Embed Size (px)
Citation preview
UNIVERZA V MARIBORU
FAKULTETA ZA ELEKTROTEHNIKO,
RAČUNALNIŠTVO IN INFORMATIKO
Bojan Brečko
NAČRTOVANJE VODENJA NELINEARNE
REGULACIJSKE PROGE Z ADAPTIVNIM
REGULATORJEM, ZASNOVANIM NA
KOMBINACIJI MEHKE LOGIKE IN
GRADIENTNE TEHNIKE OPTIMIZACIJE
Magistrsko delo
Maribor, marec 2016

NAČRTOVANJE VODENJA NELINEARNE
REGULACIJSKE PROGE Z ADAPTIVNIM
REGULATORJEM, ZASNOVANIM NA
KOMBINACIJI MEHKE LOGIKE IN
GRADIENTNE TEHNIKE OPTIMIZACIJE
Magistrsko delo
Študent(ka): Bojan Brečko
Študijski program: FERI-E MAG ELEKTROTEHNIKA III
Smer: elektrotehnika
Mentor: red. prof. dr. Riko Šafarič
Somentor: doc. dr. Nenad Muškinja
Lektor(ica): Petra Vujnovič


ZAHVALA
Zahvaljujem se mentorju, red. prof. dr. Riku
Šafariču, in somentorju, doc. dr. Nenadu Muškinji, za
vodenje, svetovanje in vzpodbujanje pri realizaciji
magistrskega dela.
Zahvaljujem se tudi vsem, ki so mi na kakršen koli
način pomagali, da sem kljub prenapolnjenemu
vsakdanjiku uspel najti motiv in energijo za
zaključek tega dela.
i
NAČRTOVANJE VODENJA NELINEARNE REGULACIJSKE PROGE Z ADAPTIVNIM REGULATORJEM, ZASNOVANIM NA KOMBINACIJI MEHKE LOGIKE IN GRADIENTNE TEHNIKE OPTIMIZACIJE
Ključne besede: adaptivni mehki regulator, gradientni adaptacijski postopek, mehki
generator referenčne veličine
UDK: 681.52:004.5(043.2)
Povzetek
Pri izvedbi tega dela nam je bilo osnovno vodilo zasnovati splošno uporaben »online«
adaptivni mehki regulator, ki bi mu parametre bilo možno spreminjati med samim
delovanjem, algoritem pa bi bil realiziran s pomočjo nizkocenovnega industrijskega
krmilnika. V preteklosti preizkušeno profesionalno programsko orodje za načrtovanje
mehkih regulatorjev Siemens FuzzyControl++ namreč kljub visoki ceni ne omogoča
načrtovanja adaptivnih regulatorjev, spreminjanje parametrov je možno le pri zaustavljenem
procesorju, povrhu pa je uporabno le za sedaj že zastarele krmilnike višjega cenovnega
razreda Siemens serije S7-300 in S7-400.
Preizkusi so bili izvedeni za primer regulacije nivoja vode v rezervoarju na t. i. modularni
proizvodni postaji za procesno avtomatizacijo proizvajalca Festo. Naloga predstavlja tudi
SCADA-uporabniški vmesnik Siemens WinCC za nadzor vodenega procesa in
spreminjanje parametrov vodenja med samim delovanjem. Učinkovitost zasnovanih mehkih
regulatorjev je bila primerjana s klasičnim PI-regulatorjem in s PI-regulatorjem Siemens PID
Compact z integrirano funkcijo za »offline« samonastavitev parametrov.

ii
CONTROL DESIGN OF NONLINEAR CONTROL PLANT WITH ADAPTIVE CONTROLLER BASED ON COMBINATION OF FUZZY LOGIC AND GRADIENT OPTIMISATION TECHNIQUE
Key words: adaptive fuzzy controller, gradient adaptation procedure, fuzzy controller of
reference value
UDK: 681.52:004.5(043.2)
Abstract
The basic principles of our work to design a generally applicable "on-line" adaptive fuzzy
controller are next: to change the parameters during operation and the algorithm would be
realized with the help of low-priced industrial controller. In the past, proven professional
software tool for designing fuzzy controllers Siemens FuzzyControl ++, despite the high
price, doesn't allow the design of adaptive controllers, changing parameters is possible only
when the processor is stopped, and on top of that, it is only useful for the now obsolete
industrial controllers high-priced Siemens S7-300 and S7-400 series.
Tests were carried out for control plant: the water level in the tank at so called modular
manufacturing station for process automation from Festo company. The SCADA user
interface Siemens WinCC for process control and management parameters change during
operation are also presented. Efficiency of presented fuzzy controllers were compared with
a conventional PI controller and PI controller Siemens PID Compact with integrated function
for the "off-line" parameter self-adjusting.
iii
KAZALO
1 UVOD ......................................................................................................................................... 1
2 SISTEM MPS PA ....................................................................................................................... 4
2.1 STROJNA OPREMA ........................................................................................................................ 4
2.1.1 MPS PA ....................................................................................................................................... 5
2.1.2 Krmilni sistem ............................................................................................................................... 7
2.1.3 Oddaljen dostop ......................................................................................................................... 10
2.1.4 Video nadzor procesa ................................................................................................................ 12
2.2 PROGRAMSKA OPREMA ............................................................................................................. 12
2.3 PROCESNI SIGNALI...................................................................................................................... 13
2.3.1 Meritev volumna vode ................................................................................................................ 13
2.3.2 Meritev hitrosti spremembe nivoja vode ..................................................................................... 21
2.3.3 Črpanje vode .............................................................................................................................. 22
2.3.4 Izpust vode ................................................................................................................................. 25
3 OSNOVE MEHKE LOGIKE ..................................................................................................... 27
3.1 PREDSTAVITEV OSNOVNIH POJMOV TEORIJE MEHKE LOGIKE ............................................ 28
3.2 MEHKI REGULATOR ..................................................................................................................... 29
3.2.1 Mehčanje ostrih vrednosti vhodnih spremenljivk ........................................................................ 30
3.2.2 Mehko sklepanje ........................................................................................................................ 35
3.2.3 Ostrenje mehkih vrednosti ......................................................................................................... 39
3.3 ADAPTACIJA PARAMETROV MEHKEGA REGULATORJA Z GRADIENTNIM ADAPTACIJSKIM
POSTOPKOM ............................................................................................................................................. 43
3.4 ADAPTACIJA PARAMETROV ....................................................................................................... 43
3.4.1 Izbira metode GAP ..................................................................................................................... 45
4 REZULTATI .............................................................................................................................. 47
4.1 KLASIČNI PI-REGULATOR ........................................................................................................... 48
4.1.1 Rezultati ..................................................................................................................................... 49
4.2 REGULATOR SIEMENS PID COMPACT ...................................................................................... 51
4.2.1 Rezultati ..................................................................................................................................... 54
4.2.2 Primerjava klasičnega PI-regulatorja in regulatorja PI Siemens ................................................. 55
4.3 MEHKI REGULATOR (BREZ ADAPTACIJE) ................................................................................. 56
4.3.1 Uporabniški vmesnik HMI .......................................................................................................... 56
4.3.2 Rezultati ..................................................................................................................................... 59
4.3.3 Komentar odzivov in primerjava rezultatov mehkega regulatorja z regulatorjem PI Siemens .... 60
4.4 ADAPTIVNI MEHKI REGULATOR Z GAP ..................................................................................... 62
4.4.1 Uporabniški vmesnik .................................................................................................................. 65
4.4.2 Postopek prve adaptacije ........................................................................................................... 67
4.4.3 Rezultati ..................................................................................................................................... 68
iv
4.4.4 Komentar odzivov ...................................................................................................................... 72
4.4.5 Primerjava odzivov ..................................................................................................................... 73
4.5 REGULATOR NIVOJA Z MGR IN PI REGULATORJEM (MGRPI) ................................................ 74
4.5.1 Princip delovanja ........................................................................................................................ 74
4.5.2 Uporabniški vmesnik .................................................................................................................. 75
4.5.3 Rezultati ..................................................................................................................................... 76
4.5.4 Komentar odzivov ...................................................................................................................... 78
4.6 ODZIVANJE REGULATORJEV NA MOTNJE ................................................................................ 79
4.6.1 Odzivi na motnje primerjalnih metod .......................................................................................... 80
4.6.2 Komentar odzivov ...................................................................................................................... 82
5 SKLEP ...................................................................................................................................... 83
6 LITERATURA ........................................................................................................................... 85
v
KAZALO SLIK
Slika 2.1: Sistem z MPS PA .............................................................................................. 4
Slika 2.2: Predstavitev osnovnih komponent MPS PA ....................................................... 5
Slika 2.3: Procesna shema za regulacijo nivoja vode ........................................................ 6
Slika 2.4: Krmilni sistem s krmilnikom S7-1212C in signalna plošča MPS PA ................... 8
Slika 2.5: Struktura omrežja za oddaljen dostop z VPN-usmerjevalnikom eWon Cosy 131
................................................................................................................................ 11
Slika 2.6: Spletna kamera Maginon IPC-1A .................................................................... 12
Slika 2.7: Rezervoar 2 ..................................................................................................... 14
Slika 2.8: Meritev višine gladine vode in prilagoditev signala PLC-ju ............................... 15
Slika 2.9: Delovanje v analogno vhodno kartico vgrajenega filtra .................................... 17
Slika 2.10: Konfiguracija filtra analognega vhoda ............................................................ 18
Slika 2.11: Odvisnost napetosti senzorja od volumna vode in interpolirane krivulje ......... 20
Slika 2.12: Centrifugalna črpalka (P101) ......................................................................... 22
Slika 2.13: Električni načrt za krmiljenje črpalke .............................................................. 23
Slika 2.14: Karakteristika črpalke .................................................................................... 24
Slika 2.15: Proporcionalni izpustni ventil ......................................................................... 25
Slika 2.16: Dvopoložajni izpustni ventil ........................................................................... 26
Slika 3.1: Regulacijska proga z mehkim regulatorjem nivoja ........................................... 28
Slika 3.2: Shema mehkega regulatorja ........................................................................... 29
Slika 3.3: Vhodne pripadnostne funkcije za regulacijski pogrešek ................................... 31
Slika 3.4: Vhodne pripadnostne funkcije za hitrost spreminjanja nivoja ........................... 34
Slika 3.5: Izhodne singletonske pripadnostne funkcije .................................................... 36
Slika 3.6: Grafični prikaz ostrenja .................................................................................... 42
Slika 4.1: Uporabniški vmesnik za nadzor klasičnega PI-regulatorja ............................... 48
Slika 4.2: Odzivi za klasični PI-regulator ......................................................................... 49
Slika 4.3: Funkcijski blok Siemens PID Compact ............................................................ 51
Slika 4.4: Blokovna shema regulatorja Siemens PID Compact ....................................... 52
Slika 4.5: Uporabniški vmesnik za nadzor funkcije za samonastavitev parametrov
regulatorja Siemens PID Compact ........................................................................... 53
Slika 4.6: Odzivi regulatorja PI Siemens Compact .......................................................... 54
Slika 4.7: Uporabniški vmesnik za nadzor mehkega regulatorja (neadaptivnega) ........... 57
Slika 4.8: Uporabniški vmesnik za oblikovanje vhodnih pripadnostnih funkcij ................. 58
Slika 4.9: Oblikovanje vhodnih pripadnostnih funkcij ....................................................... 58

vi
Slika 4.10: Odzivi mehkega regulatorja ........................................................................... 59
Slika 4.11: Regulator nivoja z mehkim generatorjem referenčne spremembe nivoja in GAP
adaptacijo ................................................................................................................ 63
Slika 4.12: Uporabniški vmesnik adaptivnega mehkega regulatorja z GAP ..................... 66
Slika 4.13: Oblike in položaji vhodnih pripadnostnih funkcij za vhod regulacijski pogrešek e
(slika a) in za vhod hitrost spreminjanja nivoja dPV (slika b) .................................... 66
Slika 4.14: Adaptacija z GAP (za pomen krivulj glej legendo slike 4.14)......................... 67
Slika 4.15: Odzivi za AMRGAP ....................................................................................... 70
Slika 4.16: Odzivi AMRGAP z upoštevanjem omejitev proge (legenda krivulj enaka kot na
sliki 4.13 ) ................................................................................................................ 71
Slika 4.17: Oblikovanje odzivov z AMRGAP ................................................................... 71
Slika 4.18: Regulator nivoja MGRPI ................................................................................ 74
Slika 4.19: Uporabniški vmesnik regulatorja MGRPI ....................................................... 75
Slika 4.20: Odzivi regulatorja MGRPI .............................................................................. 76
Slika 4.21: Odzivi regulatorja MGRPI z upoštevanjem omejitev proge (legenda krivulj
enaka kot na sliki 4.20 ) ........................................................................................... 77
Slika 4.22: Oblikovanje odzivov z regulatorjem MGRPI ................................................... 77
Slika 4.23: Odzivanje na motnje regulatorja PI Siemens in mehkega regulatorja ............ 80
Slika 4.24: Odzivanje regulatorjev AMRGAP in MGRPI .................................................. 81

vii
KAZALO TABEL
Tabela 2.1: Predstavitev komponent procesne sheme ...................................................... 7
Tabela 2.2: Opisi sklopov omrežja oddaljenega dostopa z eWon Cosy 131 .................... 11
Tabela 2.3: A/D pretvorba signala za kartico AI 4xU/I 2-wire ST (napetostni vhod) ......... 16
Tabela 2.4: Karakteristika rezervoarja - izmerjene in interpolirane vrednosti volumna ..... 19
Tabela 3.1: Določanje stopenj pripadnosti vhodnim pripadnostnim funkcijam za
regulacijski pogrešek e ............................................................................................ 33
Tabela 3.2: Primer določanja stopenj pripadnosti vhodnim pripadnostnim funkcijam za
hitrost spreminjanja nivoja ....................................................................................... 34
Tabela 3.3: Izhodne pripadnostne funkcije ...................................................................... 37
Tabela 3.4: Baza pravil mehkega sklepanja .................................................................... 38
Tabela 3.5: Primerjava lastnosti metod GAP, povzetih po [6] .......................................... 45
Tabela 4.1: Odzivanje klasičnega PI-regulatorja ............................................................. 50
Tabela 4.2: Odzivanje regulatorja PI Siemens ................................................................ 55
Tabela 4.3: Primerjava odzivanja klasičnega PI-regulatorja in regulatorja PI Siemens .... 55
Tabela 4.4: Odzivanje mehkega regulatorja nivoja .......................................................... 60
Tabela 4.5: Primerjalni podatki odzivanja regulatorja PI Siemens in mehkega regulatorja
................................................................................................................................ 61
Tabela 4.6: Odvisnost pretočne sposobnosti črpalke od različnih razmerah na progi ...... 68
Tabela 4.7: Parametri odzivov AMRGAP ........................................................................ 69
Tabela 4.8: Odzivanje AMRGAP ..................................................................................... 72
Tabela 4.9: Primerjava odzivov regulatorja PI Siemens, mehkega regulatorja in
adaptivnega mehkega regulatorja z GAP ................................................................. 73
Tabela 4.10: Odzivanje regulatorja nivoja MGRPI ........................................................... 78
Tabela 4.11: Primerjava rezultatov vseh uporabljenih regulatorjev.................................. 79
Tabela 4.12: Primerjava odzivanja regulatorjev na motnje .............................................. 79

viii
UPORABLJENE KRATICE
AMR – Adaptivni Mehki Regulator
AMRGAP – Adaptivni Mehki Regulator z Gradientnim Adaptacijskim Postopkom
dPV – delta Process Value (hitrost spremembe procesne veličine)
dPVref – delta Process Value reference (referenčna vrednost hitrosti spremembe
procesne veličine)
e – regulacijski pogrešek
edPV – regulacijski pogrešek hitrosti spremembe procesne veličine
GAP – Gradientni Adaptacijski Postopek
HMI – Human Machine Interface (vmesnik človek-stroj)
IRD – individualno raziskovalno delo
LAN – Local Area Network (lokalno omrežje)
MGR – Mehki Generator Reference (tudi mehki generator referenčne veličine)
MGRPI – regulator zasnovan na kombinaciji mehkega generatorja reference in PI
regulatorja
MPS PA – Modular Production Station for Process Automation (modularna
produkcijska postaja za procesno avtomatizacijo)
PLC – Programable Logic Controller (programirljiv logični krmilnik)
PV – Process Value (procesna vrednost)
SCADA – Supervisory Control And Data Acquisition (sistem za nadzor, vodenje in
zajemanje podatkov)
SP – Set Point (želena vrednost)
SSL – Secure Sockets Layer (kriptografski protokol)
VPN – Virtual Private Network (navidezno zasebno omrežje)
WAN – Wide Area Network (zunanje omrežje)
Bojan Brečko, magistrsko delo
1
1 UVOD
Osnovna motivacija za realizacijo naloge je bila zasnovati učinkovit adaptivni mehki (fuzzy)
regulator za vodenje nelinearne regulacijske proge, katerega algoritem bo sposoben izvajati
nizkocenovni industrijski krmilnik, v našem primeru Siemens S7-1212C. Za teorijo mehke
logike je namreč značilno, da je realizirana s pomočjo dokaj preproste matematike, ki ob
pravilnem načrtovanju predstavlja močno orodje za reševanje najrazličnejših, tako linearnih
kot tudi nelinearnih, aproksimacijskih in krmilnih problemov.
Med drugim smo želeli imeti tudi možnost lastnih prilagoditev programske kode dotični
aplikaciji in možnost spreminjanja pomembnih parametrov mehkega regulatorja preko HMI-
vmesnika med samim vodenjem procesa, pri čemer se le-ti posodabljajo samodejno, brez
potrebe po zaustavljanju procesorja. V preteklosti smo namreč že preizkusili profesionalno
programsko orodje za načrtovanje mehkih regulatorjev proizvajalca Siemens
(FuzzyControl++), ki kljub visoki ceni (ca. 2000 €) omogoča posodabljanje parametrov le
pri zaustavljenem procesorju, ne omogoča pa načrtovanja adaptivnih mehkih regulatorjev,
povrhu pa je uporabno le na sedaj že zastarelih krmilnikih višjega cenovnega razreda serije
S7-300 in S7-400.
Za regulacijsko progo smo si izbrali regulacijo nivoja vode v pretočnem rezervoarju, ki je
ena izmed štirih razpoložljivih regulacijskih prog na delovni postaji Festo. Ta t. i. modularna
proizvodna postaja za procesno avtomatizacijo (v nadaljevanju MPS PA, iz Modular
Production Station for Process Automation) bo podrobneje prestavljena v 2. poglavju.
Zraven regulacije nivoja je na MPS PA možno proučevati še pretok vode, regulacijo tlaka v
tlačni posodi in temperaturo vode. Za regulacijo nivoja vode smo se odločili na podlagi
dejstev, da je dogajanje v procesu za razliko od ostalih prog možno spremljati tudi vizualno,
da ima proces relativno kratke odzivne čase (pomembno pri nastavljanju parametrov) in da
je karakteristika proge nekoliko nelinearna. Slednje pomeni, da je progo kljub vsemu možno
voditi s klasičnim PID- oz. PI-regulatorjem, nelinearnost procesa in vpliv spremenljivih
razmer na progi pa se na odzivih kljub temu opazita v tolikšni meri, da nam je vpliv le-teh v
izziv odpravljati z adaptivnim mehkim regulatorjem.
S problematiko reguliranja sistemov z nelinearno karakteristiko smo se prvič konkretneje
srečali ob zaključku visokošolskega študija pri realizaciji diplomske naloge na sistemu
»Palica in voziček«. Po takratnem seznanjanju s tehnikami reguliranja nelinearnih sistemov

Bojan Brečko, magistrsko delo
2
so se nam zdele še najprimernejše metode, temelječe na teoriji mehke logike, saj nam
omogočajo snovanje regulatorjev tudi za zahtevne nelinearne regulacijske proge na način,
ki je blizu človeškemu načinu razmišljanja, pri tem ne zahtevajo poglobljenega znanja
regulacijskih tehnik, obenem pa so algoritmi računsko dokaj nezahtevni in s tem časovno
nepotratni v primerjavi s konkurenčnimi tehnikami (nevronske mreže, genetski algoritmi,
teorija rojev delcev …). Mehki sistemi za razliko od navedenih tehnik omogočajo še
neposredno upoštevanje razpoložljivega znanja o odzivanju izhodov regulacijske proge v
odvisnosti od vhodnih spremenljivk, ki je lahko pridobljeno s strani eksperta ali na podlagi
lastnih izkušenj. To znanje je ključnega pomena še posebej v primerih, ko je sistem
matematično težko opisljiv (nelinearnosti, nedoločljivi zunanji vplivi …).
Težava pa nastopi, kadar je ekspertno znanje pomanjkljivo in kadar se karakteristika
regulacijske proge med samim obratovanjem precej spreminja. Prvi primer vodi v
nezmožnost izvedbe učinkovitega regulatorja, drugi pa v situacijo, kjer regulator zadovoljivo
deluje le v bližnji okolici razmer, za katere je bil optimiziran. S pomanjkljivim naborom znanja
smo se srečali pri snovanju mehkega regulatorja za sistem »Palica in voziček«, s težavo
močno spremenljive regulacijske proge pa nedavno, ravno pri izvedbi mehkega regulatorja
za regulacijo nivoja vode na MPS PA (v okviru IRD). Na podlagi teh izkušenj smo prišli do
spoznanja, da je potrebno morebitno pomanjkljivo znanje o progi in spremenljive razmere
na progi v čim večji meri kompenzirati s katerim izmed adaptivnih postopkov. Glede na to,
da se morajo parametri mehkega regulatorja prilagajati med samim vodenjem (»online«) in
da želimo celoten algoritem realizirati na manj zmogljivem procesorju, smo prišli do sklepa,
da je za tovrstno adaptacijo najpriročnejši gradientni adaptacijski postopek (GAP),
predstavljen v [7] in [10]. Navdih za adaptacijo mehkega regulatorja z GAP smo dobili v
[12], kjer je bil uporabljen za kompenzacijo neznanih oz. nedoločenih dinamičnih vplivov pri
vodenju direktno gnanega robota.
Magistrsko delo v 2. poglavju predstavlja zgradbo MPS PA, opisuje vhodno/izhodne signale
(meritev nivoja vode, krmiljenje črpalke, ventilov …) in pojasnjuje zgradbo krmilnega
sistema s krmilnikom Siemens S7-1212C in modulom za distribuirano periferijo ET 200SP.
3. poglavje predstavlja osnovne pojme, ki so pomembni za razumevanje zasnovanih
mehkih regulatorjev. Glede na že dodobra uveljavljeno teorijo mehke logike in dejstvo, da
se za načrtovanje mehkih regulatorjev poslužujemo bolj kot ne standardnih postopkov in
metod realizacije mehkega inferenčnega stroja, na tem mestu predstavljamo le bistvene, s
tem povezane pojme, in to konkretno za naš primer. To poglavje tudi podrobneje predstavlja
izvirno obliko GAP, iz katere smo razvili svojo, nekoliko modificirano izvedbo, ki je opisana
v poglavju 4.

Bojan Brečko, magistrsko delo
3
Na začetku 4. poglavja predstavljamo rezultate primerjalnih metod. To so najprej rezultati,
dobljeni z lastno kodiranim klasičnim PI-regulatorjem, sledijo rezultati v serijo S7-1200
integriranega PI-regulatorja s samonastavitveno funkcijo (Siemens PID Compact) in na
koncu še rezultati mehkega regulatorja z ekspertno nastavljenimi parametri brez adaptacije.
Za primerjalnimi metodami navajamo rezultate mehkega regulatorja z GAP, za tem pa še
mehki regulator, izveden kot kombinacija mehkega generatorja referenčne veličine in PI-
regulatorja referenčne veličine. Sledi sklepno poglavje, kjer povzemamo dobljene rezultate
in primerjamo prednosti in slabosti posameznih regulacijskih tehnik.
Bojan Brečko, magistrsko delo
4
2 SISTEM MPS PA
Poglavje opisuje zgradbo in funkcionalnosti MPS PA ter uporabljeno strojno in programsko
opremo za krmiljenje in nadzor na njej vodenih procesov.
2.1 Strojna oprema
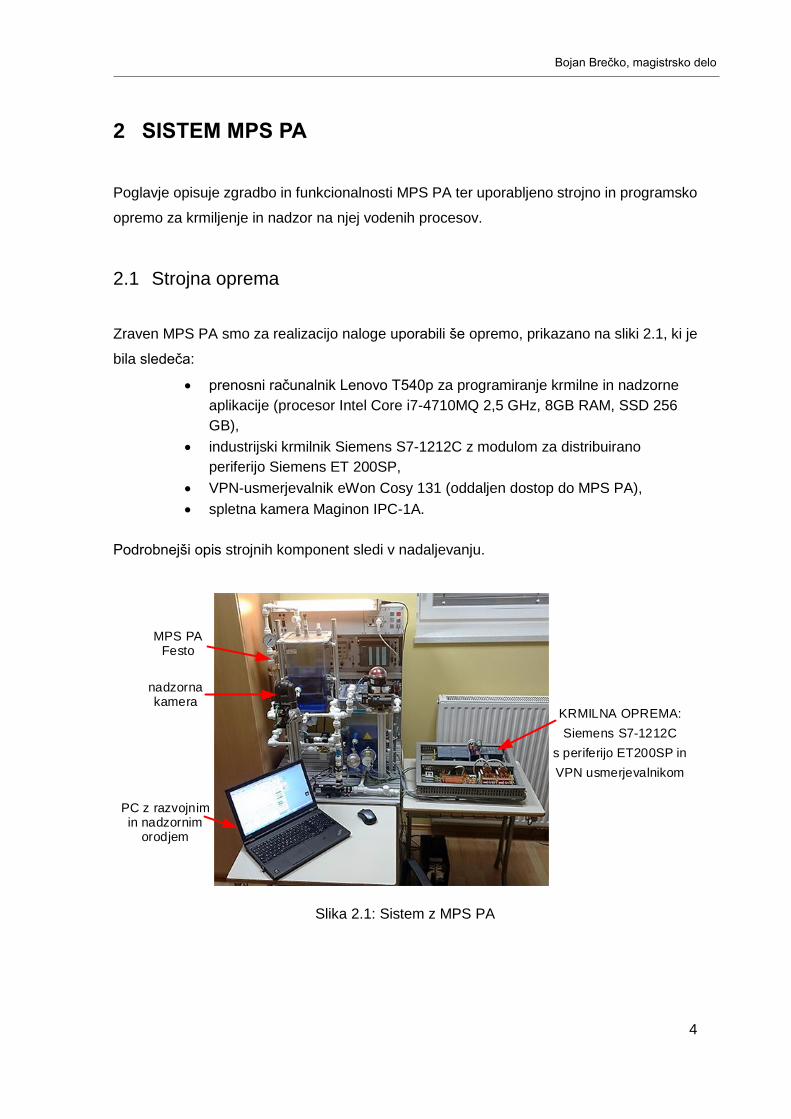
Zraven MPS PA smo za realizacijo naloge uporabili še opremo, prikazano na sliki 2.1, ki je
bila sledeča:
prenosni računalnik Lenovo T540p za programiranje krmilne in nadzorne
aplikacije (procesor Intel Core i7-4710MQ 2,5 GHz, 8GB RAM, SSD 256
GB),
industrijski krmilnik Siemens S7-1212C z modulom za distribuirano
periferijo Siemens ET 200SP,
VPN-usmerjevalnik eWon Cosy 131 (oddaljen dostop do MPS PA),
spletna kamera Maginon IPC-1A.
Podrobnejši opis strojnih komponent sledi v nadaljevanju.
Slika 2.1: Sistem z MPS PA
MPS PA Festo
nadzorna kamera
PC z razvojnim in nadzornim
orodjem
KRMILNA OPREMA:
Siemens S7-1212C
s periferijo ET200SP in
VPN usmerjevalnikom

Bojan Brečko, magistrsko delo
5
2.1.1 MPS PA
Zgradbo MPS PA prikazuje slika 2.2. Zasnovana je tako, da nam je omogočala proučevanje
naslednjih regulacijskih prog:
regulacija nivoja vode v rezervoarju,
regulacija pretoka vode,
regulacija tlaka v tlačni posodi in
regulacija temperature vode v rezervoarju 1.
Slika 2.2: Predstavitev osnovnih komponent MPS PA
Kot je bilo že uvodoma omenjeno, smo se v našem primeru osredotočili na regulacijo nivoja
vode v rezervoarju 2. V ta namen je bilo potrebno regulacijsko progo z manjšimi mehanskimi
posegi prilagoditi v skladu s procesno shemo, prikazano na sliki 2.3.
ultrazvočni senzorrazdalje
rezervoar2
zapirni ventil
grelec
profilna plošča
voziček
tlačni senzor
proporcionalni ventil
senzor pretoka
črpalka
rezervoar 1
temperaturnisenzor
PLC
vhodno/izhodna plošča

Bojan Brečko, magistrsko delo
6
Slika 2.3: Procesna shema za regulacijo nivoja vode
Pomen komponent regulacijske proge navaja tabela 2.1. Podrobnejši opis ključnih
komponent sledi v nadaljevanju v poglavju Procesni signali. Električni načrti ožičenja
vhodno/izhodnih signalov in pnevmatični načrt krmiljenja ventila V102 se nahajajo v
prilogi A.
ULTRAZVOČNI SENZOR
RAZDALJE
PROPORCIONALNI VENTIL
PNEVMATIČNI ZAPIRNI VENTIL
ČRPALKA
REZERVOAR 1
REZERVOAR 2 ROČNI VENTIL
ROČNI VENTIL
SENZOR PRETOKA

