Embed Size (px)
Citation preview
Glava 1
Interpolacija
Osnovni problem interpolacije je egzistencija funkcije koja u tacka-ma xk ima zadate vrednosti fk. Tacke (xk, fk) nazivamo cvorovimainterpolacije, a funkciju f interpolacionom funkcijom. Zbog jedin-stvenosti polinomske funkcije, koja zadovoljava polazni uslov, najcesscaintencija je da se formira funkcija polinomskog tipa koja interpolira po-laznu funkciju.
1.1 Interpolacija funkcije polinomima
Teorema 1. Neka je funkcija f zadata u n + 1 cvorova (xk, fk), k =0, 1, . . . , n. Tada postoji jedinstven polinom oblika
(1.1) Pn(x) = a0xn + a1x
n−1 + · · ·+ an−1x + an, (x0 < x1 < . . . < xn)
takav da je
(1.2) Pn(xk) = fk
Dokaz. Ako u jednokosti (1.1) zamenimo uslove (1.2) dobijamo sistemjednacina za odredivanje koeficijenata a0, a1, . . . , an, koji glasi
a0xn0 + a1x
n−10 + · · ·+ an−1x0 + an = f0
a0xn1 + a1x
n−11 + · · ·+ an−1x1 + an = f1
...
a0xnn + a1x
n−1n + · · ·+ an−1xn + an = fn
1

2 GLAVA 1. INTERPOLACIJA
odnosno u matricnom zapisu
xn0 xn−1
0 · · · x0 1xn
1 xn−11 · · · x1 1
......
. . ....
...xn
n xn−1n · · · xn 1
·
a0
a1...
an
=
f0
f1...
fn
Kako je determinantna ovog sistema Vandermondova, koja ima
vrednostn∏
i,j=0,i>j
(xi−xj) 6= 0, sistem ima jedinstveno resenje, za koefi-
cijente trazenog polinoma.
1.2 Lagrangeov interpolacioni polinom
Neka je funkcija f zadata u tackama x0, x1, . . . , xn, vrednostimaf0, f1, . . . , fn, pri cemu je x0 < x1 < . . . < xn, (n + 1) puta diferencija-bilna.
Posmatrajmo pomocne funkcije:
Πn+1(x) = (x− x0)(x− x1) · · · (x− xn)
Π′n+1(xi) = (xi − x0)(xi − x1) . . . (xi − xi−1)(xi − xi+1) . . . (xi − xn)
kao i funkciju
pi(x) =1
x− xi
Πn+1(x)
Π′n+1(xi)
.
Lako se uocava da je pi(xk) = 0 za i 6= k, odnosno pi(xk) = 1, za i = k.(Odnosno: pi(xk) = δik)
Funkcija
(1.3) Pn(x) =n∑
i=0
pi(x)fi ≡ Ln(x), gde je i = 0, 1, . . . , n
ima osobine da je Pn(xk) = fk, (k = 0, 1, . . . , n), sto znaci da jednakost(1.3) predstavlja interpolacioni polinom funkcije f , koji nazivamo La-grangeovim interpolacionim polinomom.

1.3. OPSTA FORMULA ZA GRESKU INTERPOLACIJE 3
1.3 Opsta formula za gresku interpolacije
Postavlja se pitanje greske pri izracunavanju vrednosti funkcije unekoj medutacki x pomocu njenog interpolacionog polinoma.
Definicija 1. Greska interpolacije je definisana izrazom
Rn(x) = f(x)− Pn(x).
Teorema 2. Greska interpolacije funkcije f koja je (n + 1) putadiferencijabilna ima oblik:
|Rn(x)| ≤ Mn+1
(n + 1)!|Πn+1(x)|
gde je Mn+1 = maxt∈[a,b]
|fn+1(t)|, gde je a = min{x, x0}, b = max{x, xn}.Dokaz. Posmatrajmo pomocnu funkciju
(1.4) ϕ(s) = f(s)− Pn(s)− Πn+1(s)Πn+1(x)
(f(x)− Pn(x))
gde je x 6= xk (ako je x = xk, greska je 0).
Nije tesko uociti da su x0, x1, . . . , xn, kao i tacka x, nule funkcije ϕ(s),jer je f(xk) − Pn(xk) = 0 i Πn+1(xk) = 0. Dakle, ϕ(s) ima (n + 2) nule,odakle na osnovu Rolleove teoreme o srednjoj vrednosti zakljucujemo dapostoji ε za koje vazi
(1.5) min{x0, x} < ε < max{xn, x}
i za koje je
(5’) ϕ(n+1)(ε) = 0.
Diferenciranjem jednakosti (4) po promenljivoj s i to (n + 1) put dobi-jamo da je
(1.6) ϕ(n+1)(s) = f (n+1)(s)− (n + 1)!Πn+1(x)
(f(x)− Pn(x))
jer je P(n+1)n (s) = 0 (polinom stepena n) i Π(n+1)
n+1 (s) = (n + 1)! (polinomstepena (n + 1) sa vodecim koeficijentom jednakim 1).

4 GLAVA 1. INTERPOLACIJA
Zamenom s sa ε iz (6) dobijamo, zbog (5’) da je
Rn(x) = f(x)− Pn(x) =f (n+1)(ε)(n + 1)!
Πn+1(x)
Kako je |f (n+1)(ε)| ≤ Mn+1 tvrdenje je dokazano.
Napomena: Postavlja se pitanje da li tacka x u kojoj izracunavamovrednost funkcije mora biti na intervalu [x0, xn]. Odgovor je ,,NE”.Ako je tacka unutar intervala rec je o interpolaciji, a ako je tacka vanintervala rec je o ekstrapolaciji. U slucaju interpolacije jednakost (1.5)postaje x0 < ε < xn. Udaljavanjem tacke x od intervala povecava segreska racunanja vrednosti funkcije.
1.4 Konacne razlike funkcije
Definisimo konacne razlike prvog reda (funkcija je zadata cvorovima(xk, fk)):
∆fi = fi+1 − fi
Konacne razlike viseg reda definisemo induktivno:
II reda: ∆2fi = ∆(∆fi)) = ∆(fi+1 − fi)
= ∆fi+1 −∆fi = fi+2 − 2fi+1 + fi
III reda: ∆3fi = ∆(fi+2 − 2fi+1 + fi)
= fi+3 − fi+2 − 2fi+2 + 2fi+1 + fi+1 − fi
= fi+3 − 3fi+2 + 3fi+1 − fi
· · ·n-tog reda: ∆nfi = ∆(∆n−1fi)
Osobine konacnih razlika:
1) ∆(fk − fj) = ∆fk −∆fj
2) ∆(C · fk) = C ·∆fk
Definisane konacne razlike neki autori nazivaju i konacnim raz-likama unapred. Konacne razlike unazad, u iznaci ∇kfj mogu se defin-isati pomocu navedenih, sa ∇kfj = ∆kfj−k, te je u pitanju samo druganotacija.
1.5. NEWTONOVI INTERPOLACIONU POLINOMI 5
1.5 Newtonovi interpolacionu polinomi
Neka je funkcija f zadata cvorovima (xk, fk) koji su ekvidistantni,tj. xi+1 − xi = h, i = 0, . . . , n− 1.
I Newtonov interpolacioni polinom je polinom oblika:
Pn(x) = a0 + a1(x− x0) + a2(x− x0)(x− x1)
+ · · ·+ an(x− x0) · · · (x− xn−1),(1.7)
gde su a0, a1, . . . , an koeficijenti koje treba odrediti. Kako mora vazitiPn(xk) = fk. Uzimajuci da je x = x0 dobijamo da je a0 = f0 = ∆0f0
0!h0 .Nastavljajuci postupak za x = x1 imamo da je a0 + a1(x1 − x0) = f1
odakle zbog x1−x0 = h dobijamo da je a1 = f1−f0
h, odnosno a1 = ∆1f0
1!h1 .
Slicno za x = x2 nalazimo da je f0+∆f0
h(x2−x0)+a2(x2−x0)(x2−x1) =
f2 odakle imajuci u vidu da je x2− x0 = 2h i x2− x1 = h dobijamo daje a2 = f2−2f1+f0
2h2 = ∆2f0
2h2 . Indukcijom dobijamo da je:
an =∆nf0
n!hn
Dakle, I Newtonov interpolacioni polinom ima oblik:
NI(x) = f0 +∆1f0
1!h1(x− x0) +
∆2f0
2!h2(x− x0)(x− x1)
+ · · ·+ ∆nf0
n!hn(x− x0) · · · (x− xn−1)
(1.8)
odnosno, uvodeci smenu x−x0
h= u, imamo da je:
NI(x) = f0+∆1f0
1!u+
∆2f0
2!u(u−1)+ · · ·+ ∆nf0
n!u(u−1) · · · (u−n+1).
Napomena: NI(x) je dobro primeniti u slucaju kada se tacka x nalaziu prvoj polovini intervala [x0, xn].
II Newtonov interpolacioni polinom je oblika:
Pn(x) = a0 + a1(x− xn) + a2(x− xn)(x− xn−1)
+ · · ·+ an(x− xn) · · · (x− x1),(1.9)
6 GLAVA 1. INTERPOLACIJA
gde su a0, a1, . . . , an koeficijenti koje treba odrediti. Uzimajuci da jex = xn dobijamo da je a0 = fn, zatim za x = xn−1 nalazimo da je
a1 = ∆fn−1
1!h1 . Za x = xn−2 dobijamo da je a2 = ∆2fn−2
2!h2 . Indukcijom
zakljucujemo da je an = ∆nf0
n!hn
Dakle,
NII(x) = fn +∆1fn−1
1!h1(x− xn) +
∆2fn−2
2!h2(x− xn)(x− xn−1)
+ · · ·+ ∆nf0
n!hn(x− xn) · · · (x− x1),
odnosno uzimajuci smenu v = x−xn
hdobijamo da je:
NII(x) = fn+∆1fn−1
1!v+
∆2fn−2
2!v(v+1)+· · ·+∆nf0
n!v(v+1) · · · (v+n−1).
Postavlja se pitanje greske kod Newtonovih interpolacionih polinoma?Greska je ista kao kod uopstene interpolacije. Ako nije poznat anal-
iticki oblik funkcije tada izraz f (n+1)(ξ) treba zameniti sa ∆n+1(ξ)hn+1 , gde
je ∆n+1(ξ) maksimalna vrednost, po apsolutnoj vrednosti, konacne ra-zlike (n+1) reda.
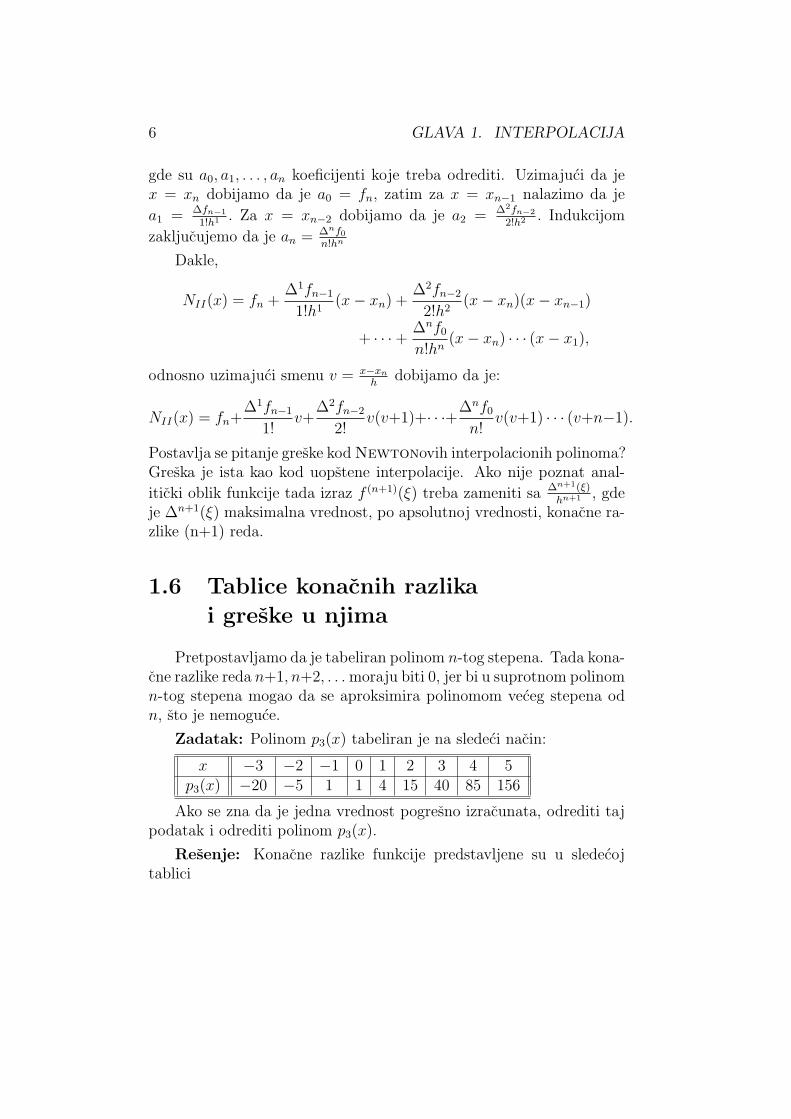
1.6 Tablice konacnih razlika
i greske u njima
Pretpostavljamo da je tabeliran polinom n-tog stepena. Tada kona-cne razlike reda n+1, n+2, . . . moraju biti 0, jer bi u suprotnom polinomn-tog stepena mogao da se aproksimira polinomom veceg stepena odn, sto je nemoguce.
Zadatak: Polinom p3(x) tabeliran je na sledeci nacin:
x −3 −2 −1 0 1 2 3 4 5p3(x) −20 −5 1 1 4 15 40 85 156
Ako se zna da je jedna vrednost pogresno izracunata, odrediti tajpodatak i odrediti polinom p3(x).
Resenje: Konacne razlike funkcije predstavljene su u sledecojtablici
1.6. TABLICE KONACNIH RAZLIKA I GRESKE U NJIMA 7
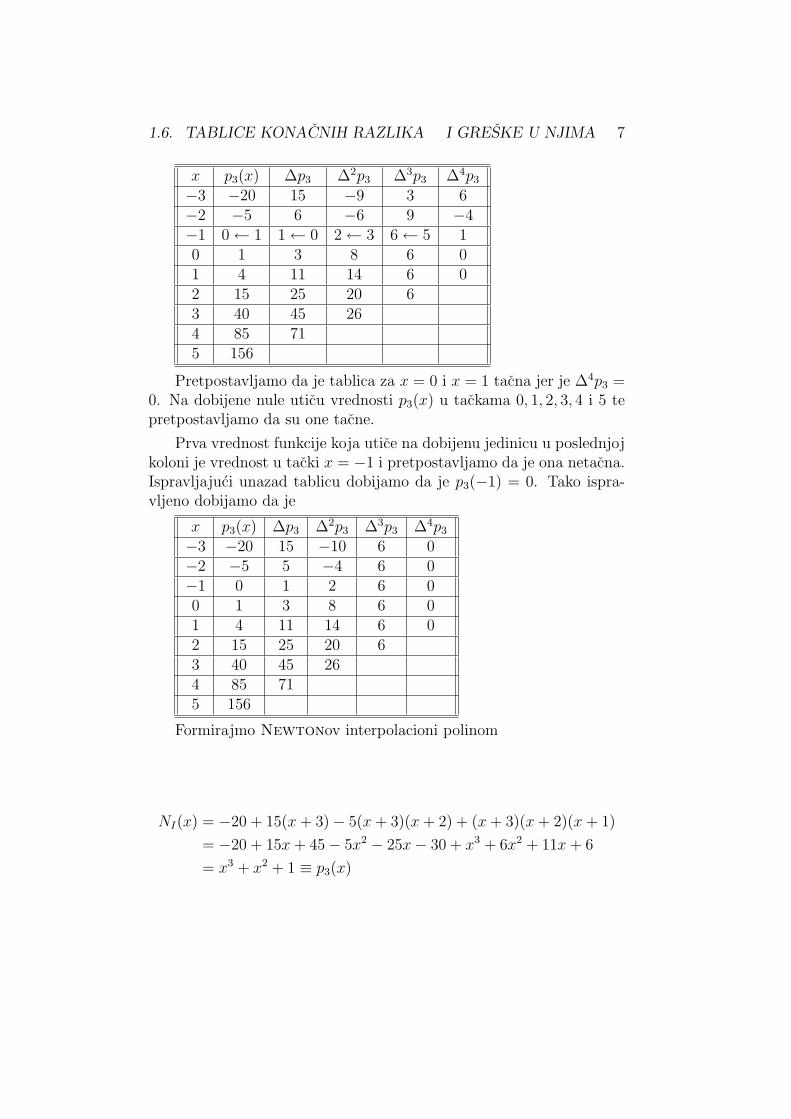
x p3(x) ∆p3 ∆2p3 ∆3p3 ∆4p3
−3 −20 15 −9 3 6−2 −5 6 −6 9 −4−1 0 ← 1 1 ← 0 2 ← 3 6 ← 5 10 1 3 8 6 01 4 11 14 6 02 15 25 20 63 40 45 264 85 715 156
Pretpostavljamo da je tablica za x = 0 i x = 1 tacna jer je ∆4p3 =0. Na dobijene nule uticu vrednosti p3(x) u tackama 0, 1, 2, 3, 4 i 5 tepretpostavljamo da su one tacne.
Prva vrednost funkcije koja utice na dobijenu jedinicu u poslednjojkoloni je vrednost u tacki x = −1 i pretpostavljamo da je ona netacna.Ispravljajuci unazad tablicu dobijamo da je p3(−1) = 0. Tako ispra-vljeno dobijamo da je
x p3(x) ∆p3 ∆2p3 ∆3p3 ∆4p3
−3 −20 15 −10 6 0−2 −5 5 −4 6 0−1 0 1 2 6 00 1 3 8 6 01 4 11 14 6 02 15 25 20 63 40 45 264 85 715 156
Formirajmo Newtonov interpolacioni polinom
NI(x) = −20 + 15(x + 3)− 5(x + 3)(x + 2) + (x + 3)(x + 2)(x + 1)
= −20 + 15x + 45− 5x2 − 25x− 30 + x3 + 6x2 + 11x + 6
= x3 + x2 + 1 ≡ p3(x)
8 GLAVA 1. INTERPOLACIJA
1.7 Pitanje inverzne interpolacije
Postavlja se pitanje odredivanja originala, ako je poznata vrednostfunkcije. Sustina je da se iz interpolacionog polinoma izvede iterativniproces koji konvergira.
Zadatak: Funkcija y = f(x) data je tablicom. Odrediti x za kojeje f(x) = 2.
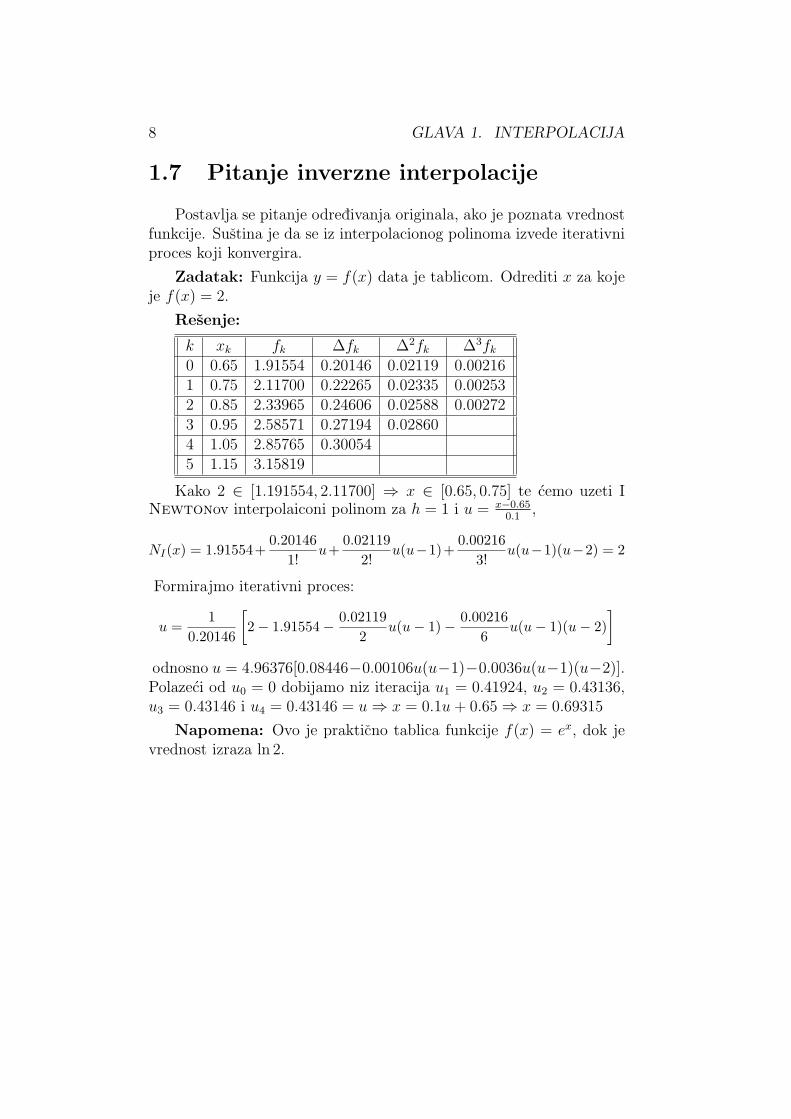
Resenje:
k xk fk ∆fk ∆2fk ∆3fk
0 0.65 1.91554 0.20146 0.02119 0.002161 0.75 2.11700 0.22265 0.02335 0.002532 0.85 2.33965 0.24606 0.02588 0.002723 0.95 2.58571 0.27194 0.028604 1.05 2.85765 0.300545 1.15 3.15819
Kako 2 ∈ [1.191554, 2.11700] ⇒ x ∈ [0.65, 0.75] te cemo uzeti INewtonov interpolaiconi polinom za h = 1 i u = x−0.65
0.1,
NI(x) = 1.91554+0.20146
1!u+
0.021192!
u(u−1)+0.00216
3!u(u−1)(u−2) = 2
Formirajmo iterativni proces:
u =1
0.20146
[2− 1.91554− 0.02119
2u(u− 1)− 0.00216
6u(u− 1)(u− 2)
]
odnosno u = 4.96376[0.08446−0.00106u(u−1)−0.0036u(u−1)(u−2)].Polazeci od u0 = 0 dobijamo niz iteracija u1 = 0.41924, u2 = 0.43136,u3 = 0.43146 i u4 = 0.43146 = u ⇒ x = 0.1u + 0.65 ⇒ x = 0.69315
Napomena: Ovo je prakticno tablica funkcije f(x) = ex, dok jevrednost izraza ln 2.
Glava 2
Numericko diferenciranje
2.1 Numericko diferenciranje
Neka je Pn(x) interpolacioni polinom, a Rn(x) greska interpolacije.Tada je
f(x) = Pn(x) + Rn(x) ⇒ f (k)(x) = P (k)n (x) + R(k)
n (x).
Dakle, priblizna vrednost izvoda funkcije moze se odrediti diferencira-njem interpolacionog polinoma, dok je greska tako dobijene vrednostiizvoda jednaka izvodu greske. Kako je:
Rn(x) =Mn+1
(n + 1)!|Πn+1(x)|, tada je R(k)
n (x) =Mn+1
(n + 1)!|Πn+1(x)|(k)
Potrazimo izvode Newtonovih interpolacionih polinoma. Kako jeu′x = v′x = 1
h, imamo da je:
N ′I(x) =
1
h
[∆f0 +
∆2f0
2!(2u− 1) +
∆3f0
3!(3u2 − 6u + 2)
+∆4f0
4!(4u3 − 18u2 + 22u− 6) + · · ·
]
N ′II(x) =
1
h
[∆fn−1 +
∆2fn−2
2!(2u + 1) +
∆3fn−3
3!(3u2 + 6u + 2)
+∆4fn−4
4!(4u3 + 18u2 + 22u + 6) + · · ·
]
1

2 GLAVA 2. NUMERICKO DIFERENCIRANJE
1. Odrediti tacku maksimuma funkcije, koja je zadata tabelom:
x y ∆y ∆2y ∆3y ∆4y0.1 0.284605 0.073166 −0.047531 0.017963 −0.0103820.2 0.357771 0.025635 −0.029568 0.007581 −0.0033880.3 0.383406 −0.003933 −0.021987 0.004193 −0.0025260.4 0.379473 −0.025920 −0.017794 0.0026670.5 0.353553 −0.043714 −0.0151270.6 0.309839 −0.0588410.7 0.250998
Kako se od 0.2 do 0.3 vrednost funkcije uvecava, a od 0.3 do 0.4 uma-njuje, tada nezavisno promenljivu u kojoj je maksimum treba trazitiu okolini tacke x = 0.3. Stoga, napisimo NI(x), polazeci od vrednostix = 0.3 kao da je ona pocetak tablice.
N ′I(x) =
1h
[−0.003933 +
−0.0219872!
(2u− 1) +0.004193
3!(3u2 − 6u + 2)
]
Kako bi ovaj izvod bio 0, treba da vazi da je:
−0.003933 +−0.021987
2(2u− 1) +
0.004193
6(3u2 − 6u + 2) = 0
0.002096u2 − 0.026180u + 0.008458 = 0
Formiramo iterativni proces po lineranom clanu:
un+1 =0.008458
0.026180+
0.002096
0.026180u2
n
un+1 = 0.323071 + 0.080061u2n
Pocetna vrednost u iterativnom postupku je u0 = 0. Iz poslednje jed-nakosti dobijamo niz iteracija:
2.2. FORMULE ZA NUMERICKO DIFERENCIRANJE 3
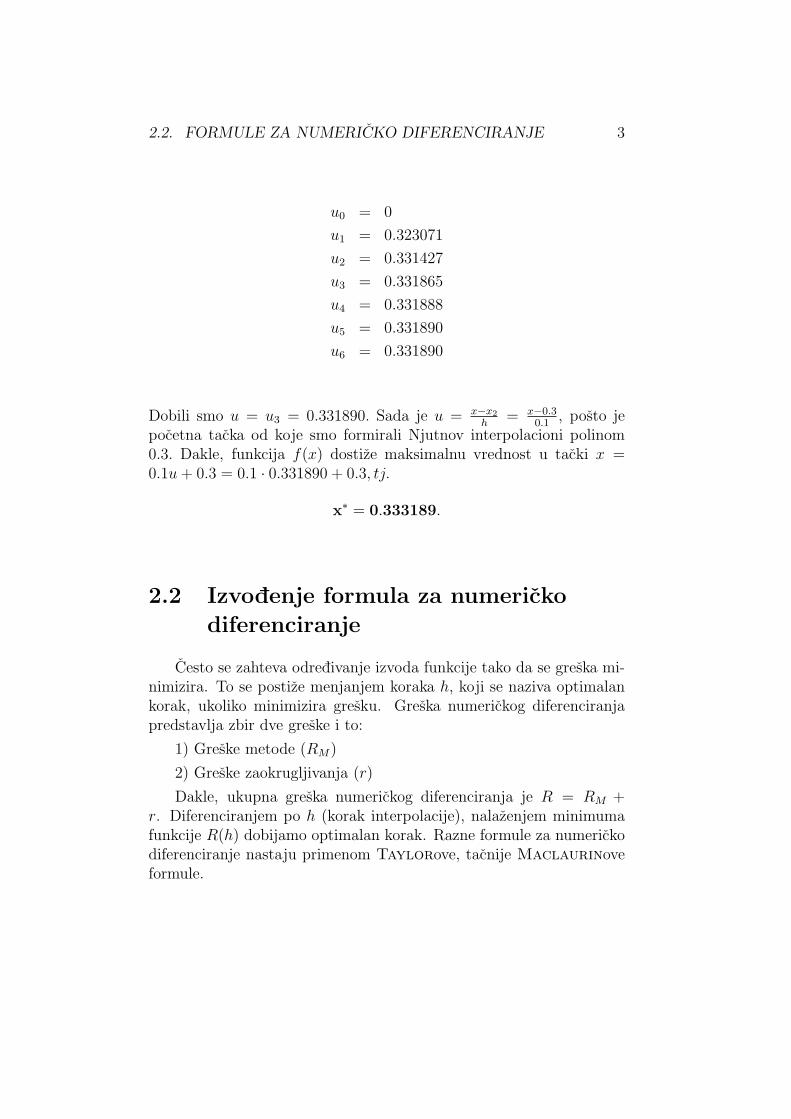
u0 = 0
u1 = 0.323071
u2 = 0.331427
u3 = 0.331865
u4 = 0.331888
u5 = 0.331890
u6 = 0.331890
Dobili smo u = u3 = 0.331890. Sada je u = x−x2
h= x−0.3
0.1, posto je
pocetna tacka od koje smo formirali Njutnov interpolacioni polinom0.3. Dakle, funkcija f(x) dostize maksimalnu vrednost u tacki x =0.1u + 0.3 = 0.1 · 0.331890 + 0.3, tj.
x∗ = 0.333189.
2.2 Izvodenje formula za numericko
diferenciranje
Cesto se zahteva odredivanje izvoda funkcije tako da se greska mi-nimizira. To se postize menjanjem koraka h, koji se naziva optimalankorak, ukoliko minimizira gresku. Greska numerickog diferenciranjapredstavlja zbir dve greske i to:
1) Greske metode (RM)
2) Greske zaokrugljivanja (r)
Dakle, ukupna greska numerickog diferenciranja je R = RM +r. Diferenciranjem po h (korak interpolacije), nalazenjem minimumafunkcije R(h) dobijamo optimalan korak. Razne formule za numerickodiferenciranje nastaju primenom Taylorove, tacnije Maclaurinoveformule.

