Embed Size (px)
Citation preview

aq

1
P r ó l o g o
Precálculo es la continuación del manual de Matemática Básica. Está diseñado con el
propósito de servir de base a aquellos futuros estudiantes de cálculo diferencial e integral.
Dentro de los objetivos que se persiguen está desarrollar el pensamiento del estudiante para
inclinarlo hacia el estudio y desarrollo de las matemáticas, y hacia la investigación y desarrollo
científico. También aplicar los conocimientos adquiridos para resolver problemas específicos en
las carreras de: Multimedia, software, tecnología de la información, manufactura, mecatrónica,
ingeniería eléctrica, Ingeniería mecánica, Ingeniería civil, Ingeniería industrial, informática,
Electrónica, estadística, etc.
Entre los contenidos a desarrollar se encuentran funciones y ecuaciones trascendentes,
vectores, matrices, sistema de ecuaciones lineales y no lineales, trigonometría y algunos temas
optativos entre los cuales se encuentran Los números complejos, Las coordenadas polares,
Solidos de revolución, Razonamiento matemático, Teoría y Operaciones conjuntista.
Wilton Oltmanns

2
INDICE
Página
Módulo 6. Funciones y ecuaciones exponenciales………...……………….4-19
Módulo 7. Vectores……….. ………………………………….………....….20-28
Módulo 8. Matrices…………………………………………………...……...29-51
Módulo 9. Sistema de ecuaciones lineales y no lineales………………...…52-72
Módulo 10. Trigonometría………………………………………….…….…73-101
Módulo 11. Números complejos………………………………………...…102-121
Módulo 12.Coordenadas polares………..……………………………..…..122-131
Módulo 13. Solido de revolución………………………………………….132-136
Módulo 14. Razonamiento lógico matemático…………….........................137-148
Bibliografía…………………………………………………………….…….149
Módulo 15.teoria y operaciones de conjuntos……………………..………150-161
Bibliografía…………………………………………...……………………162-167
No es maestro el que transmite información, sino, el que es capaz de captar
La atención de sus pupilos haciéndole comprender aquello que quiere enseñar.

3
Anónimo.
Estudios Matemáticos Argentera.
“Un matemático es un quijote moderno que lucha en el mundo real con armas imaginarias”. P. Corcho
Leonhard Euler
Nació en suiza 1707. Sus trabajos más importantes se centraron en el campo de las matemáticas puras.
Realizó el primer tratamiento analítico completo del álgebra, la teoría de ecuaciones, la trigonometría y la geometría analítica, abordó las superficies tridimensionales, trabajó el cálculo de variaciones, la teoría de números y el análisis infinito.
Hizo aportaciones a la astronomía, la mecánica, la óptica y la acústica. Su productividad matemática fue extraordinaria. Nos encontramos su nombre en todas las ramas de las matemáticas. Hay fórmulas de Euler, polinomios de Euler, constantes de Euler, integrales Eulerianas y líneas de Euler. Murió el 7 de septiembre de 1783. El problema de los 7 puentes de Königsberg
En el siglo XVIII había en la ciudad de Königsberg (situada
en la antigua Prusia, hoy Kaliningrado, perteneciente a
Rusia) siete puentes que conectaban cada una de las
orillas del río Pregel con dos islas interiores. Los
ciudadanos estaban muy orgullosos de sus puentes y
bromeaban sobre la posibilidad de recorrerlos todos
pasando una sola vez por cada uno de ellos. El
matemático Euler trato de darle solución, pero fue casi
imposible pues por la geometría euclidiana no era posible
por lo que este famoso problema dio origen a la
geometría de grafos mediante la cual el famoso
matemático le busco una posible solución
Módulo 6:
Funciones y Ecuaciones
Exponenciales y Logarítmicas.

4
Importancia y uso de La Funciones exponenciales y Logarítmicas
Las funciones logarítmicas y exponenciales son inversas, su aplicación real se puede ver
a través de modelos de crecimiento y decrecimiento en diferentes áreas como la Biología,
sociología, economía, ingeniería, estadística, probabilidades, trigonometría, física, química,
cálculos complejos.
Un ejemplo claro se encuentra en física acústica como es el caso de los decibeles los
cuales son una unidad de medida de audio. En ingeniería para calcular el tiempo que tarda una
masa en llegar a cierta temperatura o en biología para ver el crecimiento o decrecimiento de
una especie específica. En ingeniería electrónica sirve para modelar el comportamiento de un
capacitor o para predecir la corriente que va a consumir un circuito.
El dB (debelio) relaciona la potencia de entrada y la potencia de salida en un circuito,
10*
Psdb Log
PE N
Las computadoras también usan mucho los logaritmos. La función fundamental en
teoría de la información es logarítmica. Los tipos de algoritmos y los rendimientos de diversas
estructuras de datos pueden ser logarítmicos respecto al set de entrada.
La escala sismológica de Richter, también conocida como escala de magnitud local (ML),
es una escala logarítmica arbitraria que asigna un número para cuantificar el efecto de un
terremoto, denominada así en honor del sismólogo estadounidense Charles Richter (1900-
1985). M log10A mm 3log10 8 t s 2.92
Definición de la función exponencial
Se llaman así a todas aquellas funciones de la forma f(x) = bx, donde la base b, es una
constante y el exponente es la variable independiente. Matemáticamente la definimos como
0, 1b b la ecuación xy b y dominio (x) todos los números reales (R).

5
Propiedades de las funciones exponenciales de base a.
1. El dominio (x) de la función exponencial está formada por el conjunto de los números
reales.
2. Su Rango (y) está representado por el conjunto de los números reales positivos.
3. La función es creciente cuando b 1, es decir que para Las gráficas de las funciones
exponenciales de la forma f(x)=bx, con b 1, los valores de la función crecen cuando x
aumenta y será decreciente cuando 1o b .
4. La curva es cóncava hacia arriba cuando b 1 y también cuando 1o b 5. La grafica tocara el punto (0,1).
1. Graficar y=f(x)=2x
La tabla siguiente muestra algunos valores para la función de base dos.
X -3 -2 -1 0 1 2 3
f(x) 1/8 1/4 ½ 1 2 4 8
x
yy = (2)^x; -3.000000 <= x <= 3.000000

6
2. Graficar la función x
1 y
2
x -3 -2 -1 0 1 2 3
f(x) 8 4 2 1 1/2 1/4 1/8
Logaritmos: Es el exponente al que hay que elevar una base positiva diferente a uno para que nos de ese número.
Función logarítmica: Se define como logby x ; siendo 0, 1b b una base y
dominio 0x . Es equivalente a y
by lob x x b
De la definición podemos deducir que:
1. No existe el logaritmo de un número con base negativa.
2. No existe el logaritmo de un número negativo.
3. No existe el logaritmo de cero.
4. El logaritmo de 1 es cero.
5. El logaritmo en base a de a es uno.
x
yy = (1/2)^x; -3.000000 <= x <= 3.000000

7
Tipos de logaritmos:
Ambos tienen las mismas propiedades aunque a nivel del cálculo se usa más logaritmo natural, pues su derivada es más sencilla:
Logaritmos Decimales :
Se llaman logaritmos decimales, vulgares o base 10 a los logaritmos que tienen por base el número 10. Al ser muy habituales es frecuente no escribir la base.
Logaritmos Neperianos :
Se llaman logaritmos neperianos, naturales, base e o hiperbólicos a los logaritmos que tienen
por base el número e.
Cambio de una función logarítmica a exponencial y viceversa.
La función logarítmica y la exponencial son inversas, es decir, logby x es equivalente a, yx b donde en la que tendremos que:
1. yx b , b es la base, y es el exponente, x es la potencia.
2. logby x , b es la base, y es exponente, x es la potencia.
Ejemplos:
a) 3
464 3 4 64Log
b) 2
55 25 25 2Log
Como ya sabemos que para toda constante 0, 1b b , la ecuación de la forma
logby x , define una función logarítmica con base b y dominio toda x 0.
Propiedades de la función Logarítmica:
1. El dominio es el conjunto de todos los números reales positivos (x).
2. El rango, recorrido o contra dominio es el conjunto de todos los números reales
(y).

8
3. La función es creciente para 1b y decreciente cuando 0 1b .
4. La curva es cóncava hacia abajo cuando 1b y cóncava hacia arriba cuando 0 1b .
5. El punto (1, 0) pertenece a la gráfica. No hay ordenada al origen.
6. El eje y es una asíntota vertical a la curva en dirección vertical a la curva en dirección hacia
abajo cuando 1b y hacia abajo cuando 0 1b .
Cuanto mayor es la base del logaritmo más cerca del cero estará. Analicemos las siguientes gráficas:
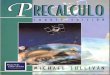
a) Cuando la Base es mayor que la unidad (a > 1).
Aquí se tienen 6 funciones Log x, Log 3x, Log 5x, log (3x)-2, log (3x)+2, log (-x). Se unen en el
punto (1,0). Analizando estas gráficas podemos concluir que mientras mayor es el valor de la
variable x más cerca de cero estará. Y la constantes como es el 2 mueve la gráfica hacia arriba o
hacia abajo, y si la v ariable la ponemos negativa cambia la posición de la gráfica.
Ahora se analiza la Base positiva y menor que la unidad (0 < a < 1)
x
yy = log (x)
y = log (3x)
y = log (5x)
y = log (3x) -2
y = log (3x)+2
y = log (-x)
x
y(1/3)^y=x
(1/5)^y=x
(1/9)^y+2=x
(1/9)^y-2=x

9
1 1 1 1
3 5 9 9
, , 2,log 2Log x Log x Log x Aquí tenemos 4 gráficas de las cuales 2 tiene traslaciones. En
la función logarítmica (cuando 0 < a < 1) cuanto mayor es el denominador de la base de
logaritmo más se cerca del eje X está.
Partes de un logaritmo:
Las partes de un logaritmo son característica y mantisa.
1. La característica: Es la parte entera de los logaritmos. Se consigue restándole uno a la
cantidad de dígitos dados.
Ejemplo: Log 859, su característica es 2 pues 3-1= 2
2. La mantisa: Es la parte decimal que está después del punto y se consigue a través de la
calculadora electrónica.
Log 859= 2.93399316331…
Anti logaritmación: Es el proceso que consiste en dado un resultado hallar el número del cual
ese es el logaritmo.
Antilogaritmo :
Es el número que corresponde a un logaritmo dado. Consiste en el problema inverso al cálculo del logaritmo de un número.
Es decir, consiste en elevar la base al número resultante:
1)log log q
aa anti q mm q a m
3
22 log 3 8 2 82).log 8 3 anti
Cologaritmo:
Se llama cologaritmo de un número N al logaritmo de su recíproco.
Cambio de Base logarítmica :

10
0, 1n a b R es decir que para todo n mayor que 0, a y b siendo números reales positivos
no igual a 1.
Ejemplo: Calcular los siguientes logaritmos
4
652
5
6
4
9
log 282.4036
log 4
log82 1.91380.6797
log652 2.8156
log897 2.94404.2117
log5 0.6990
ln525 6.26343.4956
ln 6 1.791
1).log 28
2).log 82
3).log 897
4).ln 525
5).ln
8
ln 62 4.12712.9771
ln 4 1.3863
ln172
62
6).ln 17l
2
5.14752.3428
n 9 2.1972
Ahora podemos ver que si usamos el logaritmo natural el resultado será el mismo.
7
log 45 1.653245 1.9562
log7 0.8451Log
7
ln 45 3.806745 1.9462
ln 7 1.9559Log
Aunque sus equivalencias son diferentes, pero nos darán el mismo resultado. Pues recordemos
que ya vimos que del logaritmo vulgar trabaja en base a 10 y el natural trabaja en base a
2.78...e

11
1 1(3)
5
55 1
1
5 1
1Ejemplo3: R
8 32 2 2 3( 1) 5(5 1)
3 3 25 5 22 8
esolver
4
1
8 32
1
x x
x
x x
x x x
x x x x
Ecuación exponencial:
Es aquella donde la incógnita se encuentra en el exponente.
Para resolver una ecuación exponencial debemos eliminar las bases iguales para que nos quede
una ecuación lineal. En caso que estas no sean iguales debemos entonces igualarlas a través de
artificios matemáticos.
Ejemplo 1: Resolver la ecuación 4 6 3 112 2x x
4 6 3 112 2 4 6 3 11
4 3 11 6 5
x x x x
x x x
b) Si las bases son diferentes debemos convertir una en la forma de la otra y así nos quedara
también una ecuación lineal pero con productos. Veamos.
Ejemplo 2: Resolver la ecuación exponencial2 8 4 2027 3x x
2 8 4 20
3(2 8) 4 20
27 3
3 3
6 24 4 20
2 44
22
x x
x x
x x
x
x
Leyes de los logaritmos
1. Logaritmo de un producto
Si M y N son positivos, b 0 y b 1 entonces:
log log logb b bMN M N El logaritmo de un producto es la suma de los logaritmos.
Ejemplo: 356 47 356 47 2.551 3.74 1 26 3. 5721Log Log Log

12
2. Logaritmo de un cociente
Si M y N son positivos, b 0 y b 1 entonces:
log log logb b b
MM N
N El logaritmo de un cociente es la diferencia de los
logaritmos.
Ejemplo:
356356 47 2.5514 1.672 0.8791 3
47Log Log Log
3. Logaritmo de un exponente
Si M y N son positivos, b 0 y b 1 entonces:
log .logk
b bkN N El logaritmo de una expresión exponencial es igual al producto del
exponente por el logaritmo de la base.
Ejemplos: 47
356 47 356 47 2.55 119.914 581Log Log
4. Logaritmo de un radical
Si M y N son positivos, b 0 y b 1 entonces:
ay Log x bLog2
bLog NN El logaritmo de una expresión radical es igual al
logaritmo de la cantidad sub.-radical entre el índice del radical.
Ejemplo: 47 356 1.6721356
47 470.0356
LogLog

13
1ln ln ln ln
2
1ln ln ln ln ln ln ln ln
3).ln
2
n q x z w
y
n q x z w y c
c
t p k q n z a b
n t q p k
t p q n z
a
x q z n w z y a c
b
b
k
Ejemplos: Aplicar las propiedades logarítmicas:
Ecuación logarítmica: Es aquella donde la incógnita está afectada por un logaritmo.
Resolver una ecuación logarítmica consiste en determinar para qué valores de la incógnita (x) la
igualdad se convierte en identidad, es decir, para cuales valores se satisface la ecuación.
Debemos aplicar las propiedades vistas anteriormente.
Ejemplos: Resolver las siguientes ecuaciones logarítmicas:
2
95)
95 10 95 100
5
2
100 95
a Lo
x
x
gx
x
x
6 64 8 3)
4 8 3 6
6
2
Log x L x
x
ob
x
g
x
1).log 249 48
282).log
48 379
log 48log 249
2
2.3962 0.8406
3.2368
1log 28 og 48 log379
2
1.4472 0.8406 2.5786
1.9720
l
7
1ln 23 570 7 ln 32
2
1ln 23 ln 570 7 ln 32
2
13.1355
23 5704).ln
6.3456 24.26022
7.38
3
96
2

14
0 2
c)
aplicando las leyes logaritmicas inversas.
x(x-1)Log x x 1 – log 6 0 log 0
6
Llevando esta ecuaci n a su forma exponen
Lo
cial
( 1) ( 1)10
g x log x 1 – log
1 66 6
S
6
e nos forma
0
ra
ó
x x x xx x
2
1 2
una ecuaci n de 2do grado, buscar sus raices.
6 0 x 3 x 2 0 por lo tanto 3 ^ 2
La soluci n es el conjunto 3, 2
ó
x x x x
ó
1
1
)
Aplicando Ln en ambos lados y luego resolviendo
7 7 3 7 ( 1) 3 7
R
0.71 13 3
esolver 3
7
7
12x
xd
Ln LnLn Ln x Ln Ln x x
Ln Lnx
3 27
3 33 3
3
3 3 3 3
9
cambio de base en la resta.
Log LogLog 6 Log 6
Log 27 3
1 2Log L
) Re Log 6
og
6 Log 6 Log 93 3
3
Haciendo
x xx x
x x
x
e
x
solver x
x
Log x

15
Actividades
1. Grafica las siguientes funciones Exponenciales.
1-
2-
3-
4-
5-
2. Grafica las siguientes funciones logarítmicas.
1) Y= [-2,2]
2) Y= [-2,2]
3) Y= [-2,2]
4) Y= [-2,2]
5) Y= [-2,2]
3. Calcular
1 ) log 2 8 =
2 ) log 97 =
3 ) log 23 =
4 ) log 3 6 =
5 ) log 5 0,2 =
6 ) log 2 0.7543245 =
7 ) log 0,5 16 =
8 ) log 1000 =

16
9 ) log 2 207 + log 4 19 =
10 ) log 8 215 log
4 7 =
11 ) log 4 64 + log 8 64 =
12 ) log 0.00003 =
13 ) Ln 5 =
14 ) log 2 log .00000097 =
15 ) log 3232 / log 20 =
16 ) Ln 569807 =
17 ) Ln 12349-Ln 136 =
18 ) log 264 log 27 =
b) Buscar el valor de la variable:
1 ) log 3 64 = x
2 ) log 2 45.90 = x
3 ) log 2 81 = ( 2x 9 ) /18
4 ) log 2 16 = x 2/ 24
5 ) log 2 x = 3
6 ) Log3 x = 2
7 ) log 3 [ 8 ( x 1 ) ] = 18
8 ) log x 125 = 3
11 ) log 4 x + 6 162 = 4
4. Expresar como un solo logaritmo.
1)

17
2)
3)
4) (
5) 5. Expresar los siguientes logaritmos como antilogaritmos o viceversa.
1)
2)
3)
4)
5)
6. Realice las siguientes ecuaciones exponenciales.
a.
b.
c.
d.
e.
f.
g. ( )
h.
i.
j.

18
7. Realice las siguientes ecuaciones logarítmicas.
1) 232Log 2)
1
2
log 0.25 x
3) 3
2log 6x
4) ln(x+4)=ln3x-ln2
8. Cambia de una función a otra.
a) 5log 125 y
b)4log 3 x
c)3
2 6Log x 4)
)6 7w
d t u
e
9. Con la fórmula para el cambio de base resolver los siguientes logaritmos:
a)3
log 28 b) 4
log 120 c)5
log 95 d) 8
log 64
e)12
log 257 f) log 129
h) log 45620
i) log 25416
“El que se enaltece será humillado y el que se humilla será enaltecido”
(Evangelio, San Lucas. 14, 1-7;14)

19
Estudios Matemáticos Argentera
“Las matemáticas son una gimnasia del
espíritu y una preparación para la filosofía”.
Isócrates
”
John Forbes Nash Jr. (Bluefield, 13 de junio de 1928). Matemático estadounidense ganador del premio Nobel de Economía en 1994 por sus aportes a la teoría de juegos. En su honor se firma la película Una mente brillante (2001). Acabó el doctorado en 1950 con la tesis Juegos No Cooperativos, pero se conoce popularmente como el Equilibrio de Nash. Actualmente está vivo y trabaja como matemático en la universidad de Princeton.
La vida me ha enseñado " Que no son los golpes ni las caídas las que hacen
fracasar al hombre; sino su falta de voluntad para
levantarse y seguir adelante." He aprendido que
realmente el fracaso no existe, simplemente este es un
método utilizado por la vida para enseñarnos que por
ahí no funciona el camino que hemos elegido. No hay
que sufrir, ni caer en depresión, simplemente vuelve al
principio donde empezaste, allá encontrarás la respuesta
y el camino que debes ahora elegir. Wilton Oltmanns
inspirada en un anónimato.

20
Vectores El origen del concepto de vector se asocia a José Luis LaGrange (1736-1813), quien en
su libro Mecánica Analítica logró una representación matemática de las fuerzas, las
velocidades y las aceleraciones. Más tarde, en la segunda mitad del siglo XIX, el
estudio de los fenómenos eléctricos condujo al desarrollo del algebra vectorial.
Santillana (2001)
Alex Vidó (2009), plantea que los vectores son muy importantes porque en el estudio
de la física no basta con saber solo las magnitudes sino que es muy importante
representarlos vectorialmente porque así nos damos cuenta de cómo ocurre el
fenómeno físico más allá de una perspectiva simple y mecánica.
Los vectores se usan en cinemática (en el movimiento, son magnitudes vectoriales la
velocidad y la aceleración, por ejemplo), en dinámica (fuerza, peso, impulso
mecánico...), en electricidad (intensidad del campo eléctrico, fuerza electrostática...), en
electromagnetismo (vector de inducción
magnética). También en la vida diaria
cuando caminamos o vamos para un sitio
se usan diferentes vectores.

