Embed Size (px)
Citation preview


Indice general
Introduccion vTerminologıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
1. La estructura de preferencia 11.1. PREFERENCIA, INDIFERENCIA E INDECISION COMO
RELACIONES BINARIAS . . . . . . . . . . . . . . . . . . . . 2• COMPLETITUD EN ESTRUCTURAS DE PREFERENCIA 14
1.2. ESTRUCTURAS DE PREFERENCIA INDUCIDAS POR UNAFAMILIA DE CONJUNTOS CONVEXOS . . . . . . . . . . . 17• CONOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.3. ESTRUCTURAS DE PREFERENCIA REPRESENTADASMEDIANTE FUNCIONES DE VALOR . . . . . . . . . . . . 21
1.4. CONJUNTOS EFICIENTES PARA UNA ESTRUCTURA DEPREFERENCIA . . . . . . . . . . . . . . . . . . . . . . . . . 26• CONJUNTOS EFICIENTES PARA LA ESTRUCTURA
DE PREFERENCIA ASOCIADA AL ORDEN DE PARE-TO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
• CONJUNTOS EFICIENTES PARA ESTRUCTURAS DEPREFERENCIA REPRESENTADAS POR UNA FUN-CION DE VALOR ESCALAR . . . . . . . . . . . . . . 32
• CONJUNTOS EFICIENTES PARA LA ESTRUCTURADE PREFERENCIA ASOCIADA AL ORDEN LEXICO-GRAFICO . . . . . . . . . . . . . . . . . . . . . . . . . 33
• CONJUNTOS EFICIENTES PARA ESTRUCTURAS DEPREFERENCIAS CONICAS CONSTANTES . . . . . 33
2. Aproximaciones de estructuras de preferencia 38
1

2.1. ESTRUCTURAS DE PREFERENCIA REPRESENTADASMEDIANTE FAMILIAS DE FUNCIONES ESCALARES:�V−PREFERENCIAS . . . . . . . . . . . . . . . . . . . . . . . . . 39• RELACIONES ENTRE ESTRUCTURAS DE PREFEREN-
CIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.2. APROXIMACIONES LINEALES A ESTRUCTURAS DE PREF-
ERENCIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492.3. ESTRUCTURAS DE APROXIMACION LINEAL Y �V−
PREFERENCIAS LINEALES . . . . . . . . . . . . . . . . . . 632.4. ESTRUCTURAS DE APROXIMACION LINEAL Y �V−
PREFERENCIAS EN R2 . . . . . . . . . . . . . . . . . . . . 682.5. ESTRUCTURAS DE APROXIMACION LINEAL Y �V−
PREFERENCIAS EN Rn . . . . . . . . . . . . . . . . . . . . 87
3. Eficiencia en �V−preferencias 963.1. EFICIENCIA EN ESTRUCTURAS DE PREFERENCIA CONICAS
NO CONSTANTES . . . . . . . . . . . . . . . . . . . . . . . . 973.2. APROXIMACIONES A CONJUNTOS EFICIENTES PARA
ESTRUCTURAS DE PREFERENCIA GENERALES . . . . . 100• METODO ITERATIVO DE APROXIMACION AL CON-
JUNTO EFICIENTE PARA UNA ESTRUCTURA DEPREFERENCIA CONICA NO CONSTANTE . . . . . 103
3.3. APROXIMACIONES A CONJUNTOS EFICIENTES PARA�V− PREFERENCIAS . . . . . . . . . . . . . . . . . . . . . 108• CONJUNTOS EFICIENTES PARA�V− PREFERENCIAS
EN Y ⊂R2 . . . . . . . . . . . . . . . . . . . . . . . . 109• CONJUNTOS EFICIENTES PARA�V− PREFERENCIAS
EN Y ⊂Rn . . . . . . . . . . . . . . . . . . . . . . . . 1133.4. CONJUNTO EFICIENTE ESTRICTO EN �V− PREFER-
ENCIAS EN Rn . . . . . . . . . . . . . . . . . . . . . . . . . 114
Problemas abiertos y futuras lıneas de trabajo 115
Bibliografıa 117
ii

Agradecimientos
Deseo hacer constar mi mas profundo agradecimiento al Profesor Dr. D.Sixto Rıos Insua, cuya ayuda fue indispensable en el desarrollo de esta memo-ria, pues, ademas de proporcionarme los primeros conocimientos sobre Teorıade la Decision, supo con su valıa humana disipar esos ‘ciertos momentos ba-jos’.
Jose Manuel Perez ha compartido conmigo desde hace muchos anos suamistad y entusiasmo por la Ciencia, es a el a quien debo agradecer la tantasveces tediosa tarea de mecanografiado.
Tambien deseo hacer extensiva mi gratitud a mis companeros de Depar-tamento, con los cuales siempre pude aprender y cambiar impresiones. DavidRıos me estimulo en ocasiones con sus sugerencias y opiniones en el tema.
Finalmente, doy las gracias a mis padres y hermana, pues, aunque ellosson ajenos al contenido de este trabajo, su carino es coautor del mismo.
iii

Introduccion
Hasta hace relativamente pocos anos, la Investigacion Operativa, basan-dose en el punto de vista de los economistas, reducıa sus modelos de opti-mizacion a maximizar beneficios o minimizar perdidas, todo ello en termi-nos monetarios. En la vida real se ha demostrado, que tanto en el terrenotecnologico, como en el economico, el polıtico o en el de otras areas de lasllamadas Ciencias Sociales, la toma de una decision debe conjugar a veces di-versos objetivos o criterios, los cuales pueden llegar a ser conflictivos, difıcilesde comparar e incluso imposibles de medir. Intentar conseguir simultanea-mente varias de estas metas es lo que da lugar a la Teorıa de los Problemas deDecision Multiobjetivo (o Multicriterio). Esta ha constituido el marco idoneoen donde enunciar problemas tan dispares como el de la ubicacion de unacentral nuclear o un aeropuerto, el control de inventarios en bancos de san-gre, la planificacion de una region geografica, el diagnostico y tratamiento deenfermedades, etc.
Los orıgenes historicos de la mencionada teorıa se encuentran en la obrade Pareto “Course dEconomie Politique”, fechada en 1896. En dicha obrase habla por primera vez de ‘punto de equilibrio’como aquella situacion, enla relacion consumidor–productor, en la cual la mejora del estado de unapersona suponıa perjuicio para las restantes.
No es hasta despues de la Segunda Guerra Mundial, coincidiendo conel auge global que experimenta la Investigacion Operativa, cuando aparecenotros trabajos de importancia, como los de Koopmans, Kuhn, Tucker, Arrow,etc.
Cinendonos mas al tema que nos ocupa en esta memoria, diremos que elestudio sobre preferencias surge de los trabajos de Cantor y Haussdorf sobreordenacion de conjuntos. Ası, por ejemplo, la nocion conjuntista de clase de
v

equivalencia darıa lugar a las llamadas curvas de isovalor, utilizadas pararepresentar preferencias e indiferencias. En los trabajos de Debreu, Fishburn,Keeney, Raiffa, ... se analiza este ultimo concepto junto con algunos teoremasde representacion.
Es en la decada de los 70 cuando Yu (1973,1974) introduce la nocionde estructura de dominacion. Este concepto, desarrollado posteriormente entrabajos como los de Bergstresser et al. (1976), Coladas (1979) o Chien etal. (1989), entre otros, constituye el punto de partida para nuestro estudio.
Un proceso de decision multiobjetivo, al cual nos referimos repetidamenteen este trabajo, esta constituido por los siguientes elementos:
El decisor, o persona encargada de tomar una decision. Pueden servarios los decisores en un proceso de decision.
El analista, o persona encargada de asesorar cientıficamente al decisor.
El conjunto de alternativas, o acciones, a elegir por aquel que decide.
El ambiente en el cual se desarrolla el proceso: puede ser controlablepor el decisor, y por tanto no influir en el proceso, (ambiente de cer-tidumbre), o no controlable, y por tanto influir en el (ambiente de incer-tidumbre). En esta memoria se considerara que el proceso de decisionlleva asociado un ambiente del primer tipo. Debido a ello, podemosprescindir de este elemento en nuestra modelizacion.
El conjunto de objetivos o consecuencias: sus elementos seran un con-junto finito de medidas numericas, y estaran relacionados unıvocamentecon el conjunto de alternativas o acciones. Se suele denotar como unsubconjunto Y de Rn. Cada uno de los elementos de Y indica el gradocon que se alancanzarıa cada objetivo, si el decisor eligiese la alternativao alternativas asociadas a dicho elemento.
La informacion proporcionada al analista por la persona que decide:esta formada por la descripcion de las actitudes que toma el decisor, alcotejar diferentes pares de alternativas.
La estructuracion de la informacion mencionada es el principal objetivode esta memoria, que consta de tres capıtulos. En el primero de ellos, lainformacion obtenida por el analista se recoge en el concepto de estructura depreferencia (definicion 1.1.7). En el aparecen, en forma de relaciones binarias
vi

diferentes, las actitudes de preferencia, indiferencia y duda que puede tomarla persona que decide. Esta ultima postura, considerada en muchos trabajoscomo una posicion incomoda para el analista, adquiere gran importancia en elnuevo concepto de estructura de preferencia. Ası, englobando tambien bajoel termino de duda las posibles incoherencias del decisor detectadas en elestudio, esta se convierte en un tipo de informacion relevante en el proceso.
El teorema 1.1.13 permite pasar relaciones binarias, de las utilizadas paramodelizar preferencias e indiferencias, al nuevo lenguaje de estructuras depreferencia.
El resto del capıtulo se completa con la transcripcion a la mencionadaterminologıa de resultados sobre teorıa del valor y estructuras de dominacion.
El segundo capıtulo esta dedicado a la aproximacion de estructuras depreferencia. Con el termino de estructura de aproximacion lineal, se define unconcepto que pretende ser operativo en el estudio de la eficiencia o busquedade alternativas idoneas para el decisor.
El teorema 2.2.10 permite utilizar el concepto de aproximacion con propiedady rigor matematico, sirviendo como base para la descripcion y resultados que,sobre estructuras de aproximacion, se dan posteriormente para un caso par-ticular de estructuras de preferencia: las �V− preferencias.
Estas proceden de generalizar aquellas estructuras que poseen representacionanalıtica mediante una funcion de valor.
Los teoremas 2.4.14 y 2.4.15 abren las puertas a lo que podrıan ser aprox-imaciones con condiciones analıticas mas complejas que las lineales, y queaprovecharıan mejor la informacion.
En el ultimo capıtulo se utilizan la terminologıa y los resultados expuestosanteriormente para el estudio de aproximaciones del conjunto eficiente tantoen �V−preferencias como en estructuras generales. Ası, el algoritmo uti-lizado en Yu (1974) para realizar una aproximacion superior iterativa delconjunto eficiente, y que aparece recogido de forma estructurada en Rıos etal. (1989), se modifica, estableciendo un tipo de aproximacion mas estricta.Dicho concepto se extiende, finalmente, al caso de aproximaciones inferiores.
vii

Terminologıa
Se representa por letras mayusculas los conjuntos (A, B, ...) y por minuscu-las sus elementos (a1, a2 ∈ A ...). Se sigue la siguiente notacion:
A + B = {a + b : a ∈ A, b ∈ B} .
αB = {αb : b ∈ B} α ∈ R .
Ac para el complementario de A.
A\B para la diferencia de conjuntos A y B.
δA para el concepto topologico de frontera del conjunto A.
C`A para el concepto topologico de clausura del conjunto A.
◦A para el concepto topologico de interior del conjunto A.
viii

Capıtulo 1
La estructura de preferencia
El objetivo de este primer capıtulo sera definir un concepto, mediante elcual, la informacion que proporciona el decisor al analista, quede estructuradaen base a las actitudes que toma el primero de ellos en un problema dedecision.
Las definiciones 1.1.7 (estructura de preferencia) y 1.1.8 (cuaterna derelaciones binarias asociada a una estructura de preferencia) cumplen estecometido. A su vez, se establece un marco comun para la teorıa de estruc-turas de dominacion, aparecida en los trabajos de Yu (1974) y Bergstresseret al (1976) (seccion 1.2), y para algunos teoremas enunciados por Debreu(1954,1959) y Fishburn (1970) sobre teorıa del valor (seccion 1.3).
Finalmente, el capıtulo concluye con el estudio de la eficiencia en es-tructuras de preferencias, como uno de los conceptos fundamentales en losproblemas de decision multiobjetivo (seccion 1.4).
1

1.1. PREFERENCIA, INDIFERENCIA E IN-
DECISION COMO RELACIONES BI-
NARIAS
Se denomina preferencia, a la actitud favorable manifestada por la per-sona que decide (decisor) hacia una alternativa, una vez que se ha cotejadocon otra. Cuando las alternativas se encuentran cuantificadas, o convenien-temente representadas, el sımbolo que indica que una de ellas es preferi-da a la otra es ‘�’. Ası, dadas dos opciones a traves de las letras x e y,‘x � y’simboliza la preferencia que manifiesta el decisor hacia x al compara-rla con y. Esta puede expresarse, igualmente, mediante el sımbolo simetrico‘≺’. De este modo, la expresion ‘x � yes equivalente a ‘y ≺ x’, que se traducecomo y es menos preferida que x.
No es la preferencia la unica actitud que puede manifestar el decisor alcotejar dos alternativas. De hecho, existen dos posturas mas ante las cualespuede encontrarse la persona que decide. La primera de ellas es la indiferen-cia. El decisor, en este caso, recibe la sensacion de similitud al comparar dosopciones. Ello indica que ambas satisfacen del mismo modo sus objetivos. Lacitada actitud se representa por ‘∼’. Ası, ‘x ∼ y’simboliza, en un proceso dedecision, que al decisor le resulta indiferente elegir entre la alternativa x o lay.
La segunda actitud es la duda o indecision. Esta puede aparecer en eldecisor:
1. Como consecuencia de incoherencias en sus juicios. En este caso, elanalista comprueba, en su interaccion con la persona que decide, queesta no respeta ciertos principios de racionalidad.
2. Como duda temporal. Aparece ante la incapacidad del decisor, en unmomento determinado, de realizar comparaciones entre ciertas alterna-tivas, debido a la situacion del problema o a la falta de informacion.
3. Como duda de tipo conmensurable. La calidad de los datos, el numerode atributos u objetivos a tener en cuenta etc, imposibilitan al decisorcomparar ciertas alternativas.
4. Finalmente, puede existir otra serie de causas de difıcil determinacion,como, por ejemplo, no querer revelar preferencias.
2

Algunos autores, como Roy (1977) o Jacquet–Lagreze (1975), tratan estaactitud desde la perspectiva del apartado 3, utilizando para ello el nombre deincomparabilidad. Sin embargo, recientemente, Chien et al. (1989) utilizanel termino de indecision para referirse, de modo mas extenso, a este tipo depostura.
A partir de ahora, utilizaremos ‘?’como sımbolo para representar estarelacion entre alternativas. Ası, ‘x?y’simboliza la indecision que se origina enel decisor al comparar las alternativas x e y, es decir, el decisor duda, duranteel proceso de decision, elegir x o y.
El marco formal donde incluiremos estos tres tipos de actitudes, ‘�’, ‘∼’y‘?’(en realidad cuatro, si se considera ‘≺’como una actitud distinta), seranlas relaciones binarias en un conjunto. A continuacion, se resume algunasdefiniciones y propiedades sobre estas, esenciales para el desarrollo de estamemoria.
Definicion 1.1.1 Dado un conjunto X, denominaremos relacion binariaen X, a todo subconjunto del producto cartesiano X ×X, el cual se deno-tara por R.
La relacion (x1, x2) ∈ R, siendo x1, x2 ∈ X, se puede escribir como x1Rx2.Veamos ahora algunas propiedades que puede verificar una relacion bina-
ria.
Definicion 1.1.2 Una relacion binaria R en un conjunto X puede ser:
a) Reflexiva: cuando (x, x) ∈ R, ∀x ∈ X .
b) Irreflexiva: cuando (x, x) 6∈ R, ∀x ∈ X .
c) Simetrica: cuando se verifica que (x, x′) ∈ R ⇒ (x′, x) ∈ R, siendox, x′ ∈ X.
d) Asimetrica: cuando se verifica que (x, x′) ∈ R ⇒ (x′, x) 6∈ R, siendox, x′ ∈ X.
e) Antisimetrica: cuando se verifica que (x, x′) ∈ R y (x′, x) ∈ R ⇒ x′ =x, siendo x, x′ ∈ X.
f) Transitiva: si se verifica que, (x, x′) ∈ R y (x′, x′′) ∈ R ⇒ (x, x′′) ∈ R,siendo x, x′, x′′ ∈ X.
3

g) Negativamente transitiva: si se verifica que (x, x′) 6∈ R y (x′, x′′) 6∈R ⇒ (x, x′′) 6∈ R, siendo x, x′, x′′ ∈ X.
h) Completa (o debilmente conexa): si se verifica que x 6= x′ ⇒ (x, x′) ∈R o (x′, x) ∈ R, siendo x, x′ ∈ X.
i) Fuertemente conexa: si se verifica que, ∀x, x′ ∈ X, o bien (x, x′) ∈ Ro bien (x′, x) ∈ R.
Veamos como se denominan ciertas relaciones binarias atendiendo a laspropiedades que verifican.
Definicion 1.1.3 Sea R una relacion binaria en un conjunto X. Diremosque:
a) R es una relacion de equivalencia, si es reflexiva, simetrica y transi-tiva.
Una relacion de equivalencia proporciona una clasificacion del conjuntoX, lo que en teorıa de conjuntos se denomina una particion, es decir,una familia de subconjuntos de X disjuntos cuya union es el conjuntototal.
Cada subconjunto de la particion se denomina clase de equivalencia.Ası, dado x ∈ X, la clase de equivalencia a la cual pertenece sera elsubconjunto {x′ ∈ X/(x, x′) ∈ R}. Este se suele denotar por [x]R.
El conjunto de todas las clases de equivalencia se simboliza por X/R,y se le conoce por conjunto cociente:
X/R = {[x]R : x ∈ X} .
b) R es un orden parcial estricto, si es irreflexiva y transitiva.
c) R es un orden debil estricto, si es asimetrica y negativamente transi-tiva.
d) R es un orden lineal estricto, si R es un orden debil estricto y, ademas,completo.
Ejemplo 1.1.4 Vamos a representar por x = (x1, x2) los elementos de R2.
4

1. La relacion R definida por (x, x′) ∈ R ⇐⇒| x |=| x′ |, en donde
| x |= +√
x21 + x2
2 representa el modulo de dicho vector, es una relacion
de equivalencia en R2.
2. La relacion R definida por (x, x′) ∈ R ⇐⇒ x1 + x2 > x′1 + x′2, es unorden debil estricto en R2
3. La relacion R definida por (x, x′) ∈ R ⇐⇒ x1 ≥ x′1 y x2 ≥ x′2, siendox 6= x′, es un orden parcial estricto, denominado orden de Pareto enR2.
4. La relacion R definida por
(x, x′) ∈ R ⇐⇒
x1 > x′1ox1 = x′1 y x2 > x′2
es un orden lineal estricto en R2 denominado orden lexicografico.
Observacion 1.1.5 Teniendo en cuenta la definicion anterior, todo ordenlineal estricto es un orden debil estricto.
Tambien se verifica que todo orden debil estricto es un orden parcialestricto. El ejemplo 1.1.4.3 nos ilustra, sin embargo, que el recıproco no escierto.
Para comprobar este tipo de relaciones, recordemos algunas propiedadesde facil demostracion.
Propiedades 1.1.6
1. Si R es asimetrica, es irreflexiva.
2. Si R es irreflexiva y transitiva, es asimetrica.
3. Si R es negativamente transitiva y asimetrica, es transitiva.
4. Si R es transitiva, irreflexiva y completa, es negativamente transitiva.
5

Observese, que la propiedad 3 es la que sustenta la afirmacion de la ob-servacion 1.1.5.
La siguiente definicion nos va a permitir modelizar las actitudes del de-cisor, frente a un problema de decision, en una unica estructura. Autores co-mo White (1972) o Roy (1977), entre otros, ya establecen una modelizacionde estas mediante un conjunto de relaciones binarias. Mas recientemente,los trabajos de Yu (1985) y Chien et al. (1989) tratan el tema, aunque noproporcionan una estructura totalmente unificada en donde incluir esas ac-titudes.
Definicion 1.1.7 (ESTRUCTURA DE PREFERENCIA).Sea Y el conjunto que representa el espacio de objetivos o consecuencias
en un problema de decision. Una estructura de preferencia en Y es unpar de relaciones binarias en dicho conjunto, denotadas por (R1,R2), queverifican los siguientes axiomas:
E1: R1 es asimetrica y transitiva. A R1 se le denominara preferencia enY .
E2: R2 es una relacion de equivalencia. A R2 se le denominara indiferenciaen Y .
E3: R1 y R2 son disjuntos: R1 ∩R2 = ∅
Ademas, R1 y R2 se relacionan mediante los siguientes axiomas de co-herencia racional:
E4: Si (y1, y2) ∈ R1 e (y2, y3) ∈ R2 ⇒ (y1, y3) ∈ R1
E5: Si (y1, y2) ∈ R2 e (y2, y3) ∈ R1 ⇒ (y1, y3) ∈ R2
La definicion se ha hecho para un conjunto Y de objetivos o consecuencias,que es lo que nos va a interesar en esta memoria. No obstante, esta se podrıaextender sobre el conjunto de acciones.
En Chien et al. (1989) se define la estructura de preferencia como la re-union de las relaciones {�}, {∼} y {?}; sin embargo, no se establece unaconexion precisa entre ellas, ni se propone tampoco una axiomatica que pro-porcione una mayor coherencia al concepto. Esta axiomatica, necesaria a
6

nuestro parecer, se suple en el citado trabajo por un conjunto de hipotesis aposteriori.
En realidad, hemos manejado cuatro tipos de relaciones binarias (si con-sideramos por separado la relacion simetrica a la preferencia) que se corre-sponden con las cuatro actitudes citadas en un proceso de decision. Esto noslleva a dar una nueva definicion que, aunque no enriquece el contenido de ladefinicion 1.1.7, nos proporciona una herramienta util e intuitiva.
Definicion 1.1.8 (CUATERNA DE RELACIONES BINARIAS ASO-CIADAS A UNA ESTRUCTURA DE PREFERENCIA).
Sea (R1,R2) una estructura de preferencia en Y . Llamaremos cuaternade relaciones binarias asociada a (R1,R2) a las relaciones
(R1,Rs1,R2,Rc
12) ,
donde Rs1 es el simetrico de R1 en Y × Y repecto de la diagonal (∆) y Rc
12
es el complementario de R1 ∪ Rs1 ∪ R2 en Y × Y . A esta ultima relacion se
le denominara duda o indecision.
Con esta definicion se originan particiones del espacio Y ×Y como la queaparece en la figura 1.1
Para ilustrar estos conceptos, veamos cual sera la estructura de prefer-encia, y su cuaterna asociada, en un problema de decision enunciado porJacquet–Lagreze (1975).
Ejemplo 1.1.9 Supongamos que tenemos cuatro proyectos a,b,c y d, entrelos cuales debemos elegir, siendo nuestro objetivo minimizar costes. Nuestraactitud serıa clara, si la diferencia entre dichos costes superase las 20.000Ptas; en caso contrario, debido a que la calidad de los datos no es suficiente-mente fidedigna, nuestra postura quedarıa confusa, originando actitudes deindecision.
La relacion entre proyectos y costes es la siguiente:
Acciones a b c dCostes (Ptas) 135.000 150.000 160.000 175.000
7

Y
Y
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
��
∆
R2
R1
Rs1
Rc12
Figura 1.1:
Para este caso, nuestra estructura de preferencia en el espacio de objetivosdescrito por los costes es la siguiente:
R1 = {(a, c), (a, d), (b, d)}R2 = {(a, a), (b, b), (c, c), (d, d)} .
Si deseamos obtener la cuaterna de relaciones binarias asociadas a (R1,R2),completarıamos las relaciones binarias anteriores con
Rs1 = {(c, a), (d, a), (d, b)}
Rc12 = {(a, b), (b, a), (b, c), (c, b), (c, d), (d, c)} .
Esta ultima relacion puede ser expresada del siguiente modo:
yRc12y
′ ⇔ |y − y′| ≤ 20,000 .
Observese, que hemos utilizado para representar los costes (elementos delespacio de objetivos) la nomenclatura de las acciones, con las cuales se cor-responden biunıvocamente.
Veamos ahora algunas propiedades adicionales, que se deducen a partirde los axiomas que verifica una estructura de preferencia.
8

