Embed Size (px)
Citation preview

1
Rekayasa
USUL PENELITIAN
HIBAH BERSAING
VISION BASED FUZZY Q LEARNING PADA NAVIGASI TELEAUTONOMOUS MOBILE ROBOT MENGGUNAKAN FPGA
UNTUK APLIKASI SEARCH AND RESCUE
Peneliti Utama: Handy Wicaksono, S.T., M.T.
Peneliti Anggota:
Indar Sugiarto, S.T., M.Sc.
UNIVERSITAS KRISTEN PETRA SURABAYA MARET 2010
2
HALAMAN PENGESAHAN 1. Judul Penelitian : Vision based Fuzzy Q Learning pada Navigasi
Teleautonomous Mobile Robot menggunakan FPGA untuk Aplikasi Search and Recue
2. Ketua Peneliti a. Nama Lengkap : Handy Wicaksono, S.T., M.T. b. Jenis Kelamin : Laki-laki c. NIP : 04-004 d. Jabatan Struktural : - e. Jabatan Fungsional : Lektor f. Fakultas/Jurusan : Teknologi Industri / Teknik Elektro g. Pusat Penelitian : - h. Alamat : Jurusan Teknik Elektro, UK Petra, Jl.
Siwalankerto 121-131, Surabaya 60236 i. Telpon/Faks : (031) 2983115 j. Alamat Rumah : Sukolilo Park Regency K7, Keputih, Surabaya k. Telpon/Faks/E-mail : 0852 310 39493 / - / [email protected] ,
3. Jangka Waktu Penelitian : 2 (dua) tahun
4. Pembiayaan Biaya diajukan ke Dikti Biaya dari Institusi Lain - Biaya Tahun ke-1 Rp. 49.950.000,- Rp. - - Biaya Tahun ke-2 Rp. 49.900.000,- Rp. -
6. Lama Penelitian : 2 (satu) tahun
7. Jumlah biaya yang diusulkan : Rp. 99.914.000,- (Sembilan puluh sembilan juta sembilan ratus empat belas ribu rupiah)
Surabaya, 22 Maret 2010 Mengetahui, Ketua Peneliti, Dekan Fak. Teknologi Industri Ir. Djoni Haryadi S., M.Eng Handy Wicaksono, S.T., M.T. NIP. 85-009 NIP. 04-004
Menyetujui, Kepala Pusat Penelitian & Pengabdian Masyarakat
Prof. DR. Ir. Lilianny Sigit Arifin, MSc NIP. 84-011
3
I. Identitas Penelitian
1. Judul Usulan : Vision based Fuzzy Q Learning pada Navigasi
Teleautonomous Mobile Robot menggunakan
FPGA untuk Aplikasi Search and Recue
2. Ketua Peneliti
a. Nama Lengkap : Handy Wicaksono, S.T., M.T.
b. Bidang Keahlian : Intelligent robot, otomasi industri
c. Jabatan Struktural : Kepala Laboratorium Sistem Kontrol
d. Jabatan Fungsional : Lektor
e. Unit Kerja : Jurusan Teknik Elektro – Universitas Kristen
Petra
f. Alamat surat : Jurusan Teknik Elektro
Universitas Kristen Petra
Jl. Siwalankerto 121 – 131 Surabaya 60236
g. Telepon/faks : (031) 2983115
h. E-mail : [email protected] ,
3. Anggota Peneliti
Tim Peneliti
No. Nama dan gelar
akademik
Bidang
Keahlian
Instansi Alokasi waktu
(jam/minggu)
1 Indar Sugiarto, S.T.,
M.Sc.
Embedded
system,
intelligent
robot
Teknik Elektro
– UK Petra
6 jam
4. Objek penelitian
Prototipe robot untuk aplikasi Search and Rescue.
5. Masa pelaksanaan penelitian :
- Mulai : awal 2011
- Berakhir : akhir 2012
6. Anggaran yang diusulkan :
- Tahun pertama : Rp. 49.982.000,-
4
- Anggaran keseluruhan : Rp. 99.914.000,-
7. Lokasi penelitian :
Laboratorium Sistem Kontrol – UK Petra
8. Hasil yang ditargetkan :
- Prototipe robot SAR dengan dilengkapi kamera, sensor benturan, sensor
ultrasonik, sensor pendeteksi suhu tubuh.
- Program vision based Fuzzy Q Learning pada FPGA.
- Publikasi ilmiah pada jurnal terakreditasi
- Laporan penelitian
9. Institusi lain yang terlibat :
Kelompok studi Robotics and Automation Based on Biologically-Inspired
Technology (RABBIT) dari Politeknik Elektronika Negeri Surabaya (PENS)
10. Keterangan lain yang dianggap perlu :
- Penelitian ini merupakan penelitian lanjutan dari penelitian yang
mendapatkan Hibah Penelitian Dosen Muda periode 2010, dengan judul :
”Implementasi Adaptive Potensial Field Behaviour Coordination and
Compact Q-Learning untuk Sistem Navigasi Autonomous Mobile Robot”.
- Penelitian ini akan dilakukan bekerja sama dengan Robotics and
Automation Based on Biologically-Inspired Technology (RABBIT)
research group dari Politeknik Elektronika Negeri Surabaya (PENS) yang
dipimpin oleh Dr. Ir. Son Kuswadi. Kerja sama yang dilakukan meliputi :
perancangan program, pengujian/eksperimen, diskusi dan share hasil
penelitian.
5
ABSTRAK
Dalam beberapa tahun terakhir gempa bumi sering terjadi di Indonesia, misalnya di Aceh, Yogyakarta, dan Padang. Proses penyelamatan korban gempa sulit dilakukan karena kemungkinan terjadinya gempa susulan yang dapat membahayakan tim penyelamat. Untuk itu robot dapat membantu tim SAR untuk mengidentifikasi adanya korban.
Aplikasi robot di bidang SAR membutuhkan arsitektur robot yang tepat. Behavior based architecture yang bersifat reaktif dan cepat akan digunakan pada penelitian ini. Pengaturan behavior pada robot perlu dilakukan mengingat robot hanya bersifat semi otonom sebagai alat bantu manusia.
Robot akan dikendalikan oleh manusia secara teleoperasi melalui user interface pada komputer. Meski demikian robot tetap perlu memiliki kecerdasan sehingga dalam batasan tertentu robot dapat mengambil keputusan sendiri. Hal ini membantu operator manusia untuk fokus pada tujuan utama SAR.
Untuk itu, robot akan dilengkapi dengan algoritma Fuzzy Q Learning (FQL) yang bersifat off policy, konvergen dan dapat bekerja pada continuous state/action. Mengingat algoritma FQL cukup kompleks, akan digunakan FPGA sebagai pengendali robot.
Sebagai sensor untuk mendeteksi ada tidaknya obyek (baik halangan maupun korban) akan digunakan kamera. Dengan teknik image processing tertentu, informasi dari kamera akan digunakan sebagai inputan dari algoritma FQL yang telah ada, sehingga keputusan yang diambil robot lebih akurat.

6
BAB I
PENDAHULUAN
Latar Belakang
Dalam beberapa tahun terakhir bencana gempa bumi sering terjadi di Indonesia.
Mulai dari tsunami berakibat gempa di Aceh (menelan korban sekitar 220.000 jiwa),
gempa di Yogyakarta (menelan korban sekitar 6000 jiwa), dan gempa di Padang yang
baru terjadi beberapa bulan yang lalu (menelan korban sekitar 1.100 jiwa).
Setelah bencana gempa terjadi, sangat penting untuk melakukan pencarian dan
penyelamatan (Search and Recue). Hasil dari pengamatan Kobe Fire Department,
proses Search and Recue (SAR) yang cepat sangat penting karena survival rate
korban selamat terus menurun seiring waktu. Menurut Tokyo Fire Department, proses
search (pencarian) ialah yang paling sulit dilakukan. Banyak penolong pertama
menyatakan bahwa mereka dapat menyelamatkan korban jika posisinya telah
diketahui. Seringkali, search berada di luar kemampuan manusia, sehingga
dibutuhkan sistem pembantu untuk melakukan operasi ini (Tadokoro, 2009).
Tadokoro (2009) menyimpulkan bahwa tujuan dari robot dalam aplikasi SAR :
1. Membantu operasi SAR yang sulit dilakukan oleh manusia.
2. Mengurangi resiko dari kerusakan sekunder.
3. Meningkatkan kecepatan operasi supaya tingkat keselamatan korban naik.
Pada penelitian ini akan dibuat prototipe robot sebagai alat bantu tim SAR.
Robot yang digunakan sebagai alat bantu akan bersifat teleautonomous, artinya
robot bisa dikendalikan secara teleoperasi (operasi jarak jauh) oleh manusia namun
juga masih memiliki tingkat otonomi tertentu. Perpaduan ini penting mengingat robot
sulit untuk bekerja mandiri dalam aplikasi SAR yang kompleks, namun robot juga
perlu memiliki otonomi untuk membantu operator manusia menjalankan tugasnya.
Saat robot berada dalam fase otonom, robot perlu dilengkapi dengan
kemampuan belajar mandiri (tanpa guru) supaya robot dapat mengantisipasi berbagai
perubahan yang tidak terduga. Penggunaan kamera sebagai vision sensor juga dapat
membantu meningkatkan akurasi masukan bagi algoritma pembelajaran robot.
Penerapan algoritma pembelajaran (yang umumnya kompleks) pada robot
merupakan masalah tersendiri. Perlu dilakukan beberapa modifikasi dalam algoritma
dan pemilihan perangkat keras yang mendukung sehingga algoritma tersebut dapat
7
digunakan pada robot nyata. Hal ini penting dilakukan karena algoritma yang canggih
sekalipun menjadi tidak berarti jika tidak dapat diterapkan pada robot nyata.
Tujuan Khusus
Mengingat sangat diperlukannya penerapan robot di bidang SAR, maka melalui
penelitian ini akan dibuat prototipe robot sebagai alat bantu tim SAR. Robot ini akan
dirancang dengan arsitektur teleautonomous, gabungan antara teleoperasi dan
otonomi.
Dari aspek otonomi, robot akan dilengkapi dengan sensor – sensor berikut :
bump sensor, ultrasonic sensor, sensor panas dan tubuh. Hal ini dimaksudkan supaya
dalam batas tertentu robot masih dapat menghindari halangan bahkan menemukan
target (korban bencana).
Selain itu robot akan dilengkapi dengan kemampuan belajar dari lingkungan
menggunakan metode Reinforcement Learning (RL). Metode ini memungkinkan
robot belajar mandiri tanpa guru, melainkan hanya mengandalkan reward dari
lingkungan. Metode RL yang populer dan efektif pada continuous state/action ialah
Fuzzy Q Learning (FQL), sehingga metode tersebut akan digunakan pada penelitian
ini.
Karena metode pembelajaran di atas cukup kompleks, untuk menerapkannya
pada robot sebenarnya akan digunakan Field Programmable Gate Array (FPGA) dari
Xilinx. FPGA memiliki kemampuan pemrosesan tinggi dan kapasitas memori yang
sangat besar jika dibandingkan dengan mikrokontroler biasa.
Sedang untuk menunjang aspek teleoperasi pada robot, maka robot akan
dilengkapi dengan kamera. Gambar yang didapat dari kamera akan dikirimkan secara
wireless kepada komputer yang dioperasikan operator. Untuk itu robot juga akan
dilengkapi dengan modul komunikasi wireless. Sedangkan pada komputer harus
dilengkapi dengan program Graphical User Interface yang memadai untuk
mempermudah operator melakukan tugasnya.
Penggunaan kamera pada robot juga memungkinkan digunakannya vision based
reinforcement learning pada mode otonom robot. Dengan metode tersebut, robot
dapat mengambil keputusan setelah belajar dari gambar yang dikirimkan oleh kamera.
Hal ini diharapkan dapat meningkatkan akurasi pengambilan keputusan robot.
8
Urgensi Penelitian
Penyelamatan Korban Bencana (Penerapan Nyata di Lapangan)
Penelitian ini penting untuk dilakukan karena frekuensi gempa yang cukup
sering terjadi di Indonesia dalam 5 tahun terakhir. Penggunaan robot sebagai alat
bantu tim SAR belum dilakukan di Indonesia, padahal di negara lain (Jepang,
Amerika Serikat) hal ini sudah mulai dilakukan. Dengan menggunakan alat bantu
berupa robot, sangat diharapkan nantinya makin banyak korban gempa yang dapat
diselamatkan.
Dengan membuat sendiri robot SAR, tentunya Pemerintah tidak perlu membeli
robot SAR dari negara lain dengan harga yang tinggi. Hal ini tentunya dapat
mengurangi ketergantungan bangsa Indonesia dari negara lain dalam hal teknologi
robotika, dan pada akhirnya dapat meningkatkan daya saing bangsa.
Pengembangan IPTEKS
Di sisi lain, melalui penelitian ini akan dibuat prototipe robot SAR yang akan
dikendalikan dari jarak jauh oleh operator. Melalui berbagai eksperimen tentunya
aspek – aspek yang penting dari teleautonomy (gabungan dari teleoperasi dan robot
otonom) dapat digali di sini, sehingga dapat membantu dalam penerapan sebenarnya
di masa mendatang.
