Embed Size (px)
Citation preview

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 1/30
U V O D
U prvom dijelu ovog udžbenika prouili smo kretanje jedne materijalbne take. Utehnici eš#e se sre#e problem kretanja više materijalnih taaka, koje su me%usobno
povezane kao tijela koja se kre#u. Tako, naprimjer, automobil, svaka mašina, mehanizamitd., predstavlja mehaniki sistem materijalnih taaka, odnosno tijela.Do sada smo prouili kretanje jedne materijalne take i došli do zakljuka da se
rješavanje svakog od navedenih problema bazira na osnovnim Newtonovim zakonima. Istizakoni sainjavaju osnovu za prouavanje kretanja više materijalnih taaka, tj. sistemamaterijalnih taaka.Pri kretanju više materijalnih taaka, ija kretanja zavise jedna oddrugih, postoje izvjesne specifinosti, postoje teoreme koje olakšavaju postavljanje i prouavanje pojedinog problema. Ovdje treba napomenuti da sve izvedene relacije, jednaine, dokazi, polaze od Newtonovih zakona, koji ine osnovu kretanja materijalnogsvijeta (uz pretpostavku da su brzine male u odnosu na brzinu svjetlosti).
Dinamiku sistema predstavlja skup teorema, diferencijalnih jednaina, koje nanajpogodniji nain opisuju kretanje mehanikog tijela. Uzimaju#i u obzir dinamikekarakteristike (mase, raspored masa, itd.), sa jedne strane, i sila koje djeluju pri kretanju, sa
druge strane. Osnovni zadatak dinamike sistema materijalnih taaka jeste postavljanjediferencijalnih jednaina kretanja ijim integriranjem dolazimo do zakona kretanja.
Ovdje #emo sve zakone, odnosno jednaine kretanja izvjesti za sluaj diskretnoraspore%enih masa (skup materijalnih taaka na konanim rastojanjima), kao i u sluajukontinualno raspore%enih masa - kontinuuma. Pritom #e kontinuum biti uglavnom smatrannedeformabilnim. Tada su u pitanju kruta tijela.
U pojedinim poglavljima ovog udžbenika navedeni su i primjeri koji ilustruju primjenu teorije, naglašavaju#i nain kako treba razmišljati pri postavljanju problema.Ilustrovani primjeri treba da stvore sliku o tome koje zakone, teoreme treba primijeniti prirješavanju pojedinih problema.
Dinamika sistema materijalnihtaaka i krutog tijela

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 2/30
9.1. MEHANI#KI SISTEM. SILE KOJE DJELUJU NA SISTEM
Skup materijalnih taaka obrazuje materijalni sistem. Pod materijalnim sistemom podrazumjeva se skup materijalnih taaka u kome kretanje jedne take zavisi od kretanjasvih ostalih taaka. Materijalne take koje obrazuju sistem mogu da se nalaze name%usobnim konanim rastojanjima i da ih ima konaan broj, i tada imamo sluajdiskretnog sistema. Ukoliko su mase u nekom dijelu prostora neprekidno raspore%ene, tadataaka ima beskonano mnogo i sistem obrazuje neprekidnu sredinu. Oblast prostoraispunjena neprekidno raspore%enom masom predstavlja materijalno tijelo. Ako tijelo nemijenja svoj oblik i dimenzije za vrijeme djelovanja sila, kažemo da se radi o krutom tijelu.
Sistem materijalnih taaka ije kretanje nije ogranieno nikakvim vezama naziva se slobodni materijalni sistem, a onaj sistem ije je kretanje ogranieno postojanjem veza,naziva se materijalni sistem ili neslobodni materijalni sistem.
Promjena položaja mehanikog sistema u prostoru vrši se pod djelovanjem sila. Dotog zakljuka dolazi se posmatranjem izolovane materijalne take sistema. Kretanjeizolovane materijalne take zavisi od djelovanja sila na tu taku, shodno zakonimadinamike take, kretanje sistema, kao skupa materijalnih taaka, zavisi od sila koje djelujuna sistem.
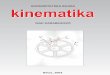
Pri prouavanju materijalnog sistema kao cjeline i svake njegove take posebno, potrebno je sve sile koje djeluju na take sistema podijeliti, na spoljašnje i unutrašnje sile.Sile koje potjeu od tijela koja ne ulaze u posmatrani sistem nazivaju se spoljašnje sile (slika 9.1.).
Sile kojima djeluju jedna na drugu materijalne take (tijela) posmatranog sistemanazivaju se unutrašnje sile.
Op%e mehanike karakteristikematerijalnog sistema

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 3/30
U primjeru prikazanom na slici 9.1., spoljašnje sile su reakcije zgloba A( x A, y A) sila F
i sile koje djeluju na klip n F izme%u klipa i cilindra, te sila F = p ⋅ A, kao posljedica pritiska u cilindru.
Unutrašnje sile su sile me%usobnog djejstva izme%u taaka i tijela posmatranogsistema. To su sile u zglobovima B,D (sile izme%u poluga AB i ED te poluge ED i klipa).Ovdje treba napomenuti da i sile me%usobnog djejstva pojedinih taaka istoga tijela(kohezione, elastine sile, itd.), predstavljaju unutarnje sile mehanikog sistema.
Unutrašnje sile razmatranog materijalnog sistema koje djeluju na take izdvojenogdijela, bi#e spoljašnje sile u odnosu na izdvojeni dio. Tako, naprimjer, pri kretanju planetaSunevog sistema kao cjeline, privlana sila Sunca u odnosu na Zemlju je unutrašnja sila,ako se, pak, posmatra samo kretanje Zemlje oko Sunca, onda #e ta sila biti spoljašnja.
Slika 9.1. Primjer spoljašnjih i unutrašnjih sila
Postoji još jedna podjela sila koje djeluju na mehaniki sistem, a to je da spoljašnjei unutrašnje sile mogu biti aktivne i rekcije veze.
Treba ista#i, unutrašnje sile javljaju se uvijek u parovima, one su uvijek istog
pravca, istog intenziteta a suprotnih smjerova. Rezultanta svakog para unutrašnjih sila jednaka je nuli, pa možemo zakljuiti da je vektorski zbir (glavni vektor) svih unutrašnjihsila materijalnog sistema jednak nuli.
∑=
==n
i
u
i
u
R F F 1
0rr
(9.1.)
Tako%er je i vektorski zbir momenata (glavni moment) svih unutrašnjih sila materijalnogsistema u odnosu na proizvoljno izabrani nepokretni pol O jednak nuli.
E
F
A
B
F=p·A
n F
D
F=p·A
n F
D
D y
D x
E
F
B y
B x
B D y
D x
A
B
B y
B x
A x
A y

