MINI ROBOT AUTNOMO REPROGRAMABLE DISEADO UTILIZANDO CPLDI.
RESUMENEn este trabajo se explica un mtodo de aprendizaje basado en
proyectos en los que se desarrollaron mini-robots autnomos con
fines de investigacin, educacin y entretenimiento. En el caso de
sistemas remotos sensores inalmbricos se desarrollan en las reas
crticas, que recogera los datos a intervalos de tiempo especficos,
el envo de los datos al nodo inalmbrico central basado en cierta
informacin preferida sera tomar decisiones para encender o apagar
una unidad de conmutacin o control. Tales transferencias de
informacin difcilmente resume a unos pocos bytes y tasas de datos,
por lo tanto bajos seran suficientes para dichas implementaciones.
Como un robot es una plataforma multidisciplinar, las cuestiones
interrelacionadas que participan se analizan en este documento. El
documento se centra principalmente en la fuente de alimentacin,
tierra y cuestiones de desacoplamiento.II. INTRODUCCINUn
dispositivo electromecnico que puede realizar tareas automatizadas,
en muchas formas diferentes, ya sea con la supervisin directa
humana, un programa pre-definido, o una serie de directrices
generales utilizando algunas tcnicas de inteligencia. El trabajo
con los robots es realmente una diversin, as como un reto. Mucho
trabajo se lleva a cabo en esta zona desde el nivel de
entretenimiento a nivel de investigacin.Diseadores de robots deben
estar imbuidos con el conocimiento de diseo electrnico, anlisis y
desarrollo de software. Adems, tienen que estar familiarizados con
los componentes electrnicos tales como sensores, motores,
dispositivos lgicos, microprocesadores y muchos otros [1]. En este
trabajo se reporta una iniciativa de aprendizaje basado en
proyectos donde mini robots autnomos se desarrollan con fines de
investigacin, educacin y entretenimiento. Competiciones de robots
en la educacin en ingeniera se discuten y se ven ms comn hoy en da
ampliamente.El objetivo principal de este trabajo es discutir los
problemas de diseo con respecto a la tierra, la disociacin, la
fuente de alimentacin, interfaces temas y conexiones. El control
inteligente simple es posible a travs de cualquier CPLD. Pero hoy
en da muchas aplicaciones exige ms modernas tcnicas de control
inalmbricos, que pueden ser a travs de por ejemplo, web o mvil.III.
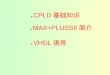
DIAGRAMA DE BLOQUES TPICO La figura explica la idea del sistema en
breve. Como se muestra en el diagrama de bloques del ncleo es CPLD
y las diversas otras partes se explican a continuacin.
IV. DISEO CONVENCIONAL DE LOS COMPONENTESA. CPLDNormalmente, un
micro controlador juega un papel importante en todos los diseos de
los robots de hoy ya que ayudan en la toma programable diseo de una
manera rentable. Dispositivos lgicos programables complejos (CPLD)
estn siendo ampliamente utilizados debido a su hardware
re-configuracin, programacin, de baja potencia y bajo costo.CPLD
estn hechos de pequeos circuitos denominados como clulas macro, que
contiene la lgica de la aplicacin de expresiones booleanas y
operaciones ms especializadas lgicas. Miles de estos macro celdas,
cada nmero de clulas que contiene de puertas lgicas permiten la
implementacin de moderadamente complicados dispositivos de
procesamiento de datos en CPLDs. Con LUT de macro celdas y se
consigue una mayor flexibilidad mediante caminos de realimentacin
complicadas de implementar muchas funciones de uso comn y la
aritmtica de enteros. A diferencia de muchos dispositivos
programables de campo, no se requiere una configuracin ROM externo,
y el CPLD puede funcionar de inmediato en el inicio del sistema por
lo tanto sin nimo voltil del CPLD y convertido en la eleccin del
diseo de sistemas digitales modernos.Enrutamiento limita la mayora
de los bloques lgicos de tener seales de entrada y salida
conectadas a los pines externos, lo que reduce las oportunidades de
almacenamiento de estado interno y la lgica profundamente en
capas.El bajo costo, la configuracin no voltil, y macro celdas con
caractersticas de tiempo predecibles da una ventaja arquitectnica
para CPLDs que sern suficientes para mantener el liderazgo en el
hardware reconfigurable arena el futuro previsible.El CPLD que se
utiliza para el diseo y generalmente preferible para el diseo de
los robots es fresco del corredor-2 la familia (XC2C32A) [4]. Esta
CPLD tiene 56 trminos producto por clula macro y con 32 clulas de
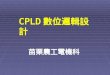
macro.B. DIAGRAMA DE FLUJO.
