Embed Size (px)
Citation preview

* CICY
Centro de Investigación Científica de Yucatán, A. C.
Posgrado en Materiales Poliméricos
"Análisis de interfases en materiales compuestos de fibra termoplástica y matriz
termofija por medio de la técnica de fotoelasticidad"
TESIS QUE PRESENTA
JOSÉ MANUEL VÁZQUEZ RODRÍGUEZ
En opción al título de
DOCTOR EN MATERIALES POLIMÉRICOS \G~CION C¡~
~~'\ ""~ ~ -- ~ ............. ~- " ~ --~ ,.
Mérida, Yucatán, Noviembre de 2005 ~ ~ ~ ~ ~~ .... ';:; ..............- e: ~ e ~ .., ICY 4'-f
~

El Consejo Nacional de Ciencia y
Tecnología (CONACyT} a través del
proyecto J-28642U financió el trabajo
experimental de la presente tesis.

DECLARACION
Declaro que la información contenida en la sección de materiales y métodos
experimentales, los resultados y discusión de este documento, proviene de las
actividades de investigación realizadas durante el período que se me asignó para
desarrollar mi trabajo de tesis, en las unidades y laboratorios del Centro de
Investigación Científica de Yucatán A.C., y que dicha información le pertenece en
los términos de la ley de propiedad industrial, por lo que no me reservo ningún
derecho sobre ellos.
Mérida, Yucatán, a 19 de Septiembre de 2005.
M. C. José Manuel Vázquez Rodríguez

Agradecimientos
Un generoso agradecimiento al Dr. Pedro lván González Chi quien me asesoró en
el desarrollo del presente estudio.
Al Dr. Pedro Jesús Herrera Franco por su marcado interés y sabios comentarios.
A los miembros del Posgrado en Materiales Poliméricos, investigadores y técnicos
del área de Materiales del Centro de Investigación Científica de Yucatán. En
especial al Dr. Gonzalo Canché Escamilla y al Dr Juan V. Cauich.
A todos mis compañeros y amigos gracias.

Dedicatoria
Esta mañana al abrir los ojos, me sentí satisfecho y tranquilo; como si no le
debiera nada a la vida, llenándome de la belleza y la inmensa comprensión de mi
mujer y de toda mi familia. Gracias Dios por concederme el regalo de la vida.
A ti madre por tu cariño y fortaleza; a ti padre por tu entereza. A mis hermanos por
darme la oportunidad de disfrutarlos con todos sus detalles, con sus defectos y
virtudes pero siempre juntos.
A mi esposa Deneb:
Gracias por ser el ángel que Dios me envió para fortalecer mis desalientos y llenar
con amor los huecos que deja la vida y la ciencia. Gracias por acompañarme y
alentarme en este camino.
A todos los pequeños traviesos que han llegado a mi vida,
a sus padres, abuelos y bisabuelos.
Con cariño a mis abuelos Don Manuel Rodríguez (qepd) y Doña Carlota Casillas.

IN DICE
LISTA DE TABLAS
LISTA DE FIGURAS
LISTA DE SÍMBOLOS
RESUMEN
ABSTRACT
INTRODUCCIÓN
OBJETIVOS
CAPITULO l. TEORÍA DE FOTOELASTICIDAD
1.1. Ley del esfuerzo óptico
1.2. Patrones de esfuerzo por flexión pura
1.3. Propagación de un haz de luz a través de un polariscopio
1 .3.1 . Análisis para un polarizador lineal
1.3.2. Análisis para un polarizador circular
CAPITULO 11.- MATERIALES COMPUESTOS
2. '· ~n)e.r)-ase 'J~'DTa)ma"JT~2
z. t. t. Análi:Ji:J mic:;ramec:;ánic:;o
2.2. Modelo de transferencia de esfuerzo cortante (Modelo
Shear-lag)
2.2.1 . Distribuciones del esfuerzo y de la deformación
2.2.2. Transferencia de esfuerzo entre fibra-matriz
2.3 Análisis teórico del desprendimiento a tensión (Pu/1-out),
empleando el modelo de transferencia de esfuerzo cortante
iv
V
xi
XV
xvi
xvii
ix
1
1
5
10
16
22
26
27
29
32
34
41
(Shear-lag) 43

2.4. Modelos alternativos de análisis para el modelo de Pu/1-out 49
2.5. Análisis para el punteo de una grieta con una fibra. Geometría
Crack-bridging 56
2.5.1 Análisis teórico en una probeta compuesta de dos bloques
de resina unidos por una fibra (Crack-Bridging) empleando el
modelo de transferencia de esfuerzo cortante
CAPITLO 111.- MATERIALES Y MÉTODOS
3.1. Resina epóxica y agente de entrecruzamiento
3.2. Análisis mecánico de la resina epóxica
3.2.1. Relación de Poisson
3.2.2. Calibración fotoelástica de la resina
3.3. Caracterización de la fibra poliéster
3.3.1 . Análisis infrarrojo de la fibra
3.3.2. Propiedades mecánicas de la fibra
3.4. Arreglo del polaroscopio
3.4.1 . Calibración del polaroscopio
3.5. Preparación del modelo de Pu/1-out
3.6. Esfuerzo cortante por medio de fotoelasticidad para la
57
62
62
64
66
70
72
72
73
73
75
78
geometría de Pu/1-out 80
3.7. Localización de las isoclinas 82
3.8. Preparación del modelo para la geometría de Crack-bridging 83
3.9. Esfuerzo cortante por medio de fotoelasticidad para la
geometría de Crack-bridging 85
CAPITULO IV.- RESULTADOS Y DISCUSIÓN 88
4.1. Caracterización de la fibra poliéster 88
4.2. Análisis por espectroscopia de infrarrojo de la fibra poliéster 89
---- ·---··-·-------·---···---·--·---11

4.3. Propiedades mecánicas de la resina epóxica 90
4.4. Calibración fotoelástica de la resina 92
4.5. Esfuerzo cortante por medio de fotoelasticidad. Geometría de
Pul/- out 98
4.6. lsoclinas y trayectorias de esfuerzos principales 1 08
4.7. Esfuerzo cortante por fotoelasticidad. Geometría de Crack-
bridging 118
CONCLUSIONES 128
BIBLIOGRAFIA 133
APÉNDICE A. Teoría de la luz 140
APÉNDICE B. Relación de las longitudes de onda de las fuentes de luz
con la constante fotoelástica fa .
APÉNDICE C. Cambio del espesor de la probeta
APÉNDICE D. Cálculo de la constante fotoelástica to
APÉNDICE E. Artículo publicado
-·-----------
149
154
156
157
lll

Lista de Tablas.
Tabla 4.1. Propiedades mecánicas de la fibra poliéster 88
Tabla 4.2. Bandas de absorción de infrarrojo para la fibra poliéster 89
Tabla 4.3. Propiedades mecánicas de la resina epóxica 91
Tabla 4.4. Relación de poisson de la resina epóxica 91
Tabla 4.5. Valores obtenidos de fa para los órdenes fotoelásticos
obtenidos para la probeta 1 usando la ecuación 2.22. 96
Tabla 4.6. Valores obtenidos de fa para los órdenes fotoelásticos
obtenidos para la probeta 1 usando la ecuación 2.23. 96
Tabla 4.7. Diferencia de esfuerzos principales y esfuerzo cortante
corregidos para la geometría de Pul/ out 105
Tabla 4.8. Diferencia de esfuerzos principales y esfuerzo cortante
corregidos para la geometría de Crack-bridging 122
Tabla 81. Fuentes de radiación isocromática 149
Tabla 82. Calculo del coeficiente de franja fotoelástico usando la
ecuación 2.22, y lámpara de sodio (faS). 152
Tabla 83. Cálculo del coeficiente de franja fotoelástico usando la
ecuación 2.22, y lámpara de mercurio (f aM). 152
--------------·····--------· lV

Figura 1.1.
Figura 1.2.
Figura 1.3.
Figura 1.4.
Figura 1.5.
Figura 1.6.
Figura 1.7.
Figura 2.1.
Figura 2.2.
Figura 2.3.
Lista de Figuras.
Esquema de flexión. Diagrama de cuerpo libre (a),
diagrama de momentos de flexión (b) y distribución de
esfuerzos (e)
Modelo fotoelástico bajo un par de esfuerzos colocado en
un banco de polarización circular de campo oscuro
Vectores de luz en diferentes etapas en un polarizador (a)
a la entrada del modelo; (b) ejes ópticos de la segunda
placa de retardo paralelos a los ejes x, y; (e) eje óptico del
analizador a un ángulo f3 respecto a la dirección x
Modelo fotoelástico bajo sistema de esfuerzos colocado
entre un banco de polarización lineal (q>= 90°)
Imágenes del campo oscuro para un disco bajo
compresión en dirección del diámetro en un polarizador
lineal con q>= 90°; a es el ángulo entre el eje óptico del
polarizador y la dirección del esfuerzo
Significado físico de las isoclinas en términos de las
direcciones de los esfuerzos de un material
lsoclinas (a) y franjas isocromáticas (b) correspondientes a
un disco bajo compresión a lo largo del diámetro.
Niveles estructurales de un material compuesto fibra
reforzado: (a) nivel molecular, (b) micronivel y (e) meso
nivel. ie la distancia de equilibrio interatómico
Ensayos micromecánicos en los que la carga es aplicada
directamente sobre la fibra: Pu/1-out (a), microgota (b) y
push-out (e)
Pruebas micromecánicas en las que la carga es aplicada
sobre la matriz: fragmentación (a) y prueba de Broutman
(b)
8
12
15
18
19
20
22
28
30
31
---------···---V

Figura 2.4.
Figura 2.5.
Figura 2.6.
Figura 2.7.
Figura 2.8.
Figura 2.9.
Figura 2.1 O.
Figura 2.11.
Figura 2.12.
Figura 2.13.
Figura 3.1.
Figura 3.2.
------
Esquema del modelo de Shear-lag, mostrando (a) sistema
libre de esfuerzos, (b) desplazamiento axial u inducido al
aplicar un esfuerzo de tensión paralelo a la fibra y (e) la
variación radial del esfuerzo cortante y la deformación en
la matriz
Distribución de esfuerzo cortante interfacial y del esfuerzo
a lo largo de una fibra embebida en una matriz
considerando una transferencia de esfuerzo totalmente
33
elástica 40
Distribución del esfuerzo a tensión en la fibra (a) y del
esfuerzo cortante interfacial (b) para dos relaciones de
aspecto LJr = s de una fibra embebida en una matriz
Geometrías empleadas para el ensayo de Pu/1-out, (a)
41
matriz en forma de disco, (b) matriz en forma de bloque 43
Distribución de esfuerzos y gráficas de esfuerzo -
deformación en un ensayo de Pu/1-out
Vista axial (a) y vista lateral (b) de los ordenes
fotoelásticos superpuestos en una probeta de Pu/1-out
Parámetros para la corrección del esfuerzo cortante
Distribución del esfuerzo cortante interfacial obtenido por
medio de la teoría de Shear-lag y por medio de la técnica
de fotoelasticidad
Esquema de la geometría de Crack Bridging
Distribución de esfuerzos en la geometría de Crack
Bridging
Estructuras químicas de a) resina epóxica D. E. R. 331, b)
diamina alifática ancamine 1784 y e) reacción general de
entrecruzamiento
Dimensiones del molde usado para preparar una placa de
resina epóxica
45
52
54
55
56
59
63
65
Vl

Figura 3.3.
Figura 3.4.
Figura 3.5.
Figura 3.6.
Figura 3.7.
Figura 3.8.
Figura 3.9.
Figura 3.1 O.
Figura 3.11.
Dimensiones de la probeta tipo 1 ASTM d 638 - 82a
Esquema de cableado de galgas
Sistema para la determinación de la relación de Poisson
(a) y detalle de la probeta con las galgas (b) , unidad de
balanceo (e) e indicador de deformación (d)
Marco de carga para flexión (a), esquema de flexión (b) y
momento flexionante en la probeta (e)
Esquema de pruebas a tensión para las fibras en la
máquina de pruebas universales Shimatzu AG1
Disposición del banco de polarización circular de campo
oscuro con marco de carga
Dimensiones del molde para la probeta de Pu/1-out
Dimensiones de la probeta para la geometría de Pu/1-out
Brazo de palanca y mordazas del marco de carga del
polariscopio. Geometría de Pu/1-out
Figura 3.12. Método para la construcción de las direcciones de
66
67
69
71
74
75
79
79
81
esfuerzos principales. 84
Figura 3.13. Dimensiones del molde para la probeta de Crack-bridging 84
Figura 3.14. Dimensiones y geometría empleadas para la probeta para
Crack-bridging. El filamento está situado al centro del
bloque de resina
Figura 3.15. Brazo de palanca y mordazas del marco de carga del
polariscopio Geometría de Crack-bridging
Figura 4.1.
Figura 4.2.
Curva de esfuerzo- deformación para una fibra típica de
poliéster de acuerdo a la norma ASTM 2343-67
Espectro de infrarrojo de la fibra poliéster usada en este
trabajo
-·----·-·-···· ·--·
85
86
89
90
Vll

Figura 4.3.
Figura 4.4.
Figura 4.5.
Figura 4.6.
Figura 4.7.
Figura 4.8.
Figura 4.9.
Patrones fotoelásticos de esfuerzo para una probeta
sometida a flexión, las cargas aplicadas correspondientes
(en newtons) están indicadas en la parte inferior de cada
imagen
Distancia desde el eje de simetría hasta cada uno de los
ordenes para el patrón fotoelástico de una probeta
sometida a flexión
Disminución del valor del coeficiente fotoelástico fo en
función del tiempo transcurrido entre la formulación de la
resina epóxica y la realización de la prueba
Patrón fotoelástico para la geometría de pu/1-out obtenido
en un polaroscopio circular de campo oscuro
Franjas isocromáticas para la geometría de pu/1-out
sometida a cargas diferentes (campo oscuro de un
polaroscopio circular)
Longitud y ubicación de las franjas fotoelásticas obtenidas
por medio de la técnica de fotoelasticidad para la
geometría de Pu/1-out
Distribuciones del esfuerzo cortante interfacial para la
93
95
97
98
101
103
geometría de pul/ out obtenidos experimentalmente 1 04
Figura 4.1 O. Distribuciones de la relación ( r e 1 a e ) , empleando la
teoría de transferencia de esfuerzo cortante Shear-lag y
para los valores experimentales
Figura 4.11. lsoclinas para la geometría de Pu/1-out correspondientes a
las isoclinas de oo (a) y 20° (b). Polaroscopio de campo
oscuro
Figura 4.12. Trazo de las isoclinas de parámetro e:::;: 0°, 20° y 45°
Figura 4.13. lsoclina y bandas isocromáticas obtenidas con luz blanca
para las isoclinas de parámetros e = 5° (a) y 85° (b).
Polaroscopio lineal de campo oscuro
-----------------··-··--·- -~.
107
108
110
111
Vlll

Figura 4.14. Patrones fotoelásticos mostrando los pares de isoclinas en
las cuales la trayectoria es simétrica (el parámetro esta
indicado en cada figura) 112
Figura 4.15. Familia de isoclinas para la geometría de Pu/1-out 113
Figura .16. Trazado de las direcciones de esfuerzo principales a1 y a2
en las isoclinas con parámetro e= 20°, 25°, 35° y 45° para
la geometría de Pu/1-out correspondiente al área
sombreada en la figura 5.13 115
Figura 4.17. Trayectorias de las direcciones de los esfuerzos
principales para la geometría de Pu/1-out 116
Figura 4.18. Topografía del frente de fractura en una probeta de Crack-
bridging antes de ser cargada
Figura 4.19. Crecimiento del patrón fotoelástico de una probeta de
Crack-bridging al ser cargada. Las figuras a, b y e se
obtuvieron empleando la lámpara de mercurio y las figuras
118
d, e y f con la lámpara de sodio 120
Figura 4.20. Conteo de bandas isocromáticas en una probeta de Crack-
bridging 121
Figura 4.21. Propagación del frente de fractura en una probeta de
Crack-bridging (1.8 kg) 124
Figura 4.22. Comportamiento del esfuerzo cortante interfacial para una
probeta de Crack-bridging antes de propagarse la fractura 125
Figura 4.23. Patrones fotoelásticos para las geometrías de Pul/ out (a) y
Crack-bridging (b) al generar dos franjas isocromáticas
Figura A1.
Figura A2.
Figura A3.
Figura A4.
empleando una lámpara de mercurio
Patrones del campo eléctrico y magnético de un haz de luz
Ilustración del concepto de frente de onda
Interferencia entre dos ondas viajando sobre el mismo eje
Movimiento del vector eléctrico en un haz de luz
circularmente polarizado
127
140
141
142
143
ix

Figura AS.
Figura AS.
Figura A7.
Movimiento del vector eléctrico en un haz de luz
linealmente polarizado
Efecto de un retardador de 1f4 de onda en haz con
polarización circular o plana
Conjunto de placas de retardadores de % de onda
dispuestos a ± 45° entre dos polariscopios lineales con
144
145
ejes ópticos paralelos (a) y cruzados (b) 146
Figura AS.
Figura 81.
Figura C1.
Doble refracción en un material birrefringente
Resultados del ensayo de flexión a cuatro puntos para la
probeta con una lámpara de sodio (a) y una lámpara de
mercurio (b). La carga empleada para la obtención de
ambos patrones es de 61.3 N
Resultados del ensayo de flexión a cuatro puntos para la
probeta con espesor hL = 0.53 cm. (a) y hL = 1.02 cm. (b).
La carga empleada es de 61.3 N
------·--------------.--.. ------·- . ---·
147
151
153
X

A
A
B
c1, c2
e
o
Dy
E
Ex,
E y
E" X
E" y
EP
E,
E m
f
fa
G,c
Gm
Lista de símbolos
amplitud del vector en el plano en que se propaga una onda de
luz
distancia entre apoyos en flexión a cuatro puntos
vector de inducción magnética
coeficientes de esfuerzo óptico para un material específico
velocidad de la luz
vector de desplazamiento eléctrico
magnitud del vector unitario incidente en el modelo en el eje y
vector eléctrico en una onda electromagnética
magnitud del componente ortogonal del vector eléctrico en el eje x
magnitud del componente ortogonal del vector eléctrico en el eje y
vector eléctrico a la salida de la última placa de retardo de% de
onda en el eje x
vector eléctrico a la salida de la última placa de retardo de % de
onda en el eje y
vector resultante a la salida del segundo polarizador en el
polasroscopio circular
modulo de elástico de la fibra
modulo de elástico de la matriz
fracción volumétrica de fibra en un material compuesto
constante fotoelástica de esfuerzo óptico
energía de fractura interfacial
modulo a cortante de la matriz
--··--·-·--··--- """
xi

H
h
1
'1-2
J
kx
k y
L
M
n1, n2, n3
N
p
Ox
O y
R;..
r
r).
S
t
u
vector magnético
altura de la probeta para flexión a cuatro puntos
espesor de la probeta o la distancia recorrida por el haz de luz en
la probeta
momento de inercia
intensidad de radiación
vector de densidad de corriente
magnitud del componente ortogonal polarizado en el eje x
magnitud del componente ortogonal polarizado en el eje y
longitud total embebida de fibra
momento flexionante
índices de refracción para las ondas propagándose en dirección
paralela a los esfuerzos principales (no isotrópicos)
orden de franja u orden fotoelástico
carga empleada en la prueba de flexión a cuatro puntos
retardo absoluto de la segunda placa de retardo en el eje x
retardo absoluto de la segunda placa de retardo en el eje y
cambio de fase angular (retardo en radianes)
radio de la fibra
retrazo (en longitudes de onda o angular) entre las dos ondas
relacion de aspecto Ur
tiempo
elongaciones de la matriz
-----.--........... -.--.. --.-------xii

y distancia desde el eje neutro en una viga a flexión al punto donde
se presenta un esfuerzo crx
11 11
x,y
a
f3
Sm
r
vectores unitarios incidentes un modelo en la direcciones x, y
ángulo entre un esfuerzo principal y el vector eléctrico de un haz
con polarización lineal en dirección horizontal
ángulo del eje óptico del analizador con respecto a la dirección x
desplazamientos angulares de las componentes polarizadas de
un haz de luz en la dirección x y en la dirección y, producidas por
una placa de retardo de un cuarto de onda
magnitud de los retardo en la propagación en un modelo sometido
a esfuerzos
retrazo lineal relativo entre dos haces ortogonales propagándose
deformación en la fibra
deformación en la matriz
deformación total del material compuesto
conductividad específica
ángulo entre los ejes ópticos del primer polarizador y el primer
cuarto de onda
deformación cortante en la matriz
ángulo entre el plano de polarización de la luz incidente (eje
óptico del primer polarizador) y el eje óptico del analizador
longitud de onda
Jla permeabilidad magnética
v frecuencia
e ángulo de la isoclina o parámetro de la isoclina
·----·-··-----.---·----·--·· Xlll

p
PE
TMAX
T;MAX
TcMAX
V
radio desde el centro de la fibra hacia el seno de la matriz
densidad de carga eléctrica
esfuerzo inicial de falla interfacial o diferencia de los esfuerzos
principales observado en un punto por fotoelasticidad
esfuerzos en las direcciones principales
esfuerzo corregido en un punto
esfuerzos de tensión en la fibra
esfuerzo de transición entre la zona desprendida y la adherida en
una probeta de Crack-bridging
esfuerzo sobre la fibra en la sección adherida en una probeta de
Crack -bridging
esfuerzo en la sección desprendida de la fibra en una probeta de
Crack -bridging
es le nivel de esfuerzo nominal o campo de esfuerzo en la
corrección axisimétrica
esfuerzo cortante máximo obtenido por fotoelasticidad
esfuerzo cortante en el seno de la matriz
esfuerzo cortante interfacial
esfuerzo cortante interfacial máximo
esfuerzo cortante máximo corregido
esfuerzo cortante interfacial constante provocado por la fricción
velocidad de propagación de una onda
relación de Poisson de la matriz
frecuencia de vibración de una onda electromagnética
coeficiente dieléctrico
·----------.. --------------·-·-------·---------------·--XIV

Resumen
Las imágenes de los patrones fotoelásticos de las geometrías de Pu/1-out y Crack
bridging se usaron para medir y analizar la distribución del esfuerzo cortante
interfacial en la interfase formada entre una fibra termoplástica de
polietilentereftalato y una matriz termofija resina epoxy (PET/Epoxy). La técnica de
fotoelasticidad permitió observar la distribución del esfuerzo cortante interfacial y
seguir el proceso de falla in-situ de las probetas para ambas geometrías. El
esfuerzo cortante interfacial máximo fué localizado sobre la superficie de la fibra a
una distancia de 2.5 veces el diámetro de la fibra a partir del borde del bloque de
resina para las geometrías de Pu/1-out y Crack-bridging. El esfuerzo cortante
interfacial máximo para la geometría de Pu/1-out fue de 1.17 MPa; para las
probetas de Crack-bridging fue de 1 .41 MPa.
La técnica de fotoelasticidad fue usada para localizar las direcciones de los
esfuerzos principales trazando las trayectorias de las isoclinas para una probeta
de Pull-out. Las trayectorias de los esfuerzos principales consisten de dos familias
de curvas ortogonales, una de las cuales corresponde al esfuerzo principal a1
(algebraicamente mas grande) y la otra a los esfuerzos principales a2. Las
imágenes de las isoclinas con parámetros de 0° a 90° mostraron que el esfuerzo
está simétricamente distribuido en la probeta de Pu/1-out. Las direcciones de los
esfuerzos principales a1 y a2 convergen en un plano localizado sobre la superficie
de la fibra en el punto donde fue localizado el esfuerzo cortante interfacial máximo
en las probetas de Pull-out. Finalmente, los modos de falla 1 y 11 fueron asociados
con las direcciones de los esfuerzos principales en una probeta de Pu/1-out para
explicar la falla interfacial.
XV

Abstract
The photoelastic images of the isochromatic fringes for Pu/1-out and Crack-bridging
specimens were used to measure and to analyze the interfacial shear stress
distribution for a thermoplastic-thermoset interphase (PET/Epoxy). The
photoelastic technique showed the shear stress distribution and has the capability
to follow in-situ the loading and failure process of a specimen. A description of the
stress transfer process and the interfacial shear stress level along the embedded
fiber was measured for Pu/1-out and Crack-bridging geometries. The maximum
interfacial shear strength was located along the fiber surface at a distance of 2.5
times the fiber diameter from the specimen border for the Pu/1-out and Crack
bridging specimens. The maximum interfacial shear stress measured for a Pu/1-out
specimen had a value of 1.17 MPa and 1.41 MPa for the Crack-bridging specimen.
The photoelastic technique was also used to locate the principal stress directions
by tracing out the isoclinic fringe pattern of the Pu/1-out geometry. The principal
stress trajectories consist of two families of orthogonal curves, one corresponds to
the a1 principal stresses (algebraically greater) and the other to the a2 principal
stresses. The images of the isoclinic fringes from 0° to 90° showed that the stress
is symmetrically distributed in the Pu/1-out specimen. The principal stress directions
for a1 and a2 converge on the fiber surface at the plane in which the maximum
interfacial shear stress was located for the Pu/1-out specimen at 2.5 times the fiber
diameter from the edge of the resin block. Finally, the failure modes 1 and 11 based
on the principal stress directions were associated for the Pu/1-out specimen to
explain the interfacial failure.
·------------·-------·--·---- ·------xvi

Introducción
Uno de los parámetros más importantes en el diseño de materiales compuestos es
el nivel de adherencia entre los componentes que lo constituyen. El análisis de la
adherencia en materiales compuestos se realiza de manera tradicional usando
técnicas de análisis micromecánico en las cuales se mide el esfuerzo necesario
para extraer o para fracturar una fibra embebida en una matriz polimérica.
La distribución de esfuerzos puede ser analizada también por medio de sistemas
ópticos que generan patrones de franjas de interferencia. Una técnica de análisis y
diseño mecánico es la fotoelasticidad, en la que dos haces luminosos con
polarización lineal interfieren entre sí al propagarse a través de un material
sometido a una carga. La interferencia de estos haces produce imágenes con
patrones de franjas que muestran la distribución y el nivel de los esfuerzos
generados en el material.
La ley de esfuerzo óptico relaciona la propagación de la luz a través de diferentes
índices de refracción en un material o modelo fotoelástico con la distribución de
esfuerzos en él al estar sometido a una carga. La combinación de la ley de
esfuerzo óptico con las ecuaciones de propagación para una onda plana permite
el análisis de las transformaciones de un haz de luz con polarización lineal o
circular al propagarse a través de un material sometido a un sistema de esfuerzos
en dos dimensiones.
El análisis por medio de un sistema óptico de un modelo de material compuesto
genera imágenes con patrones de franjas que están relacionadas con la
distribución de los esfuerzos en todo el modelo. De esta manera se correlacionará
la distribución de esfuerzos obtenida aplicando la técnica de fotoelasticidad y la
distribución equivalente obtenida a partir de las teorías de transferencia de
xvu

esfuerzo cortante para la geometría de desprendimiento a tensión (Pu/1-out)
sometida a una carga cuasiestática. En el caso de la geometría de puenteo de una
grieta (Crack-bridging), el análisis se realizará en el frente de fractura interfacial al
propagar una grieta hasta la completa separación de la fibra, a diferencia de la
geometría de Pu/1-out donde el proceso de falla no fue continuo.
Las direcciones de los esfuerzos principales para el modelo de Pu/1-out fueron
trazadas en base a las trayectorias de las franjas fotoelásticas conocidas como
isoclinas. Las direcciones de esfuerzo, se usaron para esclarecer los mecanismos
de falla interfacial predominantes a lo largo de la superficie de la fibra embebida.
XVlll

Objetivo general
Diseñar una metodología para medir la distribución del esfuerzo cortante interfacial
en un sistema de fibra termoplástica y matriz termofija empleando como base la
técnica de fotoelasticidad.
Objetivos específicos
• Medir la distribución del esfuerzo cortante interfacial en un sistema de fibra
termoplástica y matriz termofija para las geometrías de Pu/1-out y Crack
bridging.
• Definir la distribución de las direcciones de los esfuerzos principales que
actúan en una probeta para la geometría de Pu/1-out sometida a una carga.
• Analizar el proceso de transferencia de esfuerzo y definir los modos de falla
en base a las direcciones de los esfuerzos principales en modelos de Pu/1-
out.
-----------·· xix

