Embed Size (px)
DESCRIPTION
Flexible Sensorimotor Strategies using Muscle Synergies. ارائه كننده: علي فلكي استاد : جناب دكتر توحيدخواه. مقدمه. سيستم حركتي انسان سينرجي (تعريف) روشهاي استخراج سينرجيها وجود عدم قطعيت در سيستم عصبي حركتي و نياز به مدل دروني كنترل بهينه پسخوري تئوري مانيفولد كنترل نشده - PowerPoint PPT Presentation
Citation preview

11
Flexible Sensorimotor Flexible Sensorimotor Strategies using Muscle Strategies using Muscle
SynergiesSynergies
ارائه كننده: علي فلكيارائه كننده: علي فلكي
استاد : جناب دكتر توحيدخواهاستاد : جناب دكتر توحيدخواه

22
مقدمهمقدمه
سيستم حركتي انسانسيستم حركتي انسان)سينرجي )تعريف(سينرجي )تعريفروش هاي استخراج سينرجي هاروش هاي استخراج سينرجي ها وجود عدم قطعيت در سيستم عصبي حركتي و نياز به وجود عدم قطعيت در سيستم عصبي حركتي و نياز به
درونيدروني مدلمدلكنترل بهينه پس خوريكنترل بهينه پس خوريتئوري مانيفولد كنترل نشدهتئوري مانيفولد كنترل نشدهكنترل حركت توسط سينرجي هاي عضالنيكنترل حركت توسط سينرجي هاي عضالني

33
سيستم حركتي انسانسيستم حركتي انسان
:برخي ويژگي هاي سيستم حركتي انسان:برخي ويژگي هاي سيستم حركتي انسان
يادگيري و تطابقيادگيري و تطابق درجات آزادي فراوان درجات آزادي فراوان وجود عدم قطعيت در سيستم حسي و وجود عدم قطعيت در سيستم حسي و
حركتيحركتي تكرارپذيري و قابليت اطمينان دستيابي به تكرارپذيري و قابليت اطمينان دستيابي به
اهداف حركتياهداف حركتيتفاوت حركت ها در جزئياتتفاوت حركت ها در جزئياتوجود نويز در سيگنال حسي و حركتيوجود نويز در سيگنال حسي و حركتي

44
مشكل درجات آزاديمشكل درجات آزاديمثال براي حركت دست در صفحه افقمثال براي حركت دست در صفحه افق
22 متغير زواياي مفصل، متغير زواياي مفصل، 22متغيرهاي فضاي حالت: متغيرهاي فضاي حالت: متغير براي متغير براي 66متغير سرعت زاويه اي مفاصل و متغير سرعت زاويه اي مفاصل و
فعاليت ماهيچه هافعاليت ماهيچه ها
براي مدل نسبتا كاملي از دست )شامل مچ و براي مدل نسبتا كاملي از دست )شامل مچ و ماهيچه درنظر ماهيچه درنظر 5050 مفصل و مفصل و 1010انگشتان( اگرانگشتان( اگر
7070گرفته شود، تعداد متغيرهاي حالت به گرفته شود، تعداد متغيرهاي حالت به مي رسد.مي رسد.
در اين فضاي كنترلي به دليل بعد باالي فضاي در اين فضاي كنترلي به دليل بعد باالي فضايحالت، با مشكل دردسر بعد زياد مواجه حالت، با مشكل دردسر بعد زياد مواجه
مي باشيم.مي باشيم.

55
مشكل درجات آزادي )ادامه(مشكل درجات آزادي )ادامه(
روش هاي پيشنهاد شده براي حل مشكل روش هاي پيشنهاد شده براي حل مشكلدرجات آزادي:درجات آزادي:
( استراتژي حذف كردن )استراتژي حذف كردنBernstein 1967, Newell Bernstein 1967, Newell
1991, Vereijken et al. 19921991, Vereijken et al. 1992)) استفاده از روش هاي بر مبناي بهينه سازي استفاده از روش هاي بر مبناي بهينه سازي
((Mussa- Ivaldi 1991, Mussa- Ivaldi 1991, Rosenbaum et al. 1995Rosenbaum et al. 1995, Todorov , Todorov
2002,20042002,2004)) سينرجي )در سطح نيروها، واحدهاي سينرجي )در سطح نيروها، واحدهاي
,Mussa-Ivaldi et al. 1994,Mussa-Ivaldi et al. 1994)) موتوري و ماهيچه ها(موتوري و ماهيچه ها(Thoroughman & shadmehr 2000, Todorov 2002, Cheung Thoroughman & shadmehr 2000, Todorov 2002, Cheung
2007, Latash et al. 20102007, Latash et al. 2010 ))