Proposicion 1.1.10 La relacion que representa la duda o incertidumbre,Rc
12, es irreflexiva y simetrica.
.Demostracion. Es irreflexiva, pues R2 ∩ Rc12 = ∅ , y, como ∆ ⊂ R2 ,
entonces, Rc12 ∩∆ = ∅ .
Por otra parte, es inmediato deducir que Rc12 es simetrica, pues esta es el
complementario en Y × Y del conjunto simetrico R1 ∪Rs1 ∪R2 . c.q.d. /
Proposicion 1.1.11 Dada (R1,R2) una estructura de preferencia en Y , severifican las siguientes propiedades:
1. Si (y1, y2) ∈ R2 e (y2, y3) ∈ Rc12 ⇒ (y1, y3) ∈ Rc
12
2. Si (y1, y2) ∈ Rc12 e (y2, y3) ∈ R2 ⇒ (y1, y3) ∈ Rc
12
.Demostracion. Demostraremos solamente el apartado 1, pues el 2 seobtiene mediante un razonamiento analogo.
Supongamos que (y1, y2) ∈ R2 e (y2, y3) ∈ Rc12 .
Si (y1, y3) ∈ R1, como (y2, y1) ∈ R2, por E5 tendrıamos que (y2, y3) ∈R1, que es absurdo; luego (y1, y3) 6∈ R1
Si (y1, y3) ∈ R2, como (y1, y2) ∈ R2, por E2 tendrıamos que (y2, y3) ∈R2, que es absurdo; luego (y1, y3) 6∈ R2
Finalmente, si (y1, y3) ∈ Rs1 (que es lo mismo que decir que (y3, y1) ∈
R1), como (y1, y2) ∈ R2, por E4 tendrıamos que (y3, y2) ∈ R1. Es decir,(y2, y3) ∈ Rs
1, que es absurdo; luego (y1, y3) 6∈ Rs1.
Por tanto, (y1, y3) 6∈ R1 ∪R2 ∪Rs1, luego (y1, y3) ∈ Rc
12 , c.q.d. /
Lo que hasta ahora se ha venido denominando en la literatura especial-izada preferencia e indiferencia, no siempre va a poder ser transcrito directa-mente, a la terminologıa de estructura de preferencia, (definicion 1.1.7) comoR1 y R2. Veamos, para ilustrar esta afirmacion, un ejemplo de Jacquet–Lagreze (1975).
Ejemplo 1.1.12 Supongamos que una persona quiere elegir entre cuatrocoches a, b, c y d, cuyos precios en francos son los siguientes:
9

coches a b c dPrecios 9.900 9.980 10.050 10.100
Si su objetivo es minimizar los gastos y, ademas, dicha persona confiesaresutarle indiferente elegir entre un coche u otro cuando la diferencia deprecio es menor a 100 francos, se tendrıan las siguientes relaciones entre losdiferentes coches, segun la informacion del decisor:
{∼} = {(a, b), (b, a), (b, c), (c, b), (c, d), (d, c), (a, a), (b, b), (c, c), (d, d)}
{�} = {(a, c), (a, d), (b, d)}
{≺} = {(c, a), (d, a), (d, b)}
{?} = ∅
Con {∼} se representa lo que hasta ahora se ha considerado como relacionde indiferencia. Del mismo modo, {�} estarıa representando la preferenciaen dicho problema, {?} la duda o indecision y {≺} la relacion simetrica a lapreferencia.
Sin embargo, observese, que no se puede reconstruir una estructura depreferencia para este problema (definicion 1.1.7) llamando R1 a {�} y R2
a {∼}. La razon es que {∼} no es una relacion de equivalencia, pues, comose puede observar, no verifica la propiedad transitiva. ¿ Como solucionamosesta situacion? Podemos, incluso, hacernos una pregunta aun mas general:dadas dos relaciones binarias R y S en un conjunto de objetivos Y , tal que∆ ⊂ S ¿se puede generar una estructura de preferencia a partir de ellas?. Elsiguiente resultado dara respuesta a esta cuestion.
Llamemos C, al mayor de los subconjuntos de R ∪ S ⊂ Y × Y con lassiguientes propiedades:
1. En C se verifican los axiomas de coherencia racional para R y S E4 yE5.
2. R∩ C es asimetrica y transitiva.
3. S ∩ C es una relacion de equivalencia.
10

Teorema 1.1.13 Sean dos relaciones binarias R y S en Y , tales que ∆ ⊂S.Consideremos, ademas, el conjunto C definido anteriormente. Si llamamosR∗
1 y R∗2 a las relaciones R ∩ C y S ∩ C, respectivamente, y se verifica que
R∗1 6= ∅, entonces,
(R∗1\R∗
2,R∗2)
es una estructura de preferencia, que llamaremos asociada a R y S yrepresentaremos por (R1,R2)R,S
.Demostracion. Los axiomas E2 y E3 se obtienen directamente de ladefinicion de las relaciones R∗
1\R∗2 y R∗
2, que definen la estructura de prefer-encia. Veamos que se verifica E1:
R∗1\R∗
2 es asimetrica, por ser subconjunto de R∗1 y ser esta asimetrica.
R∗1\R∗
2 es transitiva:
Si (y1, y2) ∈ R∗1\R∗
2 e (y2, y3) ∈ R∗1\R∗
2, entonces (y1, y3) ∈ R∗1, pues
R∗1 verifica la transitividad, por definicion del conjunto C.
Nos queda probar que (y1, y3) 6∈ R∗2, y por tanto, (y1, y3) ∈ R∗
1\R∗2.
Supongamos que (y1, y3) ∈ R∗2; esto es lo mismo que decir que (y3, y1) ∈
R∗2. Como (y1, y2) ∈ R∗
1, tendremos que (y3, y2) ∈ R∗1 (por verificarse
E5 en C), lo cual es absurdo, por ser R∗1 asimetrica.
Veamos que se verifica E4:Supongamos (y1, y2) ∈ R∗
1\R∗2 e (y2, y3) ∈ R∗
2, queremos ver que (y1, y3) ∈R∗
1\R∗2. Que (y1, y3) ∈ R∗
1 esta claro, pues en C se verifica E4. Queda probarque (y1, y3) 6∈ R∗
2. Supongamos que (y1, y3) ∈ R∗2, entonces, como (y2, y3) ∈
R∗2, por E2 se verifica que (y1, y2) ∈ R∗
2, lo cual es absurdo, luego (y1, y3) ∈R∗
1\R∗2,
Del mismo modo podemos verificar E5. c.q.d. /
Observacion 1.1.14 Podemos ampliar el concepto de estructura de prefer-encia asociada, al caso en que R∗
1 = ∅.El hecho de ser R∗
1 = ∅, indica que el decisor toma actitudes de indiferen-cia o duda pero no expresa preferencia por ninguna alternativa. La estructurade preferencia asociada sera (∅,R∗
2).Un caso particular de este tipo de estructura es la que expresa duda total,
y vendrıa representada por (∅, ∆).
11

Dadas dos relaciones binarias R y S en Y , a su estructura de preferenciaasociada le llamaremos directamente (R1,R2), si no existe ambiguedad en lanotacion.
Podemos observar que el conjunto C, el cual se ha definido para con-struir esta estructura de preferencia asociada, es el conjunto de pares dondese manifiesta cierta coherencia racional, por parte del decisor, frente a lacomparacion de objetivos o consecuencias. Ası, asociar una estructura depreferencia a un par de relaciones, es incluir todos aquellos pares de alter-nativas que no verifican las reglas de coherencia racional, aparecidas en ladefinicion 1.1.7, en el subconjunto Rc
12, quedando en R1 y R2 solo aquellosante los cuales la postura del decisor sea coherente o consistente.
La estructura de preferencia asociada al problema del ejemplo 1.1.12 sera:
R1 = {(a, c), (a, d), (b, d)} = {�}R2 = {(a, a), (b, b), (c, c), (d, d)} = ∆ 6= {∼}
Si quisiesemos la cuaterna asociada a (R1,R2), tendrıamos que completaresas relaciones con las siguientes:
Rs1 = {(c, a), (d, a), (d, b)} = {≺}
Rc12 = {(a, b), (b, a), (b, c), (c, b), (c, d), (d, c)} 6= {?}
Observese, que hemos pasado a Rc12 los puntos de {∼} que transgredıan
la propiedad racional de la transitividad para la indiferencia.Veamos algunos ejemplos mas.
Ejemplo 1.1.15
1. La actitud del decisor frente al conjunto de objetivos que se describepor ‘cuanto mas en cada uno de ellos, mejor’, y que se denomina ordende Pareto (ejemplo 1.1.4.4), lleva asociada la siguiente estructura depreferencia, denotada por (R1P ,R2P ):
Suponiendo que Y ⊂ Rn, y que cada yi∈ Rn viene representado por
yi= (yi1, yi2, ..., yin) ,
12

R1P = {(y1, y
2) ∈ Y × Y : y1i ≥ y2i, ∀i = 1, ..., n y y
16= y
2}
R2P = {(y, y) ∈ Y × Y } = ∆
Si quisieramos la cuaterna asociada a (R1P ,R2P ), complementarıamosestas dos relaciones con Rs
1P y con aquella que representa la duda oindecision:
Rc12P = {(y
1, y
2) ∈ Y × Y : ∃i, j/y1i > y2i y y1j < y2j} .
2. Cuando el decisor logra establecer una jerarquıa entre todos los ob-jetivos, ordenandolos de tal forma, que el primero que aparece en elvector n–dimensional sea el mas importante y vayan disminuyendo enimportancia a medida que subimos en el orden de las coordenadas, sedefine el llamado orden lexicografico (ejemplo 1.1.4). Su estructurade preferencia asociada se representa por (R1L,R2L), y viene expresadapor:
R1L = {(y1, y
2) ∈ Y × Y : y11 > y21 o (y1i < y2i, i = 1, ..., k
e y1k+1 > y2k+1, k = 1, ..., n− 1)}R2L = ∆
En este caso, la cuaterna asociada a (R1L,R2L) se complementarıa conRs
1L y Rc12L = ∅. Esto significa que el decisor expresa, en cada caso, su
preferencia con racionalidad y sin dudas.
COMPLETITUD EN ESTRUCTURAS DE PREFER-ENCIA
La completitud, en el marco de las estructuras de preferencia, sera unapropiedad para indicar que tipo de actitudes toma el decisor frente al conjuntode objetivos o alternativas. Ası, podemos asegurar que R1 ∪ R2 ∪ Rc
12 y
13

Rs1 ∪ R2 ∪ Rc
12 son relaciones completas, pues la persona que decide, o bienprefiere una alternativa a la otra (R1 o Rs
1), o bien permanece indiferenteante ellas (R2), o duda o comete una incoherencia (Rc
12).
R1, y por tanto Rs1, sera completa cuando el decisor tenga un juicio preciso
sobre sus preferencias, y no permanezca ni indiferente ante las alterna-tivas ni dude entre ellas.
R2 sera completa cuando el decisor vea equivalentes todas las alternativasproporcionadas por el problema (en este caso, R2 = Y × Y ).
Rc12 sera completa cuando el decisor dude frente a todo par de alternativas,
salvo en el caso de la identidad, que le resultara indiferente.
Definicion 1.1.16 Una estructura de preferencia (R1,R2) se dice comple-ta cuando R1 ∪R2 (y, por tanto, Rs
1 ∪R2) sea una relacion completa.
Veamos algunas propiedades de la completitud, cuyas demostracionesomitimos por su sencillez.
Propiedades 1.1.17 Dada (R1,R2), estructura de preferencia sobre un es-pacio de objetivos Y , se verifica:
1. R1 ∪R2 (y, por tanto, Rs1 ∪R2) es completa sii 1 Rc
12 = ∅.
2. R1 ∪Rc12 (y, por tanto, Rc
1 ∪Rc12) es completa sii R2 = ∆.
3. R1 (y, por tanto, Rs1) es completa sii R2 = ∆ y Rc
12 = ∅.
4. R2 ∪Rc12 es completa sii R1 = ∅ (y, por tanto, Rs
1 = ∅).
El orden lexicografico (ejemplo 1.1.15.2) llevara, de este modo, asociadauna estructura de preferencia completa, pues, al ser R2L = ∆ y Rc
12L = ∅,R1L es completa y, por tanto, lo sera R1L ∪R2L
El siguiente resultado relaciona el concepto de completitud, cuando elespacio de objetivos es finito, con la posibilidad de encontrar una unica con-secuencia, o elemento de Y , optima para el decisor.
1En lo sucesivo, utilizaremos la abreviatura ‘sii’para indicar ‘si y solo si’.
14

Teorema 1.1.18 Sea Y un espacio de objetivos o consecuencias finito y(R1,R2) una estructura de preferencia sobre Y .
Si R1 es completa, existe un unico elemento y∗ ∈ Y tal que
(y, y∗) ∈ R1 ∀y ∈ Y, siendo y 6= y∗
.Demostracion. En esta demostracion utilizaremos la notacion clasica de� para referirnos a R1 y ∼ para referirnos a R2, teniendo siempre en cuentaque es a una estructura de preferencia (definicion 1.1.7) a la que nos referimos.
Sea Y = {y1, ..., yn} el espacio finito de consecuencias. Tomemos el ele-mento y1:
1. Si no existe yj tal que yj � y1, tomamos y∗ = y1, pues, al ser R1
completa, y1 � yj ∀j = 2, ..., n y, por tanto, ya estarıa probado elteorema.
2. Si existiese un yj � y1, harıamos el mismo razonamiento que se hahecho antes para y1, esta vez con yj, es decir,
Si no existiese un yk � yj, tomarıamos y∗ = yj, y
Si existiese un yk � yj, usarıamos yk para aplicar el proceso.
Como estudiamos un conjunto finito, llegaremos a la existencia de y∗, yasea agotando todos los elementos, o probando hasta un numero intermediode ellos.
Veamos la unicidad. Supongamos que hubiese dos elementos y∗1, y∗2 tales
que y∗1 � yj, para todo yj tal que yj 6= y∗1, e y∗2 � yj, para todo yj tal queyj 6= y∗2. Por tanto y∗1 = y∗2, pues, si no se verificase la igualdad, llegarıamosa un absurdo, al ser R1 asimetrica. c.q.d. /
Vamos a utilizar la siguiente terminologıa, respetando la notacion clasica:Si Y es un conjunto de objetivos o consecuencias, (R1,R2) una estructurade preferencia sobre Y e y0 ∈ Y :
El conjunto de las consecuencias u objetivos mejores que y0, respectoa (R1,R2), lo denotaremos por
{y0 ≺} = {y ∈ Y : (y0, y) ∈ Rs1 o (y, y0) ∈ R1}
15

El conjunto de las consecuencias u objetivos peores que y0, respecto a(R1,R2), lo denotaremos por
{y0 �} = {y ∈ Y : (y0, y) ∈ R1} o (y, y0) ∈ Rs1}
El conjunto de elementos de Y indiferentes a y0, respecto a (R1,R2),lo denotaremos por
{y0 ∼} = {y ∈ Y : (y0, y) ∈ R2}
Finalmente, el conjunto de elementos de Y que al compararlos con y0
producen indecision, respecto a (R1,R2), lo denotaremos por
{y0?} = {y ∈ Y : (y0, y) ∈ Rc12}
Frecuentemente, se utilizaran notaciones mixtas como
{y0 ∼≺ } = {y0 ≺} ∪ {y0 ∼}, {y0 ≺?} = {y0 ≺} ∪ {y0?} etc
Observese tambien, que la notacion utilizada, aunque no lo lleve explıcito,depende implıcitamente de la estructura de preferencia considerada en Y . Sinembargo, ha sido omitido para evitar excesiva complicacion en la notacion.
En Yu (1985, pg 17) se hace la siguiente observacion, que adaptaremos ala terminologıa de estructuras de preferencia:
Consideremos en Y = Rn la estructura de preferencia asociada al ordende Pareto (R1P ,R2P ). Utilizando la nomenclatura anterior y dado y
0∈ Rn,
{y0?} = {y ∈ Rn : ∃ j, i ∈ {1, ..., n}/y0j > yj e y0i < yi, y 6= y
0}
Este conjunto representara [1−2(1/2)n] de Rn; por tanto, se observa, quea medida que crece n, numero de objetivos, la region que representa la zonaindecisa respecto y
0de Rn crecera exponencialmente. Esto es logico, pues la
capacidad del decisor de discernir entre objetivos ira disminuyendo a medidaque estos aumentan.
16

1.2. ESTRUCTURAS DE PREFERENCIA
INDUCIDAS POR UNA FAMILIA DE
CONJUNTOS CONVEXOS
Supongamos que Y ⊂ Rn representa el espacio de objetivos o conse-cuencias de un problema de decision. Ademas, sea una familia de conjuntosconvexos
{P (y0)} y
0∈Y ,
verificando que y0∈ P (y
0) ∀y
0∈ Y , tal que las actitudes de preferencia (�)
e indiferencia (∼) (todas ellas en el sentido clasico), que manifiesta el decisoren dicho problema, vienen expresadas por:
y1� y
2⇔ y
1∈ y
2+ P (y
2) pero y
26∈ y
1+ P (y
1)
y1∼ y
2⇔ y
1∈ y
2+ P (y
2) y y
2∈ y
1+ P (y
1)
Definicion 1.2.1 Llamaremos estructura de preferencia inducida porla familia de conjuntos convexos {P(y
0)}y
0∈Y a (R1,R2)R,S (teorema
1.1.13), donde R = {�} y S = {∼}.
Esta definicion podrıa darse, sin utilizar un lenguaje propio de un prob-lema de decision, partiendo de dos relaciones binarias R y S definidas delmodo anterior, por la familia {P (y
0)}y
0∈Y .
Yu (1974) estudia, inicialmente, el caso particular en el que {≺} (puesel habla de ‘dominacion’y no de preferencia) viene expresada por una famil-ia {P (y
0)}y
0∈Y de conos convexos. Sin embargo, mas adelante, Bergstresser,
Charnes y Yu (1976) amplıan el estudio a una familia de conjuntos convexos.Su intencion era establecer un modelo que no perdiese gran parte de la infor-macion proporcionada por el decisor al analista. En Coladas (1979) tambienencontramos esta generalizacion.
Antes de continuar nuestro estudio, vamos a recoger algunas de las propiedadesde conos que pueden resultarnos utiles 2.
2Informacion mas detallada sobre este tema puede encontrarse en obras clasicas sobreanalisis convexo como Rockafellar (1970), Stoer y Witzgall (1970) y Robert y Varberg(1973), entre otras
17

CONOS
En primer lugar, veamos algunas definiciones basicas.
Definicion 1.2.2 Un cono en Rn es un conjunto C ⊂ Rn que verifica lapropiedad: αC ⊂ C, ∀α > 0.
Si, ademas, verifica la condicion: ∀α, β > 0/α+β = 1, αC +βC ⊂ C (deconjunto convexo), diremos que C es un cono convexo.
Un cono se dice apuntado cuando C∩(−C) = {0}. Esto equivale a decirque C no contiene subespacios no triviales.
Un cono poliedrico sera aquel que viene expresado por la ecuacion ma-tricial
C = {c ∈ Rn/AcT ≥ 0T} ,
donde A ∈Mm×n, es decir, que C es un poliedro.Estos conos poliedricos puede expresarse por
C = {m∑
i=1
aivi/ ai ≥ 0 ai ∈ R} .
Al conjunto V = {vi ∈ R i = 1, ...,m} se le denomina conjunto degeneradores, y al cono C se le denotara por C[V ].
Los generadores no tienen por que ser unicos, incluso se puede hablar deconjuntos de generadores con el menor numero de elementos posibles. A estosse les llama conjuntos minimales de generadores (Steuer (1986)).
Ejemplo 1.2.3 Sea el cono poliedrico
C = {(c1, c2) ∈ R2/2c1 + 3c2 ≥ 0 3c1 + 2c2 ≥ 0 } .
Tendremos queV = {(3,−2), (−2, 3)}
es un conjunto de generadores de C, como tambien lo es
V ′ = {(3,−2), (−2, 3), (1, 1)} .
En este caso, V es el conjunto minimal de generadores.
18

Definicion 1.2.4 Dado un subconjunto S ⊂ Rn, llamaremos polar de S, ylo denotaremos por S∗, al conjunto
S∗ = {x ∈ Rn/x · s ≥ 0, ∀s ∈ S} .
Algunas propiedades sobre conos polares pueden verse en Yu (1974),Bazaraa y Shetty (1976), Coladas (1979) o Yu (1985), entre otros 3.
Consideremos nuevamente las estructuras de preferencias inducidas poruna familia de conjuntos convexos. El siguiente resultado es una propiedadinteresante para el caso de una familia conica constante, es decir, P (y
0) = P
∀y0∈ Y , siendo P un cono convexo tal que 0 ∈ P .
Teorema 1.2.5 Sea (R1,R2)R,S una estructura de preferencia inducida poruna familia conica convexa y constante, cuyo cono contiene a 0 (P (y
0) = P
∀y0∈ Y y 0 ∈ P ). Se verifica que R1 = R y R2 = S.
.Demostracion Teniendo en cuenta que
y1R y
2⇔ y
1∈ y
2+ P pero y
26∈ y
1+ P
y1S y
2⇔ y
1∈ y
2+ P y y
2∈ y
1+ P ,
demostraremos que (R,S) es una estructura de preferencia.
En primer lugar, veamos que se verifica E1:
• R es asimetrica: si y1Ry
2, tenemos que y
1∈ y
2+ P pero y
26∈
y1+ P , con lo cual se verifica No [y
2Ry
1]
• R es transitiva: veamos que si y1Ry
2e y
2Ry
3, entonces y
1Ry
3,
que es equivalente a decir que y1∈ y
3+ P pero y
3/∈ y
1+ P .
y1− y
2∈ P e y
2− y
3∈ P , por verificarse y
1Ry
2e y
2Ry
3. Como
P es convexo, entonces,
3Alguno de ellos, como Yu o Coladas, utilizan como definicion de cono polar (−S∗).Ello se debe a que su estudio se hace bajo el punto de vista de la dominacion y no de lapreferencia, como se hace en esta memoria.
19

1
2(y
1− y
2) +
1
2(y
2− y
3) ∈ P ,
y esto significa, al ser P un cono, que y1− y
3∈ P .
Ademas, y3− y
16∈ P . Si se verificase que y
3− y
1∈ P , entonces,
como y2− y
3∈ P e y
1− y
2∈ P , al ser P convexo, tenemos que
y2−y
1∈ P e y
3−y
2∈ P , lo cual es absurdo, pues y
1Ry
2e y
2Ry
3.
Veamos que S verifica E2:
• Que S es reflexiva y simetrica se obtiene facilmente de la definicionde esta relacion binaria.
• S es transitiva: supongamos que y1Sy
2e y
2Sy
3. Veamos como
y1Sy
3, es decir, y
1− y
3∈ P e y
3− y
1∈ P . Esto se obtiene
facilmente de la definicion de S y del hecho de ser P convexo.
Por definicion de R y S obtenemos E3.
Finalmente, demostraremos E4, puesto que E5 se obtendrıa medianteun razonamiento analogo:
Si y1Ry
2e y
2Sy
3, tendremos que
y1∈ y
2+ P pero y
26∈ y
1+ P
y2∈ y
3+ P y y
3∈ y
2+ P
Aplicando la convexidad de P , obtenemos que y1− y
3∈ P . Ademas,
se observa, que y36∈ y
1+ P , ya que, si no se verificase esto ultimo,
deducirıamos, por un razonamiento ya empleado, que y2− y
1∈ P , y
esto es absurdo. Luego y1Ry
3.
c.q.d. /
A este tipo de estructura de preferencia se le llama estructura de pref-erencia conica constante.
20

Ejemplo 1.2.6 1. La estructura de preferencia asociada al orden de Pare-to (R1P ,R2P ) en Rn (ejemplo 1.1.15.1) es una estructura de preferenciaconica constante, definida por
P = {p = (p1, ..., pn) ∈ Rn/p 6= 0, pi ≥ 0 ∀i} .
2. Por otro lado, el orden lexicografico en Rn origina una estructura depreferencia conica constante (R1L,R2L) (ejemplo 1.1.15.2), definida por
P = {p = (p1, ..., pn) ∈ Rn/pi > 0 o (pi = 0, i < l; pl > 0, l = 2, ..., n)} .
Observese, que en el caso de una estructura de preferencia conica con-stante definida por un cono convexo y apuntado P , se verifica lo siguiente:
{y ≺} = (y + P−) ∩ Y {y �} = (y − P−) ∩ Y{y ∼} = ∆ ⊂ Y {y?} = (y + P ∗) ∩ Y ,
siendo P ∗ = P c\{0} (es decir, el complementario de P en Rn salvo el punto{0}) y P− = P\{0}.
Esta observacion nos permite deducir, que dado dos puntos y1, y
2∈ Y
tales que y1� y
2, la direccion d = y
1−y
2de Rn nos lleva a puntos preferentes
a y2, dentro del conjunto Y .Este ultimo resultado es de gran interes en nuestro estudio; es por ello
por lo que, mas adelante, (capıtulo 2) utilizaremos diversos conceptos de losaquı expuestos para definir aproximaciones a estructuras de preferencia quesatisfagan propiedades como la anterior.
1.3. ESTRUCTURAS DE PREFERENCIA
REPRESENTADAS MEDIANTE FUN-
CIONES DE VALOR
En esta seccion veremos dos formas de representar una estructura depreferencia a traves de funciones en el espacio de objetivos o consecuencias.
21

Definicion 1.3.1 Sea (R1,R2) una estructura de preferencia en el espaciode objetivos Y ⊂ Rn. Diremos que (R1,R2) tiene una representacionmediante una funcion de valor escalar sii existe una funcion v : Y ⊂Rn −→ R tal que:
(y1, y
2) ∈ R1 ⇔ v(y
1) > v(y
2)
(y1, y
2) ∈ R2 ⇔ v(y
1) = v(y
2)
Nuestra pregunta sera ahora: ¿Bajo que condiciones podrıamos garanti-zar la existencia de una funcion escalar que represente a una estructura depreferencia dada?
Una condicion fundamental es que Rc12 = ∅. Esto indica que las actitudes
del decisor, frente a las alternativas de que consta el problema, son de prefer-encia e indiferencia. No existe, por tanto, la duda ante ellas. De esta manera,la postura del decisor esta determinada completamente.
En el tratamiento que algunos autores, como Debreu (1959) o Fishburn(1970), dan en sus obras, clasicas sobre este problema, no se recoge explıcita-mente el hecho de que Rc
12 = ∅, aunque aparece de modo implıcito. En Chienet al. (1989) se recoge recientemente esta condicion, la cual viene expresadapor {?} = ∅, donde {?} representa pares de alternativas frente a las cuales el‘decisor’cree poseer duda.
Teorema 1.3.2 (DEBREU). Sea (Y, τ), Y ⊂ Rn, un espacio de objetivosdotado de una topologıa (por lo general, la natural de Rn). Las siguientescondiciones son suficientes para que una estructura de preferencia (R1,R2)sobre Y tenga una representacion mediante una funcion de valor escalarcontınua:
D1: Rc12 = ∅
D2: {y �}, {y ≺} ∈ τ ∀y ∈ Y 4.
D3: (Y, τ) es conexo y separable.
La demostracion de este teorema puede encontrarse en Debreu (1959).Este autor enuncia en su trabajo las condiciones D2 y D3, pero, ademas,
impone que las actitudes de preferencia e indiferencia, por parte del decisor,
4segun la terminologıa introducida al final de la seccion 1.1
22

constituyan una relacion binaria ( ∼� ) reflexiva, transitiva y completa. Estaultima condicion aparece dentro de nuestro teorema recogida en D1, ya quepor la proposicion 1.1.17.1, esto equivale a que R1 ∪ R2 sea completa. Porotra parte, es evidente que verifica las propiedades reflexiva y transitiva,pues estas ya aparecen recogidas en la definicion de estructura de preferencia(definicion 1.1.7).
Veamos ahora una representacion de una estructura de preferencia quegeneraliza a la funcion de valor escalar.
Definicion 1.3.3 Sea (R1,R2) una estructura de preferencia en el espaciode objetivos Y ⊂ Rn. Diremos que (R1,R2) tiene una representacionmediante una funcion de valor vectorial sii existe una funcion v ≡(v1, ..., vk) : Y ⊂ Rn −→ Rk (k < n) tal que:
(y1, y
2) ∈ R1 ⇔ v(y
1) 6= v(y
2) y vi(y1
) ≥ vi(y2) i = 1, ..., k
(y1, y
2) ∈ R2 ⇔ v(y
1) = v(y
2)
Esta representacion podrıamos haberla expresado del modo siguiente: Si(R1P ,R2P ) es la estructura de preferencia asociada al orden de Pareto en elespacio de objetivos v(Y ) ⊂ Rk,
(y1, y
2) ∈ R1 ⇔ (v(y
1), v(y
2)) ∈ R1P
(y1, y
2) ∈ R2 ⇔ (v(y
1), v(y
2)) ∈ R2P
Trabajos como los de Roberts (1979), Rıos-Insua (1980), Skulimowski(1985) y Rıos y Rıos-Insua (1986) han estudiado este tipo de representacion.
El siguiente resultado de representacion de una estructura de preferenciamediante una funcion de valor vectorial es una extension del aparecido enRıos-Insua (1980), en el caso topologico, a este planteamiento mas generalque constituye la nocion de estructura de preferencia.
Teorema 1.3.4 Sea (Y, τ), Y ⊂ Rn, un espacio de objetivos dotado de unatopologıa. Las siguientes condiciones son suficientes para que (R1,R2), es-tructura de preferencia sobre Y , tenga una representacion mediante una fun-cion de valor vectorial contınua:
23