C. COMPARADOR ANALGICO.Comparador analgico realmente llena el
mundo fsico con el mundo analgico digital. Es un amplificador
operacional con velocidad de respuesta ms rpido y su salida est
optimizada para el propsito de conmutacin. Aqu estamos utilizando
comparador analgico como un detector de nivel de umbral para
controlar una variable fsica que es la intensidad de la luz y una
seal cada vez que la variable se eleva por encima o por debajo de
un valor prescrito llamado valor ajustado. La salida del detector
se utiliza a continuacin para llevar a cabo una accin especfica. A
medida que el comparador est interconectado con el controlador de
la tensin de trabajo tiene que ser compatible TTL aunque el
comparador puede trabajar con una amplia gama de voltaje como el
LM324 puede trabajar con 3-32 rangos de tensin.El voltaje de sensor
de entrada se puede comparar con una tensin de referencia y un
valor binario simple, lo que indica que el valor analgico est por
encima o por debajo de la referencia se pasa a CPLD. Comparador de
tensin analgica toma lineal, tensin analgica y emite una sencilla
seal de encendido y apagado para controlar el robot a travs de
CPLD.Para interactuar con el CPLD se puede utilizar la configuracin
de colector abierto o salida ttem. Colector abierto se utiliza
normalmente con LM324 mientras que la produccin ttem est dirigida a
aplicaciones de lgica.Como este bloque requiere de alimentacin de
baja tensin analgica separada y motivos digitales debe ser
establecido y conectado slo en un punto. El secciones digitales del
circuito analgico y deberan estar fsicamente separados sin pistas
digitales que atravesar la seccin analgica y viceversa. Esto
reducir al mnimo la diafona entre los circuitos. Una vez que las
seales de entrada estn en formato digital que actan como los datos
de entrada a la operacin CPLD. Se trata de los datos de origen de
la decisin de produccin.
D. DRIVER DE LOS MOTORES.Precauciones similares como etapa de
entrada se deben tomar para la etapa de salida, por la razn
inversa, ya que la produccin es la causa de la interferencia. Como
etapa de salida significa la etapa de conductor del motor est
funcionando a altas corrientes y tensiones ms altas y por lo tanto
la posibilidad de retroalimentacin no deseada.
Esta etapa debera tener su propio circuito impreso separado
diseado con pistas separadas, ya que puede tener alta corriente.
Motores de corriente continua tambin exhiben volver efectos de los
CEM y por lo que les conduce con transistores es aconsejable
utilizar diodos de captura. Motores de corriente continua causan
problemas de interferencia electromagntica, si el comunicador no se
suprime con el condensador del condensador de cermica 100 nano
disco 50V/100V faradio soldado directamente a travs de los
contactos en el motor ser adecuada. Como conductor del motor
requiere un voltaje ms alto el voltaje de suministro dada a Vcc de
transistores de potencia debe estar directamente conectado a la
oferta y para conducir los transistores de conmutacin interna la
comparativamente baja tensin est directamente proporcionada por el
suministro por separado.
E. CONVERSOR ANALOGICO DIGITAL.Interfaz ADC con CPLD s es grande
diseo de la PCB reto es a menudo crucial para el xito del diseo de
los circuitos ADC. El principal punto muy importante a considerar
es la velocidad y la frecuencia no coincidentes entre el ADC y el
controlador.Resoluciones de ms de 12 bits son menos tolerantes del
ruido simplemente porque 1 LSB es del orden de 1mV o menos. Conexin
a tierra es la clave para el xito como con pequea seal, la
proximidad de las formas de onda de conmutacin digital, inherente
en el diseo de ADC y los circuitos CPLD oscilador que hace entorno
ruidoso. Por lo tanto, cuidado con desacoplamiento de los
suministros, la segregacin de analgico y digital terrestre y evitar
lazos de tierra son muy importantes.
F. DESACOPLO.El propsito del desacoplo es mantener baja
impedancia dinmica de la tensin de alimentacin IC individuo a
tierra. No importa lo bueno que el VCC y conexiones a tierra son,
no se puede eliminar todo inductancia de lnea. Excepto en los
tableros ms pequeos, la distancia de pista introducir impedancia
que crear ruido de conmutacin de las corrientes transitorias. Esta
es la razn para el desacoplamiento. El valor mnimo del condensador
se puede calcular utilizando la frmula.
Los requisitos mnimos para el desacoplamiento son Un condensador
de 22F por tabla Una 10-100 NF condensador de cermica de mltiples
capas para cada pin de alimentacin con diferentes tensiones de
alimentacin. De esta forma podemos calcular los requisitos para
dispositivos de mxima velocidad hambrientos de poder individuales
para asegurarse de que el circuito tiene suficientes condensadores
en los lugares correctos. Condensadores de desacoplamiento se van a
conectar lo ms cerca a los pines del CI como sea posible. Cuando el
circuito contiene IF y RF partes en este momento entonces para
conservar la estabilidad a alta ganancia, la disociacin se debe
seguir cuidadosamente. Normalmente, para desacoplar o de
condensadores cermicos de acoplamiento de RF se utilizan. Se
requieren condensadores de desacoplamiento discretos para mediados
de desacoplamiento de frecuencia.
