Embed Size (px)
Citation preview
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 1/12
1 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
UNIVERSIDAD TECNOLÓGICA DE NEZAHUALCÓYOTL
TSU MECATRÓNICA ÁREA SISTEMAS DE MANOFACTURA FLEXIBLE
ASIGNATURA
SISTEMAS DE CONTROL AUTOMÀTICO
PRÀCTICA
MOTOR PASO APASO
GRUPO
MEM 32
ELABORADO POR
Estefanía Lara Gomes
Juan Carlos Martínez Hernández
Hugo Daniel Carreto Pérez
Cristian Adán García Mora
Ricardo Martin Olvera Castro
Verónica Ramírez muños
Juan Francisco Rocha Paredes
PROFESORA
Diana Nelly Pacheco González
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 2/12
2 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
ÌNDICEpág.
UTN MECATRÓNICA
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 3/12
3 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
INTRODUCCIÒN
Los motores paso a paso son ideales para la construcción de mecanismos en donde serequieren movimientos muy precisos.
La característica principal de estos motores es el hecho de poder moverlos un paso a la vez,
por cada pulso que se le aplique.
Este paso puede variar desde 90° hasta pequeños movimientos de tan solo 1.8°, es decir, que
se necesitarán\ 4 pasos en el primer caso (90°) y 200 para el segundo caso (1.8°), para
completar un giro completo de 360°.
Estos motores poseen la habilidad de poder quedar enclavados en una posición o bien
