Embed Size (px)
Citation preview

GPS測量の原理
京都大学
村田

H25岩盤斜面合同現地検討会 2
GPS衛星
通 称:NAVSTAR/GPS運用総数:24(実際は31)軌道形状:円(離心率
約0.005)
軌道高度:約20,200km周回周期:11時間58分02秒軌道傾斜角:55度昇交点赤経:60度間隔軌道面記号:A, B, C, D, E, F基準発信器(f0 ):10.23MHz測位電波:L1帯
・・・(1575.42MHz=154 f0 )
C/Aコード 出力480W
P(Y)コード
出力240WL2帯 ・・・(1227.6MHz=120 f0 )
P(Y)コード
出力81W

H25岩盤斜面合同現地検討会 3
GPS測位の種類
■単独測位(1)C/A コード利用(精度30m、SA オフ);L1 帯1 波のみ(2)P(Y)コード利用(精度16m);L1 帯,L2 帯2 波(3)Doppler 測定(精度数cm/s);L1 帯1 波,L1,L2 帯2 波
速度ベクトルの測定
■相対測位(1)DGPS(差分GPS):複数点における単独測位
C/A コード利用(精度2~3m)P(Y)コード利用(精度~1m)
(2)干渉測位(GPS 測量)(L1 帯,L2 帯とも利用可能)搬送波位相の測定
(イ)static 測位(静的干渉測位)(精度~1cm,60分以上)(ロ)rapid static 測位(高速静止)(精度~3cm,20分以上)(ハ)疑似kinematic 測位(精度~3cm,10秒以上)(ニ)kinematic 測位(stop and go)(精度~3cm,10秒以上)(ホ)実時間kinematic 測位(精度~3cm,10秒以上)

H25岩盤斜面合同現地検討会 4
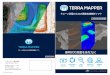
GPS測量の概要<行路差><行路差>測点Aから衛星までの距離と測点Bから衛星
までの距離の差。搬送波位相を用いて計算
される。
<基線ベクトル><基線ベクトル>測点Aと測点Bを結ぶベクトル。
<基線解析><基線解析>GPS測量において行路差を計算し,それを
もとに測点の位置関係を求める作業。
<< GPSGPS測量>測量>
座標位置がわかっている点と未知点に測量
機(受信機)を置いて,同時に最低4個の衛
星の組を観測する。数100km以上にわたる
基線の測量が数cmの精度で可能。

H25岩盤斜面合同現地検討会 5
搬送波位相の数式表現
GPSアンテナ
中間周波数
搬送波再生 位相カウンタ
増幅器
周波数変換器
中間周波数
増幅器
受信機Aの局部発信器
( )SSS Nt πψω 2sin +−GPS衛星Sからの電波
( )AA Nt πψω 2sin +−
ω:角周波数(=2πf)ψ:初期位相
N:整数値バイアス
周波数変換器において電波の掛算をおこない,差
の部分だけを取り出す。(ダウンコンバート)
<中間周波数(IF)>ダウンコンバートにより作り出された低い周波数
( ) ( ) ( ){ }SA
SSA NNttIF −+−−−= πψωψω 2cos
21
( ) ( ){ } 2/coscossinsin βαβαβα −−+−=×

H25岩盤斜面合同現地検討会 6
搬送波位相式
( ) ( ) ( ){ }SA
SSA NNttIF −+−−−= πψωψω 2cos
21
( ) ( )( ) ( )( ) S
AS
A
SSSSAA
NNN
tt
tt
=−
=−
=−
φπψω
φπψω
2
2 受信機Aの局部発信機が作る電波の位相
衛星Sからの搬送波の位相
整数値バイアス
したがって,中間周波数のコサインの中身を
とすると( )tS
Aφ
( ) ( ) ( ) SA
SA
SA Nfttt ++−= τφφφ 搬送波位相式
( ) ( ) ( ) ( ) ( ) ( ) τφτπωφτφφτφφ ftt
dttdttt SS
SSSSS −=−=−=−=
2K
ここで,ts は衛星の時刻である。また,τ を搬送波の受信機までの到達時間とすると,

H25岩盤斜面合同現地検討会 7
搬送波位相式の解釈
( ) ( ) ( ) ( ) SA
SA
SA
SA
SA
SA PNt
CfttNft ++=−++= ρφφτφ
第1項:衛星から受信機までの距離における搬送波の“波”の数
第2項:整数値バイアス
第3項:実数値バイアス
ここで,
は τ秒の間に搬送波が進む距離(位相擬似距離)
C は搬送波の伝播速度
(299,792km/s)
は実数値バイアス
( )tSAρ
( ) ( )ttP SA
SA φφ −=
搬送波位相搬送波位相とは定数(整数値バイアス+実数値バイアス)を含んだ
衛星・受信機間における搬送波の“波”の数
整数値バイアス整数値バイアスとは,搬送波位相に含まれる未確定な整数部分

H25岩盤斜面合同現地検討会 8
行路差と搬送波位相差
GPS測量では,搬送波位相を計測し,基線の両端AとBにおける行路差を計算
すれば測点の位置関係を求めることができる。
( ) ( )
( ) ( ) SB
SB
SB
SB
SA
SA
SA
SA
PNtCft
PNtCft
++=
++=
ρφ
ρφA点における搬送波位相:
B点における搬送波位相:
搬送波位相差(受信機間一重位相差)
( ) ( ) ( )
( ) ( ){ } ( ) ( )SA
SB
SA
SB
SA
SB
SA
SB
SAB
PPNNttCf
ttt
−+−+−=
−=
ρρ
φφφ
行路差 バイアス

