Embed Size (px)
Citation preview

(fr) Notice d’utilisation
Module de manipulation
HSP-...-AP/AS
80743232017-10b[8074327]
HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b 2
Notice originale
Symboles : Le montage et la mise en service doivent exclusi
vement être réalisés par un personnel spécialisé
disposant des qualifications adéquates, confor
mément à la notice d’utilisation.
Avertissement
Attention
Nota
Environnement
Accessoires
Français 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 3
Module de manipulation HSP-...-AP/ASFrancais
Documentations relatives au produit
Pour toutes les documentations Produits disponibles � www.festo.com/pk
1 Organes de commande et de raccordement
1
2
3
4
5
7
8
9
6
aJaAaB
1 Entretoise à ressort
2 Butée de fin de course avec – Rainure pour capteur de proximité SMx-8– Amortisseur YSRW (...-AP)– Butée fixe avec tampon en caoutchouc
(...-AS)
3 Vis de réglage de la course (sens y)
4 Coulisse avec piste de guidage
5 Vis de butée pour le réglage de la course(sens z)
6 Passage de câble avec bouchons (1 ou 2 selon la taille)
7 Partie centrale de la piste de guidage(uniquement pour HSP-16-... et HSP-25-...)
8 Plaque de montage avec 4 trous taraudéstraversants pour les vis de fixation
9 Barre de butée
aJ Levier pivotant
aA Support collier de serrage pour câblesd’alimentation (1 ou 2 selon la taille)
aB Guidage orthogonal (chariot de guidage)
Fig. 1 Organes de commande et de raccordement du type HSP-... (vue de face)

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français4
2 Vue d’ensemble du produit
Exécution de base Variantes
Type HSP-12-..., HSP-16-..., HSP-25-...Le module de manipulation est livré enstandard dans les tailles 12, 16, 25 avecles éléments de fonction suivantspréassemblés :– Plaque de montage avec différentes
possibilités de montage et de fixation8
– 2 coulisses réglables pour le guidagedu déplacement par roulements 4
– 2 guidages linéaires disposés en croix(guidage orthogonal) aB
– 2 butées de fin de course avecchacune un amortisseur (type ...-AS:avec tampons en caoutchouc) et unrail de fixation pour le capteur deproximité 2
Type HSP-...-ASModule demanipulation sansentraînement
Type HSP-...-APModule demanipulation avecmodule oscillantDSM-... (double effet,pneumatique)
Options
Type HSP-...-...-SD
Module de manipulation avec couverclede protection et joues latérales.
L’exécution “SD” est recommandée pourle fonctionnement autonome.
Type HSP-...-...-WR/WLModule de manipulation avec vérin typeBWR-/BWL-HSP-... (voir aussi le chapitre“Accessoires”) pour le rappel du levierpivotant dans une position d’attenteau-dessus de la position de fin de– course droite: type ...-WR– course gauche: type ...-WL.

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 5
Kits et accessoires (voir aussi le chapitre “Montage” et “Accessoires”)
Kit de montage HMB...Pour le montage avec équerres et tasseauxpar ex. sur les colonnes profilées
Kit d’installation MKRP... (A)– Tuyau de protection flexible pour flexibles
mobiles– Porte-câble sur le guidage orthogonal– Equerre d’adaptation pour la fixation par ex.
sur la plaque de montage ou la structure– Profilé de recouvrement pour le passage de
câble dans les rainures de la plaque demontage ou des joues latérales
(A)
(B)
(C)
(D)
Capteur de proximité SME/SMT-8-... (B)Pour la détection des positions de fin decourse et de la position d’attente (typeHSP-...-...-WR/WL)
Kit d’adaptation HAPG-... (C) et le caséchéant plaques d’adapation (D)Pour la fixation de composants annexes(pince, vérin oscillant)Pour des informations supplémentaires sur lemontage d’autres accessoires encombinaison avec des composants Festo, sereporter à la description du système“Techniques de manipulation”.
Pour HSP-...-AP : Limiteurs de débit unidirectionnelGRLA-...�(E)Pour le réglage de la vitesse de déplacement
(E)

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français6
3 Fonctionnement et application
Par l’intermédiaire de la piste de guidage 4et du guidage orthogonal aB est créé un mouvement positif vertical et horizontal (piste y-z).Les entretoises à ressort 1 montées sur lesbutées de fin de course garantissent unehaute reproductibilité des positions.
En positions de fin de course, des amortisseurs hydrauliques et autoréglables 2 (uniquement type ...-AP) amortissent le mouvement. Les positions de fin de course peuventêtre détectées à l’aide de capteurs de proximité de type SME/SMT-8...�. Il est possibled’observer l’état des capteurs de proximitéavec le couvercle de corps monté par le regard.
La course est réglée séparément pour les deux positions de fin de course (positionde prise et de dépose) :
– dans le sens y : via les vis de réglage des coulisses 3
– dans le sens z : via les vis de butée sur le rail de guidage vertical 5
Le module de manipulation HSP-... est prévu pour l’équipement en composantsautomatique dans le domaine des techniques de manipulation et de montage. Le HSP-... convient particulièrement à la manipulation de petites pièces à grandevitesse par ex. pour la pose, le déplacement ou l’assemblage.
4 Transport et stockage
� Tenir compte du poids du HSP-... Il peutpeser selon la taille dans l’exécution debase jusqu’à 8,2 kg.
� Tenir compte des recommandationssuivantes pour le stockage :
Durée de stockage 48 moisTempérature de stockage + 20 °C
Fig. 2
z
y
Fig. 3

