Embed Size (px)
Citation preview

簡介MoonBear多軸飛行器專案及基本原理
鄭聖文2014/8/21 @成功大學2014/8/22 @中央研究院

About me
●鄭聖文(Colin)●弘文高中 普通科三年級●參與 敬群老師一三年、一 四嵌入式系統課程●同修課同學發展四軸飛器專 案 (Moon Bear Project)
Team members (歡迎參與開發)

軟體硬體一手包辦!

開發現況(2014年 8月 )
完成項目 :姿態控制高度控制
GPS自動定位
開發中項目 :軟體地面站通訊GPS定點自動導航
未來可能目標 :室內影像定位
無線電
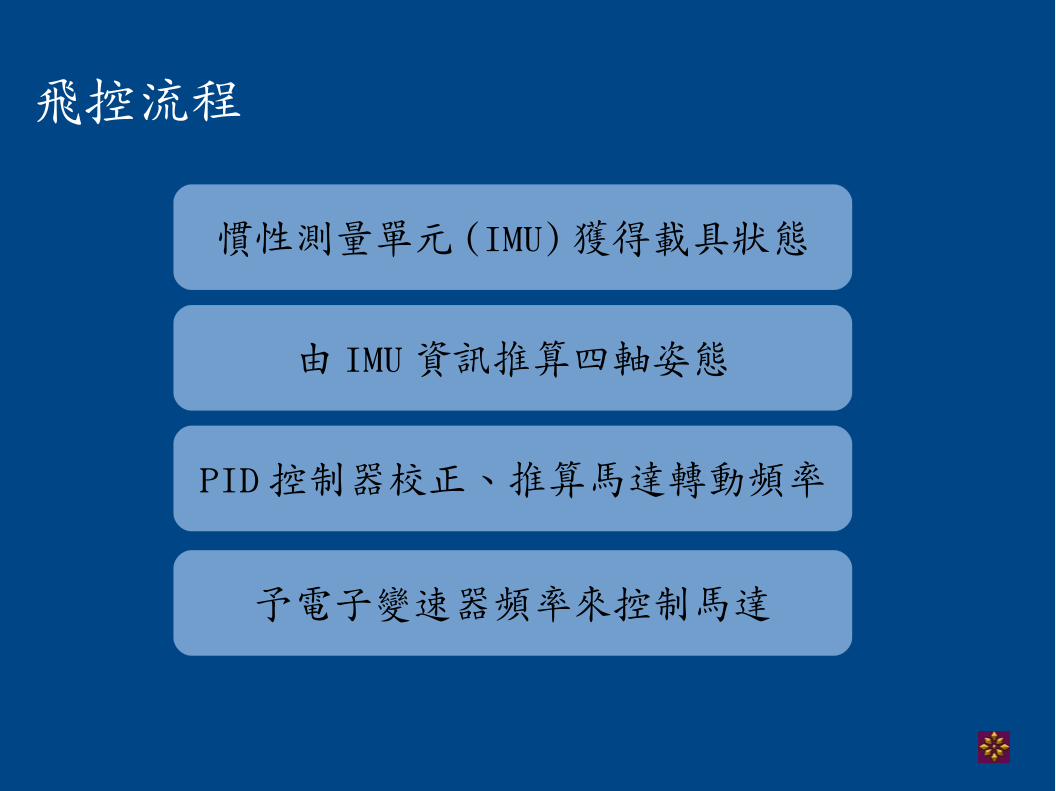
飛控流程
慣性測量單元(IMU)獲得載具狀態
由IMU資訊推算四軸姿態
PID控制器校正、推算馬達轉動頻率
予電子變速器頻率來控制馬達