1. (R1,R2) es una estructura de preferencia definida por:
R2 =k⋂
i=1
R2i
R1 = R\R2 donde R =⋂k
i=1(R1i ∪R2i) ,
siendo {(R1i,R2i)}i=1,...,k (k < n) una familia finita de estructuras depreferencia en Y , verificando las condiciones D1 y D2 del teorema 1.3.2
2. (Y, τ) es conexo y separable.
.Demostracion. Aplicando el teorema 1.3.2 a cada estructura de prefer-encia (R1i,R2i), i = 1, ..., k, ya que estas verifican las condiciones D1, D2 yD3 del citado teorema, obtendremos k funciones escalares contınuas
vi : Y ⊂ Rn −→ R ,
tales que :
(y1, y
2) ∈ R1i ⇔ vi(y1
) > vi(y2)
(y1, y
2) ∈ R2i ⇔ vi(y1
) = vi(y2) i = 1, ..., k .
Llamandov ≡ (v1, ..., vk) : Y ⊂ Rn −→ Rk ,
y teniendo en cuenta la definicion de R1 y R2 en 1, tendremos:
(y1, y
2) ∈ R1 ⇔ vi(y1
) ≥ vi(y2)) i = 1, ..., k pero v(y
1) 6= v(y
2)
(y1, y
2) ∈ R2 ⇔ v(y
1) = v(y
2) .
c.q.d. /
Estos dos ultimos teoremas (1.3.2 y 1.3.4) pueden ser enunciados en unespacio topologico general (Y, τ), aunque nosotros hemos preferido seguirconsiderando el espacio de objetivos como un subconjunto de Rn, ya quesera lo que aparezca en la practica.
Por otra parte, al encontrarnos en un espacio metrico como es Rn, lacondicion D3 del teorema 1.3.2 puede ser expresada mediante las dos condi-ciones siguientes:
24

D3’: R1P ⊂ R1
D3”: Si (y1, y
2) ∈ R1 y (y
2, y
3) ∈ R1, ∃λ, µ ∈ (0, 1) tal que
(λy1+ (1− λ)y
3, y
2) ∈ R1
(y2, µy
1+ (1− µ)y
3) ∈ R1 .
Estas condiciones aparecen, bajo la terminologıa clasica de preferencia eindiferencia en el decisor (�,∼), en Fishburn (1970). La relacion entre D3 yD3’
–D3” se recoge en Yu (1985). La generalizacion de estas condiciones,cuando la estructura de preferencia es representada mediante una funcionde valor vectorial, aparece en Rıos-Insua (1980), tambien con la notacionanterior.
Finalmente, observemos en el teorema 1.3.4 como la estructura de pref-erencia aquı definida, (R1,R2), a pesar de definirse a partir de estructurasde preferencia completas, {(R1i,R2i)}i=1,...,k, no es completa (Rc
12 6= ∅).De un modo mas general, si tenemos una familia de estructuras de pref-
erencia {(R1i,R2i)}i∈I y definimos la estructura de preferencia (R1,R2) me-diante
R1 =⋂i∈I
R1i , R2 =⋂i∈I
R2i ,
no podemos extender este tipo de relaciones, mediante intersecciones, al casode Rc
12. Solo podemos asegurar que⋂i∈I
Rc12i ⊂ Rc
12 .
1.4. CONJUNTOS EFICIENTES PARA UNA
ESTRUCTURA DE PREFERENCIA
Hasta ahora, la informacion que proporciona el decisor sobre sus actitudesfrente a un problema, ha sido recogida, por parte del analista, en lo que seha llamado estructura de preferencia. En la seccion 1.3 hemos dado teoremasque nos permiten representar dichas estructuras, relacionandolas, ası, conla teorıa del valor. Nos queda, ahora, utilizar esa informacion para obtener
25

aquellas alternativas que sean optimas a la persona que decide. Esto nos llevaa dos definiciones de lo que, en terminos generales, llamaremos eficiencia.
Definicion 1.4.1 Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn.Diremos que y
0∈ Y es un punto eficiente 5 respecto de (R1,R2) en Y , si
6 ∃y ∈ Y tal que (y, y0) ∈ R1 , es decir, {y
0≺} = ∅ .
Esta condicion se puede expresar de forma equivalente por
1. ∀y ∈ Y (y, y0) ∈ Rs
1 ∪R2 ∪Rc12
2. ∀y ∈ Y (y0, y) ∈ R1 ∪R2 ∪Rc
12
3. 6 ∃y ∈ Y /(y0, y) ∈ Rs
1
Denominaremos conjunto eficiente al conjunto de todos los puntos efi-cientes respecto de (R1,R2) en Y . Se denotara por
ξ(Y, (R1,R2)) .
En el ejemplo 1.1.12, una vez definida la estructura de preferencia (R1,R2),tendrıamos que
ξ(Y, (R1,R2)) = {(a, b)} .
El concepto de conjunto eficiente juega, como es obvio, un papel cen-tral en los Problemas de Decision Multiobjetivo y, aunque sus propiedades,caracterısticas y representaciones son numerosas (ver, por ejemplo, White(1982)), nuestro interes se centrara en aquellas que nos permitan, a travesde algoritmos, la determinacion de dicho conjunto.
Trabajos en los que se encuentran desarrolladas propiedades de la eficien-cia son, entre otros, Coladas (1979), Hazen, Morin (1983) y Sawaragi et al.(1985).
Veamos ahora un concepto de eficiencia mas restrictivo que el establecidoen la definicion 1.4.1 (ver Chien et al. (1989))
5En la literatura aparece con otros nombre, como ‘punto no dominado’, ‘optimal dePareto’, etc.
26

Definicion 1.4.2 Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn.Diremos que y∗ ∈ Y es un punto eficiente estricto respecto de (R1,R2)en Y , si
6 ∃y ∈ Y tal que (y, y∗) ∈ R1 ∪Rc12 , es decir, {y∗ ≺?} = ∅ .
Igual que para la definicion anterior, esta condicion puede ser expresadade modo equivalente por
1. ∀y ∈ Y, (y, y∗) ∈ Rs1 ∪R2
2. ∀y ∈ Y, (y∗, y) ∈ R1 ∪R2
3. 6 ∃y ∈ Y / (y∗, y) ∈ Rs1 ∪Rc
12
Denominaremos conjunto eficiente estricto al conjunto de todos lospuntos eficientes estrictos respecto de (R1,R2) en Y , y lo denotaremos por
ξ∗(Y, (R1,R2)) .
Observese, que los puntos eficientes estrictos son aquellos que no estandominados ( {y ≺} = ∅) y, ademas, no producen en el decisor la actitud deduda o indecision (?) frente a otra alternativa.
En el ejemplo 1.1.12:
ξ∗(Y, (R1,R2)) = ∅ .
Los siguientes resultados nos relacionan los dos conjuntos eficientes definidosanteriormente.
Proposicion 1.4.3 Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn.Se verifica que
ξ∗(Y, (R1,R2)) ⊂ ξ(Y, (R1,R2)) .
La demostracion se obtiene directamente de las definiciones
Proposicion 1.4.4 Sea (R1,R2) una estructura de preferencia completa enY ⊂ Rn. Se verifica que
ξ∗(Y, (R1,R2)) = ξ(Y, (R1,R2)) .
27

.Demostracion Por la proposicion 1.1.17.1, al ser completa (R1,R2), severifica que Rc
12 = ∅, luego
∀ y ∈ Y, {y?} = ∅ .
Sea y ∈ ξ(Y, (R1,R2)). Por definicion, esto es equivalente a que {y ≺} = ∅,luego
{y ≺?} = {y ≺} ∪ {y?} = ∅y, por tanto,
y ∈ ξ∗(Y, (R1,R2)) .
c.q.d. /
Observese, que el orden lexicografico origina una estructura de preferencia(R1L,R2L) (ejemplo 1.1.15.2) en donde ξ∗(Y, (R1L,R2L)) = ξ(Y, (R1L,R2L)).Esta igualdad tambien se verifica para las estructuras de preferencia repre-sentadas por una funcion de valor escalar (definicion 1.3.1).
Una localizacion inicial en Y de los dos conjuntos anteriores viene dadapor los siguientes resultados.
Consideremos Y con la topologıa natural de Rn
Proposicion 1.4.5 Sea (R1,R2) una estructura de preferencia en Y . Si∀y
0∈ Y {y
0 ∼� } no es un entorno de y0, entonces
ξ∗(Y, (R1,R2)) ⊂ δY .
.Demostracion Consideremos y0∈ ξ∗(Y, (R1,R2)), ya que si ξ∗(Y, (R1,R2)) =
∅ la afirmacion serıa evidente. Se verifica, entonces, que {y0≺?} = ∅ (defini-
cion 1.4.2). Supongamos que y06∈ δY . Por tanto,
y0∈
◦Y ,
es decir, podemos encontrar un entorno V de y0, tal que y
0∈ V ⊂ Y . Como
{y0 ∼� } = Y , al ser {y
0≺?} = ∅, resulta que y
0∈ V ⊂ {y
0 ∼� }, lo cual esabsurdo. c.q.d. /
Proposicion 1.4.6 Sea (R1,R2) una estructura de preferencia en Y . Si∀y
0∈ Y, {y
0 ∼� ?} no es un entorno de y0, entonces
ξ(Y, (R1,R2)) ⊂ δY .
28

La demostracion de este resultado es analoga a la del anterior.
Estas ultimas proposiciones proceden de modificar ciertos resultados apare-cidos en Casares de Cal (1989), transcribiendolos a la terminologıa de estruc-tura de preferencia.
CONJUNTOS EFICIENTES PARA LA ESTRUCTURADE PREFERENCIA ASOCIADA AL ORDEN DE PARE-TO
Veamos algunos resultados que nos permitiran el calculo de conjuntoseficientes para este tipo de estructuras. Solucionamos, en primer lugar, elproblema para el caso del conjunto eficiente estricto.
Proposicion 1.4.7 Sea (R1P ,R2P ) la estructura de preferencia asociada alorden de Pareto en Y ⊂ Rn. Se verifica que
ξ∗(Y, (R1P ,R2P )) = ∅ o ξ∗(Y, (R1P ,R2P )) = {y∗} ,
donde y∗ = (y∗1, ..., y∗n) se define como
y∗i = maxy ∈ Y
pri(y), i = 1, ..., n
(pri representa la funcion proyeccion i–esima en Rn).
.Demostracion Supongamos que ξ∗(Y, (R1P ,R2P )) 6= ∅ y sea
y0≡ (y01, ..., y0n) ∈ ξ∗(Y, (R1P ,R2P )) .
Entonces, por definicion, {y0≺P ?} = ∅.
Teniendo en cuenta como esta definido Rs1P y Rc
12P (ejemplo 1.1.15.1),∀y ≡ (y1, ..., yn) ∈ Y se verifica y0i ≥ yi, i = 1, ..., n. Por tanto
y0i = maxy ∈ Y
yi = maxy ∈ Y
pri(y) ,
es decir y0
= y∗, c.q.d. /
29

El punto y∗ recibe el nombre de punto ideal o punto utopıa para Y .
Introducimos la siguiente notacion, que nos ayudara a enunciar las proxi-mas proposiciones sobre la localizacion de conjuntos eficientes:
Λ> = {d ∈ Rn/di > 0 i = 1, ..., n}Λ≥ = {d ∈ Rn/di ≥ 0 i = 1, ..., n}\{0}
Λ>= = {d ∈ Rn/di ≥ 0 i = 1, ..., n}
Impongamos, ademas, la condicion de que Y sea un conjunto cerrado 6.
Proposicion 1.4.8 Sea (R1P ,R2P ) la estructura de preferencia asociada alorden de Pareto en Y ⊂ Rn. Se verifica que y
0∈ ξ(Y, (R1P ,R2P )) sii y
0es
la unica solucion de algun programa de la forma
max pri(y)
s.a. y ∈ Yi(y0) ,
dondeYi(y0
) = {y ∈ Y/yk ≥ y0k, k 6= i, k = 1, ..., n} ,
y ≡ (y1, ..., yn) e y0≡ (y01, ..., y0n)
Proposicion 1.4.9 Sea (R1P ,R2P ) la estructura de preferencia asociada alorden de Pareto en Y ⊂ Rn.
1. Si y0∈ Y es solucion de algun programa de la forma
maxn∑
i=1
λipri(y)
s.a. y ∈ Y ,
siendo λ ≡ (λ1, ..., λn) ∈ Λ>, entonces
y0∈ ξ(Y, (R1P ,R2P )) .
6Esta condicion es equivalente a decir que δY ⊂ Y , lo cual es indispensable para quelos conjuntos eficientes, estudiados en los siguientes resultados, no sean vacıos de partidaa causa de las propiedades topologicas de Y .
30

2. Si y0∈ Y es la unica solucion de algun programa de la forma
maxn∑
i=1
λipri(y)
s.a. y ∈ Y ,
siendo λ ≡ (λ1, ..., λn) ∈ Λ≥, entonces
y0∈ ξ(Y, (R1P ,R2P )) .
Proposicion 1.4.10 Sea (R1P ,R2P ) la estructura de preferencia asociadaal orden de Pareto en Y ⊂ Rn. Se verifica:
y0∈ ξ(Y, (R1P ,R2P ))
sii para algun i ∈ {1, ..., n}, existen n− 1 constantes
r(i) = {rk/k 6= i k = 1, ..., n} ,
tales que y0
es la solucion unica del programa:
max pri(y)
s.a. y ∈ Y (r(i)) ,
siendo y ≡ (y1, ..., yn) y Y (r(i)) = {y ∈ Y/yk ≥ rkk 6= i, k = 1, ..., n}
Las demostraciones de estas tres ultimas proposiciones se encuentran enYu (1985) 7. Los enunciados, en nuestro caso, han sido transcritos a la ter-minologıa de estructura de preferencia.
Observese, que el problema de localizar el conjunto eficiente para la es-tructura de preferencia asociada al orden de Pareto, ha sido tratado en unascondiciones generales en cuanto al espacio de objetivos Y se refiere. En Yu(1985) se estudia la eficiencia en el orden de Pareto bajo ciertas condicionesparticulares de Y , por ejemplo, distintas condiciones de convexidad, com-pacidad, etc. Estas no son recogidas en esta memoria.
7Pagina 24, teoremas 3.4, 3.5 y 3.6 respectivamente.
31

CONJUNTOS EFICIENTES PARA ESTRUCTURASDE PREFERENCIA REPRESENTADAS POR UNAFUNCION DE VALOR ESCALAR
Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn representada poruna funcion de valor escalar
v : Y ⊂ Rn −→ R .
Se observo anteriormente que, al ser (R1,R2) completa,
ξ∗(Y, (R1,R2)) = ξ(Y, (R1,R2)) .
Se verifica el siguiente resultado.
Proposicion 1.4.11 Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn
representada por una funcion de valor escalar
v : Y ⊂ Rn −→ R .
y0∈ ξ(Y, (R1,R2)) sii y
0es solucion del programa de la forma
max v(y)
s.a. y ∈ Y ,
Su demostracion es sencilla a partir de la definicion de una estructurade preferencia representada por una funcion de valor escalar y del conjuntoeficiente.
Este ultimo programa es un problema de optimizacion clasico, para el quehay un buen numero de metodos de solucion.
CONJUNTOS EFICIENTES PARA LA ESTRUCTURADE PREFERENCIA ASOCIADA AL ORDEN LEXI-COGRAFICO
32

Sea (R1L,R2L) la estructura de preferencia asociada al orden lexicograficosobre Y ⊂ Rn (ejemplo 1.1.15.2). Al ser completa, se verifica, como en el casoanterior, que
ξ∗(Y, (R1L,R2L)) = ξ(Y, (R1L,R2L)) .
El siguiente resultado soluciona, para este caso, el problema de localizarel conjunto eficiente.
Proposicion 1.4.12 y0∈ ξ(Y, (R1L,R2L)) sii y
0es solucion de la familia
de programas {Pk}nk=1, definidos de la siguiente forma:
[Pk] max prk(y)
s.a. y ∈ Dk−1 ,
siendo Dk−1 las soluciones del programa Pk−1 y D0 = Y .
CONJUNTOS EFICIENTES PARA ESTRUCTURASDE PREFERENCIAS CONICAS CONSTANTES
Para establecer condiciones necesarias y suficientes que caractericen estosconjuntos, vamos a imponer a P ser un cono poliedrico, tal que Cl(P ) seaapuntado (cono agudo) y su polar P ∗ este generado por un conjunto finitode vectores {h1, ..., hr} ∈ Rn. Definamos
Z = {z ∈ Rr/ zT = HyT siendo y ∈ Y } ,
donde H es la matriz de dimension r×n que tiene en su fila k-esima al vectorhk.
El siguiente teorema se usara como punto de partida en resultados pos-teriores.
Teorema 1.4.13 Sea (R1,R2) una estructura de preferencia conica con-stante de cono P con las propiedades expuestas anteriormente.
1. y0∈ ξ(Y, (R1,R2)) sii
zT0 = HyT
0∈ ξ(Z, (R1P ,R2P )) ,
siendo (R1P ,R2P ) la estructura de preferencia asociada al orden dePareto en Z ⊂ Rr
33

2. y0∈ ξ∗(Y, (R1,R2)) sii
(z∗0)T = HyT
0,
donde z∗ ≡ (z∗1 , ..., z∗r ) es el punto ideal para Z ⊂ Rr.
.Demostracion.
1. “⇒” Lo demostraremos por reduccion al absurdo. Supongamos quez0 6∈ ξ(Z, (R1P ,R2P )). Existe , por tanto,
z ∈ Z, z 6= z0/ (z, z0) ∈ R1P .
Esto es equivalente a decir que z ≥P z0, en donde ≥P representa ladesigualdad en cada una de las componentes. Luego existe un elementoy ∈ Y tal que HyT ≥P HyT
0, o lo que es lo mismo,
H(y − y0)T ≥P 0 .
Ello significa que y−y0∈ P , por definicion de cono polar y de la matriz
H. Por tanto,y ∈ y
0+ P ,
que es equivalente a decir
(y, y0) ∈ R1 ,
con lo cual {y0≺} 6= ∅, que es absurdo.
“⇐” Nuevamente, por reduccion al absurdo, supongamos que y06∈
ξ(Y, (R1,R2)). Existe entonces y, tal que y ∈ {y0≺}, es decir, y−y
0∈
P\{0}. Por tanto, H(y − y0)T ≥P 0, que expresado de otro modo nos
dice que HyT ≥P HyT0. Por tanto
z0 6∈ ξ(Z, (R1P ,R2P )) ,
que es absurdo. c.q.d.
2. “⇒” Consideremos y0∈ ξ∗(Y, (R1,R2)). Se verifica que {y
0≺?} = ∅,
por tanto {y0�} = Y \∆. Podemos asegurar entonces que
∀y 6= y0
y0∈ y + P ,
34

es decir,HyT
0≥P HyT = zT ,
por lo tantoHyT
0= z∗T ,
siendo z∗ el punto ideal en Z.“⇐” Si HyT
0= z∗T , siendo zT punto ideal en Z, entonces
HyT0≥P Hy∗ ∀y 6= y
0∈ Y .
Por tanto H(y − y0)T ≥P 0T y esto significa que
y0− y ∈ P ∀y ∈ Y, y 6= y
0.
Concluimos ası que y0∈ ξ∗(y, (R1,R2)), pues {y
0�} = Y \∆ y, por
ello, {y0≺?} = ∅ c.q.d. /
Con este teorema, hemos solucionado el problema para conjuntos efi-cientes estrictos en estructuras conicas constantes de preferencia, remitiendonosal caso ya estudiado de estructuras de preferencias asociadas al orden de Pare-to. Ademas, nos permite enunciar los proximos resultados para conjuntos efi-cientes, los cuales son analogos a los ya estudiados en el caso de estructurasde preferencia asociadas al orden de Pareto.
Proposicion 1.4.14 Sea (R1,R2) una estructura de preferencia conica con-stante de cono P con las hipotesis impuestas inicialmente. Se verifica que
y0∈ ξ(Y, (R1,R2))
sii para algun i ∈ {1, ..., r}, y0
es solucion unica del programa
max hi · ys.a. y ∈ Yi(y0
) ,
siendo
Yi(y0) = {y ∈ Y/hk · y ≥ hk · y0
, k 6= i, k = 1, ..., r} .
35

Proposicion 1.4.15 Sea (R1,R2) una estructura de preferencia conica con-stante en las condiciones anteriores.
1. Si y0∈ Y maximiza λ ·HyT sobre Y para algun λ ∈ Λ> ⊂ Rr, entonces
y0∈ ξ(Y, (R1,R2))
2. Si y0∈ Y es el unico punto que maximiza la expresion λ · HyT sobre
Y para algun λ ∈ Λ≥, entonces
y0∈ ξ(Y, (R1,R2))
Proposicion 1.4.16 Sea (R1,R2) una estructura de preferencia como en losenunciados anteriores. Una condicion necesaria y suficiente para que y
0∈
ξ(Y, (R1,R2)) es que para algun i ∈ {1, ..., r} existan r − 1 constantes
C(i) = {ck/k 6= i, k = 1, ..., r} ,
tal que y0
sea solucion unica del programa
max hi · ys.a. y ∈ Y (C(i)) ,
dondeY (C(i)) = {y ∈ Y/yk ≥ ck k 6= i, k = 1, ..., r} .
Las demostraciones de las proposiciones anteriores, no desarrolladas eneste trabajo, utilizan el teorema 1.4.13 junto con las proposiciones 1.4.8, 1.4.9y 1.4.10, respectivamente.
Si al construir una funcion de valor que represente una estructura depreferencia, se utilizase lo que en Keeny y Raiffa (1976) se denomina tasa deintercambio, la intuicion nos lleva a eliminar aquellos puntos del espacio deobjetivos que posean tasas no acotadas. Esto origina el concepto de puntopropiamente eficiente, introducido por Kuhn y Tucker (1951) y desar-rollado, mas adelante, por Geoffrion (1968) y Benson (1977), entre otros.Nosotros no trataremos, sin embargo, dicho concepto en esta memoria.
36

En Yu (1985), igual que ocurre para el orden de Pareto, se estudia la efi-ciencia en estructuras de preferencias conicas constantes bajo ciertas condi-ciones particulares de Y (condiciones de compacidad, convexidad, ...) que,sin embargo, no hemos recogido en este estudio.
Finalmente, nos quedarıa estudiar la eficiencia en casos mas generalescomo en estructuras de preferencia inducida por una familia de conjuntosconvexos, o en estructuras representadas por una funcion de valor vectorial. Este analisis se realizara, en la medida que corresponda, en el capıtulo 2,dedicado a unas estructuras de preferencia mas generales, como son las �V−preferencias
37

Capıtulo 2
Aproximaciones de estructurasde preferencia
Cuando en un proceso de decision el conjunto de alternativas es muynumeroso (por ejemplo, un conjunto contınuo), obtener de modo exacto laestructura de preferencia que clasifique las actitudes del decisor es practica-mente imposible. Una primera solucion al problema se describe en la seccion2.1 con las llamadas �V−preferencias (definicion 2.1.3). Estas forman unaclase particular de estructuras de preferencia cuya utilidad, en muchos casos,consiste en reemplazar a otras que no posean representacion analıtica, seadifıcil de obtener o sea difıcil de manejar. Es por ello por lo que son tratadasen este capıtulo dedicado a la aproximacion.
En la seccion 2.2 se introduce el concepto mas sencillo de aproximacionlineal: una cuaterna de relaciones binarias cuya conexion entre ellas es aprox-imar, bajo ciertas condiciones de linealidad, a la cuaterna asociada a una es-tructura de preferencia. Las definiciones dadas en 2.2.5, 2.2.6 y 2.2.7 muestranlas tres clases posibles de dichas aproximaciones: las estructuras de aproxi-macion lineal inferior, superior y local, respectivamente.
La seccion 2.3 analiza la relacion existente entre estructuras de aproxi-macion lineal y las �V−preferencias, definidas al inicio del capıtulo.
Finalmente, en las secciones 2.4 y 2.5, se describen las aproximacioneslineales a las �V−preferencias, atendiendo a si el espacio de objetivos es R2
o Rn (n > 2), respectivamente.
38