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 7
5 Conditions de mise en œuvre du produit
NoteUne utilisation incorrecte peut causer des dysfonctionnements.
� Veiller au respect permanent des instructions énoncées dans ce chapitre. Le respect des instructions garantit un fonctionnement correct et en toutesécurité du produit.
� Respecter les prescriptions des organismes professionnels, des services decontrôle technique et les réglementations nationales en vigueur.
� Tenir compte des conditions ambiantes.
� Comparer au cas réel les valeurs limitesindiquées dans cette notice d’utilisation(p. ex. pressions, forces, couples, températures, masses, vitesses).
� Enlever les emballages. Les emballagessont conçus pour que leurs matériauxpuissent être recyclés (à l’exceptionpapier huileux = déchet résiduel).
� Tenir compte des avertissements et instructions figurant
– sur le produit– dans cette manuel d’utilisation et– pour type HSP-...-...WR/WL: dans le manuel d’utilisation du BWR-/BWL-
HSP-...
� Utiliser le produit dans son état d’origine, sans apporter de modifications.
� Veiller au conditionnement correct de l’aircomprimé.
� Utiliser le même fluide tout au long de ladurée de vie du produit.Exemple : toujours utiliser de l’air comprimé non lubrifié.
Fig. 4
[°C] [%] [mbar]
Fig. 5
LF-... LR-...

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français8
� Mettre toute l’installation lentement souspression. Utiliser pour cela le distributeurde mise sous pression progressive typeHEL-.../HEM-...�.
� Vérifier si les accessoires suivants sont nécessaires :
Accumulateur de type VZS-... Clapet anti-retour piloté de typeHGL-...
Cela permet de réduire les variations depression.
En cas de chute de pression brutale, onévite ainsi la chute de la charge utile.
6 Montage
NoteAvant le montage de l’ensemble des composants, veiller en particulier à ce quisuit :
‒ Ne pas créer de déformation ou de contrainte mécanique lors de l’assemblage par vis
‒ Positionner correctement les vis (ceci évite d’endommager les filetages)
‒ Respecter les couples de serrage prescrits
‒ Tenir propre les surfaces de raccordement (ceci évite des fuites et des fauxcontacts)
Pour des modules ou des composants rajoutés ultérieurement, suivre les consignes de montage jointes aux produits.
NotePour type HSP-...-...WR/WL: Tenir compte des avertissements et instructionsfigurant dans le manuel d’utilisation du BWR-/BWL-HSP-...
Fig. 6

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 9
Montage : mécanique
Le HSP-... est livré prêt à être monté.
� Le cas échéant, retirer le couvercle de protection avant le montage.
� Monter d’abord les composants annexes et pour le HSP-...-AS l’entraînementexterne ou s’assurer après le montage qu’il reste suffisamment d’espace librepour le montage des composants.
� S’assurer que l’emplacement est en mesure de supporter le poids du HSP-...�.
� Ne monter le HSP-... que sur une surface plane et rigide.
Choisissez un des types de fixation suivants :
– Fixation directe par l’intermédiaire des 4 trous traversants de la plaque demontage
[mm] HSP-12 HSP-16 HSP-24
H1 40 20 40
H2 40±0,2 100±0,2 100±0,2
@ D1 6,3 6,3 6,3
L1 200±0,6 280±0,6 370±0,6
– Fixation par l’intermédiaire des joueslatérales (plan de perçage spécifique àl’utilisateur).
– Fixation sur la face arrière de la plaque demontage avec
– des tasseaux de type HMBN-5-M5(Fig. 8) ou
– le kit de montage de type HMBK-NDet l’équerre de montage de typeHMBV-ND (exemple : Fig. 9).
Fig. 7
D1
L1H2
H1
Fig. 8

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français10
Recommandation�:
Monter de préférence le HSP-... verticalement avec le kit de montage HMBK-ND etl’équerre de montage HMBV-ND sur une ou deux colonnes profilées.
Fig. 9
NoteAttention, deux colonnes profilées sont nécessaires pour le montage stable duHSP-25-...�.
� Mettre en place le HSP-... de manière à toujours pouvoir atteindre les organesde commande.
� Lors du montage, veiller à ne pas déformer les éléments : Serrer uniformémentles vis de fixation.
� Laisser un dégagement suffisant pour raccorder les câbles et les tuyaux d’alimentation.

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 11
Pour le montage des composants annexes :
Utililser le kit d’adaptation HAPG-... avec :
– Adaptateur universel pour tous les taillesdu HSP-... (A).
– Deux canaux pour le passage des flexibles(B) et le support du collier de serrage (C).
Le plan de perçage standard de l’adaptateuruniversel (D) constitue l’interface avec lesproduits Festo choisis comme par ex. lamicro-pince.
� Vérifier si des éléments de fixation et desplaques d’adaptation (E) supplémentairessont nécessaires. Un résumé à ce sujetfigure dans les documents d’achat duHSP-...�.
NoteLa résonance propre lors de vibrations de la charge utile peuvent endommagerle système.
� Aussi, monter le centre de gravité de la charge utile le plus près possible desaxes de symétrie du guidage orthogonal.
NoteDes forces et des couples trop élevésendommagent l’entraînement et lamécanique.
� Veiller à respecter les valeurs maximalesadmissibles pour les grandeurscaractéristiques suivantes :– Force Fx, Fy, Fz– Couples Mx, My et Mz
Le point de référence des forces et descouples est le centre du guidageorthogonal sur le chariot de guidage.Voir à ce sujet le chapitre Caractéristiques techniques.
Fig. 10
(A)
(B)
(C)
(D)
(E)
Fig. 11

