Embed Size (px)
Citation preview

Fecha: 16 de Febrero de 2015
Movimiento Armónico Simple en Sistemas SimplesH. Cordero, Y. Yánez, J. Hoyos, G. Toro
Departamento de Física y Electrónica, Universidad de Córdoba, Montería, Colombia.
Resumen
El Movimiento Armónico Simple (MAS) es muy característico en los estudios físicos de los fenómenosdel Universo. Dos sistemas simples que pueden cumplir con las propiedades de dicho movimientoson El Péndulo Simple y el Sistema Masa-Muelle cuando realizan un movimiento oscilatorio cuyosdesplazamientos son uniformes, periódicos y relativamente pequeños, y cumplen con la Ley de Hooke.En el presente informe se estudia el comportamiento de los sistemas mencionados mediante unapráctica de laboratorio realizada, variando (en el caso del péndulo) la longitud de la cuerda y lamasa suspendida, y (en el caso del sistema masa-muelle) los muelles y las masas suspendidas conel fin de verificar las propiedades del MAS. Se considera estudiar experimentalmente la relaciónfuncional entre el periodo T y la longitud L del péndulo simple, la independencia de dicho periodocon la masa del péndulo y encontrar el valor de la gravedad en el lugar del experimento. Además deesto, se busca comprobar experimentalmente que la frecuencia angular para un sistema masa-muelleviene dada por
√k
Msiendo k la constante del muelle y M la masa oscilante.
Palabras clave: Ley de Hooke, MAS, Movimiento Oscilatorio.
Abstract
Simple Harmonic Movement (SHM) is many characteristic in the physical studios of the Universephenomenons. Two simple systems that can play the mentioned movement properties are TheSimple Pendulum and the Spring-Mass System when they realize an oscillatory movement withuniform, periodic, and relative small displacements, and they play Hooke’s Law. In the presentwork, we study the said systems performance throw a realized laboratory practice, varying (inpendulum) the length rope and the hang mass, and (in the mass-spring system), springs and hangmasses, trying to verify SHM properties. Consider to study the functional relation between period Tand length L of the simple pendulum experimentally, the period independence with the pendulummass and to find the gravity value in the experiment place. It looks shall for experimentally provethat angular frequency is given for
√k
Mwhere k is the spring constant and M the swinging mass.
Keywords: Hookes’s Law, SHM, Oscillating Movement.
I. TEORÍA RELACIONADA
Movimiento Periódico
Cuando hay la deformación de un objeto, éste comienzaa ejercer una fuerza elástica de restitución proporcionala la deformación. Cuando la fuerza deja de actuar, elobjeto comienza a vibrar de un lado a otro respecto a suposición de equilibrio. Por ejemplo, después de que unclavadista salta de un trampolín, éste continúa vibrandode arriba a abajo de su posición normal durante ciertotiempo.
Se dice que este movimiento es periódico porque la po-sición y la velocidad de las partículas en movimiento, serepiten en función del tiempo. Como la fuerza va dismi-nuyendo con el tiempo (en la vida real), el objeto tardeo temprano regresará al estado de reposo.
Definición 1. El Movimiento Periódico es aquel enel que un cuerpo se mueve de un lado a otro, sobre unatrayectoria fija, y regresa a cada posición y velocidad des-pués de un tiempo definido.
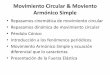
Supóngase que un objeto sobre una mesa de aire (lacual no ejerce mucha fricción) se sujeta al extremo deun resorte sin masa (masa despreciable con respecto a laque está sujeta a él) que está unido a una pared en elotro extremo. Esto se muestra en la figura 1. Denotamosla posición de equilibrio con x = 0, luego se estira elresorte a una distancia x = A. Al soltarlo, el cuerpooscila de un lado a otro por la posición de equilibrio confricción despreciable. De acuerdo con la Ley de Hooke, lafuerza de restitución F es directamente proporcional aldesplazamiento a partir de x = 0. Esta fuerza siempre seopone al desplazamiento, por lo que la ley de Hooke parael sistema es:
F = −kx (1)
El desplazamiento máximo a partir de la posición deequilibrio x = ±A se llama Amplitud. En esta posi-ción, el cuerpo siente el máximo de la fuerza, dirigidahacia el centro de oscilación. La fuerza disminuye a me-dida que el cuerpo se aproxima al centro de oscilación;al llegar a él, se vuelve igual a cero. La cantidad de mo-
2
Figura 1: Cuerpo unido a un resorte: (a) Posición de equi-librio, (b) Oscilando de un lado a otro sobre una mesa deaire.
vimiento del cuerpo lo lleva hasta el otro extremo, perola fuerza se incrementa nuevamente hasta llevarlo pocoa poco al equilibrio, cumpliendo la oscilación. Si no hu-biese fricción, el movimiento sería infinito. Este tipo demovimiento se denomina Armónico Simple.
Definición 2. El Movimiento Armónico Simple(MAS) es un movimiento periódico que ocurre en ausen-cia de fricción y es producido por una fuerza de restitu-ción directamente proporcional al desplazamiento y tieneuna dirección opuesta a éste.
Periodo y Frecuencia en un MAS
Se ha dicho que el MAS es un movimiento periódico,veamos el porqué de esta afirmación.
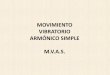
Figura 2: El MAS es un movimiento periódico con amplitud,frecuencia y periodo constantes
El periodo T se define como el tiempo en que se reali-za un oscilación completa cuando el cuerpo se mueve conMAS. Observemos el ejemplo siguiente: un cuerpo sujetoa un muelle vertical (figura 2). Si se estira el resorte haciaabajo a una distancia y = −A y se suelta, su movimien-to se aproximará a un MAS. El tiempo que gasta desdeel principio del movimiento (y = −A) hasta que regresa
a la misma posición (y se cumplen las mismas condicio-nes -velocidad y dirección de movimiento-) se dice quees un periodo de oscilación. Cabe señalar que el tiempoque necesita para moverse del equilibrio (y = 0) al máxi-mo desplazamiento A en cualquier dirección, sólo es unacuarta parte del periodo.En ausencia de fricción, el movimiento siempre estarárestringido a moverse en el intervalo de desplazamiento[−A,A].La frecuencia f es el número de oscilaciones comple-
tas por unidad de tiempo. Puesto que el periodo es iguala la cantidad de tiempo por oscilación, se deduce que lafrecuencia será el recíproco del período.
f = 1T
(2)
Oscilador Armónico
El oscilador armónico es un ejemplo de excepcionalimportancia del movimiento periódico porque sirve demodelo exacto o aproximado para muchos problemas enfísica clásica y cuántica. Los casos reales de oscilador ar-mónico constituyen sistemas estables que se pueden des-plazar ligeramente de su posición de equilibrio, por ejem-plo:
1. Un péndulo simple, cuyas oscilaciones son pequeñas(sen θ ≈ θ).
2. Una masa sujeta a un muelle, cuyas deformacionessean pequeñas comparadas con la longitud naturaldel mismo.
3. Un circuito eléctrico LC que cumpla la condiciónde linealidad.
Que un sistema cumpla con la condición de linealidad,significa que la respuesta sea directamente proporcionala la solicitud (Ley de Hooke). La mayoría de los casosque se consideran en este tipo de movimiento son linea-les, siempre que el intervalo que se considere sea sufi-cientemente pequeño, sus curvas son líneas rectas paraintervalos suficientemente pequeños de valores.Las propiedades más importantes del oscilador armó-
nico son las siguientes:
1. La frecuencia del movimiento es independiente de laamplitud de la oscilación dentro de las restriccionesde linealidad.
2. Los efectos de varias solicitudes pueden superpo-nerse linealmente.
Sistema Masa-Muelle
Un sistema masa muelle consta de un cuerpo de masaM suspendida a un resorte (muelle) con masa me des-
3
preciable (me << M) y constante k que oscila con des-plazamientos x.
