Embed Size (px)
Citation preview

MÉTODOS DE SOLUCIÓN DEECUACIONES DIFERENCIALESORDINARIAS CUADRÁTICAS
Juan Camilo Carranza Caro
Proyecto de grado para obtener el título de Matemático
presentado a
Departamento de Matemáticas
Universidad de los Andes
Director: Prof. Camilo Sanabria Malagón
Mayo 2016

2

Introducción
Un sistema diferencial autónomo n-dimensional es un sistema de n ecuaciones diferencialesordinarias, las cuales no dependen explícitamente de la variable independiente, es decir, elsistema es de la forma
d
dtX(t) = F (X(t)), X(t) ∈ Rn. (1)
Este tipo de sistema se diferencia del sistema de ecuaciones diferenciales de la forma
d
dtX(t) = G(X(t), t),
en el cual existe una dependencia explícita de la variable independiente t.
Este proyecto se concentra en sistemas de autónomos de la forma (1), y busca soluciones acasos específicos en los que F es una función cuadrática de X , usando cambio de coordenadascartesianas a proyectivas (homogéneas).
En el primer capítulo se hace una introducción a la geometría proyectiva y se consideran lassubvariedades proyectivas como el conjunto de puntos de ceros de polinomios homogéneos.
En el segundo capítulo se estudian los sistemas dinámicos lineales y cómo solucionarlosdependiendo de la naturaleza de la matriz de transformación. Igualmente se introduce el conceptode flujo asociado a una ecuación diferencial y espacios invariantes bajo la acción de dicho flujo.
El tercer capítulo se divide en dos secciones. La primera de ellas expone qué tipos de sistemaslineales de primer orden en Rn definen un sistema diferencial en Pn−1. La segunda secciónestudia los sistemas diferenciales que surgen en el espacio proyectivo a partir de sistemas linealesen el espacio euclídeo n-dimensional. Igualmente, se estudia un tipo de ecuación diferencial deprimer orden no polinomial, pues involucra raíces cuadradas, que surge de sistemas lineales enR3 que dejan el cono invariante bajo su acción.
En el cuarto capítulo estudiamos la relación entre la ecuación diferencial ordinaria de segundoorden y′′ + ay′ + by = 0 y la ecuación de Riccati w′ = −b− aw − w2 como un caso particularque surge de tomar la razón entre dos soluciones linealmente independientes de la ecuación desegundo orden.
3

CONTENIDO
1 INTRODUCCIÓN A LA GEOMETRÍA PROYECTIVA 5
2 SISTEMAS DINÁMICOS LINEALES 92.1 Teorema de Existencia y Unicidad . . . . . . . . . . . . . . . . . . . . . . . . 92.2 El Exponencial de una Matriz . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3 Solución de Sistemas Lineales de Primer Orden . . . . . . . . . . . . . . . . . 152.4 Flujo y Variedades Invariantes . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3 SISTEMAS PROYECTIVOS DEFINIDOS A PARTIR DE SISTEMAS LINEALES 243.1 Sistemas de Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.2 Sistemas en Pn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4 EDOs LINEALES DE SEGUNDO ORDEN Y LA ECUACIÓN DE RICCATI 36
REFERENCIAS 40
4

CAPÍTULO 1
INTRODUCCIÓN A LA GEOMETRÍAPROYECTIVA
Considere el espacio vectorial n-dimensional Rn, y sobre éste defina la relación ∼ dada por:
~x = (x1, x2, . . . , xn) ∼ (y1, y2, . . . , yn) = ~y ⇐⇒ ∃λ ∈ R \ 0 : ~x = λ~y.
Evidentemente ∼ es una relación de equivalencia:(i) Reflexividad: ~x = 1~x⇒ ~x ∼ ~x.(ii) Simetría: ~x ∼ ~y ⇒ ~x = λ~y ⇒ ~y = 1
λ~x⇒ ~y ∼ ~x.
(iii) Transitividad: ~x ∼ ~y , ~y ∼ ~z ⇒ ~x = λ~y , ~y = µ~z ⇒ ~x = λµ~z ⇒ ~x ∼ ~z.
El espacio proyectivo real n-dimensional, denotado por Pn, está dado por:
Pn = Rn+1\~0 /∼
Se puede pensar en Pn como el conjunto de todas las rectas de Rn+1 que pasan por el origen.Los elementos del espacio proyectivo se llaman puntos. Las coordenadas proyectivas de unpunto P son x0, x1, . . . , xn, donde (x0, x1, . . . , xn) es un elemento de la clase de equivalenciacorrespondiente. Esto se denota por P = [x0 : x1 : · · · : xn], los dos puntos y los paréntesiscuadrados enfatizan el hecho de que el lado derecho es una clase de equivalencia, la cual estádefinida mediante la razón entre las coordenadas.
El espacio proyectivo real es una variedad. Podemos definir cartas coordenadas (Ui, φi),dadas por:
φi([x0 : x1 : · · · : xn]) =
(x0
xi,x1
xi, . . . ,
xi−1
xi,xi+1
xi, . . . ,
xn
xi
), (1.1)
con dominioUi = [x0 : x1 : · · · : xn] : xi 6= 0 (1.2)
5

e inversaφ−1i (y1, . . . , yn) = (y1 : · · · : yi−1 : 1 : yi+1 : · · · : yn). (1.3)
Tenemos entonces que Pn tiene un atlas A = (Ui, φi) : i = 0, 1, . . . , n que consiste de n+ 1
cartas.El caso n = 1, es decir, P1 recibe el nombre de recta proyectiva real. Recordemos que esteespacio es el conjunto de rectas de R2 que pasan por el origen. Este espacio es homeomorfo alcírculo, mediante la función que identifica puntos antipodales. En la Figura 1.1 se muestra elatlas correspondiente, compuesto de dos cartas que cubren P1.
Figura 1.1: Recta proyectiva real P1 como variedad.
El caso n = 2, es decir, P2 recibe el nombre de plano proyectivo real. Podemos cubrirel plano proyectivo con tres cartas, una por cada coordenada en R3. Una de ellas sería de lasiguiente manera. Sea U3 ⊂ P2 el subconjunto de puntos de R3 con coordenada x3 diferente de0.
U3 = [x1 : x2 : x3] ∈ P2 : x3 6= 0.
En este subconjunto abierto, podemos considerar coordenadas homogéneas dadas por:
(x1, x2, x3) ∼(x1
x3, x
2
x1, 1)
.
Geométricamente, esto proyecta cada recta que corta el plano x3 = 1 en su punto de interseccióncon dicho plano (Figura 1.2). Así, esta carta está dada por:
φ3 : U3 −→ R2
[x1 : x2 : x3] 7−→(x1
x3,x2
x3
).
Note que la inversa, φ−13 : R2 −→ U3 está dada por (y1, y2) 7−→ [y1 : y2 : 1].
6

