Embed Size (px)
Citation preview

Något om Vektorer och MathematicaBertil Nilsson2018-10-15
HH/ITE/BN Vektorer och Mathematica 1

Förord
På följande sidor presenteras en elementär “streetwise guide” till vektorer i planet och rummet med flitig användning av Mathemat-ica. Framställningen är fåordig, fri från pedanteri men i någon mening fullständig. Det man väsentligen behöver veta om begrepp,terminologi, beteckningar och teori för att modellera och lösa problem i framtida kurser och yrkesliv som ingenjör, naturvetare ellerlärare klarläggs och typiska exempel ges.
Vektorbegreppet
Inom naturvetenskap finns många storheter som är bestämda av ett enda tal, storhetens mätetal, t.ex. massa, temperatur, längd,
vinkel eller fart. Sådana storheter kallas för en skalär. Det finns emellertid också storheter som utöver mätetal även har en riktning.
En sådan storhet kallas vektor och har både riktning och längd (ibland också kallad storlek eller belopp). Dess längd är en skalär.Det typiska exemplet är hastighet som är en vektor och dess längd som kallas fart. Eftersom vi inte kan avgöra åt vilket håll vi körnär vi tittar på bilens “hastighetsmätare” har vi alltså strängt taget inte en hastighetsmätare i bilen utan en fartmätare! Ett annatexempel är kraft som har både längd (storlek) och en speciell riktning.
En vektor betraktas ibland som en riktad sträcka mellan två punkter
och åskådliggörs vanligtvis med en pil som då både visar dess längd
och riktning. Man talar om vektorns startpunkt fotpunkt A och
slutpunkt spets B. Vanligtvis betecknas en vektor med små feta
bokstäver, exempelvis v eller , vilket utläses “vektorn v”.
Typiska undantag är i mekanik där man av tradition använder beteckningar som , och för en kraftvektor och för ett kraftmo-
ment. Ibland ser man också de lite äldre beteckningarna v och v. Längden skrivs med motsvarande enkla font v eller med belopp-stecken . Längden är alltså en skalär, ett tal, och sambandet mellan skrivsätten är v .
I Mathematica skrivs feta bokstäver, t.ex. v eller , med “fet italiensk” font respektive dsv , där ds står för double-struck.Författaren brukar vara konsekvent och använda det senare både i Mathematica och för hand. För att öka läsbarheten brukar manofta pynta ett namn med en för vektorn typisk egenskap, exempelvis om pekar åt samma håll som . Läsaren uppmuntras attfölja denna vana. Inte sällan används grekiska bokstäver. Dessa hämtas ur palette eller direkt på tangentbordet som bokstav ,t.ex. Α a , Β b , Μ m , j och Θ q osv. Det går naturligtvis lika bra att använda vanliga tecken!
Enhetsvektor och nollvektor
Om en vektor har längden ett, det vill säga 1, kallas den för enhetsvektor och är en mycket viktig byggsten när man mod-ellerar och löser problem. För denna brukar man ofta reservera namn som , , , (enhetsvektor) eller (unit vector). En vektor
som har längden noll kallar vi för nollvektor och reserverar namnet för denna. Skilj noga på vektorn och talet 0, sambandet dememellan är 0.
Likhet för vektorer
Två vektorer och säges vara lika, vilket skrivs , om antingen och har samma längd och samma riktning eller båda ärnollvektorer. Om de inte är lika skriver vi .
Alla vektorer som är lika långa och riktade åt samma håll är lika.
Exempel: Tre vektorer som är lika.
Addition, subtraktion och multiplikation med skalär
Addition och subtraktion mellan vektorer liksom multiplikation av en vektor med en skalär ger nya vektorer. Dessa definieras så attman geometriskt får en analogi med kraftbegreppet i mekanik.
2 Vektorer och Mathematica HH/ITE/BN