بلوك هاي حركتي اوليهبلوك هاي حركتي اوليه
بلوك هاي حركتي بر مبناي ايده اي است كه بلوك هاي حركتي بر مبناي ايده اي است كه خروجي حركتي ساختاري ماجوالر داردخروجي حركتي ساختاري ماجوالر دارد
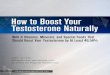
ميدان هاي نيروميدان هاي نيرو1.1.تحريك الكتريكي نخاع منجر به فعاليت ماهيچه اي تحريك الكتريكي نخاع منجر به فعاليت ماهيچه اي 1.1.
شده كه در نقطه خاصي به تعادل مي رسدشده كه در نقطه خاصي به تعادل مي رسد
تحريك همان نقطه در وضعيت هاي مختلف عضو تحريك همان نقطه در وضعيت هاي مختلف عضو 2.2.منجر به اندازه و جهت هاي انقباضي متفاوتي منجر به اندازه و جهت هاي انقباضي متفاوتي
مي شود كه به يك نقطه همگرا استمي شود كه به يك نقطه همگرا است
حركت به صورت تركيب اين ميدان ها ايجاد مي شودحركت به صورت تركيب اين ميدان ها ايجاد مي شود3.3.

A و :B ميدان نيروي ناشي از تحريك
دو نقطه متفاوت از نخاع
C ميدان محاسبه :شده براي تحزيك
B و Aتوام
D ميدان واقعي :ناشي از تحريك
B و Aتوام

88
تعاريف متفاوت سينرجيتعاريف متفاوت سينرجي
دو ماهيچه با عملكرد مشابه را ماهيچه هاي دو ماهيچه با عملكرد مشابه را ماهيچه هايسينرجيك و ماهيچه هاي با عملكرد مخالف را سينرجيك و ماهيچه هاي با عملكرد مخالف را
((Kandel et al. 2000Kandel et al. 2000آنتاگونيست گويند )آنتاگونيست گويند ) ماهيچه هايي كه براي رفتاري خاص، با يكديگر ماهيچه هايي كه براي رفتاري خاص، با يكديگر
فعال مي شوند را تحت يك سينرجي دسته بندي فعال مي شوند را تحت يك سينرجي دسته بندي (. در اين تعريف تنها از (. در اين تعريف تنها از Smith et al. 1985Smith et al. 1985مي كنند )مي كنند )
زمان شروع و پايان براي تعيين سينرجي ها زمان شروع و پايان براي تعيين سينرجي ها استفاده مي شود.استفاده مي شود.

99
تعاريف متفاوت سينرجي )ادامه(تعاريف متفاوت سينرجي )ادامه(
استخراج سينرجي ها از داده هاي استخراج سينرجي ها از داده هايEMGEMG چند كاناله چند كاناله ,PCAPCA ((Shemmell et al. 2005, Shemmell et al. 2005با استفاده از با استفاده از
Krishnamoorthy et al. 2003Krishnamoorthy et al. 2003)) يا يا ICAICA ))Hyvarinen & Oja Hyvarinen & Oja
2000, Hart &Giszter 20042000, Hart &Giszter 2004((.. در اين تعريف يك در اين تعريف يك ماهيچه مي تواند متعلق به چندين سينرجي ماهيچه مي تواند متعلق به چندين سينرجي
باشد.باشد.
در اين تعريف سينرجي، تعادلي ميان پروفايل در اين تعريف سينرجي، تعادلي ميان پروفايل فعاليت چندين ماهيچه است.فعاليت چندين ماهيچه است.

1010
تعاريف متفاوت سينرجي )ادامه(تعاريف متفاوت سينرجي )ادامه(
مشابه تعريف قبل، هر سينرجي نمايش تعادلي مشابه تعريف قبل، هر سينرجي نمايش تعادليميان پروفايل فعاليت ماهيچه ها است. فرق ميان پروفايل فعاليت ماهيچه ها است. فرق
اين تعريف با تعريف قبل، اين است كه فرض اين تعريف با تعريف قبل، اين است كه فرض مي شود كه مولفه هاي سينرجي و نيز ضرايب مي شود كه مولفه هاي سينرجي و نيز ضرايب
& d’Avella 2000, Ting & d’Avella 2000, Tingفعاليت آنها مثبت هستند. )فعاليت آنها مثبت هستند. )
Mcpherson 2005, Cheung et al. 2005Mcpherson 2005, Cheung et al. 2005))
تعداد سينرجي هاي بدست آمده در دو تعريف تعداد سينرجي هاي بدست آمده در دو تعريف 22اخير، كمتر از تعداد بدست آمده از تعريف اخير، كمتر از تعداد بدست آمده از تعريف
(.(.Krouchev et al. 2006Krouchev et al. 2006است )است ) در تعريف هاي باال، سينرجي ها سنكرون فرض در تعريف هاي باال، سينرجي ها سنكرون فرض
شده اند كه مي توانند متغير با زمان نيز باشند. شده اند كه مي توانند متغير با زمان نيز باشند. ((d’Avella et al. 2006d’Avella et al. 2006))