Bojan Brečko, magistrsko delo
7
Tabela 2.1: Predstavitev komponent procesne sheme
SIMBOL NAZIV OPIS
B101 rezervoar 1 rezervoar za vodo (10 l – zaloga vode
B102 rezervoar 2 rezervoar za vodo (10 l) – za regulacijo nivoja (volumna)
V101 ročni ventil ventil za omejevanje dotoka vode v rezervoar 2
V102 zapirni ventil kroglični ventil, krmiljen z dvopoložajnim pnevmatičnim
ventilom, ki služi kot dodatni izpust vode iz rezervoarja 2
V105 ročni ventil ventil za izpust vode iz sistema
V106 proporcionalni
ventil ventil za zvezno nastavljanje izpusta vode iz rezervoarja 2
V112 ročni ventil ventil za omejevanje iztoka vode v rezervoar 1 (pogoj je
odprt ventil V102)
LIC B101 ultrazvočni senzor
razdalje
senzor za zvezno merjenje višine vode v rezervoarju 2
(izhod 4-20 mA 0-10 V 345-50 mm)
LA+ S111 končno stikalo zaznavanje kritično visokega nivoja vode v rezervoarju 1
LS- S112 končno stikalo plovno stikalo za zaznavanje spodnje meje nivoja vode v
rezervoarju 2
LS- B113 limitno stikalo
(kapacitivni senzor)
kapacitivni senzor za zaznavanje spodnje meje nivoja
vode v rezervoarju 1
LS+ B114 limitno stikalo
(kapacitivni senzor)
kapacitivni senzor za zaznavanje zgornje meje nivoja
vode v rezervoarju1
P101 črpalka centrifugalna črpalka za črpanje vode iz rezervoarja 1 v
rezervoar 2
2.1.2 Krmilni sistem
Jedro krmilnega sistema (slika 2.4) predstavljal kompaktni PLC Siemens S7-1212C. Na
njem so se izvajali regulacijski algoritmi, skrbel pa je tudi za izmenjavo krmilnih in nadzornih
informacij s SCADA-sistemom Siemens WinCC Pro V13, ki je tekel na osebnem
računalniku.
Vhodno/izhodne signale MPS PA smo na PLC povezali preko modula za distribuirano
periferijo ET 200SP. Razlog za uporabo modula za distribuirano periferijo in ne obstoječih
vhodov in izhodov PLC-ja je bil v ideji, da v primeru potrebe po uporabi zmogljivejšega
krmilnika ne bi bilo potrebno posegati v ožičenje vhodno/izhodnih signalov. To pomeni, da

Bojan Brečko, magistrsko delo
8
bi v primeru menjave PLC-ja bilo potrebno le prekopirati program in v konfiguraciji
PROFINET mreže modul ET 200SP povezati z novim PLC-jem.
Signali MPS PA so na kartice modula ET 200SP priključeni preko dveh kablov. Eden je za
digitalne, drugi za analogne vhodno/izhodne signale. Kabel za digitalne signale je na strani
MPS PA opremljen s 24-polnim Centronics konektorjem (slika 2.4), priključenim na vmesnik
»-XMA1«, na strani PLC-ja pa so puščene posamezne žičke, zaključene z votlicami. Le-te
so priključene na ET 200SP preko vmesnika za digitalne signale po načrtu v prilogi A.
Kabel za analogne signale je oplaščen in na strani MPS PA opremljen s 15-polnim D-SUB-
konektorjem, priključenim na vmesnik »-X2«. Analogni signali so na ET 200SP priključeni
preko vmesnikov po načrtu v prilogi A.
Slika 2.4: Krmilni sistem s krmilnikom S7-1212C in signalna plošča MPS PA
PLC S7-1212C
ET 200SP
napajalnik 24V/2,5A
digitalnisignali
signalna plošča MPS PA
K1 A4 A1 A2 A3 A5
digitalni vhodi
digitalni izhodi
analogni signali
24-polniCentronics priključek
vmesnik -X2(analogni signali)
VPN usmerjevalnik
eWon Cosy 131
vmesnik -XMA1(digitalni signali)
15-polniD-SUB
priključek

Bojan Brečko, magistrsko delo
9
Osnovne lastnosti krmilnika Siemens S7-1212C so:
maloprodajna kataloška cena: 217,40 € + DDV (na dan 12. 3. 2016),
hitrost obdelave podatkov:
o Bool-ove (bitne) operacije: 0,08 µs/inštrukcijo,
o operacije z besedami (ang. Word operation): 1,7 µs/inštrukcijo,
o operacije z realnimi števili (ang. Real math): 2,3 µs/inštrukcijo,
75 kB delovnega pomnilnika (ang. Work memory),
1 MB podatkovnega pomnilnika, razširljivega z SD-kartico (ang. Load memory),
10 kB retentivnega pomnilnika (trajna ohranitev vrednosti ob izpadu napajanja),
komunikacija: PROFINET,
digitalni vhodi/izhodi: 8 vhodov (24 V), 6 izhodov (24 V, 0,5A),
analogni vhodi: 2 x 0-10V (10-bitna ločljivost),
analogni izhodi: 0,
razširljivost: do 2 signalna modula (največ 64 digitalnih vhodov/izhodov ali največ
16 analognih vhodov/izhodov) in 1 signalna ploščica (do 4 digitalni vhodi/izhodi ali
1 analogni vhod/izhod),
več podatkov v [16].
Konfiguracija uporabljenega modula za distribuirano periferijo Siemens ET 200SP je
sledeča:
komunikacijski vmesnik IM 155-6 PN ST (6ES7 155-6AU00-0BN0),
kartica s 16 digitalnimi vhodi: DI 16x24VDC ST (6ES7 131-6BH00-0BA0),
kartica z 8 digitalnimi vhodi: DI 8x24VDC HF (6ES7 131-6BF00-0CA0),
kartica s 16 digitalnimi izhodi: DQ 16x24VDC/0.5A ST (DQ 16x24VDC/0.5A ST),
kartica s 4 analognimi vhodi: AI 4xU/I 2-wire ST (6ES7 134-6HD00-0BA1):
o vhodna območja za meritev napetosti: 1-5 V in 0-10 V (15-bitna ločljivost),
+/-5 V in +/- 10 V (16-bitna ločljivost, vključno s predznakom),
o vhodna območja za meritev toka: 0-20 mA, 4-20 mA, (15-bitna ločljivost),
kartica s 4 analognimi izhodi: AQ 4xU/I ST (6ES7 135-6HD00-0BA1):
o napetostni izhodni signali: 1-5 V, 0-10 V, +/-5 V, +/- 10 V,
o tokovni izhodni signal: 0-20 mA, 4-20 mA, +/-20 mA,
Podrobnejše informacije v zvezi z uporabljenimi komponentami se nahajajo v zbirki
tehničnih navodil komponent ET 200SP v [13].

Bojan Brečko, magistrsko delo
10
2.1.3 Oddaljen dostop
MPS PA je nastanjena v laboratoriju Višje strokovne šole na Ptuju. Pri proučevanju in
optimiziranju regulatorjev je bilo potrebno opraviti precej poizkusov, ki pa smo jih zaradi
aktivnosti v privatnem podjetju v večini lahko izvajali le v poznih popoldanskih in večernih
urah. Čeprav takrat naj ne bi bilo težav z dostopnostjo opreme, se je namesto fizične
prisotnosti v laboratoriju za bistveno bolj praktično rešitev izkazal oddaljen dostop do
opreme preko spleta.
Uporabljen PLC komunicira s SCADA-sistemom, ki se izvaja na prenosnem računalniku,
preko ethernet omrežja in mu je za oddaljen dostop potrebno zagotoviti dostopnost iz
zunanjega omrežja (s spleta). Hitro se je izkazalo, da ob množici varnostnih protokolov, ki
jih mora izvajati administracija šolskega omrežja, te dostopnosti ni tako enostavno urediti,
kot se zdi na prvi pogled. Zato se je za najbolj praktično rešitev izkazala uporaba
namenskega industrijskega usmerjevalnika, ki je sposoben brez poseganja administratorja
omrežja ustvariti navidezno zasebno omrežje (ang. VPN – Virtual Private Network), ki je
dostopno preko spleta.
Izbrali smo VPN-usmerjevalnik proizvajalca eWon, model Cosy 131 (sliki 2.4 in 2.5). Za
oddaljen dostop uporablja HTTPS-protokol (vrata 443) ali protokol UDP (vrata 1194), zato
administratorjem omrežja ni potrebno posegati v nastavitve požarnega zidu. Za ves promet
preko VPN-kanala uporablja kriptografski protokol SSL z 2048-bitnim ključem, ki omogoča
dostop le uporabnikom, ki posedujejo ustrezne prijavne podatke.
Strukturo omrežja in princip oddaljenega dostopa prikazuje slika 2.5. Opisi sklopov in
naprav so zbrani v tabeli 2.2.

Bojan Brečko, magistrsko delo
11
Slika 2.5: Struktura omrežja za oddaljen dostop z VPN-usmerjevalnikom eWon Cosy 131
Tabela 2.2: Opisi sklopov omrežja oddaljenega dostopa z eWon Cosy 131
Oznaka na
Slika 2.5 OPIS
1 Na daljavo nadzorovan objekt - MPS PA.
2 PLC S7-1212C z modulom ET 200SP.
3 HMI – SCADA-sistem WinCC Pro na prenosnem računalniku v primeru, ko proces nadzorujemo, priključeni s kablom na lokalno omrežje naprave MPS PA.
4 Spletna kamera Maginon za opazovanje dogajanja v procesu, nameščena pred rezervoar 2.
5 VPN-usmerjevaljnik eWon Cosy 131.
6 Strežnik Talk2M podjetja eWon, ki nadzoruje promet med lokalnim omrežjem in prijavljenim uporabnikom.
7
Prenosni računalnik s programom eCatcher podjetja eWon, ki skrbi za ustvarjanje VPN-kanala na računalniku, na katerega je nameščen SCADA-sistem WinCC Pro (možno programiranje PLC-ja in podatkovna komunikacija s PLC-jem).
8 Spletna aplikacija M2Web, dostopna preko https://m2web.talk2m.com, ki omogoča oddaljen dostop do naprav lokalnega omrežja PLC-ja iz poljubne naprave z dostopom do spleta (telefon, tablica, PC …).
7
MPS PA
spletna kamera
PLCHMI
VPN usmerjevalnik
požarni zidVPN
spletna aplikacija M2Web
HTTPS
PC z WinCC Proin eCatcher
(oddaljen dostop)
strežnik Talk2M
6
WAN
5
4
2
3
1
LAN
8
Bojan Brečko, magistrsko delo
12
2.1.4 Video nadzor procesa
Za avdio-vizualni nadzor vodenega procesa med oddaljenim dostopom je bila uporabljena
spletna kamera Maginon IPC-1A (slika 2.6). Na MPS PA je nameščena na nosilec pred
rezervoarjem 2 (slika 2.1).
Lastnosti kamere:
ločljivost 640x480 pik,
kot premikanja: 270° vodoravno, 90°navpično (motorni pogon),
kot slike: 60°,
podprti protokoli: HTTP, FTP,TCP/IP SMTP, DHCP, DDNS, UPnP,
nastavitve in nadzor pozicije: preko spletnega vmesnika kamere,
nočni režim: do 15 m,
leča: F = 2,4, f = 3,6 mm.
Slika 2.6: Spletna kamera Maginon IPC-1A
2.2 Programska oprema
Za realizacijo magistrske naloge je bila uporabljena naslednja programska oprema:
operacijski sistem Windows 7 Enterprise (64-bitni),
Microsoft Excel 2013 (interpolacijske funkcije, obdelava podatkov odzivov),
Siemens TIA portal Step 7 Professional V13 SP1 Update 7 (programiranje
PLC-ja in konfiguracija ET 200SP),
Siemens WinCC Professional V13 Update 7 (SCADA-sistem),
eCatcher 6.0 (vzpostavitev VPN za usmerjevalnik eWon).
90°
270°
Bojan Brečko, magistrsko delo
13
2.3 Procesni signali
Za izvedbo in proučevanje regulacije nivoja vode v rezervoarju smo potrebovali naslednje
procesne signale:
nivo vode v rezervoarju, izražen v litrih (volumen), ki ga dobimo posredno z
meritvijo višine gladine v rezervoarju 2 in z naknadnim preračunom,
za izvedbo mehkih regulatorjev potrebujemo podatek o hitrosti spreminjanja nivoja
vode v rezervoarju v ml/s, ki ga dobimo s preračunom iz spremljanja nivoja vode,
analogni izhodni signal za nadzor hitrosti vrtenja črpalke P101 (0-10 V 0-100 %
vrtljajev),
analogni izhodni signal za krmiljenje odprtosti proporcionalnega ventila V106 za
nadzor pretoka vode iz rezervoarja 2 v rezervoar 1 (0-10 V 0-100 % odprtosti),
digitalni izhodni signal za krmiljenje dodatnega izpusta vode iz rezervoarja 2, ki ga
krmilimo z dvopoložajnim ventilom V102, pretok skozenj pa nastavljamo z ročnim
ventilom V112.
2.3.1 Meritev volumna vode
Rezervoar 2 (slika 2.7) prejme 10 l vode in je opremljen z označbami za volumen, ki so
razporejene po koraku 0,5 l. Na vrhu rezervoarja je nameščen ultrazvočni senzor razdalje
B101, s katerim merimo višino gladine vode. Ker nas je zanimal volumen vode v rezervoarju
in ne višina gladine, smo morali izvesti ustrezno umerjanje. V kolikor bi bil rezervoar katere
izmed osnovnih geometrijskih oblik, kot so kvader, valj ipd., bi do volumna lahko prišli z
enostavno uporabo enačb, ki povezujejo višino in volumen. V našem primeru pa ima
rezervoar obliko narobe obrnjene prirezane štiristrane piramide z zaobljenimi stranskimi
robovi (slika 2.7). To pomeni, da bi morali povezavo med višino in volumnom rezervoarja
opisati s sestavljanjem enačb osnovnih geometrijskih teles, kar pa bi bilo precej zamudno
in nepraktično.
Problema smo se lotili tako, da smo najprej izmerili karakteristiko rezervoarja (odvisnost
napetosti senzorja razdalje od načrpane količine vode), podatke vnesli v program Excel in
uporabili funkcijo za samodejno generiranje interpolacijskih funkcij na podlagi vnesenih
podatkov. Interpolacijska funkcija nam torej omogoča, da kasneje lahko pridemo do
podatka o volumnu vode v rezervoarju neposredno iz izmerjene napetosti senzorja.
Postopek umerjanja in izbira interpolacijske funkcije bosta predstavljena v nadaljevanju, še
prej sledi opis meritve višine gladine vode.

Bojan Brečko, magistrsko delo
14
Slika 2.7: Rezervoar 2
2.3.1.1 Meritev višine gladine vode
Višino gladine vode merimo z ultrazvočnim senzorjem razdalje B101 (slika 2.7), ki deluje
na principu merjenja časa med oddanim in sprejetim ultrazvočnim valovanjem. Merilno
območje uporabljenega senzorja je od 50 do 345 mm. Pri nivoju 345 mm dobimo na
izhodnem priključku senzorja tokovni signal 4 mA, pri nivoju 50 mm signal 20 mA, vmes
poteka karakteristika linearno. Torej gre za invertirano karakteristiko senzorja, saj se
velikost izhodnega signala z večanjem razdalje zmanjšuje. Izven navedenega merilnega
območja senzor generira nepredvidljiv signal.
Ker je MPS PA v osnovi opremljena z industrijskim regulatorjem in PLC-jem, ki imata le
napetostne analogne vhode v območju 0-10 V, so vsi analogni senzorji opremljeni z
merilnimi pretvorniki, ki pretvarjajo izvorno veličino dotičnega senzorja v napetostni signal
0-10 V (priloga A, stran 4). Za pretvorbo signala senzorja razdalje B101 skrbi
tokovno/napetostni (I/U) pretvornik »-A1«, ki tokovni signal 4-20 mA pretvori v napetostnega
0-10 V (slika 2.8 in priloga A, stran 4). Tako na analognem vhodu PLC-ja izmerjena napetost
0 V predstavlja višino gladine 345 mm, napetost 10 V pa nivo 50 mm.
rezervoar 2
oznaka 1 l
oznaka 10 l
ultrazvočnisenzor razdalje
(B101)
7
8
spodnji rob
zgornji rob
tlorisrezervoarja
stranski ris rezervoarja

Bojan Brečko, magistrsko delo
15
Slika 2.8: Meritev višine gladine vode in prilagoditev signala PLC-ju
2.3.1.2 Natančnost meritve nivoja
Natančnost meritve nivoja je odvisna od kvalitete senzorja in analogno/digitalne (A/D)
pretvorbe. Pri A/D pretvorbi je pomembno število bitov A/D-pretvornika in s tem velikosti
stopnice med dvema izmerjenima vrednostima. Uporabljena analogna kartica ima v režimu
merjenja unipolarne napetosti v območju 0-10 V sicer dokaj visoko, 15-bitno ločljivost,
vendar ne uporablja vseh 15 bitov za nazivno merilno območje. Način pretvorbe prikazuje
tabela 2.3, iz katere je razvidno, da se območje 0-10 V razdeli »le« na 27648 delov in ne
na 32768, kot bi pričakovali od 15-bitne pretvorbe (215 = 32768). Tako znaša najmanjša
napetost, ki jo lahko z uporabljeno kartico izmerimo, 361,7 µV.
ULTRAZVOČNI
SENZOR RAZDALJE
345...50 mm 4...20 mA
I/U MERILNI PRETVORNIK
4...20 mA 0...10 V
1. analogni vhod PLC-ja
Bojan Brečko, magistrsko delo
16
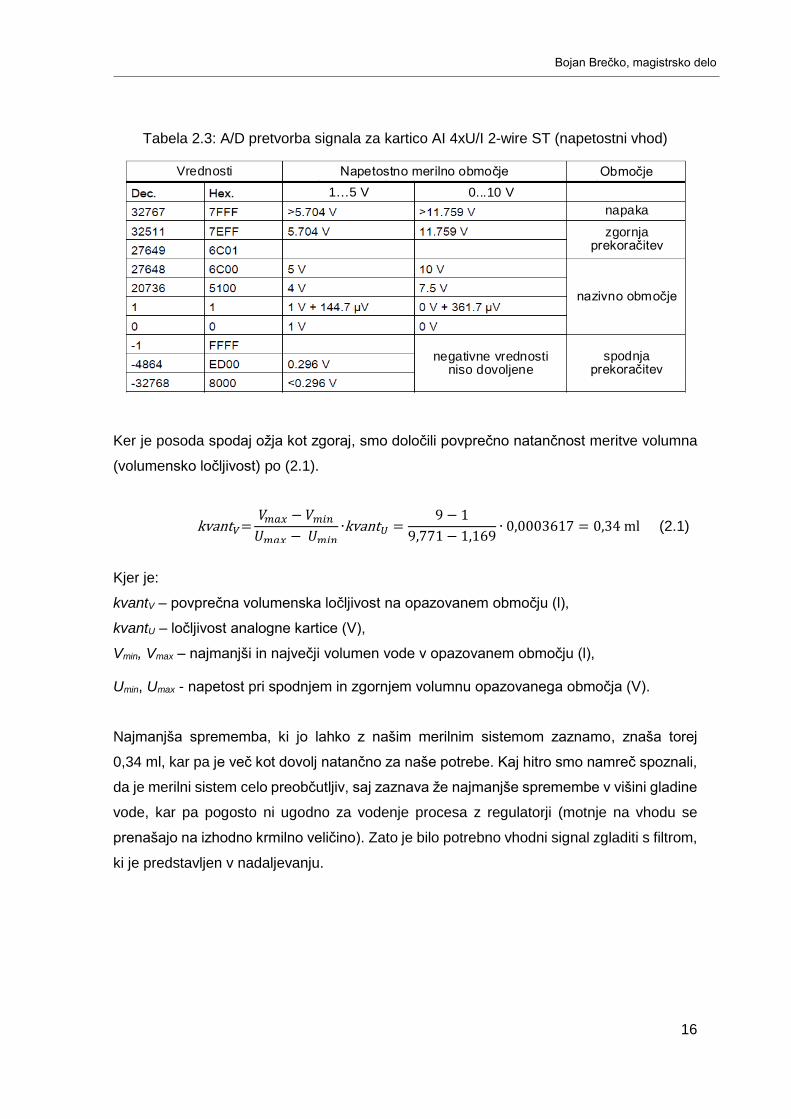
Tabela 2.3: A/D pretvorba signala za kartico AI 4xU/I 2-wire ST (napetostni vhod)
Ker je posoda spodaj ožja kot zgoraj, smo določili povprečno natančnost meritve volumna
(volumensko ločljivost) po (2.1).
kvant𝑉=𝑉𝑚𝑎𝑥 − 𝑉𝑚𝑖𝑛
𝑈𝑚𝑎𝑥 − 𝑈𝑚𝑖𝑛∙kvant𝑈 =
9 − 1
9,771 − 1,169∙ 0,0003617 = 0,34 ml (2.1)
Kjer je:
kvantV – povprečna volumenska ločljivost na opazovanem območju (l),
kvantU – ločljivost analogne kartice (V),
Vmin, Vmax – najmanjši in največji volumen vode v opazovanem območju (l),
Umin, Umax - napetost pri spodnjem in zgornjem volumnu opazovanega območja (V).
Najmanjša sprememba, ki jo lahko z našim merilnim sistemom zaznamo, znaša torej
0,34 ml, kar pa je več kot dovolj natančno za naše potrebe. Kaj hitro smo namreč spoznali,
da je merilni sistem celo preobčutljiv, saj zaznava že najmanjše spremembe v višini gladine
vode, kar pa pogosto ni ugodno za vodenje procesa z regulatorji (motnje na vhodu se
prenašajo na izhodno krmilno veličino). Zato je bilo potrebno vhodni signal zgladiti s filtrom,
ki je predstavljen v nadaljevanju.
negativne vrednosti niso dovoljene
napaka
spodnja prekoračitev
nazivno območje
Napetostno merilno območjeVrednosti Območje
zgornja prekoračitev
1…5 V 0...10 V

Bojan Brečko, magistrsko delo
17
2.3.1.3 Glajenje signala senzorja razdalje
Za stabilno in mirno odzivanje regulacijske proge je pomembno, da je vhodni signal čim bolj
»gladek«, torej da vsebuje čim manj šuma. Šum je pogosto posledica elektromagnetnih
motenj, v našem primeru pa tudi posledica kombinacije občutljivega merilnega sistema in
dejstva, da v rezervoar dotekajoča voda nekoliko vzvalovi gladino. Za glajenje napetosti
senzorja smo uporabili filter, ki je v osnovi vgrajen v vse analogne kartice modula ET 200SP
in ga lahko nastavimo v treh stopnjah, kot prikazuje slika 2.9 (od šibkega do močnega
glajenja).
Slika 2.9: Delovanje v analogno vhodno kartico vgrajenega filtra
Čas glajenja, torej čas, ko signal doseže 63 % končne vrednosti, je določen kot produkt
števila ciklov izbranega filtra k in časa cikla modula. Čas cikla modula oz. kartice je odvisen
od števila aktiviranih vhodov. V našem primeru, ob samo enem aktiviranem vhodu na kartici,
znaša 60 ms. Po testiranjih smo filter nastavili na srednje močno glajenje (Medium, k = 8),
torej je čas glajenja znašal 480 ms. Pri šibkem glajenju je bil namreč signal še vedno preveč
moten, pri močnem glajenju pa je že prihajalo do neželenih zakasnitev med dejanskim
spreminjanjem gladine in merjenim signalom (poslabšanje vodljivosti procesa).
Vrednost filtra se enostavno nastavi v konfiguraciji analogne kartice modula ET 200SP v
programskem okolju Siemens TIA Portal (slika 2.10), nato je konfiguracijo potrebno prenesti
v PLC.
1 – brez glajenja (None, k=1)
2 – šibko (Weak, k=4)
3 – srednje (Medium, k=8)
4 – močno (Strong, k=16)
cikli modula [k]
sto
pn
ičn
i odziv

Bojan Brečko, magistrsko delo
18
Slika 2.10: Konfiguracija filtra analognega vhoda
2.3.1.4 Pretvorba signala iz višine gladine v volumen vode
Kot je bilo omenjeno, je rezervoar nepravilne geometrijske oblike, na njem pa ni oznak za
višino gladine vode, pač pa le oznake za volumen. Torej je lažje in natančneje spremljati
dogajanje preko volumna kot preko višine gladine.
Umerjanje smo opravili tako, da smo v rezervoar načrpali vodo do oznake za 1 l, zaprli ročni
ventil V101 (slika 2.3) in nato preko programa v PLC-ju v »online« režimu odčitali izmerjeno
vrednost napetosti ultrazvočnega senzorja. Enak postopek smo ponovili za celotno skalo
rezervoarja od 1 do 9 l po koraku 0,5 l (tabela 2.4, stolpca 2 in 3).
analogna vhodna
kartica
AI 4xU/I 2-wire ST
jakost filtra
tip vhoda
merilno območje
1. vhod

Bojan Brečko, magistrsko delo
19
Tabela 2.4: Karakteristika rezervoarja - izmerjene in interpolirane vrednosti volumna
Sledila je obdelava podatkov v programu Excel, kjer je iz izmerjenih podatkov enostavno
dobiti enačbe za različne interpolacijske krivulje in pripadajoče enačbe (pot v Excel-u:
Orodja za grafikone zavihek Načrt Dodaj element grafikona Trendna črta).
Glede na to, da je krivulja odvisnosti napetosti od volumna na prvi pogled delovala precej
linearno, smo najprej poizkusili z interpolacijo s polinomom 1. reda, ki ga predstavlja (2.2).
𝑉𝑖 = 0,9285 ∙ 𝑈 − 0,2117 (2.2)
Kjer je:
Vi – interpoliran volumen vode v rezervoarju (l),
U – izmerjena napetost senzorja razdalje (V).
Z vstavljanjem izmerjene napetosti v (2.2) smo izračunali odstopanje izračunane vrednosti
volumna od dejanske (tabela 2.4, stolpec 5), ki je v skrajnih točkah znašala ca.130 ml, v
Dejanski
volumen
V [l]
Izmerjena
napetost
U [V]
Izračunan
volumen
V i [l]
Odstopanje
[ml]
Izračunan
volumen
V i [l]
Odstopanje [ml]
1. 1,00 1,169 0,874 -126 0,997 -3
2. 1,50 1,771 1,433 -67 1,506 6
3. 2,00 2,364 1,983 -17 2,014 14
4. 2,50 2,946 2,523 23 2,520 20
5. 3,00 3,475 3,015 15 2,987 -13
6. 3,50 4,028 3,528 28 3,480 -20
7. 4,00 4,583 4,044 44 3,982 -18
8. 4,50 5,142 4,562 62 4,493 -7
9. 5,00 5,683 5,065 65 4,995 -5
10. 5,50 6,224 5,567 67 5,502 2
11. 6,00 6,751 6,056 56 6,002 2
12. 6,50 7,285 6,552 52 6,514 14
13. 7,00 7,813 7,042 42 7,027 27
14. 7,50 8,316 7,510 10 7,521 21
15. 8,00 8,817 7,974 -26 8,017 17
16. 8,50 9,291 8,415 -85 8,492 -8
17. 9,00 9,771 8,861 -139 8,978 -22
Povp. (ABS): 54 Povp. (ABS): 13
Linearna interpolacija
V =0.9285U - 0.2117
Polinomska interpolacija
V =0.0103U 2+0.1851U+0.0299Št.
meritve
Vhodni podatki

Bojan Brečko, magistrsko delo
20
poprečju pa 54 ml. Potek odvisnosti izmerjene napetosti senzorja od volumna vode v
rezervoarju je na sliki 2.11 prikazan z neprekinjeno vijolično črto, interpolirane vrednosti pa
z linearno funkcijo prikazuje črna črtkana krivulja.
Slika 2.11: Odvisnost napetosti senzorja od volumna vode in interpolirane krivulje
Ker nam je tolikšno odstopanje bilo nesprejemljivo, smo poskusili še s polinomi 2. in 3. reda.
Izkazalo se je, da interpolacija s polinomom 2. reda, ki ga predstavlja (2.3), bistveno izboljša
rezultate in s tem zmanjša odstopanje izračunane od dejanske vrednosti na ca. 20 ml v
skrajnih točkah in na le 13 ml v poprečju (tabela 2.4, stolpec 7). S polinomom 2. reda
interpolirane vrednosti prikazuje rdeča črtkana krivulja na sliki 2.11.
𝑉 = 0,0103 ∙ 𝑈2 + 0,1851 ∙ 𝑈 + 0,0299 (2.3)
Poizkus interpolacije s polinomi 3. in višjih redov so prinesli le minimalno izboljšanje
rezultatov (le za nekaj ml v povprečju), zato smo se odločili za kompromisno rešitev,
polinom 2. reda. Za to rešitev smo se namreč odločili tudi ob zavedanju dejstva, da vsakršno
odstopanje
dejanske od
interpolirane
vrednosti
VOLUMEN VODE V REZERVOARJU: V [l]
linearna interpolacija: V=0.9285U-0.2117
dejanska odvisnost napetosti od volumna
polinomska interpolacija: V=0.0103U2+0.1851U+0.0299
IZM
ER
JE
NA
NA
PE
TO
ST
: U
[V
]

Bojan Brečko, magistrsko delo
21
povečevanje stopnje polinoma občutno poveča računski čas in s tem čas cikla procesorja,
ki pa ga pri uporabi nizkocenovnega PLC-ja ne gre zanemarjati.
2.3.2 Meritev hitrosti spremembe nivoja vode
Za učinkovito realizacijo mehkih regulatorjev je samo podatek o odstopanju želene od
dejanske vrednosti nivoja vode premalo (regulacijski pogrešek). Če želimo v celoti izkoristiti
uporabnost teorije mehke logike, potrebujemo še kakšen podatek, ki nam dodatno opisuje
dogajanje v vodenem procesu. V našem primeru se nam je ob regulacijskemu pogrešku
zdelo najbolj smiselno spremljati še hitrosti spreminjanja nivoja v rezervoarju. Tako lahko v
primeru informacije, da je npr. nivo malo prenizek in da le-ta hitro narašča, učinkoviteje
spreminjamo krmilno veličino (CV), kot če bi imeli na voljo le informacijo, da je nivo malo
prenizek.
Pri spremljanju hitrosti spreminjanja nivoja vode gre torej za spremljanje spreminjanja
hitrosti procesne veličine, zato smo pri realizaciji programske kode za to veličino uporabljali
kratico dPV (delta Process Value). Ker je ta veličina izražena v ml/s, bi pri površnem branju
hitro pomislili, da je to pretok, ki ga ustvarja črpalka. Pa temu ni čisto tako. Pri tem gre
namreč za razliko volumenskega pretoka med pozitivnim pretokom, ki ga ustvarja črpalka,
in negativnim pretokom oz. iztokom iz rezervoarja, ki je posledica gravitacije. Tako bi pri
iztekanju vode iz rezervoarja z npr. 5 ml/s morala črpalka za doseganje hitrosti dviganja
nivoja 15 ml/s ustvarjati pretok 20 ml/s.
Podatek dPV smo dobili tako, da smo računali razliko med nivojema, odčitanima v razmiku
natanko 50 ms (diskretno odvajanje). Točen časovni razmik smo dosegli z uporabo ciklične
prekinitvene rutine PLC-ja. Pri takšnih izračunih pogosto dobimo precej spreminjajoč signal,
iz katerega je za nadaljnjo uporabo potrebno izluščiti uporabno informacijo. To smo storili s
tekočim povprečenjem signala v časovnem oknu ene sekunde, v katerem smo računali
povprečje zadnjih dvajsetih meritev (20 odtipkov v presledkih po 50 ms).