H25岩盤斜面合同現地検討会 9
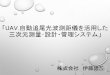
一重位相差
受信機間一重位相差 衛星間一重位相差

H25岩盤斜面合同現地検討会 10
受信機間一重位相差
( ) ( ) ( )
( ) ( ){ } ( ) ( ) ( ){ } ( ) ( ){ }
( ) ( ){ } ( ) 111
111111
111
ABABAB
BAABAB
ABAB
NtfttCf
ttftftfNNttCf
ttt
++−=
−+−+−+−=
−=
δρρ
δδδδρρ
φφφ
( ) ( )( )( ) ( )( )ttft
ttftSSAA
δφ
δφ
−=
−=
衛星と受信機それぞれの位相がそれぞれ時計誤差を含めて次式で表されるとする。
( )( )tt
SA
δ
δ :受信機Aの時計誤差
:衛星Sの時計誤差
受信機間一重位相差
衛星時計の誤差は消去される
受信機Aと受信機Bの時計誤差
よって,実数値バイアスは ( ) ( ) ( ) ( ) ( ){ }ttftttP ASS
ASA δδφφ −=−= と書ける。

H25岩盤斜面合同現地検討会 11
衛星間一重位相差
( ) ( ) ( )
( ) ( ){ } ( ) ( ) ( ){ } ( ) ( ){ }
( ) ( ){ } ( ) 121212
121212
1212
AAAA
AAAAAA
AAA
NtfttCf
ttftftfNNttCf
ttt
++−=
−+−+−+−=
−=
δρρ
δδδδρρ
φφφ
衛星間一重位相差
受信機時計の誤差は消去される
衛星1と衛星2の時計誤差

H25岩盤斜面合同現地検討会 12
二重位相差
( ) ( ) ( )
( ) ( ){ } ( ) ( ) ( ){ } ( )
( ) 1212
111222
1212
ABAB
ABABABABABAB
ABABAB
NtCf
NtfttCfNtftt
Cf
ttt
+=
⎥⎦⎤
⎢⎣⎡ ++−−++−=
−=
ρ
δρρδρρ
φφφ
受信機A,Bと衛星1,2による二重位相差
ここで, ( ) ( ) ( ){ } ( ) ( ){ }1212
112212
ABABAB
ABABAB
NNN
ttttt
−=
−−−= ρρρρρ
二重位相差には衛星の時計誤差も受信機
の時計誤差も含まれていない。
・・・
位相擬似距離
・・・
整数値バイアス
基線解析では二重位相差を観測量として位相擬似距離位相擬似距離から未知点の座標を求める。

H25岩盤斜面合同現地検討会 13
位相擬似距離における未知数
( ) ( ) ( ){ } ( ) ( ){ }ttttt ABABAB112212 ρρρρρ −−−=
位相擬似距離
位相擬似距離には未知点Bの座標(X,Y,Z)が3つの未知数として含まれる。
既知未知
この3つの未知数を求めるためには,最低4つの衛星を同時に観測し独立な3つの
二重位相差式を立てる。
( ) ( ) ( ) ( ) ( ) ( ) 141414131313121212 ,, ABABABABABABABABAB NtCftNt
CftNt
Cft +=+=+= ρφρφρφ
しかし,二重位相差式では整数値バイアスも未知数なので
未知数の数は6個になる。
既知未知

H25岩盤斜面合同現地検討会 14
フロート解の決定
( ) ( ) ( ){ } ( ) ( ){ }[ ]( ) ( ) ( ){ } ( ) ( ){ }[ ]( ) ( ) ( ){ } ( ) ( ){ }[ ]( ) ( ) ( ){ } ( ) ( ){ }[ ]( ) ( ) ( ){ } ( ) ( ){ }[ ]( ) ( ) ( ){ } ( ) ( ){ }[ ] 14
21
21
22
24
214
132
12
12
32
32
13
122
12
12
22
22
12
141
11
11
21
41
14
131
11
11
31
31
13
121
11
11
21
21
12
ABABABAB
ABABABAB
ABABABAB
ABABABAB
ABABABAB
ABABABAB
NttttCft
NttttCft
NttttCft
NttttCft
NttttCft
NttttCft
+−−−=
+−−−=
+−−−=
+−−−=
+−−−=
+−−−=
ρρρρφ
ρρρρφ
ρρρρφ
ρρρρφ
ρρρρφ
ρρρρφ
4個の衛星を連続間隔で観測し,時刻
t1 と
t2 で合計6つの二重位相差式を解
けば未知点の座標(フロート解)と整数値バイアスが求まる。
未知数・・・B点の座標(XB ,YB ,ZB )と3つの整数値バイアス

H25岩盤斜面合同現地検討会 15
フィックス解の決定
整数値バイアスは整数値でなければならない。
このため,多重解多重解となるフロート解を絞込みフィックス解を決定する必要がある。
フィックス解の決定方法の例
1)衛星の移動に伴う多重解の移動を利用する。
衛星が移動しても変化しない解をフィックス解とする。
2)多数の衛星の組み合わせを利用する。
衛星の組み合わせが変化しても変化しない解をフィックス解とする。
3)L1帯とL2帯の組み合わせ及びワイドレーン,ナローレーンを利用する。
搬送波の周波数帯が変わっても変化しない解をフィックス解とする。
ワイドレーン:1575.42MHz-1227.6MHz=347.82MHz(波長86.3cm)
ナローレーン:
1575.42MHz+1227.6MHz=2803.02MHz(波長10.7cm)