Embed Size (px)
Citation preview

O princípio dos trabalhos virtuaise o equilíbrio dos sistemas de corpos rígidos
Manuel Ritto Corrêa
Conteúdo
1 Introdução 31.1 A mecânica analítica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Trabalho e trabalho elementar de uma força . . . . . . . . . . . . . . . . . . . . . 31.3 O PTV aplicado ao equilíbrio de uma partícula . . . . . . . . . . . . . . . . . . . . 41.4 Organização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Corpos rígidos 72.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 O movimento de corpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 Problemas planos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.4 O PTV aplicado a um corpo rígido . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.5 Invariância do trabalho relativamente ao ponto de redução . . . . . . . . . . . . . 112.6 Trabalho elementar de um binário e de uma carga distribuída . . . . . . . . . . . 122.7 Sobre a natureza infinitesimal dos deslocamentos virtuais no contexto do PTV . . 12
3 Sistemas de corpos rígidos 153.1 Constrangimentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2 Forças aplicadas e forças de ligação . . . . . . . . . . . . . . . . . . . . . . . . . . 163.3 Deslocamentos virtuais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.4 A condição dos trabalhos virtuais . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.5 O PTV aplicado aos sistemas de corpos rígidos . . . . . . . . . . . . . . . . . . . . 183.6 Exemplo de aplicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.7 Forças elásticas, de contacto e de atrito . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Aplicações a mecanismos 234.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.2 Coordenadas generalizadas e forças generalizadas . . . . . . . . . . . . . . . . . . 234.3 Determinação de configurações de equilíbrio . . . . . . . . . . . . . . . . . . . . . 244.4 Determinação da relação de forças para assegurar equilíbrio . . . . . . . . . . . . 25
5 Aplicações a estruturas isostáticas 275.1 Utilização do PTV em estruturas isostáticas . . . . . . . . . . . . . . . . . . . . . . 275.2 Libertações de reações ou esforços . . . . . . . . . . . . . . . . . . . . . . . . . . 275.3 Procedimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.4 Vigas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.5 Pórticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.6 Determinação de centros instantâneos de rotação na presença de libertações de
deslocamentos internos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.7 Cálculo de deslocamentos virtuais com base na propagação de deslocamentos sem
determinar centros de rotação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1

5.8 Vantagens do PTV na determinação de reações e esforços em estruturas . . . . . . 40
6 Energia potencial e estabilidade do equilíbrio 416.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.2 Forças conservativas e energia potencial . . . . . . . . . . . . . . . . . . . . . . . 416.3 Equilíbrio como ponto de estacionariedade da energia potencial . . . . . . . . . . 416.4 Estabilidade do equilíbrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2
1 Introdução
1.1 A mecânica analítica
Existem duas alternativas para o estabelecimento das equações do movimento, as quais po-dem ser designadas, respetivamente, por mecânica vetorial e por mecânica analítica. Enquantoa mecânica vetorial parte diretamente das leis de Newton envolvendo explicitamente grande-zas vetoriais tais como forças e velocidades, a mecânica analítica lida preferencialmente comgrandezas escalares tais como trabalho e energia cinética.
A mecânica analítica de Lagrange é uma reformulação das leis de Newton, no sentido emque não é mais geral nem produz diferentes resultados. Para analisar o movimento de partículasisoladas, as duas formulações são na prática totalmente equivalentes. Porém, para sistemas comconstrangimentos, resultantes de ligações externas ou internas, a mecânica analítica providenciauma abordagem mais simples de aplicar e com um formalismo mais elegante.
Enquanto na mecânica vetorial as forças de ligação externas e internas desempenham umpapel importante, a mecânica analítica incorpora diretamente os constrangimentos na definiçãodos graus de liberdade do sistema e não considera explicitamente essas forças de ligação, dimi-nuindo assim o número de variáveis (incógnitas). A mecânica analítica é particularmente útilem problemas conservativos onde as forças podem ser obtidas a partir de uma energia poten-cial e onde a energia total se conserva. Já na presença de forças de atrito (dissipativas), cujosvalores são dependentes de forças de ligação — as reações normais —, é geralmente vantajosaa abordagem da mecânica vetorial.
No presente texto, aborda-se unicamente o caso estático de sistemas com um número finitode graus de liberdade. Dito por outras palavras, ocupa-se do equilíbrio de sistemas de corposrígidos. Como é sabido, para estes sistemas (ou estruturas) a aplicação dos métodos da mecânicavetorial consiste no desenho dos diagramas de corpo livre e na escrita das equações de equilíbrio(forças e momentos) para cada corpo rígido. Em contrapartida, a abordagem da mecânicaanalítica para o caso estático toma a forma do princípio dos trabalhos virtuais, que constitui oobjeto destes apontamentos.
Embora neste texto apenas se estude o equilíbrio de corpos rígidos, vale a pena referir queeste princípio é de aplicação também a corpos deformáveis, desempenhando um papel muitoimportante na disciplina de Resistência de Materiais, onde torna mais fácil o cálculo de des-locamentos em estruturas compostas por barras deformáveis. Note-se que, nesse contexto, aestrutura não se comporta mais como um conjunto de corpos rígidos pelo que é necessáriotambém contabilizar o trabalho de todas as forças internas.
1.2 Trabalho e trabalho elementar de uma força
O conceito do trabalho de uma força é fulcral no enunciado do PTV, recordando-se de seguidaas definições fundamentais.
O trabalho de uma força−→F (de valor constante) é dado pelo produto da força pelo desloca-
mento−→∆r do seu ponto de aplicação na direção da força. Essa relação é expressa matematica-
mente através do produto interno,
W =−→F ·−→∆r
Em vez de calcular o trabalho num deslocamento finito, é também possível calcular o traba-lho elementar, isto é o trabalho realizado sobre um deslocamento infinitesimal
−→dr,
dW =−→F ·−→dr
3

Como é natural, o trabalho total pode ser obtido por integração do trabalho elementar
W =
∫ B
AdW =
∫ B
A
−→F ·−→dr =
−→F ·
∫ B
A
−→dr =
−→F ·
(−→r B −
−→r A
)=−→F ·−→∆r
onde se teve em conta que, por ser constante, a força−→F pode passar para fora do integral. Deste
modo, conclui-se que o trabalho da força constante é independente do caminho percorrido pelaforça, interessando apenas conhecer o deslocamento total, dado pela diferença entre as posiçõesfinal (B) e inicial (A), ou seja
−→∆r =
−→r B −
−→r A
Para além de forças constantes, existem outras forças, ditas conservativas, cujo trabalho re-alizado depende apenas do deslocamento total. Mas como se verá, o princípio dos trabalhosvirtuais assenta essencialmente no trabalho elementar, pelo que para os nossos propósitos ésuficiente a consideração de forças constantes.
1.3 O PTV aplicado ao equilíbrio de uma partícula
Para introduzir a ideia base por detrás do PTV, começa-se por considerar a sua aplicação a umapartícula, mostrando-se que o PTV é totalmente equivalente às equações de equilíbrio, podendoser deduzido a partir delas.
Uma partícula está em equilíbrio se se verifica a equação
−→R =
n∑i=1
−→Fi =
−→0
onde−→Fi representa cada uma das n forças que atuam sobre essa partícula. Esta equação é,
evidentemente, uma equação vetorial cuja satisfação equivale a satisfazer cada uma das suascomponentes (1, 2 ou 3, consoante a dimensão do espaço considerado).
Considere-se agora um deslocamento virtual−→δr, o qual é um deslocamento infinitesimal ima-
ginado, independente do deslocamento real da partícula ou das forças que nele atuam. Justa-mente para reforçar a sua natureza virtual, não real, substitui-se o «d», habitualmente utilizadono cálculo matemático para denotar variação infinitesimal, por um delta «δ».
Fazendo o produto interno da equação de equilíbrio com este deslocamento−→δr tem-se o
trabalho virtual δW dado por
δW =
(n∑i=1
−→Fi
)·−→δr = 0, ∀
−→δr
ou
δW =
n∑i=1
−→Fi ·−→δr = 0, ∀
−→δr
É trivial reconhecer que se a partícula está em equilíbrio então o trabalho virtual total (detodas as forças) é nulo. Reciprocamente, se o trabalho virtual é nulo para qualquer deslocamentovirtual arbitrário então pode concluir-se que
∑ni=1
−→Fi =
−→0 , isto é, que a partícula está em
equilíbrio. Esta observação permite-nos escrever o enunciado do PTV para uma partícula:
Uma partícula está em equilíbrio se e só se o trabalho virtual de todas as forças for nulopara qualquer deslocamento virtual.
4
À primeira vista, não é evidente o que se ganha com esta reformulação. Na verdade, asvantagens do PTV só aparecem em problemas envolvendo constrangimentos e a partícula emconsideração não os tem. Mas abrimos caminho para a aplicação do PTV a situações mais gerais,importando, desde já, chamar a atenção para os seguintes aspetos:
(i) O princípio é expresso por uma única equação escalar envolvendo a anulação do trabalhovirtual δW . A forma muito geral com que é enunciado irá facilitar a sua aplicação noutroscontextos.
(ii) Introduz-se o conceito de deslocamento virtual−→δr, como um deslocamento infinitesimal
imaginado. É importante que o deslocamento virtual seja arbitrário, pois, apenas dessaforma a equação escalar do PTV é equivalente à equação vetorial do equilíbrio.
(iii) Observa-se que, para a partícula isolada, o deslocamento virtual não precisa de satisfazerqualquer constrangimento. Além disso, não é, para já, evidente a razão de se exigir que odeslocamento seja infinitesimal.
1.4 Organização
Na secção 2 analisa-se o equilíbrio de corpos rígidos isolados na perspetiva do PTV, introduzindoas rotações virtuais na descrição dos deslocamentos virtuais. Na secção 3 a análise é alargadaa sistemas de corpos rígidos, mostrando-se como os constrangimentos externos e internos dãoorigem ao conceito de deslocamentos virtuais compatíveis, na prática reduzindo o número degraus de liberdade do sistema e, também, o número de incógnitas e de equações de equilíbrio.
No campo das aplicações, o PTV é usado na secção 4 para a determinação de configuraçõesde equilíbrio em mecanismos, o que exige quantificar de uma forma precisa a geometria dasconfigurações do mecanismo. Em alternativa, é possível estabelecer qual a relação de forças queassegura o equilíbrio do mecanismo numa dada configuração.
Na secção 5 mostra-se como, recorrendo à introdução de libertações fictícias, o PTV podeser utilizado para a obtenção de reações e esforços em estruturas isostáticas a partir das cargasaplicadas com base numa única equação de equilíbrio — a do PTV — e sem necessidade decalcular quaisquer outras forças de ligação (externas ou internas).
Uma muito breve introdução ao conceito de estabilidade de equilíbrio é apresentada nasecção 6.
O autor agradece aos professores Carlos Tiago e Luís Guerreiro a ajuda na revisão do texto.
5

6

2 Corpos rígidos
2.1 Introdução
Nesta secção aborda-se o equilíbrio de corpos rígidos isolados, formulado na perspetiva do PTV.Começa-se por descrever sucintamente a cinemática dos corpos rígidos, dando particular
atenção aos movimentos elementares, tanto no espaço tridimensional como no plano.Depois, opta-se por introduzir o PTV como um princípio (sem demonstração) e posterior-
mente verificar que ele é equivalente à versão estática das leis de Newton e da sua generaliza-ção para corpos rígidos. Esta opção permite evidenciar as vantagens do formalismo da mecânicaanalítica: todas as equações de equilíbrio derivam de um princípio geral e da consideração dasrelações cinemáticas relevantes para o problema em causa.
Mostra-se que o trabalho de um sistema de forças pode ser feito a partir dos seus elementosde redução, aproveitando-se para se obter expressões para o cálculo do trabalho de um momentoou de uma carga distribuída. A secção termina com uma discussão sobre a necessidade deconsiderar movimentos virtuais infinitesimais e não finitos.
2.2 O movimento de corpo rígido
Por definição, um corpo rígido é um corpo no qual a distância entre quaisquer dois pontos semantém inalterada. Deste modo, o movimento de qualquer ponto do corpo fica definido seconhecermos qual a sua translação e a sua rotação.
A matemática do movimento finito de um corpo rígido no espaço tridimensional não é amais simples, envolvendo, por exemplo, a definição de uma matriz de rotação e conceitos comoa não comutatividade da composição de movimentos. Mas para os propósitos do PTV interessaexclusivamente o movimento elementar (infinitesimal), mais simples de descrever matematica-mente, já que tanto a translação como a rotação podem ser descritos por vetores, ao mesmotempo que é possível decompor o movimento numa soma de parcelas.
O campo de deslocamentos elementares é análogo ao campo de velocidades num corporígido. A lei de propagação das velocidades no interior de um corpo rígido é
−→v B =
−→v A +
−→ω ×
−−→AB (1)
Na prática, esta lei significa que o movimento pode ser decomposto na soma de uma translaçãocom uma rotação: a velocidade de um ponto B pode ser obtida somando à velocidade de trans-lação de um ponto A (tomado como referência) a velocidade que resulta da rotação de B emtorno de A. A escolha do ponto A é arbitrária.
Face à semelhança formal entre a lei de propagação de velocidades (1) e a lei de propagaçãode momentos de um sistema de forças
−→MB =
−→MA +
−−→BA×
−→R =
−→MA +
−→R ×
−−→AB (2)
existe uma analogia completa entre os dois campos e as suas propriedades.A transformação da lei de propagação de velocidades na lei de propagação de deslocamentos
elementares é feita a partir das definições de velocidade linear e velocidade angular
−→v =
−→drdt
⇒−→dr =
−→v dt
−→ω =
−→dθdt
⇒−→dθ =
−→ω dt
As quantidades−→dr e−→dθ representam respetivamente a translação e rotação elementares do corpo
rígido. Analogamente ao vetor velocidade angular−→ω , o vetor rotação elementar
−→dθ tem a
7

