Embed Size (px)
Citation preview

Norm Bir vektörün, bir matrisin, bir sinyalin veya
bir sistemin
ya sahip olmak avantajdır ve değerlendirme
yapmak icin kullanılabil
toplam büyük
ir.
Bu amaçl
lüğünü v
a norm o
eren bir tek
say
larak isimle
ı
ndirilen fonksiyonları kullanıyoruz.
nin normu ile gösterilen reel bir sayıdır ve aşağıdaki
özelliklere sahiptir:
1- Negatif degildir: e 0
2- e 0 ise e=0.
3- Homojenlik: e e bütün sk
Tanım:
al
e e
1 2 1 2
ar için.
4- Üçgen eşitsizliği:
e e e e
İspatlarda kullanılmaktadır.

vektör
matri
Norm aşağıdaki dört değişik vektör uzayı için düşünülebilir:
1- sabit bir
2- sabit bir
3- zamana bağlı bir yani ( ) bu durumda herbir zaman
değerinde sabit s
s
s
kalar veya v
in l
ek
ya
e
e
e e t
tör
4- bir , herbir veya değerinde sabit bir skalar veya matris
olan ( ) transfer fonksiyonu veya ( ) i
s
m
is
puls cev
e
a
t
bı
me s t
G s g t
Norm
1 21
2 2 2
1 22( ) ( )
max : 1,2
n
T
n
i
x x x x
x x x x x x
x x i n
vektor normu:
1
2 2 2 2
2
6
4,
2
5
6 4 2 5 17
( 6) 4 2 ( 5) 9
6
x
x
x
x

2
,
2
( ) ( )
matrisin koşegen elemanlarının toplamını ifade etmektedir.
Vektor için Frobenius normu 2 normu
Frobenius Matris normu
na esitt
:
ir:
T T
ijFi j
F
A a trace AA trace A A
trace
x x
matrisin kolonları içinde elemanları toplamı maksimum olan kolon norm degeridir.
matrisin satırları içinde elemanları toplamı maksimum olan satir norm değeridir.
Norm
Matrisler icin norm:
11
1
max2
max : 1,2
max : 1,2
( )
m
ij
i
n
ij
j
T
A a j n
A a i m
A A A

Örnek:
Norm
5 1 3
6 2 4
2 9 3
7 3 9
35 -44 10 -59
-44 56 -6 72* ( * ) (35 56 94 139) 18
10 -6 94 -68
-59 72 -68 139
( 5 6 2 7) 20
T T
F
A
A A A trace A A
1
(1 2 9 3) 15
( 3 4 3 9) 19
( 5 1 3 ) 9
(6 2 4) 12
( 2 9 3 ) 14
(7 3 9) 19
A
A
2
15.4095A
Tek tek kolon elemanlarinin toplami icinde en buyuk olan deger
Tek tek satir elemanlarinin toplami icinde en buyuk olan deger

Örnek:
Norm
215.4095A
A=[-5 1 -3;6 -2 4;-2 -9 -3;7 3 9] AAoz=eig(A'*A) AAozroot=sqrt(eig(A'*A)) A2norm=sqrt(max(eig(A'*A))) A2normMatlab=norm(A,2)
max2( )TA A A
Bir matrisin 2 normu matrisin karesinin oluşturduğu matrisin özdeğerleri içinde en büyük olan özdeğerin kareköküdür.

2
2
2 2
2
( ), g(t) nin Laplace transformu olsun. Yani
No
L[g(t)]=G(s).
G(s) in normu aynı zamanda aşa
rm
ğı
unun Hesaplanması:
1( ( ) ( ))
2
( ( )
daki şekilde de hesaplanabilir:
T
G trace G j G j d
G
G
g trac
s
t
H
e g
H
( ))T
g t dt
Norm
Eğer norm bir sistem transfer fonksiyonu için hesaplanıyorsa “Hardy space” anlamında H sembolü kullanılmaktadır. H2 normu transfer fonksiyonu için 2 normu anlamındadır.
2 Normunun HesaplanmasıH
Sistem normu