Vi ser att addition är kommutativ . Vid multiplikation av en vektor med en skalär, s , får vi som resultat en ny vektormed längden s s som förblir längs samma syftlinje som . Om s 0 säger vi att vektorn får motsatt riktning. Se figurovan hur olika s påverkar en given vektor . Med vektorn menas vektorn 1 . Vi har också utnyttjat likhet förvektorer när vi ritat upp “additionsparallellogrammen”. Man talar ibland om olika representanter för samma vektor.
Räknelagar: Om , och är godtyckliga vektorer och s och t reella tal gäller 1 kommutativa lagen 6 s t s t distributiva lagen
2 associativa lagen 7 s t st3 8 1
4 9 1
5 s s s distributiva lagen
Parallella vektorer
Två vektorer och säges vara parallella om de har samma riktning eller är motsatt riktade mot varandra eller om minst en av
vektorerna är en nollvektor. Nollvektorn är alltså parallell med alla andra vektorer! Att och är parallella skrivs och betyderpraktiskt att de ligger på samma syftlinje och kan därmed bringas att övertäcka varandra genom att den ena multipliceras med enskalär. I figuren ovan till höger som exemplifierar multplikation av vektor med skalär är alltså alla fem vektorerna parvis parallellamed varandra. Parallellitet är en mycket viktig byggsten vid problemlösning och återkommer i tid och otid!
Parallellitet: s
Koordinatsystem, komposanter, komponenter och index
I rummet, det vill säga i tre dimensioner som vanligtvis betecknas 3, representeras vektorer med fördel i ett så kallat ortonormerat
koordinatsystem, ON-system. Om inget speciellt sägs antar man alltid att man befinner sig i ett sådant! Detta består av en given
punkt origo och spänns upp av parvis vinkelräta(=Ortogonala) basvektorer som är enhetsvektorer(=Normerade); , och i de tre
koordinatriktningarna x, y respektive z. Man talar om koordinatsystemets koordinataxlar x-axeln, y-axeln och z-axeln.
Vanligtvis använder man ett så kallat högerorienterat system för att bestämma det inbördes förhållandet mellan koordinatrikt-ningarna. Motsvarigheten i planet, två dimensioner 2, kommer sedan ut som ett specialfall genom att enbart betrakta och medtillhörande x och y.
Inte sällan brukar man pynta namnet på en vektor för att understryka en väsentlig egenskap, t.ex. x för en vektor som pekar i positivx-riktning. Exempelvis ser man ibland att de tre basvektorerna , och betecknas med x, y respektive z eftersom de är enhetsvek-
torer och pekar i var sin koordinatriktning. Ofta nämner man synonymt de olika koordinatriktningarna med deras ordningstal, det villsäga x 1, y 2 och z 3. Det ska alltså inte vålla någon förvirring om vi i text eller figur skriver 2 i stället för y.
HH/ITE/BN Vektorer och Mathematica 3
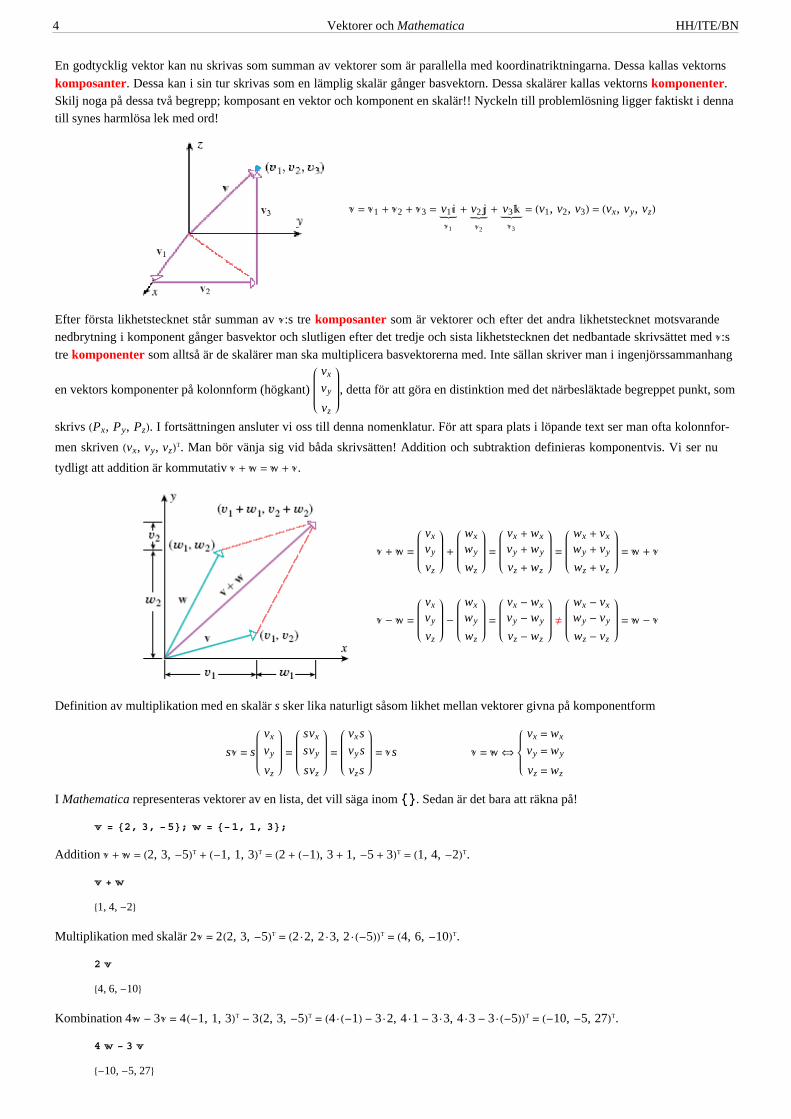
En godtycklig vektor kan nu skrivas som summan av vektorer som är parallella med koordinatriktningarna. Dessa kallas vektorns
komposanter. Dessa kan i sin tur skrivas som en lämplig skalär gånger basvektorn. Dessa skalärer kallas vektorns komponenter.Skilj noga på dessa två begrepp; komposant en vektor och komponent en skalär!! Nyckeln till problemlösning ligger faktiskt i dennatill synes harmlösa lek med ord!
1 2 3 v11
v22
v33
v1, v2, v3 vx, vy, vz
Efter första likhetstecknet står summan av :s tre komposanter som är vektorer och efter det andra likhetstecknet motsvarandenedbrytning i komponent gånger basvektor och slutligen efter det tredje och sista likhetstecknen det nedbantade skrivsättet med :s
tre komponenter som alltså är de skalärer man ska multiplicera basvektorerna med. Inte sällan skriver man i ingenjörssammanhang
en vektors komponenter på kolonnform (högkant)
vxvy
vz
, detta för att göra en distinktion med det närbesläktade begreppet punkt, som
skrivs Px, Py, Pz . I fortsättningen ansluter vi oss till denna nomenklatur. För att spara plats i löpande text ser man ofta kolonnfor-
men skriven vx, vy, vz . Man bör vänja sig vid båda skrivsätten! Addition och subtraktion definieras komponentvis. Vi ser nu
tydligt att addition är kommutativ .
vxvy
vz
wxwy
wz
vx wxvy wy
vz wz
wx vxwy vy
wz vz
vxvy
vz
wxwy
wz
vx wxvy wy
vz wz
wx vxwy vy
wz vz
Definition av multiplikation med en skalär s sker lika naturligt såsom likhet mellan vektorer givna på komponentform
s svxvy
vz
svxsvy
svz
vxsvysvzs
svx wxvy wy
vz wz
I Mathematica representeras vektorer av en lista, det vill säga inom {}. Sedan är det bara att räkna på!
2, 3, 5 ; 1, 1, 3 ;
Addition 2, 3, 5 1, 1, 3 2 1 , 3 1, 5 3 1, 4, 2 .
1, 4, 2
Multiplikation med skalär 2 2 2, 3, 5 2 2, 2 3, 2 5 4, 6, 10 .
2
4, 6, 10
Kombination 4 3 4 1, 1, 3 3 2, 3, 5 4 1 3 2, 4 1 3 3, 4 3 3 5 10, 5, 27 .
4 3
10, 5, 27
4 Vektorer och Mathematica HH/ITE/BN

Likhet skrivs som vanligt med två “=”-tecken i Mathematica precis som vid ekvation.
True
Synsättet att ange de olika koordinatriktningarna med deras ordningstal, det vill säga x 1, y 2 och z 3, är direkt översättbart till
begreppet index i en vektor eller lista. Om man i Mathematica är speciellt intresserad av någon av vektorns komponenter kan dennaenkelt hämtas/modifieras med indicering, t.ex. y-komponenten [[2]]. Detta kan också skrivas lite mer kompakt på tangentbordetsom [[ 2 ]] , med resultatet 2 , eller varför inte använda palette 2 . Vi provar
2 , 2 , 2
3, 3, 3
3, 1
5, 2
1 10;
10, 3, 5
Exempel: I Mathematica finns stöd för att rita både två- och tredimensionella vektorer. Se vidare Arrow.
Lösningsförslag: Rita en liten pil i 2D!
Graphics Red, Arrowheads Medium , Arrow 0, 0 , 1, 1 ,
Axes True, AxesLabel "x", "y"
0.2 0.4 0.6 0.8 1.0x
0.2
0.4
0.6
0.8
1.0y
Punkt och ortsvektor
Läget av en punkt i ett koordinatsystem anges med dess koordinater. Släktskapet med vektor är nära. För att inte förväxlas skrivsoftast en punkt med stor enkel bokstav. Koordinaterna skrivs i motsats till vektorer på radform
P Px, Py, Pz x, y, z
Inte sällan brukar man liksom för vektorer pynta namnen med ett subindex P1, QL. Den direkta kopplingen mellan en punkt P och
en vektor är begreppet “ortsvektor för punkten P”. Denna går från koordinatsystemets origo O, en punkt, till punkten P ochdefinieras helt enkelt av att koordinaterna för P blir ortsvektorns komponenter på kolonnform. Att ange en vektor från en punkt till
en annan med punkternas namn och en “pil på taket” är tydligt självdokumenterande. Så OP Px, Py, Pz är ortsvektorn för
punkten P. En vektor från punkt P1 till punkt P2 definieras sedan som
HH/ITE/BN Vektorer och Mathematica 5

