Embed Size (px)
Citation preview

Univerza v LjubljaniFakulteta za matematiko in ziko
Oddelek za ziko
Seminar Ia, £etrti letnik, stari program
Molekularni motor dinein
Avtor: Miha JurasMentor: asist. dr. Andreja arlah
Ljubljana, oktober 2013
Povzetek
V prvem delu seminarja predstavim motivacijo za obravnavo molekularnih motorjev s poudarkom
na dineinu. Obravnavam njegov pomen za organizem in njegovo kompleksno strukturo, zaradi katere
je ²e najmanj raziskan. Predstavim moºen potek kroºne spremembe in njeno energetsko bilanco. V
drugem delu obravnavam elasto-mehanske lastnosti noge dineina v Kirchhoovi teoriji deformacije,
ki jo uporabim za izra£un upogiba in deformacijske energije noge pri znani sili.

Kazalo
1 Uvod 2
2 Molekularni motorji 3
2.1 Struktura dineina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Kroºna sprememba v koraku dineina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 Energija hidrolize ATP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Mehanske lastnosti dineina 6
3.1 Dimenzijske razseºnosti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2 Persisten£na dolºina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.3 Kirchhoova teorija deformacije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.4 Deformacija noge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.5 Vpliv deformacije noge na celotni dinein . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Zaklju£ek 10
1 Uvod
V vsakdanjem ºivljenju nam je samoumevno, da se gibamo, saj imamo mi²ice in kosti, ki nam to gibanjeomogo£ajo. Samoumevno nam je tudi, da se v na²em telesu dogajajo biolo²ki procesi kot so transportsnovi, celi£ne delitve, proizvodnja za ºivljenje potrebnih proteinov, itd. Svojim otrokom ob£asno prikaºemrisani lm Neko£ je bilo . . . ºivljenje[1], kjer so prikazani razli£ni procesi v na²em telesu, ki jih opravljajorisani junaki, kar pa pravzaprav ni dale£ od resnice.
Mehansko delo v celicah opravljajo biolo²ki motorji[2]. Njihovo delovanje bi lahko opisal kot toplotnestroje, ki v kroºni spremembi ob izgorevanju snovi opravljajo delo, v okolico pa oddajo odve£no toploto.Ker pa so to motorji, ki delujejo v sami celici, opravljajo transport med celi£nimi organeli in so sestavljeniiz nekaj molekul, vsakdanji (fenomenolo²ki) opis ne zadostuje.
Resnici se pribliºamo, £e biolo²ke motorje poimenujemo kar molekularne motorje, saj so sestavljeniiz ene (monomeri), dveh (dimeri) in redko ve£jih molekul[3]. S sodelovanjem (katalizo) pri gorenjuceli£nega goriva - hidrolizi adenozin trifosfata (ATP) v adenozin difosfat (ADP) - izkoristijo spro²£enoenergijo za spremembo svoje oblike. Energijsko gledano molekularni motor iz ene potencialne jamesko£i v sosednjo potencialno jamo in s tem povzro£i porast natezne sile. Nadaljujemo lahko, da se takopridobljena deformacijska energija sprosti s premikom tovora, torej z opravljenim delom, kar bi lahkoprimerjali z raztegnjeno vzmetjo, ki z relaksacijo sprosti proºnostno energijo in opravi mehansko delo.
Molekularne motorje delimo[4] na citoskeletne motorje, ki se opirajo na celi£ni skelet, motorje, kiaktivno sodelujejo pri polimerizaciji aktina, rotirajo£e motorje, ki vrtijo bi£ke, in aminokislinske motorje,ki skrbijo za raznovrstne naloge povezane z DNK in RNK.
Od treh glavnih druºin citoskeletnih molekularnih motorjev, miozina, kinezina in dineina, najmanjpoznamo delovanje dineina (slika 1), £igar lastnosti in mehanizmi so tema pri£ujo£ega seminarja.
Slika 1: Dinein brez tovora, ki hodi vzdolº mikrotubula. Izrez naslovnice Science 4. marec 2011.
2
2 Molekularni motorji
Kot vsi drugi proteini imajo tudi proteini, ki omogo£ajo aktivno delo v celicah, svoj zapis v dednemmaterialu celice, ki se spreminja ºe na milijone let, kar posledi£no pomeni, da se spreminja tudi strukturamolekularnih motorjev, vendar so si v osnovni funkcionalnosti ostali enaki. Molekularni motorji soproteini z encimsko vlogo pri hidrolizi ATP s skupnim imenom ATPaze. Pri sami katalizi reakcije seoblika proteina/encima spremeni in ob zunanji opori, na katero se protein opira, to spremembo pretvoriv mehansko delo. Lastnost encimov je, da se ob kemijski reakciji, ki jo katalizirajo, sami ne obrabijoin tako lahko vstopijo v novo reakcijo. Podobne cikli£ne spremembe so nam poznane pri motorjih znotranjim izgorevanjem, zato za encime, ki kemijsko energijo, shranjeno v ATP, cikli£no pretvarjajo vmehansko delo, uporabljamo izraz molekularni motorji.
Prvi izolirani molekularni motor je bil miozin, ki poganja kr£enje mi²ic. Leta 1864 je Kuhne ssodelavci uspe²no lo£ili miozin kot kompleks skupaj s lalmenti aktina, leta 1940 pa je bil komplekslo£en na posamezne beljakovine, miozin in aktin. Dinein, ki poganja bitje bi£kov in migetalk, je bilodkrit leta 1963. Kinezin, ki premika organele znotraj celic, pa v letu 1985. Vsi trije predstavljajotemeljne druºine citoskeletnih molekularnih motorjev. Od prvih odkritij do danes se je tempo novihdognanj le pospe²eval na ra£un vse bolj²ih postopkov v vseh vedah naravoslovja, kot so sekvenciranjecelotnih genomov, krio-elektronska mikroskopija, tomograja, ...
