Embed Size (px)
Citation preview
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 176.
. .
Aviation civile
MINISTÈRE DE L’ÉCOLOGIE,DU DÉVELOPPEMENT DURABLE,
DES TRANSPORTS ET DU LOGEMENT
Direction générale de l’aviation civile
Direction de la sécurité de l’aviation civile
Direction coopération européenneet réglementation de sécurité
Pôle aéronefs et opérations aériennes
Instruction du 24 juin 2011 relative à l’utilisation des minimums opérationnels par les avionsen aviation générale en France métropolitaine et dans les départements d’outre-mer
NOR : DEVA1117477J
(Texte non paru au Journal officiel)
Résumé : la présente instruction a pour objet de donner des interprétations et explications pourl’application de l’arrêté du 24 juin 2011 relatif à l’utilisation des minimums opérationnels par lesavions en aviation générale.
Catégorie : mesure d’organisation des services retenue par le ministre pour la mise en œuvre desdispositions dont il s’agit.
Domaine : transports aériens.
Mots clés liste fermée : Transports_ActivitesMaritimes_Ports_NavigationInterieure.
Mots clés libres : MIN 2, minimums opérationnels, aviation générale.
Références :Code des transports ;Arrêté du 24 juin 2011 relatif à l’utilisation des minimums opérationnels par les avions enaviation générale.
Date de mise en application : Date d’application.
Pièce(s) annexe(s) : 1.
Publication : BO ; site : circulaires.gouv.fr.
La ministre de l’écologie, du développement durable, des transports et du logement,
1. Introduction – Champ d’application
Cette instruction est relative à l’utilisation des minimums opérationnels par les avions en aviationgénérale.
L’arrêté dont elle donne les interprétations et explications s’applique en France métropolitaine etdans les départements d’outre-mer pour tous les exploitants et, pour les exploitants français autresque ceux issus de Polynésie française, de Nouvelle-Calédonie, de Wallis-et-Futuna et de Saint-Pierre-et-Miquelon, en tout autre lieu où il est compatible avec les règles propres à l’État d’opération. Pourles exploitants de Polynésie française, de Nouvelle-Calédonie, de Wallis-et-Futuna et de Saint-Pierre-et-Miquelon, les dispositions applicables demeurent celles de l’arrêté du 20 mars 1998 (extension pararrêté du 23 novembre 1998).
2. Harmonisation des règles de calcul des minimums opérationnels
Le règlement (CE) no 859/2008 de la Commission modifiant le règlement (CEE) no 3922/91 duConseil introduit l’EU-OPS. Celui-ci, dans sa sous-partie E « opérations tout temps », impose auxexploitants de transport aérien commercial d’adopter, au plus tard le 16 juillet 2011, une nouvelleméthode de détermination des minimums opérationnels.
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 177.
. .
L’arrêté relatif à l’utilisation des minimums opérationnels par les avions en aviation générale dontest issue la présente instruction harmonise les règles de calcul auxquelles sont soumis les exploi-tants de l’aviation générale avec celles du transport aérien commercial.
Les cartes d’aérodrome et cartes d’approche aux instruments publiées par le service de l’infor-mation aéronautique contiennent les nouveaux minimums opérationnels calculés conformément auxrègles de l’EU-OPS pour les aérodromes de France métropolitaine et des départements d’outre-mer.
3. Interprétations et explications contenues dans l’annexe à la présente instruction
Les interprétations et explications pour l’application des dispositions des paragraphes de l’annexeà l’arrêté du 24 juin 2011 relatif à l’utilisation des minimums opérationnels par les avions en aviationgénérale se présentent sous la forme de paragraphes de même numérotation, rassemblés dans ledocument annexé à la présente instruction.
Fait le 24 juin 2011.
Pour la ministre et par délégation :La directrice de la sécurité
de l’aviation civile,F. ROUSSE
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 178.
. .
A N N E X E
UTILISATION DES MINIMUMS OPÉRATIONNELS PAR LES AVIONS EN AVIATION GÉNÉRALE EN FRANCEMÉTROPOLITAINE ET DANS LES DÉPARTEMENTS D’OUTRE-MER
IEM MIN 2.430 – Documents contenant des informations relatives aux opérations tout temps
Le but de cette instruction est de fournir aux exploitants une liste de documents relatifs aux opéra-tions tout temps.
(a) Annexe II de l’OACI – Règles de l’air.(b) Annexe VI de l’OACI – Exploitation des aéronefs – 2e et 3e parties.(c) Annexe X de l’OACI – Télécommunications – 1er volume.(d) Annexe XIV de l’OACI – Aérodromes – 1er volume.(e) Doc. 8168 de l’OACI – Procédures pour les services de la navigation aérienne (PANS-OPS),
exploitation technique des aéronefs.(f) Doc. 9365 de l’OACI – Manuel d’exploitation tout temps.(g) Doc. 9476 de l’OACI – Manuel sur les systèmes de guidage et de contrôle de la circulation de
surface (SMGCS).(h) Doc. 9157 de l’OACI – Manuel de conception des aérodromes.(i) Doc. 9328 de l’OACI – Manuel des méthodes d’observation et de compte rendu de la portée
visuelle de piste.(j) Doc. 17 de la CEAC (partiellement incorporé dans l’EU-OPS).(k) CS-AWO (certification navigabilité).
AMC MIN 2.430(b) (4) – Incidence sur les minimums d’atterrissage d’une panneou d’un déclassement temporaires des équipements au sol
1. Introduction1.1. Cette instruction fournit aux exploitants des instructions à l’intention des équipages de
conduite portant sur les incidences sur les minimums d’atterrissage de pannes ou dedéclassements temporaires des équipements au sol.
1.2. Les installations aéroportuaires sont supposées être aménagées et entretenues en seconformant aux normes spécifiées dans les annexes X et XIV de l’OACI. Toute panne estsupposée être réparée sans délai injustifié.
