Embed Size (px)
Citation preview
MOMENTO ANGULAR Y SU CONSERVACION
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2016

Índice general
3. Momento angular y su conservación 13.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23.2. Movimiento curvilíneo, leyes de Newton y energía . . . . . . . . . . . . . . . . . . . . 2
3.2.1. Vector posición en el movimiento curvilíneo . . . . . . . . . . . . . . . . . . . 23.2.2. Vector velocidad en el movimiento curvilíneo . . . . . . . . . . . . . . . . . . 33.2.3. Vector aceleración en el movimiento curvilíneo . . . . . . . . . . . . . . . . . . 4
3.3. Dinámica del movimiento curvilíneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.4. Movimiento circular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.4.1. Vector posición (r) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.4.2. Vector velocidad (v) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.4.3. Vector aceleración (a) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.4.4. Movimiento circular uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.4.5. Movimiento circular uniformemente acelerado . . . . . . . . . . . . . . . . . . 113.4.6. Vector velocidad angular y vector aceleración angular . . . . . . . . . . . . . 113.4.7. Dinámica del movimiento circular . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.5. Vector momento angular de una partícula . . . . . . . . . . . . . . . . . . . . . . . . . 163.5.1. Variación del vector momento angular con el tiempo . . . . . . . . . . . . . . 183.5.2. Conservación del momento angular y fuerzas centrales . . . . . . . . . . . . . 183.5.3. Concepto de cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.6. Vector momento angular de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . 213.7. Momento de inercia de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.7.1. Ejes principales de inercia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.7.2. Ejes principales de inercia en un cuerpo esférico . . . . . . . . . . . . . . . . . 243.7.3. Ejes principales de inercia en un cuerpo cilíndrico . . . . . . . . . . . . . . . . 243.7.4. Ejes principales de inercia en un cuerpo rectangular . . . . . . . . . . . . . . . 27
3.8. Teorema de Steiner o de los ejes paralelos . . . . . . . . . . . . . . . . . . . . . . . . . 273.8.1. Radio de giro de un cuerpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . 273.8.2. Conservación del vector momento angular en un cuerpo rígido . . . . . . . . 28
3.9. ENUNCIADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Bibliografía 33
3

Capı́tulo 3Momento angular y su conservación
CompetenciasEn esta unidad se busca que el estudiante
Defina los vectores unitarios radial y trans-versal y exprese el vector velocidad en suscomponentes radial y transversal.
Defina e interprete correctamente los con-ceptos de velocidad radial y velocidadtransversal.
Defina los vectores unitarios tangencial ynormal y exprese el vector aceleración ensus componentes tangencial y normal.
Defina e interprete correctamente las com-ponentes tangencial y normal del vectoraceleración.
Exprese el vector fuerza en sus componen-tes tangencial y normal.
Defina e interprete correctamente las com-ponentes tangencial y normal del vectorfuerza.
Describa las características de un movi-miento circular.
Defina los conceptos de vector velocidadangular y de vector aceleración angular.
Defina y analice el movimientos circularuniforme y el movimiento circular unifor-memente acelerado.
Aplique las leyes de Newton en el mo-vimiento curvilíneo, particularmente en elmovimiento circular.
Defina el concepto de vector momento an-gular y analice su variación con el tiempo.
Analice situaciones en las que se conservael vector momento angular.
Defina el concepto de fuerza central.
Defina el concepto de cuerpo rígido.
Infiera la diferencia entre el modelo de par-tícula y el modelo de cuerpo rígido.
Obtenga el momento angular de un cuerporígido.
Defina el concepto de momento de inercia.
Infiera la relación entre masa y momentode inercia.
Defina un eje principal de inercia.
Enuncie y aplique adecuadamente el Teo-rema de Steiner.
Aplique la conservación del momento an-gular en el caso un cuerpo rígido.
CONCEPTOS BASICOSSe definirán los conceptos de velocidad radial(vr), velocidad transversal (vθ), aceleración tan-gencial (aT), aceleración normal (aN), fuerza tan-gencial (FT), fuerza normal (FN), vector veloci-dad angular (ω), vector aceleración angular (α),vector momento angular ( L) y momento deinercia (I).
2 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
3.1. Introducción
En la primera parte de la unidad se hace un aná-lisis de partículas que se mueven a lo largo detrayectorias curvilíneas, aplicando los conceptoanalizados en las unidades anteriores. En estaunidad se redefinen los conceptos de vector po-sición (r), vector velocidad (v) y vector acelera-ción (a), empleando coordenadas polares, parallegar a las causas que generan los cambios en elestado de reposo o de movimiento de los cuer-pos. Posteriormente, se define el vector momen-to angular o cantidad de movimiento angular,ya que esta es una cantidad física de mucho in-terés, puesto que en la naturaleza se presentanmuchas situaciones físicas en las que el vectormomento angular se conserva, cuando un cuer-po describe una trayectoria curvilínea. Esto dalugar al principio de conservación del momen-to angular, que se aplica en diferentes áreas dela física. Es de mucha utilidad en el análisis defuerzas centrales, como se verá posteriormenteen el caso del movimiento de la tierra alrededordel sol. Finalmente, se define el concepto del es-calar, momento de inercia, que desempeña enrotación el mismo papel que la masa en trasla-ción.
3.2. Movimiento curvilíneo, leyesde Newton y energía
En esta sección se analizan los efectos que sepresentan cuando ocurren cambios en la magni-tud y en la dirección, tanto del vector posicióncomo del vector velocidad de una partícula quese mueve en una trayectoria curvilínea. Para lle-var a cabo esta tarea se utilizan coordenadas po-lares.
Igual que en el caso de coordenadas rectan-gulares, se definen dos vectores unitarios per-pendiculares entre sí ur y uθ , que cumplen lassiguientes condiciones:
ur, en todo instante, es paralelo al vectorposición r y se le denomina vector unitarioradial.
uθ , en todo instante, es perpendicular al
vector posición r y se le denomina vectorunitario transversal.
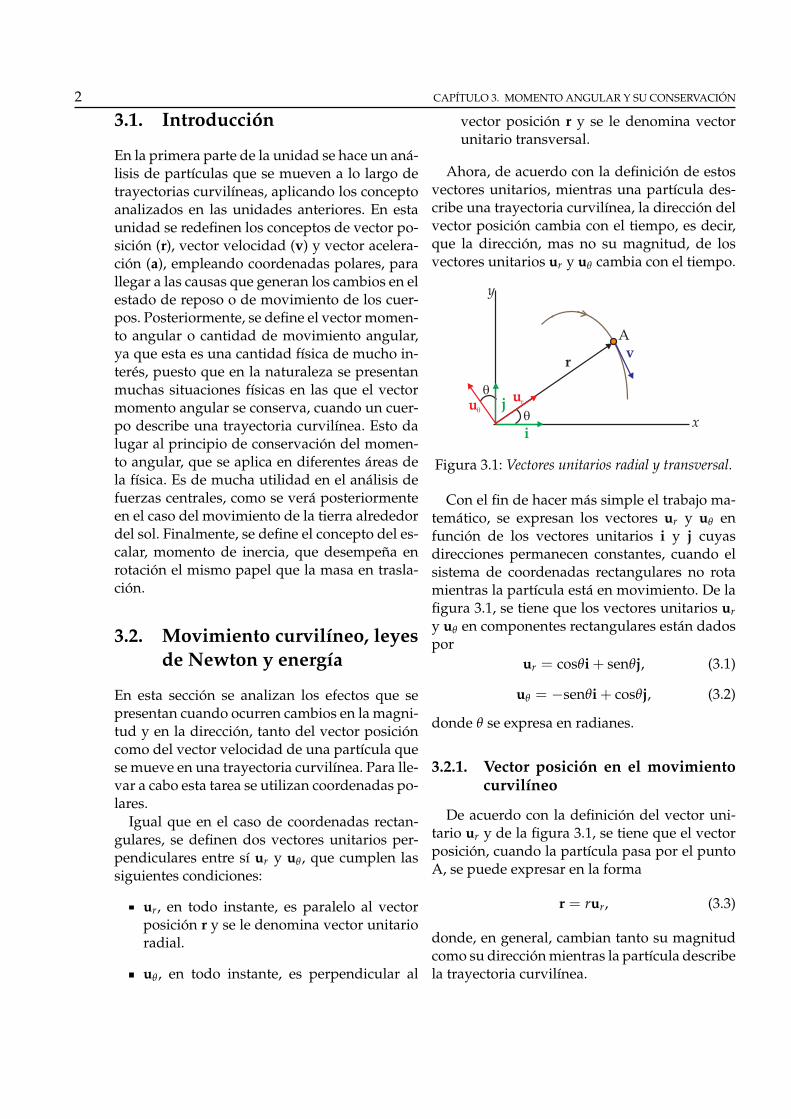
Ahora, de acuerdo con la definición de estosvectores unitarios, mientras una partícula des-cribe una trayectoria curvilínea, la dirección delvector posición cambia con el tiempo, es decir,que la dirección, mas no su magnitud, de losvectores unitarios ur y uθ cambia con el tiempo.
A
vr
uru
qj
i
q
x
y
q
Figura 3.1: Vectores unitarios radial y transversal.
Con el fin de hacer más simple el trabajo ma-temático, se expresan los vectores ur y uθ enfunción de los vectores unitarios i y j cuyasdirecciones permanecen constantes, cuando elsistema de coordenadas rectangulares no rotamientras la partícula está en movimiento. De lafigura 3.1, se tiene que los vectores unitarios ury uθ en componentes rectangulares están dadospor
ur = cosθi + senθj, (3.1)
uθ = −senθi + cosθj, (3.2)
donde θ se expresa en radianes.
3.2.1. Vector posición en el movimientocurvilíneo
De acuerdo con la definición del vector uni-tario ur y de la figura 3.1, se tiene que el vectorposición, cuando la partícula pasa por el puntoA, se puede expresar en la forma
r = rur, (3.3)
donde, en general, cambian tanto su magnitudcomo su dirección mientras la partícula describela trayectoria curvilínea.
3.2. MOVIMIENTO CURVILÍNEO, LEYES DE NEWTON Y ENERGÍA 3
3.2.2. Vector velocidad en el movimientocurvilíneo
En esta sección se muestra que un cambio en lamagnitud del vector posición ó un cambio en sudirección, genera una componente en la veloci-dad.
De acuerdo con la figura 3.1, la velocidad dela partícula en el punto A, está dada por la defi-nición usual v = dr/dt, donde al reemplazar laecuación (3.3), adquiere la forma
v =drdt
=ddt
(rur). (3.4)
Derivando la ecuación (3.3) respecto al tiempo,teniendo en cuenta que ur varía en dirección portratarse de una trayectoria curvilínea, se tiene
v =drdt
ur + rdur
dt. (3.5)
Derivando la ecuación (3.1) respecto al tiempo ycomparando el resultado con la ecuación (3.2),se encuentra que
dur
dt=
dθ
dtuθ , (3.6)
donde se observa que la derivada respecto altiempo del vector unitario en la dirección radial,es un vector paralelo al vector unitario en la di-rección transversal, es decir, es un vector per-pendicular al vector posición.
Luego de reemplazar la ecuación (3.6) en laecuación (3.5), se obtiene
v =drdt
ur + rdθ
dtuθ . (3.7)
Como resultado del procedimiento llevado a ca-bo, en la ecuación (3.7) aparecen dos componen-tes de la velocidad, una en la dirección radial yotra en la dirección transversal.
La componente de la velocidad en direcciónradial, solo aparece cuando cambia con el tiem-po la magnitud del vector posición y se le deno-mina velocidad radial, es decir
vr ≡drdt
. (3.8)
En cambio, la componente de velocidad en la di-rección transversal, solo aparece cuando cambia
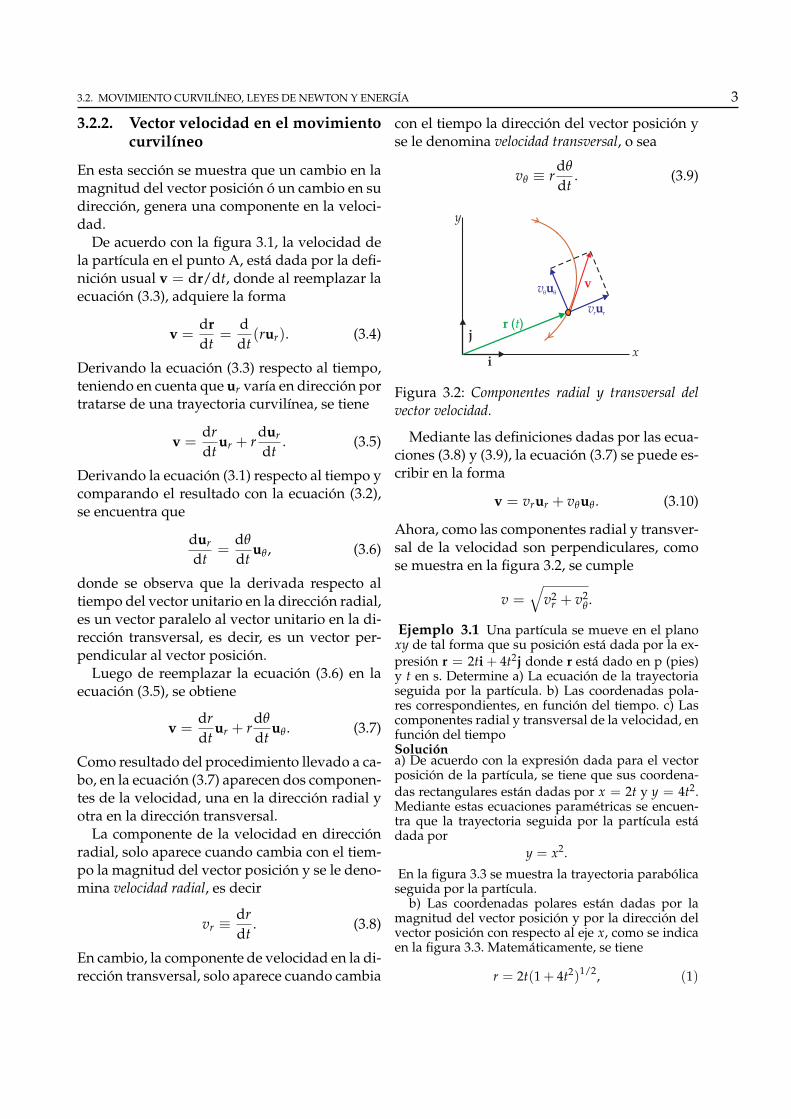
con el tiempo la dirección del vector posición yse le denomina velocidad transversal, o sea
vθ ≡ rdθ
dt. (3.9)
j
ix
y
r ( )t
vvq qu
vr ru
Figura 3.2: Componentes radial y transversal delvector velocidad.
Mediante las definiciones dadas por las ecua-ciones (3.8) y (3.9), la ecuación (3.7) se puede es-cribir en la forma
v = vrur + vθuθ . (3.10)
Ahora, como las componentes radial y transver-sal de la velocidad son perpendiculares, comose muestra en la figura 3.2, se cumple
v =√
v2r + v2
θ .
Ejemplo 3.1 Una partícula se mueve en el planoxy de tal forma que su posición está dada por la ex-presión r = 2ti + 4t2j donde r está dado en p (pies)y t en s. Determine a) La ecuación de la trayectoriaseguida por la partícula. b) Las coordenadas pola-res correspondientes, en función del tiempo. c) Lascomponentes radial y transversal de la velocidad, enfunción del tiempoSolucióna) De acuerdo con la expresión dada para el vectorposición de la partícula, se tiene que sus coordena-das rectangulares están dadas por x = 2t y y = 4t2.Mediante estas ecuaciones paramétricas se encuen-tra que la trayectoria seguida por la partícula estádada por
y = x2.
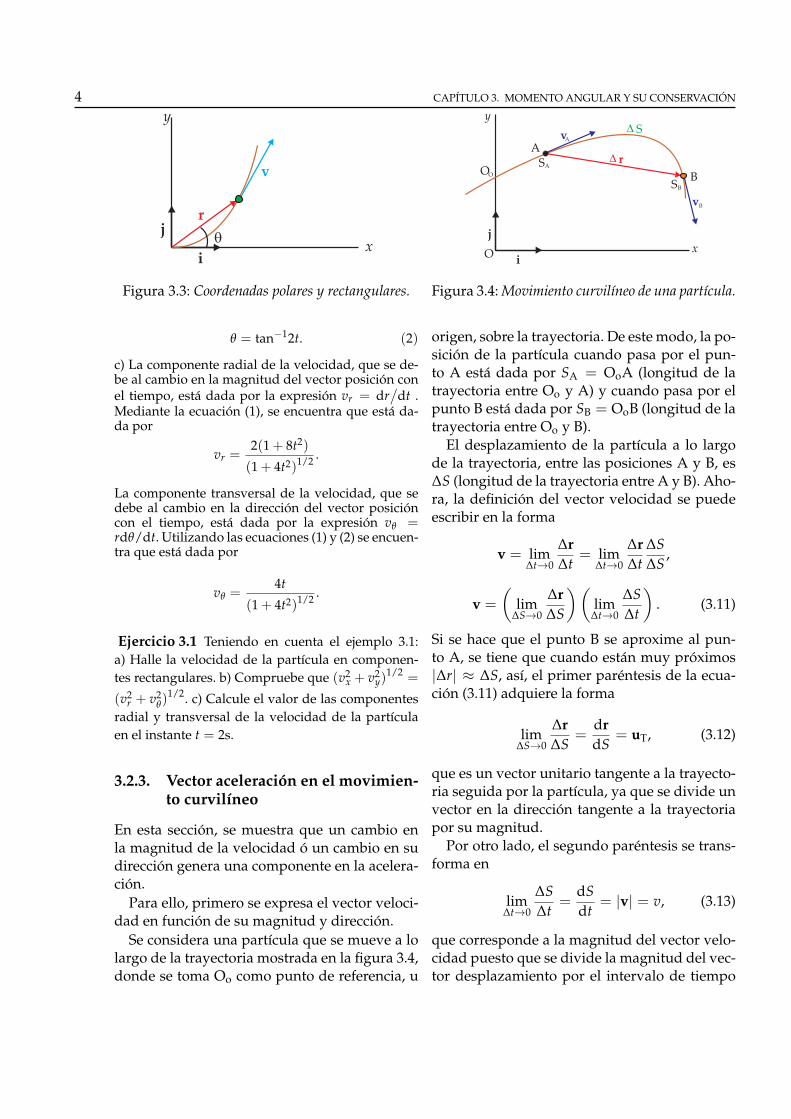
En la figura 3.3 se muestra la trayectoria parabólicaseguida por la partícula.
b) Las coordenadas polares están dadas por lamagnitud del vector posición y por la dirección delvector posición con respecto al eje x, como se indicaen la figura 3.3. Matemáticamente, se tiene
r = 2t(1 + 4t2)1/2, (1)
4 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
j
ix
y
v
r
q
Figura 3.3: Coordenadas polares y rectangulares.
θ = tan−12t. (2)
c) La componente radial de la velocidad, que se de-be al cambio en la magnitud del vector posición conel tiempo, está dada por la expresión vr = dr
/dt .
Mediante la ecuación (1), se encuentra que está da-da por
vr =2(1 + 8t2)
(1 + 4t2)1/2 .
La componente transversal de la velocidad, que sedebe al cambio en la dirección del vector posicióncon el tiempo, está dada por la expresión vθ =rdθ/dt. Utilizando las ecuaciones (1) y (2) se encuen-tra que está dada por
vθ =4t
(1 + 4t2)1/2 .
Ejercicio 3.1 Teniendo en cuenta el ejemplo 3.1:a) Halle la velocidad de la partícula en componen-tes rectangulares. b) Compruebe que (v2
x + v2y)
1/2 =
(v2r + v2
θ)1/2. c) Calcule el valor de las componentes
radial y transversal de la velocidad de la partículaen el instante t = 2s.
3.2.3. Vector aceleración en el movimien-to curvilíneo
En esta sección, se muestra que un cambio enla magnitud de la velocidad ó un cambio en sudirección genera una componente en la acelera-ción.
Para ello, primero se expresa el vector veloci-dad en función de su magnitud y dirección.
Se considera una partícula que se mueve a lolargo de la trayectoria mostrada en la figura 3.4,donde se toma Oo como punto de referencia, u
j
ix
y
vA
vB
D r
D S
O
B
A
SA
SB
OO
Figura 3.4: Movimiento curvilíneo de una partícula.
origen, sobre la trayectoria. De este modo, la po-sición de la partícula cuando pasa por el pun-to A está dada por SA = OoA (longitud de latrayectoria entre Oo y A) y cuando pasa por elpunto B está dada por SB = OoB (longitud de latrayectoria entre Oo y B).
