Embed Size (px)
Citation preview

HISTORIA DE LAS PROTESIS
DANIEL SOLIS TORO
INTRODUCCIÓN• La existencia de las extremidades artificiales, tan simples
como un palo de madera tallado, se remontan a los principios de la humanidad.
• Desde las antiguas pirámides hasta nuestros tiempos el campo de la protésica ha evolucionado mostrando el interés del hombre por mejorar.
• El avance en el diseño las de prótesis ha estado ligado directamente con el avance en el manejo de los materiales empleados por el hombre, así como el desarrollo tecnológico y el entendimiento de la biomecánica del cuerpo humano.
EGIPCIOS • De la cuarta dinastia egipcia (2613 al 2494 A.C)
proceden protesis de nariz, orbita y oreja entontradas en excavaviones , dado que en esa epoca de pensaba que solo sin desfiguramiento fisico podian entrar al reino de Osiris.
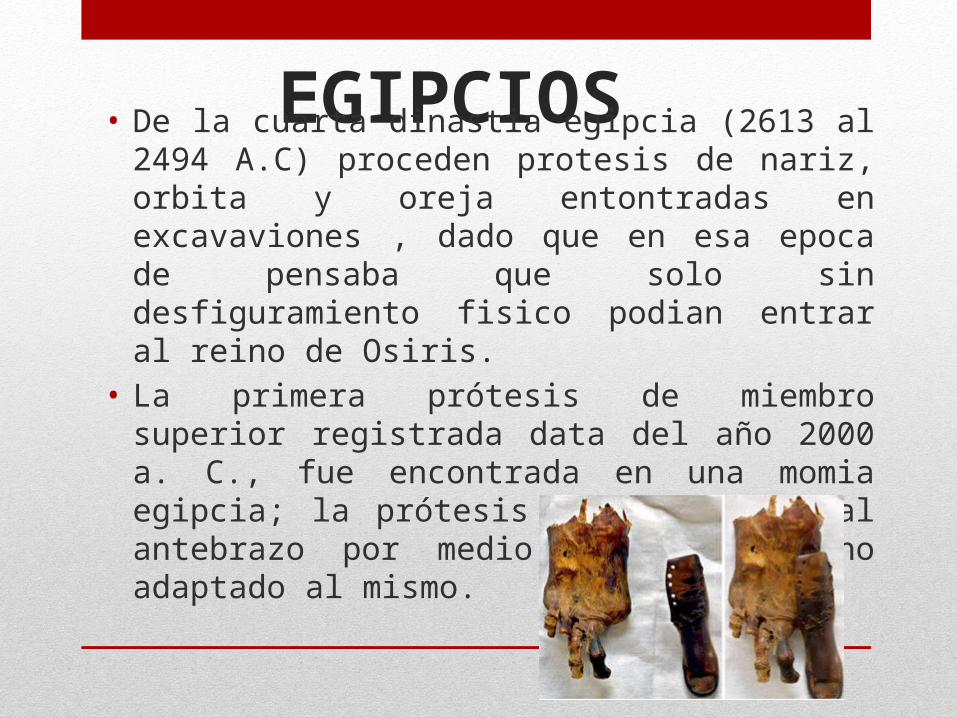
• La primera prótesis de miembro superior registrada data del año 2000 a. C., fue encontrada en una momia egipcia; la prótesis estaba sujeta al antebrazo por medio de un cartucho adaptado al mismo.
424 a. C. al 1 a. C.• En 424 a. C. Heródoto escribió sobre un vidente persa
condenado a muerte que escapó luego de amputarse su propio pie y reemplazarlo con una plantilla protésica de madera.
