Embed Size (px)
Citation preview

Institut National des Sciences Appliquées de Strasbourg
Mémoire de soutenance de Diplôme d’Ingénieur INSA
Spécialité TOPOGRAPHIE
Qualification de la précision de données topographiques issues d’acquisitions par méthode scanner laser
dynamique ferroporté au sein de la SNCF.
Présenté le 24 septembre 2015 par Audrey JACQUIN
Réalisé au sein de l’entreprise :
SNCF Réseau, Direction Ingénierie et Projets Département Lignes Voie Environnement Division Assistance Travaux et Topographie 6, avenue François Mitterrand 93574 La Plaine Saint-Denis Cedex
Directeur de PFE : M. Mathieu REGUL Ingénieur Géomètre-Topographe, SNCF M. Florian BIROT Ingénieur Géomètre-Topographe, SNCF
Correcteurs de PFE : M. Gilbert FERHAT
Maître de Conférences, INSA de Strasbourg
Mme Tania LANDES Maître de Conférences, INSA de Strasbourg

Page 2
Audrey JACQUIN - Sept. 2015 - INSA - PFE

Page 3
Audrey JACQUIN - Sept. 2015 - INSA - PFE
AVANT-PROPOS
Ce stage de six mois m’a permis d’évoluer au sein de la division Assistance Travaux et
Topographie de SNCF Réseau, qui représente une structure conséquente composée de différents
cœurs de métier. J’ai eu l’opportunité de travailler avec des instruments à la pointe de la technologie.
Une grande part d’autonomie m’a été accordée, ce qui a nécessité une bonne organisation du
temps de travail. D’un point de vue personnel, cette expérience fut riche en découvertes puisque j’ai
eu l’occasion de travailler sur chacune des étapes d’un projet de relevés par scanner laser dynamique
ferroporté, depuis la préparation du projet, jusqu’au traitement des données qui fait intervenir une
suite logicielle conséquente. Ce sujet de recherche m’a également permis de développer un esprit de
réflexion et d’analyse afin de traiter au mieux le sujet qui m’a été confié.

Page 4
Audrey JACQUIN - Sept. 2015 - INSA - PFE

Page 5
Audrey JACQUIN - Sept. 2015 - INSA - PFE
REMERCIEMENTS
Je souhaite adresser mes remerciements aux personnes qui m'ont apportées leur aide et leur
soutien et ainsi contribuées au bon déroulement de mon Projet de Fin d’Etudes, pour en faire une
expérience professionnelle enrichissante.
Je souhaite avant tout remercier Monsieur Bruno Landes, chef de la Division Assistance Travaux
et Topographie (ATT) de SNCF Réseau, pour m’avoir accueillie au sein de son service.
Je tiens également à remercier Messieurs Mathieu Regul et Florian Birot, directeurs de ce Projet
de Fin d’Etudes, pour leurs apports de connaissances professionnelles et le soutien qu’ils m’ont
apporté afin d’assurer le bon déroulement de ce projet.
Je voudrais adresser toute ma gratitude à Monsieur Jean-Christophe Michelin, pour sa
disponibilité et ses conseils judicieux, qui ont permis d’orienter mes réflexions et mes choix
professionnels.
Mes remerciements s’adressent aussi à Messieurs Pierre Lasseur et Patrick Manant, pour leurs
remarques pertinentes à propos de ce projet.
Pour le bon déroulement des expérimentations sur le terrain, je remercie Messieurs Audric Albert
et François Giroud.
De manière générale, je remercie tous les membres de la division ATT pour leur accueil.

Page 6
Audrey JACQUIN - Sept. 2015 - INSA - PFE

Page 7
Audrey JACQUIN - Sept. 2015 - INSA - PFE
SOMMAIRE
AVANT-PROPOS
REMERCIEMENTS
SOMMAIRE
INTRODUCTION ................................................................................................................................................ 1
CHAPITRE.I. ETAT DE L’ART .............................................................................................................................. 3
I.1. PRINCIPE DE FONCTIONNEMENT DE LA CARTOGRAPHIE MOBILE .................................................................................... 3
I.1.1. Composants dédiés à la trajectographie ............................................................................................... 3 I.1.1.1. Système de positionnement par GNSS et centrale inertielle* ......................................................................... 3 I.1.1.2. Données odomètriques ................................................................................................................................... 4 I.1.1.3. Algorithme de fusion des données: filtre de Kalman ....................................................................................... 4
I.1.2. Instruments de mesures du terrain : scanners laser .............................................................................. 6
I.1.3. Erreurs impactant les mesures .............................................................................................................. 6
I.2. EVALUATION DE LA QUALITE DE RELEVES LASER MOBILES ............................................................................................ 8
I.2.1. Critères d’évaluation de la qualité des données laser mobiles .............................................................. 8
I.2.2. Méthodes d’évaluation de l’exactitude de données issues de système mobile ................................... 10
I.3. ETUDE INTERNE ANTERIEURE .............................................................................................................................. 12
I.4. CONCLUSION................................................................................................................................................... 12
CHAPITRE.II. PRESENTATION DE LA CAMPAGNE D’ACQUISITION ................................................................... 14
II.1. PRESENTATION DU SCANNER LASER DYNAMIQUE RIEGL VMX-450 RAIL .................................................................... 14
II.1.1. Eléments constitutifs .......................................................................................................................... 14
II.1.2. Caractéristiques .................................................................................................................................. 16
II.2. PRESENTATION DE LA ZONE DE LEVE .................................................................................................................... 19
II.3. ETAPES PREALABLES A L’ACQUISITION.................................................................................................................. 20
II.3.1. Géo-référencement statique : acquisitions de points d’appui ............................................................ 20
II.3.2. Choix de la disposition des pivots GNSS pour l’acquisition dynamique .............................................. 21
II.4. DEROULEMENT DE L’ACQUISITION ...................................................................................................................... 22
II.4.1. Paramétrage du système.................................................................................................................... 22
II.4.2. Initialisation de l’ensemble « GNSS-IMU» .......................................................................................... 22
II.5. TRAITEMENTS DE L’ENSEMBLE DES DONNEES : GNSS/IMU ET NUAGE DE POINTS ........................................................ 23
II.5.1. Calcul du réseau de pivots .................................................................................................................. 23
II.5.2. Calcul de la trajectoire ........................................................................................................................ 23
II.5.3. Combinaison des données LiDAR avec la trajectoire .......................................................................... 24
II.5.4. Classification du nuage de points ....................................................................................................... 24
II.5.5. Recalage absolu des données à l’aide de points d’appui .................................................................... 24
II.5.6. Recalage relatif à l’aide de points communs ...................................................................................... 26
II.6. CONCLUSION.................................................................................................................................................. 27
CHAPITRE.III. EVALUATION DE LA PRECISION DES DONNEES .......................................................................... 28
III.1. ETUDE DE PRECISION DE LA TRAJECTOIRE AVANT RECALAGE SUR POINTS D’APPUI ......................................................... 28
III.1.1. Présentation du logiciel ..................................................................................................................... 28
III.1.2. Méthodologie .................................................................................................................................... 30
III.1.3. Résultats et analyses ......................................................................................................................... 31

Page 8
Audrey JACQUIN - Sept. 2015 - INSA - PFE
III.1.3.1. Influence de la méthode de calcul ............................................................................................................... 31 III.1.3.2. Influence des paramètres de calculs ............................................................................................................ 32 III.1.3.3. Influence de l’odomètre .............................................................................................................................. 33 III.1.3.4. Méthode de calcul à préconiser ................................................................................................................... 34
III.2. PRECISION DES DONNEES APRES RECALAGE SUR POINTS D’APPUI .............................................................................. 34
III.2.1. Méthodologie .................................................................................................................................... 34
III.2.2. Trajectoire et nuage de points de référence ...................................................................................... 35
III.2.3. Méthodes de comparaisons .............................................................................................................. 36 III.2.3.1. Trajectoires .................................................................................................................................................. 36 III.2.3.2. Nuages de points ......................................................................................................................................... 36
III.3. RESULTATS ET ANALYSES .................................................................................................................................. 39
III.3.1. Influence de l’intervalle entre points d’appui .................................................................................... 39 III.3.1.1. Comparaisons des trajectoires dynamiques ................................................................................................ 39 III.3.1.2. Comparaisons entre nuages de points dynamiques .................................................................................... 42 III.3.1.3. Comparaisons nuage dynamique/nuage statique ....................................................................................... 44
III.3.2. Etude économique ............................................................................................................................. 46 III.3.2.1. Coûts de mise en place des points d’appui .................................................................................................. 46 III.3.2.2. Coûts consacrés au traitement .................................................................................................................... 46
III.4. CONCLUSION................................................................................................................................................. 47
CHAPITRE.IV. METHODE D’APPLICATION DE L’ARRETE DE 2003 ..................................................................... 48
IV.1. NOUVEAUTES APPORTEES PAR L’ARRETE ET DEFINITIONS ........................................................................................ 48
IV.2. MISE EN PLACE DE METHODES DE CONTROLE DE NUAGES DE POINTS DYNAMIQUES ...................................................... 49
IV.2.1. Méthode par mesure de points de contrôle ...................................................................................... 49 IV.2.1.1. Méthodologie .............................................................................................................................................. 49 IV.2.1.2. Respect du coefficient de sécurité ............................................................................................................... 50 IV.2.1.3. Choix de l’échantillon .................................................................................................................................. 51
IV.2.2. Méthode par acquisition de nuages de points statiques ................................................................... 51 IV.2.2.1. Méthodologie .............................................................................................................................................. 51 IV.2.2.2. Respect du coefficient de sécurité ............................................................................................................... 52 IV.2.2.3. Choix de l’échantillon .................................................................................................................................. 53
IV.3. RESULTATS ET ANALYSES ................................................................................................................................. 53
IV.3.1. Méthode par mesure de points de contrôle : zone contrôlée ............................................................ 53 IV.3.1.1. Exemple de calcul ........................................................................................................................................ 54 IV.3.1.2. Evaluation de la classe de précision des données ....................................................................................... 55
IV.3.2. Contrôle par scanner statique : zone contrôlée................................................................................. 57 IV.3.2.1. Exemple de calcul ........................................................................................................................................ 57 IV.3.2.2. Evaluation de la classe de précision............................................................................................................. 57
IV.4. CONCLUSION ................................................................................................................................................ 60
CONCLUSION GENERALE ET PERSPECTIVES .................................................................................................... 61
TABLE DES ILLUSTRATIONS ............................................................................................................................. 63
BIBLIOGRAPHIE .............................................................................................................................................. 65
ANNEXES

Page 1
Audrey JACQUIN - Sept. 2015 - INSA - PFE
INTRODUCTION
Contexte de l’étude
Ce Projet de Fin d’Etudes (PFE) s’est déroulé au sein de la division Assistance Travaux et
Topographique (ATT) de la direction Ingénierie et Projets de SNCF Réseau.
La division ATT est composée entre autres d’une section méthodes et mesures 3D. Elle se
concentre sur les techniques de mesures par lasergrammétrie et photogrammétrie et réalise les
développements géomatiques en liens avec ces technologies (logiciels, capteurs, etc.). Cette section
a pour objectif de déployer des techniques émergentes en complément de la topographie
traditionnelle, afin de pouvoir répondre rapidement à des missions de grande échelle. En effet, le
réseau ferroviaire français s’étend sur 33.000 kilomètres de lignes, il y a donc un véritable besoin de
suivre l’évolution de la topographie vers des moyens techniques plus productifs et moins intrusifs.
La division s’est donc intéressée aux scanners laser dynamiques puisqu’ils offrent une
productivité élevée et le principe d’intervention de ce système est compatible avec les contraintes
opérationnelles et de sécurité du milieu ferroviaire. De plus, le convoi de mesures peut s’insérer dans
la circulation sans perturber celle des trains, ce qui est un avantage incontestable. Son choix s’est
porté sur le scanner laser dynamique ferroporté de type VMX-450 Rail, développé par la société Riegl.
SNCF Réseau envisage d’utiliser ce système pour surveiller l’ensemble de son réseau à
intervalles réguliers de l’ordre de 2 ans, mais aussi dans le cadre d’autres projets tels que les
simulations de gabarits, les études caténaires, la régénération des voies, etc. Les avantages
d’acquisition de cette technologie, tels que la rapidité et la sécurité, très adaptés au milieu ferroviaire,
nécessitent en effet d’être exploités au maximum à travers ces projets. Les données acquises par le
système étant d’une telle densité et complétude, elles offrent une polyvalence pour de nombreuses
applications et pourront être réutilisées pour d’autres études et par d’autres cœurs de métier au sein
de SNCF Réseau. La mise en place d’un système d’information géographique 3D, voire d’un BIM1
ferroviaire recensant l’ensemble des acquisitions par scanner dynamique en « France » sont à l’étude
au sein de la division ATT.
Le potentiel de cette technologie a déjà été prouvé en milieu routier depuis plusieurs années,
mais le milieu ferroviaire est plus complexe (perturbations électromagnétiques liées aux caténaires,
faible réflectance des rails, faible variation du parcours due aux grands rayons de courbure, etc.), c’est
pourquoi les scanners laser dynamiques ne sont montés que depuis peu sur rail. Une étude préalable
est donc nécessaire afin d’évaluer si l’on peut atteindre la précision requise pour les levés ferroviaires.
Principaux objectifs et déroulement du projet
Cette étude vise à évaluer la précision que peut fournir le scanner laser dynamique VMX-450 Rail
et à déterminer les moyens à mettre en œuvre pour y parvenir. On distingue la précision absolue et la
précision relative. La précision relative décrit le bruit interne du nuage de points et dépend du type de
scanner laser, tandis que la précision absolue est liée au système de positionnement en mode
cinématique.
1 BIM ferroviaire : maquette numérique 4D permettant de mieux gérer et aménager le réseau ferré national.

Page 2
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Une étude de précision relative du système Riegl VMX-450 Rail a été réalisée en 2014 lors du PFE de
Quentin Choquart et a permis de valider l’utilisation de ce scanner laser dynamique pour réaliser les
mesures et contrôles de gabarits ferroviaires. Dans cette étude, seule la précision relative importait.
Si l’on étend l’utilisation du scanner laser dynamique, une étude de précision absolue s’avère
indispensable, notamment dans le cadre de projets «Régévoie», consistant à effectuer un relevé des
voies en vue de travaux de remplacements. Le premier objectif de ce projet est donc d’étudier la
précision absolue des données issues du système Riegl VMX-450 Rail suivant les moyens mis en
œuvre. Il s’agit d’évaluer le besoin de mise en place de points d’appui pour améliorer le géo-
référencement des données. Ce travail nous amènera également à proposer des solutions
d’améliorations dans le processus de traitement des données.
Le second objectif vise à mener une réflexion dans le but de contrôler la précision du nuage de
points constituant le rendu final. La méthode de contrôle sera appliquée aux données acquises par le
système VMX-450 Rail en interne ainsi qu’aux données fournies par les sous-traitants. En tant
qu’établissement public à caractère industriel et commercial (EPIC), SNCF doit adopter une
méthodologie conforme à l’arrêté de 2003 sur les classes de précision puisqu’il est applicable aux
travaux réalisés par les établissements publics.
L’organisation de mon rapport s’articule autour de 4 grandes parties.
Premièrement, nous aborderons les aspects théoriques du fonctionnement d’un scanner laser
dynamique afin de faciliter la compréhension du mémoire. Nous ferons ensuite la synthèse des
travaux traitant de l’évaluation de la précision absolue de données lasergrammétriques. Il paraît
également intéressant de présenter les résultats de l’étude réalisée par Quentin Choquart sur la
précision relative du scanner laser VMX-450 Rail. Cette partie constituera l’état de l’art de notre étude.
Dans un second temps, nous nous intéresserons plus particulièrement aux caractéristiques du
scanner laser ferroporté acquis par SNCF Réseau, notamment celles qui ont permis de l’adapter au
milieu ferroviaire. Nous présenterons le déroulement d’une campagne d’acquisition par scanner laser
dynamique et nous aborderons également le traitement des données.
Une fois le traitement des données effectué, nous pouvons réaliser les expérimentations
permettant d’analyser la précision obtenue en fonction des moyens mis en œuvre. L’étude de
précision sera réalisée à la fois sur la trajectoire et sur le nuage de points obtenu. A partir de ces
résultats et d’une étude économique succincte du coût de mise en place des points d’appui, cette
étude permettra de déterminer la répartition des points d’appui optimale pour atteindre la précision
requise pour les levés ferroviaires.
Le dernier chapitre est consacré au contrôle de la précision des données finales et présentera les
méthodes que nous avons proposées pour rendre ce contrôle conforme à l’arrêté de 2003 sur les
classes de précision.
Enfin nous conclurons cette étude en apportant les méthodes à mettre en œuvre pour atteindre
les précisions requises, ainsi que les méthodes de contrôle des nuages de points et nous
présenterons les perspectives d’évolutions envisagées.

Page 3
Audrey JACQUIN - Sept. 2015 - INSA - PFE
CHAPITRE.I. ETAT DE L’ART
L’état de l’art présenté ci-dessous se compose de trois grandes parties. Premièrement, nous
aborderons les aspects théoriques du fonctionnement d’un scanner laser dynamique au travers de
ses composants, dans le but de faciliter la compréhension de la suite du rapport. Nous dresserons
également un bilan des erreurs impactant les mesures, afin de mettre en avant les problèmes
auxquels nous sommes confrontés. Nous présenterons ensuite les méthodes qui existent
actuellement pour évaluer la précision de données acquises par scanners laser dynamiques, qui ont
permis d’orienter notre choix. Pour finir, nous nous intéresserons à l’étude antérieure réalisée sur le
système VMX-450 Rail au sein de SNCF Réseau, puisque notre projet de fin d’études s’inscrit dans la
continuité.
I.1. Principe de fonctionnement de la cartographie mobile
La cartographie mobile a été développée depuis les années 1990 avec les progrès de la
géodésie spatiale et inertielle, permettant de déterminer directement la position et l’attitude du
système de mesures. Il s’agit d’une technologie complexe, composée de nombreux capteurs, destinés
aux mesures de trajectographie et de topographie mais aussi à la synchronisation des données et à
leur enregistrement. Un scanner laser dynamique repose sur l’association de technologies de pointe
qui sont : le laser, l’unité inertielle, le système GNSS et l’imagerie numérique. Pour assurer une bonne
précision des données, le système nécessite d’être rigide afin qu’il n’y ait aucun mouvement entre les
éléments au cours de l’acquisition. Chaque composant interne doit être calibré et l’ensemble du
système doit être étalonné pour définir précisément les bras de levier et les matrices de montage
entre chaque composant (rotations résiduelles dues aux imperfections d’assemblage).
Cette technologie est de plus en plus utilisée et offre un bon compromis entre précision, rapidité
d’acquisition et coût de réalisation. En effet, ce principe de mesure offre une vitesse de production
supérieure aux méthodes de relevés traditionnelles grâce à l’automatisation des acquisitions.
Néanmoins, la chaîne de traitement est plus obscure du fait de l’emploi de certains algorithmes ou
logiciels « boîte noire » et s’avère coûteuse en temps de post-traitement et de report cartographique
pour l’utilisateur. Par ailleurs, cette technologie nécessite un parc informatique récent et performant,
ainsi qu’une capacité importante de stockage et d’archivage. On peut donner l’exemple des
acquisitions réalisées en 2014 au sein de SNCF Réseau, dont le stockage de 9000 kilomètres a été
estimé à 100 To.
I.1.1. Composants dédiés à la trajectographie
I.1.1.1. Système de positionnement par GNSS et centrale inertielle*
Les principaux composants d’un système de cartographie mobile dédiés à la trajectographie
sont : un système de réception GNSS (antenne et récepteur) et une centrale inertielle. Ces données
interviennent pour déterminer la position et l’orientation des scanners laser au cours du déplacement
du système mobile lors des acquisitions, afin de géo-référencer les données lasergrammétriques.
Le système GNSS est aujourd’hui un élément de navigation bien adapté pour le positionnement
statique et dynamique. Il détermine la position et la vitesse du mobile à tout instant, dans un système
de référence mondiale (WGS84). Afin d’assurer un positionnement centimétrique, le mode GNSS
différentiel est utilisé. C'est-à-dire que le positionnement du récepteur mobile est amélioré en
déterminant les vecteurs tridimensionnels qui le séparent d’un ou plusieurs autres récepteurs fixes

Page 4
Audrey JACQUIN - Sept. 2015 - INSA - PFE
dont la position est connue. Les récepteurs sont situés dans un rayon de 20 kilomètres et reçoivent
simultanément les signaux des satellites. Cette méthode permet d’éliminer certains biais
systématiques propres au système GPS [Ledig, 2014]. (Cf. partie I.1.3).
La centrale inertielle enregistre les accélérations et les attitudes du système mobile à partir de 3
accéléromètres et de 3 gyroscopes, disposés le long des 3 axes de référence du système. Le
positionnement du scanner dynamique est obtenu par intégration des données fournies par les
capteurs d’accélération et de rotation, tandis que l’orientation du système dans l’espace, appelé
attitude, est issue des angles de roulis, lacet et tangage fournis par les gyroscopes. La fréquence
d’acquisition est beaucoup plus élevée que celle des données GNSS. Selon les modèles, elle varie
entre 1 et 20 Hertz pour les mesures GNSS, alors que la fréquence des mesures inertielles se situe
entre 200 à 1000 Hertz.
Le positionnement inertiel a l’inconvénient de subir une dégradation rapide, qui augmente de
manière exponentielle au cours du temps. Ceci est dû aux dérives gyroscopiques et aux biais des
accéléromètres, liés à la double intégration des accélérations pour déterminer la position du système.
Lorsque le signal GNSS est disponible, cette technologie permet de combler l’incertitude inertielle.
[Alshawa et Grussenmeyer, 2009]. Néanmoins, les mesures de position et de vitesse par GNSS sont
perturbées en milieux confinés et parfois indisponibles (tunnels, forêts dense, etc.). Ce problème
justifie l’emploi d’une centrale inertielle afin d’avoir une disponibilité continue de la position du
système. Elle maintient la précision fournie par le système GNSS pendant un temps variable en
fonction du modèle (généralement quelques minutes pour les centrales inertielles utilisées en
cartographie mobile). Ces deux systèmes de positionnement sont donc complémentaires.
I.1.1.2. Données odomètriques
L’odomètre est un système peu coûteux, qui permet de mesurer une distance parcourue et une
vitesse. Il peut être utilisé dans les systèmes de cartographie mobile afin d’apporter un complément
d’informations sur la trajectographie. Les détections de phases d’arrêts et de mouvements du système
mobile permettent de compenser une partie des dérives de la centrale inertielle. Cependant,
l’odométrie présente également des limites. D’une part, elle ne permet qu’une localisation 2D, d’autre
part, elle est sensible aux erreurs de roulement (glissement du véhicule, surface irrégulière : trous et
bosses), [Ndjeng, 2009]. Toutefois, nous verrons en partie II.1.2, que les caractéristiques de
l’odomètre utilisé avec le système VMX-450 Rail permettent de limiter ces erreurs.
I.1.1.3. Algorithme de fusion des données: filtre de Kalman
Comme nous l’avons vu, le système de positionnement GNSS actuel et la centrale inertielle ne
sont pas suffisamment robustes pour être utilisés seuls dans la localisation fiable de systèmes
mobiles. C’est pourquoi nous utilisons un système hybride fondé sur l’utilisation conjointe de la
localisation absolue et relative. Le système de localisation absolue (GNSS) est chargé de corriger
régulièrement l’estimation du système de localisation relative (centrale inertielle et odomètre) afin de
corriger les problèmes de dérives. Inversement, le système de localisation relative fournit des
informations en continue, même lorsque les données GNSS ne sont pas disponibles. [Selloum, 2010].
Il convient donc d’employer un algorithme permettant de fusionner ces données complémentaires.
D’après l’état de l’art réalisé par [Alshawa et Grussenmeyer, 2009], la méthode la plus adaptée, à
quelques exceptions près, pour intégrer des données de trajectographie issues de différents capteurs,
réside en l’utilisation d’un filtre de Kalman. D’autres méthodes sont présentées par [Ndjeng, 2009].

