Embed Size (px)
DESCRIPTION
Guía básica acerca de los controladores lógicos programables
Citation preview

Ing. Eduardo Hernández C [email protected] Derechos de autor reservados Copyrights reserved

Definición: El controlador lógico programables (Programmable Logic Controller por sus siglas en inglés) se define como un dispositivo electrónico digital que usa una memoria programable para guardar instrucciones y llevar a cabo funciones lógicas, de configuración y secuencia, de sincronización, de conteo y aritméticas, para el control de procesos. Se denomina lógico porque su programación tiene que ver básicamente con la ejecución de operaciones lógicas y de conmutación. Aunque su arquitectura es similar a la de un computador, tiene características específicas que les permite desempeñarse eficientemente en el ambiente industrial como son su robustez, su interfaz de entradas y salidas y su fácil programación. Actualmente, la mayoría cuenta además con capacidad de comunicación mediante algún protocolo de protocolos de red industrial como profibus, modbus, fieldbus e incluso ethernet y TCP/IP.

Aplicaciones:
• Automatización de maquinas
• Control de procesos
• Mecatrónica
• Domótica

Ventajas: • Permiten modificar un sistema de control sin necesidad de tener que
volver a cablear las conexiones de los dispositivos de entrada y salida ya que las modificaciones se realizan mediante software.
• Son robustos y están diseñados para resistir vibraciones, temperatura, humedad y ruido.
• La interfaz para las entradas y salidas está en el mismo controlador.
• Es muy fácil programarlos y entender sus lenguajes de programación. La programación básicamente consiste en operaciones de lógica y conmutación.
El primer PLC fue desarrollado por Dick Morley de la firma Modicon en 1968 y desde entonces, estos dispositivos han venido evolucionando al ritmo de la tecnología.

Estructura básica del PLC:
CPU La estructura básica de un PLC consiste en una unidad central de proceso (CPU) que controla y procesa todas las operaciones dentro del PLC. Cuenta con un reloj que determina la frecuencia de operación del dispositivo, la unidad aritmética y lógica, la unidad de control, memoria ROM para guardar permanentemente el sistema operativo, memoria RAM para el programa de usuario y memoria buffer temporal para los canales de entrada/salida.
MODULO DE ENTRADAS El módulo de entradas constituye la interfaz entre la CPU y los dispositivos que envían señales binarias (on/off o encendido/apagado y algunos equipos cuentan además con entradas analógicas) al PLC como interruptores, pulsadores, detectores inductivos, detectores capacitivos, detectores fotoeléctricos, finales de carrera etc. En cada ciclo del reloj, la CPU lee secuencialmente el estado de las entradas (inputs) y las almacena en la memoria (buffer) de las entradas.
MODULO DE SALIDAS El módulo de salidas constituye la interfaz entre la CPU y los dispositivos a los que el PLC, mediante los contactos o relés de salida (también existen salidas por transistor, SCR), envía señales de control de acuerdo con las instrucciones del programa a los dispositivos conectados a estos como pueden ser contactores, relés, electroválvulas etc., que a su vez permiten accionar los elementos finales de control como motores, elementos de calefacción, sistemas de iluminación, actuadores hidráulicos o neumáticos etc. En cada ciclo del reloj, la CPU lee secuencialmente el estado de las salidas (outputs) y las almacena en la memoria (buffer) de las salidas.

lámpara (salida)
interruptor (entrada)
PLC
bornera de entradas
Bornera de salidas
CPU

Ejemplos de elementos de entrada: • Interruptores • Pulsadores • Selectores • Sensores fotoeléctricos • Detectores de proximidad • Finales de carrera • Presostatos • Termostatos • Paros de emergencia • Termopar*
Ejemplos de elementos de salida: • Contactores • Relés • Selectores • Motores paso a paso • Solenoides de electroválvulas • Lámparas de señalización
* Requiere entrada analógica

Tipos de PLC:
Existe en el mercado una amplia gama de PLC’s que satisfacen las necesidades de control y automatización de máquinas y procesos. Desde pequeñas unidades básicas conocidas como relés inteligentes, pasando por los nano, micros, gama media, hasta sistemas modulares sofisticados.
• PLC compactos: El número de entradas y salidas es fijo.
• PLC modulares: El número de entradas y salidas es configurable, es decir, se pueden ampliar según las necesidades. La unidad de alimentación , la CPU y la unidad de comunicaciones están separadas de los módulos de entradas y salidas.