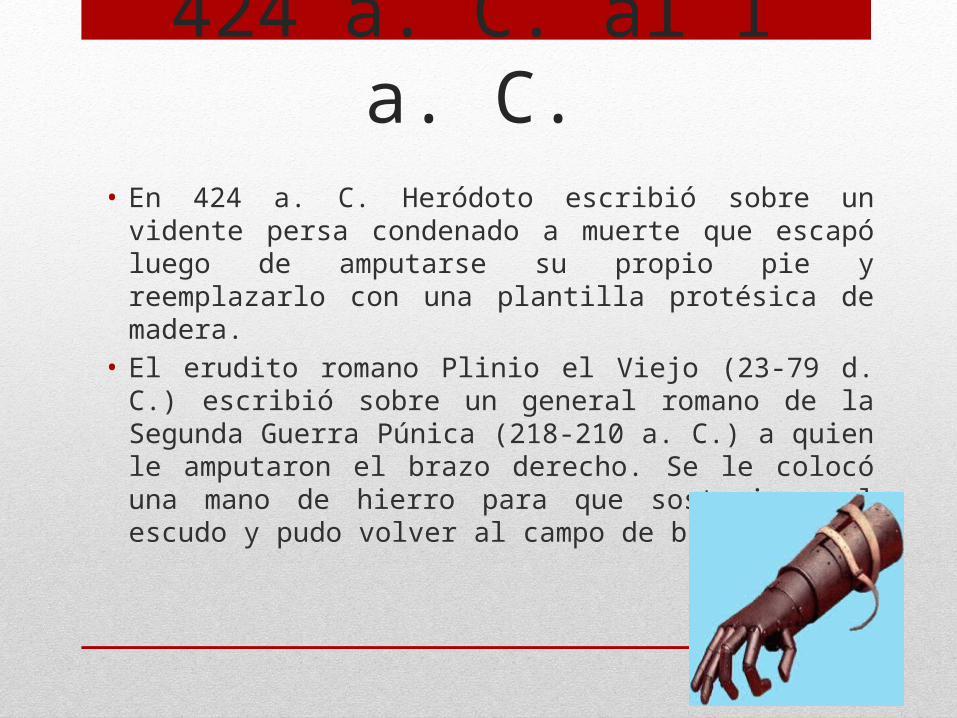
• El erudito romano Plinio el Viejo (23-79 d. C.) escribió sobre un general romano de la Segunda Guerra Púnica (218-210 a. C.) a quien le amputaron el brazo derecho. Se le colocó una mano de hierro para que sostuviera el escudo y pudo volver al campo de batalla.
ALTA EDAD MEDIA (476 A 1000)
• En la Alta Edad Media hubo pocos avances en el campo de la protésica, además del gancho de mano y la pata de palo.
• A un caballero se le colocaba una prótesis diseñada solamente para sostener un escudo o para calzar la pata en el estribo, y se prestaba poca atención a la funcionalidad.
EL RENACIMIENTO (1400 A 1800)
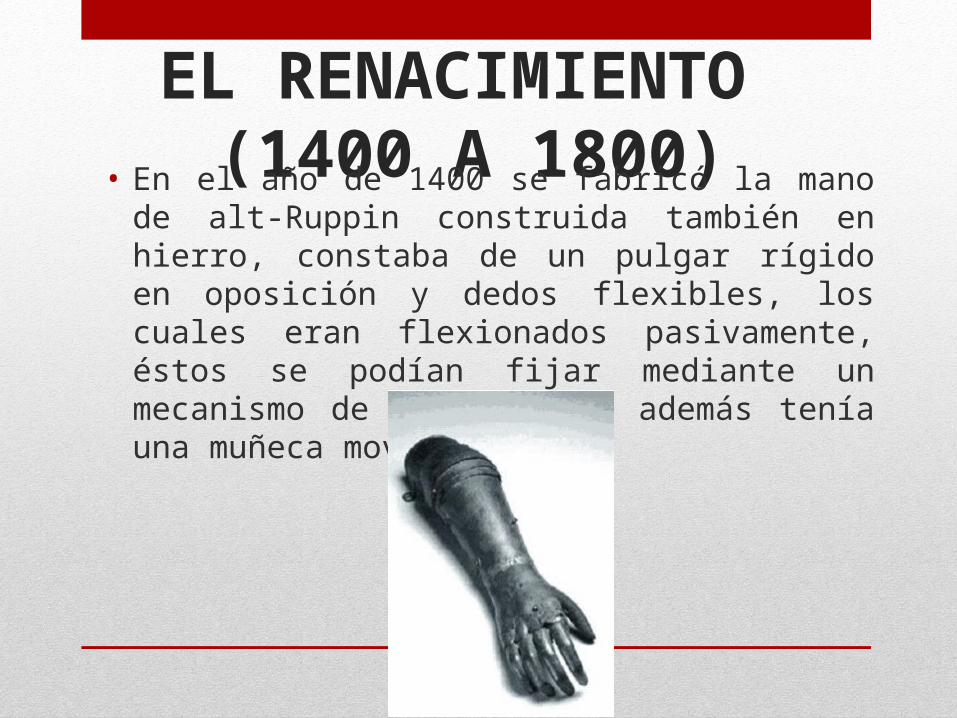
• En el año de 1400 se fabricó la mano de alt-Ruppin construida también en hierro, constaba de un pulgar rígido en oposición y dedos flexibles, los cuales eran flexionados pasivamente, éstos se podían fijar mediante un mecanismo de trinquete y además tenía una muñeca movible.