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français12
Pour le montage d’un entraînement externe detype HSP-...-AS :
Note
� Utiliser un entraînement avec un coupled’entraînement uniforme sans à-coups.
� Veiller à respecter les valeurs maximalesadmissibles pour les grandeurs caractéristiques suivantes :– Force axiale-radiale Fy et Fz
– Couple d’entraînement MyLe point de référence des forces et descouples est le milieu de l’arbre.Voir à ce sujet le chapitre Caractéristiques techniques.
La transmission du couple s’effectue par le biais d’un arbre d’entraînement àroulements à billes. L’entraînement externe peut être fixé sur la face arrière de laplaque de montage.
Fixation de l’entraînement HSP-12-AS HSP-16-AS HSP-25-AS
(A) Trous de fixation (4x) M4 M4 M5
(B) Arbre avec clavette selon DIN 6885
A2x2x12 A2x3x18 A2x4x25
(C) Ajustement de centrage @ 45 f8 @ 60 f8 @ 70 f8
Fig. 12
(A)
(B)
(C)
HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 13
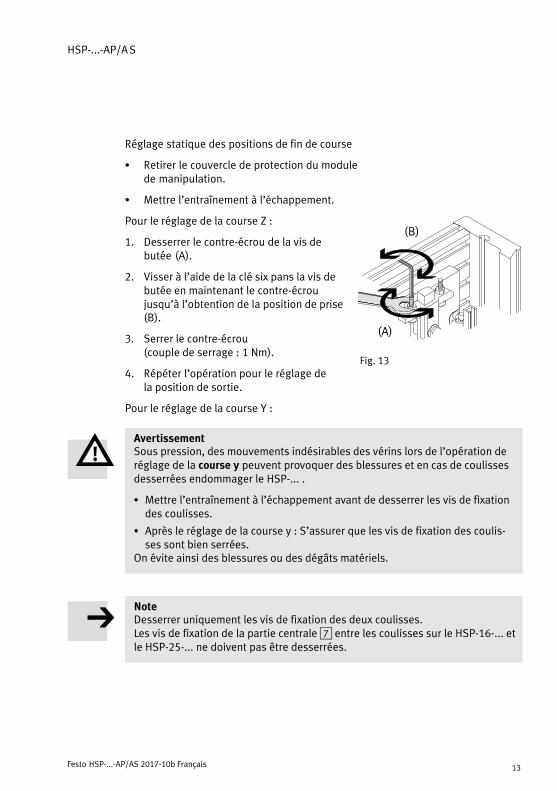
Réglage statique des positions de fin de course
� Retirer le couvercle de protection du modulede manipulation.
� Mettre l’entraînement à l’échappement.
Pour le réglage de la course Z :
1. Desserrer le contre-écrou de la vis debutée (A).
2. Visser à l’aide de la clé six pans la vis debutée en maintenant le contre-écroujusqu’à l’obtention de la position de prise(B).
3. Serrer le contre-écrou (couple de serrage : 1 Nm).
4. Répéter l’opération pour le réglage dela position de sortie.
Pour le réglage de la course Y :
AvertissementSous pression, des mouvements indésirables des vérins lors de l’opération deréglage de la course y peuvent provoquer des blessures et en cas de coulissesdesserrées endommager le HSP-... .
� Mettre l’entraînement à l’échappement avant de desserrer les vis de fixationdes coulisses.
� Après le réglage de la course y : S’assurer que les vis de fixation des coulisses sont bien serrées.
On évite ainsi des blessures ou des dégâts matériels.
NoteDesserrer uniquement les vis de fixation des deux coulisses. Les vis de fixation de la partie centrale 7 entre les coulisses sur le HSP-16-... etle HSP-25-... ne doivent pas être desserrées.
Fig. 13
(B)
(A)

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français14
5. Desserrer les vis de fixation (C) des coulisses droite et gauche jusqu’à ce que celles-ci puissent être déplacées.
6. Visser les vis de réglage (D) jusqu’à ceque les coulisses atteignent la position deprise ou de dépose désirée.Lorsque les joues latérales sont montées,il est possible de régler les vis de réglageà l’aide d’une clé à six pans à travers letrou traversant des joues latérales.
Pour un réglage sans décalage :
7. Plaquer les coulisses verticalement vers lebas contre la barre de butée en aluminium(E) du rail de guidage horizontal tout enserrant leurs vis de fixation (couple deserrage : 6 Nm).
� Contrôler après chaque réglage manuellement (sans mise sous pression de l’entraînement)
– si la position de fin de course désirée aété atteinte,
– le réglage sans décalage des coulisses.
� Pour cela, basculer la masse en mouvement dans les positions de fin de course
– à la main ou– à l’aide de la 6 pans creux sur l’entraî
nement (Fig. 16).
� Veiller au mouvement sans à-coups desgalets doubles dans la piste de guidage.
� En cas de besoin, corriger l’alignementdes coulisses.
Fig. 14
(D)
(C)
Fig. 15(E)
Fig. 16

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 15
Montage : pneumatique
Pour le raccordement de l’entraînement detype HSP-...-AP
� Utiliser des limiteurs de débit unidirectionnel du type GRLA-... pour régler lavitesse de rotation. La limitation de lavitesse est obtenue par la limitation del’air d’échappement.
� Visser les deux limiteurs de débit unidirectionnel sur l’entraînement.
� Procéder au raccordement de l’entraînement.
Pour le raccordement des composants annexes
Le kit d’installation MKRP-.. (voir le chapitre Accessoires) permet un guidage sûrdes flexibles et des câbles dans une gaine d’installation souple. La gaine d’installation est fixée à l’aide du support sur le guidage orthogonal et à l’aide del’équerre d’adaptation par ex. sur la plaque de montage ou sur la structure. Lagaine d’installation peut être remplie à 70 % au maximum.
Veiller à un guidage sûr des flexibles pneumatiques et des câbles électriques (exempleFig. 18) :
� Poser les câbles et les flexibles le long durail de guidage vertical vers le haut.
� Fixer les câbles et les flexibles à l’aide decolliers de serrage
– sur le support du collier de serrage del’adaptateur universel (A) ou les guiderà travers les deux canaux de câble del’adaptateur universel (B)
– sur le support du collier de serrage (C)du guidage orthogonal.
� Guider les câbles et les flexibles à traversle trou traversant de la plaque de montage (E) ou utiliser des gaines de protection lors de la pose (D).
Fig. 17
Fig. 18
(A)
(B)
(C)
(D)
(E)