Bojan Brečko, magistrsko delo
22
2.3.3 Črpanje vode
Za črpanje vode iz rezervoarja 1 v rezervoar 2 služi centrifugalna črpalka, ki je prikazana
na sliki 2.12. Deluje lahko v diskretnem ali v zveznem režimu. V diskretnem režimu ima
samo dve stanji - izklopljena (miruje) in vklopljena (100 % vrtljajev), v zveznem pa lahko s
spreminjanjem krmilne napetosti na črpalki v razponu od 0 do 24 V dosegamo poljubne
vrtljaje od 0 do nazivnih vrtljajev črpalke. Črpalko poganja enosmerni motor (24 V, 26 W,
2,5 bar). Krmilni načrt za vodenje črpalke je predstavljen na sliki 2.13 in v prilogi A na
strani 5.
Slika 2.12: Centrifugalna črpalka (P101)
2.3.3.1 Krmiljene črpalke
V diskretnem režimu mora biti rele K1, ki služi za izbiro režima krmiljenja, izklopljen (izhod
Q 0.2 = 0), z digitalnim izhodom Q 0.3 (P101ON) pa vklopimo oz. izklopimo črpalko.
Za zvezni režim delovanja mora biti rele K1 vklopljen, hitrost vrtenja črpalke pa določimo z
velikostjo napetosti na analognem izhodu UA1 (0-10 V 0-100 % vrtljajev). Za pretvorbo
krmilnega signala 0-10 V v močnostni signal 0-24 V skrbi modul A4. Modul A5 omejuje tok
črpalke in jo s tem ščiti pred preobremenitvijo.
CENTRIFUGALNA
ČRPALKA
TLAČNI VOD
SESALNI VOD
REZERVOAR 1

Bojan Brečko, magistrsko delo
23
Slika 2.13: Električni načrt za krmiljenje črpalke
2.3.3.2 Karakteristika črpalke
Karakteristiko črpalke, ki jo prikazuje slika 2.14, smo posneli za tri različne obratovalne
razmere; pri popolnoma odprtem, pri napol odprtem in pri popolnoma zaprtem
proporcionalnem izpustnem ventilu V106. V primeru, ko je proporcionalni ventil popolnoma
zaprt, se lahko rezervoar 2 prazni le nazaj skozi črpalko. V tej situaciji črpalka premaguje
le tlak, ki ga povzroča voda v rezervoarju 2.
Če primerjamo neprekinjene krivulje karakteristike črpalke na sliki 2.14 s pripadajočimi
interpoliranimi črtkanimi, je razvidno, da gre za nekoliko nelinearen proces. Pomembno pa
je, da nelinearnost še kljub temu ni tako izrazita, da procesa ne bi bilo možno zadovoljivo
voditi s klasičnimi regulacijskimi tehnikami (PID), s katerimi smo želeli primerjati realizirane
izvedbe mehkih regulatorjev.
OMEJEVALNIK
TOKA
ČRPALKA
ANALOGNI VHOD
0-10V
PREKLOP
DISKRETNO/ZVEZNO
PRETVORNIK
0...10V 0...24V
IZHOD
0...24 V

Bojan Brečko, magistrsko delo
24
Slika 2.14: Karakteristika črpalke
1
2
3
4
5
6
7
8
9
15 20 25 30 35 40 45 50 55 60 65 70 75 80
Vo
lum
en
vo
de
[l]
Hitrost črpalke [%]
Izpust 0%
Izpust 50%
izpust 100%

Bojan Brečko, magistrsko delo
25
2.3.4 Izpust vode
Za izpuščanje vode iz rezervoarja 2 nam služita proporcionalni ventil V106 in dvopoložajni
kroglični ventil V102 v kombinaciji z ročnim ventilom V112.
2.3.4.1 Proporcionalni ventil
Proporcionalni ventil se nahaja na iztočnem priključku rezervoarja 2 (slika 2.15), v katerem
reguliramo volumen vode. Odprtost ventila nastavljamo z neposrednim vnosom želene
vrednosti odprtosti (od 0 do 100 %) v SCADA-aplikaciji na PC-ju.
Slika 2.15: Proporcionalni izpustni ventil
Krmiljenje ventila omogočimo s vklopom releja K106 (priloga A, stran 6), ki ga aktiviramo z
digitalnim izhodom krmilnika Q 0.4. Odprtost ventila določimo z višino napetosti na drugem
analognem izhodu krmilnika (UA2: 0-10 V 0-100 % odprtosti ventila).
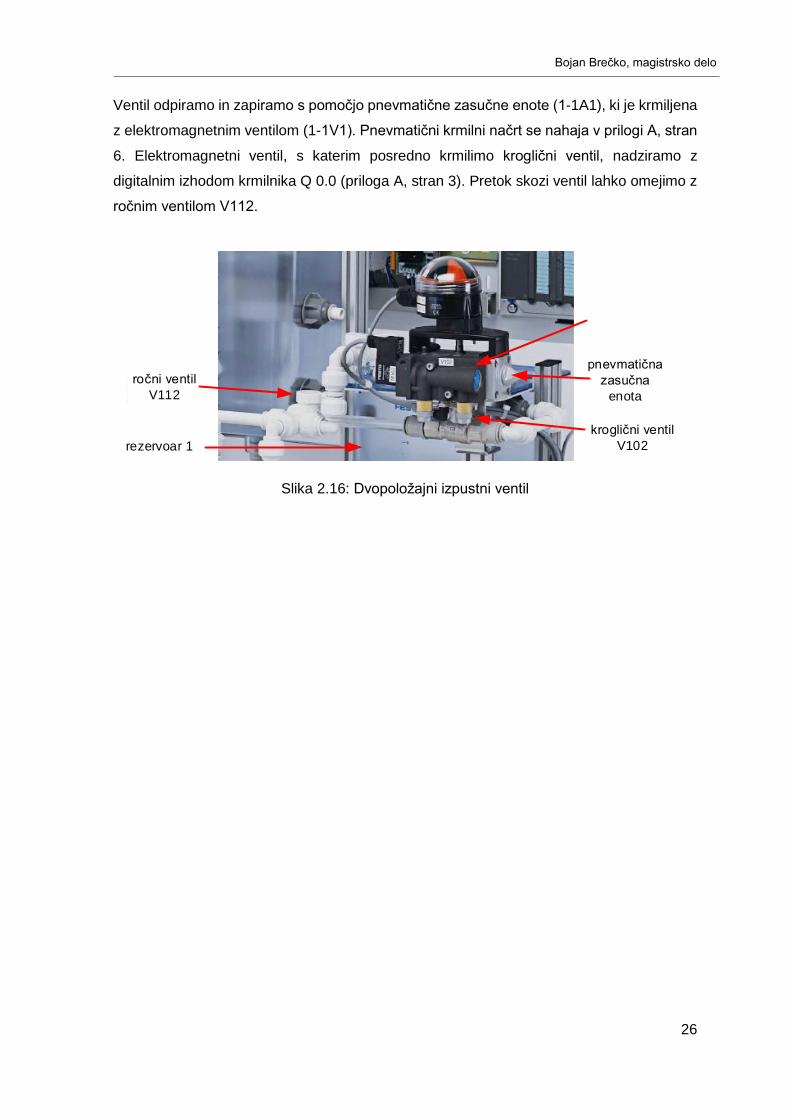
2.3.4.2 Dvopoložajni izpustni ventil
Dvopoložajni izpustni ventil V102, ki ga prikazuje slika 2.16, služi za dodatni izpust vode iz
rezervoarja 2 v rezervoar 1. Le-ta nam pri proučevanju različnih regulacijskih tehnik
omogoča vnos dodatne motnje v voden proces.
REZERVOAR 2
REZERVOAR 1
PROPORCIONALNI
VENTIL
(V106)
IZTOČNI VOD
Bojan Brečko, magistrsko delo
26
Ventil odpiramo in zapiramo s pomočjo pnevmatične zasučne enote (1-1A1), ki je krmiljena
z elektromagnetnim ventilom (1-1V1). Pnevmatični krmilni načrt se nahaja v prilogi A, stran
6. Elektromagnetni ventil, s katerim posredno krmilimo kroglični ventil, nadziramo z
digitalnim izhodom krmilnika Q 0.0 (priloga A, stran 3). Pretok skozi ventil lahko omejimo z
ročnim ventilom V112.
Slika 2.16: Dvopoložajni izpustni ventil
kroglični ventil
V102
ročni ventil
V112
rezervoar 1
pnevmatična
zasučna
enota
pnevmatični
monostabilni
ventil
indikator
stanja ventila
rezervoar 2
Bojan Brečko, magistrsko delo
27
3 OSNOVE MEHKE LOGIKE
Poglavje predstavlja osnovne pojme s področja mehke logike, povezane z načrtovanjem
mehkih regulatorjev, predstavljene v navezavi na konkretni primer snovanja mehkega
regulatorja iz naše naloge. Podrobnejše definicije pojmov, povezanih z mehko logiko, so
predstavljene v [4], [7], [10] in [12]. Poglavje vsebuje tudi predstavitev principa gradientnega
adaptacijskega postopka, ki mehkemu regulatorju omogoča samodejno prilagoditev
ključnih parametrov spremenljivi regulacijski progi.
Začetki danes na mnogih področjih inženirske prakse nepogrešljive teorije mehke logike
segajo v leto 1965, ko je matematik Lofti A. Zadeh v [21] predstavil do tedaj še
neobravnavane, po prevodu izvirnega izraza »fuzzy« t. i. mehke veličine. To so veličine, ki
jih ni možno zapisati niti s formalnim matematičnim zapisom niti s pomočjo verjetnostne
teorije, ki ji je od matematičnih orodij še najbližja. Določen pojav lahko namreč eksaktno
matematično zapišemo le, kadar imamo o njem v vsakem trenutku na voljo dovolj informacij
in so nam znane vse z njim povezane zakonitosti. Vseh navedenih informacij pa v svetu,
polnem zapletenih, multivariabilnih procesov pogosto ni na voljo. In tukaj nastopi teorija
mehke logike, ki je še posebej po uvedbi pojma lingvistične spremenljivke v [22] leta 1973
postala močno orodje za opisovanje sicer težko ali celo matematično nemogoče opisljivih
pojavov.
Z nadaljnjim razvojem se je teorija mehke logike najbolj izrazito uveljavljala na področju
vodenja in identifikacije sistemov, vse bolj pa je postajala prisotna tudi na področjih, kot so
obdelava signalov, razpoznavanje vzorcev, procesiranje slike, večkriterijska optimizacija …

Bojan Brečko, magistrsko delo
28
3.1 Predstavitev osnovnih pojmov teorije mehke logike
Osnovni pojmi, pomembni za splošno razumevanje in načrtovanje mehkih regulatorjev,
bodo predstavljeni na našem primeru regulacije nivoja vode. Regulacijsko progo z mehkim
regulatorjem prikazuje slika 3.1.
Slika 3.1: Regulacijska proga z mehkim regulatorjem nivoja
Želeno vrednost nam predstavlja nivo vode v rezervoarju, merjen v litrih. V želji, zasnovati
čim bolj univerzalen primer regulatorja, izvedenega s pomočjo mehke logike, smo za vhodni
podatek mehkega regulatorja izbrali naslednji veličini:
1. Regulacijski pogrešek (e), ki je osnovni podatek vsake regulacijske proge in ga
predstavlja razlika želene (SP) in dejanske oz. procesne (PV) vrednosti regulirane
veličine. V našem primeru je to razlika med želenim in dejanskim nivojem vode v
rezervoarju 2, izraženim v litrih (l).
2. Hitrost spreminjanja procesne veličine (dPV), ki nam dodatno opisuje
dogajanje v reguliranem procesu in nam tako omogoča učinkovitejšo zasnovo
mehkega regulatorja. V našem primeru je to hitrost spreminjanja nivoja vode,
izražena v mililitrih na sekundo (ml/s). Pri servosistemih bi na tem mestu imeli
rotacijsko ali translacijsko hitrost, pri regulaciji temperature hitrost spreminjanja
temperature itd.
Pri določitvi izhodne veličine mehkega regulatorja se je izkazalo, da je izbira odvisna od tipa
zasnove regulatorja. Za primerjalno metodo adaptivnemu mehkemu regulatorju smo najprej
zasnovali mehki regulator s fiksnimi izhodnimi singletonskimi vrednostmi. V tem primeru se
je izkazalo, da je lažje sestaviti učinkovita mehka pravila s spremembo izhodne krmilne
veličine (dCV), kot pa z neposredno krmilno veličino (CV). Tako npr. pridemo do mehkega
pravila: »Če je nivo malo prenizek in hitro narašča, potem hitro zmanjšuj vrtljaje črpalke.«
To je učinkovitejše tudi v spremenljivih regulacijskih progah od npr. istega pravila z direktno
krmilno veličino na izhodu, ki bi se glasilo: »Če je nivo malo prenizek in nivo hitro narašča,
VODEN
PROCES
MEHKI
REGULATOR
Želen NivoSP [l]
_+
dCV[%/s]
e [l]
1. odvod
dPV [ml/s]
NivoPV [l]
NivoPV [l]

Bojan Brečko, magistrsko delo
29
potem nastavi velike vrtljaje črpalke.« V nadaljevanju, pri načrtovanju adaptivnega
mehkega regulatorja, pa se je izkazalo ravno nasprotno. Lažje in stabilnejše je bilo
adaptirati položaje izhodnih singletonov same krmilne veličine kot položaje singletonov
spremembe krmilne veličine.
3.2 Mehki regulator
Mehki inferenčni stroj, pogosto imenovan kar mehki krmilnik ali mehki regulator (odvisno od
načina uporabe), je prikazan na sliki 3.2.
Slika 3.2: Shema mehkega regulatorja
Načrtovanje mehkega regulatorja v grobem razdelimo na tri faze, ki so:
1. mehčanje ostrih vhodnih vrednosti, ki številčno predstavljeni informaciji o
trenutnem stanju dotične spremenljivke dodeli besedni opis,
2. mehko sklepanje, s katerim na podlagi mehkih vrednosti vhodnih spremenljivk in
baze pravil generiramo želene mehke vrednosti izhodne spremenljivke in
3. ostrenje, kjer za realni svet neuporabnim izhodom v mehki obliki dodelimo ostre,
številčne vrednosti, primerne za vodenje aktuatorjev, s katerimi vplivamo na
voden proces.
Sledi podrobnejši opis posameznih faz in z njimi povezanih pojmov.
MEHKI KRMILNIK
OSTRENJE
MEHKIH
VREDNOSTI
MEHKO
SKLEPANJE
BAZA
PRAVIL
MEHČANJE
OSTRIH
VREDNOSTI
ostre izhodne
vrednosti
ostre vhodne
vrednosti
𝑥 ∈ 𝑈 𝑦 ∈ 𝑉
mehkemnožice
v V
mehkemnožice
v U

Bojan Brečko, magistrsko delo
30
3.2.1 Mehčanje ostrih vrednosti vhodnih spremenljivk
V tem delu sledi predstavitev postopka mehčanja, ki nam omogoča snovanje mehkega
regulatorja s pomočjo orodij mehke logike.
3.2.1.1 Mehčanje vhoda regulacijski pogrešek (e)
Kot je že bilo omenjeno, predstavlja regulacijski pogrešek osnovni vhodni podatek vsake
regulacijske proge. V želji, da bi lahko naše izkušnje iz opazovanja procesa karseda
podobno obravnavali tudi v mehkem regulatorju, vhodnih spremenljivk nismo normirali, kot
je to običajna praksa, pač pa le omejili. To pomeni, da smo regulacijski pogrešek
obravnavali kar v litrih in ga omejili na +/-1 l. Za učinkovito mehko vodenje procesa nam je
namreč dovolj že, če opazujemo, kaj se dogaja s procesom v območju želene vrednosti
nivoja +/- 1 l.
Vhodni podatek o pogrešku je v obliki realnega števila in lahko zavzame poljubno vrednost
na opazovanem območju +/-1 l. Če odmislimo ločljivost A/D-pretvorbe, si lahko posamezno
vrednost (npr. e = 0,35) predstavljamo kot matematično točko na številski premici, ki je
neskončno majhna. To pomeni, da še tako majhnemu opazovanemu območju pripada
neskončno mnogo realnih števil in posledično lahko vhodna spremenljivka v vsakem
trenutku zavzema natanko eno vrednost. Na vprašanje, ali trenutni pogrešek znaša npr.
0,35 l, bi tako lahko odgovorili samo z da ali z ne. Če to vprašanje poskušamo opisati s
teorijo »navadnih« množic, ki jo je v 19. stoletju vpeljal nemški matematik G. Cantor, bi se
vprašanje glasilo: »Ali opazovan element e pripada množici, ki vsebuje element 0,35 l?«
Tudi na tako zastavljeno vprašanje bi lahko odgovorili pritrdilno le, če je e natanko 0,35 l, v
vseh ostalih primerih pa ne. To pomeni, da v zvezi s tem vprašanjem ni nobenih
nedoločenosti oz. dvomov in da imamo o vsaki vrednosti v vsakem trenutku vse informacije.
Takšnim vrednostim rečemo, da so ostre in jih je za uporabo v mehkih sistemih potrebno
ustrezno prilagoditi, zmehčati.
Prelomni trenutek na področju množic je predstavljala že omenjena uvedba t. i. mehkih
množic, stopnje pripadnosti elementa mehki množici in posledično nastali t. i. lingvistični
spremenljivki. Stopnja pripadnosti elementa mehki množici lahko za razliko od pripadnosti
elementa klasični množici zvezno zavzema poljubno vrednost na intervalu med 0 in 1. Tako

Bojan Brečko, magistrsko delo
31
pri postopku mehčanja ugotavljamo, kako močno se ostre vrednosti teh vhodov nahajajo v
določenih, predhodno definiranih, besedno opisanih območjih. Območja so določena s t. i.
pripadnostnimi funkcijami, »močnost« nahajanja ostre vrednosti v dotičnem območju pa
nam pove podatek o stopnji pripadnosti, ki je najpogosteje označen s črko μ. Za nadaljnjo
uporabo tem območjem dodelimo kratke, smiselne besedne opise (npr. nivo »Pada hitro«,
temperatura »Malo prenizka« …). Tako opisano območje imenujemo lingvistična
spremenljivka, le-te pa nam v nadaljevanju omogočajo oblikovanje mehkih pravil odločanja,
s katerimi vplivamo na izhod. Sledi predstavitev postopka mehčanja vhodnih spremenljivk
e in dPV v nalogi zasnovanega mehkega regulatorja, in to na enak način in z enakimi
vrednostmi, kot smo jih uporabili pri kasnejši izvedbi.
Območje opazovanja spremenljivke e, ki je omejeno na +/- 1 l, smo pokrili s petimi
pripadnostnimi funkcijami trapezne in trikotne oblike. Število, oblike in postavitev le-teh
prikazuje slika 3.3. Na njej je predstavljen tudi način določanja stopnje pripadnosti ostre
vhodne vrednosti spremenljivke e posameznim vhodnim pripadnostnim funkcijam, ki ga
bomo obravnavali kasneje.
Slika 3.3: Vhodne pripadnostne funkcije za regulacijski pogrešek
Za trapezno in trikotno obliko pripadnostnih funkcij smo se odločili, ker so v večini primerov
dovolj učinkovite, obenem pa računsko bistveno manj zahtevne in s tem časovno manj
potratne kot Gaussova, sigmoidna in zvončasta oblika pripadnostne funkcije. Slednje se
uporabljajo predvsem v primerih, ko mora biti izhod iz mehkega sistema gladka funkcija, ki
je matematično odvedljiva.
Vhodnih pripadnostnih funkcij pri tem nismo poimenovali neposredno na stanje pogreška,
pač pa glede na to, kakšen je trenuten nivo glede na želeno vrednost. To pomeni, da smo
npr. vhodno pripadnostno funkcijo, ki bi jo sicer poimenovali kot pogrešek »Velik
1.00 0.80.60.40.20.20.40.60.81.0
1
μe = μ1
e [l]
ZVOK
MNMV ZN
-e [l] e = 0.08 l
μe,OK = μ1,3 = 0.2
μe,MN = μ1,4 = 0.8

Bojan Brečko, magistrsko delo
32
Negativen«, poimenovali glede na želen nivo, torej nivo »Zelo Visok«. Negativni pogrešek
namreč pomeni, da je dejanska vrednost nivoja večja od želenega in s tem, da je nivo
previsok. Pripadnostne funkcije, ki so preko pogreška poimenovane glede na trenutni nivo,
so naslednje: nivo Zelo Visok (ZV), Malo Visok (MV), OK (OK), Malo Nizek (MN) in Zelo
Nizek (ZN).
Če se navežemo na v uvodu poglavja navedeno teorijo, smo ostremu vhodu pogrešek e
dodelili 5 mehkih pripadnostnih funkcij (trapezne in trikotne oblike), jih besedno opisali (nivo
Zelo Visok, Malo Visok, OK, Malo Nizek, Zelo Nizek) in tako dobili 5 lingvističnih
spremenljivk, s katerimi lahko v fazi mehkega sklepanja oblikujemo mehka pravila.
Položaje in oblike vhodnih pripadnostnih funkcij smo na začetku določili na podlagi preteklih
izkušenj z načrtovanjem mehkih regulatorjev in po občutku na podlagi meritev, dokončno
pa smo jih določili kasneje med opazovanjem odzivov regulatorja. Za prekritje vsakega
vhoda s petimi pripadnostnimi funkcijami smo se prav tako odločili na podlagi dosedanjih
izkušenj z načrtovanjem mehkih regulatorjev. S tem naborom je tako možno oblikovati
največ 25 mehkih pravil. Dodelitev še večjega števila vhodnih pripadnostnih funkcij bi
namreč zelo povečala število možnih pravil, kar teoretično poveča možnosti zasnove
kvalitetnejšega, bolj določenega mehkega regulatorja, praktično pa to pogosto vodi v
preveliko število parametrov, ki jih je potrebno ustrezno izbrati.
Primer postopka določanja stopnje pripadnosti vhoda e posameznim vhodnim
pripadnostnim funkcijam je prikazan na sliki 3.3, in sicer za vrednost e = 0,08 l. Dobljene
vrednosti so predstavljene v tabeli 3.1, kjer sta za vsako stopnjo izpolnjenosti navedena dva
simbola, eden s kraticami vhodov in vhodnih pripadnostnih funkcij, drugi z indeksi. Prvega
uporabljamo za lažje razumevanje shem in pojasnil, drugi pa nam omogoča enostavno
zapisovanje enačb in programiranje algoritmov. Tako npr. simbol μe,MV predstavlja stopnjo
pripadnosti ostre vrednosti vhoda pogrešek e mehki pripadnostni funkciji nivo »Malo
Nizek«, njemu ekvivalenten simbol μ1,2 pa stopnjo pripadnosti ostre vrednosti 1. vhoda 2.
mehki pripadnostni funkciji.

Bojan Brečko, magistrsko delo
33
Tabela 3.1: Določanje stopenj pripadnosti vhodnim pripadnostnim funkcijam za
regulacijski pogrešek e
Indeks
pripadnostne
funkcije
Naziv
pripadnostne
funkcije
Simbol
(opisni)
Simbol
(indeksni)
Vrednost stopnje
pripadnosti za
e=0,08 l
1 nivo Zelo Visok μe,ZV μ1,1 0,0
2 nivo Malo Visok μe,MV μ1,2 0,0
3 nivo OK μe,OK μ1,3 0,2
4 nivo Malo Nizek μe,MN μ1,4 0,8
5 nivo Zelo Nizek μe,MV μ1,5 0,0
3.2.1.2 Mehčanje vhoda hitrost spreminjanja nivoja (dPV)
V poglavju o procesnih signalih smo omenili, da je hitrost spreminjanja nivoja dPV podatek,
izražen v ml/s, in da predstavlja razliko med pretokom, ki ga ustvarja črpalka, in pretokom
na izpustnem priključku rezervoarja. Ta podatek nam tako izpopolnjuje sliko trenutnega
dogajanja v procesu, na podlagi katere lahko učinkoviteje oblikujemo mehka pravila in
položaje izhodnih pripadnostnih funkcij.
Mejne vrednosti, ki jih ta spremenljivka lahko zavzame, smo določili na podlagi krmiljenja
črpalke v ročnem režimu. S spreminjanjem vrtljajev črpalke se spreminja pretok in s tem
hitrost spreminjanja nivoja, ki smo jo opazovali in odčitali preko trenda spremenljivke na
zaslonu HMI-aplikacije (WinCC). V skrajnih mejah lahko spremenljivka zavzame vrednosti
znotraj območja +/- 100 ml/s.
To območje opazovanja spremenljivke dPV smo prav tako kot za pogrešek e pokrili s petimi
pripadnostnimi funkcijami trapezne in trikotne oblike. Število, oblike in postavitev le-teh
prikazuje slika 3.4, na kateri je predstavljen tudi način določanja stopnje pripadnosti
posameznim vhodnim pripadnostnim funkcijam za primer vrednosti vhoda dPV = 17,5 ml/s.
Pri poimenovanju vhodnih pripadnostnih funkcij za ta vhod nas je vodila podobna želja kot
pri pogrešku, torej da poimenovanje omogoči oblikovanje mehkih pravil, ki so čim bližja
človekovemu načinu razmišljanja in izražanja. Tako smo področje, ki pokriva velike
negativne vrednosti, poimenovali namesto z nivojem »Pada hitro«, kar je nadomestilo
Bojan Brečko, magistrsko delo
34
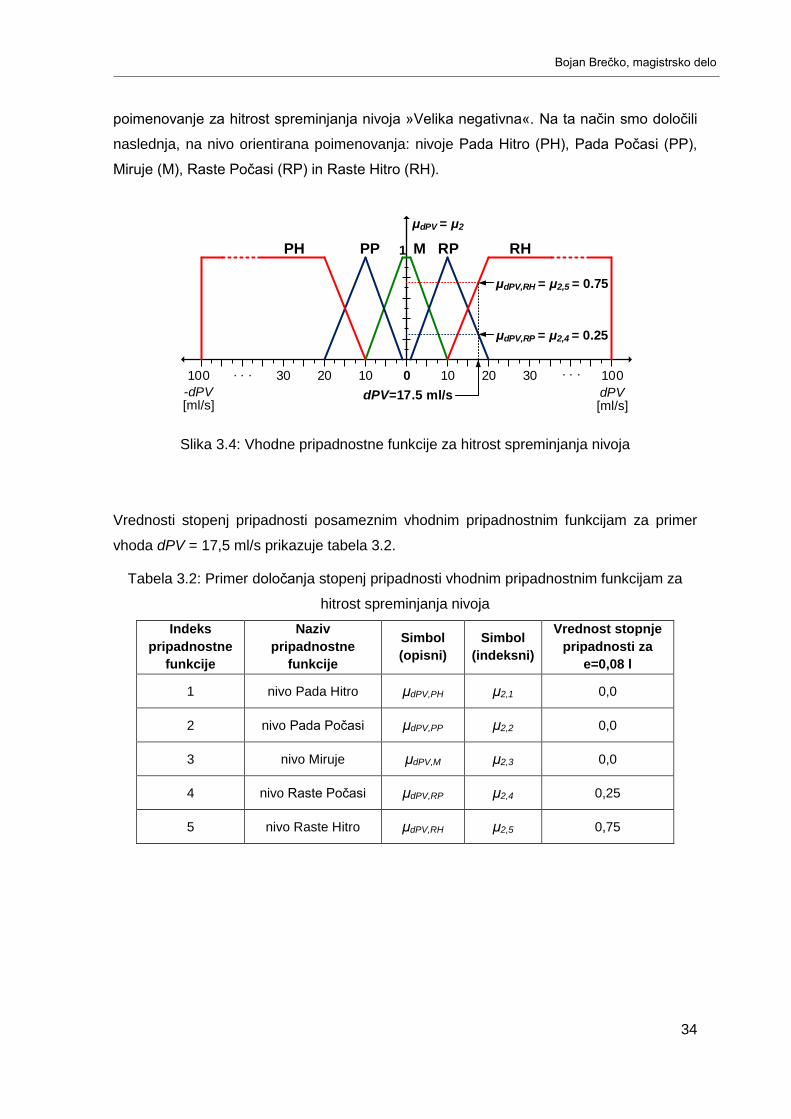
poimenovanje za hitrost spreminjanja nivoja »Velika negativna«. Na ta način smo določili
naslednja, na nivo orientirana poimenovanja: nivoje Pada Hitro (PH), Pada Počasi (PP),
Miruje (M), Raste Počasi (RP) in Raste Hitro (RH).
Slika 3.4: Vhodne pripadnostne funkcije za hitrost spreminjanja nivoja
Vrednosti stopenj pripadnosti posameznim vhodnim pripadnostnim funkcijam za primer
vhoda dPV = 17,5 ml/s prikazuje tabela 3.2.
Tabela 3.2: Primer določanja stopenj pripadnosti vhodnim pripadnostnim funkcijam za
hitrost spreminjanja nivoja
Indeks
pripadnostne
funkcije
Naziv
pripadnostne
funkcije
Simbol
(opisni)
Simbol
(indeksni)
Vrednost stopnje
pripadnosti za
e=0,08 l
1 nivo Pada Hitro μdPV,PH μ2,1 0,0
2 nivo Pada Počasi μdPV,PP μ2,2 0,0
3 nivo Miruje μdPV,M μ2,3 0,0
4 nivo Raste Počasi μdPV,RP μ2,4 0,25
5 nivo Raste Hitro μdPV,RH μ2,5 0,75
1000 . . .302010102030. . .100
1
μdPV = μ2
-dPV[ml/s]
PH M RPPP RH
dPV[ml/s]
dPV=17.5 ml/s
μdPV,RH = μ2,5 = 0.75
μdPV,RP = μ2,4 = 0.25

Bojan Brečko, magistrsko delo
35
3.2.2 Mehko sklepanje
Mehko sklepanje predstavlja določanje baze vzročno-posledičnih t. i. IF-THEN pravil (ČE-
POTEM), ki so na vzročni strani sestavljena iz besedno opisanih stanj ostrih vhodov
(lingvističnimi spremenljivkami) in na posledični strani iz besedno opisanih mehkih izhodnih
spremenljivk. Pravilo z več vhodi in enim izhodom prestavlja (3.1).
𝑅𝑙: 𝐼𝐹 𝑥1 = 𝑋1,𝑙𝑎𝑛𝑑 𝑥2 = 𝑋2,𝑙𝑎𝑛𝑑 … 𝑎𝑛𝑑 𝑥𝑖 = 𝑋𝑖,𝑙𝑎𝑛𝑑 … 𝑎𝑛𝑑 𝑥𝑛 = 𝑋𝑛,𝑙
𝑇𝐻𝐸𝑁 𝑦 = 𝑌𝑙 (3.1)
Tu je:
𝑅𝑙 – l-to mehko pravilo,
𝑙– zaporedno število pravila,
𝑛 – število vseh vhodov,
𝑥𝑖– i-ti ostri vhod,
𝑋𝑖,𝑙– vhodna lingvistična spremenljivka za i-ti vhod in l-to pravilo,
𝑦 – mehki izhod,
𝑌𝑙– izhodna lingvistična spremenljivka za l-to pravilo.
V našem primeru smo pravila oblikovali tako, da njihova izhodna spremenljivka ni mehka
funkcija, pač pa kar ostra vrednost, kot to predstavlja (3.2).
𝑅𝑙: 𝐼𝐹 𝑥1 = 𝑋1,𝑙𝑎𝑛𝑑 𝑥2 = 𝑋2,𝑙𝑎𝑛𝑑 … 𝑎𝑛𝑑 𝑥𝑛 = 𝑋𝑛,𝑙 𝑇𝐻𝐸𝑁 𝑦𝑙 = 𝑐𝑙 (3.2)
Tu je:
𝑦𝑙– izhodna lingvistična spremenljivka za l-to pravilo in
𝑐𝑙 – ostra izhodna vrednost l-tega pravila.
Takšnim pravilom, oblikovanim s kombinacijo mehkega in ostrega pristopa, rečemo
singleton pravila. Le-ta nam omogočijo uporabo poenostavljenega postopka ostrenja,
obenem pa so zelo praktična v primerih, ko želimo izhodne funkcije prilagajati spremenljivim
razmeram na progi z adaptivnimi algoritmi. Slednje je namreč eden izmed osnovnih ciljev
naše naloge.