P1P2 OP2 OP1
x2
y2
z2
x1
y1
z1
Lägg märke till ordningen! Man kan inte “räkna” med punkter. Om någon påstår det så är det förmodligen ortsvektorerna som avses!Uttryck av typen P1 P2 eller P1 saknar alltså mening.
Längd, storlek eller belopp
Ständigt behöver man räkna ut längden av en vektor. Denna defineras naturligt som “Pytagoras sats i tre dimensioner”
v vx2 vy
2 vz2
Lite beroende på vilken fysikalisk storhet vektorn representerar används ofta storlek eller belopp som synonymer till längd. Iblandser man också att längden, precis som i figuren ovan, anges med dubbla beloppstecken för att understryka dess nära släktskap
med det mer generella begreppet norm. Ur definitionen inser vi att 0 och att nollvektorn måste ha alla sina komponenterlika med noll, eftersom 0.
Exempel: Bestäm längden av vektorn 1, 2, 3 .
Lösningsförslag: Direkt tillämpning på formeln ovan ger 1, 2, 3 12 2 2 32 14 . Se till att negativtecken
kommer med i kvadreringen, det vill säga plustecknen i formeln är alltid plustecken! I Mathematica finns funktionen Norm[ ].
Norm 1, 2, 3
14
Linjärt beroende
Låt 1, 2, , n vara givna vektorer och Λ1, Λ2, , Λn godtyckliga tal. En vektor på formen
Λ1 1 Λ2 2 Λn n
kallas för en linjärkombination av vektorerna 1, 2, , n. Man säger att vektorerna 1, 2, , n är linjärt beroende om minst
en av vektorerna kan uttryckas som en linjärkombination av de övriga. I motsatt fall kallas vektorerna för linjärt oberoende. Tvåvanliga formuleringar i sammanhanget är
Vektorerna 1, 2, , n är linjärt beroende om och endast om det finns tal Λ1, Λ2, , Λn, som inte alla är 0, så attΛ1 1 Λ2 2 Λn n .
Om vektorerna 1, 2, , n är linjärt oberoende och uppfyller likheten Λ1 1 Λ2 2 Λn n , så måsteΛ1 Λ2 Λn 0.
Linjärt oberoende vektorer kan vi använda som basvektorer för att bygga koordinatsystem som, i motsats till de ON-system vi
känner sedan tidigare, varken är ortogonala eller normerade. Sådana baser eller koordinatsystem kallar vi snedvinkliga.
6 Vektorer och Mathematica HH/ITE/BN

Skalärprodukt
Skalärprodukt mellan två vektorer skrivs och definieras
cos Θ ,
där Θ är vinkeln mellan vektorerna.
Även beteckningen , används ibland och inte sällan ser man bara . Den sistämnda varianten är odramatisk eftersom man lättkan avgöra vilken multiplikation som skall åkallas vid ”st”, “s ” respektive “ ” genom att helt enkelt rådfråga vilka typer som ärinblandade. Som namnet antyder och bekräftas av högerledet så är skalärprodukten en skalär, ett tal. Vi ser också av högerledet attden är kommutativ, det vill säga .
Räknelagar: Om , och är godtyckliga vektorer och s reellt tal gäller 1 kommutativa lagen 3 distributiva lagen
2 s s s 4 0
Eftersom både och är positiva kommer skalärproduktens tecken att bestämmas av cos Θ . I figuren nedan åskådliggörs dettafaktum att skalärprodukten är positiv om vektorerna bildar spetsig vinkel, negativ om de bildar trubbig vinkel och noll då vektorernabildar rät vinkel.
Att skalärprodukten är noll då vektorerna bildar rät vinkel är en viktig och ständigt återkommande byggsten vid modellering. Man
säger att vektorerna är ortogonala.
Vinkelräthet: 0
Definitionen av skalärprodukt används endast då Θ söks. Med kända komponenter i ett ON-system räknas den i stället ut som
uxvx uyvy uzvz
ty med de parvis ortogonala enhetsvektorerna , och har vi
ux uy uz vx vy vz
uxvx1
uxvy0
uxvz0
uyvx 0
uyvy1
uyvz0
uzvx0
uzvy0
uzvz1
uxvx uyvy uzvz vxux vyuy vzuz
Skalärprodukt skrivs i Mathematica med en “vanlig” punkt. Utan den blir det listoperation som saknar mening i vektorernas värld!
Exempel: Bestäm skalärprodukten mellan vektorerna 1, 2, 3 och 3, 4, 5 .
Lösningsförslag: Eftersom vi känner vektorernas komponenter får vi direkt
1, 2, 3 3, 4, 5 1 3 2 4 3 5 20
1, 2, 3 . 3, 4, 5
20
Skalärprodukt utgör bland annat ett smidigt sätt att räkna ut längden av en vektor
v vx2 vy
2 vz2 vxvx vyvy vzvz
HH/ITE/BN Vektorer och Mathematica 7

Eftersom den behövs i tid och otid är det på sin plats att definiera en liten händig funktion för ändamålet. Tyvärr kan vi inte användavanliga | när vi definierar funktionen, eftersom den är upptagen till annat i Mathematica, utan väljer några snarlika som skrivs l|till vänster (left) och r| till höger (right) om argumentet. Om man inte uppskattar “svåra” ackord på tangentbordet går detnaturligtvis lika bra att använda den i Mathematica inbyggda funktionen Norm[ ].
: .
1, 2, 3 , Norm 1, 2, 3
14 , 14 Exempel: Sök vinkeln mellan vektorerna 3, 2, 4 och 1, 1, 2 .
Lösningsförslag: Enda tillfället då definitionen används!
3, 2, 4 ; 1, 1, 2 ;
Vi får 3 1 2 1 4 2 7, 32 22 4 2 29 och 12 1 2 22 6 , varav slutligenΘ arccos 7
29 6. I Mathematica levereras, som vi vet, vinklar i radianer. Vi kollar av hela resan, samt med VectorAngle.
. , , , ArcCos . , VectorAngle , 7, 29 , 6 , cos 1 7
174, cos 1 7
174
Om vi vill ligga nära modelleringen, utan att lösa ut Θ för hand, som ju är en potentiell felkälla, kan vi välja att använda
Solve . Cos Θ , 0 Θ Π , ΘΘ cos 1 7
174
eller
FindRoot . Cos Θ , Θ, Π2
Θ 2.13019
Skalärprodukt används mycket flitigt vid modellering i diverse tillämpningar så som att räkna ut ett arbete eller att bestämma enprojektion. Det sistnämnda behandlas under ett senare avsnitt.
Exempel: Sök det arbete som kraften om 100 N uträttar
under skådespelet som återges i figuren. Enheten på
x–axeln är meter.
Lösningsförslag: Arbete är ju lika med kraftens storlek i vägens riktning gånger sträckan, det vill säga A Fcos Θ s vilket inte ärnågot annat än skalärprodukt om vi betraktar både kraft och väg som vektorer A . Mathematica arbetar alltid med vinklar iradianer. Omräkning av grader till radianer görs som vanligt med hjälp av Π
180 eller vackrare med deg som då resulterar i ett .
Först kraften och vägen på vektorform
100 Cos 60 , Sin 60
50, 50 3 50, 0 0, 0
50, 0
sedan arbetet i Nm med skalärprodukt
.
2500
8 Vektorer och Mathematica HH/ITE/BN