1
2
1
Kontrol problemi olarak G(s)
A B( ) ( ) Aynı zamanda: G(s)=
Bu kontrol sisteminin G normunu hesaplamak için D=0 kabul edelim.
Impuls cevabı için:
( ) [ ( )]
G s C sI A B DC
x Ax Bu
y Cx Du
D
g t L G s
1 1
2 0
0
t 0[ ( ) ]
0 t 0
( ( ) ( )) ( ) ) ( ( ) )
olarak tanımlansın.
T
T
At
TAt T At T A t T At
A t T At
Ce BL C sI A B
G trace g t g t dt trace Ce B Ce B dt trace B e C Ce dt B
S e C Ce dt
Norm 2 Normunun HesaplanmasıH

2
1
( )
Burada S sistemin (A,C) gözlemlenebilirlik Gramian dir
ve aşağıdaki denklemden hesaplanabilir:
0
Bu denklem cebirsel Riccati ile karşılaştırılırsa:
0
, 0
T
T T
T T
G trace B SB
SA A S C C
SA A S Q SBR B S
A A B
, , oldugu anlaşılır.TQ C C R I
Norm 2 Normunun HesaplanmasıH

Örnek:
1 1
2 2
3 3
1
2
3
3 2
3 2
2
3 2
0 1 0 0
0 0 1 0
2 5 1 1
1 0 0
0 1 0
0 0 1
1
5 2
( )5 2
5 2
0
2.4167 2.4167
S =
T T
x xd
x x udt
x x
x
y x
x
s s s
sG s
s s s
s
s s s
SA A S C C
2
0.2500
2.4167 5.7500 0.5833 ( ) 1.0408
0.2500 0.5833 1.0833
TG trace B SB
Norm
2 Normunun HesaplanmasıH
A=[ 0 1 0; 0 0 1; -2 -5 -1]; B=[0;0;1]; C=eye(3); D=zeros(3,1) [NUM,DEN] = ss2tf(A,B,C,D,1) sys=ss(A,[],C,[]); S=gram(sys,'o') G2norm=sqrt(trace(B'*S*B))

11 11
Norm
1
Normu:
( ) transfer fonksiyonunun bütün
frekans
( ) ( ) şeklinde bir transf
değerlerinde alacağı en
er fonksiyonu
düşünelim(D
yüksek d
0 olsu
eğer transfer
fonksiyonunun sonsuz normu
)
d
n .
ur
G s C sI
H
G
A B
s
D
singül
Matr
er de
issel anla
ğerin
mda
sistem transfer matrisinin
ke
(
arşılık gelir
) max ( ( ))
.
.
G s G j

12 12
1
1 1
Sistem ( ) ( ) olsun. > 0 olmak üzere G sadece
ve sadece ( ) ve aşağıdaki matrisin imajiner eksen üzerinde hiç bir
özdeğere sahip olmaması şartıyla sağlanır:
:
T T
G s C sI A B D
D
Teor
A BV D
m
C BV
e
B
1
2
1 : Hamilton matri
( )si
burada dir.
( )T T T T
T
C I DV D C A BV D C
V I D D
2Bir kontrol sistemi için H normunu doğrudan hesaplamak H normunu
hesaplamaktan çok daha zordur. Verilen 0 herhangi bir değeri için
normun şeklinde sağlanıp sağlanmadığını
kontrol etmek g
G
öreceli olarak daha kolaydır.
Normunun Hesaplanması:H
Norm

1
1 1
1
( )(
Hamilton matrisinin elde edilişi:
Aşağıdaki Cebirsel Riccati denklemini
)
düşünelim.
[ ( ) ( ) ]( ) 0
[
( ) 0
( ) (
T T T T T T
T T T T T T T
T T T T T
A P PA C C PB C D I D D PB C
A P PA C C PB I D D C D I D D PB C D
A P PA C C PB I D D C D I D
D
1
1
1
1 1
1 1
Matr
1
1
isi
) ]( ) 0
( )
( ) 0
( )
(
( ) ( )
( ) ( )
)
T T
T T T T T
T T T
T T T Tn
n T T T T T T
Hamilto
T T
T
n
T
D D C B P
A P C C C D I D D D C
C D I D D B P
IA B I D D D C B I D D BP I
PC I DD C A C D I D D B
PA PB I D D D C
PB I D D B P
0
Norm