totalmente libres. Si una o más de sus bobinas está energizada, el motor estará enclavado en
la posición correspondiente y por el contrario quedará completamente libre si no circula
corriente por ninguna de sus bobinas. En este artículo trataremos solamente los motores P-P
del tipo de imán permanente, ya que estos son los más usados en robótica.
Básicamente estos motores están constituidos normalmente por un rotor sobre el que van
aplicados distintos imanes permanentes y por un cierto número de bobinas excitadoras
bobinadas en su estator. Las bobinas son parte del estator y el rotor es un imán permanente.
Toda la conmutación (o excitación de las bobinas) deber ser externamente manejada por un
controlador.
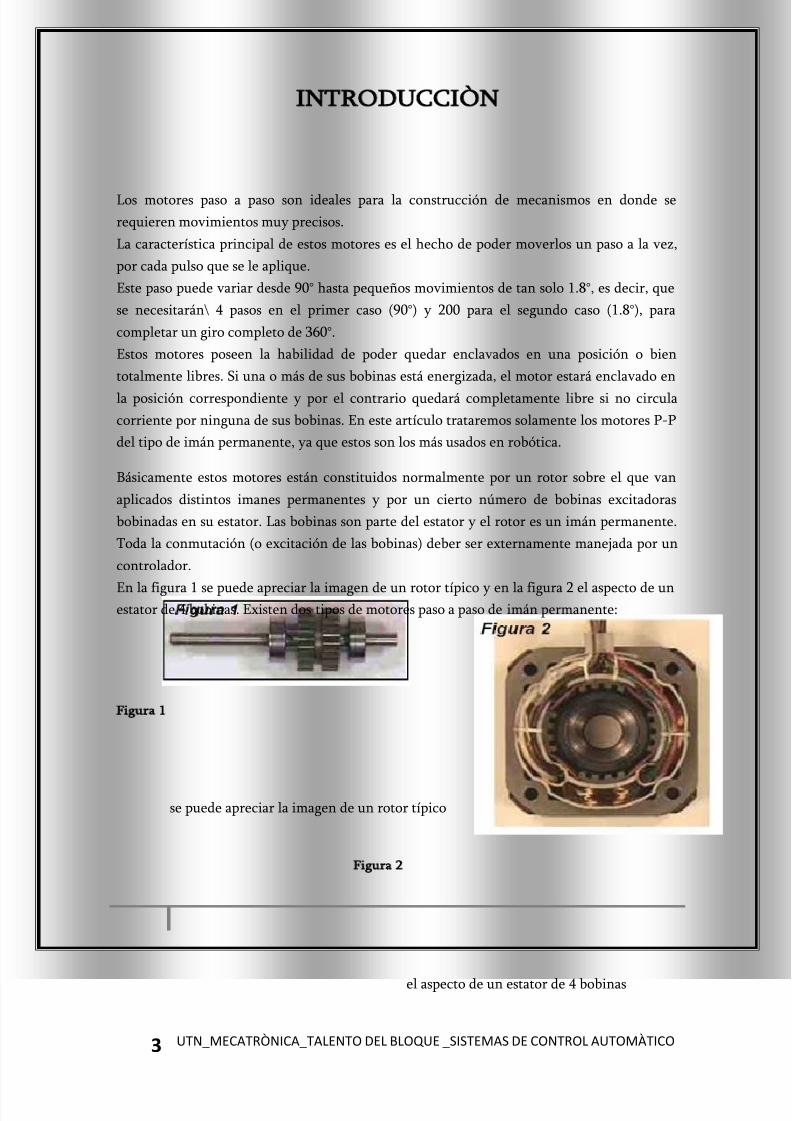
En la figura 1 se puede apreciar la imagen de un rotor típico y en la figura 2 el aspecto de unestator de 4 bobinas. Existen dos tipos de motores paso a paso de imán permanente:
Figura 1 se puede apreciar la imagen de un rotor típico
Figura 2 el aspecto de un estator de 4 bobinas
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 4/12
4 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
PRÁCTICA
MOTOR PASO APASO
OBJETIVO
Construir circuitos en Proteus y Microcode determinando las tres secuencias demotores paso a paso
DESARROLLO
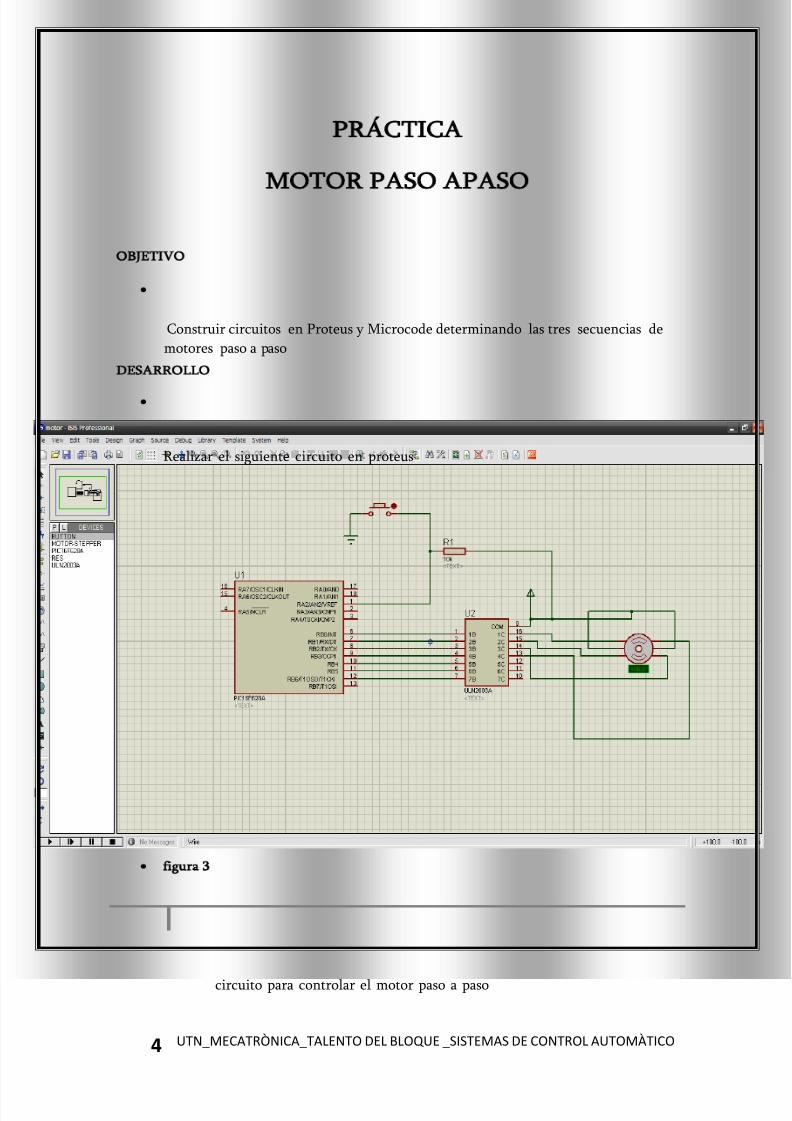
Realizar el siguiente circuito en proteus