El desplazamiento de la partícula a lo largode la trayectoria, entre las posiciones A y B, es∆S (longitud de la trayectoria entre A y B). Aho-ra, la definición del vector velocidad se puedeescribir en la forma
v = lim∆t→0
∆r∆t
= lim∆t→0
∆r∆t
∆S∆S
,
v =
(lim
∆S→0
∆r∆S
)(lim
∆t→0
∆S∆t
). (3.11)
Si se hace que el punto B se aproxime al pun-to A, se tiene que cuando están muy próximos|∆r| ≈ ∆S, así, el primer paréntesis de la ecua-ción (3.11) adquiere la forma
lim∆S→0
∆r∆S
=drdS
= uT, (3.12)
que es un vector unitario tangente a la trayecto-ria seguida por la partícula, ya que se divide unvector en la dirección tangente a la trayectoriapor su magnitud.
Por otro lado, el segundo paréntesis se trans-forma en
lim∆t→0
∆S∆t
=dSdt
= |v| = v, (3.13)
que corresponde a la magnitud del vector velo-cidad puesto que se divide la magnitud del vec-tor desplazamiento por el intervalo de tiempo
3.2. MOVIMIENTO CURVILÍNEO, LEYES DE NEWTON Y ENERGÍA 5
correspondiente. Así, dS juega el mismo papelque dx ó dy en un movimiento rectilíneo.
De este modo, reemplazando las ecuaciones(3.12) y (3.13) en la ecuación (3.11), se encuentraque
v = vuT, (3.14)
donde se expresa el vector velocidad como elproducto de su magnitud por su dirección.
j
ix
y
r ( )t
v
uT
uN
j
j
P
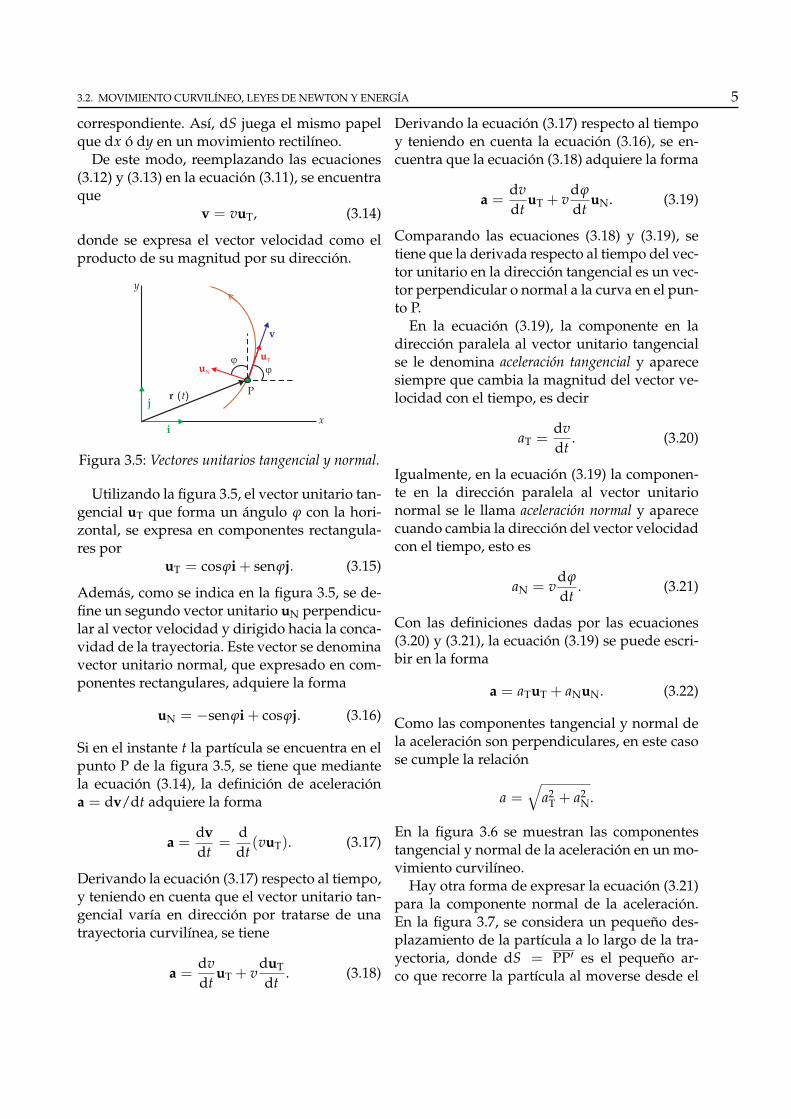
Figura 3.5: Vectores unitarios tangencial y normal.
Utilizando la figura 3.5, el vector unitario tan-gencial uT que forma un ángulo φ con la hori-zontal, se expresa en componentes rectangula-res por
uT = cosφi + senφj. (3.15)
Además, como se indica en la figura 3.5, se de-fine un segundo vector unitario uN perpendicu-lar al vector velocidad y dirigido hacia la conca-vidad de la trayectoria. Este vector se denominavector unitario normal, que expresado en com-ponentes rectangulares, adquiere la forma
uN = −senφi + cosφj. (3.16)
Si en el instante t la partícula se encuentra en elpunto P de la figura 3.5, se tiene que mediantela ecuación (3.14), la definición de aceleracióna = dv/dt adquiere la forma
a =dvdt
=ddt
(vuT). (3.17)
Derivando la ecuación (3.17) respecto al tiempo,y teniendo en cuenta que el vector unitario tan-gencial varía en dirección por tratarse de unatrayectoria curvilínea, se tiene
a =dvdt
uT + vduT
dt. (3.18)
Derivando la ecuación (3.17) respecto al tiempoy teniendo en cuenta la ecuación (3.16), se en-cuentra que la ecuación (3.18) adquiere la forma
a =dvdt
uT + vdφ
dtuN. (3.19)
Comparando las ecuaciones (3.18) y (3.19), setiene que la derivada respecto al tiempo del vec-tor unitario en la dirección tangencial es un vec-tor perpendicular o normal a la curva en el pun-to P.
En la ecuación (3.19), la componente en ladirección paralela al vector unitario tangencialse le denomina aceleración tangencial y aparecesiempre que cambia la magnitud del vector ve-locidad con el tiempo, es decir
aT =dvdt
. (3.20)
Igualmente, en la ecuación (3.19) la componen-te en la dirección paralela al vector unitarionormal se le llama aceleración normal y aparececuando cambia la dirección del vector velocidadcon el tiempo, esto es
aN = vdφ
dt. (3.21)
Con las definiciones dadas por las ecuaciones(3.20) y (3.21), la ecuación (3.19) se puede escri-bir en la forma
a = aTuT + aNuN. (3.22)
Como las componentes tangencial y normal dela aceleración son perpendiculares, en este casose cumple la relación
a =√
a2T + a2
N.
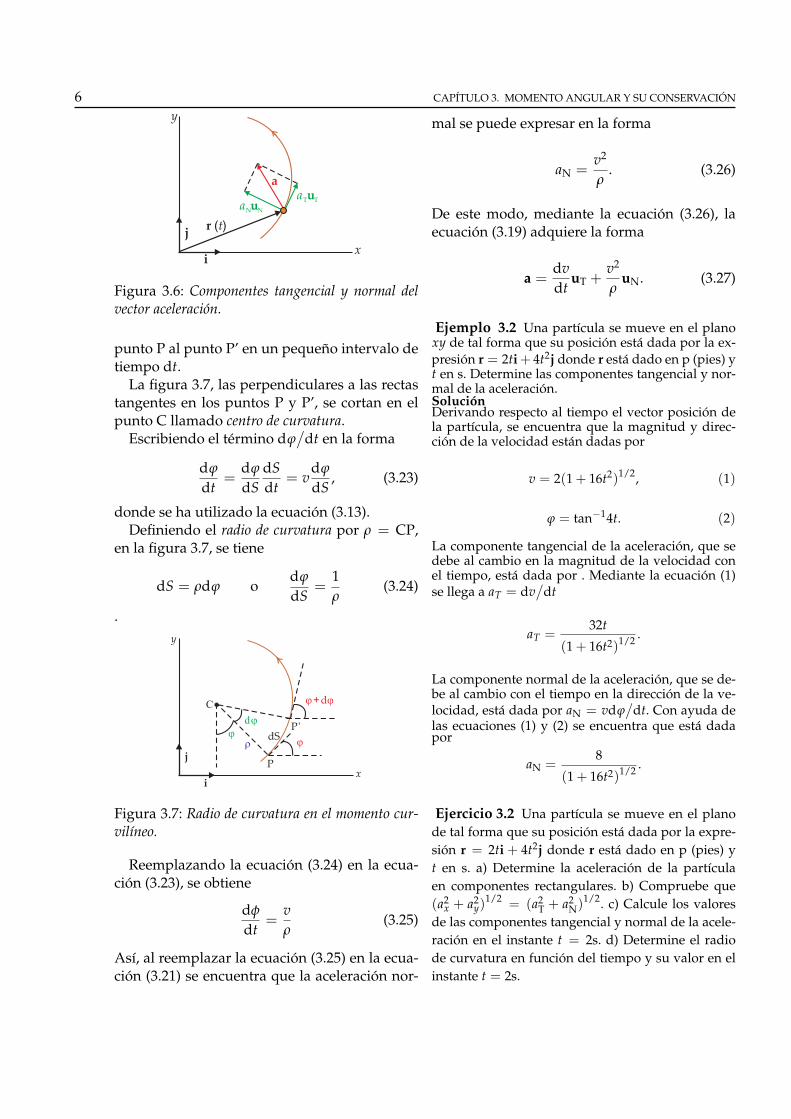
En la figura 3.6 se muestran las componentestangencial y normal de la aceleración en un mo-vimiento curvilíneo.
Hay otra forma de expresar la ecuación (3.21)para la componente normal de la aceleración.En la figura 3.7, se considera un pequeño des-plazamiento de la partícula a lo largo de la tra-yectoria, donde dS = PP′ es el pequeño ar-co que recorre la partícula al moverse desde el
6 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
j
ix
y
r ( )t
aa
T Tu
aN Nu
Figura 3.6: Componentes tangencial y normal delvector aceleración.
punto P al punto P’ en un pequeño intervalo detiempo dt.
La figura 3.7, las perpendiculares a las rectastangentes en los puntos P y P’, se cortan en elpunto C llamado centro de curvatura.
Escribiendo el término dφ/
dt en la forma
dφ
dt=
dφ
dSdSdt
= vdφ
dS, (3.23)
donde se ha utilizado la ecuación (3.13).Definiendo el radio de curvatura por ρ = CP,
en la figura 3.7, se tiene
dS = ρdφ odφ
dS=
1ρ
(3.24)
.
j
ix
y
C
P
P'dS
r
dj
j
j j+d
j
Figura 3.7: Radio de curvatura en el momento cur-vilíneo.
Reemplazando la ecuación (3.24) en la ecua-ción (3.23), se obtiene
dϕ
dt=
vρ
(3.25)
Así, al reemplazar la ecuación (3.25) en la ecua-ción (3.21) se encuentra que la aceleración nor-
mal se puede expresar en la forma
aN =v2
ρ. (3.26)
De este modo, mediante la ecuación (3.26), laecuación (3.19) adquiere la forma
a =dvdt
uT +v2
ρuN. (3.27)
Ejemplo 3.2 Una partícula se mueve en el planoxy de tal forma que su posición está dada por la ex-presión r = 2ti+ 4t2j donde r está dado en p (pies) yt en s. Determine las componentes tangencial y nor-mal de la aceleración.SoluciónDerivando respecto al tiempo el vector posición dela partícula, se encuentra que la magnitud y direc-ción de la velocidad están dadas por
v = 2(1 + 16t2)1/2, (1)
φ = tan−14t. (2)
La componente tangencial de la aceleración, que sedebe al cambio en la magnitud de la velocidad conel tiempo, está dada por . Mediante la ecuación (1)se llega a aT = dv
/dt
aT =32t
(1 + 16t2)1/2 .
La componente normal de la aceleración, que se de-be al cambio con el tiempo en la dirección de la ve-locidad, está dada por aN = vdφ
/dt. Con ayuda de
las ecuaciones (1) y (2) se encuentra que está dadapor
aN =8
(1 + 16t2)1/2 .
Ejercicio 3.2 Una partícula se mueve en el planode tal forma que su posición está dada por la expre-sión r = 2ti + 4t2j donde r está dado en p (pies) yt en s. a) Determine la aceleración de la partículaen componentes rectangulares. b) Compruebe que(a2
x + a2y)
1/2 = (a2T + a2
N)1/2. c) Calcule los valores
de las componentes tangencial y normal de la acele-ración en el instante t = 2s. d) Determine el radiode curvatura en función del tiempo y su valor en elinstante t = 2s.

3.4. MOVIMIENTO CIRCULAR 7
3.3. Dinámica del movimientocurvilíneo
Cuando la fuerza F y la velocidad v forman unángulo diferente a 0o ó 180o, es decir, v y a for-man un ángulo diferente a 0o ó 180o, la partícu-la describe una trayectoria curvilínea, donde laaceleración aN se debe al cambio en la direcciónde la velocidad y aT al cambio en la magnitudde la velocidad, como se analizó anteriormente.
Para una masa m, constante, la segunda leyde Newton, en este caso, tiene la forma
F = ma. (3.28)
De acuerdo con la ecuación (3.28), la fuerza yla aceleración son paralelas, por ello, la fuerzatambién debe tener componentes tangencial ynormal igual que la aceleración, como se indicaen la figura 3.8.
F
F uN N
F uT T
m
Figura 3.8: Componentes tangencial y normal deuna fuerza.
Sabiendo que la aceleración se puede expre-sar en la forma
a =dvdt
uT +v2
ρuN,
la ecuación (3.28) se transforma en
F = m (aTuT + aNuN) . (3.29)
De este modo, se tiene que
FT = maT = mdvdt
,
corresponde a la componente de la fuerza en ladirección tangente a la trayectoria y es la res-ponsable (causante) del cambio en la magnitud dela velocidad, por ello, a esta componente se le lla-ma fuerza tangencial.
Igualmente,
FN =mv2
ρ,
corresponde a la componente de la fuerzaen la dirección normal, apuntando siemprehacia el centro de curvatura de la trayectoriay es la responsable (causante) del cambio en ladirección de la velocidad. A esta componente se ledenomina fuerza normal o centrípeta.
Casos particulares de la ecuación (3.29)
1. Si sobre una partícula, FN = 0 y FT ̸= 0, nohay cambio en la dirección de la velocidad.Por tanto, el movimiento es rectilíneo ace-lerado, ya que FT genera un cambio en lamagnitud de la velocidad. Si en este caso,FT es constante, se tiene movimiento recti-líneo uniformemente acelerado (MRUA)
2. Si sobre una partícula, FN = 0 y FT = 0,no cambia la dirección ni la magnitud de lavelocidad, por lo que el cuerpo tiene movi-miento rectilíneo uniforme (MRU), o se en-cuentra en reposo.
3. Si sobre una partícula, FN ̸= 0 y FT = 0, nohay cambio en la magnitud de la velocidad,sólo cambia su dirección como en el movi-miento circular uniforme, que se analiza enlo que sigue.
3.4. Movimiento circular
En esta sección se analiza un caso particular demovimiento curvilíneo en un plano, como es elmovimiento circular. En este caso, la trayectoriaseguida por una partícula es una circunferenciade radio R, dada por la expresión
x2 + y2 = R2,
donde se ha tomado el origen de coordenadascoincidente con el centro de la trayectoria, comose indica en la figura 3.9.
8 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
Ox
y
R
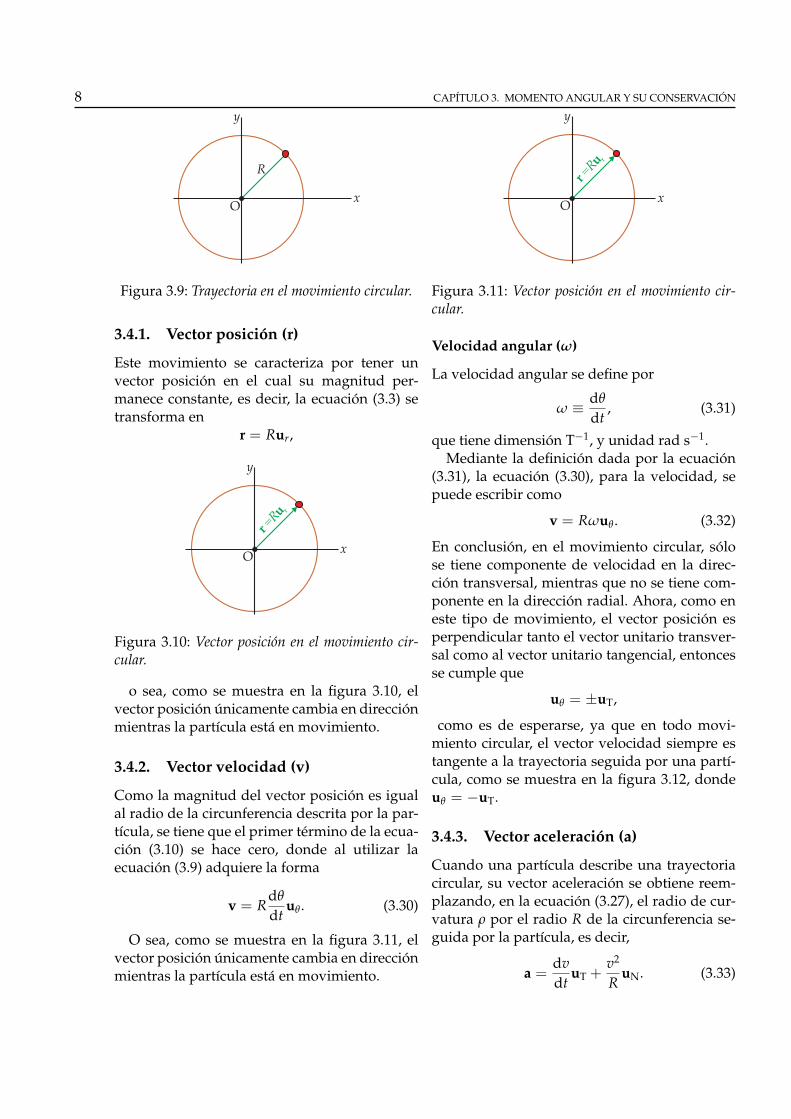
Figura 3.9: Trayectoria en el movimiento circular.
3.4.1. Vector posición (r)
Este movimiento se caracteriza por tener unvector posición en el cual su magnitud per-manece constante, es decir, la ecuación (3.3) setransforma en
r = Rur,
Ox
y
r
u
=R
r
Figura 3.10: Vector posición en el movimiento cir-cular.
o sea, como se muestra en la figura 3.10, elvector posición únicamente cambia en direcciónmientras la partícula está en movimiento.
3.4.2. Vector velocidad (v)
Como la magnitud del vector posición es igualal radio de la circunferencia descrita por la par-tícula, se tiene que el primer término de la ecua-ción (3.10) se hace cero, donde al utilizar laecuación (3.9) adquiere la forma
v = Rdθ
dtuθ . (3.30)
O sea, como se muestra en la figura 3.11, elvector posición únicamente cambia en direcciónmientras la partícula está en movimiento.
Ox
y
r
u
=R
r
Figura 3.11: Vector posición en el movimiento cir-cular.