Figura 1.2: Plano proyectivo real P2.
Ejemplo 1.0.1. Considere el espacio proyectivo n−dimensional Pn, y sea
H = [x0 : · · · : xn] ∈ Pn : a0x0 + · · ·+ anx
n = 0,
donde (a0, . . . , an) ∈ Rn \ ~0. Este H recibe el nombre de hiperplano proyectivo.
Veamos que H es una subvariedad de Pn de dimensión n − 1. Sean (Ui, φi) las cartascoordenadas descritas en (1.1) y en (1.2). Consideremos H∩U0, y sean (ζ1, . . . , ζn) coordenadasen Rn. Suponga que [x0 : · · · : xn] ∈ H ∩ U0, entonces, como x0 6= 0 tenemos:
a1x1
x0+ a2
x2
x0+ · · ·+ an
xn
x0= −a0,
lo que implica que si ζ = (ζ1, . . . , ζn) = φ0([x0 : · · · : xn]), entonces ζ satisface
a1ζ1 + · · ·+ anζn = −a0. (1.4)
Podemos suponer que al menos uno entre a1, . . . , an no es cero, pues de lo contrario, tendríamosa0 6= 0 y a1 = · · · = an = 0, entonces ningún punto (ζ1, . . . , ζn) ∈ Rn satisfaría (1.4) y por lotanto H ∩ U0 = ∅.
Se sigue ahora que, si usamos ecuaciones similares a (1.4) en los otros sistemas coordenadospara representar a H , este espacio es una subvariedad proyectiva de Pn de dimensión n− 1.
El Ejemplo 1.0.1 nos sirve para generalizar el concepto de subvariedad proyectiva. Considere
V = [x0 : · · · : xn] ∈ Pn : p1(x0, . . . , xn) = · · · = pk(x
0, . . . , xn) = 0,
7

donde p1, . . . , pk son polinomios homogéneos (no necesariamente del mismo grado). En coorde-nadas locales (por ejemplo en U0), uno puede encontrar ecuaciones de la forma
p1
(1, x
1
x0, . . . , x
n
x0
)= 0,
...pk
(1, x
1
x0, . . . , x
n
x0
)= 0,
y por lo tanto, V será una subvariedad proyectiva.
8

CAPÍTULO 2
SISTEMAS DINÁMICOS LINEALES
2.1 Teorema de Existencia y Unicidad
Un sistema lineal n-dimensional autónomo de primer orden es una lista de n ecuaciones difer-enciales lineales de primer orden en n funciones desconocidas de una variable t. Se puederepresentar mediante la ecuación matricial
d
dt~x = A~x+~b
donde ~x es un vector n-dimensional que contiene las funciones desconocidas, A es una matrizn× n de coeficientes y~b es un vector de n funciones en la variable t. Si~b = 0, decimos que elsistema es homogéneo. Por ejemplo, el sistema lineal 3-dimensional
x′1 = x1 − 4x2 + 2x3 + et
x′2 = x3 − t
x′3 = −x2 + 5x3 + t2
estaría dado por:
~x =
x1x2x3
, A =
1 −4 2
0 0 1
0 −1 5
, ~b =
et
−tt2
En general, un problema de valor inicial es una ecuación diferencial ordinaria de primerorden junto con una condición incial, es decir, es de la forma:
d
dtX = F (X), X(t0) = X0 (2.1)
Estamos interesados en las siguientes preguntas. ¿Bajo qué circunstancias podemos estar segurosque una solución a (2.1) existe? ¿Bajo qué circunstancias podemos asegurar que dicha solución
9

es única? El siguiente teorema responde esta pregunta.
Teorema de Existencia y Unicidad ([3], p. 385): Considere el problema de valor inicial(2.1), donde X0 ∈ Rn. Suponga que F : Rn −→ Rn es C1. Entonces, primero, existe unasolución a este problema de valor inicial y, segundo, esta solución es única. Más precisamente,existe δ > 0 y una única solución
X : (t0 − δ, t0 + δ) −→ Rn
de esta ecuación diferencial que satisface la condición inicial X(t0) = X0.En el caso en que F es lineal se tiene δ =∞.
Teorema ([2], p. 89): Sea E un subconjunto abierto de Rn y suponga que F ∈ C1(E).Entonces, para cada x0 ∈ E, existe un intervalo maximal J en el cual el problema de valorinicial (2.1) tiene una solución única X(t); i.e., si el problema de valor inicial tiene una soluciónY (t) en un intervalo I , entonces I ⊆ J y Y (t) = X(t) para todo t ∈ I . Más aún, el intervalomaximal J es abierto, es decir, J = (α, β).
Denotamos el intervalo maximal de existencia (α, β) de la solución al problema de valorinicial (2.1) por I(x0), pues los extremos del intervalo maximal generalmente dependen de x0.
2.2 El Exponencial de una Matriz
El "sistema" 1× 1 de ecuaciones lineales
x′(t) = ax(t), a ∈ R
es el más sencillo y al mismo tiempo uno de los más importantes. La solución a esta ecuación seobtiene de cálculo: si k ∈ R, entonces la función x(t) = keat es una solución pues
x′(t) = akeat = ax(t).
Más aún, ésta es la única solución. Para ver esto, sea u(t) solución arbitraria. Operamos:
d
dt(u(t)e−at) = u′(t)e−at + u(t)(−ae−at)
= au(t)e−at − au(t)e−at
= 0.
Luego, u(t)e−at es una constante k, entonces u(t) = keat. Esto prueba la afirmación. Por lotanto hemos encontrado todas las posibles soluciones a esta ecuación diferencial.
10

Este ejemplo nos muestra una manera natural, en cierto sentido, de encontrar soluciones asistemas de ecuaciones lineales, pues simplemente exponenciamos la matriz (a) de tamaño 1× 1
para obtener la solución general x(t) = keat. De hecho, este proceso sirve en el caso generalen el que lidiemos con matrices de tamaño n× n. Para esto sólo necesitamos definir qué es elexponencial de una matriz.
Recordermos que la función exponencial se puede expresar como una serie infinita
ex =∞∑n=0
xn
n!.
Sabemos que esta serie converge para todo x ∈ R. Esto nos permite definir el exponencial de
una matriz A de tamaño n× n como
eA =∞∑n=0
An
n!.
Veamos algunos ejemplos.
Ejemplo 2.2.1. Veamos el exponencial de una matriz diagonal. Sea
A =
[λ 0
0 µ
].
Entonces tenemos
An =
[λn 0
0 µn
],
luego
eA =
∞∑n=0
λn/n! 0
0∞∑n=0
µn/n!
=
[eλ 0
0 eµ
]
Por lo tanto, si A es una matriz diagonal, su exponencial se obtiene exponenciando cada entradade su diagonal principal.
Ejemplo 2.2.2. Sea
A =
[0 β
−β 0
].
Entonces tenemos
A0 = I, A2 = −β2I, A3 = −β3
[0 1
−1 0
]
A4 = β4I, A5 = β5
[0 1
−1 0
].
11

Por lo tanto
A2n = (A2)n = (−β2I)n = (−1)nβ2nI
A2n+1 = A3A2(n−1) =
(−β3
[0 1
−1 0
])((−1)n−1β2(n−1)I
)= (−1)nβ2n+1
[0 1
−1 0
]
Luego, el exponencial está dado por:
eA =
∞∑n=0
(−1)n β2n
(2n)!
∞∑n=0
(−1)n β2n+1
(2n+1)!
−∞∑n=0
(−1)n β2n+1
(2n+1)!
∞∑n=0
(−1)n β2n
(2n)!
=
cos β sin β
− sin β cos β
.
Ejemplo 2.2.3. Ahora sea
A =
[λ 1
0 λ
],
con λ 6= 0. Computamos el exponencial de At. Tenemos:
(At)n =
[(tλ)n ntnλn−1
0 (tλ)n
].
Por lo tanto
eAt =
∞∑n=0
(tλ)n
n!t∞∑n=0
(tλ)n
n!
0∞∑n=0
(tλ)n
n!
=
[eλt teλt
0 eλt
].
Note que en estos tres ejemplos, la matriz eA es una matriz cuyas entradas son series infinitas.Por lo tanto, decimos que la serie infinita de matrices eA converge absolutamente si cada unode sus términos individuales lo hace, lo cual es claro es los tres ejemplos anteriores. Veamos laconvergencia en el caso general.
12