figura 3 circuito para controlar el motor paso a paso
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 5/12
5 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
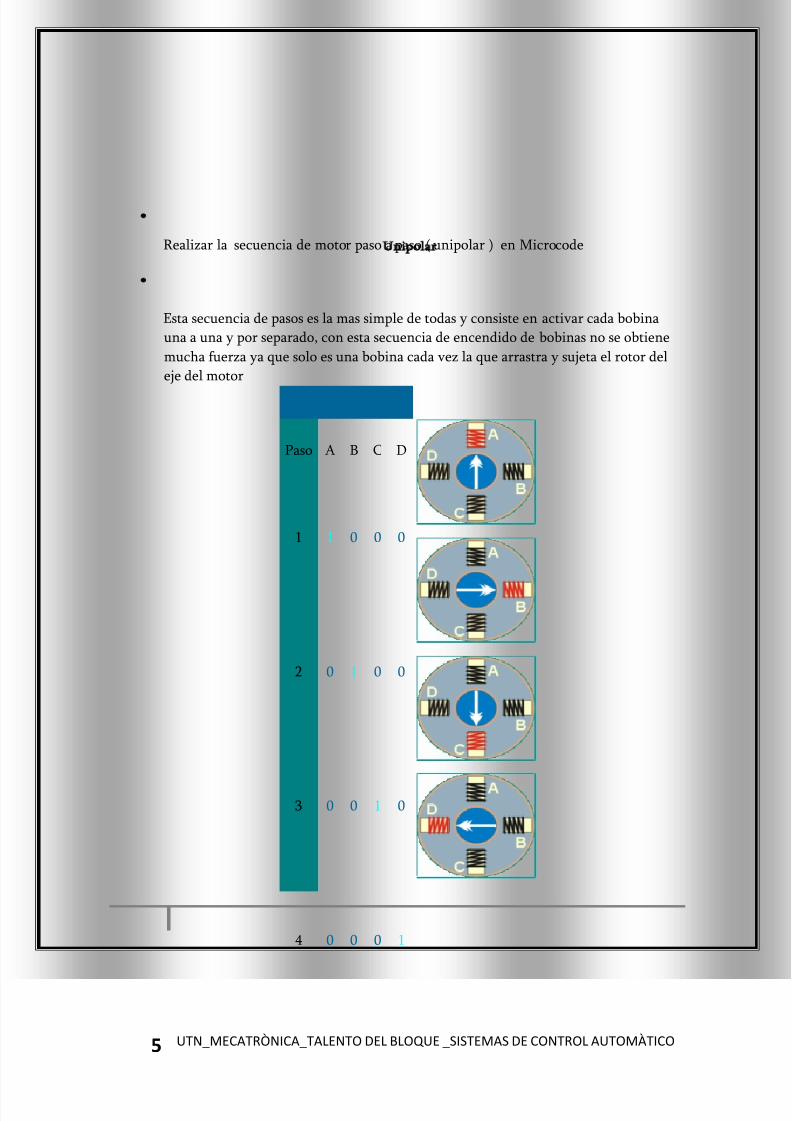
Realizar la secuencia de motor paso a paso ( unipolar ) en Microcode
Unipolar
Esta secuencia de pasos es la mas simple de todas y consiste en activar cada bobinauna a una y por separado, con esta secuencia de encendido de bobinas no se obtienemucha fuerza ya que solo es una bobina cada vez la que arrastra y sujeta el rotor deleje del motor
Paso A B C D
1 1 0 0 0
2 0 1 0 0
3 0 0 1 0
4 0 0 0 1
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 6/12
6 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