Exempel: Genom att använda integral kan vi även ta hand om fallet då både väg
och kraft varierar under resan. Sök det arbete som kraften x, 1 uträttar
då den släpar en grön boll uppför cosinusbacken y x 1 cos x , x 0, Π .
0.0 0.5 1.0 1.5 2.0 2.5 3.0x0.0
0.5
1.0
1.5
2.0
2.5
3.0y
x x,1
Lösningsförslag: Här varierar både kraft och väg med parametern x. Genom att ta på oss integralglasögen inser vi att en studie av enliten del av resan med efterföljande sammanslagning leder till målet. Så under den lilla förflyttningsvektorn vid x uträttas det lilla
arbetet A x, y 1, yx x, med exempelvis enheten Nm. Nu är det bara att lägga samman alla små bidrag som
vanligt A A A ab 1, y
x x. Här får vi
A 0Π 1, y
x x 0Π x, 1 1, sin x x 0
Π x sin x x x cos x 0Π 3 Π.
Eller med Mathematica
0
Πx, 1 . 1, D 1 Cos x , x x
3 ΠNaturligtvis går det bra att generalisera till allmänna kurvor på parameterform s x s , y s . Vi får då
A x, y Fx s , Fy s xs , y
s s A A A sa
sb Fx s , Fy s xs , y
s s.
Cauchy-Schwarz olikhet
För godtyckliga vektorer och gäller Cauchy-Schwarz olikhet
ty om Θ är vinkeln mellan dem så är cos Θ cos Θ , eftersom cos Θ 1. Observera attvänsterledet i Cauchy-Schwarz är absolutbeloppet av skalärprodukten (talet) , medan högerledet är produkten av vektorernaslängder. Olikheten kommer till användning i diverse teoretiska överläggningar och kan också skrivas .Namnet refererar till upphovsmännen Augustin Louis Cauchy (1789-1857) och Herman Amandus Schwarz (1843-1921).
Triangelolikheten
För godtyckliga vektorer och gäller triangelolikheten
eftersom 2 2 2 2 2 2 2 2 medhjälp av Cauchy-Schwarz olikhet . Första och sista led är kvadrater på icke-negativa tal, så rotutdragning ger sedan detönskade resultatet. En geometrisk tolkning är att längden av en sida i en triangel är mindre än eller lika med summan av de bådaandra sidornas längder. Detta motiverar namnet.
Enhetsvektor att räkna med
En mycket vanlig beräkningsatom i linjär algebra och mekanik är enhetsvektor pekande från en punkt mot en annan punkt, det villsäga i samma riktning som en given vektor. Rustade med vår nyvunna kunskap kan vi nu genomföra erforderlig kalkyl. Sökenhetsvektor i samma riktning som given vektor .
s 1def s s s 0 s s 1 1
Notera att uttrycket med division, , ska ses som ett kompakt skrivsätt för multiplikation med en skalär 1 . I Mathematica finns
Normalize[ ] som bestämmer en enhetsvektor i riktning , men vi definierar en egen liten funktion som ligger nära det vi
skriver för hand. Denna kommer till flitig användning vid problemlösning!
HH/ITE/BN Vektorer och Mathematica 9

:
Om A är ortsvektor för punkten A och analogt för punkten B har vi vektorn från A till B som AB B A. Så enhetsvektorn
ABAB
AB. Även detta är så vanligt förekommande så man kan inte låta bli att definiera
A ,B : B A
Notera att Mathematica har inga problem med att skilja de två funktionerna åt, trots samma namn, eftersom de har ett respektive tvåargument. Vi provkör på enhetsvektorn från punkten 3, 2, 5 till punkten 2, 6, 1 . Handräkning i nästa exempel.
3, 2,5 , 2,6,1
5
21,
8
105,
4
105
Enhetsvektorn längs ortsvektorn för den första punkten
3, 2,5
3
38,
2
19,
5
38
Vi sammanfattar det som kommer till ständig användning vid modellering och problemlösning.
En vektor kan alltid brytas ner i sina två atomer, längd gånger enhetsvektor i rätt riktning, .
Exempel: Bestäm vektorn från punkten A till punkten B, dess längd
samt en enhetsvektor i samma riktning. Bestäm slutligen en vektor
som har längden 5 och samma riktning som .
Lösningsförslag: Vi får direkt den sökta vektorn AB OB OA 2, 5, 0 0, 0, 4 2, 5, 4 .
2, 5, 0 0, 0, 4
2, 5, 4
med längden ax2 ay
2 az2 22 52 4 2 45 32 5 3 5
3 5
Enhetsvektorn i :s riktning 1
3 52, 5, 4 .
2
3 5,
5
3,
4
3 5
Slutligen formas den önskade vektorn av sina två atomer 5 5 5 1
3 52, 5, 4 1
32, 5, 4 .
5
2
3,
5
3,
4
3
10 Vektorer och Mathematica HH/ITE/BN

