-
8/10/2019 jako zanimljivo
1/6
INFOTEH-JAHORINA Vol. 10, Ref. F-35, p. 1055-1060, March
2011.
1055
MODELOVANJE ELKTRINIH MAINA NA RAUNARU
Milica Mitrainovi,Milica Guslov,
Jelena Teanovi
Sadraj U ovom radu su opisani metode i postupci koji se koriste
prilikom modelovanja
elektrinih maina i izradu raunarskih simulacija rada za prelazne
reime. Dati su matematikimodeli asinhronih, sinhronih i maina
jednosmjerne struje.Abstract - In this paper a description of the
methods and procedures used in the modeling ofelectric machines is
presented. Also, there is presented describe of making computer
simulations ofthe transient. This paper describes the mathematical
models of asynchronous, synchronous anddirect current machines.
1. UVOD
Modelovanje na raunaru svodi se na predstavljanjejednaina
matematikog modela putem jednostavne blokeme. Prednosti modelovanja
se ogledaju u sledeem:
jednostavnost i bezbjednost, uvid u veliine koje se tekomjere
ili ne vide, mogunost simuliranja ekstremnih reima i
mogunost razvijanja sloenih algoritama za upravljanjerazliitim
mainama. Znaaj izrade sopstvenih modela je tose ima potpuni uvid u
jednaine na kojima je model baziran.Postupak izrade modela
elektrinih maina u ovom raduopisan je u nekoliko poglavlja. U
drugom poglavlju izveden
je matematiki model asinhrone maine i dati su
rezultatisimulacija optereenog asinhronog motora. Pri izvoenju
matematikog modela koriena je trofazno-dvofaznatransformacija
promjenljivih, kao i obrtna transformacija. Utreem poglavlju
izveden je matemtiki model sinhronemaine i dati su rezultati
simulacije rada sinhronog
generatora pri naponskom napajanju sa promjenom tereta. Uetvrtom
poglavlju izveden ja matematiki model mainajednosmjerne struje i
dati su razultati simulacije rada mainejednosmjerne struje pri
promjeni napona sa konstantnim
teretom. Rezultati simulacija rada dati su u vidu
grafikakarakteristinih fizikih veliina. U zakljuku rada, koji
se
nalazi u petom poglavlju, sumirani su dobijeni rezultati
2. MATEMETKI MODEL ASINHRONIH MAINA
Matematiki model je skup diferencijalnih jednaina i
prateih algebarskih izraza. U zavisnosti od primjene
razlikujemo dva matematika modela asinhronih maina:matematiki
model u jednistvenom tzv. - koordinatnomsistemu, koji je nepokretan
i vezan za stator i sinhroni tj. d-qmodel. Matematiki model u -
sistemu dat je sledeimjednainama:
ss s s
du R i
dt
= + (1)
s
s s s
du R i
dt
= + (2)
0 rr r r m r
du R i
dt
= = + + (3)
0 rr r r m r d
u R idt
= = + (4)
gdje su jednaine (1.) - (4.) jednaine naponskog balansa za
stator i rotor. Jednaine fluksnih obuhvata su date
sledeimizrazima:
s s s m rL i L i
= + (5)
r r r m sL i L i
= + (6)
Model maine u tzv. statorskom koordinatnom sistemupogodan je za
analizu rada jer su sve veliine u njemu u
stacionarnom stanju prostoperiodine, a
zahvaljujuiinvarijantnosti amplituda, i jednake stvarnim faznim
veliinama u svim reimima.Matematiki model u sinhronom
koordinatnom sitemu jepredstavljen sledeim sistemom jednaina.
Sistem jednainau matrinom obliku za stator i rotor u d-q
koordinatnomsitemu je:
0 1
1 0
ds ds ds ds
s s
qs qs qs qs
u i dRu i dt
= + +
(7)
0 0 1
0 1 0
dr dr dr dr
r k
qr qr qr qr
u i dR
u i dt
= = + +
(8)
Jednaine fluksnih obuhvata :
ds s ds m dr L i L i = + (9)
qs s qs m qr L i L i = + (10)
dr r dr m dsL i L i = + (11)
qr r qr m qsL i L i = + (12)
Izraz za elektomagnetni moment je:
( )
m r rem ds qs qs ds
r m m
m r s r s mds qs r dr qs ds qs r qr ds dr qs qr ds
r m m r
L L LM p i i
L L L
L L L L L Lp i i L i i i i L i i p i i
L L L L
= =
= + =
(13)
D-Q model pogodan je za sintezu upravljanja asinhronommainom jer
se u tom modelu jednostavno mogu realizovatiklasini regulatori koji
se koriste u sistemima automatskog
upravljanja.