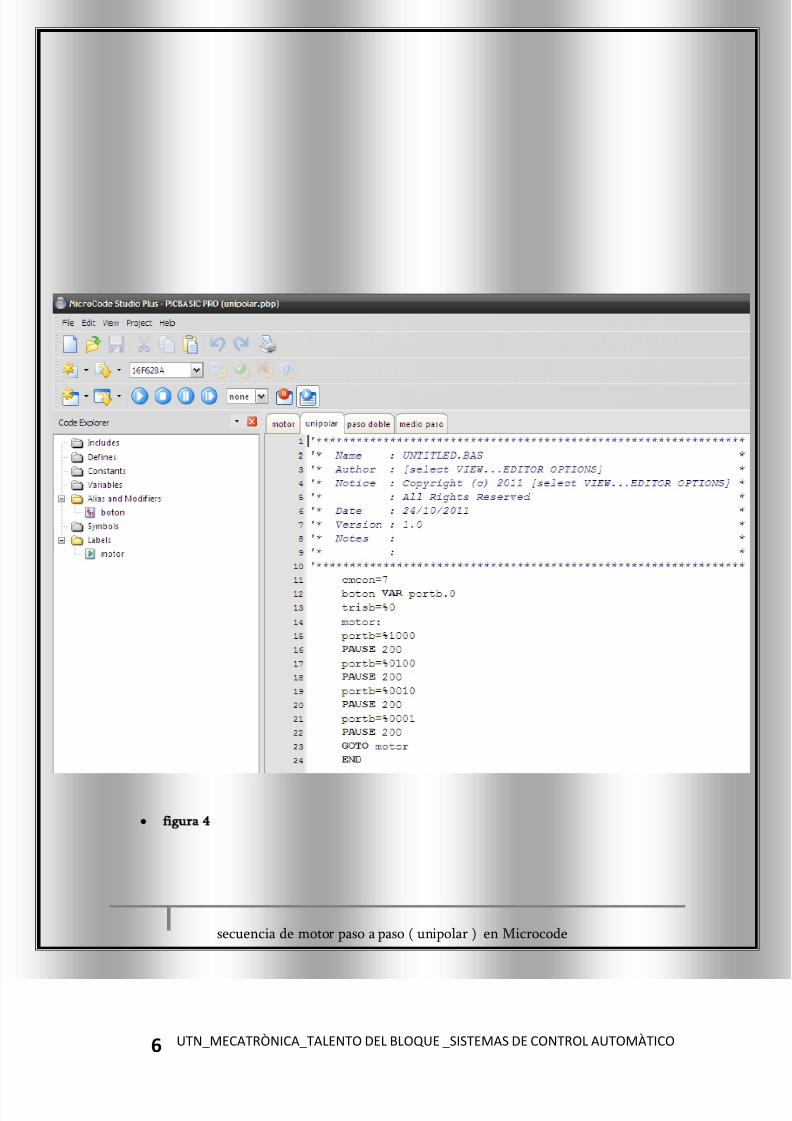
figura 4 secuencia de motor paso a paso ( unipolar ) en Microcode
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 7/12
7 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
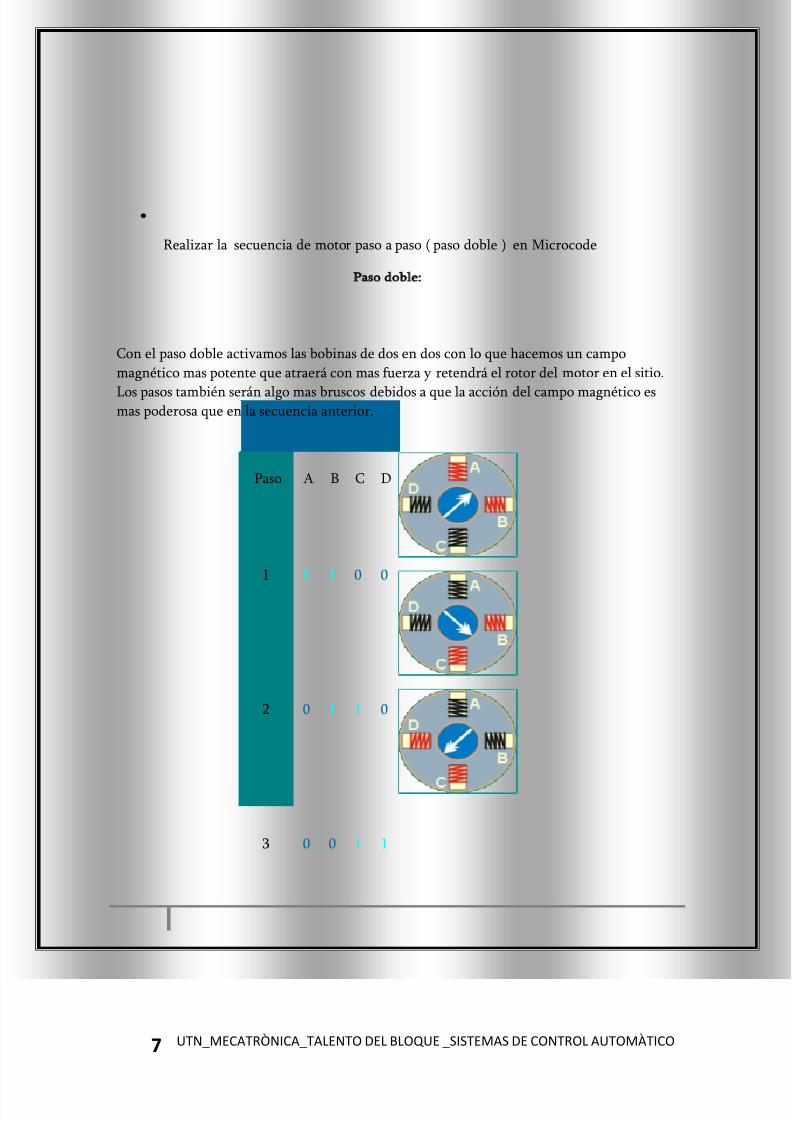
Realizar la secuencia de motor paso a paso ( paso doble ) en Microcode
Paso doble:
Con el paso doble activamos las bobinas de dos en dos con lo que hacemos un campomagnético mas potente que atraerá con mas fuerza y retendrá el rotor del motor en el sitio.
Los pasos también serán algo mas bruscos debidos a que la acción del campo magnético esmas poderosa que en la secuencia anterior.
Paso A B C D
1 1 1 0 0
2 0 1 1 0