Page 5
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Le principe du filtre de Kalman repose sur des calculs de compensation par l’intermédiaire des
moindres carrés, afin de prédire et de corriger les erreurs liées aux systèmes de mesures. Il prédit
l’état du système mobile (position, vitesse et orientation) à l’instant t+1, à partir des écarts entres les
mesures réelles précédentes et les estimations qu’il avait faites.
Il existe deux modes principaux de couplage des données.
Le couplage lâche repose sur le traitement individuel des mesures GNSS et inertielles avant
l’intégration au filtre. On traite les pseudo-distances pour calculer les positions et vitesses, qui
sont ensuite combinées avec les données du système de navigation inertielle.
Le couplage serré considère directement les observations GNSS et inertielles brutes pour
calculer en même temps tous les éléments du vecteur d’état. Ce mode de traitement permet
un meilleur contrôle des données puisqu’elles n’ont pas subi de prétraitement. [Alshawa et
Grussenmeyer, 2009]. Par rapport au couplage lâche, le système GNSS bénéficie d’un retour
du filtre de navigation qui permet une meilleure détection des erreurs. [Le Marchand, 2010].
Ces modes de couplage sont présentés sous forme de schéma en annexe A.1 « Fusion des
données GNSS et inertielles : méthodes de couplage ».
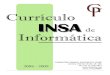
Afin de pallier les dérives exponentielles de la centrale inertielle durant les coupures de signaux
GNSS (pouvant atteindre 10 centimètres au bout d’une minute avec le modèle équipant le système
VMX-450, présenté en partie II.1.2), une méthode de calcul « forward » (sens chronologique de
l’acquisition) et « reverse » (sens anti-chronologique) est réalisée à partir de ce filtre. Le schéma
présenté en figure 1 permet d’expliciter cette méthode à partir des caractéristiques de la centrale
inertielle qui équipe le système VMX-450 Rail.
Figure 1 : Exemple de résultats de la combinaison forward/reverse des mesures inertielles lors d’une coupure GNSS, par application de filtre de Kalman. Source : adaptation de [Thies, 2011]
Le calcul effectué dans le sens chronologique (« forward »), prend en compte les mesures de
la centrale inertielle à partir de la dernière position GNSS avant la coupure du signal, jusqu’à
ce qu’on retrouve des mesures GNSS suffisamment précises.
Le calcul effectué dans le sens anti-chronologique (« reverse ») débute de la première
position GNSS après la coupure, jusqu’à la position GNSS avant la coupure.
Les résultats sont ensuite fusionnés et lissés pour fournir la trajectographie finale. L’écart le plus
important se retrouvera au milieu de la période de coupure.

Page 6
Audrey JACQUIN - Sept. 2015 - INSA - PFE
I.1.2. Instruments de mesures du terrain : scanners laser
Les scanners laser permettent de réaliser des saisies rapides et automatiques de points en 3D,
sans contact direct avec l’objet. Cette technologie fournit d’énormes quantités de données en un
temps réduit, ce qui permet souvent de gagner du temps sur le terrain. [Landes et Grussenmeyer,
2011].
Le principe de fonctionnement repose sur le LiDAR, qui est une mesure électronique de distance,
estimée à partir de la propagation d’une onde électromagnétique entre l’appareil et l’élément mesuré.
On distingue les scanners laser à impulsion (ou « temps de vol ») des scanners à décalage de phase.
Les premiers déterminent la distance à partir du temps de propagation de l’onde entre l’émission et la
réception. Les seconds mesurent le décalage de phase entre l’onde émise et reçue. Le principe de
mesure à partir du décalage de phase est davantage utilisé pour les LiDAR terrestres puisqu’ils ont
une plus courte portée que ceux à impulsion, utilisés en dynamique. [Vosselman et al. 2010].
Le rayon laser du scanner est dévié au cours du temps, grâce à un dispositif de miroirs rotatifs et
permet de balayer des surfaces à fréquence élevée. Les informations enregistrées pour chaque point
fournissent la distance par rapport au scanner, l’angle horizontal et vertical, ainsi que l’intensité de
l’impulsion reçue. L’intensité se détermine à partir de la différence entre la puissance émise par l’onde
et la puissance reçue. Elle dépend de la nature de la surface balayée et de son éloignement par
rapport au scanner. Les données doivent ensuite être géo-référencées et l’ensemble des points
collectés constituent un « nuage de points ».
Les scanners laser terrestres fournissent des données de haute densité, cependant le temps
d’intervention est élevé dans le cas de grands projets. Quant aux levés aériens, ils sont adaptés aux
projets de grande surface mais la densité de points est plus faible qu’en terrestre du fait de
l’éloignement du scanner par rapport aux éléments relevés. C’est pourquoi les systèmes mobiles sont
apparus comme étant un bon compromis entre la densité de points acquis et la rapidité d’intervention.
[Yoo, 2011].
Les systèmes mobiles de cartographie sont généralement composés d’un ou plusieurs scanners,
utilisés en mode profilométrique. Alors que les scanners laser terrestres balayent dans les trois
directions de l’espace, ceux utilisés en cartographie mobile ne balayent que dans deux directions et la
troisième est obtenue par le déplacement du système.
La disposition et l’orientation des scanners sur la plateforme mobile ont une importance pour
l’acquisition des données. Les travaux de [Yoo, 2011] ont montré que fixer deux scanners laser selon
deux plans inclinés l’un par rapport à l’autre permet de couvrir une grande surface et de limiter les
zones de masques, non atteignables par le laser. C’est le cas du système VMX-450 de Riegl. (Cf.
partie II.1.2 figure 6).
I.1.3. Erreurs impactant les mesures
Les scanners laser dynamiques étant composés de plusieurs systèmes de mesures, ils sont
soumis aux sources d’erreurs de chaque élément. Elles peuvent être intrinsèques à la conception du
matériel, ou de nature environnementale. Il est important de prendre conscience de ces erreurs afin
d’adapter les modes opératoires, ou de les corriger lors du traitement des données.
Le bilan des erreurs présenté ici ne pourra être exhaustif aux vues des relations complexes qui
existent entre les différents éléments de ce type de système, faisant preuve d’une grande technologie.

Page 7
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Erreurs liées aux mesures GNSS : Selon [Ndjeng, 2009] et [Ledig, 2014].
Types d’erreurs Gestion des erreurs en mode différentiel
Erreurs liées aux satellites : imprécision des
orbites et dérives d’horloges. Utilisation de modèles d’orbites précises.
Erreurs dues à la géométrie des satellites. Planification des mesures en fonction de la
constellation GNSS.
Erreurs de propagation de l’onde dans
l’ionosphère.
Elimination par double différence sur des lignes de
base inférieures à 15 km [Ledig, 2014].
Au-delà de 15 km : élimination par l’utilisation de
récepteurs bi-fréquences pour former la fréquence
« ionofree » ou L3.
Erreurs de propagation de l’onde dans la
troposphère.
Pour des lignes de base courtes (paramètres
troposphériques identiques entre les stations) :
atténuation par double différence.
Pour des lignes de base plus longues : atténuation
en grande partie par traitement différentiel. On peut
également employer des modèles de corrections.
Eventuels multi-trajets de l’onde. Augmentation de la durée d’observation.
Les sauts de cycles. Ils sont déterminés par triple différence.
Tableau 1 : Erreurs liées au système GNSS
Erreurs liées à la centrale inertielle : D’après [Alshawa et Grussenmeyer, 2009].
On distingue les erreurs au niveau des capteurs, des erreurs au niveau du système.
Erreurs au niveau des capteurs :
o Les gyroscopes et accéléromètres sont affectés par le même type d’erreurs. On
distingue le biais qui est l’erreur la plus évidente, l’erreur de facteur d’échelle et le
bruit.
Le biais : il varie à chaque mise sous tension et évolue avec le temps et la
température, c’est ce qu’on nomme la dérive. C’est le critère qui détermine la
gamme d’une centrale inertielle.
Le facteur d’échelle : il s’agit d’un coefficient entre l’accélération exercée et
mesurée. Il dépend également de la température et du temps. Si l’effet de
température est compensé par une calibration réalisée en usine, on peut
modéliser le biais et le facteur d’échelle.
Le bruit : il est issu de l’imprécision des dispositifs électroniques et en général
il ne peut pas être supprimé avec des modèles déterministes.
o Les erreurs des magnétomètres : elles sont dues aux interférences avec des champs
magnétiques extérieurs. Si les éléments ferromagnétiques appartiennent au système
mobile, l’erreur est modélisée comme une valeur additive aux composantes du champ
magnétique. S’ils proviennent d’éléments extérieurs au système il est difficile de les
modéliser.

Page 8
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Erreurs au niveau du système :
o La non orthogonalité des capteurs : elle se corrige avec un modèle établi en usine.
o L’effet du changement de température sur la performance des capteurs : il est
compensé en temps réel par l’utilisation de thermomètres à mesures numériques qui
équipent la plupart des centrales inertielles.
o L’erreur d’initialisation : elle entache uniquement l’attitude si l’initialisation se fait en
mode fixe ou par mesures GNSS.
Erreurs liées aux scanners laser : Selon [Landes, 2010]
o Erreurs instrumentales
Erreurs sur la mesure de distances
Erreurs angulaires
o Erreurs liées aux objets numérisés
Influence de la propriété des matériaux constituant la surface de l’objet
(rugosité, réflectivité, couleur, température)
Influence de l’angle d’incidence du rayon laser
Effet de bord lorsque le signal réfléchit l’objet et les éléments au second plan
o Erreurs environnementales
La propagation du signal laser diffère en fonction des paramètres de
pression, de température, d’humidité et de vibrations du scanner.
Maintenant que nous avons présenté le principe de fonctionnement et les sources d’erreurs d’un
système de cartographie mobile, nous pouvons nous intéresser aux critères permettant d’évaluer la
qualité des données acquises par ce système.
I.2. Evaluation de la qualité de relevés laser mobiles
Avant d’aborder la qualification des données issues du scanner dynamique VMX-450, il est
nécessaire d’évoquer les critères permettant d’évaluer la qualité de relevés laser mobile. Nous
présenterons également certaines méthodes actuellement employées pour évaluer ces critères.
I.2.1. Critères d’évaluation de la qualité des données laser mobiles
Il est du ressort de l’ingénieur géomètre d’analyser la qualité des données fournies par les
appareils utilisés en topographie, afin d’attester la précision du produit final livré.
On se concentre ici sur l’analyse quantitative de la qualité des données, basée sur des calculs de
statistiques. A partir de ces valeurs statistiques, on définit deux indices de qualité qui sont la précision
et l’exactitude des données. Il est nécessaire, dans le cas de cette étude, de rappeler clairement ce
que nous entendons par précision et exactitude afin d’éviter toute confusion.
[Yoo, 2011] définit le terme de précision tel qu’il est utilisé la plupart du temps de manière
générale et distingue trois façons de l’exprimer : en erreur de RMS (Root Mean Square : ), en
exactitude (biais : ) ou encore en fidélité (écart-type : ).
Lorsque l’échantillon statistique suit une loi normale, les trois termes sont liés par l’équation I.1 et
illustrés par la figure 2.
(I.1)

Page 9
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Figure 2 : Représentation des notions d’exactitude et de fidélité dans le cas d’une loi normale,
inspiration [Yoo, 2011]
Précision : de manière rigoureuse, elle définit la fidélité, c'est-à-dire l’étroitesse entre les valeurs
obtenues par mesures répétées du même élément. L’écart-type est l’indicateur de la fidélité puisqu’il
représente la dispersion des mesures autour de l’espérance. Pour déterminer la précision d’un
scanner laser, ou fidélité, il suffit de numériser des éléments plans, perpendiculaires à la direction du
scanner, comme indiqué dans les travaux de [Landes et Grussenmeyer, 2011]. La dispersion des
points autour du plan moyen (épaisseur du nuage) est déterminée par calcul des écarts en distance
de chaque point par rapport au plan moyen. L’écart-type déterminé à partir de ces valeurs représente
la précision de mesure du scanner.
Exactitude : selon [Grussenmeyer et al. 1994], une mesure est exacte lorsqu’on peut la confondre
avec sa valeur vraie (appelée aussi valeur réelle ou nominale). L’exactitude est quantifiée par un biais
représentant la différence entre la valeur moyenne des données acquises et la valeur vraie. Il est
souvent délicat d’estimer l’exactitude puisqu’on ne dispose pas de la valeur réelle. On parle donc de
valeur vraie lorsque la mesure a été effectuée avec un appareil de précision supérieure. Ces critères
sont illustrés en figure 3.
On distingue ensuite, pour la précision et l’exactitude, les notions de relatif et d’absolu.
Le niveau relatif concerne la position d’un point par rapport aux autres pour un même levé, tandis que
le niveau absolu concerne l’ensemble des points du levé.
Figure 3 : Représentation de la précision (fidélité) et de l’exactitude d'une série de mesures

Page 10
Audrey JACQUIN - Sept. 2015 - INSA - PFE
D’autres critères complémentaires permettent d’évaluer la qualité des nuages de points.
[Cahalane et al. 2010], se basent sur des critères de répétabilité des données, d’exactitude, et de
résolution. La résolution permet de s’assurer de la bonne répartition spatiale des données, afin
d’éviter les zones sur-densifiées et sous-densifiées. La répétabilité des mesures est un paramètre
difficile à estimer dans le cadre de données issues d’acquisitions par scanner dynamique, puisque
d’une part il est difficile de mesurer exactement deux fois le même point avec un scanner laser,
d’autre part le positionnement dépend du signal GNSS qui ne sera pas toujours de même qualité.
Les travaux de [Yoo, 2011], tiennent compte également des critères de précision (fidélité et
exactitude) et de résolution, mais aussi de la complétude. Elle évalue si les données couvrent les
zones d’intérêts. La procédure employée consiste à attribuer des notes à chaque critère suivant les
résultats obtenus et de fournir une note unique globale synthétisant la qualité de chacun des relevés.
Une approche différente, prenant en compte les données de trajectographie, est abordée par
[Mano et al. 2012]. La méthode employée évalue dans l’ordre : la qualité des données de
trajectographie en fonction du nombre de satellites visibles et du facteur DOP (Dilution Of Precision),
la précision, l’exactitude absolue et finalement l’exactitude relative.
Dans le cas des relevés de corps de rue à Genève, [Gaillet et al. 2013], s’intéressent à la
précision du géo-référencement des données et à leur densité approximative, c'est-à-dire leur
résolution. Quant aux travaux de [Alshawa, 2010], ils se concentrent uniquement sur l’évaluation de
l’exactitude et de la précision.
Les critères que nous venons de présenter sont importants pour qualifier les données issues de
systèmes de cartographie mobile. Nous constatons que les critères de complétude et de résolution ne
font l’objet que d’études poussées. Dans notre cas, pour assurer la densité de points souhaitée, les
acquisitions sont réalisées à la fréquence maximale et une vitesse d’acquisition à ne pas dépasser a
été fixée (Cf. partie II.4.1). Concernant la complétude des données, la disposition des scanners selon
deux plans formant un « X » a l’avantage de réduire les zones de masques et les deux acquisitions
dans le sens aller puis retour pallient les éventuelles occultations lors d’un croisement avec un train.
La détermination de la précision des scanners laser équipant le système mobile VMX-450 Rail a déjà
fait l’objet des travaux de [Choquart, 2014]. (Cf. partie I.3). Dans le cadre de notre étude, nous nous
intéresserons donc à l’exactitude du système de positionnement des données.
I.2.2. Méthodes d’évaluation de l’exactitude de données issues de système mobile
Les critères de qualité de données issues de scanners laser dynamiques ayant été présentés,
nous faisons désormais l’état de l’art des méthodes permettant d’évaluer leur exactitude, puisque
nous nous concentrons sur ce paramètre dans notre étude. Dans toutes les méthodes que nous
avons rencontrées, l’exactitude est évaluée par l’écart (ou biais) entre les données acquises et des
données de référence plus précises.
Avant de s’attarder sur les données laser, il est important de quantifier la précision des données
de trajectographie. Des méthodes sont proposées dans la littérature, tout comme celle présentée par
[Calvet et al. 2014]. Le principe consiste à disposer un prisme spécifique sur l’antenne GNSS, qui est
suivi au cours du déplacement du scanner dynamique par un tachéomètre robotisé. La trajectoire est
obtenue par mesures successives sur le prisme, puis comparée à celle obtenue par le système
mobile. Cette approche offre des résultats pertinents et réalistes. Elle a été mise en œuvre dans les
travaux de [Guittet, 2014] et s’avère être efficace. Néanmoins, du fait que la précision diminue lorsque
la cible s’éloigne de l’appareil, cette méthode ne peut être utilisée pour des zones étendues de
relevés. Elle n’est donc pas envisageable dans notre cas, aux vues du linéaire important à acquérir.

Page 11
Audrey JACQUIN - Sept. 2015 - INSA - PFE
De plus, les conditions de mise en place seraient délicates en milieu ferroviaire et étant donné
que le mobile se déplace à 60km/h, le tachéomètre ne pourrait pas suivre le prisme à une telle
vitesse.
Plusieurs méthodes sont proposées pour évaluer l’exactitude des nuages de points. La première
approche consiste à comparer les coordonnées de points identifiés dans le nuage avec des données
de référence.
Dans ses travaux, [Yoo, 2011] propose une solution visant à numériser plusieurs cibles dont la
position réelle est obtenue à l’aide d’une station totale. Le calcul du biais entre la position de chaque
cible dans le nuage et la position réelle donne l’exactitude du relevé laser mobile. Lors de
l’expérimentation, il utilise finalement des objets fixes comme éléments de comparaisons (panneaux
et lampadaires).
Dans la même optique, [Mano et al. 2012] utilisent des points de contrôle (GCP : Ground Control
Points) mesurés dans le nuage de points, dont les coordonnées de référence ont été déterminées par
levé GNSS statique.
On constate que des incertitudes interviennent dans cette première approche puisque les
conditions de saisie des points sont différentes. En effet, on compare un point de référence saisi par
tachéomètre ou par GNSS, avec son homologue pointé dans le nuage. Suivant les éléments de
contrôle choisis, le pointage dans le nuage n’est pas toujours aisé et dépend de la densité de points,
ce qui peut fausser l’écart.
[Alshawa, 2010] propose d’autres approches. Une première méthode vise à comparer un plan
horizontal extrait du nuage au niveau du sol, avec un plan cadastral à l’échelle du 1/1000. Ceci permet
d’avoir une comparaison plus globale du levé.
Il propose également de comparer les données par rapport à des nuages de points fixes ou
aéroportés, afin de comparer deux mêmes types de données. La densité et la précision d’un nuage
fixe (obtenu par un levé scanner statique dont les données sont géo-référencées), sont plus élevées
que celles d’un nuage mobile, donc il peut être pris pour référence. Toutefois, [Alshawa, 2010] met en
avant que leurs propriétés géométriques sont différentes (zones de masques et différences
d’orientation du scanner et du système de balayage), ce qui entraîne des subtilités lors de la
comparaison des nuages. Le nuage de points aéroporté a également une précision supérieure au
relevé laser mobile puisque les centrales inertielles utilisées sont des modèles plus haut de gamme et
la réception GNSS souffre de moins de masques. Toutefois, la comparaison nuage mobile/nuage
aéroporté s’avère plus délicate du fait que le relevé aérien a une densité plus faible. Dans ce cas,
[Alshawa, 2010] propose d’effectuer la comparaison au niveau de l’emprise au sol des bâtiments,
extraits par coupes. Selon lui, cette méthode est plus exhaustive que la comparaison par rapport à un
plan cadastral mais moins qu’avec un nuage de points obtenu par scanner laser statique.
Une dernière approche vise à comparer les données mobiles par rapport à un nuage de points
généré automatiquement à partir d’un levé photogrammétrique.
Nous avons passé en revue le type de données de référence utilisées dans la littérature. Nous
présentons maintenant les méthodes de comparaisons possibles lorsque la référence est un nuage de
points.
Dans le cas de la comparaison d’un nuage mobile avec un nuage fixe, [Alshawa, 2010] propose
d’appliquer une triangulation élémentaire de Delaunay au nuage de référence, afin de rester fidèle au
nuage d’origine. Les pics du maillage sont éliminés localement sans appliquer de lissage global. Les
écarts sont ensuite calculés entres les points et le maillage.
Concernant les nuages mobiles et aéroportés, il est préférable d’extraire des plans dans chacun
des nuages et de calculer les écarts en distance et en angle entre ces plans. On s’affranchit ainsi de
la difficulté de calcul de distances mutuelles liée aux différences entre les densités de points.

Page 12
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Une autre solution est envisagée pour la comparaison du nuage mobile et
« photogrammétrique » et consiste à estimer l’exactitude en appliquant la méthode de recalage de
nuages de points basée sur l’ICP (Iterative Closest Point), qui fournit la rotation et la translation entre
les données comparées.
On constate que parmi toutes ces méthodes d’estimation de l’exactitude, celle basée sur la
comparaison par rapport à des nuages de points plus précis est préférable puisqu’on compare des
données de même nature. Dans notre cas, on privilégiera comme référence, un relevé effectué par
scanner statique puisque les travaux de [Alshawa, 2010] présentent cette méthode comme étant la
plus exhaustive, et sa mise en place est plus simple qu’un relevé aérien.
I.3. Etude interne antérieure
Lorsque SNCF a fait l’acquisition du scanner laser dynamique Riegl VMX-450 Rail, la division
ATT s’est intéressée à l’utilisation de ce système pour les mesures et contrôles de gabarits. Une
étude de précision relative des données lasergrammétriques fournies par ce système a donc été
réalisée en 2014 lors du projet de fin d’études de Quentin [Choquart, 2014]. Elle a fait l’objet d’une
analyse de la précision interne du nuage de points, afin de contrôler la cohérence géométrique des
éléments et de s’assurer de l’absence de déformation. Un contrôle de fiabilité des données a ensuite
été réalisé en calculant les dévers, les écartements des rails, etc.
La méthodologie employée par [Choquart, 2014] repose sur une comparaison des nuages de
points acquis par scanner laser dynamique par rapport à des nuages de points de référence de
précision supérieure. Afin d’analyser la disposition des points dans le nuage, une comparaison point à
point a été réalisée à l’aide d’un algorithme nommé « score pseudo distance bornée point à point »,
qui est fondé sur l’appariement de points homologues. La méthode de distance de Hausdorff a été
expérimentée. Il en résulte qu’elle n’est pas adaptée pour la comparaison de nuages de points issus
de données laser multi-sources. Ceci est dû à la différence de densité qu’il peut y avoir entre les
nuages de points, mais aussi aux points de vue des scanners et aux zones de masques qui différents
fortement selon les sources de données.
Il ressort de cette étude que le scanner dynamique Riegl VXM-450 Rail répond aux exigences de
mesures et de contrôles des gabarits SNCF et fournit une précision relative de 4 millimètres, conforme
aux 5 millimètres annoncés par le constructeur.
I.4. Conclusion
Nous avons pu mettre en évidence à travers cet état de l’art que les critères de qualité employés
pour qualifier un nuage de points sont généralement la précision, l’exactitude, la densité et la
complétude. L’étude antérieure réalisée par [Choquart, 2014] sur le système VMX-450 Rail, s’est
concentrée sur la précision relative des données lasergrammétriques.
Notre sujet s’inscrit dans la suite de ce travail. Il se concentrera uniquement sur l’exactitude du
système, afin de valider ou non son utilisation pour d’autres types de projets pour lesquels un géo-
référencement des données est nécessaire avec une précision inférieure à 5 centimètres.
Nous orienterons nos expérimentations en fonction des méthodes d’évaluation de l’exactitude
que nous avons mise en avant dans cette partie. La comparaison du nuage de points mobile avec un
nuage de référence statique nous apparaît la plus pertinente. De plus, nous tiendrons compte des
remarques de [Choquart (2014] afin que ces deux études soient cohérentes au niveau des méthodes
de comparaisons de nuages de points et des appareils de référence employés.
Cet état de l’art a permis d’aborder le fonctionnement théorique des éléments constituants un
scanner laser dynamique. Le chapitre suivant sera consacré aux caractéristiques du scanner laser
VMX-450 Rail acquis par SNCF Réseau et au déroulement d’un projet.