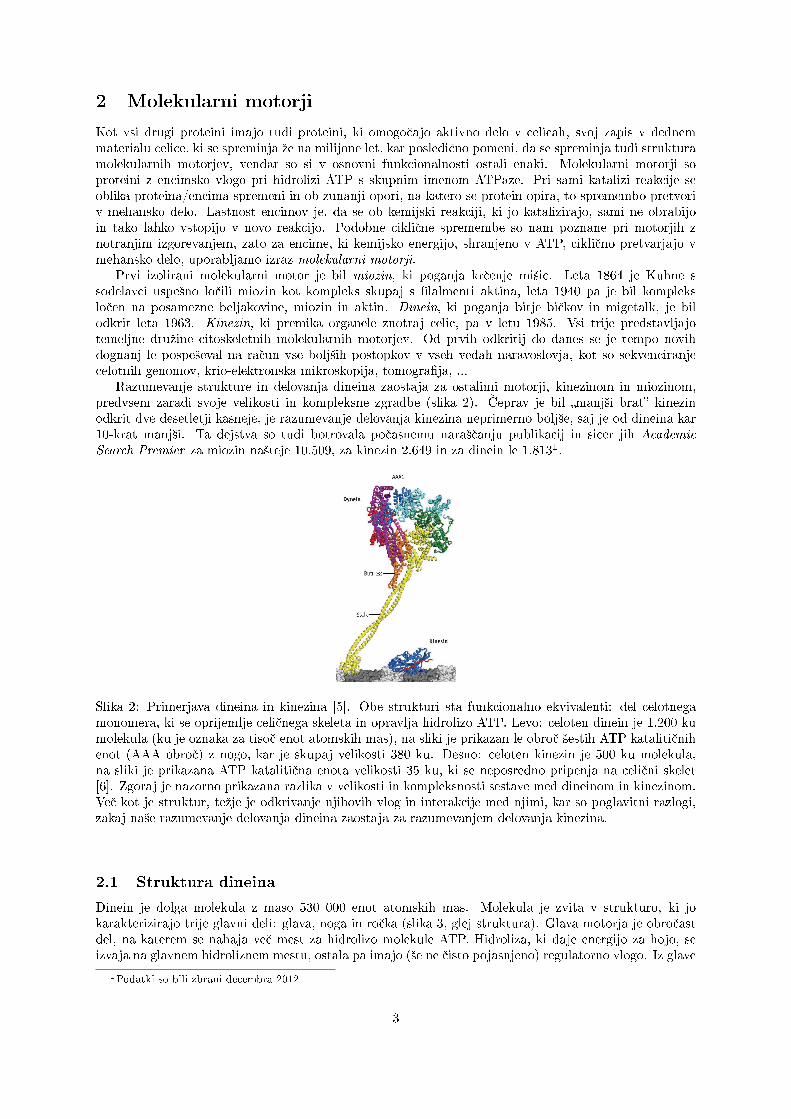
Razumevanje strukture in delovanja dineina zaostaja za ostalimi motorji, kinezinom in miozinom,predvsem zaradi svoje velikosti in kompleksne zgradbe (slika 2). eprav je bil manj²i brat kinezinodkrit dve desetletji kasneje, je razumevanje delovanja kinezina neprimerno bolj²e, saj je od dineina kar10-krat manj²i. Ta dejstva so tudi botrovala po£asnemu nara²£anju publikacij in sicer jih Academic
Search Premier za miozin na²teje 10.509, za kinezin 2.649 in za dinein le 1.8131.
Slika 2: Primerjava dineina in kinezina [5]. Obe strukturi sta funkcionalno ekvivalenti: del celotnegamonomera, ki se oprijemlje celi£nega skeleta in opravlja hidrolizo ATP. Levo: celoten dinein je 1.200 kumolekula (ku je oznaka za tiso£ enot atomskih mas), na sliki je prikazan le obro£ ²estih ATP kataliti£nihenot (AAA obro£) z nogo, kar je skupaj velikosti 380 ku. Desno: celoten kinezin je 500 ku molekula,na sliki je prikazana ATP kataliti£na enota velikosti 35 ku, ki se neposredno pripenja na celi£ni skelet[6]. Zgoraj je nazorno prikazana razlika v velikosti in kompleksnosti sestave med dineinom in kinezinom.Ve£ kot je struktur, teºje je odkrivanje njihovih vlog in interakcije med njimi, kar so poglavitni razlogi,zakaj na²e razumevanje delovanja dineina zaostaja za razumevanjem delovanja kinezina.
2.1 Struktura dineina
Dinein je dolga molekula z maso 530 000 enot atomskih mas. Molekula je zvita v strukturo, ki jokarakterizirajo trije glavni deli: glava, noga in ro£ka (slika 3, glej struktura). Glava motorja je obro£astdel, na katerem se nahaja ve£ mest za hidrolizo molekule ATP. Hidroliza, ki daje energijo za hojo, seizvaja na glavnem hidroliznem mestu, ostala pa imajo (²e ne £isto pojasnjeno) regulatorno vlogo. Iz glave
1Podatki so bili zbrani decembra 2012
3
motorja izhaja noga. Njen prosti konec se lahko veºe na MT, mo£ vezave oziroma aniteta do vezavepa je odvisna od stopnje hidrolize ATP. Na nasprotnem koncu glave izhaja ro£ka. Njen togi del se tesnoprilega eni strani glave, nato pa se nadaljuje v eksibilen rep, na katerega se veºe tovor. Ro£ka je glavnimehanski element motorja, saj je konformacijska sprememba pod vplivom hidrolize ATP povezana ravnos spremembo poloºaja ro£ke.