Exempel: Bestäm kraften i linan om en vantskruv
i punkten B är åtdragen till 100 N.
Lösningsförslag: Typiskt fall då vi har kraften angiven i sina beståndsdelar storlek och riktning. Riktningen blir ju densammaantingen man pekar med hela armen eller bara “finger”! Det vi söker är en enhetsvektor från punkten A 5, 0, 2 till punktenB 3, 1, 0 för då kan kraften skrivas som produkten av sin storlek och enhetsvektor i rätt riktning, F A,B.
Nu är det bara att räkna på A,BAB
AB
3,1,0 5,0,23,1,0 5,0,2
2,1, 22,1, 2
2,1, 2
2 2 12 22
13
2, 1, 2 .
5,0,2 , 3,1,0
2
3,
1
3,
2
3
100 5,0,2 , 3,1,0
200
3,
100
3,
200
3
Exempel: Sök arbetet då en kraft på 5 N i riktning 1, 3, 2 flyttar en låda 8 m i riktning 2, 3, 1 .
Lösningsförslag: Arbetet ges av skalärprodukt A , där och måste vara givna på vektorform. Så ännu en övning på att sättaihop en vektor utgående från dess längd och riktning.
5 1,3, 2
5
14,
15
14, 5
2
7
8 2,3, 1
8 2
7, 12
2
7, 4
2
7
Varav arbetet
. Nm
260 Nm
7
Projektion
Ett mycket vanligt behov vid modellering är ortogonal projektion av en vektor
på en annan vektor . Man talar om :s skugga på . Resultatet är en ny vektor
s som uppenbarligen ligger på den syftlinje som pekas ut av .
Projektionsvektorn brukar emellanåt skrivas på pyntad form proj för att
verkligen dokumentera sin historia.
Att härleda detta resultat är förmodligen den enskilt viktigaste övningen man kan underkasta sig. Nyckeln till förståelse och modeller-ing med vektorer baseras nämligen på två mycket grundläggande samband som återkommer jämt och ständigt.
1. parallellitet: s2. vinkelräthet: 0
s 0 s
Projektion av på :
HH/ITE/BN Vektorer och Mathematica 11
Notera att det är olika multiplikationer inblandade! Först måste två skalärprodukter genomföras. Kvoten mellan dessa tal (skalärer)är sedan det tal (skalär) som slutligen ska multipliceras med. Självklart är proj proj . Rita gärna en förtydligande bild!
Försäkra dig ännu en gång att du har förstått härledningen i detalj! Slutligen besparar vi oss kommande skrivarbete genom attdefiniera en smidig funktion, alternativt använda den i Mathematica inbyggda funktionen Projection , .
proj :.
.
Exempel: Bestäm projektionen av 3, 2, 4 på 1, 1, 2 .
Lösningsförslag: Härledningen ovan med hjälp av parallellitet och vinkelräthet är mycket viktig att kunna! Räkna sedan på i rättordning: 3 1 2 1 4 2 7 och 1 1 1 1 2 2 2 6. Så projektionen av på blir alltså
76
76
1, 1, 2 . Vi kontrollräknar med vår lilla funktion. Samt det självklara att proj proj .
proj 1, 1,2 3, 2, 4
7
6,
7
6,
7
3
proj 3,2, 4 1, 1, 2
21
29,
14
29,
28
29
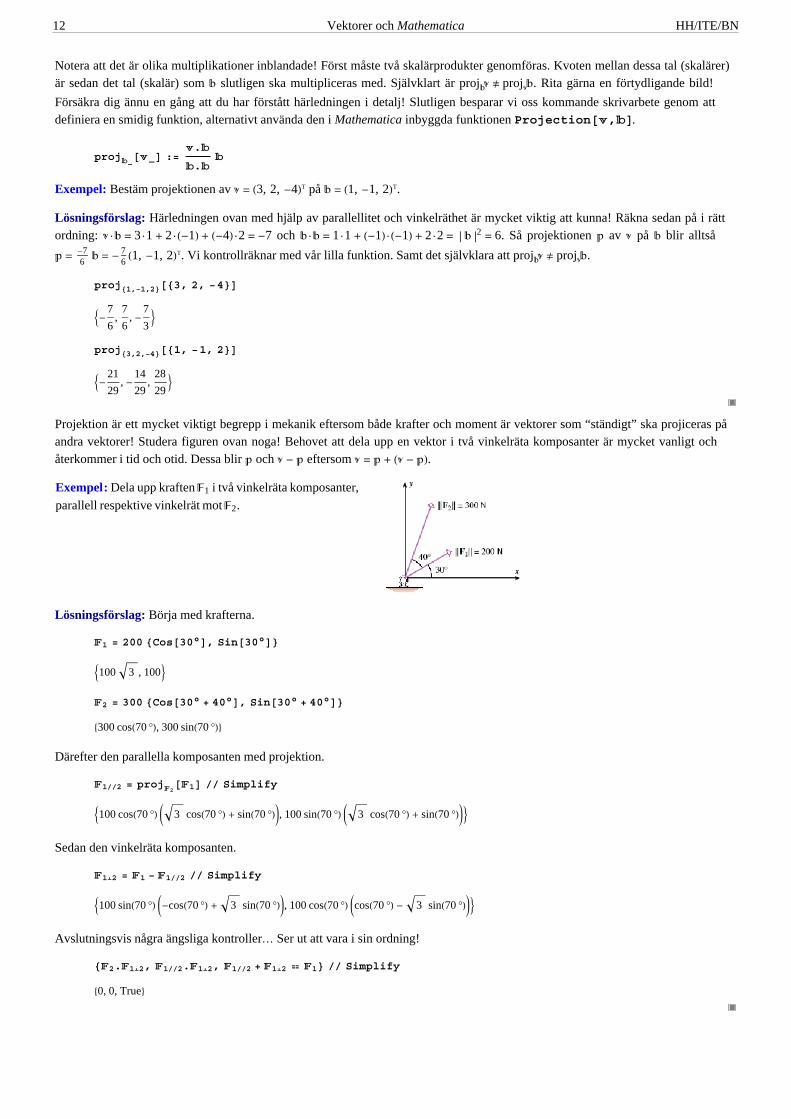
Projektion är ett mycket viktigt begrepp i mekanik eftersom både krafter och moment är vektorer som “ständigt” ska projiceras påandra vektorer! Studera figuren ovan noga! Behovet att dela upp en vektor i två vinkelräta komposanter är mycket vanligt ochåterkommer i tid och otid. Dessa blir och eftersom .
Exempel: Dela upp kraften 1 i två vinkelräta komposanter,
parallell respektive vinkelrät mot 2.
Lösningsförslag: Börja med krafterna.
1 200 Cos 30 , Sin 30
100 3 , 1002 300 Cos 30 40 , Sin 30 40
300 cos 70 , 300 sin 70
Därefter den parallella komposanten med projektion.
1 2 proj2 1 Simplify
100 cos 70 3 cos 70 sin 70 , 100 sin 70 3 cos 70 sin 70 Sedan den vinkelräta komposanten.
1 2 1 1 2 Simplify
100 sin 70 cos 70 3 sin 70 , 100 cos 70 cos 70 3 sin 70 Avslutningsvis några ängsliga kontroller Ser ut att vara i sin ordning!
2. 1 2, 1 2. 1 2, 1 2 1 2 1 Simplify
0, 0, True
12 Vektorer och Mathematica HH/ITE/BN

Vektorprodukt (kryssprodukt)
Vektorprodukt mellan två vektorer resulterar i en ny vektor somentydigt definieras av tre egenskaper
1. sin Θ .
2. och . VIKTIGT Vektorn vinkelrät mot både och
3. , , ska bilda ett högersystem. Se figur.
För att att skilja vektorprodukt från tidigare produkter vi kommit i kontakt med måste -tecknet alltid skrivas ut, .
Räknelagar: Om , och är godtyckliga vektorer och s reellt tal gäller 1 kommutativa lagen gäller ej 4 distributiva lagen
2 s s s 5
3 distributiva lagen 6
Med kända komponenter i ett ON-system räknas den ut som
ux uy uz
vx vy vz
uyvz uzvy
uxvz uzvxuxvy uyvx
ty med de parvis ortogonala enhetsvektorerna , och har vi
ux uy uz vx vy vz
uxvx uxvy uxvz uyvx uyvy uyvz uzvx uzvy uzvz
uyvz uzvy uzvx uxvz uxvy uyvx uyvz uzvy, uxvz uzvx , uxvy uyvx
Notera att vektorprodukt endast är definierad i tre dimensioner. Om man vill räkna med någon slags tvådimensionell variant, intehelt ovanligt i mekanik, får man lov att “hänga” på en nolla som z-komponent i vektorerna.
I Mathematica används funktionen Cross[ , ], eller lite snyggare cross som resulterar i . Om man väljer ur paletten
så gäller det att välja rätt kryss! Det lilla ( ) är vektorprodukt medan det stora ( ) betyder vanlig (list)multiplikation!
Exempel: Sök vektorprodukten då 3, 2, 4 och 1, 1, 2 .
Lösningsförslag: Räkna på enligt receptet ovan
3 2 4
1 1 2
2 2 4 1
3 2 4 1
3 1 2 1
0
10
5
0, 10, 5
3, 2, 4 ; 1, 1, 2 ;
0, 10, 5
Observera att vektorprodukt inte är kommutativ som skalärprodukt. Däremot är .
True
Förutom diverse geometriska tillämpningar är den typiska användningen i mekanik att räkna ut kraftmoment.
Exempel: Sök en vektor som är vinkelrät mot både 3, 2, 4 och 1, 1, 2 .
Lösningsförslag: Typisk användning av vektorprodukt. Kontrollräkna gärna för hand likt föregående exempel!
3, 2, 4 ; 1, 1, 2 ;
0, 10, 5
HH/ITE/BN Vektorer och Mathematica 13