Capitulo 1
Capitulo l. Teoría de fotoelasticidad
Fotoelasticidad es un método experimental que se emplea en mecánica de
materiales para el análisis de campos de esfuerzo y deformación. La luz al
atravesar ciertos materiales transparentes revela, por medio de efectos ópticos
estos campos de esfuerzo o deformación [1, 2].
1.1 Ley del esfuerzo óptico
Los polímeros son capaces de presentar una doble refracción cuando son
sometidos a cargas; a esta propiedad se le conoce como birrefringencia inducida.
De la misma forma que los cristales, estos materiales también tienen la habilidad
de separar un haz de luz en dos componentes ortogonales con polarización lineal,
los cuales se propagan a diferente velocidad. Este efecto se puede observar al
inducir una deformación cuando se aplica al material a una carga y desaparece
instantáneamente al retirar la carga o después de cierto tiempo dependiendo del
material y la carga aplicada. Este efecto de doble refracción artificial fue observada
por primera vez en 1816 por Brewster [1 ], siendo ésta la característica física base
de la fotoelasticidad.
En general, un sistema de esfuerzo tridimensional posee tres esfuerzos principales
y tres direcciones de esfuerzo principales en cualquier punto del material. En un
cuerpo con doble refracción temporal, las direcciones de los esfuerzos principales
coinciden con los índices de refracción en las direcciones de los ejes
cristalográficos del material.
1

Capitulo 1
Las ecuaciones que relacionan a los esfuerzos aplicados con los índices de
refracción para materiales temporalmente birrefringentes fueron formuladas por
Maxwell en 1852 [3]:
n1-n =C1a1 +C2(a2 +o-3 )
n2-n =C1a2 +CAa3 +a1)
n3 -n =C1a3 +C2(a1 +aJ,
(1 .1)
(1.2)
(1.3)
donde n es el índice de refracción del material en su estado ópticamente
isotrópico, n1, n2, na son los índices de refracción para las ondas propagándose en
dirección paralela a los esfuerzos principales (no isotrópicos), cr1, o-2, aa, son los
esfuerzos principales y c1 ' c2 son los coeficientes de esfuerzo óptico para un
material específico.
Las ecuaciones anteriores fueron deducidas para materiales cristalinos, sin
embargo, son aplicables a polímeros que permiten la refracción de la luz.
Arreglando las ecuaciones anteriores como diferencias de índices de refracción no
isotrópicos y eliminando n se obtiene:
n1 -n2 = (c1 -C2Xa1 -o-2) =C(o-1 -o-2),
(1.4)
donde C = (C1 - C2 ) es el coeficiente relativo de esfuerzo óptico.
De manera similar:
n1 -n3 =C (o-1 -o-3 )
n2 -n3 =C (o-2 -aJ (1.5)
(1.6)
--------------·-----.. --2

Capitulo 1
Las ecuaciones (1.5} y (1.6) relacionan los índices de refracción en las direcciones
de los esfuerzos principales que actúan en el sistema. De tal manera que si el
esfuerzo normal al material es constante, y el sistema de esfuerzos a través del
mismo no varía, la diferencia entre los índices de refracción inducidos por el
esfuerzo será constante y el material actuará como una placa de retardo temporal.
Entonces una luz polarizada propagándose a través del material, se separará en
dos haces ortogonales con polarización lineal, que acumularán un retardo relativo
entre ellos a causa del esfuerzo aplicado; así, definiendo al retrazo lineal relativo 8
como:
(1.7)
donde hL es el espesor de la probeta o la distancia recorrida por el haz de luz en la
probeta.
Las diferencias de los índices de refracción producen el retrazo del haz que pasa
por el material. Considerando un sistema de esfuerzos bidimensional, el retrazo
angular en radianes estaría expresado de la siguiente forma:
(1.8)
(1.9)
donde; R;._ es el cambio de fase angular (retardo en radianes) entre los dos
componentes vectoriales de las ondas propagándose después de pasar por el
material bajo carga y A. es la longitud de onda de la luz empleada.
La ecuación (1 .8) representa la ley de esfuerzo óptico y es la base de la
fotoelasticidad. Esta ley establece que el cambio de fase angular R;._ es
-------·----····----3

Capitulo 1
linealmente proporcional a la diferencia entre los esfuerzos principales a1 - a2 y al
espesor hL del material e inversamente proporcional a la longitud de onda de la luz
empleada f... .
Reordenando la ecuación (1 .8) y definiendo a N como el retrazo relativo en
términos de ciclos completos (orden de franja) , y a fa como la deformación
necesaria para provocar un cambio de un ciclo de una longitud de onda por unidad
de espesor del modelo (también es conocida como la constante de esfuerzo óptico
con unidades de N m o lbt plg) [2, 3]:
(a - a ) = R ;,. A _i_ !_ 1 2
2n hL e
N= R ;,. = 8 2n A
f = ~ cr e
Agrupando términos:
(1.10a)
(1.10b)
(1.1 Oc)
(1 .11)
Finalmente, la ley de esfuerzo óptico es comúnmente escrita de la siguiente forma:
1 (a - a ) = Nf -
1 2 cr h L
(1 .12)
4

Capitulo 1
De las relaciones de esfuerzo-deformación para un sistema bidimensional, se
sabe que la diferencia de los esfuerzos principales esta relacionada con el
esfuerzo cortante máximo ( r MAX) de la siguiente forma:
(1 .13)
Reordenando se tiene:
(a 1 - CT 2 ) = r MAX
2 (2.13a)
Ahora relacionando la ecuación (1.13a) con la ley de esfuerzo óptico (ecuación
1.12), el esfuerzo cortante máximo puede ser expresado en términos de la teoría
de fotoelasticidad:
TMAX (1.14)
El orden fotoelástico N es de gran importancia en fotoelasticidad, pues en
cualquier punto el esfuerzo cortante máximo ( r MAX) es directamente proporcional
al orden fotoelástico N.
1.2. Patrones de esfuerzo por flexión pura
Para convertir los patrones fotoelásticos obtenidos a valores de esfuerzo cortante
máximo o de diferencia de esfuerzos principales, se debe determinar
experimentalmente el coeficiente fotoelástico del material (fa ). La mejor técnica
para obtener esta constante es emplear una probeta en forma de viga
-----------5

Capítulo 1
simplemente apoyada en flexión pura del mismo material en estudio dentro de su
intervalo de respuesta de deformación elástica. Esta viga al ser cargada en puntos
intermedios situados generalmente a distancias de % de la longitud genera un
esfuerzo flexionante constante en el tercio central. La carga es aplicada y un cierto
tiempo después el patrón fotoelástico generado es fotografiado. Posteriormente se
determinan las posiciones de los órdenes enteros y se estiman los esfuerzos por
medio de la teoría de flexión.
De la teoría de elasticidad se sabe que en una probeta sometida a flexión pura, el
esfuerzo en un punto situado a una distancia y del eje neutro de la probeta (figura
2.1) esta dado por:
(1 .15)
donde M e 1 son el momento flexionante y el momento de inercia de la sección
transversal respectivamente, y es la distancia desde el eje neutro al punto donde
se presenta un esfuerzo ax, que es el esfuerzo principal (figura 1.1).
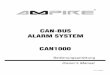
La figura 1 .1 a muestra una probeta sujeta a flexión pura. Cuando se flexiona la
probeta, la porción superior de la probeta estará sujeta a un esfuerzo de
compresión y la parte inferior a un esfuerzo a tensión. En la parte media de la
probeta se encuentra una zona en la que la transición entre el esfuerzo de
compresión y tensión se lleva a cabo. Esta zona en la que el esfuerzo es cero, se
llama eje neutro y esta localizada en el centro de la probeta.
La figura 1 .1 b muestra la magnitud del momento flexionante en la probeta. La
figura 1 .1 e muestra la distribución de los esfuerzos en la porción central de la
probeta.
--··------·--6

Capitulo 1
Entonces, si en un punto q a una distancia y del eje neutro existe un esfuerzo ax
que cause una diferencia de fase de una longitud de onda, entonces en todos los
puntos en la línea horizontal (línea AB) que pasa a través del punto "q" , estarán
sometidos al mismo esfuerzo y tendrán la misma diferencia de fase formando una
banda oscura (figura 1.1 e). De manera similar todos los puntos en la línea CD a
una distancia 2y del eje longitudinal, tendrán una diferencia de fase igual a dos
veces la longitud de onda. Por lo anterior, el patrón de esfuerzos para un sistema
a flexión pura consiste de bandas horizontales paralelas oscuras y brillantes
equidistantes entre si. En la figura 1.1 se puede observar las bandas en las que
las diferencias de esfuerzo O"x - ay permanecen constantes a una distancia y (línea
AB) y 2y (línea CO).
La franjas fotoelásticas obtenidas por flexión son simétricas respecto al eje neutro
de la probeta. De tal forma que al generar la deformación necesaria para la
aparición de dos franjas, estas aparecerán en la parte superior e inferior del eje
neutro. De esta manera las líneas A-8 y C-D estarán sometidas a un esfuerzo de
compresión igual al esfuerzo de tensión en las líneas A'-8' y C'-D'.
Los patrones de esfuerzo en probetas sometidas a tensión, compresión o flexión,
producen en materiales fotoelásticos, una doble refracción temporal que es una
función lineal de la diferencia de esfuerzos principales. En una probeta de material
fotoelástico visto a través de un polariscopio, las líneas de diferencia de esfuerzos
principales ax- ay constante coinciden con las bandas oscuras de extinción. De tal
manera que de acuerdo a la ecuación (1 .11) podemos decir que una franja
fotoelástica oscura (de extinción) coincide con la trayectoria en la que se localizan
los puntos sometidos a una diferencia de esfuerzos principales constante o con un
esfuerzo cortante máximo constante. De tal manera que la aparición de las franjas
fotoelásticas están relacionadas directamente con el sistema de esfuerzos
generado en un material por una carga aplicada.
--··-·--··-··--·····--·····-----··---· 7

Capitulo 1
Diagrama de cuerpo libre
p p Eje neutro
a) ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·- ·
p
b)
e)
a : : Diagrama de momentos de flexión
Momento flexionant constante
rama de distribución de esfuerzos
Eje neutro
a p
Figura 1.1 Esquema de flexión. Diagrama de cuerpo libre (a), diagrama de momentos de flexión (b) y distribución de esfuerzos (e).
La manera más simple y directa para determinar el orden de franja y la constante
fotoelástica de un material fotoelástico sometido a una carga es observar
cuidadosamente la formación del patrón fotoelástico durante la carga y descarga
de un modelo a flexión colocado en un polariscopio.
El momento máximo de flexión M esta definido de la siguiente forma:
8

Capitulo 1
M=p·a, (1 .16)
donde, p es la carga empleada en Newtons (N) y a es la distancia entre apoyos
(figura 1.1 ). Así mismo, el momento de inercia 1 esta definido como:
/ = hLh3 12 '
donde h es la altura de la probeta en metros.
Sustituyendo en la ecuación (1 .15), con y = h/2, se obtiene:
(e_ la(!!__ l (j =faN =~
X 1 nz3 l Ahora despejando f de la ecuación (1 .18) se obtiene:
a
(1.17)
(1 .18)
(1 .19)
La ecuación (1 .19) proporciona el valor de la constante de franja fotoelástica
cuando la franja fotoelástica con el orden fotoelástico máximo (N) se encuentra en
los bordes de la probeta.
El situar la franja con el máximo orden fotoelástico en el borde de la probeta es
uno de los métodos para la calibración fotoelástica usando una viga a flexión. Un
método alterno es seleccionar una carga constante p y medir la distancia y hasta
cada orden fotoelástico N a partir del eje longitudinal neutro de la probeta.
9

Capitulo 1
En este caso, la ecuación (1 .18) queda expresada de la siguiente forma:
(1.20)
Despejando fa,
(1.21)
La ecuación (1.21) proporciona el valor de la constante de franja fotoelástica (fa)
cuando la franja fotoelástica de un orden fotoelástico (N) a cualquier distancia y
desde el eje neutro de la probeta.
Par las ecuaciones (1.19) y (1.21 ), p, es la carga en Newtons, a es la longitud
entre apoyos en metros, h, es la altura de la probeta en metros, N, es el orden
fotoelástico y f es el valor de franja fotoelástico. a
El valor de la constante de franja fotoelástica f , es el valor en N m necesario para a
deformar un material y lograr un cambio en el índice de refracción suficiente para
la aparición de un orden fotoelástico.
1.3 Propagación de un haz de luz a través de un
polariscopio
El comportamiento de la luz al propagarse a través de un modelo fotoelástico
sometido a una carga, es similar al comportamiento de la luz al pasar por una
-------····-·--··----·-·-··· ·----10

Capitulo 1
placa de retardo produciendo una polarización circular a partir de un haz incidente
con polarización lineal.
Los cambios de fase de la onda al propagarse en un material sometido a un
campo de esfuerzos constante esta dado por las ecuaciones (1.7) y (1.8), donde
a1 y a2 son los esfuerzos principales en el punto de análisis.
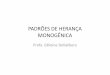
El arreglo de la figura 1 .2 corresponde a un polariscopio circular de campo oscuro
el cual esta compuesto por dos placas de retardo de % de onda, colocados entre
el primer elemento, un polarizador y el último elemento, que es el analizador. Los
ejes ópticos de las placas de retardo de V4 de onda pueden estar cruzados o
paralelos entre si, pero desplazados ±45° respecto al eje óptico del primer
polarizador, para convertir la polarización de la luz de plana a circular y de nuevo a
plana antes de entrar al analizador. La figura 1.2 muestra un modelo fotoelástico
sometido a esfuerzos en un polariscopio circular de campo oscuro.
El modelo fotoelástico sometido a esfuerzos introduce un retardo adicional a causa
de la deformación inducida, cambiando la polarización entre las placas de retardo,
de circularmente polarizada a elípticamente polarizada.
Considerando que el haz de luz incidente en el modelo fotoelástico esta formado
por dos componentes ortogonales Ex y Ey las componentes ortogonales se
describen como:
E X A cos [ 2: (z - u xt )] sen <!>
(1.22)
------·--···· 11

Capitulo 1
donde 4> es el ángulo entre los ejes ópticos del primer polarizador y el primer cuarto de onda.
Eje lento
Eje óptico
-+ ,,~
O z i / 0 1 ' ~
Eje rápido ~-+,,,,," ···· · 2da placa de , k'¡ V4 de onda
,, Modelo
Figura 1.2. Modelo fotoelástico bajo un par de esfuerzos colocado en un banco de polarización circular de campo oscuro.
Agrupando términos de la siguiente forma: k x = A sen<j>; ro t = 2 7w ¡;,{ y
.1¡ = 2~ los vectores de las componentes ortogonales quedan descritos como:
Ex = kxcos (wt + flx)
E y =k reos (wt + llr) ' (1.23)
donde Ex y Ey son los vectores eléctricos del haz de luz vibrando en la dirección x
o en la dirección y, w es la frecuencia de la vibración , kx y ky, son las magnitudes
de las componentes ortogonales polarizadas, t es el tiempo y ~x y ~Y son los
desplazamientos angulares de las componentes polarizadas en la dirección x y en
la dirección y, producidas por el primer cuarto de onda [4] .
12

Capitulo l
En el caso especial en el que las dos componentes tengan una diferencia de fase
de % de longitud de onda (rc/2 radianes), las componentes serán de igual
magnitud, y el haz será polarizando circularmente. Por otro lado, si ambos haces
tienen una diferencia de fase diferente a% de longitud de onda, el haz incidente
tendrá una polarización elíptica.
Empleando una notación vectorial, el vector incidente (E) en el modelo se define
de la siguiente forma:
A A
E=Exx+Dry, (1.24)
A A
donde Ex y Dy son las magnitudes de vectores unitarios y x , y son los vectores
unitarios en la dirección x y en la dirección y.
Cambiando a notación rectangular y asumiendo que durante la propagación a
través del polarizador la frecuencia de vibración m permanece constante, entonces
ambos vectores se simplifican de la siguiente forma:
E =k e1~:.x X X
E =k e 1~:.y ' y y
(1.25)
donde j es un vector unitario.
La magnitud del vector eléctrico propagándose esta dada por:
(1.26)
Al pasar por el modelo fotoelástico, ambas componentes sufren un retardo en la
propagación con una magnitud de ó 1 y ó2. Por consiguiente, el retardo relativo
13

Capitulo 1
entre ellas es: R;.. = ó1 - ó2, de tal manera que a la salida del modelo fotoelástico,
los haces se denotan de acuerdo a la ecuación (1.25):
E ~ = E 1e 1t.,
E; = E 2 e Jt. 2
O en términos de los componentes sobre los ejes x, y
(1.27)
E~=~ eil1 1 [Ex(eiR~. + 1)+ (eiR~. -1XExcos 2a + Eysen 2a)]
1 (1.28) E~ =
2 eil12 [E Y (e iR~. + 1)- (e iR~. -1 XE Ycos 2a -E xsen 2a )]'
donde a es el ángulo de un esfuerzo principal respecto a un plano horizontal,
como se muestra en la figura 1.3a. Las ecuaciones (1 .28) son las ecuaciones
generales para los haces de luz emergiendo de un modelo sometido a esfuerzos.
En la figura 1 .3 se pueden observar los vectores de luz en diferentes etapas de
propagación. En la figura 1.3a los vectores provenientes de la primera placa de
retardo de % de onda que se sitúan a la entrada del modelo fotoelástico bajo
esfuerzos con las direcciones de los esfuerzos principales a un ángulo a respecto
al eje x. En la figura 1.3b, los ejes ópticos de la segunda placa de retardo de % de
onda están alineados con el eje x y el eje y. Finalmente, en la figura 1 .3c, se
muestra al vector resultante producido en la segunda placa de retardo de % de
onda desplazado a un ángulo {3 respecto a la dirección del eje x.
----·---------------------------------------- ----14

O¡
(a)
Extraordinario Y /(lento)
Ordinario /(Rápido)
--------X
(b)
Capitulo 1
y
X
(e)
Figura 1.3 Vectores de luz en diferentes etapas en un polarizador: (a) A la entrada del modelo; (b) ejes ópticos de la segunda placa de retardo paralelos a los ejes x, y; (e) eje óptico del analizador a un ángulo {3 respecto a la dirección x.
La adición de una placa de retardo después del modelo alineada como se muestra
en la figura 1 .3b, añade a cada uno de los haces, retardos absolutos Ox y Oy,
haciendo que el haz cambie de nuevo su polarización. Los vectores que emergen
de esta última placa de retardo esta dada por:
donde E: y E; son los vectores eléctricos a la salida de la última placa de retardo
de% de onda.
Finalmente, añadiendo el segundo polarizador (analizador) desplazado un ángulo
~ entre su eje óptico y la dirección x, la ecuación del haz que emerge del
analizador toma la siguiente forma:
(1.30)
___ _. ___ , __ _ 15

Capitulo 1
Donde E~ es el vector resultante a la salida del segundo polarizador.
Sustituyendo los valores de E: y de E; y factorizando ~ox se obtiene:
E13
= ~ei~2 ei0y[ei0 (Ex(eiR~- +1)+(eiR~- -1XExcos2a+Eysen2a))·cos~
+ (EY (eiR~- + 1)- (eiR>- -1XEYcos 2a -Ex sen 2a))·sen ~ J, (1.31)
donde O y es el retardo relativo en el segundo cuarto de onda, R" es el retardo
relativo ocasionado por el esfuerzo inducido en el modelo, a es el ángulo formado
entre la dirección x y la dirección del esfuerzo principal en el modelo y f3 es el
ángulo formado entre la dirección x y el plano de polarización del analizador.
La ecuación (1.31) es la ecuación general de un haz de luz emergiendo de
cualquier tipo de polariscopio con un · modelo estresado entre los cuartos de onda.
Considerando ahora varias simplificaciones para ciertas condiciones especiales de
los elementos que lo conforman.
1.3.1. Análisis para un polariscopio lineal
En este caso f3 = O (figura 1.2); el eje óptico del analizador coincide con la
dirección de referencia x. El resultado final es que las placas de retardo de V4 de
onda son ópticamente eliminados (figura 1.4).
·-·---·-······------ --- ------·---------------16

Capitulo 1
Entonces, a partir de la ecuación (1.31 ), la expresión para el haz a la salida del
polariscopio lineal es:
La luz incidente sobre el modelo fotoelástico sometido a esfuerzos esta
linealmente polarizada, entonces, definiendo al ángulo entre el plano de
polarización de la luz incidente (eje óptico del primer polarizador) y el eje óptico del
analizador como q> , los vectores de las componentes polarizadas estarán
definidos de la siguiente manera:
Ex =E ~cos <p
y
E r = E~sen <p
(1.33)
La intensidad del haz de luz esta definida como el producto punto de la amplitud
por su conjugado:
(1.34)
Donde E fJ es la magnitud del vector del haz de luz que sale del polariscopio.
Sustituyendo las ecuaciones (1.32) y (1.33) en la ecuación (1.34), la intensidad del
haz de luz queda expresada de la siguiente manera:
------------· ---···-·-------------------- -17

Capitulo 1
La ecuación (1.35} permanece sin cambio aun cuando Q = O; es decir, no existe
un retardo adicional después del modelo fotoelástico (lo que prueba la ausencia
óptica de los % de onda). La ecuación (1 .35) es entonces la expresión general
para la intensidad de un haz de luz cuando un modelo fotoelástico es colocado en
un polarizador lineal con los ejes de ópticos del polarizador y del analizador a un
ángulo cp entre si (Figura 1.4) .
El polarizador lineal puede estar arreglado de tal manera que los ejes ópticos del
primer elemento polarizador y del analizador estén cruzados [5-8] . Esta es la
configuración básica del polarizador lineal de campo oscuro. Si los planos de
ambos polarizad ores están cruzados, entonces cp = 90°, Ex = O y E Y = E
entonces la intensidad para un polarizador lineal de campo oscuro se encuentra
sustituyendo estos valores en la ecuación (1 .35).
Analizador
_¿: Eje óptico
Eje óptico
Polarizador
Figura 1.4. Modelo fotoelástico bajo sistema de esfuerzos colocado entre un banco de polarización lineal ( cp = 90°).
---------18

Capitulo 1
(1.36)
La ecuación (1 .36) representa la intensidad de un haz de luz que sale de un
polariscopio lineal en campo oscuro (figura 1.4) y es función de la dirección de los
esfuerzos principales a y del retardo relativo RL inducido por los esfuerzos.
Cuando un disco de material fotoelástico que está sometido a una carga de
compresión es visto a través de un polarizador lineal de campo oscuro el patrón
fotoelástico aparece como en la figura 1.5. En cambio, cuando el modelo
fotoelástico esta libre de esfuerzos, este aparecerá oscuro debido a que no se ha
inducido un retardo en el modelo.
y V
Figura 1.5. Imágenes del campo oscuro para un disco bajo compresión en dirección del diámetro en un polarizador lineal con cp = 90°; a es el ángulo entre el eje óptico del polarizador y la dirección del esfuerzo.
19

Capitulo 1
Cuando los ejes ópticos del polarizador y del analizador están con los ejes
cruzados, se obtiene un polariscopio circular de campo oscuro. La ecuación 1 .37
es la ecuación general de un haz de luz emergiendo de un polariscopio circular.
Para un haz emergiendo de un polarizador circular de campo oscuro, E Y = - jE x .
Ahora sustituyendo este valor en la ecuación 1.37, se obtiene la expresión.
La intensidad de este haz de luz se define sustituyendo la ecuación (1 .38) en la
ecuación (1 .34), así:
/1 - 2 = E: ( 1 - cos R A )
R 1 = 2E 2 sen 2 _A
1- 2 y 2
1 K 2 R A 1- 2 = sen 2
donde K es una constante particular para cada polarizador.
(1 .39)
La ecuación (1.39) es la intensidad de un haz de luz emergiendo de un
polariscopio circular de campo oscuro con un modelo estresado, similar a la
ecuación (1 .36) excepto que el término a correspondiente a la generación de las
isoclinas ha desaparecido. Para esta ecuación solo se tiene una condición para la
extinción [20, 21].
para RA o d" , - = , n: ... ra 1anes o 2
RA = 0,2n: .... ,N(2n:)
23

Capitulo 1
Donde N es un entero que puede tomar valores de O a oo y es conocido como
orden de franja isocromática.
Ya que la extinción es independiente de la orientación de los ejes de los
polarizadores, el patrón de franjas isocromáticas mantiene una posición fija para
cualquier rotación del modelo fotoelástico en el polariscopio [22-24].
De esta manera, los puntos bajo una deformación relativa a la cual se induce un
retardo igual a un numero entero (N= 1, 2, 3, ... ), forman una franja de extinción
llamada banda isocromática, que puede ser empleada para encontrar la magnitud
del esfuerzo cortante máximo en un modelo fotoelástico.
Cuando los ejes ópticos del polarizador y del analizador están paralelos, se
obtiene un polariscopio circular de campo claro.
Para esta disposición EY = jEx. Ahora empleando la ecuación (1.37) para un haz
de luz emergiendo de un polariscopio circular de campo oscuro y la ecuación
(1.34) para la intensidad, la ecuación de un haz de luz emergiendo de un
polariscopio circular de campo claro es:
11_ 2 =E: (1 + cosR,J
R 1 = 2 E 2 cos 2
-"" 1-2 y 2
1 K 2 R"-1 2 = cos -- 2 1
donde K es una constante y las condiciones de extinción son ahora:
(1.40)
24

para R~ n 3n d" , - = - ,- ... ra 1anes o 2 2 2
Capítulo 1
R ~ = n,3n,5n ... , (N + t )2n
Ahora las franjas de extinción isocromáticas coinciden con los órdenes
isocromáticos medios y aparecen como franjas oscuras.
25

Capitulo 11
Capitulo 11. Materiales compuestos
El progreso tecnológico en la producción y aplicación de materiales tradicionales
hace que las tendencias en el uso de los diversos tipos de materiales se orienten
progresivamente hacia productos en el que el uso de materiales compuestos no
sólo es posible, sino necesario. Esto ha conducido a la adopción de materiales y
métodos de transformación de nueva generación que minimizan el costo de
producción y mejoran la calidad, aspecto y características mecánicas de los
productos terminados.
La tecnología de los materiales compuestos consiste en la manufactura de piezas
y/o estructuras con materiales convencionales, poliméricos, metálicos o
cerámicos, a los que se les añade un material de refuerzo que mejora sus
características mecánicas o su desempeño bajo condiciones de trabajo
específicas.
Estos materiales, que nacieron para los grandes proyectos aeroespaciales y de
defensa, ocupan ahora, un más amplio sector del mercado pese a que
inicialmente, su precio los hacía no competitivos con los materiales
convencionales como el hierro y el acero, los plásticos, el cemento, etc. [25, 26].
La penetración de estos materiales a los diferentes segmentos de mercado es
impulsada por la actual tecnología que permite que se fabriquen una gran variedad
de productos por procesos automáticos o semiautomáticos que, en una sola etapa
proporcionan un producto terminado aun cuando el proceso de producción sea
más complejo que el de los materiales monolíticos.
Las propiedades mecánicas de los materiales poliméricos reforzados están
influidas por una gran cantidad de parámetros ligados a la interacción
matriZ/refuerzo. El análisis y medición de las características de un material
26

Capitulo 11
compuesto ha llevado a la conclusión de que existe una región que se encuentra
entre la superficie de la fibra y la matriz, la cual tiene una estructura y composición
propia, resultado de la combinación de las características superficiales mecánicas,
físicas o químicas de la fibra y la matriz. A esta región se le conoce como Interfase
[27, 28].
2.1. Interfase fibra/matriz
La interfase es la región que determina en gran magnitud, la variedad de
propiedades de un sistema heterogéneo como lo son los materiales compuestos.
Un material compuesto típico consiste de una fase continua (la matriz) y de
inclusiones de otra fase(s) discontinua (generalmente en la forma de partículas, o
fibras). Como una regla, los materiales compuestos en los que la fase discontinua
esta formada por fibras, el esfuerzo de fractura de las fibras excede
considerablemente al esfuerzo de fractura de la matriz y por consiguiente, tales
materiales son conocidos como materiales compuestos fibra-reforzados. Las fibras
aseguran la fortaleza del material mientras la matriz proporciona la forma del
material compuesto. En este tipo de materiales compuestos, el nivel de
transferencia de carga de la matriz a las fibras es responsable del efecto de
refuerzo [29].
Los materiales compuestos fibra-reforzados pueden ser considerados a cuatro
niveles estructurales (figura 2.1 ). Al nivel molecular (figura 2.1 a), la interacción ·
entre los dos fases distintas, la fibra y la matriz, es determinada por las fuerzas de
Van der Waals entre las estructuras químicas de las fases, las interacciones ácido
base y por el tipo de enlaces químicos. Desde el punto de vista químico, la fuerza
de interacción interfacial depende de la energía de los enlaces y de la
concentración de éstos en la superficie de la fibra y la matriz.