3 0 0 1 1
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 8/12
8 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
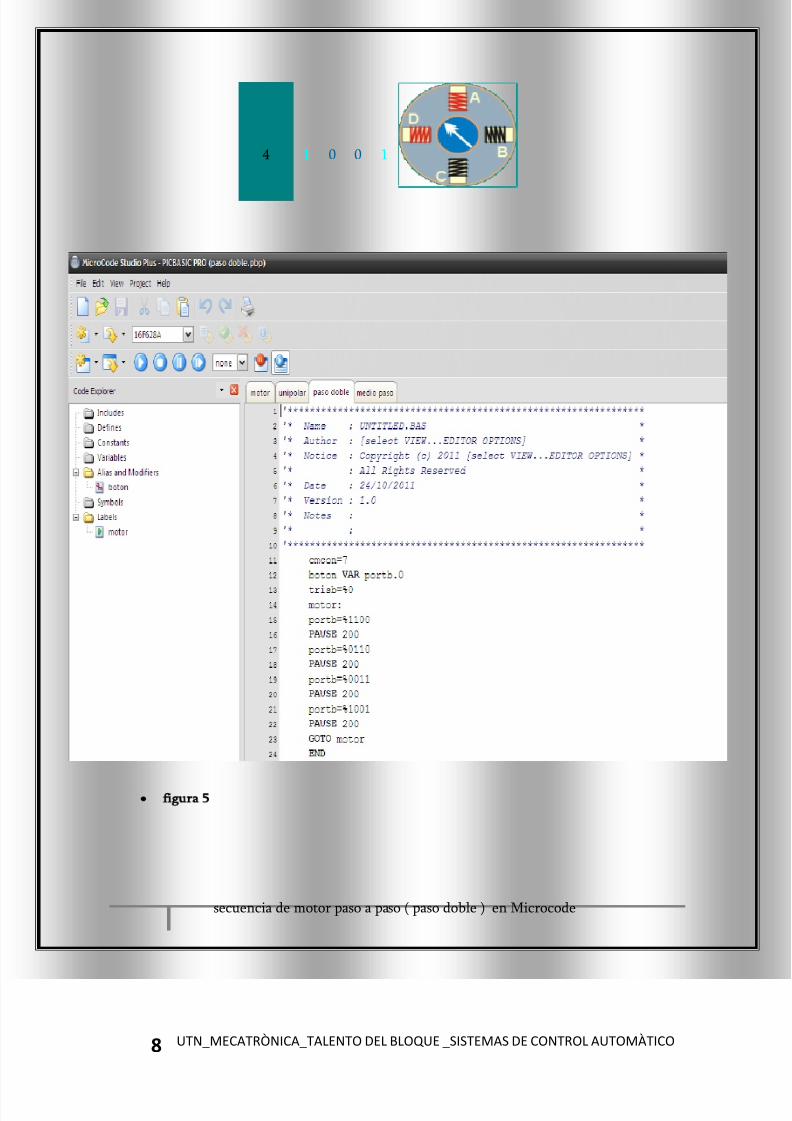
4 1 0 0 1
figura 5 secuencia de motor paso a paso ( paso doble ) en Microcode
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 9/12
9 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
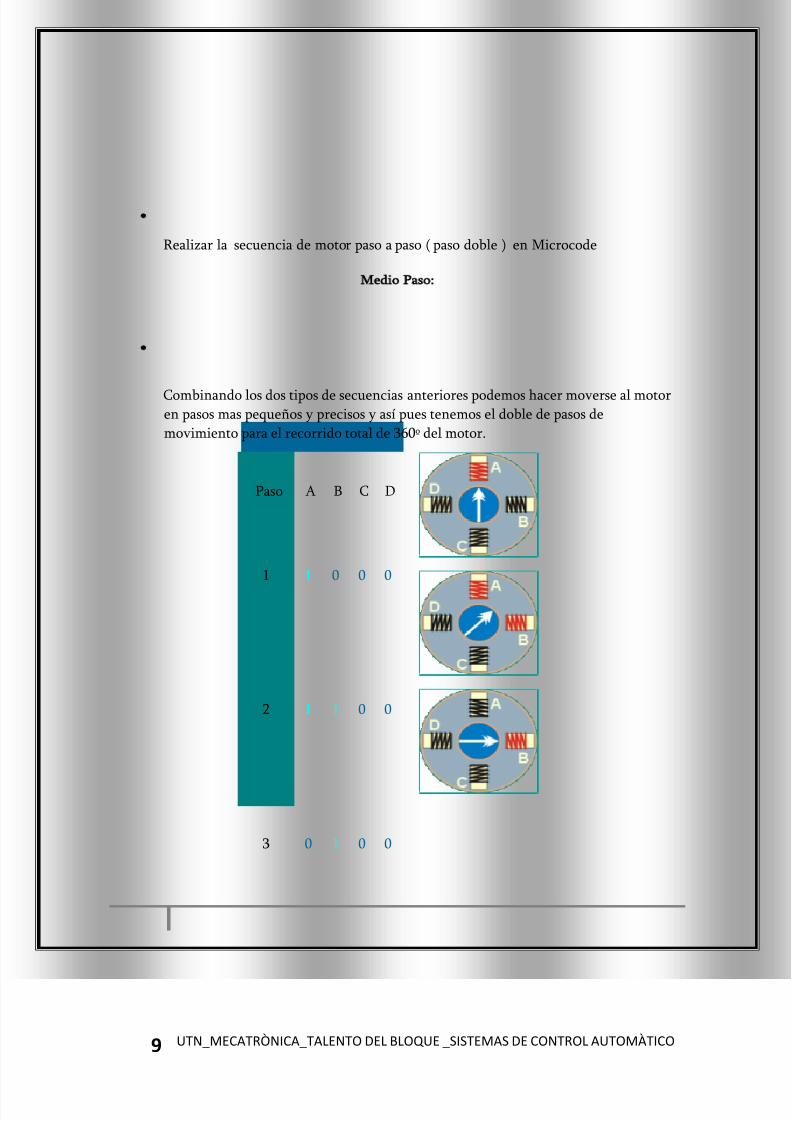
Realizar la secuencia de motor paso a paso ( paso doble ) en Microcode
Medio Paso:
Combinando los dos tipos de secuencias anteriores podemos hacer moverse al motoren pasos mas pequeños y precisos y así pues tenemos el doble de pasos demovimiento para el recorrido total de 360º del motor.
