Embed Size (px)
Citation preview

1
REGULATORY W UKŁADACH REGULACJI AUTOMATYCZNEJ
TI - czas zdwojenia (całkowania)
TD - czas wyprzedzenia (różniczkowania)
Kp – współczynnik wzmocnienia
Regulator PID idealny
����� = �� �1 +1��� + ���� = �� +
�� + ��
Regulator PID rzeczywisty
����� = �� 1 +1��� + �����
α� + 1
� = �� +�� +
����α� + 1
Go(s)
Yo(s)
U(s)Y(s)E(s)
Z(s)
1/TIs
1
TDs
Kp
N(s)
B(s)-

2
REGULATOR PI
-90
⋅
����� [dB]
-0
20 log��
1
��
1
��
���� [°]
log�
log�
-45
����� =�(�)
�(�)= �� �1 +
1
�� = �� � − ���
gdzie:
�� = −1
� − jest zerem
�� = �� − wskaźnikiem wzmocnienia regulatora
��� = ��� �1 +��
Odpowiedź skokowa
��
�� ∙ �
��
�� ∙ � 2�� ∙ �
��
�

3
REGULATOR PD
90
⋅
����� [dB]
0
20 log��
1
��
�
��(� + 1)
��� [°]
log�
log�
20 log��
�
��
����� = �� �1 +�����
α� + 1
� = �� � − �� − ��
gdzie: � = −α�1 + α��� − jest zerem,
�� = −��� − jest biegunem,
�� = ���1 + α� – jest wskaźnikiem wzmocnienia
regulatora rzeczywistego PD.
����
�
�� ∙
��
�
��(1 + �)
���� = �� �1 + �����
���
Odpowiedź skokowa
��
����
�
���� = �� � �� + � − ������
���
Odpowiedź prędkościowa
���
�
���� �1 − �����
��� ����

4
REGULATOR PID
����� = �� �1 +1��� +
�����α� + 1
� = �� +�� +
����α� + 1
����� = � �� − ���� − ����� − ���
� = −
1���� , � = −
1���� , �� = − �� , � = ���� ,
�� =2�� − � , �� =
2�� + � gdzie � = ���� − 4� przy czym � = �� ��⁄ ≥ 4 ;
����
�
���
��
�
���(1 + �)
���� = ��� �1 +��� + ���
���
Odpowiedź skokowa

5
Zasady budowy regulatorów
����� =
�(�)
�(�)=
��1 + ���(�)
�� ≫ 1 → ���(�) ≫ 1
����� =
�(�)
�(�)=
1
�(�)
���� =1
� 1 +1����
=��
1 + ��
� =���
, � = ��
−
ue
)(sT
wk
Regulator PI
przy czym
���� =1
�
���� =1
��1 + ����
=�
1 + ��
� =1
�
, � = ��
Regulator P
W celu budowy regulatora typu P (propor-
cjonalnego) należy w pętli sprzężenia zwrot-
nego użyć element o transmitancji
Regulator PD
przy czym

6
Inne struktury regulatora PID
������ = �� �1 +1
���� , ������ = ���1 + ����
Połączenie równoległe PI +PD
ue
)(sGPD
)(sGPI
Połączenie szeregowe PI i PD
)(sGPI
)(sGPD
ue
����� = �� �1 +1
���� + ���1 + ����
= � �1 +1
��� + ����
� = �� + �� , �� =�
�� �� , �� =���
��
����� = �� �1 +1
�������1 + ����
= � �1 +1
��� + ����
� = ���� �1 +����� ,�� = ���� ,�� =
����� +� ��

7
����� =���
1 + ��� , ����� =��
1 + ���
���� = ���������� =�����
�1 + �����1 + ����
����� =�������� =
1
���� =�1 + �����1 + ����
�����= � 1 +
1
��� + ����
� =�� + ������ , �� = �� + �� , �� =
������ + ��
−
ue
wk
)(1sG )(
2sG
przy czym
����� =�
1 + ��� , ����� =�
1 + ���
���� = ����� − ����� = � 1
1 + ��� −1
1 + ����
����� =1
�(�)=
�1 + �����1 + �������� − ����
= � 1 +1
��� + ����
� =�� + ������ , �� = �� + �� , �� =
������ + ��
−
ue
wk
)(2sG
)(1sG
−
przy czym