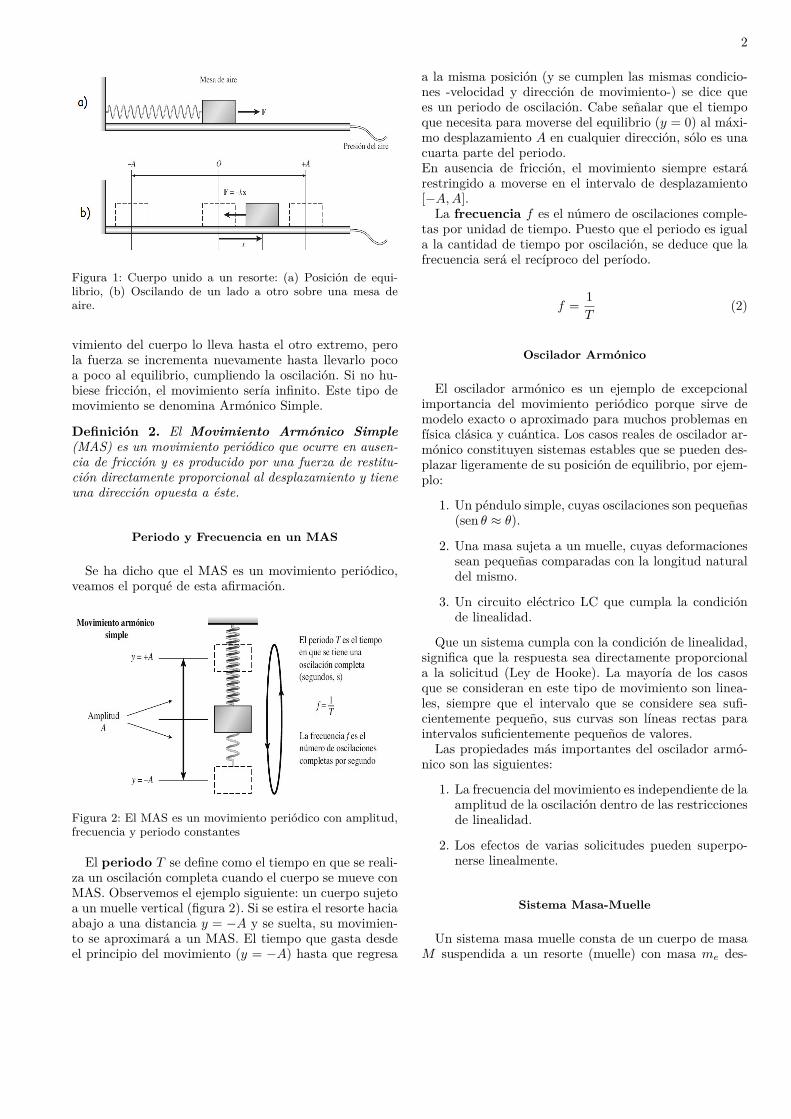
Figura 3: Sistema Masa-Muelle describiendo un MAS.
En la figura 3 se muestra un sistema masa-muelle ver-tical, que cumple con las condiciones del MAS cuando lasdeformaciones x medidas desde el equilibrio son suficien-temente pequeñas para que la plumilla sujeta aM dibujeen el papel una curva sinusoidal.Por la segunda Ley de Newton, se observa que la fuerzaneta que actúa en el sistema es F = Ma (se omiten losvectores por tratarse de una sola dimensión), donde a esla aceleración del sistema (que en este caso correspondríaa la gravedad).Tratando esta ecuación, se tiene:
F = Md2x
dt2
Pero el sistema cumple con la Ley de Hooke (F =−kx), siendo x el desplazamiento medido desde la posi-ción de equilibrio. Así, se puede reescribir la ecuación dela siguiente manera:
−kx = Md2x
dt2
0 = Md2x
dt2+ kx
0 = d2x
dt2+ k
Mx
Si llamamos ω2 = k/m la frecuencia angular del movi-miento, la ecuación final para describir el sistema es:
0 = d2x
dt2+ ω2x (3)
La ecuación (3) corresponde a un MAS, cuya solución(detallada en el apéndice A) resulta:
x = A sen(ωt+ φ) (4)
SiendoA: la amplitud de movimiento.φ: la constante de fase (que proporciona las condicionesiniciales).ωt+ φ: la fase del movimiento.
Sabiendo que la función seno es periódica en 2π, po-dríamos decir que en un periodo, el movimiento del siste-ma vuelve a cumplir las mismas condiciones, por lo quepodemos establecer la siguiente relación:
x = A sen(ωt+ φ+ 2π)= A sen((ωt+ φ) + 2π)= A sen(ωt+ φ) cos(2π) + cos(ωt+ φ) sen(2π)= A sen(ωt+ φ)
Esto indica lo siguiente:
ω(t+ T ) + φ = (ωt+ φ) + 2πωt+ ωT + φ = ωt+ φ+ 2π
ωT = 2πω = 2π
T(5)
La ecuación (5) establece la relación entre el periodode oscilación y la frecuencia angular del sistema.Se puede finalmente establecer la proporcionalidad entreel periodo de oscilación y las condiciones del sistema:
T = 2π√m
k(6)
La ecuación (6) nos dice que el periodo de oscilaciónde un sistema Masa-Muelle que cumple un MAS, es di-rectamente proporcional a la masa e inversamente pro-porcional a la constante de elasticidad del resorte.El movimiento del sistema puede presentar dos casos
especiales (Resorte poco estirable y Resorte muy estirable-slinky-) donde, para que se cumpla un MAS, hay queestablecer ciertas condiciones. Estos casos se estudian enel apéndice B.Además, para casos reales, la masa del muelleme puede
contribuir a la masa suspendida en oscilación. Este casose estudia en el apéndice C.
Péndulo Simple
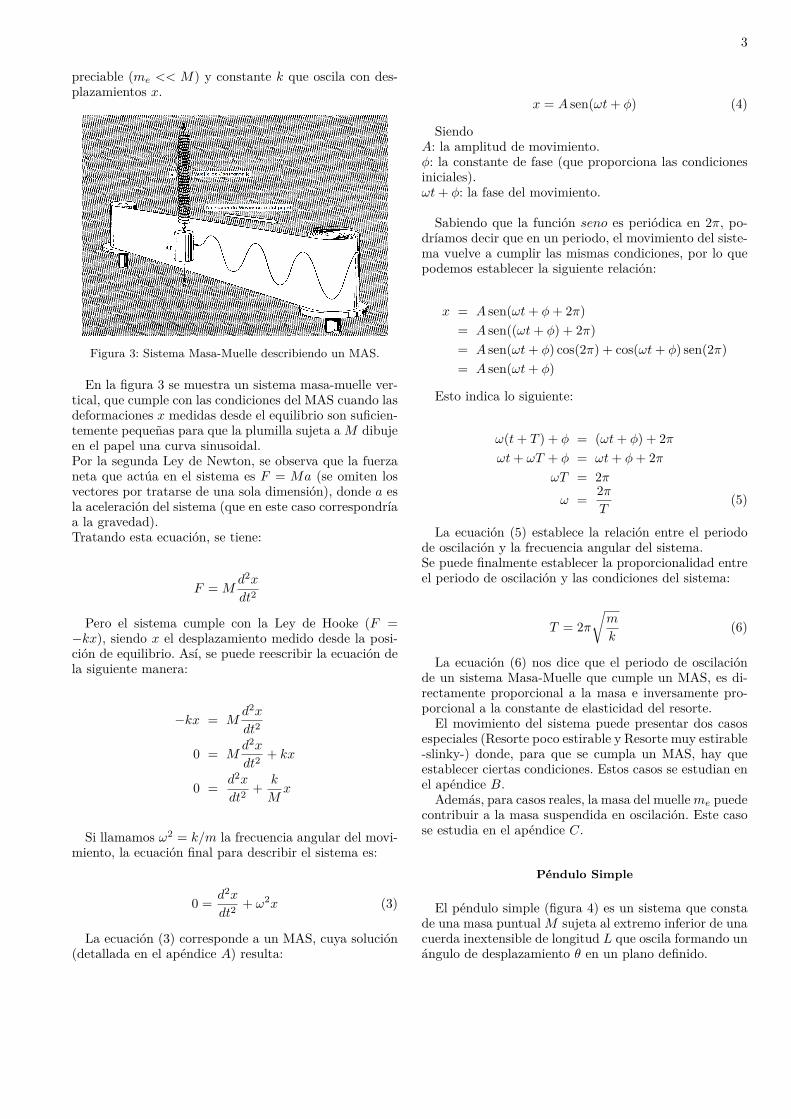
El péndulo simple (figura 4) es un sistema que constade una masa puntualM sujeta al extremo inferior de unacuerda inextensible de longitud L que oscila formando unángulo de desplazamiento θ en un plano definido.