14 14
Bisection Algoritması:
Çıkış:
G(s) proper reel transfer fonksiyonu ve yüzdelik tolerans olsun.
Hatası den küçük sistemin G normu
A BG(s)=
C D
şeklindeki bir
Giriş:
Adım 1:
Adım
gerçeklenmeyi kur.
gibi bir alt sınır ve gibi bir üst sınır G şeklinde oluştur.
( ) Eğer 2 ise
o zaman G ( ) / 2 yap ve dur
değilse
.
2:
Adım
=( ) / 2 yap ve
3:
Adı gim 4 t
Norm Normunun Hesaplanması:H

15 15
1 1
1 1
Aşağıdaki matrisin öz değerlerini bul
( ) ( )
Eğer özdeğerler imajiner eksen üzerinde ise:
Adı
= eşitle
değilse
m 4.
Adım 5.
T T
T T T T
A BV D C BV B
C I DV D C A BV D C
Ad
ım
6.
Adım
=
e 3 t. gi
Norm
2 TV I D D

16 16
2
1 1
1 1
Örnek:
1 0 0 1
0 2 0 , 2
0 0 3 3
1 2
=10,
3 , 1
( )= 5.5
2
( ) ( )
(
=1 seçil
) 2.6443 1.5428 0.6231 2.64
29.25
in.
4
s
T
T T
T T T T
A B
C D
A BV D C BV B
V
C I DV D C A B
I D D
V D C
3 0.6231 1.5428
Görüldüğü gibi hiç bir özdeğer imajiner eksen üzerinde değildir.
Norm

17 17
2
Bir sonraki adimda
=5.5, =1
( )= 3.25
2
9.5625
( ) 2.4491 -1.1914 2.4491 1.1914
Görüldüğü gibi imajiner ekse
2.5268i
n üzerinde komplek özdegerler vardı
2.526 i 8
TV I D D
r.
3.25 icin çözüm yoktur. En son 5.5 çözüm vardı dolayısı ile
bu değerlerde sonsuz normu bu sistem elde edilebilirdir.
sys=ltisys(A,B,C,D);
hnorm=hinfnorm(sys,0.1)
hnorm =
5.0000 5.5000 0
>> hnorm=hinfnorm(sys,0.01)
hnorm =
5.0000 5.0500 0
Norm

18
1m
2x
2k
1F
2c
2m
1x
1k 1c2F
1
2 1 1
1 2 2
2
, ,
x Ax Bu
y Cx
x
x F xx u y
x F x
x
1 1 1 1
1 1 1 1 1
1 1 2 1 1 2
2 2 2 2 2
2 2
0 0 1 0 0 0
0 0 0 1 0 0
10,
10
1 0 0 0, 0
0 1 0 0
k k c cA B
m m m m m
k k k c c c
m m m m m
C D
Norm
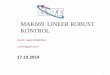
Grafiksel yöntemle H_infinity normunun bulunması.
m1=1;m2=2; k1=1; k2=4; c1=0.2; c2=0.1;

19
Norm
m1=1;m2=2; k1=1; k2=4; c1=0.2; c2=0.1; A=[ 0 0 1 0 0 0 0 1 -k1/m1 k1/m1 -c1/m1 c1/m1 k1/m2 -(k1+k2)/m2 c1/m2 -(c1+c2)/m2]; B=[0 0 0 0 1/m1 0 0 1/m2]; C=[1 0 0 0 0 1 0 0]; D=zeros(2); G=pck(A,B,C,D);
hinfnorm(G,0.0001) % relative hata 0:0001
%linfnorm(G,0.0001)
w=logspace(-1,1,200); % 0.1 ile 10 arasinda 200 nokta
Gf=frsp(G,w); % frekans cevabinin hesaplanmasi
[u,s,v]=vsvd(Gf); % herbir frekansta SVD(singuler deger hesabi)
vplot('liv,lm',s); grid % singuler degerlerin ve grid cizilmesi
normu H
max 0.84828
hinfnorm komutu ile elde edilen sonuç grafiksel olarak da görülebiliyor. Grafiksel yöntem az sönümlü sistemlerde yanlış sonuçlar verebilir. logspace de tanımlanan frekans noktalarının sayısına bağlı olarak farklı sonuçlar verebilir.
en kucuk singuler deger
en buyuk singuler deger =11.47 G