direção do eixo de rotação e o sentido de acordo com a regra da mão direita (ou da progressãode um saca-rolhas).
Multiplicando a lei de propagação de velocidades por dt obtemos a lei de propagação dedeslocamentos elementares num corpo rígido,
−→drB =
−→drA +
−→dθ ×
−−→AB (3)
É importante tomar consciência de que, à parte o factor de escala dt que lhes altera as di-mensões de grandeza física, os deslocamentos elementares comportam-se no essencial comovelocidades. Em particular, a parcela de rotação
−→dθ ×
−−→AB é perpendicular a
−−→AB. Então, se A
for um ponto fixo (−→drA =
−→0 ), o deslocamento elementar
−→drB é tangente à trajetória descrita
pelo ponto B. Neste aspeto, os deslocamentos elementares têm muito mais a ver com veloci-dades (também tangentes à trajetória) do que com deslocamentos finitos (os quais seguem atrajetória).
De resto, o campo de deslocamentos elementares num corpo rígido herda as propriedadesdo campo de velocidades que se recordam aqui:
propriedade projetiva :−→drA ·
−−→AB =
−→drB ·
−−→AB ou
−→drA ·
−→λ AB =
−→drB ·
−→λ AB;
invariantes : invariante vetorial−→dθ e invariante escalar
−→dr ·−→dθ;
eixo central : se o invariante vetorial−→dθ é não nulo, existe um eixo central onde os desloca-
mentos elementares são mínimos (em módulo) e paralelos a−→dθ.
A propriedade projetiva de que goza o campo de deslocamentos elementares tem uma in-terpretação física clara. Como são iguais as projeções dos deslocamentos
−→drA e
−→drB sobre a
linha que os une, concluímos que os dois pontos A e B mantêm a sua distância relativa — deacordo, portanto, com a indeformabilidade do corpo rígido. Observe-se que se se tratasse demovimentos não elementares, a propriedade projetiva não se manteria verdadeira.
Com base nos valores dos invariantes é possível a identificação de quatro casos de redução:
repouso elementar :−→dθ =
−→0 ;−→dr =
−→0 ;
translação elementar :−→dθ =
−→0 ;−→dr 6=
−→0 ;
rotação elementar :−→dθ 6=
−→0 e−→dr ·−→dθ = 0;
translação mais rotação elementar :−→dθ 6=
−→0 e−→dr ·−→dθ 6= 0.
Quando existe, o eixo central recebe a designação geral de eixo helicoidal instantâneo ou, nocaso da rotação elementar, de eixo instantâneo de rotação, sendo o eixo em torno do qual se dáa rotação elementar.
2.3 Problemas planos
As aplicações mais habituais do PTV envolvem problemas planos, pelo que vale a pena dedicar--lhes uma atenção especial.
Nestes problemas é possível estudar o movimento num dado plano — o plano do pro-blema —, admitindo-se que todos os pontos do corpo se movem em planos que lhe são paralelos.A rotação elementar, se existir, é perpendicular ao plano do problema, podendo concluir-se queo último caso de redução está excluído pois forçosamente se tem
−→dr ·−→dθ = 0. À intersecção do
eixo instantâneo de rotação com o plano do problema dá-se o nome de centro instantâneo derotação.
8
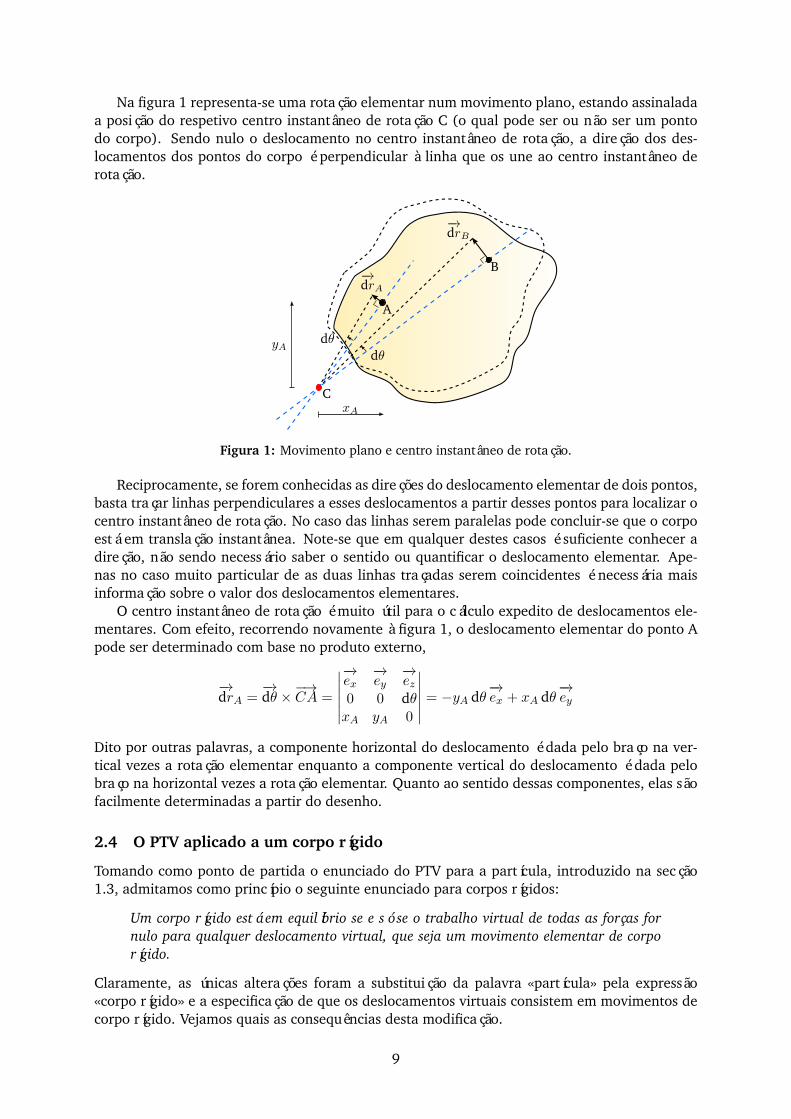
Na figura 1 representa-se uma rotação elementar num movimento plano, estando assinaladaa posição do respetivo centro instantâneo de rotação C (o qual pode ser ou não ser um pontodo corpo). Sendo nulo o deslocamento no centro instantâneo de rotação, a direção dos des-locamentos dos pontos do corpo é perpendicular à linha que os une ao centro instantâneo derotação.
C
A
−→drB
−→drA
B
dθdθ
xA
yA
Figura 1: Movimento plano e centro instantâneo de rotação.
Reciprocamente, se forem conhecidas as direções do deslocamento elementar de dois pontos,basta traçar linhas perpendiculares a esses deslocamentos a partir desses pontos para localizar ocentro instantâneo de rotação. No caso das linhas serem paralelas pode concluir-se que o corpoestá em translação instantânea. Note-se que em qualquer destes casos é suficiente conhecer adireção, não sendo necessário saber o sentido ou quantificar o deslocamento elementar. Ape-nas no caso muito particular de as duas linhas traçadas serem coincidentes é necessária maisinformação sobre o valor dos deslocamentos elementares.
O centro instantâneo de rotação é muito útil para o cálculo expedito de deslocamentos ele-mentares. Com efeito, recorrendo novamente à figura 1, o deslocamento elementar do ponto Apode ser determinado com base no produto externo,
−→drA =
−→dθ ×
−→CA =
∣∣∣∣∣∣−→ex
−→ey−→ez
0 0 dθxA yA 0
∣∣∣∣∣∣ = −yA dθ−→ex + xA dθ
−→ey
Dito por outras palavras, a componente horizontal do deslocamento é dada pelo braço na ver-tical vezes a rotação elementar enquanto a componente vertical do deslocamento é dada pelobraço na horizontal vezes a rotação elementar. Quanto ao sentido dessas componentes, elas sãofacilmente determinadas a partir do desenho.
2.4 O PTV aplicado a um corpo rígido
Tomando como ponto de partida o enunciado do PTV para a partícula, introduzido na secção1.3, admitamos como princípio o seguinte enunciado para corpos rígidos:
Um corpo rígido está em equilíbrio se e só se o trabalho virtual de todas as forças fornulo para qualquer deslocamento virtual, que seja um movimento elementar de corporígido.
Claramente, as únicas alterações foram a substituição da palavra «partícula» pela expressão«corpo rígido» e a especificação de que os deslocamentos virtuais consistem em movimentos decorpo rígido. Vejamos quais as consequências desta modificação.
9
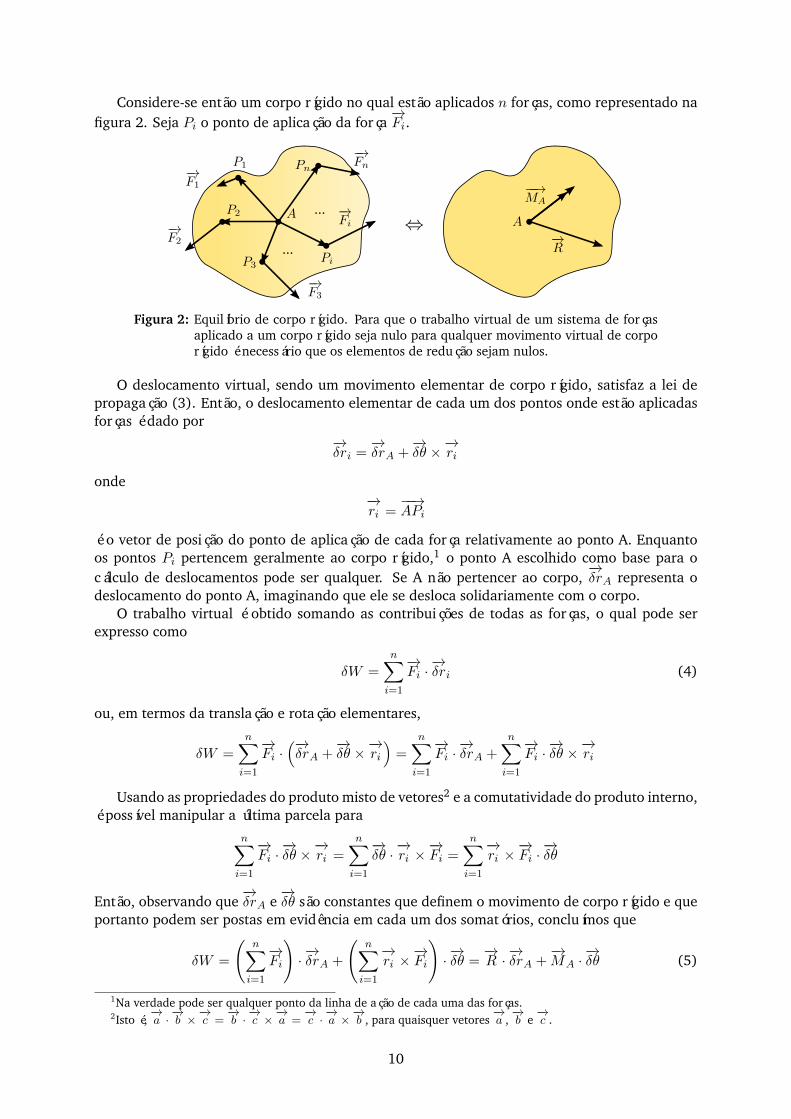
Considere-se então um corpo rígido no qual estão aplicados n forças, como representado nafigura 2. Seja Pi o ponto de aplicação da força
−→Fi.
−→F2
⇔
−→F1
−→F3
−→Fn
−→Fi
−→R
−−→MA
AA
P1
P2
P3Pi
Pn
...
...
Figura 2: Equilíbrio de corpo rígido. Para que o trabalho virtual de um sistema de forçasaplicado a um corpo rígido seja nulo para qualquer movimento virtual de corporígido é necessário que os elementos de redução sejam nulos.
O deslocamento virtual, sendo um movimento elementar de corpo rígido, satisfaz a lei depropagação (3). Então, o deslocamento elementar de cada um dos pontos onde estão aplicadasforças é dado por
−→δri =
−→δrA +
−→δθ ×
−→ri
onde−→ri =
−−→APi
é o vetor de posição do ponto de aplicação de cada força relativamente ao ponto A. Enquantoos pontos Pi pertencem geralmente ao corpo rígido,1 o ponto A escolhido como base para ocálculo de deslocamentos pode ser qualquer. Se A não pertencer ao corpo,
−→δrA representa o
deslocamento do ponto A, imaginando que ele se desloca solidariamente com o corpo.O trabalho virtual é obtido somando as contribuições de todas as forças, o qual pode ser
expresso como
δW =n∑i=1
−→Fi ·−→δri (4)
ou, em termos da translação e rotação elementares,
δW =n∑i=1
−→Fi ·
(−→δrA +
−→δθ ×
−→ri
)=
n∑i=1
−→Fi ·−→δrA +
n∑i=1
−→Fi ·−→δθ ×
−→ri
Usando as propriedades do produto misto de vetores2 e a comutatividade do produto interno,é possível manipular a última parcela para
n∑i=1
−→Fi ·−→δθ ×
−→ri =
n∑i=1
−→δθ ·−→ri ×
−→Fi =
n∑i=1
−→ri ×
−→Fi ·−→δθ
Então, observando que−→δrA e
−→δθ são constantes que definem o movimento de corpo rígido e que
portanto podem ser postas em evidência em cada um dos somatórios, concluímos que
δW =
(n∑i=1
−→Fi
)·−→δrA +
(n∑i=1
−→ri ×
−→Fi
)·−→δθ =
−→R ·−→δrA +
−→MA ·
−→δθ (5)
1Na verdade pode ser qualquer ponto da linha de ação de cada uma das forças.2Isto é,
−→a ·−→b ×−→c =
−→b ·−→c ×−→a =
−→c ·−→a ×−→b , para quaisquer vetores
−→a ,−→b e−→c .
10

onde−→R e−→MA são os elementos de redução do sistema de forças dados por
−→R =
n∑i=1
−→Fi
−→MA =
n∑i=1
−→ri ×
−→Fi
A aplicação do PTV a um corpo rígido revela-nos então que
δW =−→R ·−→δrA +
−→MA ·
−→δθ = 0 ,∀
−→δrA,
−→δθ ⇔
{ −→R =
−→0
−→MA =
−→0
A arbitrariedade dos deslocamentos (e rotações) virtuais implica que a anulação do trabalhovirtual seja equivalente a que a resultante e o momento resultante do sistema de forças sejamnulos.
Em conclusão, o enunciado simples do PTV, complementado com as apropriadas relações ci-nemáticas, é equivalente às leis de equilíbrio de um corpo rígido: equilíbrio de forças e equilíbriode momentos. Aqui partiu-se do PTV para chegar às equações de equilíbrio de um corpo rígido,mas podíamos ter feito precisamente o contrário: «demonstrar» o PTV a partir das equações deequilíbrio. É pois totalmente arbitrário qual o ponto de partida da teoria — razão pela qual oPTV é encarado como um princípio, como possível alternativa às leis de Newton.3
Do ponto de vista da mecânica vetorial, o equilíbrio de um corpo rígido exige o equilíbrio deforças — a versão estática da segunda lei de Newton — mas também o equilíbrio de momentos,o qual necessita de ser tomado como um postulado adicional.4 Em contrapartida, na perspetivada mecânica analítica, o equilíbrio de momentos surge naturalmente associado a uma rotaçãovirtual. Do ponto de vista filosófico pode, portanto, argumentar-se que o enunciado do PTVconstitui uma formulação alternativa das leis de equilíbrio «mais elegante». Contudo, há quereconhecer que, do ponto de vista prático, esta reformulação das equações de equilíbrio não traz(ainda) diferenças significativas.
2.5 Invariância do trabalho relativamente ao ponto de redução
O trabalho é uma grandeza escalar sendo, portanto, invariante face a transformações de coor-denadas (o produto interno de dois vetores não depende da orientação dos referencial em quesão escritas as coordenadas das forças e dos deslocamentos).
O cálculo do trabalho virtual é também independente do ponto do corpo rígido em que é feitaa redução do sistema de forças. Para mostrar este resultado basta utilizar a lei de propagaçãode momentos (2) em conjunto com a lei de propagação de deslocamentos elementares (3):
δW =−→R ·−→δrA +
−→MA ·
−→δθ
=−→R ·−→δrA +
(−→MB +
−−→AB ×
−→R)·−→δθ
=−→R ·−→δrA +
−→MB ·
−→δθ +
−−→AB ×
−→R ·−→δθ
=−→R ·−→δrA +
−→MB ·
−→δθ +
−→δθ ×
−−→AB ·
−→R
=−→R ·
(−→δrA +
−→δθ ×
−−→AB)
+−→MB ·
−→δθ
=−→R ·−→δrB +
−→MB ·
−→δθ
3O presente texto lida apenas com o caso estático. Mas vale a pena referir que recorrendo ao princípio ded’Alembert o PTV pode ser generalizado ao caso dinâmico estando na base das equações de Lagrange.
4Em alternativa, o equilíbrio de momentos pode também ser deduzido considerando o corpo como um conjuntode partículas, recorrendo ao equilíbrio de forças e a uma versão «mais forte» da terceira lei de Newton, na qual asforças de ação e de reação não só são iguais e opostas mas também partilham a mesma linha de ação.
11