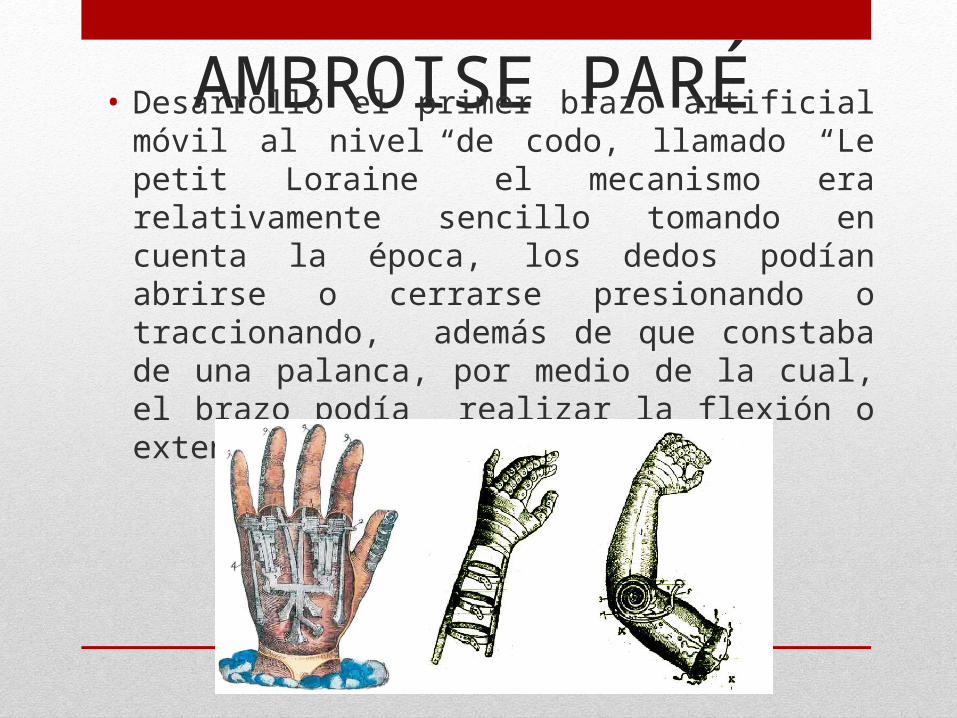
AMBROISE PARÉ• Desarrolló el primer brazo artificial móvil al nivel de
codo, llamado “Le petit Loraine” el mecanismo era relativamente sencillo tomando en cuenta la época, los dedos podían abrirse o cerrarse presionando o traccionando, además de que constaba de una palanca, por medio de la cual, el brazo podía realizar la flexión o extensión a nivel de codo
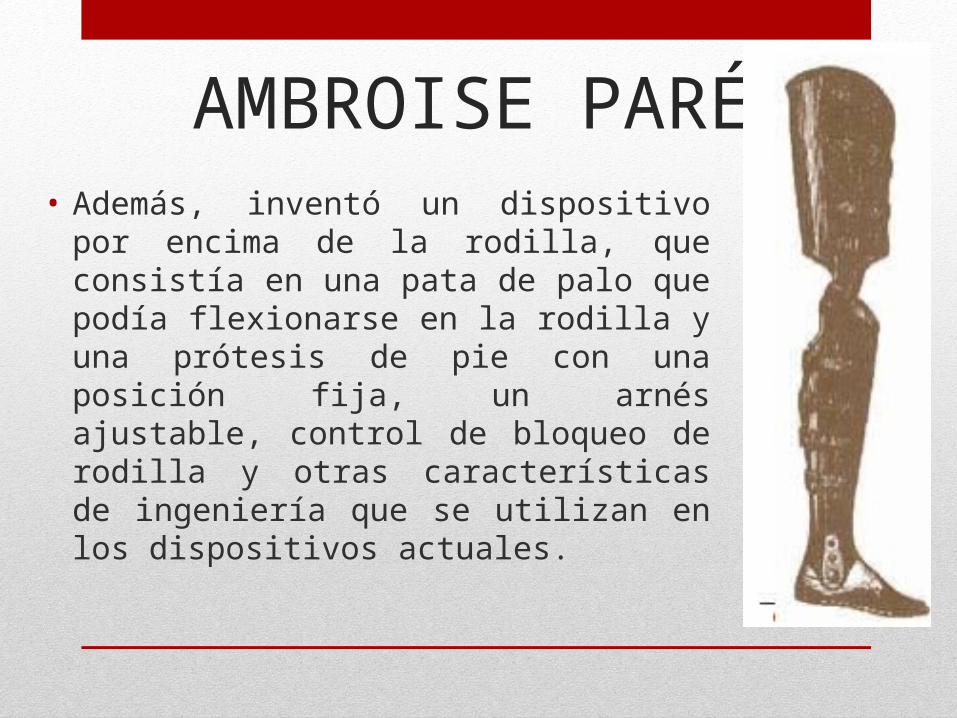
AMBROISE PARÉ• Además, inventó un dispositivo por encima de la
rodilla, que consistía en una pata de palo que podía flexionarse en la rodilla y una prótesis de pie con una posición fija, un arnés ajustable, control