Kontroll av vinkelräthet.
. , .
0, 0
Exempel: Bestäm arean av den parallellogram som spänns upp
av vektorerna 2, 1, 3 och 1, 3, 2 .
Lösningsförslag: Ur figuren ovan ser vi att arean A basen höjden sin Θ . Men detta är ju inget annat än beloppet av
vektorprodukten, så arean av parallellogrammen A . Notera att om så är och arean noll som sig bör. Menhär arean av en “sund” parallellogram. Kontrollräkna för hand ännu en gång!
2, 1, 3 1, 3, 2
3 19
Exempel: Sök arean av triangeln i figuren.
Lösningsförslag: Detta är en direkt tillämpning på exemplet ovan. Trangelns area är precis hälften av arean för motsvarande
parallellogram. Först vektorerna som spänner upp triangeln P1P2 och P1P3
1, 0, 2 2, 2, 0
3, 2, 2
0, 4, 3 2, 2, 0
2, 2, 3
Slutligen den efterlängtade triangelarean
1
2
15
2
Exempel: Sök volymen av parallellepipeden
som spänns upp av vektorerna , och .
Lösningsförslag: Ur figuren ovan ser vi att volymen V basytan höjden h cos Θ , där Θ är vinkeln mellan
vektorerna och . Vi känner igen definition på skalärprodukt, så volymen av parallellepipeden V . Detta kallas för
skalär trippelprodukt och som namnet antyder levererar den en skalär som resultat. Eftersom man kan permutera (välja ordningenpå) vektorerna på 3 2 1 6 sätt får vi på grund av vektorprodukten tre positiva volymer och tre negativa, som till beloppet är lika.
14 Vektorer och Mathematica HH/ITE/BN

Exempel: Sök det kraftmoment kring origo
som kraften 2, 1, 2 orsakar.
Lösningsförslag: Även detta är typexempel på användning av vektorprodukt. Om är hävarmen och kraften, båda vektorer, såges kraftmomentet av vektorn . Obs ordningen! Vidare är ortsvektor för punkten A som har koordinaterna A 5, 0, 2 , det
vill säga OA.
5, 0, 2 ; 2, 1, 2 ;
Varav momentet kring origo.
2, 6, 5
Notera att är vinkelrät mot både och som sig bör!
. , .
0, 0
Exempel: Bestäm kraften i linan om en vantskruv i
punkten B är åtdragen till 100 N samt det moment som
denna orsakar kring origo.
Lösningsförslag: Väsentligen repris av två tidigare exempel. Kan inte skada! Återigen kraften på vektorform F A,B. Nu är det
bara att räkna på. Kontrollräkna för hand!
5,0,2 , 3,1,0
2
3,
1
3,
2
3
100 5,0,2 , 3,1,0
200
3,
100
3,
200
3
Slutligen ges momentet kring origo av vektorn A B .
5, 0, 2
200
3, 200,
500
3
Exempel: När man räknat ut momentet med avseende på en punkt vill man ofta projicera det på en ny axel genom punkten. Pro-jicera momentet i föregående exempel på en axel genom origo med riktingsvektorn 2, 3, 1 .
Lösningsförslag: Här handlar det återigen om projektion. Verkar vara vårt ständigt återkommande bekymmer.
2, 3, 1 ;
Skådespelet ger upphov till två vinkelräta komposanter. Projektionen, det vill säga den som är parallell med , kallas för vridmo-ment kring axeln.
proj
HH/ITE/BN Vektorer och Mathematica 15

300
7,
450
7,
150
7
och den mot vinkelräta komposanten kallas för böjmoment på axeln.
2300
21,
950
7,
3950
21
Båda komposanterna ligger i planet som spänns upp av och .
Linjen
En linje L i planet eller rummet bestäms av en given punkt P0 med ortsvektor 0
samt en riktningssvektor . Då kan ortsvektorn för en godtycklig punkt P på
linjen skrivas
0 t x, y, z x0, y0, z0 t vx, vy, vz .
Detta kallas linjens ekvation på vektorform eller parameterform. Linjen haroändlig utsträckning och alla punkter på linjen får vi om vi låter parametern tgenomlöpa alla reella tal, det vill säga t .
Om vi eliminerar parametern får vi linjens ekvation på normalform
t x x0
vx
y y0
vy
z z0
vz.
När man modellerar och löser problem är det alltid vektorformen som används!
Exempel: En linje är given på normalform x 12
y 23
z 31
. Sök dess vektorform.
Lösningsförslag: Vi får
t x 12
x 1 2t
t y 23
y 2 3t
t z 31
z 3 t
vektorformxyz
1
2
3
t2
3
10 t .
Exempel: Sök ekvationen för den linje som går genom punkterna 2, 4, 1 och 5, 0, 7 .
Lösningsförslag: Vi kan exempelvis välja P0 2, 4, 1 och riktningsvektorn 5, 0, 7 2, 4, 1 3, 4, 8 .
Exempel: Sök koordinaterna för den punkt som ligger på avståndet tre längdenheter i positiv riktning från P0 på linjen
0 t 1, 3, 2 t 1, 2, 1 .
Lösningsförslag: Vi söker “punkten” 0 3 , där enhetsvektorn och riktad åt samma håll. Observera att vi inte kan gå 3
eftersom inte är en enhetsvektor, 3 3 3 6 3. Sedan tidigare vet vi att , så slutligen den sökta punkten
1, 3, 2 3 1,2,1
1 3
2, 3 6 , 2
3
2
Exempel: Sök avståndet från punkten A 5, 4, 3 till
linjen L : 0 t 1, 3, 2 t 1, 2, 1 .
Lösningsförslag: När man säger avstånd menar man alltid det kortaste avståndet. Detta innebär att vi ska söka det vinkelrätaavståndet från linjen till punkten. Om vi låter vara vektorn från P0 till A och vektorn representera det sökta avståndet har visituationen i figuren ovan. För lämpligt val av t gäller då
t0
t 0 t
16 Vektorer och Mathematica HH/ITE/BN