Page 13
Audrey JACQUIN - Sept. 2015 - INSA - PFE

Page 14
Audrey JACQUIN - Sept. 2015 - INSA - PFE
CHAPITRE.II. PRESENTATION DE LA CAMPAGNE D’ACQUISITION
Dans ce chapitre nous présenterons les caractéristiques du scanner laser dynamique acquis par
SNCF Réseau à l’été 2013, notamment celles qui ont permis de l’adapter au milieu ferroviaire. Nous
expliquerons également le déroulement d’un projet, à savoir la phase de préparation, l’acquisition et le
traitement des données, en se basant sur la campagne de relevés, réalisée dans le cadre de notre
étude.
II.1. Présentation du scanner laser dynamique Riegl VMX-450 Rail
II.1.1. Eléments constitutifs
Le système de mesures
Comme son nom l’indique, le système VMX-450 Rail a été adapté au milieu ferroviaire par la
société Riegl, pour le compte de SNCF Réseau. Il diffère principalement du modèle routier du fait que
les scanners laser ont une caractéristique supplémentaire permettant d’avoir une bonne
représentation des rails (en mode « high sensibility »). Sans cette particularité, aucun point ne serait
enregistré sur les rails puisque leur surface très réfléchissante éblouit le capteur.
Le système mobile repose sur un couplage d’éléments de haute technologie, à savoir :
2 scanners laser Riegl VQ-450 permettant d’acquérir des mesures sur les voies et leurs
abords selon deux plans formant un « X », afin de minimiser les zones masquées. L’ensemble
des scanners peut mesurer jusqu’à 1.1 millions de points par seconde.
4 caméras disposées à l’avant et à l’arrière du système, utilisées pour faciliter l’interprétation
des éléments qui constituent le nuage de points et permettre sa colorisation.
3 capteurs dédiés à la trajectographie, parmi lesquels :
- Une antenne et un récepteur GNSS couplés à une centrale inertielle agissent de
façon complémentaire afin d’assurer le positionnement des données à ± 1 centimètre
en relatif, et ± 2 à 5 centimètres en absolu, selon les données constructeurs.
- Un odomètre optique détecte les phases d’arrêts et de mouvements du convoi de
mesures.
Pour assurer la précision du système, chaque composant doit être calibré et l’ensemble du
système doit être étalonné afin d’avoir une bonne estimation des bras de leviers et des matrices de
rotation entre chaque élément du système. Cette étape est réalisée une fois par an par le
constructeur.
La structure
Pour des raisons de sécurité, le scanner ne peut être disposé directement sur train. La solution
développée permet de le fixer sur une structure métallique reposant sur roulettes, le tout étant disposé
sur un wagon plat, tracté par un locotracteur comme le montre la figure 4.
Afin que le wagon et la structure ne constituent pas de masques pour les mesures scanner, celle-
ci doit être suffisamment haute et étroite, tout en veillant à respecter une distance de sécurité de 1.5
mètres avec la caténaire afin d’éviter les risques d’arcs électriques.
La configuration adoptée permet de caler la structure pendant l’acquisition, mais aussi de
déplacer simplement le système à l’autre extrémité du wagon lors de l’acquisition retour. En effet, le

Page 15
Audrey JACQUIN - Sept. 2015 - INSA - PFE
retournement de l’ensemble « locotracteur-wagon » n’est possible que lorsque les voies forment un
triangle ou une boucle, mais on ne rencontre cette configuration que rarement sur le réseau national.
En temps normal, le locotracteur vient se raccrocher à l’autre extrémité du wagon.
Figure 4 : Représentation du convoi de mesures et du positionnement du système sur la structure
Le système d’alimentation et de stockage
Le locotracteur fonctionne avec un moteur thermique afin de pouvoir effectuer les acquisitions
des voies non électrifiées et de ne pas provoquer de mouvement des caténaires, puisqu’elles font
partie des éléments relevés.
Les éléments nécessaires au stockage des données et le dispositif de pilotage de l’appareil sont
disposés à l’intérieur du locotracteur (Cf. figure 5). Un groupe électrogène, placé sur le wagon plat,
assure l’alimentation de ces éléments et du scanner. En cas de dysfonctionnement, une batterie de
secours se substitue au groupe électrogène.
Le stockage des données est assuré par divers éléments :
Une unité centrale fonctionnant sous Windows gère le pilotage du VMX-450 et la
configuration du projet. Elle réceptionne également les données des scanners et de la
trajectographie. Les données de chaque scanner sont enregistrées sur 2 disques durs
d’une capacité de 500 Go chacun.
Une unité centrale fonctionnant sous Linux gère les données des caméras. Les photos
sont enregistrées parallèlement sur 3 disques durs de 500 Go, afin d’assurer la fréquence
d’acquisition (4 × 4 images/secondes au maximum).
Un faisceau de câblage semi-rigide assure la liaison des éléments.
Ces capacités de stockage et d’alimentation disponibles à bord permettent de réaliser des
acquisitions d’une journée.
L’opérateur a la possibilité de suivre le déroulement de l’acquisition, et d’effectuer certains
réglages, notamment au niveau des caméras, à l’aide d’un écran et d’un clavier reliés aux unités
centrales. Ce dispositif permet d’être informé en temps réel de la précision de la trajectoire, de la
qualité des données GNSS, mais surtout des éventuels dysfonctionnements du système. L’ensemble
du matériel à bord est illustré en figure 5.

Page 16
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Figure 5 : Principaux éléments de stockage, d’alimentation, et de pilotage du système
II.1.2. Caractéristiques
Le principe de fonctionnement des éléments d’un scanner laser dynamique ayant déjà fait l’objet
de la partie I.1, nous présentons uniquement les caractéristiques techniques du système Riegl VMX-
450 Rail.
Les scanners laser
Les principales caractéristiques des scanners laser de type VQ-450 et de marque Riegl, intégrés
dans le système, sont présentées dans le tableau 2. Les données ne concernent qu’un seul scanner
avec la configuration utilisée lors de nos acquisitions, c’est-à-dire à fréquence maximale.
Type Scanner à impulsion ou « à temps de vol »
Longueur d’onde du faisceau laser 1550 nanomètres
Vitesse de rotation maximale 200 hertz, soit 200 lignes/seconde
Fréquence d’acquisition maximale 550 kilohertz, soit 550.000 points/seconde
Distance minimale 1.5 mètres
Portée maximale
(pour une cible perpendiculaire à l’angle
d’incidence et une luminosité moyenne)
140 mètres (ρ ≥ 10%) - 220 mètres (ρ ≥ 80%)
ρ : pourcentage de réflexion de la lumière par l’objet
relevé
Précision (à 1 ) 5 millimètres (à 50 mètres)
Exactitude (à 1 ) 8 millimètres (à 50 mètres)
Tableau 2 : Caractéristiques d'un scanner laser VQ-450 de marque Riegl. Source : [Riegl@, 2012]
Les deux scanners sont disposés selon deux plans formant un « X », comme le montre la figure
6, ce qui confère un avantage certain au système en limitant les zones de masques.

Page 17
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Figure 6 : Représentation de la disposition des scanners selon deux plans formant un "X" (vue de face
et de côté) et exemple du rendu dans le nuage de points
Le dispositif centrale inertielle/système de réception GNSS
L’ensemble est développé par la société Applanix et comprend un système GNSS Trimble et une
centrale inertielle. Les données GNSS déterminent la position du système à une fréquence de 1 Hz,
alors que la centrale inertielle mesure les accélérations et les angles d’attitudes à une fréquence plus
élevée de 200 Hz, permettant de densifier la trajectoire et palier aux coupures GNSS. Lors de
coupures GNSS, la dérive de cette centrale inertielle est de l’ordre de 10 cm par minute en planimétrie
et de 7 cm en altimétrie [Applanix@, 2013]. Ceci met en évidence la dégradation importante de
positionnement en l’absence prolongée de signal GNSS et met en lumière l’importance d’utiliser un
filtre de Kalman lors de la combinaison des données.
Selon les données du constructeur, les précisions de positionnement que l’on peut atteindre avec
le dispositif centrale inertielle/système de réception GNSS, sont de ± 1 centimètre en relatif et de ± 2 à
± 5 centimètres en absolu. Ces précisions sont annoncées à 1σ.
L’odomètre
L’odomètre du système VMX-450 étant conçu pour être fixé sur voiture, il s’avère impossible de
l’utiliser dans notre cas puisque les roues des wagons sont différentes de celles d’un véhicule routier.
La société Riegl a donc fourni un instrument plus adapté à notre cas. Il s’agit d’un vélocimètre laser de
surface, de type LSV-2000, développé par la société Polytec. Son principe de fonctionnement repose
sur un rayon laser, qui par réflexion sur une surface solide (le rail dans notre cas) détermine la vitesse
du convoi par mesures de l’effet Doppler. La longueur parcourue est obtenue par intégration dans le
temps de la vitesse mesurée. Ce système mesure également à l’arrêt et reconnaît la direction des
mouvements. Le constructeur indique qu’il est adapté pour mesurer sur des surfaces brillantes, ce qui
nous permet de le fixer au-dessus du rail. De plus, le dispositif de mesures sans contact permet de
s’affranchir des erreurs liées aux glissements des roues, auxquels sont confrontés les autres types
d’odomètres. [Polytec@, 2015].
Comme le montre la figure 7, un dispositif de fixation a dû être adapté sous le wagon plat, de
façon à ce que le faisceau atteigne le rail et respecte la portée du signal, à savoir 30 [± 6] centimètres.
Néanmoins, chaque wagon est différent et la façon dont certains sont conçus ne permet pas de fixer
le dispositif qui a été créé. L’odomètre est en phase de test.

Page 18
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Figure 7 : Présentation de l'odomètre et du dispositif de fixation sous le wagon plat
Les caméras
L’ensemble de 4 caméras est disposé autour du système, dans un plan horizontal. Elles sont
orientées à ± 90° les unes par rapport aux autres et seules les caméras arrière présentent un
recouvrement du fait de leur positionnement (Cf. figure 8). Cette disposition offre différents points de
vue permettant d’identifier idéalement les éléments du nuage de points, mais aussi de coloriser
l’ensemble des éléments d’intérêts.
Les paramètres de prises de vues peuvent être automatiques ou manuels. Nous avons opté pour
le mode manuel puisque les clichés couvrent une partie importante de ciel et le mode automatique
aurait adapté les réglages pour avoir un bon rendu de cette zone majoritaire, au détriment des autres
éléments. Nous pouvons ainsi adapter l’exposition de l’image afin d’avoir un bon rendu des zones
d’intérêts.
Ces caméras offrent une résolution optimale de 5 mégapixels et une fréquence maximale de
prises de vues de 4×4 images/secondes.
Elles présentent toutefois l’inconvénient de ne pas être adaptées pour les acquisitions de nuit.
Ainsi, des tests sont actuellement réalisés pour évaluer l’efficacité de caméras à bas niveau de
lumière, afin de les utiliser lors d’acquisitions nocturnes, qui sont relativement fréquentes.
Figure 8 : Disposition des quatre caméras
Avant
Arrière

Page 19
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Pour plus d’informations sur les éléments constituant le scanner laser dynamique, les
caractéristiques de l’appareil sont fournies en annexe B.1 « Caractéristiques du scanner laser
dynamique Riegl VMX-450 ».
II.2. Présentation de la zone de levé
Afin de quantifier la précision des données topographiques issues du scanner laser dynamique
ferroporté, nous avons réalisé un projet dans la région Rhône-Alpes. La zone d’acquisition (Cf. figure
9) concerne la portion de la ligne 800.000 comprise entre la gare de Givors et celle de Peyraud et
représente un total de 54 kilomètres de ligne à 2 voies. Les acquisitions ont été réalisées dans le sens
aller, sur la voie 1, puis dans le sens retour sur la voie 2, ce qui permet de réaliser les observations
sous une constellation GNSS différente, et de compenser les éventuels masques présents dans le
nuage de points en cas de croisement avec un train.
Le temps de traitement des données acquises par scanner laser dynamique est conséquent (Cf.
annexe B.2 « Descriptif du temps de traitement des données par étape »), c’est pourquoi nous avons
sélectionné une zone d’étude de 5 kilomètres, afin de réaliser des expérimentations. Elle offre un
environnement varié avec la présence de ponts, d’une zone urbaine et d’un passage en gare. Ainsi,
nous ne sommes pas dans une configuration qui offre des conditions optimales pour l’acquisition des
données, ce qui permet de fournir des résultats représentatifs de la plupart des levés et non d’un cas
idéal.
Figure 9 : Plan de situation de la zone du projet, région Rhône-Alpes (69), France.

Page 20
Audrey JACQUIN - Sept. 2015 - INSA - PFE
II.3. Etapes préalables à l’acquisition
II.3.1. Géo-référencement statique : acquisitions de points d’appui
Lorsque la précision absolue du levé dynamique ne respecte pas la classe de précision attendue,
le géo-référencement dynamique des données est amélioré par un rattachement statique sur points
d’appui. La préparation du projet consiste à choisir l’emplacement des points d’appui à partir d’une
fiche synoptique représentant les accès aux voies, les passages à niveau, les ponts, les tunnels et les
points kilométriques associés (PK). Cette étape permet d’optimiser la mise en place sur le terrain.
Une bonne répartition des points d’appui est nécessaire afin d’avoir un géo-référencement
homogène sur l’ensemble de la zone levée. Ainsi, leur disposition devra respecter les critères
suivants, en tenant compte des difficultés d’accès et des milieux non propices aux réceptions GNSS
(murs, végétation haute et dense, etc.).
Disposition à intervalles réguliers (selon spécifications)
De part et d’autre des voies
Aux entrées et sorties de tunnels
Avant et après les ponts
Privilégier les gares, les passages à niveau et les accès faciles
Matérialisation des points
Les points d’appui sont matérialisés par des cibles de taille standard 50×50 centimètres avec un
revêtement en crépi blanc. Elles sont maintenues par un tire-fond en leur centre (Cf. figure 10). Après
plusieurs essais au sein de la division, ce matériau a été retenu puisqu’il présente une réflectance
élevée et une surface plutôt lambertienne. Ce type de surface réfléchit de la même manière dans
toutes les directions. Parmi les autres matériaux testés que furent le PVC, le carton plume et la
peinture réfléchissante, c’est le crépit qui offre une meilleure réflectance du faisceau laser. Il faut
toutefois éviter de placer ces cibles sur l’herbe verte, car elles se confondent avec le terrain naturel
dans le nuage de points ce qui rend leur détection plus difficile. D’autres matériaux et formes de cibles
(ex : damiers) seront testés dans les mois à venir afin d’améliorer leur détection dans ce type de
milieu.
Méthode de mesure
La détermination des coordonnées des points d’appui (centre de la plaque) se fait par la méthode
du RTK classique avec 4 périodes d’observations GNSS de 30 secondes chacune, à 1 hertz (c'est-à-
dire une position par seconde). La canne est fixée sur tripode pour plus de précision et de stabilité (Cf.
figure 10).
L’erreur de centrage de la bulle de la nivelle sphérique est corrigée en pivotant la canne de 180°
entre chaque période d’observations. Après les deux premières périodes d’observations, la réception
des signaux GNSS est coupée afin de réaliser une nouvelle initialisation.
Le choix des stations de références se fait en fonction de la portée du signal radio, pouvant
couvrir un rayon de 5 à 10 kilomètres. Afin d’assurer la cohérence interne du levé, certains points sont
déterminés depuis deux stations de référence consécutives. De plus, nous réalisons un contrôle
absolu en stationnant des points du canevas existant, ainsi que des repères de nivellement.

Page 21
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Figure 10 : Matérialisation des points de contrôle et visualisation de la méthode de mesure
II.3.2. Choix de la disposition des pivots GNSS pour l’acquisition dynamique
Au cours de la phase de préparation, nous déterminons l’emplacement des stations de base
nécessaires au géo-référencement dynamique des données lors de l’acquisition avec le système
VMX-450. Elles permettront de calculer la trajectoire en post-traitement. La seule utilisation des
stations permanentes du RGP ou d’autres réseaux n’assure pas une figure d’ajustement
géographiquement homogène, c’est pourquoi nous disposons des pivots supplémentaires afin
d’encadrer correctement la trajectoire du mobile.
Dans notre cas, nous considérons généralement le rayon d’action de la station de base à 20
kilomètres au maximum. Ainsi, pour le projet réalisé, deux stations ont été nécessaires pour couvrir
les 54 kilomètres de voies, comme le montre la figure 11. Nous avons disposé deux pivots
supplémentaires afin d’évaluer leur influence sur la qualité de la trajectoire en fonction de la méthode
de calcul utilisée dans le logiciel POSPac MMS.
Figure 11 : Plan de situation des stations permanentes et des stations de base mises en place

Page 22
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Le positionnement des stations GNSS de base se fait dans un environnement dégagé de toute
obstruction, c’est-à-dire avec un horizon dégagé à 15° d’élévation pour tout azimut, et en respectant
une bonne répartition le long de la trajectoire, afin d’avoir une couverture homogène de la zone
d’acquisition. Ces pivots sont mis en place une heure avant le début de l’acquisition et enlevés un
quart d’heure après la fin des mesures, afin d’avoir un jeu de données suffisant pour fixer les
ambiguïtés, réduire les multi-trajets et permettre le recouvrement temporel de la période de mesures.
II.4. Déroulement de l’acquisition
L’acquisition des données nécessite une bonne organisation afin de réaliser le montage de la
structure et de respecter les horaires de passages prévus, puisque le train de mesures n’est pas
prioritaire et doit s’insérer dans la circulation. Nous allons présenter les différentes phases de
l’acquisition des données, ainsi que les paramètres à régler.
II.4.1. Paramétrage du système
Avant de débuter l’acquisition, les paramètres des composants du système doivent être
renseignés.
Pour les levés ferroviaires, les scanners laser mesurent à leur fréquence maximale, soit 550 kHz
par scanner, ce qui représente 550.000 points levés en une seconde. De plus, la vitesse de rotation
du scanner permet d’acquérir 200 lignes par seconde. La fonction « sensibilité élevée » du capteur est
activée pour chaque scanner afin d’avoir des mesures sur les rails. Sans ce paramètre, aucun point
ne peut être acquis sur cette surface très brillante puisqu’elle éblouit le capteur. Néanmoins, les
données produites sont davantage bruitées puisque les scanners laser acquièrent désormais des
points sur des surfaces ayant une moins bonne réflectance.
La vitesse maximale de circulation du convoi est fixée à 60 km/h afin de respecter la densité de
points requise. Cette configuration permet d’obtenir des nuages de points avec une densité de l’ordre
de 500 points par mètre carré à une distance de 20 mètres [Riegl@, 2012].
Concernant les caméras, la fréquence de prises de vues est paramétrée par intervalles de temps
ou de distances régulières, ou bien en fonction du recouvrement souhaité. Du fait de la configuration
des caméras, le recouvrement ne sera pas utilisé. Ce paramètre n’est utile qu’en photogrammétrie.
Dans le cas de notre projet, nous avons effectué des prises de vues à intervalle de 5 mètres, ce qui
représente environ 3 photos par seconde à 60km/h.
La prise de vues est effectuée en mode manuel, afin de régler la sensibilité et le gain du capteur
de manière à avoir un bon rendu des voies et abords.
Au cours du levé, l’opérateur interviendra uniquement pour modifier les paramètres des caméras si les
conditions météorologiques sont changeantes et pour stopper les mesures des scanners et des
caméras lorsque le train est à l’arrêt, afin d’éviter un remplissage inutile des fichiers. En temps normal,
une configuration automatique permet de fragmenter l’enregistrement des données en fichiers de 1
Go afin de faciliter leur traitement.
II.4.2. Initialisation de l’ensemble « GNSS-IMU2»
Cette étape est indispensable et permet d’assurer la fiabilité des mesures GNSS et inertielles au
démarrage du convoi.
2 IMU : Inertial Measurement Unit (centrale inertielle)

Page 23
Audrey JACQUIN - Sept. 2015 - INSA - PFE
La première étape consiste à réaliser un alignement statique de l’ensemble « GNSS-IMU ». Le
convoi reste à l’arrêt pendant un temps d’occupation d’au moins 5 minutes durant lequel le récepteur
enregistre les signaux GNSS afin de résoudre les ambiguïtés. On limite ce temps d’acquisition à 20
minutes puisqu’en l’absence de données odométriques, les dérives inertielles peuvent perturber
l’initialisation. En théorie, si l’on pouvait s’assurer du bon fonctionnement de l’odomètre à chaque
acquisition, il serait préférable d’allonger le temps d’acquisition en mode statique, comme on le fait
dans le cas de mesures GNSS seules.
Un alignement dynamique est ensuite nécessaire afin d’initialiser la centrale inertielle. Cela
consiste à estimer son attitude au début des mesures, afin de pouvoir réaliser une bonne intégration
des accélérations et vitesses angulaires au cours de l’acquisition et d’assurer des mesures fiables de
l’orientation de la plateforme. En mode routier ou aérien, l’excitation de la centrale inertielle se fait
aisément en effectuant des accélérations et des virages serrés, afin d’initialiser les mesures
gyroscopiques. Ces mouvements étant restreints en milieu ferroviaire, nous considèrerons cette
phase d’alignement établie après quelques kilomètres parcourus. C’est pourquoi le démarrage du
convoi s’effectue avant le début de la zone d’acquisition. L’ensemble des éléments est mis sous
tension et l’enregistrement des mesures scanners et des prises de vues ne débutent que dans la zone
concernée.
La session de mesures se termine par une nouvelle occupation statique de 5 minutes afin
d’encadrer la trajectoire par deux points statiques. Ceci permet au filtre de Kalman d’effectuer le calcul
dans le sens aller et retour, comme nous l’avons expliqué en partie I.1.1.3.
II.5. Traitements de l’ensemble des données : GNSS/IMU et nuage de points
Nous avons présenté le déroulement des acquisitions. Il s’ensuit le traitement des données, qui
s’avère être une étape conséquente et coûteuse en temps. Nous présenterons les différentes étapes
menant aux données finales, ainsi que les logiciels utilisés pour chacune d’entre elles.
II.5.1. Calcul du réseau de pivots
L’étape préalable au calcul de la trajectoire consiste à déterminer les coordonnées des pivots de
base nécessaires au géo-référencement dynamique de la trajectoire. Les données des pivots sont
post-traitées à l’aide du logiciel LGO (Leica Geo Office), à partir des stations permanentes du RGP
(Réseau GNSS Permanent) ou du réseau Orphéon et des éphémérides précises ou radiodiffusées
selon la disponibilité.
II.5.2. Calcul de la trajectoire
La détermination de la trajectoire est une étape cruciale dans le traitement des données puisque
toutes les étapes qui suivent en dépendent. Le logiciel POSPac MMS d’Applanix permet de post-
traiter la trajectoire en s’appuyant sur les stations de base mises en place pendant l’acquisition et sur
les stations permanentes disponibles dans la zone de levé. La trajectoire est issue d’un calcul fondé
sur un couplage entre les observations des différents capteurs : système de réception GNSS, centrale
inertielle et odomètre s’il est disponible. Nous sommes donc en présence de données redondantes,
ainsi, la personne en charge du traitement sera en mesure d’apporter plus d’importance à certaines
données en fonction de leur qualité. Plusieurs méthodes de calculs sont possibles avec le logiciel
POSPac MMS, elles sont davantage développées en partie III.1.1. A l’issu de chaque calcul, les
précisions du positionnement de la trajectoire au cours du temps sont estimées par le logiciel.

Page 24
Audrey JACQUIN - Sept. 2015 - INSA - PFE
II.5.3. Combinaison des données LiDAR avec la trajectoire
Une fois la trajectoire obtenue, les données LiDAR sont géo-référencées en fusionnant le nuage
de points à la trajectoire associée. On utilise le logiciel RiPROCESS de la société Riegl. A partir des
données de la trajectoire et des paramètres de calibration du système, fournissant les bras de levier et
les matrices de rotations entre l’ensemble « GNSS-IMU » et chacun des scanners, les coordonnées
du nuage de points peuvent être déterminées.
Les nuages de points aller et retour et leurs trajectoires associées sont ensuite exportés en
RGF93 cartésien.
II.5.4. Classification du nuage de points
La suite des traitements s’effectue sous Terrasolid, qui utilise l’interface du logiciel Microstation,
édité par la société Bentley.
Premièrement, le nuage de points et la trajectoire sont exprimés dans la projection CC45 dans
notre cas. Puis, une correction au géoïde est appliquée à partir de la grille RAF09 téléchargée sur le
site de l’IGN, afin de transformer les hauteurs ellipsoïdales GRS80 en altitudes IGN69. Une fois le
nuage de points obtenu dans le système de coordonnées souhaité, on applique une classification
automatique selon différents critères, afin de distinguer les éléments suivants :
Le terrain naturel
Les éléments verticaux : bâtiments, poteaux caténaires, etc.
Les points lointains : éléments à plus de 25 m de part et d’autre de la trajectoire
Le bruit : points parasites se trouvant dans l’air ou sous le terrain naturel
Les données correspondant au bruit et aux points éloignés ne sont pas conservées pour le rendu
final. Un nettoyage manuel peut être nécessaire en complément de la classification si les résultats ne
sont pas satisfaisants.
II.5.5. Recalage absolu des données à l’aide de points d’appui
Afin d’augmenter la cohérence des données avec la réalité et de respecter la classe de précision
absolue de 5 centimètres fixée par le cahier des charges pour les relevés ferroviaires, un géo-
référencement statique est nécessaire à partir de données externes. L’objectif ici est de contraindre la
trajectoire et le nuage de points avec les points d’appui relevés sur le terrain. (Cf. partie II.3.1). Nous
utilisons ici l’applicatif TerraMatch de TerraSolid.
Les cibles blanches représentant les points d’appui sont détectées automatiquement dans le
nuage de points, par application d’une routine de reconnaissance disponible dans l’applicatif
TerraMatch. Un contrôle est toutefois nécessaire afin de s’affranchir d’éventuelles erreurs. Les cibles
ayant une réflectance différente par rapport aux éléments extérieurs, leur visualisation dans le nuage
se fait en affichant les points par valeurs d’intensité. Le contrôle s’effectue par superposition d’un
prototype sur la cible afin d’avoir une bonne visualisation de son centre comme le montre les figures
12 et 13. La vérification de la position altimétrique se fait en réalisant une coupe transversale.