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 4/30
∑= ==
n
i
F F ui
u R
M M 100 0
rr rr
(9.2.)
Projektovanjem vektorske jednaine (9.2.) na ose Descartesovog koordinatnogsistema, dobijamo tri skalarne veliine
==
==
==
∑
∑
∑
=
=
=
n
i
F
z u
z
n
i
F
y
u
y
n
i
F
x
u
x
ui
ui
ui
M M
M M
M M
1
1
1
0
0
0
r
r
r
(9.3.)
Izvršimo analizu unutrašnje površinske i zapreminske sile sistema materijalnih
taaka kontinuirano raspore%enih (kontinuum), kakav je sluaj kada se radi o tijelima ilifluidima.
Posmatrajmo dio kontinuma dV , slika 9.2., koji je ogranien elementarnim površinama. Tako%er možemo konstatovati da se uticaj tvari van ovog dijela prenosi naelementarnu zapreminu dV preko površinskih sila (koje, kada svedemo na jedinicu površine, nazivamo naponima).
Slika 9.2. Uz objašnjenje unutrašnjih sila kontinuuma
Na slici 9.2. oznaena je komponenta u
yy
F d unutrašnje sile u
y
dF na površinu y
dA
kao rezultanta normalnog napona yσ
odnosno
⋅≈=
⋅≈=
∫
∫
z
y
dA
z z z z
u
zz
dA
y y y y
u
yy
dAdAd dF
dAdAd dF
σσ
σσ
)(
)(
(9.3.)
x
0
x
i j
k
dAdV
dA y
dV
u yy F d
u yy F d ′
u yx F d
u yx F d ′
u yz F d
u yz F d ′
u y F d
u y F d ′
z
dA z
u zz F d

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 5/30
Na potpuno isti nain odre%ujemo i ostale komponente u yx F d i u
yz F d kao rezultante
tangencijalnih napona yz yx ττ i
⋅==⋅==
z zy
u
zy z zx
u
zx
y yz u
yz y yxu
yx
dAdF dAdF
dAdF dAdF
ττ
ττ
(9.4.)
pa imamo da je
++=++=++=++=
z z zy zx zz zy zx
u
z
y yz y yx yz yy yx
u
y
dAk yi F d F d F d F d
dAk yi F d F d F d F d
)(
)(rrrrrrr
rrrrrr
τστ
τστ (9.5.)
Ukoliko izvršimo integraciju po svim zamišljenim površinama na koje smo kontinuum podijelili te na taj nain pokupimo sve unutrašnje sile, dolazimo do zakljuka da je glavnivektor unutrašnjih sila jednak nuli
∑ ∫ =
==n
i A
i
uu
R
i
dA F F 1
0rr
(9.6.)
Na potpuno isti nain možemo dokazivati da je i glavni moment unutrašnjih površinskihsila jednak nuli
∑ ∫ =
=×=n
i A
i
u F
i
ur dA F r M
10 0
rrr
(9.7.)
9.2. MASA I SREDIŠTE MASA SISTEMA
Na osnovu dinamike take. može se odmah
re#i, bez dokazivanja, da kretanje materijalnogsistema, osim sila koje djeluju na njega, zavisi iod ukupne mase sistema i od rasporeda masa utom sistemu.
Pretpostavimo da su nam poznate masematerijalnih taaka M1(m1), M2(m2),...,Mn(mn),od kojih se sastoji slika 9.3.
Masa materijalnog sistema prikazanog na slici9.3. jednaka je algebarskom zbiru masa svihtaaka ili tijela koje obrazuju sistem:
∑=
=n
i
imm1
(9.8.)
Slika 9.3. Materijalni sistem od M n materijalnih ta! aka
Ovo se odnosi na diskretno raspore%ivanje masa u prostoru. Me%utim, za kontinuiranoraspore%en sistem materijalnih taaka (kontinuum) masa sistema je jednaka masikontinuuma. Za izraunavanje mase tijela ija je zapremina V , potrebno je poznavatifunkciju raspodjele mase u prostoru (slika 9.4.).
0
x
M1 (m1)M2 (m2)
Mi (mi)
M (mn)
C1r 2r
3r C
r
M3 (m3)
ir
nr

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 6/30
Slika 9.4. Slika uz definiciju mase kontinuuma
Karakteristika raspodjele mase u prostoru je gustina ρ, koja predstavlja masu jedinicezapremine. Ako je ∆V mali volumen mase ∆m posmatranog tijela, onda se odnos
sV
mρ=
∆∆
(9.9.)
naziva srednjom specifi! nom masom ili srednjom gusto$om volumena ∆V tijela, a graninavrijednost jednaine (9.9.)
ρ==∆∆
→∆ dV
dm
V
m
V 0lim (9.10.)
je specifi! na masa ili gusto$a tijela u posmatranoj taki.Masu tijela zapremine V , ako poznajemo funkciju r jegdje),(r ρρ = vektor položaja (vidi
sliku 9.4.), izraunavamo integracijom
∫ =V
dV m ρ (9.11.)
Kod nehomogenog tijela gustina se mijenja od take do take, tako da tada vrijedi
),,( z y x f =ρ
a masa je odre%ena jednainom
∫∫∫ ∫ ==V V
dz dydx z y xdV m ),,(ρρ (9.12.)
Ako je tijelo homogeno onda je gustina konstantna, pa je
∫ ====
V
const V
mV dV m . , ρρρ (9.13.)
Pretpostavimo sada da je materijalno tijelo takvog oblika da je jedna dimenzija mala uodnosu na druge dvije (primjer limova), kao što je prikazano na slici 9.5. Za takvo tijelokažemo da je oblika površine i tada treba definisati površinsku gustinu, kao masu po jedinici površine.
V
m
∆∆
=,ρ (9.14.)
a jedinica gustine
[ ] .2
,
m
kg
A
m=
=ρ
0
x
dVm
V
(K)
dm= '·dV C
r
C r