2.1. ESTRUCTURAS DE PREFERENCIA
REPRESENTADAS MEDIANTE FAMIL-
IAS DE FUNCIONES ESCALARES: �V−PREFERENCIAS
En el primer capıtulo se introdujo el concepto de estructura de prefer-encia representada por una funcion de valor vectorial v (definicion 1.3.1).Este puede ser un primer ejemplo de representacion mediante una familia defunciones escalares, considerando como elementos de la familia a las compo-nentes de v.
En esta definicion aparece como condicion, que la dimension del espaciovectorial donde esta contenido el dominio de la funcion vectorial, n, sea mayorque la del espacio donde esta contenido el rango, k. Esto respeta el sentidohistorico del concepto, utilizado por autores como los ya citados Roberts,Rıos, Rıos–Insua, Skulimowsky, etc. La funcion de valor vectorial aparece enaquellos problemas en los que el decisor no proporcina informacion suficientecomo para poder representar sus preferencias mediante una funcion de valorescalar. Sin embargo, esta puede utilizarse para remodelar, en cierto modo,el espacio de objetivos, logrando bajar su dimension.
Podemos plantearnos la generalizacion de este concepto desde una moti-vacion estrictamente teorica, utilizando para representar ciertas estructurasde preferencia familias de funciones escalares 1 cuyo cardinal no este someti-do a ningun tipo de restriccion. La necesidad de dicha generalizacion ven-dra tambien reforzada, ahora desde una perspectiva practica, con los sigu-ientes resultados y ejemplo enunciados a continuacion.
Proposicion 2.1.1 Sea (R1,R2) una estructura de preferencia conica con-stante en Rn de cono P , poliedrico y convexo. Sea {l∗1, ..., l∗p} un conjuntominimal de generadores de P ∗, siendo l∗i = (l∗i1, ..., l
∗in) i = 1, ..., p. Si lla-
mamos li(y) a la funcion lineal sobre Rn definida por
li(y) = l∗i1y1 + ... + l∗inyn i = 1, ..., p
y l(y) a la funcion vectorial
1No hemos utilizado el termino funcion de valor vectorial, pues, cuando k ≥ n, estaterminologıa carece de sentido.
39

l(y) = (l1(y)...lp(y)) ,
tendremos que:
(y1, y
2) ∈ R1 ⇔ li(y1
) ≥ li(y2) ∀i = 1, ..., p pero l(y
1) 6= l(y
2)
(y1, y
2) ∈ R2 ⇔ li(y1
) = li(y2)
.Demostracion. Por ser (R1,R2) una estructura de preferencia conica decono P , se verifica:
(y1, y
2) ∈ R1 ⇔ y
1− y
2∈ P pero y
2− y
16∈ P .
Esto equivale a lo siguiente:
l∗i · (y1− y
2) ≥ 0 ∀i = 1, .., p
⇐⇒ l∗i · y1≥ l∗i · y2
∀i = 1, ..., p ⇐⇒ li(y1) ≥ li(y2
)
∀i = 1, ..., p. Sin embargo, l(y1) 6= l(y
2) pues y
2− y
16∈ P .
Por otro lado
(y1, y
2) ∈ R2 ⇐⇒ y
1− y
2∈ P e y
2− y
1∈ P .
Y esto, debido al razonamiento que se ha hecho anteriormente, equivalea que
l(y1) = l(y
2) ,
c.q.d. /
Con este resultado, vemos la posibilidad de representar estructuras depreferencia conicas constantes mediante familias de funciones escalares cuyocardinal puede llegar a ser igual a la dimension del espacio donde esta con-tenido el conjunto de objetivos o consecuencias.
Veamos ahora un ejemplo adaptado de otro que aparece en Yu (1985).
40

Ejemplo 2.1.2 Un trabajador informa, ante la posibilidad de elegir entrevarias ofertas de empleo, que no le importarıa trabajar en domingo si lepagasen al menos $ 50 por hora.
El analista, en este caso, construye el espacio de objetivos Y ⊂ R2, endonde, para cada y ≡ (y1, y2) ∈ Y , y1 representa el “tiempo de ocio” (en ho-ras) e y2 el “beneficio economico” (tomando como unidad los $ 50). Veamosdos caminos diferentes a traves de los cuales podremos concluir que la es-tructura de preferencia de dicho trabajador, sobre las ofertas de empleo, esuna estructura conica constante.
Primer caminoVamos a describir aquı lo que usualmente se ha hecho con este tipo de
problemas, sin utilizar, para ello, la terminologıa de estructura de preferencia2. El analista supone que las preferencias del decisor estarıan representadasmediante una hipotetica funcion de valor escalar desconocida v0. La informa-cion de que dispone es insuficiente como para construir esta. Sin embargo, lepermite definir una familia V de funciones que la contendra. A partir de V ,se puede dar una ‘aproximacion’de las preferencias del decisor del siguientemodo (Hazen (1988)):
y1� y
2⇔ ∀v ∈ V v(y
1) > v(y
2), siendo y
1, y
2∈ Y .
Es decir, para representar la preferencia hacia y1, manifestada por el decisor
una vez comparada con y2, que es equivalente a decir que v0(y1
) > v0(y2),
imponemos esta condicion a todos los elementos de V , ya que sabemos quev0 ∈ V .
Tambien podemos aproximar la indiferencia de la siguiente manera:
y1∼ y
2⇐⇒ ∀v ∈ V v(y
1) = v(y
2), siendo y
1, y
1∈ Y .
En nuestro caso, la informacion proporcionada por el trabajador llevarıaa que la hipotetica funcion de valor es aditiva. En base a esto, dicha funcionserıa del tipo
vλ(y) = λ1y1 + λ2y2 ,
2Ası aparece tratado en Yu (1985).
41

donde λ = (λ1, λ2) pertenece al cono
K = {(λ1, λ2) :λ1
λ2
≥ 1 , λ1 > 0, λ2 > 0} .
De esta forma, la preferencia en Y vendrıa expresada por el siguienteorden conico constante:
y1 � y2 ⇔ ∀v ∈ V v(y1) > v(y2) ⇔ y1− y
2∈ K∗ .
Hazen (1988) estudia una generalizacion del problema, suponiendo paraello que V no definiese una preferencia representada por un orden conicoconstante en Y . En el citado trabajo el autor consigue reducir el problemaal caso conico, sumergiendo a Y en un espacio de dimension mayor que eloriginal.
Observese, que este primer camino utilizado no tendrıa fundamento, si envez de considerar preferencia e indiferencia en el sentido clasico hubiesemosutilizado el concepto de estructura de preferencia.
En primer lugar, no podrıamos suponer la existencia de una funcion devalor escalar v0 que representase dicha estructura, pues sabemos (teorema1.3.2), que la condicion indispensable para ello es que Rc
12 = ∅ 3 (es decir,(R1,R2) completa), y esto, en nuestro caso, no se verifica.
Por otra parte, en este supuesto, la duda o indecision se manifiesta comola incapacidad de construir la funcion v0, debida a una informacion insu-ficientemente extensa o detallada (problemas con informacion parcial). Sinembargo, la duda frente a alternativas, como componente de una estructurade preferencia (Rc
12), es una actitud mas, consciente o inconsciente, por partedel decisor, y por tanto, parte significativa dentro de la informacion propor-cionada al analista.
El segundo camino para tratar el problema incorpora un concepto funda-mental en nuestro estudio, como es la estructura de preferencia.
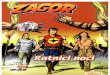
Segundo caminoEn este caso, el analista fija un punto arbitrario y0 = (y0
1, y02) ∈ Y e
intenta extraer informacion acerca de las actitudes del decisor ante ese puntoy el resto de las alternativas.
3{?} = ∅, Chien et al. (1989).
42

-
6
II
III
y01
y1
y02
y2
y01
y0
Figura 2.1:
En nuestro ejemplo, la informacion proporcionada por el trabajador noslleva a que {y0 ≺} es aproximadamente el conjunto que aparece subrayadoen la figura 2.1.
Como la informacion que proporciona el trabajador es global y no dependedel y
0tomado, tenemos que la aproximacion del conjunto preferido es igual
para todos los elementos del conjunto Y .Del mismo modo, podemos representar la aproximacion del conjunto dom-
inado y de duda respecto de y0mediante las figuras 2.2 y 2.3, respectivamente.
Para el conjunto indiferente tenemos que {y0 ∼} = {y0} ∀y0 ∈ Y .
A la vista de esto, puede concluirse que la estructura de preferencia(R1,R2) del trabajador frente a las ofertas de empleo es conica constantede cono
P = {(d1, d2) ∈ R2/d2 ≥ 0 d1 + d2 ≥ 0} .
Como {(0, 1), (1, 1)} es un conjunto minimal de generadores de P ∗, laproposicion 2.1.1 nos dice que esta estructura de preferencia viene represen-tada por la familia de funciones lineales
V = {v1, v2} ,
donde
v1 : Y ⊂ R2 −→ R v2 : Y ⊂ R2 −→ R(y1, y2) −→ y2 (y1, y2) −→ y1 + y2 .
43

-
6
II
III
y2
y1
y0
{y0 �}
Figura 2.2:
-
6
II
III
II
III
y0
y2
y1
{y0?}
Figura 2.3:
44

White (1972) estudia ciertas aproximaciones lineales a los conjuntos {y0 �} e {y0? ∼}. Su estudio esta basado en modificaciones a resultados aparecidosen los trabajos de Luce (1956) y Aumann (1962). Sin embargo, desde nuestropunto de vista, algunas objeciones al trabajo de White son las siguientes:
1. No distingue entre las actitudes de duda e indiferencia. De hecho, en-globa a ambas dentro de una relacion binaria que denota por I.
2. Establece hipotesis restrictivas para las preferencias, con la finalidadde obtener aproximaciones lineales constantes. Ası, al estar trabajandoen R2, crea un par de familias de rectas paralelas (dos direcciones enR2), de forma que son las intersecciones de estas las que aproximan alos conjuntos preferentes, dominados e indecisos.
3. Restringe su analisis exclusivamente a las aproximaciones lineales.
Posteriormente, Yu (1974) trata el problema de aproximaciones linealesmediante la terminologıa de conos de direcciones de preferencia, de domi-nacion e indiferencia 4. Este planteamiento se recogera mas adelante, en estamemoria, bajo la perspectiva de la estructura de preferencia, unificandolo,en cierta forma, con el estudio de White.
Observese, que tanto en el resultado 2.1.1 como en el ejemplo 2.1.2, apare-cen estructuras de preferencia representadas por una familia V de funciones.Esto nos lleva a definir el proximo concepto, el cual puede ser consideradocomo una generalizacion de las estructuras de preferencia representadas poruna funcion de valor vectorial.
Definicion 2.1.3 Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn yV una familia de funciones de clase Ck(Rn). Diremos que (R1,R2) es una�V− preferencia de clase k 5 , si (R1,R2) = (R1,R2)R,S , donde
y1Ry
2⇔ v(y
1) ≥ v(y
2) ∀v ∈ V
y1Sy
2⇔ v(y
1) = v(y
2) ∀v ∈ V .
Un ejemplo de �V− preferencia es la estructura de preferencia asociadaal orden Pareto en Rn (R1P ,R2P ), en donde V = {pr1, pr2, ..., prn}, siendopri la proyeccion i-esima en Rn.
4En Chien et al. (1989) se amplıa con direcciones de indecision.5Cuando sea de clase 1, se denominara simplemente �V− preferencia.
45

Las estructuras de preferencia conicas constantes y aquellas que poseenuna representacion mediante una funcion de valor vectorial seran tambien�V− preferencias segun se deduce de las consideraciones realizadas al prin-cipio del capıtulo.
Observese, que de la anterior definicion se obtiene la siguiente relaciondirecta entre la familia V y la cuaterna de relaciones binarias asociada a(R1,R2).
Proposicion 2.1.4 Sea (R1,R2) una �V− preferencia en Y ⊂ Rn. Se ver-ifica que:
y1R1y2
⇔ v(y1) ≥ v(y
2) ∀v ∈ V y ∃v′ ∈ V/v′(y
1) > v′(y
2)
y1Rs
1y2⇔ v(y
1) ≤ v(y
2) ∀v ∈ V y ∃v′ ∈ V/v′(y
1) < v′(y
2)
y1R2y2
⇔ v(y1) = v(y
2) ∀v ∈ V
y1Rc
12y2⇔ ∃v, v′ ∈ V/v(y
1) > v(y
2) y v′(y
1) < v(y
2)
.Demostracion Se obtiene de combinar las definiciones 1.1.8 y 2.1.3. /
Antes de pasar al siguiente epıgrafe, estudiemos ciertas relaciones binariasque pueden definirse en el conjunto de estructuras de preferencia sobre unespacio de objetivos Y . Estas constituiran una herramienta util en posterioresresultados.
RELACIONES ENTRE ESTRUCTURAS DE PREF-ERENCIA
Dado un espacio de objetivos Y ⊂ Rn, denotaremos por EY al conjuntode todas las estructuras de preferencia sobre Y .
Dadas (R1,R2) y (R′1,R′
2) pertenecientes a EY , tendremos:
Definicion 2.1.5 Se dice que (R1,R2) es mas fina que (R′1,R′
2) y se repre-sentara por (R1,R2) >>Y (R′
1,R′2) cuando
R1 ⊃ R′1 y R2 ⊇ R′
2 .
46

A partir de esta definicion, obtenemos el siguiente resultado de facil de-mostracion:
Proposicion 2.1.6 Si (R1,R2) >>Y (R′1,R′
2), entonces R′c12 ⊃ Rc
12.
Una estructura de preferencia sera por tanto mas fina que otra, cuandoel decisor dude menos y, ademas, cometa menos incoherencias en sus juicios.
Proposicion 2.1.7
1. >>Y es un orden parcial estricto en EY .
2. Si (R1,R2) es una estructura de preferencia en Y completa, entonceses un elemento maximal de >>Y en EY .
.Demostracion
1. >>Y es irreflexiva, por serlo la relacion de inclusion ⊂.
Por otro lado, es transitiva, pues ⊂ y ⊆ tambien lo son.
2. Supongamos que (R1,R2) ∈ EY es completa.
Si existiese (R′1,R′
2) tal que
(R′1,R′
2) >>Y (R1,R2) ,
entonces R′c12 = ∅, pues, por 2.1.6, R′c
12 ⊂ Rc12 = ∅. Por tanto, (R′
1,R′2)
es completa:R′
1 ∪R′s1 ∪R′
2 = Y × Y .
Si (R′1,R′
2) >>Y (R1,R2), entonces, por definicion,
R′1 ⊃ R1 y R′
2 ⊇ R2 .
. Sin embargo, esto es absurdo, pues, al ser (R1,R2) completa,
R1 ∪Rs1 ∪R2 = Y × Y .
Luego no puede existir (R′1,R′
2) en esas condiciones.
47

c.q.d. /
Al conjunto ERn le llamaremos conjunto de estructuras globales depreferencia.
Podemos definir en ERn la siguiente relacion de equivalencia:
(R1,R2) ∼Y (R′1,R′
2) ⇔
R1 ∩ (Y × Y ) = R′1 ∩ (Y × Y ) y R2 ∩ (Y × Y ) = R′
2 ∩ (Y × Y )
Proposicion 2.1.8 Entre el conjunto cociente ERn/∼Y y EY existe unabiyeccion que los identifica como conjuntos.
.Demostracion Definamos una aplicacion f de la siguiente forma:
f : ERn/∼Y −→ EY
[(R1,R2)] −→ (R1 ∩ (Y × Y ),R2 ∩ (Y × Y ))
f esta bien definida,
pues (R1 ∩ (Y × Y ),R2 ∩ (Y × Y )) es una estructura de preferenciasobre Y (verifica E1, E2, E3, E4 y E5), al ser (R1,R2) una estructurade preferencia en Rn
f es inyectiva:
Si f([(R1,R2)]) = f([(R′1,R′
2)]) entonces
R1 ∩ (Y × Y ) = R′1 ∩ (Y × Y )
yR2 ∩ (Y × Y ) = R′
2 ∩ (Y × Y ) ,
luego(R1,R2)∼Y (R′
1,R′2)
y esto significa que
[(R1,R2)] = [(R′1,R′
2)] .
48

f es sobreyectiva:
Dada (R1,R2) ∈ EY , definimos (R01,R0
2) en ERn como sigue:
R01 = R1 y R0
2 = R2 ∪∆, siendo ∆ la diagonal de Rn ×Rn.
Se verifica quef [(R0
1,R02)] = (R1,R2) .
c.q.d. /
A partir de ahora nuestros objetivos seran los siguientes: por una parte,construir aproximaciones lineales a una �V− preferencia. Por otra, lo quepodrıa ser el problema recıproco, dadas ciertas aproximaciones lineales a unaestructura de preferencia, estudiar la posibilidad de construir la familia Vque defina a esta como una �V− preferencia.
Veamos, previamente, que se entiende por aproximacion lineal.
2.2. APROXIMACIONES LINEALES A ES-
TRUCTURAS DE PREFERENCIA
Dado dos puntos y0, y
1∈ Y , si se verifica que (y
0, y
1) ∈ R1, podrıa
considerarse la direccion d = y1−y
0como buena para hallar puntos preferidos
a y0. Un razonamiento similar puede hacerse con cualquiera de las relaciones
binarias que forman la cuaterna asociada a una estructura de preferencia.Esto nos lleva a la siguientes definiciones:
Definiciones 2.2.1 Sea (R1,R2) ∈ EY y (R01,R0
2) un representante de laclase de equivalencia
f−1((R1,R2)) ∈ ERn/∼Y .
Dado y0∈ Y y d ∈ Rn, tal que d 6= 0
1. Se dice que d es una direccion global de preferencia en y0, si ∀α > 0
(y0+ αd, y
0) ∈ R0
1 .
Al conjunto de todas las direcciones globales de preferencia en y0
se lellama cono de preferencia y se denota por P (y
0)
49

2. Se dice que d es una direccion local de preferencia en y0, si existe
α1 ∈ R, tal que ∀α, 0 < α < α1, se verifica que
(y0+ αd, y
0) ∈ R0
1 .
Al conjunto de todas las direcciones locales de preferencia en y0
se lellama cono de preferencia local y se denota por LP (y
0).
3. Se dice que d es una direccion global de dominio en y0, si ∀α > 0
(y0+ αd, y
0) ∈ (R0
1)s .
Al conjunto de todas las direcciones globales de dominio en y0
se lellama cono de dominacion global y se denota por D(y
0).
4. Se dice que d es una direccion local de dominio en y0, si existe
α2 ∈ R, tal que ∀α, 0 < α < α2, se verifica que
(y0+ αd, y
0) ∈ (R0
1)s .
Al conjunto de todas las direcciones locales de dominio en y0se le llama
cono de dominacion local y se denota por LD(y0).
5. Se dice que d es una direccion global de indiferencia en y0, si
∀α > 0(y
0+ αd, y
0) ∈ R0
2 .
Al conjunto de todas las direcciones globales de indiferencia en y0
se lellama cono de indiferencia global y se denota por I(y
0).
6. Se dice que d es una direccion local de indiferencia en y0, si existe
α3 ∈ R, tal que ∀α, 0 < α < α3, se verifia que
(y0+ αd, y
0) ∈ R0
2 .
Al conjunto de todas las direcciones locales de indiferencia en y0
se lellama cono de indiferencia local y se denota por LI(y
0).
50

7. Se dice que d es una direccion global de duda en y0, si ∀α > 0
(y0+ αd, y
0) ∈ (R0
12)c .
Al conjunto de todas las direcciones globales de duda en y0
se le llamacono de duda global y se denota por DD(y
0).
8. Se dice que d es una direccion local de duda para y0, si existe
α4 ∈ R, tal que ∀α, 0 < α < α4, se verifica que
(y0+ αd, y
0) ∈ (R0
12)c .
Al conjunto de todas las direcciones locales de duda en y0
se le llamacono de duda local y se denota por LDD(y
0).
Las definiciones anteriores han sido formuladas respecto a la estructuraglobal de preferencia (R0
1,R02), y no a la (R1,R2), para no tener problemas
cuando el conjunto Y sea discreto o cerrado.En Chien et al. (1989), esto se soluciona definiendo un conjunto abierto
Y 0 ⊃ Y sobre el cual se establecen la preferencia, la indiferencia y la duda(estos terminos utilizados en el sentido clasico). Sin embargo, cualquier tipode acotacion de Y 0, como ‘tener diametro finitoo ‘estar contenido en unsemiespacio’, afectarıa a las definiciones allı expuestas. Es por ello, por lo quese ha preferido transcribir estas, a la terminologıa de estructura de preferencia(definicion 2.2.1), considerando Y 0 = Rn.
Veamos algunos ejemplos ilustrativos de estos ultimos conceptos
Ejemplo 2.2.2 A Supongamos el caso hipotetico de una estructura depreferencia (R1,R2) sobre R2 representada por la siguiente funcion de valorescalar:
v : R2 −→ Ry −→ ‖y − y∗‖
2
,
donde y∗ = (y∗1, y∗2) es un punto fijo de R2.
Al ser Rc12 = ∅, pues (R1,R2) es completa, tendremos que
DD(y0) = LDD(y
0) = ∅ ∀y
0∈ R2 (Y 0 = R2) .
51

-
6
y1
y2
&%'$y∗ y
0
Figura 2.4:
Por otra parte, el conjunto indiferente para un punto y0∈ R2 sera una
circunferencia (ver figura 2.4) con centro en y∗ y radio ‖y0− y∗‖
2. Esto se
expresa analıticamente por
{y0∼} = {y ∈ R2/‖y − y∗‖2 = ‖y
0− y∗‖2} .
Ası, los conos de direcciones indiferentes seran
I(y0) = LI(y
0) = {(0, 0)} ∀y
0∈ R2 .
Finalmente, los conos restantes verifican lo siguiente: ∀ y0∈ R2,
P (y0) = LP (y
0) = {(d1, d2) ∈ R2/(y01 − y∗1)(d1 − y01) +
(y02 − y∗2)(d2 − y02) ≥ 0}\{(0, 0)}, siendo
y0
= (y01, y02) e y∗ = (y∗1, y∗2)
D(y0) = ∅
LD(y0) = −P (y
0) = −LP (y
0)
B Para (R1P ,R2P ), estructura de preferencia asociada al orden dePareto en Rn, tendremos ∀y
0∈ Rn que
52

P (y0) = LP (y
0) = {d ∈ Rn/di ≥ 0 i = 1, ..., n }\{(0, 0)} = Λ≥
D(y0) = LD(y
0) = −Λ≥
I(y0) = LI(y
0) = {(0, ..., 0)}
DD(y0) = LDD(y
0) = {d ∈ Rn/∃i, j verificando di > 0 y dj < 0} =
(Λ≥ ∪ −Λ≥ ∪ {(0, ..., 0)})c .
C Para (R1L,R2L), estructura de preferencia asociada al orden lexi-cografico en Rn, tendremos ∀y
0∈ Rn que
P (y0) = LP (y
0) = {d ∈ Rn/d1 > 0 o (dj = 0 j < l, dl > 0),
l = 2, ..., n}D(y
0) = LD(y
0) = −P (y
0) = −LP (y
0)
I(y0) = LI(y
0) = {(0, ..., 0)}
DD(y0) = LDD(y
0) = ∅ .
Observese, que los conos definidos en 2.2.1 no tienen por que ser convexos.De hecho, DD(y
0), para la estructura de preferencia (R1P ,R2P ) en Rn, no
es convexo.Los conos globales verifican la siguiente propiedad de aproximacion.
Proposicion 2.2.3 Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn.∀y
0∈ Y se verifican las siguientes inclusiones:
(y0+ P (y
0)) ∩ Y ⊂ {y
0≺} (y
0+ I(y
0)) ∩ Y ⊂ {y
0∼}
(y0+ D(y
0)) ∩ Y ⊂ {y
0�} (y
0+ DD(y
0)) ∩ Y ⊂ {y
0?}
.Demostracion Sea y ∈ (y0+ P (y
0)) ∩ Y . Esto significa que y = y
0+ d,
donde d ∈ P (y0). Por definicion de P (y
0), se verifica que
(y, y0) ∈ R0
1 ∩ (Y × Y ) = R1 ,
luego y ∈ {y0≺}. Para el resto de expresiones se utilizara el mismo razon-
amiento. c.q.d. /
Para los conos locales no existen expresiones generales de este tipo.
53

Observese, que en los tres ejemplos de 2.2.2 se verifica que
I(y0) = 0 ∀y
0∈ Rn .
Vamos a enunciar un resultado que describe este tipo de conos para un casoparticular de �V− preferencia.
Teorema 2.2.4 Sea (R1,R2) una �V−preferencia de clase k en Rn, sien-do V una familia de cardinal finito. Si en y
0∈ Rn se verifica que I(y
0) 6=
{(0, ..., 0)}, entonces, y0
+ I(y0) esta constituido por todas las rectas, con-
tenidas en la variedad diferenciable {y0∼}, que pasan por y
0.
.Demostracion En primer lugar, veamos que {y0∼} es una variedad
diferenciable.Por definicion de {y
0∼} y de �V−preferencia, si V = {v1, ..., vk}, ten-
dremos que:
{y0∼} = {y ∈ Rn/vi(y) = vi(y0
) i = 1, ..., n} ,
es decir, tenemos la ecuacion implıcita de una variedad diferenciable de clasek en Rn.
Al ser I(y0) 6= {(0, ..., 0)}, el cono I(y
0) esta constituido por rectas que
pasan por (0, ..., 0), luego y0+ I(y
0) son rectas que pasan por y
0.
Como, por 2.2.3, y0+ I(y
0) ⊂ {y
0∼}, queda demostrado el teorema. /.
Otra consideracion, basada en la definicion 2.2.1 y constatada con losejemplos, es que no siempre se dan relaciones como
P (y0) = −D(y
0) D(y
0) = LD(y
0) , etc .
Algunas de estas relaciones algebraicas seran estudiadas mas adelante en elcaso particular de las �V−preferencias.
Veamos ahora que se entiende por aproximacion lineal de una estructurade preferencia general.
Definicion 2.2.5 Sean (R1,R2) ∈ EY y (R01,R0
2) ∈ ERn , en las condi-ciones de la definicion 2.2.1. Se denomina estructura de aproximacion
54

lineal inferior de (R1,R2) a una cuaterna de relaciones binarias en Rn,(L1, L2, L3, L4), definida por
L1 =⋃
y0∈ Y
d ∈ P (y0)
α > 0
{(y0+ αd, y
0)} L2 =
⋃y
0∈ Y
d ∈ D(y0)
α > 0
{(y0+ αd, y
0)}
L3 =⋃
y0∈ Y
d ∈ I(y0)
α > 0
{(y0+ αd, y
0)} L4 =
⋃y
0∈ Y
d ∈ DD(y0)
α > 0
{(y0+ αd, y
0)}
Definicion 2.2.6 Bajo las mismas hipotesis de 2.2.5, denominaremos es-tructura de aproximacion lineal inferior de (R1,R2) a una cuaternade relaciones binarias en Rn, (L′
1, L′2, L
′3, L
′4), definidas por
L′1 =
⋃y
0∈ Y
d ∈ K1(y0)
α > 0
{(y0+ αd, y
0)} L′
2 =⋃
y0∈ Y
d ∈ K2(y0)
α > 0
{(y0+ αd, y
0)}
L′3 =
⋃y
0∈ Y
d ∈ K3(y0)
α > 0
{(y0+ αd, y
0)} L′
4 =⋃
y0∈ Y
d ∈ K4(y0)
α > 0
{(y0+ αd, y
0)}
en donde para cada y0∈ Y , K1(y0
), K2(y0), K3(y0
) y K4(y0) son los
siguientes conos:
K1(y0) = {d ∈ Rn/ ∃α′ > 0 verificando que
(y0+ α′d, y
0) ∈ R1}
K2(y0) = {d ∈ Rn/ ∃α′ > 0 verificando que
(y0+ α′d, y
0) ∈ Rs
1}K3(y0
) = {d ∈ Rn/ ∃α′ > 0 verificando que
(y0+ α′d, y
0) ∈ R2}
55