Dari sisi teknis, penerapan robot dalam aplikasi SAR ini cukup menantang,
mengingat sifat dari medan bencana yang berubah – ubah dan tidak menentu. Hal
tersebut juga menimbulkan kebutuhan robot untuk dapat belajar secara mandiri
(dalam batas tertentu). Sehingga dalam penelitian ini, akan diterapkan algoritma
pembelajaran Fuzzy Q Learning.
Algoritma pembelajaran robot sebagian besar masih dilakukan dalam bentuk
simulasi komputer karena algoritmanya yang kompleks dan pada penelitian ini akan
digunakan FPGA sebagai pengendali robot yang memiliki kemampuan pemrosesan
tinggi dan kapasitas memori besar. Melalui penelitian ini algoritma FQL akan
diprogram menggunakan media FPGA dan performa yang dihasilkan robot akan
diamati.
Sering kali informasi yang didapat robot kurang akurat. Sehingga pada
penelitian ini, inputan dari algoritma pembelajaran akan menggunakan gambar yang
direkam kamera. Hal ini penting karena dalam penerapan robot SAR, peran kamera
dalam memandu operator jarak jauh ataupun sebagai media pendeteksi obyek (baik
halangan maupun korban) sangat penting.
9
Pengembangan Kelembagaan
Akhirnya, melalui penelitian ini, diharapkan Jurusan Teknik Elektro (JTE) –
Universitas Kristen Petra (UKP) dapat menjadi center of excellence di bidang robotika
pada umumnya, dan robot SAR pada khususnya.
Saat ini JTE – UKP memiliki Automation and Robotics Research Group
(ARRG) yang bertujuan untuk meningkatkan atmosfer ilmiah serta melakukan
penelitian bersama di bidang Otomasi & Robotika. Melalui Hibah Bersaing ini
diharapkan akan muncul penelitian – penelitian bermutu di bidang robotika oleh
dosen & mahasiswa melalui ARRG di masa mendatang.
Peningkatan Kerja Sama Riset
Penelitian yang akan dilakukan dengan Hibah Bersaing ini juga akan
meningkatkan kerja sama riset antara ARRG dari JTE – UKP dengan Robotics and
Automation Based on Biologically-Inspired Technology (RABBIT) research group
dari Politeknik Elektronika Negeri Surabaya (PENS) yang dipimpin oleh Dr. Ir. Son
Kuswadi.
Kerja sama yang dilakukan meliputi : perancangan perangkat lunak dan
perangkat keras, pengujian/eksperimen, diskusi dan share hasil penelitian. Melalui
kerja sama ini diharapkan mutu penelitian yang dilakukan meningkat. Selain itu
diharapkan terjadi sharing of knowledge antar peneliti dari 2 kelompok studi tersebut
sehingga mutu peneliti – penelitinya juga akan mengalami peningkatan.
10
BAB II
STUDI PUSTAKA
Aplikasi robot dalam operasi Search And Rescue (SAR) mulai dilakukan
pada bencana WTC di Amerika Serikat. Kondisi area bencana yang berbahaya bagi
manusia pekerja maupun anjing membuat robot dipilih sebagai sarana pembantu.
Untuk memenuhi tugasnya menemukan dan membantu proses lokalisasi korban, robot
harus memiliki ukuran kecil, memiliki mobilitas tinggi, fleksibel dan dilengkapi
dengan sensor – sensor yang diperlukan (Murphy dkk., 2000).
Gambar 1. Contoh rescue robot dari SOLEM dan URBOT (Carlson, 2005)
Di Indonesia penelitian tentang robot SAR diantaranya dilakukan oleh
ABBIT (Robotics and Automation Based on Biologically Inspired Technology)
research group dari PENS-ITS dimana penulis ikut bergabung selama penyelesaian
tesis. Penelitian yang dilakukan meliputi mekanisme robot dengan menggunakan
robot berkaki lima (Prihastono et. al., 2009) dan mekanisme gabungan roda – kaki
(Kuswadi et. al., 2009). Selain itu penelitian tentang pembelajaran robot dengan
Reinforcement Learning (Anam et. al., 2009) juga aktif dilakukan.
Untuk mewujudkan robot untuk aplikasi SAR diperlukan arsitektur robot
yang tepat. Arsitektur robot yang pertama kali dikemukakan ialah arsitektur
deliberative / hirarki. Contohnya ialah robot Shakey yang dikembangkan oleh
Stanford Research Institute. Prinsip kerja dari arsitektur ini ialah robot merasa
kemudian berpikir sebelum dapat bergerak (sense – plan – act ). Kelemahan dari
arsitektur ini ialah waktu untuk perencanaan yang lama sehingga tidak cocok untuk
aplikasi dalam real robot.
11
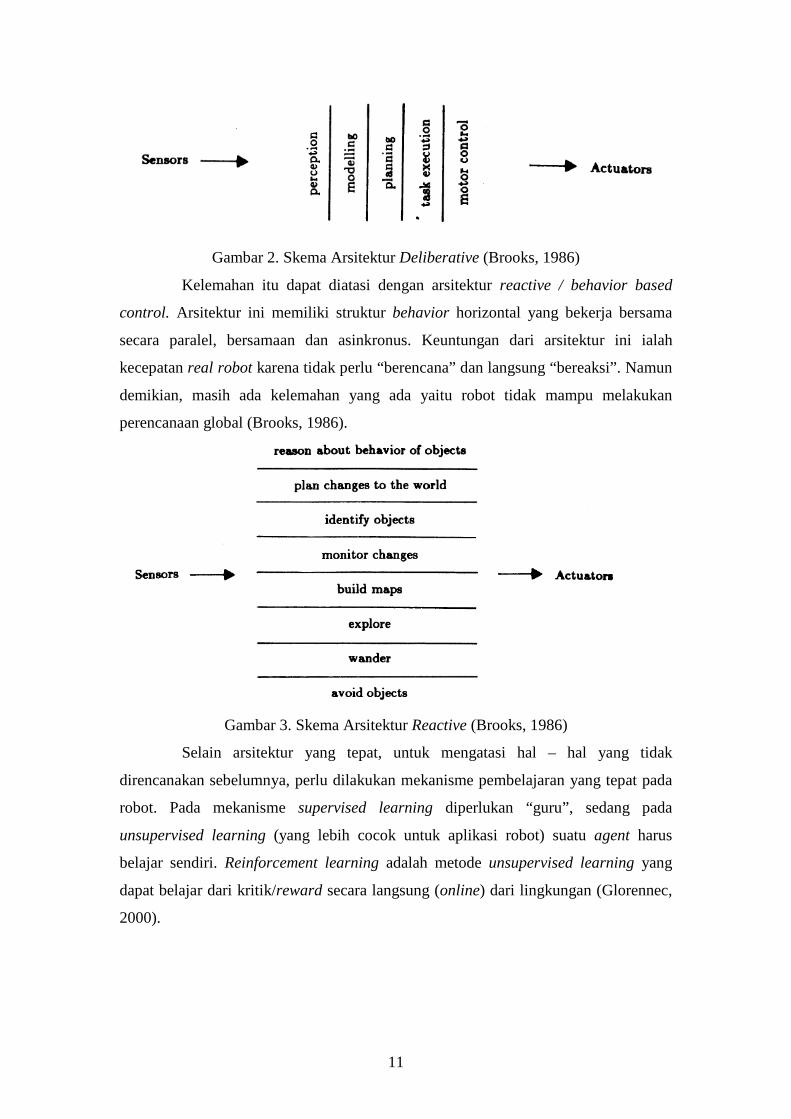
Gambar 2. Skema Arsitektur Deliberative (Brooks, 1986)
Kelemahan itu dapat diatasi dengan arsitektur reactive / behavior based
control. Arsitektur ini memiliki struktur behavior horizontal yang bekerja bersama
secara paralel, bersamaan dan asinkronus. Keuntungan dari arsitektur ini ialah
kecepatan real robot karena tidak perlu “berencana” dan langsung “bereaksi”. Namun
demikian, masih ada kelemahan yang ada yaitu robot tidak mampu melakukan
perencanaan global (Brooks, 1986).
Gambar 3. Skema Arsitektur Reactive (Brooks, 1986)
Selain arsitektur yang tepat, untuk mengatasi hal – hal yang tidak
direncanakan sebelumnya, perlu dilakukan mekanisme pembelajaran yang tepat pada
robot. Pada mekanisme supervised learning diperlukan “guru”, sedang pada
unsupervised learning (yang lebih cocok untuk aplikasi robot) suatu agent harus
belajar sendiri. Reinforcement learning adalah metode unsupervised learning yang
dapat belajar dari kritik/reward secara langsung (online) dari lingkungan (Glorennec,
2000).
12
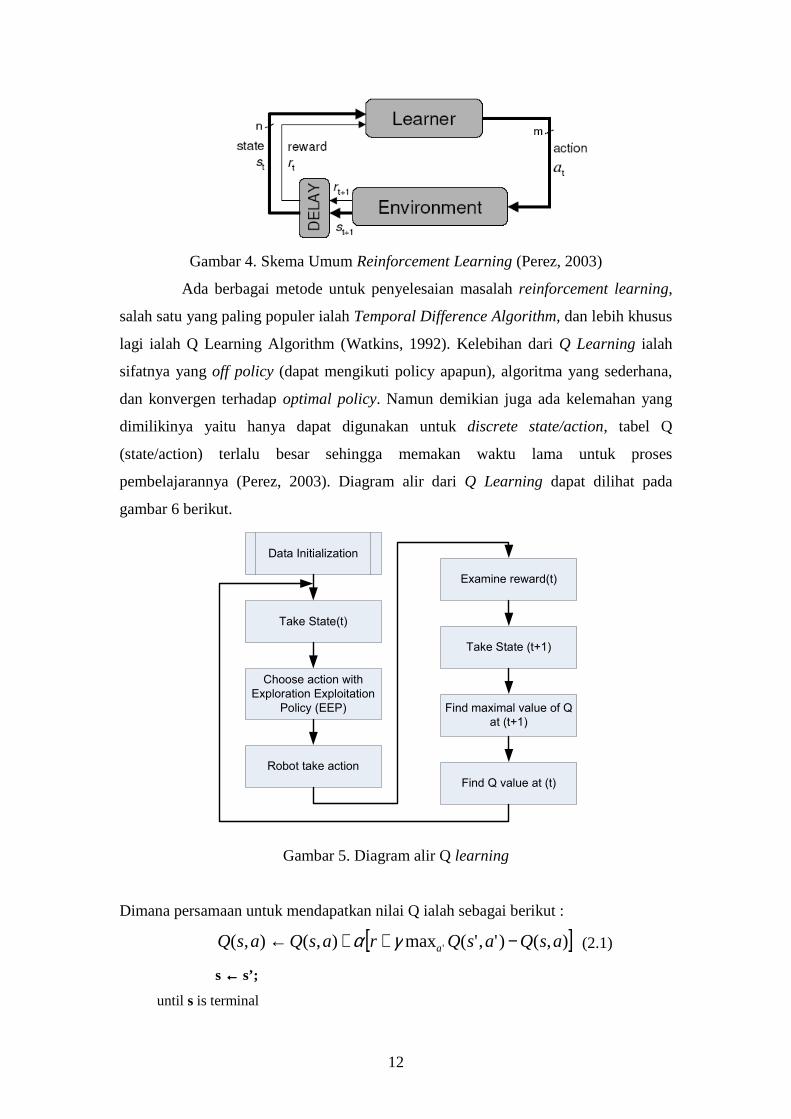
Gambar 4. Skema Umum Reinforcement Learning (Perez, 2003)
Ada berbagai metode untuk penyelesaian masalah reinforcement learning,
salah satu yang paling populer ialah Temporal Difference Algorithm, dan lebih khusus
lagi ialah Q Learning Algorithm (Watkins, 1992). Kelebihan dari Q Learning ialah
sifatnya yang off policy (dapat mengikuti policy apapun), algoritma yang sederhana,
dan konvergen terhadap optimal policy. Namun demikian juga ada kelemahan yang
dimilikinya yaitu hanya dapat digunakan untuk discrete state/action, tabel Q
(state/action) terlalu besar sehingga memakan waktu lama untuk proses
pembelajarannya (Perez, 2003). Diagram alir dari Q Learning dapat dilihat pada
gambar 6 berikut.
