Embed Size (px)
Citation preview

Материалы научно-методической конференции профессорско-преподавательского состава,
аспирантов и студентов
Секция X Радиоэлектроника 1
ПРОБЛЕМЫ ИСПОЛЬЗОВАНИЯ И
ИННОВАЦИОННОГО РАЗВИТИЯ ВНУТРЕННИХ
ВОДНЫХ ПУТЕЙ В БАССЕЙНАХ ВЕЛИКИХ РЕК
Труды конгресса «Великие реки» 2018
Выпуск 7, 2018 г.
ISBN 978-5-901722-60-2
УДК 519.876.5
В.Я. Бычков – студент 5го курса, ФГБОУ ВО «ВГУВТ»
А.В. Рубцов – студент 5го курса, ФГБОУ ВО «ВГУВТ»
Т.В. Гордяскина – доцент кафедры радиоэлектроники, к.ф-м.н., ФГБОУ ВО «ВГУВТ»
С.В. Перевезенцев– доцент кафедры радиоэлектроники, к.т.н., ФГБОУ ВО «ВГУВТ»
603951, Нижний Новгород, ул. Нестерова, 5
О ПЕРВОМ ОПЫТЕ СОЗДАНИЯ ИНТЕЛЛЕКТУАЛЬНЫХ ДАТЧИКОВ ДЛЯ
РЕАЛИЗАЦИИ СИСТЕМЫ УПРАВЛЕНИЯ СУДНОМ
Ключевые слова: системы управления, платформа Arduino, датчики.
Рассматривается пример реализации интеллектуального датчика, используемого для
определения параметров движения судна на базе модуля MPU-92/65 платформы Arduino.
В современном высокотехнологичном производстве возникает потребность в
реализации систем, обеспечивающих его безопасность, снижающих побочные эффекты
производственных процессов (утилизация отходов производства), а также
обеспечивающих быстрое обнаружение и ликвидацию различных аварий. При этом очень
важно отметить тот факт, что данные требования относятся ко всем сферам человеческой
деятельности. Так, к примеру, обеспечение безопасности судовождения, его вредного
влияния на экологию, относится к тому же классу задач автоматического управления, что
решаются на промышленных предприятиях.
Примером систем, выполняющих задачи обеспечения безопасности морских и
речных перевозок (пассажирских и грузовых), служат системы помощи
судоводителю[1,2,3,4]. Для создания таких систем необходимы сведения о большом
количестве параметров движения судна, при этом нужно учитывать, как внутренние
составляющие (собственная скорость, ускорение по всем трем координатам и т.д.), так и
внешние (волнение, течение, ветер, различные преграды). Все измерения этих переменных
проводятся с помощью различных датчиков. Рассмотрим методы разработки
интеллектуального датчика на базе модуля MPU-92/65, позволяющего получить
информацию о параметрах движения судна.
Модуль MPU-92/65 с интегрированным
датчиком MPU-6000 изображен на рисунке
1.Микросхема данного датчика выполнена по
технологии МЭМС (микро-электромеханические
сенсоры) и содержит на своем кристалле три
основных устройства: трехосевые гироскоп,
акселерометр и магнитометр.
Рассмотрим основные характеристики и
функционирование датчика на примере
акселерометра – устройства, регистрирующего
линейное ускорение; и гироскопа – регистрирующего угловую скорость. На рисунке 2
приведена часть технических характеристик модуля MPU-92/65.
Рис. 1.МодульMPU-92/65

Материалы научно-методической конференции профессорско-преподавательского состава,
аспирантов и студентов
Секция X Радиоэлектроника 2
Рис.2. Информация о датчике из документации
Микросхема MPU-60X0 настраивается под решение конкретной задачи. Для работы
с акселерометром используется высокий уровень точности (16385 пунктов на 1g).
Полученные показания акселерометра принимаются через I2Cинтерфейс и
обрабатываются с помощью Arduino. На рис. 3 представлено фото собранного макета
интеллектуального датчика на платформе Arduino.
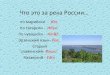
При исследовании макета с интеллектуальным датчиком проведены лабораторные
испытания при 1) перемещении датчика в пространстве и 2) неподвижном датчике,
установленном на горизонтальной поверхности. Результаты измерений последнего
эксперимента, полученные с акселерометра по всем трем осям, представлены на рис.4, 5.

