Embed Size (px)
Citation preview
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
I L R I L I E V O F O T O G R A M M E T R I C O l a d o c u m e n t a z i o n e d e i b e n i
c u l t u r a l i a t t r a v e r s o l e i m m a g i n i
D O C E N T E l a u r a t a f f u r e l l i
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Geomatica e il rilievo dei beni culturali
bull Il rilievo diretto
bull Scale di rappresentazione e concetto di precisione nel rilievo enel disegno
bull Elementi di topografia e nozioni di geodesia
bull Fotogrammetria e rilievo fotogrammetrico
bull Basi di cartografia
PROGRAMMA DEL CORSO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La fotogrammetria egrave una tecnica di misura che utilizza le immagini
bull Attraverso il processo fotogrammetrico di acquisizione misura ed interpretazione del dato contenuto nelle immagini si ottengono informazioni spaziali e geometriche di un oggetto fisico
bull Il procedimento fotogrammetrico trasforma le immagini da semplice documento qualitativo a documento quantitativo (metrico)
INTRODUZIONE ALLA FOTOGRAMMETRIA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquooggetto rappresentato egrave fissato in un preciso momento permettendo lrsquoanalisi anche qualora questo non fosse piugrave accessibile o fosse modificato nel tempo
bull La costruzione di un modello che raccoglie tutti i dati e le informazioni spaziali di ogni punto dellrsquooggetto senza apparente discontinuitagrave permette di effettuare operazioni di misura sul modello stesso come se fossero eseguite sullrsquooggetto reale
bull Nei piugrave recenti sviluppi ha molti punti di contatto con la computer graphicbull image processingbull computer vision
FOTOGRAMMETRIAGENERALITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Rilievo di piccoli oggetti o metrologia industriale
bull Rilievo di edifici (monumentali)bull Controllo di strutturebull Restauro bull Diagnosticabull Rilievo archeologicobull Rilievo territoriobull Cartografia e pianificazione urbanabull Cartografia storicabull Controllo del rischio idro-geograficobull Pianificazione urbanabull Virtualizzazione e modellazione 3D
CAMPI DI APPLICAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Elevata accuratezza geometricabull Elevato livello di dettagliobull Automazionebull Fotorealismobull Low costbull Portabilitagravebull Flessibilitagrave
VANTAGGI DEL RILIEVO FOTOGRAMMETRICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FOTOGRAMMETRIAGENERALITArsquo
bull Esistono diversi tipi di fotogrammetria
bull subacquea
bull terrestre o da vicino close rangephotogrammetry
bull da drone
bull aerea
bull Telerilevamento o remote sensing
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Progetto di rilievo bull Rilevamento fotogrammetricobull Rilevamento topografico o misure dirette
sullrsquooggetto
bull Orientamento fotogrammibull Restituzione
bull Editing grafico ndash Cadbull Collaudo
bull Modellazione solida bull Rendering
PROCESSO DI RILIEVO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull MACCHINA FOTOGRAFICA (o fotocamera)Dispositivo capace di catturare la luce entrante attraverso un elemento dotato di meccanismi ottici (obiettivo) e di registrarla su un sensore fotosensibile -pellicola fotografica (macchine fotografiche tradizionali) -sensore digitale (CCD o CMOS) (macchine fotografiche digitali)
bull Una macchina fotografica puograve lavorare con lo spettro visibile della luce o con altre porzioni dello spettro elettromagnetico (infrarosso)
bull Il diaframma controlla la quantitagrave di luce che entra nella camera durante la ripresa lrsquootturatore controlla la lunghezza del tempo durante il quale la luce colpisce la superficie di registrazione
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Geomatica e il rilievo dei beni culturali
bull Il rilievo diretto
bull Scale di rappresentazione e concetto di precisione nel rilievo enel disegno
bull Elementi di topografia e nozioni di geodesia
bull Fotogrammetria e rilievo fotogrammetrico
bull Basi di cartografia
PROGRAMMA DEL CORSO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La fotogrammetria egrave una tecnica di misura che utilizza le immagini
bull Attraverso il processo fotogrammetrico di acquisizione misura ed interpretazione del dato contenuto nelle immagini si ottengono informazioni spaziali e geometriche di un oggetto fisico
bull Il procedimento fotogrammetrico trasforma le immagini da semplice documento qualitativo a documento quantitativo (metrico)
INTRODUZIONE ALLA FOTOGRAMMETRIA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquooggetto rappresentato egrave fissato in un preciso momento permettendo lrsquoanalisi anche qualora questo non fosse piugrave accessibile o fosse modificato nel tempo
bull La costruzione di un modello che raccoglie tutti i dati e le informazioni spaziali di ogni punto dellrsquooggetto senza apparente discontinuitagrave permette di effettuare operazioni di misura sul modello stesso come se fossero eseguite sullrsquooggetto reale
bull Nei piugrave recenti sviluppi ha molti punti di contatto con la computer graphicbull image processingbull computer vision
FOTOGRAMMETRIAGENERALITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Rilievo di piccoli oggetti o metrologia industriale
bull Rilievo di edifici (monumentali)bull Controllo di strutturebull Restauro bull Diagnosticabull Rilievo archeologicobull Rilievo territoriobull Cartografia e pianificazione urbanabull Cartografia storicabull Controllo del rischio idro-geograficobull Pianificazione urbanabull Virtualizzazione e modellazione 3D
CAMPI DI APPLICAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Elevata accuratezza geometricabull Elevato livello di dettagliobull Automazionebull Fotorealismobull Low costbull Portabilitagravebull Flessibilitagrave
VANTAGGI DEL RILIEVO FOTOGRAMMETRICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FOTOGRAMMETRIAGENERALITArsquo
bull Esistono diversi tipi di fotogrammetria
bull subacquea
bull terrestre o da vicino close rangephotogrammetry
bull da drone
bull aerea
bull Telerilevamento o remote sensing
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Progetto di rilievo bull Rilevamento fotogrammetricobull Rilevamento topografico o misure dirette
sullrsquooggetto
bull Orientamento fotogrammibull Restituzione
bull Editing grafico ndash Cadbull Collaudo
bull Modellazione solida bull Rendering
PROCESSO DI RILIEVO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull MACCHINA FOTOGRAFICA (o fotocamera)Dispositivo capace di catturare la luce entrante attraverso un elemento dotato di meccanismi ottici (obiettivo) e di registrarla su un sensore fotosensibile -pellicola fotografica (macchine fotografiche tradizionali) -sensore digitale (CCD o CMOS) (macchine fotografiche digitali)
bull Una macchina fotografica puograve lavorare con lo spettro visibile della luce o con altre porzioni dello spettro elettromagnetico (infrarosso)
bull Il diaframma controlla la quantitagrave di luce che entra nella camera durante la ripresa lrsquootturatore controlla la lunghezza del tempo durante il quale la luce colpisce la superficie di registrazione
