Embed Size (px)
Citation preview

Estudos de Controle – Revisão
1

Transformada de Laplace
• Método operacional para solucionar equações diferenciais linerares porque fornece simplificações.
𝐹 𝑠 = 𝑓(𝑡)𝑒−𝑠𝑡 𝑑𝑡∞
0
𝑓 𝑡 =1
2𝜋𝑗 𝐹(𝑠)
𝑐+∞
𝑐−∞
𝑒𝑠𝑡 𝑑𝑠
2

Transformada de Laplace
• Propriedades importantes:
• 𝑇𝐿 𝐴𝑓 𝑡 = 𝐴𝐹 𝑠
• 𝑇𝐿 𝐴𝑓 𝑡 + 𝐵𝑔 𝑡 = 𝐴𝐹 𝑠 + 𝐵𝐺(𝑠)
• 𝑇𝐿𝑑
𝑑𝑡𝑓 𝑡 = 𝑠𝐹 𝑠 − 𝑓(0)
• 𝑇𝐿 𝑓 𝑡 𝑑𝑡 =𝐹 𝑠
𝑠+
𝑓−1(0)
𝑠
• 𝑇𝐿(𝑓1 𝑡 ∗ 𝑓2 𝑡 ) = 𝐹1 𝑠 𝐹2 𝑠
3

Função de Transferência
• Caracterizam as relações de entrada e saída dos sistemas.
• Geralmente escritas por equações diferenciais lineares invariantes no tempo.
𝐺 𝑠 =𝑌(𝑠)
𝑋(𝑠)
4

Diagrama de Blocos
• Representação gráfica das funções desempenhadas por cada componente e o fluxo de sinais entre eles.
• Diagrama de blocos de um sistema de malha fechada:
• Função de transferência de malha aberta: 𝐵(𝑠)
𝐸(𝑠)= 𝐺 𝑠 𝐻(𝑠)
• Função de transferência de malha fechada: 𝐶(𝑠)
𝑅(𝑠)=
𝐺(𝑠)
1 + 𝐺 𝑠 𝐻(𝑠) 5

Espaço de Estados
• Estado é o menor conjunto de variáveis de estado que determinam completamente o comportamento do sistema.
• Equação de estado: 𝒙 𝑡 = 𝒇 𝒙, 𝒖, 𝑡
• Equação de saída: 𝒚 𝑡 = 𝒈 𝒙, 𝒖, 𝑡
• Linearização: 𝒙 𝑡 = 𝑨 𝑡 𝒙 𝑡 + 𝑩 𝑡 𝒖(𝑡) 𝒚 𝑡 = 𝑪 𝑡 𝒙 𝑡 + 𝑫 𝑡 𝒖(𝑡)
6

Espaço de Estados
• Para sistemas invariantes no tempo: 𝒙 𝑡 = 𝑨𝒙 𝑡 + 𝑩𝒖(𝑡) 𝒚 𝑡 = 𝑪𝒙 𝑡 + 𝑫𝒖(𝑡)
• Podemos obter a função de transferência:
𝐺 𝑠 =𝑌(𝑠)
𝑈(𝑠)= 𝑪 𝒔𝑰 − 𝑨 −1𝑩 + 𝐷
7

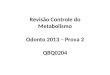
Exemplo: Controle de Pitch
• Forças e sistemas de coordenadas de um avião:
• Assumindo:
• Movimento estacionário (cruzeiro) com velocidade e altitude constante;
• Mudanças no pitch não afetam a velocidade da aeronave;
8

Exemplo: Controle de Pitch
• Com as simplificações, as equações que descrevem o pitch ficam da seguinte forma:
𝛼 = 𝜇𝜏𝜎 − 𝐶𝐿 + 𝐶𝐷 𝛼 +1
𝜇 − 𝐶𝐿𝑞 − 𝐶𝑊 sin 𝛾 𝜃 + 𝐶𝐿
𝑞 =𝜇𝜏
2𝑖𝑦𝑦 𝐶𝑀 − 𝜗 𝐶𝐿 + 𝐶𝐷 𝛼
+ 𝐶𝑀 + 𝜎𝐶𝑀 1 − 𝜇𝐶𝐿 𝑞 + 𝜗𝐶𝑊 sin 𝛾 𝛿
𝜃 = 𝜏𝑞
9

Exemplo: Controle de Pitch
• Para simplificar vamos usar valores numéricos das constantes do avião da Boeing:
𝛼 = −0.313𝛼 + 56.7𝑞 + 0.232𝛿
𝑞 = −0.0139𝛼 − 0.426𝑞 + 0.203𝛿
𝜃 = 56.7𝑞
• Com isso, encontrar a função de transferência e construir o modelo do espaço de estados.
10

Exemplo: Controle de Pitch
• Função de Transferência:
𝐺 𝑠 = 𝜃(𝑠)
𝛿(𝑠)=
1.151𝑠 + 0.1774
𝑠3 + 0.739𝑠2 + 0.921𝑠
11

Exemplo: Controle de Pitch
• Modelo de estados:
𝛼 𝑞
𝜃 =
−0.313 56.7 0−0.0139 −0.426 0
0 56.7 0
𝛼𝑞𝜃
+0.2320.0203
0𝛿
𝑦 = 0 0 1
𝛼𝑞𝜃
12

Linearização
• Permite analisar a resposta para duas entradas simultâneas considerando entradas individualmente e somando os resultados (princípio da superposição).
• Aproximação de um sistema não-linear para um sistema linear pode ser feita se:
• O sistema operar em torno de um ponto de equilíbrio;
• Sinais envolvidos forem pequenos. 13

Linearização
• Utilização da expansão da série de Taylor e retenção apenas do termo linear:
𝑦 = 𝑓 𝑥
𝑦 = 𝑓 𝑥 +𝑑𝑓
𝑑𝑥𝑥 − 𝑥
𝑦 = 𝑦 + 𝐾 𝑥 − 𝑥 , 𝑜𝑛𝑑𝑒 𝐾 =𝑑𝑓
𝑑𝑥 𝑥=𝑥
(𝑦 − 𝑦 ) = 𝐾 𝑥 − 𝑥
• A equação final fornece um modelo matemático linear próximo do ponto de operação 𝑥 − 𝑥 𝑒(𝑦 − 𝑦 )
14

Linearização
• O mesmo vale para duas entradas: 𝑦 − 𝑦 = 𝐾1 𝑥1 − 𝑥 1 + 𝐾2 𝑥2 − 𝑥 2
onde,
𝐾1 =𝜕𝑓
𝜕𝑥1 𝑥1=𝑥 1,𝑥2=𝑥 2
𝐾2 =𝜕𝑓
𝜕𝑥2 𝑥1=𝑥 1,𝑥2=𝑥 2
15