Материалы научно-методической конференции профессорско-преподавательского состава,
аспирантов и студентов
Секция X Радиоэлектроника 3
Рис 3.Датчик, подключенный к Arduino
Рис.4.Показания акселерометра
а)
б)
Рис.5.Измерения ускорений по осям OX, OY(а) и оси OZ(б)
X_acceleration; 1; 432
X_acceleration; 2; 496 X_acceleration; 3; 436 X_acceleration; 4; 380
X_acceleration; 5; 448
X_acceleration; 6; 468
X_acceleration; 7; 448
X_acceleration; 8; 440
X_acceleration; 9; 448 X_acceleration; 10; 384
X_acceleration; 11; 444
X_acceleration; 12; 456
X_acceleration; 13; 476 X_acceleration; 14; 416
X_acceleration; 15; 460
X_acceleration; 16; 428
X_acceleration; 17; 452
X_acceleration; 18; 428
X_acceleration; 19; 432
X_acceleration; 20; 400
X_acceleration; 21; 444
X_acceleration; 22; 460
X_acceleration; 23; 428
X_acceleration; 24; 444
X_acceleration; 25; 412
X_acceleration; 26; 408
X_acceleration; 27; 448
X_acceleration; 28; 512
X_acceleration; 29; 380
X_acceleration; 30; 420
X_acceleration; 31; 452
X_acceleration; 32; 456
X_acceleration; 33; 452
X_acceleration; 34; 420
X_acceleration; 35; 468
X_acceleration; 36; 440
X_acceleration; 37; 404
X_acceleration; 38; 392
X_acceleration; 39; 420
X_acceleration; 40; 412
X_acceleration; 41; 408
X_acceleration; 42; 420
X_acceleration; 43; 472 X_acceleration; 44; 400
X_acceleration; 45; 452
X_acceleration; 46; 472
X_acceleration; 47; 432
X_acceleration; 48; 408
X_acceleration; 49; 388
X_acceleration; 50; 420
Y_acceleration; 1; 540
Y_acceleration; 2; 516
Y_acceleration; 3; 532
Y_acceleration; 4; 564
Y_acceleration; 5; 600 Y_acceleration; 6; 548
Y_acceleration; 7; 528
Y_acceleration; 8; 568
Y_acceleration; 9; 536
Y_acceleration; 10; 528
Y_acceleration; 11; 560
Y_acceleration; 12; 532
Y_acceleration; 13; 528
Y_acceleration; 14; 548
Y_acceleration; 15; 588 Y_acceleration; 16; 524
Y_acceleration; 17; 544
Y_acceleration; 18; 520
Y_acceleration; 19; 608 Y_acceleration; 20; 544
Y_acceleration; 21; 548
Y_acceleration; 22; 564
Y_acceleration; 23; 560 Y_acceleration; 24; 500
Y_acceleration; 25; 544
Y_acceleration; 26; 536
Y_acceleration; 27; 520
Y_acceleration; 28; 552
Y_acceleration; 29; 544
Y_acceleration; 30; 596 Y_acceleration; 31; 500
Y_acceleration; 32; 532
Y_acceleration; 33; 556
Y_acceleration; 34; 560
Y_acceleration; 35; 580
Y_acceleration; 36; 556
Y_acceleration; 37; 540
Y_acceleration; 38; 556
Y_acceleration; 39; 528
Y_acceleration; 40; 512
Y_acceleration; 41; 572
Y_acceleration; 42; 552
Y_acceleration; 43; 580 Y_acceleration; 44; 524
Y_acceleration; 45; 564 Y_acceleration; 46; 500
Y_acceleration; 47; 548 Y_acceleration; 48; 500
Y_acceleration; 49; 496
Y_acceleration; 50; 560
Ах,у
n
X&Y Acceleration
X_acceleration
Y_acceleration
Z_Acceleration; 1; 15512
Z_Acceleration; 2; 15704 Z_Acceleration;
3; 15648
Z_Acceleration; 4; 15668
Z_Acceleration; 5; 15644
Z_Acceleration; 6; 15640 Z_Acceleration;
7; 15536
Z_Acceleration; 8; 15716 Z_Acceleration;
9; 15608 Z_Acceleration;
10; 15564
Z_Acceleration; 11; 15600
Z_Acceleration; 12; 15664 Z_Acceleration;
13; 15572
Z_Acceleration; 14; 15644
Z_Acceleration; 15; 15704
Z_Acceleration; 16; 15716
Z_Acceleration; 17; 15604 Z_Acceleration;
18; 15556
Z_Acceleration; 19; 15616
Z_Acceleration; 20; 15572
Z_Acceleration; 21; 15724
Z_Acceleration; 22; 15548
Z_Acceleration; 23; 15672
Z_Acceleration; 24; 15720
Z_Acceleration; 25; 15728
Z_Acceleration; 26; 15684
Z_Acceleration; 27; 15680
Z_Acceleration; 28; 15652
Z_Acceleration; 29; 15628
Z_Acceleration; 30; 15688
Z_Acceleration; 31; 15672
Z_Acceleration; 32; 15660
Z_Acceleration; 33; 15528
Z_Acceleration; 34; 15648
Z_Acceleration; 35; 15672
Z_Acceleration; 36; 15672
Z_Acceleration; 37; 15680
Z_Acceleration; 38; 15664
Z_Acceleration; 39; 15676
Z_Acceleration; 40; 15676 Z_Acceleration;
41; 15604
Z_Acceleration; 42; 15652
Z_Acceleration; 43; 15516
Z_Acceleration; 44; 15684 Z_Acceleration;
45; 15580
Z_Acceleration; 46; 15728
Z_Acceleration; 47; 15684
Z_Acceleration; 48; 15672 Z_Acceleration;
49; 15592
Z_Acceleration; 50; 15644
Az
n
Z Acceleration
1 2