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 7/30
Slika 9.5. Uz definiciju mase tijela oblika površine
Masa tijela se dobije integracijom po površini A tijela
∫ =V
dAm ,ρ (9.15.)
Za homogeno tijelo imamo
∫ ====V
const A
m AdAm . , ,,, ρρρ (9.16.)
Ukoliko je materijalno tijelo takvog oblika da su dvije dimenzije zanemarive u odnosu natre#u dimenziju (primjer žice), kao što je prikazano na slici 9.6., tada definišemo linijsku gustinu kao masu po jedinici dužine
dl dm=,,ρ (9.17.)
a jedinica gustine
[ ] .,,
m
kg
l
m=
=ρ
Slika 9.6. Uz definiciju mase tijela oblika linije
0 x
C
r
C r
dA dm
dm= ''·dA
(=0
A
0 x
C r
C r
dl
dm
dm= '''·dl
d=0

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 8/30
Masa cijelog tijela se dobije integracijom jednaine (9.17.)
∫ =l
dl m ,,ρ (9.18.)
gdje je ∫ l
krivolinijski integral.
Za homogeno tijelo imamo
∫ ====l
const l
ml dl m . , ,,,,,, ρρρ (9.19.)
Raspored masa materijalnog sistema, u prvom redu je okarakterisan položajem takesistema, koja se zove središte masa ili centart inercije materijalnog sistema. Središte masaili centar inercije datog sistema (slika 9.3.), jeste geometrijska taka C, iji je vektor
položajac
r odre%en jednainom
m
r m
r
n
i
ii
c
∑== 1
r
r (9.20.)
gdje su: mi(i = 1,2,3,...,n) - mase materijalnih taaka sistema,
cr - vektori položaja tih taaka
∑=
n
i
iir m1
r- statiki momenti masa taaka sistema.
Projektovanjem vektorske jednaine (9.20.) na ose Descartesovog koordinatnog sistema,dobijamo tri skalarne jednaine:
m
xm
x
ii
c
Σ
=
m
z m z
m
ym y
iic
iic
Σ=
Σ=
(9.21.)
Jednaina (9.21.), odnosno jednaina (9.20.), predstavlja, definiciju središta masa. Vidimoda je to geometrijska taka u prostoru, iji položaj zavisi od položaja materijalnih taakakoje ine sistem i veliina njihovih masa. Taka C može u datom trenutku (položaju) da se poklapa sa nekom od taaka sistema, a može biti i van svake od materijalnih taaka.U sluaju da se radi o kontinuumu, tada je položaj središta masa definisan jednainom
m
dV r
r V c ∫ =
r
r
ρ
(9.22.)
gdje je: r - vektor položaja elementarne mase dm, ρ - gustina, m - ukupna masa. Izvektorske jednaine (9.22.) slijede tri skalarne jednaine,
∫ ∫ ∫ ===V
c
V
c
V
c zdV m
z ydV m
y xdV m
x 1
, 1
, 1
ρρρ (9.23.)
Za jednoliko raspore%enu masu u prostoru (homogeno tijelo) ρ = const. središte masa se poklapa sa geometrijskim središtem zapremine

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 9/30
=
=
=
⇒==
∫
∫ ∫ ∫
∫
∫
V
c
V
c
V
c
V
V
V c
zdV V
z
ydV V
y
xdV V x
V
dV r
dV
dV r
r
1
1
1
rr
r
ρ
ρ
(9.24.)
Položaj središta masa sistema koji se nalzi u polju teže poklapa se sa težištem definiranim u[23]. Proširenjem jednaine (9.20.) sa ubrzanjem g , imamo
G
r G
mg
r g m
r
n
i
ii
n
i
ii
c
∑∑== == 11
rr
r (9.25.)
gdje je Gi - težina pojedinih taaka, G - ukupna težina sistema. Pojam težišta ima smislasamo u polju djelovanja Zemljine teže. Središte masa postoji (može se definisati) uvijekkada postoje mase, i u bestežinskom stanju.
9.3. MOMENTI INERCIJE MATERIJALNOG SISTEMA
U dinamici take (prvom poglavlju ovog udžbenika) vidjeli smo da je masamaterijalne take veliina koja karakterište inertnost i pojavljuje se u jednainama kretanja.
Me%utim, u svim drugim vrstama kretanja sistema (npr. obrtanje tijela oko ose,ravno kretanje tijela, itd.) kretanje ne zavisi samo od veliine mase sistema, ve# i od položaja, rasporeda masa. Karakteristika rasporeda masa, u tom sluaju, jeste središte C
masa ili centar inercije materijalnog sistema. Me%utim, pri obrtnom kretanju materijalnogsistema, odnosno krutog tijela mjera inercije jeste moment inercije*. Poznavanje mementainercije, njihovo izuavanje, neophodno je za dalja razmatranja u dinamici sistema, kao i zarješavanje konkretnih praktinih i teorijskih zadatak.
U ovom poglavlju posmatrat #emo uglavnom kontinualno raspore%en sistemtaaka, mada u pojedinim sluajevima napisat #emo i jednaine koje podrazumjevajudiskretno raspore%ene materijalne take u prostoru.
9.3.1.
VRSTE MOMENTA INERCIJE
Posmatrajmo materijalni sistem, koji u specijalnom sluaju može biti kruto tijelo. Uoimo proizvoljnu taku Mi (slika 9.6.) tog sistema iji je položaj, u odnosu na izabrani
Descartesov koordinatni sistem, odre%en koordinatama xi, yi, z i. proizvoljna taka Mi imaelementarnu masu dmi, koja zauzima dV i, a položaj joj je odre%en radijus vektorom položaja u odnosu na koordinatni poetak.
__________________* Pojam momenta inercije uveo je L. Euler.