8
Ogólne zasady doboru typu regulatora
Przewidywane działanie układu ze względu na typ regulatora:
1. Zmiana uchybu statycznego (przy wymuszeniu skokowym), zmiana przeregulowania i
czasu regulacji - zalecany regulator typu P
2. Skrócenie czasu regulacji, zmiana uchybu statycznego, zmiana przeregulowania - zalecany
regulator typu PD
3. Likwidacja lub zmiana uchybu statycznego, zmiana przeregulowania, wydłużenie czasu
regulacji - zalecany regulator typu PI
4. Likwidacja lub zmiana uchybu statycznego, zmiana przeregulowania, zmiana lub skróce-
nie czasu regulacji - zalecany regulator typu PID.
Go(s)
Yo(s)
U(s)Y(s)E(s)
Z(s)
1/TIs
1
TDs
Kp
N(s)
B(s)-

9
Dobór nastaw regulatorów PID
W celu uzyskania jak najlepszej jakości pracy układu regulacji z regulatorem o trzech nasta-
wach (Kp , TI , TD) , udział poszczególnych członów regulatora (PID) winien być odpowiednio
dobrze dobrany. Jeżeli znany jest dokładny model obiektu , wówczas dobór odpowiednich na-
staw może być dokonany droga symulacji cyfrowych lub metodami analitycznymi. Modele
obiektów przemysłowych są zwykle nieznane, a zwłaszcza zmieniają się ich parametry tech-
niczne. Wówczas regulatory muszą być strojone metodami empirycznymi. W przemyśle sze-
roko są stosowane metody eksperymentalnego strojenia regulatorów oparte na identyfikacji
parametrów odpowiedzi układu (Ziegler i Nichols, 1942r.)
1. Identyfikacja parametrów odpowiedzi na granicy stabilności układu regulacji
2. Identyfikacja parametrów charakterystyki sko-
kowej układu otwartego
Celem obu metod jest uzyskanie odpowiedzi układu
z tłumieniem oscylacji (dwóch kolejnych przeregu-
lowań) w stosunku m3/m1=
1/4 .
���� =����
�� + 1 , ���� =
����
��� + 1��
����
��
��
t
��
��

10
Granica stabilności
Metoda oparta jest o eksperymentalne wyznaczenie parametrów granicy stabilności, czyli pul-
sacji przecięcia fazy (okresu drgań nie gasnących Tg oraz zapasu wzmocnienia (wzmocnienia
krytycznego) Kg
1. Przestawiając regulator na strojenie ręczne ustawiamy układ w jego normalnym punkcie
pracy.
2. Ustawiamy regulator na działanie proporcjo-
nalne (t.j. TI=maximum, TD= 0).
3. Nastawiamy niewielką wartość wzmocnienia
Kp członu proporcjonalnego.
4. Ustawiamy regulator na działanie automa-
tyczne i rejestrujemy odpowiedź skokową
układu.
5. Zwiększamy wzmocnienie Kp aż do uzyskania
wartości Kg , t.j., tej, przy której układ uzysku-
je drgania niegasnące – granica stabilności
6. Określamy okres tych drgań granicznych Tg.
7. Wartości tak wyznaczonych parametrów do wstawiamy do tablicy nastaw Ziegler-Nicholsa.
�� yo
−
e ��(�) u y
�(�)
�
��

11
Zalecane nastawy regulatora zgodnie wg. Zieglera-Nicholsa
Metoda w oparciu o parametry granicy stabilności
����� = �� �� = 0,5��
����� = �� �1 +1
���� �� = 0,45�� �� = 0,85��
����� = �� �1 +1
��� + ���� �� = 0,6�� �� = 0,5�� �� = 0,125��
Metoda w oparciu o parametry odpowiedzi skokowej układu otwartego
����� = �� �� =
1
∙
����� = �� �1 +1
���� �� =0,9
∙ �� = 3,3
����� = �� �1 +1
��� + ���� �� =1,2
∙ �� = 2 �� = 0,5