det vill säga vektorn t är :s projektion på . Samma visa hela tiden Nu är det bara att räkna på häng med för hand!
0 1, 3, 2 ; 1, 2, 1 ;
5, 4, 3 0
4, 1, 5
tA.
.
7
6
tA
17
6,
10
3,
23
6
Varav slutligen det sökta avståndet
203
6
Exempel:: Sök spegelpunkten S till punkten A i linjen L i föregående exempel.
Lösningsförslag: Som namnet antyder ligger spegelpunkten lika långt från spegeln fast “på andra sidan”, så A är också spegelpunkttill S. Vi kan fortsätta direkt där vi slutade, men eftersom vi räknade “lokalt” behöver vi placera in bilden globalt och hålla i minnetatt definierades att gå från linjen till punkten A. Nu är det bara att spegla fram ortsvektorn för S;
OS 0 2 eller utan “omvägen” om A; OS 0 tA
0 2
2
3,
8
3,
14
3
Exempel: Sök avståndet mellan linjerna
L1 : 1 1, 3, 2 s 1, 2, 1 och
L2 : 2 1, 1, 3 t 1, 3, 2 .
Lösningsförslag: Denna frågeställning är av stort intresse för mätingenjörer och lantmätare som arbetar med geografiska information-ssystem (GIS) eller för en mobiltelefon som räknar ut GPS-koordinater. Då avståndet mellan linjerna är minimalt är avståndsvektorn
vinkelrät mot båda linjerna. Detta ger ett linjärt ekvationssystem med två ekvationer som bestämmer de två parametrarna s och t.Notera att det måste vara olika parametrar i de två linjerna. Typisk råräkning. Häng mé
2 1
1 1 0
2 2 0
1 1, 2, 1 ;
2 1, 3, 2 ;
1 1, 3, 2 s 1;
2 1, 1, 3 t 2;
2 1
s t 2, 2 s 3 t 2, s 2 t 5
ekv . 1, . 2 0 Simplify
6 s 5 t 7 5 s 14 t 6
HH/ITE/BN Vektorer och Mathematica 17

sÅt Solve ekv First
s 128
59, t
71
59
Slutligen avståndet mellan linjerna och var detta inträffar samt den för GIS intresserade mätpunkten och mätfelet.
, 1, 2,1
21 2 ,
1
2 . sÅt
25
59, 187
59,
79
59,
10
59, 12
59,
154
59,
35
59, 199
118,
233
118,
45
118, 25
2 59
Planet
Ett plan i rummet bestäms av en given punkt P0 med ortsvektor 0 samten normalvektor . Då måste ortsvektorn för en godtycklig punkt P i
planet uppfylla planets ekvation på vektorform
0 0.
Ibland brukar planets ekvation anges på normalform eller affin form.Denna fås genom att expandera vektorformen
0 0 x, y, z x0, y0, z0 nx, ny, nz 0 nxx ny y nzz x0nx y0ny z0nz
konstant
0.
När man modellerar och löser problem är det alltid vektorformen som används!
De första och vanligaste planen man stiftar bekantskap med är de som naturligt genereras av koordinatsystemet själv, nämligen
koordinatplanen xy-planet, xz-planet och yz-planet. Alla dessa innehåller origo och har basvektorerna , respektive somnormalvektorer.
Exempel: Ett plan är givet på normalform 2y 3z 6 0. Sök dess vektorform.
Lösningsförslag: Vi söker 0 x0, y0, z0 och nx, ny, nz . Normalvektorns komponenter kan direkt avläsas som koefficien-
terna framför x, y och z i normalformen, så 0, 2, 3 . När det gäller 0 finns det oändligt med punkter i planet att välja på, mensom tur är räcker det att hitta en. Efter en stunds funderande inser man att alla plan måste skära minst en koordinataxel, så ett 0
finner man genom att i den givna normalformen succesivt prova de tre fallen
1 : x x0, y 0, z 0?
x0 0 x0, 0, 0
2 : x 0, y y0, z 0?
y0 0 0, y0, 0
3 : x 0, y 0, z z0?
z0 0 0, 0, z0
Vi provar
1 : 2 0 3 0 6 0 6 0
2 : 2y0 3 0 6 0 y0 3 0 0, 3, 0 .
18 Vektorer och Mathematica HH/ITE/BN

Exempel: Bestäm det plan som går genom
punkterna 2, 4, 1 , 4, 3, 2 och 5, 0, 7 .
Lösningsförslag: Planet är entydigt bestämt av tre punkter om dessa inte ligger på samma linje. Vi kan exempelvis välja den första
punkten P1 som P0 2, 4, 1 . Sedan bildar vi de två vektorerna P1P2 OP2 OP1 och P1P3 OP3 OP1, varav slutligenen normalvektor till planet eller . Sätt igång!
4, 3, 2 2, 4, 1
2, 1, 3
5, 0, 7 2, 4, 1
3, 4, 8
4, 7, 5
Man brukar säga att och spänner upp planet.
Exempel: Sök avståndet från punkten A 3, 2, 1
till planet x, y, z 2, 1, 3 1, 1, 2 0.
Lösningsförslag: Resan blir ungefär som vid avståndsberäkning punkt till linje. Om vi låter vara vektorn från P0 till A ochvektorn representera det sökta avståndet d har vi situationen i figuren ovan. Vi ser att är :s projektion på , det vill säga
Samma visa hela tiden
3, 2, 1 2, 1, 3
1, 3, 4
1, 1, 2
1, 1, 2
proj
5
3,
5
3,
10
3
Varav slutligen det sökta avståndet
52
3
Exempel: Sök skärningspunkten mellan linjen 1, 3, 2 t 1, 2, 1
och planet x, y, z 2, 1, 3 1, 1, 2 0.
HH/ITE/BN Vektorer och Mathematica 19

Lösningsförslag: Eftersom skärningspunkten Q ligger både på linjen och i planet är det bara att sätta in linjen i planets ekvation.Detta bestämmer parametern t, det vill säga hur många steg vi ska ta från den givna punkten på linjen för att nå planet. Nu är detbara att låta Mathematica tugga i sig receptet, men det skadar ju inte att kontrollräkna för hand på ett litet papper vid sidan om
linjen 1, 3, 2 t 1, 2, 1
1 t, 2 t 3, t 2
tQ Solve linjen 2, 1, 3 . 1, 1, 2 0 First
t 7
Varav slutligen skärningspunkten Q
linjen . tQ
8, 11, 5
Riktningscosiner och resultanter i mekanik
Ett gammalmodigt och förbryllande begrepp som märkligt nog också dyker uppi moderna läroböcker i mekanik är så kallade riktningscosiner. Detta är heltenkelt cosinus för de tre rymdvinklarna mellan en given vektor och de trebasvektorerna. Om dessa efterfrågas kan man enkelt visa med skalärproduktgör det gärna att de är komponenterna av enhetsvektorn i :s riktning
cos Αcos Βcos Γ .
Exempel: I mekanik är man ofta intresserad av summan
av två eller flera krafter, en så kallad resultant, dess storlek
och vinkel i förhållande till en given riktning, exempelvis
x–axeln. Sök resultanten samt lite vinklar till situationen
i den vänstra figuren. Facit kan beskådas i den högra.
Lösningsförslag: Mathematica arbetar alltid med vinklar i radianer, men kan anges i grader med hjälp av Π180
eller vackrare med
deg som då resulterar i ett . Nu är det bara att räkna
1 200 Cos 30 , Sin 30
100 3 , 1002 300 Cos 30 40 , Sin 30 40
300 cos 70 , 300 sin 70
1 2
100 3 300 cos 70 , 100 300 sin 70 N
471.09
Enda tillfället då man använder definition av skalärprodukt är när man söker vinkeln mellan två vektorer. För övrigt varnar för-fattaren för “vinkelträsket”. I stället rekommenderas med skärpa användning av de mycket säkrare teknikerna skalärprodukt ochprojektion om man söker komposanter längs en önskad riktning.
180.0Π ArcCos . 1, 0 54.1634
20 Vektorer och Mathematica HH/ITE/BN