Mais uma vez, os pontos A e B, embora sirvam para descrever o movimento virtual do corpo epara calcular os elementos de redução do sistema de forças, podem ser quaisquer.
Não pode deixar de observar-se que esta invariância é fruto da semelhança formal que ca-racteriza as duas leis de propagação. Esta dualidade entre uma relação estática (a propagaçãode momentos) e uma relação cinemática (a propagação de deslocamentos elementares) é típicada mecânica estrutural, desempenhando um papel muito importante na análise de estruturas.
2.6 Trabalho elementar de um binário e de uma carga distribuída
A expressão a que chegámos para o cálculo do trabalho virtual de um sistema de forças per-mite-nos facilmente deduzir quanto vale o trabalho elementar de alguns casos particulares desistemas de forças atuando em corpos sujeitos a movimentos de corpo rígido.
Um binário é um sistema constituído por duas forças com linhas de ação paralelas, de igualintensidade mas sentidos opostos. Do estudo dos sistemas de forças sabemos que os elementosde redução de um binário são um vetor principal
−→R nulo e um momento resultante
−→M que é
independente do ponto onde é calculado, pelo que podemos omitir a indicação do ponto deredução. Em consequência, um binário é um sistema equivalente a conjugado (ou momento).Particularizando a expressão (5) tem-se
δW =−→M ·−→δθ
Isto é, o trabalho elementar é dado pelo produto interno do momento de um binário com o vetorrotação elementar (é indiferente se o movimento elementar é virtual ou real) do corpo rígido.De resto, esta mesma expressão aplica-se a outros sistemas de (mais que duas) forças que sejamtambém equivalentes a conjugado.
Cargas distribuídas são forças aplicadas que estão distribuídas por um volume, área ou linha.Se todas as forças distribuídas têm a mesma direção e sentido então o sistema de forças éinevitavelmente equivalente a força única. É portanto possível substituir o sistema de forçasdistribuídas por uma única força (a resultante
−→R) atuando sobre a sua linha de ação (coincide
com o eixo central do sistema de forças). Então, escolhendo um ponto qualquer Q dessa linhade ação, onde o momento
−→MQ é nulo, o trabalho virtual é
δW =−→R ·−→δrQ +
−→MQ ·
−→δθ =
−→R ·−→δrQ
Isto significa que o trabalho de uma carga distribuída num movimento de corpo rígido pode sercalculado multiplicando (produto interno) a resultante da carga distribuída pelo deslocamentode um ponto da linha de ação dessa resultante.
Observe-se que qualquer destas expressões só é válida se todas as forças que constituem osistema de forças estiverem aplicadas ao mesmo corpo rígido.
2.7 Sobre a natureza infinitesimal dos deslocamentos virtuais no contexto doPTV
É importante notar que os deslocamentos virtuais considerados têm de ser infinitesimais ou,mais precisamente, apenas podem envolver rotações infinitesimais. Para mostrar que assim éconsidere-se um exemplo muito simples de um corpo rígido sujeito a duas forças iguais e opostas(e partilhando a mesma linha de ação) tal como representado na figura 3. Sejam A e B os pontosde aplicação das duas forças.
É evidente que o corpo está em equilíbrio. De acordo com essa condição, o trabalho virtualtotal deverá ser nulo para qualquer movimento de corpo rígido. Numa translação — infinitesi-mal ou não — isso é evidente, já que o trabalho de uma das forças é simétrico ao realizado pelaoutra (ou a translação é perpendicular às forças e o trabalho de ambas as forças é nulo).
12
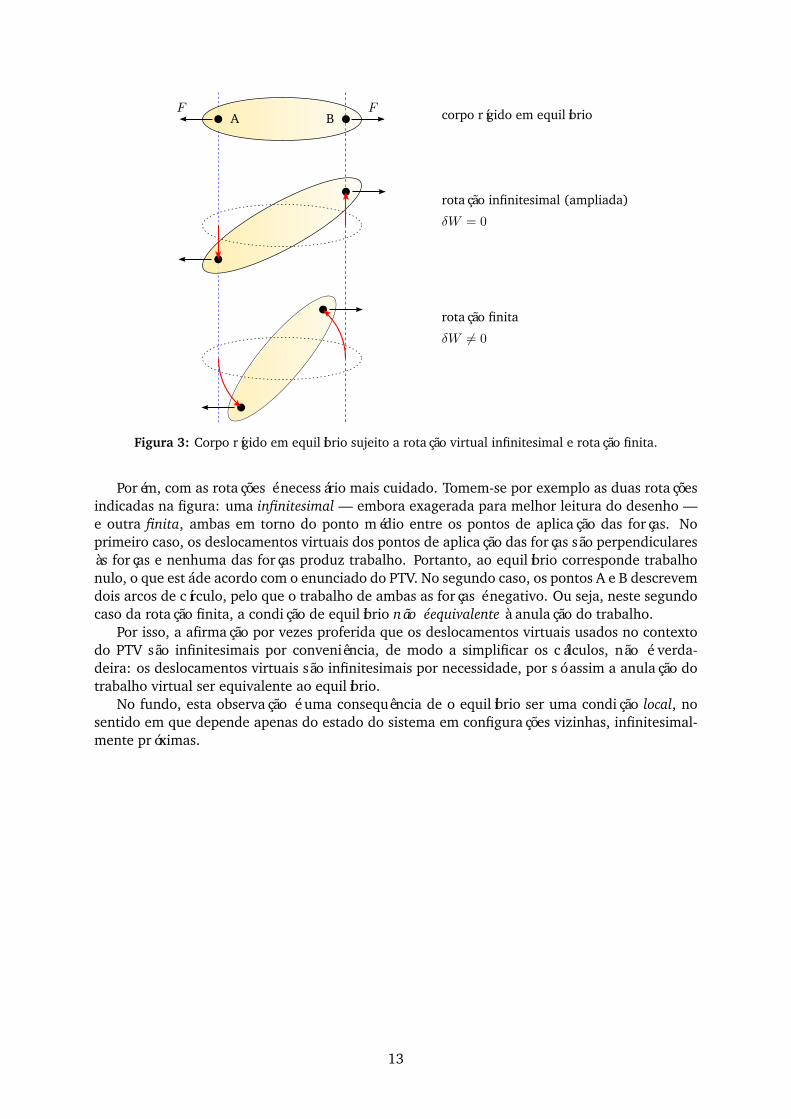
A BF F
rotação infinitesimal (ampliada)
δW = 0
rotação finita
δW 6= 0
corpo rígido em equilíbrio
Figura 3: Corpo rígido em equilíbrio sujeito a rotação virtual infinitesimal e rotação finita.
Porém, com as rotações é necessário mais cuidado. Tomem-se por exemplo as duas rotaçõesindicadas na figura: uma infinitesimal — embora exagerada para melhor leitura do desenho —e outra finita, ambas em torno do ponto médio entre os pontos de aplicação das forças. Noprimeiro caso, os deslocamentos virtuais dos pontos de aplicação das forças são perpendicularesàs forças e nenhuma das forças produz trabalho. Portanto, ao equilíbrio corresponde trabalhonulo, o que está de acordo com o enunciado do PTV. No segundo caso, os pontos A e B descrevemdois arcos de círculo, pelo que o trabalho de ambas as forças é negativo. Ou seja, neste segundocaso da rotação finita, a condição de equilíbrio não é equivalente à anulação do trabalho.
Por isso, a afirmação por vezes proferida que os deslocamentos virtuais usados no contextodo PTV são infinitesimais por conveniência, de modo a simplificar os cálculos, não é verda-deira: os deslocamentos virtuais são infinitesimais por necessidade, por só assim a anulação dotrabalho virtual ser equivalente ao equilíbrio.
No fundo, esta observação é uma consequência de o equilíbrio ser uma condição local, nosentido em que depende apenas do estado do sistema em configurações vizinhas, infinitesimal-mente próximas.
13

14

3 Sistemas de corpos rígidos
3.1 Constrangimentos
Em vez de partículas ou corpos rígidos isolados, iremos agora considerar sistemas de corposrígidos sujeitos a constrangimentos, isto é, um conjunto de corpos rígidos com ligações entreeles e com ligações ao exterior. É aliás para estes sistemas com constrangimentos que o PTVganha a sua principal razão de ser.
Convém começar por esclarecer que, para os nossos propósitos, só consideramos constrangi-mentos que podem ser escritos sob a forma de uma equação do tipo5
f(−→r 1,−→r 2,−→r 3, . . .) = 0 (6)
onde−→r i representa a posição de um ponto genérico do corpo.
A própria condição de corpo rígido é um constrangimento deste tipo, já que as posições entrequaisquer dois pontos de um corpo rígido satisfazem
‖−→r i −
−→r j‖ − dij = 0
onde dij representa a distância entre os dois pontos. É aliás a existência deste constrangimentoque permite ter em conta apenas os seis graus de liberdade no movimento de corpo rígido.Optando à partida por descrever o movimento dos corpos rígidos por uma translação e por umarotação, as equações de constrangimento deverão naturalmente ser expressas na forma
f(−→r 1,−→r 2,−→r 3, . . . ,
−→θ 1,−→θ 2,−→θ 3, . . .) = 0 (7)
onde agora−→r i e
−→θ i representam a translação e a rotação6 de cada corpo rígido.
Em particular, interessa-nos considerar os constrangimentos cinemáticos que resultam dasligações exteriores e interiores de um determinado sistema de corpos rígidos. Nas ligações aoexterior há (pelo menos) um deslocamento ou rotação que está impedido, de acordo com umdeterminado aparelho de apoio. Nas ligações interiores lidamos com corpos rígidos ligados entresi de modo a que o deslocamento (ou rotação) relativo de dois pontos — um de cada corpo —seja nulo.
A figura 4 ilustra situações comuns, no contexto de uma estrutura plana. No apoio móvelhorizontal em A o deslocamento vertical está impedido (mas não o deslocamento horizontal oua rotação), pelo que a equação de constrangimento toma a forma
−→r ABA ·
−→e y = 0 ⇒ rABAy = 0
5Por poderem ser expressos por uma diferencial exata estes constrangimentos designam-se por holónomos. Alémdisso, admitimos adicionalmente que são independentes do tempo. Apenas constrangimentos holónomos permitemreduzir o número graus de liberdade e a introdução de coordenadas generalizadas.
Existem constrangimentos não holónomos que envolvem relações diferenciais não integráveis. Um exemplo destetipo é o associado a um carro que se desloca sobre uma superfície plana. O deslocamento está condicionado pelaposição das rodas, pelo que o carro não pode, por exemplo, deslocar-se diretamente para a direita. No entanto,o carro pode manobrar para a frente e para trás de forma a vir a ocupar a posição pretendida à direita (ou outraqualquer). Existe, portanto, um constrangimento sobre o movimento instantâneo que não se traduz numa relaçãototal do tipo da equação (6). Já um comboio circulando sobre carris constitui um constrangimento holónomo.
Outro exemplo de constrangimentos que não podem ser expressos na forma (6) são os que correspondem aocontacto unilateral, que apenas podem ser expressos por inequações e não por equações.
6A descrição de uma rotação finita no espaço tridimensional envolve dificuldades não abordadas aqui. Para osnossos propósitos, basta saber que o formato exibido em (7) é válido para problemas planos (nesse caso a rotaçãode um corpo rígido é descrita por um escalar) ou para problemas tridimensionais envolvendo pequenas rotações(infinitesimais).
15
A
B C
x
y
d
A
B B CP
P PFBx
FBy
FBxRCx
MC
FBy
RAy
P
F F
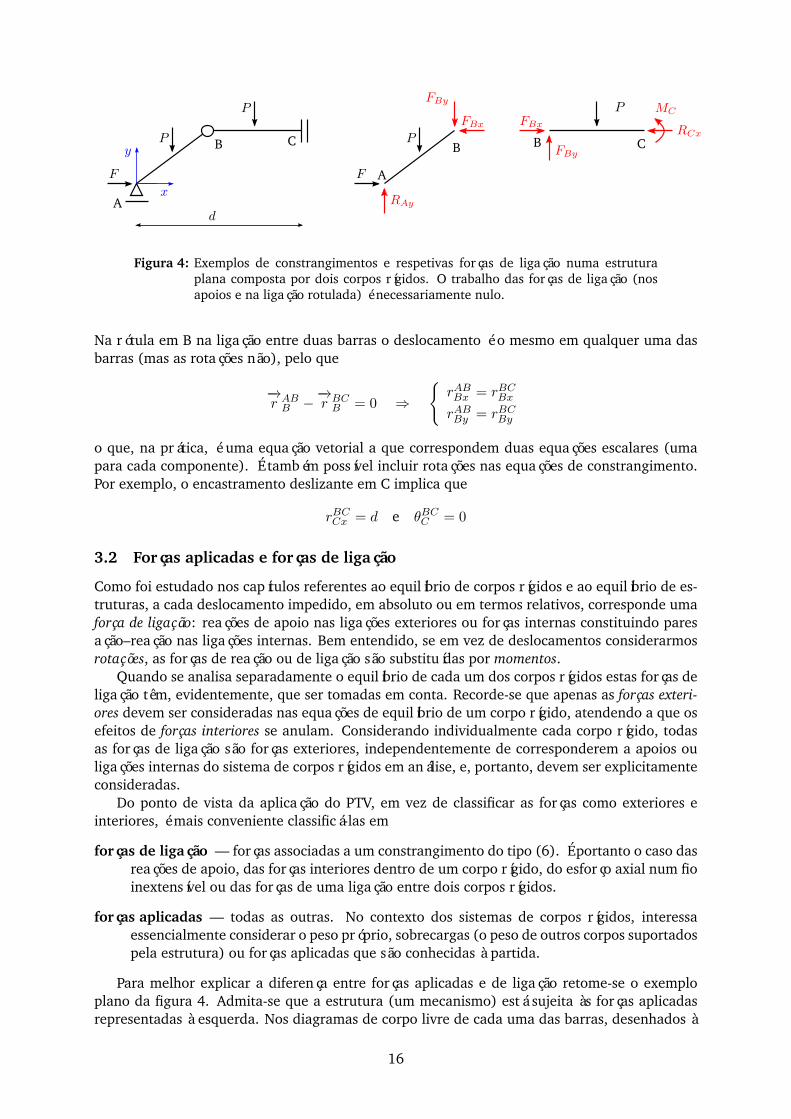
Figura 4: Exemplos de constrangimentos e respetivas forças de ligação numa estruturaplana composta por dois corpos rígidos. O trabalho das forças de ligação (nosapoios e na ligação rotulada) é necessariamente nulo.
Na rótula em B na ligação entre duas barras o deslocamento é o mesmo em qualquer uma dasbarras (mas as rotações não), pelo que
−→r ABB −
−→r BCB = 0 ⇒
{rABBx = rBCBxrABBy = rBCBy
o que, na prática, é uma equação vetorial a que correspondem duas equações escalares (umapara cada componente). É também possível incluir rotações nas equações de constrangimento.Por exemplo, o encastramento deslizante em C implica que
rBCCx = d e θBCC = 0
3.2 Forças aplicadas e forças de ligação
Como foi estudado nos capítulos referentes ao equilíbrio de corpos rígidos e ao equilíbrio de es-truturas, a cada deslocamento impedido, em absoluto ou em termos relativos, corresponde umaforça de ligação: reações de apoio nas ligações exteriores ou forças internas constituindo paresação–reação nas ligações internas. Bem entendido, se em vez de deslocamentos considerarmosrotações, as forças de reação ou de ligação são substituídas por momentos.
Quando se analisa separadamente o equilíbrio de cada um dos corpos rígidos estas forças deligação têm, evidentemente, que ser tomadas em conta. Recorde-se que apenas as forças exteri-ores devem ser consideradas nas equações de equilíbrio de um corpo rígido, atendendo a que osefeitos de forças interiores se anulam. Considerando individualmente cada corpo rígido, todasas forças de ligação são forças exteriores, independentemente de corresponderem a apoios ouligações internas do sistema de corpos rígidos em análise, e, portanto, devem ser explicitamenteconsideradas.
Do ponto de vista da aplicação do PTV, em vez de classificar as forças como exteriores einteriores, é mais conveniente classificá-las em
forças de ligação — forças associadas a um constrangimento do tipo (6). É portanto o caso dasreações de apoio, das forças interiores dentro de um corpo rígido, do esforço axial num fioinextensível ou das forças de uma ligação entre dois corpos rígidos.
forças aplicadas — todas as outras. No contexto dos sistemas de corpos rígidos, interessaessencialmente considerar o peso próprio, sobrecargas (o peso de outros corpos suportadospela estrutura) ou forças aplicadas que são conhecidas à partida.
Para melhor explicar a diferença entre forças aplicadas e de ligação retome-se o exemploplano da figura 4. Admita-se que a estrutura (um mecanismo) está sujeita às forças aplicadasrepresentadas à esquerda. Nos diagramas de corpo livre de cada uma das barras, desenhados à
16

direita, identificam-se tanto as forças aplicadas (a preto) como as forças de ligação (a vermelho).De facto, de acordo com a classificação apresentada, por estarem associadas a constrangimentos,constatamos que as reações (exteriores) em A e C, mas também as forças de ligação (interiores)na rótula B são forças de ligação. Já a força horizontal F aplicada em A e o peso P das barrasAB e BC são forças aplicadas.7
3.3 Deslocamentos virtuais
Se antes tínhamos adotado para deslocamentos virtuais, movimentos elementares de uma par-tícula ou de um corpo rígido sem qualquer constrangimento adicional (que não a condição decorpo rígido), iremos agora naturalmente incorporar os constrangimentos exteriores e interioresde um sistema de corpos rígidos nos deslocamentos virtuais a que o iremos sujeitar.
Retomando o exemplo da figura 4, os movimentos (elementares) de corpo rígido das barrasAB e BC deverão respeitar
δrABAy = 0; δrABBx = δrBCBx ; δrABBy = δrBCBy ; δrBCCx = 0; δθBC = 0
de modo a que os deslocamentos virtuais sejam compatíveis com as ligações externas (em A eC) e internas (em B).
Como é evidente, para que seja possível submeter uma estrutura constituída por barras rígi-das a deslocamentos virtuais compatíveis com as ligações é necessário que esta seja um meca-nismo (estrutura hipostática). Uma estrutura constituída por barras rígidas que seja isostáticaou hiperestática não se pode mexer e está necessariamente em equilíbrio.
Finalmente note-se que, sempre que os constrangimentos em consideração são expressospor uma equação, todos os deslocamentos virtuais são reversíveis, isto é, podem ser dados emqualquer sentido.
3.4 A condição dos trabalhos virtuais
No essencial, a classificação atrás apresentada permite distinguir as forças aplicadas, que podemrealizar trabalho, das forças de ligação, que respeitando os constrangimentos, estão impedidasde o fazer.
Retome-se o exemplo da figura 4. No que diz respeito às reações de apoio, é evidenteque o seu trabalho tem que ser nulo: a reação vertical RAy está aplicada no ponto A que sótem deslocamento horizontal, a reação horizontal RCx está aplicada no ponto C que só temdeslocamento vertical e o momento de reação MC está aplicado no corpo rígido BC que apenaspode ter movimento de translação.
Menos evidente é o caso das forças de ligação entre corpos. As forças de ligação na rótulaB constituem um par de forças acção–reação (em termos das suas componentes, dois pares deforças). Como a rótula B se pode mover, o trabalho individual de cada uma das forças podeser não nulo, mas o trabalho total será forçosamente nulo. Para constatar que assim é, bastaobservar que as forças são simétricas, mas os deslocamentos são iguais, isto é
−→F ABB = −
−→F BCB
−→δrABB =
−→δrBCB
pelo que
δW =−→F ABB ·−→δrABB +
−→F BCB ·−→δrBCB = 0
7Os pesos das barras são cargas distribuídas, mas, de acordo com o explicado na secção 2.6, as cargas distribuídasaplicadas num mesmo corpo rígido podem ser substituídas pela sua resultante.
17