12
Metoda w oparciu o parametry odpowiedzi skokowej układu otwartego
Metoda zakłada model dynamiki obiektu jako inercyjny z dominującą stałą czasową T oraz
opóźnieniem transportowym �
���� =����
�� + 1
1. Przestawiając regulator na strojenie ręczne
ustawiamy układ w jego normalnym punkcie
pracy (układ otwarty)
2. Podaj niewielkie wymuszenie skokowe na
wejście układu (obiektu).
3. Znajdź odcinek na krzywej odpowiedzi o mak-
symalnym nachyleniu R (punkt przegięcia)
i wykreśl styczną w tym punkcie.
4. Określ opóźnienie � = �
5. Znając tak wyznaczone parametry R i L korzy-
stamy z odpowiedniej tabeli nastaw regulato-
ra (poprzednia strona)
� =ℎ(∞)
�
ℎ(∞)
�
�
P
�
�� ��(�) �
ℎ�
�(�)
�
ℎ(�)
ℎ� ��
��
ℎ(�)

13
����� = �� �1 +1
��� + ����
����� = � �� − ���
� =0,6
� wskaźniki wzmocnienia regulatora � = 0,075����
�,� = −1
� zera regulatora �,� = −4
��
�� =2
|| , �� =1
2||
����� =1,2
�� �1 +1
2�� + 0,5��
����� =0,6
��� +
1���
�
Próba skoku
����� = 0,6�� �1 +1
0,5��� + 0,125����
����� = 0,075������ +
4����
�
Granica stabilności

14
Wybrane metody analityczne
1) Metoda Zieglera-Nicholsa, służąca do syntezy regulatora liniowego suboptymalnego,
w sensie tej metody, oparta na zapasie stabilności układu regulacji.
2) Metoda kompensacji (skreślania) dominujących biegunów układu otwartego za pomocą
odpowiednio dobranych zer regulatora liniowego wraz z metodą linii pierwiastkowych.
Zakłada się tu, że kompensacji podlegają bieguny stabilne układu otwartego oraz, że ich
lokalizacja podlega niewielkim wahaniom, zależnie od warunków pracy układu.

15
Procedura wyznaczania parametrów regulatora PID metodą Zeiglera - Nicholsa
Stosując metodę regulator ����� połączony kaskadowo z obiektem ����� ustawia się na dzia-
łanie P przy �� = 1. Korzystając z twierdzenia Nyquista o stabilności układu zamkniętego
można obliczyć wartość graniczną wzmocnienia regulatora �� = ��, przy której układ znajdzie
się na granicy stabilności oraz wartość okresu drgań granicznych �� = 2� �� . Procedura ta
sprowadza się zatem do wyznaczenia wartości pulsacji �� z równania
Im��(��)� = 0
i następnie podstawienia jej do wzoru
�� =1
��(���) .
Mając wartości ��i �� należy wyznaczyć nastawy regulatorów zgodnie z tabelą na str. 12.

16
Przykład 1.
Dany jest URA złożony z obiektu regulacji opisanego transmitancją operatorową
����� =1
��� + 2� + 1��4� + 1�
i szeregowego regulatora idealnego o transmitancji operatorowej
����� = �� �1 +1
��� + ����
Należy wyznaczyć nastawy regulatora stosując metodę Zieglera-Nicholsa.
Rozwiązanie
Podstawiając � = uzyskuje się postać transmitancji widmowej układu otwartego
��� =��
���� + 2 + 1��4 + 1� = ��
1 − 9� + 2�2� − 3��� + 2� + 1��16� + 1� = �� + ���
przy czym
�� = ��
1 − 9�
�� + 2� + 1��16� + 1� , ��� = ��
2�2� − 3��� + 2� + 1��16� + 1�

17
Rozwiązując równanie ���� = 0 ⇒ 2�� − 3 = 0 otrzymujemy wartość pulsacji drgań nie-
gasnących – granicznych.
�� = �3
2= 1,225
Zapas wzmocnienia układu wynosi
�� =1����� = �� ��
� + 2��� + 1�16��
� + 11 − 9��
��� = 12,5 .
Otrzymaliśmy: �� = 12,5 , �� = 2� ��� = 5,13 s .
Nastawy regulatora wynoszą:
�� = 0,6�� = 7,5 , �� = 0,5�� = 2,6, �� = 0,125�� = 0,64
a jego transmitancja będzie miała postać
����� = �� �1 +1��� + ���� = 7,5 �1 +
1
2,6� + 0,64�� .
Odpowiedzi skokowe jednostkowe układu regulacji przed korekcją

18
�(�) = ℒ�� � �����1 + ����� ∙
1
s�
i po korekcji z zastosowaniem regulatora
�(�) = ℒ�� � ����������1 + ���������� ∙
1
s�
pokazane są na rysunku obok.
Zastosowany tutaj regulator z wpro-
wadził astatyzm do układu i przez to
likwidację uchybu położeniowego
Odbyło to się kosztem znacznego
wzrostu przeregulowania i zwiększe-
nia czasu regulacji. Na ten wzrost
wartości owych wskaźników miała
wpływ zastosowana tutaj metoda do-
boru nastaw regulatora.
0 5 10 15 20
0.5
1
1.5
����
t
Rys. Porównanie odpowiedzi skokowych
jednostkowych układu bez regulatora
i z regulatorem PID.

19
Przykład 2.
Dany jest układ regulacji automatycznej z obiektem opisanym transmitancją
����� =1
��� + 1��5� + 1�
i regulatorem PID o transmitancji wskazanej w przykładzie 1. Wyznaczyć nastawy regulatora
metodą Zieglera-Nicholsa.
Rozwiązanie
Transmitancja układu zamkniętego z regulatorem o działaniu proporcjonalnym ����� = ��
ma postać
����� =�������
1 + �������=
��
5�� + 6�� + � + ��
Stosując kryterium Hurwitza do równania charakterystycznego
5�� + 6�� + � + �� = 0
otrzymujemy obszar stabilności układu
0 < �� < 1,2.

20
Wartość graniczną wzmocnienia, wynoszącą �� = 1,2 , wstawiamy do równania charaktery-
stycznego układu zamkniętego i po podstawieniu � = �� otrzymujemy
5����� + 6������ + ���� + �� = −6�� + 1,2 + ���1 − 5��� = 0.
Przyrównując część rzeczywistą lub urojoną do zera znajdujemy wartość pulsacji granicznej
�� =1
√5= 0,447
rad
s
i stąd okres drgań niegasnących wynosi
�� =2��
=2 ∙ 3,14
0,447≅ 14 s .
Optymalne w sensie metody Zieglera-Nicholsa nastawy regulatora wynoszą:
�� = 0,6�� = 0,72 , �� = 0,5�� = 7 s , �� = 0,125�� = 1,75 s ,
a jego transmitancja będzie miała postać
���� = �� �1 +1
��� + ���� = 0,72 �1 +1
7� + 1,75�� .

21
Jak widać, zastosowana tutaj meto-
da doboru nastaw regulatora pozwoli-
ła znacznie skrócić czas regulacji,
zwiększyła się tłumienność odpowie-
dzi przy mniejszej pulsacji drgań.
Niewiele natomiast zmniejszyła się
wartość przeregulowania, pozostając
na dość wysokim poziomie 62%.
Chwila wystąpienia przeregulowania
i czas narastania pozostały w zasadzie
takie same, jak w układzie bez regula-
tora.
����
� 0 10 20 30 40 50 60 70 80
0.5
1
1.5
2
� = 62%
���% = 39,8
Rys. Porównanie odpowiedzi skokowych jednostkowych układu
bez regulatora i z regulatorem PID.