G. TOMA DE TIERRA El principal problema de acoplamiento de
tierra de salida es que ambos compartir una impedancia comn vuelve
la seal de salida as que deben ser como se muestra en la figura 6.
Conexin a tierra es siempre sensible a la disposicin. La anchura de
la planta pistas deben estar en la proporcin 3:1.
Cada pista en PCB genera su propia inductancia que a menudo
engaoso, ya que ser modificado por la proximidad a otras vas por
las que las corrientes de retorno. Se muestra el principio de
cancelacin de campo magntico de dos pistas estrechas que llevan
corrientes iguales pero opuestas. De ello se deduce la ecuacin de
Maxwell.
La figura muestra el efecto de la inductancia mutua. La segunda
cifra es la correcta disposicin de las lneas de tierra. Aqu, la
inductancia total dentro del bucle es cero. Esto le da forma ms
eficaz de reducir la potencia total y la inductancia de tierra es
ejecutar la seal y volver caminos muy prximos entre s.
H. SENSORES.Por el uso ms comn de las entradas en la robtica son
sensores. Principalmente hay dos tipos de sensores: Sensores
analgicos. Sensores digitales.En el caso de sensores analgicos se
requiere circuitera adicional para convertir diferentes niveles de
tensin en la forma que un ordenador de control puede utilizar. Para
este propsito podemos utilizar un comparador analgico o ADC. Pero
en el caso de los sensores digitales sin necesidad de aadir ningn
circuito adicional. Estos sensores se pueden conectar directamente
a CPLD porque la salida es directamente compatible.I. TRANSCEPTOR
DTMFDTMF proporciona una baja disipacin de potencia y una alta
fiabilidad.El MT8880C, transceptor DTMF emplea una interfaz de
microprocesador que permite el control preciso de las funciones de
transmisor y receptor. Mediante la recopilacin de datos a
intervalos de tiempo especficos, y el envo de los datos al
controlador para tomar decisiones para encender o apagar una unidad
de conmutacin o control. Tales transferencias de informacin
difcilmente resume a unos pocos bytes y tasas de datos, por lo
tanto bajos seran suficientes para dichas implementaciones.Hay
cinco registros internos asociados con la interfaz de
microprocesador que se puede subdividir en tres categoras, es
decir, la transferencia de datos, control de transceptor y el
estado del transceptor [6]. Hay dos registros asociados con las
operaciones de transferencia de datos. Los sistemas basados en
microprocesador pueden inyectar ruido indeseable en los carriles de
alimentacin. El rendimiento de la MT8880 se puede optimizar al
mantener el ruido en los carriles de alimentacin a un mnimo. El
condensador de desacoplamiento se debe conectar cerca del
dispositivo y los lazos de tierra deben ser evitados. Condensador
de entrada se utiliza aqu en serie con el pin de entrada para pasar
la seal de DTMF y para bloquear la componente de corriente continua
no deseada.
V. ESTRUCTURAS DE RUEDAS HOLONMICO Tres diferentes diseos
mecnicos estn en construccin [7], la direccin diferencial, Ackerman
direccin y el volante Omni (Estructura Holonmica). A. ESTRUCTURA
HOLONMICA. Se prefiere la configuracin de silla de ruedas para el
quad y triciclo por el giro ms ajustado, que se requiere para
llevar a cabo el 90 y giros de 180 grados en los confines de un
corredor de edificios de oficinas.Con la configuracin de la silla
de ruedas es posible disear el chasis de forma que estos giros se
pueden ejecutar en el acto. Tanto el vehculo de tres ruedas y de
cuatro mueve lejos de las ruedas motrices durante la aceleracin y /
o de frenado. Tambin pueden causar daos en la superficie e
introducir una gran tensin en los componentes de la direccin de
giro, si se ejecuta mientras se est parado. El control de un
dispositivo que est llevando a cabo cualquiera de estos sistemas
tambin puede ser complicado si se requiere.
VI. CONCLUSIONES Y TRABAJO FUTURO El anlisis cuantitativo y
cualitativo del robot mvil se llev a cabo. Se examinaron los
sensores, conductor del motor, circuitos ADC. Todos los circuitos
hechos son configurables por lo que todo el sistema tiene una alta
flexibilidad y alta eficiencia en el futuro tambin. Los chips
individuales que se utilizan pueden ser parte de un solo chip como
System On Chip (SoC) para Robots Mviles. El trabajo futuro se puede
concentrar en el diseo SoC de todo el circuito para que podamos
controlar analgica as como los dispositivos digitales en un nico
chip.