2. GénéralitésCes instructions sont destinées à être utilisées avant et pendant le vol. Le commandant de
bord n’est toutefois pas tenu de consulter de telles instructions après avoir passé la radioborneextérieure ou une position équivalente. En cas d’annonce d’une panne des installations sol à cestade, la poursuite de l’approche est laissée à l’entière discrétion du commandant de bord.
Cependant, si des pannes sont annoncées avant ce stade de l’approche, leur incidence surl’approche devrait être prise en compte, conformément aux indications portées dans le tableau6A de l’appendice 1 au MIN 2.430.
3. Opérations sans hauteur de décision (DH)3.1. L’exploitant devrait s’assurer que les avions autorisés a effectuer des opérations sans
hauteur de décision avec les valeurs les plus basses de RVR appliquent les limitationssuivantes en plus de celles spécifiées dans le tableau 6A de l’appendice 1 au MIN 2.430 :(i) RVR – au moins une valeur de la RVR doit être disponible à l’aérodrome ;(ii) Feux de piste
a) aucun feu de bordure de piste ou aucun feu d’axe de piste – jour uniquement :RVR mini. 200 m ;
b) aucun feu TDZ – aucune restriction ;c) aucune alimentation de secours pour les feux de piste – jour uniquement : RVR mini.
200 m.4. Conditions applicables au tableau 6A de l’appendice 1 au MIN 2.430
(i) Les pannes multiples du balisage autres que celles indiquées au tableau 1B ne sont pasacceptables.
(ii) Les pannes du balisage de piste et d’approche sont traitées séparément.
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 179.
. .
(iii) Opérations de Catégorie II ou III – Une panne simultanée du balisage de piste et des indica-teurs de RVR n’est pas autorisée.
(iv) Les pannes autres que celles affectant l’ILS ont uniquement une incidence sur la RVR et nonsur la hauteur de décision.
(v) Dans le cas d’un aérodrome français, quand le transmissomètre de la zone de toucher desroues est en panne ou dégradé, il y a déclassement par le contrôle aérien de l’aérodromeen catégorie I.
(vi) Dans le cas d’un aérodrome français, quand l’alimentation en secours des feux de piste esten panne ou dégradée, il faut au moins 800 m de RVR pour pouvoir utiliser cet aérodromecomme aérodrome de destination et cet aérodrome ne peut être utilisé comme aérodromede dégagement.
(vii) Dans le cas d’un aérodrome français, où les taxiways débouchent sur la piste et où lebalisage est en panne ou dégradé, il faut une RVR supérieure ou égale a 150 m ou unbalisage axial des taxiways non dégradé.
AMC à l’appendice 1 au MIN 2.430, paragraphe (a) (3)(ii)
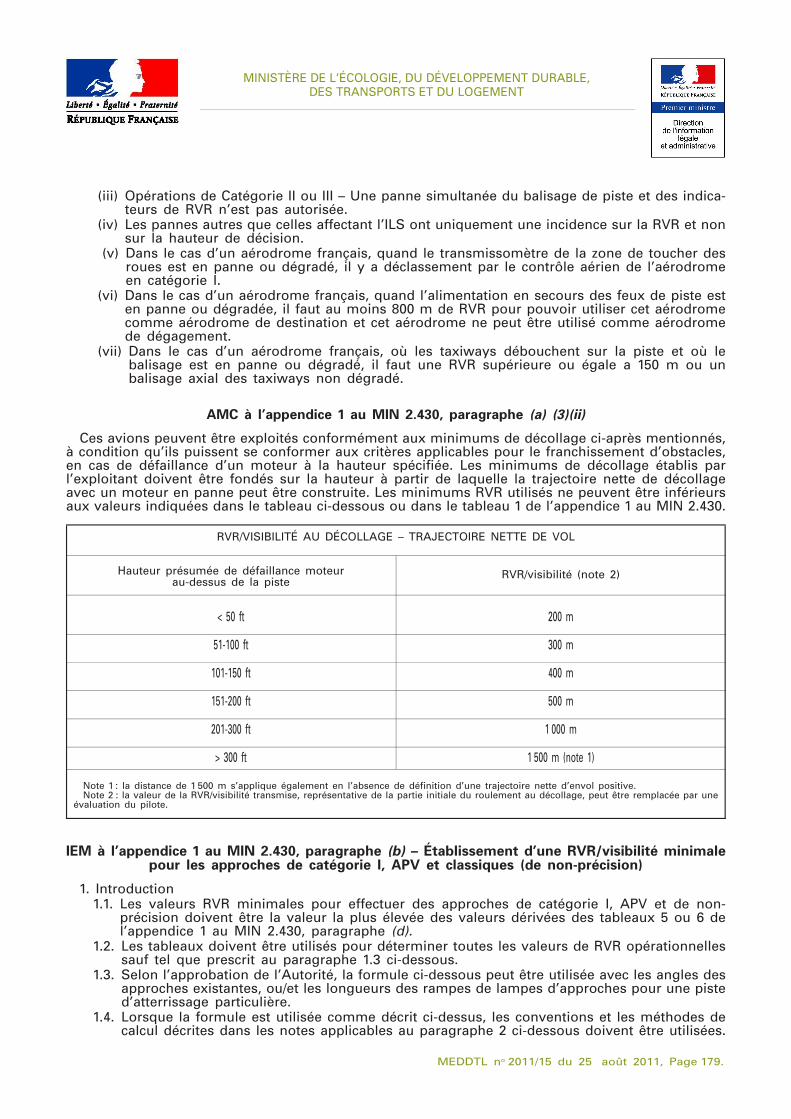
Ces avions peuvent être exploités conformément aux minimums de décollage ci-après mentionnés,à condition qu’ils puissent se conformer aux critères applicables pour le franchissement d’obstacles,en cas de défaillance d’un moteur à la hauteur spécifiée. Les minimums de décollage établis parl’exploitant doivent être fondés sur la hauteur à partir de laquelle la trajectoire nette de décollageavec un moteur en panne peut être construite. Les minimums RVR utilisés ne peuvent être inférieursaux valeurs indiquées dans le tableau ci-dessous ou dans le tableau 1 de l’appendice 1 au MIN 2.430.