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 10/30
Slika 9.6. Uz definiciju momenta inercije
Možemo definisati slijede#e momente inercije:
9.3.1.1. Planarni moment inercije
Moment inercije za ravan (planirani moment inercije) naziva se skalarna veliina, koja je jednaka zbiru proizvoda masa svih taaka sistema i kvadrata njihovih udaljenosti od ravni.U posmatranom primjeru, moment inercije za ravan xy, elementarne mase dmi je
ii xy dm z dJ 2=Π (9.26.)
jer je udaljenost mase dmi od ravnine xy upravo koordinata z . Na potpuno isti nain
dolazimo do planiranog momenta inercije za preostale dvije ravnine xz i yz
ii yz
ii xz
dm xdJ
dm ydJ
2
2
=
=
Π
Π (9.27.)
Ukupni moment inercije tijela za koordinatne ravnine xy, xz i yz dobijamo sabiranjem svihelementarnih momenata inercije po cijeloj masi tijela, a to možemo svesti na odre%eniintegral po cijeloj masi
∫ ∫
∫ ∫
∫ ∫
==
==
==
Π
Π
Π
m V
iiii yz
m V
iiii xz
m V
iiii xy
dV xdm xdJ
dV ydm ydJ
dV z dm z dJ
22
22
22
ρ
ρ
ρ
(9.28.)
Ovdje je iskorištena jednaina (9.10.) koja daje vezu izme%u elementarne mase ielementarne zapremine dmi = ρdV i gdje je ρ - gustina. Ukoliko se materijalni sistem sastojiod n materijalnih taaka mase mi, onda se planirani momenti inercije mogu definisati naslijede#i nain
0
x
r z
r y i
dmi dV i
i xi
ir z i

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 11/30
∑
∑∑
=Π
=Π
=Π
=
=
=
n
i
ii yz
n
i
ii xz
n
iii xy
xm J
ym J
z m J
1
2
1
2
1
2
(9.29.)
Planirani moment inercije ve#i je od nule, ali može i biti jednak nuli za datu ravninu ako secijela masa nalazi u datoj ravnini. Planirani momenta inercije je ve#i ukoliko su maseudaljenije od posmatrane ravnine.
9.3.1.2. Aksijalni moment inercije
Moment inercije materijalnog sistema u odnosu na datu osu naziva se (moment inercije zaosu) aksijalni moment inercije. Po definiciji, predstavlja proizvod mase i kvadratarastojanja take i ose. Potražimo moment inercije elementarne mase dm za osu x
iii x x dm z ydmr dJ )( 222 +== (9.30.)
gdje je r ix - rastojanje mase dm od ose x (slika 9.6.)Za preostale dvije koordinatne ose elementarni moment inercije iznosi
iii z z
iii y y
dm z ydmr dJ
dm z ydmr dJ
)(
)(222
222
+==
+== (9.31.)
Ukoliko pokupimo sve elementarne momente inercije za cijelo tijelo, dobit #emo da suaksijalni momenti inercije (tijela) za koordinatne ose x, y, z :
∫ ∫
∫ ∫ ∫ ∫
+=+=
+=+=
+=+=
m V
iiiiii z
m V
iiiiii y
m V
iiiiii x
dV y xdm y x J
dV z xdm z x J
dV z ydm z y J
)()(
)()(
)()(
2222
2222
2222
ρ
ρ
ρ
(9.32.)
Ukoliko se materijalni sistem sastoji od n materijalnih taaka M i, ije su mase mi, onda seaksijalni moment inercije definiše na slijede#i nain
∑∑
∑
=
=
=
+=
+=
+=
n
i
iii z
n
i
iii y
n
i
iii x
z xm J
z xm J
z ym J
1
22
1
22
1
22
)(
)(
)(
(9.33.)
Na osnovu jednaina (9.32.) i (9.33.) možemo zakljuiti da je aksijalni moment inercije zaneku osu ve#i ukoliko su mase udaljenije od ose, a jednak je nuli za posmatranu osu samo usluaju da se cjelokupna masa nalazi na osi.Jedinica mjere (dimenzije) za moment inercije u sistemu mjera SI je kilogram metar nakvadrat.
[ J ] = kg m2 (9.34.)

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 12/30
9.3.1.3.
Poluprenik inercije
Moment inercije sistema u odnosu na proizvoljnu osu z mogu#e je izraziti u obliku proizvoda mase sistema i kvadrata linearnog rastojanja od te ose kojeg nazivamo polupre! nik inercije u odnosu na tu osu, tj.
J z = m 2 z i (9.35.)
Pretpostavimo da je moment inercije sistema za osu poznat, onda se poluprenikinercije tog sistema za osu odre%uje formulom
m
J i z z = (9.36.)
Na osnovu formule (9.36.) slijedi da, fiziki, poluprenik inercije sistema predstavlja onorastojanje od ose na kome treba postaviti cjelokupnu masu sistema, da aksijalni moment
inercije ostane nepromijenjen.Praktino, fiziko, tumaenje bi znailo: ako imamo tijelo K mase m, te od njega napravimo pravi štap vrlo malog poprenog presjeka, onda #e štap imati isti moment inarcije J z za osu z kao i tijelo K, ako se postavi paralelno osi z , na udaljenosti i z . Svaki djeli# mase štapanalazi se na istoj udaljenosti od ose z .
Slika 9.7. Uz objašnjenje polupre! nika inercije
Pošto se svaki djeli# mase štapa (slika 9.7.) nalazi na istom rastojanju i z ako se primijeni jednaina (9.31.), dobije se
∫ ∫ =====m m
z z
z z z š z J m
m J midmidmi J 222 (9.37.)
gdje je š
z J - moment inercije štapa.
x
0
m
x
0
i z
m

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 13/30
9.3.1.4.
Polarni moment inercije
Moment inercije materijalnog sistema u odnosu na dati pol O, odnosno taku O, polarni moment inercije za taku O, predstavlja proizvod mase take i kvadrata njenograstojanja od te take O.Za elementarnu masu dm (slika 9.6.) polarni moment inercije za taku O jednak je
iiiiii dm z y xdmr dJ )( 22220 ++== (9.38.)
Ukoliko izvršimo integraciju predhodne jednaine, dobit #emo moment inercije tijela zataku O.
∫ ∫ ∫ ++=++==m V
iiiiiiii
m
iidV z y xdm z y xdmr J )()( 2222222
0 ρ (9.39.)
Za sistem materijalnih taaka M i ije su mase mi sa koordinatama x p y p z p polarni moment
inercije za taku O je
∑ ∑= =
++==n
i
n
i
iiiiii z y xmr m J 1 1
22220 )( (9.40.)
Na osnovu jednaina (9.39.) 9 (9.40.), možemo zakljuiti da je polarni moment inercije pozitivna veliina koja karakteriše udaljenost masa os posmatrane take. On je jednak nuliako je cjelokupna masa skoncentrisana u taki za koju tražimo polarni moment inercije.
9.3.1.5. Centrifugalni moment inercije
Centrifugalni moment inercije materijalne take M i ija je masa dmi za dvijeme%usobno okomite ose, jednak je proizvodu mase take i rastojanja take od osa.Elementarni centrifugalni moment inercije je
iii xy dm y xdJ = (9.41.)
Na potpuno isti nain se definišu centrifugalni momenti inercije s obzirom na ose xz i yz
iii yz
iii xz
dm z ydJ
dm z xdJ
==
Centrifugalni momenti inercije za kontinuirano raspore%enu masu (kontinuum) dmi uzapremini dV i su:
∫ ∫
∫ ∫
∫ ∫
==
==
==
m V
iiiiii yz
m V
iiiiii xz
m V
iiiiii xy
dV z ydm z y J
dV z xdm z x J
dV y xdm y x J
ρ
ρ
ρ
(9.42.)
a za sluaj diskretno raspore%enih masa