1111
تعاريف متفاوت سينرجي )ادامه(تعاريف متفاوت سينرجي )ادامه(
تعريف قبل است. تعريف قبل است. 22اين تعريف نيز مشابه با اين تعريف نيز مشابه با سينرجي ها، گروه هايي از المان ها هستند كه سينرجي ها، گروه هايي از المان ها هستند كه
متغير عملكردي خاصي را پايدار مي سازند )در متغير عملكردي خاصي را پايدار مي سازند )در ( استفاده شده است ( استفاده شده است UCMUCMاين حالت از تئوري اين حالت از تئوري
كه در صفحات بعد توضيح داده شده است. كه در صفحات بعد توضيح داده شده است. ((Krishnamoorthy et al. 2003, Asaka et al. 2008, Krishnamoorthy et al. 2003, Asaka et al. 2008,
Marieke et al. 2011Marieke et al. 2011 ))

1212
سينرجيسينرجي سينرجي ماهيچه اي: فعاليت منسجم، زماني و سينرجي ماهيچه اي: فعاليت منسجم، زماني و
مكاني مجموعه اي از ماهيچه ها در ارتباط با مكاني مجموعه اي از ماهيچه ها در ارتباط با يكديگر به منظور پايدار ساختن متغير عملكردي يكديگر به منظور پايدار ساختن متغير عملكردي
خاصخاص پروفايل فعاليت ماهيچه اي از تركيب اين سينرجي ها پروفايل فعاليت ماهيچه اي از تركيب اين سينرجي ها
)شيفت زماني و ميزان فعاليت( ايجاد مي شود )شيفت زماني و ميزان فعاليت( ايجاد مي شود

1313
سينرجيسينرجيمزيت هاي استفاده از سينرجي در كنترل حركت:مزيت هاي استفاده از سينرجي در كنترل حركت:
كاهش افزونگي به دليل محدود ساختن كاهش افزونگي به دليل محدود ساختنمجموعه الگوهاي ماهيچه اي قابل دسترسمجموعه الگوهاي ماهيچه اي قابل دسترس
حذف الگوهاي ماهيچه اي خاص كه منجر به حذف الگوهاي ماهيچه اي خاص كه منجر بهحركات ناهماهنگ مي شوند به دليل فعاليت حركات ناهماهنگ مي شوند به دليل فعاليت
گروهي ماهيچه هاگروهي ماهيچه ها ساده ساختن تعميم دهي كنترل حركت ساده ساختن تعميم دهي كنترل حركت
بااستفاده از اصالح ميزان و نحوه فعاليت بااستفاده از اصالح ميزان و نحوه فعاليت مجموعه ثابتي از سينرجي ها مجموعه ثابتي از سينرجي ها
نگاشتي مابين اهداف حركتي )در سطح نگاشتي مابين اهداف حركتي )در سطحانجام حركت( و دستورات حركتي )در سطح انجام حركت( و دستورات حركتي )در سطح
فرمان هاي مغزي(فرمان هاي مغزي(

1414
روش هاي استخراج سينرجي هاروش هاي استخراج سينرجي ها داده هاي عملي عمدتا بسيار پيچيده و با بعد باال داده هاي عملي عمدتا بسيار پيچيده و با بعد باال
هستند. از روش هاي جداسازي ماتريسي به هستند. از روش هاي جداسازي ماتريسي به منظور تعيين زيرفضاي اصلي مربوط به داده منظور تعيين زيرفضاي اصلي مربوط به داده
واقعي مي توان استفاده كرد.واقعي مي توان استفاده كرد.برخي روش هاي مطرح در استخراج سينرجي هابرخي روش هاي مطرح در استخراج سينرجي ها
ICA )ICA )Bell & Sejnowski 1995, Kargo & Nitz 2003, Hart & Bell & Sejnowski 1995, Kargo & Nitz 2003, Hart &
Giszter 2004Giszter 2004(( PCA )PCA )Jolliffe 2002, Krishnamoorthy et al. 2003,Jolliffe 2002, Krishnamoorthy et al. 2003, Shemmell et Shemmell et
al. 2005al. 2005(( Nonnegative Matrix Factorization Nonnegative Matrix Factorization )Lee & Seung 1999, )Lee & Seung 1999,
Tresch et al. 2006, Cheung 2007, Cheung et al. 2009(Tresch et al. 2006, Cheung 2007, Cheung et al. 2009( UCM UCM )Scholz & Schoner 1999, Asaka et al. 2008, Marieke et )Scholz & Schoner 1999, Asaka et al. 2008, Marieke et
al. 2011(al. 2011(