K4(y0) = {d ∈ Rn/ ∃α′ > 0 verificando que
(y0+ α′d, y
0) ∈ Rc
12}
En estas definiciones se han usado los terminos ‘aproximacion’y ‘lineal’,que justificamos a continuacion.
Proposicion 2.2.7 Bajo las mismas hipotesis de 2.2.5, si (L1, L2, L3, L4) y(L′
1, L′2, L
′3, L
′4) son las estructuras de aproximacion lineal inferior y superior
de (R1,R2), respectivamente, se verifica que
L1 ∩ (Y × Y ) ⊆ R1 ⊆ L′1 ∩ (Y × Y ) L2 ∩ (Y × Y ) ⊆ Rs
1 ⊆ L′2 ∩ (Y × Y )
L3 ∩ (Y × Y ) ⊆ R2 ⊆ L′3 ∩ (Y × Y ) L4 ∩ (Y × Y ) ⊆ Rc
12 ⊆ L′4 ∩ (Y × Y )
Estas cuatro relaciones las expresaremos, a partir de ahora, de formacompacta, por
(L1, L2, L3, L4) << (R1,Rs1,R2,Rc
12) << (L′1, L
′2, L
′3, L
′4)
.Demostracion En primer lugar, veamos las inclusiones inferiores.Sea (y
1, y
2) ∈ L1 ∩ (Y × Y ). Por ser (y
1, y
2) ∈ L1, tendremos que
d = y1− y
2∈ P (y
2) ,
con lo cual y1∈ (y
2+ P (y
2))∩ Y . Aplicando la proposicion 2.2.3, se obtiene
que y1∈ {y
2≺}. Por tanto, (y
1, y
2) ∈ R1.
Hemos demostrado que L1 ∩ (Y × Y ) ⊂ R1. El resto de inclusiones infe-riores se demuestran de modo analogo.
Veamos ahora las inclusiones superiores.Sea (y
1, y
2) ∈ R1. Esto nos dice que (y
1, y
2) ∈ Y × Y . Habra que ver por
tanto que (y1, y
2) ∈ L′
1 o, equivalentemente, que
d = y1− y
2∈ K1(y2
) .
Ello se obtiene tomando α′ = 1El resto de inclusiones superiores se demuestra con un argumento analogo.
c.q.d. /
56

Proposicion 2.2.8 Bajo las mismas hipotesis de 2.2.5, si (L1, L2, L3, L4) y(L′
1, L′2, L
′3, L
′4) son las aproximaciones lineales superior e inferior de (R1,R2),
se verifica que:
P(1) Si (y1, y
2) ∈ Li ( o L′
i) i = 1, ..., 4 ⇒
(y, y2) ∈ Li ( o L′
i) i = 1, ..., 4 ,
para cada y ∈ {y2+ α(y
1− y
2), α > 0}, semirrecta de origen y
2y direccion
d = y1− y
2.
.Demostracion Es consecuencia directa de las definiciones de Li y L′i, i =
1, ..., 4. /
La propiedad P(1) de la proposicion 2.2.8 indica que, si dos puntos serelacionan a traves de algunas de las relaciones binarias que forman las aprox-imaciones lineales, el segundo de ellos se relacionara con todos los puntos dela semirrecta que tiene como origen a este y pasa por el primero de ellos.Es ası como se entiende el concepto ‘lineal’que aparece en las definicionesanteriores.
Un tercer concepto de aproximacion lineal, basado en los conos locales,se recoge en la siguiente definicion.
Definicion 2.2.9 Bajo las mismas hipotesis de 2.2.5, llamaremos estruc-tura de aproximacion lineal local de (R1,R2) a la cuaterna de relacionesbinarias en Rn siguiente:
L∗1 =
⋃y
0∈ Y
d ∈ LP (y0)
α > 0
{(y0+ αd, y
0)} L∗
2 =⋃
y0∈ Y
d ∈ LD(y0)
α > 0
{(y0+ αd, y
0)}
L∗3 =
⋃y
0∈ Y
d ∈ LI(y0)
α > 0
{(y0+ αd, y
0)} L∗
4 =⋃
y0∈ Y
d ∈ LDD(y0)
α > 0
{(y0+ αd, y
0)}
57

Se denominan aproximaciones locales, a estas relaciones, debido a que,∀y
0∈ Y , existira un entorno V de y
0en Rn tal que
o L∗i
⋂({y
0} × V) ⊆ {y
0} × {y
0@}
o bien L∗i
⋂({y
0} × V) ⊇ {y
0} × {y
0@} i = 1, ..., 4 ,
siendo @ la relacion binaria de la cuaterna asociada a (R1,R2) que este-mos estudiando.
El entorno puede ser elegido comun, independientemente de la L∗i consid-
erada, pues, aunque para cada i existiese un entorno Vi distinto, podrıamosdefinir V como la interseccion de esos cuatro. Por otro lado, estas aproxima-ciones se denominan lineales pues, tal y como se definen, todas verifican lapropiedad P(1) de 2.2.8.
A partir de ahora, nos referiremos a estructuras de preferencia definidassobre todo Rn (es decir, Y = Rn), con lo cual no haremos distincion entre(R1,R2) y (R0
1,R02), pues, en este caso, coincidirıan las dos estructuras. Ello
no supone una restriccion importante y, sin embargo, nos proporciona unaterminologıa mas simple para los resultados que se tratan a continuacion.
El siguiente teorema es una caracterizacion importante para las estruc-turas de aproximacion lineal, tanto inferior como superior, de una estructurade preferencia.
Teorema 2.2.10 Sea (R1,R2) una estructura de preferencia en Rn y (S, >>) el conjunto ordenado de todas las cuaternas de relaciones binarias en Rn
comparables con la cuaterna asociada a (R1,R2) mediante el orden >>. Siconsideramos los conjuntos
C = {(S1, S2, S3, S4) ∈ S : Si verifica P(1) de 2.2.8 ∀i = 1, ..., 4 y
(S1, S2, S3, S4) << (R1,Rs1,R1,Rc
12)}
C′ = {(S1, S2, S3, S4) ∈ S : Si verifica P(1) de 2.2.8 ∀i = 1, ..., 4 y
(R1,Rs1,R1,Rc
12) << (S1, S2, S3, S4)} .
Se verifica que:
58

1. (L1, L2, L3, L4) = maxC .
2. (L′1, L
′2, L
′3, L
′4) = mınC′ ,
siendo (L1, L2, L3, L4) y (L′1, L
′2, L
′3, L
′4) las estructuras de aproximacion lin-
eal inferior y superior, repectivamente.
.Demostracion Veamos en primer lugar 1.Sea (S1, S2, S3, S4) ∈ C. Si (y
1, y
2) ∈ S1, por verificarse la propiedad P(1)
de 2.2.8, tendremos que
(y2+ α(y
1− y
2), y
2) ∈ S1, ∀α > 0 .
Como S1 ⊂ R1 por definicion de C:
(y2+ α(y
1− y
2), y
2) ∈ R1, ∀α > 0 .
Luego d = y1− y
2∈ P (y
2) y por tanto, tal y como se definio L1, tendrıamos
que(y
2+ α(y
1− y
2), y
2) ∈ L1 ∀α > 0 .
A partir de esto queda demostrado que S1 ⊂ L1, tomando para ello α = 1.Las inclusiones Si ⊂ Li, i = 2, 3, 4, se demuestran de modo analogo,
utilizando los conceptos de D(y2), I(y
2) y DD(y
2), respectivamente.
De esta forma, se ha demostrado que
∀(S1, S2, S3, S4) ∈ C, (S1, S2, S3, S4) << (L1, L2, L3, L4) .
Como(L1, L2, L3, L4) ∈ C ,
tendrıamos que(L1, L2, L3, L4) = maxC .
Veamos ahora 2.Consideremos (S1, S2, S3, S4) ∈ C ′. Supongamos que (y
1, y
2) ∈ L′
1, ten-dremos que
(y2+ α(y
1− y
2), y
2) ∈ L′
1 ∀α > 0 .
Esto significa, tal y como se define L′1, que
d = y1− y
2∈ K1(y2
) .
59

Por tanto, existe algun α′ > 0 tal que
(y2+ α′(y
1− y
2), y
2) ∈ R1 ⊂ S1 .
Con lo cual, ∀α > 0,
(y2+ α(y
1− y
2), y
2) ∈ S1 ,
por verificarse la propiedad P(1) de 2.2.8. Ası, tomando α = 1, tendremosque
(y1, y
2) ∈ S1 .
Por tanto, L′1 ⊂ S1.
Las inclusiones L′i ⊂ Si i = 2, 3, 4 se demuestran de forma analoga, uti-
lizando los conos K2(y2), K3(y2
) y K4(y2), respectivamente.
Hemos demostrado entonces que
∀(S1, S2, S3, S4) ∈ C′, (L1, L2, L3, L4) << (S1, S2, S3, S4) .
Luego(L′
1, L′2, L
′3, L
′4) = mınC′ ,
pues (L′1, L
′2, L
′3, L
′4) ∈ C′ c.q.d. /
Observese, que el teorema justifica por que hemos elegido como aproxi-maciones lineales superiores e inferiores a (L′
1, L′2, L
′3, L
′4) y (L1, L2, L3, L4),
respectivamente.Veamos una consecuencia del teorema, que nos permite relacionar, entre
sı, las tres definiciones de aproximacion lineal.
Corolario 2.2.11 Sea (R1,R2) una estructura de preferencia en Rn. Si(L1, L2, L3, L4), (L′
1, L′2, L
′3, L
′4) y (L∗
1, L∗2, L
∗3, L
∗4) son las estructuras de aprox-
imacion lineal inferior, superior y local, respectivamente, se verifica que
Li ⊆ L∗i ⊆ L′
i ∀i = 1, ..., 4 .
.Demostracion Las inclusiones Li ⊆ L∗i ∀i = 1, ..., 4 se demuestran
facilmente a partir de las definiciones de conos globales y locales de 2.2.1pues, ∀y
0∈ Y , se verifica que
P (y0) ⊂ LP (y
0) , D(y
0) ⊆ LD(y
0)
60

I(y0) ⊆ LI(y
0) y DD(y
0) ⊆ LDD(y
0)
Veamos las inclusiones superiores.Sea (y
1, y
2) ∈ L∗
1. Tendremos que
(y2+ α(y
1− y
2), y
2) ∈ L∗
i , ∀α > 0 .
Por definicion de L∗i , d = y
1− y
2∈ LP (y
2) y por tanto existe un α1 tal
que∀α 0 < α < α1 (y
2+ α(y
1− y
2), y
2) ∈ R1 ⊂ L′
1 .
Como L′1 verifica la propiedad P(1) de 2.2.8, podemos asegurar que
(y2+ α(y
1− y
2), y
2) ∈ L′
1 ∀α > 0 .
Por tanto, tomando α = 1, se demuestra la inclusion L∗1 ⊂ L1. Sin embargo,
podrıa ocurrir que R1 ⊂ L∗1 y esto nos llevarıa por el teorema 2.2.10, a la
igualdad L∗1 = L′
1. Por consiguiente,
L∗1 ⊆ L′
1 .
Para el resto de inclusiones se utilizara un argumento similar, usando loscorrespondientes conos locales, c.q.d. /
Observese que
{L1y0} = {y ∈ Rn : (y, y
0) ∈ L1} = y
0+ P (y
0)
{L2y0} = {y ∈ Rn : (y, y
0) ∈ L1} = y
0+ D(y
0)
{L3y0} = {y ∈ Rn : (y, y
0) ∈ L1} = y
0+ I(y
0)
{L4y0} = {y ∈ Rn : (y, y
0) ∈ L1} = y
0+ DD(y
0)
De igual modo tendremos, para las aproximaciones superiores, las sigu-ientes igualdades:
{L′1y0} = y
0+ K1(y0
) {L′2y0} = y
0+ K2(y0
){L′
3y0} = y
0+ K3(y0
) {L′4y0} = y
0+ K4(y0
)
Ante este hecho, podemos hacernos la siguiente pregunta: ¿ por que con-struir Li y L′
i i = 1, ..., 4 y no utilizar simplemente los conos ? La respuesta se
61

basa, en que nuestro principal objetivo consiste en construir estructuras, queaproximen a (R1,R2), que esten, de algun modo, representadas analıtica-mente (dichas estructuras se denotaran de forma generica por (RA
1 ,RA2 )).
Todo ello tiene como finalidad obtener una buena herramienta que posibilitetrabajar con estructuras de preferencia de difıcil representacion.
Una manera de obtener estas (RA1 ,RA
2 ) serıa a traves de cuaternas aso-ciadas, imponiendoles ciertas condiciones a las relaciones que la constituyen(como puede ser la linealidad P(1)-2.2.8).
Sin embargo, no siempre (L1, L2, L3, L4) o (L′1, L
′2, L
′3, L
′4) definen cuater-
nas asociadas a una estructura de preferencia.En el siguiente epıgrafe trataremos un caso en donde no se da esta obje-
cion.
2.3. ESTRUCTURAS DE APROXIMACION
LINEAL Y �V− PREFERENCIAS LIN-
EALES
Consideremos (R1,R2) una�V−preferencia en Rn. Diremos que (R1,R2)es una�V−preferencia lineal, si los elementos de la familia V son funcionesescalares lineales en Rn.
Nuestro proposito es: dadas las aproximaciones lineales a una �V− pref-erencia, deducir a partir de ellas si nos encontramos o no frente a una �V−preferencia lineal.
Lema 2.3.1 La cuaterna de relaciones binarias asociada a una �V− prefer-encia lineal (R1,R2) cumple la propiedad de linealidad P(1) de la proposicion2.2.8.
.Demostracion Veamos primeramente queR1 verifica la propiedad P(1)-2.2.8.
Sea (y1, y
2) ∈ R1, al ser (R1,R2) una estructura de preferencia, se tiene,
por la proposicion 2.1.4, que v(y1) ≥ v(y
2) ∀v ∈ V y ∃v′ ∈ V tal que
v′(y1) > v′(y
2). Como v es lineal,
∀v ∈ V v(y1− y
2) ≥ 0 y ∃v′ tal que v′(y
1− y
2) > 0 .
62

Considerando α > 0, se verifica que
v(y2) + αv(y
1− y
2) ≥ v(y
2), ∀v ∈ V
y ∃v′ ∈ V tal quev′(y
2) + αv′(y
1− y
2) > v(y
2) .
Estas ultimas expresiones, al aplicar la linealidad de los elementos de V ,quedarıan enunciadas como:
∀α > 0 v(y2+ α(y
1− y
2)) ≥ v(y
2), ∀v ∈ V
y ∃v′ ∈ V tal quev′(y
2+ α(y
1− y
2)) > v′(y
2) .
Esto es equivalente a decir:
∀α > 0 (y2+ α(y
1− y
2), y
2) ∈ R1 ,
o, lo que es igual, R1 verifica P(1)-2.2.8.
La demostracion para Rs1 se deduce de esta.
Razonemos ahora para R2.Consideremos (y
1, y
2) ∈ R2. Por la proposicion 2.1.4 y haciendo uso de
la linealidad de los elementos de V , esto se expresa mediante las siguientesigualdades:
v(y1) = v(y
2) ∀v ∈ V ⇔ v(y
1− y
2) = 0 ∀v ∈ V .
. Por la misma razon, se tiene que
v(y2+ α(y
1− y
2)) = v(y
2) + αv(y
1− y
2) = v(y
2), ∀v ∈ V .
Esto es equivalente a decir que
∀α > 0 (y2+ α(y
1− y
2), y
2) ∈ R2 ,
o lo que es igual, R2 verifica P(1)-2.2.8.Como R1,Rs
1 y R2 verifican P(1)-2.2.8, su complementario Rc12 tambien
lo verificara c.q.d. /
El siguiente teorema nos proporciona una caracterizacion de las�V−preferenciaslineales.
63

Teorema 2.3.2 Sea (R1,R2) una �V−preferencia en Rn.(R1,R2) sera una �V−preferencia lineal sii:
1. (L1, L2, L3, L4) = (L′1, L
′2, L
′3, L
′4).
2. Cada Li es compatible con la suma en Rn, es decir,
∀y ∈ Rn, si (y1, y
2) ∈ Li, (y1
+ y, y2+ y) ∈ Li .
.Demostracion
“⇒” Si (R1,R2) es una �V−preferencia lineal, tendremos, por el lema 2.3.1,que (R1,Rs
1,R2,Rc12) verifican la propiedad P(1)-2.2.8. Esto significa,
como consecuencia del teorema 2.2.10, que
(L1, L2, L3, L4) = (R1,Rs1,R2,Rc
12) = (L′1, L
′2, L
′3, L
′4) .
Queda ası demostrado 1
Vamos a demostrar 2. Supongamos que (y1, y
2) ∈ L1; por estar L1 ⊂ R1
y ser (R1,R2) una �V−preferencia, se tienen las siguientes desigual-dades:
v(y1) ≥ v(y
2), ∀v ∈ V
y, ademas,∃v′ ∈ V / v′(y
1) > v′(y
2) .
Como (R1,R2) es una �V−preferencia lineal, tendremos que
v(y1− y
2) ≥ 0, ∀v ∈ V
y, ademas,∃v′ ∈ V / v′(y
1− y
2) > 0 .
Sumando y restando y ∈ Rn, se obtienen las expresiones:
v((y1+ y)− (y
2+ y)) ≥ 0, ∀ v ∈ V
y para v′:v′((y
1+ y)− (y
2+ y)) > 0 .
Aplicando linealidad se verifican las desigualdades:
v(y1+ y) ≥ v(y
2+ y) ∀v ∈ V
64

y para v′
v′(y1+ y) > v(y
2+ y) .
Esto significa que
(y1+ y, y
2+ y) ∈ R1 = L1 .
Un razonamiento similar demostrarıa la compatibilidad con la sumapara el resto de los Li.
“⇐” Por verificarse 1 de 2.3.2, aplicando la proposicion 2.2.7, tendremosque
(R1,Rs1,R2,Rc
12) = (L1, L2, L3, L4) = (L′1, L
′2, L
′3, L
′4) .
Demostremos las siguientes igualdades: ∀y0∈ Rn,
P (y0) = LP (y
0) = P D(y
0) = LD(y
0) = −P
I(y0) = LI(y
0) = I DD(y
0) = LDD(y
0) = −DD
Las igualdades entre conos globales y locales se deducen directamentede 1. Veamos, por tanto, que los conos globales son constantes. Paraello, probaremos que, ∀y
1, y
2∈ Rn,
P (y1) = P (y
2) ,
ya que para el resto de conos se seguirıa un razonamiento analogo.
Sea d ∈ P (y1), ∀α > 0 (y
1+ αd, y
1) ∈ L1. Debido a la propiedad 2, se
tiene que
∀y ∈ Rn ∀α > 0, (y1+ y + αd, y
1+ y) ∈ L1 .
Aplicando la definicion de L1, tendremos que
d ∈ P (y1+ y), ∀y ∈ Rn .
LuegoP (y
1) ⊆ P (y
1+ y), ∀y ∈ Rn .
65

Considerando y = y2− y
1, y teniendo en cuenta el papel simetrico de
y1
e y2, se obtiene la igualdad buscada,
P (y1) = P (y
2) = P .
Ası(y
1, y
2) ∈ R1 ⇔ y
1− y
2∈ P ,
siendo P convexo al serR1 transitiva. Por otra parte,R2 vendra definidopor:
(y1, y
2) ∈ R2 ⇔ y
1− y
2∈ I ,
donde I sera un subespacio vectorial de Rn, pues
0 ∈ I
Si d, d′ ∈ I ⇒ d + d′ ∈ I, al ser I convexo (R2 es transitiva).
Si d ∈ I ⇒ −d ∈ I (al ser R2 simetrico). Por tanto
∀α ∈ R, αd ∈ I
Ası, al ser (R1,R2) una �V−preferencia, esta debe ser lineal, pues
(y1, y
2) ∈ R2 ⇔ y
1− y
2∈ I ⇔ v(y
1) = v(y
2) ∀v ∈ V ,
e I es un subespacio vectorial de Rn. Ademas, C`P = P ∪I (observese,que estamos en una �V−preferencia) y, por tanto, la estructura depreferencia se puede expresar por las siguientes equivalencias:
(y1, y
2) ∈ R1 ⇔ y
1− y
2∈ C`P pero y
2− y
16∈ C`P
(y1, y
2) ∈ R2 ⇔ y
1− y
2∈ C`P y y
2− y
1∈ C`P
Como C`P es poliedrico y convexo, por 2.1.1, quedarıa demostrado que(R1,R2) es una �V−preferencia lineal. /
Corolario 2.3.3 Dada (R1,R2) una �V−preferencia lineal, se verifica que:
(L1, L2, L3, L4) = (L∗1, L
∗2, L
∗3, L
∗4) = (L′
1, L′2, L
′3, L
′4) .
66

.Demostracion Se obtiene del teorema 2.3.2 y el corolario 2.2.11 . /Observese, como, supuesto el caso en el que las estructuras de aproxi-
macion lineal superior e inferior verificasen las condiciones 1 y 2 del teorema2.3.2, estas pueden considerarse como una cuaterna asociada a alguna estruc-tura de preferencia (�V−preferencia, en este caso).
Surge por tanto la pregunta: ¿ cuando se verificara, en una estructura deaproximacion lineal, relaciones como Ls
1 = L2, L4 = (L1∪L2∪L3)c, ..., propias
de las cuaternas asociadas a estructuras de preferencia? Esta comenzara atener respuesta en posteriores epıgrafes.
La problematica tratada en esta seccion, resuelta con el teorema 2.3.2, fueya estudiada por White (1972). Sin embargo, en dicho trabajo no se cuentacon herramientas como las estructuras de preferencia o las aproximacioneslineales, para dar una mayor coherencia a los resultados e incluso poderampliar el estudio a otros tipos de aproximaciones.
Ejemplo 2.3.4 El ejemplo 2.1.2 (mas concretamente, la parte correspondi-ente al segundo camino), nos ilustra estos conceptos con un caso practico. Elpunto de partida no sera, como en el primer camino, una hipotetica funcionde valor, la cual se intente construir o aproximar mediante la informacion queproporciona el decisor. Ahora se tiene una estructura de preferencia (R1,R2)que, teoricamente, recoge y clasifica las actitudes del trabajador ante alter-nativas de empleo en todo R2.
Llegar a esta estructura de preferencia global en R2 es imposible en lapractica, pues todas las posibilidades de comparacion en dicho espacio son in-aprehensibles. Nuestra intencion sera, por tanto, aproximar dicha estructurade preferencia mediante una �V−preferencia.
¿ como construir una esta �V−preferencia? La respuesta es: a traves delas aproximaciones lineales a la estructura de preferencia (R1,R2) subyacenteal problema. Esas aproximaciones se obtendrıan, en este caso, considerandoun numero finito de ofertas de empleo y, fijando cada una de ellas, recogiendocuales son las actitudes del decisor al cotejar la fijada con las restantes. Conesos datos se realizarıa un ajuste lineal a los conjuntos {y
0≺}, {y
0�},
{y0∼} e {y
0?} (siendo y
0la alternativa fijada), que se traducirıan en los
conjuntos {L1y0}, {L2y0
}, {L3y0} y {L4y0
}, o en aquellos que utilizan las L′i
para su definicion.En el ejemplo, ya sea porque el decisor ha ordenado sus preferencias
antes de la entrevista, o bien porque el numero de alternativas elegidas porel analista permita realizar este tipo de ajuste, las aproximaciones lineales
67

verifican las hipotesis 1 y 2 del teorema 2.3.2. De esto se deduce, que la�V−preferencia, utilizada para aproximar la estructura de preferencia deltrabajador, es lineal.
La aproximacion, mediante una �V−preferencia o una estructura de pref-erencia, sera mas exacta, cuanto mayor sea el numero de alternativas elegidaspor el analista en su entrevista con el decisor.
2.4. ESTRUCTURAS DE APROXIMACION
LINEAL Y �V− PREFERENCIAS EN
R2
Antes de adentrarnos en la tematica de la seccion, veamos unos resulta-dos generales, que justifican por que comenzaremos siempre nuestro estudiosuponiendo que V es un conjunto unitario.
Proposicion 2.4.1 Sea (R1,R2) una �V−preferencia en Rn. Se verificaque
1. R2 =⋂
v∈V S2v
2. R1 = R\R2, donde R =⋂
v∈V S1v ∪ S2v ,
siendo {(S1v, S2v)}v∈V una familia de estructuras de preferencia represen-tadas por una funcion de valor de clase C1(Rn) 6 .
.Demostracion Definiremos (S1v, S2v), siendo v ∈ V , como
(y1, y
2) ∈ S1v ⇔ v(y
1) > v(y
2)
(y1, y
2) ∈ S2v ⇔ v(y
1) = v(y
2)
Por un razonamiento similar al realizado en el teorema 1.3.4, demostarıamosel resultado. /
Proposicion 2.4.2 Dada (R1,R2) una �V−preferencia en Rn, sus estruc-turas de aproximacion lineales, que denotaremos genericamente por (L•
i ) i =1, ..., 4, 7 verifican:
6Se verifica, por tanto, el axioma D2 del teorema de Debreu.7Representa tanto los inferiores, como los superiores, como los locales.
68