TomeAmatriz de tamaño n×n y sea (aij(k)) la entrada ij de la matrizAk. Sea a = max|aij|.Tenemos
|aij(1)| ≤ a,
|aij(2)| =
∣∣∣∣∣n∑k=1
aikakj
∣∣∣∣∣ ≤ na2,
|aij(3)| =
∣∣∣∣∣n∑
l,k=1
aikaklalj
∣∣∣∣∣ ≤ n2a3,
...
|aij(k)| ≤ nk−1ak.
Por lo tanto tenemos una cota para la entrada ij de la matriz eA:∣∣∣∣∣∞∑k=0
aij(k)
k!
∣∣∣∣∣ ≤∞∑k=0
|aij(k)|k!
≤∞∑k=0
nk−1ak
k!≤
∞∑k=0
(na)k
k!= ena.
Luego esta serie converge absolutamente por el test de comparación.
Algunos resultados importantes se exponen a continuación.
Proposición: Si ~v ∈ Rn es un vector propio asociado al valor propio λ de A, entonces ~v es asu vez un vector propio de eA asociado a eλ.Demostración: A partir de A~v = λ~v, obtenemos
eA~v = limn→∞
(n∑k=0
Ak~v
k!
)
= limn→∞
(n∑k=0
λk
k!~v
)= eλ~v.
Proposición: Sean A,B y T matrices n× n. Entonces:
1. Si B = T−1AT , entonces eB = T−1eAT .
2. Si AB = BA, entonces eA+B = eAeB.
3. e−A = (eA)−1.
La demostración de esta proposición se pueden encontrar en el capítulo 6 de [3].
13

Ejemplo 2.2.4. Cualquier matriz compleja A de tamaño n × n se puede poner en la formacanónica de Jordan mediante una tranformación semejante J = T−1AT ([2], p.39). En particular,si tomamos n = 3, tenemos que J tiene la forma
J =
α 1 0
0 α 1
0 0 α
la cual se puede descomponer de la siguiente forma:
J = D + U =
α 0 0
0 α 0
0 0 α
+
0 1 0
0 0 1
0 0 0
Estas dos matrices conmutan entre sí, i.e.,
DU =
α 0 0
0 α 0
0 0 α
0 1 0
0 0 1
0 0 0
=
0 α 0
0 0 α
0 0 0
=
0 1 0
0 0 1
0 0 0
α 0 0
0 α 0
0 0 α
= UD.
Igualmente tenemos
U2 =
0 0 1
0 0 0
0 0 0
, Un =
0 0 0
0 0 0
0 0 0
para n ≥ 3.
Por lo tanto
eJ = eD+U
= eDeU
= eD∞∑n=0
Un
n!
= eD(I + U +
U2
2!
)
=
eα 0 0
0 eα 0
0 0 eα
1 0 0
0 1 0
0 0 1
+
0 1 0
0 0 1
0 0 0
+
0 0 1/2
0 0 0
0 0 0
=
eα 0 0
0 eα 0
0 0 eα
1 1 1/2
0 1 1
0 0 1
=
eα eα eα/2
0 eα eα
0 0 eα
.14

El siguiente teorema puede ser considerado como el teorema fundamental de ecuacionesdiferenciales lineales con coeficientes constantes.
Teorema: Sea A una matriz n × n. Entonces la solución al problema de valor inicialX ′ = AX , con X(0) = X0 es X(t) = eAtX0. Más aún, esta es la única solución.Demostración:
X ′(t) =d
dtX(t) =
d
dt(eAtX0) =
(d
dteAt)X0 = AeAtX0 = AX(t).
Más aún, como X(0) = e0AX0 = X0, se sigue que ésta es una solución al problema de valorinicial. Para ver la unicidad de dicha solución, considere Y (t) solución diferente satisfaciedoY (0) = X0 y tome
Z(t) = e−AtY (t).
Entonces
Z ′(t) =
(d
dte−At
)Y (t) + e−AtY ′(t)
= −Ae−AtY (t) + e−AtAY (t)
= e−At(−A+ A)Y (t)
≡ 0.
Por lo tanto Z(t) es constante. Tomando t = 0 se tiene que Z(t) = X0, por ende Y (t) = etAX0.
2.3 Solución de Sistemas Lineales de Primer Orden
Estamos interesados en hallar soluciones al sistema lineal homogéneo
d
dt~x = A~x, (2.2)
donde A es una matriz compleja.
Dos hechos nos permiten encontrar las soluciones a (2.2). El primero de ellos se exponea continuación. Sean ~x1, ~x2, . . . , ~xn soluciones linealmente independientes de (2.2) y seanc1, c2, . . . , cn constantes, entonces ~x = c1 ~x1 + c2 ~x2 + · · ·+ cn ~xn también es solución de (2.2),
15

pues
d
dt~x =
d
dt(c1 ~x1 + c2 ~x2 + · · ·+ cn ~xn)
= c1d
dt~x1 + c2
d
dt~x2 + · · ·+ cn
d
dt~xn
= c1A~x1 + c2A~x2 + · · ·+ cnA ~xn
= A(c1 ~x1 + c2 ~x2 + · · ·+ cn ~xn)
= A~x.
Estas n soluciones linealmente independientes forman una base para todas las soluciones, es decir,cualquier solución arbitraria se puede representar como una combinación lineal de ~x1, ~x2, . . . , ~xny esto nos permite resolver el mismo sistema lineal homogéneo con cualquier condición inicial.
Para encontrar los n vectores solución linealmente independientes, es necesario primero cal-cular los valores propios λ de A, solucionando la ecuación característica det(A−λI) = 0 para λ,y luego encontrando sus correspondientes vectores propios generalizados ~v ∈ Cn, solucionandola ecuación vectorial (A− λI)d~v = 0 para ~v. A continuación distinguimos tres posibles casos.
Valores propios reales distintos: Si λ es un valor propio que aparece una vez como raízde la ecuación característica, y ~v es su correspondiente vector propio, entonces ~x = eλt~v es unvector solución de la ecuación homogénea.
Valores propios complejos distintos: Si λ = α + iβ es un valor propio entonces tambiénlo es su complejo conjugado λ = α − iβ. Cada uno de estos valores propios dará un vectorsolución, pero como están relacionados entre sí, usamos λ = α+ iβ para hallar ambas soluciones.Encontramos el correspondiente vector propio ~v y lo representamos de la forma ~v = ~v1 + i~v2,donde ~v1 y ~v2 tienen entradas reales. Una solución de (2.2) es
x(t) = ~veλt
= (~v1 + i~v2)e(α+iβ)t
= eαt(~v1 + i~v2)eiβt
= eαt(~v1 + i~v2)(cos(βt) + i sin(βt))
= eαt(cos(βt)~v1 − sin(βt)~v2) + ieαt(sin(βt)~v1 + cos(βt)~v2)
= ~x1(t) + i~x2(t).
Como ~x(t) es solución de ~x′(t) = A~x entonces tenemos ~x′1(t) + i~x′2(t) = A~x1(t) + iA~x2(t).Igualando la parte real e imaginaria en ambos lados de la ecuación obtenemos ~x′1(t) = A~x1(t) y~x′2(t) = A~x2(t), por lo tanto ~x1(t) y ~x2(t) también son solución a (2.2). Más aún, ~x1(t) y ~x2(t)son linealmente independientes.
16