21
Conceptos y propiedades: Vector: Es cualquier número n-pla ordenado de números reales llamados componentes. Se
representa como �⃗� .
Ejemplo: �⃗⃗� = (2, 5,-4) tiene 3 componentes
�⃗� = (-1,2) tiene 2 componentes
𝑋 = (5, 0, 3, 2, 4) tiene 5 componentes
Propiedades de los vectores:
Sea: 𝑍 = (z₁, z₂, z₃,… zn)
�⃗⃗⃗� = (w₁, w₂, w₃,…, wn)
a) Suma
𝑍 + �⃗⃗⃗� = (z₁ + w₁, z₂ + z₂, …, zn + wn)
b) Producto de escalar por un vector �⃗⃗� . Es otro vector quedará tantas veces aumentado
o disminuido como sea el escalar:
Sea k un escalar y z un vector
k 𝑍 = k (z₁, z₂, z₃ … zn)
= (k z₁, k z₂, k z₃,…, k zn)
Ejemplo: Si K = 2 y 𝑍 = (5, -3, 1)
K 𝑍 = 2 (5, -3, 1) = (10, -6, 2)
c) Vector nulo: Es aquel donde sus coordenadas son todas cero.
�⃗� = (0, 0, 0,… 0)
d) Vector opuesto: Dado un vector �⃗� = (v₁, v₂, v₃, …, vn), su opuesto es otro vector
-�⃗� = (-V₁, -V₂, -V₃, …, -Vn),
Ejemplo: Si u = (-2, 4, 5) su opuesto es –u = (2, -4, -5)

22
1. Modelo geométrico de un vector. Es un segmento de recta dirigido que tiene modulo, dirección y sentido.
𝐴𝐵⃗⃗⃗⃗ ⃗ B (x₂, y₂)
A(x₁, y₁)
Modulo: es la distancia entre A y B, se representa |𝐴𝐵⃗⃗⃗⃗ ⃗|.
|𝐴𝐵⃗⃗⃗⃗ ⃗|= √(x₂ − x₁)2 + (y₂ − y₁)2. También se llama norma de un vector y suele
representarse como ‖𝑉‖ = √𝑣12 + 𝑣2
2 + 𝑣32 + ⋯+ 𝑣𝑛2
Ejemplo: Calcular la norma de �⃗� = (3, 4, 0)
‖�⃗� ‖= √(3)2 + (4)2 + (0)2 = √25 = 5
Dirección: Es la recta que pasa por los puntos A y B
Sentido: Es su orientación.
2. Vector unitario.
Es aquel cuyo módulo es la unidad. El vector unitario �⃗⃗� de un vector dado �⃗� ≠ 0 es otro
vector de igual dirección y sentido:
�⃗⃗� = �⃗⃗�
‖�⃗� ‖
Ejemplo: Calcular un vector unitario del vector �⃗� = (-3,0,4)
‖�⃗� ‖= √(−3)2 + (0)2 + (4)2 = √9 + 16 = √25 = 5cm
�⃗⃗� = �⃗⃗�
‖�⃗� ‖ =
(−3,0,4)
5 = (−
3
5, 0,
4
5) → �⃗⃗� = (−
3
5, 0,
4
5)
Para comprobar se le debe sacar el modulo al vector obtenido y el resultado debe ser la unidad.
:
‖�⃗⃗� ‖ = √(−3
5)2+ (0)2 + (
4
5)2
= √9
25+
16
25 = √
25
25 = 1, ‖�⃗⃗� ‖ = 1

23
3. Representación grafica de los componentes de un vector. La representación de un vector se hace respecto a los ejes cartesianos.
Ejemplo: Sea A (5,0) y B (0,4)
𝐴𝐵⃗⃗⃗⃗ ⃗ = (5,0) + (0,4) = (5,4) → 𝐴𝐵⃗⃗⃗⃗ ⃗ = 5 𝑖 + 4𝑗
4𝒋
5 𝒊
4. Representación grafica de las operaciones vectoriales en el plano
Si �⃗⃗� = (X1, Y1), �⃗� = (X2, Y2) y �⃗⃗⃗� Es otro vector resultante, entonces,
�⃗� = �⃗⃗� + �⃗� = (X1, + X2, Y1 + Y2)
Ejemplo: Sea �⃗⃗� = (4, 2); �⃗� = (1, 5)
�⃗� = �⃗⃗� + �⃗� = (4, 2) + (1, 5) = (5, 7)

24
a) Método del poligono
�⃗⃗� = (1, 2); �⃗� (3, 4);
�⃗⃗⃗� = (-3, 1)
�⃗� = ¿?
�⃗� = �⃗⃗� + �⃗� + �⃗⃗⃗�
�⃗� = (1,2) + (3,4) + (-3,1)
�⃗� = (1,7)
b) Resta de vectores en el plano.
Es la suma de un vector con el opuesto del otro. �⃗⃗� - �⃗� = �⃗⃗� + (- �⃗� )
Ejemplo: Dado �⃗⃗� = (4,-2) y �⃗� = (3,-1), opera
�⃗⃗� - �⃗�
�⃗⃗� - �⃗� = �⃗⃗� + (- �⃗� ) = (4,-2) + (-3,1) = (1,-1)
→ �⃗� = (1,-1)
5. Combinación lineal de vectores.
Sea {𝑍1 , 𝑍2 , 𝑍3, … 𝑍𝑛} un conjunto de vectores y {∝, 𝛽, 𝛿, ∅, 𝜃, 𝜑 …} ∈ IR. El vector �⃗� es una
combinación lineal de los vectores {Z1 , Z2 , Z3, … Zn} . Si se puede expresar:
�⃗� = ∝ 𝑍1 + 𝛽 𝑍2 + 𝛿𝑍3, … 𝜑𝑛𝑍𝑛
Ejemplo: Calcular dos combinaciones lineales del vector �⃗� = {(1,-3,0) ; (2,0,4)} ∈ 𝑅3
∝ (1,-3,0) + 𝛽 (2, 0,4); ∝, 𝛽 ∈ 𝐼𝑅
a) Si ∝ =2 y 𝛽 = 3 →
= 2(1,-3,0) + 3(2, 0,4) = (2,-6,0) + (6, 0,12)
= (8,-6,12) es una combinación lineal de vectores.

25
b) Si ∝ = -1 y 𝛽 = -2 →
= -1 (1,-3,0) + (-2) (2, 0,4)
= (-1, 3,0) + (-4, 0,-8) = (-5, 3,-8) por lo tanto
(-5, 3,-8) es otra una combinación lineal de �⃗� = {(1,-3,0) ; (2,0,4)} ∈ 𝑅3
b) Vectores linealmente dependientes.
Es cuando la combinación lineal de dos o más vectores da como resultado cero.
Es decir que {𝑍1,𝑍2 , 𝑍3, … 𝑍𝑛}, son linealmente dependiente si ∝1 𝑍1 + ∝2 𝑍2 + ∝3 𝑍3+… ∝𝑛 𝑍𝑛
Para ∝𝑛≠ 0. De lo contrario el vector es linealmente independiente.
c) Producto escalar de dos vectores ( �⃗⃗� . �⃗⃗� )
Se le llama también producto interno. Se multiplican las respectivas componentes y luego se
suman. Su resultado es un número.
Si �⃗⃗� = (𝑈1, 𝑈2,𝑈3,…,𝑈𝑛) y �⃗� = (𝑉1,𝑉2,𝑉3, …, 𝑉𝑛)
�⃗⃗� . �⃗� = 𝑈1𝑉1 + 𝑈2𝑉2+𝑈3𝑉3+ …+ 𝑈𝑛𝑉𝑛
Ejemplo1: Conseguir e producto escalar l �⃗⃗� . �⃗� , sabiendo que �⃗⃗� = (2,-5) 𝑦 �⃗� = (3,4)
�⃗⃗� . �⃗� = 2(3) + 4(5) = 6-20= -14
�⃗⃗� . �⃗� = -14
Otra forma es:
�⃗⃗� .V⃗⃗ = |�⃗⃗� | . |�⃗� | Cos 𝜃
Para encontrar el ángulo comprendido será Cos θ= U⃗⃗ .V⃗⃗
|U⃗⃗ | .|V⃗⃗ |
Ejemplo 2: ¿Cuál es el producto escalar de dos vectores �⃗⃗� y �⃗� de modulos 3 y 5 y que forman un
angulo de 600?
�⃗⃗� . �⃗� = |�⃗⃗� | . |�⃗� | cos 600
= (3) (5) cos 600 = 15 cos 600= 7.5
d) Producto vectorial y Módulo de un producto vectorial.
Si �⃗⃗� y �⃗� son dos vectores, su producto vectorial o exterior �⃗⃗� x �⃗� es un vector perpendicular a
los planos de los vectores �⃗⃗� y �⃗� .

26
Ejemplo 1. Dado �⃗⃗� = i- 2j+ k y �⃗� = 3i – j + 4k
determinar �⃗⃗� x �⃗� .
�⃗⃗� x V⃗⃗ = |𝑖 𝑗 𝑘1 −2 13 −1 4
|
= |−2 1−1 4
| 𝑖 - |1 13 4
| 𝑗 + |1 −23 −1
| �⃗�
= (-8 + 1)𝑖 - (4-3) 𝑗 + (-1+6)�⃗�
= -7 𝑖 - 𝑗 + 6�⃗�
�⃗⃗� x V⃗⃗ = -7 𝑖 - 𝑗 + 6�⃗�
b) El módulo de un producto vectorial �⃗⃗� x V⃗⃗ = |�⃗⃗� |. |�⃗� | Sen 𝜃
Ejemplo2: Calcular el módulo de �⃗⃗� = 2i+ 3j+ 5k; �⃗� = i + j- 2k. Si el ángulo comprendido es de 300
|U|= √22 + 32 + 52= √38
|U|= √𝟑𝟖
|V| = √12 + 12 + (−2)2 = √𝟔
|�⃗⃗� x V⃗⃗ | = |U| . |V| Sen 𝜃 = (√38) (√6) Sen 𝜃 = 15.1 (0.5) →|�⃗⃗� x �⃗⃗� |= 7.55

27
Actividades
I) Grafica los siguientes vectores en los puntos dados.
1) A(3,-1); B(5,3)
2) P(-1,7); B(4,0)
II) Obten los vectores unitarios asociados a los siguientes vectores.
* ( 4, 1)
* (3, 10, 2)
* (1,0, 1)
* ( 2, 2,1, 4)
P
Q
R
W
III) Realiza las siguientes operaciones vectoriales.
* ( 3, 4) (5,7)
3* ( 2, , 6) 4( 1,0,2)
5
1* 4(0, 2,7) ( ,3,2)
2
IV) Determina los siguientes productos interior y el ángulo comprendido.
* ( 2,4); (5,1)
* (9, 5); ( 3,1)
* ( 5,4); (2 / 5, 1)
P W
P r
A B

28
Estudios Matemáticos Argentera
En estos días el ángel de la topología y el demonio del
algebra abstracta luchan por el alma de cada dominio de la
matemáticas. Herman Hayek
Módulo 8:
Matrices …….…….. Gabriel Cramer: (Ginebra, Suiza, 1704-
Francia, 1752) Matemático y filosofo suizo. En 1750 expuso en Introducción al análisis de las curvas algebraicas la teoría newtoniana referente a las curvas algebraicas, clasificándolas según el grado de la ecuación. Reintrodujo el determinante, algoritmo que Leibniz ya había utilizado al final del siglo XVII para resolver sistemas de ecuaciones lineales con varias incógnitas. Editó las obras de Jakob Bernoulli y parte de la correspondencia de Leibniz. El sistema de cramer para resolver ecuaciones es compatible determinado, tiene solución única y es para sistema de la forma n=m.
Matrices Tecnológicas Son piezas o moldes diseñados para la construcción de maquinas. Su campo de aplicación lo podemos encontrar en industria automotriz, Aeronáutica, La naval, Electrónica, la informática. Dentro de la industria de la matricería, el desarrollo técnico y tecnológico de los últimos tiempos ha hecho que las máquinas utilizadas en este campo permitan trabajar a grandes velocidades que hace pocos años era imposible. Por tal razón la programación de máquinas de C.N.C. y CAD-CAM es necesaria y habitual si realmente queremos ser competitivos en un mercado cada vez más abierto y globalizado. Debemos tener presente, que la mayoría de sus piezas están sometidas a largos y costosos procesos de mecanizado que implican muchas horas de trabajo y dedicación, pues cada pieza del diseño se trabaja individual y como única.

29
Matrices
Las matrices aparecen por primera vez en el año 1850. Fueron introducidas
por J.J. Sylvester. El desarrollo inicial de la teoría se debe al matemático
W. R. Hamilton en 1853, aunque en el 1858, A. Cayley introduce la
notación matricial como una forma abreviada de escribir un sistema de m
ecuaciones lineales con n incógnitas.
Se emplean en cálculo numérico, en la resolución de sistemas de
ecuaciones lineales, de las ecuaciones diferenciales y de las derivadas
parciales. Aparecen de forma natural en geometría, estadística, economía,
informática, física, etc...
La utilización de matrices constituye actualmente una parte esencial
de los lenguajes de programación, ya que la mayoría de los datos se
introducen en los ordenadores como tablas organizadas en filas y columnas:
hojas de cálculo, bases de datos.
Las matrices se denotan con letras mayúsculas: A, B, C,... y los elementos
de las mismas con letras minúsculas y subíndices que indican el lugar
ocupado: a, b, c,… Filas i y columnas j. Un elemento genérico que ocupe
la fila i y la columna j se escribe aij . Si aparece entre paréntesis
también representa a toda la matriz: A = (aij)
11 12 13
21 22 23
31 32 33
( )ij
a a a
A a a a a
a a a

30
Vector fila: Es un ordenamiento de elementos dispuestos horizontalmente.
Vector columna: Es un ordenamiento de elementos dispuesto verticalmente.
Matriz: Es un ordenamiento de elementos en vectores filas y vectores
columnas.
5 8
( ) 0
37.6
7
ij
a
B b d k
m
Esta matriz es de orden 3*3= 9 elementos.
Orden de una matriz
El orden de una matriz viene dado por "p × q" donde p representa las filas y
q las columnas. El orden de una matriz también se denomina tamaño,
siendo m y n números naturales. También m x n representa la cantidad
de elementos que intervienen en la matriz.
2
32
Esta ma
6 9
0
12
triz
5
es de orden 3*3.
m
a u
a
A

31
Tipos de Matrices
Rectangular: Es aquella matriz que tiene distinto número de filas y columnas, siendo su orden p*q, para p ≠ q
6 1 4
5 0 3B
Transpuesta:
Dada una matriz A, se llama traspuesta de A a la matriz que se obtiene cambiando ordenadamente las filas por las columnas.
Se representa por At ó AT
5 3 5 2
2 4 3 4
tE E
Opuesta:
La matriz opuesta de una dada es la que resulta de sustituir cada elemento por su opuesto. La opuesta de A es -A.
5 3 5 3
2 4 2 4E E
Nula: Si todos sus elementos son cero.
Cuadrada: Es aquella matriz que tiene igual número de filas que de
columnas, p = q.
* 3*3
6 5 8
6 0
4 9 7p q
A k

32
Diagonal principal y secundaria
Diagonal principal: son los elementos ai=j: a11, a22,...
Diagonal secundaria: son los elementos aij con i+j = n+1.
11 12 13
21 22 23
31 32 33
a a a
A a a a
a a a
Diagonal principal Diagonal secundaria:
Traza de una matriz cuadrada: es la suma de los elementos de la
diagonal principal.
T 11 22 33
1
( ) ...n
nn ii
i
tr A a a a a a
1 31 7 8
0 7A trA
Simétrica
Es una matriz cuadrada que es igual a su traspuesta. A = At, aij = aji
2 8 9 2 8 9
8 4 7 8 4 7
9 7 6 9 7 6
tP p
Por lo que tp p

33
Anti simétrica.
Es una matriz cuadrada que es igual a la opuesta de su transpuesta.
A = -At, aij = -aji Necesariamente aii = 0 0
2 4 9 2 1 4 2 1 4
1 5 7 4 5 7 4 5 7
4 7 6 9 7 6 9 7 6
2 4 9 2 1 4 0 5 5
( ) 1 5 7 4 5 7 5 0 14
4 7 6 9 7 6 5 14 0
t t
t
P p p
p p
Diagonal
Es una matriz cuadrada que tiene todos sus elementos nulos excepto los de
la diagonal principal
Escalar
Es una matriz diagonal que tiene iguales los elementos de la digonal
principal
Identidad o unidad
Es una matriz escalar donde los elementos de la diagonal principal es la
unidad

34
Matriz Triangular
Es una matriz cuadrada que tiene nulo todos los elementos por encima y
por debajo de la diagonal principal. Puede ser triangular inferior y superior.
Será Triangular superior cuando sea cero por debajo de la diagonal
principal, sin embargo si es cero por arriba de la diagonal principal se le
llama triangular inferior.
Normal
Una matriz es normal si conmuta con su traspuesta. Las matrices simétricas,
anti-simétricas u ortogonales son necesariamente normales.
OPERACIONES MATRICIALES
Suma y resta de matrices: Para sumar o restar dos matrices estas deben
de ser del mismo orden. El resultado es otra matriz cuyos elementos se
obtienen al sumar o restar los elementos que estén en la misma posición.
11 12 13 11 12 13 11 11 12 12 13 13
21 22 23 21 22 23 21 21 22 22 23 23
31 32 33 31 32 33 31 31 32 32 33 33
a a a b b b a b a b a b
a a a b b b a b a b a b
a a a b b b a b a b a b
5 2 3 6 9 0 11 11 3
4 1 9 2 8 1 2 9 8
0 2 7 1 0 4 1 2 3

35
Resta de matrices
6 2 3 1 3 36 3 2 1
5 6 2 7 7 15 2 6 7
Producto de un escalar por una matriz
Cuando multipliquemos un escalar k por una matriz de orden m*n esta
quedará tantas veces aumentado o disminuido tal como sea su escalar (k).
11 12 11 12
21 22 21 22
a a ka kak
a a ka ka
Visto en números tenemos que 5 6 10 12
2,8 3 16 6
k A kA
Producto de matrices
La multiplicación de matrices es my importante porque por medio de ella
podemos resolver un sin número de problemas tanto de la ciencia como de
nuestra vida diaria, por tal razón es importante que la tomemos en cuenta
por eso tratamos de hacerla lo más didáctica posible.
Para dos matrices ser multiplicables tienen que cumplir que el numero de
columnas de la primera sea igual al número de filas de la segunda.
Esto significa que si tenemos una matriz de 1x3 y otra de 3x4 si se pueden
operar y la matriz resultante será igual a 1x4.
El producto de matrices no es por posición como en la suma y la resta, sino
de la siguiente manera: Se toma la primera fila de la primera matriz y la
primera columna de la segunda, y lo que se hace es multiplicar una posición
de fila por una de columna, así sucesivamente.

36
Ejemplos: Multiplica las Siguientes Matrices:
1) A=16 10
5 24
; B=3 9
4 6
16 10 3 9 48 40 144 60 88 84
*5 24 4 6 15 96 45 144 111 99
2) A=
14 3 5
9 4 2
,B=
10 7 5
12 9 2
1 4 8
14 3 5 10 7 5 140 36 5 98 27 20 70 6 40 181 145 104
9 4 2 * 12 9 2 90 48 2 63 36 8 45 8 16 44 35 69
1 4 8
División de Matrices
La división de matrices se define como el producto del numerador
multiplicado por la matriz inversa del denominador. Es decir, sean las
matrices A y B tal que A/B = AB-1.
Si una matriz está dividida entre un escalar, todos los términos de la matriz
quedarán divididos por ese escalar.
DETERMINANTE.
Determinantes es un número real asociado a una matriz.
Propiedades de los determinantes
Las propiedades que vamos a enunciar son generales para determinantes de
cualquier orden. Pueden comprobarse en los de orden dos o tres.
1. El determinante no varía si se traspone la matriz. Es decir: det A = det At
.
(Esta propiedad permite enunciar las demás sólo para filas o columnas).

37
2. Si permutamos entre sí dos filas (o columnas) el determinante cambia de signo.
3. Si multiplicamos (o dividimos) una fila o columna por un número el determinante queda
multiplicado por dicho número.
4. Si dos filas o dos columnas son iguales la determinante es cero
5. si los elementos de una fila o una columna de una matriz cuadrada son los correspondientes
múltiplos de los elementos de otra fila o columna, el determinante de dicha matriz es cero.
Determinante de segundo orden (2*2)
En una matriz cuadrada de dos por dos la determinante será igual al producto de la
diagonal principal menos el producto de la diagonal secundaria.
11 12
21 22
a aA
a a
11 22 12 21. ( . )A a a a a
Ejemplo: Calcular la determinante de A.
3 4
3 1 5 4 3 20 17 175 1
A A A
Determinante de tercer orden (3x3) (método de zarrus)
Para determinar el valor de un determinante de tercer orden utilizamos el
método de Zarrus, que consiste en lo siguiente:
Dado el determinante de tercer orden, calcular su valor.
1 2 3
1 2 3
1 2 3
a a a
B b b b
c c c
Procedimiento:
Podemos trabajar en filas o columnas, en caso de trabajar en filas lo que
debemos hacer es repetir las dos primeras filas y si es en columnas repetir
las dos primeras columnas.