Take State(t)
Choose action with
Exploration Exploitation
Policy (EEP)
Robot take action
Data Initialization
Examine reward(t)
Take State (t+1)
Find maximal value of Q
at (t+1)
Find Q value at (t)
Gambar 5. Diagram alir Q learning
Dimana persamaan untuk mendapatkan nilai Q ialah sebagai berikut :
[ ]),()','(max),(),( ' asQasQrasQasQ a −++← γα (2.1)
s ←←←← s’;
until s is terminal
13
dimana
Q(s,a) : component of Q table (state, action)
s : state s’ : next state a : action a’ : next action
r : reward α : learning rate γ : discount factor
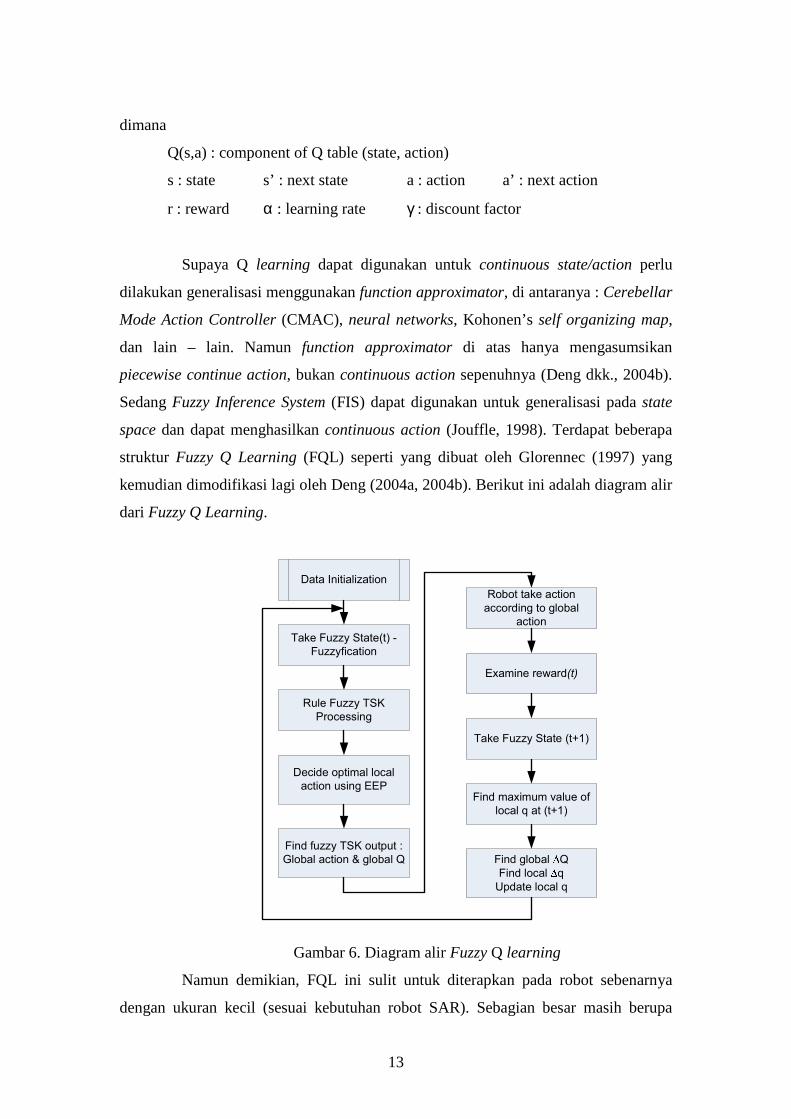
Supaya Q learning dapat digunakan untuk continuous state/action perlu
dilakukan generalisasi menggunakan function approximator, di antaranya : Cerebellar
Mode Action Controller (CMAC), neural networks, Kohonen’s self organizing map,
dan lain – lain. Namun function approximator di atas hanya mengasumsikan
piecewise continue action, bukan continuous action sepenuhnya (Deng dkk., 2004b).
Sedang Fuzzy Inference System (FIS) dapat digunakan untuk generalisasi pada state
space dan dapat menghasilkan continuous action (Jouffle, 1998). Terdapat beberapa
struktur Fuzzy Q Learning (FQL) seperti yang dibuat oleh Glorennec (1997) yang
kemudian dimodifikasi lagi oleh Deng (2004a, 2004b). Berikut ini adalah diagram alir
dari Fuzzy Q Learning.
Take Fuzzy State(t) -
Fuzzyfication
Decide optimal local
action using EEP
Robot take action
according to global
action
Examine reward(t)
Take Fuzzy State (t+1)
Find maximum value of
local q at (t+1)
Find global Q
Find local q
Update local q
Data Initialization
Rule Fuzzy TSK
Processing
Find fuzzy TSK output :
Global action & global Q
Gambar 6. Diagram alir Fuzzy Q learning
Namun demikian, FQL ini sulit untuk diterapkan pada robot sebenarnya
dengan ukuran kecil (sesuai kebutuhan robot SAR). Sebagian besar masih berupa

14
simulasi pada komputer (Deng, 2004b), (Suh, 1997), (Hafner, 2003). Memang
sebelumnya aplikasi Q Learning telah diterapkan pada robot pendorong kotak namun
aplikasi tersebut menggunakan komputer (sehingga ukuran robot cukup besar) dan
masih membutuhkan waktu yang lama (Mahadevan et.al, 1991). Selain itu algoritma
Q Learning juga diterapkan pada robot nyata, namun masih perlu fase supervising
dari operator manusia (Smart et.al, 2002).
Kesulitan tersebut dikarenakan robot berukuran kecil memiliki ukuran
memori dan program yang terbatas, performa processor yang rendah, dan otonomi
daya yang rendah. Padahal algoritma pembelajaran umumnya cukup kompleks.
Karenanya Asadpour melakukan beberapa penyederhanaan dan modifikasi pada
algoritma Q learning (disebut compact Q learning) dengan hanya menggunakan
operasi penjumlahan dan pengurangan, serta membatasi tipe bilangan menjadi integer
saja (Asadpour et.al, 2004). Penulis juga telah menerapkan compact Fuzzy Q
Learning pada mobile robot melalui simulasi Webots (Wicaksono, 2009).
Penerapan pembelajaran pada robot SAR akan lebih akurat jika
menggunakan vision sensor berupa kamera, meskipun hal ini memerlukan teknik
image processing yang cukup rumit. Gambar yang ditangkap kamera nantinya akan
menjadi input bagi algoritma pembelajaran. Suatu pendekatan yang disebut Direct-
Vision-based Reinforcement Learning telah dikembangkan oleh Iida et. al. (2002) dan
diterapkan pada tugas mendorong kotak oleh Shibata et. al. (2003). Pendekatan ini
tidak menggunakan teknik pemrosesan gambar tertentu, melainkan langsung
memproses input sensor mentah dengan Neural Network. Proses ini berpotensi untuk
memperlambat gerak robot jika terjadi fase training yang lama. Gambar 8.
menunjukkan skema umumnya.
Gambar 7. Direct Vision Based Reinforcement Learning (Iida, 2002)
15
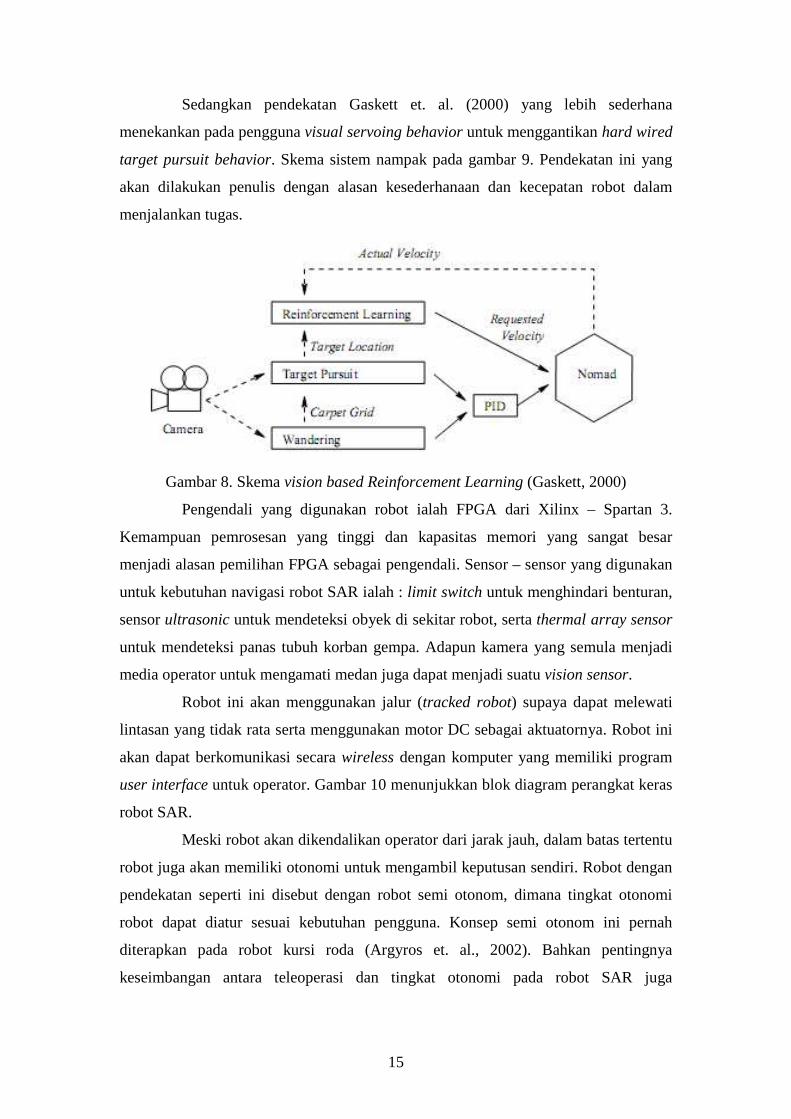
Sedangkan pendekatan Gaskett et. al. (2000) yang lebih sederhana
menekankan pada pengguna visual servoing behavior untuk menggantikan hard wired
target pursuit behavior. Skema sistem nampak pada gambar 9. Pendekatan ini yang
akan dilakukan penulis dengan alasan kesederhanaan dan kecepatan robot dalam
menjalankan tugas.
Gambar 8. Skema vision based Reinforcement Learning (Gaskett, 2000)
Pengendali yang digunakan robot ialah FPGA dari Xilinx – Spartan 3.
Kemampuan pemrosesan yang tinggi dan kapasitas memori yang sangat besar
menjadi alasan pemilihan FPGA sebagai pengendali. Sensor – sensor yang digunakan
untuk kebutuhan navigasi robot SAR ialah : limit switch untuk menghindari benturan,
sensor ultrasonic untuk mendeteksi obyek di sekitar robot, serta thermal array sensor
untuk mendeteksi panas tubuh korban gempa. Adapun kamera yang semula menjadi
media operator untuk mengamati medan juga dapat menjadi suatu vision sensor.
Robot ini akan menggunakan jalur (tracked robot) supaya dapat melewati
lintasan yang tidak rata serta menggunakan motor DC sebagai aktuatornya. Robot ini
akan dapat berkomunikasi secara wireless dengan komputer yang memiliki program
user interface untuk operator. Gambar 10 menunjukkan blok diagram perangkat keras
robot SAR.
Meski robot akan dikendalikan operator dari jarak jauh, dalam batas tertentu
robot juga akan memiliki otonomi untuk mengambil keputusan sendiri. Robot dengan
pendekatan seperti ini disebut dengan robot semi otonom, dimana tingkat otonomi
robot dapat diatur sesuai kebutuhan pengguna. Konsep semi otonom ini pernah
diterapkan pada robot kursi roda (Argyros et. al., 2002). Bahkan pentingnya
keseimbangan antara teleoperasi dan tingkat otonomi pada robot SAR juga
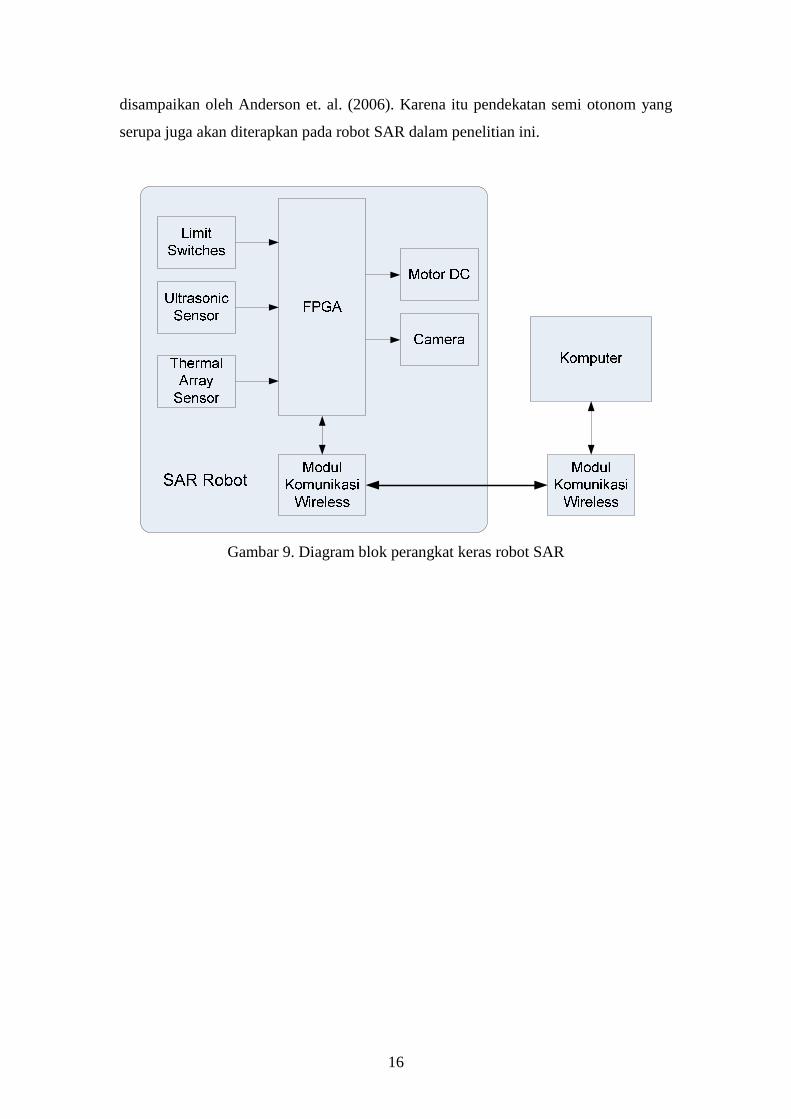
16
disampaikan oleh Anderson et. al. (2006). Karena itu pendekatan semi otonom yang
serupa juga akan diterapkan pada robot SAR dalam penelitian ini.