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La fotogrammetria egrave una tecnica di misura che utilizza le immagini
bull Attraverso il processo fotogrammetrico di acquisizione misura ed interpretazione del dato contenuto nelle immagini si ottengono informazioni spaziali e geometriche di un oggetto fisico
bull Il procedimento fotogrammetrico trasforma le immagini da semplice documento qualitativo a documento quantitativo (metrico)
INTRODUZIONE ALLA FOTOGRAMMETRIA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquooggetto rappresentato egrave fissato in un preciso momento permettendo lrsquoanalisi anche qualora questo non fosse piugrave accessibile o fosse modificato nel tempo
bull La costruzione di un modello che raccoglie tutti i dati e le informazioni spaziali di ogni punto dellrsquooggetto senza apparente discontinuitagrave permette di effettuare operazioni di misura sul modello stesso come se fossero eseguite sullrsquooggetto reale
bull Nei piugrave recenti sviluppi ha molti punti di contatto con la computer graphicbull image processingbull computer vision
FOTOGRAMMETRIAGENERALITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Rilievo di piccoli oggetti o metrologia industriale
bull Rilievo di edifici (monumentali)bull Controllo di strutturebull Restauro bull Diagnosticabull Rilievo archeologicobull Rilievo territoriobull Cartografia e pianificazione urbanabull Cartografia storicabull Controllo del rischio idro-geograficobull Pianificazione urbanabull Virtualizzazione e modellazione 3D
CAMPI DI APPLICAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Elevata accuratezza geometricabull Elevato livello di dettagliobull Automazionebull Fotorealismobull Low costbull Portabilitagravebull Flessibilitagrave
VANTAGGI DEL RILIEVO FOTOGRAMMETRICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FOTOGRAMMETRIAGENERALITArsquo
bull Esistono diversi tipi di fotogrammetria
bull subacquea
bull terrestre o da vicino close rangephotogrammetry
bull da drone
bull aerea
bull Telerilevamento o remote sensing
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Progetto di rilievo bull Rilevamento fotogrammetricobull Rilevamento topografico o misure dirette
sullrsquooggetto
bull Orientamento fotogrammibull Restituzione
bull Editing grafico ndash Cadbull Collaudo
bull Modellazione solida bull Rendering
PROCESSO DI RILIEVO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull MACCHINA FOTOGRAFICA (o fotocamera)Dispositivo capace di catturare la luce entrante attraverso un elemento dotato di meccanismi ottici (obiettivo) e di registrarla su un sensore fotosensibile -pellicola fotografica (macchine fotografiche tradizionali) -sensore digitale (CCD o CMOS) (macchine fotografiche digitali)
bull Una macchina fotografica puograve lavorare con lo spettro visibile della luce o con altre porzioni dello spettro elettromagnetico (infrarosso)
bull Il diaframma controlla la quantitagrave di luce che entra nella camera durante la ripresa lrsquootturatore controlla la lunghezza del tempo durante il quale la luce colpisce la superficie di registrazione
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquooggetto rappresentato egrave fissato in un preciso momento permettendo lrsquoanalisi anche qualora questo non fosse piugrave accessibile o fosse modificato nel tempo
bull La costruzione di un modello che raccoglie tutti i dati e le informazioni spaziali di ogni punto dellrsquooggetto senza apparente discontinuitagrave permette di effettuare operazioni di misura sul modello stesso come se fossero eseguite sullrsquooggetto reale
bull Nei piugrave recenti sviluppi ha molti punti di contatto con la computer graphicbull image processingbull computer vision
FOTOGRAMMETRIAGENERALITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Rilievo di piccoli oggetti o metrologia industriale
bull Rilievo di edifici (monumentali)bull Controllo di strutturebull Restauro bull Diagnosticabull Rilievo archeologicobull Rilievo territoriobull Cartografia e pianificazione urbanabull Cartografia storicabull Controllo del rischio idro-geograficobull Pianificazione urbanabull Virtualizzazione e modellazione 3D
CAMPI DI APPLICAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Elevata accuratezza geometricabull Elevato livello di dettagliobull Automazionebull Fotorealismobull Low costbull Portabilitagravebull Flessibilitagrave
VANTAGGI DEL RILIEVO FOTOGRAMMETRICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FOTOGRAMMETRIAGENERALITArsquo
bull Esistono diversi tipi di fotogrammetria
bull subacquea
bull terrestre o da vicino close rangephotogrammetry
bull da drone
bull aerea
bull Telerilevamento o remote sensing
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Progetto di rilievo bull Rilevamento fotogrammetricobull Rilevamento topografico o misure dirette
sullrsquooggetto
bull Orientamento fotogrammibull Restituzione
bull Editing grafico ndash Cadbull Collaudo
bull Modellazione solida bull Rendering
PROCESSO DI RILIEVO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull MACCHINA FOTOGRAFICA (o fotocamera)Dispositivo capace di catturare la luce entrante attraverso un elemento dotato di meccanismi ottici (obiettivo) e di registrarla su un sensore fotosensibile -pellicola fotografica (macchine fotografiche tradizionali) -sensore digitale (CCD o CMOS) (macchine fotografiche digitali)
bull Una macchina fotografica puograve lavorare con lo spettro visibile della luce o con altre porzioni dello spettro elettromagnetico (infrarosso)
bull Il diaframma controlla la quantitagrave di luce che entra nella camera durante la ripresa lrsquootturatore controlla la lunghezza del tempo durante il quale la luce colpisce la superficie di registrazione
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Rilievo di piccoli oggetti o metrologia industriale
bull Rilievo di edifici (monumentali)bull Controllo di strutturebull Restauro bull Diagnosticabull Rilievo archeologicobull Rilievo territoriobull Cartografia e pianificazione urbanabull Cartografia storicabull Controllo del rischio idro-geograficobull Pianificazione urbanabull Virtualizzazione e modellazione 3D
CAMPI DI APPLICAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Elevata accuratezza geometricabull Elevato livello di dettagliobull Automazionebull Fotorealismobull Low costbull Portabilitagravebull Flessibilitagrave
VANTAGGI DEL RILIEVO FOTOGRAMMETRICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FOTOGRAMMETRIAGENERALITArsquo
bull Esistono diversi tipi di fotogrammetria
bull subacquea
bull terrestre o da vicino close rangephotogrammetry
bull da drone
bull aerea
bull Telerilevamento o remote sensing
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Progetto di rilievo bull Rilevamento fotogrammetricobull Rilevamento topografico o misure dirette
sullrsquooggetto
bull Orientamento fotogrammibull Restituzione
bull Editing grafico ndash Cadbull Collaudo
bull Modellazione solida bull Rendering
PROCESSO DI RILIEVO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull MACCHINA FOTOGRAFICA (o fotocamera)Dispositivo capace di catturare la luce entrante attraverso un elemento dotato di meccanismi ottici (obiettivo) e di registrarla su un sensore fotosensibile -pellicola fotografica (macchine fotografiche tradizionali) -sensore digitale (CCD o CMOS) (macchine fotografiche digitali)