Page 25
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Le contrôle s’avère difficile lorsque la distinction de la cible avec le milieu extérieur n’est pas
aisée. Dans ce cas, le point n’est pas pris en compte. En effet, l’intensité de la cible réfléchie est plus
importante lorsqu’elle se situe proche du scanner. Ainsi, suivant le côté de la voie où elle a été
disposée, elle sera davantage visible dans le nuage acquis à l’aller ou au retour.
Une fois le contrôle terminé, les corrections sont appliquées aux trajectoires ainsi qu’aux nuages
de points. Le logiciel calcule les écarts à corriger entre le point du nuage et sa position réelle. Ces
écarts sont pondérés en fonction de la précision de la trajectoire fournie par le logiciel POSPac MMS.
Des poids plus élevés sont appliqués lorsque la précision de la trajectoire est moins bonne. A partir de
ces valeurs, une courbe de corrections est construite par interpolation linéaire entre deux corrections
consécutives comme le montre la figure 14. La construction de cette courbe peut se faire de deux
manières :
Méthode « Free curve » : la courbe des corrections est directement appliquée
Méthode « Smooth curve » : la courbe des corrections est lissée en fonction d’un facteur
choisi, qui, multiplié à la précision de la trajectoire, donne la valeur maximale de la
correction possible sur une distance de 100 mètres. Plus ce facteur est élevé, moins la
courbe est lissée. Nous utilisons cette méthode puisque les corrections sont moins
sensibles aux points d’appui qui auraient été détectés de manière moins précise dans le
nuage de points.
Figure 14 : Illustration des méthodes de corrections à partir de points d'appui, employée par Terrasolid
Source : personnelle, inspiration de [TerraMatch@, 2014]
Un contrôle de l’ajustement absolu des données est ensuite réalisé conformément à l’arrêté de
2003 sur les classes de précision. Le principe sera détaillé en partie IV.
Figure 12 : Détection automatique du centre d'une
cible dans le nuage de points
Figure 13 : Contrôle de la détection
automatique
50 cm
Corrections « Free curve » Corrections « Smooth curve » Représentation des écarts
à intervalles réguliers
Temps
Valeur
des
écarts

Page 26
Audrey JACQUIN - Sept. 2015 - INSA - PFE
II.5.6. Recalage relatif à l’aide de points communs
Malgré le recalage absolu des données, des écarts peuvent subsister entre les nuages de points
aller (circulation voie 1) et retour (circulation voie 2). Ces écarts relatifs doivent respecter les
tolérances indiquées dans le cahier des charges, à savoir ± 1.5 centimètres en planimétrie et ± 1
centimètre en altimétrie. La mise en correspondance des nuages se fait par identification de points et
géométries homologues, en planimétrie et en altimétrie. Les points communs planimétriques sont
ajoutés manuellement, principalement aux angles de poteaux caténaires. On effectue également une
détection automatique de lignes verticales le long des poteaux caténaires. Ces points ou lignes sont
disposés à intervalles réguliers d’environ 20 mètres et répartis de part et d’autre des voies. On peut
effectuer en complément une détection automatique de géométries homologues au niveau des quais
de gares et des voiries à proximité, ou encore réaliser un recalage au niveau du terrain naturel si les
éléments ont été correctement classifiés.
La méthode d’application des corrections est identique à celle des points d’appui (Cf. partie
II.5.5), mais on procède par itérations successives, en ajustant le recalage en planimétrie et/ou en
altimétrie.
Les figures 15 et 16 illustrent un écart relatif altimétrique entre les deux nuages, et le résultat
après correction.
Figure 15 : Ecart relatif entre le nuage de points
aller et le nuage retour au niveau des rails
Figure 16 : Correspondance des nuages après
correction par l’ajout de points homologues
Une fois les corrections appliquées, un contrôle de l’ajustement global relatif des données est
effectué sur l’ensemble de la zone. L’applicatif TerraMatch fournit un rapport indiquant les statistiques
sur les écarts relatifs entre les nuages, mais uniquement au niveau des points communs et des points
d’appui. Ce rapport n’est donc pas un moyen exhaustif de contrôle du recalage relatif puisqu’il ne
donne pas d’informations sur l’ensemble du nuage.
A présent, le contrôle s’effectue donc de visu en réalisant des coupes dans les nuages de points
et en mesurant l’écart relatif entre les deux nuages. Ces contrôles sont ponctuels, réalisés à
intervalles réguliers et de manière raisonnée, c’est-à-dire en privilégiant les zones entre points
communs et points d’appui.
Les intervalles de contrôles sont déterminés à partir de l’écart relatif auquel on était confronté
avant correction. Dans le cas du projet de la ligne 800.000, avec une zone d’acquisition de 54
kilomètres, les contrôles ont été effectués par coupes à intervalles de 10 mètres, afin de déceler des
écarts locaux pouvant subsister.
Un temps conséquent est consacré au contrôle du recalage relatif, c’est pourquoi des solutions
d’automatisation sont en cours de développement. Une méthode développée en parallèle de mon
PFE concernant le recalage de données 3D pourrait être utilisée pour contrôler les données, en
déterminant l’écart entre les deux nuages de points, qui constitue l’écart relatif.
Nuage de points aller Nuage de points retour
4 cm

Page 27
Audrey JACQUIN - Sept. 2015 - INSA - PFE
II.6. Conclusion
Le schéma présenté en figure 17 permet de synthétiser l’ensemble des étapes que nous venons
de présenter, des acquisitions terrain au traitement des données. Maintenant que le principe de
fonctionnement du système VMX-450 Rail et le déroulement du traitement des données ont été
explicités, il est nécessaire de s’intéresser à la précision qu’un tel système peut fournir. Le chapitre
suivant fera l’objet d’une étude de précision absolue des données, c’est-à-dire de la trajectoire et du
nuage de points.
Figure 17 : Schéma synthétique de la réalisation d'un projet en scanner dynamique

Page 28
Audrey JACQUIN - Sept. 2015 - INSA - PFE
CHAPITRE.III. EVALUATION DE LA PRECISION DES DONNEES
Les scanners laser dynamiques ont déjà fait leur preuve en milieu routier depuis plusieurs
années. Le milieu ferroviaire étant plus complexe (présence des caténaires, perturbations
électromagnétiques, faible réflectance des rails, etc.) ce n’est que depuis peu que ce système est
monté sur rail, notamment depuis la fin de l’année 2013 au sein de SNCF Réseau. L’exploitation d’un
tel système présente de nombreux avantages dans le milieu ferroviaire, mais une étude de précision
est nécessaire afin de voir si l’on peut atteindre les précisions requises pour les relevés ferroviaires
(inférieur à 5 centimètres).
L’objectif de ce chapitre est de quantifier la précision absolue des données (trajectoire et nuage
de points) suivant les moyens mis en œuvre.
L’étude de précision a été menée à différents niveaux :
- Sur les données de positionnement avant recalage à l’aide de points d’appui
- Sur la trajectographie et le nuage de points après recalage sur points d’appui, en fonction de
l’intervalle entre ces points.
- Sur le nuage de points par comparaison à des données externes de précision connue.
Pour chacune de ces étapes, nous présenterons la méthodologie employée, les résultats obtenus
à partir des données de notre zone d’étude, ainsi qu’une l’analyse de ces résultats.
III.1. Etude de précision de la trajectoire avant recalage sur points d’appui
Avant de s’intéresser à l’exactitude du nuage de points final, nous réalisons une étude de
précision de la trajectoire initiale (avant recalage sur points d’appui). En effet, d’après l’état de l’art que
nous avons établi en partie I.1.1.1, la précision des mesures laser du scanner dynamique semble
étroitement liée à celle des mesures GNSS.
Dans un premier temps, nous présenterons les différentes méthodes de calcul de trajectoire
proposées par le logiciel POSPac MMS que nous avons appliquées et comparées. Puis, nous
présenterons la méthodologie employée pour évaluer la qualité des trajectoires obtenues, suivi d’une
analyse des résultats qui permettra de proposer une méthode de calcul à préconiser.
III.1.1. Présentation du logiciel
Comme nous l’avons évoqué en partie II.5.2, le calcul de la trajectoire s’effectue avec le logiciel
POSPac MMS version 7.1, développé par Applanix.
Le principe consiste à traiter les données GNSS en cinématique post-traitement à 1 Hertz (une
position par seconde) et de densifier ces mesures avec les données inertielles acquises à 200 Hertz
dans notre cas. La solution logicielle propose différentes méthodes de calcul, et plusieurs paramètres
de configuration permettant d’optimiser le traitement.
Nous nous sommes intéressés à trois méthodes de calculs qui sont :
Le calcul en mode « SmartBase » : il est basé sur le principe de la méthode VRS (Virtual
Reference Station), valable aussi bien en temps réel qu’en post-traitement. La trajectoire est encadrée
par un polygone formé par un réseau de stations, pouvant provenir d’un réseau permanent, ou de
stations de bases mises en place à proximité de la trajectoire. (Cf. figure 18). A l’aide des
observations de cet ensemble de stations et des coordonnées approchées (de navigation) du mobile,
les données d’un pivot virtuel, proche du mobile, sont déterminées afin de simuler une station proche.
Le mobile reçoit ensuite les informations de la station virtuelle comme si c’était une station de
référence physique.

Page 29
Audrey JACQUIN - Sept. 2015 - INSA - PFE
En principe seulement trois stations sont nécessaires pour générer une « Smartbase », mais
pour obtenir une solution plus robuste et précise, le constructeur recommande d’utiliser entre 6 et 10
stations, idéalement réparties, en encadrant la trajectoire. Il conseille également de respecter une
distance maximale entre stations de référence de 100 kilomètres et une distance maximale entre les
stations de référence et le mobile de 70 kilomètres.
Parmi ces stations, l’une est choisie comme référence pour calculer le réseau. Le constructeur
préconise de choisir celle qui est la plus au centre de la trajectoire et qui présente le moins de sauts
de cycles. Nous pouvons également faire le choix d’une station de contrôle.
Avec cette méthode de calcul nous avons testé l’influence de différents paramètres :
Influence du nombre de pivots GNSS le long de la trajectoire Influence du choix des stations du réseau RGP ou Orphéon Influence du paramètre de multi-trajets (élevés, moyen, faible) Influence de la présence ou non de l’odomètre
Figure 18 : Illustration de la méthode de calcul "SmartBase"

Page 30
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Le calcul en mode « Multi-Single-Base ». On
utilise cette méthode dans le cas de longs projets
linéaires, ou lorsque la géométrie du réseau de stations
permanentes n’est pas appropriée. Le principe consiste
à mettre en place des stations de base GNSS le long de
la trajectoire. Le constructeur considère une portée de
20 km pour chaque pivot, donc au-delà il va utiliser les
données du pivot suivant. A partir de ces pivots, une
« Multi-Single-Base » est créée, c’est-à-dire que les
lignes de bases entre chaque station sont déterminées.
(Cf. figure 19). Puis, pour chaque époque d’observation,
le meilleur pivot est identifié.
Nous avons effectué différents calculs afin d’évaluer
l’influence du nombre de pivots le long de la trajectoire.
Les pivots disposés à Badan et Serrières (Cf. figure 11,
partie II.3.2) permettent de respecter la
recommandation du constructeur pour les lignes de
bases de 20 km, mais nous avons disposé deux pivots
supplémentaires nommés Bans et Chavanay afin de
mettre en évidence l’influence du nombre de pivots.
Pour les méthodes « SmartBase » et « Multi-Single-
Base », la combinaison des données se fait par
couplage serré. Son principe a été expliqué en partie
I.1.1.3.
Figure 19 : Illustration de la méthode de
calcul « Multi-Single-Base (MSB)»
Le calcul avec « POSGNSS » : cette méthode effectue la combinaison des données par
couplage lâche (Cf. partie I.1.1.3). Nous avons vu dans l’état de l’art qu’elle présente un désavantage
par rapport au couplage serré, mais elle permet à l’utilisateur de maîtriser davantage le calcul,
puisqu’on détermine d’abord de façon indépendante les solutions GNSS à l’aide du logiciel
POSGNSS. Cette étape consiste à résoudre uniquement les ambigüités entières et à calculer les
positions successives du mobile au cours du temps. Dans un second temps, les résultats sont
importés sous POSPac MMS pour être combinés avec les données inertielles et les informations de
l’odomètre, à l’aide d’un filtre de Kalman.
III.1.2. Méthodologie
Afin de mettre en évidence la méthode de calcul qui fournit la trajectoire la plus proche de la
réalité, nous avons effectué une comparaison de chacune des trajectoires calculées par rapport à la
trajectoire recalée avec des points d’appui à intervalles de 300 mètres (Cf. partie III.2.1), que l’on
considère comme référence dans ce cas, puisqu’elle est plus proche de la vérité terrain. Cette
comparaison permettra également d’analyser la fiabilité des résultats annoncés par le logiciel POSPac
MMS, concernant les précisions estimées de la trajectoire. En effet, il est du ressort de l’ingénieur
topographe de prendre du recul par rapport aux informations annoncées par les constructeurs et de
mettre en place des méthodes de contrôle.
Ces comparaisons sont réalisées uniquement dans la zone d’étude qui est représentée sur le
plan de situation en figure 20. Chaque trajectoire est comparée par rapport à celle de référence en
déterminant les écarts planimétriques et altimétriques entre deux points acquis au même instant. Les
coordonnées des trajectoires sont exprimées dans le système RGF 93 projection CC 45. Ces écarts
entre les coordonnées considérées comme vraies (points de la trajectoire recalée) et les coordonnées

Page 31
Audrey JACQUIN - Sept. 2015 - INSA - PFE
observées (points de la trajectoire issue de POSPac MMS) sont les écarts vrais. Nous comparons
ensuite ces valeurs avec les précisions sur la trajectoire estimées par le logiciel.
III.1.3. Résultats et analyses
III.1.3.1. Influence de la méthode de calcul
Les méthodes de calculs utilisées dans ce logiciel sont confidentielles, ce qui en fait un logiciel
« boîte noire ». Il est donc difficile de savoir comment se fait exactement la combinaison des données
GNSS et inertielles. Les résultats statistiques obtenus dans le tableau 3 mettent en évidence, dans
notre cas, le degré de fidélité des trajectoires par rapport à la réalité, suivant la méthode de calcul
employée.
Tableau 3 : Résultats statistiques de la comparaison des trajectoires issues de différentes méthodes de calcul avec la référence
Pour les méthodes « Multi-Single-Base » et « Smartbase », la répartition des écarts est similaire
avec une Emq planimétrique autour de 36 cm et une Emq altimétrique comprise entre 8 et 10 cm. Le
fait que les systèmes GNSS souffrent d’une plus grande imprécision en altimétrie qu’en planimétrie ne
se retrouve pas dans les valeurs d’Emq et d’écart type que nous obtenons ici. En effet, pour ces deux
méthodes, nous sommes beaucoup plus proches de la réalité en altimétrie qu’en planimétrie. Les
écarts planimétriques répartis autour de la valeur moyenne de 36 cm laissent penser que les mesures
sont entachées d’un systématisme.
Afin de pouvoir effectuer le traitement des données GNSS, nous avons utilisé la méthode
« POSGNSS ». De nombreux graphiques fournis par le logiciel POSGNSS donnent des informations
sur le résultat du traitement des données GNSS. A l’aide de ces informations, l’utilisateur peut agir sur
des paramètres jusqu’à obtenir une trajectoire (issue uniquement des données GNSS) dont la qualité
correspond à son besoin. Des exemples de graphiques et de paramètres à régler sont présentés en
annexe C.2 : « Graphiques issus du logiciel POSGNSS ».
En comparant les valeurs d’Emq en planimétrie, on constate que cette méthode a permis
d’améliorer la qualité des données GNSS (Emq de 27 cm contre 36 cm pour les autres méthodes)
mais un écart important subsiste. La précision a néanmoins été dégradée en altimétrie. Cela nous
laisse penser qu’une partie des erreurs est liée au système GNSS, mais aussi aux mesures inertielles,
aux données odométriques et/ou aux filtres employés pour combiner ces données.
Méthodes de calcul « Multi-Single-Base » « SmartBase » « POSGNSS »
Station primaire Chavanay
Station de contrôle Badan
Réseau de stations GNSS
RGP et Orphéon RGP et Orphéon RGP et Orphéon
Paramètre Multi-trajets
Moyen Moyen Moyen
Mesures 593 593 593
Ecarts / trajectoire de référence aller
Planimétrie (cm)
Altimétrie (cm)
Planimétrie (cm)
Altimétrie (cm)
Planimétrie (cm)
Altimétrie (cm)
Minimum 9,4 -1,3 9,7 2,0 1,4 19,6
Maximum 44,8 12,9 43,6 12,6 31,2 30,6
Moyenne 36,1 7,4 35,8 9,5 26,5 25,9
Ecart-type 2,9 2,1 3,1 1,8 2,2 2,1
Erreur moyenne quadratique (EMQ)
36,2 7,7 35,9 9,7 26,6 26,0

Page 32
Audrey JACQUIN - Sept. 2015 - INSA - PFE
A travers ces résultats, nous constatons que lorsque le milieu GNSS est défavorable, comme
c’était le cas dans notre zone, il est préférable de réaliser le traitement des données GNSS
indépendamment à l’aide de la méthode POSGNSS pour maîtriser cette étape.
III.1.3.2. Influence des paramètres de calculs
En cinématique, les problèmes liés aux multi-trajets affectent directement la position puisqu’on ne
mesure qu’une seule position par époque. On ne peut donc pas corriger ces erreurs en réalisant de
longues sessions d’observations comme nous l’avons vu en partie I.1.3. Il est donc important de
trouver un moyen de les corriger. Un outil du logiciel permet de choisir trois niveaux de multi-trajets
(faible : absence de multi-trajets, moyen et élevé). L’environnement bordant la ligne 800.000 était
propice aux multi-trajets du fait des passages en zones urbaines. Nous avons donc expérimenté les
niveaux moyen et élevé afin de constater s’il y a une amélioration au niveau du positionnement de la
trajectoire. Les résultats sont présentés dans le tableau 4.
Méthodes de calcul « SmartBase » « SmartBase »
Station primaire Chavanay Chavanay
Station de contrôle Bans Bans
Réseau de stations GNSS RGP et Orphéon RGP et Orphéon
Paramètre multi-trajets Moyen Elevé
Mesures 593 593
Ecarts / trajectoire de référence aller
Planimétrie (cm)
Altimétrie (cm)
Planimétrie (cm)
Altimétrie (cm)
Minimum 10,6 1,8 0,8 1,2
Maximum 44,2 13,7 34,0 12,1
Moyenne 36,8 10,0 26,6 9,1
Ecart-type 3,1 2,4 3,2 2,1
Erreur moyenne quadratique 36,9 10,3 26,8 9,3
Tableau 4 : Résultats statistiques de la comparaison des trajectoires avec la référence, mettant en
évidence l'influence du paramètre de multi-trajets
On constate que quelle que soit la méthode de calcul employée, les trajectoires calculées avec le
paramètre de multi-trajets élevé sont plus proches de la réalité que celles déterminées avec le niveau
moyen. Dans le tableau 4, nous présentons les résultats d’une seule comparaison. L’emploi de ce
paramètre permet de réduire l’Emq de 37 centimètres à 27 centimètres, mais nous sommes toujours
en présence d’un systématisme en planimétrie.
Dans le cas d’un projet comme celui-ci, où l’on se trouve à flan de colline et dans un milieu
relativement confiné, avec une alternance de zones boisées et urbanisées, plusieurs passages en
gare et sous des ouvrages, on constate que l’utilisation du paramètre de multi-trajets élevé permet
une nette amélioration de la qualité de la trajectoire, surtout en planimétrie.
Nous avons également évalué l’influence de l’utilisation des stations du RGP et du réseau
Orphéon, ou uniquement de l’un des réseaux. Nous n’avons constaté aucune différence significative.
En effet, on remarque sur le plan de situation en figure 11 que dans notre zone la répartition des
stations du RGP est similaire à celle du réseau Orphéon.
Dans les cas de la méthode « Multi-Single-Base », nous avons constaté que l’utilisation de deux
ou quatre pivots le long de la trajectoire fournit des résultats similaires. Le seul paramètre qui importe
pour la disposition des pivots est donc de respecter la longueur maximale de 20 kilomètres pour les
lignes de base, comme le préconise le constructeur du logiciel.

Page 33
Audrey JACQUIN - Sept. 2015 - INSA - PFE
III.1.3.3. Influence de l’odomètre
L’odomètre est en phase de test donc nous avons évalué l’influence de l’utilisation ou non de ses
données avec la méthode « SmartBase », et la méthode « POSGNSS ».
Méthodes de calcul « SmartBase » « SmartBase » « POSGNSS »
Station primaire Chavanay Chavanay
Station de contrôle Badan Badan
Réseau de stations GNSS
RGP et Orphéon RGP et Orphéon RGP et Orphéon
Odomètre Utilisé Non utilisé Non utilisé
Paramètre Multi-trajets
Elevé Elevé Elevé
Mesures 593 593 593
Ecarts / trajectoire de référence aller
(mètres)
Planimétrie (cm)
Altimétrie (cm)
Planimétrie (cm)
Altimétrie (cm)
Planimétrie (cm)
Altimétrie (cm)
Minimum 0,6 -1,4 0,3 -5,1 0,1 13,7
Maximum 34,3 10,1 29,8 6,4 31,1 26,3
Moyenne 26,8 6,7 5,4 3,0 3,2 20,6
Ecart-type 3,3 2,2 2,4 2,2 2,0 2,9
Erreur moyenne quadratique
27,0 7,1 5,9 3,7 3,8 20,8
Tableau 5 : Résultats statistiques de la comparaison des trajectoires calculées avec et sans odomètre
par rapport à celle de référence.
On constate, d’après les résultats du tableau 5, qu’en faisant abstraction des mesures de
l’odomètre, nous obtenons des résultats nettement meilleurs en planimétrie et en altimétrie. Le
systématisme qui entachait les mesures semble donc provenir de l’emploi de l’odomètre. L’utilisation
de la méthode « POSGNSS » permet une fois de plus d’améliorer la qualité du positionnement
planimétrique avec une Emq de 3,8 cm contre 6 cm pour la méthode « SmartBase ». Dans notre cas,
le positionnement altimétrique a été dégradé, comme on l’a vu dans le premier cas, mais il serait
possible d’apporter des corrections en analysant les graphiques fournis par le logiciel, comme nous
l’avons déjà fait.
L’odomètre est censé consolider l’information de positionnement. Nous sommes ici dans un cas
particulier où son utilisation a dégradé la qualité de la trajectoire. Le phénomène qui s’est produit
semble être dû à des pertes du signal, survenues de temps en temps. Nous avons rencontré ce
problème puisque le système de fixation de l’odomètre n’était pas adapté au wagon qui a servi pour
l’acquisition. De ce fait, dans les passages en courbes et dans les zones d’aiguillages, le faisceau
laser n’est plus aligné sur le rail et ne peut plus effectuer de mesures puisqu’il a une portée de 30
centimètres [±6cm] et la distance qui le sépare du sol est supérieure. Cette phase sans mesures est
considérée comme un arrêt. Il y a donc une incohérence avec les mesures GNSS qui ont mesuré un
déplacement, ce qui entraîne un décalage dans le positionnement de la trajectoire. Pour pallier ce
problème, la division ATT envisage de faire l’acquisition d’un wagon dédié aux mesures, sur lequel on
adaptera un système permettant de fixer idéalement l’odomètre. C'est-à-dire de veiller à ce que le
faisceau laser soit toujours aligné au-dessus du rail et positionné à la bonne hauteur.