38
1 2 3
1 2 3 1 2 3 1 21 2
1 2
1 2 1 2 3
1
3
1 2 3 1 2 3 1 2 3
1 2
3
3 1 2
2
3
a a
a a a
a a a a a a b b b
B b b b b b b c cb b
c c a a a
c
c c c c c c
b b b
Luego determinamos la diagonal principal y sus dos paralelas, según
podemos ver en el determinante. Estas van desde el extremo superior
izquierdo hasta el extremo inferior derecho. Estas líneas estarán formadas
por tres elementos cada una precedidas del signo (+). Así, se constituyen
los tres términos positivos del polinomio correspondiente al desarrollo del
determinante del tercer orden luego la diagonal secundaria, y sus dos
paralelas, que van desde el extremo inferior izquierdo al superior derecho.
Estas líneas estarán formadas por tres elementos precedidos de signo
menos. Así, se constituyen los tres términos negativos del desarrollo del
polinomio de dicho determinante.
Expresemos la determinante en columnas:
1
1 2
1 2 3 1 2 1 2 3
1 2 3
1 2 3
1
2 2 3 1 3 1 2
22 13
+a b c c b a +c b a +c b a
a a a
b b b
c c
a a
b b
cc
B
c
2 3 3 1a b c a b c
Ahora lo veremos en filas y haremos una comparación de la determinante.
Revisar esta matriz
1
1 3 1 2 2 1 2
2 3
1 2 3
3 2 3 1
1 2 3
1 2 3
1 33 12 2+a b c c b a +c b a +c b a
a a
a a a
b b b
c c
a
b b
c
b
B 2 3 3 1a b c a b c

39
Observando tendremos que
1
1 3 1 2 2 1 2 3 2 3 1 3 1
2 3 1 2 1 2 3 2 3 1 3 1 2
2+a b c c b a +c b
+a b c c b a +c b a +c b a
a +c b a =
BB
2
2
3 3 1
3 3 1
a
a
b c a b c
b c a b c
Eso significa que no importa como trabajemos si es fila o columna como quiera
dará lo mismo. También podemos poner la determinante de esta forma.
Ejemplo: Buscar la determinante de la siguiente matriz.
1 2 3
0 4 5
1 0 6
B
1 2 3 1 2
0 4 5 0 4 (1*4*6) (2*5* 1) (3 0 0) (2*0*6) (1*5*0 (3* 4* 1))
1 0 6 1 0
B
(24 10 0) (0 0 12) 14 12 26 26B
Método Triangular para Determinante de tercer orden (3x3)
También podemos determinar un determinante de tercer orden por el
método triangular, el cual consiste en encontrar tres productos negativos y
tres productos positivos por medio de triángulos dentro del determinante.
Ejemplos: Obtener el valor de la determinante.
2 3 4
0 5 0
1 1 6
A
Productos diagonal principal Productos diagonales secundarias
2 3 4
0 5 0
1 1 6
A
2 3 4
0 5 0
1 1 6
A

40
60 0 0) (20 0 0)
60 20
40
A
A
A
Matrices invertibles
Se dice que una matriz cuadrada A es invertible, si existe una matriz B con
la propiedad de que AB = BA = I, siendo I la matriz identidad. Se denomina
a la matriz B la inversa de A y la denotamos por 1A .
Ejemplo: Puesto que AB = BA = I, A y B son invertibles, siendo cada una
la inversa de la otra
Matriz inversa
Toda matriz inversa debe cumplir que 1 1. .A A A A I .
La inversa de una matriz cuadrada es única.
1. Buscar la determinante (Si det 0 no hay matriz inversa)
2. matriz complementaria
3. matriz adjunta.
Inversa de una matriz 2*2 por medio de cofactores.
11 12
21 22
1 1
11
1 2
12
21
4 1Ejemplo: Busca la matriz inversa de
1
11 3
1) la
1 3 3
1 11 1
determinante
2)
1
comp
A
Buscar
a aA Matriz c
A
a
o
a
mplementaria
a
a a
2 1
2 2
22
1 1 1
1 4 4
3 11
1 4comp
a
A

41
.
: 3) .
3 1
11 4
Adj
Matriz Adjunta eslatraspuestadelamatriz complen
A
taria
.1Matriz inversa
.
3 14)
11 4
AdjAA
Det
1
1
5)
.
4 1 3 1 12 11 4 4 1 0.
11 3 11 4 33 33 11 12
Pr
0 1
ue
A
a
A I
b
A A
Cálculo directo de la inversa de una matriz cuadrada de
segundo orden
Como ya sabemos que una matriz cuadrada A tiene inversa1A, si se
verifica que A·A-1 = A-1·A = I por lo que este método que sigue a
continuación puede ser muy sencillo a la hora de hacer el cálculo rápido de
la inversa de una matriz de 2*2, por lo que debemos seguir estos pasos
11 12
21 22
a aA
a a
a) Se determina el valor del determinante A, recordando que este debe ser
diferente de cero.
b) Se intercambian los elementos a11 y a22
c) Se sustituyen los elementos a12 y a21 por los opuestos correspondientes
d) Dividimos cada uno de estos elementos por el valor del determinante de la
e) matriz.

42
Ejemplo: Buscar la inversa de la matriz 4 5
2 3A
4 5
Det. A= 4 3 2 5 12 10 22 3
Intercambiamos los elementos 4y3 y sustituimos 2 y 5 por sus opuestos
3 5
2 4
Ahora procedemos a dividir cada uno de los elementos anteriores por el
valor del determinante A. el resultado obtenido es la matriz inversa de la
matriz dada, como podemos ver.
3 52 21
1 2A
Ejemplo 2:
Inversa de una matriz de 3*3 por medio de los cofactores.
11 12 13
21 22 23
31 32 33
1 1
11 31
1 2
12 32
2 1
13
1 2 3
4 0 5
6 1 3
1) 53
2)
0 51 5 10
1 3
4 51 18 21
6 3
4 01
6
comp
A
A
a a a
A a a a Matriz complementaria
a a a
a a
a a
a
33
2 2
21
2 2
22
5
23
11 12 13
21 22 23
31 32 33
4 81
2 31 3
1 8
1 31 21
6 3
1 21 13
6 1
5 18 4
3 21 13
10 21 8
3)
comp
a
a
a
a
a a a
A a a a
a a a
Matriz
1
.
: .
5 3 10 5 3 101
18 21 21 , 18 21 2153
4 13 8 4 13 8
Adj
Adjunta es la traspuesta dela matriz complentaria
A A

43
Inversa de una matriz por medio de sistema de ecuaciones.
Aunque los sistemas de ecuaciones están en el siguiente capítulo aquí
dejamos a opción del lector, la explicación de la búsqueda de la inversa de
una matriz inversa por medio de sistema de ecuaciones.
4 5
2 3A
El determinante no es nulo, esta matriz tiene inversa.
El paso siguiente es encontrar una matriz cuadrada de segundo orden que
multiplicada por A nos de la matriz identidad de segundo orden.
1 x y
Sea A la matriz inversaz w
Por consiguiente 4 5 1 0
. 2 3 0 1
x yObteniendo el producto
z w
2 3
4 5 0
13 0
5 1
2
4
y w
yx
z
w
x
z
Por igualdad de matrices tenemos:
1) 4x + 5z = 1 2) 2x + 3z = 0
3) 4y + 5w = 0 4) 2y + 3w = 1
Para obtener el valor de las variables x, y, z, w aplicamos el método de
resolución de ecuaciones simultáneas.
4x 5z 1
2x 3z 0

44
Seleccionamos la ecuación 2 y la multiplicamos por -2 y se la sumamos a la
ecuación 1, obtenemos:
Sustituyendo en la ecuación 2 el valor Z=-1, obtenemos x
Para obtener a w procedemos a multiplicar la ecuación número 4 por -2 y se
la sumamos a la ecuación 3, es decir 4y 5w 0
2y 3w 1
multiplicada por -2.
Para obtener a y sustituimos a w en la ecuación 4 que es 2y+2w=1
Por consiguiente 3 5 4 5
2 2 2 31 2
x yesta matriz es la inversa de
z w
Poe lo tanto tenemos que
4 5 1 0.
2 3 0 1
x y
z w
Multiplicando la matriz dada y su inversa tenemos
3 52 24 5 1 0
.2 3 1 2 0 1
Por lo que es correcta.
“La educación es la clave del futuro. La clave del destino del hombre y de su posibilidad de actuar en un
mundo mejor.” John Fitzgerald Kennedy
2 3 1 0
32 3 2
x
x x
4 5 1
4 6 0 1
1
x z
x zz
z
4y 5 0
4 6 2 2
2
w
y ww
w
2y 3w 1 2y+3(2)=1
5y=- 2.5
2

45
ACTIVIDADES
10. Resuelva las siguientes sumas de matrices, de ser posible:
a)
4 5 8 2 1 9
6 1 2 8 4 4
5 0 7 3 1 2
b) 5 8 0 2
2 1 5 7
c)
12 47 88 12 15 10
30 70 6 45 30 11
23 30 2 7 8 10
11. Halle el resultado de las siguientes operaciones:
a) 9 4 8 3
3 1 6 9
b)
3 9 0 3 9 3
6 3 7 0 5 2
4 1 4 9 6 0
c) 12 37 41 30
29 8 88 0
12. Realice las siguientes multiplicaciones de matrices:
a) 0 7 2 9
4 6 6 3
b)
5 0 1
0 3 0 2 7 7
3 8 6
c)
52 7
3

46
13. Calcular las determinantes de las siguientes matrices:
a) 10 114
49 8A
b) 53 60
100 11B
c) 25 2
42 29A
d) 34 3
101 14B
e) 27 2
41 50A
14. Calcular las siguientes determinantes utilizando el método de Zarrus:
a)
2 7 0
10 19 1
0 15 0
A
b)
26 13 1
15 39 2
43 70 0
B
c)
1 5 12
2 8 35
0 1 7
A
d)
8 11 29
7 33 9
3 22 5
B

46
15. Calcular las siguientes determinantes utilizando el método triangular:
a)
0 9 7
6 8 4
5 3 1
A
b)
2 0 2
1 5 0
0 3 7
B
c)
0 5 7
13 0 3
10 2 1
A
d)
1 0 8
0 1 0
2 0 5
B

16. Determine la inversa de las siguientes matrices:
a) 2 1
4 6A
=
b) 6 4
3 8B
=
c) 12 3
7 9C
=
d) 3 4
6 8D
=
e) 13 10
9 7R
=
f)
3 4 1
2 6 7
1 0 3
F
=
g)
1 3 6
4 2 1
2 0 4
G
=
h)
1 1 0
2 1 0
0 0 0
H
=

49
“La principal razón de existir del matemático es resolver problemas, y por lo tanto en lo que realmente consisten las matemáticas es en problemas de soluciones”. . Autor Pendiente
Ennemond Camille Jordan:
Nació el 5de enero de 1838 en Lyon, Francia. Su padre era ingeniero y su madre artista. Ingresó a la Escuela Politécnica en 1855 para estudiar matemáticas. Seis años más tarde ya era matemático e ingeniero. A partir de 1861 trabajó como matemático en Paris.Estudió en la Escuela Politécnica (promoción 1855). En 1876 entró como profesor en el Colegio de Francia, sustituyendo a Joseph Liouville.
Dentro de sus trabajos encontramos la teoría de grupos, el teorema de la curva de Jordan (un resultado topológico recogido en análisis complejo).La forma normal de Jordan y método matemático para resolver sistema de ecuaciones en lineal. El teorema de Jordan-Holder, que es el resultado básico de unas series de composiciones. El 4 de abril de 1881 fue elegido miembro de la Academia de la Ciencia y de 1885 a 1921 dirige la «Revista de matemáticas puras y aplicadas» fundado por Liouville.Murió el 22 de enero de 1922 en Paris, Francia.
Relación entre matemáticas puras y aplicadas
La matemática aplicada se focaliza principalmente en el empleo de instrumentos matemáticos en disciplinas de diversos órdenes, mientras que la Matemáticas pura se encarga del estudio de sí misma como verdades abstractas. Según el matemático Hardy La matemática aplicada busca expresar verdades físicas dentro de un marco matemático, mientras que las matemáticas puras buscan expresar verdades independientes del mundo físico. Para Hardy, la matemática pura es la verdadera matemática, que ostenta un valor estético permanente, una belleza intrínseca que la hacen comparable a la pintura o a la poesía.
Estudios Matemáticos Argentera

50
SISTEMA DE ECUACIONES LINEALES Y NO LINEALES
Historia e Importancia.
Los babilonios fueron los primeros en resolver sistemas de ecuaciones, su
procedimiento se basaba en el manejo de grandes tablas.
Los sistemas de ecuaciones son de mucha importancia por sus aplicaciones
en física, ingeniería y economía y su estudio está principalmente dentro del
algebra lineal.
Por medio de dicho sistema se expresan las condiciones de equilibrio de una
estructura en ingeniería, mediciones para levantamientos topográficos y
los sistemas no lineales nos pueden ayudar a buscar posibles soluciones a
muchos problemas relacionados con la dinámica de las poblaciones.
Solamente un 5% de los problemas que se presenta con sistema de
ecuaciones tienen solución exacta, todos las demás tienen soluciones
aproximadas, por lo que hay que dominar diferentes métodos para llegar a
través del camino más fácil, pues si tenemos un sistema de n=10 incógnitas
por el método de Cramer se nos cogerá un promedio de 40,000
multiplicaciones, mientras que por el método de Gauss Jordan llegaremos a
solo 300 multiplicaciones y divisiones.
En general, un sistema con m ecuaciones lineales y n incógnitas puede ser
escrito en forma ordinaria como:
11 12 1 1
21 22 2 2
31 32 3 3
...
...
...
... .... ...
n
n
n
a x a y a z k
a x a y a z k
a x a y a z k
Donde , ... x y z son las incógnitas y los números son los
coeficientes del sistema sobre el cuerpo K.

51
Sistema de ecuaciones:
Es un conjunto de dos o más ecuaciones con varias incógnitas.
Clasificación:
a) Sistema de ecuaciones compatible:
Es aquel que tiene solución. 3 5 5
2 1
u w
u w
b) Sistema de ecuaciones incompatibles:
Es aquel que no tiene solución
2 6 2 8
2 8 10
4 12 4 6
m n w
m n
m n w
c) Sistema de ecuaciones compatibles determinado:
Es aquel que tiene al menos una solución.2 3 8
4 2
x y
x y
d) Sistema de ecuaciones compatibles Indeterminado:
Es aquel que tiene infinitas soluciones.6 2 8
6 2 4
m n
n w
e) Ecuaciones dependientes: Es cuando en un sistema una ecuación
depende de la otra.6 2 8
18 6 24
j k
n w
f) Sistema independiente: Es cuando en un sistema una ecuación no
depende de la otra.6 2 8
5 7 24
j k
n w

52
Métodos para resolver sistema de ecuaciones.
1. Método de Sustitución
2. Método de Igualación
3. Método de Reducción
4. Método Gráfico
5. Método de Cramer (Determinantes)
6. Método de inversión de matrices.
7. Método de Gauss (Reducción)
8. Método de Gauss-Jordan (Eliminación)
9. Método de Gauss-Seidel
10. Método de Jacobi
1. Método de sustitución
Consiste en despejar una incógnita en cualquiera de las ecuaciones y
sustituirla en la otra; así, se obtiene una sola ecuación con una incógnita.
Una vez obtenido el valor de esta incógnita, se sustituye su valor en
cualquiera de las ecuaciones del sistema inicial para calcular el valor de la
otra incógnita.
Ejemplo: Resolver el siguiente sistema2 3 8
4 2
x y
x y
a) Despejamos x en I. 8 3 / 2x y
b) Sustituimos en la otra ecuación. 8 3
4( ) 22
yy
c) Resolvemos la ecuación obtenida 16 6 2
7 14 2
y y
y y

53
d) Sustituimos e y=2 en la ecuación 2 3 8x y eso implica que ser
2x+3(2)=8 por lo que tenemos que 2x=2 dividiendo será x=1. Por lo
tanto este sistema se satisface para X=1 y Y=2.
2. Método de igualación:
Este método consiste en despejar la misma incógnita en ambas
ecuaciones e igualar las expresiones resultantes; se resuelve la ecuación de
primer grado con una incógnita obtenida y se sustituye este valor en las
ecuaciones iníciales.
Ejemplo: Resolver el siguiente sistema de ecuaciones 2 3 8
4 2
x y
x y
.Despejamos Y de la primera y segunda ecuación.
8 32 3 8
2
24 2
4
yx y x
yx y x
1. Igualamos ambos despeje:8 3 2
2 4
y yx x
2. Resolvemos
4 8 3 2 2 32 12 4 2
12 2 4 32 14 28 2
y y y y
y y y y
Sustituyendo a y=2 en la ecuación II.
4 2 4 2 2
4 4 1
x y x
x x
3. La solución obtenida es 1^ 2x y

54
3. Método de Reducción o suma y resta:
Consiste en multiplicar ambas ecuaciones por escalares que permitan
eliminar una de las variables, y luego realizar las operaciones indicadas.
Para resolver un sistema de ecuación por el método de reducción o se
igualan los coeficientes salvo el signo de una de la incógnita mediante
multiplicación por numero apropiados de la ecuación. O se suma o se resta
las dos ecuaciones del sistema resultante.
Se preparan las dos ecuaciones, multiplicándolas por los números que
convenga.
Ejemplo: Resolver este sistema de ecuaciones5 2 1
3 7
x y
x y
por escalares 3^2
5 2 1 15 6 33
2 6 142 3 7
17 17
Sustituyendo x=1 en ecuacion
2
x=1^ 2
II
7 1 6 3 7
3 3
1
x=
Multiplicando
x y x
y
y
x yx
x y
y
yx
y

55
4. Método de Gabriel Cramer.
Es aplicable si el sistema tiene igual número de ecuaciones que de
incógnitas n=m y el determinante de la matriz de coeficientes es distinto de
cero. Un sistema de Cramer es, por definición, compatible determinado y,
por tanto, tiene siempre una solución única.
Pasos:
1. Calcular la determinante del sistema s , se formará una matriz solamente con los coeficientes de la
variable.
2. Buscar a x para eso se quedan en el mismo sitio los valores de Y, y los de X, se sustituyen por los
términos independientes, y luego se calcula la determinante.
3. Buscar a y para eso se quedan en el mismo sitio los valores de X, y los de Y, se sustituyen por
los términos independientes, y luego se calcula la determinante.
4. x
xs
, de esta forma encontramos el valor de la incógnita X.
5. y
ys
y aquí la de Y.
Ejemplo: Resolver el siguiente sistema de ecuaciones 4 2 14
3 7
x y
x y
1) Buscando a 4 2
141 3
s
2) Luego encontramos a 14 2
42 14 287 3
x
3) Mientras que 4 14
28 14 421 7
y

56
4) Por lo que 42
314
yy
s
y 28
214
xx
s
5) Solución: 2^ 3x y
2 0
4 10
5 3 14
Resolviendo
Ejemplo 2 : Resolver el siguiente si
este sistema por el metodo de Cramm
stema compatibl
er tenemos que:
1 2 1 0
0 1 4 10
5 0
e determi
3 14
nado
x y z
y z
x z
s
1 2 1
0 1 4 3 40 0 5 0 0 43 5 38
5 0 3
0 2 1
10 1 4 0 112 0 14 0 60 112 74 38
14 0 3
1 0 1
0 10 4 30 0 0 50 0 56 30 106 76
5 14 3
1 2 0
0 1 10 14 100 0 0 0 0 114
5 0 14
x
y
z
xx
38
138
762
38
1143
38
solución:
1; 2;
3
s
yy
s
zz
s
x y z

57
5. Método gráfico
Para este método solamente enfocaremos los sistemas de m
ecuaciones con dos incógnitas. Cuya solución será la intercepción
que hay en las diferentes gráficas.
Resolver los siguientes sistemas de ecuaciones
a)
2 0
3
x y
x y
Si localizamos los intercepto de cada grafica o dos puntos cualesquiera
podremos hacer el grafico y ver rápidamente la intercepción.
2 (0,0);(2,4
3 (0,3);(3,0)
y x
y x
Como vemos la intersección de las gráficas es x= 1 ^ y=2 esa es la solución del
sistema.
x
yy = 2x
y = 3-x

58
Ejemplo 2 : Resolver el siguiente sistema compatible determinado
por el método gráfico.
4 11
2x
Despejándo la variable en cada ecuación y luego asi
3 9
-
gnando valores
obtendremos que las
5y 2
y
x y
y
x
graficas se cortarán en un mismo punto, si se desea
se pueden buscar interceptos, El punto en comun es la solución del sistema
Haciendo las gráficas se obtiene:
Haciendo un análisis veremos que es un sistema compatible determinado cuya solución es el
punto de intersección (3, 1). Es el punto en común de las graficas.

59
6. Método de Gauss por medio de (Reducción) o matriz
aumentada.
Antes de entrar en materia con este método es necesario que el lector
recuerde lo que es una combinación lineal y cuando dos vectores son
linealmente dependientes e independientes.
Una Combinación lineal de dos o más vectores: Es el vector que se
obtiene al sumar dos vectores multiplicados por escalares. Podemos ver que
dados los vectores ^u v y los escalares , , entonces el vector u v es
una combinación lineal de ^u v .
En álgebra lineal, un conjunto de vectores es linealmente independiente si
ninguno de ellos puede ser escrito como una combinación lineal de los
restantes. Por ejemplo, en R3, los vectores (1, 0, 0), (0, 1, 0) y (0, 0, 1) son
linealmente independientes, mientras que (2, −1, 1), (1, 0, 1) y (3, −1, 2)
no lo son, ya que el tercero es la suma de los dos primeros.
Ahora ya se esta preparados para empezar a trabajar con este método de
resolución de ecuaciones por lo que dado un sistema de "m" ecuaciones con
"n" incógnitas se trata de obtener un sistema equivalente cuya 1ª ecuación
tenga n incógnitas, la segunda n-1, la tercera n-2, y así sucesivamente
hasta llegar a la última ecuación, que tendrá una sola incógnita. Hecho esto,
se resuelve la última ecuación, a continuación la penúltima, y así hasta
llegar a la primera. Es decir, el método de Gauss consiste en triangular
superiormente la matriz de coeficientes. Siempre debemos tratar de que el
coeficiente de la variable de la primera ecuación sea la unidad.
Recodar que para trabajar con los vectores (filas, renglones o columnas)
cuando se vaya a hacer cero los elementos por debajo de la diagonal
secundaria hagamos la combinación utilizando las filas que indique el
subíndice donde se vaya a hacer cero, es decir, que si se v a a hacer cero el
elemento 31a se debe combinar la fila 3 y la 1 a través de operaciones
matemáticas para así obtener otro vector o fila.