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français16
Montage : électrique
En cas d’utilisation du capteur de proximitéSME/SMT-8 pour la détection de la positionde fin de course :
1. Retirer le couvercle de protection du module de manipulation.
2. S’assurer que les amortisseurs sont bienvissés (uniquement type HSP-...-AP; étatà la livraison).
3. Introduire le capteur de proximité dans larainure du rail des capteurs (A).
Le déclenchement du capteur de proximité électrique se fait par l’intermédiairedes aimants dans les vis de butée (B).
4. Monter le capteur de proximité dans laposition de fin de course. Un réglageultérieur des amortisseurs n’est pasnécessaire.
NoteLes câbles du capteur de proximité ne doivent pas se trouver dans la zone detravail du module de manipulation.
� Serrer les câbles dans la rainure des joues latérales (D) et de la plaque demontage.
� Protéger les câbles au moyen du profilé de recouvrement (C) du kit d’installation (le couper).
� Guider les câbles à travers le trou traversant de la plaque de montage versl’arrière (E).
Fig. 19
(A)
(B)
(D)(E)
(C)

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 17
7 Mise en service
Installation complète
� Mettre l’installation lentement sous pression. On évite ainsi tout mouvementincontrôlé. Pour une mise sous pression progressive, utiliser le distributeur demise sous pression progressive type HEL-... ou HEM-...�.
� Vérifier que les conditions de fonctionnement lors du réglage sont identiques àcelles du fonctionnement en continu. Sinon, il existe un risque de surcharge dumodule de manipulation.
Appareil individuel
Avertissement
� Vérifier que dans la zone de déplacement/zone de manipulation :‒ personne n’entre en contact avec cette zone
‒ qu’aucun corps étranger ne se trouve dans cette zone.
‒ qu’aucun câble ou flexible ne se trouve dans cette zone.
Protéger la zone par ex. à l’aide du couvercle de protection ou d’une grille deprotection.
NoteAvec HSP-...-AP :
� Manipuler les amortisseurs en veillant à ne pas endommager le filetage, latige du piston et l’extérieur du vérin.
� S’assurer que les amortisseurs sont correctement vissés et bloqués (état à lalivraison). En cas de desserrage des amortisseurs, la capacité d’amortissement est considérablement réduite (course d’amortissement réduite).
NoteAvec le HSP-...-AS avec moteur électrique :L’arrivée sur la butée fixe (�2 sur la figure 1) génère des chocs brutaux dans laligne d’entraînement. Celles-ci peuvent p. ex. endommager le réducteur.
� Procéder à la prise de référence contre les butées fixes uniquement avec uneénergie faible. Les tampons en caoutchouc dans les butées fixes ne serventqu’à amortir le bruit.
HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français18
NotePour type HSP-...-...WR/WL: Tenir compte des avertissements et instructionsfigurant dans le manuel d’utilisation du BWR-/BWL-HSP-...
� Mettre les composants annexes sous pression. Vérifier le cas échéant d’abordle fonctionnement des composants annexes dans une phase d’essai séparée :
Composants annexes Contrôles
Sans charge utile – Affectation correcte des raccords d’aircomprimé
– Vitesse de serrage– Fonctionnement des capteurs de proximité
Avec charge utile – Maintien sûr de la charge utile
� Mettre sous pression l’entraînement soit :
– lentement d’un côté– soit simultanément des deux côtés avec échappement consécutif d’un côté.
NoteLe module oscillant DSM-... pour HSP-...-AP doit être utilisé uniquement nonmodifié dans son état de livraison et avec un cache.
Note
� Procéder d’abord à une phase d’essai à une vitesse de fonctionnementréduite.
� Accélérer progressivement jusqu’à la vitesse de fonctionnement ultérieure.Pour connaître celle-ci, la calculer pour chaque cas réel.
� Interrompre la phase d’essai :‒ En cas de bruit métallique audible des vis de butée
‒ En cas de passage incorrect des galets doubles dans la piste de guidage
‒ Lorsque les positions de fin de course sont pas atteintes
‒ En cas de chute de la charge utile
Respecter également pour le dépannage les consignes du chapitre 12.

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 19
Phase d’essai
1. Fermer les deux limiteurs de débit unidirectionnel
– d’abord complètement– puis les ouvrir d’environ un tour.
2. S’assurer que l’appareil fonctionne dansles plages admissibles.
NoteL’impact cinétique admissible pour labutée de fin de course est valable pour descombinaisons poids-vitesse données. Il nedoit pas être dépassé.
� Veiller au respect des valeurs admissibles pour le temps de déplacement enfonction de la charge utile. (chapitreCourbes caractéristiques).
3. Pendant la phase d’essai, contrôler :
– le fonctionnement des capteurs de proximité– le maintien sûr de la charge utile– le temps de déplacement en fonction de la charge utile– le réglage des positions de fin de course.
4. Pour le réglage ultérieur des positions de fin de course, tenir compte desconsignes du chapitre Montage.
AvertissementSous pression, des mouvements indésirables des vérins lors de l’opération deréglage de la course y peuvent provoquer des blessures et, en cas de coulissesdesserrées, endommager le HSP-...�.
� Mettre l’entraînement à l’échappement avant de desserrer les vis de fixationdes coulisses.
� Après le réglage de la course y : S’assurer que les vis de fixation des coulisses sont bien serrées.
On évite ainsi des blessures ou des dégâts matériels.
Fig. 20
Fig. 21