Page 34
Audrey JACQUIN - Sept. 2015 - INSA - PFE
III.1.3.4. Méthode de calcul à préconiser
Pour l’ensemble des expérimentations que nous avons réalisées, les courbes de précisions des
trajectoires estimées par le logiciel POSPac MMS sont similaires. Elles annoncent des précisions
(RMS) de l’ordre de 4 à 5 centimètres dans notre zone d’étude. Or, nous avons mis en évidence à
travers nos expérimentations, des variations importantes d’Emq suivant les méthodes de calculs
employées. De ce fait, on constate qu’on ne peut pas se fier uniquement à ce qu’indique le logiciel
pour quantifier la précision de la trajectoire initiale. Les précisions estimées par le logiciel sont
présentées en annexe C.1 « Précision sur la trajectoire estimée par le logiciel POSPAC MMS ».
Nous recommandons ainsi d’utiliser la méthode de calcul POSGNSS lorsqu’on se trouve dans un
milieu peu favorable aux mesures GNSS. Elle permet à l’utilisateur d’effectuer le traitement des
données GNSS pour obtenir une trajectoire de qualité satisfaisante. L’étape de traitement de la
trajectoire est primordiale puisqu’elle constitue les données de base pour le géo-référencement du
nuage de points. Par expérience avec les différents projets déjà réalisés, le calcul de trajectoire
nécessite un temps non négligeable, afin d’effectuer une bonne analyse des graphiques issus du
traitement des données et de pouvoir apporter des corrections. C’est pourquoi, nous considérons que
cette étape doit être réalisée par un ingénieur, qui saura déceler d’éventuelles erreurs, même si les
précisions estimées par le logiciel sont satisfaisantes. Les graphiques auxquels nous nous
intéressons sont présentés en annexe C.2 « Graphiques issus du logiciel POSGNSS », avec des
exemples issus du calcul effectué avec la méthode « POSGNSS ».
Néanmoins, le couplage lâche des données est l’inconvénient majeur de cette méthode comme
nous l’avons vu dans la partie I.1.1.3. Ainsi, dans un milieu favorable aux mesures GNSS, nous
privilégierons la méthode « SmartBase ». Elle offre la possibilité d’apporter quelques corrections pour
le traitement des données GNSS, comme par exemple désactiver l’utilisation des satellites dont les
signaux ont trop de sauts de cycles ou qui ont subi des multi-trajets.
Quant à la méthode « Multi-Single-Base », nous l’utiliserons uniquement si les stations
permanentes à proximité du projet ne permettent pas d’encadrer idéalement la trajectoire, ou dans le
cas de petits chantiers, de l’ordre de 10 à 20 km, pour lesquels un seul pivot est nécessaire au lieu de
4 stations permanentes.
Quelle que soit la méthode de calcul, nous recommandons d’utiliser le paramètre de multi-trajets
élevé lorsque des éléments à proximité du système de réception GNSS sont susceptibles de réfléchir
ou diffracter des ondes décimétriques (immeubles, arbres, etc.).
Pour effectuer la suite du traitement, nous avons utilisé la trajectoire obtenue par la méthode
«SmartBase», en utilisant les stations du RGP et du réseau Orphéon et en choisissant comme station
primaire, la station Chavanay, située la plus au centre du projet et présentant peu de sauts de cycles.
Il est nécessaire d’effectuer un recalage de cette trajectoire et du nuage associé à l’aide de points
d’appui afin de corriger le systématisme induit par le problème de l’odomètre. Nous avons fait le choix
de ne pas poursuivre les traitements avec la trajectoire la plus précise, afin de tester le recalage à
l’aide de points d’appui sur des données présentant des écarts plus importants par rapport à la réalité.
III.2. Précision des données après recalage sur points d’appui
III.2.1. Méthodologie
Dans cette partie, nous nous intéressons à la précision absolue et à l’exactitude des données
finales (trajectoire et nuage de points) qui ont été recalées à l’aide de points d’appui. La mise en place
de ces points est une étape coûteuse en temps et en moyens humains. Considérant les distances

Page 35
Audrey JACQUIN - Sept. 2015 - INSA - PFE
conséquentes d’acquisitions à réaliser pour suivre l’ensemble du réseau, il est nécessaire de
déterminer un intervalle idéal offrant un bon compromis entre les contraintes financières et la précision
requise.
La méthodologie consiste à comparer les trajectoires et nuages de points contraints avec des
points d’appui à intervalles différents, par rapport à des données de référence (Cf. partie III.2.2). Ces
comparaisons mettent en évidence l’influence de l’intervalle entre points d’appui sur la qualité des
données. Nous avons disposé des points d’appui à intervalles d’un kilomètre pour la majeure partie du
projet, hormis dans la zone d’étude de 5 kilomètres, que nous avons densifiée avec des cibles à
intervalles de 300 mètres. Nous avons recalé les données de la zone d’étude avec l’ensemble des
points d’appui disponibles, puis en restreignant leur nombre. Les expérimentations réalisées sont
présentées dans le tableau 6 et la disposition des points est représentée sur le plan de situation en
figure 20.
Tableau 6 : Intervalles
choisis entre les points
d'appui pour les
expérimentations
menées dans la zone
d’étude
Tests
Intervalles
moyens
entre points
d’appui
Test 0 300 m
Test 1 600 m
Test 2 1200 m
Test 3 2200 m
Figure 20 : Plan de situation, localisation des points d'appui pour les
différents tests
Le choix des intervalles s’est fait de manière empirique à partir des critères de coûts de mise en
place des points d’appui. Il nous est apparu qu’un intervalle minimal de 300 mètres était adapté. En
effet, si on devait augmenter la proximité entre les points pour atteindre la précision requise pour les
levés ferroviaires, l’étape de mise en place des points d’appui serait trop coûteuse en temps et
mobilisation du personnel.
III.2.2. Trajectoire et nuage de points de référence
Dans l’étude menée, la trajectoire recalée avec des points d’appui à intervalles de 300 mètres est
considérée comme étant la vérité terrain. On évalue la précision des trois autres trajectoires recalées
avec des intervalles plus conséquents par rapport à cette référence.
On effectue les mêmes comparaisons avec les nuages de points pour voir l’influence des points
d’appui sur les éléments relevés, qui constituent le rendu final. Dans ce cas, le nuage de points de
référence est celui qui a été recalé à l’aide de points d’appui à intervalles de 300 mètres.
Pour quantifier véritablement la précision absolue des données, il est nécessaire d’effectuer une
étude comparative avec des données externes de précisions connues. Nous prenons pour référence
un nuage de points issu d’une acquisition par scanner laser statique, de plus grande précision que le

Page 36
Audrey JACQUIN - Sept. 2015 - INSA - PFE
levé mobile. Dans notre étude, nous quantifions l’exactitude des nuages de points dynamiques à partir
des écarts en distance mesurés entre ce nuage et le nuage statique.
Le choix de la référence s’est porté sur un nuage de points acquis à l’aide du scanner statique
Leica HDS 7000, pour plusieurs raisons. D’une part, la classe de précision de 4 millimètres de ce
système a été contrôlée lors d’une étude interne à SNCF [Division, 2013].
D’autre part, étant donné que nous sommes dans la continuité du PFE de [Choquart, 2014], qui a
effectué une analyse comparative des nuages de points mobiles en prenant pour référence des
nuages de points acquis avec le HDS7000, il est préférable d’utiliser ce même matériel afin d’apporter
des résultats cohérents entre les deux études. Les résultats des traitements des données acquises
par scanner laser statique sont présentés en annexe C.4 « Résultats des traitements des levés au
HDS 7000 ».
Comme nous l’avons vu dans l’état de l’art, l’évaluation de l’exactitude d’un nuage de points
dynamique par comparaison avec un nuage de points statique plus précis est une méthode
exhaustive. L’avantage étant que l’on compare deux technologies qui fournissent le même type de
données.
III.2.3. Méthodes de comparaisons
III.2.3.1. Trajectoires
Les trajectoires sont comparées par rapport à celle de référence en déterminant les écarts
planimétriques puis altimétriques entre deux points acquis au même instant. Etant donné que les
trajectoires comparées proviennent des mêmes données brutes (recalées ensuite avec un nombre de
points d’appui différent), nous pouvons nous baser sur les temps d’acquisition pour estimer les écarts
entre les coordonnées.
III.2.3.2. Nuages de points
La comparaison de nuages de points peut s’effectuer à différents niveaux. Une première
méthode consiste à comparer les points issus des deux nuages, de façon brute. Il s’agit de la
méthode « point à point ». Une autre approche vise à extraire des primitives géométriques (lignes,
plans, etc.) du nuage de points de référence ou des deux nuages et d’effectuer une comparaison
« point/primitive » ou « primitive/primitive », selon le cas. Dans la même optique, il est également
possible de créer un maillage (traitement qui permet de créer une surface à partir des points) du
nuage de référence ou de chacun des nuages de points et d’appliquer une comparaison
« point/maillage » ou « maillage/maillage ».
Compte tenu de la nature des données que nous avons à comparer, la méthode de comparaison
par primitives ne semble pas adaptée. En effet, l’extraction des fils de rail serait longue à mettre en
œuvre pour obtenir des résultats satisfaisants, et les données ne représentent pas de géométries
spécifiques, excepté les poteaux caténaires et les quais qui ne représentent qu’une partie minime du
levé. La méthode de comparaison à partir de maillages s’applique à des données qui présentent les
mêmes prises de vues et des densités de points similaires. Cette méthode ne sera pas employée
dans notre étude puisque la densité de points du nuage statique est 4 fois supérieure à celle du nuage
dynamique. De plus, les résultats issus de ce type de comparaison sont étroitement liés à la qualité du
maillage réalisé, qui doit rester fidèle au nuage de points initial.
Afin de contrôler le nuage de points dans sa globalité, et d’éviter un mauvais appariement des
points avec les primitives ou une approximation de la surface par maillage, notre étude se concentrera
sur une comparaison « point à point ». Elle peut être entreprise de différentes manières. Nous allons
présenter quelques méthodes, et expliquer la solution que nous avons retenue pour comparer nos
jeux de données.

Page 37
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Distance de Hausdorff
Dans le cas de traitement d’images, la distance de Hausdorff quantifie les dissemblances entre
deux formes différentes.
Elle peut être utilisée pour calculer la distance entre deux ensembles, comme le fait [Chavant,
2013] pour comparer deux nuages photogrammétriques.
Mathématiquement, cette méthode détermine le maximum du maximum des plus courtes
distances d’un élément 1, noté E1 (nuage de points dans notre cas) à un élément 2, noté E2 et de E2
à E1, comme l’indique la formule III.1 de la distance de Hausdorff symétrique nommée dHS. On note
p1 et p2 les points respectifs des nuages E1 et E2.
Avec :
correspond au maximum des plus courtes distances des points de E à E
correspond au maximum des plus courtes distances des points de E à E
et
(avec la norme euclidienne usuelle)
distance entre un point p de l’élément et l’élément .
Comme l’a souligné [Choquart, 2014], cette technique n’est pas adaptée lorsque les points de
vue et les zones de masques des données comparées diffèrent. Dans notre cas le point de vue est
différent lors de l’acquisition par scanner dynamique (depuis la voie) et par scanner statique (depuis le
quai). Ainsi, cette méthode risque de qualifier la plus grande dissemblance entre les nuages,
correspondant aux masques non communs aux deux nuages. Nous pouvons illustrer ces propos à
travers la figure 21.
Figure 21 : Illustration de la distance de Hausdorff pour deux nuages de points présentant des zones
de masques différentes. Exemple au niveau de poteaux caténaires
Nous n’appliquerons pas la distance de Hausdorff puisque les résultats ne sont pas
représentatifs de ce que nous voulons réellement mettre en évidence, à savoir, l’écart entre points
homologues.
Algorithme « distance point à point »
Cette méthode basée sur une mesure de « score pseudo distance bornée point à point » permet
de pallier les problèmes induits par la distance de Hausdorff, lorsque les données présentent des
zones de masques différentes. Elle se base sur le même principe, mais limite la zone de recherche de
(III.1)

Page 38
Audrey JACQUIN - Sept. 2015 - INSA - PFE
points homologues. Cet algorithme consiste à définir, pour un point Pn d’un nuage N1, son équivalent
Pm dans un nuage N2, en limitant la recherche dans un rayon r autour du point Pn, fixé par l’utilisateur.
S’il n’y a pas de point équivalent dans ce rayon, aucune distance n’est calculée pour ce point. Nous
pouvons voir l’influence de l’ajout de ce rayon de recherche sur la figure 22, qui reprend les mêmes
données que pour l’illustration de la distance de Hausdorff. Cette fois ci les points du nuage N1 se
trouvant dans la zone de masque du nuage N2 n’ont pas d’équivalent, tandis que les points communs
aux deux éléments trouvent leurs homologues dans le rayon de recherche noté r.
Figure 22 : Illustration de l'algorithme distance "point à point"
Mathématiquement la distance calculée est déterminée à l’aide de la formule III.2.
On nomme N1 le nuage de référence et Pn l’ensemble des points qui le constituent. Le nuage à comparer est nommé N2 et ses points Pm.
La distance d1-2 est définie par :
, si r
non définie sinon
Avec : , : distance entre le point n et le point le plus proche m
r rayon de recherche, au délà on ne recherche plus de points homologue
De la même manière on définit d2-1 par :
, si r
non définie sinon
La valeur du rayon de recherche est fixée par l’utilisateur.
Dans le cas où r = ∞, la valeur max(d1-2, d2-1)correspond à la distance de Hausdorff.
Pour optimiser le traitement des données, l’ensemble des points du nuage est stocké dans un
« kD-Tree », abréviation de « k-Dimendionnal Tree ». Il s’agit d’un processus itératif de subdivision
spatiale, qui permet d’accélérer la recherche de plus proches voisins. A chaque itération, l’ensemble
des points est subdivisé en deux sous-ensembles disjoints, séparés par un plan. Pour un espace à 3
dimensions, dans un repère orthonormé, le premier plan de coupe est orthogonal à l’axe x, le second
est orthogonal à y, et les coupes du troisième niveau sont orthogonales à z. Ce processus est ensuite
réitéré.
Algorithme « distance nuage à nuage »
Le logiciel CloudCompare, propose un outil de comparaison nuage à nuage, nommé
«Cloud/Cloud distance ». Il permet de calculer les distances (approximatives ou exactes) entre deux
nuages de points. [DGM, 2013].
(III.2)

Page 39
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Un premier calcul approximatif est basé sur la distance de Chanfrein. Elles sont rapides à
calculer mais ne fournissent qu’une approximation de la distance euclidienne. En se basant sur ces
approximations, l’utilisateur peut paramétrer un calcul précis des distances, basé sur un calcul de type
distance de Hausdorff. Cette méthode prend en compte la différence d’échantillonnage entre les jeux
de données comparés, mais aussi les différences de prises de vues. En effet, ce calcul repose sur
une amélioration du calcul par distance de Hausdorff, puisque l’utilisateur peut ajouter des
paramètres, comme le choix d’un niveau « d’octree » (subdivision spatiale), le choix d’une
modélisation des nuages, ou encore fixer une distance maximale de recherche. Ce dernier paramètre
est l’équivalent de la fonction de rayon de recherche de points homologues que nous avons vu dans
l’algorithme « score pseudo distance ».
La solution retenue pour réaliser l’étude de précision, vise à appliquer l’algorithme «score pseudo
distance bornée point à point» et à mettre en concordance l’outil de CloudCompare présenté
précédemment, afin de pouvoir cartographier les écarts sur le nuage de points et d’avoir un rendu
visuel des zones présentant les plus gros écarts.
III.3. Résultats et analyses
III.3.1. Influence de l’intervalle entre points d’appui
III.3.1.1. Comparaisons des trajectoires dynamiques
Les résultats statistiques issus des comparaisons des trajectoires recalées avec des points
d’appui à intervalles de 600, 1200 et 2200 mètres, par rapport à la trajectoire de référence, sont
synthétisés dans le tableau 7 et les figures 23, 25 et 26 représentent la répartition des écarts au cours
du temps, en fonction de la disposition des points d’appui.
La délimitation rouge représente la zone où les points de la trajectoire de référence sont disposés
à intervalles de 300 mètres, alors qu’en dehors, l’intervalle est de 1 kilomètre. Les résultats
statistiques sont déterminés uniquement à partir des valeurs des écarts dans la zone rouge, puisqu’en
dehors, les intervalles entre points d’appui des trajectoires 1 et 2 sont les mêmes que pour la
trajectoire de référence. Nous avons pu étendre légèrement cette zone pour la comparaison de la
trajectoire 3 (points tous les 2200 mètres) puisque l’intervalle diffère de celui de la trajectoire de
référence mais nous ne prenons pas en compte les valeurs en dehors de la zone rouge dans le calcul
des statistiques.
Figure 23 : Courbe représentant les écarts entre la trajectoire 1 et celle de référence au cours du
temps
-4
-3
-2
-1
0
1
2
3
4
5
0 60 120 180 240 300 360 420 480 540 600
Ecart
s (
cm
)
Temps (s)
Ecarts planimétriques Ecarts altimétriques Ponts

Page 40
Audrey JACQUIN - Sept. 2015 - INSA - PFE
On constate que l’écart entre les deux trajectoires est effectivement nul lorsqu’elles ont un point
d’appui commun. On observe une augmentation de l’écart qui semble linéaire au cours du temps
lorsqu’on s’éloigne d’un point d’appui commun et le maximum est obtenu environ à mi-distance entre
deux points d’appui de la trajectoire comparée. Les valeurs maximales atteintes varient de quelques
centimètres, elles dépendent de la précision initiale de la trajectoire. En effet, on remarque que les
valeurs les plus élevées sont obtenues après le passage d’un PRO3, qui entraîne un masque pour la
réception du signal GNSS, et donc la dégradation des informations de positionnement.
On constate néanmoins que par endroit, les écarts diminuent alors qu’il
n’y a pas de points d’appui communs entre les trajectoires, comme dans
l’encadré bleu de la figure 23. Ceci est dû à la présence des points
communs, qui assurent le recalage relatif entre les données acquises dans le
sens aller puis retour, comme nous l’avons expliqué en partie II.5.6. La figure
24 illustre également ce phénomène, qui est plus visible sur les figures 25 et
26.Elle montre les corrections apportées par les points communs aux
nuages. Ces mêmes corrections s’appliquent à la trajectoire. Afin de mettre
en évidence l’influence des points communs, nous avons comparé une
trajectoire recalée en absolue (points d’appui à intervalles de 300 mètres) et
en relatif, avec la même trajectoire ayant été recalée uniquement en absolu.
Les résultats montrent que l’absence de points communs entraîne des écarts
moyens et maximums respectivement de 3.7 et 12.4 centimètres entre les
trajectoires, ce qui n’est pas négligeable. Les points communs ont beaucoup
d’importance et permettent d’avoir un recalage homogène des données. Ceci
met en évidence l’importance d’effectuer des mesures dans le sens aller puis
retour.
Figure 24 : Illustration du recalage relatif à
l'aide de points commun
Figure 25 : Courbe représentant les écarts entre la trajectoire 2 et celle de référence au cours du
temps
En comparant les figures 23, 25, et 26, on constate que l’on retrouve approximativement le même
profil pour chacune des trois courbes. Cela vient du fait que les points communs ont été disposés aux
mêmes endroits pour l’ensemble des tests, et lorsqu’un point d’appui est enlevé, on ajoute un point
commun à proximité. Les valeurs des écarts maximaux par rapport à la trajectoire de référence sont
assez similaires pour les trajectoires 1 et 2, malgré le fait que l’on ait doublé l’intervalle entre points
d’appui d’une trajectoire à l’autre.
3 PRO : Pont route, c'est-à-dire qu’une route passe au-dessus de la voie.
-4
-3
-2
-1
0
1
2
3
4
5
0 60 120 180 240 300 360 420 480 540 600
Ecart
s (
cm
)
Temps (s)
Ecarts planimétriques Ecarts altimétriques Ponts Points d'appui 300 m Points d'appui 1200 m

Page 41
Audrey JACQUIN - Sept. 2015 - INSA - PFE
La différence est plus significative en augmentant l’intervalle à 2200 mètres. Les pics maximaux
atteints sont désormais compris approximativement entre 4 et 5 centimètres.
Figure 26 : Courbe représentant les écarts entre la trajectoire 3 et celle de référence au cours du
temps
Planimétrie Altimétrie
Trajectoire 1 2 3 1 2 3
Intervalle entre
points d’appui 600 m 1200 m 2200 m 600 m 1200 m 2200 m
Mesures 7231 7231 7231 7231 7231 7231
Ecart minimal (cm) 0 0 0 0 0 0
Ecart maximal (cm) 4,5 4,0 5,3 3,2 3,7 4,0
Ecart moyen (cm) 0,9 1,0 1,8 0,5 0,8 1,1
Ecart-type (cm) 0,8 0,8 1,2 0,6 0,8 0,9
Erreur moyenne
quadratique (cm) 1,2 1,3 2,2 0,7 1,1 1,8
Tableau 7 : Résultats statistiques de la comparaison des trajectoires 1, 2 et 3 par rapport à celle de
référence
La figure 27 montre que pour chaque trajectoire, nous avons une répartition gaussienne des
écarts. A partir des histogrammes, on voit que les résultats sont assez similaires pour les trajectoires
1 et 2 en planimétrie, avec une concentration des écarts autour de 1 cm, et qu’elle se déplace autour
de 2 cm pour la trajectoire 3. En altimétrie, l’augmentation des écarts est plus régulière avec
l’augmentation de l’intervalle.
Le tableau 7 montre que dans l’ensemble, les écarts moyens et les Emq sont relativement faibles
par rapport à la classe de précision de ± 5 centimètres, fixée par le cahier des charges. Ceci est lié à
l’ajout de points communs comme nous l’avons expliqué. Néanmoins, pour la trajectoire 3, la plupart
des écarts maximaux en planimétrie sont compris entre 4 et 5 centimètres (Cf. figure 26) donc nous
pouvons mettre en évidence qu’il ne faudra pas dépasser un intervalle de 2 kilomètres entre points
d’appui.
-4
-3
-2
-1
0
1
2
3
4
5
6
0 60 120 180 240 300 360 420 480 540 600
Ecart
s (
cm
)
Temps (s)
Ecarts planimétriques Ecarts altimétriques Ponts
Points d'appui 300 m Points d'appui 2200 m

Page 42
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Figure 27 : Histogrammes de répartition des écarts entre les trajectoires 1, 2 et 3 et celle de référence
III.3.1.2. Comparaisons entre nuages de points dynamiques
Nous effectuons les mêmes comparaisons mais avec les nuages de points. Nous avons obtenu
les mêmes résultats avec l’algorithme « score pseudo distance bornée point à point » et l’outil de
CloudCompare, en renseignant le même rayon de recherche maximal. Ce rayon de 5 cm a été fixé à
partir des paramètres annoncés par CloudCompare lors du calcul de distance approximatif. Nous
avons donc utilisé l’outil de CloudCompare pour cartographier les écarts sur les nuages de points, que
l’on peut visualiser sur la figure 29.
Les comparaisons ont été faites sur plusieurs dalles, pour alléger les données manipulées, mais
aussi pour voir l’évolution des écarts lorsqu’on s’éloigne d’un point d’appui commun. La figure 28
montre que, même si les échantillons comparés sont plus proches du point d’appui précédent (environ
600 m) que du point d’appui suivant pour la trajectoire 3, ils sont situés dans la zone où l’on obtient les
écarts maximaux pour la trajectoire.
Figure 28 : Courbe représentant les écarts tridimensionnels entre les trajectoires 1, 2 et 3 et la
trajectoire de référence dans la zone où ont été effectuées les comparaisons entre nuages de points
En s’intéressant à la comparaison du nuage 1 avec la référence, on voit à travers la figure 29,
que les écarts augmentent progressivement lorsqu’on s’éloigne d’un point d’appui commun.
0
10
20
30
40
Fré
qu
en
ce (
%)
Ecarts planimétriques (cm)
Trajectoire 1 Trajectoire 2 Trajectoire 3
0
20
40
60
80
Fré
qu
en
ce (
%)
Ecarts altimétriques (cm)
Trajectoire 1 Trajectoire 2 Trajectoire 3
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
240 260 280 300 320 340 360
Ecart
s (
cm
)
Temps (s)
Ecarts 3D (Trajectoire 1 - Ref)
Ecarts 3D (Trajectoire 2 - Ref)
Ecarts 3D (Trajectoire 3 - Ref)
Délimitation des dalles de nuages de points comparés Points d'appui 300 m
Points d'appui 600 m
Points d'appui 1200 m
Points d'appui 2200 m
Zone correspondant à la
gare (St-Romain-en-gal)
2 3 4 1