Velocidad angular (ω)
La velocidad angular se define por
ω ≡ dθ
dt, (3.31)
que tiene dimensión T−1, y unidad rad s−1.Mediante la definición dada por la ecuación
(3.31), la ecuación (3.30), para la velocidad, sepuede escribir como
v = Rωuθ . (3.32)
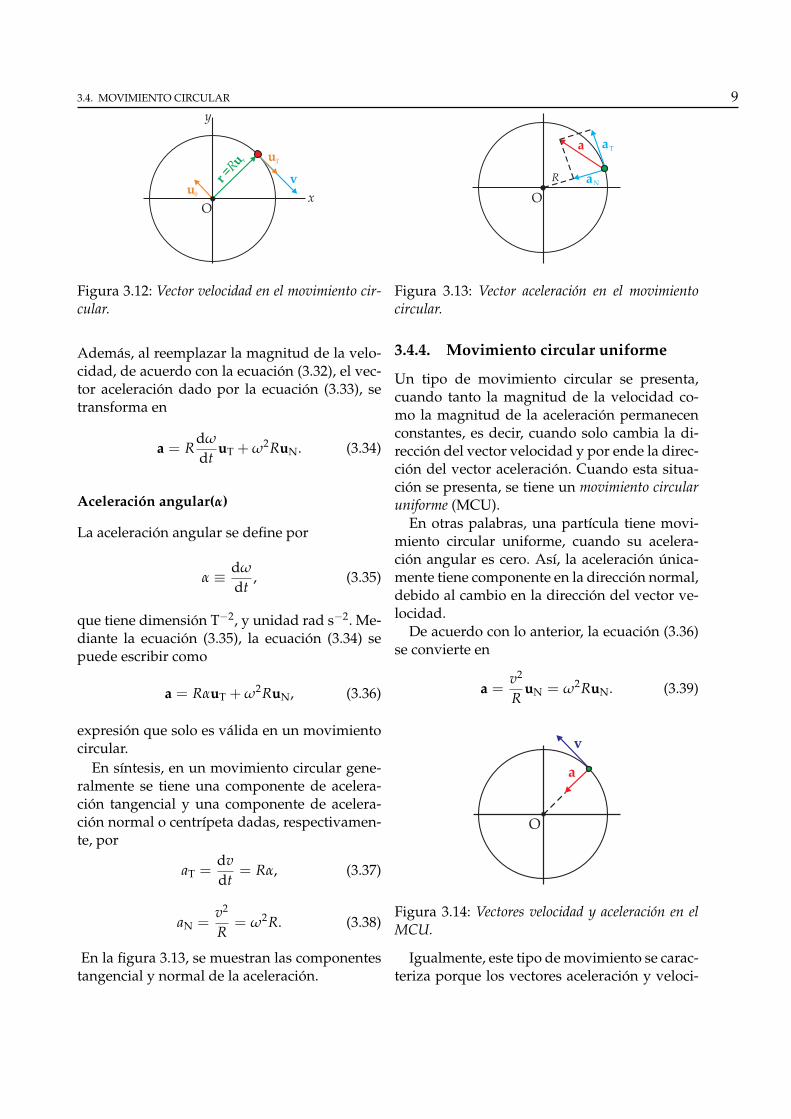
En conclusión, en el movimiento circular, sólose tiene componente de velocidad en la direc-ción transversal, mientras que no se tiene com-ponente en la dirección radial. Ahora, como eneste tipo de movimiento, el vector posición esperpendicular tanto el vector unitario transver-sal como al vector unitario tangencial, entoncesse cumple que
uθ = ±uT,
como es de esperarse, ya que en todo movi-miento circular, el vector velocidad siempre estangente a la trayectoria seguida por una partí-cula, como se muestra en la figura 3.12, dondeuθ = −uT.
3.4.3. Vector aceleración (a)
Cuando una partícula describe una trayectoriacircular, su vector aceleración se obtiene reem-plazando, en la ecuación (3.27), el radio de cur-vatura ρ por el radio R de la circunferencia se-guida por la partícula, es decir,
a =dvdt
uT +v2
RuN. (3.33)
3.4. MOVIMIENTO CIRCULAR 9
Ox
y
vr
u
=R
r
uq
uT
Figura 3.12: Vector velocidad en el movimiento cir-cular.
Además, al reemplazar la magnitud de la velo-cidad, de acuerdo con la ecuación (3.32), el vec-tor aceleración dado por la ecuación (3.33), setransforma en
a = Rdω
dtuT + ω2RuN. (3.34)
Aceleración angular(α)
La aceleración angular se define por
α ≡ dω
dt, (3.35)
que tiene dimensión T−2, y unidad rad s−2. Me-diante la ecuación (3.35), la ecuación (3.34) sepuede escribir como
a = RαuT + ω2RuN, (3.36)
expresión que solo es válida en un movimientocircular.
En síntesis, en un movimiento circular gene-ralmente se tiene una componente de acelera-ción tangencial y una componente de acelera-ción normal o centrípeta dadas, respectivamen-te, por
aT =dvdt
= Rα, (3.37)
aN =v2
R= ω2R. (3.38)
En la figura 3.13, se muestran las componentestangencial y normal de la aceleración.
O
aT
aN
a
R
Figura 3.13: Vector aceleración en el movimientocircular.
3.4.4. Movimiento circular uniforme
Un tipo de movimiento circular se presenta,cuando tanto la magnitud de la velocidad co-mo la magnitud de la aceleración permanecenconstantes, es decir, cuando solo cambia la di-rección del vector velocidad y por ende la direc-ción del vector aceleración. Cuando esta situa-ción se presenta, se tiene un movimiento circularuniforme (MCU).
En otras palabras, una partícula tiene movi-miento circular uniforme, cuando su acelera-ción angular es cero. Así, la aceleración única-mente tiene componente en la dirección normal,debido al cambio en la dirección del vector ve-locidad.
De acuerdo con lo anterior, la ecuación (3.36)se convierte en
a =v2
RuN = ω2RuN. (3.39)
O
v
a
Figura 3.14: Vectores velocidad y aceleración en elMCU.
Igualmente, este tipo de movimiento se carac-teriza porque los vectores aceleración y veloci-

10 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
dad son perpendiculares entre sí, como se ilus-tra en la figura 3.14.
Una partícula sometida a un movimiento cir-cular uniforme, posee un movimiento que se re-pite a intervalos iguales de tiempo, o sea, que elmovimiento es periódico.
Si la partícula, con movimiento circular uni-forme, realiza n vueltas en un tiempo t, se defi-ne el período P, o tiempo que tarda en dar unavuelta completa, por
P =tn
. (3.40)
Además, la partícula tiene una frecuencia ν, onúmero de vueltas por unidad de tiempo, defi-nida por
ν =nt
. (3.41)
Comparando las ecuaciones (3.40) y (3.41), seencuentra que la frecuencia es el inverso del pe-ríodo, o sea
ν =1P
. (3.42)
Por la ecuación (3.42), se tiene que la dimensiónde frecuencia es T−1, es decir, su unidad es s−1
que se acostumbra definir como
1s−1 ≡ 1Hz,
símbolo que proviene de la palabra Hertz.La frecuencia también se expresa en revolu-
ciones por minuto o rpm, donde
1rpm ≡ 160
Hz.
Si en el tiempo to, una partícula con MCU tie-ne una posición angular θ, mediante la ecuación(3.31), se encuentra que su posición angular enel instante de tiempo t, está dada por
θ = θo +
t∫to
ω(t)dt, (3.43)
pero como en este caso la velocidad angulares una constante del movimiento, la ecuación(3.43) se transforma en
θ = θo + ω(t − to), (3.44)
donde ω es una constante del movimiento y θ seexpresa en radianes. Esta ecuación correspondea la ecuación cinemática de posición angular enun movimiento circular uniforme.
Si en el tiempo to = 0, una partícula con mo-vimiento circular uniforme tiene la posición an-gular θo = 0, cuando da una vuelta se tiene queel tiempo y la posición angular, respectivamen-te, son t = P y 2π. Reemplazando estos térmi-nos en la ecuación (3.44), se obtiene
ω =2π
P, (3.45)
o teniendo en cuenta la ecuación (3.42)
ω = 2πν. (3.46)
No sobra aclarar que las ecuaciones (3.45) y(3.46), únicamente son válidas para el caso departículas con movimiento circular uniforme.
Ejemplo 3.3 Como se muestra en la figura 3.15,una piedra, sujeta al extremo de una cuerda, se hacegirar de tal manera que describe una circunferenciade radio 30 cm y en un plano horizontal. La posiciónangular de la piedra está dada por θ (t) = 3t, dondeθ está dado en rad y t en s. Calcular: a) La velocidadangular de la piedra. b) La velocidad de la piedra. c)El tiempo que demora la piedra en dar una vuelta. d)El número de vueltas que da la piedra en la unidadde tiempo. e) La aceleración de la piedra.
O
v
a
q
R
Figura 3.15: MCU sobre un plano horizontal.
SoluciónDe acuerdo con el enunciado, R = 30 cm ≡ 0.3 m yθ(t) = 3t son cantidades dadas.
a) Utilizando la definición de velocidad angular,ecuación (3.44), se encuentra que su valor es
ω = 3 rads−1
Este resultado indica que la velocidad angular es in-dependiente del tiempo, de este modo, la piedra tie-ne un movimiento circular uniforme.
3.4. MOVIMIENTO CIRCULAR 11
b) Como es un movimiento circular, la velocidades un vector tangente a la trayectoria seguida por lapiedra. Por consiguiente, de acuerdo con la defini-ción de velocidad transversal (que en este caso coin-cide con la velocidad tangencial) dada por la ecua-ción (3.32), se encuentra que su valor es
ν = 0.90 ms−1.
c) El tiempo que demora la piedra en dar una vuelta,que corresponde al período, se obtiene reemplazan-do θ = 2π rad y t = P, en la expresión dada en elenunciado. Con ello, se encuentra que
P = 2.09 s.
d) El número de vueltas por unidad de tiempo, quecorresponde a la frecuencia, se encuentra teniendoen cuenta que es igual al inverso del período, así
ν = 0.48 Hz.
e) Como la piedra posee un movimiento circularuniforme, su aceleración coincide con la aceleracióncentrípeta dada por la ecuación (3.39), obteniéndoseel valor
a = aN = 2.70 ms−2.
Ejercicio 3.3 Una piedra, sujeta al extremo de unacuerda, se hace girar de tal manera que describe unacircunferencia de radio 30 cm y en un plano horizon-tal. La posición angular de la piedra está dada porθ (t) = 3t, donde θ está dado en rad y t en s. a) ¿Cuáles el valor de la aceleración angular de la piedra?¿Por qué? b) ¿Por qué razón la piedra está someti-da a una aceleración, si la magnitud de la velocidadpermanece constante? c) En la situación considera-da, ¿el vector aceleración es paralelo a la cuerda?
3.4.5. Movimiento circular uniforme-mente acelerado
Cuando la aceleración angular de una partícu-la permanece constante, se dice que tiene unmovimiento circular uniformemente acelerado(MCUA), es decir, que tanto la magnitud comola dirección del vector velocidad cambian con eltiempo. Como consecuencia, la velocidad angu-lar también varía con el tiempo.
Ahora, si una partícula en el instante to tieneuna velocidad angular ωo y se mueve con unaaceleración angular α, la velocidad angular ω enel instante de tiempo t, está dada por
ω = ωo + α(t − to), (3.47)
donde se ha utilizado la ecuación (3.35). Estaecuación corresponde a la ecuación cinemáticade velocidad angular en un movimiento circu-lar uniformemente acelerado.
Por otro lado, al reemplazar la ecuación (3.47)en la ecuación (3.43), luego de integrar y evaluarse llega a
θ = θo + ωo(t − to) +12 α(t − to)
2, (3.48)
que corresponde a la ecuación cinemática deposición angular para una partícula con movi-miento circular uniformemente acelerado.
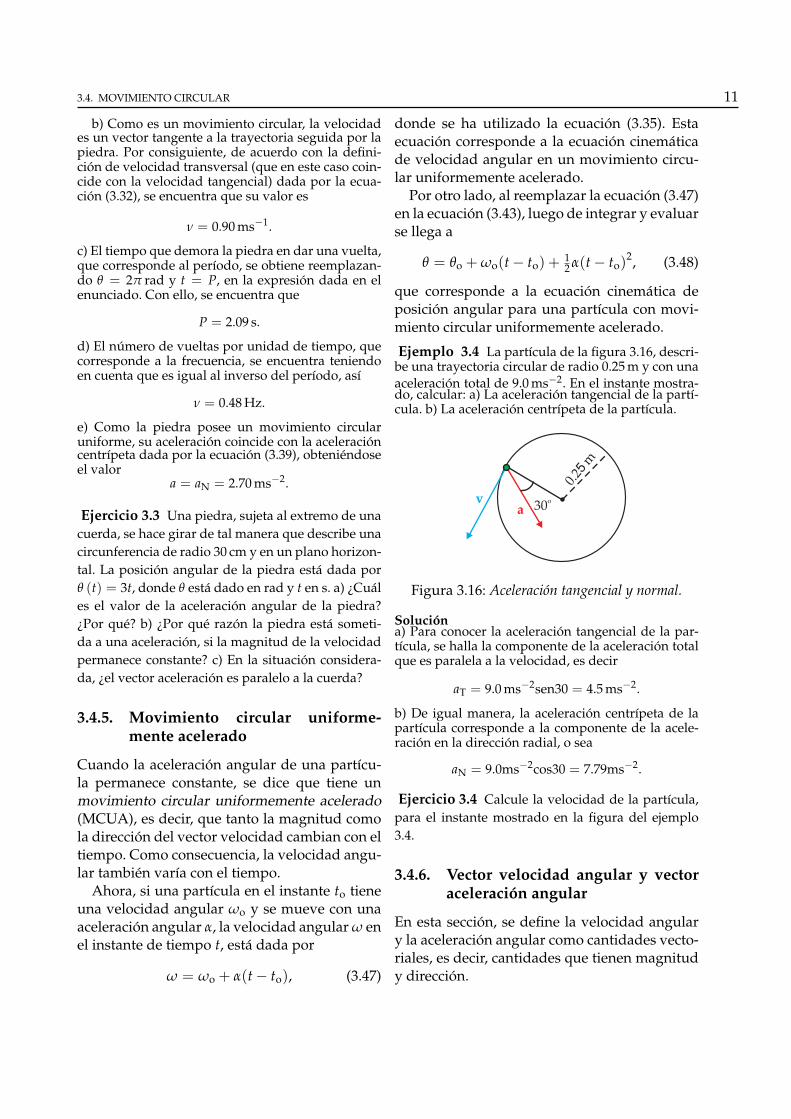
Ejemplo 3.4 La partícula de la figura 3.16, descri-be una trayectoria circular de radio 0.25 m y con unaaceleración total de 9.0 ms−2. En el instante mostra-do, calcular: a) La aceleración tangencial de la partí-cula. b) La aceleración centrípeta de la partícula.
v
a30
o
0.2
5m
Figura 3.16: Aceleración tangencial y normal.
Solucióna) Para conocer la aceleración tangencial de la par-tícula, se halla la componente de la aceleración totalque es paralela a la velocidad, es decir
aT = 9.0 ms−2sen30 = 4.5 ms−2.
b) De igual manera, la aceleración centrípeta de lapartícula corresponde a la componente de la acele-ración en la dirección radial, o sea
aN = 9.0ms−2cos30 = 7.79ms−2.
Ejercicio 3.4 Calcule la velocidad de la partícula,para el instante mostrado en la figura del ejemplo3.4.
3.4.6. Vector velocidad angular y vectoraceleración angular
En esta sección, se define la velocidad angulary la aceleración angular como cantidades vecto-riales, es decir, cantidades que tienen magnitudy dirección.
12 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
x
y
z
r
v
w
O
R
g
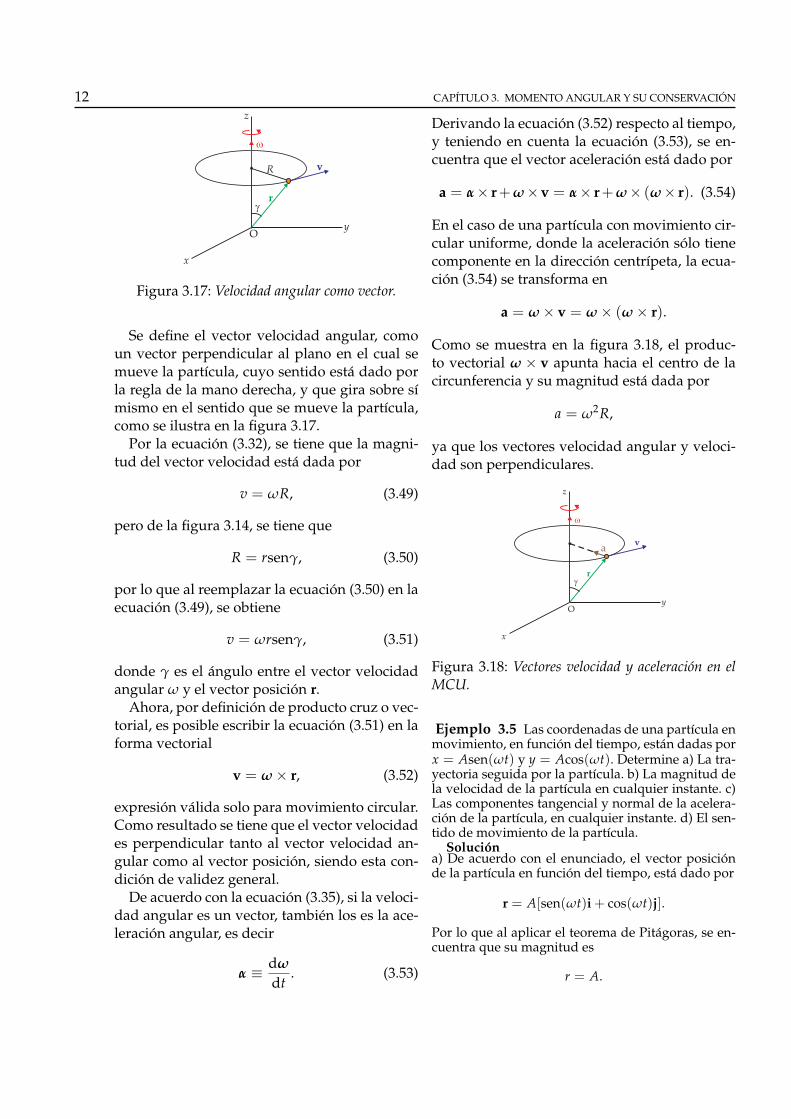
Figura 3.17: Velocidad angular como vector.
Se define el vector velocidad angular, comoun vector perpendicular al plano en el cual semueve la partícula, cuyo sentido está dado porla regla de la mano derecha, y que gira sobre símismo en el sentido que se mueve la partícula,como se ilustra en la figura 3.17.
Por la ecuación (3.32), se tiene que la magni-tud del vector velocidad está dada por
v = ωR, (3.49)
pero de la figura 3.14, se tiene que
R = rsenγ, (3.50)
por lo que al reemplazar la ecuación (3.50) en laecuación (3.49), se obtiene
v = ωrsenγ, (3.51)
donde γ es el ángulo entre el vector velocidadangular ω y el vector posición r.
Ahora, por definición de producto cruz o vec-torial, es posible escribir la ecuación (3.51) en laforma vectorial
v = ω × r, (3.52)
expresión válida solo para movimiento circular.Como resultado se tiene que el vector velocidades perpendicular tanto al vector velocidad an-gular como al vector posición, siendo esta con-dición de validez general.
De acuerdo con la ecuación (3.35), si la veloci-dad angular es un vector, también los es la ace-leración angular, es decir
α ≡ dω
dt. (3.53)
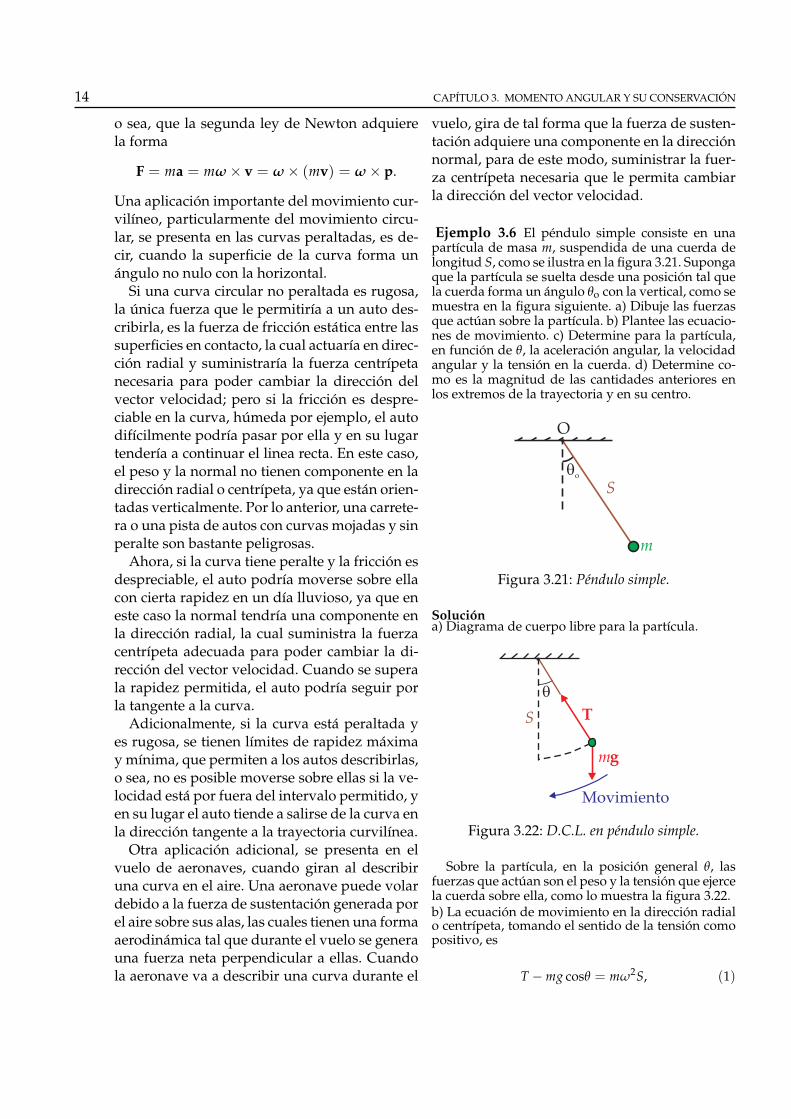
Derivando la ecuación (3.52) respecto al tiempo,y teniendo en cuenta la ecuación (3.53), se en-cuentra que el vector aceleración está dado por
a = α× r+ω×v = α× r+ω× (ω× r). (3.54)
En el caso de una partícula con movimiento cir-cular uniforme, donde la aceleración sólo tienecomponente en la dirección centrípeta, la ecua-ción (3.54) se transforma en
a = ω × v = ω × (ω × r).
