Embed Size (px)
Citation preview

UNIVERZITET U TUZLIPRIRODNO-MATEMATICKI FAKULTET
Nermin Okicic
Uvod u Teoriju operatora
- Skripta -
Tuzla, 2017.

Sadrzaj
1 Linearni operatori 1
1.1 Ogranicenost i neprekidnost . . . . . . . . . . . . . . . . . . . 6
1.1.1 Skup ogranicenih linearnih operatora . . . . . . . . . . 15
1.1.2 Primjene operatorske konvergencije . . . . . . . . . . . 20
1.2 Inverzni operator . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.2.1 Opsta teorija o inverznom operatoru . . . . . . . . . . 24
1.2.2 Primjena teorije inverznog oparatora . . . . . . . . . . 26
1.2.3 Princip otvorenog preslikavanja . . . . . . . . . . . . . 35
1.3 O jos dva principa . . . . . . . . . . . . . . . . . . . . . . . . 41
1.4 Zatvoreni operator . . . . . . . . . . . . . . . . . . . . . . . . 46
2 Linearni funkcionali 54
2.1 Geometrijski smisao linearnih funkcionala . . . . . . . . . . . 55
2.2 Hahn-Banachov teorem . . . . . . . . . . . . . . . . . . . . . 59
2.3 Reprezentacije ogranicenih linearnih funkcionala . . . . . . . 65
2.3.1 Konacnodimenzionalni prostori . . . . . . . . . . . . . 65
2.3.2 Beskonacnodimenzionalni prostori . . . . . . . . . . . 68
3 Konjugovani prostori i konjugovani operator 83
3.1 Konjugovani prostori i refleksivnost . . . . . . . . . . . . . . . 83
3.2 Konjugovani operator . . . . . . . . . . . . . . . . . . . . . . 89
4 Slaba topologija 95
4.1 Slaba topologija na X . . . . . . . . . . . . . . . . . . . . . . 95
4.2 Slaba−∗ topologija . . . . . . . . . . . . . . . . . . . . . . . . 100
4.2.1 O jos jednoj motivaciji za uvodenje slabe topologije . 105
5 Spektar linearnog operatora 107
5.1 Definicija spektra operatora . . . . . . . . . . . . . . . . . . . 107
5.2 Spektralni radius . . . . . . . . . . . . . . . . . . . . . . . . . 111
6 Kompaktni operatori 118
6.1 Neke osobine kompaktnih operatora . . . . . . . . . . . . . . 119
i

Sadrzaj
ii
7 Ograniceni linearni operatori na Hilbertovim prostorima 125
7.1 Ortogonalna projekcija . . . . . . . . . . . . . . . . . . . . . . 1257.2 Dual Hilbertovog prostora . . . . . . . . . . . . . . . . . . . . 1297.3 Konjugovani operator na Hilbertovim prostorima . . . . . . . 1317.4 Samokonjugovani i unitarni operatori . . . . . . . . . . . . . . 1347.5 Slaba konvergencija na Hilbertovim prostorima . . . . . . . . 138
Bibliografija 144
Dodatak A Prostori u funkcionalnoj analizi 145
Dodatak B Grcki alfabet 146

1
Linearni operatori
1.1 Ogranicenost i neprekidnost . . . . . . . . . . . . 6
1.1.1 Skup ogranicenih linearnih operatora . . . . . . . . 15
1.1.2 Primjene operatorske konvergencije . . . . . . . . . 20
1.2 Inverzni operator . . . . . . . . . . . . . . . . . . 24
1.2.1 Opsta teorija o inverznom operatoru . . . . . . . . 24
1.2.2 Primjena teorije inverznog oparatora . . . . . . . . 26
1.2.3 Princip otvorenog preslikavanja . . . . . . . . . . . 35
1.3 O jos dva principa . . . . . . . . . . . . . . . . . . 41
1.4 Zatvoreni operator . . . . . . . . . . . . . . . . . . 46
Neka su X i Y dva proizvoljna skupa. Preslikavanje A : X → Y nazivamooperator, pri cemu koristimo standardnu definiciju preslikavanja, da svakomelementu iz podskupa od X pridruzujemo po nekom pravilu jedinstven ele-ment iz Y . Dakle, pod terminom operator podrazumijevamo najopstiji oblikpreslikavanja, a opstost se ogleda u tome da se podrucje originala nalazi uproizvoljnom prostoru X, a podrucje slika u proizvoljnom prostoru Y . Akonije drugacije naglaseno, u daljem izlaganju podrazumijeva se da su X i Ylinearni vektorski prostori. Cesto se umjesto termina operator koriste i ter-mini preslikavanje, transformacija ili funkcija. Sa DA ⊆ X cemo oznacavatidomen preslikavanja operatora A
DA = x ∈ X | A(x) je definisano ,
i podrazumijevamo da je on linearan vektorski prostor. Uobicajeno se podra-zumijeva da je domen operatora citav X, osim ako nije precizirano drugacije.Sa RA ⊆ Y (ili sa Rang(A)) oznacavamo podrucje slika ili kodomen opera-tora A
RA = y ∈ Y | y = A(x) za neko x ∈ X .Za x ∈ X, djelovanje operatora A uobicajeno cemo zapisivati sa Ax, umjestoA(x).
Definicija 1.1. Za operator A : X → Y kazemo da je aditivan ako i samoako za proizvoljne x1, x2 ∈ DA ⊆ X, vrijedi
A(x1 + x2) = Ax1 +Ax2 .
1

2
Definicija 1.2. Za operator A : X → Y kazemo da je homogen ako i samoako vrijedi
(∀x ∈ DA ⊆ X)(∀λ ∈ Φ) A(λx) = λAx .
Definicija 1.3. Za operator A : X → Y kazemo da je linearan operator akoi samo ako je on istovremeno aditivan i homogen, tj. ako vrijedi
(∀x1, x2 ∈ DA ⊆ X)(∀λ, µ ∈ Φ) A(λx1 + µx2) = λAx1 + µAx2 .
Lema 1.1. Za proizvoljan linearan operator vrijede osobine:
1. A0 = 0.
2. A(−x) = −Ax.
Dokaz :
1. Iz osobina linearnog vektorskog prostora i linearnosti operatora imamoAx = A(x+0) = Ax+A0, a zbog jedinstvenosti neutralnog elementaza sabiranje imamo A0 = 0.
2. Koristeci gornju osobinu i linearnost operatora, imamo 0 = A0 =A(x + (−x)) = Ax + A(−x), iz cega je zbog jedinstvenosti inverznogelementa za sabiranje onda A(−x) = −Ax. ♣
Primjer 1.1. Neka su V i W konacnodimenzionalni linearni vektorski pros-tori, pri cemu je dim(V ) = m i dim(W ) = n (m,n ∈ N). Neka je BV =v1, v2, ..., vm baza prostora V , a BW = w1, w2, ..., wn baza prostoraW i neka je F : V → W linearno preslikavanje. Za proizvoljan vi (i ∈1, 2, ...,m) njegova slika Fvi lezi u prostoru W , pa postoje jedinstvenikoeficijenti a1i, a2i, ..., ani ∈ Φ, takvi da je
Fvi =n∑
j=1
ajiwj .
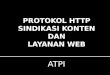
Oznacimo sa A = [aij ]m×n (1 ≤ i ≤ m, 1 ≤ j ≤ n) matricu koju do-bijemo tako sto svaki vektor baze BV preslikamo preslikavanjem F , a pritome jedinstveno odredene koeficijente postavimo kao kolone matrice A. Zamatricu A kazemo da je matricna reprezentacija linearnog operatora F uodnosu na baze BV i BW ili jednostavnije to iskazujemo sa time da je Amatrica linearnog operatora F .Iz geometrije znamo da je rotacija linearna transformacija. Ako posma-
tramo R2 kao linearan vektorski prostor neka je Rα : R2 → R2 rotacijarealne ravni za ugao α ∈ [0, 2π]. Neka je e1, e2 =
(1, 0)T , (0, 1)T
stan-
dardna baza u R2. Tada Rαe1 treba da predstavlja rotirani vektor e1 , aRαe2, rotirani vektor e2 za ugao α. Nije tesko vidjeti da vrijedi

3
UVOD U TEORIJU OPERATORA
α
α
e1
e2Rαe1
Rαe2
1
1
Slika 1.1: Rotacija ravni za ugao α
Rαe1 = (cosα, sinα)T , Rαe2 = (− sinα, cosα)T ,
tj. operator rotacije je reprezentovan matricom
A =
[cosα − sinαsinα cosα
].
Sada za proizvoljan vektor x = (x1, x2)T ∈ R2, na osnovu reprezentacije
linearnih preslikavanja u konacnodimenzionalnim prostorima imamo,
Rαx = A · x =
[cosα − sinαsinα cosα
]·[x1x2
]=
[x1 cosα− x2 sinαx1 sinα+ x2 cosα
]♦
Gornji primjer nam govori da su matrice na konacnodimenzionalnim pros-torima ustvari linearna preslikavanja. Tojest vrijedi,
Lema 1.2. Neka su V i W linearni vektorski prostori dimenzija m i nrespektivno i neka su BV i BW njihove baze. Neka je F : V → W linearanoperator i A = [aij ]m×n. Matrica A reprezentuje operator F ako i samo akoje za proizvoljan vektor x ∈ V
Fx = A · x .
Dokaz : Neka je A = [aij ]m×n matrica linearnog operatora F . Za proizvo-ljan x ∈ V neka je x = (b1, b2, ..., bm)T njegova reprezentacija u bazi BV .Tada imamo,
Fx = F
m∑
j=1
bjvj
=
m∑
j=1
bjFvj
=
m∑
j=1
bj
(n∑
i=1
aijwi
)=
n∑
i=1
m∑
j=1
aijbj
wi .

4
Dakle, vektor Fx u bazi BW ima reprezentaciju
Fx =
m∑
j=1
a1jbj ,
m∑
j=1
a2jbj , ...,
m∑
j=1
anjbj
T
= A · x .
Obratno, neka je B matrica takva da je Fx = B · x, za sve x ∈ V i neka jeA matrica operatora F . Birajuci vektor x = (1, 0, ..., 0)T ∈ V , ocigledno jeprva kolona matrice B jednaka prvoj koloni matrice A. Analogno se utvrdujejednakost i ostalih kolona, tj. mora vrijediti B = A. ♣
Definicija 1.4. Neka je A : X → Y linearan operator. Skup
Ker(A) = x ∈ X| Ax = 0 ,
nazivamo jezgro operatora ili nul-prostor operatora. Skup
Rang(A) = y ∈ Y | (∃x ∈ X) Ax = y ,
nazivamo rang operatora A.
Osobine injektivnosti i surjektivnosti lagano izrazavamo preko novouvede-nih skupova. Tako imamo da je linearan operator injektivan ako i samo akoje Ker(A) = 0, a surjektivan ako i samo ako je Rang(A) = Y . Bijektiv-nost imamo ako je operator istovremeno i injektivan i surjektivan. Takodevrijede i sljedece osobine.
Teorem 1.3. Neka je A : X → Y linearan operator. Tada vrijedi:
1. Ker(A) je linearni vektorski potprostor od X.
2. Rang(A) je linearni vektorski potprostor od Y .
3. Ako su X i Y konacnodimenzionalni prostori onda je
dim(X) = dim(Ker(A)) + dim(Rang(A)) .
Primjer 1.2. Neka je X skup svih polinoma cetvrtog stepena, definisanih na(−1, 1), tj. X =
P4(x) = ax4 + bx3 + cx2 + dx+ e| a, b, c, d, e ∈ R , x ∈ (−1, 1)
i analogno Y =P3(x) = ax3 + bx2 + cx+ d| a, b, c, d ∈ R , x ∈ (−1, 1)
.
Posmatrajmo preslikavanje
Du =du
dx= u′ , u ∈ X .
Ocigledno je operator D sa X u Y . Za u, v ∈ X je D(u+v) = (u+v)′ = u′+v′ = Du+Dv. Osim toga je za u ∈ X i λ ∈ Φ, D(λu) = (λu)′ = λU ′ = λDu.Dakle, D je linearan operator sa prostora X u prostor Y.

5
UVOD U TEORIJU OPERATORA
Kako je izvod konstante 0, to je jezgro ovog operatora skup svih polinomanultog stepena (konstante), dakle Ker(D) 6= 0, pa operator nije injekti-van.Za proizvoljan polinom treceg stepena v(x) = P3(x) = ax3 + bx2 + cx + d,polinom
P4(x) =
∫P3(x)dx =
a
4x4 +
b
3x3 +
c
2x2 + dx+C ∈ X ,
te vrijedi Rang(D) = Y , tj. operator je surjekcija.Primjetimo da ce preslikavanje D : C1[0, 1] → C[0, 1]× R, definisano sa
Du =
(u′(x)u(0)
),
biti injektivno preslikavanje, sta vise bijekcija. ♦
Primjer 1.3. Desni sift operator AR definisan na l∞(R) je operator zadat sa
AR(x) = AR(x1, x2, x3, ...) = (0, x1, x2, x3, ...) , (xn)n∈N ∈ l∞(R) ,
a lijevi sift operator AL na l∞(R) zadat je sa
AL(x) = AL(x1, x2, x3, ...) = (x2, x3, x4, ...) , (xn)n∈N ∈ l∞(R) .
Ocigledno je Ker(AR) = 0, a rang operatora je skup svih ogranicenihnizova kod kojih je prva koordinata 0,
Rang(AR) = x = (0, x1, x2, ...) | x ∈ l∞(R) .
Jezgro operatora AL je jednodimenzinalan potprostor
Ker(AL) = x = (a, 0, 0, ...) | a ∈ R ,
a njegov rang je cijeli prostor l∞(R).Dakle, operator AR jeste injektivan, ali nije surjektivan, dok operator AL
nije injektivan, a jeste surjektivan.Primjedba: Ovakva situacija nije moguca kod linearnih preslikavanja na
konacnodimenzionalnim prostorima. Naime, ako je A : Rn → Rn (n ∈ N)linearan operator, tada vrijedi: Ker(A) = 0 ako i samo ako je Rang(A) =Rn. ♦
Primjer 1.4. Fredholmov integralni operator K : C[0, 1] → C[0, 1], definisansa
Kf(x) =
∫ 1
0k(x, y)f(y)dy ,
je linearan operator za proizvoljnu neprekidnu funkciju k(·, ·) koju nazivamojezgro integralnog operatora (Jezgro integralnog operatora nema nikakve

1.1. Ogranicenost i neprekidnost
6
veze sa Ker(K)). Za ovaj operator kazemo da je degenerisan ako mu jejezgro oblika
k(x, y) =
n∑
i=1
φi(x)ψi(y) ,
gdje su φi, ψi : [0, 1] → R neprekidne funkcije. Bez umanjenja opstostimozemo pretpostaviti da su skupovi φ1, φ2, ..., φn i ψ1, ψ2, ..., ψn line-arno nezavisni. Tada je rang operatora K konacnodimenzionalan potprostorrazapet sa φ1, φ2, ..., φn, a jezgro operatora je
Ker(K) =
f ∈ C[0, 1] |
∫ 1
0f(y)ψi(y)dy = 0 , ı = 1, 2, ..., n
.
Moze se pokazati da su i jezgro i rang ovog operatora zatvoreni potprostoriod C[0, 1]. ♦
1.1 Ogranicenost i neprekidnost
Definicija 1.5. Za linearan operator A : X → Y kazemo da je neprekidan utacki x0 ∈ DA ako i samo ako za svaku okolinu V tacke Ax0, postoji okolinaU tacke x0, tako da je za svako x ∈ U , Ax ∈ V .
Ako su X i Y metricki prostori, gornju definiciju iskazujemo sa
(∀ε > 0)(∃δ = δ(ε) > 0)(∀x ∈ DA)(dX (x, x0) < δ ⇒ dY (Ax,Ax0) < ε) ,
a u normiranim prostorima sa
(∀ε > 0)(∃δ = δ(ε) > 0)(∀x ∈ DA)(||x− x0||X < δ ⇒ ||Ax−Ax0||Y < ε) .
Kazemo da je linearan operator neprekidan na skupu D ako je neprekidanu svakoj tacki skupa D.Za definisanje pojma neprekidnosti mozemo koristiti i nizovnu definiciju.
Definicija 1.6. Za linearan operator A : X → Y kazemo da je neprekidanu tacki x0 ∈ DA ako za proizvoljan niz (xn)n∈N ⊂ X, takav da xn → x0(n→ ∞), vrijedi
Axn → Ax0 , (n→ ∞) .
Teorem 1.4. Ako je aditivan operator A : X → Y neprekidan u jednoj tackidomena, onda je on neprekidan na citavom domenu.
Dokaz : Neka je A : X → Y aditivan operator i neka je x0 ∈ DA tacka ukojoj je operator neprekidan. Neka je sada x ∈ DA proizvoljan. Uzmimoproizvoljan niz (xn)n∈N ⊂ DA, takav da xn → x (n → ∞). Posmatrajmoniz (xn − x+ x0)n∈N ⊂ DA. Ocigledno vrijedi
xn − x+ x0 → x0 , (n→ ∞) ,

7
UVOD U TEORIJU OPERATORA
pa zbog neprekidnosti operatora u tacki x0 imamo
A(xn − x+ x0) → Ax0 , (n→ ∞) .
Na osnovu aditivnosti i osobina limesa, sada vrijedi
limn→∞
A(xn − x+ x0) = limn→∞
(Axn −Ax+Ax0)
= limn→∞
Axn −Ax+Ax0
= Ax0 ,
iz cega je onda
limn→∞
Axn = Ax ,
tj. operator je neprekidan i u tacki x. Zbog proizvoljnosti x ∈ DA, za-kljucujemo da je A neprekidan na citavom skupu DA. ♣
Definicija 1.7. Neka je A : X → Y linearan operator. Kazemo da je Aogranicen linearan operator ako vazi
(∃M > 0)(∀x ∈ X) ||Ax||Y ≤M ||x||X . (1.1)
Infimum svih brojeva M za koje vazi (1.1) nazivamo norma operatora A ioznacavamo je sa ||A||X→Y ili jednostavno sa ||A||, podrazumijevajuci dje-lovanje operatora. Linearan operator je ogranicen ukoliko mu je normakonacna i pri tome onda vrijedi
(∀x ∈ X) ||Ax||Y ≤ ||A||X→Y ||x||X .
Teorem 1.5. Neka je A : X → Y ogranicen homogen operator. Tada vrijedi
||A|| = supx∈X\0
||Ax||||x|| = sup
||x||≤1||Ax|| = sup
||x||=1||Ax|| .
Dokaz : Oznacimo sa
α = supx∈X\0
||Ax||||x|| .
Tada za svako ε > 0, postoji x′ ∈ X \ 0, takav da je ||Ax′|| / ||x′|| > α− ε,tj. ||Ax′|| > (α−ε) ||x′||. Na osnovu definicije norme operatora onda imamo||A|| > α− ε, za proizvoljno ε > 0, odnosno ||A|| ≥ α.Ako bi bilo ||A|| > α, tada bi za neko ε > 0 vrijedilo ||A|| − α = ε. Tada biiz α < ||A|| − ε/2 imali
||Ax||||x|| ≤ α < ||A|| − ε
2,

1.1. Ogranicenost i neprekidnost
8
tj. za svako x ∈ X \ 0 bi vrijedilo
||Ax|| ≤(||A|| − ε
2
)||x|| .
Posljednje nije u saglasnosti sa tim da je norma operatora infimum svihbrojeva koji zadovoljavaju (1.1), pa dakle mora vrijediti
||A|| = α = supx∈X\0
||Ax||||x|| .
Zbog homogenosti operatora dalje imamo
supx∈X\0
||Ax||||x|| = sup
x∈X\0
∣∣∣∣∣∣∣∣A(
x
||x||
)∣∣∣∣∣∣∣∣ = sup
||x||=1||Ax|| .
Ostaje jos pokazati drugu jednakost. Naime, ako posmatramo samo ele-mente koji zadovoljavaju ||x|| ≤ 1, tada imamo
||A|| = α = supx∈X\0
||Ax||||x|| ≥ sup
||x||≤1
||Ax||||x|| ≥ sup
||x||≤1||Ax|| .
Sa druge strane, kako je supremum na vecem skupu veci, to vrijedi
sup||x||≤1
||Ax|| ≥ sup||x||=1
||Ax|| = ||A|| ,
pa zakljucujemo da mora biti ||A|| = sup||x||≤1
||Ax||. ♣
Za linearna preslikavanja vrijedi sljedeca ”lijepa” osobina.
Teorem 1.6. Linearan operator je neprekidan ako i samo ako je ogranicen.
Dokaz : Neka je A : X → Y neprekidan linearan operator. Pretpostavimoda on nije ogranicen. Tada
(∀n ∈ N)(∃xn ∈ X, ||xn|| = 1) ||Axn|| > n .
Posmatrajmo sada sljedeci niz,
zn =xnn, n ∈ N .
Za njega vrijedi
||zn|| =||xn||n
=1
n→ 0 , n→ ∞ ,
tj. zn → 0 (n → ∞). Ali tada imamo
||Azn|| =1
n||Axn|| ≥ 1 , n ∈ N ,

9
UVOD U TEORIJU OPERATORA
a to znaci da Azn 9 0 (n → ∞), sto je u suprotnosti sa neprekidnoscuoperatora.Neka je sada A ogranicen operator, tj. ||A|| < +∞. Uzmimo proizvoljnox ∈ DA i neka je (xn)n∈N ⊂ DA, takav da xn → x (n → ∞). Zbogogranicenosti sada imamo
0 ≤ ||Axn −Ax|| = ||A(xn − x)|| ≤ ||A|| ||xn − x|| → 0 , n→ ∞ .
Dakle, A je neprekidan u tacki x, pa je prema Teoremi 1.4, on neprekidanoperator. ♣
Teorem 1.7. Neka je A : X → Y linearan operator. Operator A je ne-prekidan ako i samo ako ogranicene skupove iz X preslikava u ograniceneskupove u Y .
Dokaz : Neka je A : X → Y ogranicen linearan operator, tj.
(∀x ∈ X) ||Ax|| ≤ ||A|| ||x|| , (||A|| <∞)
i neka je S ⊂ X ogranicen skup, tj.
(∃M > 0)(∀x ∈ S) ||x|| ≤M .
Oznacimo sa S′ sliku skupa S, S′ = Ax| x ∈ S. Za proizvoljno y ∈ S′
tada vrijedi
||y|| = ||Ax|| ≤ ||A|| ||x|| ≤M ||A|| =M ′ <∞ ,
te je S′ ogranicen skup.Neka A slika ogranicene skupove u ogranicene skupove. Kako je jedinicna
kugla K = x ∈ X| ||x|| ≤ 1, ogranicen skup u X, to je i skup
AK = Ax| ||x|| ≤ 1
ogranicen u Y , a to znaci
(∃M > 0)(∀y ∈ AK) ||y|| ≤M ,
odnosno(∃M > 0)(∀x ∈ X, ||x|| ≤ 1) ||Ax|| ≤M .
Posljednja cinjenica nije nista drugo do ogranicenost operatora ili sto jeekvivalentno, njegova neprekidnost. ♣
U ispitivanju ogranicenosti proizvoljnog operatora A : X → Y prvo nasto-jimo pokazati da za svako x ∈ X vrijedi ||Ax|| ≤M ||x||, za neko M > 0 (pomogucnosti najbolju aproksimaciju), cime ustvari pokazemo ogranicenostoperatora (||A|| ≤ M). Pokazati da je ||A|| = M znaci naci konkretan ele-ment x′ ∈ X, za koga je ||Ax′|| = M ||x′||. Ovo bi znacilo da je ||A|| ≥ M ,sto sa ranije pokazanim daje ukupno ||A|| =M .

1.1. Ogranicenost i neprekidnost
10
Primjer 1.5. Linearni operator A : R → R, definisan sa Ax = ax, gdje jea ∈ R, je ogranicen operator cija je norma ||A|| = |a|. ♦
Primjer 1.6. Identicko preslikavanje I : X → X, Ix = x, je primjerogranicenog linearnog operatora za proizvoljan normiran prostor X i normamu je ||I|| = 1.Ukoliko neki operator ima normu 0, onda to mora biti nuloperator tojest,0x = 0. ♦
Primjer 1.7. Posmatrajmo lijevi i desni shift operator na l2, tj. preslikavanjaAL : l2 → l2 i AR : l2 → l2, zadata sa
ARx = (0, x1, x2, ...) , ALx = (x2, x3, x4, ...) za x = (x1, x2, x3, ...) ∈ l2 .
Oba operatora su ocigledno linearna. Pri tome je
||ARx|| =( ∞∑
i=1
|xi|2) 1
2
= ||x|| ,
a odavde je onda ||AR|| = 1. Za lijevi shift imamo
||ALx|| =( ∞∑
i=2
|xi|2) 1
2
≤( ∞∑
i=1
|xi|2) 1
2
= ||x|| ,
tako da je ||AL|| ≤ 1. Ako posmatramo specijalno vektor oblika x =(0, x1, x2, x3, ...) ∈ l2, tada je
||ALx|| =( ∞∑
i=2
|xi−1|2) 1
2
= ||x|| ,
te je ||AL|| = 1. ♦
U nesto tezim primjerima, pretpostavimo da je pokazana ogranicenost ope-ratora tojest, za sve x ∈ X vrijedi ||Ax|| ≤ M ||x||. Ako je moguce naci niz(xn)n∈N ⊂ X, takav da je
||Axn||||xn||
→M , (n→ ∞) ,
iz toga onda zakljucujemo da je ||A|| =M .
Primjer 1.8. Posmatrajmo operator T : L2(a, b) → L2(a, b) (a, b ∈ R, a < b),zadat sa
Tx(t) = f(t)x(t) ,

11
UVOD U TEORIJU OPERATORA
gdje je f ∈ C[a, b]. Linearnost se jednostavno pokazuje, a za ogranicenostimamo
||Tx|| =
(∫ b
a|f(t)x(t)|2dt
) 12
=
(∫ b
a|f(t)|2|x(t)|2dt
) 12
≤ maxa≤t≤b
|f(t)|(∫ b
a|x(t)|2dt
) 12
.
Dakle, ||Tx||L2(a,b) ≤ ||f ||C[a,b]||x||L2(a,b), iz cega onda imamo ||T || ≤ ||f ||C[a,b].Kako je f neprekidna funkcija na segmentu [a, b], postoji c ∈ [a, b] u kojoj
funkcija uzima maksimalnu vrijednost (ne gubeci na opstosti, neka je c ∈(a, b)). Za n ∈ N, posmatrajmo funkcije
xn(t) =
1 ; |t− c| < 1
n0 ; inace
Tada imamo
||Txn||||xn||
=n
2
(∫ c+ 1n
c− 1n
|f(t)|2dt) 1
2
→ |f(c)| , (n → ∞) ,
zato sto je f neprekidna funkcija. Iz ovoga onda zakljucujemo da je
||T || = |f(c)| = maxa≤t≤b
|f(t)| = ||f ||C[a,b] . ♦
Primjer 1.9. Neka je X = C[0, 1] sa standardnom normom. Posmatrajmooperator K : X → X, definisan sa
Kf(x) =
∫ x
0f(t)dt .
Integralni operator sa promjenljivom granicom se naziva Volterrin integralnioperator. Za njega vrijedi
||Kf || = sup0≤x≤1
∣∣∣∣∫ x
0f(t)dt
∣∣∣∣ ≤ ||f || sup0≤x≤1
∫ x
0dt = ||f || .
Dakle, ||K|| ≤ 1 te je K ogranicen linearan operator. Sta vise, za izborkonstantne funkcije f0(x) = 1, ta norma se i dostize tojest, ||K|| = 1. Rangovog operatora je skup neprekidno diferencijabilnih funkcija na [0, 1] kojese anuliraju za x = 0, C1
0 [0, 1]. On jeste linearan vektorski potprostor odC[0, 1], ali zbog toga sto nije zatvoren skup (C1
0 [0, 1] ⊂ C[0, 1] i posmatramoindukovanu normu sa C[0, 1]), on nije Banachov potprostor. Nedostatakzatvorenosti se ima zbog efekta ”glatkosti” operatora K, koji neprekidnefunkcije slika u diferencijabilne funkcije (integral povecava glatkost funkcije)♦

1.1. Ogranicenost i neprekidnost
12
Primjer 1.10. Na osnovu Leme 1.2, linearna preslikavanja na konacnodimen-zionalnim prostorima su reprezentovana matricama i uobicajeno saA oznaca-vamo i linearno preslikavanje i njemu korespondiranu matricu.Razlicite norme na Rn i Rm inudukivat ce i razlicite norme matrice kojareprezentuje linearni operator. Neka je A : Rn → Rm linearan operator ineka je norma ||x||22 = xT · x = |x1|2 + |x2|2 + · · · + |xk|2 (k ∈ N). Na os-novu definicije norme operatora, normu mozemo izracunati maksimizacijomvelicine ||Ax||22 na jedinicnoj sferi ||x||22 = 1. Dakle, u pitanju je uslovnaekstremizacija, cija je Lagrangeova funkcija
f(x, λ) = (Ax)T ·Ax− λ(xT · x− 1) ,
gdje je λ Lagrangeov multiplikator. Racunajuci gradijent funkcije f i iz-jednacavajuci ga sa 0, ∇f = 0, dobijamo da mora vrijediti uslov
AT ·A · x = λx . (1.2)
Vidimo da je x svojstveni vektor matrice AT · A i da je λ odgovarajucasvojstvena vrijednost. Pri tome je AT · A matrica formata n × n koja imakonacno mnogo realnih, nenegativnih svojstvenih vrijednosti. Mnozeci (1.2)sa xT sa lijeve strane dobijamo uslov
xTATAx = (Ax)T · Ax = λxT · x ,
ili sto je isto ||Ax||22 = λ||x||22, a kako je ||x||2 = 1 zakljucujemo da je||Ax||22 = λ. Dakle, maksimalna vrijednost od ||Ax||22 predstavlja maksi-malnu svojstvenu vrijednost matrice AT ·A. Ako sa r(B) oznacimo najvecuapsolutnu vrijednost svojstvenih vrijednosti operatora B (spektralni radi-jus), onda Euclidsku normu matrice A mozemo zadati sa
||A||2 =√r(AT ·A) . (1.3)
Ako koristimo maksimum normu, ||x||∞ = max1≤i≤n
|xi|, zbog
A · x =
n∑
j=1
a1jxj ,
n∑
j=1
a2jxj , ...,
n∑
j=1
anjxj
T
,
imamo da je
||Ax||∞ ≤ max1≤i≤m
n∑
j=1
|aij ||xj |
≤ max1≤i≤m
n∑
j=1
|aij | max1≤j≤n
|xj |
= max1≤i≤m
n∑
j=1
|aij | · ||x||∞ .

13
UVOD U TEORIJU OPERATORA
Dakle, ||Ax||∞ ≤ max1≤i≤m
n∑
j=1
|aij |. Pretpostavimo da se maksimum desne
strane dogodi za i = i0. Birajuci x0 ∈ Rn tako da su mu koordinate xj =sgn(ai0j), imamo da je ||x0||∞ = 1 i
||Ax0|| = |ai01|+ |ai02|+ ·+ |ai0n| =n∑
j=1
|ai0j | .
Kako je ||A||∞ ≥ ||Ax0||, zakljucujemo da je norma operatora data sa
||A||∞ = max1≤i≤m
n∑
j=1
|aij | .
Slicnom argumentacijom bi za izbor norme ||x||1 = |x1| + |x2| + · · · + |xk|,dobili da je
||A||1 = max1≤j≤n
m∑
i=1
|aij| .
Primjedba: Moze se pokazati da je za proizvoljno 1 < p < ∞ zadovoljeno
||A||p ≤ ||A||1p
1 ||A||1− 1
p∞ .
Primjedba: Svaka od gore navedenih normi matricnog operatora je pro-izasla iz pretpostavljenih normi na domenu i kodomenu preslikavanja. Medutim,postoje norme ovih opertatora koje nisu pridruzene niti jednoj normi na Rn
i Rm. Takav primjer je Hilbert-Schmidt norma
||A|| =
m∑
i=1
n∑
j=1
|aij |2
12
. ♦
Primjer 1.11. U Primjeru 1.4 smo posmatrali Fredholmov integralni opera-tor K : C[0, 1] → C[0, 1], definisan sa
Kf(x) =
∫ 1
0k(x, y)f(y)dy ,
gdje je jezgro k : [0, 1] × [0, 1] → R neprekidna funkcija. To je ogranicenlinearana operator sa normom
||K|| = max0≤x≤1
∫ 1
0k(x, y)dy .
Ovo na neki nacin predstavlja analogon maksimalnoj sumi po vrstama kod∞-norme za matricne operatore. ♦

1.1. Ogranicenost i neprekidnost
14
Linearna preslikavanja na konacnodimenzionalnim prostorima su obaveznoogranicena ili ekvivalentno, neprekidna. Medutim, na beskonacnodimenzio-nalnim prostorima to nije uvijek slucaj.
Primjer 1.12. Neka je X = C∞[0, 1] (skup funkcija definisanih na [0, 1]koje imaju neprekidan izvod bilo kog reda) sa supremum normom. X jestenormiran prostor ali nije Banachov prostor jer nije kompletan. Posmatrajmooperator diferenciranja D : X → X, Du = u′. On jeste linearan operator,ali nije neprekidan. Zaista, posmatrajmo funkcije fn(x) = enx. Kako jeDfn(x) = nenx, jasno je da ce tada vrijediti
||Dfn||||fn||
= n ,
a desnu stranu gornje jednakosti mozemo uciniti po volji velikom, te opera-tor D ne moze biti ogranicen.Jedna od fundamentalnih teskoca primjenjene matematike upravo je neo-granicenost operatora diferenciranja. ♦
Naredna tvrdnja nalazi mnoge primjene, a govori o ”produzenju” linearnogogranicenog operatora
Teorem 1.8. (Ogranicena linearna transformacija) Neka je X nor-miran prostor i Y Banachov prostor. Ako je M svuda gust potprostor odX i ako je A : M → Y ogranicen linearan operator, tada postoji jedinstvenogranicen linearan operator A : X → Y , takav da je Ax = Ax za sve x ∈Mi ||A|| = ||A||.
Dokaz : Za svako x ∈ X postoji (xn)n∈N ⊂ M , takav da xn → x kadn→ ∞. Definisimo preslikavanje
Ax = limn→∞
Axn . (1.4)
Y je kompletan prostor, a (Axn)n∈N je Cauchyjev niz jer je (xn)n∈N Cauc-hyjev niz i A je ogranicen operator na M , pa zakljucujemo da gornji limespostoji za svako x ∈ X.Neka su (xn)n∈N i (x′n)n∈N dva razlicita niza koji konvergiraju ka x ∈ X. Naosnovu relacije trougla je
||xn − x′n|| ≤ ||xn − x||+ ||x− x′n|| ,
pa pustajuci da n tezi ka ∞ imamo
limn→∞
||xn − x′n|| = 0 .
A je ogranicen operator na M pa vrijedi
||Axn −Ax′n|| ≤ ||A|| · ||xn − x′n|| → 0 (n→ ∞) .

15
UVOD U TEORIJU OPERATORA
Dakle, nizovi (Axn)n∈N i (Ax′n)n∈N konvergiraju ka istoj vrijednosti, tegranicni proces (1.4) ne ovisi o izboru niza. Ovim potvrdujemo da je pres-likavanje A dobro definisano.Linearnost operatora A slijedi iz linearnosti operatora A. Za x ∈ M , biratcemo konstantni niz xn = x (n ∈ N), te je ocigledno Ax = Ax za x ∈M .Ogranicenost operatora A slijedi iz nejednakosti
||Ax|| = limn→∞
||Axn|| ≤ limn→∞
||A|| ||xn|| = ||A|| ||x|| ,
tojest ||A|| ≤ ||A|| i cinjenice da je Ax = Ax za x ∈M . Dakle, ||A|| = ||A||.Ostaje jos pokazati jedinstvenost ovakvog operatora A. Neka je i A jos
jedno preslikavanje sa datim osobinama. Za proizvoljno x ∈ X neka je(xn)n∈N niz u M koji konvergira ka x. Tada je
Ax = A( limn→∞
xn) = limn→∞
Axn = limn→∞
Axn = Ax .
dakle, A = A. ♣
I naredno tvrdenje govori o produzenju operatora, a na odreden nacin jeupstije od tvrdnje Teorem 1.8. Naime, ogranicen linearan operator cestoje definisan na potprostoru nekog sireg prostora, a bilo bi pozeljno prosiritidomen tog oparatora bez promjene norme operatora.
Teorem 1.9. (Teorem o produzenju) Neka je X normiran prostor i nekaje X njegovo kompletiranje. Neka je Y Banachov prostor i A : X → Yogranicen linearan operator. Tada postoji jedinstven A : X → Y takav da jeAx = Ax za sve x ∈ X i ||A|| = ||A||.
Dokaz ove cinjenice je u potpunosti analogan dokazu Teorem 1.8. Ope-rator A uveden u gornjoj tvrdnji nazivamo produzenje operatora A. Kaosto rekosmo, ceste su situacije u kojima je primjena ovakvog teorema odvelike koristi. Naime, ako radimo sa linearnim ogranicenim operatorom de-finisanim na normiranom prostoru koji nije kompletan, a kako nam je kom-pletnost esencijalna za mnoge karakteristike, ovo tvrdenje nam dozvoljava”dodefinisati” operator na siri prostor od startnog, koji je kompletan, takoda operator zadrzi sve karakteristike sa startnog prostora i norma mu se nepromjeni na sirem porstoru.
1.1.1 Skup ogranicenih linearnih operatora
Skup svih ogranicenih linearnih operatora koji djeluju sa prostora X u pros-tor Y oznacavat cemo sa L(X,Y ),
L(X,Y ) = A : X → Y | A ogranicen i linearan .

1.1. Ogranicenost i neprekidnost
16
Specijalno, ako je X = Y koristit cemo oznaku L(X). Na L(X,Y ) mozemodefinisati operacije sabiranja i mnozenja skalarom. Neka su A,B ∈ L(X,Y )i neka je λ ∈ Φ. Za x ∈ X definisemo
(A+B)xdef= Ax+Bx , (λA)x
def= λAx .
Pri tome je DA+B = DA ∩DB i DλA = DA.Neka su x, y ∈ X i λ, µ, α ∈ Φ. Tada imamo
(A+B)(λx+ µy) = A(λx+ µy) +B(λx+ µy)
= λAx+ µAy + λBx+ µBy
= λ(A+B)x+ µ(A+B)y ,
αA(λx+ µy) = α(λAx + µAy)
= αλAx+ αµAy
= λ(αA)x + µ(αA)y .
Dakle, A+B i αA su linearni operatori. Osim toga vrijedi
||(A+B)x|| = ||Ax+Bx|| ≤ ||Ax||+ ||Bx|| ≤ (||A||+ ||B||) ||x|| , x ∈ X ,
i||(αA)x|| ≤ |α| ||A|| ||x|| ,
pa zakljucujemo da su oni i ograniceni operatori, tj. A+B,αA ∈ L(X,Y ),cime smo pokazali da je L(X,Y ) linearan vektorski prostor. Sta vise, vrijedi
Teorem 1.10. Neka je X proizvoljan normiran prostor i Y Banachov pros-tor. L(X,Y ) je Banachov prostor.
Dokaz : Vec smo pokazali da je L(X,Y ) linearan vektorski prostor. Kakoje svaki A ∈ L(X,Y ) ogranicen operator, onda je velicina
||A|| = supx∈X\0
||Ax||||x|| , (1.5)
dobro definisana. Pri tome vrijedi:
1. 0 ≤ ||A|| = supx∈X\0
||Ax||||x|| < +∞.
2.
||A|| = 0 ⇔ 0 = supx∈X\0
||Ax||||x|| ≥ ||Ax||
||x|| , x ∈ X \ 0
⇔ ||Ax|| ≤ 0 , x ∈ X \ 0⇔ ||Ax|| = 0 , x ∈ X \ 0⇔ Ax = 0 , x ∈ X \ 0⇔ A ≡ 0 .

17
UVOD U TEORIJU OPERATORA
3. Za λ ∈ Φ,
||λA|| = supx∈X\0
||(λA)x||||x|| = |λ| sup
x∈X\0
||(λA)x||||λx||
= |λ| supy∈X\0
||Ay||||y|| = |λ| ||A|| .
4. ||(A+B)x|| ≤ (||A||+ ||B||) ||x|| tojest,
||A+B|| ≤ ||A||+ ||B|| .
Dakle, sa (7.4) je definisana norma na L(X,Y ), te je L(X,Y ) normiranprostor.Neka je sada (An)n∈N ⊂ L(X,Y ), proizvoljan Cauchyjev niz tojest, neka
vrijedi||An −Am|| → 0 , n,m→ ∞ .
Tada za proizvoljan x ∈ X imamo
||Anx−Amx|| ≤ ||An −Am|| ||x|| → 0 , n,m→ ∞ ,
odnosno, za svaki x ∈ X, niz (Anx)n∈N ⊂ Y je Cauchyjev niz. Zbog kom-pletnosti prostora Y , ovi nizovi su konvergentni. Oznacimo sa
A0x = limn→∞
Anx , x ∈ X .
Neka su x, y ∈ X i α, β ∈ Φ proizvoljni. Tada,
A0(αx+ βy) = limn→∞
An(αx+ βy)
= limn→∞
(αAnx+ βAny)
= α limn→∞
Anx+ β limn→∞
Any
= αA0x+ βA0y ,
pa je A0 linearan operator. Iz cauchyjevosti niza (An)n∈N imamo
(∀ε > 0)(∃n0 ∈ N)(∀n,m ∈ N)(n,m ≥ n0 ⇒ ||An −Am|| < ε
2
).
Ako je x ∈ X, ||x|| ≤ 1, onda za n,m ≥ n0 vrijedi
||(An −Am)x|| ≤ ||An −Am|| < ε
2.
Drzimo li n fiksnim, a pustimo da m tezi u beskonacnost, dobijamo iz pos-ljednjeg
||(An −A0)x|| ≤ε
2,

1.1. Ogranicenost i neprekidnost
18
ilisup
||x||≤1||(An −A0)x|| ≤
ε
2< ε .
Dakle, za svako n ≥ n0, operator An − A0 je ogranicen, pa kako su i An
ograniceni operatori, takav mora biti i operator A0 odnosno, A0 ∈ L(X,Y ).Osim toga iz gornjeg imamo
(∀ε > 0)(∃n0)(∀n ∈ N)(n ≥ n0 ⇒ ||An −A0|| < ε) ,
sto ne znaci nista drugo nego da An → A0 (n → ∞), tj. niz (An)n∈N jekonvergentan u L(X,Y ) odnosno, L(X,Y ) je kompletan prostor. Iz svegarecenog imamo da je L(X,Y ) Banachov prostor. ♣
U dokazu gornje teoreme smo koristli konvergenciju niza operatora u ope-ratorskoj normi na L(X,Y ).
Definicija 1.8. Neka je niz (An)n∈N ⊂ L(X,Y ) i A ∈ L(X,Y ). Ako
||An −A|| → 0 kada n→ ∞
tada kazemo da niz (An)n∈N uniformna konvergira ka A i ovu vrstu konver-gencije operatora nazivamo uniformna konvergencija.
Uniformna konvergencija diktirana je topologijom na L(X,Y ) koja je in-dukovana standardnom normom na L(X,Y ). Ova topologija (uniformnatopologija) u opstem slucaju nije jaka topologija. Sta vise, kad god je Xbeskonacnodimenzionalan prostor jaka topologija na L(X,Y ) je razlicita odtopologije indukovane normom na L(X,Y ).
Primjer 1.13. Neka je X = C[0, 1]. Za n ∈ N neka je Kn : X → X definisansa,
Knf(x) =
∫ 1
0xynf(y)dy .
Za proizvoljan n ∈ N je Kn ∈ L(X,X) i pri tome vrijedi Kn → 0 (n → ∞)jer je
||Knf(x)|| ≤ maxy∈[0,1]
|f(y)| maxx∈[0,1]
∫ 1
0xyndy = ||f || · 1
n+ 1→ 0 , n→ ∞ .
Mozemo posmatrati i generalni slucaj. Neka su kn(x, y) neprekidne funkcijena [0, 1] × [0, 1] i neka su njima definisani operatori
Knf(x) =
∫ 1
0kn(x, y)f(y)dy .
Ako maxx∈[0,1]
∫ 1
0kn(x, y)dy → 0 (n → ∞), tada ce niz (Kn)n∈N uniformno
konvergirati ka nul-operatoru. ♦

19
UVOD U TEORIJU OPERATORA
Definicija 1.9. Neka je niz (An)n∈N ⊂ L(X,Y ) i A ∈ L(X,Y ). Ako je
limn→∞
Anx = Ax za svako x ∈ X ,
kazemo da niz (An)n∈N jako konvergira ka A i ovu konvergenciju operatoranazivamo jaka konvergencija.
Jaka konvergencija operatora je u stvari konvergencija po tackama, u od-nosu na normu u prostoru Y . Uniformna i jaka konvegrencija vektora uBanachovom prostoru su jednoteista stvar, dok kod operatora na Banacho-vim prostorima to su dva razlicita pojma. Uniformna konvergencija je jacaod jake konvergencije.
Teorem 1.11. Ako niz operatora (An)n∈N uniformno konvergira ka opera-toru A tada on i jako konvergira ka operatoru A.
Primjer 1.14. Posmatrajmo projektivna preslikavanja Pn na prostoru l2.Dakle, Pn : l2 → l2 i definisan je sa
Pn(x1, x2, ..., xn, xn+1, ...) = (x1, x2, ..., xn, 0, 0, ...) .
Za n,m ∈ N i n 6= m imamo ||Pn − Pm|| = 1 te dakle niz (Pn)n∈N nijeuniformno konvergentan.S druge strane, za proizvoljan x ∈ l2 je Pnx → x (n → ∞) tojest, niz(Pn)n∈N konvergira jako ka identickom opeeratoru I. ♦
Primjer 1.15. Za n ∈ N posmatrajmo preslikavanja Tn : C[0, 1] → R, defi-nisana sa
Tnf =
∫ 1
0sin(nπx)f(x)dx .
Neka je p = p(x) proizvoljan polinom. Koristeci se parcijalnom integracijomimamo
Tnp =p(0)− cos(nπ)p(1)
nπ+
1
nπ
∫ 1
0cos(nπx)p′(x)dx .
Pustajuci da n → ∞, jasno je da Tnp → 0, za proizvoljan polinom p.Neka je sada f ∈ C[0, 1] proizvoljna. Prema Weierstrassovom teoremu, zaproizvoljno ε > 0 postoji polinom p, takav da je ||f − p|| < ε
2 , a premapokazanom, postojat ce i n0 ∈ N, takav da za sve n ≥ n0 ce biti |Tnp| < ε
2 .Kako je ||Tn|| ≤ 1 za proizvoljno n ∈ N, onda je
|Tnf | = |Tnf − Tnp+ Tnp| ≤ ||Tn|| · ||f − p||+ |Tnp| < ε .
Zajkljucujemo da ce vrijediti Tnf → 0 (n → ∞), za proizvoljno f ∈ C[0, 1]tojest, niz (Tn)n∈N konvergira jako ka nul-operatoru.

1.1. Ogranicenost i neprekidnost
20
Ako specijalno izaberemo funkcije fn(x) = sinnπx ∈ C[0, 1], za koje je||fn|| = 1 i |Tnf | = 1
2 , jasno je da tada vrijedi ||Tn|| ≥ 12 (provjeriti da je za-
ista ||Tn|| = 2π ) te ocigledno ovaj niz operatora nije uniformno konvergentan.
♦
Kompozicija linearnih operatora je takode linearan operator. Sta vise,kompozicija ogranicenih operatora je ogranicen operator.
Teorem 1.12. Neka su X,Y i Z normirani prostori i neka je A ∈ L(X,Y )i B ∈ L(Y,Z). Tada je BA ∈ L(X,Z) i vrijedi
||BA|| ≤ ||A|| · ||B|| .
Dokaz : Za proizvoljno x ∈ X, zbog ogranicenosti operatora A i B imamo
||(BA)x|| = ||B(Ax)|| ≤ ||B|| · ||Ax|| ≤ ||B|| · ||A|| · ||x|| .
Odavde je ocigledno ||BA|| ≤ ||A|| · ||B||. ♣
Kao posljedicu gornje tvrdnje imamo da za proizvoljne A ∈ L(X,X) in ∈ N vrijedi, ||An|| ≤ ||A||n. Dakle, u opstem slucaju ne vrijedi jednakostnorme kompozicije i proizvoda normi. Naime, neka su A,B : R2 → R2
zadata matricama
A =
[λ 00 0
]i B =
[0 00 µ
].
Euklidske norme ovih matrica su ||A|| = |λ|, ||B|| = |µ|, dok je ||AB|| =||BA|| = 0, te za λ, µ 6= 0 ocigledno vrijedi ||BA|| < ||A|| · ||B||.Linearan vektorski prostor na kome je definisano mnozenje naziva se alge-
bra. Kompozicija operatora definise produkt na prostoru L(X,X), te datiprostor predstavlja algebru. Kako je kompozicija preslikavanja asocijativna(AB)C = A(BC), to je L(X,X) asocijativna algebra, ali ne i komutativnajer u opstem slucaju ne vrijedi AB = BA.
1.1.2 Primjene operatorske konvergencije
Iskoristimo pojam operatorske konvergencije za definisanje eksponencijalnefunkcije sa operatorskim eksponentom. Neka je A : X → X ogranicenlinearan operator na Banachovom prostoru X. Po analogiji za razvoj eks-ponencijalne funkcije u McLaurinov red, stavimo
eA = I +A+1
2!A2 +
1
3!A3 + · · · + 1
n!An + · · · (1.6)
Stavljajuci specijalno ||A|| umjesto A u gornjoj jednakosti, dobijamo obicannumericki red
e||A|| = 1 + ||A|| + 1
2!||A||2 + 1
3!||A||3 + · · · + 1
n!||A||n + · · · ,

21
UVOD U TEORIJU OPERATORA
koji je konvergentan za proizvoljno ||A|| <∞, a sto onda znaci da je red nadesnoj strani u (1.6) apsolutno konvergentan na L(X), a time i konvergen-tan. Sta vise, vidimo da vrijedi
∣∣∣∣eA∣∣∣∣ ≤ e||A|| .
Ako operatori A i B komutiraju, onda mnozenjem i rearanziranjem sume ueksponencijalnom razvoju nam daju da vrijedi
eAeB = eA+B .
Rjesenje Cauchyjevog problema za linearnu, skalarnu obicnu diferencijalnujednacinu xt = ax, sa polaznim uslovom x(0) = x0, dato je sa x(t) = x0e
at.Ovaj rezultat mozemo generalizovati na linearni sistem ovakvih jednacinatojest,
xt = Ax , x(0) = x0 (1.7)
gdje je x : R → X, X Banachov prostor i A : X → X ogranicen linearanoperator. Ne toliko ocigledno, ali ocekivano ce rjesenje problema (1.7) bitix(t) = etAx0. To imamo zbog sljedeceg,
d
dtetA = lim
h→0
(e(t+h)A − etA
h
)
= etA limh→0
(ehA − I
h
)
= etA limh→0
∞∑
n=0
1
(n+ 1)!Anhn
= AetA .
Kao vazan specijalan slucaj gornjeg rezultata imamo konacne linearne sis-teme ODE, gdje je X = Rn, a A kvadratna matrica formata n× n.
Primjer 1.16. Neka je k : [0, 1]×[0, 1] → R neprekidna funkcija iK integralnioperator
Ku(x) =
∫ 1
0k(x, y)u(y)dy .
Rjesenje problema,
ut(x, t) + λu(x, t) =
∫ 1
0k(x, y)u(y, t)dy , u(x, 0) = u0(x) ,
za u(·, t) ∈ C[0, 1] je u = e(K−λI)tu0 ♦
Jednoparamatarska familija operatora T (t) = etA se naziva tok evolucionejednacine (1.7). Operator T (t) preslikava rjesenje koje imamo u trenutku0 u rjesenje koje imamo u vremenskom trenutku t. Za ovu familiju vrijedenaredne tvrdnje.

1.1. Ogranicenost i neprekidnost
22
Teorem 1.13. Neka je A : X → X ogranicen linearan operator i neka jeT (t) = etA za t ∈ R. Tada vrijedi:
1. T (0) = I.
2. T (s)T (t) = T (s+ t).
3. T (t) → I uniformno kada t→ 0.
Proizvoljna jednoparametarska familija T (t) | t ∈ R koja zadovoljava 1.,2. i 3. gornje teoreme, naziva se jednoparametarska uniformno neprekidnagrupa. Osobine 1. i 2. impliciraju da ovakvi operatori formiraju komutativnugrupu u odnosu na kompoziciju, dok osobina 3. znaci da T : R → L(X) jeneprekidno preslikavanje u odnosu na norma topologiju na L(X) u tackit = 0. Osobine grupe impliciraju da je T uniformno neprekidna na R tojest,||T (t)− T (t0)|| → 0 kada t→ t0, za svako t0 ∈ R.Svaka jednoparametarska uniformno neprekidna grupa operatora moze biti
zapisana u formi T (t) = etA, za pogodan operator A, koga onda nazivamogenerator grupe. Generatora ovakve grupe mozemo dobiti izracunavajuci
A = limt→0
T (t)− I
t.
Mnoge linearne parcijalne diferencijalne jednacine predstavljaju evolucionejednacine oblika (1.7), gdje je A neogranicen operator. Pod odredenim uslo-vima na operator A, postoji rjesenje familije T (t), koje je moguce definisanosamo za t ≥ 0 i koje je strogo neprekidno po t, radije nego uniformno ne-prekidno. Za ovakvu familiju onda kazemo da predstavlja C0-semigrupu(primjer za ovo je jednacina toplote).Kao drugi primjer gdje koristimo operatorsku konvergenciju navodimo nu-
mericku analizu.Neka su X i Y Banachovi prostori i A : X → Y nesingularan linearni ope-rator. Za zadato f ∈ Y posmatrajmo operatorsku jednacinu
Au = f , (1.8)
sa nepoznatom u. Pretpostavimo da mozemo aproksimirati jednacinu (1.8)jednacinom
Aεuε = fε , (1.9)
cije rjesenje uε mozemo naci na jednostavniji nacin. Pretpostavljamo da jeAε : X → Y nesingularan linearan operator koji ima ogranicen inverz. Fa-miliju jednacina (1.9) nazivamo aproksimaciona sema problema (1.8). Na-primjer, ako je (1.8) diferencijalna jednacina, tada je (1.9) odgovarajucadiferentna sema, gdje je ε mrezna podjela. Jedna od komplikacija moze bitida numericka aproksimacija Aε djeluje na prostoru Xε koji je razlicit od X.Zato jednostavnosti radi pretpostavimo da to nije slucaj tojest, da A i Aε
djeluju sa istog prostora X. Primarni zahtjev na aproksimacionu semu jeda je ona konvergentna, sto uvodimo definicijom.

23
UVOD U TEORIJU OPERATORA
Definicija 1.10. Aproksimaciona sema (1.9) konvergira ka (1.8) ako i samoako uε → u (ε→ 0), kada fε → f .
Ideju da Aε aproksimira A preciziramo kroz pojam konzistentnosti.
Definicija 1.11. Aprokismaciona sema (1.9) je konzistentna sa (1.8) akoi samo ako Aεv → Av (ε→ 0), za svako v ∈ X.
Drugacije receno, aproksimaciona sema je konzistentna ako Aε konvergirajako ka A kada ε→ 0. Konzistentnos nije sama po sebi dovoljna za konver-genciju. Za to nam je potrebna jos jedna osobina aproksimacione seme.
Definicija 1.12. Aproksimaciona sema (1.9) je stabilna ako i samo akopostoji konstanta M neovisna o ε, takva da je
||A−1ε || ≤M .
Konzistentnost i konvergencija uvezuju operatore Aε i A, dok je osobinastabilnosti samo vezana za operator Aε. Stabilnost ce igrati krucijalnu uloguu konvergenciji jer sprijecava povecanje greske u aproksimacionom rjesenjukada ε→ 0.
Teorem 1.14. Konzistentna aproksimaciona sema je konvergentna ako isamo ako je stabilna.
Dokaz : Posmatrajmo problem Au = f i njegovu aproksimativnu semuAεuε = fε i neka je aproksimaciona sema konzistentna.Neka je aproksimaciona sema stabilna. Ako na jednakost
u− uε = A−1ε (Aεu−Au+ f − fε) ,
primjenimo normu i iskoristimo definiciju norme operatora i nejednakosttrougla, dobijamo
||u− uε|| ≤ ||A−1ε ||(||Aεu−Au||+ ||f − fε||) .
Kako Aεu → Au kada ε → 0 (konzistentnost) i kako je ||A−1ε || ≤ M (stabi-
lonost), zakljucujemo da ce vrijediti u → uε kad fε → f , a to predstavljakonvergenciju aproksimacione seme.Pretpostavimo sada da je aproksimaciona sema konvergentna. Za pro-
izvoljno f ∈ Y neka je uε = A−1ε f . Pustajuci da ε → 0 iz konvergencije
imamo da je uε → u tojest, niz (uε) je konvergentan, a time i ogranicen.Dakle, postoji konstanta Mf neovisna o ε, takva da je ||uε|| = ||A−1
ε f || ≤Mf . Teorem o unifromnoj ogranicenosti (koga cemo raditi nesto kasnije)nam tada garantuje da ce postojati univerzalna konstanta M > 0 takva daje ||Aε|| ≤M , a to prdstavlja stabilnost aproksimacione seme. ♣
Na zalost, neki ovakav generalni kriterij za konvergenciju aproksimacioneseme ne postoji za nelinearne probleme.

1.2. Inverzni operator
24
1.2 Inverzni operator
Neka je A : X → Y linearan operator ciji je domen DA ⊆ X i kodomenRA ⊆ Y . Ukoliko za svako y ∈ RA, jednacina y = Ax ima jedinstvenorjesenje x ∈ DA, onda kazemo da postoji inverzno preslikavanje, u oznaciA−1, preslikavanja A i zapisujemo x = A−1y. Pri tome je DA−1 = RA iRA−1 = DA. Dakle, za postojanje inverznog operatora linearnog operatoraA : DA → RA, dovoljno je da A bude injektivno preslikavanje. Kao sto jepokazano ranije injektivnost je direktno vezana za jezgro operatora. Naime,linearan operator A je injektivan ako i samo ako jeKer(A) = 0. Ukoliko jeKer(A) = 0 kazemo da je operator nesingularan, u suprotnom je operatorsingularan.
1.2.1 Opsta teorija o inverznom operatoru
Definicija 1.13. Za operator A kazemo da je inverzibilan ako postoji ope-rator B takav da vrijedi A B = B A = I, gdje je I identicko preslika-vanje. Tada za operator B kazemo da je inverzni operator operatora A ioznacavamo ga sa B = A−1.
U konacnodimenzionalnim prostorima uslov A B = I je dovoljan za za-kljucak da je operator A inverzibilan i da je B = A−1, a razlog je taj sto su ukonacnodimenzionalnim prostorima linearna preslikavanja odredena matri-cama i sto nam uslov det(A) 6= 0 obezbjeduje postojanje inverzne matrice.U beskonacnodimenzionalnim prostorima stvari su nesto drugacije. Na-ime, posluzimo se primjerom lijevog i desnog shift operatora na l2. Zax = (xn)n∈N ∈ l2 neka su AR : l2 → l2 i AL : l2 → l2 definisani sa
ARx = (0, x1, x2, ...) i ALx = (x2, x3, ...) .
Za x ∈ l2 sada imamo
(AL AR)x = AL(ARx) = AL(0, x1, x2, ...) = (x1, x2, ....) = x ,
tojest, AL AR = I. Ali
(AR AL)x = AR(ALx) = AR(x2, x3, ...) = (0, x2, x3, ....) 6= x ,
odnosno Ar AL 6= I, te je jasno da ova dva operatora jedan drugom nisuinverzni.
Teorem 1.15. Ako postoji, inverzni operator linearnog operatora je i samlinearan operator.
Dokaz : Neka postoji inverzni operator i neka su y1, y2 ∈ DA−1 = RA iα, β ∈ Φ proizvoljni. Tada postoje jednoznacni x1, x2 ∈ DA, takvi da je

25
UVOD U TEORIJU OPERATORA
Ax1 = y1 i Ax2 = y2, a ovo znaci i x1 = A−1y1, x2 = A−1y2. Sada imamo,
A−1(αy1 + βy2) = A−1(αAx1 + βAx2)
= A−1A(αx1 + βx2)
= αx1 + βx2
= αA−1y1 + βA−1y2 . ♣
Sljedece dvije elementarne tvrdnje za inverzni operator navodimo bez do-kaza.
Teorem 1.16. Ako postoji inverzni operator od A, tada je(A−1
)−1= A.
Teorem 1.17. Neka za operatore A i B postoje inverzni operatori. Tadapostoji inverzni operator od A B i vrijedi
(A B)−1 = B−1 A−1 .
Teorem 1.18. Neka je A : X → Y linearan operator. A ima ograniceninverzan operator na RA ako i samo ako vrijedi
(∃m > 0)(∀x ∈ X) ||Ax|| ≥ m ||x|| . (1.10)
Pri tome vrijedi∣∣∣∣A−1
∣∣∣∣ ≤ 1m .
Dokaz : Neka A ima ogranicen inverzni operator, tj. neka vrijedi
(∃M > 0)(∀y ∈ RA)∣∣∣∣A−1y
∣∣∣∣ ≤M ||y|| .Kako za svako y ∈ RA, postoji x ∈ DA tako da je A−1y = x, gornju cinjenicumozemo iskazati i sa
(∃M > 0)(∀x ∈ DA) ||x|| ≤M ||Ax|| ,odnosno stavljajuci da je m = 1
M imamo
(∃m > 0)(∀x ∈ DA) ||Ax|| ≥ m ||x|| .Neka sada vrijedi (1.10) pri cemu A : X → RA ⊆ Y . Neka je Ax = 0 zaneko x ∈ X. Tada na osnovu (1.10) vrijedi
0 = ||Ax|| ≥ m ||x|| ,a odavde je onda ||x|| = 0, te je x = 0. Dakle, A ima inverzni operatorA−1 : RA → X, pa jednacina y = Ax ima jedinstveno rjesenje x = A−1y.Na osnovu ovoga, iz (1.10) onda imamo
(∃m > 0)(∀y ∈ RA) ||y|| ≥ m∣∣∣∣A−1x
∣∣∣∣ ,ili
(∃m > 0)(∀y ∈ RA)∣∣∣∣A−1y
∣∣∣∣ ≤ 1
m||y|| .
Ovo znaci da je operator A−1 ogranicen, a osim toga, prema definicijiogranicenosti operatora, zakljucujemo i da vrijedi
∣∣∣∣A−1∣∣∣∣ ≤ 1
m . ♣

1.2. Inverzni operator
26
1.2.2 Primjena teorije inverznog oparatora
Teorem o geometrijskom redu
Jedan specijalan slucaj egzistencije inverznog operatora dajamo u sljedecojtvrdnji, a cesto se pojavljuje u numerickoj analizi i primjenjenoj matematici.
Teorem 1.19. (Teorem o geometrijskom redu)Neka je X Banachov prostor i A ∈ L(X) takav da je ||A|| < 1. Tada jeI − A bijekcija na X, njegovo inverzno preslikavanje je ogranicen linearanoperator za koga vrijedi
(I −A)−1 =
∞∑
n=0
An i ||(I −A)−1|| ≤ 1
1− ||A|| .
Dokaz : Neka je n ≥ 0 proizvoljan. Posmatrajmo red Mn =n∑
i=0
Ai. Za
p ∈ N proizvoljno vrijedi
||Mn+p −Mn|| =∣∣∣∣∣
∣∣∣∣∣
n+p∑
i=n+1
Ai
∣∣∣∣∣
∣∣∣∣∣ ≤n+p∑
i=n+1
||Ai|| ≤n+p∑
i=n+1
||A||i .
Koristeci pretpostavku ||A|| < 1, zakljucujemo
||Mn+p −Mn|| ≤||A||n+1
1− ||A|| . (1.11)
Dakle,supp≥1
||Mn+p −Mn|| → 0 , n→ ∞ ,
te je dakle (Mn)n∈N Cauchyjev niz u L(X), a kako je ovaj kompletan prostor,postoji M ∈ L(X) takav da
Mn →M , n→ ∞ .
Koristeci definiciju od Mn, jednostavnim racunom se provjerava da vrijedi
(I −A) Mn =Mn (I −A) = I −An+1 .
Pustajuci da n→ ∞ imamo
(I −A) M =M (I −A) = I .
Gornje znaci da je (I −A) bijekcija na X i pri tome je
M = (I −A)−1 = limn→∞
Mn =
∞∑
n=0
An .

27
UVOD U TEORIJU OPERATORA
Za proizvoljno n ≥ 0 je
||Mn|| =∣∣∣∣∣
∣∣∣∣∣
n∑
i=0
Ai
∣∣∣∣∣
∣∣∣∣∣ ≤n∑
i=0
||Ai|| ≤n∑
i=0
||A||i ≤ 1
1− ||A|| .
Pustajuci da n→ ∞ zakljucujemo ogranicenost operatora M ,
||M || = ||(I −A)−1|| ≤ 1
1− ||A|| . ♣
Gornji teorem nam govori da pod pretpostavkama teorema, za proizvoljnoy ∈ X, jednacina (I − A)x = y ima jedinstveno rjesenje x = (I − A)−1y ∈X. Sta vise, ovo rjesenje je neprekidno zavisno o y ∈ X. Zaista, ako je(I −A)x1 = y1 i (I −A)x2 = y2, tada je
x1 − x2 = (I −A)−1(y1 − y2) ,
odakle je onda||x1 − x2|| ≤ C · ||y1 − y2|| ,
gdje je C = 11−||A|| . Teorem nam omogucava dobiti i aproksimativno rjesenje
jednacine (I −A)x = y sax = lim
n→∞xn ,
gdje je xn =n∑
i=0
Aiy.
Primjer 1.17. Posmatrajmo linearnu integralnu jednacinu drugog reda
λu(x)−∫ b
ak(x, y)u(y)dy = f(x) , a ≤ x ≤ b .
Neka su λ 6= 0, k(·, ·) neprekidna funkcija po x, y ∈ [a, b] i f ∈ C[a, b].Neka je X = C[a, b] sa standardnom maksimum normom. Gornju jednacinuuobicajeno simbolicki zapisujemo u formi
(λI −K)u = f , (1.12)
gdje je K integralni operator generisan jezgrom k,
Ku(x) =
∫ b
ak(x, y)u(y)dy .
Jednacinu (1.12) mozemo transformisati u jednacinu
(I −A)u =1
λf ,

1.2. Inverzni operator
28
gdje je A = 1λK, cime problem prelazi u domen teorema o geometrijskom
redu. Pod pretpostavkom da je
||A|| = 1
|λ| ||K|| < 1 ,
tada postoji (I −A)−1 i pri tome je ||(I −A)−1|| ≤ 11−||A|| . Pretpostavka ce
biti zadovoljena ako je
||K|| = maxa≤x≤b
∫ b
a|k(x, y)|dy < |λ| (1.13)
i tada mozemo tvrditi da ce postojati (λI −K)−1 i da ce biti zadovoljeno
||(λI −K)−1|| ≤ 1
|λ| − ||K|| .
Dakle, pod pretpostavkom (1.13) za f ∈ C[a, b], jednacina (1.12) ce imatijedinstveno rjesenje u ∈ C[a, b] za koga ce vrijediti
||u||∞ ≤ ||(λI −K)−1|| · ||f ||∞ ≤ ||f ||∞|λ| − ||K|| ♦
Primjetimo da je teorem o geometrijskom redu potpuna generalizacija slucajarealnog geometrijskog reda
(1− x)−1 =
∞∑
n=0
xn , x ∈ R , |x| < 1 ,
ili kompleksnog slucaja
(1− z)−1 =
∞∑
n=0
zn , z ∈ C , |z| < 1 .
Iz dokaza teorema vidimo da ce za A ∈ L(X) na Banachovom prostoru X,
za ||A|| < 1 red
∞∑
n=0
An konvergirati u L(X) i to ka ogranicenom linearnom
operatoru (I −A)−1.Jos generalnije, mozemo definisati operatorsku funkciju f(A), pomocu realnefunkcije f realne promjenljive (ili kompleksne funkcije kompleksne promjen-ljive) koja je analiticka funkcija za x = 0 tojest, moze se razviti u potencijalnired
f(x) =
∞∑
n=0
anxn , |x| < δ ,

29
UVOD U TEORIJU OPERATORA
za neko δ > 0 i an = f(n)(0)n! , n ∈ N0. Sada ako je X Banachov prostor i
A ∈ L(X), takav da je ||A|| < δ, mozemo definisati
f(A) =
∞∑
n=0
anAn .
Red na desnoj strani je dobro definisan operator iz L(X) zahvaljujuci pret-postavci ||A|| < δ. Primjeri ovakvih operatorskih funkcija bi bili
eA =∞∑
n=0
1
n!An ,
sin(A) =
∞∑
n=0
(−1)n
(2n+ 1)!A2n+1 ,
arctg(A) =
∞∑
n=0
(−1)n
2n+ 1A2n+1 , ||A|| < 1 ,
gdje je A ∈ L(X), X Banachov prostor.
Generalizacija teorema o geometrijskom redu
Teorem 1.20. Neka je X Banachov prostor i A ∈ L(X). Pretpostavimo daza neko cjelobrojno m ≥ 1 vrijedi ||Am|| < 1. Tada je (I − A) bijekcija naX, njegov inverzni operator je linearan operator za koga vrijedi
||(I −A)−1|| ≤ 1
1− ||Am||
m−1∑
i=0
||Ai|| .
Dokaz : Operator Am zadovoljava uslove Teorema 1.19, te vrijedi da pos-toji (I −Am)−1 koji je ogranicen linearan operator na X i pri tome je
(I −Am)−1 =
∞∑
i=0
(Am)i u L(X) .
Pri tome vrijedi procjena
||(I −Am)−1|| ≤ 1
1− ||Am|| .
Iz jednakosti
(I −A) (
m−1∑
i=0
Ai
)=
(m−1∑
i=0
Ai
) (I −A) = I −Am ,

1.2. Inverzni operator
30
zakljucujemo da je (I − A) bijekcija na X, a mnozenjem posljednjeg saodgovarajucim inverzima imamo da vrijedi
(I −A)−1 =
(m−1∑
i=0
Ai
) (I −Am)−1 .
Pri tome je
||(I −A)−1|| =∣∣∣∣∣
∣∣∣∣∣
(m−1∑
i=0
Ai
) (I −Am)−1
∣∣∣∣∣
∣∣∣∣∣ ≤∣∣∣∣∣
∣∣∣∣∣
(m−1∑
i=0
Ai
)∣∣∣∣∣
∣∣∣∣∣ · ||(I −Am)−1||
≤ 1
1− ||Am||
(m−1∑
i=0
||Ai||)
♣
Gornji rezultat ce nam posluziti za nalazenje rjesenja integralne jednacineVolterrinog tipa drugog reda
u(x)−∫ x
0h(x, y)u(y)dy = f(x) , x ∈ [0, β] ,
gdje je β > 0, h(·, ·) neprekidna funkcija za 0 ≤ y ≤ x ≤ β i f ∈ C[0, β]. Akobi smo koristili Teorem 1.19, za egzistenciju i jedinsvenost rjesenja polaznejednacine bi nam trebala procjena
max0≤x≤β
∫ x
0|h(x, y)|dy < 1 .
Medutim, koristeci se Teoremom 1.20 mozemo doci do istog na drugacijinacin. Polaznu jednacinu posmatrajmo u formi (I − A)u = f , gdje je A :C[0, β] → C[0, β], linearan ogranicen integralni operator, zadat sa
Au(x) =
∫ x
0h(x, y)u(y)dy , 0 ≤ x ≤ β .
Iterirani operator Ak (kompozicija operatora sa samim sobom) ima sljedecuformu
Aku(x) =
∫ x
0hk(x, y)u(y)dy ,
za k = 1, 2, 3, .., gdje je h1(x, y) = h(x, y) i pri cemu je
hk+1(x, y) =
∫ x
yhk(x, z)h(z, y)dz .
Iz pretpostavke o neprekidnosti funkcije h imamo njenu ogranicenost i nekaje
M = max0≤y≤x≤β
|h(x, y)| .

31
UVOD U TEORIJU OPERATORA
Tada je |h1(x, y)| ≤ M za 0 ≤ y ≤ x ≤ β. Pretpostavimo da je za nekocjelobrojno k ≥ 1 zadovoljeno
|hk(x, y)| ≤Mk (x− y)k−1
(k − 1)!, 0 ≤ y ≤ x ≤ β .
Sada imamo
|hk+1(x, y)| ≤∫ x
y|hk(x, z)h(z, y)|dz
≤Mk+1
∫ x
y
(x− z)k−1
(k − 1)!dz
=Mk+1 (x− y)k
k!.
Sada za proizvoljno k ≥ 1 i proizvoljno x ∈ [0, β] imamo
|Aku(x)| ≤∫ x
0|hk(x, y)||u(x)|dx
≤∫ x
0Mk (x− y)k−1
(k − 1)!dy · ||u||∞
=Mk xk
k!· ||u||∞ ,
iz cega zakljucujemo da je
||Ak|| ≤Mk βk
k!, k = 1, 2, 3, ...
Jasno je sada da ce za dovoljno veliko k biti zadovoljeno ||Ak|| < 1 te je zado-voljen uslov Teorema 1.20, iz cega onda dobijamo informaciju o ogranicenostioperatora (I − A)−1, a time i ogranicenja za rjesenje polazne integralnejednacine.
Perturbaciona metoda
Jedna vazna tehnika u primjenjenoj matematici bazira se na zamjeni polaznejednacine njoj ”bliskom” jednacinom za koju imamo egzistenciju rjesenja.Vazan alat u toj tehnici je sljedeci teorem o perturbaciji.
Teorem 1.21. Neka su X i Y normirani prostori od kojih je bar jedankompletan i neka je L ∈ L(X,Y ) koji ima ogranicen inverzan operator L−1 :Y → X. Neka je A ∈ L(X,Y ) koji zadovoljava
||A− L|| < 1
||L−1|| .

1.2. Inverzni operator
32
Tada je A bijektivno preslikavanje na X, A−1 ∈ L(Y,X) i vrijedi
||A−1|| ≤ ||L−1||1− ||L−1|| · ||A− L|| . (1.14)
Sta vise, vrijedi
||A−1 − L−1|| ≤ ||L−1||2 · ||A− L||1− ||L−1|| · ||A− L|| . (1.15)
Za rjesenja jednacina Lx1 = f i Ax2 = f tada vrijedi procjena,
||x1 − x2|| ≤ ||A−1|| · ||(A− L)x1|| . (1.16)
Dokaz : Neka je A ∈ L(X,Y ) takav da ||A − L|| < 1
||L−1|| . Ukoliko je Y
kompletan prostor izrazimo ovaj operator sa A = (I − (L − A) L−1) L,a ukoliko je X kompletan onda stavimo A = L (I − L−1 (L − A)).Bez umanjenja opstosti pretpostavimo da je Y kompletan prostor. Tadaje operator (L − A) L−1 linearan na Y i za koga prema pretpostavkamatvrdenja vrijedi
||(L−A) L−1|| ≤ ||(L−A)|| · ||L−1|| < 1 ,
te je on i ogranicen. Tada prema Teoremu 1.19 postoji (I−(L−A)L−1)−1,pri cemu je
||(I − (L−A) L−1)−1|| ≤ 1
1− ||(L−A) L−1|| ≤1
1− ||L−A|| · ||L−1|| .
Dakle, postoji A−1 i pri tome je
A−1 = L−1 (I − (L−A) L−1)−1 ,
i za koga vrijedi procjena (1.14),
||A−1|| ≤ ||L−1|| · ||(I − (L−A) L−1)−1|| ≤ ||L−1||1− ||L−A|| · ||L−1|| .
Kako je L−1 −A−1 = A−1 (A− L) L−1, onda vrijedi i procjena (1.15),
||L−1 −A−1|| ≤ ||A−1|| · ||(A− L) L−1|| ≤ ||L−1||2 · ||A− L||1− ||L−1|| · ||A− L|| .
Neka je Lx1 = f i Ax2 = f . Iz utvrdene egzistencije inverznih operatoraimamo da je x1 = L−1f i x2 = A−1f . Tada je
x1 − x2 = (L−1 − L−1)f = A−1 (A− L) L−1f = A−1 (A− L)x1 ,

33
UVOD U TEORIJU OPERATORA
sto nakon uzimanja norme i koristenja ogranicenosti odgovarajucih opera-tora daje
||x1 − x2|| ≤ ||A−1|| · ||(A− L)x1|| ♣
Operator A u gornjoj teoremi se naziva perturbacija operatora L. Gornjiteorem bi mogli parafrazirati na sljedeci nacin: Operator koji je blizu ope-ratora koji ima ogranicen inverz i sam ce imati ogranicen inverz. Ova idejaje okvir koji se koristi u mnogim problemima rjesivosti linearnih diferenci-jalnih i integralnih jednacina, a varijacija ovakve ideje se koristi cak i prirjesavanju nelinearnih problema.Nejednakost (1.15) mozemo citati kao lokalnu Lipschitz neprekidnost ope-
ratorskog inverza, a nejednakost (1.16) mozemo shvatiti kao procjenu greskerjesenja koja nastaje ako za zadati operator A koristimo njemu ”bliski” ope-rator L, ili ako za poznati operator L koristimo njemu perturbovan operatorA, dakle zavisno od nacina pristupa rjesavanju problema.Posmatrajmo jednacinu Lx = f kao egzaktan problem i posmatrajmo nizalroksimacionih problema Lnxn = f (n ∈ N). Pod pretpostavkom da niz(Ln)n∈N konvergira ka operatoru L mozemo primjeniti teorem o perturbacijii konstatovati da ce za dovoljno veliko n, problem Lnxn = f imati jedins-tveno rjesenje x∗n, za koga ce vrijediti
||x− x∗n|| ≤ ||L−1n || · ||(L− Ln)x|| . (1.17)
Postojanost (konzistentnost) aproksimacije definisana je uslovom da
||(L− Ln)x|| → 0 , n→ ∞ .
Stabilnost rjesenja je definisana uslovom da je niz (Ln)n≥k unifrmno ogranicen.Jasno je da konzistentnost plus stabilnost daju konvergenciju,
||x− x∗n|| → 0 , n→ ∞ .
Procjena greske (1.17) daje nam dovoljne uslove za konvergenciju (i procjenureda greske pod pretpostavkom o regularnosti rjesenja x) cak i prije negorijesimo aproksimacioni problem Lnxn = f . Ovakvu procjenu nazivamo apriori procjena greske.Drugi nacin koristenja procjene (1.16) jeste posmatranje stvarnog problemaAx = f i Ln (n ∈ N) kao aproksimacije operatora A. Neka je xn rjesenjeaproksimacionog problema Lnxn = f , koji ima jedinstveno rjesenje za do-voljno veliko n. Tada opet imamo procjenu
||x− xn|| ≤ ||A−1|| · ||(A− Ln)xn|| .Pretpostavimo da imamo procjenu za ||A−1||. Nakon sto nademo aprok-simativno rjesenje xn, gornja procjena nam daje gornje ogranicenje greskerjesenja polaznog problema. Ova procjena se naziva a posteriori procjenagreske.

1.2. Inverzni operator
34
Primjer 1.18. Ispitajmo rjesivost integralne jednacine za λ 6= 0,
λu(x)−∫ 1
0sin(xy)u(y)dy = f(x) , 0 ≤ x ≤ 1 .
Na osnovu Primjera 1.17 imamo da ako je
|λ| > ||K|| =∫ 1
0sin ydy = 1− cos 1 ≈ 0.4597 ,
tada polazna jednacina ima jedinstveno rjesenje u ∈ C[0, 1], za svako f ∈C[0, 1].Naravno, postavlja se pitanje da li mozemo prosiriti skup vrijednosti za λ zakoje polazna jednacina ima jedinstveno rjesemje? Odgovor na ovo pitanjecemo potraziti primjenom perturbacione metode.Kako je sin(xy) ≈ xy za male vrijednosti od |xy|, polazni problem cemouporediti sa modifikovanim problemom
λv(x) −∫ 1
0xyv(y)dy = f(x) , 0 ≤ x ≤ 1 .
U notaciji perturbacionog metoda, polazna jednacina je Au = f , a gornjaje Lv = f . Prostor X = C[0, 1] sa standardnom maksimumm normom iA,L ∈ L(X).Modifikovanu jednacinu mozemo rjesiti eksplicitno. Pod pretpostavkom daje λ 6= 0, eksplicitno rjesenje ima formu
v(x) =1
λ(f(x) + cx) ,
za neku konstantu c. Zamjenjujuci ovu formu u modifikovanoj jednacini,nalazimo vrijednsot konstante c, te je rjesenje modifikovane jednacine
v(x) =1
λ
(f(x) +
1
λ− 13
∫ 1
0xyf(y)dy
), za λ 6= 0,
1
3.
Ova jednakost nam u stvari definise L−1f , za svako f ∈ C[0, 1]. Za koristenjeteorema o perturbaciji potrebne su nam sljedece velicine, koje dobijamokracim racunom.
||L−1|| ≤ 1
|λ|
(1 +
1
2|λ− 13 |
).
||L−A|| =∫ 1
0(y − sin y)dy = cos 1− 1
2≈ 0.0403 .
Uslov teorema o perturbaciji ||A− L|| < 1||L−1|| sada glasi
cos 1− 1
2<
(1
|λ|
(1 +
1
2|λ− 13 |
))−1
,

35
UVOD U TEORIJU OPERATORA
5
10
15
20
25
30
1−1
y = c
c = 1cos 1− 1
2
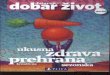
Slika 1.2: Graf funkcije
ili u ekvivalentnoj formi
1
|λ|
(1 +
1
2|λ− 13 |
)<
1
cos 1− 12
. (1.18)
Na slici vidimo da za realne vrijednosti od λ postoje tri podrucja u kojima jezadovoljena nejednakost (1.18): λ < 0, 0 < λ < 1
3 i λ > 13 . U slucaju λ < 0,
nejednakost (qrefperturbacija5) ce biti zadovoljena ako je λ < λ0 ≈ −0.0881,gdje je λ0 negativno rjesenje jednacine
λ2 −(5
6− cos 1
)λ− 5
6
(cos 1− 1
2
).
Bez primjene perturbacione teorije jedinstvenost rjesenja polazne jednacinesmo mogli garantovati za |λ| > 0.4597, a vidimo primjenom perturbacioneteorije da cemo to moci garantovati i za slucaj λ < −0.0881, sto predstavljaocigledno poboljsanje. ♦
1.2.3 Princip otvorenog preslikavanja
Lema 1.22. Neka je M svuda gust skup u Banachovom prostoru X. Tadase svaki nenula vektor x ∈ X moze prikazati u formi
x =
∞∑
n=1
xn ,

1.2. Inverzni operator
36
gdje su xn ∈M (n ∈ N), takvi da je
||xn|| ≤3
2n||x|| , n ∈ N .
Dokaz : Neka je x ∈ X proizvoljan. Kako je M svuda gust u X, postojix1 ∈ M , takav da je ||x− x1|| ≤ ||x||
2 . Sada vektor x − x1 ∈ X, pa opetzbog svuda gustosti skupa M , postoji x2 ∈M , takav da je ||x− x1 − x2|| ≤||x||22
. Na isti nacin, postoji x3 ∈ M , takav da je ||x− x1 − x2 − x3|| ≤ ||x||23
odnosno, postoji xn ∈M , takav da je
||x− x1 − x2 − · · · − xn|| ≤||x||2n
.
Zbog nacina izbora elemenata xn ∈M (n ∈ N), vrijedi∣∣∣∣∣
∣∣∣∣∣x−n∑
k=1
xk
∣∣∣∣∣
∣∣∣∣∣→ 0 , n→ ∞ ,
tj. red∑∞
k=1 xk konvergira ka elementu x.Pri tome vrijede sljedece ocjene normi,
||x1|| = ||x1 − x+ x|| ≤ ||x1 − x||+ ||x|| ≤ 3
2||x|| ,
||x2|| = ||x2 + x1 − x+ x− x1|| ≤ ||x2 + x1 − x||+ ||x− x1|| ≤3
22||x|| ,
ili za proizvoljno n ∈ N imamo
||xn|| = ||xn + xn−1 + · · ·+ x1 − x+ x− x1 − · · · − xn−1||≤ ||xn + xn−1 + · · ·+ x1 − x||+ ||x− x1 − · · · − xn−1||
≤ 3
2n||x|| . ♣
Teorem 1.23. (Banachov teorem o inverznom operatoru) Neka je Aogranicen linearan operator koji obostrano jednoznacno preslikava Banachovprostor X na Banachov prostor Y . Tada je i inverzni operator A−1 takodeogranicen.
Dokaz : Zbog pretpostavki teorema, preslikavanje A je bijektivno, pa inverznioperator A−1 postoji. Posmatrajmo u prostoru Y skupove
Mk =y ∈ Y |
∣∣∣∣A−1y∣∣∣∣ ≤ k ||y||
, k ∈ N .
Pretpostavimo da postoji y0 ∈ Y (y0 6= 0), takav da y0 /∈ Mk, niti za jednok ∈ N. Tada bi vrijedilo
∣∣∣∣A−1y0∣∣∣∣ > k ||y0|| za sve k ∈ N, odnosno
(∀k ∈ N) ||Ax0|| <1
k||x0|| (Ax0 = y0) .

37
UVOD U TEORIJU OPERATORA
Iz toga onda imamo da je ||Ax0|| = 0, tj. Ax0 = 0 = y0, a sto je u suprotnostisa pretpostavkom da y0 nije nula element.Dakle, vrijedi
Y =⋃
k∈NMk .
Zbog kompletnosti prostora Y , na osnovu Berove teoreme o kategorijama,bar jedan od skupova, neka je to Mn, je gust u nekoj kugli B. Unutar kugleB, posmatrajmo prsten
P =z ∈ B| α <
∣∣∣∣z − y′∣∣∣∣ < β
,
gdje je 0 < α < β, a y′ ∈ Mn proizvoljan. Translirajmo prsten P , tako damu centar bude u nuli, cime dobijamo skup
P0 = z| α < ||z|| < β .
Neka je sada z ∈ P ∩Mn, tada z − y′ ∈ P0 i pri tome vrijedi
∣∣∣∣A−1(z − y′)∣∣∣∣ ≤
∣∣∣∣A−1z∣∣∣∣+
∣∣∣∣A−1y′∣∣∣∣
≤ n(||z||+∣∣∣∣y′∣∣∣∣)
≤ n(∣∣∣∣z − y′
∣∣∣∣+ 2∣∣∣∣y′∣∣∣∣)
= n∣∣∣∣z − y′
∣∣∣∣(1 +
2 ||y′||||z − y′||
)
≤ n∣∣∣∣z − y′
∣∣∣∣(1 +
2 ||y′||α
).
Izraz n(1 + 2||y′||
α
)ne zavisi od z i ako stavimo da je
N = 1 + n
⌊1 +
2 ||y′||α
⌋,
zakljucujemo da z − y′ ∈ MN . Kako je Mn gust u B, a time i u P , to jeskup MN gust u P0.
Neka je sada y ∈ Y proizvoljan nenula element. Moguce je izabrati λ ∈ Φ,takav da je α < ||λy|| < β, tj. da je λy ∈ P0. Kako je MN gust u P0, postojiniz (yk)k∈N ⊂ MN koji konvergira ka λy. Tada niz ( 1λyk)k∈N konvergira kay, a zbog cinjenice da 1
λyk ∈ MN (k ∈ N, λ 6= 0), zakljucujemo da je MN
gust i u Y \ 0, odnosno i u Y .
Neka je opet y proizvoljan nenula element iz Y . Kako je MN gust u Y , naosnovu Leme 1.22, postoje yk ∈MN (k ∈ N), takvi da je
y =∑
k∈Nyk , ||yk|| ≤
3
2k||y|| .

1.2. Inverzni operator
38
Stavimo xk = A−1yk ∈ X (k ∈ N). Kako vrijedi
||xk|| =∣∣∣∣A−1yk
∣∣∣∣ ≤ N ||yk|| ≤3N ||y||
2k,
to red∑
k∈N xk konvergira ka nekom elementu x ∈ X i pri tome je
||x|| ≤∑
k∈N||xk|| ≤ 3N ||y||
∞∑
k=1
1
2k= 3N ||y|| .
Zbog konvergencije reda∑
k∈N xk i neprekidnosti operatora A, imamo
Ax =∑
k∈NAxk =
∑
k∈Nyk = y ,
odakle je onda x = A−1y. Sada vrijedi
∣∣∣∣A−1y∣∣∣∣ = ||x|| ≤ 3N ||y|| ,
za proizvoljno y ∈ Y , a ovo znaci da je A−1 ogranicen operator. ♣
Gornji teorem je jedan od najkoristenijih alata za rjesavanje jednacinaoblika Lx = y, kada je L : X → Y linearan operator. On nam daje egzis-tenciju i jedinstvenost rjesenja za proizvoljan y ∈ Y kroz postojanje inverz-nog operatora L−1. Pored toga, cinjenica o ogranicenosti (neprekidnosti)inverznog operatora nam daje informaciju o stabilnosti rjesenja. Naime,zbog neprekidnosti L−1, male promjene y uzrokuju male promjene rjesenjajednacine. Objasnimo pojam stabilnosti rjesenja preciznije. Posmatrajmojednacine Lx = y i Lx′ = y′. Tada je zbog linearnosti inverza
x− x′ = L−1(y)− L−1y′ = L−1(y − y′) ,
a odavde zbog ogranicenosti imamo
||x− x′|| ≤ ||L−1|| · ||y − y′|| .
Jasno je sada da ako je y−y′ mala velicina, tada ce i x−x′ morati biti malavelicina. Velicina ||L−1|| nam tada daje vezu izmedu greske koju pravimona velicini y i greske koju dobijamo na velicini x.Mnogo vazniji nacin gledanja je posmatranje relativne promjene ovih dvijugresaka,
||x− x′||||x|| ≤ ||L−1|| · ||y − y′||
||x|| = ||L−1|| · ||L|| ||y − y′||||L|| · ||x|| .
Kako je jos ||y|| = ||Lx|| ≤ ||L|| · ||x||, dobijamo procjenu
||x− x′||||x|| ≤ ||L−1|| · ||L|| ||y − y′||
||y|| .

39
UVOD U TEORIJU OPERATORA
Kvantitativnu velicinu ||L−1|| · ||L|| nazivamo uslvni broj jednacine. Primje-timo da je uvijek ||L−1|| · ||L|| ≥ ||L−1L|| = ||I|| = 1 tojest, uslovni brojje uvijek veci ili jednak 1. Problemi u kojima je uslovni broj malen (bliskojedinici) nazivaju se dobro-uslovljeni problemi, a za velike uslovne brojevekazemo da je problem lose-uslovljen.Stav o inverznom operatoru se uobicajeno iskazuje kao posljedica mnogo
poznatije teoreme o otvorenom preslikavanju.
Teorem 1.24. (Princip otvorenog preslikavanja)Neka su X i Y Banachovi prostori i neka je A ogranicen linearan operatorkoji slika X na Y . Tada je A otvoreno preslikavanje, tj. slika otvorenogskupa u X je otvoren skup u Y .
Dakle, najjednostavnije receno, svako neprekidno, linearno i bijektivnopreslikavanje izmedu dva Banachova prostora ima meprekidno inverzno pres-likavanje.Trivijalno je rang operatora linearni vektorski potprostor (Teorem 1.3), ali
da bi obezbjedili da je i on Banachov potprostor (ako je kodomen Banachovprostor) neophodna nam je njegova zatvorenost. U nekim situacijama toimamo na jednostavan nacin ako je kodomen citav prostor.
Primjer 1.19. Posmatrajmo operator T = I +K : C[0, 1] → C[0, 1], gdje jeK Volterrin integralni operator
Kf(x) =
∫ x
0f(y)dy .
(Cesto se operator T naziva perturbacijom identitete (I) za operator K)Pokazimo da je Rang(T ) zatvoren skup. Za proizvoljno g ∈ C[0, 1] posma-trajmo jednacinu g = Tf tojest,
f(x) +
∫ x
0f(y)dy = g(x) .
Stavimo da je F (x) =
∫ x
0f(y)dy, pri cemu je onda F ′ = f , pa polazna
jednacina prelazi u jednacinu
F ′(x) + F (x) = g(x) uz uslov F (0) = 0 .
Rjesenje ovog Cauchyjevog probleme je funkcija
F (x) =
∫ x
0e−(x−y)g(y)dy .
Diferencirajuci posljednju jednacinu po varijabli x dobijamo
F ′(x) = f(x) = g(x) −∫ x
0e−(x−y)g(y)dy , (1.19)

1.2. Inverzni operator
40
i pri tome je f ∈ C[0, 1]. Dakle, za svako g ∈ C[0, 1] postoji f ∈ C[0, 1],tako da je Tf = g, te je Rang(T ) = C[0, 1], a time je to i zatvoren skup.Ocigledno je zbog recenog, da jednacina Tf = 0 ima samo rjesenje f = 0, paje operator T injektivan. Dakle, T je bijektivan operator izmedu Banachovihprostora i pri tome je ogranicen, te je on invertibilan. Sta vise, iz (1.19)vidimo da je
T−1 = (I +K)−1 = I − L ,
gdje je L Volterin integralni operator
Lg(x) =
∫ x
0e−(x−y)g(y)dy . ♦
Narednim tvrdenjem dajemo jedan dobar kriterij utvrdivanja zatvorenostiranga operatora.
Teorem 1.25. Neka je A : X → Y ogranicen linearan operator izmeduBanachovih prostora. Sljedeca tvrdenja su ekvivalentna:
1. Postoji konstanta c > 0, takva da za sve x ∈ X vrijedi c||x|| ≤ ||Ax||.
2. A ima zatvoren rang i jedino rjesenje jednacine Ax = 0 je x = 0.
Dokaz : Pretpostavimo da operator A zadovoljava uslov 1. Tada jednacinaAx = 0 implicira da je ||x|| = 0 odnosno x = 0. Pokazimo da je Rang(A)zatvoren skup. U tom cilju neka je (yn)n∈N proizvoljan konvergentan niziz Rang(A), takav da yn → y ∈ Y (n → ∞). Tada postoji niz (xn)n∈N ⊂X, tako da je Axn = yn (n ∈ N). Za proizvoljne n,m ∈ N, na osnovupretpostavke 1. vrijedi
||xn − xm|| ≤ 1
c||Axn −Axm|| = 1
c||yn − ym|| ,
a kako je (yn)n∈N Cauchyjev niz, takav je onda i niz (xn)n∈N. Zbog kom-pletnosti prostora X, onda je ovaj niz ikonvergentan tojest, xn → x ∈ X(n→ ∞). Operator A je ogranicen, odnosno neprekidan te vrijedi
Ax = A( limn→∞
) = limn→∞
Axn = limn→∞
yn = y .
Dakle, y ∈ Rang(A) te je Rang(A) zatvoren skup.Pokazimo obrat, neka je zadovoljen uslov 2. Kako je Rang(A) zatvoren
skup, on je onda Banachov potprostor od Y .Za proizvoljne x1, x2 ∈ X, ako je Ax1 = Ax2, tada je A(x1 − x2) = 0, pazbog drugog dijela prtpostavke 2. je x1 = x2. Ovo znaci da je A : X → Yinjektivno preslikavanje. Sve u svemu, A : X → Rang(A) je tada bijektivnopreslikavanje izmedu Banachovih prostora, pa prema teoremu o otvorenom

41
UVOD U TEORIJU OPERATORA
preslikavanju, operator A−1 : Rang(A) → X je ogranicen. Dakle, postojikonstanta C > 0, takva da za sve y ∈ Rang(A) vrijedi
||A−1y|| ≤ C||y|| .
Stavljajuci u ovaj izraz y = Ax imamo
c||x|| ≤ ||Ax|| ,
za sve x ∈ X, gdje je c = 1C . ♣
Primjer 1.20. Posmatrajmo Volterrin integralni operator K : C[0, 1] →C[0, 1]. Specijalno, posmatrajmo funkcionalni niz fn(x) = cos(nπx) (n ∈N). Sada imamo,
Kfn =
∫ x
0cos(nπy)dy =
sin(nπx)
nπ→ 0 , n→ ∞ .
Kako je ||fn|| = 1, ocigledno je da nije moguce procjeniti ||fn|| pomocu||Kfn|| (ne postoji konstanta c > 0 u uslovu a) gornje teoreme), a cega jeposljedica da Rang(K) nije zatvoren skup. ♦
Pokazuje se da je zatvorenost jezgra operatora mnogo lakse obezbjedena.
Teorem 1.26. Ako su X i Y normirani prostori i A : X → Y ogranicenlinearan operator, tada je Ker(A) zatvoren potprostor od X.
Dokaz : Neka je (xn)n∈N ⊂ Ker(A) proizvoljan i neka xn → x ∈ X (n →∞). Zbog neprekidnosti operatora A tada imamo
Tx = T ( limn→∞
xn) = limn→∞
Txn = 0 .
Dakle, x ∈ Ker(A), a zbog proizvoljnosti niza zakljucujemo da je Ker(A)zatvoren skup. ♣
Specijalno, jezgro ogranicenog operatora koji djeluje sa Banachovog pros-tora je Banachov potprostor.
1.3 O jos dva principa
Medu najbitna tvrdenja funkcionalne analize spadaju i sljedeca dva. To suprincip konvergencije i princip uniformne ogranicenosti.
Teorem 1.27. (Princip uniformne ogranicenosti)Neka je τ proizvoljna familija ogranicenih linearnih operatora koji djelujusa Banachovog prostora X u normiran prostor Y . Neka za svako x ∈ X,

1.3. O jos dva principa
42
postoji konstanta M(x) > 0 (koja zavisi eventualno samo od x), tako davrijedi
(∀ T ∈ τ ) ||Tx|| ≤M(x) .
Tada postoji konstanta M , za koju vrijedi
(∀ T ∈ τ ) ||T || ≤M .
Dokaz : Pretpostavimo da familija τ nije ogranicena niti na jednoj kugliu X. Posmatrajmo kuglu K0 = K(0, 12) i kako τ nije ogranicena ni na njoj,postoji T = T1 ∈ τ i x1 ∈ K(0, 12), tako da je ||T1x1|| > 1.Neka je sada r1 proizvoljan, takav da vrijedi
0 < r1 < min
||T1x1|| − 1
||T1||,1
2
.
Oznacimo sa K1 = K(x1, r1). Za proizvoljan x ∈ K1 je ||x− x1|| ≤ r1 i pritome je
||T1x|| = ||T1x1 − T1(x1 − x)||≥ ||T1x1|| − ||T1(x1 − x)||≥ ||T1x1|| − ||T1|| ||x− x1||≥ ||T1x1|| − ||T1|| r1> 1 .
Dakle, za proizvoljno x ∈ K1, vrijedi ||T1x|| > 1.Polazeci sada od kugleK1 = K(x1, r1), na isti nacin utvrdujemo postojanje
operatora T2 ∈ τ i x2 ∈ K1, te kugle K2 = K(x2, r2) ⊂ K1, takvih da je
(∀x ∈ K2) ||T2x|| > 2 ,
pri cemu je r2 <122. Nastavljajuci ovaj postupak, dolazimo do niza ope-
ratora T1, T2, ..., Tn, ... i niza kugli K0 ⊃ K1 ⊃ · · · ⊃ Kn ⊃ · · · ciji supoluprecnici r1, r2, ..., rn, ..., takvi da je rn <
12n (n ∈ N), i pri tome je
||Tnx|| > n , x ∈ Kn .
Na osnovu teorema o karakterizaciji kompletnosti imamo da je
⋂
n∈NKn = x0 , za neko x0 ∈ X .
Sta vise, xn → x0 (n→ ∞), gdje je (xn)n∈N niz centara konstruisanih kugli.Pri tome je za proizvoljno n ∈ N, ||Tnx0|| > n, a to je nemoguce jer smopretpostavili da za svako x ∈ X, vrijedi
||Tx|| ≤M(x) .

43
UVOD U TEORIJU OPERATORA
Dakle, mora postojati kugla K(x′, r′), takva da je
||Tx|| ≤M ′ ,
za sve x ∈ K(x′, r′) i za sve T ∈ τ .Neka je sada x ∈ K(0, r′) proizvoljan. Tada x+ x′ ∈ K(x′, r′), pa za svakoT ∈ τ imamo
||Tx|| =∣∣∣∣−Tx′ + T (x+ x′)
∣∣∣∣ ≤∣∣∣∣Tx′
∣∣∣∣+∣∣∣∣T (x+ x′)
∣∣∣∣ ≤M(x′) +M ′ .
Stavimo li M ′′ =M(x′) +M ′, vrijedi
(∀x ∈ K(0, r′)) ||Tx|| ≤M ′′ ,
za svako T ∈ τ .Neka je sada x ∈ X proizvoljan (x 6= 0). Tada je x
||x||r′ ∈ K(0, r′), pa vrijedi
∣∣∣∣∣∣∣∣T(
x
||x||r′)∣∣∣∣∣∣∣∣ ≤M ′′ ,
tj.
||Tx|| ≤ M ′′
r′||x|| .
Stavimo M = M ′′
r′ , dakle vrijedi
(∀ T ∈ τ )(∀x ∈ X) ||Tx|| ≤M ||x|| ,
a ovo upravo znaci
(∀ T ∈ τ ) ||T || ≤M . ♣
Znamo iz matematicke analize da za funkcionalni niz mozemo posmatratidvije vrste konvergencije, konvergenciju po tackama i uniformnu konver-genciju i da je uniformna konvergencija ”jaca” od tackaste konvergencije.U opstem slucaju iz konvegrencije po tackama nemamo uniformnu konver-genciju. Princip uniformne ogranicenosti, pojednostavljeno govoreci, namkazuje da pri odredenim uslovima, familija ogranicenih linearnih operatorakoja je konvergentna po tackama, je i uniformno konvergentna. Dokazaniteorem smo mogli iskazati i u obratnoj formi, tj
Teorem 1.28. Ako niz (||Tn||)n∈N nije ogranicen, tada postoji x∗ ∈ X,takav da je
lim supn→∞
||Tnx∗|| = +∞ .
Ovako iskazan teorem naziva se princip rezonancije.

1.3. O jos dva principa
44
Teorem 1.29. (Princip konvergencije)Neka je (Tn)n∈N niz ogranicenih linearnih operatora koji djeluju sa normi-ranog prostora X u Banachov prostor Y . Ako su zadovoljeni uslovi
1. (∃M > 0)(∀n ∈ N) ||Tn|| ≤M .
2. Postoji limn→∞
Tnx, za sve x iz skupa koji je gust u nekoj kugli prostora
X.
Tada postoji limn→∞
Tnx, za sve x ∈ X i sa
T0x = limn→∞
Tnx
je definisan ogranicen linearan operator T0, za koga vrijedi
||T0|| ≤ lim inf ||Tn|| .
Dokaz : Neka je S skup koji je gust u nekoj kugli K(x0, r), tako da postojilimn→∞
Tnx, za sve x ∈ S.
Neka su sada x ∈ K(x0, r) i ε > 0 proizvoljni. Tada postoji y ∈ S, takavda je ||x− y|| < ε
4M . Osim toga, zbog konvergencije niza (Tny)n∈N, za svakoy ∈ S, postoji N ∈ N, tako da za proizvoljne n,m ≥ N , vrijedi
||Tny − Tmy|| <ε
2.
Na osnovu svega ovoga, za n,m ≥ N , sada imamo
||Tnx− Tmx|| = ||(Tnx− Tny) + (Tny − Tmy) + (Tmy − Tmx)||≤ ||Tn(x− y)||+ ||Tny − Tmy||+ ||Tm(x− y)||≤ ||Tn|| ||x− y||+ ||Tny − Tmy||+ ||Tm|| ||x− y||≤ 2M ||x− y||+ ||Tny − Tmy||< 2M
ε
4M+ε
2= ε .
Ovo znaci da je za proizvoljno x ∈ K(x0, r), niz (Tnx)n∈N Cauchyjev, a kakose on nalazi u Banachovom prostoru Y , on je i konvergentan, tj. postoji
limn→∞
Tnx , x ∈ K(x0, r) .
Neka je sada x ∈ X proizvoljan (x 6= 0). Tada je
x0 +r
||x||x ∈ K(x0, r) ,
pa postoji
limn→∞
Tn
(x0 +
r
||x||x)
= limn→∞
(Tnx0 + Tn
(r
||x||x))
.

45
UVOD U TEORIJU OPERATORA
Zato sto x0 ∈ K(x0, r), postoji limn→∞
Tnx0, a to onda znaci da mora postojati
i
limn→∞
Tn
(r
||x||x),
tj. postojilimn→∞
Tnx .
Dakle, za svako x ∈ X, postoji limn→∞
Tnx. Definisimo onda za x ∈ X
T0x = limn→∞
Tnx .
Za proizvoljne x′, x′′ ∈ X i za proizvoljne α, β ∈ Φ, vrijedi
T0(αx′ + βx′′) = lim
n→∞Tn(αx
′ + βx′′)
= limn→∞
(αTnx
′ + βTnx′′)
= α limn→∞
Tnx′ + β lim
n→∞Tnx
′′
= αT0x′ + βT0x
′′ ,
te je T0 linearan operator.Za proizvoljno x ∈ X je
||T0x|| = limn→∞
||Tnx||= lim inf
n→∞||Tnx||
≤ lim infn→∞
(||Tn|| ||x||)= (lim inf
n→∞||Tn||) ||x|| .
Iz posljednjeg vidimo da je T0 ogranicen operator, i da pri tome vrijedi
||T0|| ≤ lim infn→∞
||Tn|| . ♣
Pretpostavka o ogranicenosti operatora, tj. ||T || < ∞ za T ∈ τ nijeobavezujuca da bi supremum normi takvih operatora bio konacan. Napri-mjer, neka je I identicno preslikavanje netrivijalnog normiranog prostoraX. Posmatrajmo familiju τ = nI | n ∈ N. Jasno je da τ ⊂ L(X,X), aliocigledno je sup
n∈N||nI|| = ∞. Naravno, konsekvenca ovoga je ta da je uslov
2. u Teoremu 1.29 zadovoljen na skupu D = 0 koji nije gust u X.Vidimo da je bitna pretpostavka u obje teoreme kompletnost prostora, i
to u principu uniformne ogranicenosti zahtjevamo da je domen X Banac-hov prostor, a u principu konvergencije zahtjevamo da je kodomen Y Ba-nachov prostor. Ova dva stava kada ih objedinimo, daju poznati Banach-Steinhausov stav.

1.4. Zatvoreni operator
46
Teorem 1.30. Neka su X i Y Banachovi prostori i neka je (Tn)n∈N nizogranicenih linearnih operatora koji djeluju sa X u Y . Da bi niz (Tnx)n∈Nkonvergirao ka Ax za svako x ∈ X, gdje je A : X → Y ogranicen linearanoperator, potrebno je i dovoljno da su zadovoljeni uslovi
1. Niz (||Tn||)n∈N je ogranicen.
2. Postoji limn→∞
Tnx na nekom svuda gustom skupu elemenata.
1.4 Zatvoreni operator
Neka su X i Y Banachovi prostori. Sa X × Y oznacavamo Descartesovprodukt skupova X i Y . Ako na X × Y uvedemo unutrasnju i spoljasnjukompoziciju na sljedeci nacin,
• (∀(x1, y1), (x2, y2) ∈ X × Y ) (x1, y1) + (x2, y2) = (x1 + x2, y1 + y2),
• (∀(x, y) ∈ X × Y )(∀λ ∈ Φ) λ(x, y) = (λx, λy),
lahko se provjerava da X × Y dobija strukturu vektorskog prostora.
Na X × Y mozemo definisati i normu na sljedeci nacin
||(x, y)|| = ||x||+ ||y|| , (x, y) ∈ X × Y ,
u odnosu na koju je X × Y Banachov prostor (pokazati ove dvije tvrdnje!).
Definicija 1.14. Neka je A : X → Y linearan operator. Skup
GA = (x,Ax)| x ∈ DA ⊆ X × Y ,
nazivamo grafom operatora A.
Definicija 1.15. Neka su X i Y Banachovi prostori i neka je A : X → Ylinearan operator. Kazemo da je A zatvoren operator ako i samo ako je GA
zatvoren skup u X × Y .
U gornjoj definiciji pod zatvorenoscu skupa GA se podrazumijeva zatvore-nost skupa u odnosu na jaku topologiju na X × Y , indukovanu definisanomnormom na tom prostoru.
Teorem 1.31. Linearan operator A koji slika Banachov prostor X u Ba-nachov prostor Y je zatvoren ako i samo ako iz
1. xn → x0 (n→ ∞), (xn)n∈N ⊂ DA i
2. Axn → y0,
slijedi x0 ∈ DA i Ax0 = y0.

47
UVOD U TEORIJU OPERATORA
Dokaz : Dokaz ostavljen citaocu za vjezbu! ♣
Definicija 1.16. Neka su A,B : X → Y linearni operatori. Za operator Bkazemo da je prosirenje operatora A, u oznaci A ⊂ B, ako i samo ako jeGA ⊂ GB.
Za linearan operator A kazemo da dopusta zatvorenje ako postoji zatvo-ren operator A1, takav da je A ⊂ A1. Operator A1 nazivamo zatvorenjemoperatora A. Ako za proizvoljno drugo zatvorenje A2 operatora A, vrijediA1 ⊂ A2, za A1 kazemo da je minimalno zatvorenje operatora A.
Teorem 1.32. Da bi linearan operator A : X → Y dopustao zatvorenjeneophodno je i dovoljno da zatvorenje GA grafika GA ne sadrzi elementeoblika (0, y) za y 6= 0.
Dokaz : Neka operator A dopusta zatvorenje i neka je A1 njegovo pro-izvoljno zatvorenje. To znaci da je GA ⊂ GA1 i GA1 je zatvoren skup. Zbogtoga je onda GA ⊂ GA1 = GA1 .Neka je sada (0, y) ∈ GA. Tada je (0, y) ∈ GA1 , te je 0 ∈ DA1 i A10 = y.Kako je A1 linearan operator to mora vrijediti A10 = 0, tj. y = 0, pa GA
ne sadrzi elemente oblika (0, y), gdje je y 6= 0.
Pretpostavimo sada daGA ne sadrzi elemente oblika (0, y), y 6= 0. Oznacimosa
DA =x ∈ X| (∃y ∈ Y ) (x, y) ∈ GA
.
Skup DA je linearan vektorski prostor. Zaista, GA je linearan jer je onzatvorenje linearnog prostora GA. Neka su sada x1, x2 ∈ DA. Tada postojey1, y2 ∈ Y , takvi da je (x1, y1), (x2, y2) ∈ GA. Zbog linearnosti GA, tada je
(x1, y1) + (x2, y2) = (x1 + x2, y1 + y2) ∈ GA ,
a ovo opet znaci da je x1 + x2 ∈ DA.Neka je x ∈ DA i λ ∈ Φ. Tada postoji y ∈ Y , takav da je (x, y) ∈ GA, teopet imamo da je
λ(x, y) = (λx, λy) ∈ GA .
Dakle, λx ∈ DA.Sada tvrdimo da za svako x ∈ DA postoji tacno jedno y ∈ Y , tako da je
(x, y) ∈ GA. Zaista, da bar jedan y postoji, imamo na osnovu definicijeskupa DA. Pretpostavimo da postoje dva, tj. (x, y), (x, y′) ∈ GA. Zboglinearnosti skupa GA, vrijedi
(x, y) − (x, y′) = (0, y − y′) ∈ GA ,
a zbog polazne pretpostavke zakljucujemo da mora biti y = y′.Za proizvoljan x ∈ DA, oznacimo sa y = Ax onaj postojeci jedinstveniy ∈ Y . Na taj nacin smo definisali novo preslikavanje A, za koga je domen

1.4. Zatvoreni operator
48
ocigledno, upravo skup DA. Lahko se pokazuje da je A linearan operator,a takode i to da je graf GA operatora A, upravo GA. Onda je GA zatvorenskup, a time je A zatvoren operator. Kako je ocigledno GA ⊂ GA = GA,jasno je da je A zatvorenje operatora A.Sta vise, neka je A1 bilo koje zatvorenje operatora A, tj. GA ⊂ GA1 , onda
jeGA = GA ⊂ GA1 = GA1 ,
a ovo znaci da je A ⊂ A1, odnosno A je minimalno zatvorenje operatora A.♣
Gornji teorem se moze iskazati i u sljedecoj formi
Teorem 1.33. Da bi linearan operator A : X → Y dopustao zatvorenjepotrebno je i dovoljno da ako vrijedi xn → 0 (n→ ∞ , xn ∈ DA) i Axn → y(n→ ∞), onda mora biti y = 0.
Ovaj oblik teorema nam daje nacin kako cemo izvrsiti zatvaranje operatoraako je to moguce. Naime, ako je gornji uslov ispunjen, onda definisemooperator A tako da mu je domen skup DA, svih x ∈ X za koje postoji niz(xn)n∈N ⊂ DA, tako da vrijedi
xn → x , Axn → y , (n→ ∞) ,
gdje je y ∈ Y , takav da je
Ax = y = limn→∞
Axn .
Naravno, ostaje da vidimo kakva je veza izmedu neprekidnosti i zatvore-nosti operatora. U dosadasnjim izlaganjima uglavnom smo posmatrali ne-prekidne operatore. Medutim, i veoma jednostavni operatori, u primjenamacesti, nisu neprekidni.
Primjer 1.21. Neka je M ⊂ l1, skup svih nizova iz l1 koji imaju samokonacno mnogo koordinata razlicitih od nula i neka je A :M → l1, zadat sa
x = (x1, x2, ..., xn, 0, 0, ...) ∈M , Ax = (0, x1, x2, ..., xn, 0, 0, ...) .
A je linearan operator za koga je za proizvoljno x ∈M
||Ax|| =n∑
k=1
|xk| ≤∞∑
k=1
|xk| = ||x|| ,
tj. vrijedi ||A|| ≤ 1. Dakle, A je neprekidan operator.Medutim, posmatramo li niz (xn)n∈N ⊂ M , gdje je xn = (12 ,
122 , ...,
12n , 0, ...)
(n ∈ N), jasno je da xn → x0 = (12 ,122 , ...,
12n , ...) ∈ l1 (n → ∞), ali x0 /∈ M ,
pa A nije zatvoren operator. ♦

49
UVOD U TEORIJU OPERATORA
Gornji primjer nam pokazuje da neprekidnost linearnog operatora ne povlacinjegovu zatvorenost. Zato iskazimo sljedecu tvrdnju, ciji dokaz je ostavljencitaocu za vjezbu.
Teorem 1.34. Da bi neprekidan linearan operator bio zatvoren, potrebno jei dovoljno da je on definisan na potprostoru Banachovog prostora.
Sljedeci primjer nam daje preslikavanje koje jeste zatvoreno ali nije nepre-kidno.
Primjer 1.22. Posmatrajmo operator ddx : C1[0, 1] → C[0, 1], zadat sa
d
dxf(x) = f ′(x) .
Za posmatrani operator diferenciranja se lahko pokazuje da je on linearanoperator. Medutim, ako posmatramo niz (fn(x))n∈N ⊂ C1[0, 1], gdje jefn(x) = xn, imamo
∣∣∣∣∣∣∣∣d
dxfn(x)
∣∣∣∣∣∣∣∣ =
∣∣∣∣nxn−1∣∣∣∣C[0,1]
= n , n ∈ N .
Iz ovoga je ocigledno da operator diferenciranja nije ogranicen operator.Neka je (gn(x))n∈N ⊂ C1[0, 1] proizvoljan niz, takav da
gn → g0 idgndx
→ φ , n→ ∞ ,
druga od ovih pretpostavki znaci da niz izvoda (g′n)n∈N uniformno konvergiraka funkciji φ (po metrici prostora C[0, 1]). Sada za proizvoljno x ∈ [0, 1]imamo
∫ x
0φ(t)dt =
∫ x
0limn→∞
dgndt
(t)dt
= limn→∞
∫ x
0
dgndt
(t)dt ( zbog uniformne konvergencije )
= limn→∞
(gn(x)− gn(0))
= g0(x)− g0(0) .
Dakle,
g0(x) = g0(0) +
∫ x
0φ(t)dt , x ∈ [0, 1] .
Funkcija φ ∈ C[0, 1] jer je ona kao granicna vrijednost uniformno konver-gentnog niza neprekidnih funkcija i sama neprekidna. To nam onda gornjajednakost daje da je g0 ∈ C1[0, 1], a osim toga jasno je da vrijedi dg0
dx = φna [0, 1]. Ostaje nam pozvati se na Teorem 1.31 i konstatovati zatvorenostoperatora. ♦

1.4. Zatvoreni operator
50
Narednim teoremom dajemo uslove pod kojima ce zatvoren operator bitiogranicen i poznat je pod nazivom Banachov teorem o zatvorenom
grafiku.
Teorem 1.35. Neka je A zatvoren linearan operator koji preslikava Banac-hov prostor X u Banachov prostor Y . Ako je skup DA skup druge kategorijeu X, onda vrijedi DA = X i A je neprekidan operator.
Dokaz : Za proizvoljan n ∈ N, posmatrajmo skupove
Xn = x ∈ DA | ||Ax|| ≤ n ||x|| .
Jasno je da vrijedi
DA =⋃
n∈NXn .
Kako je po pretpostavci DA skup druge kategorije u X, postoji Xn0 koji jegust u nekoj kugli K(x0, r) (r > 0).Neka je sada K(x1, r1), takva da je K(x1, r1) ⊂ K(x0, r), pri cemu je x1 ∈Xn0 . Neka je ε > 0 proizvoljan (bez umanjenja opstosti pretpostavimo daje ε < r1
2 ). Ako je y ∈ X, takav da je ||y|| = r1, tada je y + x1 ∈ K(x1, r1).Kako je Xn0 gust u K(x1, r1), postoji z ∈ Xn0 , takav da je ||x1 + y − z|| < ε.S druge strane imamo
||z|| = ||(z − x1 − y) + (x1 + y)||≤ ||z − x1 − y||+ ||x1 + y||≤ ε+ ||x1||+ ||y||≤ r1
2+ ||x1||+ r1
< 2r1 + ||x1|| .Takode vrijedi
||z − x1|| = ||(z − x1 − y) + y||≥ ||y|| − ||z − x1 − y||> r1 − ε ≥ r1
2.
Kako su x1, z ∈ Xn0 ⊂ DA, tada i z − x1 ∈ DA, pa vrijedi
||A(z − x1)|| ≤ ||Ax1||+ ||Az|| ≤ n0 ||x1||+ n0 ||z|| = n0(||x1||+ ||z||) .Iz svega ovoga zakljucujemo
||A(z − x1)|| ≤ n0(||x1||+ ||z||)≤ 2n0(r1 + ||x1||)
=2n0(r1 + ||x1||)
r12
r12
≤ 4n0(r1 + ||x1||)r1
||z − x1|| .

51
UVOD U TEORIJU OPERATORA
Oznacimo sa n1 prvi prirodan broj koji nije manji od 4n0(r+||x1||)r1
. Posljednjunejednakost onda zapisujemo sa
||A(z − x1)|| ≤ n1 ||z − x1|| ,
a ovo znaci da z−x1 ∈ Xn1 . Dakle, pokazali smo da za svako y ∈ X, ||y|| =r1, postoji element iz Xn1 (to je upravo element z − x1), koji proizvoljnodobro aproksimira element y.Ako je sada y ∈ K(0, r1), tj. neka je ||y|| ≤ r1, onda za element y1 = r1
||y||y,
vrijedi ||y1|| = r1, pa prema dokazanom, postoji z1 ∈ Xn1 , takav da je zaproizvoljno ε > 0
||y1 − z1|| < ε .
Ovo onda znaci∣∣∣∣∣∣∣∣y −
||y||r1
z1
∣∣∣∣∣∣∣∣ <
||y||r1
ε ≤ ε (jer||y||r1
≤ 1) ,
a zbog homogenosti skupova Xn (tj. ako x ∈ Xn, onda i λx ∈ Xn, za
proizvoljno λ ∈ Φ) onda imamo da je za z1 ∈ Xn1 , element z = ||y||r1z1 ∈
Xn1 , pa zakljucujemo da proizvoljan y ∈ K(0, r1) mozemo proizvoljno dobroaproksimirati elementom z ∈ Xn1 odnosno, Xn1 je gust u kugli K(0, r1).Pokazimo sada da je K(0, r1) ⊂ DA. Zaista, neka je x ∈ K(0, r1) proizvo-
ljan. Kako je Xn1 gust u K(0, r1), postoji y1 ∈ Xn1 , takav da vrijedi
||x− y1|| <r12.
Ovo znaci da je x− y1 ∈ K(0, r1), pa opet postoji y2 ∈ Xn1 , takav da je
||x− y1 − y2|| <r122
.
Ako ovaj postupak produzimo, dobijamo niz (yk)k∈N ⊂ Xn1 za koga je
||x− (y1 + y2 + · · ·+ yk)|| <r12k
, k ∈ N .
Oznacimo sa zk = y1 + y2 + · · · + yk, k ∈ N. Kako yi ∈ Xn1 ⊂ DA (i ∈ N),tada i zk ∈ DA, a osim toga vrijedi
zk → x , k → ∞ .
Takode imamo
||yk|| = ||(yk + yk−1 + · · · + y1 − x) + (x− y1 + y2 + · · ·+ yk−1)||≤ r1
2k+
r12k−1
<r1
2k−2.

1.4. Zatvoreni operator
52
Neka su sada m,n ∈ N, n > m proizvoljni. Tada imamo
||Azn −Azm|| = ||A(zn − zm)||= ||A(yn + yn−1 + · · · + ym+1)||≤ ||Ayn||+ ||Ayn−1||+ · · ·+ ||Aym+1||≤ n1(||yn||+ ||yn−1||+ · · ·+ ||ym+1||)< n1
( r12n−2
+r1
2n−3+ · · ·+ r1
2m−1
)
=r1n12m−1
(1 +
1
2+ · · ·+ 1
2n−m−1
)
<r1n12m−1
.
Iz gornjeg zakljucujemo da vrijedi
||Azn −Azm|| → 0 , n,m→ ∞ ,
a ovo znaci da je (Azn)n∈N Cauchyjev niz u Y i zbog potpunosti prostora Y ,on je i konvergentan. Neka je granicna vrijednost tog niza element y. Tadaimamo za niz (zk)k∈N ⊂ DA
zk → x , k → ∞
Azk → y , k → ∞ ,
pa zbog zatvorenosti operatora zakljucujemo da x ∈ DA i Ax = y, tj.pokazali smo da je K(0, r1) ⊂ DA.Opet na osnovu homogenosti skupa imamo da je za proizvoljno n ∈ N,
skup nK(0, r1) ⊂ DA, a kako je
X =⋃
n∈NnK(0, r1) ,
imamo da je X ⊆ DA, tj. mora vrijediti X = DA.Ostaje nam jos pokazati ogranicenost operatora A.
Vidjeli smo da za proizvoljno x ∈ K(0, r1), postoji niz (zk)k∈N, zk = y1 +y2 + · · · yk (yi ∈ Xn1 , i ∈ N, ||yk|| < r1
2k−2 ), koji konvergira ka x i za koga je
Ax = limn→∞
Azn .
Odavde je ||Ax|| ≤ limn→∞ ||Azn||, i pri tome je
||Azn|| ≤ n1(||y1||+ ||y2||+ · · · + ||yn||) < 4r1n1 .
Neka je sada x ∈ X proizvoljan. Tada r1||x||x ∈ K(0, r1), pa je na osnovu
pokazanog zadovoljeno∣∣∣∣∣∣∣∣A(r1||x||x
)∣∣∣∣∣∣∣∣ < 4n1r1

53
UVOD U TEORIJU OPERATORA
tojest, vrijedi ||Ax|| ≤ 4n1 ||x||. Ovo znaci da je operator A ogranicen, atime je teorem dokazan. ♣
Sljedeca tvrdnja je direktna posljedica gornje teoreme jer je X kao Banac-hov prostor, skup druge kategorije u sebi.
Posljedica 1.36. Ako je A zatvoren linearan operator definisan na cijelomBanachovom prostoru X, onda je A neprekidan operator.
I sljedeca jednostavna tvrdnja ostavljena je citaocu za vjezbu.
Teorem 1.37. Ako je linearan operator A zatvoren i ako postoji inverznioperator A−1, tada je i A−1 zatvoren operator.
Sljedecu tvrdnju necemo dokazivati ali se preporucuje citaocu da je ana-lizom uporedi sa ranije spomenutom teoremom o otvorenom preslikavanjujer se u literaturi cesto i ovaj teorem naziva ”teorem o otvorenom preslika-vanju”.
Teorem 1.38. Neka je A zatvoren linearan operator koji slika Banachovprostor X u Banachov prostor Y . Neka je RA skup druge kategorije u Y ,onda vrijedi
1. RA = Y .
2. Postoji konstanta m > 0, takva da za svako y ∈ Y , postoji x ∈ X,takav da je Ax = y i ||y|| ≥ m ||x||.
3. Ako A−1 postoji, onda je i on ogranicen operator.

2
Linearni funkcionali
2.1 Geometrijski smisao linearnih funkcionala . . . 55
2.2 Hahn-Banachov teorem . . . . . . . . . . . . . . . 59
2.3 Reprezentacije ogranicenih linearnih funkcionala 65
2.3.1 Konacnodimenzionalni prostori . . . . . . . . . . . 65
2.3.2 Beskonacnodimenzionalni prostori . . . . . . . . . 68
Izucavajuci operatore i njihove osobine, mi smo ustvari posmatrali presli-kavanja sa proizvoljnog protora X u proizvoljan prostor Y . Ukoliko prostorY preciziramo, tojest ukoliko je Y = R ili Y = C, onda takvim operatorimadajemo poseban naziv.
Neka je X proizvoljan linearan prostor. Preslikavanje f : X −→ Φ, gdjeje Φ = R ili Φ = C, nazivamo funkcional. Dakle, fukcionali su specijalnavrsta operatora, pa sve iskazano o operatorima vrijedi i za funkcionale. Takoimamo, za funkcional f : X −→ Φ kazemo da je aditivan, ako za proizvoljnex, y ∈ X vrijedi
f(x+ y) = f(x) + f(y) ,
a ako i za proizvoljan λ ∈ Φ vrijedi
f(λx) = λf(x) ,
kazemo da je funkcional homogen. Za homogen i aditivan funkcional jed-nostavno kazemo da je linearan funkcional.
I normu funkcionala definisemo kao normu operatora, stim da normu ukodomenu zamjenjujemo sa modulom,
||f || = supx∈X\0
|f(x)|||x|| = sup
||x||≤1
|f(x)|||x|| = sup
||x||=1|f(x)| .
Primjer 2.1. Neka je a = (a1, a2, ..., an) ∈ Rn proizvoljan fiksan element.Tada je sa
f(x) =n∑
i=1
aixi , x = (x1, x2, ..., xn) ∈ Rn ,
definisan linearan funkcional f : Rn −→ R. ♦
54

55
UVOD U TEORIJU OPERATORA
Primjer 2.2. Neka je x ∈ C[a, b] proizvoljan. Tada je sa
f(x) =
∫ b
ax(t)dt ,
definisan linearan funkcional f : C[a, b] −→ R. ♦
Primjer 2.3. Za fiksirano t0 ∈ [a, b], sa
g(x) = x(t0)
je takode definisan linearan funkcional na C[a, b]. ♦
Primjer 2.4. Na prostoru lp (1 ≤ p ≤ +∞) primjer linearnog funkcionala je
f(x) = xk , k ∈ N ,
gdje je x = (xk)k∈N ∈ lp. ♦
Skup svih linearnih neprekidnih funkcionala, definisanih na normiranomlinearnom vektorskom prostoru X, oznacavamo sa X∗. Dake, saglasno od-govarajucem skupu za operatore imamo da je X∗ = L(X,Φ). Na osnovuTeorema 1.10, prostor X∗ je Banachov prostor jer je Φ takav, i nazivamo gadualni, adjungovani ili konjugovani prostor prostora X.
2.1 Geometrijski smisao linearnih funkcionala
Neka je f : X −→ R proizvoljan linearan funkcional definisan na linearnomvektorskom prostoru X. Kao i kod operatora sa
Ker(f) = x ∈ X | f(x) = 0 ,
oznacavamo jezgro funkcionala f . Ker(f) je linearan vektorski prostor jerza x, y ∈ Ker(f) i za proizvoljne λ, µ ∈ Φ imamo
f(λx+ µy) = λf(x) + µf(y) = 0 .
Medutim, jezgro funkcionala ne mora biti potprostor prostora X, tj. on nijeobavezno zatvoren skup. Sta vise, vrijedi
Teorem 2.1. Neka je X normiran prostor i f linearan funkcional na X. fje ogranicen ako i samo ako je Ker(f) zatvoren skup.
Dokaz : Neka je f ogranicen, dakle neprekidan funkcional i neka je (xn)n∈N ⊂Ker(f), takav da xn → x (n→ ∞). Tada vrijedi
f(x) = f( limn→∞
xn) = limn→∞
f(xn) = 0 ,

2.1. Geometrijski smisao linearnih funkcionala
56
tj. x ∈ Ker(f).Obratno, neka je Ker(f) zatvoren skup. Ako je Ker(f) = X, to znaci da
je f funkcional identicki jednak 0, a kao takav je i ogranicen. Pretpostavimozato da je Ker(f) 6= X, tj. postoji x0 ∈ X \ Ker(f). Zbog zatvorenostijezgra, postoji r > 0, takav da B(x0, r) ∩ Ker(f) = ∅. Ne umanjujuciopstost, neka je f(x0) = 1 (inace bi umjesto x0 posmatrali x0
f(x0)). Neka je
sada x ∈ X proizvoljan, takav da x /∈ Ker(f). Kako je f(x) 6= 0, onda je
− x
f(x)+ x0 ∈ Ker(f) ,
a to opet znaci da − x
f(x)+ x0 /∈ B(x0, r). Tada je
∣∣∣∣∣∣∣∣(− x
f(x)+ x0
)− x0
∣∣∣∣∣∣∣∣ ≥ r
tojest, ||x|||f(x)| ≥ r. Odavde sada imamo da vrijedi |f(x)| ≤ 1
r||x||, za svako
x /∈ Ker(f). Kako ova nejednakost vrijedi trivijalno i za elemente jezgra,zakljucujemo da je f ogranicen funkcional. ♣
Posljedica 2.2. Neka je f linearan funkcional na normiranom prostoru X.f je neogranicen funkcional ako i samo ako Ker(f) je pravi podskup od X isvuda gust u X.
Lema 2.3. Neka je f proizvoljan, netrivijalan ogranicen linearan funkcionalna linearnom vektorskom prostoru X. Kodimenzija potprostora Ker(f) jed-naka je 1.
Dokaz : Prije svega, kako je f ogranicen funkcional, na osnovu Teoreme2.1, Ker(f) je zatvoren pa je kao takav i potprostor od X. Neka je x0 ∈ X,takav da x0 /∈ Ker(f), tj. f(x0) 6= 0 (takav postoji jer je f netrivijalan).Bez umanjenja opstosti, pretpostavimo da je f(x0) = 1 (u suprotnom biposmatrali element x0
f(x0)). Za proizvoljan x ∈ X, oznacimo sa
y = x− f(x)x0 .
Kako je f(y) = f(x − f(x)x0) = f(x) − f(x)f(x0) = 0, jasno y ∈ Ker(f).Dakle, za proizvoljan x ∈ X imamo
x = αx0 + y , gdje je y ∈ Ker(f) .
Tvrdimo sada da je gornja reprezentacija elementa x jedinstvena. Zaista,neka je
x = α1x0 + y1 i x = α2x0 + y2 , y1, y2 ∈ Ker(f) , α1, α2 ∈ Φ .

57
UVOD U TEORIJU OPERATORA
Oduzimanjem ove dvije jednakosti bi dobili (α1 − α2)x0 = y2 − y1. Ako bibilo α1 6= α2, to bi znacilo da je
x0 =y2 − y1α1 − α2
∈ Ker(f) ,
sto protivrijeci izboru elementa x0. Dakle, reprezentacija je jedinstvena.Neka su sada x1, x2 ∈ X. Prema prethodnom postoje jedinstvene repre-
zentacije
x1 = f(x1)x0 + y1 , y1 ∈ Ker(f) ,
x2 = f(x2)x0 + y2 , y2 ∈ Ker(f) .
Tada je
x1 − x2 = (f(x1)− f(x2))x0 + (y1 − y2) .
Iz ovoga sada vidimo da ce x1 − x2 ∈ Ker(f) ako i samo ako je f(x1) −f(x2) = 0, tj. x1 i x2 pripadaju istoj klasi ekvivalencije kolicnickog prostoraX/Ker(f) ako i samo ako je f(x1) = f(x2).
Oznacimo sa ξ0 onu klasu ekvivalencije koja sadrzi element x0. Ako je sadaξ proizvoljna klasa ekvivalencije, ona je odredena bilo kojim svojim pred-stavnikom, a na osnovu gornjeg, za predstavnika mozemo izabrati upravoelemet αx0. Ovo opet znaci da vrijedi
ξ = αξ0 ,
za proizvoljnu klasu ekvivalencije, a to ne znaci nista drugo nego da jedimenzija kolicnickog prostora X/Ker(f) jednaka 1. ♣
Lema 2.4. Ukoliko dva linearna funkcionala imaju ista jezgra, onda su oniproporcionalni.
Dokaz : Neka za linearne funkcionale f i g vrijedi Ker(f) = Ker(g). Nekaje x0 takav da je f(x0) = 1. Tada na osnovu dokaza gornje leme imamo zaproizvoljno x
x = f(x)x0 + y , y ∈ Ker(f) = Ker(g) .
Djelujmo funkcionalom g na x, dobijamo
g(x) = f(x)g(x0) + g(y) = f(x)g(x0) .
Ako bi sada imali da je g(x0) = 0, to bi znacilo da je funkcional g identickijednak nuli, ali onda bi zbog jednakosti jezgara i funkcional f bio identickijednak nuli, sto nije moguce zbog izbora elementa x0. Dakle g(x0) 6= 0, a to
onda znaci g(x)f(x) = g(x0), za proizvoljno x. ♣

2.1. Geometrijski smisao linearnih funkcionala
58
Lema 2.5. Neka je X linearan vektorski prostor i L njegov potprostor ko-dimenzije 1. Tada postoji ogranicen linearan funkcional na X takav da jeKer(f) = L.
Dokaz : Kako je kodimenzija od L u X jednaka 1, postoji x0 ∈ X takavda se svaki x ∈ X moze predstaviti na jedinstven nacin u obliku
x = αx0 + y ; α ∈ Φ , y ∈ L .
Definisimo sada funkcional f : X −→ R, sa f(x) = α. Jednostavno se sadapokazuje da vrijedi Ker(f) = L. ♣
Neka je L potprostor prostora X, kodimenzije 1. Tada L predstavlja hi-perpovrs u prostoru X. Medutim, svaka klasa ekvivalencije iz X/L takodepredstavlja hiperpovrs datog prostora i to ”paralelnu” potprostoru L. Pritome pod ”paralelnoscu” ovdje podrazumijevamo da se svaka od tih klasamoze dobiti paralelnim pomjeranjem ili translacijom potprostora L za nekivektor x0 ∈ X,
ξ ∈ X/L , ξ = L+ x0 = y | y = x+ x0 , x ∈ L .
Ako je x0 ∈ L, tada je ξ = L. U suprotnom, ako x0 /∈ L, onda je ξ 6= L.
Lema 2.6. Neka je f proizvoljan netrivijalan, ogranicen linearan funkcionalna X. Tada je skup
H = x ∈ X | f(x) = 1 ,
hiperpovrs u prostoru X, sta vise, paralelna je potprostoru Ker(f).
Dokaz : Kao sto smo vidjeli, Ker(f) zaista jeste potprostor odX i pri tomemu je kodimenzija 1, te je i hiperpovrs. Neka je sada y ∈ H proizvoljan, tj.f(y) = 1. Kako se svaki vektor x ∈ X moze predstaviti na jedinstven nacinsa
x = αx0 + y′ , α ∈ Φ , y′ ∈ Ker(f) ,
(za neko x0 ∈ X) to isto ce vrijediti i za element y, tj. postoje jedinstveniα′ ∈ Φ i y′ ∈ Ker(f), takvi da je y = α′x0 + y′. Kako je
f(y) = α′f(x0) + f(y′) = α′f(x0) = 1 ,
zakljucujemo da mora biti α′ = 1f(x0)
, a to daje da se proizvoljan vektory ∈ H, moze predstaviti u obliku
y =x0
f(x0)+ y′ , y′ ∈ Ker(f) .
Ovo ne znaci nista drugo nego da je kodimenzija od H u X jednaka 1, tj. Hje hiperpovrs, a osim toga iz posljednje jednakosti zakljucujemo da vrijedi
H = Ker(f) +x0
f(x0)♣

59
UVOD U TEORIJU OPERATORA
Sta vise, vrijedi i obrat ovog tvrdenja.
Lema 2.7. Neka je H proizvoljna hiperpovrs u prostoru X, paralelna pot-prostoru L ⊂ X. Tada postoji jedinstven ogranicen linearan funkcional f naX, takav da je
H = x ∈ X | f(x) = 1 .
Dokaz : Neka je za neko x0 ∈ X, H = L+x0. Tada se svaki vektor x ∈ Xmoze na jednoznacan nacin predstaviti u obliku
x = αx0 + y , y ∈ L .
Stavljajuci da je f(x) = α, dobijamo trazeni funkcional jer ce u tom slucajuhiperpovrs biti odredena sa f(x) = 1. Ako bi postojao i funkcional g na X,takav da je za x ∈ H, g(x) = 1, tada bi moralo biti g(y) = 0, za y ∈ L, a tobi zbog
g(αx0 + y) = α = f(αx0 + y) ,
znacilo poklapanje funkcionala. ♣
Sa ove dvije leme smo uspostavili obostrano jednoznacno pridruzivanjeizmedu svih hiperpovrsi posmatranog prostora X i na njemu definisanihfunkcionala, sa cime smo onda dobili i geometrijsku interpretaciju linearnihfunkcionala
2.2 Hahn-Banachov teorem
U svakom Banachovom prostoru preslikavanje identicki jednako nuli, pred-stavlja jedan ogranicen linearan funkcional. Postavlja se pitanje, da li pos-toje i drugi, netrivijalni funkcionali na proizvoljnom Banachovom prostoru?Ako postoje, mogu li im se unaprijed pripisati, i u kojoj mjeri, izvjesne oso-bine? Specijalno, postoji li ogranicen linearan funkcional jednak nuli na ne-kom pravom potprostoru Banachovog prostora, a da pri tome ne iscezava nacitavom prostoru? Na sva ova pitanja egzistencije, odgovor nam daje Hahn-Banachov teorem o produzenju linearnog ogranicenog funkcionala. Bez ovogteorema, danasnja funkcionalna analiza bi bila sasvim drugacija. Prve re-zultate vezane za ovaj teorem dali su Riesz i Helly na samom pocetku dva-desetog vijeka, a Hahn i Banach ce ga 1920. godine postaviti i dokazati udanasnjem obliku (za realan slucaj), neovisno jedan od drugog.Po svojoj eleganciji i jacini, Hahn-Banachov teorem je omiljen u matemati-
ckim krugovima. Neki od ”nadimaka” ovog teorema su ”Analiticka formaaksioma izbora” i ”Krunski dragulj funkcionalne analize”. Neophodan jealat u funkcionalnoj analizi, ali i u drugim oblastima matematike, kao stosu teorija upravljanja, konveksno programiranje, teorija igara, neophodan jeu dokazu egzistencije Greenove funkcije, u formulaciji termodinamike i sl.

2.2. Hahn-Banachov teorem
60
Teorem 2.8 (Hahn-Banachov teorem, realan slucaj). Neka je X re-alan Banachov prostor i neka je L lineal u X. Neka je na L definisanogranicen linearan funkcional f . Tada postoji ogranicen linearan funkcionalf∗, definisan na cijelom X, takav da vrijedi
• (∀x ∈ L) f∗(x) = f(x) i
• ||f∗|| = ||f ||.
Dokaz : Neka je na L definisan ogranicen linearan funkcional f . SlucajL = X je trivijalan, zato pretpostavimo da je L pravi potprostor od X.Tada postoji x0 ∈ X, takav da x0 /∈ L. Oznacimo sa L0 lineal generisanelementom x0, tj.
L0 = x ∈ X| x = λx0 , λ ∈ R .
Neka je sada L1 = L⊕L0, koji je zbog konacne dimenzije lineala L0, takodepotprostor od X. Pokazimo kao prvo da se nas funkcional moze produzitina L1, bez promjene norme.Zbog direktne sume, svaki se element x ∈ L1 moze na jedinstven nacin
zapisati u oblikux = l + λx0 , l ∈ L , λ ∈ R .
(Za svako x, λ i l su jedinstveno odredeni.)Ne gubeci na opstosti, pretpostavimo da je ||f || = 1. Tada za proizvoljnex, y ∈ L imamo
f(x− y) ≤ |f(x− y)|≤ ||f || ||x− y|| = ||x− y|| = ||x− x0 + x0 − y||≤ ||x− x0||+ ||x0 − y|| .
Zbog linearnosti funkcionala, tj. f(x − y) = f(x) − f(y), iz gornjeg za-kljucujemo da vrijedi
f(x)− ||x− x0|| ≤ f(y) + ||x0 − y|| .
Odavde, uzimajuci prvo supremum lijeve strane, a onda infimum desne,dobijamo da vrijedi
sup f(x)− ||x− x0|| | x ∈ L ≤ inf f(y) + ||x0 − y|| | y ∈ L .
Zbog gustosti skupa R, postoji k ∈ R, takav da je
sup f(x)− ||x− x0|| | x ∈ L ≤ k ≤ inf f(y) + ||x0 − y|| | y ∈ L .
Definisimo sada funkcional f1 : L1 −→ R, na sljedeci nacin: za x = l+λx0 ∈L1, neka je po definiciji
f1(x) = f(l) + λ · k .

61
UVOD U TEORIJU OPERATORA
Za x′ = l′ + λ′x0 i x′′ = l′′ + λ′′x0 iz L1 i α, β ∈ R, vrijedi
f1(αx′ + βx′′) = f1((αl
′ + βl′′) + (αλ′ + βλ′′)x0)
= f(αl′ + βl′′) + (αλ′ + βλ′′)k
= αf(l′) + βf(l′′) + αλ′x0 + βλ′′x0= αf1(x
′) + βf1(x′′) ,
dakle, f1 je linearan funkcional. Osim toga, kako je L ⊂ L1, to za x ∈ Limamo da je x = x+ 0 · x0, a time je
f1(x) = f(x) + 0 · k = f(x) ,
pa zakljucujemo da se funkcionali f i f1 poklapaju na L, tj. f1 je produzenjefunkcionala f .Ostaje nam jos pokazati da je pri tom produzenju ocuvana norma. Neka
je x ∈ L1 proizvoljan. Tada je za jedinstvene l ∈ L i λ ∈ R, x = l + λx0,i pri tome je f1(x) = f(l) + λk. Neka je sada λ > 0. Zbog nacina izborabroja k, vrijedi
f1(x) = f(l)+λk ≤ f(l)+λ(f(y)+ ||y−x0||) = f(l)+ f(λy)+ ||λy−λx0|| ,
za proizvoljno y ∈ L. Odaberimo y tako da vrijedi λy = −l. Tada imamo
f1(x) ≤ || − l − λx0|| = ||l + λx0|| = ||x|| . (2.1)
S druge strane, ponovo zbog izbora broja k vrijedi
f1(x) = f(l)+λk ≥ f(l)+λ(f(y)−||y−x0||) = f(l)+ f(λy)−||λy−λx0|| ,
za sve y ∈ L. Odaberimo opet da je λy = −l, dobijamo
f1(x) ≥ −|| − l − λx0|| = −||l + λx0|| = −||x|| . (2.2)
Iz (2.1) i (2.2) zakljucujemo da vrijedi
|f1(x)| ≤ ||x|| , za sve x ∈ L1 .
Sve gornje je pokazano za slucaj ako je λ > 0. Ako je λ < 0, tada biposmatrali −x = l′+λ′x0, gdje je λ′ = −λ, a l′ = −l, te bi prema dokazanomimali
|f1(x)| = |f1(−x)| ≤ || − x|| = ||x|| .Ako je na kraju λ = 0, tada je x ∈ L, pa zbog poklapanja funkcionala vrijedi
|f1(x)| = |f(x)| ≤ ||f ||||x|| = ||x|| .
Iz svega recenog zakljucujemo da za svako x ∈ L1 vrijedi |f1(x)| ≤ ||x||, tj.
||f || ≤ 1 . (2.3)

2.2. Hahn-Banachov teorem
62
S druge strane opet, zbog definicije norme funkcionala i osobina supremumaimamo
||f1|| = supx∈L1\0
|f1(x)|||x|| ≥ sup
x∈L\0
|f1(x)|||x|| = sup
x∈L\0
|f(x)|||x|| = ||f || = 1 ,
tj. vrijedi
||f1|| ≥ 1 . (2.4)
Iz (2.3) i (2.4) zakljucujemo da vrijedi
||f1|| = 1 ,
te smo dobili produzenje funkcionala bez promjene norme.
Posmatrajmo sada familiju , svih produzenja funkcionala f bez promjenenorme. Na osnovu gore pokazanog, 6= ∅. U uvedimo sljedecu relaciju,za f1, f2 ∈
f1 f2 ⇔ f2 je produzenje funkcionala f1.
Trivijalno se pokazuje da je sa uvedenom relacijom, parcijalno uredenskup. Pokazimo sada da su u ispunjeni uslovi za primjenu Zornove leme.Neka je 0 proizvoljan lanac u (svi elementi u 0 su medusobno uporediviuvedenom relacijom). Oznacimo sa
L′ =⋃
i∈ILi ,
gdje su Li (i ∈ I) lineali na kojima su definisani funkcionali fi ∈ 0 i kojipredstavljaju prosirenja lineala L. Kako je 0 lanac, to je za proizvoljnefi, fj ∈ 0 ili fi fj ili fj fi, a to onda znaci da za odgovarajuce linealevrijedi ili Li ⊆ Lj ili Lj ⊆ Li. Koristeci ovo, lahko dokazujemo da je L′
lineal u X i da je L ⊆ L′, a takode za svako i ∈ I je Li ⊆ L′.Definisimo sada funkcional f0 : L′ −→ R na sljedeci nacin: za proizvoljnox ∈ L′, postoji i ∈ I, takav da je x ∈ Li, i stavimo
f0(x) = fi(x) .
Neka je x ∈ L′ proizvoljan i neka je i ∈ I onaj za koga je x ∈ Li. Ako je Lj
neki drugi lineal koji sadrzi x, tada za odgovarajuce funkcionale vrijedi
fi fj ili fj fi .
Neka je recimo fi fj. Ovo onda znaci da je funkcional fj prosirenjefunkcionala fi, a onda se njihove vrijednosti poklapaju na Li, tj.
f0(x) = fi(x) = fj(x) ,

63
UVOD U TEORIJU OPERATORA
te vrijednost funkcionala f0 ne ovisi o tome koji od funkcionala biramo negosamo o x, pa je f0 dobro definisan funkcional.Ako su x, y ∈ L′ proizvoljni, tada postoje Li i Lj takvi da je x ∈ Li iy ∈ Lj, ali pri tome zbog uredenosti lanca, jos vrijedi npr. Li ⊆ Lj . Dakle,x, y ∈ Lj, a kako je on lineal, to mamo
f0(x+ y) = fj(x+ y) = fj(x) + fj(y) = f0(x) + f0(y) .
Na slican nacin se pokazuje da za proizvoljno λ ∈ R, vrijedi
f0(λx) = λf(x) .
Dakle, f0 je linearan funkcional.Kako je za proizvoljan f ∈ , ||f || = 1, tada je za proizvoljno x ∈ L′
|f0(x)| = |fi(x)| ≤ ||x|| ,odnosno ||f0|| ≤ 1. S druge strane imamo
||f0|| = supx∈L′\0
|f0(x)|||x|| ≥ sup
x∈Li\0
|f0(x)|||x|| = sup
x∈Li\0
|fi(x)|||x|| = ||fi|| ,
za proizvoljno i ∈ I, a to znaci ||f0|| ≥ 1. Dakle, vrijedi
||f0|| = 1 .
Iz svega navedenog zakljucujemo da je f0 prosirenje funkcionala f , bez pro-mjene norme, ali takode i prosirenje svakog od funkcionala fi ∈ 0. Dakle,
(∀fi ∈ 0) fi f0 ,
a sto ne znaci nista drugo do da lanac 0 ima bar jedno gornje ogranicenje.Zbog proizvoljnosti lanca, a na osnovu Zornove leme, zakljucujemo da u
postoji maksimalan element, oznacimo ga sa f∗. Kao prvo, imamo da jef∗ prosirenje funkcionala f , bez promjene norme, a kao drugo ostaje namvidjeti da je ovaj funkcional definisan na citavom X.Kad to ne bi bilo, tj. Df∗ ⊂ X, postojao bi z ∈ X, takav da z /∈ Df∗ .Tada bi funkcional f∗, na osnovu prvog dijela dokaza, mogli prosiriti bezpromjene norme na lineal
L∗1 = Df∗ ⊕ L1 ,
gdje je L1 = x ∈ X| x = λz , λ ∈ R. Medutim, ovo bi znacilo da f∗ nijemaksimalan element u , pa prema tome ova mogucnost otpada, tj. moravrijediti
Df∗ = X ,
cime je teorem dokazan. ♣
Hahn-Banachov teorem je jedna ”ogromna” teorema, a to potvrduju imnoge posljedice, tj. tvrdnje koje se dokazuju koristeci ovaj teorem. Micemo ovdje navesti samo neke od njih.

2.2. Hahn-Banachov teorem
64
Teorem 2.9. Neka je x0 proizvoljan nenula element prostora X. Tada naX postoji linearan funkcional f∗, takav da vrijedi
• ||f∗|| = 1.
• f∗(x0) = ||x0||.
Dokaz : Neka je 0 6= x0 ∈ X proizvoljan. Posmatrajmo lineal
L = x| x = λx0 , λ ∈ Φ .
Definisimo f : L −→ Φ, na sljedeci nacin, za x = λx0 ∈ L
f(x) = λ||x0|| .
Za x′, x′′ ∈ L i a, b ∈ Φ, imamo
f(ax′ + bx′′) = f(aλ′x0 + bλ′′x0)
= f((aλ′ + bλ′′)x0) = (aλ′ + bλ′′)||x0|| = af(x′) + bf(x′′) ,
te je f linearan funkcional. Dalje imamo
||f || = supx∈L\0
|f(x)|||x|| = sup
λ∈Φ
|λ||x0|||||λx0||
= 1 .
Iz same definicije funkcionala vidimo da je zbog x0 = 1 · x0
f(x0) = ||x0|| .
Pozivajuci se sada na Hahn-Banachov teorem, dati funkcional f mozemoproduziti na citav prostor do funkcionala f∗, koji ima istu normu kao i f(tj. vrijedi prva osobina) i pri tome se poklapa sa funkcionalom f na L (tj.vrijedi druga trazena osobina). ♣
Teorem 2.10. Neka je X Banachov prostor i neka je L pravi potprostor odX. Neka je x0 ∈ X \ L. Tada postoji ogranicen linearan funkcional f∗ naX, takav da vrijedi
• ||f∗|| = 1.
• f∗(x0) = d = d(x0, L).
• (∀x ∈ L) f∗(x) = 0.
Dokaz : Neka je x0 ∈ X \ L. Posmatrajmo skup
L1 = x ∈ X| x = λx0 , λ ∈ Φ .

65
UVOD U TEORIJU OPERATORA
L1 je jednodimenzionalan potprostor od X, te je potprostor i
L′ = L⊕ L1 ,
i pri tome se onda svaki x ∈ L′, na jednoznacan nacin moze zapisati u obliku
x = l + λx0 , l ∈ L , λ ∈ Φ .
Definisimo na L′ funkcional f0 sa
f0(x) = f0(l + λx0) = λd ,
gdje je d udaljenost elementa x0 od potprostora L, tj. d = d(x0, L). Ociglednoza x ∈ L vrijedi f0(x) = 0, a takode i f0(x0) = d. Izracunajmo normu ovogfunkcionala.
||f0|| = supx∈L′
|f0(x)|||x|| = sup
l∈L, λ∈Φ
|f0(l + λx0)|||l + λx0||
= supl∈L, λ∈Φ
|λd|||l + λx0||
= supl∈L, λ∈Φ
d
||x0 + lλ ||
= d supl′∈L
1
||x0 + l′|| =d
inf l′∈L ||x0 + l′||
=d
d= 1 .
Ostaje nam samo primjeniti Hahn-Banachov teorem i utvrditi postojanjeovakvog funkcionala na citavom prostoru. ♣
Sljedeca posljedica cesto se naziva teorem o postojanju dovoljnog brojaneprekidnih funkcionala.
Teorem 2.11. Neka je X Banachov prostor i neka su x, y ∈ X. Ako zasvaki f ∈ X∗ vrijedi f(x) = f(y), tada je x = y.
Dokaz : Ako je x 6= y, onda je x − y 6= 0, pa na osnovu prve posljedice,postoji f ∈ X∗, takav da je f(x−y) = ||x−y||. Ovo znaci da je f(x) 6= f(y),pa kontrapozicijom imamo iskazanu tvrdnju. ♣
Ovaj teorem smo mogli iskazati i u ekvivalentnom obliku: Ako je f(x) = 0za sve f ∈ X∗, onda je x = 0.
2.3 Reprezentacije ogranicenih linearnih funkcionala
2.3.1 Konacnodimenzionalni prostori
Teorem 2.12. Neka je X konacnodimenzionalan vektorski prostor dimen-zije n, nad poljem Φ. Neka je e1, e2, . . . , en baza prostora X i neka su

2.3. Reprezentacije ogranicenih linearnih funkcionala
66
a1, a2, . . . , an proizvoljni elementi iz Φ. Tada postoji jedinstven linearanfunkcional f : X −→ Φ takav da vrijedi
f(ei) = ai , (i = 1, 2, . . . , n) .
Dokaz : Neka je X konacnodimenzionalan vektorski prostor dimenzije n,nad poljem Φ i neka je e1, e2, . . . , en njegova baza. Svaki vektor x ∈ X najedinstven nacin se moze prikazati kao linearna kombinacija vektora baze
x =n∑
i=1
ξiei .
Neka su ai (i = 1, 2, . . . , n), dati elementi iz Φ. Za proizvoljan vektor x =n∑
i=1
ξiei ∈ X, definisimo funkcional f : X −→ Φ sa
f(x) = ξ1a1 + ξ2a2 + . . .+ ξnan .
Vektore baze prostora X mozemo prikazati kao uredene n-torke, sa svimnulama i na k-tom mjestu 1,
ek = (0, 0, 0, . . . , 1︸︷︷︸k
, . . . , 0, 0) , k = 1, 2, ..., n ,
pa je ocigledno f(ei) = ai za i = 1, 2, . . . , n.Dokazimo da je funkcional f linearan. Neka su λ, µ ∈ Φ proizvoljni i neka
su x, y ∈ X, sa reprezentacijama x =
n∑
i=1
ξiei i y =
n∑
i=1
ηiei. Tada je
f(x) = ξ1a1 + ξ2a2 + . . .+ ξnan i f(y) = η1a1 + η2a2 + . . . + ηnan .
Kako je X linearan vektorski prostor, to je λx + µy ∈ X, pa je njegovareprezentacija
λx+ µy = (λξ1 + µη1)e1 + (λξ2 + µη2)e2 + . . .+ (λξn + µηn)en .
Na osnovu definicije funkcionala f je
f(λx+ µy) = (λξ1 + µη1)a1 + (λξ2 + µη2)a2 + . . .+ (λξn + µηn)an
= λ(ξ1a1 + ξ2a2 + . . .+ ξnan) + µ(η1a1 + η2a2 + . . .+ ηnan)
= λf(x) + µf(y) .
Dakle, definisani funkcional f je linearan.Ostaje da pokazemo jedinstvenost funkcionala f . Pretpostavimo da su f ig dva linearna funkcionala iz X∗, takva da je
f(ei) = ai i g(ei) = ai , i = 1, 2, ..., n .

67
UVOD U TEORIJU OPERATORA
Neka je x =
n∑
i=1
ξiei proizvoljan vektor iz X. Zbog linearnosti funkcionala
f i g imamo
f(x) = f(ξ1e1 + ξ2e2 + . . .+ ξnen) = ξ1f(e1) + ξ2f(e2) + . . .+ ξnf(en)
= ξ1a1 + ξ2a2 + . . .+ ξnan = ξ1g(e1) + ξ2g(e2) + . . .+ ξng(en)
= g(ξ1e1 + ξ2e2 + . . .+ ξnen) = g(x) ,
a ovo znaci da su f i g jednaki funkcionali. ♣
Navedeni teorem nam ustvari govori da je reprezentacija linearnog funkci-onala f : X −→ Φ na konacnodimenzionalnom prostoru X data sa
f(x) =
n∑
i=1
ξiai , (2.5)
gdje je x =n∑
i=1
ξiei ∈ X i a1, a2, . . . , an ∈ Φ
Reprezentacija linearnog funkcionala f na konacnodimenzionalnom vektor-skom prostoru se moze prikazati i u matricnom obliku. Neka je x ∈ X pro-izvoljan vektor konacnodimenzionalnog prostora X. Prikazimo ga u oblikumatrice formata ”n × 1”,
x =
ξ1ξ2...ξn
.
Sa ”a” oznacimo matricu vrstu ”1 × n”,
a = [a1 a2 . . . an] ,
gdje su a1, a2, . . . , an dati skalari iz Φ. Proizvod ovih matrica definise line-aran funkcional na X,
f(x) = [a1 a2 . . . an]
ξ1ξ2...ξn
= a1ξ1 + a2ξ2 + . . .+ anξn , (2.6)
Primjer 2.5. Preslikavanje f : R3 −→ R, zadato sa f(x) = 2ξ1 − ξ2 +4ξ3, jelinearan funkcional.
Neka su x =
3∑
i=1
ξiei i y =
3∑
i=1
ηiei dva proizvoljna vektora iz R3. Tada je,
prema definiciji preslikavanja f ,
f(x) = 2ξ1 − ξ2 + 4ξ3 ,

2.3. Reprezentacije ogranicenih linearnih funkcionala
68
f(y) = 2η1 − η2 + 4η3 .
Sa e1 = (1, 0, 0), e2 = (0, 1, 0), e3 = (0, 0, 1) oznacimo vektore baze prostoraR3. Odavde, na osnovu Teorema 2.12, vidimo da je f(e1) = 2, f(e2) =−1, f(e3) = 4.Neka su λ, µ ∈ R proizvoljni. Tada je
λx+ µy = λξ1e1 + λξ2e2 + λξ3e3 + µη1e1 + µη2e2 + µη3e3
= (λξ1 + µη1)e1 + (λξ2 + µη2)e2 + (λξ3 + µη3)e3 ,
pa je
f(λx+ µy) = f ((λξ1 + µη1)e1 + (λξ2 + µη2)e2 + (λξ3 + µη3)e3)
= (λξ1 + µη1)f(e1) + (λξ2 + µη2)f(e2) + (λξ3 + µη3)f(e3)
= 2(λξ1 + µη1)− (λξ2 + µη2) + 4(λξ3 + µη3)
= λ(2ξ1 − ξ2 + 4ξ3) + µ(2η1 − η2 + 4η3)
= λf(x) + µf(y) .
Kako ovo vrijedi za proizvoljne vektore x, y ∈ R3 i proizvoljne skalare λ, µ ∈R, zakljucujemo da je dato preslikavanje f linearan funkcional na R3 . ♦
2.3.2 Beskonacnodimenzionalni prostori
Teorem 2.13. Ogranicen linearan funkcional f na prostoru ℓp, (1 < p <+∞) ima reprezentaciju
f(x) =
∞∑
i=1
ξiηi ,
gdje je x = (ξi)i∈N ∈ ℓp, y = (ηi)i∈N ∈ ℓq,(1p +
1q = 1
), pri cemu je ‖f‖ =
‖y‖ℓq . Funkcionalom f na ℓp, tacka y ∈ ℓq je jednoznacno odredena.
Dokaz : Neka je 1 < p < +∞. Za proizvoljan x = (ξi)i∈N ∈ ℓp, vrijedi
∑
i∈N|ξi|p < +∞ i norma u ℓp je definisana sa ‖x‖ =
( ∞∑
i=1
|ξi|p) 1
p
.
Za x = (ξi)i∈N ∈ lp i y = (ηi)i∈N ∈ lq (1p +
1q = 1 i 1 < p <∞), izraz
∞∑
i=1
ξiηi
uvijek ima smisla jer na osnovu Holderove nejednakosti vrijedi
∞∑
i=1
ξiηi ≤( ∞∑
i=1
|ξi|p) 1
p( ∞∑
i=1
|ηi|q) 1
q
= ||x||lp ||y||lq < +∞ .
Posmatrano kao funkcija od x ∈ lp, on definise funkcional f na lp, cija selinearnost jednostavno pokazuje, a ogranicenost slijedi iz
|f(x)| ≤ ||y||lq ||x||lp .

69
UVOD U TEORIJU OPERATORA
Pokazimo i obrat, tj. da svaki ogranicen linearan funkcional na lp imanavedenu formu sa datim osobinama. Sa en oznacimo niz ciji su svi clanovi,izuzev n-tog jednaki nuli, a n-ti clan je jednak 1, tj.
en = (0, 0, 0, . . . , 1︸︷︷︸n−to mjesto
, 0, . . .) (n ∈ N) .
Ocigledno je en ∈ ℓp i pri tome vrijedi ‖en‖ = 1 (n ∈ N). Sada za x =(ξi)i∈N ∈ ℓp i proizvoljno n ∈ N imamo da je
n∑
i=1
ξiei = (ξ1, ξ2, . . . , ξn, 0, 0 . . .) ,
pa je
x−n∑
i=1
ξiei = (0, 0, 0, . . . , 0, ξn+1, ξn+2, . . .) .
Odavde je∥∥∥∥∥x−
n∑
i=1
ξiei
∥∥∥∥∥ =
( ∞∑
i=n+1
|ξi|p) 1
p
,
i pustajuci da n → +∞, imamo
∞∑
i=n+1
|ξi|p → 0, tj. ‖x −n∑
i=1
ξiei‖ → 0.
Dakle, red
∞∑
i=1
ξiei je konvergentan u ℓp i vrijedi x =
∞∑
i=1
ξiei.
Neka je f ogranicen linearan funkcional na ℓp. Funkcional f je neprekidan,pa iz konvergencije
n∑
i=1
ξiei −→ x, (n→ ∞) ,
slijedi
f
(n∑
i=1
ξiei
)−→ f(x), (n→ ∞) .
Koristeci linearnost funkcionala f tada je
f
(n∑
i=1
ξiei
)=
n∑
i=1
ξif(ei) ,
tj.n∑
i=1
ξif(ei) −→ f(x) (n→ ∞) .

2.3. Reprezentacije ogranicenih linearnih funkcionala
70
Dakle, red
∞∑
i=1
ξif(ei) konvergira i suma mu je jednaka f(x):
f(x) =
∞∑
i=1
ξif(ei) . (2.7)
Zbog proizvoljnosti elementa x ∈ ℓp, zakljucujemo da (2.7) vrijedi za svex ∈ ℓp. Oznacimo sa ηi = f(ei) (i ∈ N), imat cemo da je
f(x) =
∞∑
i=1
ξiηi , (2.8)
sto je ustvari reprezentacija proizvoljnog funkcionala f ∈ ℓ∗p. Na ovaj nacinsmo proizvoljnom funkcionalu f ∈ ℓ∗p pridruzili niz y = (ηi)i∈N, gdje jeηi = f(ei), za i ∈ N. Iz ogranicenosti funkcionala f imamo
|f(x)| ≤ ‖f‖‖x‖ℓp . (2.9)
Pokazimo sada da je y ∈ ℓq, gdje je1
p+
1
q= 1.
Posmatrajmo proizvoljno ali fiksirano k ∈ N i stavimo da je
xk = (ξi)i∈N , ξi =
|ηi|q−1 sgn(ηi), i = 1, 2, . . . , k
0, i > k, (2.10)
Pri ovakovom izboru vektora imamo
f(xk) =
n∑
i=1
ξiηi =
n∑
i=1
|ηi|q−1 sgn(ηi) · |ηi| sgn(ηi) =n∑
i=1
|ηi|q .
Iz (2.9), (2.10) i konjugovanosti brojeva p i q imamo da je
n∑
i=1
|ηi|q ≤ ‖f‖(
n∑
i=1
∣∣∣|ηi|q−1 sgn(ηi)∣∣∣p) 1
p
= ‖f‖(
n∑
i=1
|ηi|pq−p
) 1p
,
tj.n∑
i=1
|ηi|q ≤ ‖f‖(
n∑
i=1
|ηi|q)1− 1
q
. (2.11)
Mnozenjem izraza (2.11) sa
(n∑
i=1
|ηi|q) 1
q−1
dobijamo da je
(n∑
i=1
|ηi|q) 1
q
≤ ‖f‖ < +∞ .

71
UVOD U TEORIJU OPERATORA
Na ovaj nacin smo pokazali da je niz parcijalnih suma
(n∑
i=1
|ηi|q)
n∈Npo-
zitivnog reda
∞∑
i=1
|ηi|q ogranicen odozgo brojem ‖f‖q, pa je taj red konver-
gentan i vrijedi∞∑
i=1
|ηi|q ≤ ‖f‖q < +∞ .
Ovim smo pokazali da je niz y = (ηi)i∈N ∈ ℓq i da je
( ∞∑
i=1
|ηi|q) 1
q
≤ ‖f‖ ,
tj.
‖y‖ ≤ ‖f‖ . (2.12)
Iz reprezentacije funkcionala f(x) =
∞∑
i=1
ξiηi, imamo da je
|f(x)| =∣∣∣∣∣
∞∑
i=1
ξiηi
∣∣∣∣∣ ≤∞∑
i=1
|ξi| |ηi| .
Na osnovu Holderove nejednakosti imamo da je za svaki x ∈ ℓp
|f(x)| ≤( ∞∑
i=1
|ξi|p) 1
p
·( ∞∑
i=1
|ηi|q) 1
q
,
pri cemu je1
p+
1
q= 1. Znaci
|f(x)| ≤ ‖x‖‖y‖, (∀x ∈ ℓp) .
Iz ovoga dalje imamo
|f(x)|‖x‖ ≤ ‖y‖, (∀x ∈ ℓp, ‖x‖ 6= 0) ,
pa je
‖f‖ = supx∈ℓp,‖x‖6=0
|f(x)|‖x‖ ≤ ‖y‖ ,
tj.‖f‖ ≤ ‖y‖ . (2.13)
Iz (2.12) i (2.13) zakljucujemo da je ‖f‖ = ‖y‖.

2.3. Reprezentacije ogranicenih linearnih funkcionala
72
Pokazimo jos da je funkcionalom f ∈ ℓ∗p element y ∈ ℓq jednoznacnoodreden. Pretpostavimo suprotno, tj. pretpostavimo da postoji jos jednatacka y′ = (η′i)i∈N ∈ ℓq razlicita od y odredena funkcionalom f . To znaci daje
f(x) =
∞∑
i=1
ξiηi =
∞∑
i=1
ξiη′i (∀x ∈ ℓp) ,
pa za x = en imamo f(en) = ηn = η′n, za svako n ∈ N tojest, y = y′, stoje suprotno pretpostavci da je y 6= y′. Dakle, funkcionalom f ∈ ℓ∗p elementy ∈ ℓq je jednoznacno odreden. ♣
Teorem 2.14. Ogranicen linearan funkcional f na prostoru ℓ1 ima repre-zentaciju
f(x) =
∞∑
i=1
ξiηi ,
gdje je x = (ξi)i∈N ∈ ℓ1, y = (ηi)i∈N ∈ ℓ∞ i pri tome je ‖f‖ = ‖y‖.Funkcionalom f ∈ ℓ∗1 jednoznacno je odreden element y ∈ ℓ∞.
Dokaz : Neka je x = (ξi)i∈N ∈ ℓ1 proizvoljan. Tada je
∞∑
i=1
|ξi| < +∞ i
‖x‖ =
∞∑
i=1
|ξi|.
Za x = (ξi)i∈N ∈ l1 i y = (ηi)i∈N ∈ l∞, izraz
∞∑
i=1
ξiηi uvijek ima smisla jer
vrijedi∞∑
i=1
|ξiηi| ≤ supi∈N
|ηi|∞∑
i=1
|ξi| = ||y||l∞ ||x||l1 < +∞ .
Kao funkcija od x ∈ l1, ovo je ocigledno jedan linearan funkcional na l1, azbog posljednje nejednakosti, tj.
|f(x)| ≤ ||y||l∞ ||x||l1 ,
on je i ogranicen.Pokazimo i obrat. Posmatrajmo vektore (ei)i∈N ⊂ l1 (vektori standardne
baze). Za x = (ξ1, ξ2, . . . , ξn, ξn+1, . . .) ∈ ℓ1 i fiksno n ∈ N, imamo da je
n∑
i=1
ξiei = (ξ1, ξ2, . . . , ξn, 0, 0, . . .) ,
pa je
x−n∑
i=1
ξiei = (0, 0, . . . , 0, ξn+1, ξn+2, . . .) ,

73
UVOD U TEORIJU OPERATORA
odnosno ∥∥∥∥∥x−n∑
i=1
ξiei
∥∥∥∥∥ =∞∑
i=n+1
|ξi| .
Pustimo li da n→ ∞, to ce
∞∑
i=n+1
|ξi| → 0, tj.
∥∥∥∥∥x−n∑
i=1
ξiei
∥∥∥∥∥ −→ 0 .
Znaci, red∞∑
i=1
ξiei je konvergentan u ℓ1 i vrijedi
x =∞∑
i=1
ξiei .
Neka je f linearan ogranicen funkcional na ℓ1, tj. f ∈ ℓ∗1. Na osnovuneprekidnosti funkcionala f imamo da konvergencija
n∑
i=1
ξiei −→ x, (n→ ∞) ,
povlaci konvergenciju
f
(n∑
i=1
ξiei
)−→ f(x), (n→ ∞) .
Koristeci linearnost funkcionala f , dalje je za fiksno n ∈ N
f
(n∑
i=1
ξiei
)=
n∑
i=1
ξif(ei) .
Pustimo li da n→ ∞ imat cemo da je
f(x) =
∞∑
i=1
ξif(ei) .
Uvedimo oznaku ηi = f(ei) za i ∈ N. Tada proizvoljan funkcional f ∈ ℓ∗1ima oblik
f(x) =
∞∑
i=1
ξiηi, (2.14)
sto je ustvari reprezentacija funkcionala f na l1.Posmatrajmo sada tacku y = (ηi)i∈N, gdje je ηi = f(ei),za svaki i ∈ N.
Pokazimo da y ∈ ℓ∞, tj. da je y element prostora svih ogranicenih nizova

2.3. Reprezentacije ogranicenih linearnih funkcionala
74
ℓ∞.U tom cilju, posmatrajmo niz tacaka xn = (ξni )i∈N ∈ ℓ1, (n ∈ N), gdje je
ξni =
sgn(ηn), i = n
0, i 6= n.
Za niz tacaka xn, (n ∈ N) imamo da je ‖xn‖ = 1 i f(xn) = sgn(ηn) ·ηn = |ηn|Koristeci sada ogranicenost funkcionala f , imamo da je za svaki n ∈ N
|f(xn)| ≤ ‖f‖ · ‖xn‖ ,
|ηn| ≤ ‖f‖ < +∞, (∀n ∈ N) .
Time je i
supn∈N
|ηn| ≤ ‖f‖ < +∞ .
Odavde najprije slijedi da je y = (ηn)n∈N ∈ ℓ∞, te
‖y‖ℓ∞ ≤ ‖f‖ . (2.15)
Iz ogranicenosti funkcionala f , za svaki x ∈ ℓ1 imamo:
|f(x)| =∣∣∣∣∣
n∑
i=1
ξiηi
∣∣∣∣∣ ≤n∑
i=1
|ξi| |ηi| ≤ supn∈N
|ηi|∞∑
i=1
|ξi| = ‖y‖ℓ∞‖x‖ℓ1 ,
pa slijedi da je
‖f‖ ≤ ‖y‖ℓ∞ . (2.16)
Sada iz (2.15) i (2.16) zakljucujemo da je
‖f‖ = ‖y‖ℓ∞ .
Pokazimo jos jedinstvenost tacke y ∈ ℓ∞. Pretpostavimo suprotno, tj.
pretpostavimo da postoje dvije razlicite tacke y1 = (η(1)i )i∈N i y2 = (η
(2)i )i∈N
iz ℓ∞ takve da je za proizvoljno x = (ξi)i∈N ∈ ℓ1 funkcional f ∈ ℓ∗1 imareprezentaciju
f(x) =
∞∑
i=1
ξiη(1)i =
∞∑
i=1
ξiη(2)i .
Tada bismo za x = en imali
f(en) = η(1)n = η(2)n , (∀n ∈ N) ,
tj. y1 je jednako y2 po svim koordinatama, sto je suprotno pretpostavci daje y1 6= y2. Dakle, funkcionalu f ∈ ℓ∗1 jednoznacno je pridruzen elementy ∈ ℓ∞. ♣

75
UVOD U TEORIJU OPERATORA
Teorem 2.15. Ogranicen linearan funkcional f na prostoru c0 ima repre-zentaciju
f(x) =
∞∑
i=1
ηiξi ,
gdje je y = (ηi)i∈N ∈ ℓ1 i ‖f‖ = ‖y‖.Funkcionalom f ∈ c∗0 tacka y ∈ ℓ1 jednoznacno je odredena.
Dokaz : Neka je x = (ξi)i∈N ∈ c0 i y = (ηi)i∈N ∈ ℓ1. Tada izraz
∞∑
i=1
ξiηi
ima smisla, jer je
∞∑
i=1
|ξiηi| ≤ supi∈N
|ξi| ·∞∑
i=1
|ηi| = ‖x‖c0 · ‖y‖ℓ < +∞ .
Posmatran kao funkcija od x ∈ c0, izraz
∞∑
i=1
ξiηi definise jedan funkcional f
na c0, tj.
f(x) =
∞∑
i=1
ξiηi .
Pokazimo njegovu linearnost. Neka su x1, x2 ∈ c0 i α, β ∈ R (ili C) pro-izvoljni. Posmatrajmo
f(αx1 + βx2) =
∞∑
i=1
(αξ
(1)i + βξ
(2)i
)ηi .
Kako su α, β, ξi, ηi ∈ R (ili C), za svaki i ∈ N to vrijedi zakon distributiv-nosti, pa je
f(αx1 + βx2) =
∞∑
i=1
(αξ
(1)i ηi + βξ
(2)i ηi
)
=∞∑
i=1
αξ(1)i ηi +
∞∑
i=1
βξ(2)i ηi
= α∞∑
i=1
ξ(1)i ηi + β
∞∑
i=1
ξ(2)i ηi
= αf(x1) + βf(x2) .
Znaci, funkcional f je linearan za proizvoljne x1, x2 ∈ c0, pa je, zbog njihoveproizvoljnosti linearan na cijelom prostoru c0.Pokazimo sada ogranicenost funkcionala f na c0. Posmatrajmo
|f(x)| =∣∣∣∣∣
∞∑
i=1
ξiηi
∣∣∣∣∣ ≤∞∑
i=1
|ξiηi| ≤ supi∈N
|ξi|∞∑
i=1
|ηi| ,

2.3. Reprezentacije ogranicenih linearnih funkcionala
76
|f(x)| ≤ ‖x‖c0‖y‖ℓ < +∞ .
Kako je |f(x)| ≤ ‖f‖‖x‖ za svaki x ∈ c0 i na osnovu pokazanog |f(x)| < +∞,imamo da je
‖f‖ ≤ ‖y‖ℓ . (2.17)
Dakle, pokazali smo da za svaki x ∈ c0 i y ∈ ℓ izraz f(x) =
∞∑
i=1
ξiηi pred-
stavlja linearan ogranicen funkcional f na c0.
Obrnuto, pretpostavimo da je f proizvoljan ogranicen linearan funkcionalna c0. Tada je sa
x =
∞∑
i=1
ξiei ,
dat jedinstven prikaz elementa x ∈ c0, gdje su en (n ∈ N) standardni vektori
baze. Za fiksno n ∈ N oznacimo xn =n∑
i=1
ξiei i posmatrajmo izraz
x−n∑
i=1
ξiei =
∞∑
i=n+1
ξiei .
Tada je ∥∥∥∥∥x−n∑
i=1
ξiei
∥∥∥∥∥ =
∥∥∥∥∥
∞∑
i=n+1
ξiei
∥∥∥∥∥ = supi>n
|ξi| .
Pustimo li da n → ∞ to ce supi>n
|ξi| −→ 0 tj. xn −→ x. Zbog neprekidnosti
funkcionala f imamo da f(xn) −→ f(x) kada n→ ∞, tj.
f(x) = f
( ∞∑
i=1
ξiei
),
a zbog linearnosti
f(x) =
∞∑
i=1
ξif(ei) .
Stavimo li da je ηi = f(ei), za svaki i ∈ N, dobijamo da je
f(x) =
∞∑
i=1
ξiηi ,
sto je ustvari reprezentacija funkcionala f na c0. Na ovaj nacin smo pro-izvoljnom funkcionalu f ∈ c∗0 pridruzili element
y = (η1, η2, . . . , ηi, . . .) , ηi = f(ei) , (i ∈ N) .

77
UVOD U TEORIJU OPERATORA
Pokazimo sada da je y ∈ ℓ. Posmatrajmo
|f(x)| =∣∣∣∣∣
∞∑
i=1
ξiηi
∣∣∣∣∣ ≤∞∑
i=1
|ξi| |ηi| ≤ supi∈N
|ξi|∞∑
i=1
|ηi| .
Kako je x ∈ c0, to je ‖x‖c0 = supi∈N
|ξi|, pa imamo da je
|f(x)| ≤∞∑
i=1
|ηi| ‖x‖c0 .
Posmatrajmo niz tacaka xn = (ξni )i∈N ∈ c0 takav da je
ξni =
sgn(ηi), i ≤ n
0 i > n, (n ∈ N) .
Odavde je ocigledno ‖xn‖ = sup0<i≤n
|ξi| = 1, pa je
f(xn) =
n∑
i=1
sgn(ηi) · ηi =n∑
i=1
|ηi| , (∀n ∈ N) .
Kako je f ogranicen, to je |f(xn)| =n∑
i=1
|ηi| < +∞ za svako n ∈ N, pa je i
∞∑
i=1
|ηi| < +∞, sto znaci da je y = (ηi)i∈N ∈ ℓ1, tj. ‖y‖ℓ1 =∞∑
i=1
|ηi|. Sada
imamo da je za svaki x ∈ c0, |f(x)| ≤ ‖y‖ℓ‖x‖c0 , tj.
|f(xn)| =n∑
i=1
|ηi| ≤ ‖f‖ · ‖xn‖ = ‖f‖ · 1 ,
odnosnon∑
i=1
|ηi| ≤ ‖f‖ .
Pustajuci n→ ∞ imamo da je∞∑
i=1
|ηi| ≤ ‖f‖, sto je ekvivalentno sa
‖y‖ℓ1 ≤ ‖f‖ . (2.18)
Iz (2.17) i (2.18) zakljucujemo da je ‖f‖ = ‖y‖.Ostaje jos da pokazemo jedinstvenost elementa y ∈ ℓ1. Pretpostavimo
suprotno, tj. pretpostavimo da postje dva razlicita elementa y1 = (η(1)i ) i
y2 = (η(2)i ) iz ℓ1 za koje proizvoljan funkcional f na c0 ima reprezentaciju
f(x) =
∞∑
i=1
ξiη(1)i =
∞∑
i=1
ξiη(2)i .

2.3. Reprezentacije ogranicenih linearnih funkcionala
78
Ako uzmemo da je x = ei imat cemo da je za svako i ∈ N f(ei) = η(1)i = η
(2)i ,
pa su y1 i y2 jednaki po svim koordinatama, sto je suprotno pretpostavci.Znaci, funkcionalom f ∈ c∗0 element y ∈ ℓ1 je jednoznacno odreden. ♣
Teorem 2.16. Ogranicen linearan funkcional f na C[a, b] ima reprezenta-ciju
f(x) =
∫ b
ax(t)dg(t) ,
gdje je x(t) ∈ C[a, b], g(t) funkcija ogranicene varijacije na [a, b] koja seanulira u tacki t = a i pri tome je
‖f‖ = V ba (g) .
Primjedba 2.3.1. Funkcional f na C[a, b] ne odreduje jednoznacno funk-ciju ogranicene varijacije g.
Dokaz : Bez umanjenja opstosti, posmatrajmo prostor C[0, 1]. Neka je g(t)funkcija ogranicene varijacije na [0, 1]. Tada postoji Riemann-Stieltjesov
integral
∫ 1
0xdg, za svaku neprekidnu funkciju x, pa ima smisla posmatrati
funkcional f definisan sa
f(x) =
∫ 1
0x(t)dg(t) .
Njegova linearnost je ocigledna, a ogranicenost se ima na osnovu sljedeceg.
|f(x)| =
∣∣∣∣∫ 1
0x(t)dg(t)
∣∣∣∣ ≤∫ 1
0|x(t)| dg(t) ≤ max
0≤t≤1|x(t)|
∫ 1
0dg(t)
= V 10 (g) · ‖x‖ < +∞ .
Znaci, funkcional f je i ogranicen. Odavde slijedi i da je
‖f‖ ≤ V 10 (g) . (2.19)
Obrnuto, pretpostavimo da je f proizvoljan linearan, ogranicen funkcionalna C[0, 1]. Pokazimo da postoji funkcija g ∈ V [0, 1] sa g(0) = 0, tako da je
f(x) =
∫ 1
0x(t)dg(t).
Kako je svaka neprekidna funkcija i bitno ogranicena, tj.
x ∈ C[0, 1] =⇒ x ∈M [0, 1] ,
i kako su norme iste ‖x‖C[0,1] = ‖x‖M [0,1], to mozemo prostor C[0, 1] posma-trati kao potprostor prostora M [0, 1]. Na osnovu Hahn-Banachove teoreme,na M postoji ogranicen linearan funkcional f∗ takav da je:

79
UVOD U TEORIJU OPERATORA
1. f∗(x) = f(x) za x ∈ C[0, 1],
2. ‖f∗‖M = ‖f‖C .
Neka je 0 < t ≤ 1. Stavimo da je
yt = yt(u) =
1, 0 ≤ u < t0, t < u ≤ 1
.
Kolekcija funkcija yt | t ∈ [0, 1] lezi u M [0, 1]. Pomocu ovako uvedenekolekcije i funkcionala f∗ definisimo funkciju
g(t) =
f∗(yt), 0 < t ≤ 1
0, t = 0.
Iz same definicije funkcije g vidimo da je g(0) = 0. Pokazimo da je g funkcijaogranicene varijacije na [0, 1]. Posmatrajmo podjelu segmenta [0, 1]
π : 0 = t0 < t1 < t2 < . . . < tn = 1,
i stavimo
εk = sgn [g(tk)− g(tk−1)] , k = 1, 2, . . . , n .
Tada je
n∑
k=1
|g(tk)− g(tk−1)| =n∑
k=1
[(g(tk)− g(tk−1)] · εk
= [g(t1)− g(t0)] ε1 +n∑
k=2
[(g(tk)− g(tk−1)] · εk
= f∗(yt1) · ε1 +n∑
k=2
[f∗(ytk)− f∗(ytk−1
)]· εk
= f∗(yt1ε1 +
n∑
k=2
(ytk − ytk−1)εk
)
≤ ‖f∗‖ · ‖yt1ε1 +n∑
k=2
(ytk − ytk−1)εk‖ .
Kako su ytk ∈M [0, 1], za svako k = 1, 2, . . . , n, to je yt1ε1+
n∑
k=2
∣∣ytk − ytk−1
∣∣ εk
vektor iz M [0, 1], pa je njegova norma:
‖yt1ε1+n∑
k=2
(ytk−ytk−1)εk‖ = sup
0≤u≤1ess
∣∣∣∣∣ε1yt1(u) +n∑
k=2
[ytk(u)− ytk−1
(u)]εk
∣∣∣∣∣ .

2.3. Reprezentacije ogranicenih linearnih funkcionala
80
Da bismo izracunali ovu normu, posmatrajmo u na podsegmentima [t0, t1], [t1, t2],. . . , [tn−1, tn]. Kako je
y1(u) =
1, za u ∈ [0, t1]0, za u /∈ [0, t1]
,
i
ytk(u)− ytk−1(u) =
1, za u ∈ [tk−1, tk]0, za u /∈ [tk−1, tk]
, k = 2, 3, . . . , n ,
to za svako u ∈ [0, 1] imamo da je∣∣∣∣∣ε1yt1(u) +
n∑
k=2
[ytk(u)− ytk−1
(u)]εk
∣∣∣∣∣ ≤ 1 .
Znaci
‖yt1ε1 +n∑
k=2
[ytk(u)− ytk−1
(u)]εk‖ ≤ 1, (∀n ∈ N) .
Pustimo li n→ ∞, imat cemo:
V ba (g) =
∞∑
k=1
|g(tk)− g(tk−1)| ,
i
‖yt1ε1 +∞∑
k=2
[ytk(u)− ytk−1
(u)]εk‖ ≤ 1 .
To znaci da je:
V ba (g) ≤ ‖f∗‖M
Han-Banach︷︸︸︷= ‖f‖C . (2.20)
Dakle, g je funkcija ogranicene varijacije na [0, 1] i iz (2.19) i (2.20) slijedida je
‖f‖ = V ba (g) .
Ostaje jos da pokazemo da je reprezentacija funkcionala f data sa
f(x) =
∫ 1
0x(t)dg(t) (∀x ∈ C[0, 1]) .
Neka je x ∈ C[0, 1] proizvoljan. Stavimo da je
zn(u) = x(t1)yt1(u) +n∑
k=2
x(tk) [ytk(u)− ytk−1(u)] .
Tada je
zn(u)− x(u) =
x(t1)− x(u), u ∈ [t0, t1]
x(tk)− x(u), u /∈ (tk−1, tk], k = 2, 3, . . . , n .

81
UVOD U TEORIJU OPERATORA
Kako je x neprekidna na [0, 1] i [0, 1] kompaktan skup, to je x uniformnoneprekidna funkcija na [0, 1], pa
(∀ε > 0)(∃δ > 0)(m(π) < δ ⇒ |zn(u)− x(u)| < ε) ,
gdje je m(π) duzina maksimalnog podsegmenta podjele π
m(π) = max1≤k≤n
|tk − tk−1| .
Drugim rijecima, ako za niz podjela, m(π) → 0 kada n → ∞, tada zn → xu smislu metrike u M .Zbog neprekidnosti funkcionala f∗ naM imamo da f∗(zn) −→ f∗(x), (n →∞) tj.
limn→∞
f∗(zn) = f∗(x) ,
a kako je x ∈ C[0, 1] to je, na osnovu Hahn-Banachovog stava
f∗(x) = f(x), tj. f(x) = limn→∞
f∗(zn) .
Sada na osnovu definicije funkcije g i linearnosti funkcionala f∗ imamo:
f∗(zn) = f∗(x(t1)yt1 +
n∑
k=2
x(tk)[ytk − ytk−1
])
= x(t1)f∗(yt1) +
n∑
k=2
x(tk)[f∗(ytk)− f∗(ytk−1
)]
= x(t1)g(t1) +
n∑
k=2
x(tk) [g(tk)− g(tk−1)]
=
n∑
k=1
x(tk) [g(tk)− g(tk−1)] ,
pa je
f(x) = limn→∞
n∑
k=1
x(tk) [g(tk)− g(tk−1)] .
Zbog neprekidnosti funkcije x i ogranicene varijacije funkcije g na [a, b],egzistencija Riemann-Stieltjesovog integrala je obezbijedena, tj.
f(x) =
∫ b
ax(t)dg(t) . ♣
Kao sto je spomenuto u primjedbi prije dokaza, funkcionalom f na C[a, b]nije jednoznacno odredena funkcija ogranicene varijacije g, takva da je
f(x) =
∫ b
ax(t)dg(t) ,

2.3. Reprezentacije ogranicenih linearnih funkcionala
82
a objasnjenje za to lezi u cinjenici sto Riemann-Stieltjesov integral ima istuvrijednost za funkcije koje se razlikuju na skupu mjere 0. Dakle, ako jeg1(t) = g2(t) za svako t ∈ (a, b) \ E, a g1(t) 6= g2(t) na E, pri cemu jem(E) = 0, tada je
∫ b
ax(t)dg1(t) =
∫ b
ax(t)dg2(t) .
Teorem 2.17. Ogranicen linearan funkcional f na Lp(a, b) (1 < p < +∞)ima reprezentaciju
f(x) =
∫ b
ay(t)x(t)dt ,
gdje je y ∈ Lq(a, b),1
p+
1
q= 1 i pri tome je
‖f‖ = ‖y‖ .
Funkcionalom f na Lp, funkcija y u Lq jednoznacno je odredena.
Teorem 2.18. Ogranicen linearan funkcional f na prostoru L(a, b) imareprezentaciju
f(x) =
∫ b
ax(t)y(t)dt ,
gdje je y ∈ L∞(a, b) i ‖f‖ = ‖y‖L∞.
Funkcionalom f na L funkcija y ∈ L∞(a, b) jednoznacno je odredena.
Dokazi posljednje dvije teoreme mogu se naci u [1].

3
Konjugovani prostori i
konjugovani operator
3.1 Konjugovani prostori i refleksivnost . . . . . . . 83
3.2 Konjugovani operator . . . . . . . . . . . . . . . . 89
3.1 Konjugovani prostori i refleksivnost
Kao sto smo vidjeli u sekciji o linearnim operatorima, sa L(X,Y ) oznacavalismo skup svih ogranicenih linearnih operatora sa prostora X u prostor Y ,gdje smo zahtjevali jedino da su X i Y normirani prostori. Na osnovuTeorema 1.10, pod pretpostavkom da je Y Banachov prostor, L(X,Y ) jesam za sebe Banachov prostor. Kada posmatramo sva ogranicena linearnapreslikavanja kod kojih je kodomen Y = R ili Y = C, zbog cinjenice daje R (ili C) kompletan prostor, prostor L(X,Φ) (Φ = R ili Φ = C) jeBanachov prostor i za njega cemo koristiti oznaku X∗, a nazivamo ga dualni,konjugovani ili adjungovani prostor prostora X. Dakle, sa X∗ oznacavamoskup svih linearnih i ogranicenih funkcionala definisanih na X,
X∗ = f : X → Φ | f linearan i ogranicen .
Naravno da bi smo sada mogli posmatrati, za zadati Banachov prostor X, iskup svih neprekidnih funkcionala definisanih na X∗, tj. skup (X∗)∗ = X∗∗,u kome linearne operacije i normu mozemo uvesti na prirodan nacin, i sakojima on takode predstavlja jedan Banachov prostor. Slicno bi smo moglirazmisljati i formirati prostore X∗∗∗, X∗∗∗∗ itd. Nama je ovde od interesaposebno prostor X∗∗ koga nazivamo drugi dualni ili adjungovani prostorprostora X.Na osnovu teorema o reprezentaciji linearnih ogranicenih funkcionala smo
vidjeli naprimjer, da je dualni prostor prostora c0 jednak prostoru l1, tj.c∗0 = l1, u smislu algebarske i metricke izomorfnosti. Takode je l∗1 = l∞,l∗p = lq (1p + 1
q = 1). Praveci druge duale ovih prostora mozemo zakljuciti
sljedece veze, c∗∗0 = l∗1 = l∞ ili l∗∗p = l∗q = lp (1p +1q = 1). U smislu algebarske
i metricke izomorfnosti, prvi primjer nam govori da je c0 ⊂ c∗∗0 , a drugi daje lp = l∗∗p . Sljedecim teoremom dajemo generalnu vezu izmedu prostora inegovog drugog duala.
83

3.1. Konjugovani prostori i refleksivnost
84
Teorem 3.1. Proizvoljan Banachov prostor X se moze algebarski i izometri-cki uloziti u X∗∗, tj. vrijedi
X ⊆ X∗∗ .
Dokaz : Neka je X proizvoljan Banachov prostor i x ∈ X proizvoljanfiksan element. Pomocu njega definisimo preslikavanje Fx : X∗ → Φ, saFx(f) = f(x). Da je Fx funkcional, jasno je jer je f ∈ X∗. Za proizvoljnef, g ∈ X∗ i λ, µ ∈ Φ je
Fx(λf + µg) = (λf + µg)(x) = λf(x) + µg(x) = λFx(f) + µFx(g) ,
te je to i linearno preslikavanje. Dalje, za proizvoljno f ∈ X∗ imamo
|Fx(f)| = |f(x)| ≤ ||x|| · ||f || ,
iz cega zakljucujemo da je Fx i ogranicen funkcional, sta vise
||Fx|| ≤ ||x|| . (3.1)
Na osnovu svega imamo da je Fx ∈ X∗∗. Na osnovu jedne od posljedicaHahn-Banachove teoreme, izaberimo funkcional f0 ∈ X∗, takav da je ||f0|| =1 i f0(x) = ||x||. Tada imamo
|Fx(f0)| = |f0(x)| = ||x|| ,
a to na osnovu definicije norme funkcionala nam govori da vrijedi
||Fx|| ≥ ||x|| . (3.2)
Iz (3.1) i (3.2) zakljucujemo da je ||Fx|| = ||x||.Na ovaj nacin smo svakom x ∈ X pridruzili Fx ∈ X∗∗, te je jasno da
elemenata u X∗∗ nema manje nego sto je elemenata u X. Osim toga, ovimpridruzivanjem smo takode definisali jedno preslikavanje, oznacimo ga saT0 : X → X∗∗, zadato sa T0x = Fx. Neka su x, y ∈ X i λ, µ ∈ Φ proizvoljni.Kako je
Fλx+µy(f) = f(λx+ µy) = λf(x) + µf(y) = λFx(f) + µFx(f) ,
tada jeT0(λx+ µy) = Fλx+µy = λFx + µFy .
Dakle, T0 je linearno preslikavanje, pa je T0 algebarski izomorfizam izmeduX i X∗∗. Osom toga, na osnovu ranije pokazanog imamo da je
||T0x|| = ||Fx|| = ||x|| ,
te je T0 i izometrija. Kako ne pravimo razliku izmedu nekog Banachovogprostora i njegove linearne izometricke slike, to vrijedi
X = T0(X) ⊆ X∗∗ ,
cime je tvrdnja dokazana. ♣

85
UVOD U TEORIJU OPERATORA
Definicija 3.1. Ukoliko za neki Banachov prostor vrijedi T0(X) = X∗∗
(odnosno X = X∗∗), tada kazemo da je X refleskivan prostor.
Operator T0 uveden u dokazu gornje teoreme se naziva prirodno ili kanon-sko preslikavanje prostora X u prostor X∗∗. Taj pojam preciziramo iz raz-loga da ako za neko drugo preslikavanje T : X → X∗∗ vrijedi T (X) = X∗∗,to ne mora znaciti refleksivnost prostora X.
Teorem 3.2. Svaki potprostor refleksivnog Banachov prostora je takode re-fleksivan.
Dokaz : Neka je L potprostor refleksivnog Banachovog prostoraX. Oznacimosa L⊥ skup svih funkcionala iz X∗ koji se anuliraju na L, tj.
L⊥ = f ∈ X∗ ||(∀x ∈ L) f(x) = 0 .
Ovakav skup se naziva anihilator ili anulator skupa L, za koga se lahkopokazuje da predstavlja potprostor od X∗, za proizvoljan L ⊆ X.Posmatrajmo sada X∗
/L⊥ i neka je [f ] proizvoljan element tog skupa (klasa
ekvivalencije). Za proizvoljna dva elementa g1, g2 iz te klase, na osnovudefinicije kolicnickog prostora X∗
/L⊥ je g1 − g2 = l ∈ L⊥, tojest vrijedi
(∀x ∈ L) g1(x)− g2(x) = l(x) = 0 . (3.3)
Definisimo sada funkcional fL na L, na sljedeci nacin,
fL(x) = g(x) ,
gdje je g proizvoljan funkcional iz [f ]. Specijalno, mozemo staviti da jeg = f . Dakle, fL je po definiciji, suzenje na L bilo kojeg funkcionala iz klase[f ]. Na osnovu (3.3), zakljucujemo da je fL dobro definisan. Takode je jasnoda je fL linearan funkcional, pri cemu je
|fL(x)| = |g(x)| ≤ ||g|| · ||x|| ,
za proizvoljan x ∈ L, gdje je g bilo koji funkcional iz [f ]. Prelaskom nainfimum u posljednjoj nejednakosti, vodeci racuna o definiciji norme nakolicnickom prostoru, dobijamo
(∀x ∈ L) |fL(x)| ≤ ||[f ]|| · ||x|| .
Dakle, fL je i ogranicen, tj. fL ∈ L∗, pri cemu je
||fL|| ≤ ||[f ]|| .
Ovako uveden funkcional fL je definisan na L pa na osnovu Hahn-Banachoveteoreme mozemo ga produziti do funkcionala f0, bez promjene norme, defi-nisanog na citavom prostoru, tj. f0 ∈ X∗ i ||f0|| = ||fL||. Uzimajuci u obzir

3.1. Konjugovani prostori i refleksivnost
86
da klasa [f ] sadrzi sve funkcionale iz X∗ cija se suzenja na na L poklapajusa fL, onda zakljucujemo da je f0 ∈ [f ]. Dakle,
||[f ]|| = inf ||g|| | g ∈ [f ] ≤ ||f0|| = ||fL|| .
Ovo zajedno sa ranije dobijenom nejednakoscu znaci da vrijedi ||fL|| =||[f ]||. Mi smo dakle svakom elementu [f ] ∈ X∗
/L⊥ na gore opisan nacin
pridruzili funkcional fL ∈ L∗, pri cemu je ||fL|| = ||[f ]||. Time smo us-tvari definisali izometricko preslikavanje sa X∗
/L⊥ u L∗, tj. definisali smo
preslikavanje A0 : X∗/L⊥ → L∗ sa
A0([f ]) = fL .
Za [f ], [g] ∈ X∗/L⊥ proizvoljne je
A0([f ] + [g])(x) = A0([f + g])(x) = (f + g)L(x) = fL(x) + gL(x)
= A0([f ])(x) +A0([g])(x) ,
tj. A0([f ] + [g]) = A0([f ]) + A0([g]). Na slican nacin se pokazuje da zaproizvoljne [f ] ∈ X∗
/L⊥ i λ ∈ Φ, vrijedi A0(λ[f ]) = λA0([f ]). Dakle, A0 je
izometricki izomorfizam sa X∗/L⊥ u L∗.
Za proizvoljan fL ∈ L∗ mozemo izvrsiti njegovo prosirenje, bez promjenenorme, na citav X. Ako sa [f ] oznacimo onu klasu iz X∗
/L⊥ kojoj pripada
f , jasno je da vrijediA0([f ]) = fL ,
a sto ustvari znaci da je A0 surjektivno preslikavanje. Zbog svega navedenogmozemo pisati
L∗ = X∗/L⊥ ,
i u daljem necemo praviti razliku izmedu klase [f ] i njegove slike fL u pres-likavanju A0.Neka je sada F ∈ L∗∗ proizvoljan i za proizvoljno f ∈ X∗ stavimo
TF (f) = F ([f ]) .
Neka su f1, f2 ∈ X∗ i λ, µ ∈ Φ. tada je
TF (λf1 + µf2) = F ([λf1 + µf2]) = F (λ[f1] + µ[f2]) = λF ([f1]) + µF ([f2]) ,
dakle, TF je linearno preslikavanje. Osim toga je
|TF (f)| = |F ([f ])| ≤ ||F || · ||[f ]|| ≤ ||F || · ||f || ,
za proizvoljno f ∈ X∗, pa je TF i ograniceno preslikavanje, tj. TF ∈ X∗∗.Kako je X refleksivan prostor, postoji element xF ∈ X, takav da vrijedi
TF (f) = f(xF ) ,

87
UVOD U TEORIJU OPERATORA
za proizvoljan f ∈ X∗. Sada tvrdimo da taj xF mora biti u L. Zaista, usuprotnom bi postojao f0 ∈ X∗, takav da je f0(xF ) 6= 0 i za sve x ∈ L,f0(x) = 0. Druga od pretpostavki bi znacila de je f0 ∈ L⊥ te bi klasa [f0]bila nula-element u X∗
/L⊥ = L∗. kako je F linearan funkcional na L∗, to bi
moralo biti F ([f0]) = 0, a sto bi opet dovelo do toga da je
0 6= f0(xF ) = TF (f0) = F ([f0]) = 0 .
Dobijena kontradikcija daje da mora biti xF ∈ L.Neka je sada fL proizvoljan element iz L∗ i [f ] jednoznacno odredena klasa
iz X∗/L⊥ za koju je A0([f ]) = fL. Koristeci cinjenicu L∗ = X∗
/L⊥ , tada je
F (fL) = TF (f) = f(xF ) = fL(xF ) .
Dakle, za svako F ∈ L∗∗ mozemo naci xF ∈ L, takav da je
F (fL) = fL(xF ) ,
za sve fL ∈ L∗, a to i odreduje refleksivnost potprostora L. ♣
Teorem 3.3. Banachov prostor je refleksivan ako i samo ako je njegov dualrefleksivan prostor.
Dokaz : Neka je X refleksivan Banachov prostor i neka je T ∈ X∗∗∗ pro-izvoljan. Oznacimo kao i ranije sa Fx (x ∈ X) funkcional na X∗, definisansa
Fx(f) = f(x) .
Iz refleksivnosti prostora X imamo da za svaki F ∈ X∗∗, postoji x ∈ X,takav da je F = Fx. Definisimo sada funkcional f0 na sljedeci nacin,
f0(x) = T (Fx) .
Jasno je da je f0 linearan. Pri tome je
|f0(x)| = |T (Fx)| ≤ ||T || · ||Fx|| = ||T || · ||x|| ,
te je on i ogranicen, tj. f0 ∈ X∗. Tada za proizvoljan Fx ∈ X∗∗ imamo
T (Fx) = f0(x) = Fx(f0) ,
a zbog proizvoljnosti T ∈ X∗∗∗, zakljucujemo refleksivnost prostora X∗.Neka je sada X∗ refleksivan. Ako X nije refleksivan, onda je X ⊂ X∗∗,
tj. postoji funkcional F0 ∈ X∗∗ koji nije jednak niti jednom funkcionalu Fx
(x ∈ X). Kako je skup svih funkcionala Fx (x ∈ X) potprostor prostoraX∗∗ (jer je taj skup slika prostora X u prirodnom preslikavanju prostora Xu X∗∗), to postoji T ∈ X∗∗∗, takav da je T (F0) 6= 0 i T (Fx) = 0 za x ∈ X.

3.1. Konjugovani prostori i refleksivnost
88
Zbog refleksivnosti prostora X∗ postoji f0 ∈ X∗ takav da je ||T || = ||f0|| iT (F ) = F (f0) za proizvoljno F ∈ X∗∗. Na osnovu druge pretpostavke ondaimamo
0 = T (Fx) = Fx(f0) = f0(x) ,
za proizvoljno x ∈ X, te je dakle f0 nula-funkcional, a to bi se onda protiviloprvoj pretpostavci da je ||T || = ||f0||. Dakle, X mora biti refleksivan prostor.♣
Teorem 3.4. Neka je X Banachov prostor. Ako je X∗ separabilan, ondaje i X separabilan prostor.
Dokaz : Neka je f∗i ∈ X∗ | i ∈ N svuda gust skup u X∗. Lahko se poka-zuje da tada funkcionali dobijeni sa
fi =f∗i
||f∗i ||, i ∈ N ,
cine svuda gust skup na jedinicnoj sferi u X∗. Kako je
||fi|| = sup||x||=1
|fi(x)| = 1 , i ∈ N ,
to za proizvoljan i ∈ N, postoji element xi, takav da je
||xi|| = 1 i |fi(xi)| >1
2.
Oznacimo sa L lineal u X generisan skupom xi| i ∈ N. L je ociglednoseparabilan jer skup svih linearnih kombinacija elemenata xi (i ∈ N) sakompleksno-racionalnim koeficijentima je prebrojiv i svuda gust u L.Pretpostavimo da je L 6= X. Tada postoji x0 ∈ X \L, a na osnovu posljediceHahn-Banahove teoreme, postoji i f0 ∈ X∗, takav da je ||f0|| = 1, f0(x0) 6= 0i f0(x) = 0 za sve x ∈ L. Kako funkcionali fi cine svuda gust skup najedinicnoj sferi u X∗, postoji fi0 , takav da je
||f0 − fi0 || <1
2.
Kako je njemu odgovarajuci xi0 iz L, imamo
1
2< |fi0(xi0)| = |fi0(xi0)− f0(xi0)| ≤ ||fi0 − f0|| · ||xi0 || <
1
2.
U gornju kontradikciju nas je dovela pretopstavka de je L 6= X, pa daklemora biti L = X, a to po definiciji znaci da je X separabilan prostor. ♣
Da obrat gornje teoreme ne vazi uvjeravamo se primjerom prostora l1.Naime, l1 jeste separabilan, ali njegov dual l∗1 = l∞, kao sto smo to vidjeli usekciji o separabilnosti, nije separabilan prostor.

89
UVOD U TEORIJU OPERATORA
3.2 Konjugovani operator
Neka su X i Y Banachovi prostori i A ∈ L(X,Y ). Neka je domen oparatoraA (DA) skup svuda gust u X. Za proizvoljan funkcional g ∈ Y ∗ definisimopreslikavanje
f(x) = g(Ax) , x ∈ DA .
Ocigledno je f dobro definisano za svako x ∈ DA jer je Ax ∈ Y . Kako jeg ∈ Y ∗ jasno je da je f funkcional. Za proizvoljne x1, x2 ∈ DA i λ, µ ∈ Φ je
f(λx1 + µx2) = g(A(λx1 + µx2)) = g(λAx1 + µAx2)
= λg(Ax1) + µg(Ax2) = λf(x1) + µf(x2) ,
te je f linearan. Takode vrijedi
|f(x)| = |g(Ax)| ≤ ||g|| · ||Ax|| ≤ ||g|| · ||A|| · ||x|| ,
tj. on je i ogranicen funkcional (zbog ogranicenosti funkcionala g i operatoraA). Kako je DA svuda gust u X, operator A mozemo bez promjene normeproduziti na citav prostor, a time i funkcional f . Jednostavnosti radi, tajproduzeni funkcional oznacimo ponovo sa f . Dakle, na gore opisan nacinmi smo svakom funkcionalu na Y pridruzili jedan (tacno jedan) funkcionalna X, te smo na taj nacin definisali jedno preslikavanje.
Definicija 3.2. Neka su X,Y Banachovi prostori i A ∈ L(X,Y ). Preslika-vanje A∗ : Y ∗ → X∗, definisano sa
A∗g(x) = f(x) = g(Ax) , g ∈ Y ∗ , f ∈ X∗ ,
nazivamo konjugovani, adjungovani ili dualni operator operatora A.
U gornjoj definiciji smo definisali konjugovani operator ogranicenog opera-tora. Medutim, to smo mogli uciniti i za proizvoljan linearan operator, alitada se oblast definisanosti konjugovanog operatora moze bitno suziti u od-nosu na Y ∗, moze se cak sastojati jedino iz trivijalnog funkcionala na Y , bezobzira sto je domen operatora svuda gust u X. U slucaju da je A ogranicenoperator definisan na X, tada je domen konjugovanog operatora citav Y ∗,sto cemo u daljem podrazumijevati, osim ako drugacije ne naglasimo.
Teorem 3.5. Za A ∈ L(X,Y ) je A∗ ∈ L(Y ∗,X∗) i pri tome vrijedi ||A∗|| =||A||.
Dokaz : Neka je A ∈ L(X,Y ). Za proizvoljne g1, g2 ∈ Y ∗ i λ, µ ∈ Φ imamo
A∗(λg1 + µg2)(x) = (λg1 + µg2)(Ax) = λg1(Ax) + µg2(Ax)
= λA∗g1(x) + µA∗g2(x) = (λA∗g1 + µA∗g2)(x) ,
cime je pokazana linearnost operatora A∗.

3.2. Konjugovani operator
90
Kako je vec pokazano, vrijedi
|A∗g(x)| ≤ ||A|| · ||g|| · ||x|| ,
za svako x ∈ X, pa zakljucujemo da vrijedi
||A∗g|| ≤ ||A|| · ||g|| ,
tj.
||A∗|| ≤ ||A|| . (3.4)
Neka je sada ε > 0 proizvoljan i x0 ∈ X, takav da je ||x0|| = 1 i ||Ax0|| ≥||A||−ε. Prema jednoj od posljedica Hahn-Banachove teoreme mozemo nacig0 ∈ Y ∗ takav da je ||g0|| = 1 i g0(Ax0) = ||Ax0||. Tada imamo
||A∗|| = sup||g||=1
||A∗g|| ≥ ||A∗g0|| = sup||x||=1
|A∗g0(x)|
≥ |A∗g0(x0)| = |g0(Ax0)| = ||Ax0|| ≥ ||A|| − ε .
Zbog proizvoljnosti ε, zakljucujemo
||A∗|| ≥ ||A|| . (3.5)
Iz (3.4) i (3.5) zakljucujemo jednakost normi. ♣
Primjer 3.1. Neka je AR : l2 → l2 desni shift operator, tj. za x = (xi)i∈N ∈ l2
ARx = (0, x1, x2, ...) .
Na osnovu reprezentacije linearnih ogranicenih funkcionala na l2, za g ∈ l2onda imamo
g(ARx) =∞∑
i=1
(ARx)iηi =∞∑
i=2
xi−1ηi =∞∑
i=1
xiηi+1 , y = (ηi)i∈N ∈ l2 .
Dakle, A∗R = AL, konjugovani operator desnog shift operatora je lijevi shift
operator tojest, operator sa djelovanjem
ALx = (x2, x3, ...) , x = (xi)i∈N ∈ l2 . ♦
Primjer 3.2. Neka je k(s, t) neprekidna funkcija na kvadratu(s, t)| 0 ≤ s ≤ 1 , 0 ≤ t ≤ 1, pri cemu je za q > 1
∫ 1
0|k(s, t)|qdt ≤M , za svako s ∈ [0, 1] .

91
UVOD U TEORIJU OPERATORA
Definisimo preslikavanje A : Lp[0, 1] → Lq[0, 1] (1p + 1
q = 1), sa
Ax(s) =
∫ 1
0k(s, t)x(t)dt .
Zbog pretpostavljene neprekidnosti jezgra K, preslikavanje je dobro defini-sano i ocigledno linearno. Osim toga vrijedi
∫ 1
0|Ax(s)|qds ≤
∫ 1
0ds
(∫ 1
0|k(s, t)||x(t)|dt
)q
≤∫ 1
0ds
(∫ 1
0|k(s, t)|qdt ·
(∫ 1
0|x(t)|pdt
) q
p
),
pa je
||Ax|| ≤(∫ 1
0
∫ 1
0|k(s, t)|qdtds
) 1q
·(∫ 1
0|x(t)|pdt
) 1p
≤M1q ||x||Lp
te je A i ogranicen operator.Odredimo sada konjugovani operator A∗. Proizvoljan funkcional g na pro-
sotoru Lq[0, 1] ima reprezentaciju
g(y) =
∫ 1
0y(s)x0(s)ds ,
gdje je x0 ∈ Lp[0, 1], element jednoznacno pridruzen funkcionalu g. Podefiniciji konjugovanog oparatora, tada je
A∗g(x) = g(Ax) =
∫ 1
0Ax(s)x0(s)ds =
∫ 1
0
(∫ 1
0k(s, t)x(t)dt
)x0(s)ds
=
∫ 1
0x(t)
(∫ 1
0k(s, t)x0(s)ds
)dt .
Dakle, dobili smo neki funkcional f na Lp[0, 1], a opet zbog reprezentacijefunkcionala je njemu jednoznacno pridruzeni element dat sa
y0(t) =
∫ 1
0k(s, t)x0(s)ds ∈ Lq[0, 1] .
Zbog identifikacije prostora Lp i L∗q , posljednjom jednakoscu je definisan
konjugovani operatorA∗g = f ,
gdje smo poistovjetili funkcional g sa njemu pridruzenim elementom x0 ∈Lp i takode funkcional f smo poistovjetili sa njemu pridruzenom elementuy0 ∈ Lq. Pri tome A∗ preslikava dakle L∗
q = Lp u L∗p = Lq. ♦

3.2. Konjugovani operator
92
Teorem 3.6. Konjugovani operator proizvoljnog operatora je zatvoren ope-rator.
Dokaz : Neka je A : X → Y proizvoljan linearan operator. Neka je(gn)n∈N ⊂ DA∗ , za koga vrijedi
gn → g0 i A∗gn → f0 , n→ ∞ ,
gdje su g0 ∈ Y ∗ i f0 ∈ X∗. Tada za svako x ∈ DA imamo
gn(Ax) → g0(Ax) i gn(Ax) = A∗gn(x) → f0(x) n→ ∞ .
Ali ovo onda znaci da je za proizvoljno x iz domena operatora A, f0(x) =g0(Ax), pa je i g0(Ax) ogranicen funkcional (jer je f0 takav), te je g0 ∈DA∗ . Iz istog identiteta zakljucujemo i da je A∗g0 = f0, cime je zatvorenostoperatora A∗ dokazana. ♣
Teorem 3.7. Ako je A ∈ L(X,Y ) onda je A∗∗ = (A∗)∗ ∈ L(X∗∗, Y ∗∗).Operator A∗∗ je prosirenje operatora A, tj. A ⊆ A∗∗ i pri tome je ||A∗∗|| =||A||.
Dokaz : Kao sto smo vec pokazati (Teorem 3.5), ako je A ogranicen opera-tor, tada je i A∗ ogranicen sa Y ∗ u X∗. Ali tada je na osnovu istog i A∗∗ =(A∗)∗ ogranicen operator sa X∗∗ u Y ∗∗ i pri tome je ||A|| = ||A∗|| = ||A∗∗||.Treba jos pokazati da je A∗∗ prosirenje oparatora A. Neka je Fx funkcional
iz X∗∗ takav da je za proizvoljan f ∈ X∗
Fx(f) = f(x) ,
gdje je x proizvoljan fiksan element iz X. Tada je za g ∈ Y ∗
(A∗∗Fx)(g) = Fx(A∗g) = (A∗g)(x) = g(Ax) = FAx(g) ,
fdje je FAx onaj funkcional iz Y ∗∗ za koga je FAx(g) = g(Ax), za svakog ∈ Y ∗. Dakle,
A∗∗Fx = FAx .
Kako ne pravimo razliku izmedu x i Fx (takode ni izmedu Ax i FAx), gornjujednakost mozemo pisati sa
A∗∗x = Ax , za proizvoljno x ∈ X ,
cime je teorem dokazan. ♣
U sljedecim tvrdenjima raspravljamo o egzistenciji inverznog operatoraadjungovanom operatoru, kao i njegovoj vezi sa inverzom samog operatora.
Teorem 3.8. Neka je A : X → Y linearan operator takav da je DA svudagust u X. Operator (A∗)−1 postoji ako i samo ako je RA svuda gust u Y .

93
UVOD U TEORIJU OPERATORA
Dokaz : Neka je DA svuda gust u X. Pretpostavimo da RA nije gust uY . Tada postoji y0 ∈ Y takav da y0 /∈ RA. Prema jednoj od posljedicaHahn-Banachove teoreme, postoji funkcional g0 ∈ Y ∗ za koga je g0(y0) 6= 0i za sve x ∈ DA je g0(Ax) = 0.Sada za proizvoljno x ∈ DA imamo
(A∗g0)(x) = g0(Ax) = 0 ,
a kako je DA svuda gust u X i A∗g0 neprekidan funkcional, zakljucujemoda je A∗g0 = 0. Kako je pri tome g0 6= 0 (jer g0(y0) 6= 0), zakljucujemo da(A∗)−1 ne postoji. Kontrapozicijom imamo tvrdnju s lijeva u desno.
Neka je sada RA svuda gust u Y . Neka je h0 ∈ Y ∗ takav da je A∗h0 = 0.Za proizvoljno x ∈ DA tada imamo
h0(Ax) = (A∗h0)(x) = 0 .
Kako je RA svuda gust u Y , to je onda h0(y) = 0, za sve vektore y izsvuda gustog skupa u Y . Ali, zbog neprekidnosti funkcionala h0 mora bitih0(y) = 0 za sve y ∈ Y , tj. funkcional h0 je identicki jednak 0. Dakle, akoje A∗h = 0, mora biti h = 0, te operator A∗ ima inverzni operator. ♣
Teorem 3.9. Neka je A : X → Y linearan operator za koga je DA svudagust u X i RA svuda gust u Y i neka postoji A−1. Tada postoji i (A∗)−1 ipri tome vrijedi
(A∗)−1 = (A−1)∗ .
Dokaz : Iz pretpostavljenih uslova teoreme, na osnovu prethodnog tvrdenja,(A∗)−1 postoji.
Neka je f ∈ D(A∗)−1 , naravno f ∈ X∗. Oznacimo g = (A∗)−1f , sto mozemozapisati sa A∗g = f . Za proizvoljan x ∈ DA onda vrijedi
f(x) = (A∗g)(x) = g(Ax) .
Stavljajuci y = Ax, tj. x = A−1y je
f(A−1y) = g(y) ,
pri cemu posljednja jednakost vrijedi za svako y ∈ DA−1 . Kako je g ogranicenfunkcional, to je f ∈ D(A−1)∗ , i pri tome je (A−1)∗f = g. Dakle, za svakof ∈ D(A−1)∗ imamo jednakost
g = (A∗)−1f = (A−1)∗f ,
iz cega onda imamo
(A∗)−1 ⊂ (A−1)∗ . (3.6)

3.2. Konjugovani operator
94
Neka je sada f ∈ D(A−1)∗ , tada za svako y ∈ DA−1 vrijedi
((A−1)∗f)(y) = f(A−1y) ,
odakle stavljajuci x = A−1y, odnosno y = Ax dobijamo
((A−1)∗f)(Ax) = f(x) .
Kada y prolazi kroz DA−1 , tada x prolazi kroz cijeli DA. Posljednja jedna-kost onda daje (A−1)∗f ∈ DA∗ i pri tome je za svako f ∈ D(A−1)∗
A∗((A−1)∗f) = f .
Ovo opet znaci da je f ∈ D(A∗)−1 i da vrijedi
(A−1)∗f = (A∗)−1f ,
za svako f ∈ D(A−1)∗ , tj.
(A−1)∗ ⊂ (A∗)−1 . (3.7)
Iz 3.6 i 3.7 dobijamo trazenu jednakost. ♣
Teorem 3.10. Neka je A : X → Y linearan operator za koga je DA svudagust u X i RA svuda gust u Y i neka postoji A−1. Operator A−1 je ogranicenako i samo ako je operator (A∗)−1 definisan na cijelom X∗ i ogranicem.
Dokaz : Neka je A−1 ogranicen. Tada je i (A−1)∗ ogranicen i definisanna cijelom X∗ (Teorem 3.5). Kako je prema prethodnoj teoremi (A∗)−1 =(A−1)∗, onda je i operator (A∗)−1 ogranicen i definisan na cijelom X∗.Neka je (A∗)−1 ogranicen operator, definisan na cijelom X∗. Onda je i
operator (A−1)∗ ogranicen i definisan na X∗. Zato za sve f ∈ X∗ i svakix ∈ DA vrijedi
f(A−1(Ax)) = ((A−1)∗f)(Ax) .
Stavljajuci y = Ax imamo
f(A−1y) = ((A−1)∗f)(y) ,
za sve f ∈ X∗ i svako y ∈ DA−1 . Odavde sada imamo
∣∣f(A−1y)∣∣ ≤ ||(A−1)∗|| ||f || ||y|| .
Dakle, za proizvoljno y ∈ DA−1 vrijedi
||A−1y|| ≤ ||(A−1)∗|| ||y|| ,
a ovo predstavlja upravo ogranicenost operatora A−1. ♣

4
Slaba topologija
4.1 Slaba topologija na X . . . . . . . . . . . . . . . . 95
4.2 Slaba−∗ topologija . . . . . . . . . . . . . . . . . . 100
4.2.1 O jos jednoj motivaciji za uvodenje slabe topologije105
Neka je X Banachov prostor. Tada je X kompletan normiran metrickiprostor sa metrikom
d(x, y) = ||x− y|| , x, y ∈ X .
Znamo da je svaki metricki prostor ujedno i topoloski prostor, pri cemu jebaza topologije familija svih otvorenih kugli u X. Kako su kugle definisanemetrikom, tojest zadatom normom na X, to je i topologija diktirana tomnormom i takvu topologiju nazivamo jaka topologija na X. Sve sto smodo sada spominjali, a sto se ticalo otvorenih skupova, zatvorenih skupova,adherencije skupa, tacaka nagomilavanja i drugih topoloskih pojmova, a sa-mim tim i neprekidnost, konvergencija, kompaktnost, podrazumijevali smoda su ti pojmovi odredeni jakom topologijom. Kako se na proizvoljnomskupu mogu definisati i druge topologije, to cemo za sve gore nabrojanepojmove dodavati prefiks ”jako”, npr. jako otvoren skup, jaka neprekid-nost, konvergencija u jakom smislu itd., ako ih koristimo u odnosu na jakutopologiju.
4.1 Slaba topologija na X
Jaka topologija je ”veoma siroka” tj., ima ”previse” otvorenih skupova. Ukom smislu ”previse”? Jaka topologija je ”dobra” u nasim primjenama akodozvoljava izdvojiti tacku konvergencije iz niza u X, tj. ako imamo te-oremu o egzistenciji za tacku konvergencije. Ovo opet imamo veoma lakhoako se niz nalazi u kompaktnom skupu (na osnovu Bolzano-Weierstrassoveteoreme), tako ce neka topologija za nas biti dobra ako ima ”mnogo” kom-paktnih skupova. Medutim, da neki prostor ima ”mnogo” kompaktnih sku-pova, podrazumijeva da data topologija ima ”sto manje” otvorenih skupova.Obrazlozenje za to je u definiciji kompaktnosti, naime skup je kompaktanako se iz proizvoljnog otvorenog pokrivaca moze izdvojiti konacan potpo-krivac, a to je naravno teze ostvariti sto imamo vise otvorenih skupova.Dakle, zelimo da imamo sto manje otvorenih skupova. Ali ne i premalo!
95

4.1. Slaba topologija na X
96
Naime, drugi motiv za trazenje ”dobre” topologije na X je neprekidnostpreslikavanja f : X → Y , ili za sto smo posebno zainteresovani, za preslika-vanja f : X → R. Naime, i neprekidnost je diktirana otvorenim skupovima(preslikavanje je neprekidno ako je inverzna slika otvorenog skupa, otvorenskup) pa manje otvorenih skupova u X dovodi do toga da mozemo imatimanje neprekidnih preslikavanja sa X. Sve u svemu, ”dobra” topologijamora imati dovoljno otvorenih skupova.
Definicija 4.1. Najmanja topologija na X u odnosu na koju su svi f ∈ X∗
neprekidni, naziva se slaba topologija na X.
Ako je τ slaba topologija na X, uobicajeno je oznacavamo sa w-topologijaili sa σ(X,X∗)-topologija. Slaba topologija na proizvoljnom skupu postoji!Zaista, klasa svih topologija u odnosu na koje su linearni funkcionali nepre-kidni je neprazna jer jedna takva je sigurno jaka topologija. Kako je presjektopologija opet topologija, presjek svih elemenata navedene klase je upravoslaba topologija.Sada cemo dati i eksplicitan opis slabe topologije na proizvoljnom skupuX. Neka su ε > 0 i f1, f2, ..., fn ∈ X∗ proizvoljni. Za x0 ∈ X definisimoskup
U(x0; f1, f2, ..., fn; ε) = x ∈ X | |fi(x)− fi(x0)| < ε , i = 1, 2, ..., n .
Skup U(x0; f1, f2, ..., fn; ε) nazivamo slaba okolina tacke x0. Neka je B fa-milija svih skupova koje mozemo formirati na ovaj nacin.Ocigledno je X =
⋃U∈B U .
Neka su U1(x1; f1, f2, ..., fn; ε1) = U1 i U2(x2; g1, g2, ..., gm; ε2) = U2 pro-izvoljna dva skupa iz B i neka je y ∈ U1 ∩ U2 proizvoljan. Posmatrajmoskup
U(y; f1, f2, ..., fn, g1, g2, ..., gm; ε) = U ,
gdje je
0 < ε = mini=1,2,...nj=1,2,...,m
ε1 − |fi(y)− fi(x1)|, ε2 − |gj(y)− gj(x2)| .
Jasno je prema definiciji da U ∈ B. Neka je sada z ∈ U proizvoljno, tadavrijedi
|fi(z)− fi(y)| < ε , i = 1, 2, ..., n ,
|gi(z)− gi(y)| < ε , i = 1, 2, ...,m .
Sada za proizvoljno i ∈ 1, 2, ..., n imamo
|fi(z)− fi(x1)| ≤ |fi(z)− fi(y)|+ |fi(y)− fi(x1)|< ε+ |fi(y)− fi(x1)|≤ ε1 − |fi(y)− fi(x1)|+ |fi(y)− fi(x1)| = ε1 .

97
UVOD U TEORIJU OPERATORA
Ovo znaci da z ∈ U1, a zbog proizvoljnosti z je U ⊆ U1. Na identican nacinbi zakljucili da je U ⊆ U2, sto bi zajedno dalo da je
U ⊆ U1 ∩ U2 .
Na osnovu karakterizacije baze topologije zakljucujemo da je familija B bazaza neku topologiju na X. Ta topologija je upravo slaba topologija na X.
Lema 4.1. Slaba topologija je Hausdorffova topologija.
Dokaz : Neka su x0, y0 ∈ X proizvoljne takve da je x0 6= y0. Na osnovujedne od posljedica Hahn-Banachove teoreme, postoji funkcional f0, takavda je f0(x0− y0) = ||x0 − y0|| 6= 0. Posmatrajmo slabe okoline elemenata x0i y0,
U(x0) = U
(x0; f0;
||x0 − y0||2
), U(y0) = U
(y0; f0;
||x0 − y0||2
).
Ako bi postojao z ∈ U(x0) ∩ U(y0), onda bi imali
|f0(z − x0)| = |f0(z) − f0(x0)| <||x0 − y0||
2,
i
|f0(z − y0)| = |f0(z) − f0(y0)| <||x0 − y0||
2,
a odavde bi onda zakljucili
||x0 − y0|| = f0(x0 − y0) ≤ |f0(x0 − z) + f0(z − y0)|≤ |f0(x0 − z)|+ |f0(z − y0)|
<||x0 − y0||
2+
||x0 − y0||2
= ||x0 − y0|| ,
sto je nemoguce. Dakle, skupovi U(x0) i U(y0) su otvorene okoline elemenatax0 i y0 koje su medusobno disjunktne, tj. razdvajaju date elemente. ♣
Kao posljedicu gornjeg tvrdenja imamo da u prostoru sa slabom topologi-jom ako niz konvergira, onda je tacka konvergencije jedinstvena.
Definicija 4.2. Za niz (xn)n∈N u Banachovom prostoru X kazemo da jeslabo konvergentan ako je za proizvoljan f ∈ X∗ niz (f(xn))n∈N konvergen-tan.Kazemo da niz (xn)n∈N slabo konvergira ka x0 ∈ X ako je niz (f(xn))n∈Nkonvergentan ka f(x0), za svako f ∈ X∗ i to cemo oznacavati sa
xn x0 , n→ ∞ .
Teorem 4.2. Ako je niz u Banachovom prostoru jako konvergentan, ondaje on i slabo konvergentan.

4.1. Slaba topologija na X
98
Dokaz : Neka je X Banachov prostor i (xn)n∈N ⊂ X jako konvergentan kax0 ∈ X. Prema definiciji jake konvergencije ovo znaci
||xn − x0|| → 0 , (n→ ∞) .
Neka je sada f ∈ X∗ proizvoljan. Tada imamo
|f(xn)− f(x0)| = |f(xn − x0)| ≤ ||f || ||xn − x0|| → 0 , (n→ ∞) ,
tj.
f(xn) → f(x0) , (n → ∞) ,
a ovo zbog proizvoljnosti funkcionala znaci xn x0 (n→ ∞). ♣
U opstem slucaju slaba konvergencija ne povlaci jaku konvergenciju. Tomozemo vidjeti iz sljedeceg primjera.
Primjer 4.1. Posmatrajmo prostor lp (1 < p < +∞) i (en)n∈N, gdje su en(n ∈ N) standardni vektori baze tog prostora. Kako za n,m ∈ N, n 6= mvrijedi ||en − em|| = p
√2, posmatrani niz nije Cauchyjev, a time ni konver-
gentan.Neka je sada f ∈ l∗p proizvoljan. Na osnovu reprezentacije linearnog funkci-onala na lp, imamo da je za proizvoljno n ∈ N
f(en) =
∞∑
i=1
e(n)i ηi = ηn ,
gdje je (ηi)i∈N = y ∈ lq, za1p + 1
q = 1. Kako opsti clan konvergentnog redamora biti nula niz, zakljucujemo
f(en) = ηn → 0 , (n→ ∞) ,
te je posmatrani niz (en)n∈N slabo konvergentan ka 0 u prostoru lp (1 < p <+∞). ♦
U konacno dimenzionalnim prostorima slaba i jaka topologija su ekviva-lentne, pa samim tim slaba i jaka konvergencija se poklapaju. Na be-skonacnodimenzionalnim prostorima to nije slucaj, sto potvrduje i gornjiprimjer, ali i tu imamo izuzetke. Naprimjer, na prostoru l1 ove dvije ko-nvergencije su ekvivalentne.
Teorem 4.3. Slabo konvergentan niz je uniformno ogranicen po normi.
Dokaz : Neka je (xn)n∈N ⊂ X slabo konvergentan niz. To znaci da zasvako f ∈ X∗ postoji i konacan je
limn→∞
f(xn) = af .

99
UVOD U TEORIJU OPERATORA
Oznacimo sa Fxn funkcional iz X∗∗ koji je kanonskim preslikavanjem pros-tora X u X∗∗ pridruzen elementu xn (n ∈ N), tj.
Fxn(f) = f(xn) , n ∈ N , f ∈ X∗ .
Tada imamo
limn→∞
f(xn) = limn→∞
Fxn(f) = af , f ∈ X∗ .
Posmatrajuci funkcionale Fxn kao operatore sa Banachovog prostora X∗ uprostor skalara Φ, oni predstavljaju familiju ogranicenih linearnih operatorakoja zadovoljava sve uslove teorema o uniformnoj ogranicenosti, pa postojikonstanta M > 0, takva da je
||Fxn || ≤M ,
za sve n ∈ N. Kako vrijedi ||xn|| = ||Fxn ||, zakljucujemo da je
||xn|| ≤M <∞ ,
za sve n ∈ N, tj. niz je uniformno ogranicen po normi. ♣
Teorem 4.4. Potprostor Banachovog prostora je slabo zatvoren skup.
Dokaz : Neka je X Banachov prostor i L ⊂ X njegov pravi potprostor. Zax0 ∈ X \L, oznacimo sa d = d(x0, L). Jasno je d > 0 i na osnovu posljediceHahn-Banachovog teorema, postoji f0 ∈ X∗ takav da je f0(x0) = d i f0(x) =0 za x ∈ L. Oznacimo sa U(x0) slabu okolinu tacke x0 odredenu sa
U(x0) = U(x0; f0;d
2) .
Tada je U(x0) ∩ L = ∅. Zaista, ako bi postojao y0 ∈ U(x0) ∩ L, onda bizbog y0 ∈ U(x0) imali
|f0(y0)− f0(x0)| <d
2,
a kako je y0 ∈ L, onda bi imali
|f0(x0)| <d
2,
sto je suprotno izboru funkcionala, tj. f0(x0) = d.Dakle, oko svake tacke x0 ∈ X\Lmozemo opisati slabu okolinu U(x0), takvuda U(x0) ⊂ X \ L. Ovo ne znaci nista drugo do da je X \ L otvoren skupu slaboj topologiji (slabo otvoren), a sto opet znaci da je L slabo zatvorenskup. ♣

4.2. Slaba−∗ topologija
100
Definicija 4.3. Za niz (xn)n∈N u Banachovom prostoru X kazemo da jeslabo Cauchyjev ako i samo ako je (f(xn))n∈N Cauchyjev niz, za svako f ∈X∗.
Primjetimo da je niz (f(xn))n∈N u skupu skalara, pa zahtjev u gornjojdefiniciji da je on Cauchyjev, ekvivalentan je zahtjevu da je on konvergentan.Zato imamo da je niz (xn)n∈N slabo Cauchyjev u X ako i samo ako postojilimn→∞
f(xn), za sve f ∈ X∗. Zbog ovoga onda direktno imamo da je svaki
slabo konvergentan niz i slabo Cauchyjev niz, dok obrat u opstem slucajune vrijedi. Naime, niz (fn(x))n∈N ⊂ C[0, 1], zadat sa fn(x) = xn (n ∈ N),konvergira u obicnom smislu ka funkciji
f0(x) =
0 ; x ∈ [0, 1)1 ; x = 1
koja je prekidna u tacki x = 1, pa niz nije slabo konvergentan. Medutim,za proizvoljan f∗ ∈ C∗[0, 1] i m,n ∈ N imamo
f∗(fm)− f∗(fn) =∫ 1
0(fm(x)− fn(x))dg(x) = 0 → 0 , m, n→ ∞ ,
za svaku funkciju g ogranicene varijacije na [0, 1], pa je nas niz slabo Cauc-hyjev.
Definicija 4.4. Za prostor kazemo da je slabo kompletan ako je u njemisvaki slabo Cauchyjev niz slabo konvergentan.
Definicija 4.5. Neka je X Banachov prostor. Za skup M ⊂ X kazemo daje relativno sekvencijalno slabo kompaktan ako se iz svakog niza u M mozeizdvojiti podniz koji je slabo konvergentan.
Za skup M ⊂ X kazemo da je sekvencijalno slabo kompaktan ako se iz sva-kog niza u M moze izdvojiti podniz koji slabo konvergira ka nekom elementuu M .
Teorem 4.5. Svaki slabo kompaktan skup je slabo kompletan.
4.2 Slaba−∗ topologija
Kako je dualni prostor X∗, prostora X, sam za sebe Banachov prostor, toi na njemu mozemo uvesti slabu topologiju na identican nacin kao sto jeto uvedeno u prethodnoj sekciji, s tim da bi funkcionale uzimali iz X∗∗.Medutim, za zadati prostor X, na njegovom dualu X∗ mozemo definisatijos jednu topologiju, takozvanu slabu−∗ topologiju ili X topologiju. Njukarakterise cinjenica da funkcionale ne biramo iz cijelog X∗∗, nego samo izX ⊆ X∗∗.

101
UVOD U TEORIJU OPERATORA
Neka je f0 ∈ X∗. Za proizvoljan ε > 0 i konacno mnogo elemenatax1, x2, ..., xn ∈ X, definisimo skup
U(f0;x1, x2, ..., xn; ε) = f ∈ X∗ | |f(xi)−f0(xi)| < ε , i = 1, 2, ..., n (4.1)
koga proglasavamo okolinom funkcionala f0. Kao i kod slabe topologijelagano se provjerava da familija svih ovakvih skupova zajedno sa praznimskupom, cini bazu neke topologije u X∗. Tu topologiju nazivamo slaba−∗topologija na X∗. Kao i kod slabe topologije i ovdje mozemo dati formalnudefiniciju ove topologije.
Definicija 4.6. Slaba−∗ toplogija na X∗ je najmanja topologija na X∗ uodnosu na koju su svi funkcionali Fx : X∗ → Φ, definisani sa Fx(f) = f(x),(x ∈ X), neprekidni.
Ako bi smo na X∗ uveli slabu topologiju (kao u prethodnoj sekciji), nijetesko vidjeti da je onda slaba−∗ topologija slabija od nje. Zaista, dok jeslaba topologija definisana da bude najmanja u odnosu na koju su svi F ∈X∗∗ neprekidni, kod slabe−∗ topologije to zahtijevamo ”samo” za specijalnefunkcionale oblika Fx.
Nije tesko pokazati da je ta topologija Hausdorffova topologija, tj. dase svaka dva razlicita funkcionala mogu razdvojiti disjunktnim okolinamaoblika 4.1. Takode, ako je X refleksivan prostor, slaba i slaba−∗ se pok-lapaju. Specijalno, ako je X konacnodimenzionalan prostor onda su jaka,slaba i slaba−∗ topologije ekvivalentne.
Konvergenciju u slaboj−∗ topologiji uvodimo na identican nacin kao u sla-boj topologiji. Pri tome cemo reci da niz (fn)n∈N ⊂ X∗ slabo−∗ konvergiraka elementu f0 ∈ X∗, a sto cemo oznacavati sa
fn∗ f0 , (n→ ∞) ,
a sto u stvari znaci da za proizvoljan x ∈ X vrijedi,
|fn(x)− f0(x)| → 0 , (n→ ∞) .
Hausdorfovost ove topologije nam opet obezbjeduje jedinstvenost tacke ko-nvergencije niza. Takode vrijedi da je svaki slabo−∗ konvergentan niz uni-formno ogranicen po normi, i ako je fn
∗ f0 , (n → ∞), onda vrijedi
||f0||X∗ ≤ lim inf ||fn||X∗ .
Teorem 4.6. Neka je X separabilan i refleksivan Banachov prostor. Tadaje svaka kugla
B = f ∈ X∗ | ||f || ≤M ,
sekvencijalno slabo kompaktna u X∗.

4.2. Slaba−∗ topologija
102
Dokaz : Neka je X separabilan Banachov prostor i neka je x1, x2, ...svuda gust skup u njemu. Neka je (fn)n∈N ⊂ B. Za x = x1, niz (fn(x1))n∈Nje numericki niz za koga vazi
|fn(x1)| ≤ ||fn|| · ||x1|| ≤M ||x1|| ,
tojest, posmatrani niz je ogranicen. Iz njega onda mozemo izdvojiti pod-niz (fnk
)k∈N koji je konvergentan u x = x1. Jednostavnosti zapisa radi,
oznacimo ovaj podniz sa (f(1)n )n∈N. Sada na slican nacin kao malo prije,
iz ovog niza mozemo izdvojiti podniz (f(2)n )n∈N koji ce biti konvergentan u
tacki x = x2, a zato sto je podniz od (f(1)n )n∈N, on ce biti konvergentan
i u tacki x1. Nastavljajuci ovaj postupak izdvajanja podnizova i posma-tranja njihove konvergencije redom u ostalim tackama svuda gustog skupa,dobijamo nizove sa osobinama:
• Svaki od tih podnizova je podniz polaznog niza (fn)n∈N.
• Osim prvog, svaki od podnizova je podniz prethodnog niza.
• m-ti podniz, (f(m)n )n∈N je konvergentan u tackama x = x1, x2, ..., xm.
Izdvojimo sada dijagonalnim postupkom niz (gn)n∈N, tojest gn = f(n)n (n ∈
N). Zbog prve osobine podnizova zakljucujemo da je i niz (gn)n∈N podniznaseg polaznog niza, a zbog druge i trece osobine on je konvergentan u svimtackama svuda gustog skupa.Neka je sada x ∈ X proizvoljan. Za proizvoljno ε > 0, odredimo xn0 iz svuda
gustog skupa, za koga je |x−xn0 | <ε
3M. Kako je niz (gn)n∈N konvergentan
u tacki xn0 , to ce za uzeto ε, postojati N ∈ N, tako da za i, j ≥ N vrijedi
|gi(xn0)− gj(xn0)| <ε
3.
Koristeci ove dvije nejednakosti imamo da je za i, j ≥ N zadovoljeno
|gi(x)− gj(x)| ≤ |gi(x)− gi(xn0)|+ |gi(xn0)− gj(xn0)|+ |gj(xn0)− gj(x)|≤ ||gi|| · ||x− xn0 ||+ |gi(xn0)− gj(xn0)|+ ||gj || · ||x− xn0 ||< M
ε
3M+ε
3+M
ε
3M= ε .
Dakle, niz (gn(x))n∈N je Cauchyjev niz, a kako je on u skupu skalara, on jei konvergentan za proizvoljno x ∈ X.Na osnovu gore pokazanog i cinjenice da je ||gn|| ≤ M , za sve n ∈ N, na
osnovu Banach-Steinhausovog stava zakljucujemo da je sa
f(x) = limn→∞
gn(x) ,
dobro definisan ogranicen linearan funkcional na X. Ovim je takode poka-zano da niz funkcionala (gn)n∈N slabo konvergira ka funkcionalu f . Time

103
UVOD U TEORIJU OPERATORA
smo iz proizvoljnog niza (fn)n∈N u B izdvojili podniz (gn)n∈N koji je slabokonvergentan, pa je skup B sekvencijalno slabo kompaktan skup. ♣
Teorem 4.7 (Banach-Alaoglu). Neka je X Banachov prostor. Tada jesvaka kugla
B = f ∈ X∗ | ||f || ≤M ,kompaktna u slaboj-∗ topologiji na X∗.
Dokaz : Za proizvoljno x ∈ X oznacimo sa
Cx = z ∈ Φ | |z| ≤M · ||x|| .
Skup Cx je zatvorena kugla kompleksne ravni, te ja kao takav kompaktanskup. Oznacimo
Y =∏
x∈XCx ,
i ako ga snabdijemo produkt topologijom (topologijom Tihonova), na os-novu teoreme Tihonova o produktu kompaktnih topoloskih prostora, Y cebiti kompaktan topoloski prostor. Napomenimo da su elementi prostora Yfunkcije p = p(x), definisane na X, sa vrijednostima u Cx. To znaci da jeza proizvoljno x ∈ X
|p(x)| ≤M · ||x|| .Neka je sada f ∈ B proizvoljan. Pridruzimo mu element pf ∈ Y , tako da je
(∀x ∈ X) pf (x) = f(x) .
Jasno je zbog |f(x)| ≤ ||f || · ||x|| ≤ M · ||x||, da pf zaista pripada Y . Naovaj nacin smo definisali jedno preslikavanja sa kugle B u skup Y .Za f1, f2 ∈ B, ako je f1 6= f2 to znaci da postoji x0 ∈ X, takav da jef1(x0) 6= f2(x0), ali tada ce vrijediti i pf1(x0) 6= pf1(x0), tojest virijedipf1 6= pf2 . Dakle, nase preslikavanje je injektivno.Pokazimo sada da je ovo preslikavanje homeomorfizam kugle B, snabdjeveneslabom-∗ topologijom, i njene slike u Y . Neka je f0 ∈ B proizvoljan. Zasliku pf0 neka je U(pf0) proizvoljna okolina. Bez umanjenja opstosti, nekaje U(pf0) iz topoloske baze u Y . Tada postoje x1, x2, ..., xn ∈ X i εi > 0(i = 1, 2, ..., n), takvi da se U(pf0) sastoji iz svih onih p ∈ Y , za koje je
|p(xi)− pf0(xi)| < εi , i = 1, 2, ..., n ,
sto je opet ekvivalentno zbog definisanog preslikavanja p sa
|p(xi)− pf0(xi)| < εi , i = 1, 2, ..., n .
Neka je sada
U(f0) =
n⋂
i=1
Ui(f0) ,

4.2. Slaba−∗ topologija
104
gdje su
Ui(f0) = f ∈ B | |f(xi)− f0(xi)| < εi , i = 1, 2, ..., n .
Skup U(f0) je okolina od f0 u slaboj-∗ topologiji jer je presjek okolina Ui(f0).Za proizvoljan f ∈ U(f0) tada vrijedi
|f(xi)− f0(xi)| < εi , i = 1, 2, ..., n .
Odavde je onda
|pf (xi)− pf0(xi)| < εi , i = 1, 2, ..., n ,
sto nam govori da se U(f0) slika u U(pf0), a to znaci da je nase preslikavanjeneprekidno. Kako je to jos i bijektivno preslikavanje Hausdorffovog prostora(B) u kompaktan prostor Y , to je ovo preslikavanje i homeomorfizam.Neka je sada p0 ∈ B element zatvorenja slike skupa B. Neka su x, y ∈ X iλ ∈ Φ proizvoljni. Formirajmo okolinu tacke p0 na sljedeci nacin
U(p0) =p ∈ Y | |p(x+ y)− p0(x+ y)| < ε
3
,
za koje je |p(x)−p0(x)| < ε3 , |p(y)−p0(y)| < ε
3 i |p(λx)−p0(λx)| < ε3 . Kako
p0 lezi u zatvorenju slike skupa B, to postoji f0 ∈ B takav da je pf0 ∈ U(p0).Odavde je onda zadovoljeno
|pf0(x+ y)− p0(x+ y)| < ε
3
|pf0(x)− p0(x)| <ε
3
|pf0(y)− p0(y)| <ε
3
|pf0(λx)− p0(λx)| <ε
3,
sto je opet ekvivalentno sa
|f0(x+ y)− p0(x+ y)| < ε
3
|f0(x)− p0(x)| <ε
3
|f0(y)− p0(y)| <ε
3
|f0(λx)− p0(λx)| <ε
3.
Sada na osnovu gornjih veza imamo
|p0(x) + p0(y)− p0(x+ y)| = |(p0(x)− f0(x)) + (p0(y)− f0(y)) + f0(x) + f0(y)− p0(x+ y)|≤|p0(x)− f0(x)|+ |p0(y)− f0(y)|+ |f0(x+ y)− p0(x+ y)|<ε
3+ε
3+ε
3= ε .

105
UVOD U TEORIJU OPERATORA
Zbog proizvoljnosti ε zakljucujemo da je
p0(x) + p0(y) = p0(x+ y) .
Na slican nacin bi pokazali da je
p0(λx) = λp0(x)q,
te je p0 linearan funkcional definisan na X. Kako je |p0(x)| ≤ M · ||x||, tj.||p0|| ≤M , zakljucujemo da on pripada slici kugle B.Dakle, ako p0 pripada zatvorenju slike kugle onda on pripada i slici kugle,zakljucujemo da je slika kugle B zatvoren skup u Y , a kako je Y jos i kom-paktan, to je slika kugle B kompaktan skup. Kako je kugla B snabdjevenasa slabom-∗ topologijom, homeomorfna sa svojom slikom u Y , onda je isama kugla kompaktan skup u slaboj-∗ topologiji. ♣
Posljednje dvije teoreme, zajedno sa ranije poznatim cinjenicama nam go-vore sljedece:
• Jedinicna kugla u X∗ sa norma topologijom nikada nije kompaktanskup.
• Jedinicna kugla u X∗ sa slabom topologijom moze biti kompaktanskup, u zavisnosti opd prostora X.
• Jedinicna kugla u X∗ sa slabom-∗ topologijom je uvijek kompaktanskup.
4.2.1 O jos jednoj motivaciji za uvodenje slabe topologije
Veoma cesto u konkretnim problemima minimizacija i optimalnog uprav-ljanja mi radimo sa funkcionalom f : X → R, za koga znamo da postojim = inf
||x||=1f(x) > −∞, tojest f je ogranicen sa donje strane. Napri-
mjer, takav je problem minimizacije funkcionala B(x) =∫ t1t0L(t, x, x)dt na
X = C1[t0, t1], gdje je cilj naci takav x∗ ∈ C1[t0, t1] koji minimizira datifunkcional B(x). Prirodno je pretpostaviti da je x∗ granicna vrijednost ne-kog minimizirajuceg niza za B u sljedecem smislu:
1 Posmatramo niz (xn)n∈N u jedinicnoj kugli prostora X, za koga vrijediB(xn) → m (n → ∞). Kako je m infimum naseg funkcionala, ovakavminimizirajuci niz postoji.
2 Postoji x∗ ∈ X, ||x∗|| = 1, takav da xn → x∗ (ili to mozemo tvrditibar za neki podniz).
3 Ako je B : X → R neprekidan (u norma topologiji), tada iz B(xn) →B(x∗) zbog jedinstvenosti tacke konvergencije imamo da jem = B(x∗).

4.2. Slaba−∗ topologija
106
U klasicnim situacijama koje imamo u praksi, uslovi 2 i 3 najcesce nisuzadovoljeni. U jakoj topologiji jedinicna kugla nije kompaktan skup, pa izdatog niza ne mozemo izdvojiti konvergentan podniz. Takode, uobicajenofunkcionali koji se pojavljuju nisu neprekidni (u jakom smislu). Zbog togasmo zainteresovani uvesti topologiju na X koja ce imati dovoljno malo otvo-renih skupova da jedinicna kugla bude kompaktna, ali i dovoljno mnogo daposmatrani funkcionali budu neprekidni u nekom smislu. Pokazuje se da jeodlican izbor upravo slaba (ili slaba-∗) topologija jer
• ograniceni skupovi (u jakom smislu) u X su slabo kompaktni tako daxn x∗ (ili neki njegov podniz)
• mada f : X → R ne mora biti slabo neprekidan, u mnogim kon-kretnim situacijama on je slabo odozgo poluneprekidan (tj. f(x∗) ≤lim inf f(xn) kada xn x∗ u X).
Koristeci onda ove dvije osobine imamo da je
m = limn→∞
f(xn) ≥ f(x∗) ≥ m ,
i kako je f(x∗) = m, x∗ minimizira dati problem.

5
Spektar linearnog operatora
5.1 Definicija spektra operatora . . . . . . . . . . . . 107
5.2 Spektralni radius . . . . . . . . . . . . . . . . . . . 111
Rjesavanje mnogih matematickih problema svodi se na nalazenje inverznogpreslikavanja datom preslikavanju, odredenog tipa. Zbog toga je i posebnointeresovanje za inverzna preslikavanja, njihovo postojanje, ispitivanje nji-hovih domena i kodomena. Kao sto cemo vidjeti, spektralna teorija se usustini bavi upravo time.
5.1 Definicija spektra operatora
U ovom dijelu cemo razmatrati samo osnovne dijelove spektralne teorijelinearnih operatora.
Neka je A linearni operator koji djeluje sa Banachovog prostora X u X,I identicko preslikavanje na X, λ fiksan kompleksni broj, y zadat elementprostora X i x trazeni element iz X. Posmatrajmo jednacinu
(A− λI)x = y . (5.1)
Jasno je da ce posmatrana jednacina imati rjesenje ako i samo ako y ∈Rang(A−λI). Mozemo postaviti i mnoga druga pitanja u vezi ove jednacine:koliko ce biti rjesenja, da li rjesenja neprekidno ovise o y, da li postojiinverzno prelikavanje (A−λI)−1, sta je domen, a sta kodomen preslikavanjaA − λI i kako oni uticu na egzistenciju rjesenja itd. Naprimjer, ako jeoperator (A − λI)−1 neprekidan i definisan na cijelom X onda jednacina(5.1) ima jedinstveno rjesenje za proizvoljan y ∈ X, koje je dato sa x =(A−λI)−1y i pri tome to rjesenje neprekidno zavisi o y. Sva gore postavljenapitanja i razmisljanja nas navode na uvodenje novih pojmova bitnih za to.
Definicija 5.1. Neka je A linearan operator sa Banachovog prostora X uX i λ kompleksan broj. Kazemo da je λ regularna tacka operatora A akopostoji inverzni operator (A − λI)−1 operatora A − λI, koji je ogranicen idefinisan na svuda gustom skupu u X.Skup svih regularnih tacaka operatora A nazivamo rezolventni skup operatorai oznacavamo ga sa ρ(A).
107

5.1. Definicija spektra operatora
108
Definicija 5.2. Neka je ρ(A) rezolventni skup linearnog operatora A. Skupσ(A) = C \ ρ(A) nazivamo spektar operatora A (C kompleksna ravan).
Na osnovu Teorem 1.21 jednostavno se pokazuje da je rezolventni skupotvoren. Zaista, neka je λ ∈ C regularna tacka operatora A. To znaci dapostoji operator (A − λI)−1 koji je ogranicen i definisan na svuda gustomskupu, i neka je ||(A− λI)−1|| =M . Posmatrajmo sada kuglu B
(λ, 1
2M
)⊂
C. Za proizvoljno µ ∈ B(λ, 12M ) imamo
||A−λI − (A−µI)|| = ||λI −µI|| = |λ−µ| < 1
2M<
1
M=
1
||(A− λI)−1|| .
Na osnovu Teorem 1.21 zakljucujemo da je i A−µI inverzibilan operator, teje i µ regularna tacka operatora A. Dakle, rezolventni skup je okolina svakesvoje tacke te je i otvoren skup. Dakle vrijedi,
Teorem 5.1. Rezolventni skup je otvoren, a spektar operatora je zatvorenskup.
Osim toga, za rezolventni skup vrijedi i sljedeca jednostavna, a korisnatvrdnja.
Teorem 5.2. Neka je A ∈ L(X,X) i neka je λ ∈ C takav da je ||A|| < |λ|.Tada je λ regularna tacka operatora A.
Dokaz : Neka je ||A|| < |λ|, tada je∣∣∣∣ 1
λA∣∣∣∣ < 1. Na osnovu Teorem 1.19
operator I − 1λA je takode inverzibilan, a time je i operator A − λI =
−λ(I − 1λA) inverzibilan. ♣
Definicija 5.3. Za tacku λ ∈ σ(A) kazemo da je tacka neprekidnog spektraoperatora A ako postoji operator (A − λI)−1, koji je definisan na svudagustom skupu i nije ogranicen operator.Skup svih tacaka neprekidnog spektra operatora A oznacavamo sa σc(A).
Definicija 5.4. Za tacku λ ∈ σ(A) kazemo da je tacka rezidualnog spektraoperatora A ako postoji operator (A − λI)−1, koji nije definisan na svudagustom skupu.Skup svih tacaka rezidualnog spektra operatora A oznacavamo sa σr(A).
Definicija 5.5. Za tacku λ ∈ σ(A) kazemo da je tacka punktualnog (tackastogili diskretnog) spektra operatora A ako operator (A− λI)−1 ne postoji.Skup svih tacaka punktualnog spektra operatora A oznacavamo sa σp(A).
Na osnovu datih definicija je jasno da su rezolventni skup i spektar opera-tora disjunktni skupovi, ρ(A) ∩ σ(A) = ∅ i pri tome je
ρ(A) ∪ σ(A) = C .

109
UVOD U TEORIJU OPERATORA
Takode je jasno i da su skupovi σc(A),σr(A) i σp(A) disjunktni i da jesvaki od njih podskup od σ(A). Pri tome je
σ(A) = σc(A) ∪σr(A) ∪ σp(A) .
Definicija 5.6. Kompleksan broj λ nazivamo svojstvena ili karakteristicnavrijednost operatora A ako postoji nenula element x ∈ X takav da vrijedi
Ax = λx .
Vektor x pridruzen na ovaj nacin svojstvenoj vrijednosti λ nazivamo svoj-stveni ili karakteristicni vektor operatora A.
Na osnovu definicije punktualnog spektra, ako λ ∈ σp(A) tada ne postoji(A−λI)−1, a kako je to linearan operator, to znaci da postoji x ∈ X, x 6= 0,takav da je (A − λI)x = 0. Dakle, ako je λ tacka punktualnog spektra,tada postoji 0 6= x ∈ X, takav da je Ax = λx, tojest λ je svojstvenavrijednost operatora A, pa mozemo reci da punktualni spektar operatoracine upravo svojstvene vrijednosti tog operatora. Cinjenicu o pripadnostikompleksnog broja λ punktualnom spektru mogli bi smo izraziti i cinjenicomda je Ker(A−λI) 6= ∅. Pri tome dimenziju prostora Ker(A−λI) nazivamovisestrukost svojstvene vrijednosti λ.Ukoliko posmatramo linearan operator na konacnodimenzionalnom pros-
toru X situacija je poprilicno jednostavna. Naime, ako postoji (A− λI)−1,to znaci da je preslikavanje A−λI bijekcija. Tada je (A−λI)(X) = X pa jeinverzni operator (A−λI)−1 definisan na svuda gustom skupu. Pri tome sulinearna preslikavanja na konacnodimenzionalnim prostorima neprekidna paje (A− λI)−1 i ogranicen operator. Dakle, ako je X konacnodimenzionalanprostor, linearan operator A − λI ili ima ogranicen inverzni operator iliga uopste nema, a to znaci da proizvoljan kompleksan broj λ ili pripadarezolventnom skupu ili punktualnom spektru operatora A (kontinualni i re-zidualni spektri su prazni skupovi).
Primjer 5.1. Neka je operator A : C2 → C2 zadat u standardnoj (kanonskoj)bazi prostora C2 matricom
[0 −11 0
].
Neka je λ ∈ C. Pretpostavka da operator A − λI nema inverzni operatorsvodi se na cinjenicu da je det(A−λI) = 0 (karakteristicni polinom matrice).Kako je
det(A− λI) =
∣∣∣∣−λ −11 −λ
∣∣∣∣ = λ2 + 1 ,
to jednacina λ2 + 1 = 0 ima dva rjesenja, λ = i i λ = −i, te je premarecenom za konacnodimenzionalne prostore
σ(A) = σp(A) = −i, i .

5.1. Definicija spektra operatora
110
Svojstveni vektor za svojstvenu vrijednost λ = i dobijamo nalazeci nenulavektor x = (x1, x2) ∈ C2 takav da je (A−iI)x = 0, sto se svodi na rjesavanjesistema
−ix1 − x2 = 0
x1 − ix2 = 0
Jedno rjesenje ovog sistema je vektor x = (i, 1). Naravno, i svi vektori ax isamo oni, gdje je a ∈ C ce biti rjesenje datog sistema, sto nam govori da jevisestrukost svojstvene vrijednosti λ = i jednaka 1. ♦
Primjer 5.2. Neka je X prostor C[−1, 1] sa standardnom maksimum metri-kom i neka je A : X → X zadat sa
f ∈ C[−1, 1] , Af = f(0) + f .
Odredimo spektar i rezolventni skup datog operatora.Za proizvoljno f ∈ C[−1, 1] imamo
||Af || = maxx∈[−1,1]
|f(0)+ f(x)| ≤ |f(0)|+ maxx∈[−1,1]
|f(x)| ≤ ||f ||+ ||f || = 2||f || ,
sto znaci da je ||A|| ≤ 2. Posmatrajmo f0(x) = 1− x2 ∈ C[−1, 1]. Tada je
||A|| = supf∈X\0
||Af ||||f || ≥ ||Af0||
||f0||=
maxx∈[−1,1] |f0(0) + f0(x)|maxx∈[−1,1] |f0(x)|
= 2 ,
pa zakljucujemo da je ||A|| = 2.Neka je sada g ∈ C[−1, 1] proizvoljna. Rijesimo jednacinu (A − λI)f = g
po f ∈ C[−1, 1]. Tada je
g(x) = (A− λI)f(x) = Af(x)− λf(x) = f(0) + f(x)− λf(x) . (5.2)
Specijalno, za x = 0 moralo bi biti
g(0) = f(0) + f(0)− λf(0) = (2− λ)f(0) . (5.3)
Kako f mora biti neprekidna funkcija, ocigledno posljednja jednakost nedaje rjesenje po funkciji f za λ = 2, za proizvoljnu funkciju g. Zakljucujemoda onda mora biti 2 ∈ σ(A). Neka je nadalje λ 6= 2. Iz (5.3) dobijamo
f(0) =g(0)
2− λ,
pa stavljajuci to u (5.2) imamo
g(x)− g(0)
2− λ= (1− λ)f(x) .

111
UVOD U TEORIJU OPERATORA
Opet, slicno malopredasnjem, rezonujemo da za λ = 1 nemamo jednoznacnoodredeno f , za proizvoljno g ∈ C[−1, 1], pa mora biti 1 ∈ σ(A).neka je sada i λ 6= 2 i λ 6= 1. Tada je funkcija
f(x) = (A− λI)−1g(x) =1
1− λg(x) − g(0)
(1− λ)(2 − λ),
rjesenje polazne jednacine (A − λI)f = g, koje je neprekidno ako je i gneprekidna funkcija. Pri tome je
||f || = ||(A− λI)−1g|| ≤
1
|1− λ| +1
|1− λ||2− λ|
||g|| = C(λ)||g|| .
Ovo onda znaci da je C \ 1, 2 ⊆ ρ(A), a kako je pokazano 1, 2 ⊆ σ(A),zakljucujemo da vrijedi
ρ(A) = C \ 1, 2 i σ(A) = 1, 2 .
Pokazimo jos da su tacke λ = 1 i λ = 2 svojstvene vrijednosti posmatranogoperatora. Kako je za posmatrani operator svojstvena vrijednost okarakte-risana sa jednacinom
Af(x) = f(0) + f(x) = λf(x) ,
to za λ = 1 imamo da mora biti f(0) + f(x) = f(x), tojest f(0) = 0, paje svako f ∈ C[−1, 1] za koju je f(0) = 0 svojstveni vektor za svojstvenuvrijednost λ = 1.
Ako je λ = 2, opet iz karakterizacije svojstvene vrijednosti imamo da morabiti f(0) + f(x) = 2f(x). Tada je svaka konstantna funkcija f(x) = c svoj-stveni vektor za svojstvenu vrijednost λ = 2. Iz svega recenog konstatujmosljedece:
σ(A) = σp(A) , σc = ∅ , σr = ∅ . ♦
5.2 Spektralni radius
Za proizvoljno λ ∈ C koja je regularna tacka operatora A, postoji ope-rator (A − λI)−1. Dakle, svakom λ ∈ ρ(A) mozemo pridruziti operatorR(A,λ) = (A − λI)−1 koji se naziva rezolventom operatora A, a koji pred-stavlja preslikavanje sa ρ(A) u L(X). Za rezolventu vrijedi sljedece tvrdenje.
Teorem 5.3. Neka je A ∈ L(X) i neka su λ, µ ∈ ρ(A). Tada vrijedi
R(A,λ) −R(A,µ) = (λ− µ)R(A,λ)R(A,µ) . (5.4)

5.2. Spektralni radius
112
Dokaz : Pretpostavimo da ρ(A) nije prazan skup i neka su λ, µ ∈ ρ(A).Za svako x ∈ X je R(A,λ)x,R(A,µ)x ∈ DA. Oznacimo sa
B = R(A,λ)−R(A,µ) ,
tada je Bx = R(A,λ)x −R(A,µ)x, za svako x ∈ X. Tada vrijedi
(A− µI)Bx = (A− µI)R(A,λ)x− (A− µI)R(A,µ)x
= ((A− λI) + (λ− µ)I)R(A,λ)x − x
= (λ− µ)R(A,λ)x .
Ako i na lijevu i na desnu stranu posljednje jednakosti djelujemo operato-rom R(A,µ), dobijamo
R(A,µ)(A− µI)Bx = (λ− µ)R(A,µ)R(A,λ)x ,
tojest imamo jednakost B = (λ− µ)R(A,µ)R(A,λ), ili drugacije napisano
R(A,λ)−R(A,µ) = (λ− µ)R(A,µ)R(A,λ) . (5.5)
Primjenjujuci simetricno sve gornje na operator B = R(A,µ) − R(A,λ),imali bi
R(A,µ)−R(A,λ) = (µ− λ)R(A,λ)R(A,µ) . (5.6)
Sabiranjem jednacina (5.5) i (5.6) dobijamo jednakost
R(A,λ)R(A,µ) = R(A,µ)R(A,λ) ,
koja zajedno sa (5.5) daje trazenu jednakost (5.4). ♣
Jednakost (5.4) se naziva rezolventna jednacina. Ona nam izmedu osta-log govori da je rezolventa operatora neprekidna funkcija po λ ∈ ρ(A), au dokazu gornje teoreme smo pokazali da dvije rezolvente istog operatorakomutiraju za proizvoljne dvije regularne tacke tog operatora.Ranije smo pokazali da je rezolventni skup operatora, otvoren skup i u pos-
ljednjoj teoremi smo pretpostavili da je rezolventni skup neprazan. Pokazimosada da je ta pretpostavka bila opravdana.
Teorem 5.4. Neka je A ∈ L(X). Tada su ρ(A) i σ(A) neprazni podskupovikompleksne ravni.
Dokaz : Neka je λ ∈ C, takav da je ||A|| < |λ|. Tada je || 1λA|| = 1|λ| ||A|| <
1, pa prema Teoremi 1.19 operator I − 1λA ima inverzni operator (definisan
na X) i pri tome vrijedi
(I − 1
λA
)−1
=
∞∑
i=0
1
λiAi .

113
UVOD U TEORIJU OPERATORA
Odavde onda slijedi da i operator A − λI ima ogranicen inverzni operatordefinisan na X, i da je pri tome
(A− λI)−1 = − 1
λ
∞∑
i=0
1
λiAi = −
∞∑
i=0
1
λi+1Ai ,
a ovo znaci da svaki kompleksan broj λ, za koga je ||A|| < |λ|, pripada skupuρ(A). Kako razmatramo ogranicene operatore (||A|| ≤M < +∞), ovo znacida je rezolventni skup neprazan, a na osnovu odnosa rezolventnog skupa ispektra operatora, zakljucujemo da spektar σ(A) mora lezati u kugli ciji jepoluprecnik jednak ||A||.Pretpostavimo sada da je σ(A) = ∅. Tada je ρ(A) = C, te je rezolventaR(A,λ) definisana na cijeloj kompleksnoj ravni. Neka je |λ| > 2||A||. Kakoje
R(A,λ) = −∞∑
i=0
1
λi+1Ai , (5.7)
to onda imamo
||R(A,λ)|| ≤ 1
|λ|
∞∑
i=0
1
|λ|i ||A||i ≤ 1
|λ|
∞∑
i=0
||A||i|λ|i
<1
2||A||
∞∑
i=0
(1
2
)i
= C1 .
Dakle, cim je |λ| > 2||A||, onda je ||R(A,λ)|| ≤ C1. Kako je rezolventaneprekidna funkcija, na osnovu relacije
|||R(A,λ)|| − ||R(A,µ)||| ≤ ||R(A,λ)−R(A,µ)|| ,
zakljucujemo da je i realna funkcija ||R(A,λ)|| neprekidna po λ ∈ ρ(A).Time je ona i ogranicena na ogranicenom skupu, tj. vrijedi
||R(A,λ)|| ≤ C2 , |λ| ≤ 2||A|| .
Stavljajuci da je C = max C1, C2 zakljucujemo da vrijedi ||R(A,λ)|| ≤ C,za sve λ ∈ C. Neka je sada x0 6= 0 i f ∈ X∗ proizvoljan. Posmatrajmofunkciju definisanu sa φ(λ) = f(R(A,λ)x0). Ona je definisana na cijelojkompleksnoj ravni i tamo je ogranicena jer vrijedi
|φ(λ)| = |f(R(A,λ)x0)| ≤ ||f || · ||R(A,λ)|| · ||x0|| ≤ C||f || · ||x0|| ,
za proizvoljno λ ∈ C.Neka je sada λ 6= µ (λ, µ ∈ C). Tada imamo
φ(λ)− φ(µ) = f(R(A,λ)x0)− f(R(A,µ)x0)
= f((R(A,λ)−R(A,µ))x0)
= f((λ− µ)R(A,λ)R(A,µ)x0) .

5.2. Spektralni radius
114
Zato vrijediφ(λ)− φ(µ)
λ− µ= f(R(A,λ)R(A,µ)x0) .
Kako je rezolventa neprekidna funkcija, zakljucujemo da vrijedi
φ(λ)− φ(µ)
λ− µ→ f(R2(A,µ)x0) , λ→ µ .
Dakle, funkcija φ(λ) ima izvod u cijeloj kompleksnoj ravni, te je dakle cijelafunkcija, a kako je i ogranicena, prema poznatom stavu iz teorije funkcijakompleksne promjenljive ona je konstanta. Za proizvoljno λ ∈ C je prematome
φ(λ) = f(R(A,λ)x0) = K (K = const) .
Iz ranije dobijene veze (5.7), pustanjem da λ tezi u beskonacnost, zakljucujemoda mora vrijediti ||R(A,λ)|| → 0, te onda imamo
0 ≤ |K| = |f(R(A,λ)x0)| ≤ ||f || · ||R(A,λ)|| · ||x0|| → 0 , λ→ ∞ ,
iz cega onda mora biti K = 0. To onda znaci da za proizvoljan funkcionalf ∈ X∗ i proizvoljno λ ∈ C, vrijedi f(R(A,λ)x0) = 0, pa preme jednoj odposljedica Hahn-Banachove teoreme zakljucujemo da mora biti R(A,λ)x0 =0. Kako R(A,λ) ima inverzni operator A − λI, zakljucujemo da mora bitix0 = 0, sto se naravno protivi nasem izboru elementa x0.Dobivena kontradikcija pokazuje da spektar ogranicenog operatora ne moze
biti prazan skup, cime je teorem dokazan. ♣
Kao sto smo vec mogli vidjeti iz Teorema 5.2, spektar linearnog operatoraA se nalazi u krugu poluprecnika ||A||. Medutim, taj se rezultat moze ipojacati. Naime, vec smo imali da vrijedi 0 ≤ ||An|| ≤ ||A||n za proizvoljnon ∈ N, a to onda znaci da vrijedi i 0 ≤ n
√||An|| ≤ ||A||, za n ∈ N pro-
izvoljno. Dakle, niz ( n√
||An||)n∈N je ogranicen. Neka je rA infimum skupavrijednosti tog niza. Za proizvoljno ε > 0, na osnovu definicije infimuma,postoji prirodan broj n0, takav da je
n0√
||An0 || < rA + ε . (5.8)
Neka je sada n ≥ n0, tada mozemo pisati n = mn0+ q, za neke nenegativnecijele brojeve m i q, pri cemu je 0 ≤ q < n0. Tada imamo
n√
||An|| = n√
||Amn0+q|| ≤ n√
||Aq|| · ||Amn0 || ≤ n√
||A||q · ||An0 ||m≤ n
√||A||q · n
√||An0 ||m
< n√
||A||q · n√
((rA + ε)n0)m
= n√
||A||q · n√
(rA + ε)mn0+q · n√
(rA + ε)−q
= n
√( ||A||rA + ε
)q
· (rA + ε) .

115
UVOD U TEORIJU OPERATORA
Kako je 0 ≤ q < n0, to vrijedi
n
√( ||A||rA + ε
)q
→ 1 , (n→ ∞) ,
pa postoji n1 = n1(ε) takav da je za n ≥ n1 zadovoljeno,
n
√( ||A||rA + ε
)q
· (rA + ε) < rA + 2ε .
Dakle, za proizvoljno n ≥ n1 vrijedin√
||An|| < rA+ε, te zbog proizvoljnostiε zakljucujemo da je posmatrani niz konvergentan i da je pri tome
n√
||An|| → rA , n→ ∞ .
Posmatrajmo sada red
−∞∑
k=0
Ak
λk+1, (5.9)
i kao sto smo to pokazali ranije, on konvergira ako konvergira brojni red
∞∑
k=0
||Ak|||λ|k ,
a ovaj je opet konvergentan (na osnovu Cauchyjevog korijenog kriterija) akovrijedi
limk→∞
k
√||Ak|||λ|k < 1 .
Posljednje je ekvivalentno sa uslovom
rA = limk→∞
k
√||Ak|| < |λ| .
Dakle, ako je rA < |λ| tada je red (5.9) konvergentan (u L(X,X)). KoristeciLemu 1.19, stavljajuci umjesto A operator 1
λA, zakljucujemo da red (5.9)predstavlja upravo operator (A− λI)−1, a to znaci da je λ ∈ ρ(A). Odavdeje jasno da se onda spektar σ(A) mora nalaziti u skupu K(0, rA) = λ ∈C | |λ| ≤ rA.Pokazimo da se na kugli K(0, rA) mora nalaziti bar jedna tacka spektraoperatora A. Neka je f(λ) neprekidna kompleksna funkcija na nekoj oblastiG ⊂ ρ(A). Neka je Γ kriva koja se moze rektificirati i koja lezi u oblasti G.Posmatrajmo na klasican nacin definisan integral
∫
Γf(λ)R(A,λ)dλ . (5.10)

5.2. Spektralni radius
116
Ovaj integral predstavlja ogranicen linearan operator koji djeluje sa X u X.Ako je Γ zatvorena kriva koja ogranicava oblast G ⊂ ρ(A) i ako je f(λ)analiticka funkcija u i na G, tada iz teorije funkcija kompleksne promjenljiveznamo da vrijedi ∮
Γf(λ)R(A,λ)dλ = 0 ,
a odavde opet zakljucujemo da se vrijednost integrala nece promjeniti akoputanju integracije mijenjamo (ostajuci u ρ(A)), drzeci krajeve krive fiks-nim. Isto tako to onda znaci da ako je oblast G ⊂ ρ(A) ogranicena dvjemazatvorenim krivama Γ1 i Γ2, koje se ne sijeku i koje se nalaze u ρ(A), ondaje ∫
Γ1
f(λ)R(A,λ)dλ =
∫
Γ2
f(λ)R(A,λ)dλ .
Neka je sada Γ proizvoljna zatvorena kriva u ρ(A), koja ogranicava oblastu kojoj je sadrzan σ(A) (to ocigledno moze biti proizvoljna kruznica sacentrom u 0, poluprecnika veceg od rA). Kao sto smo vec imali vrijedi,
R(A,λ) = −∞∑
k=0
Ak
λk+1,
pa mnozeci to sa λn (n ∈ N) imamo,
λnR(A,λ) = λn−1I − λn−2A− · · · − 1
λAn − 1
λ2An+1 − · · · .
Kako je red na desnoj strani uniformno konvergentan, integraleci posljednjujednakost dobijamo,
− 1
2πi
∮
ΓλnR(A,λ)dλ =
(1
2πi
∮
Γλn−1dλ
)I +
(1
2πi
∮
Γλn−2dλ
)A+ · · ·
· · ·+(
1
2πi
∮
Γ
1
λdλ
)An +
(1
2πi
∮
Γ
1
λ2dλ
)An+1 + · · · .
Svi integrali na desnoj strani su jednaki 0, osim
1
2πi
∮
Γ
1
λdλ = 1 ,
pa zakljucujemo jednakost,
An = − 1
2πi
∮
ΓλnR(A,λ)dλ , n ∈ N0 .
Pretpostavimo sada da na kugli K(0, rA) nema tacaka spektra. Kako suK(0, rA) i σ(A) zatvoreni i ograniceni skupovi, to je udaljenost izmedunjih pozitivna. To znaci da postoji δ > 0, tako da za r = rA − δ je

117
UVOD U TEORIJU OPERATORA
σ(A) ⊂ K(0, r) ⊂ K(0, rA). Prema ranijoj napomeni za integrale kom-pleksne funkcije onda zakljucujemo
An = − 1
2πi
∮
S(0,r)λnR(A,λ)dλ ,
a onda vrijedi procjena
||An|| ≤ 1
2π(rA − δ)n · C · 2π(rA − δ) = (rA − δ)n+1C ,
gdje je C konstanta za koju je ||R(A,λ)|| ≤ C, za sve λ. Sada je
limn→∞
n√
||An|| ≤ limn→∞
n√
(rA − δ)n+1C = rA − δ < rA ,
a to je naravno u suprotnosti sa odredenjem broja rA, tj.
rA = limn→∞
n√
||An|| .
Dakle, bar jedna tacka spektra operatora A mora lezati na kugli K(0, rA).Velicinu rA uvedenu na gornji nacin, nazivamo spektralni radius operatoraA. Pri tome je jasno da je rA ≤ ||A|| jer je n
√||An|| ≤ ||A||, a konkretnim
primjerima se moze pokazati da je moguce da bude rA < ||A||.Sada cemo napraviti poredenje izmedu spektra linearnog operatora A i
spektra njemu konjugovanog operatora.
Teorem 5.5. Neka je A ∈ L(X) zatvoren operator. Tada vrijedi
σ(A) = σ(A∗) .
Jasno je da na osnovu jednakosti iz gornje teoreme imamo i jednakostρ(A) = ρ(A∗). Takode vrijedi,
Teorem 5.6. Neka je A ∈ L(X,X) zatvoren operator.
1. Ako je λ ∈ σp(A), tada je ili λ ∈ σp(A∗) ili λ ∈ σr(A
∗).
2. Ako je λ ∈ σp(A∗), tada je ili λ ∈ σp(A) ili λ ∈ σr(A).

6
Kompaktni operatori
6.1 Neke osobine kompaktnih operatora . . . . . . . 119
Ako je X konacnodimenzionalan prostor i A : X → X linearan operator,imamo poprilicno cjelovito izradenu teoriju egzistencije rjesenja jednacineoblika Ax = y. Da bi smo nekako primjenili ove rezultate i na beskonacnodi-menzionalne prostore, uvodimo koncept kompaktnih operatora.
Definicija 6.1. Neka su X i Y Banachovi prostori i neka je A : X → Ylinearan operator. Za operator A kazemo da je kompaktan ako ogranicenskup iz X preslikava u relativno kompaktan skup u Y .
Gornju definiciju smo mogli iskazati i u ekvivalentnoj formi, preko konver-gencije.
Definicija. Za linearan operator A : X → Y kazemo da je kompaktan akose iz svakog ogranicenog niza (xn)n∈N ⊂ DA moze izdvojiti podniz (xnk
)k∈N,takav da je niz (Axnk
)k∈N konvergentan.
Cesto za kompaktan operator kazemo da je potpuno neprekidan operator,a to se dovodi u vezu zbog odnosa biti kompaktan i biti neprekidan ope-rator. Naime, svaki kompaktan operator je i neprekidan operator. Zaista,kako je svaki relativno kompaktan skup ogranicen, to onda kompaktan ope-rator ogranicene skupove slika u ogranicene skupove, pa na osnovu Teoreme1.7 on je i neprekidan. Cesto u ispitivanju kompaktnosti nekog operatoraA posmatramo samo da li skup Ax | ||x|| ≤ 1 ima kompaktno zatvorenjetojest, da li je slika jedinicne kugle relativno kompaktan skup.Obrat gore iskazanog odnosa kompaktnosti i neprekidnosti operatora u opstemslucaju ne vrijedi. Tacnije, na konacnodimenzionalnim prostorima su nepre-kidnost i kompaktnost linearnih preslikavanja ekvivalentni pojmovi. Naime,ako je X konacnodimenzionalan prostor i A : X → Y linearan i neprekidanoperator, tada je i A(X) konacnodimenzionalan potprostor u Y . Kako sulinearna preslikavanja na konacnodimenzionalnim prostorima neprekidna,to A preslikava ogranicene skupove iz X u ogranicene skupove u A(X), ana konacnodimenzionalnim prostorima ograniceni skupovi su relativno kom-paktni, te je A kompaktan operator.
U beskonacnodimenzionalnim prostorima neprekidan operator ne mora bitikompaktan. Da to vidimo, posmatrajmo proizvoljan beskonacnodimenzionalan
118

119
UVOD U TEORIJU OPERATORA
prostor X i identicko preslikavanje I : X → X. Kako je ovo preslikavanjeocigledno ograniceno (||I|| = 1), ono je zbog linearnosti i neprekidno. UX postoji beskonacno mnogo linearno nezavisnih vektora x1, x2, ..., xn, ....Oznacimo sa Xn (n ∈ N) lineal generisan vektorima x1, x2, ..., xn. Jasno jetada da vrijedi Xn ⊆ Xn+1 i da je Xn pravi potprostor od X za svako n ∈ N.Na osnovu Rieszove leme mozemo konstruisati niz vektora (yn)n∈N, takvihda je
yn ∈ Xn , ||yn|| = 1 i d(yn,Xn−1) ≥1
2.
Jasno je da je ovaj niz ogranicen u X, te je i njegova slika ogranicen skup.Kako za proizvoljne n,m ∈ N, n 6= m vrijedi ||yn − ym|| ≥ 1
2 , jasno je da iztog niza ne mozemo izdvojiti konvergentan podniz, pa prema tome taj skupnije relativno kompaktan, a time ni identicko preslikavanje nije kompaktanoperator.
6.1 Neke osobine kompaktnih operatora
Teorem 6.1. Neka su X i Y Banachovi prostori i neka je A : X → Yogranicen linearan operator. Ako je Rang(A) konacnodimenzionalan pot-prostor od Y , tada je A kompaktan operator.
Dokaz : Kako je Rang(A) konacnodimenzionalan u kompletnom prostoru,on je i sam kompetan potprostor. Posmatrajmo skup S = Ax | ||x|| ≤1 , x ∈ X. kako je ||Ax|| ≤ ||A|| ||x||, to je on ocigledno ogranicen skup i pritome je S ⊂ Rang(A). Kako su ograniceni skupovi u konacnodimenzionalnimprostorima relativno kompaktni, zakljucujemo da je slika jedinicne kugle uX operatorom A relativno kompaktan skup u Y , te je operator A kompak-tan. ♣
Primjer 6.1. Neka je X = C[0, 1] sa standardnom normom. Neka je
k(x, y) =n∑
i=1
αi(x)βi(y) , (6.1)
gdje su sve αi neprekidne funkcije na [0, 1] i βi apsolutno integrabilne na[0, 1]. Pridruzimo ovoj funkciji (jezgru) integralni operator K : X → X,zadat sa
Kf(x) =
∫ 1
0k(x, y)f(y)dy , f ∈ X .
Tada je
||K|| ≤n∑
i=1
||αi||∫ 1
0|βi(y)|dy ,

6.1. Neke osobine kompaktnih operatora
120
te je on ogranicen operator. kako je jos
Kf(x) =
n∑
i=1
αi(x)
∫ 1
0βi(y)f(y)dy ,
jasno je da je Rang(K) = span α1, α2, ..., αn tojest, rang operatoraK je li-neal nad funkcijama αi (i ∈ 1, 2, ..., n) i kao takav, konacnodimenzionalan.Dakle, K je kompaktan operator.Za jezgra integralnih operatora oblika (6.1) kazemo da su degenerisana. ♦
Teorem 6.2. Neka su X i Y Banachovi prostori i neka su A,B : X → Ykompaktni operatori. Svaka linearna kombinacija ovih operatora je kompak-tan operator.
Teorem 6.3. Neka je (An)n∈N niz linearnih kompaktnih operatora sa X uY i neka An → A0 kada n→ ∞. Tada je i A0 kompaktan operator.
Dokaz : Neka je ε > 0 proizvoljan. Na osnovu konvergencije niza opera-tora, postoji n0 ∈ N, takav da je
||An0 −A0|| <ε
2.
Zbog kompaktnosti operatora An0 , skup An0(B(0, 1)) je relativno kompak-tan skup u Y , te postoji konacna ε
2 -mreza tog skupa i neka se ona sastoji odelemenata y1, y2, ..., yN . Za proizvoljno y ∈ A0(B(0, 1)) neka je x ∈ B(0, 1)onaj za koga je y = A0x i neka je yk0 element mreze za koga je
||An0x− yk0 || <ε
2.
Tada imamo
||y − yk0 || = ||A0x− yk0 || ≤ ||A0x−An0x||+ ||An0x− yk0 ||< ||A0 −An0 || · ||x|| +
ε
2
<ε
2· ||x||+ ε
2≤ ε
2+ε
2= ε .
Ovim smo pokazali da je skup y1, y2, ..., yN takode i konacna ε-mreza zaA0(B(0, 1)), a zbog proizvoljnosti ε zakljucujemo da je A0(B(0, 1)) relativnokompaktan skup.Dakle, operator A0 preslikava jedinicnu kuglu (ogranicen skup) u ogranicenskup, a to je dovoljno za zakljucak da ce A0 biti kompaktan operator. ♣
Jasno je da ako imamo niz operatora (An)n∈N sa konacnodimenzionalnimrangom koji je uniformno konvergentan ka operatoru A, da ce i A biti kom-paktan operat. Tada kazemo da se kompaktan operator A moze aproksi-mirati sa nizom operatora konacnodimenzionalnog ranga (finite-rank opera-tors). Obrat ovoga tojest, da li se svaki kompaktan operator moze aproksi-mirati sa finite-rank operatorima, ima pozitivan odgovor na mnogim Ba-nachovim prostorima, ukljucujuci tu sve Hilbertove prostore. Medutim,

121
UVOD U TEORIJU OPERATORA
moguce je konstruisati separabilan prostor na kome ova aproksimacija nijemoguca. Kompaktni operatori imaju jako ”lijepo” ponasanje naime, u be-skonacnodimenzionalnim prostorima oni se u mnogim aspektima ponasajukao operatori na konacnodimenzionalnim prostorima, pa odatle i zaintere-sovanost za ovim aproksimacijama.
Primjer 6.2. Neka je D zatvoren i ogranicen podskup od R2 i neka je k(x, y)neprekidna funkcija na D. pretpostavimo da mozemo naci niz neprekidnihdegenerisanih jezgara k(x, y), takvih da
max(x,y)∈D
∫
D|kn(x, y)− k(x, y)|dy → 0 , n→ ∞ .
Za asocirane integralne operatore ovakvim jezgrima tada vrijedi Kn → Kkada n → ∞, a onda na osnovu Teorem 6.3 zakljucujemo da je K kom-paktan operator i da je on aproksimiran operatorima Kn ciji su rangovikonacnodimenzionalni.Konkretno, posmatrajmo jezgra
k(x, y) =1
|x− y|α ,
gdje je 0 < α1. Konstruisimo niz funkcija kn na sljedeci nacin:
kn(x, y) =
1|x−y|α ; |x− y| ≥ 1
n
nα ; |x− y| ≤ 1n
Ocigledno su funkcije kn neprekidne za svako n ∈ N na [0, 1] × [0, 1] i pritome su asocirani operatori
Knf(x) =
∫ 1
0kn(x, y)f(y)dy ,
kompaktni na C[0, 1]. Pri tome je za proizvoljno f ∈ C[0, 1]
|Kf(x)−Knf(x)| =∣∣∣∣∫ 1
0(k(x, y) − kn(x, y))f(y)dy
∣∣∣∣
≤∫ 1
0|k(x, y) − kn(x, y)||f(y)|dy
≤ 2α
1− α· 1
n1−α||f ||C[0,1] .
Iz ovoga vidimo da ce vrijediti
||K −Kn|| ≤2α
1− α· 1
n1−α→ 0 , n→ ∞ .
Dakle, niz (Kn)n∈N uniformno konvergira ka operatoru K, te je i K kom-paktan operator. ♦

6.1. Neke osobine kompaktnih operatora
122
Ako sa K(X,Y ) oznacimo skup svih kompaktnih operatora izmedu Banac-hovih prostora X i Y , Teorem 6.2 i Teorem 6.3 nam govore da je K(X,Y )zatvoren linearan potprostor od L(X,Y ).U Teoremi 6.3 smo koristili konvergenciju po normi (uniformnu konver-
genciju) niza operatora. Ako tu konvergenciju zamjenimo jakom konver-gencijom niza operatora, tada tvrdnja ne mora da vrijedi. Naime, neka jeX = Y = l2 i neka su en (n ∈ N) standardni vektori baze prostora l2. Tadaza proizvoljno x ∈ l2 vrijedi
x =
∞∑
i=1
xiei , xi ∈ Φ .
Posmatrajmo projekciona preslikavanja Pn definisana sa
x ∈ l2 , Pnx =
n∑
i=1
xiei .
Zbog konacne dimenzionalnosti slike ovih operatora to su kompaktni opara-tori za svako n ∈ N. Osim toga ocigledno vrijedi
Pnx =n∑
i=1
xiei →∞∑
i=1
xiei = x ,
za proizvoljno x ∈ l2, tj. niz operatora (Pn)n∈N konvergira jako ka identickomoperatoru I, za koga smo vec pokazali da nije kompaktan operator.
Teorem 6.4. Ako je A : X → X kompaktan operator i ako je B : X → Xogranicen operator, tada su operatori AB i BA kompaktni.
Dokaz : Neka je S ogranicen skup u X. Tada je zbog ogranicenosti ope-ratora B, skup B(S) ogranicen, a onda je zbog kompaktnosti operatoraA, skup A(B(S)) relativno kompaktan u X. Dakle, operator A B slikaogranicen skup u relativno kompaktan skup, te je on kompaktan operator.Na slican nacin se pokazuje kompaktnost i drugog navedenog operatora. ♣
Kao posljedicu ovog tvrdenja imamo da ako T ∈ K(X), tada ce za svakoA ∈ L(X) biti TA ∈ K(X) i AT ∈ K(X).
Teorem 6.5. Neka je A : X → Y kompaktan operator i dim(X) = ∞. Akopostoji inverzni operator A−1, tada on nije neprekidan.
Dokaz : Neka je A : X → Y kompaktan operator i neka jeX beskonacnodi-menzionalan prostor. Ako pretpostavimo da A−1 postoji i da je neprekidan,tj. ogranicen, tada bi prema prethodnoj teoremi i operator A A−1 = I biokompaktan, a kao sto smo vec pokazali, identicki operator nije kompaktan.♣

123
UVOD U TEORIJU OPERATORA
Teorem 6.6. Rang svakog kompaktnog operatora je separabilan prostor.
Dokaz : Neka je A : X → Y kompaktan operator. Kako je za proizvoljann ∈ N kugla Bn = B(0, n) ogranicen skup, na osnovu kompaktnosti opera-tora je A(Bn) relativno kompaktan skup, a na osnovu Teorema ?? on je iseparabilan. Pri tome je ocigledno
Rang(A) =
∞⋃
n=1
A(Bn) ,
te je rang operatora separabilan kao prebrojiva unija separabilnih skupova.♣
Kompaktnost operatora se prenosi na konjugovani operator, sto iskazujemosljedecim tvrdenjem.
Teorem 6.7. Linearan operator je kompaktan ako i samo ako je njemukonjugovan operator kompaktan.
Dokaz : Neka je A : X → Y kompaktan operator. Tada je Rang(A) sepa-rabilan skup, ali takav je onda i Rang(A) ⊆ Y . Neka je sada (gn)n∈N ⊂ Y ∗,takav da je ||gn|| ≤ M , za svako n ∈ N. Ne umanjujuci opstost, neka jeM = 1.Posmatrajmo djelovanje funkcionala gn (n ∈ N) na Rang(A). Kako jeRang(A) separabilan Banachov potprostor, to iz niza (gn)n∈N mozemo iz-dvojiti podniz (gnk
)k∈N koji slabo konvergira ka nekom funkcionalu g0 naRang(A), tj.
gnk(y) → g0(y) , k → ∞ ,
za svako y ∈ Rang(A). Jednostavnosti radi podrazumijevacemo da ovovrijedi i za sam niz,
gn(y) → g0(y) , n→ ∞ , y ∈ Rang(A) . (6.2)
Jasno je da ||g0|| ≤ 1. Na osnovu Hahn-Banachovog teorema, prosirimofunkcional g0 na citav Y ne mijenjajuci mu normu. Opet jednostavnostiradi, taj prosireni funkcional oznacimo sa g0.Neka je sada ε > 0 proizvoljan. Zbog kompaktnosti operatora A, skupA(B(0, 1)) je relativno kompaktan u Y , pa za njega postoji ε
3 -mreza. Nekatu mrezu cine elementi y1, y2, ..., yN , za koje uvijek mozemo tvrditi (takoih mozemo izabrati) da su iz skupa A(B(0, 1)), a time onda za svako i =1, 2, ..., N postoji xi ∈ X, tako da je yi = Axi. Zbog 6.2 i kako je elemenatayi konacno mnogo, mozemo odrediti prirodan broj n0 = n0(ε), takav da zasve i = 1, 2, ..., N vrijedi
|gn(yi)− g0(yi)| <ε
3,

6.1. Neke osobine kompaktnih operatora
124
cim je n ≥ n0. Neka je sada x proizvoljan element iz B(0, 1). Tada za svakoi = 1, 2, ..., N imamo
|A∗gn(x)−A∗g0(x)|≤ |A∗gn(x)−A∗gn(xi)|+ |A∗gn(xi)−A∗g0(xi)|+ |A∗g0(xi)−A∗g0(x)|= |gn(Ax)− g0(Axi)|+ |gn(Axi)− g0(Axi)|+ |g0(Axi)− g0(Ax)|= |gn(y) − gn(yi)| + |gn(yi) − g0(yi)| + |g0(yi) − g0(y)| ,
gdje je y = Ax ∈ A(B(0, 1)). Neka je sada yi0 onaj element iz skupay1, y2, ..., yN za koga je ||y−yi0 || < ε
3 . Tada iz gornjih nejednakosti imamoza n ≥ n0
|A∗gn(x)−A∗g0(x)| ≤ ||gn|| · ||y − yi0 ||+ |gn(yi0)− g0(yi0)|+ ||g0|| · ||yi0 − y||
<2ε
3+ |gn(yi0)− g0(yi0)|
<2ε
3+ε
3= ε .
Dakle, za proizvoljan x ∈ B(0, 1), cim je n ≥ n0 vrijedi
|A∗gn(x)−A∗g0(x)| < ε ,
odakle je onda||A∗gn −A∗g0|| ≤ ε .
Na osnovu svega zakljucujemo da
A∗gn → A∗g0 , n→ ∞ ,
te je operator A∗ kompaktan.Neka je sada A∗ kompaktan operator. Tada je prema vec dokazanom i
operator A∗∗ = (A∗)∗ kompaktan. Kako je na osnovu Teorema 3.7 A ⊆ A∗∗,to je i A kompaktan operator. ♣

7
Ograniceni linearni operatori
na Hilbertovim prostorima
U konkretnim realnim situacijama primjenjene matematike cesto smo u si-tuaciji posmatrati operatore na Hilbertovim prostorima, a odatle i posebnazainteresovanost za takve. Ovdje cemo se pozabaviti nekim specijalnim kla-sama ogranicenih operatora na Hilbertovim prostorima, medu kojima cemoobraditi projektore, samokonjugovane operatore i unitarne operatore.
7.1 Ortogonalna projekcija
Zapocnimo ovu sekciju sa ponavljanjem nekih osnovnih pojmova. Neka suM i N potprostori linearnog prostora X, takvi da se svaki x ∈ X moze najedinstven nacin napisati u obliku x = y + z, gdje je y ∈ M i z ∈ N , tadakazemo da je X direktna suma od M i N , sto zapisujemo sa X = M ⊕N .Tada kazemo da je M komplementni potprostor od N u X. Dekompozicijax = y + z, y ∈ M i z ∈ N je jedinstvena ako su potprostori disjunktnitojest, M ∩ N = 0. Zadati potprostor M moze imati vise kompleme-nata. Naprimjer, ako je X = R3 i ako je M proizvoljna ravan koja prolazikroz koordinatni pocetak, tada je svaka prava koja prolazi kroz koordinatnipocetak njegov komplementarni potprostor. Ono sto je zajednicko svimkomplementarnim prostorima nekog potprostora, osim nul elementa, jesteista dimenzija. Dimenziju komplementarnog prostora N , potprostora M ,nazivamo kodimenzija od M u X.
Ako je X = M ⊕ N , tada mozemo definisati preslikavanje P : X → Xsa Px = y, gdje je x = y + z, y ∈ M i z ∈ N . Ovakvo preslikavanjenazivamo projekcija na M i ono je linearno preslikavanje sa Rang(P ) =M ,Ker(P ) = N i osobinom P 2 = P . Pokazuje se da upravo ova posljednjaosobina karakterise projektivna preslikavanja.
Definicija 7.1. Projekcija ili projektor na linearnom prostoru X je presli-kavanje P : X → X koje zadovoljava osobinu
P 2 = P . (7.1)
Svaka projekcija je asocirana dekompozicijom prostora na direktnu sumu.O tome govori naredno tvrdenje.
125

7.1. Ortogonalna projekcija
126
Teorem 7.1. Neka je X linearan prostor. Tada vrijedi:
1. Ako je P : X → X projekcija, tada je X = Rang(P )⊕Ker(P ).
2. Ako je X = M ⊕ N , gdje su M i N linearni potprostori od X, tadapostoji projekcija P : X → X za koju je Rang(P ) =M i Ker(P ) = N .
Dokaz : Neka je P : X → X projekcija tojest, P 2 = P . Ako je Px = x,jasno je da x ∈ Rang(P ). S druge strane, ako je x ∈ Rang(P ), tada jex = Py za neko y ∈ X, akako je P 2 = P , tada imamo Px = P 2y = Py = x.Ovime je pokazano da x ∈ Rang(P ) ako i samo ako je Px = x.Pretpostavimo da x ∈ Rang(P ) ∩ Ker(P ). Tada je x = Px i Px = 0.
Dakle x = 0 tojest, Rang(P ) ∩Ker(P ) = 0.Neka je sada x ∈ X proizvoljan. Stavimo da je Px = y i z = x−Px. Jasno
je dax = Px+ (x− Px) ,
pri cemu je y ∈ Rang(P ), a zbog P (x− Px) = Px− P 2x = Px− Px = 0,jasno z ∈ Ker(P ). Dakle, X = Rang(P )⊕Ker(P ).Dokazimo tvrdnju 2.. Ako je X = M ⊕ N , tada svako x ∈ X ima jedins-
tvenu dekompoziciju x = y + z, gdje je y ∈ M i z ∈ N . Tada preslikavanjedefinisano sa Px = y je projekcija koja zadovoljava postavljene uslove. ♣
U gornjem smo uveli pojam projekcije na proizvoljnom linearnom vektor-skom prostoru. Ako posmatramo Hilbertove prostore, tada smo zaintere-sovani posmatrati ne proizvoljne potprostore nego ortogonalne potprostore.Neka je M proizvoljan zatvoren potprostor Hilbertovog prostora H. Naosnovu Teorema o ortogonalnoj dekompoziciji je tada H = M ⊕M⊥. Zaprojekciju P prostora H na M tada kazemo da je ortogonalna projekcija.Pri tome, ako su x = y+z i x′ = y′+z′ jedinstvene reprezentacije elemenatax, x′ ∈ X, gdje su y, y′ ∈M i z, z′ ∈M⊥ i P ortogonalna projekcija prostoraH na M , tada zbog ortogonalnosti M i M⊥ vrijedi
〈Px, x′〉 = 〈y, y′ + z′〉 = 〈y, y′〉+ 〈y, z′〉 = 〈y, y′〉= 〈y, y′〉+ 〈z, y′〉 = 〈y + z, y′〉 = 〈x, Px′〉 .
Nesto kasnije cemo vidjeti da ova osobina znaci da su projektori samo-konjugovani operatori, a mi cemo to iskoristiti za definisanje projektora naHilbertovim prostorima.
Definicija 7.2. Ortogonalna projekcija Hilbertovog prostora H je linearnioperator P : H → H koji zadovoljava osobine
P 2 = P i 〈Px, y〉 = 〈x, Py〉 za sve x, y ∈ H .
Teorem 7.2. Neka je H Hilbertov prostor i P : H → H netrivijalna orto-gonalna projekcija. Tada je ||P || = 1.

127
UVOD U TEORIJU OPERATORA
Dokaz : Neka je x ∈ H i Px 6= 0. Sada je,
||Px||2 = 〈Px, Px〉 = 〈x, P 2x〉 = 〈x, Px〉 .
Koristeci Cauchy-Schwarzovu nejednakost zakljucujemo ||Px||2 ≤ ||x||·||Px||,odnosno ||Px|| ≤ ||x||, a ovo opet znaci da je ||P || ≤ 1.S druge strane, kako je P netrivijalan projektor, postoji y ∈ H takav da0 6= x = Py ∈ H. Tada je ||P (Py)|| = ||Py|| tojest, ||Px|| = ||x||, tezakljucujemo da je ||P || ≥ 1. Dakle, ||P || = 1. ♣
Pokazuje se da postoji jedan-jedan korespodencija izmedu svih ortogonal-nih projekcija P na H i zatvorenih potprostora M , takvih da je Rang(P ) =M .
Teorem 7.3. Neka je H Hilbertov prostor.
1. Ako je P ortogonalni projektor na H, tada je Rang(P ) zatvoren ivrijedi H = Rang(P )⊕Ker(P ).
2. Ako je M zatvoren potprostor od H, tada postoji ortogonalni projektorP na H, takav da je Rang(P ) =M i Ker(P ) =M⊥.
Dokaz : Neka je P ortogonalni projektor na H. Prema Teorem 7.1 vrijediH = Rang(P ) ⊕Ker(P ). Za proizvoljne x = Py ∈ Rang(P ) i z ∈ Ker(P )vrijedi,
〈x, z〉 = 〈Py, z〉 = 〈y, Pz〉 = 0 ,
iz cega je onda Rang(P )⊥Ker(P ). Dakle, H je ortogonalna direktna sumaRang(P ) i Ker(P ) iz cega je onda Rang(P ) = (Ker(P ))⊥, pa je Rang(P )zatvoren potprostor.
Neka jeM zatoren potprostor od H. Tada je H =M ⊕M⊥ i preslikavanjeP : H → H, definisano sa Px = y, za x = y + z gdje je y ∈M i z ∈M⊥, jeprojekcija. Ocigledno je Rang(P ) =M i Ker(P ) =M⊥, te je P ortogonalniprojektor. ♣
Ako je P ortogonalni projektor na H sa rangomM i asociranom direktnomsumom H = M ⊕N , tada je I − P ortogonalni projektor na H sa rangomN i asociranom direktnom sumom H = N ⊕M .
Primjer 7.1. Prostor L2(R) se moze zapisati kao ortogonalna suma potpros-tora M svih parnih i potprostora N svih neparnih funkcija. Pri tome suortogonalni projektori P : L2(R) →M i Q : L2(R) → N zadati sa,
Pf(x) =f(x) + f(−x)
2, Qf(x) =
f(x)− f(−x)2
.
Uocimo da je I − P = Q. ♦

7.1. Ortogonalna projekcija
128
Primjer 7.2. Neka je A proizvoljan mjerljiv podskup od R (naprimjer, in-terval) i na njemu definisana karakteristicna funkcija
χA(x) =
1 ; x ∈ A0 ; x /∈ A
Za proizvoljno f ∈ L2(R) je tada sa
PAf(x) = χA(x)f(x) ,
definisan ortogonalni projektor na potprostor funkcija ciji je nosac sadrzanu A.Nosac funkcije f : X → R je skup suppF = x ∈ X | f(x) 6= 0. ♦
Najcesce posmatrani slucaj projektora jeste projekcija na jednodimenzi-onalni potprostor Hilbertovog prostora. Za proizvoljan u ∈ H, sa ||u|| = 1,definisemo ortogonalni projektor Pu sa
Pux = 〈u, x〉u , x ∈ H ,
i on predstavlja ortogonalnu projekciju vektora na njegovu komponentu upravcu vektora u.Matematicari koriste tenzor produkt notaciju u ⊕ u za ovu projekciju, zarazliku od fizicara koji koriste takozvanu ”bra-ket” notaciju koju je uveoDirac. U ovoj notaciji element x Hilbertovog prostora se oznacava sa ”bra”〈x| ili ”ket” |x〉, a skalarni produkt vektora x i y tada oznacavamo sa 〈x|y〉.Ortogonalna projekcija u pravcu vektora u je tada |u〉〈u|, pa je onda
(|u〉〈u|)|x〉 = 〈u|x〉|u〉 .
Primjer 7.3. U slucaju Hilbertovog prostora H = Rn, ortogonalni projektorPu u pravcu jedinicnog vektora u je matrica uu⊤ ranga jedan i pri tome jePux = (u⊤x)u ♦
Primjer 7.4. Ako je H = l2(Z) i u = en (standardni vektor koji ima svenule i na mjestu n ∈ Z jedinicu), tada je za x = (xn)n∈N sa
Pux = xnen ,
zadat ortogonalni projektor u pravcu vektora u. ♦
Primjer 7.5. Neka je H = L2(T) prostor svih 2π-periodicnih funkcija i nekaje u = 1√
2πkonstantna funkcija norme 1, tada ortogonalni projektor Pu
preslikava proizvoljnu funkciju f u njenu glavnu vrijednost tojest, Puf = 〈f〉,gdje je
〈f〉 = 1
2π
∫ 2π
0f(x)dx .

129
UVOD U TEORIJU OPERATORA
Odgovarajuca ortogonalna dekompozicija lementa f ∈ H je data sa
f(x) = 〈f〉+ f ′(x) ,
gdje je 〈f〉 konstanta, glavna vrijednost i f ′ fluktirajuci dio glavne vrijednostinula. ♦
7.2 Dual Hilbertovog prostora
Kao sto smo to vec ranije rekli, linearni funkcionali su specijalan slucajlinearnih operatora kod kojih je kodomen skup skalara (R ili C). Kada jedomen linearnog funkcionala f Hilbertov prostor H, tada kazemo da je onogranicen ako postoji nenegativna konstanta M , tako da za svako x ∈ Hvrijedi |f(x)| ≤M ||x||, a normu funkcionala mozemo racunati sa
||f || = sup||x||=1
|f(x)| .
Koristeci se osobinama skalarnog proizvoda i Cauchy-Schwarzovm nejed-nakoscu imamo da je za svako y ∈ H sa
fy(x) = 〈y, x〉 , (7.2)
definisan ogranicen linearan funkcional na H, za koga je ||fy|| = ||y||. Jednaod fundamentalnih cinjenica vezana za Hilbertove prostore je ta da ogranicenilinearni funkcionali na njima i ne mogu imati drugaciju formu od ove izrazenesa (7.2).
Teorem 7.4 (Rieszova teorema reprezentacije). Neka je f ogranicenlinearan funkcional na Hilbertovom prostoru H. Tada postoji jedinstveny ∈ H takav da je
f(x) = 〈y, x〉 ,za sve x ∈ H.
Dokaz : Ako je f nul-funkcional, tada je odgovarajuci y = 0. Zato pret-postavimo da f nije trivijalan funkcional. Tada je Ker(f) pravi zatvorenipotprostor od H, pa onda sigurno postoji 0 6= z ⊥ Ker(f). Definisimo sadapreslikavanje P : H → H, zadato sa
Px =f(x)
f(z)z .
Sada imamo
P 2x = P (Px) =f(Px)
f(z)z =
f(f(x)f(z)z
)
f(z)z =
f(x)f(z)f(z)
f(z)z =
f(x)
f(z)z = Px .

7.2. Dual Hilbertovog prostora
130
Dakle, P 2 = P , a to onda znaci da je moguca dekompozicijaH = Rang(P )⊕Ker(P ). Pri tome jos imamo
Rang(P ) = αz | α ∈ C , Ker(P ) = Ker(f) ,
a odavde je trivijalna cinjenica da je Rang(P )⊥Ker(P ). Dakle, P je orto-gonalan projektor, a H je direktna ortogonalna suma potprostora Rang(P )i Ker(P ). Sada za x ∈ H imamo x = αz+k (α ∈ C i k ∈ Ker(f)), mnozeciovo sa z, dobijamo
α =〈x, z〉||z||2 .
Djelujuci funkcionalom f na x imamo
f(x) = αf(z) ,
a uvrstavajuci izraz za α u ovo dobijamo
f(x) = 〈y, x〉 ,
gdje je
y =f(z)
||z||2 z .
Dakle, svaki ogranicen linearan funkcional na Hilbertovom prostoru zadatje kao skalarni produkt sa fiksiranim vektorom. Ako bi postojali y1, y2 ∈ Htakvi da je f(x) = 〈y1, x〉 i f(x) = 〈y2, x〉, tada bi za x = y1 − y2 imali
〈y1, y1 − y2〉 = 〈y2, y1 − y2〉 ,
a odavde bi slijedilo ||y1−y2|| = 0 tojest, y1 = y2. Reprezentacija je odredenajedinstvenim vektorom. ♣
Rieszov teorem reprezentacije nam govori da ogranicen linearan funkcionalna Hilbertovom prostoru moze biti samo u formi skalarnog produkta tojest,oblika (7.2). Ako sa T oznacimo preslikavanje zadato sa Ty = fy, tadaT : H → H∗, a ovo onda znaci da prostore H i H∗ mozemo identifikovati,a kako je jos ||fy|| = ||y||, oni su cak i izometricni. Ovo ce opet znacitida je kanonsko preslikavanje T0 : H → H∗∗, zadato sa Tx = Fx, gdje jeFx(f) = f(x), bijektivno i izometricno, te su Hilbertovi prostori refleksivni.U slucaju kompleksnog Hilbertovog prostora preslikavanje T je antilinearnojer fλy = λfy. Zbog toga kazemo da suH iH∗ izomorfni kao Banachovi pros-tori, a anti-izomorfni kao Hilbertovi prostori, a ovo je specijalno karakteris-tika Hilberovih prostora. Naime, dualni prostori beskonacnodimenzionalnihprostora kao sto su Lp (p 6= 2) ili C[a, b] nisu izomorfni originalnom prostoru.
Primjer 7.6. U kvantnoj mehanici, observabilnost sistema je reprezentovanaprostorom svih linearnih preslikavanja na Hilbertovom prostoru H. Tada

131
UVOD U TEORIJU OPERATORA
dogadaj ω kvantnog mehanickog sistema predstavlja linearan funkcional naL(H) koji zadovoljava sljedece osobine
ω(A∗A) ≥ 0 za sve A ∈ L(H)
ω(I) = 1 .
Pri tome je vrijednost ω(A) ocekivana vrijednost dopustivog operatora Aako se nalazimo u stanju ω. Prvi od uslova se naziva pozitivnost, a druginormaliziranost. U konkretnoj situaciji, neka je H = Cn i L(H) prostor svihn × n kompleksnih matrica. Tada je L(H) Hilbertov prostor sa skalarnimproduktom
〈A,B〉 = tr A∗B ,
(tr A je trag matrice A). Prema Rieszovom teoremu reprezentacije, za svakidogadaj ω postojat ce jedinstven T ∈ L(H), tako da je
ω(A) = tr T ∗A ,
za sve A ∈ L(H). Uslovi pozitivnosti i normalizacije su tada T ≥ 0 itr T = 1. ♦
7.3 Konjugovani operator na Hilbertovim prosto-
rima
Kao vaznu posljedicu Rieszovog teorema reprezentacije imamo i u egzisten-ciji konjugovanog operatora, ogranicenog operatora na Hilbertovim prosto-rima. Odgovarajuca osobina konjugovanog operatroa A∗ ∈ L(H), ogranicenogoperatora A ∈ L(H) glasi
〈x,Ay〉 = 〈A∗x, y〉 , x, y ∈ H .
Sama definicija implicira dvije jednostavne osobine,
(A∗)∗ = A , (AB)∗ = B∗A∗ .
Pokazimo egzistenciju konjugovanog operatora. Neka je x ∈ H proizvoljanfiksan element. Preslikavanje
fx(y) = 〈x,Ay〉 ,
je linearno (zbog linearnosti operatora A) i ograniceno jer
|fx(y)| ≤ ||x|| ||Ay|| ≤ ||x|| ||A|| ||y|| .
Sta vise, ||fx|| ≤ ||x|| ||A||. Dakle, fx je ogranicen linearan funkcional pana osnovu Rieszovog teorema, postoji jedinstven z ∈ H takav da je fx(y) =〈z, y〉. Definisuci ovime novo preslikavanje A∗x = z zakljucujemo
〈z, y〉 = 〈A∗x, y〉 = 〈x,Ay〉 .

7.3. Konjugovani operator na Hilbertovim prostorima
132
Linearnost od A∗ se ima iz jedinstvenosti u Rieszovoj teoremi i linearnostiskalarnog produkta.
Primjer 7.7. Neka je A ∈ Rm×n sto je uobicajena oznaka za linearan, ne-prekidan operator (matrica) koji djeluje sa Rn u Rm (A ∈ L(Rn,Rm)).Koristeci se standardnim Euclidskim skalarnim produktom na Rn i Rm zaproizvoljan x ∈ Rn i y ∈ Rm imamo
y⊤Ax = 〈Ax, y〉Rm , x⊤A⊤y = 〈x,A⊤y〉Rn .
Kako je y⊤Ax cisto realan broj, to vrijedi y⊤Ax = (y⊤Ax)⊤ = x⊤A⊤y. Izovoga zakljucujemo
〈Ax, y〉Rm = 〈x,A⊤y〉Rn
odnosno, konjugovani operator operatora A je njegova transponovana ma-trica A⊤.Specijalno, matrica konjugovanog operatora linearnog operatora na Rn,
reprezentovanog matricom A je A⊤. Ovo se ima jer je
x · (Ay) = (A⊤x) · y ,
ili u raspisanoj formi
n∑
i=1
xi
n∑
j=1
aijyj
=
n∑
j=1
(n∑
i=1
aijxi
)yj .
Matrica konjugovanog operatora linearnog preslikavanja na Cn je data sa
A∗ = A⊤ ♦
Primjer 7.8. Neka su AR i AL desni i lijevi shift operatori na l2. Tada jeAL = A∗
R jer je
〈x,ARy〉 = x2y1 + x3y2 + x4y3 + · · · = 〈ALx, y〉 ♦
Konjugovani operator igra veoma vaznu ulogu u ispitivanju rjesivosti ope-ratorske jednacine
Ax = y , (7.3)
gdje je A : H → H ogranicen linearan operator na Hilbertovom prostoru.Neka je z ∈ H proizvoljno rjesenje homogene jednacine
A∗z = 0 .

133
UVOD U TEORIJU OPERATORA
Mnozeci jednacinu (7.3) sa z imamo
〈Ax, z〉 = 〈y, z〉 ,
a kako je 〈Ax, z〉 = 〈x,A∗z〉, zakljucujemo da je 〈Ax, z〉 = 〈y, z〉 = 0. Dakle,neophodan uslov na rjesenje x jednacine (7.3) jeste da 〈y, z〉 = 0 za svez ∈ Ker(A∗), odnosno da y ∈ (Ker(A∗))⊥. Na zalost, ovaj uslov na y nijeuvijek i dovoljan za garantovati rjesivost jednacine (7.3).
Teorem 7.5. Neka je H Hilbertov prostor i A ∈ L(H). Tada vrijedi
Rang(A) = (Ker(A∗))⊥ i Ker(A) = (Rang(A∗))⊥ .
Dokaz : Neka je x ∈ Rang(A), tada postoji y ∈ H takav da je x = Ay. Zaproizvoljno z ∈ Ker(A∗) tada imamo
〈x, z〉 = 〈Ay, z〉 = 〈y,A∗z〉 = 0 .
Dakle, x ∈ (Ker(A∗))⊥ odnosno, Rang(A) ⊆ (Ker(A∗))⊥. Kako je josKer(A∗)⊥ zatvoren skup, onda je Rang(A) ⊆ (Ker(A∗))⊥.S druge strane, ako je x ∈ Rang(A)⊥, tada za svako y ∈ H imamo
0 = 〈Ay, x〉 = 〈y,A∗x〉 ,
te je A∗x = 0. Ovo znaci da je Rang(A)⊥ ⊆ Ker(A∗). Primjenjujuciortogonalni komplement na posljednju relaciju imamo
(Ker(A∗))⊥ ⊆ (Rang(A))⊥⊥ = Rang(A) ,
sto dokazuje prvu jednakost.
Za dokaz druge jednakosti primjenimo isti postupak kao malo prije, mije-njajuci A sa A∗, koristeci da je A∗∗ = A i uzimajuci ortogonalne komple-mente. ♣
U ekvivalentnoj formi gornji teorem mozemo iskazati da ako je ogranicenlinearan operatro A definisan na Hilbertovom prostoru H, da je tada
H = Rang(A)⊕Ker(A∗) .
Koristeci se ovime sada mozemo dati potrebne i dovoljne uslove rjesivostijednacine (7.3).
Teorem 7.6. Neka je A : H → H ogranicen linearan operator na hilberto-vom prostoru H sa zatvorenim rangom. Jednacina Ax = y ima rjesenje pox ako i samo ako je y ortogonalan na Ker(A∗).

7.4. Samokonjugovani i unitarni operatori
134
Ovaj rezultat daje veoma koristan generalni metod za utvrdivanje egzis-tencije iz jedinstvenosti. Posmatrajmo problem Ax = y.Ako operator A ima zatvoren rang i ako rjesenje konjugovanog problemaA∗x = y je jedinstveno, tada je Ker(A∗) = 0, te je svako y ortogonalnona Ker(A∗). Dakle, problem Ax = y ima rjesenje za svako y ∈ H.Zbog dihotomije za rjesivost linearnih jednacina, uobicajeno se sumiranje
gornjeg razmisljanja iskazuje poznatom Fredholmovom alternativom.
Teorem 7.7. Neka je H Hilbertov prostor i A : H → H ogranicen linearanoperator. Tada vrijedi:
1. ili Ax = 0 i A∗x = 0 imaju jedino trivijalno rjesenje i jednacineAx = y, A∗x = y imaju jedinstveno rjesenje x za svako y ∈ H
2. ili Ax = 0 i A∗x = 0 imaju netrivijalna, konacnodimenzionalna pros-tor rjesenja istih dimenzija, jednacina Ax = y ima (nejedinstveno)rjesenje ako i samo ako y⊥z, za svako z koje je rjesenje jednacineA∗z = 0 i jednacina A∗x = y ima (nejedinstveno) rjesenje ako i samoako y⊥z za svako z koje je rjesenje jednacine Az = 0.
7.4 Samokonjugovani i unitarni operatori
Dvije veoma vazne klase operatora na Hilbertovim prostorima su samoko-njugovani i unitarni operatori, zato krenimo sa njihovim definisanjem.
Definicija 7.3. Neka je H Hilbertov prostor i A : H → H ogranicen line-aran operator. Kazemo da je A samokonjugovan ako i samo ako je A = A∗.
Ekvivalentno, da je ogranicen linearan operator A na Hilbertovom porstorusamokonjugovan mogli smo iskazati i sa cinjenicom da je za proizvoljne x, y ∈H
〈Ax, y〉 = 〈x,Ay〉 .
Primjer 7.9. Linearno preslikavanje na Hilbertovom prostoru Rn je repre-zentovano matricom A i ono je samokonjugovano ako je matrica simetricnajer tada je A = A⊤.Na prostoru Cn matrica A je samokonjugovana ako i samo ako je hermitska,sto podrazumijeva da je A = A∗. ♦
Primjer 7.10. Integralni operator K : L2[0, 1] → L2[0, 1], zadat sa
Kf(x) =
∫ 1
0k(x, y)f(y)dy ,
je samokonjugovan ako i samo ako je k(x, y) = k(y, x). ♦

135
UVOD U TEORIJU OPERATORA
Za zadat linearan operator A : H → H mozemo definisati preslikavanjea : H × H → C sa a(x, y) = 〈x,Ay〉 za koje kazemo da je seskvilinearnaforma. Ako je A samokonjugovan operator tada je a hermitski simetricnaforma tojest,
a(x, y) = a(y, x) .
Odatle onda imamo da je asocirana kvadratna forma q(x) = a(x, y) ili q(x) =〈x,Ax〉 realna funkcija. Reci cemo da je A nenegativan operator ako je onsamokonjugovan i ako vrijedi 〈x,Ax〉 ≥ 0 za sve x ∈ H. Reci cemo da jeoperatro pozitivan ili pozitivno definitan ako je samokonjugovan i 〈x,Ax〉 > 0za svaki nenula x ∈ H. Ako je A pozitivan, ogranicen linearan operator tadasa
(x, y) = 〈x.Ay〉 ,mozemo definisati skalarni produkt na H. Ako jos vrijedi da postoji c > 0takav da je
〈x,Ax〉 ≥ c||x||2 ,tada kazemo da je A ogranicen odozdo i pri tome norma koja izvire iz skalar-nog produkta (·, ·) je ekvivalentna normi koja izvire iz skalarnog produkta〈·, ·〉.Kvadratna forma asocirana samokonjugovanom operatoru na Hilbertovom
prostoru odreduje normu tog operatora.
Lema 7.8. Neka je A ogranicen, samokonjugovan operator na Hilbertovomprostoru. Tada vrijedi
||A|| = sup||x||=1
|〈x,Ax〉| .
Dokaz : Oznacimo sa α = sup||x||=1
|〈x,Ax〉|. kako za proizvoljno x ∈ H
vrijedi
|〈x,Ax〉| ≤ ||x|| ||Ax|| ≤ ||A|| ||x||2 ,jasno je da vrijedi α ≤ ||A||.Koristeci se klasicnim pristupom izracunavanja norme operatora
||A|| = sup||x||=1
||Ax|| ,
i cinjenicom da za proizvoljan z ∈ H je
||z|| = sup||y||=1
|〈y, z〉| ,
dobijamo relaciju
||A|| = sup|〈y,Ax〉| | ||x|| = 1 , ||y|| = 1 . (7.4)

7.4. Samokonjugovani i unitarni operatori
136
Iskoristimo poznatu jednakost za unitarne prostore
〈y,Ax〉 = 1
4(〈x+ y,A(x+ y)〉 − 〈x− y,A(x− y)〉
− i〈x+ iy,A(x+ iy)〉+ i〈x− iy,A(x − iy)〉) .
Kako je A samokonjugovan operator, prva dva sabirka su realni, a posljednjadva su imaginarni. Zamjenimo y sa eiφy, gdje φ ∈ R biramo tako da je〈eiφy,Ax〉 cisto realno. Tada ce imaginarni dijelovi nestati, te dobijamo
|〈y,Ax〉|2 =1
16|〈x+ y,A(x+ y)〉 − 〈x− y,A(x− y)〉|2
≤ 1
16α2(||x+ y||2 + ||x− y||2)2
=1
4α2(||x||2 + ||y||2)2 ,
gdje je iskoristena definicija velicine α i pravilo paralelograma. Koristeci ovou (7.4) dobijamo ||A|| ≤ α, sto sa vec pokazanim znaci ||A|| = α. ♣
Kako za ogranicen linearan operator A vrijedi ||A|| = ||A∗|| i ||AA∗|| =||A||2, to kao posljedicu gornjeg teorema imamo da ako je A samokonjugovanoperator onda je ||A2|| = ||A||2, a samim time i ||An|| = ||A||n za n ∈ N.Ako je H Hilbertov prostor, skup svih samokonjugovanih operatora naH predstavlja vektorski potprostor od L(H). To potvrdujemo narednomtvrdnjom.
Teorem 7.9. Neka su A1, A2 ∈ L(H) samokonjugovani operatori. Za pro-izvoljne skalare λ i µ je λA1 + µA2 samokonjugovan operator na H.
Za kompoziciju samokonjugovanih operatora imamo narednu vezu.
Teorem 7.10. Neka su A1, A2 ∈ L(H) samokonjugovani operatori. Opera-tor A1A2 je samokonjugovan ako i samo ako vrijedi A1A2 = A2A1.
Kao posljedicu ovih tvrdenja imamo sljedece generalno pravilo.
Teorem 7.11. Neka je A ∈ L(H) samokonjugovan operator. Za proizvoljnon ∈ N0 je i An samokonjugovan operator (dogovorno, A0 = I).Sta vise, ako je p(x) proizvoljan polinom sa realnim koeficijentima, tada jep(A) samokonjugovan operator.
Definisimo sada ortogonalne ili unitarne operatore na realnom ili komplek-snom Hilbertovom prostoru, respektivno.
Definicija 7.4. Linearan operator A : H1 → H2 izmedu realnih ili kom-pleksnih Hilbertovih prostora H1 i H2 nazivamo ortogonalnim ili unitarnimoperatorom, ako je on invertibilan i za sve x, y ∈ H1 vrijedi
〈Ax,Ay〉H2 = 〈x, y〉H1 .

137
UVOD U TEORIJU OPERATORA
Dakle, unitaran operator je bijektivan i cuva skalarni produkt. Ako je pritome H1 = H2 = H, tada je unitarnost izrazena uslovom AA∗ = A∗A = I.Za Hilbertove prostore H1 i H2 kazemo da su izomorfni kao Hilbertovi pros-tori ako postoji linearno unitarno preslikavanje izmedu njih, za razliku odpojma izomorfni (izomorfni kao Banachovi prostori) gdje se podrazumijevalopostojanje linearne izometrije izmedu prostora.
Primjer 7.11. Realna n × n matrica A je ortogonalna ako i samo ako jeA⊤ = A−1. Kompleksna n × n matrica U je unitarna ako i samo ako jeU∗ = U−1. ♦
Primjer 7.12. Neka je A ogranicen, samokonjugovan operator. Tada je ope-rator
eiA =
∞∑
n=0
1
n!(iA)n ,
unitaran operator. Zaista,(eiA)∗
= e−iA =(eiA)−1 ♦
Primjer 7.13. Neka je H konacnodimenzionalan Hilbertov prostor sa orto-normalnom bazom e1, e2, ..., en. Preslikavanje U : Cn → H, definisanosa
Ux = x1e1 + x2e2 + · · ·+ xnen , x = (x1, x2, ..., xn) ∈ Cn ,
je unitaran operator, a time je svaki n-dimenzionalan Hilbertov prostor iz-omorfan sa Cn. ♦
Primjer 7.14. Neka su H1 i H2 Hilbertovi prostori (mogu biti i beskonacnihdiomenzija) iste dimenzije. Neka su (ek)k∈I i (fk)k∈I ortonormirane bazerespektivno u H1 i H2. Tada svako x ∈ H1 mozemo na jedinstven nacinpredstaviti sa
x =∑
k∈Ickek ,
gdje su koeficijenti ck ∈ C (k ∈ I). Preslikavanje U : H1 → H2, definisanosa
Ux = U
(∑
k∈Ickek
)=∑
k∈Ickfk ,
je unitaran operator, a ovo opet znaci da su Hilbertovi prostori iste dimenzijeizomorfni kao Hilbertovi prostori.Ovo mozemo posmatrati i u generalnom smislu birajuci λk = eiφk i posma-
trajuci preslikavanje U : H1 → H2, definisano sa
Ux =∑
k∈Iλk〈ek, x〉fk .

7.5. Slaba konvergencija na Hilbertovim prostorima
138
Operator U je unitaran. Specijalno, posmatrajmo periodicku Hilbertovutransformaciju H : L2(T) → L2(T),
H
( ∞∑
−∞fne
inx
)=
∞∑
−∞i(sgn(n))fne
inx .
Ona nije unitaran operator jer H(1) = 0 (nije bijekcija), ali Parsevalovteorem implicira da ovo jeste unitaran operator na potprostoruH kvadratno-inegrabilnih periodickih funkcija sa glavnom vrijednoscu 1,
H = f ∈ L2(T) |∫
T
f(x)dx = 0 ♦
Primjer 7.15. Operator U : L2(T) → l2, koji slika funkciju u njene Fouri-erove koeficijente, Uf = (fn)n∈Z, gdje je
fn =1√2π
∫ 2π
0f(x)e−inxdx ,
je takode unitaran operator. Dakle, Hilbertov prostor kvadratno-integrabilnihfunkcija na krugu (T) je izomorfan Hilbertovom prostoru kompleksnih nizovasumabilnih sa kvadratom. ♦
Primjer 7.16. Neka je a ∈ T. Preslikavanje Ta : L2(T) → L2(T), definisanosa
Taf(x) = f(x− a) ,
nazivamo translacioni operator i on je unitaran. Pri tome vrijedi
Ta+b = TaTb .
Za familiju Ta | a ∈ T kazemo da je unitarna reprezentacija aditivne grupeR/2πZ na linearni prostor L2(T). ♦
Spomenimo ovde jos jednu klasu operatora. Ako operatro A : H → Hkomutira sa svojim konjugovanim operatorom, AA∗ = A∗A, za njega kazemoda je normalan. Dakle, i samokonjugovani i unitarni operatori su normalni.Vazna stvar vezana za normalne operatore je da specijalno za njih imamoveoma pogodnu spektralnu teoriju.
7.5 Slaba konvergencija na Hilbertovim prostorima
Na osnovu reprezentacije ogranicenih linearnih funkcionala na Hilbertovimprostorima, niz (xn)n∈N ⊂ H je slabo konvergentan ako i samo ako
limn→∞
〈xn, y〉 = 〈x, y〉 ,

139
UVOD U TEORIJU OPERATORA
za proizvoljno y ∈ H, sto zapisujemo sa xn x kada n→ ∞. Poznato namje da jaka konvergencija implicira slabu konvergenciju i u opstem slucajuobrat ne vrijedi.
Primjer 7.17. Neka je H = l2 i neka su (en)n∈N standardni vektori bazetog prostora cije su sve komponente 0 osim n-te koja je 1. Za proizvoljnoy = (yn)n∈N ∈ H onda imamo
〈en, y〉 = yn → 0 , n→ ∞ .
Ovo znaci da en 0 kada n → ∞. S druge strane za proizvoljne razliciten,m ∈ N je ||en − em|| =
√2, te dati niz nije Cauchyjev, a time nije ni jako
konvergentan. ♦
Cinjenica da je svaki slabo konvergentan niz ogranicen, posljedica je prin-cipa uniformne ogranicenosti, koji opet u Hilbertovim prostorima ima sljedecuformu.
Teorem 7.12 (Princip uniformne ogranicenosti). Neka je (fn)n∈N nizlinearnih funkcionala na Banachovom prostoru X, takvih da je skup fn(x) | n ∈N ogranicen za svako x ∈ X. Tada je skup ||fn|| | n ∈ N ogranicen.
Dakle, ogranicenost po tackama familije linearmnih funkcionala impliciraogranicenost po normi te familije. Narednim tvrdenjem dajemo neophodnei dovoljne uslove za slabu konvergenciju niza u Hilbertovom prostoru.
Teorem 7.13. Neka je (xn)n∈N niz u Hilbertovom prostoru H i neka je Dsvuda gust podskup od H. Dati niz slabo konvergira ka x ∈ H ako i samoako vrijedi:
1. Postoji konstanta M ≥ 0 tako da je ||xn|| ≤M , za svako n ∈ N.
2. 〈xn, y〉 → 〈x, y〉 za svako y ∈ D.
Primjer 7.18. Neka je eα | α ∈ A ortonormirana baza Hilbertovog prostoraH. Lineal nad ovim skupom je svuda gust u H, pa ce za slabu konvergencijuniza u H neophodni i dovoljni uslovi biti da je taj iz ogranicen po normi ida vrijedi 〈xn, eα〉 → 〈x, eα〉 za svako α ∈ A. ♦
Ogranicenost po normi je fundamentalna za slabu konvergenciju. Naimekako sto smo vec pokazali niz (en)n∈N je slabo konvergentan ka 0 u prostorul2. Medutim, neograniceni niz (nen)n∈N jeste konvergentan po koordinatamau odnosu na bazu (en)n∈N, ali nije slabo konvergentan. Zaista, neka je
x = (n−34 )n∈N. Jasno x ∈ l2, ali tada imamo
〈nen, x〉n14
i ovo ocigledno nije konvergentno kada n→ ∞. Narednim primjerima cemoilustrovati neke od nacina kada i zasto niz jeste salbo konvergentan ali nijekonvergentan.

7.5. Slaba konvergencija na Hilbertovim prostorima
140
Primjer 7.19. Posmatrajmo niz (sin(nπx))n∈N u prostoru L2[0, 1]. Kako jepokazano u Primjeru 1.15 (samo sa prostorom C[0, 1])
∫ 1
0f(x) sin(nπx)dx→ 0 , n→ ∞ ,
za svako f ∈ L2[0, 1], a ovo onda znaci slabu konvergenciju posmatranogniza. Medutim, dati niz ne moze biti konvergentan ka 0 jer je || sin(nπx)|| =1√2. U ovom slucaju posmatrani niz funkcija enormno osciluje kada n tezi u
∞.Posmatrajmo niz
fn(x) =
√n ; 0 ≤ x ≤ 1
n0 ; 1
n < x ≤ 1
Pokazimo da je on slabo konvergentan u L2[0, 1]. Za proizvoljan polinomp(x) je
∣∣∣∣∫ 1
0p(x)fn(x)dx
∣∣∣∣ =√n
∣∣∣∣∣
∫ 1n
0p(x)dx
∣∣∣∣∣
≤ 1√n
∣∣∣∣∣n∫ 1
n
0p(x)dx
∣∣∣∣∣→ 0 , n→ ∞ ,
a posljednji zakljucak imamo iz neprekidnosti polinomijalne funkciji i cinjenice
n
∫ 1n
0p(x)dx = p(0) + n
∫ 1n
0(p(x)− p(0))dx → p(0) , n→ ∞ .
Dakle, 〈p, fn〉 → 0 kada n → ∞ za svaki polinom p. Kako je skup svihpolinomijalnih funkcija gust u L2[0, 1] i zbog ||fn|| = 1 za svako n ∈ N,zakljucujemo na osnovu Teorem 7.13 da je fn 0. Jasno je da zbog ||fn|| =1 dati niz ne moze biti jako konvergentan u ovom prostoru. Za ovakve nizovekazemo da imaju singularnost koja je koncentrisana u jednoj tacki.Niz
fn(x) =
1 ; n < x < n+ 10 ; inace
je slabo konvergentan ka 0 u prostoru L2(R), ali ne i jako konvergentan(slaba konvergencija se ima zbog gustosti skupa funkcija sa kompaktnimnosacem u L2(R)). Za ovakve funkcije kazemo da ”bjeze” u beskonacnost.♦
Kao sto to vidimo iz gornjeg primjera, norma limesa slabo konvergentnogniza moze biti strogo manja od normi pojedinacnih clanova niza, sto mozemo

141
UVOD U TEORIJU OPERATORA
pripisati gubljenju ”energije” u oscilaciji, u singularnosti ili u bjezanju u be-skonacnost, u slabom limesu. U svakom od ovih slucajeva, predstavljanjefunkcioja fn u bilo kom ortonormiranom sistemu sadrzi koeficijente koji ”od-lutaju” u beskonacnost. Ocigledno je da ako niz normi slabo konvergentnogniza konvergiraju ka normi slabog limesa da je tada niz jako konvergentan.
Teorem 7.14. Neka niz (xn)n∈N slabo konvergira ka x. Tada vrijedi
||x|| ≤ lim infn→∞
||xn|| .
Ako je ||x|| = lim infn→∞
||xn||, tada dati niz jako konvergira ka x.
Dokaz : Koristeci se definicijom slabe konvergencije u Hilbertovim prosto-rima i Cauchy-Schwarzovom nejednakoscu imamo,
||x||2 = 〈x, x〉 = limn→∞
〈x, xn〉 ≤ ||x|| lim infn→∞
||xn|| ,
odakle slijedi prvi dio tvrdnje.Iskoristimo definiciju i osobine skalarnog prosdukta
||xn − x||2 = 〈xn − x, xn − x〉 = ||xn||2 − 〈xn.x〉 − 〈x, xn〉+ ||x||2 .
Koristeci slabu konvergenciju niza imamo 〈xn, x〉 → x i pretpostavku da||xn|| → ||x||, zakljucujemo da vrijedi ||xn − x|| → 0 kada n → ∞, a ovoupravo predstavlja jaku konvergenciju niza (xn)n∈N ka x. ♣
Jedan od motiva koristenja slabe konvergencije, kao sto smo to vec spome-nuli kod slabe topologije, jeste taj da se kompaktnost skupa mnogo laksepostize u slaboj nego u jakoj topologiji. Naime, skup je slabo relativnokompaktan ako i samo ako je ogranicen i ovaj rezultat je prakticno analo-gija Heine-Borelovom teoremu za beskonacnodimenzionalne prostore. Kaosto smo imali u Primjeru 7.17, dati niz je slabo konvergentan, a time iogranicen, ali niti jedan podniz tog niza nije konvergentan te nije ni rela-tivno kompaktan. Ipak to jeste slabo relativno kompaktan skup. Sta vise,Banach-Alaoglu teorem u varijanti Hilbertovih prostora ima sljedecu formu.
Teorem 7.15. Zatvorena jedinicna kugla u Hilbertovom prostoru je slabokompaktan skup.
Vazna primjena ovog tvrdenja se ima u problemima minimizacije. Naime,za funkciju f : K → R, gdje je K slabo zatvoren skup, kazemo da je slabosekvencijalno poluneprekidna odozdo ili krace, slabo poluneprekidna odozdoako vrijedi
f(x) ≤ lim infn→∞
f(xn) ,
za svaki niz (xn)n∈N u K koji je slabo konvergentan ka x. Prema Teoremi7.14 imamo da je norma slabo poluneprekidna odozdo funkcija.

7.5. Slaba konvergencija na Hilbertovim prostorima
142
Teorem 7.16. Neka je f : K → R slabo poluneprekidna odozdo funkcija naslabo zatvorenom i ogranicenom skupu K u Hilbertovom prostoru. Tada jef ogranicena odozdo i dostize svoj infimum.
Dokaz ove cinjenice je potpuno analogan dokazu teorema o neprekidnojfunkciji na kompaktnom skupu. Slaba relativna kompaktnost je manje stroguslov od relativne kompaktnosti, ali slaba zatvorenost i slaba poluneprekid-nost odozdo su mnogo jaci uslovi od odgovarajucih ”jakih” formulacija, arazlog za to lezi u cinjenici da u beskonacnodimenzionalnim prostorima pos-toji mnogo vise slabo konvergentnih nizova nego jako konvergentnih nizova.Jedan koristan alat za dobiti slabo zatvornje skupa ili slabu poluneprekid-
nost odozdo iz jakog zatvorenja, odnosno poluneprekidnosti odozdo, jestepojam konveksnosti. Prisjetimo se, za funkciju f : C → R definisanu nakonveksnom skupu C ⊂ C (R) kazemo da je koveksna ako vrijedi
f(tx+ (1− t)y) ≤ tf(x) + (1− t)f(y) ,
za sve x, y ∈ C i sve t ∈ [0, 1]. Ako se ima stroga nejednakost za sve x 6= y isve t ∈ (0, 1), kazemo da je f striktno konveksna. Za vektor y kazemo da jekonveksna kombinacija vektora x1, x2, ..., xn, ako postoje realni nenegativnibrojevi λ1, λ2, ..., λn takvi da vrijedi
y =n∑
i=1
λixi ,n∑
i=1
λi = 1 .
Narednim poznatim tvrdenjem dajemo vezu izmedu konveksnosti i slabekonvergencije, ali i jos bolji uvid u slabu konvergenciju.
Teorem 7.17 (Mazur). Ako niz (xn)n∈N slabo konvergira ka x u Hilberto-vom prostoru, tada postoji niz (yn)n∈N ciji su elementi konacne konveksnekombinacije skupa xn | n ∈ N, koji jako konvergira ka x.
Dokaz : Neka xn x, tada niz (xn−x)n∈N slabo konvergira ka 0. Stavimoda je n1 = 1 i izaberimo n2 > n1 tako da bude |〈xn1 , xn2〉| ≤ 1. Generealno,za nadene n1, n2, ..., nk izaberimo nk+1 > nk tako da je
|〈xn1 , xnk+1〉| ≤ 1
k, ..., |〈xnk
, xnk+1〉| ≤ 1
k. (7.5)
Ovakvi izbori su moguci jer je svaki slabo konvergentan niz i slabo Cauchyjevniz. Stavimo sada
yk =1
k(xn1 + xn2 + · · ·+ xnk
) .
Za ovakav izbor onda imamo,
||yk||2 =1
k2
k∑
i=1
||xni||2 + 2
k2Re
k∑
j=1
j−1∑
i=1
〈xni, xnj
〉
.

143
UVOD U TEORIJU OPERATORA
Niz (xn)n∈N je slabo konvergentan pa je i ogranicen, te postoji konstantaM > 0 tako da je ||xn|| ≤M za svako n ∈ N. Koristeci sada (7.5), dobijamo,
||yk||2 ≤M2
k+
2
k2
k∑
j=1
j−1∑
i=1
1
j − 1≤ M2 + 2
k.
Odavde je jasno da yk → 0 kada k → ∞. ♣
Na osnovu ovog rezultata odma je vidljivo da strogo zatvoren i konveksanskup jeste slabo zatvoren skup. Medutim, bez konveksnosti ovo i nije uvi-jek slucaj. Naime, posmatramo li zatvorenu jedinicnu kuglu u l2 prostoru,x ∈ l2 | ||x|| ≤ 1 ona jeste slabo zatvorena (jako zatvorena i konveksna),ali jedinicna sfera x ∈ l2 | ||x|| = 1, ona jeste jako zatvorena i nije konvek-sna, ali nije ni slabo zatvoren skup.Na slican nacin, poluneprekidna odozdo, konveksna funkcija je i slabo polu-neprekidna odozdo. Zahvaljujuci svemu ovome sada mozemo iskazati poz-nati rezultat za egzistenciju minimizirajuceg elementa u problemima konvek-sne optimizacije.
Teorem 7.18. Neka je f : C → R poluneprekidna odozdo i konveksna funk-cija na strogo zatvorenom, konveksnom i ogranicenom skupu C u Hilberto-vom prostoru. Tada je funkcija f ogranicena odozdo i dostize svoj infimum.Ako je f striktno konveksna, postojanje elementa koji minimizira funkcijuje jedinstveno.
Naprimjer, norma na Hilbertovom prostoru je striktno konveksna funkcijai poluneprekidna odozdo, te dakle svaki konveksan i zatvoren skup sadrzielement sa minimalnom normom. Slican rezultat, sa slicnim dokazom vrijediza konveksan zatvoren skup u refleksivnim Banachovim prostorima.

Bibliografija
[1] S. Aljancic: Uvod u realnu i funkcionalnu analizu, Beograd 1979.
[2] P. Alexandroff, H. Hopf: Topologie, Berlin, 1935.
[3] V. Bryant: Metric Spaces: Iteration and Application Cambridge Univ.Press, Cambridge, 1985.
[4] A.N. Kolmogorov , S.V. Fomin : Elements of the Theory of Functionsand Functional Analysis, Volume 1 Metric and normed spaces, Roches-ter N. Y. , 1957.
[5] L.B. Kantorovic , G.P. Akilov : Funkcionaljnij analjiz, Moskva, 1977.
[6] W. Rudin: Principles of Mathematical Analysis 3rd ed., McGraw-Hill,New York, 1976.
[7] B. Stankovic : Osnovi funkcionalne analize, Naucna knjiga, Beograd,1975.
[8] G. Hardy , J.E. Littlewood , G Polya : Inequalities, Cembridge Mathe-matical Library, 1934. (first published)
[9] Z. Cerin : Metricki prostori, predavanja za istoimeni kurs, PMF Zagreb
144

A
Prostori u funkcionalnoj
analizi
Vektorski prostori Topoloski prostori
Topoloski vektorski prostori Metricki prostori
Normirani vektorski prostori Kompletni metricki prostori
Unitarni prostori Banachovi prostori
Hilbertovi prostori
145

B
Grcki alfabet
α A alfa
β B beta
γ Γ gama
δ ∆ delta
ε E epsilon
ζ Z zeta
η H eta
θ, ϑ Θ teta
ι I jota
κ K kapa
λ Λ lambda
µ M mi
ν N ni
ξ Ξ ksi
o O omikron
π Π pi
ρ P ro
σ Σ sigma
τ T tau
υ Υ ipsilon
φ, ϕ Φ fi
χ X hi
ψ Ψ psi
ω Ω omega
146