60
Ejemplo 1: Resolver el siguiente sistema de ecuaciones por el método de
gauss2 3 8
5 6 7
x y
x y
a) Si se forma la matriz aumentada será con los coeficientes de las
variables por lo que
2 3 8
5 6 7
Tiene esta forma
11 12
21 22
8
7
a a
a a
b) Ahora se realiza la búsqueda de ceros a la izquierda de la línea trabajando con las celdas, solo que como la matriz es de orden 2*2
solo se hará un cero que estará ubicado en 21a .
2 2 121 2 5
2 3 8
5 6 7F F Fa
al operar obtenemos
2 3 8
0 27 54
c) Volviendo a reponer las variables tenemos que 2 3 8
0 27 54
x y
y
resolviendo ahora tenemos que 54
227
y buscando el valor de la otra
variable
22 3 8 2 3(2) 8 1
2x y x x
por lo tanto 1^ 2x y
Ejemplo 2: Resolver el siguiente sistema por el método de Gauss.
4 2 2 4
6 2 4 18
2 4 10 10
x y z
x y z
x y z
a) forma la matriz aumentada.
4 2 2 4
6 2 4 18
2 4 10 10

61
b) Realizar la búsqueda de ceros a la izquierda de la línea intermitente, en
las celdas correspondientes a 31 21 32, ,a a a
11
31 3 3 1
22 21 2 2 1
33
32 3 3 2
2 4 2 2 4 2 1 1 2 2
6 2 4 18 3 1 2 9 2 32
2 4 10 10 1 2 5 5
2
2 1 1 2 2 1 1 25 3
0 5 7 12 0 5 7 12
0 3 11 8 0 0 76 76
FF
a F F FF
F a F F F
FF
a F F F
c) el sistema ha quedado de esta forma
2 2
5 7 12
76 76
x y z
y z
z
Buscando a z tenemos que 76 76 1z z
Ahora resolviendo en la 2da
5 7 12 5 7( 1) 12
12 7 51
5 5
y z y
y
Para x obtendremos 2 2
2 1 1 2 2 4 2
x y z
x x x
d) Solución: 2, 1, 1x y z

62
7. Método de Gauss- Jordán.
Es una variante del método de Gauss, y resulta ser más simple al final del
proceso, ya que no es preciso despejar las variables pues la solución se
obtiene directamente.
Este método se basa en diagonalizar la matriz de coeficientes,
triangularizarla inferior y superiormente, es decir, hacerla cero tanto por
arriba como por abajo y se obtendrá el resultado en la diagonal principal.
Ejemplo 1: Resolver el siguiente sistema de ecuaciones por el método de
Gauss-Jordan.
4 2 2 4
6 2 4 18
2 4 10 10
x y z
x y z
x y z
a) forma la matriz aumentada.
4 2 2 4
6 2 4 18
2 4 10 10
b) Realizar la búsqueda de ceros a la izquierda de la línea intermitente, en
las celdas correspondientes a 31 21 32 13 23, 12, , , ,a a a a a a .
11
31 3 3 1
22 21 2 2 1
33
332 3 3 2 3
2 4 2 2 4 2 1 1 2 2
6 2 4 18 3 1 2 9 2 32
2 4 10 10 1 2 5 5
2
2 1 1 2 2 1 1 25 3
0 5 7 12 0 5 7 12 76
0 3 11 8 0 0 76 76
2 1 1
0
FF
a F F FF
F a F F F
FF
Fa F F F F
12 1 2 1
13 1 3 1
23 2 3 2
2 2 1 0 3 55 7 12 0 5 0 5
70 0 1 1 0 0 1 1
10 0 0 20
0 5 0 5
0 0 1 1
a F F Fa F F F
a F F F

63
c) Como ya tenemos la matriz diagonal ahora la convertimos en escalar
unidad.
11
22
10 0 0 20 1 0 0 210
0 5 0 5 0 1 0 1
0 0 1 1 0 0 1 15
FF
FF
d) La solución es: 2, 1, 1x y z
Ejercicio para el estudiante 2: Resolver por Gauss-Jordan
X Y Z 11
2X Y Z 5
3X 2Y Z 24
sabiendo que el resultado es: x=4; y=5; w= 2
Resolución de sistemas ecuaciones no lineales.
Usualmente este tipo de ecuaciones se resuelven por el método de
sustitución. Vamos a ilustrarnos con un ejemplo.
8) Método de Sustitución para sistemas no lineales
Resuelve el sistema 2 4
3
x y
xy
a) Despejando Y en la Ec.2 3
yx
luego sustituimos en la ec1 y operamos
2 2 334 4 4 3 0x y x x x
x
Realizando por Paolo Ruffini veremos que ésta ecuación solo tiene una raíz
real x=-1.
Sustituyéndola en la otra ecuación para encontrar el valor de la incógnita y
obtendremos

64
3 ( 1) 3 3xy y y 1^ 3x y
9) Sistemas de ecuaciones exponenciales
Un sistema de ecuaciones exponenciales es aquel sistema en los que las
incógnitas aparecen en los exponentes. Lo que hay que hacer es eliminar las
bases y resolverlo de formas anteriormente visto.
Pasos para resolver un sistema:
a) Igualar los exponentes si los dos miembros tienen potencias con la misma base.
b) Cuando en el sistema no se puedan eliminar directamente las bases, se
hace cambio de variables.
Ejemplo 1: Resolver el sistema 4 2 14
2 4 2
5 5
5 5
x y
x y
Eliminando la base tenemos que quedarán los exponentes.4 2 14
2 4 2
x y
x y
Resolviendo
el sistema tenemos que x=3 ^ y=1.
Ejemplo 2: Buscar la solución de1
1
4 10 3
4 10 26
x y
x y
Haciendo un cambio de bases tenemos que 4 ^ 10x ym n
Arreglando la ecuación 1
4 10 34
4 (10)10 26
x y
x y
y sustituyendo 1
4 10 34
4 (10)10 26
x y
x y
Resolviendo el sistema por un método anterior obtendremos que
16 ^ 1m n , como ya sabemos que 4 ^ 10x ym n y que 16 ^ 1m n .
Ahora sustituimos y nos quedará 4 16 ^10 1x y , resolviendo estas ecuaciones
exponenciales 2 ^ 0x y . La prueba queda a consideración del lector.

65
10) Sistemas de ecuaciones logarítmicas
Los sistemas de ecuaciones logarítmicas se resuelven esencialmente igual
que las ecuaciones exponenciales, actuando sobre cada ecuación igual que
hemos hecho y resolviendo el sistema (ya sin logaritmos que se obtenga).
2log 5log 4
log log 5
Resolviendo por el m todo de reducci n tenemos que
2log 5log 4 2 log 5log 4
5log 5log 25 log log 5
Ejemp
lo 1: Resolver
7 log 21
x y
x y
é ó
x y x y
x yx y
x
3
log 3
10 1000
Sustituyendo en la ecu. II
log log 5 log1000 log 5
log 2 100 1000
x
x
x y y
y xy
^ 0 10y
2 21
log log 1
Podemos observar que la primera ecuaci n es lineal y la
segunda eslogar tmica por lo tanto debemos llevar una a
la otra, rec
Ejemplo 2. Resolve
omendable es llevar la logar tmic
rm n
m n
ó
í
lo í
a a lineal.
log 1 10 10
Sustituyendo en la ecuaci n 1.
log 1 10 10
2(10 ) 21 20 21 1
Sustituyendo n 1 en la ecuaci n II
log log 1 log log1
10 ^
1
log 1 1 10
m mm n
n n
ó
m
m mm n
n n
n n n n n
ó
m n m
m m n

66
ACTIVIDADES
1. Resuelve por el método de sustitución los siguientes sistemas de
ecuaciones.
a) 3w 2z 13
2w 6z 16
b)
9m 3n 8w 16
3m 3n- 14
8m n 4 3
w
w
c) 15u 5v 5
3u v 3
2. Resuelva los siguientes sistemas de ecuaciones por el método de
igualación:
a)
3 y 11
510x 38
3
x
y
b)
1 x y - 0
2
133 7 0
2x y
c)
x – 6y – 4z 79
2x 3y 5z 62
3x 9y 20z 4

67
3. Resuelve los siguientes sistemas de ecuaciones utilizando el método de
reducción:
a) 4x 2y 34
2x 16y 102
b)
x 2y 3z 23
5x – 6y z 3
3x 7y – 8z 25
c) 3x 10y 20
2x 12y 16
4. Resuelve los siguientes sistemas de ecuaciones utilizando el método de
Cramer:
a) 2 4 12
5 6 18
x y
x y
b) 13 9 5
4 36 10
x y
x y
c)
x - 6y z 10
x – y 4z 8
3x 4y – z 4
5. Resolver los siguientes sistemas de ecuaciones por el método de Gauss.
a) 3 7
2 4 6
x y
x y

68
b) 3 2 2
5 8 60
x y
x y
c)
4 2 3
3 4 2 1
5 3
8
2
a b c
a b
a b c
c
d)
2 8 2 1
4 10 14 18
6 4 2 2
2
a b c
a b c
a b c

69
6. Resolver los siguientes sistemas de ecuaciones por el método de
Gauss-Jordán.
a) 3 4 14
2 6
x y
x y
b) 2 2 5
5
–
7
x 6y z 1
x y z
x y z
c) 4 3 11
3 4 24
2 4 2
x y z
x y z
x y z
La educación necesita tanto de formación técnica, científica y
profesional, como de sueños y utopías. Freire

70
Estudios Matemáticos Argentera
Las matemáticas pueden ser definidas como aquello de
lo que no sabemos de qué hablamos, ni si lo que
decimos es verdadero. Bertrand Russel (1872-1972)
filosofo y matemático inglés.
Hiparco de Nicea: Astrónomo, geógrafo y
matemático griego. (190 a. C. - 120 a. C.). Entre sus aportaciones cabe destacar: el primer catálogo de estrellas, el descubrimiento de la precesión de los equinoccios, distinción entre año sidéreo y año trópico, mayor precisión en la medida de la distancia Tierra-Luna y de la oblicuidad de la eclíptica, invención de la trigonometría y de los conceptos de longitud y latitud geográficas. Clasificó las estrellas según su intensidad de brillo. Dividió el círculo en 360 grados de 60 minutos cada uno. Compiló una tabla trigonométrica que necesitó para computar la excentricidad de las órbitas de la Luna y el Sol y que sirvió para calcular cualquier triángulo, hacer modelos astronómicos cualitativos y realizar predicciones. LOS NUMEROS ORDINALES
1° primero 11° undécimo 10° décimo 100° centésimo
2° segundo 12°duodécimo 20°vigésimo 200° ducentésimo
3°tercero 13°decimotercero 30°trigésimo 300°tricentésimo
4°cuarto 14°decimocuarto 40°cuadragésimo 400°cuadrigentésimo
5°quinto 15° decimoquinto 50°quincuagésimo 500°quingentésimo
6° sexto 16° decimosexto 60°sexagésimo 600°sexcentésimo
7°séptimo 17°decimoséptimo 70°septuagésimo 700°septingentésimo
8°octavo 18°decimoctavo 80°octogésimo 800°octingentésimo
9° noveno 19°decimonoveno 90° nonagésimo 900° noningentésimo
1000° milésimo 10,000° diezmilésimo
100,000° cienmilésimo 1000,000° millonésimo

71
Historia e importancia
La Trigonometría es la rama de las matemáticas que estudia las
relaciones entre los lados y los ángulos de los triángulos. Los
babilonios y los egipcios (hace más de 3000 años) fueron los
primeros en utilizar los ángulos de un triángulo y las razones
trigonométricas para efectuar medidas en agricultura y para la
construcción de pirámides. También se desarrolló a partir de los
primeros esfuerzos hechos para avanzar en el estudio de la
astronomía mediante la predicción de las rutas y posiciones de los
cuerpos celestes y para mejorar la exactitud en la navegación y en el
cálculo del tiempo y los calendarios.
El estudio de la trigonometría pasó después a Grecia, en donde se
destaca el matemático y astrónomo Griego Hiparco. Desde Grecia, la
trigonometría pasó a la India y Arabia donde era utilizada en la
Astronomía. Y desde Arabia se difundió por Europa, donde finalmente
se separa de la Astronomía para convertirse en una rama
independiente que la hace parte de la matemática.
En nuestros tiempos de avances tecnológicos es necesario y casi
prioritario el uso de cálculos y funciones que nos suministren
informaciones y material de vanguardia en el moderno mundo de
hoy, dando así respuesta a fenómenos y hechos de la historia
humana.
La trigonometría se aplica en todos aquellos ámbitos donde se
requieren medidas de precisión. Sirve de soporte para el buen
funcionamiento de otras matemáticas.
Las primeras aplicaciones de la trigonometría se hicieron en los
campos de la navegación, la geodesia y la astronomía, en las que el
principal problema era determinar una distancia inaccesible, como la
distancia entre la Tierra y la Luna, o una distancia que no podía ser
medida de forma directa. Otras aplicaciones de la trigonometría se
pueden encontrar en la física, química y en casi todas las ramas de la
ingeniería, sobre todo en el estudio de fenómenos periódicos, como el
sonido o el flujo de corriente alterna.
Un ejemplo claro de aplicación suministrado por wikipedia lo es El
Canadarm 2, un brazo manipulador robótico gigantesco de la Estación
Espacial Internacional. Este manipulador es operado controlando los

72
ángulos de sus articulaciones. Calcular la posición final del astronauta
en el extremo del brazo requiere un uso repetido de las funciones
trigonométricas de esos ángulos que se forman por los varios
movimientos que se realizan.
Sus dos ramas principales son la trigonometría plana, que se ocupa
de figuras contenidas en un plano, y la trigonometría esférica, que se
ocupa de triángulos que forman parte de la superficie d de una
esfera. Se usa sobre todo en navegación y astronomía en la
superficie.
El Teorema de Pitágoras.
Establece que en un triángulo rectángulo, el cuadrado de la hipotenusa es igual a la suma de los cuadrados de los dos catetos, es
decir que 2 2 2h c c
Ejemplo1: Dado un triángulo abc, hallar la hipotenusa. Sabiendo que b=8cm, c= 6cm. a=?.
2 2 2 2 2a b c a b c Sustituyendo y operando 2 28 6 100 10a cm
Aplicaciones del Teorema:
Una escalera de 10 m de longitud está apoyada sobre un árbol. La distancia del tronco al pie de la escalera es de 6m. ¿Cuál es la altura
(b) del tronco del árbol?
2 2 100 36 64 8b a c cm
Ejemplo 2. Una cancha de voleibol olímpica es un rectángulo de 90
metros de largo y 80 metros de ancho. ¿Qué longitud tiene la
diagonal de la cancha?

73
Solución: La diagonal es la hipotenusa de un triángulo rectángulo,
con catetos de longitudes 80 m y 90 m. Puedes usar el Teorema de Pitágoras para encontrar su longitud.
2 280 90 6400 8100 14500 120.4159h m
Razones trigonométricas:
Es el cociente que se obtiene al dividir las medidas de las longitudes de dos de los lados de un triángulo rectángulo con respecto a un
ángulo agudo. Debemos empezar estableciendo los parámetros para poder definir las funciones trigonométricas.
Hipotenusa: Es el lado mayor de un triángulo rectángulo.
Cateto adyacente: Es aquel lado que forma parte del ángulo agudo sobre
el cual vamos a definir las funciones trigonométricas.
Cateto Opuesto: Es aquel lado que no forma parte del ángulo agudo sino
que se opone a él.
Definiciones de las funciones trigonométricas.
cb
hipotenusa
gulo θesto al ancateto opusenθ
ca
hipotenusa
ángulo θacente al cateto adyθ cos
b
cgulo θesto al áncateto opu
hipotenusaθ csc
Ejemplo 1: Calcule los valores de las
funciones trigonométricas del ángulo agudo , sabiendo que
4
7Sen .
ab
ángulo θacente al cateto ady
gulo θesto al áncateto oputgθ
ba
gulo θesto al áncateto opu
ngulo θcente al ácatetoadyactgθ
ac
ngulo θacene al ácateto ady
hipotenusaθ sec

74
Aplicando el teorema de Pitágoras para encontrar
el otro cateto y así encontrar las otras 5 funciones
faltantes.
2 24, 7, ? 49 16 33a c b b c a ,
4
7Sen
7sec
4Co
33
7Cos
7 7 33
3333Sec Sec
4 4 33
3333Tan Tan
33
4Cotan
Analice este ejemplo proporcionado por el matemático cubano
Aurelio Baldor.

75
Unidades angulares y conversiones.
Ángulo: Es la abertura comprendida entre dos semirrectas (rayos)
que se cortan en un punto llamado vértice. Este será positivo si gira en sentido contrario al movimiento de las agujas del reloj.
Hay tres unidades:
1) Grado sexagesimal: unidad angular que divide una circunferencia
en 360º. Es la más utilizada en la vida cotidiana.
Un grado tiene 60 minutos (') y un minuto tiene 60 segundos ('').

76
2) Radián: Es la medida del ángulo central de una circunferencia cuya
longitud de arco coincide con la longitud de su radio. Divide la circunferencia en 2π radianes. Es el más utilizado en matemática.
3) Grado centesimal: unidad angular que divide la circunferencia en 400 grados centesimales. Se desarrolló como la unidad más próxima
al sistema decimal, se usa en topografía, arquitectura y en
construcción.
Conversiones:
Como es bien sabido que la vuelta completa de una circunferencia es
360º equivalente a 2 rad entonces tenemos que
180
2 . 360º 1180
rad Rad Sgc
A la hora de hacer conversiones de radianes a grado debemos
multiplicar por 180
y si es de grado sexagesimal a radián debe ser por
180
.
Ejemplos:
a) Convertir 45 º a radianes. Resolviendo tenemos que
4545 ( )
180 180 4
b) Convertir 3
2 a grados sexagesimales. Resolviendo tenemos que
3 180 540( )( ) 270
2 2

77
Ángulos notables:
Son aquellos que tienen valores fijos. Cualquier ángulo que sea múltiplo de 5 es posible expresarlo a través de funciones fijas. Pero
siempre hemos trabajado más con 30 , 45 y 60 .
Demostración de las funciones trigonométricas de de 30º y
60º
Para esta demostración partiremos de un triángulo equilátero de
lados iguales a 2, luego trazamos una altura que dividirá al triángulo
equilátero en dos triángulos rectángulos iguales cuyos ángulos miden
90º, 60º y 30º.
Ahora las funciones trigonométricas de 30 y 60 grados las podemos buscar partiendo del triángulo rectángulo de la derecha. En este caso
buscaremos por la definición la de 30 grados y por racionalización la de 60 grados. Tomando en cuenta que nos falta el cateto c por lo que
hay que aplicarle el teorema de Pitágoras visto anteriormente. , como
vimos anteriormente 2 22 1 3c c
1
6 2
3
6 2
3
6 3
36
2 3
6 3
sec 26
Sen
Cos
Tan
Cotan
Sec
Co
3
3 2
1
3 2
33
3
3 3
23
2 3sec
3 3
Sen
Cos
Tan
Cotan
Sec
Co

78
Demostración de las funciones trigonométricas de 45º.
Para esta demostración partiremos de la construcción de un cuadrado de lados iguales a la unidad. Luego trazaremos una diagonal que dividirá al cuadrado en dos triángulos rectángulos iguales cuyos
ángulos miden 90º, 45º y 45º.
Buscando la hipotenusa tendremos que 2 21 1 2h h ahora
empezamos a buscar las funciones trigonométricas de 454
.
3
4 2
3
4 2
14
Sen
Cos
Tan
14
24
sec 24
Cotan
Sec
Co
Tabla de Valores de las funciones trigonométricas de 30º, 45º
y 60º en el sistema sexagesimal.
. 30º . . 45º . . 60º .
Seno
21
22
23
Coseno
23
22 2
1

79
Tangente 33 1 3
Cotangente
3 1 33
Secante 3
2 3 2 2
Cosecante
2 2 3
2 3
Valor Numérico de expresiones trigonométricas:
En trigonométrica existen ángulos notables, tales como 30, 45 y 60
grados. Se le llaman notables porque sus funciones tienen reglas
fijas. Para determinar el valor de una expresión trigonométrica basta
con sustituir cada una de las funciones por su valor y luego las
operaciones indicadas.
Ejemplos: Encontrar el valor numérico de:
1) Tan 45 . cota 1 n 45 1 1
Sen 30 Cotan 45 co1 1
(1)02 2=
s 602) = =0
1
5 1
4Tan
Sen . Tan 5cos
2 63)
3
3 1 3(1) 5( 1) 5
3 153 2 3= = =3(1) 0 3 9
24
Tan sen

80
Gráfica de funciones trigonométricas
Las gráficas de funciones trigonométricas reciben diferentes nombre
según la función que se esté trabajando. Estas son La sinusoide,
cusinusoide, tangentoide, cotangentoide, secantoide, cosentoide. En
cada una de esta se encuentra la oscilación, amplitud y frecuencia.
La amplitud es la altura vertical que tiene el gráfico, mientras que la
frecuencia son las veces que se repite la gráfica dentro de un periodo.
A continuación se presentan diferentes gráficos.
Ejemplo 2. Graficar la función 𝑦 = 4 5
x
yy = sin(x)
y = cos(x)
y = tan(x)
x
y

81
Resolución de triángulos rectángulo
Resolver un triángulo es hallar sus lados, ángulos y área. Es
necesario conocer dos lados del triángulo, o bien un lado y un ángulo
distinto del recto.
Partiremos en primer plano de resolución de triángulo rectángulo y
luego continuaremos con triángulo obtusángulo y oblicuángulo.
Resolución de triángulos rectángulos.
1. Se conocen la hipotenusa y un cateto
Resolver un triángulo rectángulo donde la hipotenusa a= 47cm y uno
de los cateto es c= 24cm.
B=? , C=?,b=?
*Buscando el lado faltante por Pitágoras:
C
2 2
2 2
40.
2
4
47 4
b
b cm
a c
b
b=? a=47cm
*Buscando ángulo C A c=24cm B
'
* ( )
24( ) 30.70635584
30 23"
7
42o
c cSenC C Arcs
C
ena a
C Arcsen C
*Buscando ángulo B por medio de conjugados.
0
'
'90 30 42 23"
59 17 37"
o
o
B C A B A C
B
B

82
2. Se conocen los Dos ángulos y un lado cualquiera.
2
4.6
A=90 , 60 , 8 , ?, ?, ?
90 60
8 8* 9.2376
60 0.866025
8
60
2
9
.24
30
:
o
O
o
a
B b cm C c a
B C A C A B
C
b b cm cmSenB a cm
a SenB Sen
b b cmTanB c
c TanB Tan
También los podemos realizar por p
cm
itágoras
a
C
m
c
c
b
c
2 2 2(9.24) ( 4 628) .c cc m
Aplicación de triángulos rectángulo.
3. Una Torre de 105 pies de altura proyecta una sombra de 83.86
pies. Calcule el ángulo de elevación del sol

83
4. Desde la cúspide de un Faro de 145 pies de altura sobre el nivel
del mar, se observa que el ángulo de depresión a una Boya es de 50 grado. Hallase la distancia horizontal desde el Faro a la
boya.
Resolución triángulos oblicuángulos y obtusángulos
La ley o teorema de los Senos es una relación de tres igualdades que
siempre se cumplen entre los lados y ángulos de un triángulo
cualquiera, y que es útil para resolver ciertos tipos de problemas de
triángulos
Ley de los senos:
En todo triángulo, los lados son directamente proporcionales a los senos de los ángulos
opuestos.
a b c
senA senB senC
. .