Como se muestra en la figura 3.18, el produc-to vectorial ω × v apunta hacia el centro de lacircunferencia y su magnitud está dada por
a = ω2R,
ya que los vectores velocidad angular y veloci-dad son perpendiculares.
x
y
z
r
v
a
w
O
g
Figura 3.18: Vectores velocidad y aceleración en elMCU.
Ejemplo 3.5 Las coordenadas de una partícula enmovimiento, en función del tiempo, están dadas porx = Asen(ωt) y y = Acos(ωt). Determine a) La tra-yectoria seguida por la partícula. b) La magnitud dela velocidad de la partícula en cualquier instante. c)Las componentes tangencial y normal de la acelera-ción de la partícula, en cualquier instante. d) El sen-tido de movimiento de la partícula.
Solucióna) De acuerdo con el enunciado, el vector posiciónde la partícula en función del tiempo, está dado por
r = A[sen(ωt)i + cos(ωt)j].
Por lo que al aplicar el teorema de Pitágoras, se en-cuentra que su magnitud es
r = A.

3.4. MOVIMIENTO CIRCULAR 13
O sea, que la magnitud del vector posición de la par-tícula es constante mientras la partícula se mueve.De este modo, la partícula describe una trayectoriacircular de radio R = A.
b) Empleando la definición de velocidad, se en-cuentra que está dada por
v = ωA[cos(ωt)i − sen(ωt)j],
por lo que su magnitud es
v = ωA.
es decir, que la partícula se mueve de tal forma quela magnitud de su velocidad permanece constante,en otras palabras, tiene un movimiento circular uni-forme.
c) Como la magnitud de la velocidad es indepen-diente del tiempo, la componente tangencial de laaceleración es cero (aT = dv
/dt), pues es una conse-
cuencia del cambio en la magnitud de la velocidad.La componente normal o centrípeta de la acele-
ración, que proviene del cambio en la dirección delvector velocidad, en este caso coincide con la acele-ración total de la partícula, es decir
a = −ω2 A[sen(ωt)i + cos(ωt)j] = −ω2r,
por lo que su magnitud está dada por
aN = a = ω2 A.
Como se esperaba, la magnitud de la aceleración dela partícula permanece constante.
d) Para determinar el sentido de movimiento dela partícula en la trayectoria circular, se considera elpunto P de la figura 3.19. Cuando la partícula pasa
R=
A
P
?
?
a
x
y
O
Figura 3.19: Sentido de movimiento en la circunfe-rencia.
por el punto P sus coordenadas son x = A y y = 0,o sea que
sen(ωt) = 1 cos(ωt) = 0.
Como en ambos casos se cumple que ωt = π/2, alreemplazar este valor en la expresión para la veloci-dad, se obtiene v = −ωAj , lo cual indica que la par-tícula se mueve en una trayectoria circular de radio
A, con movimiento circular uniforme y en sentidohorario.
Ejercicio 3.5 Las coordenadas de una partícula enmovimiento, en función del tiempo, están dadas porx = Asen(ωt) y y = Acos(ωt). a) ¿Cuál es la posi-ción inicial de la partícula si to = 0 ? ¿Cuál es la po-sición correspondiente de la partícula en la gráficaanterior? b) Determine la relación matemática entreel vector posición y el vector aceleración, en cual-quier instante. ¿Qué ángulo forman estos dos vecto-res? ¿Por qué? c) Compruebe que se satisface la ex-presión aN = v2/R. d) ¿Cuál es la aceleración angu-lar de la partícula? ¿Por qué?
3.4.7. Dinámica del movimiento circular
Cuando una partícula de masa m, describe unatrayectoria circular donde ρ = R y v = ωR, lascomponentes tangencial y normal de la fuerzaadquieren la forma
FT = (mαR)uT y FN = (mω2R)uN,
que no son fuerzas aplicadas sino que corres-ponden, respectivamente, a las componentestangencial y normal de la fuerza resultante.
En el caso de movimiento circular uniforme,sólo se tiene cambio en la dirección de la veloci-dad, es decir, F = FNuN.
x
y
z
O
F v
r
m
w
Figura 3.20: Vectores v, ω y F en un MCU.
En forma vectorial, para movimiento circularuniforme, y de acuerdo con la figura 3.20 se tie-ne
a = ω × v,
14 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
o sea, que la segunda ley de Newton adquierela forma
F = ma = mω × v = ω × (mv) = ω × p.
Una aplicación importante del movimiento cur-vilíneo, particularmente del movimiento circu-lar, se presenta en las curvas peraltadas, es de-cir, cuando la superficie de la curva forma unángulo no nulo con la horizontal.
Si una curva circular no peraltada es rugosa,la única fuerza que le permitiría a un auto des-cribirla, es la fuerza de fricción estática entre lassuperficies en contacto, la cual actuaría en direc-ción radial y suministraría la fuerza centrípetanecesaria para poder cambiar la dirección delvector velocidad; pero si la fricción es despre-ciable en la curva, húmeda por ejemplo, el autodifícilmente podría pasar por ella y en su lugartendería a continuar el linea recta. En este caso,el peso y la normal no tienen componente en ladirección radial o centrípeta, ya que están orien-tadas verticalmente. Por lo anterior, una carrete-ra o una pista de autos con curvas mojadas y sinperalte son bastante peligrosas.
Ahora, si la curva tiene peralte y la fricción esdespreciable, el auto podría moverse sobre ellacon cierta rapidez en un día lluvioso, ya que eneste caso la normal tendría una componente enla dirección radial, la cual suministra la fuerzacentrípeta adecuada para poder cambiar la di-rección del vector velocidad. Cuando se superala rapidez permitida, el auto podría seguir porla tangente a la curva.
Adicionalmente, si la curva está peraltada yes rugosa, se tienen límites de rapidez máximay mínima, que permiten a los autos describirlas,o sea, no es posible moverse sobre ellas si la ve-locidad está por fuera del intervalo permitido, yen su lugar el auto tiende a salirse de la curva enla dirección tangente a la trayectoria curvilínea.
Otra aplicación adicional, se presenta en elvuelo de aeronaves, cuando giran al describiruna curva en el aire. Una aeronave puede volardebido a la fuerza de sustentación generada porel aire sobre sus alas, las cuales tienen una formaaerodinámica tal que durante el vuelo se generauna fuerza neta perpendicular a ellas. Cuandola aeronave va a describir una curva durante el
vuelo, gira de tal forma que la fuerza de susten-tación adquiere una componente en la direcciónnormal, para de este modo, suministrar la fuer-za centrípeta necesaria que le permita cambiarla dirección del vector velocidad.
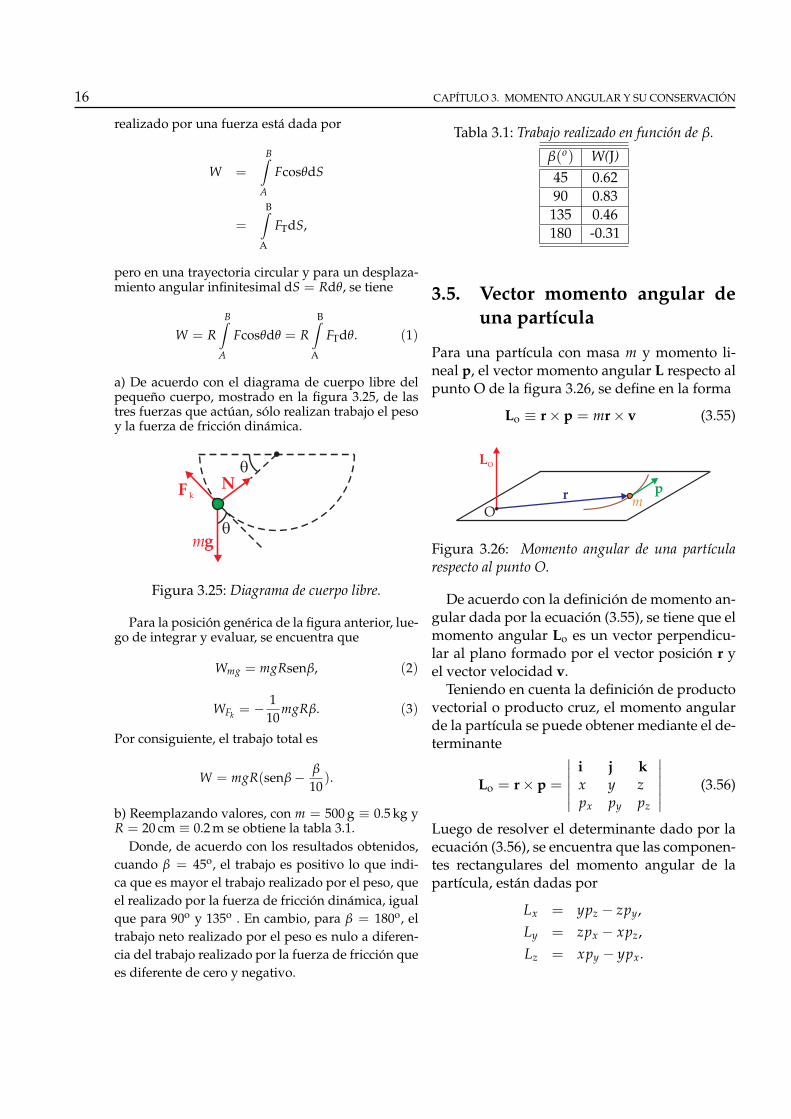
Ejemplo 3.6 El péndulo simple consiste en unapartícula de masa m, suspendida de una cuerda delongitud S, como se ilustra en la figura 3.21. Supongaque la partícula se suelta desde una posición tal quela cuerda forma un ángulo θo con la vertical, como semuestra en la figura siguiente. a) Dibuje las fuerzasque actúan sobre la partícula. b) Plantee las ecuacio-nes de movimiento. c) Determine para la partícula,en función de θ, la aceleración angular, la velocidadangular y la tensión en la cuerda. d) Determine co-mo es la magnitud de las cantidades anteriores enlos extremos de la trayectoria y en su centro.
qo
S
m
O
Figura 3.21: Péndulo simple.
Solucióna) Diagrama de cuerpo libre para la partícula.
mg
q
TS
Movimiento
Figura 3.22: D.C.L. en péndulo simple.
Sobre la partícula, en la posición general θ, lasfuerzas que actúan son el peso y la tensión que ejercela cuerda sobre ella, como lo muestra la figura 3.22.b) La ecuación de movimiento en la dirección radialo centrípeta, tomando el sentido de la tensión comopositivo, es
T − mg cosθ = mω2S, (1)

3.4. MOVIMIENTO CIRCULAR 15
y en la dirección tangencial, tomando como positivoel sentido del movimiento de la figura 3.22, es
mg senθ = mαS. (2)
c) De la ecuación (2), la aceleración angular de la par-tícula está dada por
α =gS
senθ. (3)
teniendo en cuenta la definición de aceleración an-gular, la ecuación (3) se transforma en
dω
dt=
gS
senθ, (4)
donde se tienen las variables ω, t y θ. Con el fin deresolver la ecuación (4) se hace necesario eliminar lavariable tiempo, ya que interesa obtener ω(θ). Mul-tiplicando a ambos lados de la ecuación (4) por dθ,se llega a la expresión
−ωdω =gS
senθ dθ, (5)
el signo menos en la ecuación aparece ya que en lasituación de la figura 3.22, a medida que transcurreel tiempo el ángulo θ disminuye.
Integrando la ecuación (5) entre los límites ω =0 cuando θ = θo y ω en la posición angular θ, seobtiene
ω =
√2gS(cos θ − cosθo), (6)
mediante las ecuaciones (1) y (6), se llega a
T = mg [3 cosθ − 2 cosθo] . (7)
d) De las ecuaciones (3), (6), (7) y teniendo en cuentala figura 3.23, se obtiene para los extremos A y B,donde θ = θo
α =gS
senθo,
ω = 0,
T = mg cosθo.
Ahora, en el centro de la trayectoria C con θ = 0
α = 0
ω =
√2gS
(1 − cosθo),
T = mg(3 − 2 cosθo).
De estos resultados, entre las posiciones B y C setiene que al soltar la partícula desde el punto B, laaceleración angular disminuye desde un valor má-ximo hasta cero, mientras que la velocidad angular
qo S
B
qo
A
C
Figura 3.23: Puntos extremos en un péndulo simple.
aumenta desde cero hasta un valor máximo y la ten-sión aumenta entre estos dos puntos. Entre las posi-ciones C y A se presentan cambios opuestos en es-tas cantidades. En conclusión, donde la aceleraciónes máxima (extremos de la trayectoria), la velocidadangular es mínima (cero) y viceversa. Igualmente, seobserva que la tensión adquiere su máximo valor enel centro de la trayectoria y el mínimo en los extre-mos.
Ejercicio 3.6 a) Analizar los resultados del proble-ma anterior suponiendo que θo = π/2 b) ¿Por quérazón en el punto C de la figura 3.23, la tensión en lacuerda no es igual al peso de la partícula?
Ejemplo 3.7 Un pequeño cuerpo de masa m, queparte del punto A de la figura 3.24, desliza sobre latrayectoria circular de radio R. Suponer que la mag-nitud de la fuerza de fricción Fk es constante, convalor un décimo del peso del cuerpo. a) Determi-ne el trabajo neto realizado sobre el pequeño cuer-po, cuando pasa por el punto B. b) Si m = 500 g,R = 20 cm, para β = 45o, 90o, 135o, 180o, hallar elvalor de la cantidad obtenida en el numeral anterior.
C
B
A D
b
mR
Figura 3.24: Superficie circular lisa.
SoluciónComo consecuencia de la ecuación (2.48), el trabajo
16 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
realizado por una fuerza está dada por
W =
B∫A
FcosθdS
=
B∫A
FTdS,
pero en una trayectoria circular y para un desplaza-miento angular infinitesimal dS = Rdθ, se tiene
W = RB∫
A
Fcosθdθ = RB∫
A
FTdθ. (1)
a) De acuerdo con el diagrama de cuerpo libre delpequeño cuerpo, mostrado en la figura 3.25, de lastres fuerzas que actúan, sólo realizan trabajo el pesoy la fuerza de fricción dinámica.
Fk
mg
Nq
q
Figura 3.25: Diagrama de cuerpo libre.
Para la posición genérica de la figura anterior, lue-go de integrar y evaluar, se encuentra que
Wmg = mgRsenβ, (2)
WFk = − 110
mgRβ. (3)
Por consiguiente, el trabajo total es
W = mgR(senβ − β
10).
b) Reemplazando valores, con m = 500 g ≡ 0.5 kg yR = 20 cm ≡ 0.2 m se obtiene la tabla 3.1.
Donde, de acuerdo con los resultados obtenidos,cuando β = 45o, el trabajo es positivo lo que indi-ca que es mayor el trabajo realizado por el peso, queel realizado por la fuerza de fricción dinámica, igualque para 90o y 135o . En cambio, para β = 180o, eltrabajo neto realizado por el peso es nulo a diferen-cia del trabajo realizado por la fuerza de fricción quees diferente de cero y negativo.
Tabla 3.1: Trabajo realizado en función de β.
β(o) W(J)45 0.6290 0.83
135 0.46180 -0.31
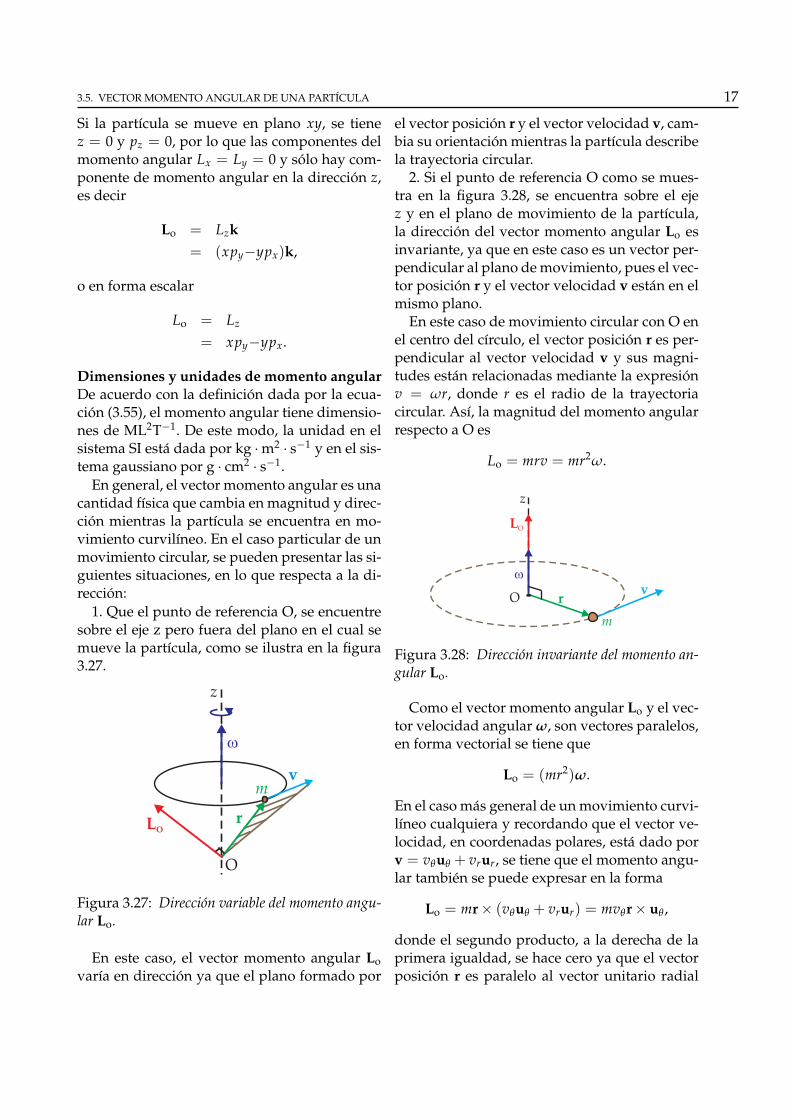
3.5. Vector momento angular deuna partícula
Para una partícula con masa m y momento li-neal p, el vector momento angular L respecto alpunto O de la figura 3.26, se define en la forma
Lo ≡ r × p = mr × v (3.55)
O
LO
r pm
Figura 3.26: Momento angular de una partícularespecto al punto O.
De acuerdo con la definición de momento an-gular dada por la ecuación (3.55), se tiene que elmomento angular Lo es un vector perpendicu-lar al plano formado por el vector posición r yel vector velocidad v.
Teniendo en cuenta la definición de productovectorial o producto cruz, el momento angularde la partícula se puede obtener mediante el de-terminante
Lo = r × p =
∣∣∣∣∣∣i j kx y zpx py pz
∣∣∣∣∣∣ (3.56)
Luego de resolver el determinante dado por laecuación (3.56), se encuentra que las componen-tes rectangulares del momento angular de lapartícula, están dadas por
Lx = ypz − zpy,Ly = zpx − xpz,Lz = xpy − ypx.
3.5. VECTOR MOMENTO ANGULAR DE UNA PARTÍCULA 17
Si la partícula se mueve en plano xy, se tienez = 0 y pz = 0, por lo que las componentes delmomento angular Lx = Ly = 0 y sólo hay com-ponente de momento angular en la dirección z,es decir
Lo = Lzk= (xpy−ypx)k,
o en forma escalar
Lo = Lz
= xpy−ypx.
Dimensiones y unidades de momento angularDe acuerdo con la definición dada por la ecua-ción (3.55), el momento angular tiene dimensio-nes de ML2T−1. De este modo, la unidad en elsistema SI está dada por kg · m2 · s−1 y en el sis-tema gaussiano por g · cm2 · s−1.