Selección del PLC:
Al seleccionar un PLC es necesario tener en cuenta: • El número de entradas y salidas requerido y su posible expansión futura
• Tipo de entradas y salidas (relé, transistor, SCR) y aislamiento eléctrico
de la CPU (normalmente las entradas y salidas son optoacopladas)
• Voltaje y tipo de alimentación (24V DC, 110V AC y 220V AC etc.)
• Capacidad de memoria, temporizadores, contadores, relés internos
• Velocidad del ciclo de escaneo de la CPU
• Entradas analógicas (si se requiere)
• Interfaz de programación (lenguajes)
• Costo del equipo, capacitación del personal, servicio técnico etc.

Ejemplo de información técnica

Operación del PLC:
Básicamente un PLC energizado puede estar en tres estados: • RUN: Ejecutando el programa
• PROGRAM: Modo de programación
• ERROR: Condición de error. El programa se detiene. Operación: La CPU lee las instrucciones del programa secuencialmente y en cada una verifica el estado del buffer de entrada para determinar si se realizó un cambio de estado en algún contacto (bit) de entrada y modificando o no la salida correspondiente según el resultado lógico que la instrucción determine. Los estados de las entradas y salidas son solamente dos: apagado (off) o encendido (on).

Programación del PLC:
La programación de un PLC consiste en relacionar en forma estructurada las entradas y salidas de este según la lógica requerida por una aplicación determinada. Existen varias estructuras para programar un PLC conocidas como lenguajes de programación, normalizados según el estándar IEC-1131. Estos lenguajes pueden ser textuales o gráficos. Algunos PLC admiten ser programados mediante dos o más lenguajes de programación, otros solo cuentan con uno. TEXTO ESTRUCTURADO (ST): Lenguajes textuales que utilizan instrucciones características de lenguajes de programación de alto nivel como los lenguajes C, BASIC etc. LISTA DE INSTRUCCIONES (IL): Instrucciones textuales reducidas conocidas como nemónicos. BLOQUES FUNCIONALES (FBD): Tipo gráfico. La programación se hace mediante diagramas lógicos como los utilizados en los circuitos digitales.

GRAFICOS DE FUNCION SECUENCIAL (SFC Sequential Function Chart): Utilizan diagramas basados en los gráficos de etapas y transiciones (GRAFCET). LADDER O ESCALERA: Está basado en el diagrama de los circuitos eléctricos que componen la aplicación por lo que es muy popular, sencillo y fácil de entender por personas con conocimientos básicos de electricidad. De hecho, el PLC nació de la idea de flexibilizar el control electromecánico de máquinas.

La disponibilidad de varios lenguajes facilita la programación del PLC a profesionales de diferentes disciplinas.
Niveles vs prestaciones para el análisis, diseño y codificación de los diferentes lenguajes de programación de PLC

Desde el punto de vista operativo, la programación del PLC se realiza transfiriendo a su memoria (EEPROM, Flash) el programa desarrollado por el usuario utilizando el software del fabricante. La transferencia del programa al PLC puede hacerse de varias formas según el modelo: desde un computador por medio de un cable de comunicaciónes, o utilizando un programador de mano (hand held), o mediante una interfaz HMI (Human Machine Interface) teclado con visualizador conectado permanentemente al PLC o pantalla táctil.

Programación en Ladder
El lenguaje ladder (traducido escalera) es una herramienta de programación de tipo gráfico para PLCs que deriva su nombre de los esquemas utilizados corrientemente en el campo de la electricidad y el control industrial que semejan escaleras donde las barandas corresponden a las líneas de alimentación mientras que en los peldaños (rungs) se representan los circuitos. Debido a su estandarización, interfaz de usuario y fácil interpretación por personal no especializado, es el lenguaje de programación de PLC más popular.

