Universitatea Politehnic Timioara
Universitatea Politehnic Timioara
Facultatea de Mecanic
IPEB ANUL I MASTER
Interpretarea mimicii feei umane ca mijloc de asisten
medical
Student: Oliver eicu
Coordonator: Prof. Dr. Ing. Nicolae HerianuCUPRINS
Capitolul I Descrierea aparaturii
...................................................3I.1Principiu......................................................................................3I.2
Constrngeri......,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,............4Capitolul
II Prelevarea semnalelor optice
umane..........................4II.1 Generarea modelului de lumin
...........................4II.2 Alegerea tipului de
radiaie.......................................................5II.3
Proiectarea senzorului...5Capitolul III. Transformare in semnal
electric.8Capitolul IV. Interpretarea semnalelor de ctre
Traductor(senzor+analizor+vizualizare).....9IV.1 Transmiterea si
prelucrarea informaiei......9IV.2 Abordare ca funcie matematic a
efectului Moire.10IV. 3. Strile traductorului.13IV. 4.Condiia de
modificare.....13
IV.5 Posturile.13Capitolul V. Aspecte
economice...................................................13Bibliografie....................................................................................13Capitolul
I Descrierea aparaturii1.PrincipiuSe folosete un scaner
tridimensional cu lumin structurat pentru a msura tipare
tridimensionale ale unui obiect. Scanerul este alctuit din un
proiector de benzi de lumin i un sistem de camere video.Proiectnd
benzi nguste de lumin pe o suprafa tridimensional se produc linii
de lumin care apar distorsionate dac sunt privite din alta
pespectiv dect aceea din care sunt proiectate i pot fi folosite
pentru a reconstui exact forma suprafeei.
1 Oscilator; 2 Emitor fotoelectric; 3 Receptor fotoelectric;4
Preamplificator; 5 Operator logic; 6 Convertor digital analog; 7
Afiaj de stare; 8 Ieire cu circuit de protecie; 9 Surs de
alimentare extern; 10 Surs de tensiune constant intern; 11 Distana
optic de comutare; 12 Ieirea de comutare.
O metod rapid i versatil e reprezentat de proiectarea unui model
constnd din mai multe benzi simultan, cu franj arbitrar, permind
achiziionarea mai multor eantioane.Vazut din perspective diferite,
modelul apare distorsionat geometric datorit formei suprafeei
obiectului.
Sunt posibile multe variante de lumin structurat.
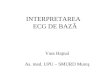
Imaginea arat deformarea geometric a unei singure dungi
proiectat pe o suprafat tridimensional simpl
Dislocarea dungilor permite refacerea exact a coordonatelor
tridimensionale ale oricror detalii ale suprafeei obiectului.2.
Constrngeri
Senzorul acestui aparat este compus din una sau mai multe camere
i una sau mai multe surse de lumin i sunt o alternativ convingtoare
la senzorul stereoscopic folosit n medii controlate(medical,
industrial), n medii slab iluminate(vedere nocturn, sub-marin) i n
medii slab texturate(biometrie, antropometrie). Provocarea const n
faptul c modelul de lumin proiectat pe obiect reprezint un semnal
invaziv care poate fi nedorit in unele cazuri. Acesta conduce la
pierderea sau alterarea informaiei texturale si colorimetrice a
suprafeei iluminate, la inconsisten de flux optic i mai mult dect
att la aspectul agresiv si intr-adevr periculos al iluminrii si
msurrii feei umane chiar i cu proiectorul diapozitiv. Acest sistem
trebuie s achiziioneze msuratori geometrice asupra obiectelor din
cmpul de detecie fr s perturbe, s modifice sau sa pun in pericol
mediul.
Capitolul II Prelevarea semnalelor optice umane1.Generarea
modelului de lumin Pentru a beneficia de avantajele tehnologiei cu
lumin structurat n acelai timp evitnd dezavantajele amintite, am
stabilit obiectivul de a alctui un senzor cu proiectare de model de
lumin din spectrul invizibil.