84
Resolver un triángulo conociendo un lado y dos ángulos.
: a 10 m, B
1. Si en un
30 ,C 11
tri ngulo : a 10 m,
5 , ?, ?
B 30 y C 115 . Calcul
, ?
a los
180 180 30 1
restantes ele
15
mentos.
( )
5
1 30
3
0
O O O O O
Datos A c b
A B C A
a b a SenB Senb b
SenA SenB S A
á
A
en S
35
( ) 10 115
3515.8
5.23en
a c a SenC Senc c
SenA SenC SenA Sec
b c
mn
c
m
Leyes de los cosenos:
En todo triángulo el cuadrado de un lado es igual a la suma de los cuadrados de los
otros dos lados menos el doble del producto de ellos, por el coseno del ángulo que
forman.
2 2 2
2 2 2
2 2 2
2 .cos
2 .cos
2 .cos
a b c bc
b a c ac
c a b ab
2 2 2 2 2
2 2
Ejemplo. Si tenemos un tri ngulo donde : a 15m, c 10 y B 120 .
la ley del coseno consig
2 .cos 2 .cos
(15) (10) 2(15)(10)cos12
a el valor del otro lado.
0 325 150o
b a c ac b a
á m
Aplic
c c
a
a
b b
ndo
21.79b m
Ángulos múltiplos y submúltiplos
Los ángulos múltiplos y submúltiplos son de mucha importancia pues
a través de ellos podemos expresar las funciones de un ángulo a
través de otros. Estos indican cuantas veces podemos repetirlo,
mientras que los submúltiplos indican cuantas veces podemos
dividirlo; Para demostrar las funciones del ángulo duplo, mitad, etc;
partiremos de las funciones trigonométricas de las suma de dos
ángulos, desarrollando estas por la definición no por demostración
pués es un poco rigurosa.

85
Funciones trigonométrica a través de la suma de dos ángulos.
1) ( ) sen cos cos sen
2) sen( ) sen cos cos sen
3) cos( ) cos cos sen sen
4) cos( ) cos cos sen sen
tan tan5) tan( )
1 tan tan
tan tan6 ) tan
( )
( )1 tan
sen x y x y x y
x y x y x y
x y x y x y
x y x y x y
x yx y
x
Si x y Sen Se
y
x yx y
y
x
n x
tan y
Nota: Para encontrar el valor de la cotangente, secante, cosecante, basta con buscar las funciones
inversas.
1
E
0
je
5=
mplo
60+4
1 : Hal
5
1)Sen(6
lar las funcione
0+45)=sen60 cos4
s trigonométricas de 105
a travé
5 +sen45 cos 60
3 2 1 2
s de la suma de do
= ( ) ( )2 2 2
s ángulos notab
2
2)
le
C
s.
os
6
(60+
2
4
45)
=cos 60 cos45 -sen45sen60
1 2 3 2 = ( )- ( )
2 2 2 2
60 453) (60+45)=
1 an 60. 45
3 1 =
1 3(1)
4) (60+45)=
5) (60+45)
6) (60
2 6
4
3 1
1 3
1 3
3 1
4
2 6
+45)
Tan TanTan
T Tan
Cot
Sec
Cosec
4
2 6

86
Funciones trigonométrica a través del ángulo duplo.
Para demostrar las funciones trigonométricas del ángulo duplo
partiremos de la suma de dos ángulos, donde un ángulo es igual al
otro x=y.
Como ya sabemos qué yxyxyx sencoscossen)sen( , pero como x=y
entonces tendremos
( ) sen cos cos sen
(2 ) 2sen cos
sen x x x x x x
por lo qu sen xe x x
Aplicando este mismo procedimiento con todas las demás funciones
trigonométricas tendremos que:
2 2 2
2
cos(2 ) cos 2cos 1
2 tanan(2 )
1 tan
2)
3)
x x sen x x
xT x
x
2
Ejemplo : Hallar el seno, tangente y la cosecante
de 120 a través del angulo duplo.
Sen
120=2(60)
* = 2sen60 cos60
3 1 3 =2( )( )
2 2 2
2 60* =
1 an
2(
60
60
)
2(6
0) TanTan
T
2
2( 3) = 3
1 ( 3)
2* 2 (60
3)Cosec

87
Funciones trigonométrica a través del ángulo Triplo.
Si hacemos la evaluación de (x+y) donde sustituiremos a x por 2x ^ y por x,
desarrollando por ejemplo el seno tendremos que Sen(x+y)
Sen(2x+x)=Sen2x.Cosx+Senx.Cos2x, haciendo
ese desarrollo obtendremos
3
3
3
3
3
2
Ejemplo: Calcular el
las siguientes reglas:
135 3(
33) 3
1 3tan
45 ) 3 45 4 45
2 2 3 23
2) 3 4c
seno
4 22 2 2
1) 3 3 4
2
de 135 .
o 3
2
s cos
Se
Sen Sen sen sen
Co
Tanx Tan x
n x senx s
Tan xx
e x
s
n
x x x
Funciones trigonométricas a través del ángulo mitad.
Para el desarrollo de las funciones trigonométricas del ángulo mitad partiremos del ángulo duplo tal como veremos a continución.
22
2
Despejando sen ,
1 cos 2 1 cos 2 . sen sen
2 2
Cambiando 1 cos
sen ( ) : 2
cos 2 1 2 n
2 2
se x
x xluego aplicamos radicación x
x
x xxx p r
x
x
o
2
2
2) Para el coseno aplicamos cos 2 2cos 1 obteniendo
1 cos 2cos Cambiando (
1 coscos
2 2) :
2 2
x x
x xx x por
x x
3) La fórmula de la tangente del ángulo mitad se obtiene dividiendo
miembro a miembro las identidades de seno y coseno del ángulo
mitad:

88
Ejemplo: Busca las funciones trigonométricas seno,
coseno, y tangente de 15 en función del an
1 cos1) sen
gulo mitad.
30
31
30 1 cos30 2 32( ) =
2
2
15 (
2
2
2
)
2 2S
x x
en
31
30 1 cos30 2 32( )
1 cos2)co
2
2 2
s
2
2
2C
x x
os
2 330 2 32a
1 cos3) an
2
n( )2 2 3 2
1 os
3
c
2
x xT
T
x

89
Identidades trigonométricas de producto a suma o
resta.
:
) ( ) sen cos cos sen
) sen( ) sen cos cos sen
) cos( ) cos cos sen sen
) cos( ) cos cos sen sen
Tomando encuenta que
I sen x y x y x y
II x y x y x y
III x y x y x y
IV x y x y x y
Ahora para encontrar productos debemos hace
.
1. Restando ^ :
( ) sen cos cos sen
sen( ) sen cos cos sen
( ) sen
1os [ (
( ) 2cos sen
) ( )]2
SenyC x sen x y sen x
r sumas y resta
del dessarrollo de mas arriba
I II
sen x y x y x y
x y x y x y
sen x y x y x y
y
2. umando ^ :
( ) sen cos cos sen
sen( ) sen cos cos sen
( ) sen( ) 2
1os [ ( ) ( )]
.
2
S I II
sen x y x y x y
x y x y x y
sen x y x y Se
SenxC y sen x y sen x y
nx Cosy
3. umando ^ :
( ) cos cos sen
cos( ) cos cos sen sen
( ) cos( ) 2cos .cos
1cos .cos [ ( ) cos( )]
2
S III IV
cos x y x y senx y
x y x y x y
cos x y x
x y cos
y
x
y
x y y
x
4. Restando III^IV ó IV ^III en este caso los haremos con IV^III
por asuntos de signos de operaciones, es mas sencillo, veamos!:
cos( ) cos cos sen sen
cos( ) cos cos sen sen
( )
x y x y x y
x y x y x y
cos x y
1. [ ( )
cos( )
cos( )]2
2 .
senx seny cos x
x y sen
y
x
x
sen
y
y

90
Concluiremos diciendo que sumando y restando
el seno y el coseno de la suma de dos angulos llegaremos a producto
los cuales son de mucha importancia tanto en este curso como en cálculo
in
NO
t
TA :
egral, es decir:
) ( ) sen cos cos sen
) sen( ) sen cos cos sen
) cos( ) cos cos sen sen
) cos( ) cos cos sen se
11) . [ ( ) cos( )
1os
]2
n
:
22
)
I sen x y x y x y
II x y x y x y
III x y x y x y
IV x y x y x y
Obte
Senx Seny cos x y
ndremos
SenxC
y
y
x
13)
14) os . os [ ( ) cos( )
[ ( ) (
]
os [ ( ) ( )]2
]
2
)
SenyC x sen x y s
C x C y cos
sen x y s
x y
e
x y
n y
en x
x
y
( ) ( )5) Tan x .Tan y=
Anexas a estas vamos a agregar la de producto de tangente y cotangen
( ) ( )6) ot .Cot y =
(
( ) (
t
(
e
)
) )
T
Cot x C
an x Tan y
Co
ot yC x
Ta
t x C
n x
y
n y
ot
Ta
Resuelva los siguientes ejemplos:
a) Dado 12 5 Expresar como suma de ángulos.
) Si 6 2 Exprésalo como
1os . os [ ( ) cos( )]
2
1[ (17 ) cos(7 )]
2
1. [ ( )
2
suma :
C x C y cos x
Cos x Cos
y x y
cos x x
Senx Seny
b Sen x
cos x
S n x
y
e
) siguiente producto 5 * os 1 3 exprésarlo
en suma de funciones trigonometricas
cos( )]
1[ (4 ) cos(10 )]
2
1os [ ( ) ( )]
2
15 * os13 [ (18 ) (8 )]
2
.
x y
cos x x
SenyC x sen x y sen x y
Sen x C x s
c El Sen x C x
en x sen x

91
12
que : Sen os en( ) en( )
Ahora asumiendo que A=x+y ^ B=x-y, operamos a traves de suma y resta
para obte
IDE
ner
NTIDADES DE SUMA A PRODUCT
valores de x^ y, por lo que obtendremos
Suma:
O
Sabiendo xC y S x y S x y
x + y Resta: x + y= A
( ) +
x =
- 2 2
Ahora esc
2y =
2
A
x y B x y B
x A B
BB
y A
A
B
A
12
ribimos la identidad inicial en t rminos de y :
sen cos sen sen , Sen en2 2
Obtendremos sen sen 2sen cos2 2
Este mismo prosceso de demostracion lo deb
é A B
A B A BA B despejamos A S B
A B A BA B
emos emplear para las otras,
por tal razón a continuacion la ponemos y la dejamos a opción del lector.
1)sen sen 2sen cos2 2
2)sen sen 2cos se
3)cos cos 2cos
n2 2
2
A B A BA B
A B A BA B
A BA B
( )5)
4)cos
( )6)
.
c
.
os 2sen sen2 2
cos2
Sen A BT
Sen A BCotA Co
anA TanB
tBSenA Sen
A B A BA B
CosAC
B
o B
A
s
B
Esta expresión es la que corresponde a la 4, osea,
cos cos 2sen sen ,Desarrollando tenemos que 2 2
90 40 90 40 Cos90 40 2 sen
2 2
Ejemplo : Transformar Cos90 0
2
4
A B A BA B
Cos sen
Cos
65 sen 25sen

92
Identidades trigonométricas
Es una igualdad que se satisface para cualesquiera que sean los
valores de las variables que en ella intervienen. Hay varios tipos de
identidades, por tal razón aquí en este nivel vamos a poner las que
consideramos más necesaria, aunque es bueno recordarle al lector
que debe saber despejar formula (consultar módulo 1) para encontrar
otras que estarán inmersas aquí.
2
2
1 1- Cos2x 1) 10)Sen x =
cosc 2
1 1 cos 22) Cos x= 11
Identidades fundamentales e i
)Cos x x 2
1 x3) Tan x
nvers
= x
a
Cos x
s:
senxx
x
Sec
Sen
Cot
2
2 2
2
2 2
12)
1 Cos x 4) Cot x= = 13) Sec x 1 +Tan
x Sen x
15) Sec x= 14) Tan Sec x 1
Cos x
16) Cosc x=
Sec x-Ta
e x
n 1
xTan
x
S n
x
2 2
2
2 2
2 2 2
2
2
Cosc 1
Sen x + Cos x
15)
Identidades Pitagóricas. 16) Cosc 1 +
7)
8) Sen x =1- Cos x 17)
1
c x 1
=
x Cot x
Cot x Cos
x Cot x
2
2 2
2
Identidades para c
alculo inte
1- Cos2x 1+ Cos2x a) Sen x
9)Cos x 1 x
=
gral:
b) Cos x =
2 2
Sen

93
Aquí tenemos otra tabla de identidades aun más general.
Sen x Cos x Tan x Cot x Sec x Csc x
Sen x
21 cos x
2
Tan x
1 Tan x
2
1 Cot x
1
Sec 1
x
2 x
Sec
x
1
Csc
Cos x
21 Sen x
21 Tan x
1
Cot x
21 Cot x
x
1
Sec Csc 1
x
2 x
Csc
Tan x
Sen x
21 Sen x
1- Cos
x
2 x
Cos
x
1
Cot
2Sec x - 1
2Csc x
1
- 1
Cot x
1- Sen
x
2 x
Sen
Cos x
21- Cos x
x
1
Tan
2Sec x
1
- 1
2
Csc x - 1
Sec x 2
1- Sen x
1
x
1
Cos
21 Tan x 1 Cot
x
2 x
Cot
Csc x
2Csc x 1
Csc x Sen x
1
21- Cos x
1 1
x
2Tan x
Tan
21 Cot x
2
Sec x
Sec x 1
Demostracion de una identidad trigonométrica En la demostración de identidades trigonométricas no hay procedimientos matemáticos
específicos, por lo que en la mayoría de los casos va a depender de nuestra destreza,
habilidad mental y conocimientos matemáticos.
Recomendamos que debemos trabajar desde adentro hacia fuera tratando siempre de
convertir las expresiones en función de senos y cosenos.

94
1Si aplicamos la prop.1 tendremos que
Ejemplos :Demostrar las siguientes identidades trigonom tricas.
1) . 1
2) . 1
3) . 1-
1
1 1
CoscxCoscx
CosxSenx Cosx
S
é
Senx Coscx
Senx Cotx
Senx
enx
Senx
2 2 2 2
2
1- Cos x
Se elige uno de los miembros cualquiera o ambos y se
trata de llegar a una igualdada común. En este caso
vamos a trabajar en el miembro izqui
Cos x
4) 1- TanxSenx
Sen x Sen x Se
Coscx Sec
x
x
n
erdo para llegar
al derecho (1- Tanx).
. . 1- Tanx
1 11- Tanx
1- 1- Tanx 1- Tanx
Tanx
Senx Coscx Senx Secx
Senx SenxSenx Cosx
Senx Senx
Senx Cosx
Ecuaciones trigonométricas:
Son expresiones que contienen funciones trigonométricas de un ángulo desconocido.
Suelen tener infinitas soluciones.
Pasos para resolver una ecuación trigonométrica:
1. Si hay ángulos diferentes, reescribirla en función de un solo ángulo.
2. Si tenemos varias razones trigonométricas ponerla como una sola.
3. Aplicar funciones arco para conseguir el valor de la incógnita.

95
1 1
Resuelve las siguientes ecuaciones trigonometricas
1) 2
1 1Cos = arccos
2 2 3
2 0 2 2 0
2 1 0 ^ 2 1 0
1
cos -1=0
2)
^0
2
)
2 6
3
^2
Sen C
Sen Cos Sen Cos Cos
Cos Sen Cos o Sen
Cos Sen
os
2 2
2 2
2
2
1 1
2
cos 1 0 2(1 cos ) cos 1 0
2cos cos 1 0 2cos cos 1 0
cambio de base tenemos que cos
2 1 0
21 1 8
14
1
1 3 1 1 w
4 2 2
1 3
2 1 co
s
sen x x x x
x x x x
haciendo w x
w w
a
sen x
b
x
w
c
w
w
21 14
1 1) arccos
2 2
) x=-1 x=arccos (
3
- =1 x)
x
w
Sustituyendo
a Cos x x
b Cos
Cuando me preguntaron sobre algún arma capaz de contrarrestar el poder
de la bomba atómica yo sugerí la mejor de todas, la paz.
Albert Einstein (1879-1955) Científico alemán.

96
ACTIVIDADES:
1. Resolver los siguientes problemas por medio del teorema de Pitágoras
a- Una parcela es un cuadrado con catetos de longitudes de 60 cm. Usar el
Teorema de Pitágoras para determinar la longitud de la parcela.
b- Un joven de 5.6 pies de alturas se encuentra a una distancia de 14 pies
de una pelota. Que distancia recorre su mirada para poder ver la pelota
diagonalmente, quedándose en posición firme.
2. Convertir los siguientes ángulos de grados a radianes
a- 45°
b- 75°
3. Convertir los siguientes ángulos de radianes a grados
a- 7
b- 3
2
4. Calcular los valores de las funciones trigonométricas del ángulo agudo
sabiendo que:
a- 2
5Cos
b- 2
7Cot
5. Racionaliza el denominador:

97
3
4 2
7
3
2
5 3 10
6. Encontrar el valor numérico de las siguientes expresiones
trigonométricas
a- 50 * 60 5 0
603 45 90
Tan Sen CosCos
Tan Sen
b- 2 3 2
32
2
Cos Tan Tan
Cos Sen
7. Resolución de triángulos rectángulos a) Resolver un triángulo rectángulo donde la hipotenusa a= 20cm y uno de sus
catetos es c= 14 cm
b) Resolver un triángulo rectángulo donde un cateto es b= 5cm y otro cateto es B=
50 grados.
8. Aplicar ley de los senos para resolver los siguientes ejercicios
a- Resuelva el triángulo ABC, donde A=55°, B=28° y a=15 cm
b- Resuelva el triángulo HIJ, donde H=120°, I=40° y j=20 cm
9. Hallar las funciones trigonométricas de los siguientes ángulos a través de la suma
de dos ángulos notables
a- 100°
b- 15°

98
10. Hallar el seno, tangente y la cosecante de los siguientes ángulos a través del
ángulo duplo
a- 60°
b- 1300°
11. Buscar las funciones trigonométricas seno, coseno y tangente de los siguientes
ángulos en función del ángulo mitad
a- 30°
b- 120°
12. Hacer uso de las identidades producto – suma para resolver los siguientes
ejercicios.
a- 9 * 5Cos x Cos x
b- 50 * 20Sen x Cos x
13. Hacer uso de las identidades suma-Producto para resolver los
siguientes ejercicios
a- 45 25Cos Cos
b- 120 80Sen Sen
14. Resolver las siguientes ecuaciones trigonométricas
a- 2 * 0Cosx Senx Cosx
b- 2os 0C Sen

99
Instituto Tecnológico de las
Américas ITLA
“Nunca consideres el estudio como una obligación, sino como una oportunidad para penetrar en el bello y maravilloso mundo del saber. Albert Einstein
Albert Einstein: (1879-1955), Científico Alemán,
nacionalizado estadounidense. Es uno de los científicos más conocidos y trascendentes del Siglo XX. En 1905, Hizo la ecuación de la física más conocida, masa-energía, E=mc², también publicó ciertos escritos concernientes a la física estadística y la mecánica cuántica. En 1915 presentó la teoría restringida de la relatividad, la teoría sobre foto efecto y explicación del movimiento Browniano. Obtuvo el Premio Nobel de Física en 1921 por su explicación del efecto fotoeléctrico y sus numerosas contribuciones a la física teórica.
La crisis según Albert Einstein…. “No pretendamos que las cosas cambien, si siempre hacemos lo mismo. La crisis, es la mejor bendición que puede sucederle a personas y países, porque la crisis trae progresos. La
creatividad nace de la angustia como el día nace de la noche oscura. Es en la crisis que nace la inventiva, los descubrimientos y las grandes estrategias. Quien supera la crisis se supera a sí mismo sin quedar superado. Quien atribuye a la crisis sus fracasos y penurias, violenta su propio
talento y respeta más a los problemas que a las soluciones. La verdadera crisis, es la crisis de la incompetencia. El inconveniente de las personas y los países es la pereza para encontrar las salidas y soluciones. Sin crisis no hay desafíos,
sin desafíos la vida es una rutina, una lenta agonía. Sin crisis no hay méritos. Es en la crisis
donde aflora lo mejor de cada uno, porque sin crisis todo viento es caricia. Hablar de crisis es promoverla, y callar en la crisis es exaltar el conformismo. En vez de esto, trabajemos duro. Acabemos de una vez con la única crisis amenazadora, que es la tragedia de no querer luchar por superarla.”