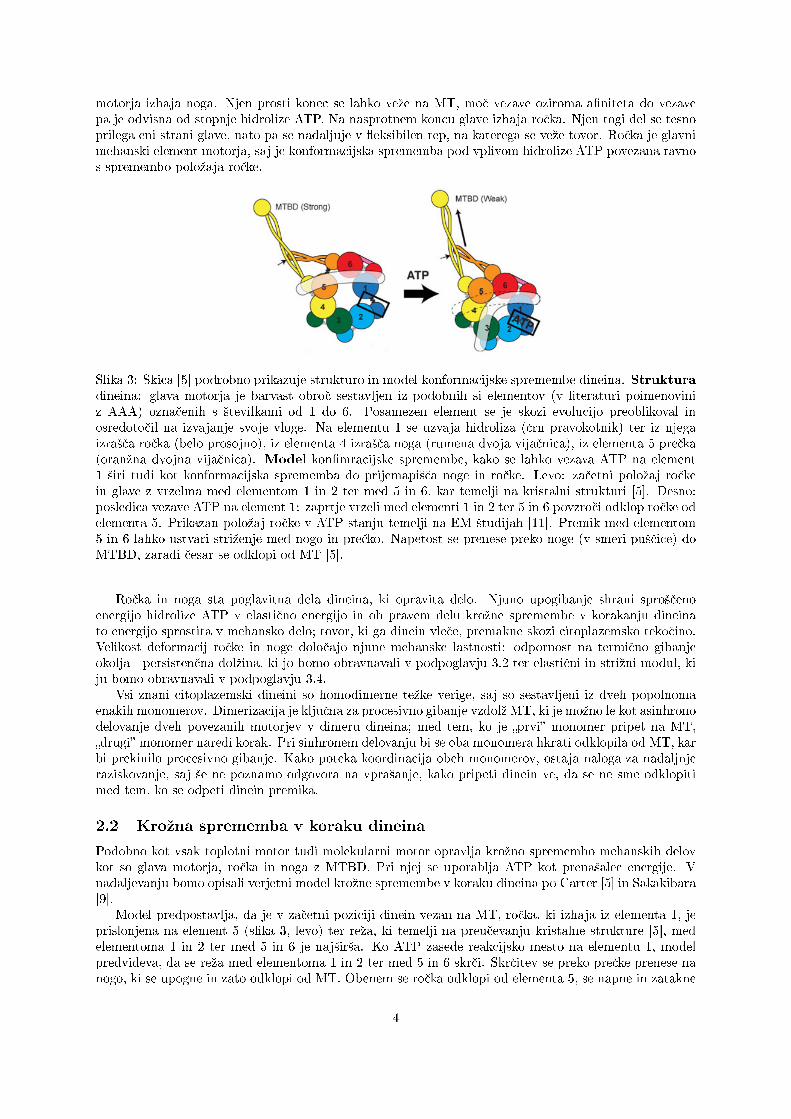
Slika 3: Skica [5] podrobno prikazuje strukturo in model konformacijske spremembe dineina. Strukturadineina: glava motorja je barvast obro£ sestavljen iz podobnih si elementov (v literaturi poimenoviniz AAA) ozna£enih s ²tevilkami od 1 do 6. Posamezen element se je skozi evolucijo preoblikoval inosredoto£il na izvajanje svoje vloge. Na elementu 1 se uzvaja hidroliza (£rn pravokotnik) ter iz njegaizra²£a ro£ka (belo prosojno), iz elementa 4 izra²£a noga (rumena dvoja vija£nica), iz elementa 5 pre£ka(oranºna dvojna vija£nica). Model konmracijske spremembe, kako se lahko vezava ATP na element1 ²iri tudi kot konformacijska sprememba do prijemapi²£a noge in ro£ke. Levo: za£etni poloºaj ro£kein glave z vrzelma med elementom 1 in 2 ter med 5 in 6, kar temelji na kristalni strukturi [5]. Desno:posledica vezave ATP na element 1: zaprtje vrzeli med elementi 1 in 2 ter 5 in 6 povzro£i odklop ro£ke odelementa 5. Prikazan poloºaj ro£ke v ATP stanju temelji na EM ²tudijah [11]. Premik med elementom5 in 6 lahko ustvari striºenje med nogo in pre£ko. Napetost se prenese preko noge (v smeri pu²£ice) doMTBD, zaradi £esar se odklopi od MT [5].
Ro£ka in noga sta poglavitna dela dineina, ki opravita delo. Njuno upogibanje shrani spro²£enoenergijo hidrolize ATP v elasti£no energijo in ob pravem delu kroºne spremembe v korakanju dineinato energijo sprostita v mehansko delo; tovor, ki ga dinein vle£e, premakne skozi citoplazemsko teko£ino.Velikost deformacij ro£ke in noge dolo£ajo njune mehanske lastnosti: odpornost na termi£no gibanjeokolja - persisten£na dolºina, ki jo bomo obravnavali v podpoglavju 3.2 ter elasti£ni in striºni modul, kiju bomo obravnavali v podpoglavju 3.4.
Vsi znani citoplazemski dineini so homodimerne teºke verige, saj so sestavljeni iz dveh popolnomaenakih monomerov. Dimerizacija je klju£na za procesivno gibanje vzdolº MT, ki je moºno le kot asinhronodelovanje dveh povezanih motorjev v dimeru dineina; med tem, ko je prvi monomer pripet na MT,drugi monomer naredi korak. Pri sinhronem delovanju bi se oba monomera hkrati odklopila od MT, karbi prekinilo procesivno gibanje. Kako poteka koordinacija obeh monomerov, ostaja naloga za nadaljnjeraziskovanje, saj ²e ne poznamo odgovora na vpra²anje, kako pripeti dinein ve, da se ne sme odklopitimed tem, ko se odpeti dinein premika.
2.2 Kroºna sprememba v koraku dineina
Podobno kot vsak toplotni motor tudi molekularni motor opravlja kroºno spremembo mehanskih delovkot so glava motorja, ro£ka in noga z MTBD. Pri njej se uporablja ATP kot prena²alec energije. Vnadaljevanju bomo opisali verjetni model kroºne spremembe v koraku dineina po Carter [5] in Sakakibara[9].
Model predpostavlja, da je v za£etni poziciji dinein vezan na MT, ro£ka, ki izhaja iz elementa 1, jeprislonjena na element 5 (slika 3, levo) ter reºa, ki temelji na preu£evanju kristalne strukture [5], medelementoma 1 in 2 ter med 5 in 6 je naj²ir²a. Ko ATP zasede reakcijsko mesto na elementu 1, modelpredvideva, da se reºa med elementoma 1 in 2 ter med 5 in 6 skr£i. Skr£itev se preko pre£ke prenese nanogo, ki se upogne in zato odklopi od MT. Obenem se ro£ka odklopi od elementa 5, se napne in zatakne
4
na element 2 (slika 3, desno), kar od MT odklopljeni dinein potisne naprej proti negativnemu koncuMT. S tem se zaklju£i potek hidrolize. Ker je noga prosta, v njej ni ve£ napetosti, se ji povrne vezavnasposobnost za vezavo na MT. Ob vezavi na MT se sprosti ADT in fosfat, reºa med elementoma 1 in 2ter 5 in 6 se raz²iri. Posledi£no se napeta ro£ka sproºi, kar ustvari silo, ki potegne tovor naprej. Sedajse cikel ponovi za sosednji dinein.