Dezvoltarea recent a roboilor industriali a impus dezvoltarea
prelucrrii imaginilor n timp real n vederea recunoaterii formei
obiectelor 3D dintr-o scen i a deteciei poziiei i orientrii unor
obiecte cunoscute ntr-o imagine.Se utilizeaz cuplarea a dou metode
de codare a imaginilor prin proiecia unei reele (structurarea binar
a iluminrii) i decodarea ntr-un procesor optoelectronic.
Proiecia direct, utilizeaz iluminarea periodic a obiectului ca o
eantionare spaial sensibil la orientarea i poziia obiectului.
Model codat binar care este modulat pe faz n timp, cunoscut i
sub denumirea de proiecie cu marginiDemodularea spaial se obine
prin nmulirea reelei modulate cu reeaua original sau cu o reea
generat electronic, cbinndu-se bti spaiale identice cu liniile de
egal nlime ale suprafeei obiectului 3D.
Proiecie de model obinuit
2.Alegerea tipului de radiaie
Laserele de clasa 1 sunt sigure n condiiile rezonabile prevzute
pentru operare, incluznd utilizarea instrumentelor optice pentru
vizualizri n interiorul razei.Laserele de clasa 2 genereaz n mod
normal o reflexie intermitent care protejeaz ochii; aceast reacie
este considerat s confere o protecie adecvat n condiiile rezonabile
prevzute, incluznd utilizarea instrumentelor optice pentru
vizualizarea n interiorul razei.
Chiar mai multe modele complexe, pe baza efectului Moir sunt
folosite n zilele noastre pentru a crete acurateea i robusteea
acestor sisteme. Efectul Moir este pur i simplu rezultatul spaial a
dou semnale de amplitudine modulata ce interacioneaz mpreun. Un
scanner Moir proiecteaz un model regulat pe obiectul care urmeaz s
fie scanat n timp ce camera ce captureaz scena are, de asemenea, un
model integrat obinuit. Interferena dintre aceste dou modele
suprapuse reciproc genereaz un model Moir de la care putem
determina modificri precise de adncime.
3.Proiectarea SenzoruluiUn sensor este un convertor care
transform o mrime fizic ( de exemplu temperatu- r, distan,
presiune) intr-o alt mrime mai uor de evaluat - n mod uzual, o
mrime electric. Receptorul poate fi un fototranzistor cu siliciu
sau fotodiod cu siliciu.
Spectrul infrarou care nu este vizibil este folosit n cazurile n
care creterea performanelor luminii roii este necesar . n afar de
aceasta, lumina infraroie este mai puin susceptibil la la
interferene cu lumina ambiental.
Principiul de funcionare - se bazeaz pe prelucrarea unui semnal
electric care apare ca urmare a intreruperii sau reflectrii unui
flux luminos produs de un dispozitiv electroluminiscent de ctre un
element de comutaie.
n funcie de mrimea care variaz, se ntlnesc mai multe tipuri de
senzori optici
Scanerele active emit un fel de radiaii controlate i le
detecteaz reflexia cu scopul de a lua o mostr a obiectului sau a
mediului. Dintre posibilele tipuri de radiaie amintim lumina,
ultrasunetele sau razele X. De vreme ce aceste tehnici de msurare
activ presupun un transmitor i un receptor laser, ele sunt mai
complexe din punct de vedere mecanic dect tehnicile pasive. Cele
mai importante avantaje ale acestor sisteme sunt:
Nu necesit alt surs de lumin, deoarece i genereaz propria
radiaie;
Furnizeaz msurtori de mare densitate ntr-un mod foarte
automatizat;
Sunt invizibile pe suprafee fr proprieti deosebite;
Puterea de colectare a informaiilor este relativ rapid (1000
500.000 puncte/sec)Capitolul III. Transformare in semnal electricn
informatic, dispozitivul cu cuplaj de sarcin (CCD) este un
dispozitiv utilizat ntr-un scanner sau ntr-un aparat de fotografiat
digital pentru a realiza conversia luminii n semnale electrice pe
care le poate interpreta calculatorul. Rezoluia orizontal a unui
scanner este determinat de numrul de elemente CCD care alctuiesc un
rnd - de obicei 300, dar la unele scannere performante, 600.