− L•1 =
( ⋂v∈V L•
1v
⋃L•
3v
)\
⋂v∈V
L•3v
− L•i =
⋂v∈V
L•iv i = 2, 3
− L•4 ⊃
⋂v∈V
L•4v
.Demostracion Se obtiene a partir de la proposicion 2.4.1 y de las defini-ciones de conos globales, locales, y los Ki(y0
) definidos en 2.2.6, que son losque determinan las estructuras de aproximacion lineal.
Para demostrar la ultima inclusion podemos seguir la observacion finalde la seccion 1.3 del capıtulo anterior. /
De este resultado, se concluye que las aproximaciones lineales a una�V−preferencia pueden obtenerse a partir de aproximaciones de este tipoa estructuras de preferencia completas. Estudiaremos, pues, aproximacioneslineales a estas estructuras que, por el teorema de Debreu 1.3.2, seran a su vez�V−preferencias, donde V es el conjunto unitario formado por la llamadafuncion de valor.
En esta seccion, consideraremos como espacio de consecuencias u obje-tivos al plano R2. Por otra parte, a partir de ahora, (R1,R2) sera una estruc-tura de preferencia representada mediante una funcion de valor v0 ∈ C1(R2)no lineal 8. Esta funcion, tal y como se construye una funcion de valor, ver-ificara el teorema de la funcion implıcita y, por tanto, existira una funciong ∈ C1(R) tal que v0(y1, y2) = y2−g(y1). Ademas, impondremos la condicionde que v0(0, 0) = 0
Definicion 2.4.3 Sea (R1,R2) una estructura de preferencia como las con-sideradas en esta seccion, definiremos para cada y = (y1, y2) ∈ R2 los sigu-ientes coeficientes:
m+(y) = sup{
g(z1)−g(y1)z1−y1
: z1 > y1
}m−(y) = sup
{g(z1)−g(y1)
z1−y1: z1 < y1
}8El caso lineal ya fue estudiado anteriormente.
69

m+(y) = inf{
g(z1)−g(y1)z1−y1
: z1 > y1
}m−(y) = inf
{g(z1)−g(y1)
z1−y1: z1 < y1
}Estas definiciones nos seran utiles para el calculo de aproximaciones lin-
eales a estrucuturas de preferencia como las consideradas en esta seccion.Observese, que solo dependen de la primera coordenada del punto y, pero,por razones de nomenclatura, las ponemos dependientes del punto, del plano,elegido. Antes de pasar a utilizar estos coeficientes, vamos a enunciar ciertasrelaciones que se verifican entre ellos.
Proposicion 2.4.4 En las condiciones de la definicion anterior, se verificanlas siguientes desigualdades: ∀y ∈ Y ,
m+(y) ≥ m−(y) m−(y) ≥ m+(y) .
.Demostracion Si denotamos por g′+(y) y g′−(y) las derivadas a la derechay a la izquierda de g en y, respectivamente, y tenemos en cuenta que g′+(y) =g′−(y) ∀y ∈ Y , por ser g ∈ C1(R), se obtiene:
m+(y) ≥ g′+(y) = g′−(y) ≥ m−(y)
m−(y) ≥ g′−(y) = g′+(y) ≥ m+(y)
c.q.d. /
Proposicion 2.4.5 Sea (R1,R2) una estructura de preferencia con las hipotesisde esta seccion. Si definimos el conjunto
D1 =
{(y
1, y
2) ∈ R2 ×R2 :
m+(y2)(y11 − y21)− (y12 − y22) < 0
m−(y2)(y11 − y21)− (y12 − y22) < 0
},
considerando la desigualdad (y11 − y21) < 0 cuando algunos de esos coe-ficientes fuese infinito, se verifica que
L1 = D1 .
.Demostracion Para demostrar esta igualdad, nos apoyaremos en el teo-rema 2.2.10. Ası, el resultado quedarıa probado viendo que D1 verifica lapropiedad P(1) y, ademas, las inclusiones L1 ⊂ D1 ⊂ R1.
Que D1 verifica la propiedad 1 de 2.2.10, se obtiene directamente de ladefinicion de D1.
Demostraremos que este conjunto esta contenido en R1.Sea (y
1, y
2) ∈ D1
70

Si y11 − y21 > 0, como
m+(y2) <
y12 − y22
y11 − y21
,
entonces, por ser m+(y2) un supremo, se tiene que
g(y11)− g(y21)
y11 − y21
<y12 − y22
y11 − y21
⇒ g(y11)− g(y21) < y12 − y22 ⇒
y22 − g(y21) < y12 − g(y11) ⇒ v0(y2) < v0(y1
)
y, por tanto, (y1, y
2) ∈ R1
Si y11 − y21 < 0, como
m−(y2) >
y12 − y22
y11 − y21
,
entonces, por ser m−(y2) un ınfimo, se tiene que
g(y11)− g(y21)
y11 − y21
>y12 − y22
y11 − y21
⇒ g(y11)− g(y21) < y12 − y22 ⇒
y22 − g(y21) < y12 − g(y11) ⇒ v0(y2) < v0(y1
)
y, por tanto, (y1, y
2) ∈ R1.
Debido a esto, D1 ⊂ R1.
Veamos ahora que L1 ⊂ D1.Sea (y
1, y
2) ∈ L1, es decir,
∀α > 0 (y2+ α(y
1− y
2), y
2) ∈ R1 .
Esto, en terminos de la funcion v0, significarıa que
∀α > 0 v0(y2+ α(y
1− y
2)) > v0(y2
) .
Luego
y22 + α(y12 − y22)− g(y21 + α(y11 − y21)) > y22 − g(y21) ∀α > 0 .
Simplificando, tendremos que
g(y21 + α(y11 − y21))− g(y21) < α(y12 − y22) ∀α > 0 .
Distinguiremos dos casos:
71

Si (y11 − y21) > 0, tendrıamos que, ∀α > 0
g(y21 + α(y11 − y21))− g(y21)
α(y11 − y21)<
y12 − y22
y11 − y21
.
Como cualquier punto y1 ∈ R, tal que y1 > y21, se puede expresar comoy1 = y21 + α(y11 − y21), entonces
m+(y2) <
y12 − y22
y11 − y21
,
lo que implica que
m+(y2)(y11 − y21)− (y12 − y22) < 0 .
Esto, aplicando la proposicion 2.4.4, significa que
m−(y2)(y11 − y21)− (y12 − y22) < 0 .
Si (y11 − y21) < 0, tendrıamos que ∀α > 0
g(y21 + α(y11 − y21))− g(y21)
α(y11 − y21)>
y12 − y22
y11 − y21
.
Por un razonamiento similar al anterior, se obtendrıa que
m−(y2) >
y12 − y22
y11 − y21
y por la proposicion 2.4.4:
m+(y2) >
y12 − y22
y11 − y21
.
Luego se verifica que
m+(y2)(y11 − y21)− (y12 − y22) < 0
m−(y2)(y11 − y21)− (y12 − y22) < 0
72

Por tanto, se concluye que L1 ⊂ D1, c.q.d. /
Con un razonamiento similar al que hemos utilizado, se puede demostrarel siguiente resultado.
Proposicion 2.4.6 Sea (R1,R2) una estructura de preferencia con las hipotesisde esta seccion. Si definimos el conjunto
D2 =
{(y
1, y
2) ∈ R2 ×R2 :
m−(y2)(y11 − y21)− (y12 − y22) > 0
m+(y2)(y11 − y21)− (y12 − y22) > 0
},
considerando la desigualdad y11 − y21 > 0 cuando alguno de esos coefi-cientes fuese infinito, se verifica que
L2 = D2 .
Finalmente, el estudio de la aproximacion lineal inferior a (R1,R2) locompletaremos con la proposicion siguiente.
Proposicion 2.4.7 Sea (R1,R2) una estructura de preferencia con las hipotesisde esta seccion, se verifica que
L3 = ∆ y L4 = ∅ .
.Demostracion Sabemos que si L3 fuese distinto de ∆, estarıa formadapor pares de puntos pertenecientes a algunas de las rectas contenidas en lahipersuperficie de valor {y
0∼} (teorema 2.4.4). En este caso, como {y
0∼}
son curvas de R2, si contuviesen alguna recta serıa porque dicha curva espor sı misma una recta, con lo cual v0 serıa lineal, y este caso lo habıamoseliminado.
L4 = ∅, pues, al ser (R1,R2) completa, tendremos que Rc12 = ∅ . c.q.d.
/
Como conclusion de estos resultados, tendremos:Dada una estructura de preferencia (R1,R2) representada por una fun-
cion de valor v0 ∈ C1(R2), no lineal, y verificando que v0(0, 0) = 0 y
73

v0(y1, y2) = y2 − g(y1), siendo g ∈ C1(R), su estructura de aproximacionlineal inferior es
(D1, D2, ∆, ∅) .
Vamos a determinar las aproximaciones lineales superior y local.
Proposicion 2.4.8 Sea (R1,R2) una estructura de preferencia con las hipotesisde esta seccion, se verifica que
L′1 =
{(y
1, y
2) ∈ R2 ×R2 :
m−(y2)(y11 − y21)− (y12 − y22) < 0 o bien
m+(y2)(y11 − y21)− (y12 − y22) < 0
}
L′2 =
{(y
1, y
2) ∈ R2 ×R2 :
m+(y2)(y11 − y21)− (y12 − y22) > 0 o bien
m−(y2)(y11 − y21)− (y12 − y22) > 0
}
L′3 =
{(y
1, y
2) ∈ R2 ×R2 :[
m−(y2)(y11 − y21)− (y12 − y22) ≥ 0 y
m−(y2)(y11 − y21)− (y12 − y22) ≤ 0
]
o bien
[m+(y
2)(y11 − y21)− (y12 − y22) ≥ 0 y
m+(y2)(y11 − y21)− (y12 − y22) ≤ 0
] }
L′4 = ∅
.Demostracion Llamando D′1 al conjunto que aparece igualado a L′
1 enel enunciado, demostraremos que D′
1 verifica P(1)– 2.2.8 y, ademas, queR1 ⊂ D′
1 ⊂ L′1. De esta manera, por el teorema 2.2.10, tendrıamos probada
la igualdad.D′
1, por su definicion, verifica la propiedad P(1).Consideremos (y
1, y
2) ∈ R1. Entonces, (y
1, y
2) ∈ D′
1, ya que si no severificase esto,
(y1, y
2) ∈ (D′
1)c = L2 ∪ { las rectas m−(y
2)(y11 − y21)− (y12 − y22) = 0,
74

m+(y2)(y11 − y21)− (y12 − y22) = 0} ⊂ R2 ∪Rs
1
y esto es absurdo.Por otro lado, tomemos (y
1, y
2) ∈ D′
1. Si
6 ∃α′ > 0 tal que (y2+ α′(y
1− y
2), y
2) ∈ R1 ,
esto implicarıa que
∀α > 0, (y2+ α(y
1− y
2), y
2) ∈ (R1)
c = Rs1 ∪R2 .
Debido a esto, tal como se define L2, tendrıamos que
(y1, y
2) ∈ L2 ∪ { las rectas m−(y
2)(y11 − y21)− (y12 − y22) = 0,
m+(y2)(y11 − y21)− (y12 − y22) = 0} .
Por tanto, (y1, y
2) ∈ (D′
1)c, que es absurdo. Luego, si (y
1, y
2) ∈ D′
1,tendremos que
y1− y
2∈ K1(y2
)
y, por tanto,(y
1, y
2) ∈ L′
1 .
El resto de la igualdades se demostrarıan de modo analogo. c.q.d. /
Proposicion 2.4.9 Sea (R1,R2) una estructura de preferencia con las hipotesisconsideradas hasta ahora, anadiendo, ademas, la condicion v0 ∈ C∞(Rn). Severifica que
L∗1 = {(y
1, y
2) ∈ R2 ×R2 : g′(y
2)(y11 − y21)− (y12 − y22) < 0}
L∗2 = {(y
1, y
2) ∈ R2 ×R2 : g′(y
2)(y11 − y21)− (y12 − y22) > 0}
L∗3 = ∆
L∗4 = ∅
.Demostracion Sea (y1, y
2) ∈ R2 ×R2 tal que
g′(y2)(y11 − y21)− (y12 − y22) < 0 .
Analicemos los dos casos posibles:
75

Si (y11 − y21) > 0, entonces, todo y1 tal que y1 > y21 se puede ponercomo y1 = y21 + α(y11 − y21). Por otro lado,
g′(y2) <
y12 − y22
y11 − y21
,
con lo cual, al verificarse que
g′(y2) = g′+(y
2) = lım
y1 → y21
y1 > y21
g(y1)− g(y21)
y1 − y21
,
tendrıamos que ∃α0 tal que, si 0 < α < α0,
g(y21 + α(y11 − y21))− g(y21)
α(y11 − y21)<
α(y12 − y22)
α(y11 − y21).
Simplificando, y sumado y restando y22 en el segundo termino, ten-dremos:
g(y21 + α(y11 − y21))− g(y21) < y22 + α(y12 − y22)− y22
⇒ y22 + α(y12 − y22)− g(y21 + α(y11 − y21)) > y22 − g(y21) ,
o, lo que es igual,
v0(y2+ α(y
1− y
2)) > v0(y2
) ∀α / 0 < α < α0 .
Esto significa que
∀α / 0 < α < α0 (y2+ α(y
1− y
2), y
2) ∈ R1 .
Si (y11 − y21) < 0, argumentarıamos, de un modo similar, utilizandoahora el concepto de g′−(y
2) en lugar de g′+(y
2).
Por tanto (y1, y
2) ∈ L∗
1
Sea (y1, y
2) ∈ L∗
1. Esto equivale a decir que y1− y
2∈ LP (y
2). Luego ∃α0
tal que, si 0 < α < α0,
(y2+ α(y
1− y
2), y
2) ∈ R1 ,
76

es decir,v0(y2
+ α(y1− y
2)) > v0(y2
) .
Tal y como se define v0, tendremos que
y22 − g(y21) < y22 + α(y12 − y22)− g(y21 + α(y11 − y21)) .
Por tanto,
g(y21 + α(y11 − y21))− g(y21)
α(y11 − y21)<
y12 − y22
y11 − y21
si y11 − y21 > 0
g(y21 + α(y11 − y21))− g(y21)
α(y11 − y21)>
y12 − y22
y11 − y21
si y11 − y21 < 0
Tomando lımite cuando α −→ 0, se tiene:
g′(y2) <
y12 − y22
y11 − y21
si y11 − y12 > 0
g′(y2) >
y12 − y22
y11 − y21
si y11 − y12 < 0
Ambos casos se resumen en la expresion
g′(y2)(y11 − y21)− (y12 − y22) < 0 .
Por tanto, queda demostrada la igualdad para L∗1.
Para L∗2 la demostracion es similar.
L∗3 = ∆, pues no puede haber ningun segmento contenido en las curvas
{y2∼}, ya que estas son de clase ∞.
Finalmente, la igualdad para L∗4 se demuestra por el corolario 2.2.11 y las
proposiciones 2.4.7 y 2.4.8. cqd /Hemos tratado hasta ahora el caso en el que V es unitario. Para poder
generalizar nuestro estudio a una familia de funciones de R2 con cualquiercardinal, daremos primeramente una definicion que amplıa la dada en 2.4.3.
77

Definicion 2.4.10 Sea (R1,R2) una �V−preferencia en R2, donde V esuna familia de funciones de clase C1(R2) tales que v(y1, y2) = y2 − gv(y1) yv(0, 0) = 0, ∀v ∈ V . Para cada y = (y1, y2) ∈ R2 y ∀v ∈ V , podemos definirlos siguientes coeficientes:
m+v (y) = sup
{gv(z1)−gv(y1)
z1−y1: z1 > y1
}m−
v (y) = sup{
gv(z1)−gv(y1)z1−y1
: z1 < y1
}mv+(y) = inf
{gv(z1)−gv(y1)
z1−y1: z1 > y1
}mv−(y) = inf
{gv(z1)−gv(y1)
z1−y1: z1 < y1
}
M+(y) = supv
m+v (y) m+(y) = inf
vm+
v (y)
M−(y) = supv
m−v (y) m−(y) = inf
vm−
v (y)
M+(y) = supv
mv+(y) m+(y) = infv
mv+(y)
M−(y) = supv
mv−(y) m−(y) = infv
mv−(y)
La siguiente proposicion nos describe las estructuras de aproximacionlineales inferiores a las citadas �V−preferencias.
Proposicion 2.4.11 Sea (R1,R2) una �V−preferencia en R2 con las condi-ciones de 2.4.10. Se verifican las siguientes igualdades:
L1 =
{(y
1, y
2) ∈ R2 ×R2 :
M+(y2)(y11 − y21)− (y12 − y22) < 0 y
m−(y2)(y11 − y21)− (y12 − y22) < 0
}
L2 =
{(y
1, y
2) ∈ R2 ×R2 :
78

M−(y2)(y11 − y21)− (y12 − y22) > 0 y
m+(y2)(y11 − y21)− (y12 − y22) > 0
}
L3 = ∆
L4 =
{(y
1, y
2) ∈ R2 ×R2 :
si y11 < y21,
[M−(y
2)(y11 − y21)− (y12 − y22) < 0 y
m−(y2)(y11 − y21)− (y12 − y22) > 0
]
y si y11 > y21,
[M+(y
2)(y11 − y21)− (y12 − y22) > 0 y
m+(y2)(y11 − y21)− (y12 − y22) < 0
] }.Demostracion Las igualdades para L1, L2, L3 se demuestran aplicando
el resultado 2.4.2 junto con las proposiciones 2.4.5, 2.4.6 y 2.4.7, respectiva-mente.
Veamos que ocurre en el caso de L4. Para ello, denotemos por D4 elconjunto que aparece igualado a L4 en el enunciado. Vamos a demostrarque D4 verifica la propiedad P(1) de la proposicion 2.2.8 y, ademas, queL4 ⊂ D4 ⊂ Rc
12. De este modo, aplicando el teorema 2.2.10, quedarıa probadala igualdad L4 = D4.
Que D4 verifica P(1) se obtiene directamente de su definicion.Probemos que D4 ⊂ Rc
12. Para ello, distinguiremos dos casos: Sea (y1, y
2) ∈
D4.
Si (y11 − y21) < 0, se verifica que
M−(y2)(y11 − y21)− (y12 − y22) < 0 ,
con lo cual obtenemos que
M−(y2) >
y12 − y22
y11 − y21
.
Por definicion de supremo, esto implicarıa que
∃vj ∈ V / mvj−(y2) >
y12 − y22
y11 − y21
.
Ası, por definicion de mvj−(y2),
gj(y11)− gj(y21)
y11 − y21
>y12 − y22
y11 − y21
9 .
9Utilizamos gi y gj para denotar a gvi y gvj , rspectivamente.
79

Esto nos lleva, multiplicando por y11 − y21, a que
gj(y11)− gj(y21) < y12 − y22 ⇒ y22 − gj(y11) < y12 − gj(y21)
y, por tanto,vj(y2
) < vj(y1) .
Por otra parte, tambien se verifica que
m−(y2)(y11 − y21)− (y12 − y22) > 0 .
Ası,
m−(y2) <
y12 − y22
y11 − y21
.
Por definicion de ınfimo, esto implicarıa que
∃vi ∈ V / m−vi(y
2) <
y12 − y22
y11 − y21
.
De esto, por definicion de m−vi(y
2), se obtiene que
gi(y11)− gi(y21)
y11 − y21
<y12 − y22
y11 − y21
.
Multiplicando la desigualdad por y11 − y21, obtenemos:
gi(y11)− gi(y21) > y12 − y22 ⇒ y22 − gi(y21) > y12 − gi(y11) .
Por tanto,vi(y2
) > vi(y1) .
Aplicando la proposicion 2.1.4, tenemos que, si (y1, y
2) ∈ D4 y y11 −
y21 < 0, (y1, y
2) ∈ Rc
12
Si (y11 − y21) > 0, se verifica por una parte que
M+(y2)(y11 − y21)− (y12 − y22) > 0 ,
Por tanto,
M+(y2) >
y12 − y22
y11 − y21
.
80

Como tambien se verifica que
m+(y2)(y11 − y21)− (y12 − y22) < 0 ,
entonces, se obtiene que
m+(y2) <
y12 − y22
y11 − y21
.
Aplicando un razonamiento analogo al caso anterior, obtendrıamos que(y
1, y
2) ∈ Rc
12. Queda pues probado, que D4 ⊂ Rc12.
Veamos ahora que L4 ⊂ D4.Sea (y
1, y
2) ∈ L4, entonces y
1− y
2∈ DD(y
2), es decir,
(y2+ α(y
1− y
2), y
2) ∈ Rc
12, ∀α > 0 .
Por la proposicion 2.1.4, existiran vi, vj ∈ V tales que
vi(y2+ α(y
1− y
2)) > vi(y2
) ∀α > 0
vj(y2+ α(y
1− y
2)) < vj(y2
) ∀α > 0 ,
o lo que es equivalente
(A)
{y22 + α(y12 − y22)− gi(y21 + α(y11 − y21)) > y22 − gi(y21) ∀α > 0y22 + α(y12 − y22)− gj(y21 + α(y11 − y21)) < y22 − gj(y21) ∀α > 0
Si (y11 − y21) < 0, estas dos ultimas desigualdades podrıan expresarsepor
gi(y21 + α(y11 − y21))− gi(y21)
α(y11 − y21)>
y12 − y22
y11 − y21
∀α > 0
gj(y21 + α(y11 − y21))− gj(y21)
α(y11 − y21)<
y12 − y22
y11 − y21
∀α > 0 .
Esto nos llevarıa a que
mvi−(y2) >
y12 − y22
y11 − y21
> m−vi(y
2) .
81

Por tanto,
M−(y2) >
y12 − y22
y11 − y21
,
lo cual implica que
M−(y2)(y11 − y21)− (y12 − y22) < 0 .
Ademas,
m−(y2) <
y12 − y22
y11 − y21
,
por lo quem−(y
2)(y11 − y21)− (y12 − y22) > 0 .
Si (y11 − y21) > 0, las desigualdades (A) se expresarıan como
gi(y21 + α(y11 − y21))− gi(y21)
α(y11 − y21)<
y12 − y22
y11 − y21
∀α > 0
gj(y21 + α(y11 − y21))− gj(y21)
α(y11 − y21)>
y12 − y22
y11 − y21
∀α > 0 .
Esto nos lleva a que
mvi+(y2) >
y12 − y22
y11 − y21
> m+vi(y
2) .
Por tanto,
M+(y2) >
y12 − y22
y11 − y21
,
lo cual implica que
M+(y2)(y11 − y21)− (y12 − y22) > 0 .
Ademas,
m+(y2) <
y12 − y22
y11 − y21
,
por lo quem+(y
2)(y11 − y21)− (y12 − y22) < 0 .
82

c.q.d. /
Veamos ahora que ocurre con las estructuras de aproximacion lineal su-periores.
Proposicion 2.4.12 Sea (R1,R2) una �V−preferencia en R2 con las condi-ciones de 2.4.10. Se verifican las siguientes igualdades:
L′1 =
{(y
1, y
2) ∈ R2 ×R2 :
M−(y2)(y11 − y21)− (y12 − y22) < 0 o bien
m+(y2)(y11 − y21)− (y12 − y22) < 0
}
L′2 =
{(y
1, y
2) ∈ R2 ×R2 :
m−(y2)(y11 − y21)− (y12 − y22) > 0 o bien
M+(y2)(y11 − y21)− (y12 − y22) > 0
}
L′3 = ∆
L′4 =
{(y
1, y
2) ∈ R2 ×R2 :
[m−(y
2)(y11 − y21)− (y12 − y22) > 0 y
M−(y2)(y11 − y21)− (y12 − y22) < 0
]
o bien
[M+(y
2)(y11 − y21)− (y12 − y22) > 0 y
m+(y2)(y11 − y21)− (y12 − y22) < 0
] }.Demostracion Se demuestra, atendiendo a la definicion de estructura de
aproximacion lineal superior, y a la observacion siguiente para determinarL′
4:Toda funcion gv verifica que su grafica, a la izquierda de un punto y
2≡
(y21, y22), esta contenido en la region
mv−(y2)(y11 − y21)− (y12 − y22) > 0 y m−
v (y2)(y11 − y21)− (y12 − y22) < 0 ,
y, a la derecha de dicho punto, en
m+v (y
2)(y11 − y21)− (y12 − y22) > 0 y mv+(y
2)(y11 − y21)− (y12 − y22) < 0
c.q.d. /
Finalmente, veamos cual es la estructura de aproximacion lineal local.
83

Proposicion 2.4.13 Sea (R1,R2) una �V−preferencia de R2 con las condi-ciones de 2.4.10. Se verifican las siguientes igualdades:
L∗1 =
{(y
1, y
2) ∈ R2 ×R2 :
(infv g′v(y2))(y11 − y21)− (y12 − y22) < 0 y
(supv g′v(y2))(y11 − y21)− (y12 − y22) < 0
}
L∗2 =
{(y
1, y
2) ∈ R2 ×R2 :
(infv g′v(y2))(y11 − y21)− (y12 − y22) > 0 y
(supv g′v(y2))(y11 − y21)− (y12 − y22) > 0
}
L∗3 = ∆
L∗4 = (L∗
1)c ∩ (L∗
2)c ∩ (L∗
3)c
.Demostracion Las igualdades para L∗1 y L∗
2 se demuestran aplicando elresultado 2.4.2 junto con la proposicion 2.4.9.
Para demostrar la tercera igualdad, se utilizan los resultados 2.2.11, 2.4.11y 2.4.12.
Finalmente, la igualdad para L∗4 se demuestra con la siguiente consid-
eracion: si una direccion d, junto con un punto y0, no verifica que
∃α0 / si 0 < α < α0, o bien (y0+ αd, y
0) ∈ R1 o (y
0+ αd, y
0) ∈ Rs
1
o (y0+ αd, y
0) ∈ R2 ,
entonces, (y0+ αd, y
0) debe pertenecer a Rc
12, ∀ 0 < α < α0 (observeseque (R1,R2) es una �V−preferencia). c.q.d. /
Veamos ahora, igual que se hizo para el caso de las �V−preferenciaslineales, una caracterizacion de las �V−preferencias definidas a partir defunciones globalmente convexas en R2
Teorema 2.4.14 Sea (R1,R2) una �V−preferencia en R2. V esta consti-tuida por funciones globalmente convexas en R2 sii
L2 = L∗2
84

