Embed Size (px)
Citation preview

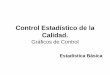
Muestreo de señales analógicas
2
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Principal requerimiento que surge al muestrear una señal continua:
• Definir el periodo de muestreo con suficiente exactitud.
• Ajustar el mismo a un valor adecuado de acuerdo al tipo de señal
que se desea adquirir.
Teorema del muestreo
3
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Se puede reconstruir una señal analógica a partir de sus valores
instantáneos equiespaciados (muestras). A partir de estos valores existen
∞ señales que pasan por esos puntos, pero si la señal original es de
banda limitada y las muestras son tomadas con un periodo suficiente,
entonces hay una única señal que se puede extrapolar de esas muestras
(se determina unívocamente).
Teorema del Nyquist
Si una señal de banda limitada es muestreada a una frecuencia de por lo
menos el doble de su máxima componente, ENTONCES es posible
recuperarla unívocamente (a partir de sus puntos muestra) con un filtro
pasabajos ideal.
• El microcontrolador debería entonces adquirir un dato cada un delta
de tiempo determinado.
• ¿Cómo se hace esto en forma confiable…?
Muestreo de señales analógicas
4
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
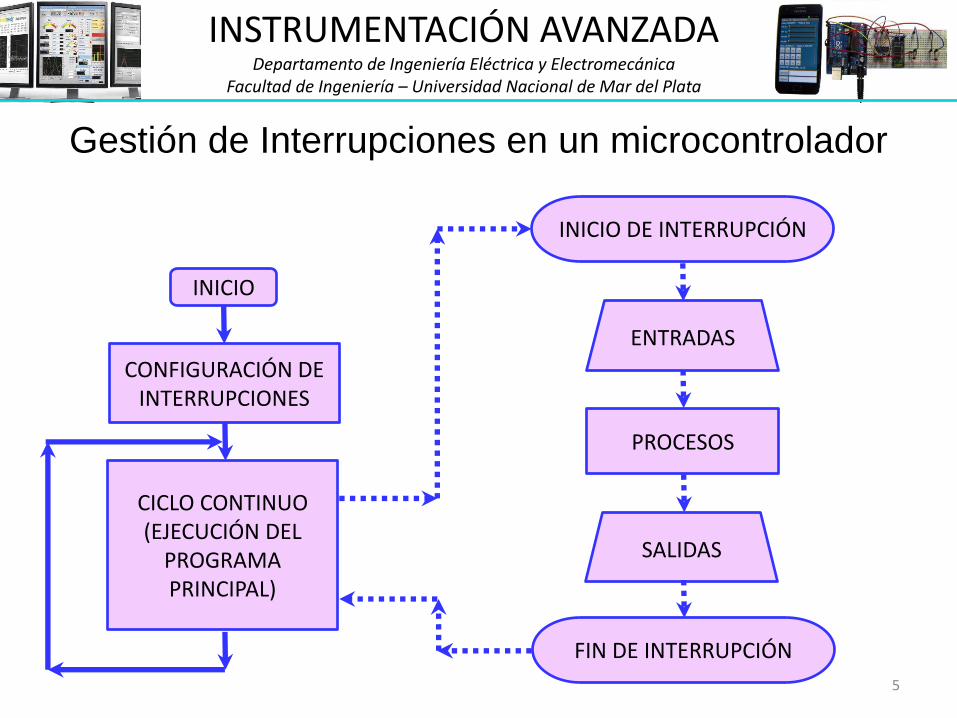
• Con interrupciones:
Las interrupciones son recursos o mecanismos del microcontrolador
para responder a eventos, permitiendo suspender temporalmente el
programa principal, para ejecutar una subrutina de servicio de
interrupción (ISR por sus siglas en inglés Interrupt Service Routine);
una vez terminada dicha subrutina, se reanuda la ejecución del
programa principal.
Gestión de Interrupciones en un microcontrolador
5
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
INICIO
CONFIGURACIÓN DE INTERRUPCIONES
CICLO CONTINUO (EJECUCIÓN DEL
PROGRAMA PRINCIPAL)
INICIO DE INTERRUPCIÓN
ENTRADAS
PROCESOS
SALIDAS
FIN DE INTERRUPCIÓN
Tipos de Interrupciones
6
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
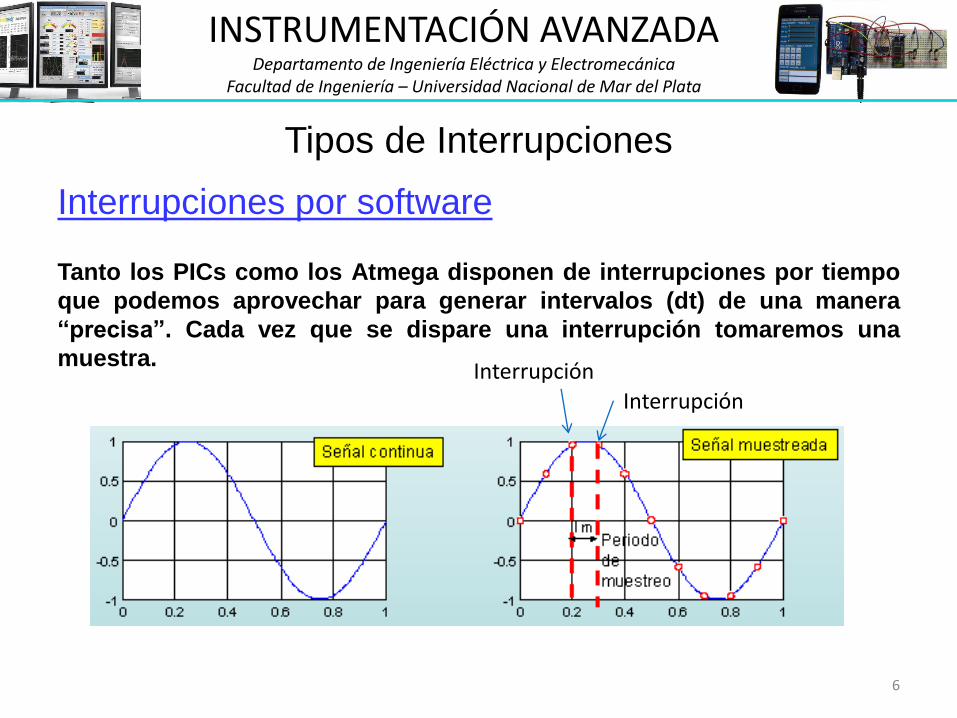
Interrupciones por software
Tanto los PICs como los Atmega disponen de interrupciones por tiempo
que podemos aprovechar para generar intervalos (dt) de una manera
“precisa”. Cada vez que se dispare una interrupción tomaremos una
muestra.
Interrupción Interrupción
Interrupciones en Arduino
7
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Generación de dt para producir Interrupciones por software
Tipos de Timers
En los chips AVR Atmega 328 (Arduino UNO) se dispone de 3 timers, mientras
que en los Atmega 2560 (Arduino MEGA) se cuenta con 6 timers.
• Timer 0: contador de 8 bits (contará como máximo hasta 255). Se utiliza en
las funciones delay() y millis().
• Timer 1: contador de 16 bits (contará como máximo hasta 65535). Es
utilizado por la librería servo.
• Timer 2: contador de 8 bits. Similar al Timer 0. Es utilizado por la función
tono.
• Timer 3, 4 y 5: son tres contadores de 16 bits similares al Timer 1,
disponibles en la Arduino MEGA.
8
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Interrupciones en Arduino
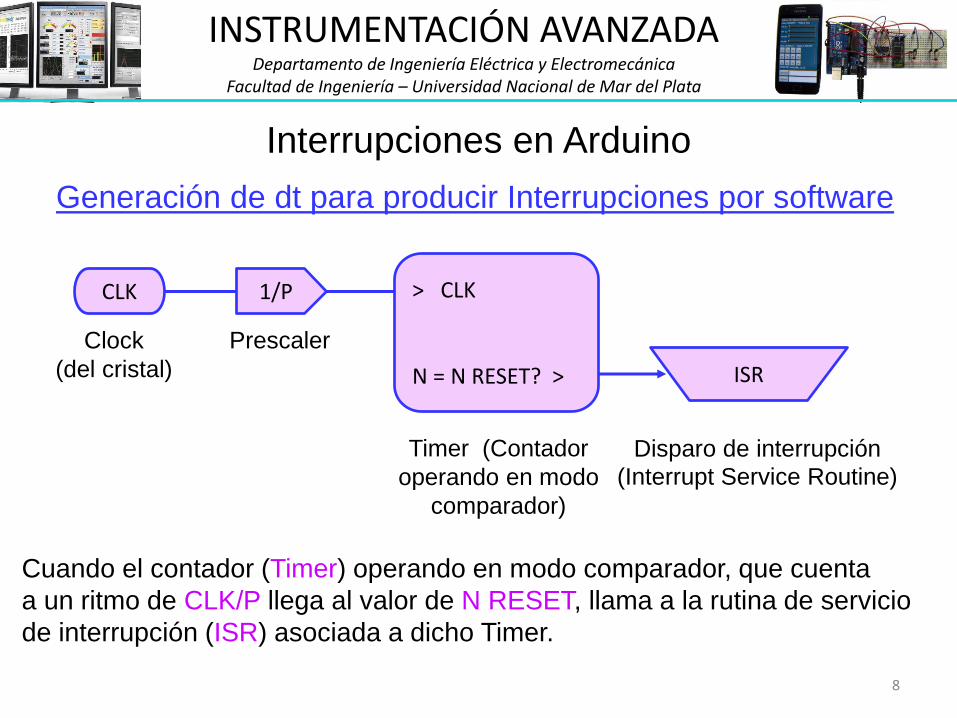
Generación de dt para producir Interrupciones por software
> CLK N = N RESET? >
Timer (Contador
operando en modo
comparador)
1/P
Disparo de interrupción
(Interrupt Service Routine)
CLK
Prescaler Clock
(del cristal) ISR
Cuando el contador (Timer) operando en modo comparador, que cuenta
a un ritmo de CLK/P llega al valor de N RESET, llama a la rutina de servicio
de interrupción (ISR) asociada a dicho Timer.