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 14/30
∑
∑∑
=
=
=
=
=
=
n
i
iii xy
n
i
iii xz
n
iiii xy
z ym J
z xm J
y xm J
1
1
1
(9.43.)
Na osnovu jednaina (9.42.) i (9.43.) zakljuujemo da centrifugalni momenti inercije mogu biti pozitivni, negativni i jednaki nuli.Kod utvr %ivanja dimenzije vidimo da se radi o proizvodu mase i kvadrata rastojanja pa je jedinica
[ J ] = kg m2
Do veze izme%u planiranih, aksijalnih i polarnih momenata inercije dolazimo akosumiramo jednaine (9.28.) uz pomo# jednaine (9.39.)
∫ ∫ ∫ ∫ =++=++=++ ΠΠΠV V
iiiiii
V
ii
V
ii yz xz xy J dV z y xdV xdV ydV z J J J 0222222 )(ρρρρ
(9.44.)
Sabiranjem prve dvije jednaine slijedi da je
∫ ∫ ∫ =+=+=+ ΠΠV
xiii
V
ii
V
ii xz xy J dV y z dV ydV z J J )( 2222 ρρρ
a zatim ostalih
∫ ∫ ∫
∫ ∫ ∫
=+=+=+
=+=+=+
ΠΠ
ΠΠ
V
z iii
V
ii
V
ii yz xz
V
yiii
V
ii
V
ii yx yz
J dV x ydV xdV y J J
J dV z xdV z dV x J J
)(
)(
2222
2222
ρρρ
ρρρ
(9.45.)
Sabiranjem jednaina (9.45.) dobijamo
∫ =++=++V
iiii z y z J dV z y x J J J 0222 2)(2 ρ (9.46.)
Izvedene jednaine (9.44.), (9.45.) i (9.46.) predstavljaju tražene veze izme%u pojedinihvrsta momenata inercije.
9.4. HUYGENS-STEINEROVA TEOREMA
Posmatrajmo tijelo M mase m i postavimo Descartesov koordinatni sistem usredište masa C sistema. Neka je poznat aksijalni moment inercije sistema (tijela) u odnosuna osu O z . Da bismo odredili moment inercije sistema (tijela) u odnosu na osu Z 1 koja je paralelna osi O z a udaljena je od nje za rastojanje a (sl. 9.8.), napišimo moment inercije zaosu O z
∑ ∑= =
+==n
i
n
i
iiiiz i z y xmr m J 1 1
222 )( (9.47.)
Potražimo moment inercije za osu z 1
[ ]∑ ∑= =
−+==n
i
n
i
iiiiz i z a y xmr m J 1 1
22211 ) (9.48.)

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 15/30
odnosno
∑ ∑= =
−+=n
i
n
i
iiicz z ymama J J 1 1
21 2 (9.49.)
Slika 9.8. Uz objašnjenje Huygens-Steinerove teoreme
Imaju#i u vidu da smo izveli jednaine (9.21.) na osnovu kojih odre%ujemo središte masa C.
=
=
∑
∑
=
=
n
ii
n
i
iiC
mm
ymmJ
1
1
(9.50.)
a pošto je u našem sluaju središte masa uzeto za koordinatni poetak sistema referencijeC xyz , to je yC pa slijedi da je ∑ mi yi = 0, te možemo pisati
J z 1 = J Cz + m a2 (9.51.)
gdje je a - rastojanje izme%u osa C z i Z 1, pri emu osa C z prolazi kroz središte masa C. Ova jednaina izražava Steinerovu, odnosno Huygensovu* teoremu koja glasi:
Moment inercije materijalnog sistema (tijela) za neku osu jednak je zbirumomenata inercije tog sistema (tijela) u odnosu na paralelnu osu koja prolazi kroz središtemasa sistema (težište krutog tijela) i proizvoda mase sistema i kvadrata rastojanja izme%utih osa.
Pošto su na desnoj strani jednaine (9.51.) pozitivne veliine, slijedi da od svih paralelnihosa najmanji aksijalni moment inercije je za osu koja prolazi kroz središte masa. Momentinercije materijalnog sistema, odnosno krutog tijela za osu koja prolazi kroz središte masanaziva se sopstveni moment inercije sistema, a proizvod mase i kvadrata rastojanja izme%utežišne ose i uoene njoj paralelne ose, naziva se položajni moment inercije sistema (tijela).
_____________________*Huygens (Hajgens, 1629. - 1695.), Steiner (Štajner, 1796. - 1863.)
x
i
i
xi
i
0
1
a
r iz r iz1