Stadiul actual al tehnicii scanerelor laser de art sunt pe
deplin integrat pentru setri mai rapide. Ele combina un scaner, un
panou de control, medii de stocare interne si o baterie ntr-o
singur unitate de echipament. Compensatorii cu ax dubl sunt, de
asemenea, integrate pentru a ridica n mod automat scanerul. Unele
scanere au dispozitive de ridicare pentru a ataa receptoare GPS i /
sau compensatori INS pentru a poziiona i orienta direct scanerul n
spaiu. Pentru a aduga informaiile color de nalt rezoluie la setul
de puncte msurate, unele scanere integreaz camere digitale de nalt
calitate sau ofer un dispozitiv de ridicare.
Tehnologia de scanare laser este n continu dezvoltare:
Filtrarea omogen a setului de puncte bazat pe echipamente
electronice;
Combinaia celor mai bune scanere de tip timp-de-zbor i scanere
bazate pe faz intr-un singur scaner;
Tabelul confer o vedere de ansamblu a ctorva sisteme de scanner
laser disponibile comercial
Capitolul IV. Interpretarea semnalelor de ctre
Traductor(senzor+analizor+vizualizare)1. Transmiterea si
prelucrarea informaiei
Un scaner laser bazat pe teoria triunghiului utilizeaz acelai
principiu pentru a colecta mostre din mediul nconjurtor. El trimite
o raz laser ablon ctre obiect si solicit camera s caute locaia
proieciei laser pe obiect. Emitorul laser i camera sunt setate
ntr-un unghi constant,dnd natere la un triunghi ntre ele i proiecia
laser pe obiect, de aici i numele de triunghi. Datorit acestei
configuraii, proiecia laser schimb cmpul de vedere al camerei n
funcie de distana pn la camer.
Latura triunghiului (D), distana dintre camer i emitorul laser
este cunoscut. Unghiul dintre emitorul laser () este de asemenea
cunoscut. Unghiul camerei() poate fi determinat privind ctre locaia
razei laser n cmpul de vedere al camerei. Aceste trei informaii
determin total forma i mrimea triunghiului i confer adncimea exact
a obiectului msurat. Poate fi demonstrat c, cu ct linia de baz este
mai mare (D), cu att are mai puine erori n coordonatele n pixeli n
estimarea adncimii.
n practic, metoda activ a triunghiului a fost inventat pentru a
rezolva problema notorie a corespondenei, ntlnit n tehnicile de
msurare pasive. Problema corespondenei poate fi susinut dup cum
urmeaz: se dau dou imagini I1 i I2 dintr-o scena surprins din dou
puncte de vedere, orientarea relativ a camerelor digitale i o
pereche de puncte corespunztoare ntre aceste imagini, putem calcula
apoi punctul 3D corespunztor, folosind principiul triunghiului.
Astfel, problema corespondenei const n a gsi puncte de potrivire
ntre diferite imagini. Metoda triangulaiei active utilizeaz lumina
laserului pentru a rezolva aceast problem prin marcarea punctului
3D de pe obiect cu culoarea luminii laserului, astfel nct s poat fi
uor de detectat n imagine.