Interrupciones en Arduino
9
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Generación de dt para producir Interrupciones por software Configuraremos el Timer 1 de la Arduino UNO ó MEGA 2560 para que cuente
pulsos de una señal de clock cuya frecuencia se fija previamente.
Ejemplo:
La placa opera con un oscilador de 16MHz. Existe un divisor de
frecuencia configurable por el usuario denominado “prescaler” que
puede tomar los valores 1, 8, 64, 256 ó 1024.
Por lo tanto la frecuencia de la señal de clock aplicada al Timer 1 será:
𝐹𝑐𝑙𝑜𝑐𝑘 =16𝑀𝐻𝑧
𝑃𝑟𝑒𝑠𝑐𝑎𝑙𝑒𝑟
Interrupciones en Arduino
10
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
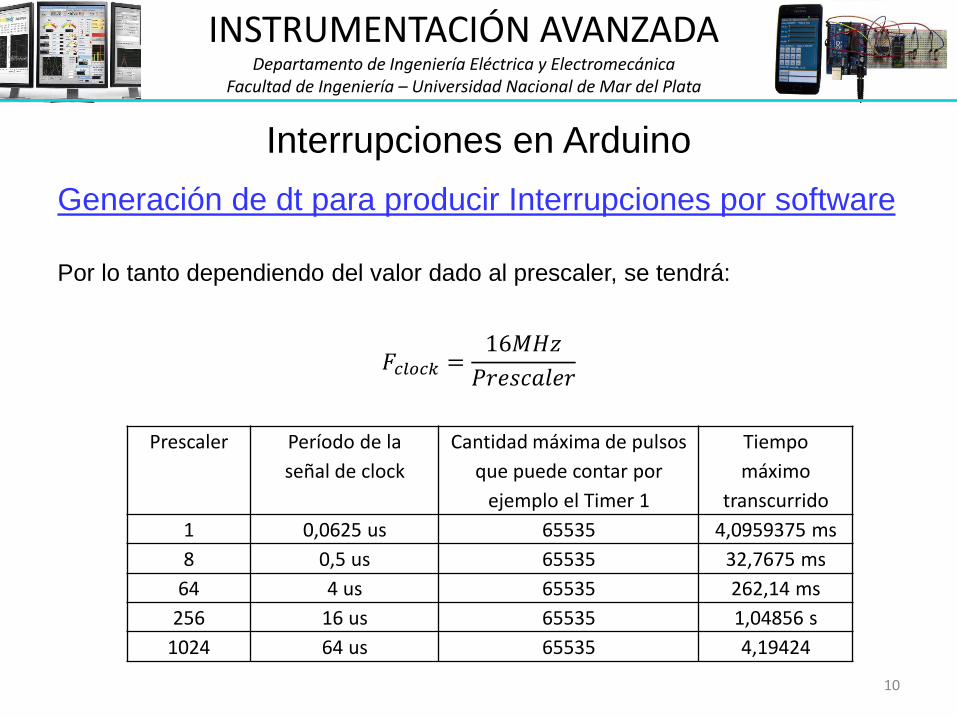
Generación de dt para producir Interrupciones por software
Por lo tanto dependiendo del valor dado al prescaler, se tendrá:
Prescaler Período de la
señal de clock
Cantidad máxima de pulsos
que puede contar por
ejemplo el Timer 1
Tiempo
máximo
transcurrido
1 0,0625 us 65535 4,0959375 ms
8 0,5 us 65535 32,7675 ms
64 4 us 65535 262,14 ms
256 16 us 65535 1,04856 s
1024 64 us 65535 4,19424
𝐹𝑐𝑙𝑜𝑐𝑘 =16𝑀𝐻𝑧
𝑃𝑟𝑒𝑠𝑐𝑎𝑙𝑒𝑟
11
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
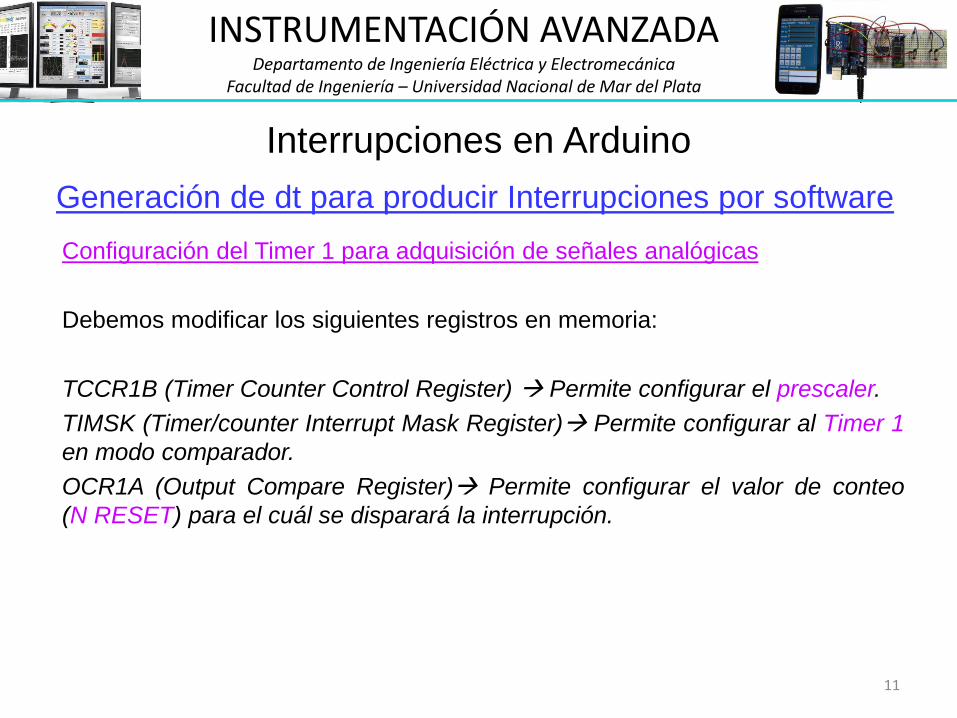
Configuración del Timer 1 para adquisición de señales analógicas
Debemos modificar los siguientes registros en memoria:
TCCR1B (Timer Counter Control Register) Permite configurar el prescaler.
TIMSK (Timer/counter Interrupt Mask Register) Permite configurar al Timer 1
en modo comparador.
OCR1A (Output Compare Register) Permite configurar el valor de conteo
(N RESET) para el cuál se disparará la interrupción.
Interrupciones en Arduino
Generación de dt para producir Interrupciones por software
12
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
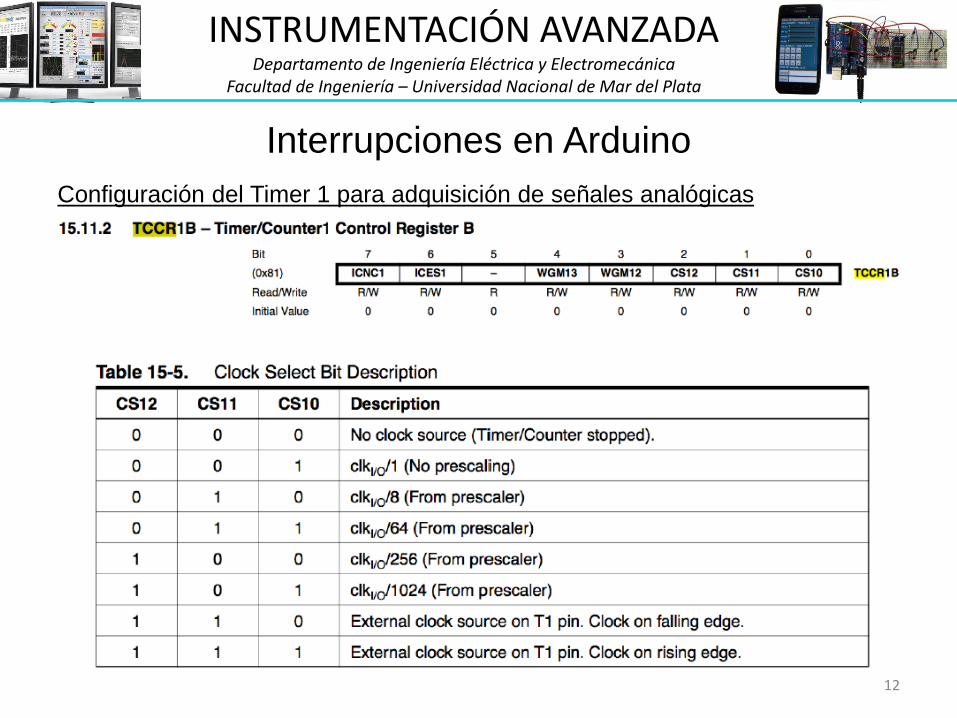
Configuración del Timer 1 para adquisición de señales analógicas
Interrupciones en Arduino
13
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