1515
نحوه تعيين سينرجي هاي ماهيچه اينحوه تعيين سينرجي هاي ماهيچه اي
ثبت ثبتEMGEMG از تعدادي ماهيچه در طي انجام حركتي از تعدادي ماهيچه در طي انجام حركتي خاصخاص
تعيين مجموعه اي از سينرجي ها )بردارهاي پايه تعيين مجموعه اي از سينرجي ها )بردارهاي پايهاصلي( با استفاده از روش هاي تجزيه ماتريسي اصلي( با استفاده از روش هاي تجزيه ماتريسي
چون تجزيه غيرمنفي ماتريس يا آناليز مولفه هاي چون تجزيه غيرمنفي ماتريس يا آناليز مولفه هاي مجزامجزا
،ارزيابي: آيا مجموعه سينرجي ها مي توانند به خوبي، ارزيابي: آيا مجموعه سينرجي ها مي توانند به خوبي هاي ثبت شده( را توصيف هاي ثبت شده( را توصيف EMGEMGپايگاه داده اوليه )پايگاه داده اوليه )
كنند؟كنند؟ ارتباط مابين سينرجي هاي استخراج شده و ارتباط مابين سينرجي هاي استخراج شده و
متغيرهاي موردنظر سيستم عصبي حركتيمتغيرهاي موردنظر سيستم عصبي حركتي

1616
الگوريتم تجزيه غيرمنفي ماتريس الگوريتم تجزيه غيرمنفي ماتريس ((NMFNMF))
سينرجي هاي به دست آمده از سينرجي هاي به دست آمده ازPCAPCA و يا و يا ICAICA حالتي جامع دارند يعني مولفه هاي غيرصفر براي حالتي جامع دارند يعني مولفه هاي غيرصفر براي
بيشتر ماهيچه هاي درگير وجود دارند.بيشتر ماهيچه هاي درگير وجود دارند. با استفاده از روش با استفاده از روشNMFNMF سينرجي هاي مشترك ، سينرجي هاي مشترك ،
بين حركت هاي متفاوت و سينرجي هاي خاص هر بين حركت هاي متفاوت و سينرجي هاي خاص هر حركت را مي توان همزمان تعيين نمود. حركت را مي توان همزمان تعيين نمود.
)الگوريتم بروز رساني به صورت ضرب شونده()الگوريتم بروز رساني به صورت ضرب شونده(NMFNMF با داشتن ماتريس غيرمنفي با داشتن ماتريس غيرمنفيVV ماتريس هاي ، ماتريس هاي ،
rr را به دست مي آورد كه: ) را به دست مي آورد كه: )HH و و WWغيرمنفي غيرمنفي انتخاب مي شود انتخاب مي شود mm و و nnكوچك تر از كوچك تر از
mrrnmn HWV

1717
الگوريتم تجزيه غيرمنفي ماتريس الگوريتم تجزيه غيرمنفي ماتريس )ادامه()ادامه(
ورودي دارد ورودي دارد22اين الگوريتم نياز به اين الگوريتم نياز به NNتعداد سينرجي ها: تعداد سينرجي ها: 1.1.
ماتريس سيگنال هاي كنترليماتريس سيگنال هاي كنترلي2.2. هدف الگوريتم يافتن مجموعه اي مناسب از هدف الگوريتم يافتن مجموعه اي مناسب از
سينرجي ها است كهسينرجي ها است كه
در هر قدم در هر قدمWW و و CC به صورت ضربي بروز به صورت ضربي بروزمي شوندمي شوند
اين روش هنگامي كه حركات از لحاظ مدت اين روش هنگامي كه حركات از لحاظ مدتزمان اجرا بسيار متفاوت باشند، قابل اعمال زمان اجرا بسيار متفاوت باشند، قابل اعمال
نمي باشد.نمي باشد.

1818
انواع سينرجيانواع سينرجي
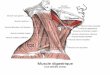
Synchronous synergiesSynchronous synergies : : تاخير زماني بين ماهيچه ها مجاز نمي باشد تاخير زماني بين ماهيچه ها مجاز نمي باشد فعاليت تمامي ماهيچه هاي موجود در سينرجي در فعاليت تمامي ماهيچه هاي موجود در سينرجي در
هنگام فعال شدن سينرجيهنگام فعال شدن سينرجيTime varying synergiesTime varying synergies : :
بخش زماني: هر ماهيچه پروفايل زماني خاص خود را بخش زماني: هر ماهيچه پروفايل زماني خاص خود رادارد. بين فعاليت ماهيچه ها در سينرجي، تاخير وجود دارد. بين فعاليت ماهيچه ها در سينرجي، تاخير وجود
داردداردبخش مكاني: توازن فعاليت ميان ماهيچه هابخش مكاني: توازن فعاليت ميان ماهيچه ها