Bojan Brečko, magistrsko delo
36
Pravilom oblike (3.1), kjer so vhodne in izhodne lingvistične spremenljivke v mehki obliki,
rečemo Mamdani pravila. Poznamo še Takagi-Sugeno pravila (3.3), pri katerih je izhodna
spremenljivka prav tako ostra vrednost kot pri singleton pravilih, le da ni konstanta, ampak
je izračunana kot linearna kombinacija vhodnih vrednosti.
𝑅𝑙: 𝐼𝐹 𝑥1 = 𝑋1,𝑙𝑎𝑛𝑑 𝑥2 = 𝑋2,𝑙𝑎𝑛𝑑 … 𝑎𝑛𝑑 𝑥𝑛 = 𝑋𝑛,𝑙
𝑇𝐻𝐸𝑁 𝑦𝑙 = 𝑐0𝑙 + 𝑐1
𝑙 𝑥1 + ⋯ + 𝑐𝑛𝑙 𝑥𝑛
(3.3)
3.2.2.1 Izhodne lingvistične spremenljivke
Za oblikovanje mehkih pravil potrebujemo ob predstavljenih vhodnih mehkih lingvističnih
spremenljivkah še izhodne lingvistične spremenljivke, ki jih v našem primeru predstavljajo
ostre vrednosti.
Število in položaje izhodnih singletonskih pripadnostnih funkcij smo najprej postavili na
podlagi spoznavanja procesa z uporabo ročnega režima krmiljenja črpalke in s tem
dobljenega občutka o odzivanju vodenega procesa. Kasneje smo te parametre prilagajali
na podlagi večkratnih poizkusov. Končno število in položaje pripadnostnih funkcij prikazuje
slika 3.5.
Slika 3.5: Izhodne singletonske pripadnostne funkcije
1
μdCV
dCV [%/s]
SP HPHZ SZ PZ
-dCV [%/s]
2 4 6 8 10 12 14 16 18 20248101214161820 0
PP
6
NS
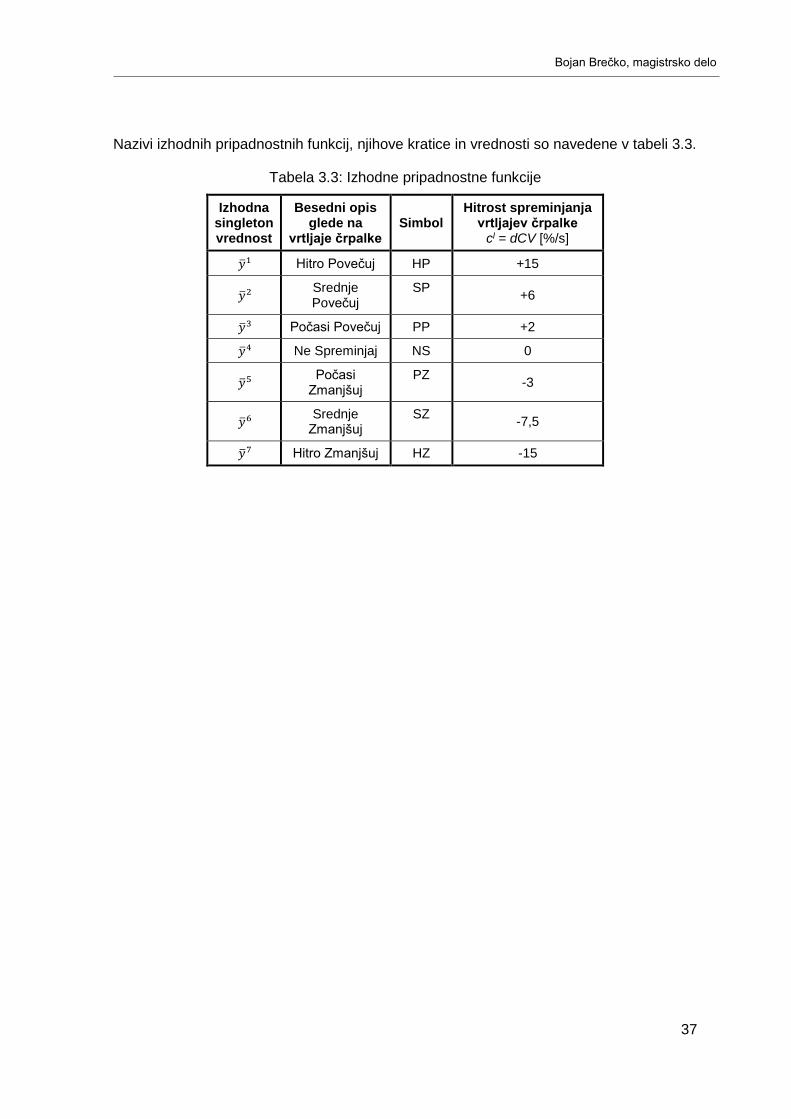
Bojan Brečko, magistrsko delo
37
Nazivi izhodnih pripadnostnih funkcij, njihove kratice in vrednosti so navedene v tabeli 3.3.
Tabela 3.3: Izhodne pripadnostne funkcije
Izhodna singleton vrednost
Besedni opis glede na
vrtljaje črpalke Simbol
Hitrost spreminjanja vrtljajev črpalke
cl = dCV [%/s]
�̅�1 Hitro Povečuj HP +15
�̅�2 Srednje Povečuj
SP +6
�̅�3 Počasi Povečuj PP +2
�̅�4 Ne Spreminjaj NS 0
�̅�5 Počasi
Zmanjšuj PZ
-3
�̅�6 Srednje
Zmanjšuj SZ
-7,5
�̅�7 Hitro Zmanjšuj HZ -15

Bojan Brečko, magistrsko delo
38
3.2.2.2 Oblikovanje baze pravil
V naš mehki regulator vodimo dva vhoda, ki ju mehčamo s po petimi pripadnostnimi
funkcijami, zato lahko zapišemo največ 25 pravil. Za naš primer je bilo dovolj že 17 pravil
(tabela 3.4), saj v primeru zelo nizkega ali zelo visokega nivoja hitrost spreminjanja nivoja
dPV ni pomembna. Mehka spremenljivka »Vseeno«, ki se nahaja v 1. in 17. pravilu,
predstavlja vrednost 1. Pravilo, ki vsebuje takšno spremenljivko, postane odvisno le od
druge spremenljivke, zato jo moramo uporabljati previdno. Pravilo, ki bi bilo sestavljeno iz
obeh spremenljivk »Vseeno«, je razumljivo nesmiselno.
Tabela 3.4: Baza pravil mehkega sklepanja
Pravilo
Vhod 1 Vhod 2 Izhod
Regulacijski pogrešek
(e)
Hitrost spreminjanja nivoja (dPV)
Sprememba hitrosti črpanja (dCV)
ČE Nivo: … IN Nivo: … POTEM Vrtljaje črpalke:
R1 Zelo Nizek Vseeno Hitro Povečuj
R2 Malo Nizek Raste Hitro Srednje Zmanjšuj
R3 Malo Nizek Raste Počasi Srednje Povečuj
R4 Malo Nizek Miruje Srednje Povečuj
R5 Malo Nizek Pada Počasi Srednje Povečuj
R6 Malo Nizek Pada Hitro Hitro Povečuj
R7 OK Raste Hitro Hitro Zmanjšuj
R8 OK Raste Počasi Počasi Zmanjšuj
R9 OK Miruje Ne Spreminjaj
R10 OK Pada Počasi Počasi Povečuj
R11 OK Pada Hitro Hitro Povečuj
R12 Malo Visok Raste Hitro Hitro Zmanjšuj
R13 Malo Visok Raste Počasi Srednje Zmanjšuj
R14 Malo Visok Miruje Srednje Zmanjšuj
R15 Malo Visok Pada Počasi Srednje Zmanjšuj
R16 Malo Visok Pada Hitro Srednje Povečuj
R17 Zelo Visok Vseeno Hitro Zmanjšuj

Bojan Brečko, magistrsko delo
39
3.2.3 Ostrenje mehkih vrednosti
Rezultat mehkega sklepanja predstavljajo izhodne mehke množice, ki so za naš primer kar
singletonske lingvistične spremenljivke, katerih vrednosti so odvisne od stopenj
izpolnjenosti pripadajočih mehkih pravil. Takšen rezultat za vodenje aktuatorjev vodenega
procesa, ki delujejo v svetu ostrih vrednosti, ni uporaben. Mehkemu izhodu je tako potrebno
s postopkom ostrenja dodeliti ostro vrednost, predstavljeno v obliki realnega števila. Le-to
v našem primeru predstavlja hitrost spreminjanja vrtljajev črpalke od 0 do 100 %/s oz.
natančneje 0 do 10 V/s krmilne napetosti črpalke.
Za ostrenje je bilo razvitih več metod, odločitev za izbiro ustrezne pa je odvisna že od same
oblike mehkih pravil, principa ostrenja in zmogljivosti procesorja, na katerem se izvaja
algoritem mehkega vodenja. Med najbolj uveljavljene prištevamo metodo maksimalne
vrednosti (Max-Height Method), metodo maksimalne srednje vrednosti (Mean of Maximum
Method), težiščno metodo (Centre of Gravity Method – COG) in poenostavljeno težiščno
metodo. Omenjene metode so podrobneje predstavljene v [10], [12] in [18], mi se bomo
osredotočili le na v našem primeru uporabljeno poenostavljeno težiščno metodo. Zaradi
visoke učinkovitosti ob računski nezahtevnosti ter možnosti enostavne adaptacije položajev
izhodnih singletonskih vrednosti je ta metoda v sistemih vodenja med najpogosteje
uporabljenimi. Prav te lastnosti so pomembne za načrtovanje mehkega regulatorja za naš
primer, ko se algoritem izvaja na nizkocenovnem industrijskem krmilniku z relativno majhno
procesorsko močjo. Za poenostavljeno težiščno metodo izračunamo ostro izhodno vrednost
z izrazom:
𝑦(𝑥) =∑ �̅�𝑙 ∙ 𝑧𝑙𝑀
𝑙=1
∑ 𝑧𝑙𝑀𝑙=1
, (3.4)
kjer je:
𝑧𝑙 = ∏ 𝜇𝑅𝑖,𝑙(𝑥𝑖)𝑛
𝑖=1. (3.5)
Tu je:
�̅�𝑙 – izhodna ostra vrednost za l-to pravilo,

Bojan Brečko, magistrsko delo
40
𝑧𝑙 – stopnja izpolnjenosti l-tega pravila,
𝑀 – število vseh pravil,
𝑛– število vhodov v mehki regulator,
𝜇𝑅𝑖,𝑙 - stopnja pripadnosti i-tega vhoda za l-to pravilo.
Postopek ostrenja si bomo prav tako pojasnili na našem primeru, in sicer z vrednostima
pogrešek e = 0,08 l in hitrost spreminjanja nivoja dPV = 17,5 ml/s.
Iz tabel 3.1 in 3.2 lahko razberemo rezultate mehčanja, torej stopnje pripadnosti
posameznega vhoda pripadajočim pripadnostnim funkcijam. Tako ostra vrednost pogreška
e = 0,08 l v največji meri pripada pripadnostni funkciji nivoja »Malo Nizek« (μe,MN = 0,8), nato
pripadnostni funkciji nivoja »OK« (μe,OK = 0,2), ostalim pripadnostnim funkcijam pa sploh ne
pripada (μe,ZV = μe,MV = μe,ZN = 0,0). Ostra vrednost dPV = 17,5 ml/s v največji meri pripada
pripadnostni funkciji nivoja »Raste Hitro« (μdPV,RH = 0,75), nato pripadnostni funkciji nivoja
»Raste Počasi« (μdPV,RP=0.25), ostalim pa ne pripada (μdPV,PH = μdPV,PP = μdPV,M = 0,0).
V (3.6) zapišemo le od 0 različne stopnje pripadnosti mehkim vhodnim pripadnostnim
funkcijam:
𝜇𝑒,𝑀𝑁 = 0,8
𝜇𝑒,𝑂𝐾 = 0,2
𝜇𝑑𝑃𝑉,𝑅𝐻 = 0,75
𝜇𝑑𝑃𝑉,𝑅𝑃 = 0,25
(3.6)
Po mehčanju ostrih vrednosti sledi mehko sklepanje na podlagi zapisane baze mehkih
pravil, navedenih v tabeli 3.4. Najprej določimo stopnjo izpolnjenosti IF-dela posameznega
pravila z:
𝜇𝑅𝑙 = 𝑚𝑖𝑛 (𝜇𝑒𝑙 , 𝜇𝑑𝑃𝑉𝑙). (3.7)
Postopku rečemo mehka agregacija ali mehki kartezijski produkt in se pogosto izračuna kar
s produktom. Za naš primer se glasi:
𝜇𝑅𝑙 = 𝑧𝑙 = 𝜇𝑒𝑙 ∙ 𝜇𝑑𝑃𝑉𝑙 . (3.8)
Pripadnost 𝜇𝑅𝑙 predstavlja stopnjo izpolnjenosti pravila, ki jo nekateri avtorji označijo tudi z
𝑧𝑙. Rezultat mehkega sklepanja po pravilu 𝑅𝑙 je tako stopnja pripadnosti izhodni mehki
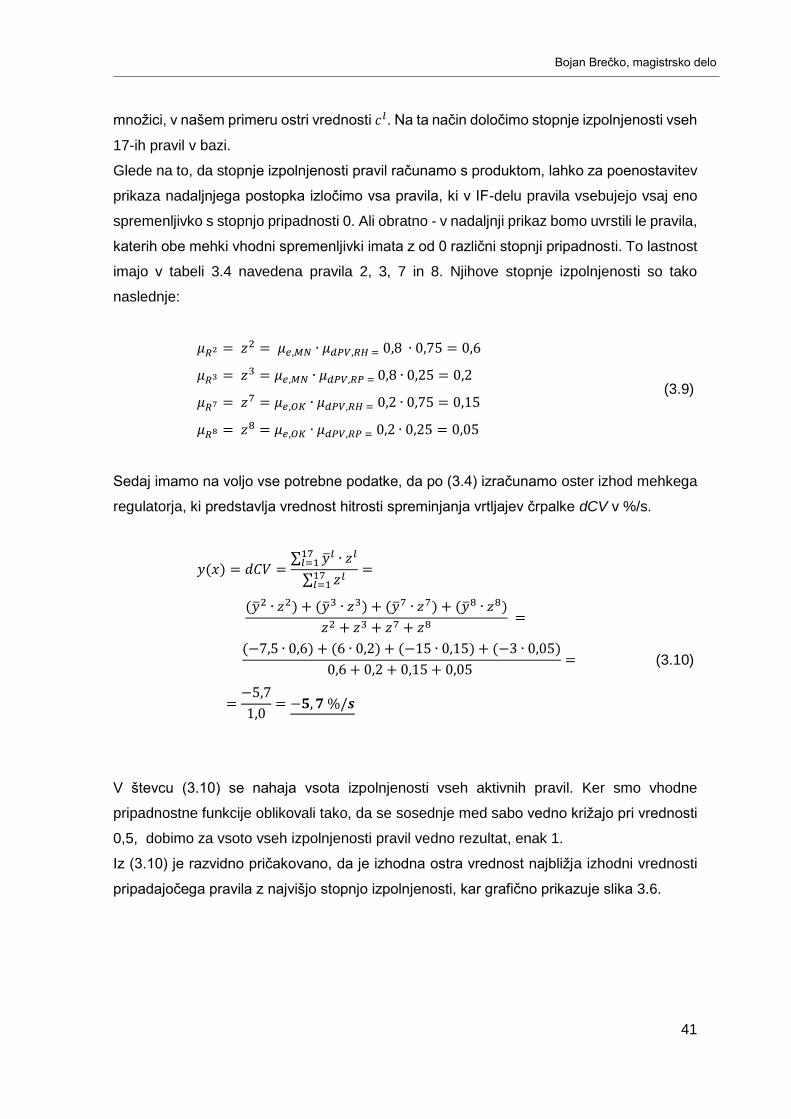
Bojan Brečko, magistrsko delo
41
množici, v našem primeru ostri vrednosti 𝑐𝑙. Na ta način določimo stopnje izpolnjenosti vseh
17-ih pravil v bazi.
Glede na to, da stopnje izpolnjenosti pravil računamo s produktom, lahko za poenostavitev
prikaza nadaljnjega postopka izločimo vsa pravila, ki v IF-delu pravila vsebujejo vsaj eno
spremenljivko s stopnjo pripadnosti 0. Ali obratno - v nadaljnji prikaz bomo uvrstili le pravila,
katerih obe mehki vhodni spremenljivki imata z od 0 različni stopnji pripadnosti. To lastnost
imajo v tabeli 3.4 navedena pravila 2, 3, 7 in 8. Njihove stopnje izpolnjenosti so tako
naslednje:
𝜇𝑅2 = 𝑧2 = 𝜇𝑒,𝑀𝑁 ∙ 𝜇𝑑𝑃𝑉,𝑅𝐻 = 0,8 ∙ 0,75 = 0,6
𝜇𝑅3 = 𝑧3 = 𝜇𝑒,𝑀𝑁 ∙ 𝜇𝑑𝑃𝑉,𝑅𝑃 = 0,8 ∙ 0,25 = 0,2
𝜇𝑅7 = 𝑧7 = 𝜇𝑒,𝑂𝐾 ∙ 𝜇𝑑𝑃𝑉,𝑅𝐻 = 0,2 ∙ 0,75 = 0,15
𝜇𝑅8 = 𝑧8 = 𝜇𝑒,𝑂𝐾 ∙ 𝜇𝑑𝑃𝑉,𝑅𝑃 = 0,2 ∙ 0,25 = 0,05
(3.9)
Sedaj imamo na voljo vse potrebne podatke, da po (3.4) izračunamo oster izhod mehkega
regulatorja, ki predstavlja vrednost hitrosti spreminjanja vrtljajev črpalke dCV v %/s.
𝑦(𝑥) = 𝑑𝐶𝑉 =∑ �̅�𝑙 ∙ 𝑧𝑙17
𝑙=1
∑ 𝑧𝑙17𝑙=1
=
(�̅�2 ∙ 𝑧2) + (�̅�3 ∙ 𝑧3) + (�̅�7 ∙ 𝑧7) + (�̅�8 ∙ 𝑧8)
𝑧2 + 𝑧3 + 𝑧7 + 𝑧8 =
(−7,5 ∙ 0,6) + (6 ∙ 0,2) + (−15 ∙ 0,15) + (−3 ∙ 0,05)
0,6 + 0,2 + 0,15 + 0,05 =
=−5,7
1,0= −𝟓, 𝟕 %/𝒔
(3.10)
V števcu (3.10) se nahaja vsota izpolnjenosti vseh aktivnih pravil. Ker smo vhodne
pripadnostne funkcije oblikovali tako, da se sosednje med sabo vedno križajo pri vrednosti
0,5, dobimo za vsoto vseh izpolnjenosti pravil vedno rezultat, enak 1.
Iz (3.10) je razvidno pričakovano, da je izhodna ostra vrednost najbližja izhodni vrednosti
pripadajočega pravila z najvišjo stopnjo izpolnjenosti, kar grafično prikazuje slika 3.6.
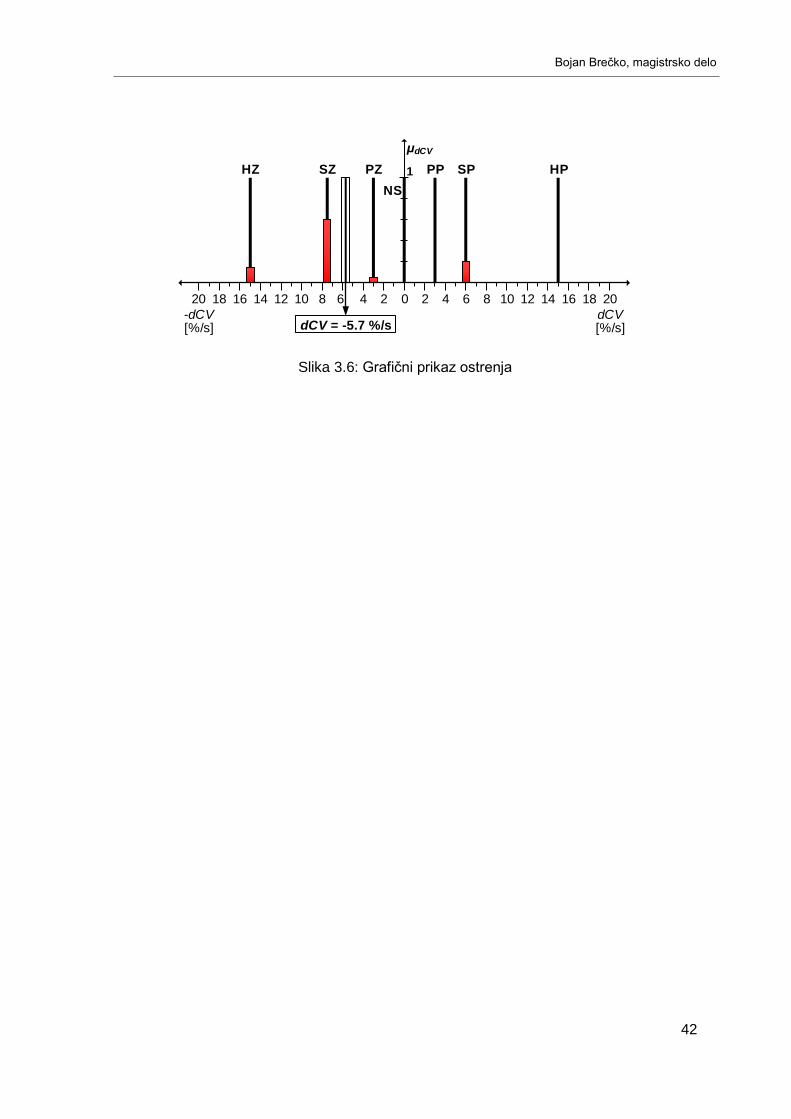
Bojan Brečko, magistrsko delo
42
Slika 3.6: Grafični prikaz ostrenja
1
μdCV
dCV [%/s]
SP HPHZ SZ PZ
-dCV [%/s]
2 4 6 8 10 12 14 16 18 20248101214161820 0
PP
6
dCV = -5.7 %/s
NS

Bojan Brečko, magistrsko delo
43
3.3 Adaptacija parametrov mehkega regulatorja z gradientnim
adaptacijskim postopkom
V sistemih mehkega vodenja se pogosto pojavi potreba po sprotnem prilagajanju
parametrov mehkega regulatorja trenutnim razmeram na progi. Vzrok temu so časovno
spreminjajoči se parametri proge, nepredvidljivi zunanji vplivi in nepopolno lingvistično
znanje. Sprotnemu prilagajanju parametrov med samim vodenjem procesa pravimo
»online« adaptacija parametrov. Njeno nasprotje, »offline« adaptacija, pomeni določevanje
parametrov regulatorja pred samim obratovanjem.
Za »online« adaptacijo je bilo razvitih že precej metod, ki temeljijo na raznih kombinacijah
naprednih algoritmov, kot so genetski algoritmi, nevronske mreže, teorije rojev delcev ipd.,
vendar je večina od teh procesorsko precej potratnih. Prednost teh metod je predvsem ta,
da so se sposobne izogniti lokalnim optimumom, kar je pomembno pri vodenju močno
nelinearnih sistemov, kar pa naš ni.
V našem primeru se zavedamo, da zaradi zmerno nelinearne regulacijske proge ni bojazni,
da bi zašli v lokalni optimum, zato so se nam zdele bistveno primernejše metode, temelječe
na enostavnih računskih algoritmih, ki kljub potrebi po majhni procesorski moči omogočajo
hitre konvergence k želenim vrednostim. To so različne izvedbe gradientnih adaptacijskih
postopkov (GAP), predstavljene oz. uporabljene v [1], [5] do [8], [10] do [12] in [18].
3.4 Adaptacija parametrov
Za kvalitetno in učinkovito prilagajanje regulatorja progi je ključnega pomena izbira
parametrov, ki jih je sploh racionalno adaptirati. Adaptirali bi namreč lahko vse parametre
mehkega sistema (položaji in oblike vhodnih pripadnostnih funkcij, položaji izhodnih
singletonskih mehkih množic), smiselno pa jih zagotovo ni.
V našem primeru položaje in oblike vhodnih pripadnostnih funkcij določamo s položaji štirih
točk posamezne vhodne pripadnostne funkcije trapezne oblike. Ker v naš regulator vodimo
dva vhoda, ki ju mehčamo s po petimi pripadnostnimi funkcijami, dobimo za vsak vhod 20
parametrov oz. skupno kar 40 parametrov. Z dvema vhodoma s po petimi pripadnostnimi
funkcijami lahko zapišemo največ 25 mehkih pravil, vsakemu pravilu pa pripada ena
Bojan Brečko, magistrsko delo
44
izhodna singletonska vrednost. Tako dobimo dodatnih 25 parametrov za adaptacijo.
Skupno je torej 65 parametrov, ki so povrhu še soodvisni. Hitro nam postane jasno, da bi
adaptacija vseh parametrov mehkega sistema povečala računsko zahtevnost na po časovni
plati nesprejemljivo raven. Zato se je potrebno odločiti, katere parametre bi bilo dobro
adaptirati in katere bi znali dovolj dobro sami določiti. Izhajali smo iz naslednjega
razmisleka:
Vhodne spremenljivke zavzemajo vrednosti znotraj fizično pogojenih območij, ki so
za dotični sistem dobro znana. Prav tako lahko že po občutku dokaj enostavno
kvantitativno ocenimo meje za lingvistične spremenljivke, na podlagi katerih
oblikujemo vhodne pripadnostne funkcije. Npr. v povezavi z našim primerom:
pogrešek znotraj območja +/- 5 ml je OK, majhen je v območju od 100 do 200 ml
itd.
Izhodna vrednost za krmiljenje aktuatorja je običajno v velikem razponu. Za naš
primer predstavlja izhodno krmilno veličino napetost od 0 do 10 V, ki predstavlja
od 0 do 100 % vrtljajev. V primeru dveh vhodov s po petimi pripadnostnimi
funkcijami to pomeni 25 izhodnih singletonskih vrednosti. Pri ročnem nastavljanju
takšnega števila parametrov se običajno izkaže, da je razpoložljivo znanje za
učinkovito izbiro le-teh premajhno, obenem pa tudi ne more zajeti vpliva
spremenljive regulacijske proge.
Na podlagi navedenega sklepamo, da vhodnih parametrov ni smiselno adaptirati, vsekakor
pa se nam zdi nujna adaptacija izhodnih singletonskih vrednosti. V nadaljevanju navajamo
različne izvedbe GAP in predstavljamo izraz za adaptacijo izhodnih singletonskih mehkih
množic.