En general, el vector momento angular es unacantidad física que cambia en magnitud y direc-ción mientras la partícula se encuentra en mo-vimiento curvilíneo. En el caso particular de unmovimiento circular, se pueden presentar las si-guientes situaciones, en lo que respecta a la di-rección:
1. Que el punto de referencia O, se encuentresobre el eje z pero fuera del plano en el cual semueve la partícula, como se ilustra en la figura3.27.
z
O
LO
r
m
v
w
Figura 3.27: Dirección variable del momento angu-lar Lo.
En este caso, el vector momento angular Lovaría en dirección ya que el plano formado por
el vector posición r y el vector velocidad v, cam-bia su orientación mientras la partícula describela trayectoria circular.
2. Si el punto de referencia O como se mues-tra en la figura 3.28, se encuentra sobre el ejez y en el plano de movimiento de la partícula,la dirección del vector momento angular Lo esinvariante, ya que en este caso es un vector per-pendicular al plano de movimiento, pues el vec-tor posición r y el vector velocidad v están en elmismo plano.
En este caso de movimiento circular con O enel centro del círculo, el vector posición r es per-pendicular al vector velocidad v y sus magni-tudes están relacionadas mediante la expresiónv = ωr, donde r es el radio de la trayectoriacircular. Así, la magnitud del momento angularrespecto a O es
Lo = mrv = mr2ω.
z
O
LO
w
m
rv
Figura 3.28: Dirección invariante del momento an-gular Lo.
Como el vector momento angular Lo y el vec-tor velocidad angular ω, son vectores paralelos,en forma vectorial se tiene que
Lo = (mr2)ω.
En el caso más general de un movimiento curvi-líneo cualquiera y recordando que el vector ve-locidad, en coordenadas polares, está dado porv = vθuθ + vrur, se tiene que el momento angu-lar también se puede expresar en la forma
Lo = mr × (vθuθ + vrur) = mvθr × uθ ,
donde el segundo producto, a la derecha de laprimera igualdad, se hace cero ya que el vectorposición r es paralelo al vector unitario radial

18 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
ur. Por consiguiente, su magnitud en este casoes
Lo = mrvθ = mr2 dθ
dt.
3.5.1. Variación del vector momento an-gular con el tiempo
Ahora se considera la variación del vector mo-mento angular con el tiempo. Derivando laecuación (3.55) con respecto al tiempo se tiene
dLo
dt= r × dp
dt+
drdt
× p
= r × F, (3.57)
donde el segundo producto a la derecha de laprimera igualdad es cero, ya que el vector ve-locidad v es paralelo al vector momento linealp, mientras que el segundo producto correspon-de a la forma matemática de la segunda ley deNewton. De este modo, la variación del mo-mento angular con el tiempo está relacionadacon la fuerza neta que actúa sobre la partícula,mediante la ecuación (3.57).
La ecuación (3.57) es fundamental cuando seanaliza el movimiento de rotación, con la condi-ción que los vectores Lo y r × F sean evaluadosrespecto al mismo punto. Esta expresión desem-peña en el movimiento rotación, el mismo papelque la segunda ley de Newton en el movimien-to de traslación.
3.5.2. Conservación del momento angu-lar y fuerzas centrales
Si en la ecuación (3.57), el producto vectorial en-tre el vector posición r y la fuerza resultante F escero, se tiene que el vector momento angular esuna constante del movimiento. Por lo tanto, setiene que el momento angular de una partícu-la es constante si el producto vectorial r × F escero. Esta situación se presenta en los dos casossiguientes.
1. Si la fuerza neta sobre la partícula es cero,se tiene una partícula libre o en equilibrio, es de-cir, r × F = 0 y la condición Lo = Constante sesatisface.
En la figura 3.29, se considera una partículade masa m con movimiento rectilíneo uniforme
O
m
q
Tra yectoria
v
r
d
Figura 3.29: Momento angular en el movimientorectilíneo.
y con el origen de coordenadas ubicado en O.Por lo tanto
Lo = m r × v,
ó en magnitud
Lo = mrv senθ.
Como muestra la figura 3.29, d = r senθ, por loque
Lo = mvd
con m, v y d son constantes, el vector momentoangular es constante en magnitud y dirección yaque es un vector que entra perpendicularmenteal plano de la hoja mientras la partícula se en-cuentre en movimiento sobre la trayectoria rec-tilínea.
2. Igualmente, el producto vectorial entre elvector posición r y la fuerza F se hace cero, sison vectores paralelos con la misma línea de ac-ción, es decir, si la línea de acción de la fuer-za pasa por un punto fijo, como se ilustra en lafigura 3.30 donde una partícula de masa m semueve sobre una trayectoria curvilínea, siendoO un punto de referencia fijo. Por consiguiente,el momento angular de esta partícula se conser-va.
Cuando una fuerza actúa sobre una partícu-la en movimiento y cumple la condición de pa-sar su línea de acción por un punto fijo, llama-do centro de fuerzas, se dice que la fuerza es unafuerza central.
En conclusión, cuando un cuerpo se muevebajo la acción de una fuerza central, su momen-to angular no varía, es decir, el momento angu-lar del cuerpo respecto al centro de fuerza esuna constante de movimiento.
3.5. VECTOR MOMENTO ANGULAR DE UNA PARTÍCULA 19
m
O
F
r
v
Tray ectoria
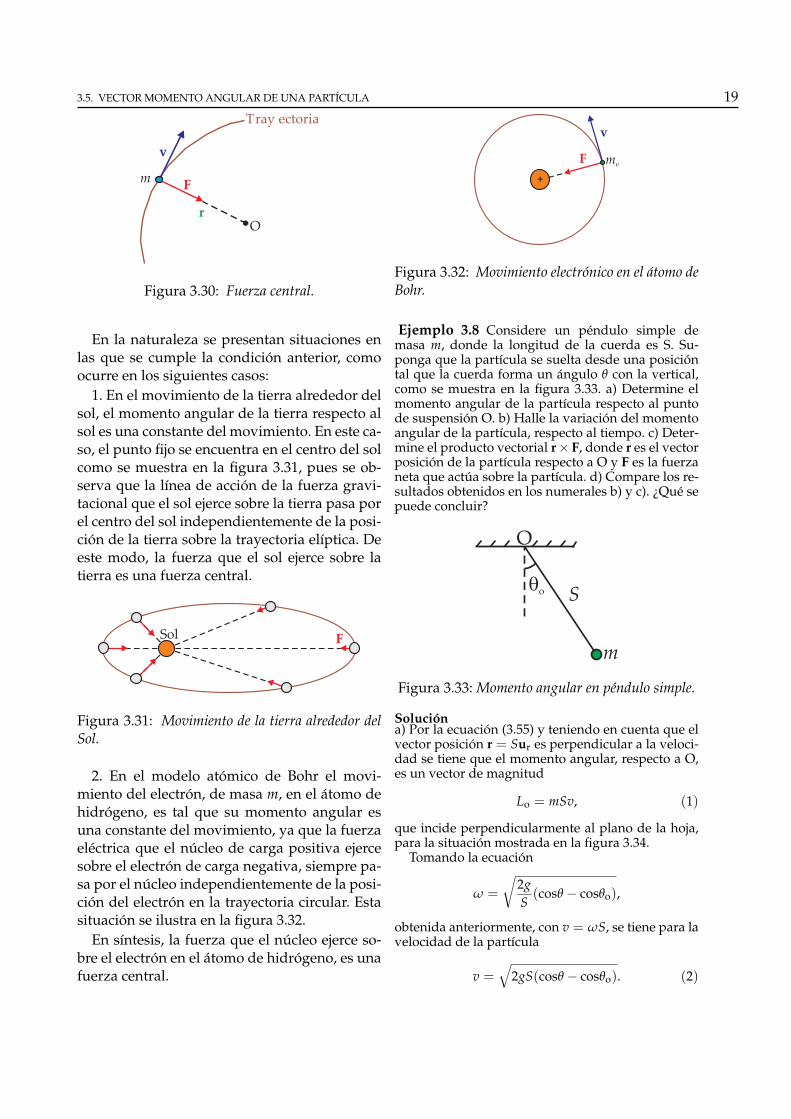
Figura 3.30: Fuerza central.
En la naturaleza se presentan situaciones enlas que se cumple la condición anterior, comoocurre en los siguientes casos:
1. En el movimiento de la tierra alrededor delsol, el momento angular de la tierra respecto alsol es una constante del movimiento. En este ca-so, el punto fijo se encuentra en el centro del solcomo se muestra en la figura 3.31, pues se ob-serva que la línea de acción de la fuerza gravi-tacional que el sol ejerce sobre la tierra pasa porel centro del sol independientemente de la posi-ción de la tierra sobre la trayectoria elíptica. Deeste modo, la fuerza que el sol ejerce sobre latierra es una fuerza central.
Sol F
Figura 3.31: Movimiento de la tierra alrededor delSol.
2. En el modelo atómico de Bohr el movi-miento del electrón, de masa m, en el átomo dehidrógeno, es tal que su momento angular esuna constante del movimiento, ya que la fuerzaeléctrica que el núcleo de carga positiva ejercesobre el electrón de carga negativa, siempre pa-sa por el núcleo independientemente de la posi-ción del electrón en la trayectoria circular. Estasituación se ilustra en la figura 3.32.
En síntesis, la fuerza que el núcleo ejerce so-bre el electrón en el átomo de hidrógeno, es unafuerza central.
+
F
v
me
Figura 3.32: Movimiento electrónico en el átomo deBohr.
Ejemplo 3.8 Considere un péndulo simple demasa m, donde la longitud de la cuerda es S. Su-ponga que la partícula se suelta desde una posicióntal que la cuerda forma un ángulo θ con la vertical,como se muestra en la figura 3.33. a) Determine elmomento angular de la partícula respecto al puntode suspensión O. b) Halle la variación del momentoangular de la partícula, respecto al tiempo. c) Deter-mine el producto vectorial r× F, donde r es el vectorposición de la partícula respecto a O y F es la fuerzaneta que actúa sobre la partícula. d) Compare los re-sultados obtenidos en los numerales b) y c). ¿Qué sepuede concluir?
qo S
m
O
Figura 3.33: Momento angular en péndulo simple.
Solucióna) Por la ecuación (3.55) y teniendo en cuenta que elvector posición r = Sur es perpendicular a la veloci-dad se tiene que el momento angular, respecto a O,es un vector de magnitud
Lo = mSv, (1)
que incide perpendicularmente al plano de la hoja,para la situación mostrada en la figura 3.34.
Tomando la ecuación
ω =
√2gS(cosθ − cosθo),
obtenida anteriormente, con v = ωS, se tiene para lavelocidad de la partícula
v =√
2gS(cosθ − cosθo). (2)
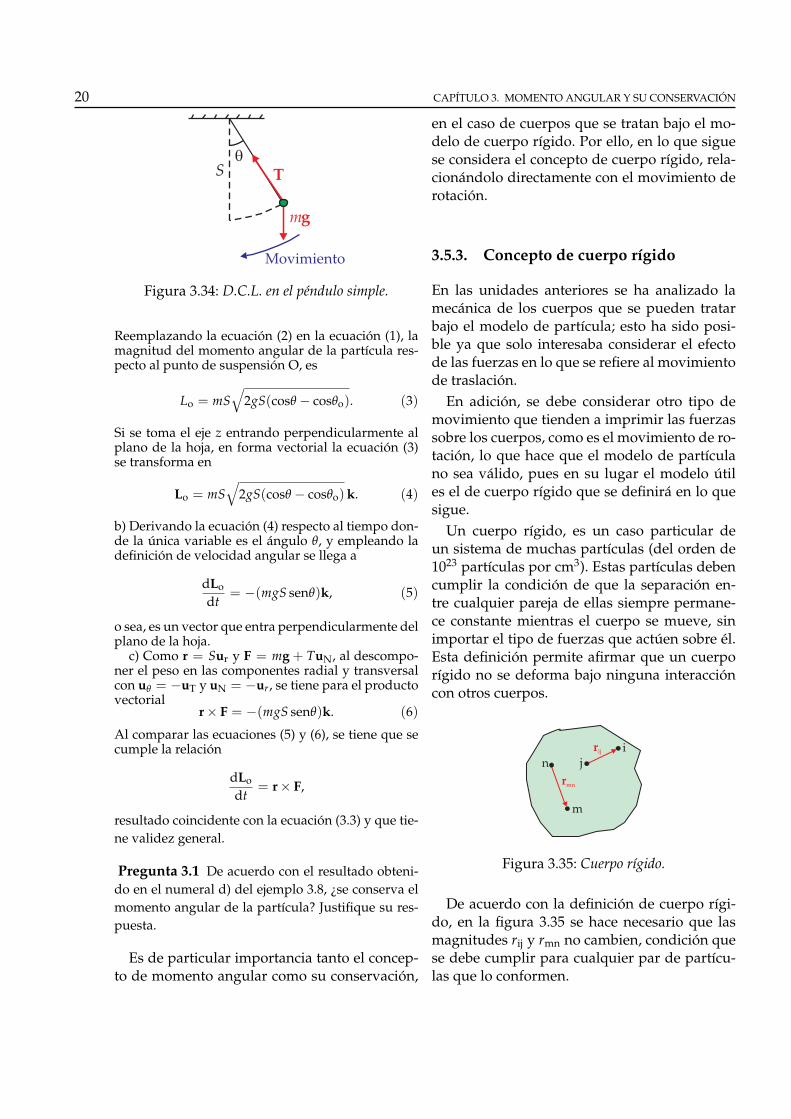
20 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
mg
q
TS
Movimiento
Figura 3.34: D.C.L. en el péndulo simple.
Reemplazando la ecuación (2) en la ecuación (1), lamagnitud del momento angular de la partícula res-pecto al punto de suspensión O, es
Lo = mS√
2gS(cosθ − cosθo). (3)
Si se toma el eje z entrando perpendicularmente alplano de la hoja, en forma vectorial la ecuación (3)se transforma en
Lo = mS√
2gS(cosθ − cosθo)k. (4)
b) Derivando la ecuación (4) respecto al tiempo don-de la única variable es el ángulo θ, y empleando ladefinición de velocidad angular se llega a
dLo
dt= −(mgS senθ)k, (5)
o sea, es un vector que entra perpendicularmente delplano de la hoja.
c) Como r = Sur y F = mg + TuN, al descompo-ner el peso en las componentes radial y transversalcon uθ = −uT y uN = −ur, se tiene para el productovectorial
r × F = −(mgS senθ)k. (6)
Al comparar las ecuaciones (5) y (6), se tiene que secumple la relación
dLo
dt= r × F,
resultado coincidente con la ecuación (3.3) y que tie-ne validez general.
Pregunta 3.1 De acuerdo con el resultado obteni-do en el numeral d) del ejemplo 3.8, ¿se conserva elmomento angular de la partícula? Justifique su res-puesta.
Es de particular importancia tanto el concep-to de momento angular como su conservación,
en el caso de cuerpos que se tratan bajo el mo-delo de cuerpo rígido. Por ello, en lo que siguese considera el concepto de cuerpo rígido, rela-cionándolo directamente con el movimiento derotación.
3.5.3. Concepto de cuerpo rígido
En las unidades anteriores se ha analizado lamecánica de los cuerpos que se pueden tratarbajo el modelo de partícula; esto ha sido posi-ble ya que solo interesaba considerar el efectode las fuerzas en lo que se refiere al movimientode traslación.
En adición, se debe considerar otro tipo demovimiento que tienden a imprimir las fuerzassobre los cuerpos, como es el movimiento de ro-tación, lo que hace que el modelo de partículano sea válido, pues en su lugar el modelo útiles el de cuerpo rígido que se definirá en lo quesigue.
Un cuerpo rígido, es un caso particular deun sistema de muchas partículas (del orden de1023 partículas por cm3). Estas partículas debencumplir la condición de que la separación en-tre cualquier pareja de ellas siempre permane-ce constante mientras el cuerpo se mueve, sinimportar el tipo de fuerzas que actúen sobre él.Esta definición permite afirmar que un cuerporígido no se deforma bajo ninguna interaccióncon otros cuerpos.
i
j
m
n
rmn
rij
Figura 3.35: Cuerpo rígido.
De acuerdo con la definición de cuerpo rígi-do, en la figura 3.35 se hace necesario que lasmagnitudes rij y rmn no cambien, condición quese debe cumplir para cualquier par de partícu-las que lo conformen.

3.6. VECTOR MOMENTO ANGULAR DE UN CUERPO RÍGIDO 21
3.6. Vector momento angular deun cuerpo rígido
De acuerdo con la ecuación (3.55), el momentoangular Li,o de una partícula i que describe unatrayectoria curvilínea con velocidad vi, está da-do por
Li,o = miri × vi, (3.58)
donde mi es la masa de la partícula y ri es suvector posición respecto al origen de coordena-das.
En el caso de un cuerpo rígido, cuando ro-ta alrededor de un eje determinado, esta defini-ción sigue siendo válida para cualquier partícu-la del cuerpo. Además, si los momentos angula-res de todas las partículas del cuerpo se evalúanrespecto al mismo punto, el momento angulartotal del cuerpo rígido está dado por
Lo = ∑ miri × vi
= ∑ Li. (3.59)
Primero se considera el caso de la figura 3.36, enel cual se tienen n partículas que forman una lá-mina rígida muy delgada, de espesor desprecia-ble, con forma irregular y cuya distribución demasa también es irregular. La lámina gira convelocidad angular ω, en su propio plano, alre-dedor de un eje fijo perpendicular a ella y cuyoorigen O también se encuentra en ese plano.
mi
z
Li,O
Ov
i
ri
w
Figura 3.36: Momento angular de una lámina res-pecto al punto O.
De las partículas que conforman la lámina, seconsidera la partícula genérica i, que describeuna trayectoria circular de radio ri = Ri con ve-locidad vi = ω × ri. Como la velocidad angulares paralela al eje de rotación, esto es perpendi-cular a ri, la magnitud de la velocidad es
vi = ωri. (3.60)
Ahora, como ri es perpendicular a vi, de acuer-do con la ecuación (3.58) la magnitud del mo-mento angular, está dada por
Li,o = mirivi. (3.61)
Reemplazando la ecuación (3.60) en la ecuación(3.61), se encuentra
Li,o = mir2i ω, (3.62)
que corresponde a una relación entre las mag-nitudes de los vectores Li y ω; lo cual permiteescribir la ecuación (3.62) en la forma vectorial,
Li,o = (mir2i )ω. (3.63)
El término entre paréntesis que aparece en laecuación (3.63), se conoce como el momento deinercia de la partícula i, respecto al eje de rota-ción z que pasa por el punto O. Este concepto seanaliza con más detalle en la siguiente sección.
Reemplazando la ecuación (3.63) en la ecua-ción (3.59), se encuentra que el momento angu-lar del cuerpo rígido, respecto al punto O, estádado por
Lo =(∑ mir2
i)
ω, (3.64)
donde se ha tenido en cuenta que la velocidadangular es la misma para todas las partículasque forman la lámina.
La ecuación (3.64) se puede escribir en la for-ma
Lo = Iω, (3.65)
donde se define
I ≡ ∑ mir2i , (3.66)
como el momento de inercia de la lámina res-pecto al eje z, que pasa por el punto O.
En síntesis, cuando la lámina está en rotación y elpunto de referencia O coincide con el punto de inter-sección entre el eje de rotación y la lámina, el momen-to angular total es paralelo a la velocidad angular.
Ahora, se considera la misma lámina, pero elorigen O ya no coincide con la intersección entreel eje z y el plano de rotación, como se ilustra enla figura 3.37.

22 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
O
w
mi
z
gi
Ri
vi
ri
Li,O
Figura 3.37: Momento angular de una lámina conO fuera de ella.
En esta situación, la ecuación (3.59) siguesiendo válida para la partícula i, pero la magni-tud del vector posición ri ya no coincide con elradio de la trayectoria descrita por la partícula.
Como se ilustra en la figura 3.37, se presentauna diferencia respecto a la dirección del vec-tor momento angular Li,O, ya que de acuerdocon su definición es un vector perpendicular alplano formado por ri y vi, esto es, el vector mo-mento angular de la partícula i forma un ángulode 90 − γi con el eje de rotación z, y gira conti-nuamente con la partícula alrededor del eje.
Por lo anterior, si Li,o no es paralelo a ω, elmomento angular total de la lámina aun es da-do por la ecuación (3.62), pero en general no esparalelo al vector velocidad angular.
En conclusión, cuando la lámina está rotando yel punto de referencia O no coincide con el punto deintersección entre el eje de rotación y la lámina, elmomento angular total no es, en general, paralelo ala velocidad angular.