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 16/30
9.5.
MOMENT INERCIJE KRUTOG TIJELA U ODNOSU NA OSU
PROIZVOLJNOG PRAVCA KROZ DATU TA#KU
Izvedimo jednainu za odre%ivanje momenta inercije homogenog krutog tijela uodnosu na osu u koja prolazi kroz taku O koordinatnog sistema, i koja sa koordinatnimosama x, y, z zatvara uglove α, β, γ (slika (9.9.).
Slika 9.9. Moment inercije u odnosu na osu proizvoljnog pravca
Neka je normalno rastojanje od ose u proizvoljne take Mi ija je masa mi jednakah1 (slika 9.9.), tada je moment inercije tijela u odnosu na osu u
∑=
=n
i
iiu hm J
1
2 (9.52.)
Rastojanje hi take M i ije su koordinate x, y, z od ose u je jednako intenzitetu vektorskog
proizvoda vektora položaja 1r i jedininog vektora 0u :
100 sin hur ur ii ==× ϕ (9.53.)
gdje je ϕ ugao izme%u 0i ur i . Kvadrat rastojanja 2ih se može analitiki izraziti
==×=γ βα
γ
coscoscos
2
02
iiiii z y x
k i
ur h
r
rr
{ }2)coscos()coscos()coscos( k y x j x z i z y iiiiii
rrr
αβγ αβγ −+−+−=
odnosno2222
1 )coscos()coscos()coscos( αβγ αβγ iiiiii y x x z z yh −+−+−= (9.54.)
Ako uzmemo u obzir da su kosinusi uglova koje gradi proizvoljna osa u sa koordinatnimosama Oxyz sistema, vezani slijede#om relacijom
1coscoscos 222 =++ γ βα
to je
x
i (mi )
i
xi
i 0
i
j
k 0u
)
* ,
ir
i
u

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 17/30
βαγ
γ αβ
γ βα
222
222
222
coscoscos1
coscoscos1
coscoscos1
+=−
+=−
+=−
Kvadriranjem izraza u zagradi (9.54.) i grupisanjem lanova, dobijamo
αγ γ ββα
γ βα
coscos2coscos2coscos2
cos)(cos)(cos)( 2222222222
iiiiii
iiiiiii
x z z y y x
y x x z z yh
−−−−+++++=
(9.55.)
Zamjenom ovog izraza u jednainu (9.52.), dobijamo moment inercije
∑ ∑∑ ∑
∑∑
= =
= =
==
−−
−−++
++++=
n
i
n
i
iiiiii
n
i
n
i
iiiiii
n
i
iii
n
i
iiiu
x z m z ym
y xm y xm
x z m z ym J
1 1
1 1
222
1
22
1
2222
coscos2coscos2
coscos)(cos
)(cos)(cos
αγ γ β
βαγ
βα
(9.56.)
prva tri zbira, prema jednainama (9.33.), predstavljaju aksijalne momente inercije J x , J y , J z ,a veliine
∑
∑
∑
=
=
=
==
==
==
n
i
xz zxiii
n
i
zy yz iii
n
i
yx xyiii
J J x z m
J J z ym
J J y xm
1
1
1
nazivaju se centrifugalni momenti inercije (proizvodi inercije) krutog tijela koji mogu biti pozitivni, negativni i jednali nuli. Konano, moment inercije za osu u može se izraziti pomo#u aksijalnih i centrifugalnih momenata osa x, y, z Descartesovog koordinatnogsistema:
γ αγ β
βαγ βα
coscos2coscos2
coscos2coscoscos 222
xz yz
xy z y xu
J J
J J J J J
−−
−−++= (9.56.)
Možemo zakljuiti da je za izraunavanje momenta inercije tijela za proizvoljnu osu u prema (9.56.), potrebno poznavati uglove α, β, γ koje ta osa gradi sa koordinatnim osamasistema O xyz , aksijalne J x , J y , J z i centrifugalne J xy , J yz , J xz momente inercije tijela u odnosuna koordinatne ose. Ovih devet veliina od kojih je nezavisno šest, karakterišu invarijantnu
osobinu krutog tijela pri njegovoj rotaciji i nazivaju se tenzor inercije tijela.
9.6. ELIPSOID INERCIJE GLAVNE OSE INERCIJE
Da bismo prouili promjenu momenta inercije tijela pri rotaciji ose u oko take O,odaberimo na osi u taku N ije je rastojanje ρ od koordinatnog poetka odre%eno izrazom(slika (9.10.)
u J OK
1==ρ
r (9.57.)

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 18/30
gdje je J u - moment inercije tijela u odnosu na osu u.
Slika 9.10. Elipsoid inercije
Koordinate take K kraja vektora ρ su:
γ ρβραρ cos , cos , cos === y x (9.58.)
odnosno imamo
cos , cos , cos uuu J z J y J x === γ βα (9.59.)
Vode#i rauna o jednainama (9.59.), jednaina (9.56.) poprima slijede#i oblik:
zx J J yz J J xy J J z J J y J J x J J J u zxu yz u xyu z u yu xu 222222 −−−++= (9.60.)
Podijelimo li jednainu (9.60.) sa J u, dobijamo
1222222 =−−−++ zx J yz J xy J z J y J x J zx yz xy z y x (9.61.)
Jednaina (9.61.) predstavlja jednainu elipsoida ije se središte nalazi u koordinatnom poetku. Ovaj elipsoid se naziva elipsoid inercije. Elipsoid inercije karakteriše promjenumomenta inercije krutog tijela koja nastaje usljed promjene pravca ose u koja prolazi krozkoordinatni poetak O. Svakom materijalnom sistemu odgovaraju razliiti elipsoidi inercijeza razne take u prostoru.Tri ose simetrije elipsoida inercije, okomite me%u sobom, nazivaju se glavne ose inercije
tijela u taki O, a momenti inercije u odnosu na glavne ose inercije nazivaju se glavnimomenti inercije tijela. Ako su to ose ξ η ζ (slika 9.10.) onda za njih vrijedi da je
0 ,0 ,0 === ξζηζξη J J J (9.62.)
Jednaina elipsoida inercije u odnosu na glavne ose inercije glasi:
1222 =++ ζηξ ζηξ J J J (9.63.)
Sve ose koje prolaze kroz središte masa sistema nazivaju se centralne ose, a glavne oseinercije koje prolaze kroz središte masa zovu se centralne ose inercije. Momenti inercijetijela u odnosu na glavne centralne ose inercije nazivaju se glavni centralni momenti
inercije tijela.
x
0)
* K
ρ
u
-
.
/