Page 43
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Concernant la comparaison des nuages 2 et 3, on constate que les résultats statistiques
présentés sur la figure 29 sont similaires, et ce pour chaque dalle. Les valeurs d’Emq sont comprises
entre 2,1 et 2,3 cm.
De manière générale, nous avons mis en évidence que les résultats obtenus en comparant les
trajectoires et les nuages de points dans la même zone sont similaires. Le tableau de valeur est
présenté en annexe C.5. Comme le montre la figure 28, les écarts obtenus en comparant les
trajectoires 2 et 3 par rapport à la référence sont proches dans la zone où nous avons comparé les
nuages de points, mais aux alentours de 300 secondes les écarts par rapport à la référence sont
beaucoup plus importants pour la trajectoire 3 que pour la trajectoire 2 puisqu’on a ajouté un point
d’appui à cette dernière. De ce fait, nous pouvons en déduire que, même si dans la zone où nous
avons comparé les nuages de points il n’y a pas de différence majeure entre les nuages recalés avec
des points disposés à intervalles de 1200 m ou 2200, nous aurions obtenu des écarts plus importants
à d’autres endroits. Cela dépend de la localisation de la zone de comparaison par rapport à celle des
points d’appui.
Figure 29 : Résultats statistiques des écarts tridimensionnels entre nuages de points 1, 2 et 3 par
rapport au nuage de référence dynamique et cartographie visuelle des écarts (voie vue de dessus)
50 m
50 m
50 m
50 m
Dalle 1
Dalle 1
Dalle 2
Dalle 1
Dalle 3
Dalle 4
Dalle 2
Dalle 2
Dalle 3
Dalle 3
Dalle 4
Dalle 4
Nuage 2 / Nuage de référence dynamique (cm)
Effectif Min. Max. Moy. Ecart-type Emq
Dalle
1 2.839.834 0,0 5,0 2,0 0,7 2,1
2 3.594.623 0,0 5,0 2,0 0,8 2,1
3 2.292.308 0,0 5,0 2,1 0,8 2,3
4 4.103.416 0,0 5,0 2,0 0,8 2,1
Nuage 3 / Nuage de référence dynamique (cm)
Effectif Min. Max. Moy. Ecart-type Emq
Dalle
1 2.839.832 0,0 5,0 2,0 0,8 2,1
2 3.594.571 0,0 5,0 2,0 0,8 2,2
3 2.292.710 0,0 5,0 2,1 0,9 2,3
4 4.103.703 0,0 5,0 2,0 0,9 2,2
Nuage 1 / Nuage de référence dynamique (cm)
Effectif Min. Max. Moy. Ecart-type Emq
Dalle
1 2.839.846 0,0 5,0 1 ,2 0,6 1,4
2 3.594.683 0,0 5,0 0,8 0,4 0,9
3 2.292.361 0,0 5,0 0,3 0,3 0,4
4 4.103.626 0,0 4,9 0,4 0,3 0,5

Page 44
Audrey JACQUIN - Sept. 2015 - INSA - PFE
III.3.1.3. Comparaisons nuage dynamique/nuage statique
Nous avons estimé l’exactitude de chacune des dalles comparées dans la partie précédente pour
les 4 tests que nous avons réalisés (intervalles de 300m, 600m, 1200m et 2200m). Ces données ont
été comparées avec le nuage de points statique. Les résultats de traitement du levé réalisé au
scanner laser statique HDS7000 sont présentés en annexe C.4. Les comparaisons ont été réalisées
sur des portions restreintes des dalles, au niveau d’un poteau caténaire et du quai, afin d’optimiser les
calculs puisque les données statiques sont quatre fois plus denses. Les résultats statistiques sont
présentés par dalle, dans les tableaux 8, 9, 10 et 11 et complétés par les histogrammes en figures 30,
31, 32 et 33. Pour visualiser les écarts entre les différents nuages de points, des coupes de profils
sont jointes en annexe C.6.
On constate une fois de plus que la répartition des écarts est gaussienne.
(cm) Test 0 Test 1
Effectif 538.928 539.109
Minimum 0,0 0,0
Maximum 10,0 10,0
Moyenne 1,9 1,6
Ecart-type 1,2 1,3
Emq 2,3 2,1
(cm) Test 2 Test 3
Effectif 538.927 538.912
Minimum 0,0 0,0
Maximum 9,9 10,0
Moyenne 2,4 2,2
Ecart-type 1,2 1,3
Emq 2,6 2,6
Tableau 8 : Résultats statistiques de la comparaison des nuages dynamiques avec la référence
statique pour la dalle 1
Figure 30 : Histogramme de répartition des écarts entre les nuages de points dynamiques et le nuage de points de référence
pour la dalle 1
(cm) Test 0 Test 1
Effectif 1052132 1052220
Minimum 0,0 0,0
Maximum 10,0 10,0
Moyenne 1,9 1,7
Ecart-type 1,3 1,3
Emq 2,3 2,2
(cm) Test 2 Test 3
Effectif 1052201 1052077
Minimum 0,0 0,0
Maximum 10,0 10,0
Moyenne 2,5 2,3
Ecart-type 1,3 1,5
Emq 2,8 2,7
Tableau 9 : Résultats statistiques de la comparaison des nuages dynamiques avec la référence
statique pour la dalle 2
Figure 31 : Histogramme de répartition des écarts entre les nuages de points dynamiques et le nuage de points de référence
pour la dalle 2
0
5
10
15
20
25
30
35 [0
-0.5
]
]0.5
-1]
]1-
1,5
]
]1,5
- 2]
]2-
2,5
]
]2,5
-3]
]3-3
,5]
]3,5
-4]
]4-4
,5]
]4.5
-5]
]5-5
,5]
]5,5
- 6]
]6-
6,5
]
]6,5
- 7]
]7-
7,5
]
]7,5
- 8]
]8-8
,5]
]8,5
-9]
]9-9
,5]
]9,5
-10]
Fré
qu
en
ce (
%)
Ecarts tridimensionnels (cm)
Test 0 Test 1 Test 2 Test 3
0
5
10
15
20
25
30
35
[0-0
,5]
]0,5
-1]
]1-1
,5]
]1,5
- 2]
]2-2
,5]
]2,5
-3]
]3-3
,5]
]3,5
-4]
]4-4
,5]
]4.5
-5]
]5-5
,5]
]5,5
- 6]
]6-
6,5
]
]6,5
- 7]
]7-
7,5
]
]7,5
- 8]
]8-8
,5]
]8,5
-9]
]9-9
,5]
]9,5
-10]
Fré
qu
en
ce (
%)
Ecarts tridimensionnels (cm)
Test 0 Test 1 Test 2 Test 3

Page 45
Audrey JACQUIN - Sept. 2015 - INSA - PFE
(cm) Test 0 Test 1
Effectif 944.268 944.199
Minimum 0,0 0,0
Maximum 10,0 10,0
Moyenne 2,0 2,1
Ecart-type 1,2 1,1
Emq 2,3 2,4
(cm) Test 2 Test 3
Effectif 944.608 944.677
Minimum 0,0 0,0
Maximum 10,0 10,0
Moyenne 3,4 3,2
Ecart-type 1,0 1,2
Emq 3,6 3,4
Tableau 10 : Résultats
statistiques de la comparaison des nuages dynamiques avec la référence statique pour la dalle 3
Figure 32 : Histogramme de répartition des écarts entre les nuages de points dynamiques et le nuage de points de référence
pour la dalle 3
On remarque que pour chaque dalle, les résultats des tests 0 et 1 sont similaires (intervalles de
300 m et 600 m) et ceux des tests 2 et 3 aussi (intervalles de 1200 m et 2200 m). Les valeurs d’Emq
varient d’une dalle à l’autre. Pour les dalles 1 à 3, elles sont inférieures à la précision attendue de 5
cm pour chacun des tests. Néanmoins, les écarts au niveau de la dalle 4 sont plus importants, ils sont
liés à la qualité initiale des données GNSS qui est dégradée puisqu’on se trouve sous un pont. Dans
ce cas les valeurs d’Emq atteignent respectivement 5,6 cm et 5,3 centimètres pour les tests 2 et 3.
Ceci met en évidence la limite des intervalles supérieurs à 1 km dans les zones de réception
défavorables, pour respecter la précision du cahier des charges.
(cm) Test 0 Test 1
Effectif 301858 301859
Minimum 0,0 0,0
Maximum 10,0 10,0
Moyenne 3,9 3,9
Ecart-type 1,1 1,1
Emq 4,1 4,1
(cm) Test 2 Test 3
Effectif 301858 301859
Minimum 0,0 0,0
Maximum 10,0 10,0
Moyenne 5,4 5,1
Ecart-type 1,6 1,5
Emq 5,6 5,3
Tableau 11 : Résultats
statistiques de la comparaison des nuages
dynamiques avec la référence statique pour la dalle 4
Figure 33 : Histogramme de répartition des écarts entre les nuages de points dynamiques et le nuage de points de référence pour la
dalle 4
0
5
10
15
20
25
30
35
40
45
[0-0
.5]
]0.5
-1]
]1-1
,5]
]1,5
-2]
]2-2
,5]
]2,5
-3]
]3-3
,5]
]3,5
-4]
]4-4
,5]
]4.5
-5]
]5-5
,5]
]5,5
- 6]
]6-
6,5
]
]6,5
- 7]
]7-7
,5]
]7,5
- 8]
]8-8
,5]
]8,5
-9]
]9-9
,5]
]9,5
-10]
Fré
qu
en
ce (
%)
Ecarts tridimensionnels (cm)
Test 0 Test 1 Test 2 Test 3
0
5
10
15
20
25
30
35
40
[0-0
.5]
]0.5
-1]
]1-1
,5]
]1,5
-2]
]2-2
,5]
]2,5
-3]
]3-3
,5]
]3,5
-4]
]4-4
,5]
]4.5
-5]
]5-5
,5]
]5,5
- 6]
]6-
6,5
]
]6,5
- 7]
]7-7
,5]
]7,5
- 8]
]8-8
,5]
]8,5
-9]
]9-9
,5]
]9,5
-10]
Fré
qu
en
ce (
%)
Ecarts tridimensionnels (cm)
Test 0 Test 1 Test 2 Test 3

Page 46
Audrey JACQUIN - Sept. 2015 - INSA - PFE
III.3.2. Etude économique
III.3.2.1. Coûts de mise en place des points d’appui
Les différentes étapes sont : la mise en place et la mesure des points d’appui, les déplacements
d’un point à l’autre, et les changements de pivots GNSS pour les mesures RTK. Cette dernière étape
est relativement coûteuse en temps, mais ne dépend que de l’étendue du projet puisque les pivots
couvrent un rayon compris entre 5 et 10 km correspondant à la portée du signal radio.
Une fois sur place, le positionnement de la cible et la mesure de ses coordonnées sont
relativement rapide (5 à 10 minutes suivant l’expérience). Le temps de déplacement d’un point à
l’autre dépend de la facilité d’accès et de la connaissance du site.
Dans le cas de notre projet, il est difficile de distinguer le temps que nous avons mis pour disposer
les points à intervalles de 300 mètres, et ceux à intervalles de 1 kilomètre, puisque nous avons pu
nous rendre compte que le nombre de points mis en place variait d’un jour à l’autre et était tributaire
de plusieurs facteurs comme par exemple :
La difficulté d’accès à l’emplacement (temps de marche le long de la voie à prévoir si un
accès direct en voiture n’est pas possible).
Une mauvaise réception du signal radio (temps de mise en place d’une autre référence)
Nous pouvons indiquer, à titre informatif, que dans le cadre de notre projet, la mise en place de 61
points d’appui (à intervalles de 300 mètres sur 5,5 kilomètres et de 1 kilomètre sur 43 kilomètres) a
nécessité 28 heures de travail terrain et mobilisé 3 personnes. Ce qui représente en moyenne 2,2
points par heure, soit 10 à 15 points par jour incluant les temps de déplacement et de changement de
pivots.
Si l’on se base sur ce que l’on a évoqué, on peut définir qu’en théorie, le rapport de temps pour
mettre en place des points d’appui à deux intervalles différents, correspond directement au rapport
entre le nombre de points d’appui de chaque intervalle. Dans ce cas, si l’on considère les intervalles
dont il était question dans notre étude, en comparant par rapport au temps mis pour disposer des
points à intervalles de 1200 mètres, il faudra environ 2 fois plus de temps pour les disposer tous les
600 mètres et 4 fois tous les 300 mètres. Le calcul est développé en annexe C.7.
III.3.2.2. Coûts consacrés au traitement
La variation du nombre de points d’appui n’a pas une grande influence sur le temps de traitement
puisque l’utilisateur intervient uniquement pour contrôler leur détection automatique. Bien que le
temps de contrôle soit fonction du nombre de points d’appui, il faut prendre en compte que la
réduction du nombre de points d’appui est compensée par l’ajout de points communs. Ainsi, les temps
de traitements sont similaires suivant le nombre de points d’appui. De plus, le temps consacré au
recalage relatif des données par l’ajout de points communs est largement supérieur à celui consacré
au recalage absolu, donc l’impact du nombre de points d’appui utilisé pour ce dernier est minime.
Les temps consacrés aux différentes étapes de traitements sont présentés en annexe B.2.

Page 47
Audrey JACQUIN - Sept. 2015 - INSA - PFE
III.4. Conclusion
La comparaison des nuages par rapport aux données externes de référence montre que nous
obtenons des résultats similaires pour les intervalles de 300 et 600 mètres, de même que pour les
intervalles de 1200 et 2200 mètres.
A partir de l’étude économique, on en déduit que les surcoûts entrainés pour la disposition à
intervalles de 300 mètres par rapport aux intervalles plus grand, ne sont pas nécessaires puisqu’on
obtient des résultats similaires avec un intervalle de 600 m.
Nous avons mis en évidence que l’on obtient des écarts similaires en comparant les trajectoires
ou les nuages de points. Ce lien nous permet, à partir des écarts obtenus au niveau de la trajectoire,
de prévoir l’ordre de grandeur des écarts que l’on retrouvera au niveau des nuages de points et donc
au niveau du rendu final. La comparaison des trajectoires par rapport à celle recalée à intervalles de
300 mètres, a montré que pour l’intervalle de 2200 mètres, la plupart des écarts maximums sont
concentrés autour de 5 cm. On peut donc annoncer qu’il ne faudra pas dépasser un intervalle de 2
kilomètres afin de respecter la classe de précision de 5 centimètres pour le rendu final.
On a pu voir que l’exactitude des nuages de points à intervalles de 1200 m était d’environ 3 à 4
centimètres dans un milieu GNSS qui n’est pas le plus favorable et d’environ 6 centimètres dans une
zone masquée par un ouvrage.
En définitive, on envisage une disposition des points d’appui à intervalles de 1 kilomètre dans les
zones dégagées, puisqu’il offre un bon compromis entre l’exactitude obtenue et le coût de mise en
place des cibles. On respectera par ailleurs la disposition des cibles que nous avons présentée en
partie II.3.1, à savoir en encadrant les ouvrages avec des points d’appui.
Dans les milieux GNSS défavorables (milieu confiné, succession de passages sous ouvrages
etc.), on privilégiera un intervalle entre points d’appui d’environ 500 mètres. Par rapport aux prévisions
théoriques, le coût entraîné par la réduction de l’intervalle à 500 mètres sera 2 fois plus important que
celui estimé pour l’intervalle de 1 kilomètre. Cependant, ce surcoût ne s’appliquera globalement que
sur une portion restreinte des acquisitions. La modifications de l’intervalle entre les points d’appui est
indispensable dans ces milieux GNSS défavorables afin de pouvoir garantir une précision homogène
du nuage de points conformément aux prescriptions du cahier des charges, à savoir ± 5 cm selon les
trois composantes x, y et z.

Page 48
Audrey JACQUIN - Sept. 2015 - INSA - PFE
CHAPITRE.IV. METHODE D’APPLICATION DE L’ARRETE DE 2003
Maintenant que nous avons qualifié la précision des données topographiques issues des
acquisitions par scanner laser dynamique, nous devons mettre en place une méthode permettant de
contrôler ces données conformément à l’arrêté de 2003 sur les classes de précision. En effet, cet
arrêté est « applicable aux catégories de travaux topographiques réalisés par l’Etat, les collectivités
locales et leurs établissements publics ou exécutés pour leur compte » [Kasser, 2003]. Ainsi, en tant
qu’établissement public à caractère industriel et commercial (EPIC), SNCF se doit de mettre en place
une procédure permettant d’évaluer la précision des données conformément à cet arrêté.
IV.1. Nouveautés apportées par l’arrêté et définitions
Cette partie permet de rappeler les points clés de l’arrêté que nous allons évoquer par la suite.
Nouveautés
L’arrêté de 2003 succède à celui de 1980, dans le but de palier les défauts mis en évidence dans
ce dernier. Comme l’a évoqué Michel [Kasser, 2003], la différence majeure entre les deux arrêtés est
la suivante : « nous ne sommes plus dans une spécification de moyens, mais dans une spécification
de résultats ». Alors que l’arrêté de 1980 était appliqué principalement lors des calculs pour contrôler
le respect des tolérances, la mise en place de l’arrêté de 2003 nécessite de réaliser de nouvelles
mesures, ce qui pousse le donneur d’ordre à spécifier ses besoins réels puisque le coût de contrôle
sera plus important. Néanmoins, l’avantage de cet arrêté est d’offrir aux entreprises exécutantes le
choix des méthodes de contrôle employées. Cela permet de choisir les méthodes les plus appropriées
au milieu et au type de travaux réalisés, en tenant compte de la précision souhaitée et du coût de
contrôle.
Méthode de mise en place
L’arrêté de 2003 s’applique à 3 catégories de travaux qui sont les canevas, les objets
géographiques, ainsi que les images rectifiées et les documents cartographiques scannés. Pour
contrôler l’une de ces catégories, nous devons exprimer la précision souhaitée par une classe de
précision en centimètres. Il faut ensuite effectuer les mesures de contrôle selon des procédés
permettant de fournir une précision au moins deux fois supérieure à celle de la classe de précision
recherchée, comme le stipule l’article 3 de l’arrêté [Légifrance@, 2015]. On détermine alors les écarts
en position entre les coordonnées des points de la prestation et ceux contrôlés.
Pour valider une classe de précision, les écarts obtenus doivent respecter les conditions du
modèle standard (le plus utilisé) ou du gabarit d’erreur. Ils définissent des valeurs de seuils et le
nombre d’écarts tolérés pouvant dépasser ces seuils. Le modèle standard s’appuie sur une
distribution gaussienne des erreurs et l’appartenance à une classe passe par le respect de 3 critères
détaillés en partie IV.2.1.1, tandis que le gabarit d’erreur laisse la possibilité d’établir son propre
modèle d’erreurs de mesures, en définissant les seuils et le nombre d’écarts tolérés pouvant les
dépasser [Kasser, 2003].
Concernant la taille et la composition de l’échantillon de contrôle, l’arrêté n’indique aucune
spécification. Le donneur d’ordre et la partie exécutante des travaux ont donc libre choix pour fixer ces
paramètres, qui doivent être renseignés dans le contrat après un accord.

Page 49
Audrey JACQUIN - Sept. 2015 - INSA - PFE
IV.2. Mise en place de méthodes de contrôle de nuages de points dynamiques
Comme nous l’avons vu dans la littérature, les entreprises ont mis un certain temps avant
d’appliquer cet arrêté. Selon [Cayot, 2007] cela est lié d’une part à la difficulté de sa compréhens ion
au premier abord et au manque d’exemples d’applications, d’autre part, à la modification des
habitudes de travail qu’il entraîne. A l’heure actuelle, nous avons à notre disposition davantage de cas
d’applications concernant les levés topographiques ou les restitutions photogrammétriques.
Néanmoins, nous n’avons trouvé aucune information à propos de son application à des données
lasergrammétriques.
La mise en place d’une méthode de contrôle conforme à cet arrêté nécessite une véritable
réflexion. Bien qu’il laisse libre choix à l’entreprise d’utiliser la technologie de contrôle qui lui semble la
plus appropriée, au cours de notre réflexion pour appliquer l’arrêté aux données lasergrammétriques,
nous nous sommes heurtés à plusieurs spécifications que nous expliquerons dans le développement.
Nous avons donc proposé deux méthodes de contrôle et vérifié si elles étaient conformes aux
spécifications de l’arrêté de 2003. Deux types de classe de précision sont distingués, la précision
interne et totale. La classe de précision interne fait intervenir l’erreur interne mais aussi l’erreur propre
au réseau légal ainsi que l’erreur de rattachement. Ces erreurs sont définies en annexe D.1. Dans
notre cas, nous nous intéresserons seulement à la classe de précision totale, qui représente la
composition quadratique des erreurs que l’on vient de citer. Le contrôle de la classe de précision
interne serait plus difficile, il faudrait disposer du nuage de points dans un système local et les points
d’appui devraient aussi être exprimés dans ce système indépendant.
IV.2.1. Méthode par mesure de points de contrôle
IV.2.1.1. Méthodologie
La première méthode que nous avons proposée pour valider la classe de précision des nuages
de points consiste à contrôler des points bien identifiés dans le nuage. Il s’agit de contrôler des objets
géographiques comme l’indique l’arrêté.
En milieu ferroviaire, les éléments relevés ne présentent pas suffisamment de détails réels que
l’on pourrait bien identifier dans le nuage en tant que points de contrôle. Ainsi, lors de l’étape de mise
en place des points d’appui, des points complémentaires matérialisés par les mêmes cibles seront mis
en place et serviront de points de contrôle. Leurs coordonnées seront déterminées par mesures
GNSS en temps réel, selon les règles de l’art.
La classe de précision s’applique aux écarts entre les coordonnées des points de contrôle
mesurées par GNSS et leurs coordonnées mesurées dans le nuage de points final. Or, dans le rendu
final, les nuages aller et retour ne sont pas totalement confondus, il peut subsister un écart relatif
maximal de ± 1.5 cm en planimétrie et de ± 1 cm en altimétrie, comme nous l’avons expliqué en partie
II.5.6. La procédure de contrôle sera donc appliquée à chacun des nuages de points aller et retour.
Nous choisissons d’appliquer le modèle standard pour valider la classe de précision, puisque le
gabarit d’erreur est utilisé si l’on souhaite établir un modèle en dehors de toute considération
statistique [Cayot, 2007], ce qui n’est pas notre cas. Dans le cas du modèle standard, la classe de
précision notée [xx] est validée si les écarts en position définis par la distance euclidienne entre les
coordonnées des points de contrôle et de leurs homologues dans le nuage, respectent les 3
conditions présentées ci-dessous.