Capitulo 11
Cuantitativamente, el trabajo de adherencia se caracteriza por que incluye todos
los tipos de contribuciones; interacciones físicas y químicas, que pueden ser
locales (interacciones ácido-base o covalentes) y no locales, como las fuerzas de
Van der Waals. Sin embargo a nivel microscópico (figura 2.1b), la interacción
interfacial normalmente se describe en base a las condiciones de varios
parámetros que caracterizan la transferencia de carga a través de la interfase
como son: el esfuerzo de adhesión, el esfuerzo cortante interfacial, liberación de
energía, etc. [29].
(a) (b) (e)
Figura 2.1. Niveles estructurales de un material compuesto fibra-reforzado: (a) nivel molecular, (b) micronivel y (e) meso nivel. ie la distancia de equilibrio interatómico.
A nivel intermedio (meso-nivel figura 2.1 e), se toma en cuenta la distribución real
de las fibras de refuerzo en la matriz y se determina el elemento estructural del
material compuesto, ya sea este un laminado, un multi-laminado, etc. Finalmente,
a un nivel macro (no mostrado en la figura 2.1) se caracterizan las partes del
material compuesto como un material a granel.
28

Capitulo 11
El concepto de interfase es considerado en la literatura en dos niveles. Primero a
nivel molecular, se estudia la química y la física molecular y en segundo lugar, la
adherencia, incluyendo los aspectos tales como la naturaleza y la densidad
superficial de los enlaces de adhesión, la distribución de energía de estos enlaces,
los rangos de acción, etc.
Las interrogantes generales relacionadas con la energía superficial son tratadas
por la termodinámica; sin embargo desde el punto de vista de diseño, el principal
problema es la eficiencia con que se lleva a cabo la transferencia de carga por
medio de un esfuerzo cortante interfacial que es el parámetro de diseño más
importante a nivel microscópico. La formación de la interfase por otra parte, ha
sido estudiada desde aspectos moleculares [30], mientras que en micromecánica
se usa casi exclusivamente en la descripción de la falla interfacial [28].
2.1.1. Análisis micromecánico
Para determinar los parámetros de interacción interfacial entre fibras y matrices,
se han desarrollado varias pruebas micromecánicas. La definición de prueba
micromecánica se aplica a ensayos en los que los especimenes examinados
contienen una sola fibra.
Todas estas pruebas pueden ser divididas en dos grupos. Un grupo incluye las
pruebas en las que la carga externa es directamente aplicada a la fibra (figura
2.2); éstas son, en primer lugar, la prueba de extracción de una fibra a tensión a la
que nombraremos en adelante como ensayo de Pu/1-out o simplemente Pu/1-out
[31] (figura 2.2a) con sus variaciones, como la prueba de microgota (figura 2.2b) y
la prueba de extracción de una fibra a compresión (Push-out) (figura 2.2c).
29

Capitulo 11
a)
e) F
Figura 2.2. Ensayos micromecánicos en los que la carga es aplicada directamente sobre la fibra: Pu/1-out (a), microgota (b) y push-out (e).
El segundo grupo de ensayos esta formado por las pruebas en los que la matriz es
cargada externamente (figura 2.3). A este tipo de ensayos pertenece la prueba de
fragmentación [32] (figura 2.3a), la prueba de Broutman [33] (figura 2.3b) y las
variaciones de la prueba de fragmentación en las que la matriz se sujeta a flexión
en lugar de una carga de tensión.
------ ------ -----·-··-·-------·--·-·--··-----··-30

Capitulo 11
(a)
1 1 1 (b)
l l Figura 2.3. Pruebas micromecánicas en las que la carga es aplicada sobre la matriz: fragmentación (a) y prueba de Broutman (b).
En la literatura existen discusiones extensas sobre la aplicación del método
micromecánico adecuado para la caracterización de la interfase en cada material
compuesto. Resulta obvio decir entonces, que el método correcto para una
configuración a caracterizar debe ser aquella con una distribución de esfuerzos
similar a la que experimenta un material compuesto real. Para los materiales
compuestos con matrices dúctiles y fibras frágiles es decir, para un sistema en el
que la deformación a la fractura de la matriz es varias veces mayor que la
deformación de fractura de la fibra (por ejemplo un polímero reforzado con fibra de
carbono), la prueba de fragmentación sería adecuada. Por el contrario, para
materiales compuestos basados en matrices frágiles que fallan a través de
múltiples fracturas transversales (con fibras de refuerzo uniendo una fractura) la
prueba de Pu/1-out se acerca más a la realidad.
----·-·----- ------·----··· 31

Capitulo 11
2.2. Modelo de transferencia de esfuerzo cortante (Modelo
Shear-lag)
El proceso de refuerzo es uno de los factores más importantes para la producción
de materiales compuestos con buenas cualidades. Las interacciones entre las
fibras y la matriz son extremadamente complejas y no completamente entendidas.
El primer intento para explicar el proceso de refuerzo de las fibras se basó
solamente en interacciones elásticas. Este estudio fue descrito por Cox (1952) y
este trabajo constituye lo que hoy se conoce como el modelo de transferencia de
esfuerzo cortante el cual nombraremos en adelante como el modelo de Shear-lag
o simplemente Shear-lag [34-35].
La eficiencia con la que las fuerzas son transferidas, depende tanto de la
naturaleza y propiedades de la fibra y de la matriz, así como de la calidad de la
interfase formada entre ambas. El refuerzo e interacción fibra-matriz puede
analizarse considerando que la transferencia de carga se genera por medio de un
fuerzas a cortante y depende de la transferencia elástica de fuerzas y del nivel de
la adherencia [35, 37].
El modelo Shear-lag fue subsecuentemente desarrollado por otros investigadores
como Outwater (1956), Rosen (1960), Dow (1963) [38]; que se centran en la
transferencia del esfuerzo de tensión de la matriz a la fibra por medio de un
esfuerzo interfacial de corte [39, 40].
Esquemáticamente, se puede representar dicho modelo como se muestra en la
figura 2.4. En donde se han dibujado líneas de referencia en la fibra y matriz
circundante.
---·· .. ·---···-------32

a)
b)
e)
R
~r~~- -
J"
X
! : 1
1 1 1 1
X+dX
t dp
• p
Capitulo 11
Figura 2.4. Esquema del modelo de Shear-lag, mostrando (a) sistema libre de esfuerzos, (b) desplazamiento axial u inducido al aplicar un esfuerzo de tensión paralelo a la fibra y (e) la variación radial del esfuerzo cortante y la deformación en la matriz.
33

Capitulo 11
La figura 2.4a muestra un modelo de material compuesto formado por un
segmento de una fibra embebida en una matriz. Al inicio, la deformación en el
modelo es nula al estar libre de esfuerzos, dando como resultado que las líneas de
referencia se mantengan rectas.
Cuando se ejerce un esfuerzo a 1 en el modelo en dirección paralela a la fibra, la
matriz reacciona al esfuerzo elongándose en la dirección del esfuerzo (figura
2.4b). En el mismo proceso la matriz transfiere a la fibra a través de la interfase
una cantidad de esfuerzo a, que ocasiona que la fibra sufra una elongación.
Ahora las líneas de referencia se distorsionan mostrando los perfiles de
elongación a los cuales tanto la fibra como a la matriz circundante están sometidas
(figura 2.4b).
Finalmente, en la figura 2.4c, se esquematizan las distorsiones provocadas por la
transmisión del esfuerzo en un elemento diferencial de la fibra. En esta figura se
puede observar como las elongaciones sufridas en la matriz por efecto del
esfuerzo a 1 , son transmitidas a través de un esfuerzo cortante r que disminuye
de intensidad hasta la superficie de la fibra. El esfuerzo cortante !'; en la
superficie de la fibra ocasiona que el elemento diferencial de la fibra se elongue al
ser sometido a un esfuerzo a,+ da,.
2.2.1. Distribuciones del esfuerzo y de la deformación
De acuerdo a la figura 2.4c el esfuerzo interfacial de corte r en el interior de la
matriz a una distancia x a lo largo de la fibra es obtenido por medio de un balance
de fuerzas de corte que actúan sobre las vecindades de un ánulo con radios r1 y r2
en una longitud dx.
34

Capitulo 11
(2.1)
(2.2)
Por lo tanto, el esfuerzo de corte r en la matriz a cualquier radio p desde el
centro de la fibra (figura 2.4c) está relacionado con el esfuerzo cortante interfacial
entre la fibra y la matriz r¡ de la siguiente forma:
(2.3)
Donde r es el esfuerzo cortante en la matriz, p es un radio a partir del centro de
la fibra y r¡ es el esfuerzo cortante interfacial.
Los campos de deformación alrededor de la fibra pueden ser definidos en términos
de las elongaciones u de la matriz en la dirección x respecto a la posición en la
que se encontraban cuando estaban libres de esfuerzos (figura 2.4). El incremento
de la elongación du, hacia el seno de la matriz desde el centro de la fibra está
determinado por la deformación de corte r , de tal manera que:
(2.4}
Donde d p es la variación de la distancia radial desde el centro de la fibra, du es la
variación de la elongación de la matriz, r es el radio de la fibra, y es la
deformación de corte, r es el esfuerzo cortante en la matriz y Gm es el módulo a
cortante de la matriz definido por:
--· ---··---------·------· 35

Capitulo 11
(2.5)
Donde Em es el módulo de elástico de la matriz, y vm es la relación de Poisson de
la matriz.
Para cualquier valor de x, la diferencia entre el desplazamiento de la matriz a un
radio R y el desplazamiento que se ejerce en la interfase, puede ser definido
integrando la ecuación (2.4):
(2.6)
donde uR es la elongación a un radio R desde el centro de la fibra, u, es la
elongación sobre la superficie de la fibra y r es el radio de la fibra.
Realizando la integración:
(2.7)
Se asume que la deformación en la matriz tiene un comportamiento lineal desde
las vecindades de la fibra hasta una posición remota en la matriz. El radio R está
localizado en una posición remota donde el patrón de deformaciones es constante.
En un material compuesto con un cierto arreglo en las fibras, el valor apropiado de
(R/r) depende de la proximidad de las fibras vecinas y por consiguiente de la
fracción volumétrica de fibra f. La relación exacta entre (R/r) y f depende del
arreglo de las fibras, sin embargo, la relación (R/r) en el resultado final tiene una
36

Capitulo 11
forma logarítmica, lo que lo hace poco sensible al tipo de arreglo en las fibras.
Para un arreglo hexagonal, la fracción volumétrica f esta definida de la siguiente
forma.
(2.8a)
Reordenando:
(R )
2 n 1
,- = 2t-JS .... ¡ (2.8b)
La distribución de los esfuerzos de tensión en la fibra a, , pueden definirse en
función del esfuerzo cortante interfacial tomando como base el balance de fuerzas
que actúan sobre un elemento diferencial dx de la fibra (figura 2.4c):
2rr:rdxr¡ = -rr:r 2 da,
da, 2-r¡ -- =- -dx r
(2.9a)
(2.9b)
donde a, es el esfuerzo a tensión en la fibra, x es la dirección en la que la fibra se
está elongando, r; es el esfuerzo cortante generado en la interfase fibra-matriz y r
es el radio de la fibra.
La variación del esfuerzo cortante interfacial r; a lo largo de la longitud de la fibra
x es desconocida pero usando la ecuación (2. 7) es posible relacionar las
elongaciones en la matriz con las deformaciones en la fibra en dirección axial
asumiendo que no existen deformaciones de corte y que la adhesión interfacial es
---------· ------· 37

Capitulo 11
perfecta de tal forma que las elongaciones en la superficie de la fibra sean iguales
a las de la matriz circundante (u, = u,).
Sustituyendo las ecuaciones (2.5), (2.6) y (2.7) en la ecuación (2.9b) se tiene que:
do f 2 E m (u R - u f ) -- =-
dx (1 + u m )- ' In ( ; ) , (2.1 O)
donde uR y u, son las elongaciones en la matriz a dos radios diferentes desde el
centro de la fibra, E m es el módulo de elástico de la matriz, u, es el esfuerzo a
tensión en la fibra, vm es la relación de Poisson de la matriz y f es la fracción
volumétrica de la fibra en el material compuesto.
La deformación en la zona elástica de la fibra es:
du, = e, = ( a t ) dx E, '
(2.11)
donde u, es la elongación en la fibra, &t es la deformación en la fibra, u, es el
esfuerzo sobre la fibra y E, es el módulo elástico de la fibra.
Para el análisis de la matriz, si se considera que la elongación diferencial uR se
produce en un campo lejano a la fibra, se puede asumir que la deformación de la
matriz es casi igual a la deformación total del material compuesto &t . Así se tiene
entonces que:
(2.12)
--38

Capitulo 11
donde uR es la elongación en la matriz a una distanciaR del centro de la fibra, &m
es la deformación en la matriz y s1 es la deformación en el material compuesto.
Finalmente, la distribución de esfuerzos a lo largo de la fibra puede ser
determinada diferenciando la ecuación (2.1 O) y sustituyendo en esta las
ecuaciones (2.11) y (2.12) (figura 2.5).
(2.13)
donde el parámetro n está definido de la siguiente manera:
n= (2.14)
La ecuación (2.13) es una ecuación diferencial lineal de segundo orden cuya
solución es la siguiente:
a =E E +B·senh(nx) +D·cosh(nx) , r 1 r r (2.15)
Aplicando las siguientes condiciones de frontera: a, = o cuando x = L y x = - L
(figura 2.5) donde L es la mitad de la longitud total embebida de la fibra y
definiendo la relación de aspecto como Ur = s se tiene la siguiente solución para
la ecuación (2.15).
39

Capitulo 11
(2.16)
donde E, es el módulo elástico de la fibra, s1 es la deformación en el material
compuesto, n es el parámetro definido en la ecuación (2.14) y s es la relación de
aspecto. La distribución del esfuerzo cortante interfacial a lo largo de la fibra se
obtiene diferenciando la ecuación (2.16) según la ecuación (2.9b) y (35].
(2.17)
La figura 2.5 muestra el comportamiento del esfuerzo cortante interfacial r¡ y del
esfuerzo sobre la fibra embebida u, empleando las ecuaciones (2.16) y (2.17), en
un modelo de material compuesto formado por una fibra embebida en una matriz.
';~---- L
X
X
Figura 2.5. Distribución de esfuerzo cortante interfacial y del esfuerzo a lo largo de una fibra embebida en una matriz considerando una transferencia de esfuerzo totalmente elástica.
40

Capitulo 11
2.2.2. Transferencia de esfuerzo entre fibra-matriz
Las ecuaciones (2.16) y (2.17) permiten hacer predicciones sobre la distribución
de los esfuerzos a lo largo de una fibra cuya longitud embebida es 2L. Un ejemplo
se presenta en la figura 2.6 en ella se muestran las variaciones del esfuerzo en la
fibra y el esfuerzo cortante interfacial a lo largo de la longitud embebida de la fibra
en un material compuesto.
-1
S= 50 S= 5
o
... _ ..
·.
Distancia desde el centro de la fibra, x/(rs)
... ·· .. ..
S= 50 S= 5
.· .. ··""· ... ..
.... -· .. ... • '!'4>"'
... ... .. ~ . ...
.. ......
-1~---------------4--------------~ o Distancia desde el centro de la fibra, x/(rs)
Figura 2.6. Distribución del esfuerzo a tensión en la fibra (a) y del esfuerzo cortante interfacial (b) para dos relaciones de aspecto Ur = s de una fibra embebida en una matriz.
···---------41

Capitulo 11
Las curvas de la figura 2.6 corresponden a dos relaciones de aspecto diferentes
para un material compuesto modelo sujeto a un esfuerzo de tensión paralelo a la
fibra. El esfuerzo a tensión es cero en los extremos de la fibra y máximo en el
centro de la misma. Por otro lado, el esfuerzo cortante interfacial es cero en el
centro y alcanza su valor máximo en los extremos. Para el caso de una relación de
aspecto s = 50, la longitud de la fibra es lo suficientemente larga para que la
transmisión del esfuerzo cortante produzca una deformación igual a la que
presenta el material compuesto.
Este comportamiento lleva al concepto de longitud crítica de transferencia de
esfuerzo cortante entre la fibra y la matriz. Este concepto sostiene que la longitud
de la fibra debe ser lo suficientemente larga para permitir una transferencia de
esfuerzo de tal forma que la deformación en la fibra sea igual a la del material
compuesto, siempre y cuando el sistema se mantenga en la región elástica y no
se presente una falla interfacial. La longitud crítica depende entonces del módulo
elástico de la fibra, del módulo elástico de la matriz y de la calidad de la interfase.
Para la relación de aspecto baja (s = 5 figura 2.6), la longitud de la fibra no es lo
suficientemente larga como para que el esfuerzo cortante interfacial transfiera el
esfuerzo necesario para que la deformación en la fibra y en el material compuesto
sean iguales.
42

Capitulo 11
2.3 Análisis teórico del desprendimiento a tensión {Pu/1-out), empleando el modelo de transferencia de esfuerzo cortante {Shear-lag)
Una de las pruebas para medir la adherencia interfacial es el ensayo en el que se
extrae una fibra parcialmente embebida de un bloque de resina, conocida como
Pu/1-out (figura 2.7).
b t 1
Figura 2. 7 Geometrías empleadas para el ensayo de Pu/1-out, (a) matriz en forma de disco, (b) matriz en forma de bloque.
Teniendo en cuenta las consideraciones hechas por Chua y Piggott [38-41], se
tienen al menos cinco variables en el sistema: Presión interfacial (p), coeficiente
de fricción a lo largo de la fibra extraída (~). trabajo para la fractura de la interfase
(Gj), longitud embebida de fibra (L) y longitud libre de fibra (!,) [38]. En este
experimento se asume que, tanto la fibra como la matriz tienen un comportamiento
elástico, de manera tal que la transferencia de esfuerzo se hace de la fibra a la
matriz.
La fibra es cargada a tensión manteniendo el bloque de resina anclado durante
todo el proceso de extracción, de tal forma que se puede construir una gráfica en
la que la ordenada corresponde a la fuerza externa aplicada y la abscisa
corresponde al tiempo o a la deformación de la fibra.
·-----·-- ----43

Capitulo 11
Los datos de esfuerzo/deformación generados pueden ser interpretados
empleando una adaptación de la teoría de Shear-lag [42, 43]. La figura 2.8
muestra la distribución de esfuerzo/deformación para la geometría de Pu/1-out. En
esta figura, se pueden observar tres etapas del ensayo de Pu/1-out, que
corresponden a la deformación elástica producida por una carga hasta el inicio de
la falla y la propagación de la falla interfacial.
De manera convencional se asume que el valor máximo alcanzado en la curva de
esfuerzo/deformación (punto 1 en la figura 2.8a), coincide con el punto en el que
ocurre la falla interfacial al ejercer sobre el modelo un esfuerzo igual a a 0 , que
genera un esfuerzo cortante interfacial máximo r¡ MAX en un punto cerca de la zona
en la que la fibra emerge del bloque de resina. A partir del punto 1 el esfuerzo
sobre la fibra a, y el esfuerzo cortante interfacial r¡ disminuyen hasta hacerse
nulos en el extremo embebido de la fibra (figura 2.8b).
El punto 2 de la curva de esfuerzo/deformación (figura 2.8c), corresponde a la
zona en la que el frente de fractura avanza en la interfase fibra-matriz. En esta
zona, se puede observar una disminución del esfuerzo a tensión en la fibra y el
esfuerzo cortante interfacial producido por fricción entre la fibra y la matriz. El
esfuerzo de fricción entre la fibra y la matriz es estimado como un esfuerzo
cortante interfacial que aumenta a lo largo de la superficie desprendida (figura
3.8b).
Finalmente, en el punto 3 de la figura 2.8d, se observan los perfiles de esfuerzo a
lo largo de la superficie desprendida. El esfuerzo sobre la fibra disminuye al
aproximarse al extremo embebido de la fibra con un perfil totalmente diferente al
del punto 1 . En el caso del esfuerzo cortante, este se incrementa lentamente al
44

Capitulo 11
aumentar la superficie de fricción a lo largo de la sección desprendida entre la fibra
y la matriz.
a)
b) Deformación e)
desprendimiento f(
· ~
-~:~s: ~. t . 2:r .-..... • __..
® CTo
1j 1j
:r: () x.;L .'( X
Figura 2.8. Distribución de esfuerzos y gráficas de esfuerzo - deformación en un ensayo de Pu/1-out.
·------------·---45

Capitulo 11
El tratamiento teórico para la geometría de Pu/1-out es similar al empleado para
deducir la ecuación (2.1 O) , pero se emplea la relación R/r entre las deformaciones
observadas en un radio R hacia el seno de la matriz y el radio de la fibra r; en
lugar de la fracción volumétrica de la fibra ya que este concepto no tiene sentido
en la geometría de Pu/1-out. De tal forma, es posible deducir para el presente caso
una ecuación similar a la ecuación (2.1 O):
(2.18)
donde UR y u, son las elongaciones en la matriz en el radio de la fibra r y a un radio
R desde el centro de la fibra, E m es el módulo de elástico de la matriz, a, es el
esfuerzo en la fibra y vm es la relación de Poisson de la matriz.
Las deformaciones en la superficie de la fibra y en un punto situado a un radio R
de ésta son:
du, - =&t dx
duR =0 dx
(2.19)
(2.20)
Donde uR y u, son las elongaciones en la matriz a dos radios diferentes del centro
de la fibra y &t es la deformación en la fibra.
Estas deformaciones corresponden a una interfase perfectamente unida y a una
zona de la matriz alejada de la interfase la cual no presenta deformación. Para la

Capitulo 11
geometría de Pu/1-out la carga es aplicada directamente a la fibra y no a la matriz
como en el modelo de Shear-lag. Ahora asumiendo un comportamiento elástico y
que la adhesión entre la fibra y la matriz. es perfecta. La distribución del esfuerzo a
tensión en la fibra a, (ecuación 2.18), toma ahora la siguiente forma empleando
las ecuaciones (2.19) y (2.20):
(2.21)
donde la constante adimensional n está definida como:
n= (2.22)
donde Em y E, son los módulos elásticos de la fibra y la matriz, om es la relación
de Poisson de la matriz y los radios desde el centro de la fibra son R y r.
Las condiciones de frontera para la geometría de Pu/1-out son las siguientes: el
esfuerzo en el punto donde la fibra emerge de la matriz es igual al esfuerzo
aplicado (a,(O)= a0 ) y en el extremo embebido de la fibra de longitud L el
esfuerzo a tensión sería nulo, es decir: a, (L) =O .
Aplicando éstas condiciones de frontera, la solución de la ecuación diferencial
lineal de segundo orden (2.21) es la siguiente:
47

senh[ n(L,-x)]
senh(nrL)
Capitulo 11
(2.23)
Donde a, es el esfuerzo sobre la fibra, a0 es el esfuerzo aplicado, L es la longitud
embebida y r es el radio de la fibra
La ecuación correspondiente para el esfuerzo cortante interfacial se obtiene según
la ecuación (2.9b), diferenciando la ecuación (2.23).
cosh [n(\- x)] senh ( nrL )
r da na0 'r · = - -- = --1 2 dx 2
(2.24)
Donde -r¡ es el esfuerzo cortante interfacial, a0 es el esfuerzo aplicado, L es la
longitud embebida y r es el radio de la fibra
Asumiendo que en el punto en el que emerge la fibra x = O, el esfuerzo cortante
interfacial máximo necesario para el inicio de la propagación de la falla -r; MAX se
alcanzará cuando el esfuerzo aplicado sobre la fibra es igual a a 0 (figura 2.7) [38].
(2.25)
48

Capitulo 11
2.4. Modelos alternativos de análisis para el modelo de
Pu/1-out
Después del modelo de Shear-lag propuesto por Cox y modificado por Greszczuc
[41, 44]; Lawrence [40], Laws [41] y Piggott [36] adicionaron a éste el esfuerzo
cortante producido por la fricción en la extracción de la fibra e identificaron que el
esfuerzo máximo para la extracción es función de la longitud embebida L y de la
relación entre el esfuerzo necesario para la extracción y el esfuerzo cortante
causado por el proceso de fricción.
Otro efecto importante a considerar durante la prueba es la posibilidad de
encontrar un mecanismo de falla interfacial por dos vías; en donde la
concentración del esfuerzo interfacial de corte se encuentra tanto en el extremo
embebido en la resina, como en el inicio de la sección libre de la fibra fuera del
bloque de resina [44-46]. Con lo cual se tiene la posibilidad de propagar la falla
interfacial desde ambos extremos de la fibra bajo el criterio de un esfuerzo de
corte. Este fenómeno difiere de la suposición convencional de que el proceso de
falla interfacial ocurre siempre desde la sección cargada de la fibra.
Desde el punto de vista de la mecánica de fractura, la falla interfacial está
relacionada con la energía de deformación liberada por la fibra para la extracción
completa de la longitud embebida L. Este fenómeno puede ser considerado similar
al de la energía de fractura interfacial que puede calcularse a partir del producto
de la energía de fractura interfacial G1c y el área del cilindro de la fibra extraída
[38].
Otros análisis han tomado en cuenta el efecto de la contracción de Poisson y el
efecto de la fricción no lineal en la región extraída de la fibra [47]. Por su parte,
Piggott estudió el incremento de la longitud despendida con el cambio de energía
.. -.-----·--··---------··-------· 49

Capitulo 11
obtenido a partir de la falla a tensión de la fibra y el esfuerzo cortante en la matriz
(46].
Otros estudios se han enfocado al hecho de que las fibras empleadas como
refuerzo tienen una superficie rugosa y que esta rugosidad dificulta de manera
importante a la extracción al aumentar la fricción en un experimento de Pu/1-out
(48, 49]. Esta teoría supone que una vez desprendida la fibra de la matriz, se
genera una presión uniforme a causa de la aspereza inherente de la fibra sobre el
cilindro del bloque de resina en la cual estaba embebida.
De todos los modelos propuestos se destacan las aportaciones hechas por Tyson
y Davies al emplear un modelo fotoelástico para calcular la distribución de los
esfuerzos en una fibra embebida en resina. Por medio de este modelo lograron
identificar puntos de concentración de esfuerzo y la distribución del esfuerzo
cortante interfacial a lo largo de la fibra embebida [50].
Otra de las aportaciones de Tyson fue el establecer la dependencia que tienen las
propiedades de los materiales compuestos con las propiedades elásticas y
plásticas de la fibra y de la matriz, así como que debe de existir una longitud
mínima (crítica) para la transferencia óptima de carga entre la fibra y la matiz en
un material compuesto [51].
Por otra parte, Schuster y Scala [52] analizaron la transferencia de esfuerzo en
cerdas de alúmina embebidas en resina epóxica por medio de fotoelasticidad. Los
patrones fotoelásticos obtenidos fueron empleados para analizar la distribución del
esfuerzo cortante interfacial en un modelo fotoelástico a través del cálculo de la
diferencia de esfuerzos principales (ecuación 2.12).
Al analizar una probeta para la geometría de Pu/1-out por medio de fotoelasticidad,
la primera franja fotoelástica aparece alrededor de la fibra sobre la interfase entre
50