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 19/30
Ukoliko tijelo ima osu simetrije, onda je ona glavna centralna osa inercije. Neka je osa z
osa simetrije, onda svakoj taki Mi ( xi, yi, z i) mase mi odgovara taka Mi (- xi, yi, z i)simetrina u odnosu na osu z (slika 9.11.).
Slika 9.11. Uz objašnjenje glavne centralne ose inercije
Uvrstimo koordinate taaka Mi i Mi' u jednainu (9.61.) i imat #emo
1222
1222222
222
=++−++
=−−−++
zx J yz J xy J z J y J x J
zx J yz J xy J z J y J x J
zx yz xy z y x
zx yz xy z y x (9.64.)
Oduzimanjem ove dvije jednaine, dobijamo
044 =+ zx J yz J zx yz
odnosno04 =+ x J y J z zx yz (9.65.)
Jednaina (9.65.) je zadovoljena ako je samo J yz = 0 J zx = 0 (9.66.)
Možemo zakljuiti ako je bilo koja od koordinatnih osa glavna osa inercije u datoj taki,onda su centrifugalni momenti inercije tijela koji odgovaraju toj osi jednaki nuli. Osa z jeglavna osa inercije, a pošto prolazi i kroz središte C, ona je glavna centralna osa inercije.
Ukoliko homogeno tijelo ima ravan materijalne simetrije, onda svaka osanormalna na ravan simetrije, je glavna osa inercije. Pretpostavimo da je nepokretna ravanO xy ravan simetrije tijela (9.12.).
Slika 9.12. Homogeno tijelo koje ima ravan materijalne simetrije
x
0
CMi' (- xi' , - yi' , z i' ) Mi (- xi , - yi , z i)
x
0 C
Mi' (- xi' , - yi' , z i' )
Mi (- xi , - yi , z i)
mi'
mi

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 20/30
Svakoj taki Mi tijela mase mi sa koordinatama xi, yi, z i koja leži sa jedne strane
ravni, odgovara taka Mi mase mi' = mi sa koordinata xi', yi' - z i' koja leži sa druge straneravni. Centrifugalni momenti J xz , J yz odre%eni su jednainama
∑ ∑
∑ ∑
= =
= =
=−=
=−=
n
i
n
i
iiiiii zx
n
i
n
i
iiiiii yz
z xm z xm J
z ym z ym J
1 1
1 1
0''
0''
(9.67.)
te zakljuujemo, da osa z koja je okomita naravan simetrije, je glavna osa inercije u takiO. Na slian nain se može dokazati da jeglavna centralna osa inercije ujedno i glavnaosa inercije za sve take koje se nalaze na
njoj.Pretpostavimo da su ose x1, y1, z 1 glavnecentralne ose inercije (slika 9.13.), tadavrijedi
0111111
=== z y y x z x J J J (9.68.)
Ako postavimo ose O x i O y na rastojanju h,tada koordinatna transformacija glasi:
x = x1 , y = y1 , z = z 1 - h (9.69.)Slika 9.13. Uz dokaz da je glavnacentralna osa simetrije ujedno i glavna
osa inercije za sve ta! ke na njojDokažimo da je J
yz = 0 prema
definiciji
∫ ∫ ∫ ∫ −=−==m m m m
xz dm xhdm z xdmh z x xzdm J 11111 )( (9.70.)
U jednaini posljednji integral ∫ m
dm x1 na osnovu jednaine (9.24.) x1C ⋅ m = 0, a time je i
J xz = 0.
0
C
x
i
xi
,z i

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 21/30
RJEŠENI ZADACI IZ POGLAVLJA 9.
Zadatak 9.1.
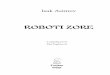
Za homogeno pravi kružni cilindar mase m, poluprenika r i dužine l izraunati momentinerfcije za ose x, y, z
Slika uz zadatak 9.1.
Rješenje:
Isijecimo jedan element oblika kružne ploe debljine dz ija #e masa biti jednaka
dz r dV dm πρρ 2 ==
gdje je ρ - zapreminska gustina
l r
m
V
m
2πρ ==
Elementarni moment inercije za osu z je
dmr dJ z
2
2
1=
ako izvršimo integraciju ove jednaine, dobit #emo
∫ ∫ ∫ ====m mm
z z mr dmr dmr dJ J 222
2
1
2
1
2
1 (1.)
Moment inercije elementarne mase dm za osu x1 izraunat #emo uz pomo# Steineroveteoreme
dm z dmr dm z dJ dJ x x
222' 4
11
+=+= (2.)
dz
l/2 l/2
x1 x x'
1
r
C
dm

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 22/30

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 23/30
Moment inercije za osu O y za cijelo tijelo odredit #emo sumiranjem momenata inercije svih
ploa:
)(12
)(12
)(12
2222
2
2
2
2
22'0
cbm
cbabc
J
dycbbc
dy J J
y
a
a
a
a
y
+=+=
+== ∫ ∫ −−
ρ
ρρ
Analognim postupkom odredimo momente inercije za ose O x i O z :
)(12
),(12
2222 bam
J cam
J z x +=+=
Kako je za glavne centralne ose
J xy = J xz = J yz = 0te na osnovu gornje slike imamo
AB
c
AB
a
AB
b
cba AB
===
++=
γ βα cos cos cos
2222
Koriste#i obrazac (9.56.)
γ αγ β
βαγ βα
coscos2coscos2
coscos2coscoscos 222
xz yz
xy z y xu
J J
J J J J J
−−
−−++=
nakon sre%ivanja dobijamo
.6 222
222222
cba
cacbbam J
u +++
=
Zadatak 9.3.
Za pravi homogeni kružni konus mase m, visine h izraunati moment inercije u odnosu nanjegovu izvodnicu Ou i centrifugalni moment inercije J uv.
Slika uz zadatak 9.3.
v
dy
hu
r=y tg +
0

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 24/30
Osa O y je osa simetrije, tako da je
J yz = J xz = 0Kako je
22
0
22
0
sincos
90 cos 90
hr
r
r h
h
+−=−=
+=+
==
βγ
βγ βα
Na osnovu obrasca (9.56.) je
)(1
coscos 2222
22 r J h J hr
J J J z y z yu ++
=+= γ β
Iz predhodne jednaine vidimo da ostaje da odredimo momente inercije J y i J z . Na osnovu obrazaca (4.45.) iz [23], odnosno (4.) i (5.) iz [9] je
( )
∫
∫
+=
+=
===
===
h
y z
h
yr
y
hr mdy yh
r y J J
mr h
h
r dy y J
y f yh
r ytg z
0
224
2
25
04
44
)4(20
3
2
1
10
3
52
1
2
1
)(
ρπ
ρπρπ
β
Zamjenom dobijamo
)6(203 22
22
2
r hhr
mr J u ++⋅=
Centrifugalni moment inercije J uv odredit #emo primjenom obrasca koji daje vezu izme%ucentrifugalnih momenata inercije J uv i J xy, pri emu koordinatni sistem Ouv nastajerotacijom koordinatnog sistema O xy za ugao α u pozitivnom smjeru ose x.
J uv = ( J x - J y) sinα cosα + J xy cos 2α
J uv = ( J y - J z ) sin (- β) cos (- β) = ( J z - J y) sin β cos β
22
22
22222
4
20
3
10
3)4(
20
3
hr
r hmrh J
hr
hr mr hr m J
uv
uv
+−=
+⋅−+=