4
Figura 4: Péndulo Simple
Estudiando el movimiento de la masa suspendida, po-demos darnos cuenta que el arco que forma es s = Lθ.Ahora, usando la velocidad y la aceleración de la masa yla segunda ley de Newton (F = Ma):
v = ds
dt= L
dθ
dt= Lθ̇
Así:
a = d2s
dt2= L
d2θ
dt2
Sobre M actúan dos fuerzas, la de gravedad y la ejer-cida por la cuerda. Pero, como la cuerda no ejerce fuerzaa lo largo de s, tomamos sólo la componente del peso alo largo de s. Esta componente (figura 4) es mg sen θ enla dirección contraria al desplazamiento θ.Por lo tanto, ~F = m~a se reduce para esta dimensión en:
mg sen θ = −mLd2θ
dt2
Ahora, el desarrollo en serie de sen θ es
sen θ = θ − θ3
3! + θ5
5! ...
Pero para desplazamientos pequeños (0 < θ ≤ π/9),se cumple la condición de que sen θ ≈ θ, por lo tanto, laecuación que describe el movimiento pasa a ser:
mgθ = −mLd2θ
dt2
gθ = −Ld2θ
dt2
− gLθ = d2θ
dt2
Ahora, llamando ω2 = g/L la frecuencia angular delmovimiento, la ecuación final queda escrita de la siguientemanera:
d2θ
dt2+ ω2θ = 0 (7)
La ecuación (7) describe un movimiento armónico, ytiene por solución:
θ = θ0 sen(ωt+ φ) (8)
Siendo:θ0: la amplitud de movimiento.φ: la constante de fase (que proporciona las condicionesiniciales).ωt+ φ: la fase del movimiento.La ecuación (5) se cumple de igual manera para el
péndulo simple, al igual que la ecuación (6) (siendoT = 2π
√Lg ) siempre que se hagan ciertas consideraciones
establecidas del desplazamiento angular.
II. MONTAJE Y PROCEDIMIENTO
En el laboratorio se realizaron dos procedimientos consus respectivos materiales, el Péndulo simple y el siste-ma Masa-Muelle, los que se consideran individualmentea continuación:
Péndulo Simple
Los materiales usados en la práctica se muestran en laTabla I.
Materiales Referencia CantidadSensor óptico con contador de tiempo P11207.08 1Fuente de poder 5V P11076.93 1Balín con ojete de diferentes radios P02466.01 3Regla milimetrada 1000mm P03001.00 1Cursores 1 par P02201.00 1Pinza en ángulo recto P02040.55 1Varilla cuadrada 1250mm P02029.55 1Base triangular P02002.55 1Pasador P03949.00 1Sedal 1m ——– 1
Tabla I: Materiales usados para la práctica del Péndulo Sim-ple.
Se realizó el montaje como en la figura 5. Se usó elsensor óptico para calcular los diferentes periodos conángulos de oscilación de θ ≈ 15o en dos procedimientos:
Se varió la longitud del péndulo, manteniendo lamasa oscilante constante. Con los datos se llenó latabla III ubicada en los resultados.
5
Figura 5: Montaje del Péndulo Simple.
Se varió la masa oscilante, manteniendo constantela longitud de la cuerda. Con los datos se llenó latabla IV ubicada en los resultados.
Sistema Masa-Muelle
Los materiales usados en la práctica se muestran en laTabla II.
Materiales Referencia CantidadPie estativo 02001.00 1Varilla soporte, 600mm 02037.00 1Varilla soporte, 250mm 02031.00 1Nuez doble 1000mm 02043.00 2Platillo para pesas de ranura, 10g 02204.00 1Pesa de ranura, 10g 02205.01 4Pesa de ranura, 50g 02206.01 3Muelle helicoidal, 3N/m 02220.00 1Muelle helicoidal, 20N/m 02222.00 1Pasador 1m 03949.00 1Barrera Óptica 1m P11207.08 1
Tabla II: Materiales usados para la práctica del Sistema Masa-Muelle.
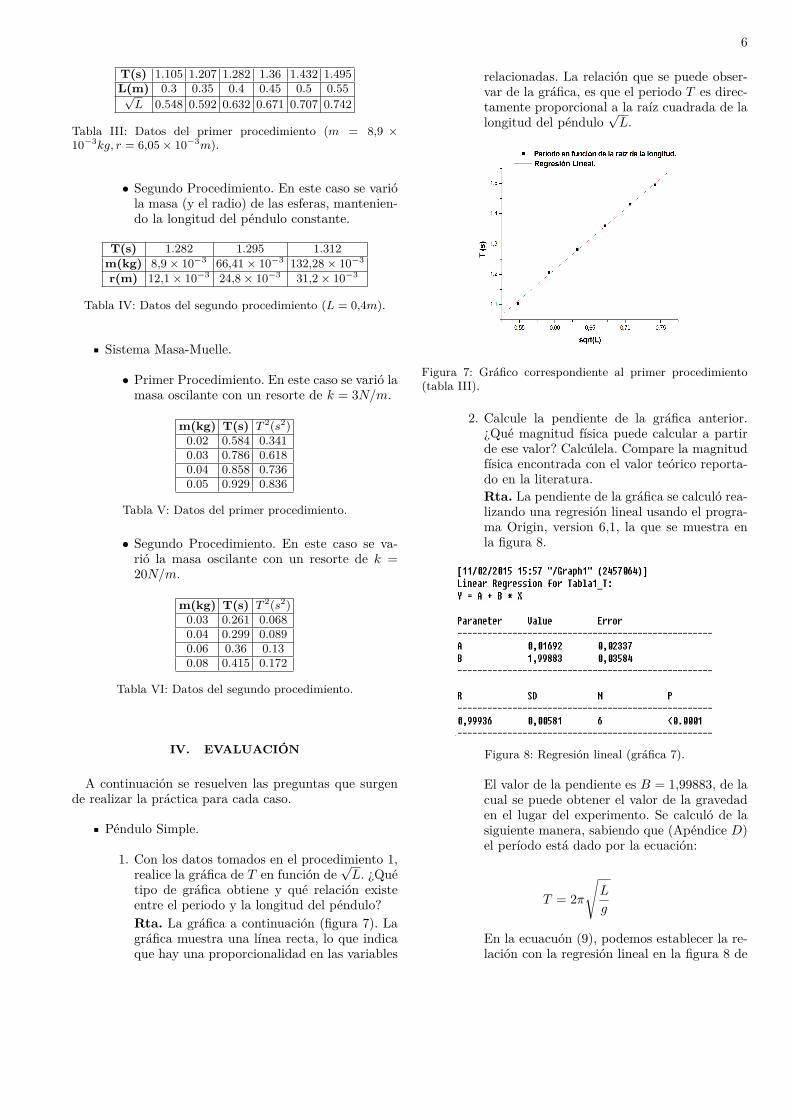
Para este sistema, la recolección de datos se dio va-riando las masas que oscilaban en el resorte (figura 6,tanto con el de k = 3N/m y el de k = 20N/m. Los valo-res fueron anotados en las tablas V y VI ubicadas en losresultados.
Figura 6: Montaje del sistema Masa-Muelle.