bull Una macchina fotografica puograve lavorare con lo spettro visibile della luce o con altre porzioni dello spettro elettromagnetico (infrarosso)
bull Il diaframma controlla la quantitagrave di luce che entra nella camera durante la ripresa lrsquootturatore controlla la lunghezza del tempo durante il quale la luce colpisce la superficie di registrazione
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Elevata accuratezza geometricabull Elevato livello di dettagliobull Automazionebull Fotorealismobull Low costbull Portabilitagravebull Flessibilitagrave
VANTAGGI DEL RILIEVO FOTOGRAMMETRICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FOTOGRAMMETRIAGENERALITArsquo
bull Esistono diversi tipi di fotogrammetria
bull subacquea
bull terrestre o da vicino close rangephotogrammetry
bull da drone
bull aerea
bull Telerilevamento o remote sensing
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Progetto di rilievo bull Rilevamento fotogrammetricobull Rilevamento topografico o misure dirette
sullrsquooggetto
bull Orientamento fotogrammibull Restituzione
bull Editing grafico ndash Cadbull Collaudo
bull Modellazione solida bull Rendering
PROCESSO DI RILIEVO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull MACCHINA FOTOGRAFICA (o fotocamera)Dispositivo capace di catturare la luce entrante attraverso un elemento dotato di meccanismi ottici (obiettivo) e di registrarla su un sensore fotosensibile -pellicola fotografica (macchine fotografiche tradizionali) -sensore digitale (CCD o CMOS) (macchine fotografiche digitali)
bull Una macchina fotografica puograve lavorare con lo spettro visibile della luce o con altre porzioni dello spettro elettromagnetico (infrarosso)
bull Il diaframma controlla la quantitagrave di luce che entra nella camera durante la ripresa lrsquootturatore controlla la lunghezza del tempo durante il quale la luce colpisce la superficie di registrazione
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
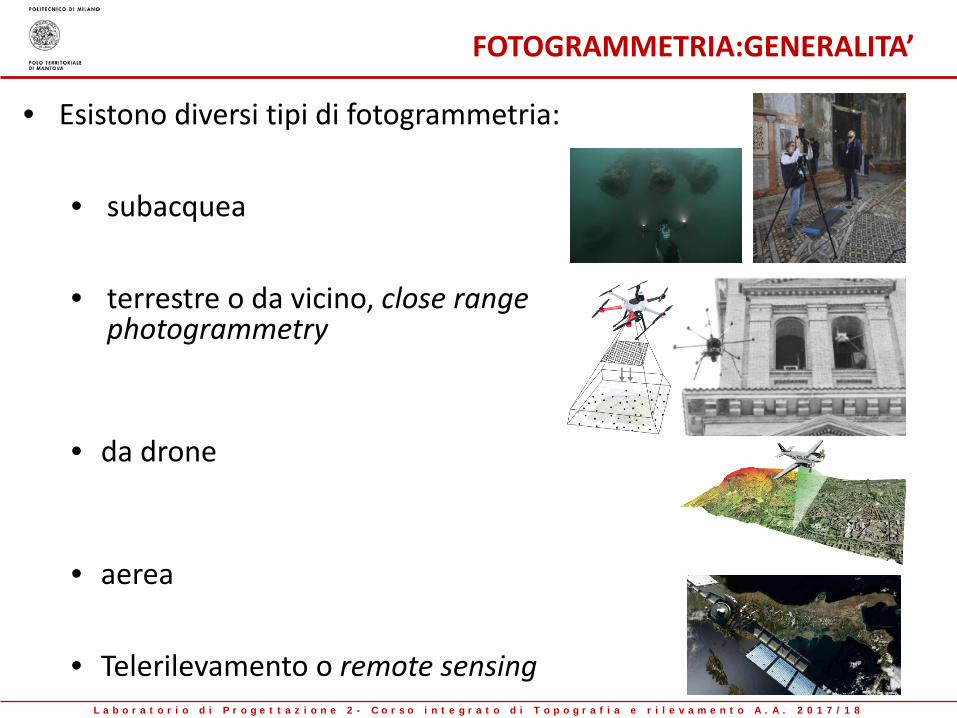
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FOTOGRAMMETRIAGENERALITArsquo
bull Esistono diversi tipi di fotogrammetria
bull subacquea
bull terrestre o da vicino close rangephotogrammetry
bull da drone
bull aerea
bull Telerilevamento o remote sensing
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Progetto di rilievo bull Rilevamento fotogrammetricobull Rilevamento topografico o misure dirette
sullrsquooggetto
bull Orientamento fotogrammibull Restituzione
bull Editing grafico ndash Cadbull Collaudo
bull Modellazione solida bull Rendering
PROCESSO DI RILIEVO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull MACCHINA FOTOGRAFICA (o fotocamera)Dispositivo capace di catturare la luce entrante attraverso un elemento dotato di meccanismi ottici (obiettivo) e di registrarla su un sensore fotosensibile -pellicola fotografica (macchine fotografiche tradizionali) -sensore digitale (CCD o CMOS) (macchine fotografiche digitali)
bull Una macchina fotografica puograve lavorare con lo spettro visibile della luce o con altre porzioni dello spettro elettromagnetico (infrarosso)
bull Il diaframma controlla la quantitagrave di luce che entra nella camera durante la ripresa lrsquootturatore controlla la lunghezza del tempo durante il quale la luce colpisce la superficie di registrazione
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
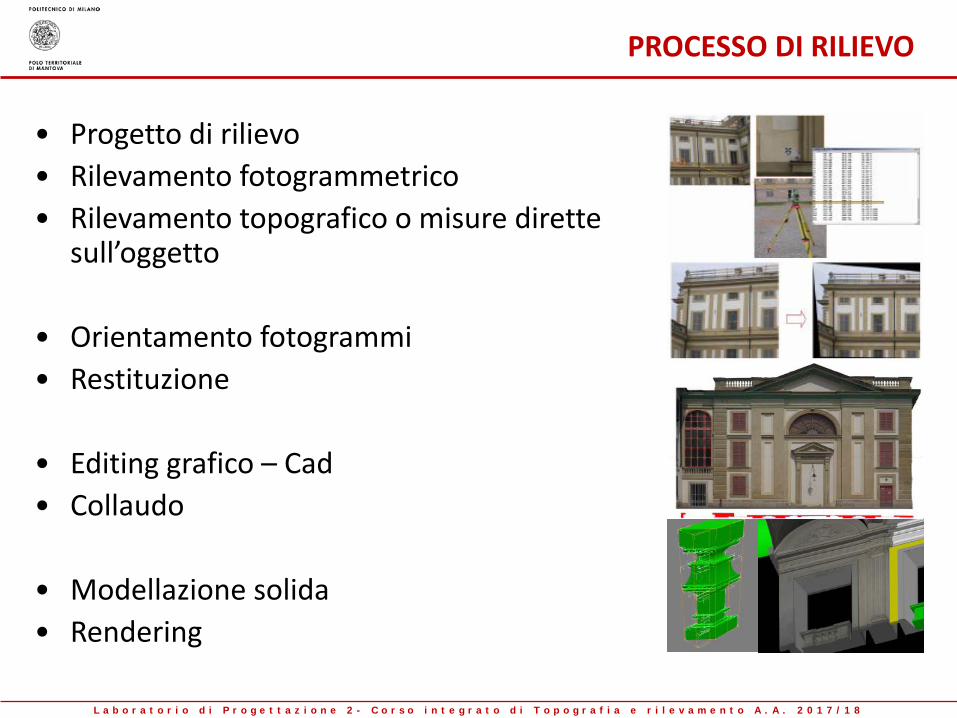
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Progetto di rilievo bull Rilevamento fotogrammetricobull Rilevamento topografico o misure dirette
sullrsquooggetto
bull Orientamento fotogrammibull Restituzione
bull Editing grafico ndash Cadbull Collaudo
bull Modellazione solida bull Rendering
PROCESSO DI RILIEVO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull MACCHINA FOTOGRAFICA (o fotocamera)Dispositivo capace di catturare la luce entrante attraverso un elemento dotato di meccanismi ottici (obiettivo) e di registrarla su un sensore fotosensibile -pellicola fotografica (macchine fotografiche tradizionali) -sensore digitale (CCD o CMOS) (macchine fotografiche digitali)
bull Una macchina fotografica puograve lavorare con lo spettro visibile della luce o con altre porzioni dello spettro elettromagnetico (infrarosso)
bull Il diaframma controlla la quantitagrave di luce che entra nella camera durante la ripresa lrsquootturatore controlla la lunghezza del tempo durante il quale la luce colpisce la superficie di registrazione
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016

L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull MACCHINA FOTOGRAFICA (o fotocamera)Dispositivo capace di catturare la luce entrante attraverso un elemento dotato di meccanismi ottici (obiettivo) e di registrarla su un sensore fotosensibile -pellicola fotografica (macchine fotografiche tradizionali) -sensore digitale (CCD o CMOS) (macchine fotografiche digitali)
bull Una macchina fotografica puograve lavorare con lo spettro visibile della luce o con altre porzioni dello spettro elettromagnetico (infrarosso)
bull Il diaframma controlla la quantitagrave di luce che entra nella camera durante la ripresa lrsquootturatore controlla la lunghezza del tempo durante il quale la luce colpisce la superficie di registrazione
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
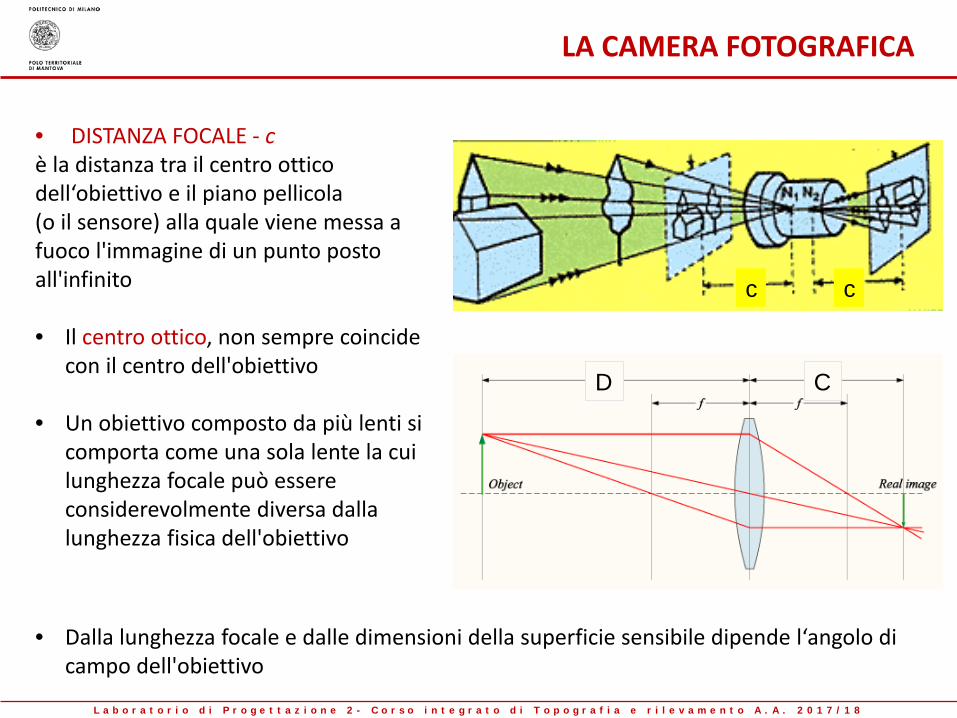
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull DISTANZA FOCALE - cegrave la distanza tra il centro ottico delllsquoobiettivo e il piano pellicola (o il sensore) alla quale viene messa a fuoco limmagine di un punto posto allinfinito
bull Il centro ottico non sempre coincide con il centro dellobiettivo
bull Un obiettivo composto da piugrave lenti si comporta come una sola lente la cui lunghezza focale puograve essere considerevolmente diversa dalla lunghezza fisica dellobiettivo
c c
bull Dalla lunghezza focale e dalle dimensioni della superficie sensibile dipende llsquoangolo di campo dellobiettivo
D C
LA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
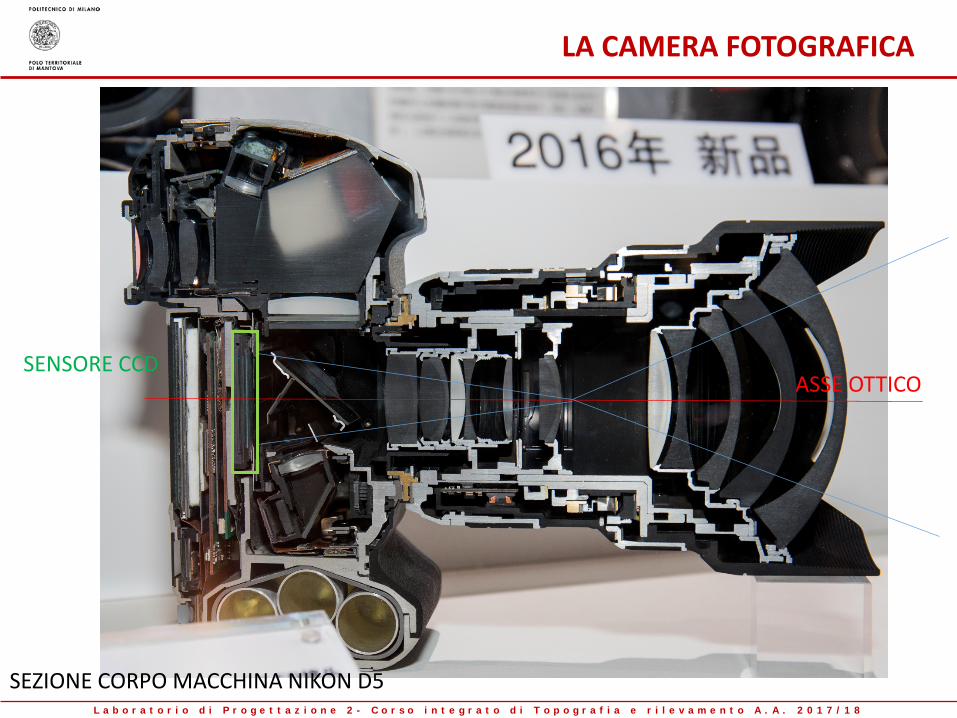
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA CAMERA FOTOGRAFICA
SEZIONE CORPO MACCHINA NIKON D5
SENSORE CCDASSE OTTICO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
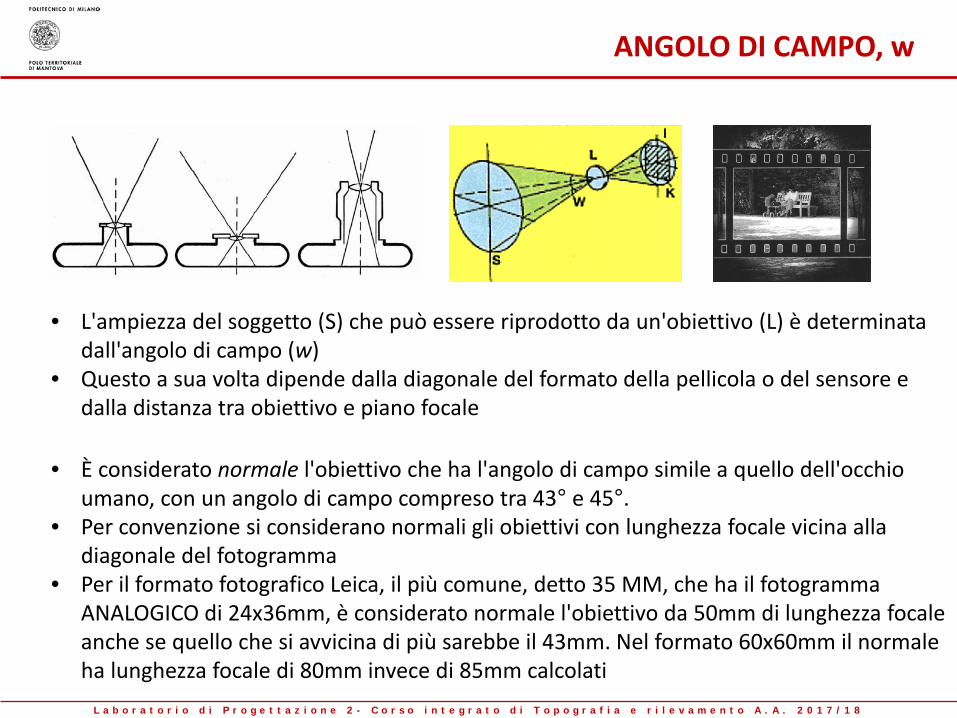
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Egrave considerato normale lobiettivo che ha langolo di campo simile a quello dellocchio umano con un angolo di campo compreso tra 43deg e 45deg
bull Per convenzione si considerano normali gli obiettivi con lunghezza focale vicina alla diagonale del fotogramma
bull Per il formato fotografico Leica il piugrave comune detto 35 MM che ha il fotogramma ANALOGICO di 24x36mm egrave considerato normale lobiettivo da 50mm di lunghezza focale anche se quello che si avvicina di piugrave sarebbe il 43mm Nel formato 60x60mm il normale ha lunghezza focale di 80mm invece di 85mm calcolati
bull Lampiezza del soggetto (S) che puograve essere riprodotto da unobiettivo (L) egrave determinata dallangolo di campo (w)