20 20
Norm
2
2
normu sistemin bütün frekans bölgesinde en büyük singüler
değerinini verir.
normu tüm frekans bölgesinde tüm sing
normu ile normu arasin
üler değerlerin bir anlamd
daki fark:
a
ortalamasını v
H
H
H H
ermektedir.
Kontrol tasarımı açısından düşünüldüğünde kontrolörü kapalı sistemin
maksimum singüler değerini minimize etmeyi amaçlamaktadır.
H

Sistem Belirsizliklerinin Modellenmesi
Gerçek kontrol sistemlerinde belirsizliklerden kaçınmak mümkün değildir.
Belirsizlikler iki katagori olarak sınıflandırılabilir: ve
dinamik bozucu e .
Gü
gürü
rült
ltü sin
ü sinya
yalle
lleri
tk
il
g
ri
er
iriş ve çıkış gürültüleri, sensör gürültüsü, aktüatör
gürültüsü vb. dir. Dinamik bozucu etkiler matematik model ile
çalışan gerçek sistemin dinamiği arasındaki farklılıklardır.
Matematik model herzaman gerçek sistemin sistem dinamiğinin
bir yaklaşımıdır. Bu tip bozucu etkilerin kaynağı modellenemeyen
dinamikler(genellikle yüksek frekans dinamikleri), ihmal
edilen nonlineerlikler ve çevresel değişik
Bu modelleme hataları k
liklerden dolayı sistem
ontrol sisteminin karar
deki
parametre
lılığını ve
pe
lerdeki
rforman
değişimlerd
sını etki
ir.
ler.

Sistem Belirsizliklerinin Modellenmesi
m
Y
o
ap
de
ısal
llen
olmayan
emeyenBir sistemin değişik kısımlarında oluşan
yüksek frekans dinamikleri gibi
bir çok din
belirsizlikle
amik bozucu et
r(U
kil
nstruc
er
ture
gibi
d Uncer
bir te
tainitie
k bozu b
s)
cu lok içinde
toplanabilir. Bu şekilde temsil edilen belirsizliklere
"yapısal olmayan belirsizlikler"
olarak isimlendiriyoruz. Lineer zamanla değişmeyen
sis transfer fonksiyonu matritemde olarak gsi öste rilebilir.

Toplam Belirsizlikleri
( )oG s
( )s
+
+
( ) ( ) ( )
( ) : nominal sistem
( ) : gerçek sistem
Toplam belirsizliği nominal model ile gerçek sistem dinamiği
arasındaki mutlak(obsolut verir.e) hatayı
p o
o
p
G s G s s
G s
G s

Çarpım Belirsizlikleri
( )oG s
( )s
Giriş çarpım belirsizliği:
( ) ( ) ( )p oG s G s I s
+
+ ( )oG s
( )s
+
+
Çıkış çarpım belirsizliği:
( ) ( ) ( )p oG s I s G s
relatif hatalÇarpım belirsizlik göstermektearı dir.

Sistem Belirsizlikleri
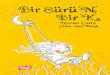
2 2
2
2
a 2 2
2
m 2
Toplam belirsizli
Gerçek sis
ği:
tem dinamiği:
1( )
( 2)
Nominal sistem dinamiği:
1( )
1( ) ( ) ( )
( 2)
( ) ( ) 1( )
( )
Çarpım belirsizliği:
2
p
o
p o
p o
o
G ss s
G ss
ss G s G s
s s
G s G s ss
G s s

10-2
10-1
100
101
102
-100
-80
-60
-40
-20
0
20
40
60
80
100
Frekans [ Hz]
Genlik
[ d
B ]
m ( )s
10-2
10-1
100
101
102
-100
-80
-60
-40
-20
0
20
40
60
80
100
Frekans [ Hz]
Genlik
[ d
B ]
10-2
10-1
100
101
102
-200
-150
-100
-50
0
50
100
Frekans [ Hz]
Genlik
[ d
B ]
10-2
10-1
100
101
102
-100
-80
-60
-40
-20
0
20
40
60
80
100
Frekans [ Hz]
Genlik
[ d
B ]
( )pG s ( )oG s
Sistem Belirsizlikleri
a ( )s