III. RESULTADOS
Los resultados de la práctica se anotan en las tablascorrespondientes a cada sistema.
Péndulo Simple.
• Primer Procedimiento. En este caso se varió lalongitud del péndulo y se mantuvieron cons-tantes las demás variables.
6
T(s) 1.105 1.207 1.282 1.36 1.432 1.495L(m) 0.3 0.35 0.4 0.45 0.5 0.55√
L 0.548 0.592 0.632 0.671 0.707 0.742
Tabla III: Datos del primer procedimiento (m = 8,9 ×10−3kg, r = 6,05× 10−3m).
• Segundo Procedimiento. En este caso se varióla masa (y el radio) de las esferas, mantenien-do la longitud del péndulo constante.
T(s) 1.282 1.295 1.312m(kg) 8,9× 10−3 66,41× 10−3 132,28× 10−3
r(m) 12,1× 10−3 24,8× 10−3 31,2× 10−3
Tabla IV: Datos del segundo procedimiento (L = 0,4m).
Sistema Masa-Muelle.
• Primer Procedimiento. En este caso se varió lamasa oscilante con un resorte de k = 3N/m.
m(kg) T(s) T 2(s2)0.02 0.584 0.3410.03 0.786 0.6180.04 0.858 0.7360.05 0.929 0.836
Tabla V: Datos del primer procedimiento.
• Segundo Procedimiento. En este caso se va-rió la masa oscilante con un resorte de k =20N/m.
m(kg) T(s) T 2(s2)0.03 0.261 0.0680.04 0.299 0.0890.06 0.36 0.130.08 0.415 0.172
Tabla VI: Datos del segundo procedimiento.
IV. EVALUACIÓN
A continuación se resuelven las preguntas que surgende realizar la práctica para cada caso.
Péndulo Simple.
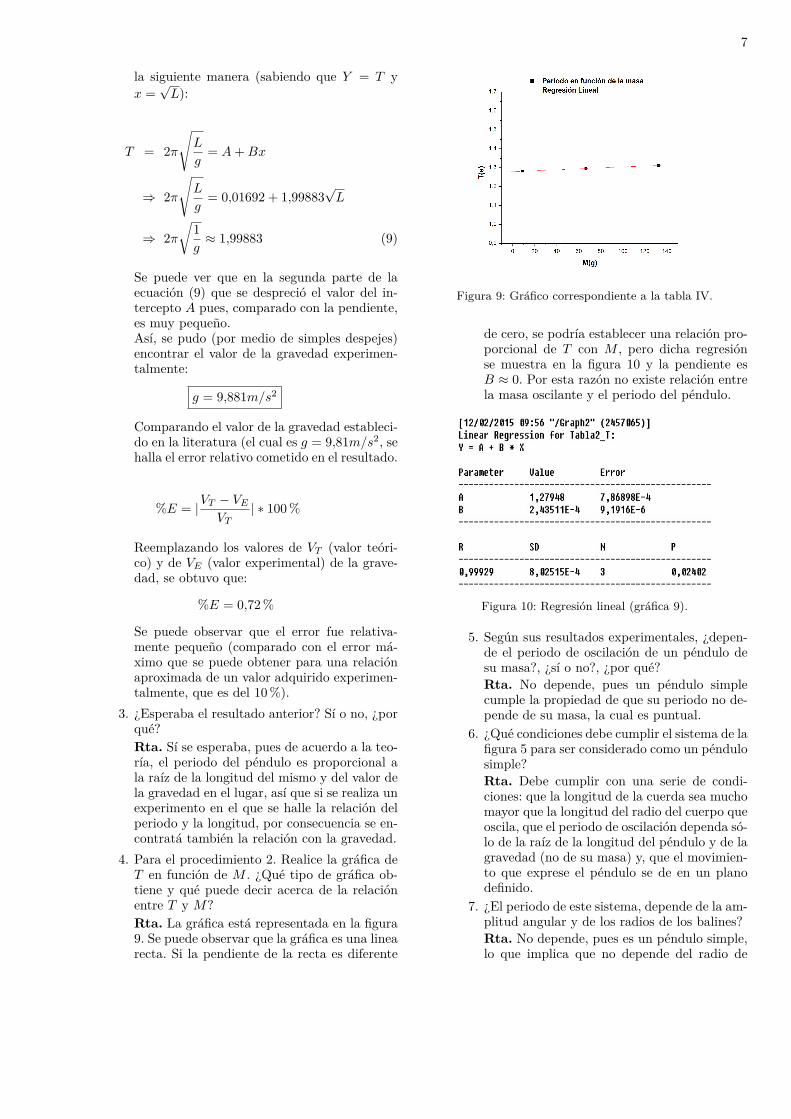
1. Con los datos tomados en el procedimiento 1,realice la gráfica de T en función de
√L. ¿Qué
tipo de gráfica obtiene y qué relación existeentre el periodo y la longitud del péndulo?Rta. La gráfica a continuación (figura 7). Lagráfica muestra una línea recta, lo que indicaque hay una proporcionalidad en las variables
relacionadas. La relación que se puede obser-var de la gráfica, es que el periodo T es direc-tamente proporcional a la raíz cuadrada de lalongitud del péndulo
√L.
Figura 7: Gráfico correspondiente al primer procedimiento(tabla III).
2. Calcule la pendiente de la gráfica anterior.¿Qué magnitud física puede calcular a partirde ese valor? Calcúlela. Compare la magnitudfísica encontrada con el valor teórico reporta-do en la literatura.Rta. La pendiente de la gráfica se calculó rea-lizando una regresión lineal usando el progra-ma Origin, version 6,1, la que se muestra enla figura 8.
Figura 8: Regresión lineal (gráfica 7).
El valor de la pendiente es B = 1,99883, de lacual se puede obtener el valor de la gravedaden el lugar del experimento. Se calculó de lasiguiente manera, sabiendo que (Apéndice D)el período está dado por la ecuación:
T = 2π
√L
g
En la ecuacuón (9), podemos establecer la re-lación con la regresión lineal en la figura 8 de
7
la siguiente manera (sabiendo que Y = T yx =√L):
T = 2π
√L
g= A+Bx
⇒ 2π
√L
g= 0,01692 + 1,99883
√L
⇒ 2π√
1g≈ 1,99883 (9)
Se puede ver que en la segunda parte de laecuación (9) que se despreció el valor del in-tercepto A pues, comparado con la pendiente,es muy pequeño.Así, se pudo (por medio de simples despejes)encontrar el valor de la gravedad experimen-talmente:
g = 9,881m/s2
Comparando el valor de la gravedad estableci-do en la literatura (el cual es g = 9,81m/s2, sehalla el error relativo cometido en el resultado.
%E = |VT − VEVT
| ∗ 100 %
Reemplazando los valores de VT (valor teóri-co) y de VE (valor experimental) de la grave-dad, se obtuvo que:
%E = 0,72 %
Se puede observar que el error fue relativa-mente pequeño (comparado con el error má-ximo que se puede obtener para una relaciónaproximada de un valor adquirido experimen-talmente, que es del 10 %).
3. ¿Esperaba el resultado anterior? Sí o no, ¿porqué?Rta. Sí se esperaba, pues de acuerdo a la teo-ría, el periodo del péndulo es proporcional ala raíz de la longitud del mismo y del valor dela gravedad en el lugar, así que si se realiza unexperimento en el que se halle la relación delperiodo y la longitud, por consecuencia se en-contratá también la relación con la gravedad.
4. Para el procedimiento 2. Realice la gráfica deT en función de M . ¿Qué tipo de gráfica ob-tiene y qué puede decir acerca de la relaciónentre T y M?Rta. La gráfica está representada en la figura9. Se puede observar que la gráfica es una linearecta. Si la pendiente de la recta es diferente
Figura 9: Gráfico correspondiente a la tabla IV.
de cero, se podría establecer una relación pro-porcional de T con M , pero dicha regresiónse muestra en la figura 10 y la pendiente esB ≈ 0. Por esta razón no existe relación entrela masa oscilante y el periodo del péndulo.
