Trabalho de conclusão de curso (Mestrado Profissional em Engenharia Automotiva) – Escola Politécnica da Universidade de São Paulo, São Paulo, 2010. MUKUL. J.; KAUTUBH, J.; SONAWANE, D. N.; VINAYAK, S.; JOSHI, M. A. “A novel and cost effective resistive rain sensor for automatic wiper control: circuit modelling and implementation”, Seventh international conference on sensing technology (ICST), pp. 40-45, 2013. NICE, K. How Windshield Wipers Work. Disponível em: <http://auto.howstuffworks.com/wiper.htm>. Acesso em: 02 fev. 2016. NIPON WIPER BLADE CO, LTDA. Saitama-Ken, Japão. Fabricante de limpadores de para-brisa. Disponível em: <http://www.nwb.co.jp/e/e_index5.html>. Acesso em: 22 dez. 2009. OGATA, K.; Engenharia de Controle Moderno. Prentice Hall Brasil, 4ª edição, 2003. OLIVEIRA, Ives Soares de. Controle Fuzzy PI de Temperatura num Modelo de Edificação em Escasa Reduzida. 2008. Trabalho de Conclusão de Curso, Universidade Federal de Ouro Preto, Ouro Preto. OTTOBONI, A. Servo Acionamentos. Revista Mecatrônica Atual. Edição N° 6. Outubro 2002. Disponível em: <http://www.mecatronicaatual.com.br/educacao/1038-servo-acionamentos>. Acesso em: 01 jun. 2016. PEDRYCZ, W.; GOMIDE, F. An introduction to fuzzy sets: analysis and design. [S.l.]: the MIT Press, 1998. POFFENBERGER, Albert T. Robert Sessions Woodworth: 1869-1962. 1962. POLÍCIA RODOVIÁRIA FEDERAL. Balanço de Atividades 2014. Disponível em: <https://www.prf.gov.br/portal/noticias/nacionais/prf-balanco-de-atividades-2014>. Acesso em: 03 fev. 2016. PRATI, R. C. Sistemas Fuzzy. Disponível em: <http://professor.ufabc.edu.br/~ronaldo.prati/InteligenciaArtificial/AulaFuzzy.pdf>. Acesso em: 01 jun. 2016. REZENDE, J. A. D.; MAITELLI, André Laurindou. In: Simpósio Brasileiro de Automação Inteligente. 1999. p. 8-10.

64
SOCIETY OF AUTOMOTIVE ENGINEERS. SAE J903: Passenger Car Windshield Wiper Systems. 1999. 13p. SIMÕES, M. G; SHAW, I. S. Controle e modelagem fuzzy. 1ª ed. São Paulo: Editora Edgard Blücher Ltda., 2007. SOCIETY OF AUTOMOTIVE ENGINEERS. SAE J903: Passenger Car Windshield Wiper Systems. 1999. 13p. SOSA CARDOZA, Jorge Alexsander. Sensores de Imagem Digitais CCD E CMOS. In: VII CONNEPI-Congresso Norte Nordeste de Pesquisa e Inovação. 2012. SOUZA, Josue da Silva; BATISTA LOPES, José Soares. Implementação de um Controlador Fuzzy para um Sistema de Controle de Nível. In: VII CONNEPI-Congresso Norte Nordeste de Pesquisa e Inovação. 2012. STUCK, Bruno Moreno. Controle do Conforto Luminoso e Térmico de um Ambiente. 2006. Trabalho de Conclusão de Curso. Universidade Federal de Ouro Preto, Ouro Preto. SUETAKE, M.; DA SILVA, I. N.; GOEDTEL, A. Sistema Fuzzy Compacto Embarcado em DSP e sua aplicação para Controle V/F de Motores de Indução. Revista Controle & Automação, v. 21, n. 3, p. 245-259, 2010. TANSCHEIT, R. Sistemas Fuzzy. Disponível em: <http://paginapessoal.utfpr.edu.br/sumar/ensino/sistemas-fuzzy/sistemas-fuzzy/ICA-Sistemas%20Fuzzy.pdf>. Acesso em: 01 jun. 2016. TEDESCO, Patricia; VASCONCELOS, Germano. Lógica Difusa. Disponível em: <http://www.cin.ufpe.br/~%EEf684/EC/2010-1/>. Acesso em: 1 jun. 2016. UNITED STATES PATENT AND TRADE MARK OFFICE. Disponível em: < http://www.uspto.gov/>. Acesso em: 22 Dez. 2009. VIDAL, Leonardo de Carvalho; LANDIM, Wellington Carlos de Almeida; COSTA, Alessandro Pires. Aplicação de Lógica Fuzzy no Controle de Plantas Industriais In IX Simpósio de Excelência em Gestão e Tecnologia, 15f., 2012.

65
VON ALTROCK, Constantin. Fuzzy logic and neuroFuzzy applications in bussines and finance. New Jersey: Prentice Hall PTR, 1996. WESCOTT, Tim. PID without a PhD. Embedded Systems Programming, v. 13, n. 11, p. 1-7, 2000. YISHAY, N. “Differential windshield capacitive rain sensor”, Google patents: US 6373263 B1, 2002.