Entonces una base para el conjunto de soluciones está dada por los vectores:
~x1 = eαt(cos(βt)~v1 − sin(βt)~v2)
~x2 = eαt(sin(βt)~v1 + cos(βt)~v2)(2.3)
Ejemplo 2.3.1. Vamos a encontrar la solución al sistema dinámico lineal descrito por:
d
dt
x1x2x3
=
−3 0 2
1 −1 0
−2 −1 0
x1x2x3
La ecuación característica correspondiente det(A− λI) = 0 da como resultado:
−(λ+ 2)(λ+ 1−√
2i)(λ+ 1 +√
2i) = 0
En otras palabras, los valores propios de la matriz A son λ1 = −2, λ2 = −1 +√
2i y λ3 =
−1−√
2i. Los vectores propios correspondientes son:
~v1 =
2
−2
1
, ~v2 =
2−√
2i
−1−√
2i
3
, ~v3 =
2 +√
2i
−1 +√
2i
3
El vector solución ~x1(t)correspondiente a λ1 = −2 es:
~x1(t) = e−2t
2
−2
1
Para hallar los vectores solución ~x2(t) y ~x3(t) expresamos ~v2 = ~u+ i~w.
~v2 =
2−√
2i
−1−√
2i
3
=
2
−1
3
+ i
−√
2
−√
2
0
Reemplazamos valores en la ecuación (2.3) y obtenemos:
~x2(t) = e−t
cos(√2t)
2
−1
3
− sin(√
2t)
−√
2
−√
2
0
y
~x3(t) = e−t
sin(√
2t)
2
−1
3
+ cos(√
2t)
−√
2
−√
2
0
Entonces, la solución general del sistema es ~x∗(t) = c1~x1(t) + c2~x2(t) + c3~x3(t).
17

Valores propios repetidos: Si los valores propios son repetidos, debemos analizar con máscuidado la matriz A para encontrar los vectores solución correspondientes. Recordemos quela multiplicidad algebraica de un valor propio λ es el número de veces que éste aparece comoraíz de la ecuación característica, y se representa por ma(λ). Por otro lado, la multiplicidad
geométrica de un valor propio λ es el número de vectores propios linealmente independientescorrespondientes a dicho valor propio, y se representa por mg(λ).
Para cada valor propio λ, necesitamos que el número de vectores solución que encontremoscorresponda a su multiplicidad algebraica. Si ma(λ) = 1 nos encontramos en la situacióndescrita anteriormente. Por lo tanto asumimos el caso ma(λ) > 1.
La multiplicidad algebraica y la geométrica cumplen la relación 1 ≤ mg(λ) ≤ ma(λ). En elcaso mg(λ) = ma(λ) tenemos suficientes vectores propios para hallar soluciones de la forma~x = eλt~v, correspondientes a λ y procedemos como en el caso anterior. Luego, nos interesamosen el caso mg(λ) < ma(λ).
Para este caso necesitamos la siguiente definición. Si λ es un valor propio de A, entonces~v es un vector propio generalizado correspondiente a λ si (A − λI)d~v = 0 para algún enteropositivo d. Note que un vector propio es a su vez un vector propio generalizado (tome d = 1),pero a medida que d aumenta habrá más soluciones que no son vectores propios.
Considere un valor propio λ tal que ma(λ) = 2 y mg(λ) = 1, de tal manera que buscamosdos vectores solución correspondientes a λ pero sólo tenemos un vector propio linealmenteindependiente ~v1 y, por ende, sólo un vector solución ~x1 = eλt~v1. Solucionando la ecuación(A− λI)2~v = 0, la cual tiene dos grados de libertad, encontramos dos vectores propios general-izados linealmente independientes. Escogemos un vector propio generalizado ~v2 linealmenteindependiente de ~v1 y entonces la segunda solución correspondiente a λ es:
~x2 = eλt(I + (A− λI)t)~v2 (2.4)
Esta solución se deriva de la definición del exponencial de una matriz, así:
eAt = e(λI+A−λI)t
= eλtIe(A−λI)t
= eλt(I + (A− λI)t+ (A− λI)2
t2
2!+ (A− λI)3
t3
3!+ . . .
).
Como ~v2 es tal que (A− λI)2~v2 = 0 tenemos
eAt~v2 = eλt(I + (A− λI)t+ (A− λI)2
t2
2!+ (A− λI)3
t3
3!+ . . .
)~v2
= eλt (I + (A− λI)t)~v2.
18

Ejemplo 2.3.2. Vamos a encontrar la solución al sistema dinámico lineal descrito por:
d
dt
x1x2x3
=
−1 2 1
0 −1 0
−1 −3 −3
x1x2x3
La ecuación característica correspondiente det(A− λI) = 0 da como resultado:
−(λ+ 1)(λ+ 2)2 = 0
En otras palabras, los valores propios de la matriz A son λ1 = −1 y λ2 = −2. Primero considereel valor propio λ2 = −2, el cual tiene multiplicidad algebraica 2 y para el cual la ecuacióncorrespondiente al vector propio es: 1 2 1
0 1 0
−1 −3 −1
~v = 0
Esta ecuación da el vector propio
~v1 =
1
0
−1
Pero ahora también necesitamos encontrar un vector propio generalizado. Operamos:
(A− λI)2 =
1 2 1
0 1 0
−1 −3 −1
2
=
0 1 0
0 1 0
0 −2 0
y después solucionamos la ecuación 0 1 0
0 1 0
0 −2 0
~v = 0.
Escogemos el vector propio generalizado ~v2 de tal manera que éste sea linealmente independientede ~v1, por ejemplo:
~v2 =
1
0
0
Por lo tanto, los dos vectores solución del sistema son:
~x1 = e−2t
1
0
−1
19

y (usando la ecuación (2.4))
~x2 = e−2t
I +
1 2 1
0 1 0
−1 −3 −1
t1
0
0
= e−2t
1 + t
0
−t
Por otro lado, el valor propio λ = −1 tiene multiplicidad algebraica 1 y su vector propiocorrespondiente es
~v3 =
1
1
−2
Tenemos entonces que la solución general del sistema es:
~x∗ = c1e−2t
1
0
−1
+ c2e−2t
1 + t
0
−t
+ c3e−t
1
1
−2
2.4 Flujo y Variedades Invariantes
Sea E es un subconjunto abierto de Rn y sea F ∈ C1(E). Entonces para cada condición inicialX0 ∈ E la ecuación diferencial ordinaria X ′ = F (X) tiene una solución única que denotamospor X(t). Entonces X(0) = X0 y X ′(t) = F (X(t)). El flujo es una función
ϕ : Ω = (t, x0) ∈ R× E : t ∈ I(x0) −→ Rn
de X ′ = F (X), definida porϕ(t,X0) = X(t),
donde I(x0) es el intervalo maximal de existencia. Por lo tanto, las propiedades que definen a ϕson:
ϕ(0, X0) = X0,d
dtϕ(t,X0) = F (ϕ(t,X0)) ∀t.
Luego, para cualquier estado inicial X0 del sistema, el flujo nos indica el estado del sistemadespués de t unidades de tiempo. De hecho, el flujo es una acción de grupo pues, debido a launicidad de la solución, sabemos que
ϕ(0, x) = x, ϕ(t, ϕ(s, x)) = ϕ(t+ s, x). (2.5)
Esto implica que ϕ es siempre invertible y ϕ−1(t, x) = ϕ(−t, x).
Es conveniente representar la solución de una ecuación diferencial ordinaria por medio delflujo. Cuando escribimos X(t) estamos prestando atención a cómo una solución particular
20