Cuando el momento angular no es paraleloa la velocidad angular, se considera la compo-nente del momento angular paralela al eje z, esdecir Liz,O. En la figura 3.38, se tiene que estacomponente está dada por
Liz,O = Li,ocos(90−γi). (3.67)
Reemplazando la ecuación (3.61) en la ecuación(3.67), teniendo en cuenta que vi = riωsenγi yRi = risenγi, se encuentra
Liz,O = (miR2i )ω, (3.68)
donde de nuevo aparece el término miR2i .
Igual que en el caso del vector momento an-gular total, la componente z del momento angu-lar total de la lámina está dada por Lz = ∑ Liz,O,así que al reemplazar Liz,O mediante la ecuación(3.62), se tiene la expresión escalar
LzO = Iω, (3.69)
con I dado por la ecuación (3.66).
De acuerdo con los resultados anteriores, enuna placa que gira sobre su propio plano, siem-pre es posible tomar el origen O en ese plano yen consecuencia lograr una simplificación con-siderable, ya que el momento angular total esparalelo a la velocidad angular. En cambio,cuando se trata el caso más general de un cuer-po rígido tridimensional que está rotando, co-mo el mostrado en la figura 3.38, ya no es posi-ble hacer tal elección.
z
w
Ri
mi
O
qiLi,O
vi
ri
Figura 3.38: Momento angular de un cuerpo rígidotridimensional.
Igual que en el caso de la lámina, el cuerporígido rota alrededor del eje z con velocidad an-gular ω, y todas las partículas describen trayec-torias circulares. Mediante un procedimiento si-milar al llevado a cabo cuando el punto de refe-rencia O se toma por fuera de la lámina, se en-cuentran resultados semejantes, así que en ge-neral, el momento angular total no es paralelo al vec-tor velocidad angular, pues en general los Li no sonparalelos al eje de rotación.
Por esta razón, es necesario considerar lacomponente del momento angular paralela aleje z, lo que lleva a relaciones idénticas a las da-das por las ecuaciones (3.69) y (3.59).
3.7. MOMENTO DE INERCIA DE UN CUERPO RÍGIDO 23
3.7. Momento de inercia de uncuerpo rígido
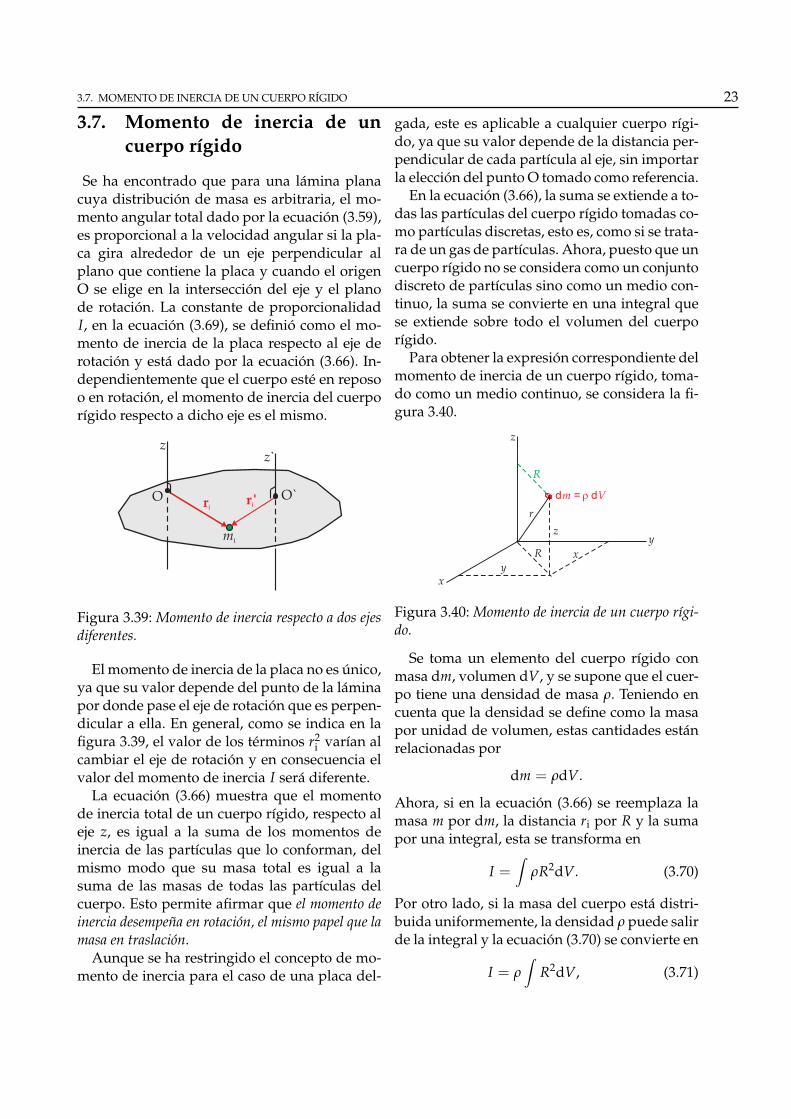
Se ha encontrado que para una lámina planacuya distribución de masa es arbitraria, el mo-mento angular total dado por la ecuación (3.59),es proporcional a la velocidad angular si la pla-ca gira alrededor de un eje perpendicular alplano que contiene la placa y cuando el origenO se elige en la intersección del eje y el planode rotación. La constante de proporcionalidadI, en la ecuación (3.69), se definió como el mo-mento de inercia de la placa respecto al eje derotación y está dado por la ecuación (3.66). In-dependientemente que el cuerpo esté en reposoo en rotación, el momento de inercia del cuerporígido respecto a dicho eje es el mismo.
z
z`
mi
O O`r
i'r
i
Figura 3.39: Momento de inercia respecto a dos ejesdiferentes.
El momento de inercia de la placa no es único,ya que su valor depende del punto de la láminapor donde pase el eje de rotación que es perpen-dicular a ella. En general, como se indica en lafigura 3.39, el valor de los términos r2
i varían alcambiar el eje de rotación y en consecuencia elvalor del momento de inercia I será diferente.
La ecuación (3.66) muestra que el momentode inercia total de un cuerpo rígido, respecto aleje z, es igual a la suma de los momentos deinercia de las partículas que lo conforman, delmismo modo que su masa total es igual a lasuma de las masas de todas las partículas delcuerpo. Esto permite afirmar que el momento deinercia desempeña en rotación, el mismo papel que lamasa en traslación.
Aunque se ha restringido el concepto de mo-mento de inercia para el caso de una placa del-
gada, este es aplicable a cualquier cuerpo rígi-do, ya que su valor depende de la distancia per-pendicular de cada partícula al eje, sin importarla elección del punto O tomado como referencia.
En la ecuación (3.66), la suma se extiende a to-das las partículas del cuerpo rígido tomadas co-mo partículas discretas, esto es, como si se trata-ra de un gas de partículas. Ahora, puesto que uncuerpo rígido no se considera como un conjuntodiscreto de partículas sino como un medio con-tinuo, la suma se convierte en una integral quese extiende sobre todo el volumen del cuerporígido.
Para obtener la expresión correspondiente delmomento de inercia de un cuerpo rígido, toma-do como un medio continuo, se considera la fi-gura 3.40.
d = dm Vr
R
R
x
x
y
y
z
z
r
Figura 3.40: Momento de inercia de un cuerpo rígi-do.
Se toma un elemento del cuerpo rígido conmasa dm, volumen dV, y se supone que el cuer-po tiene una densidad de masa ρ. Teniendo encuenta que la densidad se define como la masapor unidad de volumen, estas cantidades estánrelacionadas por
dm = ρdV.
Ahora, si en la ecuación (3.66) se reemplaza lamasa m por dm, la distancia ri por R y la sumapor una integral, esta se transforma en
I =∫
ρR2dV. (3.70)
Por otro lado, si la masa del cuerpo está distri-buida uniformemente, la densidad ρ puede salirde la integral y la ecuación (3.70) se convierte en
I = ρ∫
R2dV, (3.71)
24 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
lo que permite una simplificación, ya que el pro-blema se reduce a resolver una integral que con-tiene sólo un factor geométrico, que es el mismopara todos los cuerpos de igual forma y tamaño.Dimensiones y unidades de momento de iner-ciaDe acuerdo con la ecuación (3.66) ó (3.70), las di-mensiones de momento de inercia son ML2, porlo tanto, la unidad en el sistema internacionalde unidades está dada por kg m2 y en el sistemagaussiano de unidades por g cm2.
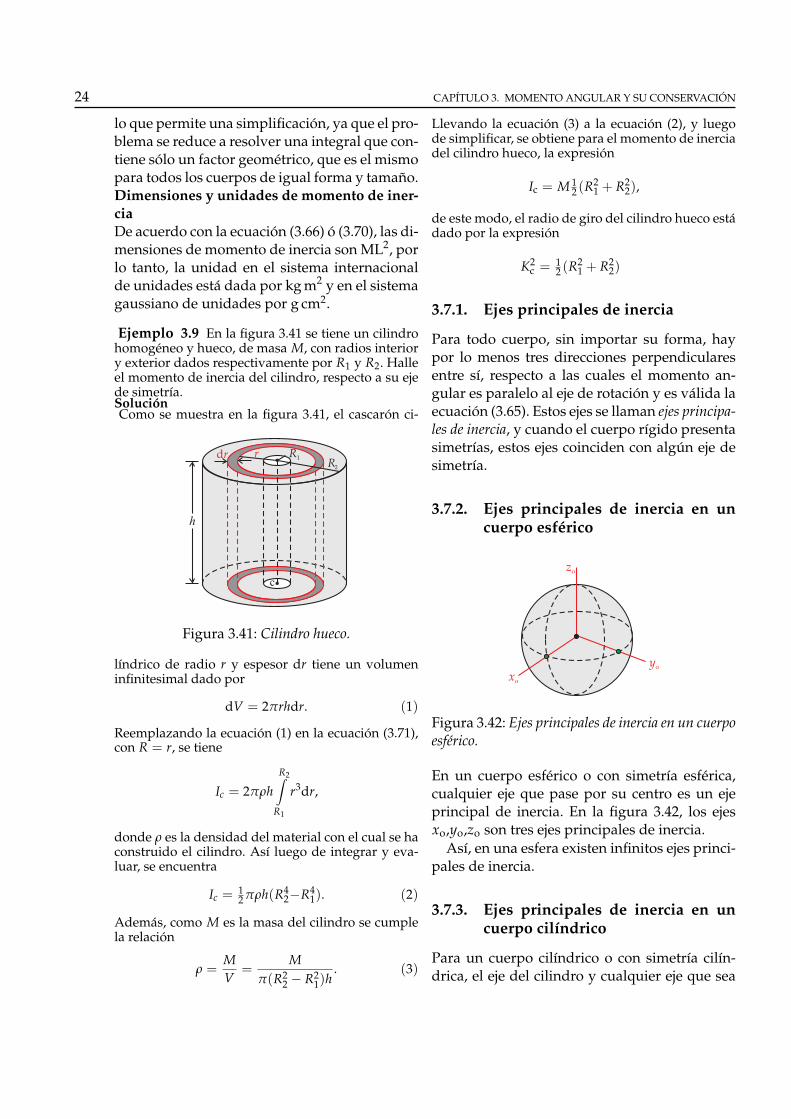
Ejemplo 3.9 En la figura 3.41 se tiene un cilindrohomogéneo y hueco, de masa M, con radios interiory exterior dados respectivamente por R1 y R2. Halleel momento de inercia del cilindro, respecto a su ejede simetría.SoluciónComo se muestra en la figura 3.41, el cascarón ci-
dr r R1
R2
c
h
Figura 3.41: Cilindro hueco.
líndrico de radio r y espesor dr tiene un volumeninfinitesimal dado por
dV = 2πrhdr. (1)
Reemplazando la ecuación (1) en la ecuación (3.71),con R = r, se tiene
Ic = 2πρhR2∫
R1
r3dr,
donde ρ es la densidad del material con el cual se haconstruido el cilindro. Así luego de integrar y eva-luar, se encuentra
Ic =12 πρh(R4
2−R41). (2)
Además, como M es la masa del cilindro se cumplela relación
ρ =MV
=M
π(R22 − R2
1)h. (3)
Llevando la ecuación (3) a la ecuación (2), y luegode simplificar, se obtiene para el momento de inerciadel cilindro hueco, la expresión
Ic = M 12 (R2
1 + R22),
de este modo, el radio de giro del cilindro hueco estádado por la expresión
K2c = 1
2 (R21 + R2
2)
3.7.1. Ejes principales de inercia
Para todo cuerpo, sin importar su forma, haypor lo menos tres direcciones perpendicularesentre sí, respecto a las cuales el momento an-gular es paralelo al eje de rotación y es válida laecuación (3.65). Estos ejes se llaman ejes principa-les de inercia, y cuando el cuerpo rígido presentasimetrías, estos ejes coinciden con algún eje desimetría.
3.7.2. Ejes principales de inercia en uncuerpo esférico
xo
zo
yo
Figura 3.42: Ejes principales de inercia en un cuerpoesférico.
En un cuerpo esférico o con simetría esférica,cualquier eje que pase por su centro es un ejeprincipal de inercia. En la figura 3.42, los ejesxo,yo,zo son tres ejes principales de inercia.
Así, en una esfera existen infinitos ejes princi-pales de inercia.
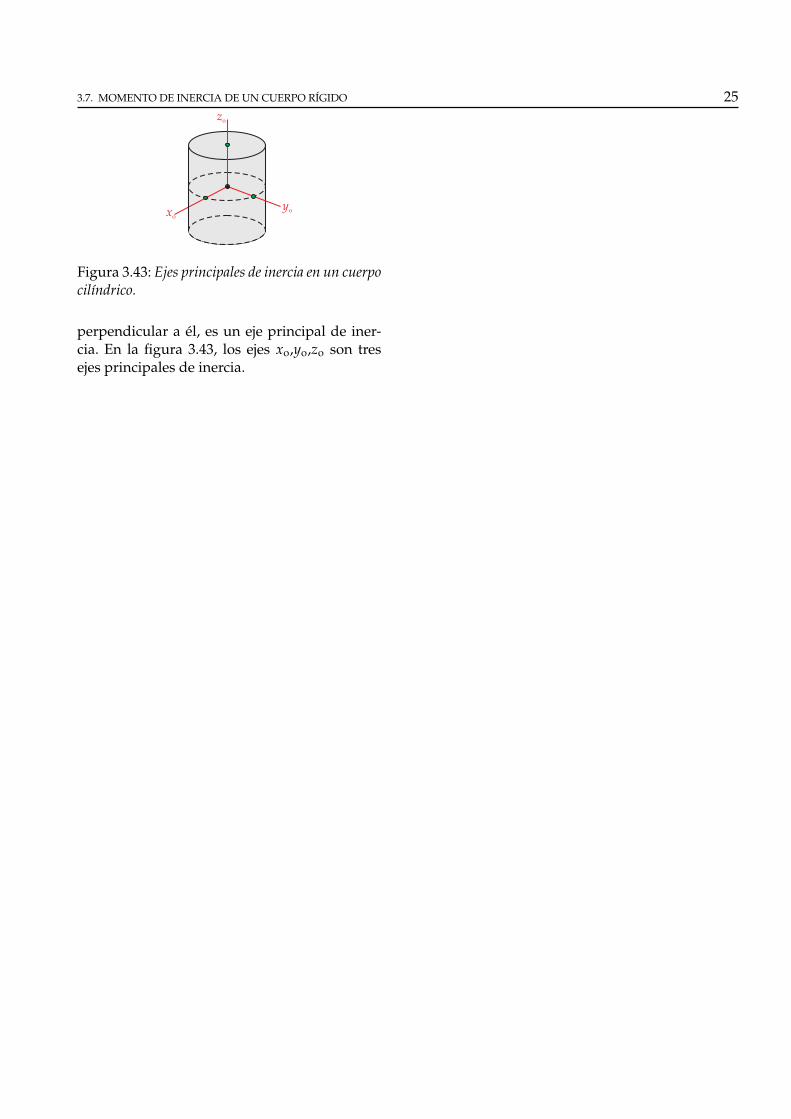
3.7.3. Ejes principales de inercia en uncuerpo cilíndrico
Para un cuerpo cilíndrico o con simetría cilín-drica, el eje del cilindro y cualquier eje que sea
3.7. MOMENTO DE INERCIA DE UN CUERPO RÍGIDO 25
xo
zo
yo
Figura 3.43: Ejes principales de inercia en un cuerpocilíndrico.
perpendicular a él, es un eje principal de iner-cia. En la figura 3.43, los ejes xo,yo,zo son tresejes principales de inercia.
26 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
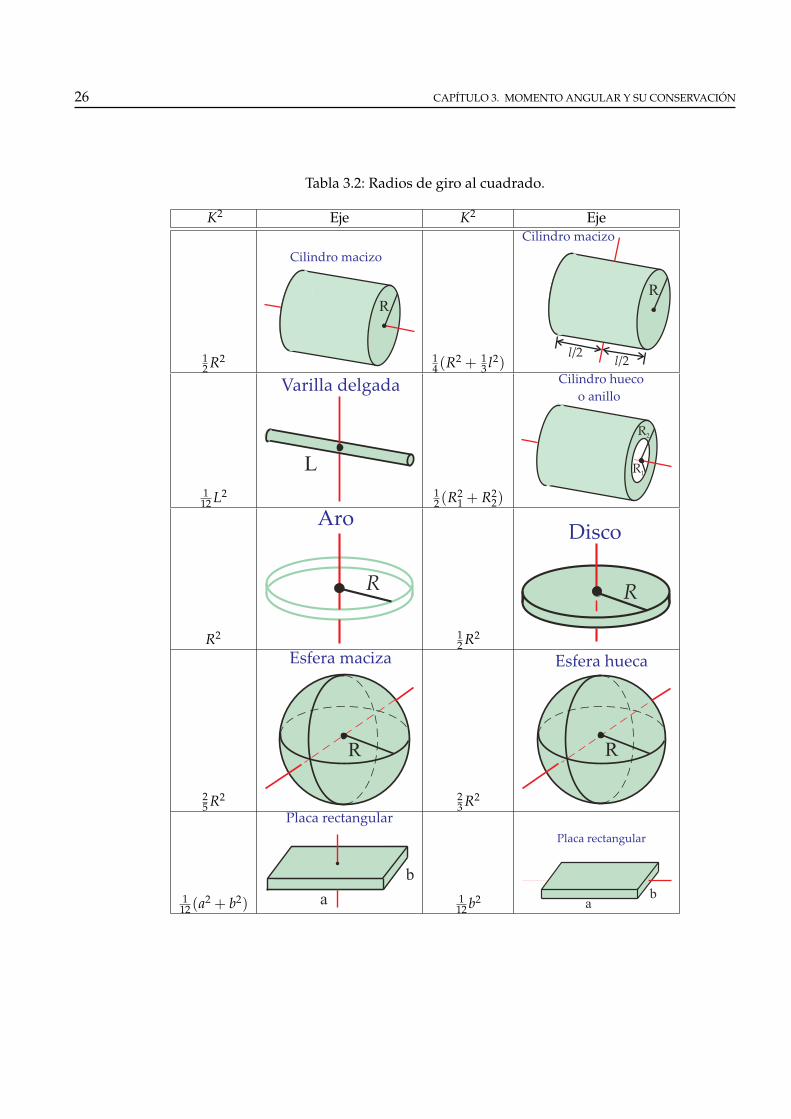
Tabla 3.2: Radios de giro al cuadrado.