-
8/10/2019 jako zanimljivo
2/6
1056
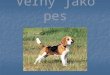
2.1 REZULTATI SIMULACIJE ZALETAOPTEREENOG MOTORA U KOORDINATNOM
SISTEMU
Ovaj reim rada se izvodi kada se uzmu u obzir
komponente momenta tereta i momenta usljed trenja iventilacije.
Pretpostavljeno je da teret sadri dvije
komponente jednu konstantnu i jednu proporcionalnukvadratu
brzine, to je tipina situacija za pogon pumpe.Takoe, u simulaciji
nije zanemareno ni trenje. Rezlultatisimulacije su prikazani na
sledeim graficima. Promjenatrenutnih vrijednosti struja statora
prikazane su na slikama
(1.) i (2.).
Slika 1. Promjena trenutne vrijednosti strujesi
Slika 2. Promjena trenutne vrijednosti strujesi
Na slikama (3.) i (4.) prikazane su trenutne vrijednosti
strujarotora. Sa slika moemo uoiti da je vrijednost polazne
struje
u trenutku zaleta vea od nominalne. Razlog tome je to utrenutku
kada se motor prikljuuje na mreu, njegov rotor jemehaniki
nepokretan, a elektriki je u kratkom spoju (bezobzira na tip
asinhrone maine), a uz maksimalnu indukovanuelektromotornu silu u
namotaju rotora (obrtno polje presjecaprovodnike sinhronom
brzinom), to stanje je praeno
pojavom velikih struja.
Slika 3. Trenutna vrijednost struje rotorar
i
Slika 4. Trenutna vrijednost struje rotorari
Slika 5. Dinamika karakterisitka momenta motora imomenta
tereta
3. MATEMETKI MODEL SINHRONIH MAINA
Kao i model asinhrone, tako i model sinhrone maine
sastoji se iz:Ndiferencijalnih jednaina naponske
ravnotee,definicione jedanine flukseva, mehanike jednaine koja
opisuje zavisnost promjene ugaone brzine od rezulutjuegmomenta i
izraza za moment, gdje je N ukupni broj namotaja.Matematiki model
sinhrone maine u prirodnomkoordinatnom sistemu je:
aa s a
du R i
dt
= + (14)
-
8/10/2019 jako zanimljivo
3/6
1057
bb s b
du R i
dt
= + (15)
cc s c
du R i
dt
= + (16)
0 AA r A
du R i
dt
= = + (17)
0 BB r Bd
u R idt
= = + (18)
0 CC r C
du R i
dt
= = + (19)
f f f f
du R i
dt= + (20)
gdje su jednaine (14) - (20) jednaine naponskog balansa
zastator, rotor i pobudni namotaj. Jednaine fluksnih obuhvatasu
date sledeim izrazima:
f
a s a ab b ac c aA A aB B aC C af f
b ab a s b bc c bA A bB B bC C bf f
c ac a bc b s c cA A cB B cC C cf f
fA A fB B fC C ff f fa f fb f fc f
A aA a bA b cA c r A
L i M i M i M i M i M i M i
i L i M i M i M i M i M ii M i L i M i M i M i M i
i M i M i L i M i M i M i
M i M i M i L i M
= + + + + + +
= + + + + + += + + + + + +
= + + + + + +
= + + + + AB B AC C fA f
B aB a bB b cB c AB A r B BC C fB f
C aC a bC b cC c AC A BC B r C fC f
i M i M i
M i M i M i M i L i M i M i
i M i M i M i M i L i M i
+ +
= + + + + + +
= + + + + + +
Ovaj model maine primjenom Klarkine taransformacijetransformisan
je u dvofazni model, ili model u -sistemu ion je dat je sledeim
jednainama:
s s s sdu R idt
= + (21)
s s s s
du R i
dt = + (22)
f f f
du R i
dt= + (23)
'' '0 s
du R i
dt
= = + (24)
'' '0 s
du R i
dt
= = + (25)
Ove jednaine su jednaine naponskog balansa za stator,
pobudni namotaj i rotor. Jednaine fluksnih obuhvatapredstavljene
u obliku matrice su:
0 cos
0 sin
cos sin
s s m m s
s s m m s
f m m m m f fR
L L i
L L i
L L L i
=
(26)
Loa osobina ovog modela je to promjenjive meusobne
induktivnosti posmatranog modela daju jednaine naponskeravnotee
u kojima postoje trigonometrijske funkcije
promjenjivih stanja, to oteava formiranje zamjenske emeza
ustaljena stanja.
