GNSS L1 Band No external Filter, only AsteRx SB internal filter
ジャマー
25
CigaretteLighterPlug
10 mW 4x 300 mW
プレゼンター
プレゼンテーションのノート
Should be here at 15:25 .
GPS L1のジャミング例: -75 dBm @ 1575,42 MHz
26
>45 dBRejection
Before Mitigation After Mitigation
GPS Main LobeAppears
Instant Detection
プレゼンター
プレゼンテーションのノート
This slide shows an in-band continuous wave interferer right on top of the L1 GPS main lobe at a quite significant power. This was recorded from the baseband sample stream of the receiver. If an interferer like this shows up, AsteRx4 will automatically detect it in a split second and reject it by more than 45 dB. The picture at the right shows the signal after rejection, as obtained from baseband sample logging after the interference mitigation circuitry. It shows the GPS C/A bump gets nicely recovered. The rejection has hardly any impact on phase or group delay.
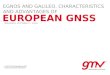
C/N比は干渉源の100x近くまでキープ
27
C/No
40 dB100x closer
Mitigation
NoMitigation
プレゼンター
プレゼンテーションのノート
To take into account front-end distortion, we first applied a very high interfering power at the GPS main lobe, knocking out the receiver. Then we gradually decreased the power in order to see where the receiver recovered. This shows the C/No recovers 40 dB earlier on a receiver with interference mitigation enabled than a receiver without interference mitigation. In line-of-sight conditions the interfering source could be 100 times closer in this case before causing the same effect.
28
Input
25 dB
C/AP(Y)
GPS L1
-72 dBm
Mitigated
プレゼンター
プレゼンテーションのノート
Finally, the signal from the black chirp device was combined with the GPS signal and sourced to the receiver. The power of the interference was -72 dBm (antenna referenced). The input signal monitoring shows the jammer wipes out the complete GPS L1 band. Monitoring the signal after interference mitigation shows the chirp signal is rejected with about 25 dB and the GPS C/A bump reappears.
Most likely around ± 22° from the magnetic equator
Source: InsideGNSSSeptentrio in Confidence
プレゼンター
プレゼンテーションのノート
+/- 20 deg lattitude
35
IONO+ robust FW for the whole family
プレゼンター
プレゼンテーションのノート
Baseline independence Mine : operational Uptime very important : 1hour more availability thru IONO+
衛星信号が近傍にある表面体に反射して生じたマルチパスを緩和
短い遅延時間のマルチパスの発生頻度が最も高く、悪影響が最も大きい
APME+
• 短い遅延時間のマルチパスにより良い効果
• トラッキングループを変更せずにマルチパスを推定
• 衛星ごとにマルチパスを推定
• マルチパス誤差量を表示
• 搬送波のマルチパスの緩和が可能
(RTKや、PPP、ヘディング測位で不可欠)
業界唯一の無バイアス(偏倚)マルチパス対策
マルチ・パス対策:APME+
36
プレゼンター
プレゼンテーションのノート
The graph shows the error effect of multipath (vertical axis) in function of the “delay” expressed in meters (delay expressed in meters, because the replected GNSS signals take an indirect – longer – path (in m) to the receiver, which induces a delay which is the actual cause of the error.) Blue and green are 2 competitive solutions, red is the Septentrio solution. It is clearly smaller, most spectacularly so on the left (short delay). Short delay is most present and most damaging, because it is most difficult to compensate for. In fact, competitive solutions that try to “steer” the receiver to compensate this, cannot react fast enough, and can therefore not compensate this. Septentrio’s unique technology allows measuring the multipath
RAIMと信頼性
Septentrio in Confidence
x20で表示AsteRx-m2
他社
プレゼンター
プレゼンテーションのノート
Highlight error at lower right for other company Again mention no scaling, apart from their wrong fix which is most likely linked to the DOP Should be here at 15:35