-
8/12/2019 Lecture1 Jen RigidBodies
1/19
Rigid Body Motion Outline
Kinematics- describes motion (position, vel, accel)without
regard for the forces that cause it (hw7 due 4/12)
Dynamics- describes the causes of motion (forces!) andhow they
influence the motion (hw8 due 4/26)
2 Projects:Trifilar Pendulum, vibrations and rigid body motion
(4/19) Solar Car, rigid body motion and power transmission
(5/7)
1Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
2/19
Rigid Bodies
BEFORE: points/particles - no rotation, just translation
RIGID BODIES: arbitrary shaped bodies that do notdeform - must
consider translation and rotation
2Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
3/19
x
y
x
y d2
d2d1
d1
Rigid Bodies
Between any 2 points on the body, the distance is fixed:
springs: notrigid
3Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
4/19
2D Kinematics:Rotation about a fixed point
i
j
counter-clockwise
rotation about O
O
Pfind motion of P
(velocity and
acceleration)
7Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
5/19
i
j
counter-clockwise
rotation about O
O
Pfind motion of P
(velocity and
acceleration)
rp
vp
rp= r(cosi+ sinj)
vp= r(sini+ cosj)
rp vp = 0
Rotation about a fixed point
r = distance b/t 2 points = constant8Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
6/19
i
j
counter-clockwise
rotation about O
O
Pfind motion of P
(velocity and
acceleration)
rp
vp
rp= r(cosi+ sinj)
vp= r(sini+ cosj)
Rotation about a fixed point
rp vp = 0
apt
apn
ap=r
(sin
i+cos
j) r2
(cos
i+sin
j)9Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
7/19
i
j
counter-clockwise
rotation about O
O
Pfind motion of P
(velocity and
acceleration)
rp
vp
rp= r(cosi+ sinj)
vp= r(sini+ cosj)
Rotation about a fixed point
rp vp = 0
apt
apn
ap=r
(sin
i+cos
j) r2
(cos
i+sin
j)
|v| =r =r
|at| =r =r
|an| =r 2=r2 =|v|/2
10Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
8/19
Example 1: 2 gears
rA
rB
A B
B
A
what are B and B?
A an A are prescri e
11Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
9/19
Example 1: 2 gears
rA
rB
A B
B
A
what are B and B?
A an A are prescri e
|vp|=rAA=rBB
B = (rA/rB)A
B = (rA/rB)A
Solution: take velocity at point P where gears
intersect:
P
12Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
10/19
What if you have multiple gears?
PQ
rA rBrC
B = (rA/rB)A
C= (rB/rC)B
C= (rB/rC)(rA/rB)A
C= (rA/rC)A
velocity at point P:
velocity at point Q:
13Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
11/19
Traditional 3-gear Manual Transmission
http://www.youtube.com/watch?v=JOLtS4VUcvQ
Spinning Levers (1936)
14Friday, April 5, 13
http://www.youtube.com/watch?v=JOLtS4VUcvQhttp://www.youtube.com/watch?v=JOLtS4VUcvQ
-
8/12/2019 Lecture1 Jen RigidBodies
12/19
http://eahart.com/prius/psd/
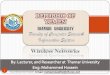
Prius Power Split Device (PSD)
ICE: Internal Combustion Engine (gasoline)
MG1: Electric Motor/Generator 1MG2: Electric Motor/Generator
2
MG2 powers
outer ring:
connected towheels
ICE powers plate
of planetary
gears
MG1powers
sun gear
15Friday, April 5, 13
http://eahart.com/prius/psd/http://eahart.com/prius/psd/http://eahart.com/prius/psd/
-
8/12/2019 Lecture1 Jen RigidBodies
13/19
Fixed Point Rotation
in Vector Form
i
j
O
P
k
r
r = vector from axis of rotation to point P
v
",#= angular velocity and accel vectors
",#always point along axis of rotation
RHR: curl fingers in direction of rotation,
thumb points in direction of "
"
16Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
14/19
Fixed Point Rotation
in Vector Form
i
j
O
P
k
r
v "
v = r
a= r+ ( r)
",#are the same at all points on a rigid body
a, v vary at each point and depend on distance r from rotation
axis
tangential normal
17Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
15/19
Example 2: simple rotation in vector form
B
A
0.4 m
0.3 m
Rotates clockwise about B
at an angular velocity
decreasing at a rate of 4
rad/sec.
Find v and a at A at theinstant when "=2 rad/sec
18Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
16/19
General Kinematics:2D planar motion
motion is decomposed intotranslation and rotation
x
y
19Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
17/19
Example 2: simple rotation in vector form
B
A
0.4 m
0.3 m
Rotates clockwise about B
at an angular velocity
decreasing at a rate of 4
rad/sec.
Find v and a at A at theinstant when "=2 rad/sec
given: "= -2 k, #= 4 k, r = 0.4i + 0.3j
i
j
draw coordinate system aligned with body
solve: v = "x r
a ="
x ("
x r) ="
x v20Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
18/19
j
O
k
i
rB
rA
rA/BA
B
ArA/B
rA/B =|rA/B|(cosi+ sinj)
rA = rA/B + rB
rA = rB+|rA/B|(cosi+ sinj)vA =
vB+|
rA/B|(
sini+
cosj)
translation of B + rotation of A
about point B
rA/B=location of A relative to B
21Friday, April 5, 13
-
8/12/2019 Lecture1 Jen RigidBodies
19/19
a
A =a
B+ ( r
A/B) + (
( r
A/B))
vA = vB+ ( rA/B)
kinematics of point A:
depends on kinematics of B, plusrotational velocity and
acceleration
j
O i
rB
rA
rA/BAB
B
ArA/B