22
Metoda Evansa – linii pierwiastkowych
Linie pierwiastkowe jest to miejsce geometryczne położeń
pierwiastków (m.g.p.) równania charakterystycznego (a) na
płaszczyźnie zmiennej zespolonej układu zamkniętego,
otrzymane przy uzmiennianiu współczynnika wzmocnienia
układu otwartego. Dla schematu blokowego układu regulacji
przedstawianego na rysunku obok równanie charakterystycz-
ne układu zamkniętego jest równoważne równaniu
1 + ������ = ���� + ����� = 0 czyli ����
����= ����� = −
1
� (a)
Na tej podstawie możliwe położenie pierwiastków układu zamkniętego jest określone przez
warunek argumentu
arg����� = � , gdzie � nieparzyste dla � > 0 (b)
oraz warunek modułu
|�����| =1
|�| (c)
�
��(�)
−
�
Rys. Schemat blokowy układu re-
gulacji stosowany przy korzystaniu
z metody linii pierwiastkowych
��

23
W przypadku analizy układu regulacji dla określenia kształtu linii pierwiastkowej korzysta się
warunku argumentu (b), z warunku modułu (c), korzysta się zaś dla określenia położenia
pierwiastków na linii pierwiastkowej przy konkretnych wartościach wzmocnienia K.
W przypadku natomiast syntezy (projektowania) układu regulacji, mając z góry narzucone,
oczekiwane położenia pierwiastków układu, wyznacza się niezbędną wartość wzmocnienia K
w układzie otwartym, tak aby była spełniona tożsamość (a).
Mając na uwadze łatwy dostęp do komputerów oraz szerokiej gamy procedur matematycz-
nych w tym pakietów dedykowanych dla celów automatyki, linie pierwiastkowe można okre-
ślić bezpośrednio z definicji (a).
W prostym przypadku układu otwartego o zerach i biegunach rzeczywistych transmitancja
układu dana jest zwykle jako ułamek w postaci
���� = ������ = �∏ ���� + 1�
�=0
�� ∏ ���� + 1���=0
, < � + � = (d)
stosowanej przy analizie i syntezie układów metodami częstotliwościowymi. Otóż w zastoso-
waniach metody linii pierwiastkowych dogodnie jest stosować nieco odmienną postać trans-
mitancji, a mianowicie
���� = �∏ �� − ��
��=0
�� ∏ �� − �����=0
, (e)
w której k jest wskaźnikiem wzmocnienia dany wzorem

24
� = �∏ ��
��=0
∏ ����=0
,
�� = −1
��, �� = −
1
�� są zerami i biegunami transmitancji układu otwartego,
1) punkty przecięcia linii pierwiastkowych z osią liczb urojonych odpowiadają wartościom gra-
nicznym wzmocnienia � = ��, które mogą być także wyznaczone przy użyciu kryterium sta-
bilności Hurwitza lub Nyquista
2) wartość bezwzględna K dla dowolnego punktu �� należącego do linii pierwiastkowej wynika
z warunku modułu (c), czyli
|�| =1
|����|=
∏ ����=0
∏ �����=0
|��� ∏ �� + ���
��=0 |
�∏ �� + �����=0 �
, (g)
Miejsca geometryczne położeń pierwiastków – bieguny układu regulacji - mają ścisły zwią-
zek z własnościami dynamicznymi zamkniętego układu regulacji.
Im bliżej osi liczb urojonych przebiegają linie pierwiastkowe, tym mniejsze jest tłumienie
układu. Stan przejściowy, nieustalony, trwa dłużej.
Z położenia biegunów układu zamkniętego można określić takie wielkości charakteryzujące
zachowanie się układu, jak: � - względny współczynnik tłumienia, � - częstotliwość drgań

25
własnych, ��- częstotliwość drgań nietłumionych, �� – graniczną wartość współczynnika
wzmocnienia.
Należy zwrócić uwagę, że wykres linii pierwiastkowej uzupełnia kryterium Nyquista.
Sposób określenia tych wielkości ilustruje rysunek na następnej stronie.

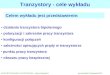
26
Re{s}
Im{s}
�� = ���� + ����
� = cos� =����
�� ���
���
��
��
��
�� �
Rys. Sposób wyznaczania parametrów charaktery-
zujących dynamikę układu zamkniętego, takich jak:
względny współczynnik tłumienia �, pulsację drgań
nietłumionych �� i własnych �� na wykresie
miejsc geometrycznych pierwiastków.