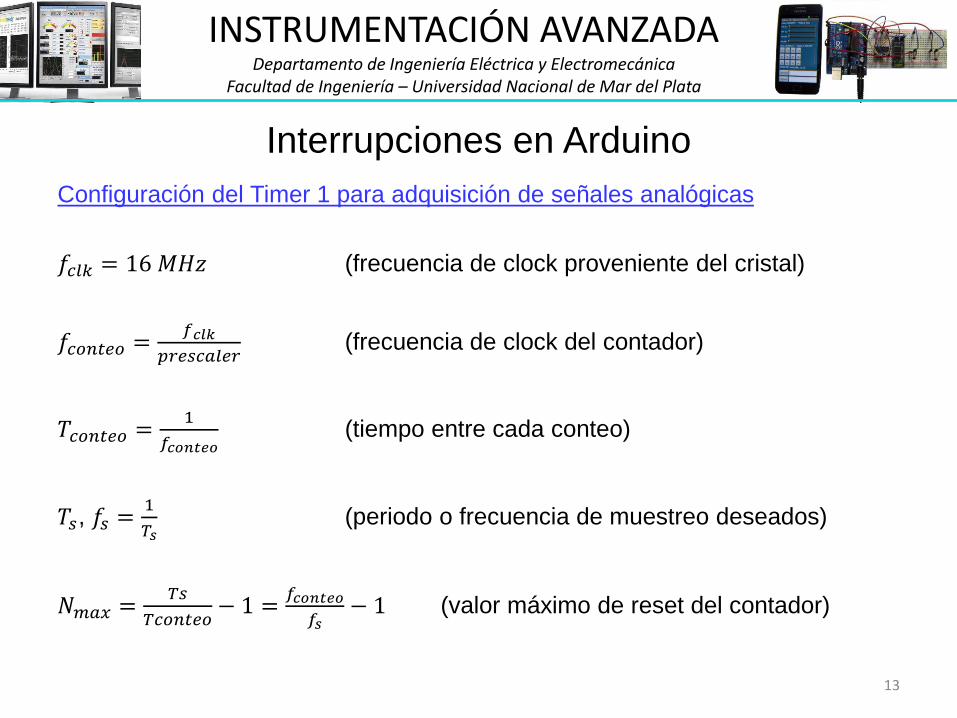
Configuración del Timer 1 para adquisición de señales analógicas
𝑓𝑐𝑙𝑘 = 16 𝑀𝐻𝑧 (frecuencia de clock proveniente del cristal)
𝑓𝑐𝑜𝑛𝑡𝑒𝑜 =𝑓𝑐𝑙𝑘
𝑝𝑟𝑒𝑠𝑐𝑎𝑙𝑒𝑟 (frecuencia de clock del contador)
𝑇𝑐𝑜𝑛𝑡𝑒𝑜 =1
𝑓𝑐𝑜𝑛𝑡𝑒𝑜 (tiempo entre cada conteo)
𝑇𝑠, 𝑓𝑠 =1
𝑇𝑠 (periodo o frecuencia de muestreo deseados)
𝑁𝑚𝑎𝑥 =𝑇𝑠
𝑇𝑐𝑜𝑛𝑡𝑒𝑜− 1 =
𝑓𝑐𝑜𝑛𝑡𝑒𝑜
𝑓𝑠− 1 (valor máximo de reset del contador)
Interrupciones en Arduino
Muestreo de señales analógicas
14
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
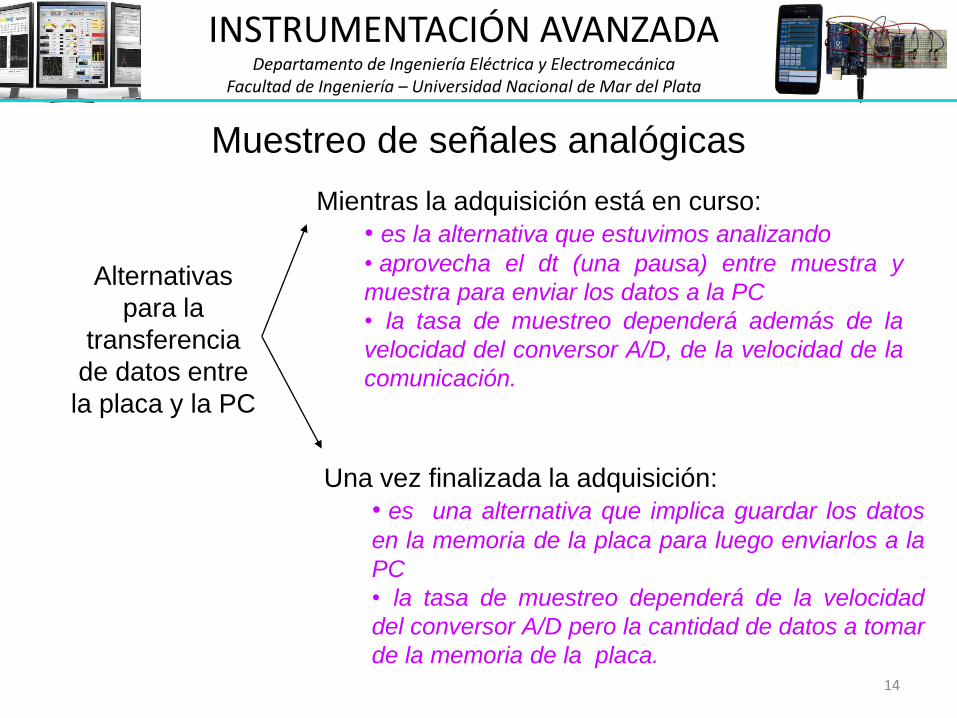
Una vez finalizada la adquisición:
• es una alternativa que implica guardar los datos
en la memoria de la placa para luego enviarlos a la
PC
• la tasa de muestreo dependerá de la velocidad
del conversor A/D pero la cantidad de datos a tomar
de la memoria de la placa.
Mientras la adquisición está en curso:
• es la alternativa que estuvimos analizando
• aprovecha el dt (una pausa) entre muestra y
muestra para enviar los datos a la PC
• la tasa de muestreo dependerá además de la
velocidad del conversor A/D, de la velocidad de la
comunicación.
Alternativas
para la
transferencia
de datos entre
la placa y la PC
Frecuencia de Muestreo: Caso Arduino
15
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
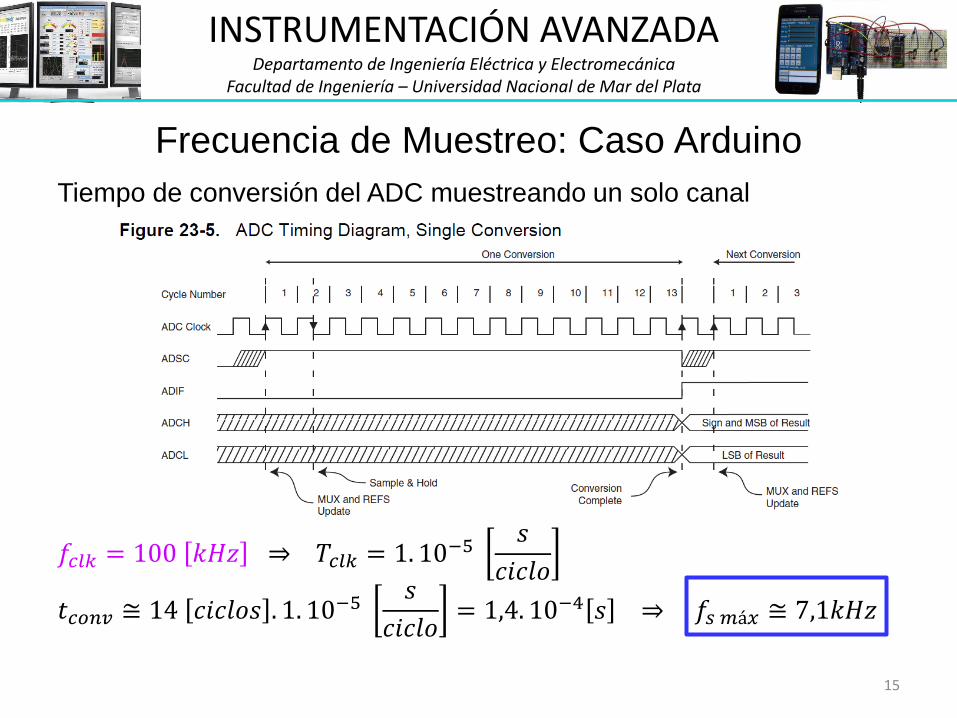
Tiempo de conversión del ADC muestreando un solo canal
𝑓𝑐𝑙𝑘 = 100 𝑘𝐻𝑧 ⇒ 𝑇𝑐𝑙𝑘 = 1. 10−5 𝑠
𝑐𝑖𝑐𝑙𝑜
𝑡𝑐𝑜𝑛𝑣 ≅ 14 𝑐𝑖𝑐𝑙𝑜𝑠 . 1. 10−5 𝑠
𝑐𝑖𝑐𝑙𝑜= 1,4. 10−4 𝑠 ⇒ 𝑓𝑠 𝑚á𝑥 ≅ 7,1𝑘𝐻𝑧
Frecuencia de Muestreo: Caso Arduino
16
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
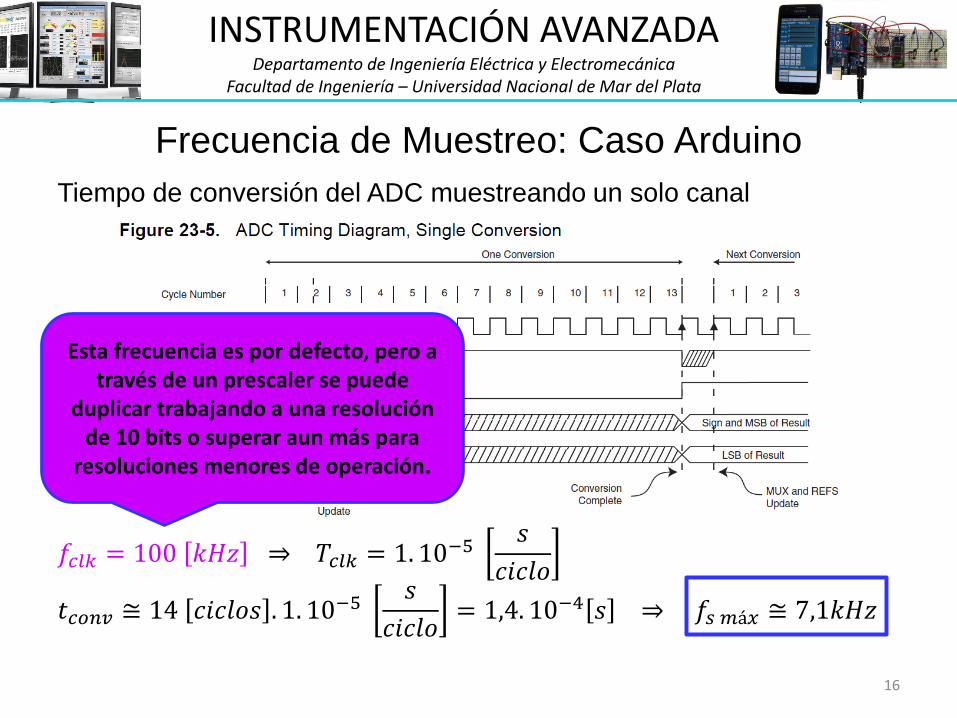
Tiempo de conversión del ADC muestreando un solo canal
𝑓𝑐𝑙𝑘 = 100 𝑘𝐻𝑧 ⇒ 𝑇𝑐𝑙𝑘 = 1. 10−5 𝑠
𝑐𝑖𝑐𝑙𝑜
𝑡𝑐𝑜𝑛𝑣 ≅ 14 𝑐𝑖𝑐𝑙𝑜𝑠 . 1. 10−5 𝑠
𝑐𝑖𝑐𝑙𝑜= 1,4. 10−4 𝑠 ⇒ 𝑓𝑠 𝑚á𝑥 ≅ 7,1𝑘𝐻𝑧
Esta frecuencia es por defecto, pero a través de un prescaler se puede
duplicar trabajando a una resolución de 10 bits o superar aun más para
resoluciones menores de operación.