4 GLAVA 2. NUMERICKO DIFERENCIRANJE
2. Neka je funkcija f(x) ∈ C2[a, b] dva puta neprekidno diferencija-bilna, cije su poznate vrednosti u ekvidistantnim cvorovima a = x0 <x1 < . . . < xj < . . . < xn = b. Dokazati da je:
f ′(xk) =∆fk
h− f ′′(ξ)
2h, za neko ξ ∈ (xk, x); x < xk+1
Dokaz: Kako je
f(xk+1) = f(xk + h) = f(xk) +f ′(xk)
1!(xk+1 − xk) +
f ′′(ξ)2!
(xk+1 − xk)2
odnosno
f ′(xk) =f(xk+1)− f(xk)
h− f ′′(ξ)
2!h
dobijamo da je
f ′(xk) =∆fk
h− f ′′(ξ)
2!h.
{Objasnjenje: Taylorova formula:
FXk(h) = FXk
(0) +F ′
Xk(0)
1!h +
F ′′Xk
(0)
2!h2 + · · ·
Funkcija FXk(h) je razvijena u okolini h = 0, a Xk u indeksu je fiksiran
parametar.}
Postavlja se pitanje ,,Da li je moguce izracunati vrednost izvoda utackama koje nisu cvorovi?”
3. Neka je funkcija f(x) ∈ C3[a, b] dva puta neprekidno diferencija-bilna, cije su poznate vrednosti u ekvidistantnim cvorovima a = x0 <x1 < . . . < xj < . . . < xn = b. Dokazati da je
f ′(
xk +h
2
)=
∆fk
h− f ′′′(ξ)
24h2;
Dokaz: Oznacimo sa x = xk + h2. Tada je
xk = x− h
2, a xk+1 = x +
h
2

2.2. FORMULE ZA NUMERICKO DIFERENCIRANJE 5
Na osnovu Taylorove formule imamo da je:
f(xk) = f
(x− h
2
)= f(x)− h
2
f ′(x)
1!+
h2
22
f ′′(x)
2!− h3
23
f ′′′(ξ)3!
f(xk+1) = f
(x +
h
2
)= f(x) +
h
2
f ′(x)
1!+
h2
22
f ′′(x)
2!− h3
23
f ′′′(ξ)3!
Oduzimanjem prve formule od druge dobijamo da je
f(xk+1)− f(xk) = hf ′(x) +h3
24f ′′′(ξ),
odnosno
f ′(x) =∆fk
h− h2
24f ′′′(ξ)
Napomena: Uocimo da su priblizne vrednosti izvoda, u tackamau x0 i x0 + h/2 iz prethodna dva zadatka iste i iznose ∆fk/h, ali segreske razlikuju.
Domaci zadatak: Za f(x) ∈ C3[a, b] izvesti formulu za diferenci-ranje f ′(xk + h/n) gde je n ∈ N bilo koji prirodan broj, n > 1.
4. Neka se vrednosti funkcije f mogu izraziti sa tacnoscu ε i neka jemax |f (n)(x)| = Mn. Odrediti optimalan korak za numericko diferenci-ranje po formuli:
a) f ′(xk) ≈ ∆fk
h; b) f ′
(xk +
h
2
)≈ ∆fk
h;
c) f ′′(xk) ≈ ∆2fk−1
h2=
f(xk+1)− 2f(xk) + f(xk−1)
h2
Resenje:
a) Zbog zadatka 1, imamo da je RM = | − f ′′(ξ)h/2| ≤ M2h/2, agreska zaokrugljivanja vrednosti izraza je r = 2ε/h, odakle sledi da jeukupna greska R = M2h/2 + 2ε/h. Diferenciranjem po h dobijamo daje:
R′(h) =M2
2− 2ε
h2= 0 ⇒ h2 =
4ε
M2

6 GLAVA 2. NUMERICKO DIFERENCIRANJE
b) Slicno, R = h2M3
24+ 2ε
h⇒ R′(h) = hM3
12− 2ε
h2 = 0 ⇒ h3 = 24εM3
c) Posmatrajmo desnu stranu predlozene formule:
1
h2
[f(xk+1)− 2f(xk) + f(xk−1)
]=
1
h
[f(xk + h)− 2f(xk) + f(xk − h)
]
=1
h2
[f(xk) + h
f ′(xk)
1!+ h2f ′′(xk)
2!+ h3f ′′′(xk)
3!+ h4f iv(ξ)
4!+
−2f(xk) + f(xk)− hf ′(xk)
1!+ h2f ′′(xk)
2!+ h3f ′′′(xk)
3!+ h4f iv(ξ)
4!
]=
= f ′′(xk) +h2
12f iv(ξ),
cime je dokazana predlozena formula sa greskom RM = h2
12M4, a greskom
racuna r = 4εh2 , te je:
R =h2
12M4 +
4ε
h2⇒ R′(h) =
hM4
6− 8ε
h3= 0 ⇒ h4 =
48ε
M4
Domaci zadatak:
1) Izvesti formule za nalazenje sledecih izvoda
{f ′′′(xk), fiv(xk); f ′′(xk + h/n), f ′′′(x + k + h/n), f iv(xk + h/n)}
i odrediti optimalan korak takvog diferenciranja.
2) Neka se vrednosti funkcije mogu odrediti sa tacnoscu ε i nekaje Mn = max |f (n)(x)|, x ∈ [a, b]. Naci optimalan korak za numerickodiferenciranje po formuli (cvorovi su ekvidistantni).
f ′(xk) =1
2h[−3f(xk) + 4f(xk+1)− f(xk+2)]
Resenje:
2) R = h2M3 + 4εh;
R′(h) = 2hM3 − 4ε
h2= 0 ⇒ h3 =
2ε
M3
.

2.2. FORMULE ZA NUMERICKO DIFERENCIRANJE 7
Postavlja se pitanje da li je u opstem slucaju moguce izvesti ,,na-jbolju” formulu za odredivanje izvoda u obliku:
f ′(x) =1
h(a1f(x + b1h) + a2f(x + b2h))
Resenje: Pretpostavimo da je ovaj problem normalizovan, tj. daje |b2− b1| = 1. Primenimo Taylorovu formulu tako da ostatak budeoblika O(hr), pri cemu je r sto je moguce vece. U tom slucaju imamoda je ostatak najmanji moguc.
f ′(x) =1
h
[a1(f(x) +
f ′(x)
1!(b1h)1 +
f ′′(x)
2!(b1h)2 +
f ′′′(x)
3!(b1h)3+
O(h3)) + a2(f(x) +f ′(x)
1!(b2h)1 +
f ′′(x)2!
(b2h)2 +f ′′′(x)
3!(b2h)3 + O(h3)
]
Iz poslednjeg dobijamo da je
f ′(x) =a1 + a2
hf(x) + (a1b1 + a2b2)f
′(x) +h
2(a1b
21 + a2b
22)f
′′(x)
+h2
3!(a1b
31 + a2b
32)f
′′′(x) +
[f iv(ξ1)
4!(b1h)4 +
f iv(ξ2)
4!(b2h)4
]
Da bi leva strana bila ,,jednaka” desnoj zahtevamo da jea1 = −a2, b1 − b2 = 1, b1 = −b2, 2a1b1 = 1tj. a1 = −a2 = 1, b1 = −b2 = 1/2
Dakle, najbolja od ,,dvotackastih” formula za izracunavanje izvodaje
f ′(x0) =1
h
(f
(x +
h
2
)− f
(x− h
2
)), a greska RM =
h4
23 · 4!M4
Napomena: J. M. Ash i R. L. Jones su pokazali da je u klasi,,trotackastih” formula, polazeci od:
f ′(x) =1
h(a1f(x + b1h) + a2f(x + b2h) + a3f(x + b3h)),
uz uslov normalizacije min{|b1 − b2|, |b2 − b3|, |b1 − b3|} = 1, najboljaona za koju je
a1 = 32/120 b1 = 3a2 = −27/120 b2 = −2a3 = −5/120 b3 = 6

8 GLAVA 2. NUMERICKO DIFERENCIRANJE
(Ispitni zadatak): Funkcija x 7→ f(x) tabelirana je sa korakomh > 0, u ekvidistantnim cvorovima x0, x1, x2, x3, x4. Dokazati aproksi-macije (fk ≈ f(xk)):
a) f ′(x0) = 112h
(−25f0 + 48f1 − 36f2 + 16f3 − 3f4)
b) f ′(x1) = 112h
(−3f0 − 10f1 + 18f2 − 6f3 + f4)
c) f ′(x2) = 112h
(f0 − 8f1 + 8f3 − f4)
Resenje: Iskoristimo I Newtonov interpolacioni polinom:
x f ∆f ∆2f ∆3f ∆4fx0 f0 f1 − f0 f2 − 2f1 + f0 f3 − 3f2 + 3f1 − f0 f4 − 4f3 + 6f2 − 4f1 + f0
x1 f1 f2 − f1 f3 − 2f2 + f1 f4 − 3f3 + 3f2 − f1
x2 f2 f3 − f2 f4 − 2f3 + f2
x3 f3 f4 − f3
x4 f4
u = (x− x0)/h
NI(x) = f0 + (f1 − f0)u +1
2(f2 − 2f1 + f0)(u
2 − u)
+1
6(f3 − 3f2 + 3f1 − f0)(u
3 − 3u2 + 2u)
+1
24(f4 − 4f3 + 6f2 − 4f1 + f0)(u
4 − 6u3 + 11u2 − 6u)
odnosno:
N ′I(x) =
1
h
[(f1 − f0) +
1
2(f2 − 2f1 + f0)(2u− 1)
+1
6(f3 − 3f2 + 3f1 − f0)(3u
2 − 6u + 2)
+1
24(f4 − 4f3 + 6f2 − 4f1 + f0)(4u
3 − 18u2 + 22u− 6)]
Zamenom:x = x0 ⇒ u = 0 . . . dobijamo prvu formulu (a)x = x1 ⇒ u = 1 . . . dobijamo prvu formulu (b)x = x2 ⇒ u = 2 . . . dobijamo prvu formulu (c)
Domaci zadatak: Formiranjem drugog interpolacionog New-tonovog polinoma odrediti iz datih podataka f ′(x3) i f ′(x4).
Glava 3
Numericka integracija
3.1 Kvadtraturne formule
Numericka integracija se zasniva na integraciji interpolacionih poli-noma. Naime, ako je f(x) = Pn(x) + Rn(x), tada je
b∫
a
f(x) dx ≈b∫
a
Pn(x) dx,
dok je greska ovakve integracije R ≤ |b∫
a
Rn(x) dx|.Pretpostavimo da je funkcija interpolirana Lagrangeovim inter-
polacionim polinomom. Tada je:
b∫
a
f(x) dx =
b∫
a
(n∑
i=0
∏n+1(x)
(x− xi)∏′
n+1(xi)fi
)dx +
b∫
a
Rn(x) dx
=n∑
i=0
{b∫
a
∏n+1(x)
(x− xi)∏′
n+1(xi)dx · fi}+
b∫
a
Rn(x) dx.
Imamo da je vrednost integrala sledeceg oblika
(3.1)
b∫
a
f(x) dx =n∑
i=0
Aifi+R, gde je Ai =
b∫
a
∏n+1(x)
(x− xi)∏′
n+1(xi)dx.
1

2 GLAVA 3. NUMERICKA INTEGRACIJA
Formule oblikan∑
i=0
Aifi koje aproksimiraju vrednost integrala nazivaju
se kvadraturne formule. Ako je funkcija f(x) polinom stepena ≤ n,da je tada Rn(x) = 0, a samim tim je i R = 0, te je iz (3.1) za polinomestepena ≤ n zadovoljeno da je
b∫
a
f(x) dx =n∑
i=0
Aifi.
Uzimajuci da je funkcija f ∈ {1, x, x2, . . . , xn} dobijamo sistem jedna-cina:
b− a =n∑
i=0
Ai;b2 − a2
2=
n∑i=0
Aixi . . .bn+1 − an+1
n + 1=
n∑i=0
Aixni .
iz koga odredujemo koeficijente Ai.
U slucaju kada je x0 = a, xn = b, a ostali cvorovi su ekvidis-tantni, integracijom Lagrangeovog interpolacionog polinoma dobi-jamo Newton-Cotes ove formule.
3.2 Newton-Cotes ove formule
Neka su x0, x1, . . . , xn ekvidistantni cvorovi, takvi da je x0 = a ixn = b. Imamo da je
Ai =
xn∫
x0
∏n+1(x)
(x− xi)∏′
n+1(xi)dx
=
xn∫
x0
(x− x0) · · · (x− xi−1)(x− xi+1) · · · (x− xn)
(xi − x0) · · · (xi − xi−1)(xi − xi+1) · · · (xi − xn)dx
Uvodeci smenu x = x0 + th, pri cemu je xi = x0 + ih (i = 0, 1, . . . , n)

3.2. NEWTON-COTES OVE FORMULE 3
dobijamo
pi(x) =th(t− 1)h · · · (t− i + 1)(t− i− 1) · · · (t− n)h
ih(i− 1)h · · · (i− i + 1)(i− i− 1) · · · (i− n)h
∣∣∣∣·t− i
t− i
=t(t− i) · · · (t− n)
(t− i)i!(−1)n−i(n− i)!
gde i! proistice iz prvog dela cinilaca, (−1)n−i(n − i)! iz drugog delacinilaca.
Zbog poslednjeg i cinjenice da je h = b−an
imamo da je:
Ai =
n∫
0
(−1)n−it(t− 1) · · · (t− n)
(t− i)i!(n− i)!h dt
=h(−1)n−i
i!(n− i)!
n∫
0
t(t− 1) . . . (t− n)
(t− i)dt
= (b− a)(−1)n−i
n i! (n− i)!
n∫
0
t(t− 1) · · · (t− n)
(t− i)dt = (b− a)Cn
i
Cni nazivamo Newton-Cotesovi koeficijenti. Za njih vazi Cn
i = Cnn−i.
Specijalni Slucajevi:
1) Za n = 1 dobijamo trapezno pravilo (jer imamo dva cvora)
C10 = −
1∫
0
t(t− 1)
tdt =
1
2; C1
1 =
1∫
0
t(t− 1)
(t− 1)dt =
1
2,
koje glasi:x1∫
0
f(x) dx =1
2h (f0 + f1) + R1,
za h = b− a koje stoji ispred Cni .

4 GLAVA 3. NUMERICKA INTEGRACIJA
Ako imamo n cvorova, uopstavanjem prethodnog dobijamo da jexn∫
x0
f(x) dx =
x1∫
x0
f(x) dx +
x2∫
x1
f(x) dx + · · ·+xn∫
xn−1
f(x) dx
=1
2h(f0 + f1) +
1
2h(f1 + f2) + · · ·+ 1
2h(fn−1 + fn) + R
⇒b∫
a
f(x) dx =1
2h (f0 + 2(f1 + · · ·+ fn−1) + fn) + R,
sto predstavlja opste trapezno pravilo.
Pitanje greske: Kako je greska Lagrange ovog interpolacionogpolinoma Rn = Mn+1
(n+1)!|∏n+1(x)| tada ce ukupna greska biti suma gre-
saka na pojedinim segmentima. Integralna greska za polazni slucajiznosi
R1 =M2
2!
∣∣∣∣∣∣
x1∫
x0
(x− x0)(x− x1) dx
∣∣∣∣∣∣smena: x = x0 + th
=M2
2!h3
∣∣∣∣∣∣
1∫
0
(t2 − t) dt
∣∣∣∣∣∣=
M2
12h3,
odakle nalazimo da je ukupna greska R, za gornji niz zbira integralaR = nM2h3
12, a kako je b−a
n= h imamo da je greska metode
R = (b− a)M2h
2
12.
2) Za n = 2 dobijamo Simpsonovo pravilo:
C20 =
1
4
2∫
0
f(t− 1)(t− 2)
tdt =
1
4
2∫
0
(t2−3t+2) dt =1
6= C2
2 ; C21 =
2
3
odakle sledi da zbog b−a2
= h ⇔ b− a = 2h vazi da je:
x2∫
x0
f(x) dx = 2h
(1
6f0 +
2
3f1 +
1
6f2
)+ R1 =
h
3(f0 + 4f1 + f2) + R1.

3.2. NEWTON-COTES OVE FORMULE 5
Ako je dato 2n + 1 cvorova, i to x0, x1, . . . , x2n, deljenjem na integralegornjeg tipa dobijamo Opstu Simpsonovu formulu:
x2n∫
x0
f(x) dx =h
3(f0 + 4f1 + f2) +
h
3(f2 + 4f3 + f4)
+ · · ·+ h
3(f2n−2 + 4f2n−1 + x2n) + R
=h
3(f0 + 4(f1 + f3 + · · ·+ f2n−1)
+ 2(f2 + f4 + · · ·+ f2n−2) + f2n) + R
Pitanje greske: Za jedan segment imamo da je:
R1 =M3
3!
∣∣∣∣∣∣
x2∫
x0
(x− x0)(x− x1)(x− x2) dx
∣∣∣∣∣∣
=M3h
4
3!
∣∣∣∣∣∣
2∫
0
t(t− 1)(t− 2) dt
∣∣∣∣∣∣
=M3
3!h4
∣∣∣∣∣∣
2∫
0
(t3 − 3t2 + 2t)
∣∣∣∣∣∣= 0
⇒ R = 0, sto je nemoguce, jer su funkcija f i njen interpolacionipolinom razliciti! Dobijeni rezultat R = 0 znaci da je formula tacna iza polinom stepena 3, te ce greska biti cetvrtog reda. Dakle, imamoda je
R1 =M4
24
∣∣∣∣∣∣
x2∫
x0
(x− x0)2(x− x1)(x− x2) dx)
∣∣∣∣∣∣=
M4 h5
90
odakle dobijamo da je ukupna greska izvedene formule
R =(b− a)
180h4M4
Kod odredivanja integrala ukupna tj. totalna greska je RT =RM + r, gde je greska r greska racuna i ona iznosi r = εr(b− a), a RM
greska metode.

6 GLAVA 3. NUMERICKA INTEGRACIJA
Kod trapeznog pravila imamo da je r = nh 1210−k, ako se radi sa
k decimala, pri cemu je εr = 1210−k, a kako je nh = b− a dobijamo da
je r = (b− a) 1210−k,
Kod Simpson ovog pravila iste su formule za r kao kod trapeznogpravila. (Izvesti za domaci).
3.3 Rungeova ocena greske za procenu
greske metoda
U opstem slucaju greska Newton-Cotesovih formula ima oblik,za korak tabeliranja h i funkciju f :
Rh(f) = c(b− a)Mnhn
{Simpson: Rh(f) = b−a
180M4h
4
Trapezna: Rh(f) = b−a180
M2h2
Vidimo da se greska integracije smanjuje ako se smanji korak h. Nekaje integral I funkcije f izracunat za dva koraka h1 i h2 istom metodom,pri cemu je h1 < h2. Imamo da je:
Rh1(f) = c(b− a)Mnhn1
Rh2(f) = c(b− a)Mnhn2
}Za neku odabranu Newton-Cotesovuformulu i fiksirano n
Imamo da je:
Rh1(f) = I − Ih1
Rh2(f) = I − Ih2
}Ih1 , Ih2 su izracunati nekomkvadraturnom formulom
Iz gornjeg sledi:
Ih2 − Ih1 = Rh1(f)−Rh2(f) = c(b− a)Mnhn1
(1−
(h2
h1
)n)
= (I − Ih1)
(1−
(h2
h1
)n)= Rh1(f)
(1−
(h2
h1
)n)
Iz cega dobijamo da je:
Rh1(f) =Ih1 − Ih2(h2
h1
)n
− 1

3.3. RUNGEOVA OCENA GRESKE 7
Zbog pozitivnosti greske vazi da je:
Rh1(f) =|Ih1 − Ih2|(
h2
h1
)n
− 1
Dakle, gresku metode za odredeni korak h1 ne moramo racunatipomocu maksimuma izvoda, nego ,,uporedivanjem” razlike vrednostidobijenih integrala za taj korak i za veci korak h2. Najcesce se greskasmanjuje, do postizanja potpuno zadovoljavajuceg resenja, duplim sma-njivanjem koraka. U specijalnim slucajevimagreske Rungea imaju ob-lik:
Simpson: R(f) =|Ih1 − Ih2|(
h2
h1
)4
− 1; Trapezna: R(f) =
|Ih1 − Ih2|(h2
h1
)2
− 1
Napomena: Podelu ,,usitnjavamo” sve dok konacna greska ne budemanja od unapred zadate greske metode.
Zadatak 1. Koristeci Simpsonovu formulu izracunati1∫0
cos(x2) dx
sa tacnoscu R = 0.5× 10−4, radeci sa 5 decimala.
Resenje:RT = RM + r, gde je rR = 1
2(1− 0)10−5 te je
RM = RT − rR ⇒ RM = 0.0005− 0.00005 = 0.00045
Dakle, RM = 4.5×10−4. Osnovno pitanje je koliko je korak h. Uzmimoda je h = 0.1, a zatim h = 0.05 i primenimo Rungeovu ocenu greske.(Racunamo u rad - radijanima).