Ejemplo: encendido de una lámpara:
solución manual solución PLC
esquema eléctrico
esquema eléctrico de contactos programa PLC
L
S1
Un programa ladder es el equivalente lógico del esquema eléctrico de contactos o relés. Físicamente, los dispositivos de entrada se conectan a las entradas y los de salida a las salidas del PLC en las correspondientes borneras pero, desde el punto de vista lógico, el PLC solo lee el estado de sus entradas para determinar cambios en sus salidas de acuerdo con el programa. En la figura por ejemplo, si en el PLC se conecta el interruptor S1 a la entrada marcada en la bornera como I:0/1 y la lámpara a la salida marcada como O:0/1 (la nomenclatura de las entradas y salidas varía según el fabricante), al cerrar el interruptor S1 el PLC igualmente cierra su relé de entrada I:0/1 cambiando su estado lógico de apagado a encendido y, de acuerdo con la instrucción de programa ladder mostrado, cambia el estado lógico de la salida O:0/1 cerrando su correspondiente contacto permitiendo el paso de corriente y encendiendo la lámpara.

Herramientas del ladder
La programación del PLC se realiza mediante la aplicación de software del fabricante donde se pueden encontrar las herramientas para el desarrollo, la edición, la compilación y la simulación del programa (no siempre esta última), así como las de control, transferencia y monitoreo de datos y comunicaciones entre el PC y el PLC.

PLCMotion
Dado que el lenguaje ladder es estandarizado y lógico, la visualización de un programa ladder es muy similar en las diferentes marcas de PLC existiendo algunas diferencias mínimas principalmente en cuanto a la nomenclatura de los contactos. Veamos a continuación un mismo programa ladder en tres simuladores diferentes:

DCIPLC 4.0
TriLogi 6.0

Aunque la nomenclatura de los contactos de entrada, salida y temporizador varía, la lógica de la escalera es la misma y, por tanto, el resultado del programa es el mismo en todos los casos como lo muestran las correspondientes simulaciones.

Elementos básicos del diagrama de contactos:
El diagrama ladder o de contactos se realiza a partir de elementos que permiten construir la lógica de los circuitos eléctricos que requiere la aplicación. Estos elementos son:
• Contactos o relés de entrada
• Bobinas o relés de salida
• Contadores
• Temporizadores
• Bloques de funciones especiales
• Relés o contactos auxiliares internos (virtuales) o externos.
Los elementos son mostrados como iconos que se seleccionan y se pegan en los peldaños de la escalera donde se necesiten. Las entradas se localizan a la izquierda del diagrama y las salidas a la derecha.

Los contactos de entrada corresponden y se identifican con el borne, pin o conexión al módulo de entrada. Pueden ser normalmente abiertos o normalmente cerrados según se encuentren abiertos o cerrados en su posición de reposo en correspondencia con el dispositivo. Existen además otro tipo de contactos que conmutan por flancos de subida o de bajada. Simbología en ladder:
normalmente abierto NA o (NO)
normalmente cerrado NC
activado por flanco de subida
activado por flanco de bajada
Las bobinas o relés de salida corresponden y se identifican con el borne, pin o conexión al módulo de salida. Pueden ser normalmente abiertos o normalmente cerrados según se encuentren abiertos o cerrados en su posición de reposo. Existen además otro tipo de bobinas que se denominan SET y RESET que permiten sostener y liberar la salida solo hasta que se cumpla o no una condición específica en la entrada Simbología en ladder:
salida normalmente abierta NA o (NO)
salida normalmente cerrada NC
salida de sostenimiento SET
salida de liberación RESET

Los temporizadores permiten la conmutación de contactos una vez transcurrido un tiempo prefijado. Existen temporizadores al trabajo (on delay) los cuales conmutan sus contactos cierto tiempo después de haber sido energizados. Existen temporizadores al reposo (off delay) que conmutan cierto tiempo después de haber sido desenergizados. Por lo general, los temporizadores requieren fijar además del tiempo de temporización, la base de tiempo y el tiempo acumulado. Simbología en ladder:
Temporizador al trabajo (on delay)
Temporizador al reposo (off delay)
Los contadores permiten la conmutación de contactos una vez transcurrido un numero de eventos predefinido. Existen contadores de cuenta hacia arriba o crecientes y de cuenta hacia abajo o decrecientes. Simbología en Ladder:
contador hacia arriba Contador hacia abajo

Los contactos auxiliares externos son contactos accionados por los elementos de salida y por tanto tienen su misma marca o nomenclatura. Se representan igual que los contactos de entrada. Los contactos auxiliares internos o relés internos son contactos virtuales que el software proporciona y se pueden utilizar como si fuesen reales para realizar operaciones del lógica en el programa. Se representan igual que los contactos de entrada. Los PLC pueden contar además con funciones especializadas tales como funciones matemáticas, comparadores, secuenciadores por tiempo o eventos y funciones para tratamiento de registros y memoria entre otras.