RVR/VISIBILITÉ AU DÉCOLLAGE – TRAJECTOIRE NETTE DE VOL
Hauteur présumée de défaillance moteurau-dessus de la piste
RVR/visibilité (note 2)
< 50 ft 200 m
51-100 ft 300 m
101-150 ft 400 m
151-200 ft 500 m
201-300 ft 1 000 m
> 300 ft 1 500 m (note 1)
Note 1 : la distance de 1 500 m s’applique également en l’absence de définition d’une trajectoire nette d’envol positive.Note 2 : la valeur de la RVR/visibilité transmise, représentative de la partie initiale du roulement au décollage, peut être remplacée par une
évaluation du pilote.
IEM à l’appendice 1 au MIN 2.430, paragraphe (b) – Établissement d’une RVR/visibilité minimalepour les approches de catégorie I, APV et classiques (de non-précision)
1. Introduction1.1. Les valeurs RVR minimales pour effectuer des approches de catégorie I, APV et de non-
précision doivent être la valeur la plus élevée des valeurs dérivées des tableaux 5 ou 6 del’appendice 1 au MIN 2.430, paragraphe (d).
1.2. Les tableaux doivent être utilisés pour déterminer toutes les valeurs de RVR opérationnellessauf tel que prescrit au paragraphe 1.3 ci-dessous.
1.3. Selon l’approbation de l’Autorité, la formule ci-dessous peut être utilisée avec les angles desapproches existantes, ou/et les longueurs des rampes de lampes d’approches pour une pisted’atterrissage particulière.
1.4. Lorsque la formule est utilisée comme décrit ci-dessus, les conventions et les méthodes decalcul décrites dans les notes applicables au paragraphe 2 ci-dessous doivent être utilisées.
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 180.
. .
2. Calcul des valeurs de RVR minimale2.1. Les valeurs dans le tableau 5 de l’appendice 1 au MIN 2.430, paragraphe (d) sont obtenues
avec la formule ci-dessous :RVR/visibilité (m) = [DH/MDH (ft) x 0,304 8]/ Tan �] – longueur de la rampe d’approche (m).Note 1. � est l’angle de calcul, soit une valeur par défaut de 3,00 degrés que l’on incrémente
de 0,10 degré à chaque ligne du tableau 5 jusqu’à une valeur maximale de3,77 degrés.
Note 2. La valeur par défaut de la longueur de la rampe d’approche est égale à la longueurminimale des différents systèmes décrits dans le tableau 4 de l’appendice 1 auMIN 2.430.
Note 3. Les valeurs dérivées de la formule ci-dessus ont été arrondies à 50 m près jusqu’àune valeur de RVR de 800 m puis arrondies à 100 m près.
Note 4. Les intervalles de DH/MDH dans le tableau 5 ont été sélectionnés afin d’éviter lesanomalies causées par l’arrondi des OCA(H).
Note 5. Les intervalles de hauteur de la note 4 ci-dessus sont de 10 ft jusqu’à une DH/MDHde 300 ft, puis de 20 ft jusqu’à une DH/MDH de 760 ft et enfin de 50 ft pour uneDH/MDH au-dessus de 760 ft.
Note 6. La valeur minimale de la table est de 550 m.2.2. Selon l’approbation de l’Autorité, la formule peut être utilisée pour calculer la valeur de RVR
applicable aux approches avec des pentes de plus de 4,5 degrés.3. Opérations d’approche avec une RVR inférieure à 750 m (800 m en monopilote)
3.1. À condition que la DH ne soit pas supérieure à 200 ft, les approches ne sont quasiment paslimitées si la piste est équipée d’une configuration complète de la rampe d’approche (FALS),de feux de zone de toucher RTZL et de feux d’axe de piste (RCLL). Dans ces conditions, unevaleur de RVR inférieure à 750 m (800 m pour du monopilote) peut être extraite directementdu tableau 5. Il ne devrait pas y avoir de restrictions liées à l’utilisation de l’ILS publiée dansl’AIP, par NOTAM ou dans d’autres documents. Des restrictions d’utilisation de l’ILS inclu-raient des limitations d’utilisation du Loc et/ou du glide au-dessous d’une certaine hauteur,interdiction d’utiliser le signal ILS couplé au pilote automatique ou des limitations liées à laclassification de la station ILS.
3.2. Sans RTZL et sans RCLL et pour l’obtention d’une valeur de RVR inférieure à 750 m (800 mpour du monopilote) dans le tableau 5, l’approche doit être effectuée en utilisant un viseurtête haute « d’atterrissage » (HUDLS) approuvé (ou un système équivalent approuvé), oubien réalisée avec un couplage au pilote automatique, ou bien avec un directeur de voljusqu’à une DH supérieure ou égale à 200 ft. (Note : cela est interdit pour du monopilote.)Un système équivalent pourrait, par exemple, être un viseur tête haute (HUD) qui n’est pascertifié en tant que système d’atterrissage mais qui est en mesure de fournir des indicationsde guidage appropriées. D’autres systèmes peuvent également être adaptés, tels que lessystèmes de vision infrarouge ou synthétiques, Enhanced/Synthetic Vision Systems (E/SVS),ou d’autres systèmes hybrides de ce genre.