Capitulo 11
la fibra y la matriz en dos puntos (figura 2.9a). La diferencia de esfuerzos
principales o el esfuerzo cortante máximo TMAX medido por fotoelasticidad según la
ley del esfuerzo óptico es constante a lo largo de toda la trayectoria de ésta franja
isocromática (sección 2.3.2) , de tal manera que se puede asumir que cuando la
franja toca la interfase fibra-matriz (figura 2.9b) , el esfuerzo cortante máximo r MAX
obtenido por la técnica de foelasticidad es igual al valor del esfuerzo cortante
interfacial r¡. Esto significa que el esfuerzo cortante interfacial r1 tiene dos valores
iguales en dos puntos diferentes a lo largo de la interfase entre la fibra y la matriz
(figura 2.9b).
La segunda franja isocromática se genera al aumentar la carga. Esta segunda
franja al igual que la primera toca también la interfase entre la fibra y la matriz en
dos puntos y está rodeada en dirección radial por la primera franja isocromática
que migró a una posición diferente al de la segunda franja fotoelástica. Para los
órdenes de la franja superiores, este mismo comportamiento se repite.
En este esquema entonces, los órdenes de franja más altos se localizan cerca de
la fibra y en dirección radial hacia los bordes de la probeta, los órdenes
fotoelásticos más bajos (figura 2.9). De esta forma, la imagen obtenida es un
efecto combinado de todas las franjas isocromáticas es decir, la imagen final es
una proyección bidimensional de un estado de esfuerzos tridimensional (figura
2.9b).
En la figura 2.9b la vista es perpendicular al plano longitudinal de tal forma que es
posible ver a las diferentes franjas isocromáticas como si estuvieran actuando de
forma independiente. Cuando el punto de análisis se posiciona cerca de la
interfase, el esfuerzo cortante interfacial r i , será un promedio del nivel de
esfuerzo observado por medio de las franjas fotoelásticas actuando en esa
dirección. Por consiguiente, el esfuerzo cortante a través del espesor del modelo
51

Capitulo 11
no es constante lo que concuerda con lo expresado en la teoría de Shear-lag
tratada en secciones anteriores.
a) Vista axial
Radio dé la fibra
Fibra
b) Vista lateral
Dirección de visión
N=3
N=1
Espesor de la probeta
Radio de influencia r1 para N= 1
Límite del radio de influencia r¡
Figura 2.9. Vista axial (a) y vista lateral (b) de los ordenes fotoelásticos superpuestos en una probeta de Pu/1-out.
Entonces, teniendo en cuenta la naturaleza tridimensional axisimétrica del campo
de esfuerzos alrededor de la fibra, y el hecho de que las imágenes de los patrones
fotoelásticos para el modelo de Pu/1-out son una proyección bidimensional, se
hace necesario corregir los valores del esfuerzo cortante r MAX observado por
medio de las franjas isocromáticas.
52

Capitulo 11
Para obtener la distribución real de los esfuerzos cortantes, Shuster y Scala
asumieron una distribución lineal de esfuerzos en la dirección radial para la
diferencia de esfuerzos principales (a1-a2) de cada franja isocromática en un
modelo fotoelástico [52]. La ecuación para la solución analítica propuesta conduce
a un valor corregido de la diferencia de esfuerzos de cada franja fotoelástica, de
tal manera que:
O"c= ( ) +an
2{r;a- ~ [ar; + (r0 df In(~ :'~)]} (2.26)
a = ~;2 - (x - r 0 'f ~ , (2.26a)
donde, ac es la diferencia de esfuerzos principales corregida en un punto, a 0 es
la diferencia de esfuerzos principales observado en un punto, r0 es el radio de la
fibra, r¡ es el radio de influencia de la deformación radial, x es la distancia desde la
superficie de la fibra, un es le nivel de esfuerzo nominal o campo de esfuerzo, hL
es el espesor de la probeta z es una variable definida por: z = r¡ cose, cuando r = r¡; y z =O cuando r = ro+X (figura 3.1 O) [52].
Posteriormente el esfuerzo cortante máximo corregido r cMAX es obtenido
sustituyendo la diferencia de esfuerzos principales corregidos u e en la ecuación
(2.13). Finalmente se asume que el esfuerzo cortante máximo corregido rcMAX es
igual al esfuerzo cortante interfacial r ; en los puntos en los que la franja
isocromática toca la interfase fibra-matriz.
La diferencia fundamental entre el modelo de Shear-lag y la técnica de
fotoelasticidad es que un análisis por medio de fotoelasticidad nos ofrece la
53

Capitulo 11
oportunidad de monitorear el proceso de carga y de falla in-situ así como también
el conocer la distribución real de los esfuerzos en cualquier geometría empleada
en el análisis.
z ----
'
o
' ' ' ' ' ' \ \
\ 1 1 1 1 1 1
(¡COS () , , ,
Figura 2.1 O. Parámetros para la corrección del esfuerzo cortante.
En la figura 2.11 se puede observar el comportamiento del esfuerzo cortante
interfacial r ; obtenido de la teoría de Shear-lag y por medio de la técnica de
fotoelasticidad.
El seguimiento para obtener la distribución del esfuerzo cortante interfacial a lo
largo de la fibra embebida empleando la técnica de fotoelasticidad es el siguiente:
después de determinar el valor de la constante fotoelástica se asigna con base a
éste, un valor específico de diferencia de esfuerzos principales (2 r MAX) para cada
orden de franja efectuando también la corrección axisimétrica. Posteriormente, se
----·-·-------·· 54