Também é nulo o trabalho das forças internas no interior de um corpo rígido. Para demons-trar esta afirmação é necessário admitir que as forças entre duas partículas genéricas A e B deum mesmo corpo rígido constituem um par ação–reação que partilham a mesma linha de ação,
−→F A = F
−→λ AB
−→F B = −
−→F A = −F
−→λ AB
e usar a propriedade projetiva do movimento elementar de corpo rígido,
δW =−→F A ·
−→δrA +
−→F B ·
−→δrB = F
(−→λ AB ·
−→δrA −
−→λ AB ·
−→δrB
)= 0
Mostrou-se então a partir da terceira lei de Newton8 que o trabalho das forças de ligação énulo. No entanto, na formulação da mecânica analítica, prefere-se simplesmente admitir comopostulado esse resultado que recebe o nome da condição dos trabalhos virtuais:
O trabalho virtual das forças de ligação é nulo para qualquer deslocamento virtualcompatível com as ligações.
3.5 O PTV aplicado aos sistemas de corpos rígidos
Se em vez de um corpo rígido considerarmos um conjunto de corpos rígidos, podemos somar ascontribuições de todos os corpos rígidos. Como o trabalho é uma grandeza escalar, a expressão(4) continua a ser válida, desde que o somatório seja estendido a todas as forças aplicadas aosistema,
δW =
n∑i=1
−→Fi ·−→δri
As forças atuando num dado ponto material podem ser divididas em forças de ligação eforças aplicadas,
−→Fi =
−→Fiapl +
−→Filig
Existe aqui um ponto subtil. Quando considerado isoladamente, todas as forças exteriores queatuam num corpo rígido são forças aplicadas. Porém, como discutido anteriormente, quandoenglobamos vários corpos rígidos num único sistema, apenas as forças que não estão associadasa constrangimentos são forças aplicadas.
Introduzindo esta divisão na expressão do trabalho leva a
δW =n∑i=1
(−→Fiapl +
−→Filig)·−→δri =
n∑i=1
−→Fiapl ·−→δri +
n∑i=1
−→Filig ·−→δri
Se apenas considerarmos deslocamentos virtuais compatíveis com as ligações, pela condição dostrabalhos virtuais o último somatório é nulo, pelo que, para um sistema em equilíbrio
δW =
n∑i=1
−→Fiapl ·−→δri = 0 (8)
Estamos agora em condições de generalizar o PTV a sistemas de corpos rígidos:
Um sistema de corpos rígidos está em equilíbrio se e só se o trabalho virtual de todasas forças aplicadas for nulo para qualquer deslocamento virtual compatível com asligações.
8Na verdade, foi necessário admitir a «versão forte» da terceira lei de Newton, isto é admitir também que a açãoe a reação têm a mesma linha de ação.
18
Comparando este enunciado com o relativo a partículas podemos fazer as seguintes obser-vações:
(i) O princípio continua a ser expresso por uma única equação escalar envolvendo a anulaçãodo trabalho virtual das forças aplicadas. As forças de ligação (reações, forças entre corpose no interior de cada corpo rígido) não precisam de ser consideradas, o que constitui agrande vantagem da aplicação do PTV.
(ii) Os deslocamentos virtuais têm agora de estar em harmonia com os constrangimentos,respeitando as ligações ao exterior, as ligações entre corpos e a indeformabilidade de cadacorpo rígido.
(iii) Dentro dos limites impostos pelos constrangimentos, os deslocamentos virtuais são deslo-camentos infinitesimais arbitrários, podendo ser em ambos os sentidos (reversíveis).
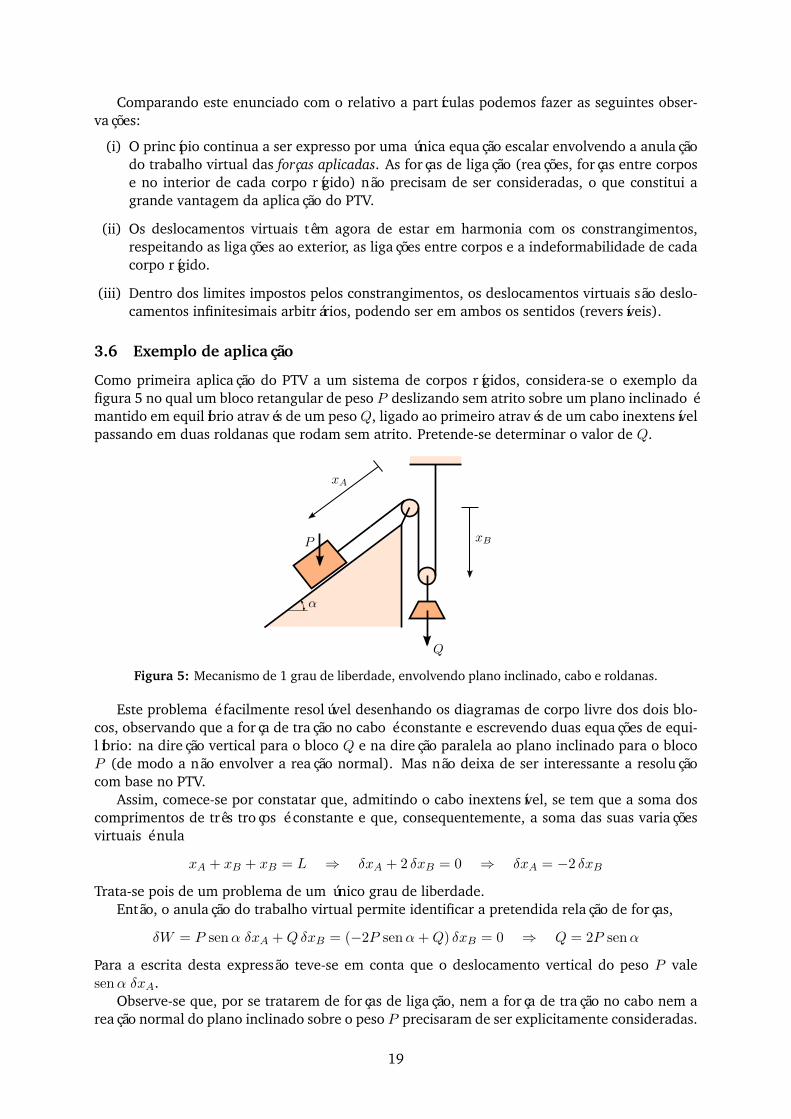
3.6 Exemplo de aplicação
Como primeira aplicação do PTV a um sistema de corpos rígidos, considera-se o exemplo dafigura 5 no qual um bloco retangular de peso P deslizando sem atrito sobre um plano inclinado émantido em equilíbrio através de um peso Q, ligado ao primeiro através de um cabo inextensívelpassando em duas roldanas que rodam sem atrito. Pretende-se determinar o valor de Q.
xB
xA
P
Q
α
Figura 5: Mecanismo de 1 grau de liberdade, envolvendo plano inclinado, cabo e roldanas.
Este problema é facilmente resolúvel desenhando os diagramas de corpo livre dos dois blo-cos, observando que a força de tração no cabo é constante e escrevendo duas equações de equi-líbrio: na direção vertical para o bloco Q e na direção paralela ao plano inclinado para o blocoP (de modo a não envolver a reação normal). Mas não deixa de ser interessante a resoluçãocom base no PTV.
Assim, comece-se por constatar que, admitindo o cabo inextensível, se tem que a soma doscomprimentos de três troços é constante e que, consequentemente, a soma das suas variaçõesvirtuais é nula
xA + xB + xB = L ⇒ δxA + 2 δxB = 0 ⇒ δxA = −2 δxB
Trata-se pois de um problema de um único grau de liberdade.Então, o anulação do trabalho virtual permite identificar a pretendida relação de forças,
δW = P senα δxA +QδxB = (−2P senα+Q) δxB = 0 ⇒ Q = 2P senα
Para a escrita desta expressão teve-se em conta que o deslocamento vertical do peso P valesenα δxA.
Observe-se que, por se tratarem de forças de ligação, nem a força de tração no cabo nem areação normal do plano inclinado sobre o peso P precisaram de ser explicitamente consideradas.
19

3.7 Forças elásticas, de contacto e de atrito
Nas aplicações do PTV que temos em vista iremos considerar principalmente sistemas de corposrígidos com ligações exteriores e interiores ideais (rígidas). Mas, para uma apresentação maiscompleta, discutiremos brevemente os casos de forças elásticas, forças de contacto unilaterale das forças de atrito. Numa primeira leitura deste documento, correspondente ao primeirocontacto com o PTV, esta discussão pode ser ignorada.
forças elásticas
A classificação das forças atrás apresentada, distinguindo forças aplicadas das forças de ligação,pode ter consequências aparentemente algo paradoxais quando generalizada a corpos deformá-veis ou com ligações flexíveis.
Considere-se o caso de dois corpos ligados por uma mola elástica: à luz da classificaçãoacima apresentada, a força de ligação transmitida pela mola não pode ser classificada comoforça de ligação, já que, atendendo à deformabilidade da mola, o constrangimento não podeser expresso por uma equação do tipo (6). Dito de outro modo, ao contrário das forças aquiclassificadas como forças de ligação, a força elástica da mola realiza trabalho, devendo, portanto,ser classificada como força aplicada.
O mesmo acontece com os esforços de uma estrutura deformável (constituída por barras quenão possam ser consideradas rígidas). Este tópico é analisado na disciplina de Resistência deMateriais.
forças de contacto unilateral
Quando existe contacto unilateral os constrangimentos são expressos por inequações em vezde equações. Nesse caso, os deslocamentos virtuais compatíveis com as ligações apenas podemacontecer num sentido — o que se traduz na perda de contacto — e deixam de ser reversíveis,como até aqui admitido. Para ter em conta este tipo de constrangimentos e a existência dedeslocamentos virtuais não reversíveis, é possível reformular o PTV, expressando-o tambémna forma duma inequação: no equilíbrio, o trabalho virtual das forças aplicadas deve ser nãopositivo para deslocamentos virtuais compatíveis com as ligações (e não necessariamente nulocomo no enunciado apresentado anteriormente).
Por exemplo, um bloco assente numa superfície horizontal (sem atrito) pode deslocar-se(realmente e virtualmente) para cima mas não para baixo. Quando o bloco está em equilíbrioa reação normal é uma força de ligação com a mesma intensidade mas sentido oposto ao peso,o qual é a única força aplicada. Para deslocamentos virtuais para o lado, o trabalho do peso énulo. Porém, para deslocamentos virtuais para cima o trabalho da força aplicada é negativo.
Problemas envolvendo a potencial perda de contacto, ou, reciprocamente, a formação denovos contactos não são aqui estudados.
forças de atrito
Havendo contacto entre corpos, o movimento tangencial relativo é condicionado pela existênciade atrito (seco) entre as duas superfícies. Do ponto de vista da aplicação do PTV é fundamentaldistinguir duas situações.
Se a força máxima de atrito não é atingida, não há deslizamento relativo entre as superfí-cies pelo que o contacto funciona exatamente como um apoio fixo, o qual se traduz por umconstrangimento do tipo (6). Neste caso, para deslocamentos virtuais que respeitem o constran-gimento, a força de atrito não realiza trabalho e pode ser classificada como uma força de ligação,como qualquer outra reação. Problemas com apoios envolvendo atrito sem deslizamento nãonecessitam portanto de qualquer cuidado especial.
20
Porém, em problemas em que o atrito é vencido e existe deslizamento, não existe um cons-trangimento absoluto, pelo que as forças de atrito produzirão trabalho em geral e, portanto, sequiséssemos utilizar o PTV, teriam que ser classificadas como forças aplicadas e o seu trabalhocontabilizado.
Note-se, porém, que a quantificação da força máxima de atrito requer o conhecimento dareação normal, a qual é uma força de ligação que não produz trabalho e que, portanto, não éexplicitamente considerada na abordagem do PTV. Por esta razão, se se põe a hipótese de haverdeslizamento é geralmente preferível a via da mecânica vetorial, a qual envolve desenhar osdiagramas de corpo livre e escrever as equações de equilíbrio para cada corpo rígido, nas quaisparticipam todas as forças (incluindo reações normais e forças de atrito).
21

22
4 Aplicações a mecanismos
4.1 Introdução
Um mecanismo é um sistema de corpos rígidos cujas ligações interiores e exteriores permitemalgum tipo de movimento.
Um corpo rígido tem seis graus de liberdade no espaço (três componentes de translação e trêscomponentes de rotação) e três graus de liberdade no plano (duas componentes de translação euma componente de rotação). Num conjunto de corpos rígidos isolados estes números devem sermultiplicados pelo número de corpos, mas cada equação de constrangimento (correspondentea uma ligação entre corpos ou ao exterior) faz naturalmente diminuir o número de graus deliberdade do sistema.
No vocabulário das estruturas, um mecanismo é uma estrutura hipostática, sendo o númerode graus de liberdade dado pelo grau de hipoestatia.
Nesta secção, começa-se por introduzir os conceitos de coordenadas e forças generalizadas,para depois exemplificar dois tipos de aplicações do PTV a mecanismos: (i) determinação deconfigurações de equilíbrio e (ii) determinação da relação de forças para assegurar equilíbrionuma dada configuração.
4.2 Coordenadas generalizadas e forças generalizadas
Como os mecanismos se podem mover, podem adotar a forma de configurações distintas. Onúmero de graus de liberdade de um mecanismo coincide com o número de coordenadas ge-neralizadas que são necessárias para descrever a sua configuração genérica. Estas coordenadasgeneralizadas podem ser coordenadas cartesianas, deslocamentos relativos, ângulos ou uma suacombinação.
A escolha de quais as coordenadas generalizadas é um procedimento algo arbitrário. A únicaexigência é que as coordenadas generalizadas escolhidas definam inequivocamente a configu-ração genérica. Por exemplo, na estrutura representada na figura 4 existe apenas um grau deliberdade — trata-se de uma estrutura uma vez hipostática — podendo adotar-se para coorde-nada generalizada a coordenada y do apoio C, a coordenada x do apoio A ou o ângulo que abarra AB faz com a horizontal.
Seja N o número de graus de liberdade do mecanismo e qj a sua jésima coordenada ge-neralizada. Por definição, a posição do ponto de um mecanismo é função das coordenadasgeneralizadas,
−→r i =
−→r i(q1, q2, . . . , qN )
Esta dependência existe para todos os pontos do sistema de corpos rígidos, mas, para efeitospráticos, basta considerar os pontos onde existem forças aplicadas. O deslocamento virtual decada um destes n pontos, pode ser obtido por diferenciação (a variação virtual é tratada comoum diferencial)
−→δri =
N∑j=1
∂−→r i
∂ qjδqj
onde δqj representa a variação virtual da coordenada generalizada genérica. Então a expressãodo trabalho utilizada na equação (8), pode ser rescrita como
δW =n∑i=1
−→Fiapl ·−→δri =
n∑i=1
N∑j=1
−→Fiapl · ∂
−→r i
∂ qjδqj =
N∑j=1
Qj δqj (9)
23

sendo Qj a força generalizada associada à coordenada generalizada qj
Qj =
n∑i=1
−→Fiapl · ∂
−→r i
∂ qj(10)
a qual recebe a contribuição de cada uma das n forças aplicadas ao mecanismo.De acordo com o PTV, a condição de equilíbrio fica simplesmente
δW =
N∑j=1
Qj δqj = 0 ∀ δqj ⇔ Qj = 0 (11)
uma vez que a variação virtual de cada uma das coordenadas generalizadas permite descrevertodos as formas (linearmente independentes) como o mecanismo se pode mover respeitando osconstrangimentos. Ou seja, um mecanismo de N graus de liberdade está em equilíbrio se cadauma das N forças generalizadas Qj for nula.
4.3 Determinação de configurações de equilíbrio
Numa primeira aplicação admitimos que as forças que atuam no mecanismo são conhecidase pretendemos determinar qual é a configuração de equilíbrio. Não sendo conhecida sequeruma aproximação da verdadeira configuração de equilíbrio é preferível formular o problema emtermos das coordenadas generalizadas, determinar as correspondentes forças generalizadas eigualá-las a zero.
Ilustra-se este procedimento no problema de dois graus de liberdade representado na figura6. As duas barras ABC e CDE têm comprimento L e peso P . Pretende-se saber quais as configu-rações de equilíbrio do sistema quando uma força horizontal F é aplicada no apoio móvel A. Ospesos das barras são cargas distribuídas no comprimento, mas, como atuam em corpos rígidos,para o cálculo do trabalho realizado podemos substituí-las por cargas concentradas aplicadasnos pontos B e D (os centros de gravidade).
A
B
CD
E
F
P
P
θ1
θ2
x
y
L
L
Figura 6: Mecanismo de dois graus de liberdade. Definição do problema e as quatro confi-gurações de equilíbrio para F = P .
A estrutura é globalmente hipostática do segundo grau, ou seja, é um mecanismo com doisgraus de liberdade. Escolhemos como coordenadas generalizadas os ângulos θ1 e θ2, a partirdos quais é fácil calcular as seguintes coordenadas, relevantes para o cálculo dos trabalhos
xA = −L cos θ1 − L cos θ2
yB = L2 sen θ1
yD = L sen θ1 + L2 sen θ2
24