de bloqueo de rodilla y otras características de ingeniería que se utilizan en los dispositivos actuales.
SIGLOS XVII AL XIX • Peter Beil. El diseño de la mano cumple con el cierre y la
apertura de los dedos pero, es controlada por los movimientos del tronco y hombro contra lateral.
• En 1696 Pieter Andrianzoon, cirujano holandés, introdujo la primera protesis por debajo de rodilla sin seguro.
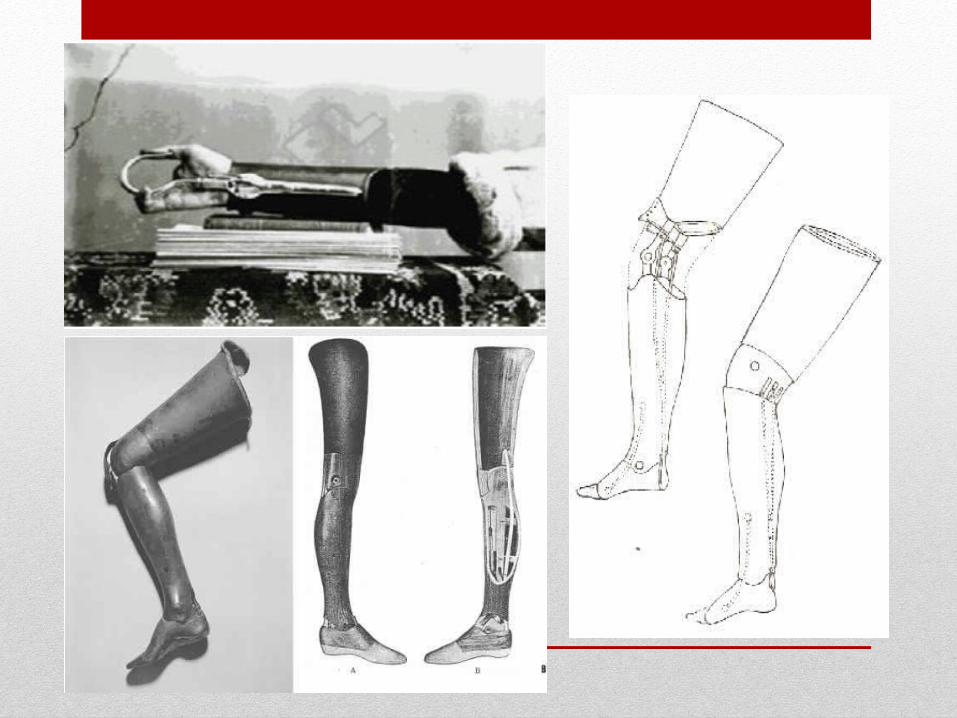
• En 1800, el londinense James Potts diseñó una prótesis elaborada con una pierna de madera con encaje, una articulación de rodilla de acero y un pie articulado controlado por tendones desde la rodilla hasta el tobillo.