.Demostracion
“⇒” Si gv es una funcion convexa, entonces se verifica, ∀y2∈ R2, que
m−v (y
2) = m+v(y2
) = g′v(y2) .
Por ello, aplicando las proposiciones 2.4.11 y 2.4.13, tendremos queL2 = L∗
2.
“⇐” Si L2 = L2∗, entonces, ∀y2∈ R2,
M−(y2) = sup
vm−
v (y2) = sup
vg′v(y2
) ( o infv
g′v(y2))
m+(y2) = inf
vm+
v (y2) = inf
vg′v(y2
) ( o supv
g′v(y2))
Como resulta que
m−v (y
2) ≥ g′v(y2
) ≥ mv+(y2) ,
la �V−preferencia puede ser descrita por un conjunto de funcionesglobalmente convexas, pues verifican que
m−v (y
2) = mv+(y
2) = g′v(y2
) ,
y esto es condicion necesaria y suficiente para la convexidad
c.q.d. /
El siguiente teorema es el analogo al anterior, pero con funciones global-mente concavas.
Teorema 2.4.15 Sea (R1,R2) una �V−preferencia en R2. V esta consti-tuida por funciones globalmente concavas en R2 sii
L1 = L∗1
85

2.5. ESTRUCTURAS DE APROXIMACION
LINEAL Y �V− PREFERENCIAS EN
Rn
En este ultimo epıgrafe del capıtulo 2, vamos a generalizar los resultadosobtenidos en el apartado anterior considerando �V− preferencias en el es-pacio Rn. Iniciaremos nuestro estudio, como ya hicieramos en la seccion 2.4,restringiendonos a las �V−preferencias en donde V es un conjunto unitario.Una vez realizado el analisis para esta situacion particular, pasaremos al casomas general, utilizando la proposicion 2.4.2.
De este modo, consideraremos, en primer lugar, una estructura de pref-erencia (R1,R2) en Rn representada por una funcion de valor v0 ∈ C1(Rn)no lineal 10. Esta funcion, tal y como se construye una funcion de valor,verificara el teorema de la funcion implıcita. Por tanto, puede suponerse laexistencia de una funcion g ∈ C1(Rn) tal que
v0(y1, ..., yn) = yn − g(y1, ..., yn−1) .
Ademas, impondremos la condicion v0(0, ..., 0) = 0.A partir de ahora, utilizaremos la siguiente nomenclatura:
Para cada a = (a1, a2, ..., an) ∈ Sn−1 (esfera unidad en Rn−1) e
y0
= (y01, y02, ..., y0n) ∈ Rn ,
definiremos el plano:∏a(y0
) = {(y01 + λa1, ..., y0n−1 + λan−1, µ) : λ, µ ∈ R}
y la hipersuperficie de Rn
v0,y0
= {(x1, ..., xn) ∈ Rn : v0(x1, ..., xn) = v0(y01, ..., y0n)} .
Al corte del plano con la superficie,∏
a(y0) ∩ v0,y
0, la representaremos
analıticamente porga,y
0(λ) = xn ,
que define una curva en Rn.
10el caso lineal ya fue tratado en la seccion 2.3.
86

Para cada una de estas curvas, tendremos los siguientes coeficientes:
m+a (y
0) = sup
{ga,y
0(λ)−ga,y
0(0)
λ: λ > 0
}m−
a (y0) = sup
{ga,y
0(λ)−ga,y
0(0)
λ: λ < 0
}m+a(y0
) = inf{
ga,y0(λ)−ga,y
0(0)
λ: λ > 0
}m−a(y0
) = inf{
ga,y0(λ)−ga,y
0(0)
λ: λ < 0
}
La siguiente proposicion soluciona el problema de la estructura de aprox-imacion lineal inferior para una estructura de preferencia (R1,R2), bajo lashipotesis consideradas.
Proposicion 2.5.1 Sea (R1,R2) una estructura de preferencia bajo las hipotesiscitadas. Se verifican las siguientes igualdades:
L1 =⋃
a∈Sn−1 L1(a) L2 =⋃
a∈Sn−1 L2(a)
L3 =⋃
a∈Sn−1 L3(a) L4 = ∅ ,
siendo
L1(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y ademas
m+a (y
2)λ(y
1)− (y1n − y2n) < 0 y
m−a(y2)λ(y
1)− (y1n − y2n) < 0
}
L2(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y ademas
m−a (y
2)λ(y
1)− (y1n − y2n) > 0 y
m+a(y2)λ(y
1)− (y1n − y2n) > 0
}
L3(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2)
m+a (y
2) = m−a(y2
) = m−a (y
2) = m+a(y2
) = ma
y, ademas, maλ(y1)− (y1n − y2n) = 0
},
87

donde λ(y1) representa el coeficiente λ que determina a y
1en el plano∏
a(y2), es decir
(y1
= (y21 + λ(y1), y22 + λ(y
1)a2, ..., y2n−1λ(y
1)an−1, y1n)) .
.Demostracion Por las proposiciones 2.4.5 y 2.4.6, L1(a) y L2(a) repre-sentan las aproximaciones a R1 y Rs
1 restringidas a los planos∏
a(y2), siendo
y2∈ Rn.Como recorrer a ∈ Sn−1 supone recorrer todo el espacio Rn, tendremos,
que solucionar el problema en Rn es pasar a un conjunto de problemas enR2 y unir, posteriormente, todas sus posibles soluciones.
L4 = ∅, pues (R1,R2) es completa y, por tanto, Rc12 = ∅.
Finalmente, L3 estara constituido por las rectas que aparezcan al interse-car el plano
∏a(y2
) con la hipersuperfie V0y0, es decir, cuando ga,y
2(λ) = xn
sea la ecuacion de una recta (ver teorema 2.2.4). c.q.d. /
El siguiente resultado nos resolvera el problema para el caso de las es-tructuras de aproximacion lineal superiores.
Proposicion 2.5.2 Sea (R1,R2) una estructura de preferencia bajo las hipotesisde esta seccion. Se verifican las siguientes igualdades:
L′1 =
⋃a∈Sn−1 L′
1(a) L′2 =
⋃a∈Sn−1 L′
2(a)
L′3 =
⋃a∈Sn−1 L′
3(a) L′4 = ∅ ,
siendo
L′1(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y ademas
m−a (y
2)λ(y
1)− (y1n − y2n) < 0 o
m+a(y2)λ(y
1)− (y1n − y2n) < 0
}
L′2(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y ademas
m+a (y
2)λ(y
1)− (y1n − y2n) > 0 o
m−a(y2)λ(y
1)− (y1n − y2n) > 0
}
88

L′3(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y ademas[
m−a(y2)λ(y
1)− (y1n − y2n) ≥ 0 y
m−a (y
2)λ(y
1)− (y1n − y2n) ≤ 0
]
o bien
[m+
a (y2)λ(y
1)− (y1n − y2n) ≥ 0 y
m+a(y2)λ(y
1)− (y1n − y2n) ≤ 0
] },
siendo λ(y1) el coeficiente λ que determina a y
1en el plano
∏a(y2
), tal ycomo se especifica en la proposicion 2.5.1.
.Demostracion Analoga al razonamiento realizado en la proposicion an-terior, usando, para este caso, el resultado 2.4.8. /
Finalmente, veamos que ocurre con las estructuras de aproximacion lin-eales locales a traves de la siguiente proposicion.
Proposicion 2.5.3 Sea Rn una estructura de preferencia bajo las condi-ciones de esta seccion. Se verifican las siguientes igualdades:
L∗1 =
⋃a∈Sn−1 L∗
1(a) L∗2 =
⋃a∈Sn−1 L∗
2(a)
L∗3 = ∆ L∗
4 = ∅ ,
siendo
L∗1(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y
g′ay2(0)λ(y
1)− (y1n − y2n) < 0
}L∗
2(a) ={
(y1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y
g′ay2(0)λ(y
1)− (y1n − y2n) > 0
}.Demostracion Analoga a la de los resultados anteriores, usando, en este
caso, la proposicion 2.4.9. /Hemos tratado el caso de una �V−preferencia en Rn donde V es una
familia unitaria. Para poder generalizar nuestro estudio al caso en el queV este constituido por un numero no determinado de funciones sobre Rn,daremos unas definiciones previas basadas en las aparecidas en 2.4.10.
89

Definicion 2.5.4 Sea (R1,R2) una �V−preferencia en Rn, siendo V unafamilia de funciones de clase C1(Rn) tales que
∀v ∈ V, v(y1, ..., yn) = yn − gv(y1, ..., yn−1)
yv(0, ..., 0) = 0 .
Para cada y = (y1, ..., yn) ∈ Rn, a ∈ Sn−1 y v ∈ V , podemos definir lossiguientes coeficientes:
m+v,a(y) = sup
{gv,a(λ)−gv,a(0)
λ: λ > 0
}m−
v,a(y) = sup{
gv,a(λ)−gv,a(0)
λ: λ < 0
}m+v,a(y) = inf
{gv,a(λ)−gv,a(0)
λ: λ > 0
}m−v,a(y) = inf
{gv,a(λ)−gv,a(0)
λ: λ < 0
}siendo gv,a la interseccion del plano
∏a(y) con la hipersuperficie
vy = {(x1, ..., xn) : v(x1, ..., xn) = v(y1, ..., yn)}
M+a (y) = sup
vm+
v,a(y) m+a (y) = inf
vm+
v,a(y)
M−a (y) = sup
vm−
v,a(y) m−a (y) = inf
vm−
v,a(y)
M+a(y) = supv
m+v,a(y) m+a(y) = infv
m+v,a(y)
M−a(y) = supv
m−v,a(y) m−a(y) = infv
m−v,a(y)
Veamos como se describen las aproximaciones lineales inferiores para estecaso de �V−preferencia general.
Proposicion 2.5.5 Sea (R1,R2) una �V−preferencia en Rn en las condi-ciones de 2.5.4. Se verifican las siguientes igualdades:
90

L1 =⋃
a∈Sn−1 L1(a) L2 =⋃
a∈Sn−1 L2(a)
L3 =⋃
a∈Sn−1 L3(a) L4 =⋃
a∈Sn−1 L4(a)
siendo
L1(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y ademas
M+a (y
2)λ(y
1)− (y1n − y2n) < 0
m−a(y2)λ(y
1)− (y1n − y2n) < 0
}
L2(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y ademas
M−a (y
2)λ(y
1)− (y1n − y2n) > 0
m+a(y2)λ(y
1)− (y1n − y2n) > 0
}
L3(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2)
M+a (y
2) = m−a(y2
) = M−a (y
2) = m+a(y2
) = ma
y ademas maλ(y1)− (y1n − y2n) = 0
}
L4(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2)
si λ(y1) < 0,
[M−a(y2
)λ(y1)− (y1n − y2n) < 0 y
m−a (y
2)λ(y
1)− (y1n − y2n) > 0
]
y si λ(y1) > 0,
[M+a(y2
)λ(y1)− (y1n − y2n) > 0 y
m+a (y
2)λ(y
1)− (y1n − y2n) < 0
] }.Demostracion Para las igualdades de L1, L1 y L4 se utiliza un razon-
amiento similar al realizado en las proposiciones de esta seccion, junto conel resultado 2.4.11. Para demostrar la igualdad de L3, se razona de modosimilar a la proposicion 2.5.1. /
Proposicion 2.5.6 Sea (R1,R2) una �V−preferencia en Rn con las condi-ciones de 2.5.4. Se verifican las siguientes igualdades:
L′1 =
⋃a∈Sn−1 L′
1(a) L′2 =
⋃a∈Sn−1 L′
2(a)
L′3 =< L′
3 > L′4 =
⋃a∈Sn−1 L′
4(a) .
91

siendo
L′1(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y, ademas,
M−a (y
2)λ(y
1)− (y1n − y2n) < 0 o
m+a(y2)λ(y
1)− (y1n − y2n) < 0
}
L′2(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y, ademas,
m−a(y2)λ(y
1)− (y1n − y2n) > 0 o
M+a (y
2)λ(y
1)− (y1n − y2n) > 0
}
L′4(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y, o bien[
m−a(y2)λ(y
1)− (y1n − y2n) > 0 y
M−a (y
2)λ(y
1)− (y1n − y2n) < 0
]
o
[M+
a (y2)λ(y
1)− (y1n − y2n) > 0 y
m+a(y2)λ(y
1)− (y1n − y2n) < 0
] }
y < L′3 > representa el subespacio vectorial de Rn generado por L′
3.
.Demostracion Utilizando la proposicion 2.4.12 y el teorema 2.2.4. /
Finalmente, veamos un resultado para las estructuras de aproximacionlineales locales.
Proposicion 2.5.7 Sea (R1,R2) una �V−preferencia en Rn con las condi-ciones 2.5.4. Se verifican las siguientes igualdades:
L∗1 =
⋃a∈Sn−1 L∗
1(a) L∗2 =
⋃a∈Sn−1 L∗
2(a)
L∗3 = ∆ L∗
4 =⋃
a∈Sn−1 L∗4(a) ,
siendo
L∗1(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y
92

(infv g′v,a(y2))λ(y
1)− (y1n − y2n) < 0
(supv g′v,a(y2))λ(y
1)− (y1n − y2n) < 0
}
L∗2(a) =
{(y
1, y
2) ∈ Rn ×Rn : y
1∈ ∏
a(y2) y
(infv g′v,a(y2))λ(y
1)− (y1n − y2n) > 0
(supv g′v,a(y2))λ(y
1)− (y1n − y2n) > 0
}
L∗4(a) = (L∗
1(a))c ∩ (L∗2(a))c ∩ (L∗
3(a))c .
93

Capıtulo 3
Eficiencia en �V−preferencias
En el primer capıtulo se introdujeron los conceptos de conjunto eficientey conjunto eficiente estricto en estructuras de preferencia generales, haciendoun estudio mas detallado para algunas de estas estructuras, como las aso-ciadas al orden de Pareto, las asociadas al orden lexicografico, las conicasconstantes, etc. En dicho estudio no se incluyeron ciertas clases como lasrepresentadas por una funcion de valor vectorial o las inducidas por familiasde conjuntos convexos, argumentando que este se llevarıa a cabo en un marcomas amplio, constituido por las llamadas �V−preferencias.
Nuestro proposito en este ultimo capıtulo, una vez estudiadas las �V−preferencias en el anterior, es ampliar el analisis de la eficiencia a dicho marco.
Primeramente, en la seccion 3.1, se tratara la eficiencia para una claseparticular de estructuras inducidas por familias de conjuntos convexos: lasestructuras conicas no constantes.
Toda estructura de preferencia general, a traves de sus aproximacioneslineales, origina estructuras del tipo estudiado en 3.1. Es por ello por lo quelos resultados aquı obtenidos son usados en la seccion 3.2 para aproximarconjuntos eficientes en dicho caso general.
Basandonos en cierto metodo iterativo de aproximacion, aparecido enYu (1974), en la seccion 3.3 se consigue acotar superior e inferiormente losconjuntos eficientes en �V−preferencias.
Finalmente, la seccion 3.4 trata la nocion de eficiencia estricta para dichasestructuras.
94

3.1. EFICIENCIA EN ESTRUCTURAS DE
PREFERENCIA CONICAS NO CON-
STANTES
La definicion de este tipo de estructura es una particularizacion del con-cepto de estructura de preferencia inducida por una familia de conjuntosconvexos, caso en el que dichos conjuntos convexos sean conos (ver definicion1.2.1).
Definicion 3.1.1 Sea Y ⊂ Rn el espacio de objetivos o consecuencias den-tro de un problema de decision multiobjetivo. Llamaremos estructura depreferencia conica no constante inducida por una familia de conosconvexos {K(y
0)}y
0∈Y a una estructura de preferencia, (R1,R2), inducida
por dicha familia.
Un ejemplo de este tipo de estructuras nos lo proporciona la siguienteproposicion
Proposicion 3.1.2 Sea (R1,R2) una �V−preferencia en Rn, y (L1, L2, L3, L4),(L∗
1, L∗2, L
∗3, L
∗4) sus estructuras de aproximacion lineal inferior y local, respec-
tivamente. Se verifica que (L1, L3), (Ls2, L3), (L∗
1, L∗3) y (L∗s
2 , L∗3) son estruc-
turas de preferencia conicas no constante.
.Demostracion. Por ser (R1,R2) una �V−preferencia y considerando ladescripcion que sobre sus aproximaciones lineales se hizo en el capıtulo an-terior, tendremos las siguientes equivalencias:
(y
1, y
2) ∈ L1 ⇔ y
1− y
2∈ C`P (y
2)
pero y2− y
16∈ C`P (y
1)
(y1, y
2) ∈ L3 ⇔ y
1− y
2∈ C`P (y
2)
y, ademas, y2− y
1∈ C`P (y
1)
(y1, y
2) ∈ Ls
2 ⇔ y1− y
2∈ C`−D(y
2)
pero y2− y
16∈ C`−D(y
1)
(y1, y
2) ∈ L3 ⇔ y
1− y
2∈ C`−D(y
2)
y, ademas, y2− y
1∈ C`−D(y
1)
95

(y
1, y
2) ∈ L∗
1 ⇔ y1− y
2∈ C`LP (y
2)
pero y2− y
16∈ C`LP (y
1)
(y1, y
2) ∈ L∗
3 ⇔ y1− y
2∈ C`LP (y
2)
y, ademas, y2− y
1∈ C`LP (y
1)
(y1, y
2) ∈ L∗s
2 ⇔ y1− y
2∈ C`− LD(y
2)
pero y2− y
16∈ C`− LD(y
1)
(y1, y
2) ∈ L∗
3 ⇔ y1− y
2∈ C`− LD(y
2)
y, ademas, y2− y
1∈ C`− LD(y
1)
Esto nos demuestra que (L1, L3), (Ls2, L3), (L∗
1, L∗3) y (L∗s
2 , L∗3) son estruc-
turas de preferencia conicas no constantes inducidas por los conos
{C`P (y0)}y
0∈Y , {C`−D(y
0)}y
0∈Y ,
{C`LP (y0)}y
0∈Y , {C`− LD(y
0)}y
0∈Y ,
respectivamente. c.q.d. /
El conjunto eficiente, para una estructura de preferencia conica no con-stante, puede aproximarse superior e inferiormente por conjuntos eficientespara estructuras de preferencia conicas constantes, como se demuestra en elsiguiente resultado.
Proposicion 3.1.3 Sea (R1,R2) una estructura de preferencia conica noconstante en Y ⊂ Rn inducida por una familia de conos convexos {K(y
0)}y
0∈Y .
Si se verifica que ⋂y0∈Y
K(y0) 6= {0}
y el cono generado por ese conjunto,
<⋃
y0∈Y
K(y0) > ,
es un conjunto convexo, entonces
ξ(Y, (D0, D′0)) ⊂ ξ(Y, (R1,R2)) ⊂ ξ(Y, (D, D′)) ,
siendo (D, D′) y (D0, D′0) las estructuras de preferencias conicas con-
stantes inducidas por los conos ∩y0∈Y K(y
0) y < ∪y
0∈Y K(y
0) >, respectiva-
mente.
96

.Demostracion. Sea y1∈ ξ(Y, (D0, D
′0)). Esto significa que
∀y ∈ Y (y, y1) 6∈ D0 ,
es decir,y − y
16∈<
⋃y0∈Y
K(y0) >, ∀y ∈ Y .
Por tanto, y − y16∈ K(y
1) ∀y ∈ Y , es decir, (y, y
1) 6∈ R1 ∀y ∈ Y , lo que
implica quey
1∈ ξ(Y, (R1,R2)) .
Consideremos ahora y1∈ ξ(Y, (R1,R2)). Esto significa que
∀y ∈ Y (y, y1) 6∈ R1 ,
luegoy − y
16∈ K(y
1), ∀y ∈ Y ,
lo que implica quey − y
16∈
⋂y0∈Y
K(y0) ∀y ∈ Y .
Por tanto, (y, y1) 6∈ D, ∀y ∈ Y . De esta forma,
y1∈ ξ(Y, (D, D′)) ,
c.q.d. /
Yu (1974) estudia este tipo de problemas, limitandose al caso de lasaproximaciones superiores. Observese, que podıan haberse utilizado estruc-turas de preferencias conicas constantes mas sencillas, definiendo (D, D′) y(D0, D
′0) como aquellas estructuras inducidas por los conos ∩y
0∈δY K(y
0) y
<⋃
y0∈δY K(y
0) >, respectivamente. Ello se debe a que el conjunto eficiente
para una estructura de preferencia conica no constante se encuentra en lascondiciones 1.4.6 y, por tanto, estara incluido en δY , con lo cual podrıa uti-lizarse a dicho conjunto, en lugar de Y , para definir los conos anteriores.
97

3.2. APROXIMACIONES A CONJUNTOS
EFICIENTES PARA ESTRUCTURAS
DE PREFERENCIA GENERALES
Los resultados obtenidos en la seccion anterior seran utilizados aquı, conel proposito de dar aproximaciones a conjuntos eficientes para una estructurade preferencia general (R1,R2).
Proposicion 3.2.1 Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn
y consideremos (L1, L2, L3, L4), (L∗1, L
∗2, L
∗3, L
∗4) sus estructuras de aproxi-
macion lineal inferior y local, respectivamente. Se verifica que
ξ(Y, (D01, D′01)) ⊂ ξ(Y, (L1, L3)) ⊂ ξ(Y, (D1, D
′1))
ξ(Y, (D02, D′02)) ⊂ ξ(Y, (Ls
2, L3)) ⊂ ξ(Y, (D2, D′2))
ξ(Y, (D∗01, D
∗,01)) ⊂ ξ(Y, (L∗
1, L∗3)) ⊂ ξ(Y, (D∗
1, D∗,1 ))
ξ(Y, (D∗02, D
∗,02)) ⊂ ξ(Y, (L∗s
2 , L∗3)) ⊂ ξ(Y, (D∗
2, D∗,2 )) ,
donde (D01, D′01), (D02, D
′02), (D∗
01, D∗,01) y (D∗
02, D∗,02) son estructuras de pref-
erencia conicas constantes inducidas, respectivamente, por los conos
<⋃
y0∈Y P (y
0) > <
⋃y0∈Y −D(y
0) >
<⋃
y0∈Y LP (y
0) > <
⋃y0∈Y −LD(y
0) >
Y (D1, D′1), (D2, D
′2), (D∗
1, D∗,1 ) y (D∗
2, D∗,2 ) son estructuras de preferencia
conicas constantes inducidas, respectivamente, por los conos⋂y0∈Y P (y
0)
⋂y0∈Y −D(y
0)
⋂y0∈Y LP (y
0)
⋂y0∈Y −LD(y
0) ,
siempre que estas intersecciones no sean iguales a {0} y estos conos, juntocon los anteriores, sean convexos
98

.Demostracion. Se obtiene aplicando 3.1.2 y, posteriormente, 3.1.3 /
El siguiente teorema permitira aproximar, superior e inferiormente, elconjunto eficiente para una estructura de preferencia general a partir de lasestructuras de preferencia conicas definidas en el resultado anterior.
Teorema 3.2.2 Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn y(L1, L2, L3, L4), (L∗
1, L∗2, L
∗3, L
∗4) sus estructuras de aproximacion lineal infe-
rior y local, respectivamente.
1. Si ∩y0∈Y P (y
0) y ∩y
0∈Y − D(y
0) no son iguales a {0} y son conjuntos
convexos, se verifica que
ξ(Y, (R1,R2)) ⊂ ξ(Y, (D1, D′1)) ∩ ξ(Y, (D2, D
′2))
2. Si, ademas se verifica, que L′1 = L∗
1 , L′2 = L∗
2 y
<⋃
y0∈Y
LP (y0) > , <
⋃y0∈Y
−LD(y0) >
son conjuntos convexos, tendremos que
ξ(Y, (D∗01, D
∗,01)) ∪ ξ(Y, (D∗
02, D∗,02)) ⊂ ξ(Y, (R1,R2))
.Demostracion.
1. Sea y1∈ ξ(Y, (R1,R2)). Entonces se verifica las dos afirmaciones sigu-
ientes:(a) ∀y ∈ Y (y, y
1) 6∈ R1
(b) ∀y ∈ Y (y, y1) 6∈ Rs
1
A partir de (a) se obtiene que (y, y1) 6∈ L1 ∀y ∈ Y , es decir,
y − y16∈ P (y
1) ∀y ∈ Y .
Por tanto,y − y
16∈
⋂y0∈Y
P (y0) ∀y ∈ Y ,
99

lo que implica quey
1∈ ξ(Y, (D1, D
′1)) .
A partir de (b) se obtiene que (y1, y) 6∈ L2 ∀y ∈ Y , es decir,
y1− y 6∈ D(y) ∀y ∈ Y .
De esta manera,
y1− y 6∈
⋂y0∈Y
D(y0) ∀y ∈ Y ,
con lo cualy − y
16∈
⋂y0∈Y
−D(y0) ∀y ∈ Y .
Esto implica quey
1∈ ξ(Y, (D2, D
′2)) .
2. Sea y1∈ ξ(Y, (D∗
01, D∗,01)). Esto implica que
∀y ∈ Y (y, y1) 6∈ D∗
01 ,
con lo cualy − y
16∈<
⋃y0∈Y
LP (y0) > ∀y ∈ Y
y, por tanto,y − y
16∈ LP (y
1) , ∀y ∈ Y .
Esto significa que
(y, y1) 6∈ L∗
1 = L′1 , ∀y ∈ Y ,
lo cual implica que(y, y
1) 6∈ R1 ∀y ∈ Y .
Por tantoy
1∈ ξ(Y, (R1,R2)) .
Por un razonamiento similar obtendrıamos, que dado y1∈ ξ(Y, (D∗
02, D∗,02)),
y1∈ ξ(Y, (R1,R2)) .
c.q.d. /
100