4. Description des systèmes de balisage d’approcheLe tableau suivant décrit les types de balisage lumineux d’approche qui sont acceptables pour
le calcul des minimums opérationnels d’aérodrome. Les systèmes décrits sont essentiellementles systèmes définis dans l’annexe XIV de l’OACI. Toutefois, le tableau comprend également dessystèmes plus courts qui sont acceptables pour une utilisation opérationnelle. Cela est conco-mitant avec le fait que les systèmes d’éclairage d’approche peuvent parfois être adaptés auxconditions qui existent avant le seuil. De plus, le tableau comprend les types de balisagelumineux d’approche de la FAA considérés comme équivalents pour le calcul des minimumsopérationnels d’aérodrome.
CATÉGORIE D’ÉQUIPEMENT LONGUEUR, CONFIGURATION ET INTENSITÉ DES LAMPES D’APPROCHE
FALS (Full Approach Light System) Dispositif lumineux d’approche de précision, catégorie I comme spécifié dans l’annexe XIV, feux de hauteintensité, longueur de 720 m ou plus.
FAA : ALSF1, ALSF2, SSALR, MALSR, High or Medium Intensity and/or Flashing Lights, 720 m or more.
IALS (Intermediate Approach Light System) Dispositif lumineux d’approche simplifié comme décrit dans l’annexe XIV, feux de haute intensité,longueur 420-719 m
FAA : MALSF, MALS, SALS/SALSF, SSALF, SSALS, High or Medium Intensity and/or Flashing Lights,420-719 m.
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 181.
. .
CATÉGORIE D’ÉQUIPEMENT LONGUEUR, CONFIGURATION ET INTENSITÉ DES LAMPES D’APPROCHE
BALS (Basic Approach Light System) Feux d’intensité haute, moyenne ou basse, longueur de 210-419 m comprenant une barre transversale.FAA : ODALS, High or Medium Intensity or Flashing Lights 210-419 m.
NALS (No Approach Light System) Dispositif lumineux d’approche de longueur inférieure à 210 m, ou rien.
IEM à l’appendice 1 au MIN 2.430, paragraphes (f) et (g) – Établissement d’une RVR minimale pour les opérations de catégories II et III
1. Généralités1.1. Lors de l’établissement des RVR minimales pour les opérations de catégories II et III, les
exploitants devraient prêter attention aux informations suivantes issues de la partie A dudocument 17 de la CEAC. Elles sont présentées comme contexte et, d’une certaine manière,pour des raisons historiques, bien qu’il puisse y avoir quelques contradictions avec lapratique actuelle.
1.2. Depuis le début des opérations d’approche et d’atterrissage de précision, de nombreusesméthodes ont été employées pour le calcul des minimums opérationnels d’aérodrome entermes de hauteur de décision et de portée visuelle de piste. II est relativement aiséd’établir une hauteur de décision pour une opération, mais l’établissement de la RVRminimale devant être associée à cette hauteur de décision, afin d’avoir une probabilitéélevée pour que les références visuelles requises soient acquises à cette hauteur dedécision, a été plus problématique.
1.3. Les méthodes adoptées par différents États pour résoudre la relation DH/RVR en opérationsde catégories II et III ont considérablement évolué ; dans un cas, une approche simpleentraînait l’application de données empiriques basées sur l’expérience d’une exploitationréelle dans un environnement particulier. Elle a donné des résultats satisfaisants lorsqueappliquée à l’environnement pour lequel elle fut développée. Dans un autre cas, uneméthode plus sophistiquée fut employée, qui utilisait un programme de calcul plutôtcomplexe, prenant en compte un grand nombre de variables. Cependant, dans ce derniercas, il s’avéra que, avec l’amélioration des performances des aides visuelles et l’utilisationaccrue des équipements automatiques dans les nombreux différents types d’avionsnouveaux, la plupart des variables s’annulaient l’une l’autre, et une table simple pouvaitêtre construite, applicable à une grande variété d’aéronefs. Les principes de base observésdans l’établissement des valeurs d’une telle table sont que la plage des références visuellesnécessaires au pilote à la hauteur de décision et en dessous dépend des tâches qu’il doitaccomplir, et que le degré de gêne de sa vision dépend de la cause de la gêne, la règlegénérale en matière de brouillard étant qu’il devient plus épais avec la hauteur. Desrecherches sur simulateurs de vol couplés à des épreuves en vol ont montré ce qui suit :(a) la plupart des pilotes ont besoin d’établir le contact visuel trois secondes au-dessus de
la hauteur de décision, bien qu’il ait été observé une réduction à une seconde avecl’utilisation de systèmes d’atterrissage opérationnels après panne ;
(b) pour établir sa position latérale et la vitesse de croisement de la trajectoire, la plupartdes pilotes n’ont pas besoin de voir au moins trois segments lumineux sur la lignecentrale de la rampe d’approche ou de l’axe de piste ou des feux de bord de piste ;
(c) pour le guidage au sol, la plupart des pilotes ont besoin de voir un élément latéral de latrajectoire sol, c’est-à-dire une croix lumineuse d’approche, le seuil d’atterrissage ouune barrette de la zone lumineuse de toucher ;
(d) et, pour effectuer un ajustement précis de la trajectoire de vol dans le plan vertical, telqu’un arrondi, à l’aide des seuls repères visuels, la plupart des pilotes ont besoin devoir un point au sol ayant un mouvement relatif, par rapport à l’avion, apparent nul ouquasi nul ;
(e) en ce qui concerne la structure du brouillard, des données recueillies au Royaume-Unisur une période de vingt ans ont montré que dans un brouillard dense stable il y a uneprobabilité de 90 % que la plage de vision oblique à partir d’une hauteur d’œil à plusde 15 ft au-dessus du sol soit inférieure à la visibilité horizontale au niveau du sol(c’est-à-dire la RVR). Il n’y a actuellement aucune donnée disponible pour montrer larelation entre la plage de vision oblique et la RVR dans des conditions de faible visi-bilité autres, telles que par neige volante, poussières ou forte pluie, mais les comptes
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 182.
. .
rendus des pilotes permettent de penser que le manque de contraste entre les aidesvisuelles et l’environnement, dans de telles conditions, peut produire une relation simi-laire à celle observée dans le brouillard.