Page 50
Audrey JACQUIN - Sept. 2015 - INSA - PFE
1. L’écart moyen en position (Emoypos) correspondant à la moyenne arithmétique des écarts en
position (Epos) doit être inférieur au seuil global, calculé à partir de la classe de précision et
du coefficient de sécurité (C).
Emoypos [xx] 1+1
2 × C2
[xx] : classe de précision en centimètre
C : coefficient de sécurité = é
é à
2. Le modèle standard étant basé sur un modèle gaussien de la distribution des erreurs, il fixe
un seuil T1 ne pouvant être dépassé que par un nombre limité d’écarts. Ce seuil est établi de
manière à ce que la probabilité d’avoir des écarts supérieurs soit inférieure à 1%. On le définit
par l’équation IV.2.
T1 = [xx] k 1+1
2 × C2
k : coefficient qui prend trois valeurs différentes selon si l’on considère des coordonnées
altimétriques (k = 3,23), planimétriques (k = 2,42), ou tridimensionnelles (k = 2,11).
Le nombre de points pouvant dépasser le seuil T (N’) est fonction de la taille de l’échantillon
de contr le (N), il est défini par l’équation IV.3.
N '= 0.01 × N + 0.232 × N
Remarques : - N’ s’arrondit à l’entier immédiatement supérieur
- Si N 5 alors N’=0
3. Le second seuil T2 représente une probabilité de 0.01% de trouver des écarts supérieurs à ce
seuil, et ne doit jamais être dépassé. On l’obtient avec l’équation IV.4 :
T2 = 1.5 × T1
IV.2.1.2. Respect du coefficient de sécurité
Les classes de précision requises pour l’ajustement global des données sont fixées par le cahier
des charges à ± 5 centimètres selon les trois composantes (x, y et z). Nous avons opté pour
déterminer les points de contrôle par mesures GNSS en temps réel. En effet, cette méthode s’avère
plus appropriée qu’un levé topographique de précision au tachéomètre puisqu’elle offre un bon
compromis entre la rapidité de mesure et la précision fournie. La rapidité de mesure n’est pas
négligeable aux vues des longueurs importantes d’acquisitions à contrôler.
Les levés GNSS étant moins précis en altimétrie qu’en planimétrie, nous allons dissocier les
écarts planimétriques et altimétriques. La détermination des coordonnées des points de contrôle se
fait par la méthode du RTK classique avec un récepteur GNSS Leica de type GS10. Les précisions
(RMS) en mode temps réel fournies par le constructeur [Leica@, 2012] sont présentées dans le
tableau 12.
(IV.4)
(IV.1)
(IV.2)
(IV.3)

Page 51
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Précision horizontale 8 mm + 1 ppm (rms) ppm (partie par million) : correspond à un rapport de 10
-6 , c'est-à-dire que l’on ajoute
mm à chaque kilomètre de ligne de base Précision verticale 15 mm + 1 ppm (rms)
Tableau 12 : Précision du récepteur Leica GS10 GNSS "professionnel" à 1 sigma,
en mode RTK < 20 km Source : [Leica@ 2012]
Ces précisions sont annoncées pour une ligne de base inférieure à 30 km par rapport à la station
de référence. Dans notre cas, la station de référence se situe dans un rayon d’environ 5 kilomètres
par rapport au pivot, ce qui correspond à la portée du signal radio. Comme l’annonce le constructeur,
« les mesures dépendent de plusieurs facteurs tels que le nombre de satellites observés, leur
géométrie, les masques, les multi-trajets, etc » et les caractéristiques indiquées supposent des
conditions normales à favorables ». Il est aussi précisé que l’utilisation des satellites du système russe
GLONASS peut augmenter la précision jusqu’à 30%.
Dans des conditions d’observations normales à favorables, la précision de nos mesures serait de
1,3 cm en planimétrie (8 mm + 5 mm) et de 2 cm en altimétrie. Dans ce cas, le coefficient de sécurité
défini comme « le rapport entre la classe de précision des points à contrôler et celle des détermination
de contrôle » [Kasser, 2003], est respecté. Néanmoins, selon l’environnement dans lequel se font les
acquisitions, la précision RTK risque d’être dégradée et le coefficient de sécurité ne pourra être
respecté, rendant le contrôle non conforme à l’arrêté de 2003. Cela constitue une première limite à
cette méthode.
IV.2.1.3. Choix de l’échantillon
La taille de l’échantillon n’est pas spécifiée par l’arrêté, mais une étude menée par [Cayot, 2007],
recueillant les avis de professionnels concernés, permet de donner une idée de ce qui se pratique. En
se basant sur cette étude et en tenant compte du milieu et des contraintes économiques, nous fixons
comme taille d’échantillon un nombre de points de contrôle par distance acquise, qui sera de 1 point
pour 5 kilomètres ou 10 kilomètres suivant l’environnement.
Ces points de contrôle seront répartis de manière homogène le long de la trajectoire et de part et
d’autre des voies. Comme pour l’emplacement des points d’appui, les points de contrôle seront
implantés de préférence dans des zones d’accès faciles, comme les passages à niveau, les gares et
les accès.
IV.2.2. Méthode par acquisition de nuages de points statiques
Comme nous avons pu le voir, la méthode précédente est envisageable, le principe de mesure
est adapté aux longueurs conséquentes de linéaire à contrôler et le principe de contrôle s’inscrit dans
le cadre de l’arrêté de 2003. Toutefois, il est difficile d’annoncer que le coefficient de sécurité pourra
toujours être respecté, notamment pour la classe de précision altimétrique. Nous avons donc proposé
une autre méthode.
IV.2.2.1. Méthodologie
Les levés lasergrammétriques fournissent des nuages de points représentant des surfaces
entières plutôt que des objets distincts représentés par des points individuels. Ce type de données à
contrôler fait donc partie de la catégorie « objets géographiques linéaires, surfaciques et volumiques »
de l’arrêté. Dans ce cas, le contrôle s’effectue par mesure de « la plus petite distance entre le point
de contrôle et la ligne de levée, le point de contrôle étant choisi le plus proche possible de l’un des

Page 52
Audrey JACQUIN - Sept. 2015 - INSA - PFE
points levés ». Toutefois, comme l’indique [Kasser, 2003], « le texte de l’arrêté ne traite pas les
problèmes spécifiques aux différents interpolateurs utilisables pour décrire une courbe à partir de
quelques points levés ». Afin de s’affranchir du choix d’un interpolateur, qui altère la précision en
lissant les données, nous optons pour une méthode permettant de contrôler chaque point du nuage
sans interpolateur.
La solution proposée consiste à contrôler les points du nuage dynamique à partir d’un relevé par
scanner laser statique de meilleure précision et de densité plus élevée. Le nuage de points statique
sera géo-référencé dans le même système de coordonnées que le nuage dynamique. L’avantage de
cette méthode est de comparer deux mêmes types de données. De plus, les données de contrôle
étant plus denses, la probabilité pour que le point de contrôle se trouve au plus près du point dans le
relevé mobile est plus grande.
La méthode de contrôle nuage/nuage mise en place utilise un algorithme robuste de recalage de
nuages de points, nommé « Go ICP ». Cet algorithme a été proposé récemment dans la littérature par
[Yang et al. 2010] et a la particularité de garantir une convergence vers un minimum global. L’objectif
est de déterminer la translation et la rotation entre les deux nuages de points à l’aide d’un algorithme
« Band and Bound », c’est-à-dire par séparation et évaluation. La transformation calculée est ensuite
appliquée par rapport au nuage de référence.
Les éléments de rotation et translation entre les deux nuages sont difficilement interprétables
dans le cadre de l’arrêté. C’est pourquoi, une fonction a été implémentée afin d’obtenir les distances
entre les points des nuages comparés. Dans notre cas, ces distances euclidiennes constituent les
écarts tridimensionnels entre les points des nuages statiques et dynamiques.
Distinguer les composantes planimétriques et altimétriques des coordonnées des points d’un
nuage n’a pas vraiment de sens. Nous considérons dans ce cas les coordonnées tridimensionnelles
puisque les données planimétriques et altimétriques suivent les mêmes lois statistiques et comme le
cahier des charges fixe les mêmes classes de précision en altimétrie et en planimétrie, on peut définir
une classe de précision tridimensionnelle de ± 5 cm.
IV.2.2.2. Respect du coefficient de sécurité
Nous choisissons de réaliser le relevé statique à l’aide du scanner laser Leica HDS7000. D’après
les données du constructeur et d’une étude réalisée pour déterminer la précision du scanner laser
HDS7000 [Division, 2013], il en ressort une précision relative de ± 3 millimètres à 50 mètres.
Concernant le scanner dynamique Riegl VMX-450 Rail, sa précision relative a été validée par l’étude
menée par [Choquart, 2014] et conforte les données du constructeur annoncées à ± 5 millimètres à
50 mètres. La méthode de contrôle offre une précision relative supérieure à celle du scanner laser
dynamique, ce qui assure une bonne représentation des éléments au sein du nuage de contrôle.
Le rattachement du nuage de points statique est réalisé par géo-référencement indirect avec une
consolidation basée à partir de cibles ou entre nuages. La détermination des coordonnées des cibles
ou points caractéristiques (selon le mode de consolidation utilisé) se fait par GNSS différentiel post-
traité. Le rattachement de ces points en post-traitement se fait par rapport aux stations du RGP ou du
réseau Orphéon. Le temps d’observation des points est déterminé en fonction de leur distance avec
les stations de référence. Il est fixé à 10 minutes, auxquels on ajoute une minute par kilomètre de
ligne de base avec les stations de références et 1 minute par 100 mètres de dénivelés.
Dans notre cas, le temps d’occupation des deux cibles permettant de rattacher le nuage de
points a été estimé à 1h30 puisque les stations de référence utilisées sont situées à une distance
d’environ 20 à 60 km de la gare de Saint-Romain-en-Gal. (Cf. partie II.3.2 figure 11).
Les précisions obtenues en mode post-traitement pour des observations statiques avec le
récepteur GNSS de type GS10 sont présentées dans le tableau 13.

Page 53
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Précision horizontale 3 mm + 0.1 ppm (rms)
Précision verticale 3.5 mm + 0.4 ppm (rms)
Tableau 13 : Précisions du récepteur Leica GS10 GNSS "professionnel", à 1 sigma,
en post-traitement, (Source Leica@ 2012)
Les résidus résultants de l’assemblage absolu du nuage de points statique sont de l’ordre de 2
centimètres (Cf. annexe C.4.) et montrent que le coefficient de sécurité est respecté avec cette
méthode de contrôle.
IV.2.2.3. Choix de l’échantillon
En se basant sur l’étude menée par [Cayot, 2007] et en tenant compte de l’environnement et des
contraintes économiques, nous avons fixé l’échantillon suivant : la surface contrôlée par scanner laser
statique doit représenter 10% de la surface totale acquise en dynamique. Les zones contrôlées seront
réparties de manière homogène le long de la trajectoire.
Nous avons maintenant présenté la méthodologie des deux méthodes proposées et nous avons
pu voir les limites de la méthode par mesure de points de contrôle. Nous allons maintenant les mettre
en application pour contrôler les données de notre projet.
IV.3. Résultats et analyses
IV.3.1. Méthode par mesure de points de contrôle : zone contrôlée
Nous avons appliqué la méthode par mesure de points de contrôle sur la zone d’acquisition de 5
kilomètres qui a servi pour les études précédentes. Nous choisissons de contrôler le jeu de données
le moins précis, c’est-à-dire le nuage recalé avec des points d’appui à intervalles moyens de 2.2
kilomètres. Disposant de points de contrôle surabondants par rapport à ce qui a été spécifié en partie
IV.2.1.3, nous allons utiliser la totalité des points de contrôle disponibles afin d’avoir un exemple de
calcul plus représentatif. Si nous avions respecté l’échantillonnage défini au IV.2.1.3, un seul point de
contrôle aurait été nécessaire pour cette zone. Nous disposons de 15 points de contrôle dans le cadre
de cette étude, leur répartition est illustrée en figure 34.
Figure 34 : Représentation de la zone de test et de la disposition des points de contrôle
Points d’appui
Points de contrôle
Points côté voie 1 / Points côté voie 2
Trajectoire Aller
Trajectoire Retour
Blocs de 200m le long de la trajectoire
Zoom pour visualiser la
distinction entre les
deux trajectoires

Page 54
Audrey JACQUIN - Sept. 2015 - INSA - PFE
IV.3.1.1. Exemple de calcul
Nous allons donner un exemple de calcul pour le contrôle de l’ajustement global du nuage de
points aller. Les résultats obtenus pour le nuage de points retour sont similaires.
La première étape consiste à calculer les écarts en position entre les coordonnées des points de
contrôle et les coordonnées de leurs homologues dans le nuage de points. Les écarts sont définis par
la distance euclidienne entre les points. Comme nous l’avons indiqué en partie IV.2.1.1, nous
séparons les composantes planimétriques et altimétriques dans cette méthode. Les écarts
planimétriques (Epos plani) et altimétriques (Epos alti) sont obtenus à l’aide des formules IV.5 et IV.6.
=
Avec ( c, c, c ) les coordonnées du point de contrôle et ( n, n, n) celles du point dans le nuage.
Les coordonnées des points ainsi que les écarts obtenus sont présentés dans le tableau 14. On
calcule ensuite la moyenne des écarts planimétriques (Emoy pos plani) et celle des écarts
altimétriques (Emoy pos alti).
Tableau 14 : Ecarts entre les coordonnées des points de contrôle et des points dans le nuage
L’étape suivante consiste à calculer le seuil global et les deux seuils de tolérance T1 et T2 afin de
valider la classe de précision. Les formules permettant d’obtenir ces valeurs ont été détaillées en
partie IV.2.1.1 et les éléments calculés sont présentés dans le tableau 15.
N°
Coordonnées : points de contrôle
RGF93 – CC 45
Coordonnées : points du nuage aller
RGF93 – CC 45
E pos
plani
E pos
alti
X(m) Y(m) Z(m) X(m) Y(m) Z(m) (cm) (cm)
1 1843568,184 4261669,057 155,485 1843568,174 4261669,071 155,491 1,7 0,6
2 1844123,751 4261436,021 155,163 1844123,751 4261436,046 155,187 2,5 2,4
3 1844429,495 4261443,938 154,811 1844429,522 4261443,927 154,838 2,9 2,7
4 1844732,155 4261472,133 154,771 1844732,161 4261472,154 154,777 2,2 0,6
5 1845038,738 4261410,958 155,403 1845038,715 4261410,968 155,419 2,5 1,6
6 1845264,026 4261219,948 157,401 1845264,003 4261219,985 157,419 4,4 1,8
7 1845412,529 4260973,047 158,939 1845412,526 4260973,045 158,950 0,4 1,1
8 1845647,919 4260361,962 158,101 1845647,911 4260361,983 158,124 2,2 2,3
9 1845647,051 4260226,861 158,022 1845647,068 4260226,903 158,042 4,5 2,0
10 1845574,512 4260008,148 157,940 1845574,523 4260008,168 157,946 2,3 0,6
11 1845425,622 4259758,550 158,109 1845425,631 4259758,587 158,097 3,8 1,2
12 1845323,655 4259491,905 158,141 1845323,649 4259491,934 158,128 3,0 1,3
13 1845239,884 4259182,441 158,387 1845239,893 4259182,421 158,369 2,2 1,8
14 1844862,426 4258763,410 156,372 1844862,441 4258763,403 156,330 1,7 4,2
15 1844596,562 4258604,842 155,328 1844596,581 4258604,838 155,302 1,9 2,6
(IV.5)
(IV.6)

Page 55
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Il est difficile d’évaluer exactement la précision de la méthode de contrôle employée puisque,
comme nous l’avons évoqué en partie IV.2.1.2, la qualité des données GNSS varie en fonction de
l’environnement dans lequel se font les mesures. Nous avons montré dans la partie IV.2.1.2 que la
précision annoncée par le constructeur dans des conditions favorables, permettait d’avoir un
coefficient de sécurité supérieur à 2. La zone dans laquelle l’acquisition des points de contrôle a été
réalisée ne peut pas être qualifiée de très favorable aux réceptions GNSS, puisqu’on se situe proche
des zones urbaines et à flanc de colline. Néanmoins, les travaux de [Legros et al. 2013] annoncent
que la méthode de positionnement GNSS par RTK classique permet d’atteindre une précision de 2-3
centimètres et prend en compte le fait que les conditions d’observations ne sont pas forcément
optimales. Dans la mesure où l’on observe, dans notre cas, un volume d’observations plus important
que dans cette méthode (4 observations de 30 secondes afin de fiabiliser les résultats en moyennant
les positions), nous pouvons considérer que les précisions obtenues sont légèrement meilleures et
que le coefficient de sécurité de 2 est respecté.
Les valeurs des éléments intervenant dans les calculs sont les suivantes :
Taille de l’échantillon : N = 15
Coefficient de sécurité pour la précision du levé de contrôle : C = 2
Classe de précision : planimétrique [xx] = 5 cm / altimétrique [xx] = 5 cm
Coefficient associé aux coordonnées : planimétrie k=2.42 / altimétrie k=3.23
Paramètres du modèle standard (cm) Planimétrie Altimétrie
Moyenne des écarts (Emoy pos) 2,5 1,8
Seuil global 5,6 5,6
Valeur du seuil T1 13,6 18,2
Nombre d’écarts supérieurs à T1 autorisés 2,0 2,0
Nombre d’écarts supérieurs à T1 0,0 0,0
Valeur du seuil T2 20,4 27,3
Nombre d’écarts supérieurs à T2 autorisés 0,0 0,0
Nombre d’écarts supérieurs au seuil T2 0,0 0,0
Tableau 15 : Calculs des paramètres du modèle standard nécessaires à la validation des classes de
précision
Les valeurs du tableau 15 montrent que les trois seuils sont validés pour les composantes
planimétriques et altimétriques. Nous allons maintenant interpréter ces résultats.
IV.3.1.2. Evaluation de la classe de précision des données
Pour faciliter l’interprétation des résultats, nous avons représenté la répartition des écarts
obtenus pour les nuages de points aller et retour à travers la figure 35 pour la classe de précision
planimétrique et la figure 36 pour la classe de précision altimétrique.

Page 56
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Figure 35 : Répartition des écarts planimétriques et représentation des seuils
Les figures 35 et 36 montrent que les classes de précisions planimétriques et altimétriques de 5
centimètres sont respectées pour les nuages de points aller et retour. En effet, les écarts moyens sont
inférieurs au seuil global et aucun point ne dépasse les seuils T1 et T2. On constate à partir de la
répartition des écarts sur les figures 35 et 36 que les résultats pour les nuages de points aller et retour
sont similaires, ce qui montre que l’écart relatif entre les deux nuages est bien respecté.
Nous avons donc montré que sur la zone d’étude de 5 kilomètres, l’ajustement global des
données avec des points d’appui à intervalles moyens de 2.2 kilomètres permet de respecter les
classes de précision planimétriques et altimétriques de 5 centimètres fixées par le cahier des charges.
Figure 36 : Répartition des écarts altimétriques et représentation des seuils
Néanmoins, comme nous l’avons mis en évidence dans la partie IV.2.1.2, cette méthode est
tributaire de l’environnement dans lequel se font les mesures de contrôle. Dans des conditions
favorables, elle offre une précision suffisante pour être conforme à l’arrêté de 2003, mais si ces
conditions ne sont pas réunies, le coefficient de sécurité de 2 sera difficilement respecté, notamment
pour valider la classe de précision altimétrique.
5,6
13,6
20,4
2,5 2,6
0,0
2,0
4,0
6,0
8,0
10,0
12,0
14,0
16,0
18,0
20,0
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Ecart
s p
lan
imétr
iqu
es (
cm
)
Matricule du point de contrôle
Nuage de points aller
Nuage de points retour
Seuil Global
Seuil T1
Seuil T2
Ecart moyen Aller
Ecart moyen Retour
5,6
18,2
27,3
1,8 1,4
0
3
6
9
12
15
18
21
24
27
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Ecart
s a
ltim
étr
iqu
es (
cm
)
Matricule du point de contrôle
Nuage de points aller
Nuage de points retour
Seuil Global
Seuil T1
Seuil T2
Ecart moyen Aller
Ecart moyen Retour

Page 57
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Nous avons soulevé un second inconvénient à cette méthode. En effet, les méthodes de
détermination des coordonnées sont différentes, l’une par pointage dans le nuage de points, et l’autre
par mesures GNSS du centre de la cible, ce qui peut causer des inexactitudes dans le calcul des
écarts. On peut citer par exemple les erreurs de pointé dans le nuage ou les erreurs de bullage de la
canne sur laquelle est fixée l’antenne GNSS.
IV.3.2. Contrôle par scanner statique : zone contrôlée
Le levé de contrôle par scanner statique a été réalisé en gare de Ste-Colombe-les-Viennes à
l’aide du scanner laser HDS7000 et couvre une longueur de 200 mètres. Pour effectuer le levé, nous
avons réalisé 10 stations à intervalles de 20 mètres, en optant pour une résolution élevée permettant
d’obtenir des points tous les 6.3 millimètres à une distance de 10 mètres. La largeur des nuages de
points comparés est identique, elle couvre les voies et les quais.
L’algorithme utilisé dans la méthode de contrôle (Cf. partie IV.2.2.1) est en cours de développement
en parallèle de mon PFE et certaines limites sont apparues lorsque les jeux de données comparés
sont trop proches entre eux. Ce problème est en cours de résolution.
Nous avons donc appliqué la méthode de contrôle au nuage de points dynamique n’ayant pas
subi de recalage à l’aide des points d’appui, puisqu’il présente un décalage plus important avec le
nuage de points statique. Ceci permet de déterminer la classe de précision du nuage de points avant
recalage et de mettre en application la méthode.
IV.3.2.1. Exemple de calcul
Le procédé de calcul est similaire à celui employé avec la méthode de contrôle précédente,
basée sur les points de contrôle. La particularité, dans ce cas, est que l’on a une valeur d’écart pour
chaque point du nuage. Ainsi, avec une densité de 400 points/m² pour le nuage de points dynamique,
cela représente un nombre conséquent d’écarts à analyser. De ce fait, les calculs des paramètres du
modèle standard sont plus longs. Pour faciliter les comparaisons, nous avons découpé le nuage en
dalles de 50 mètres de long, qui comportent en moyenne 600.000 points, puis nous avons effectué les
calculs avec l’ensemble des résultats obtenus.
IV.3.2.2. Evaluation de la classe de précision
Le nuage de points contrôlé n’a pas été recalé à l’aide de points d’appui. Nous avons constaté la
présence d’un systématisme lors du recalage de ce nuage puisqu’il présentait un décalage
planimétrique d’environ 30 cm par rapport aux points d’appui. Nous sommes donc conscients qu’il ne
respecte pas la classe de précision tridimensionnelle de ± 5 centimètres. Il s’agit ici de déterminer sa
classe de précision, que l’on calcule par itérations successives en augmentant la valeur de la classe
jusqu’à validation de l’ensemble des conditions.
A chaque itération, on recalcule le coefficient C puisqu’il est défini dans l’article 3 de l’arrêté comme
« le rapport entre la classe de précision des points à contrôler et celle des déterminations de
contrôle ». Ceci est nécessaire puisque le seuil global est inversement proportionnel au carré du
coefficient. Ainsi, pour une même classe de précision, plus le coefficient de sécurité est grand, plus le
seuil global à respecter est faible et plus la classe de précision est difficile à valider.
Du fait du nombre conséquent de points, nous présentons uniquement le tableau 16 de synthèse
qui permet de valider la classe de précision obtenue de 35.4 centimètres. Nous avons contrôlé
uniquement le nuage de points aller pour expérimenter la méthode. En temps normal, il faudra
contrôler les nuages de points aller et retour pour que chacun respecte la classe de précision
tridimensionnelle.