180.0Π ArcCos 1.
1
24.1634
Exempel: Vi tar ett exempel till där resultanten
hamnar i andra kvadranten.
Lösningsförslag: Vi får direkt resultanten
200 Cos 60 , Sin 60 150 Cos 60 75 , Sin 60 75 100 0, 1 N
6.06602, 179.271
Har man bestämt argument till komplexa tal z a b har man kanske lärt sig “formeln” arg z arctan ba Π
om a 0
. Funktionen
ArcTan i Mathematica kommer i två smaker, ArcTan ba samt ArcTan a, b där man inte dividerat bort eventuell “negativ”
information, ty ba
ba och b
aba . Denna senare version levererar alltså alltid rätt vinkel i förhållande till x-axeln oberoende av i
vilken kvadrant vi befinner oss.
180.0Π ArcTan
91.938
Vektorvärd funktion av en variabel
I tidigare kurs har vi stiftat bekantskap med en funktion av en reell variabel. Detta begrepp kan enkelt spilla över till en vektorvärd
funktion av en reell variabel. Vi låter helt enkelt varje komponent i vektorn vara en funktion av samma variabel. Komponenterna
kallas då ofta för koordinatfunktioner. En avsikt med konstruktionen är kanske att följa en punkts läge i rummet eller planet somfunktion av tiden t. Om vi låter punktens läge beskrivas med ortsvektorn t x t , y t , z t får vi också naturliga definitioner av
begreppen definitionsmängd D och värdemängd V . Vi säger att t är en parameterkurva med parametern t. Definition avderivation och integration gör knappast någon förvånad.
tt x t
t , y tt , z t
t , kallas tangentvektor till kurvan
t t x t t, y t t, z t tExempel: En karusell har banprofilen r t 5 cos 3t , 5 cos t 3 sin 2t , 5 sin t m, t 0, 2Π s. Låt vagnarna vara små iförhållande till övriga mått.
a. Bestäm banans längd.
b. Bestäm hastighet som funtion av tiden samt största och minsta fart.
c. Bestäm acceleration som funtion av tiden samt beloppet av denna.
Lösningsförslag: Banprofilen, det vill säga läget av en vagn som funktion av tiden.
r 5 Cos 3 t , 3 Cos t Sin 2 t , Sin t ;
Plot r, t, 0, 2 Π , PlotStyle Red, Blue, Green , AxesLabel "t s ", "x t ,y t ,z t m "
1 2 3 4 5 6t s
20
10
10
20x t ,y t ,z t m
HH/ITE/BN Vektorer och Mathematica 21

a. Först den lilla båglängden vid tidpunkten t.
ds D r, t .D r, t
225 sin2 3 t 25 cos2 t 10 cos t 3 cos 2 t 5 sin t sin 2 t 2Sedan hela banlängden.
N0
2 Πds t
143.958
b. Hastighet är tidsderivatan av läget, det vill säga tangentvektorn. Farten är beloppet av hastigheten, v .
D r, t
15 sin 3 t , 10 cos t 3 cos 2 t 5 sin t sin 2 t , 5 cos t
Plot , , t, 0, 2 Π , PlotStyle Red, Blue, Green, Orange ,
AxesLabel "t s ", "x t ,y t ,z t ,v t m s "
1 2 3 4 5 6t s
302010
10203040
x t ,y t ,z t ,v t m s
Högsta och lägsta fart samt hur mycket klockan är då det inträffar.
FindMinimum , t, 2 , FindMaximum , t, 0
6.5423 t 2.1901340.3113 t 0.
En liten rundtur piggar alltid upp. Ju rödare det är ju fortare går det
ParametricPlot3Dr, t, 0, 2 Π , PlotStyle Thickness 0.03 ,
ColorFunctionScaling False, ColorFunction Function x, y, z, t , Hue40
c. Accelerationen är andraderivatan av läget med avseende på tiden samt dess belopp.
D r, t, 2
45 cos 3 t , 20 sin t cos 2 t 5 sin 2 t cos t 20 sin 2 t cos t 3 , 5 sin t
22 Vektorer och Mathematica HH/ITE/BN

Plot , , t, 0, 2 Π , PlotStyle Red, Blue, Green, Orange ,
AxesLabel "t s ", "x t ,y t ,z t ,a t m s2 "
1 2 3 4 5 6t s
50
50
x t ,y t ,z t ,a t m s2
Högsta och lägsta värde på beloppet av accelerationen samt hur mycket klockan är då det inträffar. Eftersom m ger dettaen indikation på vilken påkänning en resenär upplever under resan.
FindMinimum , t, 1 , FindMaximum , t, 1
15.335 t 1.4933784.0751 t 0.766509
Modellering med vektorer
När man modellerar ingenjörsproblem med vektorer är det ett mycket begränsat antal tekniker som man behöver kunna. Givet attman behärskar de grundläggande momenten, som ges i repris nedan, så kan man väsentligen sammanfatta det som att
Man ska leta efter parallellitet och vinkelräthet!
1. s2. 0
ax bx, ay by, az bz Addition och subtraktion.
s sax, say, saz Multiplikation med skalär.
axbx ayby azbz Skalärprodukt ger en skalär som resultat.
ax ay az
bx by bz
aybz azby
axbz azbx
axby aybx
Vektorprodukt ger en vektor vinkelrät mot både och orienterad
enligt högerregeln ovan.
ax2 ay
2 az2 Längd, storlek eller belopp.
En vektors två atomer, längd gånger enhetsvektor i rätt riktning.
Enhetsvektor i given riktning.
cos Θ Definition av skalärprodukt. Endast då vinkeln Θmellan vektorerna söks
s Parallellitet.
0 Vinkelräthet.
Projektion av på , ges av parallellitet och vinkelräthet.
0 t Linjens ekvation.
0 0 Planets ekvation.
HH/ITE/BN Vektorer och Mathematica 23


















![HISTORISK TIDSKRIFT (Sweden) · Ferdinand Braudel, Écrits sur l’histoire, Paris 1969 [1959], s. 293. 2. Även andra beteckningar, t.ex. histoire mondiale, Universalgeschichte,](https://img.pdfslide.tips/doc/110x75/5b9cc2a209d3f2cb3b8d8ae2/historisk-tidskrift-sweden-ferdinand-braudel-ecrits-sur-lhistoire-paris.jpg)