Synchronous muscle synergy

Time-varying muscle synergy
دو سينرجي ماهيچه اي وابسته به زمان

2121
ساختار سلسله مراتبي سينرجي هاساختار سلسله مراتبي سينرجي ها
فرض: ساختار سلسله فرض: ساختار سلسلهمراتبي براي سينرجي مراتبي براي سينرجي
در سيستم عصبي در سيستم عصبي حركتي مشابه با حركتي مشابه با
ساختار كنترل حركتساختار كنترل حركت سينرجي، نگاشتي سينرجي، نگاشتي
مابين اهداف حركتي و مابين اهداف حركتي و دستورات حركتي دستورات حركتي
است كه موجب كنترل است كه موجب كنترل ساده ويژگي هاي ساده ويژگي هاي بيومكانيكي خاص بيومكانيكي خاص
مي شودمي شود

2222
نمودار وننمودار ون
آيا سينرجي هاي مشاهده شده تنها بازتابي از آيا سينرجي هاي مشاهده شده تنها بازتابي ازقيود آزمايش هستند و يا قيود نوروني ساده قيود آزمايش هستند و يا قيود نوروني ساده
كننده مساله درجات آزادي؟كننده مساله درجات آزادي؟

2323
كنترل بهينه پسخوري و سينرجيكنترل بهينه پسخوري و سينرجي
تعريف: پاسخي متفاوت به ورودي يكسان برحسب تعريف: پاسخي متفاوت به ورودي يكسان برحسبهدف هدف
با استفاده از تكنيك هاي كنترل بهينه، عموما يك فضاي با استفاده از تكنيك هاي كنترل بهينه، عموما يك فضايكنترلي با بعد كمتر تعيين مي شود كه منعكس كننده كنترلي با بعد كمتر تعيين مي شود كه منعكس كننده
ديناميك مرتبط با عمل است.ديناميك مرتبط با عمل است. اين فضاي كنترلي را مي توان توسط سينرجي هاي اين فضاي كنترلي را مي توان توسط سينرجي هاي
ماهيچه اي تخمين زد.ماهيچه اي تخمين زد.TodorovTodorov( كه تنها ( كه تنها 20022002 پيشنهاد كرده است ) پيشنهاد كرده است )
انحرافات متضاد با اهداف حركتي، اصالح انحرافات متضاد با اهداف حركتي، اصالح شوند.شوند.
Stochastic Optimal Feedback ControlStochastic Optimal Feedback Control با اين روش اجازه تغييرات در ابعاد اضافه داده با اين روش اجازه تغييرات در ابعاد اضافه داده
شده استشده استاصالحات هوشمنداصالحات هوشمند

2424
ايده تعامل در سينرجيايده تعامل در سينرجي
توليد نيرويي ثابت توليد نيرويي ثابت توسط دو انگشتتوسط دو انگشت
D1: no co-variationD1: no co-variation D2: stablizing D2: stablizing
synergiessynergies D3: DestablizingD3: Destablizing

2525
ايده تعامل در سينرجيايده تعامل در سينرجي

2626
نكاتي براي بهبود نظريه سينرجينكاتي براي بهبود نظريه سينرجي
در كنترل بهينه پس خوري، هدف تعيين بعدهاي در كنترل بهينه پس خوري، هدف تعيين بعدهايمربوط و نامربوط به عمل به منظور كاهش مربوط و نامربوط به عمل به منظور كاهش
بعد و امكان كنترل حركت استبعد و امكان كنترل حركت است .افزونگي منجر به انعطاف پذيري مي شود. افزونگي منجر به انعطاف پذيري مي شود
استفاده از درجات آزادي توسط سيستم استفاده از درجات آزادي توسط سيستم عصبي مركزي به منظور بهتر كردن انجام عصبي مركزي به منظور بهتر كردن انجام
عملعمل استفاده از تئوري مانيفولد كنترل نشده براي استفاده از تئوري مانيفولد كنترل نشده براي
تعيين بعدهاي مرتبط با حركتتعيين بعدهاي مرتبط با حركت

2727
مانيفولد كنترل نشده )حداقل مانيفولد كنترل نشده )حداقل دخالت(دخالت(
در اين تئوري، روشي ارائه مي شود كه به در اين تئوري، روشي ارائه مي شود كه بهتوسط آن مي توان درجات آزادي كنترل شده و توسط آن مي توان درجات آزادي كنترل شده و
كنترل نشده را تست نمود. در اين تئوري كنترل نشده را تست نمود. در اين تئوري كنترل معادل با پايدار ساختن در نظر گرفته كنترل معادل با پايدار ساختن در نظر گرفته
مي شود.مي شود. اين تئوري معادل با اين سوال است كه در چه اين تئوري معادل با اين سوال است كه در چه
فضايي، سيستم عصبي حركات چند مفصلي فضايي، سيستم عصبي حركات چند مفصلي رانمايش داده و كنترل )برنامه ريزي حركت( رانمايش داده و كنترل )برنامه ريزي حركت(
(.(.Scholzman & Schoner 1999Scholzman & Schoner 1999مي كند )مي كند ) تمايل سيستم عصبي مبني بر كنترل تمايل سيستم عصبي مبني بر كنترل
پارامترهاي مربوط به حركت در سطح پارامترهاي مربوط به حركت در سطح ((Francisco 2009Francisco 2009ماهيچه اي )ماهيچه اي )