Bojan Brečko, magistrsko delo
45
3.4.1 Izbira metode GAP
Obstaja več izvedb GAP, izmed katerih je večina najpomembnejših predstavljenih v [6] in
[10]. Skupno vsem metodam je to, da poskušajo z adaptiranjem izbranih parametrov
minimizirati ocenitveno funkcijo 𝐸 (3.11), kjer je 𝑦(𝑥) dejanski in 𝑑 želeni izhod iz mehkega
sistema.
𝐸 = 1
2[𝑦(𝑥) − 𝑑]2 (3.11)
V našem primeru bo torej GAP poskušal minimizirati 𝐸 s spreminjanjem vrednosti izhodnih
singletonskih mehkih množic 𝑐𝑙. V [6] avtor predstavlja in primerja učinkovitost različnih
izvedb GAP, katerih lastnosti smo povzeli v tabeli 3.5.
Tabela 3.5: Primerjava lastnosti metod GAP, povzetih po [6]
Št. Gradientna metoda Konvergenca Izvedba
1 Metoda najstrmejšega naklona (Steepest Descent ) počasna enostavna
2 Newton-ova metoda zelo hitra zelo kompleksna
3 Kvazi Newton-ova metoda hitra zelo kompleksna
4 Levenberg Marquardt za Newton-ovo metodo hitra zelo kompleksna
5 Gauss Newton-ova metoda srednja kompleksna
6 Levenberg Marquardt za Gauss Newton-ovo metodo srednja kompleksna
Iz tabele je razvidno, da je najosnovnejša izvedba GAP, t. i. metoda najstrmejšega spusta
(Steepest Descent), enostavna za izvedbo, vendar počasno konvergira k optimalnim
vrednostim parametrov. Osnovni cilj ostalih metod je torej čim hitrejša konvergenca, ki pa
jo dosegajo s kompleksnimi ali celo zelo kompleksnimi algoritmi, temelječimi na matričnih
preračunih.
Glede na dejstvo, da imamo v našem primeru opravka z relativno počasno regulacijsko
progo, pri kateri si lahko privoščimo adaptacijo v več iteracijah algoritma, in glede na željo
po realizaciji adaptivnega mehkega regulatorja na procesorsko manj zmogljivem PLC-ju
smo se odločili za metodo najstrmejšega spusta. Izraz za adaptacijo položajev izhodnih
singletonskih mehkih funkcij predstavlja (3.12).
Bojan Brečko, magistrsko delo
46
𝑐𝑙(𝑘 + 1) = 𝑐𝑙(𝑘) + 𝛼 ∙𝜕𝐸(𝑘)
𝜕�̅�𝑙(𝑘)=
= 𝑐𝑙(𝑘) + 𝛼 ∙ (𝑦(𝑥) − 𝑑) ∙𝑧𝑙
∑ 𝑧𝑙𝑀𝑙=1
(3.12)
Tu je:
𝑐𝑙(𝑘 + 1) – nova vrednost izhodne singletonske mehke množice l-tega pravila,
𝑐𝑙(𝑘) – stara vrednost izhodne singletonske mehke množice l-tega pravila,
𝛼 – faktor adaptacije (𝛼 > 0) ,
𝑦(𝑥) – dejanski izhod mehkega sistema,
𝑑 – želeni izhod mehkega sistema,
𝑧𝑙 – stopnja izpolnjenosti l-tega pravila.
Tako (3.12) spreminja vrednost oz. položaj izhodne singletonske mehke množice le, kadar
je razmerje stopnje izpolnjenosti pripadajočega mehkega pravila zl in vsote izpolnjenosti
vseh pravil večje od 0 in kadar je hkrati različna od 0 tudi vrednost ocenitvene funkcije E.
Korak adaptacije oz. spremembe vrednosti cl je premo sorazmeren faktorju adaptacije α, ki
mora zavzemati pozitivno, od 0 različno vrednost. Če je E enak 0, torej pomeni, da s
trenutno vrednostjo izhodne singletonske mehke množice cl popolnoma izpolnjujemo
ocenitveno funkcijo E in korekcije niso potrebne.
Za optimalno hitrost konvergence je ključnega pomena faktor adaptacije α. Če za α
izberemo premajhno vrednost, bo konvergenca ocenitvene funkcije k vrednosti 0 zelo
počasna, prevelika vrednost pa bo konvergenco sicer zelo pospešila, vendar obstaja velika
verjetnost preskoka minimuma funkcije E. Zaradi slednjega se lahko zgodi, da nikoli ne
bomo dosegli minimuma funkcije E (verjetnost močnih oscilacij okrog dejanske procesne
vrednosti).
Bojan Brečko, magistrsko delo
47
4 REZULTATI
V nadaljevanju sledijo rezultati treh primerjalnih metod, ki smo jih uporabili kot merilo
kvalitete zasnovanega adaptivnega mehkega regulatorja, adaptiranega s pomočjo GAP. Na
koncu so predstavljeni še rezultati lastno zasnovanega regulatorja, ki je kombinacija z naše
strani poimenovanega mehkega generatorja referenčne hitrosti spreminjanja nivoja in
regulatorja Siemens PID Compact.
Za prvo primerjalno metodo smo izvedli regulacijo nivoja s klasičnim PI-regulatorjem,
katerega algoritem smo napisali sami, parametre pa nastavili eksperimentalno. Za drugo
primerjalno metodo smo uporabili prav tako PI-regulator, ki pa je zasnovan s pomočjo
Siemensovega programskega regulatorja PID Compact. Le-ta je integriran kot funkcijski
blok v razvojnem okolju TIA Portal. V tem primeru smo parametre najprej določili s pomočjo
samonastavitvene funkcije (Autotune), ki smo jo naknadno korigirali s poskušanjem. Za
tretjo primerjalno metodo smo uporabili mehki regulator z nespremenljivimi vhodnimi in
izhodnimi pripadnostnimi funkcijami, katerega parametre smo nastavili s pomočjo
ekspertnega znanja o procesu in s poskušanjem. Sledijo rezultati adaptivnega mehkega
regulatorja, adaptiranega z GAP (AMRGAP), in na koncu še rezultati regulatorja,
izvedenega s kombinacijo mehkega generatorja referenčne hitrosti spreminjanja nivoja in
PI-regulatorja (MGRPI).
Za vse metode smo opravili testiranje v treh delovnih točkah rezervoarja. Vedno smo najprej
posneli odzive v območju na sredini rezervoarja (od 5 do 6 l), za katerega smo v osnovi
optimirali vse regulatorje, nato smo odzivanje preverili še v skrajno spodnjem (od 2 do 3 l)
in skrajno zgornjem (od 8 do 9 l) območju rezervoarja. V vsakem območju smo posneli tri
odzive. Najprej pri izhodiščnih razmerah, ki so pri polovični odprtosti proporcionalnega
izpustnega ventila. Nato je sledil test pri popolni zaprtosti izpustnega ventila, kjer se
rezervoar lahko prazni le nazaj skozi črpalko. Nazadnje smo izpustni ventil popolnoma
odprli. S tem postopkom smo torej preizkusili vse skrajne točke vodenega procesa in vnašali
precejšnje spremembe v vodeno regulacijsko progo.
Grafi odzivov so opremljeni z oznakami krivulj, ki so povsod enake, in sicer: krmilna veličina
črpalke – CV [%], procesna vrednost nivoja – PV [l], procesna vrednost hitrosti spreminjanja
nivoja – dPV [ml/s], želena vrednost nivoja – SP [l], izpust – odprtost izpustnega ventila [%],
in hitrost spreminjanja nivoja – dPVref [ml/s]. Posamezna stran z grafičnimi odzivi je
opremljena z legendo oznak.

Bojan Brečko, magistrsko delo
48
4.1 Klasični PI-regulator
Za prvo primerjalno metodo smo uporabili algoritem klasičnega PI-regulatorja z osnovno
izvedbo omejitve integriranja ob zasičenju (Anti-Windup).
𝑢(𝑡) = 𝐾 (𝑒(𝑡) +1
𝑇𝑖∫ 𝑒(𝜏) + 𝑇𝑑
𝑡
0
𝑑𝑒(𝑡)
𝑑𝑡) (4.1)
Tu je:
u(t) – izhodna krmilna veličina (CV),
K – ojačanje regulatorja,
Ti – integracijska časovna konstanta regulatorja (s),
Td - diferencialna časovna konstanta regulatorja (s).
Na podlagi večkratnih testiranj smo se odločili, da bomo uporabili le PI-regulator, saj nam
je D-del v odzivanje vnašal več slabega kot dobrega (nemirno delovanje črpalke).
Parametre smo določili »ročno«, na podlagi preteklih izkušenj s parametriranjem tovrstnih
regulatorjev (opazovanje odzivanja ob korigiranju parametrov). Uporabniški vmesnik za
nadzor regulatorja je prikazan na sliki 4.1.
Slika 4.1: Uporabniški vmesnik za nadzor klasičnega PI-regulatorja
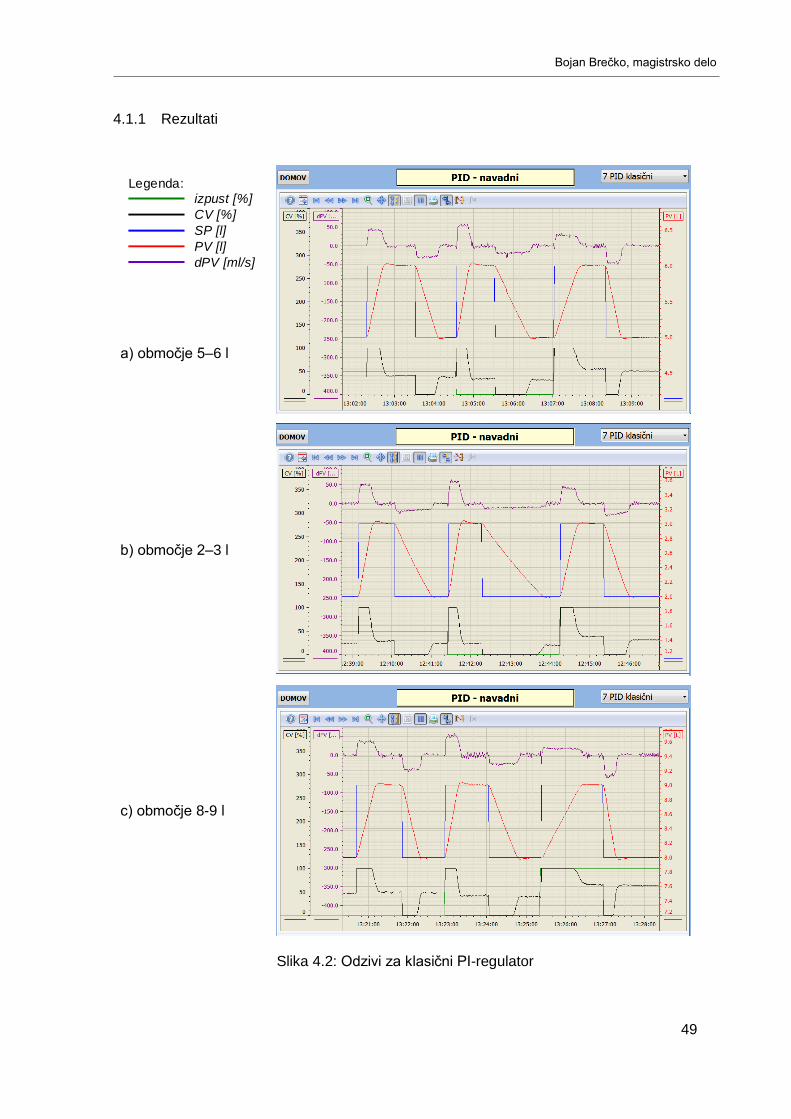
Bojan Brečko, magistrsko delo
49
4.1.1 Rezultati
a) območje 5–6 l
b) območje 2–3 l
c) območje 8-9 l
Slika 4.2: Odzivi za klasični PI-regulator
izpust [%]
CV [%]
SP [l]
PV [l]
dPV [ml/s]
Legenda:
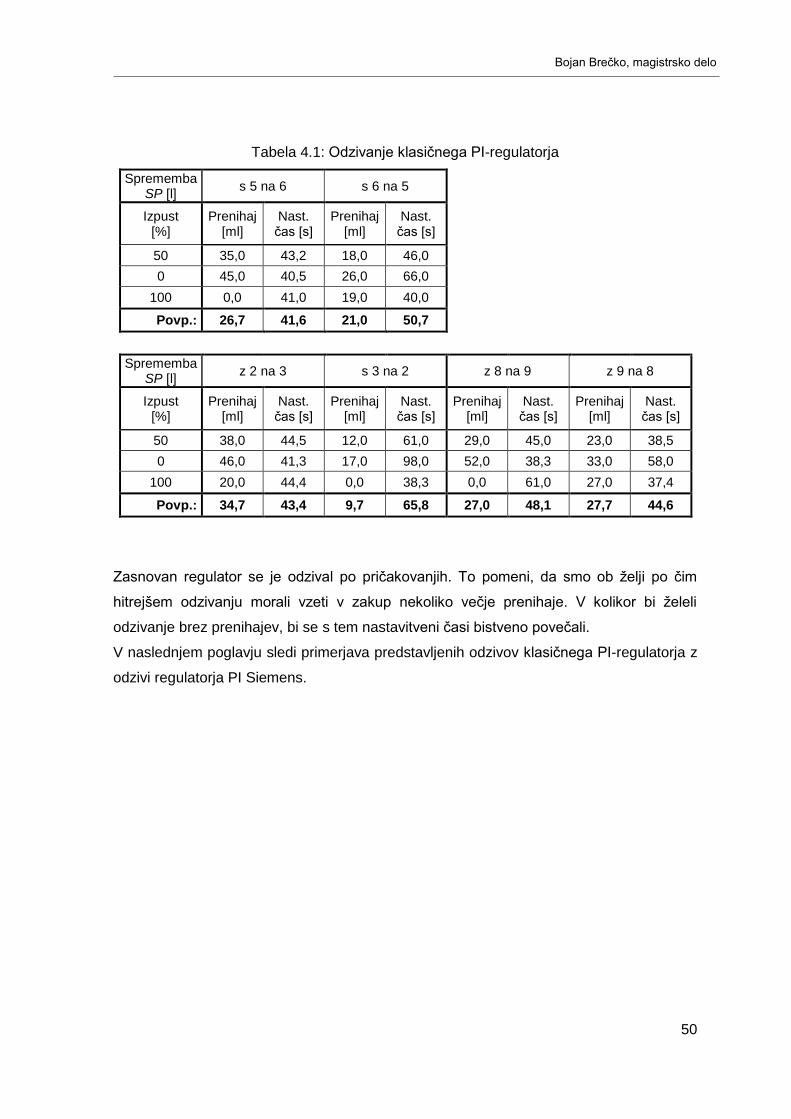
Bojan Brečko, magistrsko delo
50
Tabela 4.1: Odzivanje klasičnega PI-regulatorja
Sprememba SP [l]
s 5 na 6 s 6 na 5
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 35,0 43,2 18,0 46,0
0 45,0 40,5 26,0 66,0
100 0,0 41,0 19,0 40,0
Povp.: 26,7 41,6 21,0 50,7
Sprememba SP [l]
z 2 na 3 s 3 na 2 z 8 na 9 z 9 na 8
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 38,0 44,5 12,0 61,0 29,0 45,0 23,0 38,5
0 46,0 41,3 17,0 98,0 52,0 38,3 33,0 58,0
100 20,0 44,4 0,0 38,3 0,0 61,0 27,0 37,4
Povp.: 34,7 43,4 9,7 65,8 27,0 48,1 27,7 44,6
Zasnovan regulator se je odzival po pričakovanjih. To pomeni, da smo ob želji po čim
hitrejšem odzivanju morali vzeti v zakup nekoliko večje prenihaje. V kolikor bi želeli
odzivanje brez prenihajev, bi se s tem nastavitveni časi bistveno povečali.
V naslednjem poglavju sledi primerjava predstavljenih odzivov klasičnega PI-regulatorja z
odzivi regulatorja PI Siemens.

Bojan Brečko, magistrsko delo
51
4.2 Regulator Siemens PID Compact
Za realizacijo druge primerjalne metode smo uporabili profesionalno izvedbo PID-
regulatorja v obliki programskega funkcijskega bloka Siemens »PID Compact« (slika 4.3 ),
ki je del standardne knjižnice krmilnikov serije Siemens S7-1200 in S7-1500. Izračun
izhodne krmilne veličine se izvaja po (4.2), ki se od algoritma klasičnega PID-regulatorja
(4.1) razlikuje po dodatnih koeficientih a, b, c, ki omogočajo dodaten nadzor nad
regulatorjem in s tem kvalitetnejše odzivanje regulatorja. Takšna izvedba PID-regulatorja je
podrobneje predstavljena v [2].
Slika 4.3: Funkcijski blok Siemens PID Compact
Izhodna krmilna veličina se izračunava po (4.2), ki ga shematsko prikazuje slika 4.4. Za
zapis (4.2) smo uporabili izvorne simbole iz sistemskih navodil [16].
𝑦 = 𝐾𝑝 (𝑏 ∙ 𝑤 − 𝑥) +1
𝑇𝑖 ∙ 𝑠(𝑤 − 𝑥) +
𝑇𝑑 ∙ 𝑠
𝑎 ∙ 𝑇𝑑 ∙ 𝑠 + 1(𝑐 ∙ 𝑤 − 𝑥) (4.2)
Tu je:
y – izhodna vrednost regulatorja (krmilna veličina CV),
w – želena vrednost (SP),
želena vrednost
(SP)
procesna vrednost
(PV)
krmilnavrednost
(CV)
režim delovanja

Bojan Brečko, magistrsko delo
52
x – procesna vrednost (PV),
Kp – proporcionalno ojačanje,
Ti – integracijska časovna konstanta (s),
Td – diferencialna časovna konstanta (s),
s – Laplace-ov operator,
a – koeficient diferencialne zakasnitve,
b – utež P-dela regulatorja,
c – utež D-dela regulaltorja.
Slika 4.4: Blokovna shema regulatorja Siemens PID Compact
Regulator ima vgrajeno tudi funkcijo za samonastavitev parametrov vodenja (Autotune), ki
jo nadziramo neposredno iz razvojnega okolja TIA Portal v »online« režimu preko
namenskega uborabniškega vmesnika (slika 4.5). Samonastavitev poteka v dveh fazah. V
prvi fazi se izvede groba določitev parametrov (Pretuning) po CHR-metodi (Chien-Hrones-
Reswick), v drugi pa precizna določitev (Fine tuning) po metodi Ziegler-Nichols. Pogoj za
začetek samodejnega določevanja parametrov vodenja je nastavitev želene vrednosti (SP)
na vsaj 30 % višjo vrednost, kot je trenutna vrednost procesne veličine (PV). Parametre,
dobljene s pomočjo samonastavitvene funkcije, smo še nakdnadno korigirali, vse dokler z
odzivi nismo bili povsem zadovoljni.
želena vrednot
w (SP)
x (PV)
b
c
I KpLIMIT
DT1
y (CV)
procesna vrednost
krmilna vrednost
P-del
I-del
D-del
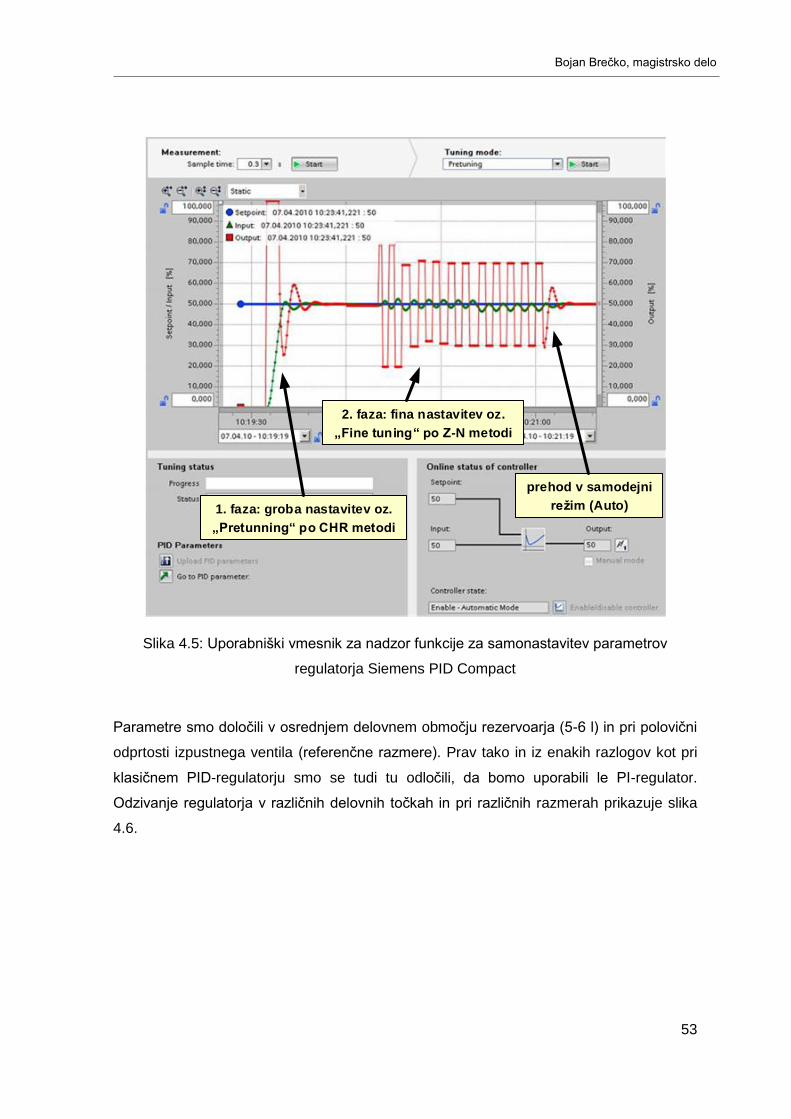
Bojan Brečko, magistrsko delo
53
Slika 4.5: Uporabniški vmesnik za nadzor funkcije za samonastavitev parametrov
regulatorja Siemens PID Compact
Parametre smo določili v osrednjem delovnem območju rezervoarja (5-6 l) in pri polovični
odprtosti izpustnega ventila (referenčne razmere). Prav tako in iz enakih razlogov kot pri
klasičnem PID-regulatorju smo se tudi tu odločili, da bomo uporabili le PI-regulator.
Odzivanje regulatorja v različnih delovnih točkah in pri različnih razmerah prikazuje slika
4.6.
1. faza: groba nastavitev oz.
„Pretunning“ po CHR metodi
2. faza: fina nastavitev oz.
„Fine tuning“ po Z-N metodi
prehod v samodejni
režim (Auto)

Bojan Brečko, magistrsko delo
54
4.2.1 Rezultati
a) območje 5–6 l
b) območje 2–3 l
c) območje 8-9 l
Slika 4.6: Odzivi regulatorja PI Siemens Compact
izpust [%]
CV [%]
SP [l]
PV [l]
dPV [ml/s]
Legenda:

Bojan Brečko, magistrsko delo
55
Tabela 4.2: Odzivanje regulatorja PI Siemens
Sprememba SP [l]
iz 5 na 6 iz 6 na 5
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 19,0 37,0 0,0 34,2
0 23,0 28,3 27,0 62,0
100 27,0 52,3 0,0 27,0
Povp.: 23,0 39,2 9,0 41,1
Sprememba SP [l]
iz 2 na 3 iz 3 na 2 iz 8 na 9 iz 9 na 8
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 30,0 35,5 12,0 59,5 23,0 36,4 0,0 28,2
0 28,0 28,7 18,0 96,0 19,0 25,0 28,0 54,5
100 27,0 41,0 0,0 38,5 35,0 73,8 0,0 20,8
Povp.: 28,3 35,1 10,0 64,7 25,7 45,1 9,3 34,5
4.2.2 Primerjava klasičnega PI-regulatorja in regulatorja PI Siemens
To primerjavo smo izvedli z namenom, da smo lahko v nadaljevanju za primerjalno metodo
uporabljali le boljšega od teh dveh. Zbrani so povprečni rezultati vseh delovnih območij
(2-3 l, 5-6 l in 8-9 l) za dviganje in spuščanje želene vrednosti nivoja (SP) za 1 l. Primerjalne
podatke prikazuje tabela 4.3. Iz podatkov je razvidno, da je v vseh točkah nekoliko boljši
regulator PI Siemens, kjer so povprečni nastavitveni časi pri dvigu želene vrednosti in vsi
nastavitveni časi boljši za ca. 10-15 %.Očitnejša razlika se je pojavljala pri velikosti
prenihaja ob zniževanju želene vrednosti, kjer so le-ti pri regulatorju PI Siemens za polovico
manjši.
Tabela 4.3: Primerjava odzivanja klasičnega PI-regulatorja in regulatorja PI Siemens
Klasični PI Siemens PI
Povprečni prenihaj pri dvigu SP za 1 l [ml] 29,4 25,7
Povprečni nastavitveni čas pri dvigu SP za 1 l [s] 44,4 39,8
Povprečni prenihaj pri spustu SP za 1 l [ml] 19,4 9,4
Povprečni nastavitveni čas pri spustu SP za 1 l [s] 53,7 46,7

Bojan Brečko, magistrsko delo
56
4.3 Mehki regulator (brez adaptacije)
Potek zasnove mehkega regulatorja je bil podrobneje predstavljen v 3. poglavju, v katerem
smo osnovne pojme mehkih regulatorjev predstavili na našem primeru regulatorja. Tako so
oblike in postavitve vhodnih mehkih pripadnostnih funkcij, izhodnih singletonskih mehkih
množic, nabor mehkih pravil in način ostrenja tam predstavljeni v natanko takšni obliki, kot
smo jih uporabljali pri snemanju v nadaljevanju navedenih odzivov regulatorja.
Sledi predstavitev uporabniškega vmesnika za upravljanje mehkega regulatorja, rezultati in
na koncu še komentar dobljenih rezultatov.
4.3.1 Uporabniški vmesnik HMI
Eden izmed osnovnih zastavljenih ciljev za realizacijo naloge je bil tudi HMI-uporabniški
vmesnik, ki bi omogočal spreminjanje vseh pomembnih parametrov mehkega regulatorja
med samim delovanjem, s samodejnim posodabljanjem le-teh in brez potrebe po zaustavitvi
procesorja pri tem. Kot je že bilo uvodoma omenjeno, je v preteklosti preizkušen programski
paket Siemens FuzzyControll++ pri posodabljanju parametrov mehkega regulatorja
zahteval zaustavitev procesorja [15]. Uporabniški vmesnik smo izvedli z orodjem Siemens
WinCC Pro V13 SP1 [17], brez večjih težav pa bi se ga dalo prilagoditi tudi za izvajanje na
Siemensovih operacijskih panelih serije Comfort, v okrnjeni izvedbi pa tudi za serijo Basic.
Uporabniški vmesnik za nadzor mehkega regulatorja prikazuje slika 4.7. Mehka pravila
oblikujemo s pomočjo spustnih oken, v katerih so na voljo predpripravljene lingvistične
spremenljivke, tako za vhodne kot tudi za izhodne pripadnostne funkcije. Po izboru se
dotično pravilo samodejno posodobi (ciklično posodabljanje na 2 s). Z izborom
spremenljivke dejansko izberemo indeks pripadajoče mehke funkcije, ki ga kasneje
uporabimo v programu pri mehkem sklepanju.
Uporabniški vmesnik je pripravljen za oblikovanje petindvajsetih razpoložljivih pravil, brez
večjih težav pa bi se ga dalo spremeniti za poljubno število vhodov in izhodov. Pri
neuporabljenih spremenljivkah izberemo znak »-«, ki predstavlja številsko vrednost stopnje
izpolnjenosti 0. Torej pravilo, ki vsebuje že en vnos »-«, ne vpliva na izhodno vrednost
mehkega regulatorja (množenje z 0 vodi v stopnjo izpolnjenosti pravila 0). Položaje
predpripravljenih izhodnih singletonskih pripadnostnih funkcij, vnos želene vrednosti nivoja
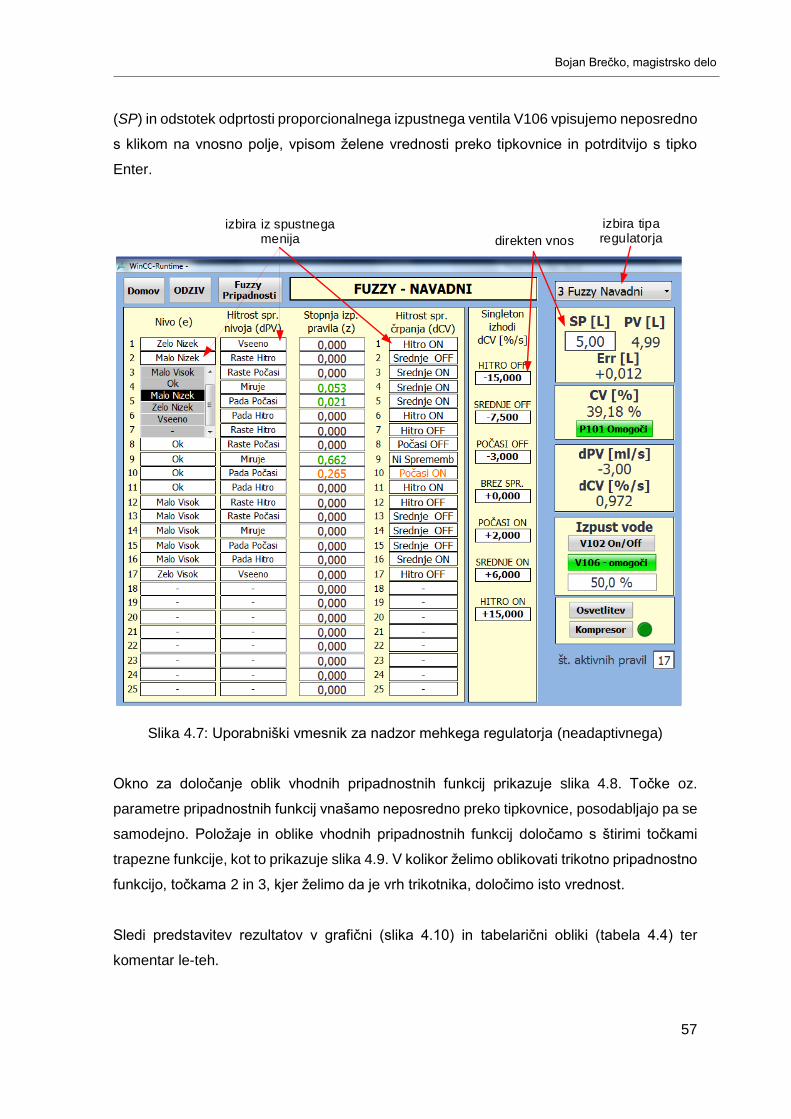
Bojan Brečko, magistrsko delo
57
(SP) in odstotek odprtosti proporcionalnega izpustnega ventila V106 vpisujemo neposredno
s klikom na vnosno polje, vpisom želene vrednosti preko tipkovnice in potrditvijo s tipko
Enter.
Slika 4.7: Uporabniški vmesnik za nadzor mehkega regulatorja (neadaptivnega)
Okno za določanje oblik vhodnih pripadnostnih funkcij prikazuje slika 4.8. Točke oz.
parametre pripadnostnih funkcij vnašamo neposredno preko tipkovnice, posodabljajo pa se
samodejno. Položaje in oblike vhodnih pripadnostnih funkcij določamo s štirimi točkami
trapezne funkcije, kot to prikazuje slika 4.9. V kolikor želimo oblikovati trikotno pripadnostno
funkcijo, točkama 2 in 3, kjer želimo da je vrh trikotnika, določimo isto vrednost.
Sledi predstavitev rezultatov v grafični (slika 4.10) in tabelarični obliki (tabela 4.4) ter
komentar le-teh.
izbira iz spustnega menija direkten vnos
izbira tipa regulatorja
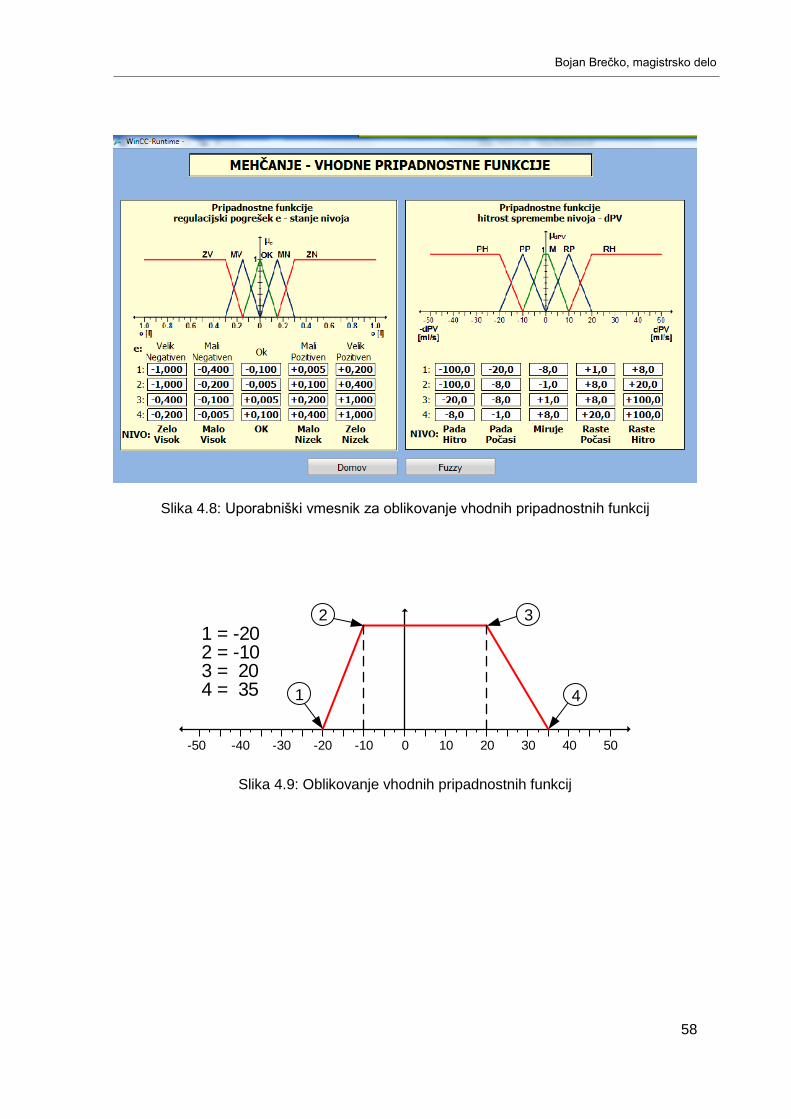
Bojan Brečko, magistrsko delo
58
Slika 4.8: Uporabniški vmesnik za oblikovanje vhodnih pripadnostnih funkcij
Slika 4.9: Oblikovanje vhodnih pripadnostnih funkcij
500 40302010-10-20-30-40-50
2
1
3
4
1 = -202 = -103 = 204 = 35