Figura 10: Regresión lineal (gráfica 9).
5. Según sus resultados experimentales, ¿depen-de el periodo de oscilación de un péndulo desu masa?, ¿sí o no?, ¿por qué?Rta. No depende, pues un péndulo simplecumple la propiedad de que su periodo no de-pende de su masa, la cual es puntual.
6. ¿Qué condiciones debe cumplir el sistema de lafigura 5 para ser considerado como un péndulosimple?Rta. Debe cumplir con una serie de condi-ciones: que la longitud de la cuerda sea muchomayor que la longitud del radio del cuerpo queoscila, que el periodo de oscilación dependa só-lo de la raíz de la longitud del péndulo y de lagravedad (no de su masa) y, que el movimien-to que exprese el péndulo se de en un planodefinido.
7. ¿El periodo de este sistema, depende de la am-plitud angular y de los radios de los balines?Rta. No depende, pues es un péndulo simple,lo que implica que no depende del radio de
8
los balines (de lo contrario sería un péndulocompuesto o físico). Además, para que el sis-tema cumpliese el MAS (que era un objetivodel experimento), debía moverse en desplaza-mientos angulares menores o iguales que 15o,bajo esta condición, el periodo no depende dela amplitud angular (Apéndice D).
8. Mencione algunas aplicaciones del péndulosimple en la vida diaria.Rta. El péndulo simple se emplea mucho enlos relojes de pared (que llevan precisamenteel nombre de relojes de péndulo), en los que sehacen oscilar con un periodo de 4s al péndu-lo, de tal manera que cada vez que el péndulollega a su máxima amplitud (tomando comoreferencia el reposo), transcurre 1s. Tambiénson usados para encontrar petróleo en distin-tos lugares de la Tierra donde la gravedad va-ría bruscamente, tomando valores muy bajos,lo que indica que hay cambios de densidad ba-jo el suelo, y en estos lugares puede encontrar-se dicho combustible.
9. ¿Qué posibles errores cometió en la elabora-ción del laboratorio y cómo los corregiría?Rta. En algunas ocasiones se hacía oscilar alpéndulo pero éste no describía al cien por cien-to un plano, sino que oscilaba en tres dimen-siones. Se podría corregir usando mejores equi-pos, pues se sostenía con la mano y se soltabaen el ángulo establecido para que comenzara aoscilar. Además, el recinto donde se tomaronlos datos estaba climatizado por aire acondi-cionado, el cual expulsaba viento, que podríaincidir en el movimiento del péndulo. Se po-dría corregir con mejores condiciones en el am-biente del lugar.
Sistema Masa-Muelle.
1. Halla el cuadrado de T y anota T 2 en la tabla.Rta. El valor de T 2 se muestra en la tabla Vy en la tabla VI.
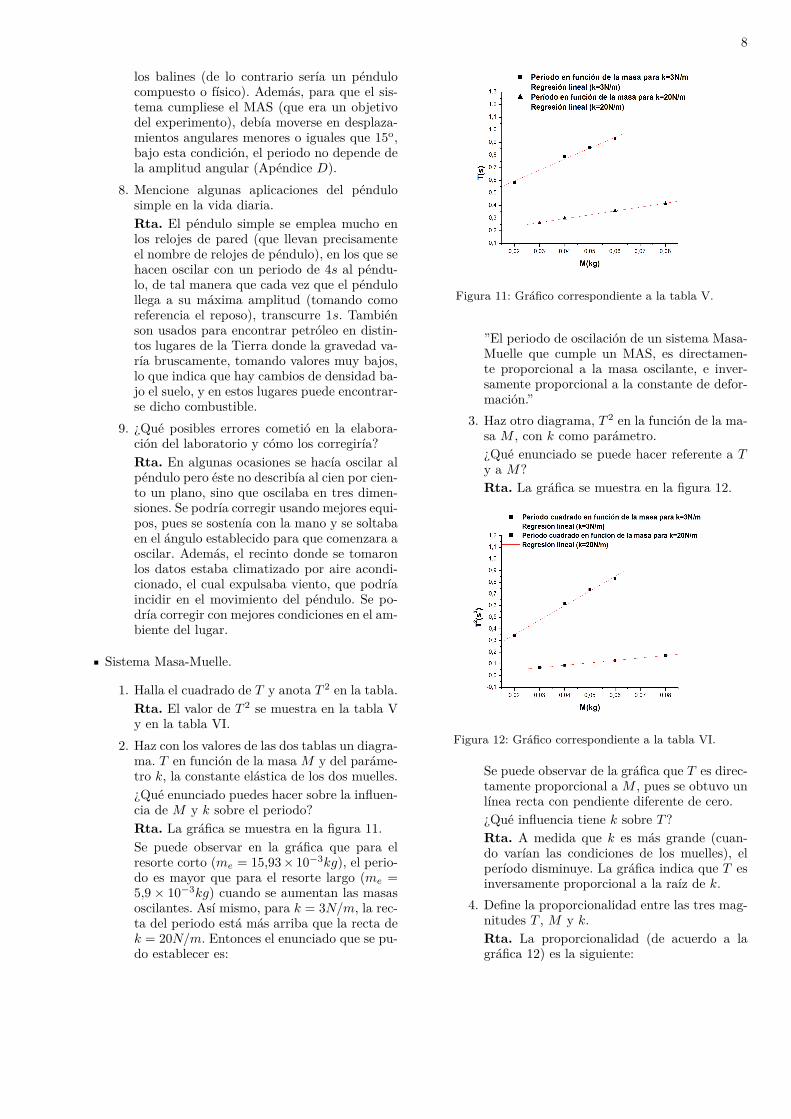
2. Haz con los valores de las dos tablas un diagra-ma. T en función de la masa M y del paráme-tro k, la constante elástica de los dos muelles.¿Qué enunciado puedes hacer sobre la influen-cia de M y k sobre el periodo?Rta. La gráfica se muestra en la figura 11.Se puede observar en la gráfica que para elresorte corto (me = 15,93× 10−3kg), el perio-do es mayor que para el resorte largo (me =5,9 × 10−3kg) cuando se aumentan las masasoscilantes. Así mismo, para k = 3N/m, la rec-ta del periodo está más arriba que la recta dek = 20N/m. Entonces el enunciado que se pu-do establecer es:
Figura 11: Gráfico correspondiente a la tabla V.
”El periodo de oscilación de un sistema Masa-Muelle que cumple un MAS, es directamen-te proporcional a la masa oscilante, e inver-samente proporcional a la constante de defor-mación.”
3. Haz otro diagrama, T 2 en la función de la ma-sa M , con k como parámetro.¿Qué enunciado se puede hacer referente a Ty a M?Rta. La gráfica se muestra en la figura 12.
Figura 12: Gráfico correspondiente a la tabla VI.
Se puede observar de la gráfica que T es direc-tamente proporcional a M , pues se obtuvo unlínea recta con pendiente diferente de cero.¿Qué influencia tiene k sobre T?Rta. A medida que k es más grande (cuan-do varían las condiciones de los muelles), elperíodo disminuye. La gráfica indica que T esinversamente proporcional a la raíz de k.
4. Define la proporcionalidad entre las tres mag-nitudes T , M y k.Rta. La proporcionalidad (de acuerdo a lagráfica 12) es la siguiente:
9
T ∝√
Mk
5. Determina con el dinamómetro la masa me delos dos muelles y corrige las masas efectivas(mk) en los dos procedimientos (mk = M +1/3me) y grafica T 2 en función de mk usandocomo parámetro a k.Rta. Se vuelven a elaborar las tablas V y VIcon los nuevos datos, llamándolas ahora TablaVII y VIII.• Primer Procedimiento. Resorte de masame = 15,93 × 10−3g y constante k =3N/m.
M + 13 me(kg) T(s) T 2(s2)
0.025 0.584 0.3410.045 0.786 0.6180.055 0.858 0.7360.065 0.929 0.836
Tabla VII: Datos del primer procedimiento.