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français20
5. Ouvrir lentement les limiteurs de débit unidirectionnel, jusqu’à l’obtention dela vitesse de déplacement souhaitée.
6. Veiller à ne pas dépasser le cycle minimal admissible.
DéfinitionTemps de cycle tt = Temps de déplacement t + Temps d’arrêt te
t : Temps nécessaire au HSP-...pour aller et revenir de la position de prise à la position de dépose. (valeurs admissibles, voir le chapitre Courbres caracté-ristiques).
te : Temps pendant lequel le HSP-...reste dans la position de prise et de dépose.
Type HSP-12-... HSP-16-... HSP-25-...
Temps de cycle minimal admissible tt [s] 0,6 0,8 1
Le HSP-... doit atteindre les positions de fin de course mais sans impact violent.Lors d’un impact trop violent, le module rebondit en fin de course.
NoteLa tendance oscillatoire augmente en cas de vitesse d’amortissement initialeélevée. Le temps de postoscillation augmente le temps de cycle complet.
� Régler l’entraînement en dessous de la vitesse d’amortissement initialeadmissible max. Ainsi, on augmente la précision des positions de fin decourse.
Après la prise en compte de toutes les corrections nécessaires :
NoteAvant la mise à l’échappement :
� Vérifier que la pince ne tient pas de charge utile.
On évite ainsi la chute brutale d’une masse lors de la mise à l’échappement.
7. Terminer l’essai. Mettre l’entraînement et les composants annexes àl’échappement.

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 21
8 Conditions d’utilisation
Avertissement
� S’assurer que dans la zone d’oscillation de lamasse en mouvement– personne n’entre en contact avec cette zone
au niveau de l’entraînement de la masse en mouvement.
– aucun corps étranger ne se trouve dans cette zone.
� S’assurer que le module de manipulation n’estmis en mouvement qu’avec le couvercle ou lagrille de protection.
m
NoteAvec HSP-...-AP :Une charge trop faible de l’amortisseur entraîne une fuite d’huile importante.
S’assurer que l’amortisseur est utilisé avec une charge d’au min. 25 % à100 %�max.
La plage recommandée est comprise entre 50 et 80 %.
A = mauvais B = admissible C = optimal
A B C B D
D = interdit
Fig. 22
� Tenir compte du fait que la viscosité de l’huile hydraulique diminue pendant lefonctionnement en raison de la chaleur provoquée par le frottement. L’amortisseur risque donc de perdre son efficacité en cas de longue durée d’utilisation.
En cas d’utilisation à des températures avoisinant 0 °C :
� Tenir compte du fait que les temps de rappel de l’amortisseur sont plus longs.Avec des températures très basses, la viscosité de l’huile hydraulique augmente.
Le HSP-... doit toujours atteindre les positions de fin de course mais sans impactviolent.

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français22
� Vérifier les signes d’usure suivants sur les éléments d’amortissement et lesentretoises à ressort (pour la désignation des types, voir les accessoires) :
Contrôle Entretoise à ressort�1 Amortisseur�2(...-AP)
Tampon en caoutchouc2 (...-AS)
Intervalle decontrôle
Tous les 2 millions de courses (env. tous les 2 mois) 1)
Signes d’usure Jeu du rail de guidagevertical dans lespositions de fin decourse dans le senshorizontal
Fuite d’huile ; impactbrutal ; le poussoir debutée reste en positionde fin de course rentréeou ne sort quetardivement de celle-ci.
Impact brutal 2)
Cycle de remplacement
Après 5 millions decommutations
Tous les 10 millions de courses (env. 1 fois par an) 1)
1) A 0,5 Hz en cas d’utilisation en deux équipes.2) Les tampons en caoutchouc dans les butées fixes ne servent qu’à amortir le bruit.
� Vérifier s’il n’est pas nécessaire de raccourcir les intervalles de contrôle. Celapeut s’avérer nécessaire :
– en cas de température élevée– en cas d’encrassement important– si des liquides ou des vapeurs liposolubles se trouvent à proximité.
NoteEn cas de charge variable, répéter en tenant compte de la charge utile modifiée
‒ le réglage des positions de fin de course (chapitre Montage)
‒ le réglage de la vitesse de déplacement (chapitre Mise en service).
NoteAvec le HSP-...-AS avec moteur électrique :L’arrivée sur la butée fixe (�2 sur la figure 1) génère des chocs brutaux dans laligne d’entraînement. Celles-ci peuvent p. ex. endommager le réducteur.
� Accoster les butées fixes uniquement avec une énergie faible ou bien utiliserune ligne d’entraînement qui peut supporter des chocs. Les tampons encaoutchouc dans les butées fixes ne servent qu’à amortir le bruit.