Gambar 9. Diagram blok perangkat keras robot SAR
17
BAB III
METODE PENELITIAN
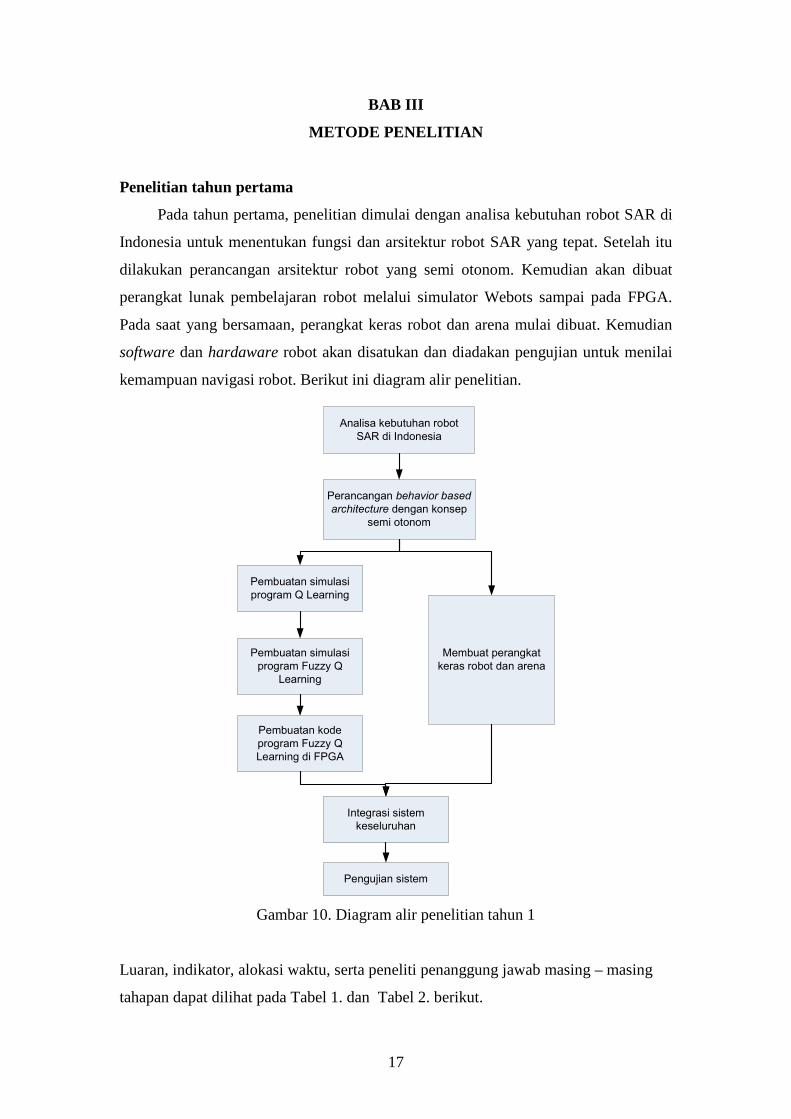
Penelitian tahun pertama
Pada tahun pertama, penelitian dimulai dengan analisa kebutuhan robot SAR di
Indonesia untuk menentukan fungsi dan arsitektur robot SAR yang tepat. Setelah itu
dilakukan perancangan arsitektur robot yang semi otonom. Kemudian akan dibuat
perangkat lunak pembelajaran robot melalui simulator Webots sampai pada FPGA.
Pada saat yang bersamaan, perangkat keras robot dan arena mulai dibuat. Kemudian
software dan hardaware robot akan disatukan dan diadakan pengujian untuk menilai
kemampuan navigasi robot. Berikut ini diagram alir penelitian.
Analisa kebutuhan robot
SAR di Indonesia
Perancangan behavior based
architecture dengan konsep
semi otonom
Pembuatan simulasi
program Q Learning
Pembuatan simulasi
program Fuzzy Q
Learning
Membuat perangkat
keras robot dan arena
Pembuatan kode
program Fuzzy Q
Learning di FPGA
Integrasi sistem
keseluruhan
Pengujian sistem
Gambar 10. Diagram alir penelitian tahun 1
Luaran, indikator, alokasi waktu, serta peneliti penanggung jawab masing – masing
tahapan dapat dilihat pada Tabel 1. dan Tabel 2. berikut.
18
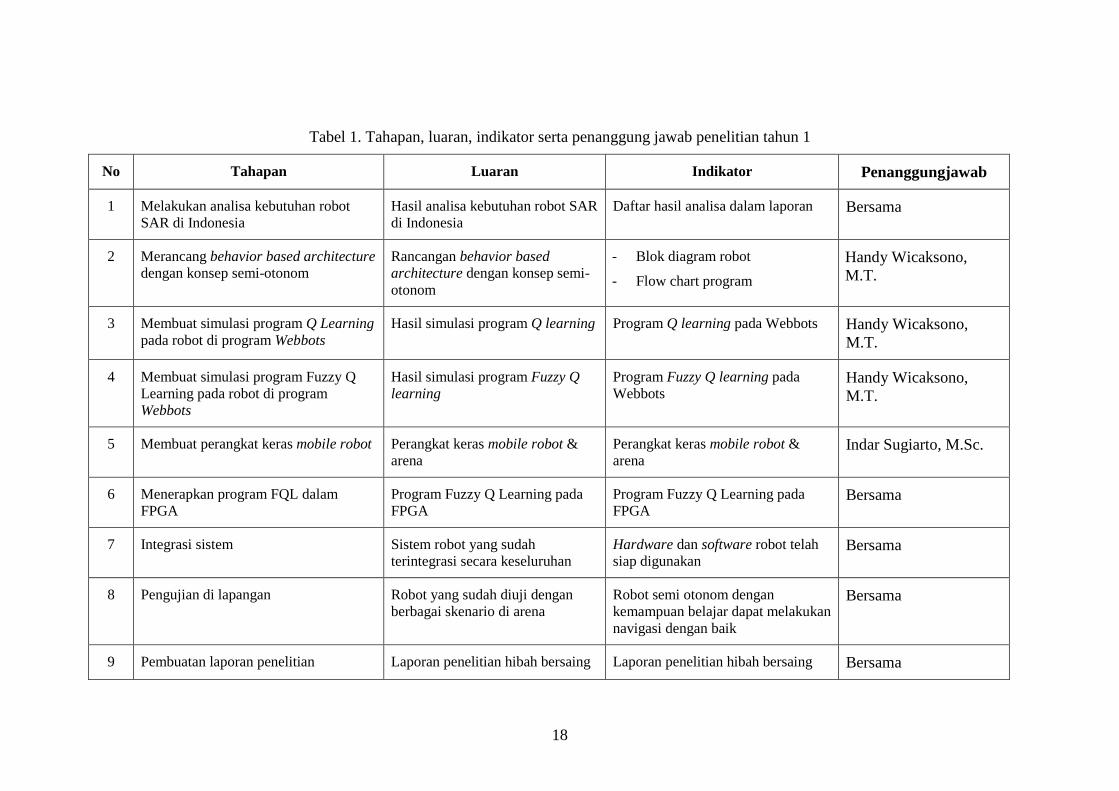
Tabel 1. Tahapan, luaran, indikator serta penanggung jawab penelitian tahun 1
No Tahapan Luaran Indikator Penanggungjawab
1 Melakukan analisa kebutuhan robot SAR di Indonesia
Hasil analisa kebutuhan robot SAR di Indonesia
Daftar hasil analisa dalam laporan Bersama
2 Merancang behavior based architecture dengan konsep semi-otonom
Rancangan behavior based architecture dengan konsep semi-otonom
- Blok diagram robot
- Flow chart program
Handy Wicaksono, M.T.
3 Membuat simulasi program Q Learning pada robot di program Webbots
Hasil simulasi program Q learning Program Q learning pada Webbots Handy Wicaksono, M.T.
4 Membuat simulasi program Fuzzy Q Learning pada robot di program Webbots
Hasil simulasi program Fuzzy Q learning
Program Fuzzy Q learning pada Webbots
Handy Wicaksono, M.T.
5 Membuat perangkat keras mobile robot Perangkat keras mobile robot & arena
Perangkat keras mobile robot & arena
Indar Sugiarto, M.Sc.
6 Menerapkan program FQL dalam FPGA
Program Fuzzy Q Learning pada FPGA
Program Fuzzy Q Learning pada FPGA
Bersama
7 Integrasi sistem Sistem robot yang sudah terintegrasi secara keseluruhan
Hardware dan software robot telah siap digunakan
Bersama
8 Pengujian di lapangan Robot yang sudah diuji dengan berbagai skenario di arena
Robot semi otonom dengan kemampuan belajar dapat melakukan navigasi dengan baik
Bersama
9 Pembuatan laporan penelitian Laporan penelitian hibah bersaing Laporan penelitian hibah bersaing Bersama
19
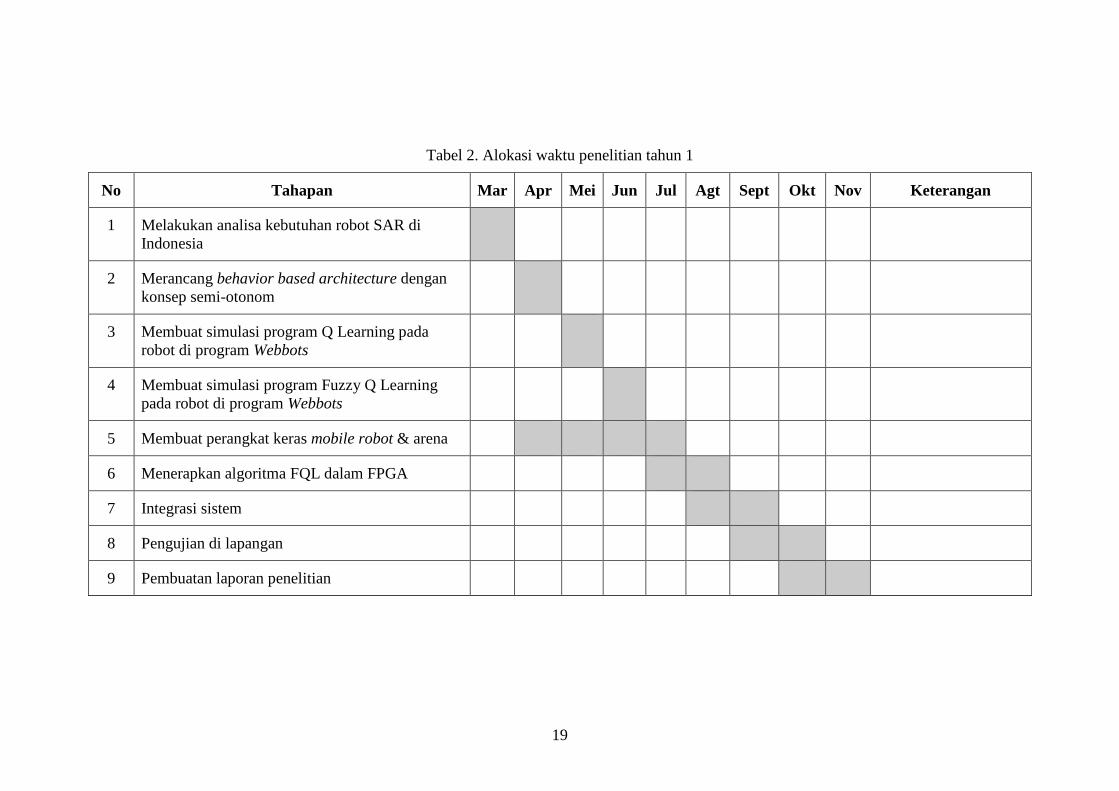
Tabel 2. Alokasi waktu penelitian tahun 1
No Tahapan Mar Apr Mei Jun Jul Agt Sept Okt Nov Keterangan
1 Melakukan analisa kebutuhan robot SAR di Indonesia
2 Merancang behavior based architecture dengan konsep semi-otonom
3 Membuat simulasi program Q Learning pada robot di program Webbots
4 Membuat simulasi program Fuzzy Q Learning pada robot di program Webbots
5 Membuat perangkat keras mobile robot & arena
6 Menerapkan algoritma FQL dalam FPGA
7 Integrasi sistem
8 Pengujian di lapangan
9 Pembuatan laporan penelitian
20
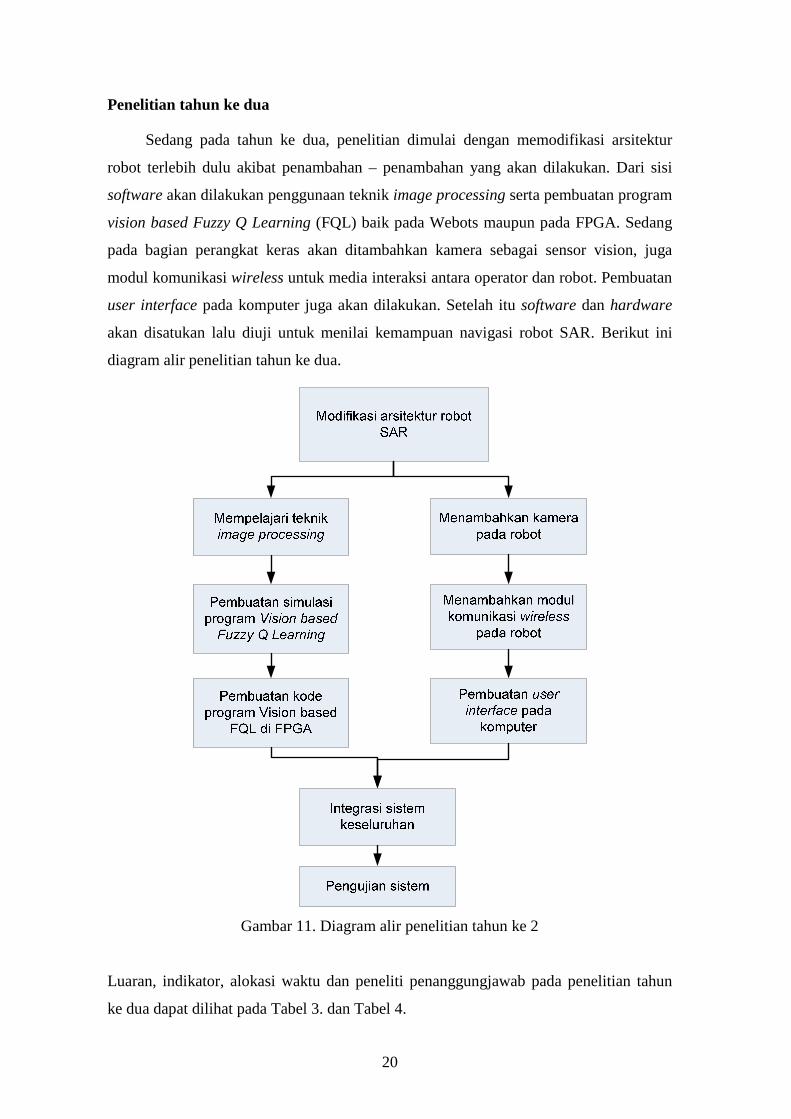
Penelitian tahun ke dua
Sedang pada tahun ke dua, penelitian dimulai dengan memodifikasi arsitektur
robot terlebih dulu akibat penambahan – penambahan yang akan dilakukan. Dari sisi
software akan dilakukan penggunaan teknik image processing serta pembuatan program
vision based Fuzzy Q Learning (FQL) baik pada Webots maupun pada FPGA. Sedang
pada bagian perangkat keras akan ditambahkan kamera sebagai sensor vision, juga
modul komunikasi wireless untuk media interaksi antara operator dan robot. Pembuatan
user interface pada komputer juga akan dilakukan. Setelah itu software dan hardware
akan disatukan lalu diuji untuk menilai kemampuan navigasi robot SAR. Berikut ini
diagram alir penelitian tahun ke dua.
