Embed Size (px)
Citation preview

1
Mẫu PL1a:
TRƯỜNG ĐẠI HỌC CÔNG NGHIỆP THÀNH PHỐ HỒ CHÍ MINH
KHOA CÔNG NGHỆ ĐIỆN TỬ
Bộ môn: Tự động
DANH MỤC ĐỀ TÀI KHOÁ LUẬN TỐT NGHIỆP
TT Họ và tên
người hướng
dẫn
Hướng đề
tài
Tên đề tài (dự kiến) Mô tả vắn tắt về tính cần thiết, mục tiêu, kết quả cần đạt Nơi thực
hiện đề tài
Ghi chú (Đồ án/Báo cáo TN,
Số lượng sinh viên)
1 Trần Nguyên
Bảo Trân
IoT, Nông
nghiệp thông
minh
Giám sát, điều khiển tự
động tưới nước và chăm
sóc cây trồng bằng
ĐTDĐ
+ Thiết bị chăm sóc cây trồng tự động giúp cho người bận
rộn có thể theo dõi tình trạng cây trồng qua ĐTDĐ. Người
dùng có thể biết được và điểu khiển được độ ẩm của đất,
nhiệt độ, độ phủ sáng, cây cần tưới nước hay không?
+ Nội dung cần thực hiện:
- Đo, hiển thị, lưu giá trị, vẽ đồ thị theo thời gian các thông
số: Độ ẩm của đất, độ pH của đất, nhiệt độ môi trường….
- Mô hình hóa đối tượng và sử dụng các luật điều khiển để
điều khiển máy bơm bổ sung nước, phân bón, phân vi sinh
vào đất nhằm hiệu chỉnh chính xác độ ẩm (đặt giá trị cụ thể
hoặc đặt tầm giá trị cho phép), độ pH (đặt tầm giá trị) như
mong muốn.
- Điều khiển mái che, máy bơm phun sương để điều chỉnh độ
phủ sáng và nhiệt độ môi trường nhằm đạt được điều kiện tối
ưu cho cây trồng phát triển (đặt trước tầm giá trị theo yêu cầu
của từng loại cây cụ thể).
- Tất cả các thông tin từ các cảm biến được đưa về bộ điều
khiển xử lý và gửi vào phần mềm trên ĐTDĐ. Các thông tin
này sẽ được lưu trữ, hiển thị v.v… Đồng thời, người dùng có
thể giám sát và ra lệnh điều khiển các thiết bị chấp hành trực
1. Nguyễn Nhật Tân
MSV: 15031301
2. Nguyễn Lê Vĩnh Thoại
MSV: 15026401

2
tiếp qua phần mềm.
- Giám sát sân vườn, cây trồng qua camera online.
2 Trần Nguyên
Bảo Trân IoT, Nông
nghiệp thông
minh
Giám sát, điều khiển hệ
thống trồng cây, nuôi cá
Aquaponics qua ĐTDĐ.
Thiết bị giám sát, điều khiển hoạt động của hệ thống
Aquaponics tự động qua ĐTDĐ dành cho người bận rộn.
Người dùng có thể biết được và hiệu chỉnh được mật độ Oxy
trong nước, độ pH, độ kiềm, nồng độ các chất dinh dưỡng
cần thiết cho cây trồng và cá nuôi, hoạt động của các máy
bơm .v.v…
+ Nội dung cần thực hiện:
- Đo, hiển thị, lưu giá trị, vẽ đồ thị theo thời gian 5 thông số
chất lượng nước quan trọng trong hệ aquaponics: Độ oxy hòa
tan, độ pH của dung dịch, nhiệt độ nước, nồng độ amoniac và
nitrit, độ cứng của nước.
- Mô hình toán hóa rồi dùng luật điều khiển vòng kín để điều
khiển máy bơm, máy sủi khí và các van để bổ sung nước,
dung dịch dinh dưỡng, các chất cần thiết khác vào nước
nhằm điều chỉnh chính xác các thông số (đặt giá trị cụ thể
hoặc đặt tầm giá trị cho phép) như mong muốn.
- Tất cả các thông tin từ các cảm biến được đưa về bộ điều
khiển xử lý và gửi vào phần mềm trên ĐTDĐ. Các thông tin
này sẽ được lưu trữ, hiển thị v.v… Đồng thời, người dùng có
thể giám sát và ra lệnh điều khiển các thiết bị chấp hành trực
tiếp qua phần mềm.
- Giám sát hệ trực tiếp qua camera online.
1. Hồ Võ Đăng Khoa
MSV: 15059141
2. Nguyễn Bá Duy Khoa
MSV: 15062751
3 Trần Nguyên
Bảo Trân IoT, nông
nghiệp thông
minh
Giám sát, điều khiển hệ
thống trồng cây thủy
canh qua ĐTDĐ
Thiết bị giám sát, điều khiển hoạt động của hệ thống thủy
canh tự động qua ĐTDĐ dành cho người bận rộn. Người
dùng có thể biết được và hiệu chỉnh các thông số quan trọng
của dung dịch thủy canh, nồng độ các chất dinh dưỡng cần
thiết cho cây trồng, hoạt động của các máy bơm.v.v…
+ Nội dung cần thực hiện:
1. Nguyễn Tấn Đạt
MSV: 15044801
2. Nguyễn Minh Nhật
MSV: 15045571

3
- Đo, hiển thị, lưu giá trị, vẽ đồ thị theo thời gian 3 thông số
quan trọng của dung dịch thủy canh: độ pH của dung dịch, độ
dẫn điện EC và tổng chất rắn hòa tan TDS.
- Dùng luật điều khiển vòng kín để điều khiển máy bơm và
các van để bổ sung cân bằng các thông số của dung dịch thủy
canh để đạt được chính xác các thông số (đặt giá trị cụ thể
hoặc đặt tầm giá trị cho phép) như mong muốn.
- Điều khiển mái che, máy bơm phun sương để điều chỉnh độ
phủ sáng và nhiệt độ môi trường nhằm đạt được điều kiện tối
ưu cho cây trồng phát triển (đặt trước tầm giá trị theo yêu cầu
của từng loại cây cụ thể).
- Tất cả các thông tin từ các cảm biến được đưa về bộ điều
khiển xử lý và gửi vào phần mềm trên ĐTDĐ. Các thông tin
này sẽ được lưu trữ, hiển thị v.v… Đồng thời, người dùng có
thể giám sát và ra lệnh điều khiển các thiết bị chấp hành trực
tiếp qua phần mềm.
4 Trần Nguyên
Bảo Trân IoT, thiết bị
thông minh
Thiết kế hệ thống phơi,
sấy quần áo tự động,
điều khiển giám sát qua
điện thoại di động
Thiết bị phơi sấy quần áo sau khi giặt tự động, sử dụng được
trong mọi điều kiện thời tiết, đảm bảo quần áo không bị ẩm
mốc, có mùi hôi. Người dùng có thể theo dõi và điều khiển
được từng quá trình hoạt động của thiết bị qua ĐTDĐ.
+ Nội dung cần thực hiện:
- Thiết kế cơ khí dàn phơi quần áo tự động (phơi dưới nắng
mặt trời), và tủ sấy, lưu quần áo sau khi phơi.
- Đo lường các thông tin độ ẩm của quần áo, nhiệt độ, độ ẩm
của môi trường để áp dụng các luật điều khiển vòng vào mô
hình đối lưu không khí trong tủ sấy, lưu quần áo giúp quần áo
không bị ẩm và có mùi hôi mốc. (Mô hình hóa nhiệt độ và độ
ẩm trong tủ sấy lưu)
- Đo, hiển thị, lưu giá trị, vẽ đồ thị theo thời gian các thông
tin nhiệt độ, độ ẩm và các thông tin khác cần thiết để người
dùng chủ động giám sát và điều khiển quá trình hoạt động
1. Trương Nguyễn Hồng Quân
MSV: 15020581
2. Nguyễn Duy Phương
MSV: 15019411

4
của thiết bị thông qua ĐTDĐ.
5 Trần Nguyên
Bảo Trân IoT, Năng
lượng sạch
Giám sát, điều khiển hệ
thống pin năng lượng
mặt trời gắn trên cửa sổ
tòa nhà qua ĐTDĐ.
Thiết bị đo đạc và xoay các bản pin năng lượng mặt trời gắn
trên cửa sổ các tòa nhà để có thể thu được năng lượng tối ưu
nhất, cũng như hiệu quả thông thoáng nhất cho người sử
dụng.
+ Nội dung cần thực hiện:
- Thiết kế cơ khí hệ thống đỡ tấm pin năng lượng mặt trời và
hệ thống xoay tấm pin theo các góc độ thích hợp của cửa sổ
để vừa đạt yếu tố thẩm mỹ, vừa thu được mức năng lượng tối
ưu nhất.
- Mô hình hóa và áp dụng các luật điều khiển để điều khiển vị
trí góc xoay của hệ thống đỡ tấm pin.
- Người dùng có thể giám sát và điều khiển tự động hoặc
bằng tay hệ thống thông qua phần mềm trên ĐTDĐ.
- Phần mềm còn lưu trữ và hiển thị theo thời gian các thông
số cần thiết để có thể đưa ra luật điều khiển tối ưu nhất cho
hệ thống.
1. Nguyễn Minh Thành
MSV: 15044101
2. Lê Thái Tài
MSV: 15044311
6 Trần Nguyên
Bảo Trân IoT, thiết bị
thông minh
Giám sát, điều khiển các
thiết bị trong phòng học
tầng 9 nhà D trường
IUH.
Hệ thống giám sát, điều khiển và thu thập dữ liệu các thông
số như nhiệt độ phòng, mật độ sử dụng phòng, thời gian sử
dụng phòng chi tiết.v.v.. Chương trình chạy trên máy tính
giúp vận hành thiết bị và phòng học tối ưu nhất, hiệu quả
nhất.
+ Nội dung cần thực hiện:
- Giám sát hoạt động của phòng học.
- Điều khiển on/off các thiết bị trong phòng học như nguồn
cho máy chiếu, hệ thống loa, nguồn cho quạt, máy lạnh.
- Mô hình hóa đối tượng nhiệt độ phòng và áp dụng các luật
điều khiển để thực hiện điều khiển luồng không khí đối lưu
giúp duy trì ổn định nhiệt độ phòng ở mức đặt trước (mức
1. Nguyễn Đông Đô
MSV: 15087481
2. Huỳnh Đức Đạt
MSV: 15074741

5
nhiệt độ mà người trong phòng cảm thấy thoải mái nhất cho
hoạt động học tập).
- Mô hình hóa độ chiếu sáng trong phòng và áp dụng các luật
điều khiển để thực hiện điều khiển các nguồn sáng giúp duy
trì ổn định độ sáng yêu cầu không gây hại cho mắt người học.
- Thực hiện các luật điều khiển cần thiết để tối ưu hóa năng
lượng sử dụng, nhằm tiết kiệm điện năng.
- Tất cả các thông tin, dữ liệu cần thiết đề được lưu trữ, hiển
thị trên máy tính cho từng phòng riêng biệt trong dãy lầu để
người dùng có thể giám sát và điều khiển hoạt động.
7 Mai Thăng
Long
Điều khiển -
ứng dụng
Thiết kế, xây dựng hệ
máy phay mạch in 2D
- Thiết kế mô hình máy phay mạch in 2D
- Thiết kế các mạch điện tử trong mô hình.
- Mô phỏng hoạt động chính – điều khiển 2 trục bằng động
cơ bước.
- Thi công lắp đặt mô hình mẫu máy phay mạch in.
- Lập trình firmware cho máy và xây dựng phần mềm giao
tiếp máy tính
- Kiểm tra hoạt động của máy và đánh giá.
Mai Thăng
Long
2 sinh viên/Báo cáo TN/Đồ án
TN
8 Mai Thăng
Long
Điều khiển -
ứng dụng
Thiết kế, xây dựng máy
CNC 3D
- Thiết kế mô hình máy CNC 3D
- Thiết kế các mạch điện tử trong mô hình.
- Mô phỏng hoạt động chính – điều khiển 3 trục bằng động
cơ bước.
- Thi công lắp đặt mô hình mẫu máy phay 3D.
- Lập trình firmware cho máy và xây dựng phần mềm giao
tiếp máy tính
- Kiểm tra hoạt động của máy và đánh giá.
Mai Thăng
Long
2 sinh viên/Đồ án TN/ Báo cáo
TN
9 Mai Thăng
Long
Điều khiển
thông minh
Điều khiển xe hai bánh
tự cân bằng bám theo
Tìm hiểu mô hình động lực học của xe hai bánh tự cân bằng
và thuật toán xử lý ảnh để nhận dạng mục tiêu và quy hoạch
Mai Thăng
Long
2 sinh viên/Đồ án TN/ Báo cáo
TN
6
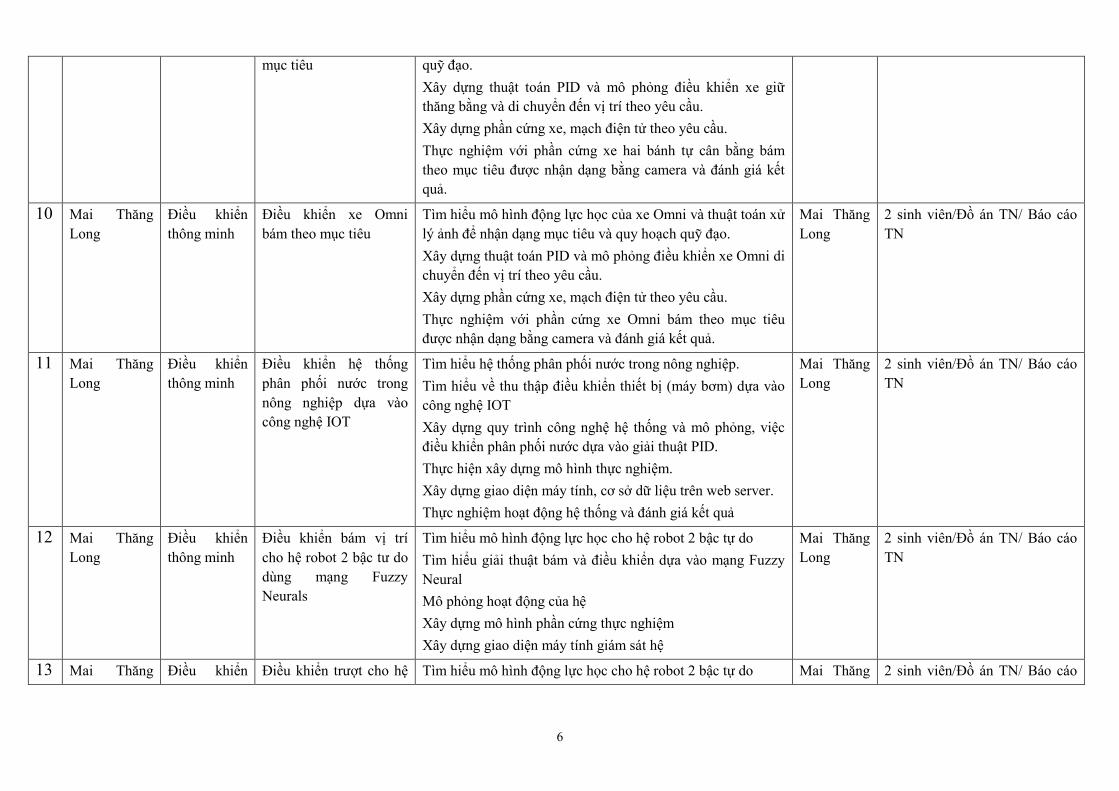
mục tiêu quỹ đạo.
Xây dựng thuật toán PID và mô phỏng điều khiển xe giữ
thăng bằng và di chuyển đến vị trí theo yêu cầu.
Xây dựng phần cứng xe, mạch điện tử theo yêu cầu.
Thực nghiệm với phần cứng xe hai bánh tự cân bằng bám
theo mục tiêu được nhận dạng bằng camera và đánh giá kết
quả.
10 Mai Thăng
Long
Điều khiển
thông minh
Điều khiển xe Omni
bám theo mục tiêu
Tìm hiểu mô hình động lực học của xe Omni và thuật toán xử
lý ảnh để nhận dạng mục tiêu và quy hoạch quỹ đạo.
Xây dựng thuật toán PID và mô phỏng điều khiển xe Omni di
chuyển đến vị trí theo yêu cầu.
Xây dựng phần cứng xe, mạch điện tử theo yêu cầu.
Thực nghiệm với phần cứng xe Omni bám theo mục tiêu
được nhận dạng bằng camera và đánh giá kết quả.
Mai Thăng
Long
2 sinh viên/Đồ án TN/ Báo cáo
TN
11 Mai Thăng
Long
Điều khiển
thông minh
Điều khiển hệ thống
phân phối nước trong
nông nghiệp dựa vào
công nghệ IOT
Tìm hiểu hệ thống phân phối nước trong nông nghiệp.
Tìm hiểu về thu thập điều khiển thiết bị (máy bơm) dựa vào
công nghệ IOT
Xây dựng quy trình công nghệ hệ thống và mô phỏng, việc
điều khiển phân phối nước dựa vào giải thuật PID.
Thực hiện xây dựng mô hình thực nghiệm.
Xây dựng giao diện máy tính, cơ sở dữ liệu trên web server.
Thực nghiệm hoạt động hệ thống và đánh giá kết quả
Mai Thăng
Long
2 sinh viên/Đồ án TN/ Báo cáo
TN
12 Mai Thăng
Long
Điều khiển
thông minh
Điều khiển bám vị trí
cho hệ robot 2 bậc tư do
dùng mạng Fuzzy
Neurals
Tìm hiểu mô hình động lực học cho hệ robot 2 bậc tự do
Tìm hiểu giải thuật bám và điều khiển dựa vào mạng Fuzzy
Neural
Mô phỏng hoạt động của hệ
Xây dựng mô hình phần cứng thực nghiệm
Xây dựng giao diện máy tính giám sát hệ
Mai Thăng
Long
2 sinh viên/Đồ án TN/ Báo cáo
TN
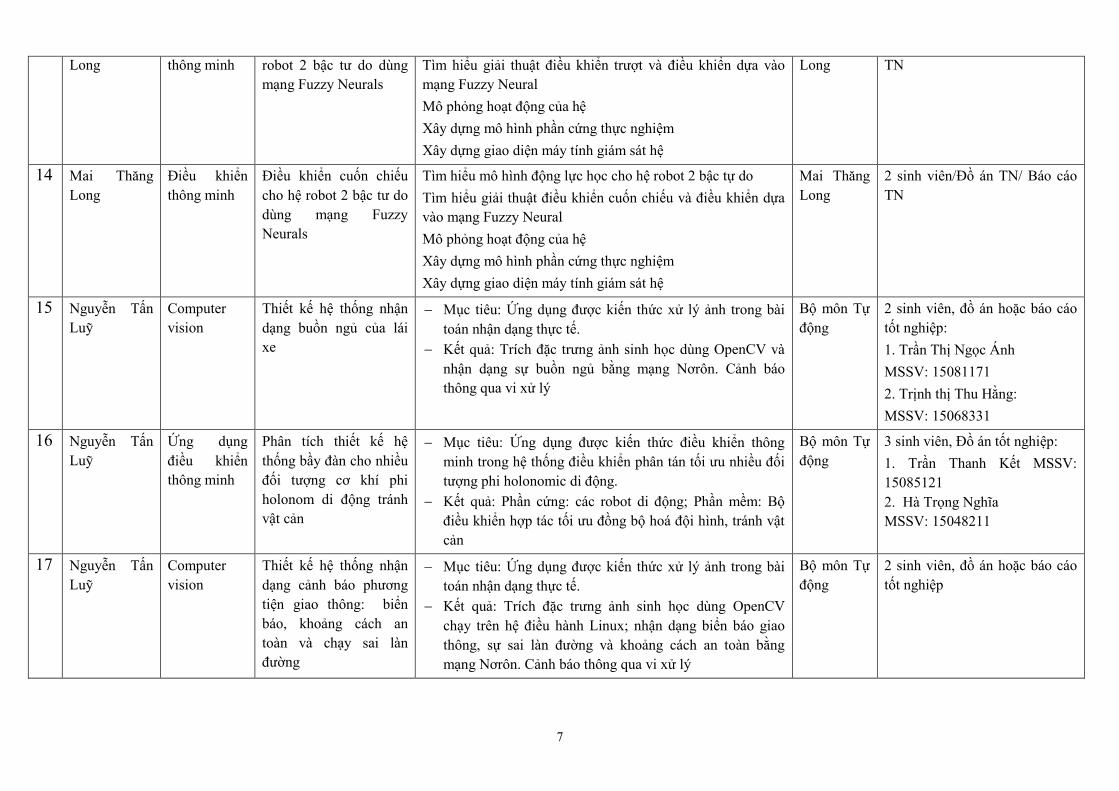
13 Mai Thăng Điều khiển Điều khiển trượt cho hệ Tìm hiểu mô hình động lực học cho hệ robot 2 bậc tự do Mai Thăng 2 sinh viên/Đồ án TN/ Báo cáo
7
Long thông minh robot 2 bậc tư do dùng
mạng Fuzzy Neurals
Tìm hiểu giải thuật điều khiển trượt và điều khiển dựa vào
mạng Fuzzy Neural
Mô phỏng hoạt động của hệ
Xây dựng mô hình phần cứng thực nghiệm
Xây dựng giao diện máy tính giám sát hệ
Long TN
14 Mai Thăng
Long
Điều khiển
thông minh
Điều khiển cuốn chiếu
cho hệ robot 2 bậc tư do
dùng mạng Fuzzy
Neurals
Tìm hiểu mô hình động lực học cho hệ robot 2 bậc tự do
Tìm hiểu giải thuật điều khiển cuốn chiếu và điều khiển dựa
vào mạng Fuzzy Neural
Mô phỏng hoạt động của hệ
Xây dựng mô hình phần cứng thực nghiệm
Xây dựng giao diện máy tính giám sát hệ
Mai Thăng
Long
2 sinh viên/Đồ án TN/ Báo cáo
TN
15 Nguyễn Tấn
Luỹ
Computer
vision
Thiết kế hệ thống nhận
dạng buồn ngủ của lái
xe
Mục tiêu: Ứng dụng được kiến thức xử lý ảnh trong bài
toán nhận dạng thực tế.
Kết quả: Trích đặc trưng ảnh sinh học dùng OpenCV và
nhận dạng sự buồn ngủ bằng mạng Nơrôn. Cảnh báo
thông qua vi xử lý
Bộ môn Tự
động
2 sinh viên, đồ án hoặc báo cáo
tốt nghiệp:
1. Trần Thị Ngọc Ánh
MSSV: 15081171
2. Trịnh thị Thu Hằng:
MSSV: 15068331
16 Nguyễn Tấn
Luỹ
Ứng dụng
điều khiển
thông minh
Phân tích thiết kế hệ
thống bầy đàn cho nhiều
đối tượng cơ khí phi
holonom di động tránh
vật cản
Mục tiêu: Ứng dụng được kiến thức điều khiển thông
minh trong hệ thống điều khiển phân tán tối ưu nhiều đối
tượng phi holonomic di động.
Kết quả: Phần cứng: các robot di động; Phần mềm: Bộ
điều khiển hợp tác tối ưu đồng bộ hoá đội hình, tránh vật
cản
Bộ môn Tự
động
3 sinh viên, Đồ án tốt nghiệp:
1. Trần Thanh Kết MSSV:
15085121
2. Hà Trọng Nghĩa
MSSV: 15048211
17 Nguyễn Tấn
Luỹ
Computer
vision
Thiết kế hệ thống nhận
dạng cảnh báo phương
tiện giao thông: biển
báo, khoảng cách an
toàn và chạy sai làn
đường
Mục tiêu: Ứng dụng được kiến thức xử lý ảnh trong bài
toán nhận dạng thực tế.
Kết quả: Trích đặc trưng ảnh sinh học dùng OpenCV
chạy trên hệ điều hành Linux; nhận dạng biển báo giao
thông, sự sai làn đường và khoảng cách an toàn bằng
mạng Nơrôn. Cảnh báo thông qua vi xử lý
Bộ môn Tự
động
2 sinh viên, đồ án hoặc báo cáo
tốt nghiệp

8
18 Nguyễn Tấn
Luỹ
Computer
vision
Thiết kế hệ thống điều
khiển tín hiệu giao
thông thông minh
Mục tiêu: Ứng dụng được kiến thức xử lý ảnh trong bài
toán nhận dạng luồng giao thông (2SV)
Ứng dụng IOT trong bài toán điều khiển tín hiệu giao
thông thông minh (2SV)
Kết quả: Nhận dạng luồng giao thông bằng xử lý ảnh;
Điều khiển phân tán đèn tín hiệu giao thông qua IOT dựa
vào hồi tiếp thị giác máy tính
Bộ môn Tự
động
1. Đỗ Ngọc Thành Sơn
MSSV: 15063761
2. Đỗ Văn Phút
MSSV: 15070401
3. Huỳnh Thanh Thương
MSSV: 15047851
4. Thân Trọng Thiên
MSSV: 15048901
19 Nguyễn
Hoàng Hiếu
SCADA Ứng dụng SCADA
trong hệ thống xử lý
nước thải công nghiệp
- Mục tiêu: Tìm hiểu hệ thống xử lý nước thải công nghiệp,
ứng dụng thu thập dữ liệu và điều khiển giám sát hệ thống
qua mạng.
- Kết quả: thiết kế hệ thống thu thập dữ liệu và giám sát điều
khiển cho hệ thống xử lý nước thải gồm
. Phần cứng: hệ thống cảm biến và bộ thu thập dữ liệu,
mạng truyền dữ liệu, webserver
. Phần mềm: cơ sở dữ liệu hệ thống, giao diện giám sát vận
hành các thông số điều khiển theo trạm xử lý nước thải Tân
Tạo
Dự kiến
nhà máy xử
lý chất thải
tại
Báo cáo TN
- Nguyễn Văn Lợi
- Đoàn Bảo Linh
- Nguyễn Đình Nam
20 Nguyễn
Hoàng Hiếu
SCADA Thiết kế hệ SCADA cho
nhà máy điện mặt trời
- Mục tiêu: Tìm hiểu các thông số và điều khiển vận hành
nhà máy điện mặt trời, xây dựng hệ thống thu thập dữ liệu và
giám sát nhà máy.
- Kết quả: hệ SCADA ứng dụng cho nhà máy điện mặt trời
theo thực tế nhà máy điện mặt trời tại Cam Ranh - KH
Công ty cổ
phần phát
triển công
nghệ QTC
Báo cáo TN
- Lê Lương Tuyên
21 Nguyễn SCADA Ứng dụng hệ thu thập - Mục tiêu: thiết kế lò ấp trứng có giám sát và điều khiển từ Báo cáo TN

9
Hoàng Hiếu dữ liệu và điều khiển
qua mạng
xa, hệ thu thập dữ liệu nhiều lò, giám sát từ xa qua mạng
Ứng dụng: trong nhà máy sản xuất
- Kết quả: lò ấp trứng tự động, server lưu trữ dữ liệu về trạng
thái lò như nhiệt độ, thời gian, ca vận hành, …( các thông số
giám sát điều khiển theo yêu cầu sản xuất), phần mềm giám
sát thông sô và điều khiển toàn bộ nhà máy.
- Huỳnh Minh Thiện
- Hồ Trung Nghĩa
- Trần Thanh Vũ
22 Nguyễn
Hoàng Hiếu
Điều khiển
tự động
Điều khiển ổn định hệ
nêm ngược
- Mục tiêu: điều khiển ổn định tại điểm cân bằng cho hệ nêm
ngược dùng giải thuật LQR và PID-Fuzzy
- Kết quả:
+ thi công hệ nêm ngược dùng trong phòng thí nghiệm
+ mô phỏng hệ thống điều khiển ổn định dùng LQR và PID-
Fuzzy
+ Thực hiện thuật toán điều khiển trên vi điều khiển có thể
kết hợp Real-Time Windows Target
Thực hiện
tại phòng
thí nghiệm
trường
Báo cáo TN
(2 SV)
23 Nguyễn
Hoàng Hiếu
Nông nghiệp
thông minh
Thiết kế và thi công hệ
thống điều khiển và
giám sát nhà vườn trồng
hoa
- Mục tiêu: Ứng dụng điều khiển giám sát cho trang trại trồng
hoa cho trang trại hoa tại Đà Lạt
- Nội dung thực hiện:
+ Tìm hiểu các thông số cần điều khiển và giám sát cho
trang trại trồng hoa.
+ Thiết kế hệ thống gồm thiết bị và mạng thu thập dữ liệu
và truyền dữ liệu về server.
+ Thiết kế phần mềm giám sát và điều khiển ổn định các
thông số trên máy tính và điện thoại cho hệ thống.
Thực hiện
tại trang
trại hoa tại
Lâm Đồng
Báo cáo tôt nghiệp
- Nguyễn Quốc Vương
- Văn Phú Vinh

10
24 Tràn Văn
Hùng
Các ứng
dụng thị giác
máy tính
Nhận dạng – phân loại
sản phẩm theo hình
dạng và màu sắc dùng
thuật toán xác định
trọng tâm và kích thước
hình học
- Xây dựng mô hình giảng dạy môn xử lý ảnh và thị giác
máy tính dùng thư viện OpenCV (Open Source Computer
Vision) qua hai IDE Microsoft Visual Studio và Eclipse
CDT
- Xây dựng phần cứng kết nối qua máy tính dùng cơ
cấu khí nén phân loại sản phẩm trên băng tải dựa trên
hình ảnh lấy qua camera
- Thực hiện được các nội dung sau:
Lập trình mô phỏng các kỹ thuật biến đổi cơ bản trong
xử lý ảnh
Lập trình xử lý ảnh với giao diện MFC (Microsoft
Foundation Classes)
Lập trình nhận dạng – phân loại sản phẩm theo hình
dạng và màu sắc dùng thuật toán xác định trọng
tâm và kích thước hình học
Bộ môn Tự
Động
- Báo cáo tốt nghiệp
- 2 sinh viên
- Trần Anh Hướng 14114171
- Trần Hoàng Phúc 14066081
Sdt:
01652133965 (Hướng)
01628060871 (Phúc)
Mail:
25 Tràn Văn
Hùng Các ứng
dụng thị giác
máy tính
Ứng dụng thuật toán
BOOSTING và MIL
trong module
OpenCV_contrib theo
dõi và bám theo xe đang
di chuyển
- Xây dựng mô hình giảng dạy môn xử lý ảnh và thị giác
máy tính dùng thư viện OpenCV (Open Source Computer
Vision) qua hai IDE Microsoft Visual Studio và Eclipse
CDT
- Xây dựng phần cứng kết nối qua máy tính thu nhận xe
đang chạy dùng camera
- Thực hiện được các nội dung sau:
Hường dẫn sử dụng OpenCV trên windows
Lập trình mô phỏng các kỹ thuật tiền xử lý ảnh
Lập trình theo dõi và phát hiện bám theo xe đang chạy
dùng thuật toán BOOSTING và MIL trong OpenCV
Bộ môn Tự
Động
- Báo cáo tốt nghiệp
- 2 sinh viên
- Hồ Viết Quyết 14122231
- Nguyễn Thanh Tân
14123031
Sdt:
093161019 (Quyết)
0969088870 (Tân)
Mail:
26 Tràn Văn
Hùng Các ứng
dụng thị giác
máy tính
Nhận dạng – phân loại
sản phẩm theo hình
dạng dùng thuật toán xử
lý bám ảnh TLD và
GOTURN trong module
- Xây dựng mô hình giảng dạy môn xử lý ảnh và thị giác
máy tính dùng thư viện OpenCV (Open Source Computer
Vision) qua hai IDE Microsoft Visual Studio và Eclipse
CDT
- Xây dựng phần cứng kết nối qua máy tính dùng cánh
Bộ môn Tự
Động
- Báo cáo tốt nghiệp
- 2 sinh viên
- Trương Thanh Long
15082551
- Nguyễn Văn Minh 15058101

11
OpenCV_contrib tay robot phân loại sản phẩm trên băng tải lấy ảnh từ
camera
- Thực hiện được các nội dung sau:
Lập trình mô phỏng các kỹ thuật làm nổi biên ảnh
Lâp trình tạo một số hiệu ứng ảnh trong video, MyCam
Lập trình nhận dạng – phân loại sản phẩm theo hình
dạng vật thể thuật toán xử lý bám ảnh TLD và
GOTURN trong OpenCV.
Sdt:
0905118319 (Long)
01632432606 (Minh)
Mail:
27 Tràn Văn
Hùng Các ứng
dụng thị giác
máy tính
Ứng dụng thuật toán
KCF và
MEDIANFLOW trong
module
OpenCV_contrib theo
dõi và bám theo người
di chuyển
- Xây dựng mô hình giảng dạy môn xử lý ảnh và thị giác
máy tính dùng thư viện OpenCV (Open Source Computer
Vision) qua hai IDE Microsoft Visual Studio và Eclipse
CDT
- Xây dựng phần cứng kết nối qua máy tính thu nhận
người di chuyển bằng camera
- Thực hiện được các nội dung sau:
Lập trình mô phỏng các kỹ thuật lọc tuyến tính và phi
tuyến trên xử số
Chỉnh sửa ảnh đơn giản bằng phần mềm, My Photo
Editor
Lập trình theo dõi và phát hiện bám người đang di
chuyển dùng thuật toán KCF và MEDIANFLOW
trong OpenCV
Bộ môn Tự
Động
- Báo cáo tốt nghiệp
- 2 sinh viên
- Phan Ánh Dương 15028151
- Trần Xuân Hải 15027501
Sdt:
0981024397 (Dương)
01687448081 (Hải)
Mail:
28 Tràn Văn
Hùng Hệ thống
thông minh,
điều khiển tự
động
Điều khiển và giám sát
robot thăm dò qua mạng
- Xây dựng phần cứng robot thăm dò cảnh báo khi có sự cố:
báo cháy, báo rò rỉ khí ga, báo trộm cạy cửa.
- Robot tự hành theo quỹ đạo đặt trước. (cải tiến nhược
điểm đề tài cũ đang điều khiển thủ công trên máy tính
không tự hành được)
- Điều khiển giám sát qua mạng LAN. (cải tiến nhược
điểm đề tài cũ là điều khiển mạng Zigbee và Wifi nên
khoảng cách điều khiển giới hạn)
Bộ môn Tự
Động
- Báo cáo tốt nghiệp
- 2 sinh viên
- Nguyễn Thành Trí
15065431
- Nguyễn Phú Vinh 15053551
Sdt:
0972928901 (Trí)
0942004216 (Vinh)
Mail:

12
- nguyenthanhtri230397@gmai
l.com
29 Trần Quý
Hữu Thiết kế ứng
dụng.
Nghiên cứu, thiết kế,
chế tạo thiết bị thông
minh gắn trên mũ bảo
hiểm.
Tính cấp thiết: Xuất phát từ tình hình tai nạn giao thông trong
thực tế.
Mục tiêu: Ứng dụng được các kiến thức của các môn học
Thiết bị và hệ thống điều khiển tự động, cảm biến đo lường,
vi xử lý, đo lường và điều khiển bằng máy tính, điều khiển và
giao tiếp thiết bị ngoại vi,…vào bài toán thực tế, chế tạo thiết
bị nhắc nhở, cảnh báo người tham gia giao thông.
Kết quả:
- Xây dựng cơ sở lý thuyết.
- Thiết kế, thi công phần cứng.
- Lập trình thu thập số liệu, điều khiển giám sát:
+ Tình trạng chưa đội mũ bảo hiểm.
+ Tình trạng ngủ gật.
+ Nồng độ cồn.
+ Truyền thông…
- Thiết bị nhỏ gọn được tích hợp vào mũ bảo hiểm.
- Có thể kết hợp với nhà sản xuất mũ bảo hiểm đăng ký bản
quyền, thương mại hóa sản phẩm.
Bộ môn Tự
Động Đồ án, 3 SV.
- Trần Văn Huy 15075981.
m
- Đặng Văn Phong 15084231.
- Nguyễn Thiên Khương
15077201.
30 Trần Quý
Hữu Lý thuyết
điều khiển
nâng cao
Thiết kế bộ điều khiển
PID cho hệ bồn nước
đôi.
Tính cấp thiết: Điều khiển ổn định hệ bồn nước nước đôi.
Mục tiêu: Ứng dụng được kiến thức của các môn học Lý
thuyết điều khiển tự động, Lý thuyết điều khiển nâng cao vi
xử lý, điều khiển và giao tiếp thiết bị ngoại vi vào bài toán
điều khiển mức nước trong hệ bồn nước đôi.
Kết quả:
- Thành lập hàm truyền của hệ bồn nước đôi.
- Xây dựng thuật toán điều khiển.
- Thiết kế bộ điều khiển PID.
Bộ môn Tự
Động Đồ án, 2 SV
13
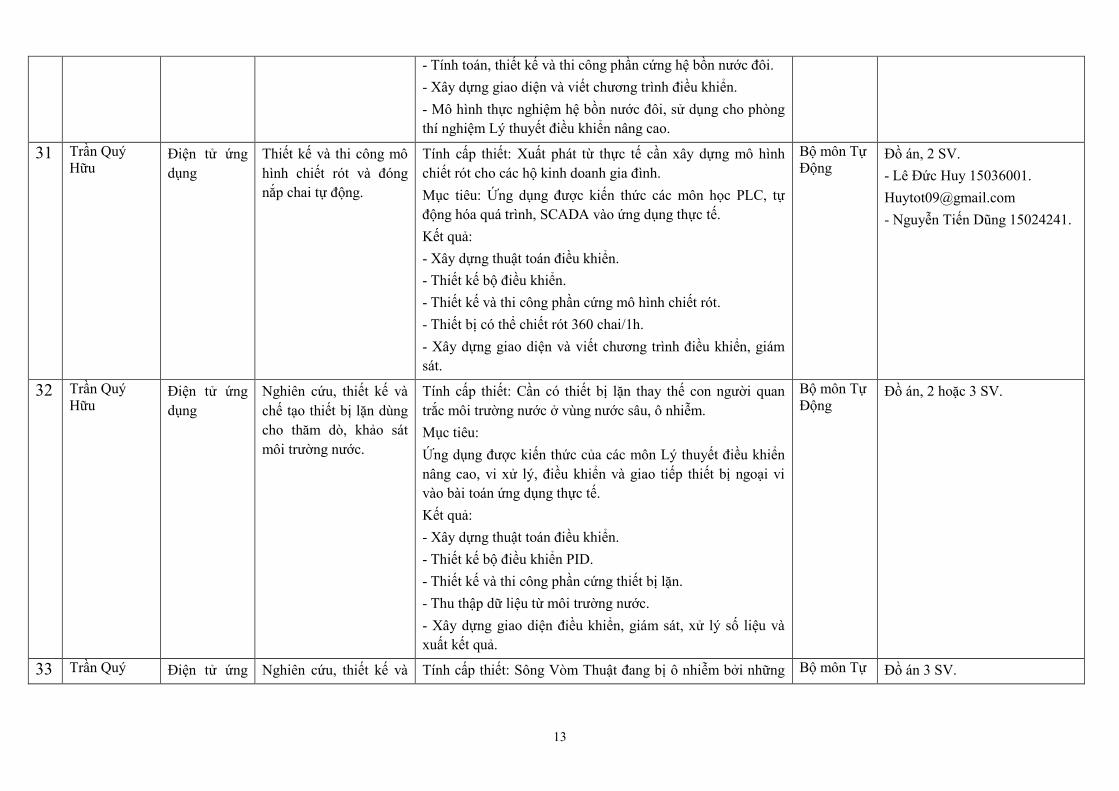
- Tính toán, thiết kế và thi công phần cứng hệ bồn nước đôi.
- Xây dựng giao diện và viết chương trình điều khiển.
- Mô hình thực nghiệm hệ bồn nước đôi, sử dụng cho phòng
thí nghiệm Lý thuyết điều khiển nâng cao.
31 Trần Quý
Hữu Điện tử ứng
dụng
Thiết kế và thi công mô
hình chiết rót và đóng
nắp chai tự động.
Tính cấp thiết: Xuất phát từ thực tế cần xây dựng mô hình
chiết rót cho các hộ kinh doanh gia đình.
Mục tiêu: Ứng dụng được kiến thức các môn học PLC, tự
động hóa quá trình, SCADA vào ứng dụng thực tế.
Kết quả:
- Xây dựng thuật toán điều khiển.
- Thiết kế bộ điều khiển.
- Thiết kế và thi công phần cứng mô hình chiết rót.
- Thiết bị có thể chiết rót 360 chai/1h.
- Xây dựng giao diện và viết chương trình điều khiển, giám
sát.
Bộ môn Tự
Động Đồ án, 2 SV.
- Lê Đức Huy 15036001.
- Nguyễn Tiến Dũng 15024241.
32 Trần Quý
Hữu Điện tử ứng
dụng
Nghiên cứu, thiết kế và
chế tạo thiết bị lặn dùng
cho thăm dò, khảo sát
môi trường nước.
Tính cấp thiết: Cần có thiết bị lặn thay thế con người quan
trắc môi trường nước ở vùng nước sâu, ô nhiễm.
Mục tiêu:
Ứng dụng được kiến thức của các môn Lý thuyết điều khiển
nâng cao, vi xử lý, điều khiển và giao tiếp thiết bị ngoại vi
vào bài toán ứng dụng thực tế.
Kết quả:
- Xây dựng thuật toán điều khiển.
- Thiết kế bộ điều khiển PID.
- Thiết kế và thi công phần cứng thiết bị lặn.
- Thu thập dữ liệu từ môi trường nước.
- Xây dựng giao diện điều khiển, giám sát, xử lý số liệu và
xuất kết quả.
Bộ môn Tự
Động Đồ án, 2 hoặc 3 SV.
33 Trần Quý Điện tử ứng Nghiên cứu, thiết kế và Tính cấp thiết: Sông Vòm Thuật đang bị ô nhiễm bởi những Bộ môn Tự Đồ án 3 SV.

14
Hữu dụng thi công máy vớt rác
trên sông Vòm Thuật.
chai lọ, rác thải trôi nổi trên sông.
Mục tiêu: Ứng dụng được kiến thức của các môn Lý thuyết
điều khiển nâng cao, vi xử lý, điều khiển và giao tiếp thiết bị
ngoại vi vào bài toán ứng dụng thực tế.
Kết quả:
- Xây dựng thuật toán điều khiển.
- Thiết kế bộ điều khiển PID.
- Thiết kế và thi công phần cứng.
- Thu thập dữ liệu môi trường và xuất kết quả.
- Điều khiển giám sát qua thiết bị di động cầm tay.
Động
34 Trần Quý
Hữu Điện tử ứng
dụng
Nghiên cứu, thiết kế và
thi công máy chế biến
thức ăn đa năng.
Tính cấp thiết: Cần có máy chế biến thức ăn đa năng phục vụ
cho ngành chăn nuôi.
Mục tiêu: Ứng dụng được kiến thức của các môn Lý thuyết
điều khiển nâng cao, vi xử lý, điều khiển và giao tiếp thiết bị
ngoại vi vào bài toán ứng dụng thực tế.
Kết quả:
- Xây dựng thuật toán điều khiển.
- Thiết kế bộ điều khiển PID.
- Thiết kế và thi công phần cứng.
- Xây dựng giao diện và viết chương trình điều khiển giám
sát.
- Máy có thể cắt ngắn, mỏng và xoay nghiền thức ăn.
Bộ môn Tự
Động Đồ án 2 hoặc 3 SV.
35 Trần Quý
Hữu Điện tử ứng
dụng
Thiết kế và thi công máy
cắt hành, tỏi.
Tính cấp thiết: Giải quyết vấn đề nhân công, nâng cao năng
suất cắt hành tỏi.
Mục tiêu: Ứng dụng được kiến thức của các môn Lý thuyết
điều khiển nâng cao, vi xử lý, điều khiển và giao tiếp thiết bị
ngoại vi vào bài toán ứng dụng thực tế.
Kết quả:
- Xây dựng thuật toán điều khiển.
Bộ môn Tự
Động Đồ án 2 hoặc 3 SV.

15
- Thiết kế bộ điều khiển.
- Mô phỏng hoạt động của hệ.
- Xây dựng phần cứng thực nghiệm.
- Máy có thể cắt 10kg/1 giờ.
- Xây dựng giao diện và viết chương trình điều khiển.
36 Huỳnh Minh
Ngọc
Hệ thống
thông minh
và điều khiển
tự động
Điều khiển tốc độ động
cơ DC dung thuật toán
mờ và dung vi điều
khiển ARM Cortex-M4
có giao tiếp máy tính
-Dùng vi điều khiển ARM Cortex-M4 (STM32F411) giao
tiếp máy tính qua cổng USB. Phản biện: Sử dụng Vi điều
khiển ARM Cortex_M4 loại mới STM32F411 so với ARM
Cortex-M3, M4 cũ STM32F103VGT6, STM32F407VGT6)
-Xây dựng thuật toán mờ. Giao diện trên máy tính dung
Visual Basic hay C#.Phản biện: Đề tài Dùng bộ điều mờ với
hai ngõ vào e và de và mộ ngõ ra u . So với đề tài của Phạm
Nhật Dương dung thuật toám PID mờ là khác nhau và việc
giao tiếp qua cổng nối tiếp (RS 232). Cortex-M4
(STM32F411) (DH khóa 9 HL Bảo vệ vào tháng 7/2018)
-Lập trình C cho ARM.
Bộ môn Tự
Động Khóa luận tốt nghiệp, 1 sinh
viên thực hiện
37 Huỳnh Minh
Ngọc
Hệ thống
thông minh
và điều khiển
tự động
Hệ thống thu thập dữ
liệu nhiều kênh
-Dùng vi điều khiển ARM Cortex-M4 (STM32F411) giao
tiếp máy tính qua cổng USB. Phản biện: Sử dụng Vi điều
khiển ARM Cortex_M4 loại mới STM32F411 so với ARM
Cortex-M3, M4 cũ STM32F103VGT6, STM32F407VGT6).
Các đề tài tốt nghiệp , đồ án chuyên ngành khóa cũ dung
giao tiếp RS 232 và dung các họ PIC 16F877A, dsPIC
30f4013,..
-Xây dựng hệ thống gồm 3 kênh (lò nhiệt). Xây dựng thuật
toán on/off và PID số cho mỗi kênh. Giao diện trên máy tính
dung Visual Basic hay C#. Phản biện: hệ thống này dung ba
kênh, mới hơn so với đồ án khóa cũ dung hai kênh hay một
kênh.
-Yêu cầu nhận dạng hàm truyền lò nhiệt dung phương pháp
Ziegler-Nichol, từ đó tính Kp, Ki và Kd. Có so sánh với chọn
Bộ môn
Điện tử tự
động.
Khóa luận tốt nghiệp, 1 sinh
viên thực hiện

16
thử sai các tham số kp, ki và kd.
-Mô phỏng dung Matlab.
-Lập trình C cho ARM.
38 Huỳnh Minh
Ngọc
Hệ thống
thông minh
và điều khiển
tự động
Điều khiển tự chỉnh
dung phương pháp đặt
cực để điều khiển nhiệt
độ
-Dùng vi điều khiển ARM Cortex-M4 (STM32F411) giao
tiếp máy tính qua cổng nối tiếp. Phản biện: đề tài này dung vi
điều khiển mới 32 bit so với đề tài khoá cũ như là Nguyễn
Hưng Thịnh dung P89V51RD2 (2010), Nguyễn Hùng Cường
dung dsPIC 30f4013 (2014).
-Xây dựng hệ thống lò nhiệt. Xây dựng thuật toán tự chỉnh
dùng phương pháp đặt cực. Giao diện trên máy tính dung
Matlab. Phản biện: dung cùng thuật toán nhưng sinh viên sẽ
triển khai trên Matlb 2016.
-Nhận dạng hàm truyền lò nhiệt dung phương pháp ARX và
so sánh kết quả nhận dạng hàm truyền dung đáp ứng nấc hệ
hở của Ziegler-Nichol.
-Lập trình C cho ARM.
Bộ môn
Điện tử tự
động.
Khóa luận tốt nghiệp, 1 sinh
viên thực hiện
39 Huỳnh Minh
Ngọc
Hệ thống
thông minh
và điều khiển
tự động
Điều khiển xe dung
thuật toán PID và dung
vi điều khiển ARM
Cortex-M4
-Dùng vi điều khiển ARM Cortex-M4 (STM32F411) giao
tiếp máy tính qua không dây sóng RF. Phản biện: Sử dụng Vi
điều khiển ARM Cortex_M4 loại mới STM32F411 so với
ARM Cortex-M3, M4 cũ STM32F103VGT6,
STM32F407VGT6). Giao tiếp mới hơn đề tài khoá cũ (giám
sát dung máy tính qua cổng Com hay chạy theo vạch)
-Xây dựng mô hình xe. Xây dựng thuật toán PID . Giao diện
trên máy tính dung Visual Basic hay C#. Phản biện: thiết kế
xe của sinh viên khi trình bày đề cương có thể khác với
những xe (dung ba bánh của các đề tài cũ.). Xe chạy tiến , lùi,
trái, phải và có điều khiển PID vòng kín tốc độ bánh xe sau
(sử dụng động cơ DC)
-Lập trình C cho ARM(Cortex-M4 (STM32F411)
Bộ môn
Điện tử tự
động.
Khóa luận tốt nghiệp, 1 sinh
viên thực hiện.
Sinh viên thực hiện:Võ Đức
Nghĩa, Mã số SV: 14073581,
lớp: DHDTTD10B.

17
40 Huỳnh Minh
Ngọc
Hệ thống
thông minh
và điều khiển
tự động
Điều khiển tốc độ động
cơ DC dùng thuật toán
mờ sử dụng card 6008
-Dùng card NI 6008 giao tiếp máy tính qua cổng USB.
-Xây dựng thuật toán mờ điều khiển tốc động động cơ DC có
kéo bang chuyền. Giao diện trên máy tính dùng LabView.
Phản biện: Các đề tài khoá cũ dung card 6008 với thuật toán
PID số, on/off cho động cơ DC không có tải.
-Minh họa cho lý thuyết điều khiển mờ dung trong các ứng
dụng kỹ thuật .
Bộ môn
Điện tử tự
động.
Khóa luận tốt nghiệp, 1 sinh
viên thực hiện
41 Trần Hữu
Toàn
Ứng dụng
điều khiển
máy hỗ trợ
nông
nghiệp
Áp dụng thuật toán
tự chỉnh định thông
số cho máy đóng gói
kẹo dừa
1. Các thông số ban đầu: Theo số liệu thực tế (Công
suất bé).
Giới hạn đề tài: Thích hợp với việc thiết kế mô hình
và qui mô của đồ án môn học.
2. Nội dung cần thực hiện:
+ Phân tích lựa chọn phương án nguồn truyền động,
các cơ cấu, bộ truyền.
+ Tạo mô hình máy đóng gói kẹo dừa (có cải tiến)
theo nhiệm vụ mô hình điều khiển trong đề tài.
+ Thiết kế mạch điều khiển cho PLC cho động cơ
bước và động cơ DC theo Encoder.
+ Tính toán nguồn truyền động.
+ Trình bày phương thức đạt được về hiệu chỉnh
kích thước và khối lượng trong giải thuật điều
khiển.
+ Viết chương trình điều khiển.
3. Các bản vẽ :
+ Bản vẽ sơ đồ nguyên lý của hệ thống.
+ Bản vẽ sơ đồ mạch phần cứng điều khiển.
Sinh viên
tự lựa
chọn nơi
thực hiện
& phối
hợp
doanh
nghiệp
1. Nguyễn Trọng Nhân
2. Nguyễn Mậu Phú
tranvanmanh0166@gmai
l.com
0965673430
Yêu cầu sinh viên khi
nhận đề tài xác định rõ:
- Nhu cầu và khả năng ứng
dụng (Tính cấp thiết)
- Mục tiêu đề tài
- Cơ sở lý thuyết và các
phương án (Chỉ nêu tên gọi
các cơ sở lý thuyết này,
không ghi chi tiết)
- Đưa sơ đồ tổng thể phần
cứng mô hình
- Danh mục các thiết bị dự
kiến lựa chọn
- Đưa sơ đồ tổng thể phần

18
+ Bản vẽ thuật toán điều khiển cứng điều khiển
- Đưa bảng danh mục thiết
bị lựa chọn dự kiến
- Thuật toán, lập trình và
nền tảng cốt lõi ứng dụng
trong đề tài
- Kế hoạch thực hiện đề tài
42 Trần Hữu
Toàn
Ứng dụng
điều khiển
máy hỗ trợ
nông
nghiệp
Điều khiển tự chỉnh
định thông số cho
băng chuyền trong
sản xuất trái cây
1. Các thông số ban đầu: Theo số liệu thực tế (Công
suất bé).
Giới hạn đề tài: Thích hợp với việc thiết kế mô hình
và qui mô của đồ án môn học.
2. Nội dung cần thực hiện:
+ Phân tích lựa chọn phương án nguồn truyền động,
các cơ cấu, bộ truyền.
+ Tạo mô hình băng chuyền tải trái cây (có cải tiến)
theo nhiệm vụ mô hình điều khiển trong đề tài.
+ Thiết kế mạch điều khiển cho PLC cho động cơ
bước và động cơ DC theo Encoder.
+ Tính toán nguồn truyền động.
+ Trình bày phương thức đạt được về hiệu chỉnh
kích thước và khối lượng trong giải thuật điều
khiển.
+ Viết chương trình điều khiển.
3. Các bản vẽ :
+ Bản vẽ sơ đồ nguyên lý của hệ thống.
Sinh viên
tự lựa
chọn nơi
thực hiện
& phối
hợp
doanh
nghiệp
1. Cao Anh Dương
2. Phạm Minh Toàn
m
01645892911
Yêu cầu sinh viên khi
nhận đề tài xác định rõ:
- Nhu cầu và khả năng ứng
dụng (Tính cấp thiết)
- Mục tiêu đề tài
- Cơ sở lý thuyết và các
phương án (Chỉ nêu tên gọi
các cơ sở lý thuyết này,
không ghi chi tiết)
- Đưa sơ đồ tổng thể phần
cứng mô hình
- Danh mục các thiết bị dự
kiến lựa chọn

19
+ Bản vẽ sơ đồ mạch phần cứng điều khiển.
+ Bản vẽ thuật toán điều khiển
- Đưa sơ đồ tổng thể phần
cứng điều khiển
- Đưa bảng danh mục thiết
bị lựa chọn dự kiến
- Thuật toán, lập trình và
nền tảng cốt lõi ứng dụng
trong đề tài
- Kế hoạch thực hiện đề tài
43 Trần Hữu
Toàn
Robot và
ứng dụng
Điều khiển Master-
Slave cho tay máy
1-DOF
Nhiệm vụ thiết kế:
1. Các thông số ban đầu: SV tự chọn theo mô hình
thực tế.
2. Nội dung phần thuyết minh và tính toán :
+ Phân tích lựa chọn phương án nguồn truyền động,
các cơ cấu, nguồn truyền động.
+ Chế tạo 2 mô hình tay máy 1 bậc tự do
+ Thiết kế mạch điều khiển cho vi điều khiển điều
khiển động cơ DC theo Encoder và động cơ bước.
+ Tính toán vị trí điểm chấp hành cuối của tay máy.
+ Trình bày phương thức đạt được điều khiển bám
Master-slave.
+ Viết chương trình điều khiển.
3. Các bản vẽ :
+ Bản vẽ sơ đồ nguyên lý của hệ thống
+ Bản vẽ sơ đồ mạch phần cứng điều khiển.
Sinh viên
tự lựa
chọn nơi
thực hiện
1. Đỗ Thế Hùng
01664163741
(Học lại)
Yêu cầu sinh viên khi
nhận đề tài xác định rõ:
- Nhu cầu và khả năng ứng
dụng (Tính cấp thiết)
- Mục tiêu đề tài
- Cơ sở lý thuyết và các
phương án (Chỉ nêu tên gọi
các cơ sở lý thuyết này,
không ghi chi tiết)
- Đưa sơ đồ tổng thể phần
cứng mô hình
- Danh mục các thiết bị dự
kiến lựa chọn

20
+ Bản vẽ thuật toán điều khiển.
4. Chương trình VĐK.
- Đưa sơ đồ tổng thể phần
cứng điều khiển
- Đưa bảng danh mục thiết
bị lựa chọn dự kiến
- Thuật toán, lập trình và
nền tảng cốt lõi ứng dụng
trong đề tài
- Kế hoạch thực hiện đề tài
44 Trần Hữu
Toàn
Robot và
ứng dụng
Điều khiển quan sát
hệ tay máy ứng dụng
trong nhận dạng và
cấp phôi
Nhiệm vụ thiết kế:
1. Các thông số ban đầu: SV tự chọn theo mô hình
thực tế.
2. Nội dung phần thuyết minh và tính toán :
+ Phân tích lựa chọn phương án nguồn truyền động,
các cơ cấu.
+ Chế tạo mô hình tay máy với số bậc tự do như
yêu cầu
+ Thiết kế mạch điều khiển cho vi điều khiển điều
khiển động cơ DC theo Encoder và động cơ bước.
+ Tính toán vị trí điểm chấp hành cuối của tay máy.
+ Trình bày phương thức đạt được điều khiển và thu
thập dữ liệu qua Camera.
+ Viết chương trình điều khiển.
3. Các bản vẽ :
+ Bản vẽ sơ đồ nguyên lý của hệ thống
+ Bản vẽ sơ đồ mạch phần cứng điều khiển.
Sinh viên
tự lựa
chọn nơi
thực hiện
1. Đỗ Quốc Đức
2. Nguyễn Trường Giang
m
Yêu cầu sinh viên khi
nhận đề tài xác định rõ:
- Nhu cầu và khả năng ứng
dụng (Tính cấp thiết)
- Mục tiêu đề tài
- Cơ sở lý thuyết và các
phương án (Chỉ nêu tên gọi
các cơ sở lý thuyết này,
không ghi chi tiết)
- Đưa sơ đồ tổng thể phần
cứng mô hình
- Danh mục các thiết bị dự
kiến lựa chọn

21
+ Bản vẽ thuật toán điều khiển.
4. Chương trình VĐK.
- Đưa sơ đồ tổng thể phần
cứng điều khiển
- Đưa bảng danh mục thiết
bị lựa chọn dự kiến
- Thuật toán, lập trình và
nền tảng cốt lõi ứng dụng
trong đề tài
- Kế hoạch thực hiện đề tài
45 Trần Hữu
Toàn
Ứng dụng
thuật toán
thông minh
trong điều
khiển,
giám sát
công
nghiệp
Đánh giá các
phương án thu thập
dữ liệu và điều khiển
chiều cao hệ thống
cột nước ứng dụng
trong thủy điện
1. Các thông số ban đầu: Theo số liệu thực tế (Công
suất bé).
Giới hạn đề tài: Thích hợp với việc thiết kế mô hình
và qui mô của đồ án môn học.
2. Nội dung cần thực hiện:
+ Phân tích lựa chọn phương án nguồn bố trí cảm
biến và lựa chọn thiết bị, các cơ cấu, bơm nước...
+ Tạo mô hình cột nước (có cải tiến) theo nhiệm vụ
mô hình sử dụng 3 phương thức đo mực nước.
+ Thiết kế mạch điều khiển dùng PLC cho động cơ
DC.
+ Tính toán thông số mạch và calib cảm biến.
+ Trình bày phương thức đạt được về thu thập dữ
liệu và giải thuật điều khiển.
+ Viết chương trình điều khiển.
3. Các bản vẽ :
+ Bản vẽ sơ đồ nguyên lý của hệ thống.
Sinh viên
tự lựa
chọn nơi
thực hiện
& phối
hợp
doanh
nghiệp
1. Nguyễn Hữu Nghĩa
2. Lê Hoàng Toàn Thắng
01274100119
Yêu cầu sinh viên khi
nhận đề tài xác định rõ:
- Nhu cầu và khả năng ứng
dụng (Tính cấp thiết)
- Mục tiêu đề tài
- Cơ sở lý thuyết và các
phương án (Chỉ nêu tên gọi
các cơ sở lý thuyết này,
không ghi chi tiết)
- Đưa sơ đồ tổng thể phần
cứng mô hình
- Danh mục các thiết bị dự
kiến lựa chọn

22
+ Bản vẽ sơ đồ mạch phần cứng điều khiển.
+ Bản vẽ thuật toán điều khiển
- Đưa sơ đồ tổng thể phần
cứng điều khiển
- Đưa bảng danh mục thiết
bị lựa chọn dự kiến
- Thuật toán, lập trình và
nền tảng cốt lõi ứng dụng
trong đề tài
- Kế hoạch thực hiện đề tài
46 Trần Hữu
Toàn
Ứng dụng
điều khiển
máy hỗ trợ
nông
nghiệp
Áp dụng thuật toán
tự chỉnh định thông
số cho máy bóc vỏ
trứng
1. Các thông số ban đầu: Theo số liệu thực tế (Công
suất bé).
Giới hạn đề tài: Thích hợp với việc thiết kế mô hình
và qui mô của đồ án môn học.
2. Nội dung cần thực hiện:
+ Phân tích lựa chọn phương án nguồn truyền động,
các cơ cấu, bộ truyền.
+ Tạo mô hình máy bóc vỏ trứng theo nhiệm vụ mô
hình điều khiển trong đề tài.
+ Thiết kế mạch điều khiển cho PLC cho động cơ
bước và động cơ DC theo Encoder,…
+ Tính toán nguồn truyền động, động cơ
+ Lựa chọn thiết bị phù hợp
+ Trình bày phương thức đạt được về hiệu chỉnh
kích thước và khối lượng trong giải thuật điều
khiển.
+ Viết chương trình điều khiển.
Sinh viên
tự lựa
chọn nơi
thực hiện
1. Nguyễn Văn Nhất
2. Nguyễn Thanh Nhã
01695479077
Yêu cầu sinh viên khi
nhận đề tài xác định rõ:
- Nhu cầu và khả năng ứng
dụng (Tính cấp thiết)
- Mục tiêu đề tài
- Cơ sở lý thuyết và các
phương án (Chỉ nêu tên gọi
các cơ sở lý thuyết này,
không ghi chi tiết)
- Đưa sơ đồ tổng thể phần
cứng mô hình
- Danh mục các thiết bị dự
kiến lựa chọn

23
3. Các bản vẽ :
+ Bản vẽ sơ đồ nguyên lý của hệ thống.
+ Bản vẽ sơ đồ mạch phần cứng điều khiển.
+ Bản vẽ thuật toán điều khiển
- Đưa sơ đồ tổng thể phần
cứng điều khiển
- Đưa bảng danh mục thiết
bị lựa chọn dự kiến
- Thuật toán, lập trình và
nền tảng cốt lõi ứng dụng
trong đề tài
- Kế hoạch thực hiện đề tài
47 Trần Hữu
Toàn
IoT Điều khiển và giám
sát hệ thống chống
cháy, giám sát
Camera
trên nền tảng
Galileo
Sinh viên
tự lựa
chọn nơi
thực hiện
1. Huỳnh Thị Bích Thúy
2. Lê Phương Quang
m
0971168744
Yêu cầu sinh viên khi
nhận đề tài xác định rõ:
- Nhu cầu và khả năng ứng
dụng (Tính cấp thiết)
- Mục tiêu đề tài
- Cơ sở lý thuyết và các
phương án (Chỉ nêu tên gọi
các cơ sở lý thuyết này,
không ghi chi tiết)
- Đưa sơ đồ tổng thể phần
cứng mô hình
- Danh mục các thiết bị dự

24
kiến lựa chọn
- Đưa sơ đồ tổng thể phần
cứng điều khiển
- Đưa bảng danh mục thiết
bị lựa chọn dự kiến
- Thuật toán, lập trình và
nền tảng cốt lõi ứng dụng
trong đề tài
- Kế hoạch thực hiện đề tài
48 Trần Hữu
Toàn
Robot và
ứng dụng
Chế tạo và điều
khiển Robot vớt rát
trên mặt hồ
Nhiệm vụ thiết kế:
1. Các thông số ban đầu: SV tự chọn theo mô hình
thực tế.
2. Nội dung phần thuyết minh và tính toán :
+ Phân tích lựa chọn phương án nguồn truyền động,
các cơ cấu.
+ Chế tạo mô hình tay máy với số bậc tự do như
yêu cầu
+ Thiết kế mạch điều khiển cho vi điều khiển điều
khiển động cơ DC theo Encoder và động cơ bước.
+ Tính toán vị trí điểm chấp hành cuối của tay máy.
+ Trình bày phương thức đạt được điều khiển và thu
thập dữ liệu.
+ Viết chương trình điều khiển.
3. Các bản vẽ :
Sinh viên
tự lựa
chọn nơi
thực hiện
1. Nguyễn Hữu Thương
2. Lê Trần Công Triển
m
0939999140
Yêu cầu sinh viên khi
nhận đề tài xác định rõ:
- Nhu cầu và khả năng ứng
dụng (Tính cấp thiết)
- Mục tiêu đề tài
- Cơ sở lý thuyết và các
phương án (Chỉ nêu tên gọi
các cơ sở lý thuyết này,
không ghi chi tiết)
- Đưa sơ đồ tổng thể phần

25
+ Bản vẽ sơ đồ nguyên lý của hệ thống
+ Bản vẽ sơ đồ mạch phần cứng điều khiển.
+ Bản vẽ thuật toán điều khiển.
4. Chương trình VĐK.
cứng mô hình
- Danh mục các thiết bị dự
kiến lựa chọn
- Đưa sơ đồ tổng thể phần
cứng điều khiển
- Đưa bảng danh mục thiết
bị lựa chọn dự kiến
- Thuật toán, lập trình và
nền tảng cốt lõi ứng dụng
trong đề tài
- Kế hoạch thực hiện đề tài
49 Trần Hữu
Toàn
Robot và
ứng dụng
Chế tạo và điều
khiển Robot quản
gia
Nhiệm vụ thiết kế:
1. Các thông số ban đầu: SV tự chọn theo mô hình
thực tế.
2. Nội dung phần thuyết minh và tính toán :
+ Phân tích lựa chọn phương án nguồn truyền động,
các cơ cấu.
+ Chế tạo mô hình tay máy với số bậc tự do như
yêu cầu
+ Thiết kế mạch điều khiển cho vi điều khiển điều
khiển động cơ DC theo Encoder, động cơ bước…
+ Tính toán vị trí điểm chấp hành cuối của tay máy.
+ Trình bày phương thức đạt được điều khiển và thu
thập dữ liệu.
Sinh viên
tự lựa
chọn nơi
thực hiện
1. Phạm Quyền Linh
2. Trần Văn Mạnh
Tranvanmanh0166@gma
il.com
0989290943
Yêu cầu sinh viên khi
nhận đề tài xác định rõ:
- Nhu cầu và khả năng ứng
dụng (Tính cấp thiết)
- Mục tiêu đề tài
- Cơ sở lý thuyết và các
phương án (Chỉ nêu tên gọi
các cơ sở lý thuyết này,

26
+ Viết chương trình điều khiển.
3. Các bản vẽ :
+ Bản vẽ sơ đồ nguyên lý của hệ thống
+ Bản vẽ sơ đồ mạch phần cứng điều khiển.
+ Bản vẽ thuật toán điều khiển.
4. Chương trình VĐK.
không ghi chi tiết)
- Đưa sơ đồ tổng thể phần
cứng mô hình
- Danh mục các thiết bị dự
kiến lựa chọn
- Đưa sơ đồ tổng thể phần
cứng điều khiển
- Đưa bảng danh mục thiết
bị lựa chọn dự kiến
- Thuật toán, lập trình và
nền tảng cốt lõi ứng dụng
trong đề tài
- Kế hoạch thực hiện đề tài
50 Phan Vinh
Hiếu
Smart
Agriculture
, IoT
Thiết kế - chế tạo bộ
điều khiển các thông
số môi trường cho
hệ Aquaponic.
Tìm hiểu hệ thống Aquaponic.
Tìm hiểu việc sử dụng công nghệ IoT trong việc thu
thập dữ liệu môi trường và điều khiển các cơ cấu
chấp hành
Xây dựng thuật toán PID điều khiển các tham số
môi trường như:
- Ph
- Oxy hòa tan
- Độ đục
- Nhiệt độ
- Ánh sang
Xây dựng mô hình thực nghiệm.
2 sinh viên, đồ án hoặc báo
cáo tốt nghiệp
Nguyễn Trọng Nhân
15052831
Huỳnh Dương Ngọc Hạnh
15076981

27
Xây dựng giao diện trên Smartphone.
Chạy thử nghiệm và đánh gia kết quả.
51 Phan Vinh
Hiếu
Smart
Agriculture
, IoT
Thiết kế - chế tạo bộ
điều khiển các thông
số môi trường cho
hệ Hyproponics.
Tìm hiểu hệ thống Hyproponics.
Tìm hiểu việc sử dụng công nghệ IoT trong việc thu
thập dữ liệu môi trường và điều khiển các cơ cấu
chấp hành
Xây dựng thuật toán PID điều khiển các tham số
môi trường như:
- Ph
- TDS
- Nhiệt độ dung dịch
- Ánh sáng
Xây dựng mô hình thực nghiệm.
Xây dựng giao diện trên Smartphone.
2 sinh viên, đồ án hoặc báo
cáo tốt nghiệp
Xích Ngọc Mai
14055131
Trịnh Xuân Nguyên
14067481
52 Phan Vinh
Hiếu
Smart
Agriculture
, IoT
Thiết kế - chế tạo bộ
điều khiển các thông
số môi trường cho
hệ Aquarium
Tìm hiểu hệ thống Aquarium.
Tìm hiểu việc sử dụng công nghệ IoT trong việc thu
thập dữ liệu môi trường và điều khiển các cơ cấu
chấp hành
Xây dựng thuật toán PID điều khiển các tham số
môi trường như:
- Ph
- Độ mặn
- Độ cứng của nước
- Nhiệt độ nước
- Oxy hòa tan.
2 sinh viên, đồ án hoặc báo
cáo tốt nghiệp
Hoàng Gia Vỹ
15041231
Phạm Tiền Khôi
14018581

28
Xây dựng mô hình thực nghiệm.
Xây dựng giao diện trên Smartphone.
53 Phan Vinh
Hiếu
Food
Manufactu
re
Thiết kế-chế tạo
máy pha trà sữa tự
động, đặt hàng qua
Smartphone
Tìm hiểu nguyên lý hoạt động của máy pha trà sữa.
Tìm hiểu cách sử dụng IoT trong việc điều khiển
máy qua Smartphone.
Xây dựng các module phần cứng và chương trình
điều khiển
Xây dựng mô hình thực nghiệm
Thử nghiệm và đánh giá kết quả.
2 sinh viên, đồ án hoặc báo
cáo tốt nghiệp
Nguyễn Lê Cường
15014671
Hồ Thanh Duy 15030541
Trần Quốc Nam 15027001
54 Phan Vinh
Hiếu
Renewable
Energy
Thiết kế-chế tạo bộ
điều khiển vị trí 2
trục của hệ Solar
Panel bám theo quỹ
đạo của mặt trời.
Tìm hiểu nguyên lý hoạt động của hệ bám theo mặt
trời.
Tìm hiểu nguyên lý chế tạo cảm biến đo góc
nghiêng của mặt trời.
Xây dựng giải thuật PID điều khiển vị trí động cơ
Servo DC.
Xây dựng module phần cứng.
Xây dựng giao diện trên máy tính
Xây dựng mô hình thực nghiệm
Thử nghiệm và đánh giá kết quả.
2 sinh viên, đồ án hoặc báo
cáo tốt nghiệp
Nguyễn Hồ An Thoại
15055471
Trương Nguyễn Quốc
Thịnh 15053951
Tp. Hồ Chí Minh, ngày tháng năm 20....
Xác nhận của Trưởng Bộ môn Người lập biểu
TS. Nguyễn Tấn Luỹ Nguyễn Tấn Luỹ





