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 23
9 Maintenance et entretien
� Vérifier régulièrement les amortisseurs (ou les tampons en caoutchouc dansles butées fixes) et les entretoises à ressort.
� Nettoyer si nécessaire l’extérieur du HSP-... avec un chiffon doux.
En cas de HSP-... défectueux ou d’entraînement HSP-...-AP défectueux :
� Envoyer le HSP-... pour réparation à Festo.
10 Remplacement et réparation
Pour le remplacement des entretoises à ressort :
NotePour le remplacement des entretoises àressort, utiliser exclusivement des piècesd’origine.
1. Mettre l’entraînement à l’échappement.
2. Retirer le couvercle de protection et lesjoues latérales.
3. Déplacer le guidage orthogonal en position médiane.
4. Desserrer l’entretoise défectueuse avecune clé à 6 pans.
5. Déplacer le guidage orthogonal en positionde fin de course.
6. Visser l’entretoise neuve jusqu’à ce qu’elle touche le chariot de guidage.
7. Serrer ensuite l’entretoise encore env. d’un 1/2 tour (prétension 0,5 mm). Ainsi le rail de guidage vertical est sans jeu.
NoteLa prétension indiquée pour l’entretoise à ressort suffit pour le guidage sansjeu. Eviter toute usure inutile du guidage orthogonal et des coulisses par unepression trop élevée.
8. Monter les joues latérales et le couvercle de protection.
Fig. 23
HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français24
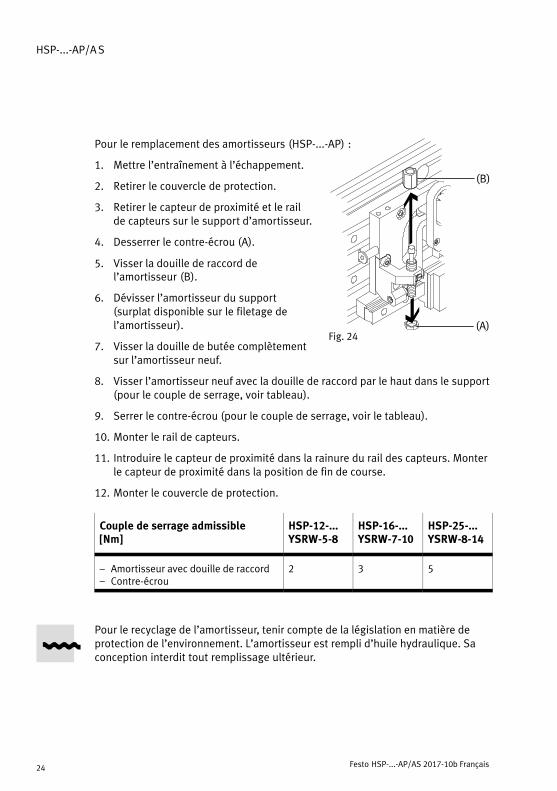
Pour le remplacement des amortisseurs (HSP-...-AP) :
1. Mettre l’entraînement à l’échappement.
2. Retirer le couvercle de protection.
3. Retirer le capteur de proximité et le railde capteurs sur le support d’amortisseur.
4. Desserrer le contre-écrou (A).
5. Visser la douille de raccord del’amortisseur (B).
6. Dévisser l’amortisseur du support(surplat disponible sur le filetage del’amortisseur).
7. Visser la douille de butée complètementsur l’amortisseur neuf.
8. Visser l’amortisseur neuf avec la douille de raccord par le haut dans le support(pour le couple de serrage, voir tableau).
9. Serrer le contre-écrou (pour le couple de serrage, voir le tableau).
10. Monter le rail de capteurs.
11. Introduire le capteur de proximité dans la rainure du rail des capteurs. Monterle capteur de proximité dans la position de fin de course.
12. Monter le couvercle de protection.
Couple de serrage admissible [Nm]
HSP-12-...YSRW-5-8
HSP-16-...YSRW-7-10
HSP-25-...YSRW-8-14
– Amortisseur avec douille de raccord– Contre-écrou
2 3 5
Pour le recyclage de l’amortisseur, tenir compte de la législation en matière deprotection de l’environnement. L’amortisseur est rempli d’huile hydraulique. Saconception interdit tout remplissage ultérieur.
Fig. 24(A)
(B)

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 25
Pour le remplacement des tampons en caoutchouc dans les butées fixes(HSP-...-A S) :
1. Couper les alimentations en énergie.
2. Retirer le couvercle de protection.
3. Retirer les tampons en caoutchouc des butées fixes à l’aide d’un outil approprié (par ex. tournevis, pinces).
4. Enfoncer les nouveaux tampons en caoutchouc dans les butées fixes.
5. Remonter le couvercle de protection.
Fig. 25
HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français26
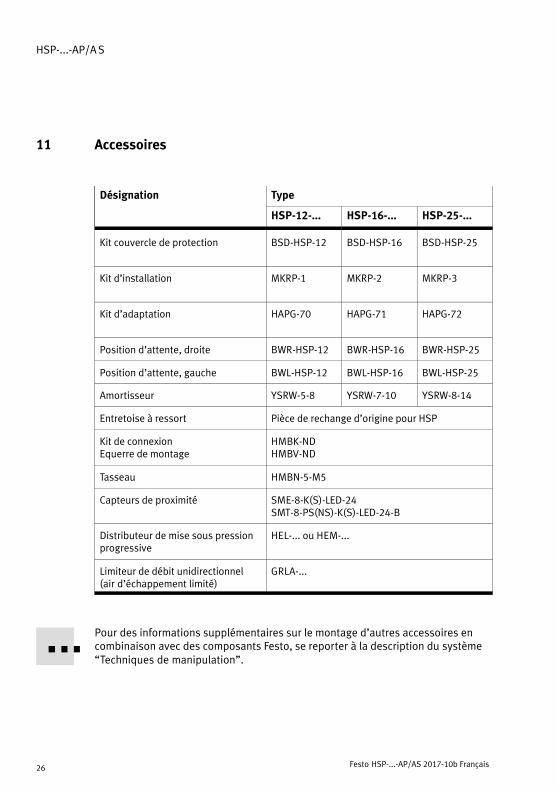
11 Accessoires
Désignation Type
HSP-12-... HSP-16-... HSP-25-...
Kit couvercle de protection BSD-HSP-12 BSD-HSP-16 BSD-HSP-25
Kit d’installation MKRP-1 MKRP-2 MKRP-3
Kit d’adaptation HAPG-70 HAPG-71 HAPG-72
Position d’attente, droite BWR-HSP-12 BWR-HSP-16 BWR-HSP-25
Position d’attente, gauche BWL-HSP-12 BWL-HSP-16 BWL-HSP-25
Amortisseur YSRW-5-8 YSRW-7-10 YSRW-8-14
Entretoise à ressort Pièce de rechange d’origine pour HSP
Kit de connexionEquerre de montage
HMBK-NDHMBV-ND
Tasseau HMBN-5-M5
Capteurs de proximité SME-8-K(S)-LED-24SMT-8-PS(NS)-K(S)-LED-24-B
Distributeur de mise sous pressionprogressive
HEL-... ou HEM-...
Limiteur de débit unidirectionnel(air�d’échappement limité)
GRLA-...
Pour des informations supplémentaires sur le montage d’autres accessoires encombinaison avec des composants Festo, se reporter à la description du système“Techniques de manipulation”.