100
Números complejos
Historia
Los números complejos surgen para dar soluciones a ecuaciones
como 2 1 0x , pues como sabemos no existe ningún número real x
cuyo cuadrado sea -1, por lo que los matemáticos de la antigüedad
concluyeron que no tenía solución.
Los griegos rechazaron el uso de los números negativos, por la
falta de un equivalente dentro de las geometrías. Para ellos, todo
número representaba la longitud de un segmento o el área de una
figura plana. La geometría era considerada entonces como el corazón
de toda la matemática y esto, por supuesto, retardo
considerablemente el desarrollo de los sistemas numéricos.
Sin embargo, a mediados del siglo XVI, el filósofo y matemático
italiano Gerolamo Cardano y sus contemporáneos comenzaron a
experimentar con soluciones de ecuaciones que incluían las raíces
cuadradas de números negativos.
Luego el matemático suizo Leonhard Euler introdujo el moderno
símbolo i para 1 en 1777 y formuló la expresión 1 0ie la
ecuación más misterios de la historia de las matemáticas.
El matemático alemán Carl F. Gauss, en su tesis doctoral de 1799,
demostró su famoso teorema fundamental del álgebra, que dice que
todo polinomio con coeficientes complejos tiene al menos una raíz
compleja. Después para 1825, continuando con el estudio de las
funciones complejas, el matemático francés Augustin L. Cauchy
generalizó el concepto de integrales definidas de funciones reales
para funciones de variable compleja.
Importancia de los números complejos.
En física e ingeniería los números complejos se utilizan para describir
circuitos eléctricos y ondas electromagnéticas. El número i aparece
explícitamente en la ecuación de onda de Schrödinger que es
fundamental en la teoría cuántica del átomo. El análisis complejo, que
combina los números complejos y los conceptos del cálculo, se ha
aplicado a campos tan diversos como la teoría de números o el diseño
de alas de avión.

101
Los números complejos se utilizan en todos los campos de las
matemáticas, en la física (y notoriamente en la mecánica cuántica) y
en ingeniería, especialmente en la electrónica y
las telecomunicaciones, por su utilidad para representar las ondas
electromagnéticas y la corriente eléctrica.
Definición de Número Imaginario.
Es la raíz cuadrada de todo número negativo. Cada número
imaginario puede ser escrito como ib donde b es un número
real e i es la unidad imaginaria, con la propiedad:
Todo número imaginario se puede expresar como el producto de un
número real por la unidad imaginaria.
Ejemplo: 25 5; 36 6 j
Potencia de un número imaginario.
Para determinar a que es igual la potencia de un imaginario donde su
exponente sea mayor o igual a cuatro, dividimos dicho exponente
entre 4 y el residuo resultante lo colocamos como exponente de i. Ver
las siguientes reglas.
3 1
2 2
1 3
4
1 1
1
Re :
1o
i i i i
i i
gl
i i i i
i i
as
17 1 54 2
Ejemplos: Buscar las siguientes potencias
a) 1 b) 1i i i i
En b el proceso fue que 54 dividido entre 4 es igual a 13 y sobran 2,
cuando chequeamos las anotaciones tenemos que 2 1i

102
Número complejo en forma canoníca.
Se define como un par ordenado de números reales cuya primera
componente es la parte real y cuya segunda componente es la parte
imaginaria.
Ejemplo 1: (5,2) es un complejo cuya parte real es 5 y cuya parte imaginaria es
2.
Ejemplos 2: Escribir en Forma Canónica los siguientes números
complejos
Solución: a) 2+3i = (2,3) c) 5-7i = (5,-7)
b) -4+i = (-4, 1) d) 9-i = (9,-1)
Números complejo en forma binómica
Sea ( , )a b un número complejo. Entonces podemos escribirlo en la
forma: ( , ) ( ,0) (0, ) (1,0) (0,1)a b a b a b
Pero como (1,0) 1 y (0,1) i , entonces ( , )a b a bi . En este caso a bi se
llama forma binómica o binomia del número complejo.
Se expresa de la forma “a+bi”, siendo a y b números reales. El
primer término a se llama parte real y el segundo bi se llama parte
imaginaria.
Ejemplo: 2-4i su parte real es 2 y la parte imaginaria es -4i.
Ejemplos: Escribir en Forma binómica los siguientes números
complejos
Solución: a) (6,2) = 6+2i c) (-3,-4) = -3-4i
b) (7,-4) = 7-4i d) (2,-1) = 2-i
Complejo Real Puro: Es aquel cuya componente imaginaria es nula.
Ejemplos: 8+0i = 8; -3+0i = -3 ; 7-0i = 7

103
Complejo Imaginario Puro: Es aquel cuya componente real es
nula.
Ejemplos: 0+9i = 9i; 0-3i = -3i; 0+6i = 6i
Complejos opuestos
Si al número complejo lo representamos por ( + )a bi , El opuesto de
este complejo seria = ( )a bi , Por lo tanto, para determinar el
opuesto de un complejo se le cambian los signos a ambas partes.
Ejemplos:
1) El Opuesto de: 3+4i = -3-4i
2) El Opuesto de: -8+3i =8-3i
3) El Opuesto de: 1-i = -1+i
Conjugado de un número complejo.
Es aquel que difiere únicamente en el signo de de su componente
imaginaria.
Ejemplo:
2 3
25
2 3
25i
i
i
i
Reciproco de un número complejo:
También llamado inverso multiplicativo de un número complejo
corresponde al único número complejo que multiplicado con el
número complejo inicial a bi da como resultado el neutro
multiplicativo 1,0 . Y este único número lo encontramos de la
siguiente forma:
Demostración: Encontrar el inverso de ( )a bi
1. Elevar el complejo a 1( )a bi
2. Representar el complejo de forma 1
( )a bi

104
3. Multiplicar por su conjugado 1 a bi
a bi a bi
Realizar la multiplicación2 2 2
1
( )
a bi a bi
a bi a bi a abi abi b i
Simplificamos
2 2 222 2 2( ) (
1
)( 1)
a bi a b
abi
i
a a abi a bi
a bi
a bi
a bi
aa bi i a bb b bi
Por lo que obtendremos 2 2
a bi
a b
Ejemplos: Encuentra el reciproco de (8, 6 )i .
1. Eleva el complejo a -11(8, 6 )i
2. Representa el complejo de forma1
(8 6 )i
3. Multiplica por su conjugado 1 8 6
8 6 8 6
i
i i
Realiza la multiplicación2
1 8 6 8 6
8 6 8 6 64 48 48 36
i i
i i i i i
2
1 8 6 8 6 8 6 8 6 8 6
8 6 8 6 64 48 48 36 64 (36)( 1) 64 36 100
i i i i i
i i i i i
4. Simplificando obtendremos : 4 3
50
i
Para comprobar si este es el reciproco basta con multiplicar nuestro
compuesto original (8, 6 )i con el reciproco encontrado4 3
50
i. Así:
24 3 32 24 24 18 32 18 508 6 1
50 50 50 50(1,0)
i i i ii
.
Representación Gráfica de los Números Complejos.
La Representación Gráfica de Números Complejos se debe a Carlos
Federico Gauss. Este empleó el sistema de Coordenadas
Rectangulares. En donde el eje (x) sería el eje Real, y el eje (y) sería
el eje Imaginario. Por esta razón a este plano se le denomino plano
Gaussiano.

105
El Punto que corresponde a un complejo se le denomina afijo del
complejo.
Operaciones de números complejos
Suma y diferencia de números complejos
La suma y diferencia de n meros complejos se realiza sumando las
partes reales y las partes imaginarias, la parte imaginaria tambi n
la podemos representar con una j.
(a bj) (c dj) a c b d
ú
é
(a bj) (c dj) a c b d
Ejemplo : Realizar las siguientes operaciones.
9 2 1 3 4 2
9 1 4 2 3 2 4 7
j
j
i i i
i i
Multiplicación de números complejos
: Re 5 2 · 2
(a b ) · (c
3
d ) ac bd ad bc
10 15 4 6 ² 10 11 6 16 11
Ejemplo
i i i
i i i i
aliza i i
i

106
2zz z
División de números complejos
El cociente de números complejos se hace racionalizando el
denominador; esto es, multiplicando numerador y denominador por el
conjugado de éste.
2 2
x iy
a ib
2 iEjemplo: Resolver
5
x iy ( ) ( ).
a ib
2 i 5 - 3i (10 3) (5 6 ).
5 3i 5 - 3i
1
25 9
3
3i 34
a ib ax by ay bx i
a ib a b
i i i
Forma modulo argumental de un complejo z .
Sea ( , )z a b a bi un número complejo cualquiera.
Llamaremos módulo del número complejo , al número real dado
por 2 2a b y lo denotaremos por
2 ( )( ) ( ) ( ) 0z z a bi a bi abi abi yi a b ab ab i a b i a b z
El módulo se interpreta como la distancia al origen del número z.
Cálculo del argumento.
arg( ) arctan( )b
za
Demostración:

107
2 2 2 2 2
2 2 2 2 2
( )( ) ( ) ( )
0
zz a bi a bi a abi abi y i a b ab ab i
a b i a b z
Ejemplo 1: Expresar en forma módulo argumental ( 2,2 )Z i
2 2
2 2
yz = x +y α=arctang
x
2z = (-2) +(2) α=arctang
-2
z = 4+4 α=arctang-1
8 135
2 2
z
z
z
1352 2
Ejemplo 2: Determinar módulo y argumento de 2 2i ;
2 22 2 2 2 8 2 2i
2
arg(2 2 ) 12 4
i arctg arctg
4
2 2z
Operaciones de números complejos en su forma de Módulo
argumental.
1 1 2 2
1 2 1 2 1 2
9030 60
3 5
2 2
Ejemplos: Realiza las siguientes operaci
a) Producto.
^
. .
a) 9 4 36
) 7 2 14
ones.
z z z z
z z z z z z
b

108
1 1 2 2
1 11
2 2 2
100
45
55
23
2
2
b) Divisi .
^
Ejemplos: Realizar la siguiente operaciones
81) 2
4
502) 10
5
n
Si z z z z
z zz
z z z
ó
1 1
1 1 1
33
50 3(50
c) Potenciaci .
Si es un conplejo en su forma mod-arg. y n es un expoente
positivo, por lo tanto tendremos que:
Ejemplos: Realiza las siguientes operaciones
1) 7 7
nn n
n
n
z z
z z z
ó
) 150
2
5 10
7 7
343
2) 4 16

109
d) Radicaci .
En la extracci de raices hay que tener presente que todo numero complejo
diferente de cero tiene dos raices cuadradas, tres c bicas, cuatro raices cua-
dradas y asi sucesivamente hasta n
n
n
ó
ó
ú
1
2
- sima raices.
Si w es un conplejo en su forma mod-argumental
entonces sus raices la podemos calcularlas por medio de las expresiones.
) En radianes: w= ; 0,1,2,3, 4,5nnk
n
z
a z z k
é
1
360
45
Ejemplos: Realiza las siguientes operaciones
,6,..., 1
) En Sexagesimal: w= ; 0,1,2,3,4,5,6,..., 1
a) Buscar las tres raices cúbicas de 8 en forma módulo argumental.
1) Cua
nnk
n
n
a z z k n
3 45 360 (0)0
3
1 45 360 (1)
3
2 45 360 (2)
3
13
6
2
15
(0)46
04
255
4
5
2
ndo k=0 8
2) Cuando k=1 2
3) Cuando k=2 2
) Busca las cuatro raices cuartas de 1 .
1) Cuando k=0
2
2
2
1 1
2)
w
w
w
b
w
2(1)46
14
2(2)46
24
2(3)46
3
25
13
24
4
47
2
3
24
Cuando k=1 1
3) Cuando k=2 1
4) Cuando k=3
1
1
1
1
w
w
w
Forma trigonométrica de un número complejo
Viene dado por la expresión w cos isen w donde ya sabes
que z es el modulo y su argumento.

110
1 1 2 2
1 2 1 2
1 2
1 21:
a) Product
20( 90
5( 30 30
o.
( ) ^ ( )
.
. 5 4 30
) ^ 4( 60 60 )
60 3
90 )
0 60
Ejemplo Multiplicar w Co
w w Cos isen w w Cos isen
w
s
Cos
isen w Cos ise
w w w Cos isen
w w Co
i
s isen
s
n
en
Ejemplo 2 : 5 cos90 i sen90 . 3 cos60
:15
i
co
sen
s150
6
i se 150
0
nSolucion
División de números complejos
Para dividir dos números complejos en forma trigonométrica se dividen
los módulos y se restan los argumentos.
1 1 2 2
11
2 2
b) División.
( ) ^ ( )w w Cos isen w w Cos isen
wwCos isen
w w
1
1
2
21: Dividir 10( 300 300 ) ^ 5( 1
10300 120 300
20
2( 180 180 )120
12
5
0 )Ejemplo w Cos isen w Cos
Cos iw
Cos is
is
nen
en
sew
1
1
2
2
5 5
7 7
2 : 32( ) ^ 8( )7 7 2 2
32
8 7 2 7 2
4
Ejemplo Dividir w Cos isen w Cos
Cos isen
wCos isen
w
isen

111
Es a trav s del cual podemos desarrollar cualquier potencia sin tener que
desarrollar la formula de Newton.
[ (cos i sen )] (cos + i
Teorema de De Moivre
Ejemplo 1: Determine
sen ); .
n n n
é
z w w n n n z
3
3
El argumento de 1 3 es y su modulo es 3 1 3 23
2(cos sen ) ahora aplicando potencia tenemos que3 3
2(cos sen )
(1 3) mediante el Teore
8(cos
ma de De Moi
)
vre
8( 1 + 3 3
z i i
z i
i ise
i
n
0 8)i
5
5Ejemplo 2: Determine 2( 30 30) mediante el Teorem
2 5*30 32 os150 15
a de D
5
e Moivr
*
e
0 03Cos is
Cos ise
en C e
n
iS n

112
5 3
9 14
15
3
2 7
4
1 5
1 5
2 4
100 200
143 521
i
i
i
i
i
i
i
i
i
i
ACTIVIDADES
I. Identifique la parte real y la parte imaginaria de los
siguientes números complejos:
II. Encuentre el opuesto de:
3 2
4 1
7 2
4 9
45 3
37 5
i
i
i
i
i
i
20,3
3
(9 30 )
(8 15 )
(14 17 )
i
i
i
i

113
III. Encuentra el conjugado de:
5 3
9 14
15
1 4
235 7
1000
1 12
9 3
25 4
60 30
22 44
i
i
i
i
i
i
i
i
i
i
IV. Encuentra el reciproco de:
768 881
315
1 4
235 7
1000
1 12
4 1
7 2
4 9
45 3
i
i
i
i
i
i
i
i
i
i

114
5 3
9 14
15
3
2 7
4
1 5
1 5
2 4
100 200
143 521
i
i
i
i
i
i
i
i
i
i
V. Representa en forma binómica los siguientes pares
ordenados.
4,1
7, 2
4,9
45, 3
(5,3 )
(9,14 )
(15, )
(1, 4 )
(235,7 )
(1000, )
i
i
i
i
i
i
i
i
i
i
VI. Grafica los siguientes complejos:

115
VII. Determinar el módulo y argumento de los siguientes
números complejos:
( 1, 3 )Z i
(4 8 )Z i
(1 44 )Z i
(4 8 )Z i
EJERCICIOS PROPUESTOS
Expresa en forma trigonométrica:
4 + 4i
−2 + 2i
-3 + 3i
2+ 2i
5 / 3i
√3 +1
3 – 4i
17i
2 + 5i

VIII. En los ejercicios siguientes utilice el teorema de De Moivre para
determinar la potencia indicada del número complejo. Escriba
respuesta en la forma estándar a + bi.
1.
3
cos sen4 4
i
2.
3 33 cos
2 2i sen
3.
4
3 32 cos
4 4i sen
IX. En los ejercicios siguientes utilice el teorema de De Moivre para
determinar la potencia indicada del número complejo. Escriba
respuesta en la forma estándar a + bi.
4.
3
cos sen4 4
i
5.
3 33 cos
2 2i sen
6.
3
3 32 cos
4 4i sen
7.
51 i
8.
203 4i
9.
3
1 3i
10.
3
1 3
2 2i

117
“El poeta debe ser capaz de ver lo que los demás no ven, debe ver más profundamente que otras personas y el matemático debe hacer lo mismo. Sofía Sonia Kovalevskaya
Sofía Sonia Kovalevskaya: Nació en Moscú el 15 de enero de 1850-1891, vivió su niñez encerrada, con su habitación empapelada con las conferencias de un matemático sobre cálculo diferencial. Se fue a estudiar a Alemania pero era imposible para una mujer por lo que contrajo matrimonio ficticio con Vladimir Kovalevsky y pudo estudiar allá primero en Heidelberg (1868) luego en Berlín. En estas universidades no se aceptaban mujeres pero Karl Weierstrass profesor de la universidad de Berlín vio el talento de esta joven y decidió darle clase particular (1871-1874), luego volvió a Rusia y este maestro le seguía dando clase por correspondencia. En 1884 fue invitada como conferencista a la Universidad de Estocolmo. En 1888 la Academia de las Ciencias de París le concedió un importante premio por su trabajo sobre rotación de un sólido alrededor de un punto fijo. En 1889 fue nombrada profesora en la universidad de Suecia gracias a su gran capacidad. En el 1891 una epidemia de gripe en Estocolmo la lleva a la muerte pero dejo una gran labor matemática y varias obras literarias.
La Multimedia
Es a través de la cual podemos unir audio, video e imágenes para llevar informaciones al mundo. Esta hace que la comunicación de la información sea más fácil y rápida. Las presentaciones multimedia pueden verse en escenarios y proyectarse y transmitirse a grandes distancia. La multimedia encuentra su uso en varias áreas: Arte, Educación, entretenimiento, ingeniería, medicina, matemática, negocio, y en la investigación científica. En la educación, la multimedia se utiliza para producir cursos de aprendizaje computarizado. En República Dominicana se puede estudiar multimedia en el Instituto Tecnológico de Las Américas (ITLA).
Estudios Matemáticos Argentera ***

118
COORDENADAS POLARES
Historia de las coordenadas polares.
Los primeros usos empíricos de relaciones entre ángulos y distancias tienen
que ver con aplicaciones a la navegación y el estudio de la bóveda celeste. El
astrónomo Hiparco, creó una tabla trigonométrica que daba la longitud de
una cuerda en función del ángulo y existen referencias del uso de
coordenadas polares para establecer la posición de las estrellas. También se
describe la espiral de Arquímedes, una función cuyo radio depende del
ángulo.
El concepto abstracto de sistema de coordenada polar se debe a Sir Isaac
Newton, quien en su Método de las fluxiones escrito en 1671, introduce ocho
nuevos sistemas de coordenadas para resolver problemas relativos a
tangentes y curvas, uno de los cuales, es el de coordenadas polares.
Jakob Bernoulli utilizó en 1691 un sistema con un punto en una línea,
llamándolos polo y eje polar respectivamente. Las coordenadas se
determinaban mediante la distancia al polo y el ángulo respecto al eje polar.
Aplicación de las coordenadas polares
Las coordenadas polares son importantes para realizar ciertos cálculos
y procedimientos que no podrían realizarse exitosamente con coordenadas
cartesianas. No se trata de que un sistema de coordenadas sea mejor que el
otro, sino que ambos son importantes pero uno servirá algunas veces y el
otro servirá en otras ocasiones, dependiendo de nuestras necesidades y
del trabajo que estemos realizando.
Las coordenadas polares se usan a menudo en la navegación, ya que el
destino o la dirección del trayecto pueden venir dados por un ángulo y una

119
distancia al objeto considerado. Las Aeronaves, por ejemplo, utilizan un
sistema de coordenadas polares ligeramente modificado para la navegación.
Los sistemas que presentan simetría radial poseen unas características
adecuadas para el sistema de coordenadas polares, con el punto central
actuando como polo. Algunos ejemplos son las antenas radioeléctricas.
Coordenadas Polares
Son un sistema de coordenadas que define la posición de un punto en un
espacio bidimensional en función de los ángulos directores y de la distancia
al origen de referencia. Es decir que un sistema de coordenadas en dos
dimensiones están formadas por (r, θ), donde r es la distancia desde el
origen polar y θ es el ángulo polar que se forma con el eje polar y el rayo
vector r.
Coordenadas polares(r, ) de un punto q:
1. Partimos del eje polar y giramos un ángulo de medida para
determinar el rayo
2. Sobre el rayo nos movemos r unidades a partir del polo 0 para
localizar q.

120
Ejemplo1: Localizar los siguientes puntos con estas coordenadas polares:
: Localizar los siguientes puntos en coordenadas polares ) 3, ; ) 4,120º4
Ejemplos a b
,
Conversión de coordenadas polares a rectangulares.
Para ver la relación que existe entre
las coordenadas polares y las
rectangulares, sobreponemos un
sistema rectangular en un sistema
polar de modo que el polo coincida con
el origen, el eje polar con la parte del
eje x y el rayo 2
con la parte positiva
del eje y.
Relación entre coordenadas polares y rectangulares de un punto.
Las coordenadas en ambos sistemas del punto P son:P (x, y) y P (r, φ)
En el plano de ejes xy con centro de coordenadas en
el punto O se puede definir un sistema de
coordenadas polares de un punto M del plano,
definidas por la distancia r al centro de coordenadas,
y el ángulo θ del vector de posición sobre el eje x.