Page 58
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Echantillon 501.403
Classe de
précision
tridimensionnelle
k E moy pos (cm) Seuil T1 T2
2,11 35,4 Valeur (cm) 74,9 112,3
[xx] en cm 35,4 C Seuil Global (cm)
Nombre d'écarts supérieurs
autorisés 5179 0
14 35,5 Nombre d'écarts supérieurs 0 0
Tableau 16 : Calcul des paramètres du modèle standard pour la détermination de la classe de
précision tridimensionnelle du nuage de points avant recalage sur points d’appui
La répartition des écarts est représentée à l’aide de l’histogramme en figure 37. On constate la
présence d’une gaussienne principale centrée autour de la valeur de 37 centimètre et d’une autre
gaussienne centrée autour de 22.5 centimètres. Les écarts centrés autour de 37 centimètres forment
une population plus proche d’une loi normale du fait qu’ils représentent un jeu de données plus
important puisqu’on retrouve les mêmes résultats dans trois des quatre blocs de 600.000 points
chacun. Les écarts centrés autour de 22.5 centimètres proviennent d’un seul bloc, c’est pourquoi la
gaussienne est moins marquée. Ces écarts obtenus entre différents blocs peuvent être liés aux
variations de la précision de la trajectoire mais aussi au problème provenant de l’odomètre que nous
avons évoqué en partie (III.1.3.3).
Figure 37 : Répartition des écarts entre le nuage de points statique et dynamique avant recalage
D’après les résultats fournis par le tableau 16, nous avons montré que le nuage de points a une
classe de précision de 35.4 centimètres avant recalage sur points d’appui. Cette valeur est cohérente
avec l’écart que nous avons corrigé sous Terrasolid lors du recalage des données à l’aide des points
d’appui. Les résultats obtenus en partie III.1.3.3 ont montré que cet écart était dû à un problème
survenu au niveau de l’odomètre.
Les écarts entre les nuages sont illustrés par les figure 38 et 39 qui représentent la visualisation
sous le logiciel Cloud Compare des nuages de points statique (blanc), dynamique non recalé
(orange), et dynamique après recalage par méthode « Go ICP » (bleu). Comme nous l’avons constaté
lors du recalage des données à l’aide de points d’appui, les décalages les plus importants sont en
planimétrie, où l’on observe un décalage longitudinal le long de la trajectoire à peu près constant pour
l’ensemble du projet.
0
5
10
15
20
25
30
] 21 ; 22 ] ] 25 ; 26 ] ] 29 ; 30 ] ] 33 ; 34 ] ] 37 ; 38 ] ] 41 ; 42 ]
Fré
qu
en
ce
d'o
ccu
ren
ce (
%)
Ecarts (cm)
Eléments
Statistiques
Minimum 21.4
Médiane 37.3
Maximum 42.0
Moyenne 35.4
Ecart type 5.7

Page 59
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Figure 38 : Visualisation des écarts entre nuages de points statique et dynamiques au niveau d’un
poteau caténaire
Figure 39 : Visualisation des écarts altimétriques entre les nuages statique et dynamiques (la légende
est identique à la figure 38)
40 cm
m
10 cm
Nuage de points statique
Nuage de points dynamique avant
recalage
Nuage de points dynamique après
recalage
m

Page 60
Audrey JACQUIN - Sept. 2015 - INSA - PFE
IV.4. Conclusion
Cette partie a mis en évidence la difficulté d’appliquer l’arrêté de 2003 sur les classes de
précisions aux données lasergrammétriques acquises par scanner laser dynamique.
D’une part puisqu’avec un scanner laser, on ne choisit que la densité de points, et non
l’emplacement des points que l’on souhaite relever. Ainsi, on ne peut pas mesurer deux fois le même
point. Il faudra donc adapter la méthode de contrôle en fonction de ce critère et de la densité du
nuage de points.
D’autre part, puisqu’aux vues du linéaire important à relever pour envisager la surveillance du
réseau SNCF, la méthode de contrôle mise en œuvre doit offrir un bon compromis entre rapidité et
précision. Afin de limiter les coûts de mobilisation de personnel pour effectuer les mesures de contrôle
et d’apporter une précision suffisante pour contrôler la classe de précision totale de 5 centimètres.
La méthodologie que l’on a mise en place va permettre d’effectuer un contrôle absolu de
l’ensemble des données acquises avec le scanner laser dynamique, ainsi que des données fournies
par les sous-traitants. Parmi les deux méthodes proposées, la méthode de contrôle par comparaison
à un nuage de points statique plus précis semble être la plus adaptée. D’une part puisqu’il s’agit de
comparer un même type de données (comparaison de nuages de points), ce qui permet de
s’affranchir des différences d’identification et de saisie des points pouvant intervenir entre les deux
méthodes. D’autre part puisque la précision qu’elle offre permet de respecter le coefficient de sécurité
minimal de 2 imposé par l’arrêté et l’algorithme utilisé est très robuste.
Cependant, des développements informatiques et de nombreuses phases de validation sont
encore nécessaires.
Par ailleurs, SNCF Réseau étudie de nouveaux instruments (scanners laser) beaucoup plus
précis que ceux actuellement utilisés afin de fournir un échantillon de contrôle robuste.
La fiabilité de ce processus de contrôle et de mise en conformité des données scanners par
rapport à l’arrêté de 2003 est un élément crucial pour SNCF Réseau, qui se doit de contrôler à la fois
les nuages de points produits en interne, mais également de contrôler et valider les nuages produits
par ses sous-traitants.
Mètres

Page 61
Audrey JACQUIN - Sept. 2015 - INSA - PFE
CONCLUSION GENERALE ET PERSPECTIVES
Nous avons évoqué en introduction le potentiel des scanners laser dynamiques et les avantages
de leur exploitation en milieu ferroviaire. Ils apparaissent comme une solution évidente pour la
surveillance de l’ensemble du réseau. Néanmoins, il est nécessaire d’étudier si cette technologie
permet d’atteindre la précision requise pour les levés ferroviaires. Nous avons donc évalué la qualité
de positionnement des données du scanner laser dynamique VMX-450 Rail.
L’étude de précision absolue que nous avons menée confirme que le scanner laser dynamique
VMX-450 Rail est adapté au milieu ferroviaire et permet d’atteindre la précision absolue fixée par le
cahier des charges à ± 5 centimètres. Pour atteindre une telle exactitude, nous avons mis en évidence
que les données nécessitent d’être recalées à l’aide de points d’appui. A partir des résultats obtenus,
nous envisageons une disposition des points d’appui à intervalle de 1 kilomètre dans les zones
dégagées, offrant un bon compromis entre la précision attendue et le coût de mise en place des
cibles. Nous prendrons la précaution de réduire cet intervalle de 500 mètres dans les zones moins
favorables à la réception GNSS afin de garantir une précision homogène du nuage de points,
conformément à la prescription du cahier des charges.
Toutefois, nous avons été confrontés à un problème provenant de l’odomètre qui a dégradé les
données de positionnement. D’autres études devront être menées, afin de confirmer les résultats
obtenus et de les compléter dans le cas d’un bon fonctionnement de l’odomètre.
Après avoir qualifié la précision des données, nous avons mis en place une méthode permettant
à SNCF Réseau de réaliser le contrôle des données produites en interne et par ses sous-traitants. La
méthodologie proposée est basée sur la comparaison des nuages de points dynamiques par rapport à
un nuage de points statique, conformément à l’arrêté de 2003 sur les classes de précision.
Cependant, des développements informatiques et de nombreuses phases de validation sont encore
nécessaires afin d’assurer la fiabilité de cette méthode puisqu’il s’agit d’un élément crucial pour SNCF
Réseau.
Cette étude nous a également permis de déceler les composantes qui nécessitent d’être
améliorées. Des perspectives sont envisagées à différents niveaux :
L’odomètre qui a été adapté au milieu ferroviaire présente de nombreux avantages, mais il
peut engendrer des erreurs de positionnement importantes en cas de dysfonctionnement.
C’est pourquoi la division ATT envisage de faire l’acquisition d’un wagon dédié aux mesures,
sur lequel pourra être adapté un système permettant de fixer idéalement l’odomètre et ainsi,
assurer la continuité des mesures.
Des études sont toujours en cours concernant les matériaux et les formes des cibles utilisées
pour matérialiser les points d’appui afin de faciliter leur mise en place, en utilisant par exemple
les goujons palace (points de repères sur les poteaux caténaires) et d’améliorer leur détection
dans le nuage de points.
Les scanners laser dynamiques offrent une rapidité d’acquisition importante, néanmoins cette
technologie reste coûteuse en temps de post-traitement. Nous avons constaté au cours de
notre étude que le processus de recalage relatif constitue l’étape la plus conséquente de la
chaîne de traitement. Des perspectives d’améliorations sont envisagées afin d’automatiser à
la fois la détection de points homologues, nécessaires au recalage, et l’étape de contrôle qui
permet de s’assurer que la tolérance fixée par le cahier des charges est respectée.

Page 62
Audrey JACQUIN - Sept. 2015 - INSA - PFE
Afin d’améliorer la méthodologie de contrôle des données qui a été proposée, SNCF Réseau
étudie de nouveaux instruments (scanners laser) beaucoup plus précis que ceux actuellement
utilisés afin de fournir un échantillon de contrôle robuste.
Ainsi, notre étude a montré que les performances du scanner laser dynamique Riegl VMX-450
Rail, alliant rapidité et précision, pourront être exploitées pour réaliser la surveillance du réseau ferré,
mais aussi pour bien d’autres projets. Les perspectives d’utilisation des données laser 3D sont vastes
et touchent tous les acteurs du milieu ferroviaire. Les données seront donc regroupées au sein d’une
base de données. Plusieurs solutions sont envisagées, la mise en place d’un système d’information
géographique 3D, voire d’un BIM ferroviaire recensant l’ensemble des acquisitions par scanner
dynamique en France sont à l’étude au sein de la division Assistance Travaux et Topographie.

Page 63
Audrey JACQUIN - Sept. 2015 - INSA - PFE
TABLE DES ILLUSTRATIONS
Liste des tableaux :
TABLEAU 1 : ERREURS LIEES AU SYSTEME GNSS ............................................................................................................................ 7
TABLEAU 2 : CARACTERISTIQUES D'UN SCANNER LASER VQ-450 DE MARQUE RIEGL. SOURCE : [RIEGL@, 2012] ............................... 16
TABLEAU 3 : RESULTATS STATISTIQUES DE LA COMPARAISON DES TRAJECTOIRES ISSUES DE DIFFERENTES METHODES DE CALCUL AVEC
LA REFERENCE .................................................................................................................................................................. 31
TABLEAU 4 : RESULTATS STATISTIQUES DE LA COMPARAISON DES TRAJECTOIRES AVEC LA REFERENCE, METTANT EN EVIDENCE
L'INFLUENCE DU PARAMETRE DE MULTI-TRAJETS .................................................................................................................. 32
TABLEAU 5 : RESULTATS STATISTIQUES DE LA COMPARAISON DES TRAJECTOIRES CALCULEES AVEC ET SANS ODOMETRE PAR RAPPORT A
CELLE DE REFERENCE. ....................................................................................................................................................... 33
TABLEAU 6 : INTERVALLES CHOISIS ENTRE LES POINTS D'APPUI POUR LES EXPERIMENTATIONS MENEES DANS LA ZONE D’ETUDE .......... 35
TABLEAU 7 : RESULTATS STATISTIQUES DE LA COMPARAISON DES TRAJECTOIRES 1, 2 ET 3 PAR RAPPORT A CELLE DE REFERENCE ..... 41
TABLEAU 8 : RESULTATS STATISTIQUES DE LA COMPARAISON DES NUAGES DYNAMIQUES AVEC LA REFERENCE STATIQUE POUR LA DALLE
1 ...................................................................................................................................................................................... 44
TABLEAU 9 : RESULTATS STATISTIQUES DE LA COMPARAISON DES NUAGES DYNAMIQUES AVEC LA REFERENCE STATIQUE POUR LA DALLE
2 ...................................................................................................................................................................................... 44
TABLEAU 10 : RESULTATS STATISTIQUES DE LA COMPARAISON DES NUAGES DYNAMIQUES AVEC LA REFERENCE STATIQUE POUR LA
DALLE 3 ............................................................................................................................................................................ 45
TABLEAU 11 : RESULTATS STATISTIQUES DE LA COMPARAISON DES NUAGES DYNAMIQUES AVEC LA REFERENCE STATIQUE POUR LA
DALLE 4 ............................................................................................................................................................................ 45
TABLEAU 12 : PRECISION DU RECEPTEUR LEICA GS10 GNSS "PROFESSIONNEL", A 1 SIGMA. ........................................................... 51
TABLEAU 13 : PRECISIONS DU RECEPTEUR LEICA GS10 GNSS "PROFESSIONNEL", A 1 SIGMA .......................................................... 53
TABLEAU 14 : ECARTS ENTRE LES COORDONNEES DES POINTS DE CONTROLE ET DES POINTS DANS LE NUAGE ................................... 54
TABLEAU 15 : CALCULS DES PARAMETRES DU MODELE STANDARD NECESSAIRES A LA VALIDATION DES CLASSES DE PRECISION .......... 55
TABLEAU 16 : CALCUL DES PARAMETRES DU MODELE STANDARD POUR LA DETERMINATION DE LA CLASSE DE PRECISION
TRIDIMENSIONNELLE DU NUAGE DE POINTS AVANT RECALAGE SUR POINTS D’APPUI ................................................................. 58
Liste des figures :
FIGURE 1 : EXEMPLE DE RESULTATS DE LA COMBINAISON FORWARD/REVERSE DES MESURES INERTIELLES LORS D’UNE COUPURE GNSS,
PAR APPLICATION DE FILTRE DE KALMAN. SOURCE : ADAPTATION DE [THIES, 2011] .................................................................. 5
FIGURE 2 : REPRESENTATION DES NOTIONS D’EXACTITUDE ET DE FIDELITE DANS LE CAS D’UNE LOI NORMALE, INSPIRATION [YOO, 2011] 9
FIGURE 3 : REPRESENTATION DE LA PRECISION (FIDELITE) ET DE L’EXACTITUDE D'UNE SERIE DE MESURES .......................................... 9
FIGURE 4 : REPRESENTATION DU CONVOI DE MESURES ET DU POSITIONNEMENT DU SYSTEME SUR LA STRUCTURE ............................. 15
FIGURE 5 : PRINCIPAUX ELEMENTS DE STOCKAGE, D’ALIMENTATION, ET DE PILOTAGE DU SYSTEME ................................................... 16
FIGURE 6 : REPRESENTATION DE LA DISPOSITION DES SCANNERS SELON DEUX PLANS FORMANT UN "X" (VUE DE FACE ET DE COTE) ET
EXEMPLE DU RENDU DANS LE NUAGE DE POINTS .................................................................................................................. 17
FIGURE 7 : PRESENTATION DE L'ODOMETRE ET DU DISPOSITIF DE FIXATION SOUS LE WAGON PLAT .................................................... 18
FIGURE 8 : DISPOSITION DES QUATRE CAMERAS ............................................................................................................................ 18
FIGURE 9 : PLAN DE SITUATION DE LA ZONE DU PROJET, REGION RHONE-ALPES (69), FRANCE. ........................................................ 19
FIGURE 10 : MATERIALISATION DES POINTS DE CONTROLE ET VISUALISATION DE LA METHODE DE MESURE ......................................... 21
FIGURE 11 : PLAN DE SITUATION DES STATIONS PERMANENTES ET DES STATIONS DE BASE MISES EN PLACE ...................................... 21
FIGURE 12 : DETECTION AUTOMATIQUE DU CENTRE D'UNE CIBLE DANS LE NUAGE DE POINTS ............................................................ 25
FIGURE 13 : CONTROLE DE LA DETECTION AUTOMATIQUE ............................................................................................................... 25
FIGURE 14 : ILLUSTRATION DES METHODES DE CORRECTIONS A PARTIR DE POINTS D'APPUI, EMPLOYEE PAR TERRASOLID SOURCE :
PERSONNELLE, INSPIRATION DE [TERRAMATCH@, 2014] ..................................................................................................... 25
FIGURE 15 : ECART RELATIF ENTRE LE NUAGE DE POINTS ALLER ET LE NUAGE RETOUR AU NIVEAU DES RAILS .................................... 26
FIGURE 16 : CORRESPONDANCE DES NUAGES APRES CORRECTION PAR L’AJOUT DE POINTS HOMOLOGUES ....................................... 26
FIGURE 17 : SCHEMA SYNTHETIQUE DE LA REALISATION D'UN PROJET EN SCANNER DYNAMIQUE ....................................................... 27
FIGURE 18 : ILLUSTRATION DE LA METHODE DE CALCUL "SMARTBASE" ............................................................................................ 29
FIGURE 19 : ILLUSTRATION DE LA METHODE DE CALCUL « MULTI-SINGLE-BASE (MSB)» .................................................................. 30
FIGURE 20 : PLAN DE SITUATION, LOCALISATION DES POINTS D'APPUI POUR LES DIFFERENTS TESTS .................................................. 35
FIGURE 21 : ILLUSTRATION DE LA DISTANCE DE HAUSDORFF POUR DEUX NUAGES DE POINTS PRESENTANT DES ZONES DE MASQUES
DIFFERENTES. EXEMPLE AU NIVEAU DE POTEAUX CATENAIRES .............................................................................................. 37
FIGURE 22 : ILLUSTRATION DE L'ALGORITHME DISTANCE "POINT A POINT" ........................................................................................ 38
FIGURE 23 : COURBE REPRESENTANT LES ECARTS ENTRE LA TRAJECTOIRE 1 ET CELLE DE REFERENCE AU COURS DU TEMPS ............. 39
FIGURE 24 : ILLUSTRATION DU RECALAGE RELATIF A L'AIDE DE POINTS COMMUN .............................................................................. 40
FIGURE 25 : COURBE REPRESENTANT LES ECARTS ENTRE LA TRAJECTOIRE 2 ET CELLE DE REFERENCE AU COURS DU TEMPS ............. 40
FIGURE 26 : COURBE REPRESENTANT LES ECARTS ENTRE LA TRAJECTOIRE 3 ET CELLE DE REFERENCE AU COURS DU TEMPS ............. 41
FIGURE 27 : HISTOGRAMMES DE REPARTITION DES ECARTS ENTRE LES TRAJECTOIRES 1, 2 ET 3 ET CELLE DE REFERENCE ................. 42

Page 64
Audrey JACQUIN - Sept. 2015 - INSA - PFE
FIGURE 28 : COURBE REPRESENTANT LES ECARTS TRIDIMENSIONNELS ENTRE LES TRAJECTOIRES 1, 2 ET 3 ET LA TRAJECTOIRE DE
REFERENCE DANS LA ZONE OU ONT ETE EFFECTUEES LES COMPARAISONS ENTRE NUAGES DE POINTS ..................................... 42
FIGURE 29 : RESULTATS STATISTIQUES DES ECARTS TRIDIMENSIONNELS ENTRE NUAGES DE POINTS 1, 2 ET 3 PAR RAPPORT AU NUAGE
DE REFERENCE DYNAMIQUE ET CARTOGRAPHIE VISUELLE DES ECARTS (VOIE VUE DE DESSUS) ................................................ 43
FIGURE 30 : HISTOGRAMME DE REPARTITION DES ECARTS ENTRE LES NUAGES DE POINTS DYNAMIQUES ET LE NUAGE DE POINTS DE
REFERENCE POUR LA DALLE 1 ............................................................................................................................................ 44
FIGURE 31 : HISTOGRAMME DE REPARTITION DES ECARTS ENTRE LES NUAGES DE POINTS DYNAMIQUES ET LE NUAGE DE POINTS DE
REFERENCE POUR LA DALLE 2 ............................................................................................................................................ 44
FIGURE 32 : HISTOGRAMME DE REPARTITION DES ECARTS ENTRE LES NUAGES DE POINTS DYNAMIQUES ET LE NUAGE DE POINTS DE
REFERENCE POUR LA DALLE 3 ............................................................................................................................................ 45
FIGURE 33 : HISTOGRAMME DE REPARTITION DES ECARTS ENTRE LES NUAGES DE POINTS DYNAMIQUES ET LE NUAGE DE POINTS DE
REFERENCE POUR LA DALLE 4 ............................................................................................................................................ 45
FIGURE 34 : REPRESENTATION DE LA ZONE DE TEST ET DE LA DISPOSITION DES POINTS DE CONTROLE .............................................. 53
FIGURE 35 : REPARTITION DES ECARTS PLANIMETRIQUES ET REPRESENTATION DES SEUILS ............................................................. 56
FIGURE 36 : REPARTITION DES ECARTS ALTIMETRIQUES ET REPRESENTATION DES SEUILS ................................................................ 56
FIGURE 37 : REPARTITION DES ECARTS ENTRE LE NUAGE DE POINTS STATIQUE ET DYNAMIQUE AVANT RECALAGE .............................. 58
FIGURE 38 : VISUALISATION DES ECARTS ENTRE NUAGES DE POINTS STATIQUE ET DYNAMIQUES AU NIVEAU D’UN POTEAU CATENAIRE . 59
FIGURE 39 : VISUALISATION DES ECARTS ALTIMETRIQUES ENTRE LES NUAGES STATIQUE ET DYNAMIQUES (LA LEGENDE EST IDENTIQUE A
LA FIGURE 38) ................................................................................................................................................................... 59

Page 65
Audrey JACQUIN - Sept. 2015 - INSA - PFE
BIBLIOGRAPHIE [Alshawa et Grussenmeyer, 2009], Alshawa, M., Grussenmeyer, P., 2009, La navigation inertielle et
ses applications en cartographie mobile, INSA de Srasbourg, Spécialité Topographie.
[Alshawa, 2010], Alshawa, M., 2010, Contribution à la cartographie mobile : développement et
caractérisation d’un système basé sur un scanner laser terrestre, Thèse pour obtenir le grade de
Docteur de l’Université de Strasbourg, spécialité Topographie, 227 p.
[Applanix@, 2013], Applanix, 2013, Site officiel de la société Applanix. URL : www.applanix.com
[Cahalane et al., 2010], Cahalane C., McCarthy, T., McElhinney, C., 2010. Mobile mapping system
performance - an initial investigation into the effect of vehicle speed on laser scan lines, RSPSoc
no.2005.
[Calvet et al. 2014], Calvet, B., Montoya, L., Grandjean P., 2014, The GUIDE High-Precision test
facility (GNSS laboratory. In International Symposium on Certification of GNSS Systems & Services, p
18-21.
[Cayot, 2007], Cayot, B., 2007, L’arrêté du 16 septembre 2003 sur les classes de précision –
Contrainte nouvelle ou opportunité du passage au contrôle du résultat, Mémoire de diplôme
d’ingénieur de l’ESGT, 82 p.
[Chavant, 2013], Chavant, P., 2013, Evaluation absolue de méthodes de localisation et de
reconstruction panoramique et photogrammétrique d’un tunnel à partir d’un nuage de points de
référence. Appliquée au tunnel-canal de Niderviller. Technical report, Mémoire de diplôme d’ingénieur
l’INSA de Strasbourg, spécialité Topographie, 135 p.
[Choquart, 2014], Choquart, Q., 2014, Intérgration des systèmes d’acquisitions de données
topographiques par scanner laser dynamique dans les processus de mesure et de contrôle des
gabarits de la SNCF, Mémoire de diplôme d’ingénieur de l’INSA de Strasbourg, spécialité
Topographie, 104 p.
[DGM, 2013], Daniel, G., 2013, CloudCompare, Manuel utilisateur de la version 2.4 de Cloud
Compare, 78 p.
[Division, 2013], Division Assistance travaux et Topographie, 2013. Retour d’expérience utilisation
HDS 7000. Technical report, SNCF, 40p.
[Gaillet et al. 2013], Gaillet, M., Henry, J., Niggeler, L., 2013, Relevé de corps de rue à Genève.
Revue Géomatique Expert n° 91, p 50-55.
[Grussenmeyer, 1994], Grussenmeyer, P., Hottier, P., Abbas, I., 1994. Le contrôle topographique
d’une carte ou d’une base de données constituées par voie photogrammétrique. Revue de
l’Association Française de Topographie, XYZ 2e trimestre 1994 n°59, ISSN 0290-9057, p 39-45.
[Guittet, 2014], Guittet, A., 2014, Repérage d’un système d’inspection dans un tunnel-canal, Mémoire
de diplôme d’ingénieur de l’INSA de Strasbourg, spécialité Topographie, 98 p.
[Kasser, 2003], Kasser, M., 2003, Les nouveaux textes réglementaires français en matière de
précision des levers. Revue de l’Association Française de Topographie, XYZ 3e trimestre 2003 n°96, p
31-42.

Page 66
Audrey JACQUIN - Sept. 2015 - INSA - PFE
[Landes, 2010], Landes, T., 2010, Lasergrammétrie Terrestre, support de cours du semestre 9, INSA
de Srasbourg, Spécialité Topographie.
[Landes et al. 2011], Landes, T., Grussenmeyer, P., Boulaassal, H., 2011, Les principes
fondamentaux de la lasergrammétrie terrestre : acquisition, traitement des données et applications
Revue de l’Association Française de Topographie, XYZ n°129, 2011 (partie 2/2) -pp 25-39.
[Ledig, 2014], Ledig, J., 2014, Pour le positionnement géodésique (G.N.S.S), INSA de Srasbourg,
Spécialité Topographie.
[Leica@, 2012], Leica@, 2012,Leica Geosystems, URL : http://www.leica-geosystems.fr.
[Légifrance@, 2015], Légifrance@ 2015, Le service public de la diffusion du droit, URL :
http://www.legifrance.gouv.fr/eli/arrete/2003/9/16/EQUP0300864A/jo/texte/.
[Legros et al. 2013], Legros R., Morel L., Viguier F., Birot F., 2013, Méthodes de travail dans les
réseaux GNSS 3éme partie. Méthodes du « statique multi-stations ». Revue de l’Association
Française de Topographie, XYZ 1er trimestre 2013 n°134, 26 p.
[Le Marchand, 2010], Le Marchand, O., 2010, Approche autonome pour la localisation et la
surveillance de l’intégrité d’un véhicule automobile en environnement complexe. Thèse présentée
pour obtenir le grade de Docteur de l’Université de Technologie de Compiègne, spécialité
technologies de l’information et des systèmes. 238p.
[Mano et al. 2012], Mano, K., Ishii, K., Hirao, M., Tachibana, K., Yoshimura, M., Akca, D., Gruen, A.,
2012. Empirical accuracy assessment of MMS Laser point clouds. International Archives of the
Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. XXXIX-B5, pp.495-498.
[Ndjeng, 2009] Ndjeng Ndjeng, A., 2009, Localisation robuste multi-capteurs et multi-modèles, Thèse
pour l’obtention du grade de Docteur de l’Université d’Evry Val d’Essonne, 222 p.
[Polytec@, 2015], Polytec@, 2015, Polytec, URL : http://www.polytec.com/fr/.
[Riegl, 2012] Compact Mobile Laser Scanning System, Riegl VMX-450. 6 p.
[Thies, 2011], Thies, T., 2011, A Vessel-Based Mobile Mapping System - From Sensor Integration to
Multipurpose Products, a Master Thesis submitted to HCU Hamburg for the degree of Master of
Science, 146 p.
[Vosselman et al. 2010], Vosselman G., Maas H.G., 2010. Airborne and Terrestrial Laser Scanning,
Whittles Publising, 320 p.
[Yang et al. 2010], Yang, M.Y., Forstner, W., 2010. Plane Detection in Point Cloud Data. Technical
Report n°1, Department of Photogrammetry, Institute of Geodesy and Geoinformation, University of
Bonn.
[Yoo, 2011], Yoo, H., 2011, Analyse et conception de scanners laser mobiles dédiés à la cartographie
3D d’environnements urbains, PhD thesis, Ecole Nationale Supérieur des Mines de Paris, 132p.

Page 67
Audrey JACQUIN - Sept. 2015 - INSA - PFE