Embed Size (px)
DESCRIPTION
Fuzzy Adaptive Internal Model Control Schemes for PMSM Speed-Regulation System. Shihua Li; Hao Gu Industrial Informatics, IEEE Transactions on Volume: 8 , Issue: 4 Digital Object Identifier: 10.1109/TII.2012.2205581 Publication Year: 2012 , Page(s): 767 – 779 IEEE JOURNALS & MAGAZINES. - PowerPoint PPT Presentation
Citation preview

Fuzzy Adaptive Internal Model Control Schemes for PMSM Speed-Regulation System
Shihua Li; Hao Gu Industrial Informatics, IEEE Transactions on Volume: 8 , Issue: 4 Digital Object Identifier: 10.1109/TII.2012.2205581Publication Year: 2012 , Page(s): 767 – 779IEEE JOURNALS & MAGAZINES
Student : 鍾子涵

2
Abstract
• In this paper, the speed regulation problem for permanent magnet synchronous motor (PMSM) system under vector control framework is studied. First, a speed regulation scheme based on standard internal model control (IMC) method is designed. For the speed loop, a standard internal model controller is first designed based on a first-order model of PMSM by analyzing the relationship between reference quadrature axis current and speed. For the two current loops, PI algorithms are employed respectively. Second, considering the disadvantages that the standard IMC method is sensitive to control input saturation and may lead to poor speed tracking and load disturbance rejection performances, a modified IMC scheme is developed based on a two-port IMC method, where a feedback control term is added to form a composite control structure. Third, considering the case of large variations of load inertia, two adaptive IMC schemes with two different adaptive laws are proposed.

3
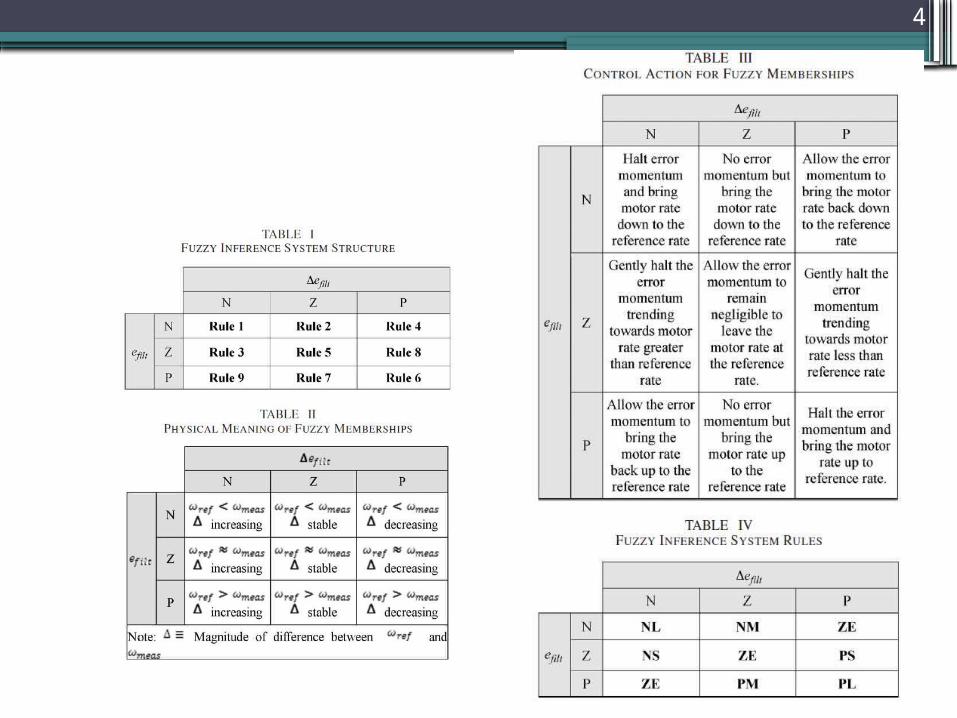
Proposed PI-/PD-like FNN controller structure
4