Tiempo para el envío de las muestras: Caso Arduino
17
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
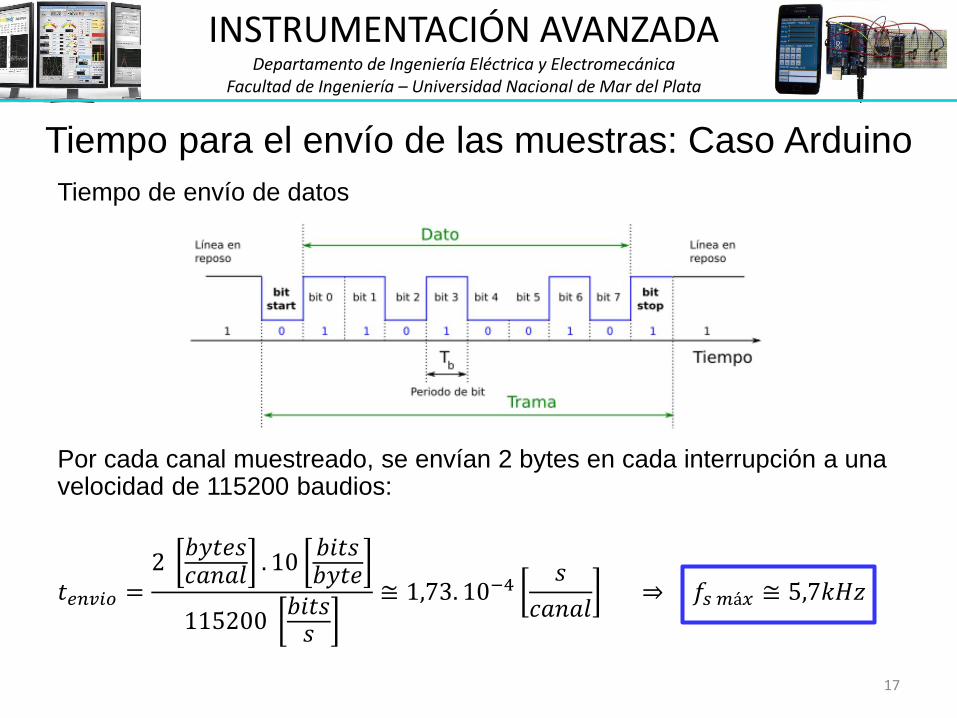
Tiempo de envío de datos
Por cada canal muestreado, se envían 2 bytes en cada interrupción a una velocidad de 115200 baudios:
𝑡𝑒𝑛𝑣𝑖𝑜 =2
𝑏𝑦𝑡𝑒𝑠𝑐𝑎𝑛𝑎𝑙
. 10𝑏𝑖𝑡𝑠𝑏𝑦𝑡𝑒
115200 𝑏𝑖𝑡𝑠
𝑠
≅ 1,73. 10−4𝑠
𝑐𝑎𝑛𝑎𝑙 ⇒ 𝑓𝑠 𝑚á𝑥 ≅ 5,7𝑘𝐻𝑧
Aspectos a tener en cuenta para medir una señal
alterna con la placa PIC o Arduino
18
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Limitaciones A TENER EN CUENTA
1. El rango de conversor A/D del PIC 18F2550 es: 0 V – 5 V (tensión de alimentación) pero en nuestro caso, como hay unos diodos de protección la tensión de alimentación no es 5V sino unos 4,2V) 0V = 0 en el conversor 4,2V=1023 en el conversor
2. El rango de conversor A/D del Arduino es: 0 V – 5 V (tensión de alimentación) 0V = 0 en el conversor 5V=1023 en el conversor
Aspectos a tener en cuenta para medir una alterna
con la placa PIC o Arduino
19
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Limitaciones A TENER EN CUENTA
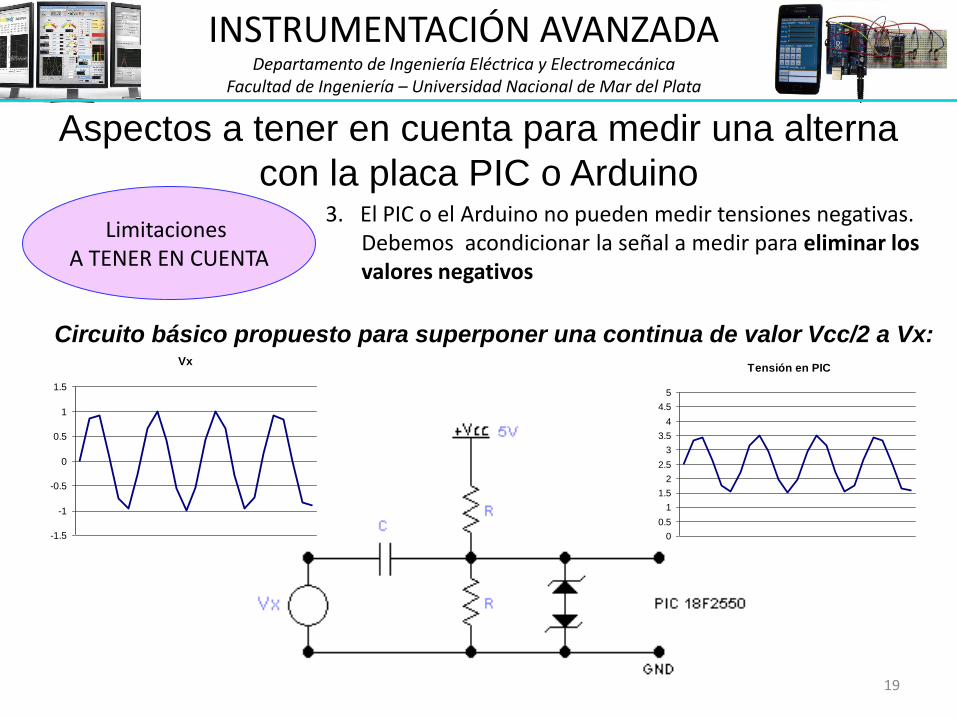
3. El PIC o el Arduino no pueden medir tensiones negativas. Debemos acondicionar la señal a medir para eliminar los valores negativos
Tensión en PIC
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Vx
-1.5
-1
-0.5
0
0.5
1
1.5
Circuito básico propuesto para superponer una continua de valor Vcc/2 a Vx:
Guía de
Ejercicios
N° 8
20
21
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
CÓDIGO ARDUINO
22
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
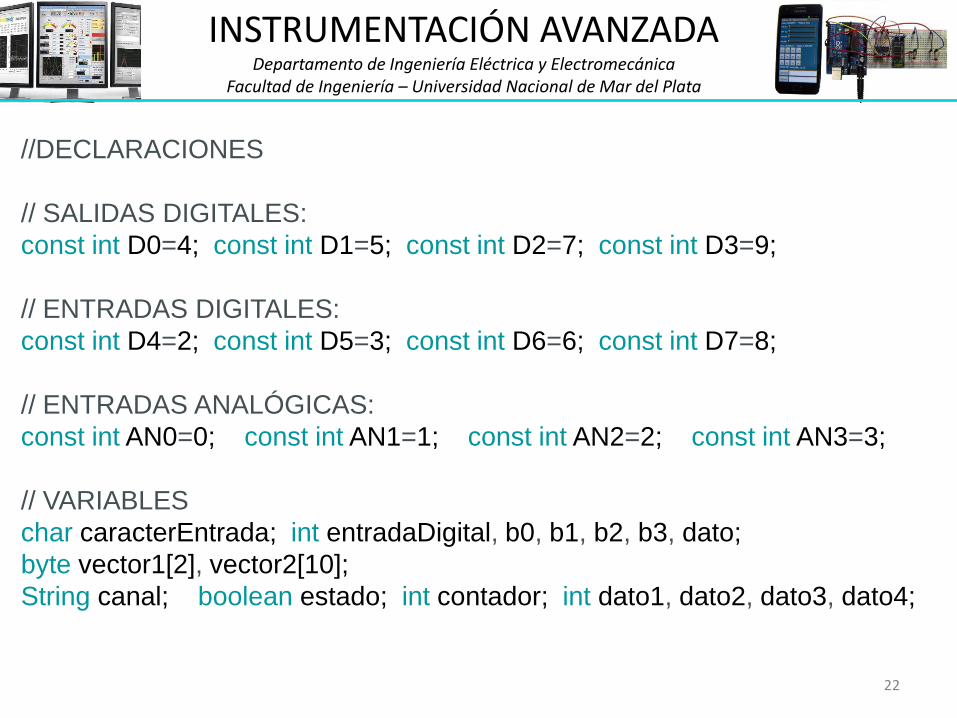
//DECLARACIONES
// SALIDAS DIGITALES:
const int D0=4; const int D1=5; const int D2=7; const int D3=9;
// ENTRADAS DIGITALES:
const int D4=2; const int D5=3; const int D6=6; const int D7=8;
// ENTRADAS ANALÓGICAS:
const int AN0=0; const int AN1=1; const int AN2=2; const int AN3=3;
// VARIABLES
char caracterEntrada; int entradaDigital, b0, b1, b2, b3, dato;