Elastik rotorlar, plakalar ve yüksek katlı yapılar gibi
titreşim kontrolünün yapıldığı mühendislik sistemlerinde
yüksek frekans modları belirsizlik
olarak kabul edilebilir. Genelde bu tür sistemlerde
ilk birkaç titreşim modunun
kontrolu büyük oranda tüm sistemin titreşim genliklerini sınırlamaktadır.
Dolayısı ile tam dereceli
sistem modellemesi yapılarak kontrol dizaynı için indirgenmiş sistem modeli elde edilir.
İndirgemede ihmal edilen sistem dianmikleri belirsizlik olarak ele alınabilir.
Bu tür yüksek frekans modlarının kontrol dizaynında
ihmal edildiği sistemlerde kontrolor tarafından
yüksek frekansların uyarıldığı spillover etkisi olarak isimlendirilen bir durum sözkonusudur.
Robust kararlilik için kontrolörün yüksek frekans modlarını uyarmayacak şekilde yüksek
frekanslarda düşük kazançlı olması gerekmektedir.
Mekanik Sistemlerde Belirsizlikler

28
f f f f fM x C x K x F u H z
İlk iki modun kontrol edilmesinin amaçlandığını
düşünelim. Öncelikle tam dereceli sistem modelinin
elde edilmesi gerekiyor.
Sistem Belirsizlikleri

f f f f
r f f
x A x B u
y C x
r r r r
r r r
x A x B u
y C x
( )0
( )0
f f
f
f
r r
r
r
A BP s
C
A BP s
C
100
101
102
-140
-120
-100
-80
-60
-40
-20 Tam ve Indirgenmis dereceli sistem frekans cevaplari
Frekans [ rad/s ]
Gen
lik
[ d
B ]
Sistem Belirsizlikleri

100
101
102
-140
-130
-120
-110
-100
-90
-80
-70
-60
-50
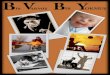
-40Modellenmeyen dinamiklerin toplam belirsizligi frekans cevabi
Frekans [rad/s]
Gain
[dB
]
100
101
102
-60
-50
-40
-30
-20
-10
0
10
20
30
40Modellenmeyen dinamiklerin carpim belirsizligi frekans cevabi
Frekans [rad/s]
Ga
in [d
B]
( ) ( )( )
( )
( ) ( ) ( )
f r
m
r
a f r
P j P jj
P j
j P j P j
m
a
Sistem Belirsizlikleri

31
%Belirsizliklerin frekans cevabinýn elde edilmesi
Pf = ltisys(Af,Bf,Cf,Df); Pr = ltisys(Ar,Br,Cr,Dr); w = logspace(-1,2,200); omega = w*2*pi; Pfg= bode(Af,Bf,Cf,Df,1,omega); Prg= bode(Ar,Br,Cr,Dr,1,omega); Delta_c=(Pfg-Prg)./Prg; Delta_t=(Pfg-Prg); figure(1) semilogx(omega,20*log10(Delta_c),'r-');grid; title('Modellenmeyen dinamiklerin carpým belirsizliði frekans cevabi ') xlabel('Frekans [rad/s]'), ylabel('Gain [dB]') axis([ 1 200 -65 40 ]) figure(2) semilogx(omega,20*log10(Delta_t),'r-');grid; title('Modellenmeyen dinamiklerin toplam belirsizliði frekans cevabi ') xlabel('Frekans [rad/s]'), ylabel('Gain [dB]') axis([ 1 200 -130 -40 ])
Sistem Belirsizlikleri