Gambar 11. Diagram alir penelitian tahun ke 2
Luaran, indikator, alokasi waktu dan peneliti penanggungjawab pada penelitian tahun
ke dua dapat dilihat pada Tabel 3. dan Tabel 4.
21
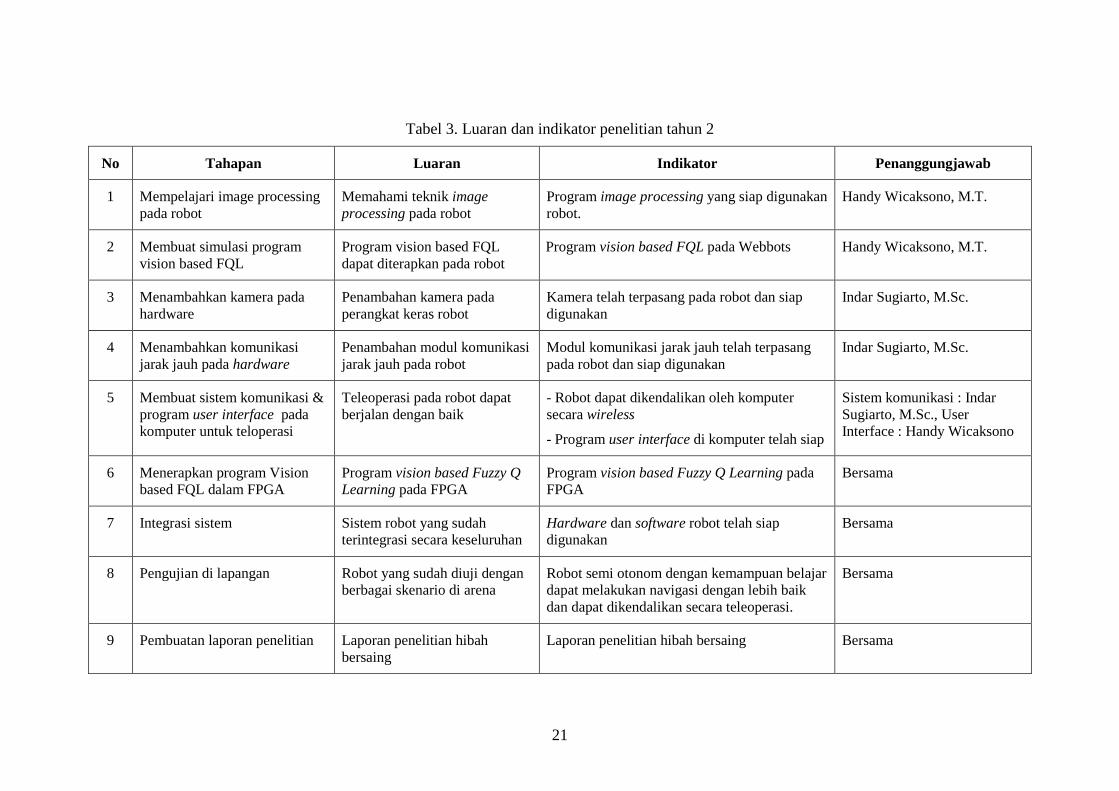
Tabel 3. Luaran dan indikator penelitian tahun 2
No Tahapan Luaran Indikator Penanggungjawab
1 Mempelajari image processing pada robot
Memahami teknik image processing pada robot
Program image processing yang siap digunakan robot.
Handy Wicaksono, M.T.
2 Membuat simulasi program vision based FQL
Program vision based FQL dapat diterapkan pada robot
Program vision based FQL pada Webbots Handy Wicaksono, M.T.
3 Menambahkan kamera pada hardware
Penambahan kamera pada perangkat keras robot
Kamera telah terpasang pada robot dan siap digunakan
Indar Sugiarto, M.Sc.
4 Menambahkan komunikasi jarak jauh pada hardware
Penambahan modul komunikasi jarak jauh pada robot
Modul komunikasi jarak jauh telah terpasang pada robot dan siap digunakan
Indar Sugiarto, M.Sc.
5 Membuat sistem komunikasi & program user interface pada komputer untuk teloperasi
Teleoperasi pada robot dapat berjalan dengan baik
- Robot dapat dikendalikan oleh komputer secara wireless
- Program user interface di komputer telah siap
Sistem komunikasi : Indar Sugiarto, M.Sc., User Interface : Handy Wicaksono
6 Menerapkan program Vision based FQL dalam FPGA
Program vision based Fuzzy Q Learning pada FPGA
Program vision based Fuzzy Q Learning pada FPGA
Bersama
7 Integrasi sistem Sistem robot yang sudah terintegrasi secara keseluruhan
Hardware dan software robot telah siap digunakan
Bersama
8 Pengujian di lapangan Robot yang sudah diuji dengan berbagai skenario di arena
Robot semi otonom dengan kemampuan belajar dapat melakukan navigasi dengan lebih baik dan dapat dikendalikan secara teleoperasi.
Bersama
9 Pembuatan laporan penelitian Laporan penelitian hibah bersaing
Laporan penelitian hibah bersaing Bersama
22
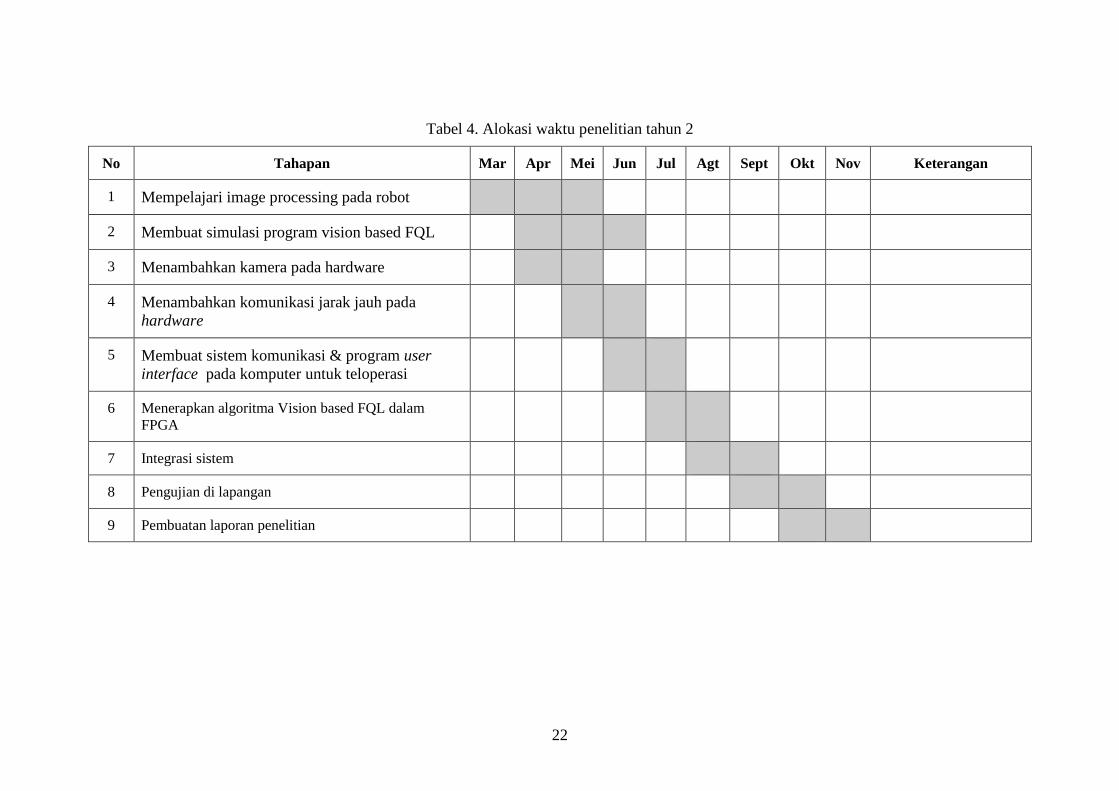
Tabel 4. Alokasi waktu penelitian tahun 2
No Tahapan Mar Apr Mei Jun Jul Agt Sept Okt Nov Keterangan
1 Mempelajari image processing pada robot
2 Membuat simulasi program vision based FQL
3 Menambahkan kamera pada hardware
4 Menambahkan komunikasi jarak jauh pada hardware
5 Membuat sistem komunikasi & program user interface pada komputer untuk teloperasi
6 Menerapkan algoritma Vision based FQL dalam FPGA
7 Integrasi sistem
8 Pengujian di lapangan
9 Pembuatan laporan penelitian
23
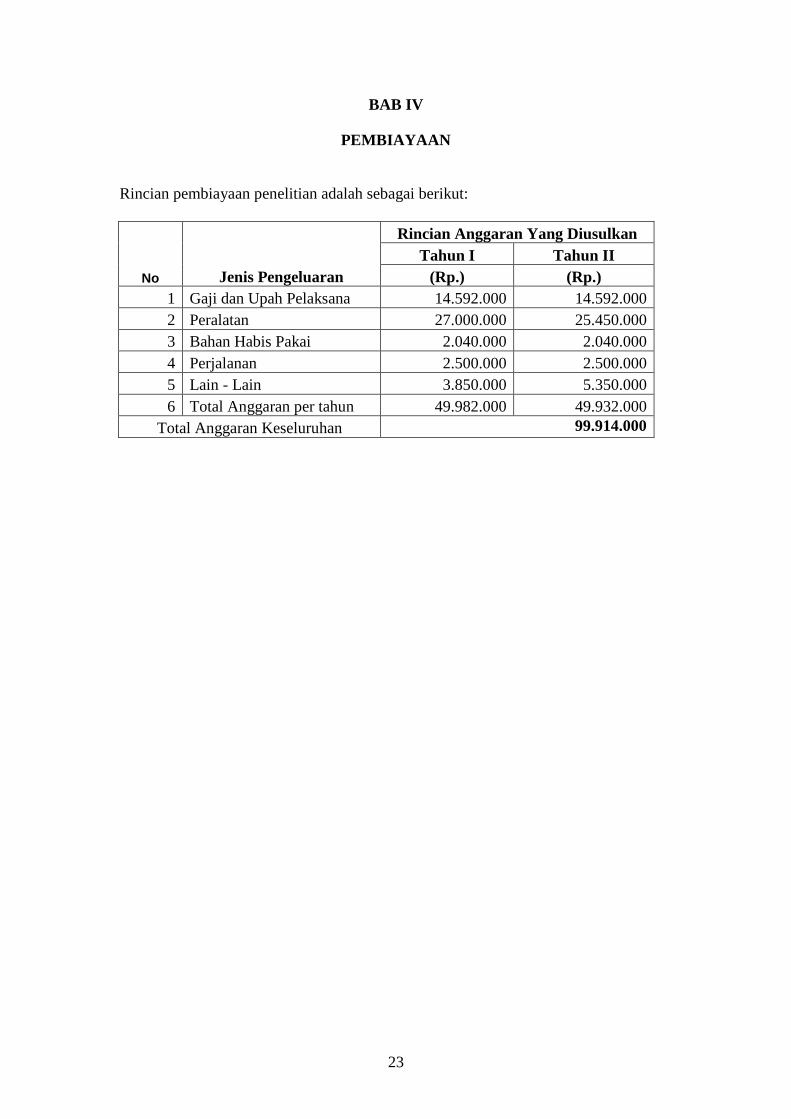
BAB IV
PEMBIAYAAN
Rincian pembiayaan penelitian adalah sebagai berikut:
No Jenis Pengeluaran
Rincian Anggaran Yang Diusulkan Tahun I Tahun II
(Rp.) (Rp.) 1 Gaji dan Upah Pelaksana 14.592.000 14.592.000 2 Peralatan 27.000.000 25.450.000 3 Bahan Habis Pakai 2.040.000 2.040.000 4 Perjalanan 2.500.000 2.500.000 5 Lain - Lain 3.850.000 5.350.000 6 Total Anggaran per tahun 49.982.000 49.932.000
Total Anggaran Keseluruhan 99.914.000

24
DAFTAR PUSTAKA
1. Anam, K., Prihastono, Wicaksono, H., Kuswadi, S., Effendie, R., Jazidie, A.,
Sulistijono, I.A., Sampei M., (2009) “Hybridization of Fuzzy Q-Learning and
Behavior-Based Control for Autonomous Mobile Robot Navigation in
Cluttered Environment”, Proceeding of ICCAS-SICE 2009 (ICROS-SICE
International Joint Conference 2009). Fukuoka, Japan.