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 27
12 Dépannage
Panne Cause possible Solution
Impact violent en finde course
Amortisseur défectueux Remplacer l’amortisseur.
Elément de butée trop sollicité– Charge utile trop lourde– Vitesse de la masse en
mouvement trop élevée
Réduire la vitesse dedéplacement.
Pannes lors de lascrutation de laposition
Position des capteurs deproximité incorrecte
Corriger la position descapteurs de proximité.
Utilisation d’un mauvais typede capteur de proximité
Utiliser uniquement descapteurs de proximité de typeSME/SMT-8-...
Capteur de proximitédéfectueux
Remplacer le capteur deproximité.
Pièces ferritiques près ducapteur de proximité
Utiliser des pièces fabriquéesavec des matériaux nonmagnétiques.
Les positions de finde course ne sontpas atteintes
Réglage incorrect des coursesy et z
Régler les positions de fin decourse (voir le chapitreMontage).
En cas de passageincorrect des galetsdoubles dans leguidage de latajectoire
Décalage des coulisses Régler les coulisses sansdécalage (voir le chapitreMontage, “Pour le réglage dela course y”).
Jeu du rail deguidage verticaldans les positionsde fin de course
Entretoise à ressortdéfectueuse
Remplacer les entretoises àressort.

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français28
13 Caractéristiques techniques
Type HSP-12-... HSP-16-... HSP-25-...
Référence -AP 533 599 533 607 533 615
-AP-SD 533 600 533 608 533 616
-AS 533 605 533 613 533 621
-AS-SD 533 606 533 614 533 622
Conception -AP Module de manipulation avec vérin oscillantpneumatique (palette oscillante à double effet)
-AP-SD Avec vérin oscillant pneumatique et couvercle deprotection
-AS Sans entraînement
-AS-SD Sans entraînement, avec couvercle de protection
Poids [kg]Exécution de base
L’augmentation du poids par lesaccessoires figure dans lesdocumentations correspondantes
-AP 1,9 3,3 6,4
-AP-SD 2,6 4,6 7,6
-AS 1,8 3,1 6,2
-AS-SD 2,5 4,3 7,4
Fluide -AP-... Air comprimé lubrifié ou non lubrifié filtré (filtre min. 40 ìm)
Pression de service admissible -AP-... De 4 à 8 bars max.
Raccord pneumatique -AP-... M5
Plage de température adm. 0 ... + 60 C
Vibrationscontrôlée selon DIN/CEI 68/EN 60068 partie 2-6
Degré de sévérité 2– 0,35 mm d’amplitude entre 10 et 60 Hz– accélération de 5g entre 60 et 150 Hz
Chocscontrôlée selon DIN/CEI 68/EN 60068 partie 2-27
Degré de sévérité 2– ± 30 g pendant 11 ms– 5 chocs selon le sens
HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 29
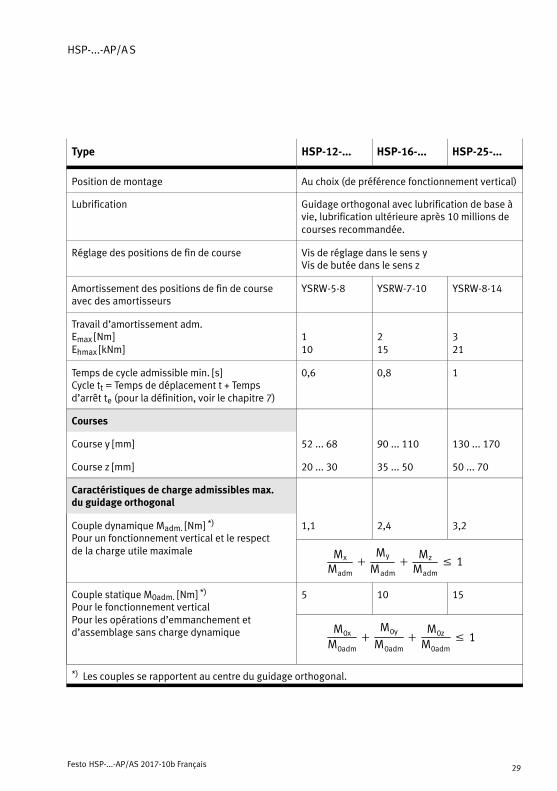
Type HSP-25-...HSP-16-...HSP-12-...
Position de montage Au choix (de préférence fonctionnement vertical)
Lubrification Guidage orthogonal avec lubrification de base àvie, lubrification ultérieure après 10 millions decourses recommandée.
Réglage des positions de fin de course Vis de réglage dans le sens yVis de butée dans le sens z
Amortissement des positions de fin de courseavec des amortisseurs
YSRW-5-8 YSRW-7-10 YSRW-8-14
Travail d’amortissement adm.Emax [Nm]Ehmax [kNm]
110
215
321
Temps de cycle admissible min. [s]Cycle tt = Temps de déplacement t + Tempsd’arrêt te (pour la définition, voir le chapitre 7)
0,6 0,8 1
Courses
Course y [mm] 52 ... 68 90 ... 110 130 ... 170
Course z [mm] 20 ... 30 35 ... 50 50 ... 70
Caractéristiques de charge admissibles max.du guidage orthogonal
Couple dynamique Madm. [Nm] *)
Pour un fonctionnement vertical et le respectde la charge utile maximale
1,1 2,4 3,2
Mx
Madm
�My
Madm
�Mz
Madm
� 1
Couple statique M0adm. [Nm] *)
Pour le fonctionnement verticalPour les opérations d’emmanchement etd’assemblage sans charge dynamique
5 10 15
M0x
M0adm
�
M0y
M0adm
�M0z
M0adm
� 1
*) Les couples se rapportent au centre du guidage orthogonal.