• Segundo Procedimiento. Resorte de masame = 5,9×10−3g y constante k = 20N/m.
M + 13 me(kg) T(s) T 2(s2)0.032 0.261 0.0680.042 0.299 0.0890.062 0.36 0.130.082 0.415 0.172
Tabla VIII: Datos del segundo procedimiento.
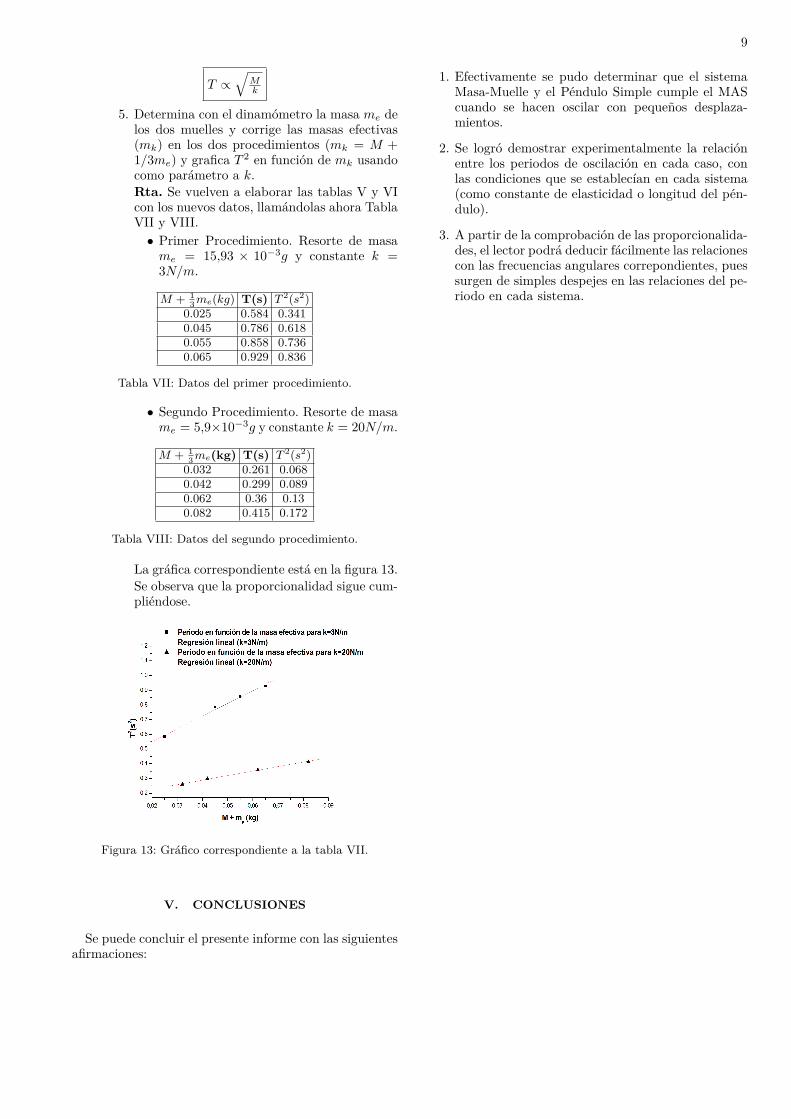
La gráfica correspondiente está en la figura 13.Se observa que la proporcionalidad sigue cum-pliéndose.
Figura 13: Gráfico correspondiente a la tabla VII.
V. CONCLUSIONES
Se puede concluir el presente informe con las siguientesafirmaciones:
1. Efectivamente se pudo determinar que el sistemaMasa-Muelle y el Péndulo Simple cumple el MAScuando se hacen oscilar con pequeños desplaza-mientos.
2. Se logró demostrar experimentalmente la relaciónentre los periodos de oscilación en cada caso, conlas condiciones que se establecían en cada sistema(como constante de elasticidad o longitud del pén-dulo).
3. A partir de la comprobación de las proporcionalida-des, el lector podrá deducir fácilmente las relacionescon las frecuencias angulares correpondientes, puessurgen de simples despejes en las relaciones del pe-riodo en cada sistema.
10
VI. BIBLIOGRAFÍA
Física sexta edición Raymond A. Serway Y JerryS. Faughn
Mecánica Newtoniana A. P. French
Física Vol 1. Mecánica. Marcelo Alonso y EdwardJ.Finn
MAS. Tippens_U01_L11_001 − 022.indd (Docu-mento web).
Mecánica Berkeley Physics Course. Volumen 1.McGraw-Hill, Inc. Nueva York.
Ondas Berkeley Physics Course. Volumen 3.McGraw-Hill, Inc. Nueva York.
Apéndice A: SOLUCIÓN DE LA ECUACIÓN DELMAS
Se busca hallar la solución de la ecuación diferencialdel Movimiento Armónico Simple, dada por:
d2x
dt2+ ω2x = 0
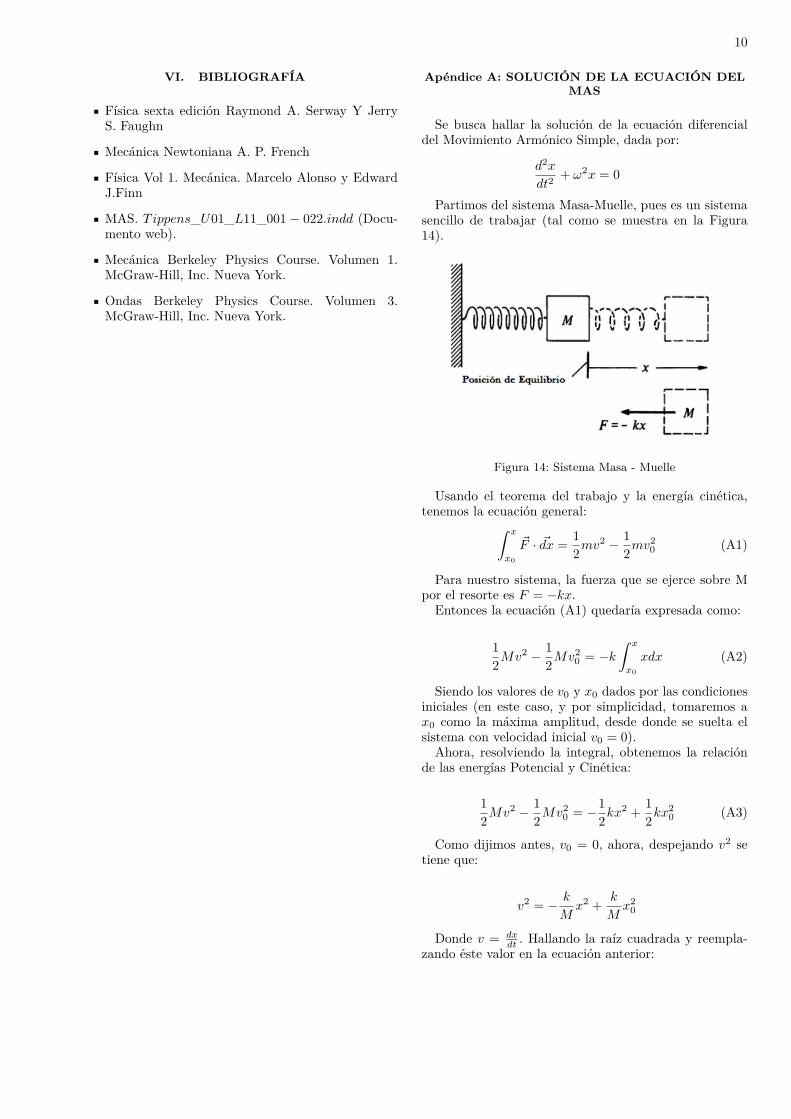
Partimos del sistema Masa-Muelle, pues es un sistemasencillo de trabajar (tal como se muestra en la Figura14).