Материалы научно-методической конференции профессорско-преподавательского состава,
аспирантов и студентов
Секция X Радиоэлектроника 4
На рис.4, 5 видно, что полученные данные имеют систематическую погрешность в
виде постоянной составляющей по всем осям и случайную погрешность в виде
флуктуаций относительно постоянной составляющей.
Для устранения систематической погрешности перед началом измерений
необходимо провести калибровку акселерометра (получить по осям OX, OY,OZ значения
Ax= 0, Ау = 0,Az= 16384 соответственно, так как на акселерометр действует только сила
тяжести Fт =1gпо оси OZ).
Для устранения случайной погрешности необходима статистическая обработка
полученных данных. Наилучшим решением данной проблемы является использование
фильтра Калмана (1). Данный метод позволяет получить готовые параметры ускорения не
только при вибрациях, но и при движении управляемого объекта. Фильтр Калмана часто
используется для обработки показанийразличных датчиков, так же это касается и
программной части Arduino, для которой написано множество библиотек для работы с
фильтром Калмана.
, (1)
где k – коэффициент фильтра (~0.01÷0.05), – результат обработки значения
фильтром Калмана, – измеренное значение, – текущий момент выборки измеренного
значения, – предшествующий момент выборки.
После статистической обработки показаний датчика можно приступить к
вычислению вектора ускорения . Для этого нами была разработана методика его
вычисления (2). Так как нас интересует линейное ускорение в плоскости XOY (вдоль
поверхности реки), показания акселерометра по оси Z можно не учитывать. В целях
удобства для судоводителя угол ускорения откладывается от 0 до 180º по левому борту и
от 0 до –180º по правому. Так же, сняв показания по оси Z с гироскопа, можно получить
данные об угловой скорости вращения судна . Это позволит определить, как движется
судно (рис. 6).
x Az Gz
Ax
Ay
y
ПБ
ЛБ
-90
+90
α Ax,y
Рис. 6
На рисунке 6: ЛБ – левый борт; ПБ – правый борт; α – угол отклонения вектора
ускорения от главной оси судна в плоскостиXOY; – показания
акселерометра по осям X, Y, Z; – показания гироскопа по оси Z.
Если и
Иначе:
(2)
Дальнейшее совершенствование интеллектуального датчика заключается в
добавлении в его структуру модуля GPS. Это позволит получить дополнительные
параметры: курс, линейную скорость и координаты судна.
Лабораторные исследования показали возможность проведения натурных
экспериментов с интеллектуальным датчиком на основе модулей MPU-92/65 и GPS на

Материалы научно-методической конференции профессорско-преподавательского состава,
аспирантов и студентов
Секция X Радиоэлектроника 5
реальном судне. После проведения натурного эксперимента и сбора данных станет
возможным доработка алгоритма обработки данных.
Список литературы:
[1]. Грошева Л.С., Плющаев В.И. Адаптивный алгоритм удержания судна с колесным
движителем на курсе – Вестник Волжской государственной академии водного транспорта.
Выпуск 43. – Н. Новгород: Изд-во ФГБОУ ВО «ВГУВТ», 2015. – с.47-56
[2]. Галкин Д.Н., Итальянцев С.А., Плющаев В.И. Компьютеризованная система
управленияпассажирским колесным теплоходом – Речной транспорт (XXI век). Москва.
№ 6. 2014 – с.29-31
[3]. Грошева Л.С., Плющаев В.И., Соловьев Д.С.Моделирование динамики судна с
колесным движительно-рулевым комплексом с учетом ветрового воздействия – Вестник
Астраханского государственного технического университета. Серия: Морская техника и
технология.2013. № 2. С. 17–22.
[4]. Плющаев В.И.Система контроля и передачи судовых технологических параметров
береговым службам – Автоматизация и современные технологии, Москва, №2, 2012. С.
37-39.
ABOUT THE FIRST EXPERIENCE OF CREATION OF INTELLIGENT SENSORS
FOR SYSTEM IMPLEMENTATION SHIP MANAGEMENT
V.Y. Bychkov, A.V. Rubtsov, T.V. Gordyaskina, S.V. Perevezentsev
Key words: Control systems, Arduino platform, sensors.
An example of the implementation of the intelligent sensor used to determine vessel motion
parameters is considered on the basis of module MPU-92/65 of Arduino platform.