Bojan Brečko, magistrsko delo
59
4.3.2 Rezultati
a) območje 5–6 l
b) območje 2–3 l
c) območje 8-9 l
Slika 4.10: Odzivi mehkega regulatorja
izpust [%]
CV [%]
SP [l]
PV [l]
dPV [ml/s]
Legenda:
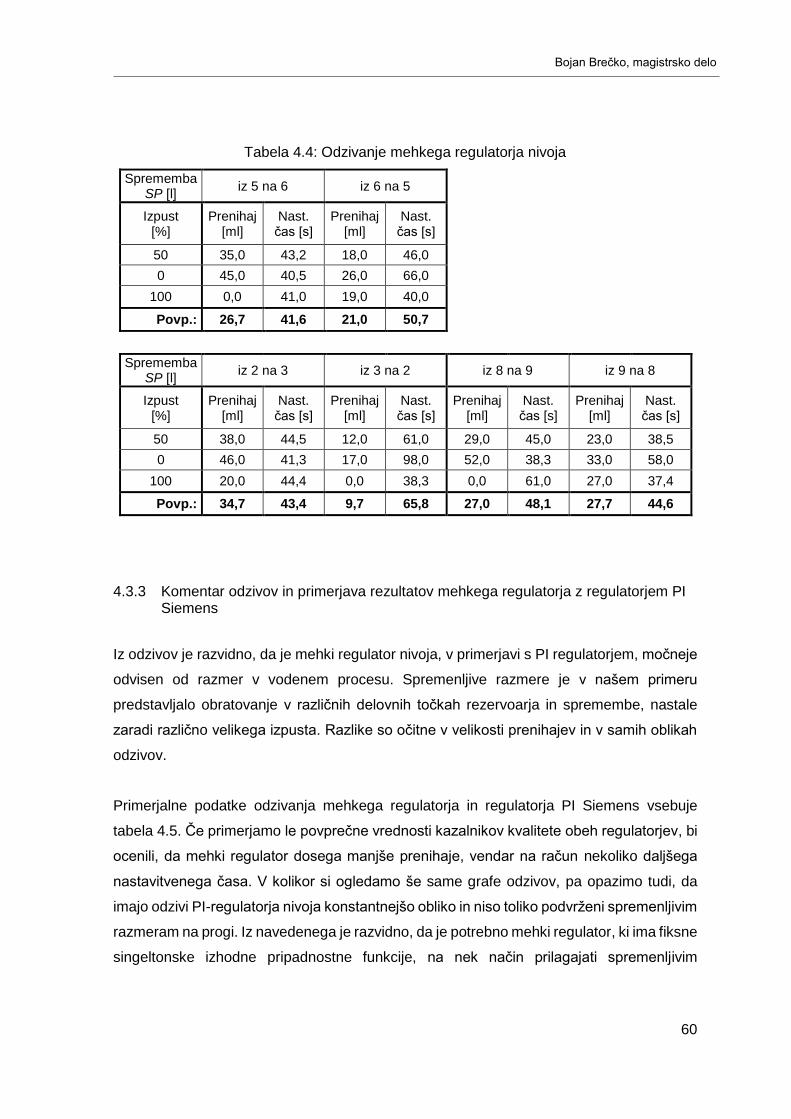
Bojan Brečko, magistrsko delo
60
Tabela 4.4: Odzivanje mehkega regulatorja nivoja
Sprememba SP [l]
iz 5 na 6 iz 6 na 5
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 35,0 43,2 18,0 46,0
0 45,0 40,5 26,0 66,0
100 0,0 41,0 19,0 40,0
Povp.: 26,7 41,6 21,0 50,7
Sprememba SP [l]
iz 2 na 3 iz 3 na 2 iz 8 na 9 iz 9 na 8
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 38,0 44,5 12,0 61,0 29,0 45,0 23,0 38,5
0 46,0 41,3 17,0 98,0 52,0 38,3 33,0 58,0
100 20,0 44,4 0,0 38,3 0,0 61,0 27,0 37,4
Povp.: 34,7 43,4 9,7 65,8 27,0 48,1 27,7 44,6
4.3.3 Komentar odzivov in primerjava rezultatov mehkega regulatorja z regulatorjem PI Siemens
Iz odzivov je razvidno, da je mehki regulator nivoja, v primerjavi s PI regulatorjem, močneje
odvisen od razmer v vodenem procesu. Spremenljive razmere je v našem primeru
predstavljalo obratovanje v različnih delovnih točkah rezervoarja in spremembe, nastale
zaradi različno velikega izpusta. Razlike so očitne v velikosti prenihajev in v samih oblikah
odzivov.
Primerjalne podatke odzivanja mehkega regulatorja in regulatorja PI Siemens vsebuje
tabela 4.5. Če primerjamo le povprečne vrednosti kazalnikov kvalitete obeh regulatorjev, bi
ocenili, da mehki regulator dosega manjše prenihaje, vendar na račun nekoliko daljšega
nastavitvenega časa. V kolikor si ogledamo še same grafe odzivov, pa opazimo tudi, da
imajo odzivi PI-regulatorja nivoja konstantnejšo obliko in niso toliko podvrženi spremenljivim
razmeram na progi. Iz navedenega je razvidno, da je potrebno mehki regulator, ki ima fiksne
singeltonske izhodne pripadnostne funkcije, na nek način prilagajati spremenljivim
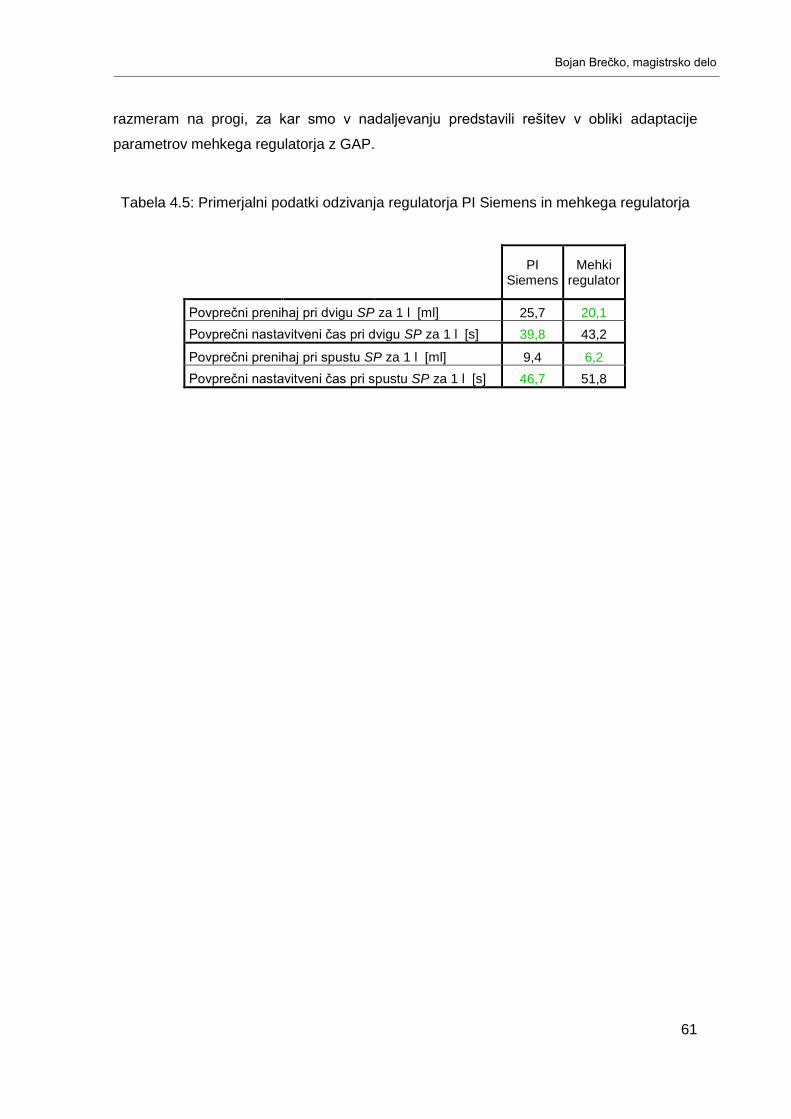
Bojan Brečko, magistrsko delo
61
razmeram na progi, za kar smo v nadaljevanju predstavili rešitev v obliki adaptacije
parametrov mehkega regulatorja z GAP.
Tabela 4.5: Primerjalni podatki odzivanja regulatorja PI Siemens in mehkega regulatorja
PI Siemens
Mehki regulator
Povprečni prenihaj pri dvigu SP za 1 l [ml] 25,7 20,1
Povprečni nastavitveni čas pri dvigu SP za 1 l [s] 39,8 43,2
Povprečni prenihaj pri spustu SP za 1 l [ml] 9,4 6,2
Povprečni nastavitveni čas pri spustu SP za 1 l [s] 46,7 51,8

Bojan Brečko, magistrsko delo
62
4.4 Adaptivni mehki regulator z GAP
Rezultati, dobljeni z neadaptivnim mehkim regulatorjem, so nas soočili z dejstvom, da je v
osnovni izvedbi kvaliteta njegovega odzivanja precej odvisna od trenutnih razmer na progi.
Rešitev za ta problem smo predstavili in utemeljili v poglavju 3.3. To je gradientni
adaptacijski postopek za prilagajanje položaja izhodnih singletonskih množic.
Kljub teoretičnemu razumevanju teorije GAP je na začetku sledila množica bolj ali manj
ponesrečenih izvedb uporabe teh postopkov, kljub temu pa je vsak od poizkusov nekaj
doprinesel h končni različici. Ključnega pomena za načrtovanje metode GAP sta namreč
izbira ocenitvene funkcije in parametrov, ki jih bomo prilagajali v odvisnosti od nje, in dokler
le-teh ne določimo našemu sistemu primerno, adaptacija ne deluje po pričakovanjih.
V poglavju 3.3 smo podali razmislek o tem, katere parametre mehkega regulatorja je
smotrno adaptirati v odvisnosti od ocenitvene funkcije. Prišli smo do zaključka, da je za naš
primer edino racionalno in obenem nujno potrebno prilagajati položaje izhodnih
singletonskih mehkih množic. V prvotni izvedbi mehkega regulatorja so nam izhodne
singletonske vrednosti predstavljale hitrost spreminjanja vrtljajev črpalke dCV v %/s, kar je
bilo za na naš način oblikovana pravila (tabela 3.4) tudi najbolj smiselno. Pri adaptaciji
parametrov z GAP pa se je kasneje za učinkovitejšo in stabilnejšo izkazala uporaba direktne
krmilne veličine CV v %, to so neposredni vrtljaji črpalke (od 0 do 100 % vrtljajev). Tako je
ena izmed ključnih stvari metode GAP pojasnjena, saj vemo, da bomo prilagajali izhodne
singletonske vrednosti in da so to neposredni vrtljaji črpalke, odvisni od krmilne veličine CV.
Drugo ključno stvar predstavlja izbira ocenitvene funkcije. Glede na to, da gre za regulacijo
nivoja, smo najprej pomislili, da jo predstavlja kar regulacijski pogrešek nivoja. Prvi testi so
pokazali, da smo zašli s prave poti, in nas vrnili na začetek. Pri izbiri ocenitvene funkcije je
namreč potrebno upoštevati tudi zasnovo pravil in k čemu v vsakem trenutku težijo. Po
podrobnejšem pregledu naših pravil smo ugotovili, da so zastavljena tako, da ne skrbijo le
za vzdrževanje dejanskega nivoja v ožji okolici želene vrednosti, pač pa tudi za to, da jo
privedejo vanjo iz širše okolice. To konkretno pomeni, da v primeru uporabe pogreška nivoja
e za ocenitveno funkcijo GAP s spreminjanjem izhodnega singletona določenih pravil nikoli
ne bo mogel zadovoljiti ocenitvene funkcije in s tem zagotoviti regulacijskega pogreška,
enakega 0. Primer takšnega pravila je: »Nivo je Malo Nizek IN nivo Pada Počasi.« Že v
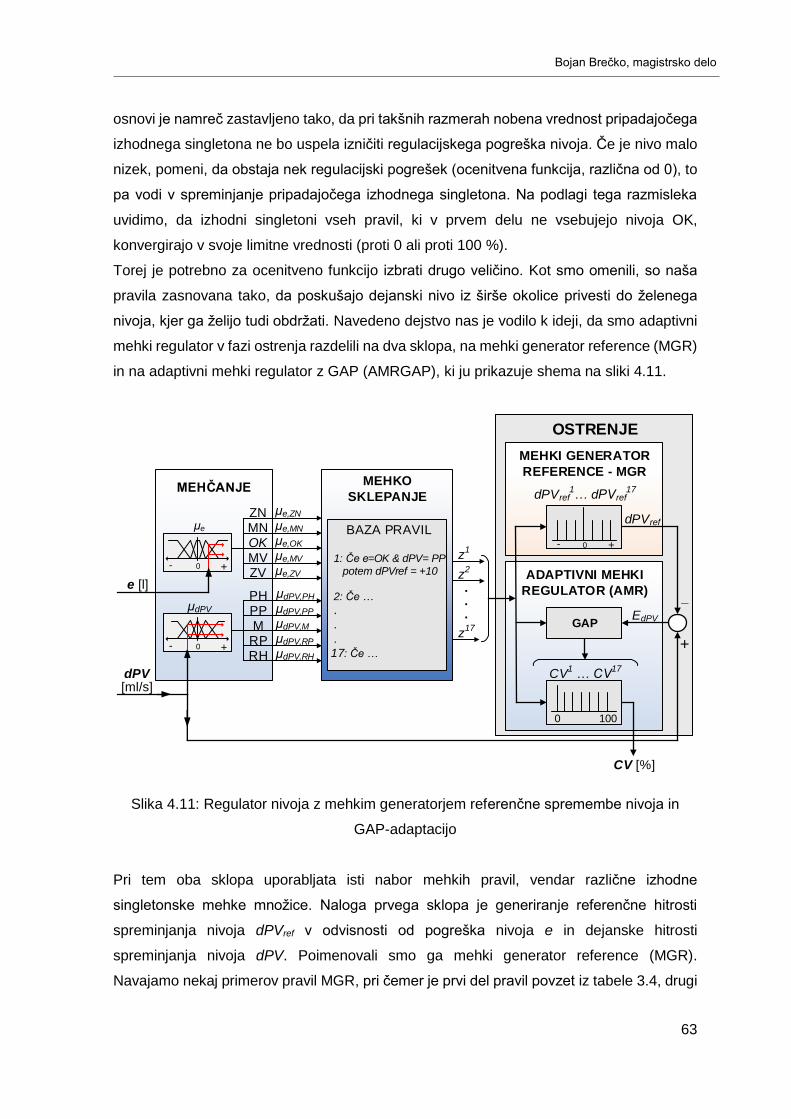
Bojan Brečko, magistrsko delo
63
osnovi je namreč zastavljeno tako, da pri takšnih razmerah nobena vrednost pripadajočega
izhodnega singletona ne bo uspela izničiti regulacijskega pogreška nivoja. Če je nivo malo
nizek, pomeni, da obstaja nek regulacijski pogrešek (ocenitvena funkcija, različna od 0), to
pa vodi v spreminjanje pripadajočega izhodnega singletona. Na podlagi tega razmisleka
uvidimo, da izhodni singletoni vseh pravil, ki v prvem delu ne vsebujejo nivoja OK,
konvergirajo v svoje limitne vrednosti (proti 0 ali proti 100 %).
Torej je potrebno za ocenitveno funkcijo izbrati drugo veličino. Kot smo omenili, so naša
pravila zasnovana tako, da poskušajo dejanski nivo iz širše okolice privesti do želenega
nivoja, kjer ga želijo tudi obdržati. Navedeno dejstvo nas je vodilo k ideji, da smo adaptivni
mehki regulator v fazi ostrenja razdelili na dva sklopa, na mehki generator reference (MGR)
in na adaptivni mehki regulator z GAP (AMRGAP), ki ju prikazuje shema na sliki 4.11.
Slika 4.11: Regulator nivoja z mehkim generatorjem referenčne spremembe nivoja in
GAP-adaptacijo
Pri tem oba sklopa uporabljata isti nabor mehkih pravil, vendar različne izhodne
singletonske mehke množice. Naloga prvega sklopa je generiranje referenčne hitrosti
spreminjanja nivoja dPVref v odvisnosti od pogreška nivoja e in dejanske hitrosti
spreminjanja nivoja dPV. Poimenovali smo ga mehki generator reference (MGR).
Navajamo nekaj primerov pravil MGR, pri čemer je prvi del pravil povzet iz tabele 3.4, drugi
OSTRENJE
ADAPTIVNI MEHKI
REGULATOR (AMR)
MEHKO
SKLEPANJE
BAZA PRAVIL
1: Če e=OK & dPV= PP potem dPVref = +10
2: Če …
.
.
.
17: Če …
MEHKI GENERATOR
REFERENCE - MGR
MEHČANJE
e [l]
dPV[ml/s]
- +0
- +0
- +0
μe
μdPV
ZVMV μe,MV
OK μe,OK
MN μe,MN
ZN μe,ZN
μe,ZV
RHRP
PPPH μdPV,PH
μdPV,PP
μdPV,M
μdPV,RP
μdPV,RH
M
.
.
.
CV [%]
dPVref
GAP
_
+
EdPV
0 100
dPVref1… dPVref
17
CV1 … CV
17
z2
z1
z17

Bojan Brečko, magistrsko delo
64
del, izhodne singletone MGR, pa predstavljajo vrednosti 𝑑𝑃𝑉𝑟𝑒𝑓𝑙, katere določamo sami in
tako vplivamo na obliko odziva:
R1: ČE je nivo Zelo Nizek POTEM 𝑑𝑃𝑉𝑟𝑒𝑓1 = 30 ml/s,
R4: ČE je nivo Malo Nizek IN nivo Miruje POTEM 𝑑𝑃𝑉𝑟𝑒𝑓4 = 15 ml/s,
R9: ČE je nivo Ok IN nivo Miruje POTEM 𝑑𝑃𝑉𝑟𝑒𝑓9 = 0 ml/s, itd.
Do ostrega izhoda MGR, vrednosti referenčne hitrosti spreminjanja nivoja dPVref, pridemo
na podlagi po (3.4) oblikovanega izraza (4.3).
𝑦(𝑥) =∑ �̅�𝑙 ∙ 𝑧𝑙𝑀
𝑙=1
∑ 𝑧𝑙𝑀𝑙=1
→ 𝑑𝑃𝑉𝑟𝑒𝑓 =∑ 𝑑𝑃𝑉𝑟𝑒𝑓
𝑙 ∙ 𝑧𝑙17𝑙=1
∑ 𝑧𝑙17𝑙=1
, (4.3)
Tu je:
𝑑𝑃𝑉𝑟𝑒𝑓𝑙– izhodna ostra vrednost referenčne hitrosti spreminjanja nivoja za l-to pravilo,
– stopnja izpolnjenosti l-tega pravila,
𝑀 – število vseh pravil, v našem primeru 17.
Rezultat postopka ostrenja MGR je tako skupna referenčna hitrost spreminjanja nivoja vode
dPVref, ki jo uporabimo za izvedbo ocenitvene funkcije EdPV. Le-ta je razlika referenčne
hitrosti spreminjanja nivoja dPVref, generirane s strani MGR, in dejanske hitrosti
spreminjanja nivoja dPV.
Drugi sklop faze ostrenja predstavlja ostrenje adaptivnega mehkega regulatorja (AMR),
kateremu položaje izhodnih singletonskih množic prilagaja GAP na podlagi (4.4), torej
ocenitvene funkcije EdPV, stopnje izpolnjenosti pripadajočega pravila in faktorja adaptacije
α. Izhod tega sklopa predstavlja krmilno veličino CV v odstotkih vrtljajev črpalke.
𝐶𝑉𝑙(𝑘 + 1) = 𝐶𝑉𝑙(𝑘) − 𝛼 ∙𝜕𝐸𝑑𝑃𝑉(𝑘)
𝜕�̅�𝑙(𝑘)=
𝐶𝑉𝑙(𝑘 + 1) = 𝐶𝑉𝑙(𝑘) − 𝛼 ∙ (𝑑𝑃𝑉 − 𝑑𝑃𝑉𝑟𝑒𝑓) ∙𝑧𝑙
∑ 𝑧𝑙17𝑙=1
(4.4)
Tu je:
𝐶𝑉𝑙(𝑘 + 1) – nova vrednost izhodnega singletona krmilne veličine CV l-tega pravila (%),
𝐶𝑉𝑙(𝑘) – stara vrednost izhodnega singletona krmilne veličine CV l-tega pravila (%),
lz

Bojan Brečko, magistrsko delo
65
𝛼 – faktor adaptacije, ki mora zavzemati od 0 različno pozitivno vrednost,
𝑑𝑃𝑉𝑟𝑒𝑓 – želena hitrost spreminjanja nivoja vode (ml/s),
𝑑𝑃𝑉– dejanska hitrost spreminjanja nivoja vode (ml/s),
𝑧𝑙 – stopnja izpolnjenosti l-tega pravila.
Če povzamemo princip delovanja AMRGAP, gre torej za sledeče: MGR na podlagi trenutnih
razmer generira referenčno hitrost spreminjanja nivoja dPVref, ki jo poskuša loviti adaptivni
mehki regulator (AMR), kateremu položaje izhodnih singletonov prilagajamo z GAP. Tako
se je izničevanje pogreška nivoja preneslo na MGR, lovljenje za to potrebne hitrosti
spreminjanja nivoja dPVref pa na AMRGAP.
4.4.1 Uporabniški vmesnik
Uporabniški vmesnik za nadzor AMRGAP prikazuje slika 4.12. Slika 4.13a prikazuje
postavitev vhodnih pripadnostnih funkcij za vhod regulacijski pogrešek e, ki so oblikovane
nekoliko drugače kot pri najprej zasnovanem neadaptivnem mehkem regulatorju (slika 3.3).
Oblike in razporeditev vhodnih pripadnostnih funkcij za vhod dPV so pri tem regulatorju
ostale nespremenjene (slika 4.13-b).
Tudi pravila so v osnovi enaka kot pri neadaptivnem mehkem regulatorju, s to razliko, da
se je na podlagi testiranj izkazalo, da je nekaj pravil smiselno onemogočiti. To so pravila od
5 do 8 in od 10 do 13. Tako je bilo za delovanje dovolj samo 9 mehkih pravil.
Pri spremembi želene vrednosti nivoja navzgor odziv oblikujejo pravila od 1 do 4, pri
spremembi navzdol pravila od 14 do 17, v neposredni okolici želene vrednosti pa za
vzdrževanje nivoja skrbi pravilo 9.

Bojan Brečko, magistrsko delo
66
Slika 4.12: Uporabniški vmesnik adaptivnega mehkega regulatorja z GAP
a)
b)
Slika 4.13: Oblike in položaji vhodnih pripadnostnih funkcij za vhod regulacijski pogrešek e
(slika a) in za vhod hitrost spreminjanja nivoja dPV (slika b)
1.00 0.80.60.40.20.20.40.60.81.0
1
μe= μ1
e [l]
ZV OK MNMV ZN
-e [l]
1000 . . .302010102030. . .100
1
μdPV = μ2
-dPV[ml/s]
PH M RPPP RH
dPV[ml/s]
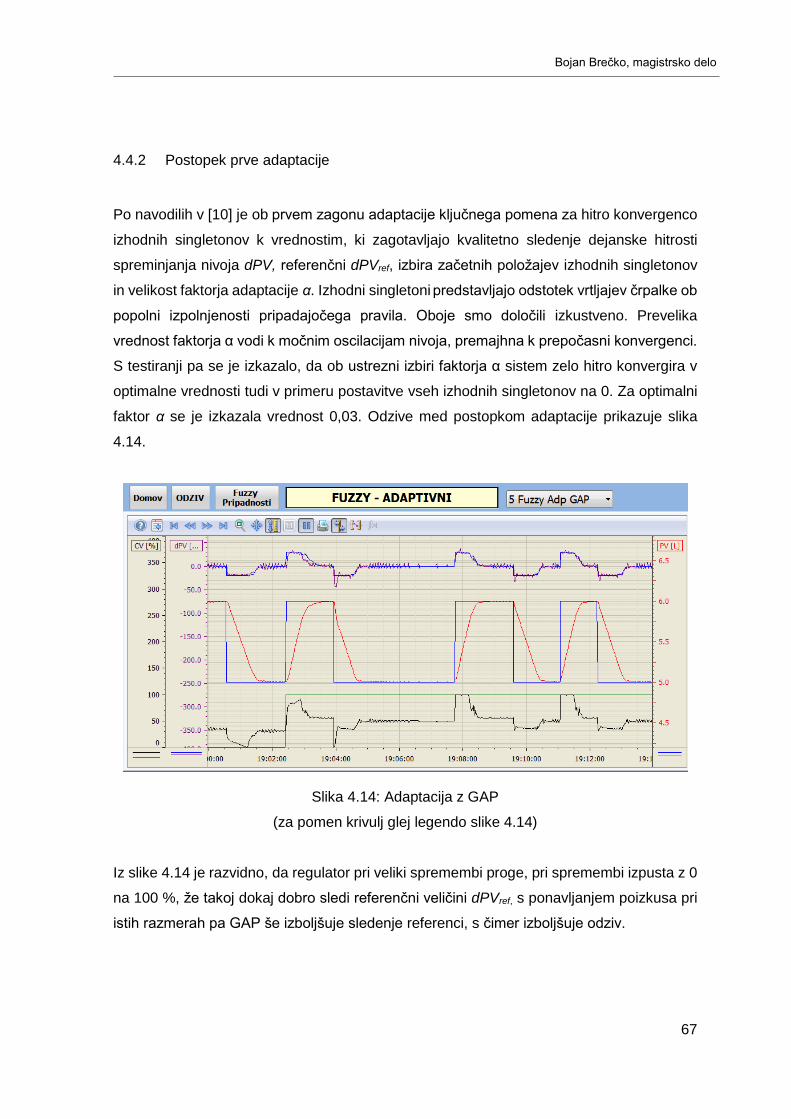
Bojan Brečko, magistrsko delo
67
izpust [%]
CV [%]
SP [l]
PV [l]
dPVref [ml/s]
dPV [ml/s]
Legenda:
4.4.2 Postopek prve adaptacije
Po navodilih v [10] je ob prvem zagonu adaptacije ključnega pomena za hitro konvergenco
izhodnih singletonov k vrednostim, ki zagotavljajo kvalitetno sledenje dejanske hitrosti
spreminjanja nivoja dPV, referenčni dPVref, izbira začetnih položajev izhodnih singletonov
in velikost faktorja adaptacije α. Izhodni singletoni predstavljajo odstotek vrtljajev črpalke ob
popolni izpolnjenosti pripadajočega pravila. Oboje smo določili izkustveno. Prevelika
vrednost faktorja α vodi k močnim oscilacijam nivoja, premajhna k prepočasni konvergenci.
S testiranji pa se je izkazalo, da ob ustrezni izbiri faktorja α sistem zelo hitro konvergira v
optimalne vrednosti tudi v primeru postavitve vseh izhodnih singletonov na 0. Za optimalni
faktor α se je izkazala vrednost 0,03. Odzive med postopkom adaptacije prikazuje slika
4.14.
Slika 4.14: Adaptacija z GAP
(za pomen krivulj glej legendo slike 4.14)
Iz slike 4.14 je razvidno, da regulator pri veliki spremembi proge, pri spremembi izpusta z 0
na 100 %, že takoj dokaj dobro sledi referenčni veličini dPVref, s ponavljanjem poizkusa pri
istih razmerah pa GAP še izboljšuje sledenje referenci, s čimer izboljšuje odziv.

Bojan Brečko, magistrsko delo
68
4.4.3 Rezultati
Pri AMRGAP obliko odziva določamo z izhodnimi singletoni mehkega generatorja reference
(MGR) dPVrefn, kjer je n indeks pravila. Tako odziv pri dvigu želene vrednosti nivoja
oblikujemo s parametri od dPVref1 do dPVref
4, pri spustu pa s parametri od dPVref14 do
dPVref17. Parameter, ki skrbi za vzdrževanje nivoja pri želeni vrednosti, je dPVref
9 in mora
vedno imeti vrednost 0 ml/s, s čimer skrbi, da regulator v tej točki teži k mirovanju nivoja.
Pri tem GAP prilagaja izhodne singletone krmilne veličine črpalke CV v trendu po čim
boljšem sledenja s strani MGR generirani referenčni veličini dPVref.
Za določanje referenčnih hitrosti spreminjanja nivoja dPVrefn MGR je pomembno tudi, da
poznamo fizične omejitve proge. S tem imamo v mislih, kolikšne hitrosti spreminjanja nivoja
dPV je sposobna ustvarjati črpalka v določenih delovnih točkah rezervoarja in pri različnih
stopnjah odprtosti izpustnega ventila. Ti podatki so zbrani v tabeli 4.6. Tako je v delovnem
območju 5–6 l črpalka pri nazivnih vrtljajih (CV = 100 %) in brez izpusta sposobna ustvarjati
povprečno hitrost spreminjanja nivoja dPV, enako 58,4 ml/s, če pa jo zaustavimo (CV =
0 %), začne nivo padati z 19 ml/s. Na enak način si razlagamo ostale podatke v tabeli 4.6.
Skrajno zmogljivost proge v določenem delovnem območju predstavljata podatek dPV za
padanje nivoja pri zaustavljeni črpalki in zaprtem izpustnem ventilu in podatek dPV za
naraščanje nivoja pri nazivnih vrtljajih črpalke in popolnoma odprtem izpustnem ventilu. V
delovnem območju 5–6 l je tako črpalka pri nazivnih vrtljajih (CV = 0 %) sposobna v
najslabšem primeru (izpust 100 %) ustvariti dPV, enako 28,6 ml/s, nivo pa lahko v tem
območju v najslabšem primeru (izpust 0 %) pada z 19 ml/s. Skrajne vrednosti za določeno
delovno območje rezervoarja so označene z odebeljeno pisavo.
Tabela 4.6: Odvisnost pretočne sposobnosti črpalke od različnih razmerah na progi
Hitrost spreminjanja nivoja dPV [ml/s]
Izpust 0 % Izpust 100 %
Območje CV=100 % CV=0 % CV=100 % CV=0 %
2-3 l 58,4 -13 41,2 -27,3
5-6 l 54,7 -19 28,6 -44,9
8-9 l 48,7 -23.8 16,5 -54,2
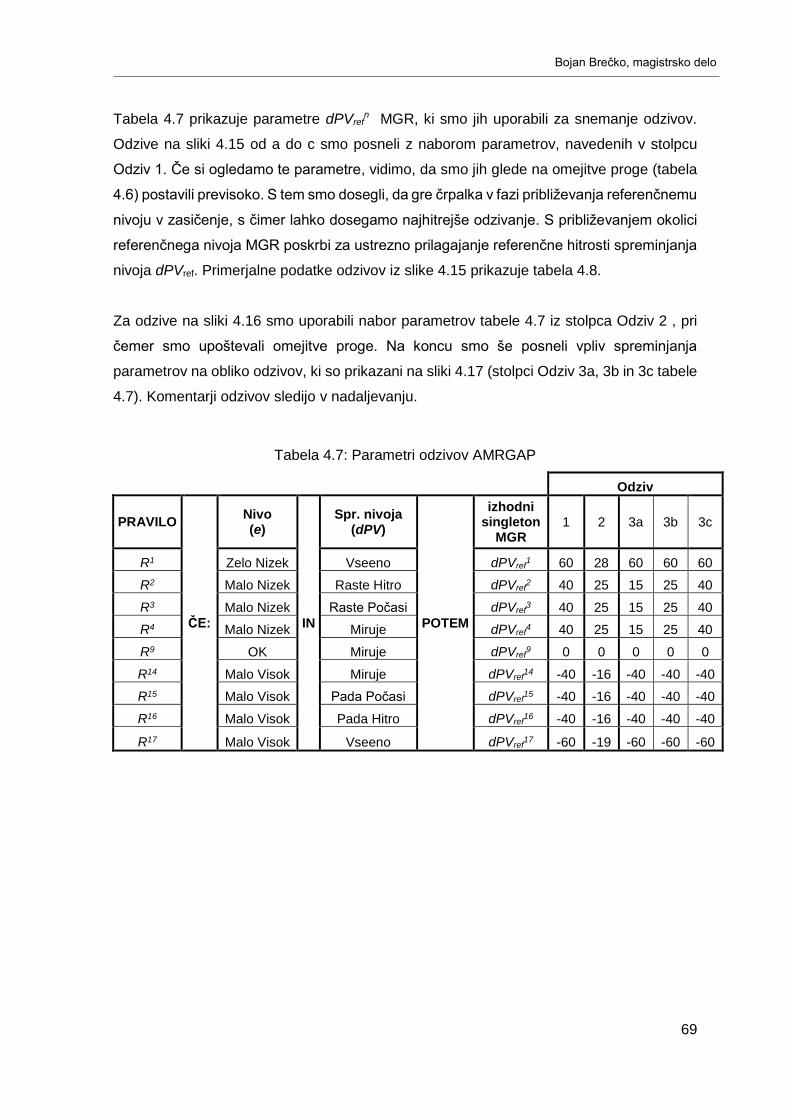
Bojan Brečko, magistrsko delo
69
Tabela 4.7 prikazuje parametre dPVrefn MGR, ki smo jih uporabili za snemanje odzivov.
Odzive na sliki 4.15 od a do c smo posneli z naborom parametrov, navedenih v stolpcu
Odziv 1. Če si ogledamo te parametre, vidimo, da smo jih glede na omejitve proge (tabela
4.6) postavili previsoko. S tem smo dosegli, da gre črpalka v fazi približevanja referenčnemu
nivoju v zasičenje, s čimer lahko dosegamo najhitrejše odzivanje. S približevanjem okolici
referenčnega nivoja MGR poskrbi za ustrezno prilagajanje referenčne hitrosti spreminjanja
nivoja dPVref. Primerjalne podatke odzivov iz slike 4.15 prikazuje tabela 4.8.
Za odzive na sliki 4.16 smo uporabili nabor parametrov tabele 4.7 iz stolpca Odziv 2 , pri
čemer smo upoštevali omejitve proge. Na koncu smo še posneli vpliv spreminjanja
parametrov na obliko odzivov, ki so prikazani na sliki 4.17 (stolpci Odziv 3a, 3b in 3c tabele
4.7). Komentarji odzivov sledijo v nadaljevanju.
Tabela 4.7: Parametri odzivov AMRGAP
Odziv
PRAVILO
ČE:
Nivo (e)
IN
Spr. nivoja (dPV)
POTEM
izhodni singleton
MGR 1 2 3a 3b 3c
R1 Zelo Nizek Vseeno dPVref1 60 28 60 60 60
R2 Malo Nizek Raste Hitro dPVref2 40 25 15 25 40
R3 Malo Nizek Raste Počasi dPVref3 40 25 15 25 40
R4 Malo Nizek Miruje dPVref4 40 25 15 25 40
R9 OK Miruje dPVref9 0 0 0 0 0
R14 Malo Visok Miruje dPVref14 -40 -16 -40 -40 -40
R15 Malo Visok Pada Počasi dPVref15 -40 -16 -40 -40 -40
R16 Malo Visok Pada Hitro dPVref16 -40 -16 -40 -40 -40
R17 Malo Visok Vseeno dPVref17 -60 -19 -60 -60 -60

Bojan Brečko, magistrsko delo
70
4.4.3.1 Odzivi
a) območje 5–6 l
b) območje 2–3 l
c) območje 8-9 l
Slika 4.15: Odzivi za AMRGAP
izpust [%]
CV [%]
SP [l]
PV [l]
dPVref [ml/s]
dPV [ml/s]
Legenda:

Bojan Brečko, magistrsko delo
71
Slika 4.16: Odzivi AMRGAP z upoštevanjem omejitev proge
(legenda krivulj enaka kot na sliki 4.13 )
Slika 4.17: Oblikovanje odzivov z AMRGAP

Bojan Brečko, magistrsko delo
72
Tabela 4.8: Odzivanje AMRGAP
Sprememba SP [l]
iz 5 na 6 iz 6 na 5
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 0,0 34,5 0,0 54,5
0 0,0 27,0 0,0 61,5
100 0,0 55,5 0,0 51,5
Povp.: 0,0 39,0 0,0 55,8
Sprememba SP [l]
iz 2 na 3 iz 3 na 2 iz 8 na 9 iz 9 na 8
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 0,0 28,7 0,0 70,5 0,0 40,0 0,0 36,3
0 0,0 33,8 0,0 90,7 0,0 26,6 0,0 49,3
100 0,0 47,0 0,0 55,6 0,0 78,5 0,0 38,5
Povp.: 0,0 36,5 0,0 72,3 0,0 48,4 0,0 41,4
4.4.4 Komentar odzivov
Iz odzivov na sliki 4.15 (a, b, c) je razvidno, da se regulator zelo hitro prilagaja spremenljivim
razmeram na progi, pri tem pa je pomembno, da nikoli ne pride do prenihaja. Pri odzivih je
opaziti nekoliko nemirno delovanje črpalke, kar je posledica dejstva, da smo pri snemanju
odzivov vsakokrat progo precej spremenili, pri čemer je moral GAP vedno na novo
prilagajati izhodne singletone.
Na sliki 4.16 je prikazan odziv, pri katerem smo upoštevali omejitve proge in parametre
mehkega generatorja reference nastavili na take vrednosti, da proge nismo spravili v
zasičenje. V tem primeru vidimo, da imajo odzivi zelo podobne naklone, če pa bi se GAP
bil sposoben v trenutku adaptirati na nove razmere, pa bi bili odzivi identični.
Odzivi na sliki 4.17 prikazujejo sposobnost, ki je primerjalne metode (PI-regulator in
neadaptivni mehki regulator) nimajo. To je sposobnost prilagajanja oblike odziva, pri čemer
ne pride do prenihaja. Odzive smo oblikovali le pri spreminjanju želene vrednosti nivoja
navzgor (s 5 na 6 l), pri spreminjanju želene vrednosti navzdol (s 6 na 5 l) pa smo pustili
parametre nespremenjene. Obliko je možno enostavno spreminjati s spreminjanjem

Bojan Brečko, magistrsko delo
73
vrednosti izhodnih singletonov MGR, kot smo to omenili že v poglavju Uporabniški vmesnik
(singletoni od dPVref1 do dPVref
4 oblikujejo odziv pri dvigu, dPVref14 do dPVref
17 oblikujejo
odziv pri spustu želene vrednosti nivoja).
4.4.5 Primerjava odzivov
Primerjalne podatke regulatorja PI Siemens, mehkega regulatorja in AMRGAP prikazuje
tabela 4.7. Iz nje je razvidno, da je obravnavan regulator v primerjavi s konkurenčnima
sposoben doseči želeno vrednost nivoja v nekoliko daljših, ampak še vedno zelo podobnih
nastavitvenih časih, vendar s pomembno razliko, vedno brez prenihaja. Pri tem se je
potrebno zavedati tudi dejstva, da bi se odzivanje adaptivnega regulatorja pri
nespremenjenih razmerah še izboljševalo, pri primerjalnih regulatorjih pa ne.
Tabela 4.9: Primerjava odzivov regulatorja PI Siemens, mehkega regulatorja in
adaptivnega mehkega regulatorja z GAP
PI Siemens
Mehki regulator
Mehki regulator z GAP
Povprečni prenihaj pri dvigu SP za 1 l [ml] 25,7 20,1 0,0
Povprečni nastavitveni čas pri dvigu SP za 1 l [s] 39,8 43,2 41,3
Povprečni prenihaj pri spustu SP za 1 l [ml] 9,4 6,2 0,0
Povprečni nastavitveni čas pri spustu SP za 1 l [s] 46,7 51,8 56,5
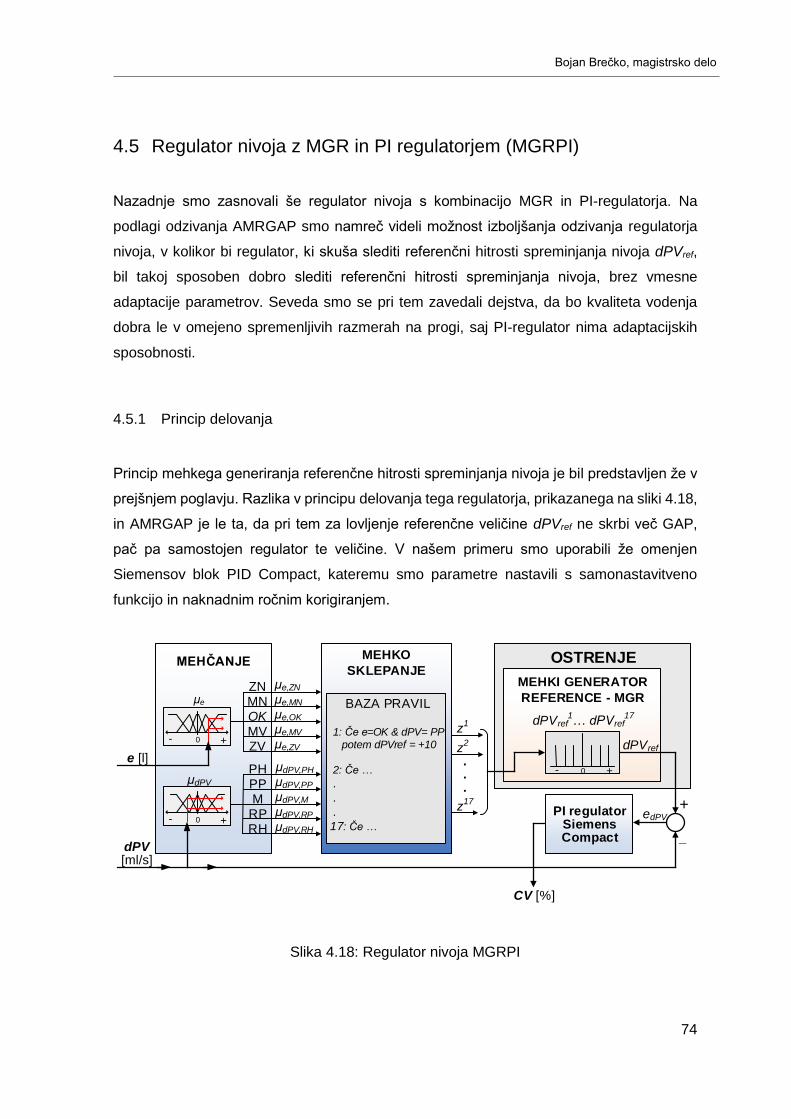
Bojan Brečko, magistrsko delo
74
4.5 Regulator nivoja z MGR in PI regulatorjem (MGRPI)
Nazadnje smo zasnovali še regulator nivoja s kombinacijo MGR in PI-regulatorja. Na
podlagi odzivanja AMRGAP smo namreč videli možnost izboljšanja odzivanja regulatorja
nivoja, v kolikor bi regulator, ki skuša slediti referenčni hitrosti spreminjanja nivoja dPVref,
bil takoj sposoben dobro slediti referenčni hitrosti spreminjanja nivoja, brez vmesne
adaptacije parametrov. Seveda smo se pri tem zavedali dejstva, da bo kvaliteta vodenja
dobra le v omejeno spremenljivih razmerah na progi, saj PI-regulator nima adaptacijskih
sposobnosti.
4.5.1 Princip delovanja
Princip mehkega generiranja referenčne hitrosti spreminjanja nivoja je bil predstavljen že v
prejšnjem poglavju. Razlika v principu delovanja tega regulatorja, prikazanega na sliki 4.18,
in AMRGAP je le ta, da pri tem za lovljenje referenčne veličine dPVref ne skrbi več GAP,
pač pa samostojen regulator te veličine. V našem primeru smo uporabili že omenjen
Siemensov blok PID Compact, kateremu smo parametre nastavili s samonastavitveno
funkcijo in naknadnim ročnim korigiranjem.
Slika 4.18: Regulator nivoja MGRPI
OSTRENJEMEHKO
SKLEPANJE
BAZA PRAVIL
1: Če e=OK & dPV= PP potem dPVref = +10
2: Če …
.
.
.
17: Če …
MEHKI GENERATOR
REFERENCE - MGR
MEHČANJE
e [l]
dPV[ml/s]
- +0
- +0
- +0
μe
μdPV
ZVMV μe,MV
OK μe,OK
MN μe,MN
ZN μe,ZN
μe,ZV
RHRP
PPPH μdPV,PH
μdPV,PP
μdPV,M
μdPV,RP
μdPV,RH
M
.
.
.
CV [%]
dPVref
_
+edPV
dPVref1… dPVref
17
z2
z1
z17
PI regulator Siemens Compact

Bojan Brečko, magistrsko delo
75
4.5.2 Uporabniški vmesnik
Uporabniški vmesnik, ki ga prikazuje slika 4.19, je v osnovi enak kot pri AMRGAP, s tem
da še omogoča spreminjanje parametrov K in TI PI-regulatorja.
Slika 4.19: Uporabniški vmesnik regulatorja MGRPI
Odzivi na slikah 4.20 do 4.22 so bili posneti po enakem principu in z enakim naborom
parametrov MGR kot pri AMRGAP (tabela 4.7).
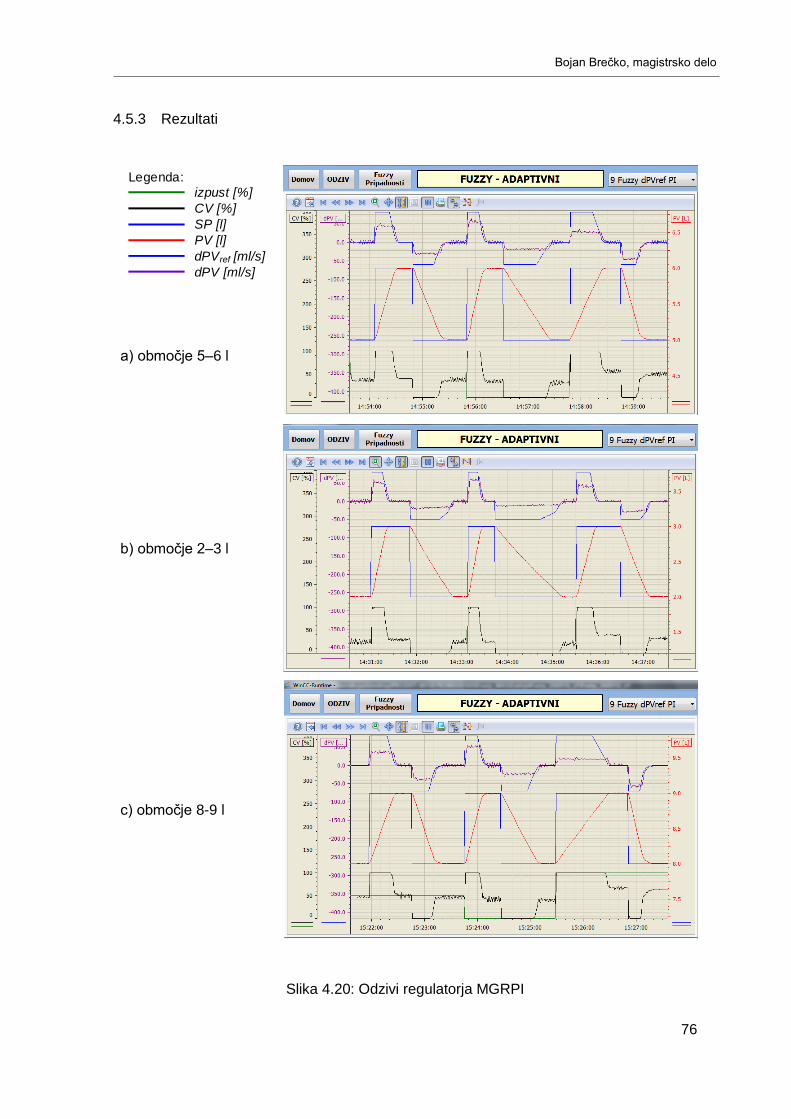
Bojan Brečko, magistrsko delo
76
4.5.3 Rezultati
a) območje 5–6 l
b) območje 2–3 l
c) območje 8-9 l
Slika 4.20: Odzivi regulatorja MGRPI
izpust [%]
CV [%]
SP [l]
PV [l]
dPVref [ml/s]
dPV [ml/s]
Legenda:

Bojan Brečko, magistrsko delo
77
Slika 4.21: Odzivi regulatorja MGRPI z upoštevanjem omejitev proge (legenda krivulj
enaka kot na sliki 4.20 )
Slika 4.22: Oblikovanje odzivov z regulatorjem MGRPI
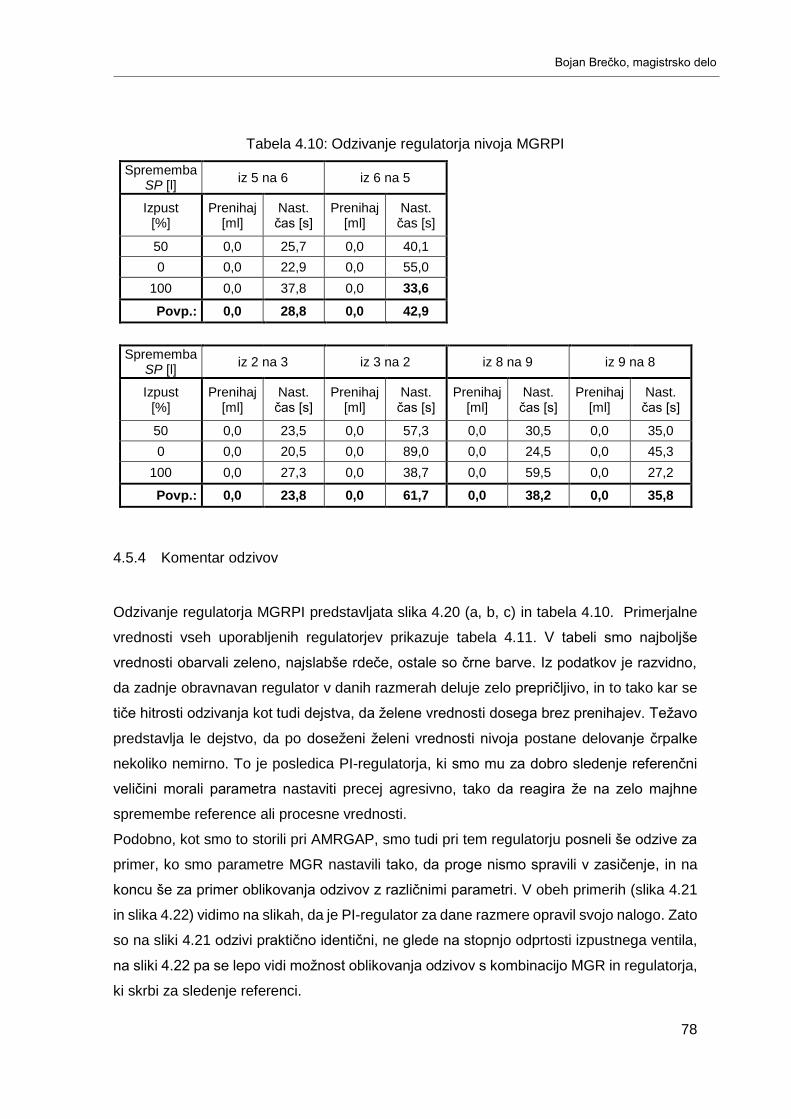
Bojan Brečko, magistrsko delo
78
Tabela 4.10: Odzivanje regulatorja nivoja MGRPI
Sprememba SP [l]
iz 5 na 6 iz 6 na 5
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 0,0 25,7 0,0 40,1
0 0,0 22,9 0,0 55,0
100 0,0 37,8 0,0 33,6
Povp.: 0,0 28,8 0,0 42,9
Sprememba SP [l]
iz 2 na 3 iz 3 na 2 iz 8 na 9 iz 9 na 8
Izpust [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 0,0 23,5 0,0 57,3 0,0 30,5 0,0 35,0
0 0,0 20,5 0,0 89,0 0,0 24,5 0,0 45,3
100 0,0 27,3 0,0 38,7 0,0 59,5 0,0 27,2
Povp.: 0,0 23,8 0,0 61,7 0,0 38,2 0,0 35,8
4.5.4 Komentar odzivov
Odzivanje regulatorja MGRPI predstavljata slika 4.20 (a, b, c) in tabela 4.10. Primerjalne
vrednosti vseh uporabljenih regulatorjev prikazuje tabela 4.11. V tabeli smo najboljše
vrednosti obarvali zeleno, najslabše rdeče, ostale so črne barve. Iz podatkov je razvidno,
da zadnje obravnavan regulator v danih razmerah deluje zelo prepričljivo, in to tako kar se
tiče hitrosti odzivanja kot tudi dejstva, da želene vrednosti dosega brez prenihajev. Težavo
predstavlja le dejstvo, da po doseženi želeni vrednosti nivoja postane delovanje črpalke
nekoliko nemirno. To je posledica PI-regulatorja, ki smo mu za dobro sledenje referenčni
veličini morali parametra nastaviti precej agresivno, tako da reagira že na zelo majhne
spremembe reference ali procesne vrednosti.
Podobno, kot smo to storili pri AMRGAP, smo tudi pri tem regulatorju posneli še odzive za
primer, ko smo parametre MGR nastavili tako, da proge nismo spravili v zasičenje, in na
koncu še za primer oblikovanja odzivov z različnimi parametri. V obeh primerih (slika 4.21
in slika 4.22) vidimo na slikah, da je PI-regulator za dane razmere opravil svojo nalogo. Zato
so na sliki 4.21 odzivi praktično identični, ne glede na stopnjo odprtosti izpustnega ventila,
na sliki 4.22 pa se lepo vidi možnost oblikovanja odzivov s kombinacijo MGR in regulatorja,
ki skrbi za sledenje referenci.
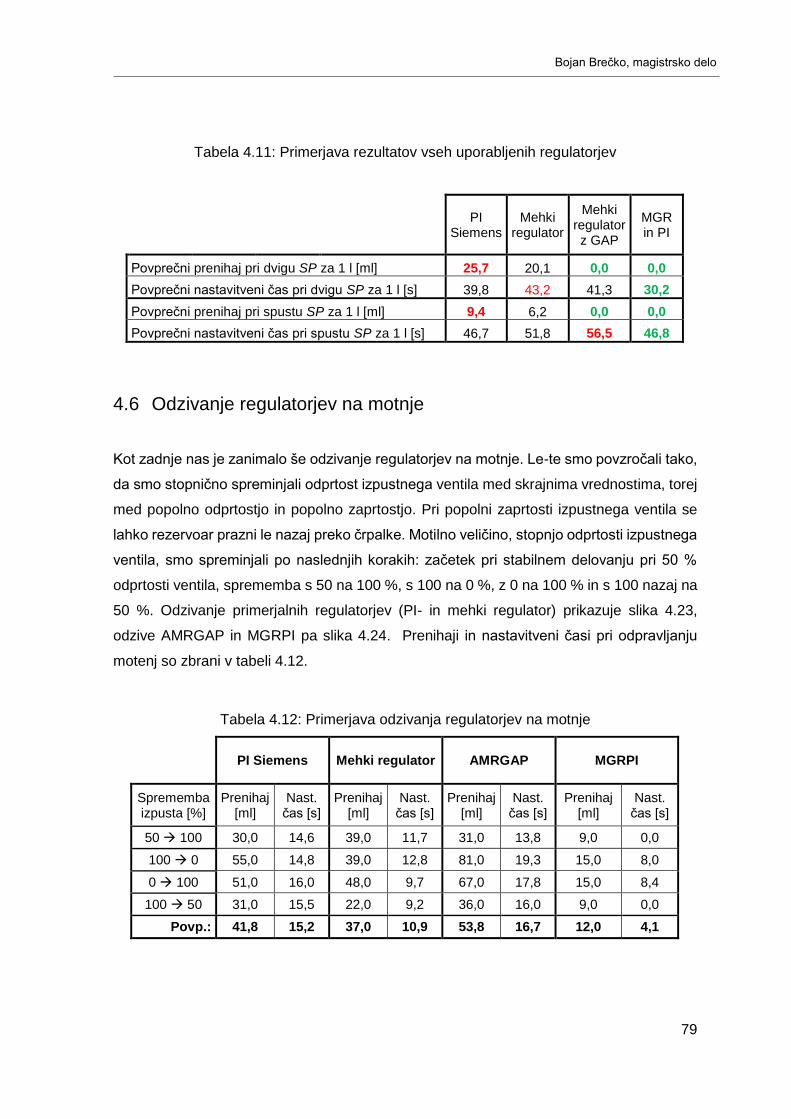
Bojan Brečko, magistrsko delo
79
Tabela 4.11: Primerjava rezultatov vseh uporabljenih regulatorjev
PI Siemens
Mehki regulator
Mehki regulator z GAP
MGR in PI
Povprečni prenihaj pri dvigu SP za 1 l [ml] 25,7 20,1 0,0 0,0
Povprečni nastavitveni čas pri dvigu SP za 1 l [s] 39,8 43,2 41,3 30,2
Povprečni prenihaj pri spustu SP za 1 l [ml] 9,4 6,2 0,0 0,0
Povprečni nastavitveni čas pri spustu SP za 1 l [s] 46,7 51,8 56,5 46,8
4.6 Odzivanje regulatorjev na motnje
Kot zadnje nas je zanimalo še odzivanje regulatorjev na motnje. Le-te smo povzročali tako,
da smo stopnično spreminjali odprtost izpustnega ventila med skrajnima vrednostima, torej
med popolno odprtostjo in popolno zaprtostjo. Pri popolni zaprtosti izpustnega ventila se
lahko rezervoar prazni le nazaj preko črpalke. Motilno veličino, stopnjo odprtosti izpustnega
ventila, smo spreminjali po naslednjih korakih: začetek pri stabilnem delovanju pri 50 %
odprtosti ventila, sprememba s 50 na 100 %, s 100 na 0 %, z 0 na 100 % in s 100 nazaj na
50 %. Odzivanje primerjalnih regulatorjev (PI- in mehki regulator) prikazuje slika 4.23,
odzive AMRGAP in MGRPI pa slika 4.24. Prenihaji in nastavitveni časi pri odpravljanju
motenj so zbrani v tabeli 4.12.
Tabela 4.12: Primerjava odzivanja regulatorjev na motnje
PI Siemens Mehki regulator AMRGAP MGRPI
Sprememba izpusta [%]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
Prenihaj [ml]
Nast. čas [s]
50 100 30,0 14,6 39,0 11,7 31,0 13,8 9,0 0,0
100 0 55,0 14,8 39,0 12,8 81,0 19,3 15,0 8,0
0 100 51,0 16,0 48,0 9,7 67,0 17,8 15,0 8,4
100 50 31,0 15,5 22,0 9,2 36,0 16,0 9,0 0,0
Povp.: 41,8 15,2 37,0 10,9 53,8 16,7 12,0 4,1
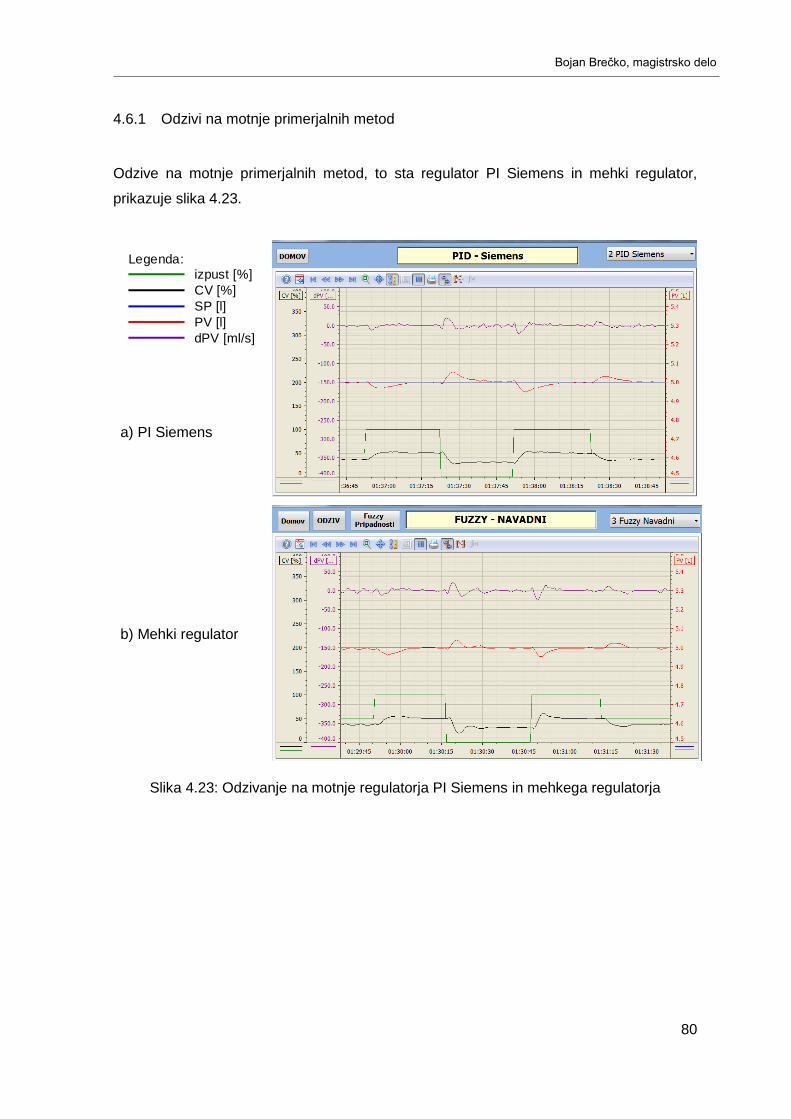
Bojan Brečko, magistrsko delo
80
4.6.1 Odzivi na motnje primerjalnih metod
Odzive na motnje primerjalnih metod, to sta regulator PI Siemens in mehki regulator,
prikazuje slika 4.23.
a) PI Siemens
b) Mehki regulator
Slika 4.23: Odzivanje na motnje regulatorja PI Siemens in mehkega regulatorja
izpust [%]
CV [%]
SP [l]
PV [l]
dPV [ml/s]
Legenda:

Bojan Brečko, magistrsko delo
81
a) AMRGAP
b) MGRPI
Slika 4.24: Odzivanje regulatorjev AMRGAP in MGRPI
izpust [%]
CV [%]
SP [l]
PV [l]
dPVref [ml/s]
dPV [ml/s]
Legenda:
Bojan Brečko, magistrsko delo
82
4.6.2 Komentar odzivov
Iz odzivov na motnje je razvidno, da je AMRGAP v primeru manjših motenj po
nastavitvenem času in velikosti prenihaja povsem primerljiv s PI- in mehkim regulatorjem,
tako po velikosti prenihaja kot tudi nastavitvenem času. Po ponovnem dosegu želene
vrednosti vrtljaji črpalke še nekoliko nihajo, kar je posledica adaptacije parametrov, vendar
se sčasoma popolnoma umirijo. Do nekoliko večjih razlik pa prihaja pri velikih spremembah
motilne veličine. Le-te so posledica previdno izbranega faktorja adaptacije α, ki je izbran
tako, da se regulator ne bi preveč burno odzival na majhne spremembe proge in povzročil
oscilacij okrog želene vrednosti.
Regulator, ki smo ga izvedli kot kombinacijo MGR in PI-regulatorja, je v odzivanju na motnje
bil razred zase. Pri vseh regulatorjih smo namreč za nastavitveni čas merili čas, ko se
pogrešek trajno spusti v območje +/- 10 ml. Pri MGRPI v primeru sprememb izpusta za +/-
50% sploh ni prišlo do zapustitve mejnega območja, zato smo za nastavitveni čas določili
kar 0 s. Pri večjih spremembah izpusta je bil prenihaj za ca. 3-4 krat manjši od vseh
konkurenčnih metod, nastavitveni čas pa ca. 2-krat krajši. Težavo pri tem pa je ponovno
predstavljalo nemirno delovanje črpalke v okolici referenčne vrednosti nivoja, kar je
posledica burnega odzivanja PI-regulatorja.

Bojan Brečko, magistrsko delo
83
5 SKLEP
Zaključeno magistrsko delo je vrh našega raziskovanja o možnostih uporabe teorije mehke
logike v namene vodenja procesov. Začelo se je v okviru diplomske naloge visokošolskega
študija z realizacijo mehkega regulatorja za sistem »Palica in voziček«, nadaljevalo na
univerzitetnem študiju z izvedbo mehkega sistema za varovanje in pomoč pri vodenju
govorno upravljanega invalidskega vozička in zaključevalo med trajanjem magistrskega
študija večinoma na v tej nalogi obravnavanem sistemu MPS PA. Pri snovanju sistema
»Palica in voziček« smo spoznali, da je mehka logika sicer močno orodje za snovanje
regulatorjev zahtevnih regulacijskih prog, vendar pa lahko pomanjkljivo poznavanje
regulacijske proge predstavlja precejšnje težave tako pri postavitvi in oblikovanju vhodnih
in izhodnih pripadnostnih funkcij kot tudi pri samem oblikovanju mehkih pravil. Pomanjkljivo
poznavanje vodenega procesa, nelinearnosti, spremenljive razmere na progi, neznani oz.
nedoločeni vplivi itd. so vse dejavniki, ki otežujejo snovanje vseh vrst regulatorjev. Kljub
naštetemu želimo tudi v prihodnosti stremeti k čim popolnejšemu odzivanju regulatorjev, ki
bi nam olajšala vsakdanja opravila, brez katerih le-ta ne bi bila tako samoumevna, kot se
nam prepogosto zdijo.
Iz navedenih dejstev o težavah pri snovanju regulatorjev in v hkratni želji po čim
popolnejšem vodenju smo zaznali izziv, ki nas je vodil do zadanih ciljev te naloge. Ti so bili
zastavljeni visokoleteče, kljub temu pa se je izkazalo, da ne čisto nerealno. Cilj nam je torej
bil zasnovati regulator, ki bi se bil sposoben odzivati na spremembe želene vrednosti in
motnje čim hitreje, brez prenihajev in podnihajev, ter čim bolj konstantno kljub spremenljivim
razmeram na progi. Za povrh smo si zadali še cilj, da bi lahko vplivali na obliko odziva, pri
čemer ne bi prihajalo do neželenih prenihajev.
V namen razviti, preizkusiti in z uveljavljenimi metodami primerjati kvaliteto zasnovanega
regulatorja, smo za regulacijsko progo izbrali regulacijo nivoja na sistemu MPS PA. Dotična
proga ima sicer nekoliko nelinearno karakteristiko vodenja, vendar ne v tolikšni meri, da je
ne bi bilo možno voditi s široko uporabljanimi PID-regulatorji.
Tako smo najprej zapisali algoritme za primerjalne metode, ki so bile sledeče: klasični PI-
regulator, s strani podjetja Siemens izpopolnjen programski PI-regulator s funkcijo za
»offline« samonastavitev parametrov in na koncu še neadaptivni mehki regulator. Sledila je
realizacija adaptivnega mehkega regulatorja z gradientnim adaptacijskim postopkom
(AMRGAP).
Bojan Brečko, magistrsko delo
84
Po preučitvi teorije GAP smo se lotili prvih zapisov algoritmov in iskanja optimalne izvedbe
adaptivnega mehkega regulatorja (AMR). Razmišljanja in utemeljitve za izvedeno
predstavljeno izvedbo AMRGAP smo navedli že v 3. poglavju. Dobljeni rezultati so nas
pozitivno presenetili. Tako zasnovan regulator se je zelo hitro prilagajal progi, pri tem pa
želeno vrednost nivoja dosegal brez prenihaja, tudi takrat, ko smo z želenimi oblikami
odzivov črpalko spravili v zasičenje. V primerjavi s PI- in z neadaptivnim mehkim
regulatorjem je sicer bil nekoliko slabši v nastavitvenih časih, kar pa z veseljem vzamemo
v zakup, glede na to, da se je sposoben prilagajati spremembam na progi in da dosega
želeno vrednost vedno brez prenihaja. Pomembno je še tudi, da po dosegu referenčnega
nivoja črpalka deluje umirjeno.
Zelo zanimiva je še lastnost zasnovanega regulatorja na kombinaciji MGR in AMR, da
imamo možnost prilagajati obliko odziva, pri čemer ne prihaja do prenihaja. S to lastnostjo
se namreč klasični PI- in PID-regulatorji ne morejo pohvaliti, saj moramo v primeru želje po
čim hitrejšem odzivanju regulatorja vzeti v zakup velike prenihaje, v primeru potrebe po
odzivu brez prenihaja pa dolge nastavitvene čase.
Ob koncu se je rodila še ideja, da bi izhod MGR, torej referenčno hitrost spreminjanja nivoja
dPVref, vodili na samostojen regulator. V ta namen smo uporabili PI-regulator Siemens. Iz
predstavljenih rezultatov je razvidno, da je bila takšna kombinacija za dani sistem izredno
uspešna, saj so bili rezultati v vseh pogledih boljši od konkurenčnih. Seveda se je pri tem
potrebno zavedati dejstva, da v kolikor bi se razmere na progi spremenile še konkretneje,
temu ne bi bilo več tako. Kvaliteta vodenja je namreč v tem primeru neposredno odvisna
od kvalitete PI-regulatorja, ki pa nima adaptacijskih sposobnosti. Težavo pri tem pa je
predstavljalo tudi dejstvo, da so po dosegu želene vrednosti nivoja, ko je MGR že generiral
referenčno hitrost spreminjanja nivoja, enako 0, vrtljaji črpalke precej nihali. Kot smo že
omenili, je to posledica »navitih« parametrov PI-regulatorja, s čimer smo lahko dosegali čim
boljše sledenje referenčni veličini dPVref. S slednjo izvedbo regulatorja smo namreč želeli
prikazati uporabnost zasnovanega principa uporabe kombinacije mehkega generatorja
referenčne veličine (MGR) s poljubno izvedbo regulatorja, ki skuša tej referenci slediti.
Uspelo nam je torej zasnovati učinkovita regulatorja na osnovi mehke logike, s katerima
smo v veliki meri izpolnili zastavljene cilje. Pri tem pa ne smemo pozabiti na dejstvo, da so
se vsi algoritmi izvajali na industrijskem krmilniku nižjega cenovnega razreda (cena ca. 250
€), s cikličnim posodabljanjem vseh parametrov mehkih regulatorjev na 2 s, s sprotnim
izrisovanjem odzivov več spremenljivk z osveževanjem na 500 ms, vse skupaj pa z za
krmilnik tega cenovnega razreda zavidljivim časom cikla, ki je znašal v povprečju 3 ms,
največ pa 6 ms.
Bojan Brečko, magistrsko delo
85
6 LITERATURA
[1] Abonyi J., Nagy L., Szeifert F. Adaptive Fuzzy Control to Compensate Process
Nonlinearities. University of Veszprém Dept. of Chem. Eng. and Cybernetics.
Dostopno na: http://www.academia.edu/21289389/
Adaptive_Fuzzy_Control_to_Compensate_Process_Nonlinearities [15. 3. 2016]
[2] Åström, K. J. Control System Design. Santa Barbara: University of California,
Department of Mechanical and Environmental Engineering, 2002.
Dostopno na:
http://www.cds.caltech.edu/~murray/courses/cds101/fa02/caltech/astrom.html
[15. 3. 2016]
[3] Ačko, A. Snovanje samonastavljivega regulatorja z mehko logiko z industrijskim
krmiljem na nelinearnem sistemu, magistrsko delo. Maribor: Fakulteta za
elektrotehniko, računalništvo in informatiko, 2011.
[4] Đonlagić D., Jurkovič F., Tovornik B. Osnove snovanja mehkih (fuzzy) regulacij.
Maribor: Fakulteta za elektrotehniko, računalništvo in informatiko, 1995.
[5] Habbi A., Zelmat M. An Improved Self-Tuning Mechanism of Fuzzy Control by
Gradient Descent Method. Laboratoire d’Automatique Appliquée, University of
Boumerdès, Algeria. Dostopno na:
http://www.scs-europe.net/services/esm2003/PDF/AI-01.pdf [15. 3. 2016]
[6] Khan, L., Anjum S., Badar S. Standard Fuzzy Model Identification using Gradient
Methods. World Applied Sciences Journal 8, (2010), 1.
[7] Wang, Li-Xin. A Course in Fuzzy Systems and Control. Univerza v Michiganu:
Prentice Hall PTR, 1997.
[8] Wang, Li-Xin. Adaptive fuzzy systems and control: Design and stability analysis,
New Jersey: University of California at Berkeley, 1994.
[9] Muškinja, N. Uporaba nadzornega regulatorja za zagotavljanje stabilnosti mehkih
(fuzzy) regulacijskih sistemov, doktorska disertacija, Maribor, Fakulteta za
elektrotehniko, računalništvo in informatiko, december 1997.

Bojan Brečko, magistrsko delo
86
[10] Passino, K. M., Yurkovich S. Fuzzy Control. California: Addison Wesley Longman,
Inc., 1998.
[11] Piltan, F., Boroomand B., Jahed A., Rezaie R. Performance-Based Adaptive
Gradient Descent Optimal Coefficient Fuzzy Sliding Mode Methodology.
International Journal of Intelligent Systems and Applications (IJISA), 11, (2012),
str. 40-52.
[12] Rojko, A. Položajno vodenje nelinearnih mehanizmov z uporabo mehke logike,
doktorska disertacija. Maribor: Fakulteta za elektrotehniko, računalništvo in
informatiko, 2002.
[13] Siemens, ET 200SP distributed I/O system Manual Collection. Germany, 2015.
[14] Siemens, FuzzyControl++ - Cookbook, Recipes for easy applications of fuzzy logic.
Germany, 1999.
[15] Siemens, FuzzyControl++ User Manual V6, Recipes for easy applications of fuzzy
logic. Germany, 2008.
[16] Siemens, S7-1200 Programmable controller System Manual. Germany, 2015.
[17] Siemens, WinCC Professional V13.0 SP1System Manual. Germany, 2014.
[18] Šafarič, R., Rojko A. Inteligentne regulacijske tehnike v mehatroniki. Maribor:
Fakulteta za elektrotehniko, računalništvo in informatiko, 2007.
[19] Virant, J. Uporaba mehke logike v sodobnih sistemih. Radovljica: Didakta, 1992.
[20] Yen, J., Langari R., Zadeh L. A. Industrial Applications of Fuzzy Logic and
Intelligent Systems. New York: IEEE Press, 1995.
[21] Zadeh, L. A. Fuzzy sets, Information and Control, 8, (1965), 3, str. 338-353.
[22] Zadeh, L. A. Outline of a new approach to the analysis of complex systems and
decision processes, IEEE Transactions on Systems, Man, and Cybernetics, 1,
(1973), 3, str. 28-44.
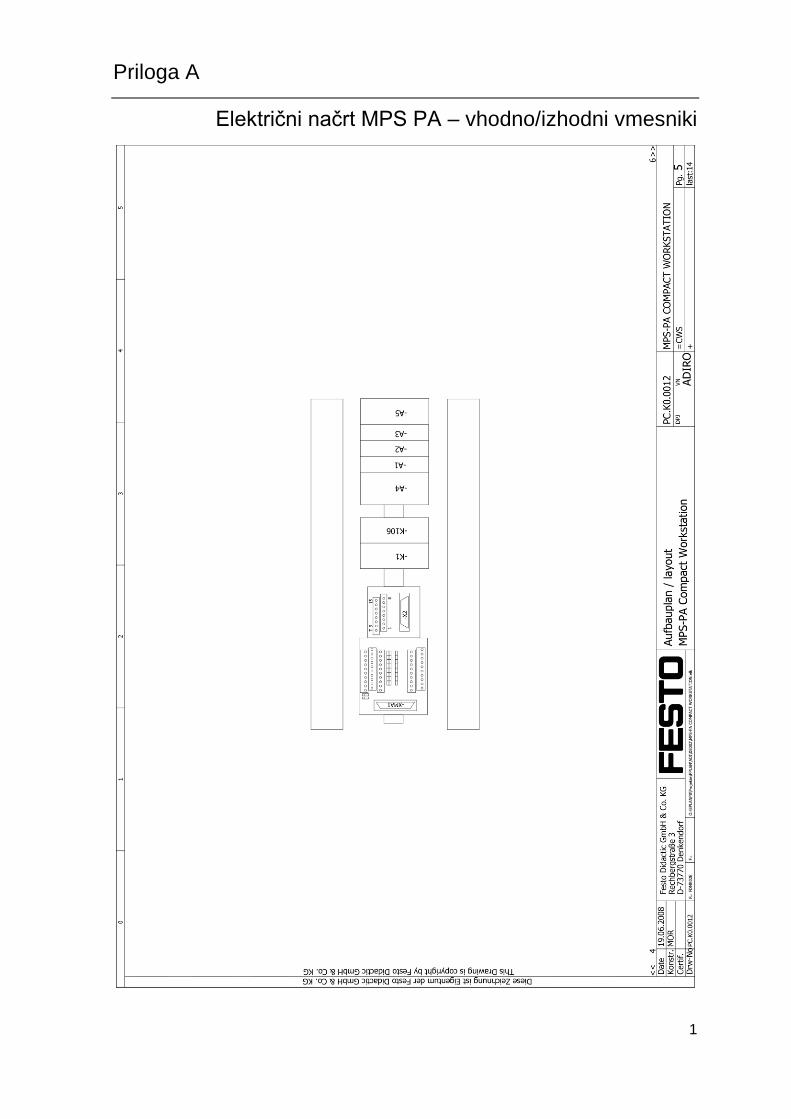
1
Priloga A
Električni načrt MPS PA – vhodno/izhodni vmesniki
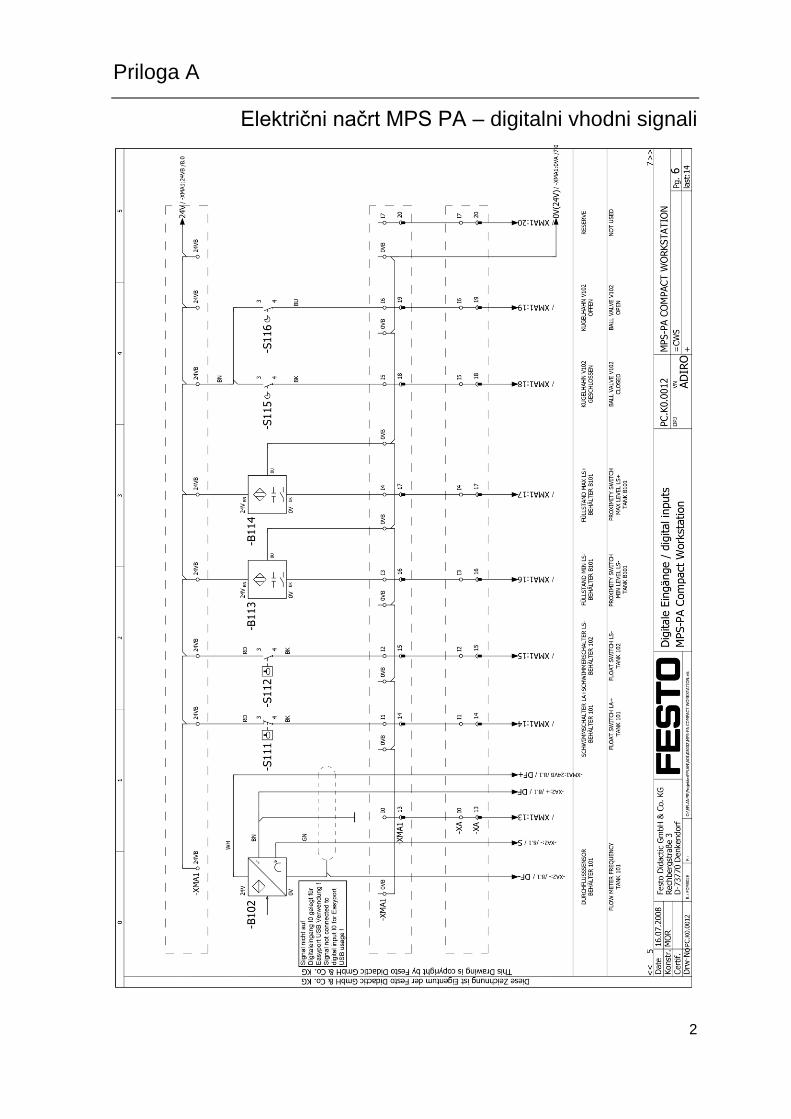
2
Priloga A
Električni načrt MPS PA – digitalni vhodni signali
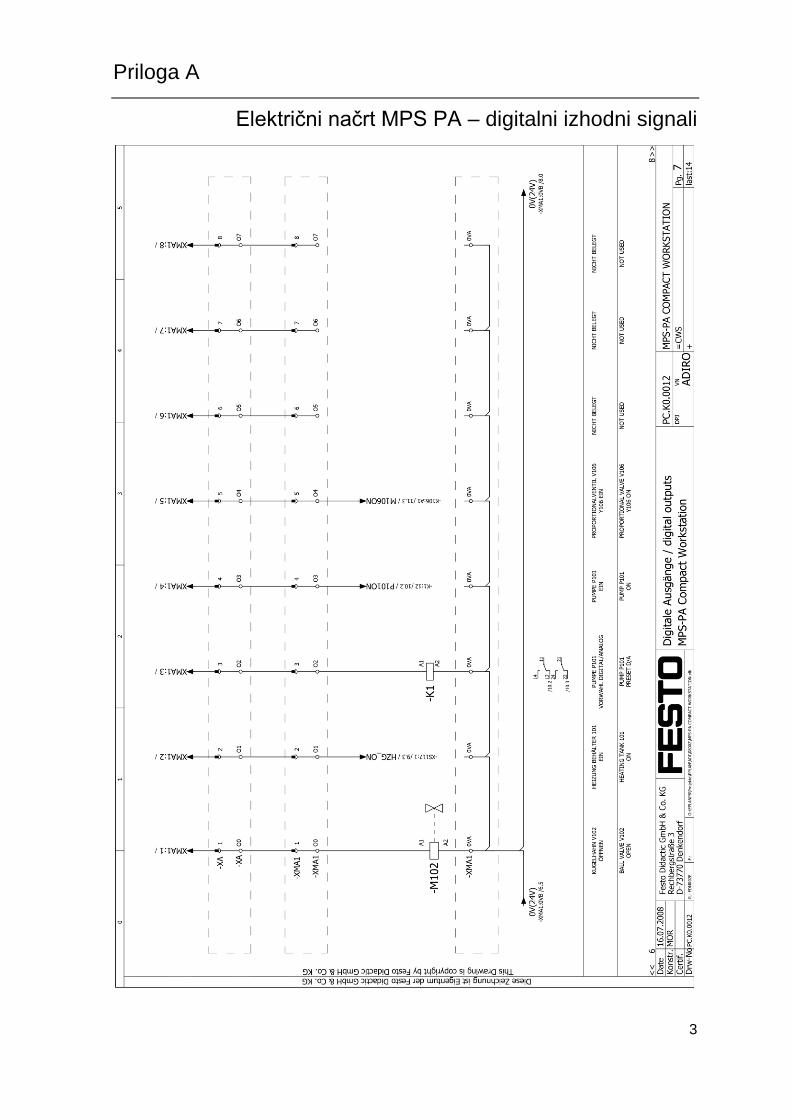
3
Priloga A
Električni načrt MPS PA – digitalni izhodni signali
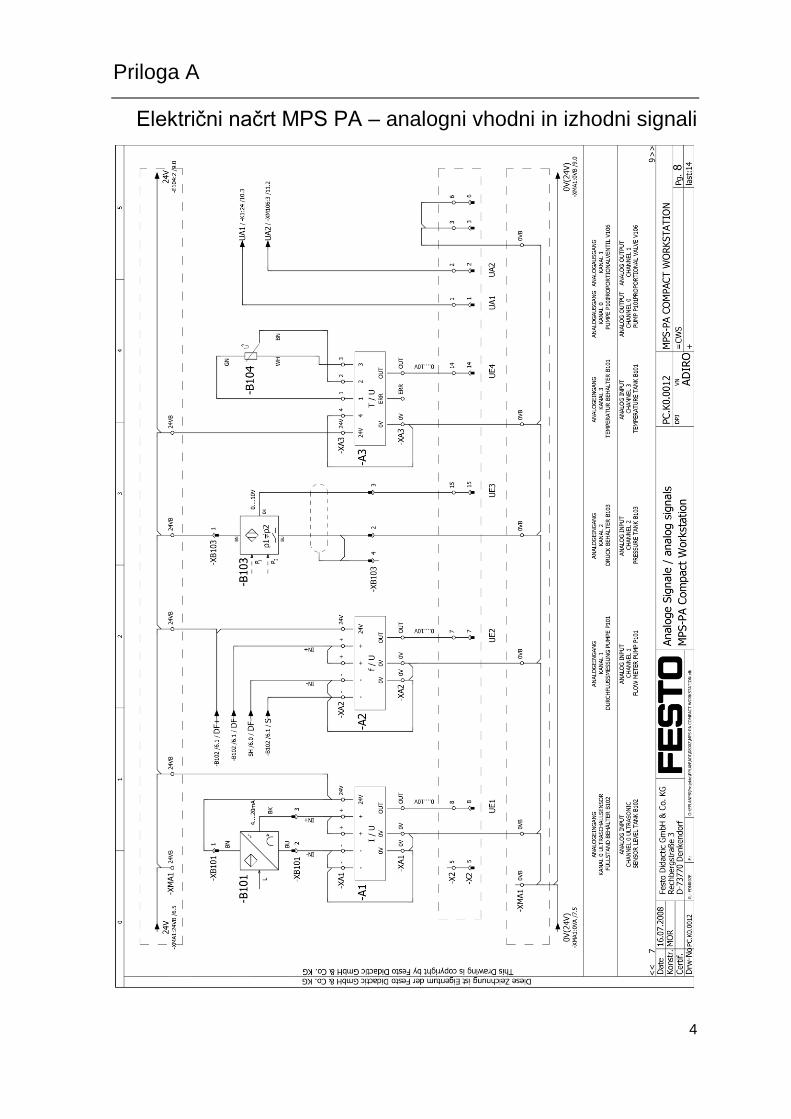
4
Priloga A
Električni načrt MPS PA – analogni vhodni in izhodni signali

5
Priloga A
Električni načrt MPS PA – krmiljenje črpalke

6
Priloga A
Električni načrt MPS PA – krmiljenje proporcionalnega ventila
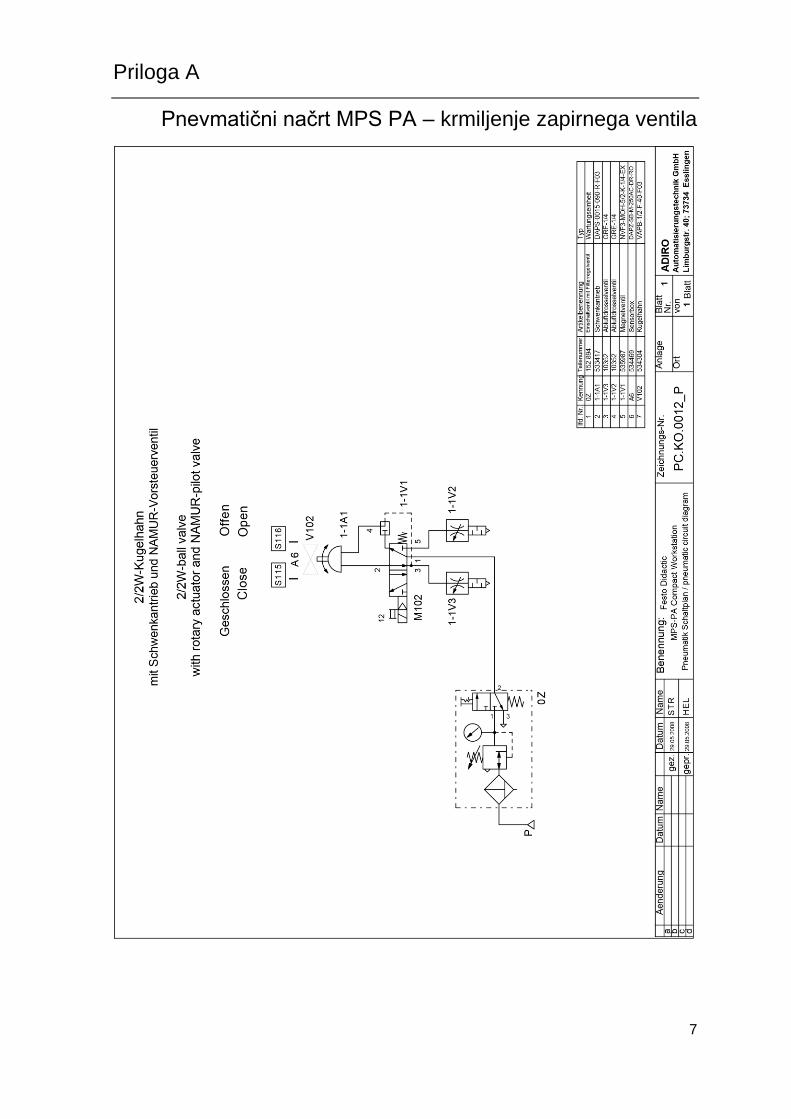
7
Priloga A
Pnevmatični načrt MPS PA – krmiljenje zapirnega ventila