2. Argyros, A., Georgiadis, P., Trahanias, P., Tsakiris, D., (2002) “Semi-
autonomous Navigation of a Robotic Wheelchair”, Journal of Intelligent and
Robotic Systems, Vol. 34, Issue 3, hal. 315 – 329.
3. Asadpour, M. dan Siegwart, R. (2004), “Compact Q-Learning for Micro-
robots with Processing Constraints”, Journal of Robotics and Autonomous
Systems, vol. 48, no. 1, hal. 49-61.
4. Carlson, J. & Murphy, R. (2005) “How UGVs physically fail in the field,”
IEEE Transactions on Robotics, Vol. 21, No. 3, hal. 423-437.
5. Brooks, R. (1986), “A Robust Layered Control System For a Mobile Robot”,
IEEE Journal of Robotics and Automation, vol. 2, no. 1, hal. 14 – 23.
6. Deng, C., Er, M.J. dan Xu, J. (2004a), "Dynamic Fuzzy Q-learning and
Control of Mobile Robots", 8th International Conference on Control,
Automation, Robotics and Vision, Kunming, China
7. Deng, C. dan Er, M.J. (2004b), “Real Time Dynamic Fuzzy Q-learning and
Control of Mobile Robots”, Proceedings of 5th Asian Control Conference,
vol. 3, hal. 1568- 1576.
8. C. Gaskett, L. Fletcher, A. Zelinsky, (2000), “Reinforcement Learning for a
Vision Based Mobile Robot”, Proc. IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), Takamatsu, Japan.
9. Glorennec, P.Y. dan Jouffe,L. (1997). ”Fuzzy Q-learning”, Proceeding of the
sixth IEEE International Conference on Fuzzy Sistem, Vol. 2, No. 1, hal. 659
– 662
10. Glorennec, P. Y. (2000), “Reinforcement Learning : An Overview”,
Proceedings of European Symposium on Intelligent Techniques, Aachen,
Germany.
25
11. Hafner, R. dan Riedmiller, M. (2003), “Reinforcement Learning on a
Omnidirectional Mobile Robot”, Proceedings of 2003 IEEE/RSJ International
Conference on Intelligent Robots and Systems, Las Vegas, Vol. 1, hal. 418 –
423.
12. Iida, M., Sugisaka, M., Shibata, K. (2002), “Direct-Vision-Based
Reinforcement Learning to a Real Mobile Robot”, Proc. of Int'l Conf. of
Neural Information Processing Systems (ICONIP '02), Vol. 5, hal. 2556 –
2560.Jakarta Information Tsunami Center (2009), Tentang Tsunami,
http://www.jtic.org
13. Jouffle, L. (1998), “Fuzzy Inference System Learning by Reinforcement
Methods”, IEEE Transactions on System, Man, and Cybernetics – Part C :
Applications and Reviews, Vol. 28, No. 3, hal. 338 – 355.
14. Kuswadi, S., Sulistijono, I.A., Ardyansyah, R., Zulkarnain, A., Aviyanto, T.,
Imadudin, I.R., Saifulloh, M., (2009), “The Mobility Performances of New
Wheeled and Legged Hybrid Mechanism System Robot iSRo”, Proceeding of
ICCAS-SICE 2009 (ICROS-SICE International Joint Conference 2009).
Fukuoka, Japan.
15. Mahadevan, S. dan Connell, J. (1991), “Automatic Programming of Behavior
Based using Reinforcement Learning”, Proceeding of the Eighth International
Workshop on Machine Learning, hal. 328-332.
16. Murphy, R., Casper J., Hyams, J., Micire, M. dan Minten, B. (2000),
“Mobility and Sensing Demand in USAR”, Proceedings of IEEE
International Conference on Industrial Electronics, Control, and
Instrumentation, Nagoya, Japan.
17. Perez, Marc C. (2003), A Proposal of Behavior Based Control Architecture
with Reinforcement Learning for an Autonomous Underwater Robot, Tesis
Ph.D., University of Girona, Girona.
18. Prihastono, Wicaksono, H., Anam, K., Kuswadi, S., Effendie, R., Jazidie, A.,
Sulistijono, I.A., Sampei M. (2009), “Autonomous Five Legs Robot
Navigation in Cluttered Environment Using Fuzzy Q-Learning and Hybrid
Coordination Node”, Proceeding of ICCAS-SICE 2009 (ICROS-SICE
International Joint Conference 2009). Fukuoka, Japan.
19. Shibata, K., Iida, M., (2003), ”Acquisition of Box Pushing by Direct-Vision-
Based Reinforcement Learning”, Proc. of SICE Annual Conf., Japan.
26
20. Smart, W.D. dan Kaelbling, L.P. (2002), ”Effective Reinforcement Learning
for Mobile Robots”, Proceeding of International Conference on Robotics and
Automation.
21. Suh, I.H., Kim, J.H. dan Rhee, F.C.H.(1997), ”Fuzzy-Q Learning for
Autonomous Robot Systems”, Proceedings of the sixth IEEE international
Conference on Neural Networks, Vol. 3, hal. 1738 – 1743.Sutton, R.S., dan
Barto,A.G. (1998), Reinforcement Learning, an Introduction, MIT Press,
Massachusets.
22. Tadokoro, S. (2009), Rescue Robotics, DDT Project on Robots and Systems
for Urban Search and Rescue, Springer, London.
23. Watkins, C., Dayan, P.(1992). ”Q-learning,Technical Note”, Machine
Learning, Vol 8, hal.279-292.
24. Wegner, R., Anderson, J., (2006), “Agent-based support for balancing
teleoperation and autonomy in urban search and rescue”, International
Journal of Robotics and Automation, Volume 21 , Issue 2, pp. 120 - 128
25. Wicaksono, H. (2009), Implementasi Compact Fuzzy Q Learning untuk
Navigasi Otonom Robot Berkaki, Tesis Master, Institut Teknologi Sepuluh
Nopember, Surabaya.
27
LAMPIRAN
I. Pertimbangan Alokasi Biaya
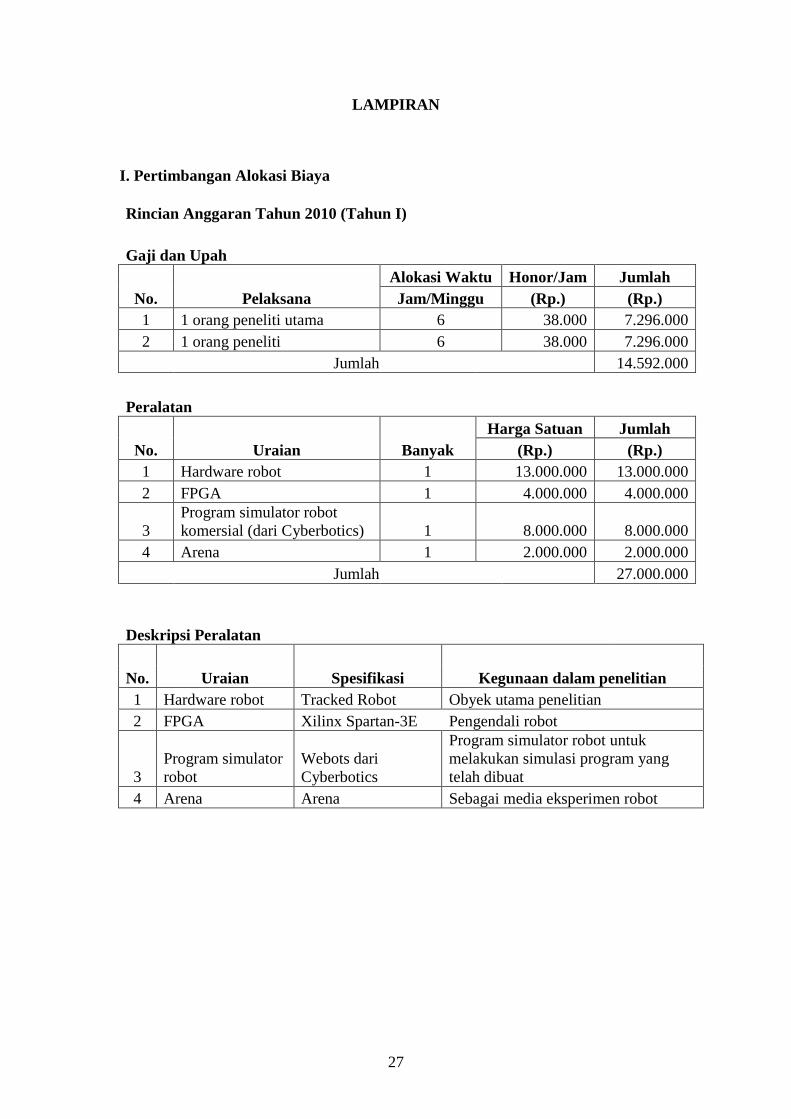
Rincian Anggaran Tahun 2010 (Tahun I) Gaji dan Upah
No. Pelaksana Alokasi Waktu Honor/Jam Jumlah Jam/Minggu (Rp.) (Rp.)