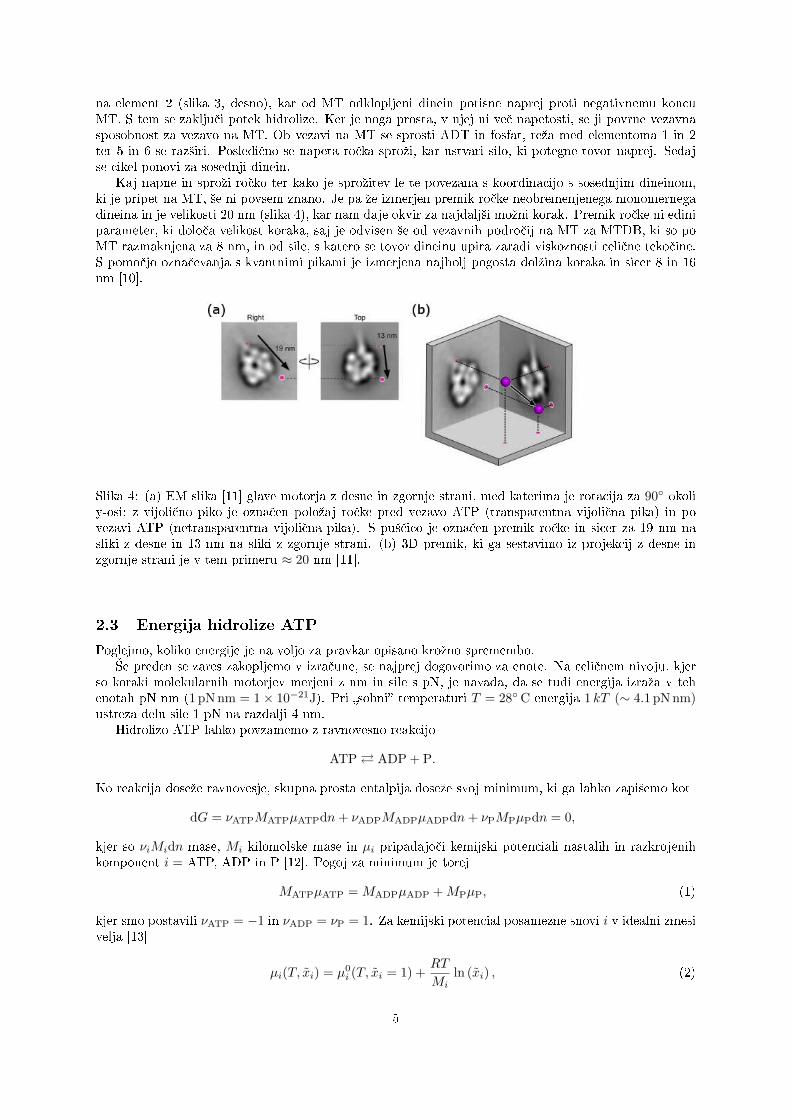
Kaj napne in sproºi ro£ko ter kako je sproºitev le te povezana s koordinacijo s sosednjim dineinom,ki je pripet na MT, ²e ni povsem znano. Je pa ºe izmerjen premik ro£ke neobremenjenega monomernegadineina in je velikosti 20 nm (slika 4), kar nam daje okvir za najdalj²i moºni korak. Premik ro£ke ni ediniparameter, ki dolo£a velikost koraka, saj je odvisen ²e od vezavnih podro£ij na MT za MTDB, ki so poMT razmaknjena za 8 nm, in od sile, s katero se tovor dineinu upira zaradi viskoznosti celi£ne teko£ine.S pomo£jo ozna£evanja s kvantnimi pikami je izmerjena najbolj pogosta dolºina koraka in sicer 8 in 16nm [10].
Slika 4: (a) EM slika [11] glave motorja z desne in zgornje strani, med katerima je rotacija za 90 okoliy-osi; z vijoli£no piko je ozna£en poloºaj ro£ke pred vezavo ATP (transparentna vijoli£na pika) in povezavi ATP (netransparentna vijoli£na pika). S pu²£ico je ozna£en premik ro£ke in sicer za 19 nm nasliki z desne in 13 nm na sliki z zgornje strani. (b) 3D premik, ki ga sestavimo iz projekcij z desne inzgornje strani je v tem primeru ≈ 20 nm [11].
2.3 Energija hidrolize ATP
Poglejmo, koliko energije je na voljo za pravkar opisano kroºno spremembo.e preden se zares zakopljemo v izra£une, se najprej dogovorimo za enote. Na celi£nem nivoju, kjer
so koraki molekularnih motorjev merjeni z nm in sile s pN, je navada, da se tudi energija izraºa v tehenotah pN nm (1 pN nm = 1× 10−21J). Pri sobni temperaturi T = 28 C energija 1 kT (∼ 4.1 pN nm)ustreza delu sile 1 pN na razdalji 4 nm.
Hidrolizo ATP lahko povzamemo z ravnovesno reakcijo
ATP ADP + P.
Ko reakcija doseºe ravnovesje, skupna prosta entalpija doseºe svoj minimum, ki ga lahko zapi²emo kot
dG = νATPMATPµATPdn+ νADPMADPµADPdn+ νPMPµPdn = 0,
kjer so νiMidn mase, Mi kilomolske mase in µi pripadajo£i kemijski potenciali nastalih in razkrojenihkomponent i = ATP, ADP in P [12]. Pogoj za minimum je torej
MATPµATP = MADPµADP +MPµP, (1)
kjer smo postavili νATP = −1 in νADP = νP = 1. Za kemijski potencial posamezne snovi i v idealni zmesivelja [13]
µi(T, xi) = µ0i (T, xi = 1) +
RT
Miln (xi) , (2)
5

kjer µ0i kemijski potencial £iste snovi i (takrat je xi = 1) in xi molska koncentracija snovi i v zmesi, za
katero velja
xi =mi/Mi∑j mj/Mj
.