2. Opérations de catégorie IILe choix des dimensions des segments visuels requis utilisés en catégorie II est fondé sur lesexigences visuelles suivantes :
(a) un segment visuel d’au moins 90 m devra être vu à et sous la hauteur de décision pourque le pilote puisse surveiller un système automatique ;
(b) un segment visuel d’au moins 120 m devra être vu pour que le pilote puisse maintenirl’attitude en roulis à et sous la hauteur de décision ;
(c) et, pour un atterrissage manuel à l’aide des seuls repères visuels externes, un segmentvisuel de 225 m sera nécessaire à la hauteur à laquelle commence le début de l’arrondiafin de donner au pilote la vue d’un point de faible mouvement relatif sur le sol.
Nota. – Avant d’utiliser un ILS pour un atterrissage automatique en conditions réelles de caté-gorie II, l’exploitant devrait vérifier l’adéquation de la combinaison ILS/type d’avion pour l’atter-rissage automatique.
3. Opérations de catégorie III passives après panne3.1. Les opérations de catégorie III à l’aide d’équipements d’atterrissage automatiques passifs
après panne furent introduites à la fin des années soixante et il est souhaitable que les prin-cipes présidant à l’établissement de la RVR minimale pour de telles opérations soientétudiés dans le détail.
3.2. Lors d’un atterrissage automatique, le pilote a besoin de surveiller les performances dessystèmes de l’avion, non pour détecter une panne – ce qui est mieux fait par les dispositifsde surveillance intégrés au système –, mais pour avoir une connaissance précise de lasituation du vol. Dans la phase finale, il devrait établir un contact visuel et, avant d’atteindrela hauteur de décision, il devrait avoir contrôlé la position de l’avion par rapport aux feuxd’approche ou d’axe de piste. Pour cela, il a besoin d’éléments horizontaux (comme réfé-rence en roulis) et d’une partie de l’aire de toucher. Il devrait contrôler la position latérale etla vitesse de croisement de la trajectoire et, si elles sont au-delà des limites préétablies, ildevrait effectuer une remise des gaz. Il devrait également contrôler l’évolution longitudinale,et la vue sur le seuil d’atterrissage y est utile, de même que la vue des feux de l’aire detoucher.
3.3. Dans le cas d’une panne du système de guidage automatique sous la hauteur de décision, ily a deux séries d’actions possibles : la première est une procédure permettant au pilote determiner l’atterrissage manuellement, s’il possède les références visuelles adéquates pour lefaire, ou de commencer une remise des gaz s’il ne les possède pas ; la seconde est derendre obligatoire la remise des gaz en cas de déconnexion du système, quelle que soitl’estimation par le pilote des références visuelles disponibles.(a) Dans le premier cas, l’exigence première dans la détermination de la RVR minimale est
celle de la disponibilité de repères visuels suffisants à et sous la hauteur de décisionpour que le pilote puisse effectuer un atterrissage manuel. Les données présentées dansle document 17 de la CEAC ont montré qu’une valeur minimale de 300 m présenteraitune grande probabilité de disponibilité des repères nécessaires au pilote pour évaluer letangage et le roulage de l’aéronef, et cela devrait donc être la RVR minimale pour cetteprocédure.
(b) Le deuxième cas, qui nécessite qu’une remise des gaz soit effectuée en cas de panne dusystème automatique de guidage sous la hauteur de décision, permettra une RVRminimale inférieure car les exigences de références visuelles seront moindres s’il n’y apas besoin d’assurer la possibilité d’un atterrissage manuel. Cependant, cette optionn’est acceptable que si on peut montrer que la probabilité d’une panne du système sousla hauteur de décision est acceptable. Il devrait être accepté que la tendance d’un pilotequi expérimente une telle panne serait de continuer l’atterrissage manuellement, maisque les épreuves en vol en conditions réelles et les expériences sur simulateursmontrent que les pilotes n’ont pas toujours conscience que les repères visuels sontinsuffisants dans de telles situations et que les données enregistrées actuellementrévèlent que les performances des pilotes à l’atterrissage se réduisent progressivementau fur et à mesure que la RVR descend sous 300 m.De plus, il devrait être accepté qu’il y a quelques risques à effectuer une remise des gazmanuelle sous 50 ft avec une très faible visibilité et il faudrait donc accepter que, si desRVR inférieures à 300 m sont autorisées, les procédures du poste de pilotage devraient
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 183.
. .
normalement permettre au pilote de continuer l’atterrissage dans de telles conditions etles systèmes de l’avion devraient être suffisamment fiables pour limiter le taux deremise des gaz.
3.4. Ces critères peuvent être allégés dans le cas d’un aéronef équipé d’un système d’atter-rissage automatique passif après panne complété d’une visualisation tête haute qui n’estpas considéré comme système opérationnel après panne, mais qui donne des indicationspermettant au pilote de terminer un atterrissage dans le cas d’une panne du systèmed’atterrissage automatique. Dans ce cas, il n’est pas nécessaire de rendre obligatoire laremise des gaz en cas de panne du système d’atterrissage automatique avec une RVR infé-rieure à 300 m ; il n’est pas non plus nécessaire de démontrer que la probabilité d’unepanne du système automatique n’est pas supérieure à dix puissance moins trois (1 × 10–3).
4. Opérations de catégorie III opérationnelles après panne – avec hauteur de décision4.1. Pour les opérations de catégorie III effectuées au moyen d’un système d’atterrissage opéra-
tionnel après panne avec hauteur de décision, un pilote devrait être capable de voir aumoins un feu d’axe.
4.2. Pour les opérations de catégorie III effectuées au moyen d’un système d’atterrissage hybrideopérationnel après panne avec une hauteur de décision, un pilote devrait avoir une réfé-rence visuelle contenant un segment d’au moins 3 feux consécutifs de l’axe central.