depende del tiempo. Por otra parte, cuando escribimos ϕ(t,X0) estamos representando la depen-dencia de todas las soluciones a la condición inicial.
Ejemplo 2.4.1. El sistema diferencial lineal ddt~x = A~x, donde A es una matriz n × n con
entradas reales, define un flujo ϕ : R× Rn −→ Rn dado por
ϕ(t, ~x) = eAt~x.
Note que el intervalo maximal de la solución en el caso lineal corresponde a todo R.
Podemos ahora hablar de espacios invariantes bajo la acción del flujo. Decimos que unsubespacio M de Rn es invariante bajo el flujo si y sólo si ∀x ∈M y ∀t ∈ R, ϕ(t, x) ∈M .
Ejemplo 2.4.2. Considere el cono C ⊂ R3, C = (X, Y, Z) : X2 + Y 2 − Z2 = 0. ¿Bajo quésupuestos se puede garantizar que empezando con una condición inicial (X0, Y0, Z0) ∈ C, elflujo asociado al sistema
d
dt
XYZ
= A
XYZ
va a mantenerse sobre el cono?Cualquier matriz diagonal con valores propios iguales cumple esta condición: SeaF (X, Y, Z) =
X2 + Y 2 − Z2 y sea
A1 =
α 0 0
0 α 0
0 0 α
Entonces
d
dtF (X, Y, Z) = 2(XX ′ + Y Y ′ − ZZ ′)
= 2(αX2 + αY 2 − αZ2)
= 2α(X2 + Y 2 − Z2)
= 0
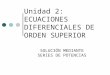
Por lo tanto, el cono es invariante bajo la acción de A1. Esta condición es suficiente, pero no esnecesaria. Por ejemplo, considere el flujo que se muestra en la Figura 2.1.
21

Figura 2.1: Flujo asociado a la matriz A2.
Este flujo corresponde a la matriz
A2 =
1 1 0
−1 1 0
0 0 1
y podemos verificar que mantiene el cono invariante bajo su acción
d
dtF (X, Y, Z) = 2(XX ′ + Y Y ′ − ZZ ′)
= 2(X(X + Y ) + Y (−X + Y )− Z2)
= 2(X2 +XY − Y X + Y 2 − Z2)
= 2(X2 + Y 2 − Z2)
= 0
De hecho, si tenemos un campo vectorial V definido por V (~v) = A~v = α ∂∂X
+ β ∂∂Y
+ γ ∂∂Z
,donde A = (aij) es matriz 3 × 3, podemos hallar una forma general para A que deje el conoinvariante bajo su acción. Para esto debe cumplirse que V F = λF en los puntos donde F = 0.Operamos:
V F = α∂F
∂X+ β
∂F
∂Y+ γ
∂F
∂Z
= 2αX + 2βY − 2γZ
= 2(a11X + a12Y + a13Z)X + 2(a21X + a22Y + a23Z)Y − 2(a31X + a32Y + a33Z)Z
22

Comparando coeficientes de esta última ecuación con λF = λX2 + λY 2 − λZ2 llegamos a lasigualdades
a11 = a22 = a33 = a
a12 = −a21 = b
a13 = a31 = c
a23 = a32 = d
Por lo tanto cualquier matriz de la forma
A2 =
a b c
−b a d
c d a
, (2.6)
mantiene el cono invariante bajo su acción.
Teorema: Si los valores propios de una matriz A de tamaño n × n de coeficientes realesson distintos, entonces podemos descomponer Rn como una suma directa de subespacios unoy dos-dimensionales. Cada uno de estos subespacios es invariante bajo el flujo que defineddt~x = A~x, el cual está dado por ϕ(t, ~x) = eAt~x. En el caso en que A tenga algún valor propio de
multiplicidad mayor que uno, el subespacio fundamental asociado a éste también será invariante,con dimensión igual a su multiplicidad.
Ejemplo 2.4.3. Recordemos que si λk es un valor propio con multiplicidad algebraica nk dealguna matriz A, entonces el espacio propio asociado a λk se define como:
Ek = ~x ∈ Rn : (A− λkI)nk~x = 0.
Los espacios propios Es (espacio estable) asociado a los valores propios de A con partereal negativa, Ec (espacio centro) asociados a los valores propios de A con parte real nula y Eu(espacio inestable) asociados a los valores propios de A con parte real positiva, cumplen que
Rn = Es ⊕ Eu ⊕ Ec.
Además estos espacios son invariantes bajo el flujo de ~x′ = A~x, es decir, cualquier solución concondición inicial en Es, Ec o Eu en el tiempo t = 0, permanece en Es, Ec o Eu respectivamentepara todo t ∈ R.
23

CAPÍTULO 3
SISTEMAS PROYECTIVOS DEFINIDOSA PARTIR DE SISTEMAS LINEALES
3.1 Sistemas de Rn
En esta sección veremos cuáles sistemas en Rn definen un sistema diferencial en Pn−1 y lo queesto significa. Para esto son necesarias unas definiciones primero.
Un sistema dinámico sobre una variedad M es la acción de un campo vectorial V sobre ésta,i.e., un sistema dinámico es
d
dtγ(t) = V (γ(t)),
donde γ(t) son coordenadas en M .
Sea F : N −→M función suave entre variedades. Decimos que un campo vectorial V sobreN está F -relacionado con un campo vectorial W sobre M si para todo p ∈ N ,
dF |pV (p) = W (F (p)).
En particular, estamos interesados en el caso en que F = π : Rn+1 \~0 −→ Pn es la proyec-ción. Luego nos preguntamos, ¿cuál es un campo vectorial sobre Rn+1 que está π-relacionadocon un campo vectorial sobre Pn?
Empezamos exponiendo el siguiente ejemplo.
Ejemplo 3.1.1. Recordemos que en P1 tenemos el sistema de coordenadas
U1 = [X : Y ] : X 6= 0 U2 = [X : Y ] : Y 6= 0
[X : Y ] 7−→ w =Y
X[X : Y ] 7−→ z =
X
Y
24

Considere el campo vectorial W sobre P1 dado por
W = −w2 ∂
∂w+
∂
∂z.
Obtenemos entonces el siguiente sistema diferencial en P1:W |U1 ⇒ w′ = −w2
W |U2 ⇒ z′ = 1
w =1
z
Nos preguntamos ahora si este sistema diferencial definido en la recta proyectiva viene dado poralgún sistema en R2. Para hallar esto operamos:
1 = z′ =
(X
Y
)′=X ′Y −XY ′
Y 2=X ′
Y− X
Y
Y ′
Y
Esta ecuación se cumple si X ′ = Y y Y ′ = 0. Así que tenemos que el sistema diferencialdescrito en P1 viene definido por el sistema diferencial en R2:
X ′ = Y
Y ′ = 0
el cual corresponde al campo vectorial V sobre R2 dado por
V = Y∂
∂X+ 0
∂
∂Y.
Es fácil ver que los campos vectoriales V y W están π-relacionados.
Esto nos hace preguntarnos ¿cuándo un sistema en R2 nos define un sistema en P1? Oequivalentemente, ¿qué condiciones tienen que cumplir P (X, Y ), Q(X, Y ), R(w, z) y S(w, z)
en
V = P (X, Y )∂
∂X+Q(X, Y )
∂
∂Y
W = R(w, z)∂
∂w+ S(w, z)
∂
∂z
para que los campos vectoriales V y W , definidos sobre R2 y P1 respectivamente, esténπ-relacionados?
Si [X : Y ] es solución al sistema dado por el campo vectorial V , entonces [λX : λY ] tambiéndebe ser solución para todo λ 6= 0. Como las coordenadas homogéneas no están unívocamentedeterminadas por un punto, las funciones P (X, Y ) y Q(X, Y ) deben ser homogéneas. Por otrolado, como queremos que V y W estén π-relacionados, obtenemos las relaciones:
25