Ejercicio práctico 1
Desde un panel de control se requiere operar dos motores eléctricos. La aplicación requiere que al accionarse un pulsador opere el primer motor instantáneamente pero el segundo debe entrar a operar 10 segundos después del primero e iluminar una lámpara piloto en el panel que indica que los dos motores se encuentran trabajando. El apagado de los motores es simultáneo por medio de otro pulsador y el sistema debe contar además con un paro de emergencia. Desarrollar un diagrama ladder para esta aplicación.

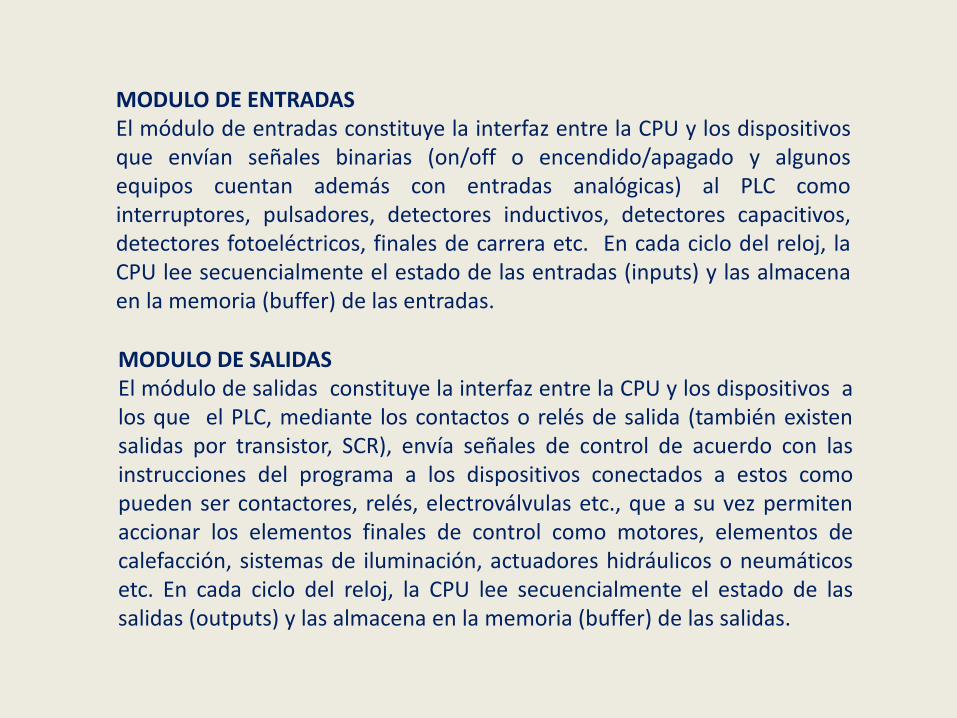
El programa diagrama ladder mostrado, desarrollado con el software PLCmotion, es una solución el programa requerido para la aplicación solicitada. El contacto normalmente cerrado I:0/1 corresponde al paro de emergencia que al abrirse desenergiza todos los circuitos. El contacto normalmente abierto I:0/2 corresponde al pulsador de marcha el cual mantiene sus contactos cerrados mientras permanezca oprimido permitiendo alimentación de la bobina O:0/1 la cual corresponde a la bobina del contactor 1 que energiza el motor 1. Sin embargo, debido a que el pulsador abre el circuito al dejar de oprimirse, se requiere un contacto de retención en paralelo con el pulsador I:0/1 asociado a la bobina O:0/1. Para el apagado normal, se recurre a un pulsador de paro normalmente cerrado conectado en el borne de entrada I:0/3. Otro contacto abierto asociado a la bobina O:0/1 energiza el temporizador T4:1 el cual, después de contar 10 segundos, cierra su contacto T4:1 permitiendo salida de corriente al borne de salida Q:0/2 donde está conectada la bobina del contactor 2 que acciona el motor 2.
Solución ejercicio 1
Simulación de este programa en el PLCmotion: