Embed Size (px)
Citation preview

por
INGENIERÍA MECATRÓNICA
ESPE
TABLA DE CONTENIDO
TABLA DE ILUSTRACIONES................................................................................................................................2
INTRODUCCIÓN............................................................................................................................................4
MOTORES DE INDUCCIÓN MONOFÁSICOS............................................................................................5
CONSTRUCCIÓN DE UN MOTOR DE INDUCCIÓN MONOFÁSICO..................................................................5
CARACTERÍSTICA DE PAR O MOMENTO DE TORSIÓN-VELOCIDAD............................................................7
PRINCIPIO DE OPERACIÓN.........................................................................................................................8
PAR CON EL ROTOR BLOQUEADO...........................................................................................................11
MOTOR DE INDUCCIÓN DE FASE PARTIDA..................................................................................................12
MOTOR DE ARRANQUE POR CONDENSADOR DE FASE PARTIDA..............................................................13
MOTOR CON CONDENSADOR DE FASE PARTIDA PERMANENTE (DE UN SOLO VALOR)............................14
MOTOR CON CONDENSADOR DE DOS VALORES..........................................................................................15
MOTOR DE INDUCCIÓN DE ESPIRAS DE SOMBRA........................................................................................16
MOTOR DE INDUCCIÓN DE ARRANQUE POR RELUCTANCIA........................................................................18
MOTORES SÍNCRONOS.............................................................................................................................20
GENERALIDADES.....................................................................................................................................20
CÓNSTRUCCIÓN......................................................................................................................................20
FUNCIONAMIENTO DE LOS MOTORES SÍNCRONOS..................................................................................23
ARRANQUE DE MOTORES SÍNCRONOS....................................................................................................24
PAR DE HISTÉRESIS.................................................................................................................................25
PAR DE RELUCTANCIA............................................................................................................................25
MOTOR DE RELUCTANCIA...........................................................................................................................26
MOTOR DE HISTÉRESIS...............................................................................................................................27
MOTORES SUBSÍNCRONOS..........................................................................................................................28
MOTORES MONOFÁSICOS DE COLECTOR...........................................................................................29
EL PRINCIPIO DE REPULSIÓN..................................................................................................................29
MOTOR DE REPULSIÓN COMERCIAL............................................................................................................32
MOTOR DE INDUCCIÓN DE ARRANQUE POR REPULSIÓN.............................................................................34
MOTOR DE INDUCCIÓN-REPULSIÓN............................................................................................................34
MOTOR UNIVERSAL....................................................................................................................................35
MOTOR SERIE DE AC..................................................................................................................................36
| 1
BIBLIOGRAFÍA.................................................................................................................................................39
TABLA DE ILUSTRACIONES
MOTORES DE INDUCCIÓN MONOFÁSICOS
Fig. 1- 1Vista de corte de un motor monofásico...............................................................................................5
Fig. 1- 2 (a) Estator laminado desnudo de un motor monofásico de 1/4HP. Las 36 ranuras están aisladas con un forro de papel. El rotor de jaula de ardilla es idéntico al de un motor trifásico (b) Cuatro polos del devanado principal están insertados en las ranuras. (c) Cuatro polos del devanado auxiliar están montados sobre el devanado principal..............................................................................................................................6
Fig. 1- 3 (a) Vista plana del devanado principal de un motor de 36 ranuras y 4 polos, que muestra el número de vueltas por bobina. (b) Posición del devanado auxiliar con respecto al devanado principal.......................6
Fig. 1- 4 Devanados principal y auxiliar de un motor monofásico de 2 polos.................................................7
Fig. 1- 5Corrientes en las barras del rotor cuando el rotor está bloqueado. Las fuerzas resultantes se cancelan entre sí y no se produce momento de torsión.....................................................................................7
Fig. 1- 6Curva típica de momento de torsión-velocidad de un motor monofásico..........................................8
Fig. 1- 7 Corrientes inducidas en las barras del rotor debido a la rotación. Producen en flujo φr que actúa perpendicular al flujo φs del estator..................................................................................................................8
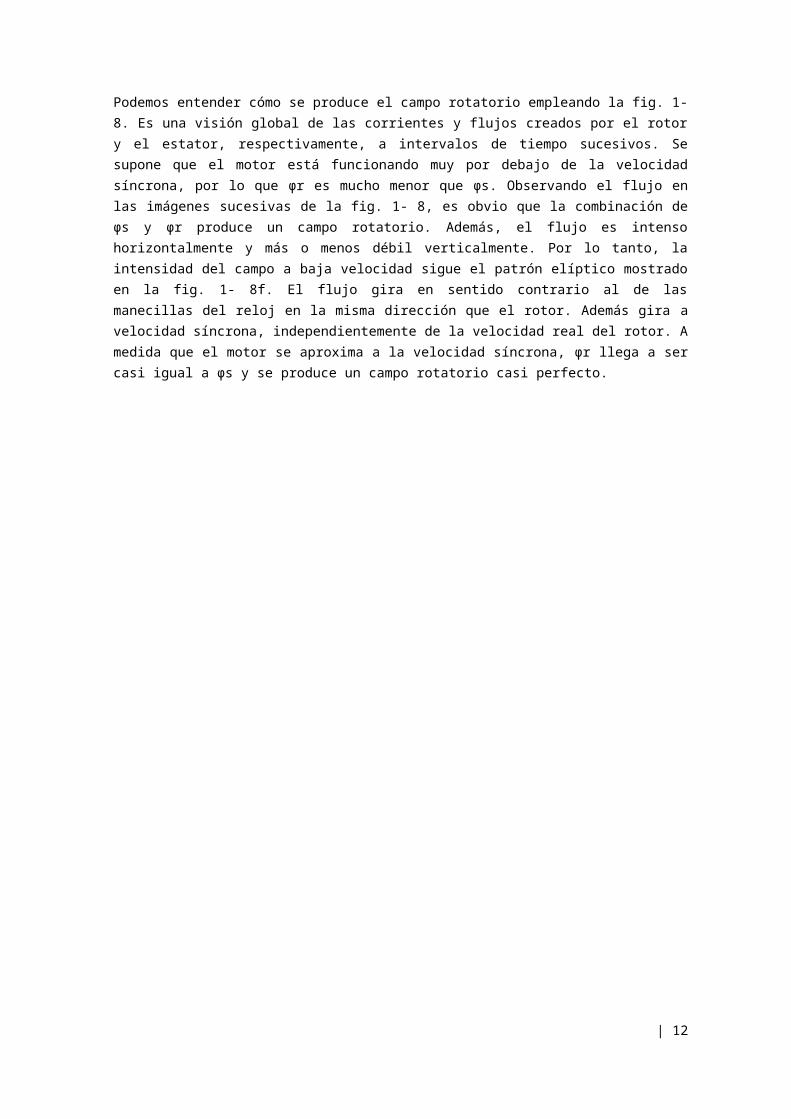
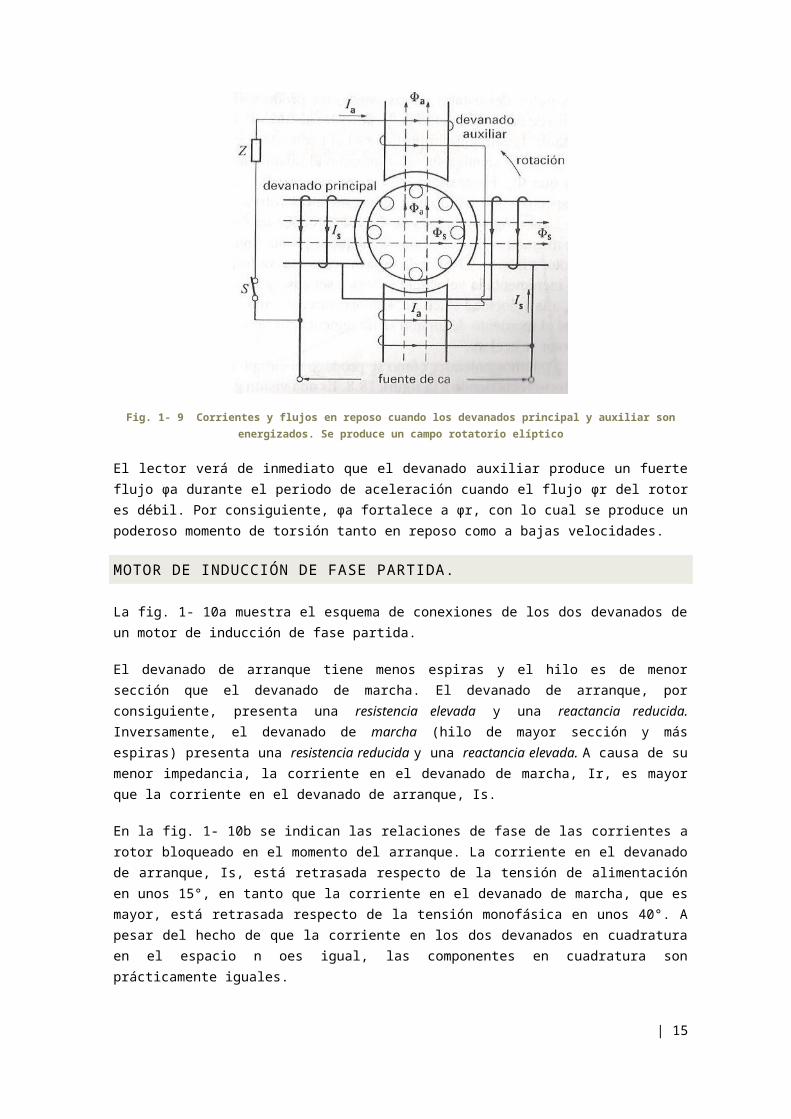
Fig. 1- 8 Corrientes y flujo instantáneos en un motor monofásico con el devanado principal excitado. La duración de un ciclo es T segundos y las condiciones se muestran a intervalos sucesivos de un cuarto de ciclo. (a) La corriente Is del estator es máxima, la corriente Ir del rotor es cero. (b) La corriente del estator es cero, la corriente del rotor es máxima; sin embargo, φr es menor que φs. (c) La corriente del estator es máxima, pero negativa. (d) La corriente del rotor es máxima, pero negativa. (e) Después de un ciclo completo (t=T) se repiten las condiciones. (f) El flujo φ resultante en el entrehierro gira en sentido contrario al de las manecillas del reloj a velocidad síncrona. Su amplitud varía de un φs máximo a un φr mínimo....11
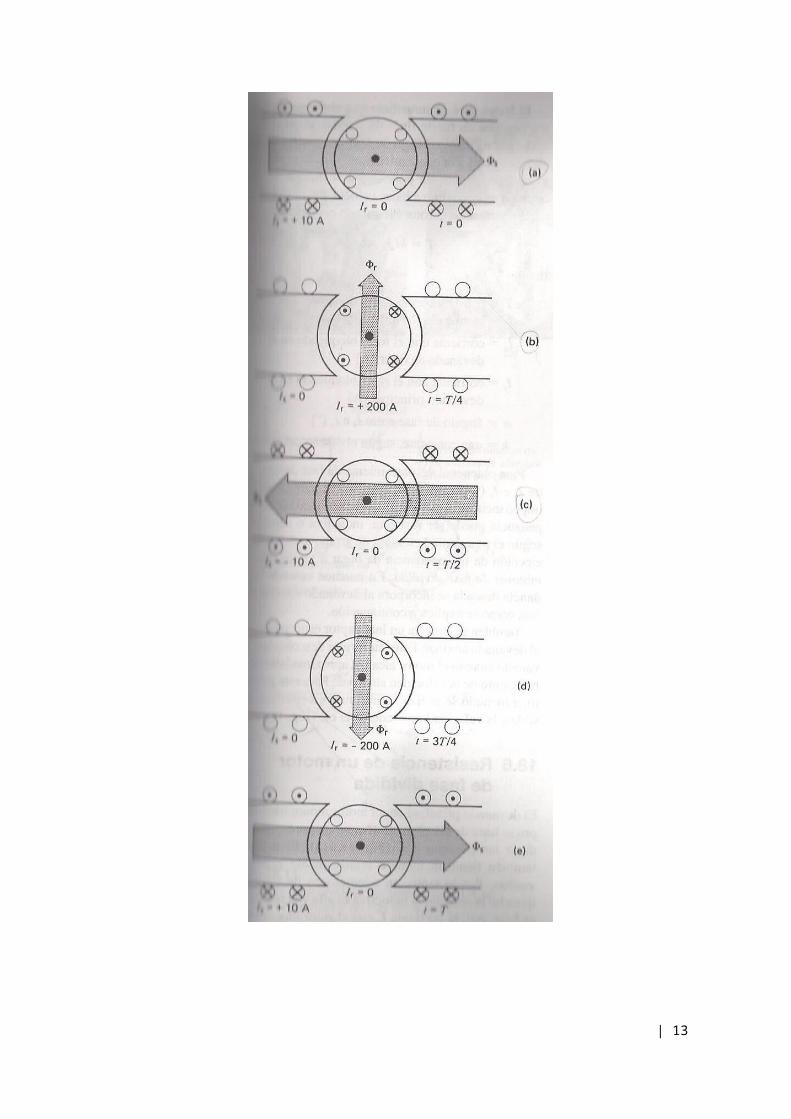
Fig. 1- 9 Corrientes y flujos en reposo cuando los devanados principal y auxiliar son energizados. Se produce un campo rotatorio elíptico...............................................................................................................11
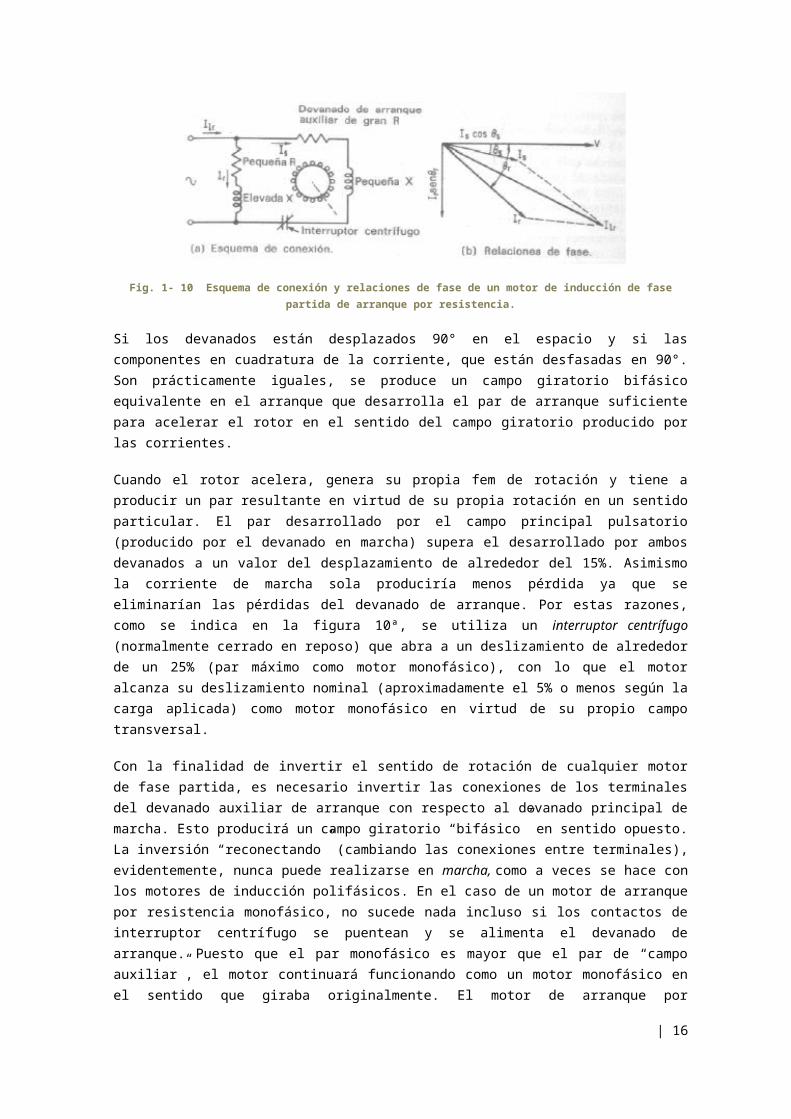
Fig. 1- 10 Esquema de conexión y relaciones de fase de un motor de inducción de fase partida de arranque por resistencia.................................................................................................................................................12
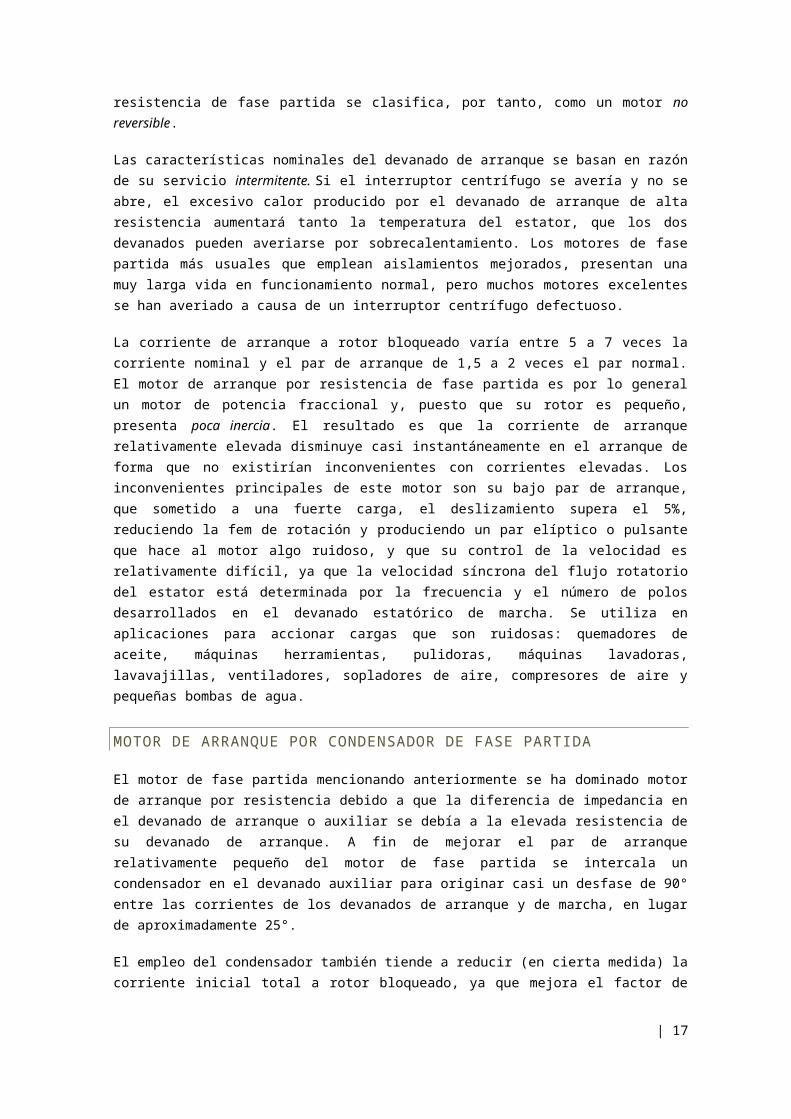
Fig. 1- 11 Esquema de conexión y relaciones de fase de un motor de inducción de fase partida de arranque por condensador..............................................................................................................................................14
Fig. 1- 12 Esquema de conexión, relaciones de fase y características de tensión de un motor de fase partida permanente......................................................................................................................................................15
Fig. 1- 13 Esquemas de conexión de dos tipos de motores con condensador de dos valores.......................16
Fig. 1- 14 Construcción general y principio del motor con espiras de sombra.............................................17
Fig. 1- 15 Métodos para invertir los motores con espiras de sombra............................................................18
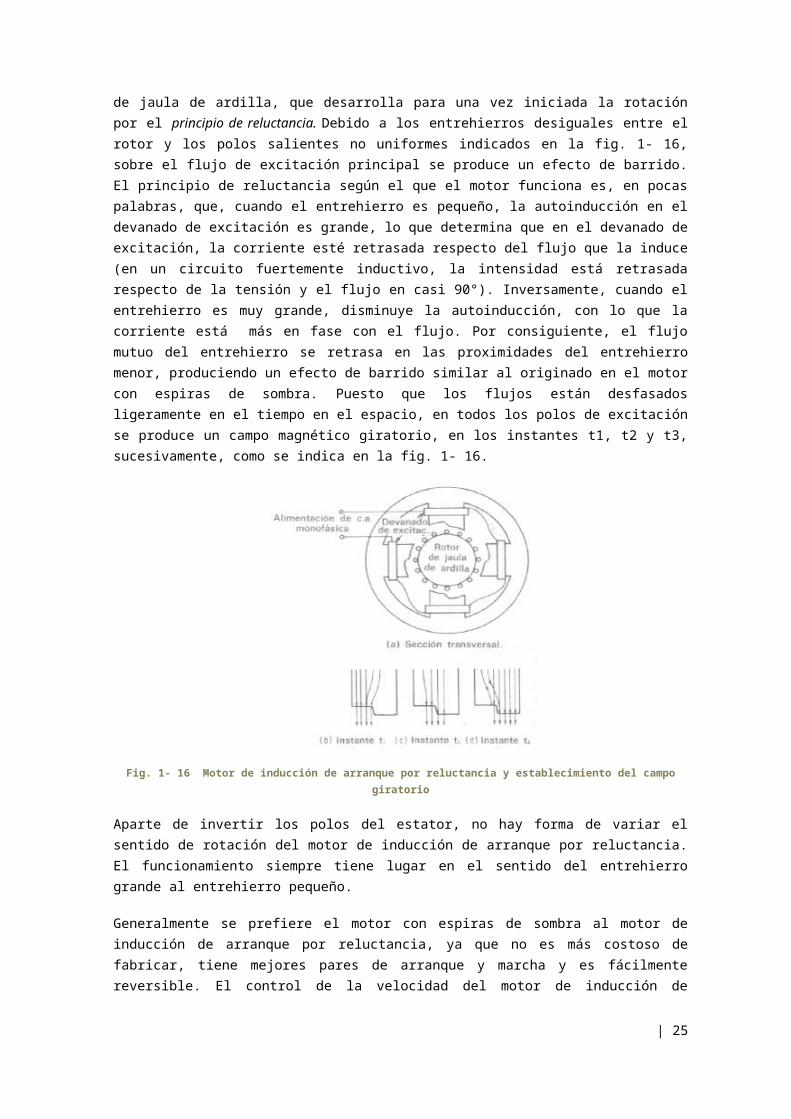
Fig. 1- 16 Motor de inducción de arranque por reluctancia y establecimiento del campo giratorio.............19
| 2
MOTORES SÍNCRONOS
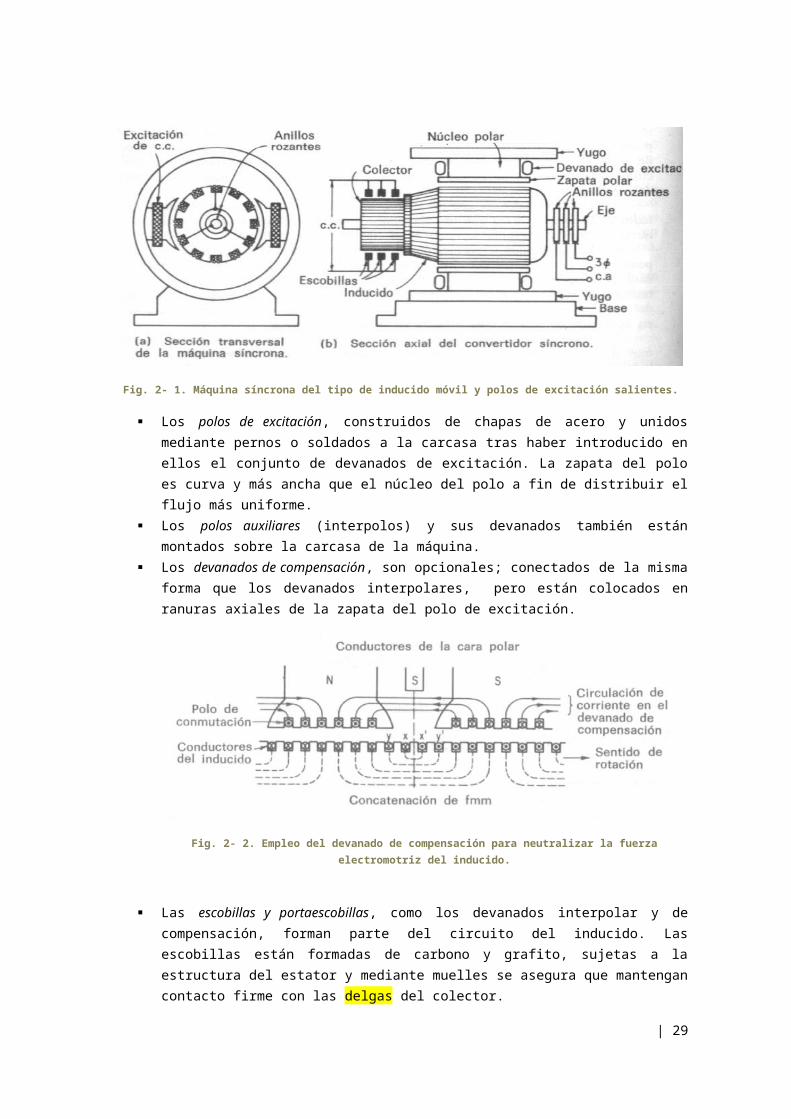
Fig. 2- 1. Máquina síncrona del tipo de inducido móvil y polos de excitación salientes...............................21
Fig. 2- 2. Empleo del devanado de compensación para neutralizar la fuerza electromotriz del inducido.....21
Fig. 2- 3. Máquina síncrona de inductor móvil..............................................................................................22
Fig. 2- 4 Polo de una máquina síncrona de AC en la que se ve el devanado de amortiguamiento................23
Fig. 2- 5 Par resultante cero desarrollado por los conductores del estator de un motor síncrono cuando el rotor está en reposo.........................................................................................................................................23
Fig. 2- 6 Par en igual sentido cuando el rotor gira a velocidad síncrona........................................................24
Fig. 2- 7 Campo magnético giratorio de flujo constante producido por las armaduras de un estator polifase........................................................................................................................................................................24
Fig. 2- 8 Diferencias entre laminaciones y devanados de inducción de arranque y de funcionamiento de motores síncronos excitados (tipo histéresis).................................................................................................26
Fig. 2- 9 Característica velocidad-par de un motor de reluctancia.................................................................27
Fig. 2- 10 Dos tipos de laminaciones de alta retentividad de motores síncronos no excitados (tipo de histéresis)........................................................................................................................................................27
MOTORES MONOFÁSICOS DE COLECTOR
Fig. 3- 1 Posición del neutro rígido mostrando una corriente máxima, sin par..............................................30
Fig. 3- 2 Posición del neutro flexible indicando corriente nula, sin par.........................................................31
Fig. 3- 3 Eje de escobillas entre el neutro rígido y el neutro flexible originando flujo de transformación y de par con el correspondiente par motor.............................................................................................................32
Fig. 3- 4 Motor de repulsión práctico............................................................................................................33
Fig. 3- 5 Características velocidad-par de un motor de repulsión.................................................................33
Fig. 3- 6 Característica velocidad-par de un motor de arranque por repulsión.............................................34
Fig. 3- 7 Característica par-velocidad de un motor de inducción-repulsión.................................................35
Fig. 3- 8 Funcionamiento del motor serie o universal...................................................................................36
Fig. 3- 9 Motor serie de AC...........................................................................................................................37
| 3
INTRODUCCIÓN
Los motores monofásicos son los motores eléctricos más conocidos porque se utilizan en aparatos domésticos y herramientas portátiles. En general se emplean cuando no se dispone de potencia trifásica. Existen muchos tipos de motores monofásicos en el mercado, cada uno diseñado para satisfacer una aplicación específica.
Se utilizan diversas técnicas para producir el campo magnético giratorio que se necesita para el arranque, sin embargo, un rotor de inducción, una vez arrancado mediante un campo magnético giratorio, continuará funcionando mediante alimentación monofásica.
La carga y los requerimientos de uso de motores monofásicos son de gran importancia debido a la falta de mantenimiento preventivo en las viviendas. Los motores serie monofásicos AC se prevén para servicios que requieran gran potencia como en grúas, ascensores y en tracción (locomotoras eléctricas), pudiendo oscilar sus potencias desde unos pocos caballos hasta varios miles. Los alternadores y motores síncronos monofásicos se utilizan ampliamente en servicio de ferrocarriles. En general, las máquinas de mayor capacidad son realmente máquinas síncronas, trifásicas, conectadas en estrella, desequilibradas con una fase abierta y, como tales, se utilizan en potencias de hasta varios miles de caballos en grupos motor-generados en locomotoras.
Debido a que un motor de inducción monofásico es esencialmente no autoarrancador, o sea, no posee el verdadero campo magnético giratorio que es fundamental en el motor de inducción polifásico, se emplean diversos métodos para iniciar la rotación del rotor en jaula de ardilla. En consecuencia, se ha establecido una clasificación de los motores de inducción monofásicos basada en el tipo de arranque, motores síncronos monofásicos y motores monofásicos de tipo colector, como se describe:
I. Motores de inducción monofásicosA. Motores de fase partida
1. Motor de arranque por resistencia.2. Motor de arranque por condensador.3. Motor de condensador de fase partida permanente (un solo valor)
B. Motor de inducción de arranque por reluctancia.C. Motor de inducción con espiras de sombra.D. Motor de inducción de arranque por repulsión.
II. Motores síncronos monofásicosA. Motor de reluctancia.B. Motor de histéresis.C. Motor subsíncrono.
III. Motores monofásicos tipo colectorA. Motor de repulsión.B. Motor de inducción-repulsión.C. Motor de serie de ACD. Motor universal
| 4
MOTORES DE INDUCCIÓN MONOFÁSICOS
CONSTRUCCIÓN DE UN MOTOR DE INDUCCIÓN MONOFÁSICO
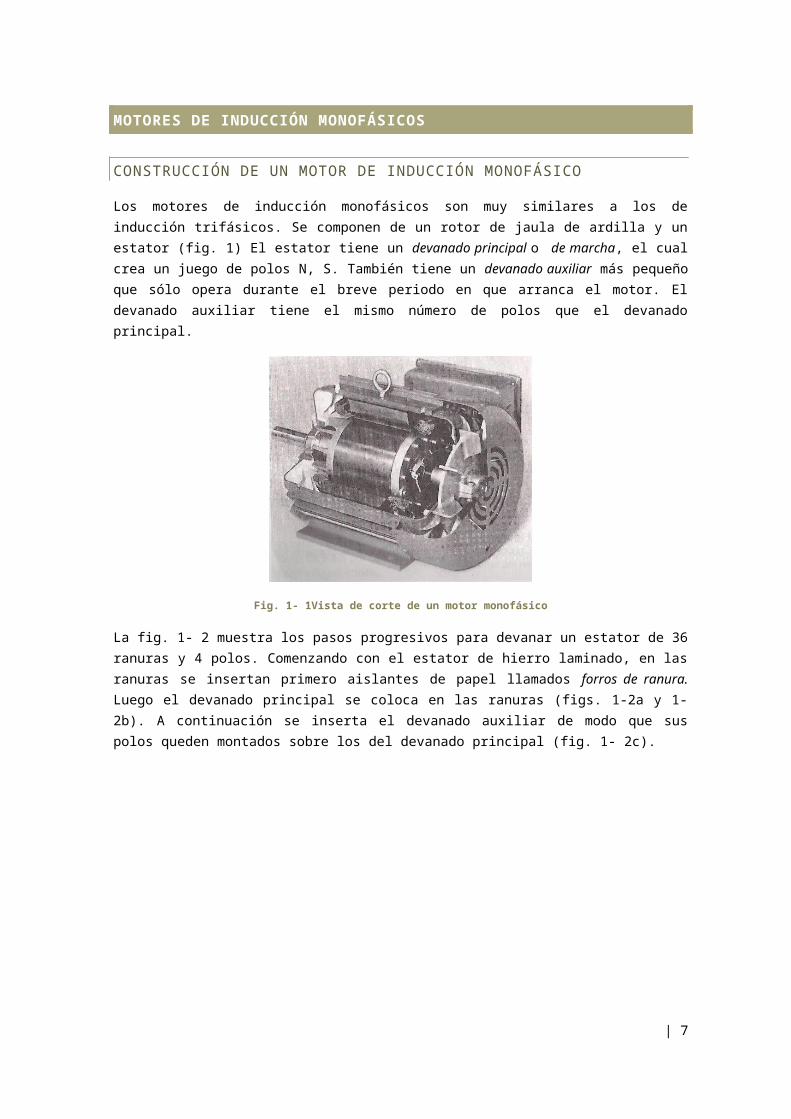
Los motores de inducción monofásicos son muy similares a los de inducción trifásicos. Se componen de un rotor de jaula de ardilla y un estator (fig. 1) El estator tiene un devanado principal o de marcha, el cual crea un juego de polos N, S. También tiene un devanado auxiliar más pequeño que sólo opera durante el breve periodo en que arranca el motor. El devanado auxiliar tiene el mismo número de polos que el devanado principal.
Fig. 1- 1Vista de corte de un motor monofásico
La fig. 1- 2 muestra los pasos progresivos para devanar un estator de 36 ranuras y 4 polos. Comenzando con el estator de hierro laminado, en las ranuras se insertan primero aislantes de papel llamados forros de ranura. Luego el devanado principal se coloca en las ranuras (figs. 1-2a y 1-2b). A continuación se inserta el devanado auxiliar de modo que sus polos queden montados sobre los del devanado principal (fig. 1- 2c).
(a)
| 5
(b) (c)
Fig. 1- 2 (a) Estator laminado desnudo de un motor monofásico de 1/4HP. Las 36 ranuras están aisladas con un forro de papel. El rotor de jaula de ardilla es idéntico al de un motor trifásico (b) Cuatro polos del devanado principal están insertados en las
ranuras. (c) Cuatro polos del devanado auxiliar están montados sobre el devanado principal.
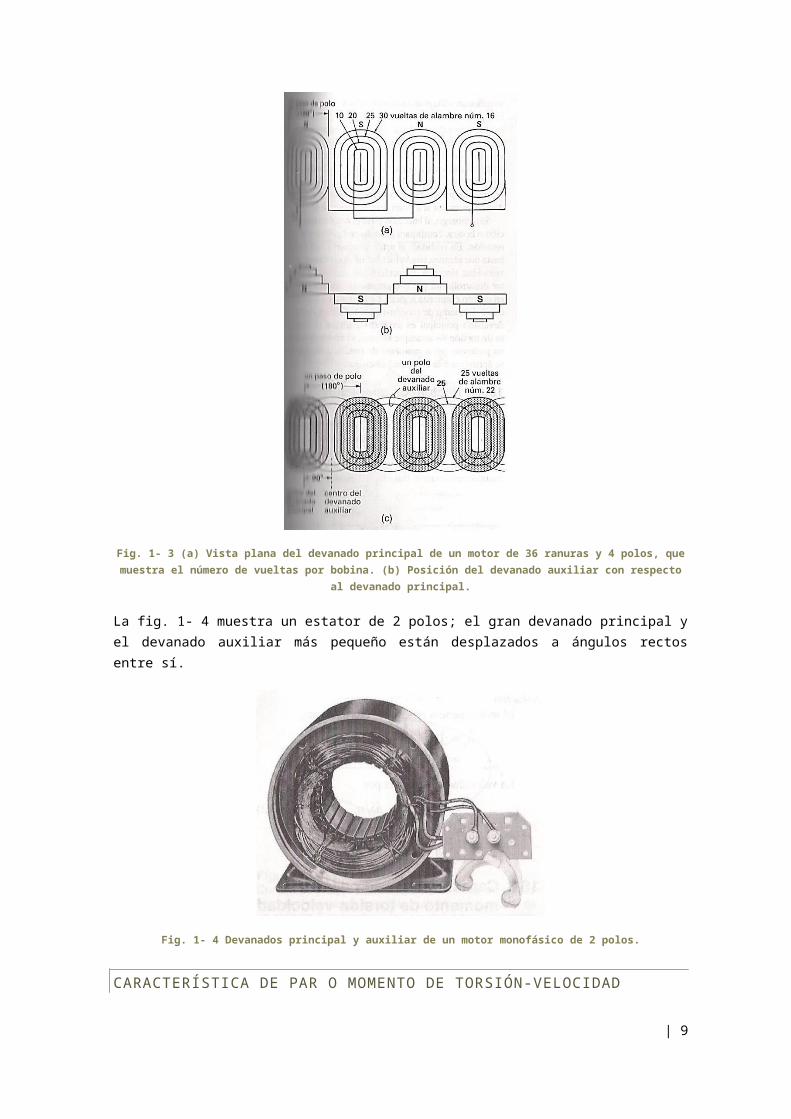
Cada polo del devanado principal consta de un grupo de cuatro bobinas concéntricas, conectadas en serie (fig. 1- 3a). Los polos adyacentes se conectan de modo que produzcan polaridades N, S alternas. La ranura vacía en el centro de cada polo (mostrada como una línea punteada vertical) y las ranuras parcialmente llenas a ambos lados de ella se utilizan para alojar el devanado auxiliar. Éste tiene sólo dos bobinas concéntricas por polo (fig. 1- 3c)
Fig. 1- 3 (a) Vista plana del devanado principal de un motor de 36 ranuras y 4 polos, que muestra el número de vueltas por bobina. (b) Posición del devanado auxiliar con respecto al devanado principal.
| 6
La fig. 1- 4 muestra un estator de 2 polos; el gran devanado principal y el devanado auxiliar más pequeño están desplazados a ángulos rectos entre sí.
Fig. 1- 4 Devanados principal y auxiliar de un motor monofásico de 2 polos.
CARACTERÍSTICA DE PAR O MOMENTO DE TORSIÓN-VELOCIDAD
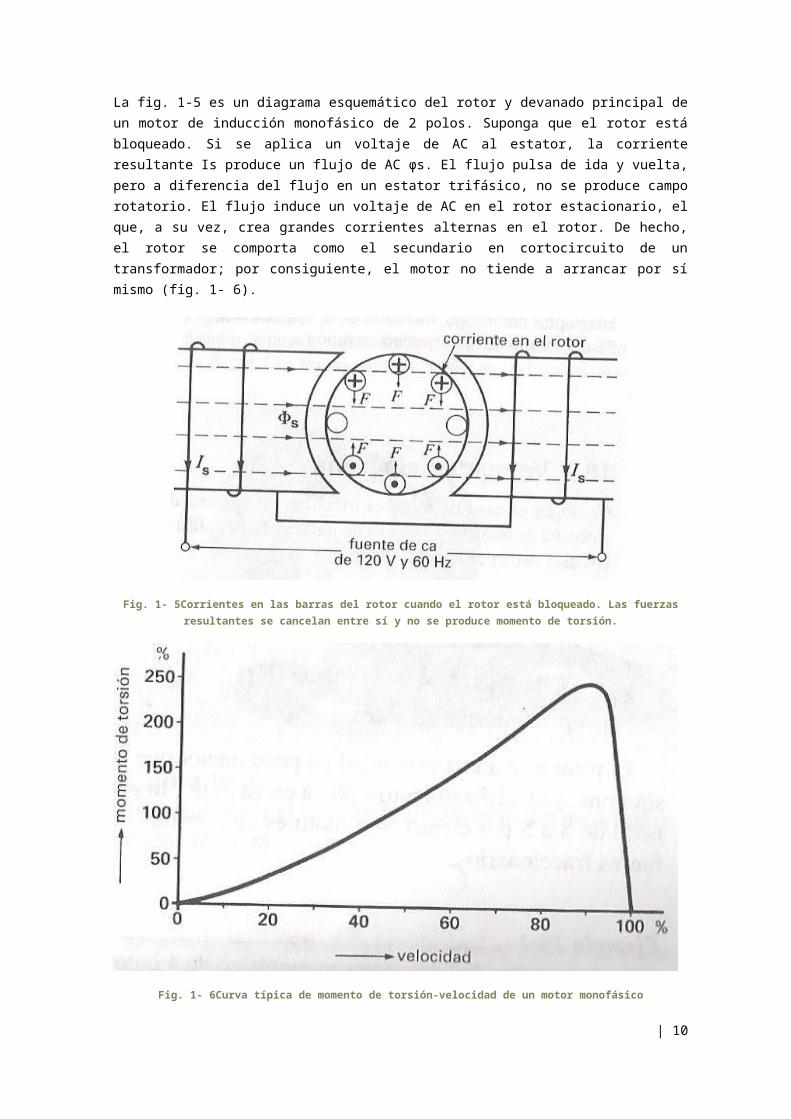
La fig. 1-5 es un diagrama esquemático del rotor y devanado principal de un motor de inducción monofásico de 2 polos. Suponga que el rotor está bloqueado. Si se aplica un voltaje de AC al estator, la corriente resultante Is produce un flujo de AC φs. El flujo pulsa de ida y vuelta, pero a diferencia del flujo en un estator trifásico, no se produce campo rotatorio. El flujo induce un voltaje de AC en el rotor estacionario, el que, a su vez, crea grandes corrientes alternas en el rotor. De hecho, el rotor se comporta como el secundario en cortocircuito de un transformador; por consiguiente, el motor no tiende a arrancar por sí mismo (fig. 1- 6).
Fig. 1- 5Corrientes en las barras del rotor cuando el rotor está bloqueado. Las fuerzas resultantes se cancelan entre sí y no se produce momento de torsión.
| 7
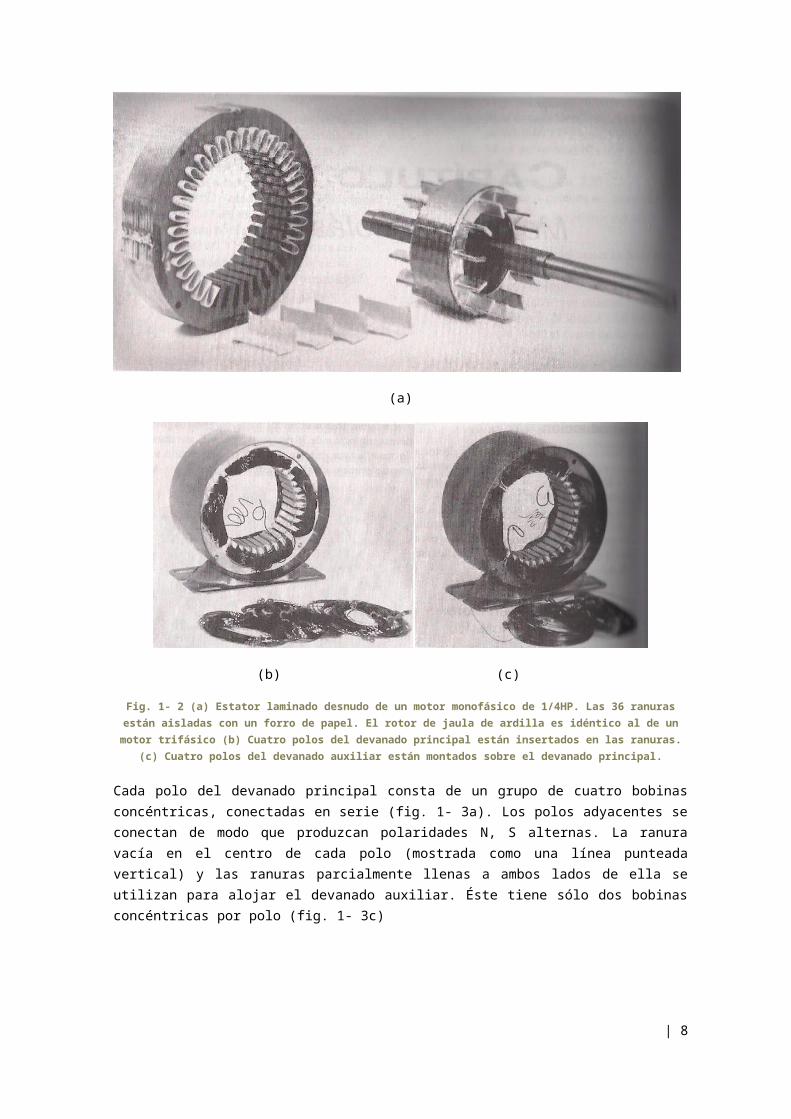
Fig. 1- 6Curva típica de momento de torsión-velocidad de un motor monofásico
Sin embargo, si hacemos girar el rotor en una dirección o la otra, continuará girando en la dirección de la rotación. En realidad, el rotor se acelera con rapidez hasta que alcanza una velocidad un poco menor que la velocidad sincrónica. La aceleración indica que el motor desarrolla un par o momento de torsión positivo en cuanto comienza a girar. La fig. 1- 6 muestra la curva momento de torsión-velocidad típica cuando el devanado principal es excitado. Aunque el momento de torsión de arranque es cero, el motor desarrolla un poderoso par o momento de torsión a medidas que se aproxima a la velocidad sincrónica.
PRINCIPIO DE OPERACIÓN
En cuanto el rotor comienza a girar, se induce una fem de velocidad E en los conductores del rotor cuando atraviesan el flujo φs del estator. (fig. 1- 7)
Fig. 1- 7 Corrientes en las barras del rotor debido a la rotación. Producen en flujo φr que actúa perpendicular al flujo φs del estator.
| 8
Este voltaje se incrementa a medida que se incrementa la velocidad del rotor, y hace que fluyan corrientes Ir en las barras del rotor que están frente a los polos del estator. Estas corrientes producen un flujo de AC φr que actúa perpendicular al flujo φs del estator. Igualmente importante es el hecho de que el flujo φr no alcanza su valor máximo al mismo tiempo que φs, debido a la inductancia del rotor.
La acción combinada de φs y φr produce un campo magnético rotatorio, similar al que se produce en un motor trifásico. El valor de φr se incrementa conforme se incrementa la velocidad y llega a ser casi igual que φs a la velocidad síncrona. Esto explica, en parte, por qué el momento de torsión se incrementa conforme el motor se acelera.
Podemos entender cómo se produce el campo rotatorio empleando la fig. 1- 8. Es una visión global de las corrientes y flujos creados por el rotor y el estator, respectivamente, a intervalos de tiempo sucesivos. Se supone que el motor está funcionando muy por debajo de la velocidad síncrona, por lo que φr es mucho menor que φs. Observando el flujo en las imágenes sucesivas de la fig. 1- 8, es obvio que la combinación de φs y φr produce un campo rotatorio. Además, el flujo es intenso horizontalmente y más o menos débil verticalmente. Por lo tanto, la intensidad del campo a baja velocidad sigue el patrón elíptico mostrado en la fig. 1- 8f. El flujo gira en sentido contrario al de las manecillas del reloj en la misma dirección que el rotor. Además gira a velocidad síncrona, independientemente de la velocidad real del rotor. A medida que el motor se aproxima a la velocidad síncrona, φr llega a ser casi igual a φs y se produce un campo rotatorio casi perfecto.
| 9
| 10
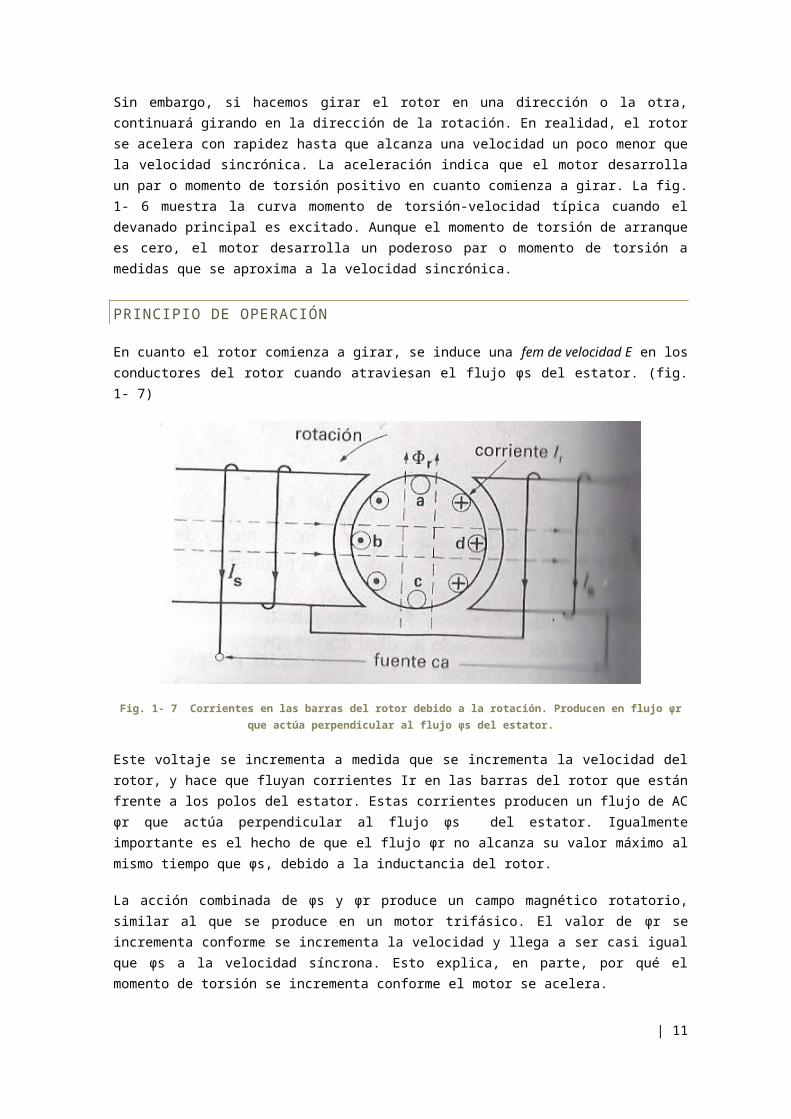
Fig. 1- 8 Corrientes y flujo instantáneos en un motor monofásico con el devanado principal excitado. La duración de un ciclo es T segundos y las condiciones se muestran a intervalos sucesivos de un cuarto de ciclo. (a) La corriente Is del estator es máxima, la corriente Ir del rotor es cero. (b) La corriente del estator es cero, la corriente del rotor es máxima; sin embargo, φr es menor que φs. (c) La corriente del estator es máxima, pero negativa. (d) La corriente del rotor es máxima, pero negativa. (e) Después de un ciclo completo (t=T) se repiten las condiciones. (f) El flujo φ resultante en el entrehierro gira en sentido contrario al de las manecillas del reloj a velocidad síncrona. Su amplitud varía de un φs máximo a un φr mínimo.
PAR CON EL ROTOR BLOQUEADO
Para producir un par o momento de torsión de arranque en un motor monofásico, debemos crear de algún modo un campo rotatorio. Esto se hace añadiendo un devanado auxiliar, como se muestra en la fig. 1- 9. Cuando los devanados principal y auxiliar están conectados a una fuente de AC, el devanado principal produce un flujo φs, mientras que el devanado auxiliar produce un flujo φa. Si los dos flujos están fuera de fase, de modo que φa se atrasa o se adelanta a φs, se establece un campo rotatorio.
Fig. 1- 9 Corrientes y flujos en reposo cuando los devanados principal y auxiliar son energizados. Se produce un campo rotatorio elíptico
El lector verá de inmediato que el devanado auxiliar produce un fuerte flujo φa durante el periodo de aceleración cuando el flujo φr del rotor es débil. Por consiguiente, φa fortalece a φr, con lo cual se produce un poderoso momento de torsión tanto en reposo como a bajas velocidades.
| 11
MOTOR DE INDUCCIÓN DE FASE PARTIDA.
La fig. 1- 10a muestra el esquema de conexiones de los dos devanados de un motor de inducción de fase partida.
El devanado de arranque tiene menos espiras y el hilo es de menor sección que el devanado de marcha. El devanado de arranque, por consiguiente, presenta una resistencia elevada y una reactancia reducida. Inversamente, el devanado de marcha (hilo de mayor sección y más espiras) presenta una resistencia reducida y una reactancia elevada. A causa de su menor impedancia, la corriente en el devanado de marcha, Ir, es mayor que la corriente en el devanado de arranque, Is.
En la fig. 1- 10b se indican las relaciones de fase de las corrientes a rotor bloqueado en el momento del arranque. La corriente en el devanado de arranque, Is, está retrasada respecto de la tensión de alimentación en unos 15°, en tanto que la corriente en el devanado de marcha, que es mayor, está retrasada respecto de la tensión monofásica en unos 40°. A pesar del hecho de que la corriente en los dos devanados en cuadratura en el espacio n oes igual, las componentes en cuadratura son prácticamente iguales.
Fig. 1- 10 Esquema de conexión y relaciones de fase de un motor de inducción de fase partida de arranque por resistencia.
Si los devanados están desplazados 90° en el espacio y si las componentes en cuadratura de la corriente, que están desfasadas en 90°. Son prácticamente iguales, se produce un campo giratorio bifásico equivalente en el arranque que desarrolla el par de arranque suficiente para acelerar el rotor en el sentido del campo giratorio producido por las corrientes.
Cuando el rotor acelera, genera su propia fem de rotación y tiene a producir un par resultante en virtud de su propia rotación en un sentido particular. El par desarrollado por el campo principal pulsatorio (producido por el devanado en marcha) supera el desarrollado por ambos devanados a un valor del desplazamiento de alrededor del 15%. Asimismo la corriente de marcha sola produciría menos pérdida ya que se eliminarían las pérdidas del devanado de arranque. Por estas razones, como se indica en la figura 10ª, se utiliza un interruptor centrífugo (normalmente cerrado en reposo) que abra a un deslizamiento de alrededor de un 25% (par máximo como motor monofásico), con lo que el motor alcanza su deslizamiento nominal (aproximadamente el 5% o menos según la carga aplicada) como motor monofásico en virtud de su propio campo transversal.
Con la finalidad de invertir el sentido de rotación de cualquier motor de fase partida, es necesario invertir las conexiones de los terminales del devanado auxiliar de arranque con respecto al devanado principal de marcha. Esto producirá un campo giratorio “bifásico” en sentido opuesto. La inversión “reconectando” (cambiando las conexiones entre terminales), evidentemente, nunca puede realizarse en marcha, como a veces se hace con los motores de inducción polifásicos. En el caso de un motor de arranque por resistencia monofásico, no sucede nada incluso si los contactos de interruptor centrífugo se puentean y se alimenta el devanado de arranque. Puesto que el par monofásico es mayor que el par de “campo auxiliar”, el motor
| 12
continuará funcionando como un motor monofásico en el sentido que giraba originalmente. El motor de arranque por resistencia de fase partida se clasifica, por tanto, como un motor no reversible.
Las características nominales del devanado de arranque se basan en razón de su servicio intermitente. Si el interruptor centrífugo se avería y no se abre, el excesivo calor producido por el devanado de arranque de alta resistencia aumentará tanto la temperatura del estator, que los dos devanados pueden averiarse por sobrecalentamiento. Los motores de fase partida más usuales que emplean aislamientos mejorados, presentan una muy larga vida en funcionamiento normal, pero muchos motores excelentes se han averiado a causa de un interruptor centrífugo defectuoso.
La corriente de arranque a rotor bloqueado varía entre 5 a 7 veces la corriente nominal y el par de arranque de 1,5 a 2 veces el par normal. El motor de arranque por resistencia de fase partida es por lo general un motor de potencia fraccional y, puesto que su rotor es pequeño, presenta poca inercia. El resultado es que la corriente de arranque relativamente elevada disminuye casi instantáneamente en el arranque de forma que no existirían inconvenientes con corrientes elevadas. Los inconvenientes principales de este motor son su bajo par de arranque, que sometido a una fuerte carga, el deslizamiento supera el 5%, reduciendo la fem de rotación y produciendo un par elíptico o pulsante que hace al motor algo ruidoso, y que su control de la velocidad es relativamente difícil, ya que la velocidad síncrona del flujo rotatorio del estator está determinada por la frecuencia y el número de polos desarrollados en el devanado estatórico de marcha. Se utiliza en aplicaciones para accionar cargas que son ruidosas: quemadores de aceite, máquinas herramientas, pulidoras, máquinas lavadoras, lavavajillas, ventiladores, sopladores de aire, compresores de aire y pequeñas bombas de agua.
MOTOR DE ARRANQUE POR CONDENSADOR DE FASE PARTIDA
El motor de fase partida mencionando anteriormente se ha dominado motor de arranque por resistencia debido a que la diferencia de impedancia en el devanado de arranque o auxiliar se debía a la elevada resistencia de su devanado de arranque. A fin de mejorar el par de arranque relativamente pequeño del motor de fase partida se intercala un condensador en el devanado auxiliar para originar casi un desfase de 90° entre las corrientes de los devanados de arranque y de marcha, en lugar de aproximadamente 25°.
El empleo del condensador también tiende a reducir (en cierta medida) la corriente inicial total a rotor bloqueado, ya que mejora el factor de potencia proporcionando una componente de corriente que adelanta a la tensión aplicada. En la fig. 1- 11a puede verse un motor de arranque por condensador. En la tabla 1 aparecen los valores aproximados de la capacidad para los motores de arranque por condensador de 1/8 a 3/4hp.
| 13
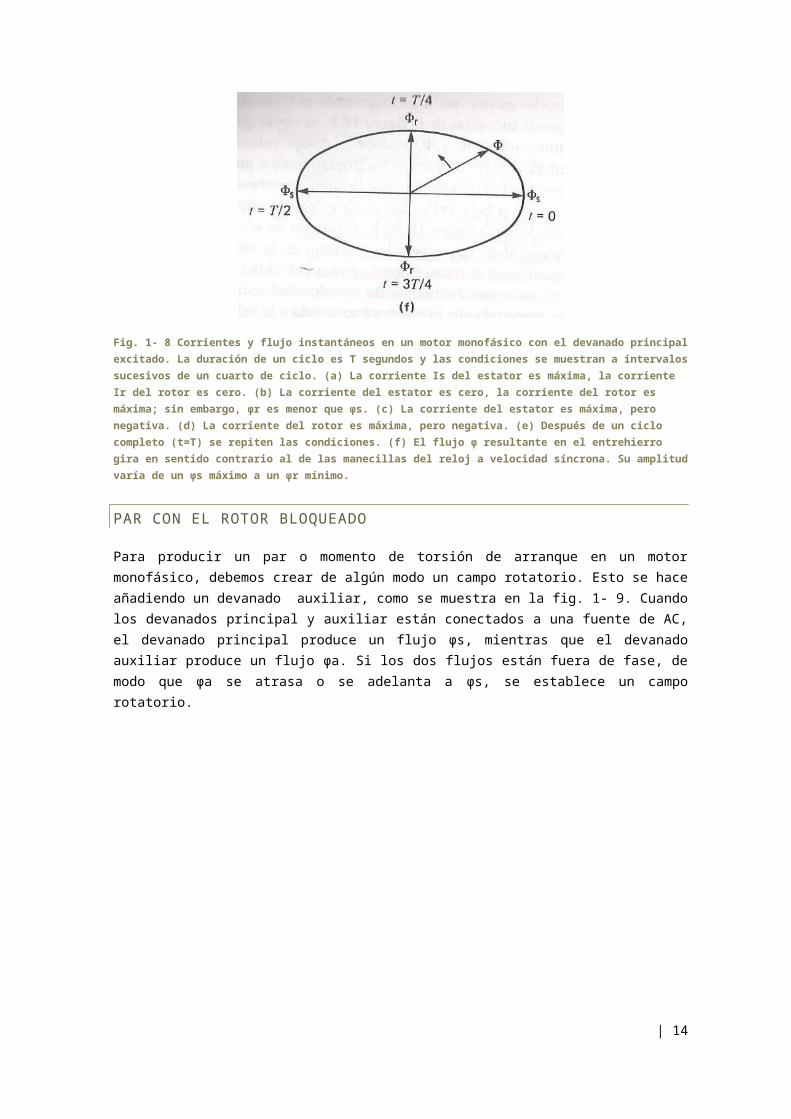
Fig. 1- 11 Esquema de conexión y relaciones de fase de un motor de inducción de fase partida de arranque por condensador.
A causa de que el condensador tiene unas características de servicio intermitente (además de las características nominales de servicio intermitente del devanado de arranque), un interruptor de arranque defectuoso en un motor de arranque por condensador puede dañar no tan sólo los devanados sino el condensador mismo.
El motor de arranque por condensador, a diferencia del motor de fase partida de arranque por resistencia es un motor reversible, Si se desconecta temporalmente de la alimentación, la velocidad del motor disminuye hasta un deslizamiento del 20% (alrededor de cuatro veces el deslizamiento nominal del 5%), con lo que el interruptor centrífugo se cierra. Si al mismo tiempo, las conexiones del devanado auxiliar de arranque se invierten respecto del devanado de marcha y se conectan de nuevo a la alimentación, se establecerá un campo bifásico giratorio opuesto al sentido de rotación del rotor. A diferencia del motor de arranque por resistencia, cuyas corrientes principal y auxiliar sólo están desfasadas en 25°, el motor de arranque por condensador presenta un desfase a 82° aproximadamente.
En el motor de arranque por condensador, por consiguiente, el par de “campo auxiliar” o “par bifásico” supera al par monofásico de la fem de rotación producido por el campo transversal del rotor. El campo giratorio invertido, moviéndose en sentido opuesto al de rotación del rotor, frena el motor (reduciendo la fem de rotación y el par del campo transversal aún más), lo para e invierte su sentido de rotación. El motor acelera hasta un deslizamiento del 20% en sentido opuesto y, cuando el interruptor centrífugo se abre, el motor alcanza la velocidad nominal como un motor de inducción monofásico en sentido opuesto.
Debido a su mayor par de arranque, de 3,5 a 4, 5 veces el par nominal y su corriente de arranque reducida para la misma potencia en el momento del arranque, el motor de arranque por condensador se fabrica ordinariamente en tamaños de hasta 7,5 hp. En virtud de su mayor para de arranque, los motores de fase partida de arranque por condensador se utilizan en bombas, compresores, unidades de refrigeración, acondicionadores de aire y máquinas lavadoras grandes en las que se precisa un motor monofásico para desarrollar un elevado par de arranque baja carga y que sea reversible.
MOTOR CON CONDENSADOR DE FASE PARTIDA PERMANENTE (DE UN SOLO VALOR)
Debido a la reversibilidad del motor de fase partida de arranque por condensador, se ha desarrollado un motor monofásico que tiene dos devanados permanentes. Debido a que funciona continuamente como un motor de fase partida permanente, no se precisa interruptor centrífugo. El motor arranca y funciona gracias a la partición de fase cuadratura producida por dos devanados idénticos desfasado temporal y espacialmente. Como resultado, este motor no posee el elevado par de marcha producido tanto en el motor de arranque por resistencia como de arranque por condensador. El valor del condensador se determina en función de una marcha óptima en lugar de por su característica de arranque. En el momento del arranque, la corriente en la rama capacitiva es muy pequeña. El resultado es que el motor de fase partida permanente
| 14
con condensador de un solo valor tiene un par de arranque muy pobre, de alrededor del 50% al 100% del par nominal.
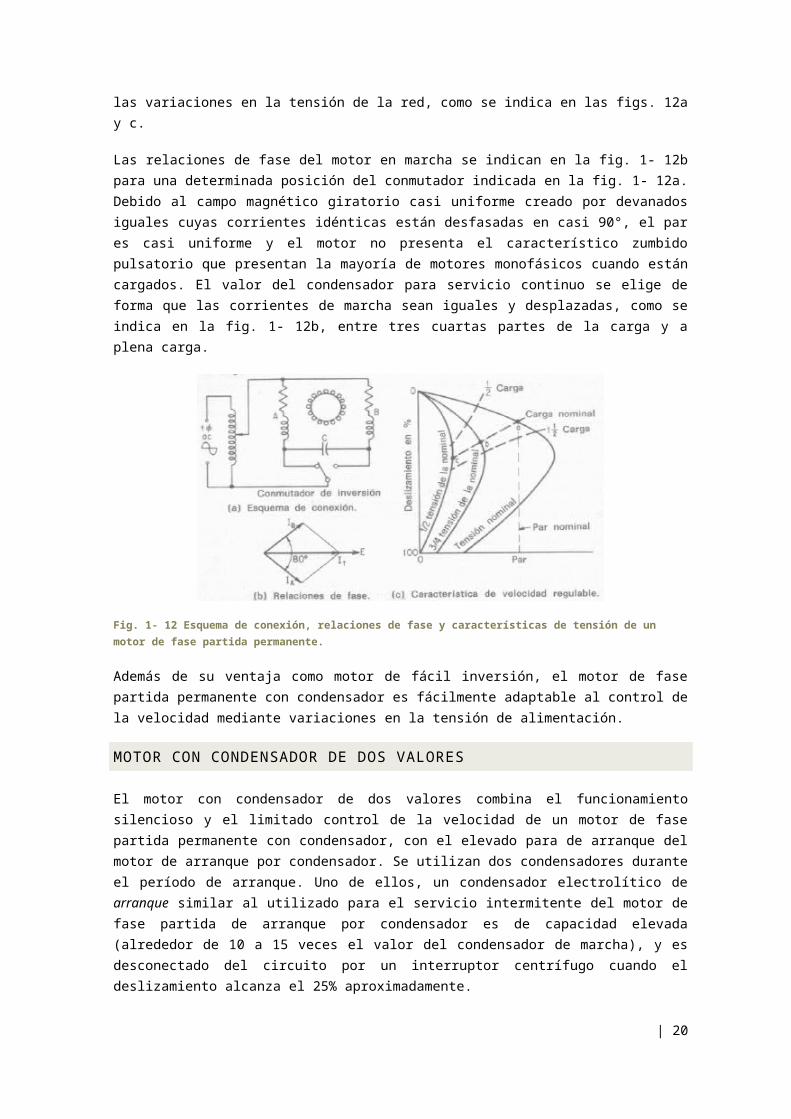
Como se indica en la fig. 1- 12a, un conmutador permite que el condensador de aceite se conecte fácilmente a uno u otro de los devanados. Las ventajas de este motor son que no necesita un interruptor centrífugo y se invierte fácilmente debido a su reducido par de marcha. Además es un motor cuya velocidad puede controlarse fácilmente mediante las variaciones en la tensión de la red, como se indica en las figs. 12a y c.
Las relaciones de fase del motor en marcha se indican en la fig. 1- 12b para una determinada posición del conmutador indicada en la fig. 1- 12a. Debido al campo magnético giratorio casi uniforme creado por devanados iguales cuyas corrientes idénticas están desfasadas en casi 90°, el par es casi uniforme y el motor no presenta el característico zumbido pulsatorio que presentan la mayoría de motores monofásicos cuando están cargados. El valor del condensador para servicio continuo se elige de forma que las corrientes de marcha sean iguales y desplazadas, como se indica en la fig. 1- 12b, entre tres cuartas partes de la carga y a plena carga.
Fig. 1- 12 Esquema de conexión, relaciones de fase y características de tensión de un motor de fase partida permanente.
Además de su ventaja como motor de fácil inversión, el motor de fase partida permanente con condensador es fácilmente adaptable al control de la velocidad mediante variaciones en la tensión de alimentación.
MOTOR CON CONDENSADOR DE DOS VALORES
El motor con condensador de dos valores combina el funcionamiento silencioso y el limitado control de la velocidad de un motor de fase partida permanente con condensador, con el elevado para de arranque del motor de arranque por condensador. Se utilizan dos condensadores durante el período de arranque. Uno de ellos, un condensador electrolítico de arranque similar al utilizado para el servicio intermitente del motor de fase partida de arranque por condensador es de capacidad elevada (alrededor de 10 a 15 veces el valor del condensador de marcha), y es desconectado del circuito por un interruptor centrífugo cuando el deslizamiento alcanza el 25% aproximadamente.
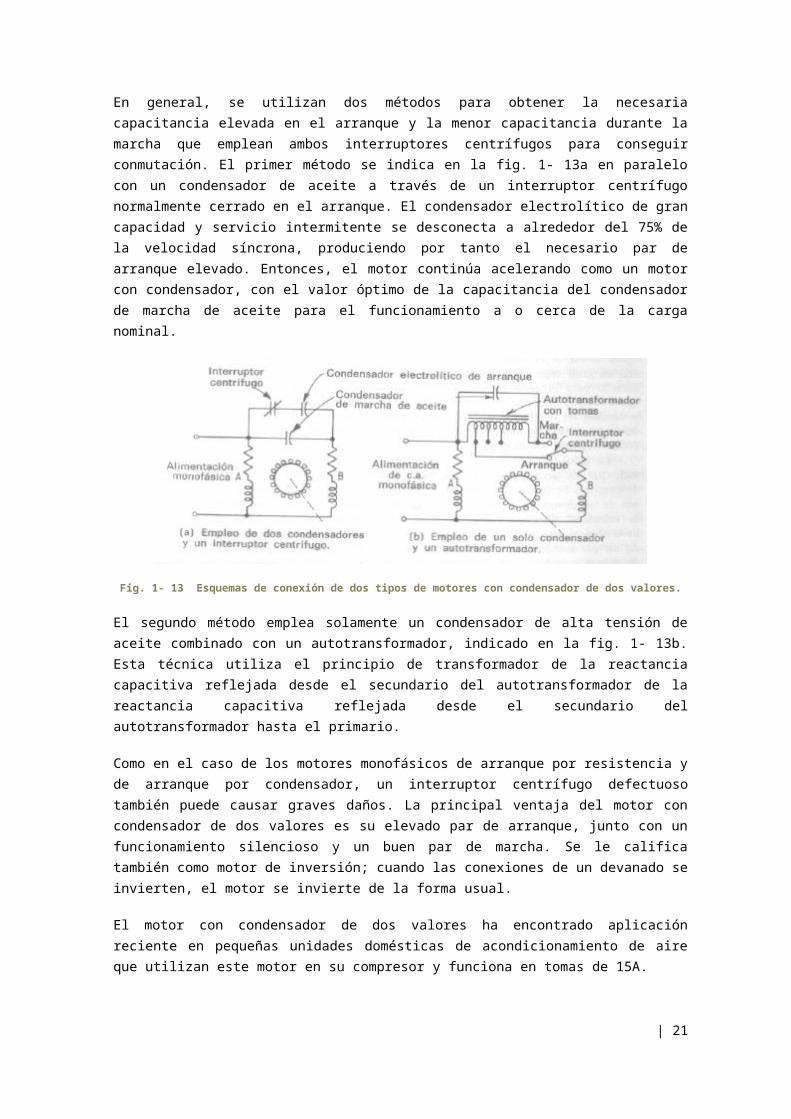
En general, se utilizan dos métodos para obtener la necesaria capacitancia elevada en el arranque y la menor capacitancia durante la marcha que emplean ambos interruptores centrífugos para conseguir conmutación. El primer método se indica en la fig. 1- 13a en paralelo con un condensador de aceite a través de un interruptor centrífugo normalmente cerrado en el arranque. El condensador electrolítico de gran capacidad y servicio intermitente se desconecta a alrededor del 75% de la velocidad síncrona, produciendo por tanto el necesario par de arranque elevado. Entonces, el motor continúa acelerando como un motor con
| 15
condensador, con el valor óptimo de la capacitancia del condensador de marcha de aceite para el funcionamiento a o cerca de la carga nominal.
Fig. 1- 13 Esquemas de conexión de dos tipos de motores con condensador de dos valores.
El segundo método emplea solamente un condensador de alta tensión de aceite combinado con un autotransformador, indicado en la fig. 1- 13b. Esta técnica utiliza el principio de transformador de la reactancia capacitiva reflejada desde el secundario del autotransformador de la reactancia capacitiva reflejada desde el secundario del autotransformador hasta el primario.
Como en el caso de los motores monofásicos de arranque por resistencia y de arranque por condensador, un interruptor centrífugo defectuoso también puede causar graves daños. La principal ventaja del motor con condensador de dos valores es su elevado par de arranque, junto con un funcionamiento silencioso y un buen par de marcha. Se le califica también como motor de inversión; cuando las conexiones de un devanado se invierten, el motor se invierte de la forma usual.
El motor con condensador de dos valores ha encontrado aplicación reciente en pequeñas unidades domésticas de acondicionamiento de aire que utilizan este motor en su compresor y funciona en tomas de 15A.
MOTOR DE INDUCCIÓN DE ESPIRAS DE SOMBRA
El motor de espiras de sombra es en general un motor pequeño de potencia fraccional no superior a 1/16 hp, pero se han fabricado motores de hasta 1/4 hp. La mayor cualidad de este motor estriba en su extrema simplicidad: un devanado rotórico monofásico, un rotor de fundición en jaula de ardilla y unas piezas polares especiales. A pesar de tener un devanado monofásico es autoarrancador.
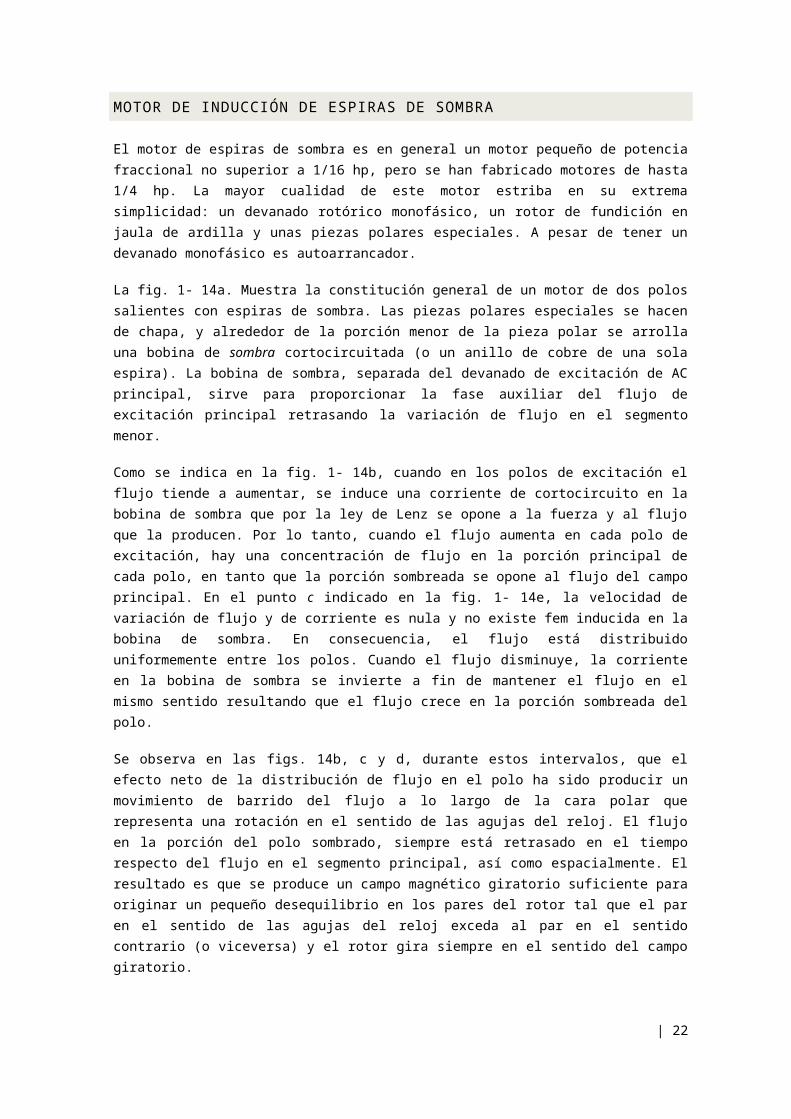
La fig. 1- 14a. Muestra la constitución general de un motor de dos polos salientes con espiras de sombra. Las piezas polares especiales se hacen de chapa, y alrededor de la porción menor de la pieza polar se arrolla una bobina de sombra cortocircuitada (o un anillo de cobre de una sola espira). La bobina de sombra, separada del devanado de excitación de AC principal, sirve para proporcionar la fase auxiliar del flujo de excitación principal retrasando la variación de flujo en el segmento menor.
Como se indica en la fig. 1- 14b, cuando en los polos de excitación el flujo tiende a aumentar, se induce una corriente de cortocircuito en la bobina de sombra que por la ley de Lenz se opone a la fuerza y al flujo que la producen. Por lo tanto, cuando el flujo aumenta en cada polo de excitación, hay una concentración de flujo en la porción principal de cada polo, en tanto que la porción sombreada se opone al flujo del campo principal. En el punto c indicado en la fig. 1- 14e, la velocidad de variación de flujo y de corriente es nula y no existe fem inducida en la bobina de sombra. En consecuencia, el flujo está distribuido uniformemente
| 16
entre los polos. Cuando el flujo disminuye, la corriente en la bobina de sombra se invierte a fin de mantener el flujo en el mismo sentido resultando que el flujo crece en la porción sombreada del polo.
Se observa en las figs. 14b, c y d, durante estos intervalos, que el efecto neto de la distribución de flujo en el polo ha sido producir un movimiento de barrido del flujo a lo largo de la cara polar que representa una rotación en el sentido de las agujas del reloj. El flujo en la porción del polo sombrado, siempre está retrasado en el tiempo respecto del flujo en el segmento principal, así como espacialmente. El resultado es que se produce un campo magnético giratorio suficiente para originar un pequeño desequilibrio en los pares del rotor tal que el par en el sentido de las agujas del reloj exceda al par en el sentido contrario (o viceversa) y el rotor gira siempre en el sentido del campo giratorio.
Fig. 1- 14 Construcción general y principio del motor con espiras de sombra.
A fin de invertir el sentido de rotación, se emplean métodos como las siguientes:
El primero de estos métodos consiste en conectar las bobinas de sombra en serie en las correspondientes porciones sombreadas y cortocircuitarlas mediante un interruptor. Esto se indica en la fig. 1- 15a, en la que las bobinas de sombra en los extremos de los polos salientes que se alcanzan en primer lugar en un lado están cortocircuitados en caso de giro en el sentido de las agujas del reloj, y los extremos del polo que se alcanzan en primer lugar en el lado opuesto del polo están cortocircuitados en caso de giro en sentido contrario al de las agujas del reloj. Sin embargo, en ningún instante, ambos grupos de extremos polares que se alcanzan en primer lugar están cortocircuitados.
El segundo método se utiliza generalmente con estatores de polos no salientes. En la fig. 1- 15b pueden verse dos devanados distribuidos distintos, A y B, a 90° con respecto a los polos sombreados cortocircuitados. Cuando A es alimentado, el sentido del flujo es el mismo que el de las agujas del reloj: devanado A, polo sombreado A’; devanado A (en el lugar de B) y polo sombreado B’. Cuando B es alimentado, el sentido del flujo es contrario al de las agujas del reloj: devanado B, bobina sombreada A’, devanado B distribuido en A y bobina sombreada B’.
El tercer método indicado en la fig. 1- 15c, también utiliza un solo devanado distribuido continuo con tomas apropiadas en los puntos a 90°. Cuando las tomas de un grupo son alimentadas a través de un interruptor bipolar de doble posición, el rotor gira en el sentido de las agujas del reloj. Cuando las tomas de un segundo grupo, desfasadas 90° con respecto a las bobinas de sombra son alimentadas, el motor gira en sentido opuesto.
| 17
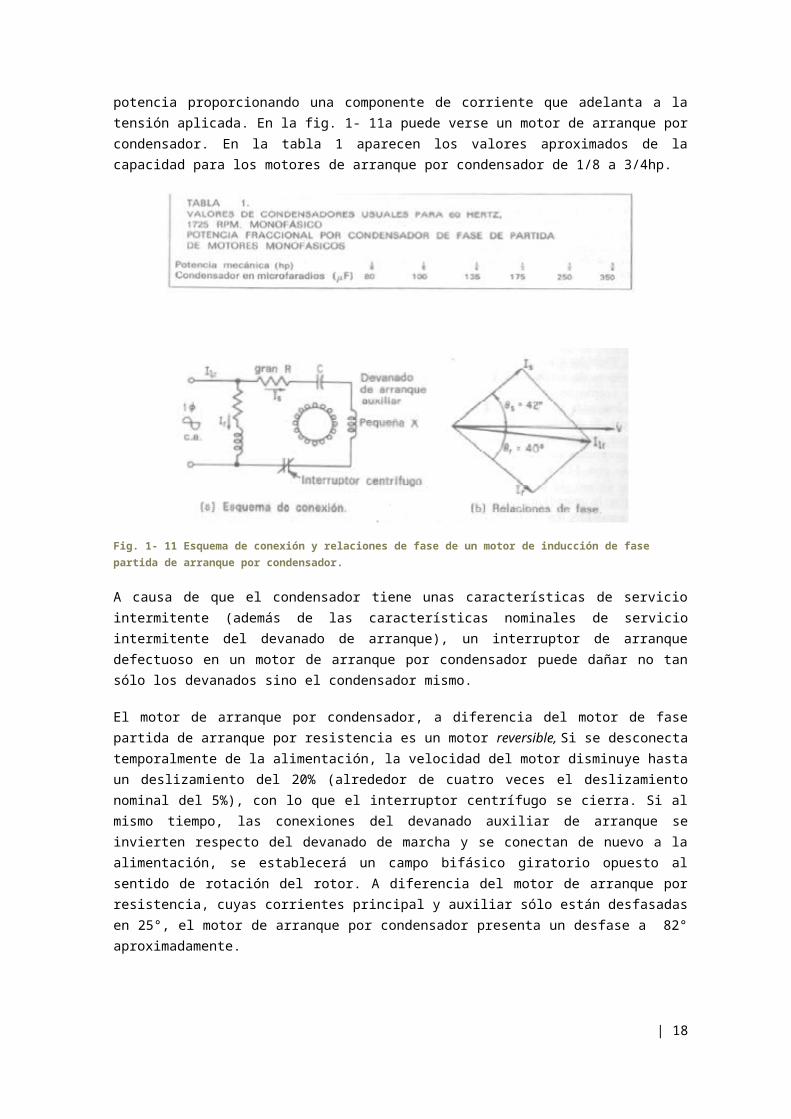
Fig. 1- 15 Métodos para invertir los motores con espiras de sombra.
El motor con espiras de sombra es robusto, barato, de pequeño tamaño y precisa poco mantenimiento. La corriente en reposo a rotor bloqueado es sólo ligeramente superior a su corriente nominal normal, de modo que puede permanecer parado durante cortos períodos sin daño. Su reducido par de arranque limita su aplicación a los motores de tocadiscos, proyectores cinematográficos, asadores eléctricos, ventiladores y sopladores pequeños, plataformas giratorias en escaparates de tiendas, y otras cargas relativamente ligeras. Los métodos básicos de control de velocidad utilizan un medio para reducir la tensión de alimentación de AC para producir un aumento de deslizamiento.
MOTOR DE INDUCCIÓN DE ARRANQUE POR RELUCTANCIA.
Otro motor de inducción que emplea un estator con entrehierro no uniforme es el motor de arranque por reluctancia. Su rotor es el clásico de jaula de ardilla, que desarrolla para una vez iniciada la rotación por el principio de reluctancia. Debido a los entrehierros desiguales entre el rotor y los polos salientes no uniformes indicados en la fig. 1- 16, sobre el flujo de excitación principal se produce un efecto de barrido. El principio de reluctancia según el que el motor funciona es, en pocas palabras, que, cuando el entrehierro es pequeño, la autoinducción en el devanado de excitación es grande, lo que determina que en el devanado de excitación, la corriente esté retrasada respecto del flujo que la induce (en un circuito fuertemente inductivo, la intensidad está retrasada respecto de la tensión y el flujo en casi 90°). Inversamente, cuando el entrehierro es muy grande, disminuye la autoinducción, con lo que la corriente está más en fase con el flujo. Por consiguiente, el flujo mutuo del entrehierro se retrasa en las proximidades del entrehierro menor, produciendo un efecto de barrido similar al originado en el motor con espiras de sombra. Puesto que los flujos están desfasados ligeramente en el tiempo en el espacio, en todos los polos de excitación se produce un campo magnético giratorio, en los instantes t1, t2 y t3, sucesivamente, como se indica en la fig. 1- 16.
| 18
Fig. 1- 16 Motor de inducción de arranque por reluctancia y establecimiento del campo giratorio
Aparte de invertir los polos del estator, no hay forma de variar el sentido de rotación del motor de inducción de arranque por reluctancia. El funcionamiento siempre tiene lugar en el sentido del entrehierro grande al entrehierro pequeño.
Generalmente se prefiere el motor con espiras de sombra al motor de inducción de arranque por reluctancia, ya que no es más costoso de fabricar, tiene mejores pares de arranque y marcha y es fácilmente reversible. El control de la velocidad del motor de inducción de arranque por reluctancia es igual que el de los motores con espiras de sombra.
| 19
MOTORES SÍNCRONOS
Estos motores son maquinas síncronas que se utilizan para convertir potencia eléctrica en potencia mecánica de rotación, teniendo como característica principal que trabajan a velocidad constante que depende solo de la frecuencia de la red y de otros aspectos constructivos de la máquina. La diferencia con los motores síncronos es la puesta en marcha ya que requiere de maniobras especiales a no ser que se cuente con un sistema automático de arranque. Además el motor síncrono al operar de forma sobrexcitada consume potencia reactiva y mejora el factor de potencia.
Existen máquinas síncronas (AC) con inducido móvil y un inductor fijo y máquinas síncronas (AC) con un inductor móvil y un inducido fijo.
GENERALIDADES
Para que un motor sea considerado síncrono de AC debe cumplir alguna de las dos condiciones siguientes:
Una disminución de la corriente de excitación y de la fem generada (inferior a la tensión de barras).
Una disminución de la velocidad instantánea de la máquina de AC
La velocidad de este motor viene determinada por el número de polos y la frecuencia, o sea N=120f/P, como la frecuencia de las barras que alimenta el motor es constante, y el numero de polos también, se concluye que la velocidad de este motor es constante. El inducido de este motor no solo necesita y recibe corriente de AC sino que también requiere D.C. para su excitación. Como se puede variar la excitación de un motor síncrono de AC posee una característica que no tiene otro tipo de motor de AC: el factor de potencia al cual funciona puede hacerse variar a voluntad.
Otra característica poco usual es que inherentemente no arranca por sí mismo, lo cual significa que debe llevarse a su funcionamiento a su velocidad mediante medios auxiliares y luego debe conectarse a la línea.
Además estos motores poseen susceptibilidad a las oscilaciones, particularmente cuando las cargas están sometidas a variaciones bruscas o no son uniformes durante un ciclo de revolución, como en caso de estampadores, cizallas, compresores o bombas; pero con la ayuda de amortiguadores en la estructura de los rotores ha terminado con este problema y con esto ha sido posible que el motor síncrono pueda arrancar por si mismo como motor de inducción.
Los motores síncronos presentan las siguientes ventajas con respecto a los motores de inducción:
1. Pueden usarse para la corrección del factor de potencia, además de suministrar par para accionar cargas.
2. Mayor rendimiento con F.P=1 que los motores de inducción de las correspondientes potencia y tensión nominales.
3. Los rotores de los polos de excitación permiten el uso de entrehierros más anchos que los correspondientes al tipo de jaula de ardilla usados en los motores de inducción, exigiendo menos tolerancia de cojinetes y permitiendo un mayor desgaste de cojinetes.
4. Pueden resultar menos caros a igualdad de potencia, velocidad y tensión nominales. Esta diferencia de coste varía de acuerdo a las técnicas de fabricación relativas del estator y del rotor ya que para tamaños medios (50-500HP y bajas velocidades) y potencias y velocidades altas resulta mejor en cuanto a costo.
CÓNSTRUCCIÓN
| 20
CONSTRUCCIÓN DE MÁQUINAS SÍNCRONAS CON INDUCIDO MÓVIL
Posee el mismo tipo de estator que una máquina de D.C. lo cual significa que el estator consta de:
Un yugo o carcasa cilíndrica de acero fundido o laminado. Este yugo sirve de soporte y a la vez proporciona un camino de retorno para el flujo en el circuito magnético creado por los devanados de excitación.
Los devanados de excitación son electroimanes cuyos amperios-vuelta proporcionan una fuerza electromotriz adecuada para producir en el entrehierro el flujo que se precisa para generar una fuerza electromotriz. Estos devanados se colocan en los polos de excitación.
Fig. 2- 1. Máquina síncrona del tipo de inducido móvil y polos de excitación salientes.
Los polos de excitación, construidos de chapas de acero y unidos mediante pernos o soldados a la carcasa tras haber introducido en ellos el conjunto de devanados de excitación. La zapata del polo es curva y más ancha que el núcleo del polo a fin de distribuir el flujo más uniforme.
Los polos auxiliares (interpolos) y sus devanados también están montados sobre la carcasa de la máquina.
Los devanados de compensación, son opcionales; conectados de la misma forma que los devanados interpolares, pero están colocados en ranuras axiales de la zapata del polo de excitación.
Fig. 2- 2. Empleo del devanado de compensación para neutralizar la fuerza electromotriz del inducido.
| 21
Las escobillas y portaescobillas, como los devanados interpolar y de compensación, forman parte del circuito del inducido. Las escobillas están formadas de carbono y grafito, sujetas a la estructura del estator y mediante muelles se asegura que mantengan contacto firme con las delgas del colector.
Detalles mecánicos, unidos mecánicamente al yugo.
El devanado de excitación es alimentado por una fuente de D.C. y el devanado del inducido (rotor) se saca al exterior a través de anillos rozantes y de un colector, como se indica en la figura 2-1b. si a los anillos rozantes se les aplica AC, la máquina funciona como motor de AC y generador de D.C. simultáneamente, en cambio si se aplica D.C. a las escobillas, la máquina funciona como motor D.C. y el alternador funciona en AC simultáneamente.
CONSTRUCCIÓN DE MÁQUINAS SÍNCRONAS DE INDUCTOR MÓVIL
En esta máquina, el devanado de excitación es alimentado mediante una fuente de D.C. a través de dos anillos rozantes y el inducido se conecta directamente a una carga. Si el inducido se conecta a una carga de alimentación monofásica de AC, la máquina funcionará como motor síncrono y el rotor girará a una velocidad síncrona en sincronismo con el campo giratorio que establece el devanado del estator determinado por el número de polos y la frecuencia de alimentación. El rotor puede ser saliente como en la figura 2-3a o liso como en la figura 2-3b, y si se lo hace girar a una velocidad síncrona mediante un motor primario, la máquina funcionará como alternador monofásico.
Fig. 2- 3. Máquina síncrona de inductor móvil.
Básicamente la construcción de un motor síncrono de AC es la misma que la de un alternador. El estator tiene un devanado monofásico idéntico. El rotor generalmente de polos salientes, excepto en los tipos de velocidad muy elevada. Para eliminar oscilaciones y desarrollar el par de arranque necesario cuando se aplica una tensión de AC al estator, los polos del rotor contienen conductores en la cara del polo que están cortocircuitados en sus extremos, como lo muestra la figura 2-4. Este devanado amortiguador consta de barras de cobre homogéneo alojadas en la superficie de la cara del polo y cortocircuitadas en cada extremo mediante conexiones puenteadoras, como se muestra en la fig. 2-4b.
| 22
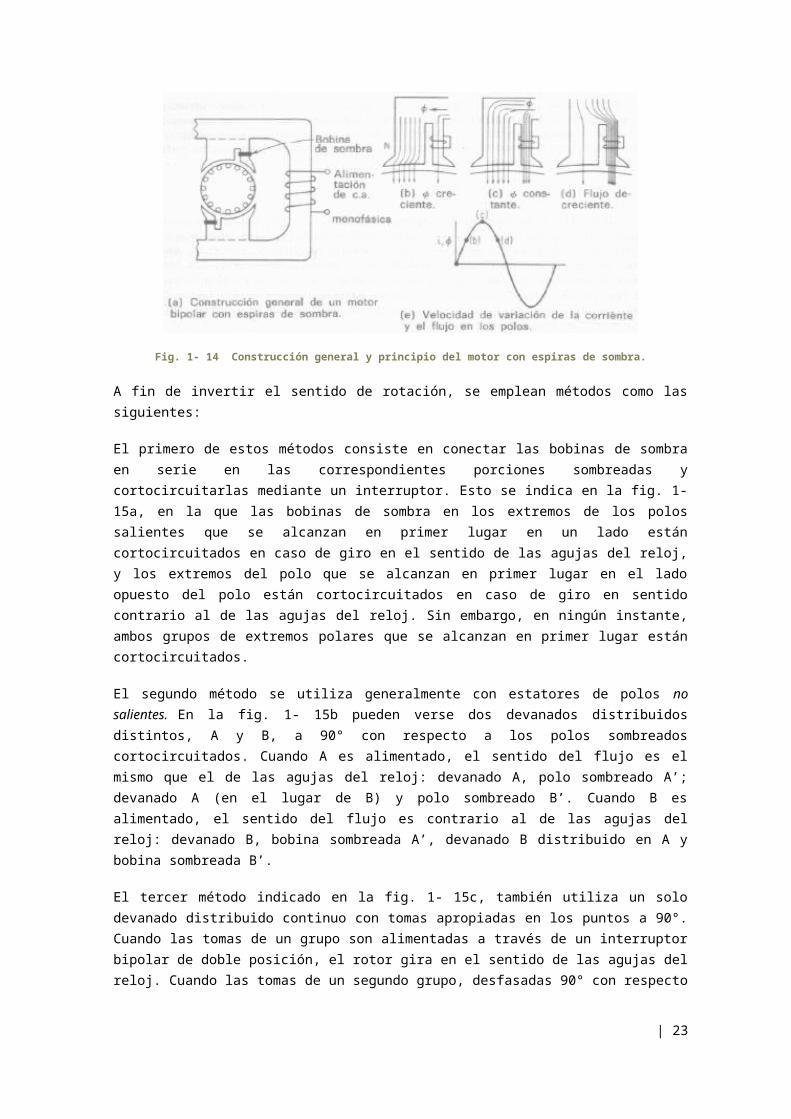
Fig. 2- 4 Polo de una máquina síncrona de AC en la que se ve el devanado de amortiguamiento.
FUNCIONAMIENTO DE LOS MOTORES SÍNCRONOS
Como se nombró anteriormente, este motor inherentemente no arranca por sí mismo, es decir que no puede hacerlo sin un devanado amortiguador. Esto puede verse en la fig. 2-4, en la que se aplica una corriente alterna al arrollamiento del estator, y en la que se ve el sentido instantáneo de la corriente en los lados de una bobina dada del inducido, A y B. tanto los polos norte como sur estarán sometidos a un par electromagnético que mueve los polos hacia la izquierda. En el instante siguiente (1/120 s después) la frecuencia cambia el sentido de la corriente en la bobina, y los polos reciben un par en sentido opuesto como se ve en la figura 2-5. Debido a la alta inercia del rotor, el par resultante que se produce en un segundo es cero, puesto que el motor ha sido empujado alternativamente en sentido horario y opuesto, 60 veces en ese segundo si es que se trabaja a una frecuencia de 60Hz.
Fig. 2- 5 Par resultante cero desarrollado por los conductores del estator de un motor síncrono cuando el rotor está en reposo.
En cambio, si por algún medio se mueve el motor en sentido horario a velocidad síncrona o a una velocidad cercana, como en la figura 2-6, se desarrollará un par en los lados de la bobina A y B, lo que hará que el motor continúe moviéndose en el sentido del reloj. El desplazamiento en el espacio del polo en grados eléctricos para la velocidad síncrona se corresponde con la inversión de 180º del sentido de la corriente en la bobina del inducido, y el par resultante producido tiene el mismo sentido.
La relación entre el campo giratorio del estator y los polos del rotor puede verse en la figura 2-6a. Los polos norte y sur, respectivamente, del rotor, que giran a una velocidad síncrona, quedan enclavados en sincronismo con el campo giratorio síncrono del inducido resultante del estator. Así un polo N del rotor queda enclavado en sincronismo con un polo S del estator y viceversa, girando ambos en el mismo sentido horario, en sincronismo a la velocidad síncrona.
| 23
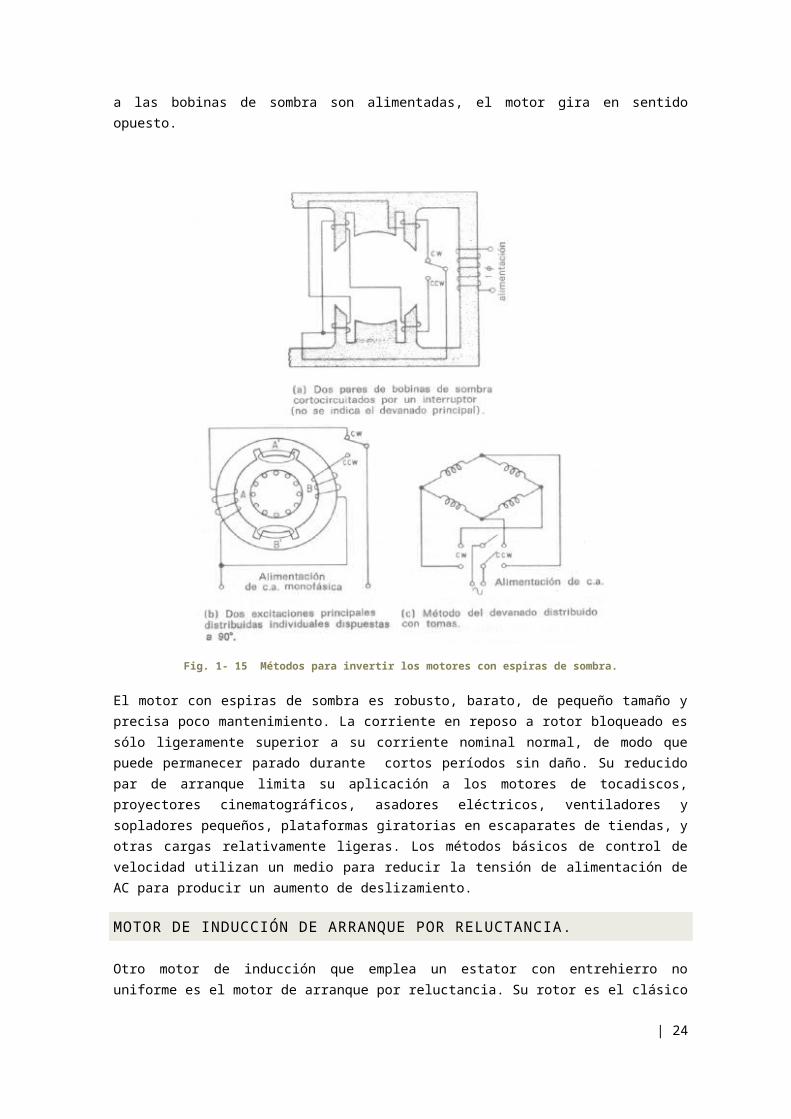
Fig. 2- 6 Par en igual sentido cuando el rotor gira a velocidad síncrona.
Si se coloca una carga en el eje síncrono, el par resistente de la carga hará que el motor disminuya de velocidad momentáneamente, pero continuará girando a la misma velocidad respecto al campo giratorio del estator. La velocidad del rotor continua siendo la síncrona respecto al campo giratorio, pero el flujo del rotor o el flujo mutuo en el entrehierro se reduce ligeramente, como muestra la figura 2-7b, debido a la mayor reluctancia del entrehierro.
Fig. 2- 7 Campo magnético giratorio de flujo constante producido por las armaduras de un estator polifase
Si el par resistente es tan grande que supera el par máximo desarrollado y si el rotor cae fuera de sincronismo, el motor síncrono se parará. Así, un motor síncrono o gira a velocidad síncrona o no gira. Cuando el rotor disminuye su velocidad, el campo giratorio del estator desliza, en relación con los polos del rotor, tan rápidamente que estos son incapaces de enclavarse sincrónicamente con el campo giratorio del estator. Esta es la razón de que un rotor en reposo también sea incapaz de arrancar. En un instante dado, un polo N de un rotor está atraído por el polo S del estator que se está aproximando, produciendo un par en sentido antihorario de la fig. 2-7b, y en el siguiente instante, el mismo polo N es atraído en sentido opuesto por un polo S del rotor, que pasa produciendo un par en sentido horario, o sea un par resultante cero.
ARRANQUE DE MOTORES SÍNCRONOS
| 24
Es evidente que el motor síncrono debe llevarse a una velocidad suficientemente cercana a la velocidad sincrónica, a fin de quedar en sincronismo con el campo giratorio. Los medios con los cuales se lleva hasta la velocidad correspondiente son:
1. Un motor de D.C. acoplado al eje del motor síncrono.2. El uso de la excitatriz como motor de D.C.3. Un pequeño motor de inducción de por lo menos un par de polos menos que el inductor síncrono.4. El uso de los devanados amortiguadores como motor de inducción de jaula de ardilla.
El primer método se usa a veces en laboratorios con motores síncronos no equipados con devanados amortiguadores. Generalmente, el motor síncrono está pensado como motor de accionamiento de velocidad constante para el generador de D.C. pero para llevar el motor a sincronismo, el generador de D.C. se hace funcionar como motor, y la máquina síncrona de AC se sincroniza a la fuente de AC como alternador. El motor de D.C. no actuará como generador si su corriente de excitación aumenta de manera que su fem generada sea mayor que la tensión en barras de D.C.
El segundo método es igual al primero excepto que la excitatriz se hace funcionar como motor y que la máquina síncrona de AC está sincronizada a la fuente de AC
El tercer método en el cual se usa un motor de inducción auxiliar con menos polos, implica el mismo procedimiento de sincronización para motor síncrono de AC que un alternador. Se necesitan como mínimo un par de polos menos en el motor de inducción para compensar la pérdida de velocidad del motor de inducción debida al deslizamiento.
En los tres métodos anteriores, es necesario:
1. Que haya poca o ninguna carga sobre el motor síncrono2. Que la capacidad del motor de arranque (D.C. o AC) esté comprendida entre el 5 y 10% de la
potencia nominal del motor síncrono acoplado a él.
ARRANQUE DE UN MOTOR SÍNCRONO COMO MOTOR DE INDUCCIÓN MEDIANTE SUS DEVANADOS AMORTIGUADORES
Obviamente el método más común de arranque de un motor síncrono, es como motor de inducción mediante sus devanados amortiguadores, este devanado se lo puede observar en la figura 2-4a y b.
Cuando se arranca un motor síncrono sobre sus devanados amortiguadores se tiene que:
1. El devanado de excitación de D.C. es cortocircuitado y se aplica la AC al estator, llevándolo al motor a la velocidad de vacío como motor de inducción.
2. Se aplica D.C. al devanado de excitación la corriente de excitación se regula de manera ue se absorba una corriente mínima de la red de AC
HISTÉRESIS
La histéresis es la diferencia máxima que se observa en los valores
RELUCTANCIA
La oposición al flujo magnético se llama reluctancia. La reluctancia de un objeto depende del material y de las dimensiones del mismo. Si las dimensiones se suponen constantes, podemos comparar la reluctancia de varios materiales. Los materiales
| 25

La relación entre potencia mecánica externa o interna, par y velocidad para cualquier motor viene dada por:
Independientemente del modo de funcionamiento, expresará el par electromagnético desarrollado por los conductores del inducido de una máquina síncrona de AC bien sea (1) como motor para producir el giro del rotor, o (2) como generador, para producir un par resistente consecuencia de la circulación de la corriente generada en los conductores del inducido.
Se ha establecido que, al aumentar la carga mecánica aplicada al eje de un motor síncrono, aumenta el ángulo de carga α, aumentando a su vez la diferencia de tensión resultante Er,
MOTOR DE RELUCTANCIA
Fig. 2- 8 Diferencias entre laminaciones y devanados de inducción de arranque y de funcionamiento de motores síncronos excitados (tipo histéresis)
Son motores de inducción síncronos monofásicos de polos salientes. Si el rotor de cualquier motor de inducción monofásico distribuido uniformemente se altera de manera que las chapas tiendan a producir polos de rotor salientes, como muestra la figura 2-8b, la reluctancia del camino del flujo del entrehierro será mayor cuando no existan conductores alojados en las ranuras. Tal tipo de motor, que llega a velocidades de un motor de inducción, pueden ponerse en sincronismo con la excitación monofásica de AC pulsatoria debido al par de reluctancia desarrollados en los salientes de hierro que tienen entrehierros de menor reluctancia.
La característica par velocidad de un motor de reluctancia síncrono monofásico puede verse en la figura 2-9. El motor arranca en cualquier condición entre 300 y 400% de su par de plena carga como motor bifásico., como resultado del campo magnético giratorio creado por un devanado de arranque y de marcha. A cerca de los tres cuartos de la velocidad síncrona, un interruptor centrífugo abre el devanado de arranque, y el motor continúa desarrollando un par monofásico debido solamente a su devanado de marcha. Al acercarse a la velocidad síncrona, el par de reluctancia es suficiente para poner el rotor en sincronismo monofásico, no excitado de velocidad constante hasta un poco por encima del 200% de su par de plena carga. Si se carga por encima del valor de su par límite, continuará funcionando como motor de inducción monofásico hasta aproximadamente el 500% de su par nominal.
| 26
Fig. 2- 9 Característica velocidad-par de un motor de reluctancia.
MOTOR DE HISTÉRESIS
Los motores de inducción-síncronos, cilíndricos, monofásicos (de polos lisos) o motores con bobina de sombreo están clasificados como motores de histéresis. La diferencia entre este motor y del apartado anterior estaba en:
1. La forma del rotor2. La naturaleza del par inducido
Mientras el motor de reluctancia es llevando al sincronismo y funciona debido al par de reluctancia, el motor de histéresis es llevado al sincronismo y funciona debido al par de histéresis. Las chapas del tipo histéresis, mostrados en la figura 2-10, se fabrican generalmente con acero endurecido de elevada retentividad, en lugar de acero de máquina comercial de baja retentividad.
Fig. 2- 10 Dos tipos de laminaciones de alta retentividad de motores síncronos no excitados (tipo de histéresis).
| 27
Como resultado del campo magnético giratorio producido por la fase auxiliar o por un estator con bobinas de sombreo, se inducen corrientes parásitas en el acero del rotor que circulan por los dos caminos de las barras del rotor mostrados en la figura 2-9a. Un acero de alta retentividad produce unas elevadas pérdidas de histéresis y consume una cantidad apreciable de energía del campo giratorio invirtiendo el sentido de la corriente del rotor. Al mismo tiempo el campo magnético del rotor creado por las corrientes circulatorias, hace que el rotor gire. Se produce un par de arranque elevado como resultado de la elevada resistencia del rotor. Al aproximarse el rotor a la velocidad síncrona, la frecuencia de inversión de la corriente en las barras transversales disminuye y el motor resulta magnetizado permanentemente en un sentido, como resultado de la elevada retentividad del rotor de hacer. Con dos polos de excitación, el rotor mostrado en la figura a, desarrollará una velocidad de 3600rpm a 60Hz. El motor funciona como motor de histéresis con un par de histéresis debido a que el rotor está permanentemente magnetizado.
El valor de par producido como resultado de esta magnetización no es tan elevado como el par de reluctancia. Pero el par de histéresis es extremadamente constante tanto en amplitud como en fase, a pesar de las fluctuaciones de la tensión de alimentación, con lo que es extremadamente utilizado para accionar los tocadiscos y magnetófonos de alta calidad. Como el par de reluctancia puede producirse de manera más barata que el par de histéresis para las mismas potencias fraccionales, los motores síncronos de histéresis de par elevado de buena calidad son más caros que los motores síncronos de par de reluctancia de la misma potencia nominal.
MOTORES SUBSÍNCRONOS
Es otro tipo de motor subsíncrono cuya chapa de polo saliente puede verse en la figura 2-9b. Este motor arranca de la misma manera que el motor de histéresis descrito anteriormente. A la velocidad síncrona, los polos del rotor inducidos en un rotor de histéresis permanecen en puntos fijos sobre la superficie del rotor al girar este en sincronismo con el campo magnético giratorio del estator. Debe también hacerse notar que el par de histéresis es eficaz cuando ambos rotores (fig. 2-9) giran a una velocidad menor que la síncrona. Por ejemplo, la chapa del rotor subsíncrono que muestra la fig. 2-9b tiene 16 polos y girará a 450rpm. Pero el par de histéresis, contrariamente al par de reluctancia, es independiente de la velocidad del rotor. Si el rotor está girando a una velocidad menor que la síncrona, los polos inducidos se mueven sobre la superficie del rotor a una velocidad de deslizamiento, o sea, a una velocidad igual a la diferencia entre la velocidad síncrona y la velocidad del rotor.
En el caso del motor subsíncrono, si el par aplicado es demasiado grande para su velocidad síncrona normal basada en el número de polos del rotor saliente, el motor girará a una velocidad subsíncrona determinada por un múltiplo del número de polos. Como el par varía inversamente con la velocidad al disminuir la velocidad, el motor subsíncrono puede proporcionar todavía pares bastante elevados a una velocidad constante baja.
Una distinción final entre el par de reluctancia y el par de histéresis es que todos los motores de par de reluctancia requieren un par de arranque de motor de inducción para llegar cerca de la velocidad síncrona a la que la puesta en sincronismo pueda tener lugar como resultado del par de reluctancia, y el motor funciona como motor de reluctancia a una velocidad síncrona constante. Por tanto, ningún motor de reluctancia es capaz de arrancar por si mismo.
Los motores de histéresis y los motores subsíncronos, son capaces de arrancar por sí mismos y llegan a plena velocidad síncrona, desarrollando una elevada resistencia del rotor debido a las pérdidas de histéresis y, en consecuencia, un par de arranque bastante elevado, pero un par de histéresis en marcha menor que los motores de par de reluctancia.
| 28
MOTORES MONOFÁSICOS DE COLECTOR
Los motores monofásicos de colector están equipados con un colector y escobillas. Este grupo consta de dos clases: aquellos que funcionan según el principio de repulsión en los que la energía se transfiere inductivamente desde el devanado de excitación estatórico monofásico hasta el rotor, y aquellos que funcionan según el principio del motor serie, en los que la energía es transportada por conducción, tanto al inducido rotórico como a la excitación estatórica monofásica conectada en serie.
EL PRINCIPIO DE REPULSIÓN
El estator de un motor de repulsión es igual que el de un motor de inducción en que las ranuras están distribuidas uniformemente en la periferia del estator. El devanado también es un devanado bi, tetra o hexapolar estándar distribuido alrededor del estator para originar los polos necesarios. No se utilizan devanados auxiliares o partidos. La estructura del estator de un motor de repulsión es intercambiable con el estator de cualquier motor de inducción monofásico.
Las chapas del estator son intercambiables con las de casi cualquier motor de inducción (excepto el motor con espiras de sombra). En las figuras a continuación se representa un estator bipolar.
El rotor de un motor de repulsión es muy similar al inducido de CC, ordinariamente con devanado imbricado con uno o más pares de escobillas según los pares de polos para los que se devana el estator. Sin embargo, estas escobillas están cortocircuitadas y el portaescobillas puede girar para variar la posición de las escobillas con respecto al eje polar.
La fig. 3-1a muestra el sentido instantáneo del flujo de excitación, φf, producido por un estator bipolar. De acuerdo con la ley de Lenz, en el devanado del inducido de anillo de gramme del rotor se establece una fem inducida que se opone al flujo de excitación. Las fem inducidas individualmente se combinan vectorialmente en cada una de las dos ramas produciendo una polaridad instantánea positiva en la escobilla de la izquierda y una polaridad negativa en la escobilla de la derecha. Por el conductor de cortocircuito que conecta las dos escobillas circula la corriente máxima. Cuando el flujo se invierte, 180 grados eléctricos más tarde, la polaridad de la escobilla también se invierte debido a que las fem inducidas también lo hacen, y en sentido opuesto circula la corriente máxima. La fig. 3-1b muestra las corrientes instantáneas en las escobillas y en los devanados correspondientes al sentido del flujo de excitación señalado en la fig. 3-1a. No se produce par útil como resultado de esta circulación de corriente, sin embargo; como puede observarse según las fuerzas perpendiculares por cada conductor normal al sentido de la corriente y al campo magnético. Para cada conductor debajo de un polo N que tiende a producir un par en el sentido de las agujas del reloj (b’ a a). Existe un conductor que tiende a producir un par en el sentido contrario (b a a). El rotor del motor está, en consecuencia, fijo con el rotor bloqueado en una posición neutra rígida (corriente máxima). La fig. 3-1c también muestra que todo el flujo de excitación, φf, está produciendo flujo de transformación φx (despreciando la dispersión), con el resultado de que el rotor no produce flujo ortogonal que reaccione contra este campo. No puede haber rotación sin esta interacción de campos.
| 29
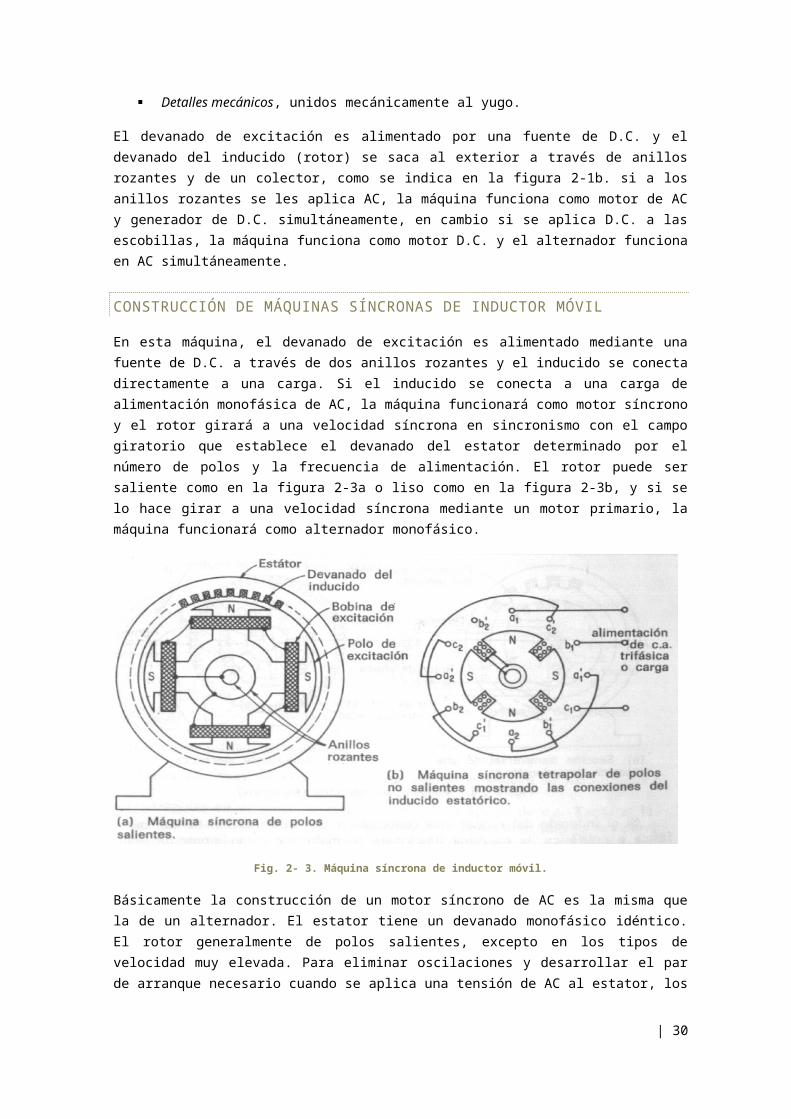
Fig. 3- 1 Posición del neutro rígido mostrando una corriente máxima, sin par.
Si el eje de la escobilla se desplaza 90° del eje polar, como se indica en la fig. 3-2, en el inducido se originan las mismas fem instantáneas como resultado del mismo flujo instantáneo; pero, debido a la posición de la escobilla, no circula corriente en el circuito exterior. La suma de las fem entre escobilla en cada rama es cero, como se indica en las fig. 3-2a y b. Puesto que no circula corriente, los conductores no producen flujo perpendicular al par, como se indica en la fig. 3-2c y el rotor está en reposo en una posición neutra flexible (corriente nula).
Si el eje de la escobilla se desplaza cierto ángulo α desde el eje polar, siendo α menor de 90°, se produce rotación. Aunque las fem son aún las mismas que en las fig. 3-1a y 3-2a, se produce un desequilibrio de fem en cada rama a causa de la posición de la escobilla con el resultado de que la corriente circula en proporción a la diferencia de tensión existente en los conductores del rotor, como se indica en las figs. 3-3a y b. El eje de las escobilla es x-x’ y el eje polar continúa siendo a-a’. Nótese que por los conductores desde a a x y desde a’ a x’ circula corriente en sentido opuesto al de su tensión inducida, debido a que la tensión a-x’ y la tensión x-a’ exceden a la tensión a’-x’. Ahora existe un desequilibrio de conductores debajo de polos N y S, respectivamente, por los que circula corriente en un sentido determinado y el rotor gira en el sentido de las agujas del reloj como resultado de estas fuerzas, como se indica en la fig. 3-3a. Otra manera de indicar esto puede verse en la fig. 3-3c. El flujo neto del inducido, φa, según la ley de Lenz, debe haber sido producido por un flujo de transformación, φx, que es una componente del flujo de excitación, φf. Por consiguiente, hay una componente en cuadratura del flujo de excitación, φt, denominada flujo de par. El flujo de par, φt, es una componente del flujo de excitación, φf, que forma ángulo recto con el flujo del inducido, φa, que tiende a producir rotación a través de la interacción (o repulsión) de los campo perpendiculares entre sí. Por lo tanto, la repulsión entre los mapos del rotor y el estator determina la rotación del rotor; de ahí el nombre de motor de repulsión.
| 30
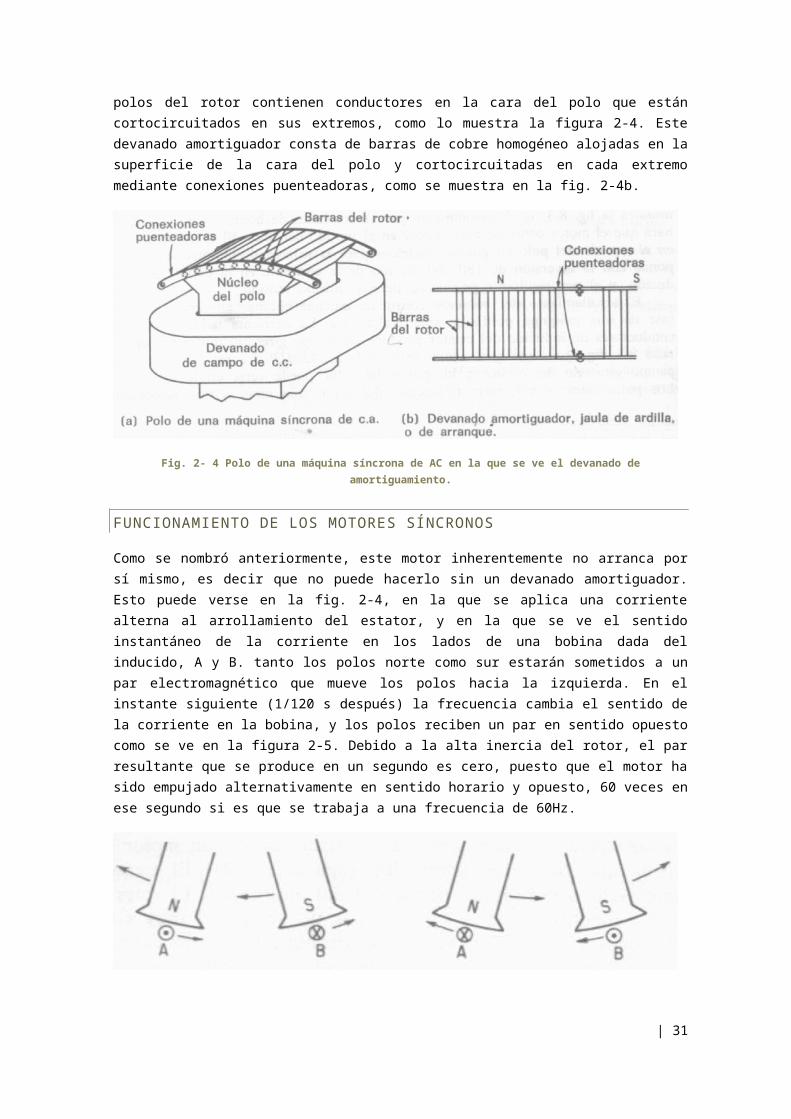
Fig. 3- 2 Posición del neutro flexible indicando corriente nula, sin par.
Debe notarse que el par es nulo a cero grados (corriente máxima) o posición neutra rígida, y que el par también es cero en la posición flexible a 90° (corriente nula). Puesto que el par es el producto del flujo de inducido (producido por la corriente de inducido) por el flujo del par (producido por la excitación como resultado de la separación de la posición neutra rígida), es evidente que el par máximo se presentará más cerca de la posición neutra rígida si la corriente de inducido es elevada. En los motores comerciales, el par máximo de un motor de repulsión del tipo de escobillas desplazables se presenta ordinariamente cuando α es de 25° contados desde la posición neutra rígida.
Debe notarse que se produjo una rotación en el sentido de las agujas del reloj cuando el eje de las escobillas se desplazó de la posición neutra rígida en el sentido de las agujas del reloj o sea en el mismo sentido. El desplazamiento del eje de las escobillas en sentido contrario al de las agujas del reloj desde la posición neutra flexible provoca el giro en este sentido.
| 31
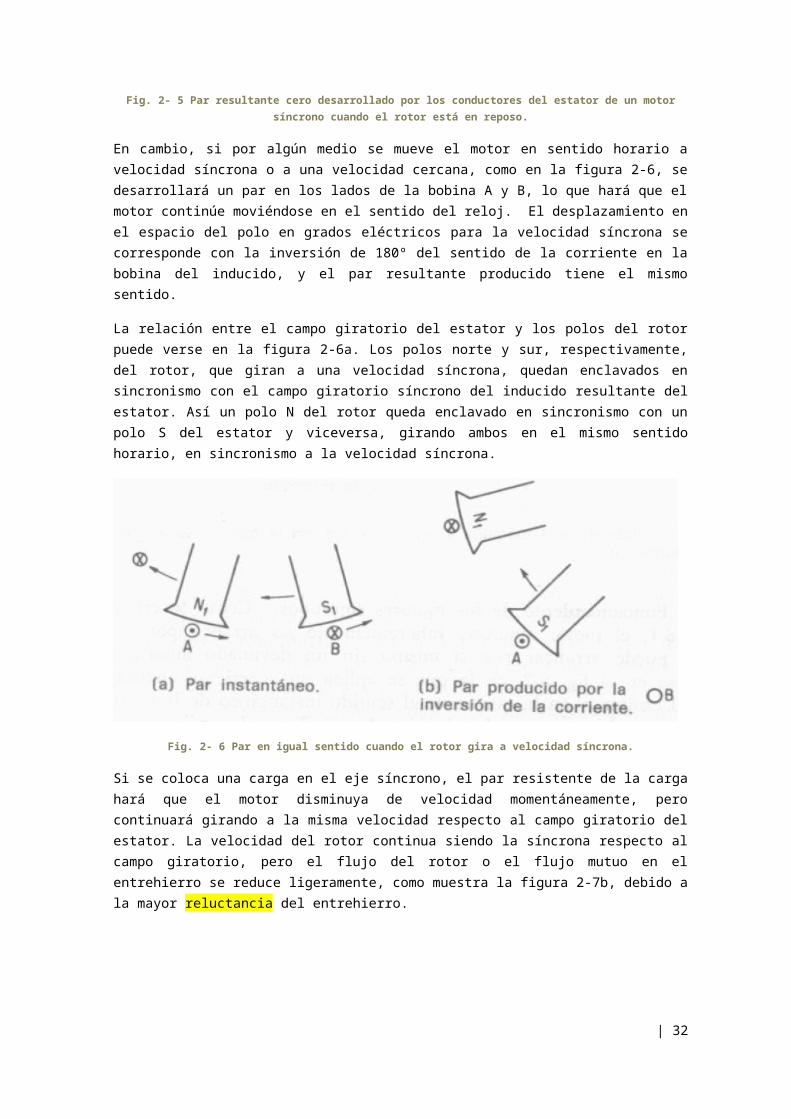
Fig. 3- 3 Eje de escobillas entre el neutro rígido y el neutro flexible originando flujo de transformación y de par con el correspondiente par motor.
MOTOR DE REPULSIÓN COMERCIAL
Puesto que los rotores del motor de repulsión tienen ordinariamente inducidos con devanado imbricado, un devanado estatórico de AC tetrapolar requeriría dos pares de escobillas; un estator hexapolar, etc. Cada par de escobilla estaría cortocircuitado y desplazado 90° mecánicos (para el tetrapolar) o 60° mecánicos (para el hexapolar). La mayoría de motores de repulsión comerciales son tetra o hexapolares, correspondiendo a los polos producidos por el tipo de devanados estatóricos de AC utilizados. Además, los devanados estatóricos son devanados de excitación partida que constan de dos excitaciones conectadas en serie desplazadas 90° eléctricos en el estator. Las escobillas se disponen a lo largo del eje de uno de estos devanados, denominado de excitación de transformación, φx, y un ángulo de 90° eléctricos con el otro devanado, denominado de par, φf. La relación del inducido con estos devanados puede verse en la fig. 3-4a. Nótese que el flujo resultante, φr, producido por los dos devanados indicados en la fig. 3-4b, tiene el mismo efecto que el señalado en el esquema de la fig. 3-3c sin necesidad de desplazar escobillas. El empleo de dos devanados separados da lugar a una mayor componente del flujo del par, reduciendo la corriente de inducido requerida para producir un par determinado, así como mejorando el factor de potencia. En un motor comercial, el factor de potencia es aproximadamente la unidad a la velocidad síncrona y es menor que la unidad por encima y por debajo de las velocidades síncronas.
| 32
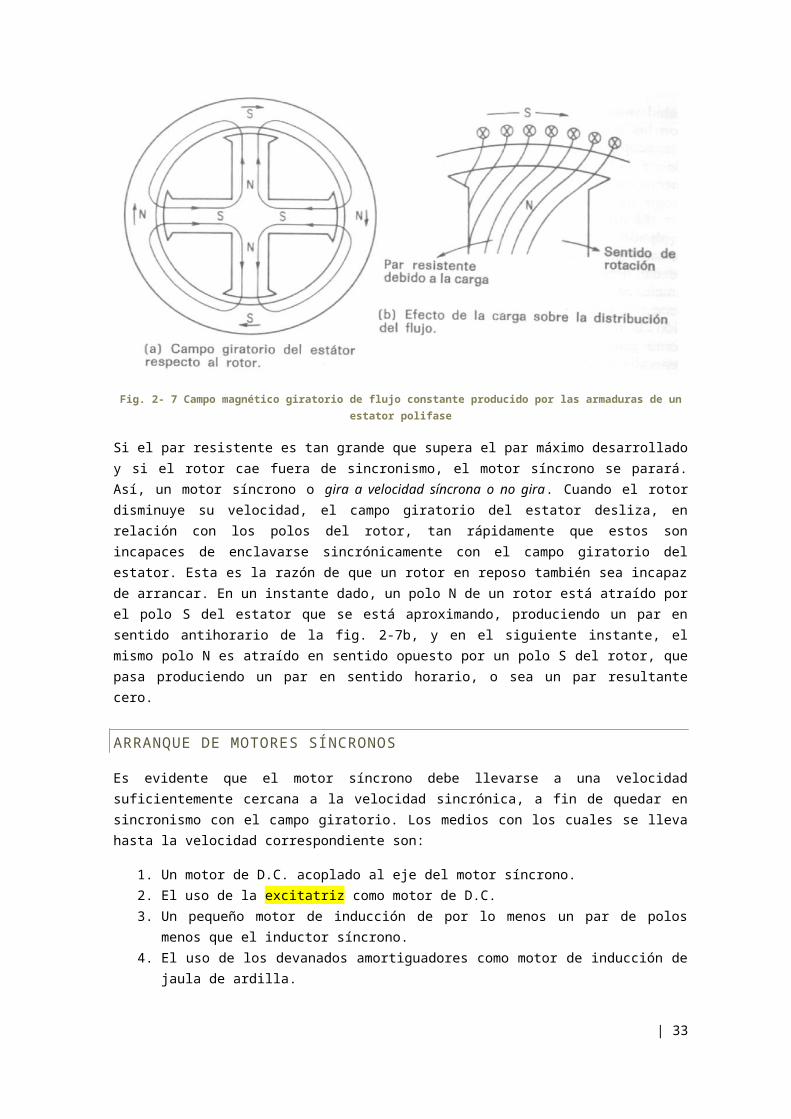
Fig. 3- 4 Motor de repulsión práctico.
El motor de repulsión, a diferencia de los diversos motores de inducción monofásicos, es capaz de funcionar a velocidades bastante superiores a la velocidad síncrona con cargas ligeras y bastante inferiores a la velocidad síncrona con cargas fuertes. Su característica par-velocidad, indicada en la fig. 3-5, es muy parecida a la de un motor serie. Y esto se debe a que es, efectivamente, un motor serie acoplado inductivamente, en el que la corriente de inducido es suministrada por acoplamiento magnético en lugar de por acoplamiento directo conductivo. Como en el motor serie, un aumento de carga en el motor de repulsión produce un aumento proporcional de la corriente de inducido (secundario) y de la corriente de excitación del transformador acoplado (primario). Por lo tanto, con cargas fuertes y en el arranque, el motor de repulsión desarrolla una corriente de arranque de 1,5 a 2 veces aproximadamente la corriente nominal de carga.
Fig. 3- 5 Características velocidad-par de un motor de repulsión
El motor de repulsión práctico indicado de forma esquemática en la fig. 3-4ª no requiere desplazamiento de escobillas debido a que el efecto ha sido producido por el flujo resultante de los devanados estatóricos. Si se desea invertir el sentido de rotación, ello se conseguirá fácilmente invirtiendo las conexiones de cualquiera de las dos excitaciones con respecto a la otra. Algunos motores de repulsión comerciales, denominados motores de escobillas desplazables, se fabrican con una palanca conectada al portaescobillas; estos motores presentan amplios márgenes de variación de la velocidad y un control suave, sin brusquedades de la misma, alcanzando hasta seis veces la velocidad nominal con las escobillas en el ángulo del par máximo hasta velocidad cero en el neutro flexible para una determinada carga.
| 33
El motor de repulsión es muy ruidoso, tiene una regulación pobre, y exige un mantenimiento periódico del colector. El principio de repulsión se aplica a otros dos motores, el motor de inducción de arranque por repulsión y el motor de inducción-repulsión.