En U1
dπV =
[−YX2
1
X
][P (X, Y )
Q(x, Y )
]
= −Y P (X, Y )
X2+Q(X, Y )
X= R(w, z)
En U2
dπV =
[1
Y
−XY 2
] [P (X, Y )
Q(x, Y )
]
=P (X, Y )
Y− XQ(X, Y )
Y 2= S(w, z)
Estas dos relaciones llevan az2R(w, z) = −S(w, z).
Este mismo argumento se puede generalizar para sistemas lineales de primer orden definidosen Rn.
3.2 Sistemas en Pn
Ya vimos cuándo un sistema diferencial en Rn me define un sistema en Pn−1. Ahora queremosver qué tipo de sistema obtenemos en el espacio proyectivo a partir de dicho sistema lineal en elespacio euclídeo n-dimensional. Empezamos con el caso n = 2. Para esto, considere el siguientesistema en R2. [
X1
X2
]′=
[a b
c d
][X1
X2
](3.1)
En coordenadas homogéneas, si X2 6= 0, hacemos el cambio de variable x1 = X1
X2, obte-
niendo:
x′1 =X ′1X2 −X1X
′2
X22
=X ′1X2
X22
− X1X′2
X22
=X ′1X2
X2
X2
− X1
X2
X ′2X2
=aX1 + bX2
X2
− x1cX1 + dX2
X2
= ax1 + b− x1 (cx1 + d)
Análogamente, si X1 6= 0, la sustitución x2 = X2
X1da como resultado la ecuación diferencial
x′2 = −bx22 + (d− a)x2 + c. De forma general, el sistema ~X ′ = A ~X , con A = (aij) matriz2× 2 define el siguiente sistema diferencial cuadrático en P1:
x′i = −a2ji + (aii − ajj)xi + aij i, j ∈ 1, 2, i 6= j (3.2)
26

Ejemplo 3.2.1. Un caso particular de este tipo de ecuaciones es la conocida ecuación logística,la cual define un modelo para el crecimineto poblacional, dada por
dP
dt= rP
(1− P
K
)o bien,
P ′ = − r
KP 2 + rP (3.3)
Esta ecuación cuadrática (vista en P1) sería un caso particular de (3.2), con a21 = rK
,(a11 − a22) = r y b = 0. Es decir, la ecuación logística vendría definida del sistema diferencialen R2 dado por [
X
Y
]′=
[a 0rK
a− r
][X
Y
]haciendo la sustitución P = X
Y.
Solucionar este sistema es más fácil que solucionar (3.3) directamente y, mediante la susti-tución indicada, encontramos la solución de la ecuación logística. Para solucionar el sistemadebemos hallar los valores y vectores propios de la matriz correspondinte. Los valores propios
son λ1 = a y λ2 = a − r, y sus vectores propios respectivamente son v1 =
[11K
]y v2 =
[0
1
].
Por lo tanto la solución está dada por[X
Y
]= C1e
at
[11K
]+ C2e
(a−r)t
[0
1
]=
[C1e
at
C1
Keat + C2e
(a−r)t
]
Luego, la solución a la ecuación logística es
P =X
Y=
C1eat
C1
Keat + C2e(a−r)t
=C1e
at
eat(C1
K+ C2e−rt
) =CK
C +Ke−rt, (3.4)
donde C = C1/C2.Para ver la dependencia de esta solución a una condición inicial P (t = 0) = P0, reemplazamosesta ecuación en (3.4) y obtenemos:
P (t = 0) = P0 =⇒ P0 =CK
C +K=⇒ C =
KP0
K − P0
.
Por lo tanto el flujo asociado a la ecuación logística (3.3) con condición inicial P (0) = P0 es
ϕ(t, P0) =
KP0
K − P0
K
KP0
K − P0
+Ke−rt=
KP0
P0 + (K − P0)e−rt.
27

Veamos que se satisfacen las propiedades (2.5) de una acción de grupo.
ϕ(0, P0) =KP0
P0 + (K − P0)= P0,
ϕ(t, ϕ(s, P0)) = ϕ
(t,
KP0
P0 + (K − P0)e−rt
)
=
KKP0
P0 + (K − P0)e−rs
KP0
P0 + (K − P0)e−rs+
(K − KP0
P0 + (K − P0)e−rs
)e−rt
=KP0
P0 + (P0 + (K − P0)e−rs − P0)e−rt
=KP0
P0 + (K − P0)e−r(t+s)
= ϕ(t+ s, P0).
Ahora analicemos el caso n = 3. Considere el siguiente sistema dinámico lineal en R3 :XYZ
′
=
a1 b1 c1
a2 b2 c2
a3 b3 c3
XYZ
Para Z 6= 0 realizamos el siguiente cambio de variable
x =X
Z, y =
Y
Z
y obtenemos para x
x′ =X ′Z −XZ ′
Z2=X ′
Z− X
Z
Z ′
Z
=a1X + b1Y + c1Z
Z− x
(a3X + b3Y + c3Z
Z
)= a1x+ b1y + c1 − x (a3x+ b3y + c3)
Y para y
y′ =Y ′Z − Y Z ′
Z2=Y ′
Z− Y
Z
Z ′
Z
=a2X + b2Y + c2Z
Z− y
(a3X + b3Y + c3Z
Z
)= a2x+ b2y + c2 − y (a3x+ b3y + c3)
Obteniendo el sistema diferencial en P2x′ = a1x+ b1y + c1 − x (a3x+ b3y + c3)
y′ = a2x+ b2y + c2 − y (a3x+ b3y + c3)(3.5)
28

Veamos dos ejemplos que ilustran cómo hallar la solución exacta a una ecuación diferencialcuadrática de este tipo.
Ejemplo 3.2.2. En el Ejemplo 2.3.2 vimos que el sistemaXYZ
′
=
−1 2 1
0 −1 0
−1 −3 −3
XYZ
tiene solución
XYZ
= c1e−2t
1
0
−1
+ c2e−2t
1 + t
0
−t
+ c3e−t
1
1
−2
=
(c1 + c2 + c2t) e−2t + c3e
−t
c3e−t
− (c1 + c2t) e−2t − 2c3e
−t
En coordenadas homogéneas, tomando el caso cuando z 6= 0, realizamos el cambio de
variable x = XZ
, y = YZ
y tenemos que este sistema define en P2 el siguiente sistema deecuaciones:
x′ = −x+ 2y + 1− x(−x− 3y − 3)
y′ = −y − y(−x− 3y − 3)
o equivalentemente x′ = x2 + 3xy + 2x+ 2y + 1
y′ = 3y2 + xy + 2y
Como sabemos de qué sistema provienen, podemos concluir que las soluciones a este sistemaestán dadas por:
x =X
Z=− (c1 + c2 + c2t) e
−2t + c3e−t
(c1 + c2t) e−2t + 2c3e−t
y =Y
Z=
−c3e−t
(c1 + c2t) e−2t + 2c3e−t
Ejemplo 3.2.3. En el Ejemplo 2.3.1 vimos que el sistema
29