Molsko koncentracijo xi lahko zapi²emo tudi s kemiku znano notacijo kot [i], le da jo bomo v nadaljevanjuuporabljali kot brezdimenzijsko molsko koncentracijo. Ko vstavimo (2) v (1) lahko zapi²emo standardnoprosto entalpijo kot
∆Geq =1
NA
(MADPµ
0ADP +MPµ
0P −MATPµ
0ATP
)= −kT ln
[ADP ]eq · [P ]
eq
[ATP ]eq ,
kjer so [ADP ]eq, [P ]
eq in [ATP ]eq ravnovesne molske koncentracije. Te dolo£ajo ravnovesno konstanto
hidrolize Keq in standardno prosto entalpijo ∆Geq
Keq =[ADP]
eq · [P]eq
[ATP]eq = 4.9× 105,
∆Geq = −kT lnKeq = −13 kT.
Vrednost ravnovesne konstante Keq pri£akovano favorizira ADP in P pred ATP, saj dobro gorivo je tistoki rado gori.
V okolju celice, kjer so izmerjene koncentracije [ATP]c ∼ 1 mM, [ADP]c ∼ 10 µM in [P]c ∼ 1 mMdale£ od ravnovesnih, prosta entalpija nima minimuma, zato velja
dG = −MATPµATPdn+MADPµADPdn+MPµPdn 6= 0.
e ponovimo postopek in izraz (2) za kemijski potencial vstavimo v zgornjo ena£bo, dobimo
∆G = ∆Geq − kT ln[ATP]
c
[ADP]c · [P]
c = ∆Geq −∆Gc,
∆Gc = 12kT.
Torej koncentracije v celici [ATP]c, [ADP]c in [P] postavijo prosto entalpijo dosti vi²je kot je standardnaprosta entalpija. Tak porast je posledica neravnovesnih koncentracij v celici, te pa so posledica celi£negametabolizma, ki vzdrºuje visoko koncentracijo ATP.
Pri hidrolizi enega ATP v ADP se tako sprosti ∆Geq − ∆Gc = −25 kT ∼ −100 pN nm energije.e z opti£nimi pastmi na motor delujemo z maksimalno silo (7 pN), pri kateri se motor ²e premikanaprej z najmanj²imi koraki (8 nm), opravi delo 56 pN nm. e za en korak porabi energijo enega ATP,ima molekularni motor izkoristek ∼ 50% [2]. Za primerjavo imajo motorji na notranje izgorevanje vtermodinamski limiti (kot idealen Carnojev stroj) izkoristek 37%, v realnosti pa doseºejo le 10-20% [14].Primerjava je zanimiva, vendar ne primerjamo enakovrednih principov, saj pri dineinu ni dela zaradiraztegovanja vro£ega plina. Princip je bolj podoben gorivnim celicam, ki pa imajo izkoristek med 40%in 60% [15].
3 Mehanske lastnosti dineina
Pri natan£nej²i obravnavi delovanja dineina, se nam zastavljajo vpra²anja, kak²no vlogo igra noga, ali joje potrebno obravnavati kot tog ali elasti£en element in za koliko se upogne, ko je izpostavljena sili terkoliko energije, ki je spro²£ena pri hidrolizi, se porabi za njeno deformacijo. Da bi lahko odgovorili nazastavljena vpra²anja bomo najprej pogledali dimenzijske lastnosti, ocenili togost oz. elasti£nost noge,obnovili Kirchhoovo teorijo deformacije in na koncu izra£unali upogib in energijo, ki je za deformacijonoge potrebna.
3.1 Dimenzijske razseºnosti
Vzdolºna dimenzija noge je 10 nm (od stika pre£ke in noge do MTBD), do£imer pre£na dimenzija noge je1 nm. Pre£ni presek noge bomo obravnavali kot kroºni presek s premerom 1 nm. Zaradi takega razmerjalahko nogo dineina ²e obravnavamo kot tanko palico.
6

3.2 Persisten£na dolºina
Persisten£na dolºina je osnovna mehanska lastnost, ki opredeli togost polimera oz. v na²em primeruzavite vija£nice pre£ke in noge.
Fenomenolo²ki opis persisten£ne dolºine je, da za kose iz polimerov, ki so kraj²i od persisten£nedolºine, se molekula obna²a podobno kot upogljiva elasti£na palica, medtem ko za dalj²e, lahko dolo£imolastnosti le statisti£no kot naklju£en tridimenzionalni hod (slika 5). Formalno je persisten£na dolºina
Slika 5: Prikaz obna²anja polimera v treh reºimih njegove dolºine L v primerjavi s persisten£no dolºinoLp
Lp denirana kot dolºina, nad katero se zaradi termike okolja izgubi korelacija v smeri tangente. edolo£imo kot θ med tangentama v izhodi²£u l = 0 in na razdalji l = L, se lahko dokaºe, da pri£akovanavrednost kosinusa kota pada eksponentno z razdaljo [16]
〈cos θ〉 = e−L/Lp .
Persisten£no dolºino lahko izrazimo tudi z Youngovim modulom elasti£nosti E in vztrajnostnim momen-tom preseka I
Lp =EI
kT. (3)
Persisten£na dolºina pri sobni temperaturi za dvojne vija£nice, kot so DNK je Lp = 50 nm [17], tropo-miozin Lp = 50 − 200 nm, miozin in paramiozin Lp = 130 nm [2]. Iz slednjega lahko privzamemo, danogo, ki v celoti meri 15 nm in je podobne strukture, lahko obravnavamo kot upogljivo palico, zaradi£esar lahko njeno deformacijo obravnavamo s Kirchoovo teorijo deformacij.
3.3 Kirchhoova teorija deformacije
Torzija in ukrivljanje tankih palic sta sklopljeni v Kirchhoovi teoriji deformacije lalmentov, ki je enaod temeljev elastomehanike, katere poudarke bi na tem mestu obnovili [19, 20].