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 25/30
Zadatak 9.4.
Izraunati moment inercije homogene lopte poluprenika r i mase m za osu y.
Slika uz zadatak 9.4.
Rješenje:
Za uoenu elementarnu masu dm debljine dy vrijedi:
2
222
222
2
2
2
2
5
2
15
8)(
2
1
2
13
4
2
1
mr J
r dy yr dJ J
yr r
dyr dJ
r
m
V
mdyr dm
dmr dJ
y
m
r
r
y y
I
I y
I
I y
=
=−==
−=
=
===
=
∫ ∫ −
ρπρπ
πρ
π
ρ
πρ
Uslijed simetrije vrijedi J x = J y = J z , a polarni moment inercije
20
20
5
35
232
mr J
mr J J J J z y x
=
=++=
r
x
r 1
dm
dy

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 26/30
ZADACI ZA RJEŠAVANJE IZ POGLAVLJA 9
Zadatak 9.5.
Izraunati moment inercije tankog homogenog štapa AB mase m, dužine l za osu A y i C y,kao što je prikazano na slici.
Slika uz zadatak 9.5.
Rješenje:
21
2
12
13
1
ml J
ml J
y
y
=
=
Zadatak 9.6.
Izra
unati moment inercije homogenog pravog šupljeg cilindra,
ija je osnovica kružni prsten poluprenika r i R visine h, mase m, kao što je prikazano na slici.
Slika uz zadatak 9.6.
Rješenje:
[ ]222
22
4)(312
1
)(2
1
h Rr m J J
Rr m J
z x
z
++==
+=
A BC x
1
x dx
l
dm
x
h
r R
0

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 27/30
Zadatak 9.7.
Za homogeno tijelo specifine gustine ρ oblika Z-profila (prikazano na slici),dimenzija d << a, b, l a : b : l = 1 : 1 : 4. Odrediti momente inercije za ose x, y i z .
Rješenje:
l ad m
l bd mm
⋅=⋅⋅==
2
31
ρ
ρ
0 0
48812
46812
6812
22
1
22
221
2
2
1
2
2
221
2
2
1
22
2
2
221
=
=
⇒<<
++=
+++=
++=
l
d
l
d l d
m
m
l
bl
m J
l
a
m
m
l
a
l
m
J
l
a
m
m
l
a
l
bl
m J
z
y
x
Slika uz zadatak 9.7.
Zadatak 9.8.
Izraunati momente inercije homogene tanke kružne ploe mase m i poluprenika R. Za plou kažemo da je tanka ako se njena debljina u odnosu na dimenzije u ravni možezanemariti, tako da se može smatrati da je cjelokupna masa smještena u ravni.
Rješenje:
2
2
2
4
14
12
1
mR J
mR J
mR J
y
x
z
=
=
=
Slika uz zadatak 9.8.
d
d
a
x
b
l
x
R
r
dr
dr
0
, d ,
dm

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 28/30
Tabela 9.1.6.1
Momenti inercije homogenih tijela
Pravougaoni paralelepiped:
).(3
1
),(3
1),(
3
1
).(12
1
),(12
1),(
12
1
221
221
221
22
2222
ba g
G J
ac g
G J cb
g
G J
ba g
G J
ac g
G J cb
g
G J
z
y x
z
y x
+=
+=+=
+=
+=+=
Kocka ivice: a:
2
6
1a
g
G J J J z y x ===
Piramida pravougaone osnove:
).(20
1
),34(80
1),34(
80
1
22
2222
ba g
G J
hb g
G J ha
g
G J
z
y x
+=
+=+=
Pravilna etverostrana piramida (a = b):
.10
1),34(
20
1 222a
g
G J ha
g
G J J z y x =+==
Prav kružni cilindar:
).43(12
1
.2
1 ),3(
12
1
221
222
hr g
G J
r g
G J hr
g
G J J
x
z y x
+=
=+==
Cilindarska cijev:
).(2
1 ),33(
12
1 22222 r R g
G J hr R
g
G J J z y x +=++==
Cilindar tankih zidova:
. ),6(12
1 222 R g
G J h R
g
G J J z y x =+==
a
b
x
1
x1
1
0
C
x
¾ h
¼ hC
h
r r
x
x1
C
x
r
C

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 29/30
Pravi kružni konus:
.10
3 ),4(
80
1 222 r g
G J hr
g
G J J z y x =+==
Prava zarubljena kupa:
33
55
10
3
r R
r R
g
G J z −
−=
Lopta:
.5
7
5
2
21
2
r g
G J
r g
G J J J
x
z y x
=
===
Sferna ljuska:
33
55
5
2
r R
r R
g
G J J J z y x −
−===
Sferna ljuska tankih zidova:
2
3
2 R
g
G J J J z y x ===
Loptin isje! ak :
).cos2)(cos1(5
1)3(
5
1 2 αα +−=−= r g
Ghr h
g
G J z
¾ h
¼ h
x1
x
r
C
r
h
C
r
x
x1
C
x
r
h
0
)

7/23/2019 Isak Karabegovic - Dinamika i Oscilacije (Poglavlje 9)
http://slidepdf.com/reader/full/isak-karabegovic-dinamika-i-oscilacije-poglavlje-9 30/30
Loptin odsje! ak:
hr
hrhr h
g
G J z −
+−=
3
31520
10
1 22
Troosni elipsoid:
).6(5
1
).(
5
1
),(5
1 ),(
5
1
221
22
2222
cb g
G J
ba
g
G J
ac g
G J cb
g
G J
x
z
y z
+=
+=
+=+=
Obrtni paraboloid:
.5
1 ),3(
18
1 222 r g
G J hr
g
G J J z y x =+==
Prsten pravougaonog presjeka:
).4(4
1
),232(24
1
22
222
b R g
G J
hb R g
G J J
z
y x
+=
++==
r
h
0
C
x
x1 a
b
c
h
r
x
h
b
x R
C