XYZ
′
=
−3 0 2
1 −1 0
−2 −1 0
XYZ
tiene solución
c1~x1(t) + c2~x2(t) + c3~x3(t)
donde
~x1(t) = e−2t
2
−2
1
~x2(t) = e−t cos(√
2t)
2
−1
3
− e−t sin(√
2t)
−√
2
−√
2
0
~x3(t) = e−t cos(√
2t)
−√
2
−√
2
0
+ e−t sin(√
2t)
2
−1
3
Cuando Z 6= 0, hacemos el cambio de variable x = X
Z, y = Y
Zy tenemos que este sistema
define el siguiente sistema de ecuaciones en P2:x′ = −3x+ 2− x(−2x− y)
y′ = x− y − y(−2x− y)
o equivalentemente x′ = 2x2 + xy − 3x+ 2
y′ = y2 + 2xy + x− y
Las soluciones a este sistema son son
x =X
Z=k1e−2t + k2e
−t cos(√
2t) + k3e−t sin(
√2)t
k4e−2t + k5e−t cos(√
2t) + k6e−t sin(√
2t)
y =Y
Z=k7e−2t + k8e
−t cos(√
2t) + k9e−t sin(
√2)t
k4e−2t + k5e−t cos(√
2t) + k6e−t sin(√
2t)
donde los ki, i = 1, . . . , 9 son constantes que dependen de los cj , j = 1, 2, 3.
30

Entonces, se tiene que para cualquier sistema diferencial de la forma (3.5), se puede encontraruna solución exacta, pues éste proviene de un sistema lineal de primer orden en R3.
Este mismo argumento se puede generalizar para Rn. Dado el siguiente sistema dinámicolineal de primer orden
X1
X2
...Xn
′
=
a11 a12 . . . a1n
a21 a22 . . . a2n...
... . . . ...an1 an2 . . . ann
X1
X2
...Xn
Cuando Xj 6= 0, podemos hacer el cambio de coordenadas
xi =Xi
Xj
, i 6= j
En consecuencia
x′i =X ′iXj −XiX
′j
X2j
=X ′iXj
− Xi
Xj
X ′jXj
=ai1X1 + ai2X2 + · · ·+ ainXn
Xj
− xi(aj1X1 + aj2X2 + · · ·+ ajnXn
Xj
)Finalmente, obtenemos el sistema
x′i = ai1x1 + ai2x2 + . . . ainxn − xi (aj1x1 + aj2x2 + · · ·+ ajnxn) , i 6= j.
Este tipo de sistemas cuadráticos no son los únicos que surgen de un sistema lineal en R3.Por ejemplo considere el cono C ⊆ R3 dado por C = (X, Y, Z) ∈ R3 : X2 + Y 2 − Z2 = 0,y sobre éste considere un sistema linealXY
Z
′
=
a1 b1 c1
a2 b2 c2
a3 b3 c3
XYZ
el cual deja al cono invariante bajo su flujo, es decir,
[X Y Z
]′ a1 b1 c1
a2 b2 c2
a3 b3 c3
XYZ
= 0.
En coordenadas homogéneas, tomando Z 6= 0, podemos hacer el cambio de variable x = XZ
,y = Y
Zy obtenemos el sistema diferencial en P2 descrito en (3.5). Si fijamos Z en un valor
31

diferente de 0, podemos reescribir la ecuación sometida al círculo x2+y2 = 1. Entonces tenemosun sistema dinámico en x y y, junto con una relación entre las dos variables, y = ±
√1− x2.
Positivo si nos encontramos en la parte superior del cono; negativo si estamos en la parte inferior.En cualquiera de estos dos casos, podemos escribir un sistema dinámico sólo en términos de x(o sólo en términos de y) así:
x′ =
(X
Z
)′=X ′
Z− xZ
′
Z
=a1X + b1Y + c1Z
Z− xa3X + b3Y + c3Z
Z
= a1x+ b1y + c1 − x(a3x+ b3y + c3)
= a1x+ b1√
1− x2 + c1 − x(a3x+ b3√
1− x2 + c3).
Por lo tanto, obtenemos el sistema de dimensión 1
x′ = a1x+ b1√
1− x2 + c1 − x(a3x+ b3√
1− x2 + c3), (3.6)
el cual involucra raíces cuadradas, entonces ya no es polinomial, pero podemos determinar cuáles la solución a dicho sistema.
Ejemplo 3.2.4. En el Ejemplo 2.4.2 vimos que el flujo asociado a cualquier matriz de la forma(2.6) deja el cono invariante bajo su acción. Tome en particular la matriz 1 1 1
−1 1 1
1 1 1
Luego, partiendo del sistema linealXY
Z
′
=
1 1 1
−1 1 1
1 1 1
XYZ
, (3.7)
haciendo el cambio de variable x = XZ
y y = YZ
, y restringiendo la ecuación al círculo x2+y2 = 1,si reemplazamos valores en el sistema (3.6), obtenemos la ecuación diferencial
x′ = x+√
1− x2 + 1− x(x+√
1− x2 + 1).
Expandiendo y organizando términos, la ecuación resultante es
x′ = −x2 − x√
1− x2 +√
1− x2 + 1 (3.8)
32

Los valores propios de la matriz del sistema lineal (3.7) son λ1 = 2, λ2 = 1 y λ3 = 0. Susrespectivos vectores propios son:
~v1 =
1
0
1
, ~v2 =
1
−1
1
, ~v3 =
0
−1
1
Por lo tanto, la solución general a (3.7) está dada por:XY
Z
= C1e2t
1
0
1
+ C2et
1
−1
1
+ C3
0
−1
1
=
C1e2t + C2e
t
−C2et − C3
C1e2t + C2e
t + C3
.De la relación x2 + y2 = 1 obtenemos
(C1e2t + C2e
t)2
(C1e2t + C2et + C3)2+
(−C2et − C3)
2
(C1e2t + C2et + C3)2= 1,
o bien(C1e
2t + C2et)2 + (−C2e
t − C3)2 = (C1e
2t + C2et + C3)
2.
Expandiento términos y comparando coeficientes obtenemos la relación:
C22 = 2C1C3 (3.9)
Por lo tanto, la solución general x a la ecuación (3.8) es
x =C1e
2t + C2et
C1e2t + C2et + C3
,
donde C1, C2 y C3 cumplen la relación (3.9). Reemplazando C3 =C2
2
2C1
y tomando C =C2
C1
,
podemos escribir la solución de la forma
x(t) =1 + Ce−t
1 + Ce−t + 12(Ce−t)2
. (3.10)
Para ver la dependencia de esta solución a una condición inicial x(t = 0) = x0, es convenientetrabajar en un sistema de coordenadas (U, V,W ) en el cual el flujo sea más sencillo. Para esto,realizamos el cambio de coordenadas
X = U + V, Y = −V −W, Z = U + V +W.
La solución al sistema lineal (3.7) escrito en las nuevas coordenadas quedaUVW
=
e2t 0 0
0 et 0
0 0 1
C1
C2
C3
33

Las ecuación a resolver ahora viene dada de
x =X
Z=
U + V
U + V +W
y =Y
Z=−V −WU + V +W
.
Sometido al círculo, debe satisfacerse x2 + y2 = 1, o bien
(U + V )2 + (−V −W )2 = 1,
de donde obtenemos la relaciónV 2 = 2UW,
la cual es coherente con la ecuación (3.9).
El flujo asociado a este sistema se obtiene sólo multiplicando por un factor de e−t, entoncessi empezamos con un punto inicial P0 dado por
P0 = [C1 : C2 : C3] = [1 : C :1
2C2],
el flujo vendría dado por
ϕt(P0) = [1 : Ce−t :1
2(Ce−t)2].
De la ecuación (3.10) obtenemos:
x(t = 0) = x0 =⇒ 1 + C
1 + C + 12C2
= x0, (3.11)
o bien,x02C2 + (x0 − 1)C + (x0 − 1) = 0,
lo cual corresponde a una ecuación cuadrática en C. La solución está dada por:
C =(1− x0)±
√1− x20
x0. (3.12)
Comparando las ecuaciones (3.10) y (3.11), observamos que la primera de ellas es una cuadráticaen Ce−t, por lo que su solución está dada por
Ce−t =1− xt +
√1− x2t
xt,
donde xt = ϕt(x0). A partir de esta ecuación, obtenemos la identidad
1− x0 +√
1− x20x0
e−t =1− xt +
√1− x2t
xt. (3.13)
34