byte vector1[2], vector2[10];
String canal; boolean estado; int contador; int dato1, dato2, dato3, dato4;
23
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
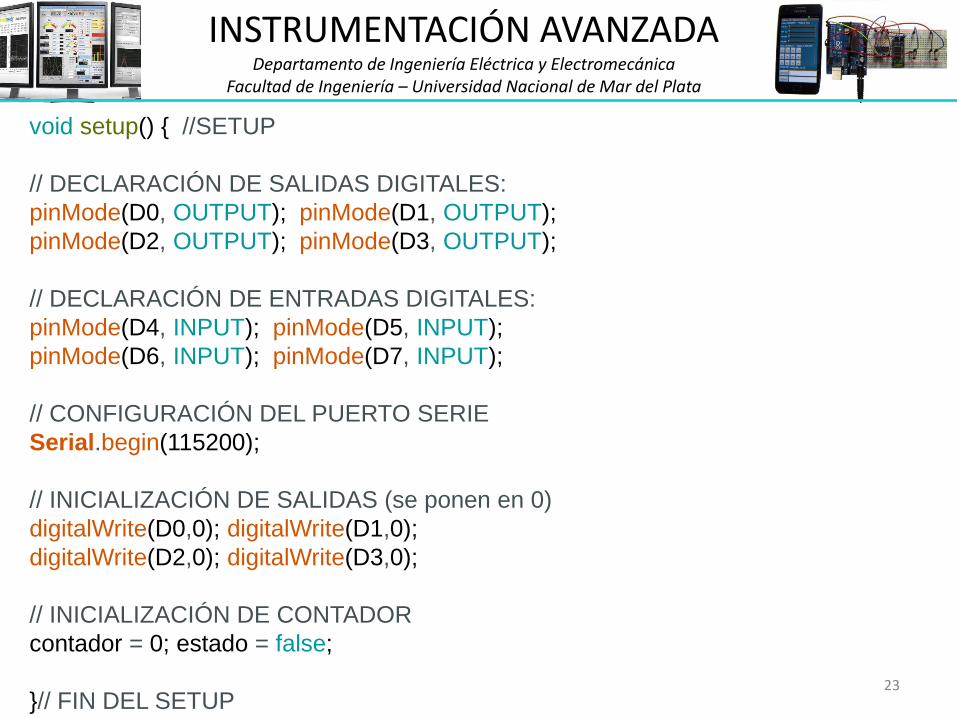
void setup() { //SETUP
// DECLARACIÓN DE SALIDAS DIGITALES:
pinMode(D0, OUTPUT); pinMode(D1, OUTPUT);
pinMode(D2, OUTPUT); pinMode(D3, OUTPUT);
// DECLARACIÓN DE ENTRADAS DIGITALES:
pinMode(D4, INPUT); pinMode(D5, INPUT);
pinMode(D6, INPUT); pinMode(D7, INPUT);
// CONFIGURACIÓN DEL PUERTO SERIE
Serial.begin(115200);
// INICIALIZACIÓN DE SALIDAS (se ponen en 0)
digitalWrite(D0,0); digitalWrite(D1,0);
digitalWrite(D2,0); digitalWrite(D3,0);
// INICIALIZACIÓN DE CONTADOR
contador = 0; estado = false;
}// FIN DEL SETUP
24
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
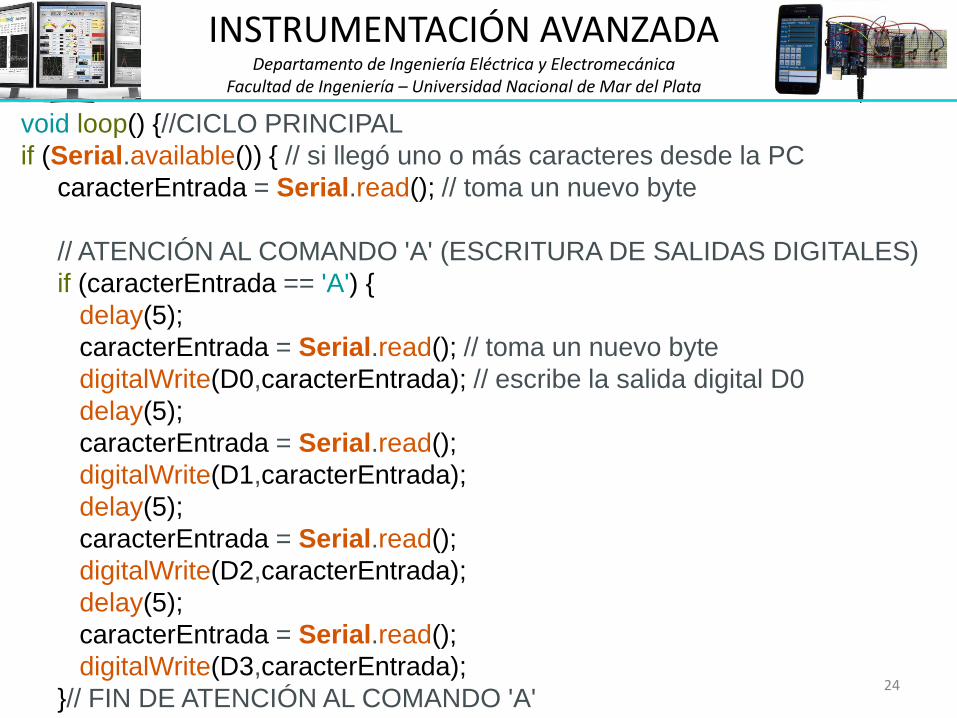
void loop() {//CICLO PRINCIPAL
if (Serial.available()) { // si llegó uno o más caracteres desde la PC
caracterEntrada = Serial.read(); // toma un nuevo byte
// ATENCIÓN AL COMANDO 'A' (ESCRITURA DE SALIDAS DIGITALES)
if (caracterEntrada == 'A') {
delay(5);
caracterEntrada = Serial.read(); // toma un nuevo byte
digitalWrite(D0,caracterEntrada); // escribe la salida digital D0
delay(5);
caracterEntrada = Serial.read();
digitalWrite(D1,caracterEntrada);
delay(5);
caracterEntrada = Serial.read();
digitalWrite(D2,caracterEntrada);
delay(5);
caracterEntrada = Serial.read();
digitalWrite(D3,caracterEntrada);
}// FIN DE ATENCIÓN AL COMANDO 'A'
25
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
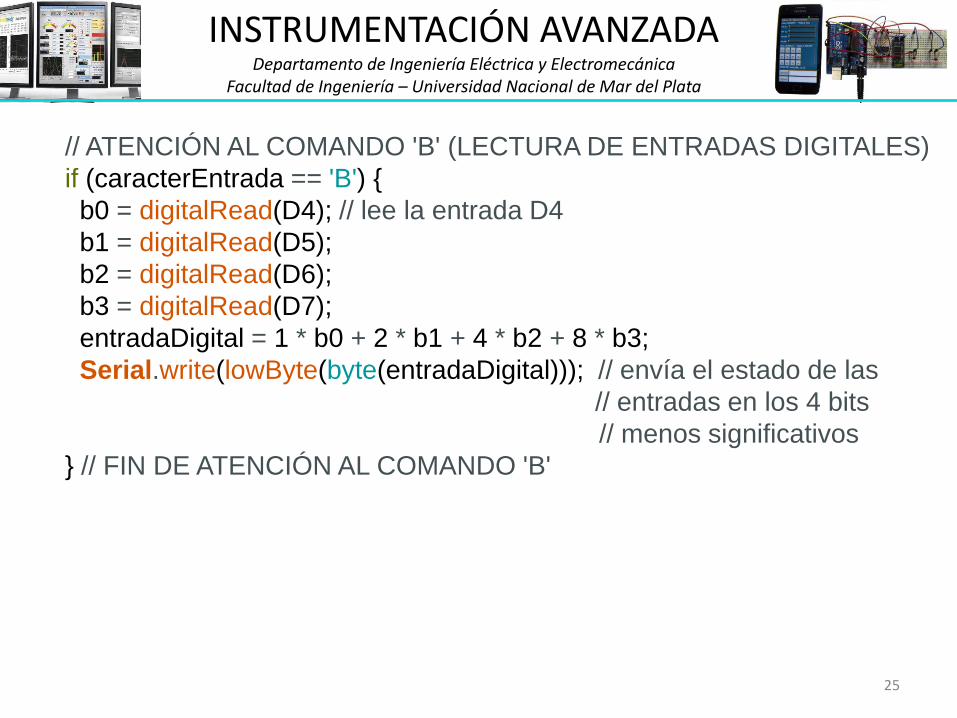
// ATENCIÓN AL COMANDO 'B' (LECTURA DE ENTRADAS DIGITALES)
if (caracterEntrada == 'B') {
b0 = digitalRead(D4); // lee la entrada D4
b1 = digitalRead(D5);
b2 = digitalRead(D6);
b3 = digitalRead(D7);
entradaDigital = 1 * b0 + 2 * b1 + 4 * b2 + 8 * b3;
Serial.write(lowByte(byte(entradaDigital))); // envía el estado de las
// entradas en los 4 bits
// menos significativos
} // FIN DE ATENCIÓN AL COMANDO 'B'
26
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
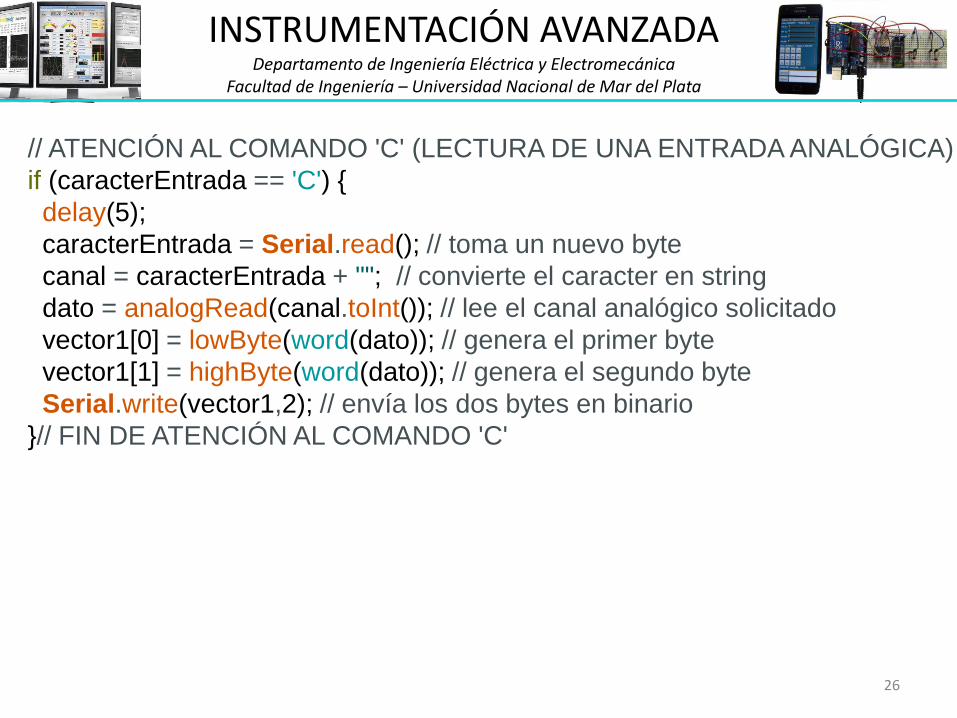
// ATENCIÓN AL COMANDO 'C' (LECTURA DE UNA ENTRADA ANALÓGICA)
if (caracterEntrada == 'C') {
delay(5);
caracterEntrada = Serial.read(); // toma un nuevo byte
canal = caracterEntrada + ""; // convierte el caracter en string
dato = analogRead(canal.toInt()); // lee el canal analógico solicitado
vector1[0] = lowByte(word(dato)); // genera el primer byte
vector1[1] = highByte(word(dato)); // genera el segundo byte
Serial.write(vector1,2); // envía los dos bytes en binario
}// FIN DE ATENCIÓN AL COMANDO 'C'
27
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
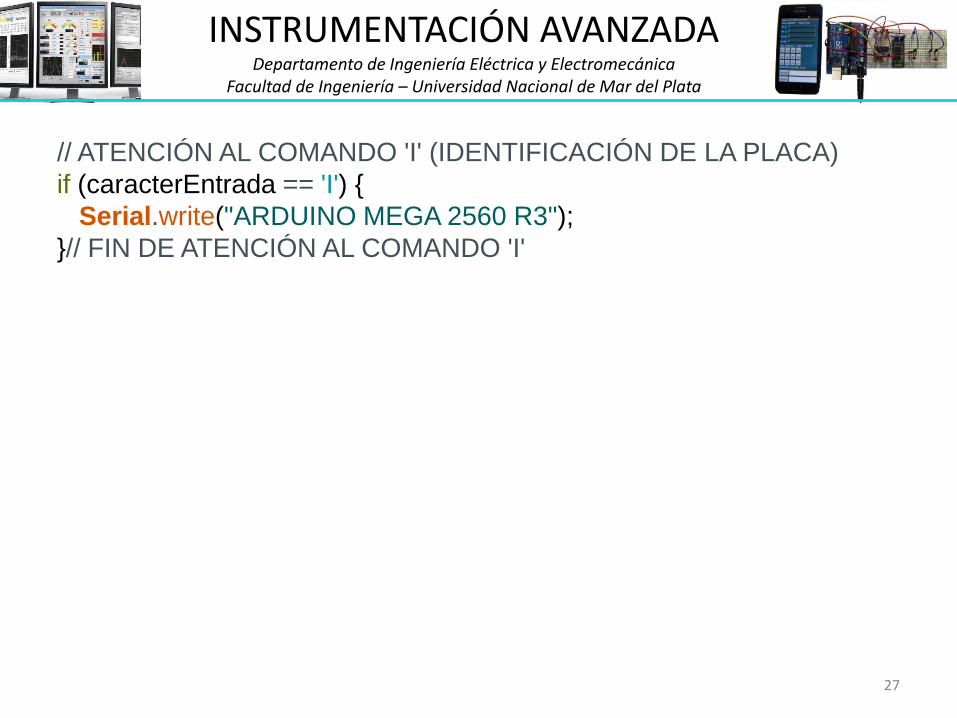
// ATENCIÓN AL COMANDO 'I' (IDENTIFICACIÓN DE LA PLACA)
if (caracterEntrada == 'I') {
Serial.write("ARDUINO MEGA 2560 R3");
}// FIN DE ATENCIÓN AL COMANDO 'I'
28
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
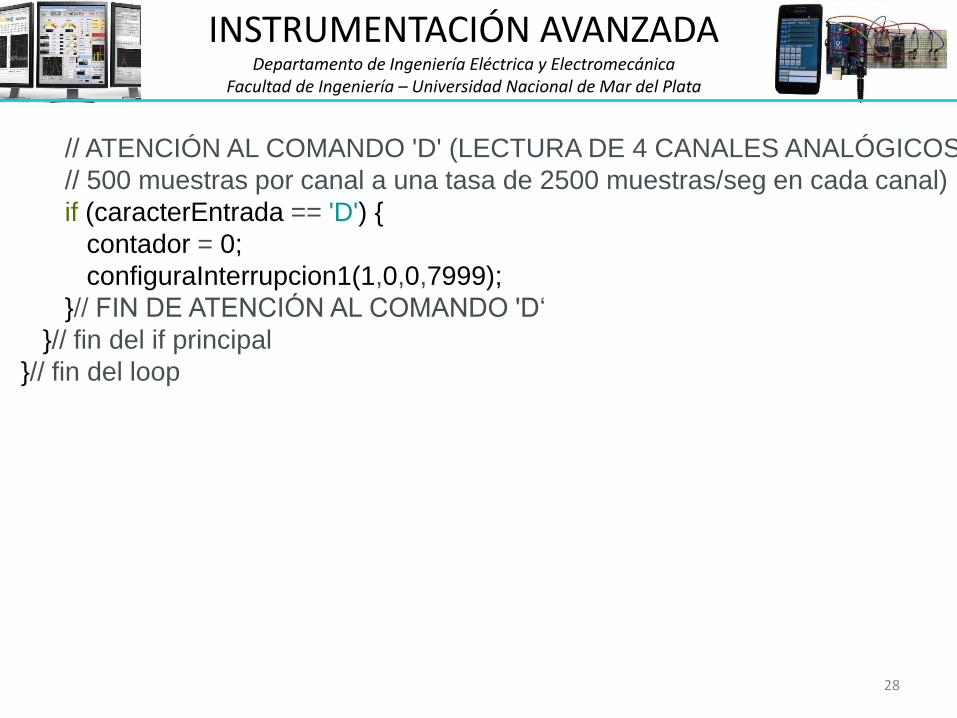
// ATENCIÓN AL COMANDO 'D' (LECTURA DE 4 CANALES ANALÓGICOS:
// 500 muestras por canal a una tasa de 2500 muestras/seg en cada canal)
if (caracterEntrada == 'D') {
contador = 0;
configuraInterrupcion1(1,0,0,7999);
}// FIN DE ATENCIÓN AL COMANDO 'D„
}// fin del if principal
}// fin del loop
29
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
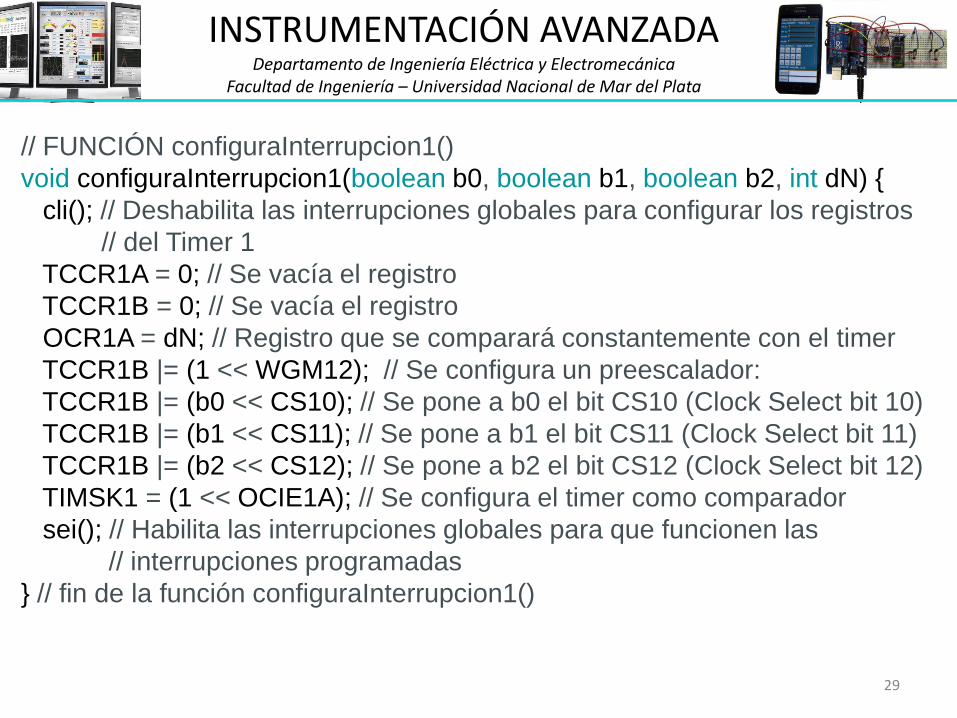
// FUNCIÓN configuraInterrupcion1()
void configuraInterrupcion1(boolean b0, boolean b1, boolean b2, int dN) {
cli(); // Deshabilita las interrupciones globales para configurar los registros
// del Timer 1
TCCR1A = 0; // Se vacía el registro
TCCR1B = 0; // Se vacía el registro
OCR1A = dN; // Registro que se comparará constantemente con el timer
TCCR1B |= (1 << WGM12); // Se configura un preescalador:
TCCR1B |= (b0 << CS10); // Se pone a b0 el bit CS10 (Clock Select bit 10)
TCCR1B |= (b1 << CS11); // Se pone a b1 el bit CS11 (Clock Select bit 11)
TCCR1B |= (b2 << CS12); // Se pone a b2 el bit CS12 (Clock Select bit 12)
TIMSK1 = (1 << OCIE1A); // Se configura el timer como comparador
sei(); // Habilita las interrupciones globales para que funcionen las
// interrupciones programadas
} // fin de la función configuraInterrupcion1()
30
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
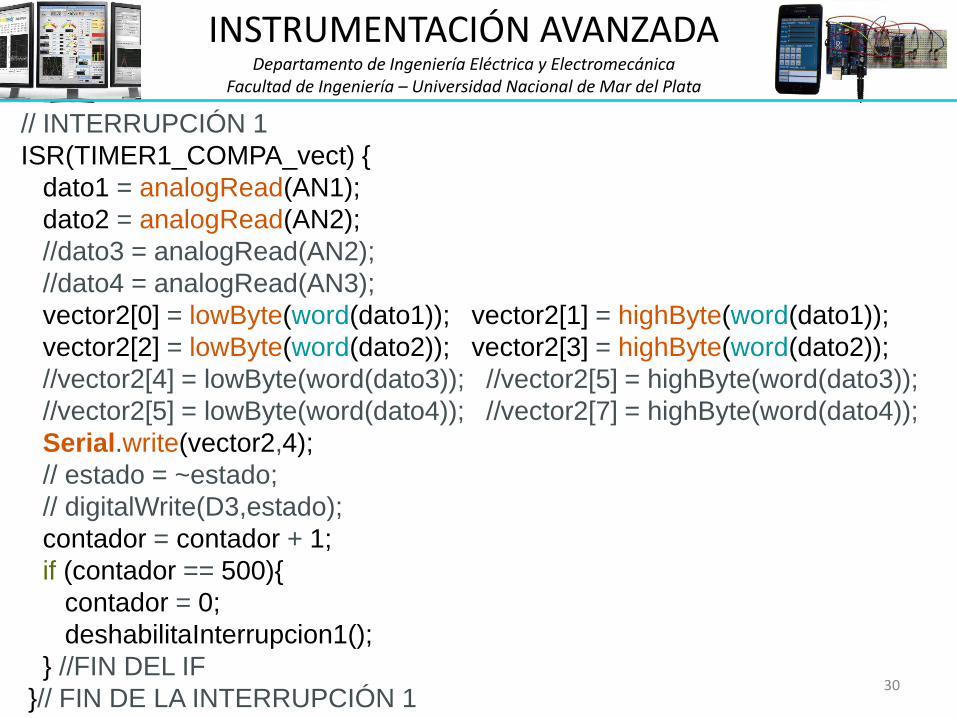
// INTERRUPCIÓN 1
ISR(TIMER1_COMPA_vect) {
dato1 = analogRead(AN1);
dato2 = analogRead(AN2);
//dato3 = analogRead(AN2);
//dato4 = analogRead(AN3);
vector2[0] = lowByte(word(dato1)); vector2[1] = highByte(word(dato1));
vector2[2] = lowByte(word(dato2)); vector2[3] = highByte(word(dato2));
//vector2[4] = lowByte(word(dato3)); //vector2[5] = highByte(word(dato3));
//vector2[5] = lowByte(word(dato4)); //vector2[7] = highByte(word(dato4));
Serial.write(vector2,4);
// estado = ~estado;
// digitalWrite(D3,estado);
contador = contador + 1;
if (contador == 500){
contador = 0;
deshabilitaInterrupcion1();
} //FIN DEL IF
}// FIN DE LA INTERRUPCIÓN 1
31
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
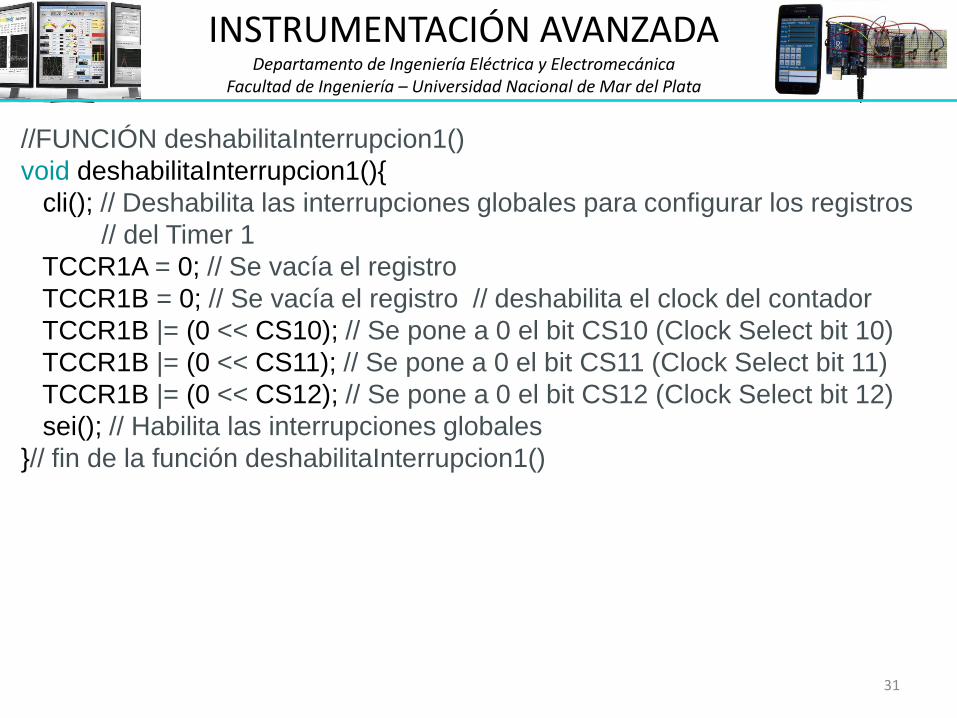
//FUNCIÓN deshabilitaInterrupcion1()
void deshabilitaInterrupcion1(){
cli(); // Deshabilita las interrupciones globales para configurar los registros
// del Timer 1
TCCR1A = 0; // Se vacía el registro
TCCR1B = 0; // Se vacía el registro // deshabilita el clock del contador
TCCR1B |= (0 << CS10); // Se pone a 0 el bit CS10 (Clock Select bit 10)
TCCR1B |= (0 << CS11); // Se pone a 0 el bit CS11 (Clock Select bit 11)
TCCR1B |= (0 << CS12); // Se pone a 0 el bit CS12 (Clock Select bit 12)
sei(); // Habilita las interrupciones globales
}// fin de la función deshabilitaInterrupcion1()
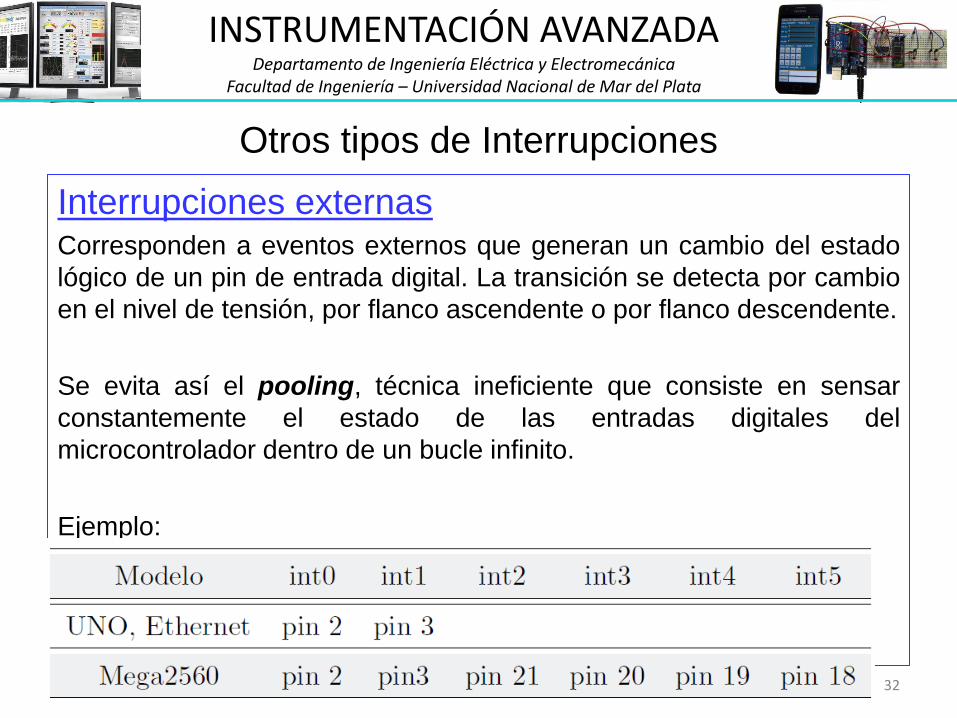
Otros tipos de Interrupciones
32
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Interrupciones externas Corresponden a eventos externos que generan un cambio del estado
lógico de un pin de entrada digital. La transición se detecta por cambio
en el nivel de tensión, por flanco ascendente o por flanco descendente.