Vzemimo palico poljubne oblike (ukrivljenosti) in v vsaki to£ki palice denirajmo koordinatni sistem.Enotski vektor vzdolº palice ozna£imo z d3, ravnino, ki je pravokotna nanj, pa opi²emo z d1 in d2.Slednji dve smeri vzamemo tako, da sovpadata z glavnimi smermi tenzorja vztrajnostnega momentapreseka palice. Palico smo parametrizirali z naravnim parametrom l in jo zapi²emo kot r(l), ki je vnaslednji relaciji z tangentnim vektorjem
d3(l) =dr(l)
dl= r(l).
V nadaljevanju bomo odvod po naravnem parametru l ozna£evali s piko, torej ddl () = ().
V stacionarnem stanju se po palici baza di(l) vrti zaradi deformacije. e deformacijo zapi²emo zrotacijsko matriko R, parametrizirano z Eulerjevimi koti
φ(l) = (ϕ(l), θ(l),Ψ(l)),
kot je prikazano na naslednji strani (slika 6), deformacijo baze di zapi²emo kot
di(l) = R(φ(l))d0i = R(l)d0
i ,
7

Slika 6: Z Eulerjevimi koti ϕ, θ in Ψ zapi²emo rotacijo baze di [20]. Baza di na za£etku palice (l = 0)je ozna£ena z enotskimi vektorji d0
1 = ex, d02 = ey in d0
3 = ez.
kjer je d0i baza di na za£etku palice pri l = 0 oz. d0
i = di(l = 0). Spreminjanje baze di po naravnemparametru l lahko sedaj zapi²emo z vektorjem Ω(l), kjer velja
di =d
dl
(Rd0
i
)= Rd0
i = RRTRd0i = RRTdi = Ω× di.
Zaradi preglednosti v zgornjem zapisu namenoma izpustimo funkcijsko odvisnost od l in zato zapi²emonpr. di(l) kot di in Ω(l) kot Ω.
Komponente vektorja Ω(l) so ukrivljenosti palice κ1(l) in κ2(l) v smeri d1 in d2 ter torzija τ(l) okolid3, kar lahko skupaj zapi²emo kot
Ω = Ω1d1 + Ω2d2 + Ω3d3 = κ1d1 + κ2d2 + τd3,
κ1 = ϕ sin θ sin Ψ + θ cos Ψ,
κ2 = ϕ sin θ cos Ψ− θ sin Ψ,
τ = ϕ cos θ + Ψ.
Ker predpostavimo, da ni zunanjih navorov in sil, ki bi delovale po dolºini palice, kot je recimo teºnost,lahko zapi²emo ohranitvena zakona
F = 0, (4)
M = −d3 × F. (5)
Zgornji ena£bi opravi£imo na naslednji na£in: (4) na vsak pre£ni izsek palice v stacionarnem stanju morabiti rezultanta sil enaka ni£, torej se zunanja sila F nespremenjeno prena²a po vsej dolºini palice, (5)na vsak pre£ni izsek palice dolºine dl na obeh ploskvah izseka prijemljeta nasprotno enaki si sili in £epostavimo izhodi²£e v sredini izseka, sila F prijemlje v −d3/2 od izhodi²£a ter sila −F prijemlje v d3/2od izhodi²£a. Vsota njunih navorov je enaka zgornjemu zapisu.
Gostota proste energije deformirane palice je
f = f0 +1
2EI1κ
21 +
1
2EI2κ
22 +
1
2µJτ2,
kjer so E Youngov modul, µ striºni modul, Ii lastne vrednosti tenzorja vztrajnostnega momenta ter κiin τ komponente vektorja Ω. Delo, ki ga opravi zunanji navor na posamezen pre£ni izsek palice je
dW = dM · φ(l),
kar upo²tevam v prosti energiji celotne palice
F =
∫ L
0
f(φ, φ)dl
=
∫ L
0
(1
2EI1κ
21 +
1
2EI2κ
22 +
1
2µJτ23
)dl −
∫ L
0
dM
dl· φdl.
8

Z Lagrangejevim formalizmom lahko iz proste energije dobim ena£be stanja, kjer so konjugirane spre-menljivke kar Eulerjevi koti φ in njihovi odvodi φ po naravnem parametru palice l
d
dl
(∂f
∂φ
)=∂f
∂φ.
Nadaljnje izpeljave privedejo do ena£be za navor M(l), kjer predpostavljamo, da so lastnosti palice E,µ, Ii in J konstantne po celi dolºini. Tako set ena£b
F(l) = 0 ⇒ F(l) = F = konst.,
M(l) = −d3(l)× F(l), (6)
di(l) = Ω(l)× di(l) i = 1, 2, 3 in
M(l) = EI1κ1(l)d1(l) + EI2κ2(l)d2(l) + µJτ(l)d3(l)
zaobjema stacionarno ena£bo stanja palice. e poenostavimo, da ima palica kroºni presek, kjer veljaI1 = I2 = J/2 = πR4/4, lahko dobimo tudi njeno obliko iz ena£b za d3(l):
d3(l) = r(l),
d3(l) =1
EIM(l)× d3(l), (7)
F(l) = 0,
M(l) = −d3(l)× F.
Pri izrazu za d3(l) = Ω× d3 smo uporabili identiteto
Ω(l) =1
EIM(l) +
(1
µJ− 1
EI
)(M(l) · d3(l)
)d3(l),
zato pri vektorskem mnoºenju z d3(l) zadnji £len odpade.Dobljene ena£be stanja (7) so zapisane samo s silo, navorom in tangencialno smerjo ter njunimi odvodi,
kar pa lahko ob znanih za£etnih vrednostih spretno uporabimo pri re²evanju z numeri£nimi metodami.Analiti£ne re²itve so sicer pridobljive s pomo£jo analogije z vrtenjem osno simetri£nega togega telesain so v splo²nem izpeljane kot odvisnost Eulerjevih kotov od elipti£nih funkcij in nepopolnih elipti£nihintegralov [20]. Ena£be stanja (7) niso odvisne od torzijske vztrajnosti palice µJ niti od d1 in d2, saj
Slika 7: Euler je ºe v polnosti raziskal ravninske deformacije tanke palice [20]. eprav so oblike lepegaizgleda, pa niso intuitivne. Na²a izku²nja pravi, da pri tako ob£utnem ukrivljanju palica rada pobegnev tretjo dimenzijo, kar je posledica ne komplanarnosti robnih pogojev in torzije. V prvem primeru smernavektorja dl=0
3 in dl=L3 pri danih poloºajih obeh robov palice rl=0 in rl=L ne leºita v isti ravnini. V drugem
primeru pa dovolj²nja torzija povzro£i torzijsko nelinearnost, ki povzro£i zvijanje palice v plektonemo,kar pa lahko sre£amo pri DNK. V celi£nem okolju do takih ukrivljanj noge dineina ne pride, so pa oblikepodobne odsekom zgornjih krivulj, kar nazorno prikaºe slika 8.