Esta identidad nos permite comprobar con facilidad que el flujo asociado a la ecuación (3.8)satisface las propiedades (2.5) de una acción de grupo, pues tenemos:
ϕ(s, ϕ(t, x0)) =
1 + e−s
((1− xt) +
√1− x2t
xt
)
1 + e−s
((1− xt) +
√1− x2t
xt
)+
1
2
(e−s
(1− xt) +√
1− x2txt
)2
=1 + e−s(e−tC)
1 + e−s(e−tC) +1
2(e−se−tC)2
=1 + e−(s+t)C
1 + e−(s+t)C +1
2(e−(s+t)C)2
= ϕ(s+ t, x0).
35

CAPÍTULO 4
EDOs LINEALES DE SEGUNDOORDEN Y LA ECUACIÓN DE RICCATI
Empezamos con la ecuación diferencial de segundo orden
y′′(z) + a(z)y′(z) + b(z)y(z) = 0 (4.1)
donde a(z), b(z) ∈ C(z), i.e., son funciones racionales con coeficientes complejos.
Sean y1(z) y y2(z) dos soluciones linealmente independientes de (4.1) sobre C. Definimos elmapa w(z), el cual va desde un conjunto abierto donde pertence la solución al espacio proyectivo1−dimensional, donde a z se envía al punto con coordenadas homogéneas [y1(z) : y2(z)], estoes:
w : U ⊆ C −→ P1(C)
z 7−→ [y1(z) : y2(z)]
Lo que se obtiene es una parametrización de este espacio, lo cual es similar a lo trabajadoen secciones anteriores. La diferencia radica en el origen del mapa. Ahora [y1(z) : y2(z)]
corresponde a tomar la razón entre dos soluciones linealmente independientes y asignarla a unacoordenada del mapa; antes, esto correspondía a tomar la razón entre dos coordenadas de lasolución.
Veamos qué ecuación satisface w si tenemos el sistema lineal de ecuaciones diferenciales[y1
y2
]′= A(z)
[y1
y2
]con
A(z) =
[a11(z) a12(z)
a21(z) a22(z)
].
36

Luego, obtenemos
w′(z) =
(y2(z)
y1(z)
)′=y′2(z)
y1(z)− w(z)
y′1(z)
y1(z)
=a21(z)y1(z) + a22(z)y2(z)
y1(z)− w(z)
a11(z)y1(z) + a12(z)y2(z)
y1(z)
= a21(z) + a22(z)w(z)− a11(z)w(z)− a12(z)w2(z)
Por lo tanto, la ecuación de Riccati asociada a w(z) = y2(z)/y1(z) es:
w′(z) = a21(z) + (a22(z)− a11(z))w(z)− a12(z)w2(z) (4.2)
La teoría clásica de la ecuación de Riccati resulta ser un caso particular notando que la ecuacióndiferencial de segundo orden (4.1) se puede ver como un sistema matricial 2× 2 de la siguienteforma: [
y
y′
]′=
[0 1
−b(z) −a(z)
][y
y′
]En este sentido, estaríamos empezando con la ecuación diferencial X ′ = A(z)X , donde
A(z) =
[0 1
−b(z) −a(z)
]lo cual se asemeja mucho a un sistema dinámico lineal, pero con dependencia de z. La ecuaciónclásica de Riccati asociada a este sistema en particular es
w′(z) = −b(z)− a(z)w(z)− w2(z) (4.3)
Entonces tenemos la relación entre las ecuaciones diferenciales (4.1) y (4.3). Solucionar (4.3), oal menos encontrar las soluciones algebraicas, es más fácil.
Teorema: La solución general de una ecuación diferencial es una función racional lineal(transformación de Möbius) de una constante arbitraria si y sólo si dicha ecuación es una ecuaciónde Riccati.Demostración: Primero suponga que la solución w(z) de una ecuación diferencial resulta deaplicar una transformación de Möbius a una constante arbitraria K, es decir, w(z) tiene la forma
w(z) =KA(z) +B(z)
KC(z) +D(z), (4.4)
donde A(z), B(z), C(z) y D(z) son funciones analíticas de z.Si despejamos la constante K de la ecuación (4.4) obtenemos
K =B(z)− w(z)D(z)
w(z)C(z)− A(z). (4.5)
37

Derivando ambos lados de (4.5) con respecto a z, y tomando w = w(z), A = A(z), B = B(z),C = C(z) y D = D(z) resulta
w′(AD −BC) =− w2(C ′D − CD′)
− w(B′C − A′D − C ′B +D′A)
− (A′B − AB′);
es decir, se obtiene una ecuación de Riccati.
Por otro lado, suponga que tenemos una ecuación de Riccati de la forma
w′(z) = p(z) + q(z)w(z) + r(z)w(z)2, (4.6)
y sea w1(z) una solución particular conocida de (4.6), es decir,
w′1(z) = p(z) + q(z)w1(z) + r(z)w21(z).
Haciendo la tranformación de la variable dependiente
w(z) = w1(z) +1
v(z), (4.7)
tenemos
w′(z) = w′1(z)− 1
v2(z)v′(z)
= p(z) + q(z)w1(z) + r(z)w21(z)− 1
v2(z)v′(z). (4.8)
Por otro lado, (4.6) lleva a
w′(z) = p(z) + q(z)w(z) + r(z)w(z)2
= p(z) + q(z)
(w1(z) +
1
v(z)
)+ r(z)
(w1(z) +
1
v(z)
)2
. (4.9)
Igualando (4.8) y (4.9) obtenemos
− 1
v2(z)v′(z) = r(z)
1
v2(z)+ 2w1(z)r(z)
1
v(z)+ q(z)
1
v(z),
simplificando esta última ecuación llegamos a
v′(z) + (q(z) + 2w1(z)r(z))v = −r(z), (4.10)
la cual es una ecuación lineal en v(z). Su solución general se puede encontrar integrando dosveces y tiene la forma
v(z) = Kφ(z) + ψ(z), (4.11)
38

donde K es una constante arbitraria.Por lo tanto, de (4.7) y (4.11) podemos concluir
w(z) = w1 +1
Kφ(z) + ψ(z)
=Kw1(z)φ(z) + w1(z)ψ(z) + 1
Kφ(z) + ψ(z),
es decir, la solución general de una ecuación de Riccati es una función racional lineal de unaconstante arbitraria.
39

REFERENCIAS
[1] Einar Hille. Ordinary Differential Equations in the Complex Domain. John Wiley & Sons(1976).
[2] Lawrence Perko. Differential Equations and Dynamical Systems. Third edition. Springer-Verlag (2001).
[3] Morris W. Hirsch, Stephen Smale and Robert L. Devaney. Differential Equations, Dy-
namical Systems & an Introduction to Chaos. Second edition. Elsevier Academic Press(1974).
[4] Robert Hartshorne. Foundations of Projective Geometry. Irish Press International (1967).
[5] Loring W. Tu. An Introduction to Manifolds. Second edition. Springer New York (2007).
40