121
Conversión de coordenadas polares a rectangulares
Como sabemos las coordenadas polares r se definen como P (r, θ). Y las
cartesianas como P (x, y) , siendo x=r cos , y= r sen .
60º
cos x 2 co
Ejemplo: Dad
s 60º 2
o2 converti
1
rlo en coordenas ca
p x, y p (1, 3
y r sen y 2 sen 60º 2
rtesianas.
3
)
x r
Conversión de coordenadas rectangulares a polares
Como vimos en temas anteriores r es la distancia y es el ángulo
2 2 2r x y tan =y
x→
Ejemplo: Dadas las coordenadas cartesianas del punto P (1,- 3 ) determinar
las coordenadas polares:
Se sabe que: r = 2 2x y , sustituyendo las coordenadas conocidas del
punto, se tiene que r = 2
21 3 = 1 3 = 2
Por otra parte para buscar el ángulo se debe conocer a x y Y:
sen =y
r = 3
2
= Arcosen(
3
2 )=300º=
5
3
=
5
3
Por lo que las coordenadas polares de P son: 5
( 2, )3
p

122
Gráficas de Ecuaciones Polares
Este tipo de gráficas las representamos con la forma r= f (t). Adquieren
diversas formas como corazón, flores, pétalos, etc.
A lo largo de la historia de las matemáticas se encuentran figuras que
podemos realizar a través de gráficos en coordenadas polares tales como
Rosas, Cardiodes, Limaçon o caracol, Circunferencia, Lemniscata, Nefroide
de Freeth, Concoide de Nicómenes, Cisoide de Diocles, Parábola, Espiral.
Entre otras, aunque en estas son las más importantes y a la vez comunes.
Haciendo un análisis de algunas de estas graficas encontramos por ejemplo:
La Cardiode: las cuales son curvas que adquieren la forma de corazón y
que se forman con las ecuaciones polares de la forma
r = a(1 cos t) ó con r=a(1 cos ) , si utilizamos la función seno su simetría está
en el eje normal o vertical pero si es coseno entonces será en el eje polar.
Rosas: Las cuales son curvas que tiene forma de pétalos de rosas, se
forman a través de las ecuaciones ( ) ó Cos ( )r a Sen n r a n . Tomando a n
como la cantidad de pétalos.
Como sabemos las cardiodes se forman con las ecuaciones de la forma
r = a(1 cos t) ó con r=a(1 cos ), pero entonces la ecuacion que nos
estan dando
Ejemplo: Discutir y graficar la curva r= cos (t)-1
convertirla en la forma por lo que r= -1(1-cos ),
al hacer los valores que estos quedan opuestos.
30 60 12090
010.13 0.
02
0
00.87 0.5
6 3 32 1
5r= -1(1-co
os
s )
debemos
observam
C
os
150 210 240 300 330180 270 360
5 7 4 5 113 2
6 6 3
2 1
1 0 10.5 0.87
3 61 2
01.5 1.87 1.87 1.5 0.5 0.1
0.87 0.5 0.5 .87
3
1

123
Ejemplo 2: Graficar la función f (t)=4cos (3t)
x
yr = cos(t)-1; 0.000000 <= t <= 6.283190
x
yr = 4cos(3t); 0.000000 <= t <= 6.283190

124
Actividades
I. Construya un plano polar y marque los puntos cuyas coordenadas
polares son dadas.
a. (1, )2
b. 2
(4, )3
c. 3
( 3, )2
d. ( 1, )
e. ( 1, )3
II. Localice los puntos siguientes en un mismo sistema de coordenadas
polares.
1. (1,30º), (-1,30º), (1,-30º), (-1,-30)
2. (2,90º), (-2,90º), (2,-90º), (-2,-90º)
III. Convierta las siguientes coordenadas polares a coordenadas
rectangulares.
3. 5
7,2
4.
138,
6
5. 3 5
,2 2
6.
IV. Convertir las siguientes coordenadas polares a coordenadas
rectangulares:
a. 270º2
c. 30º2
b. 0º2
d. 60º2

125
V. Convertir las siguientes coordenadas rectangulares a coordenadas
polares:
a.(0,2) c.(-1,- 3 )
b.(-2,0) d.(1, 3 )
VI. Graficar:
1. R= 2
2. R = 𝜃
3. R = sin(𝜃)
4. R = (1/2) + cos𝜃
5. R = 6 sin 𝜃
La voluntad necesita ser más fuerte que la habilidad.
Muhammad Alí

126
“Debe haber un mundo ideal, una especie de paraíso matemático donde todo sucede como en los libros de texto”. Bertrand Russell (1872-1970) Matemático y filósofo galés
Sophie Germain:Nació en Paris 1776. Se entusiasmo por las matemáticas a partir de los 13 años, por su inquietud de saber cómo murió Arquímedes. A los 18 años quiso ingresar a L’Ecole Polytechnique, pero no admitían mujeres, por lo que sus amigos le pasaban los apuntes y así se iba puliendo hasta que pudo vestirse y presentarse con el nombre de Mesie Leblanc alumno del instituto que se había ido, así presentó sus apuntes e investigaciones en el mundo de la ciencia. LaGrange uno de los profesores y matemáticosmás destacado de la época sintió admiración por su estudiante al saber que era una mujer , quiso conocerlo y decidió darle clase particular. Luego estableció comunicación con Gauss y para 1801 presentó el tema la teoría de números, después trabajo en física, matemática, acústica, elasticidad.Gauss se dio cuenta que su amigo Mesie Leblanc era una mujer cuando la invasión de Alemania por parte de Napoleón esta intercedió ante el emperador para defenderlo de la guillotina. Le iban a otorgar el título de doctora honor y causa por sus aportes a la ciencia, pero murió un mes antes.Paris 1831
El Agua en exceso Las dietas en base a agua son muy delicadas y peligrosas. No se debe consumir agua en exceso, pues se conoce que existe un tipo de intoxicación por agua. El exceso de agua en el organismo ocasiona que los minerales como el potasio, sodio y magnesio se diluyan rápidamente en el torrente sanguíneo, ocasionando cansancio, calambres y pérdida de agilidad mental. El consumo de agua diario depende del gasto de esta misma por el organismo y diversos factores como el clima, la humedad, altitud, edad, constitución física, edad y actividad diaria. La necesidad de agua es individual para cada organismo. Según investiga se debe consumir un estimado de 8 vasos diario, y después de la 5 pm no se debe consumir mucho liquido pues no nos deja dormir ni descansar correctamente.
Estudios Matemáticos Argentera

127
SOLIDOS DE REVOLUCION
Cuerpos redondos:Son aquellos que no están limitados por polígonos, es
decir, por figuras planas.
Los sólidos de revolución: Se engendran al hacer girar una figura plana sobre un eje.Entre estos encontramos:
El cilindro Es el cuerpo geométrico engendrado por un rectángulo al girar en torno a
uno de sus lados.
Sus partes: Eje: Es el ladofijo alrededor del cual gira
elrectángulo. Altura: Es la distancia entre las dos bases.
Generatriz: Es el lado opuesto al eje de giro que engendra el cilindro. Es igual a laaltura.
T
L
2
T
L
rea lateral del cilindro
rea total del cilindro
A A 2B
Volumen de un cilindro V B.h
Donde :
A 2 .r.h
A
B rea de la bas
2 .r. h
e
r
r
Á
Á
á
2. V hy r Ejemplos: Hallar el área total de un cilindro circular
Cuyo diámetro es 10 cm. Y altura 20 cm.
𝐴 = 2 ( + )
= 2(3.14)(5 )(20 + 25 ) = 85.40 2
𝑉 = 2.
= (3.14)(5 )2(20 ) = 15 0 2
2
2
8 v = r . h
24 v = 3.14 4 . 24
4 v = 3.14 16 24
3.14 v = 3.14 384
?
el volumen de un cilindro, cuyo diametro mide 8m si su altura es de
24m.
D m
h m
Calcule
r cm
v
3v =1205. 76m

128
CONO
El cono se obtiene al girar un triángulo rectángulo alrededor de uno de sus catetos.
Base: Es el círculo que forma el otro cateto.
Altura: Es la distancia del vértice a la base.
Generatriz: Es la hipotenusa del triángulo rectángulo.
2 2
2
:
rea lateral :
Area total: A ( )
:3
l
t
Generatriz g r h
Á A rg
r g r
r hVolumen V
2
2
3
.v =? v =
3
3.14 3 . 10 3.14 9 10r =3cm v =
3 3
3.14 90 282.6h =10cm 94.
el volumen de un cono de 3cm de radio y 10 de altura.
Datos
3
:
4.23
92
H
r
allar
v cm
h
x
x

129
ESFERA
La esfera es un sólido de revolución que se obtiene al girar un semicírculo alrededor de su diámetro.
Cuerda: Segmento que une dos puntos de la esfera.
Diámetro: Cuerda que divide la esfera en dos partes iguales.
Polos: Son los puntos del eje de giro que quedan sobre la superficie esférica.
2 334 ; V r
4S r
33
4
4 3.14 24?
: Determine el volumen de una esfera cuyo diámetro mide 4cm.
Datos :
43.4
3 3
12.56 8 100.48 33.
493
3
9
d cm
rv v
Ejemplos
v cm
v

130
1) el volumen de un cono de 5cm de radio y 12 de altura.
2) El radio y la altura de un cono miden 7 y 14 cm respectivamente,
Calcular su volumen.
3)
ACTIVIDADES
Hallar
La generatriz y el radio de un cono miden 16 y 6 cm respectivamente,
Calcule el volumen del cono.
4) Calcula el volumen de un cilindro, cuyo diametro mide 8m si su
altura es de 24m.
5) El area d 2e las bases de un cilindro mide 12cm ; Calcula el volumen
del cilindro sabiendo que la generatriz del mismo es igual a 10cm.
6) Halle el volumen de un cilindro de 8cm de altura si el radio
es igual
a 10cm.
7) Calcule el volumen de una esfera cuyo radio mide 5cm.
8) El diametro de una esfera es igual al duplo del valor de -3;
Determine su volumen.
9) La generatriz de un cono mide 5cm. Calcule el v
olumen del mismo
sabiendo que mide 3cm.

131
Estudios Matemáticos Argentera
“El hombre está dispuesto siempre a negar todo
aquello que no comprende”. Blaise Pascal (1623-1662)
Matemático, físico, filósofo y escritor francés.
María Gaetana Agnesi: Nació en Milán en 1718.
Lingüista, matemática y filósofa. Dominaba más de 7 idiomas, en la universidad sustituía a su padre por eso fue la primera mujer en ocupar una cátedra de matemáticas. En 1748, se publicó su libro "InstituzioniAnalithe" sobre cálculo diferencial, que fue muy popular; se tradujo a muchos idiomas y se usó en Europa durante muchos años. Le decían La Bruja de Agnesi por error en la traducción de curva de agnesi, Murió también en Milán en 1799.
Paradoja de albertainstein. Albert Einstein recorría América explicando su teoría de la relatividad. Siempre le acompañaba su chófer, que se sentaba al fondo de la sala, mientras Einstein daba su conferencia. De tanto oír las tesis del maestro llegó a aprenderlas de memoria. "No entiendo a los americanos -comentó en una ocasión el chófer- ¿Cómo es posible que le concedan tanta importancia a algo tan sencillo?" Einstein quiso darle una lección y le respondió: "La próxima vez darás tú la conferencia." Y así fue. El chofer expuso magníficamente la teoría, mientras Einstein le escuchaba desde un rincón. Después de los aplausos, llega el turno de preguntas y la primera es la siguiente: “¿Podría decirme la relación entre el Big-Bang y la teoría de la relatividad?" El supuesto Einstein respondió: "Mire, eso es tan sencillo que incluso mi chófer, que se encuentra sentado en el fondo de la sala, puede contestarla," lógicamente, el falso chófer respondió a la perfección.

132
Razonamiento matemático
Razonamiento: Es el arte de pensar lógicamente. A través de él podemos dar respuestas a diferentes conjeturas del conocimiento y del saber científico y general. El razonamiento es una facultad únicamente humana, los demás animales actúan por instintos.
Tipos de razonamientos:
Razonamiento Argumentativo: Justifica las acciones humanas como verdad o como acciones razonables.
Razonamiento lógico: Es aquel que partiendo de ciertas primicias o juicios en muchos casos
aceptados como verdaderos llegamos a conclusiones asumidas como buenas y válidas. Puede
ser deductivo e inductivo.
Razonamiento no lógico: Se basa en el contexto en la experiencia. ¡Lógicamente!... es una
expresión muy usada dentro del contexto coloquial, el individuo que la usa, está asumiendo
juicios como verdaderos y secuenciales que lleva a una verdad que se debe asumir tan
evidente por ser tan fácil de ver o pensar.
Los razonamientos Lógicospueden ser deductivos e inductivos
a) Razonamiento deductivo: Es aquel que va desde lo general a lo particular.
P1: Todos los felinos son carnívoros. P2: El gato es un felino. C: El gato es carnívoro.
b) Razonamiento inductivo:
Es aquel que partiendo de proposiciones particulares llega a una proposición general, este
tipo de razonamiento expresa una verdad relativa.
P1: Las mujeres sanjuaneras son hermosas. P2: Las mujeres azuana son hermosas. P3: Las mujeres seibanas son hermosas. P4: Las mujeres de Bonao son hermosas. P5: Las mujeres santiagueras son hermosas C: Las mujeres dominicanas son hermosas

133
Lógica matemática
La lógica: Es la rama de la matemática que estudia el razonamiento del pensamiento humano.
Enunciado: Es todo aquello que decimos tenga o no, sentido. Es una ciencia formal y una rama
de la filosofía que estudia los principios de la demostración e inferencia validas. Esta examina la
valides de los argumentos en función de su estructura. Rige las leyes del proceso del
pensamiento humano.
Desde sus orígenes la han vinculado como rama de la filosofía, hasta que en el siglo XIX hacen
una vinculación de esta hacia el mundo de las matemáticas, dándole el nombre de lógica
matemática o formal la cual es pura ciencia.
Historia:
Aristóteles es considerado como el padre de la lógica, es uno de los más grandes filósofos de la
antigüedad. En su obra ORGANON la cual es un tratado de lógica donde se enfoca el raciocinio
y estructura del pensamiento.
A partir de la segunda mitad del siglo XIX, la lógica sería revolucionada profundamente. En
1847, George Boole publicó un breve tratado titulado El análisis matemático de la lógica, y en
1854 otro más importante titulado Las leyes del pensamiento. La idea de Boole fue construir a
la lógica como un cálculo donde sus valores de verdad se representan mediante el 0 (falsedad)
y el 1 (verdad).
Al mismo tiempo, Augusto de Demorganpublica en 1847 su obra Lógica formal, donde
introduce las leyes de Demorgan. También es bueno mencionar a John Vennquien en 1881
publicó su libro Lógica Simbólica, donde introdujo los famosos diagramas de Venn.
La verdadera revolución de la lógica vino de la mano de GottlobFrege, quien frecuentemente es
considerado como el lógico más importante de la historia, junto con Aristóteles. En el caso de
Freege su lógica escrita en un lenguaje formal fue la base para el desarrollo de Las ciencia de la
computación.
En 1910, Bertrand Russell y Alfred North Whiteheadpublican Principio matemáticoun trabajo
monumental en el que logran gran parte de la matemática a partir de la lógica.

134
La lógica: Es la rama de la matemática que estudia el razonamiento del pensamiento humano.
Enunciado: Es todo aquello que decimos tenga o no, sentido
Ejemplo: ¡llueve!, ¡llueve! ¡llueve!
Proposición: Es un enunciado que puede ser o verdadero o falso Ejemplo 1: 5+6=10
Ejemplo 2: Duarte es el padre de la patria dominicana.
Valor de verdad: Es la veracidad o falsedad de una proposición. Ejemplos: Escribir el valor de verdad
3+8=11:______________________________________.
Cristóbal Colon descubrió América:____________.
Te amo: ______________________________________.
Clasificaciones de las proposiciones
a) La proposición simple:Es aquella que tiene un solo enunciado Ejemplo: 2+1=3
b) Proposición compuesta: Es aquella que tienes más de un enunciado y se unen mediante conectivo.
Ejemplo: El sol sale para todos y amo a mi hermana
Conectiva:Símbolo lógico que se usa para unir proposiciones.
TABLA SÍMBOLO
LENGUAJE
COLOQUIAL
Conjunción ٨ y
disyunción inclusiva ٧ o
condicional o implicación → Si entonces
bi. condicional o doble
implicación ↔ Si…solo si,,
Negación no

135
Lenguaje coloquial y lenguaje simbólico o matemático
Si tenemos que:
p: En Plutón no hay vida
q: 3+6=9
r : La vida es hermosa.
1) Traducir del lenguaje simbólico al lenguaje coloquial.
a) p ^ q: En Plutón no hay vida y 3+6=9.
b) (q v r): Si 3+6=9 o la vida es hermosa entonces en Plutón hay vida.
2) traducir del lenguaje coloquial al lenguaje simbólico.
a) Si la vida no es hermosa entonces en Plutón no hay vida. ( r → p)
b) 3+6=9 si solo si la vida es hermosa q ↔ r.
Tabla de verdad:
Es la representación grafica de la proposiciones, en ella podremos ver las combinaciones que
se pueden hacer con los valores de verdad.
El número de filas depende del número de proposiciones simples que la compone.
P, q → 2 proposiciones
P, q, r →3 proposiciones La base es siempre 2
P, q → 2 proposiciones
Las proposiciones compuestas son: La conjunción, la disyunción, la implicación y la doble
implicación.
a) Conjunción:
Es una proposición compuesta que establece que solo será verdaderas cundo ambas
proposiciones simple que formen sean verdadera. Se representa por la conectiva y (^) .

136
En los códigos computacionales la Verdad (v) se representa como 1; y la falsedad (f) se
representa como (o). Siempre debemos partir de la verdad.
Ejemplo: Buscar la verdad p ^ q. Por lo que 22 2 4n Filas, 2 verdaderas y dos falsas.
B) Disyunción: Hay dos tipos las cuales son: inclusiva y exclusiva.
1) Disyunción inclusiva: Es una proposición compuesta que establece que solo será falsa cuando ambas proposiciones simples que la formen sean falsa. Se representa por la conectiva. “0 “(v).
Ejemplo: Grafica (p v q)
2) Disyunción exclusiva: Establece que solo es verdadera cuando ambas proposiciones simples
que la formen tengan diferentes valores de verdad.Se representa por o…o, .
p q P^ q
1 1 1
1 0 0
0 1 0
0 0 0
p q P v q
1 1 1
1 0 1
0 1 1
0 0 0

137
Ejemplo: Graficar p v q
c) Negación : Es una proposición simple que expresa lo contrario se representa Por “no” ( ).
p q p v q
1 1 1
1 0 1
0 1 1
0 0 0
P p
1 0
0 1

138
d) Implicación o incondicional:Expresa condiciones, establece que solo es
falsa cuando el antecedente sea verdadero y el consecuente falso. Se representa
Por “si entonces “(→). Ejemplo: Graficar la proposiciones (p → q).
e) Doble implicación o Bi-condicional: Establece que solo es verdadera cuando ambas
proposiciones que la formen tengan igual valor
de verdad. Se representa por “si… solo si “ ( ↔ ).
Ejemplo: Graficar ( p ↔ q )
p q P → q
1 1 1
1 0 0
0 1 1
0 0 1
P q P ↔ q
1 1 1
1 0 0
0 1 0
0 0 1

139
Ejemplo general: Represente gráficamente la siguiente proposición (p ^ q) → r
Obtenga una conclusión, sabiendo que:
p: El sol sale para todo, q: Eres mi amo, r: 3+2=5.
P q r (p ^ q) r (p^ )q) → r
1 1 1 1 0 0
1 1 0 1 1 1
1 0 1 0 0 1
1 0 0 0 1 1
0 1 1 0 0 1
0 1 0 0 1 1
0 0 1 0 0 1
0 0 0 0 1 1
f) Tautología. Es cuando lo valores de verdad resultantes son siempre verdaderos.
Ejemplo: Analicemos la tabla [(p → q) ^ p] → q
P q P → q [( p → q)^p] [ ( p → q ) ^ p] → q
1 1 1 1 V
1 0 0 0 V
0 1 1 1 V
0 0 1 0 V

140
g) Contradicción:
Es cuando los valores de verdad resultantes son siempre falsos.
Representa gráficamente (P ^ p)
p p P ^ p
1 0 0
0 F 0
h) Contingencia: Es cuando los valores de verdad resultantes son verdaderos y falsos.
(p → r) → q
p q R (p → r) (q → r) →q
1 1 1 1 1
1 1 0 0 1
1 0 1 1 1
1 0 0 0 1
0 1 1 0 1
0 1 0 1 0
0 0 1 0 1
0 0 0 1 0

141
i) Falace. Es cuando lo valores de verdad resultantes son siempre falsos.
Ejemplo: Analicemos la tabla [(p → q) ^ p] → q
p q P → q [( p → q)^p] [ ( p → q ) ^ p] → q [ ( p → q ) ^ p] → q
1 1 1 1 V f
1 0 0 0 V f
0 1 1 1 V f
0 0 1 0 V f
Dios nos ayude a ser sincerosen lo más íntimo de nuestras almas
y a saber decir la verdad sin temory sin herir innecesariamentela suceptibilidad de los demás.
Autor pendiente

142
1. Escribe 5 proposiciones simples.
2. Escribe 5 proposiciones compuesta.
3. Defina lo que es una proposicion.
4. Exponga brevemente sobre la importancia de la lógica.
.
5
Actividades
Defina razonamiento y cada una de su clasificación.
6. Establezca la diferencia entre Tautología, contingencia,
y falacia.
II. Dado:
p: 7-2=3
q: Duarte es el padre de la patri dominicana.
r: El oro es un
metal.
Traducir al lenguaje coloquial y representela graficamente.
1) p r
2)( )
3)
4)( ( ) )
5) ( )
pvq r
p r q
pv pvq r r
pv q

143
Bibliografía
http://www.sectormatematica.cl/contenidos.htm
http://es.wikipedia.org/wiki/Razonamiento
La lógica http://es.wikipedia.org/wiki/L%C3%B3gica
La lógica http://www.liceodigital.com/filosofia/logica.htm
Padre de la lógica http://es.answers.yahoo.com/question/index?qid
Biografía de María Gaetana
Agnesihttp://www.um.es/docencia/pherrero/mathis/mujeres/mujer.htm
http://www.google.com.do/imgres?imgurl=http://3.bp.blogspot.com/-c-xd6-
lmyCw/TVfhIhL3BuI
Imagen de presentación de los dados fue tomada de la página
http://www.google.com.do/imgres?imgurl=http://1.bp.blogspot.com/_i-NXzP_-
sac/TM2RgJ_dm-I/AAAAAAAACbY/xiza4sBDFLI/s1600/
Imagen de la logica.jpg&imgrefurl=http://lalocura
decadadia.blogspot.com/2010/10/logico-fallecimiento.html&usg

144
Estudios Matemáticos Argentera
Las matemáticas no mienten, lo que hay
son muchos matemáticos mentirosos.
Henry David Thoreau.
Módulo 15:
Teoría y operaciones
De Conjuntos.
George Cantor: Nació el 3 de marzo de 1845. Matemático alemán, fue uno de los inventores de la teoría de conjuntos, base de la matemática moderna. Demostró que no siempre el todo es mayor que una de sus partes. Formulo la teoría de los conjuntos infinitos. Falleció en Alemania el 6 de enero del 1918, a los 73 años de edad bajo una enfermedad maniaco-depresiva. Murió sin poder demostrar la teoría del continuo.
C U B I S M O Fue un movimiento artístico donde se empezó a usar en diferente estilo del arte las figuras geométricas. Tuvo como exponentes a Picaso y a Braque. Paris fue uno de los países que comenzó con esta abstracción geométrica, luego Rusia y Holanda. Se unió el misticismo de malevich y el constructivismo de Tatling quienes después dieron paso a que sus seguidores hicieran excelsas obras tridimensionales. La abstracción Geométrica ha tendido a soñar con un entorno utópico para el hombre moderno creado a la imagen de su arte. Este tipo de arte influencio la arquitectura, diseño de interiores, muebles y tipografía Luego llego a Francia donde tuvo excelentes exponentes que hacían obras relacionadas directamente con modelos matemáticos. Finalmente este estilo de crear obras a través de figuras geométricas es un arte que viene de décadas en décadas y todavía hoy en día lo usamos, todo queda a gusto de cada pintor o matemático, pues la matemática están en todo, en el arte, la ciencia, la música y en nuestro diario vivir.