5
FNN PI.PD structure

6

7
Block diagram of the hardware apparatus

8
under normal condition

9
under zero speed

10
under disturbance

11
under load

12
under constant speed

13
poor initial condition & training improvement

14
REFERENCES• [1] A. Sant and K. R. Rajagopal, “PM synchronous motor speed control using hybrid fuzzy-PI with novel
switching functions,” IEEE Trans. Magn.,vol. 45, no. 10, pp. 4672–4675, Oct. 2009.• [2] B. M. Hohan and A. Sinha, “Analytical structure and stability analysis of a fuzzy PID controller,” Appl.
Soft Comput., vol. 8, no. 1, pp. 749–758,Jan. 2008.• [3] A. Rubaai, M. J. Castro-Sitiriche, and A. R. Ofoli, “DSP-based laboratory implementation of hybrid
fuzzy-PID controller using genetic optimization for high performance motor drives,” IEEE Trans. Ind. Appl., vol. 44, no. 6, pp. 1977–1986, Nov./Dec. 2008.
• [4] Y.-P. Kuo and T.-H. S. Li, “GA-based Fuzzy PI/PD controller for automotive active suspension system,” IEEE Trans. Ind. Electron., vol. 46, no. 6, pp. 1051–1056, Dec. 1999.
• [5] B.-G. Hu, G. K. I.Mann, and R. Gosine, “A systematic study of fuzzy PID controllers—Function-based evaluation approach,” IEEE Trans. Fuzzy Syst., vol. 9, no. 5, pp. 699–712, Oct. 2001.
• [6] H.-X. Li, L. Zhang, K.-Y. Cai, and G. Chen, “An improved robust fuzzy-PID controller with optimal fuzzy reasoning,” IEEE Trans. Syst., Man,Cybern. B, Cybern., vol. 35, no. 6, pp. 1283–1294, Dec. 2005.
• [7] M.Masiala, B. Vafakhah, J. Salmon, and A.M. Knight, “Fuzzy self-tuning speed control of an indirect field-oriented control induction motor drive,” IEEE Trans. Ind. Appl., vol. 44, no. 6, pp. 1732–1740, Nov./Dec. 2008.
• [8] M. Barut, S. Bogosyan, and M. Gokasan, “Speed sensorless estimation for induction motors using extended Kalman filters,” IEEE Trans. Ind. Electron., vol. 54, no. 1, pp. 272–280, Feb. 2007.
• [9] K. Szabat and T. Orlowska-Kowalska, “Performance improvement of industrial drives with mechanical elasticity using nonlinear adaptive Kalman filter,” IEEE Trans. Ind. Electron., vol. 55, no. 3, pp. 1075–1084, Mar. 2008.
• [10] K. K. Ahn and D. Q. Truong, “Online tuning fuzzy PID controller using robust extended Kalman filter,” J. Process Control, vol. 19, no. 6, pp. 1011–1023, Jun. 2009.
• [11] D. J. Lary and H. Y. Mussa, “Using an extended Kalman filter learning algorithm for feed-forward neural networks to describe tracer correlations,” Atmos. Chem. Phys. Discuss., vol. 4, pp. 3653–3657, 2004.
• [12] S. Singhal and L. Wu, “Training feedforward networks with extended Kalman filter algorithm,” in Proc. Int. Conf. ASSP, 1989, pp. 1187–1190.
15
REFERENCES• [13] S.-J. Ho, L.-S. Shu, and S.-Y. Ho, “Optimizing fuzzy neural networks for tuning PID controllers
using an orthogonal simulated annealing algorithm OSA,” IEEE Trans. Fuzzy Syst., vol. 14, no. 3, pp. 421–434, Jun. 2006.
• [14] I. del Campo, J. Echanobe, G. Bosque, and J. M. Tarela, “Efficient hardware/ software implementation of an adaptive neuro–fuzzy system,” IEEE Trans. Fuzzy Syst., vol. 16, no. 3, pp. 761–778, Jun. 2008.
• [15] M. N. Uddin and M. A. Rahman, “Development and implementation of a hybrid intelligent controller for interior permanent-magnet synchronous motor drives,” IEEE Trans. Ind. Appl., vol. 40, no. 1, pp. 68–76, Jan./Feb. 2004.
• [16] dSPACE User’s Guide, Digital Signal Processing and Control Engineering, dSPACE, Paderborn, Germany, 2003.
• [17] G413-817 Technical Data Manual, Moog Aerospace, East Aurora, New York, 2000.• [18] T200-410 Technical Data Manual, Moog Aerospace, East Aurora, New York, 2000.

16
Thank you for your attention.

17
Q & A.





![Драйвер PMSM серводвигателей Hyperdrive · 2019-06-18 · ПАСПОРТ ИЗДЕЛИЯ Драйвер PMSM серводвигателей Hyperdrive 8 [800]](https://img.pdfslide.tips/doc/110x75/5ed7c7c87626b373466bc408/-pmsm-hyperdrive-2019-06-18-.jpg)






