27
Przykład 3.
Dla układu z przykładu 2 należy dokonać takiej korekcji nastaw regulatora, aby uzyskać
znaczne skrócenie czasu regulacji.
Linie pierwiastkowe układu automatycznej
regulacji z przykładu 2 bez regulatora (linie
czarne) i z regulatorem PID idealnym (linie nie-
bieskie) pokazane są na rysunku obok.
W celu skrócenia czasu regulacji należy zmie-
nić położenie pary zer regulatora przesuwając je
bliżej początku układu współrzędnych.
Aktualna wartość zer wynosi
��,� = −4
��
= −4
14= −0,284
Niech położenie pary zer regulatora zostanie
skorygowane o połowę, czyli o połowę zmniejszy
się dystans do początku układu współrzędnych
���,� =��,�
2= −0,142
-1 -0.8 -0.6 -0.4 -0.2
-1
-0.8
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
1
�� = 1,2
�� = 1,2
Re���
Im���

28
Stałe czasowe regulatora po korekcji położeń
jego zer przyjmą wartości
��� =2
|���| = 14,05 , ��� =1
2|���| = 3,5
������ = �� 1 +1
���� + ����
= 0,72 1 +1
14,05� + 3,5�
lub
���(s) = 2,53 (s + 0,142)�
s
Na rysunku obok kolor zielony reprezentuje li-
nie pierwiastkowe układu regulacji po korekcji
położeń zer regulatora (układu).
Zera układu są bliżej biegunów położonych
w początku układu współrzędnych.
-1 -0.8 -0.6 -0.4 -0.2
-1
-0.8
-0.6
-0.4
-0.2
0.2
0.4
0.6
0.8
1
Re���
Im���

29
20 40 60
0
0.2 0.4 0.6 0.8
1
1.2 1.4 1.6
�
�(�)
Odpowiedzi skokowe układu regulacji
przed korekcją położeń zer regulatora
(kolor niebieski) i po korekcji (kolor
zielony).

30
Procedura wyznaczania parametrów regulatora PID metodą kompensacji (skreślania)
biegunów dominujących poprzez odpowiedni dobór zer ��, ��regulatora
����� = �� �1 +1
��� + ��� =��
�� ������ + ��s + 1
� = ��� − ����� − ���
�
gdzie: �� = −1
���� i �� = −1
���� − są zerami regulatora ,
� = ���� − wskaźnik wzmocnienia regulatora
przy czym wartości współczynników pomocniczych �� i �� dla zadanego stosunku
� = �� ��⁄ ≥ 4 wyznacza się z zależności
�� =2�
� − � , �� =2�
� + � i gdzie � = ���� − 4� ;
1. Niech jedno z zer regulatora, np. �� przyjmie wartość jednego z biegunów dominujących
obiektu.
2. Biorąc pod uwagę, że �� = −�
���� przyjąć wartość � ≥ 4 i obliczyć wartość czasu wyprze-
dzenia � =�
��|��| , przy czym �� =
��
� �, i gdzie � = ���� − 4�
3. Sprawdzić czy drugie zero regulatora �� = −�
���� (przy czym �� =
��
��� ) uzyskało wartość
bliską wartości drugiego bieguna dominującego obiektu.

31
4. Jeżeli nie, należy przyjąć inną wartość � i powtórzyć obliczenia jak w pkt. 2 i 3. Jeżeli war-
tość zera �� będzie bardzo bliska lub równa wartości bieguna obiektu obliczyć wartość
czasu zdwojenia �� = ��� regulatora.
5. Na podstawie dopuszczalnej wartości przeregulowania w odpowiedzi skokowej układu
regulacji należy określić dopuszczalną wartość wzmocnienia �� regulatora.