飛行姿態(尤拉角表示)
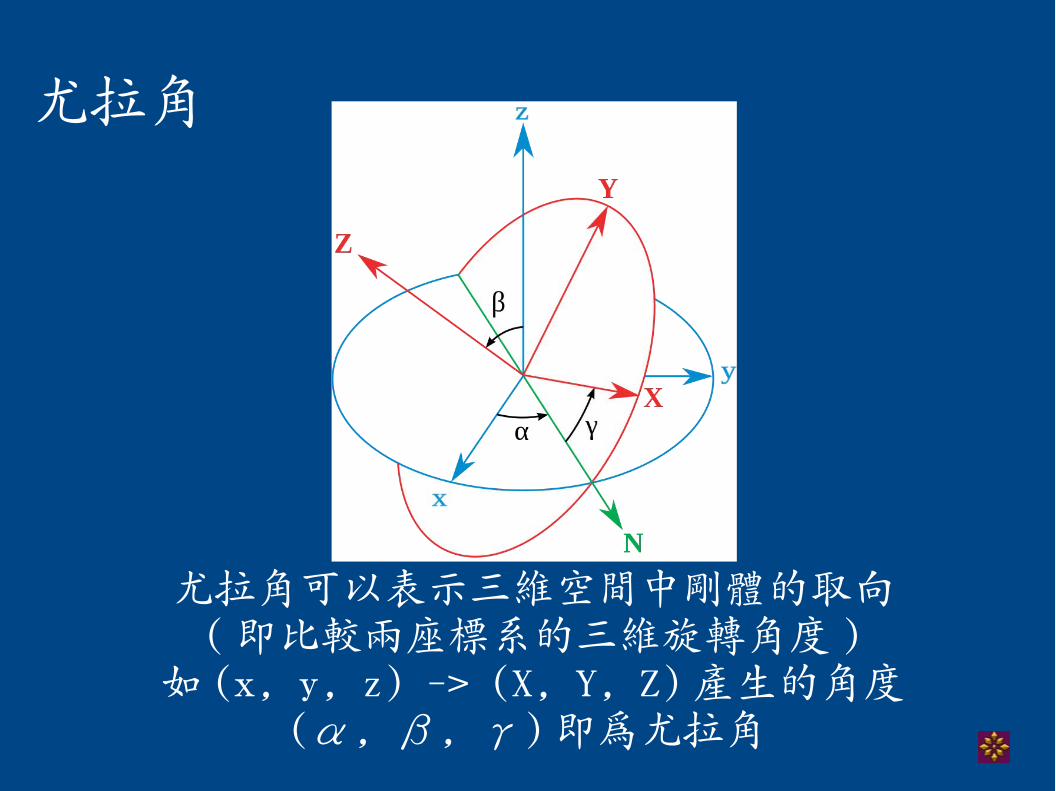
尤拉角
尤拉角可以表示三維空間中剛體的取向(即比較兩座標系的三維旋轉角度 )
如 (x, y, z) -> (X, Y, Z) 產生的角度(α, β, γ)即為尤拉角

多軸飛行器的姿態
對於四軸求取尤拉角:Body frame(載體座標系 ) - 即飛行器起飛之後不斷
旋轉改變的新座標系Inertial frame(慣性座標系 ) – 取飛行器開機時的
座標系狀態
這樣一來就可以得到移動後的尤拉角了

運動模型
姿態 移動
Throttle 油門 推力改變
Pitch 俯仰 前後移動
Roll 側翻 左右移動
Yaw 偏航 航向改變
控制姿態移動飛行器 ,不直接對馬達控制(對系統控制高階化)

馬達推力改變姿態Roll Pitch
Yaw Throttle

姿態重要性
受機體配重不均、亂流、馬達品質等因素影響人類手控四顆馬達幾乎是不可能的任務
因此 ,得到了姿態之後可以使用控制系統替駕駛員自動穩定住飛行器,降低駕駛難度

力矩
相鄰兩個旋翼方向兩兩相反以消除反扭矩

力矩與螺旋槳
螺旋槳有方向性,組裝時必須特別留意否則有可能使推力消失
輕則無法起飛、嚴重則有可能傷害人

馬達、螺旋槳實際配置
CW(Clock Wise) - 順時針CCW(Couter Clock Wise) - 逆時針
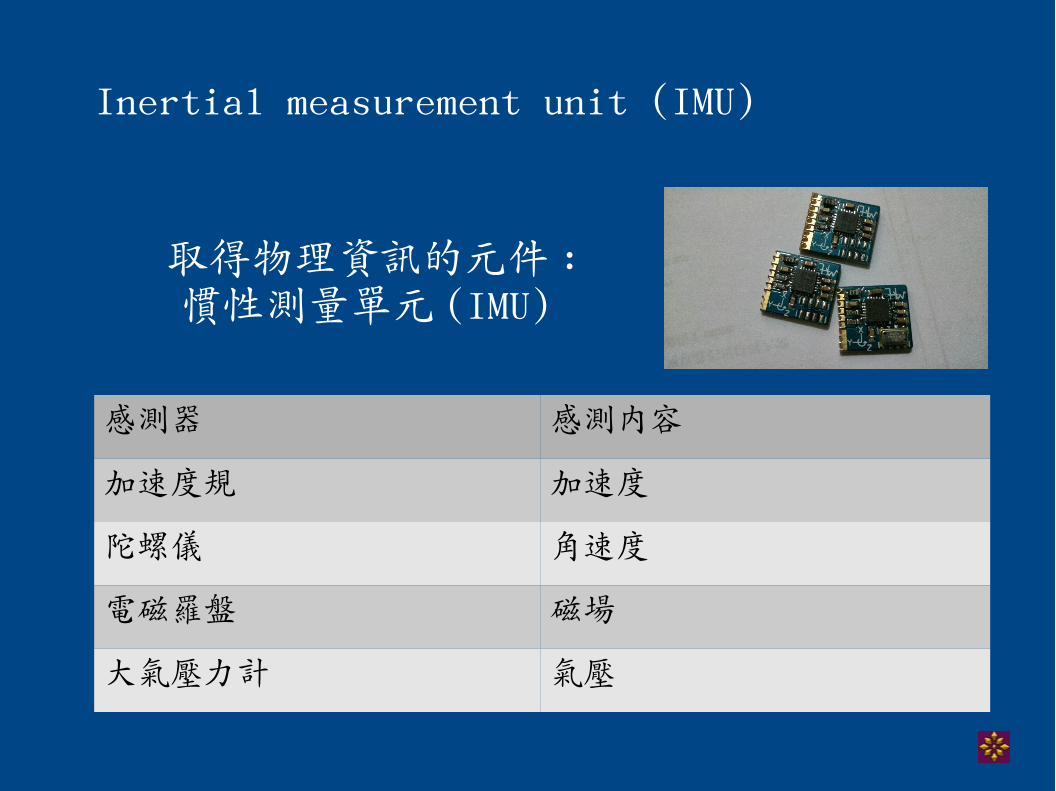
Inertial measurement unit (IMU)
感測器 感測內容
加速度規 加速度
陀螺儀 角速度
電磁羅盤 磁場
大氣壓力計 氣壓
取得物理資訊的元件 :慣性測量單元 (IMU)