Matematiki model u sinhronom koordinatnom sitemu jepredstavljen
je sledeim sistemom jednaina. Sistemjednaina u matrinom obliku za
stator i rotor u d-qkoordinatnom sitemu je:
dd S d q
du R i
dt
= + (27)
qq S q d
du R i
dt
= + + (28)
0 DD D Dd
u R i
dt
= = + (29)
0Q
Q Q Q
du R i
dt
= = + (30)
ff f f
du R i
dt
= + (31)
Jednaine fluksnih obuhvata :
d d d d f d DL i M i M i = + + (32)
q q q q QL i M i = + (33)
f d d f f d Di L i M i = + + (34)
D d d d f D DL i M i L i = + + (35)
Q q q Q Qi L i = + (36)
Prednost ovog modela je to u jednainama fluksinhobuhvata imamo
konastantne parametre, a mana je to su u
stacionarnom stanju sve kakrakteristine
veliineprostoperiodine.
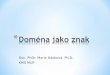
3.1. SIMULACIJA RADA SINHRONE MAINEBAZIRANE NA MATEMATIKOM
MODELU
Na primjeru simulacije promjene tereta sinhronog generatorapri
naponskom napajanju pobude, pokazan je nain primjeneteorije
prostornih vektora za simulaciju rada trofaznihsinhronih maina u
prelaznim reimima. Matematiki modeli,
koji su izvedeni u prethodnom poglavlju, realizovani su
uprogramskom paketu Matlab-Simulink. Pokretanjem date
simulacije dobijeni su grafici prikazani na slikama (6.)
-(10.).
19 19.2 19.4 19.6 19.8 20 20.2 20.4 20.6 20.8 21-2000
-1500
-1000
-500
0
500
1000
1500
2000Struja faze a
Vrijeme [t]
Struja[A]
6. Grafik struje faze a
Grafici struja faze b i c izgledaju isto kao i grafici (1.), pa
ih
ovdje neemo navoditi.
-
8/10/2019 jako zanimljivo
4/6
1058
0 5 10 15 20 25 30 35 403600
3650
3700
3750
3800
3850
Struja pobude
Vrijeme [t]
Struja[A]
7. Grafik pobudne struje
0 5 10 15 20 25 30 35 40-7.5
-7
-6.5
-6x 10
5 Moment
Moment[Nm]
Vrijeme [t]
8 . Grafik momenta
0 5 10 15 20 25 30 35 40-50
0
50
100
150Struja prigusnog namotaja po D osi
Vrijeme [t]
Struja[A]
9 . Grafik struje prigunog namotaja po D osi
0 5 10 15 20 25 30 35 40-50
0
50
100
150Struja prigusnog namotaja po Q osi
Vrijeme [t]
Struja[A]
10. Grafik struje prigunog namotaja po Q osi
Sa grafika faznih struja, struje pobude i momenta, vidi se dase
promjenom impedanse tereta mijenjaju struje i moment.Znak momenta
je negativan jer maina radi u generatorskomreimu. Prelazni proces
uspostavljanja novog stacionarnog
stanja je eksponencijalan. U trenutku promjene impedansetereta,
dolazi do poveanja faznih struja, ali njihovauestanost ostaje ista.
Takoe, tokom prelaznog procesajavljaju se i struje kroz priguni
namotaj, koje e po zavretku
prelaznog procesa, ponovo biti jednake nuli.
4. MATEMETI
KI MODEL MAINEJEDNOSMJERNE STRUJE
Ovaj model u odnosu na prethodna dva sadri manji brojjednaina.
Razlog tome je to ovi motori pripadaju
dvopobudnim sistemima, jer imaju dva namota, statorski
irotorski. U zavisnosti od izvedbe i naina prikljuenjapobudnog
statorskog namota razlikuje se vie tipova motoraza jednosmjenu
struju, kao na primjer motori sa nezavisnom,rednom, paralelnom i
sloenom pobudom.Matematiki model motora jednosmjerne struje sa
nezavisnom pobudom u apsolutnim jedinicama dat jejednainama:
fa
aaaadtdiLiRu ++= (37)
dt
diRu
f
fff += (38)
fm i= (39)
fe= (40)
fff i= (41)
me mmdt
dJ = (42)
Postupak normalizacije izvee se polazei od modela uapsolutnim
jedinicama. Normiranje (normalizacija) jepostupak kojim se sve
promjenljive i svi parametri izraze urelativnom odnosu prema
odgovarajuim baznim
vrijednostima. Na taj nain sve veliine postaju meusobnobliske po
vrijednosti, to znaajno poboljava numerikutanost pri rjeavanju
modela. Normalizovani model izgleda:
***
*** fa
aaaadt
diTiRU ++= (43)
dt
dTiRU
f
ffff
*
***
+= (44)
***
ae im = (45)*** =e (46)
***
mem mmdt
dT =
(47)
Vrenjem Laplasove transformacije na normalizovani sistemjednaina
koje opisuju maine jednosmjerne struje dobijamo:
( )*
***********
/1
1
aa
afaafaaaaa
RpT
RUipiTiRU
+=++=
( )m
mfamfampT
mimipT1******** ==
-
8/10/2019 jako zanimljivo
5/6
1059
ff
f
fffffffpTR
uiipTiRU
+==+=
*
*
******
gdje je
a
aa
R
LT = ,
b
nm
m
JT = ,
f
f
fR
LT = .