5. Opérations de catégorie III opérationnelles après panne – sans hauteur de décision5.1. Pour les opérations de catégorie III sans hauteur de décision, le pilote n’a pas besoin de voir
la piste avant le toucher des roues. La RVR permise dépend du niveau des équipements del’avion.
5.2. Une piste de catégorie III peut être considérée comme acceptant les opérations sans hauteurde décision, à moins qu’une restriction spécifique ne soit publiée par la voie de l’infor-mation aéronautique.
IEM à l’appendice 1 au MIN 2.430, paragraphe (g) (5) – Tableau 8 – Actions équipage en cas depanne du pilote automatique à ou en dessous de la hauteur de décision lors d’exploitation decatégorie III avec un système passif après panne
Lors d’exploitations avec des valeurs réelles de RVR inférieures à 300 m, une remise des gaz estenvisagée en cas de panne du pilote automatique à ou en dessous de l’altitude de décision.
Cela signifie qu’une remise des gaz est la procédure normale. Quoi qu’il en soit, la formulationreconnaît qu’il peut y avoir des circonstances où la procédure la plus sûre consiste à poursuivrel’atterrissage. De telles circonstances incluent la hauteur à laquelle se produit la panne, les réfé-rences visuelles réelles, et d’autres fonctionnements défectueux. Ces considérations s’appliquenttypiquement juste avant l’arrondi.
En conclusion, il n’est pas interdit de continuer l’approche et finir l’atterrissage quand lecommandant de bord ou le pilote à qui la conduite du vol a été déléguée détermine qu’il s’agit de lamarche à suivre la plus sûre.
Des instructions opérationnelles devraient refléter les informations contenues dans cetteinstruction et la politique de l’exploitant.
IEM à l’appendice 1 au MIN 2.430, paragraphe (h) – Systèmes à vision augmentée (EVS)
1. IntroductionLes systèmes de vision améliorée (EVS) utilisent la technologie des capteurs pour améliorer la
capacité du pilote à détecter des objets, tels que les feux de piste ou de terrain, qui pourraientne pas être visibles autrement. L’image produite par le capteur et/ou par le calculateur d’ima-gerie peut être affichée au pilote de différentes façons, notamment par l’intermédiaire d’unviseur tête haute. Les systèmes peuvent être utilisés dans toutes les phases de vol et peuventaméliorer la conscience de la situation. En particulier, les systèmes à base de technologie infra-rouge permettent l’affichage du terrain lors des opérations de nuit, améliorent la conscience dela situation pendant la nuit et par faible visibilité au roulage, et permettent aussi l’acquisitionanticipée des références visuelles pendant les approches aux instruments.
2. Contexte du paragraphe (h) de l’appendice 1 au MIN 2.4302.1. Le paragraphe (h) de l’appendice 1 au MIN 2.430 a été élaboré à partir du paragraphe (h) de
l’appendice 1 (nouveau) à l’OPS 1.430, lui-même élaboré après une évaluation opérationnellede deux systèmes EVS différents, avec en plus les données et le soutien fournis gracieu-
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 184.
. .
sement par la FAA. Les approches à l’aide du système EVS ont été effectuées dans desconditions météo très variées, telles que le brouillard, la pluie et des averses de neige, ainsique la nuit sur des aérodromes situés en zone montagneuse. Les performances des EVSbasés sur la technologie infrarouge peuvent varier selon les conditions météorologiquesrencontrées. Par conséquent, le règlement adopte une approche conservatrice pour prendreen compte la grande variété de conditions qui peuvent être rencontrées. Il sera peut-êtrenécessaire de modifier le règlement dans le futur pour tenir compte d’une plus grande expé-rience opérationnelle sur le sujet.
2.2. Le paragraphe (h) de l’appendice 1 au MIN 2.430 ne traite pas de l’utilisation de l’EVSpendant le décollage. En effet les systèmes EVS évalués n’ont pas donné de résultats satis-faisants lorsque la RVR était inférieure à 300 mètres. Il pourrait y avoir certains avantages àl’utilisation de l’EVS au décollage, à condition qu’il y ait une plus grande visibilité et unéclairage de la piste réduit ; toutefois, ces opérations devront être évaluées.
2.3. Le paragraphe (h) de l’appendice 1 au MIN 2.430 ne porte uniquement que sur les systèmesEVS à base de technologie infrarouge. Il n’est pas prévu d’exclure les autres technologies,cependant les systèmes EVS à base de technologie autre que les infrarouges devront êtreévalués afin de déterminer leur adéquation au règlement ou bien afin de déterminer lerèglement associé. Lors de l’élaboration du paragraphe (h) de l’appendice 1 (nouveau) àl’OPS 1.430, on a considéré le système minimum devant être installé dans l’avion. Comptetenu de l’état actuel du développement technologique, il est considéré qu’un HUD est unélément essentiel du système EVS.
2.4. Afin d’éviter la nécessité de créer des cartes d’approches dédiées à l’utilisation de l’EVS, ilest prévu que l’opérateur utilise le tableau 9 pour déterminer les RVR applicables lors ducommencement de l’approche.
3. Les exigences opérationnelles additionnellesUn système de vision améliorée (EVS) certifié dans le but d’être utilisé selon l’appendice 1 au MIN2.430, paragraphe (h) doit avoir :(i) Un viseur tête haute (capable d’afficher la vitesse anémométrique, la vitesse verticale, l’assiette
de l’appareil, le cap, l’altitude, la commande de guidage appropriée à l’approche à effectuer, lesindications de déviation de la trajectoire, vecteur matérialisant la trajectoire de vol [flight pathvector], et les indications sur l’angle de trajectoire de vol et l’image EVS).
(ii) Pour des opérations à deux pilotes, une visualisation tête basse de l’image EVS ou tout autremoyen d’afficher facilement les informations dérivées de l’EVS au pilote contrôlant le dérou-lement de l’approche.