1 1 orang peneliti utama 6 38.000 7.296.000 2 1 orang peneliti 6 38.000 7.296.000
Jumlah 14.592.000
Peralatan
No. Uraian Banyak Harga Satuan Jumlah
(Rp.) (Rp.) 1 Hardware robot 1 13.000.000 13.000.000 2 FPGA 1 4.000.000 4.000.000
3 Program simulator robot komersial (dari Cyberbotics) 1 8.000.000 8.000.000
4 Arena 1 2.000.000 2.000.000 Jumlah 27.000.000
Deskripsi Peralatan
No. Uraian Spesifikasi Kegunaan dalam penelitian 1 Hardware robot Tracked Robot Obyek utama penelitian 2 FPGA Xilinx Spartan-3E Pengendali robot
3 Program simulator robot
Webots dari Cyberbotics
Program simulator robot untuk melakukan simulasi program yang telah dibuat
4 Arena Arena Sebagai media eksperimen robot
28
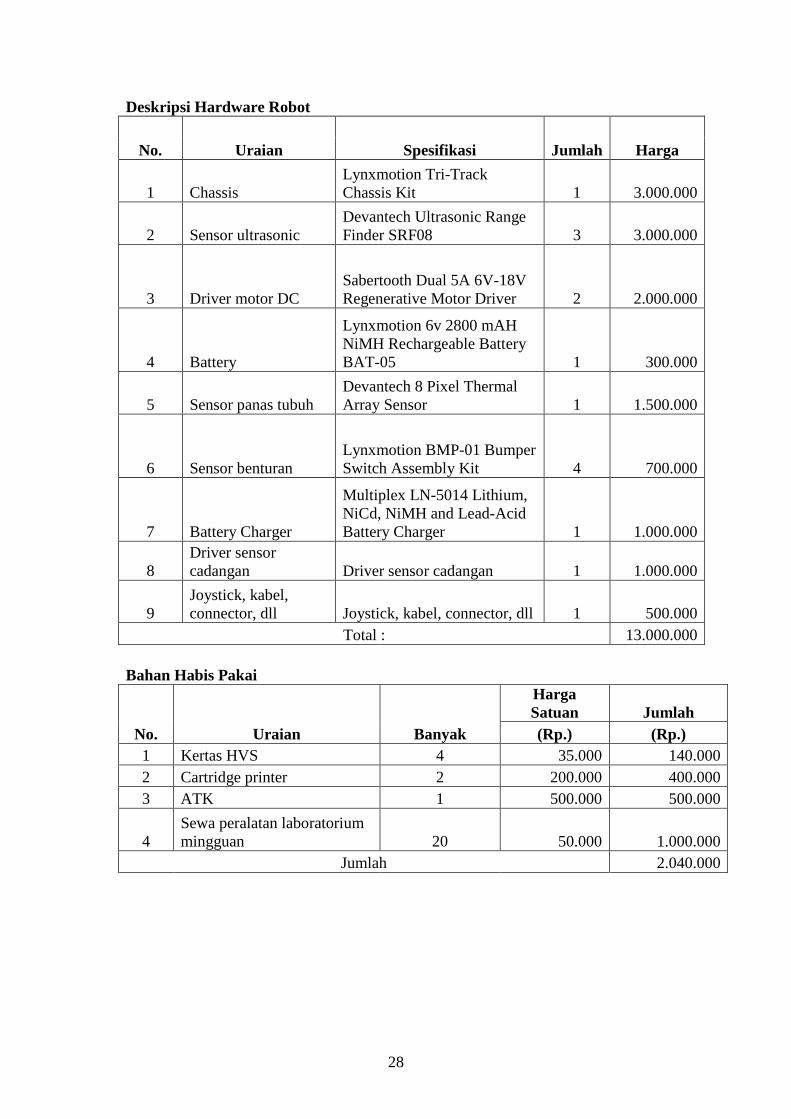
Deskripsi Hardware Robot
No. Uraian Spesifikasi Jumlah Harga
1 Chassis Lynxmotion Tri-Track Chassis Kit 1 3.000.000
2 Sensor ultrasonic Devantech Ultrasonic Range Finder SRF08 3 3.000.000
3 Driver motor DC Sabertooth Dual 5A 6V-18V Regenerative Motor Driver 2 2.000.000
4 Battery
Lynxmotion 6v 2800 mAH NiMH Rechargeable Battery BAT-05 1 300.000
5 Sensor panas tubuh Devantech 8 Pixel Thermal Array Sensor 1 1.500.000
6 Sensor benturan Lynxmotion BMP-01 Bumper Switch Assembly Kit 4 700.000
7 Battery Charger
Multiplex LN-5014 Lithium, NiCd, NiMH and Lead-Acid Battery Charger 1 1.000.000
8 Driver sensor cadangan Driver sensor cadangan 1 1.000.000
9 Joystick, kabel, connector, dll Joystick, kabel, connector, dll 1 500.000
Total : 13.000.000 Bahan Habis Pakai
No. Uraian Banyak
Harga Satuan Jumlah (Rp.) (Rp.)
1 Kertas HVS 4 35.000 140.000 2 Cartridge printer 2 200.000 400.000 3 ATK 1 500.000 500.000
4 Sewa peralatan laboratorium mingguan 20 50.000 1.000.000
Jumlah 2.040.000
29
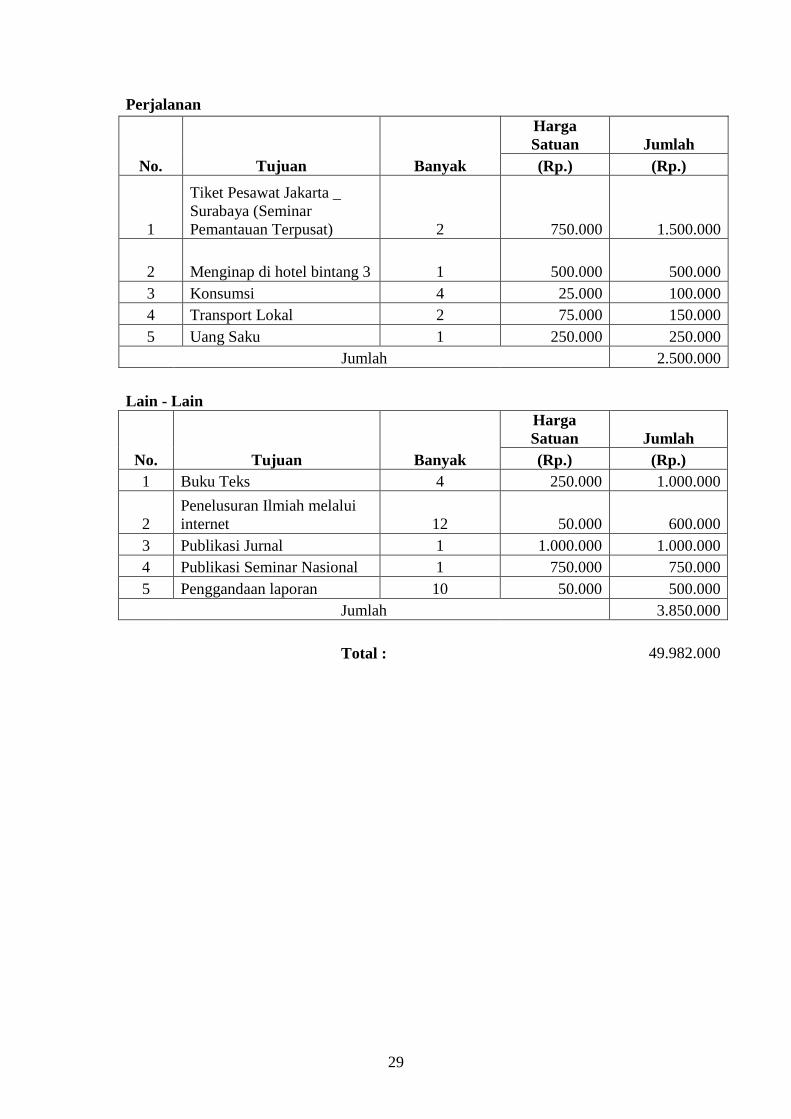
Perjalanan
No. Tujuan Banyak
Harga Satuan Jumlah (Rp.) (Rp.)
1
Tiket Pesawat Jakarta _ Surabaya (Seminar Pemantauan Terpusat) 2 750.000 1.500.000
2 Menginap di hotel bintang 3 1 500.000 500.000 3 Konsumsi 4 25.000 100.000 4 Transport Lokal 2 75.000 150.000 5 Uang Saku 1 250.000 250.000
Jumlah 2.500.000 Lain - Lain
No. Tujuan Banyak
Harga Satuan Jumlah (Rp.) (Rp.)
1 Buku Teks 4 250.000 1.000.000
2 Penelusuran Ilmiah melalui internet 12 50.000 600.000
3 Publikasi Jurnal 1 1.000.000 1.000.000 4 Publikasi Seminar Nasional 1 750.000 750.000 5 Penggandaan laporan 10 50.000 500.000
Jumlah 3.850.000
Total : 49.982.000
30
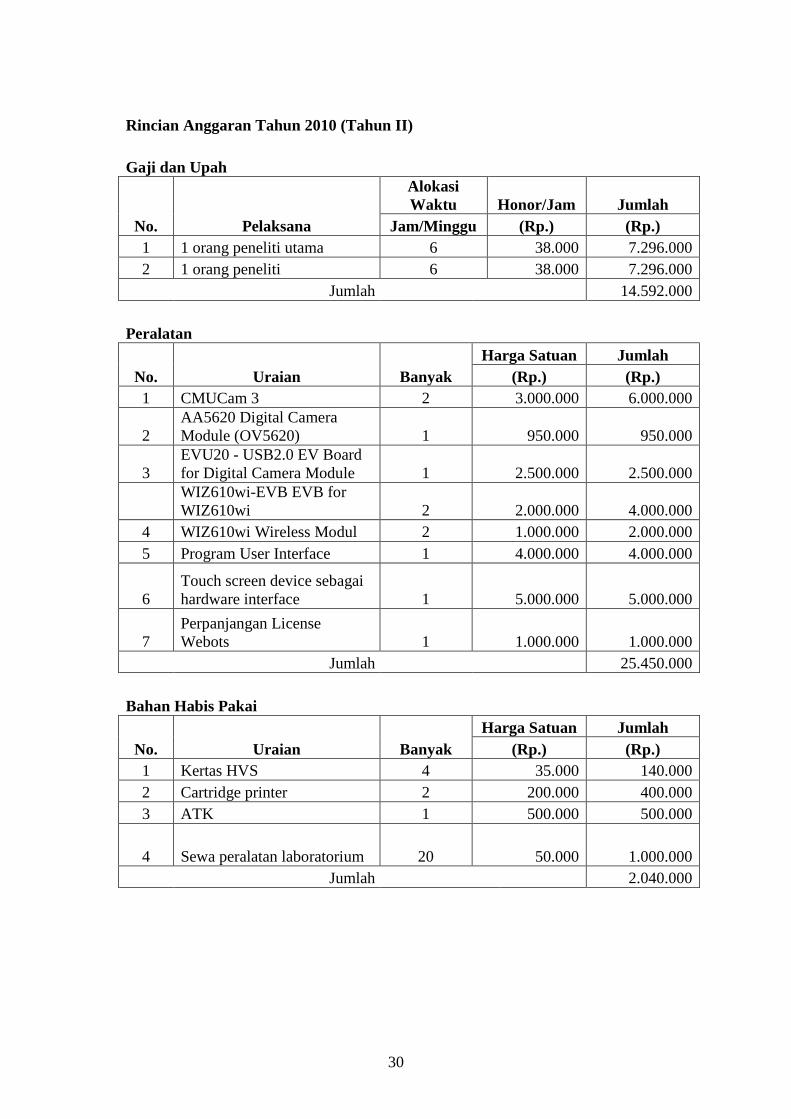
Rincian Anggaran Tahun 2010 (Tahun II) Gaji dan Upah
No. Pelaksana
Alokasi Waktu Honor/Jam Jumlah
Jam/Minggu (Rp.) (Rp.) 1 1 orang peneliti utama 6 38.000 7.296.000 2 1 orang peneliti 6 38.000 7.296.000
Jumlah 14.592.000 Peralatan
No. Uraian Banyak Harga Satuan Jumlah
(Rp.) (Rp.) 1 CMUCam 3 2 3.000.000 6.000.000
2 AA5620 Digital Camera Module (OV5620) 1 950.000 950.000
3 EVU20 - USB2.0 EV Board for Digital Camera Module 1 2.500.000 2.500.000
WIZ610wi-EVB EVB for WIZ610wi 2 2.000.000 4.000.000
4 WIZ610wi Wireless Modul 2 1.000.000 2.000.000 5 Program User Interface 1 4.000.000 4.000.000
6 Touch screen device sebagai hardware interface 1 5.000.000 5.000.000
7 Perpanjangan License Webots 1 1.000.000 1.000.000
Jumlah 25.450.000 Bahan Habis Pakai
No. Uraian Banyak Harga Satuan Jumlah
(Rp.) (Rp.) 1 Kertas HVS 4 35.000 140.000 2 Cartridge printer 2 200.000 400.000 3 ATK 1 500.000 500.000
4 Sewa peralatan laboratorium 20 50.000 1.000.000 Jumlah 2.040.000
31
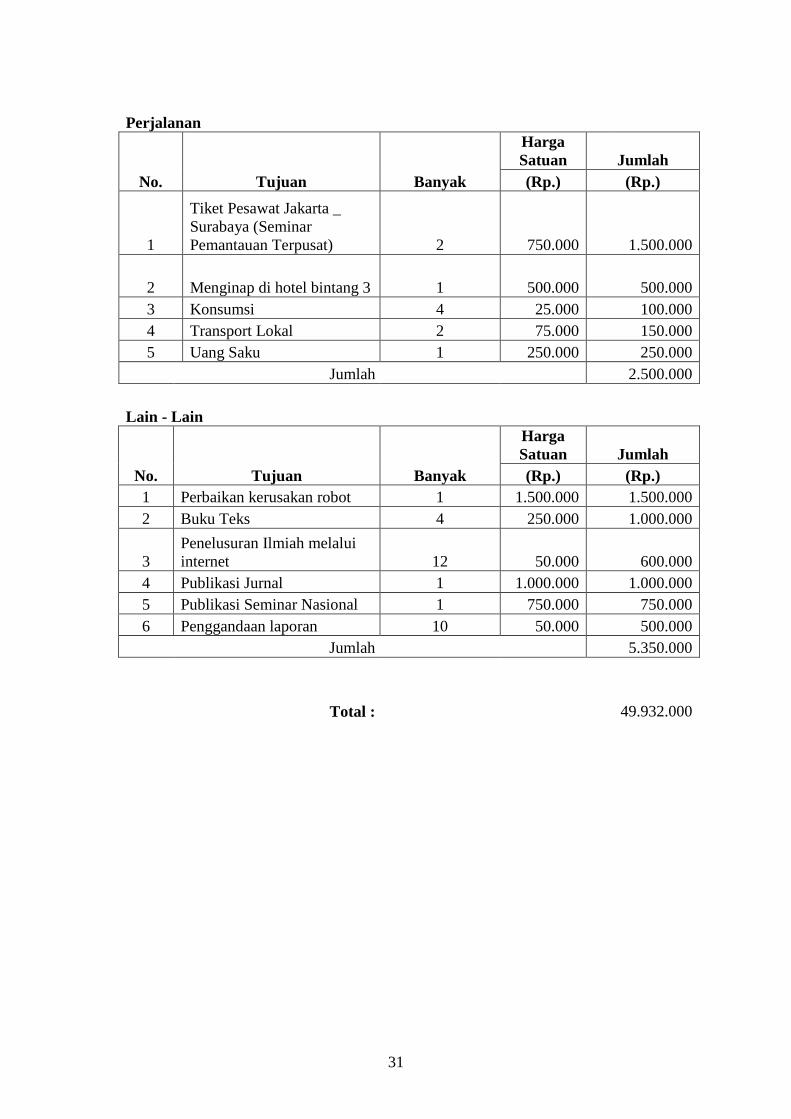
Perjalanan
No. Tujuan Banyak
Harga Satuan Jumlah (Rp.) (Rp.)