MOTOR DE INDUCCIÓN DE ARRANQUE POR REPULSIÓN
Si el colector de un motor de repulsión estuviese completamente cortocircuitado, daría lugar a un rotor del tipo jaula de ardilla. El estator de un motor de repulsión es un estator monofásico distribuido, además, el motor de repulsión presenta un par de arranque muy elevado.
El motor de inducción de arranque por repulsión arranca como un motor de repulsión con sus escobillas colocadas en la posición del par máximo. Cuando la carga ha sido acelerada hasta aproximadamente el 75% de la velocidad síncrona, un dispositivo centrífugo incorporado pone a un anillo puenteador en contacto con las delgas del colector, convirtiendo al inducido en un rotor de jaula de ardilla. Entonces, el motor funciona como un motor de inducción en su característica de inducción (fig. 3-6).
Fig. 3- 6 Característica velocidad-par de un motor de arranque por repulsión.
En los tamaños de potencias enteras, el motor de inducción de arranque por repulsión monofásico se continúa fabricando debido a su elevado par de arranque, reducida corriente de arranque, y capacidad de acelerar una carga fuerte más rápidamente que los motores con condensador doble de gran capacitancia. Como desventaja, principalmente en motores de potencia fraccional se menciona su exigencia de mantenimiento del colector, inversión difícil de giro, producen mucho ruido durante el arranque y el chisporroteo del colector origina interferencias de radio y televisión.
MOTOR DE INDUCCIÓN-REPULSIÓN
Éste motor combina las características del motor de repulsión con las del motor de inducción. La modificación que se requiere en el rotor tipo colector es la adición de un devanado de jaula de ardilla. El motor de inducción-repulsión, tiene un rotor de doble jaula en el que el devanado superior se conecta a las delgas del colector y el devanado inferior (reactancia elevada) es un devanado de jaula de tipo de inducción. Los dos devanados rotóricos están aislados entre sí y el motor no emplea dispositivos centrífugos ni mecanismos de elevación de las escobillas. Con el devanado de jaula, en el arranque tiene una reactancia y una impedancia muy grandes. Por el devanado de jaula circula poca corriente y el par de arranque producido por este devanado es despreciable en comparación con el del devanado de repulsión, como se indica en la fig. 3-7.
| 34
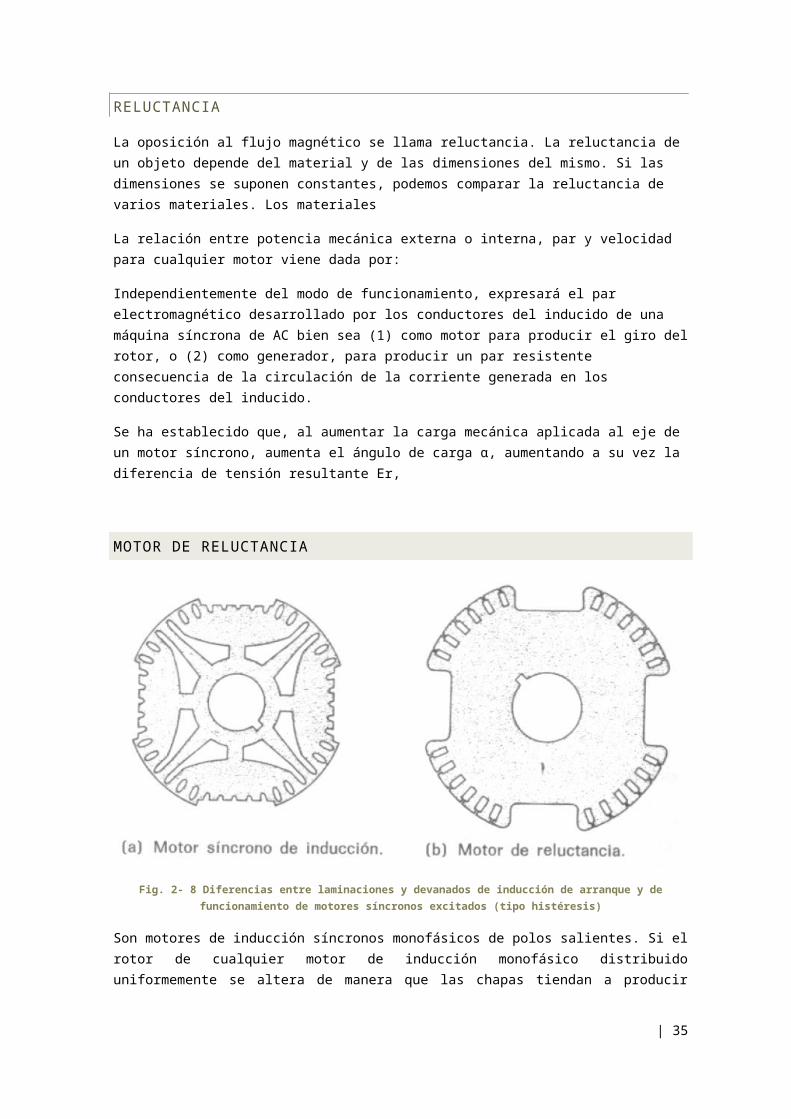
Fig. 3- 7 Característica par-velocidad de un motor de inducción-repulsión.
El motor arranca como un motor de repulsión sobre su característica de repulsión produciendo un par de alrededor de 3 o 4 veces el par nominal. Al acelerar el rotor, la frecuencia del rotor y la reactancia del devanado de jaula de baja resistencia disminuyen y por él circula más corriente. Para una determinada carga en el rotor, el motor funcionará como un motor combinado de repulsión e inducción. Si la carga disminuye, se precisa un menor deslizamiento y la velocidad del motor aumenta, acelerada por su característica de repulsión.
A la carga nominal, el motor funciona aproximadamente a la velocidad de sincronismo y, puesto que el devanado tipo jaula del rotor no corta flujo, en él no se induce corriente. A carga inferiores a la nominal el motor de repulsión tiende a acelerarse a lo largo de las líneas de su característica de repulsión indicada en la fig. 3-7.
Como se indica en la fig. 3-7, el motor de inducción-repulsión monofásico presenta las ventajas de elevado par de arranque, regulación de velocidad bastante buena y la capacidad de continuar desarrollando para bajo la aplicación de bruscas y fuertes cargas sin inestabilidad. Se fabrica con potencias superiores a un hp y se utiliza para accionar bombas alternativas y compresores bastante grandes cuando sólo se dispone de potencia monofásica. Debido a su velocidad casi constante con la aplicación de carga, e motor de inducción-repulsión también se utiliza en máquinas herramientas tales como tornos revólver y grandes máquinas para taladrar en las que puede producirse un bloqueo súbito, también se utilizan en hornos, transportadores, compresores y bombas de profundidad. Lo motores de inducción-repulsión también se invierten de la misma forma que los motores de inducción de arranque por repulsión. Sus tamaños comerciales son desde ½ hp hasta aproximadamente 15 hp.
MOTOR UNIVERSAL
Siempre ha existido demanda de un motor que operara en aparatos portátiles y a cualquier frecuencia a partir de las fuentes de potencia disponibles en diversas regiones. Las diferencias de tensión en las diversas regiones podrían subsanarse utilizando un transformador con tomas o una resistencia con tomas junto con un motor de tensión nominal superior.
Si se invierten los terminales de línea de una fuente de CC, que alimenta un motor de derivación de CC, el motor continúa funcionando en el mismo sentido. La aplicación de corriente alterna como fuente de tensión de un motor derivación, sin embargo, determina un par de arranque o de marcha muy pequeños. La excitación derivación es altamente inductiva en tanto que el inducido es esencialmente muy resistivo. Por lo
| 35
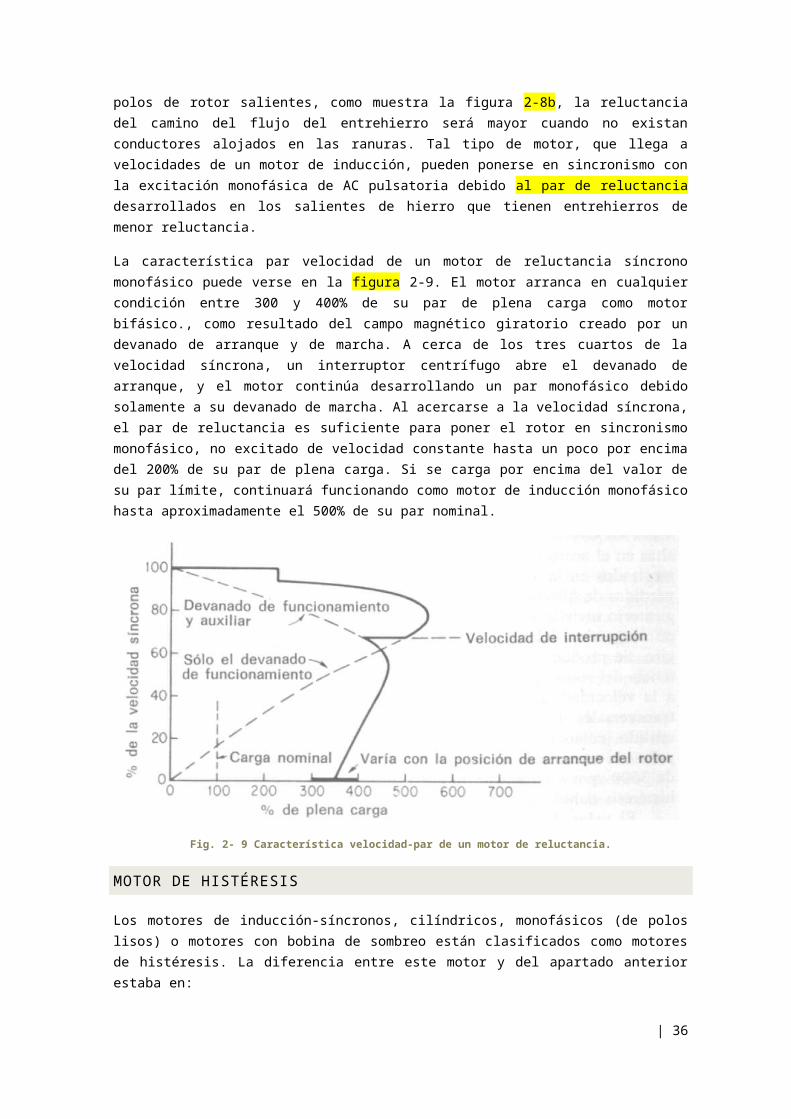
tanto, el inducido y la excitación no están en fase y sus flujos máximos respectivos están desfasados en un ángulo ϴ bastante grande, como se indica en la fig. 3-8a, y prácticamente no producen par.
En el motor serie, por otro lado, ya que el inducido y la excitación conectada en serie siempre tienen la misma corriente, sus campos están siempre en fase y el par producido será elevado (ϴ=0). Un motor serie de CC pequeño, de potencia fraccional, trabaja igualmente bien con AC por las razonas mostradas en la fig. 3-8b, c y d. Cuando se invierte la polaridad de la alimentación, también se invierten la polaridad de la excitación y el sentido de las corrientes de inducido, por lo que continúa desarrollando un par en el mismo sentido indicado.
El motor universal se proyecta para frecuencias comerciales desde 60 Hz hasta CC y para tensiones desde 250V hasta 1,5V. Se fabrica en potencias de hasta 3/4 HP, particularmente en aspiradoras y máquinas de coser industriales. Los tamaños de 1/4 HP o menores se utilizan en taladradoras eléctricas portátiles.
Con frecuencia, se incorporan en el mismo alojamiento del motor universal reductores de engranajes a fin de proporcionar un fuerte par a velocidades reducidas y también para limitar la elevada velocidad en vacío proporcionando cierta carga debida al rozamiento de los engranajes. Cuando estos motores se utilizan en aparatos tales como rasuradoras eléctricas, máquinas de coser, máquinas de oficina y pequeños secadores de pelo portátiles, están siempre directamente cargados con poco peligro de embalamiento del motor.
Fig. 3- 8 Funcionamiento del motor serie o universal.
MOTOR SERIE DE AC
Se precisan varias modificaciones de proyecto en el motor serie para mejorar su funcionamiento en corriente alterna. A continuación se describirán las modificaciones necesarias y las razones para ellas. Los motores serie de AC comerciales se proyectan:
1. Con una estructura de la excitación mucho más laminada, a fin de reducir las mayores pérdidas por corrientes parásitas con corriente alterna.
| 36
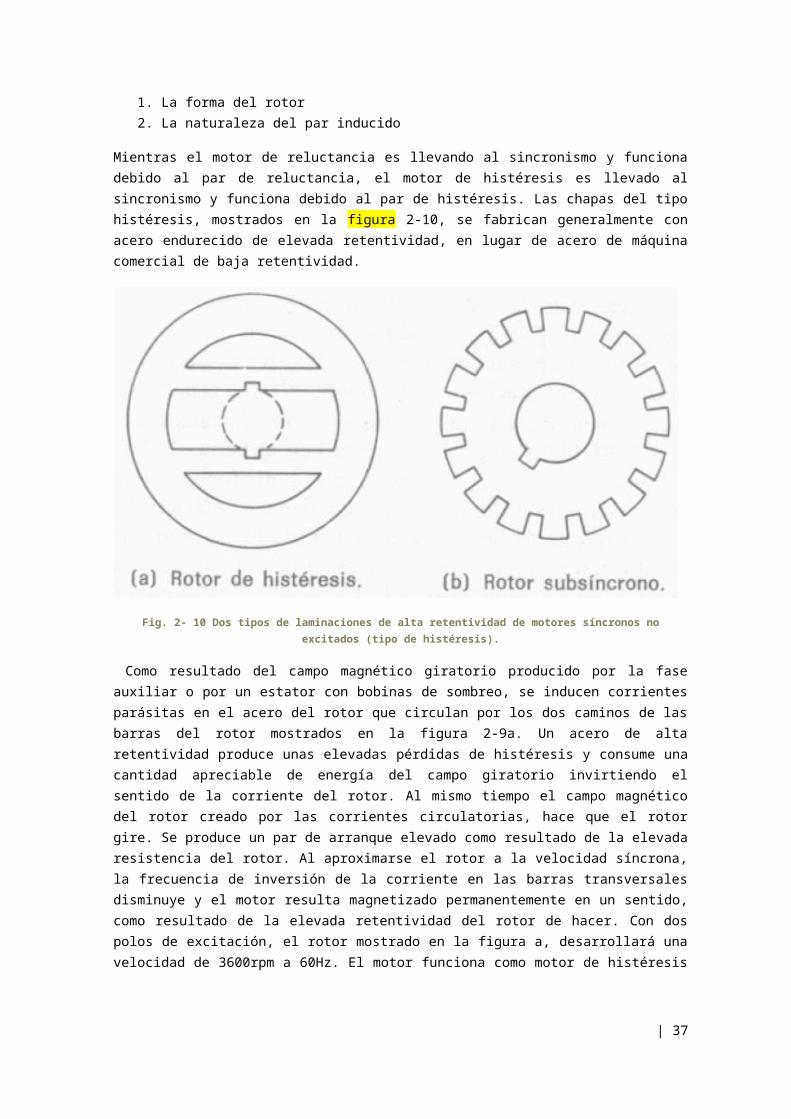
2. Con un menor número de espiras de excitación serie, a fin de reducir la caída de tensión reactiva en la excitación serie y las pérdidas debidas a corrientes parásitas y a la histéresis.
3. Con más polos que los correspondientes a las máquinas de CC a fin de restablecer el par total.4. Con más conductores en el inducido y más delgas en el colector, para compensar la disminución del
flujo de excitación.5. Con una resistencia en serie con las conexiones del inducido al colector, a fin de reducir las corrientes
circulantes, el chispeo en las escobillas y las mayores dificultades en la conmutación provocadas por el funcionamiento en CC.
6. Con tipos especiales de devanados de compensación, para reducir la mayor reacción de inducido originada por el mayor número de conductores en el inducido.
7. Con tipos especiales de devanados de los polos auxiliares, por la misma razón que en el punto 6.8. Para reducir la caída de tensión serie en los devanados de los polos auxiliares y de compensación;
estos devanados a menudo están conectados inductivamente en vez de conductivamente, como se indica en la fig. 3-9c. Cuando la corriente de inducido aumenta debido al aumento de carga, el flujo de inducido induce una corriente mayor en estos devanados, por lo que el efecto de la fmm auxiliar y de compensación es proporcional a la carga o a la corriente del inducido. Ya que en los conductores del inducido se produce corriente alterna, incluso cuando están conectados a una alimentación de CC, puede utilizarse para estos devanados un acoplamiento inductivo incluso en el motor serie de CC. La caída de tensión en estos devanados en corriente continua es ordinariamente pequeña. Sin embargo, hay menos problemas de proyecto con el acoplamiento conductivo, lo que se indica en la fig. 3-9a.
Con las modificaciones anteriores, los motores serie que funcionan con corriente alterna se comportarán de la misma forma que los de CC, originando la característica indicada en la fig. 3-9d.
En la fig. 3-9b puede verse el diagrama vectorial de un motor de AC acoplado conductivamente. La potencia desarrollada por el inducido del motor serie de AC es EgIa, por tanto, la corriente de inducido queda limitada por la fuerza contraelectromotriz generada en el inducido, Eg, más todas las caídas de impedancia en serie, como se indica mediante la ecuación en la fig. 3-9b.
Fig. 3- 9 Motor serie de AC
A ventaja del acoplamiento inductivo es un aumento en la fem generada y la potencia de inducido, indicadas en la fig. 3-9c. Con un débil acoplamiento magnético, los devanados auxiliares y de
| 37
compensación se reflejan capacitivamente en el inducido tendiendo a reducir la caída de impedancia de inducido y a mejorar el ángulo ϴ del factor de potencia entre Vp e Ia.
Los motores serie de AC se utilizan en líneas principales y en sistemas de ferrocarriles interurbanos (sistema de tracción) para locomotoras eléctricas. Las potencias nominales para los motores de ferrocarril oscilan entre varios cientos hasta algo más de mil HP, con factores de potencia de 0,95 y rendimientos de alrededor de 0,88 como resultado de las modificaciones descritas anteriormente.
La regulación de velocidad se consigue fácilmente mediante la variación de la tensión de alimentación del motor serie de AC a través de un transformador con tomas o un regulador de inducción. La inversión también se consigue fácilmente invirtiendo la excitación en serie con respecto al inducido mediante conmutaciones apropiadas.
| 38
(Kosow, 1993)
(Wildi, 2006)
BIBLIOGRAFÍA
Kosow, I. (1993). Máquinas Eléctricas y Transformadores. Reverte S.A.
Wildi, T. (2006). Máquinas Eléctricas y Sistemas de Potencia (Sexta ed., Vol. I). (P. M. Rosas, Ed., & R. N. Salas, Trad.) Pearson.
| 39