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français30
Type HSP-12-... HSP-16-... HSP-25-...
Charge adm. max. en cas d’entraînement externe
Effort axial sur l’arbre d’entraînement FYadm. [N] 18 30 50
Effort radial sur l’arbre d’entraînement FZadm.[N]
45 75 120
Couple d’entraînement MYadm. [Nm] 1,25 2,5 5
Emissions sonores selon DIN 45635 *)
LpAeq [dBA]Niveau sonore selon la perception sonore, (correspond au niveau sonore DIN CEI 804)
64 67 73
LpAeq [dBA]Composantes impulsionnelles des bruits dedéplacement, (correspond au niveau sonored’impulsion DIN CEI 804)
75 78 84
*) Mesurées pour une course max., 6 bars, fréquence de cycle 1/s, masse supplémentaire 0,3 kgPondération de fréquence A
HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français 31
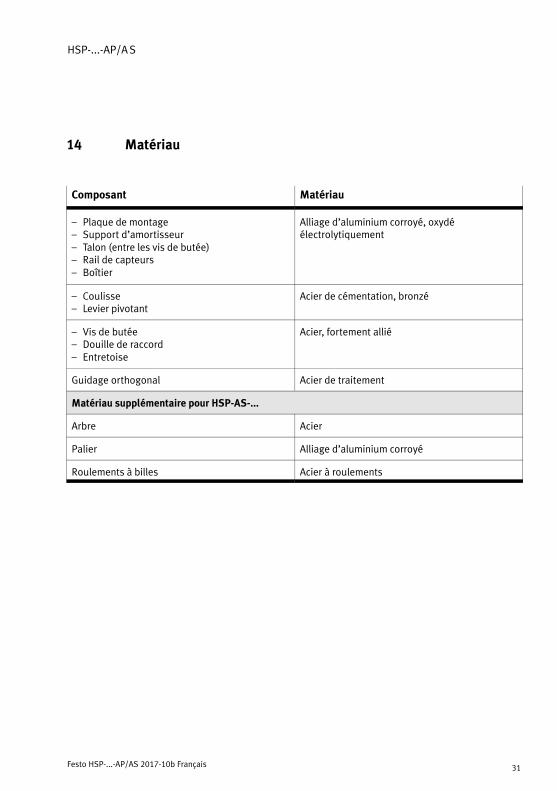
14 Matériau
Composant Matériau
– Plaque de montage– Support d’amortisseur– Talon (entre les vis de butée)– Rail de capteurs– Boîtier
Alliage d’aluminium corroyé, oxydéélectrolytiquement
– Coulisse– Levier pivotant
Acier de cémentation, bronzé
– Vis de butée– Douille de raccord– Entretoise
Acier, fortement allié
Guidage orthogonal Acier de traitement
Matériau supplémentaire pour HSP-AS-...
Arbre Acier
Palier Alliage d’aluminium corroyé
Roulements à billes Acier à roulements
HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b Français32
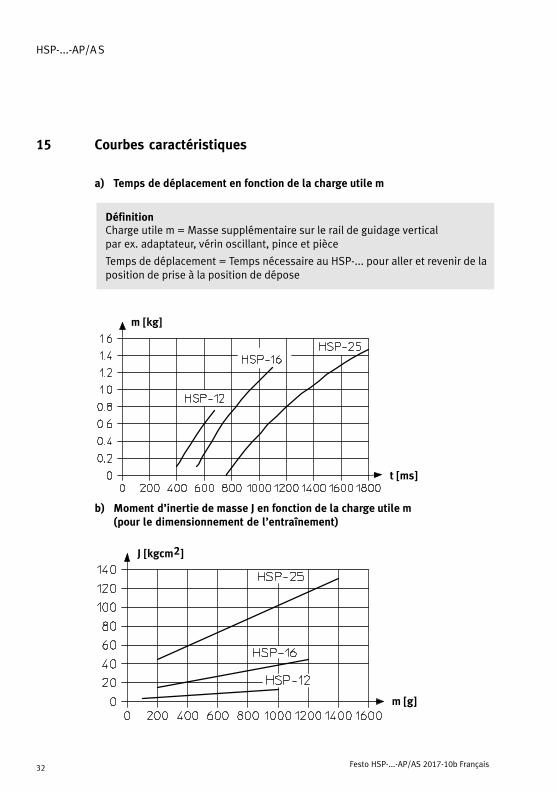
15 Courbes caractéristiques
a) Temps de déplacement en fonction de la charge utile m
DéfinitionCharge utile m = Masse supplémentaire sur le rail de guidage vertical par ex. adaptateur, vérin oscillant, pince et pièce
Temps de déplacement = Temps nécessaire au HSP-... pour aller et revenir de laposition de prise à la position de dépose
m [kg]
t [ms]
b) Moment d’inertie de masse J en fonction de la charge utile m (pour le dimensionnement de l’entraînement)
J [kgcm2]
m [g]

HSP-...-AP/A S
Festo HSP-...-AP/AS 2017-10b 33

Toute communication ou reproduction de ce document, sous quelqueforme que ce soit, et toute exploitation ou communication de soncontenu sont interdites, sauf autorisation écrite expresse. Toutmanquement à cette règle est illicite et expose son auteur auversement de dommages et intérêts. Tous droits réservés pour le casde la délivrance d’un brevet, d’un modèle d’utilité ou d’un modèle deprésentation.
Copyright:Festo AG & Co. KGRuiter Straße 8273734 EsslingenAllemagne
Phone:+49 711 347-0
Fax:+49 711 347-2144
E-mail:[email protected]
Internet:www.festo.com





