Capitulo 11
asume que en los puntos donde cada franja fotoelástica de orden N toca la fibra, el
esfuerzo cortante máximo corregido obtenido por fotoelasticidad ( rcMAX) es igual al
esfuerzo cortante interfacial r;. Finalmente, se localizan los puntos donde cada
franja fotoelástica toca a la interfase y se mide la distancia a éstos desde el borde
de la probeta para graficar de esta manera la distribución de esfuerzo cortante
interfacial a lo largo de la fibra embebida (figura 2.11 ).
a)
T;2 = TcMAX2
T ; t = TcMAX1
b)
o Shear-lag
• Fotoelasticidad
:: : • : 1
-:~ ·- ~--- -¡------ -:---------------:------------------------ --.. .. .. .. .. .
¡ r MAXt = N/C'J' /2hJ . rMAX2 = NlC'J'/2hi r MAX3 =N sfC'J' /2hL rMAX4 =N/C'J'/2hL rMAXs = Nsfa /2hl
X
Fibra
~~~~~~~~~~? X
Figura 2.11 Distribución del esfuerzo cortante interfacial obtenido por medio de la teoría de Shear-lag y por medio de la técnica de fotoelasticidad.
55

Capitulo 11
En la figura 2.11 a se puede observar la distribución del esfuerzo cortante
interfacial obtenida empleando el procedimiento anterior y en la figura 2.11 b un
patón fotoelástico de la geometría de Pu/1-out constituido por cinco franjas
isocromáticas. Es importante notar que en la figura 2.11 b cada uno de los ordenes
fotoelásticos posee un valor específico de esfuerzo cortante máximo observado
(no corregido) y que el valor de esfuerzo cortante interfacial r¡ en los puntos
donde cada franja toca a la interfase es igual al esfuerzo cortante máximo
corregido rcMAX·
2.5. Análisis para el puenteo de una grieta con una fibra.
Geometría Crack-bridging
Esta geometría se obtiene a partir de un bloque de resina que contiene una fibra a
lo largo de la probeta. Una fractura es propagada en dirección perpendicular a la
fibra en la parte media de la probeta sin dañar la interfase entre el bloque de
resina y la superficie de la fibra, obteniendo al final dos bloques de resina unidos
por una fibra a la que nombraremos en adelante como ensayo de Crack-bridging o
simplemente Crack-bridging (figura 2.12) [53].
Fractura
Figura 2.12. Esqt,Jema de la geometría de Crack-bridging.
"---·-·-"""··----- ----56

Capitulo 11
Esta geometría tiene numerosas ventajas sobre las geometrías de Pu/1-out y
fragmentación. Al separar los dos bloques de resina unidos solo por la fibra, el
esfuerzo será transmitido a la fibra de manera directa a través de la interfase ya
que la fibra solo tiene el papel de enlace entre los dos bloques de resina.
El ensayo con esta geometría puede considerarse esencialmente como un ensayo
de una probeta doble de Pu/1-out [53]. Para esta geometría, la longitud libre de
fibra es esencialmente el desprendimiento debido a la fractura existente entre los
dos bloques de resina unidos por la fibra. En esta probeta la deformación de la
interfase es directa ya que la fibra al ser muy larga difícilmente es extraída
produciéndose preferencialmente la falla en la interfase. Este comportamiento
permite también un mejor control del proceso de falla interfacial, haciendo posible
establecer el mecanismo de falla y el cálculo del esfuerzo cortante interfacial en el
proceso. Sin embargo, el proceso de fractura para obtener esta geometría libera
parte de la energía a través de la interfase entre la fibra y la matriz produciendo un
frente de fractura en ambos extremos unidos por la fibra (figura 2.13).
2.5.1 Análisis teórico en una probeta compuesta de dos bloques de resina unidos una fibra de Crack-bridging empleando el modelo retransferencia de esfuerzo cortante {Shear-lag)
La teoría de falla interfacial desarrollada por Piggott para el ensayo de Pu/1-out en
la cual una interfase fibra/matriz es dividida en dos regiones fue obtenida
modificando la teoría de Shear-lag de Cox [53-55]. En la primera región, entre la
fibra y la matriz existe una falla y el esfuerzo cambia linealmente con la posición a
lo largo de la fibra con un valor constante de esfuerzo cortante interfacial. En la
segunda región, donde la fibra está aún totalmente adherida a la resina, la
57

Capitulo 11
transferencia de esfuerzo es elástica y los valores de esfuerzo cortante interfacial
disminuyen de manera exponencial.
En el punto 1 de la figura 2.13 se puede observar que el esfuerzo aplicado sobre
la probeta de Crack-bridging ero, es transferido de manera directa sobre la sección
libre de la fibra que comunica a ambos bloques de resina. El esfuerzo ero se
transfiere posteriormente a la sección en la que la fibra está desprendida de la
matriz con un valor de <rte. que es afectado por la fricción entre la superficie de la
fibra y del bloque de matriz (punto 1 de la figura 2.13a). En la misma sección se
presenta un esfuerzo cortante interfacial constante rtr provocado por la fricción
(punto 2 figura 2.13a).
El comportamiento del esfuerzo en la región desprendida <rte y del esfuerzo
cortante r,, se mantiene a lo largo de la longitud desprendida m entre la fibra y la
matriz (figura 2.13b). En el punto en el que se localiza el frente de fractura, se
tiene un esfuerzo de transición <rtd entre la zona desprendida y la adherida. El
esfuerzo <rtd es el resultado de la transferencia del esfuerzo aro y de las pérdidas
por fricción en la zona desprendida. El esfuerzo de transición <rtd es transferido a la
sección de la fibra adherida, generando un esfuerzo sobre la fibra <rtc y un esfuerzo
cortante interfacial r;.
58

b)
Bloque de resina
Región con una falla en la lriUOlrT!::I"'C..
Fibra
.... <~-- L
1
21 1 1
3
: CYfd
V 3
Capitulo 11
:.'
Figura 2.13. Distribución de esfuerzos en la geometría de Crack-Bridging.
El modelo de Pu/1-out puede aplicarse a la geometría de Crack-Bridging
considerando que el esfuerzo en la región con una falla en la interfase fibra-matriz
y el esfuerzo cortante interfacial correspondiente están relacionados de la
siguiente forma:
59

2r ·X 1 O' fe =a o - --
r
r ¡ = - J.lO' r
Capitulo 11
(2.27)
(2.28)
Donde ate, es el esfuerzo a tensión en la zona desprendida de la interfase fibra
matriz, a0 es el esfuerzo ejercido sobre la fibra, r; es el esfuerzo cortante interfacial
en la región desprendida entre la fibra y la matriz, x es la posición a lo largo de la
fibra, r es el radio de la fibra, fA. es el coeficiente de fricción y a, es el esfuerzo
residual.
En el caso de la región elástica, las ecuaciones que describen al esfuerzo a
tensión y al esfuerzo cortante interfacial a lo largo de la fibra son:
nafd r¡ = --2
senh( n(\- x)) senh(nsm)
cosh( n(L,-x ))
senh(nsm)
(2.29)
(2.30)
Donde el esfuerzo de transición atd. el parámetro n y la relación de aspecto están
definidos de la siguiente manera.
2r¡ (1-m '1-a fd = a o -
r (2.31)
60

2 2Gm n = _ ______:..:.:....__
E, In(;) L
5= r
Capitulo 11
(2.32)
(2.33)
Donde are, es el esfuerzo en la región adherida, afd es el esfuerzo de tensión
sobre la fibra en la zona de transición entre la región adherida y la zona
desprendida en la interfase fibra-matriz, L es la longitud embebida, m es la
longitud desprendida, Gm es el módulo a cortante de la matriz y E, es el módulo
elástico de la fibra.
61

Capitulo 111
Capitulo 111. Materiales y métodos
3.1. Resina epóxica y agente de entrecruzamiento
La técnica a emplear en este trabajo para el análisis del esfuerzo cortante
interfacial entre una fibra termoplástica y una resina termofija es la técnica de
fotoelasticidad. Por consiguiente, la matriz polimérica empleada debe tener buena
respuesta fotoelástica. Se usó una resina epóxica a base de bisfenoi-A de nombre
comercial DER 331 de DOW Chemical. El agente de entrecruzamiento empleado
a base de aminas alifáticas tiene el nombre comercial de ANCAMINE 1784
distribuida por AIR PRODUCTS. Las probetas para las geometrías de Pu/1-out,
Crack-bridgíng, así como las que se emplearon para flexión fueron obtenidas
empleando un molde específicamente diseñado para cada propósito.
El proceso de curando para todas las probetas se realizó en condiciones de
humedad controlada a temperatura ambiente con un tiempo de curado de ocho
días.
La relación empleada fue de 0.6 moles de resina por cada mol de agente de
entrecruzamiento, la cual corresponde a mezclar en peso, 1 00 g de resina/78 g de
agente de entrecruzamiento. Esta relación se aparta de la concentración
estequiométrica óptima para la resina final, obteniéndose de esta manera una
resina plastificada con un exceso de agente de entrecruzamiento.
Una de las características especiales de la resina y del agente de
entrecruzamiento es que absorben poca humedad del medio ambiente; el proceso
de curado se realiza a temperatura ambiente y no requiere de un proceso de
poscurado, por lo que al final no presenta esfuerzos residuales. Las estructuras
62

Capitulo 111
del monómero, su agente de entrecruzamiento y de la reacción general de
entrecruzamiento se presentan en la figura 3.1 [56, 57].
a)
¿~\CHCH. c{}-00(}~ ~C(CH,),-Qorn,é~01, n
e)
Figura 3.1 Estructuras químicas de a) resina epóxica DER 331, b) diamina alifática ANCAMINE 1784 y e) reacción general de entrecruzamiento.
----.. ··-------·-----·---63

Capitulo 111
La preparación de la resina epóxica se inició pesando 120 g de resina epóxica en
un vaso de polietileno. Posteriormente se pesaron 93.6 g de agente de
entrecruzamiento en un segundo vaso de polietileno. El paso siguiente se mezcló
la resina epóxica y al agente de entrecruzamiento en un solo vaso agitándolos por
un período de 5 a 6 minutos. Después de haber mezclado la resina epóxica y el
agente de entrecruzamiento se procedió a hacer una primera degasificación para
retirar el aire atrapado en la mezcla colocándolos en una estufa de vacío a
temperatura ambiente por 1 O minutos. Después del primer período de
degasificación, la mezcla fue agitada nuevamente por otro período de de 5 a 6
minutos, colocándolos después en la estufa de vacío a temperatura ambiente por
1 O minutos para un segundo período de degasificación; en este punto la mezcla
esta lista para verterla en el molde.
3.2. Análisis mecánico de la resina epóxica
El primer paso para la obtención de las probetas para el análisis mecánico fue la
obtención de una placa plana de resina. Para este propósito se empleó un molde
de Nylon (nombre comercial Nylamid) con las siguientes dimensiones: 18 cm de
alto, 24 cm de largo y 1.27 cm de espesor. Las dimensiones del espacio interior
del molde fueron: 14 cm de alto y 20 cm de largo (figura 3.2). Antes de llenar el
molde con la resina epóxica se aplicó una capa de desmoldante al molde de Nylon
para extraer la placa de resina al final del período de curado.
Para obtener una placa plana de espesor constante se niveló una placa de vidrio
de 20 cm de ancho y 30 cm de largo, sobre la cual fue adherida una película de
poliéster y sobre esta, el molde de Nylon con desmoldante. El claro central del
molde fue llenado hasta lograr un espesor de 1 cm con resina epóxica preparada
de acuerdo con las especificaciones ya mencionadas en la sección 3.1 (1 00 g
resina/78 g de agente de entrecruzamiento).

Capitulo 111
~----------- 20cm
18 cm 14 cm
~------------- 24cm
1.27 cm
Figura 3.2. Dimensiones del molde usado para preparar una placa de resina epóxica.
Después de llenar el molde con la mezcla preparada, se deja curar a la mezcla por
un espacio de 12 h a temperatura ambiente. Al término de éste primer período de
12 h se tiene una placa de resina epóxica que puede ser desmoldada y colocada
horizontalmente sobre la placa de vidrio en un desecador para que termine el
período de curado de la resina el cual fue de 8 días a temperatura ambiente y
humedad controlada.
Para fabricar las probetas para las pruebas de tensión, se cortaron con una sierra
de disco de diamante secciones de 19 mm de ancho por 165 mm de largo de la
placa plana moldeada. Las secciones cortadas fueron montadas en un molde de
-65

Capitulo 111
acero para probetas tipo 1 (figura 3.3) y se les dio la forma final con un cortador
tipo fresa (router). Al finalizar el maquinado en él , los cantos fueron lijados con una
lija de agua calibre 500 para dar el acabado final.
Las pruebas mecánicas se llevaron a cabo en una maquina de pruebas
universales Shimatzu AG1 , a una velocidad de 1 mm/min empleando una celda de
carga de 5 KN. Las probetas empleadas fueron tipo 1, conforme a la designación
ASTM D 638- 82a, para plásticos.
Wo ~J::o-:-:: -: : 0 ::::-:-: oo o
1~ W= 13mm
G = 50 mm
\R
1
1
Wc i
t= G
L
D
Lo
L = 57 mm
D = 115 mm
~ J Wo= 19mm
R= 76mm
-
-
~ +-
T
Lo= 165 mm
T= ?mm
Figura 3.3. Dimensiones de la probeta tipo 1, ASTM d 638- 82a.
3.2.1. Relación de Poisson
Para determinar la relación de Poisson de la resina epóxica, se usaron probetas
tipo 1 (figura 3.1 ), similares a las empleadas para las pruebas de tensión. Sobre las
probetas se pegaron galgas extensométricas de la designación EA - 06250 BF -
350; con un factor de galga de 2.095±0.5%. Donde la designación EA indica que
es una galga de constantan, reforzado con poliimida de cara abierta de uso
general para un rango de temperatura de -75 a 175°C, con una deformación
------66

Capitulo 111
permisible de ±3 % de la longitud de la galga (menos de 1/8 de pulgada). La
longitud activa de la galga fue de 625 mm, con una resistencia nominal de galga
de 350 ohms. El cableado se realizó de acuerdo a la figura 3.4.
Galga longitudinal
Galga transversal
Terminales Figura 3.4. Esquema de cableado de galgas.
El proceso para adherir las galgas fue el siguiente. Se lijó suavemente y se limpió
el centro de una de las superficies planas de la probeta. Posteriormente se adhirió
por el frente a la galga en una cinta de celofán y se centró alineando las marcas
en esta, con líneas guía previamente marcadas en la probeta. Una de las líneas
guía se trazó en el centro y a lo ancho de la cara de la probeta y la segunda en la
parte media del largo de la probeta formando un ángulo recto con la primera. Con
la galga centrada, se levantó depositando el catalizador sobre ésta, colocando
posteriormente una gota de resina sobre la probeta para cubrir el área de
adhesión de la galga (las cantidades no deben ser grandes) . Posteriormente se
depositó la galga sobre la superficie y se mantuvo presionada por doce horas, o el
tiempo suficiente para que la resina cure y la galga quede adherida. Al término de
67

Capitulo 111
este tiempo, se limpió nuevamente la superficie de la probeta asentando la
segunda galga a 90° de la primera repitiendo el método empleado para la primera
galga. Una vez curada la resina se levantó la cinta adhesiva colocando 4
terminales para conectar la galga al equipo de medición. Finalmente las terminales
de las galgas fueron unidas mediante cables con las terminales para conectar al
equipo de registro de las lecturas de deformación (figura 3.4).
Antes de iniciar la prueba, las terminales de las galgas fueron unidas por medio de
cables con la entrada de la unidad de balanceo (figura 3.5a) , que también se
emplea para seleccionar la galga en la que se hace la lectura de deformación
específica. La unidad de balanceo esta conectada al indicador de deformación
(figura 3.5b) .
El proceso de lectura de la relación de Poisson inició con el balanceo de las
galgas para lo cual la probeta fue precargada dejándose estabilizar (figura 3.5 a y
b). La estabilización se alcanza cuando la lectura de deformación de ambas
galgas se mantiene constante. Esta precarga debe ser pequeña y debe también
estar dentro de la región elástica de la galga y de la probeta. La lectura de
deformación esta dada en micras la cual debe de ser constante para cada galga;
pero no necesariamente igual.
Para tomar las lecturas de deformación, se emplearon cargas cíclicas dentro de la
región elástica de la probeta en la máquina de pruebas universales Shimatzu AG1 ,
empleando una celda de carga de 5 KN. Después de balancear cada galga, se
procedió a aplicar una carga registrando la lectura de deformación de cada una de
las galgas. Después de hacer la lectura, se descarga la probeta hasta un nivel
similar al empleado para el balanceo de las galgas; se espera a que el sistema se
estabilice y posteriormente se somete de nuevo a una carga para hacer una
segunda medición.
-----------68

Capitulo 111
Figura 3.5. Sistema para la determinación de la relación de Poisson (a) y detalle de la probeta con las galgas (b), unidad de balanceo (e) e indicador de deformación ( d).
69

Capítulo 111
La relación de Poisson esta definida de forma sencilla como la relación entre la
deformación longitudinal EL y la transversal Er; cuando una probeta es sometida a
una prueba de tensión simple de la siguiente forma: v = -Er/ EL [58].
3.2.2. Calibración fotoelástica de la resina
Para la calibración fotoelástica de la resina, fue obtenida una placa plana de 1 cm
de espesor con el mismo método empleado en la sección 3.2. Para la obtención
de probetas para la calibración fotoelástica fueron cortadas en una sierra de disco
de diamante secciones escuadradas de 1 .O cm de altura, 1 O cm de largo y con un
espesor de 5 mm. Posteriormente, cada probeta fue rectificada con una pulidora
empleando una lija calibre 1000. La tolerancia de las probetas terminadas fue de±
1 mm, siendo de primordial importancia que cada una esté perfectamente
escuadrada.
Las dimensiones de las probetas fueron medidas y colocadas posteriormente en el
marco de carga para flexión (figura 3.6a), procurando que ésta se mantuviera
centrada durante el proceso de carga. Las cargas empleadas para las probetas
fueron de O g a 7.50 K, aplicadas con pesos muertos.
El procedimiento para la calibración fotoelástica de la resina fue el siguiente. Se
aumentó la carga hasta la aparición de una banda oscura en el centro de la
probeta. Esta banda oscura es el orden fotoelástico cero (N = O), lo que indica que
se alcanzó la deformación suficiente para la aparición del primer orden
fotoelástico. En este punto el orden fotoelástico uno (N = 1) se situó en los bordes
exteriores de la probeta [4].
70

Capitulo 111
a)
Puente fijo
Probeta
a p
M=pa
) e)
p
p
Figura 3.6. Marco de carga para flexión (a), esquema de flexión (b) y momento flexionante en la probeta (e).
El orden fotoelástico uno (N =1) es difícil de situar sobre las orillas de la probeta,
por lo que fue necesario ejercer una carga mayor, que hace que el orden N = 1
migre de las orillas de la probeta hacia el centro de esta pudiendo ahora localizar
la franja isocromática de manera exacta sobre la cara de la probeta. La imagen del
patrón fotoelástico anterior fue tomada 1 o 2 minutos después de haber cargado la
probeta registrando el peso aplicado.
--·----------------·-71

Capitulo 111
El segundo orden (N = 2), se obtiene ejerciendo cargas mayores a las empleadas
para el orden N = 1 , que en consecuencia migra más hacia el centro de la probeta
hasta que se observa la aparición de una nueva franja isocromática en la orilla de
la probeta (orden fotoelástico N = 2). La carga fue incrementada hasta que el
nuevo orden fotoelástico N = 2 se ·ubicó en la misma posición que inicialmente
ocupaba el orden N = 1 , registrando la imagen y el peso utilizado del nuevo patrón
fotoelástico 1 o 2 minutos después de aplicada la carga. Las imágenes de los
patrones fotoelásticos de orden superior fueron obtenidas con el mismo
procedimiento procurando no sobrepasar el límite elástico del material.
Se calcula el esfuerzo de flexión correspondiente a la carga empleando la
ecuación (1.19) o la ecuación (1 .21), graficado contra el orden de franja en un
punto específico. Posteriormente, se midió la pendiente a una línea recta que se
ajustó a los puntos obtenidos. La pendiente de la línea recta es el valor de la
constante fotoelástica del material fa en Newtons por metro.
3.3. Caracterización de la fibra de poliéster
3.3.1. Análisis infrarrojo de la fibra
Para comprobar la naturaleza química de la fibra poliéster, se corrió un análisis de
infrarrojo. Se obtuvo una pastilla de bromuro de potasio y de la fibra poliéster para
lo cual fueron obtenidas partículas pequeñas raspando la superficie de la fibra. A
continuación las partículas de la fibra y el bromuro de potasio fueron mezcladas y
depositadas en el recipiente del pastillador colocándole el embolo y compactando
la mezcla por 5 minutos en una prensa hidráulica. Posteriormente la pastilla fue
desmoldada del pastillador y se coloca en un porta muestras dentro del equipo de
infrarrojo. Las condiciones empleadas en el Infrarrojo Nicolet fueron las siguientes:
-----·--------··-------·-"----------------72

Capitulo 111
espectro por transmisión en pastilla de Bromuro de potasio grado espectroscópico
de Aldrich , con 100 barridos y una sensibilidad de 2 cm-1 en un rango de 3500 a
500 cm-1•
3.3.2. Propiedades mecánicas de la fibra
Para caracterizar mecánicamente al cordel se utilizó una prueba de tensión según
la norma ASTM O 2343-67 en la máquina de pruebas universales Shimatzu AG1 ,
a una velocidad de 30 mm/min. Empleando una celda de carga de 5 KNw, una
longitud de 245 mm entre mordazas y las mordazas neumáticas especiales para
pruebas de cordeles. Para el análisis anterior, se prepararon dos grupos de diez
probetas (figura 3.7) .
3.4. Arreglo del polariscopio
El banco fotoelástico usado fue circular de campo oscuro compuesto de cuatro
elementos ópticos, un marco de carga y tres fuentes de luz (lámpara de sodio, luz
blanca incandescente y una lámpara de mercurio), alineados como se muestra en
la figura 3.8.
La posición de los ejes ópticos de los polarizadores en el polariscopio fue la
siguiente. El eje de óptico del primer polarizador está desfasado 90° en relación
con el eje óptico del segundo elemento polarizador (analizador) [1-3]. El eje óptico
de la primera placa de retardo de % de onda está desfasado un ángulo de 45° con
respecto al eje óptico del primer polarizador. En el caso de la segunda placa de
retardo de % de onda, su eje óptico está desfasado un ángulo de -45° en relación
con el eje óptico del primer polarizador. La distancia entre el frente de la lámpara
73

Capitulo 111
al primer polarizador fue de 15 cm; de este al primer cuarto de onda 1 O cm; la
distancia a la muestra fue de 1 O cm; repitiéndose las distancias anteriores para la
segunda placa de retardo de % onda y el segundo polarizador (analizador).
Finalmente el lente de la cámara se ubicó a 2.5 cm del segundo polarizador
(analizador).
La fuente de luz debe encenderse de 15 a 20 minutos antes de las pruebas para
que alcancen su máxima intensidad.
Cabezal móvil
t~ordazas para ~ cordeles y
Base fija
Figura 3.7. Esquema de pruebas a tensión para las fibras en la máquina de pruebas universales Shimatzu AG1.
74

% deonda \
Analizador h ~arga J
Cámara o
Capitulo 111
% de nda 1 er Polarizador
Difusor
~Fuente -:=:::/Luminosa
Figura 3.8. Disposición del banco de polarización circular de campo oscuro con marco de carga.
3.4.1. Calibración del polariscopio
El procedimiento para la calibración del polariscopio fue el siguiente [1]: El primer
paso fue colocar el primer polarizador y el analizador en el banco de polarización
con la lámpara ya encendida, para así obtener la extinción del haz de luz
propagándose en el polariscopio. Esto se logra fijando el polarizador y rotando el
analizador, hasta que la luz sea extinguida y se observe un campo oscuro como
respuesta en el analizador. Con esto, se asegura que los ejes ópticos del
polarizador y el analizador están cruzados.
El segundo paso fue localizar las direcciones de los ejes ópticos del polarizador y
del analizador. Esto se puede hacer examinando un disco de un material
fotoelástico sometido a una carga específica. Se coloca el disco y se aplica una
carga de compresión a lo largo del diámetro, asegurándose de que la carga esté
orientada verticalmente. Posteriormente, tanto el polarizador como el analizador
fueron rotados manteniendo los ejes ópticos de ambos cruzados, hasta que una
75

Capítulo 111
franja de extinción (isoclina) aparece a lo largo del eje de simetría del modelo. En
este punto, la dirección de los ejes ópticos del polarizador y del analizador son
conocidos, ya que uno de ellos (polarizador) esta alineado en dirección paralela
con la carga aplicada verticalmente, quedando el eje óptico del analizador en
dirección perpendicular.
El paso siguiente fue localizar los ejes ópticos de las placas de retardo de% onda,
para lo cual se colocó una de tas placas de retardo entre el polarizador y el
analizador que se mantienen con sus ejes ópticos cruzados. Posteriormente se
rota la placa de retardo hasta que se logre la extinción del haz de luz
propagándose en el polariscopio. En esta posición los planos de polarización del
haz ordinario y extraordinario que emergen de la placa de retardo están alineados
con los ejes ópticos del polarizador y analizador. Acto seguido se marcan las
direcciones de los dos planos de polarización de esta placa de retardo de % onda.
El procedimiento anterior sólo indica la dirección de los ejes ópticos de los haces
que emergen de la placa de retardo de % onda, pero no define cual de ellos es el
haz ordinario o el haz extraordinario (haz rápido o lento).
Después de marcar la posición de los ejes ópticos de la primer placa de retardo de
% onda, esta fue removida, repitiendo el procedimiento para la segunda placa de
retardo.
El paso siguiente fue colocar ambas placas de retardo de % onda en el
polariscopio entre el polarizador y el analizador para observar si la respuesta
fotoelástica del disco a compresión se mantiene simétrica. Cuando las placas de
retardo de % onda son colocadas estando ausente el disco a compresión, dos
situaciones pueden ocurrir.
76

Capitulo 111
Si la posición inicial de ambas placas de retardo de V4 onda en el polariscopio
resulta en una cantidad mínima de luz transmitida, entonces los ejes ópticos de
ambas placas de retardo están en Posición opuesta, siendo ésta la posición
correcta. Sin embargo, si se transmite una cantidad relativamente alta de luz,
entonces los ejes ópticos de las placas de retardo de % onda tienen la misma
posición y debe de rotarse uno de ellos un ángulo de 90° para lograr que los ejes
ópticos de ambas estén cruzados y que se transmita una cantidad mínima de luz.
La configuración del polariscopio alcanzada hasta este punto corresponde a una
polarización lineal de campo oscuro.
Finalmente, para convertir el polariscopio de lineal a circular, los ejes ópticos de
las placas de retardo de % onda deben estar desplazados 45° respecto al eje
óptico del polarizador o del analizador. Para lograr esto, se debe iniciar con la
configuración del polariscopio lineal a la que se llegó en el paso anterior y rotar
ambas placas de retardo de V4 onda un ángulo de 45° en la misma dirección, ya
sea en el sentido de las manecillas de un reloj o en sentido contrario a estas.
Si se desea cambiar la configuración del polariscopio de campo oscuro a campo
claro, solo se debe rotar ya sea el polarizador o el analizador un ángulo de 90°.
Mediante esta rotación los ejes ópticos del polarizador y del analizador están
paralelos, mientras que las placas de retardo de % onda se mantienen cruzadas.
Por medio de la configuración de campo oscuro se obtienen los valores enteros de
los órdenes de franja isocromática y con la configuración de campo claro se
obtienen líneas de extinción correspondientes a los órdenes medios de las franjas
isocromáticas.
·--------· . -·--···-------------··· .. ·-·----·----77

Capitulo 111
3.5. Preparación del modelo de Pu/1-out
El molde de nylon de la figura 3.2 fue adaptado con un puente removible el que
mantiene los filamentos en una posición fija. Posteriormente al puente removible
se le aplicó desmoldante al igual que al marco rectangular. El puente removible
tiene 3 agujeros con un diámetro de 1 .3 mm para sostener una fibra de 8 cm de
largo cuyos extremos fueron cortados con una navaja filosa de tal manera que no
se formen rebabas sobre la cara transversal de la fibra. Posteriormente cada fibra
se limpió con p-xileno, quedando lista para embeberse. El puente removible con
las fibras se coloco en la parte media del marco rectangular formando de esta
manera dos cavidades de 9 cm largo. El molde con las fibras se colocó
posteriormente sobre una película de poliéster adherida a un vidrio nivelado,
llenándose después una de las cavidades con la resina epóxica preparada con la
metodología mencionada en la sección 4.2 hasta lograr un espesor de 1.1 cm
(figura 3.9).
El modelo para la geometría de Pu/1-out fue cortado a partir de la placa
desmoldada del paso anterior en una sierra de disco de diamante. Las
dimensiones finales de la probeta fueron las siguientes: el bloque de la resina
tiene 4 cm. de ancho y 8 cm de largo y un espesor de 1.1 cm. La fibra estaba
longitudinalmente embebida en el centro del bloque, y la longitud embebida fue de
4.0 cm. con una longitud libre de fibra de 4 cm. (figura 3.1 O). Para dar el acabado
final las caras del bloque de resina fueron lijados con una lija de grano fino (calibre
1500).
78

Capitulo 111
18 cm
24cm
Puente removible 4cm
2.54 cm
14 cm
La longitud embebida de fibra es de 4 cm.
Puente
01.3 mm
Figura 3.9. Dimensiones del molde para la probeta de Pull-out.
r--4cm
Figura 3.1 O. Dimensiones de la probeta para la geometría de Pu/1-out.
79

Capitulo 111
3.6. Esfuerzo cortante por medio de fotoelasticidad para la geometría de Pu/1-out
Las mediciones fueron realizadas en el banco óptico esquematizado en la figura
3.8. Para la transmisión de las cargas se emplearon mordazas de aluminio,
acopladas a un brazo de palanca (figura 3.11 ). La fibra fue amordazada en la parte
superior y en la parte inferior (bloque de resina) se adhiere con pegamento
cianoacrílico.
Una vez colocada la probeta, se inició la carga de esta colocando pesos muertos
en el brazo de palanca con el cual se multiplica la carga 6.25 veces. La carga
empleada para el proceso fue de 147 N.
Con la probeta sujeta en el marco de carga se aumento la carga hasta la aparición
de una banda oscura alrededor de fibra embebida la probeta. Esta banda oscura
corresponde al orden fotoelástico uno (N = 1 ), lo que indica que se ha alcanzado
la deformación inicial suficiente para la aparición del primer orden fotoelástico
quedando el orden cero en las orillas de la probeta [1-8, 15, 16,58].
La imagen del patrón fotoelástico fue tomada 1 o 2 minutos después de haber
cargado la probeta registrando al mismo tiempo el peso muerto aplicado.
El segundo orden (N= 2), se obtuvo ejerciendo cargas mayores a las empleadas
para el orden N = 1 , que en consecuencia migra hacia los bordes de la probeta
hasta observar la aparición de una nueva franja isocromática alrededor de la fibra
(orden fotoelástico N = 2) registrando la imagen y el peso utilizado del nuevo
patrón fotoelástico 1 o 2 minutos después de aplicada la carga. Las imágenes de
los patrones fotoelásticos de orden superior se obtuvieron con el mismo
·-80

Capitulo 111
procedimiento hasta que se produzca una falla en la interfase entre la fibra y la
matriz.
Mordazas
Brazo de palanca
Pesos muertos
Marco de carga
p
Probeta de Pu/1-out
Figura 3.11. Brazo de palanca y mordazas del marco de carga del polariscopio. Geometría de Pu/1-out.
El método para calcular la diferencia de esfuerzos principales (a1 - a2) o el
esfuerzo cortante máximo por fotoelasticidad ( rMAX) fue el siguiente: se asignó en
base al valor de la constante fotoelástica un valor específico de diferencia de
esfuerzos principales para cada orden de franja empleando la ecuación (2.12).
Ésta diferencia de esfuerzos principales es corregida después empleando la
ecuación (2.26) sustituyendo el resultado de ésta en la ecuación (1.14) para
obtener el esfuerzo cortante máximo corregido rcMAX·
81

Capitulo 111
Posteriormente para obtener la distribución del esfuerzo cortante interfacial, se
asumió que en los puntos donde cada franja fotoelástica toca a la interfase el
esfuerzo cortante máximo corregido (obtenido por fotoelasticidad) es igual al
esfuerzo cortante interfacial (rcMAX = r;). Finalmente se localizan los puntos donde
cada franja fotoelástica toca a la interfase y se mide la distancia a éstos desde el
borde de la probeta obteniendo de esta manera la distribución del esfuerzo
cortante interfacial r; a lo largo de la fibra embebida.
3.7. Localización de las isoclinas
La metodología empleada para la obtención de las isoclinas fue la siguiente. Se
procedió a lijar la superficie del filamento de poliéster con una lija de calibre 1200,
para así mejorar la adhesión mecánica entre ambos materiales. Se debe remarcar
aquí que la intención de la presente fase del proyecto, fue determinar las
direcciones de los esfuerzos.
Una vez lijados los filamentos, se limpiaron con p-xileno y se procedió a obtener
probetas para Pu/1-out con las dimensiones y metodología empleadas en la