Paso A B C D
1 1 0 0 0
2 1 1 0 0
3 0 1 0 0
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 10/12
10 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
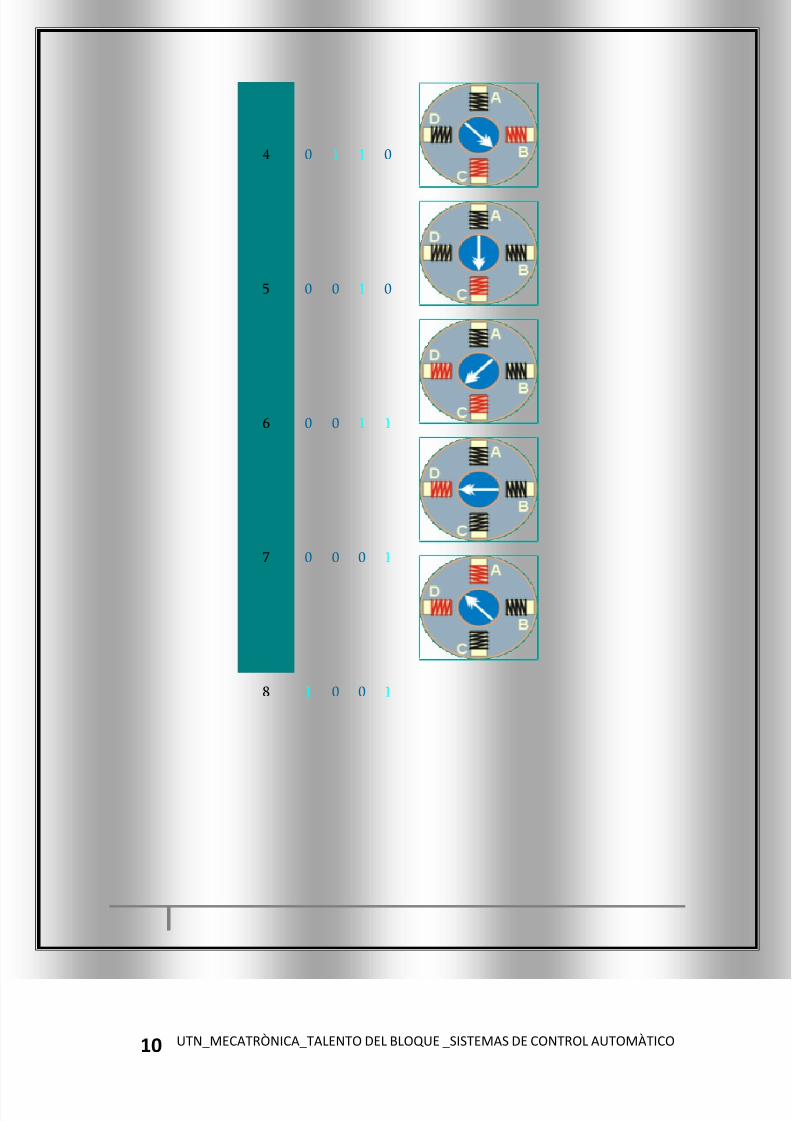
4 0 1 1 0
5 0 0 1 0
6 0 0 1 1
7 0 0 0 1
8 1 0 0 1
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 11/12
11 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
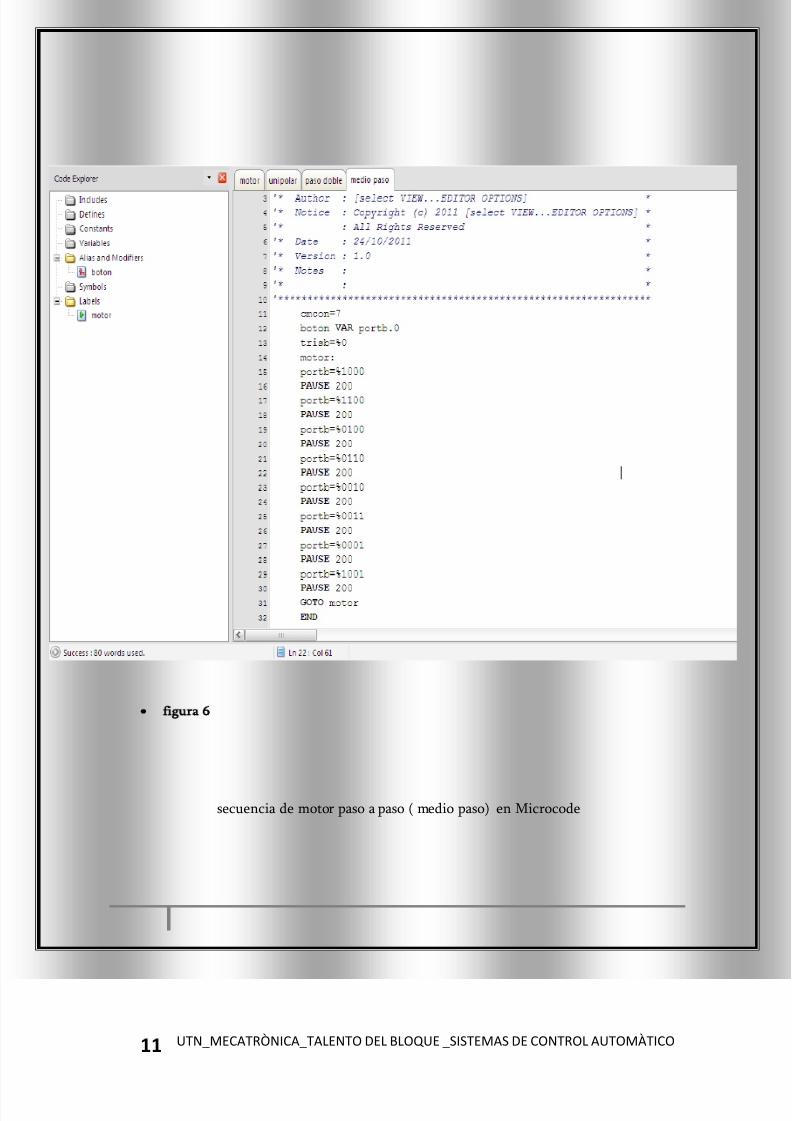
figura 6 secuencia de motor paso a paso ( medio paso) en Microcode
5/12/2018 Mem 32_motor Paso a Paso - slidepdf.com
http://slidepdf.com/reader/full/mem-32motor-paso-a-paso 12/12
12 UTN_MECATRÒNICA_TALENTO DEL BLOQUE _SISTEMAS DE CONTROL AUTOMÀTICO
CONCLUSIÒN
BIBLIOGRAFÌA


