145
TEORIA Y OPERACIONES CONJUNTISTAS.
Historia e Importancia de los conjuntos
La teoría de conjuntos cambio siglos de conocimientos. Sus inicio se
remonta al siglo XIX a cargo del matemático George Cantor , quien
sentó las bases para el desarrollo de la teoría de conjuntos moderna.
Con ésta se inició una revolución en las matemáticas, pues motivó
una profunda revisión de la idea de número; principalmente en lo que
tiene que ver con un concepto abstracto como el del infinito. La teoría
de conjunto desempeña un papel muy importante dentro de las artes.
Conjunto: Es una colección de elementos con cualidades comunes.
Se representan con letras mayúscula. Sus elementos se encierran
entre llaves y en minúsculas.
Ejemplos:
1) , ,9D a b
2) M = Los calderos de la cocina
3) N = Los carros de Santo Domingo Norte.
Pertenencia (): Es cuando un elemento pertenece a un conjunto.
A:{2,3,♥} ; 2A; 3A; 5A.
Diagrama de Euler-Venn: Se utiliza para representar gráficamente
los conjuntos. Esta formados por curvas que encierran a los elementos
de un conjunto. La letra mayúscula que lo nombra se coloca afuera de
la curva.

146
Conjunto extensión y comprensión:
Son las distintas formas de expresar los conjuntos
•Conjunto extensión: un conjunto esta expresado por extensión
cuando los elementos se nombran uno a uno. A= {a,e,i,o,u}
•Conjunto por comprensión: Es cuando los elementos de un conjunto
se nombran todos bajo una frase general. A={x/x es una vocal}.
Ejemplos: Diga cuales de los siguientes conjuntos esta expresado por
comprensión y cuales por extensión.
a,b,c,d,e
es un grano de arena de la playa
es mes del año
Lunes, martes, miercoles, jueves, viernes, sabado, domingo
A
xBx
xCx
D
Conjuntos finitos e infinitos
Conjuntos finito: intuitivamente es cuando podemos contar sus
elementos. En Análisis matemático un conjunto será finito cuando
pueda ponerse en biyección con un subconjunto de N.
Conjunto infinito: Es cuando no pueda ponerse en biyección con
ningún
n N .

147
U
A
Ejemplo: Diga el cardinal de cada conjunto
a,b,c,d,eA ____________________________
E=
_______________
Subconjunto () y superconjunto ( ).
Un conjunto A es subconjunto () de B si todos los elementos de A
están contenidos en B, ; A B. por lo tanto Si A es subconjunto de B
entonces B es s superconjunto ( ) de A.
A={3,5,7,} ; B={1,3,5,7,8,9}
si A B B A
B
Conjuntos especiales:
a) El conjunto vacío: ( ): Es aquel que carece de elementos.
b) El conjunto universal ( U): Es el que reúne todos los
elementos.
El único conjunto que se representa gráficamente de un modo distinto
es el universal U, pues para él se utiliza un rectángulo y su nombre se
coloca en el interior, generalmente en el ángulo superior izquierdo.
Lunes, martes, miercoles, jueves, viernes, sabado, domingoD

148
La Inclusión
Un conjunto A está incluido en otro conjunto B si, y sólo si, todos los
elementos de A lo son también de B.
BxAxBA
Propiedades de la inclusión:
1º) Propiedad Reflexiva: todo conjunto está incluido en sí mismo.
AAA :
2º) Propiedad Transitiva: CACBBA
3º) El conjunto vacío está incluido en cualquier conjunto. AA :
4º) Todo conjunto está incluido en el Universal UAA :
Conjuntos iguales: Se dice que dos conjuntos serán iguales cuando
tengan los mismos elementos, pero matemáticamente lo definiríamos
como ABBABA
Propiedades de la igualdad de conjuntos:
1º) Propiedad Reflexiva: AAA :
2º) Propiedad Simétrica ABBA
3º) Propiedad Transitiva: CACBBA

149
1
2
3
a
b
c
1
2
3
a
b
c
Conjuntos disjuntos: Es cuando dos conjuntos no tienen elementos
comunes.
A B
A y B son disjuntos
Conjuntos Equipotentes: Es cuando dos conjuntos tienen la misma
cantidad de elementos.
A B
A y B son equipotentes
Conjunto Universal (U): Es aquel que contiene todos los elementos
en su totalidad.
Conjunto Potencia: Es el formado por todos los subconjuntos de un
conjunto dado. En este también se incluye el conjunto vacio y el mismo
conjunto. Las cantidades de subconjuntos se obtienen con 2n , donde n
es la cantidad de elementos.
Ejemplo1: Hacer el conjunto potencia de , ,A a b c .
( ) ; , ; , , ; , ; ;P A a b c a b a c b c A
Ejemplo 2: Dado 2,3B hacer el conjunto potencia.
( ) 2 ; 3 ; ;P B B

150
OPERACIONES CONJUNTISTA
Al igual que hay un algebra aritmética, un algebra abstracta, una
algebra de grafo, pués también hay un algebra conjuntista que es la
que se encarga de las operaciones que podemos hacer entre dos o más
conjuntos tales como; Unión, intersección, diferencia relativa, diferencia
aritmética, complemento, tanto en forma analítica como gráfica.
A continuación se hace el desarrollo de las diferentes operaciones y
gráficas.
a) Unión conjuntista: Es aquella que está formada por los elementos
de dos o más conjuntos sin que hayan elementos repetidos. Se
representa por ( ), su definición es /X Y x x X x Y
Ejemplo 1. Dados A= {1,3,4,5,6}; B={2,4,6,8,10}
Hallar A∪B: AUB={1,2,3,4,5,6,8,10}
Ejemplo 2: Dado 1,3,4,6,7,8 ; 2,4,5,6,9X Y Hallar el conjunto unión.
1,2,3,4,6,8,9X Y

151
Propiedades:
1º) Propiedad de Idempotencia: X X X
2º) Propiedad Conmutativa: X Y Y X
3º) Propiedad Asociativa: X Y Z X Y Z
b) Conjunto Intersección: Es aquel que está formado por los
elementos comunes de dos o más conjuntos. Se representa por ( ),
su definición dice que /X Y x x X x Y
Ejemplo: A={1,3,4,5,6}; B={2,4,6,8,10}
AB= {4,6}
Gráficamente:

152
Propiedades:
1) Propiedad de Idempotencia: X X X
2) Propiedad Conmutativa: X Y Y X
3) Propiedad Asociativa: X Y Z X Y Z
c) Conjunto diferencia relativa: Es aquel que está formado por los
elementos que pertenecen al primer conjunto pero no al segundo. Se
representa .
Ejemplo: Dado A={1,3,4,5,6} ; B={2,4,6,8,10}
A-B= {1, 3,5}
U A B
A
Debemos saber que la diferencia relativa de conjuntos no es
conmutativa
A-B B-A

153
Conjunto diferencia simétrica (∆): Esta formada por los elementos
de ambos conjuntos, excepto los de la intersección.
Ejemplo : Dado A={1,3,4,5,6} ; B= {2,4,6,8,10}, Hallar 1,2,3,5,10A B .
d) Conjunto complemento: Es aquel que está formado por los
elementos que le faltan a A para ser igual a U, es decir que
matemáticamente ' / ^A U A . se representa por ' cA o A .
Dado: U 1,2,3,4,5,6,7,8,9,10 y A 1,3,4,5,6 ;B 2,4,6,8,10 Hallar el
complemento de los conjuntos dados.
En forma gráfica:

154
Ejercicios resueltos de operaciones conjuntista.
U= {1,2,3,4,5,6,7,8,9} A={2,3,4,5,9} ; B={3,5,7,8} D={1,4,5,6,7}
Realizar:
1) (AUB)
Solución: {2, 3, 4, 5, 6, 7, 8 ,9}
2) (A∩D)
Solución = {2, 3, 8, 9}
2) (B∩D) Δ cA =
B∩D= {5,7} cA = {1, 6, 7, 8}
(B∩D) Δ cA = {1, 5, 6, 8}
A
B U
D
Leyes de algebra de conjunto
Leyes de idempotencia:
1ª) AUA=A 1b) A∩A=A
Leyes asociativas
2ª) (AUB) UC= AU (BUC) 2b) (A∩B) ∩C= A∩ (B∩C)
Leyes conmutativas
3ª) AUB =BUA 3b) A∩B=B∩A
Leyes distributivas
4a) AU (B∩C)=(AUB) ∩(AUC) 4b) A ∩ (BUC)=(A∩B) U (A∩C)
Leyes de identidad
5ª) AUØ=A 5b) A∩U=A

155
6ª) A∪U =U 6b) A∩Ø=Ø
Leyes del complemento
7ª) AU cA =U 7b) A∩A cA =Ø
8ª) ( )c cA A 8b) cU =Ø; UcØ
Leyes de Morgan
9ª) AUB A Bc c c 9b) A B A B
c c c
Verificación de las leyes de De-morgan
1) AUB A Bc c c
Si U 1,2,3,4,5,6,7,8
A 2,4,5,6,7 y B 1,2,5,7
(A ) 1,2,4,5,6,7
A {1,3,8}
(A ) 3,8
A B 3, B 3,4,6,8
8c c
c
c c
tenemos que
B
y
B
2) A B A Bc c c
Si U 1,2,3,4,5,6,7,8
A 2,4,5,6,7 y B 1,2,5,7
(A ) 2,5,7
A {1,3,8}
B 3,4,6
(A ) 1,3,4,6,8
A B 1,3,4,6,8
,8
c
c c
c c
tene
B
mos que
B
y
Cada día que vivimos puede ser un milagro...
La magia esta en creer, que hay algo más allá
de lo que vemos, sentimos y hacemos.
Luchar por mantener siempre,
la esperanza y el amor. Extraido de la película premonición

156
Bibliografía
Seymour lipschutz, ph.D. (1970). Teoría y problemas de conjuntos y temas afines Editor
McGraw-Hill México.
Morel Roberto, Ventura Eduardo (2008); Matemática Superior I. Santo Domingo Rep. Dom:
Universidad Católica de santo Domingo.
Santillana I. serie umbral, (educación media).
(2001), 1ra ediccion, Rep.Dom: Editora Santillana
Peña Geraldino, Fafael. Matemática Básica Superior, (2005), 4ta edición, Republica
Dominicana. Editorial Antillanas.
Un Picasso geométrico. albaderamon.wordpress.com
Sobel Max; Lerner Norbert, (2006). Precálculo. 6ta edición, México: editora Pearson
Educación.
Baldor Aurelio, (1994). Algebra. Undécima edición, México: editora Codice América, S.A.
Santillana I. serie umbral, (educación media).
(2001), 1ra edición, Rep.Dom: Editora Santillana
Demana; Waits; Foley; Kennedy y Blitzer. Matemáticas universitarias introductorias con
nivelador mathlab. (2009), 1ra edición, México: Editora Pearson Educación. 448 pág.
Peña Geraldino, Rafael. Matemática Básica Superior, (2005), 4ta edición, Republica
Dominicana. Editorial Antillanas.
Ecuaciones lineales y cuadráticas http://www.vitutor.com/ecuaciones
Los siete puentes de konigsbers en http://www.aulademate.com
Los siete puentes de konigsberghsber http://es.wikipedia.org/wiki/Problema_de_los_puente
Biografía de Eulers: http://es.wikipedia.org/wikileonar-euler
Imagen de Eulers; http://www.biografiasyvidas.com/biografia,euler
Imagen de la gaviota: Autor y fuente desconocida (Pendiente)

157
Vida de Jonh Nash http://es.wikipedia.org/wiki/John_Forbes_Nash
Matematica 3 Santillana (2001)
Alex Vido http://es.answers.yahoo.com/question/index?qid=20081208055546AAFDubM
Morel Roberto, Ventura Eduardo (2008); Matemática Superior I. Santo Domingo Rep. Dom:
Universidad Católica de santo Domingo.
Sobel Max; Lerner Norbert, (2006). Precálculo. 6ta edición, México: editora Pearson
Educación.
Baldor Aurelio, (1994). Algebra. Undécima edición, México: editora Codice América, S.A.
Ecuaciones lineales y cuadráticas http://www.vitutor.com/ecuaciones
Los siete puentes de konigsbers en http://www.aulademate.com
Los siete puentes de konigsberghsber http://es.wikipedia.org/wiki/Problema_de_los_puente
Biografía de Eulers: http://es.wikipedia.org/wikileonar-euler
Imagen de Eulers; http://www.biografiasyvidas.com/biografia,euler
Imagen de la gaviota: Autor y fuente desconocida (Pendiente)
Nota: Muchos de los ejercicios de este modulo fueron propuestas hecha por los estudiantes del
fondo 12 del instituto.
Sobel Max; Lerner Norbert, (2006). Precálculo. 6ta edición, México: editora Pearson
Educación.
Baldor Aurelio, (1994). Algebra. Undécima edición, México: editora Codice América, S.A.
Historia de las matrices http://es.wikipedia.org/wiki/Matriz_28matem
Biografia de Cramer en http://www.biografiasyvidas.com
Seminario sobre tecnología de matrices, fundación ASCAMM
Frases de motivación http://www.elmulticine.com/frases

158
Peña Geraldino, Rafael. Matemática Básica Superior, (2005), 4ta edición, República
Dominicana. Editorial Antillanas.
Ecuaciones lineales y cuadráticas http://www.vitutor.com/ecuaciones
Historia de las matrices http://es.wikipedia.org/wiki/Matriz_28matem
http://es.wikipedia.org/wiki/Camille_Jordan
http://www.vitutor.com/al/log/se_e.html para el cuaderno de trabajo.
Sistema de ecuaciones logarítmicas en http://www.vitutor.net
Prof. Miguel Ángel jurado (2006). Trigonometría de 4to año (colegio canonesas de la cruz).
México
Solucionario trigonometría Baldor. Algunos pdf. (Ejercicios sobre las funciones
trigonométricas).
Teorema de Pitágoras su aplicación. Discovering Geometry Condensed Lessons in Spanish,
©2004 Key Curriculum Press, 128 CHAPTER 9 7Revista de trigonometria de Joao Batista.
Argentina
Teorema de Pitágoras. Discovering Geometry Condensed Lessons in Spanish, ©2004 Key
Curriculum Press, CHAPTER 9 123©2004
Jorge José Osés Recio. 2004. Folleto sobre Trigonometría. Departamento de Ciencias Básicas
Centro de Matemáticas Ing. Ofelio González Serrano. Departamento de Matemáticas -
Universidad de los Andes – Bogotá – Colombia
Identidades trigonométricas por http://www.fisicanet.com.ar
ALPHA (imagen de trigonometría) by jim vamer, http:,//www.jlm3d.com
Historia de la trigonometría http://html.rincondelvago.com
Historia de la trigonometría http://www.enfatic,net
Hiparco_de_Nicea http://es.wikipedia.org/wiki

159
Ditutor.com. (n.d.). Retrieved from ditutor.com: http://ditutor.com/numeros
complejos/operacionescomplejos.html
Encarta Microsoft Corporation. (2007). Numeros Complejos.
Geraldino, R. P. (1999). Matematicas 4to. Segundo Ciclo Nivel medio. Santo Domingo:
Santillana.
Murillo, P. J. (2010). Coordenadas Polares. 3-5.
Slideshare. (2006). Retrieved Marzo 30, 2010, from Slideshare.net:
http://slideshare.net/darkapalmira/nmenor-complejos-1906395
Thdes.cica.es. (2005, Abril 23). Retrieved Marzo 30, 2010, from Thdes.cica.es/recursos
matematicos: http://www.thdes.cica.es/recursos matematicos
Wikipedia. (n.d.). Wikipedia. Retrieved marzo 27, 2011, from
http://es.wikipedia.org/wiki/Coordenadas_polares
“Forma trigonométrica de números complejos” en: http://www.luiszegarra.cl/algebra/cap8.pdf
“Forma trigonométrica de números complejos” en: www.Wikipedia.com
“Forma trigonométrica de números complejos” en:
http://www.unizar.es/aragon_tres/unidad4/u4comte40.pdf
“Módulo de números complejos” en : http://es.wikipedia.org/wiki/N%C3%BAmero_complejo
“Módulo de números complejos” en:
http://wmatem.eis.uva.es/~matpag/CONTENIDOS/Complejos/complejos.htm#Forma%20polar
“Modulo de Números complejos” en:
http://www.fisicanet.com.ar/matematica/numeros_complejos/ap04_numeros_complejos.php
“Números complejos” en: www.wikipedia.com
“Números complejos” en: www.ditutor.com
“Teorema de Moivre” en: http://es.wikipedia.org/wiki/Teorema_de_De_Moivre-Laplace
“Teorema de Moivre” en:
http://www.mathematicsdictionary.com/spanish/vmd/full/d/demoivrestheorem.htm

160
“Teorema de Moivre” en: http://www.ditutor.com/distribucion_normal/teorema_moivre.html
Frase de Albert Einstein http://www.proverbia.net/citasautor.asp?autor=
es.wikipedia.org/wiki/Albert Einstein
Murillo, P. J. (2010). Coordenadas Polares. 3-5.
Wikipedia. (s.f.). Wikipedia. Recuperado el 27 de marzo de 2011,
dehttp://es.wikipedia.org/wiki/Coordenadas_polares
-"Que son coordenadas polares " en: http://es.wikipedia.org/wiki/Coordenadas_polares
-"Relación entre coordenadas polares y rectangulares" en:
http://licmoralesvidea.files.wordpress.com/2008/11/coordenadas-polares.pdf-
"Concepto de coordenadas polares" en:
http://www.mitecnologico.com/Main/CoordenadasPolares
-"Conversiones" en:
http://es.wikipedia.org/wiki/Coordenadas_polares#Conversi.C3.B3n_de_coordenadas
-"Coordenadas polares" en: www.itescam.edu.mx/principal/sylabus/fpdb/.../r39280.DOC
Roland E. Hostetler Robert P. Cálculo Tomo II Editorial: Grupo Editorial Iberoamericano
Swokowski Earl W. Cálculo con Geometría Analítica. Grupo Editorial Iberoamericano
http://es.wikipedia.org/wiki/Multimedia
Biografía de Sofía Kavalevskaya http://eliatron.blogspot.com/2008/09/breves-reseas-de-
matemticos-sofia-sonia.html
http://www.google.com.do/imgres?imgurl=http://www.tristarmedia.com/bestofrussia/images/kov
alevskaya3.jpg&imgrefurl=h
http://eliatron.blogspot.com/2008/09/breves-reseas-de-matemticos-sofia-
sonia.htmlwikipedia.org/wiki/Aeronavettp://www.tristarmedia.com/b
“El cono” en: http://es.wikipedia.org/wiki/Cono
“El cilindro” en: http://enciclopedia.us.es/index.php/Cilindro
“La esfera” en: http://es.wikipedia.org/wiki/Esfera
http://www.matematicaparatodos.com/SEXTO/6_09aplicaciones.pdf
http://www.um.es/docencia/pherrero/mathis/indice.htm

161
Ejercicios de cilindro en http://www.vitutor.net/2/2/8.html
El agua en exceso es mala. Alimentación sana en http://www.alimentacion-
sana.com.ar/Portal%20nuevo/actualizaciones/aguaexceso.htm
Revisado el 3 de septiembre del 2013
Prof. Wilton Oltmanns