Figura 14: Sistema Masa - Muelle
Usando el teorema del trabajo y la energía cinética,tenemos la ecuación general:∫ x
x0
~F · ~dx = 12mv
2 − 12mv
20 (A1)
Para nuestro sistema, la fuerza que se ejerce sobre Mpor el resorte es F = −kx.Entonces la ecuación (A1) quedaría expresada como:
12Mv2 − 1
2Mv20 = −k
∫ x
x0
xdx (A2)
Siendo los valores de v0 y x0 dados por las condicionesiniciales (en este caso, y por simplicidad, tomaremos ax0 como la máxima amplitud, desde donde se suelta elsistema con velocidad inicial v0 = 0).Ahora, resolviendo la integral, obtenemos la relación
de las energías Potencial y Cinética:
12Mv2 − 1
2Mv20 = −1
2kx2 + 1
2kx20 (A3)
Como dijimos antes, v0 = 0, ahora, despejando v2 setiene que:
v2 = − k
Mx2 + k
Mx2
0
Donde v = dxdt . Hallando la raíz cuadrada y reempla-
zando éste valor en la ecuación anterior:
11
dx
dt=
√k
m
√x2
0 − x2
Tenemos aquí, una ecuación diferencial de primer or-den donde podemos separar variables, de tal manera que:
dx√x2
0 − x2=
√k
Mdt
Integrando ambas partes:
∫ x
x0
dx√x2
0 − x2=
√k
M
∫ t
0dt
La integral de la izquierda es elemental, correspondien-te a la función Arcsen, así mismo, del lado derecho elvalor de
√kM corresponde a la frecuencia angular ω.
arcsin( xx0
)|xx0= ωt
Evaluando la solución de la integral de la izquierda,obtenemos:
arcsin( xx0
)− arcsin(1) = ωt
Pero Arcsen(1) = π2 , entonces:
arcsin( xx0
) = ωt+ π
2Así, aplicando la función Seno en ambos lados de la
ecuación, se obtiene:
x
x0= sen(ωt+ π
2 )
De lo que finalmente podemos encontrar la ecuaciónque nos propusimos al principio:
x = x0 sen(ωt+ π
2 )
O también, sabiendo que el seno y el coseno tienen unadiferencia de fase de π
2 , la ecuación se puede reescribir:
x = x0 cos(ωt) (A4)
Si derivamos dos veces esta ecuación, obtenemos lo si-guiente:
d2x
dt2= −x0ω
2 cos(ωt)
Donde x = x0 cos(ωt), por tanto, la ecuación (A4) vie-ne entonces a ser la solución de la ecuación diferencialdel MAS, la cual expresamos al principio del presenteapéndice.
Apéndice B: OSCILACIONES TRANSVERSALESDEL SISTEMA MASA-MUELLE
Se estudia en este ejemplo, el comportamiento del sis-tema Masa-Muelle, cuando la masa se mueve perpendi-cularmente al eje que la une con dos resortes, y se buscaencontrar la frecuencia del movimiento para pequeñas os-cilaciones.
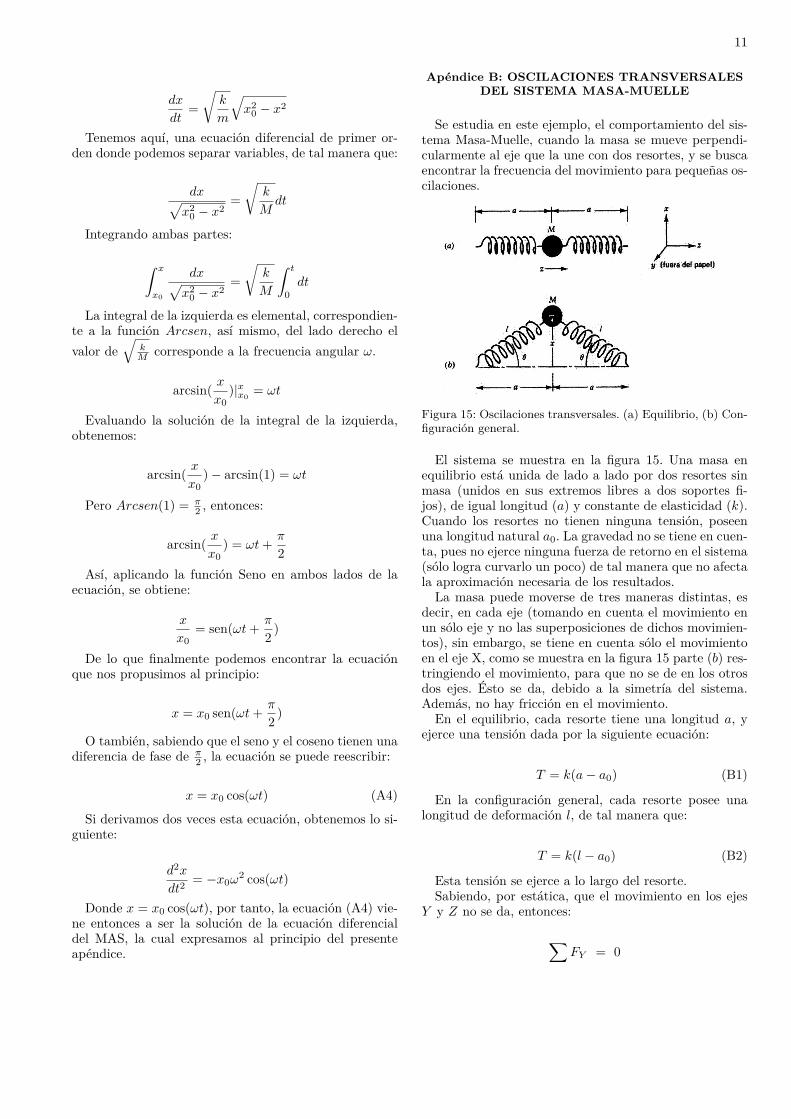
Figura 15: Oscilaciones transversales. (a) Equilibrio, (b) Con-figuración general.
El sistema se muestra en la figura 15. Una masa enequilibrio está unida de lado a lado por dos resortes sinmasa (unidos en sus extremos libres a dos soportes fi-jos), de igual longitud (a) y constante de elasticidad (k).Cuando los resortes no tienen ninguna tensión, poseenuna longitud natural a0. La gravedad no se tiene en cuen-ta, pues no ejerce ninguna fuerza de retorno en el sistema(sólo logra curvarlo un poco) de tal manera que no afectala aproximación necesaria de los resultados.La masa puede moverse de tres maneras distintas, es
decir, en cada eje (tomando en cuenta el movimiento enun sólo eje y no las superposiciones de dichos movimien-tos), sin embargo, se tiene en cuenta sólo el movimientoen el eje X, como se muestra en la figura 15 parte (b) res-tringiendo el movimiento, para que no se de en los otrosdos ejes. Ésto se da, debido a la simetría del sistema.Además, no hay fricción en el movimiento.En el equilibrio, cada resorte tiene una longitud a, y
ejerce una tensión dada por la siguiente ecuación:
T = k(a− a0) (B1)
En la configuración general, cada resorte posee unalongitud de deformación l, de tal manera que:
T = k(l − a0) (B2)
Esta tensión se ejerce a lo largo del resorte.Sabiendo, por estática, que el movimiento en los ejes
Y y Z no se da, entonces:
∑FY = 0

12∑FZ = 0
Así que se considera sólo la contribución de la fuerzade tensión en el eje X.Observe que en la parte (b) de la figura existe un ángulo
θ para cada resorte, por lo que la tensión medida en eleje X viene dada por TX = T sen θ en la dirección (−X).Además, usando las distancias en el sistema, se encuentrala equivalencia de que sen θ = x/l.Ahora, usando la segunda ley de Newton:
∑FX = M
d2x
dt2= TX + TX
Luego:
Md2x
dt2= −T sen θ − T sen θ
= −2T sen θ
Reemplazando la relación del seno con las distancias,y la ecuación B2, se tiene que:
Md2x
dt2= −2k(l − a0)(x
l)
Y, factorizando x, finalmente:
Md2x
dt2= −2kx(1− a0
l) (B3)
La ecuación (B3) es exacta, bajo las suposiciones he-chas (incluyendo la ecuación (B2) que expresa la lineali-dad del resorte, es decir, cumple la Ley de Hooke). Ahora,la longitud l que aparece a la derecha de Ec. (B3) es unafunción de x, lo que muestra que la fuerza de retorno so-bre la masa M no es exactamente dependiente de x demanera lineal. Por lo tanto, hay que hacer unas conside-raciones para que en el sistema se exprese un MovimientoArmónico Simple.