8 GLAVA 3. NUMERICKA INTEGRACIJA
h = 0.1
x y0, y2k y2k−1 y2k
0 1
0.1 0.99995
0.2 0.99920
0.3 0.99595
0.4 0.98723
0.5 0.96891
0.6 0.93590
0.7 0.88233
0.8 0.80210
0.9 0.68950
1.0 0.54030∑1.54030 4.53664 3.72443
h1 = 0.05
x y2k−1
0.05 1.00000
0.15 0.99995
0.25 0.99805
0.35 0.99251
0.45 0.97957
0.55 0.95460
0.65 0.91207
0.75 0.84592
0.85 0.75015
0.95 0.61965∑9.05247
Ih =0.1
3[1.54030 + 4× 4.53664 + 2× 3.72443] = 0.90452
Ih1 =0.05
3[1.54030 + 4× 9.05247 + 2× 8.26107] = 0.90454
Uocimo da umanjenjem koraka svi cvorovi iz prethodnog dela postajucvorovi sa parnim indeksom u narednom! Imamo da je za drugu tabelu
∑y2k
4.53664 + 3.72443 = 8.26107
Procena greske Rungeovom metodom:
Rh1 =0.90454− 0.90452
24 − 1= 1.3× 10−6 < 4.5× 10−4
Dakle, postignuta je tacnost, te je:
I ≈ 0.90454
***Maple daje rezultat I ≈ 0.9045242448***

3.4. GAUSOVE KVADRATURNE FORMULE 9
3.4 Gausove kvadraturne formule
Formule oblika
b∫
a
f(x) dx ≈n∑
i=0
Aif(xi)
nazivamo kvadraturnim formulama.
Koeficijente Ai odredujemo tako da formula bude tacna za poli-nome sto je moguce veceg stepena. Zamenom f ∈ {1, x, x2, . . . , xn}dobijamo koeficijente A0, A1, . . . , An. Greska je tada:
R ≤b∫
a
Mn+1
(n + 1)!
∣∣∣(x− x0) . . . (x− xn)∣∣∣ dx.
Ako se uoci da je dobijena formula tacna i za xn+1, . . . , xn+k, a dane vazi za xn+k+1, tada je greska
R ≤b∫
a
Mn+k+1
(n + k + 1)!
∣∣∣(x− x0)k+1(x− x1) . . . (x− xn)
∣∣∣ dx.
Formule oblika
1∫
−1
f(x) dx =n∑
i=1
Aif(xi) + Rn(f),
gde su xi (i = 1, . . . , n) nule Legandreovog polinoma n-tog stepena
Ln(x) =1
2nn!
((x2 − 1)n
)(n)
nazivamo Gaussovim kvadraturnim formulama i pri tome je
Rn(f) ≤ 22n+1
(2n + 1)!
((n!)2
(2n)!
)2
M2n

10 GLAVA 3. NUMERICKA INTEGRACIJA
Napomena: Ako imamo integraciju na intervalu [a, b], a zelimoda primenimo Gauss kvadraturne formule, prvo uvodimo smenu:
x =a + b
2+
b− a
2t, t ∈ [−1, 1]
Zadatak 2. Izvesti formulu za unmericku integraciju oblika
h∫
0
f(x) dx = Af(0) + Bf
(2h
3
)+ R(h)
tako da bude tacna za polinome sto viseg stepena. Proceniti greskuintegracije R(h).
Resenje.
f(x) = 1 :A + B = h
f(x) = x :B =3
4h ⇒ A =
1
4h
Formula glasi
h∫
0
f(x) dx =1
4hf(0) +
3
4hf
(2h
3
)
Provera za gresku:
f(x) = x2 :h3
3=
3
4h · 4h2
9⇒ h3
3=
h3
3
f(x) = x3 :h4
46= 2h4
9
Dakle greska je treceg reda:
R(h) ≤h∫
0
M3
3!
((x− 0)2
(x− 2h
3
))dx =
M3
6
h∫
0
(x3 − 2h
3x2
)dx
=M3
6
(h4
4− 2
9h4
)=
M3h4
216
Glava 4
Sistemi linearnih jednacina
4.1 Gaussov metod eliminacije
Pretpostavimo da je potrebno resiti sistem:
(4.1)
a11x1 + . . . + a1nxn = b1
a21x1 + . . . + a2nxn = b2
. . . . . . . . . . . . . . . . . . . . . . . .an1x1 + . . . + annxn = bn
Odnosno AX = B, gde je
A =
a11 . . . a1n
a21 . . . a2n...
...an1 . . . ann
, X =
x1
x2...
xn
, B =
b1
b2...bn
Mnozeci prvu jednacinu sa −a21
a11,−a31
a11, . . . ,−an1
a11i dodavanjem re-
dom ostalim jednacinama dobijamo ekvivalentan sistem:
a(1)11 x1 + a
(1)12 x2 + . . . + a
(1)1n xn = b
(1)1
a(2)22 x2 + . . . + a
(2)2n xn = b
(2)2
a(2)32 x2 + . . . + a
(2)3n xn = b
(2)3
. . . . . . . . . . . . . . . . . . . . . . . .
a(2)n2 x2 + . . . + a
(2)nnxn = b
(2)n
1

2 GLAVA 4. SISTEMI LINEARNIH JEDNACINA
pri cemu je a(1)1j = a1j, j = 1, . . . , n. Nastavljanjem postupka, polazni
sistem svodimo na:
a(1)11 x1 + a
(1)12 x2 + a
(1)13 x3 + . . . + a
(1)1n xn = b
(1)1
a(2)22 x2 + a
(2)23 x3 + . . . + a
(2)2n xn = b
(2)2
a(3)33 x3 + . . . + a
(3)3n xn = b
(3)3
. . . . . . . . . . . . . . . .
a(n)nn xn = b
(n)n
Ako je matrica A regularna (det A 6= 0), tada su svi a(i)ii 6= 0,
(i = 1, . . . , n), te je resenje prethodnog sistema dato sa:
xn =b(n)n
a(n)nn
, xj =1
a(j)jj
(b(j)j −
n∑
k=j+1
a(j)jk xk
), j = 1, . . . , n− 1
Mana izlozenog Gaussovog metoda eliminacije je sto za izuzetnomale a
(1)11 , a
(2)22 , . . . , a
(n)nn dolazi do deljenja malim brojem, te su greske
koje nastaju veoma velike. Zbog toga, imamo modifikaciju navedenemetode, ali sada sa izborom glavnog elementa – Pivota.
4.2 Gaussov metod eliminacije sa izborom
glavnog elementa - Pivota
Postupak se sastoji u sledecem:Pre transformacije polaznog sistema, trazimo max{|aij|, i, j = 1, . . . , n}.Neka je to element aipjp , dakle u ip-toj vrsti i jp-toj koloni. Taj
element nazivamo Pivotom. Mnozenjem ip-te vrste sa − aijp
aipjp, gde
i ∈ {1, 2, . . . , n}\{jp} i dodavanjem ostalim vrstama elementi u jp
koloni u transformisanom sistemu postaju 0.
U novodobijenom sistemu od n−1 jednacine sa n−1 nepoznatom,bez nepoznate xjp ponavljamo postupak. Postupak se ponavlja sve dokne ostane jednacina u kojoj se pojavljuje samo jedna promenljiva.

4.3. LU DEKOMPOZICIJA 3
4.3 LU dekompozicija
Ideja LU dekompozicije je da se u sistemu AX = B, matrica Apredstavi kao proizvod dve matrice oblika:
L =
l11 0 0 · · · 0l21 l22 0 · · · 0...
......
. . ....
ln1 ln2 ln3 · · · lnn
i U =
1 d12 d13 · · · d1n
0 1 d23 · · · d2n...
......
. . ....
0 0 0 · · · 1
pri cemu dobijamo da se polazni sistem svodi na (LU)X = B, odnosnoL(UX) = B, pri cemu oznacavajuci Y ≡ UX, polazni sistem svodimona dva trougaona sistema:
UX = Y, LY = B
pri cemu prvo odredujemo kolona matricu Y , a zatim kolona matricuX. Izvedimo takozvani Croutov (Krautov) algoritam za LU dekom-poziciju. Izjednacavanjem:
a11 a12 · · · a1n
a21 a22 · · · a2n...
.... . .
...an1 an2 · · · ann
=
=
l11 0 0 · · · 0l21 l22 0 · · · 0...
......
. . ....
ln1 ln2 ln3 · · · lnn
·
1 d12 d13 · · · d1n
0 1 d23 · · · d2n...
......
. . ....
0 0 0 · · · 1
dobijamo sistem jednacina:I korak: l11 = a11, l21 = a21, . . . , ln1 = an1 (mnozenjem vrsta matriceL sa I kolonom matrice U).II korak: d12 = a12
l11, d13 = a13
l11, . . . , d1n = a1n
l11(mnozenjem I vrste
matrice L sa kolonom matrice U)III korak: l22 = a22 − l21d12, . . . , ln2 = an2 − ln1d12 (mnozenjem vrstamatrice L sa II kolonom matrice U).
Dakle,
lij = aij −j−1∑
k=1
likdkj, dij =1
lii
(aij −
i−1∑
k=1
likdkj
)

4 GLAVA 4. SISTEMI LINEARNIH JEDNACINA
pri cemu su sume 0 ako je gornja granica manja od donje.
Napomena: Kako je A = LU sledi
det A = det L · det U︸ ︷︷ ︸1
= det L = l11 · · · lnn
4.4 Iterativne metode resavanja sistema
linearnih jednacina
Sistem oblika AX = B mozemo napisati u obliku:
x1 = b11x1 + · · · + b1nxn + c1
x2 = b21x1 + · · · + b2nxn + c2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .xn = bn1x1 + · · · + bnnxn + cn
Odnosno
(4.2) X = BX + C
u matricnom obliku.
4.5 Jacobyev metod
Polazeci od jednakosti (4.2) mozemo formirati iterativni proces nasledeci nacin:
(4.3) X(k+1) = B·X(k)+C, X(k) =
x(k)1
x(k)2...
x(k)n
, X(0) =
x(0)1
x(0)2...
x(0)n
gde je X(k) k-ta iteracija, pri cemu se X(0) uzima proizvoljno.
Naravno postavlja se pitanje konvergencije ovako formiranog iter-ativnog procesa.

4.5. JACOBYEV METOD 5
Definicija 1. Norma matrice A je realan broj, u oznaci ‖A‖, saosobinama:
(1) ‖A‖ ≥ 0, ‖A‖ = 0 ⇔ A = 0
(2) ‖a · A‖ = |a| · ‖A‖, (a ∈ C, A ∈ R)
(3) ‖A + B‖ ≤ ‖A‖+ ‖B‖(4) ‖A ·B‖ ≤ ‖A‖ · ‖B‖ ⇒ (4’) ‖An‖ ≤ ‖A‖n
(5) |aij| ≤ ‖|A|‖(6) |aij| ≤ |bij| ⇒ ‖A‖ ≤ ‖B‖
Postoji nekoliko osnovnih normi definisanih nad matricama.
‖A‖1 = max1≤j≤n
n∑i=1
|aij| Sabiramo po vrstama i uzimamo maks.
‖A‖2 = max1≤i≤n
n∑j=1
|aij| Sabiramo po kolonama i uzimamo maks.
‖A‖3 =
(∑i,j
|aij|2)1/2
Teorema 1. Dovoljni uslovi konvergencije iterativnog procesa.
Ako je u iterativnom procesu (4.3), bilo koja norma matrice Bmanja od 1, tada iterativni proces konvergira ka resenju sistema (4.2),koje glasi X = (I −B)−1 · C.
Dokaz. Kako je
X(1) =BX(0) + C
X(2) =BX(1) + C odnosno X(2) = B2X(0) + BC + C
...X(k + 1) =BX(k) + C
Konacno:X(k + 1) = (I + B + · · ·+ Bk)C + Bk+1X(0)
Kako je
(I+B+· · ·+Bk)(I−B) = I−Bk+1 ⇒ (I−Bk+1)(I−B)−1 = I+B+· · ·+Bk.
Dakle
(4.4) X(k + 1) = (I −Bk+1)(I −B)−1C + Bk+1X(0)

6 GLAVA 4. SISTEMI LINEARNIH JEDNACINA
Kako je ‖B‖ < 1 ⇒ limk→∞
‖B‖k+1 = 0 ⇒ limk→∞
Bk+1 = 0. Pustajuci da
k →∞ u (4.4) dobijamo da je
X = (I −B)−1C,
sto znaci da iterativni proces konvergira ka resenju sistema.
Teorema 2. Potrebni i dovoljni uslovi kovergencije iterativnog procesa.
Iterativni proces definisan sa (4.3) konvergira ka resenju akko sesve sopstvene vrednosti matrice B po apsolutnoj strogo manje od 1.
4.6 Gauss-Siedelov metod
Postavlja se pitanje da li se proces konvergencije moze ubrzati. Tose moze uciniti tako sto se u okviru jednog kruga iteracije koriste vecdobijeni podaci iz prethodnog reda istog ciklusa. Naime, ako matricuB napisemo kao zbir dve matrice:
B =
0 0 0 · · · 0b21 0 0 · · · 0b31 b32 0 · · · 0...
......
. . ....
bn1 bn2 bn3 · · · 0
+
b11 b12 b13 · · · b1n
0 b22 b23 · · · b2n
0 0 b33 · · · b3n...
......
. . ....
0 0 0 · · · bnn
≡ B1+B2
tada iterativni postupak mozemo formirati pomocu:
(4.5) X(k + 1) = B1X(k + 1) + B2X(k) + C,
koji brze konvergira od prethodnog, Jacobyjevog, iterativnog pos-tupka.
Uslovi konvergencije Gauss-Siedelovog i Jacobyjevog iteraci-onog postupka su ekvivalentni (dokazati za Domaci zadatak) samo jematrica cije λ-vrednosti treba da budu < 1 u ovom slucaju drugacija,tj. det(λB1 + B2 − λI) = 0, odnosno λ su resenja jednacine:
∣∣∣∣∣∣∣∣∣
b11 − λ b12 · · · b1n
λb21 b22 − λ · · · b2n...
.... . .
...λbn1 bn2 · · · bnn − λ
∣∣∣∣∣∣∣∣∣= 0

4.6. GAUSS-SIEDELOV METOD 7
Objasnjenje: Iz iteracionog postupka (4.5) sledi da je:
(I −B1) ·X(k + 1) = B2 ·X(k) + C,
odnosno:X(k + 1) = (I −B1)
−1(B2 ·X(k) + C),
te je u ovom slucaju iteraciona matrica, koja odgovara iterativnompostupk (4.2), matrica (I −B1)
−1B2 i njene sopstvene vrednosti trebada budu po apsolutnoj vrednosti < 1, odnosno, sva resenja sledecejednacine treba da po apsolutnoj vrednosti budu manja od 1:
det((I −B1)
−1B2 − λI)
= 0 ⇔ det
1︷ ︸︸ ︷(I −B1)
−1 · det(B2 − λ(I −B1)
)= 0
⇔ det(B2 − λ(I −B1)
)= 0
Glava 5
Resavanje nelinearnihjednacina
Osnovni problem je resavanje jednacine f(x) = 0.
5.1 Lokalizacija resenja jednacine
Stav 1. Ako f ∈ C[a, b] i ako je f(a) ·f(b) < 0 onda na intervalu (a, b)jednacina f(x) = 0 ima bar jedno resenje.
Stav 2. Ako f ∈ C[a, b], f(a) · f(b) < 0 i ako je f monotona funkcija,onda na intervalu (a, b) jednacina f(x) = 0 ima tacno jedno resenje.
Teorema 1. Ako je x∗ ∈ [a, b] tacno resenje jednacine f(x) = 0,a x njeno priblizno resenje i 0 ≤ m1 ≤ min
x∈[a,b]|f ′(x)| < ∞, tada vazi
procena: |x∗ − x| ≤ |f(x)|m1
.
Dokaz. Ako na odsecku (x∗, x) (ili (x, x∗)) primenimo lagrange-ovuteoremu o srednjoj vrednosti imamo da je:
f(x)− f(x∗) = f ′(ξ)(x− x∗) → ξ ∈ (x∗, x)
ili
f(x∗)− f(x) = f ′(ξ)(x∗ − x) → ξ ∈ (x, x∗)
1

2 GLAVA 5. RESAVANJE NELINEARNIH JEDNACINA
odnosno, kako je f(x∗) = 0, dobijamo da je:
|x∗ − x| =∣∣∣∣f(x)f ′(ξ)
∣∣∣∣ ≤|f(x)|m1
.
U praksi se uzima da je m1 = minx∈[a,b]
|f ′(x)|.
Napomena: Ovo je teorema o proceni greske, pribliznim izracu-navanjem resenja jednacine.
5.2 Metoda polovljenja segmenata
Neka za jednacinu f(x) = 0, vazi da je f(a) · f(b) < 0. Podelimoodsecak [a, b] na dva odsecka [a, a+b
2] i [a+b
2, b]. Ako je f(a+b
2) = 0, tada
je x∗ = a+b2
resenje jednacine. U suprotnom ce vaziti da je
f(a) · f(
a + b
2
)< 0 Y f
(a + b
2
)· f(b) < 0.
Odaberimo one dve vrednosti granica jednog od intervala, na kojimaje proizvod negativan i oznacimo taj interval sa [a1, b1]. Nastavljajucipostupak, dobijamo niz intervala
· · · [a2, b2] ⊂ [a1, b1] ⊂ [a, b]
pri cemu svaki od njih sadrzi tacno resenje x∗.
(I) Kako suan+1 ≥ an > a
bn+1 ≤ bn < b
nizovi koji cine granice intervala monotoni i ograniceni te su i konver-gentni.
Nije tesko uociti da je bn − an ≤ b−a2n , odakle sledi da je
limn→∞
(bn − an) = 0 ⇒ limn→∞
bn = limn→∞
an ≡ x
Kako jelim
n→∞f(an)f(bn) = f 2(x) ≤ 0
5.3. N.-R. METODA, METODA TANGENTE 3
(zbog f(an) · f(bn) ≤ 0)⇒ f(x) = 0. Dakle, tacka kojoj konvergirajuje resenje polazne jednacine. Znaci, mozemo za priblizno resenje uzetiu svakoj iteraciji da je xn = an+bn
2.
(II) Procena greske: Ako je jednacinu potrebno resiti sa tacnoscuε postupamo na sledeci nacin:
Kako i tacno resenja x∗ i priblizno xn pripadaju intervalu [an, bn],tada je :
|x∗ − xn| ≤ 1
2(bn − an) ≤ b− a
2n+1< ε,
odakle se izracunava n, tj. broj iteracija potrebnih za tacnost ε.
5.3 Newton-Raphsonova metoda
Metoda tangente
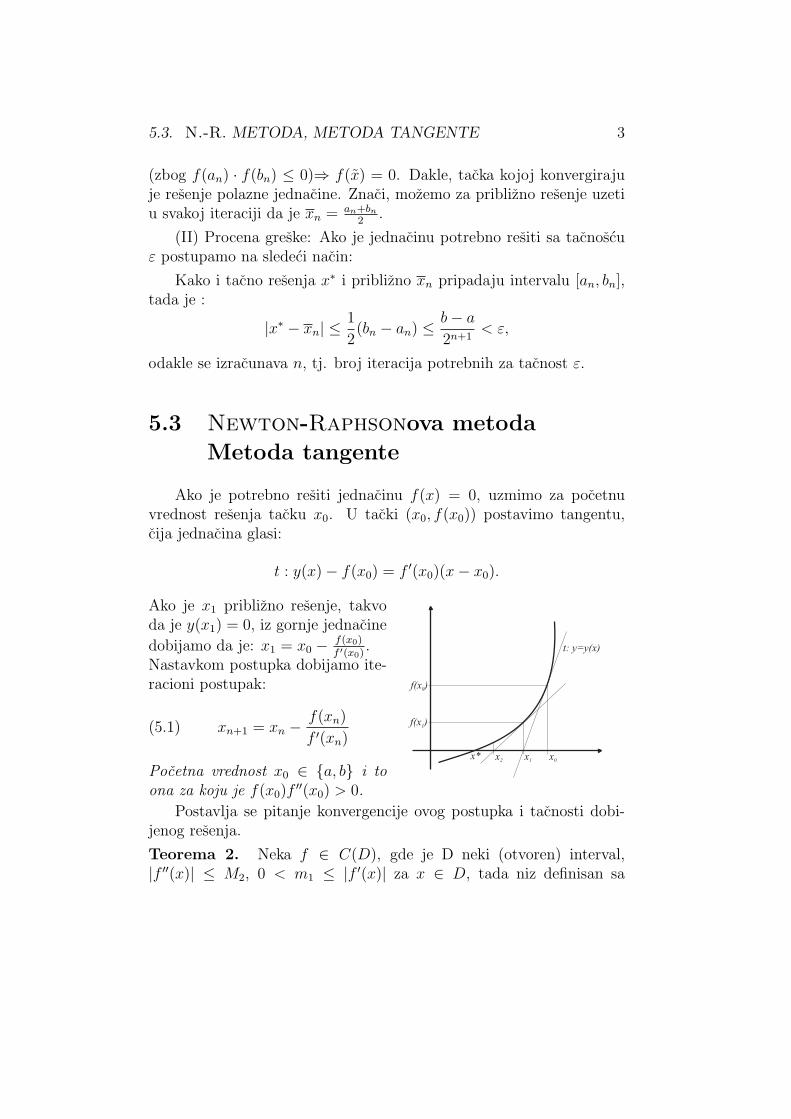
Ako je potrebno resiti jednacinu f(x) = 0, uzmimo za pocetnuvrednost resenja tacku x0. U tacki (x0, f(x0)) postavimo tangentu,cija jednacina glasi:
t : y(x)− f(x0) = f ′(x0)(x− x0).
Ako je x1 priblizno resenje, takvoda je y(x1) = 0, iz gornje jednacine
dobijamo da je: x1 = x0 − f(x0)f ′(x0)
.Nastavkom postupka dobijamo ite-racioni postupak:
(5.1) xn+1 = xn − f(xn)
f ′(xn)
Pocetna vrednost x0 ∈ {a, b} i toona za koju je f(x0)f
′′(x0) > 0.
Postavlja se pitanje konvergencije ovog postupka i tacnosti dobi-jenog resenja.
Teorema 2. Neka f ∈ C(D), gde je D neki (otvoren) interval,|f ′′(x)| ≤ M2, 0 < m1 ≤ |f ′(x)| za x ∈ D, tada niz definisan sa

4 GLAVA 5. RESAVANJE NELINEARNIH JEDNACINA
(5.1) konvergira ka resenju x∗ jednacine f(x) = 0 i pritom vazi ocena
|xn − x∗| ≤ M2
2 m1
|xn − xn−1|2.
Dokaz. Na osnovu Tejlorove formule, u okolini tacke xn−1, imamo daje:
f(xn) = f(xn−1 + (xn − xn−1))
= f(xn−1) + f ′(xn−1)(xn − xn−1) +12f ′′(ξ)(xn − xn−1)2,
pri cemu ξ ∈ (xn−1, xn).
Po definiciji postupka, iz (5.1) sledi da je podvuceni deo jednak 0, te je:
f(xn) =12f ′′(ξ)(xn − xn−1)2,
tj,
f(xn) ≤ 12M2|xn − xn−1|2
Zbog Teoreme 1 imamo da je:
|xn − x∗| ≤ |f(xn)|m1
,
odakle dobijamo da je
|xn − x∗| ≤ 12
M2
m1|xn − xn−1|2.
Ako sa tacnoscu ε treba naci resenje, uporedjivanje dva susedna korakaiteracije vrse se prema vezi:
12
M2
m1|xn − xn−1|2 ≤ ε, odnosno |xn − xn−1| ≤
√2εm1
M2.
5.3.1 Modifikacija Newtonove metode
Zbog izracunavanja, f ′(xn) se moze zameniti sa f ′(x0), te metodaglasi:
xn+1 = xn − f(xn)
f ′(x0)→ Usporava proces konvergencije.
Jedna od modifikacija Newtonove metode jeste i

5.3. N.-R. METODA, METODA TANGENTE 5
5.3.2 Metoda secice
Kako je f ′(xn) ≈ f(xn)−f(xn−1)xn−xn−1
, zamenom u Newtonov metod do-bijamo metod secice:
xn+1 = xn − f(xn)f(xn)−f(xn−1)
xn−xn−1
⇔ xn+1 = xn − (xn − xn−1)f(xn)
f(xn)− f(xn−1)
pri cemu za unapred zadanu gresku ε, imamo da je:
|xn − xn−1| ≤ m1ε
M1 −m1
Odakle naziv metoda secice:
Vidimo da secica kroz tacke (xn−1, f(xn−1)) i (xn, f(xn)) ima oblik:
y(x)− f(xn) =f(xn)− f(xn−1)
xn − xn−1
(x− xn)
Ako je y(x) = 0 za neko x dobi-jamo da je:
xn+1 = xn − (xn − xn−1)f(xn)
f(xn)− f(xn−1)
Za pocetnu tacku x0, intera-cionog procesa najcesce uzimamo aili b, i to postoje dva slucaja:
(I) Ako za x ∈ [a, b] vazi da jef ′(x) · f ′′(x) > 0, tada je x0 = a, ametod se moze modifikovati:
xn+1 = xn − f(xn)(b− xn)
f(b)− f(xn)
jer se tacno resenje nalazi krecuci se ka b.
(II) Ako je za x ∈ [a, b] ispunjeno f ′(x) · f ′′(x) < 0, tada je x0 = b,a metod glasi:
xn+1 = xn − f(xn)(a− xn)
f(a)− f(xn)
jer se naredna iteracija krece se ka a. Metoda secice sporije konvergiraod metode Newtona!

6 GLAVA 5. RESAVANJE NELINEARNIH JEDNACINA
5.3.3 Kombinovana metoda (Newtona i secice)
I slucaj: Za f ′(x) · f ′′(x) > 0
xn+1 = xn −f(xn)(xn − xn)
f(xn)− f(xn); xn+1 = xn − f(xn)
f ′(xn)
II slucaj: Za f ′(x) · f ′′(x) < 0
xn+1 = xn −f(xn)
f ′(xn); xn+1 = xn −
f(xn)(xn − xn)
f(xn)− f(xn).
Pri cemu je u oba slucaja x0 = a, x0 = b. Tacnost se postize kada je
|xn − xn| < 2ε, a za resenje se uzima: x∗ =xn+xn
2.