Remarque : si l’appareil est équipé d’un radio altimètre, il sera utilisé pour améliorer la consciencede la situation vis-à-vis du terrain durant l’approche, mais ne sera pas pris en compte dans le déve-loppement des procédures opérationnelles.
4. Opérations avec deux pilotes4.1. Les opérations avec des RVRs inférieures à 550 m doivent se faire à deux pilotes.4.2. L’exigence pour une visualisation tête basse de l’image EVS est destinée à couvrir les
besoins du concept de pilotage à deux. Le pilote non en fonction (PNF) reste dans la« boucle » et la gestion des ressources de l’équipage (CRM) ne se délite pas. Si le PF est leseul à avoir accès à l’image EVS, le pilote contrôlant l’approche pourra se sentir démunid’information nécessaire à la réalisation de sa tâche à la prise de décision.
IEM à l’appendice 1 au MIN 2.430, paragraphe (i) – Manœuvres à vue
Pour la suite de ce paragraphe, la terminologie XLS désigne indifféremment ILS/MLS/GLS.
1. L’objet de cette instruction est de fournir aux exploitants des informations supplémentairesconcernant l’application des minimums opérationnels d’aérodrome pour les manœuvres à vue.
2. Conduite du vol – Généralités2.1. La hauteur minimale de descente (MDH) et la hauteur de franchissement d’obstacle (OCH)
incluses dans la procédure sont relatives à l’altitude/hauteur de l’aérodrome.2.2. L’altitude minimale de descente (MDA) est relative au niveau moyen des mers.2.3. Pour ces procédures, la visibilité applicable est la visibilité météorologique (VIS).
3. Approche aux instruments suivie d’une manœuvre à vue libre3.1. Avant que les références visuelles ne soient obtenues, mais pas en dessous de la
MDH/MDA, l’avion doit suivre la procédure d’approche aux instruments jusqu’à ce que lepoint d’approche interrompu (MAPt) de l’approche aux instruments soit atteint.
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 185.
. .
3.2. Au début de la phase de vol au niveau ou au-dessus de la MDH/MDA, la trajectoire del’approche aux instruments déterminée par les systèmes de radionavigation, RNAV, RNP ouXLS devrait être maintenue jusqu’à ce que :(a) Le pilote estime que, dans tous les cas, le contact visuel avec la piste d’atterrissage ou
avec l’environnement de la piste sera maintenu durant toute la manœuvre ; et(b) Le pilote estime que l’avion est dans la zone de manœuvre avant de commencer la
manœuvre à vue ; et(c) Le pilote est capable de déterminer la position de l’avion par rapport à la piste d’atter-
rissage à l’aide des références visuelles extérieures appropriées.3.3. Lors de la rejointe du MAPt, si les conditions décrites au paragraphe 3.2 ci-dessus ne
peuvent pas être établies par le pilote, une procédure d’approche interrompue doit êtreinitiée en conformité avec la procédure d’approche aux instruments. Voir le paragraphe 5.
3.4. Une fois que l’avion a quitté la trajectoire de l’approche aux instruments (percée), la phaseoù le vol s’éloigne de la piste devrait être limitée à une distance appropriée, nécessaire àl’alignement de l’avion pour l’approche finale. De telles manœuvres devraient être effec-tuées afin de permettre à l’avion :(a) D’atteindre une trajectoire de descente jusqu’à la piste, contrôlée et stabilisée ; et(b) De rester dans la zone de manœuvre et de telle manière que le contact visuel avec la
piste d’atterrissage ou son environnement est maintenu tout au long de la manœuvre.3.5. Les manœuvres de vol devraient être effectuées à une altitude/hauteur qui ne soit pas infé-
rieure à la MDH/MDA de la manœuvre à vue.3.6. La descente au-dessous de la MDH/MDA peut être initiée quand le seuil de piste a été
correctement identifié et que l’avion est en mesure de poursuivre avec un taux normal dedescente et d’atterrir dans la zone de toucher des roues.
4. Approche aux instruments suivie par une manœuvre à vue imposée (selon une trajectoireimposée)
4.1. L’avion doit suivre la procédure d’approche aux instruments correspondante (ou laprocédure de percée) jusqu’à ce que l’un des éléments suivants soit atteint :(a) Le point de divergence publié à partir duquel la manœuvre à vue imposée doit
commencer ; ou(b) Le MAPt de l’approche aux instruments correspondante.
4.2. L’avion devra être établi en vol horizontal à ou au-dessus de la MDH/MDA et la trajectoired’approche aux instruments déterminée par les aides de radionavigation, RNAV, RNP, XLS,devra être maintenue jusqu’au point de divergence de la manœuvre à vue.
4.3. Si le point de divergence est atteint avant que les références visuelles requises ne soientobtenues, l’approche interrompue de l’approche aux instruments doit être initiée au plustard au MAPt de l’approche aux instruments correspondante.
4.4. La manœuvre à vue imposée, initiée au point de divergence publié, devra suivre les routeset les hauteurs/altitudes publiées.
4.5. Sauf indication contraire, une fois que l’avion est établi sur la trajectoire imposée, il nedevrait pas être nécessaire de maintenir les références visuelles publiées, à moins que :(a) Cela soit exigé par l’Autorité ;(b) Le MAPt de la manœuvre à vue (si publié) est atteint.
4.6. Si la manœuvre à vue imposée comprend un MAPt publié et que les références visuellesrequises ne sont pas acquises au MAPt, une approche interrompue doit être effectuéeconformément aux dispositions des paragraphes 5.2 et 5.3 ci-dessous.
4.7. La descente au-dessous du MDH/MDA ne devra se faire que si les références visuellesrequises sont acquises.
4.8. Sauf indication contraire dans la procédure, la descente au-dessous de la MDH/MDA ne peutêtre initiée que lorsque le seuil de piste a été correctement identifié et que l’avion est enmesure de poursuivre avec un taux normal de descente et d’atterrir dans la zone de toucherdes roues.