As variações virtuais destas coordenadas, constituem os deslocamentos virtuais desses pontosna direção das forças, sendo obtidos por diferenciação
δxA = L sen θ1 δθ1 + L sen θ2 δθ2
δyB = L2 cos θ1 δθ1
δyD = L cos θ1 δθ1 + L2 cos θ2 δθ2
Então, o trabalho virtual é dado por
δW = FδxA − PδyB − PδyD= F (L sen θ1 δθ1 + L sen θ2 δθ2)− P L
2 cos θ1 δθ1 − P(L cos θ1 δθ1 + L
2 cos θ2 δθ2)
=(FL sen θ1 − 3
2PL cos θ1)δθ1 +
(FL sen θ2 − 1
2PL cos θ2)δθ2
o que mostra que as forças generalizadas são
Qθ1 = FL sen θ1 − 32PL cos θ1 Qθ2 = FL sen θ2 − 1
2PL cos θ2
Igualando estas forças a zero, permite-nos concluir que as configurações de equilíbrio se carac-terizam por
tan θ1 =3P
2Ftan θ2 =
P
2F
Por exemplo, se F = P , obtemos θ1 = 56,31o e θ2 = 26,57o. Como a função tangente nãose modifica se somarmos 180o, existem ao todo quatro configurações de equilíbrio, as quaisse encontram esquematicamente representadas na figura 6. Três dessas configurações só sãopossíveis admitindo que os apoios móveis e a rótula interna permitem movimentos de amplitudeilimitada, o que poderá não se verificar num problema real.
Este exemplo simples ilustra bem o conceito de coordenadas e forças generalizadas e a suautilidade. Contudo, note-se que, sempre que os constrangimentos impõem relações entre ân-gulos, o procedimento atrás utilizado pode envolver algo complexas relações trigonométricas.Por exemplo, se o apoio em E for fixo a uma dada altura h, o problema tem apenas um grau deliberdade, existindo a seguinte relação entre as rotações das duas barras
L sen θ1 + L sen θ2 = h ⇒ θ2 = arcsen
(h
L− sen θ1
)Neste caso, o cálculo dos deslocamentos virtuais em função de δθ1 (tomada como única coorde-nada generalizada) ficaria consideravelmente dificultado, sendo necessário o cálculo de dθ2
dθ1.
4.4 Determinação da relação de forças para assegurar equilíbrio
Uma outra aplicação consiste na obtenção de uma relação de forças para que o equilíbrio sejamantido numa determinada configuração. Embora não seja estritamente necessário, os proble-mas deste tipo envolvem frequentemente mecanismos de apenas um grau de liberdade, sendo oobjetivo a determinação do valor de uma das forças.
Como a configuração de equilíbrio é conhecida à partida, não é tão importante a escrita dosdeslocamentos virtuais em termos das coordenadas generalizadas. Por outro lado, tratando-sede problemas com apenas um grau de liberdade, é possível determinar e utilizar os centrosinstantâneos de rotação no estabelecimento da equação (de equilíbrio) do PTV — recordar osconceitos explicados na secção 2.3.
Considere-se o mecanismo representado na figura 7, obtido a partir do exemplo anterioratravés da substituição do apoio móvel em E por um apoio fixo. Pretende-se saber qual o
25

A
B
C D
F
P
P
δθ2
L45L
35L
CIR1E≡CIR2δθ1
A
C
Figura 7: Mecanismo de um grau de liberdade. Determinação de centros instantâneos derotação (CIR) e configuração deformada.
valor de F que mantêm o mecanismo de um grau de liberdade em equilíbrio na configuraçãorepresentada.
A barra CDE só pode mover-se rodando em torno do apoio fixo em E, pelo que, na configu-ração representada, o deslocamento (elementar) do ponto C é vertical. Como também sabemosque o apoio em A só permite o deslocamento horizontal, podemos deduzir que o centro instan-tâneo de rotação da barra ABC se encontra na intersecção das duas linhas perpendiculares aesses deslocamentos.
Admitindo que a rotação da barra ABC é no sentido horário, facilmente se conclui que oponto comum às duas barras — o ponto C — se desloca para baixo e que a rotação da barraCDE deve ser no sentido anti-horário. A relação entre as duas rotações elementares é encontradaatravés da compatibilização do deslocamento vertical de C,
δrCy =4L
5δθ1 = Lδθ2 ⇒ δθ2 =
4
5δθ1
A deformada que corresponde a este movimento elementar virtual está apresentada também nafigura 7, mas note-se que este desenho não é estritamente necessário para resolver o problema.
Sendo assim, a equação dos trabalhos fica
δW = −FδxA + PδyB + PδyD
= −F 3L
5δθ1 + P
2L
5δθ1 + P
L
2δθ2
= −F 3L
5δθ1 + P
2L
5δθ1 + P
L
2
4
5δθ1
= δθ1
(−F 3L
5+ P
4L
5
)= 0
Na escrita desta expressão, teve-se em conta a localização dos centros instantâneos de rotação eo sentido escolhido para o movimento virtual para determinar os deslocamentos dos pontos deaplicação das forças e também o sinal do trabalho de cada uma das forças.
Como a rotação δθ1 é arbitrária, a quantidade entre parênteses (na verdade, a força genera-lizada associada a θ1) tem que se anular, pelo que obtemos o resultado pretendido
F =4
3P
26
5 Aplicações a estruturas isostáticas
5.1 Utilização do PTV em estruturas isostáticas
Pode parecer estranho a aplicação do PTV a estruturas isostáticas constituídas por barras rígi-das, as quais, evidentemente, não se podem mexer e, portanto, não podem ser submetidas adeslocamentos compatíveis com as suas ligações (externas e internas).
Mas o PTV é sobretudo uma forma diferente de escrever equações de equilíbrio, cujo objetivopode perfeitamente ser a determinação de uma reação ou de um esforço. Para que seja possívelaplicar o PTV em estruturas isostáticas com este propósito, é primeiro necessário introduzir ar-tificialmente uma libertação, o que permite desde logo alcançar um duplo feito: (i) a incógnitapretendida passa a poder realizar trabalho e (ii) a estrutura tornada hipostática passa a podermover-se. A introdução da libertação cinemática deve ser acompanhada pela consideração ex-plícita da reação ou esforço correspondente, uma vez que essa variável estática assume agora opapel de uma força aplicada.
Se a estrutura era isostática antes da libertação, após a sua introdução torna-se num meca-nismo de apenas um grau de liberdade, pelo que à equação dos trabalhos virtuais correspondeapenas uma equação de equilíbrio, cuja única incógnita é a reação ou esforço pretendido.9 Aconfiguração de equilíbrio é já conhecida, o que facilita muito a escrita das relações cinemáticas,permitindo por exemplo o recurso a conceitos tais como o centro instantâneo de rotação. Na ver-dade, a determinação de reações ou esforços em estruturas isostáticas por este método é muitosemelhante à determinação da relação de forças para assegurar o equilíbrio em mecanismos deum grau de liberdade, exemplificada na secção 4.4.
5.2 Libertações de reações ou esforços
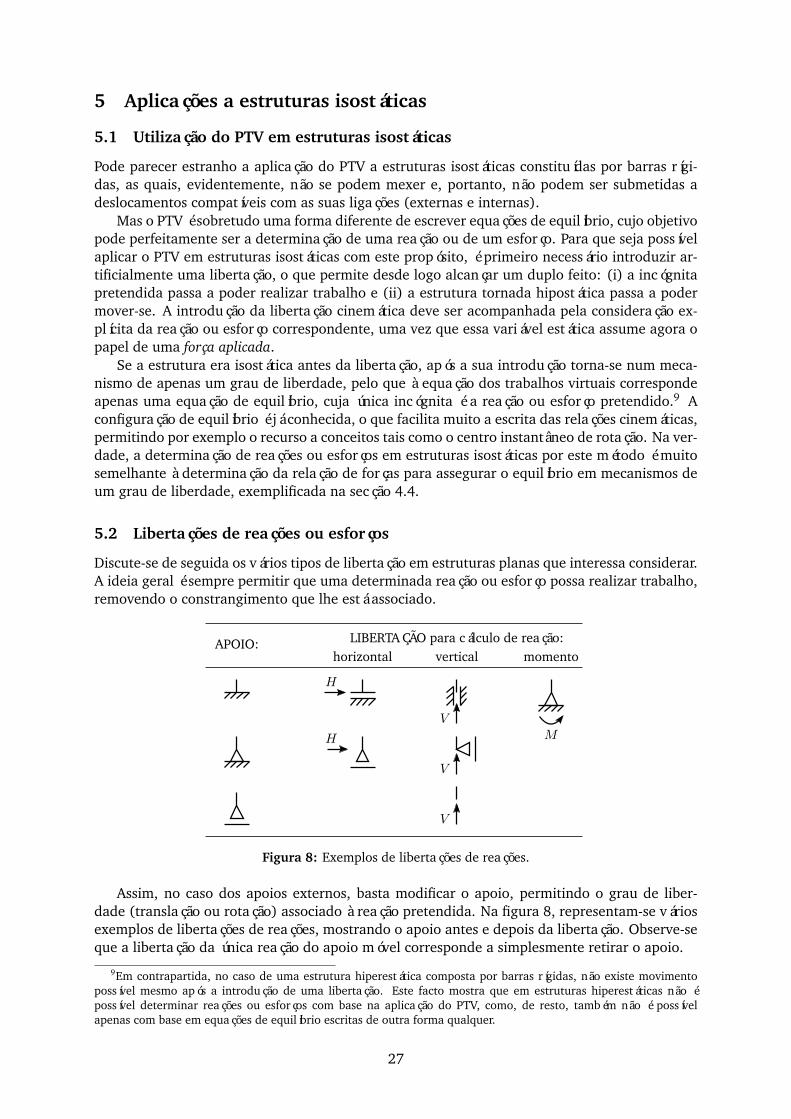
Discute-se de seguida os vários tipos de libertação em estruturas planas que interessa considerar.A ideia geral é sempre permitir que uma determinada reação ou esforço possa realizar trabalho,removendo o constrangimento que lhe está associado.
APOIO: LIBERTAÇÃO para cálculo de reação:horizontal vertical momento
H
H
VM
V
V
Figura 8: Exemplos de libertações de reações.
Assim, no caso dos apoios externos, basta modificar o apoio, permitindo o grau de liber-dade (translação ou rotação) associado à reação pretendida. Na figura 8, representam-se váriosexemplos de libertações de reações, mostrando o apoio antes e depois da libertação. Observe-seque a libertação da única reação do apoio móvel corresponde a simplesmente retirar o apoio.
9Em contrapartida, no caso de uma estrutura hiperestática composta por barras rígidas, não existe movimentopossível mesmo após a introdução de uma libertação. Este facto mostra que em estruturas hiperestáticas não épossível determinar reações ou esforços com base na aplicação do PTV, como, de resto, também não é possívelapenas com base em equações de equilíbrio escritas de outra forma qualquer.
27
No caso dos esforços, há que ter em atenção que estes são forças ou momentos internosque aparecem sempre em pares ação–reação. Para que um esforço possa realizar trabalho énecessário libertar o deslocamento relativo ou rotação relativa na secção em causa, ao mesmotempo que se mantêm impedidos os deslocamentos e/ou rotações relativos correspondentes aosrestantes esforços.
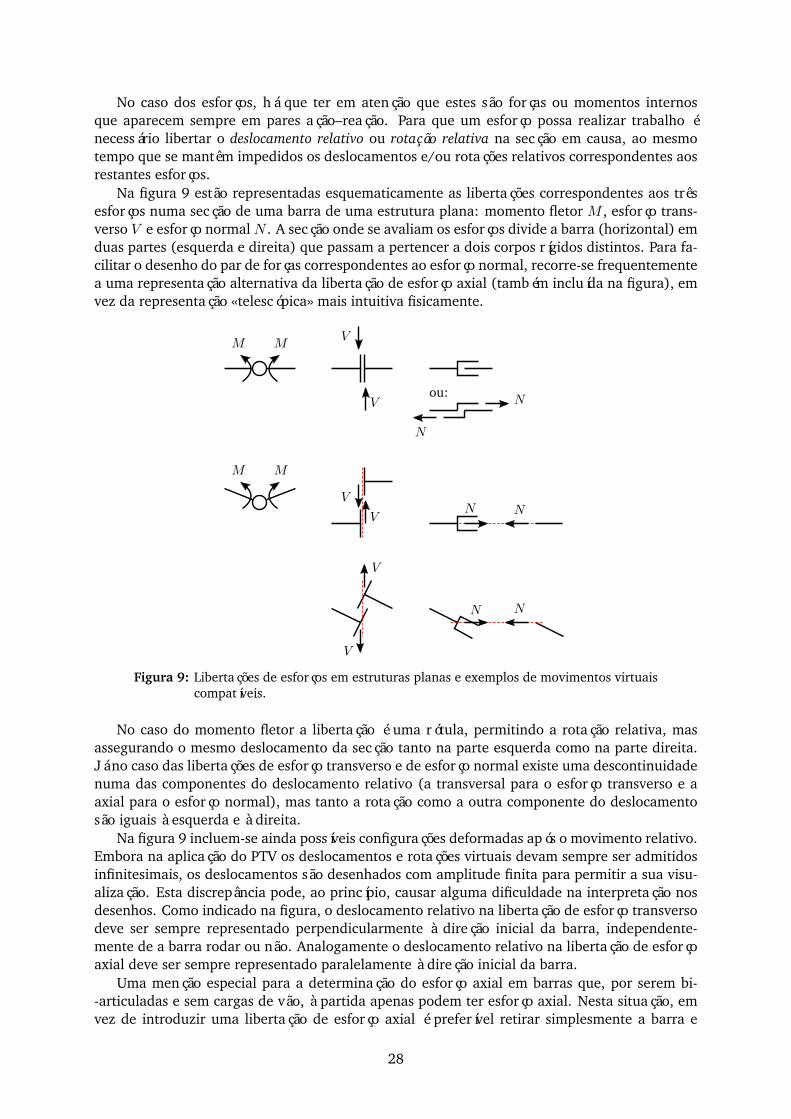
Na figura 9 estão representadas esquematicamente as libertações correspondentes aos trêsesforços numa secção de uma barra de uma estrutura plana: momento fletor M , esforço trans-verso V e esforço normalN . A secção onde se avaliam os esforços divide a barra (horizontal) emduas partes (esquerda e direita) que passam a pertencer a dois corpos rígidos distintos. Para fa-cilitar o desenho do par de forças correspondentes ao esforço normal, recorre-se frequentementea uma representação alternativa da libertação de esforço axial (também incluída na figura), emvez da representação «telescópica» mais intuitiva fisicamente.
MM
V
V
ou:N
N
M M
V
V
V
V
N N
N N
Figura 9: Libertações de esforços em estruturas planas e exemplos de movimentos virtuaiscompatíveis.
No caso do momento fletor a libertação é uma rótula, permitindo a rotação relativa, masassegurando o mesmo deslocamento da secção tanto na parte esquerda como na parte direita.Já no caso das libertações de esforço transverso e de esforço normal existe uma descontinuidadenuma das componentes do deslocamento relativo (a transversal para o esforço transverso e aaxial para o esforço normal), mas tanto a rotação como a outra componente do deslocamentosão iguais à esquerda e à direita.
Na figura 9 incluem-se ainda possíveis configurações deformadas após o movimento relativo.Embora na aplicação do PTV os deslocamentos e rotações virtuais devam sempre ser admitidosinfinitesimais, os deslocamentos são desenhados com amplitude finita para permitir a sua visu-alização. Esta discrepância pode, ao princípio, causar alguma dificuldade na interpretação nosdesenhos. Como indicado na figura, o deslocamento relativo na libertação de esforço transversodeve ser sempre representado perpendicularmente à direção inicial da barra, independente-mente de a barra rodar ou não. Analogamente o deslocamento relativo na libertação de esforçoaxial deve ser sempre representado paralelamente à direção inicial da barra.
Uma menção especial para a determinação do esforço axial em barras que, por serem bi--articuladas e sem cargas de vão, à partida apenas podem ter esforço axial. Nesta situação, emvez de introduzir uma libertação de esforço axial é preferível retirar simplesmente a barra e
28
aplicar o esforço normal (a incógnita) diretamente nos nós de extremidade.
5.3 Procedimento
Para sistematizar a aplicação do PTV à determinação de reações ou esforços, apresenta-se umametodologia geral no quadro seguinte:
Metodologia
1. Introduzir libertação correspondente à reação ou esforço pretendido;
2. Identificar corpos rígidos;
3. Determinar centros instantâneos de rotação, direções de translação e identificarcorpos em repouso;
4. Relacionar rotações virtuais (e translações);
5. Escrever a equação do trabalho virtual;
6. Obter o valor da incógnita pretendida.
O primeiro ponto corresponde à introdução da libertação, a qual permite transformar a estru-tura isostática num mecanismo de um grau de liberdade, de acordo com o discutido na sub-sec-ção precedente. Os pontos seguintes são, no essencial, idênticos aos realizados no exemplo domecanismo de um grau de liberdade da sub-secção 4.4. Seguem-se alguns breves comentários.
A identificação do número de corpos rígidos é importante no caso de estruturas complicadas,envolvendo várias barras. Como princípio geral, partes da estrutura separadas por rótulas ououtras libertações pertencem a corpos rígidos diferentes, mas pode haver grupos de barras queno seu conjunto constituem sub-estruturas isostáticas interiormente e que por isso devem serconsideradas como um único corpo.
A cada corpo rígido corresponde um movimento elementar diferente, o qual pode ser (i) umarotação, sendo necessário localizar o seu centro instantâneo de rotação, (ii) uma translação comdireção definida ou (iii) repouso (instantâneo). A determinação dos centros de rotação e dadireção das translações é feita por um processo dedutivo com base nos apoios, que condicionamo deslocamento de alguns pontos, e nas ligações entre corpos, que forçam a compatibilidade dealguns deslocamentos.
Subsequentemente, tirando partido de se tratar de um mecanismo de um grau de liberdadedeve ser quantificada a relação entre as rotações e translações virtuais dos vários corpos, permi-tindo assim calcular o deslocamento ou rotação de qualquer ponto da estrutura em função deum único parâmetro — geralmente a rotação elementar de um dos corpos.
Finalmente, calcula-se o trabalho virtual de todas as forças aplicadas, incluindo o da incóg-nita pretendida, o qual, de acordo com o PTV, é nulo se o mecanismo estiver em equilíbrio.Como a amplitude dos deslocamentos virtuais é arbitrária, a força generalizada correspondentedeve ser nula, permitindo assim calcular a reação ou esforço pretendido.
Os exemplos das duas sub-secções seguintes ilustram a aplicação desta metodologia nassituações mais habituais.
5.4 Vigas
Vigas são estruturas que se desenvolvem apenas numa direção. Podem ter um ou vários apoiose libertações internas (geralmente rótulas). Se a viga é isostática a existência de rótulas internas
29

é compensada pela existência de apoios verticais ou encastramentos em excesso. A análisedeste tipo de estrutura incide habitualmente sobre a determinação do esforço transverso ou domomento fletor, já que numa viga isostática apenas pode existir uma reação horizontal e osesforços axiais não existem ou são de determinação trivial.
Nestas condições, os deslocamentos virtuais são sempre verticais. Com efeito, os desloca-mentos horizontais são forçosamente nulos10 sob pena de não respeitar ou o constrangimento(horizontal) num apoio (fixo ou encastramento) ou a propriedade projetiva entre dois pontosde um corpo rígido (a linha que os une é horizontal pelo que o deslocamento horizontal dosdois pontos deve ser igual). Consequentemente, os centros instantâneos dos corpos em rotaçãoestarão sempre ao nível da viga. Um apoio impedindo o deslocamento vertical será o centroinstantâneo de rotação do corpo rígido de que faz parte, exceto no caso particular de o corpoestar em repouso instantâneo.
A partir destas observações e da compatibilização dos deslocamentos virtuais nas rótulas(ou da igualdade das rotações nas libertações de esforço transverso), o traçado das deformadasvirtuais faz-se sem grandes problemas.
∗ ∗ ∗
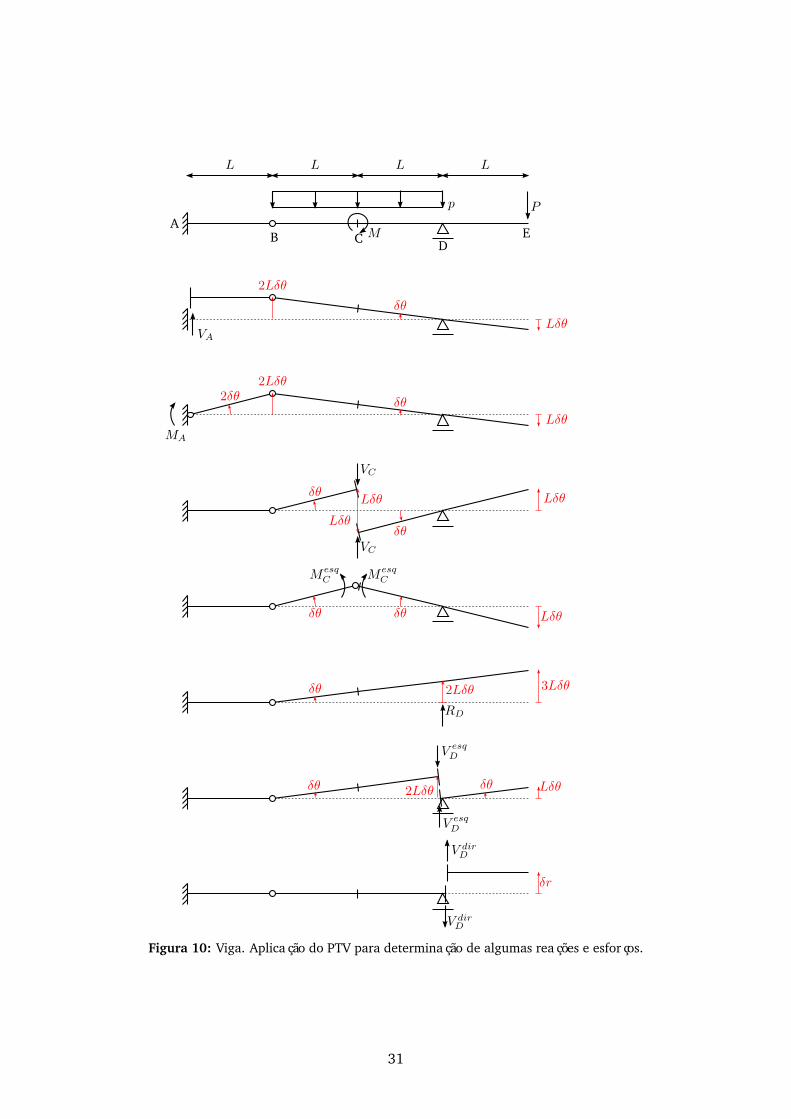
Considere-se a viga isostática representada na figura 10, a qual está submetida a uma cargadistribuída p, a uma carga concentrada P e a um momento aplicado M . Pretendem-se calcularas reações de apoio e o valor dos esforços em algumas secções. A figura 10 mostra também asdeformadas correspondentes a várias libertações, sobre as quais se tecem os seguintes comentá-rios:
(i) Para não sobrecarregar a leitura não se representa o carregamento nos desenhos das defor-madas, apenas a reação ou esforço específico de cada deformada. Os esforços consideradosem todas as libertações internas são positivos para as barras orientadas da esquerda paraa direita.
(ii) As libertações correspondentes aos esforços na secção A servem também para determinaras reações no encastramento. Já a libertação para a determinação da reação vertical em D,RD, difere das libertações correspondentes ao esforço transverso nessa secção (à esquerdaou à direita). Na verdade, como a reação vertical é dada pela diferença entre o esforçotransverso à direita e à esquerda, a deformada associada a RD é necessariamente umacombinação linear das outras duas.
(iii) Sempre que se pretende determinar um esforço numa secção onde existe uma carga con-centrada (ou reação intermédia) que implique uma descontinuidade do esforço, é neces-sário estabelecer se se pretende avaliar o esforço à esquerda ou à direita do ponto deaplicação da carga e introduzir a libertação correspondente. Por exemplo, na determina-ção do momento fletor à esquerda de C, M esq
C , introduziu-se uma rótula à esquerda de C,pelo que o momento aplicado concentrado M atua no corpo rígido CDE.
(iv) A identificação dos corpos rígidos é simples: na determinação das reações existem dois cor-pos rígidos (separados pela rótula da estrutura), na determinação de esforços no interiorda viga existem três corpos rígidos (separados pela rótula e pela libertação introduzida).
(v) Em algumas deformadas existem corpos que permanecem fixos. É o caso da barra ABsempre que não é introduzida uma libertação no encastramento em A. É também o casoda barra BCD na deformada correspondente à determinação de V dir
D para o qual é possívelidentificar dois pontos fixos: o ponto B que pertence à barra AB imóvel e o ponto D ondeexiste um apoio impedindo o movimento vertical.
10Exceto evidentemente se for libertado uma reação horizontal ou o esforço normal de uma secção.
30
δθ
δθ2δθ
MA
2Lδθ
VA
2Lδθ
Lδθ
Lδθ
VC
VC
δθ
δθ
RD
V esqD
V esqD
Lδθ
δθ δθ
MesqC
p P
M
L L L L
AB C D
E
δθ
Lδθ
Lδθ
Lδθ
3Lδθ2Lδθ
Lδθ
V dirD
V dirD
δr
δθ 2Lδθ δθ
MesqC
Figura 10: Viga. Aplicação do PTV para determinação de algumas reações e esforços.
31
(vi) Os centros instantâneos de rotação correspondem aos pontos que estão impedidos de terdeslocamento vertical pelos apoios da viga ou por serem comuns a corpos em repouso (porexemplo, o ponto B nos casos em que barra AB está encastrada). As barras em translaçãovertical são condicionadas por libertações de esforço transverso entre a barra em causa ecorpos vizinhos em repouso.
(vii) O sentido do movimento virtual é arbitrário. A consideração do sentido contrário cor-responde a multiplicar a equação por −1, não tendo implicações no valor da incógnita adeterminar.
(viii) Nas libertações de esforço transverso não existe rotação relativa entre corpos pelo que asrotações dos dois corpos são iguais (e no mesmo sentido). Nas libertações de momento fle-tor (e também na rótula original da estrutura) o deslocamento do ponto é partilhado pelosdois corpos, o que permite relacionar as rotações virtuais. Por exemplo, na determinaçãode MA o deslocamento vertical de B é δry = LδθAB = 2LδθBCDE , donde se conclui que arotação da barra AB é dupla da da barra BCDE (mas em sentido contrário).
(ix) Tratando-se de um mecanismo de um grau de liberdade todos os deslocamentos e rota-ções podem ser expressos em termos da rotação de uma das barras que é designada porδθ. Também é possível escolher para variável cinemática independente um deslocamento,como se faz na deformada para a determinação de V dir
D , na qual não existem rotações.
(x) Na escrita da equação dos trabalhos virtuais é muito importante ter presente em que corporígido está aplicada cada força, momento ou carga distribuída.
(xi) Cada uma das forças ou momentos que constituem um par (nas libertações para deter-minar o valor de um esforço) atuam evidentemente em corpos distintos. O trabalho doesforço pode ser calculado somando as contribuições de cada uma das forças ou de cadaum dos momentos. Em alternativa, esse trabalho pode ser obtido multiplicando o esforçopelo deslocamento relativo ou rotação relativa.
(xii) O trabalho das cargas distribuídas pode ser calculado multiplicando a resultante pelo des-locamento do ponto na linha de ação da resultante, desde que toda a carga distribuídaatue num mesmo corpo rígido, podendo ser necessário dividir a carga distribuída em duasou mais (é o que acontece nas libertações de esforços na secção C).
Escrevem-se de seguida as equações dos trabalhos virtuais para cada uma das deformadasapresentadas na figura e o valor correspondente da incógnita a que se é conduzido após reco-nhecer que o valor da rotação δθ (ou do deslocamento δr) é arbitrário:
VA 2Lδθ − p 2LLδθ +M δθ + P L δθ = 0 ⇒ VA = pL− M
2L− P
2
−MA 2δθ − p 2LLδθ +M δθ + P L δθ = 0 ⇒ MA = −pL2 +M
2+PL
2
−VC Lδθ − VC Lδθ − pLL
2δθ + pL
L
2δθ −M δθ − P L δθ = 0 ⇒ VC = −M
2L− P
2
M esqC δθ +M esq
C δθ − pL L2δθ − pL L
2δθ +M δθ + P L δθ = 0 ⇒ M esq
C =pL2
2− M
2− PL
2
RD 2Lδθ − p 2LLδθ −M δθ − P 3Lδθ = 0 ⇒ RD = pL+M
2L+
3P
2
−V esqD 2Lδθ − p 2LLδθ −M δθ − P L δθ = 0 ⇒ V esq
D = −pL− M
2L− P
2
V dirD δr − P δr = 0 ⇒ V dir
D = P
32
Evidentemente, todos estes valores podiam ser obtidos da forma mais habitual, escrevendotrês equações de equilíbrio global e a equação de momentos à direita (ou à esquerda) da rótulapara determinar as reações e, subsequentemente, calculando os valores dos esforços pretendidospor equilíbrio. Na verdade, essa é a forma preferível se o objetivo for a determinação de muitosdesses valores, já que utilizando o PTV é necessário recomeçar a resolução para cada novoesforço. No entanto, se o objetivo for a determinação de um número muito limitado de reaçõesou esforços, a utilização do PTV pode ser vantajosa, por ser mais económica.
Mas note-se que a utilização do PTV permite evidenciar a forma como cada esforço dependede cada uma das cargas aplicadas. Esta avaliação da dependência tem em conta quer a influênciadireta das cargas, quer indireta, isto é das reações provocadas por essas cargas. Por exemplo,o momento fletor em A provocado pela carga concentrada P vale MA = PL
2 , valor que soma acontribuição direta (−4PL), com a contribuição da reação em D (RD 3L = 3P
2 3L = 92PL).
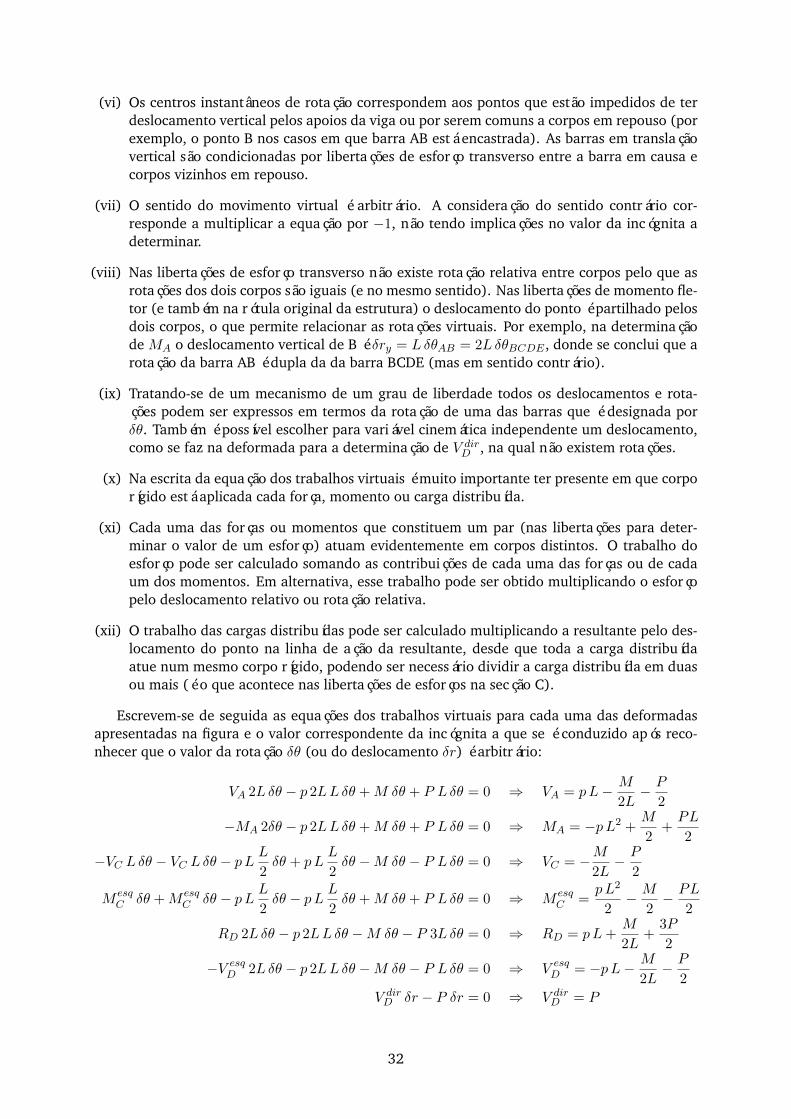
5.5 Pórticos
No caso de pórticos ou quaisquer outras estruturas que não sejam vigas, a determinação dos cen-tros instantâneos de rotação é um pouco mais complicada, pois requer em geral a determinaçãode duas coordenadas. Além disso, o movimento deixa de se dar exclusivamente na vertical,tendo os diversos pontos da estrutura deslocamentos com duas componentes. Os exemplos quese apresentam de seguida, focam-se sobretudo nesses aspetos novos.
A
C
B
D
E F G12 kN
9 kN/m
4 m 4 m 4 m
3 m
3 m
CD
E F G
CIR2
1©
2©
3©
A≡CIR1 B≡CIR3
MG
MG
3 m
2 m 2 m
C D
E F G
CIR2
1©
2©
3©
A≡CIR1 B≡CIR3
3 m
NAD
NAD
C D
E F G
CIR3
1© 2©
5©
A≡CIR1 ≡CIR2 B≡CIR5
3 m
NCD
3©4©
CIR4
NCD
1,5 m
2 m 2 m
x
y
δθ2
δθ3
δθ5δθ3
δθ3
δθ2δθ1
δθ4
δθ2
δθ1
δθ1
Figura 11: Pórtico. Aplicação do PTV para determinação de alguns esforços.
Na estrutura representada na figura 11 pretende-se determinar o momento fletor na secçãoG e os esforços axiais nas barras AD e CD. Os desenhos anexos incluídos na figura 11 mostram a
33

determinação dos centros instantâneos de rotação, sendo pertinentes os seguintes comentários:
(i) Como as barras em que se pretende determinar o esforço axial são bi-articuladas, as res-petivas libertações são conseguidas retirando simplesmente a barra.
(ii) Após a libertação para a determinação de MG ou de NAD é ainda possível identificarconjuntos barras que se comportam como um corpo rígido (zonas a azul). Por essa razão,nesses casos existem ao todo apenas três corpos rígidos. No caso da libertação para adeterminação de NCD todas as barras são corpos rígidos diferentes.
(iii) Muitos dos centros instantâneos de rotação localizam-se nos apoios fixos. Os restantessão obtidos intersectando linhas perpendiculares ao deslocamento de pontos cuja direçãoé conhecida (por pertencerem a outro corpo cujo centro já é conhecido). Essas direçõesestão assinaladas a vermelho nas figuras, as linhas perpendiculares ao deslocamento dessespontos estão representadas com traço interrompido a azul. Por exemplo, na determinaçãode NCD, a ordem de determinação dos centros é: primeiro a dos corpos 1, 2 e 5, depois ados corpos 3 e 4 (este último com base nos centros 2 e 3 ou nos centros 2 e 5).
(iv) A posição exata dessas intersecções são obtidas por semelhança de triângulos ou através daintersecção das equações das retas. Por exemplo, a determinação do centro instantâneo derotação do corpo 4 na determinação de NCD resulta de (equações escritas no referencialx− y localizado em A:
y =3
4x ∧ y = −6
8(x− 12) ⇒ x = 6 ∧ y = 4,5
(v) Determinados os centros, escolhe-se o sentido de uma das rotações virtuais e, com basenos sentidos de deslocamento dos pontos em comum, determinam-se todos os outros. Emtodos os casos deste problema, escolheu-se o sentido horário para o corpo 1. Note-se que,na determinação de NCD, embora os corpos 1 e 2 tenham o mesmo centro de rotação, ossentidos são contrários, sendo condicionados pelos sentidos dos deslocamentos dos pontosC, F e D.
(vi) Para relacionar as rotações basta compatibilizar o deslocamento — ou uma das suas com-ponentes — dos pontos partilhados por dois corpos. Assim, na determinação de MG,tem-se
δrFx = 6 δθ1 = 3 δθ2 ∧ δrGx = 6 δθ3 = 3 δθ2 ⇒ δθ2 = 2 δθ1 ∧ δθ3 = δθ1
Na determinação de NAD, tem-se
δrCx = 3 δθ1 = 6 δθ2 ∧ δrFx = 6 δθ3 = 3 δθ2 ⇒ δθ2 =1
2δθ1 ∧ δθ3 =
1
4δθ1
Finalmente, na determinação de NCD, tem-se
δrCx = 3 δθ1 = 6 δθ3 ∧ δrFx = 3 δθ3 = 1,5 δθ4 = 6 δθ5 ∧ δrDy = 4 δθ2 = 2 δθ4
⇒ δθ2 =1
2δθ1 ∧ δθ3 =
1
2δθ1 ∧ δθ4 = δθ1 ∧ δθ5 =
1
4δθ1
(vii) Na equação do trabalho virtual, escreve-se primeiro o trabalho de cada carga em termos darotação do corpo em que está aplicada, introduzindo subsequentemente as relações entrerotações determinadas atrás. O esforço pretendido é o que garante a satisfação da equaçãopara qualquer deslocamento virtual. Assim, para a determinação de MG tem-se
9× 8× 2 δθ2 + 12× 3 δθ2 +MG δθ2 +MG δθ3 = 0
⇒ δθ1 (9× 8× 2× 2 + 12× 3× 2 +MG(2 + 1)) = 0
⇒ MG = 156 kNm
34
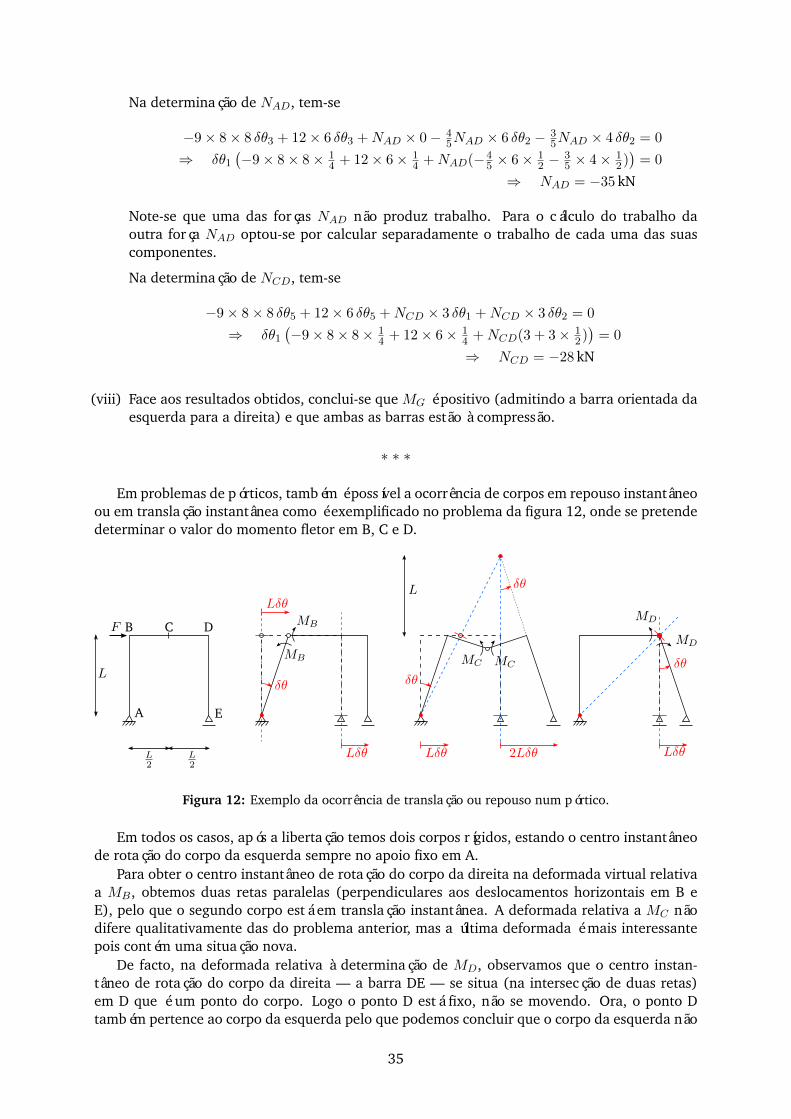
Na determinação de NAD, tem-se
−9× 8× 8 δθ3 + 12× 6 δθ3 +NAD × 0− 45NAD × 6 δθ2 − 3
5NAD × 4 δθ2 = 0
⇒ δθ1(−9× 8× 8× 1
4 + 12× 6× 14 +NAD(−4
5 × 6× 12 −
35 × 4× 1
2))
= 0
⇒ NAD = −35 kN
Note-se que uma das forças NAD não produz trabalho. Para o cálculo do trabalho daoutra força NAD optou-se por calcular separadamente o trabalho de cada uma das suascomponentes.
Na determinação de NCD, tem-se
−9× 8× 8 δθ5 + 12× 6 δθ5 +NCD × 3 δθ1 +NCD × 3 δθ2 = 0
⇒ δθ1(−9× 8× 8× 1
4 + 12× 6× 14 +NCD(3 + 3× 1
2))
= 0
⇒ NCD = −28 kN
(viii) Face aos resultados obtidos, conclui-se que MG é positivo (admitindo a barra orientada daesquerda para a direita) e que ambas as barras estão à compressão.
∗ ∗ ∗
Em problemas de pórticos, também é possível a ocorrência de corpos em repouso instantâneoou em translação instantânea como é exemplificado no problema da figura 12, onde se pretendedeterminar o valor do momento fletor em B, C e D.
δθ
Lδθ
Lδθ
A
B C D
δθ
Lδθ 2Lδθ
δθ
L
L2
δθ
Lδθ
L
F MB
MB MC MC
MD
MD
L2
E
Figura 12: Exemplo da ocorrência de translação ou repouso num pórtico.
Em todos os casos, após a libertação temos dois corpos rígidos, estando o centro instantâneode rotação do corpo da esquerda sempre no apoio fixo em A.
Para obter o centro instantâneo de rotação do corpo da direita na deformada virtual relativaa MB, obtemos duas retas paralelas (perpendiculares aos deslocamentos horizontais em B eE), pelo que o segundo corpo está em translação instantânea. A deformada relativa a MC nãodifere qualitativamente das do problema anterior, mas a última deformada é mais interessantepois contém uma situação nova.
De facto, na deformada relativa à determinação de MD, observamos que o centro instan-tâneo de rotação do corpo da direita — a barra DE — se situa (na intersecção de duas retas)em D que é um ponto do corpo. Logo o ponto D está fixo, não se movendo. Ora, o ponto Dtambém pertence ao corpo da esquerda pelo que podemos concluir que o corpo da esquerda não
35
se move, estando, portanto em repouso instantâneo.11 Como consequência, quaisquer cargasaplicadas ao corpo da esquerda não terão influência no valor do esforço MD.
As deformadas, que neste caso são simples de representar, estão desenhadas na figura. Asequações dos trabalhos virtuais e a correspondente determinação dos esforços pretendidos são
FL δθ −MB δθ = 0 ⇒ MB = FL
FLδθ −MC δθ −MC δθ = 0 ⇒ MC =FL
2−MD δθ = 0 ⇒ MD = 0
5.6 Determinação de centros instantâneos de rotação na presença de libertaçõesde deslocamentos internos
Quando dois corpos estão ligados por uma rótula o deslocamento desta é partilhado pelos doiscorpos, facto determinante para a localização de centros instantâneos de rotação ou para oestabelecimento da relação entre rotações virtuais. Mas nos casos das libertações de esforçoaxial ou de esforço transverso, apenas uma das componentes do deslocamento é comum, o querequer uma atenção especial.
Considere-se a estrutura ABC representada na figura 13. Pretende-se determinar os esforçostransverso e normal na secção B, a meio da barra inclinada. Em ambos os casos identificam--se dois corpos rígidos após a introdução das libertações, estando o centro do corpo BC sitoobviamente no apoio fixo em C. Quanto ao centro instantâneo de rotação do corpo AB, tambémem ambos os casos, sabemos que se encontra na recta vertical que passa no apoio A (de modo aque o deslocamento do apoio móvel seja horizontal).
Como encontrar outra recta para determinar a localização do centro instantâneo de rotaçãode corpo AB? A chave passa por reconhecer os três factos seguintes:
(i) Como as libertações introduzidas não permitem a rotação relativa, a rotação dos doiscorpos é igual,
δθAB = δθBC = δθ
onde δθAB e δθBC são as rotações dos corpos AB e BC.
(ii) Em cada uma das libertações é possível considerar uma direção na qual os deslocamen-tos dos dois corpos (à esquerda e à direita da libertação) são iguais. Na libertação deesforço transverso o deslocamento relativo axial é nulo e na libertação de esforço axial odeslocamento relativo transversal é nulo, tendo-se portanto
δrABBu = δrBCBu (libertação esforço transverso)
δrABBv = δrBCBv (libertação esforço axial)
onde δrABBu e δrBCBu são os deslocamentos do ponto B de cada um dos corpos segundo adireção u (paralela à barra) e δrABBv e δrBCBv são os deslocamentos dos mesmos pontos nadireção v (perpendicular à barra).
(iii) O deslocamento virtual numa determinada direção pode ser calculado multiplicando arotação virtual pelo braço perpendicular a essa direção,
δrABBu = vABB δθ δrBCBu = vBCB δθ (libertação esforço transverso)
δrABBv = uABB δθ δrBCBv = uBCB δθ (libertação esforço axial)
11Note-se que, ao dizermos que o centro de rotação do corpo da esquerda estava no apoio fixo em A, emitimos umaafirmação precipitada. Mais rigorosamente, deveríamos ter dito: se o corpo da esquerda se mover ele só o poderáfazer rodando em torno de A.
36
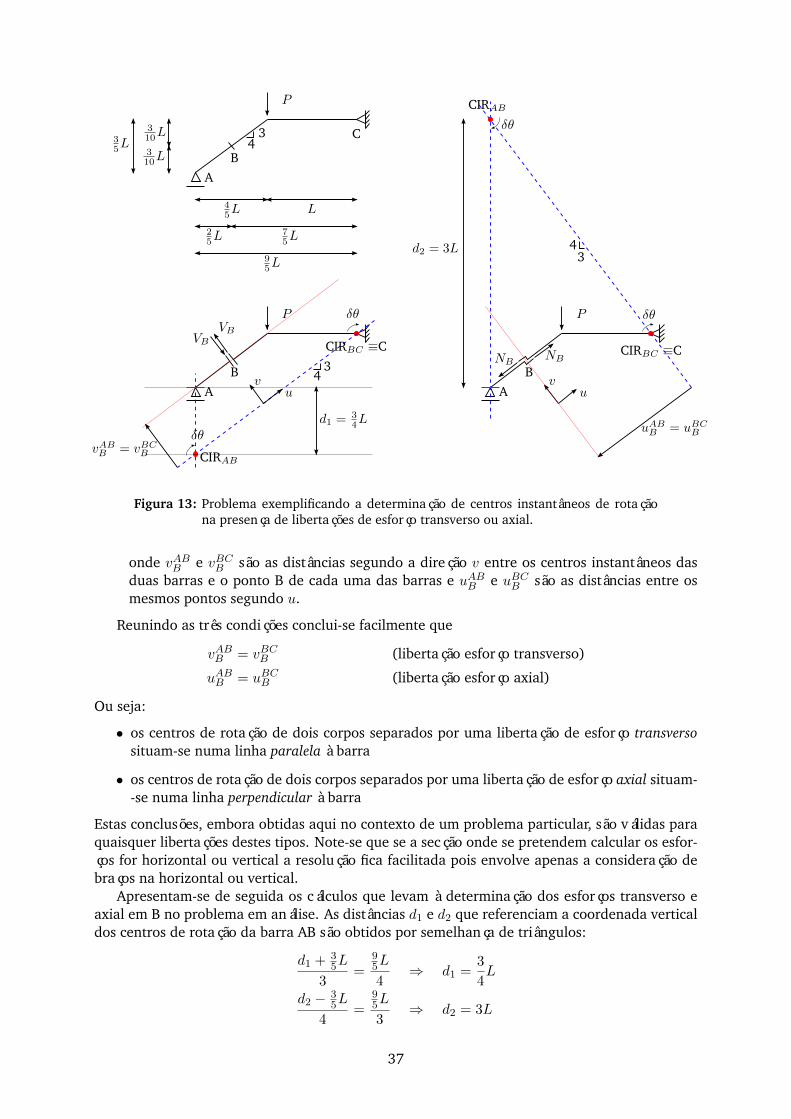
AB
C
P
δθ
CIRAB
AB
L45L
uv
vABB = vBC
B
AB
CIRAB
uv
CIRBC ≡C
35L
d1 = 34L uAB
B = uBCB
δθ
δθ
δθ
VBVB
NBNB
d2 = 3L
P P
43
43
43
CIRBC ≡C
310L
310L
25L
75L
95L
Figura 13: Problema exemplificando a determinação de centros instantâneos de rotaçãona presença de libertações de esforço transverso ou axial.
onde vABB e vBCB são as distâncias segundo a direção v entre os centros instantâneos dasduas barras e o ponto B de cada uma das barras e uABB e uBCB são as distâncias entre osmesmos pontos segundo u.
Reunindo as três condições conclui-se facilmente que
vABB = vBCB (libertação esforço transverso)
uABB = uBCB (libertação esforço axial)
Ou seja:
• os centros de rotação de dois corpos separados por uma libertação de esforço transversosituam-se numa linha paralela à barra
• os centros de rotação de dois corpos separados por uma libertação de esforço axial situam--se numa linha perpendicular à barra
Estas conclusões, embora obtidas aqui no contexto de um problema particular, são válidas paraquaisquer libertações destes tipos. Note-se que se a secção onde se pretendem calcular os esfor-ços for horizontal ou vertical a resolução fica facilitada pois envolve apenas a consideração debraços na horizontal ou vertical.
Apresentam-se de seguida os cálculos que levam à determinação dos esforços transverso eaxial em B no problema em análise. As distâncias d1 e d2 que referenciam a coordenada verticaldos centros de rotação da barra AB são obtidos por semelhança de triângulos:
d1 + 35L
3=
95L
4⇒ d1 =
3
4L
d2 − 35L
4=
95L
3⇒ d2 = 3L
37
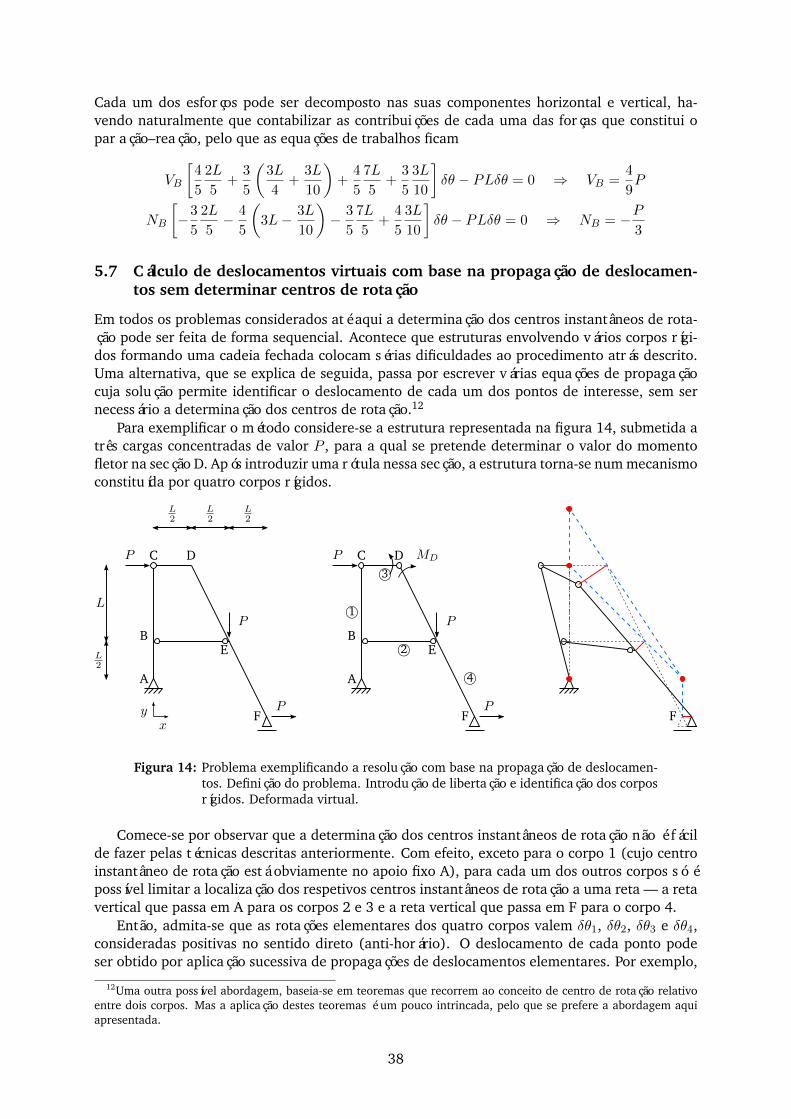
Cada um dos esforços pode ser decomposto nas suas componentes horizontal e vertical, ha-vendo naturalmente que contabilizar as contribuições de cada uma das forças que constitui opar ação–reação, pelo que as equações de trabalhos ficam
VB
[4
5
2L
5+
3
5
(3L
4+
3L
10
)+
4
5
7L
5+
3
5
3L
10
]δθ − PLδθ = 0 ⇒ VB =
4
9P
NB
[−3
5
2L
5− 4
5
(3L− 3L
10
)− 3
5
7L
5+
4
5
3L
10
]δθ − PLδθ = 0 ⇒ NB = −P
3
5.7 Cálculo de deslocamentos virtuais com base na propagação de deslocamen-tos sem determinar centros de rotação
Em todos os problemas considerados até aqui a determinação dos centros instantâneos de rota-ção pode ser feita de forma sequencial. Acontece que estruturas envolvendo vários corpos rígi-dos formando uma cadeia fechada colocam sérias dificuldades ao procedimento atrás descrito.Uma alternativa, que se explica de seguida, passa por escrever várias equações de propagaçãocuja solução permite identificar o deslocamento de cada um dos pontos de interesse, sem sernecessário a determinação dos centros de rotação.12
Para exemplificar o método considere-se a estrutura representada na figura 14, submetida atrês cargas concentradas de valor P , para a qual se pretende determinar o valor do momentofletor na secção D. Após introduzir uma rótula nessa secção, a estrutura torna-se num mecanismoconstituída por quatro corpos rígidos.
A
B
C D
E
F
L
L2
L2
L2
L2
P
P
P
A
B
C D
E
F
P
P
P
MD
1©
2©
3©
4©
Fx
y
Figura 14: Problema exemplificando a resolução com base na propagação de deslocamen-tos. Definição do problema. Introdução de libertação e identificação dos corposrígidos. Deformada virtual.
Comece-se por observar que a determinação dos centros instantâneos de rotação não é fácilde fazer pelas técnicas descritas anteriormente. Com efeito, exceto para o corpo 1 (cujo centroinstantâneo de rotação está obviamente no apoio fixo A), para cada um dos outros corpos só épossível limitar a localização dos respetivos centros instantâneos de rotação a uma reta — a retavertical que passa em A para os corpos 2 e 3 e a reta vertical que passa em F para o corpo 4.
Então, admita-se que as rotações elementares dos quatro corpos valem δθ1, δθ2, δθ3 e δθ4,consideradas positivas no sentido direto (anti-horário). O deslocamento de cada ponto podeser obtido por aplicação sucessiva de propagações de deslocamentos elementares. Por exemplo,
12Uma outra possível abordagem, baseia-se em teoremas que recorrem ao conceito de centro de rotação relativoentre dois corpos. Mas a aplicação destes teoremas é um pouco intrincada, pelo que se prefere a abordagem aquiapresentada.
38
o deslocamento do ponto F é calculado a partir do deslocamento nulo no apoio fixo A e emtrês propagações no interior de três corpos rígidos distintos (tirando partido do facto de osdeslocamentos dos pontos B e E serem os mesmos para os corpos rígidos neles ligados),
−→δrA =
−→0
−→δrB =
−→δrA +
−→δθ1 ×
−−→AB
−→δrE =
−→δrB +
−→δθ2 ×
−−→BE
−→δrF =
−→δrE +
−→δθ4 ×
−−→EF
ou, concisamente, como
−→δrF =
−→0 +−→δθ1 ×
−−→AB +
−→δθ2 ×
−−→BE +
−→δθ4 ×
−−→EF
Como no apoio móvel em F o deslocamento vertical é nulo, dever-se-á verificar a equação13
δrFy = 0 + 0 δθ1 + Lδθ2 +L
2δθ4 = 0 ⇒ δθ4 = −2 δθ2
Para obter mais equações relacionando rotações elementares, propaga-se os deslocamentos deB para D através de dois caminhos diferentes
−→δrD =
−→δrB +
−→δθ1 ×
−−→BC +
−→δθ3 ×
−−→CD
−→δrD =
−→δrB +
−→δθ2 ×
−−→BE +
−→δθ4 ×
−−→ED
pelo que se tem forçosamente
−→δθ1 ×
−−→BC +
−→δθ3 ×
−−→CD =
−→δθ2 ×
−−→BE +
−→δθ4 ×
−−→ED
Então, da igualdade das componentes em x e y desta equação vetorial conclui-se que
−Lδθ1 + 0 δθ3 = 0 δθ2 − Lδθ4 ⇒ δθ4 = δθ1
0 δθ1 +L
2δθ3 = Lδθ2 −
L
2δθ4 ⇒ δθ3 = 2δθ2 − δθ4
Reunindo as três equações obtidas, escrevem-se as rotações elementares em função de um únicoparâmetro independente δθ como
δθ1 = δθ δθ2 = −δθ2
δθ3 = −2δθ δθ4 = δθ
Com o conhecimento destas relações, utilizam-se novamente as propagações relevantes paraescrever o deslocamento de todos os pontos notáveis em função do mesmo δθ, (omitem-se oscálculos detalhados)
−→δrB = −L
2δθ−→ex
−→δrC = −3L
2δθ−→ex
−→δrD = −3L
2δθ−→ex − Lδθ
−→ey
−→δrE = −L
2δθ−→ex −
L
2δθ−→ey
−→δrF = +
L
2δθ−→ex
o que permite fazer o desenho da deformada que se apresenta à direita na figura 14. Acres-cente-se que com base nestes deslocamentos é relativamente fácil determinar a posteriori as
13Cada uma das componentes resultantes de um produto externo continua a poder ser obtida multiplicando umbraço por uma rotação.
39

localizações dos centros instantâneos de rotação, como se esquematiza no desenho da defor-mada. Note-se, contudo, que esta determinação não é realmente necessária para concluir aresolução do problema, pois todos os deslocamentos de interesse são já conhecidos.
Para obter a solução do problema basta, escrever a equação dos trabalhos virtuais, utilizandoos deslocamentos dos pontos de aplicação das cargas,
δW = PδrCx − PδrEy + PδrFx +Mδθ2 −Mδθ4
= δθ
(−3PL
2+PL
2+PL
2− 2M −M
)= 0 ⇒M = −PL
6
5.8 Vantagens do PTV na determinação de reações e esforços em estruturas
Mostrou-se como o PTV pode ser utilizado para a determinação de reações ou esforços em estru-turas isostáticas com base numa única equação de equilíbrio, sem ter a necessidade de calcularoutras reações de apoio ou outros esforços. Em contrapartida, torna-se necessário caracterizarrigorosamente o movimento virtual elementar que a libertação introduzida passa a permitir.De um ponto de vista prático, a análise recorrendo ao PTV pode ser vantajosa quando se querdeterminar o valor de apenas uma reação ou de um esforço. De facto, para cada novo valorpretendido é necessário recomeçar a resolução do problema, o que torna inviável a abordagemse o objetivo é a determinação de esforços em muitas secções.
Talvez a maior vantagem da aplicação do PTV para a determinação de esforços seja a detornar muito clara a dependência total de cada reação ou esforço de cada uma das cargas apli-cadas. Esta característica é muito valiosa para identificar qual a combinação do carregamentoque é mais desfavorável para um determinado esforço e que, portanto, deve ser consideradapara o seu dimensionamento. Acrescente-se a propósito que na disciplina de Dimensionamentode Estruturas recorre-se ao conceito de linhas de influência — gráficos que mostram como umesforço depende da localização de uma carga móvel — cuja construção é facilitada recorrendoao PTV. De resto, este tipo de análise pode, com as devidas modificações, também ser aplicadoa estruturas hiperestáticas.
Uma outra aplicação do PTV a estruturas (isostáticas ou hiperestáticas) é estudada na disci-plina de Resistência de Materiais. Na análise plástica de estruturas, procura-se saber qual o valorda carga que está em equilíbrio com os esforços de plastificação em determinadas secções (asassociadas a um dado mecanismo de colapso), através de um procedimento muito semelhanteao explicado ao longo da presente secção.
40

6 Energia potencial e estabilidade do equilíbrio
6.1 Introdução
Até agora, a atenção tem estado focada exclusivamente no trabalho elementar e na formulaçãodo PTV que dita a equivalência entre o equilíbrio e o trabalho elementar das cargas aplicadas.Mas o trabalho realizado num deslocamento finito também é útil para caracterizar o comporta-mento de um mecanismo. Nesta secção apresenta-se uma muito breve introdução ao conceitode estabilidade do equilíbrio, mantendo-se a discussão limitada a forças constantes e a sistemasde um grau de liberdade.
6.2 Forças conservativas e energia potencial
No caso de uma força constante−→F — que mantém o mesmo valor, direção e sentido, indepen-
dentemente do deslocamento do ponto em que está aplicada — o trabalho realizado quando oponto de aplicação se desloca de
−→ri até
−→rf vale
∆W =−→F ·−→∆r =
−→F ·
(−→rf −
−→ri
)= −
((−−→F ·−→rf )− (−
−→F ·−→ri ))
Introduzindo a grandeza energia potencial,
V = −−→F ·−→r
o trabalho realizado pode ser escrito como
∆W = − (Vf − Vi) = −∆V
Dito de outro modo, uma força constante é uma força conservativa cujo trabalho não dependedo caminho mas apenas da posição inicial e final. Consequentemente, o trabalho realizado pelaforça é igual ao simétrico da variação da sua energia potencial.
A energia potencial de uma carga constante aumenta (linearmente) à medida que o pontose desloca no sentido contrário ao da força. Assim, no caso do peso de um objeto, que é umaforça constante14 que atua de cima para baixo, a energia potencial aumenta com a altura a quese encontra o objecto.
6.3 Equilíbrio como ponto de estacionariedade da energia potencial
A energia potencial de uma força é portanto uma função que a cada ponto do espaço (des-crito por uma coordenada vetorial) faz corresponder uma energia (valor escalar). Se em vezde uma força considerarmos um sistema de forças, a energia potencial é obtida por soma dascontribuições das várias forças. Por outro lado, num sistema de corpos rígidos a localização dospontos de aplicação das várias forças pode ser descrita através de um determinado número decoordenadas generalizadas (ver secção 4.2). Deste modo, a energia potencial de um sistema decorpos rígidos é uma função que a cada configuração do sistema (descrita pelas coordenadasgeneralizadas) faz corresponder um valor escalar.
De acordo com o PTV, o equilíbrio é equivalente a anulação do trabalho virtual, para qual-quer deslocamento compatível com as ligações. Dada a relação entre trabalho e energia po-tencial, as configurações de equilíbrio correspondem aos pontos de estacionariedade da energiapotencial. Em problemas de apenas um grau de liberdade q, o equilíbrio está portanto associadoà anulação da derivada dV
dq .
14Embora o conceito da energia potencial possa ser generalizado à lei da gravitação universal de Newton —segundo a qual a força gravítica é inversamente proporcional ao quadrado da distância —, em problemas práticos osobjetos encontram-se perto da superfície da Terra pelo que é suficiente admitir que o peso é uma força constante.
41

θ
P
L
V (θ)
θ
0 90o
270o
Figura 15: Barra. Configuração genérica. Energia potencial e configurações de equilíbrio.
Considere-se uma barra de comprimento L, submetida ao peso próprio P e com um apoiofixo numa das extremidades. Trata-se de um problema de um grau de liberdade. Como se podeobservar da figura 15, a energia potencial é dada por
V (θ) = PL
2sen θ
O gráfico da função energia potencial está representado na figura 15, assinalando-se tambémos dois pontos de estacionariedade que são dados por (omitem-se as soluções que consistem emsomar múltiplos de 360o por descreverem exatamente as mesmas configurações).
dV
dθ=PL
2cos θ = 0 ⇒ cos θ = 0 ⇒ θ = 90o ∨ θ = 270o
Neste problema particular, observa-se que a configuração de equilíbrio não depende do valordo peso P .
6.4 Estabilidade do equilíbrio
As duas configurações determinadas são ambas de equilíbrio mas não têm a mesma natureza,diferença que se torna evidente se perturbarmos ligeiramente a barra em cada uma dessas con-figurações.
Quando a barra está na vertical por baixo do apoio (θ = 270o) e é perturbada ligeiramentepara o lado, terá tendência a voltar à configuração de equilíbrio. Este equilíbrio diz-se estável.
Em contrapartida, quando a barra está por cima do apoio (θ = 90o), uma pequena pertur-bação é o suficiente para a barra se afastar irremediavelmente dessa posição. Neste caso, oequilíbrio é instável.
Tudo depende de qual o sentido em que atua o momento do peso na posição desviada: ou nosentido contrário à perturbação (equilíbrio estável) ou no mesmo sentido (equilíbrio instável).Numa configuração desiquilibrada o sistema move-se no sentido que corresponde a um trabalhopositivo realizado pelas cargas aplicadas.
Assim, em termos de energia potencial, o sistema tem tendência para assumir uma configu-ração estável que corresponde a um mínimo (local) da energia potencial. Em sistemas de umgrau de liberdade essa condição é representada por uma segunda derivada positiva associadaao ponto de estacionariedade, d2V
dq2 > 0.
42
No exemplo da barra, a segunda derivada da energia potencial é
d2V
dθ2= −PL
2sen θ
pelo que, para cada uma das posições de equilíbrio determinadas anteriormente, se tem
θ = 270o ⇒ d2V
dθ2
∣∣∣∣270o
= −PL2
sen(270o) =PL
2> 0 ⇒ Estável
θ = 90o ⇒ d2V
dθ2
∣∣∣∣90o
= −PL2
sen(90o) = −PL2
< 0 ⇒ Instável
Esta conclusão é independente do valor (positivo) de P , o que mostra que a barra em equilíbriopor cima do apoio é, naturalmente, sempre uma posição de equilíbrio instável.
Na disciplina de Resistência de Materiais inclui-se, no final, uma introdução à estabilidadede estruturas elásticas. Nesse contexto, é necessário adicionar à energia potencial das cargas,também a energia potencial associada à deformação. Por exemplo, se no exemplo apresentadoa rotação em torno do apoio fixo mobilizasse uma mola elástica com suficiente rigidez (derotação), a posição θ = 90o podia ser estável. Particularmente relevante para a análise estruturalé a determinação de cargas críticas, isto é, a determinação de qual o valor de uma carga aplicadaa uma coluna a partir do qual o equilíbrio, embora possível em teoria, se torna instável e,portanto, impossível na prática. No entanto, a análise de corpos deformáveis está fora do âmbitodeste texto.
Manuel Ritto Corrêa
18 Maio 2017
43