Sistem Belirsizlikleri % plant parameter m1 = 1.5; m2 = 1.5;m3 = 1.5; m4 = 1.5;k1 = 2600; k2 = 2600;k3 = 2600; k4 = 2600; c1 = 0.1; c2 = 0.1;c3 = 0.1; c4 = 0.1; M_f=diag([m1 m2 m3 m4]); K_f=[ k1+k2 -k2 0 0 ;-k2 k2+k3 -k3 0 ;0 -k3 k3+k4 -k4 ;0 0 -k4 k4 ]; C_f=[ c1+c2 -c2 0 0 ; -c2 c2+c3 -c3 0 ;0 -c3 c3+c4 -c4 ;0 0 -c4 c4 ]; F_f=[0 0 0 1]'; n = length(M_f); M_fi = inv(M_f); % Definition of the full order model Af = [ zeros(n,n) eye(n,n) ;-M_fi*K_f -M_fi*C_f ]; Bf = [ zeros(n,1) ; M_fi*F_f ]; Cf1 = [ 0 0 0 1 ]; Cf = [ Cf1 zeros(1,n) ];Df = [ 0 ]; % Transform to modal axis [V,D] = eig(M_fi*K_f); [eva,idx] = sort(diag(D)); eve = V(:,idx); eme = eve'*M_f*eve; nrm = inv(sqrt(diag(diag(eme)))); phi = eve*nrm; M = phi'*M_f*phi;K = phi'*K_f*phi; C = phi'*C_f*phi;F = phi'*F_f; Cf1p = Cf1*phi; % Definition of the reduced order model (modal axis model) nr = 2; Mm = M(1:nr,1:nr);Km = K(1:nr,1:nr); Cm = C(1:nr,1:nr);Fm = F(1:nr,1); Cfm = Cf1p(1,1:nr); Arm = [ zeros(nr,nr) eye(nr,nr) ;-Km -Cm ]; Brm = [ zeros(nr,1) ; Fm ]; Crm = [ Cfm, zeros(1,nr) ]; Drm = [ 0 ]; % Definition of the reduced order model(physical axis model) phi12=phi(:,1:nr); Tphi12=[phi12 zeros(n,nr) ;zeros(n,nr) phi12 ]; Cy=[ 1 0 0 0 ; 0 0 0 1 ]; iT=[ Cy zeros(nr,n) ; zeros(nr,n) Cy ]*Tphi12; T=inv(iT); Ar=iT*Arm*T; Br=iT*Brm; Cr =Crm *T; Dr =Drm; % Frekans cevabi w = logspace(-1,2,300); omega = w*2*pi; [magp,phase] = bode(Af,Bf,Cf,Df,1,omega); [magr,phaser] = bode(Ar,Br,Cr,Dr,1,omega); figure(1) semilogx(omega,20*log10(magp(:,1)),'r-',omega,20*log10(magr(:,1)),'b-');grid; set(gca,'fontname','times','fontsize',12) title(' Tam ve Indirgenmis dereceli sistem frekans cevaplari ') xlabel('Frekans [ rad/s ]'); ylabel('Genlik [ dB ]') axis([ 1 100 -140 -20 ])

33
z
x
Kontrol
Bilgisayarı
Aktüatör
Amp.
Sensor
Amp.
f
sx
ax
1
2
3
0 1
176 1.33
0 1
2640 0.823
0 1
12300 1.33
A
A
A
1 2 3
0 0 0, ,
0.230 0.305 0.198B B B
1 2 3162 0 , 914 0 , 1450 0
0
C C C
D
Elastik çubuğun ilk üç modu için :
Sistem Belirsizlikleri
Elastik çubuk sürekli bir sistem olarak sonsuz sayıda elastik moda sahiptir. Eğer ilk üç modu dikkate alıp kontrol dizaynı yapılırsa dikkate alınmayan modların uyarılmaması gerekir. İhmal edilen yüksek frekans dinamikleri(burada 4. ve daha yukarı mod dinamikleri) kontrol tasarımında dikkate alınması istenirse belirsizlik olarak ele alınabilir.

100
102
104
-160
-140
-120
-100
-80
-60
-40
-20
0
Frekans [ Hz ]
Gen
lik
[ d
B ]
Tam dereceli sistem
Indirgenmis sistem
Sistem Belirsizlikleri
Elastik rotor manyetik sisteminde rotor elastik modlarindan ilk ikisi kontrol tasariminda model icinde dusunulurken diger ihmal edilen yuksek frekans modlari modelleme belirsizlikleri olarak kontrol tasariminda dikkate alinmaktadir.

Ödev
nominal
Bir DC motorda hızlı ve yavaş dinamiklerin oluşturduğu
gerçek sistem dinamiği:
( ) g ( ) ( )
( ) ( )
şeklinde verilmistir. Bu dinamikler
1 1( ) , ( )
1 1
olarak
p gain slow fast
slow
slow fast
G s G s G s
G s G s
G s G ssT sT
a m
ayrıldığına göre
( ), ( ) oluşturup frekans cevaplarını çiziniz.
(g 1, =0.1, T=0.5)gain
s s