5. Approches interrompues5.1. Approche interrompue lors de l’approche aux instruments précédant la manœuvre à vue.
(a) Si la décision d’effectuer une approche interrompue est prise lorsque l’avion est posi-tionné sur la trajectoire d’approche aux instruments définis par les aides de radio navi-gation RNAV, RNP, ou XLS, l’approche interrompue publiée de l’approche aux instru-ments devrait être suivie avant de commencer la manœuvre à vue.
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 186.
. .
(b) Si la procédure d’approche aux instruments est effectuée à l’aide d’un XLS ou d’uneapproche stabilisée, le MAPt associé à la procédure XLS sans alignement de descente(procédure sans GP) ou à l’approche stabilisée, le cas échéant, devrait être pris encompte.
5.2. Si une approche interrompue est publiée pour la phase de manœuvre à vue, les conditionsprescrites ci-dessous ne sont pas applicables.
5.3. Si les références visuelles sont perdues pendant la phase de manœuvre à vue, l’approcheinterrompue de la phase d’approche aux instruments devra être suivie. On attend du pilotequ’il initie une montée en virage en direction de la piste d’atterrissage et qu’il survole l’aéro-drome pour ensuite atteindre et suivre la trajectoire de l’approche interrompue.
5.4. L’avion ne devra pas quitter l’aire de manœuvres à vue, qui est protégée des obstacles, saufsi :(a) L’avion est établi sur la trajectoire de l’approche interrompue ; ou(b) L’avion est à l’altitude minimale de secteur (MSA).
5.5. Tous les virages devraient (voir la note 1 ci-dessous) être faits dans la même direction etl’avion devrait rester dans l’aire de la manœuvre à vue pendant sa montée vers :(a) L’altitude assignée à l’approche interrompue de la manœuvre à vue publiée, le cas
échéant ;(b) L’altitude assignée à l’approche interrompue de l’approche aux instruments (précédant la
manœuvre à vue) ;(c) L’altitude minimale de secteur (MSA) ;(d) L’altitude minimale de maintien (MHA), applicable pour la transition vers une transition
ou une correction, ou de continuer à monter à une altitude minimale de sécurité ; ou(e) Selon les directives ATS/C.Note 1. Lorsque la remise des gaz est engagée sur la branche vent arrière de la manœuvre
à vue, un virage en S peut être entrepris pour aligner l’avion sur l’approche inter-rompue de l’approche aux instruments, à condition que l’avion reste dans l’aireprotégée des obstacles de la manœuvre à vue.
Note 2. Le commandant est responsable du maintien des marges de franchissement durelief au cours des manœuvres décrites ci-dessus, en particulier lors de l’exécutiond’une approche interrompue initiée par l’ATS.
5.6. Les manœuvres à vue pouvant être effectuées dans plus d’une direction, plusieurs circuitsseront nécessaires pour mettre l’avion sur la trajectoire prescrite de l’approche interrompueen fonction de la position de l’avion au moment des pertes des références visuelles.En particulier, tous les virages doivent avoir lieu dans la direction prescrite et, selon lesrestrictions, à savoir est/ouest (gauche ou droite), rester dans l’aire de protection de lamanœuvre.
5.7. Si une procédure d’approche interrompue est publiée pour la piste XX sur laquelle l’avioneffectue une manœuvre à vue et que l’avion a entamé une manœuvre pour s’aligner sur lapiste, l’approche interrompue pour cette direction peut être effectuée. L’ATS devrait êtreinformé de l’intention d’effectuer la procédure d’approche interrompue pour la piste XX.
5.8. Lorsque l’option décrite au paragraphe 5.7 ci-dessus est entreprise, le commandant devrait,dans la mesure du possible, avertir à la première occasion l’ATS (C) de ses intentionsconcernant la procédure de remise des gaz. Ce dialogue devrait, si possible, se produire aucours de la première phase d’approche et inclure l’approche interrompue à effectuer etl’altitude palier.
5.9. En plus du 5.8, le commandant doit communiquer à l’ATS (C), lorsque toute remise de gaz acommencé, la hauteur/altitude à laquelle l’avion est en train de monter, la position del’avion et le cap suivi par l’avion.
IEM à l’appendice 1 au MIN 2.430, paragraphe (k) – Approches à vue
L’intention de cette exigence (RVR supérieure à 800 m) est de prévenir de la perte soudaine deréférences visuelles pendant l’arrondi lors d’une approche à vue en cas de brouillard mince. Lesmembres d’équipage devraient être avertis du risque de désorientation lors de la descente dans lacouche de brouillard.
IEM à l’appendice 1 au MIN 2.450, paragraphe (g) – Entraînements et contrôles périodiques –Opérations par faible visibilité
La nature des contrôles cités dans le paragraphe (g) de l’appendice au MIN 2.450 sera définie dansle dossier du postulant.
MINISTÈRE DE L’ÉCOLOGIE, DU DÉVELOPPEMENT DURABLE,DES TRANSPORTS ET DU LOGEMENT
MEDDTL no 2011/15 du 25 août 2011, Page 187.
. .
IEM à l’appendice 1 au MIN 2.450, paragraphe (g) (1) – Entraînements et contrôles périodiques –Opérations par faible visibilité
Le nombre d’approches cité au paragraphe (g) (1) de l’appendice au MIN 2.450 inclut une approcheet un atterrissage qui peuvent être effectués dans un avion utilisant les procédures de catégorie II/III.Cette approche et cet atterrissage peuvent être effectués en exploitation en ligne normale ou commevol d’entraînement. Il est supposé que de tels vols ne seront effectués que par des pilotes qualifiéspour la catégorie particulière d’exploitation.





