1 Uvod
Za pojedine matematicke probleme teorijska matematika moze da dokaze da resenje problemapostoji, cak i da je jedinstveno, ali ne daje postupke za odred-ivanje tog resenja. U primenjenojmatematici i tehnickim naukama to nije dovoljno, trazi se i resenje. Zadatak numerickematematike jeste dobijanje numerickog resenja odred-enog problema.
Da bi se problem resavao numerickim metodama on mora biti korektan, tj. da zazadate ulazne podatke postoji jedinstveno resenje problema, i da bude stabilan, tj. da malepromene u ulaznim podacima daju samo male promene resenja.
U mnogim slucajevima koristimo iterativne metode, cijim ponavljanjem se priblizavamotacnom resenju, ali zbog konacnog broja ponavljanja dobijeno numericko resenje odstupa odtacnog. Cilj nam je da dobijemo priblizno resenje problema koje sto manje odstupa od tacnog.
Cesto kontinualan problem koji resavamo zamenjujemo pribliznim problemom koji jeblizak polaznom, ali sa diskretnim promenljivim. Ovakav postupak predstavlja diskretizacijuproblema. Primeri diskretizacije problema su zamena izvoda razlikom i funkcije polinomom.
2 Pojam greske
Postoji nekoliko izvora gresaka koje se javljaju u resenju problema. Prema poreklu greskemogu biti:
1. Netklonjive - nastaju pri formiranju matematickog modela problema koji resavamo iliusled netacnosti pocetnih podatada ukoliko su dobijeni eksperimentalnim putem. Ovegreske se ne mogu izbeci.
2. Greska metode ili greska aproksimacije - nastaje usled diskretizacije problema, ili usledtoga sto se umesto beskonacnog iterativnog procesa koristi konacan proces.
3. Greska zaokruzivanja - nastaje usled nemogucnosti da mnoge realne brojeve zapisemosa konacnim brojem cifara, kao i zbog nacina zapisivanja brojeva na racunarima.
Zaokruzivanje. Pojedini brojevi se ne mogu zapisati sa konacnim brojem cifara. Zatopri racunu sa takvim brojevima koristimo njihove priblizne vrednosti zapisane sa konacnimbrojem cifara. Ako je x tacna vrednost, a x priblizna vrednost neke velicine, tada je |x− x|apsolutna greska, a |x − x|/|x| relativna greska. Posto su u praksi cesto tacne vrednostinepoznate, koristimo odgovarajuce granice ovih velicina:
|x− x| ≤ ∆(x) granica apsolutne greske∣∣∣∣x− x
x
∣∣∣∣ ≤ δ(x) granica relativne greske
Pri zaokruzivanju broja na k cifara, pri cemu je αk poslednja cifra koju zadravamo, vazesledeca pravila: αk se nece menjati ukoliko je αk+1 < 5 ili αk+1 = 5 i αk parno. U ostalimslucajevima αk se povecava za jedan.
1

3 Interpolacija
3.1 Lagrangeov interpolacioni polinom
Lagrangeov interpolacioni polinom Pn(x) sa (n + 1) cvorova je oblika:
Pn(x) =n∑
k=0
(x− x0) . . . (x− xk−1)(x− xk+1) . . . (x− xn)
(xk − x0) . . . (xk − xk−1)(xk − xk+1) . . . (xk − xn)yk (1)
pri cemu je yk = f(xk)Greska interpolacije funkcije f(x) Lagrangeovim interpolacionim polinomom Pn(x)data je sa:
|Rn(x)| ≤ Mn+1
(n + 1)!|(x− x0) . . . (x− xn)|,
Mn+1 = maxx∈[x0,xn]
|f (n+1)(x)|.
Mozemo da uvedemo sledece oznake:
Πn+1(x) = (x− x0)(x− x1) . . . (x− xn)
Π′n+1(xk) = (xk − x0) . . . (xk − xk−1)(xk − xk+1) . . . (xk − xn)
Dk = (x− xk)Π′n+1(xk)
Konstuisemo sledecu semu:
(x− x0) (x0 − x1) . . . (x0 − xn) D0
(x1 − x0) (x− x1) . . . (x1 − xn) D1
· · · ...(xn − x0) (xn − x1) . . . (x− xn) Dn
Πn+1(x) - proizvod elem. na dijagonali
Koristeci gornje oznake sada je Lagrangeov polinom dat na sledeci nacin:
Pn(x) = Πn+1(x)n∑
k=0
yk
Dk
. (2)
1. Konstruisati interpolacioni polinom P2(x) za funkciju f(x) =√
x ako su cvoroviinterpolacije x0 = 100, x1 = 121, x2 = 144. Izracunati P2(115) i oceniti gresku |√115−P2(115)|.Resenje: Funkcija f(x) =
√x je data u cvorovima x0 = 100, x1 = 121, x2 = 144
sledecom tabelom:
x 100 121 144f(x) 10 11 12
1
Lagrangeov interpolacioni polinom za funkciju f(x) =√
x je oblika:
P2(x) =(x− 121)(x− 144)
(100− 121)(100− 144)· 10 +
(x− 100)(x− 144)
(121− 100)(121− 144)· 11 +
+(x− 100)(x− 121)
(144− 100)(144− 121)· 12
= − 2
21252x2 +
1454
21252x +
87120
21252= 10.722755
P2(115) = 10.722755.
Odgovarajuci izvodi funkcije f(x) =√
x su:
f ′(x) =1
2√
x, f ′′(x) = − 1
4x3/2, f ′′′(x) =
3
8x5/2
Maksimum apsolutne vrednosti treceg izvoda funkcije je
M3 = max[100,144]
|f ′′′(x)| = 3
8 · 1005/2=
3
8· 10−5
Greska interpolacije u tacki 115 je:
|R2(115)| ≤ 3/8 · 10−5
3!|(115− 100)(115− 121)(115− 144)| ≤ 1.63 · 10−3
Uzimajuci u obzir postignutu tacnost,
P2(115) = 10.723√
115 = 10.723805 . . .
MAPLE:
> restart:
> points1 := [[100,10],[121,11],[144,12]]:
> polycurve := CurveFitting[PolynomialInterpolation](points1, x, form=Lagrange);
5 11
polycurve := --- (x - 121) (x - 144) - --- (x - 100) (x - 144)
462 483
3
+ --- (x - 100) (x - 121)
253
> plot(polycurve, x=9..12);
> CurveFitting[evalf(PolynomialInterpolation](points, 115, form=Lagrange));
10.72275551
> evalf(sqrt(115));
10.72380529
2
x
1211,51110,5109,5
4,9
4,8
4,85
9
4,75
Slika 1: Izlaz funkcije plot u MAPLE–u.
3.2 Newtonov interpolacioni polinom
Neka je funkcija f(x) zadata cvorovima interpolacije (xk, yk), pri cemu je yk = f(xk).Definisemo konacne razlike prvog reda:
∆yk = yk+1 − yk (3)
Konacne razlike viseg reda definisemo rekurzivno:
∆2yk = ∆(∆yk) = ∆(yk+1 − yk) = ∆yk+1 −∆yk = yk+2 − 2yk+1 + yk (4)
∆nyk = ∆(∆n−1yk) (5)
Neka su pri tom cvorovi ekvidistantni, tj. xk+1 − xk = h, k = 0, . . . n− 1.I Newtonov interpolacioni polinom (za interpolaciju unapred) je oblika:
N In(x) = y0 +
∆y0
1!u +
∆2y0
2!u(u− 1) + . . . +
∆ny0
n!u(u− 1) . . . (u− n + 1),
pri cemu je u = x−x0
h. Greska interpolacije funkcije f(x) I Newtonovim interpola-
cionim polinomom NI(x) data je sa:
RIn ≤
|∆n+1y|(n + 1)!
|u(u− 1) . . . (u− n)|.
Za ∆n+1y se uzima maksimalna vrednost po svim apsolutnim vrednostima konacnerazlike n + 1-og reda u odgovarajucim cvorovima, maxk |∆n+1yk|.
II Newtonov interpolacioni polinom (za interpolaciju unazad) je oblika:
N IIn (x) = yn +
∆yn−1
1!v +
∆2yn−2
2!v(v + 1) + . . . +
∆ny0
n!v(v + 1) . . . (v + n− 1),
pri cemu je v = x−xn
h.
Greska interpolacije funkcije f(x) II Newtonovim interpolacionim polinomomNII(x) data je sa:
RIIn ≤ |∆n+1y|
(n + 1)!|v(v + 1) . . . (v + n)|
3

Ekstrapolacija se vrsi kad trazimo procenu vrednosti funkcije f(x) u tacki x, x <x0 ili x > xn. Ove procene greske ne vaze za ekstrapolaciju. Greska ekstrapolacije jeveca od greske interpolacije.
I Newtonov interpolacioni polinom je pogodan za interpolaciju cvorova koji senalaze u prvoj polovini intervala [x0, xn] i za ekstrapolaciju tacaka x < x0. II New-tonov interpolacioni polinom je pogodan za interpolaciju cvorova koji se nalaze udrugoj polovini intervala [x0, xn] i za ekstrapolaciju tacaka x > xn.
2. Tablicom je zadana funkcija f(x) :
x 15 20 25 30 35 40 45 50 55f(x) 0.2588 0.3420 0.4226 0.5000 0.5736 0.6428 0.7071 0.7660 0.8192
Koristeci konacne razlike zakljucno sa cetvrtim redom, izracunati f(18), f(53), f(12).
Resenje: Popunimo tablicu vrednostima konacnih razlika koje racunamo iz odgo-varajucih formula (4) i (5).
x y ∆y ∆2y ∆3y ∆4y15 0.2588 0.0832 −0.0026 −0.0006 020 0.3420 0.0806 −0.0032 −0.0006 025 0.4226 0.0774 −0.0038 −0.0006 0.000130 0.5000 0.0736 −0.0044 −0.0005 035 0.5736 0.0692 −0.0049 −0.0005 0.000240 0.6428 0.0643 −0.0054 −0.000345 0.7071 0.0589 −0.005750 0.7660 0.053255 0.8192
Za izracunavanje vrednosti f(18) koristimo I Newtonov interpolacioni polinom postose tacka 18 nalazi u prvoj polovini intervala [15, 55].
N I3 (x) = 0.2588 + 0.0832u− 0.0026
u(u− 1)
2− 0.0006
u(u− 1)(u− 2)
6(6)
pri cemu je u = x−x0
h, h = 5, x0 = 15, x = 18, pa je u = 18−15
5= 0.6.
Dakle, priblizna vrednost funkcije f(x) u tacki 18 je
f(18) ≈ N I3 (18) = 0.3090.
Greska je procenjena sledecim izrazom:
RI3 ≤
|∆4y|4!
|u(u− 1)(u− 2)(u− 3|) =0.0002
240.6 · 0.4 · 1.4 · 2.4 = 6.7 · 10−6
MAPLE:
> points :=
[[15,0.2588],[20,0.3420],[25,0.4226],[30,0.5000],[35,0.5736],
[40,0.6428],[45,0.7071],[50,0.7660],[55,0.8192]]:
> CurveFitting[PolynomialInterpolation](points, 18, form=Newton);
0.3089845746
4

Racunanje vrednosti f(12) vrsimo ekstrapolacijom pomocu I Newtonovog inter-polacionog polinoma. Sada je x = 12, pa je u = 12−15
5= −0.6.
Iz jednacine (6) dobija se da je priblizna vrednost f(x) u tacki 12
f(12) ≈ N I3 (12) = 0.2079.
Posto se radi o ekstrapolaciji, greska racuna je veca nego pri interpolaciji i formulaprocene greske I Newtonovim interpolacionim polinomom ne vazi.
Za priblizno izracunavanje vrednosti f(53) koristimo II Newtonov interpolacioni
polinom:
N II3 (x) = 0.8192 + 0.0532v − 0.0057
v(v + 1)
2− 0.0003
v(v + 1)(v + 2)
6
pri cemu je v = x−x8
h, h = 5, x8 = 55, x = 53, pa je v = 53−55
5= −0.4.
f(53) ≈ N II3 (53) = 0.7986.
Gresku procenjujemo izrazom:
RII3 ≤ |∆4y|
4!|v(v + 1)(v + 2)(v + 3)| = 0.0002
240.4 · 0.6 · 1.6 · 2.6 = 8.3 · 10−6.
3. U MAPLEu nacrtati grafik funkcije e−x2
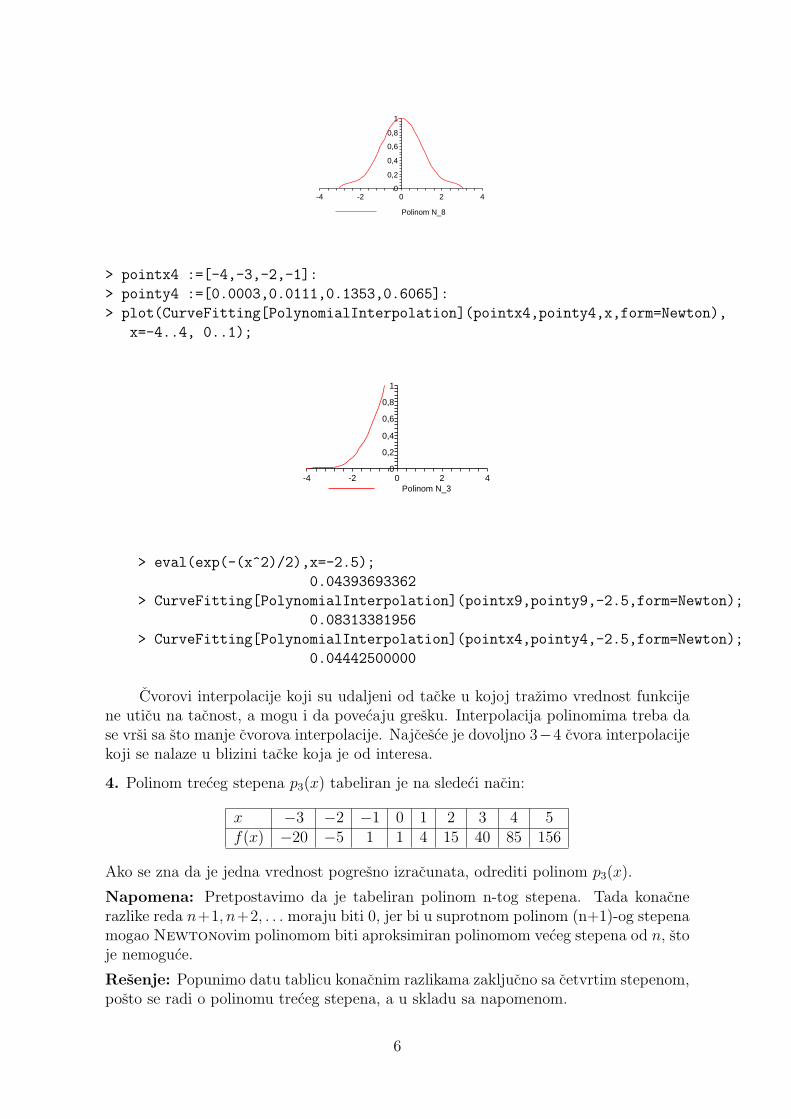
2 na intervalu [−4, 4]. Nacrtati grafikeNewtonovih interpolacionih polinoma stepena 8 u cvorovima na intervalu [−4, 4] sakorakom 1 i stepena 3 na intervalu [−4,−1] sa korakom 1. Izracunati vrednosti funkcijei oba Newtonova interpolaciona polinoma u tacki −2.5. Komentarisati dobijene rezul-tate.
Resenje:
> plot( exp(-(x^2)/2),x= -4..4, 0..1);
>
1
0,8
0,6
0,4
0,2
0420-2-4
Funkcija f(x),
> pointx9 :=[-4,-3,-2,-1,0,1,2,3,4]:
> pointy9 := [0.0003,0.0111,0.1353,0.6065,1,0.6065,0.1353,0.0111,0.0003]:
> plot(CurveFitting[PolynomialInterpolation](pointx9,pointy9,x,form=Newton),
x=-4..4, 0..1);
5
1
0,8
0,6
0,4
0,2
0420-2-4
Polinom N_8
> pointx4 :=[-4,-3,-2,-1]:
> pointy4 :=[0.0003,0.0111,0.1353,0.6065]:
> plot(CurveFitting[PolynomialInterpolation](pointx4,pointy4,x,form=Newton),
x=-4..4, 0..1);
1
0,8
0,6
0,4
0,2
0420-2-4
Polinom N_3
> eval(exp(-(x^2)/2),x=-2.5);
0.04393693362
> CurveFitting[PolynomialInterpolation](pointx9,pointy9,-2.5,form=Newton);
0.08313381956
> CurveFitting[PolynomialInterpolation](pointx4,pointy4,-2.5,form=Newton);
0.04442500000
Cvorovi interpolacije koji su udaljeni od tacke u kojoj trazimo vrednost funkcijene uticu na tacnost, a mogu i da povecaju gresku. Interpolacija polinomima treba dase vrsi sa sto manje cvorova interpolacije. Najcesce je dovoljno 3−4 cvora interpolacijekoji se nalaze u blizini tacke koja je od interesa.
4. Polinom treceg stepena p3(x) tabeliran je na sledeci nacin:
x −3 −2 −1 0 1 2 3 4 5f(x) −20 −5 1 1 4 15 40 85 156
Ako se zna da je jedna vrednost pogresno izracunata, odrediti polinom p3(x).
Napomena: Pretpostavimo da je tabeliran polinom n-tog stepena. Tada konacnerazlike reda n+1, n+2, . . . moraju biti 0, jer bi u suprotnom polinom (n+1)-og stepenamogao Newtonovim polinomom biti aproksimiran polinomom veceg stepena od n, stoje nemoguce.
Resenje: Popunimo datu tablicu konacnim razlikama zakljucno sa cetvrtim stepenom,posto se radi o polinomu treceg stepena, a u skladu sa napomenom.
6

x p3(x) ∆p3 ∆2p3 ∆3p3 ∆4p3
−3 −20 15 −9 3 6−2 −5 6 −6 9 −4−1 1 0 3 5 1
0 1 3 8 6 01 4 11 14 6 02 15 25 20 63 40 45 264 85 715 156
Prema napomeni, konacne razlike cetvrtog reda treba da imaju vrednost 0, posto jetabeliran polinom treceg stepena. Posto su ∆4p3(x3) i ∆4p3(x4) jednake 0 mozemopretpostaviti da nije bilo greske u cvorovima koji ucestvuju u formiranju ove dve vred-nosti. Kako je
∆4p3(x3) = p3(x7)− 4p3(x6) + 6p3(x5)4p3(x4) + p3(x3)
∆4p3(x4) = p3(x8)− 4p3(x7) + 6p3(x6)4p3(x5) + p3(x4)
to smatramo da su vrednosti polinoma u cvorovima x3, x4, x5, x6, x7 i x8 izracunati bezgreske. Treba da dobijemo da je ∆4p3(x2) = 0, pa na tom mestu pisemo 0. Posto je
∆4p3(x2) = ∆3p3(x3)−∆3p3(x2)
i smatramo da je p3(x3) tacna, iz ove relacije ispravljamo vrednost ∆3p3(x2) = 6. Naovaj nacin se vracamo kroz tablicu ispravljajuci ∆2p3(x2) = 2, ∆p3(x2) = 1 i p3(x2) = 0.Formiramo novu tablicu u kojoj je ispravljeno p3(x2) = 0.
x p3(x) ∆p3 ∆2p3 ∆3p3 ∆4p3
−3 −20 15 −10 6 0−2 −5 5 −4 6 0−1 0 1 2 6 0
0 1 3 8 6 01 4 11 14 6 02 15 25 20 63 40 45 264 85 715 156
Sad su sve konacne razlike cetvrtog reda 0, sto znaci da je polinom p3(x) tacno tabeliran.Koristeci I Newtonov interpolacioni polinom, uz h = 1, imamo:
N I3 (x) = −20 + 15(x + 3) +
−10
2!(x + 3)(x + 2) +
6
3!(x + 3)(x + 2)(x + 1)
= −20 + 15x + 45− 5x2 − 25x− 30 + x3 + 6x2 + 11x + 6
= x3 + x2 + x + 1 ≡ p3(x)
7

3.3 Inverzna interpolacija
Resavamo problem tipa:Naci tacku x∗ tako da je f(x∗) = y∗, pri cemu je y∗ unapred poznat broj.
Ukoliko je funkcija f(x) zadata ekvidistantnom mrezom, mozemo da koristimoNewtonov interpolacioni polinom. U suprotnom, invertujemo tablicu i koristimoLagrangeov interpolacioni polinom.
5. Tablicom je zadana funkcija f(x)
x 10 20 30 40f(x) 0.1763 0.3640 0.5774 0.8391
Inverznom interpolacijom izracunati x∗ i x∗∗ za koje vazi f(x∗) = 0.25 i f(x∗∗) = 0.8.
Resenje: Popunimo tablicu konacnim razlikama, yk = f(xk).
x y ∆y ∆2y ∆3y10 0.1763 0.1877 0.0257 0.022620 0.3640 0.2134 0.048330 0.5774 0.261740 0.8391
Posto je f(x∗) = 0.25, prema vrednostima za yk, ocekujemo da bude x∗ ∈ [10, 20],pa koristimo I Newtonov interpolacioni polinom.
y = y0 + u∆y0 +u(u− 1)
2!∆2y0 +
u(u− 1)(u− 2)
3!∆3y0 (7)
Kako je u = x−x0
h, h = 10, y = 0.25, trazimo u. Iz (7) sledi:
u =y
∆y0
− y0
∆y0
− u(u− 1)
2
∆2y0
∆y0
− u(u− 1)(u− 2)
6
∆3y0
∆y0
(8)
u =0.25
0.1877− 0.1763
0.1877− u(u− 1)
2
0.0257
0.1877− u(u− 1)(u− 2)
6
0.0226
0.1877(9)
u = 0.39265− u(u− 1) · 0.06846− u(u− 1)(u− 2) · 0.02007 (10)
Sada formiramo iterativni proces po u na sledeci nacin. Za poznatu vrednost un sledecuiteraciju un+1 racunamo po formuli:
un+1 = 0.39265−un(un−1) ·0.06846−un(un−1)(un−2) ·0.02007, n = 0, 1, . . . (11)
Moze se pokazati da je ovo preslikavanje kontrakcija, pa kao takvo, po Banahovojteoremi ima nepokretnu tacku, koja je resenje jednacine (10). Pocetna vrednost uiterativnom postupku (11) je u0 = 0. Kada zamenimo tu vrednost u desnu stranujednacine dobicemo sledecu vrednost u1.
u1 = 0.39265− u0(u0 − 1) · 0.06846− u0(u0 − 1)(u0 − 2) · 0.02007
8

Sada je u1 = 0.39265. Ponavljamo postupak tako sto na desnoj strani dobijenu vrednostza u1.
u2 = 0.39265− u1(u1 − 1) · 0.06846− u1(u1 − 1)(u1 − 2) · 0.02007
Na ovaj nacin dobijamo sledeci niz:
u0 = 0
u1 = 0.39265
u2 = 0.40128
u3 = 0.40139
u4 = 0.40139
Vrednosti za u3 i u4 su iste, pa tu zaustavljamo proces, i za trazenu vrednost u uzimamou = u4 = 0.40139. Ovu vrednost za u smo dobili za y = 0.25, pa ona odgovara vrednostix∗. Sada je
x = uh + x0 = 0.40139 · 10 + 10 = 14.0139
tj. x∗ = 14.0139.
Vrednost y = 0.8 se nalazi pri kraju tabele, pa cemo za nalazenje vrednosti x∗∗,za koju vazi f(x∗∗) = 0.8, koristiti II Newtonov interpolacioni polinom:
y = y3 + v∆y2 +v(v + 1)
2!∆2y1 +
v(v + 1)(v + 2)
3!∆3y0 (12)
Sada je:
v =y
∆y2
− y3
∆y2
− v(v + 1)
2
∆2y1
∆y2
− v(v + 1)(v + 2)
6
∆3y0
∆y2
(13)
v = −0.14941− v(v + 1) · 0.09228− v(v + 1)(v + 2) · 0.01439 (14)
Iz (14) formiramo iterativni proces:
vn+1 = −0.14941−vn(vn+1) ·0.09228−vn(vn+1)(vn+2) ·0.01439, n = 0, 1, . . . (15)
Za pocetnu vrednost uzimamo v0 = 0 i koristeci (15) dobijamo niz:
v0 = 0
v1 = −0.14941
v2 = −0.13430
v3 = −0.13556
v4 = −0.13546
v5 = −0.13546
Vrednosti v4 i v5 su se poklopile, pa stajemo sa iterativnim procesom. Sada jev = v5 = −0.13546, v = x−x3
hi
x = vh + x3 = −0.13546 · 10 + 40 = 38.6454
tj. x∗∗ = 38.6454.
6. Naci nule funkcije:
9
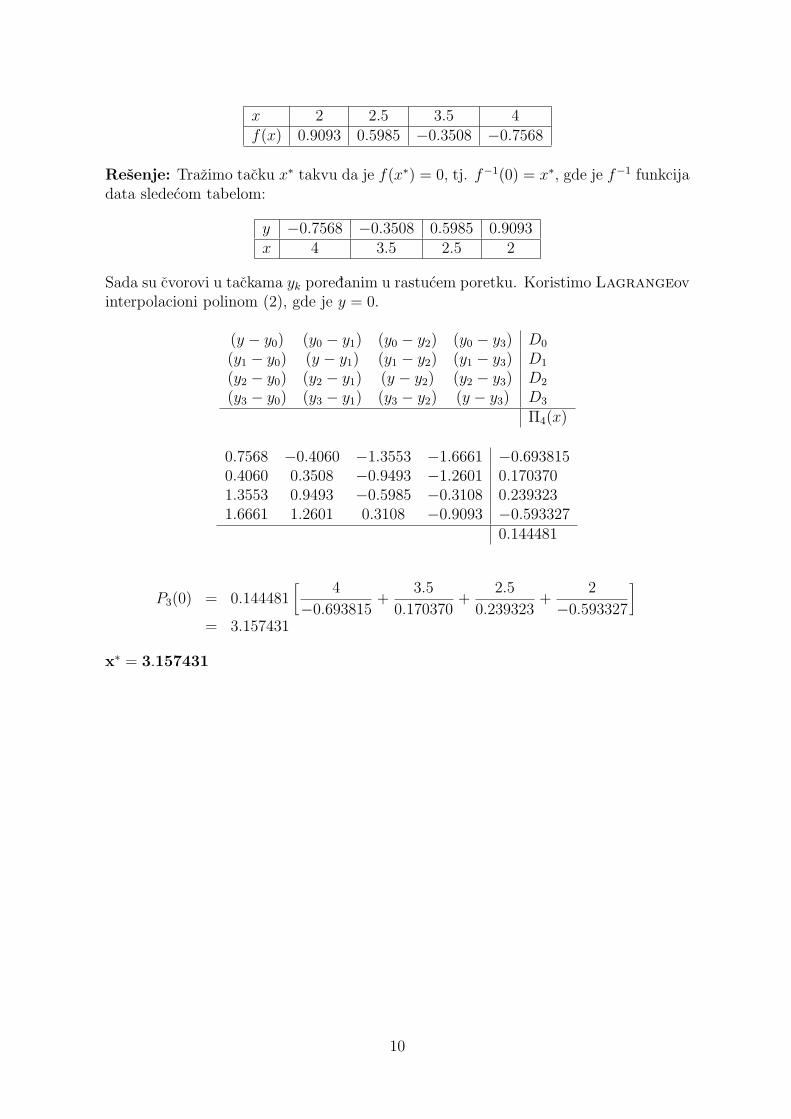
x 2 2.5 3.5 4f(x) 0.9093 0.5985 −0.3508 −0.7568
Resenje: Trazimo tacku x∗ takvu da je f(x∗) = 0, tj. f−1(0) = x∗, gde je f−1 funkcijadata sledecom tabelom:
y −0.7568 −0.3508 0.5985 0.9093x 4 3.5 2.5 2
Sada su cvorovi u tackama yk pored-anim u rastucem poretku. Koristimo Lagrangeovinterpolacioni polinom (2), gde je y = 0.
(y − y0) (y0 − y1) (y0 − y2) (y0 − y3) D0
(y1 − y0) (y − y1) (y1 − y2) (y1 − y3) D1
(y2 − y0) (y2 − y1) (y − y2) (y2 − y3) D2
(y3 − y0) (y3 − y1) (y3 − y2) (y − y3) D3
Π4(x)
0.7568 −0.4060 −1.3553 −1.6661 −0.6938150.4060 0.3508 −0.9493 −1.2601 0.1703701.3553 0.9493 −0.5985 −0.3108 0.2393231.6661 1.2601 0.3108 −0.9093 −0.593327
0.144481
P3(0) = 0.144481[
4
−0.693815+
3.5
0.170370+
2.5
0.239323+
2
−0.593327
]
= 3.157431
x∗ = 3.157431
10