Se ha visto en el ultimo resultado, que las aproximaciones al conjuntoeficiente para una estructura de preferencia general, se obtienen de las aprox-imaciones a las estructuras de preferencia conicas no constantes definidas apartir de esta (proposicion 3.1.2).
Debido a lo anterior, describiremos, seguidamente, un metodo iterativoque permita aproximar los conjuntos eficientes para estructuras de prefer-encia conicas no constante que, a su vez, ayudara a aproximar, segun elteorema 3.2.2, a los conjuntos eficientes para estructuras mas generales (estoaparecera recogido en el teorema 3.2.6, que se enuncia al final de la seccion).
Lo que proponemos es una ampliacion al metodo empleado por Yu (1974),adaptada al contexto en el cual se desarrolla esta memoria.
METODO ITERATIVO DE APROXIMACION AL CON-JUNTO EFICIENTE PARA UNA ESTRUCTURA DEPREFERENCIA CONICA NO CONSTANTE
Sea (R1,R2) una estructura de preferencia conica no constante en Y ⊂Rn, definida a partir de la familia de conos convexos {K(y
0)}y
0∈Y . Si⋂
y0∈Y
K(y0) 6= {0} ,
<⋃
y0∈Y
K(y0) >
es convexo, y consideramos (D, D′) y (D0, D′0) las estructuras de preferencia
conicas constantes inducidas por los conos⋂y0∈Y
K(y0) y <
⋃y0∈Y
K(y0) > ,
respectivamente, podemos dar el siguiente algoritmo, el cual proporciona unaaproximacion superior para el conjunto ξ(Y, (R1,R2)):
Paso 0: Consideramos el conjunto Y 0 = Y y n = 0.
Paso 1: Consideramos la estructura de preferencia conica constante (Dn, Dn′)inducida por el cono ⋂
y0∈Y n
K(y0) .
101

Paso 2: Llamamos Y n+1 = ξ(Y n, (Dn, Dn′)).
Paso 3: Si Y n+1 = Y n, paramos, e Y n serıa la aproximacion superior aξ(Y, (R1,R2)) que buscabamos.
Si Y n+1 6= Y n, se incrementa el contador n en una unidad y volvemosal paso 1
Una pregunta serıa: ¿hacia donde converge este algoritmo, caso que noparasemos en un numero finito de pasos? La respuesta nos la da el siguienteteorema.
Teorema 3.2.3 Si llamamos Y a⋂
n≥0 Y n y ξ a ξ(Y, (R1,R2)), se verificaque:
1. ξ ⊂ Y n ∀n ≥ 0
2. ξ ⊂ Y
.Demostracion.
1. Vamos a demostrarlo por induccion.
ξ ⊂ Y 1. Esto se verifica por la proposicion 3.1.3.
Si ξ ⊂ Y n, veamos que ξ ⊂ Y n+1. Supongamos que existese y1∈ ξ
tal que y16∈ Y n+1. Entonces, por definicion de Y n+1, existirıa un
y ∈ Y n, y 6= y1, tal que
y ∈ y1+
⋂y0∈Y n
K(y0) ⊂ y
1+ K(y
1) .
Por tanto, y16∈ ξ, que es absurdo
2. Se obtiene a partir de la definicion de Y y el resultado 1. c.q.d. /
De forma similar, vamos a proporcionar un algoritmo que nos permitaobtener una aproximacion inferior al conjunto eficiente ξ(Y, (R1,R2))
Paso 0: Consideramos Y0 = ξ(Y, (D0, D′0)) y n = 1.
102

Paso 1: Consideramos la estructura de preferencia conica constante (D∗n, D∗n′),
inducida por el cono<
⋃y0∈Y \Yn−1
K(y0) >
Paso 2: Llamamos Yn = ξ(Y, (D∗n, D∗n′)).
Paso 3: Si Yn = Yn−1, paramos e Yn−1 serıa la aproximacion inferior aξ(Y, (R1,R2)) que buscabamos.
Si Yn 6= Yn−1 se incrementa el contador n en una unidad y volvemos alpaso 1
La convergencia de este algoritmo queda resuelta con el siguiente resul-tado.
Teorema 3.2.4 Si llamamos Y ∗ a⋂
n≥0 Yn y ξ a ξ(Y, (R1,R2)), se verificaque:
1. Yn ⊂ ξ ∀n ≥ 0
2. Y ∗ ⊂ ξ
.Demostracion.
1. Vamos a demostrarlo por inducion.
Y0 ⊂ ξ, por la proposicion 3.1.3.
Veamos que Y1 ⊂ ξ. Para ello, demostraremos, en primer lugar,que Y0 ⊂ Y1.
Sea y1∈ Y0 = ξ(Y, (D0, D
′0)). Entonces
∀y ∈ Y, y − y16∈<
⋃y0∈Y
K(y0) > .
Luego
∀y ∈ Y y − y16∈<
⋃y0∈Y \Y0
K(y0) > ⇒
y1∈ ξ(Y, (D∗1, D
′∗1)) = Y1
103

Consideremos, pues, la descomposicion Y1 = Y1\Y0∪Y0. Debemosdemostrar, por tanto, que dado y
1∈ Y1\Y0, y
1∈ ξ. Si y
1∈
Y1\Y0 ⇒
∀y ∈ Y y − y16∈<
⋃y0∈Y \Y0
K(y0) > ,
luegoy − y
16∈ K(y
1) ∀y ∈ Y ,
pues y16∈ Y0. Esto implica que y
1∈ ξ, luego
Y1 ⊂ ξ
Supongamos que Yn ⊂ ξ, vamos a demostrar la inclusion Yn+1 ⊂ ξ.Por un razonamiento similar al de antes, se puede demostrar queYn+1 = Yn+1\Yn∪Yn. Demostraremos, por tanto, que Yn+1\Yn ⊂ ξ.
Sea y1∈ Yn+1\Yn ⇒
∀y ∈ Y y − y16∈<
⋃y0∈Y \Yn
K(y0) > ,
luego y − y16∈ K(y
1) ∀y ∈ Y (pues y
16∈ Yn) ⇒ y
1∈ ξ y ,ası,
Yn+1 ⊂ ξ
2. Se obtiene a partir de la definicion de Y ∗ y el resultado 1 c.q.d. /
A partir de estos dos ultimos teoremas, obtendremos el siguiente corolario.
Corolario 3.2.5 Bajo las condiciones de esta seccion, si Y = Y ∗, determi-narıamos el conjunto eficiente ξ(Y, (R1,R2)) a traves de cualquiera de losalgoritmos descritos anteriormente.
.Demostracion. Considerando que ξ(Y, (R1,R2)) = Y = Y ∗. /
Estas aproximaciones superiores e inferiores al conjunto eficiente, parauna estructura de preferencia conica no constante, se utilizaran para con-struir aproximaciones al conjunto eficiente para estructuras de preferenciagenerales, a traves del siguiente teorema.
104

Teorema 3.2.6 1 Sea (R1,R2) una estructura de preferencia en Y ⊂ Rn y(L1, L2, L3, L4), (L∗
1, L∗2, L
∗3, L
∗4) sus estructuras de aproximacion lineal infe-
rior y local, respectivamente.
1. Supongamos que ∩y0∈Y P (y
0) y ∩y
0∈Y −D(y
0) no son iguales a {0}, y
que, ademas, son conjuntos convexos. Si llamamos Y 1 e Y 2 a las aprox-imaciones superiores de ξ(Y, (L1, L3)) y ξ(Y, (Ls
2, L3)), respectivamente,se verifica que
ξ(Y, (R1,R2)) ⊂ Y 1 ∩ Y 2
2. Si, ademas, tenemos las condiciones L′1 = L∗
1, L′2 = L∗
2 y los conjuntos
<⋃
y0∈Y
LP (y0) > <
⋃y0∈Y
−LD(y0) >
son convexos, llamando Y 1∗ e Y 2∗ a las aproximaciones inferiores deξ(Y, (L∗
1, L∗3)) y ξ(Y, (L∗s
2 , L∗3)), se verifica que
Y 1∗ ∪ Y 2∗ ⊂ ξ(Y, (R1,R2))
.Demostracion. Aplicando los teoremas 3.2.3 y 3.2.4 a las estructuras depreferencia no constante (L1, L3), (L2s, L3), (L∗
1, L∗3) y (L∗s
2 , L∗3) y, posterior-
mente, el teorema 3.2.2. /
Este teorema es una version del teorema 3.2.2, de mayor utilidad practica.
Una vez que se ha dado un metodo de aproximacion superior e inferior delconjunto eficiente, para estructuras de preferencia generales, nos centraremosnuevamente en el caso de las �V−preferencias
3.3. APROXIMACIONES A CONJUNTOS
EFICIENTES PARA �V− PREFEREN-
CIAS
1Utilizaremos la misma nomenclatura que para el teorema 3.2.2.
105

Antes de iniciar el estudio que da tıtulo a este epıgrafe, daremos un resul-tado que permite transcribir, al lenguaje de �V−preferencias, las condicionesque han venido siendo habituales en resultados anteriores, como⋂
y0∈Y
P (y0) 6= {0} ,
⋂y0∈Y
−D(y0) 6= {0} ...
Proposicion 3.3.1 Sea (R1,R2) una �V−preferencia en Y ⊂ R2, y (L1, L2, L3, L4)su aproximacion lineal inferior. Se verifica:⋂
y0∈Y P (y
0) 6= {0} si y solo si para cualquier y
0∈ Y fijo, m−(y
0) ≤
M+(y) ∀y ∈ Y⋂y0∈Y −D(y
0) 6= {0} si y solo si para cualquier y
0∈ Y fijo m+(y
0) ≤
M−(y) ∀y ∈ Y
.Demostracion. Demostraremos solo 1, pues la demostracion de 2 sera analo-ga.
“⇒” Supongamos, por reduccion al absurdo, que dado un y0∈ Y existiese
un y1∈ Y tal que
m−(y0) > M+(y
1) .
Se verifica, entonces, que
m−(y1) ≤ M+(y
1) < m−(y
0) ≤ M+(y
0) .
Esto nos lleva, teniendo en cuenta el resultado 2.4.11, a que
P (y0) ∩ P (y
1) = {0} ,
lo cual es absurdo.
“⇐” Bajo esta hipotesis, por la proposicion 2.4.11, tendremos, que dadoy
0, y ∈ Y cualesquiera,
P (y0) ∩ P (y) 6= {0} .
Como, ademas, se verifica que
m−(y0) ≤ sup
y∈YM+(y) ,
106

entonces ⋂y0∈Y
P (y0) 6= {0}
c.q.d. /
Como se ha venido haciendo en esta memoria, distiguiremos dos casos:
1. Cuando Y es subconjunto de R2.
2. Cuando Y es subconjunto de Rn, n > 2.
CONJUNTOS EFICIENTES PARA �V− PREFEREN-CIAS EN Y ⊂R2
Consideremos (R1,R2) una�V−preferencia en Y ⊂ R2 y (L1, L2, L3, L4),(L∗
1, L∗2, L
∗3, L
∗4) sus estructuras de aproximacion lineales inferior y local, re-
spectivamente. Supongamos que se verifican las condiciones:
1. m−(y0) ≤ M+(y) ∀y ∈ Y , siendo y
0un punto fijo cualquiera de Y .
2. m+(y0) ≤ M−(y) ∀y ∈ Y , siendo y
0un punto fijo cualquiera de Y .
Utilizando la nomenclatura introducida en el resultado 3.2.1, la siguienteproposicion nos dara una descripcion de las estructuras de preferencia (D1, D
′1),
(D2, D′2).
Proposicion 3.3.2 Dada (R1,R2) una �V−preferencia bajo las condicionescitadas, se verifica que
D1 =
{(y
1, y
2) ∈ Y × Y :
(supy0∈Y M+(y
0))(y11 − y21)− (y12 − y22) < 0 y
(infy0∈Y m−(y
0))(y11 − y21)− (y12 − y22) < 0
}
D′1 = ∆, siendo ∆ la diagonal de Y × Y
107

D2 =
{(y
1, y
2) ∈ Y × Y :
(supy0∈Y M−(y
0))(y11 − y21)− (y12 − y22) < 0 y
(infy0∈Y m+(y
0))(y11 − y21)− (y12 − y22) < 0
}
D′2 = ∆, siendo ∆ la diagonal de Y × Y
.Demostracion. Se obtiene a partir de las definiciones de (D1, D′1) y
(D2, D′2) y de aplicar, posteriormente, el resultado 2.4.11. /
Apliquemos, a este caso concreto, el algoritmo dado en el epıgrafe anteriorpara aproximar el conjunto eficiente.
Paso 0: Consideramos Y 01 = Y y n = 0.
Paso 1: Consideremos la estructura de preferencia (Dn1 , ∆) definida por
Dn1 =
{(y
1, y
2) ∈ Y × Y :
(supy0∈Y n
1M+(y
0)(y11 − y21)− (y12 − y22) < 0 y
(infy0∈Y n
1m−(y
0)(y11 − y21)− (y12 − y22) < 0
}
Paso 2: Llamamos Y n+11 = ξ(Y n
1 , (Dn1 , ∆))
Paso 3: Si Y n+11 = Y n
1 , paramos y Y n serıa la aproximacion superior busca-da.
Si Y n+11 6= Y n
1 , se incrementa el contador n en una unidad y volvemosal paso 1.
El algoritmo puede ser aplicado partiendo de D01 = D2, obteniendo, en
este caso, conjuntos Y n2 .
Finalmente, considerando el conjunto
Y =⋃
n ≥ 0i = 1, 2
Y ni ,
108

obtendrıamos la aproximacion superior del conjunto eficiente:
ξ(Y, (R1,R2)) ⊂ Y .
Para poder encontrar una aproximacion inferior del conjunto eficiente,mediante un algoritmo similar al utilizado para la aproximacion superior,necesitamos imponer ciertas condiciones a la estructura de preferencia, como
1 : L∗1 = L′
1, L∗2 = L′
2
2 : infy0∈Y supv∈V g′v(y0
) ≥ supy0∈Y infv∈V g′v(y0
)
Con la condicion 2 aseguramos la convexidad del cono
<⋃
y0∈Y
LP (y0) >
(teorema 3.2.6), que en este caso particular coincide con el cono
<⋃
y0∈Y
−LD(y0) > .
Debido a esto, solo tendremos una unica aproximacion inferior a ξ(Y, (R1,R2)),que denotaremos por Y 1∗.
Antes de describir el algoritmo, veamos un resultado que nos muestracomo sera la estructura (D∗
01, D∗,01) en este caso.
Proposicion 3.3.3 Dada (R1,R2) una �V−preferencia bajo las condiciones1 y 2 mencionadas anteriormente, se verifica que
D∗01 =
{(y
1, y
2) ∈ Y × Y :
(infy0∈Y supv g′v(y0
)(y0))(y11 − y21)− (y12 − y22) < 0 y
(supy0∈Y infv g′v(y0
)(y0))(y11 − y21)− (y12 − y22) < 0
}
D∗,01 = ∆, siendo ∆ la diagonal de Y × Y
109

.Demostracion Se obtiene a partir de la definicion de (D∗01, D
∗,01), junto
con el resultado 2.4.13. /
El algoritmo, por tanto, sera el siguiente:
Paso 0: Consideraremos Y0 = ξ(Y, (D∗01, ∆)) y n = 1.
Paso 1: Consideraremos la estructura de preferencia (D∗n, ∆) definida por
D∗n =
{(y
1, y
2) ∈ Y × Y :
(infy0∈Y \Yn−1 supv g′v(y0
))(y11 − y21)− (y12 − y22) < 0
(supy0∈Y \Yn−1
infv g′v(y0))(y11 − y21)− (y12 − y22) < 0
}
Paso 2: Llamamos Yn = ξ(Y, (D∗n, ∆))
Paso 3: Si Yn = Yn−1, paramos e Yn−1 sera la aproximacion inferior buscada.
Si Yn 6= Yn−1, se incrementa el contador n en una unidad y volvemosal paso 1.
ConsiderandoY 1∗ =
⋃n≥0
Yn ,
obtendrıamos la aproximacion inferior del conjunto eficiente:
Y 1∗ = ξ(Y, (R1,R2)) .
Resumiendo, dada una �V−preferencia en Y ⊂ R2, verificando las condi-ciones 1 y 2 de la pagina 110 y 1 y 2 de la pagina 111, el conjunto eficientede dicha estructura puede ser aproximado, superior e inferiormente, a travesde los algoritmos descritos en esta seccion:
Y ∗ ⊂ ξ(Y, (R1,R2)) ⊂ Y .
Cuando se verifique que Y ∗ = Y , tendremos determinado con exactituddicho conjunto eficiente.
110

CONJUNTOS EFICIENTES PARA �V− PREFEREN-CIAS EN Y ⊂Rn
Para generalizar nuestro estudio al caso en que Y ⊂ Rn, haremos lassiguientes consideraciones, que nos permitiran reducirlo a un conjunto deproblemas en R2 como los estudiados.
Sea (R1,R2) una �V−preferencia en Y ⊂ Rn. Consideraremos el plano∏a = {(λa1, ..., λan−1, µ) : λ, µR} ,
siendo a = (a1, ..., an−1) ∈ Sn−1. Llamando
R1a = R1 ∩∏
a y R2a = R2 ∩∏
a ,
tendremos que(R1,R2) =
⋃a∈Sn−1
(R1a,R2a) .
De aquı, podremos deducir que el conjunto eficiente ξ(Y, (R1,R2)) vendrıadefinido por
ξ(Y, (R1,R2)) =⋃
a∈Sn−1
ξ(Ya, (R1a,R2a)) ,
donde Ya = Y ∩∏a.
3.4. CONJUNTO EFICIENTE ESTRICTO
EN �V− PREFERENCIAS EN Rn
Antes de finalizar este capıtulo, hemos de hacer mencion al concepto deconjunto eficiente estricto, el cual no se ha tratado aun en el contexto de las�V−preferencias.
Proposicion 3.4.1 Dada una �V−preferencia (R1,R2) en Y ⊂ Rn, elconjunto eficiente estricto sera un conjunto unitario formado por aquelelemento y∗ ∈ Y tal que
v(y∗) = maxy∈Y
v(y) ∀v ∈ V .
111

Este elemento y∗ (punto ideal o utopıa) es difıcil que exista. Sin embargo,podrıamos dar un conjunto de puntos que lo contuviese, definiendo ası, ciertaaproximacion superior para el citado conjunto eficiente estricto. Dicha aprox-imacion estarıa formada por aquellos puntos para los cuales la aproximacionde su conjunto de duda fuese vacıa, es decir, estarıa formado por aquellos pun-tos en donde la �V−preferencia se comportase como ‘una unica funcion devalor’para dicho punto. Esta aproximacion podrıa expresarse analıticamentemediante el conjunto
m−a(y) = M−a (y) y M+
a (y) = m+a(y) ∀a ∈ Sn−1} .
112

Problemas abiertos y futuraslıneas de trabajo
Para finalizar esta memoria, resumimos algunos de los problemas y futuraslıneas de trabajo surgidas a partir de ella. La motivacion en ciertas casoses puramente teorica, y aparece ante la formalizacion de conceptos comoel de estructura de preferencia, introducido en el primer capıtulo, o el deestructura de aproximacion lineal, recogido en el segundo. En otros, el origenes esencialmente practico y plantean la implantacion de los algoritmos sobreeficiencia, recogidos en el capıtulo 3, en metodos interactivos de apoyo aSistemas de Soporte a la Decision (MCDSS). Esta ultima clase de objetivos seabandonan en nuestro estudio, en beneficio del establecimiento de un modeloformal mediante el cual el analista sea capaz de interpretar, con propiedad,toda la informacion proporcionada por el decisor.
El primero de los problemas, de caracter teorico, consiste en tratarla estructura de preferencia como otra estructura matematica mas, co-mo puede ser la de espacio vectorial en un conjunto, espacio topologico,grupo, conjunto ordenado, etc. De esta forma, podrıan definirse ‘isomor-fismosentre estructuras de preferencia e incluso establecer operacionesentre ellas, como podrıan ser la estructura de preferencia producto,cociente, ...
Con los teoremas 2.4.14 y 2.4.15 se estimula la generalizacion de losresultados obtenidos en la seccion 2.3, para aproximaciones linealesy �V− preferencias lineales, al caso de aproximaciones relacionadascon �V− preferencias con condiciones analıticas mas complejas que lalinealidad (por ejemplo, concavidad, convexidad, diferenciabilidad, ...).
113

Un aspecto importante de la teorıa del valor, frente a muchos de losmetodos ad hoc en Decision Multiobjetivo, es la existencia de un desar-rollo paralelo en ambiente de incertidumbre, mediante la denominadaTeorıa de la Utilidad de Von Neumann y sus generalizaciones.
Desarrollar los conceptos de estructuras de preferencia, incorporandoel concepto de probabilidad, permitirıa obtener una teorıa global paraproblemas de decision multiobjetivo, bajo la nueva terminologıa.
Serıa tambien de interes desarrollar estructuras de preferencias en am-biente difuso, incorporando el concepto de posibilidad.
Utilizar todo el analisis realizado en este trabajo, como fundamentopara crear un metodo interactivo, que sirva de base a un Sistema deSoporte a la Decision, es el principal objetivo practico de nuestro estu-dio, como se ha dicho anteriormente.
El contraste con otros tipos de metodos, con la finalidad de encontrarel mas amigable para el decisor, puede iniciar nuevas lıneas de investi-gacion en cuanto a la comparacion de sistemas se refiere.
114

Bibliografıa
[1] Aumann, R.J. (1962). Utility theory without the completeness axiom.Econometrica Vol 30, No. 3, pp 445–462; (1964) Vol 32, No. 1, pp 210–212.
[2] Bazaraa, M.S., Shetty, C.M. (1976). Foundations of Optimization.Springer-Verlag.
[3] Benson, H.P., Morin, T.L. (1977). The vector maximization problem:Proper efficiency and Stability. SIAM Journal on Applied Mathematics,Vol 32, No. 1 , pp 64–72.
[4] Bergstresser, K., Charnes, A., Yu, P.L. (1976). Generalization of domi-nation structures and nondominated solutions in multicriteria decisionmaking. J.O.T.A., Vol 18, No. 1, pp 3 –13
[5] Chien, I. S., Yu, P.L., Zhang, D. (1989). Indefinite preference struc-tures and Decision Analysis. Working paper pendiente de publicacionen J.O.T.A.
[6] Casares de Cal, M.A. (1989). Problemas de decision multicriterio consistemas de preferencias no conicos. Tesis doctoral, Universidad de San-tiago de Compostela.
[7] Coladas, L. (1979). Problemas multiobjetivo: Estructuras de dominacion.Tesis doctoral. Universidad de Santiago de Compostela.
[8] Debreu G. (1954). Representation of a preference ordering by a numer-ical function, en Decision Processes. R.M. Thrall, C. H. Coombs, R.L.Davis, edts. Wiley.
[9] Debreu, G. (1959). Theory of value. Wiley.
115

[10] Fishburn, P.C. (1970). Utility Theory for Decision Making. Wiley.
[11] French, S. (1986). Decision Theory. Ellis Horwood.
[12] French, S. (1989). Readings in Decision Analysis. Chapman and Hall.
[13] Geoffrion, A.M. (1968). Proper efficiency and the theory of vector max-imization. Journal of Mathematical Analysis and applications. Vol 22,pp 618–630.
[14] Goicoechea, A., Hansen, D., Duckstein, L. (1982). Multiobjetive DecisionAnalysis. Wiley.
[15] Hazen, G.B., Morin, T.L. (1983). Optimality conditions in nonconicalmultiple-objetive programming. J.O.T.A. Vol 40, No. 1, pp 25–59.
[16] Hazen, G.B. (1988). Differential characterizations of nonconical domi-nance in multiple objetive decision making. Mathematics of OperationResearch. Vol 13, No. 1, pp 174–189.
[17] Jacquet-Lagreze, E. (1974). How we can use the notion of semiordersto build outranking relations in multicriteria decision making. RevueMETRA, Vol 3, pp 59–86.
[18] Keeney, R.L., Raiffa, H. (1976). Decision with Multiple Objetives: Pref-erences and Value Tradeoffs. Wiley.
[19] Kuhn, H.W., Tucker, A.W. (1951). Nonlinear programming. Procced-ings of the Second Berkeley Symposium on Mathematical Statistics andProbability.J. Neyman, edt., pp 481–492.
[20] Luce, R.D. (1956). Semiorders and Theory of Utility Discrimination.Econometrica. Vol 24, No. 1.
[21] Rıos, S. (1977). Analisis de decisiones. ICE, Madrid.
[22] Rıos, S., Rıos-Insua, S. (1986). Vector value function and vector distancemethods in multicriteria optimization, presentado en Int. Conf. VectorOptimization, Darmstadt, R.F.A.
[23] Rıos, S., Rıos-Insua, M.J., Rıos-Insua, S. (1989). Procesos de DecisionMulticriterio.EUDEMA, Madrid.
116

[24] Rıos-Insua, S. (1980). Decisiones con Multicriterios. Tesis doctoral, Uni-versidad Complutense de Madrid.
[25] Rıos-Insua, D. (1990). Sensitivity Analysis in Multi-Objective DecisionMaking. Ph. D. Thesis, Universidad de Leeds, U.K., pendiente de pub-licacion en Springer-Verlag.
[26] Roberts, F. (1979). Measurement Theory. Addison-Wesley
[27] Roberts, A.W., Varberg, D.E. (1973). Convex Functions. AcademicPress.
[28] Rockafellar, R.T. (1970). Convex Analysis. Princeton University Press.
[29] Roy, B. (1977). Partial Preference Analysis and Decision Aid: The FuzzyOutranking Relation concept. En Conflicting Objetives in Decision. Bell,D.E., Keeney, R.L., Raiffa, H. edts. Wiley.
[30] Sawaragi, Y., Nakayama, H., Tanino, T. (1985). Theory of MultiobjetiveOptimization. Academic Press.
[31] Skulimowsky, A.M.J. (1985). Solving Vector Optimization Problems viaMultilevel Analysis. Foundations of Control Engineering. Vol 10, No. 1,pp 25–38.
[32] Steuer, R. (1986). Multiple Criteria Optimization. Wiley.
[33] Stoer, J., Witzgall, C. (1970). Convexity and Optimization in FiniteDimensions I. Springer-Verlag.
[34] White, D.J. (1972). Uncertain Value Functions. Management Science.Vol 19, pp 31–41.
[35] White, D.J. (1982). Optimality and Efficiency. Wiley.
[36] Yu, P.L. (1973). Introduction to Domination Structures in MulticriteriaDecision Making. En Multiple Criteria Decision Making. Cochrane, J.L.,Zeleny, M. edts. University of Sourth Coroline Press, pp 249–261
[37] Yu, P.L. (1974). Cone convexity, cone extreme points and nondominatedsolutions in decision problems with multiobjetives. J.O.T.A.. Vol 14, No.3, pp 319–377.
117

[38] Yu, P.L. (1985). Multiple Criteria Decision Making. Plenum.
118