bull Questo a sua volta dipende dalla diagonale del formato della pellicola o del sensore e dalla distanza tra obiettivo e piano focale
ANGOLO DI CAMPO w
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
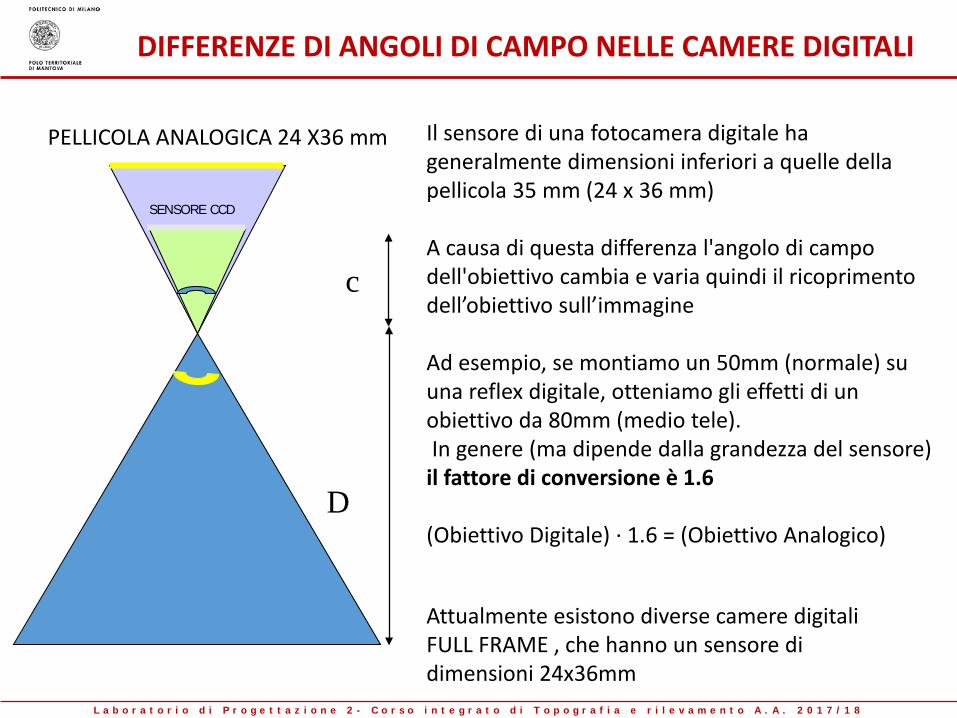
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il sensore di una fotocamera digitale ha generalmente dimensioni inferiori a quelle della pellicola 35 mm (24 x 36 mm)
A causa di questa differenza langolo di campo dellobiettivo cambia e varia quindi il ricoprimento dellrsquoobiettivo sullrsquoimmagine
Ad esempio se montiamo un 50mm (normale) su una reflex digitale otteniamo gli effetti di un obiettivo da 80mm (medio tele)In genere (ma dipende dalla grandezza del sensore)
il fattore di conversione egrave 16
(Obiettivo Digitale) middot 16 = (Obiettivo Analogico)D
c
PELLICOLA ANALOGICA 24 X36 mm
SENSORE CCD
DIFFERENZE DI ANGOLI DI CAMPO NELLE CAMERE DIGITALI
Attualmente esistono diverse camere digitali FULL FRAME che hanno un sensore di dimensioni 24x36mm
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
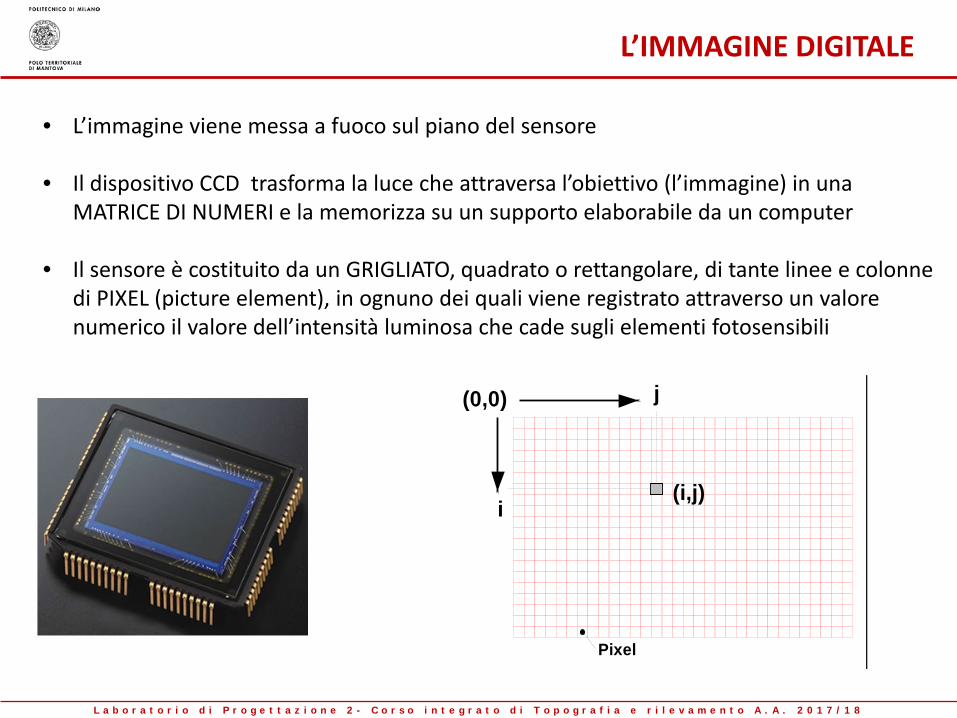
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
(00)
i
j
(ij)
Pixel
bull Lrsquoimmagine viene messa a fuoco sul piano del sensore
bull Il dispositivo CCD trasforma la luce che attraversa lrsquoobiettivo (lrsquoimmagine) in una MATRICE DI NUMERI e la memorizza su un supporto elaborabile da un computer
bull Il sensore egrave costituito da un GRIGLIATO quadrato o rettangolare di tante linee e colonne di PIXEL (picture element) in ognuno dei quali viene registrato attraverso un valore numerico il valore dellrsquointensitagrave luminosa che cade sugli elementi fotosensibili
LrsquoIMMAGINE DIGITALE
(00)
i
j
(ij)
Pixel
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
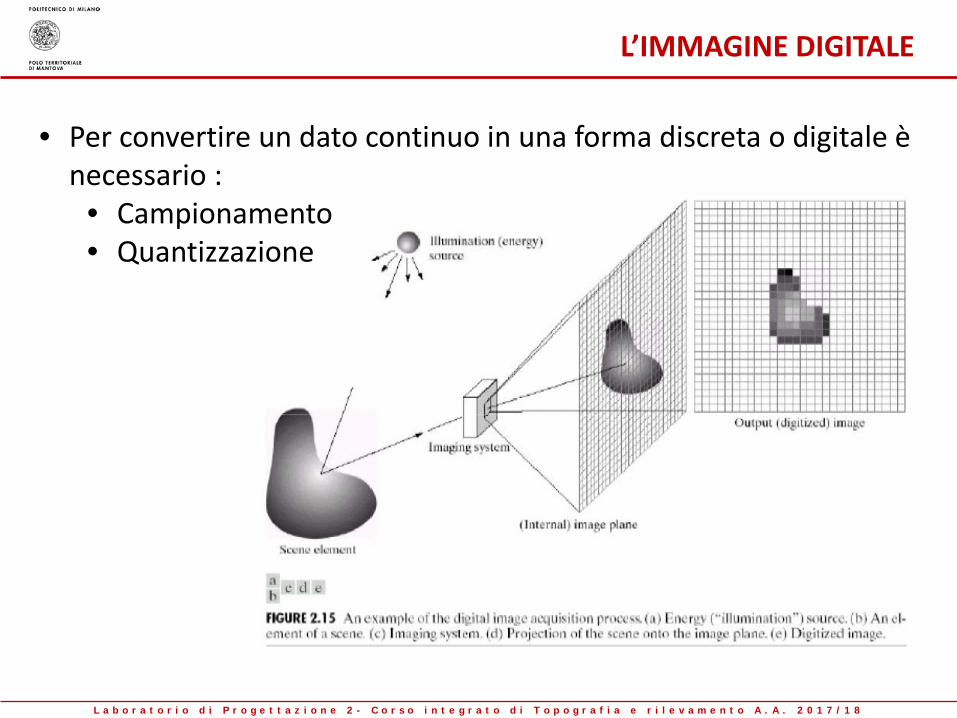
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
bull Per convertire un dato continuo in una forma discreta o digitale egrave necessario
bull Campionamentobull Quantizzazione
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
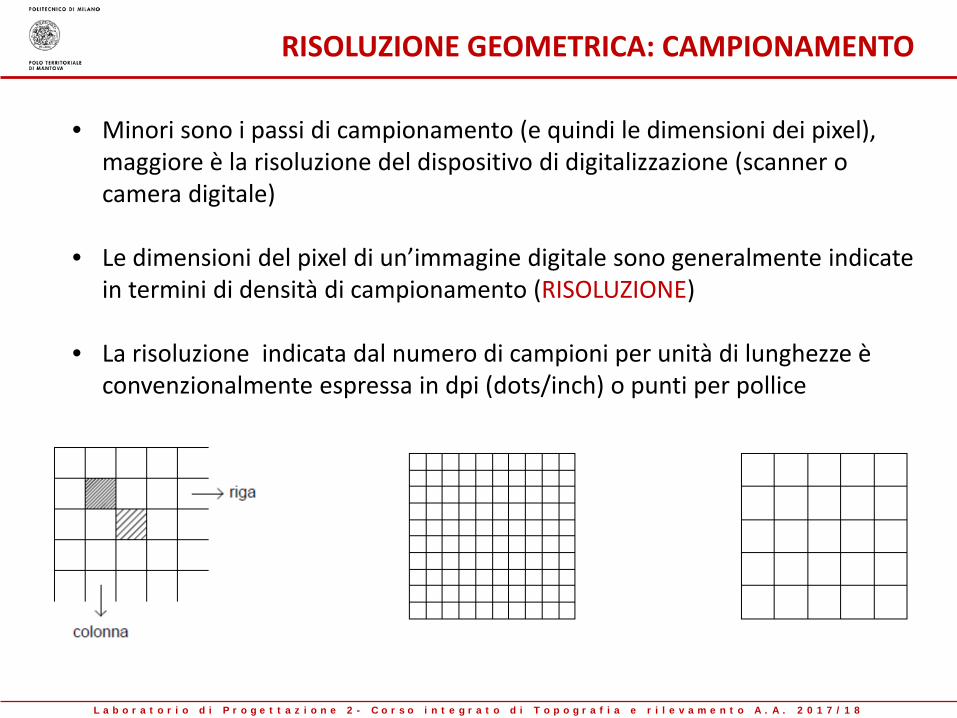
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
bull Minori sono i passi di campionamento (e quindi le dimensioni dei pixel) maggiore egrave la risoluzione del dispositivo di digitalizzazione (scanner o camera digitale)
bull Le dimensioni del pixel di unrsquoimmagine digitale sono generalmente indicate in termini di densitagrave di campionamento (RISOLUZIONE)
bull La risoluzione indicata dal numero di campioni per unitagrave di lunghezze egrave convenzionalmente espressa in dpi (dotsinch) o punti per pollice
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
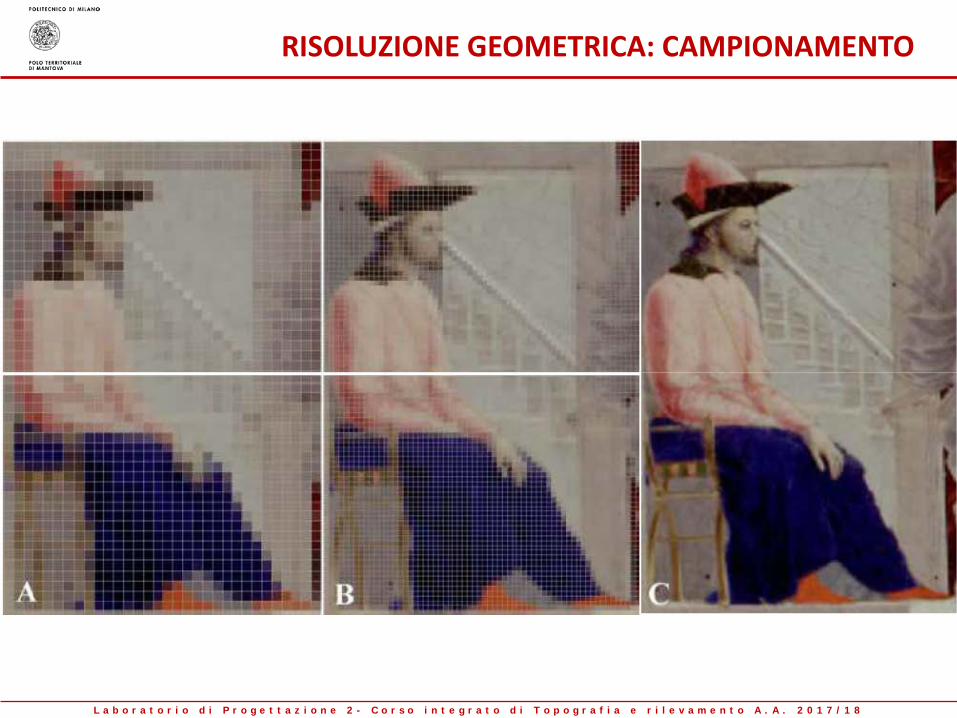
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE GEOMETRICA CAMPIONAMENTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
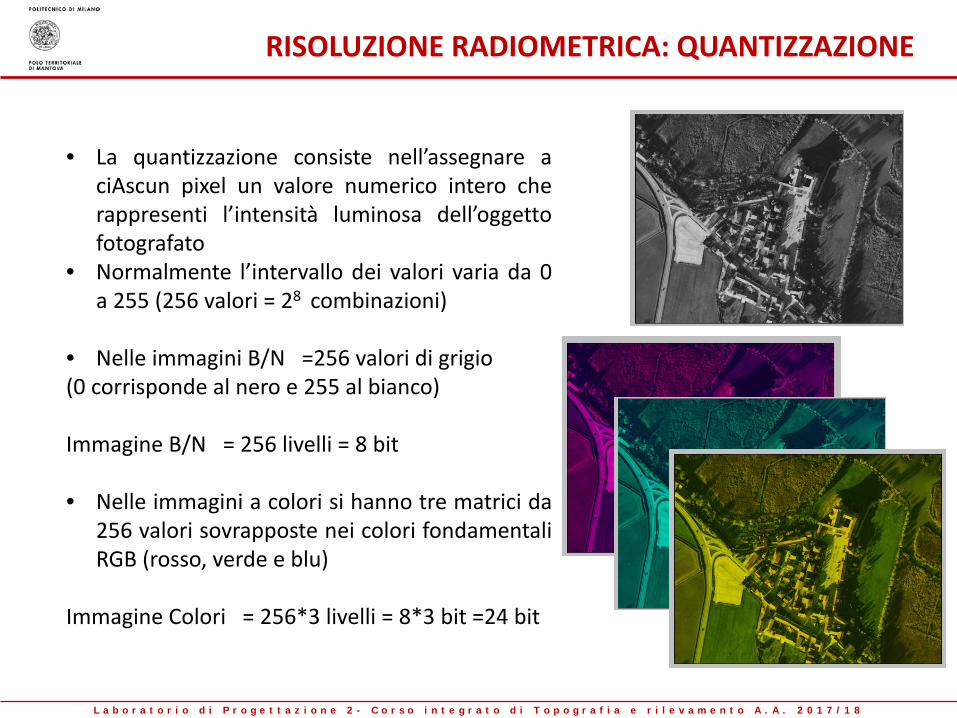
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RISOLUZIONE RADIOMETRICA QUANTIZZAZIONE
bull La quantizzazione consiste nellrsquoassegnare aciAscun pixel un valore numerico intero cherappresenti lrsquointensitagrave luminosa dellrsquooggettofotografato
bull Normalmente lrsquointervallo dei valori varia da 0a 255 (256 valori = 28 combinazioni)
bull Nelle immagini BN =256 valori di grigio(0 corrisponde al nero e 255 al bianco)
Immagine BN = 256 livelli = 8 bit
bull Nelle immagini a colori si hanno tre matrici da256 valori sovrapposte nei colori fondamentaliRGB (rosso verde e blu)
Immagine Colori = 2563 livelli = 83 bit =24 bit
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
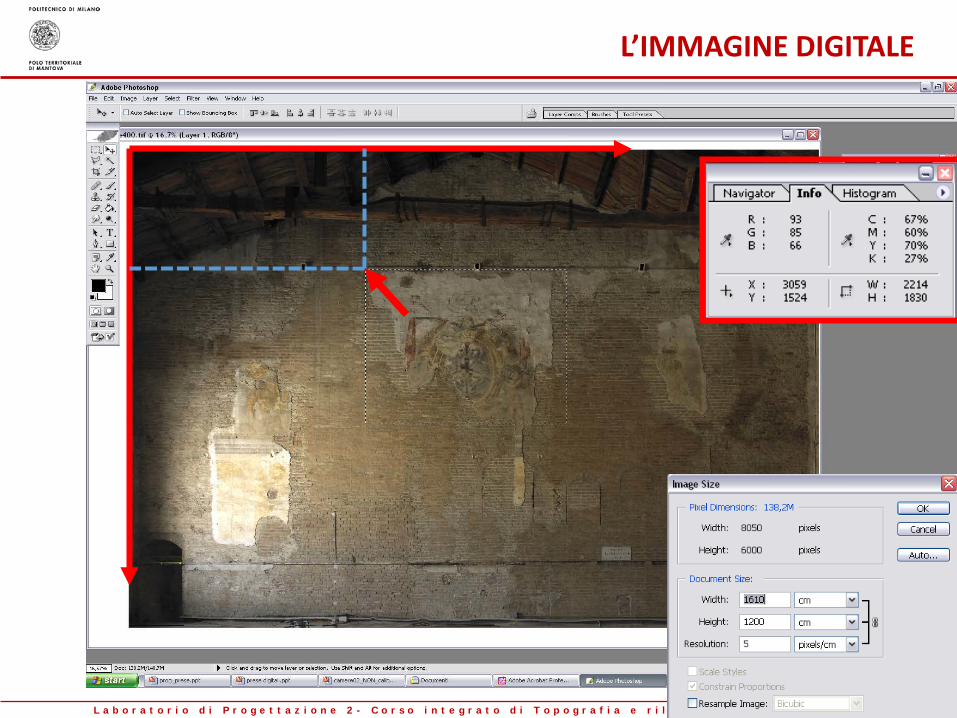
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoIMMAGINE DIGITALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
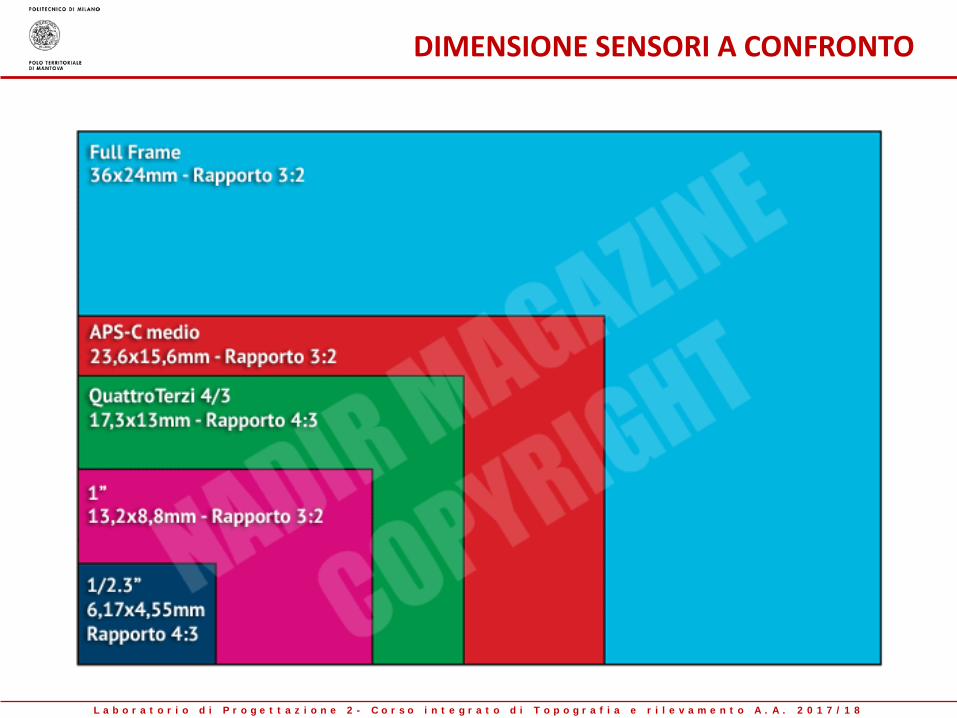
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIMENSIONE SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
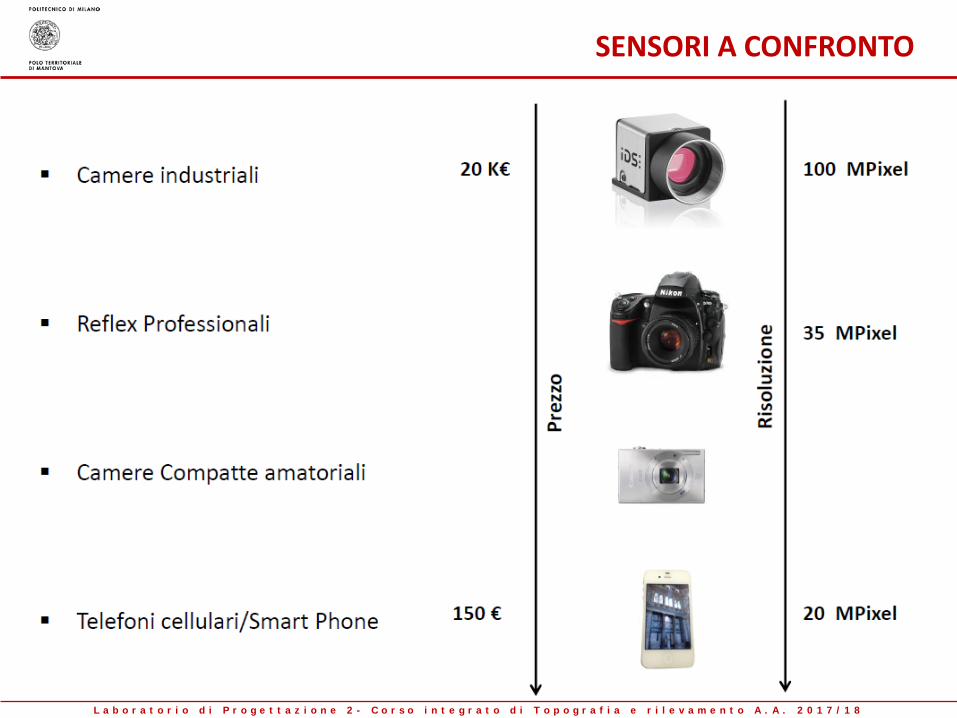
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
SENSORI A CONFRONTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
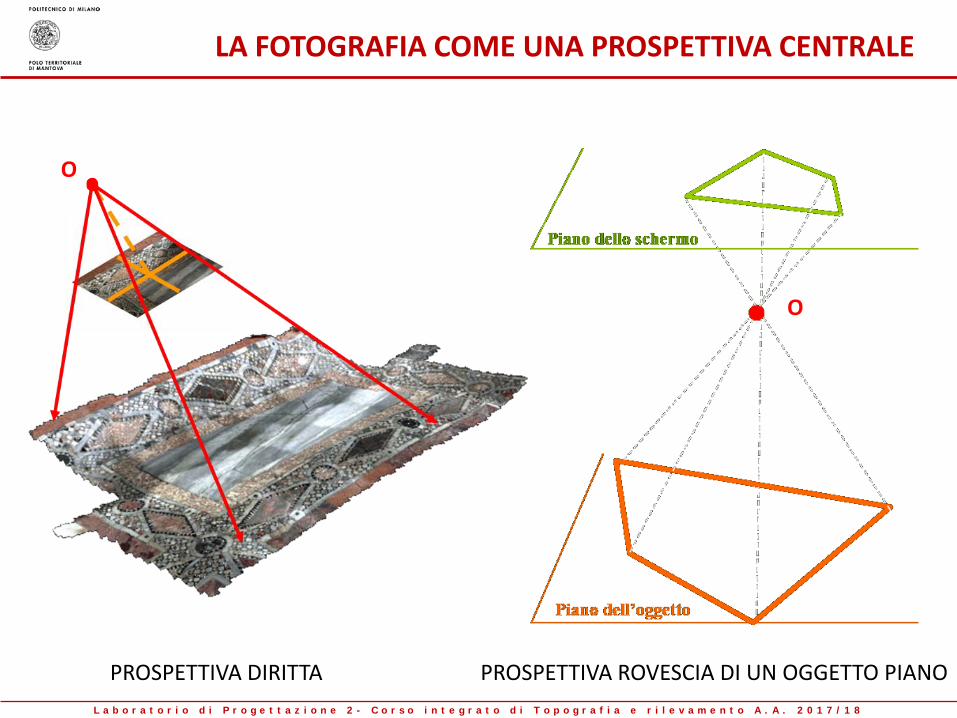
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
PROSPETTIVA ROVESCIA DI UN OGGETTO PIANO PROSPETTIVA DIRITTA
O
O
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
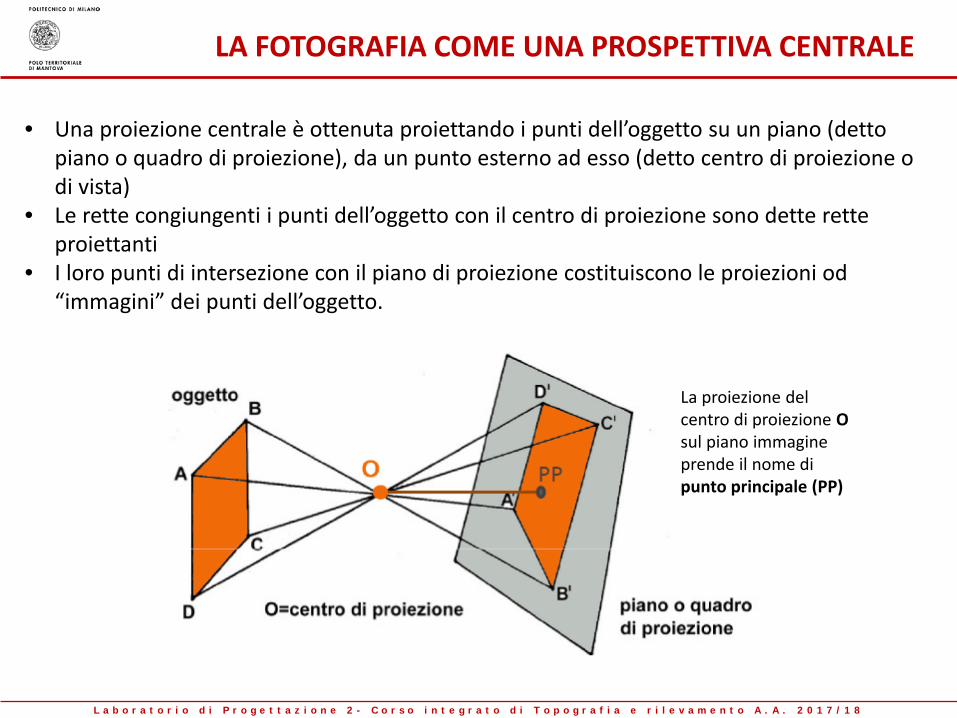
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
La proiezione del centro di proiezione Osul piano immagine prende il nome di punto principale (PP)
bull Una proiezione centrale egrave ottenuta proiettando i punti dellrsquooggetto su un piano (detto piano o quadro di proiezione) da un punto esterno ad esso (detto centro di proiezione o di vista)
bull Le rette congiungenti i punti dellrsquooggetto con il centro di proiezione sono dette rette proiettanti
bull I loro punti di intersezione con il piano di proiezione costituiscono le proiezioni od ldquoimmaginirdquo dei punti dellrsquooggetto
LA FOTOGRAFIA COME UNA PROSPETTIVA CENTRALE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016

L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016

L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
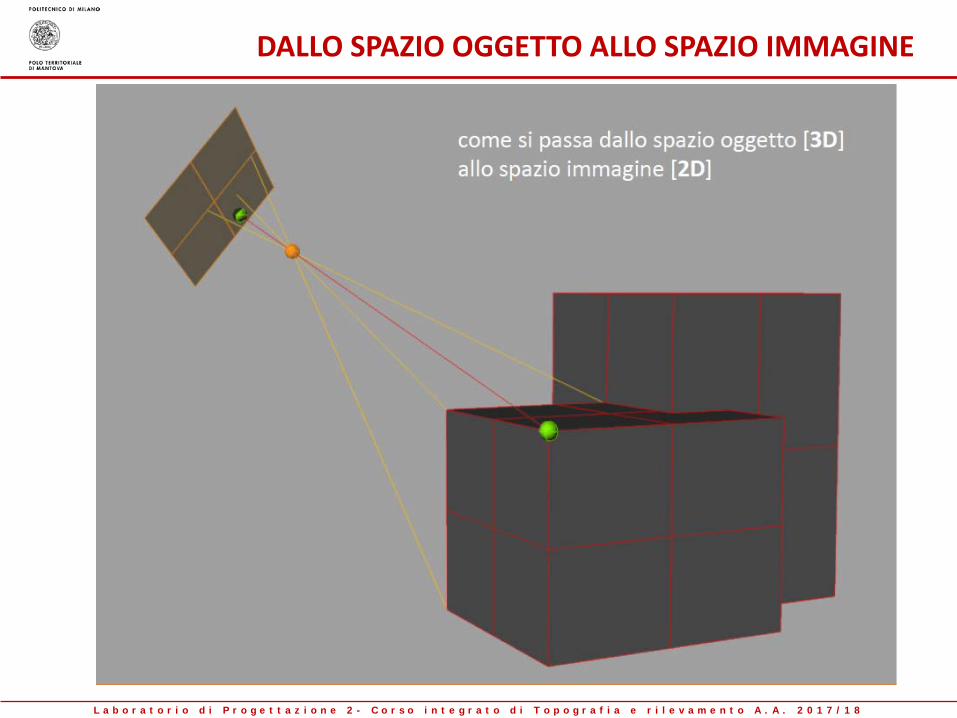
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
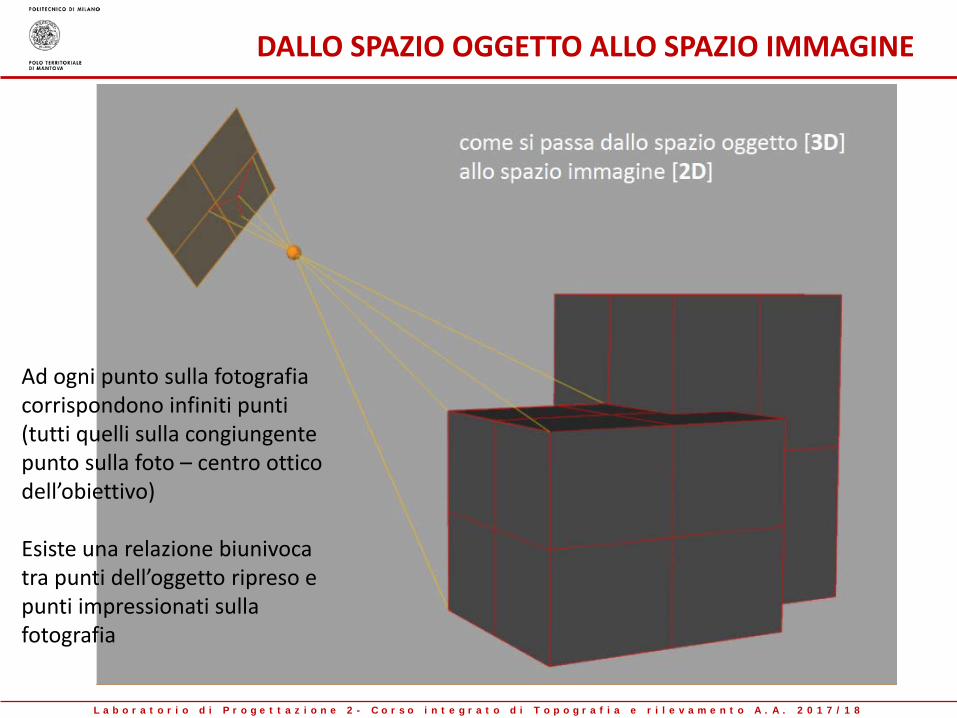
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DALLO SPAZIO OGGETTO ALLO SPAZIO IMMAGINE
Ad ogni punto sulla fotografia corrispondono infiniti punti (tutti quelli sulla congiungente punto sulla foto ndash centro ottico dellrsquoobiettivo)
Esiste una relazione biunivoca tra punti dellrsquooggetto ripreso e punti impressionati sulla fotografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
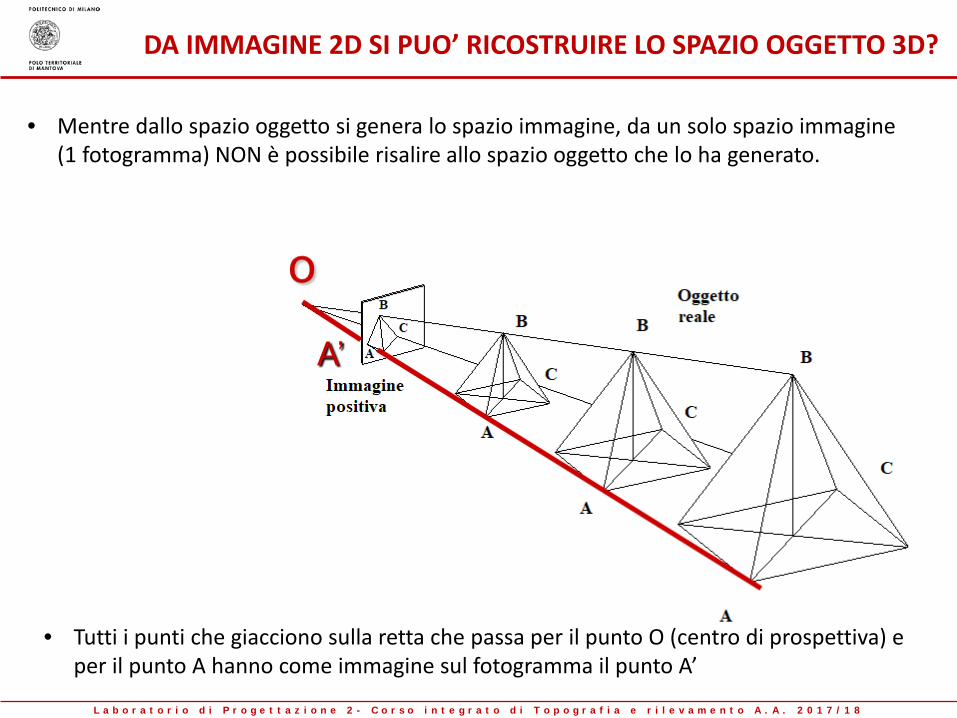
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DA IMMAGINE 2D SI PUOrsquo RICOSTRUIRE LO SPAZIO OGGETTO 3D
bull Tutti i punti che giacciono sulla retta che passa per il punto O (centro di prospettiva) e per il punto A hanno come immagine sul fotogramma il punto Arsquo
bull Mentre dallo spazio oggetto si genera lo spazio immagine da un solo spazio immagine (1 fotogramma) NON egrave possibile risalire allo spazio oggetto che lo ha generato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
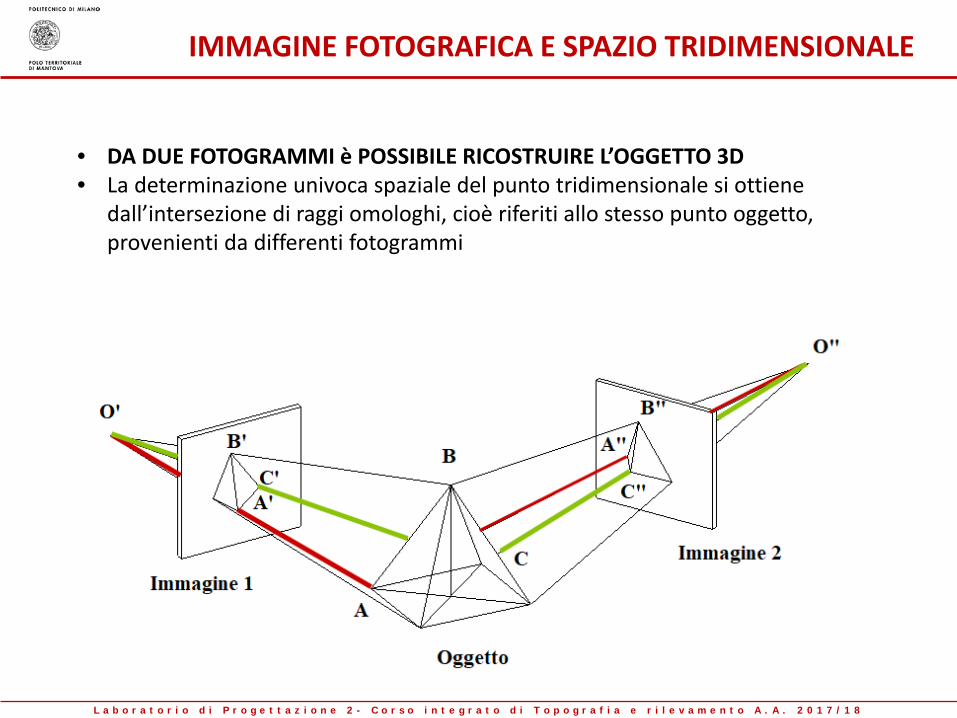
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IMMAGINE FOTOGRAFICA E SPAZIO TRIDIMENSIONALE
bull DA DUE FOTOGRAMMI egrave POSSIBILE RICOSTRUIRE LrsquoOGGETTO 3Dbull La determinazione univoca spaziale del punto tridimensionale si ottiene
dallrsquointersezione di raggi omologhi cioegrave riferiti allo stesso punto oggetto provenienti da differenti fotogrammi
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
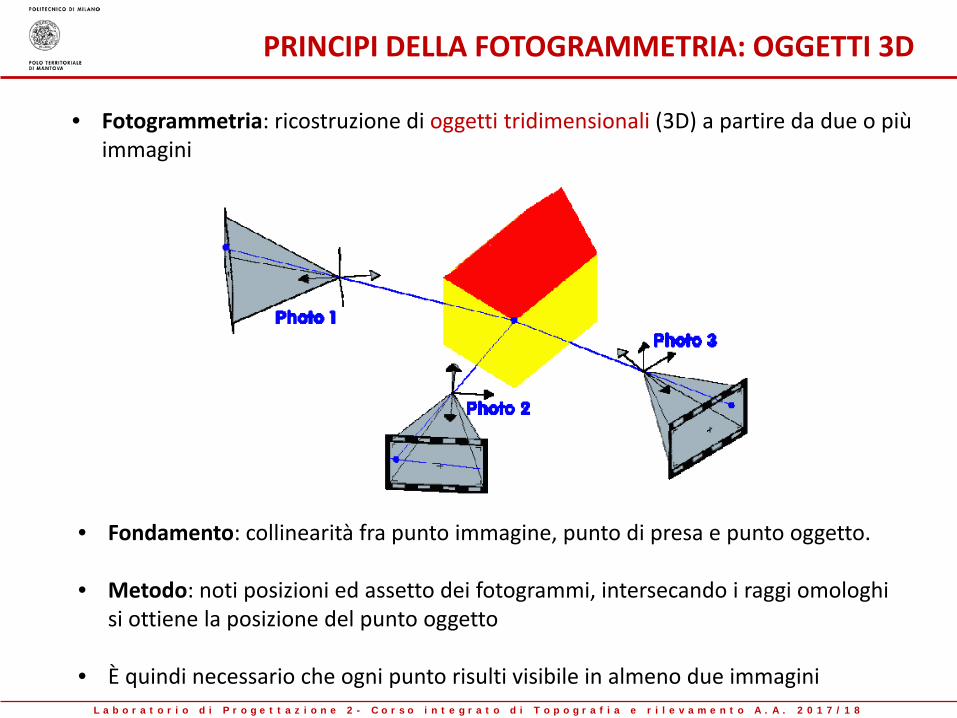
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fotogrammetria ricostruzione di oggetti tridimensionali (3D) a partire da due o piugrave immagini
bull Fondamento collinearitagrave fra punto immagine punto di presa e punto oggetto
bull Metodo noti posizioni ed assetto dei fotogrammi intersecando i raggi omologhi si ottiene la posizione del punto oggetto
bull Egrave quindi necessario che ogni punto risulti visibile in almeno due immagini