K2 Eje K2 Eje
12 R2
R
Cilindro macizo
14 (R2 + 1
3 l2)
R
Cilindro macizo
l/2l/2
112 L2
L
Varilla delgada
12 (R2
1 + R22)
R1
R2
Cilindro hueco
o anillo
R2 12 R2
Disco
25 R2
R
Esfera maciza
23 R2
R
Esfera hueca
112 (a2 + b2) a
b
Placa rectangular
112 b2
ab
Placa rectangular
3.8. TEOREMA DE STEINER O DE LOS EJES PARALELOS 27
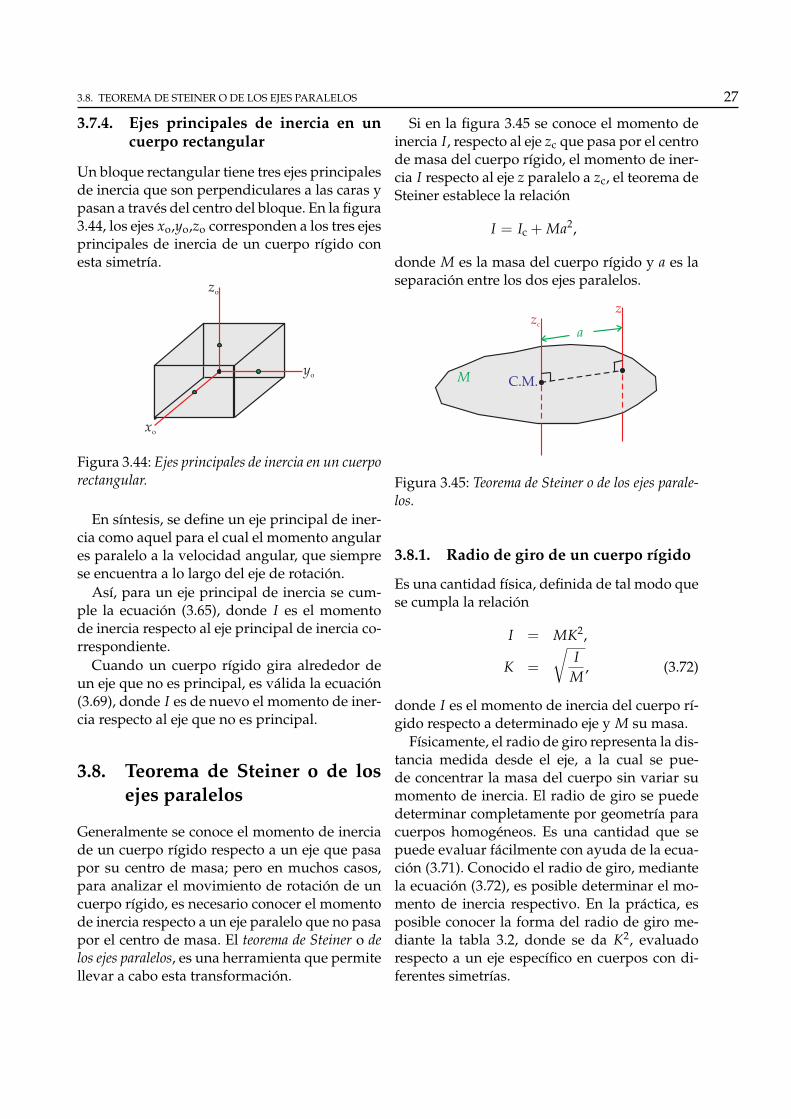
3.7.4. Ejes principales de inercia en uncuerpo rectangular
Un bloque rectangular tiene tres ejes principalesde inercia que son perpendiculares a las caras ypasan a través del centro del bloque. En la figura3.44, los ejes xo,yo,zo corresponden a los tres ejesprincipales de inercia de un cuerpo rígido conesta simetría.
xo
yo
zo
Figura 3.44: Ejes principales de inercia en un cuerporectangular.
En síntesis, se define un eje principal de iner-cia como aquel para el cual el momento angulares paralelo a la velocidad angular, que siemprese encuentra a lo largo del eje de rotación.
Así, para un eje principal de inercia se cum-ple la ecuación (3.65), donde I es el momentode inercia respecto al eje principal de inercia co-rrespondiente.
Cuando un cuerpo rígido gira alrededor deun eje que no es principal, es válida la ecuación(3.69), donde I es de nuevo el momento de iner-cia respecto al eje que no es principal.
3.8. Teorema de Steiner o de losejes paralelos
Generalmente se conoce el momento de inerciade un cuerpo rígido respecto a un eje que pasapor su centro de masa; pero en muchos casos,para analizar el movimiento de rotación de uncuerpo rígido, es necesario conocer el momentode inercia respecto a un eje paralelo que no pasapor el centro de masa. El teorema de Steiner o delos ejes paralelos, es una herramienta que permitellevar a cabo esta transformación.
Si en la figura 3.45 se conoce el momento deinercia I, respecto al eje zc que pasa por el centrode masa del cuerpo rígido, el momento de iner-cia I respecto al eje z paralelo a zc, el teorema deSteiner establece la relación
I = Ic + Ma2,
donde M es la masa del cuerpo rígido y a es laseparación entre los dos ejes paralelos.
zz
c
a
M C.M.
Figura 3.45: Teorema de Steiner o de los ejes parale-los.
3.8.1. Radio de giro de un cuerpo rígido
Es una cantidad física, definida de tal modo quese cumpla la relación
I = MK2,
K =
√I
M, (3.72)
donde I es el momento de inercia del cuerpo rí-gido respecto a determinado eje y M su masa.
Físicamente, el radio de giro representa la dis-tancia medida desde el eje, a la cual se pue-de concentrar la masa del cuerpo sin variar sumomento de inercia. El radio de giro se puededeterminar completamente por geometría paracuerpos homogéneos. Es una cantidad que sepuede evaluar fácilmente con ayuda de la ecua-ción (3.71). Conocido el radio de giro, mediantela ecuación (3.72), es posible determinar el mo-mento de inercia respectivo. En la práctica, esposible conocer la forma del radio de giro me-diante la tabla 3.2, donde se da K2, evaluadorespecto a un eje específico en cuerpos con di-ferentes simetrías.
28 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
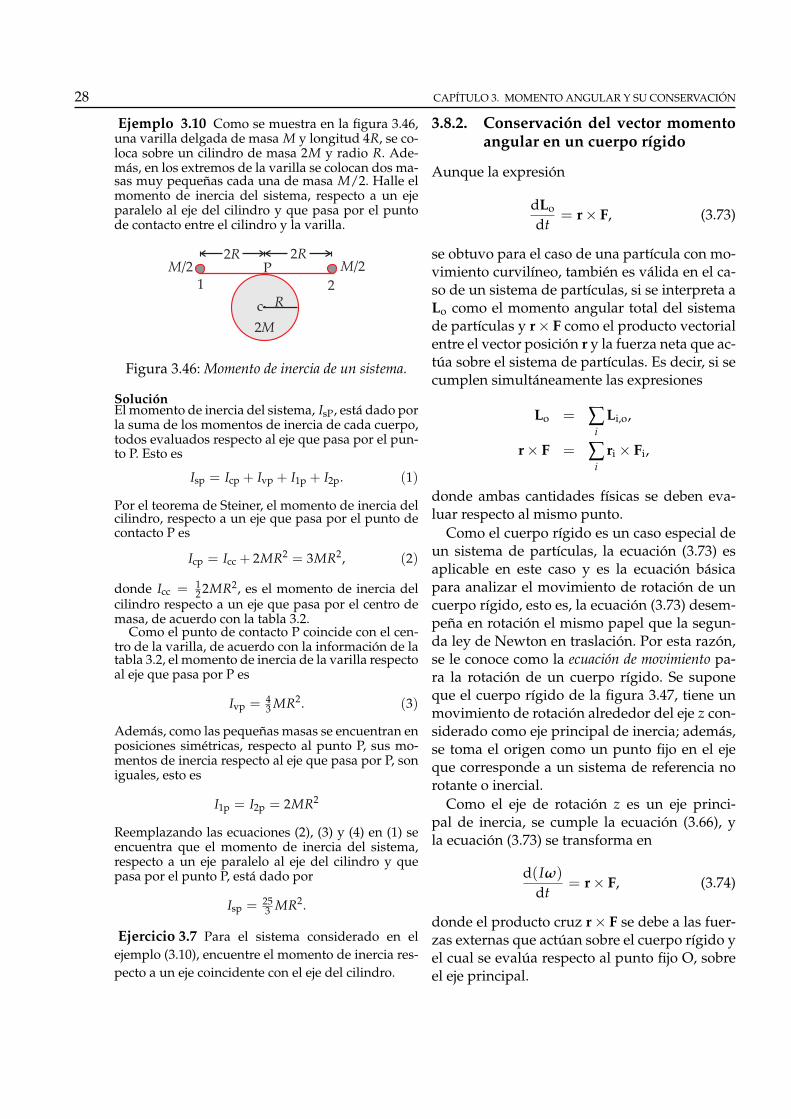
Ejemplo 3.10 Como se muestra en la figura 3.46,una varilla delgada de masa M y longitud 4R, se co-loca sobre un cilindro de masa 2M y radio R. Ade-más, en los extremos de la varilla se colocan dos ma-sas muy pequeñas cada una de masa M/2. Halle elmomento de inercia del sistema, respecto a un ejeparalelo al eje del cilindro y que pasa por el puntode contacto entre el cilindro y la varilla.
2R
P2R
c
2M
M/2 M/2
1 2
R
Figura 3.46: Momento de inercia de un sistema.
SoluciónEl momento de inercia del sistema, IsP, está dado porla suma de los momentos de inercia de cada cuerpo,todos evaluados respecto al eje que pasa por el pun-to P. Esto es
Isp = Icp + Ivp + I1p + I2p. (1)
Por el teorema de Steiner, el momento de inercia delcilindro, respecto a un eje que pasa por el punto decontacto P es
Icp = Icc + 2MR2 = 3MR2, (2)
donde Icc = 12 2MR2, es el momento de inercia del
cilindro respecto a un eje que pasa por el centro demasa, de acuerdo con la tabla 3.2.
Como el punto de contacto P coincide con el cen-tro de la varilla, de acuerdo con la información de latabla 3.2, el momento de inercia de la varilla respectoal eje que pasa por P es
Ivp = 43 MR2. (3)
Además, como las pequeñas masas se encuentran enposiciones simétricas, respecto al punto P, sus mo-mentos de inercia respecto al eje que pasa por P, soniguales, esto es
I1p = I2p = 2MR2
Reemplazando las ecuaciones (2), (3) y (4) en (1) seencuentra que el momento de inercia del sistema,respecto a un eje paralelo al eje del cilindro y quepasa por el punto P, está dado por
Isp = 253 MR2.
Ejercicio 3.7 Para el sistema considerado en elejemplo (3.10), encuentre el momento de inercia res-pecto a un eje coincidente con el eje del cilindro.
3.8.2. Conservación del vector momentoangular en un cuerpo rígido
Aunque la expresión
dLo
dt= r × F, (3.73)
se obtuvo para el caso de una partícula con mo-vimiento curvilíneo, también es válida en el ca-so de un sistema de partículas, si se interpreta aLo como el momento angular total del sistemade partículas y r × F como el producto vectorialentre el vector posición r y la fuerza neta que ac-túa sobre el sistema de partículas. Es decir, si secumplen simultáneamente las expresiones
Lo = ∑i
Li,o,
r × F = ∑i
ri × Fi,
donde ambas cantidades físicas se deben eva-luar respecto al mismo punto.
Como el cuerpo rígido es un caso especial deun sistema de partículas, la ecuación (3.73) esaplicable en este caso y es la ecuación básicapara analizar el movimiento de rotación de uncuerpo rígido, esto es, la ecuación (3.73) desem-peña en rotación el mismo papel que la segun-da ley de Newton en traslación. Por esta razón,se le conoce como la ecuación de movimiento pa-ra la rotación de un cuerpo rígido. Se suponeque el cuerpo rígido de la figura 3.47, tiene unmovimiento de rotación alrededor del eje z con-siderado como eje principal de inercia; además,se toma el origen como un punto fijo en el ejeque corresponde a un sistema de referencia norotante o inercial.
Como el eje de rotación z es un eje princi-pal de inercia, se cumple la ecuación (3.66), yla ecuación (3.73) se transforma en
d(Iω)
dt= r × F, (3.74)
donde el producto cruz r × F se debe a las fuer-zas externas que actúan sobre el cuerpo rígido yel cual se evalúa respecto al punto fijo O, sobreel eje principal.

3.9. ENUNCIADOS 29
O
w
Lo
z (Eje principal de inercia)
Figura 3.47: Rotación alrededor de un eje principalde inercia.
Ahora, si el eje está fijo en el cuerpo rígido, setiene que el momento de inercia es constante yla ecuación (3.74) adquiere la forma
Iα = r × F, (3.75)
donde se ha empleado la definición de acelera-ción angular. La ecuación (3.75), válida en rota-ción, es equivalente, en traslación a la segundaley de Newton para masa constante.
Si el producto vectorial r × F debido a todaslas fuerzas externas que actúan sobre el cuerporígido, es nulo, por la ecuación (3.75) se cumplela condición
Iω = Constante, (3.76)
que corresponde a la conservación del vectormomento angular.
Un ejemplo de esta situación, se presentacuando un patinador rota alrededor del eje desu cuerpo, donde las fuerzas que actúan sobre élson el peso y la normal que ejerce el piso, cuyaslíneas de acción coinciden con el eje de rotación.En este caso, el producto cruz r × F del peso yla normal respecto a un punto ubicado sobre eleje es nulo y el momento angular del patinadores constante respecto a dicho punto. Esto llevaa que aumente la velocidad angular del patina-dor cuando cierra los brazos, pues el momentode inercia disminuye.
Pregunta 3.2 Por qué disminuye el momento deinercia del patinador al cerrar los brazos? Explique..
En síntesis, cuando el producto vectorial r×Fes nulo, si el momento de inercia del cuerpo rí-
gido aumenta (disminuye) la velocidad angu-lar disminuye (aumenta) para garantizar que laecuación (3.76) se satisfaga.
Por otro lado, si adicionalmente el momen-to de inercia del cuerpo rígido permanece cons-tante, la ecuación (3.76) indica que la velocidadangular también permanece constante. Así, uncuerpo rígido que rota alrededor de un eje princi-pal, fijo en el cuerpo, lo hace con velocidad angularconstante cuando el producto cruz r × F es cero. Es-te enunciado, en rotación, equivale a la primeraley de Newton en traslación.
Como se verá en la próxima unidad, el con-cepto de momento angular es de vital importan-cia en el estudio del movimiento de rotación delos cuerpos.
3.9. ENUNCIADOS
3.1 En el punto A de la figura 3.48, se encuen-tra ubicado un camarógrafo, que le sigue el mo-vimiento a un auto cuando este describe unatrayectoria circular de radio R y con una rapi-dez v, en sentido antihorario. (a) Halle la rapi-dez angular con la cual debe girar la cámara, afin de que esta se mantenga en la dirección delauto. (b) Halle el valor de la cantidad obtenidaen el numeral anterior, cuando v = 25 m · s−1 yR = 30 m.
qA
r
B
C
R
v
R
Figura 3.48: Rapidez angular de una cámara.
3.2 Un auto se mueve en línea recta como seilustra en la figura 3.49. (a) Obtenga una expre-sión para la velocidad en sus componentes ra-dial y transversal. (b) Halle la magnitud de lavelocidad de la partícula. Analice el resultadoobtenido. (c) Resuelva para ω = 12 rad · s−1,b = 10 m y θ = 38o.
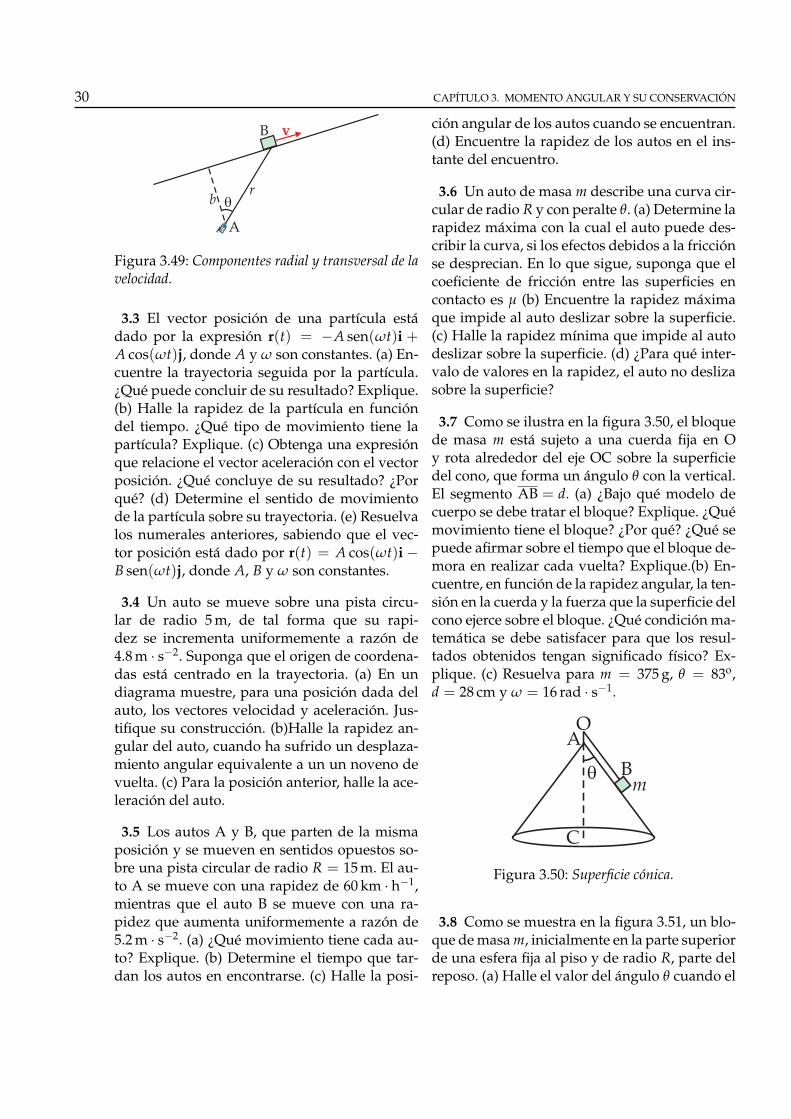
30 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
rb
v
q
A
B
Figura 3.49: Componentes radial y transversal de lavelocidad.
3.3 El vector posición de una partícula estádado por la expresión r(t) = −A sen(ωt)i +A cos(ωt)j, donde A y ω son constantes. (a) En-cuentre la trayectoria seguida por la partícula.¿Qué puede concluir de su resultado? Explique.(b) Halle la rapidez de la partícula en funcióndel tiempo. ¿Qué tipo de movimiento tiene lapartícula? Explique. (c) Obtenga una expresiónque relacione el vector aceleración con el vectorposición. ¿Qué concluye de su resultado? ¿Porqué? (d) Determine el sentido de movimientode la partícula sobre su trayectoria. (e) Resuelvalos numerales anteriores, sabiendo que el vec-tor posición está dado por r(t) = A cos(ωt)i −B sen(ωt)j, donde A, B y ω son constantes.
3.4 Un auto se mueve sobre una pista circu-lar de radio 5 m, de tal forma que su rapi-dez se incrementa uniformemente a razón de4.8 m · s−2. Suponga que el origen de coordena-das está centrado en la trayectoria. (a) En undiagrama muestre, para una posición dada delauto, los vectores velocidad y aceleración. Jus-tifique su construcción. (b)Halle la rapidez an-gular del auto, cuando ha sufrido un desplaza-miento angular equivalente a un un noveno devuelta. (c) Para la posición anterior, halle la ace-leración del auto.
3.5 Los autos A y B, que parten de la mismaposición y se mueven en sentidos opuestos so-bre una pista circular de radio R = 15 m. El au-to A se mueve con una rapidez de 60 km · h−1,mientras que el auto B se mueve con una ra-pidez que aumenta uniformemente a razón de5.2 m · s−2. (a) ¿Qué movimiento tiene cada au-to? Explique. (b) Determine el tiempo que tar-dan los autos en encontrarse. (c) Halle la posi-
ción angular de los autos cuando se encuentran.(d) Encuentre la rapidez de los autos en el ins-tante del encuentro.
3.6 Un auto de masa m describe una curva cir-cular de radio R y con peralte θ. (a) Determine larapidez máxima con la cual el auto puede des-cribir la curva, si los efectos debidos a la fricciónse desprecian. En lo que sigue, suponga que elcoeficiente de fricción entre las superficies encontacto es µ (b) Encuentre la rapidez máximaque impide al auto deslizar sobre la superficie.(c) Halle la rapidez mínima que impide al autodeslizar sobre la superficie. (d) ¿Para qué inter-valo de valores en la rapidez, el auto no deslizasobre la superficie?
3.7 Como se ilustra en la figura 3.50, el bloquede masa m está sujeto a una cuerda fija en Oy rota alrededor del eje OC sobre la superficiedel cono, que forma un ángulo θ con la vertical.El segmento AB = d. (a) ¿Bajo qué modelo decuerpo se debe tratar el bloque? Explique. ¿Quémovimiento tiene el bloque? ¿Por qué? ¿Qué sepuede afirmar sobre el tiempo que el bloque de-mora en realizar cada vuelta? Explique.(b) En-cuentre, en función de la rapidez angular, la ten-sión en la cuerda y la fuerza que la superficie delcono ejerce sobre el bloque. ¿Qué condición ma-temática se debe satisfacer para que los resul-tados obtenidos tengan significado físico? Ex-plique. (c) Resuelva para m = 375 g, θ = 83o,d = 28 cm y ω = 16 rad · s−1.
m
OA
Bq
C
Figura 3.50: Superficie cónica.