9

so zapisane za palico s kroºnim presekom, kjer lahko smeri d1 in d2 izbiramo poljubno in zato mora bitikon£na oblika palice invariantna na rotacijo okoli d3, kar pa hkrati pomeni tudi, da je neodvisna od d1
in d2 ter torzijske vztrajnosti. To sicer ne pomeni, da je oblika neodvisna od torzije τ .V posebnem primeru, ko je zunanji navor pravokoten na ravnino, ki jo dolo£ata zunanja sila in
tangenta palice d3, se palica upogiba v tej ravnini (slika 7). e nadaljujemo s poenostavitvijo, kjer soodmiki palice od nedeformirane oblike majhni, lahko ena£bo stanja lineariziramo v Bernoulijevo ena£bo
EId4y
dx4= −Fδ(x− L). (8)
3.4 Deformacija noge
e poenostavimo, da je dinein z nogo pritrjen na mikrotubul in da so dinein, njegova noga in mikrotubulna isti ravnini, sistema ne moremo obravnavati kot ravninskega, saj se npr. levi dinein opira na desnega,ki pa v splo²nem ni v isti ravnini. Tako je problem deformacije noge trirazseºen in je Euler-Kirchhoovateorija minimalna zahteva za pravilno obravnavo stati£nega ravnovesja sistema.
Za ponazoritev uporabnosti opisane deformacije lahko za primer dineina izra£unamo deformacijo innjeno energijo pri znani sili opti£ne pincete (npr. 5 pN). Upogibno vztrajnost EI bomo nadomestili spersisti£no dolºino iz izraza (3), kjer bomo vzeli srednjo vrednost za tropomiozin in sicer Lp = 100 nm.Za torzijsko vztrajnost µJ lahko uporabimo izmerjene vrednosti za DNK in sicer µJ = 410 pN nm2
[21]. Robne pogoje za re²evanje diferencialnih ena£b (7) nastavimo tako, da je noga pripeta na MT podvpadnim kotom 30 [18], konstantna sila deluje vzporedno z MT, torej v smeri −x.
r(0) =(0, 0, 0
)nm,
d3(0) =(
sin 30, cos 30, 0),
M(0) =(0, 0, 0
)pN nm,
F =(− 5, 0, 0
)pN
Z numeri£no integracijo po l od 0 do 10 nm dobimo, da se prosti konec premakne za 1,7 nm oz. za 1,3nm v smeri sile, ki je vzporedna z MT. Pri tem se v deformacijo noge shrani ∼ 6,6 pN nm ∼ 1,6 kTenergije.
3.5 Vpliv deformacije noge na celotni dinein
V prej²njem poglavju smo izra£unali premik sti£i²£a noge in pre£ke zaradi upogiba noge pri sili 5 pN.Opisane razmere so prisotne v kroºni spremembi v trenutku, ko se noga ponovno veºe na MT in ro£kasprosti. Takrat se napetost ro£ke pretvori v napetost noge, ro£ke in repa ter tako kot enotna vzmetvle£e tovor skozi celi£no teko£ino. Izra£unali smo, da se je sti£i²£e premaknilo za 1,3 nm v smeri sile. eglavo motorja in del noge s pre£ko obravnavamo kot togo telo, lahko ocenimo, da se je vrh glave motorjapremakne za 5,5 nm v smeri sile (slika 8). Tovor se zaradi sile premika, upogib noge se zmanj²uje,napetost popu²£a, zato popu²£a tudi sila na tovor. Ko se napetost dovolj manj²a, lahko drugi monomerdineina naredi naslednji korak.
4 Zaklju£ek
Na primeru citoplazemskega dineina, ki je najve£ji izmed molekularnih motorjev, smo se spoznali z na£eliceli£nega aktivnega dela, ki ga molekularni motorji opravljajo ºe ∼ 2 milijardi let. Zaradi svoje velike inkompleksne zgradbe je njegovo delovanje najmanj znano in funkcije vseh njegovih delov pravzaprav ²eleodkrivamo.
Razumevanje biolo²kih procesov se tako izbolj²uje zaradi razli£nih vej zike. Eksperimentalna zikanudi EM kristalograjo, opti£no pinceto in pri obravnavi hoje tudi ozna£evanje posameznih delov dineinas kvantnimi pikami, s £imer lahko izmerimo posamezne mehanske lastnosti. S teoreti£no ziko lahko izizmerjenih koli£in predvidimo stati£ne in tudi dinami£ne lastnosti biolo²kega sistema.