• En 1851 , el Dr. Benjamin F. Palmer obtuvo un nombramiento por su pierna protésica. La cual utilizaba un resorte posterior y tendones ocultos.
SIGLO XIX• Douglas Bly inventó y patentó la pierna anatómica en
1858, a la que se refería como “el invento más completo y exitoso desarrollado alguna vez en el área de las extremidades artificiales”.
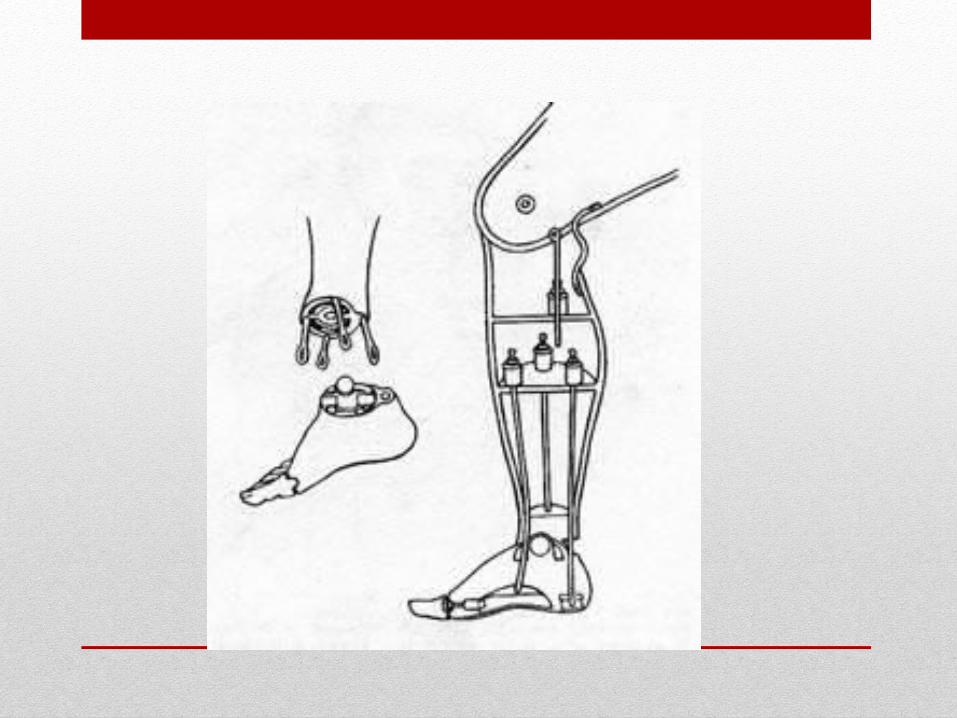
• En 1863, Dubois Parmlee inventó una prótesis avanzada con un encaje de succión, una rodilla policéntrica y un pie multiarticulado.
• Más tarde, en 1868, Gustav Hermann sugirió el uso aluminio en lugar de acero para que las extremidades artificiales fueran más livianas y funcionales.
SIGLO XX• Para el siglo XX, el médico francés Gripoulleau,
realizó diferentes accesorios que podían se usados como unidad terminal, tales como anillos, ganchos y diversos instrumentos metálicos, que brindaban la capacidad de realizar trabajo de fuerza o de precisión.