3.8 Como se muestra en la figura 3.51, un blo-que de masa m, inicialmente en la parte superiorde una esfera fija al piso y de radio R, parte delreposo. (a) Halle el valor del ángulo θ cuando el
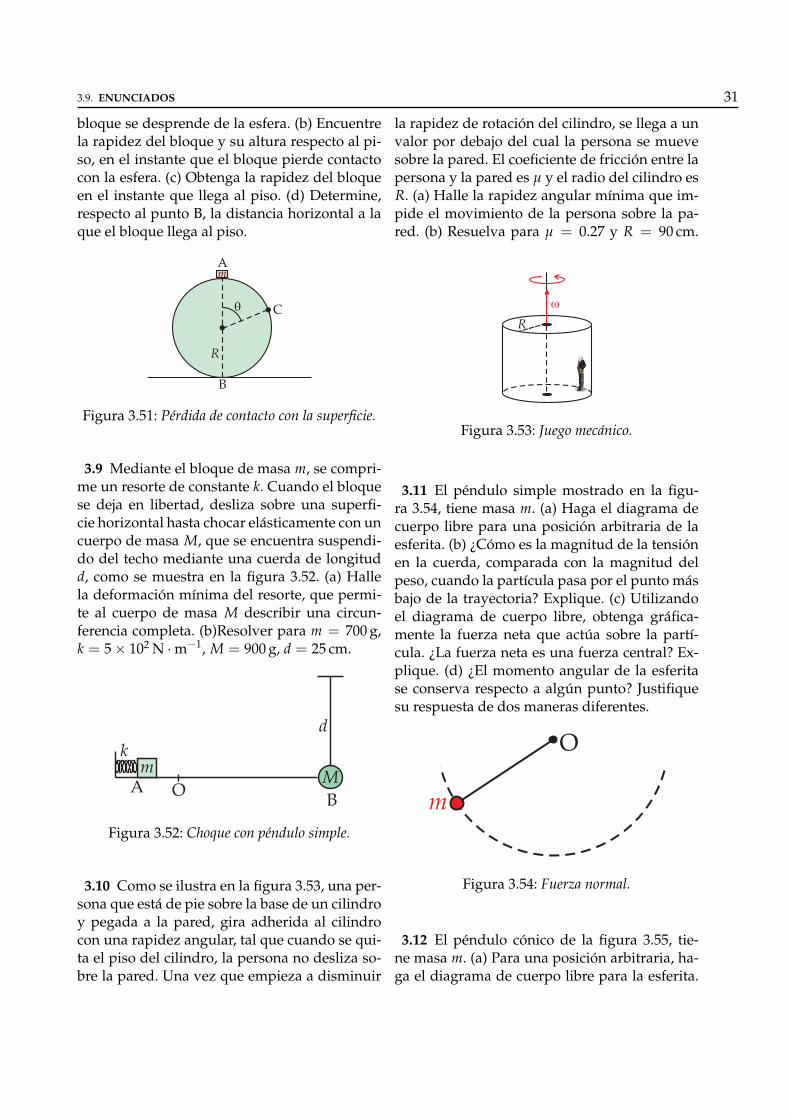
3.9. ENUNCIADOS 31
bloque se desprende de la esfera. (b) Encuentrela rapidez del bloque y su altura respecto al pi-so, en el instante que el bloque pierde contactocon la esfera. (c) Obtenga la rapidez del bloqueen el instante que llega al piso. (d) Determine,respecto al punto B, la distancia horizontal a laque el bloque llega al piso.
m
R
q
A
B
C
Figura 3.51: Pérdida de contacto con la superficie.
3.9 Mediante el bloque de masa m, se compri-me un resorte de constante k. Cuando el bloquese deja en libertad, desliza sobre una superfi-cie horizontal hasta chocar elásticamente con uncuerpo de masa M, que se encuentra suspendi-do del techo mediante una cuerda de longitudd, como se muestra en la figura 3.52. (a) Hallela deformación mínima del resorte, que permi-te al cuerpo de masa M describir una circun-ferencia completa. (b)Resolver para m = 700 g,k = 5 × 102 N · m−1, M = 900 g, d = 25 cm.
Mm
d
A
k
BO
Figura 3.52: Choque con péndulo simple.
3.10 Como se ilustra en la figura 3.53, una per-sona que está de pie sobre la base de un cilindroy pegada a la pared, gira adherida al cilindrocon una rapidez angular, tal que cuando se qui-ta el piso del cilindro, la persona no desliza so-bre la pared. Una vez que empieza a disminuir
la rapidez de rotación del cilindro, se llega a unvalor por debajo del cual la persona se muevesobre la pared. El coeficiente de fricción entre lapersona y la pared es µ y el radio del cilindro esR. (a) Halle la rapidez angular mínima que im-pide el movimiento de la persona sobre la pa-red. (b) Resuelva para µ = 0.27 y R = 90 cm.
w
R
Figura 3.53: Juego mecánico.
3.11 El péndulo simple mostrado en la figu-ra 3.54, tiene masa m. (a) Haga el diagrama decuerpo libre para una posición arbitraria de laesferita. (b) ¿Cómo es la magnitud de la tensiónen la cuerda, comparada con la magnitud delpeso, cuando la partícula pasa por el punto másbajo de la trayectoria? Explique. (c) Utilizandoel diagrama de cuerpo libre, obtenga gráfica-mente la fuerza neta que actúa sobre la partí-cula. ¿La fuerza neta es una fuerza central? Ex-plique. (d) ¿El momento angular de la esferitase conserva respecto a algún punto? Justifiquesu respuesta de dos maneras diferentes.
O
m
Figura 3.54: Fuerza normal.
3.12 El péndulo cónico de la figura 3.55, tie-ne masa m. (a) Para una posición arbitraria, ha-ga el diagrama de cuerpo libre para la esferita.
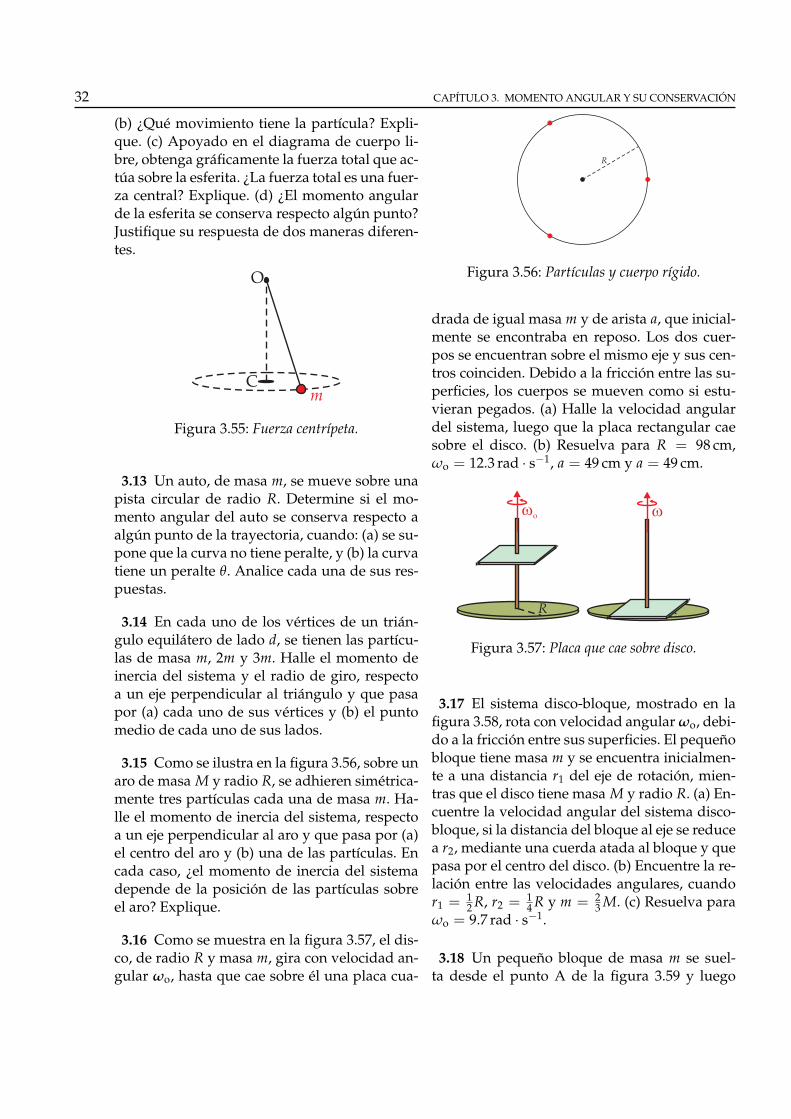
32 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
(b) ¿Qué movimiento tiene la partícula? Expli-que. (c) Apoyado en el diagrama de cuerpo li-bre, obtenga gráficamente la fuerza total que ac-túa sobre la esferita. ¿La fuerza total es una fuer-za central? Explique. (d) ¿El momento angularde la esferita se conserva respecto algún punto?Justifique su respuesta de dos maneras diferen-tes.
O
m
C
Figura 3.55: Fuerza centrípeta.
3.13 Un auto, de masa m, se mueve sobre unapista circular de radio R. Determine si el mo-mento angular del auto se conserva respecto aalgún punto de la trayectoria, cuando: (a) se su-pone que la curva no tiene peralte, y (b) la curvatiene un peralte θ. Analice cada una de sus res-puestas.
3.14 En cada uno de los vértices de un trián-gulo equilátero de lado d, se tienen las partícu-las de masa m, 2m y 3m. Halle el momento deinercia del sistema y el radio de giro, respectoa un eje perpendicular al triángulo y que pasapor (a) cada uno de sus vértices y (b) el puntomedio de cada uno de sus lados.
3.15 Como se ilustra en la figura 3.56, sobre unaro de masa M y radio R, se adhieren simétrica-mente tres partículas cada una de masa m. Ha-lle el momento de inercia del sistema, respectoa un eje perpendicular al aro y que pasa por (a)el centro del aro y (b) una de las partículas. Encada caso, ¿el momento de inercia del sistemadepende de la posición de las partículas sobreel aro? Explique.
3.16 Como se muestra en la figura 3.57, el dis-co, de radio R y masa m, gira con velocidad an-gular ωo, hasta que cae sobre él una placa cua-
R
Figura 3.56: Partículas y cuerpo rígido.
drada de igual masa m y de arista a, que inicial-mente se encontraba en reposo. Los dos cuer-pos se encuentran sobre el mismo eje y sus cen-tros coinciden. Debido a la fricción entre las su-perficies, los cuerpos se mueven como si estu-vieran pegados. (a) Halle la velocidad angulardel sistema, luego que la placa rectangular caesobre el disco. (b) Resuelva para R = 98 cm,ωo = 12.3 rad · s−1, a = 49 cm y a = 49 cm.
R
w
R
wo
Figura 3.57: Placa que cae sobre disco.
3.17 El sistema disco-bloque, mostrado en lafigura 3.58, rota con velocidad angular ωo, debi-do a la fricción entre sus superficies. El pequeñobloque tiene masa m y se encuentra inicialmen-te a una distancia r1 del eje de rotación, mien-tras que el disco tiene masa M y radio R. (a) En-cuentre la velocidad angular del sistema disco-bloque, si la distancia del bloque al eje se reducea r2, mediante una cuerda atada al bloque y quepasa por el centro del disco. (b) Encuentre la re-lación entre las velocidades angulares, cuandor1 = 1
2 R, r2 = 14 R y m = 2
3 M. (c) Resuelva paraωo = 9.7 rad · s−1.
3.18 Un pequeño bloque de masa m se suel-ta desde el punto A de la figura 3.59 y luego
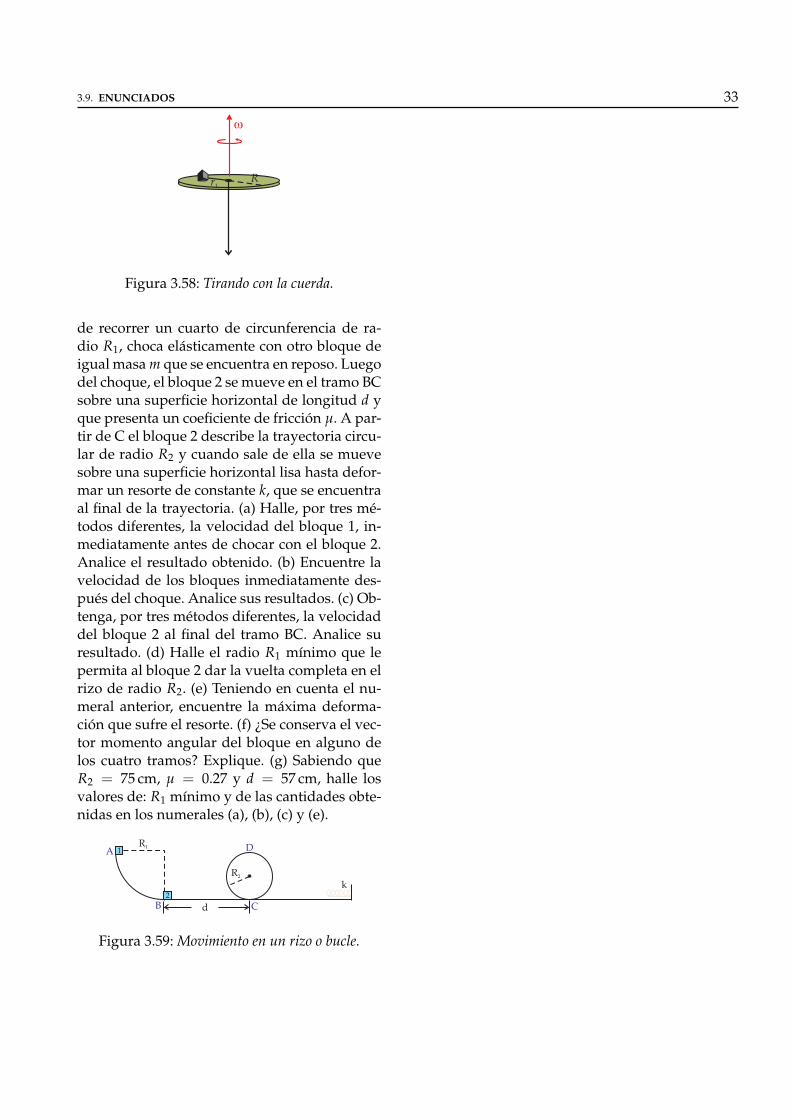
3.9. ENUNCIADOS 33
w
r1
R
Figura 3.58: Tirando con la cuerda.
de recorrer un cuarto de circunferencia de ra-dio R1, choca elásticamente con otro bloque deigual masa m que se encuentra en reposo. Luegodel choque, el bloque 2 se mueve en el tramo BCsobre una superficie horizontal de longitud d yque presenta un coeficiente de fricción µ. A par-tir de C el bloque 2 describe la trayectoria circu-lar de radio R2 y cuando sale de ella se muevesobre una superficie horizontal lisa hasta defor-mar un resorte de constante k, que se encuentraal final de la trayectoria. (a) Halle, por tres mé-todos diferentes, la velocidad del bloque 1, in-mediatamente antes de chocar con el bloque 2.Analice el resultado obtenido. (b) Encuentre lavelocidad de los bloques inmediatamente des-pués del choque. Analice sus resultados. (c) Ob-tenga, por tres métodos diferentes, la velocidaddel bloque 2 al final del tramo BC. Analice suresultado. (d) Halle el radio R1 mínimo que lepermita al bloque 2 dar la vuelta completa en elrizo de radio R2. (e) Teniendo en cuenta el nu-meral anterior, encuentre la máxima deforma-ción que sufre el resorte. (f) ¿Se conserva el vec-tor momento angular del bloque en alguno delos cuatro tramos? Explique. (g) Sabiendo queR2 = 75 cm, µ = 0.27 y d = 57 cm, halle losvalores de: R1 mínimo y de las cantidades obte-nidas en los numerales (a), (b), (c) y (e).
A
B C
R1
R2
k
d
1
2
D
Figura 3.59: Movimiento en un rizo o bucle.

34 CAPÍTULO 3. MOMENTO ANGULAR Y SU CONSERVACIÓN
Bibliografía
[1] R. A. Serway, J. W. Jewett, Jr. "Física (Sép-tima edición), Volumen 1". Cengage Lear-ning Editores S.A., 2009.
[2] Manuel José Páez. "Mecánica, Fluidos yTermodinámica". Ude@, 2005.
[3] Paul A. Tipler, Gene Mosca. "Física parala ciencia y la tecnología (Quinta edición),Volumen 1". Editorial Reverté, 2005.
[4] R. L. Reese. "Física Universitaria, VolumenI". Thomson, 2002.
[5] R. Resnick, D. Hallyday y K. Krane, "FísivaVol.1, (Quinta edición)". Compañía Edito-rial Continental, 2002.
[6] W.E.Gettys, F. O. Keller y M. J. Skover. "Fí-sica Clásica y Moderna, Tomo 1.". McGrawHill, 2005.
[7] R. M. Eisberg y L. S. Lerner. "Física Fun-damentos y Aplicaciones". McGraw Hill S.A., 1984.
[8] Arthur P. Boresi. Richard J. Schmidt. Ïn-geniería Mecánica: ESTATICA". Thomson,2001.
[9] J. P. McKelvey y H. Grotch. "Física paraCiencias e Ingeniería". Harla, 1978.
[10] M. Alonso y E. Finn. "Física, vol. I (Me-cánica)". Fondo Educativo Interamericano,S.A., 1976.
[11] F. W. Sears, M. W. Zemansky, H. D. Youngy R. A. Freedman. "Física Universitaria Vo-lumen 1 (Décimo tercera edición)". PearsonEducación, 2013.
[12] P. M. Fishbane, S. Gasiorowica y S. T.Thornton. ÏFísica para Ciencias e Ingenie-ría". Prentice-Hall Hispanoamericana S. A.1984.
[13] F. P. Beer y E. R. Johnston, Jr. "Mecá-nica Vectorial para Ingenieros, Dinámica".McGraw-Hill, 1998.
[14] F. P. Beer y E. R. Johnston, Jr. "Mecá-nica Vectorial para Ingenieros, Estática".McGraw-Hill, 1998.
[15] A. Boresi, R. J. Schmidt, . Ïngeniería Mecá-nica: Estática". Thomson Editores, 2001.
[16] A. Boresi, R. J. Schmidt, . Ïngeniería Mecá-nica: Dinámica". Thomson Editores, 2002.
35
Índice alfabético
A,aceleración
angular, 9centrípeta, 9normal, 5, 6, 9tangencial, 5, 9
C,centro
de curvatura, 6de fuerzas, 18
choqueelástico, 31, 33
componentesdel momento angular, 16
conceptode cuerpo rígido, 20de radio de giro, 27
conservacióndel momento angular, 18, 19, 29
coordenadaspolares, 2, 17rectangulares, 2
cuerporígido, 20
D,definición
de aceleración angular, 9de eje principal de inercia, 27de momento angular, 16de velocidad angular, 8
dimensiónde frecuencia, 10
dimensionesde aceleración angular, 9de momento angular, 17
de velocidad angular, 8del momento de inercia, 24
E,ecuación
de movimiento rotacional, 28ecuación cinemática
de posición angular, 10de velocidad angular, 11
ejede rotación, 27principal de inercia, 24, 27
estadode reposo, 7
F,frecuencia, 10fuerza
centrípeta, 7central, 18normal, 7, 13resultante, 13tangencial, 7, 13
L,longitud
de la trayectoria, 4
M,modelo
de cuerpo rígido, 20de partícula, 20
momentoangular total, 21, 22de inercia, 21, 23, 27
movimientocircular, 7circular uniforme, 9
36
ÍNDICE ALFABÉTICO 37
de rotación, 18, 20, 29de traslación, 20periódico, 10rectilíneo, 7rectilíneo uniforme, 18
movimiento circularuniforme, 10uniformemente acelerado, 11
P,péndulo
cónico, 31simple, 31
período, 10peralte, 14, 32posición
angular, 10producto
cruz, 12vectorial, 12
R,radio
de curvatura, 6, 8de giro, 27de la circunferencia, 8
rapidezangular mínima, 31
rapidez angular, 29
S,segunda
ley de Newton, 7, 14sistema
de partículas, 20de referencia inercial, 28
T,teorema
de Steiner, 27trayectoria
centrada, 7circular, 7, 8, 13curvilínea, 7curvilinea, 2
U,unidadaes
de velocidad angular, 8
unidadesde aceleración angular, 9de frecuencia, 10de momento angular, 17del momento de inercia, 24
V,variación
del momento angular, 17vector
aceleración, 5, 6, 8, 12aceleración angular, 11, 12fuerza, 13momento angular, 16, 21, 29posición, 2, 8unitario normal, 5unitario radial, 2, 18unitario tangencial, 4, 5, 8unitario transversal, 2, 8velocidad, 3–5, 8, 12, 29velocidad angular, 11, 12
vector fuerza, 7velocidad
angular, 8, 10radial, 3, 8transversal, 3, 8