32
Przykład 4.
Dany jest układ regulacji z kaskadowo połączonymi obiektem opisanym transmitancją opera-
torową
����� =�
�� − ����� − ����� − ��� ,
gdzie wskaźnik wzmocnienia oraz bieguny wynoszą
� = 2 , �� = −0,25 1
s , �� = −1
1
s , �� = −4
1
s .
i regulatorem
����� = ����� = �� �1 +1
�� + �� = ���� − ����� − ���
� .
gdzie: �� = −1
��� i �� = −1
��� − są zerami ,
�� = ��� − jest wskaźnikiem wzmocnienia regulatora idealnego PID,
przy czym wartości współczynników pomocniczych �� i ��, dla zadanej wartości współczyn-
nika proporcjonalności = � �⁄ ≥ 4 są wyznaczane ze wzorów
�� =2
− � , �� =2
+ � i gdzie � = � � − 4� .

33
Stosując metodę kompensacji dominujących biegunów układu otwartego oraz metodę linii
pierwiastkowych dobrać nastawy regulatora przyjmując stopień oscylacyjności � = 1.
Rozwiązanie
Dominujący biegun obiektu �� = −0,25 skompensujemy dominującym zerem regulatora �� , czyli
�� = �� = −0,25
W układzie wystąpi pełna kompensacja- skreślenie - bieguna ��. W efekcie tego zabiegu pozo-
stanie w układzie kolejny biegun dominujący �� = −1. Ten zaś może być skompensowany po-
zostałym zerem �� regulatora
�� ≈ �� = −1
Aby osiągnąć wartość zera �� jak najbliższą wartości bieguna ��, przyjmujemy współczynnik
proporcjonalności � = �� ��⁄ = 6,2 .
Wtedy wyróżnik ma wartość
� = ��� − 4 = �6,2 ∙ 2,2 = 3,69.
a wartości współczynników pomocniczych wynoszą
�� =2�
� − �=
2 ∙ 6,2
6,2 − 3.69= 4,94 , �� =
2�� + �
= 2 ∙ 6,2
6,2 + 3.69= 1,25 .

34
Mając wartości tych współczynników, na podstawie zależności
�� = −1
����= −0.25,
wyznaczamy nastawy czasów wyprzedzenia �� i zdwojenia �� regulatora
�� =1
��0,25= 0,81 , �� = ��� = 6,2 ∙ 0,81 = 5,02
Dokładna wartość drugiego zera regulatora wyniesie
�� = −1
����=
1
1,25 ∙ 0,81= −0,988
Jest ona bardzo bliska wartości bieguna �� obiektu. Wobec tego transmitancję układu otwar-
tego po korekcji całkowo-różniczkowej możemy zapisać w postaci
��� = �������� =��� − ��
�
�� − ���� − ��≅
��� + 4 ,
gdzie wskaźnik wzmocnienia układu określony jest związkiem
= � = ��� = 0,81 ∙ � ∙ 2 = 1,62�.
Wartość nastawy � członu proporcjonalnego regulatora określimy na podstawie przebiegu
linii pierwiastkowych przedstawionych na rysunku pokazanym na następnej stronie.

35
Łatwo tu spostrzec, że wobec wymagania � = 1
współrzędne biegunów dominujących układu za-
mkniętego wyniosą
���,� = −2,0 ± �2,0
Poszukiwaną wartość współczynnika wzmocnie-
nia �� członu proporcjonalnego regulatora wyzna-
czamy z warunku modułu
�� = � 1
|��|������
= �|� + 4|1,62
������
=2√2 ∙ ��−2 + 4� + 2�
1,62= 4,94
-5 -4 -3 -2 -1
-4
-3
-2
-1
1
2
3
4 Im���
�
Re���
�
� = 0,707
���
���
�� �� �� ��
�� ��
� = 8
= 4,94
� = 8
a) b)

36
Transmitancja układu otwartego po korekcji proporcjonalno-całkowo-różniczkowej ma po-
stać
���� = ���������� =
8
��� + 4�=
2
��0,25� + 1�
Rys. Odpowiedzi skokowe jednostkowe układu au-
tomatycznej regulacji: a)bez regulatora, b) z regu-
latorem PID idealnym 0 2 4 6 8
0.2
0.4
0.6
0.8
1
����
t
� = 4.3%
���% = 1 s
a)
b)
2)