1. Aproximación de Resorte muy Estirable
Existen resortes helicoidales de longitud relajada a0 dealrededor de 3” y que se pueden estirar hasta una longi-tud a de alrededor de 15ft sin exceder el límite elástico.Así, se puede hacer una aproximación en este caso deque (con respecto a a) a0 es muy pequeño por lo que,con respecto a l lo será aún más.Ésto quiere decir que en la ecuación (B3) se puede
despreciar el término a0/l, pues tiende a cero. Así:
Md2x
dt2= −2kx
Despejando, se tiene que:
d2x
dt2= −2k
Mx
Siendo ω2 = 2kM o, siendo también k = T0
a (suponiendoque a0 = 0 en Ec.(B1)), entonces:
d2x
dt2= −ω2x (B4)
Por lo que
ω2 = 2T0
Ma(B5)
La ecuación (B4) corresponde al movimiento armónicosimple, con solución x = A cos(ωt+φ), donde no se hacerestricción con respecto a la amplitud del movimiento,siempre que cumpla la linealidad de que a0 = 0.
2. Aproximación de Pequeñas Oscilaciones
Existen casos en que a0 no se puede despreciar, por loque la aproximación anterior no funciona. Sin embargo,cuando se tiene que los desplazamientos en x son muypequeños comparados con la deformación a, entonces ldifiere de a una pequeña cantidad, la cual se demostrará,es a(x/a)2. Se desprecian los términos (en la aproxima-ción de pequeñas oscilaciones) en FX que no son lineales.Se puede observar en la figura 15 parte (b) que exis-
te una relación entre las distancias, dada por la ley dePitágoras:
l2 = a2 + x2
l2 = a2(1 + ε)
Donde ε = (x2/a2), y que se puede expresar (paratrabajar algebráicamente más fácil):
1l
= 1a
(1 + ε)−1/2
Ahora, se hace un desarrollo en serie de Taylor para(1 + x)n con n = −1/2 y x = ε. Si los desplazamientosson muy pequeños, x < a, por lo que ε << 1.
1l
= 1a
[1− (12ε) + (3
8ε2)− · · · ] (B6)
Se descartan los términos de orden superior en la ecua-ción (B6). (Y en los siguientes pasos también, dejandosólo el término 1/a.) Entonces:
1l≈ 1a
[1− (12ε)]
Reemplazando el valor de ε:

13
1l
= 1a
[1− 12x2
a2 ] (B7)
Insertando la ecuación (B7) en la ecuación (B3), sepuede ver:
d2x
dt2= −2k
Mx(1− a0
l)
= −2kMx{1− a0
a[1− (1
2x2
a2 ) + · · · ]}
= −2kMx+ 2kxa0
Ma[1− (1
2x2
a2 ) + · · · ]
= −2kMx+ 2kxa0
Ma+ kxa0
Ma(x
2
a2 ) + · · ·
= −2kMx+ 2kxa0
Ma+ ka0
M(x
3
a3 ) + · · ·
Se multiplica y divide el primer término de la derechaen la última ecuación por a, y se factoriza el término 2k
Maen los dos primeros términos de la derecha, por lo que laecuación queda:
d2x
dt2= − 2k
Ma(a− a0)x+ ka0
M(x
3
a3 ) + · · · (B8)
Se desprecian los términos cúbicos y de orden superior,así:
d2x
dt2= − 2k
Ma(a− a0)x
Sabiendo que T0 = k(a− a0) (Ec.(B1)), se tiene que:
d2x
dt2= −2T0x
Ma(B9)
Ahora, la ecuación (B9) es de la forma:
d2x
dt2= −ω2x
con
ω2 = 2T0
Ma(B10)
En consecuencia, x(t) está dado por la oscilación ar-mónica:
x(t) = A cos(ωt+ φ)
Se advierte que ω2 dada en la ecuación (B10) es la fuer-za de retorno por unidad de masa por unidad de desplaza-miento. Para pequeñas oscilaciones, la fuerza de retorno
es la tensión T0 por sen θ, el cual es x/a, por dos (pues haydos resortes ejerciendo la fuerza de retorno). El desplaza-miento es x y la masa esM , entonces ω2 = 2T0(x/a)/xM .Advierta que la frecuencia para oscilaciones transver-
sales está dada por ω2 = 2T0Ma , tanto para el caso de la
aproximación de resorte muy estirable (a0 = 0) como pa-ra la aproximación de pequeñas oscilaciones (x/a << 1),como se ve en la comparación de las ecuaciones (B4) y(B5). En la aproximación de resorte muy estirable, la os-cilación longitudinal tiene también la misma frecuencia.Si la aproximación de resorte muy estirable no se cum-
ple (a0/a no es despreciable), entonces las oscilacioneslongitudinales y las transversales (pequeñas) no tienen lamisma frecuencia, tal como se muestra a continuación:
(ω2)long = 2kaMa
(B11)
(ω2)tran = 2T0
Ma(B12)
Donde T0 = k(a− a0).Ésto quiere decir (y se puede observar en las ecuaciones
(B11) y (B12)) que para pequeñas oscilaciones, como enuna cuerda de goma, las longitudinales son más rápidasque las transversales:
(ω)long(ω)tran
= 1[1− a0
a ]1/2
Apéndice C: MASA EFECTIVA DE UN SISTEMAMASA-MUELLE REAL
En un sistema masa-muelle no influye sólo la masa os-cilante en el movimiento del mismo, sino también la ma-sa del muelle. En un sistema ideal se puede despreciarla masa me, pero para casos experimentales no sería loadecuado.Tampoco sería adecuado sumar la influencia directa-
mente a la masa oscilante, así que veamos cómo puedecontribuir me a la masa M para que los resultados seanlo mejor posible esperados.La masa efectiva del muelle en un sistema ideal es in-
dependiente de si la dirección del sistema es horizontal,vertical u oblicua, permaneciendo siempre como 1/3 de lamasa del muelle. Esto puede ser demostrado del siguientemodo:Si M es la masa suspendida y me la masa del muelle,
tomemos un segmento infinitamente delgado del muelleque se encuentre a una distancia y del extremo fijo delmuelle.Su longitud será dy; su masa dme y su velocidad u.
Por lo tanto, se cumple la zazón de que dme = (dyL )me
donde L es la logitud del muelle.

14
Ahora consideremos la energía cinética total del mue-lle.
K =∫me
12u
2dme
=∫ L
0
12u
2(dyL
)me
= 12me
L
∫ L
0u2dy (C1)
Pero la velocidad de cada posición del muelle es direc-tamente proporcional a su longitud, por lo tanto u/v =y/L, así u = vy/L. Luego (C1) queda:
12me
L
∫ L
0(vyL
)2dy = 12me
L3 v2
∫ L
0y2dy
= 12me
L3 v2[y
3
3 ]L0
= 12me
3 v2 (C2)
(C3)
Si se compara la ecuación (C3) con al ecuación originalde la energía cinética, se puede concluir efectivamente quela masa efectiva del muelle en este caso es meff = me
3 .
Esta aproximación se cumple para cuando la relaciónM/me < 6. Para cuando es mayor, la masa efectiva delsistema vertical, decrese por debajo del valor de Rayleigh(m/3) e incluso puede llegar a tomar valores negativos,por lo que se necesitaría otro método para estudiar elmovimiento.