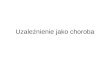
4.1. SIMULACIJA RADA JEDNOSMJERNE MAINEBAZIRANE NA MATEMATIKOM
MODELU
Izvrena je simulacija rada maine promjenom naponanapajanja pri
konstantnom teretu, a koriten je model sa
normalizovanim vrijednostima parametara i
promjenljivih.Odgovarajui grafici su dati na slikama:
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
Napon rotora Ua
[s]
[r.
j]
11. Grafik napona rotora
0 1 2 3 4 5 6 7 8 9 10-4
-2
0
2
4
6
8
10
12
14
16Struja rotora Ia
[s]
[r.
j]
12. Grafik struje rotora
0 1 2 3 4 5 6 7 8 9 10-4
-2
0
2
4
6
8
10
12
14
16Moment motora i moment tereta
[s]
[r.
j]
13. Grafik momenta motora i momenta tereta
U ovoj simulaciji motor je optereen nominalnimmomentom, a napon
napajanja se mijenja sa nominalnevrijednosti na 80%, a zatim na 50%
nominalne vrijednosti utrenucima 5s i 8s. Fluks pobude je
konstantan i jednaknominalnom fluksu. Struja motora je u trenutku
prikljuenjamotora na nominalni napon veoma velika jer
jekontraelektromotorna sila jednaka nuli. U tom trenutku
nastaje i udar momenta. Poto je motor optereen, u trenutkudo 1s,
prije nego to se uspostavi struja motora, brzina je
negativna, tj. teret okree vratilo na suprotnu stranu.
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
0.4
0.6
0.8
1
1.2Brzina motora
[s]
[r.
j]
14. Grafik brzine motora
Uspostavljanjem struje i momenta, motor ubrzava i
dostienominalnu brzinu. Uz konstantnu pobudu brzina motora
jepriblino proporcionalna sa naponom. Moment motora utrenucima
promjene napona je negativan, tj. maina odlazi ugeneratorski reim
rada jer usporava. U stacionarnimstanjima moment motora i moment
tereta su jednaki.
5. ZAKLJUAK
U ovom radu opisan je postupak izvoenjamatematikog modela
asinhrone, sinhrone i mainejednosmjerne struje. Matematiki model
treba da tanoprikae sve relevantne aspekte ponaanja maine, a da
pritome bude razumljiv i jednostavan za dalju upotrebu.
Zatim su na osnovu ovih matematikih modela
napravljene raunarske simulacije. Prednost primjeneraunarske
simulacije je u tome to je ona potpunobezopasna, kako po mainu,
tako i po osoblje, a pri tome sedobijeni rezultati veoma dobro slau
sa realnim pojavama. Uraunarskoj simulaciji se bezbjedno mogu
simuliratiekstremni reimi rada maine, koji bi se teko
moglianalizirati u praksi i koji bi vrlo lako mogli da je
otete.
Matematiki model maine ima i svrhu dalje analize radamaina i
sinteze upravljanja. Na osnovu ovakvih
matematikih modela dalje se razvijaju sloeni
algoritmiupravljanja elektrinim mainama, vektorsko upravljanje
idirektna kontrola momenta.
Danas su dostupni gotovi raunarski programi kojisadre sloene
matematike modele. Jedan od takvih paketaje program Matlab-Simulink
koji ima gotove modele svih
vrsta elektrinih maina. Iako ovi gotovi programi dostatano
simuliraju rad maina, sopstveni razvoj kako modela,
tako i programa, ima poseban znaaj. Omoguen je detaljanuvid u
sve komponente modela i programa, a takoe jemogue unositi razliite
modifikacije koje se inae ne bimogle unjeti u raspoloive programske
pakete.
6. LITERATURA
[1] Slobodan N. Vukosavi, Elektrine maine, Univerzitetu
Beogradu, Elektrotehniki fakultet, Akademska misao,Beograd,
2010.
[2] Varga Joef, Elektrine maine-teorija prostornih
vektora, Subotica,2002.
-
8/10/2019 jako zanimljivo
6/6
1060