4 Numericko diferenciranje
7. Funkcija f(x) je zadata tabelom:
x −2 0 2 4 6 8f(x) 2.1272 1.5167 1.7044 3.3285 5.0229 7.2814
Koristeci konacne razlike, zakljucno sa trecim redom, odrediti tacku x∗ minimuma funkcijef(x) i odrediti vrednost minimuma f(x∗).Resenje: Najpre popunimo tablicu konacnim razlikama:
x y ∆y ∆2y ∆3y
−2 2.1272 −0.6085 0.7942 0.64420 1.5187 0.1857 1.4384 −1.36812 1.7044 1.6241 0.0703 0.49384 3.3285 1.6944 0.56416 5.0229 2.25858 7.2814
Prema vrednostima za yk = f(xk) vidimo da funkcija dostize minimalnu vrednost u intervalu[−2, 2], tj. u okolini tacke 0. Posto je ∆f po apsolitnoj vrednosti u intervalu [0, 2] manje negou intervalu [−2, 0] verovatnije je da se minimum nalazi u intervalu [0, 2] (ali nije obaveznotako.) Zato cemo formirati I Njutnov interpolacioni polinom uzimajuci tacku 0 za pocetnu:
NI(x) = y1 + ∆y1u +∆2y1
2!u(u− 1) +
∆3y1
3!u(u− 1)(u− 2)
Neophodan uslov da funkcija ima minimum u tacki x jeste da vrednost prvog izvoda u tojtacki bude 0. Prvi izvod I Njutnovog interpolacionog polinoma u ovom slucaju je:
N ′I(x) =
1h
[∆y1 +
∆2y1
2!(2u− 1) +
∆3y1
3!(3u2 − 6u + 2)
](1)
Dovoljno je da izjednacimo izraz u zagradi sa 0 i zamenimo poznate vrednosti iz tablice:
0.1857 +1.4384
2(2u− 1) +
−1.36816
(3u2 − 6u + 2) = 0 (2)
−0.6840u2 + 2.8065u− 0.9895 = 0 (3)
Formiramo iterativni proces iz (3) po lineranom clanu:
un+1 =0.98952.8065
+0.68402.8065
u2n
un+1 = 0.3526 + 0.2437u2n (4)
Pocetna vrednost u iterativnom postupku je u0 = 0. Iz (4) dobijamo niz iteracija:
1

u0 = 0u1 = 0.3526u2 = 0.3829u3 = 0.3883u4 = 0.3893u5 = 0.3895u6 = 0.3896u7 = 0.3896
Dobili smo u = u7 = 0.3896. Sada je u = x−x1h = x−0
2 , posto je pocetna tacka od koje smoformirali Njutnov interpolacioni polinom x1 = 0. Dakle, funkcija f(x) dostize minimalnuvrednost u tacki x = 2 · u + 0 = 2 · 0.3896 + 0, tj.
x∗ = 0.7792.
Odredimo minimum funkcije f(x). Funkcija je zadata tabelom, pa cemo koristiti I Njutnovinterpolacioni polinom sa pocetnom tackom x0.
NI(x) = 2.1272− 0.6085u +0.7942
2!u(u− 1) +
0.64423!
u(u− 1)(u− 2)
gde je u = x∗−x0h = 0.7792−(−2)
2 = 1.3896. Sada je:
f(x∗) ≈ NI(x∗) = 1.4611
¤
4.1 Izvod-enje formula za numericko diferenciranje
Greska numerickog diferenciranja R je zbir dve greske, greska metode RM i greska racuna r,koja nastaje kao posledica zaokruzivanja.
R = RM + r. (5)
Greska racuna r jeste maksimalna greska sa kojom je zadata vrednost funkcije f .
8. Neka je funkcija f(x) ∈ C2[a, b] cije su poznate vrednosti u ekvidistantnim cvorovima
a = x0 < x1 < . . . < xn = b
Dokazati da je
f ′(xk) =∆fk
h− f ′′(ξ)
2h, ξ ∈ (xk, xk+1). (6)
Resenje: Koristimo Tejlorov razvoj funkcije u okolini tacke xk.
f(xk+1) = f(xk + h) = f(xk) +f ′(xk)
1!(xk+1 − xk) +
f ′′(ξ)2!
(xk+1 − xk)2
2

Odavde direktno sledi
f(xk+1 = f(xk) + f ′(xk)h +f ′′(ξ)
2h2)
f ′(xk) =f(xk+1)− f(xk)
h− f ′′(ξ)
2h
f ′(xk) =∆fk
h− f ′′(ξ)
2h
¤9. Neka je funkcija f(x) ∈ C3[a, b] cije su poznate vrednosti u ekvidistantnim cvorovima
a = x0 < x1 < . . . < xn = b
Dokazati da je
f ′(
xk +h
2
)=
∆fk
h− f ′′′(ξ)
24h2, ξ ∈ (xk, xk+1). (7)
Resenje: Uvedimo smenu:
x = xk +h
2.
Odavde je direktno:
xk = x− h
2xk+1 = x +
h
2.
Primenjujemo Tejlorov razvoj funkcije u okolini tacke x do treceg stepena.
f(xk) = f
(x− h
2
)= f(x)− f ′(x)
1!h
2+
f ′′(x)2!
(h
2
)2
− f ′′′(ξ1)3!
(h
2
)3
, ξ1 ∈ [xk, x](8)
f(xk+1) = f
(x +
h
2
)= f(x) +
f ′(x)1!
h
2+
f ′′(x)2!
(h
2
)2
+f ′′′(ξ2)
3!
(h
2
)3
, ξ2 ∈ [x, xk+1](9)
Oduzmimo (9) − (8) i, posle skracivanja i deljenja sa h, dobija se:
f(xk+1)− f(xk)h
= f ′(x) +h2
48(f ′′′(ξ1) + f ′′′(ξ2)
)(10)
Posto funkcija f(x) ima neprekidan treci izvod, to postoji tacka ξ ∈ [xk, xk+1] takva da je:
f ′′′(ξ1) + f ′′′(ξ2)2
= f ′′′(ξ)
Konacno je
f ′(
xk +h
2
)=
∆f(xk)h
− f ′′′(ξ)24
h2, ξ ∈ (xk, xk+1).
¤Napomena 1.: U prethodnom zadatku Tejlorov red razvijamo do treceg reda posto seclanovi drugog reda skracuju.
Napomena 2.: Posmatrajmo formule (6) i (7). Prvi sabirak u obe formule predstavljaaproksimaciju f ′(xk), tj. f ′(xk + h/2), a drugi sabirak gresku formule diferenciranja (greskametode). Primetimo da je prvi izvod u obe tacke, xk i xk +h/2, aproksimiran istim izrazom,ali su greske pribliznih vrednosti koje se dobijaju tim aproksimacijama razlicite.
Napomena 3. Za korak h kazemo da je optimalan korak interpolacije (ili maksimalan korakinterpolacije) ako funkcija ukupne greske R(h) ima minimum u h.
10. Neka se vrednosti funkcije f(x) mogu izraziti sa tacnoscu ε i neka je max |f (n)(x)| = Mn.Naci optimalan korak h za numericko diferenciranje po formuli:
3

a) f ′(xk) ≈ ∆fkh
b) f ′(xk + h2 ) ≈ ∆fk
h
c) f ′′(xk) ≈ ∆2fk−1
h2 = f(xk+1)−2f(xk)+f(xk−1)h2
Resenje: a) U zadatku 2. smo dokazali formulu (6). (Pogledati Napomenu 2. iza Zadatka9.) Dakle, ova aproksimacija vazi. Nad-imo optimalan korak h. Greska metode je (sledi izZadatka 9., pogledati Napomenu 2. iza zadatka 9!)
RM =∣∣∣∣−f ′′(ξ)
h
2
∣∣∣∣ ≤ M2 · h
2.
Greska racuna je (sledi iz toga sto su vrednosti funkcije date sa tacnoscu ε, a iz Zadatka 7.je f ′(xk) ≈ ∆fk
h = f(xk+1)−f(xk)h )
r =2ε
h
Dakle, ukupna greska je
R(h) = RM + r = M2 · h
2+
2ε
h
Trazimo h koje ce da minimizuje gresku R(h), tj.
R′(h) =M2
2− 2ε
h2= 0
Sada je optimalan korak za numericko diferenciranje ovom formulom
h =√
4ε
M2.
b) Slicno kao pod a), a kao posledica Zadatka 9. i formule (7), imamo da je greska metode:
RM =h2M3
24
a greska racuna
r =2ε
h
pa je ukupna greska:
R(h) =h2M3
24+
2ε
h.
Trazimo h koje ce da minimizuje gresku R(h), tj.
R′(h) =hM3
12− 2ε
h2= 0
Sada je optimalan korak za numericko diferenciranje ovom formulom
h = 3
√24εM3
.
c) Najpre dokazimo formulu
f ′′(xk) ≈ f(xk+1)− 2f(xk) + f(xk−1)h2
(11)
4

Pod-imo od desne strane predlozene formule:
f(xk+1)− 2f(xk) + f(xk−1)h2
=1h2
[f(xk + h)− 2f(xk) + f(xk − h)] =
=1h2
[f(xk) +f ′(xk)
1!h +
f ′′(xk)2!
h2 +f ′′′(xk)
3!h3 +
f IV (ξ1)4!
h4 −
−2f(xk) + f(xk)− f ′(xk)1!
h +f ′′(xk)
2!h2 − f ′′′(xk)
3!h3 +
f IV (ξ2)4!
h4]
Ovde smo iskoristili razvoj funkcije u Tejlorov red u okolini tacke xk do cetvrtog reda.
f(xk+1)− 2f(xk) + f(xk−1)h2
= f ′′(xk) +h2
12f IV (ξ)
Pritom, ξ1 ∈ (xk−1, xk), ξ2 ∈ (xk, xk+1). Ako funkcija f(x) ima neprekidan cetvrti izvod naintervalu [xk−1, xk+1], tada postoji tacka ξ ∈ (xk−1, xk+1) takva da vazi:
f IV (ξ1) + f IV (ξ2)2
= f IV (ξ).
Ovim smo dokazali predlozenu formulu sa greskom metode:
RM =h2M4
12
i greskom racuna
r =4ε
h2
Ukupna greska je
R(h) =h2M4
12+
4ε
h2.
Trazimo korak h koji minimizuje gresku:
R′(h) =hM4
12− 8ε
h3.
Optimalan korak za numericko diferenciranje po formuli (11) je
h = 4
√48εM4
.
¤
Napomena 4. Greska formule za numericko diferenciranje se smanjuje sa smanjenjem korakainterpolacije h. U tom slucaju su aproksimaciju izvoda tacnije, posto su cvorovi koje koristimopri aproksimaciji blizi. S druge strane, vrednosti f(x), f(x±h), f(x±2h) itd. postaju bliske zamale vrednosti koraka h, pa dolazi do skracivanja tih vrednosti u formulama za diferenciranje.U tom slucaju se povecava uticaj racunske greske, pa ukupna greska raste. Zato je potrebnoodrediti otimalan korak interpolacije h koji ce obezbediti minimalnu gresku.
11. Neka se vrednosti funkcije mogu odrediti sa tacnoscu ε i neka je Mn = maxx∈[a,b]
|f (n)(x)|.Naci optimalan korak za numericko diferenciranje po formuli
f ′(x) =12h
[−3f(xk) + 4f(xk+1)− f(xk+2)] ,
5

pri cemu su cvorovi ekvidistantni.
Resenje: Koristimo razvoj funkcije u Tejlorov red u okolini tacke xk. Cvorovi su ekvidis-tantni, tj. xk+1 = xk + h, xk+2 = xk + 2h. Pod-imo od desne strane predlozene formule.
12h
[−3f(xk) + 4f(xk+1)− f(xk+2)] =
12h
[−3f(xk) + 4
(f(xk) +
f ′(xk)1!
h +f ′′(xk)
2!h2 +
f ′′′(ξ)3!
h3
)−
−(
f(xk) +f ′(xk)
1!(2h) +
f ′′(xk)2!
(2h)2 +f ′′′(ξ)
3!(2h)3
)]
=12h
[2f ′(xk)h− 2
3f ′′′(ξ)h3
]= f ′(xk)− 1
3f ′′′(ξ)h2
gde je ξ ∈ [xk, xk+2] neka tacka. Dakle, dokazali smo formulu:
f ′(xk) ≈ 12h
[−3f(xk) + 4f(xk+1)− f(xk+2)] (12)
sa greskom metode RM = h2M33 i greskom racuna r = 8ε
2h . Trazimo optimalan korak h kojiminimizuje ukupnu gresku R(h) = RM + r, tj.
R′(h) =23hM3 − 4ε
h2= 0.
Odavde je optimalan korak h
h = 3
√6ε
M3
¤
12. Funkcija f(x) tabelirana je korakom h > 0 u ekvidistantnim cvorovima x0, x1, x2, x3, x4.Dokazati aproksimacije:
a) f ′(x0) = 112h [−25f0 + 48f1 − 36f2 + 16f3 − 3f4]
b) f ′(x1) = 112h [−3f0 − 10f1 + 18f2 − 6f3 + f4]
c) f ′(x2) = 112h [f0 − 8f1 + 8f3 − f4]
gde je fk = f(xk).
Resenje: Koristimo I Njutnov interpolacioni polinom:
x y ∆f ∆2f ∆3f ∆4f
x0 f0 f1 − f0 f2 − 2f1 + f0 f3 − 3f2 + 3f1 − f0 f4 − 4f3 + 6f2 − 4f1 + f0
x1 f1 f2 − f1 f3 − 2f2 + f1 f4 − 3f3 + 3f2 − f1
x2 f2 f3 − f2 f4 − 2f3 + f2
x3 f3 f4 − f3
x4 f4
I Njutnov interpolacioni polinom je oblika:
NI(x) = f0 +(f1− f0)u+12!
(f2− 2f1 + f0)(u2−u)+13!
(f3− 3f2 +3f1− f0)(u3− 3u2 +2u)+
6

+14!
(f4 − 4f3 + 6f2 − 4f1 + f0)(u4 − 6u3 + 11u2 − 6u)
pri cemu je u = x−x0h . Nama treba aproksimacija prvog izvoda funkcije f(x), pa koristimo
izvod I Njutnovog interpolacionog polinoma:
N ′I(x) =
1h
[f1 − f0 +
12(f2 − 2f1 + f0)(2u− 1) +
16(f3 − 3f2 + 3f1 − f0)(3u2 − 6u + 2)+
+124
(f4 − 4f3 + 6f2 − 4f1 + f0)(4u3 − 18u2 + 22u− 6)]
a) Trazimo procenu vrednosti f ′(x0), pa zamenimo u gornju jednacinu x = x0. U tom slucajuje u = x−x0
h = 0, pa za u = 0, posle sred-ivanja poslednjeg izraza, dobijamo trazeni izraz poda).b) Slicno kao pod a), samo je sada x = x1, a u = x1−x0
h = 1, posto su cvorovi ekvidistantni,tj. x1 − x0 = h.
c) Sada je x = x2, a u = 2. ¤
7

4 Numericka integracija
4.1 Newton-Cotesove formule
Opste trapezno pravilo sa n + 1 ekvidistantnih cvorova, (x0, x1, . . . , xn),a = x0 < x1 < . . . < xn = b, h = xk − xk−1, je dato formulom:
∫ b
af(x)dx =
h
2(f0 + 2(f1 + . . . + fn−1) + fn) + R (1)
gde je fk = f(xk), i RM greska trapeznog pravila koja je oblika:
RM = (b− a)M2h
2
12. (2)
Opste Simpsonovo pravilo kad imamo 2n+1 ekvidistantnih cvorova, (x0, x1, . . . , x2n),a = x0 < x1 < . . . < x2n = b, je dato formulom:
∫ b
af(x)dx =
h
3(f0 + 4(f1 + f3 + . . . + f2n−1) + 2(f2 + f4 + . . . + f2n−2) + f2n) + R (3)
gde je fk = f(xk), i RM greska Simpsonovog pravila koja je oblika:
RM = (b− a)M4h
4
180. (4)
Ovde je Mk = maxx∈[a,b] |f (k)(x)|. Za koriscenje Simpsonove formule potreban je neparanbroj cvorova.Ukupna greska koja nastaje prilikom odred-ivanja integrala kvadraturnim formulama tipa(1) i (3) nastaje pod uticajem greske metode, RM , i greske racuna, r, koja je posledicazaokruzivanja:
R = RM + r (5)
Greska racuna, kada se racuna sa k decimala, iznosi
r = (b− a)1210−k (6)
pri cemu deo 1210−k je posledica nacina zaokruzivanja.
Rungeova ocena greske se koristi za procenu greske metode i ima sledeci oblik:
R(f) = |I(f)− Ih(f)| = |Ih(f)− I2h(f)|2k − 1
(7)
pri cemu je I(f) tacna vrednost integrala, I2h(f) priblizna vrednost dobijena sa korakom2h, i Ih(f) priblizna vrednost dobijena sa prepolovljenim korakom h. Pri tom, za trapeznuformulu (1) k = 2, a za Simpsonovu formulu (3) k = 4. Podelu usitnjavamo sve dok greskaR(f) nije manja od unapred zadate greske metode RM .
13. Koristeci Simpsonovu formulu izracunati integral∫ 1
0cos(x2)dx
sa tacnoscu R = 0.5 · 10−4 pomocu Rungeove ocene greske.
1

Resenje: Ukupna greska R je zbir greske metode RM i greske racuna r, tj.
R = RM + r.
Posto radimo sa 5 decimala, to je greska racuna, prema (6), r = (1 − 0)12 · 10−5, dozvoljena
greska u postavci zadatka je R = 0.5 · 10−4, pa je prema tome, dozvoljena greska metode:
RM = R− r = 0.5 · 10−4 − 0.5 · 10−5 = 4.5 · 10−5 (8)
Ovo je dozvoljena greska pri aproksimaciji vrednosti integrala Simpsonovom formulom.Za procenu greske metode koristimo Rungeovu ocenu greske (7). Interval po kome
integralimo funkciju f(x) = cos(x2) je [0, 1], posto koristimo Simpsonovu formulu potrebannam je neparan broj cvorova podele ovog intervala. Zato je pogodan korak po kome vrsimopodelu intervala h = 0.1, u tom slucaju imamo 11 cvorova. Formiramo tabelu na sledecinacin:
x y0, y2n y2k−1(∗4) y2k(∗2)x0 f(x0)x1 f(x1)x2 f(x2)x3 f(x3)x4 f(x4)x5 f(x5)x6 f(x6)x7 f(x7)x8 f(x8)x9 f(x9)
x10 f(x10)∑A B C
Ovde je f(x) = cos(x2) podintegralna funkcija, a brojevi A,B i C predstavljaju sume brojevau odgovarajucoj koloni, tj. A je suma vrednosti podintegralne funkcije u prvom i poslednjemcvoru, B je suma vrednosti u neparnim cvorovima, i C je suma vrednosti u parnim cvorovimaizuzev prvog i poslednjeg. Na ovaj nacin dobijamo pregledno vrednosti koje u formuli (3)mnozimo sa odgovarajucim faktorom (koji smo zapisali u zaglavlju tabele u zagradama!) isabiramo.Za vrednosti koje dobijamo pri resavanju ovog zadatka, pri koraku h = 0.1, tabela ce izgledatina sledeci nacin:
x y0, y2n y2k−1(∗4) y2k(∗2)0 1
0.1 0.999500.2 0.999200.3 0.995950.4 0.987230.5 0.968910.6 0.935900.7 0.882330.8 0.802100.9 0.689501.0 0.54030∑
1.54030 4.53664 3.72443
2

Trigonometrijske funkcije izracunavamo u radijanima. Sada je aproksimacija integrala poSimpsonovoj formuli (3) po koraku h = 0.1:
I0.1 =0.13
[1.54030 + 4 ∗ 4.53664 + 2 ∗ 3.72443]
I0.1 = 0.90452 (9)
Da bismo iskoristili Rungeovu ocenu greske (7), prepolovicemo korak podele intervala pokom vrsimo integraciju, h = 0.05. Sada imamo novu podelu, sa 21 cvorom, pri cemu su svicvorovi prethodne podele sa korakom h = 0.1, osim prvog i poslednjeg, sada parni cvoroviu novoj podeli sa korakom h = 0.05. Necemo pisati celu tabelu za novu podelu, vec samovrednosti podintegralne funkcije u novim cvorovima, koji su sada neparni, i njihova suma semnozi sa faktorom 4 u Simpsonovoj formuli (3).
x y2k−1(∗4)0.05 1.00000.15 0.999950.25 0.998050.35 0.992510.45 0.979570.55 0.954600.65 0.912070.75 0.845920.85 0.750150.95 0.61965∑
9.05247
Sada je aproksimacija integrala po Simpsonovoj formuli (3) po koraku h = 0.05:
I0.05 =0.053
[1.54030 + 4 ∗ 9.05247 + 2 ∗ (4.53664 + 3.72443)]
I0.05 = 0.90454 (10)
Rungeova ocena greske je:
R(f) =|I0.05 − I0.1|
24 − 1=|0.90454− 0.90452|
15= 1.3 · 10−6 < 4.5 · 10−5
gde je 4.5 · 10−5 dozvoljena greska metode.Dakle, postignuta je trazena tacnost. Vrednost integrala aproksimiramo vrednoscu I0.05 kojaima vecu tacnost.
I ≈ I0.05 = 0.90454.
¤
14. Izracunati integral ∫ 1
0
dx
1 + x
Simpsonovom kvadraturnom formulom sa greskom manjom od 10−4, koristeci egzaktnu ocenugreske.
3