2828
مانيفولد كنترل نشده )ادامه(مانيفولد كنترل نشده )ادامه( به صورت رياضياتي مي توان پايداري يك حالت به صورت رياضياتي مي توان پايداري يك حالت
خاص را، تغييرپذيري متغير مربوط به آن حالت خاص را، تغييرپذيري متغير مربوط به آن حالت در زمان در نظر گرفت. در زمان در نظر گرفت.
اگر نقطه ثابت در زمان متغير باشد، تخميني اگر نقطه ثابت در زمان متغير باشد، تخمينياز تغييرپذيري را مي توان توسط چندين از تغييرپذيري را مي توان توسط چندين
مرتبه تكرار حركت و سپس آناليز سيستم مرتبه تكرار حركت و سپس آناليز سيستم در نقاط مشابه، بدست آورد.در نقاط مشابه، بدست آورد.
تغييرپذيري، نمادي از كنترل كارا در نظر تغييرپذيري، نمادي از كنترل كارا در نظرگرفته مي شود و نه نمادي از ضعف كنترلگرفته مي شود و نه نمادي از ضعف كنترل
در اين رويكرد، هدف سيستم عصبي در اين رويكرد، هدف سيستم عصبيمركزي، تعيين درجات مرتبط با عمل است مركزي، تعيين درجات مرتبط با عمل است
و نه كاهش درجات آزادي.و نه كاهش درجات آزادي. به اين ترتيب تفاوت حركات در جزئيات ديده به اين ترتيب تفاوت حركات در جزئيات ديده
خواهد شدخواهد شد

2929
مانيفولد كنترل نشده )ادامه(مانيفولد كنترل نشده )ادامه( يك فرضيه درباره آنكه كدام متغيرها، كنترل يك فرضيه درباره آنكه كدام متغيرها، كنترل
مي شوند را تشكيل داده و به صورت رياضياتي مي شوند را تشكيل داده و به صورت رياضياتي مي نويسيم.مي نويسيم.
فضاي ممكن به دو زيرفضاي عمود بر هم فضاي ممكن به دو زيرفضاي عمود بر همتقسيم مي شود. يكي از اين زيرفضاها، شامل تقسيم مي شود. يكي از اين زيرفضاها، شامل
تمامي تركيبات ممكن از متغيرها است كه منجر تمامي تركيبات ممكن از متغيرها است كه منجر به مقادير يكسان متغيرهاي كنترلي مي شود.به مقادير يكسان متغيرهاي كنترلي مي شود.
تغييرپذيري متغيرها در دو زيرفضا تخمين زده تغييرپذيري متغيرها در دو زيرفضا تخمين زدهمي شود. براي درستي فرضيه بايستي مي شود. براي درستي فرضيه بايستي
تغييرپذيري در زيرفضاي كنترل نشده بيشتر تغييرپذيري در زيرفضاي كنترل نشده بيشتر باشد.باشد.
سينرجي شامل متغيرهاي اصلي است كه كنترل سينرجي شامل متغيرهاي اصلي است كه كنترلمي شوند.مي شوند.

3030
وجود عدم قطعيت در سيستم عصبي وجود عدم قطعيت در سيستم عصبي عضالنيعضالني
نويز ارسال دستورات حسي حركتي، تمايل نويز ارسال دستورات حسي حركتي، تمايلماهيچه ها در توليد نويزماهيچه ها در توليد نويز
دقت كمتر در اجراي حركات سريع تر دقت كمتر در اجراي حركات سريع تر نويز در سطح سيگنال هاي نوروني تبديل به عدم نويز در سطح سيگنال هاي نوروني تبديل به عدم
قطعيت در سطوح باالتر شناختي مي شود.قطعيت در سطوح باالتر شناختي مي شود. سيستم عصبي براي مقابله با اغتشاشات سيستم عصبي براي مقابله با اغتشاشات
خارجي و عدم قطعيت هاي موجود در سيستم، خارجي و عدم قطعيت هاي موجود در سيستم، از افزونگي استفاده مي كند.از افزونگي استفاده مي كند.
با استفاده از سينرجي هاي حركتي سعي با استفاده از سينرجي هاي حركتي سعيمي شود تا عالوه بر كاهش بعد، مقاوم بودن مي شود تا عالوه بر كاهش بعد، مقاوم بودن
سيستم نيز تا حد امكان حفظ شود. سيستم نيز تا حد امكان حفظ شود.