1
Tiket Pesawat Jakarta _ Surabaya (Seminar Pemantauan Terpusat) 2 750.000 1.500.000
2 Menginap di hotel bintang 3 1 500.000 500.000 3 Konsumsi 4 25.000 100.000 4 Transport Lokal 2 75.000 150.000 5 Uang Saku 1 250.000 250.000
Jumlah 2.500.000 Lain - Lain
No. Tujuan Banyak
Harga Satuan Jumlah (Rp.) (Rp.)
1 Perbaikan kerusakan robot 1 1.500.000 1.500.000 2 Buku Teks 4 250.000 1.000.000
3 Penelusuran Ilmiah melalui internet 12 50.000 600.000
4 Publikasi Jurnal 1 1.000.000 1.000.000 5 Publikasi Seminar Nasional 1 750.000 750.000 6 Penggandaan laporan 10 50.000 500.000
Jumlah 5.350.000
Total : 49.932.000
32
II. Dukungan pada Pelaksanaan Penelitian
1. Dukungan Aktif yang Sedang Berjalan
Saat ini peneliti utama sedang mendapatkan dana untuk mengerjakan
penelitian awal dari usulan penelitian yang diajukan untuk Hibah Bersaing ini.
Berikut informasi detailnya :
• Nama Lembaga : DP2M – Dikti
• Nomor Persetujuan :
• Judul Penelitian :
Implementasi Adaptive Potensial Field Behaviour Coordination
and Compact Q-Learning untuk Sistem Navigasi Autonomous
Mobile Robot
• Jumlah dana : Rp. 10.000.000,-
Penelitian tersebut memiliki fokus untuk mengembangkan algoritma
pembelajaran sederhana pada robot nyata berupa LEGO Robot.
III. Sarana
Sarana penelitian yang akan digunakan ialah ”Laboratorium Sistem Kontrol” di
Jurusan Teknik Elektro – UK Petra yang memiliki berbagai peralatan laboratorium
dasar (multimeter, laboratory power supply, function generator maupun
oscilloscope). Laboratorium ini memiliki ruangan maupun komputer yang dapat
digunakan selama penelitian.
Sedangkan ”Laboratorium Elektronika” memiliki FPGA Xilinx, yang dapat
mulai digunakan untuk memprogram robot, serta adanya LEGO NXT Robot Kit yang
dapat digunakan untuk membuat rancangan mekanik awal dari robot.
Perpustakaan UK Petra juga dilengkapi dengan berbagai jurnal ilmiah dari
IEEE, sehingga akses terhadap literatur terbaru juga dapat dilakukan di perpustakaan.
33
IV. Biodata Peneliti
KETUA PENELITI
Data Pribadi
Nama lengkap : Handy Wicaksono, S.T., M.T.
NIP : 04-004
Pangkat / golongan : IIIC/Lektor
Tempat/Tanggal lahir : Trenggalek, 4 Juni 1980
Jenis Kelamin : Laki-laki
Bidang Keahlian : Intelligent robot, otomasi industri
Kantor/Unit Kerja : Jurusan Teknik Elektro - Universitas Kristen Petra
Jl. Siwalankerto 121-131 Surabaya
Telepon: 031-2983115
Alamat Rumah : Sukolilo Park Regency K-7 , Keputih, Surabaya
Alamat e-mail : [email protected], [email protected]
Pendidikan
No Perguruan Tinggi Kota &
Negara Tahun Bidang Studi
1 S1, Jurusan Teknik Elektro, Institut
Teknologi Sepuluh Nopember
Surabaya,
Indonesia
1998 – 2003 Teknik Sistem
Pengaturan
2 S2, Jurusan Teknik Elektro, Institut
Teknologi Sepuluh Nopember
Surabaya,
Indonesia
2007 - 2009 Teknik Sistem
Pengaturan
Pengalaman Kerja
• 2004 – sekarang : Dosen tetap Jurusan Teknik Elektro – Universitas Kristen Petra
• 2009 – sekarang : Kepala Laboratorium Sistem Kontrol, Jurusan Teknik Elektro,
Universitas Kristen Petra
Beasiswa, Bantuan dan Hibah
• 2007 – 2009 : Beasiswa Pendidikan Pasca Sarjana dari Ditjen Dikti
• 2009 : Bantuan Seminar Luar Negeri (mengikuti seminar ke Jepang) dari
DP2M – Dikti
• 2009 : Student Travel Grant Award dari Panitia ICCAS – SICE 2009
34
• 2010 : Hibah Penelitian Dosen Muda, dengan judul : ”Implementasi
Adaptive Potensial Field Behaviour Coordination and Compact
Q-Learning untuk Sistem Navigasi Autonomous Mobile Robot”,
dari DP2M - Dikti
Publikasi yang Relevan
1. Wicaksono, H., Prihastono, Anam, K., Kuswadi, S., Effendie, R., Jazidie, A.,
Sulistijono, I.A., Sampei, M. (2009), ”Application of Fuzzy Behavior
Coordination and Q Learning in Robot Navigation”, Proc. of The 5th
International Conference on Information & Communication Technology and
Systems (ICTS), Surabaya.
2. Wicaksono, H., Prihastono, Anam, K., Kuswadi, S., Effendie, R., Jazidie, A.,
Sulistijono, I.A., Sampei, M., (2009), ”Modified Fuzzy Behavior Coordination
for Autonomous Mobile Robot Navigation System”, Proc. of. ICCAS-SICE
2009 (ICROS-SICE International Joint Conference 2009), Fukuoka, Japan.
3. Wicaksono, H., Prihastono, Anam, K., Kuswadi, S., Effendie, R., Jazidie, A.,
Sulistijono, I.A., Sampei, M., ”Penerapan Fuzzy Q Learning pada Navigasi
Otonom Behavior Based Hexapod Robot” . proc. of Seminar Nasional Sistem
& Teknologi Informasi (SNASTI) 2009, Surabaya.
4. Wicaksono, H., Prihastono, Anam, K., Kuswadi, S., Effendie, R., Jazidie, A.,
Sulistijono, I.A., Sampei, M., ”Penerapan Behavior Based Architecture dan Q
Learnig pada Sistem Navigasi Otonom Hexapod Robot”, Proc. of Industrial
Electronic Seminar 2009, Surabaya.
5. Prihastono, Wicaksono, H., Anam, K., Kuswadi, S., Effendie, R., Jazidie, A.,
Sulistijono, I.A., Sampei M. (2009), “Autonomous Five Legs Robot
Navigation in Cluttered Environment Using Fuzzy Q-Learning and Hybrid
Coordination Node”, Proceeding of ICCAS-SICE 2009 (ICROS-SICE
International Joint Conference 2009). Fukuoka, Japan.
6. Anam, K., Prihastono, Wicaksono, H., Kuswadi, S., Effendie, R., Jazidie, A.,
Sulistijono, I.A., Sampei M., (2009) “Hybridization of Fuzzy Q-Learning and
Behavior-Based Control for Autonomous Mobile Robot Navigation in
Cluttered Environment”, Proceeding of ICCAS-SICE 2009 (ICROS-SICE
International Joint Conference 2009). Fukuoka, Japan.
35
ANGGOTA PENELITI
Nama lengkap : Indar Sugiarto
NIP : 02-002
Tempat/Tanggal lahir : Malang, 14 Mei 1977
Jenis kelamin : Laki-laki
Bidang Keahlian : Embedded System, Signal Processing, Intelligent System
Kantor/Unit kerja : Jurusan Teknik Elektro, Universitas Kristen Petra
Mata Kuliah Ampu : Perancangan Sistem Digital, Perancangan Sistem Elektronika,
Noise dalam Sistem Elektronika, Disain PCB, Server Internet
Alamat kantor : Jl. Siwalankerto 121-131 Surabaya
Alamat rumah : Perumahan BLK No. 32, Jl. Dukuh Menanggal III, Surabaya
Email : [email protected]
Website : http://faculty.petra.ac.id/indi
PENDIDIKAN
No Perguruan Tinggi Kota & Negara Tahun
Lulusan Bidang Studi
1 Institut Teknologi Sepuluh Nopember
Surabaya, Indonesia
2001 Teknik Elektro
2 University of Bremen Bremen, Jerman 2008 Automation and Information
PENGALAMAN RISET
No Judul Riset Tahun 1 Perencanaan dan Implementasi Teknik Reduksi Data Menggunakan
Teknologi HDL-FPGA Yang Diaplikasikan Pada Mesin Penjawab Telepon Otomatis Digital (Tugas Akhir S1)
2001
2 Multi-Target SSVEP-Based BCI (Master Project) 2007 3 Display And Feedback Approaches For BCI Systems (Master Thesis) 2008
BEASISWA, BANTUAN DAN HIBAH
• 2007 – 2008 : Beasiswa EED untuk menyelesaikan studi S2 di University of Bremen
• 2010 : Hibah Penelitian Dosen Muda, dengan judul : ” Sistem
Instrumentasi Elektronika untuk Sistem BCI adaptif berbasis
sinyal ECG”, dari DP2M - Dikti
36
Publikasi yang Relevan
2008
1. Indar Sugiarto. Aplikasi Logika Fuzzy Untuk Pengenalan SSVEP Pada Sistem BCI.
Seminar Nasional Sistem & Teknologi Informasi 2008. Surabaya, 22 Oktober 2008
2007
1. Indar Sugiarto, Saravanakumar Natarajan. Parameter Estimation using Least Square
Method for MIMO Takagi-Sugeno Neuro-Fuzzy in Time Series Forecasting. Jurnal
Teknik Elektro, Vol 7, No 2. September 2007.
2005
1. Indar Sugiarto. IMPLEMENTASI ALGORITMA DES PADA FPGA XILINX XC4000XL
UNTUK JARINGAN MULTIPOINT RS-485. Proceeding SIIT 2005.
2. Indar Sugiarto. Preliminary Testing Tool for VGA Monitor Using FPGA XC4005XL and
XS-Board. Jurnal Teknik Elektro ,
3. Indar Sugiarto. Simulasi Fuzzy Logic untuk Robot Pencari Jalan Maze. Proceedings
Industrial Electronics Seminar 2005. Surabaya, 24 November 2005
2004
1. Indar Sugiarto. Proceedings Industrial Electronics Seminar 2004. Studi Kasus Dua
Tipe All Digital Phase-Locked Loop Orde Satu yang diimplementasikan pada
FPGA XC4010E. Surabaya,
2002
1. Indar Sugiarto, Siti Halimah Baki. SIMM-DRAM Sebagai Penyimpan Data dengan
Teknik Kompresi yang Diimplementasikan pada FPGA. Surabaya, 2002
2. Indar Sugiarto, Siti Halimah Baki. Perancangan Upgradeable Digital Answering
Machine Berbasis Teknologi HDL-FPGA. Proceeding KOMMIT2002. Depok, 2002




