Se evita así el pooling, técnica ineficiente que consiste en sensar
constantemente el estado de las entradas digitales del
microcontrolador dentro de un bucle infinito.
Ejemplo:
Interrupciones en PIC
33
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Generación de dt para producir Interrupciones por software Tipos de Timers
En los PIC 18F2550 se dispone de 4 Timers.
• Timer 0: puede funcionar como temporizador o contador. Tiene16 bits
(contará como máximo hasta 65535).
• Timer 1 y 3: pueden funcionar como temporizadores o contadores
dependiendo del estado de unos registros de control asociados a ellos.
Tienen16 bits. Se pueden utilizar para programar interrupciones por tiempo
mediante unos módulos denominados CCP.
• Timer 2: contador o temporizador de 8 bits (contará como máximo hasta
255). Se puede utilizar para generar señales PWM también con CCP.
Interrupciones en PIC
34
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Generación de dt para producir Interrupciones por software Cada Timer del PIC 18F2550 cuenta pulsos de una señal de clock cuya
frecuencia se fija previamente.
Ejemplo:
Si el PIC trabaja con un oscilador de 20MHz por medio de una
elemento de hardware denominado PLL la frecuencia de reloj del
sistema será de 48MHz.
Existe un divisor de frecuencia configurable por el usuario denominado
“prescaler” que puede tomar los valores 1, 2, 4 u 8.
Por lo tanto la frecuencia de la señal de clock aplicada a un Timer será:
Interrupciones en PIC
35
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
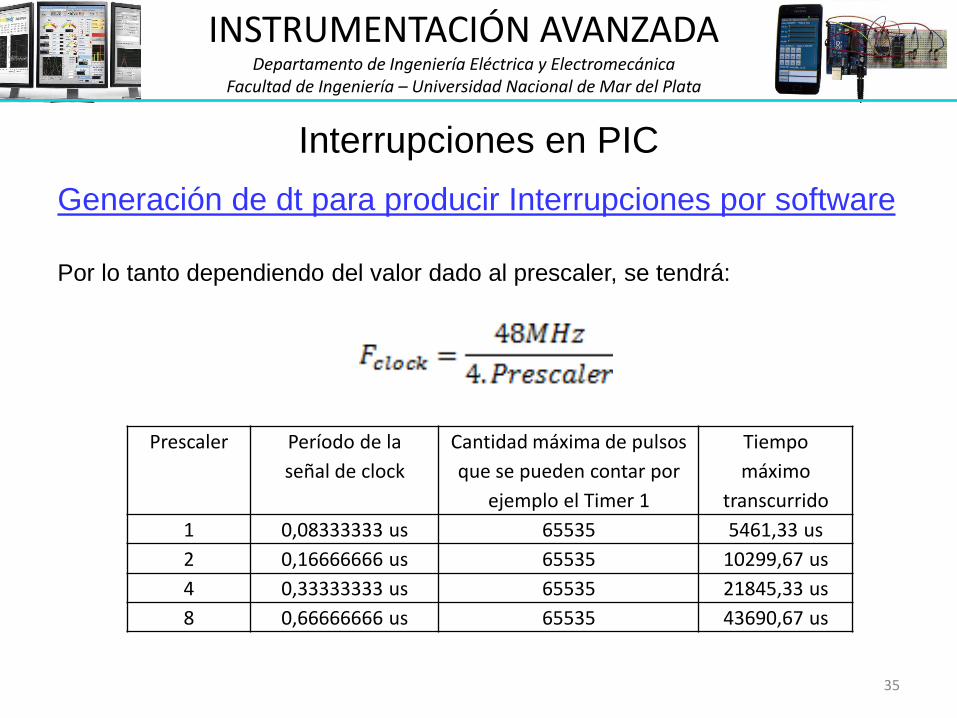
Generación de dt para producir Interrupciones por software
Por lo tanto dependiendo del valor dado al prescaler, se tendrá:
Prescaler Período de la
señal de clock
Cantidad máxima de pulsos
que se pueden contar por
ejemplo el Timer 1
Tiempo
máximo
transcurrido
1 0,08333333 us 65535 5461,33 us
2 0,16666666 us 65535 10299,67 us
4 0,33333333 us 65535 21845,33 us
8 0,66666666 us 65535 43690,67 us
Interrupciones en PIC
36
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Producido un dt disparamos una interrupción con el
módulo CCP1
El módulo CCP1
• El módulo CCP1 se puede asociar al Timer 1. (mediante un registro de
control asociado a CCP1).
• Mediante ese mismo registro de control asociado a CCP1 se lo puede
configurar en tres modos de funcionamiento. “compare, capture, o PWM”
• El CCP1 configurado en modo compare “dispara” una interrupción cuando
el valor del Timer 1 iguala a un valor seteado en CCP1.
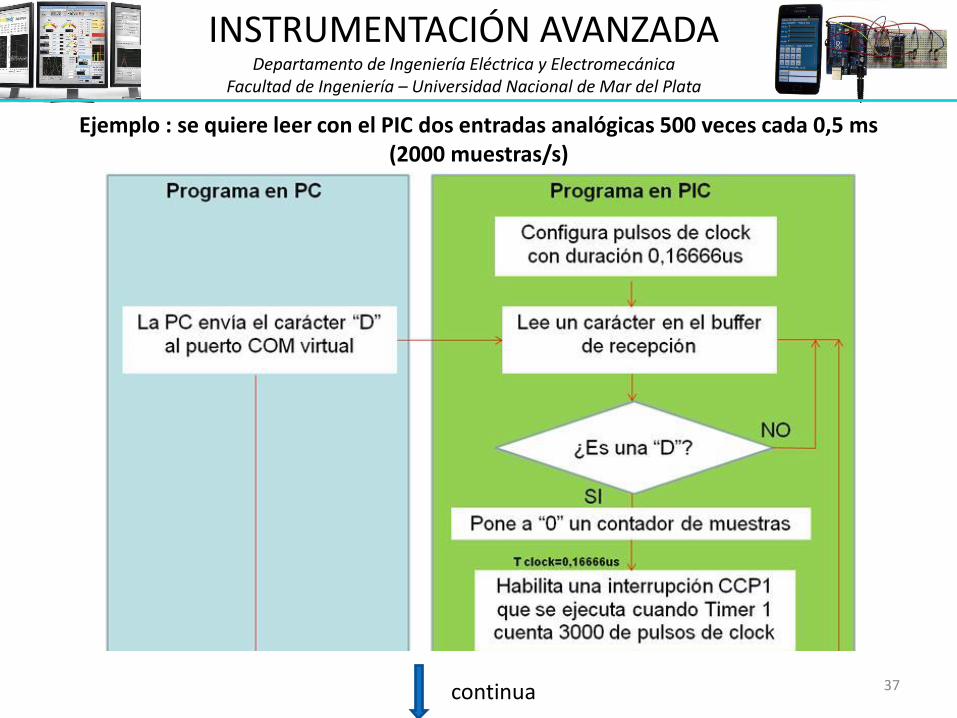
Ejemplo : se quiere leer con el PIC dos entradas analógicas 500 veces cada 0,5 ms (2000 muestras/s)
37
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
continua
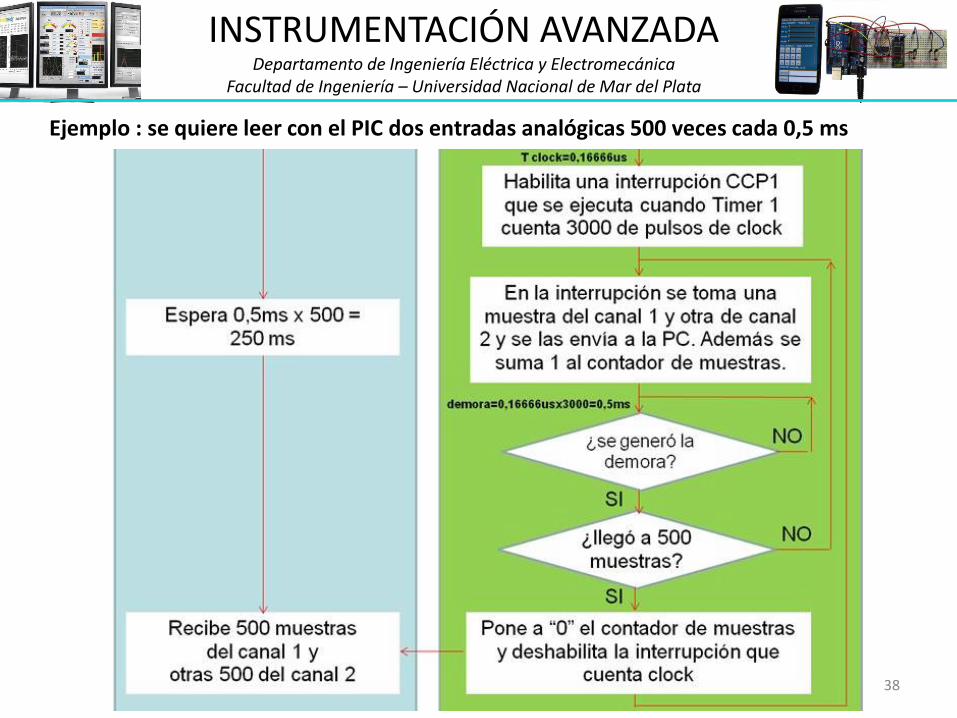
Ejemplo : se quiere leer con el PIC dos entradas analógicas 500 veces cada 0,5 ms
38
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica
Facultad de Ingeniería – Universidad Nacional de Mar del Plata
Guía de
Ejercicios
N° 8
39