sección 3.5. Al igual que en el procedimiento anterior, se utilizó la lámpara de
mercurio y se aplicó una carga de carga de 122.6 N.
La primera fotografía de las bandas isocromáticas fue tomada 1 o 2 minutos
después de haber cargado la probeta. Posteriormente las dos placas de retardo de
V4 de onda fueron retiradas con lo cual se obtuvo la imagen de la isoclina
correspondiente a cero grados (parámetro e= 0°) [59-62].
82

Capítulo 111
Sin descargar la probeta, se procedió a girar tanto el polarizador como el
analizador (manteniéndolos cruzados) un ángulo de so en la dirección de las
manecillas del reloj tomando la fotografía del patón fotoelástico 1 o 2 minutos
después. Para obtener las siguientes isoclinas se giró al polarizador y el
analizador un ángulo de so hasta completar un giro de 90°, tomando una impresión
de cada una de ellas 1 o 2 minutos después de girar cada ves al polarizador y al
analizador. Finalmente, se extrae cada isoclina del patrón fotoelástico dibujando
cada una de las trayectorias por separado.
El procedimiento para obtener las direcciones de los esfuerzos principales fue el
siguiente (figura 3.12). A través del punto 01, sobre la isoclina 1 (ft), se trazó la
línea T1-2 con un ángulo de %(81+82), localizando el punto 02 sobre la isoclina 2
(/2); 81 y 82 corresponden a los parámetros de las isoclinas 1 y 2.
Posteriormente, se traza la línea T2.3 a través del punto 02 intersectando en la
tercera isoclina (/3) en el punto 03. Al unir los puntos de cruce 01, 02 y 03, se
genera un polígono (no trazado en la figura), el cual es aproximado a una de las
trayectorias de los esfuerzos principales. La segunda trayectoria, se traza con
base en la primer trayectoria ya que esta guarda un ángulo recto con respecto a la
primera [4].
3.8. Preparación del modelo para la geometría de Crackbridging.
Las probetas para Crack-bridging [63] se obtuvieron con la misma metodología
que se empleó para las pruebas de la geometría de Pull-out, con la diferencia de
que las fibras fueron embebidas a todo lo largo del molde (figura 3.13). Para
sujetar las fibras en sus extremos se emplearon soportes cuadrados con una
--· ----·---"·--·---· 83

Capitulo 111
perforación en el centro de 1 .3 mm hechos con la misma resina epóxica los cuales
fueron adheridos al marco de Nylon como se observa en la figura 3.13.
1 1, ,'t 1,
1 1 1 1
1 1 1 ,
1 , 1 ,
,' , 1 , 1
1 , ,
1 ~' 1 1 , 1
1, ,
02 1~1
, ,1
, 1 , 1
, 1 1 1
, 1
,'1 1 1
, 1 , 1
01 ,,' ,' 1 ----
Figura 3.12. Método para la construcción de las direcciones de esfuerzos principales.
18 cm
24 cm
Fibra embebida a lo largo del molde.
Figura 3.13. Dimensiones del molde para la probeta de Crack-bridging.
84

Capitulo 111
Al final del proceso de curado, se cortaron las probetas en una sierra de disco de
diamante con las dimensiones mostradas en la figura 3.14. Luego se propagó una
grieta golpeando con una hoja filosa en el plano transversal central de la probeta.
Figura 3.14. Dimensiones y geometría empleadas para la probeta para Crackbridging. El filamento esta situado al centro del bloque de resina.
3.9. Esfuerzo cortante por medio de fotoelasticidad para la geometría de Crack-bridging
La obtención de los patrones fotoelásticos para la geometría de Crack-bridging se
realizó siguiendo el método empleado para los ensayos de Pu/1-out (figura 3.15).
El modelo fue sujetado en la parte superior y en la parte inferior adhiriéndolo con
pegamento cianoacrílico. La carga se aplica de manera similar a la empleada para
la geometría de Pu/1-out.
85

Brazo de palanca
Mordazas
Pesos p muertos
Marco de carga
Probeta de crack-bridging
Capitulo 111
Figura 3.15. Brazo de palanca y mordazas del marco de carga del polariscopio. Geometría de Crack-bridging.
La carga se incrementó hasta la aparición de una banda oscura alrededor de la
fibra embebida en ambos extremos de la fractura. Esta banda oscura es el orden
fotoelástico uno (N = 1). La imagen del patrón fotoelástico fue tomada 1 o 2
minutos después de haber cargado la probeta registrando el peso aplicado.
Incrementando la carga el orden N= 1 migra hacia los bordes de la probeta hasta
que se observa la aparición de una nueva franja isocromática alrededor de la fibra
(orden fotoelástico N = 2) registrando la imagen y el peso utilizado del nuevo
patrón fotoelástico 1 o 2 minutos después de aplicada la carga. Las imágenes de
los patrones fotoelásticos de orden superior se obtuvieron con el mismo
---------···----· 86

Capitulo 111
procedimiento hasta que se produzca una falla en la interfase entre la fibra y la
matriz.
El método para calcular la diferencia de esfuerzos principales (a1 - a2) o el
esfuerzo cortante máximo por fotoelasticidad ( 'rMAX) fue el mismo que se empleo
para la geometría de Pu/1-out.
--··---·---· ·-····-·--·-·---- ·---·-··-··----87

Capitulo IV
Capitulo IV. Resultados y discusión
4.1. Caracterización de la fibra de poliéster
En la figura 4.1 se muestra la curva típica de esfuerzo-deformación para una fibra
poliéster, mientras que en la tabla 4.1 se muestran los resultados del análisis
mecánico de la fibra poliéster a tensión.
El valor medido de Módulo elástico calculado en la zona del 1 al 2% de
deformación es de 6003 MPa.
El módulo de Young obtenido para la fibra es en promedio 6 veces más alto en
comparación con el módulo en la matriz lo que asegurará que la fibra tenga
deformaciones bajas o nulas y que se mantenga en su región elástica al realizar
ensayos.
Tabla 4.1. Propiedades mecánicas de la fibra poliéster.
Módulo Elástico Esfuerzo Max. Deformacion Esfuerzo de Probeta (MPa) (MPa) Max.% Ruptura (Pa)
Promedio 6003 0.58 46.6 0.57 Desviación Estandar 252.4 0.06 2.6 0.017
88

Capítulo IV
0.6
0.5
-ro 0.4 a..
CJ - -t:::.- Fibra poliéster o N
0.3 ,._ Q) :::J 0.2 -en w
0.1
0.0 0.0 0.1 0.2 0.3 0.4 0.5
Deformación
Figura 4.1. Curva de esfuerzo-deformación para una fibra típica de poliéster de acuerdo a la norma ASTM D 2343-67.
4.2. Análisis por espectroscopía de infrarrojo de la fibra de poliéster
Para comprobar la pureza del material de la fibra, se corrió un análisis de infrarrojo
obteniendo los resultados mostrados en la figura 4.2. Con el espectro obtenido y
con base en las bandas de absorción de la tabla 4.2, se verificó que el material de
la fibra es poliéster. La tabla 4.2 presenta las bandas de absorción características
para la fibra de poliéster.
Tabla 4.2. Bandas de absorción de infrarrojo para la fibra de poliéster.
Grupos funcionales Bandas de absorción (cm-1)
CH2 estiramiento asimétrico 2970
CH2 estiramiento simétrico
(C=0)-0
-CH (aromático)
2850
1710, 503
972
89

Capítulo IV
100
~ 80
·u e ~
/ .... . E 60 2960 (/) e ~ .....
1--40
1720
20 3500 3000 2500 2000 1500 1000 500
Longitud de onda (cm -1)
Figura 4.2. Espectro de infrarrojo de la fibra poliéster usada en este trabajo.
4.3. Propiedades mecánicas de la resina epóxica
El análisis básico del mecanismo de transferencia de carga en un material
compuesto de fibra termoplástica y matriz termofija es desarrollado en el presente
proyecto, asumiendo que la transferencia de carga entre la fibra y la matriz es
totalmente elástica. Con base en las propiedades antes mencionadas y
relacionándolas con la teoría básica de fotoelasticidad es lógico asumir que el
efecto de la transferencia de carga en este tipo de materiales compuestos se verá
reflejado en la matriz. Por lo anterior es necesario entonces que la matriz
empleada en los diferentes modelos de análisis sea sensible a las deformaciones
provocadas por la transferencia de carga. En cambio la fibra embebida debe
mantenerse libre de deformaciones o en la región elástica a lo largo de todo el
ensayo.
90

Capitulo IV
Los resultados obtenidos para el análisis a tensión de la resina epóxica son
presentados en la tabla 4.3.
Tabla 4.3. Propiedades mecánicas de la resina epóxica. Módulo elástico Esfuerzo Deformación Relación de
(M Pa) máximo (M Pa) máxima (%) Poisson
Promedio Desviación estándar
1032.05 50.85
22.80 1.84
9.24 0.43
0.38 0.01
Las deformaciones obtenidas y las cargas empleadas para calcular la relación de
Poisson de la resina son presentadas en la tabla 4.4.
El mecanismo de transferencia de carga en un material compuesto de fibra
termoplástica y matriz termofija no ha sido analizado a profundidad. Sin embargo
sistemas de matriz termoplástica reforzadas con fibras de alto rendimiento como el
Twaron han sido empleados para el análisis preliminar de modelos de materiales
compuestos [2, 55, 56] .
Tabla 4.4. Relación de Poisson de la resina epóxica. Carga (N) Deformación en el Deformación en Relación de Promedio
ejey(&y) el ejex (&x) Poisson (vx,y) Vx,y
776 8410 -3045 0.36 0.38 930 7657 -2914 0.38 Desviación 1341 9202 -3674 0.39 Estándar= 1552 3701 -1430 0.38 0.013 151 1173 -467 0.39 396 4317 -1657 0.38
Como se puede observar en la tabla 4.1, el módulo de Young obtenido para la
resina es en promedio bajo en comparación con los módulos empleados en la
obtención de materiales compuestos lo que nos brindará la oportunidad de obtener
91

Capitulo IV
una buena sensibilidad fotoelástica incluso al realizar los ensayos empleando
cargas bajas. Además el valor de la relación de Poisson de la resina generará
esfuerzos de contracción al realizar los ensayos a tensión con lo que podremos
analizar el comportamiento de los modelos en todas las direcciones posibles.
4.4. Calibración fotoelástica de la resina
La probeta fue colocada en el marco de carga para flexión el cual esta montado en
el brazo de palanca del marco de carga del polaroscopio cuidando que la probeta
se mantenga centrada durante el proceso de carga.
En la figura 4.3, se presentan las imágenes de los patrones fotoelásticos de una
viga sometida a flexión pura. En esta figura en posible observar la aparición de las
franjas isocromáticas al aumentar el esfuerzo de flexión en la cual todas las franjas
de los órdenes fotoelásticos son rectas y equidistantes entre si. El proceso de
carga para la calibración de las demás probetas fue el mismo [2-4].
La probeta fue sometida a cargas colocando pesas en el extremo del brazo de
palanca desde O g hasta la aparición de una banda oscura en el centro de la
probeta correspondiente al orden fotoelástico cero (N = O). La carga empleada
para la aparición del orden N = O fue de 24.53 N. La aparición de esta franja indica
que se ha logrado la deformación inicial suficiente para la aparición del primer
orden fotoelástico (N = 1), el cual está situado en los bordes exteriores de la
probeta (figura 4.3a).
92

Capítulo IV
Figura 4.3. Patrones fotoelásticos de esfuerzo para una probeta sometida a flexión, las cargas aplicadas correspondientes (en newtons) están indicadas en la parte inferior de cada imagen.
93

Capitulo IV
Tabla 4.5. Valores obtenidos de fu para los órdenes fotoelásticos obtenidos para la probeta 1 usando la ecuación 1 .21 .
h{cm}= 1 a{cm}=1.5
Orden Valor de franja fa Carga N Fotoelástico N
y(m) 6Pay h3N para la probeta 1
79,71 0,5 0,0012 0,0085 5,00E-07 14 kN m 79,71 1.0 0,0022 0,0156 1 ,OOE-06 Desviación 79,71 1,5 0,0034 0,0247 1 ,50E-06 estándar= 79,71 2.0 0,0047 0,0336 2,00E-06 0.002
Tabla 4.6. Valores obtenidos de fu para los órdenes fotoelásticos obtenidos para la probeta 1 usando la ecuación 1.23.
h(cm) = 1 y = h/2 a(cm)= 1.5
Orden Valor de franja fo Carga N Fotoelástico N y(m) 3pa h2N para la probeta 1
30,66 1.0 0,010 1,3795 1 ,OOE-04 13.9kNm 64,38 2.0 0,010 2,8970 2,00E-04 98,10 3.0 0,010 4,4145 3,00E-04 so= 0.16 122,63 4.0 0,010 5,5181 4,00E-04
El valor promedio final de la constante fotoelástica para los dos grupos de 5
probetas utilizando la ecuación (2.21) es fu= 13.9 kN m. El valor de la constante
fotoelástica empleando la ecuación (1 .19) para dos grupos de 5 probetas es fu =
13.8 kN m.
Se puede observar que los valores promedio de fu para ambas metodologías es
básicamente el mismo, sin embargo debido a la dificultad experimental para ubicar
los órdenes fotoelásticos sobre los bordes de la probeta, el valor obtenido
mediante la ecuación (2.21) es el mas confiable. Por lo tanto el valor de fu= 13.9
kN m fue empleado para calcular la diferencia de esfuerzos o el esfuerzo cortante
interfacial usando la ley de esfuerzo óptico para las probetas de Pu/1-out y Crack
bridging.
96

Capitulo IV
Además de la calibración de la resina para un tiempo de curado de 8 días, se
cuantificó la constante fotoelástica a diversos intervalos de tiempo de curado para
conocer la estabilidad mecánica y fotoelástica del material. La calibración se
realizó con el mismo procedimiento empleado hasta ahora con probetas obtenidas
de secciones de placas de resina empleadas para la geometría de Pu/1-out de
hasta dos años de antigüedad.
La disminución del valor de la constante fotoelástica para la resina epóxica se
muestra en la figura 4.5, en la que se puede observar como las propiedades
fotoelásticas y por ende mecánicas de la resina epóxica se estabilizan después de
7 meses. Este inesperado comportamiento de la matriz hace imperativo que el
análisis de los modelos se realice en un tiempo fijo para todos los lotes para que
de esta manera las propiedades mecánicas y fotoelásticas de la matriz sean
constantes.
14000
12000
10000
-E 8000
z ........ 6000 ~
4000
• • 2000
o o 6 12 18 24
t (meses)
Figura 4.5 Disminución del valor del coeficiente fotoelástico fo en función del tiempo transcurrido entre la formulación de la resina epóxica y la realización de la prueba.
97

Capitulo IV
4.5. Esfuerzo cortante por medio de fotoelasticidad. Geometría de Pu/1-out
La carga empleada fue de O N (figura 4.6a), hasta 147.2 N. Para cada carga
empleada se tomó una foto que registra la aparición de los órdenes fotoelásticos,
así como también el crecimiento de estos.
La distribución de los esfuerzos en una probeta de Pu/1-out varía a lo largo de la
fibra embebida y en dirección radial como se puede observar en la figura 4.6. En la
figura 4.6 se puede observar el patrón fotoelástico generado al emplear una fuente
de luz blanca y las franjas correspondientes a cada nivel de esfuerzo. Cada una
de las franjas de la figura 4.6 está relacionada con un nivel de esfuerzo cort~nte
debido al retardo progresivo ocasionado por la carga al deformar el modelo en
dirección radial a partir del centro de la probeta donde se encuentra la fibra
embebida. A medida que la deformación aumenta, una longitud de onda (color) en
el espectro de una luz blanca propagándose a través de la probeta es extinguida
iniciando con el color violeta el cual tiene la longitud de onda mas pequeña visible.
Figura 4.6. Patrón fotoelástico para la geometría de Pull-out obtenida en un polaroscopio circular de campo oscuro.
98

Capitulo IV
Por la dificultad que implica el localizar a los órdenes fotoelásticos en las
transiciones de color, se empleó una lámpara de mercurio la cual emite una
radiación compuesta de tres longitudes de onda para el ensayo con la cual los
órdenes fotoelásticos aparecen como franjas oscuras.
El proceso de falla de la interfase se monitoreó al mismo tiempo que la carga
aplicada era incrementaba. Se identificaron tres fases del proceso de falla
iniciando con una probeta libre de carga (figura 4.7a). La primera fase mostró una
respuesta fotoelástica incipiente, obtenida cuando el espécimen fue cargado por
debajo de 24.5 N, (figura 4.7b). En la segunda fase se produjo un aumento notable
en la actividad fotoelástica al multiplicarse las franjas isocromáticas. Durante este
proceso y antes de la falla de la interfase, se desarrollaron tres franjas
isocromáticas.
Entre las cargas de 24.5 N y 92.2 N, la franja con orden fotoelástico uno (N = 1)
amplió su zona de influencia hacia el interior de la resina como se puede observar
en las figuras 4.7b y 4.7c. Sin embargo, los extremos de la franja de orden N= 1
se mantienen sobre la interfase entre la fibra y la matriz. Al aumentar la carga
aparece el segundo orden fotoelástico N = 2 y el orden N = 1 es desplazado en
dirección radial hacia los bordes de la probeta de tal manera que el orden
fotoelástico N = 2 es rodeado por el orden N = 1 (figura 4. 7d)
Al aumentar la carga sobre la probeta de Pu/1-out de 116.4 a 141 .3 N, el segundo
orden fotoelástico N = 2 (figura 4. 7d) fue desplazado junto con el primer orden en
dirección radial apareciendo entonces el tercer orden fotoelástico (N = 3, figura
4.7e). La carga máxima empleada antes de la falla de la interfase fue de 147.2 N
la cual no produjo una variación apreciable en las dimensiones de las franjas
fotoelásticas.
99

Capítulo IV
La fase final fue advertida después del desprendimiento de la fibra debido a que
los patrones fotoelásticos cambiaron a causa de la falla interfacial. Los patrones
muestran la actividad fotoelástica generada por la extracción de la fibra en el
extremo embebido de ésta (figura 4.7g y 4.7h).
La figura 4.7g muestra el patrón fotoelástico en el momento en el que la interfase
falla y la fibra empieza a ser extraída del bloque de resina. El patrón de franjas
isocromáticas en los puntos en los cuales el extremo de la fibra estaba
inicialmente anclada denotan una intensa actividad fotoelástica la cual es
probablemente producida por la combinación de esfuerzos localizados en la
vecindad entre la matriz y la fibra o a esfuerzos producidos por la fricción debida a
la extracción de la fibra.
La figura 4. 7h muestra a la misma probeta exactamente después de que fibra se
ha comenzado a extraer y esta parcialmente fuera del bloque de resina. El patrón
fotoelástico muestra los esfuerzos en la cavidad vacía del bloque de resina
correspondientes al estado de esfuerzos en el proceso de extracción.
Los análisis para la transferencia de carga realizados para la geometría de Pu/1-out
basados por lo general en la teoría de Shear-lag [40-45, 57], predicen que los
esfuerzos en el extremo embebido de la fibra son nulos; sin embargo los patrones
fotoelásticos obtenidos muestran que el esfuerzo aplicado tiene un radio de
influencia mayor que la longitud de fibra embebida (figuras 4.6 y 4.7).
Para medir el esfuerzo cortante máximo r MAX a lo largo de la fibra, se emplearon
tres franjas isocromáticas de campo oscuro y tres franjas isocromáticas del campo
claro en cuatro grupos de cinco probetas con cargas que fueron de 24.5 N a 14 7.2
N.
100

Capitulo IV
Figura 4.7. Franjas isocromáticas para la geometría de Pull-out sometida a cargas diferentes (campo oscuro de un polaroscopio circular) .
·----------------·-·-·-··-101

Capitulo IV
La distribución experimental del esfuerzo cortante máximo rMAX (esfuerzo
observado) fue calculada con ecuación (2.12) empleando la constante fotoelástica
fu obtenida de los ensayos de flexión de la sección 4.2 y el orden de franja
obtenido del patrón fotoelástico. De esta forma se asignó un valor específico de
esfuerzo cortante máximo r MAX para cada orden de franja fotoelástica. El valor de
esfuerzo cortante máximo r MAX es constante a lo largo de toda la trayectoria de la
franja fotoelástica; entonces la distribución del esfuerzo cortante interfacial se
obtiene asumiendo que el esfuerzo cortante máximo r MAX es igual al esfuerzo
cortante interfacial r; en los puntos donde cada franja fotoelástica toca la interfase
entre la fibra y la matriz.
En el caso de la geometría de Pu/1-out, las franjas isocromáticas actúan, sobre dos
puntos que se encuentran sobre la superficie de la fibra (figura 3.11, sección 3.4).
Los puntos a lo largo de la fibra en los que un determinado valor de esfuerzo
cortante interfacial actúa (r; = rMAX) se determinó midiendo la distancia desde el
borde de la probeta hasta el centro de la franja fotoelástica para cada orden como
se muestra en la figura 4.8.
El origen del eje de referencia (x =O) se ubicó en el borde de la probeta justo en
punto en el que la fibra sale del bloque de resina. De acuerdo a esto, el orden
fotoelástico tres actúa sobre la superficie de la. fibra en el punto a, a una distancia
sobre la fibra igual a UD = 2 y en el punto b a una distancia UD = 2.53 como se
puede observar en la figura 4.8. El orden N= 2 actúa en un punto a la izquierda
del punto a (UD= 0.68) y en el punto e (UD= 5.78). Para el orden N= 1, la franja
correspondiente inicia en el borde de la probeta (x =o) y en el punto g sobre la
superficie de la fibra (UD= 1 0.32).
-···-·--·----·-·--------.. ----.. ·-·-----··-··---.. ---------·-·--·-------· 102

Capitulo IV
Figura 4.8. Longitud y ubicación de las franjas fotoelásticas obtenidas por medio de la técnica de fotoelasticidad para la geometría de Pull-out.
Los patrones fotoelásticos de la figura 4.8 donde se muestran las franjas
isocromáticas con órdenes enteros N = 1 , N = 2 y N = 3, se obtuvieron
directamente del polaroscopio de campo oscuro.
La distribución del esfuerzo cortante interfacial obtenida por medio del esfuerzo
cortante máximo observado fue graficada respecto a la relación de aspecto de la
fibra UD, donde L es la distancia en la cual una franja isocromática específica se
ubica sobre la superficie de la fibra y D es el diámetro de la fibra, se muestra en la
figura 4.9.
En la figura 4.9 se puede observar que la transferencia de carga entre la fibra y la
matriz es baja lo cual era esperado debido a la naturaleza inherente de la fibra y la
matriz además de que no se empleo ningún tratamiento superficial para mejorar la
103

Capitulo IV
adherencia. Sin embargo la metodología empleada demostró que es posible
seguir el proceso de carga y medir el esfuerzo cortante interfacial, el cual es el
objetivo principal de este trabajo.
El paso siguiente fue obtener la distribución real del esfuerzo interfacial corrigiendo
los valores obtenidos en la figura 4.9. La diferencia de esfuerzos principales se
calculo sustituyéndolo en la ecuación (2.13) los valores de esfuerzo cortante
interfacial observado r ; de la figura 4.9. Posteriormente empleando la ecuación
(3.26) fue obtenida la diferencia de esfuerzos principales corregida cr e la cual esta
relacionada con el esfuerzo cortante máximo corregido r cMAX mediante la
ecuación (2.13).
0.12
0.10
!iMAX - • - Probeta 1 - • - Probeta 2
0.08 - • - Probeta 3 be: - .... - Probeta 4 --l--0- 0.06
0.04 Fibra
Borde de 0.02 la probeta
o 5 10 15 20 25 30 35
LID
Figura 4.9. Distribución del esfuerzo cortante interfacial para la geometría de Pu/1-out obtenidos experimentalmente.
----------··-----· 104

Capitulo IV
Como se había expresado anteriormente, los valores de esfuerzo cortante máximo
corregido rcMAX se asumen sean iguales al esfuerzo cortante interfacial r ; en los
puntos en los que una franja isocromática toca la interfase. De acuerdo con la
tabla 4. 7 a la franja isocromática de orden N = 1 , le corresponde un valor de
esfuerzo cortante interfacial r; que sería igual a un esfuerzo cortante máximo
rcMAX de 0.33 MPa, el cual esta localizado en el borde del espécimen y en el
punto g en la figura 4.8.
La tabla 4. 7 muestra la diferencia de esfuerzo principales corregida a e y el
esfuerzo cortante máximo interfacial corregido r cMAX .
Tabla 4.7. Diferencia de esfuerzos principales y esfuerzo cortante corregidos.
Orden fotoelástico N 0.50 1.00 1.50 2.00 2.50 3.00
Diferencia de esfuerzos corregidos ac (MPa)
0,54 0,66 0,95 1,24 1,79 2,35
Esfuerzo cortante corregido rcMAX (MPa)
0,27 0,33 0,48 0,62 0,90 1 '18
En el caso de la segunda franja isocromática (orden N= 2), ésta inicia en el punto
a y abarca el espacio hasta el punto e; finalmente el tercer orden fotoelástico (N = 3), ocupa el espacio entre el punto a y el punto b de la figura 4.9. Las trayectorias
de los órdenes fotoelásticos N = 2 y N = 3 corresponden a puntos en los cuales se
generaron esfuerzos cortantes interfaciales de: 0.62 MPa y 1.18 MPa
respectivamente (tabla 4. 7).
El esfuerzo cortante interfacial máximo obtenido por medio de la técnica de
fotoelasticidad tiene la misma trayectoria que el tercer orden fotoelástico (N = 3) y
se encuentra ubicado entre los puntos a y b de la figura 4.9.
105

Capitulo IV
Para los órdenes de la franja medios de N = V2, 1 V2 y 2%, la franja fotoelástica
correspondiente a el orden N = 2V2 abarca desde el punto e al punto d (figura 4.8)
y corresponde a un esfuerzo cortante interfacial de 0.9 MPa (tabla 4.7). El orden
fotoelástico N = 1 V2 con un esfuerzo cortante interfacial igual a 0.48 MPa, se
propaga desde el borde del bloque de resina hasta el punto f y finalmente el orden
N = V2 (esfuerzo cortante interfacial igual a 0.27 MPa) abarca el espacio entre el
borde del bloque de resina hasta el extremo embebido de la fibra (figura 4.8) .
La figura 4.1 O muestra la distribución de la relación entre el esfuerzo cortante
interfacial y el esfuerzo aplicado ( r; 1 a n ) , para los valores experimentales
obtenidos por fotoelasticidad para cuatro grupos de 5 probetas y empleando la
teoría Shear-lag. La distribución del esfuerzo cortante experimental alcanza su
valor máximo ( r;MAX) en un punto que se ubica a 2.5 veces el diámetro de la fibra
a partir del borde de la probeta (figura 4.1 O).
Los valores experimentales de esfuerzo cortante interfacial y los valores
calculados usando la teoría de Shear-lag se comportan de manera similar en el
rango comprendido entre UD = O y UD = 1 O. Los valores de esfuerzo cortante
experimental en este rango se ubican en la gráfica por debajo de los calculados
por medio de la teoría de Shear-lag. Esta teoría supone una adhesión elástica
perfecta a lo largo de la fibra y no toma en cuenta el estado complejo de cargas en
el extremo embebido de la fibra o en el punto en el cual esta emerge del bloque de
resina lo que podría explicar que los valores experimentales no se ajusten al
modelo de Shear-lag [41-44].
La ubicación del esfuerzo cortante interfacial máximo en la superficie de la fibra
observado experimentalmente coincide con la ubicación que predice la teoría de
Shear-lag, sin embargo, para los puntos que se encuentran más cerca del extremo
embebido de la fibra los valores obtenidos experimentalmente son diferentes. Para
----------· .. -·--·----------··--106

Capitulo IV
valores de UD mayores a 1 O, los valores del esfuerzo cortante interfacial obtenido
experimentalmente para las franjas fotoelásticas con órdenes de % y 1 (0.27 y
0.33 MPa respectivamente, son valores más altos que los valores calculados a
partir de la teoría de Shear-lag.
0.14
0.12 - • - Experimental Pu/1-out
0.10 - • - Shear-lag
0.08
€ 0.06 --~ 0.04
0.02
Carga 0.00
o 5 10 15 20 25 30 35
LID
Figura 4.1 O. Distribuciones de la relación ( r ; / a n), empleando la teoría de transferencia de esfuerzo cortante Shear-lag y para los valores experimentales.
Adicionalmente, enfocándonos en la figura 4.6e, es posible observar que la
longitud de influencia UD de la franja fotoelástica de orden %, es mas grande que
la longitud de fibra embebida, lo que induce a pensar que la longitud embebida
para lograr un efecto optimo de refuerzo debería ser mas larga que la empleada
en este análisis.
107

Capitulo IV
4.6. lsoclinas y trayectorias de esfuerzos principales
La figura 4.11 muestra las imágenes de las isoclinas con parámetro B igual a oo y
20°. La trayectoria de cada isoclina fue obtenida trazando individualmente a cada
una de ellas a partir del correspondiente patrón isocromático (figura 4.11 a y b).
__¿;_ Carga
Figura 4.11. lsoclinas para la geometría de Pu/1-out correspondientes a las isoclinas de oo (a) y 20° (b). Polaroscopio de campo oscuro.
108

Capitulo IV
Cada trayectoria de isoclina fue determinada para un ángulo o parámetro e determinado girando simultáneamente el polarizador y el analizador respecto a la
dirección en la que la carga está aplicada (sección 2.3.1). En la figura 4.11 a el
parámetro de la isoclina es e = o o y para la figura 4.11 b es e = 20°; se puede
observar en esta figura como las trayectorias de las isoclinas (marcadas por medio
de cruces) cambian de orientación para cada parámetro. Posteriormente estas son
extraídas para colocarlas en un solo diagrama y así obtener la distribución
completa de las isoclinas en la geometría de Pu/1-out. A lo largo de cada
trayectoria de isoclina se marcan puntos que serán unidos posteriormente (figura
4.12).
En la figura 4.12a la trayectoria cada isoclina ha sido marcada con diagramas en
los cuales las flechas indican las direcciones de los esfuerzos principales. Para la
isoclina con parámetro e = o o, uno de los esfuerzos principales esta en dirección
horizontal y el segundo esfuerzo principal en dirección vertical. En el caso de las
isoclinas con parámetros diferentes a o o, una de las flechas corresponde a la
dirección de uno de los esfuerzos principales y está desplazada a 20° y 4S 0
respecto a la dirección horizontal para cada parámetro e . La dirección del
segundo esfuerzo principal entonces tendrá una dirección con un ángulo de
desplazamiento igual a e + 90° respecto de la dirección horizontal. La figura 4.12b
muestra a los puntos marcados sobre las isoclinas unidos para obtener la
distribución final de las trayectorias de las isoclinas para el modelo de Pu/1-out [32-
36].
En la figura 4.13 se puede observar la trayectoria correspondiente a la isoclina con
parámetros de so y aso (marcadas por medio de cruces). Ambas isoclinas están
compuestas por dos trayectorias, una de ellas es un lóbulo localizado en el
extremo en el cual la fibra sale del bloque de resina y un segundo lóbulo más
pequeño en el extremo embebido. La trayectoria de ambos parámetros nos
demuestra que la carga esta perfectamente distribuida alrededor y a lo largo de la
109

Capitulo IV
fibra embebida. Este comportamiento se repite para todas las isoclinas con
parámetros iguales a e y a e +90° como se puede observar en la figura 4.14.
+- (aJ + + ~r
+ ~ Bloque de matri:
*~* 20° + 20°
~45°~ +
M * +
Fibra
~X *~ + ~+ + +
'WV ~ 1 +
Figura 4.12. Trazo de las isoclinas de parámetro e:::; 0°, 20° y 45°.
Entonces tomando la fibra como eje de simetría del modelo de Pu/1-out, las
trayectorias de las isoclinas se forman en la parte superior de esta cuando los
polarizadores son rotados de e = oo a e = 45° con respecto a la dirección de la
carga (figura 4.14a, 4.14c y 4.14e). En cambio, cuando los polarizadores se rotan
de e= 45° a e = 90° las isoclinas de formaran en la parte inferior de la fibra (figura
414.b, 414.d y 4.14f).
El comportamiento observado en las isoclinas con parámetros e = 5° y e = 1 o o se
repite para las isoclinas de parámetro e = 1 o o el cual es simétrica con la isoclina
de parámetro e = 80°. Este comportamiento se repite para las isoclinas de
parámetro e = 15° y e = 75°, pero deja de ser evidente para las isoclinas de
parámetro e= 25° y e= 65°.
11 o

Bandas isocromáticas
Bandas isocromáticas
Capitulo IV
Figura 4.13. lsoclina y bandas isocromáticas obtenidas con luz blanca para las isoclinas de parámetros 8= so (a) y aso (b). Polaroscopio lineal de campo oscuro.
La figura 4.1S muestra una familia completa de isoclinas para la geometría de Pu/1-
out. Cerca del puno en el cual la fibra sale del bloque de resina las franjas que
marcan la trayectoria de las isoclinas se toman difusas y difíciles de ubicar debido
a que se encuentran cerca de la zona en la que el esfuerzo cortante máximo actúa
generando una alta concentración de esfuerzos.
111

Capitulo IV
Figura 4.14. Patrones fotoelásticos mostrando los pares de isoclinas en las cuales la trayectoria es simétrica (el parámetro esta indicado en cada figura).
112

Capitulo IV
Bloque de Parámetro de la isoclina e
+ o o
o 100
6 15° V 20° () 25°
<J 30°
* 35°
® 40°
X 45°
Figura 4.15. Familia de isoclinas para la geometría de Pu/1-out.
A partir del grupo de isoclinas en la vecindad del punto en el que la fibra sale del
bloque de resina (figura 4.15), se definieron las trayectorias de los esfuerzos
principales que actúan en esa zona en el modelo de Pull-out.
Las trayectorias de las isoclinas correspondientes a los parámetros de o o, 1 o o y
15° muestran un cambio de dirección al aproximarse al borde de la probeta. El
cambio de dirección obedece a dos hechos importantes. El primero es que la
trayectoria de las isoclinas es paralelo a los bordes de la probeta al estar este libre
de esfuerzos cortantes. El segundo es que cruza el plano en el cual se localiza el
esfuerzo cortante máximo sobre la superficie de la fibra generando cambios en la
dirección de los esfuerzos resultantes en la zona comprendida entre el borde de la
probeta y el punto donde el esfuerzo cortante máximo actúa. La figura 4.16 se
muestra como este método fue aplicado a las isoclinas con parámetro 8 de 20°,
25°, 35° y 45° en el área sombreada de la figura 4.15.
--···----··-·--·-·· -----·-·---···---113

Capitulo IV
Los ángulos o1, 02 y 03 se calculan de acuerdo a las siguientes expresiones 01 = %
(81 + 82); o2 = % (82 + 83) ; 03 = % (83 + 84) [1]. La designación de las direcciones
de esfuerzo como a1 y a2 en la figura 4.16 fue al azar con la única intención de
distinguir a ambos grupos de direcciones de esfuerzo. Para designar de manera
exacta la dirección del esfuerzo algebraicamente mayor a1, sería necesario hacer
la separación de los esfuerzos que actúan sobre el modelo.
La figura 4.17 muestra la parte superior de la probeta de Pu/1-out en la que la fibra
es el eje de simetría de los dos grupos de direcciones de esfuerzo distribuidas en
la zona del modelo fotoelástico en el cual la fibra sale del bloque de resina. Las
direcciones de esfuerzo en la figura 4.17 convergen en un plano perpendicular a la
fibra en el punto en el que el esfuerzo cortante máximo generado durante el
proceso de carga de la probeta fue localizado empleando las franjas isocromáticas
(sección 4.5} [12, 45].
El punto 1 en la figura 4.17 se ubica en una zona lejana al plano de convergencia
de la probeta de Pu/1-out y en base a las direcciones de esfuerzo obtenidas, uno
de los esfuerzos principales actuará con un ángulo pequeño respecto al eje
horizontal, de tal manera que la componente del esfuerzo resultante localizada a lo
largo del eje de x (superficie de la fibra) actuarán en forma de un esfuerzo cortante
y la componente a lo largo del eje y como un esfuerzo a tensión.
Si se considera un punto en la interfase fibra-matriz la dirección del esfuerzo que
se opone a la extracción de la fibra se alineará sobre la superficie ésta, de tal
forma que el mecanismo de falla relacionado con este estado de esfuerzos puede
asociarse a una falla por cedencia en una interfase dúctil a través de un modo de
falla tipo 11 .
114

'
'
\
'P'2 \
Capitulo IV
'
Fiber
Figura 4.16. Trazado de las direcciones de esfuerzo principales a1 y a2 en las isoclinas con parámetro 8 = 20°, 25°, 35° y 45° para la geometría de Pu/1-out correspondiente al área sombreada en la figura 4.13.
El punto 2 (figura 4.17) está localizado en el bloque de resina epóxica. Al rotar el
estado de esfuerzos en este punto la resultante variará en función del ángulo en el
que los esfuerzos principales actúan. Entonces la resultante estará sobre el eje de
x cuando el esfuerzo principal a 1 actúa con ángulos cercanos a oo o sobre el eje y
para los ángulos cercanos a 90°.
115

Plano de convergencia
Borde de la probeta
Carga aplicada
~
Capitulo IV
Figura 4.17. Trayectorias de las direcciones de los esfuerzos principales para la geometría de Pull-out.
El punto 3 en la figura 4.17 se localiza sobre el plano de convergencia; en este
punto el estado de esfuerzos esta compuesto principalmente por dos vectores a
tensión opuestos en la dirección del eje y. Uno de los esfuerzos corresponde al
esfuerzo principal a1 que actúa en el bloque de resina, mientras que en dirección
opuesta el esfuerzo corresponde a la contracción por efecto de Poisson de la fibra.
En el punto 3 de la figura 4.17 el estado de esfuerzos actúa a 90° respecto al eje
x, de tal manera que uno de los esfuerzos principales estará actuando en dirección
116

Capitulo IV
radial en un plano transversal a la fibra que esta localizado sobre el punto de
convergencia.
Cuando el ángulo en el que actúa el esfuerzo principal a 1 es más grande que 90°,
el estado de carga actuará en una área localizada a la izquierda del plano de
convergencia. Esta área cubre la zona comprendida desde el plano de
convergencia hasta el borde del bloque de resina. En esta zona las direcciones de
los esfuerzos principales deben distribuirse de forma semejante a las del lado
derecho del plano de convergencia (el área de la fibra embebida), pero en un área
más restringida. El estado de esfuerzos está entonces compuesto por las
direcciones de esfuerzo distribuidas de oo a 90° para el lado derecho del plano de
convergencia y de 90° a 180° para el lado izquierdo del plano de convergencia.
Del plano de convergencia al borde del bloque de resina las franjas
correspondientes a las isoclinas son difusas debido a que la resultante de los
esfuerzos cortantes 'Lxy se anula en todos los planos como resultado de que los
esfuerzos principales en esa zona son iguales en todas las direcciones. Lo cual
nos lleva a deducir que existe una distribución de esfuerzos similar a la que se
encuentra del lado derecho del plano de convergencia que equilibra el estado de
esfuerzos global alrededor del plano de convergencia. El efecto de este estado de
esfuerzos puede observarse en las trayectorias correspondientes a las isoclinas
con parámetros de 0°, 1 oo y 15° en las que es evidente un cambio de orientación
en las direcciones de esfuerzo (figura 4.15).
117

Capitulo IV
4.7. Esfuerzo cortante por fotoelasticidad. Geometría de Crack-bridging
El detalle más importante de la geometría de Crack-bridging es el frente de
fractura entre la fibra y el bloque de resina generado durante la fractura de esta
probeta. La forma de este frente se considera recta y en un plano en dirección
transversal a la fibra. Sin embargo, el frente de fractura obtenido fue irregular
(figura 4.18). Por consiguiente, al ejercer una carga sobre las probetas los
patrones fotoelásticos generados fueron asimétricos. Aunado al comportamiento
anterior, las franjas isocromáticas se ubicaron sobre la fibra embebida en una
longitud mayor comparada con la obtenida para la geometría de Pu/1-out.
Resina
Figura 4.18. Topografía del frente de fractura en una probeta de Crack-bridging antes de ser cargada.
·----------·-... --.. ·--------·-·---118

Capítulo IV
La disposición del polarizador circular, así como el procedimiento para la
obtención de las franjas isocromáticas antes de la falla de la interfase es similar a
la empleada para las pruebas de Pu/1-out (sección 4.6) .
La diferencia substancial de los ensayos para la geometría de Crack-bridging
respecto a los de la geometría de Pu/1-out fue que el comportamiento de falla de
esta geometría permitió observar el proceso de desprendimiento interfacial en el
momento de la falla. Esto nos permitió establecer el mecanismo de falla y cálcular
el esfuerzo cortante interfacial en el proceso de desprendimiento.
La formación y crecimiento de las franjas isocromáticas para la geometría de
Crack-bridging para diferentes cargas en el momento del desprendimiento se
muestra en la figura 4.19. El proceso de desprendimiento presentó un patrón
fotoelástico formado por dos franjas fotoelásticas para la probeta sujeta a una
carga de 214.5 N y un patrón de tres franjas para la probeta cargada con 226.9 N.
El mecanismo de carga y falla interfacial se puede resumir de la siguiente forma.
De la carga inicial hasta la carga máxima se obtuvieron patrones fotoelásticos de
hasta tres franjas isocromáticas antes del inicio de la falla interfacial (figura 4.19a,
by e). Estas fases son similares a las observadas para las probetas de Pu/1-out,
en las cuales el proceso de falla inicia con la aparición de la primera franja
isocromática (figura 4.19a y 4.19d), el crecimiento de la actividad fotoelástica
(figura 4.19b) y la aparición del orden N = 3 antes de la falla interfacial al aplicar
una carga de 226.9 N (figura 4.19c).
Posteriormente, se pudo observar el proceso de desprendimiento interfacial; en el
cual el frente de fractura se propagó con un esfuerzo cortante interfacial
correspondiente a dos órdenes fotoelásticos (figura 4.19 d y e) .
------------· ·---119

Capitulo IV
El proceso de falla finalizó con la extracción de la fibra generando en el extremo
embebido patrones fotoelásticos simétricos producidos por la fricción con la
cavidad vacía de la resina (figura 4.19f). Los patrones fotoelásticos de las figuras
4.17 a, b y e fueron obtenidas empleando como fuente de luz una lámpara de
sodio de mayor potencia para lograr una mejor definición de los patrones
fotoelásticos.
Figura 4.19. Crecimiento del patrón fotoelástico de una probeta de Crack-bridging al ser cargada. Las figuras a, b y e se obtuvieron empleando la lámpara de mercurio y las figuras d, e y f con la lámpara de sodio.
En las imágenes de la figura 4.19 se pueden distinguir ciertos acontecimientos que
han sido mencionados en estudios de desprendimiento interfacial [54, 61 ]. Uno de
estos, el más evidente, es la contribución que tiene la fricción en el proceso de
extracción del filamento. Este efecto queda resaltado por la aparición de un doble
lóbulo fotoelástico simétrico alrededor de la fibra en el lado derecho del frente de
fractura, el cual corresponde a la zona desprendida de la fibra (figura 4.19b y e) .
·-----·-·-·--- .. --------·----- -120

Capitulo IV
En la figura 4.20 se puede observar con mejor detalle el frente de fractura y la
localización de las franjas fotoelásticas obtenidas de manera general en las
probetas de Crack-bridging al aplicar una carga de 208.5 N en una sola vez. Como
se mencionó anteriormente, el frente de fractura es irregular lo cual se refleja en
los puntos de inicio de las franjas isocromáticas. Las franjas isocromáticas inician
sus trayectorias en el frente de fractura dirigiéndose posteriormente hacia el
extremo embebido de la fibra. El número de órdenes isocromáticos formados a lo
largo del frente de fractura es el mismo, por lo que el nivel de esfuerzo es
constante.
Figura 4.20. Conteo de bandas isocromáticas en una probeta de Crack-bridging.
------·--·---· 121

Capitulo IV
Los patrones fotoelásticos para la geometría de Crack-bridging se obtuvieron
empleando una lámpara de sodio de tal manera que para hacer una comparación
con los resultados para la geometría de Pu/1-out, se tuvo que corregir el valor del
esfuerzo cortante interfacial observado obtenido por medio de la ecuación (2.12)
por la relación entre las longitudes de onda de las lámparas empleadas
As = 1. 1923 para poder comparar los resultados con los obtenidos con una AM
lámpara de mercurio en la geometría de Pu/1-out (ver anexo A).
La distribución experimental del esfuerzo cortante interfacial (esfuerzo observado)
para la geometría de Crack-brídgíng fue calculada empleando cuatro grupos de
cinco probetas y el mismo método usado para la geometría de Pu/1-out. La tabla
4.8 muestra la diferencia de esfuerzos principales corregidos a e y el esfuerzo
cortante máximo interfacial corregidorcMAX para la geometría de Crack-bridging.
Tabla 4.8. Diferencia de esfuerzos principales y esfuerzo cortante corregidos.
Orden fotoelástico N 0.50 1.00 1.50 2.00 2.50 3.00 3.50
Diferencia de esfuerzos Esfuerzo cortante corregidos ac (MPa) corregido rcMAX (MPa)
0.51 0.26 0.62 0.31 0.86 0.43 1.24 0.62 1.70 0.85 2.17 1.08 2.81 1.41
En el caso de la geometría de Crack-bridgíng, se tiene al igual que en el caso de la
geometría de Pu/1-out modos de falla del tipo 1 por apertura y de tipo 11 por
deslizamiento. En el proceso de propagación del frente de fractura, la carga
aplicada sobre la fibra es balanceada sobre la superficie de fractura. En este
122

Capítulo IV
punto, la superficie de la fibra se separa del bloque de resina (modo de falla tipo 1)
provocando que el frente de fractura avance en la interfase entre la superficie de la
fibra y el bloque de matriz.
El proceso de falla se genera cuando la probeta esta sometida a una carga de 150
a 170 MPa, generando un valor de esfuerzo cortante interfacial r ¡ correspondiente
a dos órdenes fotoelásticos (rcMAX 0.62 MPa, figura 4.21) , ocasionando que el
frente de fractura avance en la interfase. La figura 4.21 a muestra el patrón
fotoelástico obtenido en el proceso de propagación de la falla cuando la probeta se
encuentra sometida a un esfuerzo de 96 MPa ( r¡ = 1.41 MPa). En la figura 4.21 b,
las bandas fotoelásticas inferiores se han desplazado a la derecha como resultado
del avance de la fractura. Finalmente en la figura 4.21 e, las bandas fotoelásticas
superiores se ubican en puntos diferentes a lo largo de la superficie de la fibra, lo
que indica que el frente de fractura se propaga en dirección al extremo embebido
de la fibra.
Los perfiles de esfuerzo cortante interfacial para una probeta de Crack-bridging
calculados experimentalmente y la predicción hecha a partir de la teoría de Shear
lag se presentan juntos en la figura 4.22. En esta figura se puede observar que los
datos experimentales y los obtenidos de la teoría de Shear-lag concuerdan
bastante bien desde el frente de fractura hasta una distancia hacia el interior del
bloque de resina de cercana a 6 veces el diámetro de la fibra.
Los valores experimentales de esfuerzo cortante interfacial para la geometría de
Crack-briging se ubican en la gráfica por debajo de los calculados por medio de la
teoría de Shear-lag de manera similar a los obtenidos en el análisis de la
geometría de Pu/1-out; especialmente al alejarse del frente de la fractura para
valores de UD mayores a 7 veces el diámetro de la fibra. Los valores
experimentales del esfuerzo cortante interfacial para la geometría de Crack-
-·-•n-.. ------· n~•
123

Capitulo IV
bridging no decrecen tan rápidamente como lo hacen los valores calculados a
partir de la teoría de Shear-lag.
Figura 4.21 Propagación del frente de fractura en una probeta de Crack-bridging al aplicar un esfuerzo de 96 MPa.
La desviación entre ambos comportamientos al igual que para el modelo de Pu/1-
out, es que esta teoría supone una adhesión elástica perfecta a lo largo de la fibra
y no toma en cuenta el estado de esfuerzos en el extremo embebido de la fibra o
en el punto en el cual esta emerge del bloque de resina [26, 42-46].
124

Capitulo IV
0.12
- • - shear-lag
0.10 - ..-- crack-bridging
0.08
0.06
0.04
o 5 10 15 20 25 30
LJD
Figura 4.22. Comportamiento del esfuerzo cortante interfacial para una probeta de Crack-bridging antes de propagarse la fractura.
La ubicación del esfuerzo cortante interfacial máximo experimental observado en
la superficie de la fibra para la geometría de Pu/1-out figura (4.1 O) y Crack-bridging
(figura 4.22) coinciden con la ubicación que predice la teoría de Shear-lag,
localizándose aproximadamente a 2.5 veces el diámetro de la fibra del borde de la
matriz.
En la figura 4.1 O también es posible observar que los valores experimentales para
la geometría de Pu/1-out decaen mas rápido que obtenidos para la de Crack
bridging.
125

Capitulo IV
Es interesante que el radio de influencia UD de los esfuerzos experimentales sea
parecido para ambas geometrías ya que la longitud embebida para la geometría
de Pu/1-out es mas corta que la de Crack-bridging. Esto hace suponer que la
longitud embebida para obtener una distribución de esfuerzos es similar para
cualquiera de las dos geometrías, la cual debe tener un valor mínimo de 4 cm.
Al comparar los patrones fotoelásticos para las geometrías de Pu/1-out y Crack
bridging se pudo comprobar que los esfuerzos para ambas geometrías se
distribuyen sobre la superficie total de la probeta y que la distribución es
independiente de la longitud embebida siempre que la longitud embebida mínima
sea de 4 cm.
En la figura 4.23a se puede observar el patrón fotoelástico para una probeta de
Pu/1-out con una longitud embebida de 4cm y el patón fotoelástico para una
probeta de Crack-bridging (figura 4.23a) en la que la longitud embebida es mayor
a 9 cm. Como se puede observar el radio de influencia de la carga aplicada es
similar en las dos probetas y cubre el espacio comprendido entre el punto en el
cual la fibra emerge del bloque de resina y los bordes de la probeta. De tal manera
que la distribución de los esfuerzos en ambas probetas podría ser independiente
de la longitud de fibra embebida.
126

Capitulo IV
Figura 4.23. Patrones fotoelásticos para las geometrías de Pu/1-out (a) y Crackbridging (b) al generar dos franjas isocromáticas empleando una lámpara de mercurio.
··-----------------·---·----·-··-··--·----·-·----··--------·· ·---· 127

Conclusiones
Conclusiones.
La técnica de fotoelasticidad se empleó como base para diseñar una metodología
para medir la distribución del esfuerzo cortante interfacial en un sistema de fibra
termoplástica y matriz termofija. También por medio de esta técnica se definieron
los modos de falla en base a las direcciones de los esfuerzos principales en
modelos de Pu/1-out y Crack-bridging.
Las imágenes de las franjas isocromáticas obtenidas de una probeta de la
geometría de Pu/1-out se emplearon para medir el esfuerzo cortante máximo
interfacial en un sistema de fibra termoplástica y matriz termofija. Estos patrones
también fueron empleados para analizar el proceso de transferencia de esfuerzo
alrededor de una fibra embebida, desde el inicio de la carga hasta la falla
interfacial. La carga inicial a la que se observo por primera vez el efecto
fotoelástico fue de 24.5 N y la carga promedio en la cual la falla interfacial se
produjo fue de 14 7.2 N. El proceso de carga produjo un patrón fotoelástico de seis
franjas isocromáticas (N= 3, 2%, 2, 11/2, 1 y%).
El esfuerzo cortante interfacial r; tuvo un valor mínimo de 0.27 MPa y un esfuerzo
cortante interfacial máximo de 1 .17 M Pa. El esfuerzo cortante interfacial máximo
fue localizado en la probeta de Pu/1-out a una distancia igual a 2.5 veces el
diámetro de la fibra (UD) desde el punto en el que ésta emerge del bloque de
resina.
La predicción hecha por medio de la teoría de Shear-lag y los resultados
experimentales tuvieron tendencias similares en el rango comprendido entre UD = O y UD = 1 O y fueron reproducibles para todas las pruebas realizadas.
Los órdenes fotoelásticos N= %y N = 1 (0.27 y 0.33 MPa respectivamente), se
128

Conclusiones
desvían de la predicción hecha por medio de la teoría de Shear-lag, obteniéndose
valores experimentales de esfuerzo interfacial más altos que los predichos
teóricamente para distancias mayores a 15 veces el diámetro de la fibra. Este
comportamiento puede ser observado en la imagen de la figura 5.7e en la cual la
franja del orden fotoelástico N = V2 excede la longitud de la fibra poliéster
quedando el orden N = 1 sobre el extremo de la fibra embebida.
Fue obtenida también la distribución de las isoclinas para la geometría de Pu/1-out.
Las isoclinas con parámetros de e = oo a e = 90° mostraron que la carga aplicada
en una probeta de Pu/1-out es distribuida de manera simétrica respecto a la fibra
embebida. Las isoclinas de la geometría de Pu/1-out se emplearon para localizar la
dirección de los esfuerzos principales que actúan sobre una probeta sometida a
una carga. Las direcciones de esfuerzo principales se extienden de un punto
común y se distribuyen en el cuerpo entero de la probeta de Pu/1-out. Las
direcciones de los esfuerzos principales son ortogonales entre si y cubren el
espacio comprendido entre la superficie de la fibra (eje de simetría) y el borde de
la resina. Lo que coincide con la existencia de esfuerzos localizados mas allá del
extremo embebido de la fibra.
La distribución de las direcciones de los esfuerzos principales generan un plano de
convergencia perpendicular a la sección transversal de la fibra que es el resultado
del sistema de esfuerzos generado alrededor del punto en el que se localiza el
esfuerzo cortante interfacial máximo. El plano de convergencia puede identificarse
como un punto singular o isotrópico, en dónde por lo menos dos isoclinas de
parámetros diferentes convergen. En esta zona la resultante de los esfuerzos
produce un esfuerzo de tensión y un esfuerzo cortante generando una
concentración de esfuerzos.
En la zona comprendida entre el plano de convergencia y el borde del bloque de
resina existe una distribución de esfuerzos similar a la que se encuentra del lado
129

Conclusiones
derecho del plano de convergencia que equilibra el sistema de esfuerzos
alrededor del plano de convergencia. El efecto de este sistema de esfuerzos solo
pudo observarse en las trayectorias correspondientes a las isoclinas con
parámetros de fJ = oo a fJ = 15° en las que es evidente un cambio de orientación en
las direcciones de esfuerzo que coincide con el plano de convergencia.
En base a la distribución de las direcciones de los esfuerzos principales se puede
concluir que el mecanismo de falla en una probeta de Pu/1-out en la zona en la que
la fibra emerge del bloque de resina inicia con un modo de falla l. En cambio, en el
punto en el que se localiza el esfuerzo cortante interfacial máximo existe una
concentración de esfuerzos donde la combinación de los modos de falla 1 y 11
promueven la falla a lo largo de la interfase entre la fibra y la matriz.
Las franjas fotoelásticas obtenidas en las probetas de Crack-bridging presentaron
un comportamiento similar al observado en las probetas de Pu/1-out. Los ensayos
de Crack-bridging mostraron franjas correspondientes a la fricción en la parte
desprendida del filamento al generar un doble lóbulo fotoelástico simétrico.
El número de órdenes isocromáticos formados a lo largo del frente de fractura en
el proceso de desprendimiento fue siempre el mismo, por lo que el nivel de
esfuerzo generado sobre el frente de fractura es constante.
En el caso de la geometría de Crack-bridging, al igual que en el caso de la
geometría de Pu/1-out, se presentaron los modos de falla del tipo 1 por apertura y
de tipo 11 por deslizamiento. En el proceso de propagación del frente de fractura
interfacial, la carga aplicada a la fibra es balanceada en la superficie de fractura.
En este punto, la superficie de la fibra se separa del bloque de resina (modo de
falla tipo 1) provocando que el frente de fractura avance en la interfase entre la
superficie de la fibra y del bloque de matriz. El proceso de propagación del frente
-----·--·---130

Conclusiones
de fractura es iniciado cuando el valor de esfuerzo cortante interfacial tiene un
valor de r¡ = 0.62 MPa, generando dos órdenes fotoelásticos
Los perfiles de esfuerzo cortante interfacial máximo corregidos para una probeta
de Crack-bridging y la predicción hecha a partir de la teoría de Shear-lag
concuerdan bastante bien desde el frente de fractura hasta una distancia hacia el
interior del bloque de resina de cercana a 6 veces el diámetro de la fibra.
Los valores de esfuerzo cortante experimental para la geometría de Crack-bridging
al igual que los de la geometría de Pu/1-out se ubicaron por debajo de los
calculados por medio de la teoría de Shear-lag especialmente al alejarse del frente
de la fractura para valores de LID mayores a 1 O veces el diámetro de la fibra. La
ubicación del esfuerzo cortante máximo interfacial experimental observado en la
superficie de la fibra para la geometría de Crack-bridging coincide con el punto
que predice la teoría de Shear-lag, localizándose aproximadamente a 2.5 veces el
diámetro de la fibra desde el frente de fractura, como ocurrió en la geometría de
Pu/1-out.
La teoría de Shear-lag y los resultados experimentales presentaron tendencias
similares en la zona con una LID menor a 1 O veces el diámetro de la fibra y
comportamientos totalmente diferentes entre para valores de LID mayores a 1 O.
Esta variación puede atribuirse a dos hechos fundamentales: de inicio, la teoría de
Shear-lag es imprecisa pues se basa en hechos que en la realidad no se cumplen
como que la geometría de la fibra sea un cilindro perfecto y que al someter el
modelo a esfuerzos cercanos a la falla interfacial el comportamiento plástico en la
matriz y en la fibra empieza a dominar el proceso de transferencia de esfuerzo. Un
comportamiento plástico causa que la franja fotoelástica tenga una zona de
influencia mayor en el extremo embebido de la fibra aumentando la posibilidad de
que los resultados se desvíen de la teoría. Esto conduce a pensar que la técnica
no tiene la capacidad de medir completamente el comportamiento del material a
--------·-------------131

Conclusiones
niveles de carga o deformación cercanos a la falla interfacial. Los resultados
obtenidos para ambas geometrías ponen de manifiesto que el límite experimental
de la técnica se alcanzó en el desarrollo del proyecto.
De acuerdo a la teoría de Shear-lag la transferencia de esfuerzo debe ser elástica,
por lo tanto, experimentalmente se podrían tener resultados más precisos
reduciendo el comportamiento plástico en la matriz promoviendo una deformación
elástica hasta el momento de la falla, dando como resultado patrones fotoelásticos
mejor definidos.
132

Bibliografía
Bibliografía
1. Froch M.M. "Photoelasticity" vol 1, Chapter 3 John Wiley and Sons, lnc. New
York, 1947 64-96.
2. Zhan W., Wang Y. "The photoelastic behaviour of optically heterogeneous fibre
composites 11. The principal direction of the equivalent birefringence for optically
heterogeneous unidirectional fibre composites". In t. J. Mech. Sci. 37 (1995}
933-942.
3. Kobayashi A. S. "Handbook on experimental mechanics". Chapter 5 Second
revised edition VHC SEM 1993 165-260.
4. Carazo-Aivarez J., Haake S. J. and Patterson E. A. "Completely Automated
Photoelastic Fringe Analysis". Optics and Lasers in Engineering. 21 (1994) 133-
149.
5. D'Acquisto L., Petrucci G., Zuccarello B. "Full field automated evaluation of the
quarter wave plate retardation by phase stepping technique". Optics and Lasers
in Engineering. 37 (2002) 389-400.
6. Ferraro P., Rastogi P. "Guest Editorial. Quaternary Optics in ltaly, Part 1:
Historical review; organizational aspects; and contributions in interferometry,
holography, speckle techniques and photoelasticity". Optics and Lasers in
Engineering. 37 (2002) 299-311 .
7. Roy X. L., Sreeparna S., Kuai H. "An experimental and numerical investigation
of adhesive bonding strengths of polymer materials". lnternational Journal of
Adhesion & Adhesives, 24 (2004) 455-460.
8. Patterson E. A., Ji W. and Wang Z. F. "On lmage Analysis for Birefringence
Measurements in Photoelasticity". Optics and Lasers in Engineering. 28 (1997)
17-36.
9. Lanen T., Nebbeling C. and van lngen J.L. "Phase-stepping holographic
interferometry in studying transparent density fields around 2-d objects of
arbitrary shape". Optics communications. 76 (1990) 268-275.
-··--------------133

Bibliografía
1 o. Fiedler B. and Schulte K. "Photoelastic analysis of fibre-reinforced model
composite materials". Composites Science and Technology. 51 (1997) 859-
867.
11. Zhao F.M. , Martin R.D.S., Hayes S.A., Patterson E.A., Young R.J., Jones F.R.
"Photoelastic analysis of matrix stresses around a high modulus sapphire fibre
by means of phase-stepping automated polariscope". Composites: Part A 36
(2005} 229-244.
12. Chan P. H. , Bryanston-Cross P. J. "Spatial Phase Stepping Method of Fringe
Pattern Análisis". Optics and Lasers in Engineering. 23 (1995) 343-354.
13. Molleda F., Mora J., Molleda F.J., Carrillo E., Mellor B.G. "Stress trajectories for
Mode 1 fracture". Materials Characterization. 54 (2005) 9-12.
14. Ageorges C., Friedrich K., Schüller T., Lauke B. "Single-fibre Broutman test:
fibre-matrix interface transverse debonding". Composites: Part A. 30 (1999)
1423-1434.
15. Tsai K. and Kyung-Suk K. "The micromechanics of fiber pull-out". J. Mech.
Phys. Solids, 44 (1996) 1147-1177.
16. Zhenkun L. , Dazhen Y., Wanming Y. "Whole determination of isoclinic
parameter by five-step color phase shifting and it's error analysis". Optics and
Lasers in Engineering. 40 (2003) 189-200.
17. Roy Xu L., Sengupta S., Kuai H. 11An experimental and numerical investigation
of adhesive bonding strengths of polymer materials". lnternational Journal of
Adhesion & Adhesives, 24 (2004) 455-460.
18. de Joussineau G., Petit J.P., Gauthier B. "Photoelastic and numerical
investigation of stress distributions around fault models under biaxial
compressive loading conditions". Tectonophysics. 363 (2003) 19-43.
19. Shukla A., Chalivendra V. B., Parameswaran V., Lee Kwang H. "Photoelastic
investigation of interfacial fracture between orthotropic and isotropic materials".
Optics and Lasers in Engineering. 40 (2003) 307-324.
134

Bibliografía
20. D'Acquisto L., Petrucci G., Zuccarello B. "Full field automated evaluation of the
quarter wave plate retardation by phase stepping technique". Optícs and Lasers
in Engíneering. 31 (2002) 389-400.
21. Ayatollahi M.R., Safari H. "Evaluation of crack tip constraint using
photoelasticity". lnternatíonal Journal of Pressure Vesse/s and Pipíng. 80 (2003)
66~70.
22. Aben H., Ainola L., Anton J. "lntegrated photoelasticity for nondestructive
residual stress measurement in glass". Optícs and Lasers in Engíneeríng, 33
(2000) 49-64.
23. Zhan W., Wang Y. "The photoelastic behaviour of optically heterogeneous fibre
composites l. The equivalence of birefringence in optically heterogeneous
unidirectional fibre composites". lnt. J. Mech. Scí. 31 (1995) 919-931 .
24. Zhan W., Wang Y .. "The photoelastic behaviour of optically heterogeneous fibre
composites 11. The principal direction of the equivalent birefringence for optically
heterogeneous unidirectional fibre composites". lnt. J. Mech. Sci. 37 (1995)
933-942.
25. Robinson D.W. and Williams D.C. "Digital phase stepping speckle
interferometry". Optícs communícatíons. 57 (1986) 26-30.
26. Zhao F., Hayes Simon A., Patterson E. A., Young R. J., Jones F. R.
"Measurement of micro stress fields in epoxy matrix around a fibre using phase
stepping automated photoelasticity". Composites Science and Technology. 63
(2003) 1783-1787.
27. Matthews F. L. and Rawlins R. D. "Composite materials: Engineering and
science" Cap 1. Woodhead Publishing limitedCambridge England 1999 20-33.
28. Hull Derek. "An introduction to composite materials". Cap 5. Cambridge
University press. Second edition. 1996 81-94.
29. Herrera-Franco P. J. and Drzal L. T. "Comparison of methods for the
measurement of fibre/matrix adhesion in composites". Composites. 23 (1992)
2-27.
------·-····---·--·····--··--135

Bibliografía
30. Sideridis E. "The in plane Shear modulus of fibre reinforced composites as
defined by the concept of interphase". Composites Science and Technology. 31
(1988) 35-53.
31. Zhandarov S., Madre E. "Characterization of fiber/matrix interface strength:
applicability of different tests, approaches and parameters". Composites
Science and Technology, 65 (2005) 149-160.
32. Good R.J. "Contact angle, wetting , and adhesion: a critica! review". In. Mittal
KL, editor. Contact angle, wettability and adhesion. Zeist, The Netherlands:
VSP. (1993) 3-36.
33. Penn LS, Bowler ER. "A new approach to surface energy characterization for
adhesive performance prediction". Surf lnterfac Anal. 3 (1981) 161-164.
34. Kelly A, Tyson W. R. "Tensile properties of fibre-reinforced metals
copper/tungsten and copper/molybdenum". J. Mech. Phys. Solids. 13 (1965)
29-50.
35. Broutman L. "Measurement of fiber-polymer matrix interfacial strength". In:
Interfaces Composites STP-452. Philadelphia, PA: American Society for
Testing and Materials. (1969) 27--41.
36. Hull D. and Clyne T. W. "An introduction to composite materials". Cap 6.
Second edition, Cambridge. 1996102-110.
37. Piggott Michael R. "Load bearing fibre composites". Cap 5. First edition.
Pergamon Press 1980.
38. Piggott M. R. "Debonding and friction at fibre polymer interfaces 1: criteria for
failure and sliding". Composites Science and technology. 30 (1987) 295- 306.
39. Hull, D. and Clyde, T. W. "An introduction to composite materials". Cap 4.
Second Edition Cambridge Solid State, Science Series 1996 66-75.
40. Hull, D. and Clyde, T. W. "An introduction to composite materials" Second
Edition Chap. 9. Cambridge Solid State Science Series 1996 199-219.
41. Rao, V. Herrera Franco PJ. , Ozzello, A. D. and Drzal L. T. "A direct comparison
of the fragmentation test and the microbond pull-out test for determining the
interfacial Shear strength". J. of Adhesion. 34 (1992) 65-77.
136

Bibliografía
42. Laurence, P. "Sorne theoretical considerations of fibre pull out from an elastic
matrix". Journal of Materials Science. 7 (1972) 1-6.
43. Laws L. Lawrence P., Nurse R.W. "Reinforcement of brittle matrices by glass
fibers". Journal of Applied Physics. 6 (1973) 523-537.
44. Nairn J. A. , Wagner H. D. "On the use of shear lag methods for analysis of
stress transfer in unidirectional composites". Material Science and Engineering
Mechanics of Materials. 26 (1997) 63-80.
45. Nairn John A., Wagner H. D. "A revised shear lag analysis of an energy model
for fiber matrix debonding". Material Science and Engineering, Advanced
Composite Letters. 5 ( 1996 ) 131 -135.
46. Greszczuc, L. B. "Theoretical studies of the mechanics of the fiber-matrix
interface in Interfaces in composites". Composites ASTM STP 452, ASTM
(1969)
47. Leung C.K., Li, V.C. "A new strength-based model for the debonding of
discontinuous fibers in an elastic matrix". Journal of Materials Science. 26
(1991) 5996-61 OO.
48. Stang H., Shah S. P. "Failure of fiber reinforced composites by pull out fracture".
Journal of Materials Science. 21 (1986) 953-957.
49. Désarmot G., Favre J.P. "Advances in pullout testing and data analysis".
Composites Science and Technology. 42 (1991) 151-187.
50. Tyson W. R. and Davies G. J. "A photoelastic study of shear stresses
associated with the transfer of stress during fibre reinforcement". Brit. J. Appl.
Phys. 6 (1964) 199-206.
51. Kelly A. and Tyson W. R. "Tensile properties of fibre-reinforced metals:
copper/tungsten and copper/molybdenum". J. Mech. Phys. Solids. 13 (1965)
329-350.
52. Schuster D. M. and Scala E. "The mechanical interaction of sapphire whiskers
with a birefringent matrix". Transactions of the metallurgical society of Al ME.
230 (1964) 1635-1640
----------137

Bibliografía
53. González-Chi P. 1., R. J. Young "Crack Bridging and fibre Pull Out in
polyethylene fibre reinforced epoxy resins" Journal of Materials Science. 33
(1998) 5715-5729.
54. Vázquez-Rodríguez J. M. Herrera-Franco P. J., González-Chi P. l.
"Micromechanical Analysis of Thermplastic-Thermoset lnterphase". Macromol.
Symp. 216 (2004) 117-129.
55. Jang-Kyo K. "Engineered Interfaces in Fiber reinforced composites", Cap 4.
Elsevier Science Ltd 1998 101-133.
56. Odian G. "Principies of polymerization". Third edition, John Wiley and sons. lnc.
Cap. 2. 1991 134-136.
57. Stevens Malcom P. "Polymer chemistry. An introduction". Second edition, cap
11. 1990 360-379.
58. Jones Robert M. "Mechanics of composite materials". First edition, lnternational
student edition. Cap 2. 1980 37-43.
59. Herrera-Franco P. J. Venkatesh R., Drzal L. T. "Bond Strength measurement in
composites analysis of experimental techniques" Composites Engineering 2,
(1992) 27-33.
60. Patterson E. A, Ji W. and Wang Z. F. "On lmage Analysis for Birefringence
Measurements in Photoelasticity". Optics and Lasers in Engineering. 28 (1997)
17-36.
61. González-Chi. P. l. "Deformation mechanics in polyethylene-epoxy fibre
reinforced composites". PhD. Thesis. UMIST, (1997), 87
62. Quiroga, JA; Gonzalez Cano A "Separation of isoclinics and isochromatics
from photoelastic data with a regularizad phase-tracking technique". Applied
Optics. 39 (2000) 2931-2940.
63. Nairn J. A, Wagner H. D. "On the use of shear lag methods for analysis of
stress transfer in unidirectional composites". Material Science and Engineering
Mechanics of Materials. 26 (1997) 63-80.
64. Allison A rapid method for stress separation in two dimensional photoelastic
models. IM Strain, 35 (1999) 83-95.
138

Bibliografía
65. Quiroga, JA; Gonzalez Cano A. "Phase measuring algorithm for extraction of
isochromatics of photoelastic fringe patterns". A Applied optics. 36 (1997) 8397-
8407.
66. Ayatollahi M.R., Safari H. "Evaluation of crack tip constraint using
photoelasticity". lnternational Journal of Pressure Vessels and Piping. 80 (2003)
665-670.
67. Molleda F., Mora J., Molleda F.J., Carrillo E., Mellar B.G. "Stress trajectories for
Mode 1 fracture". Materials Characterization . 54 (2005) 9- 12.
68. Aben H., Ainola L., Anton J. "lntegrated photoelasticity for nondestructive
residual stress measurement in glass". Optics and Lasers in Engineering. 33
(2000) 49-64.
69. Patterson E. A., Ji W. and Wang Z. F. "On lmage Analysis for Birefringence
Measurements in Photoelasticity". Optics and Lasers in Engineering. 28 (1997)
17-36.
70. Ferrari J. A., Frins E. M., Perciante C. D. "A new scheme for phase-shifting
ESPI using polarized light". Optics Communications. 202, (2002) 233-237.
71. Huang J., Honda T. and Ohyama N. "A phase stepping double-focus
interterometer using a cyclic design and polarized light". Optics
communications. 76, (1990) 297-301.
··-·------·---·---- -· 139

Apéndice A
Teoría de la luz
Ecuaciones de Maxwell: Estas ecuaciones forman la teoría que define a un
campo electromagnético y su interacción con la materia (propagación, intensidad
del campo magnético, etc.). Las ecuaciones de Maxwell abarcan cuatro
ecuaciones que relacionan a los parámetros de un campo electromagnético. Los
parámetros empleados para definir o representar un campo electromagnético son:
E el vector eléctrico, H el vector magnético, D el vector de desplazamiento
eléctrico, J el vector de densidad de corriente y 8 el vector de inducción magnética
[1' 64].
Las ecuaciones de Maxwell que relacionan los parámetros anteriores son:
1 • 4rr VxH- - D= - J
e e 1 .
VxE- - 8=0 e
V ·D = 4npE
V·8=0,
(A.1)
(A.2)
(A.3)
(A.4)
Ecuación básica de una onda: La solución más simple para la propagación de
una onda electromagnética es una función armónica de senos o cosenos
propagándose en un plano en la dirección z es:
E = A cos [ ~n (z - v t ) l , donde A es la amplitud del vector eléctrico E que se propaga en un plano como
una onda, v es la velocidad de propagación y A. es la longitud de onda. Esta
ecuación describe una radiación monocromática en forma de un espectro
-------·--------·-·--·--------------·· ·-------140

Apéndice A
electromagnético propagándose en un plano con una longitud de onda f... constante
y frecuencia v determinada (Figura A 1) [1 , 3, 64].
Velocidad de
Dirección del haz
Campo eléctrico
Número de onda = 11 .A.
Figura A 1. Patrones del campo eléctrico y magnético de un haz de luz
Fase de una onda electromagnética: Si un grupo de ondas se propagan
simultáneamente y los frentes de propagación forman un plano, se dice que están
en fase. El termino fase se refiere entonces a que un grupo de ondas tienen el
mismo recorrido angular al propagarse en un medio (figura A2)[1-3, 65, 66].
Frente de onda plano: Es conocido generalmente como onda plana o lineal y es
de especial interés en óptica ya que se caracteriza por que el vector eléctrico se
propaga en un plano específico y no presenta variaciones de fase en su
propagación. En el laboratorio, una onda plana es obtenida con un grado
aceptable de exactitud a través de elementos de polarización o polarizadores [65,
66].
141

Ondas fuera de fase
Propagación
Propagación
Apéndice A
a) Frente de onda deformado
b) Frente de onda plano o lineal
e) Frente de onda esférico
Figura A2. Ilustración del concepto de frente de onda
Fotoelasticidad: Una de las formas de medición de esfuerzos y deformaciones en
ingeniería es la fotoelasticidad, que involucra la observación de patrones de
interferencia (franjas) obtenidos por interferometría [1 ,3,64].
142

Apéndice A
lnteñerencia: Puede definirse como la suma de los vectores eléctricos de dos
ondas electromagnéticas que se están propagando en una misma trayectoria. El
proceso de interferencia entre dos ondas de luz requiere que estas interactúen
entre si al viajar a lo largo de un mismo eje. Ambas ondas además deben provenir
de la misma fuente luminosa, conservando la misma amplitud, velocidad y fase es
decir, son coherentes (figura A3) [67-70] .
o
z
Figura A3. Interferencia entre dos ondas viajando sobre el mismo eje
lnteñerometría: Es un método con el que la diferencia entre las distancias
recorridas al propagarse dos ondas es medida a través de la interferencia entre
ambas. Para que dos ondas se interfieran entre si es necesario que estas sean
coherentes, es decir que las dos ondas se hayan producidas simultáneamente en
la misma fuente luminosa [64].
Luz no polarizada: La mayoría de las fuentes luminosas emiten una luz no
polarizada compuesta de ondas que se propagan al azar, cuyos vectores
eléctricos no tienen orientación preferencial [1, 3, 54, 64].
143

Apéndice A
Luz polarizada: Se define como un grupo de ondas en las cuales el vector
eléctrico tiene una orientación preferencial, que define el eje óptico del polarizador
usado [1, 3, 54, 64].
Luz con polarización circular: Si el vector eléctrico tiene una magnitud constante
y el extremo del vector se desplaza en el tiempo o el espacio siguiendo una
trayectoria en forma de hélice, entonces se dice que la radiación es circularmente
polarizada. Otra forma de visualizar este tipo de polarización, seria observar al
vector eléctrico de la onda describiendo una hélice circular o que al observarlo en
la dirección de propagación el vector eléctrico describa un círculo (figura A4) [1, 3,
54,64].
' , ' .
- ·- -·- -. - - -·- -. ---~-------- ----- ------ ----------- -------------. . . ' ' '
\
" · -·
\
1
\
' · ... . -·
\
1
... .... ·
Hélice circular
,
Figura A4. Movimiento del vector eléctrico en un haz de luz circularmente polarizado
Luz con polarización elíptica: Una radiación circular es difícil de obtener, por lo
general, el vector eléctrico sufre una elongación en una dirección lo que produce
una elipse al propagarse; de tal manera que a dicho estado de polarización se le
define como polarización elíptica [1, 3, 54, 64].
--------------------------144

Apéndice A
Luz con polarización lineal: Si el vector eléctrico de una onda o de un grupo de
ondas al propagarse tiene una orientación fija en espacio y tiempo, entonces se
puede decir que la luz esta linealmente polarizada. Una luz con polarización lineal
puede ser separada en dos componentes ortogonales con polarización lineal.
Estas componentes son conocidas como haz ordinario y haz extraordinario (figura
A5) [1, 3, 54, 64].
Eje óptico del polarizador El vector eléctrico de la luz sigue
una curva sinusoidal en un plano al propagarse
'Plano de polarización
Figura AS. Movimiento del vector eléctrico en un haz de luz linealmente polarizado
Modelo de la onda electromagnética: La luz (incluyendo las ondas de infrarrojo,
ultravioleta y las de radio), puede considerarse como un tipo de energía que se
propaga en forma de ondas electromagnéticas, formadas por el vectores eléctrico
E y el vector magnético H, perpendiculares entre si en la dirección de propagación
de la radiación [1, 3].

Apéndice A
Placas de retardo: Es un elemento óptico que separa un haz incidente en dos
haces polarizados lineales ortogonales entre si propagándose a diferente
velocidad (retrazado uno respecto al otro). Si la diferencia de fase (retardo entre el
haz ordinario y extraordinario, (r,_) es de %de longitud de onda o rr/2 radianes, la
placa es llamada placa de retardo de % de longitud de onda, diseñadas para
cambiar un haz linealmente polarizado en un haz con polarización circular (figura
A6) (1, 3, 64].
Eje óptico de la placa de retardo de V4 de onda ~
Luz incidente con polarización lineal
~
t -----~ Polarización circular
o / Plano de polarización del Eje óptico------.,..~ •1 haz de entrada o de salida
Polarización lineal de entrada o de salida
Polarización circular de entrada o de salida
\ Placa de retardo de %
de onda
Figura A6. Efecto de un retardador de % de onda en haz con polarización circular o plana
·-146

Apéndice A
Polariscopio: Es un arreglo óptico que permite la manipulación de un haz de luz
polarizado, poniendo en evidencia los patrones de interferencia causados por los
esfuerzos inducidos cuando se propaga por un modelo fotoelástico sometidoauna
carga. Los patrones de interferencia indican la diferencia de fase obtenida en un
material al variar el índice de refracción local en la dirección en que se propaga un
haz polarizado (figura A7) [1, 3, 9, 71].
Haz no Polarizado Polarizador
ineal
Haz no Polarizado Polarizador
ineal
a) Campo claro
b) Campo oscuro
Luz brillante
Figura A7. Conjunto de placas de retardadores de% de onda dispuestos a± 45° entre dos polariscopios lineales con ejes ópticos paralelos (a) y cruzados (b)
--------·-·-----··---···-------·-·---------- --------147

Apéndice A
Polarizador: Es un elemento óptico en el cual al propagarse a través de él una luz
no polarizada produce una luz con polarización lineal que se propaga en un plano
que coincide con el eje óptico del polarizador [1, 3, 9, 71].
Polarización por doble refracción o birrefringencia: Un material que se
caracteriza por tener dos diferentes índices de refracción, es llamado
birrefringente. Este material birrefringente cuando esta bajo la influencia de una
carga, posee a causa de la distribución de esfuerzos secciones con un índice de
refracción propio que da como resultado que el haz al propagarse por estas
diferentes secciones, se divida en dos haces con polarización lineal. Estos haces
son conocidos como ordinario o (rápido) y extraordinario e (lento) (figura aS) [1, 3,
9, 71].
Haz ordinario (o) linealmente polarizado
Haz o
1 Haz incidente no 'f polarizado ; Haz extraordinario (e) · inealmente polarizado
Haz e
~ Figura AS. Doble refracción en un material birrefringente
148

Apéndice B
Apéndice B. Relación de las longitudes de onda de las fuentes de luz con la constante fotoelástica fa.
La fuente de luz para los ensayos fotoelásticos debe ser capaz de proveer una
radiación monocromática intensa. Para obtener una eficiencia máxima, la lámpara
debe ser pequeña, con alta intensidad y espectralmente pura. La pureza espectral
puede obtenerse por medio del uso de filtros separando una radiación
monocromática de una radiación multicolor.
Las lámparas de uso común en fotoelasticidad son las lámparas de vapor de
mercurio o vapor de sodio. La radiación emitida por una lámpara de mercurio
puede ser filtrada fácilmente para producir una radiación monocromática. Esta
lámpara también puede ser empleada sin filtrar obteniendo un espectro con un
número reducido de longitudes de onda respecta al de la luz blanca.
Por otro lado, la radiación emitida por una lámpara de sodio es considerada de
alta pureza espectral por lo que puede emplearse sin filtrar. La longitud de onda
para la radiación emitida por una lámpara de sodio es f...= 589 nm (ver tabla 81 ).
En el presente trabajo de tesis se emplearon como fuentes de luz una lámpara de
mercurio y una lámpara de sodio, de tal manera que para comparar los resultados
obtenidos en base a los patrones fotoelásticos obtenidos de ambas lámparas es
necesario saber la relación que guarda el coeficiente fotoelástico con las
longitudes de onda de ambas fuentes luminosas.
La ecuación 1 .12 define la diferencia entre esfuerzos principales:
149

Apéndice B
Sustituyendo ahora fa = ¿ , donde A¡ es igual a la longitud de onda de una
radiación específica i y C es la relación de índices de refracción (coeficiente
fotoelástico de refracción) de un material especifico.
Entonces sustituyendo las variables anteriores en la ecuación 1 .12 la diferencia
entre esfuerzos principales queda definida de la siguiente forma:
(1 B)
Tabla 81. Fuentes de radiación isocromática. A ( nm) Lámpara Filtro
405 Mercurio Zeiss Jena (Schott) 267406
436 Mercurio Zeiss Jena (Schott) 013213
546 Mercurio Zeiss Jena (Schott) 050025 o Kodak 74
578 Mercurio Zeiss Jena (Schott) 373635 o Kodak 22
587 Helio Zeiss Jena (Schott) 373635
589 Sodio No necesario
668 Helio Kodak 92
707 Helio Kodak 89-B
853 Incandescente de mercurio Kodak 87-C
1083 Helio Kodak 87-C
11 00 Arco Zeiss Jena 881 05/8
1145 Arco Optics Technology 160
1244 Arco Optics Technology 160
150

Apéndice B
Sustituyendo las longitudes de honda para ambas fuentes de luz en la ecuación
A 1 y asumiendo que el modelo es sometido a un esfuerzo flexionante constante,
por lo tanto la diferencia de esfuerzos (crrcr2) es también constante, quedando
definida para ambas radiaciones de la siguiente manera:
(28)
Donde, AM y As son las longitudes de onda de la lámpara de mercurio y de sodio
respectivamente.
Arreglando:
NM1M = Ns1s (38)
(48)
La relación entre longitudes de onda de ambas relaciones se obtuvo por medio de
una calibración por flexión a cuatro puntos, empleando la relación existente entre
la longitud de onda de la luz empleada y la constante fotoelástica.
Sabemos que la constante fotoelástica para un material y una fuente de luz
determinada están definidos de la siguiente manera empleando una lámpara de
sodio (f oS) o una lámpara de mercurio (f oM):
faS = ~ ' o faM = ? ' reordenando:
151

Apéndice B
f;s As - = - (58)
La constante fotoelástica para cada una de las lámparas se obtuvo empleando el
método de flexión a cuatro con una carga constante de 61.31 N. La figura 81
muestra las imágenes obtenidas empleando la lámpara de sodio (a) y de mercurio
(b).
Figura 81. Resultados del ensayo de flexión a cuatro puntos para la probeta con una lámpara de sodio (a) y una lámpara de mercurio (b). La carga empleada para la obtención de ambos patrones es de 61.3 N.
La variación en el número de franjas isocromáticas en los patrones de la figura 81,
se debe a que el número de franjas es inversamente proporcional a la longitud de
onda de la radiación empleada. Por lo tanto el patrón fotoelástico de un material
obtenido empleando una lámpara de sodio tendrá menos franjas isocromáticas
que el obtenido empleando una lámpara de mercurio al ser sometido a una carga
constante.
Los coeficientes fotoelásticos para la lámpara de sodio (faS) y para la lámpara de
mercurio (faM) se calcularon usando la ecuación 1.21 (tabla 2 y 3 respectivamente).
152

Apéndice B
Tabla 82. Cálculo del coeficiente de franja fotoelástico usando la ecuación 1.21, empleando lámpara de sodio (faS).
L(cm) = 1.5 Lámpara de sodio h(cm) =1
Carga Orden Valor de Peso K Nw Fotoelástico y( mm) y(m) 6Ply h3N franja fos
6.25 61,31 1 2,2406 0,002241 0,0124 1 ,OOE-06 12363,70 6.25 61 ,31 2 4,4937 0,004494 0,0248 2,00E-06 12398,32
12381 .01
Tabla 83. Cálculo del coeficiente de franja fotoelástico usando la ecuación 1.21, empleando lámpara de mercurio (faM)·
L{cm)=1.5 Lámpara de mercurio h(cm) =1
Carga Orden Valor de Peso K Nw Fotoelástico y(mm) y(m) 6Ply h3N franja foM
6.25 61,31 1 1,9161 0,001916 0,0106 1 ,OOE-06 10573,23 6.25 61,31 2 3,8029 0,003803 0,0210 2,00E-06 10492,39
10532.81
Sustituyendo en la ecuación 58:
Así la relación entre los ordenes de franja usando una lámpara de mercurio o una
de lámpara de sodio es la siguiente: NM = 1.18N5 .
153

Apéndice C
Apéndice C. Cambio del espesor de la probeta.
Observando las ecuaciones 1 .19 y 1 .21 , podemos observar que la constante
fotoelástica del material fa. es independiente del espesor de la probeta (hL)
empleada en la calibración por flexión a cuatro puntos. Para comprobar el
comportamiento anterior, se probaron por flexión a cuatro puntos dos probetas en
las cuales el espesor hL de la primera probeta duplicará el espesor de la segunda.
Para la calibración fotoelástica de la resina se obtuvo una placa plana de 1 cm de
espesor con el mismo método empleado en la sección 3.2. Las dimensiones de las
probetas fueron las siguientes. Para la primer probeta, la longitud fue de 1 O cm., la
altura h igual a 1.02 cm. y espesor hL igual a 0.53 cm. Para la segunda probeta, la
longitud es de 1 O cm, la altura h igual a 1.03 cm. y el espesor hL igual a 1.02 cm.
Ambas probetas fueron calibradas por medio de flexión a cuatro puntos, aplicando
una carga de 61.3 N.
La figura C1 muestra las imágenes de los patrones fotoelásticos obtenidos del
ensayo de flexión a cuatro puntos.
Figura C1. Resultados del ensayo de flexión a cuatro puntos para la probeta con espesor hL = 0.53 cm (a) y hL = 1.02 cm (b). La carga empleada es de 61.3 N.
154

Apéndice C
En las imagenes de la figura C1 se puede observar que el número de franjas
fotoelásticas es el mismo. De la misma manera, la distancia y desde el eje neutro
para cada orden fotoelástico no varía significativamente. La única diferencia que
se observa entre las fotografías a y b de la figura C1 , es la definición de las franjas
fotoelásticas, siendo mas nítidas las obtenidas para un espesor de 0.53 cm.
155

Apéndice D
Apéndice o. Cálculo de la constante fotoelástica f cr
Para el cálculo de la constante fotoelástica fa se empleó la ecuación 1.21
graficando los valores de (6Pay) contra los valores de orden de franja (h3N).
Posteriormente se trazó una línea recta a través de los puntos graficados
anteriormente, donde la pendiente de ésta es igual a la constate fotoelástica del
material f cr •
o.oso-r:-,---V-al_or_de_rr_an-'-ja_¡_otoe_las_ti_ca_,_pr_ob_l_---,
o ... s Y= A +B*X _.A/ o.0o10 Parameter Value Error ~----
-~~ :~~~~~~~= 0.015 ~:~;;~----;?' --~:~~;-~;----------;-~--------~~~~-~ 1 0.010 y ..... ---:;:rl-------------------------------------------------o.ooo-1--~---,,.---~---,------,---l
0.000000 0.000001 0.000002 0.000003
Valor de la franja fotoeñlastica prob 3
Y=A+B*X V 0.05 ,,/ 1
Parameter Value Error ~ 0 .04 ••••••••••••n••••••••••••••••u••••••••••••••••• •• ••••••
A 6,20596E-5 6,76053IÍ-B 14446,88347 3!f;~l1
6' 0 .03 ______________ ................... ;.r ·---------------------!3 R SO . / N P
0.02 / f
0 .01 ~:7~~~::::::~~::::::::~~:~~~~::::::: o .oo+-~---r--~--.-~-.-----,--'
0.000000 0,000001 0.000002
b'N 0.000003
Franja fotoelastica prob 2
o.oJs Y•A+B*X
V o.o30 Parameter Value Error /../
::: r:::::::~~~~~~::~~~~~~~-::::::::::: ~ r/
:::: ~:~g~~L:::::::~::::~:::~:~~os o .ooo-1----,-~--r-~-.,..----r---,----.-1
0.0000000 0 .0000005 0.0000010 0,0000015 0.0000020
h'N
Valor de la franja fotoelastica prob 4
Y=A+ B *X /
:.:':':~~-:~~-------~~-~~---~:-~~---- -¿ __ A 0,00128 3,8664)'r_:: ____ _
0.05
o ...
~---------~~~-~~~~~~---,:2~-~~---------------R ¿N P ~.-~~-~~~~(og~~E~~-;~-----:~~~~~-1---------------y------------------------------------------------/~
0.03
~ 0.02
0.01
o.oo-1-----,~--..-----.-~-,.---l 0.000000 0.000001 0.000002 0.000003 0.()()000.4
h'N
Valor de franja fotoelastica prob 5
0.045
0.0<0
0.035 Parameter Value Error
o.oJO A 6,39973E-4 4,7 !J E-4 8 10976,12551 2 0596
A so N
0.010 ~5~5~~~~~~:·:~::~~::::~~~~::::::: 0.015
0.005 /
0.000 +-----,~---,----,----,--,.---l 0.000000 0.000001 0,000002 0.000003 0.()()000.4
b'N
156

Apéndice E
Artículo publicado
157

Macromol. Symp. 2004, 216, 117-129 117
Micromechanical Analysis of Thermoplastic - Thermoset
Interphase
J M Vazquez-Rodríguez, • P. J Herrera-Franco, P. /. Gonzalez-Chi
Centro de Investigación Científica de Yucatán, AC, Unidad de Materiales, Calle 43, No. 130, col. Chubumá de Hidalgo 97200, Mérida, Yucatán, México E-mail: [email protected]
Summary: The interfacial shear strength of a pull out rnodel between a therrnoplastic fiber and thermoset matrix was analyzed . The method to analyze the interfacial quality in this kinJ of composite was Photoelasticity. The interfacial shcar strength w-as measured Iocalizing the isocrornatic fringes. The Isochrornatic fringe corresponds to the points along the specimen in which the principal stresses have thc same value.
Kcywor·ds: composites; interfacial shear strength; photoelasticity; polyesters; pull out
In trod u ction
Photoelasticity is a well-established technique for stress analysis and has a wide range of
industrial and research applications. The main goal of this technique is the determination of
isoclinic and isochromatic fringes to analyze the shear stress and stress distribution in a
sarnple {1. 21 . The light used for the analysis can be white or a bean with only sorne
monochromatic lines. In the first case, the analysis generales an image with a full
decomposition of wavelengths in which, each one corresponds to a leve! of shcar strength. It
is caser w recogni zc the phase change for the image analysis of the shear strength when a
narrow-chro matic light is used 131•
Photoelast icity has been used to study the shrinkage process of resins used for med ica! items.
To undcrstand tL.is phenomenon, could improve composite elaboration for clinical
effectivcness 1'· ;J_
A photoclastic experimental method has been used for analyzing the stress at the ,·ic inity of
crack tips and, in conjunction with the theory of Shear Lag, the stress fields betwecn a short
fibcr and the matrix in composites were described 16· 7·
8· 91 . Photo::lasticity is a cornrnon way
-:t:··, 200-1 lntc·muti(>llal Un ion oJ' l'urc and Applied Chcmi;;try DOI : 10. 1002 "'">' 2(11)-151213

1~9
1 1 1 R 1 = E sen 2a sen - ( 1) 2
The equation (1) represents the dark field of aplane polariscope in which 1 is function of the
angle between the nonnal and the principal stress direction (a) and the relative retardation (R)
induced when the light beam passes through the stressed specimen. There are two conditions
in which 1 is zero (the light beam is extinguished). The first one is when the angle of thc
principal stress directions corresponds to a¡= O, n/2,rc, 3rc/2 ... radians and the second
condition is when the relative retardation corresponds to R= O, 2rc ... Nrr radians, where N is
an integer. N represents the number of complete wavelcngths or retardation cycles produced
by an induced strain and it is called isochromatic fringe .
When the polariscope axis coincides with the principal stress direction (a) a dark fringe is
obtained. This fringe corresponds to the points along which the principal stresses have parallel
directions and it is known as isoclinic fringe l21 l.
In the case of the isochromatic arder N, whcn a complete cycle of retardation is reached, it
produces another dark fringe called an isochromatic fringe which is dircctly related to the
shear strength. N is known as photoelastic order, fringe ordcr or isochromatic order. The
isochromatic fringes are easicr to obtain using a circular polarization, which is obtained by
adding two-quarter wave elements to a plane polariscope. The light intensi ty 1 emerging from
this polariscope is:
I=E~{l-cosR)
1 = 2E1 sen2 ji , 2
1 = Ksen 2 ji (2) 2
Where K is a constant for each polariscope. This equation has the following cxtinction
conditions for the fringe arder /V:
1=0 for R - = 0,1r...radians or 2
R = 0,27f .... , N(21r)
When the relative strain induces a retardation of N,= l , 2, 3 . . . a dark isochromatic fringc is
obtained. The stress optic law l20J is commonly v;ritten as:

121
The equation used for the epoxy resin calibration was:
Wherc P is thc load in Newton, a is the length between supports in meter, h is thc bcam height
in meter, N is the photo elastic order and fa is the fringe-strcss coefficient in Newton per
meters.
Pull-out Test
Thc micromechanic technique used was the Pull-out test in which one end of a filament is
embebed in a matrix block and the tilament free end is loadcd. The applied load and the
displaccmcnt are continuously moniton:d until the filament is extracted or the intcrphase fai ls.
Thc stress analysis is made considering a balance between thc tension stress at the fiber (o,-)
and the shear stress (<) at the interph~oe lll. The PuiJ-out test has becn used to measurc the
adhes ion betwcen two diffcrent mater ialsl22• 231 and it is widely used to rheasurc the shcar
strength at the interphasc between a fibr.: andan epoxy-matrixl 24•
25·
26l.
Matc rials
The Pull-out specimens were manufactured using a bisphenoi-A epoxy resin DER 331 from
DO\\ ' Química Mexicana S. A. Thc curing agent was an aliphatic diamine ANCAMI1'E
1784 fro m Air Products and Chemicats, Inc. The thermoplastic polyester fiber was from
KJRSC HBAUM.
Exp e rimental
Thc: ;iba tensite test was performed a.: cording to the ASTM 02343-67 using a universal tc·st
mac': ~ nc Shinutzu A 6 t tittcd with a ' k N toad ceiJ at 30 mm/min with a gaugc lcngth of 2~ 5
mm
The \ensile test of thc cpoxy rcsin was madc using the AST1v! D 638-82' in thc universal t.:st
macl~; ne Shimatzu Á 61 with a toad ,·di of S k N, gauge length of 50 mm. The tcsting speed
wa ;; 1 mm/min. The Poisson ratio wa ' rncasurcd according to the ASTM D 638-S23 with t\\·o
cxtc ." Hnetric gaugcs (F./\-06250 ilF-3 50 gaugc facwr 2.095 ± 0.5'Yo.J ccnw~ t<:d
pcr¡':: ld icutarly to each onc nlong thc :: tain spccimcn axis. Th~ test was in a s¡cp-1\·isc lo:tdtng
fa s' :· ·n <H the elas tic zone of the epox :. n;s in.

123
Table 2. Tensile properties ofthe Epoxy resin.
Elastic Module StTcngth MaxStrain Poisson ratio
Spccimen M? a ivfPa M 10
Average 1032.050 22.7621 9:3126 0.3840 SD 2.5819 2.5819 2.5819 1.8708
The ratio between the elastic module of the fiber and the epoxy resin is around 6, which is
enough to get the isochromatic response from the specimens maintaining the elastic behavior
of the fiber.
The epoxy res in had an average Poisson ratio of 0.3840. The performance of the epoxy res in
block with this Poisson ratio generates a radial compression stre~: on the f.0er during the load
process . In the present analysis, the compression stress was not measured and considered low.
To analyze the performance of the -compression stress in a Pul!-out specimen and to
understand how affects the failure process it is necessary to analyze the dircctions of the \
principal stress.
Photoclastic Calibration of the Epoxy-resin.
Figure 2 shows a picture sequence from the four points bending test. They show the increase
of the shear strength at the specimen as an increase on isochromatic fringes.
(c)l500gr. (d) 1900 gr.
Figure 2. Photoelastic fringes of a circular polariscope (dark plane) in a four points bending system. The applied load is below each picture. The photoelastic order (a) zero, (b) one, (e) two and (e) three.

125
the interphase failure two photoelastic fringes were obtained.
The picturcs used to measure the shear strength between the fiber and thc cpoxy resin blocks
o.re shc\vn at the Figure 4.
1900 gr. Order 1 and 2 2100 gr. Order 1 and 2 2300 gr. Ord~r 1 and }
Figure 4. lsochromatic fringes for different loads (dark plane of a circular polariscope).
These pictures are from the loaded Pull out specimens. The beginning and the end c•i the
photoelastic fringe mark the field where the shear strength acts over the fibre. The ·shear
strength is related to the fringe arder and it is maximum at the left side at the block whe": the
fiber emerges from the epoxy resin. For that reason the second order fringe (small t'ringe close
to the fiber) appears on that region. The maximum shear strength begins at this area where the
free fiber was loaded. From 900 gr. to 1500 gr. the development of the first photoelastic ;x der
(N;= 1) is shown. When the load reaches 1900 gr., the second photoelas tic order (.\",=2)
appears. The second photoelastic order is directly related to higher shear strength, :u~.:'. :~crs
over the same points of the epoxy resin block where the first photoelastic order was bdore.
The growing of the second photoelastic arder conduced to the interphasc failure ; on.i ~· rwo
photoelastic orders were obtained. The maximum load that the specimens supportcd :Oefore
the interphase failure was of 2400 gr. The shear stress for each specimen was calculateé ·.:; !llg
the equation 4.

127
- • - Specim en 1 -•- Specimen2
,.----------------- -1 -•- Specimen3 _ ,_ Specimen4
-.- Specimen5 - • - Shearlag
h:10.
1~:10.
h1o•
9x10 1
8.r.:1'J1
-7ato• ., f!:.. t'h:to'
~5<10' ... ·hl01
3 x~c'
2x10'
h10 1
0.0 o.s 1,0 1,5 2,0 2.5 3.0 3,5 <4,0 •. s Longilude a long the embebed fiber (cm)
Figure 6. Shear strel).gth distribution along the embebed fibre of the Pull-outspecimen analyzed by photoelastlcity.
\
Figure 6 shows the shear st~ength distribution from. the Shear lag theory and experimental
results. The length along which the shear strength acts was mcasured from thc beginning of
the photoelastic arder at the left side of the pictures (fiber section) to its end in the epoxy res in
block . t ~!"'' acting over the section from 0.25 to 0.70 cm from the border over the embebed
fiber for photoelastic test. The maximum Photoelastic shear strength is located about 0.5 cm
from the border of the specimen. After this maximum, the shear strength decreases towards
the embebed end of the fiber.
The performance of the photoelastic Shear strength versus Shcar lag follows almost thc same
trajectory except clase to the free fibe r section and at the embebed tip where the Shear lag
theory do not takes in count variables like the adhesion at thc end of the embebed fiber or the
complex !oads clos~ to thc free fiber section.
Co nclusio ns
The pho:oelastic technique relates the strains with the interfacial shear strength in a Pul! out
specimer. under a load. The isocromatic fringes obtained from a Pull-out spccimen were used
to meast!..:'e the intc:facial shear strength and in spite of thi s. we can measure the maximun:
shear st :ength for a Ll,ermo plastic-thermoset intcrphase.

129
(22] P. J. Herrera Franco V. Rao, L. T. Drzal, Composites 1992, 23, 2. [23] M. R Piggott, Composites Science and techno/ogy 1981, JO, 295 . [24] J. A. Naim, H. D. Wagncr, Material Science and Engineering Mcchanics of Materia/s 1997, 26, 63 . [25] L.B Grcszczuc ,. Compos itcs ASTM STP 452, ASTM 1969 [26] P. Laurcnce, Journa/ of Materials Science 1972, 7, l .
![Il modello di Regressione Ricordando che: TRONCAMENTO : E(x/x>a) = + (a) e V(x/x>a) = ²[1- (a)] CENSURA:](https://img.pdfslide.tips/doc/110x75/5542eb50497959361e8bf3a5/il-modello-di-regressione-ricordando-che-troncamento-exxa-a-e-vxxa-1-a-censura.jpg)

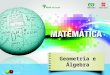



![J V J L W J ^ T a f a j ] J Q R N i j J i J { { x x x · 2019. 5. 16. · 2. c x s x x : T v x x x x ~ : 3. c x s a x m | { z x f x x x x : 4](https://img.pdfslide.tips/doc/110x75/61153100ec0ec34f1c1a9f72/j-v-j-l-w-j-t-a-f-a-j-j-q-r-n-i-j-j-i-j-x-x-x-2019-5-16-2-c-x-s-x.jpg)