3131
مدل درونيمدل دروني
فرض: حالت سيستم از طريق سنسورهاي فرض: حالت سيستم از طريق سنسورهايتاخيردار و نويزي بدست مي آيدتاخيردار و نويزي بدست مي آيد
نياز به مدل دروني از حركت و پيش بينينياز به مدل دروني از حركت و پيش بيني تخمين حالت از روي فيدبك ها و دستورات تخمين حالت از روي فيدبك ها و دستورات
حركتي ارساليحركتي ارسالي واريانس نقطه نهايي هنگامي حداقل است كه واريانس نقطه نهايي هنگامي حداقل است كه
تراژكتوري تا حد امكان دقيق و با مصرف تراژكتوري تا حد امكان دقيق و با مصرف انرژي كمتري صورت گيرد )با فرض وجود نويز انرژي كمتري صورت گيرد )با فرض وجود نويز
ضربي در سيستم عصبي حركتي(ضربي در سيستم عصبي حركتي( هدايت يادگيري در سيستم حركتي توسط خطا هدايت يادگيري در سيستم حركتي توسط خطا
و اندازه آنو اندازه آن

3232
مدل دروني )ادامه(مدل دروني )ادامه(
استفاده استفادهCNSCNS از افزونگي ماهيچه ها به منظور از افزونگي ماهيچه ها به منظور SDNSDNماكزيمم ساختن كارايي در حضور ماكزيمم ساختن كارايي در حضور
اين قواعد بايد يادگرفته شوند و ديگر به اين قواعد بايد يادگرفته شوند و ديگر بهصورت ساده ) مدوالسيون سفتي( نيستند - صورت ساده ) مدوالسيون سفتي( نيستند -
فعاليت همزمان ماهيچه ها و سينرجي هاي فعاليت همزمان ماهيچه ها و سينرجي هاي ماهيچه ايماهيچه اي
ارتباط بين يادگيري مدل دروني و سينرجي ارتباط بين يادگيري مدل دروني و سينرجيچگونه است؟چگونه است؟

3333
نقش فيدبك حسي در سينرجينقش فيدبك حسي در سينرجي
مرجع اصلي مرجع اصليCheung et al. 2007Cheung et al. 2007 : : بررسي بررسيEMGEMG ماهيچه پاهاي ماهيچه پاهاي 1313 بر روي بر روي
عقبي وزغعقبي وزغ عمدتا سينرجي ها به صورت مركزي عمدتا سينرجي ها به صورت مركزي
سازماندهي شده اندسازماندهي شده اند تفاوت الگوي فعاليت چه در دامنه و چه در تفاوت الگوي فعاليت چه در دامنه و چه در
زمان بيانگر نقش جريان سنسوري در تنظيم زمان بيانگر نقش جريان سنسوري در تنظيم فعاليت سينرجي ها استفعاليت سينرجي ها است
نقش فيدبك در نحوه بكارگيري و نقش فيدبك در نحوه بكارگيري ومدوالسيون سينرجي هامدوالسيون سينرجي ها
نقش فيدبك در فعال ساختن سينرجي هاي نقش فيدبك در فعال ساختن سينرجي هايوابسته به عملوابسته به عمل

3434
نقش فيدبك حسي در سينرجي نقش فيدبك حسي در سينرجي )ادامه()ادامه(
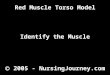
A1A1 فعال شدن توسط دستورات نخاعي يا فرانخاعي، نقش : فعال شدن توسط دستورات نخاعي يا فرانخاعي، نقش :فيدبك در مدوله ساختن فعاليتفيدبك در مدوله ساختن فعاليت
A2A2 قابل دسترسي توسط فيدبك، مسئوليت اصالح انحرافات : قابل دسترسي توسط فيدبك، مسئوليت اصالح انحرافات :عضوعضو
A3A3تنظيم هر عضله به صورت مجزا توسط سيگنال آوران: تنظيم هر عضله به صورت مجزا توسط سيگنال آوران :
A4A4سازماندهي مجدد شبكه هاي بين نوروني در اثر فيدبك: سازماندهي مجدد شبكه هاي بين نوروني در اثر فيدبك :

3535
نقش فيدبك حسي در سينرجي نقش فيدبك حسي در سينرجي )ادامه()ادامه(
EMGEMG وزغ سالم تغييرپذيري بيشتري دارد كه وزغ سالم تغييرپذيري بيشتري دارد كه به معناي سازماندهي سينرجي ها به صورت به معناي سازماندهي سينرجي ها به صورت
مركزي مي باشدمركزي مي باشد نقش فيدبك بين حيوانات مختلف، متفاوت نقش فيدبك بين حيوانات مختلف، متفاوت
است كه اين امر مي تواند به معناي تاثير است كه اين امر مي تواند به معناي تاثير تجارب قبلي در تعيين ميزان و نحوه تاثير تجارب قبلي در تعيين ميزان و نحوه تاثير
فيدبك باشدفيدبك باشد تاكنون چندان به اين مساله پرداخته نشده تاكنون چندان به اين مساله پرداخته نشده
استاست