描述姿態的方法 (使用陀螺儀 )
陀螺儀可以得到角速度(角度的導數 )然後可以進行以下運算
尤拉微分方程方向餘弦矩陣
四元數
可以互相轉換(計算結果轉為尤拉角後使用 )
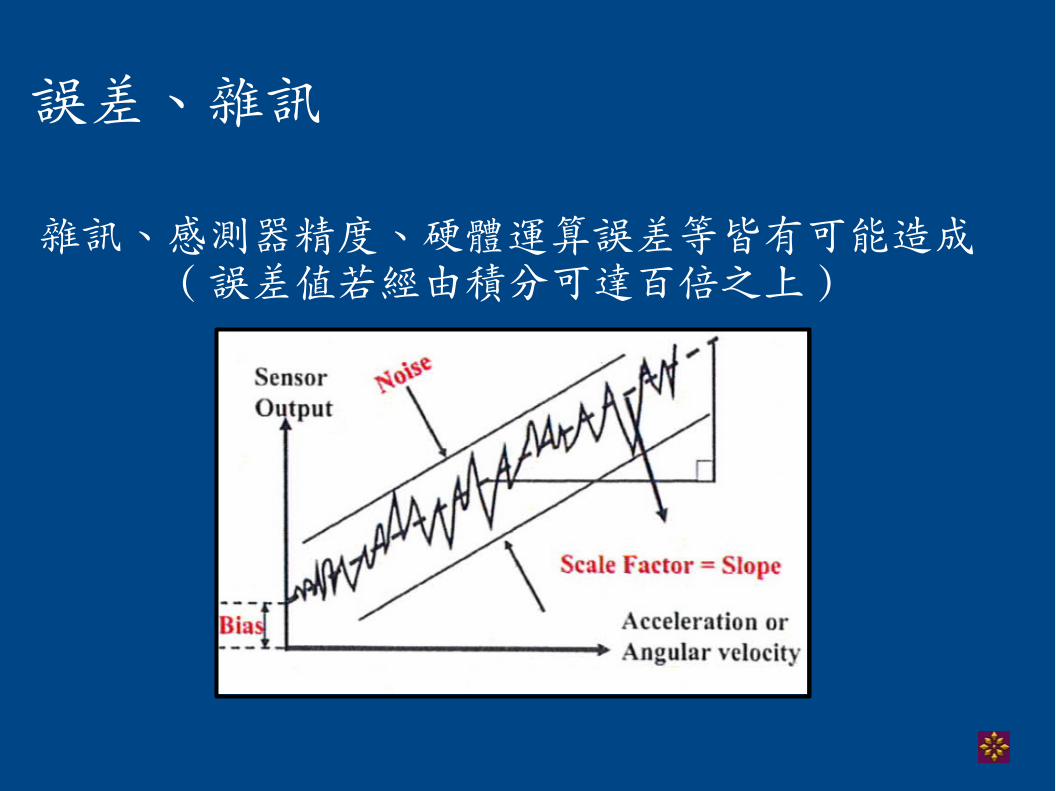
誤差、雜訊
雜訊、感測器精度、硬體運算誤差等皆有可能造成(誤差值若經由積分可達百倍之上 )