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 3D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
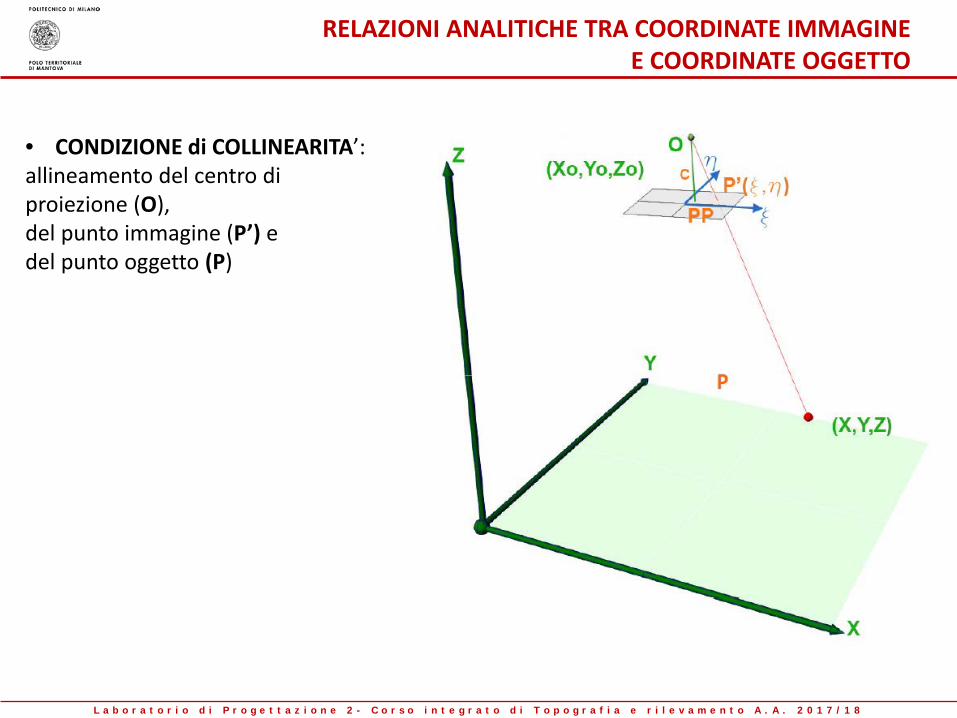
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RELAZIONI ANALITICHE TRA COORDINATE IMMAGINE E COORDINATE OGGETTO
bull CONDIZIONE di COLLINEARITArsquo allineamento del centro di proiezione (O) del punto immagine (Prsquo) e del punto oggetto (P)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
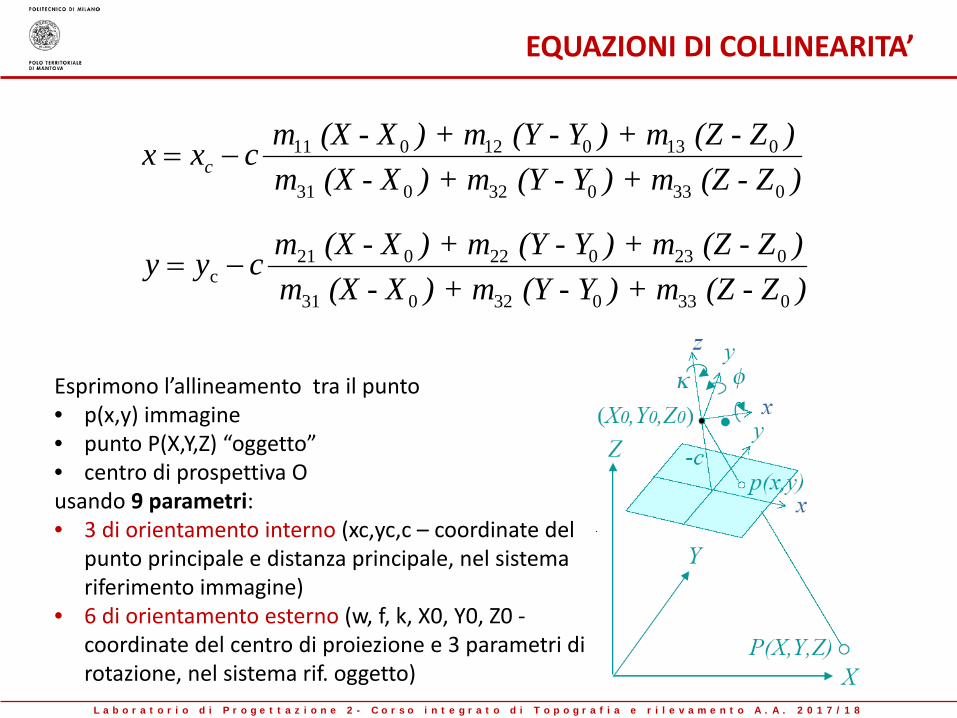
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
033032031
023022021c ) (Z - Z) + m (Y - Y) + m (X - X m
) (Z - Z) + m (Y - Y) + m (X - Xmcyy minus=
) (Z - Z) + m (Y - Y) + m (X - X m) (Z - Z) + m (Y - Y) + m (X - Xmcxx c
033032031
013012011minus=
Esprimono lrsquoallineamento tra il punto bull p(xy) immagine bull punto P(XYZ) ldquooggettordquobull centro di prospettiva O usando 9 parametribull 3 di orientamento interno (xcycc ndash coordinate del
punto principale e distanza principale nel sistema riferimento immagine)
bull 6 di orientamento esterno (w f k X0 Y0 Z0 -coordinate del centro di proiezione e 3 parametri di rotazione nel sistema rif oggetto)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
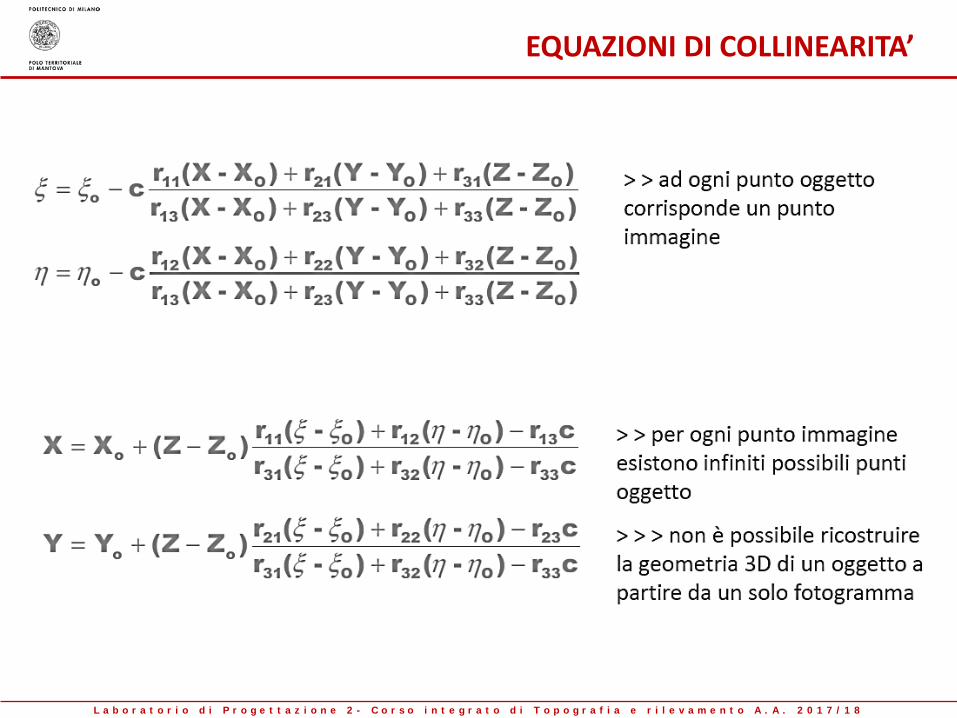
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
EQUAZIONI DI COLLINEARITArsquo
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
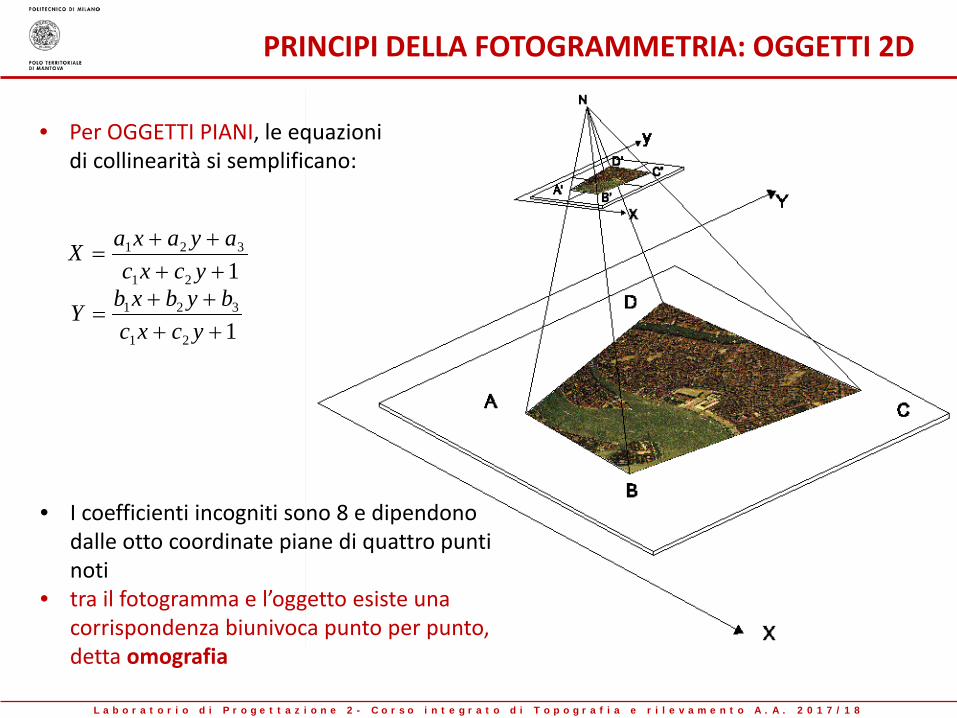
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
1
1
21
321
21
321
++++
=
++++
=
ycxcbybxbY
ycxcayaxaX
bull Per OGGETTI PIANI le equazioni di collinearitagrave si semplificano
bull I coefficienti incogniti sono 8 e dipendono dalle otto coordinate piane di quattro punti noti
bull tra il fotogramma e lrsquooggetto esiste una corrispondenza biunivoca punto per punto detta omografia
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
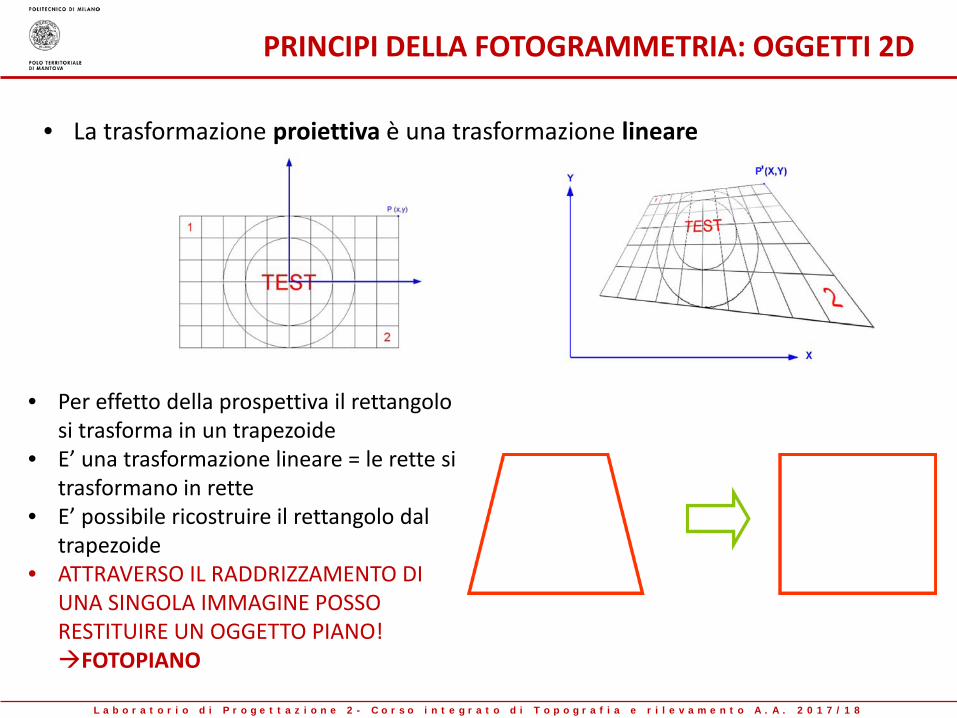
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La trasformazione proiettiva egrave una trasformazione lineare
bull Per effetto della prospettiva il rettangolo si trasforma in un trapezoide
bull Ersquo una trasformazione lineare = le rette si trasformano in rette
bull Ersquo possibile ricostruire il rettangolo dal trapezoide
bull ATTRAVERSO IL RADDRIZZAMENTO DI UNA SINGOLA IMMAGINE POSSO RESTITUIRE UN OGGETTO PIANO FOTOPIANO
PRINCIPI DELLA FOTOGRAMMETRIA OGGETTI 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
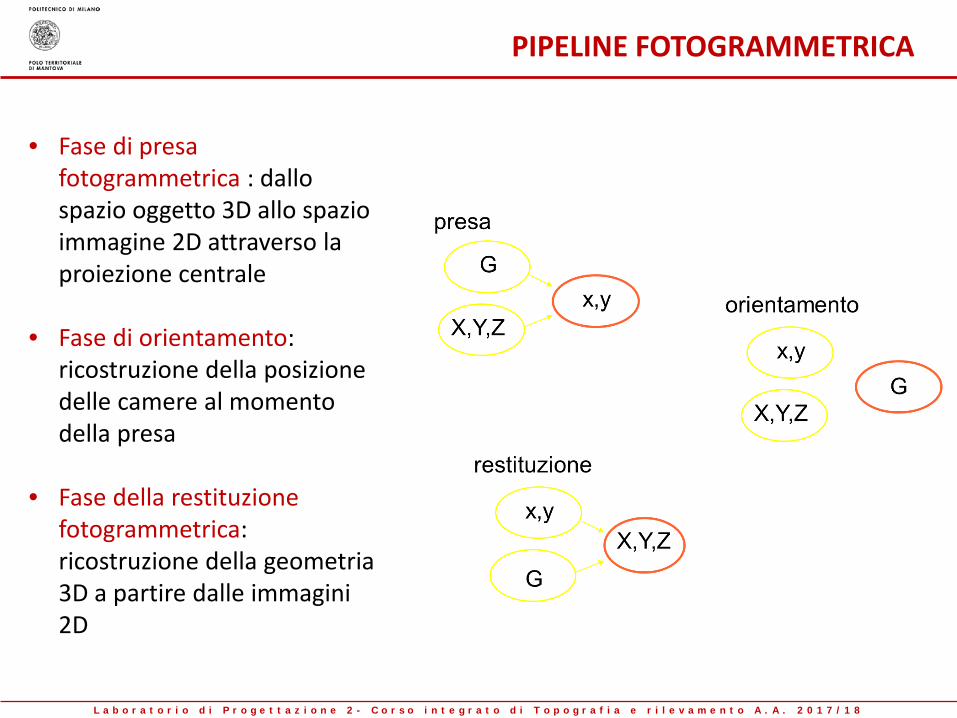
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PIPELINE FOTOGRAMMETRICA
bull Fase di presa fotogrammetrica dallo spazio oggetto 3D allo spazio immagine 2D attraverso la proiezione centrale
bull Fase di orientamento ricostruzione della posizione delle camere al momento della presa
bull Fase della restituzione fotogrammetrica ricostruzione della geometria 3D a partire dalle immagini 2D
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Fase di presa bull Scelta della scala nominalebull Progetto di rilievo fotogrammetrico
bull strumentazione (camera scelta degli obiettivi e determinazione della focale)
bull scala fotogrammibull Individuazione dei punti di presa (basi) della distanza dallrsquooggetto e
degli schemi di presa (ad assi paralleli multipli o ad assi convergenti)
bull Rilievo topografico di laquoappoggioraquo al rilievo fotogrammetricosono necessarie alcune lsquoinformazioni esternersquo per orientare e scalare il modello ottico informazioni costituite da coordinate di punti (XYZ) ottenute per mezzo di misure topografiche sullrsquooggetto
bullRestituzione ed elaborati finali bullOrtofoto (immagini di oggetti 3D) o fotopiani (immagini di oggetti 2D)bullModello mesh tridimensionale dellrsquooggettobullCreazione di texture per modelli tridimensionali
PIPELINE FOTOGRAMMETRICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
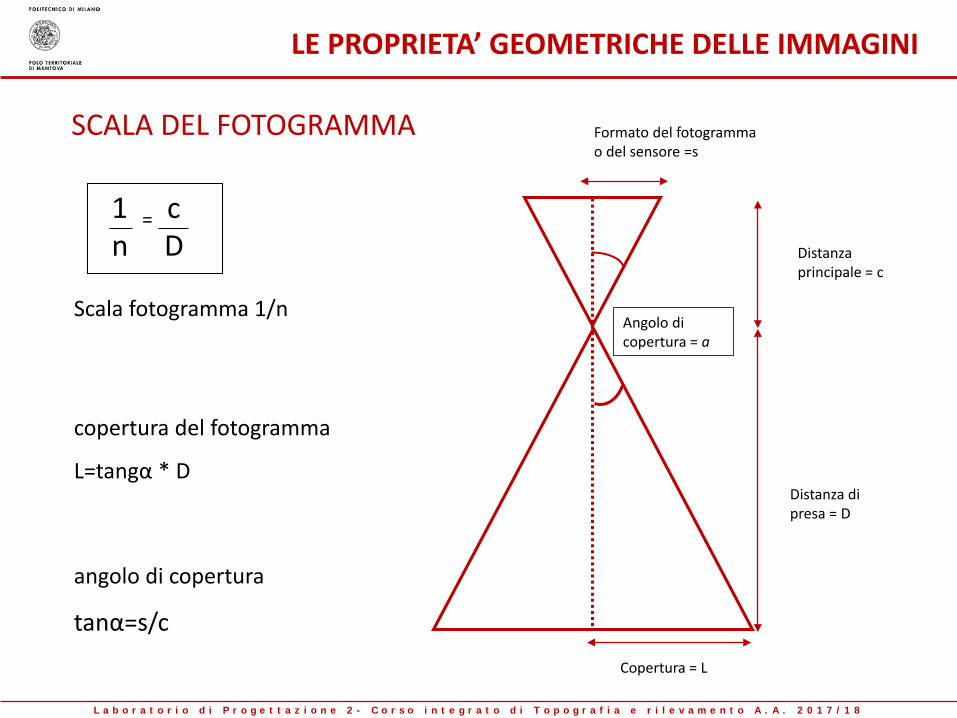
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Distanza principale = c
Distanza di presa = D
Copertura = L
Formato del fotogramma o del sensore =s
Angolo di copertura = a
1 = c
copertura del fotogramma
L=tangα D
angolo di copertura
tanα=sc
SCALA DEL FOTOGRAMMA
n D
Scala fotogramma 1n
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
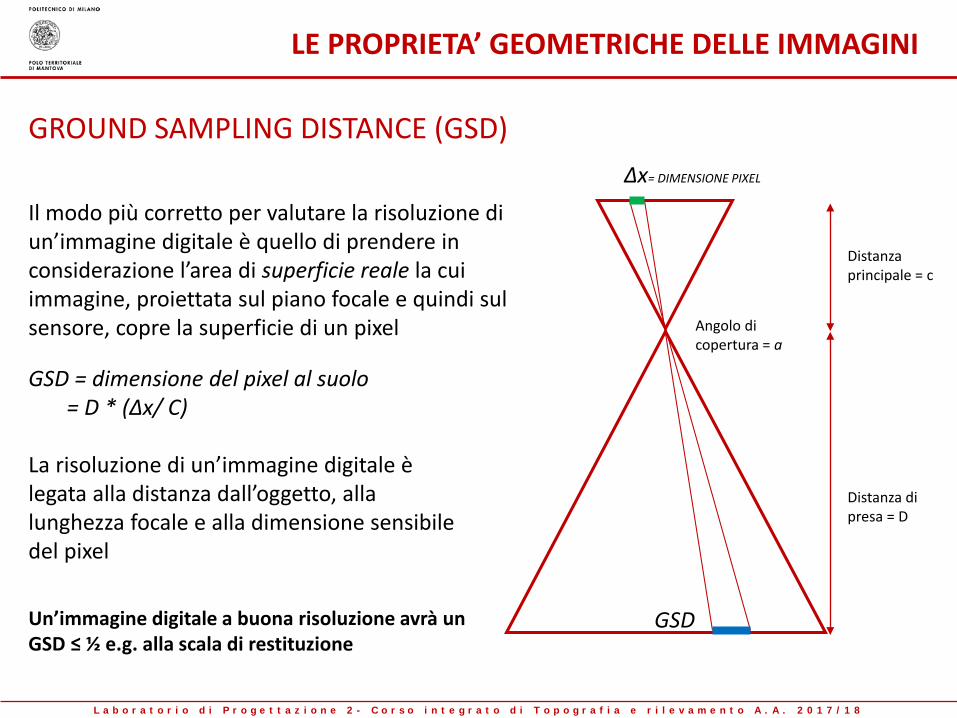
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Il modo piugrave corretto per valutare la risoluzione di unrsquoimmagine digitale egrave quello di prendere in considerazione lrsquoarea di superficie reale la cui immagine proiettata sul piano focale e quindi sul sensore copre la superficie di un pixel
GROUND SAMPLING DISTANCE (GSD)
Distanza principale = c
Distanza di presa = D
Angolo di copertura = a
GSD = dimensione del pixel al suolo = D (Δx C)
La risoluzione di unrsquoimmagine digitale egrave legata alla distanza dallrsquooggetto alla lunghezza focale e alla dimensione sensibile del pixel
Δx= DIMENSIONE PIXEL
GSDUnrsquoimmagine digitale a buona risoluzione avragrave un GSD le frac12 eg alla scala di restituzione
LE PROPRIETArsquo GEOMETRICHE DELLE IMMAGINI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
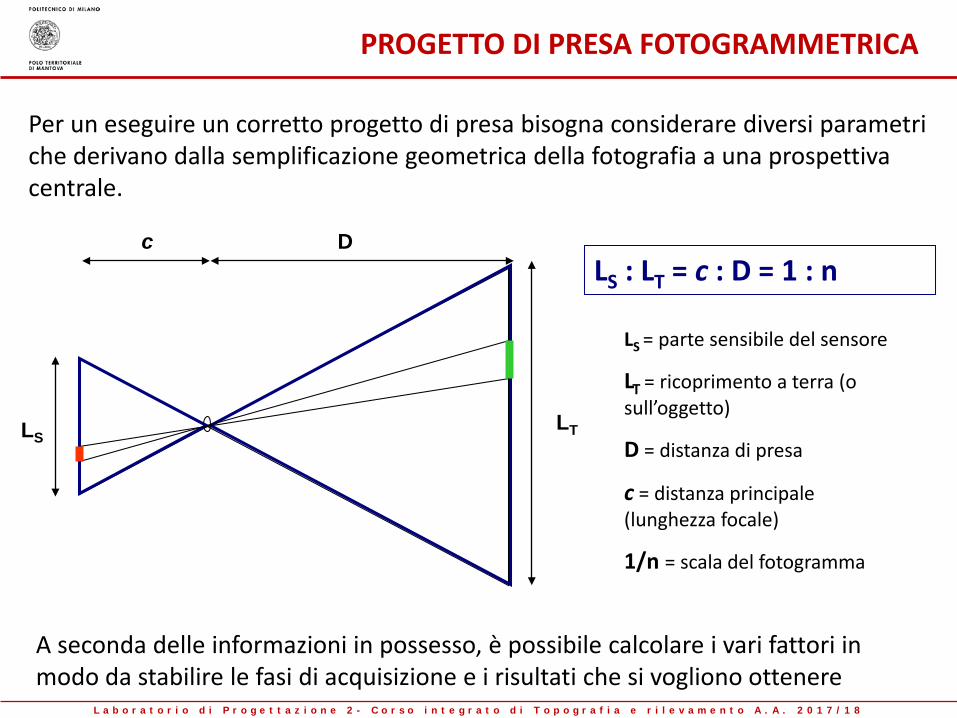
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Per un eseguire un corretto progetto di presa bisogna considerare diversi parametri che derivano dalla semplificazione geometrica della fotografia a una prospettiva centrale
LS LT = c D = 1 n
LS = parte sensibile del sensore
LT = ricoprimento a terra (o sullrsquooggetto)
D = distanza di presa
c = distanza principale (lunghezza focale)
1n = scala del fotogramma
Dc
LTLS
A seconda delle informazioni in possesso egrave possibile calcolare i vari fattori in modo da stabilire le fasi di acquisizione e i risultati che si vogliono ottenere
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
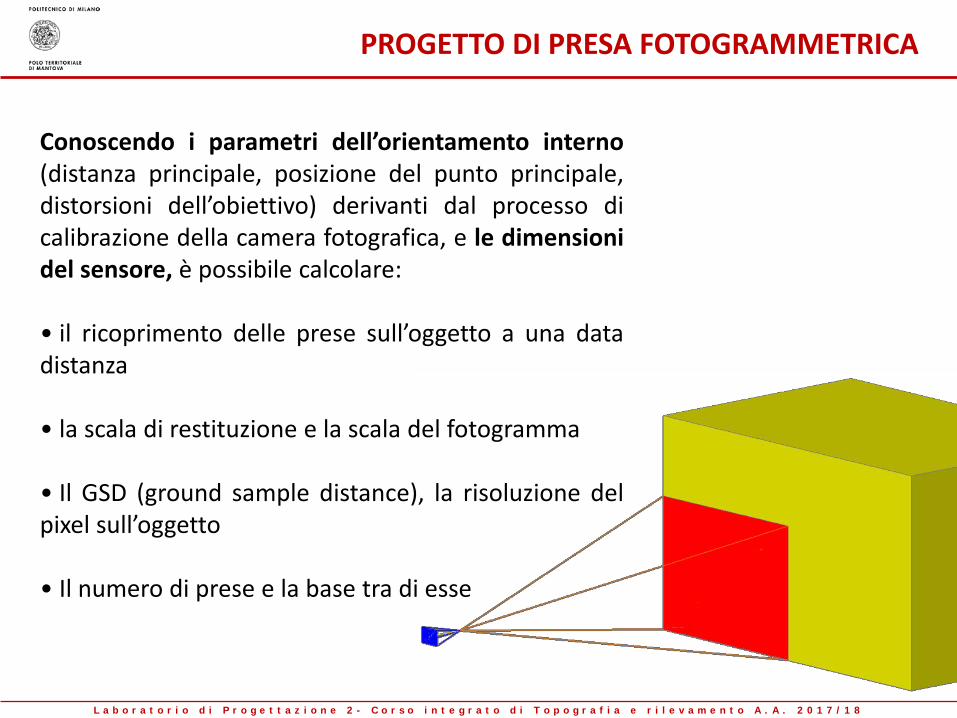
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
Conoscendo i parametri dellrsquoorientamento interno(distanza principale posizione del punto principaledistorsioni dellrsquoobiettivo) derivanti dal processo dicalibrazione della camera fotografica e le dimensionidel sensore egrave possibile calcolare
bull il ricoprimento delle prese sullrsquooggetto a una datadistanza
bull la scala di restituzione e la scala del fotogramma
bull Il GSD (ground sample distance) la risoluzione delpixel sullrsquooggetto
bull Il numero di prese e la base tra di esse
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
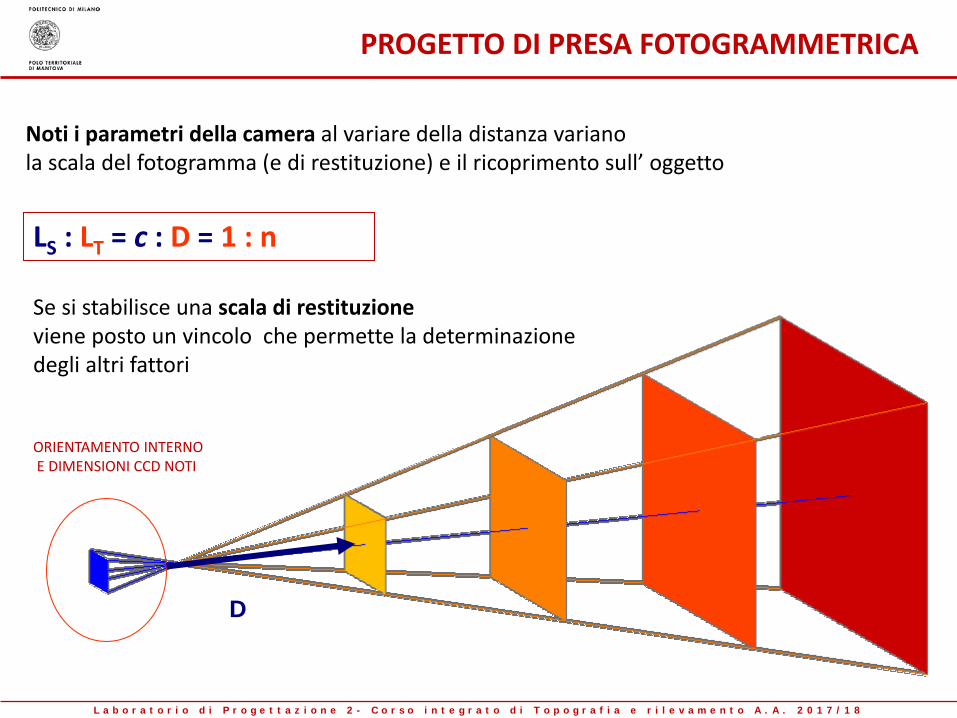
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PROGETTO DI PRESA FOTOGRAMMETRICA
LS LT = c D = 1 n
Noti i parametri della camera al variare della distanza varianola scala del fotogramma (e di restituzione) e il ricoprimento sullrsquo oggetto
D
Se si stabilisce una scala di restituzioneviene posto un vincolo che permette la determinazione degli altri fattori
ORIENTAMENTO INTERNOE DIMENSIONI CCD NOTI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
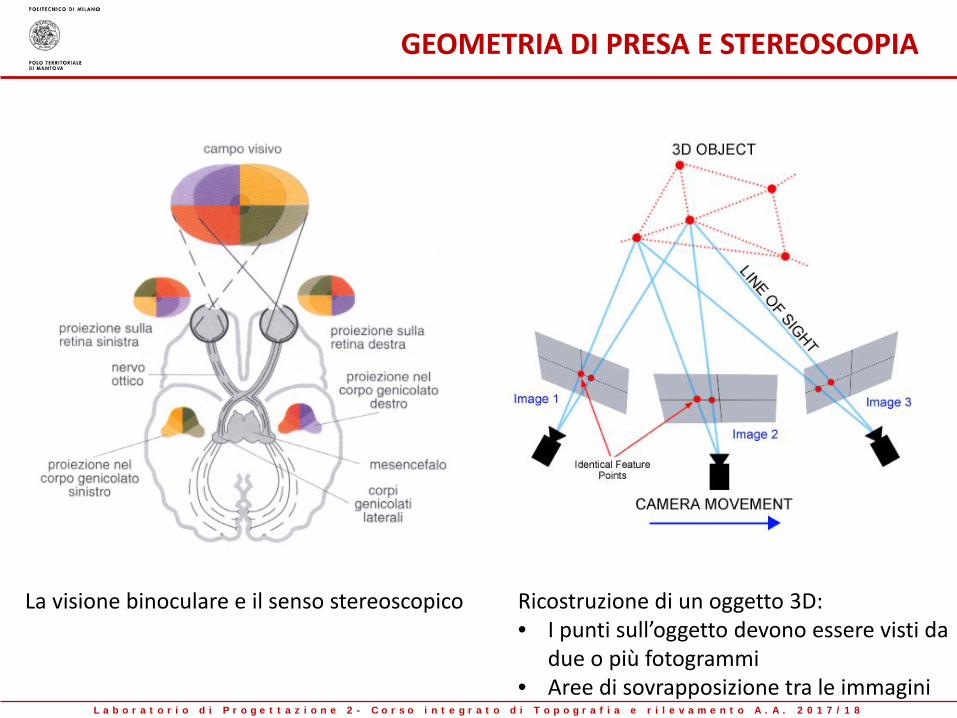
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
GEOMETRIA DI PRESA E STEREOSCOPIA
La visione binoculare e il senso stereoscopico Ricostruzione di un oggetto 3Dbull I punti sullrsquooggetto devono essere visti da
due o piugrave fotogrammibull Aree di sovrapposizione tra le immagini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
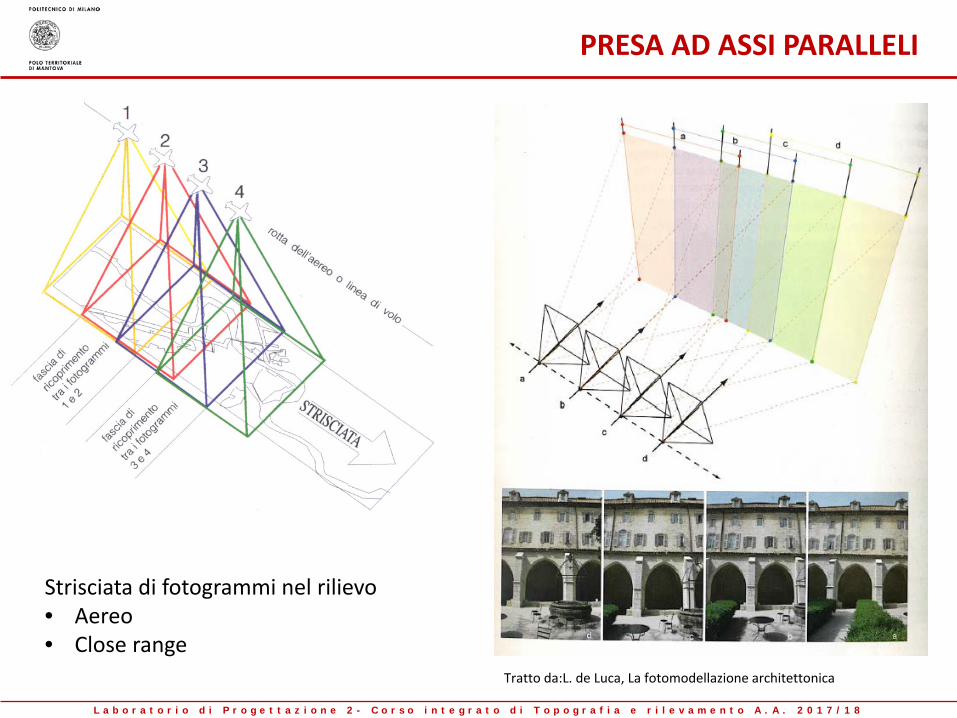
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI PARALLELI
Tratto daL de Luca La fotomodellazione architettonica
Strisciata di fotogrammi nel rilievobull Aereobull Close range
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
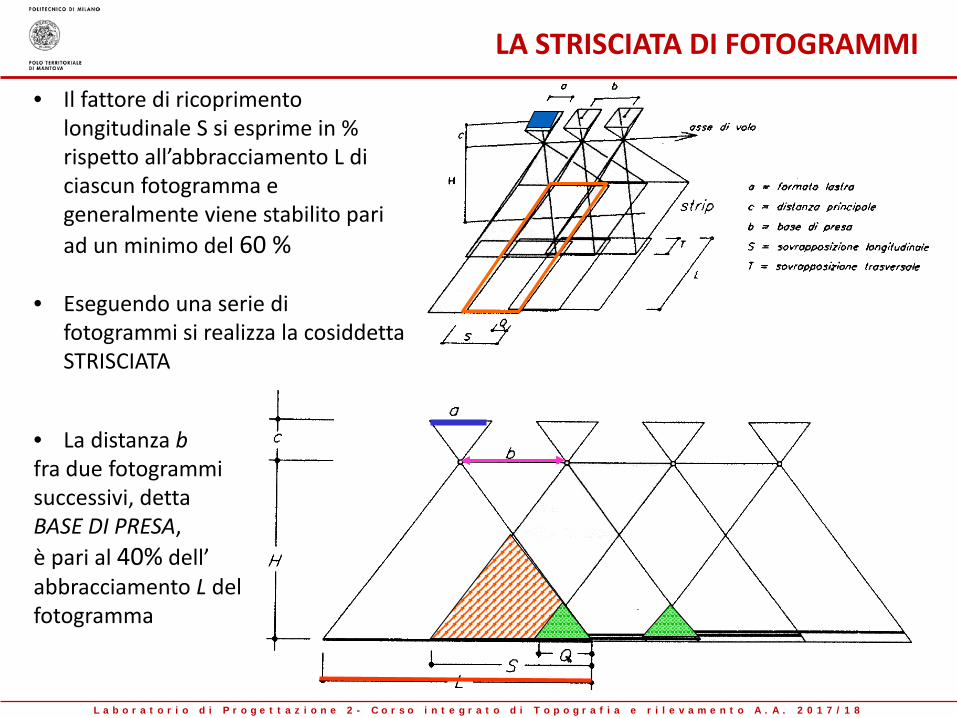
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Il fattore di ricoprimento longitudinale S si esprime in rispetto allrsquoabbracciamento L di ciascun fotogramma e generalmente viene stabilito pari ad un minimo del 60
bull Eseguendo una serie di fotogrammi si realizza la cosiddetta STRISCIATA
bull La distanza bfra due fotogrammi successivi detta BASE DI PRESA egrave pari al 40 dellrsquo abbracciamento L del fotogramma
LA STRISCIATA DI FOTOGRAMMI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
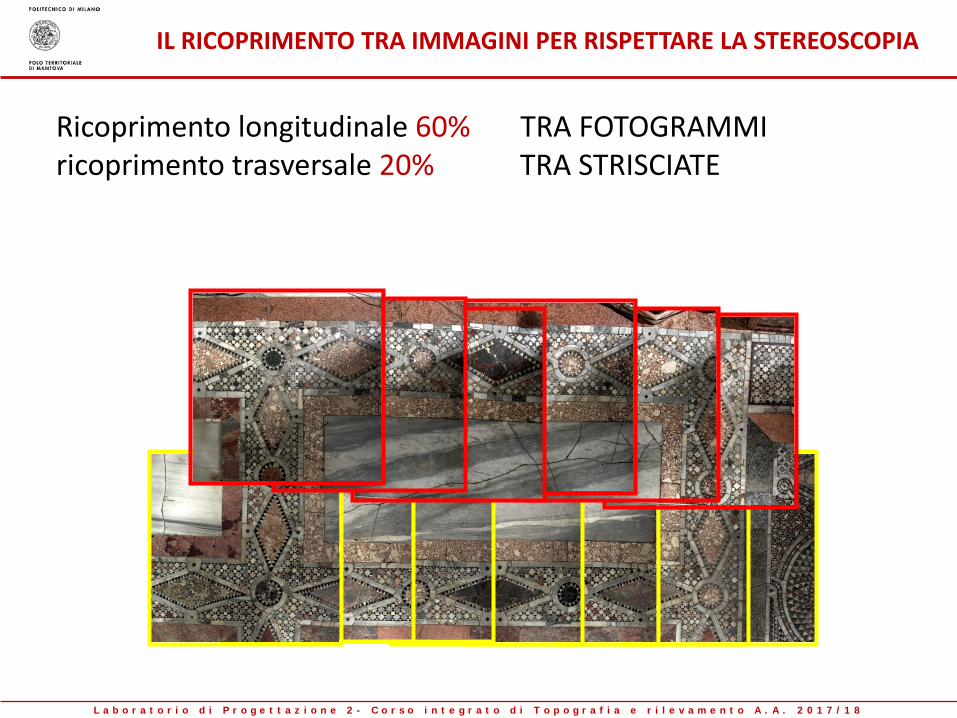
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
IL RICOPRIMENTO TRA IMMAGINI PER RISPETTARE LA STEREOSCOPIA
Ricoprimento longitudinale 60 TRA FOTOGRAMMIricoprimento trasversale 20 TRA STRISCIATE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
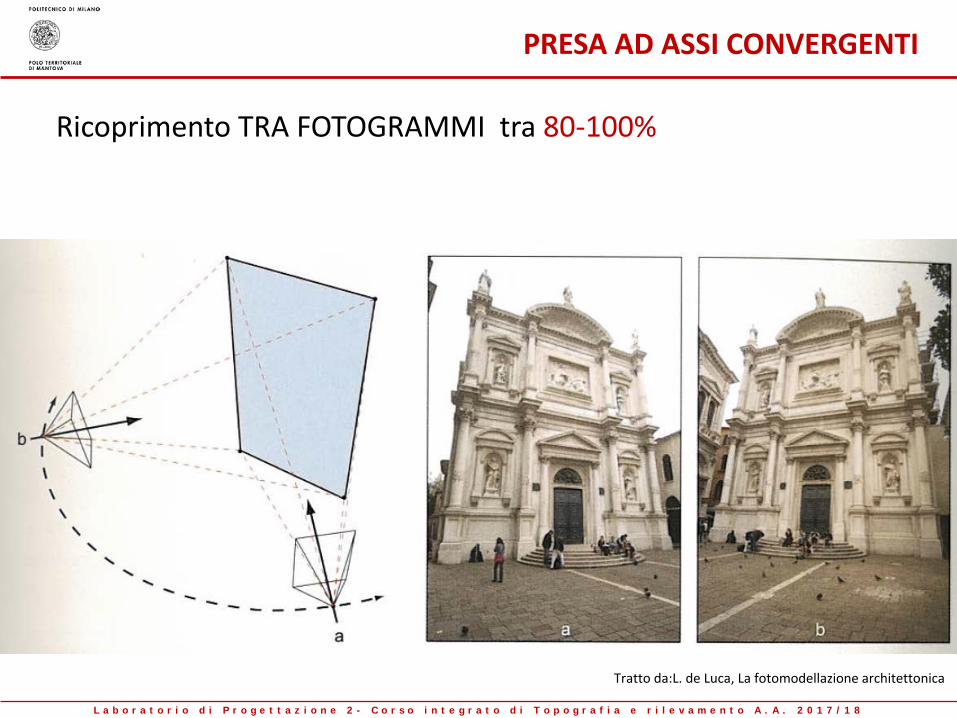
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
Ricoprimento TRA FOTOGRAMMI tra 80-100
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
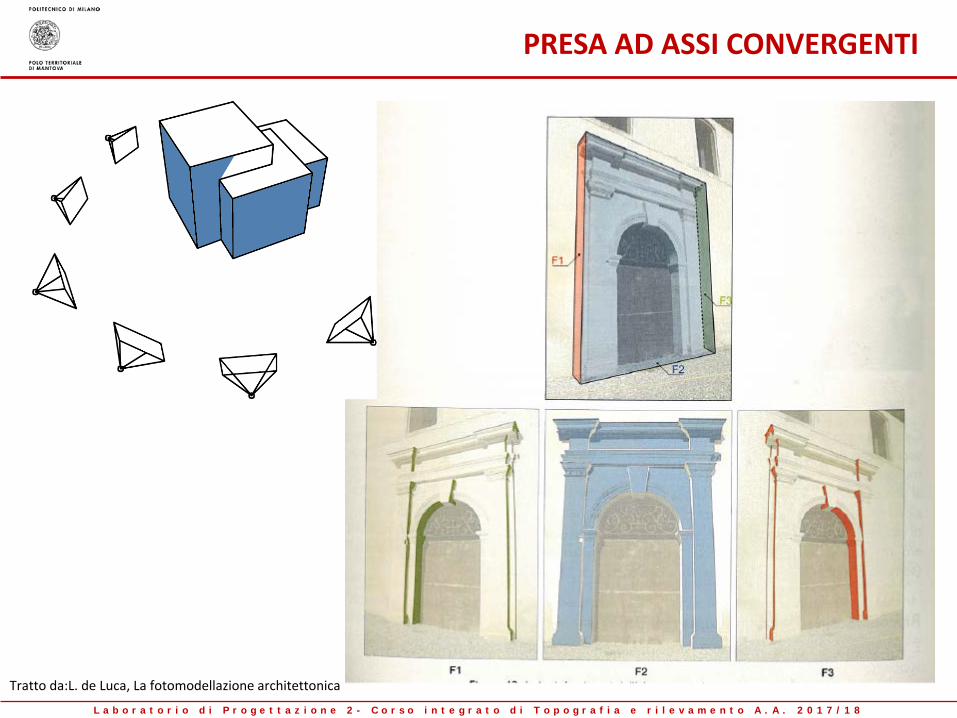
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
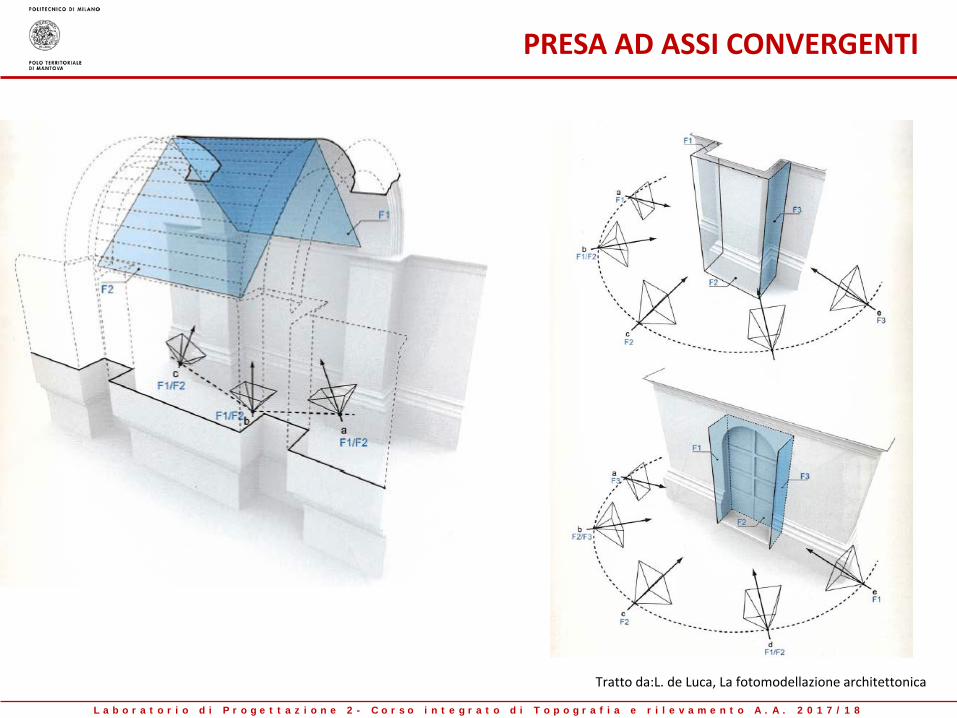
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
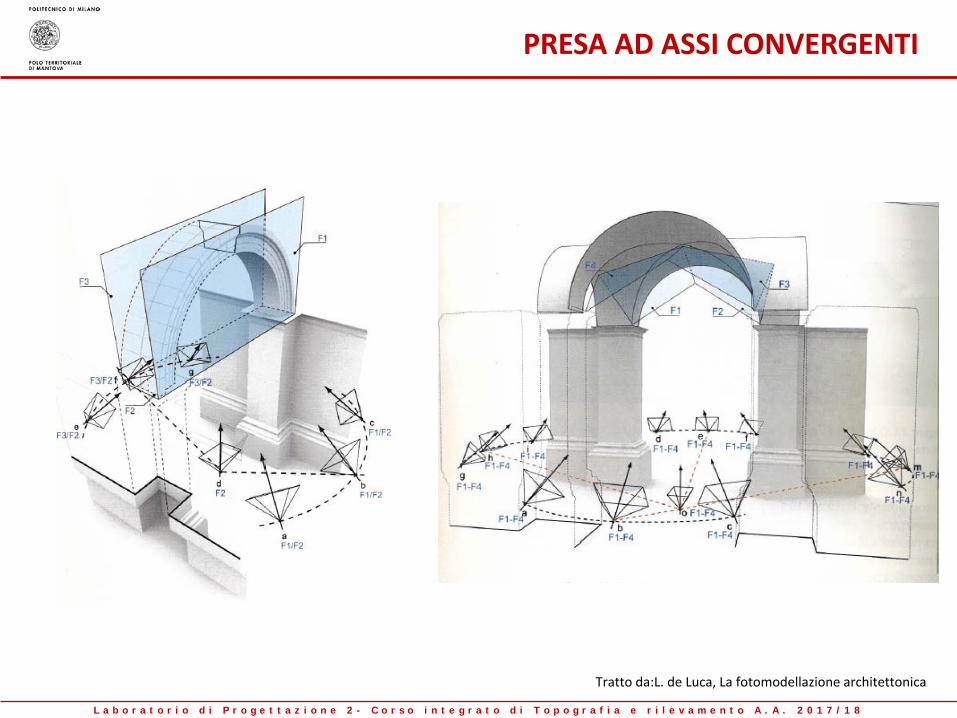
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
PRESA AD ASSI CONVERGENTI
Tratto daL de Luca La fotomodellazione architettonica
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
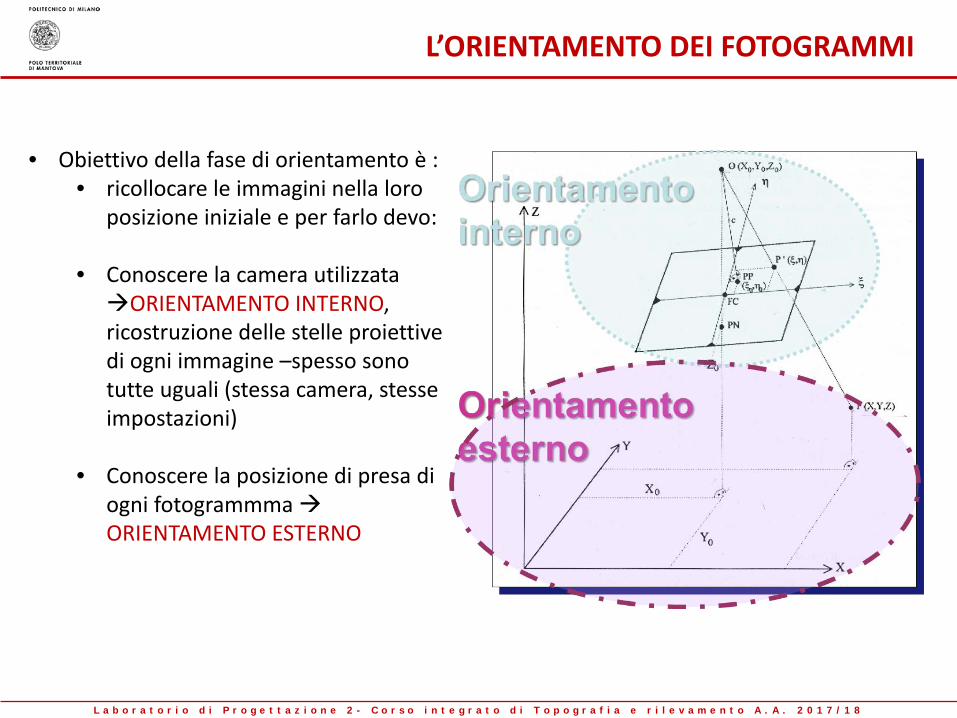
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO DEI FOTOGRAMMI
bull Obiettivo della fase di orientamento egrave bull ricollocare le immagini nella loro
posizione iniziale e per farlo devo
bull Conoscere la camera utilizzata ORIENTAMENTO INTERNO ricostruzione delle stelle proiettive di ogni immagine ndashspesso sono tutte uguali (stessa camera stesse impostazioni)
bull Conoscere la posizione di presa di ogni fotogrammmaORIENTAMENTO ESTERNO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
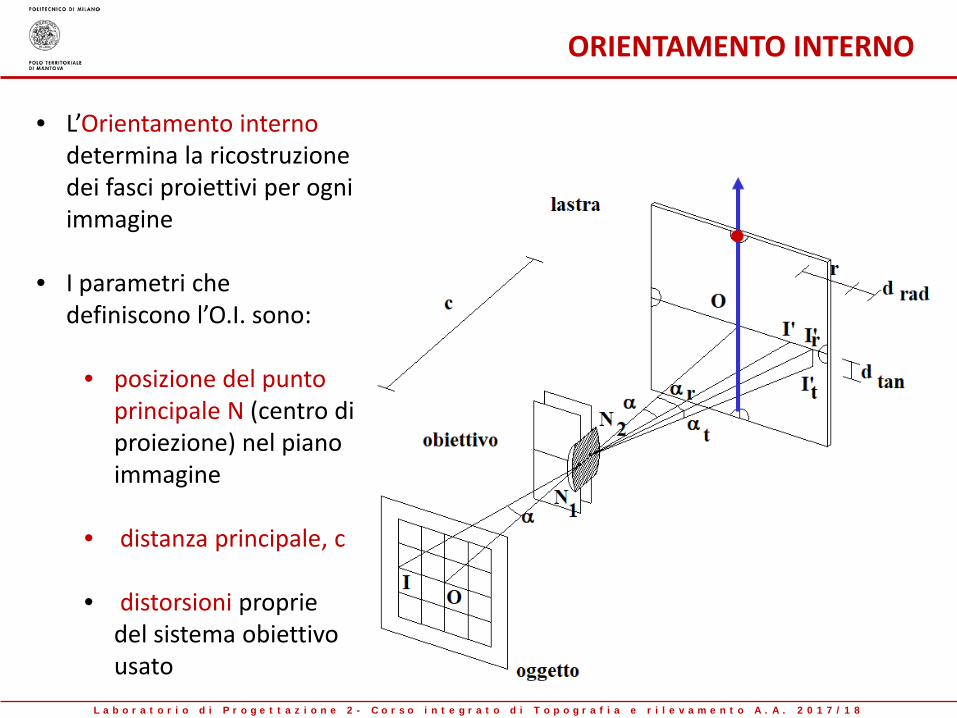
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull LrsquoOrientamento interno determina la ricostruzione dei fasci proiettivi per ogni immagine
bull I parametri che definiscono lrsquoOI sono
bull posizione del punto principale N (centro di proiezione) nel piano immagine
bull distanza principale c
bull distorsioni proprie del sistema obiettivo usato
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
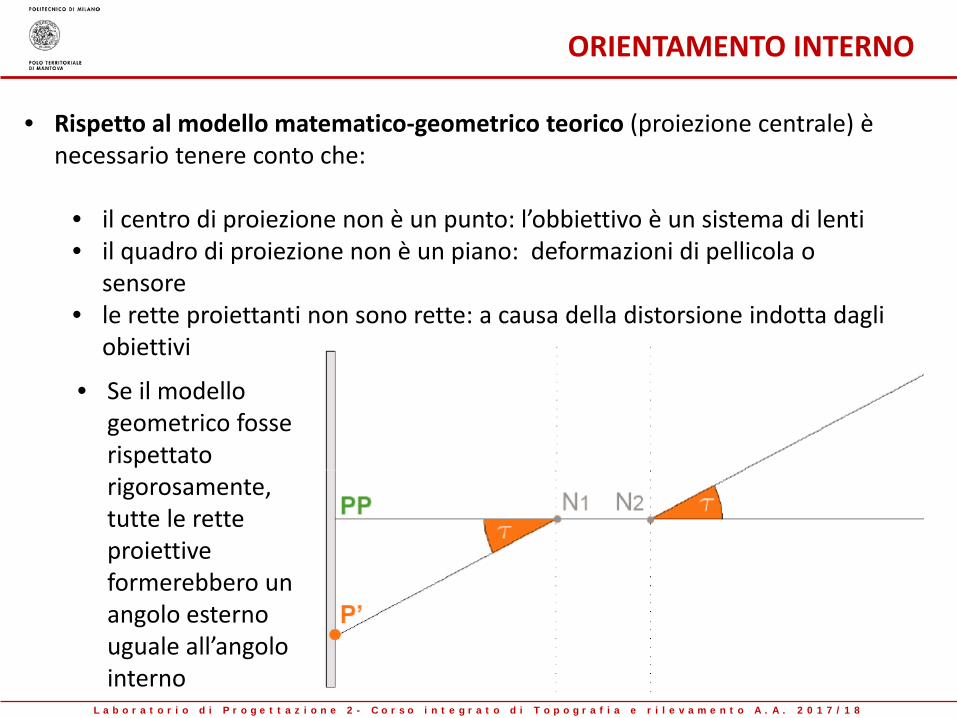
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INTERNO
bull Rispetto al modello matematico-geometrico teorico (proiezione centrale) egrave necessario tenere conto che
bull il centro di proiezione non egrave un punto lrsquoobbiettivo egrave un sistema di lentibull il quadro di proiezione non egrave un piano deformazioni di pellicola o
sensorebull le rette proiettanti non sono rette a causa della distorsione indotta dagli
obiettivi
bull Se il modello geometrico fosse rispettato rigorosamente tutte le rette proiettive formerebbero un angolo esterno uguale allrsquoangolo interno
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull effetti dellrsquoatmosfera e delle lenti dellrsquoobiettivobull non esatta conoscenza della posizione del CCD o della pellicola
relativamente alla camerabull decentramento delle lenti rispetto allrsquoasse ottico ecc
bull Una volta eliminate saragrave possibile ricampionare direttamente lrsquoimmagineoriginale ottenendone una versione indistorta con una variazione del punto principale
bull Aberrazioni geometriche
bull Aberrazione cromatica Ersquo dovuta al fatto che lrsquoindice rifrazione dipende dalla lunghezza drsquoonda luci di differente colore vengono rifratte diversamente dal sistema ottico reale (dispersione dellimmagine sul piano focale)
Nei sistemi ottici reali le immagini presentano sempre dei difetti indicati come aberrazioni
bull Cromaticobull Geometrico
ORIENTAMENTO INTERNO LE ABERRAZIONI O DISTORSIONI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
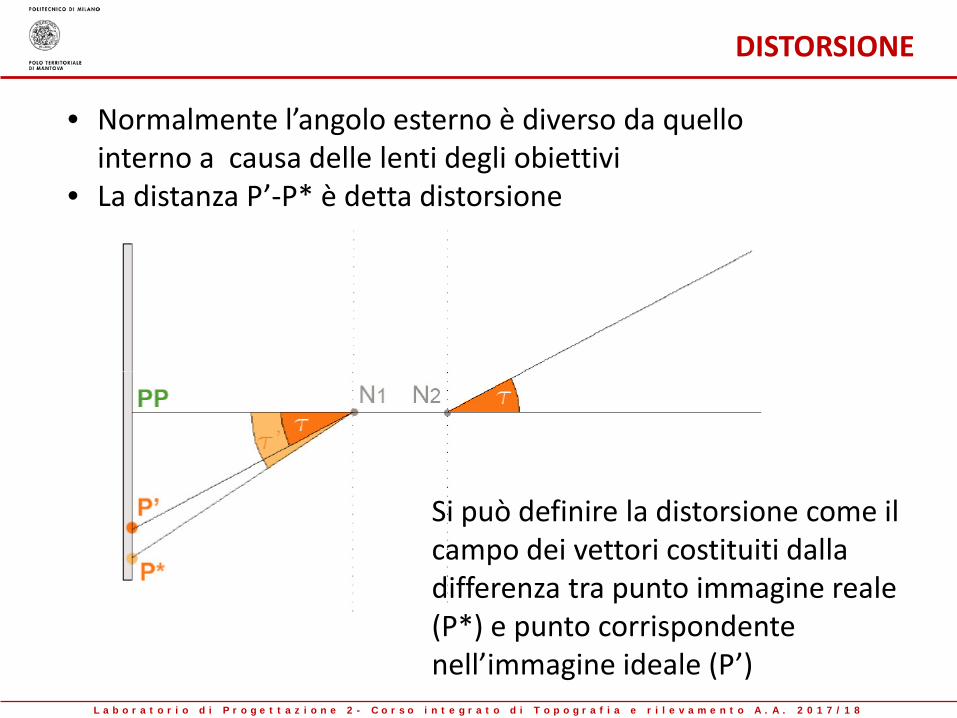
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Si puograve definire la distorsione come il campo dei vettori costituiti dalla differenza tra punto immagine reale (P) e punto corrispondente nellrsquoimmagine ideale (Prsquo)
bull Normalmente lrsquoangolo esterno egrave diverso da quello interno a causa delle lenti degli obiettivi
bull La distanza Prsquo-P egrave detta distorsione
DISTORSIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
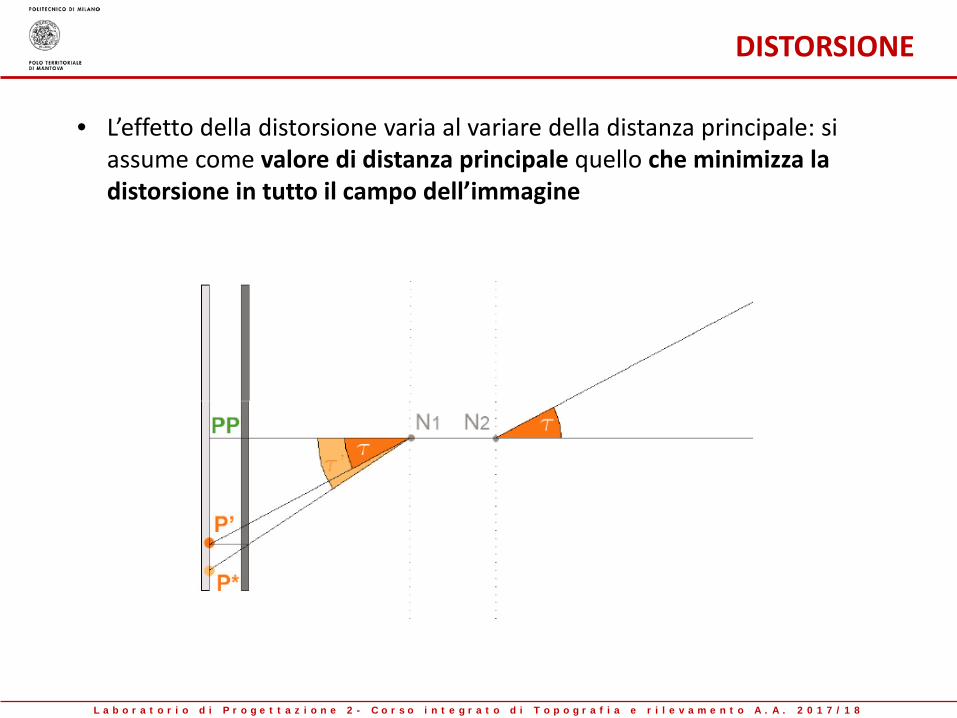
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
bull Lrsquoeffetto della distorsione varia al variare della distanza principale si assume come valore di distanza principale quello che minimizza la distorsione in tutto il campo dellrsquoimmagine
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
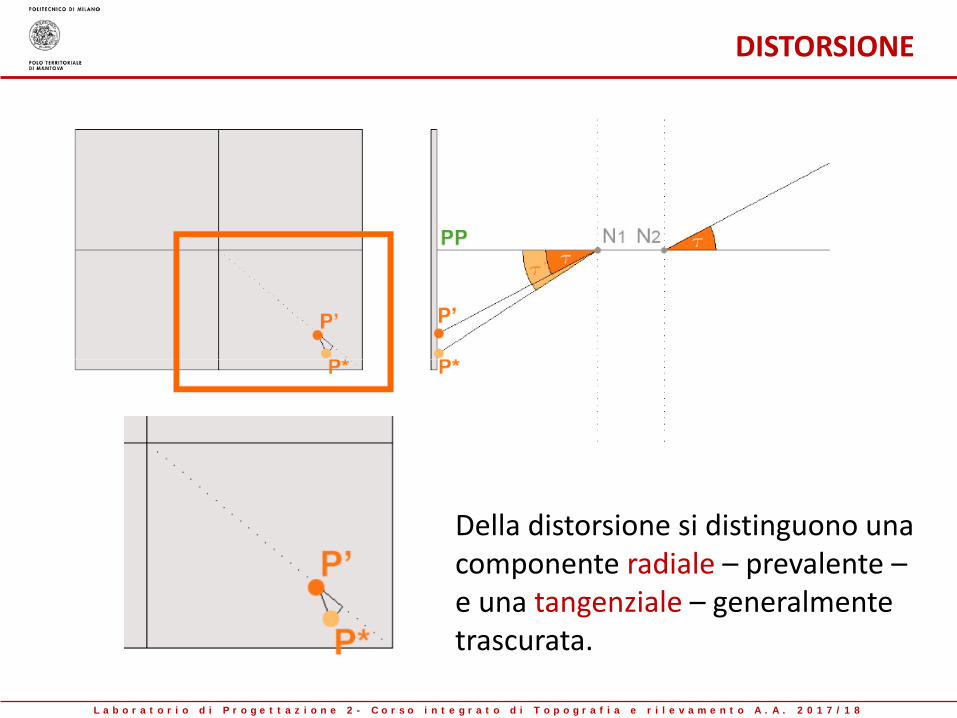
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE
Della distorsione si distinguono una componente radiale ndash prevalente ndashe una tangenziale ndash generalmente trascurata
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
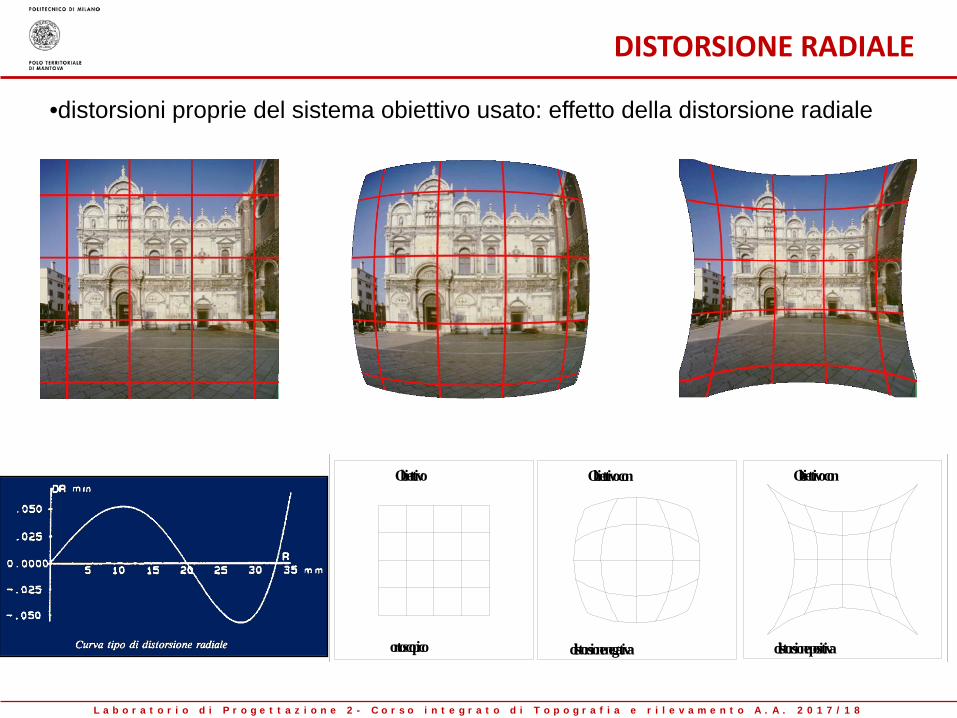
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DISTORSIONE RADIALE
Obiettivo Obiettivo conObiettivo con
distorsione positivaortoscopico distorsione negativa
bulldistorsioni proprie del sistema obiettivo usato effetto della distorsione radiale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
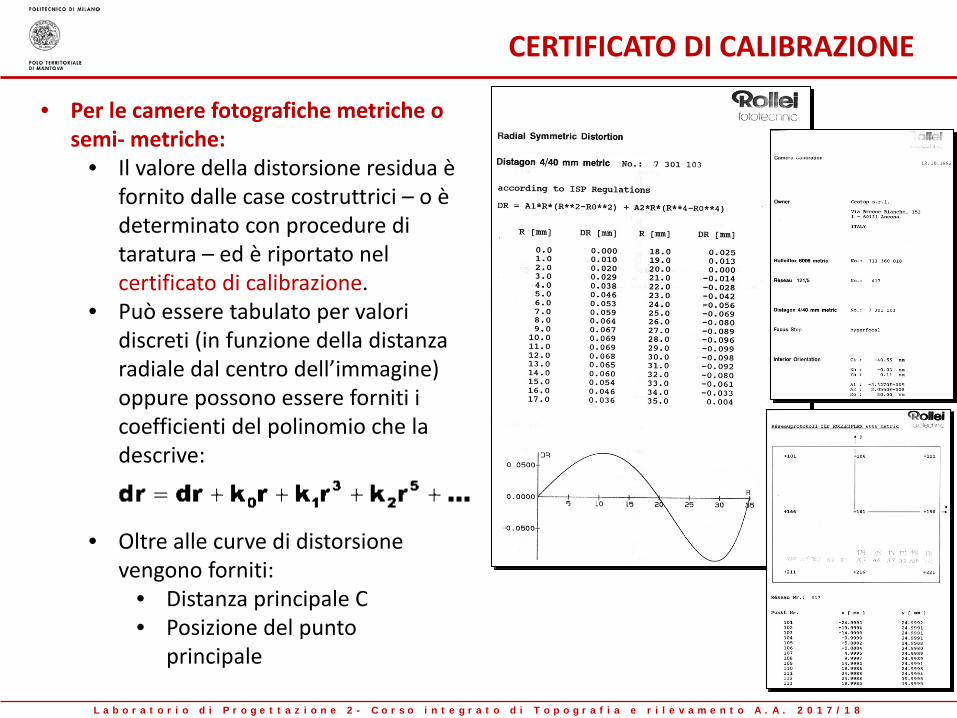
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per le camere fotografiche metriche o semi- metriche
bull Il valore della distorsione residua egrave fornito dalle case costruttrici ndash o egrave determinato con procedure di taratura ndash ed egrave riportato nel certificato di calibrazione
bull Puograve essere tabulato per valori discreti (in funzione della distanza radiale dal centro dellrsquoimmagine) oppure possono essere forniti i coefficienti del polinomio che la descrive
bull Oltre alle curve di distorsione vengono forniti
bull Distanza principale Cbull Posizione del punto
principale
CERTIFICATO DI CALIBRAZIONE
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016

L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
Camere SEMIMETRICARollei DB44 ndash fotogrammetria terrestre
CAMERE CALIBRATE ndash METRICHE O SEMIMETRICHE
Camere METRICALeica RC30 ndash fotogrammetria aerea
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
bull Per tutte le camere non metriche amatoriali o professionali lrsquooperazione rigorosa di CALIBRAZIONE di una camera egrave il metodo piugrave raffinato che consente di conoscere con precisione
bull la dimensione della parte sensibile del CCD (ogni dimensione del sensore saragrave differente seppur di poco a paritagrave di modello)
bull determinare i parametri di orientamento interno XpYpc
bull assorbire le deformazioni dellrsquoimmagine genericamente le violazioni del principio di collinearitagrave (per cui punto immagine centro di proiezione e punto oggetto si trovano allineati lungo una retta)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
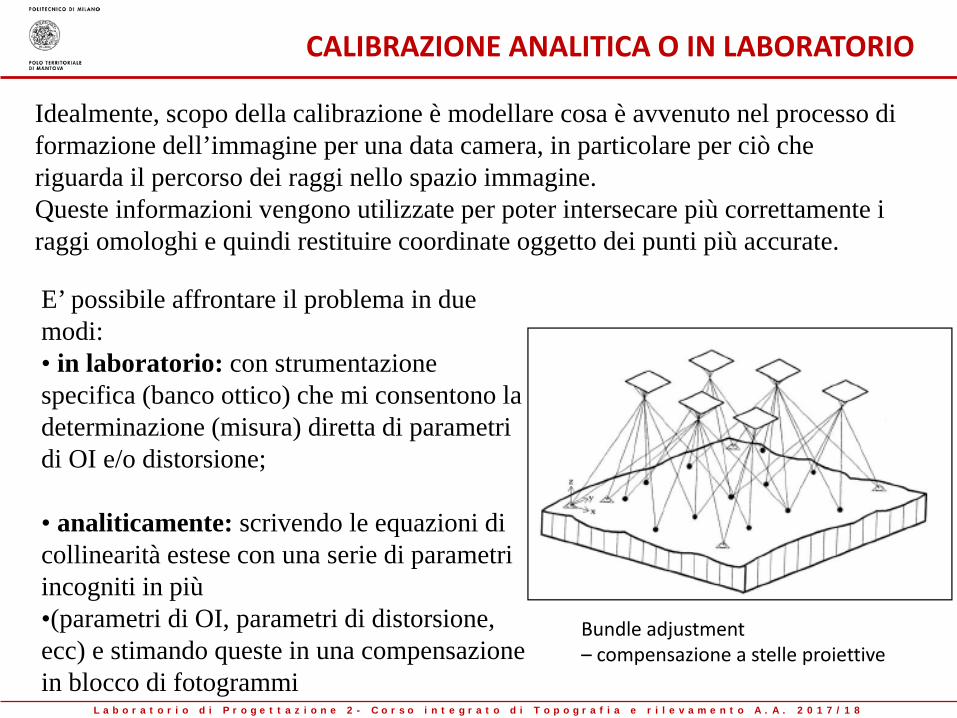
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
CALIBRAZIONE ANALITICA O IN LABORATORIO
Idealmente scopo della calibrazione egrave modellare cosa egrave avvenuto nel processo di formazione dellrsquoimmagine per una data camera in particolare per ciograve che riguarda il percorso dei raggi nello spazio immagineQueste informazioni vengono utilizzate per poter intersecare piugrave correttamente i raggi omologhi e quindi restituire coordinate oggetto dei punti piugrave accurate
Ersquo possibile affrontare il problema in due modi bull in laboratorio con strumentazione specifica (banco ottico) che mi consentono la determinazione (misura) diretta di parametri di OI eo distorsione
bull analiticamente scrivendo le equazioni di collinearitagrave estese con una serie di parametri incogniti in piugrave bull(parametri di OI parametri di distorsione ecc) e stimando queste in una compensazione in blocco di fotogrammi
Bundle adjustment ndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
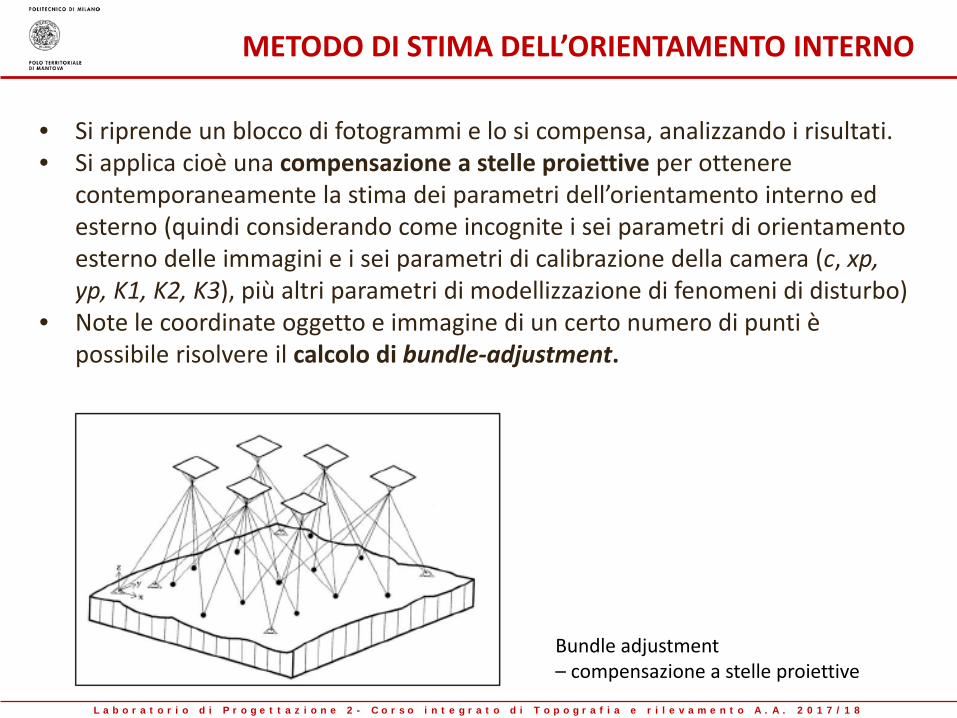
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
METODO DI STIMA DELLrsquoORIENTAMENTO INTERNO
bull Si riprende un blocco di fotogrammi e lo si compensa analizzando i risultatibull Si applica cioegrave una compensazione a stelle proiettive per ottenere
contemporaneamente la stima dei parametri dellrsquoorientamento interno ed esterno (quindi considerando come incognite i sei parametri di orientamento esterno delle immagini e i sei parametri di calibrazione della camera (c xp yp K1 K2 K3) piugrave altri parametri di modellizzazione di fenomeni di disturbo)
bull Note le coordinate oggetto e immagine di un certo numero di punti egrave possibile risolvere il calcolo di bundle-adjustment
Bundle adjustmentndash compensazione a stelle proiettive
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull La calibrazione di una camera utilizzata a fini fotogrammetrici dovrebbe essere eseguita periodicamente e questo a maggior ragione per le camere amatoriali che non hanno un sistema di fissaggio del focamento e che possono facilmente essere soggette a colpi
bull Lrsquoinstabilitagrave nellrsquoorientamento interno delle comuni camere digitali egrave tale da consigliare la ripetizione delle calibrazione ogni qual volta ci si appresti ad un nuovo rilievo fotogrammetrico e lrsquoacquisizione delle immagini del reticolo di calibrazione dovrebbe essere eseguita contemporaneamente al rilievo evitando di spegnere la camera e variarne lrsquoassetto ottico
CALIBRAZIONE INTERNA DELLA CAMERA FOTOGRAFICA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
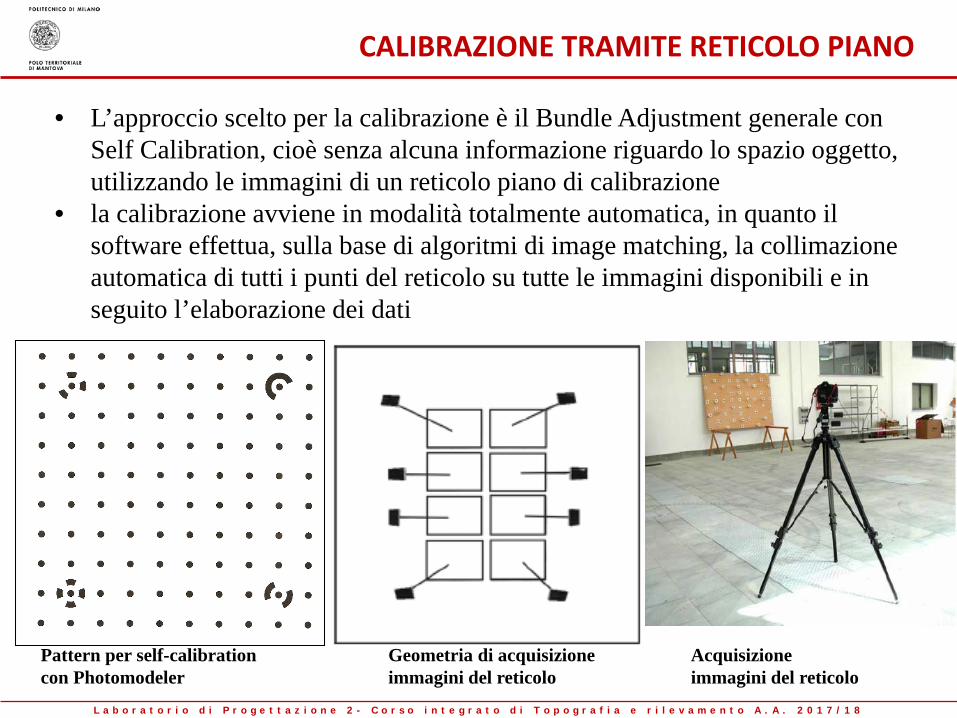
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Lrsquoapproccio scelto per la calibrazione egrave il Bundle Adjustment generale con Self Calibration cioegrave senza alcuna informazione riguardo lo spazio oggetto utilizzando le immagini di un reticolo piano di calibrazione
bull la calibrazione avviene in modalitagrave totalmente automatica in quanto il software effettua sulla base di algoritmi di image matching la collimazione automatica di tutti i punti del reticolo su tutte le immagini disponibili e in seguito lrsquoelaborazione dei dati
Pattern per self-calibrationcon Photomodeler
Geometria di acquisizione immagini del reticolo
Acquisizione immagini del reticolo
CALIBRAZIONE TRAMITE RETICOLO PIANO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
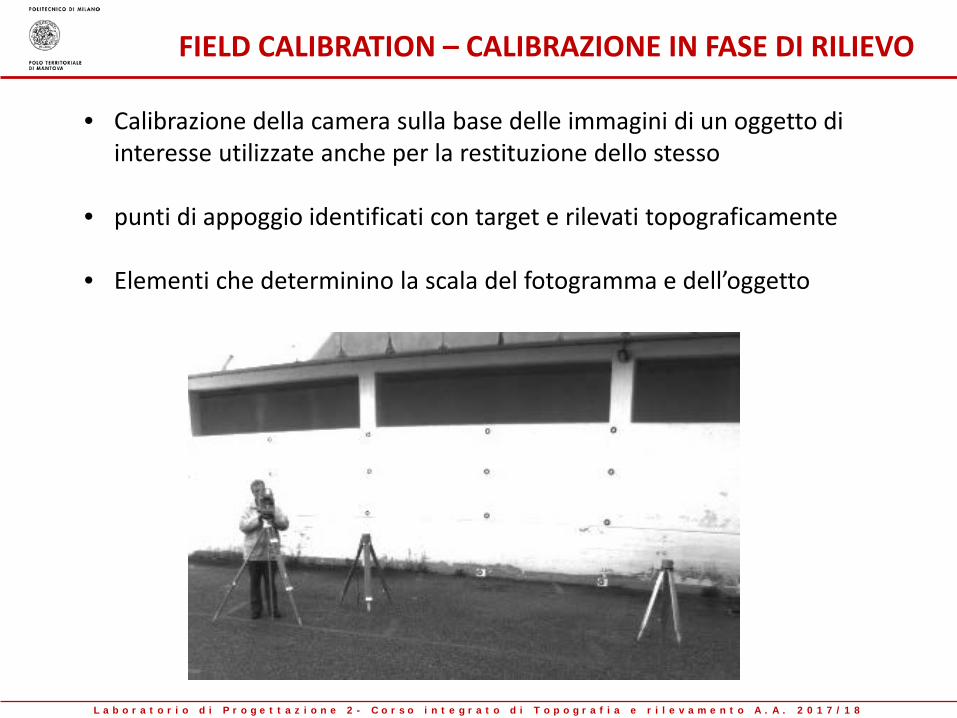
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
FIELD CALIBRATION ndash CALIBRAZIONE IN FASE DI RILIEVO
bull Calibrazione della camera sulla base delle immagini di un oggetto di interesse utilizzate anche per la restituzione dello stesso
bull punti di appoggio identificati con target e rilevati topograficamente
bull Elementi che determinino la scala del fotogramma e dellrsquooggetto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
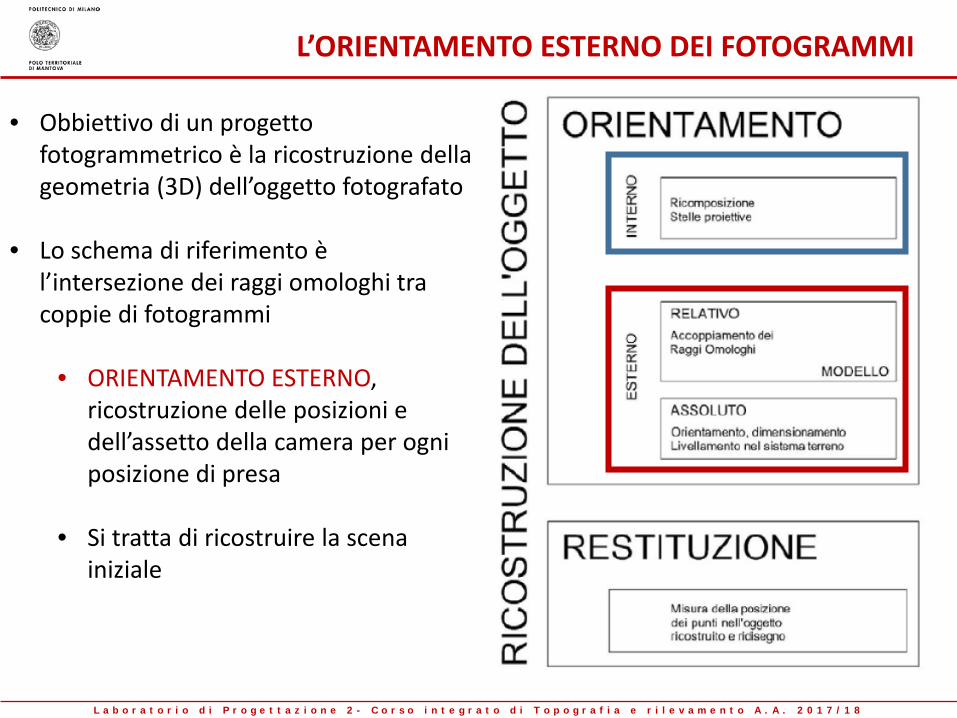
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Obbiettivo di un progetto fotogrammetrico egrave la ricostruzione della geometria (3D) dellrsquooggetto fotografato
bull Lo schema di riferimento egrave lrsquointersezione dei raggi omologhi tra coppie di fotogrammi
bull ORIENTAMENTO ESTERNO ricostruzione delle posizioni e dellrsquoassetto della camera per ogni posizione di presa
bull Si tratta di ricostruire la scena iniziale
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
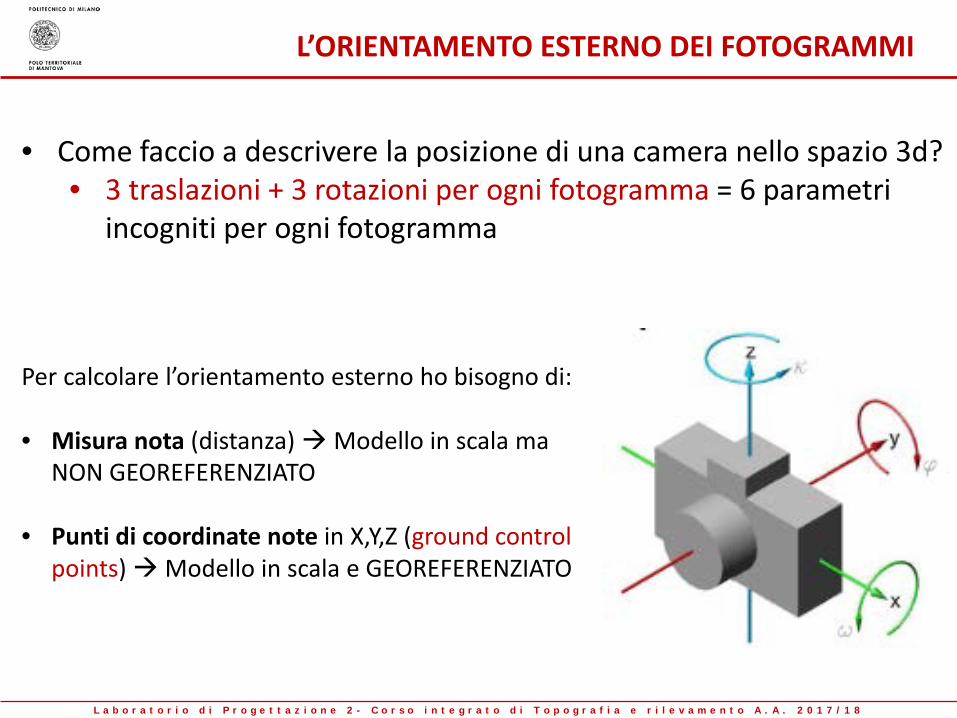
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
LrsquoORIENTAMENTO ESTERNO DEI FOTOGRAMMI
bull Come faccio a descrivere la posizione di una camera nello spazio 3dbull 3 traslazioni + 3 rotazioni per ogni fotogramma = 6 parametri
incogniti per ogni fotogramma
Per calcolare lrsquoorientamento esterno ho bisogno di
bull Misura nota (distanza) Modello in scala ma NON GEOREFERENZIATO
bull Punti di coordinate note in XYZ (ground control points) Modello in scala e GEOREFERENZIATO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIVERSI TIPI DI ORIENTAMENTO ESTERNO
bull ORIENTAMENTO IN DUE FASI DEI 2 FOTOGRAMMIbull ORIENTAMENTO RELATIVO (formazione modello)
bull Simmetricobull Asimmentrico
bull ORIENTAMENTO ASSOLUTO (trasformazione conforme nello spazio determinazione di coordinate assolute)
bull ORIENTAMENTO SIMULTANEO DEI 2 FOTOGRAMMIbull risolvo per i parametri di orientamento esterno e per i punti
incogniti
bull ORIENTAMENTO INDIPENDENTE DI CIASCUN FOTOGRAMMA bull problema del vertice di piramide
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
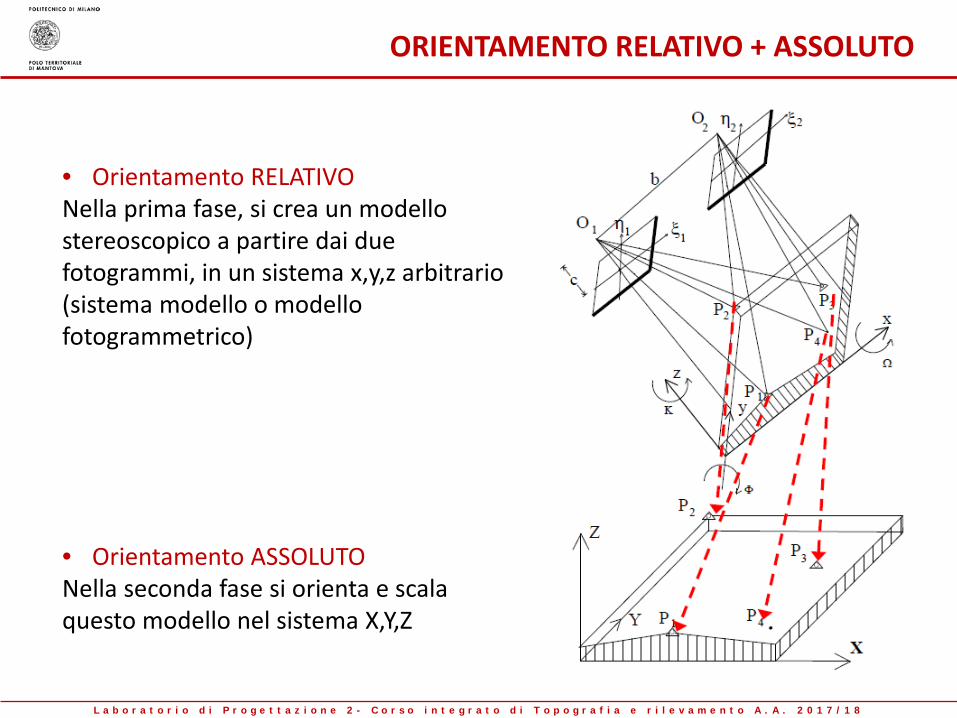
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO RELATIVO + ASSOLUTO
bull Orientamento RELATIVO Nella prima fase si crea un modello stereoscopico a partire dai due fotogrammi in un sistema xyz arbitrario (sistema modello o modello fotogrammetrico)
bull Orientamento ASSOLUTO Nella seconda fase si orienta e scala questo modello nel sistema XYZ
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
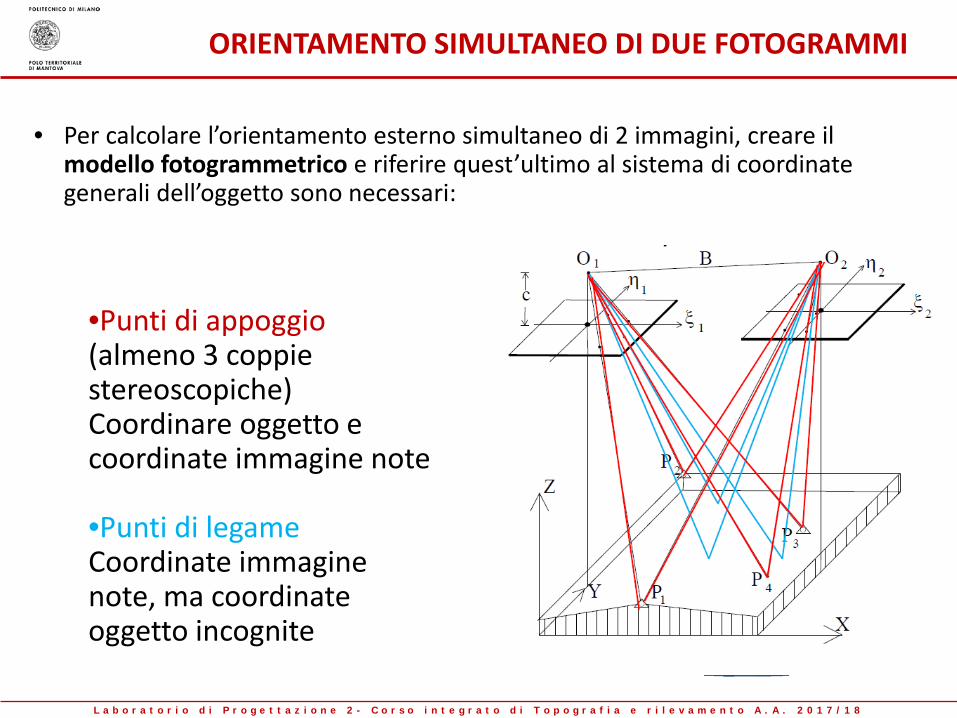
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Per calcolare lrsquoorientamento esterno simultaneo di 2 immagini creare il modello fotogrammetrico e riferire questrsquoultimo al sistema di coordinate generali dellrsquooggetto sono necessari
ORIENTAMENTO SIMULTANEO DI DUE FOTOGRAMMI
bullPunti di appoggio (almeno 3 coppie stereoscopiche)Coordinare oggetto e coordinate immagine note
bullPunti di legame Coordinate immagine note ma coordinate oggetto incognite
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
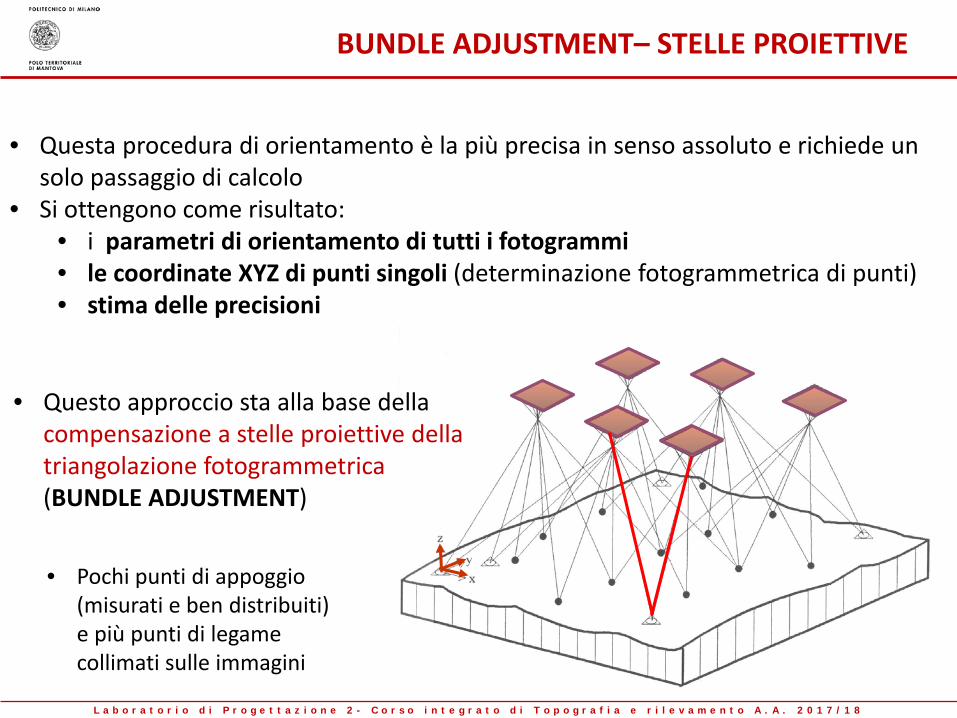
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BUNDLE ADJUSTMENTndash STELLE PROIETTIVE
bull Questa procedura di orientamento egrave la piugrave precisa in senso assoluto e richiede un solo passaggio di calcolo
bull Si ottengono come risultatobull i parametri di orientamento di tutti i fotogrammi bull le coordinate XYZ di punti singoli (determinazione fotogrammetrica di punti)bull stima delle precisioni
bull Pochi punti di appoggio (misurati e ben distribuiti) e piugrave punti di legame collimati sulle immagini
bull Questo approccio sta alla base della compensazione a stelle proiettive della triangolazione fotogrammetrica (BUNDLE ADJUSTMENT)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
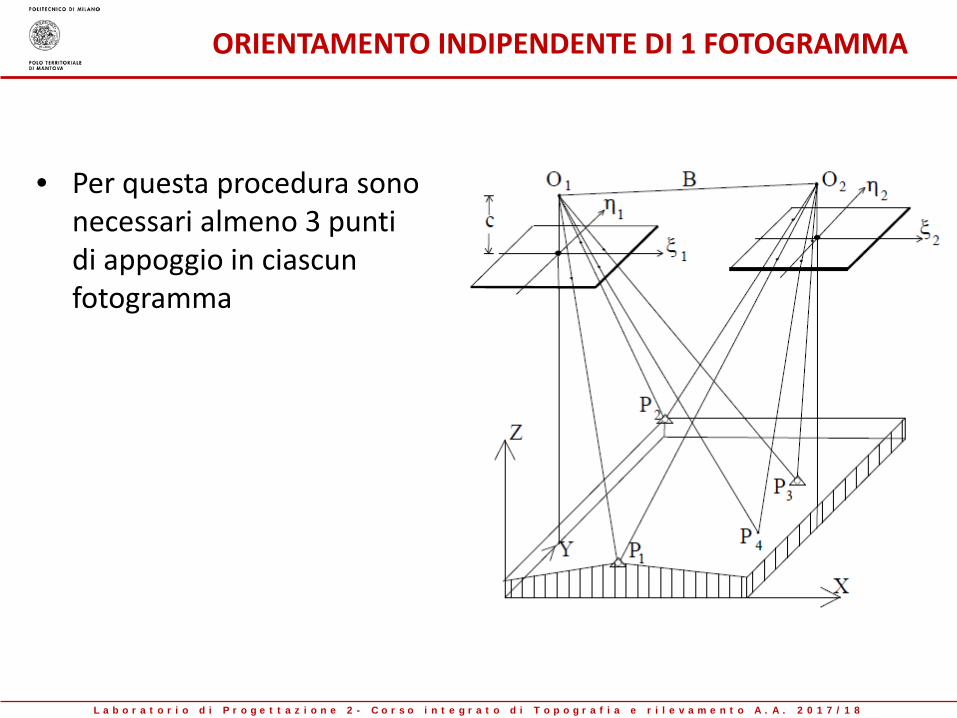
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
ORIENTAMENTO INDIPENDENTE DI 1 FOTOGRAMMA
bull Per questa procedura sono necessari almeno 3 punti di appoggio in ciascun fotogramma
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
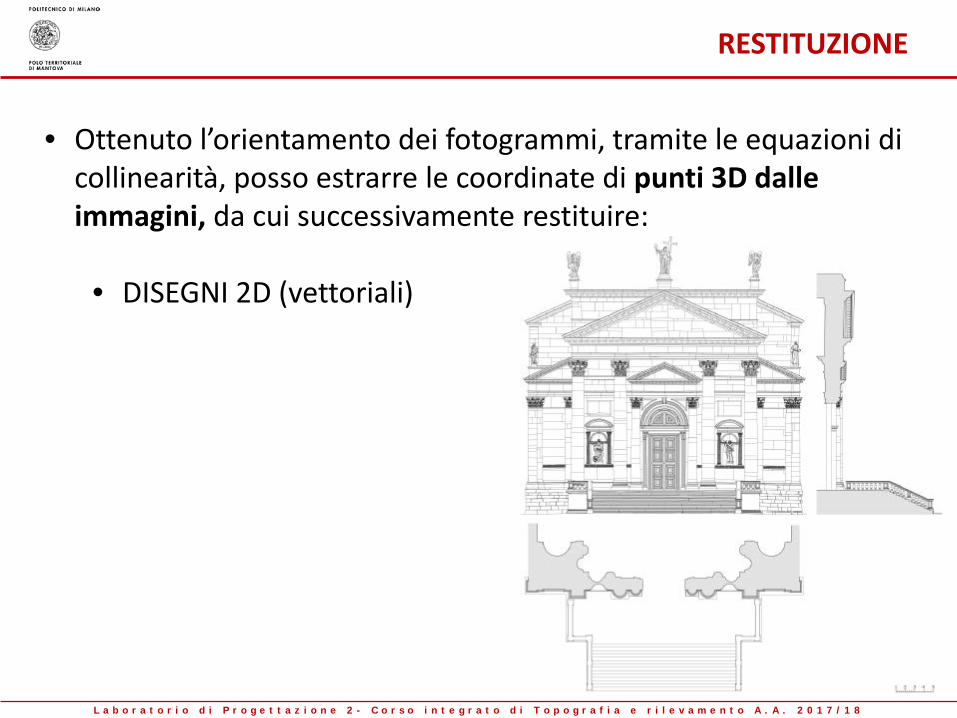
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull DISEGNI 2D (vettoriali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
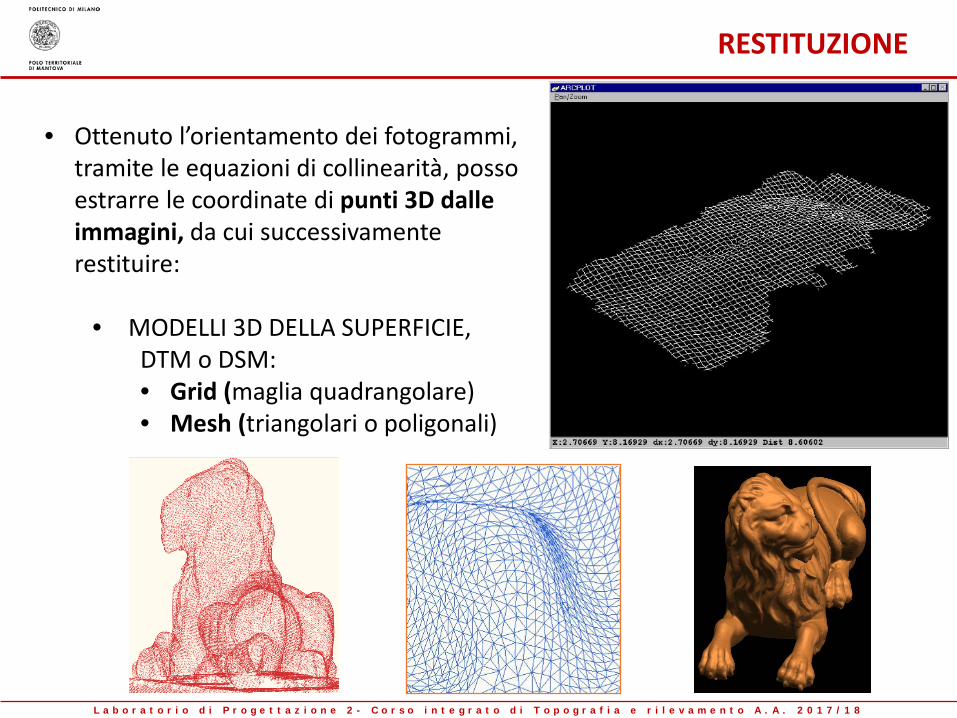
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull MODELLI 3D DELLA SUPERFICIE DTM o DSMbull Grid (maglia quadrangolare) bull Mesh (triangolari o poligonali)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
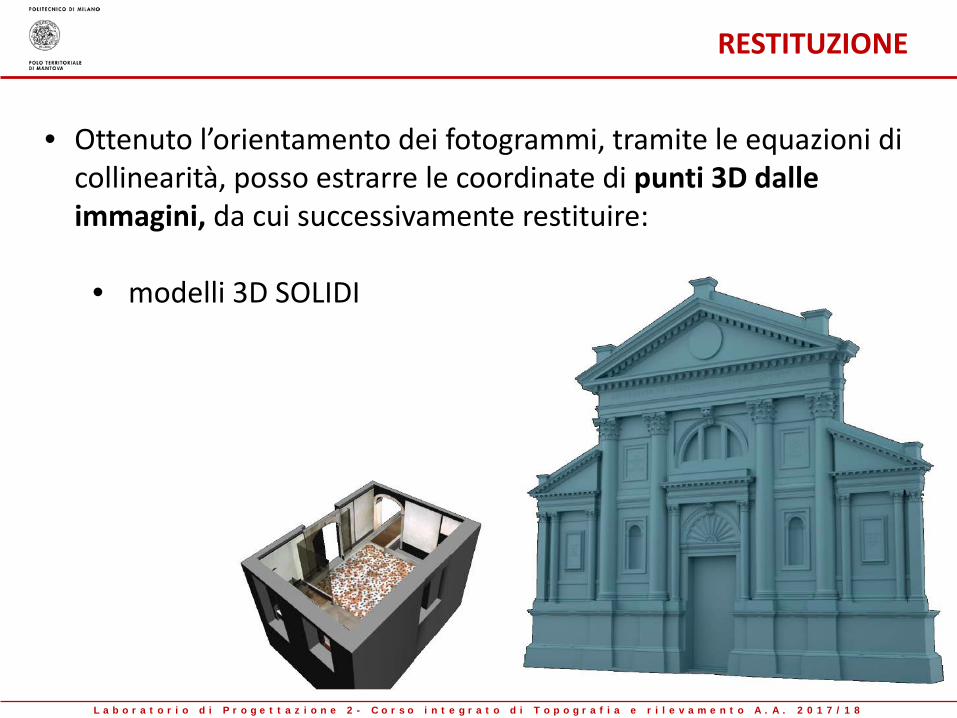
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull modelli 3D SOLIDI
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016

L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti dalle immagini da cui successivamente restituire
bull FOTOPIANI (oggetti 2D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
RESTITUZIONE
bull Ottenuto lrsquoorientamento dei fotogrammi tramite le equazioni di collinearitagrave posso estrarre le coordinate di punti 3D dalle immagini da cui successivamente restituire
bull ORTOFOTO (oggetti 3D)
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
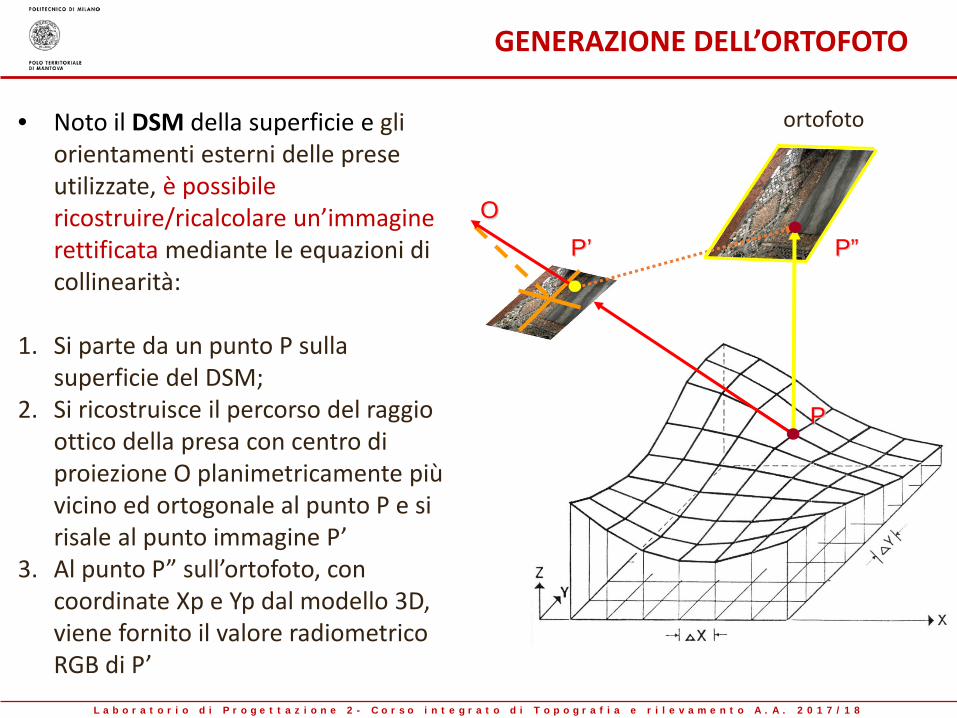
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Noto il DSM della superficie e gli orientamenti esterni delle prese utilizzate egrave possibile ricostruirericalcolare unrsquoimmagine rettificata mediante le equazioni di collinearitagrave
1 Si parte da un punto P sulla superficie del DSM
2 Si ricostruisce il percorso del raggio ottico della presa con centro di proiezione O planimetricamente piugrave vicino ed ortogonale al punto P e si risale al punto immagine Prsquo
3 Al punto Prdquo sullrsquoortofoto con coordinate Xp e Yp dal modello 3D viene fornito il valore radiometrico RGB di Prsquo
P
Prsquo PrdquoO
GENERAZIONE DELLrsquoORTOFOTO
ortofoto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016

L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
FOTOPIANO DELLA CITTArsquo DI VENEZIA -ESTRATTO
CAMPANILE
VISTA SCORCIATA DAPRESA AEREANON VIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016

L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016

L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DIFFERENZA TRA FOTOPIANO ED ORTOFOTO
ORTOFOTO DELLA CITTArsquo DI MANTOVA- ESTRATTO
TORRE DELLA GABBIAVISTA SCORCIATA DA PRESA AEREAVIENE CORRETTA
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
bull Procedura fotogrammetrica multi-immagine
bull Approccio automatico dei processi di orientamento e generazione del modello
bull Si ottengono Dense Point Cloud dalle immagini orientate
bull Mesh delle superfici
bull Modelli mesh testurizzati
bull Ortofoto digitali
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
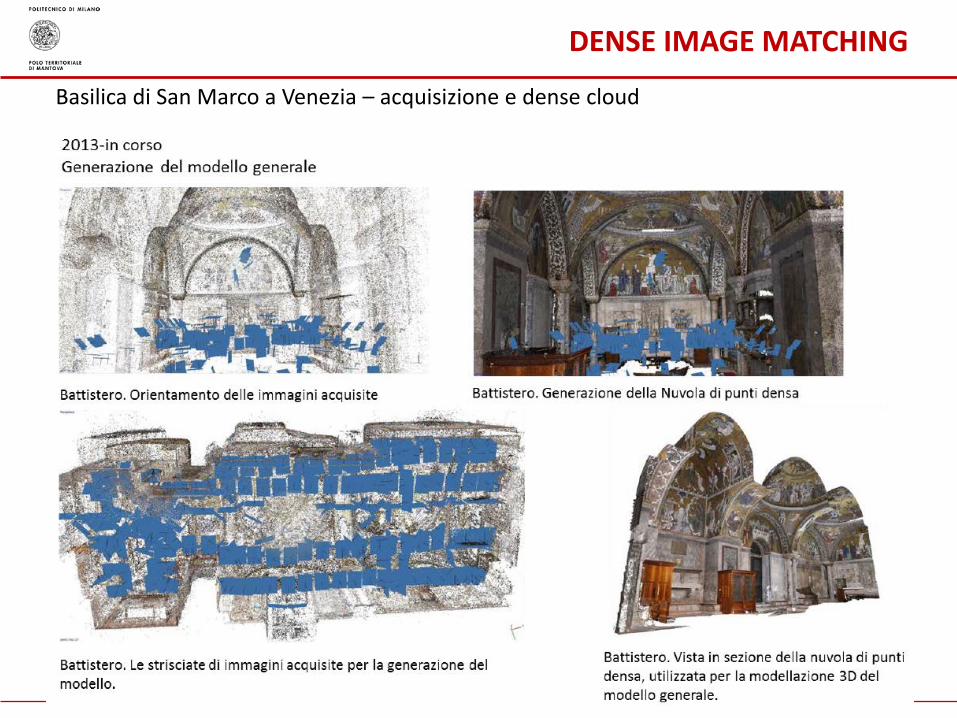
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione e dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
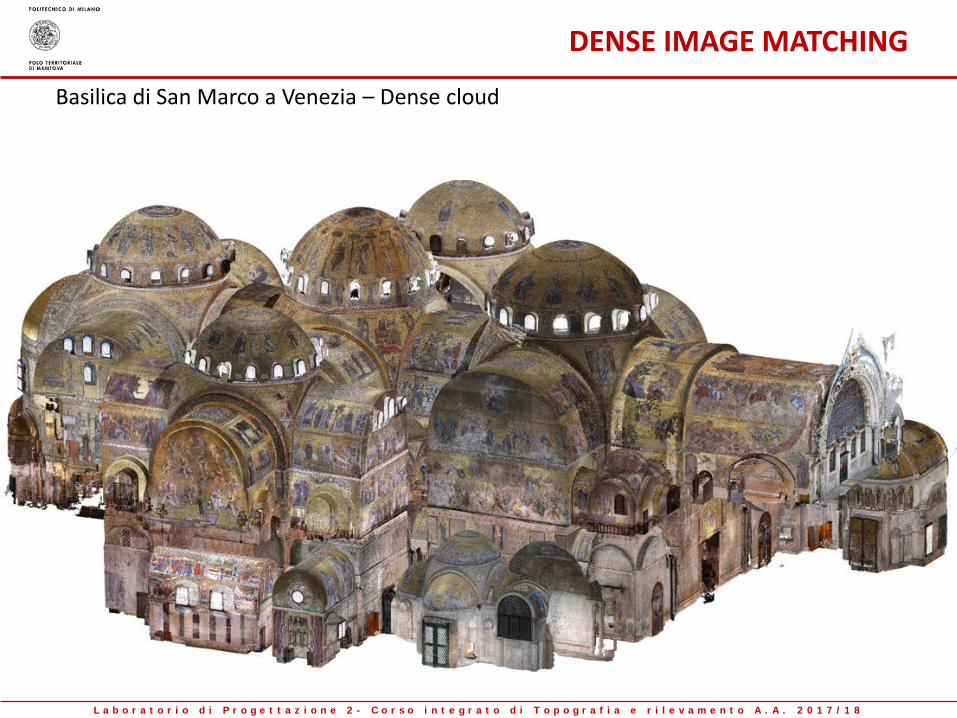
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash Dense cloud
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
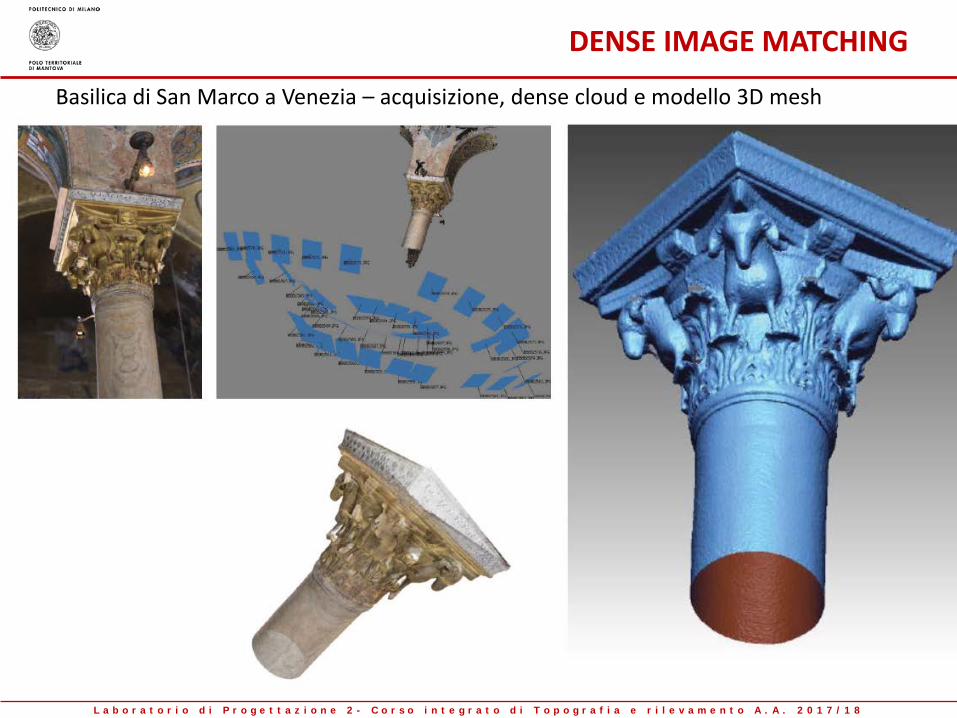
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
DENSE IMAGE MATCHING
Basilica di San Marco a Venezia ndash acquisizione dense cloud e modello 3D mesh
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
bull Buoni risultati in termini di precisionebull Acquisizione molto rapidabull Si puograve usare qualsiasi camerabull Effettua solitamente calibrazione in automatico e correzione delle
distorsionibull In alcuni casi approccio totalmente automaticobull Il modello egrave composto da milioni di puntibull Ersquo necessario calibrare la camera per ottenere i migliori risultatibull Il modello in genere egrave realizzato ldquofuoriscalardquo necessita di misure o
appoggio topografico per la scalatura e per verifica precisione
bull Software Photosynth Photoscan Arc3d Aperomicmac Bundler 123d Catch Photomodeler scanner
DENSE IMAGE MATCHING
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramentobull Acquisizione di target sullrsquooggetto
bull Target codificati riconosciuti automaticamente dal software fotogrammetrico (molto piugrave preciso)
bull Punti architettonici
bull Orientamento georeferenziazione del modello fotogrammetrico per stelle proiettivebundle adjustment
bull Calcolo degli errori residui sui ground control points e tie points
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
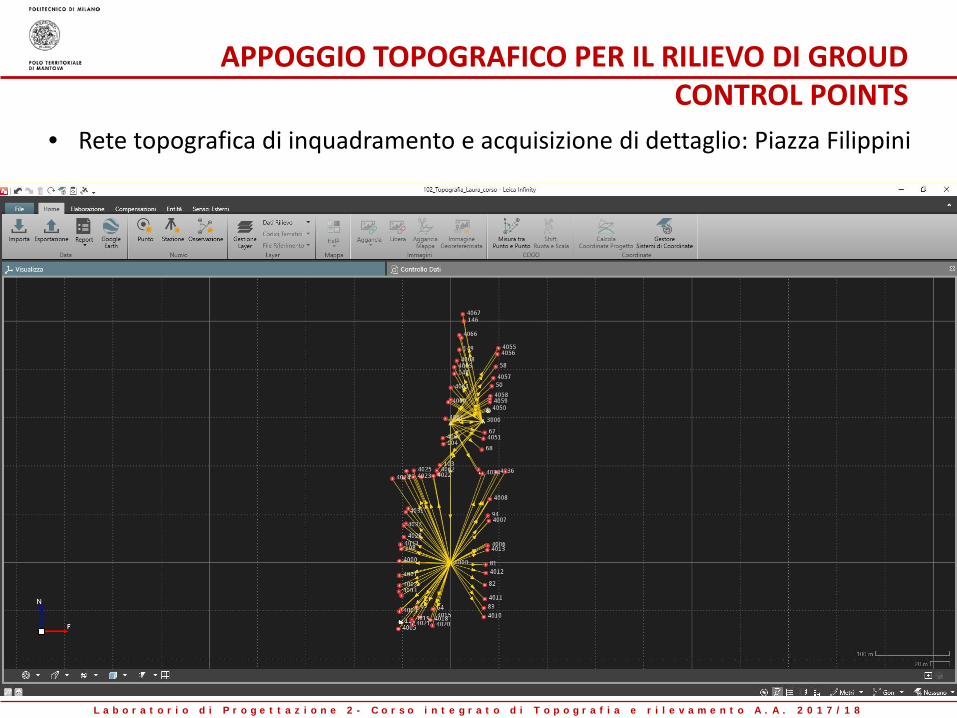
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Rete topografica di inquadramento e acquisizione di dettaglio Piazza Filippini
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
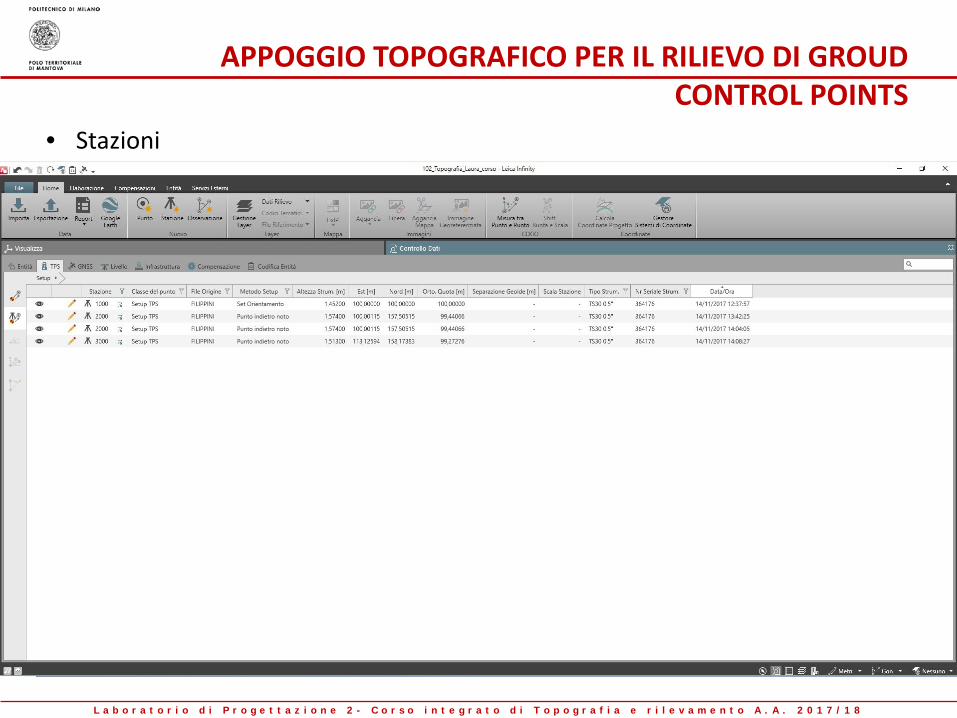
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Stazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
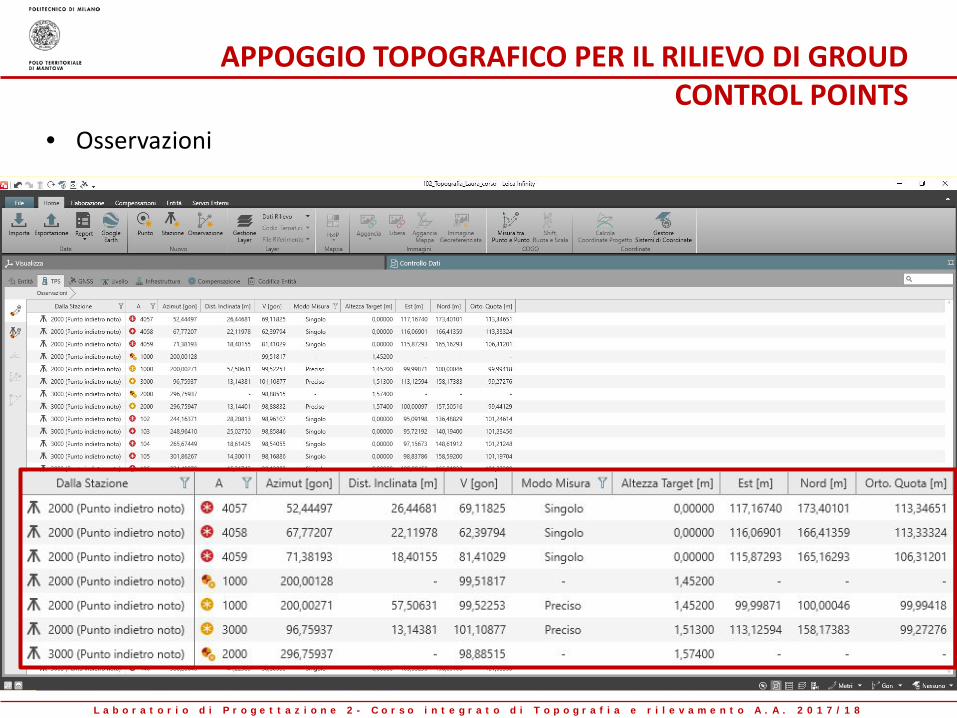
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Osservazioni
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
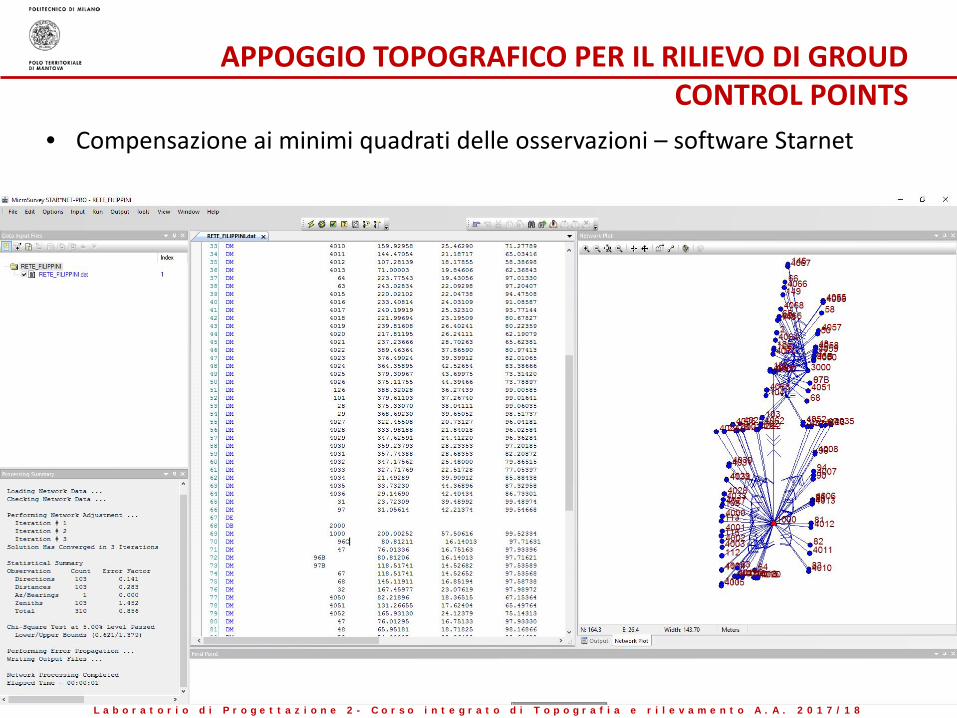
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Compensazione ai minimi quadrati delle osservazioni ndash software Starnet
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
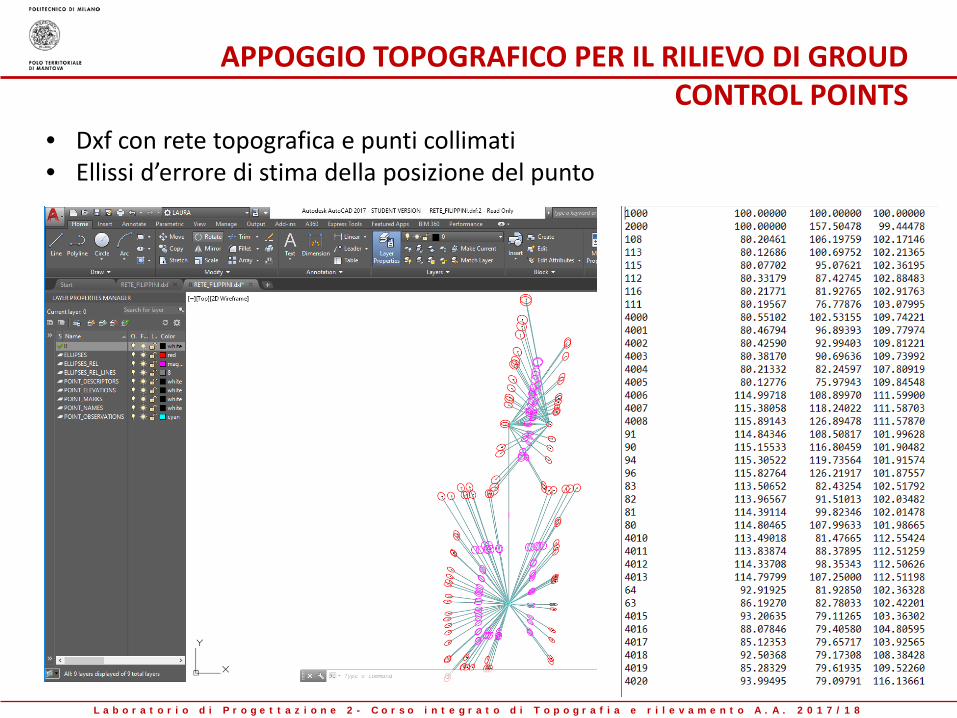
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
APPOGGIO TOPOGRAFICO PER IL RILIEVO DI GROUD CONTROL POINTS
bull Dxf con rete topografica e punti collimatibull Ellissi drsquoerrore di stima della posizione del punto
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016
L a b o r a t o r i o d i P r o g e t t a z i o n e 2 - C o r s o i n t e g r a t o d i T o p o g r a f i a e r i l e v a m e n t o A A 2 0 1 7 1 8
BIBLIOGRAFIA
bull R Brumana C Achille L Fregonese Lezioni di Fotogrammetriabull R Galetto Camere digitali per riprese aeree e terrestri Asita 2004bull L de Luca La fotomodellazione architettonica Dario Flaccovio Editore 2011bull Bonora Tucci Lezioni di Fotogrammetria wwwgeomaticaeconservazioneitbull A Adami Lezioni di Fotogrammetria Politecnico di Milano 2016









![Cartografia Numerica.ppt [modalità compatibilità]users.unimi.it/br1/Cartografia Numerica.pdf · restituzione La restituzione è una fase del processo Fotogrammetrico che permette](https://img.pdfslide.tips/doc/110x75/5c6a7f6309d3f20f7f8cbd4c/cartografia-modalita-compatibilitausersunimiitbr1cartografia-numericapdf.jpg)



