3636
ويژگي هاي سينرجيويژگي هاي سينرجي
ويژگي هايي دائمي در حركت كه مشخصه ويژگي هايي دائمي در حركت كه مشخصهاصلي آن كاهش بعد استاصلي آن كاهش بعد است
با مشاهده تجربي الگوي فعاليت ماهيچه اي و يا با مشاهده تجربي الگوي فعاليت ماهيچه اي و ياموقعيت عضو: الگوهاي مشاهده شده تنها موقعيت عضو: الگوهاي مشاهده شده تنها
زيرفضاي كوچكي از فضاي چندبعدي ممكن را زيرفضاي كوچكي از فضاي چندبعدي ممكن را دربر مي گيرند.دربر مي گيرند. ) گرفتن اجسام(: ) گرفتن اجسام(: Simpkin 2009Simpkin 2009به طور مثال در كار به طور مثال در كار
و بعد بدست آمده توسط و بعد بدست آمده توسط 1515بعد موثر در حركت بعد موثر در حركت گزارش شده است گزارش شده است88سينرجي حدود سينرجي حدود

3737
ويژگي هاي سينرجي )ادامه(ويژگي هاي سينرجي )ادامه(
افزايش تعداد سينرجي ها با پيچيده تر شدن افزايش تعداد سينرجي ها با پيچيده تر شدنعملعمل
بيشتر سينرجي ها ثابت و مستقل از عمل بيشتر سينرجي ها ثابت و مستقل از عملهستندهستند
برخي سينرجي ها وابسته به عملي خاص برخي سينرجي ها وابسته به عملي خاصهستندهستند
نقش فيدبك در نحوه بكارگيري و مدوالسيون نقش فيدبك در نحوه بكارگيري و مدوالسيونسينرجي هاسينرجي ها
نقش فيدبك در فعال ساختن سينرجي هاي نقش فيدبك در فعال ساختن سينرجي هايوابسته به عملوابسته به عمل
توليد حركت هاي بهينه جديد از طريق يادگيري توليد حركت هاي بهينه جديد از طريق يادگيريتركيبات جديد بين سينرجي هاتركيبات جديد بين سينرجي ها

3838
ويژگي هاي سينرجي ) اغتشاش ويژگي هاي سينرجي ) اغتشاش حركتي(حركتي(
با اعمال اغتشاش به عضو، الگوي فعاليت بسياري از با اعمال اغتشاش به عضو، الگوي فعاليت بسياري ازسينرجي ها تغيير مي كند اما تركيب سينرجي ها نشان سينرجي ها تغيير مي كند اما تركيب سينرجي ها نشان مي دهد كه سينرجي هاي استخراج شده تحت شرايط مي دهد كه سينرجي هاي استخراج شده تحت شرايط متفاوت ديناميك محيطي، مقاوم هستند. اين مساله متفاوت ديناميك محيطي، مقاوم هستند. اين مساله
مي تواند تاييدي باشند كه اين سينرجي ها، نمايشي از مي تواند تاييدي باشند كه اين سينرجي ها، نمايشي از ساختارهاي پايه كنترل شونده توسط سيستم عصبي ساختارهاي پايه كنترل شونده توسط سيستم عصبي
مركزي هستند.مركزي هستند.

3939
ويژگي هاي سينرجي )تمرين(ويژگي هاي سينرجي )تمرين(
( اثر تمرين بر روي سينرجي ها )اثر تمرين بر روي سينرجي هاAsaka et al. Asaka et al. 20082008))
كاهش ميزان كاهش ميزانCo-contractionCo-contractionسينرجي ها سينرجي ها ظهور سينرجي هاي تركيبيظهور سينرجي هاي تركيبي
تمرين مي تواند منجر به تنظيم سينرجي هاي تمرين مي تواند منجر به تنظيم سينرجي هاي تركيبي شود و يا اينكه الگوي فعاليت تركيبي شود و يا اينكه الگوي فعاليت
سينرجي ها را تغيير دهد. سينرجي ها را تغيير دهد.
هدف پايدار ساختن هرچه بيشتر حركت يا هدف هدف پايدار ساختن هرچه بيشتر حركت يا هدف مورد نظر است.مورد نظر است.

4040
شماي عمل كنترل توسط سينرجيشماي عمل كنترل توسط سينرجي
.سينرجي هاي ماهيچه اي. سينرجي هاي ماهيچه اي II نگاشتي براي توليد ، نگاشتي براي توليد ،دستور هاي حركتي )مشابه با محاسبات ديناميك معكوس(. دستور هاي حركتي )مشابه با محاسبات ديناميك معكوس(.
، پيش بيني توالي سنسوري ناشي از دستورات حركتي.، پيش بيني توالي سنسوري ناشي از دستورات حركتي.FFشبكه شبكه
321 ,, SSS

با تشكر