濾波器
權重、比例、參考等演算法可以設計出不同的濾波器來消除雜訊
如:IMU的各種感測器原始資料會經由低通濾波消除雜
訊後才可使用

感測器互補融合求取姿態
雖然姿態(尤拉角 )可由陀螺儀 (角速度 )求出 ,但實際上使用時誤差仍然極大,因此使用時常搭配
其他感測器互補:
對於Roll, Pitch 姿態角 ,以陀螺儀 (角速度 )及加速規 (加速度)求取角度後依照經驗以特定比
例設計出一互補濾波器
對於Yaw 原理相同,但是改以陀螺儀互補電磁羅盤(磁通量)
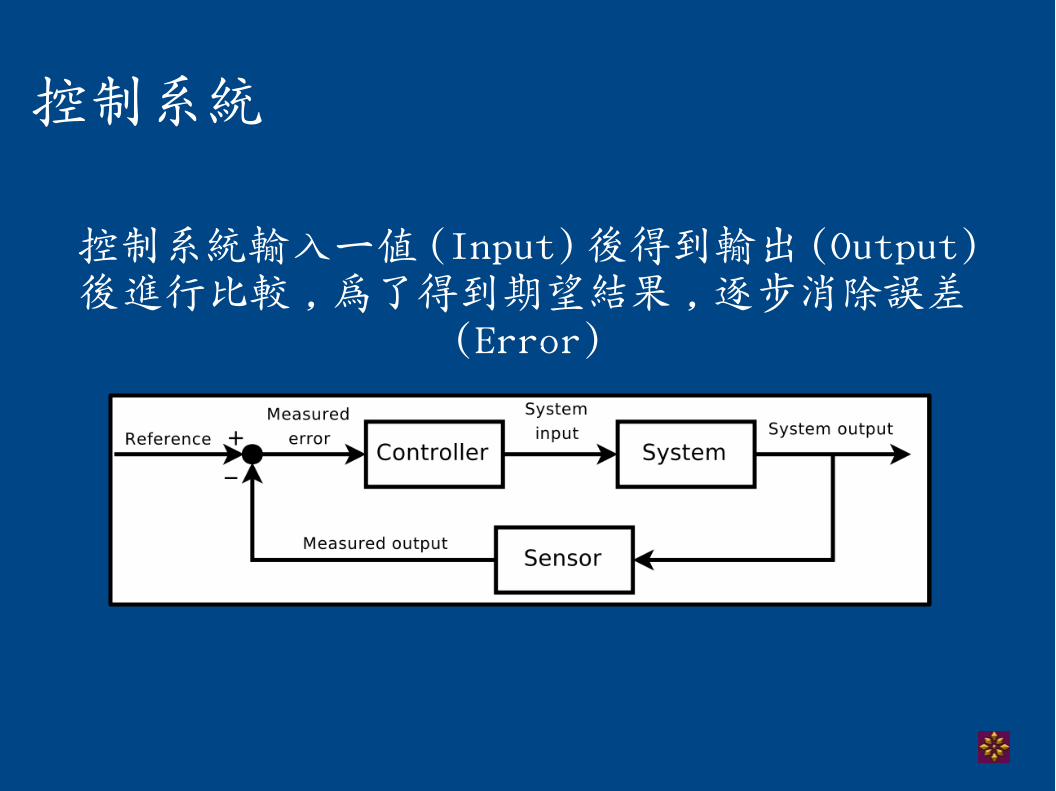
控制系統
控制系統輸入一值 (Input)後得到輸出 (Output)後進行比較,為了得到期望結果 ,逐步消除誤差
(Error)

PID控制器 (PID Controller)
P(roportion) 比例、I(ntegration)積分、D(ifferential)微分三項可用來分析系統趨
勢

PID控制器 (PID Controller)
離散化後:
PID控制器有三個參數 :KpKiKd
調整時將 PID 控制器視為黑箱子(未知系統)並依據經驗進行調整

簡介 QGroundControl為一自由軟體,採用LGPL授權
支援多種載具使用 (海、陸、空)提供一個顯示機載資訊的平台可供顯示:
飛行姿態、高度、飛行狀態 ...etc提供感測器及遙控器的校正環境
提供機載參數的調整環境提供一個自動導航路徑規劃的環境
通訊使用 MAVLink協定(亦為開放,代表任何有心實作飛行載具的人皆
可以以 QGroundControl作為監控平台 )

儀表Primary Flight Display

路徑規劃

機載參數調整

趨勢圖表
Reference
黃大峯同學更詳細的投影片獲取加速計之姿態 (郭至軒同學)
QGroundControlMAVLink

Thanks for listening!(歡迎參與開發 )