Resenje: Ukupna greska koja je dozvoljena u postavci zadatka iznosi R = 10−4, a greskaracuna, posto radimo na cetiri decimale je, prema (6), r = 1−0
2 10−4 = 0.5 · 10−4.Sada je maksimalna dozvoljena greska metode, prema (5),
RM = 10−4 − 0.5 · 10−4 = 0.5 · 10−4. (11)
Iskoristimo egzaktnu ocenu greske Simpsonove formule (4), kako bismo nasli korak podeleintervala integracije h koji nam obezbed-uje da greska metode bude u granicama dozvoljenog.
RM = (b− a)M4h
4
180
M4 = maxx∈[0,1]
|f IV (x)|
f(x) =1
1 + x, f IV (x) =
24(1 + x)5
M4 = max[0,1]
∣∣∣∣24
(1 + x)5
∣∣∣∣ = 24
Sada imamo M4, i to mozemo da ubacimo u (4), tada je, zbog (11),
RM =24180
h4 ≤ 0.5 · 10−4 ⇒ h4 ≤ 18048
· 10−4.
Dobijamo da je korak koji nam obezbed-uje dozvoljenu gresku metode
h ≤ 0.139.
Uzmimo za korak h podele intervala po kome vrsimo integraciju h = 0.1. Ovaj korak namobezbed-uje neparan broj cvorova 11. Formiramo tablicu slicno kao u predhodnom zadatku:
x y0, y2n y2k−1(∗4) y2k(∗2)0 1
0.1 0.90910.2 0.83330.3 0.76920.4 0.71430.5 0.66670.6 0.62500.7 0.58820.8 0.55560.9 0.52631.0 0.5000∑
1.5000 3.4595 2.7282
Iz ovako formirane tabele moemo lako da formiramo Simpsonovu formulu po koraku 0.1:
I0.1 =0.13
[1.5000 + 4 ∗ 3.4595 + 2 ∗ 2.7282]
Priblizna vrednost integrala je izraunata sa trazenom tacnoscu, posto smo na taj nacinodabrali korak h.
I ≈ I0.1 = 0.6931.
¤
4
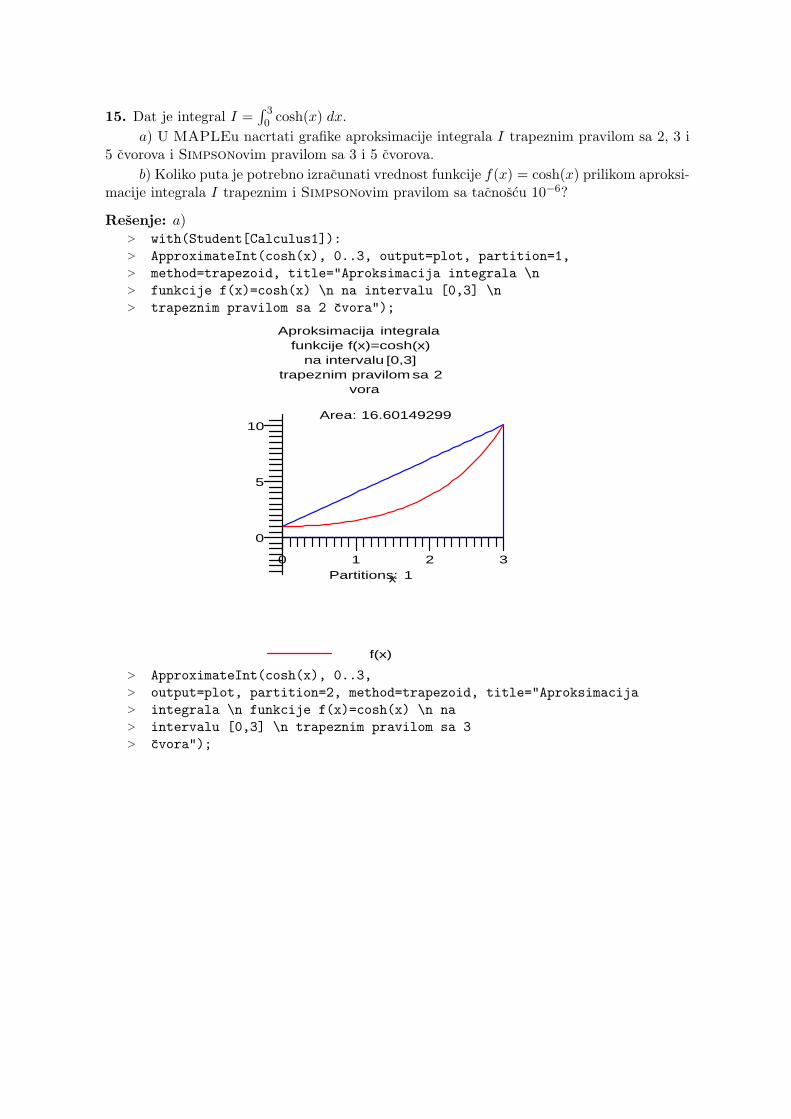
15. Dat je integral I =∫ 30 cosh(x) dx.
a) U MAPLEu nacrtati grafike aproksimacije integrala I trapeznim pravilom sa 2, 3 i5 cvorova i Simpsonovim pravilom sa 3 i 5 cvorova.
b) Koliko puta je potrebno izracunati vrednost funkcije f(x) = cosh(x) prilikom aproksi-macije integrala I trapeznim i Simpsonovim pravilom sa tacnoscu 10−6?
Resenje: a)> with(Student[Calculus1]):> ApproximateInt(cosh(x), 0..3, output=plot, partition=1,> method=trapezoid, title="Aproksimacija integrala \n> funkcije f(x)=cosh(x) \n na intervalu [0,3] \n> trapeznim pravilom sa 2 cvora");
Partitions: 1
Area: 16.6014929910
5
x
31 20
0
f(x)
Aproksimacija integrala funkcije f(x)=cosh(x)
na intervalu [0,3] trapeznim pravilom sa 2
vora
> ApproximateInt(cosh(x), 0..3,> output=plot, partition=2, method=trapezoid, title="Aproksimacija> integrala \n funkcije f(x)=cosh(x) \n na> intervalu [0,3] \n trapeznim pravilom sa 3> cvora");
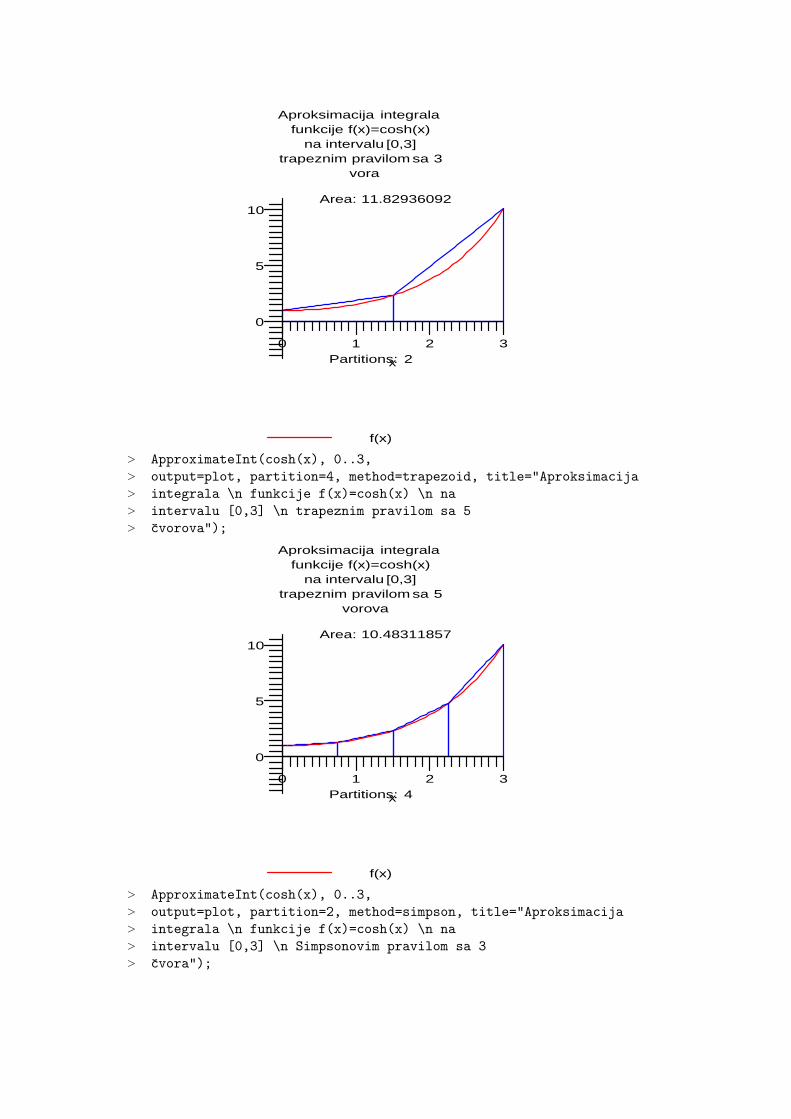
Partitions: 2
Area: 11.82936092
5
321
10
x
0
0
f(x)
Aproksimacija integrala funkcije f(x)=cosh(x)
na intervalu [0,3] trapeznim pravilom sa 3
vora
> ApproximateInt(cosh(x), 0..3,> output=plot, partition=4, method=trapezoid, title="Aproksimacija> integrala \n funkcije f(x)=cosh(x) \n na> intervalu [0,3] \n trapeznim pravilom sa 5> cvorova");
Partitions: 4
Area: 10.48311857
32
10
5
x
10
0
f(x)
Aproksimacija integrala funkcije f(x)=cosh(x)
na intervalu [0,3] trapeznim pravilom sa 5
vorova
> ApproximateInt(cosh(x), 0..3,> output=plot, partition=2, method=simpson, title="Aproksimacija> integrala \n funkcije f(x)=cosh(x) \n na> intervalu [0,3] \n Simpsonovim pravilom sa 3> cvora");
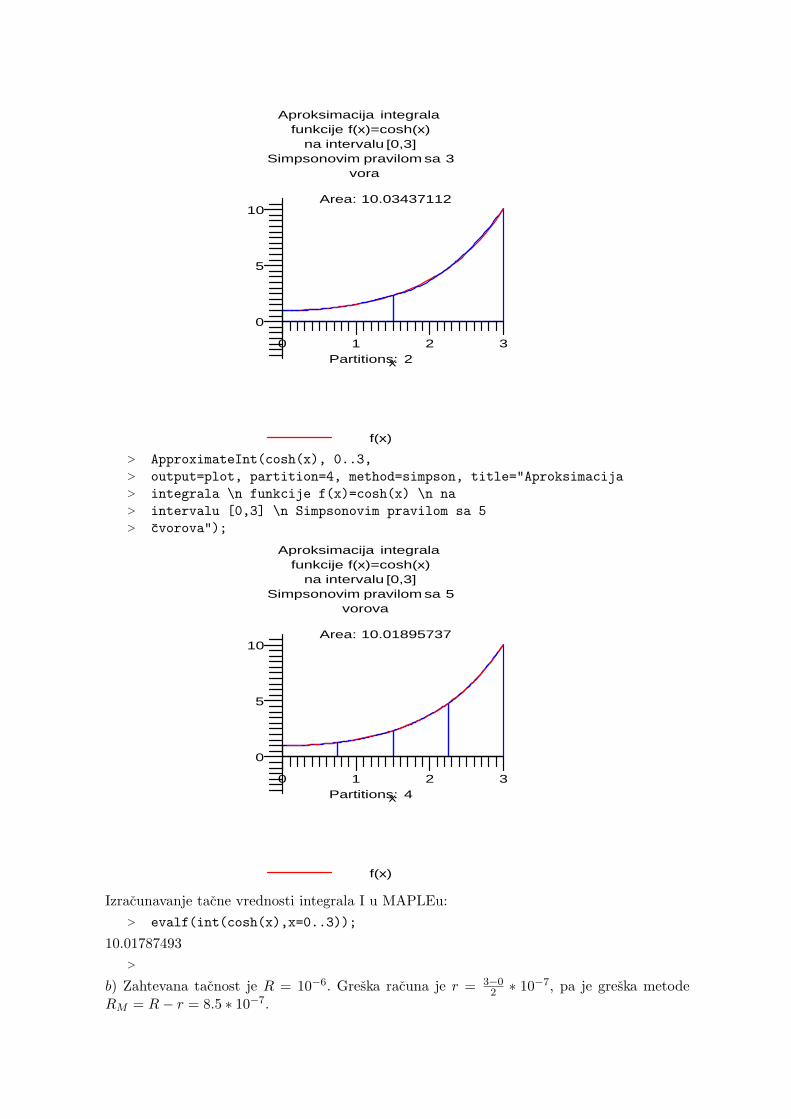
Partitions: 2
Area: 10.03437112
21
10
x
0
0
3
5
f(x)
Aproksimacija integrala funkcije f(x)=cosh(x)
na intervalu [0,3] Simpsonovim pravilom sa 3
vora
> ApproximateInt(cosh(x), 0..3,> output=plot, partition=4, method=simpson, title="Aproksimacija> integrala \n funkcije f(x)=cosh(x) \n na> intervalu [0,3] \n Simpsonovim pravilom sa 5> cvorova");
Partitions: 4
Area: 10.0189573710
32
x
5
0
0
1
f(x)
Aproksimacija integrala funkcije f(x)=cosh(x)
na intervalu [0,3] Simpsonovim pravilom sa 5
vorova
Izracunavanje tacne vrednosti integrala I u MAPLEu:> evalf(int(cosh(x),x=0..3));
10.01787493>
b) Zahtevana tacnost je R = 10−6. Greska racuna je r = 3−02 ∗ 10−7, pa je greska metode
RM = R− r = 8.5 ∗ 10−7.

Da bismo odredili koliko puta je potrebno izracunati vrednost funkcije f(x) = cosh(x)prilikom aproksimacije integrala I trapeznim i Simpsonovim pravilom sa tacnoscu 10−6
potrebno je da odredimo maksimalan korak h koji obezbed-uje trazenu tacnost iz egzaktneocene greske za odgovarajuce pravilo. Broj cvorova kojima vrsimo podelu intervala integracije[0, 3] je n = b−a
h i u svakom cvoru imamo po jedno izracunavanje podintegralne funkcije. Zato su nam potrebni izvodi podintegralne funkcije f(x) drugog i cetvrtog reda
f ′′(x) = (cosh(x))′′ = cosh(x), f IV (x) = (cosh(x))IV = cosh(x)
i maksimalne vrednosti ovih izvoda na intervalu [0, 3]. Funkcija cosh(x) je rastuca za x ≥ 0pa je M2 = M4 = cosh(3) = 10.067662.Za trapezno pravilo, iz (2) imamo da vazi
312∗ 10.067662 ∗ h2 ≤ RM = 8.5 ∗ 10−7 =⇒ h ≤ 0.00058.
Dakle, da bismo postigli tacnost od 10−6 trapeznim pravilom treba da bude korak h = 0.0005.U tom slucaju je broj cvorova u kojima racunamo vrednost podintegralne funkcije je n =
30.0005 = 6000.
U slucaju Simpsonovog pravila imamo
3180
∗ 10.067662 ∗ h4 ≤ RM = 8.5 ∗ 10−7 =⇒ h ≤ 0.047.
Broj cvorova u kojima racunamo vrednost funkcije cosh(x) je n = 30.04 = 75, sto je 80 puta
manje izracunavanja nego u slucaju koriscenja trapeznog pravila.
4.2 Izvod-enje formula za numericku integraciju
Formule oblika ∫ b
af(x)dx ≈
n∑
i=0
Aif(xi) (12)
se nazivaju kvadraturne formule, a ≤ x0 < x1 < . . . < xn ≤ b, h = xk−xk−1. Koeficijente Ai
odred-ujemo tako da formula bude tacna za polinome sto viseg stepena. Zamenom funkcijef(x) redom sa 1, x, x2, . . . , xn dobijamo koeficijente A0, A1, . . . , An. Greska formule integracijeje tada
R(f) ≤∫ b
a
Mn+1
(n + 1)!|(x− x0)(x− x1) . . . (x− xn)| dx. (13)
Ako se pokaze da je formula (12) tacna i za xn+1, . . . , xn+k, a ne vazi za xn+k+1, tada jegreska reda n + k + 1 i oblika je:
R(f) ≤∫ b
a
Mn+k+1
(n + k + 1)!|(x− x0)k+1(x− x1) . . . (x− xn)|dx. (14)
16. Izvesti formulu za numericku integraciju oblika∫ h
0f(x)dx = Af(0) + Bf(
2h
3) + R(f) (15)
tako da bude tacna za polinome sto veceg stepena i proceniti gresku integracije R(f).
Resenje: Formula (15) treba da bude tacna za polinome sto viseg stepena. Odredimokoeficijente A i B tako da formula bude tacna za f(x) = 1 i f(x) = x. (Treba da odredimo

2 nepoznate, pa nam trebaju dve jednacine.) Kako formula (15) treba da bude tacna zaf(x) = 1 greska integracije R(f) ce biti 0 u tom slucaju. Slicno ce biti kada umesto f(x) uformuli (15) stavimo x. Sada je:
f(x) = 1 : A + B = h
f(x) = x :h2
2=
2h
3B ⇒ B = 3
4h
A = h−B ⇒ A = 14h
Posto je formula (15) tacna za 1 i x bice tacna i za sve polinome prvog stepena, zbog lin-earnosti polinoma (Svaki polinom prvog stepena mozemo da dobijemo kao linearnu kombi-naciju ove dve funkcije.) Dakle, dobili smo da je formula za numericku integraciju oblika
∫ h
0f(x)dx =
h
4f(0) +
3h
4f(
2h
3) + R(f) (16)
i tacna je za polinome nultog i prvog stepena (tada je R(f) = 0). Proverimo kog je redagreska integracije R(f). Prvo proveravamo da li formula (16) vazi i za polinome drugogstepena (dovoljno je proveriti za x2). Za f(x) = x2 leva strana formule (16) je
∫ h
0x2dx) =
h3
3,
dok je desna strana:h
4· 02 +
3h
4
(2h
3
)2
+ R(h) =h3
3+ R(f).
Upored-ujuci levu i desnu stranu formule (16) za funkciju x2, mozemo da zakljucimo da jeR(f) = 0, pa je formula tacna i za polinome drugog stepena.Izvrsimo sada proveru formule (16) za f(x) = x3. Sada je leva strana jednaka:
∫ h
0x3dx) =
h4
4,
a desna:h
4· 03 +
3h
4
(2h
3
)3
+ R(f) =2h4
9+ R(f).
Iz ove dve relacije sledi da bi formula (16) bila tacna, mora biti R(f) 6= 0. Dakle, greskaintegracije je treceg reda (tacna je za polinome do drugog stepena). Prema (14) greska jeoblika:
R(f) ≤∫ h
0
M3
3!|(x− 0)2(x− 2h
3)|dx =
M3h4
216.
¤
17. Odrediti koeficijente A,B i C tako da kvadraturna formula∫ 2h
0x2f(x)dx = Af(x0) + B∆f(x0) + C∆2f(x0) + R(f) (17)
bude tacna za polinome sto viseg stepena, a zatim proceniti gresku R(f).

Resenje: Razvijmo prvo konacne razlike:
∆f(x0) = f(x1)− f(x0)
∆2f(x0) = f(x2)− 2f(x1) + f(x0)
Sada formula (17) postaje:
∫ 2h
0x2f(x)dx = [A−B + C]f(x0) + [B − 2C]f(x1) + Cf(x2) + R(f) (18)
Posto se radi o konacnim razlikama, prvi cvor x0 je u pocetnoj tacki intervala integracije, hje korak podele intervala integracije, pa je x1 = h, x2 = 2h. Zato je:
∫ 2h
0x2f(x)dx = [A−B + C]f(0) + [B − 2C]f(h) + Cf(2h) + R(f) (19)
Odredimo koeficijente A,B, C tako da formula bude tacna za polinome do drugog stepena.Zamenimo u (19) f(x) redom sa 1, x, x2. Na taj nacin smo iz (19) dobili tri jednacine sa trinepoznate:
f(x) = 1 : A = 8h3
3
f(x) = x : B = 4h3
f(x) = x2 : C = 6h3
5
Sada formula za numericku integraciju ima oblik:∫ 2h
0x2f(x)dx = h3
[83f(0) + 4∆f(0) +
65∆2f(0)
]+ R(f)
= h3
[− 2
15f(0) +
85f(h) +
65f(2h)
]+ R(f) (20)
Proverimo da li formula vazi i za polinome treceg reda: Za f(x) = x3 leva strana jednacine(20) je:
646
h6,
a desna strana:
h3
[85h3 +
658h3)
]=
565
h6.
Dakle, formula ne vazi za polinome treceg stepena, pa je greska treceg reda i vazi:
R(f) ≤∫ 2h
0
M3
3!x2|(x− 0)(x− h)(x− 2h)|dx =
4M3h6
45
U gornjoj formuli x2 potice od oblika formule integracije (17) i figurise i u proceni greske. ¤

4.3 Integracija nesvojstvenih integrala
Resavamo integral oblika ∫ +∞
af(x)dx
sa tacnoscu ε. Predstavimo ovaj integral u obliku:∫ +∞
af(x)dx =
∫ M
af(x)dx +
∫ +∞
Mf(x)dx (21)
i odredimo broj M > a takav da je∣∣∣∣∫ +∞
Mf(x)dx
∣∣∣∣ ≤12ε (22)
i sa ovako odabranim M resavamo integral∫ M
af(x)dx
sa tacnoscu 12ε.
Ako resavamo integral tipa∫ +∞−∞ f(x)dx tada mozemo da odsecemo delove
∫ M1
−∞ f(x)dx
i∫ +∞M2
f(x)dx sa tacnoscu ε4 pronalazenjem odgovarajucih M1,M2, i resavamo integral∫ M2
M1f(x)dx sa tacnoscu ε
2 .
18. Sa tacnoscu ε = 10−5, Simpsonovom metodom izracunati integral
I =∫ ∞
1
xe−x2
2 + sinxdx. (23)
Resenje: Napisimo integral (23) u sledecem obliku:
I =∫ M
1
xe−x2
2 + sinxdx +
∫ ∞
M
xe−x2
2 + sinxdx (24)
Odredimo broj M > 1 tako da je:∣∣∣∣∣∫ ∞
M
xe−x2
2 + sinxdx
∣∣∣∣∣ ≤12ε =
12· 10−5 (25)
Kako je |2 + sinx| ≥ 1, vazi∣∣∣∣∣∫ ∞
M
xe−x2
2 + sinxdx
∣∣∣∣∣ ≤∫ ∞
M
∣∣∣∣∣xe−x2
2 + sinx
∣∣∣∣∣dx ≤∫ ∞
Mxe−x2
dx = −12e−x2
∣∣∣∣∞
M
=12e−M2 ≤ 1
2· 10−5
(26)Dakle, trazimo M za koje ce biti zadovoljeno:
e−M2 ≤ 10−5 =⇒ M > 3.3930702
Uzmimo da je M=3.4. Sada je drugi sabirak iz (24) izracunat sa greskom:∣∣∣∣∣∫ ∞
3.4
xe−x2
2 + sinxdx
∣∣∣∣∣ ≤12e−3.42
= 4.8 · 10−6

Prvi sabirak iz (24) treba da izracunamo sa tacnoscu 5.2 · 10−6, da bi ukupna tacnost bila10−5, posto je:
10−5 − 4.8 · 10−6 = 10 · 10−6 − 4.8 · 10−6 = 5.2 · 10−6.
Greska racuna r pri izracunavanju prvog integrala je
r = (3.4− 1)12· 10−6 = 1.2 · 10−6.
Zahtevana tacnost Simpsonove metode je:
RM = R− r = 5.2 · 10−6 − 1.2 · 10−6 = 4 · 10−6
Zadatak resvamo primenjujuci Rungeovu ocenu greske, prvo poloveci interval [1, 3.4], sakorakom h = 1.2.
x y0, y2n y2k−1(∗4) y2k(∗2)1 0.129468
2.2 0.0061943.4 0.000019∑
0.129487 0.006194 0
pri cemu je yk = f(xk), f(x) = xe−x2
2+sin x podintegralna funkcija. Koristeci Simpsonovu formulu(3) imamo da je:
I1.2 =1.23
(0.129487 + 4 · 0.006194 + 2 · 0) = 0.061705
Uzmimo polovinu koraka h = 0.6, sada je:
x y2k−1(∗4)1.6 0.0412352.8 0.000472∑
0.041707
I0.6 =0.63
(0.129487 + 4 · 0.041707 + 2 · (0 + 0.006194)) = 0.061741
Rungeova ocena greske je, prema (7),
R(f) =|I0.6 − I1.2|
24 − 1=|0.061741− 0.061705|
15= 2.4 · 10−6 < 4 · 10−6
Dakle, postignuta je trazena tacnost, i priblizna vrednost integrala je
I ≈ 0.061741.
¤
19. Sa tacnoscu ε = 10−2 izracunati integral∫ 1
0
cosx√x
dx.
Resenje: Ovo je nesvojstveni integral, posto je:
limx→0+
cosx√x
= +∞

Uvedimo smenu x = t2, dx = 2tdt, pa imamo:∫ 1
0
cosx√x
dx =∫ 1
0
cos(t2)t
· 2tdt = 2∫ 1
0cos(t2)dt
Ovo vise nije nesvojstveni integral. Sada resavamo integral∫ 1
0cos(t2)dt
npr. trapeznom formulom (1) sa tacnoscu ε koristeci egzaktnu formulu za ocenu greske (2).Ukupna dozvoljena greska je R = 10−2, a greska racuna je
r = (b− a) · 1210−2 = 0.5 · 10−2,
pa je dozvoljena greska metode
RM = R− r = 0.5 · 10−2.
Egzaktna formula za ocenu greske (2) je
RM =b− a
12M2h
2 ≤ 0.5 · 10−2
Podintegralna funkcija f(t) je cos(t2) i njen drugi izvod je:
f ′′(t) = −2 sin(t2)− 4t2 cos(t2)
Nama treba M2, tj. maksimum apsolutne vrednosti drugog izvoda podintegralne funkcije f(t).Med-utim, nije neophodno da znamo tacnu vrednost u kojoj ova funkcija dostize maksimumna intervalu integracije [0, 1], dovoljno je da je ogranicimo sa gornje strane, i da tu vrednostkoristimo u oceni greske:
|f ′′(t)| = | − 2 sin(t2)− 4t2 cos(t2)| ≤ 6
Sada je greska metode:
RM ≤ 112· 6h2 = 0.5h2 < 0.5 · 10−2
Dakle, korak h koji obezbed-uje trazenu tacnost je h < 0.1 Odaberimo da je h = 0.1. Popunimotabelu koja ce pojednostaviti racun trapeznom formulom (1):
t y0, yn y2, . . . yn−1(∗2)0 1
0.1 0.999950.2 0.999200.3 0.995950.4 0.987230.5 0.968910.6 0.935900.7 0.882330.8 0.802100.9 0.689501.0 0.54030∑
1.54030 8.26107

Vrednosti yk = f(tk), f(t) = cos(t2) racunamo u radijanima. Sada je, prema (1):
∫ 1
0
cos(x)√x
dx = 2 ∗∫ 1
0cos(t2)dt = 2 ∗ 0.1
2(y0 + y10 + 2(y1 + . . . + y9)) = 1.80624
S obzirom na zadatu tacnost, priblizna vrednost integrala je:
I ≈ 1.81
¤
20. Simpsonovom kvadraturnom formulom sa tacnoscu 2 · 10−4 resiti integral∫ 1
0
sinx√x
dx (27)
Resenje: Podintegralna funkcija f(x) = sin x√x
ima moguci singularitet u tacki x = 0.
Med-utim, kako je:
limx→0+
sinx√x
= limx→0+
√x sinx
x= 0
Dakle, x = 0 nije pravi singularitet, pa mozemo da racunamo integral (27) Simpsonovomformulom sa tacnoscu ε, pri cemu je f(0) = 0.Koristeci Rungeovu ocenu greske, za korak h = 0.1 dobijemo
I0.1 = 0.61797,
a za prepolovljen korak h = 0.05 je
I0.05 = 0.61963
Sada je, prema Rungeovoj oceni greske:
R(f) =|I0.05 − I0.1|
24 − 1=|0.61963− 0.61797|
15= 1.1 · 10−4 < 2 · 10−4
Dakle:I = 0.61963
¤

5 Sistemi linearnih jednacina
Resavamo sistem sa n jednacina i n nepoznatih:
a11x1 + a12x2 + . . . + a1nxn = b1
a21x1 + a22x2 + . . . + a2nxn = b2
· · ·an1x1 + an2x2 + . . . + annxn = bn
(1)
Ovaj sistem mozemo da zapisemo u matricnom obliku:
Ax = b (2)
pri cemu je A matrica dimenzije n×n ciji su elementi koeficijenti {aij}ni,j=1, x = [x1, x2, . . . , xn]T
vektor nepoznatih i b = [b1, b2, . . . , bn]T slobodan vektor.
5.1 Gausov metod eliminacije sa izborom glavnog elementa
Elementarnim transformacijama nad vektorima matrice A dobicemo trougaonu matricu kojaje njoj ekvivalentna i iz takvog oblika jednostavno dobijamo resenje sistema jednacina.
19. Gausovom metodom sa izborom glavnog elementa (pivot) resiti sistem jednacina:
1.1161x1 + 0.1254x2 + 0.1397x3 + 0.1490x4 = 1.54710.1582x1 + 1.1675x2 + 0.1768x3 + 0.1871x4 = 1.64710.1968x1 + 0.2071x2 + 1.2168x3 + 0.2271x4 = 1.74710.2368x1 + 0.2471x2 + 0.2568x3 + 1.2671x4 = 1.8471
(3)
racunajuci sa 5 decimala.
Resenje: Radi lakseg racuna, formiramo tabelu cije su prve 4 kolone odgovarajuce kolonematrice A,
A =
1.1161 0.1254 0.1397 0.14900.1582 1.1675 0.1768 0.18710.1968 0.2071 1.2168 0.22710.2368 0.2471 0.2568 1.2671
Peta kolona tabele je slobodan vektor b, a poslednja kolona je za mnozitelj αi koji koristimopri formiranju trougaone matrice.
x1 x2 x3 x4 bi αi
I 1.1161 0.1254 0.1397 0.1490 1.5471 −0.14901.2671 = −0.11759
II 0.1582 1.1675 0.1768 0.1871 1.6471 −0.18711.2671 = −0.14766
III 0.1968 0.2071 1.2168 0.2271 1.7471 −0.22711.2671 = −0.17923
IV 0.2368 0.2471 0.2568 1.2671 1.8471
Najpre trazimo glavni element, tj. pivot. Pivot je maksimalan, po apsolutnoj vrednosti,koeficijent |aij |, i, j = 1, . . . , n. Sada je to koeficijent a44 = 1.2671. Mnozitelj αi, i = 1, 2, 3,biramo tako da se koeficijenti u koloni u kojoj se nalazi pivot anuliraju:
αi = − ai4
a44, i = 1, 2, 3.
1

Sada transformisemo jednacine I, II, III na sledeci nacin:
I ′ = α1 · IV + I = −0.11759 · IV + I
II ′ = α2 · IV + II = −0.14766 · IV + II
III ′ = α3 · IV + III = −0.17923 · IV + III
Koeficijenti ovih novih jednacina se dobijaju na sledeci nacin:
a′ij = αi · a4i + aij , i = 1, 2, 3, j = 1, 2, 3, 4.
Iste trasformacije vrsimo i na slobodnoj koloni b :
b′i = αi · b4 + bi, i = 1, 2, 3.
x1 x2 x3 x4 bi αi
I ′ 1.08825 0.09634 0.10950 0 1.32990 −0.109501.17077 = −0.09353
II ′ 0.12323 1.13101 0.13888 0 1.37436 −0.138881.17077 = −0.11862
III ′ 0.15436 0.16281 1.17077 0 1.41604
Jednacinu (tj. odgovarajucu vrstu matrice) u kojoj se nalazi pivot ne transformisemo, iiz nje vise ne biramo pivot. Dalje ponavljamo postupak sa transformisanim jednacinamaI ′, II ′, III ′. Biramo pivot med-u koeficijentima ove tri jednacine. Sada je to |a′34| = 1.17077,pa jednacinu III ′ ne transformisemo dalje. Transformisemo jednacine I ′ i II ′ :
I ′′ = −0.09353 · III ′ + I ′
II ′′ = −0.11862 · III ′ + II ′
x1 x2 x3 x4 bi αi
I ′′ 1.07381 0.08111 0 0 1.19746 −0.081111.11170 = −0.09353
II ′′ 0.10492 1.11170 0 0 1.20639
Napokon, u poslednjem krugu pivot je |a′′22| = 1.11170 i sad je pocetna jednacina I trans-formisana u jednacinu I ′′′:
x1 x2 x3 x4 bi αi
I ′′′ 1.06616 0 0 0 1.10944
Na ovaj nacin, pocetna matrica A je transformisana u slicnu matricu C koja je trougaona injene vrste su koeficijenti jednacina iz kojih smo birali pivot, i to redom, I ′′′, II ′′, III ′ i IV .
I ′′′ : 1.06616x1 =1.10944II ′′ : 0.10492x1 + 1.11170x2 =1.20639III ′ : 0.15436x1 + 0.16281x2 + 1.17077x3 =1.74710IV : 0.2368x1 + 0.2471x2 + 0.2568x3 + 1.2671x4=1.8471
Odavde se direktno dobijaju resenja za nepoznate x1, x2, x3, x4.
x1 =1.109441.06616
= 1.04059
x2 =1
1.11170[1.20639− 0.10492x1] = 0.98697
2

x3 =1
1.17077[1.41604− 0.15436x1 − 0.16281x2] = 0.93505
x4 =1
1.2671[1.8471− 0.2368x1 − 0.2471x2 − 0.2568x3] = 0.88129
¤
20. Odrediti inverznu matricu matrice A,
A =
3 1 -1 2-5 1 3 -42 0 1 -11 -5 3 -3
racunajuci sa 5 decimala.
Resenje: Trazimo matricu A−1 za koju je A ·A−1 = I, gde je I jedinicna matrica dimenzije4×4. Matrica A moze da se, elementarnim transformacijama nad vrstama, svede na matricuD koja u svakoj vrsti i koloni ima po jedan nenula element.
Neka je matrica B dobijena istim tim transformacijama nad matricom I (transformacijekojima je matrica D dobijena iz matrice A.) Dakle,
A ∼ D, I ∼ B
Kako je A ·A−1 = I, zbog odgovarajucih slicnosti matrica, i s obzirom da su D i B dobijeneistim transformacijama nad A i I, vazice:
D ·A−1 = B ⇒ A−1 = D−1 ·B
Zbog toga sto je D matrica koja u svakoj vrsti i koloni ima po jedan nenula element, matricuD−1 je lako odrediti.
Za dobijanje matrica D i B koristicemo Gausov metod za eliminaciju sa glavnim ele-mentom, sa odred-enim modifikacijama. Sada cemo svaki put da transformisemo sve vrstematrice A, uz pravilo: Ako smo pivot birali iz neke vrste, tu vrstu vise ne uzimamo za izborpivota. Transformacije koje obavljamo nad vrstama matrice A istovremeno obavljamo i nadodgovarajucim vrstama jedinicne matrice I. Mnozitelje za odgovarajuce vrste formiramo naisti nacin kao u predhodnom zadatke, kako bismo u koloni u kojoj se nalazi pivot dobili nuleu ostalim vrstama. Formiramo tabelu:
3
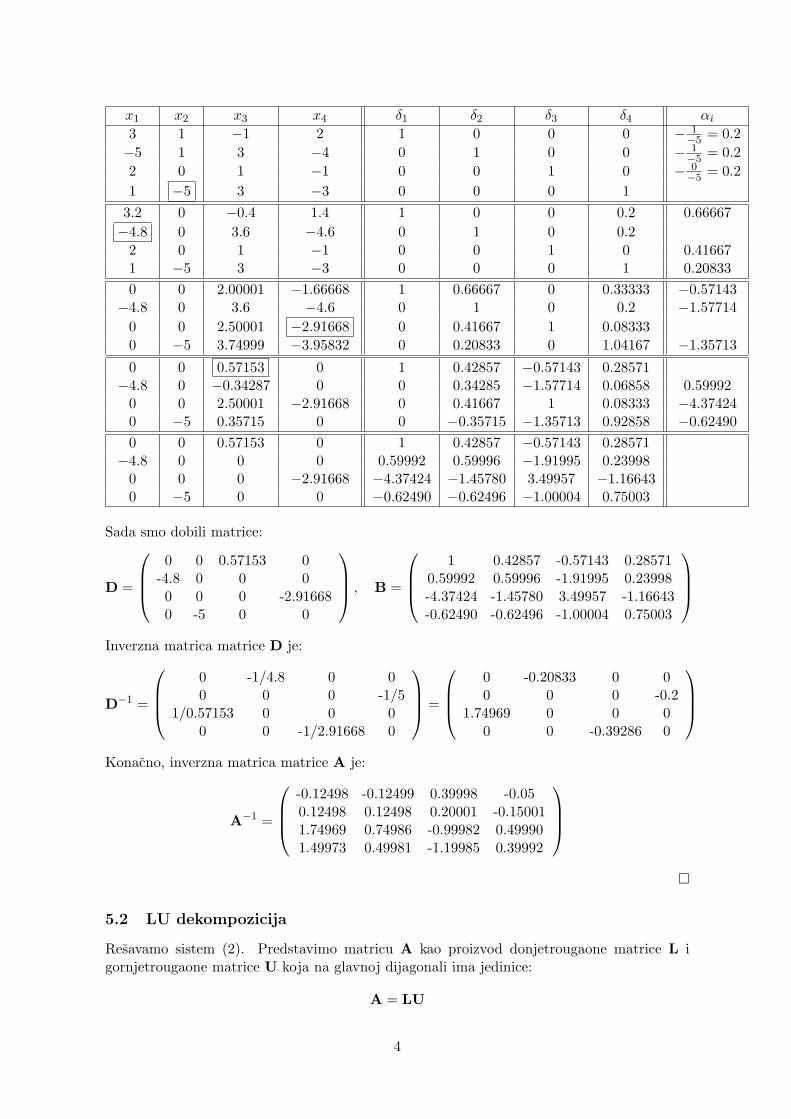
x1 x2 x3 x4 δ1 δ2 δ3 δ4 αi
3 1 −1 2 1 0 0 0 − 1−5 = 0.2
−5 1 3 −4 0 1 0 0 − 1−5 = 0.2
2 0 1 −1 0 0 1 0 − 0−5 = 0.2
1 −5 3 −3 0 0 0 13.2 0 −0.4 1.4 1 0 0 0.2 0.66667−4.8 0 3.6 −4.6 0 1 0 0.2
2 0 1 −1 0 0 1 0 0.416671 −5 3 −3 0 0 0 1 0.208330 0 2.00001 −1.66668 1 0.66667 0 0.33333 −0.57143
−4.8 0 3.6 −4.6 0 1 0 0.2 −1.577140 0 2.50001 −2.91668 0 0.41667 1 0.083330 −5 3.74999 −3.95832 0 0.20833 0 1.04167 −1.35713
0 0 0.57153 0 1 0.42857 −0.57143 0.28571−4.8 0 −0.34287 0 0 0.34285 −1.57714 0.06858 0.59992
0 0 2.50001 −2.91668 0 0.41667 1 0.08333 −4.374240 −5 0.35715 0 0 −0.35715 −1.35713 0.92858 −0.624900 0 0.57153 0 1 0.42857 −0.57143 0.28571
−4.8 0 0 0 0.59992 0.59996 −1.91995 0.239980 0 0 −2.91668 −4.37424 −1.45780 3.49957 −1.166430 −5 0 0 −0.62490 −0.62496 −1.00004 0.75003
Sada smo dobili matrice:
D =
0 0 0.57153 0-4.8 0 0 00 0 0 -2.916680 -5 0 0
, B =
1 0.42857 -0.57143 0.285710.59992 0.59996 -1.91995 0.23998-4.37424 -1.45780 3.49957 -1.16643-0.62490 -0.62496 -1.00004 0.75003
Inverzna matrica matrice D je:
D−1 =
0 -1/4.8 0 00 0 0 -1/5
1/0.57153 0 0 00 0 -1/2.91668 0
=
0 -0.20833 0 00 0 0 -0.2
1.74969 0 0 00 0 -0.39286 0
Konacno, inverzna matrica matrice A je:
A−1 =
-0.12498 -0.12499 0.39998 -0.050.12498 0.12498 0.20001 -0.150011.74969 0.74986 -0.99982 0.499901.49973 0.49981 -1.19985 0.39992
¤
5.2 LU dekompozicija
Resavamo sistem (2). Predstavimo matricu A kao proizvod donjetrougaone matrice L igornjetrougaone matrice U koja na glavnoj dijagonali ima jedinice:
A = LU
4

L =
l11 0 · · · 0l21 l22 · · · 0
· · ·ln1 ln2 · · · lnn
U =
1 d12 · · · d1n
0 1 · · · d2n
· · ·0 0 · · · 1
Elementi matrica L i U se dobijaju pomocu sledecih formula (Krautov algoritam):
lij = aij −j−1∑
k=1
likdkj (4)
dij =1lii
(aij −
i−1∑
k=1
likdkj
)(5)
Sada sistem (2) postaje:(LU)x = b
L(Ux) = b
Sada resavamo 2 sistema jednacina, pri cemu uvodimo novi vektor nepoznatih y:
y = Ux
Ly = b
Ova dva sistema se jednostavno resavaju posto su matrice L i U trougaone.Determinanta. Kako je
A = LU
pri cemu su L i U trougaone i matrica U ima na glavnoj dijagonala jedinice, to je:
detA = detL · detU = detL · 1 = l11 . . . lnn
21. Metodom LU dekompozicije resiti sistem jednacina:
3x1 + x2 − x3 + 2x4 = 6−5x1 + x2 + 3x3 − 4x4 = −12
2x1 + x3 − x4 = 1x1 − 5x2 + 3x3 − 3x4 = 3
(6)
racunajuci sa 6 decimala.
Resenje:
A =
3 1 -1 2-5 1 3 -42 0 1 -11 -5 3 -3
b =
6-1213
A = LU
5

L =
l11 0 0 0l21 l22 0 0l31 l32 l33 0l41 l42 l43 l44
U =
1 d12 d13 d14
0 1 d23 d24
0 0 1 d34
0 0 0 1
Formiramo tabelu:
3 1 −1 2 6−5 1 3 −4 −122 0 1 −1 11 5 3 3 3
3 1 0.333333 −0.333333 0.666667 2−5 2.666665 1 0.500001 −0.250000 −0.752 −0.666666 2.000000 1 −1.250000 −1.751 5.333333 6.000000 2.500000 1 3
U gornjem delu tabele upisujemo matricu A i vektor b. U donjem delu upisujemomatrice L i U (jedinice na dijagonali pripadaju matricu U kao i gornji trougao, donji trougaosu elementi matrice L). U donjem delu tabele, ispod vektora b, upisujemo vrednosti vektoray koje dobijamo resavajuci jednacinu
Ly = b.
Najpre odredimo elemente matrica L i U. To radimo naizmenicno i popunjavamo tablicu:
I. l11 = a11 l21 = a21 l31 = a31 l41 = a41
II. dii = 1
III. d12 =a12
l11= 0.333333 d13 =
a13
l11= −0.333333 d14 =
a14
l11= 0.666667
IV. l22 = a22−l21d12 = 2.666665 l32 = a32−l31d12 = −0.666666 l42 = a42−l41d12 = 5.333333
V. d23 =1l22
(a23 − l21d13) = 0.500001 d24 =1l22
(a24 − l21d14) = −0.250000
V I. l33 = a33 − l31d13 − l32d23 = 2.000000
l43 = a43 − l41d13 − l42d23 = 6.000000
V II. d34 =1l33
(a34 − l31d14 − l32d24) = −1.250000
V III. l44 = a44 − l41d14 − l42d24 − l43d34 = 2.500000
Kada smo nasli matrice L i U mozemo da resimo sistem (posto je L trougaona matrica):
Ly = b
3y1 = 2 ⇒ y1 = 2
−5y1 + 2.666665y2 = −12 ⇒ y1 = −0.75
2y1 − 0.666666y2 + 2.000000y3 = 1 ⇒ y3 = −1.75
y1 + 5.333333y2 + 6.000000y3 + 2.500000y4 = 3 ⇒ y4 = 3
Vrednosti vektora y upisujemo u tablicu u koloni ispod vektora b.
Sada resavamo sistem (opet je U trougaona matrica):
Ux = y
6

x4 = 3
x3 = −1.75 + 1.25x4 = 2
x2 = −0.75 + 0.25x4 − 0.500001x3 = 1.000002
x1 = 2− 0.333333x2 + 0.333333x3 − 0.666667x4 = 0.999999
Dobili smo resenje:x = (0.999999,−1.000002, 2, 3).
Tacno resenje je:(1,−1, 2, 3).
¤
5.3 Iterativne metode za resavanje sistema linearnih jednacina
22. Iterativnim postupkom resiti sistem
1.02x1 − 0.05x2 − 0.10x3 = 0.795−0.11x1 + 1.03x2 − 0.05x3 = 0.849−0.11x1 − 0.12x2 + 1.04x3 = 1.398
(7)
dok se resenje ne poklopi na 4 decimale.
Resenje: Zadatak cemo resiti Jakobijevom i Gaus-Zajdelovom metodom. Najpre proverimouslov konvergencije iterativnog procesa (uslovi su isti za obe metode.) Dovoljno je da budeispunjen jedan od uslova:
n∑
i=1,i 6=j
|aij | < |ajj |, (∀j) (8)
ilin∑
j=1,j 6=i
|aij | < |aii|, (∀i) (9)
Pritom su aij odgovarajuci koeficijenti uz nepoznate xi. Dakle, dijagonalni element aii morabiti, po apsolutnoj vrednosti, veci od sume ostalih elemenata po apsolutnoj vrednosti u istojvrsti ili koloni. Posmatrajmo keoficijente uz xi po vrstama:
| − 0.05|+ | − 0.10| < |1.02|| − 0.11|+ | − 0.05| < |1.03|| − 0.11|+ | − 0.12| < |1.04|
Dakle, za sistem jednacina (7) Jakobijeva i Gaus-Zajdelova iterativna metoda ce konvergirati.Napisimo sistem (7) na drugaciji nacin:
x1=0.7951.02 +0.05
1.02x2 + 0.11.02x3
=x2=0.849
1.03 +0.111.03x1 +0.05
1.03x3
=x3=1.398
1.04 +0.111.04x1 +0.12
1.04x2
(10)
7

Iz oblika (10) cemo formirati iterativni proces za obe metode.Jakobijeva iterativna metoda: Iterativni proces formiramo iz (10) na sledeci nacin:
x(k+1)1 =0.795
1.02 +0.051.02x
(k)2 + 0.1
1.02x(k)3
=x
(k+1)2 =0.849
1.03 +0.111.03x
(k)1 +0.05
1.03x(k)3
=x
(k+1)3 =1.398
1.04 +0.111.04x
(k)1 +0.12
1.04x(k)2
(11)
Pocetne vrednosti x(0)1 , x
(0)2 , x
(0)3 biramo proizvoljno, mozemo uzeti vrednosti slobodne kolone
iz jednacine (7), ili (10). Koristicemo vrednosti slobodne kolone iz jednacine (7). Formiramotabelu iteracije:
k x1 x2 x3
0 0.795 0.849 1.3981 0.9581 0.9770 1.52632 0.9769 1.0007 1.55833 0.9812 1.0042 1.56304 0.9819 1.0049 1.56395 0.9820 1.0050 1.56406 0.9820 1.0051 1.56417 0.9820 1.0051 1.5641
Jakobijevom metodom smo, posle 7 iteracija, dobili resenje sistema (7)
x1 = 0.9820
x2 = 1.0051
x3 = 1.5641
Gaus-Zajdelova iterativna metoda: Iterativni proces formiramo iz (10) na sledeci nacin:
x(k+1)1 =0.795
1.02 +0.051.02x
(k)2 + 0.1
1.02x(k)3
=x
(k+1)2 =0.849
1.03 +0.111.03x
(k+1)1 +0.05
1.03x(k)3
=x
(k+1)3 =1.398
1.04 +0.111.04x
(k+1)1 +0.12
1.04x(k+1)2
(12)
Za razliku od Jakobijeve metode, sada u jednoj iteraciji koristimo dobijene podatke u istojiteraciji. Naime, za izracunavanje vrednosti x
(k+1)1 koristimo poslednje izracunate vrednosti,
a to su iz predhodne iteracije, x(k)2 i x
(k)3 . Za izracunavanje x
(k+1)2 koristimo upravo izracunatu
x(k+1)1 , i iz predhodne iteracije x
(k)3 . Za x
(k+1)3 koristimo u ovoj iteraciji izracunate x
(k+1)1 i
x(k+1)2 .
Ovakav nacin izracunavanje znacajno ubrzava proces konvergencije. Polazimo od istih pocetnihvrednosti x
(0)1 , x
(0)2 , x
(0)3 kao pri racunanju Jakobijevom metodom, a to su elementi slobodne
kolone iz (7).
8
k x1 x2 x3
0 0.795 0.849 1.3981 0.9581 0.9945 1.56032 0.9811 1.0048 1.56393 0.9820 1.0051 1.56414 0.9820 1.0051 1.5641
Gaus-Zajdelovom metodom smo, posle 4 iteracija, dobili resenje sistema (7)
x1 = 0.9820
x2 = 1.0051
x3 = 1.5641
Postignuta tacnost je ista, ali je postignuta brza konvergencija u korist Gaus-Zajdelovemetode. ¤
23. Gaus-Zajdelovom metodom resiti sistem:
8.3x1 + 7.7x2 − 0.3x3 = 27.106.1x1 + 2.2x2 + 1.2x3 = 16.553.4x1 + 4.0x2 + 5.7x3 = 27.35
(13)
racunajuci sa 4 decimale.
Resenje: Ni jedan od uslova konvergencije iterativne metode (8) i (9) nije ispunjen. Trans-formisimo sistem jednacina (13) tako da bude ispunjen uslov (9), dakle da koeficijent aii
uz nepoznatu xi bude, po apsolutnoj vrednosti, veci od sume apsolutnih vrednosti ostalihkoeficijenata aij , j 6= i. u istoj jednacini (tj. vrsti.)Oznacimo jednacine sistema (13) redom sa I, II, III. Problem imamo sa jednacinama II iIII. Transformisimo ovaj sistem na sledeci nacin:
(II) : 6.1x1 + 2.2x2 + 1.2x3 = 16.55 (A)(I − II) : 2.2x1 + 5.5x2 − 1.5x3 = 10.55 (B)
(III) : 3.4x1 + 4.0x2 + 5.7x3 = 27.35 (C)(14)
Oznacimo gornje jednacine redom sa A,B,C. Sada imamo probem jos sa jednacinomC, pa cemo da je transformismo:
(A) : 6.1x1 + 2.2x2 + 1.2x3 = 16.55(B) : 2.2x1 + 5.5x2 − 1.5x3 = 10.55
(C −B) : 1.2x1 − 1.5x2 + 7.2x3 = 16.80(15)
Sada resavamo sistem (15) koji je ekvivalentan sa sistemom jednacina (13). Ovaj sistemzadovoljava uslov konvergencije (9). Formiramo iterativni proces iz jednacina (15) na sledecinacin:
9

x(k+1)1 = −2.2
6.1 x(k)2 +−1.2
6.1 x(k)3 +16.55
6.1
x(k+1)2 =−2.2
5.5 x(k+1)1 +1.5
5.5x(k)3 +10.55
5.5
x(k+1)3 =−1.2
7.2 x(k+1)1 +1.5
7.2x(k+1)2 +16.80
7.2
(16)
Pri racunu koristimo poslednje izracunate vrednosti za x1, x2, x3.
x(k+1)1 = −0.3606x(k)
2 −0.1967x(k)3 +2.7131
x(k+1)2 =−0.4000x(k+1)
1 +0.2727x(k)3 +1.9182
x(k+1)3 =−0.1667x(k+1)
1 +0.2083x(k+1)2 +2.3333
(17)
Za pocetne vrednosti iteracije mozemo uzeti slobodnu kolonu iz sistema jednacine (17), tj.
[x(0)1 , x
(0)2 , x
(0)3 ] = [2.7131, 1.9182, 2.3333]
Posle 8 iteracija, koristeci jednacine (17), dobija se resenje:
[x1,x2,x3] = [1.5000,2.0000,2.5000]
¤
10

6 Nelinearne jednacine
Trazimo resenje nelinearne jednacine oblika:
f(x) = 0 (1)
Tacno resenje jednacine (1) x∗ aproksimiramo pribliznim x, dobijenim jednom od metoda.Bez obzira na to koju metodu koristimo, potrebno je da odredimo koliko resenja ima i daih lokalizujemo. To radimo uz pomoc grafika, i odred-ujemo interval [a, b] u kome se nalaziresenje x∗ jednacine (1). Uslov da se resenje nalazi u ovom intervalu je:
f(a)f(b) < 0 (2)
Ako je funkcija f(x) neprekidna, ovo ce znaciti da ce grafik ove funkcije preseci x osu naintervalu [a, b].
Procena greske, bez obzira na metodu kojom resavamo jednacinu (1), bice:
|x∗ − x| ≤|f(x)|
m1(3)
gde je m1 = min[a,b] |f′(x)|.
6.1 Metoda polovljenja intervala
Polovimo interval [a, b] na kome smo lokalizovali resenje x∗ jednacine (1), to radimo dok nepostignemo zadovoljavajucu tacnost. Na taj nacin dobijemo niz umetnutih intervala:
. . . ⊂ [a2, b2] ⊂ [a1, b1] ⊂ [a, b]
Procena greske ce biti:
|x∗ − x| ≤b − a
2n+1< ε (4)
Odavde mozemo da dobijemo dovoljan broj umetnutih intervala n koji ce dati trazenu tacnostε.
23. Metodom polovljenje intervala resiti jednacinu:
f(x) = e−x − x = 0 (5)
sa tacnoscu ε = 5 · 10−2. Raditi sa 3 decimale.
Resenje: Najpre procenimo koliko resenje ima. Predstavimo jednacinu (5) u sledecem obliku:
e−x = x
i oznacimo saf1(x) = e−x, f2(x) = x
1
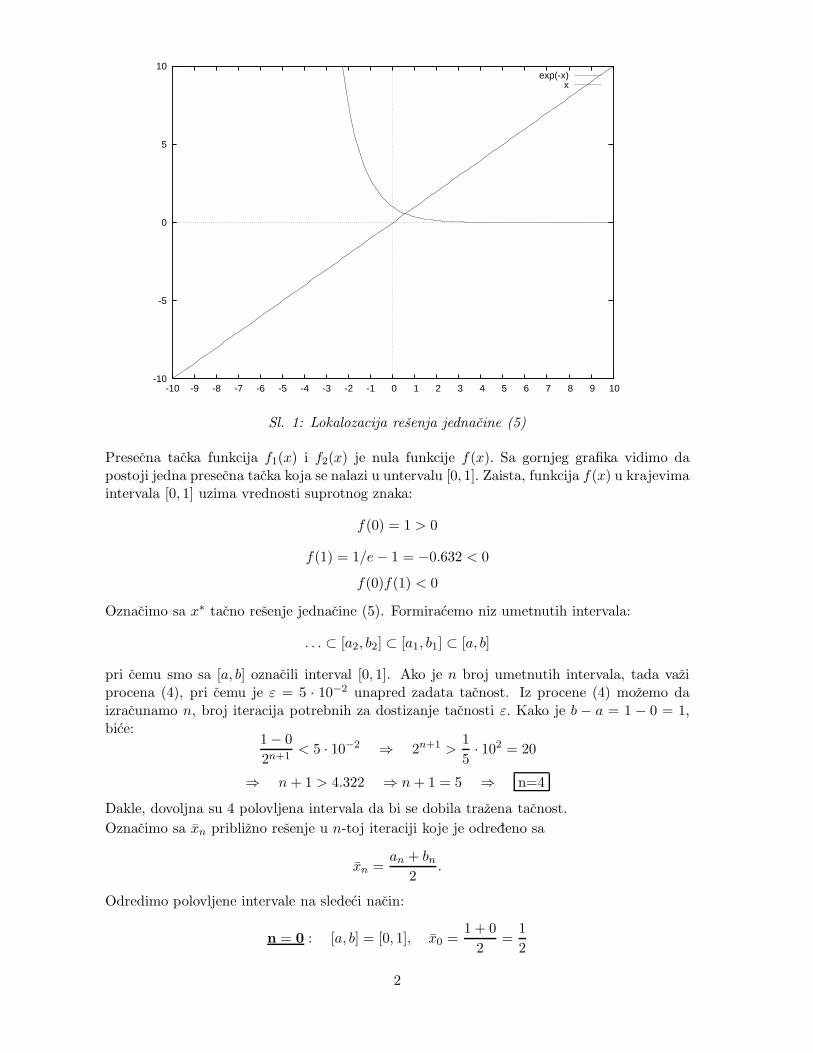
-10
-5
0
5
10
-10 -9 -8 -7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8 9 10
exp(-x)x
Sl. 1: Lokalozacija resenja jednacine (5)
Presecna tacka funkcija f1(x) i f2(x) je nula funkcije f(x). Sa gornjeg grafika vidimo dapostoji jedna presecna tacka koja se nalazi u untervalu [0, 1]. Zaista, funkcija f(x) u krajevimaintervala [0, 1] uzima vrednosti suprotnog znaka:
f(0) = 1 > 0
f(1) = 1/e − 1 = −0.632 < 0
f(0)f(1) < 0
Oznacimo sa x∗ tacno resenje jednacine (5). Formiracemo niz umetnutih intervala:
. . . ⊂ [a2, b2] ⊂ [a1, b1] ⊂ [a, b]
pri cemu smo sa [a, b] oznacili interval [0, 1]. Ako je n broj umetnutih intervala, tada vaziprocena (4), pri cemu je ε = 5 · 10−2 unapred zadata tacnost. Iz procene (4) mozemo daizracunamo n, broj iteracija potrebnih za dostizanje tacnosti ε. Kako je b − a = 1 − 0 = 1,bice:
1 − 0
2n+1< 5 · 10−2 ⇒ 2n+1 >
1
5· 102 = 20
⇒ n + 1 > 4.322 ⇒ n + 1 = 5 ⇒ n=4
Dakle, dovoljna su 4 polovljena intervala da bi se dobila trazena tacnost.
Oznacimo sa xn priblizno resenje u n-toj iteraciji koje je odred-eno sa
xn =an + bn
2.
Odredimo polovljene intervale na sledeci nacin:
n = 0 : [a, b] = [0, 1], x0 =1 + 0
2=
1
2
2

f(0) > 0, f(1) < 0, f(x0) = f
(
1
2
)
= 0.106 > 0
f(1)f
(
1
2
)
< 0 ⇒ [a1, b1] =
[
1
2, 1
]
n = 1 : [a1, b1] =
[
1
2, 1
]
, x1 =1 + 1/2
2=
3
4
f
(
1
2
)
> 0, f(1) < 0, f(x1) = f
(
3
4
)
= −0.278 < 0
f
(
1
2
)
f
(
3
4
)
< 0 ⇒ [a2, b2] =
[
1
2,3
4
]
n = 2 : [a2, b2] =
[
1
2,3
4
]
, x2 =1/2 + 3/4
2=
5
8
f
(
1
2
)
> 0, f
(
3
4
)
< 0, f(x2) = f
(
5
8
)
= −0.090 < 0
f
(
1
2
)
f
(
5
8
)
< 0 ⇒ [a3, b3] =
[
1
2,5
8
]
n = 3 : [a3, b3] =
[
1
2,5
8
]
, x3 =1/2 + 5/8
2=
9
16
f
(
1
2
)
> 0, f
(
5
8
)
< 0, f(x2) = f
(
9
16
)
= 0.007 > 0
f
(
9
16
)
f
(
5
8
)
< 0 ⇒ [a4, b4] =
[
9
16,5
8
]
n = 4 : [a4, b4] =
[
9
16,5
8
]
, x4 =9/16 + 5/8
2=
19
32
x = x4 =19
32≈ 0.594
Sada je vrednost funkcije f(x) u pribliznom resenju jednacine (5):
f(x) = f(0.595) = −0.04
Vrednost funkcije f(x) u tacki x∗ je 0, posto je x∗ tacno resenje jednacine, pa je greskaracuna:
|f(x∗) − f(x)| = |0 − (−0.04)| = 0.04 < 0.05 = 5 · 10−2
Dakle, postignuta je trazena tacnost.
�
3

6.2 Njutnova metoda (Metoda tangente)
Njutnova metoda je definisana iterativnim postupkom:
xn+1 = xn −f(xn)
f ′(xn)(6)
Da bi metoda konvergirala pocetnu tacku iterativnog postupka biramo tako da su zadovoljenisledeci uslovi:
1. Nad-emo interval [a, b] za koji je zadovoljeno:
f(a)f(b) < 0
f ′(x) 6= 0, za svako x ∈ [a, b]
f ′′(x) ne menja znak na intervalu [a, b]
2. Odaberemo tacku x0 ∈ [a, b] tako da je
f(x0)f′′(x0) > 0
Pod ovim uslovima niz xn dobijen iterativnim postupkom (6) konvergira ka resenju x∗
jednacine oblika (1), tj. f(x∗) = 0.
Postupak zaustavljamo kad je zadovoljen uslov:
|xn − xn−1| ≤
√
2εm1
M2(7)
Modifikovana Njutnova metoda: Umesto f ′(xn), u svakoj iteraciji koristimo f ′(x0) :
xn+1 = xn −f(xn)
f ′(x0)(8)
Ova modifikacija usporava proces konvergencije, ali smanjuje racun.
24. Njutnovom metodom naci sva pozitivna resenja jednacine
f(x) = ex + e−3x − 4 = 0 (9)
sa tacnoscu ε = 0.5 · 10−4.
Resenje: Najpre lokalizujmo resenje na interval [a, b]. Predstavimo jednacinu (9) u sledecemobliku:
ex = 4 − e−3x
i oznacimo saf1(x) = ex, f2(x) = 4 − e−3x
Skiciramo grafike ovih funkcija, posto se traze pozitivna resenja, samo za x > 0. Koristimoda je:
f1(0) = 1, f1(1) = 2.71828, f1(2) = 7.38906
f2(0) = 3, f2(1) = 3.95021, f1(2) = 3.99752
4
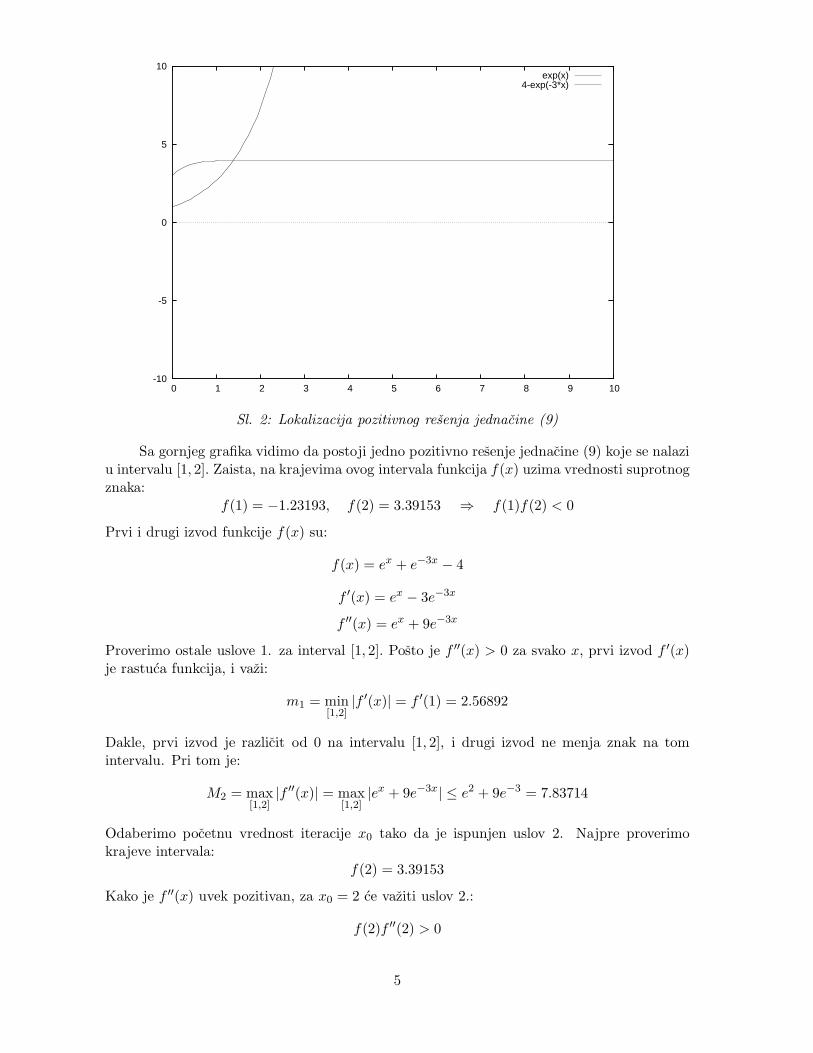
-10
-5
0
5
10
0 1 2 3 4 5 6 7 8 9 10
exp(x)4-exp(-3*x)
Sl. 2: Lokalizacija pozitivnog resenja jednacine (9)
Sa gornjeg grafika vidimo da postoji jedno pozitivno resenje jednacine (9) koje se nalaziu intervalu [1, 2]. Zaista, na krajevima ovog intervala funkcija f(x) uzima vrednosti suprotnogznaka:
f(1) = −1.23193, f(2) = 3.39153 ⇒ f(1)f(2) < 0
Prvi i drugi izvod funkcije f(x) su:
f(x) = ex + e−3x − 4
f ′(x) = ex − 3e−3x
f ′′(x) = ex + 9e−3x
Proverimo ostale uslove 1. za interval [1, 2]. Posto je f ′′(x) > 0 za svako x, prvi izvod f ′(x)je rastuca funkcija, i vazi:
m1 = min[1,2]
|f ′(x)| = f ′(1) = 2.56892
Dakle, prvi izvod je razlicit od 0 na intervalu [1, 2], i drugi izvod ne menja znak na tomintervalu. Pri tom je:
M2 = max[1,2]
|f ′′(x)| = max[1,2]
|ex + 9e−3x| ≤ e2 + 9e−3 = 7.83714
Odaberimo pocetnu vrednost iteracije x0 tako da je ispunjen uslov 2. Najpre proverimokrajeve intervala:
f(2) = 3.39153
Kako je f ′′(x) uvek pozitivan, za x0 = 2 ce vaziti uslov 2.:
f(2)f ′′(2) > 0
5

Sada su zadovoljeni svi uslovi konvergencije iterativnog procesa (6).
Kriterijum zaustavljanja iteracija je odred-en sa (7):
|xn − xn−1| ≤
√
2εm1
M2=
√
2 · 0.5 · 10−4 · 2.56892
7.83714= 0.00573
Formiramo tabelu:
n xn f(xn) f ′(xn)
0 2 3.39153 7.38162
1 1.54054 0.67695 4.63760
2 1.39457 0.04848 3.98751
3 1.38241 0.00030 3.93707
4 1.38233
Kriterijum za zaustavljanje iteracija je zadovoljen posle 4 iteracije:
|x4 − x3| = |1.38241 − 1.38233| = 0.00008 < 0.00573.
Priblizno resenje je:x = x4 = 1.38233
f(x) = f(1.38233) = −0.00001
�
6.3 Metoda secice
Koristimo aproksimaciju prvog izvoda funkcije f(x) koja vazi na osnovu Tejlorovog razvoja:
f ′(xn) ≈f(xn) − f(xn−1)
xn − xn−1
Ovom aproksimacijom zamenimo f ′(xn) u izrazu za Njutnovu metodu (6). Na taj nacindobijamo metodu secice:
xn+1 = xn − f(xn)xn − xn−1
f(xn) − f(xn−1)(10)
Ova metoda sporije konvergira od Njutnove metode.
Kriterijum zaustavljanja iterativnog procesa je:
|xn − xn−1| ≤m1ε
M1 − m1(11)
Resenje lokalizujemo na intervalu [a, b] na kome f ′(x) i f ′′(x) ne menjaju znak, i vazi:
f(a)f(b) < 0.
Za pocetnu tacku x0 mozemo da uzmemo a ili b, i to u zavisnosti od znaka f ′(x)f ′′(x) naintervalu [a, b]:
I. f ′(x)f ′′(x) > 0 za svako x na intervalu [a, b] uzimamo da je x0 = a, a metodu mozemoda modifikujemo na sledeci nacin:
xn+1 = xn − f(xn)xn − b
f(xn) − f(b)(12)
6
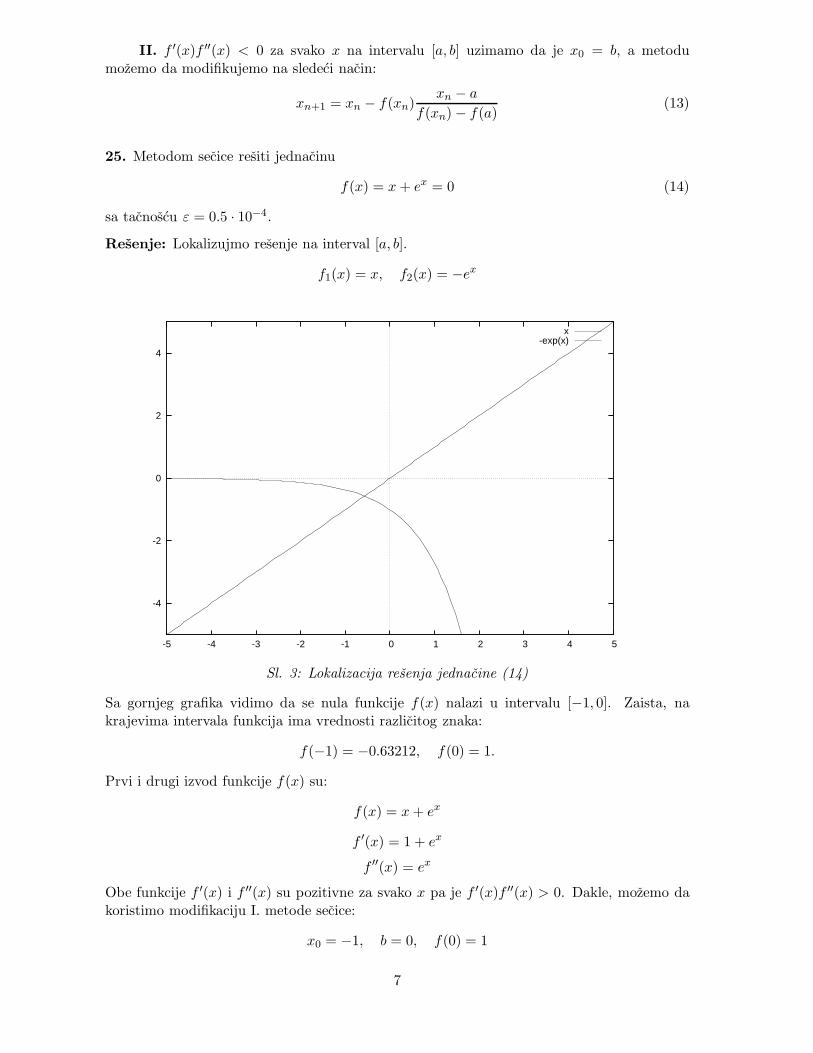
II. f ′(x)f ′′(x) < 0 za svako x na intervalu [a, b] uzimamo da je x0 = b, a metodumozemo da modifikujemo na sledeci nacin:
xn+1 = xn − f(xn)xn − a
f(xn) − f(a)(13)
25. Metodom secice resiti jednacinu
f(x) = x + ex = 0 (14)
sa tacnoscu ε = 0.5 · 10−4.
Resenje: Lokalizujmo resenje na interval [a, b].
f1(x) = x, f2(x) = −ex
-4
-2
0
2
4
-5 -4 -3 -2 -1 0 1 2 3 4 5
x-exp(x)
Sl. 3: Lokalizacija resenja jednacine (14)
Sa gornjeg grafika vidimo da se nula funkcije f(x) nalazi u intervalu [−1, 0]. Zaista, nakrajevima intervala funkcija ima vrednosti razlicitog znaka:
f(−1) = −0.63212, f(0) = 1.
Prvi i drugi izvod funkcije f(x) su:
f(x) = x + ex
f ′(x) = 1 + ex
f ′′(x) = ex
Obe funkcije f ′(x) i f ′′(x) su pozitivne za svako x pa je f ′(x)f ′′(x) > 0. Dakle, mozemo dakoristimo modifikaciju I. metode secice:
x0 = −1, b = 0, f(0) = 1
7
xn+1 = xn − f(xn)xn − 0
f(xn) − f(0)
xn+1 = xn −xnf(xn)
f(xn) − 1
xn+1 =xn
1 − f(xn)(15)
Kriterijum zaustavljanja je (11), pri cemu je:
m1 = min[−1,0]
|f ′(x)| = |f ′(−1)| = 1.36788,
posto je f ′′(x) > 0, pa je f ′(x) rastuca funkcija koja minimalnu vrednost na intervalu [−1, 0]dostize u levom kraju intervala. Iz istog razloga:
M1 = max[−1,0]
|f ′(x)| = |f ′(0)| = 2
Sada je:
|xn+1 − xn| ≤1.36788 · 0.5 · 10−4
2 − 1.36788= 0.00011
Racunajuci prema (15) formiramo tabelu:
n xn f(xn)
0 −1 −0.63212
1 −0.61270 −0.07081
2 −0.57218 −0.00789
3 −0.56770 −0.00087
4 −0.56721 −0.00010
5 −0.56712 −0.00004
Kako je kriterijum (11) ispunjen:
|x5 − x4| = 0.00009 < 0.00011
priblizno resenje jednacine (14) koje zadovoljava trazenu tacnost bice:
x = x5 = −0.56712.
Zaista:|f(x∗) − f(x)| = 0 − (−0.00004) < 0.00005 = 0.5 · 10−4.
�
6.4 Kombinovana metoda Njutna i secice
Metoda secice se moze kombinovati sa Njutnovom metodom, tako da se za definisanje secice,umesto tacke (xn−1, f(xn−1)), koristi aproksimacija odred-ena Njutnovom metodom. Imamodva slucaja:
I. Ako je f ′(x)f ′′(x) > 0:
xn+1 = xn − f(xn)xn − xn
f(xn) − f(xn)(16)
8
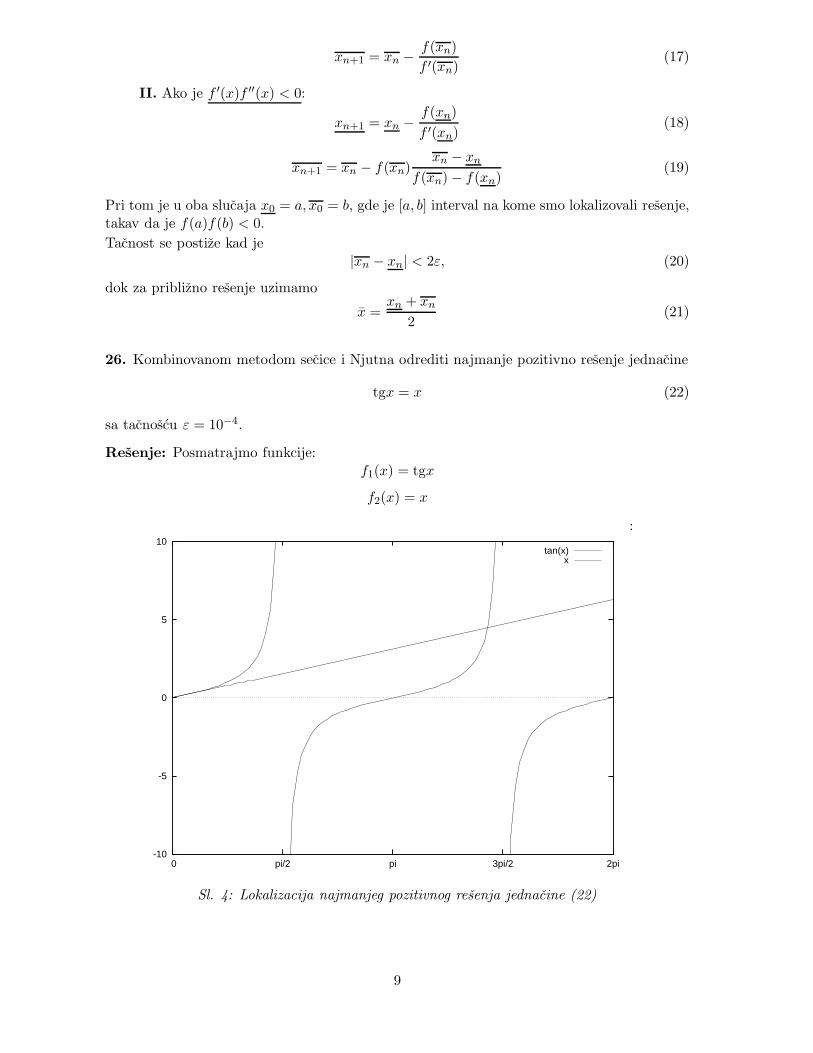
xn+1 = xn −f(xn)
f ′(xn)(17)
II. Ako je f ′(x)f ′′(x) < 0:
xn+1 = xn −f(xn)
f ′(xn)(18)
xn+1 = xn − f(xn)xn − xn
f(xn) − f(xn)(19)
Pri tom je u oba slucaja x0 = a, x0 = b, gde je [a, b] interval na kome smo lokalizovali resenje,takav da je f(a)f(b) < 0.
Tacnost se postize kad je|xn − xn| < 2ε, (20)
dok za priblizno resenje uzimamo
x =xn + xn
2(21)
26. Kombinovanom metodom secice i Njutna odrediti najmanje pozitivno resenje jednacine
tgx = x (22)
sa tacnoscu ε = 10−4.
Resenje: Posmatrajmo funkcije:f1(x) = tgx
f2(x) = x
-10
-5
0
5
10
2pi3pi/2pipi/2 0
tan(x)x
:
Sl. 4: Lokalizacija najmanjeg pozitivnog resenja jednacine (22)
9

Najmanje pozitivno resenje se nalazi u intervalu[
π, 3π2
]
. Odredimo ovo resenje kao nulufunkcije:
f(x) = sin x − x cos x (23)
f ′(x) = x sinx
f ′′(x) = sin x + x cos x
Sada je
f(π)f
(
3π
2
)
= 3.14159 · (−1) = −3.14159 < 0
Kako je x∗ ∈[
π, 3π2
]
to je x > 0, sin x < 0, cos x < 0, pa je
f ′(x) < 0, f ′′(x) < 0.
Dakle, f ′(x)f ′′(x) > 0 na intervalu[
π, 3π2
]
, pa za iterativni proces uzimamo I.:
xn+1 = xn − f(xn)xn − xn
f(xn) − f(xn)(24)
xn+1 = xn −f(xn)
f ′(xn)(25)
i x0 = π, x0 = 3π2 .
Kriterijum zaustavljanja je, prema (20):
|xn − xn| < 2 · 10−4. (26)
Sada na osnovu ovih iteracionih formula formiramo tabelu:
n xn xn f(xn) f(xn)
0 3.14159 4.71239 3.14159 −1.00000
1 3.14159 4.50018 3.14159 −0.02974
2 4.48744 4.49342 0.02615 −0.00005
3 4.49341 4.49341 0 0
i tacnost je zadovoljena:|x3 − x3| = 0
pa je priblizno resenje jednacine (22):
x = 4.49341
Napomena: Iako je u tabeli vrednost f(x3) = f(x3) = 0 ovo ipak nije tacno resenje, vecpriblizno u odnosu na zahtevanu tacnost. Ako bi zahtevana tacnost bila veca (tj. dopustenagreska manja) vrednost funkcije u pribliznom resenju ne bi bila 0. �
10