• En el año de 1912 Dorrance en Estados Unidos desarrolló el Hook, que es una unidad terminal que permite abrir activamente, mediante movimientos de la cintura escapular, además se cierra pasivamente por la acción de un tirante de goma.
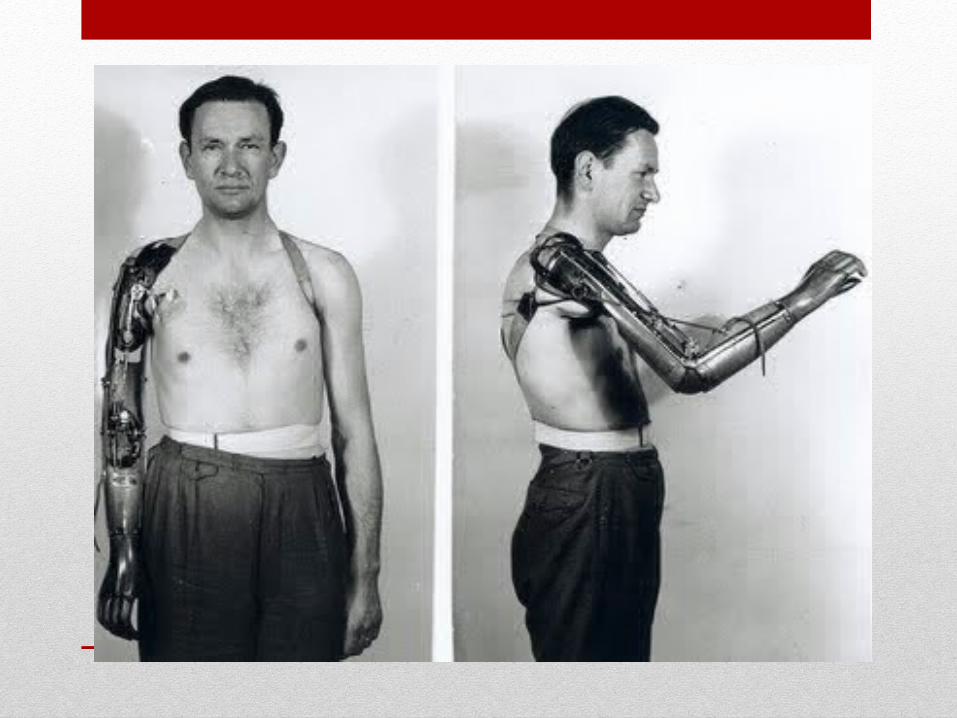
• Después de la Segunda Guerra Mundial, los veteranos estaban insatisfechos con la falta de tecnología en sus prótesis, con el tiempo, esto dio lugar a la creación de la Asociación Estadounidense de Ortoprótesis (AOPA, por sus siglas en inglés).
• Es hasta 1946 cuando se crean sistemas de propulsión asistida, dando origen a las prótesis neumáticas y eléctricas. Un sistema de propulsión asistida es aquel en el que el movimiento es activado por algún agente externo al cuerpo.
• Las prótesis con mando mioeléctrico comienzan a surgir en el año de 1960 en Rusia. Esta opción protésica funciona con pequeños potenciales extraídos durante la contracción de las masas musculares del muñón, siendo estos conducidos y amplificados para obtener el movimiento de la misma. En sus inicios, este tipo de prótesis solo era colocada para amputados de antebrazo, logrando una fuerza prensora de dos kilos.
ACTUALIDAD• Además de ser dispositivos más livianos y estar hechos a
la medida del usuario, el uso de la robótica permitieron recuperar el estilo de vida de los amputados al cual estaban acostumbrados, en lugar de simplemente proporcionarles una funcionalidad básica o un aspecto más agradable. Las prótesis son más reales con fundas de silicona y pueden imitar la función de una extremidad natural hoy más que nunca.
• Entre los países con mayor avance tecnológico e investigación sobre prótesis, se encuentran Alemania, Estados Unidos, Francia, Inglaterra y Japón.


GRACIAS