Kot je bilo predstavljeno, smo iz izmerjenih lastnosti in uporabo teorije elasti£nosti ter nekaj po-enostavitev lahko izra£unali konkretne koli£ine kot so upogib noge in deformacijsko energijo, kar nam
10
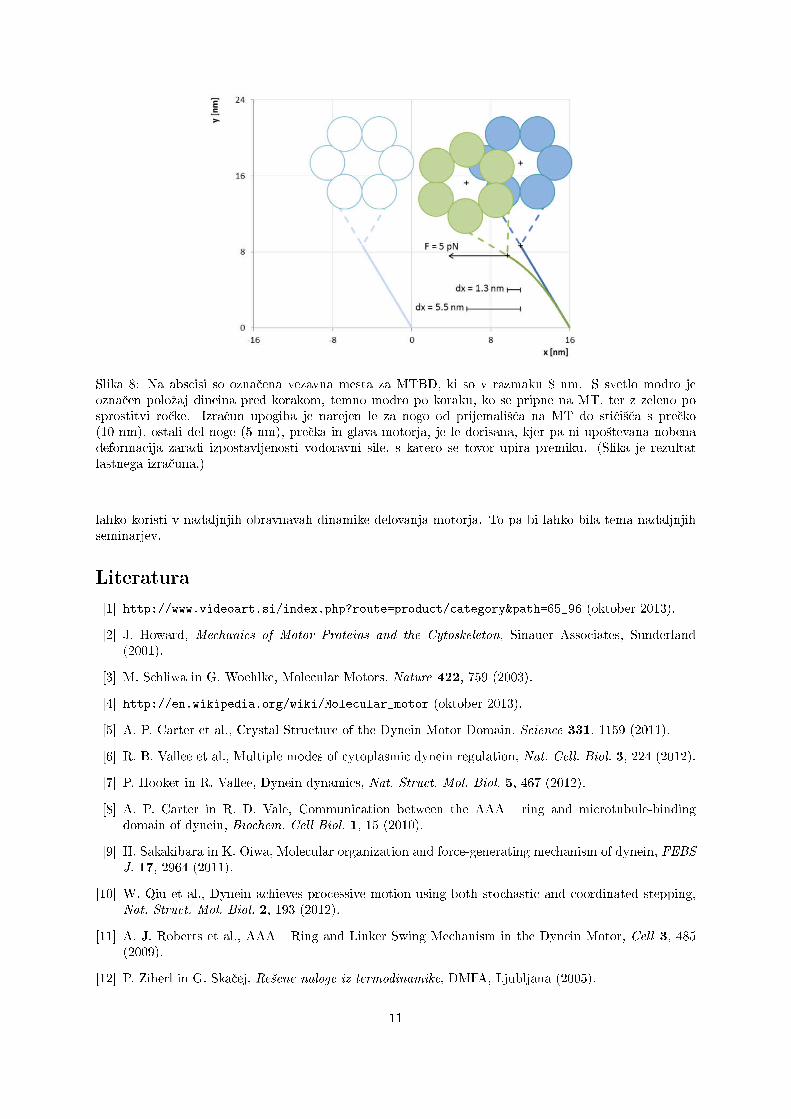
Slika 8: Na abscisi so ozna£ena vezavna mesta za MTBD, ki so v razmaku 8 nm. S svetlo modro jeozna£en poloºaj dineina pred korakom, temno modro po koraku, ko se pripne na MT, ter z zeleno posprostitvi ro£ke. Izra£un upogiba je narejen le za nogo od prijemali²£a na MT do sti£i²£a s pre£ko(10 nm), ostali del noge (5 nm), pre£ka in glava motorja, je le dorisana, kjer pa ni upo²tevana nobenadeformacija zaradi izpostavljenosti vodoravni sile, s katero se tovor upira premiku. (Slika je rezultatlastnega izra£una.)
lahko koristi v nadaljnjih obravnavah dinamike delovanja motorja. To pa bi lahko bila tema nadaljnjihseminarjev.
Literatura
[1] http://www.videoart.si/index.php?route=product/category&path=65_96 (oktober 2013).
[2] J. Howard, Mechanics of Motor Proteins and the Cytoskeleton, Sinauer Associates, Sunderland(2001).
[3] M. Schliwa in G. Woehlke, Molecular Motors, Nature 422, 759 (2003).
[4] http://en.wikipedia.org/wiki/Molecular_motor (oktober 2013).
[5] A. P. Carter et al., Crystal Structure of the Dynein Motor Domain, Science 331, 1159 (2011).
[6] R. B. Vallee et al., Multiple modes of cytoplasmic dynein regulation, Nat. Cell. Biol. 3, 224 (2012).
[7] P. Hooket in R. Vallee, Dynein dynamics, Nat. Struct. Mol. Biol. 5, 467 (2012).
[8] A. P. Carter in R. D. Vale, Communication between the AAA+ ring and microtubule-bindingdomain of dynein, Biochem. Cell Biol. 1, 15 (2010).
[9] H. Sakakibara in K. Oiwa, Molecular organization and force-generating mechanism of dynein, FEBSJ. 17, 2964 (2011).
[10] W. Qiu et al., Dynein achieves processive motion using both stochastic and coordinated stepping,Nat. Struct. Mol. Biol. 2, 193 (2012).
[11] A. J. Roberts et al., AAA+ Ring and Linker Swing Mechanism in the Dynein Motor, Cell 3, 485(2009).
[12] P. Ziherl in G. Ska£ej, Re²ene naloge iz termodinamike, DMFA, Ljubljana (2005).
11
[13] I. Ku²£er in S. umer, Toplota, DMFA, Ljubljana (1987).
[14] http://en.wikipedia.org/wiki/Internal_combustion_engine (februar 2013).
[15] http://en.wikipedia.org/wiki/Fuel_cell#Theoretical_maximum_efficiency (oktober 2013).
[16] M. Doi in S.F. Edwards, The Theory of Polymer Dynamics, Clarendon, Oxford (1986).
[17] K.S. Bloom, Beyond the code: the mechanical properties of DNA as they relate to mitosis Chromo-
soma 2, 103 (2007).
[18] W. B. Redwine et al., Structural Basis for Microtubule Binding and Release by Dynein, Science337, 1532 (2012).
[19] L.D.Landau in E.M.Lifshitz, Theory of Elastisity, Pergamon Press, Oxford (1975).
[20] M. Nizette in A. Goriely, Towards a classication of EulerKirchho laments, J. Math. Phys. 6,2830 (1999).
[21] Z. Bryant et al. Structural transitions and elasticity from torque measurements on DNA, Nature424, 338 (2003).
12





![Oddelek za ziko - University of Ljubljanamafija.fmf.uni-lj.si/seminar/files/2011_2012/Atmosfersko...na tej vi²ini, ki lahko presegajo 100 m/s [1, 3]. Primer meritve dnevnega poteka](https://img.pdfslide.tips/doc/110x75/5e7bd861f3a1c21b752a679d/oddelek-za-ziko-university-of-na-tej-viini-ki-lahko-presegajo-100-ms-1.jpg)