2.Abordare ca funcie matematic a efectului Moire
Esena efectului de moar este percepia (preponderent vizual) a
unui celui de-al treilea model distinct cauzat de suprapunerea
inexact a dou modele similare. Reprezentarea matematic a acestor
modele nu se obine n mod obinuit i poate fi oarecum arbitrar. n
aceast seciune, se va considera un exemplu matematic a dou modele
paralele a cror suprapunere produce un efect de moar, i se va arta
o modalitate (dintre multe modaliti posibile) prin care aceste
modele i efectul de moar pot fi redate pe cale matematic.
n continuare se va considera suprapunerea tipriturilor a dou
modele n tonuri de gri aproximativ similare, variate sinusoidal,
pentru a ilustra cum acestea produc un efect de moar mai nti
tiprind un model pe hrtie iar apoi tiprind cellalt model peste
primul, pstrnd axele de coordonate ale acestora n registru. Se
reprezint intensitatea griului din fiecare model printr-o funcie
pozitiv a opacitii definit de distana de-a lungul unei direcii
fixate (de exemplu, coordonata x) n planul hrtiei, sub forma
unde prezena lui 1 menine funcia pozitiv definit, iar mprirea la
2 previne valori ale funciei mai mari dect 1.
Cantitatea reprezint variaia periodic (adic frecvena spaial) a
intensitii griului modelului, msurat ca numrul de cicluri de
intensitate pe unitate de distan. Din moment ce funcia sinusoidal
este ciclic pentru schimbrile de argument de , incrementul distanei
pe ciclu de intensitate (lungimea de band) se obine cnd sau .
S se considere acum dou astfel de modele unde una are o variaie
periodic puin diferit fa de cealalt:
astfel nct .
Media acestor dou funcii, reprezentnd imaginea tiprit suprapus,
se evalueaz n modul urmtor:
de unde se poate deduce c
i
.
Aceast medie a funciei, , se situeaz n mod clar n intervalul
[0,1]. Din moment ce variaia periodic este media i prin urmare
apropiat de i , efectul de moar deste demonstrat distinctiv de ctre
funcia nfurtoare sinusoidal , a crei variaie periodic este
semidiferena variaiilor periodice ale i (i evident mult mai
lent).
Alte efecte de moar unidimensionale includ clasicul ton al
frecvenei de btaie care poate fi auzit atunci cnd dou note pure de
nlime aproximativ identic sunt create simultan. Aceasta este o
versiune acustic a efectului de moar ntr-o singur dimensiune
temporal: cele dou note originale sunt nc prezente, dar asculttorul
percepe dou nlimi care reprezint media i semidiferena frecvenelor
celor dou note. Dedublarea n timpul eantionrii semnalelor variabile
n timp, aparine de asemenea acestei paradigme a moarului.
Harta de amplitudini va fi transmis ctre comparatorul cu starea
neutr (pentru stabilirea starii noi), comparatorul cu starea
curent(luarea deciziilor) acesta informnd schimbtorul de stare s
modifice straea curent sau s cear o nou hart de la senzor. Adiional
se poate aduga o funcie asociat comparatorului cu starea neutr care
s memoreze o hart de amplitudini negasit in seria de stri
curente.3. Strile traductoruluiStarea neutr
Scanarea personajului pentru configurarea strii implicite.
(transformare in simbol specific cu reprezentare grafic a
semnalului electric specific)
Odat stabilit aceast ipostaz, nu este nevoie de configurarea
altor stri. Traductorul va ignora cadrele care nu sunt
acordate.
Aceast stare este important deoarece toate celelalte stri sunt
relative fa de ea.
Comparnd amplitudinile graficului care s-au modificat fa de
ampliudinea implicit cu amplitudinile prob inregistrate in memorie
se determin expresia iar apoi starea pacientului.4.Condiia de
modificare
5. Posturile gurii gura deschis pronunarea vocalelor
grupuri de litere gura inchis
Buza de jos mucat deschidere sau zmbet Schimbatorul de stare
Traductor
Senzor
Starea curent
Condiia
Straea nou
Starea neutr
Condiia
Harta amplitudini
EMBED ShapewareVISIO20
PAGE 3
_1126680952.vsd